Embed Size (px)
Citation preview
Efuerzo,deformacion y torsión
Realizado: David Vásquez
Ci:20535912
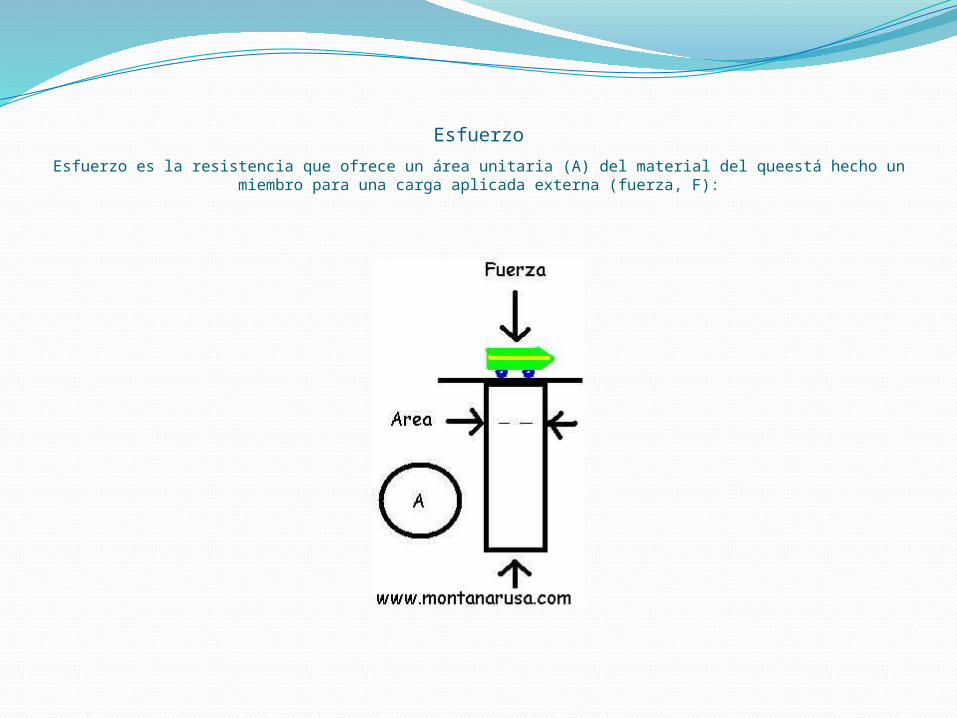
Esfuerzo
Esfuerzo es la resistencia que ofrece un área unitaria (A) del material del queestá hecho un miembro para una carga aplicada externa (fuerza, F):
ESFUERZOS QUE SOPORTAN LOS ELEMENTOS QUE COMPONEN LAS ESTRUCTURAS
Al construir una estructura se necesita tanto un diseño adecuado como unos elementos que sean capaces de soportar las fuerzas, cargas y acciones a las que va a estar sometida. Los tipos de esfuerzos que deben soportar los diferentes elementos de las estructuras son:
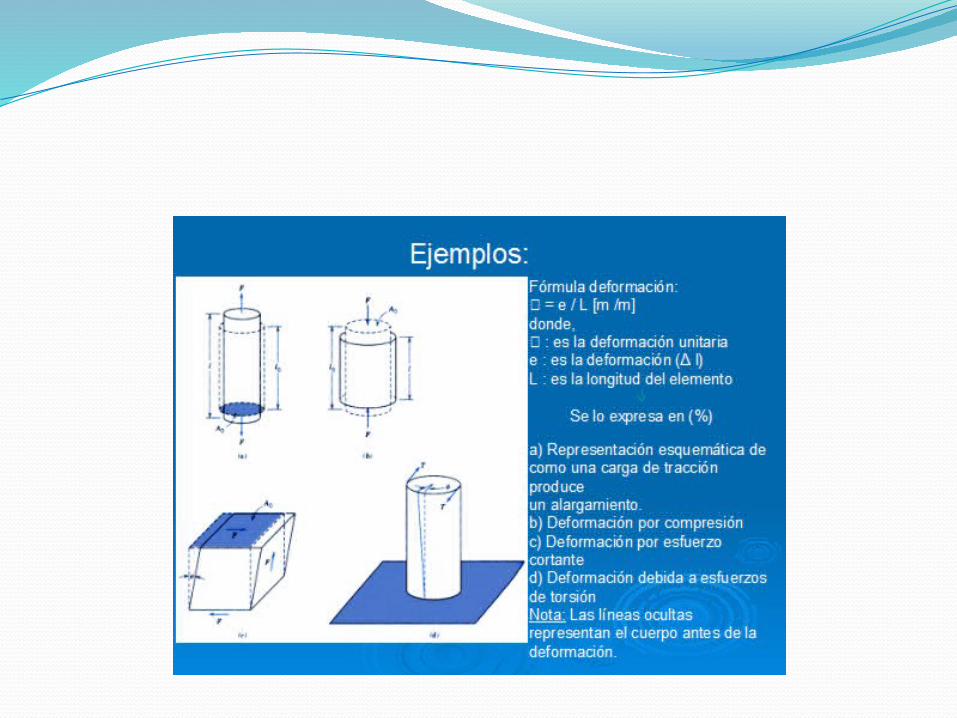
Tracción. Hace que se separen entre sí las distintas partículas que componen una pieza, tendiendo a alargarla. Por ejemplo, cuando se cuelga de una cadena una lámpara, la cadena queda sometida a un esfuerzo de tracción, tendiendo a aumentar su longitud.
Compresión. Hace que se aproximen las diferentes partículas de un material, tendiendo a producir acortamientos o aplastamientos. Cuando nos sentamos en una silla, sometemos a las patas a un esfuerzo de compresión, con lo que tiende a disminuir su altura.
Cizallamiento o cortadura. Se produce cuando se aplican fuerzas perpendiculares a la pieza, haciendo que las partículas del material tiendan a resbalar o desplazarse las unas sobre las otras. Al cortar con unas tijeras un papel estamos provocando que unas partículas tiendan a deslizarse sobre otras. Los puntos sobre los que apoyan las vigas están sometidos a cizallamiento.
Flexión. Es una combinación de compresión y de tracción. Mientras que las fibras superiores de la pieza sometida a un esfuerzo de flexión se alargan, las inferiores se acortan, o viceversa. Al saltar en la tabla del trampolín de una piscina, la tabla se flexiona. También se flexiona un panel de una estantería cuando se carga de libros o la barra donde se cuelgan las perchas en los armarios.
