Embed Size (px)
Citation preview

Se requiere que los estudiantes elaboren un trabajo del diagrama de willot, con el procedimiento de forma precisa para el cálculo y desarrollar un ejercicio práctico.
Ejemplo del desplazamiento de una viga estáticamente indeterminada de 1grado de libertad.
2- Diagramas de willot mohr para la determinación de desplazamiento en estructuras
Para averiguar los desplazamientos de los nudos de una estructura isostática, podemos utilizar una construcción grafica muy simple consiste en ir compatibilizando las deformaciones de las barras y las condiciones del contorno. El resultado de estas operaciones será una estructura deformada, pero esto suponiendo pequeñas deformaciones es difícil suponer con precisión estos movimientos, por lo cual es necesario obtener las deformaciones fuera dela armadura y con un factor de amplificación que facilite la medición
Ejemplo de diagrama de willot mohr
Para trazar este diagrama se deben seguir los siguientes pasos: a) Tomar un punto (0) como un polo. b) Trazar a partir del punto (0) los movimientos de los nudos a la escala que estimemos oportuna para tener una fácil visualización. c) A partir de estos puntos se trazan paralelas a las barras afectadas y sobre ellas llevamos las deformaciones sufridas por las mismas d) Considerando que para arcos de circunferencias pequeños se puede sustituir el trazado de estos por

perpendiculares. Trazamos las perpendiculares a las rectas del tercer paso por los puntos determinados por las deformaciones, y con ello obtenemos el nuevo lugar donde se encuentra el punto inicial o polo.
EL DIAGRAMA DE WILLIOT
a) Generalidades: Para el cálculo de los desplazamientos reales de los nudos de una celosía no son todavía suficientes los procedimientos tratados hasta ahora que solo dan las componentes de los desplazamientos en una dirección determinada. Los desplazamientos reales pueden calcularse partiendo de la variación de longitud (∆s) = S S + α t t s
EFb) Barra a y b unidades estribo rígido.
En la celosía ABC una barra a experimenta un alargamiento (∆a) y la barra b un acotamiento (∆b). en primer lugar se supone que ambas barras entre sueltas en el nudo C de modo que pueden deformarse independientemente entre sí. Luego ambas barras han de llevarse de nuevo a la unión girando la barra b alrededor de A y la barra a alrededor de B, describiendo los extremos de las barras un arco de radios a + ∆a y b - ∆b. El punto de corte de los dos arcos de la situación del nudo C después de la deformación de la estructura. Los nudos de la deformada se designan mediante A’, B’ y C’. Ya que las deformaciones ∆s son muy pequeñas frente a la longitud de las barras s, los arcos pueden sustituirse por sus tangentes, a saber, por las perpendiculares a las barras de la estructura no deformada. Por el mismo motivo las variaciones de longitud ∆s
y las longitudes de s no pueden dibujarse a la misma escala. Las variaciones de longitudes ∆s se representan a una escala mayor en un diagrama de desplazamientos particulares. Partiendo de un punto de referencia, se dibujan las variaciones de longitud de las barras teniendo en cuenta su signo (alargamiento ∆a o acortamiento ∆b) en dirección de las barras de la estructura no deformada, ya que los nudos A y B del sistema son indesplazables y por tanto han de coincidir con los nudos A’ y B’ correspondientes y coincidentes con estos nudos en el diagrama de desplazamientos. Las perpendiculares levantadas en los puntos extremos de los desplazamientos dibujados ∆s se cortan en el punto C’. de la congruencia de los dos cuadriláteros rayados se deduce que el segmento (A’B’), C’ en el diagrama de desplazamientos es igual al desplazamiento total buscando δc (segmento CC’) del nudo C.
c) Barras a y b unidas a un estribo elástico:

Si en la celosía ABC los nudos A y B como componentes de un sistema total son de por sí desplazables, se halla como sigue el desplazamiento real del punto C:
Basándonos en lo anterior suponemos ya conocidos los desplazamientos AA’ y BB’. Se supone ahora, como ya se ha descrito en b), que la unión está suelta en C. la deformación de las barras puede descomponerse entonces en:
1. Un desplazamiento paralelo (movimiento de traslación).2. Una variación de longitud.3. Un giro (rotación).
Para obtener un diagrama de desplazamientos fuera de la figura del sistema, se elige el punto C como punto de partida y a partir de él se trazan en magnitud y dirección los desplazamientos de los nudos AA’ y BB’. El punto C se designa también como polo; contiene a la vez el punto A y B. En los puntos así obtenidos A’ y B’ han de trazarse las variaciones de longitud (∆a) o (∆b).
Levantando las normales en los puntos extremos. El punto de corte de ambas normales es el punto C’ cuya unión con C da el desplazamiento real del punto C.
Aplicando lo dicho en b) y c) puede calcularse el desplazamiento de cada uno de los nudos de una celosía.
d) Diagramas de celosías enteras.
Para la celosía en voladizo ha de hallarse el diagrama de desplazamientos. Partiendo del punto de referencia A’, B? correspondiente a los puntos fijos A y B, se dibujan en primer lugar las variaciones de longitud ∆AD y ∆BD en dirección de las barras; las normales levantadas en sus puntos extremos se cortan en D’. Si se trazan ahora en el punto B’ la variación de longitud ∆BC y en D’ la variación de

