Embed Size (px)
DESCRIPTION
Apostila Modelagem Matemática
Citation preview

Graduacao Curso de Licenciatura em Matematica
Modelagem Matematica
Jose Angel Davalos Chuquipoma
UFSJMEC / SEED /UAB
2012
1

Modelagem Matematica / Jose Angel Davalos Chuquipoma. - SaoJoao del-Rei, MG: UFSJ, 2012.
139p.
Curso de Graduacao “Licenciatura”em Matematica.
1. Modelagem Matematica 2. Matematica I. Chuquipoma, J. A. D. II.Tıtulo
2

Sumario
MODELAGEM MATEMATICA 5
UNIDADE I - MODELAGEM MATEMATICA E FORMULACAO DEPROBLEMAS 61.1 Modelagem Matematica . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.1.1 O Que e Modelagem? . . . . . . . . . . . . . . . . . . . . . . . . 71.1.2 O Que e Modelagem Matematica? . . . . . . . . . . . . . . . . . 91.1.3 A Modelagem no contexto da Educacao Matematica . . . . . . . 111.1.4 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.2 Formulacao de Problemas . . . . . . . . . . . . . . . . . . . . . . . . . 161.2.1 Escolha de Temas . . . . . . . . . . . . . . . . . . . . . . . . . . 171.2.2 Coleta de dados . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.2.3 Formulacao de Modelos . . . . . . . . . . . . . . . . . . . . . . . 181.2.4 Atividade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
UNIDADE II - O METODO DOS MINIMOS QUADRADOS 232.1 Ajuste de Curvas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.2 O Metodo dos Mınimos Quadrados . . . . . . . . . . . . . . . . . . . . 272.3 Ajuste Linear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.3.1 Ajuste Linear para o Modelo Exponencial . . . . . . . . . . . . 342.3.2 Ajuste Linear de Modelos Geometricos . . . . . . . . . . . . . . 38
2.4 Ajuste Quadratico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.5 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
UNIDADE III - EQUACOES DE DIFERENCAS 463.1 Variacoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.1.1 Variacoes Discretas . . . . . . . . . . . . . . . . . . . . . . . . . 493.1.2 Variacoes Contınuas . . . . . . . . . . . . . . . . . . . . . . . . 52
3.2 Equacoes de Diferencas . . . . . . . . . . . . . . . . . . . . . . . . . . . 573.2.1 Equacoes de Diferencas Lineares . . . . . . . . . . . . . . . . . . 593.2.2 Sistemas de Equacoes de Diferencas . . . . . . . . . . . . . . . . 663.2.3 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3

UNIDADE IV - EQUACOES DIFERENCIAIS ORDINARIAS 724.1 Equacoes Diferenciais Ordinarias . . . . . . . . . . . . . . . . . . . . . 73
4.1.1 Definicoes Basicas . . . . . . . . . . . . . . . . . . . . . . . . . . 744.1.2 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.2 Equacoes Diferenciais Ordinarias de 1a Ordem . . . . . . . . . . . . . . 794.2.1 Variaveis Separaveis . . . . . . . . . . . . . . . . . . . . . . . . 844.2.2 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.3 Equacoes Diferenciais Ordinarias de 2a Ordem . . . . . . . . . . . . . . 914.3.1 Reducao de Ordem . . . . . . . . . . . . . . . . . . . . . . . . . 914.3.2 Atividade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 974.3.3 Equacoes Lineares de Segunda Ordem com Coeficientes Constantes 994.3.4 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
UNIDADE V - APLICACOES DE EQUACOES DIFERENCIAIS OR-DINARIAS 1125.1 Modelos de Dinamica Populacional . . . . . . . . . . . . . . . . . . . . 113
5.1.1 Modelo de Malthus . . . . . . . . . . . . . . . . . . . . . . . . . 1145.1.2 Modelo de Verhulst . . . . . . . . . . . . . . . . . . . . . . . . . 1175.1.3 Modelo de Lotka - Volterra . . . . . . . . . . . . . . . . . . . . 1245.1.4 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Respostas das Atividades 1346.1 Respostas das Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . 134
REFERENCIAS 140
4

MODELAGEM MATEMATICA
Seja bem-vindo (a)
ao Modulo da Disciplina Modelagem Matematica !
Este texto destina-se ao curso de graduacao a distancia da disciplina de ModelagemMatematica no marco da Universidade Aberta do Brasil -UAB. O objetivo principal doconteudo do modulo e fornecer ao aluno um texto que desenvolva os topicos principaisda ementa desta materia que normalmente nao e possıvel encontrar num unico texto,facilitando, assim, o entendimento por parte do aluno no estudo desta materia.
A informacao teorica apresentada e complementada com os exercıcios propostos, coma intencao de que o aluno mostre os conhecimentos adquiridos no texto e nos exemplosresolvidos. Os temas que apresentamos e discutimos neste texto sao divididos em cincounidades que a seguir detalhamos.
A primeira unidade se destina ao estudo dos aspectos teoricos da Modelagem Ma-tematica, onde sao abordadas as etapas da modelagem e em especial as etapas doprocesso da Modelagem Matematica, escolha de temas, formulacao de modelos.
Na segunda unidade, estudamos o metodo dos mınimos quadrados e suas implicanciasno ajuste linear de curvas para os modelos de tipo exponencial e geometrico, comotambem para o ajuste quadratico.
Na terceira unidade, estudamos as equacoes em diferencas finitas e destacamos os mo-delos lineares de diferencas e abordamos os conceitos de variacoes discretas e contınuas.
A unidade quatro esta destinada ao estudo dos aspectos introdutorios das equacoes di-ferenciais ordinarias, enfatizando o metodo de variaveis separaveis para solucionar umaequacao ordinaria de primeira ordem; solucionamos uma equacao de segunda ordemhomogenea com coeficientes constantes, consideramos exemplos de aplicacao.
Por ultimo, na quinta unidade, sao vistos alguns problemas de aplicacao das equacoesdiferenciais: abordamos problemas da dinamica populacional, entre eles o modelo deMalthus, o modelo de Verhulst e o modelo de Lotka-Volterra.
Apesar de este texto apresentar um conteudo basico, e importante consultar outrasfontes com o intuito de enriquecer os conceitos, bem como auxiliar na resolucao dosexercıcios.
O autor
5

Unidade I
MODELAGEM MATEMATICA
E
FORMULACAO DE PROBLEMAS
6

1.1 Modelagem Matematica
Objetivos
• Interpretar as etapas presentes no processo da modelagem.
• Explicitar a importancia da matematica para a formacao do aluno.
• Aplicar os conhecimento obtidos na formulacao de novos problemas que envolvema modelagem matematica.
1.1.1 O Que e Modelagem?
A diversidade de fenomenos presentes ao longo do desenvolvimento de nossa historiatem sido um dos fatos pelos quais o homem vem se superando atraves das geracoes, como intuito de ir alem do desconhecido; estes fenomenos ou obstaculos tem permitido quecada pessoa construa o seu conhecimento dentro de suas proprias limitacoes, quer dizer,vai criando conhecimentos ante seus prorios problemas da vida cotidiana. Entao, po-demos dizer que esta e uma maneira de como o homem (aprendedor) constitui o sujeitodo processo congnitivo, que, dependendo de nossas capacidades, vamos estabelecendoum conjunto de informacoes, ideias e abstracoes da realidade, cujo comportamentodesejamos analisar e interpretar em um linguagem logica, com caracterısticas similaresa magnitude do problema; conceitualmente, isto e o que e conhecido como modelo deum problema.
Assim, se o modelo obtido nao consegue interpretar a realidade do problema, seja pordiversos fatores como tamanho do problema, complexidade etc., somos obrigados asimplificar as hipoteses(informacoes) do objeto de estudo (fenomeno) para obter ummodelo com caracterısticas semelhante ao problema, porem descartanto caracterısticasou comportamentos menos importantes ou secundarios.
Neste contexto, entendemos por Modelagem o processo de aproximar ou transformarproblemas concretos do mundo real em modelos de problemas que simulem de formaotima o objeto de estudo e assim poder resolve-los para interpretar suas solucoes deforma clara.
Etapas da Modelagem
Apos ter entendido o conceito de modelagem, surge a questao: como e que podemosconfrontar problemas do mundo real com modelos que possam interpretar tais proble-mas? Para responder essa pergunta, explicaremos a seguir as etapas ou momentos que
7

devem ser tidos em conta na Modelagem.
Primeira Etapa: A primeira etapa consiste em reconhecer a existencia de um pro-blema real, no sentido de ser significativo, isto e, determinar a situacao do problema aser modelado, quer dizer, determinar seu fator de impacto no mundo real.
Exemplo 1 Quando queremos prevenir a reducao do nivel do lencol freatico, causadopelo desmatamento ou reflorestamento das areas florestais, isso constitui um problemade impacto florestal, que exige significacao, avaliacao e crıtica.
Segunda Etapa: Designado o problema, a segunda etapa da Modelagem exige hipotesesde simplificacao, ou seja, devemos conhecer o problema e simplifica-lo; nao simplifica-mos o problema real e sim introduzimos hipoteses que simplificam sua abordagem.
Todo problema nesta etapa deve ser tratado com um grau de simplificacao, e, as vezes,a simplificacao e feita para facilitar a resolucao do modelo.
Exemplo 2 No caso do problema de impacto florestal, o estudo e feito em uma regiaodo plano onde o meio poroso e homogeneo e isotropico (ou seja, possui as mesmas carac-terısticas em todas as direcoes e em todos os pontos); desta forma e que simplificamosas hipoteses com o objetivo de poder fazer um estudo de forma clara.
Terceira Etapa: No passo seguinte do processo da Modelagem temos a terceira etapa,que consiste na resolucao do modelo decorrente atraves de diversas areas do conheci-mento; nesta etapa e muito importante a aproximacao do modelo a considerar.
Exemplo 3 O modelo aproximado do problema de impacto florestal e dado atravesde um modelo de tipo matematico definido por uma equacao em derivadas parciaiscuja solucao e dada pela funcao potencial e por uma funcao que define a localizacaodo lencol freatico.
Quarta Etapa: Na quarta etapa, temos a avaliacao das solucoes encontradas naetapa anterior, de acordo com a questao real do problema a modelar.
Quinta Etapa: Nesta quinta e ultima etapa da Modelagem, o que devemos ter emconsideracao e definir a decisao com base nos resultados obtidos. E assim que, atravesda Modelagem, conseguimos obter melhores condicoes para decidir o que fazer frentea um fenonemo ou a uma situacao real.
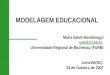
Na Figura 1.1 damos um esquema do processo da modelagem.
8

Figura 1.1: Processo da Modelagem
1.1.2 O Que e Modelagem Matematica?
A Modelagem Matematica e uma materia da Matematica que teve seu inıcio na an-tiguidade a partir de problemas praticos; a invencao da roda pelos sumerios, aproxi-madamente 3.000 anos a.C., foi, por exemplo, um dos primeiros modelos matematicosproduzidos pela humanidade que se conhece; eles observaram um tronco de arvorerolando por um declive e tiveram a ideia de transportar cargas pesadas colocando-assobre objetos rolantes.
Modelos descrevem as nossas crencas sobre como o mundo funciona. Na modelagemmatematica, traduzimos essas crencas em termos da linguagem da matematica. Issotem muitas vantagens: primeiro, Matematica e uma linguagem muito precisa. Isso nosajuda a formular ideias e estabelecer premissas importantes; segundo, a matematica euma linguagem concisa, com regras bem definidas para manipulacoes; terceiro, todosos resultados que os matematicos provaram ao longo de centenas de anos estao a nossadisposicao, e, por ultimo, os computadores podem ser usados para realizar os calculosnumericos.
Segundo BASSANEZI (2011), a ModelagemMatematica e a arte de transformar proble-mas da realidade em problemas matematicos e resolve-los, interpretando suas solucoesna linguagem do mundo real. Assim, entre essas novas formas de considerar e entendera Modelagem, podemos concluir que a Modelagem Matematica e utilizada como ummetodo cientıfico de pesquisa ou tambem como uma estrategia de ensino-aprendizagem.
9

Podemos inferir entao que a Modelagem Matematica surgiu da necessidade do homemem resolver determinadas situacoes ou problemas do seu dia a dia. Nesse sentido,pode-se dizer que Modelagem Matematica e o processo que envolve a obtencao deum modelo que tenta descrever matematicamente um fenomeno da nossa realidade paratentar compreende-lo e estuda-lo, criando hipoteses e reflexoes sobre tais fenomenos.
Ha um grande elemento de compromisso em modelagem matematica. A maioria dossistemas que interagem no mundo real sao demasiado complicados para modelar, nasua totalidade. Daı o primeiro nıvel de compromisso e o de identificar as partes maisimportantes do sistema. Essas serao incluıdas no modelo, o restante sera excluıdo. Osegundo nıvel de compromisso diz respeito a quantidade de manipulacao matematicaque vale a pena. Embora a matematica tenha o potencial de revelar os resultadosgerais, estes resultados dependerao essencialmente da forma das equacoes utilizadas.Pequenas alteracoes na estrutura das equacoes podem exigir enormes mudancas nosmetodos matematicos utilizados.
Que objetivos pode a modelagem alcancar? A Modelagem Matematica pode ser usadapara uma serie de razoes diferentes, qualquer objetivo especıfico a ser alcancado, de-pende tanto do estado do conhecimento do sistema e de como a modelage e feita..Entre as muitas variedade de objetivos temos
• desenvolver a compreensao cientıfica - atraves da expressao quantitativa do conhe-cimento atual de um sistema (bem como exibir o que sabemos ou o que nao sa-bemos);
• testar o efeito de alteracoes no sistema;
• tomar uma decisao, incluindo decisoes taticas dos gestores e as decisoes es-trategicas por planejadores.
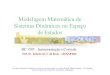
Nesse contexto, o esquema da Modelagem dada pela Figura 1.1, em termos da Mode-lagem Matematica e dado atraves da Figura 1.2:
10

Figura 1.2: Esquema do Processo de Modelagem Matematica. Adaptacao de Burghese Borrie, (1981). Fonte: DA COSTA, J. F. M.; CALDEIRA, A. D.; DOS SANTOS,A. P, 1999.
1.1.3 A Modelagem no contexto da Educacao Matematica
Pelo que foi dado anteriormente, quando estamos familiarizados com a Modelagem,em que o aluno e o sujeito do processo cognitivo e nao somente com problemas ma-tematicos, o pesquisador ou pessoa que trabalha nesta area vai ter uma maior capaci-dade em lidar com a Modelagem Matematica. De outro lado, muitas vezes, temos aideia de que trabalhar na Modelagem com conteudos matematicos altamente sofistica-dos e uma condicao que nao se pode deixar de lado; isso, em geral, nao e verdade, poisa matematica a se utilizar deve ser aquela que permita a resolucao do problema a tratar.
O procedimento ou processo de Modelagem Matematica no contexto da educacao ma-tematica, alem das etapas presentes no processo, deve estar unido a introducao doproblema por meio de informacoes adicionais, como por exemplo, uma figura, um es-quema ou um fluxograma; de tal maneira que possa facilitar ao aluno o entendimentoda situacao do problema a estudar e das diversas formas de modelagens matematicas.
Assim, isso quer dizer que a Modelagem Matematica, no campo da educacao, tem que iralem das etapas que o caracterizam, de fato; devemos entender que, quando na sala deaula o professor ministra o que preparou ou programa com anticipacao aquele conteudo
11

matematico com o intuito de que os alunos aprendessem, sao na verdade ferramentasnecessarias mas nao suficientes para que o aluno comprenda o problema, o que significaque e precisso cobrir esse vazio que ainda esta presente na educacao matematica.
O exemplo seguinte representa um problema que pode ser interpretado atraves daModelagem Matematica.
Exemplo 4 (Controle Biologico de pragas) Desejamos combater biologicamenteuma praga de insetos em uma plantacao sem o uso de substancias agroquımicas.
A estrategia a utilizar e a seguinte: controlamos a populacao de insetos fazendo umaplantacao inicial da planta atacada com o objetivo de atrair os insetos a serem com-batidos, para posteriormente serem recolhidos. No caso possıvel de obter resultadospositivos, teremos determinado na verdade o fator de impacto do problema, pois, semo uso de substancias quımicas, o custo economico resulta ser muito confortavel, deter-minando dessa forma a situacao do problema (primeira etapa).
Claro esta que devemos de considerar o caso em que temos um porcentagem maximade perda p relativa a plantacao inicial, isso devido ao fato que pode nao existireminsetos na plantacao inicial, o que origina uma coleta nula de insetos. O problema serasolucionado se conseguimos determinar a largura de uma faixa em torno de uma regiaoplantada em que pudesse ser colocada a plantacao inicial, tendo em consideracao opercentual maximo de perda p.
Supondo que a regiao de plantacao seja um retangulo e que a producao da plantacaoseja igual a area plantada, estamos na verdade simplificando as hipoteses, e dizer quefazemos uso de umas das etapas do processo da modelagem, isto e, a hipotese de sim-plificacao (segunda etapa). Representando por x a largura da faixa ao redor do camporetangular EFGH, ver Figura 1.3.
Considerando um campo retangular de dimensoes M = 90 e N = 45 dados em metros,com um porcentual maximo de perda p = 5%, vemos da Fifura 1.3 que as dimensoesdo retangulo interior EFGH sao 90− 2x e 45− 2x metros.
Da hipotese, temos que a producao da plantacao (1 − p)MN e igual a area plantada(M − 2x)(N − 2x), isto e,
(1− 0, 05)(90)(45) = (90− 2x)(45− 2x),
ou
3847, 5 = (90− 2x)(45− 2x) = 4x2 − 270x+ 4050
12

Figura 1.3: Geometria do problema
obtendo a expressao quadratica
4x2 − 270x+ 202, 5 = 0,
ou ainda
2x2 − 135x+ 101, 25 = 0,
o que significa que o modelo matematico de nosso problema e dado por uma equacaoquadratica; encontrando as raızes do polinomio de grau dois, estaremos resolvendonosso problema (terceira etapa). Logo, utilizando a formula que nos permite encontrarraızes de uma equacao quadratica, temos
x =135±
√1352 − 4.2.101, 25
4
13

obtendo os seguintes valores aproximados x = 66, 741 ou x = 0, 75.
Embora ambos os valores matematicamente sejam corretos, observamos que o valor dex = 66, 741 metros nao faz sentido, pois a largura da faixa no interior da plantacao deveser menor que 45 metros; isso corresponde a avaliacao dos resultados (quarta etapa),o que implica que a largura da faixa da plantacao inicial deve ser aproximadamentex = 0, 75 metros. Por ultimo, devemos tomar a decisao correta, se for razoavel ou naoo resultado obtido de 0, 75 metros da largura da faixa (quinta etapa).
No exemplo anterior, vemos a importancia de representar o problema por meio de umdesenho, pois isso nos da uma visao global do entendimento da situacao do problema.
Como trabalhar com a Modelagem Matematica em sala deaula?
Ja no setor da educacao, o ensino-aprendizagem realizado atraves da Modelagem Ma-tematica, permite lidar satisfatoriamente tanto entre a combinacao dos aspectos damatematica como com suas aplicacoes; isso faz parte de um dos objetivos que pre-tendemos atingir nesta disciplina. Confiamos nos professores de matematica, temos aobrigacao de mostrar aos alunos estas duas alternativas que se complementam. Outroaspecto a se ter em consideracao para trabalhar com Modelegem Matematica em salade aula e que, devido a se caracterizar como um ambiente de ensino-aprendizagem, osalunos sao convidados a indagar e/ou investigar, por meio da matematica, situacoesprovenientes de outras areas.
Assim, temos que ressaltar a importancia da integracao de situacoes provenientes docotidiano e de outras areas do conhecimento na sala de aula, com o proposito de possi-bilitar aos alunos intervirem na sua realidade. Por ultimo, os parametros que devemosdeixar claro aos alunos no ambito da investigacao e compreensao em aula, envolvemos seguintes aspectos: “identificar o problema; procurar, selecionar e interpretar in-formacoes relativas ao problema; formular hipoteses e prever resultados; selecionarestrategias de resolucao de problemas; fazer e validar conjecturas, experimentando,recorrendo a modelos, esbocos, fatos conhecidos, relacoes e propriedades.”
14

1.1.4 Atividades
1. Uma praga de cigarrinhas ataca uma plantacao de arroz; deseja-se controlar, bio-logicamente a praga, atraves de uma estrategia otima dada no Exemplo 4. Tendoem consideracao uma margem de perda ao redor de 4% ao supor uma plantacaoinicial para recolher as cigarrinha e supondo a area de plantacao um campo re-tangular de dimensoes M = 80m e N = 35m, encontre a largura da faixa emtorno da plantacao do campo retangular.
2. No exercıcio anterior, identifique e explique as etapas que estao presentes na Mo-delagem Matematica.
3. Um fazendeiro deseja circundar uma regiao junto a um rio com uma cerca de 120metros de comprimento para encerrar seus animais. Se a regiao e representadapor um retangulo (hipoteses de simplificacao), faca a Modelagem Matematica doproblema, para determinar as dimensoes do retangulo para que a area cercadaseja a maior possıvel.
4. Como voce faria uma Modelagem Matematica dos seguintes problemas:
a) A pressao exercida por uma massa de um gas e diretamente proporcional atemperatura absoluta e inversamente proporcional ao volume ocupado pelo gas(Gases perfeitos).
b) A resistencia de um fio condutor e diretamente proporcional ao seu compri-mento e inversamente proporcional a area de sua secao reta (Resistencia eletrica).
c) Dois corpos de massas m1 e m2 se atraem em razao direta das massas e narazao inversa do quadrado das distancias (Lei da gravitacao universal).
5. No Exemplo 4 do controle biologico de pragas, faca um esquema do processo deModelagem Matematica igual que ao mostrado na Figura 1.2 para este problema.
15

1.2 Formulacao de Problemas
Objetivos
• Criar modelos matematicos de problemas concretos do mundo real.
• Reconhecer os tipos de formulacoes de problemas em termos matematicos.
Nesta secao estabeleceremos mecanismos para a formulacao e obtencao de problemasnovos; cabe ressaltar que nao existe a priori formula alguma que nos permita comoresolver habilidades de matematica nem tampoco como adquiri-las, mas isso nao im-pede o nosso interesse em desenvolver estrategias que possamos considerar no inıcio damodelagem sem ir alem do objetivo principal, que e o ensino-aprendizagem.
Entretanto, o que entendemos por habilidades neste contexto e a capacidade de podertomar um problema concreto com algum grau de dificuldade e transforma-lo em ummodelo matematico para posteriormente soluciona-lo e possa ser interpretado em ter-mos do problema incial.
Figura 1.4: Processo Simplificado da Modelagem Matematica. Fonte: BASSANEZI,R. C, 2011.
16

1.2.1 Escolha de Temas
Neste cenario da modelagem, o tema de estudo escolhido resulta ser o inıcio do processo,pois o conteudo matematico a utilizar ainda e desconhecido; entao, um dos mecanis-mos a empregar nesta situacao e comecando a contar ou medir, com o intuito de seobter uma tabela de dados de tal maneira que possamos representar em um sistemade referencia (por exemplo um sistema cartesiano) a visualizacao do evento em estudo.Esta representacao dos dados com certeza vai dar origem a conjecturas, e tambem aformulacao de modelos matematicos.
A escolha de temas tem que ser feita de forma completa e motivadora para que possater um fator de interesse na area da pesquisa dos alunos. Por exemplo, se o tema esco-lhido for o desmatamento, entao podemos pensar em modelar o problema de impactoambiental do deslizamento de terra ou pensar em modelar atraves de um problemamatematico de fronteira livre.
A importancia da escolha de temas tambem reside em que estes sejam escolhidos pelosproprios alunos com o proposito de que, junto com o professor, se sintam responsaveispelo processo da modelagem; o desenvolvimento deve ser feito em grupos, cada umdeles com sua propria responsabilidade, com o objetivo de obter resultados positivosda modelagem do problema.
1.2.2 Coleta de dados
Depois de ter escolhido o tema, o procedimento seguinte sera a coleta de dados, queconsiste basicamente em buscar informacoes (medicoes, resultados estatısticos etc.)relacionadas com o objeto de estudo. Os dados coletados devem ser organizados emtabelas que, por sua vez, podem ser utilizadas na elaboracao dos graficos da curva detendencias. A coleta de dados qualitativos ou numericos pode ser efetuada aplicando-seas seguintes tecnicas:
1. por meio de entrevistas e pesquisas realizadas com os metodos de amostragemaleatoria; neste caso, sao fundamentais a qualidade das perguntas e nocoes deEstatıstica;
2. atraves de pesquisa bibliografica, uso da internet, procurando informacao emlivros e revistas especializadas;
3. por meio de experiencias dos proprios alunos.
Nesse processo de obter dados sobre a realidade a ser modelada, estamos desenvolvendo,em outras palavras, um processo de experimentar novas informacoes.
17

