Embed Size (px)
Citation preview
1
EQUIPO TRANSPONDEDOR
KT 76A
El transponder KT 76A es parte integral del Sistema Radio Faro del control de Tráfico Aéreo (ATCRBS).
En la aeronave, su función es transmitir una respuesta codificada a una interrogación codificada transmitida por
una estación de radar en tierra de control de tráfico.
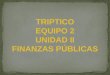
Cada una de estas estaciones ATC de tierra cuenta con dos tipos de radar. El primero de ellos, llamado Radar
de Vigilancia Primario (PSR), opera bajo los principios de un radar normal de recibir la energía reflejada de la
aeronave bajo vigilancia. El segundo, llamado Radar de Vigilancia Secundario (SSR), opera con la respuesta
codificada del Transpondedor de abordo. Ambos radares se usan en conjunto para desarrollar el escenario
completo del tráfico aéreo y mostrarlo en una sola pantalla de radar. Una estación de tierra típica de control de
tráfico aéreo se muestra en la figura 4-1.
Figura 4-1 Escenario del ATCRBS
El SSR interroga al transpondedor de abordo en uno de dos modos, referidos como interrogaciones en Modo
“A”, y modo “C”. El tipo de interrogación está determinado por el espaciado entre los dos pulsos transmitidos por
el SSR sobre una portadora de 1030+/- .2MHz. Cada interrogación contiene un tercer pulso a la misma
frecuencia el cual no es transmitido por el SSR sino por una antena omnidireccional ubicada en la misma
estación de tierra. Este pulso es transmitido 2us después del primer pulso transmitido por el SSR. Las
interrogaciones características en Modo “A” o Modo “C” se muestran en la figura 4-2.

2
Figura 4-23. Características del codificado de la interrogación.
El propósito de P2, la señal de la antena omnidireccional, es permitirle al transpondedor de abordo determinar
si la interrogación proviene del lóbulo principal de la señal de transmisión del SSR, o de algún lóbulo lateral. Si el
equipo de abordo ha sido interrogado por un lóbulo lateral, no se generará una respuesta. Una respuesta a una
interrogación de un lóbulo latera podría darle al operador de radar de tierra una lectura de posición errónea de la
aeronave cuyo transponder está respondiendo. El equipo de abordo determina por comparación de amplitud
entre los pulso P1 y P2 si la interrogación proviene de un lóbulo lateral. Si P1 el más grande que P2 se trata de
una interrogación válida del lóbulo principal. Si P2 es igual o más grande que P1, entonces la interrogación
proviene del lóbulo lateral de la señal de la estación SSR. La razón de esta condición puede explicarse con el
patrón de radiación compuesto de la antena de la estación de tierra como lo muestra la figura 4-3.
Figura 4-3. Patrón de radiación compuesto de la antena de la estación de tierra.

3
Puede observase que la potencia recibida de la antena omnidireccional es menor que la potencia recibida
del lóbulo principal, pero mayor que la potencia recibida de cualquiera de los lóbulos laterales del SSR. Eta es
la razón de que en la interrogación del lóbulo principal, P1 es más grande que P2; y en una interrogación del
lóbulo lateral, P2 es igual o más grande que P1.
El equipo de abordo responde a las interrogaciones del Modo “A” y Modo “C” con un grupo de pulsos
codificados con una portadora de 1090 +/_ 3MHz. En una respuesta al Modo “A”, el codificado de los pulsos
representa un número de identificación de la aeronave que lleva a bordo al transpondedor. El número de
identificación que será transmitido se inserta al transponder por medio de interruptores selectores de código.
Este número consta de cuatro dígitos octales (0-7) que le dan al transponder la capacidad de 4096 diferentes
números de identificación. El codificado de la respuesta en Modo “A” puede consistir de más de quince pulsos.
Doce de estos pulsos forman el número de identificación. Los otros dos, denominados pulsos delimitadores,
van colocados antes y después de los doce pulsos de información. El último pulso es un pulso especial de
identificación para auxiliar al operador de radar. Los números de identificación de la unidad de control y las
característica de codificado de la respuesta para los 15 pulsos de respuesta se muestran en la figura 4-5.

4
Figura 4-5 Características de codificado de la respuesta.
