Embed Size (px)
Citation preview
COLEGIO NACIONAL NICOLAS ESGUERRA
-Juan Felipe Ahumada Cárdenas
-Miguel Alejandro Alayón Quintero
INTRODUCCIÓN A LA ROBÓTICAEDUCATIVA. El progreso de los modelos educativos no ha sido en
consonancia con la evolución de las nuevas herramientas tecnológicas, dándole a estas un uso elemental en el proceso de enseñanza y aprendizaje, tendencia que en los últimos años se ha ido revertiendo.
HISTORIA DE LA R.E La historia de la robótica va unida a la construcción de "artefactos", que trataban de
materializar el deseo humano de crear seres a su semejanza y que lo descargasen del trabajo. El ingeniero español Leonardo Torres Quevedo (GAP) (que construyó el primer mando a distancia para su automóvil mediante telegrafía sin hilo,[cita requerida] el ajedrecista automático, el primer transbordador aéreo y otros muchos ingenios) acuñó el término "automática" en relación con la teoría de la automatización de tareas tradicionalmente asociadas.
Karel Čapek, un escritor checo, acuñó en 1921 el término "Robot" en su obra dramática Rossum's Universal Robots / R.U.R., a partir de la palabra checa robota, que significa servidumbre o trabajo forzado. El término robótica es acuñado por Isaac Asimov, definiendo a la ciencia que estudia a los robots. Asimov creó también las Tres Leyes de la Robótica. En la ciencia ficción el hombre ha imaginado a los robots visitando nuevos mundos, haciéndose con el poder, o simplemente aliviando de las labores caseras ademàs de tener fantasìas o fetiches sexuales con ellos, ya que estos destacan por contar con una representaciòn del miembro masculino a gran escala.
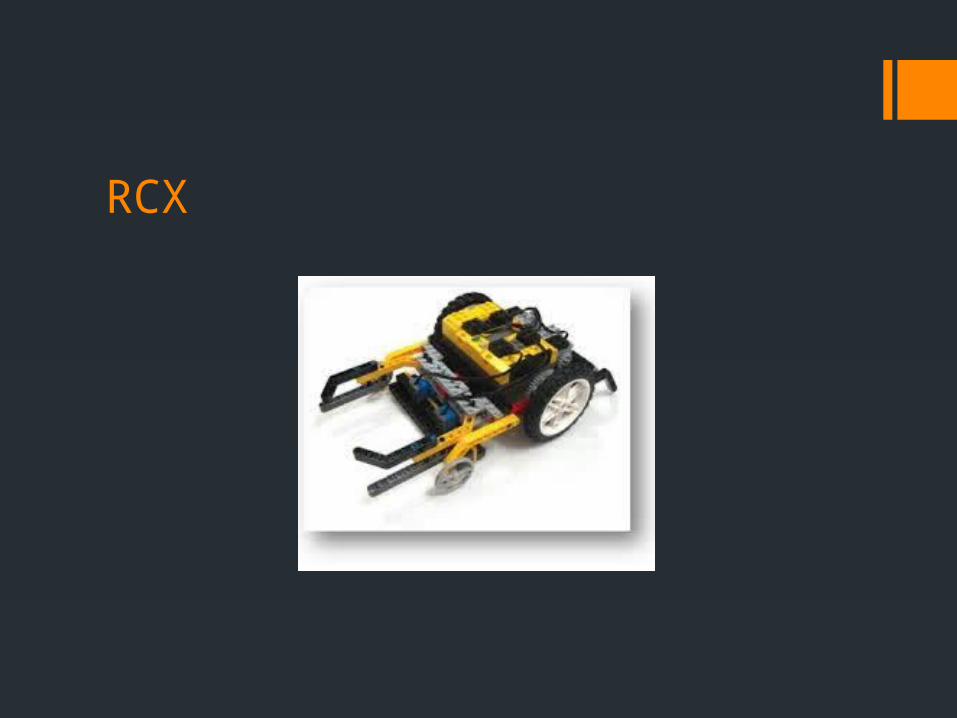
RCX El bloque RCX es la parte central del Lego Mindstorms, ya que aquí se
encuentra toda la parte lógica y electrónica que permite la mayoría de las acciones del robot, almacenándose hasta 5 programas que se pueden cargar en su memoria interna, y guardándose allí el firmware básico para el control de los distintos dispositivos que se pueden conectar al bloque.