1.2.3 Formulacao de Modelos
Uma vez feita a coleta de dados, o seguinte passo e a formulacao matematica dos mo-delos. A formulacao matematica de modelos podem ser dada de dois tipos: formulacaoestatica e formulacao dinamica.
1. Formulacao Estatica
Estas formulacoes matematicas envolvem equacoes ou funcoes dependendo de uma oumais variaveis; geralmente, essas formulacoes utilizam conceitos relacionados com aGeometria, onde a variavel tempo nao tem importancia alguma.
Exemplo 5 (Predador - Presa) Em uma populacao de veados se observa que ataxa de mortalidade esta inflingida por uma populacao de leoes; sabendo-se que a taxade mortalidade e proporcional ao numero de veados e tambem ao numero de leoes,desejamos obter um modelo matematico que interprete o problema de encontrar a taxade mortalidade dos veados.
Primeiramente, da teoria de grandezas proporcionais lembramos o seguinte: se umagrandeza z = f(x, y) e proporcional a x, enquanto y permanece constante, e quando ze proporcional a y enquanto x permanece constante, entao z e proporcional ao produtoxy, isto e,
z = c.xy
onde c ∈ R.
Entao, denotando por z a taxa de mortalidade do numero de veados, x o numero deveados e y o numero de leoes, vemos pelo anterior que a hipoteses de manter constanteuma das variaveis x e y implica que
f(x, y) = b.xy,
onde b e uma constante. Assim, a taxa de mortalidade dos veados e dado pela expressao
z = b.xy
O fato de considerar b constante nao e sempre satisfeita; logo, aqui estamos fazendouso da hipoteses de simplificacao do processo de modelagem.
18

2. Formulacao Dinamica
Em geral, esta formulacao de modelos dinamicos (modelos que dependem do tempo)contem dois tipos de variaveis, chamadas variaveis dependentes e variaveis indepen-dentes. Essa dependencia e dada atraves de uma relacao entre essas variaveis.
Exemplo 6 Do exemplo anterior podemos considerar um problema mais realista aoconsiderar a taxa de mortalidade junto com o numero de veados e leoes dependendodo tempo t.
Com efeito, representando por x(t) o numero de veados e y(t) o numero de leoesno tempo t, claro esta que a taxa de mortalidade neste caso vai depender tambem dotempo; assim, temos que a taxa de mortalidade dos veados e dada pelo modelo seguinte:
z(t) = b.x(t)y(t)
Por ultimo, no caso de nao existirem as hipoteses de proporcionalidade apresentadasnos exemplos vistos, terıamos dificuldade em obter com exatidao a relacao funcionalf(x, y); assim, devemos deixar indicado que uma coleta de dados facilitaria o estudo,pois, utilizando-se tecnicas estatısticas, e possıvel ter uma aproximacao do problema.
Exemplo 7 Em uma pesquisa feita por um grupo de biologos para obter medidasbiometricas de atuns em uma gaiola, foram obtidos os seguintes dados do peso (gra-mas) e o comprimento (centımetros) medio de uma famılia de atuns em relacao a suaidade t dada em anos:
t idade comprimento (cm) peso (gr)
2 163.9 0.68
3 170 0.91
4 176.1 1.0
5 182.2 1.2
6 188.3 1.38
7 195.4 1.48
8 203.2 1.69
9 210 1.8
10 212.7 2.3
19

Deseja-se encontrar uma relacao funcional entre o peso e o comprimento dos atunsatraves da tabela anterior.
Solucao
Definindo as seguintes variaveis
x e y como sendo o comprimento e peso medio respectivamente.
Podemos relacionar essas variaveis num sistema referencial por meio do grafico de dis-persao, Figura 1.5.
Figura 1.5: Grafico de dispersao.
Esses dados estatısticos (tabela) podem ser aproximados por uma curva de regressao(a ser definida no proximo capıtulo), curva vermelha na Figura 1.6.
A curva de regressao indica o comportamento ou tendencia de tipo geral entre o pesoe o comprimento medio dos atuns. O grafico de dispersao constitui um primeiro passopara uma Modelagem Matematica. Observamos que os pontos (x, y) nao estao sobrea curva. Uma relacao funcional, obtida atraves de um ajuste de dados, proporcionainformacoes iniciais para a elaboracao de hipoteses e tambem para a formulacao demodelos.
Pesquisas biologicas estabelecem que o modelo matematico pode ser dado pela relacaofuncional
y(x) = kxα, (1.1)
20

Figura 1.6: Curva de regressao
onde k e a taxa de metabolismo e α da informacao em termos matematicos da formado atum. Devido a caracterıstica das variaveis consideradas, a relacao funcional aindapode ser considerada como ummodelo estatico, pois nao existe uma relacao de dependenciana variavel temporal t em (1.1).
Modelos dinamicos tambem podem ser considerados no caso em que tenhamos as se-guintes relacoes funcionais
y(t) = y0
(1− e−(β/3)t
)3ou x(t) = x0(1− e−βλt),
onde β e a constante de metabolismo e representa a taxa de energia gasta para o atumse movimentar, y0 e x0 sao os respectivos valores maximos de y e x. Esses modelos saochamados modelos de Von Bertalanffy, ver BASSANEZI (2011).
21

1.2.4 Atividade
1. Suponhamos que em uma famılia de Heterodon nasicus (cobra), todas as cobrasdesta especie sejam jovens ou velhas e que tenham a mesma forma e o mesmopeso especıfico, se a taxa de metabolismo e k = 446 e α = 3 e o peso dado emgramas e o comprimento dado em metros.
a). Encontre a relacao funcional entre as variaveis comprimento e peso que defineo modelo matematico; logo, determine se o modelo e de tipo estatico ou dinamico.
b). Determine o peso para um grupo de cobras cujos comprimentos sao dadospor
COMPRIMENTO 0,4 0,6 0,8 1
c). Se a taxa de metabolismo para o modelo de Von Bertalanffy e β = 3 ex0 = 1, y0 = 446, λ = 1, encontre o peso e o comprimento para um conjunto decobras depois de um mes.
2. Em certa especie de peixes, verificou-se que o consumo de oxigenio O(l) dos peixespor unidade de peso diminui com o aumento de seu comprimento l atraves darelacao funcional (modelo matematico):
O(l) = kql 0 ≤ l ≤ 80,
para certos parametros k e q. Estimar k e q utilizando os seguintes dados:
l (cm) 0 10 30 50 60 70 80
O (ml) 121 74 30 12 6,7 3,7 2
3. Uma plantacao de cana de acucar tem a forma de um retangulo de lados 2000 e3000 m. Em cada perıodo de plantacao se planta uma area de forma retangularque esta crescendo em razao de seus lados menor e lado maior a uma velocidadede 4m/ano e 5m/ano respectivamente. Desejamos achar o modelo matematicodo problema, que consiste em encontrar a velocidade em litros por ano com quea producao de alcool procedente da cana de acucar esta crescendo, sabendo-seque a producao de alcool e dada pela area da plantacao.
22

Unidade II
O METODO DOS MINIMOSQUADRADOS
23

O Metodo dos Mınimos Quadrados
Objetivos
• Aproximar uma funcao qualquer (conhecida ou nao) ou um conjunto de pontospor uma combinacao de funcoes conhecidas.
• Determinar a importancia do metodo na Modelagem Matematica.
• Reconhecer a curva de regressao que melhor aproxime o problema ou fenomenoestudado.
O processo de coleta de dados constitui uma parte essencial na Modelagem Matematicae tambem na metodologia cientıfica; tambem e fundamental para o desenvolvimento eaplicacao da propria ciencia. No decorrer da Modelagem Matemaica, a parte experi-mental ressalta o processo de coleta de dados.
No processo de obtencao de dados ou medidas utilizam-se diversos conceitos como,por exemplo, dados estatısticos, desvios, o valor mais provavel de uma grandeza etc.fazendo convocacao a nocoes intuitivas a cada novo conceito, isto e, sem a preocupacaode apresentar uma teoria axiomatica partindo de princıpios gerais. Um primeiro passonessa direcao esta no que se chama de Metodo dos Mınimos Quadrados. Este processode sistematizacao da obtencao de dados permite, como veremos, obter bons resultadosno ajuste de curvas. Embora possa ser utilizado no ajuste de outras curvas, vamosapresentar este metodo e seu uso para o ajuste de retas, por ser no momento nossoprincipal objetivo.
Entre os motivos que avaliam a utilizacao do metodo, temos desde os mais variados,desde o mais simples ate os mais complicados. Por exemplo, pode-se querer manipularuma funcao complicada f(x) = cos(e(cot 2x)), ou entao encontrar uma aproximacao parafuncoes que nem sao conhecidas, como por exemplo.
24

2.1 Ajuste de Curvas
Definicao 1 (Ajuste de Curvas) Um ajuste de curvas ou as vezes chamada curvade regressao e um conjunto de tecnicas numericas que tem por objetivo expressar al-guma tendencia da relacao de duas grandezas. Em outras palavras, ajuste de curvas eum mecanismo ou artifıcio que fornece uma relacao funcional de uma variavel depen-dente y quando relacionada com a variavel independente x.
Exemplo 8 Considerando os dados da tabela do Exemplo 7 sobre o comprimento epeso dos atuns, podemos ver que existe, para cada nıvel de comprimento x, uma distri-buicao do peso y = kxα (curva de regressao) em cada nıvel correspondente, conformeFigura 1.6
Um ajuste de curvas e muito util para uma formulacao simplificada dos dados outambem para uma verificacao de alguma tendencia entre as grandezas.
No estudo de algum fenomeno feito por medio de dados numericos (dados experi-mentais) estamos principalmente interessados, alem das tendencias fornecidas por umajuste de curvas ou curva de regressao, em saber se a correspondente relacao funcio-nal y = f(x) e compatıvel para futuras previsoes de y no caso em que x esta fora dodomınio de definicao de f.
Na pratica, acontece que nos modelos estaticos essas previsoes se preservam na maioriade casos; ja nos modelos dinamicos, devemos tomar em conta outros tipos de consi-deracoes para preservar o ajuste de curvas, como por exemplo o comportamento doproblema estudado ante perturbacoes das variaveis que definem o fenomeno.
Quando obtemos um conjunto de dados, atraves de um processo de experimentacao, edesejamos obter um ajuste de curvas ou uma curva de regressao entre as variaveis quedefinem o problema, a priori, escolhemos a forma da curva que desejamos ajustar parapoder expressar estas variaveis, isto implica que existem uma infinidade de curvas deregressao, claro esta que nem toda relacao funcional obtida representa um bom modelomatematico.
Exemplo 9 Considerando os dados da tabela do Exemplo 7 sobre o comprimento e aidade dos atums, observamos que a reta (Figura 2.7)
y = 6.1t+ 151.7 (2.2)
25

obtida do ajuste entre os dados idade t e comprimento y e uma boa aproximacao paravalores de t menores ou iguais a 10, pois seis dados da tabela estao sobre a reta; jano caso em que t > 10 isso nao e garantido, pois o comprimento dos atuns tende a seestabilizar quando t cresce; caso contrario, acontece com os valores sobre a reta cujosvalores tendem a crescer indefinidamente, e portanto, nao pode ser feita uma previsaono futuro sobre o comprimento dos atuns.
Logo, concluımos que a equacao (2.2) nao pode ser considerada de modo geral como umbom modelo matematico, pois um dos objetivos principais da modelagem matematica eobter uma relacao funcional que interprete em seus variaveis ou parametros qualidadesproprias do fenomeno estudado, nesta parte resulta ser muito importante a validacaoda solucao.
Figura 2.7: Tendencia do crescimento de uma famılia de atuns no perıodo de 10 anos.
A questao central, como vimos, para se determinar a equacao da curva e encontrar amelhor curva regular de ajuste dos dados. Pode-se usar um criterio individual paratracar uma curva de ajustamento que se adapte ao conjunto de dados. Se for conhecidoo tipo de equacao dessa curva, e possıvel obter suas constantes, mediante a escolha de
26

tantos pontos da curva quantas sejam as constantes da equacao.
Em diversas situacoes como, por exemplo, num laboratorio, nos deparamos com gran-dezas que se relacionam entre si. Por exemplo, a pressao de uma determinada massade gas depende da sua temperatura e do seu volume; a distensao de uma mola de-pende da forca aplicada. Deseja-se, frequentemente, expressar essa relacao sob formamatematica, por meio de uma equacao que ligue as variaveis. Para auxiliar a deter-minacao de uma equacao que relacione as variaveis, um primeiro passo consiste emcolecionar dados que indiquem os valores correspondentes das variaveis consideradas.Por exemplo, x pode representar o deslocamento de uma mola causado por uma forcaaplicada y para os quais temos um conjunto de n medidas.
2.2 O Metodo dos Mınimos Quadrados
Um dos metodos mais utilizados para estimacao (aproximacao) de parametros ou ajustede curvas e denominado metodo dos mınimos quadrados que a seguir passamos a de-talhar.
De modo geral, consideramos as variaveis ou grandezas x e y que definem o fenomenoa analisar sujeitas a um conjunto de n medidas ou experimentos observados:
A = {(x1, y1), (x2, y2), ..., (xn, yn)} (2.3)
e uma funcao f : Rk+1 → R, tal que y(x) = f(x;α1, α2, ..., αk), onde α1, α2, ..., αk
sao os parametros. O metodo dos mınimos quadrados consiste em determinar essesparametros de modo que minimize o valor de
S(α1, α2, ..., αk) =n∑
i=1
[f(xi;α1, α2, ..., αk)− yi]2, (2.4)
isto e, o metodo consiste em minimizar a soma dos quadrados de
εi = f(x;α1, α2, ..., αk)− yi
entre os diversos valores de yi observados e os valores y(xi) = f(xi;α1, α2, ..., αk) ajus-tados. Os valores εi sao chamados de desvios.
Em seguida, locam-se esses pontos num plano cartesiano. O conjunto de pontos resul-tante e denominado diagrama ou grafico de dispersao ( Figura 2.8).
27

Figura 2.8: Diagrama de dispersao, Curva de regressao e Desvios εn
Neste diagrama e possıvel, frequentemente, visualizar uma curva regular que se apro-xime dos pontos dados (x1, y1), (x2, y2), ..., (xn, yn), isso como foi definido em 2.1.1 echamado ajustamento de curvas.
2.3 Ajuste Linear
Definicao 2 (Ajuste Linear) Suponhamos que as grandezas x, y, cujas medidas saodadas por (2.3) se relacionem linearmente. Um ajuste de curvas e denominado linear,se a funcao f : R3 → R e definida por
f(x; a, b) = ax+ b.
Em outras palavras, um ajuste e linear se e definido pela equacao da reta
y(x) = f(x; a, b) = ax+ b. (2.5)
Assim, a equacao (2.5) sera a melhor reta que se ajusta aos pontos (2.3) a qual deseja-sedeterminar, Figura 2.9. Devido a erros de medida, os valores (xi, yi) nao necessaria-mente satisfazem exatamente a equacao (2.5), isto e,
28

yi ∼= axi + b
Figura 2.9: Ajuste Linear
Para que essa expressao se transforme numa igualdade, deveremos levar em conta oserros ou desvios ε cometidos na medida. Assim,
yi = (axi + b) + εi
Portanto, εi tambem depende de a e b:
εi(a, b) = yi − (axi + b) (2.6)
A soma dos quadrados dos desvios e dado por
S(a, b) =n∑
i=1
[yi − axi − b]2
Aplicando-se o Metodo dos Mınimos Quadrados, tem-se que os melhores valores paraa e b (e portanto a melhor reta) sao aqueles que minimizam S(a, b). Como S e uma
29

funcao de duas quantidades a e b, escrevemos essas condicoes necessarias de mınimocomo
∂S
∂a= 0 e
∂S
∂b= 0,
ou seja,
∂S
∂a= −2
n∑i=1
(xiyi − ax2i − bxi) = 0,
e
∂S
∂b= −2
n∑i=1
(yi − axi − b) = 0.
De onde obtemos as chamadas equacoes normais
n∑i=1
xiyi =n∑
i=1
(bxi + ax2i ) (2.7)
n∑i=1
yi =n∑
i=1
(axi + b) (2.8)
Resolvendo (2.7) e (2.8) simultaneamente, para a e b encontramos
a =
[n∑
i=1
xi
][n∑
i=1
yi
]− n
[n∑
i=1
xiyi
][
n∑i=1
xi
]2− n
[n∑
i=1
x2i
] (2.9)
b =
[n∑
i=1
xiyi
][n∑
i=1
xi
]−
[n∑
i=1
x2i
][n∑
i=1
yi
][
n∑i=1
xi
]2− n
[n∑
i=1
x2i
] (2.10)
30

Por outro lado, de (2.8) obtemos
b =
n∑i=1
yi − a
n∑i=1
xi
n(2.11)
Observacao 1 Um ajuste de curvas e nao linear se a funcao f(x;α1, α2, ..., αk) dadapelos mınimos quadrados nao e uma reta. Ao fazer um ajuste linear para relacionarduas variaveis, nao sabemos a priori se a reta encontrada e o melhor modelo de ajuste.A verificacao da existencia e do grau de relacao entre variaveis e o objeto de estudo dacorrelacao que a seguir definimos.
Definicao 3 (Correlacao Linear) A correlacao linear mede a relacao que existe en-tre as variaveis (xi, yi) de um conjunto de dados em torno de uma reta ajustaday = ax+ b.
O coeficiente de correlacao de Pearson r e um mecanismo de medida da correlacaolinear e e dado por
r =
n∑i=1
xiyi −
[n∑
i=1
xi
][n∑
i=1
yi
]n{[
n∑i=1
x2i −
(∑n
i=1 xi)2
n
][n∑
i=1
y2i −(∑n
i=1 yi)2
n
]}1/2(2.12)
Verifica-se que r ∈ [−1, 1]. Se r esta proximo de 1 ou −1, dizemos que a correlacaoe mais forte. Se r esta proximo de zero, dizemos que a correlacao e fraca. Se r = 1ou r = −1, entao a correlacao entre as variaveis e perfeita. Se r = 0, nao existenenhuma correlacao. Por ultimo, o sinal de r indica o sinal do coeficiente angular dareta ajustada.
Exemplo 10 Considerando-se os dados da tabela do Exemplo 7 sobre a idade t e opeso y dos atuns:
31

ti idade yi peso (gr)
2 0.68
3 0.91
4 1.0
5 1.2
6 1.38
7 1.48
8 1.69
9 1.8
10 2.3
Encontrar um ajuste linear dos dados (ti, yi) mostrados na tabela anterior e calcular ocoeficiente de correlacao linear entre a idade e o peso dos atuns.
Solucao
De acordo com as equacoes (2.9) e (2.10), n = 9; devemos agora calcular as somas deti, yi, tiyi, t
2i .
ti yi tiyi t2i
2 0.68 1.36 4
3 0.91 2.73 9
4 1.0 4 16
5 1.2 6 25
6 1.38 8.28 36
7 1.48 10.36 49
8 1.69 13.52 64
9 1.8 16.2 81
10 2.3 23 100
9∑i=1
ti = 549∑
i=1
yi = 12.449∑
i=1
tiyi = 85.459∑
i=1
t2i = 384
32

Logo, substituindo-se esses valores nas equacoes (2.9) e (2.10), temos
a =(54)(12.44)− 9(85.45)
(54)2 − 9(384)=
−9729
−1309.05= 0.074
b =(85.45)(54)− (384)(12.44)
(54)2 − 9(384)= 0.301
Portanto, a equacao da melhor reta no sentido dos mınimos quadrados e dada por
y(t) = 0.074t+ 0.301
Esta equacao define uma reta que passa pelos seguintes pontos corrigidos:
ti y(ti) = 0.074ti + 361.4
2 0.449
3 0.523
4 0.597
5 0.671
6 0.745
7 0.819
8 0.893
9 0.967
10 1.041
Para calcular o coeficiente de correlacao dado por (2.12) devemos encontrar as somasde y2i .
9∑i=1
y2i = 0.682 + 0.912 + 1 + 1.22 + 1.382 + 1.482 + 1.692 + 1.82 + 2.32 = 118.75
Substituindo em (2.12), temos
33

r =85.45− (54)(12.44)
9{[384− (54)2
9
] [118.75− (12.44)2
9
]}1/2= 0.138
Sendo r = 0.138 proximo de zero, existe uma fraca correlacao entre a idade e o pesodos atuns.
Observacao 2 O metodo do ajuste linear tambem pode ser aplicado a outros modelosmatematicos definidos por funcoes nao lineares, isso desde que seja possıvel transformaraquelas funcoes em funcoes lineares atraves de uma mudanca de variavel adequada, porexemplo, modelos definidos por funcoes de tipo exponencial, funcao potencia, funcoesperiodicas. Na seguinte secao veremos alguns desses modelos.
2.3.1 Ajuste Linear para o Modelo Exponencial
Suponhamos que a formulacao de um modelo matematico e definido por meio de umafuncao de tipo exponencial (Figura 2.10)
y(x) = β eαx, β > 0 (2.13)
Figura 2.10: Funcao de Tipo Exponencial
Fazendo a mudanca de variavel z = ln y com o objetivo de transformar a equacaoque define o modelo (2.13) na forma de uma equacao de uma reta, obtemos ao tomarlogaritmos de ambos os lados de (2.13)
34

z(x) = ln y = αx+ ln β (2.14)
Desta forma, podemos fazer um ajuste linear para o modelo exponencial, pois e maisfacil lidar com (2.14) do que com (2.13). Alem disso, o estabelecimento da curva comdados empıricos e a analise dos desvios sao extremamente facilitados.
Portanto, tomando-se a = α e b = ln β, a equacao da reta ajustada ou equacao auxiliare
z = ax+ b
Exemplo 11 O aumento de celulas cancerosas num tumor por unidade do tempo t,supondo o tempo de duplicacao das celulas constante, e dado atraves dos seguintesdados experimentais:
Tempo (dias) Numero de celulas (miles)1.5 1,7782.5 2,6114.0 4,6425.0 6,8136.5 12,11
Com estes dados, determine a dependencia funcional do numero de celulas N(t) dotumor em relacao ao tempo t mediante um ajuste linear.
Solucao
Atraves do grafico de dispersao dos dados (ti, Ni) i = 1, 2, 3, 4, 5 mostrados na Figura2.11, podemos ver que a forma da relacao funcional procurada N(t) pode ser expressapor uma funcao do tipo exponencial.
N(t) = βeαt, β > 0, α > 0. (2.15)
Assim, a dependencia do numero de celulas com o tempo nao e linear; ou seja, acurva que modela o decaimento nao e uma reta. Entao, com os dados mostrados natabela podemos fazer um ajuste linear para o modelo, definido por uma funcao de tipoexponencial.
35

Figura 2.11: Grafico de Dispersao
Utilizando a mudanca de variavel y(t) = lnN(t), obtemos em (2.15) a espressao linearnas novas variaveis
y = αt+ ln β
Utilizando os dados da tabela, obtemos os dados auxiliares.
ti Ni yi = lnNi t2i tiyi
1.5 1,778 0.575 2.25 0.8625
2.5 2,611 0.959 6.25 2.3975
4.0 4,642 1.535 16 6.14
5.0 6,813 1.918 25 9.59
6.5 12,110 2.494 42.25 16.211
5∑i=1
ti = 19.55∑
i=1
yi = 7.4815∑
i=1
t2i = 91.755∑
i=1
tiyi = 35.201
Para calcular os parametros a e b, empregamos as equacoes (2.9) e (2.10)
36

a =
[5∑
i=1
ti
][5∑
i=1
yi
]− 5
[5∑
i=1
tiyi
][
5∑i=1
ti
]2− 5
[5∑
i=1
t2i
] =(19.5)(7.481)− 5(35.201)
(19.5)2 − 5(91.75)= 0.383
b =
[5∑
i=1
tiyi
][5∑
i=1
ti
]−
[5∑
i=1
t2i
][5∑
i=1
yi
][
5∑i=1
ti
]2− 5
[5∑
i=1
t2i
] =(35.201)(19.5)− (91.75)(7.481)
(19.5)2 − 5(91.75)= −0.00048
Portanto, obtemos a equacao da reta ajustada (reta auxiliar y = lnN)
y = 0.383t− 0.00048
Como a = α e b = ln β obtemos β = eb = e−0.00048 ≃ 0.9995. A funcao exponencial e
N(t) = 0.383e0.9995t ∀ t ≥ 0.
Figura 2.12: Ajuste da reta y = 0.383t− 0.00048 aos pontos (t, ln t)
37

Figura 2.13: Modelo Matematico do Numero de celulas na forma exponencial
2.3.2 Ajuste Linear de Modelos Geometricos
Suponhamos que a formulacao do modelo matematico e definido atraves de um modelode tipo geometrico, isto e, um modelo onde a funcao que define o problema e dado poruma funcao potencia (Figura 2.14)
y(x) = α xβ, α > 0 e β > 0 (2.16)
Neste caso, a funcao e do tipo dado pela Observacao 2; logo, o ajuste de parametrospode ser feito atraves de um ajuste linear. Fazendo a mudanca de variavel
Y = ln y e X = ln x, (2.17)
com o objetivo de transformar a equacao que define o modelo (2.16) na forma de umaequacao de uma reta, obtemos ao tomar logaritmos de ambos os lados de (2.16)
ln y = lnα + β lnx,
nas novas variaveis, isto e,
Y = a+ βX, onde a = lnα (2.18)
38