TEORÍA GENERAL DEL CIRCUITO
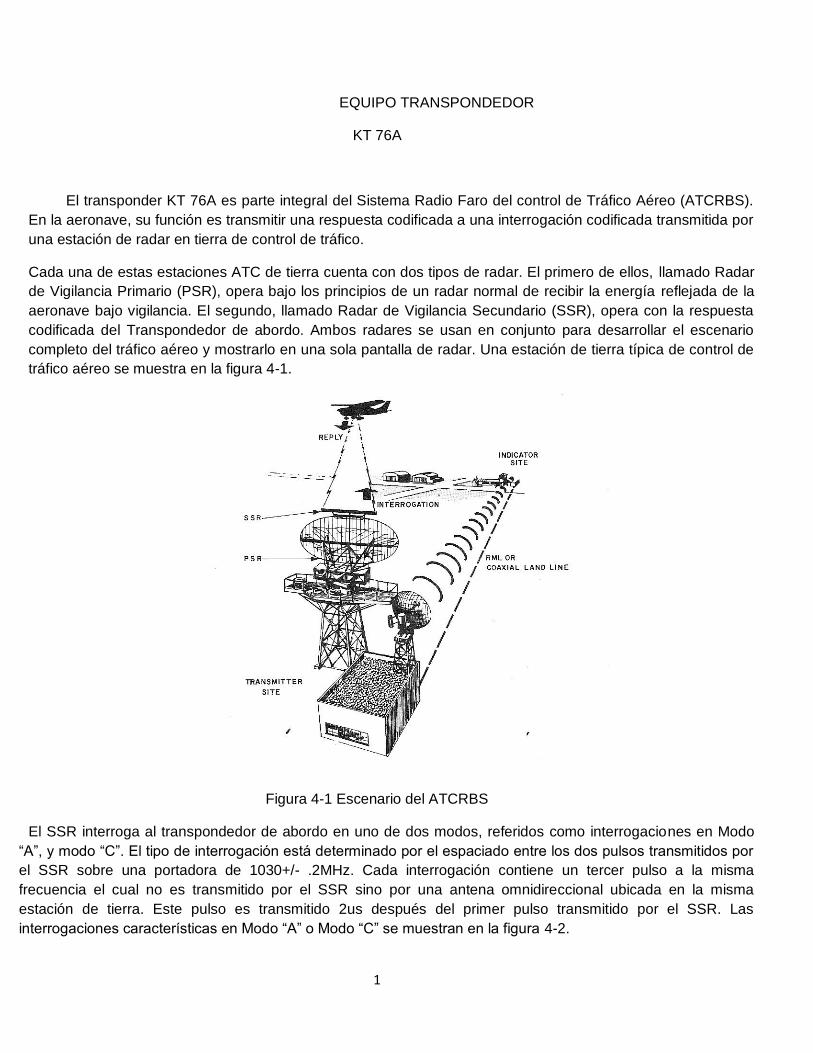
El diagrama a bloques muestra las interconexiones de las partes funcionales del equipo (Ver figura 4-7).
5
Figura 4-7. Diagrama a bloques del equipo KT 76A.
Los pulsos de interrogación del SSR los recibe el transpondedor de abordo y se dirigen a través de un Filtro
Pasa Bajos y un Duplexor a un Filtro Pasa bandas de 1030MHz y a un Mezclador. Aquí es mezclado con la
salida del >Oscilador Local (L.O.) e insertado en amplificador de FI. La frecuencia de 970MHz del oscilador
local, cuando se mezcla con la señal recibida de 1030MHz, proporciona una frecuencia de 60MHz.
AMPLIFICADOR DE FI
El amplificador de FI toma la señal de entrada sobre un rango dinámico de 50dB y comprime la salida de video
a un rango dinámico de 15dB. Esto se logra por medio de detecciones sucesivas de la señal de FI amplificada.
Una segunda entrada del Amplificador de FI es la salida del Control Automático de Sobrecarga (AOC). Esta
línea de entrada reduce la ganancia de FI bajo una condición de sobrecarga, de tal manera que solo una parte
específica de las interrogaciones recibidas causan una respuesta.
AMPLIFICADOR DE VIDEO
La salida de video detectada de la FI se amplifica en el Amplificador de Video.
CIRCUITO DE SUPRESOR DE RUIDO
El Circuito de Supresión de Ruido rechaza cualquier pulso con un ancho de menos de 0.3us.
