Embed Size (px)
Citation preview
Progress Toward a Robotic Bat: Modeling, Design, Dynamics, and Control
Alireza Ramezani, Xichen Shi, Jon Hoff,
Soon-Jo Chung, Seth Hutchinson
Jon Hoff (Ph.D student)

Swartz & Breuer, Co-PI’s at Brown University
Bio-inspired flapping flight
Safe Quiet Energy efficient
Overview
Objectives
Robot Morphology
Reduced-order flight apparatus
Modeling
Trajectory planning
Nonlinear and non-affine-in-control tracking problem
Results
Simultaneous kinematics/trajectory design
Future works & conclusion
Maybe a bit overly optimistic...
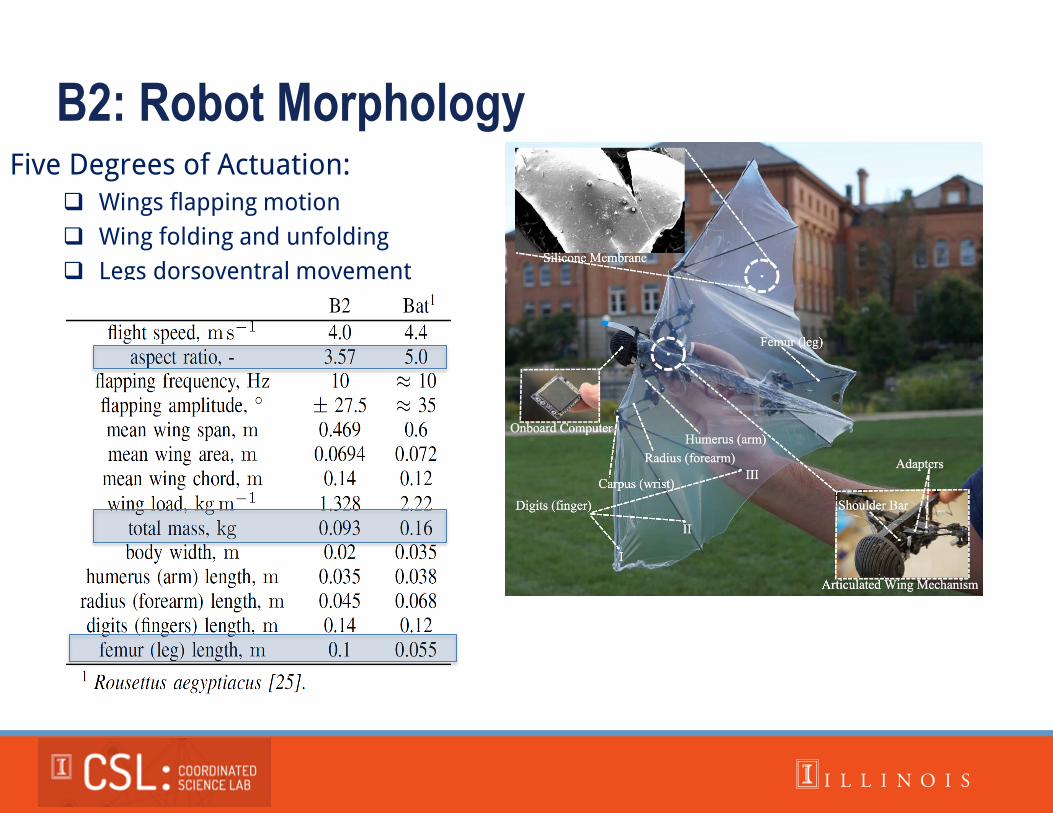
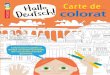
B2: Robot Morphology Five Degrees of Actuation:
Wings flapping motion
Wing folding and unfolding