Torsión. Las fuerzas de torsión son las que hacen que una pieza tienda a retorcerse sobre su eje central. Están sometidos a esfuerzos de torsión los ejes, las manivelas y los cigüeñales.
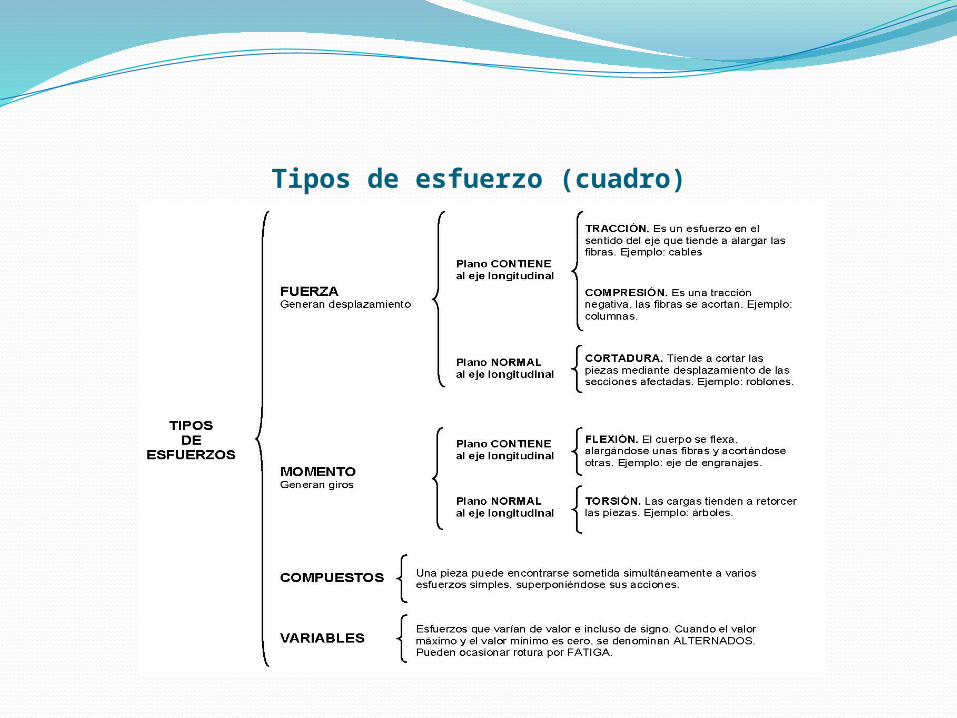
Tipos de esfuerzo (cuadro)
Clasificación de los esfuerzos
Fuerza. Son esfuerzos que se pueden clasificar debido a las fuerzas. Generan desplazamiento. Dependiendo si están contenidos (o son normales) en el plano que contiene al eje longitudinal tenemos:
Contiene al eje longitudinal:Tracción. Es un esfuerzo en el sentido del eje. Tiende a alargar
las fibras.Compresión. Es una tracción negatia. Las fibras se acortan.Normal al plano que contiene el eje longitudinal:Cortadura. Tiende a cortar las piezas mediante desplazamiento
de las secciones afectadas.Momento. Son esfuerzos que se pueden clasificar debido a los
momentos. Generan giros. Dependiendo si están contenidos (o son normales) en el plano que contiene al eje longitudinal tenemos:
Contiene al eje longitudinal:
Flexión. El cuerpo se flexa, alargándose unas fibras y acortándose otras.
Normal al plano que contiene el eje longitudinal:Torsión. Las cargas tienden a retorcer las piezas.Otros:Esfuerzos compuestos. Es cuando una pieza se
encuentra sometida simultáneamente a varios esfuerzos simples, superponiéndose sus acciones.
Esfuerzos variables. Son los esfuerzos que varían de valor e incluso de signo. Cuando la diferencia entre el valor máximo y el valor mínimo es 0, el esfuerzo se denomina alternado. Pueden ocasionar rotura por fatiga.
Deformación