longitud ∆DC, las normales levantadas en los puntos extremos de estos elementos se cortan en el punto C’. Del mismo modo se obtiene el punto E’.
El diagrama de desplazamiento así obtenido da los desplazamientos de cada uno de los nudos con respecto al punto de referencia. Ya que los puntos A y B no experimentan desplazamiento, los desplazamientos relativos son en este caso a la vez los reales δ de cada uno de los nudos.
Si han de calcularse las componentes de los desplazamientos en una dirección determinada, basta con proyectar sobre esta dirección los desplazamientos totales. Con ello pueden p. e. calcularse inmediatamente mediante el diagrama de Williot las líneas de curvatura del cordón superior e inferior de celosías. La representa otra celosía cuyo único nudo indesplazable es el A. por simetría del sistema y de la solicitación la barra CD no gira al deformarse el sistema. Por lo tanto si se elige como punto de referencia el punto D’ del diagrama de desplazamiento que corresponde al nudo D, se obtiene C’ llevado ∆ v.

Paralelamente a CD en el punto D’. con ello se conocen dos puntos del diagrama. Los restantes se hallan partiendo de D’ y C’ según la construcción de base. Los segmentos D’ A’, D’C’ y D’B’ representan los desplazamientos de los nudos A, B y C respecto al nudo D paralelamente a CD en el punto D’. con ellos se conocen dos puntos del diagrama los restantes se hallan partiendo de D’ y C’ según la construcción de base. Los segmentos D’A’, D’C’ y D’B’ representan los desplazamientos de los nudos A, B y C respecto al nudo D. según las condiciones de apoyo el punto A es fijo mientras que el B sólo puede desplazarse en dirección horizontal. Por lo tanto, en contra de la hipótesis inicial, no es D el punto fijo A y con ello igual al desplazamiento real. El nudo B se desplaza horizontalmente el valor A’B’ = δB. Según ello se obtiene los desplazamientos totales de todos los nudos mediante el diagrama de Williot como distancia δ de los puntos B’, C’ Y D’ del punto fijo A’.
Hasta ahora al calcular los desplazamiento se partió de que es conocida en el diagrama de desplazamientos la situación de dos puntos próximos. Ello podía venir condicionado por el hecho de que o bien los dos nudos eran indesplazables o bien la dirección de una barra era invariable. Pero en general no se da este caso, de modo que es difícil predecir de antemano algo sobre el giro de las barras. Por lo que hay que elegir en primer lugar un punto cualquiera como punto de referencia y considerar como fija la dirección de una barra que parte de este nudo. Los desplazamientos calculados partiendo de estas bases se contradicen con las condiciones de apoyo, pero éstas pueden cumplirse mediante desplazamientos suplementarios.

En la celosía se muestra la determinación de tales desplazamientos sumplementarios. Se elige como punto de referencia el A y se considera como fija la dirección de la barra U1. En la figura anterior se muestra el diagrama correspondiente. Si estos desplazamientos se llevan sobre la figura del sistema, resultan para los nudos las nuevas situaciones B’, C’ y D en la estructura deformada. Sin embargo la variación de la situación del nudo B allí indicada no es posible ya que B sólo puede desplazarse horizontalmente. Para eliminar esta anomalía la estructura se considera como rígida después de sus deformación, y se gira alrededor del punto fijo A, el polo, hasta que B’ esté sobre el camino de desplazamiento del apoyo B. después de girar este ángulo ω los nudos del sistema toman las posiciones A’’ ≅ A’, B’’, C’’, D’’.
PROCEDIMIENTOS:
Bv = 1
18,00(10,00 .30,00−5,46 .4,00 )=+15,46 t .
c) Esfuerzos en las barras.
Nudo 12: ∑V=0 :D 9= −Psenφ9
=−15,62 t ,
∑ H=0 :O10=O 8= Ptg φ9
=+12 ,0 t ;
Nudo 9: ∑V=0 :−D 8 senφ8+U 7 sen β 7 r=−P −D 8 s 0,640+U 70,447=−10,0