6
FORMADOR DE TRINCHERA Y CONMUTADOR DE VIDEO
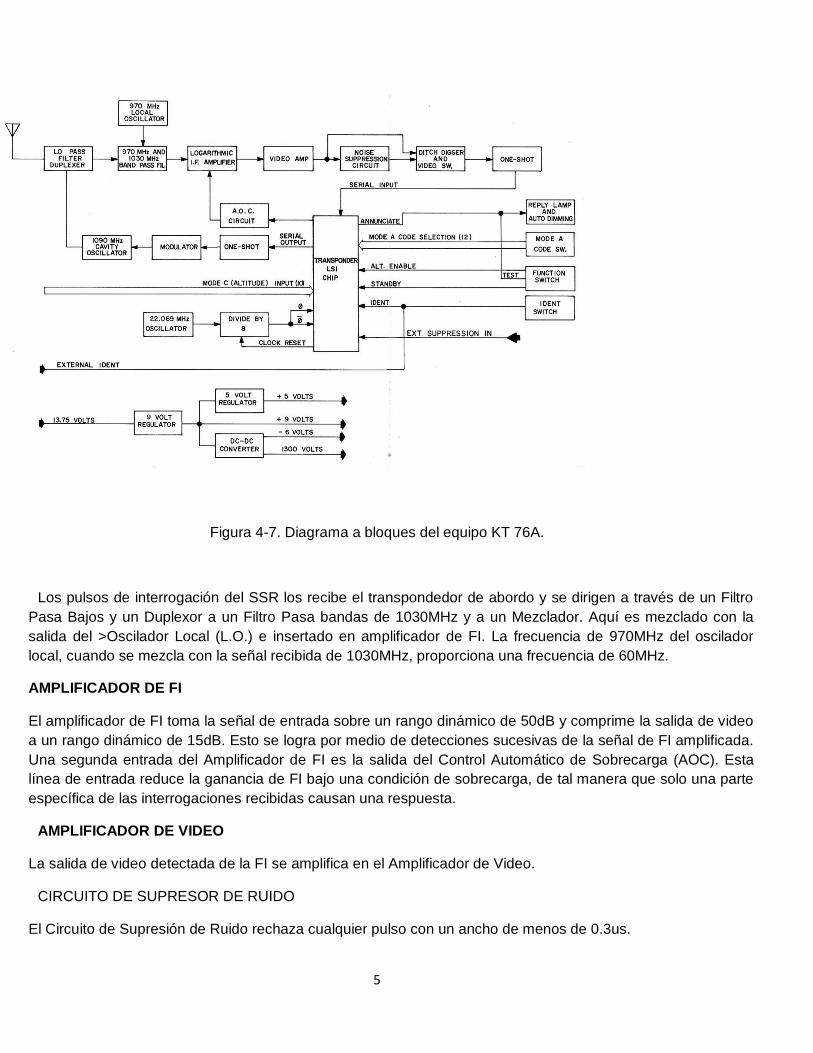
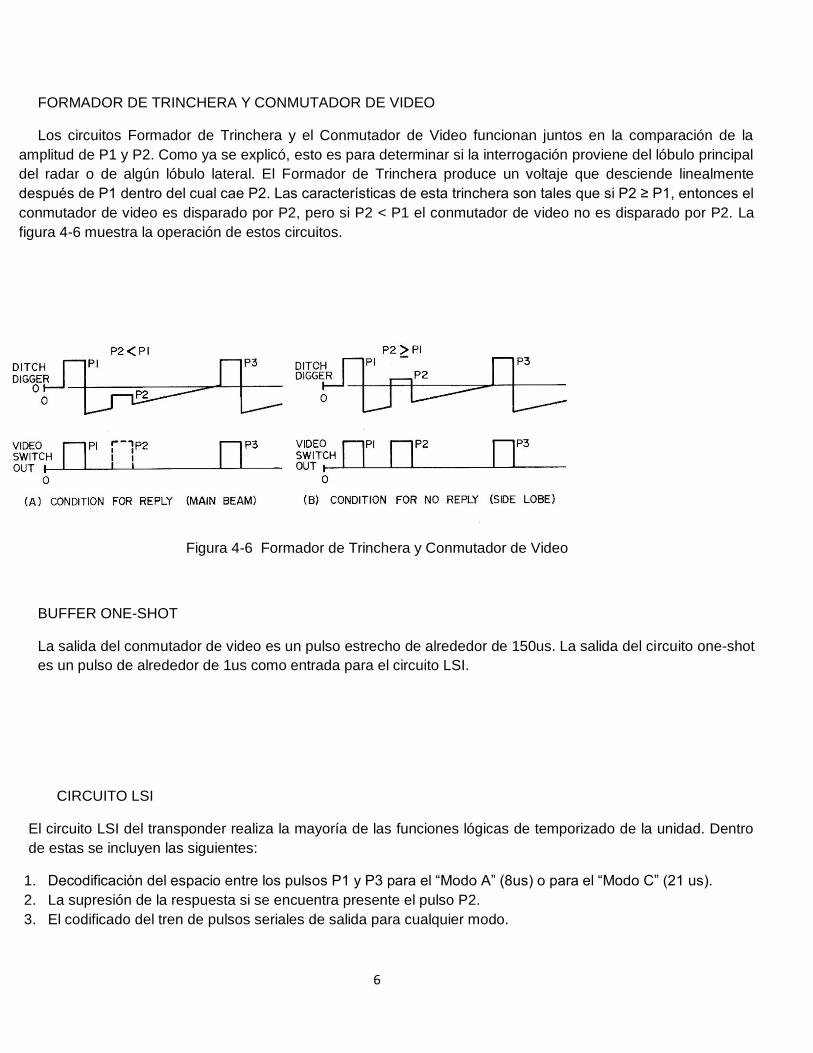
Los circuitos Formador de Trinchera y el Conmutador de Video funcionan juntos en la comparación de la
amplitud de P1 y P2. Como ya se explicó, esto es para determinar si la interrogación proviene del lóbulo principal
del radar o de algún lóbulo lateral. El Formador de Trinchera produce un voltaje que desciende linealmente
después de P1 dentro del cual cae P2. Las características de esta trinchera son tales que si P2 ≥ P1, entonces el
conmutador de video es disparado por P2, pero si P2 < P1 el conmutador de video no es disparado por P2. La
figura 4-6 muestra la operación de estos circuitos.
Figura 4-6 Formador de Trinchera y Conmutador de Video
BUFFER ONE-SHOT
La salida del conmutador de video es un pulso estrecho de alrededor de 150us. La salida del circuito one-shot
es un pulso de alrededor de 1us como entrada para el circuito LSI.
CIRCUITO LSI
El circuito LSI del transponder realiza la mayoría de las funciones lógicas de temporizado de la unidad. Dentro
de estas se incluyen las siguientes:
1. Decodificación del espacio entre los pulsos P1 y P3 para el “Modo A” (8us) o para el “Modo C” (21 us).
2. La supresión de la respuesta si se encuentra presente el pulso P2.
3. El codificado del tren de pulsos seriales de salida para cualquier modo.

7
4. La inserción del SPI o pulso de identificación en la salida serial. Cuando se pulsa el botón Ident, el pulso de