La deformación es el cambio en el tamaño o forma de un cuerpo debido a esfuerzos internos producidos por una o más fuerzas aplicadas sobre el mismo o la ocurrencia de dilatación térmica.
Deformación de los materiales
Las Deformaciones del Material pertenecen al grupo de las denominadas lesiones mecánicas. Son consecuencia de procesos mecánicos, a partir de fuerzas externas o internas que afectan a las características mecánicas de los elementos constructivos. En el caso de las deformaciones, son una primera reacción del elemento a una fuerza externa, al tratar de adaptarse a ella.
La mecánica de los sólidos deformables estudia el comportamiento de los cuerpos sólidos deformables ante diferentes tipos de situaciones como la aplicación de cargas o efectos térmicos. Estos comportamientos, más complejos que el de los sólidos rígidos, se estudian en mecánica de sólidos deformables introduciendo los conceptos de deformación y de tensión mediante sus aplicaciones de deformación. Una aplicación típica de la mecánica de sólidos deformables es determinar a partir de una cierta geometría original de sólido y unas fuerzas aplicadas sobre el mismo, si el cuerpo cumple ciertos requisitos de resistencia y rigidez. Para resolver ese problema, en general es necesario determinar el campo de tensiones y el campo de deformaciones del sólido.
Tipos de deformación
Dependiendo del tipo de material, el tamaño y la geometría del objeto, y las fuerzas aplicadas, varios tipos de deformación pueden resultar. La imagen de la derecha muestra el esfuerzo de ingeniería vs diagrama de deformación para un material dúctil típica tal como el acero. Diferentes modos de deformación pueden ocurrir en diferentes condiciones, como se puede describir en base a un mapa mecanismo de deformación.