Figura 2.14: Funcao Potencia
Portanto, tomando b = β a equacao da reta ajustada ou equacao auxiliar e
Y = a+ bX (2.19)
Exemplo 12 Com os dados do Exemplo 7 da relacao do peso (gr) e comprimento (cm)dos atuns, determinar a dependencia funcional do peso dos atuns y(x) em relacao aocomprimento x mediante um ajuste linear.
Solucao Vimos que a relacao funcional que modela o problema e formulado pelafuncao potencia dado em (1.1), isto e,
y(x) = αxβ,
onde α e a taxa de metabolismo e β da informacao em termos matematicos da forma doatum. Entao e possıvel fazer um ajuste linear, o que a seguir faremos. A reta ajustadadada por (2.19) e
Y = a+ bX,
onde devemos encontrar os parametros a e b por meio de un ajuste linear. Formamosa seguinte tabela:
39

xi yi Xi = ln xi Yi = ln yi XiYi X2i
163.9 0.68 5.099 -0.385 -1.963 25.999
170 0.91 5.135 -0.094 -0.482 26.368
176.1 1.0 5.171 0 0 26.739
182.2 1.2 5.205 0.182 0.947 27.092
188.3 1.38 5.238 0.322 1.686 27.436
195.4 1.48 5.275 0.392 2.067 27.825
203.2 1.69 5.314 0.524 2.784 28.238
210 1.8 5.347 0.587 3.138 28.590
212.7 2.3 5.359 0.832 4,438 28.718
9∑i=1
Xi = 47.1439∑
i=1
Yi = 2.369∑
i=1
XiYi = 12.6159∑
i=1
X2i = 247.005
Aplicando o metodo dos mınimos quadrados para estimar os parametros, temos
a =
[9∑
i=1
Xi
][9∑
i=1
Yi
]− 9
[9∑
i=1
XiYi
][
9∑i=1
Xi
]2− 9
[9∑
i=1
X2i
] =(47.143)(2.36)− 9(12.615)
(47.143)2 − 9(247.005)= 3.907
b =
[9∑
i=1
XiYi
][9∑
i=1
Xi
]−
[9∑
i=1
X2i
][9∑
i=1
Yi
][
9∑i=1
Xi
]2− 9
[9∑
i=1
X2i
] =(12.615)(47.143)− (247.005)(2.36)
(47.143)2 − 9(247.005)
b = 20.2
Portanto,Y = 3.907X + 20.2
sendo a = lnα, temos que α = ea = e3.907 ≃ 49.749. Assim, obtemos y = 49.749x20.2
40

Figura 2.15: Ajuste geometrico para a relacao peso-comprimento dos atuns
2.4 Ajuste Quadratico
Definicao 4 (Ajuste Quadratico) Sejam x, y duas grandezas cujas medidas sao da-das por (2.3). Um ajuste de curvas e denominado ajuste quadratico, se a funcao querelaciona as grandezas e definido por f : R4 → R
f(x; a, b, c) = a+ bx+ cx2,
isto e, um ajuste quadratico e definido pela equacao de uma parabola
y(x) = f(x; a, b, c) = a+ bx+ cx2. (2.20)
Aplicando o metodo dos mınimos quadrados, determinamos os parametros a, b e c mi-nimizando a funcao
S(a, b, c) =n∑
i=1
[f(x; a, b, c)− yi]2 =
n∑i=1
[a+ bx+ cx2 − yi]2
As condicoes necessarias de mınimo sao dadas pelas equacoes
∂S
∂a= 0,
∂S
∂b= 0,
∂S
∂c= 0,
41

isto e
n∑i=1
yi = na+ bn∑
i=1
xi + cn∑
i=1
x2i
n∑i=1
xiyi = a
n∑i=1
xi + b
n∑i=1
x2i + c
n∑i=1
x3i
n∑i=1
x2i yi = a
n∑i=1
x2i + b
n∑i=1
x3i + c
n∑i=1
x4i
(2.21)
Exemplo 13 Ajustar uma parabola de mınimos quadrados da forma y(x) = a+ bx+cx2 para os dados da tabela seguinte.
x 1.2 1.8 3.1 4.9 5.7 7.1 8.6 9.8
y 4.5 5.9 7 7.8 7.2 6.8 4.5 2.7
Solucao Devemos utilizar as equacoes (2.21), a seguinte tabela permite fazer isso.
xi yi x2i x3
i x4i xiyi x2
i yi1.2 4.5 1.44 1.73 2.08 5.40 6.481.8 5.9 3.24 5.83 10.49 10.62 19.123.1 7.0 9.61 29.79 92.35 21.70 67.274.9 7.8 24.01 117.65 576.48 38.22 187.285.7 7.2 32.49 185.19 1055.58 41.04 233.937.1 6.8 50.41 357.91 2541.16 48.28 342.798.6 4.5 73.96 636.06 5470.12 38.70 332.829.8 2.7 96.04 941.19 9223.66 26.46 259.31
8∑i=1
xi =
42.2
8∑i=1
yi =
46.4
8∑i=1
x2i =
291.20
8∑i=1
x3i =
2275.35
8∑i=1
x4i =
18, 971.92
8∑i=1
xiyi =
230.42
8∑i=1
x2i yi =
1449.00
Para n = 8, as equacoes normais (2.21) sao
8a+ 42.2b+ 291.20c = 46.4
42.2a+ 291.20b+ 2275.35c = 230.42
291.20a+ 2275.35b+ 18971.92c = 1449.00
42

Resolvendo o sistema algebrico anterior, obtemos a = 2.588, b = 2.065, c = −0.2110,daı, a parabola requerida pelo metodo dos mınimos quadrados tem a equacao
y = 2.588 + 2.065x− 0.2110x2
43

2.5 Atividades
1. Demonstre que as equacoes (2.9) e (2.10) tambem sao dadas da seguinte forma:
a =
∑ni=1 xiyi − nxy∑ni=1 x
2i − nx2
, b = y − ax
onde x =
∑ni=1 xi
ne
y =∑n
i=1 yin
.
2. Aplicando o Metodo dos Mınimos Quadrados,ajuste uma reta ao seguinte con-junto de dados:
A = {(1, 1), (3, 2), (4, 4), (6, 4), (8, 5), (9, 7), (11, 8), (14, 9)}
3. Em cinco paıses da Europa, foi encontrada uma relacao entre o conteudo de po-eira de um elemento quımico no ar (em g/m3) e o numero de ausencias femininasem certas industrias. Foram contadas somente ausencias de pelo menos sete diase encontrados os seguintes dados.
Paıs g/m3 Numero de ausencias por 1000 empregados
Franca 7 19
Espanha 13 44
Italia 14 53
Alemania 17 61
Portugal 20 88
a) Desenhe o grafico de dispersao dos dados da tabela.
b) Representar o numero de ausencias versus o conteudo de poeira do elementoquımico.
c) Estabelecer uma reta de regressao linear pelo metodo dos mınimos quadrados.
4. Mostre que o ajuste de n pontos (xi, yi) a uma reta passando pela origem, y = kx
implica que k =
n∑i
xiyi
n∑i
x2i
.
44

5. Um grupo de pesquisadores obtem os seguintes dados experimentais depois defazer algumas medicoes entre o peso (gramas) e a velocidade (m/s) de um objeto
A = {(2, 3), (3, 4), (5, 6), (6, 5), (9, 7), (12, 8)}
Faca um ajuste linear dos dados obtidos, obtenha e interprete o coeficiente decorrelacao.
6. A Tabela seguinte fornece os valores experimentais da pressao P de uma dadamassa de gas correspondente a varios valores do volume V . De acordo comprincıpios termodinamicos, existe entre as variaveis uma relacao PV β = α, ondeα e β sao constantes.
a) Encontre os valores de α e β (aplique o metodo dos mınimos quadrados paraajustar os dados atraves de um modelo de ajuste linear geometrico).
b) Escreva a equacao relacionando P e V .
c) Estimar P quando v = 100.0 in3.
Volume V (in3) 54.3 61.8 72.4 88.7 118.6 194.0
Pressao P (lb/in) 61.2 49.5 37.6 28.4 19.2 10.1
7. A tabela seguinte da informacao do censo de uma populacao (em milhoes) de umcerto paıs em relacao ao tempo (anos).
Anos 1850 1860 1870 1880 1890 1900 1910 1920 1930 1940 1950
Populacao 23.2 31.4 39.8 50.2 62.9 76.0 92.0 105.7 122.8 131.7 151.1
a) Faca um ajuste quadratico dos dados da tabela pelo metodo dos mınimosquadrados.
b) Calcule os valores da regressao (comumente chamados de valores de tendencia)para os anos dados e comparar com os valores reais.
c) Estime a populacao de 1945.
d) Estime a populacao de 1960 e compare com o valor real 178, 9.
45

Unidade III
EQUACOES DE DIFERENCAS
46

Equacoes de Diferencas
Objetivo
• Analisar as caracterıstica variacionais de uma relacao funcional presentes na mo-delagem e saber quando sequencias interpretam variaveis contınuas.
• Solucionar uma equacao em diferencas e obter a solucao em forma explıcita.
• Interpretar problemas concretos atraves de equacoes de diferencas.
3.1 Variacoes
Como vimos anteriormente no processo da modelagem matematica, a obtencao deum modelo matematico que interpreta o problema a estudar constitui a parte maiscomplicada de dito processo. As relacoes de medida que existem entre as variaveis ougrandezas observadas que define o problema (que nao necessariamente sao de caratermatematico) sao a base para a obtencao da formulacao do modelo matematico. Umamaneira de interpretar essas relacoes de medidas e em consequencia obter um modelomatematico e dada pela variacao ou taxa de variacao dessas variaveis. Iniciamos estasecao atraves da definicao a seguir.
Definicao 5 Entendemos por variaveis quaisquer grandezas que se modificam du-rante um processo dinamico. O termo parametro se refere a quantidades que podemou nao mudar durante o processo dinamico. As constantes sao quantidades que naovariam durante o processo e assumem valores fixados a priori.
Lembramos da analise real o seguinte.
Definicao 6 (Sequencia de numeros reais) Uma sequencia de numeros reais e umconjunto de pontos denotado por {xn}, definidos por uma funcao f : X ⊂ N → R, cujodomınio e um subconjunto X dos numeros naturais N, tal que xn = f(xn). Quandoeste conjunto e finito, dizemos que a sequencia e finita.
Uma das caracterısticas importantes de uma sequencia e sua convergencia, que defini-mos a seguir.
Definicao 7 (Convergencia de uma sequencia ) Dizemos que uma sequencia denumeros reais xn converge para um numero real x se xn pode se aproximar tanto quantose queira de x quando n cresce, isto e, dado ε > 0, arbitrariamente pequeno, existen0 ∈ N tal que 0 <| xn − x |< ε, quando n > n0.
47

Notacao: Denotamos a convergencia de uma sequencia xn ao valor x por
xn → x ou x = limn→∞
xn,
onde a expressao x = limn→∞
xn indica que x e o limite da sequencia xn quando n se
aproxima do infinito.
Definicao 8 (Conjunto Discreto e Variavel discreta) Uma variavel discreta euma variavel que toma valores isolados, ou seja, nao admite valores intermediariosentre dois valores especıficos. O conjunto formado por valores de uma variavel discretae chamado de conjunto discreto.
Matematicamente podemos aprofundar essa definicao. Dada uma sequencia finita denumeros reais {x1, x2, x3, ..., xn}, cada elemento da sequencia e chamado de valor dis-creto, e a variavel x recebe o nome de variavel discreta.O conjunto finito {x1, x2, x3, ..., xn} formado por valores de uma variavel discreta x edenominado conjunto discreto. Em outras palavras, um conjunto e discreto se existeuma correspondencia bijetiva entre os elementos do conjunto e um subconjunto dosnumeros naturais {1, 2, 3..., n}.
Exemplo 14 Se desejamos encontrar o numero de peixes capturados em uma empresapesqueira em cada mes n, durante un ano, devemos usar uma sequencia finita xn pararepresentar o numero de peixes capturados no mes n, isto e, {x1, x2, x3, ..., x12} e oconjunto discreto e o numero de peixes x e a variavel discreta
Definicao 9 (Variavel Contınua) Uma variavel contınua e aquela que pode assumirvalores entre dois numeros.
Em termos matematicos podemos dar a seguinte interpretacao: dada uma sequenciafinita de numeros reais {x1, x2, x3, ..., xn}, uma variavel x e dita contınua se pode assu-mir todos os valores reais intermediarios entre os valores discretos da sequencia. Emoutras palavras, uma variavel que nao e contınua sera discreta.
Exemplo 15 Se {y1 = 0.68, y2 = 0.91, y3 = 1.0, ..., y9 = 2.3} sao os valores dadosdo peso dos atuns do Exemplo 7, qualquer valor da variavel peso y pode ser assumidono intervalo [0.68, 2.3]; logo, a variavel peso dos atuns e contınua neste intervalo.
48

Na pratica, sequencias finitas de numeros reais representam grandezas que estao en-volvidas na modelagem matematica do problema e, portanto, constituem conjuntosdiscretos, isto e, o caso do numero de peixes do Exemplo 14; entao, resulta importantesaber quando tais sequencias interpretam variaveis contınuas.
Observacao 3 Uma sequencia finita {xn}kn=1 e um conjunto discreto de numerosreais, logo x e uma variavel discreta; porem, se conseguimos representar a variavelx = f(t) por uma funcao definida para todo t ∈ R, entao, na verdade, x e t seraovariaveis contınuas.
Definicao 10 (Variacao) Seja f : A ⊂ R → R y = f(x) uma funcao que associa acada variavel independente x a variavel dependente y. A variacao de uma funcao fe definida como a medida do comportamento da funcao em relacao a um estagio davariavel independente x.
As variacoes sao de dois tipos: variacoes discretas e variacoes contınuas. A seguir es-tudaremos cada tipo de variacao.
3.1.1 Variacoes Discretas
Seja D = {y1, y2, y3, ..., yn} um conjunto discreto tal que a variavel discreta y esta emrelacao a grandeza x atraves da funcao f : A ⊂ R → R, isto e, y = f(x), ∀ x ∈ Asubconjunto proprio de R.
Definicao 11 (Variacao Discreta) Uma variacao e discreta se os valores da ima-gem da funcao f , isto e, y = f(x) pertence ao conjunto discreto D.
Definicao 12 (Variacao Total) A variacao total ou as vezes chamada variacao dey = f(x) ∈ D em relacao ao intervalo [x1, x2] e definida por
∆y = y2 − y1 = f(x2)− f(x1) (3.22)
∆y tambem e chamado de incremento de y. Se ∆y > 0, entao a funcao f aumenta emtamanho; se ∆y < 0, a funcao f experimenta um decrescimo do tamanho; se ∆y = 0,a funcao permanece inalterada.
49

Exemplo 16 Em um zoologico, uma famılia de pinguins se constituıa de 43 pinguinsno primeiro dia de setembro de 1980, e um total de 95 passaros no primeiro dia desetembro de 1981. Calcular a variacao total do numero de indivıduos de pinguins epassaros.
Solucao Denotando por N o numero de indıviduos de pinguins e passaros, podemosconsiderar N como una funcao do tempo t dado em meses:
N = f(t)
Tomando t1 o primeiro dia de setembro de 1980 e t2 o primeiro dia de setembro de1981, temos f(t1) = 43 e f(t2) = 95; logo, a variacao total sera ∆N = f(t2)− f(t1) =95−43 = 52, o que implica que o numero de indıviduos aumentou. Observe que, sendoos valores f(t1) = 43 e f(t2) = 95 inteiros, a variavel N e discreta.
Definicao 13 (Taxa Media de Variacao) A taxa media de variacao ou variacaomedia de y = f(x) ∈ D em relacao x e definida por
∆y
∆x=
f(x2)− f(x1)
x2 − x1
x1 = x2. (3.23)
∆x = x2 − x1 e a extensao do intervalo [x1, x2], tambem chamado de incremento davariavel x. A taxa de variacao media representa o incremento da funcao f em relacaoao incremento da variavel x.
Exemplo 17 No Exemplo 16, a taxa media de variacao do numero de indivıduos depinguins e passaros e
∆N
∆t=
f(t2)− f(t1)
t2 − t1=
52
12= 4.33.
A populacao de pinguins e passaros entre setembro de 1980 a 1981 aumentou em mediade 4.33 por mes. Naturalmente isso indica que o numero de nascimentos foi maior emrelacao ao numero de mortes.
Outro tipo de medida variacional discreta aparece em particular na dinamica popula-cional que a seguir definimos.
50

Definicao 14 (Taxa de Variacao Relativa) A taxa de variacao relativa e a taxade variacao de uma populacao N = f(t) ∈ D em que a variacao depende somente donumero de indıviduos presentes inicialmente e nao de fatores que dependem do tempo.Temos os seguintes casos:
i) Taxa de Variacao Relativa Media, que e definida por
α =∆N
N1∆t=
N2 −N1
N1∆tN1 = f(t1), N2 = f(t2)
ii) Taxa de Variacao Malthusiana, proveniente de um crescimento exponencial emcada unidade de tempo.
α = ∆t
√Nt+∆t
Nt
− 1.
Exemplo 18 A Tabela 3.1 fornece os censos demograficos do Brasil de 1950 a 2010
Neste caso, a variavel temporal t e o numero de indivıduos assumem valores inteiros;logo, ambas as grandezas (tempo-indivıduos) sao discretas.
ANOS POPULACAOTAXAS DE
CRESCIMENTO %VARIACAO TOTAL
1950 51.944.397
3.2 19.047.9461960 70.992.343
2.8 22.146.6941970 93.139.037
2.5 25.863.6691980 119.002.706
1.9 27.822.7691991 146.825.475
1.6 22.973.6952000 169.799.170
1.1 20.933.5242010 190.732.694
Tabela 3.1: Censos Demograficos do Brasil de 1950 a 2010.
As taxas de crescimento dadas em percentagem entre dois censos consecutivos mos-trados na tabela sao obtidas utilizando-se a taxa de variacao malthusiana. Com
51

efeito, tomando-se como populacao inicial N0 = 51.944.397, e depois de dez anos,N10 = 70.992.343, entao a taxa de variacao relativa dada pela variacao malthusianaentre 1950 e 1960 e dada por
α =10
√70992343
51944397− 1 ≃ 0.032
isto e, aproximadamente 3.2%.Se agora consideramos os censos de 1950 e 2010, α e dado por
α =60
√190732694
51944397− 1 ≃ 0.022
isto e, aproximadamente 2.2%. E isso quer dizer que a populacao brasileira cresceu auma taxa media de aproximadamente 2.2% ao ano, nos 61 anos.
Exemplo 19 No Exemplo 16, a taxa de variacao media relativa ao numero de pinguinse passaros e
α =∆N
N1∆t=
52
43(12)≃ 0.1.
Neste caso, a taxa de variacao populacional entre setembro de 1980 e 1981 aumentouem media 10% por mes.
Se tomamos ∆t = t2 − t1 = 12, temos N2 = Nt1+∆t = 95 e N1 = Nt1 = 43; logo,
α = 12
√N2
N1
− 1 =12
√95
43− 1 = 0.068
entao isso quer dizer que a populacao cresceu em media 6.8% ao mes, relativamente aproporcao existente em cada mes, durante os 12 meses.
3.1.2 Variacoes Contınuas
Definicao 15 (Variacao Contınua) Uma variacao e contınua se os valores da ima-gem da funcao f : A ⊂ R → R, isto e y = f(x) e valido para todo numero real x ∈ A.
Observamos que uma variavel contınua pode assumir valores em um conjunto dis-creto, isso significa que podemos generalizar as definicoes de variacoes do caso dis-creto para o caso de variacoes contınuas, o que faremos a seguir. Consideremos uma
52

variavel y (contınua ou discreta) que esta em relacao com a variavel x atraves da funcaof : A ⊂ R → R, isto e, y = f(x), ∀ x ∈ A subconjunto R.
Definicao 16 (Variacao Total) A variacao total ou as vezes chamada variacao ab-soluta de y = f(x) em relacao ao intervalo [x1, x2] e definida por
∆y = y2 − y1 = f(x2)− f(x1) (3.24)
A variacao total e a diferenca da variavel dependente y em duas etapas da variavelindependente x.
Definicao 17 (Taxa Media de Variacao) A taxa media de variacao ou variacaomedia de y = f(x) em relacao x e definida por
∆y
∆x=
f(x2)− f(x1)
x2 − x1
t1 = t2. (3.25)
∆x = x2 − x1 e chamado o incremento da variavel x em relacao a dois estagios x1, x2.A taxa de variacao media representa o incremento da funcao f em relacao ao incre-mento da variavel x, a variacao media mostra quando variou y por unidade de x.Considerando-se de forma geral as variaveis x, x+h, onde h = ∆x, a definicao de taxamedia de variacao tambem pode ser dada por
∆y
∆x=
f(x+ h)− f(x)
h. (3.26)
Geometricamente (escalas graduadas), a taxa media de variacao tem a seguinte inter-pretacao. Se consideramos o grafico da funcao f , isto e, Gra(f) = {(x, y) ∈ R2; y =f(x)}, a taxa media de variacao tem um significado intuitivo. Na Figura 3.16, a retal e tracada ligando os dois pontos (x, f(x)), (x + h, f(x + h)) do grafico da funcao f .A taxa media de variacao e interpretada como a inclinacao da reta secante l, isto e, ocoeficiente angular da reta coincide com a taxa media de variacao
tan(α) =∆y
∆x=
f(x+ h)− f(x)
h. (3.27)
E importante deixar claro que o coeficiente angular de uma reta so pode ser dito, no
53

caso de que as escalas dos eixos de coordenadas sao igualmente espacados, isto e, emescala graduada. Ja no caso geral, quer dizer que quando lidamos com funcoes, sopodemos dizer de taxa media de variacao ou simplesmente variacao, conforme o caso.
Figura 3.16: Taxa Media de Variacao∆y
∆x=
f(x+ h)− f(x)
h
Exemplo 20 Entendemos por metabolismo o conjunto de transformacoes que as subs-tancias quımicas sofrem no interior dos organismos vivos. Seja M(t) a massa de umnutriente de um ser vivo como funcao do tempo t. Estamos interessados na velocidadede uma reacao quımica.
A taxa media de variacao da funcao massa ira responder a esta preocupacao. Admi-tamos a hipotese de que o nutriente se desintegra quimicamente; consequentemente,a massa M decresce no tempo. Se consideramos dois instantes consecutivos t1, t2:∆t = t2 − t1 representa o comprimento do intervalo [t1, t2] e ∆M = f(t2) − f(t1) odecrescimo da massa. Logo, a taxa media de variacao da massa por unidade de tempo e
∆M
∆t=
f(t2)− f(t1)
t2 − t1.
Este quociente e chamado a taxa media de reacao no intervalo de tempo de t1 a t2.Pelas hipoteses, temos que ∆M/∆t e negativo e podemos concluir que a reacao quımicanao tem que ter necessariamente uma taxa constante.
Definicao 18 (Taxa de Variacao Relativa) A taxa de variacao relativa e a taxade variacao de uma funcao y = f(x) por unidade de x relativa a etapa inicial y = yi:
54

1
yi
∆yi∆xi
=
[f(xi+1)− f(xi)
xi+1 − xi
]1
yi(3.28)
Muitas vezes nao e sempre satisfatorio considerarmos as variacoes simples, media erelativa quando os dados envolvidos sao variaveis contınuas; nesse sentido, precisamosde uma medida de variacao que permita nos informar em tempo real o comportamentoda funcao; isso pode ser dado por uma variacao em tempo real, a qual sera opostaa uma variacao media, a variacao instantanea que a seguir definimos dara resposta anossa inquietude.
Definicao 19 (Taxa de Variacao Instantanea) A taxa de variacao instantanea ea taxa de variacao de uma funcao y = f(x) no ponto x dado por
lim∆x→0
∆y
∆x= lim
h→0
[f(x+ h)− f(x)
h
]= f ′(x) (3.29)
desde que o limite existir.
A taxa de variacao instantanea f ′(x) e chamada de derivada da funcao f no ponto x,ela e o numero real, cujos valores aproximados sao os quocientes [f(x+ h)− f(x)] /hpara valores muito pequenos de h. A taxa de variacao instantanea e o limite das taxasmedias de variacao.
Geometricamente, a derivada f ′(x) e a inclinacao da reta tangente l ao grafico dafuncao f no ponto x.
O sinal e o valor da derivada f ′(x) indicam a tendencia da variacao de f a partir doponto x. Se f ′(x) > 0, entao f(x+ h) > f(x) para pequenos valores positivos de h. Sef(x) < 0, tem-se, ao contrario, f(x + h) < f(x) para h pequeno e positivo. Se f ′(x)e um numero positivo grande, entao f cresce rapidamente a partir de x. E assim pordiante. A derivada e a nocao fundamental do Calculo Infinitesimal. Sua descoberta,ha tres seculos e meio, teve uma grande repercussao e provocou um progresso extraor-dinario na Ciencia e em toda a civilizacao a partir daquela epoca.
Exemplo 21 Seja s(t) a posicao de uma partıcula no instante t que se move ao longode uma linha reta; a velocidade media do corpo no intervalo de tempo de t1 a t2 edefinida por
55