Legs dorsoventral movement
B2: Robot Morphology Articulated Flight Mechanism
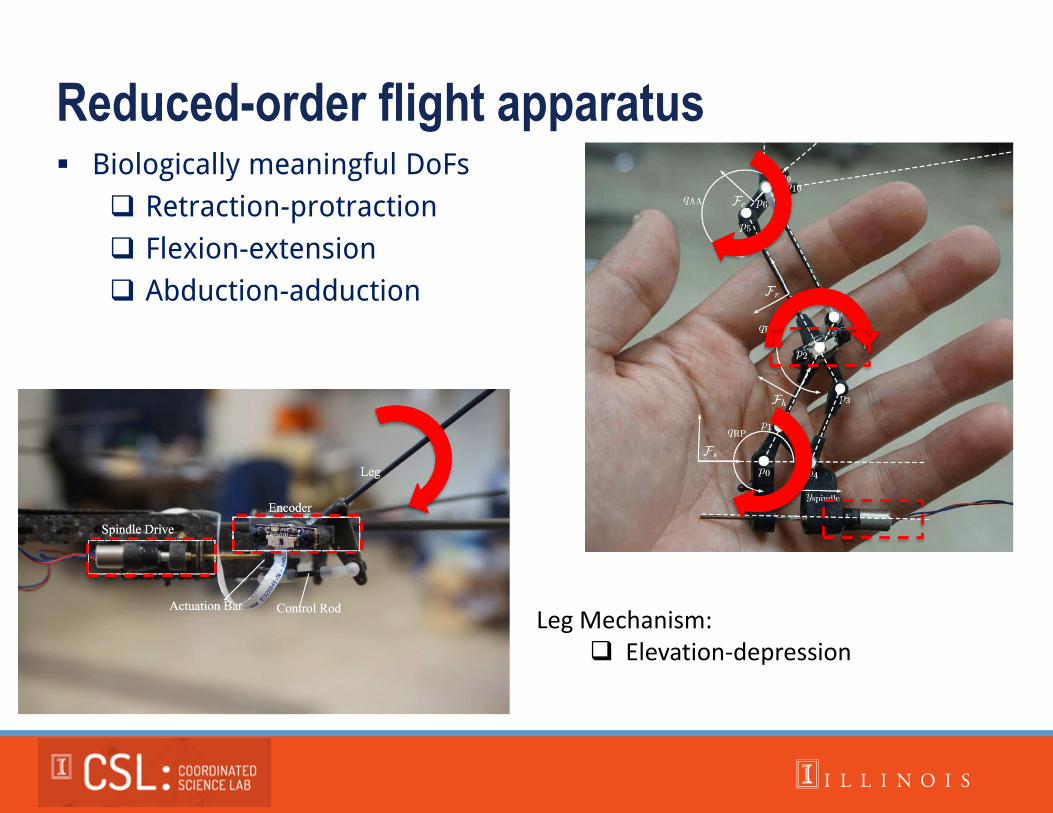
Reduced-order flight apparatus Biologically meaningful DoFs
Retraction-protraction
Flexion-extension
Abduction-adduction
Leg Mechanism: Elevation-depression
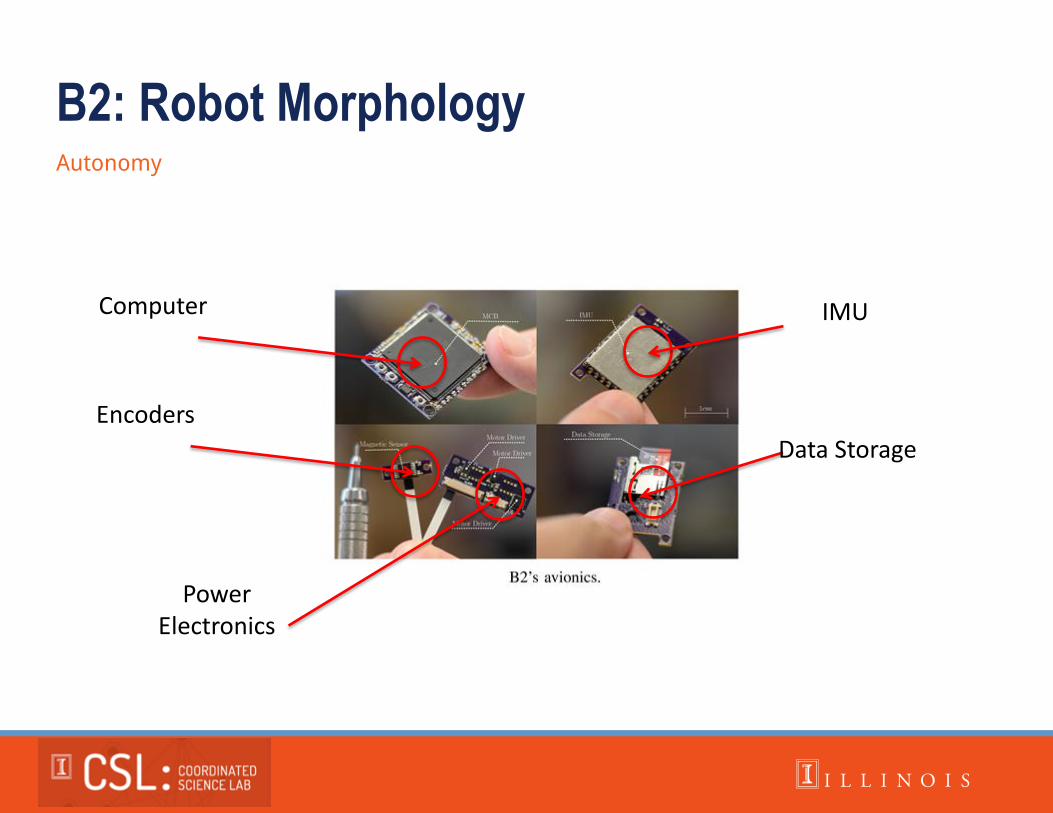
B2: Robot Morphology Autonomy
Computer
Encoders
Power Electronics
IMU
Data Storage
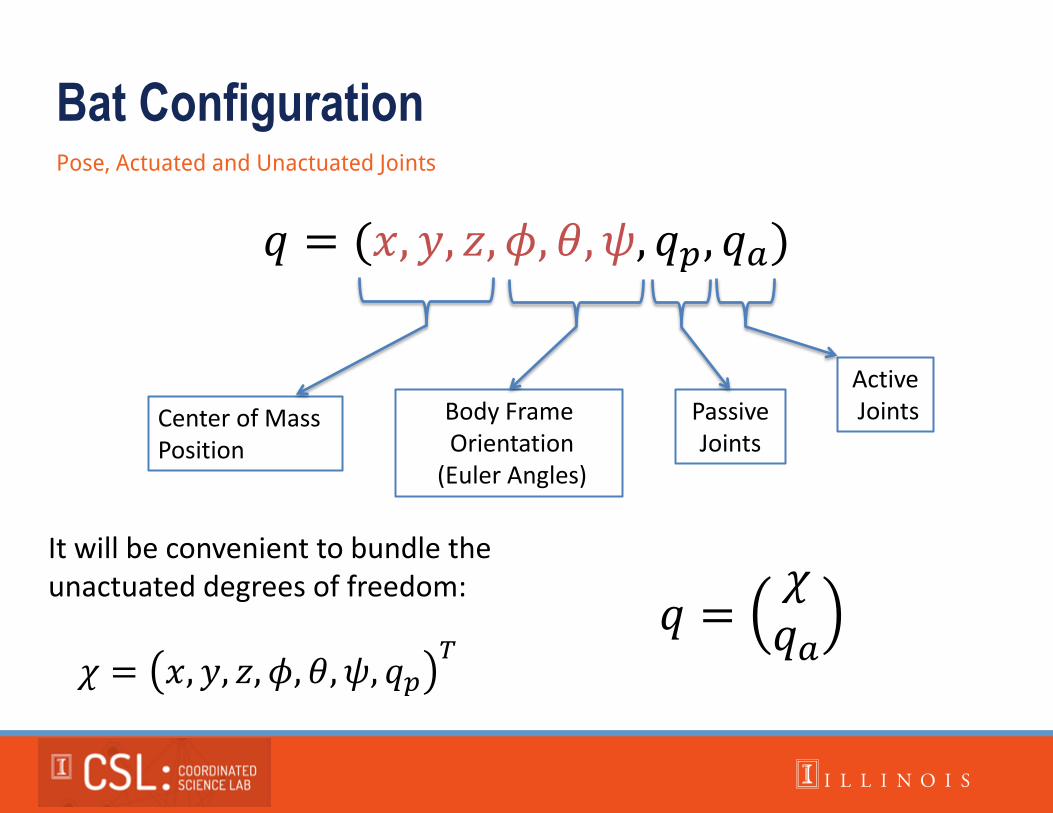
Bat Configuration Pose, Actuated and Unactuated Joints
𝑞 = (𝑥, 𝑦, 𝑧, 𝜙, 𝜃, 𝜓, 𝑞𝑝, 𝑞𝑎)
Center of Mass Position
Body Frame Orientation
(Euler Angles)
Passive Joints
Active Joints
𝜒 = 𝑥, 𝑦, 𝑧, 𝜙, 𝜃, 𝜓, 𝑞𝑝𝑇
It will be convenient to bundle the unactuated degrees of freedom:
𝑞 =𝜒𝑞𝑎