Deformación elástica Para más detalles sobre este tema, consulte la elasticidad.Este tipo de deformación es reversible. Una vez que ya no se aplican las fuerzas, el objeto vuelve a
su forma original. Elastómeros y metales con memoria de forma tales como Nitinol exhiben grandes rangos de deformación elástica, como el caucho. Sin embargo elasticidad es no lineal en estos materiales. Metales normales, cerámica y la mayoría de los cristales muestran elasticidad lineal y una zona elástica pequeña.
Deformación elástica lineal se rige por la ley de Hooke, que establece:¿Dónde está la tensión aplicada, es una constante del material llamado módulo de Young, y e es la
cepa resultante. Esta relación sólo se aplica en el rango elástico, e indica que la pendiente de la curva de esfuerzo frente a deformación se puede utilizar para encontrar el módulo de Young. Los ingenieros a menudo usan este cálculo en los ensayos de tracción. El rango elástico termina cuando el material alcanza su límite elástico. En este punto comienza la deformación plástica.
Tenga en cuenta que no todos los materiales elásticos se someten a deformación elástica lineal, y algunos, como el cemento, fundición gris, y muchos polímeros, responden linealmente. Para estos materiales de la ley de Hooke es inaplicable.
La deformación plástica Este tipo de deformación es irreversible. Sin embargo, un objeto en el rango de deformación plástica primero se han sometido a deformación elástica, que es reversible, por lo que el objeto volverá forma parte a su forma original. Termoplásticos blandos tienen una gama bastante grande deformación plástica como hacer metales dúctiles tales como el cobre, la plata, y oro. Acero también lo hace, pero no es de hierro fundido. Plásticos duros termoestables, caucho, cristales, y cerámicas tienen rangos de deformación plástica mínimos. Un material con un amplio rango de deformación plástica es la goma de mascar en húmedo, que puede ser estirados decenas de veces su longitud original.
FracturaEste tipo de deformación también es irreversible. Una ruptura se produce después de que el
material ha alcanzado el extremo de la goma, de plástico y, a continuación, los rangos de deformación. En este punto, las fuerzas se acumulan hasta que son suficientes para causar una fractura. Todos los materiales eventualmente fractura, si se aplican fuerzas suficientes.
Conceptos erróneosUna creencia popular es que todos los materiales que se doblan son "débiles" y los que no lo son
"fuertes". En realidad, muchos materiales que se someten a grandes deformaciones elásticas y plásticas, tales como el acero, son capaces de absorber las tensiones que podrían causar materiales frágiles, tales como vidrio, con rangos de deformación plástica mínimos, para romper.