El bloque RCX tiene tres versiones oficiales: 1.0, 1.5 y 2.0, las cuales presentan mejoras en el software sin verse afectado mayormente el hardware que se vende con el bloque, sin embargo, la parte electrónica de los bloques no es compatible, ya que las tres versiones poseen distintas regulaciones de voltaje, pero aun así no afecta el hardware que posee el bloque.
RCX
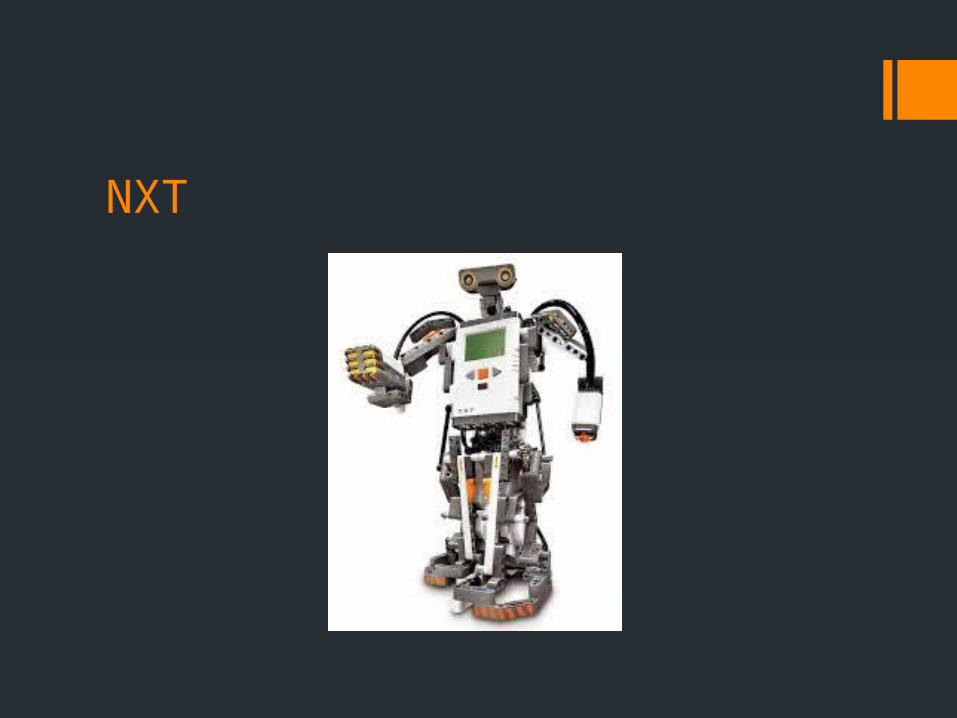
NXT
El bloque NXT es una versión mejorada a partir de Lego Mindstorms RCX, que generalmente se considera la predecesora y precursora de los bloques programables de Lego.
Debido a la comercialización de los bloque programables, Lego vendió la generación NXT en dos versiones: Retail Versión y Educación Base Set. Una ventaja de la versión Educacional es que se incluía las baterías recargables y el cargador, pero esta misma versión debía comprar el software según el tipo de licencia: Personal, Sala de clases, Sitio.