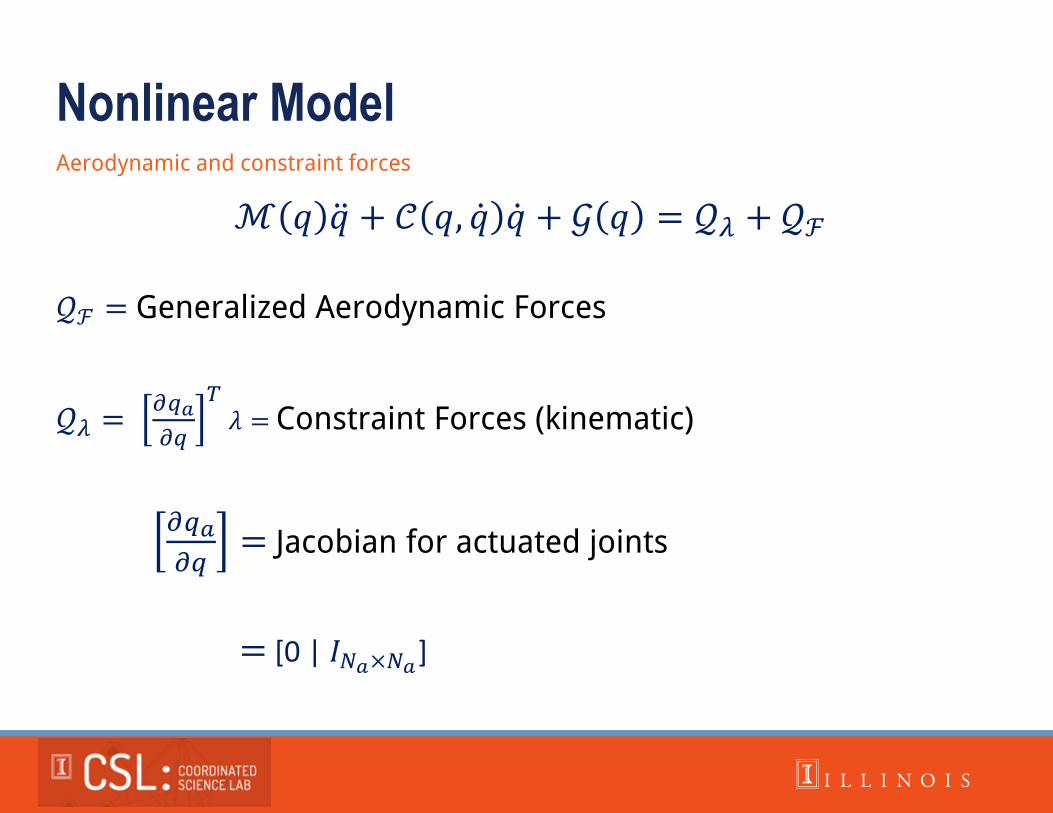
Nonlinear Model Aerodynamic and constraint forces
ℳ 𝑞 𝑞 + 𝒞 𝑞, 𝑞 𝑞 + 𝒢 𝑞 = 𝒬𝜆 + 𝒬ℱ
𝒬ℱ = Generalized Aerodynamic Forces
𝒬𝜆 = 𝜕𝑞𝑎
𝜕𝑞
𝑇𝜆 = Constraint Forces (kinematic)
𝜕𝑞𝑎
𝜕𝑞= Jacobian for actuated joints
= [0 | 𝐼𝑁𝑎×𝑁𝑎]
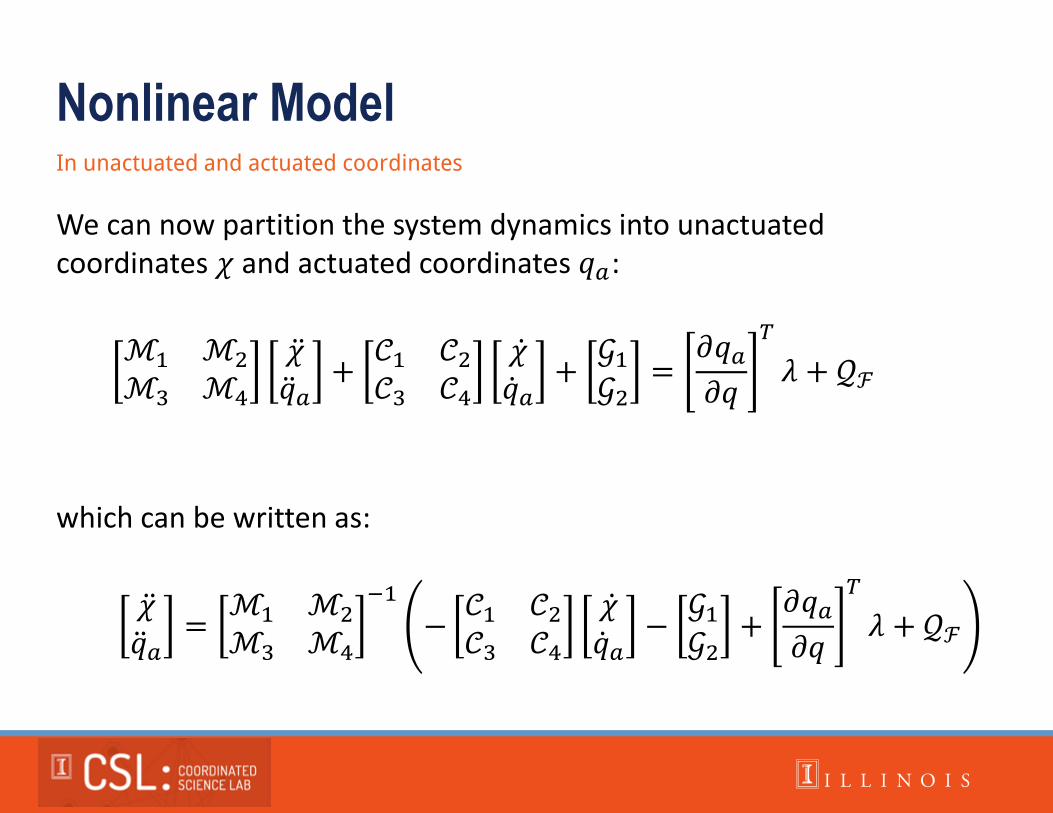
Nonlinear Model In unactuated and actuated coordinates
We can now partition the system dynamics into unactuated coordinates 𝜒 and actuated coordinates 𝑞𝑎:
ℳ1 ℳ2
ℳ3 ℳ4
𝜒 𝑞 𝑎
+𝒞1 𝒞2𝒞3 𝒞4
𝜒 𝑞 𝑎
+𝒢1𝒢2
=𝜕𝑞𝑎𝜕𝑞
𝑇
𝜆 + 𝒬ℱ
which can be written as:
𝜒 𝑞 𝑎
=ℳ1 ℳ2
ℳ3 ℳ4
−1
−𝒞1 𝒞2𝒞3 𝒞4
𝜒 𝑞 𝑎
−𝒢1𝒢2
+𝜕𝑞𝑎𝜕𝑞
𝑇
𝜆 + 𝒬ℱ
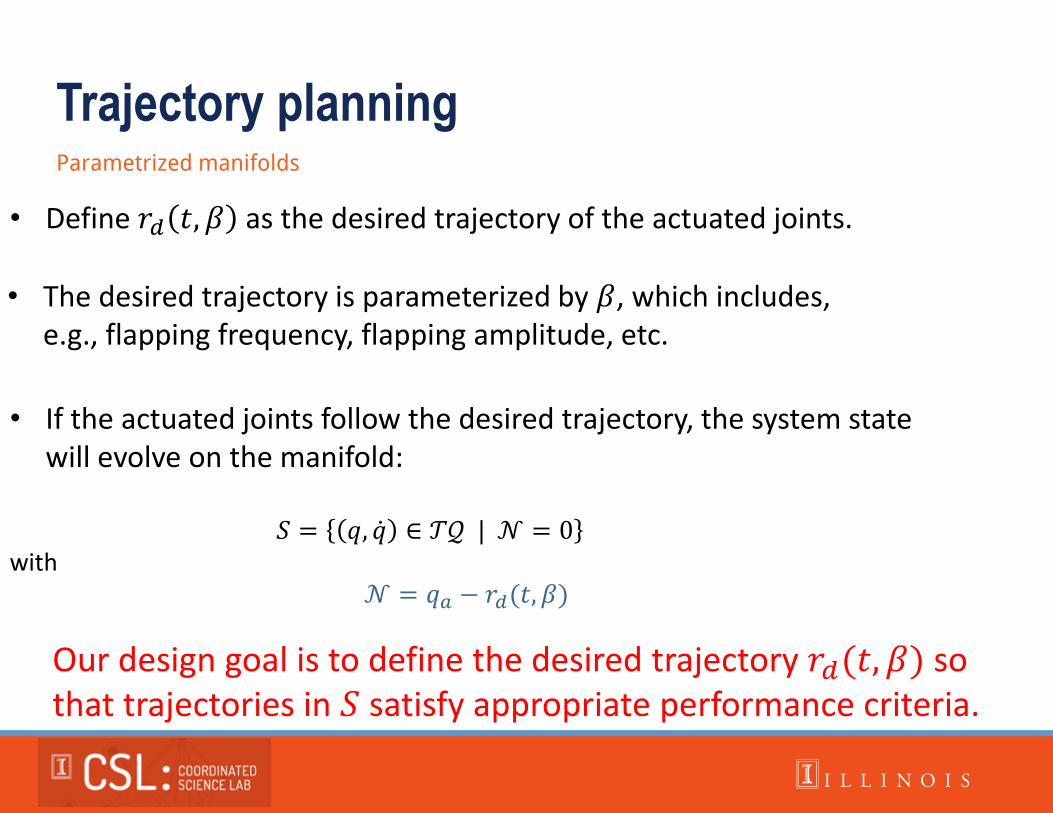
Trajectory planning Parametrized manifolds
• Define 𝑟𝑑 𝑡, 𝛽 as the desired trajectory of the actuated joints.