identificación se incluye en todas las respuestas por un periodo de 23 segundos.
5. Cuando se aplica energía al equipo por primera vez, se suprimen todas las respuestas por un período de 47
segundos. Este retardo al encendido ocurre siempre que se interrumpa la energía por más de 5 segundos.
6. La salida “Anunciate” excita a la lámpara “REPLY”. Esta salida se hace alta por un período de 760ms
siempre que el transponder envía una respuesta. Además, se hace alta continuamente por el período de 23
segundos siguiendo un bajo a la entrada “Ident”.
7. Las respuestas en “Modo C” consta de pulsos delimitadores solo cuando la señal ALT EN es alta.
8. Cuando la terminal STBY es baja, el circuito ignora la línea de entrada serial.
RELOJ
El temporizado del circuito LSI se produce a partir del oscilador a cristal de 22.069MHz. Esta
frecuencia se divide por ocho para proporcionar un reloj de dos fases a 2.758625MHz. El driver se
restablece después de una interrogación para sincronizar la respuesta con la interrogación.
CONTROL AUTOMÁTICO DE SOBRECARGA (A.O.C)
La salida de supresión externa del LSI es un pulso de 35us de duración durante cada respuesta.
Estos pulsos son promediados y utilizados para censar una condición de sobrecarga. El receptor es
desensibilizado para limitar la cantidad de respuestas a aproximadamente 1200 respuestas por segundo.
EXCITADOR DE LA LÁMPARA “REPLY” Y ATENUADOR AUTOMÁTICO DE ILUMINACIÓN.