Figura 3.17: Interpretacao geometrica da derivada
vm =∆s
∆t=
s(t2)− s(t1)
t2 − t1, (3.30)
isto e, a velocidade v = v(t) como funcao do tempo e na verdade uma taxa de variacao.Suponhamos que estamos interessados em medir a rapidez com que a velocidade au-menta ou diminui; para isso tomamos como referencia dois instantes consecutivos t1 et2 o quociente
∆v
∆t=
v(t2)− v(t1)
t2 − t1, (3.31)
e a variacao media da velocidade, por unidade de tempo. Esta quantidade e usual-mente chamada a aceleracao media e e responsavel por medir a rapidez da velocidade.Para ∆ > 0 a aceleracao e positiva, caso contrario para ∆ < 0 a velocidade decresce ea aceleracao e negativa.
Em concordancia com as leis da cinematica, o movimento de um corpo e um processocontınuo. Um corpo nao pode nem acelerar nem desacelerar no tempo zero. Conse-quentemente, nao ha dificuldade em chegarmos a nocao de uma velocidade instantaneano tempo t1 partindo de uma velocidade media; com efeito, tomando o limite em (3.30)
s′(t1) = limt2→t1
∆s
∆t= lim
t2→t1
s(t2)− s(t1)
t2 − t1, (3.32)
56

representa a velocidade instantanea no tempo t1, ela e definida como o limite da funcaoposicao da partıcula.
Da mesma forma, a aceleracao instantanea no tempo t1 e definida como segue:
v′(t1) = limt2→t1
∆v
∆t= lim
t2→t1
v(t2)− v(t1)
t2 − t1, (3.33)
quer dizer, o limite da aceleracao media dado por (3.31) representa a aceleracao ins-tantanea.
Modelos matematicos que relacionam as variaveis por meio de suas variacoes contınuassao formulados por equacoes diferenciais (veja Unidade IV ). Ja os modelos discretosutilizam as equacoes de diferencas, como veremos a seguir.
3.2 Equacoes de Diferencas
A teoria de equacos de diferencas e rica em muitos ramos das ciencias naturais pelasdiversas aplicacoes que ela possui. Essas equacoes, em geral, descrevem fenomenos aolongo do tempo. Essa evolucao do tempo e medida em intervalos iguais de modo aser interpretado como uma variavel discreta. Por exemplo, se desejassemos calcular onumero de indivıduos numa populacao de seres vivos em um determinado tempo, cadaunidade de tempo podera ser considerado como dias, ou, se se estiver a medir o caudalde um rio, o tempo pode ser considerado em semanas, ou se pretendemos determinaro produto nacional bruto de uma regiao, o tempo pode ser medido em anos etc.
Definicao 20 (Equacao de Diferencas) Uma equacao que relaciona os termos deuma sequencia {y0, y1, y2, ..., yn, ...} e chamada equacao de diferencas ou formula de re-correncia. Se a sequencia e finita dizemos que a equacao e uma equacao de diferencasfinitas. De modo geral, temos a seguinte definicao para o caso finito. Seja n ∈ Z (oun ∈ N). Uma equacao da forma
F (n, yn, yn−1, ..., yn−m) = 0 (3.34)
e designada por equacao de diferencas finitas (EDF) de ordem m < n. Por ordementendemos a diferenca entre o maior e o menor dos ındices de y.
A equacao estabelece uma relacao entre yn e n, yn−1, ..., yn−m. Para simplificar, admite-se que a equacao anterior se pode escrever na forma normal :
yn = f(n, yn−1, ..., yn−m) (3.35)
57

Exemplo 22 Um exemplo de equacao de diferencas e a seguinte:
(n+ 2)yn+1 − 3yn = n2 + 2
A equacao anterior implica que, para cada valor de n entre zero e infinito, o termo deordem n + 1 na sequencia, multiplicado por n + 2 e menos 3 vezes o termo de ordemn, e igual a n2 + 2.
Definicao 21 (Solucao de uma Equacao de Diferencas) Uma funcao ϕn e de-signada uma solucao da EDF yn = f(n, yn−1, ..., yn−m) se ϕn satisfaz
ϕn = f(n, ϕn−1, ..., ϕn−m).
Uma solucao de uma equacao de diferencas finitas e uma expressao que fornece o valorde uma variavel num estagio n em funcao de n e dos m valores dos estagios iniciais,chamados condicoes iniciais.
Observacao 4 Se uma equacao esta em forma normal, entao em princıpio e facilachar as solucoes. Considere (3.35) para os valores sucessivos n = m,m+ 1,m+ 2, ...
ym = f(m, ym−1, ..., y0)
ym+1 = f(m+ 1, ym, ..., y1)
ym+2 = f(m+ 2, ym−1, ..., y2)
......
Note-se que, se y0, y1, ..., ym−1 sao dados arbitrariamente, entao f(m, ym−1, ..., y0) nosfornece o valor de ym. Sabendo este valor, f(m + 1, ym, ..., y1) nos fornece o valor deym+1 e, sabendo este, f(m + 2, ym−1, ..., y2) nos fornece o valor de ym+2, e assim pordiante. Este processo, chamado de iteracao, constroi uma solucao da equacao a partirdos m condicoes iniciais y0, y1, ..., ym−1 que a seguir definimos e aos quais podem seratribuıdos valores arbitrarios.
Definicao 22 (Problema de Valor Inicial) Um problema de valor inicial (PVI) edefinido pela seguinte expressao:
(PV I)
{yn = f(n, yn−1, ..., yn−m)
y0, y1, ... ym−1 sao conhecidos.
58

Exemplo 23 Tomando a condicao inicial y0 = 0, uma solucao da equacao de primeiraordem do Exemplo 22 e dada pela funcao ϕn = yn = n.
Com efeito, completamos a sequencia a partir da equacao de diferencas
2y1 − 3y0 = 2 ⇒ y1 = 1
3y2 − 3y1 = 3 ⇒ y2 = 2
4y3 − 3y2 = 6 ⇒ y3 = 3
Deduzimos que a solucao obtida a partir da condicao inicial y0 = 0 e yn = n, e aobtencao da solucao atraves deste processo e chamado de metodo iterativo.
Exemplo 24 A funcao yn =n(n− 1)
2e solucao do PVI:
{yn = yn−1 + n− 1
y1 = 0
Com efeito, e simples verificar que
n(n− 1)
2=
(n− 1)(n− 2)
2+ n− 1;
portanto, yn = n(n − 1)/2 e solucao da equacao de diferencas dado. Por outro lado,y1 = (0)(1)/2 = 0, verificando-se dessa forma a condicao inicial, e, portanto, solucaodo problema de valor inicial.
Observacao 5 Observe que, uma vez dados os valores de y0, y1, ..., ym−1, os passositerativos determinam os numeros sucessivos ym, ym+1, ..., yn de maneira unica. Umaoutra maneira de expressar isso e a seguinte: se u e v sao duas solucoes e se os primeirosm valores coincidem, isto e, u0 = v0, u1 = v1, ..., um−1 = vm−1, entao u = v. Esseresultado e conhecido como Teorema de Unicidade.
3.2.1 Equacoes de Diferencas Lineares
Definicao 23 (Equacoes de Diferencas Lineares de Ordem m ) Uma equacaode diferenca linear de ordem m tem a seguinte forma:
yn + an−1yn−1 + an−2yn−2 + ...+ an−2yn−m = fn,
59

onde ai−1, (i = 1, 2, ...,m) e fn sao funcoes em n.
Definicao 24 (Equacao Linear de Ordem m com Coeficientes Constantes)Uma equacao de diferenca linear de ordem m com coeficientes constantes tem a seguinteforma:
yn + an−1yn−1 + an−2yn−2 + ...+ an−myn−m = fn, (3.36)
onde ai−1, (i = 1, 2, ...,m) sao constantes e fn e uma funcao que depende de n. No casofn = 0, a equacao (3.36) e chamada homogenea; caso contrario, e dita nao homogenea.
Observacao 6 Note-se a convencao: fn e uma expressao em n onde n varia discreta-mente; e f(n) e uma expressao em n onde n varia continuamente. Assim, se fn = n2,para n ≥ 0, entao fn assume os valores {0, 1, 4, 9, ...}. Nessa secao estudam-se as EDFde ordem m com coeficientes constantes.
O metodo iterativo, utilizado no ponto precedente, nao funciona eficientemente paraessas equacoes. Exige-se, assim, um metodo alternativo de resolucao. Comeca-se porresolver a equacao (3.36) assumindo fn = 0.
Teorema 1 [Solucao Geral] A solucao geral da equacao homogenea
yn + an−1yn−1 + an−2yn−2 + ...+ an−myn−m = 0,
e da formayn = c1u1 + c2u2 + ...+ cmum, (3.37)
onde ci (i = 1, ...,m) sao constantes arbitrarias, ui sao funcoes em n, e {u1, ..., um} euma base de dimensao m do espaco das solucoes.
Qualquer solucao particular pode ser obtida a partir da equacao precedente medianteuma escolha apropriada de ci.
O exemplo seguinte mostra como uma solucao geral de uma equacao de ordem m, de-pende de m constantes arbitrarias.
60

Exemplo 25 A equacao de segunda ordem yn+2 = 1 + 2yn + yn+1 tem como solucaogeral
yn =−1
2+ a(−1)n + 2nb,
onde a e b sao numeros quaisquer (observe que esta expressao e uma solucao). Ometodo iterativo nao nos leva necessariamente a enxergar uma maneira compacta deexpressar a solucao geral, e em geral tal maneira compacta nao existe. Para algu-mas equacoes importantes, porem, a solucao geral pode ser expressa em forma util eexplıcita. Sao essas as equacoes que estudaremos neste curso.
Exemplo 26 Provar que a EDF de segunda ordem yn+1 − 5yn + 6yn−1 = 0 tem comosolucao geral
yn = c12n + c23
n
Solucao Lembrando que uma base do espaco vectorial das solucoes de uma EDF deordem 2 e um conjunto formado por duas solucoes linearmente independentes, entaodevemos provar que o conjunto {2n, 3n} e uma base do mencionado espaco de solucoes.Nao e dificil verificar que 2n e 3n sao solucoes da equacao; com efeito, substituindo-sena equacao, obtemos
2n+1 − 5.2n + 6.2n−1 = 0,
3n+1 − 5.3n + 6.3n−1 = 0,
assim 2n e 3n sao solucoes. Essas solucoes sao linearmente independentes se, e somentese,
α12n + α23
n = 0, ∀ n ⇔ α1 = α2 = 0.
Tomando agora n = 0 e n = 1 na equacao anterior, obtemos respectivamente
α1 + α2 = 0,
2α1 + 3α2 = 0,
e resolvendo o sistema, encontramos α1 = 0 e α2 = 0; portanto, as solucoes sao linear-mente independentes. Pelo Teorema 1 provamos que a solucao geral e
yn = c12n + c23
n.
61

Sabe-se ja verificar se determinado conjunto de solucoes forma uma base do espacodas solucoes de uma EDF linear homogenea de coeficientes constantes. Importa agoraestudar um metodo que permita obter a solucao geral da EDF. Para isso, se comecapor introduzir o operador de avanco (forward) F .
Definicao 25 (Operador Avanco) O operador de avanco F sobre a expressao yndefine-se como Fyn = yn+1.
Da definicao temos que F 2yn = F (Fyn) = Fyn+1 = yn+2. Em geral, para todo k,m ∈ N
Fmyn+k = yn+k+m.
Temos a convencao F 0yn = yn. O operador F aplicado a uma constante resulta napropria constante, Fc = c. Com o operador de avanco podemos escrever a equacaolinear homogenea de ordem m
amym+n + am−1ym+n−1 + ...+ a0yn = 0 (3.38)
na forma
amFmyn + am−1F
m−1yn + ...+ a0F0yn = 0,
ou
(amFm + am−1F
m−1 + ...+ a0F0)yn = 0.
Logo,
p(F )yn = 0,
onde
p(F ) = amFm + am−1F
m−1 + ...+ a0F0.
Definimos o polinomio caracterıstico: p(r) = amrm + am−1r
m−1 + ... + a0 e a equacao
62

caracterıstica associada a equacao homogenea
p(r) = 0.
Estamos diante de uma equacao polinomial de grau m, que tem m raızes. As solucoesda equacao caracterıstica sao chamadas raızes caracterısticas da equacao e podem serusadas para estabelecer a solucao geral da equacao, que nos da todas as solucoes daequacao de diferencas.
EDF Linear de Primeira Ordem
Teorema 2 [EDF Linear de Primeira Ordem m = 1] Considere-se a EDF
a1yn+1 + a0yn = 0,
i.e., (a1F + a0)yn = 0 ou ainda p(F )yn = 0. Seja r a raiz do polinomio caracterısticop(r) = a1r + a0, isto e, r = −a0/a1. Entao,
yn = c1rn, c1 ∈ R (3.39)
e a solucao geral da EDF.
Demonstracao. Atendendo ao Teorema 1, a demonstracao e simples e deixa-se comoexercıcio. �
Exemplo 27 Resolver a EDF de primeira ordem 2yn+1 − 5yn = 0
Solucao A equacao pode ser escrita da forma
2Fyn − 5F 0yn = (2F − 5)yn = 0
cuja equacao caracterıstica associada a equacao homogenea e
2r − 5 = 0 e raiz r = 5/2
Portanto, a solucao dada pelo Teorema 2 e yn = c
(5
2
)n
, ∀ c ∈ R.
63

EDF Linear de Segunda Ordem
Teorema 3 [EDF Linear de Segunda Ordem m = 2] Considere-se a EDF
a2yn+2 + a1yn+1 + a0yn = 0,
i.e., (a2F2+a1F+a0)yn = 0 ou ainda p(F )yn = 0. Sejam r1 e r2 as raızes do polinomio
caracterıstico p(r) = a2r2 + a1r + a0. Tem-se os seguintes casos:
1. Se r1 e r2 sao reais e distintas, a solucao geral e
yn = c1rn1 + c2r
n2 , c1, c2 ∈ R; (3.40)
2. Se r1 = r2 = r, a solucao geral e
yn = c1rn + c2nr
n, c1, c2 ∈ R; (3.41)
3. Se r1 = a + bi, r2 = a − bi sao raızes complexas do polinomio caracterıstico, asolucao geral e
yn = ρ (c1 cos(ωn) + c2sen(ωn)) , (3.42)
onde ρ =√a2 + b2 e ω = arccos(a/ρ).
Demonstracao. Deixa-se como exercıcio mostrar que as solucoes, em cada caso, satis-fazem o Teorema 1. �
Exemplo 28 Resolver a EDF yn+2 − 3yn+1 + 2n = 0
Solucao A equacao e uma equacao de diferencas finitas, de segunda ordem, ho-mogenea, linear e de coeficientes constantes. A respectiva equacao caracterıstica e
r2 − 3r + 2 = 0
cujas solucoes sao
r1 = 2 ou r = 1.
Portanto, a solucao dada pelo Teorema 3 e
yn = c11n + c22
n = c1 + c22n c1, c2 ∈ R.
64

Exemplo 29 Resolver o problema de valor inicial
(PV I)
{yn+2 + yn = 0
y0 = 0, y1 = 1
Solucao A equacao caracterıstica e
r2 + 1 = 0
cujas solucoes sao
r1 = i r = −i.
Logo, a solucao dada pelo Teorema 3 e yn = ρ (c1 cos(ωn) + c2sen(ωn)) c1, c2 ∈ R, onde
ρ =√a2 + b2 =
√1 = 1 e ω = arccos(a/ρ) = arccos(0) =
π
2.
Portanto,
yn = c1 cos(π
2n) + c2 sen(
π
2n), c1, c2 ∈ R.
Das condicoes iniciais temos
y0 = c1 cos(π
20) + c2 sen(
π
20) = c1 = 0,⇒ c1 = 0.
Analogamente,
y1 = c2 sen(π
2) = c2 = 1,⇒ c2 = 1.
Portanto, a solucao do problema de valor inicial e
yn = sen(nπ
2)
65

3.2.2 Sistemas de Equacoes de Diferencas
Na Subsecao 3.2.1, estudamos as equacoes de diferencas finitas lineares. Agora, esten-deremos essas equacoes para sistemas de equacoes lineares. Veremos a seguir que umaequacao de segunda ordem e em geral de ordem m pode ser transformado num sistemalinear de duas equacoes de primeira ordem e em geral num sistema de m equacoes deprimeira ordem. Vamos nos limitar ao caso de sistemas lineares de duas equacoes deprimeira ordem com coeficientes constantes. Iniciamos com a seguinte definicao:
Definicao 26 Um sistema de equacoes nas variaveis yn, zn da forma{yn+1 = a11yn + a12zn
zn+1 = a21yn + a22zn,(3.43)
onde aij, i, j = 1, 2 sao constantes, e chamado sistema de duas equacoes em diferencasfinitas lineares.
Um sistema linear de duas equacoes de primeira ordem pode ser transformado em umaequacao linear de segunda ordem
yn+2 + ayn+1 + byn = 0 (3.44)
Com efeito, da primeira e segunda equacao de (3.43) temos respectivamente
yn+2 = a11yn+1 + a12zn+1
= a11yn+1 + a12(a21yn + a22zn)
= (a11 + a22)yn+1 + (a12a21 − a11a22)yn
Portanto,
yn+2 − (a11 + a22)yn+1 + (a11a22 − a12a21)yn = 0, (3.45)
obtendo assim (3.44) onde a = −(a11 + a22) e b = −(a12a21 − a11a22). Reciprocamentea equacao linear de segunda ordem (3.44) pode ser transformada num sistema linearde duas equacoes de primeira ordem (3.43) considerando-se a mudanca de variaveis
66

zn = yn+1: {yn+1 = zn
zn+1 = −azn − byn(3.46)
Definicao 27 A matriz
J =
(a11 a12
a21 a22
)(3.47)
e denominada matriz Jacobiana do sistema (3.43). Os autovalores desta matriz saovalores r tal que det(J − rI) = 0, onde I e a matriz identidade, isto e,
det(J − rI) =
∣∣∣∣∣ a11 − r a12
a21 a22 − r
∣∣∣∣∣ = 0 ⇔
r2 − (a11 + a22)r + (a11a22 − a12a21) = 0 (3.48)
p(r) = r2 − (a11 + a22)r + (a11a22 − a12a21) e o polinomio caracterıstico de (3.45).α = a11 + a22 e o traco da matriz J , β = a11a22 − a12a21 e o determinante de J ,α2 − 4β e o discriminante de J.
Exemplo 30 Desejamos encontrar a formulacao de um modelo matematico que go-verna a dinamica populacional dos atuns. Sabendo que o atum e considerado jovem(alevino) ate a idade de quatro anos, em que inicia sua reproducao sexual, e que onumero de alevinos no ano n e proporcional ao numero de adultos no ano n − 1, for-mular o modelo matematico do problema e solucionar.
Solucao Denotemos por N(n) = Nn o numero de adultos no ano n, e J(n) = Jn onumero de atuns jovens (alevinos), o que implica que as variaveis envolvidas sao de tipodiscreto. Como hipoteses de simplificacao suponhamos que o fator de proporcionalidadek e constante; logo, do enunciado temos
Jn = kNn−1 (3.49)
De outro lado, se yn representa o numero total de atuns no ano n, e evidente que
yn = Nn + Jn (3.50)
Considerando que o atum e jovem antes dos quatro anos, podemos tomar na verdadecada 2 anos como margem de intervalo de tempo quer dizer, o tempo n = 1 represen-tara 2 anos; logo, passados outros dois anos, n = 2 representara 4 anos, que e a idade
67

em que o atum torna-se adulto, e assim sucessivamente.
Dessa forma, iniciamos o seguinte processo iterativo:
No inicio n = 0 do processo, teremos uma quantidade inicial de N0 adultos e J0 = 0alevinos que em total sao y0 = N0 atuns.
Passados dois anos, n = 1 havera ainda N1 = N0 adultos, e J1 = kN0 alevinos quando,no total, havera y1 = N0 + kN0 atuns.
No tempo n = 2, isto e, transcorridos quatro anos, os J1 = kN0 alevinos ja sao adultose se reproduzem; logo, ha N2 = N0 + kN0 = y1 adultos e J2 = kN0 = kN1 alevinosque, no total, sao y2 = N0 + 2kN0.
Em n = 3, isto e, depois de seis anos, teremos N3 = N0 + 2kN0 = y2 adultos eJ3 = kN2 = kN0 + k2N0 alevinos, que no total, sao y3 = N0 + 3kN0 + k2N0 atuns.
Em geral, para qualquer ano n, nos teremos Nn = yn−1 = Nn−1 + Jn−1 adultos eJn = kNn−1 alevinos que, no total, somam yn = Nn + Jn = Nn−1 + Jn−1 + kNn−1.
Entao, podemos ver que a formula de recorrencia para a quantidade de atuns adultose dada por
Nn = Nn−1 + Jn−1 = Nn−1 + kNn−2 para n ≥ 2. (3.51)
Como yn = Nn + Jn, temos
Nn = yn−1 = yn−2 + kyn−3 para n ≥ 3, (3.52)
que pode ser reescrito na forma de uma equacao em diferencas lineares de segundaordem com coeficientes constantes.
yn = yn−1 + kyn−2 para n ≥ 2. (3.53)
Acrescentando as condicoes inicias y0 = N(0) = N0, y1 = N(1) = N1 = N0 obtemos omodelo matematico atraves do seguinte problema de valor inicial:{
yn = yn−1 + kyn−2
y0 = y1 = N0,(3.54)
68

Tomando o valor numerico k = 2, encontramos a solucao. A equacao caracterıstica e
r2 − r − 2 = 0,
cujas raızes sao
r1 = 2 e r2 = −1.
A solucao geral e
yn = c12n + c2(−1)n
Das condicoes iniciais temos {N0 = c1 + c2
N0 = 2c1 − c2
Resolvendo o sistema, encontramos
c1 =2N0
3, c2 =
N0
3,
obtendo
yn =N0
32n+1 +
N0
3(−1)n
69

3.2.3 Atividades
1. Classifique o tipo de variavel.
a) O numero de indıviduos de uma populacao animal ou vegetal.b) O raio de uma celula esferica.c) O numero de moleculas de uma substancia radioativa.d) A posicao de uma partıcula.
2. A concentracao C (em miligramas por mililitro) de um remedio na correntesanguınea de um cavalo e monitorada a intervalos de 20 minutos durante 2 horas,com t dado em minutos, conforme a tabela:
t 0 20 40 60 80 100 120C 0 17 55 89 111 113 68
Encontre a taxa media de variacao nos intervalos: a) [0, 20]; b) [60, 80].
3. Um grupo de excursionistas iniciou uma caminhada de 40 km as 9 horas. Ogrupo alcancou um abrigo a 32 km de distancia do ponto de partida as 18 h30 m.Aı eles passaram a noite. Na manha seguinte, as 8 horas, o grupo continuou acaminhar e chegou ao seu objetivo as 11 h 30 m. A velocidade media do segundodia e maior ou menor do que a do primeiro?
4. Suponhamos que uma populacao de 25000 indivıduos (no instante t = 0) crescede acordo com a formula N = 25000 + 45t2, onde o tempo t e medido em dias.Encontrar a taxa media de crescimento nos seguintes intervalos de tempo: a) det = 0 a t = 2; b) de t = 2 a t = 10; c) de t = 0 a t = 10.
5. O tamanho de uma cultura de bacterias que cresce lentamente no tempo (emhoras) e dado aproximadamente por
N(t) = N0 + 52t+ 2t2
Calcular a taxa de variacao instantanea em t = 6 horas.
6. O modelo discreto de um modelo populacional de indivıduos e dado pela taxa devariacao Malthusiana, proveniente de um crescimento exponencial
α = ∆t
√Nt+∆t
Nt
− 1
a) Faca ∆t = 1 e prove que Nt+1 = (1 + α)Nt.b) Considerando a equacao de diferencas de primeira ordem dado em a) e umapopulacao inicial de N(0) = N0, prove que o problema de valor inicial tem porsolucao Nt = (1 + α)tN0.
70

7. Encontrar a solucao geral da equacao
yn+2 − yn = 0
8. Considere-se o seguinte modelo economico multiplicador-acelerador simplificado
Ct = byt−1
It = I it +G
I it = k(Ct − Ct−1)
yt = Ct + It
onde C e o consumo que depende do rendimento nacional, y do perıodo anterior,I e o investimento que e igual ao investimento induzido, I i, mais gastos do estado,G, e k e o coeficiente de aceleracao. A ultima equacao representa a condicao deequilıbrio do modelo economico.
a) Prove que yt = b(1 + k)yt−1 − bkyt−2 +G.b) Se b = k = 1 e G = 0, prove que a solucao da equacao em diferencas desegunda ordem dado em a) e yt = c1 + c2t, c1, c2 constantes arbitrarias.
9. Na data t = 0 faz-se um deposito de 12000 reais a taxa anual de 5%. Se ytrepresenta o capital obtido na data t,
a) Prove que o modelo matematico e dado pelo problema de valor inicial{yt = (1.05)yt−1
y0 = 1200
b) Prove que a solucao do problema de valor inicial e yt = 12000(1.05)t.c) Prove que o valor do capital na data t = 3 e 13892.
71