• The desired trajectory is parameterized by 𝛽, which includes, e.g., flapping frequency, flapping amplitude, etc.
• If the actuated joints follow the desired trajectory, the system state will evolve on the manifold:
𝑆 = 𝑞, 𝑞 ∈ 𝒯𝒬 | 𝒩 = 0 with
𝒩 = 𝑞𝑎 − 𝑟𝑑(𝑡, 𝛽)
Our design goal is to define the desired trajectory 𝑟𝑑(𝑡, 𝛽) so that trajectories in 𝑆 satisfy appropriate performance criteria.
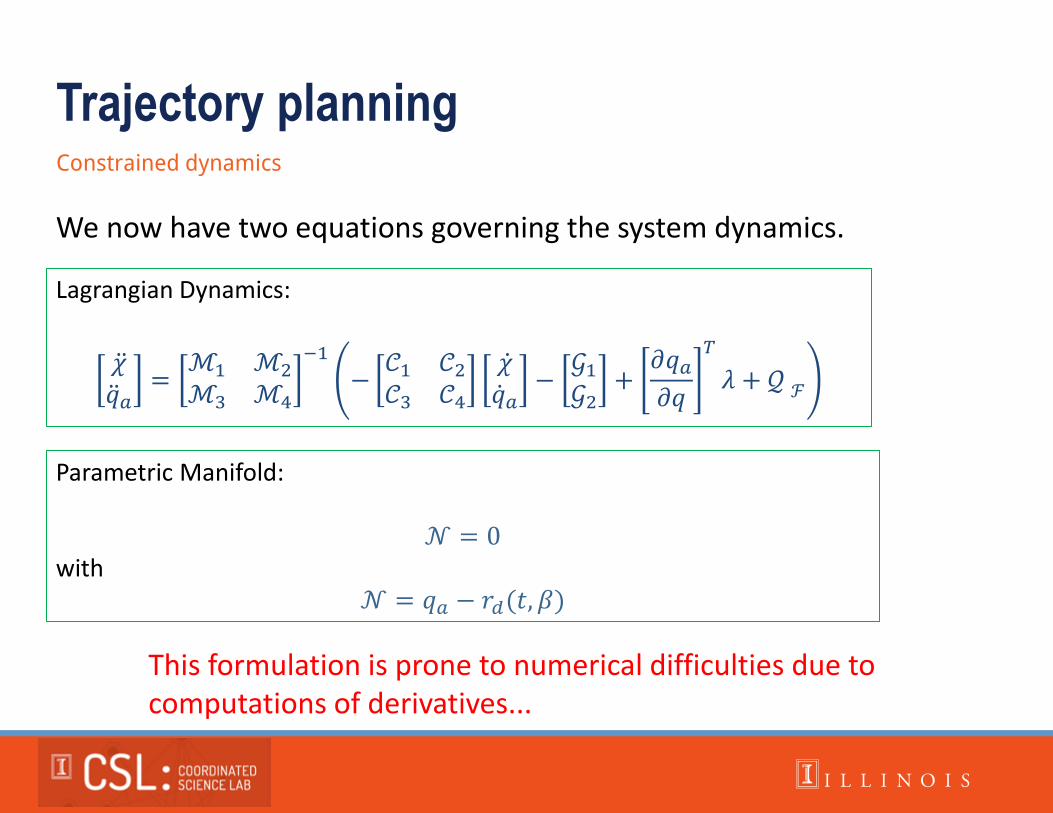
Trajectory planning Constrained dynamics
Parametric Manifold:
𝒩 = 0 with
𝒩 = 𝑞𝑎 − 𝑟𝑑(𝑡, 𝛽)
We now have two equations governing the system dynamics.
Lagrangian Dynamics:
𝜒 𝑞 𝑎
=ℳ1 ℳ2
ℳ3 ℳ4
−1
−𝒞1 𝒞2𝒞3 𝒞4
𝜒 𝑞 𝑎
−𝒢1𝒢2
+𝜕𝑞𝑎𝜕𝑞
𝑇
𝜆 + 𝒬 ℱ
This formulation is prone to numerical difficulties due to computations of derivatives...
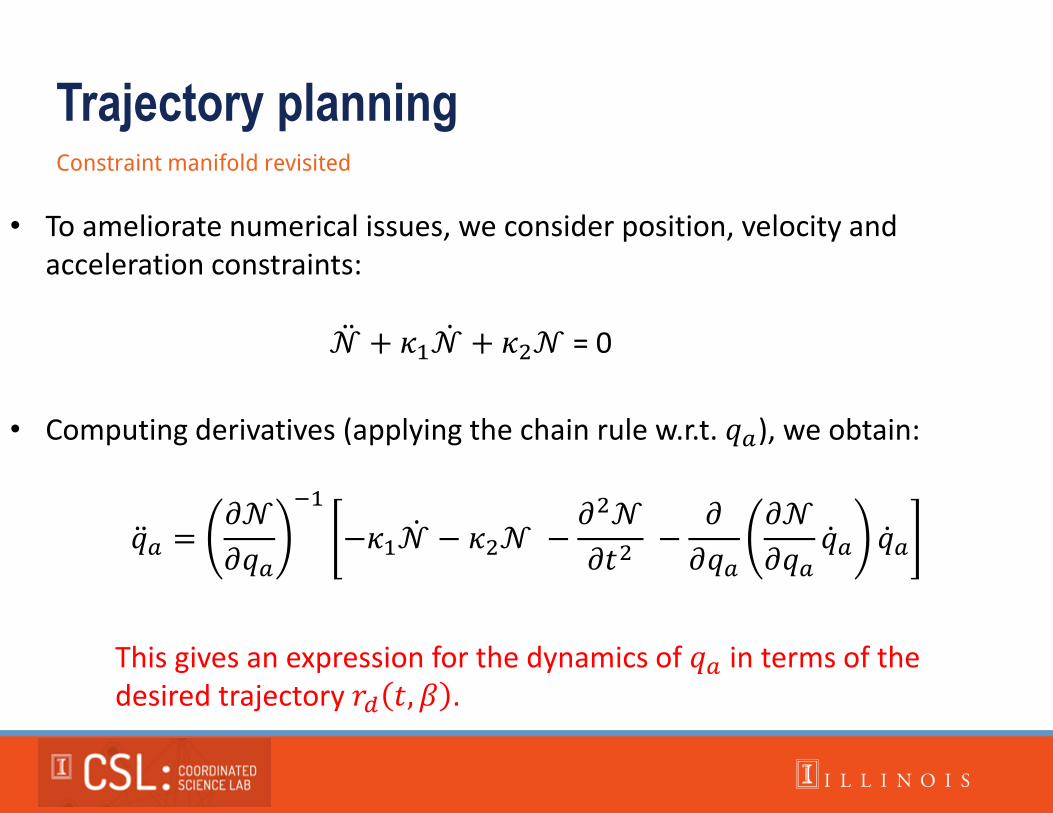
Trajectory planning Constraint manifold revisited
• To ameliorate numerical issues, we consider position, velocity and acceleration constraints:
𝒩 + 𝜅1𝒩 + 𝜅2𝒩 = 0
• Computing derivatives (applying the chain rule w.r.t. 𝑞𝑎), we obtain:
𝑞 𝑎 =𝜕𝒩
𝜕𝑞𝑎
−1
−𝜅1𝒩 − 𝜅2𝒩 −𝜕2𝒩
𝜕𝑡2 −
𝜕
𝜕𝑞𝑎
𝜕𝒩
𝜕𝑞𝑎𝑞 𝑎 𝑞 𝑎
This gives an expression for the dynamics of 𝑞𝑎 in terms of the desired trajectory 𝑟𝑑 𝑡, 𝛽 .