El circuito conmuta a la lámpara de respuesta de encendido a apagado cada vez que la línea ANUNCIATE
del circuito LSI se hace alta. Un censor de nivel de iluminación de la cabina atenúa automáticamente a la
lámpara de respuesta para niveles de iluminación de cabina bajos. Además, al colocar el interruptor de
funciones en la posición TEST, enciende la lámpara de respuesta.
MODULADOR Y TRANSMISOR
El modulador toma los datos seriales codificados y conmuta a la cavidad del transmisor a encendido o
apagado adecuadamente. La salida de RF del oscilador pasa a través de un filtro pasa bajos a la antena,
desde donde se radia la potencia. El propósito del filtro pasa bajos es atenuar los armónicos más altos de la
transmisión de 1090MHz.
TEORÍA DE OPERACIÓN DETALLADA DEL CIRCUITO
SECCIÓN DE RF
La sección completa de radio frecuencia del transponder se encuentra incorporada en un ensamble
troquelado. Las funciones que se realizan en el ensamble son las siguientes:
1. Rechazo de los armónicos del transmisor.
2. Duplexado de entrada y salida.

8
3. Selectividad de la primera etapa del receptor.
4. Filtrado e inyectado del Oscilador Local.
5. Mezclado de la señal de entrada y del Oscilador Local.
Un diagrama de circuito equivalente para la sección de RF se muestra en la figura 4-8.
Los armónicos de la salida del transmisor se filtran por medio de un filtro pasa bajos de 1300MHz.
Las características de este filtro san tales que el segundo armónico de la frecuencia del transmisor
(2180MHz) se atenúa en más de 45dB. El aislamiento entre las salida del transmisor y el diodo mezclador,
así como la primera etapa del receptor se obtiene por medio de un filtro pasa bandas de 1030MHz. Este
filtro pasa la señal recibida de 1030 MHz de la antena al diodo mezclador, mientras que atenúa
grandemente la frecuencia del transmisor de 1090MHz.
La salida del Oscilador Local se filtra por medio de un filtro pasa bandas de 970MHz. Este filtro se
utiliza para separar la frecuencia del Oscilador Local de otros armónicos del multiplicador de frecuencia en el
O.L.
La señal inyectada del O.L. y la señal de 1030MHz provenientes del filtro pasa bandas se mezclan
por acción del diodo CR202, después de pasar a través de las redes de acoplamiento apropiadas. La
frecuencia de diferencia de la acción del mezclado pasa a la sección de F.I. mientras que el resto de las
componentes del mezclado se envían a tierra por medio del capacitor C210.
9
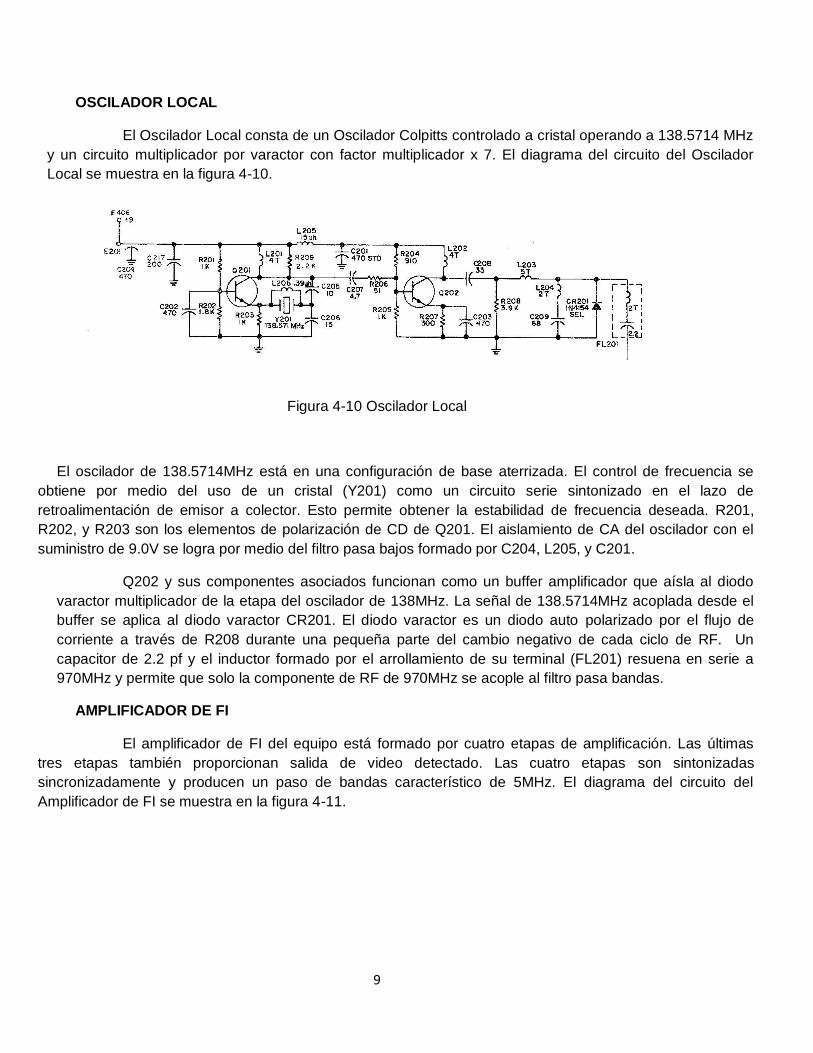
OSCILADOR LOCAL
El Oscilador Local consta de un Oscilador Colpitts controlado a cristal operando a 138.5714 MHz
y un circuito multiplicador por varactor con factor multiplicador x 7. El diagrama del circuito del Oscilador
Local se muestra en la figura 4-10.
Figura 4-10 Oscilador Local
El oscilador de 138.5714MHz está en una configuración de base aterrizada. El control de frecuencia se