Unidade IV
EQUACOES DIFERENCIAIS ORDINARIAS

4.1 Equacoes Diferenciais Ordinarias
Objetivos
• Reconhecer e classificar uma equacao diferencial ordinaria e verificar se umafuncao dada e solucao da mesma.
• Mostrar que uma mesma equacao diferencial modela problemas reais diferentes.
Para os nossos propositos, a melhor maneira de entender equacoes diferenciais e fazendoum contraste com as equacoes de diferenca visto na secao anterior. Vimos que, ao usarequacoes de diferenca no estudo da dinamica populacional de indivıduos, o tamanhodas populacoes e calculado em pontos discretos no tempo. Esses resultados tambempodem ser comparados em um instantante de tempo, isto e, observamos a situacaoem pontos no tempo, mas nao observamos o que acontece entre esses instantes. Nosmodelos de equacoes de diferenca que temos discutido ate agora, foram tomadas noinıcio de cada perıodo intervalos de tempo. Em contraste, modelos de equacoes dife-renciais se esforcam para observar a populacao em cada momento no tempo. Resolver,por exemplo, uma equacao diferencial para o problema populacional, implica encontraruma funcao X(t) para a populacao onde t pode ser qualquer valor, nao necessariamenteum numero inteiro. Em nossa analogia, a solucao de uma equacao diferencial e comoassistir a um evento se desenrolar, observando todas as etapas de sua evolucao.
Na pratica, o processo de encontrar solucoes de equacoes diferenciais nao esta plena-mente satisfeita. Isto e devido a dificuldade de encontrar as formulas que realmenteresolvem equacoes diferenciais (e o caso do modelo Lotka-Volterra da subsecao 5.1.3).O que normalmente acontece e que uma aproximacao numerica da solucao da equacaodiferencial e encontrada. Isso e feito rotineiramente, convertendo-se a equacao diferen-cial em uma equacao de diferenca “equivalente”para poder resolver este ultimo.
Em vez de nos dar informacoes sobre o quanto muda alguma coisa ao longo de umperıodo de tempo integral, equacoes diferenciais nos dao uma equacao para a deri-vada de uma funcao de alguma quantidade como por exemplo, o nıvel da populacao.Felizmente para nos, a derivada e uma nocao importante para a mudanca de umaquantidade por unidade de tempo. Assim, tanto quanto nos estamos preocupados, nospodemos tratar a equacao para a derivada exatamente da mesma maneira que trata-mos a equacao de diferenca para a variacao. A unica alteracao e a de que, no caso daequacao diferencial, e uma boa ideia para usar passos de tempo pequenos em vez de ointervalo de tempos, tipicamente utilizado em modelos de equacoes de diferencas.
73

4.1.1 Definicoes Basicas
As palavras diferencial e equacoes sugerem a resolucao de algum tipo de equacao envol-vendo derivadas ou diferenciais. Nesse sentido desejamos conhecer algumas definicoese terminologias basicas sobre o assunto. Este e o conteudo desta secao.
Definicao 28 (Equacao Diferencial Ordinaria) Uma Equacao Diferencial Ordinaria(EDO) e uma equacao que contem derivadas ou diferenciais de uma ou mais funcoes(variaveis dependentes) em relacao a uma variavel independente.
Exemplo 31 Seja f : R → R uma funcao, onde y = f(x), e a variavel dependente ex a variavel independente. As equacoes
(x2 − 1 + xy)dx− (x− y3)dy = 0 ed3f
dx3= ex + xf(x)− 3
sao exemplos de duas equacoes diferenciais ordinarias na funcao incognita y = f(x).
Definicao 29 (Ordem de uma EDO) A ordem de uma equacao diferencial ordinaria,e definida como a ordem da maior derivada presente na equacao.
Exemplo 32 As equacoes diferenciais
(yx2 + ln x− 2)dx− (x+ 2y)dy = 0 ed2f
dx2= x2 + ex
df
dx− 2xf(x)
sao exemplos de equacoes diferenciais de primeira e terceira ordem respectivamente.
Definicao 30 (Forma Geral de uma EDO) Dada a relacao F : Rn+2 → R. Aforma geral de uma equacao diferencial ordinaria de ordem n para a funcao incognitay = y(x) e representada pela igualdade
F
(x, y,
dy
dx, ...,
dny
dxn
)= 0. (4.55)
Quando a variavel independente x nao aparece explicitamente em (4.55) dizemos que
a equacao diferencial F
(y,
dy
dx, ...,
dny
dxn
)= 0 e uma equacao autonoma.
74

Exemplo 33 As equacoes diferenciais
d2y
dx2= y2 +
dy
dx− 4 e
dy
dx= ky(3− y)
sao exemplos de equacoes diferenciais autonomas.
Definicao 31 (EDO linear de ordem n) Uma equacao diferencial ordinaria e cha-mada linear de ordem n quando pode ser escrita na forma
an(x)dny
dxn+ an−1(x)
dn−1y
dxn−1+ ...+ a1(x),
dy
dx+ a0(x)y = g(x), (4.56)
onde ai(x), i = 0, 1, 2, ..., n, an = 0 e g(x) sao funcoes conhecidas definidas em algumintervalo I. Caso contrario, dizemos que a equacao diferencial e nao linear.
Observacao 7 As equacoes diferencias ordinarias lineares de primeira ordem sao ca-racterizadas pelas duas propriedades:
1. A variavel dependente y e todas as suas derivadas sao do primeiro grau.
2. Cada coeficiente depende apenas da variavel independente x.
Exemplo 34 A relacao F : R4 → R onde F (x1, x2, x3, x4) = x4−(x1+lnx2)x3+x31x
22−
cos 2x1 define a equacao diferencial de segunda ordem nao linear y′′−(x+ln y)y′+x3y2 =cos 2x atraves da forma geral F (x, y, y′, y′′) = 0.
Se agora definimos G(x1, x2, x3, x4) = x4 − (x1 + x21)x3 + x3
1x2 − cos 2x1, onde temosmudado na definicao de F (x1, x2, x3, x4) ln x2 por x
21 e x
22 por x2, a equacao diferencial
definida pela forma geral G(x, y, y′, y′′) = 0, y′′− (x+x2)y′+x3y = cos 2x e agora umaequacao linear.
Definicao 32 (Solucao de uma EDO) Toda funcao n vezes diferenciavel f : I → Rdefinida no intervalo I, que ao substituir numa equacao diferencial ordinaria de ordemn reduz a equacao a uma identidade, e chamada de solucao da equacao diferencial nointervalo I.
Assim, se y = f(x) e solucao da equacao diferencial ordinaria F (x, y, y′, ..., y(n)) = 0,entao f possui pelo menos n derivadas e satisfaz a equacao, isto e,
F (x, f(x), f ′(x), ..., f (n)(x)) = 0, ∀ x ∈ I.
75

Exemplo 35 Para qualquer constante c, a funcao f : (−∞,∞) → R definida porf(x) = ce4x e solucao da equacao diferencial f ′(x) = 4f(x). Com efeito:
f ′(x) = 4ce4x = 4f(x).
Variando a constante c obteremos infinitas solucoes. Em particular, fazendo c = 0, ob-temos uma solucao constante f(x) = 0, ∀ x ∈ (−∞,∞). Se c > 0, f(x) > 0 e f(x) < 0para c < 0, ver Figura 4.18.
Figura 4.18: Grafico das diversas solucoes f(x) = ce4x dependendo do valor c
Observacao 8 O estudo de equacoes diferenciais ordinarias e tambem semelhante aoestudo do calculo integral. Ao calcular uma integral indefinida, utilizamos uma unicaconstante de integracao. De forma analoga, quando queremos resolver uma equacaodiferencial ordinaria, por exemplo uma equacao de primeira ordem F (x, y, y′) = 0,obtemos normalmente uma famılia ou conjunto de funcoes G(x, y, c) = 0, contendoum parametro arbitrario onde cada elemento do conjunto e uma solucao da equacaodiferencial. Assim, temos a seguinte definicao.
76

Definicao 33 (Solucao Geral e Solucao Particular de uma EDO) Uma solucaogeral de uma equacao diferencial ordinaria de ordem n, F (x, y, y′, ..., y(n)) = 0, obtidaao resolver essa equacao diferencial, e uma famılia parametrica de solucoes
G(x, y, c1, ..., cn) = 0
que depende dos parametros c1, c2, ..., cn.
Escolhendo valores especıficos (fixados) dos parametros, obteremos uma solucao quesera chamada de solucao particular da equacao diferencial.
Exemplo 36 A funcao h : R − {1} → R, y = h(x) = c/(x − 1) onde c e uma cons-tante arbitraria, e a solucao geral de (x−1)y′ = −y. De fato, ao multiplicar a derivada
y′ = h′(x) = − c
(x− 1)2por x − 1, obtemos (x − 1)y′ = − c
x− 1= −y. Portanto a
EDO e verificada. Escolhendo por exemplo c = 1, obtemos uma solucao particulary = 1/(x− 1) ∀ x ∈ R− {1}. Ver Figura 4.19
Figura 4.19: Solucoes de f(x) =c
x− 1∀ c ∈ R. Solucao particular f(x) =
1
x− 1
77

4.1.2 Atividades
1. Classifique as seguintes equacoes diferenciais segundo a ordem e a linearidade.Determine a funcao incognita e a variavel independente.
a) x′′′ + 3tx′′ = ln x b)d4x
dy4+ (
dx
dy)5 = cos x c) y′′ = sec y d) y2
d3x
dy3= 2x2 − y
2. Verifique se a funcao dada e uma solucao para a equacao diferencial, determineo intervalo onde esta definida a solucao.
a) x(t) = 2e−t+ te−t; b) f(x) =1
(x2 − 1); c) y = 5 tan 5x; d) x2 = c(t+14c)
x′′+2x′+x = 0 f ′(x)+2xf 2(x) = 0 y′ = 25+ y2 x = 2tx′+x(x′)2
3. Dado F (X), X = (x1, x2, x3, x4), encontre a EDO definida por F (x, y, y′, y′′) = 0.
a) F (X) = x3−5x4+ ex2 b) F (X) = x2x3+x24 c) F (X) = lnx2+(x3+4x1)x1
d). Mostre que y1 = x2 e y2 = x3 sao ambas solucoes particulares da equacao
x2y′′ − 4xy′ + 6y = 0
As funcoes, c1y1 e c2y2, com c1 e c2 constantes arbitrarias, sao tambem solucoes?Prove que a solucao geral e c1y1 + c2y2.
4. Do Calculo, determine quais funcoes trigonometricas satisfazem a equacao dife-rencial de segunda ordem
d2x
dt2= −x
Verifique que combinacoes lineares dessas funcoes tambem satisfazem a equacaodiferencial, i.e., se x1(t) e x2(t) sao solucoes, entao x(t) = c1x1(t)+c2x2(t) tambeme solucao. Faca um grafico da solucao particular x(t) para c1 = c2 = 1.
5. Verifique que a famılia de funcoes y(x) = −5
3x3 + c, c ∈ R e a solucao geral
da equacao y′ = −5x2. Faca o grafico da solucao geral para cada valor de c e a
solucao particular y(x) = −5
3x3 + 1.
78

4.2 Equacoes Diferenciais Ordinarias de 1a Ordem
Como foi visto na secao anterior, a forma geral de uma equacao diferencial ordinariade primeira ordem e F (x, y, y′) = 0, supondo-se y = y(x) a funcao incognita. Nestasecao estudaremos o caso particular em que F (x, y, y′) = y′ − f(x, y) onde f : R → Re uma funcao conhecida definida na regiao retangular R ⊂ R2. Entao a forma geralF (x, y, y′) = 0 define a equacao diferencial
y′ = f(x, y) (4.57)
Definicao 34 (Problema de Valor Inicial) Seja f : R → R uma funcao definidana regiao retangular R = {(x, y) ∈ R2/ a ≤ x ≤ b, c ≤ y ≤ d; a, b, c, d ∈ R }; dado(x0, y0) ∈ R com y(x0) = y0, um Problema de Valor Inicial (PVI) para a equacao(4.57) e definido por
(PV I)
{y′ = f(x, y)
y(x0) = y0
A condicao y(x0) = y0 e chamada de condicao inicial do problema (PVI). Geometrica-mente falando, o problema de valor inicial acima consiste em procurar uma solucao yda equacao diferencial (4.57) definida em algum intervalo I tal que o grafico da solucaopasse pelo ponto (x0, y0) determinado a priori.
Solucionando a equacao diferencial (4.57), obteremos uma famılia de solucoes depen-dendo de uma constante de integracao; agora, se acrecentarmos a condicao inicialy(x0) = y0 a equacao diferencial, na verdade estaremos resolvendo o Problema deValor Inicial (PVI), isso implica que procuramos uma solucao particular de (4.57) pas-sando pelo ponto (x0, y0).
A interpretacao geometrica dita acima e a seguinte: consideramos uma parametrizacaoα : I → R2, α(x) = (x, y(x)), ∀ x ∈ I do grafico de y(x), onde α(x0) = (x0, y0), x0 ∈ I;logo, o vetor tangente a curva α(x) e dado por α′(x) = (1, y′(x)) = (1, f(x, y)) e noponto x0, α
′(x0) = (1, y′(x0)) = (1, f(x0, y0)). Ver Figura 4.20.
79

Figura 4.20: Interpretacao Geometrica do PVI
Exemplo 37 Achar a solucao do problema de valor inicial
(PV I)
{(x− 1)y′ = −y
y(−2) = 5
Do Exemplo 36 temos que a solucao da equacao diferencial e y = c/(x − 1), ∀ x ∈R−{1}; logo, procuramos de todas essas solucoes so aquelas que verificam a condicaoinicial y(−2) = 5, isto e,
5 = y(−2) = c/(−2− 1) ⇒ c
−3= 5 ⇒ c = −15.
Portanto, a solucao procurada e y(x) = −15/(1− x), ∀x ∈ R− {1}.
Definicao 35 (Solucao Estacionaria) Dizemos que y = y(x) e uma solucao esta-cionaria da equacao diferencial y′ = f(x, y) se f(x, y) = 0, ∀ x ∈ I.
Observacao 9
i) As solucoes estacionarias sao aquelas solucoes cujo grafico tem por vetor tangente ovetor paralelo ao eixo horizontal x.ii) A solucao da equacao diferencial (4.57) sera formado pelas solucoes estacionarias e
80

nao estacionarias.
Dado um problema de valor inicial, estamos interessados em saber se existe uma solucaodo problema e se essa solucao e unica, o teorema seguinte da condicoes suficientes paragarantir existencia e unicidade de solucoes.
Teorema 4 (Existencia e Unicidade de Solucoes) Seja f : R → R uma funcaodefinida no retangulo R = {(x, y) ∈ R2/ a ≤ x ≤ b, c ≤ y ≤ d; a, b, c, d ∈ R } quecontem o ponto (x0, y0) em seu interior. Entao, se f e ∂f/∂y sao contınuas em R,existe um intervalo I = (−ε + x0, x0 + ε) e uma funcao y : I → R definida em I quesatisfaz o problema de valor inicial (PVI).
A demonstracao deste teorema pode ser encontrada em ARNOLD, (1997). Uma inter-pretacao geometrica do Teorema 4 e ilustrada na Figura 4.21.
Figura 4.21: Interpretacao Geometrica do Teorema de Existencia e Unicidade. Comas hipoteses do Teorema 4 fica garantida a existencia de uma funcao y definida nointervalo I = (−ε + x0, x0 + ε), onde o problema de valor inicial (PVI) admite umaunica solucao.
81

Exemplo 38 Analisar a existencia e unicidade de solucoes do problema de valor inicial
(PV I)
{x′ = x1/2 − 1
x(0) = 1
Solucao Nao e difıcil verificar que a funcao constante x : R → R x(t) = 1 e solucaoda equacao diferencial dada pelo problema de valor inicial (PVI). Sera que e a unicasolucao do problema de valor inicial? Vejamos: para responder a esta questao, utiliza-mos o Teorema de Existencia e Unicidade.
A funcao f(t, x) = x1/2−1 e contınua em todo R2 e a derivada parcial∂
∂xf(t, x) =
1
2x1/2
em relacao a variavel dependente x nao e contınua em todo R2, entao x(t) = 1nao e necessariamente a unica solucao. Mas se restringir o domınio R2 ao retanguloR = R2 − {0}, entao o Teorema de Existencia e Unicidade garante uma unica solucaodo problema de valor inicial.
Se em (4.57) consideramos que a funcao f(x, y) = F (x) depende apenas de x paraalguma funcao F (x), entao teremos a equacao diferencial
dy
dx= F (x), (4.58)
logo, o problema de valor inicial (PVC), neste caso, pode ser resolvido utilizando-seum processo inverso da diferenciacao, isto e, atraves do calculo de antiderivadas ouintegracao indefinida, dados pelo o Teorema Fundamental do Calculo.
METODO DE SOLUCAO: Integracao Direta
Multiplicando em (4.58) por dx de ambos os lados da igualdade e integrando obtemos
y′dx = F (x)dx ⇔ dy = F (y)dx ⇔∫
dy =
∫F (x)dx+ C.
Assim, a solucao de (4.58) e
y(x) =
∫F (x)dx+ C. (4.59)
82

Exemplo 39 Eficiencia de um funcionario
A eficiencia F (medida em percentagem) de um trabalhador para executar uma de-terminada tarefa varia com o tempo de trabalho realizado durante um dia (12 horasde trabalho), se a eficiencia e suposta decrescente nas 6 primeiras horas de trabalho ecrescente nas 6 horas restantes.
a) Encontre a funcao eficiencia F (t) em qualquer instante de tempo t.
b) Supondo que depois de ter trabalhado 4 horas o trabalhador tem uma eficiencia de80%, determine F (t).
Solucao
a) Primeiro estabeleceremos a equacao diferencial ordinaria que modela o problema,do enunciado obtemos o seguinte: se t representa o numero de horas de trabalho, para
0 ≤ t < 6 a eficiencia F (t) e decrescente, entaodF
dt< 0 e para 6 < t ≤ 12,
dF
dt> 0.
Entao, dependendo das horas trabalhadas, ambas as hipoteses podem ser resumidasnuma unica.
dF
dt= 10(t− 6) ∀ t ∈ [0, 12].
Assim, obtemos uma equacao diferencial na forma (4.58), para solucionar aplicamos ometodo de solucao acima; integramos a equacao diferencial e obtemos
F (t) =
∫(10t− 60)dt = 5t2 − 60t+ C, (4.60)
Para cada valor da constante C obtemos uma solucao F (t).
b) Da solucao geral (4.60), encontramos a solucao particular utilizando a condicao ini-cial F (4) = 80.
F (4) = 5(4)2 − 60(4) + C = 80 ⇒ C = 160 + 80 = 240.
Portanto, F (t) = 5t2 − 60t+ 240.
Lamentavelmente, nem todo problema concreto pode ser modelado por uma mesmaequacao diferencial que possa ser resolvido por uma simples integracao. Cada metodo
83

de solucao depende da forma da equacao a estudar; nesse sentido, vamos apenas mos-trar que uma mesma equacao diferencial pode ser utilizada para modelar problemasdiferentes, isso e o objetivo da proxima equacao diferencial a definir.
4.2.1 Variaveis Separaveis
Definicao 36 (EDO em Variaveis Separaveis) Dizemos que a equacao diferencialy′ = f(x, y) e uma equacao diferencial em variaveis separaveis, se f(x, y) = F (x)G(y)para algumas funcoes F e G, isto e, se a equacao diferencial (4.57) tem a forma
y′ = F (x)G(y). (4.61)
As equacoes de primeira ordem em variaveis separaveis aparecem com certa frequenciana modelagem matematica. Nesta secao vamos estudar algums exemplos simples for-mulados com esse tipo de equacoes.
Observacao 10
i) E imediato que (4.61) se reduz a (4.58) quando G(y) = 1.
ii) As vezes uma equacao diferencial em variaveis separaveis tambem e dada na forma
y′ = F (x)/G(y).
METODO DE SOLUCAO
Multiplicando em (4.61) por dx e passando a dividirG(y) = 0, obtemos ao integrar em x∫y′dx
G(y(x))=
∫F (x)dx+ c
Como a diferencial da funcao y e dy = y′dx, a integral do lado esquerdo da igualdadeanterior e feita em relacao a y depois de uma mudanca de variavel, isto e,∫
dy
G(y)=
∫F (x)dx+ c (4.62)
Resolvendo essas integrais, obtemos a solucao da equacao diferencial (4.61).
84

Exemplos de Aplicacao
Apresentamos alguns exemplos de aplicacao e veremos que o modelo matematico deum problema concreto pode ser modelado por uma mesma equacao diferencial, poremcom interpretacao diferente das variaveis que o definem.
Exemplo 40 Decaimento Radioativo
Suponhamos que a massa de uma substancia radioativa (perda de atomos para formaratomos de outra substancia) no instante t e dado atraves da funcao
x : R+ ∪ {0} → R, x = x(t).
Se consideramos o intervalo de tempo t, t+h, h ∈ R+, e evidente que a perda de massado material radioativo, a medida que o tempo passa, implica que a funcao x = x(t)e decrescente; logo x(t + h) < x(t), entao, se aumenta o tempo diminui a quantidadede massa, ou seja, temos uma relacao de proporcionalidade inversa, assim tem sentidoconsiderar
x(t+ h)− x(t) = φ(h)x(t), (4.63)
para alguma funcao φ dependendo de h, com φ(h) < 0. Logo, a taxa de variacao demassa por unidade de tempo e
dx
dt= lim
h→0
x(t+ h)− x(t)
h= kx(t),
sendo k =φ(h)
huma constante negativa independente de x. Dessa forma, obtemos a
equacao diferencial que modela o problema de encontrar a massa x(t) de uma substanciaradioativa:
dx
dt= kx, (4.64)
o que nos permite dizer que a variacao da massa por unidade de tempo e proporcionala quantidade de substancia presente em cada instante. A solucao de (4.64) depois deseparar as variaveis e
x(t) = Cekt, ∀ C ∈ R.
85

Supondo conhecida a quantidade inicial de massa x0 da substancia radioativa no ins-tante t0, encontraremos a solucao particular que verifica a condicao inicial (t0, x0). Comefeito, o valor da constante C como e sabido e calculado de x0 = Cekt0 , isto e,
C = x0e−kt0 .
Portanto, a solucao particular e
x(t) = x0ek(t−t0) ∀ t > t0. (4.65)
Esta formula pode ser usada na datacao de fosseis da seguinte maneira: conhecendo-sea concentracao x0 de carbono-14 quando do inıcio da formacao do fossil e sabendo-sea concentracao x1 atual (no instante t1) no fossil, podemos encontrar o instante t0 doinıcio da formacao do fossil. Isso pode ser feito manipulando-se diretamente a solucaoparticular no instante t1:
x1 = x(t1) = x0ek(t1−t0).
Logo, tomando logarıtmo natural, obtemos
t0 − t1 =1
kln
x0
x1
Portanto, a idade do fossil sera
t1 − t0 =1
kln
x1
x0
Por ultimo, a meia-vida de um elemento radioativo e definido como o tempo necessariopara que a massa decaia a metade, i.e., t1/2 = t1 − t0 tal que x1 = x0/2, logo,
t1/2 = −1
kln 2
Por exemplo a meia-vida do Carbono-14 e de aproximadamente t1/2 = 5730 anosaproximadamente.
86

Exemplo 41 Capitalizacao Contınua com Juros Fixos
Uma quantia C0 e aplicada a juros fixos, capitalizados continuamente. Representandopor c(t) o capital gerado a partir da quantia inicial depois de decorrido o tempo t,vemos que c(t) e uma funcao crescente de t; logo, no intervalo de tempo [t, t+h], h > 0temos que c(t+h) > c(t); a diferenca c(t+h)−c(t) representa o lucro obtido quando seinvestiu a quantia c(t) durante o prazo h. E claro que, quando aumenta o capital c(t),aumentara o lucro obtido c(t+h)− c(t), logo, existe uma relacao de proporcionalidadedireta entre ambas as grandezas
c(t+ h)− c(t) = φ(h)c(t), (4.66)
onde o fator de proporcionalidade φ : R+∪{0} → R+∪{0} e uma funcao que dependedo prazo h e nao de t com φ(h) > 0. A taxa de variacao do capital por unidade detempo e definido por
dc
dt= lim
h→0
c(t+ h)− c(t)
h=
φ(h)
hc(t).
Tomando-se r =φ(h)
hcomo uma constante positiva independente de x, obtemos a
equacao
dc
dt= rc. (4.67)
Portanto, a taxa de variacao instantanea de um capital por unidade de tempo, capita-lizado continuamente a juros fixos, e proporcional ao capital presente no instante t.Entao, em analogia com a equacao (4.64), concluımos que em ambos exemplos, a mode-lagem matematica do problema e estabelecida atraves do seguinte princıpio: a variacaoinstantanea de uma variavel dependente y em relacao a uma variavel independente xe proporcional a y.
Como e conhecido, a unica funcao que e caracterizada por verificar (4.64) ou (4.67) edada por uma funcao de tipo exponencial (ver LIMA (2006)). Vemos que ambos osproblemas tem caracterısticas diferentes, mas podem ser modelados matematicamentepor uma mesma equacao diferencial em variaveis separaveis.
De forma geral, ambos os problemas sao modelados pelo seguinte problema de valorinicial:
87

(PV I)
{y′ = ky
y(x0) = y0,
que a seguir solucionamos. Com efeito, de (4.61) e de (PVI) temos, F (x) = k eG(y) = y = 0. De (4.62) obtemos∫
dy
y=
∫kdx+ c ⇔ ln |y| = kx+ c ⇔ |y| = ekx+c ⇔ ± y = ecekx
Fazendo C = ± ec, obtemos a solucao geral y(x) = Cekx, para C > 0.
Calculo de C
Da condicao inicial, temos ao substituir na solucao geral y(x0) = Cekx0 = y0, entaoC = y0e
−kx0 . Portanto, a solucao do problema de valor inicial e
y(x) = y0ek(x−x0), ∀ x ∈ R. (4.68)
Observamos que, se y0 = 0, entao a solucao do (PVI) e a solucao estacionaria constantey = 0.
Figura 4.22: Comportamento da solucao (4.68)
88