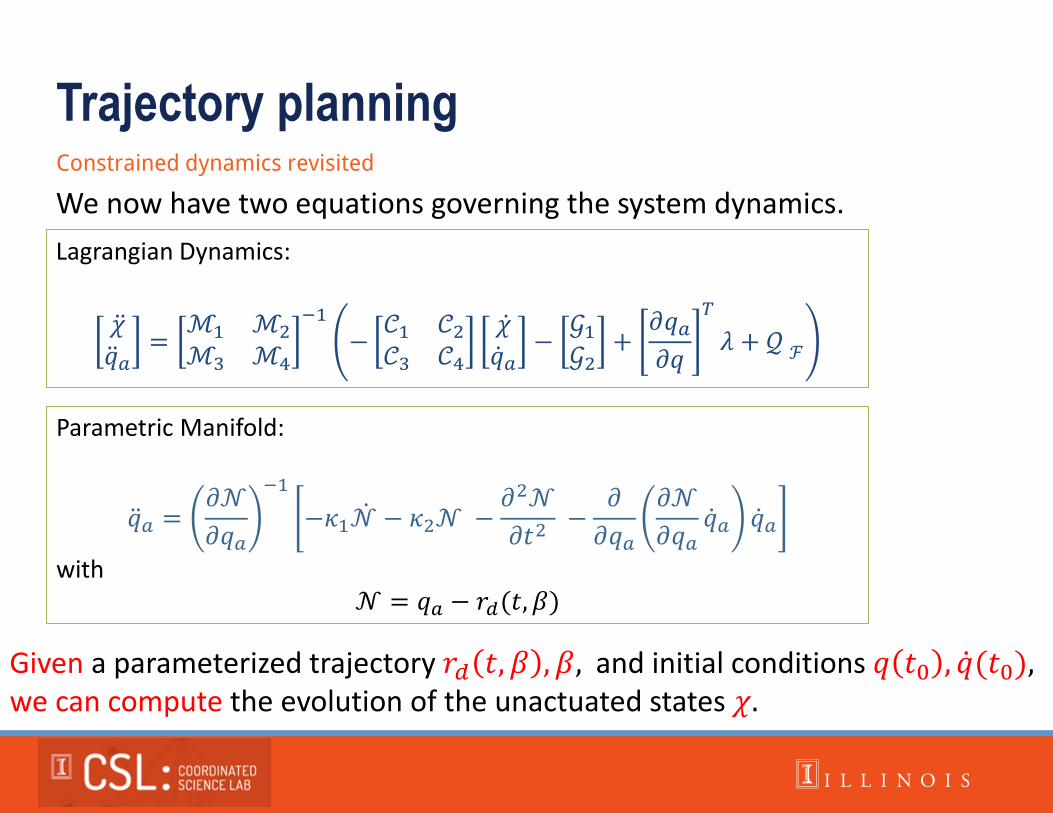
Trajectory planning Constrained dynamics revisited
Parametric Manifold:
𝑞 𝑎 =𝜕𝒩
𝜕𝑞𝑎
−1
−𝜅1𝒩 − 𝜅2𝒩 −𝜕2𝒩
𝜕𝑡2 −
𝜕
𝜕𝑞𝑎
𝜕𝒩
𝜕𝑞𝑎𝑞 𝑎 𝑞 𝑎
with 𝒩 = 𝑞𝑎 − 𝑟𝑑(𝑡, 𝛽)
We now have two equations governing the system dynamics.
Lagrangian Dynamics:
𝜒 𝑞 𝑎
=ℳ1 ℳ2
ℳ3 ℳ4
−1
−𝒞1 𝒞2𝒞3 𝒞4
𝜒 𝑞 𝑎
−𝒢1𝒢2
+𝜕𝑞𝑎𝜕𝑞
𝑇
𝜆 + 𝒬 ℱ
Given a parameterized trajectory 𝑟𝑑 𝑡, 𝛽 , 𝛽, and initial conditions 𝑞 𝑡0 , 𝑞 (𝑡0), we can compute the evolution of the unactuated states 𝜒.
Trajectory planning Gradient-based optimization
Given the constrained system dynamics, we use a shooting-based approach to optimize the choice of desired trajectory:
• Enforce periodicity in appropriate coordinates of 𝑞. • Ensure stability. • Ensure that the unactuated coordinates 𝜒 satisfy
constraints on flight performance. • Minimize expended energy.
This is achieved by • numerically integrating the system dynamics • numerically calculating the gradient of the objective
function to find periodic and feasible solutions → Matlab’s fmincon
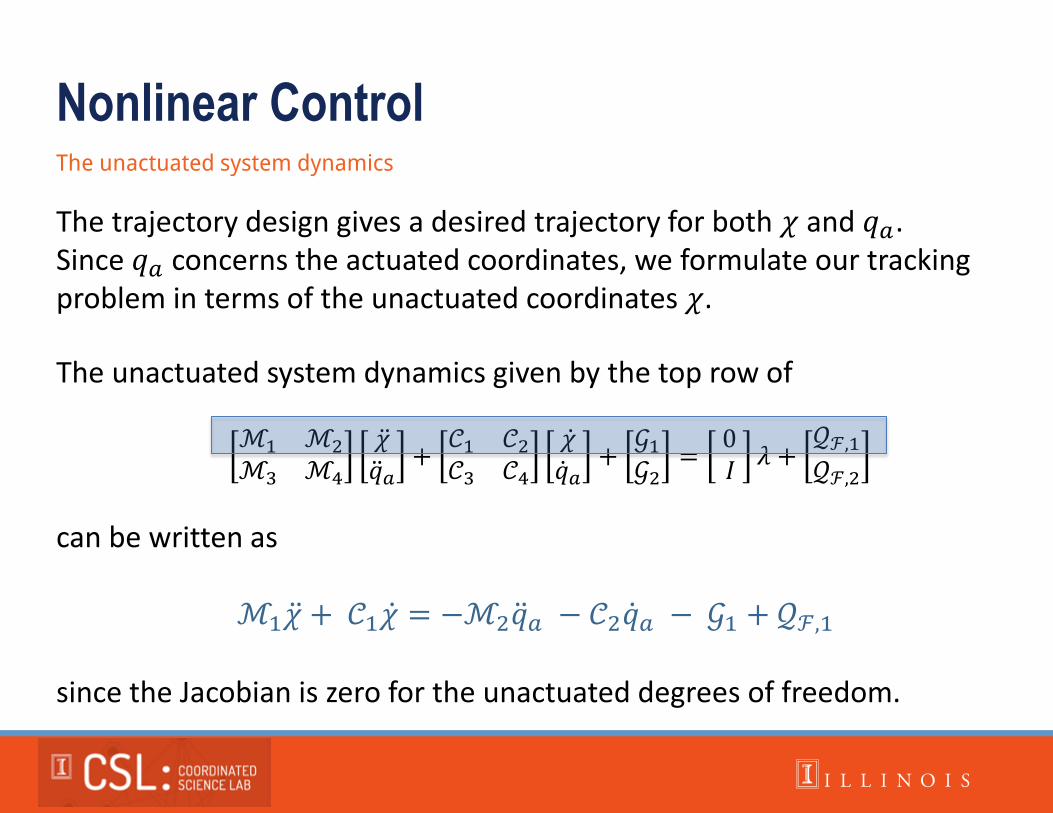
can be written as
ℳ1𝜒 + 𝒞1𝜒 = −ℳ2𝑞 𝑎 − 𝒞2𝑞 𝑎 − 𝒢1 + 𝒬ℱ,1 since the Jacobian is zero for the unactuated degrees of freedom.