obtiene por medio del uso de un cristal (Y201) como un circuito serie sintonizado en el lazo de
retroalimentación de emisor a colector. Esto permite obtener la estabilidad de frecuencia deseada. R201,
R202, y R203 son los elementos de polarización de CD de Q201. El aislamiento de CA del oscilador con el
suministro de 9.0V se logra por medio del filtro pasa bajos formado por C204, L205, y C201.
Q202 y sus componentes asociados funcionan como un buffer amplificador que aísla al diodo
varactor multiplicador de la etapa del oscilador de 138MHz. La señal de 138.5714MHz acoplada desde el
buffer se aplica al diodo varactor CR201. El diodo varactor es un diodo auto polarizado por el flujo de
corriente a través de R208 durante una pequeña parte del cambio negativo de cada ciclo de RF. Un
capacitor de 2.2 pf y el inductor formado por el arrollamiento de su terminal (FL201) resuena en serie a
970MHz y permite que solo la componente de RF de 970MHz se acople al filtro pasa bandas.
AMPLIFICADOR DE FI
El amplificador de FI del equipo está formado por cuatro etapas de amplificación. Las últimas
tres etapas también proporcionan salida de video detectado. Las cuatro etapas son sintonizadas
sincronizadamente y producen un paso de bandas característico de 5MHz. El diagrama del circuito del
Amplificador de FI se muestra en la figura 4-11.

10
Figura 4-11 Amplificador de FI
L402 y R409 a la entrada de FI forman un retorno a tierra para la corriente de CD del diodo mezclador.
El inductor L402 funciona como un choque de radio frecuencia para desacoplar a R409 de la entrada de Fide
60MHz. La línea AOC proporciona la polarización de base para la primera etapa y se filtra por acción de
C412, R406, C413. Bajo tasas normales de interrogación, el voltaje AIOC es de 1.8V. Durante una condición
de sobrecarga este voltaje disminuye para reducir la ganancia de la primera etapa. La terminal de suministro
de 9.0V se desacopla de la RF por medio de un filtro pasa bajos formado por C411, R410, C419, R416, C424,
R421, y C429.
El filtrado del suministro del colector para la segunda etapa se logra por medio de un filtro pasa bajos formado
por R413, C422. R418, y C427 proporcionan el filtrado del suministro de colector para la tercera etapa, y R423
y C432 para la última etapa.
La señal de entrada de FI se acopla a la primera etapa por medio de C414. En el circuito de colector de la
primera etapa se encuentra un circuito tanque resonante formado por el secundario de T402 y C418. La
energía se toma de la derivación del secundario de T402 para proporcionar el acoplamiento de impedancias
acoplada a la segunda etapa por medio de C420. A través de primario de T402 se encuentra un resistor de
carga, R412. La función de este resistor es disminuir la Q de este circuito resonante, ampliando las
características pasa bandas.