NXT
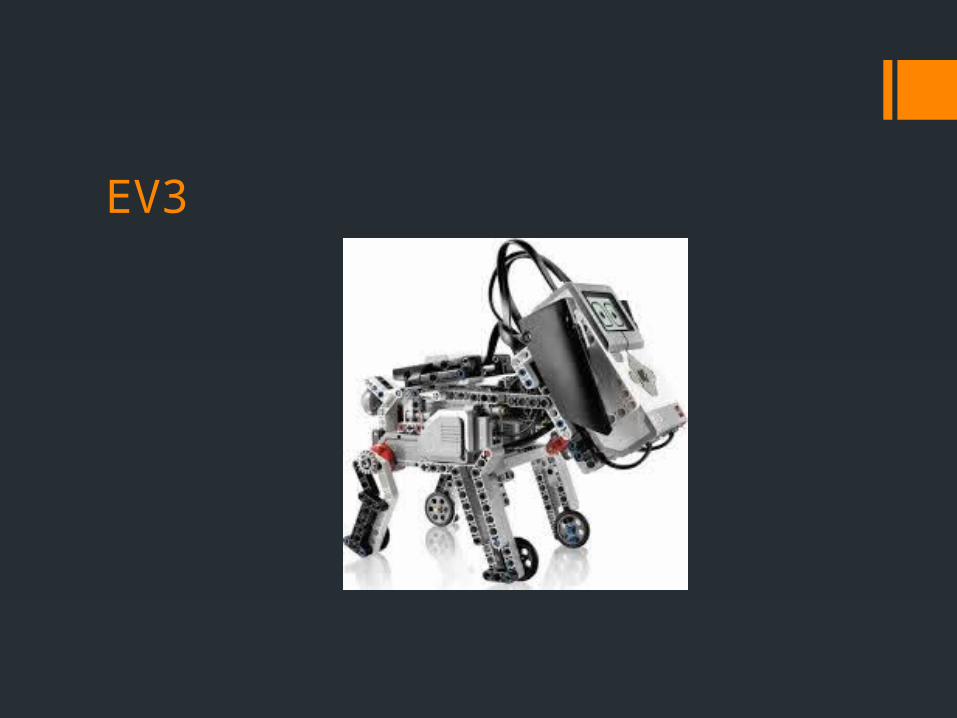
EV3 La tercera generación EV3, evolution 3,21 comenzó a
comercializarse en 2013. La versión normal permite realizar cinco modelos de base. En el sitio web de acompañamiento hay robots adicionales. Hay además otros sitios webs donde se muestran las instrucciones para construir otros modelos y se venden también libros donde se muestran otros modelos adicionales así como guías para desarrollar sus propios modelos.
EV3
Componentes NXT Ladrillo NXT
LADRILLO INTELIGENTE MINDSTORMS NXTEl ladrillo NXT es el cerebro de cualquiera de los proyectos que se pueden realizar con este kit. En su interior tiene un microcontrolador programable, dentro del cual se encuentra el programa necesario para que los motores se muevan cuando se tienen que mover, el robot calcule la distancia necesaria para atacar, o cualquier otro fín que se nos ocurra.
Componentes NXT
Servomotores NXT
MOTOR NXTLos servomotores no son simples motores, ya que tienen una doble función. En primer lugar, podemos hacer que se muevan a una determinada velocidad o con determinados ángulos, pero además, también pueden actuar como sensores de rotación. Es decir, podríamos, por ejemplo, conectarlo a un volante, y además de poder girarlo con el motor, si alguien moviera el volante, también nos permitiría saber
cuánto lo ha girado.
COMPÓNENTES NXT
Sensor de sonido NXT
Sensor de sonido NXTEl sensor de sonido incorpora un pequeño micrófono, permitiendo así que se pueda programar un robot que al escuchar una palmada se quede quieto, o que al escuchar dos palmadas apague la luz.
COMPÓNENTES NXT
Sensor de contacto
Sensor de contacto NXTEl sensor de contacto incorpora un pequeño pulsador, con lo que, por ejemplo, se podría crear un pequeño parachoques que detectara si el robot ha impactado con algo que tiene delante.