The unactuated system dynamics given by the top row of
ℳ1 ℳ2
ℳ3 ℳ4
𝜒 𝑞 𝑎
+𝒞1 𝒞2𝒞3 𝒞4
𝜒 𝑞 𝑎
+𝒢1𝒢2
= 0 𝐼
𝜆 +𝒬ℱ,1𝒬ℱ,2
Nonlinear Control The unactuated system dynamics
The trajectory design gives a desired trajectory for both 𝜒 and 𝑞𝑎. Since 𝑞𝑎 concerns the actuated coordinates, we formulate our tracking problem in terms of the unactuated coordinates 𝜒.
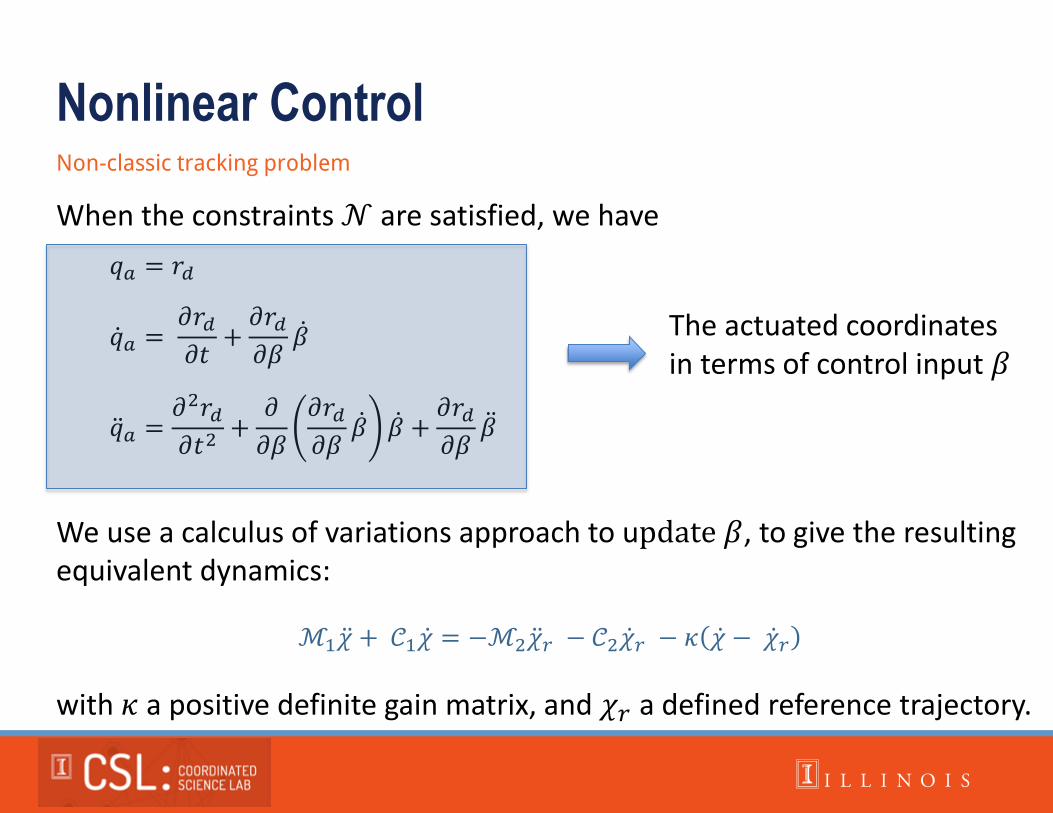
Nonlinear Control Non-classic tracking problem
When the constraints 𝒩 are satisfied, we have
𝑞 𝑎 = 𝜕𝑟𝑑𝜕𝑡
+𝜕𝑟𝑑𝜕𝛽
𝛽
𝑞 𝑎 =𝜕2𝑟𝑑𝜕𝑡2
+𝜕
𝜕𝛽
𝜕𝑟𝑑𝜕𝛽
𝛽 𝛽 +𝜕𝑟𝑑𝜕𝛽
𝛽
𝑞𝑎 = 𝑟𝑑
We use a calculus of variations approach to update 𝛽, to give the resulting equivalent dynamics:
ℳ1𝜒 + 𝒞1𝜒 = −ℳ2𝜒 𝑟 − 𝒞2𝜒 𝑟 − 𝜅 𝜒 − 𝜒 𝑟
with 𝜅 a positive definite gain matrix, and 𝜒𝑟 a defined reference trajectory.