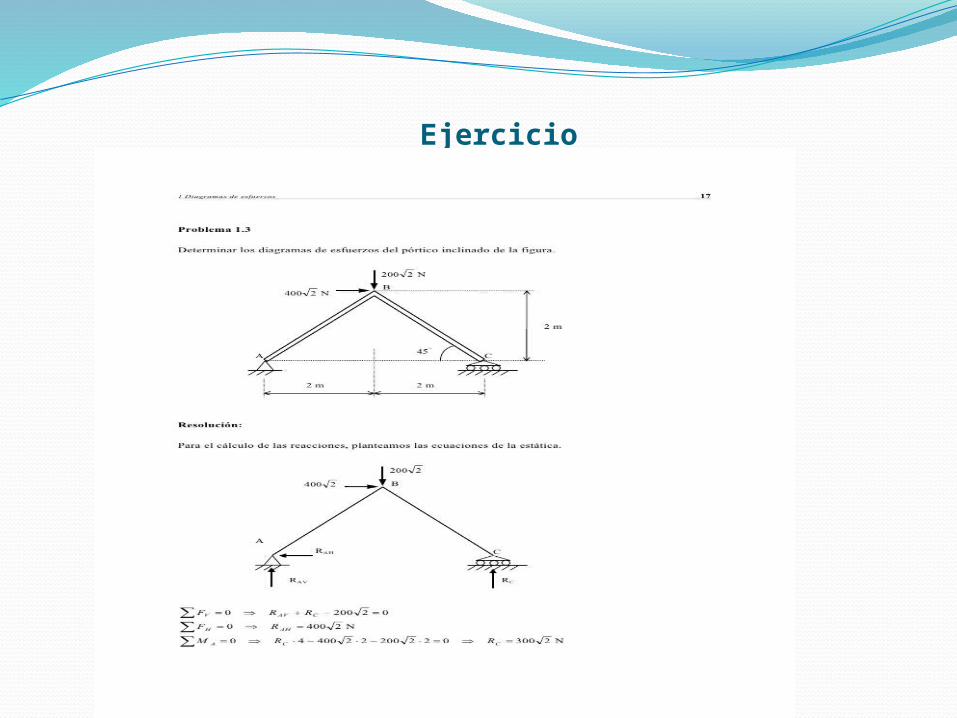
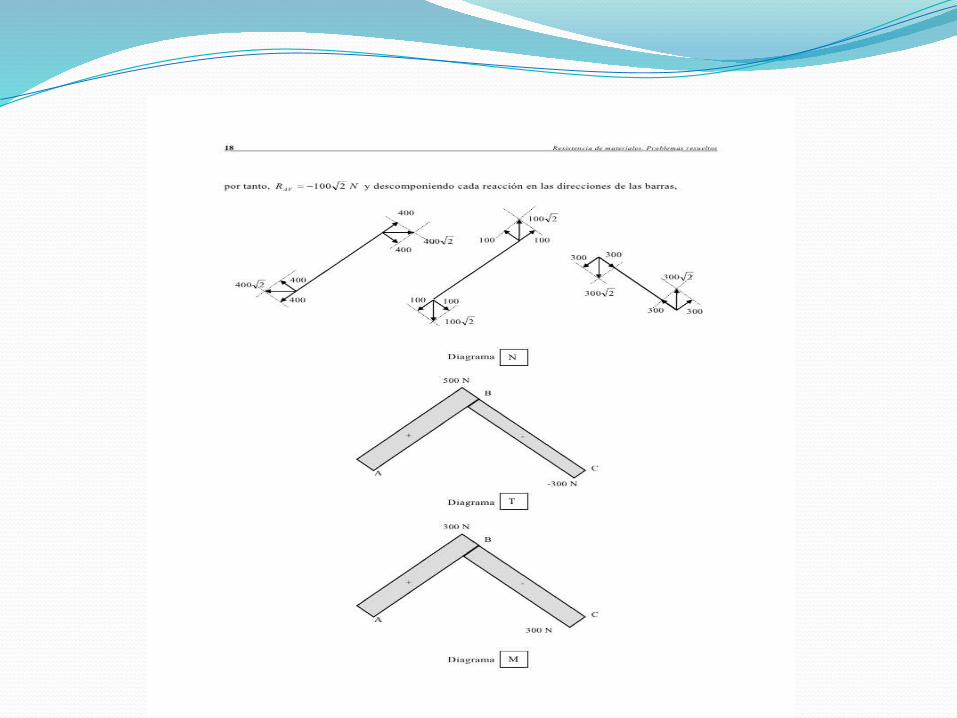
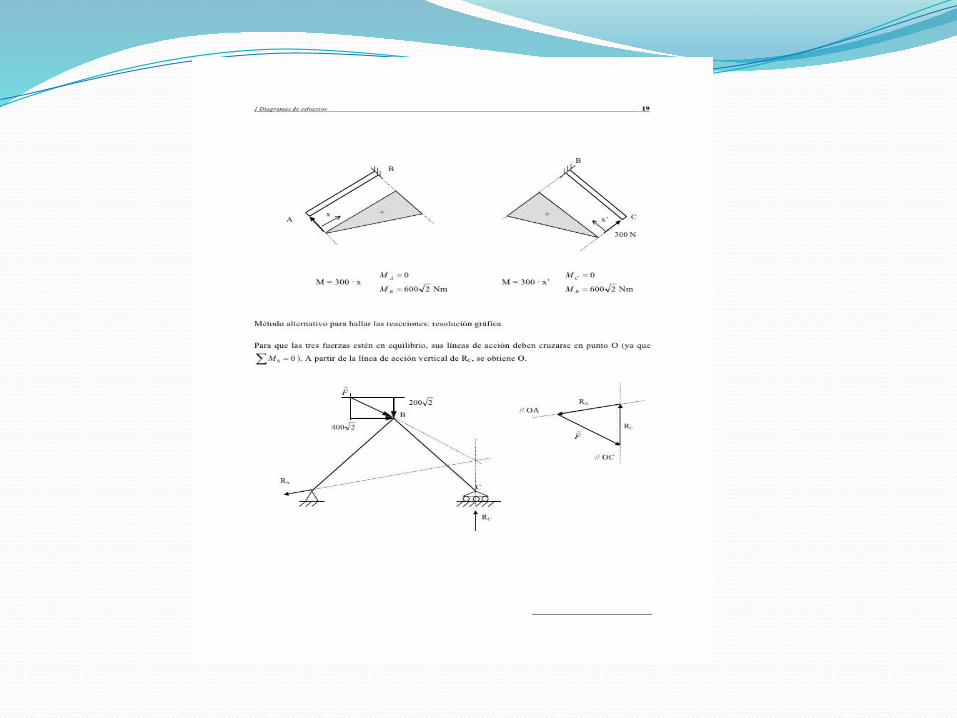
Ejercicio
Torsión de Saint-Venant pura
La teoría de la torsión de Saint-Venant es aplicable a piezas prismáticas de gran inercia torsional con cualquier forma de sección, en esta simplificación se asume que el llamado momento de alabeo es nulo, lo cual no significa que el alabeo seccional también lo sea. La teoría de torsión de Saint-Venant da buenas aproximaciones para valores , esto suele cumplirse en:
Secciones macizas de gran inercia torsional (circulares o de otra forma).
Secciones tubulares cerradas de pared delgada.Secciones multicelulares de pared delgada.Para secciones no circulares y sin simetría de revolución la teoría de
Sant-Venant además de un giro relativo de la sección transversal respecto al eje baricéntrico predice un alabeo seccional o curvatura de la sección transversal. La teoría de Coulomb de hecho es un caso particular en el que el alabeo es cero, y por tanto sólo existe giro.
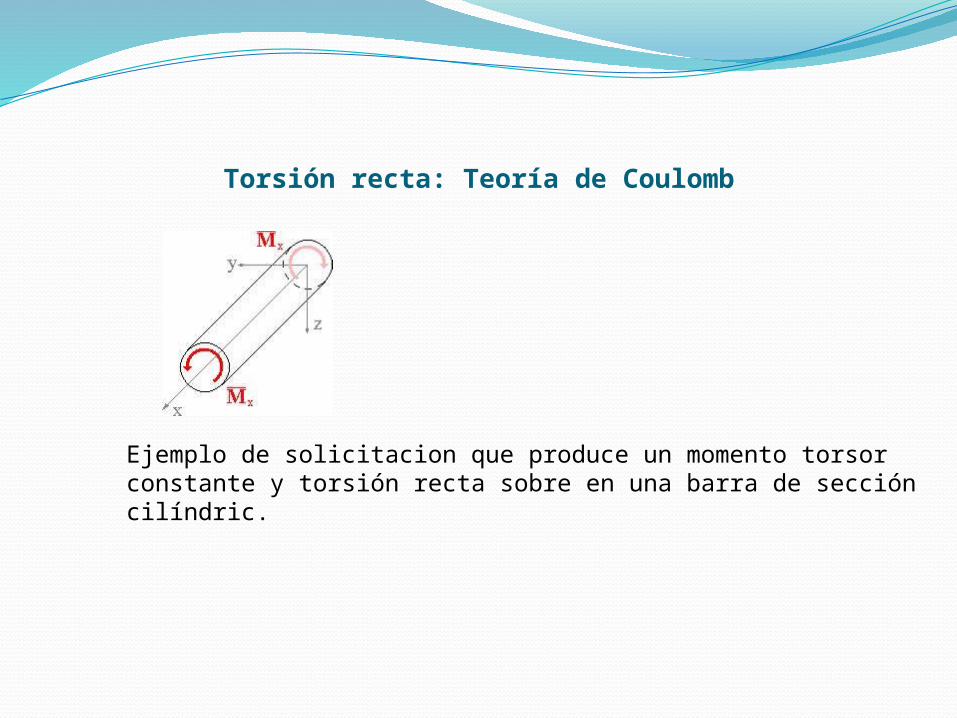
Torsión recta: Teoría de Coulomb
Ejemplo de solicitacion que produce un momento torsor constante y torsión recta sobre en una barra de sección cilíndric.