Los circuitos de colector de las siguientes tres etapas son idénticos a la primera etapa. Además
de amplificar y proporcionar selectividad, las últimas tres etapas detectan la señal de FI para obtener la
salida de video. El método de detección se denomina de detección sucesiva. La ganancia general de FI es
suficiente para generar amplitudes grandes de señal y ruido en CR403, que es el primer detector. La salida

11
resultante es cercanamente lineal y se incrementa hasta que se satura Q407. El segundo detector de video
a contribuir a la salida, es el diodo formado en la unión base-emisor de Q407. Esta salida de video se
incrementará hasta que Q406 se sature. Hasta este punto, el tercer detector, el diodo base-emisor de Q406
empieza a contribuir al video detectado. El cuarto detector es el diodo de base-emisor de Q405. La salida
total es comprimida a alrededor de 3dB de cambio de video por cada 10dB de cambio de RF, sobre al
menos un rango de 50dB de MTL. La detección de video y su combinación se muestran en la figura 4-12.
C421, C426, L403, C431, L404, y C432, completan el desacoplamiento inter-etapas de la frecuencia de
señal de FI, pero proporcionan una línea de salida común para las señales de video detectado.
AMPLIFICADOR DE VIDEO
El amplificador de video se utiliza para amplificar la salida de video del amplificador de FI. El diagrama del
circuito del Amplificador de Video se muestra en la figura 4-13.
Figura 4-13 Amplificador de Video.
La potencia para el amplificador de video se obtiene de las fuentes de alimentación de 14.0V, 9.0V, y -
6.0V. Los 14V son filtrados por un filtro pasa bajos formado por R429 y C440.
CIRCUITO DE SUPRESOR DE RUIDO
Un pulso en la salida del Amplificador de Video se traslada a niveles lógicos TTL por medio de
Q411. Cuando el colector de Q411 se hace bajo, C448 se descarga a través de R446. Después de este
retardo de tiempo, el circuito one-shot formado por I404D es disparado. El pulso de transición negativa en la
terminal 1 de I403 es invertido por I404D. R437 acopla la salida del amplificador de video al circuito de
trinchera, pero cuando la terminal 8 de I404 es baja, la línea se aterriza. El pulso one-shot, por lo tanto,
permite solo el paso de la porción media del video a través del circuito de trinchera, proporcionando rechazo
contra picos de ruido estrechos.

12
Figura 4-14 Circuito de Supresión de Ruidos
CIRCUITO FORMADOR DE TRINCHERA Y CONMUTADOR DE VIDEO
El circuito formador de trinchera y de conmutación de video se muestra en la figura 4-15.
Figura 4-15 Formador de Trinchera y Conmutador de Video
Cuando en el emisor de Q413 aparece un pulso de video, C4348 se carga. Esta corriente de carga
fluye a través de CR405 y provoca una caída de voltaje a través de R436. La corriente en reposo a través de
R436 es balanceada en I401 por la caída a través de R463. Q412 funciona como una fuente de corriente
constante que carga a C438 a una tasa lineal. I401 es un comparador diferencial de alta velocidad que
traslada la salida de trinchera de bajo nivel a niveles lógicos TTL.
I400E e I400F y sus componentes asociados funcionan como un multivibrador one-shot para
proporcionar un pulso constante (nominalmente un microsegundo) a un nivel de 9 voltios como entrada al
circuito LSI para la decodificación.

13
LIMITADOR AOC
La salida de Supresión Externa, terminal 13 de I405, (Figura 4-17) se aplica al Control
Automático de Sobrecarga. Q414 está en un estado apagado para bajas tasas de respuesta y el voltaje
de salida es de aproximadamente 3 voltios.
El circuito de entrada integra el número de respuestas/seg cargando a C437 a través de R445
durante una respuesta y descargando a C437 a través de R444 durante el tiempo en que la compuerta de
respuesta sea LO. Conforme el número de respuestas/seg se incrementa, el voltaje promedio en la base
de Q414 se incrementa. Q414 finalmente alcanzará un estado total ENCENDIDO disminuyendo el voltaje
de polarización de FI.
Figura 417. Circuito AOC
Conforme el voltaje de polarización en la base de la primera etapa de FI disminuye, la ganancia de
FI también disminuye. Consecuentemente también disminuye la sensibilidad del transponder hasta el punto
que se ven limitadas el número de interrogaciones detectadas.