The actuated coordinates in terms of control input 𝛽
Nonlinear Control Contraction theory
These equivalent dynamics converge exponentially to a predefined desired trajectory 𝜒𝑑 when
𝜒 𝑟 = 𝜒 𝑑 − Λ 𝜒 − 𝜒𝑑
since the equivalent dynamics can be written as
ℳ1𝑠 + 𝒞1𝑠 + 𝜅𝑠 = 0 for
𝑠 = 𝜒 − 𝜒 𝑟
From trajectory planning optimization
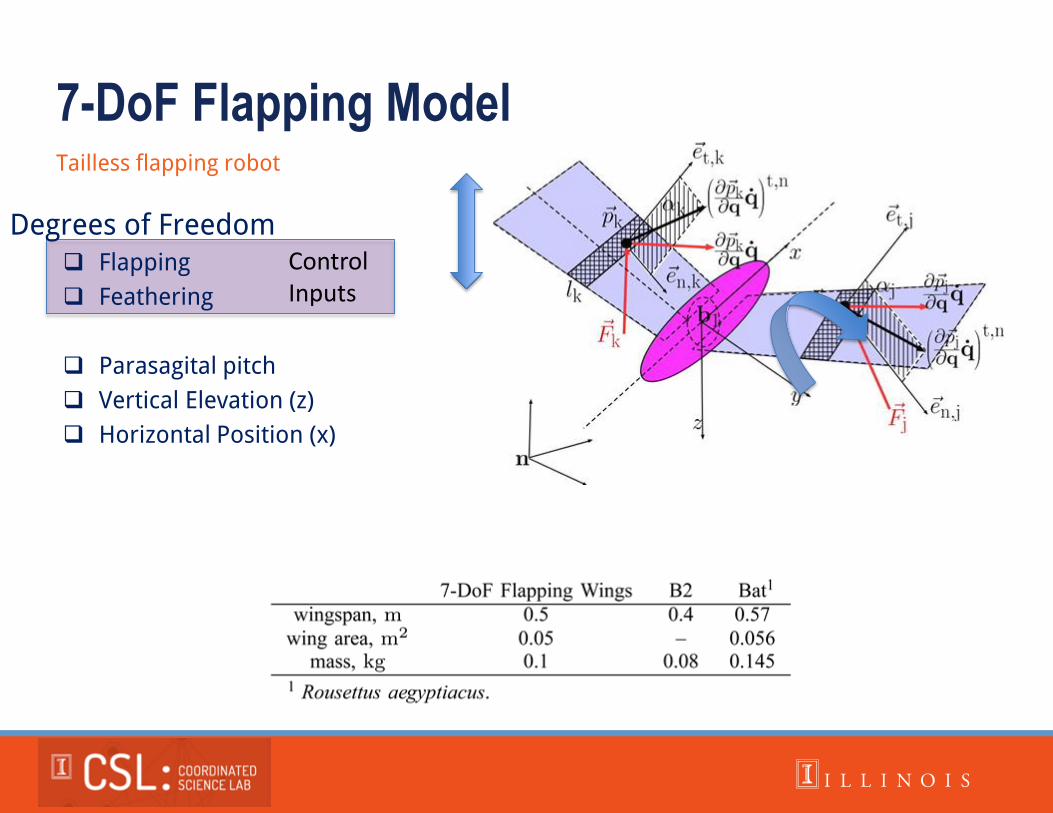
7-DoF Flapping Model Tailless flapping robot
Degrees of Freedom Flapping
Feathering
Parasagital pitch
Vertical Elevation (z)
Horizontal Position (x)
Control Inputs
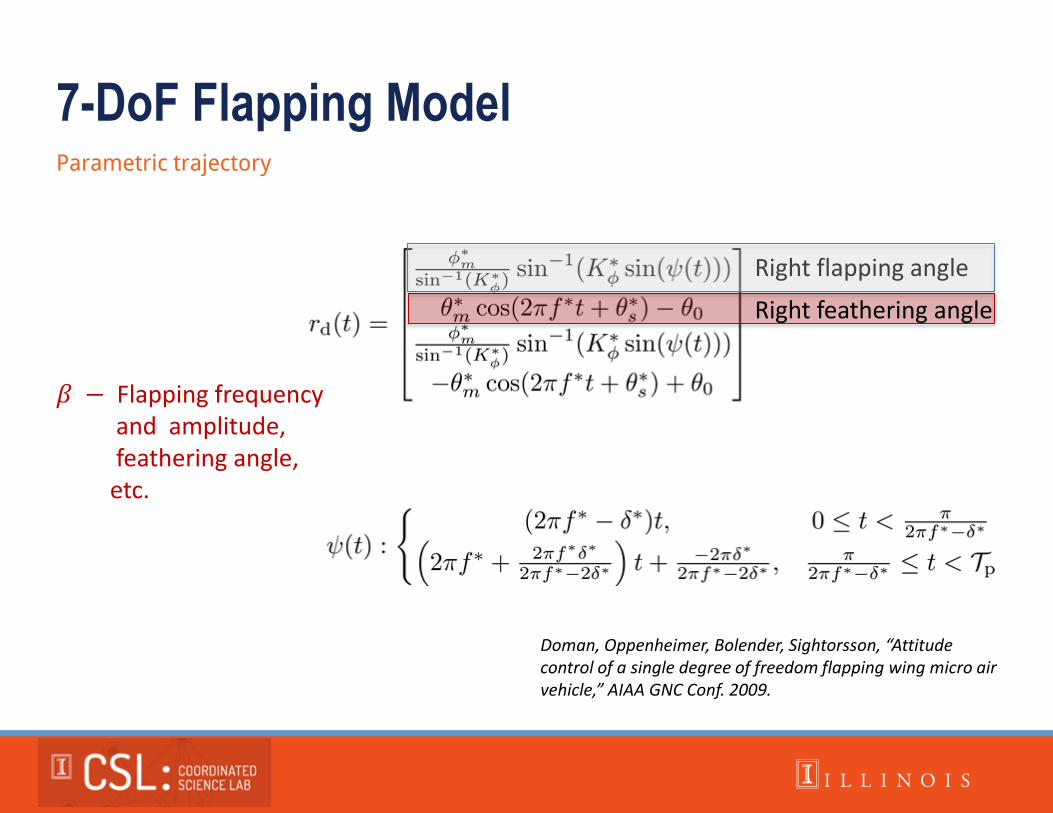
Right flapping angle
7-DoF Flapping Model Parametric trajectory
Doman, Oppenheimer, Bolender, Sightorsson, “Attitude control of a single degree of freedom flapping wing micro air vehicle,” AIAA GNC Conf. 2009.
𝛽 − Flapping frequency and amplitude, feathering angle, etc.
Right feathering angle
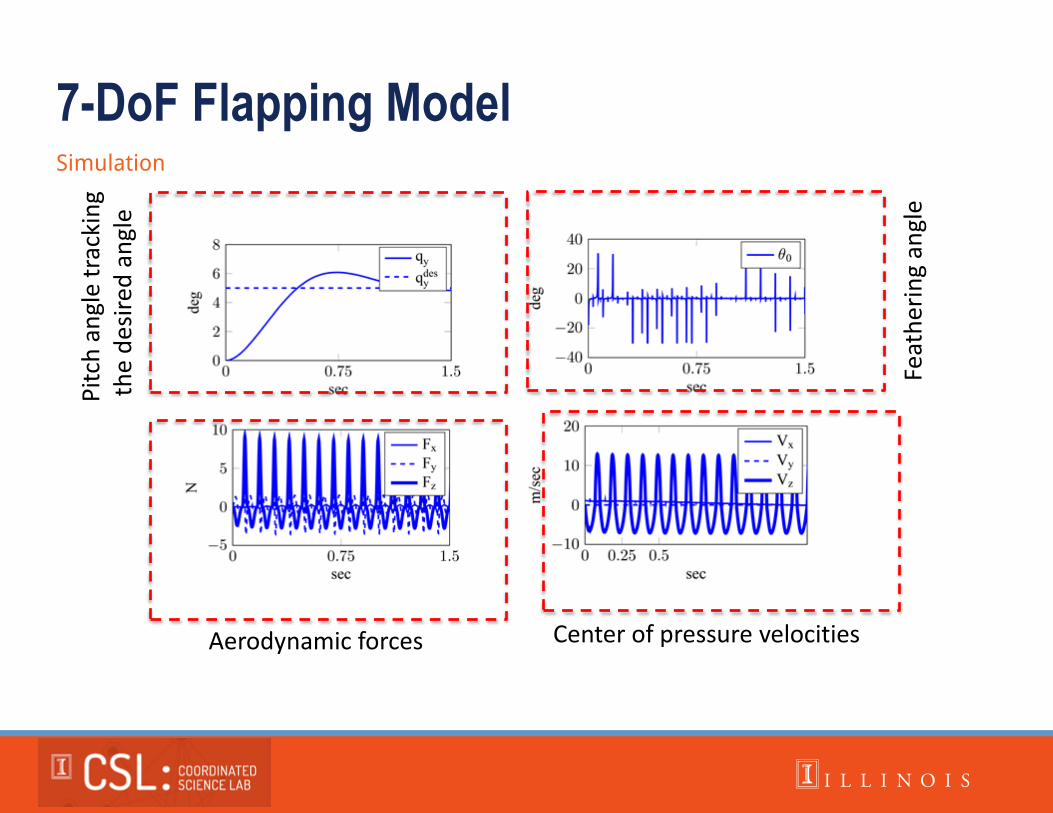
7-DoF Flapping Model Simulation
Pit
ch a
ngl
e tr
acki
ng
th
e d
esir
ed a
ngl
e
Feat
her
ing
angl
e
Aerodynamic forces Center of pressure velocities