Exemplo 42 Lei de Resfriamento de Newton
A Lei de resfriamento de Newton de um corpo diz: a taxa de variacao da temperaturaT (t) de um corpo em resfriamento e proporcional a diferenca entre a temperatura docorpo e a temperatura do meio ambiente Ta, em cada instante t.
Temos entao o modelo matematico dado pelo princıpio de Newton:
dT (t)
dt= −k
(T (t)− Ta
), (4.69)
onde k e a constante de proporcionalidade chamada coeficiente de dissipacao termica.Como por hipotese, o corpo esta esfriando, devemos ter que a temperatura do corpo Te maior que a temperatura do meio Ta, T > Ta, logo k > 0. Por outro lado, as solucoesestacionarias (ver Definicao 35) da equacao em variaveis separaveis (4.69) sao aquelassolucoes onde
dT
dt= 0 ⇔ T (t) = Ta, (4.70)
ou seja, a temperatura ambiente Ta constitui a temperatura onde T (t) nao mais varia,isto e, Ta e a temperatura de equilıbrio onde a temperatura do corpo T (t) tende aatingi-la. Identificando F (t) = k e G(T ) = T − Ta e aplicando o metodo de solucao deuma equacao em variaveis separaveis, obtemos apos a separacao das variaveis e integrarem (4.69):
∫dT
T − Ta
= −∫
kdt+ c ⇔ ln |T − Ta| = −kt+ c ⇔ |T − Ta| = ece−kt,
fazendo C = ±ec, obtemos
T (t) = Ce−kt + Ta. (4.71)
Fixada a condicao inicial em cada exemplo mostrado acima, teremos um problema devalor inicial para cada exemplo; assim, utilizando esta informacao dada pela condicaoinicial, encontramos o valor da constante de integracao C e ainda a solucao particulardo problema de valor inicial.
89

4.2.2 Atividades
1. Verifique se o Teorema 4 (Teorema de Existencia e Unicidade) garante unicidadede solucao x = x(t) para a equacao diferencial x′ =
√x2 − 25, passando pelo
ponto: a) (1, 3); b) (1, 5).
2. Nos seguintes problemas, indentifique o tipo de equacao diferencial e resolva oproblema de valor inicial utilizando o metodo de separacao de variaveis paraencontrar a solucao geral.
a)dy
dx= 4(y2 + 1), b) t2
dx
dt= x− tx
y(π/4) = 1 x(−1) = −1
3. A eficiencia F (medida em percentagem) de um trabalhador para executar umadeterminada tarefa varia com o tempo de trabalho realizado durante um dia (8horas de trabalho). Se a eficiencia e suposta crescente nas 4 primeiras horas detrabalho e decrescente nas 4 horas restantes,
a) Encontre a funcao eficiencia F (t) em qualquer instante de tempo t.
b) Supondo que depois de ter trabalhado 2 horas o trabalhador tem uma eficienciade 80%, determine F (t).
4. Sabendo que a meia-vida do Carbono-14 e de aproximadamente t1/2 = 5730 anos
e que para um certo fossil, x1 = x0
√2/2, qual a idade do fossil em consideracao?
5. Sabe-se que um capital C0 aplicado a juros fixos capitalizados continuamente,cresce a uma taxa proporcional ao capital presente em qualquer instante. Se ocapital inicial duplicou em 5 anos, quando ela triplicara? Quanto quadruplicara?
6. Suponha que a temperatura de uma xıcara de cafe segue a lei de esfriamento deNewton. Se a xıcara esta a uma temperatura de 950 C, e um minuto depois atemperatura baixa para 700 C num quarto onde a temperatura e de 250 C, deter-minar o tempo que demorara a xıcara de cafe para atingir a temperatura de 300 C.
7. Mostre que a meia-vida de uma substancia radioativa no caso geral e
t1/2 =(t1 − t0) ln 2
ln(x0/x1), onde x0 = x(t0), x1 = x(t1), t0 < t1.
90

4.3 Equacoes Diferenciais Ordinarias de 2a Ordem
A forma geral de uma equacao geral de segunda ordem e F (x, y, y′, y′′) = 0, supondoy = y(x) a funcao incognita. Nesta secao, vamos considerar certas equacoes de segundaordem da forma F (x, y, y′, y′′) = y′′ − f(x, y, y′), para alguma funcao f : R → R dadana regiao R ⊂ R3. Assim, a forma geral F (x, y, y′, y′′) = 0 define a equacao diferencialde segunda ordem
d2y
dx2= f(x, y, y′). (4.72)
Mais ainda, o Problema de Valor Inicial para a equacao (4.72) e definido a seguir.
Definicao 37 (Problema de Valor Inicial) Seja f : R → R uma funcao definidaem uma regiao R ⊂ R3, e y : I → R uma funcao duas vezes diferenciavel no intervaloI; dado (x0, y0, z0) ∈ R, x0 ∈ I onde y0 = y(x0) e z0 = y′(x0), um Problema de ValorInicial (PVI) para a equacao (4.72) e definido por
(PVI)
y′′ = f(x, y, y′)
y(x0) = y0
y′(x0) = z0
As condicoes y(x0) = y0, y′(x0) = z0 sao chamadas de condicoes iniciais do pro-blema (PVI). As dificuldades na resolucao do (PVI) anterior estao na forma da funcaof(x, y, y′) que aparece na equacao.
A seguir, vamos considerar casos particulares que podem ser reduzidos a equacoes deprimeira ordem. Posteriormente, veremos como resolver equacoes de segunda ordemlineares com coeficientes constantes.
4.3.1 Reducao de Ordem
Algumas equacoes de segunda ordem, podem ser reduzidas a equacoes de primeira or-dem atraves da introducao de novas variaveis dependentes e independentes.
Caso 1 : f(x , y , y’) = f(x , y’)
91

Se a equacao (4.72) tem a forma
d2y
dx2= f(x, y′),
sempre podemos considerar uma nova incognita definida por
v =dy
dx
e obter a equacao diferencial de primeira ordem em v
dv
dx= f(x, v).
Se f = f(x, v) define uma equacao diferencial separavel, poderemos resolver parav = v(x) e, em seguida, integrar em relacao a y para acharmos y = y(x). Observe queneste processo fazemos uma mudanca na variavel dependente, de y para v.
Exemplo 43 Queda Livre com Amortecimento
A segunda Lei de Newton para um corpo em movimento afirma o seguinte: a forcaresultante de um sistema em movimento e igual ao produto da massa do corpo pelaaceleracao. Um objeto de massa m se encontra em queda livre a uma altura h(t) dasuperfıcie. (Figura 4.23). Considerando a presenca de uma forca de resistencia do
Figura 4.23: Corpo em queda livre com resistencia do ar fr, h(t) e a altura em relacaoao solo, v a velocidade. No caso (a) laminar, pouca velocidade. Em (b) turbulento,velocidade alta.
92

ar fr proporcional a velocidadedh
dt, isto e, fr = k
dh
dt, e aplicando a segunda Lei de
Newton chegamos a seguinte equacao diferencial de segunda ordem para h = h(t):
md2h
dt2= −mg − k
dh
dt, (4.73)
onde g e a gravidade ed2h
dt2e a aceleracao. Introduzindo a variavel dependente
v =dh
dt, (4.74)
conseguimos transformar a equacao de segunda ordem (4.73) a equacao de primeiraordem na funcao incognita v
mdv
dt= −mg − kv, (4.75)
que e separavel. Fazendo α = k/m, temos a equacao de primeira ordem
dv
dt= −g − αv.
Separando as variaveis, temosdv
g + αv= −dt.
Integrando, obtemos1
αln |g + αv| = C − t.
Logo,|g + αv| = eαCe−αt.
Omitindo o modulo,g + αv = ±eαCe−αt.
Resolvendo para v,
v(t) = − g
α± eαC
αe−αt.
Substituindo ± eαC/α = C2 diferente de zero e lembrando que α = k/m, obtemos
v(t) = −gm
k+ C2e
−kt/m.
93

Se permitimos que C2 = 0, obtemos a solucao estacionaria v = −gm/k. Voltando a(4.74) obtemos
dh
dt= −gm
k+ C2e
−kt/m
Para obter h(t), integramos mais uma vez, obtendo a solucao geral da equacao do corpoem queda livre com resistencia linear:
h(t) = C1 −C2m
ke−kt/m − gm
kt, (4.76)
onde C1 e C2 sao constantes reais arbitrarias. Isso nos da a famılia de todas as solucoespossıveis.
Observacao 11
Diferentes modelagens costumam ser consideradas, tais como resistencia do ar depen-dendo linearmente ou quadraticamente da velocidade. Na pratica, a dependencia emais complicada e a resistencia ainda depende da forma do objeto, conforme estudadoem aerodinamica. A baixas velocidades, a dependencia e essencialmente linear (comoe nosso caso); ja em altas velocidades, devido a turbulencia do ar proxima a superfıciedo objeto, a resistencia se torna principalmente quadratica, dando origem a outro tipode equacao diferencial que nao apresentaremos neste texto. (O leitor interessado podever ROSA (2006)).
Caso 2 : f(x , y , y’) = f(y , y’)
Neste caso a substituicao e menos imediata, embora a ideia seja a mesma que nao ocaso anterior. A equacao (4.72) e da forma
d2y
dx2= f(y, y′), (4.77)
que nao depende explicitamente da variavel independente x. Fazemos
p =dy
dx,
mas consideramos p como uma funcao que depende de y. Usando a regra da cadeia
d2y
dx2=
dp
dx=
dp
dy
dy
dx= p
dp
dy.
Substituindo na equacao (3.18) obtemos:
94

pdp
dx= f(y, p) ⇔ dp
dy=
f(y, p)
p,
de onde novamente chegamos a uma equacao de primeira ordem; se alem disso, aequacao for separavel, podera ser resolvida pelo metodo de separacao de variaveis. Ob-serve que neste processo mudamos tanto a variavel dependente, de y para p, como avariavel independente, de x para y. Assim, procuramos obter uma solucao da formap = p(y).
Exemplo 44 Lancamento de um Projetil
A magnitude da forca de atracao gravitacional entre dois corpos e dada por
F = GmM
r2,
onde G e a constante gravitacional, m e M sao as massas dos dois corpos e r e adistancia entre os seus centros de massa. Um projetil e lancado desde um lugar da terra,desprezando a atracao que o projetil exerce sobre a terra e considerando h = h(t) aaltitude do projetil em relacao a superfıcie da terra, temos, pela segunda lei de Newton,
md2h
dt2= −G
mM
(R + h)2,
onde R e o raio da Terra. Usando que para r = R temos F = mg, onde g e a aceleracaoda gravidade na superfıcie da Terra, temos g = GM/R2; logo, podemos escrever
d2h
dt2= − gR2
(R + h)2.
Reduzindo a ordem, tomando v = dh/dt, obtemos
dv
dt= − gR2
(R + h)2.
Considerando v em funcao de h, temos
dv
dh=
dv
dt
dt
dh=
1
v
dv
dt= − gR2
v(R + h)2,
que e uma equacao separavel. Logo,
vdv = − gR2dh
(R + h)2
95

define v = v(h) implicitamente em funcao de h. Integrando, obtemos
v2 =2gR2
R + h+ C.
A constante C e independente do tempo t, mas depende de cada solucao. Assumindoque o projetil seja lancado com velocidade inicial v0 a partir do solo, temos que v = v0quando h = 0, logo, para a solucao correspondente,
C = v20 − 2gR.
Temos, assim, a solucao particular da equacao para v em funcao de h:
v2 =2gR2
R + h+ v20 − 2gR.
Se a velocidade vertical for sempre positiva, o projetil nao caira de volta para a Terra.Como o primeiro termo acima e sempre positivo, apesar de ser pequeno caso h sejagrande, podemos garantir a positividade de v tomando
v0 ≥√
2gR
Como g = 9, 8 m/s2 e R = 6.378 km, temos aproximadamente a velocidade de escape
v0 ≥ 11, 19 km/s.
Na pratica, porem, a resistencia do ar, a rotacao da Terra, a inclinacao do foguete nomomento do lancamento, a longitude do ponto de lancamento e outros fatores mais sutisdevem ser levados em consideracao. O projetil tambem nao e lancado com velocidadeinicial positiva. Ele parte com velocidade inicial nula e e impulsionado (acelerado)atraves de um foquete, perdendo massa (combustıvel) no caminho.
96

Figura 4.24: Lancamento de um projetil com angulo de inclinacao α, altura h(t), veloci-dade inicial v0, velocidade v, componentes horizontal e vertical vx e vh respectivamente.
4.3.2 Atividade
1. Verifique se as funcoes x(t) = 2t2 ln t e y(x) = 2πx10 sao solucoes das equacoes
x′′ =3x′
t− 4x
t2e x2y′′ = 7xy′ + 20y respectivamente.
2. Prove que a funcao y(x) = 9e−2x − 7e−3x e solucao do problema de valor inicial.{y′′ = −5y′ − 6y
y(0) = 2, y′(0) = 3
3. Identifique a seguinte equacao diferencial e resolva fazendo uma mudanca devariavel adequada.
y′′ =2y′
x
4. Identifique a seguinte equacao diferencial e resolva fazendo uma mudanca devariavel adequada.
yy′′ + (y′)2 = 0
5. Um objeto de massa m = 1 se encontra em queda livre a uma altura h(t) da
superfıcie. Considerando a presenca de uma forca de resistencia do ar fr =dh
dte
gravidade g = 9, 8 m/s2,
a) Encontre a equacao diferencial que modela o problema de queda com amorte-cimento.
97

b) Se a massa inicia o movimento a uma altura de h(0) = 200 metros, com umavelocidade inicial v(0) = 9, 8m/s, determine a funcao altura em cada instante detempo t.
6. Considere um corpo de massam em queda livre com resistencia do ar dependendoquadraticamente da velocidade. Se h = h(t) denota a distancia do objeto ao solo,g e a aceleracao da gravidade e k > 0 e o coeficiente de resistencia. Determine aequacao diferencial que modela o problema, independentemente de o objeto estardescendo ou subindo.
7. Um projetil e lancado desde um lugar da Terra com velocidade inicial de v(0) =300 km/hora a partir do solo, desprezando a atracao que o projetil exerce sobrea Terra e considerando h = h(t) a altitude do projetil em relacao a superfıcie daTerra. Se a gravidade e g = 9, 8 m/s2 e R = 6.378 km o raio da Terra, encontrara velocidade v(h) como funcao da altura h.
98

4.3.3 Equacoes Lineares de Segunda Ordem com CoeficientesConstantes
Uma outra classe de equacoes de segunda ordem que podem ser resolvidas explicita-mente e a de equacoes lineares com coeficientes constantes que passamos a estudar nestasecao. Como foi visto na Definicao 31, uma equacao linear de segunda ordem e da forma
a2(x)d2y
dx2+ a1(x)
dy
dx+ a0(x)y = g(x), (4.78)
onde ai(x), i = 0, 1, 2 com a2 = 0 e g(x) sao funcoes conhecidas definidas em algum
intervalo I. Dividindo por a2 e isolandod2y
dx2em (4.78) obtemos a expressao equivalente
d2y
dx2= h(x)− q(x)y − p(x)
dy
dx, (4.79)
onde q(x) =a0(x)
a2(x), p(x) =
a1(x)
a2(x)e h(x) =
g(x)
a2(x). Podemos obter esta definicao uti-
lizando a forma geral de uma equacao diferencial de segunda ordem, ver (4.72). Comefeito, uma equacao diferencial de segunda ordem
d2y
dx2= f
(x, y,
dy
dx
)e dita linear em relacao a incognita y = y(x) e sua derivada y′, quando o termo
f(x, y,
dy
dx
)e dado na forma
f(x, y,
dy
dx
)= h(x)− q(x)y − p(x)
dy
dx,
onde p, q e h sao funcoes conhecidas definidas em algum intervalo I, obtendo assim amesma equacao linear de segunda ordem nao homogenea (4.79)
d2y
dx2+ p(x)
dy
dx+ q(x)y = h(x). (4.80)
Caso h(x) = 0 para todo x ∈ R, temos uma equacao linear de segunda ordem ho-mogenea:
d2y
dx2+ p(x)
dy
dx+ q(x)y = 0. (4.81)
Acontece que nao existe uma formula geral para determinar a solucao desta equacao
99

(4.81). Mesmo assim, um caso particular de bastante interesse que pode ser resolvidode forma geral, ocorre quando os coeficientes p(x) e q(x) sao funcoes constantes nointervalo de definicao, isto e,
d2y
dx2+ p
dy
dx+ qy = h(x). (4.82)
Neste caso, dizemos que (4.82) e uma equacao linear de segunda ordem nao homogeneacom coeficientes constantes. Do mesmo modo, se h(x) = 0, temos uma equacao linearde segunda ordem homogenea com coeficientes constantes :
d2y
dx2+ p
dy
dx+ qy = 0. (4.83)
Exemplo 45 Molas Vibrantes
Figura 4.25: Tipos de movimento de uma mola. Fonte: www.stewartcalculus.com.Acesso em: junho/2012.
Consideramos o movimento de um objeto de massa m preso a uma extremidade deuma mola de comprimento l, que tem a sua outra extremidade fixa, o movimentopode ser vertical (como na Figura I) ou horizontal sobre uma superfıcie plana (comona Figura II). Uma modelagem para a forca que atua no objeto e dada pela lei deHooke, que diz que a forca de restauracao fr no objeto e diretamente proporcionalao deslocamento x em relacao a posicao de repouso, isto e, se a mola e esticada (oucomprimida) unidades a partir do seu comprimento natural, em seguida, ela exerceuma forca que e proporcional a
fr = −kx, (4.84)
100

onde k e uma constante positiva (chamada o coeficiente de restauracao da mola); osinal negativo em (4.84) indica que a forca de restauracao se opoe ao movimento damola; como vemos, a dependencia do deslocamento x(t) em relacao ao tempo e evi-dente. Estudaremos os seguintes casos.
Caso I: Movimento Livre nao Amortecido
Se ignorarmos a existencia de quaisquer outras forcas externas de resistencia ao movi-mento (devido a resistencia do ar ou atrito por exemplo), entao, pela Segunda Lei deNewton (forca e igual a massa vezes aceleracao), temos
md2x
dt2= −kx ou m
d2x
dt2+ kx = 0. (4.85)
Esta e uma equacao linear de segunda ordem homogenea com coeficientes constantesna funcao incognita x(t) (Ver Figura (4.26)). Podemos fazer ω2 = k/m com o intuitode representar a constante positiva k/m; obtemos a versao simplificada de (4.85)
d2x
dt2+ ω2x = 0. (4.86)
Figura 4.26: Diagrama do Movimento Livre nao Amortecido. Fonte:www.stewartcalculus.com.Acesso em: junho/2012.
101

Caso II: Movimento Amortecido
A seguir, consideramos o movimento de uma mola que esta sujeita a uma forca deatrito (no caso da mola horizontal da Figura 4.25 II) ou uma forca de amortecimento(no caso em que temos deslocamentos verticais da mola atraves de um fluido como naFigura 4.27 III). Temos como exemplos: a forca de amortecimento fornecido por umamortecedor de choque num carro ou uma moto ou por um amortecedor em prediosantissısmicos como na Figura 4.27. Assumimos que a forca de amortecimento fa e
Figura 4.27: Tipos de Forcas de Amortecimento. Fonte: www.nipocultura.com.br.Acesso em: junho/2012.
proporcional a velocidade da massa e atua no sentido oposto ao movimento. (Isto foiconfirmado, pelo menos aproximadamente, por alguns experimentos fısicos). Assim,
fa = −βdx
dt, (4.87)
onde β > 0 e chamado a constante de amortecimento. Neste caso, a Segunda Lei deNewton implica
md2x
dt2= forca de restauracao + forca de amortecimento = −kx− β
dx
dt,
ou
md2x
dt2+ β
dx
dt+ kx = 0, (4.88)
102

o que e uma equacao diferencial de segunda ordem linear homogenea com coeficientesconstantes, que na verdade e obtida acrescentando o termo de amortecimento (4.87) aequacao (4.85); dependendo dos valores assumidos por m,β, k, veremos que e possıvelcaracterizar os tipos de solucao da equacao (4.88).
Caso III: Movimento Forcado
Suponhamos que, alem da forca de restauracao e a forca de amortecimento, o mo-vimento da mola e afetado por uma forca externa F (t). Da Segunda Lei de Newtonobtemos
md2x
dt2= forca de restauracao + forca de amortecimento + forca externa
= −kx− βdx
dt+ F (t).
Assim, em vez da equacao homogenea (4.88), o movimento da mola e agora regido pelaseguinte equacao diferencial nao homogenea:
md2x
dt2+ β
dx
dt+ kx = F (t). (4.89)
A forca externa F (t) aparece como uma forca de perturbacao no sistema massa-mola;alguns exemplos temos na Figura 4.28.
Figura 4.28: Presenca da Forca Externa F(t). Fonte: www.engr.sjsu.edu. Acesso em:junho/2012.
103

Solucao da Equacao Diferencial Linear de Seguna Odem com CoeficientesConstantes
Nosso estudo sera limitado a solucionar equacoes diferenciais lineares de segunda ordemcom coeficientes constantes, isto e, equacoes da forma (4.82) ou (4.83). Consideramosentao de forma geral a equacao na forma
md2x
dt2+ β
dx
dt+ kx = F (t). (4.90)
Observe que, nesta forma estamos trocando y(x) pela funcao incognita x = x(t), vistoagora como uma funcao dependendo do tempo t; isso tem sua justificativa no fato deque os exemplos mostrados correspondem a problemas relacionados com o tempo.
Definicao 38 (Solucao) Dizemos que x = x(t) e solucao da equacao diferencial(4.90), se pode ser expressa pela soma
x(t) = xh(t) + xp(t), (4.91)
onde xh(t) e a solucao geral da equacao homogenea
md2x
dt2+ β
dx
dt+ kx = 0, (4.92)
e xp(t) e uma solucao particular da equacao nao homogenea (4.90).
Calculo de xh(t)
Para solucionar a equacao homogenea (4.92), suponhamos que
x(t) = Cert, onde C = 0 e r ∈ R, (4.93)
e uma solucao desta equacao; logo ela tem que verificar (4.92), e assim temos
0 = m(Cert)′′+β(Cert)′+kCert = m(r2Cert)+β(Crert)+kCert = Cert[mr2+βr+k].
Como Cert = 0, temos a equacao algebrica
mr2 + βr + k = 0, (4.94)
104

cujas raızes sao
r+ =−β +
√β2 − 4mk
2me r− =
−β −√β2 − 4mk
2m. (4.95)
Entao, o fato de considerar solucoes da forma (4.93) implica encontrar as raızes dopolinomio p(r) = mr2 + βr + k de segundo grau na variavel r, chamado de polinomiocaracterıstico; por essa razao, a equacao (4.94) e chamada de equacao caracterıstica.
Como e conhecido, as raızes de um polinomio de segunda ordem dependem do valordo discrimimante ∆ = β2 − 4mk, de ser maior, menor ou igual a zero. Vejamos cadacaso a seguir, incluindo ainda o caso β = 0.
1. Caso ∆ > 0: Neste caso, temos duas raızes reais distintas r+ e r−. Observe que0 < β2 − 4mk < β2, logo
√∆ < β e ambas as raızes sao negativas, r− < r+ < 0. A
solucao geral tem a forma
xh(t) = C1er−t + C2e
r+t. (4.96)
Como r± < 0, as solucoes decrescem exponencialmente para x = 0, como era de seesperar. Dependendo das constantes C1 e C2, a funcao xh(t) pode nao trocar de sinal,decrescendo diretamente para x = 0, ou trocar de sinal apenas uma vez, tendo umunico ponto crıtico, (x′
h(t) = 0). Figura 4.29.
Figura 4.29: Comportamento da solucao xh. Caso ∆ > 0. Fonte:www.stewartcalculus.com.Acesso em: junho/2012.
2. Caso ∆ = 0: Nesse caso, temos duas raızes iguais r± = −β/2m. A solucao gerale
xh(t) = (C1 + C2t)e−(β/2m)t. (4.97)
105

Analisando essa funcao, vemos que, caso C2 = 0, a solucao decresce exponencialmentepara a posicao x = 0, sem xh(t) trocar de sinal. Caso C2 = 0, a funcao xh(t) se anulaem t = −C1/C2 e tem um unico ponto crıtico t = (βC1 − C2)/C2. Figura 4.30.
Figura 4.30: Comportamento da solucao xh. Caso ∆ = 0.Fonte:www.stewartcalculus.com.Acesso em: junho/2012.
3. Caso ∆ < 0: Nesse caso, as raızes sao complexas, r± = −α/2m ± iα, ondeα =
√−∆. A solucao geral e
xh(t) = e−(β/2m)t(C1 cosαt+ C2 sen αt). (4.98)
Vemos que esta funcao esta limitada pela funcao exponencial e−(β/2m)t, pois | xh(t) |≤Ce−(β/2m)t xh oscila indefinidamente, mas com amplitude decrescendo exponencial-mente. Figura 4.31.
Figura 4.31: Comportamento da solucao xh. Caso ∆ < 0. Fonte: www.stewartcalculus.com.Acesso em: junho/2012.
106