∑V=0 :D 8cosφ8+U 7cos β7 r=−P 1tgφ 9
D 80,768+U 70,8943=−12,0
Y de donde, U 7=−16,76 t , D 8=+3,91 t ,
Nudo 1: ∑V=0 :D 1= −AVsen φ1
=+9,86 t ,
∑ H=0 :U 1=−Ah−D 1cosφ1=−2,74 t ,
Nudo 3: ∑V=0 :U 3= U 1cos β 3
=−2,78 t ,
∑V=0 :V 3=U 3 sen β3=−0,454 t ,
Nudo 4: ∑V=0 :D 4= −1sen β φ1
(D 1 senφ1+V 3 )=−7,82t ,
∑ H=O :O 4=D 1=D1cos φ1−Dhcosφ4=+14,21 t , O 6 :O 4=+14,21t ,
Nudo 5: ∑V=0 :U 5=Sen β7 l – D 5 sen φ5−U 3 sen β 3 – D 4 senφ 4=0 , U 50,447−D50,640=−5,46 , U 5cos β7 l+D 5cosφ5−U 3cos β3−D 4cos φ4=0 , U 50,8943+D 50,768=−8,75;
La solución del sistema de ecuaciones da:
U 5=−10,7 t , D5=+1,06 t ;Nudo 8: ∑V=0 :U 7=−(D5+D 8 ) senφ5=−3,18 t ,
Control en el nudo 7 (apoyo B) ∑V=0V 7+(U 5+U 7 ) sen β7 l+Bv=0 , −3,18−(10,7+16,76 )0,447+15,46=0 , −3,18−12,28+15,46=0 ,
∑ H=0 : (U 7+U 5 ) cos β7 l+Bh=0 , −0,06 .0,8943+5,46=0 , −5,43+5,46 0 ,
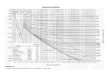
d. Variación de longitud de las barras y diagrama de desplazamientos.

Lo primero se calcula mediante ∆ s=SEF
s [m ]. Con estos valores se dibuja
luego el diagrama de desplazamientos.
Barra F [cm ]2 s [m ] S [ t ] ∆ s [10−4m ] S’ SS 'EF
s [10−4m ]02 39 6,00 0 - 0 -04 39 6,00 +14,2
1+10,42 +1,421 +14,81
06 39 6,00 +14,21
+10,42 +1,421 +14,81
08 39 6,00 +12,00
+8,80 +1,200 +10,57
010 39 6,00 +12,00
+8,80 +1,200 +10,57
U1 39 6,00 -2,74 -2,01 -0,274 + 0,55U3 39 6,08 -2,78 -2,07 -0,278 + 0,58U5 39 6,72 -10,70 -8,78 -1,070 + 9,40U7 39 6,72 -16,76 -13,76 -1,1,676 +23,03U9 39 6,08 0 - 0 -V1 16 4,00 0 - 0 -V3 16 4,00 -0,454 -0,54 -0,0454 + 0,02V5 16 5,00 0 - 0 -V7 16 8,00 -3,18 -7,57 -0,318 + 2,41V9 16 5,00 0 - 0 -V11 16 4,00 0 - 0 -D1 16 7,22 +9,86 +21,20 +0,986 + 20,90D4 16 7,82 -7,82 -18,20 -0,782 +14,23D5 16 7,82 +1,06 +2,47 +0,106 + 0,26D8 16 7,82 +3,91 +9,11 +0,391 + 3,56D9 16 7,82 -15,62 -36,39 -1,562 +56,88
∑+182,58
e) Líneas de curvatura.
El punto 1’’ está sobre la paralela a la dirección de desplazamiento de apoyo A (nudo I) trazada por el punto 1’ y sobre la perpendicular a la línea de unión de los dos apoyos. Ya que el nudo 7 es indesplazable (apoyo fijo B), coinciden 7’ y 7’’. Mediante los dos puntos 7’’ y I’ queda fijada semejante estructura. Para determinar las líneas de curvatura de los dos cordones se proyectan los puntos 1’ 12’ del diagrama de desplazamientos correspondientes a cada uno de los nudos del cordón y los puntos 1’ a 12’ sobre las verticales que

pasan por los puntos correspondientes del dibujo del sistema. Entonces los puntos de corte resultantes se unen entre sí en el orden fijado por la construcción de la estructura. La línea de unión de las perpendiculares trazadas hacia los puntos 1’’, 3’’ hasta 11’’ o bien 2’’, 4’’ hasta 12’’ es una recta que se designa como línea de cierre. Pero ya que una recta está determinada por dos puntos, es suficiente la proyección de sólo dos puntos. Las distancias verticales de los puntos 1’, 3’’ hasta 11’ o bien 2’ 4’ hasta 12’ a esta línea de cierre dan las ordenadas de la línea de curvatura.
Como control pueden calcularse las flechas de un nudo cualquiera mediante el principio del trabajo. Para ello ha de disponerse la carga P’ = 1 en el nudo correspondiente; los correspondientes esfuerzos de las barras S’ han de superponerse entonces a los esfuerzos debidos a la carga dada según.

δ=∑ SS 'EF
s
La exactitud del desplazamiento obtenido puede deducirse por comparación con el resultado analítico se obtuvo.
δ 12 v=183.10-4 m=1,83cm (gráficamente),
δ 12 v=182,58.10-4 m=1,826 cm (analíticamente),
EJERCICIO
Se busca para el pórtico de celosía de tres articulaciones el diagrama de Williot y la línea de curvatura del cordón superior. La sección de las barras diagonales, es F1 = 12 cm2, para todas las otras barras F2 = 22 cm2, el módulo de elasticidad E = 2,1 . 107 t/m2.

A) Reacciones:Av 15.00 – Ah 15,50= 37,5.Bv 11,25 – Bh 7,75 = 0,Ah = Bh,Av + Bv = 10,0.
De estas ecuaciones se obtiene:
Av = + 7,00 t;
Bv = + 3,00 t;
Ah = Bh + 4,35 t
B) Esfuerzos en las barras.

Da la relación.