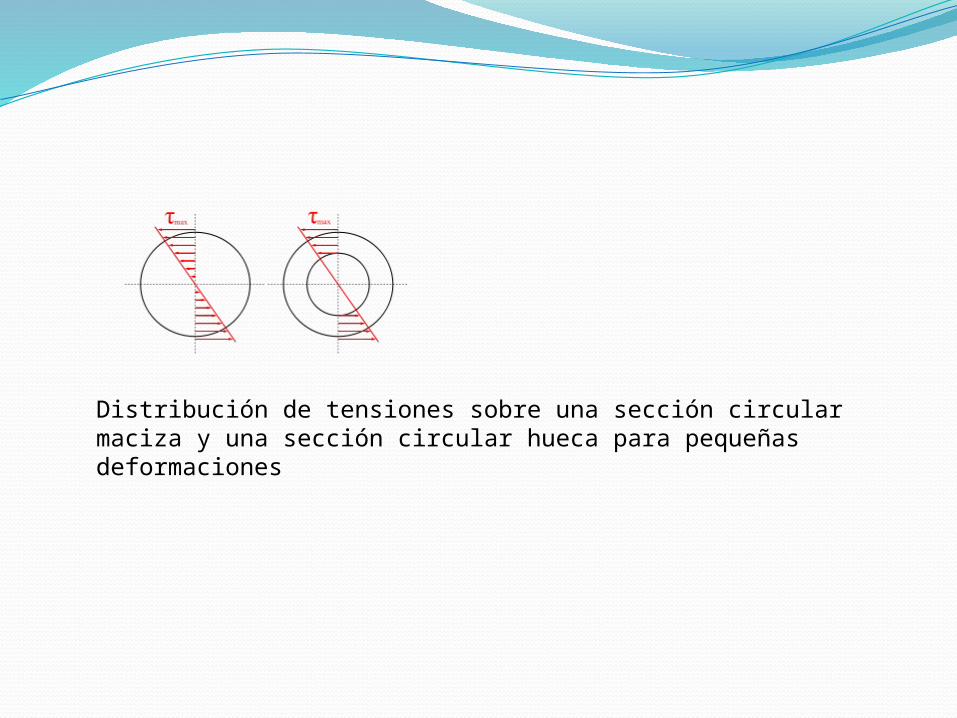
Distribución de tensiones sobre una sección circular maciza y una sección circular hueca para pequeñas deformaciones
La teoría de Coulomb es aplicable a ejes de transmisión de potencia macizos o huecos, debido a la simetría circular de la sección no pueden existir alabeos diferenciales sobre la sección. De acuerdo con la teoría de Coulomb la torsión genera una tensión cortante el cual se calcula mediante la fórmula:
Donde:: Esfuerzo cortante a la distancia .: Momento torsor total que actúa sobre la sección.: distancia desde el centro geométrico de la sección hasta
el punto donde se está calculando la tensión cortante.: Módulo de torsión.



