Mas caso contrario obtemos ao considerar β = 0, obtendo a solucao geral periodica
xh(t) = C1 cosαt+ C2 sen αt. (4.99)
Neste caso, o sistema oscila indefinidamente. Figura 4.32.
Figura 4.32: Comportamento da solucao xh. Caso ∆ < 0 e β = 0
Por outro lado, a solucao particular xp(t) de (4.90) pode ser obtida pelo metodo doscoeficientes indeterminados ou pelo metodo da variacao dos parametros (Ver ARNOLD(1997)).
Exemplo 46 Voltando ao Exemplo 45 do sistema massa-mola, vamos interpretar emcada caso a solucao da equacao diferencial de segunda ordem obtida.
No Caso I do movimento livre nao amortecido de uma mola o problema foi modeladopela equacao homogenea de segunda ordem:
d2x
dt2+ ω2x = 0. (4.100)
A equacao caracterıstica e
r2 + ω2 = 0
cujas raızes complexas sao r+ = iω, r− = −iω, onde i =√−1. Pelo que foi visto, isso
corresponde ao caso em que ∆ < 0 e β = 0, mais exatamente a equacao (4.98). Logo,
107

a solucao de (4.100) e
x(t) = C1 cosωt+ C2 sen ωt, onde ω2 = k/m,
ou
x(t) = C1 cos
(√k
mt
)+ C2 sen
(√k
mt
). (4.101)
Entao, neste caso, as solucoes oscilam indefinidamente, sem diminuir a amplitudeA =
√C2
1 + C22 , como era de se esperar, pois nao existe forca de amortecimento,
este movimento e chamado de Movimento Harmonico Simples e ω =√k/m e a
frequencia. O comportamento da funcao e dado pela Figura 4.32.
No Caso II do movimento amortecido, dado por (4.88), e dizer
md2x
dt2+ β
dx
dt+ kx = 0,
onde β = 0 e a constante de amortecimento, e k = 0 e o coeficiente de restauracao; aequacao caracterıstica neste caso e
mr2 + βr + k = 0, (4.102)
cujas raızes sao dadas por (4.95); entao, dependendo do valor do discriminante ∆ =β2 − 4mk; temos as seguintes possibilidades:
a. ∆ > 0, a solucao e dada por (4.96), isto e,
x(t) = C1er−t + C2e
r+t,
Como r− e r+ sao menores que zero, temos x(t) → 0 quando t → ∞ quer dizer que assolucoes decrescem exponencialmente para a posicao de equilıbrio x(t) = 0. Neste caso,o sistema nao oscila, porque o coeficiente de amortecimento e relativamente muito forte,ou o coeficiente de restauracao e relativamente muito fraco, o movimento e chamado deMovimento Superamortecido, (Ver Figura 4.29 para o comportamento da solucao).
b. ∆ = 0, a solucao geral e dada por (3.41), isto e
x(t) = (C1 + C2t)e−(β/2m)t.
108

Se C2 = 0, a solucao decresce exponencialmente para a posicao de equilıbrio x = 0, semoscilar, isto e x(t) nao troca de sinal. Se C2 = 0, a funcao x(t) se anula em t = −C1/C2
e tem um unico ponto crıtico t = (βC1 − C2)/C2. Neste caso, a variavel x(t) trocade sinal apenas uma vez, o movimento recebe o nome de Movimento CriticamenteAmortecido (Ver Figura 4.30).
c. ∆ < 0 :, Neste caso temos raızes complexas, a solucao geral e dada por (4.98) aseguir.
x(t) = e−(β/2m)t(C1 cosαt+ C2 sen αt).
Conforme foi visto, neste caso o sistema oscila indefinidamente, mas com amplitudedecrescendo exponencialmente. Este movimento e chamado de Movimento Suba-mortecido, o comportamento da solucao se mostra na Figura 4.32.
Exemplo 47 Uma mola e esticada 20 centımetros por uma forca de 5 Newtons. Umcorpo de massa m = 4 kg esta ligado a uma mola. Em t = 0 a massa e puxadapara baixo a partir da sua posicao de equilıbrio, a uma distancia de 50 centımetros,e lancada com uma velocidade de queda de 1 metro por segundo. Suponhamos queexiste uma forca de amortecimento de 5 Newtons de magnitude, quando a velocidadedo corpo e 0,5 metros por segundo. Encontrar um modelo matematico que representao movimento do corpo.
Solucao
Como existe forca de resistencia, o problema sera modelado pela equacao (4.92). Asunidades sao convertidas para as unidades de quilogramas-metro do sistema metrico. Amassa e m = 4. A constante da mola k e encontrada pela lei de Hoke, k = 5/0.2 = 25.A constante de amortecimento e dada por β = 5/0.5 = 10. Uma vez que nenhumaforca externa e mencionada, podemos assumir que e zero. As condicoes iniciais saox(0) = 0.5 e x′(0) = 1. O problema e modelado pelo problema de valor inicial{
4x′′(t) + 10x′(t) + 25x = 0
x(0) = 0.5, x′(0) = 1
A equacao caracterıstica e 4r2+10r+25 = 0, cujas raızes sao r = −5
4± 5
√3i
4. Logo,
a solucao geral e
x(t) = e−5t/4
(C1 cos
5√3
4t+ C2sen
5√3
4t
)
109

Susbtituindo as condicoes iniciais, encontramos que C1 = 0.5 e C2 =13√3
30. Portanto,
a solucao e
x(t) = e−5t/4
(0.5 cos
5√3
4t+
13√3
30sen
5√3
4t
)
110

4.3.4 Atividades
1. Verifique o princıpio da superposicao: suponha que y1(x) e y2(x) sejam solucoesda equacao linear de segunda ordem homogenea
d2y
dx2+ b(x)
dy
dx+ c(x)y = 0;
mostre que y(x) = C1y1(x) + C2y2(x) tambem e solucao desta equacao, paraquaisquer constantes C1, C2 reais.
2. Encontre a solucao geral das seguintes equacoes lineares homogeneas de segundaordem com coeficientes constantes:
a) y′′ − 5y′ + 6y = 0 b) y′′ + y′ + y = 0 c) y′′ − 4y′ + 4y = 0.
3. Verifique que a funcao yp(x) = 6ex e uma solucao particular da equacao naohomogenea
y′′ − 7y′ + 10y = 24ex
Prove que a solucao da equacao e y(x) = C1e2x + C2e
5x + 6ex, C1, C2 ∈ R.
4. Uma mola de comprimento l = 30 cm e esticada 2 cm quando se coloca umamassa de 1 kg no seu extremo inferior. Suponhamos que a mola e deformada em3 cm de sua posicao de equilıbrio e depois liberada com velocidade inicial de 10cm/ min. Suponha que nao existem forcas externas que perturbem o movimento.Assuma que a aceleracao da gravidade e 10.
a) Encontre a equacao diferencial que modela o problema.
b) Calcular a solucao da equacao diferencial do problema.
5. Uma mola de comprimento l = 1, 5 m e esticada por uma massa de 0, 5 Kgno seu extremo inferior. Suponhamos que a mola e deformada pelo peso em2, 48 m ate a posicao de equilıbrio e depois liberada a partir do repouso de umponto situado 2 m acima da posicao de equilıbrio. Suponha que existe umaforca de resistencia numericamente igual a velocidade instantanea. Assuma quea aceleracao da gravidade e de 9, 8.
a) Encontre a equacao diferencial que modela o problema.
b) Calcular a solucao da equacao diferencial do problema.
6. Interprete fisicamente o problema de valor inicial1
5
d2x
dt2+ 1, 2
dx
dt+ 2x = 5sen 3t
x(0) =1
2, x′(0) = 0.
111

Unidade V
APLICACOES DE EQUACOES DIFERENCIAISORDINARIAS

Aplicacoes de Equacoes Diferenciais Ordinarias
Objetivos
• Estabelecer a importancia das Equacoes Diferenciais Ordinarias na ModelagemMatematica da dinamica populacional.
• Solucionar problemas concretos utilizando a nocao de taxa de variacao de gran-dezas contınuas.
• Reconhecer a aproximacao entre a Matematica e a Biologia atraves de aplicacaode modelos simples.
5.1 Modelos de Dinamica Populacional
Entendemos por dinamica populacional a disciplina que estuda num curto ou largoprazo a variacao do tamanho de uma populacao de seres vivos bem como os processosbiologicos e ambientais que influenciam essas mudancas. O estudo da dinamica popula-cional lida com a forma de como as populacoes sao afetados por diversos fatores: taxasde nascimento e mortalidade, pela imigracao e emigracao, fatores de envelhecimentoda populacao ou o declınio da populacao etc.
Dinamica populacional tem sido tradicionalmente o ramo dominante da Biologia Ma-tematica, que tem uma historia de mais de dois seculos, embora mais recentementeno ambito da Biologia Matematica tem se expandido muito. O primeiro princıpio dadinamica populacional e amplamente considerado como a lei exponencial de Malthus,chamado O Modelo de Crescimento Malthusiano, o qual afirma que a taxa de variacaode qualquer populacao e proporcional a populacao ja existente. Apos esse perıodo ini-cial a dinamica populacional foi dominada por estudos demograficos, podendo-se citarentre eles o estudo de Francois Pierre Verhulst no inıcio do seculo XIX, que refinou eajustou o modelo demografico Malthusiano. As equacoes de predador - presa Lotka-Volterra sao outro exemplo muito estudado e que apresentaremos na secao 5.1.3.
Por ultimo, podemos dizer que a dinamica populacional se sobrepoe com outras areasativas de pesquisa em Biologia Matematica: epidemiologia matematica, o estudo dedoencas infecciosas que afetam as populacoes. Varios modelos de propagacao viral temsido propostos e analisados e fornecem resultados importantes que podem ser aplica-dos as decisoes de polıtica de saude (Ver BATSCHELET (1978)). Pretendemos estudarmodelos formulados por poucas variaveis, isto e, modelos matematicos simples (mode-los determinısticos) que sirvam de motivacao ao aluno em futuros estudos de fenomenosbiologicos mais complexos, que tem sua formulacao atraves de um grande numero devariaveis e parametros, os chamados modelos realistas, porem que representam uma
113

formulacao mais proxima da magnitude do problema.
5.1.1 Modelo de Malthus
A catastrofe malthusiana tem o nome do economista polıtico conservador e demografoThomas Robert Malthus e da visao pessimista de crescimento da populacao exibidoem seu Ensaio sobre o Princıpio da Populacao. Malthus passou a afirmar que o cres-cimento da populacao livre de alteracoes era um crescimento exponencial, enquanto aproducao de alimentos de acordo com seu argumento era de um crescimento linear.
Como a taxa de crescimento da populacao foi mais rapida do que a taxa de crescimentodos alimentos a partir de um certo tamanho de populacao, Malthus previu que haveriaescassez de alimentos e fome na metade do seculo XIX. A grande fome prevista porMalthus nunca aconteceu, mostrando que essas hipoteses eram simplistas e as vezesate enganosas.
Se o crescimento ou decrescimento de uma populacao varia no tempo, dizemos que oproblema evolui no tempo. Em nosso dia a dia e comum encontrar fenomenos que evo-luem no tempo. Alguns exemplos que podem comprovar esse fato sao a reproducao dasbacterias, juros simples, juros compostos, a taxa com que um determinado remedio eextraıdo do corpo de uma pessoa, o crescimento da populacao etc. E importante notarque o tempo t pode ser contınuo ou discreto; por exemplo, no caso dos juros, simplesou compostos, a variavel t pode ser de dias, meses ou anos; logo, t e um numero inteiropositivo; ja no crescimento da populacao, o tempo e uma variavel pertencente aos reaispositivos. Desse modo, esta evolucao pode ser descrita por equacoes diferenciais, seo tempo e contınuo, ou equacoes de diferencas, se o tempo e medido em intervalosdiscretos.
Muitas especies nao tem um aumento contınuo de geracoes, e o crescimento da po-pulacao se da em passos discretos, por exemplo, elas se propagam em epocas deter-minadas do ano. Nesses casos, o crescimento populacional pode ser descrito de umamaneira mais precisa por um modelo discreto, em vez de contınuo. Nesse trabalho ci-taremos dois modelos, a saber, modelo populacional de Malthus e modelo populacionalde Verhulst, cada um com sua versao contınua.
O Modelo Contınuo de Malthus
Representando por N(t) o numero de indivıduos no tempo t de uma determinada po-pulacao de seres vivos com uma populacao inicial de N0 indivıduos, temos que, na
114

verdade, N(t) e t assumem somente valores inteiros sendo assim N uma funcao dis-creta da variavel temporal t (Ver subsecao 3.1.1). No entanto, quando o numero deindivıduos e o tempo sao suficientemente grandes, temos que a funcao N pode ser apro-ximada por uma funcao contınua que varia continuamente no tempo, para t variandotambem continuamente no conjunto de numeros reais. A hipotese de crescimento expo-nencial implica que em termos de equacoes diferenciais, o modelo contınuo de Malthuse o seguinte:
dN
dt= kN(t)
N(0) = N0
(5.103)
onde k = n − m e a constante de proporcionalidade, chamada a taxa de crescimentoespecıfico da populacao N(t), n e a taxa de natalidade e m a taxa de mortalidade su-postas constantes. Como e sabido, dependendo de n ser maior ou menor do que m,teremos respectivamente um crescimento ou decrescimento de tipo exponencial (VerFigura 5.33).
Figura 5.33: Modelo Contınuo de Malthus
Por outro lado, se A(t) representa a quantidade total de alimentos no instante t, ahipotese de crescimento linear para a producao de alimentos e interpretada atraves daequacao diferencial ordinaria
dA
dt= rA0
A(0) = A0
(5.104)
115

onde r e a constante de proporcionalidade que mede o crescimento da producao dosalimentos, e A0 e a quantidade inicial dos alimentos. Como foi visto na secao 4.2.1, assolucoes dos problemas de valores iniciais (5.103) e (5.104) sao dadas respectivamentepor
N(t) = N0ekt (5.105)
A(t) = A0(1 + rt) (5.106)
Assim, a partir de uma populacao inicial N0, N(t) > A(t) com k > 0, em outras pa-lavras, Malthus afirmou que a capacidade de reproducao das pessoas e maior do quea capacidade da Terra de produzir mecanismos para sua subsistencia, a populacao au-menta a uma razao geometrica e os mecanismos de subsistencia a uma razao aritmetica.A solucao de ambas equacoes acima leva a entender que a quantidade de alimentos porpessoa e dada pela funcao
α(t) =A(t)
N(t)=
A0(1 + rt)
N0ekt= α0(1 + rt)e−kt, α0 =
A0
N0
Como foi visto na subsecao 3.1.1, a solucao no caso do modelo discreto de Malthus,para uma populacao inical de N0 (ver exercicio 6, Actividade 3.2.3) e
Nt = N0(1 + α)t,
onde α representa a taxa de variacao media relativa (ou taxa de variacao malthusiana).Na sua forma exponencial, a ultima igualdade pode ser escrita na forma
Nt = N0eln(1+α)t. (5.107)
Logo, comparando-se o modelo contınuo (5.103) e o modelo discreto de Malthus, atravesde suas solucoes (5.105) e (5.107) respectivamente, ambos modelos irao fornecer amesma solucao quando
k = ln(1 + α) (5.108)
Exemplo 48 Considerando-se o Exemplo 18 da subsecao 3.1.1 referente aos censosdemograficos do Brasil do ano de 1950 a 2010, da Tabela 3.1, temos que α = 2.2%.
Portanto, de (5.108) temos
k = ln(1 + 0.022) = ln(1.022) = 0.021
116

Portanto, considerando-se a populacao de 1950 como a populacao inicialN0 = 51.944.397,o modelo discreto de Malthus e dado pela seguinte funcao:
N(t) = 51.944.397e0.021t,
a qual fornece a populacao em milhoes de habitantes em cada ano t.
Para obter a solucao do modelo contınuo (5.105), precisamos encontrar o valor de k.Como temos um conjunto de dados (ti, N1) i = 0, 1, ..., 6 fornecidos pela Tabela 3.1,podemos estimar o valor de k fazendo um ajuste linear do modelo exponencial (5.105)(Ver subsecao 2.3.1).
5.1.2 Modelo de Verhulst
Pierre Francois Verhulst foi um matematico belga, doutor em teoria dos numeros.Verhulst propos em 1838 um modelo de crescimento populacional baseado nas ava-liacoes estatısticas disponıveis na epoca. O seu modelo complementa o modelo decrescimento exponencial dado por Malthus atraves da inclusao de fatores de inibicaodo crescimento. Em seu modelo, tambem conhecido como modelo logıstico, Verhulstconsidera que os recursos do meio sao limitados e a taxa de crescimento da populacaoe proporcional a populacao em cada instante e nao constante, como suposto no modeloMalthusiano, o que impede o crescimento ilimitado da populacao como no modelo deMalthus (crescimento exponencial). No modelo de Verhulst, uma populacao num de-terminado meio atinge um limite maximo sustentavel, que representa a capacidade desuporte do ambiente, isto e, expressado matematicamente como
limt→∞
N(t) = k (5.109)
onde N(t) e a populacao de indivıduos no tempo t, e k e a capacidade de suporte domeio; a interpretacao de (5.109) e que a populacao, passado um tempo, tende a seestabilizar devido a presenca dos fatores de inibicao.
Entao podemos dizer essencialmente que o modelo de Verhulst e uma reformulacao domodelo de Malthus, isto e, no modelo de Verhulst a taxa de variacao (instantanea ) emcada instante de tempo t e proporcional a populacao.
Assim, obtemos
dN
dt= P (N)N, (5.110)
117

por P (N) denotamos o fator de proporcionalidade em cada tempo t, dado como umafuncao P que depende do numero de indivıduos N . Assim, se a populacao inicial N formaior que a capacidade de suporte do meio k, terıamos um declınio da populacao; logo,dN/dt < 0, portanto de (5.110) P (N) < 0. De outro lado, se a populacao inicial formenor que a capacidade de suporte do meio, terıamos um aumento da populacao, logodN/dt > 0, e assim P (N) > 0. Considerando-se uma constante r > 0, uma equacaoque tem essas caracterısticas e
P (N) = r − rN
k, (5.111)
Dessa forma, em (5.110) obtemos a equacao diferencial ordinaria de primeira ordemnao linear
dN
dt= rN
(1− N
k
). (5.112)
Supondo-se conhecida uma populacao inicial de N(0) = N0 indivıduos, o modeloclassico de Verhulst, tambem chamado modelo logıstico, e definido pelo seguinte pro-blema de valor incial:
dN
dt= rN
(1− N
k
)N(0) = N0
(5.113)
Observamos que as solucoes estacionarias (dN/dt = 0) da equacao diferencial dadaem (5.113) sao N(t) ≡ 0 e N(t) ≡ k. A solucao particular do problema de valor ini-cial (5.113) e encontrada aplicando-se o metodo de separacao de variaveis estudado nasubsecao 4.2.1. Com efeito, separando as variaveis e integrando obtemos
∫dN
N(1−N/k)=
∫rdt. (5.114)
Como1
N(1−N/k)=
1
N+
1/k
1−N/k, temos
∫dN
N(1−N/k)=
∫ (1
N+
1/k
1−N/k
)dN = ln |N | − ln
∣∣∣∣1− N
k
∣∣∣∣ .
118

Logo, em (5.114) obtemos
ln
∣∣∣∣ N(t)
1−N(t)/k
∣∣∣∣ = rt+ C.
Da condicao inicial N(0) = N0, determinamos o valor da constante de integracao C:
C = ln
∣∣∣∣ N0
1−N0/k
∣∣∣∣ = ln
∣∣∣∣ kN0
k −N0
∣∣∣∣Portanto,
ln
∣∣∣∣ kN(t)
k −N(t)
∣∣∣∣ = rt+ ln
∣∣∣∣ kN0
k −N0
∣∣∣∣ ,simplificando o logarıtmo natural
ln
∣∣∣∣N(k −N0)
N0(k −N)
∣∣∣∣ = rt
Tomando exponencial na igualdade anterior, obtemos
N(k −N0)
N0(k −N)= ert
ou
N
k −N=
N0
k −N0
ert
Finalmente, obtemos
N(t) =kN0
(k −N0)e−rt +N0
. (5.115)
A funcao N(t) encontrada acima e denominado funcao logıstica, e seu grafico e cha-mado curva logıstica. Vejamos o comportamento qualitativo da funcao logıstica.
Se N0 > k, entao (k − N0)e−rt + N0 < N0; logo, N0 > N(t) > k, e N(t) tende a k,
decrescendo. A equacao (5.113) neste caso mostra quedN
dt< 0.
119

Se N0 < k, entao (k − N0)e−rt + N0 > N0; logo, N0 < N(t) < k, e N(t) tende a k,
crescendo. A equacao (5.113) neste caso mostra quedN
dt> 0.
Portanto, em qualquer caso sempre temos
limt→∞
N(t) = k.
De (5.113) temos que
dN
dt= rN − r
N2
k= − r
k
(N − k
2
)2
+rk
4, (5.116)
isto e,dN
dtvista como funcao de N representa uma funcao quadratica cujo grafico e
uma parabola com concavidade para abaixo e vertice
(k
2,rk
4
), com raızes dadas pelas
solucoes estacionarias N = 0 e N(t) = N0 da equacao (5.113) (Ver Figura 5.34).
Sendo
N ′′(t) = rN ′(1− 2N
k
)(5.117)
e r > 0, temos que N ′′(t) > 0 se 0 < N(t) <k
2; isso implica que
dN
dte crescente, se
0 < N(t) <k
2; analogamente vemos que
dN
dte decrescente, se
k
2< N(t) < k.
O valor maximo dedN
dtem relacao a N e atingido em N(t) =
k
2, ou seja, o maximo
valor de N ′ acontecera quando a populacao de indivıduos for igual a metade da po-pulacao limite k. Podemos encontrar este valor t = tm em que a populacao atinge a
maxima variacaodN
dt(tm), ver Figura 5.34.
Em (5.115) temos, ao igualar N(t) =k
2:
k
2=
kN0
(k −N0)e−rt +N0
de onde
ertm =k −N0
N0
,
120

Figura 5.34: Variacao de N(t)
Tomando logarıtmo natural, obtemos o valor de tm
tm =1
rln
k −N0
N0
, (5.118)
desde que k > N0. Logo,
N(tm) =k
2(5.119)
Agora encontraremos o ponto de inflexao de N(t). Em (5.113) vemos que
dN
dt(tm) =
rk
2
(1− k/2
k
)=
rk
4> 0. (5.120)
De (5.117) obtemos
N ′′(tm) = rN ′(1− 2k/2
k
)= 0,
logo, tm e um ponto de inflexao de N(t). Finalizando a analise, temos de (5.118), se
N0 =k
2, entao, tm = 0. Por ultimo, se
k
2< N0 < k nao existe ponto de inflexao,
pois neste caso lnk −N0
N0
e negativo, implicando de (5.118) que tm tambem e negativo,
isso seria uma contradicao.
121

Figura 5.35: Curva logıstica
Figura 5.36: Relacao Variacoes: Logıstica e Malthus
122

Exemplo 49 Estamos interessados em estudar a propagacao de uma doenca infecciosanuma populacao de indivıduos sensıveis. A propagacao da doenca e dada atraves decontato fısico entre os membros da populacao, procura-se obter um modelo matematicodo problema de propagacao da infeccao.
Solucao
De inicio introduzimos uma hipoteses de simplificacao considerando que o processo deinfeccao e originado por um unico infectante. Atraves do contato entre os indivıduosa doenca se espalhara originando um aumento do numero de infectantes. No inıcio ecompreensıvel que o numero de infectantes aumentara lentamente, depois o processosera acelerado para, finalmente, estabilizarse, quando a maior parte dos indivıduos es-tiver infectada.
Outra hipoteses de simplificacao que consideramos e que um indivıduo que foi infec-tado uma vez, permanecera assim durante todo o processo, e que nenhum indivıduofoi removido da populacao de infectados.
Definimos as seguintes variaveis:x(t) e a funcao que representa o numero de indivıduos suscetıveis a doenca no instantet, y(t) e a funcao que representa o numero de infectantes no instante t, e n o numerototal da populacao na qual foi introduzido um infectante.
Logo, em qualquer instante de tempo t, temos
x+ y = n+ 1. (5.121)
O estudo sera feito considerando-se as variaveis x e y como variaveis contınuas. As-sim, a taxa de variacao instantanea pela qual o numero de infectantes aumenta comosabemos, e dado pela derivada dy/dx. Quanto maior for o numero dos indivıduos in-fectantes e suscetıveis presentes, maior sera a frequencia em que ocorrerao contatosque levarao a infeccao. E, entao, possıvel admitirmos que dy/dx seja proporcional a xe tambem a y. Portanto, o modelo matematico de nosso problema pode ser expressopela equacao diferencial de primeira ordem
dy
dx= kxy (5.122)
onde k e uma constante positiva chamada taxa especıfica de infeccao. Em virtdude de(5.121), a equacao torna-se
dy
dx= ky(n+ 1− y). (5.123)
123

Esta equacao e da forma (5.112) e pode ser solucionada pela Formula (5.115) juntocom a condicao inicial y(0) = 1, pois de inıcio existe um indivıduo infectado:
y =n+ 1
1 + ne−k(n+1)t, (5.124)
isso significa que, com nossas hipoteses de simplificacao, a propagacao da infeccao segueuma lei logıstica.
5.1.3 Modelo de Lotka - Volterra
Os modelos que temos discutido ate agora (Malthus e Logıstica) sao modelos de especiesindividuais. Muitas das dinamicas mais interessantes no mundo biologico tem a ver cominteracoes entre as especies. Modelos matematicos que incorporam essas interacoes saonecessarias, se esperamos simular essas dinamicas. Um dos primeiros modelos de in-corporar as interacoes entre predadores e presas foi proposto em 1925 pelo biofısicoamericano Alfred Lotka e o matematico italiano Vito Volterra. Ao contrario dos mo-delos malthusianos e Logıstica que vimos anteriormente, o modelo de Lotka-Volterra ebaseado em um sistema de equacoes diferenciais.
O modelo de Lotka-Volterra descreve as interacoes entre duas especies em um ecos-sistema, uma chamada de predador e a outra especie denominada presa. Quando asespecies interagem a dinamica populacional de cada especie e afetada. Existem trestipos principais de interacao: (i) se a taxa de crescimento de uma populacao diminuie a outra aumenta, as populacoes estao numa situacao presa-predador; (ii) se a taxade crescimento de cada populacao diminui, entao eles estao em competicao; (iii) se ataxa de crescimento de cada populacao aumenta, entao o processo e chamado de sim-biose. Uma vez que sao consideradas duas especies, o modelo envolve duas equacoesdiferenciais, uma que descreve as mudancas da populacao de presas, e a segunda, quedescreve as mudancas na populacao de predadores.
Se definimos as seguintes variaveis x = x(t) como sendo a densidade da populacao depresas em um determinado tempo t, e y = y(t) representa a densidade populacionalde predadores das presas no instante t, entao o modelo matematico de Lotka-Volterra e
dx
dt= x (a− by)
dy
dt= y (cx− d) ,
(5.125)
(5.126)
124

onde a, b, c e d sao constantes positivas. As suposicoes do modelo sao as seguintes:
• As presas, na ausencia de qualquer predador (y = 0), crescem de uma formaexponencial sem barreiras (modelo malthusiano), este e o termo ax em (5.125).
• O efeito da predacao e reduzir a taxa de crescimento da presa (dx/dt) por habi-tante por um termo proporcional as populacoes de presas e predadores, este e otermo −bxy.
• Na ausencia de qualquer presa x = 0 para o sustento do predador, a taxa de mor-talidade do predador dy/dt tem um decaimento exponencial, isto e, representadopelo termo −dy em (5.126).
• A contribuicao da presa a taxa de crescimento dos predadores e dy/dt = cxy,isto e, dy/dt e proporcional ao numero de presas disponıveis x, assim como aotamanho da populacao dos predadores y. O termo xy pode ser modelado comorepresentando o numero de encontros possıveis entre as duas especies: bxy e re-tirado da presa, e cxy reverte para o predador.
Em resumo, o modelo de inter-relacao predador-presa afirma que, na ausencia de preda-dores, a densidade de populacao de presas aumenta exponencialmente, isto e, a variacaodx/dt do numero de presas e proporcional ao numero de presas presente nesse instante(modelo Malthusiano) e que a taxa de variacao instantanea dos predadores dy/dt, di-minui diretamente proporcional ao numero de predadores no instante t quando naoexistem presas, isto e, a morte de predadores e por falta de alimentos.
O sistema de equacoes diferenciais (5.125), (5.126) e dito sistema de equacoes diferen-ciais ordinarias nao linear, ja que as equacoes contem o produto xy de duas funcoesdesconhecidas x(t) e y(t). Nao existe nenhuma solucao explıcita das Equacoes dife-renciais (5.125), (5.126). Quando valores numericos ou graficos da solucao (x(t), y(t))sao requeridos, a solucao pode ser resolvida atraves de um computador, empregandometodos de analise numerica. Por sorte, e possıvel fazer um analise qualitativa no planode fase do comportamento das solucoes, derivando uma relacao muito facil entre x ey, que revelam algumas propriedades da solucao, e isso e feito eliminando-se a variavelindependente t, utilizando-se a regra da cadeia
dy
dx=
dy
dt/dx
dt,
donde obtemos a equacao autonoma (ver Definicao 30) correspondente a (5.125), e(5.126)
dy
dx=
y(cx− d)
x(a− by). (5.127)
125

Ja que um instante t especıfico, a variavel y esta unicamente associada com x, as-sim podemos considerar y como funcao de x. Em consequencia, (5.127) representauma equacao diferencial nao linear para a funcao y, que pode ser resolvida aplicando ometodo de separacao de variaveis introduzida na subsecao 4.2.1. Separando as variaveis,temos (
a
y− b
)dy =
(c− d
x
)dx,
integrando ∫ (a
y− b
)dy =
∫ (c− d
x
)dx (x > 0, y > 0),
obtemos
a ln y − by = cx− d lnx+K, (5.128)
onde K e uma constante de integracao que e determinada impondo condicoes iniciais(x(0), y(0)). Como vemos, nao e possıvel resolver esta equacao explicitamente comrelacao a y ou a x. Porem, com ajuda da analise numerica e possıvel encontrarmospares (x, y), que satisfazem a equacao (5.128). Em um sistema de coordenadas retan-gulares, os pontos (x, y) representam uma curva fechada. Com efeito,
definimos a funcao
φ(x, y) = cx− d lnx+ by − a ln y. (5.129)
Essa funcao e da forma
φ(x, y) = g(x) + h(y),
onde
g(x) = cx− d lnx, h(y) = by − a ln y.
Resulta bem mais simples esbocar o grafico de funcoes da forma φ(x, y) = g(x)+h(y),pois basta visualizar o grafico de cada uma das funcoes g(x) e h(y) e combina-las demaneira apropriada, isso devido a que os graficos de g(x) e h(y) sao parecidos, pois asfuncoes tem a mesma forma. Vamos analisar a funcao g(x); a melhor forma e faze-lo
126

atraves de suas derivadas. Temos
g′(x) = c− d
x, g′′(x) =
d
x2
O unico ponto crıtico da funcao g(x)(g′(x) = 0) e em x0 = d/c, e este ponto crıticoe ponto de mınimo, pois a concavidade dada por g′′(x) e sempre positiva. O valor domınimo e dado por
g(x0) = g
(d
c
)= d
(1− ln
(d
c
)),
que pode ser positivo ou negativo, dependendo dos parametros c, d. Alem disso,
limx→0+
g(x) = ∞ e limx→∞
g(x) = ∞
Assim obtemos um esboco do grafico de g(x). Figura 5.37.
Figura 5.37: Esboco dos graficos de g(x) e h(y)
No esboco da funcao z = φ(x, y) = g(x) + h(y), devemos juntar os graficos de g(x)e h(y); para isso, observamos que cada corte paralelo ao eixo x equivale a manter ovalor de y constante, o que nos da o mesmo grafico de g(x) apenas transladado ver-ticalmente pelo valor de h(y). Analogamente, cada corte paralelo ao eixo y equivalea manter o valor de x constante, obtendo assim o mesmo grafico de h(y) transladadoverticalmente por g(x). O grafico de φ(x, y) possui um ponto de mınimo global em
127

(x0, y), onde x0 = d/c e y0 = a/b.
Portanto, as curvas de nıvel de φ, (φ(x, y) = K constante) sao curvas fechadas emtorno desse ponto de mınimo, por isso (d/c, a/b) tambem e chamado de centro. (Ascurvas de nıvel estao ilustradas na Figura 5.38).
Figura 5.38: (a) Esboco da superfıcie φ(x, y). (b) Trajetorias (x(t), y(t)).
Observamos que as curvas de nıvel da superfıcie φ(x, y) coincidem com as trajetoriasdo sistema. O sentido anti-horario das trajetorias pode ser deduzido a partir do campode vetores tangentes V (x, y) = (dx/dt, dy/dt) = (x (a− by) , y (cx− d)) as trajetorias.Com efeito, se tomarmos y = y0 = a/b e x > x0 = d/c, vemos que
f(x, a/b) = x(a− b
(ab
))= 0 e g(x, a/b) =
a
b
(cx− d
)> 0,
Entao, o campo de vetores tangente as trajetorias nos pontos (x, a/b) e
V(x,
a
b
)=(0 ,
a
b
(cx− d
)),
o que indica que a direita do ponto (x0, y0) as trajetorias crescem verticalmente. Emnossa modelagem, isso e representado como uma trajetoria, com uma oscilacao nonumero de indivıduos de cada especie. Em um certo momento, temos uma diminuicaona populacao de presas devido ao aumento de predadores, em seguida uma diminuicao
128

na populacao de predadores devido a diminuicao na populacao de presas, depois umaumento na populacao de presas devido a diminuicao no numero de predadores, efinalmente um aumento no numero de predadores devido ao aumento na populacao depresas.
Exemplo 50 Em um ecossistema formado por coelhos e raposas temos os seguintesdados: em ausencia de raposas os coelhos crescem de forma exponencial, com umataxa de crescimento de 1 coelho por unidade de tempo (dias). A taxa de crescimentodos coelhos tambem esta afetada por uma diminuicao dos coelhos dado em forma pro-porcional ao produto de coelhos e raposas, com constante de proporcionalidade 0, 5.Em ausencia de coelhos, a taxa de mortalidade das raposas e proporcional ao numerode raposas nesse instante, com constante de proporcionalidade dado por 0, 75. A con-tribuicao dos coelhos a taxa de crescimento das raposas e aumentada por um termoproporcional ao produto de coelhos e raposas, com constante de proporcionalidade0, 25. Faca uma modelagem da inter-relacao de coelhos e raposas atraves das equacoesde Lotka-Volterra.
Solucao
Identificando as presas e predadores, temos
x(t) representa o numero de coelhos (presas) no instante t,
y(t) representa o numero de raposas (predadores) no instante t.
Do problema temos que, quando y = 0, a taxa de crescimento da populacao de coelhose a = 1, e a taxa de mortalidade da populacao de raposas e d = 0, 75. b = 0, 5 ec = 0, 25 sao as medidas do efeito de interacao entre os coelhos e raposas respectiva-mente. Entao, o modelo de Lotka-Volterra e
dx
dt= x− 0, 5xy
dy
dt= 0, 25xy − 0, 75y,
(5.130)
(5.131)
As trajetorias sao encontradas atraves de (5.128), isto e,
ln y − 0, 5y = 0, 25x− 0, 75 ln x+K, (5.132)
Um ponto de mınimo global de φ(x, y) = ln y − 0, 5y − 0, 25x + 0, 75 ln x e dado em
129

(x0, y0) = (d/c, a/b), isto e, no ponto
(0, 75
0, 25,
1
0, 5
)= (3, 2), onde
φ(3, 2) ≃ −0, 287
A taxa intrınseca da populacao de coelhos e1
x
dx
dt= 1 − 0, 5y, e a taxa intrınseca da
populacao de raposas e1
y
dy
dt= 0, 25x−0, 75. Observamos que, na ausencia de coelhos,
isto e, x = 0, a populacao de raposas y tende a diminuir ate ser zero, o que implicaque a populacao de coelhos tende a crescer. O centro e (x0, y0) = (3, 2) e as trajetoriascomportam-se como elıpses para condicoes iniciais perto do centro. A Figura 5.40representa a variacao de coelhos e raposas em funcao do tempo, ambas as funcoes saoperiodicas no tempo t. Se tivessemos a condicao inicial x(0) = 40 e y(0) = 20, entao,substituindo na equacao (5.132), obtemos o valor da constante k = −14, 238.
Figura 5.39: Um retrato de fase do sistema (5.130) e (5.131) para diversas condicoesiniciais. Fonte: MURRAY, 2000.
130

Figura 5.40: Variacao da populacao de coelhos e raposas. Fonte: BOYCE, W. E.;DIPRIMA, R. C., 2010.
5.1.4 Atividades
1. Suponhamos que uma populacao de celulas cancerıgenas crescem de tal maneira
que a taxa especıfica de crescimento1
N
dN
dtpermaneca constante. Seja N1 o
numero de celulas cancerıgenas no instante t1. Determinar N = N(t).
2. Uma quantidade de 435 trutas foram introduzidas em uma lagoa. Dez anos de-pois o produto da pesca comercial foi de 1′234, 000 libras. Suponhamos que opeso de uma truta e de uma libra. O crescimento da populacao foi tao rapidaque e razoavel modelar o problema atraves do modelo de Malthus. Encontrar umlimite inferior para a taxa especıfica de crescimento k (constante).
3. O crescimento populacional de uma cidade e dado pelo modelo de Malthus (5.103)para uma populacao inicial de N0 = 1, 000 indivıduos, e a quantidade de alimen-tos A(t) (em toneladas) da populacao em um ano t e dado por (5.106) parauma quantidade incial de A0 = 100, 000 toneladas de alimentos. Se as taxas decrescimento especıfica da populacao e dos alimentos sao respectivamente k = 1e r = 1, encontre a quantidade de suministros para cada pessoa depois de 10 anos.
4. Uma doenca infecciosa se espalha numa populacao de indivıduos sensıveis. Apropagacao da doenca e dada atraves de contato fısico entre os membros da
131

populacao originado por uma pessoa doente; obter e solucionar o modelo ma-tematico do problema de propagacao da infeccao, sabendo-se que a taxa especıficade infeccao e k = 0, 5.
5. No problema anterior, encontrar a populacao de indivıduos com a doenca, sabendo-se que a propagacao da infeccao e iniciada por tres pessoas e que a taxa especıficade infeccao e k = 1.
6. O modelo matematico da dinamica de uma populacao de pumas e modelado pelaequacao de Verhulst, isto e, a taxa de variacao x′(t) de uma populacao de pumasx(t) em certa area e proporcional a x, se x e pequeno (isto e, a populacao au-menta), mas proporcional a 1− x/k se x e grande (isto e, a populacao diminui),onde k e a capacidade maxima que uma populacao pode sustentar por um longotempo num dado ambiente. Dados estatısticos mostram que r = 2 e k = 127.Sabendo-se que no instante inicial a populacao de pumas era de 83, determinara populacao de pumas em qualquer instante de tempo. Prove que neste caso naoexiste ponto de inflexao tm. Se fosem introduzidos no ambiente 50 pumas, qual ea previsao da populacao de pumas?
7. Prove que a solucao (x, y) do sistema de Lotka-Volterra dado em forma implıcitapela equacao (5.128) e dado por
(x−decx)(y−aeby) = constante
8. Em um ecossistema formado por babuınos e leopardos temos os seguintes dados:em ausencia de leopardos, os babuınos crescem de forma exponencial com umataxa de crescimento de 3 babuınos por unidade de tempo (anos). A taxa de cres-cimento dos babuınos tambem esta afetada por uma diminuicao dos babuınosdada em forma proporcional ao produto de babuınos e leopardos, com constantede proporcionalidade 2. Em ausencia de babuınos, a taxa de mortalidade dos leo-pardos e proporcional ao numero de leopardos, nesse instante, com constante deproporcionalidade dada por 3. A contribuicao dos babuınos a taxa de crescimentodos leopardos e aumentada por um termo proporcional ao produto de babuınose leopardos, com constante de proporcionalidade 2. Faca uma modelagem dainter-relacao de babuınos e leopardos atraves das equacoes de Lotka-Volterra.
9. Duas especies de leoes e gazelas interagem em um ecossistema dado pelo modelomatematico de Lotka-Volterra, onde x e o numero de gazelas e y a populacao de
132

leoes. dx
dt= x− 0, 5xy
dy
dt=
1
3xy − y,
a) Encontre a solucao implıcita (5.128) e o centro do sistema do Lotka-Volterra.
b) Ache a taxa de variacao intrınseca da populacao de gazelas x, para uma po-pulacao de y = 50 leoes; interprete o resultado.
c) Ache a taxa de variacao intrınseca da populacao de leoes y, para uma po-pulacao de x = 30 gazelas; interprete o resultado.
d) Se as condicoes iniciais sao x(0) = 300 e y(0) = 30, encontre a solucao parti-cular dado por (5.128).
133

6.1 Respostas das Atividades
Atividade 1.1.4
1. 5, 41 metros.
3. Retangulo de dimensoes 30 e 60 metros.
4. a) pv = c.t b) r = k.l/s c) F = k.m1.m2/d2.
5.
Atividade 1.2.4
1. a) y(x) = 0.025x3, x e o comprimento, y o peso. Modelo de tipo estatico.
b) PESO 28,544 96,336 228,352 446
134

c) y(1) = 446(e− 1
e
)3, x(1) =
e3 − 1
e3.
2. k ≈ 121, q = 0, 955.
3. Sejam x = x(t), y = y(t) os lados maior e menor do retangulo respectivamente,dx
dt,dy
dtas velocidades dos lados. A area do retangulo e f(x, y) = xy. A velocidade de
crescimento da producao de alcool edf
dt=
∂f
∂x
dx
dt+
∂f
∂y
dy
dt= y
dx
dt+ x
dy
dt. Portanto,
df
dt= 3000(5) + 2000(4) = 23000 litros/ano.
Atividade 2.5
2. A reta y = 0.64x+ 0.55
3. Sejam x a quantidade do elemento quımico no ar, y o numero de ausencias.∑51=1 xi = 71,
∑51=1 yi = 265,
∑51=1 xiyi = 4244,
∑51=1 x
2i = 1103.
y = (5, 074)x− 19, 049.
5. y = (0.473)x+ 2.58
6. Tomando logaritmos em base decimal em PV β = α, obtemos Y = a+ bX
onde a = lg β, b = −α. Obtemos as somas∑6
x=1Xi = 11.6953,∑6x=1 Yi = 8.7975,
∑6x=1X
2i = 23.0059,
∑6x=1 XiYi = 16.8543, a = 4.2, b = −1.4,
a) α = 1.6× 104, β = 1.4. b) PV 1.40 = 16, 000. c) P = 25.1 lb/in2.
7. a) Localizamos a origem x = 0 com o ano medio 1900, e a cada uma unidade dos
anos 1910, 1920, 1930, 1940, 1950 e 1890, 1880, 1870, 1860, 1850 correspondem os
valores x1 = 1, x2 = 2, x3 = 3, x4 = 4, x5 = 5, and x7 = −1, x8 = −2,
x9 = −3, x(10) = −4, x11 = −5 respectivamente onde x6 = 0. Obtemos∑11i=1 xi = 0,
∑11i=1 yi = 886.8,
∑11i=1 x
2i = 110,
∑11i=1 x
3i = 0,
∑11i=1 x
4i = 1958,
135

∑11i=1 xiy1 = 1429.8,
∑11i=1 x
2i yi = 9209, e a equacao quadratica
y = 76.64 + 13.00x+ 0.3974x2
b)
Anox1 = −5
1850
x2 = −4
1860
x3 = −3
1870
x4 = −2
1880
x5 = −1
1890Valores detendencia
21.6 31.0 41.2 52.2 64.0
Valor atual 23.2 31.4 39.8 50.2 62.9
Anox6 = 0
1900
x7 = 1
1910
x8 = 2
1920
x9 = 3
1930
x10 = 4
1940
x11 = 5
1950Valores detendencia
76.6 90.0 104.2 119.2 135.0 151.6
Valor atual 76.0 92.0 105.7 122.8 131.7 151.1
c) 1945 corresponde a x = 4.5 para o qual y = 76.64+ 13.00(4.5)2 +0.3974(4.5)2 =
143.2.
d) 1960 corresponde a x = 6 para o qual y = 76.64 + 13.00(6) + 0.3974(6)2 = 168.9
Isso nao concorda muito bem com o valor real, 178.9.
Atividade 3.2.3
1. a) Variavel discreta. b) Variavel contınua. c) Variavel discreta. d) Variavelcontınua
2. a) 0.85 miligramas por mililitro por cada 10 minutos. b) 1.1 miligramas pormililitro por cada 10 minutos.
3. v1 ≃ 3.3 km h−1, v2 ≃ 2.2 km h−1, logo v1 > v2.
4. a)∆N
∆t= 90; b)
∆N
∆t= 540 c)
∆N
∆t= 450.
5. 72 h−1.
6. Aplique o procedimento da equacao caracterıstica.
136

7. yn = c1(−1)n + c2.
Atividade 4.1.2
1).a) Equacao linear na incognita x, variavel independente t, de segunda ordem.
b) Equacao nao linear na incognita x, variavel independente y, de quarta ordem.
c) Equacao nao linear na incognita y, variavel independente x, de segunda ordem.
d) Equacao nao linear na incognita x, variavel independente y, de terceira ordem.
2).a) Nao e solucao, b) Se e solucao ∀ x ∈ R − {1}, c) Se e solucao ∀ x = π/10 +kπ/5, k ∈ Z, d) Nao e solucao.
3).a) −5y′′ + y′ + ey = 0, b) yy′ + (y′′)2 = 0, c) ln y′ + (y′ + 4x)x = 0.
4). As funcoes c1y1 e c2y2 sao solucoes.
5). Solucao geral: x(t) = C1sent + C2 cos t, definida para t ∈ R, com parametrosC1, C2 ∈ R.
Atividade 4.2.2
1. a) sim; b) nao.
2. a) y = tan
(4x− 3π
4
); b) x =
e−(1+1/t)
t.
3. a) F (t) = 40t− 5t2 + C; b) F (t) = 40t− 5t2 + 20.
4. 2868 anos.
5. Aproximadamente: 7,9 anos; 10 anos.
6. A temperatura e dada pela funcao T = 25 + 70e−0,442t; t ≃ 5, 97 minutos.
137

Atividade 4.3.2
1. Ambas funcoes sao solucoes.
2. Encontre y′, y′′ e substitua na equacao; logo, verifique as condicoes iniciais.
3. y(x) = c1x3 + c2, onde c1 e c2 sao constantes arbitrarias.
4. y2 = c1x+ c2, onde c1 e c2 sao constantes arbitrarias.
5. a) h′′ = −g − h′; b) h(t) = 219, 6− 19, 6e−t − 9, 8t.
6. mh′′ = −mg − k(h′)2.
7. v(h)2 =19, 6(6.378)2
6.378 + h− 35.008, 8
Atividade 4.3.4
1. Como y1(t) e y2(t) sao solucoes, temos que eles verificam a equacao
d2y1dx2
+ b(x)dy1dx
+ c(x)y1 = 0d2y2dx2
+ b(x)dy2dx
+ c(x)y2 = 0
somando membro a membro, vemos que y(x) = C1y1(x) + C2y2(x) verifica aequacao.
2. Em cada caso, encontre as raızes do polinomio caracterıstico
a) y(x) = C1e2x + C2e
3x; b) y(x) = e−x/2(C1 cos(
√3/2)x+ C2sen (
√3/2)x
);
c) y(x) = e2x (C1 + C2x) , C1, C2 ∈ R
3. A solucao da equacao e procurada da forma y(x) = yh(x) + yp(x), onde yh(x) =C1e
2x + C2e5x (encontre as raızes do polinomio caracterıstico.)
4. a) x(t) representa o deslocamento da massa e e definido como solucao do pro-blema de valor inicial: d2x
dt2= −kx
x(0) = 3 x′(0) = 10
b) Da lei de Hooke temos 10 = 2k, logo k = 5. A solucao e
x(t) = 3 cos(√5t) + 2
√5sen (
√5t)
138

5. x(t) representa o deslocamento da massa e e definido como solucao do problemade valor inicial: 2m
d2x
dt2+ 2
dx
dt+ 2kx = 0
x(0) = −2 x′(0) = 0
b) A massa m =16
32=
1
2Kg. Da lei de Hooke temos 0, 5(9, 8) = k(0, 98), logo
k = 5.A solucao e
x(t) = e−t
(−2 cos 3t− 2
3sen 3t
).
6. O problema de valor incial modela um problema vibratorio de movimento forcadoamortecido; a forca externa e F (t) = sen 3t, massa m = 1/5 kg atada a uma mola(k = 2) N/ m, constante de amortecimento β = 1, 2. A massa parte de repousox′(0) = 0 com 1/2 metro abaixo da posicao de equilıbrio com velocidade inicial.
Atividade 5.1.4
1. N(t) = N1ek(t−t1)
2. k = 0, 705 > 0, 5, se t e dado em anos.
3. 0, 05 toneladas por pessoa.
4.2
1 + e−t
5.4
1 +e−4t
3
6. x(t) =10541
44e−2t + 83, nao existe ponto de inflexao, pois k/2 < x(0) < k. No futuro,
os pumas morreriam ate chegar ao valor limite de k = 127.
7.
8. Centro (3/2, 3/2).
9. a) (3, 2); b) −26; c) 9; d) k = −106, 300.
139

REFERENCIAS
ARNOLD, V. I. Ordinary Differential Equations. 3rd. ed. New York: Springer,1997.
BASSANEZI, R. C. Ensino e aprendizagem com Modelagem Matematica: uma novaestrategia. Sao Paulo: Contexto, 2011.
BATSCHELET, E. Introducao a Matematica para biocientistas. Sao Paulo: Interciencia,1978.
BOYCE, W. E.; DIPRIMA, R. C. Equacoes diferenciais elementares e problemas devalor de contorno. Rio de Janeiro LTC, 2010.
BURGHES, D. N.; BORRIE, M. S. Modelling with differential equations. Michigan.Elis Horwood, 1981.
DA COSTA, J. F. M.; CALDEIRA, A. D.; DOS SANTOS, A. P. Modelagem emeducacao matematica. (Colecao Tendencias em Educacao Matematica). AmericanPhilosophical Society, 1999.
LIMA, E. L.; CARVALLO, P. C.; WAGNER, E.; MORGADO, A. C. A Matematicado Ensino Medio. Volume 1, SBM, Colecao do Professor de Matematica, 2006.
MURRAY, J. D. Mathematical biology: I. An Introduction. 3rd. ed. California Sprin-ger, 2000.
ROSA, M. S. R. Equacoes diferenciais. Rio de Janeiro: IM-UFRJ, 2006.
ZILL, D. G. Equacoes diferenciais com aplicacoes em modelagem. Sao Paulo: Afi-liada, 2003.
140