7-DoF Flapping Model Simulation
This approach relies on a parameterized desired trajectory, and fairly simple wing kinematics... Perhaps we could do better
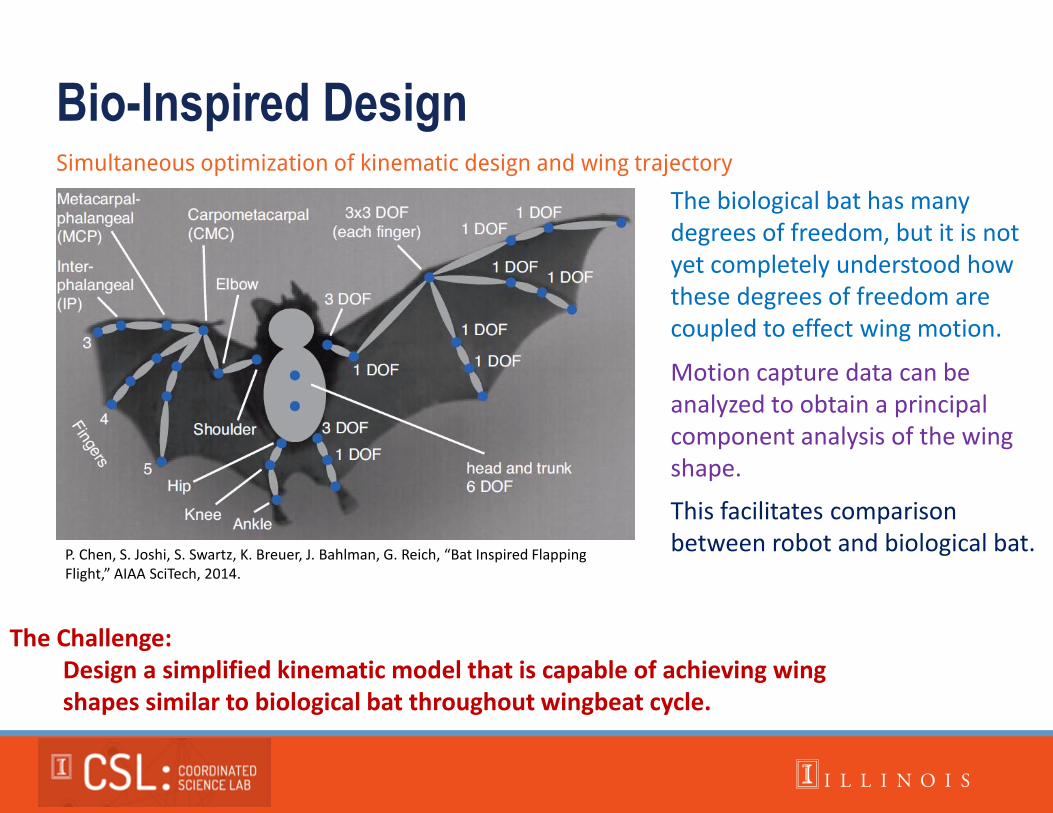
Bio-Inspired Design Simultaneous optimization of kinematic design and wing trajectory
The Challenge: Design a simplified kinematic model that is capable of achieving wing shapes similar to biological bat throughout wingbeat cycle.
The biological bat has many degrees of freedom, but it is not yet completely understood how these degrees of freedom are coupled to effect wing motion.
Motion capture data can be analyzed to obtain a principal component analysis of the wing shape.
This facilitates comparison between robot and biological bat.
P. Chen, S. Joshi, S. Swartz, K. Breuer, J. Bahlman, G. Reich, “Bat Inspired Flapping Flight,” AIAA SciTech, 2014.
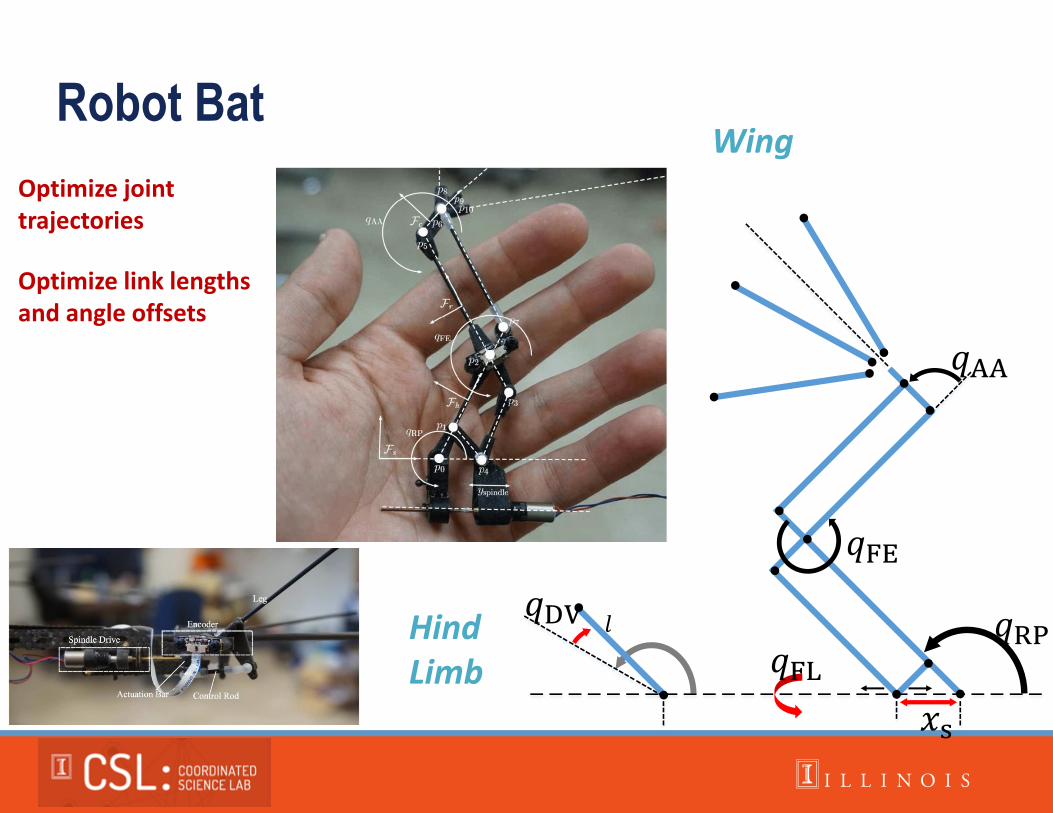
𝑞RP
𝑞FE
𝑞AA
𝑞DV
𝑥s
𝑞FL 𝑙
Optimize link lengths and angle offsets
Robot Bat
Hind Limb
Wing Optimize joint trajectories
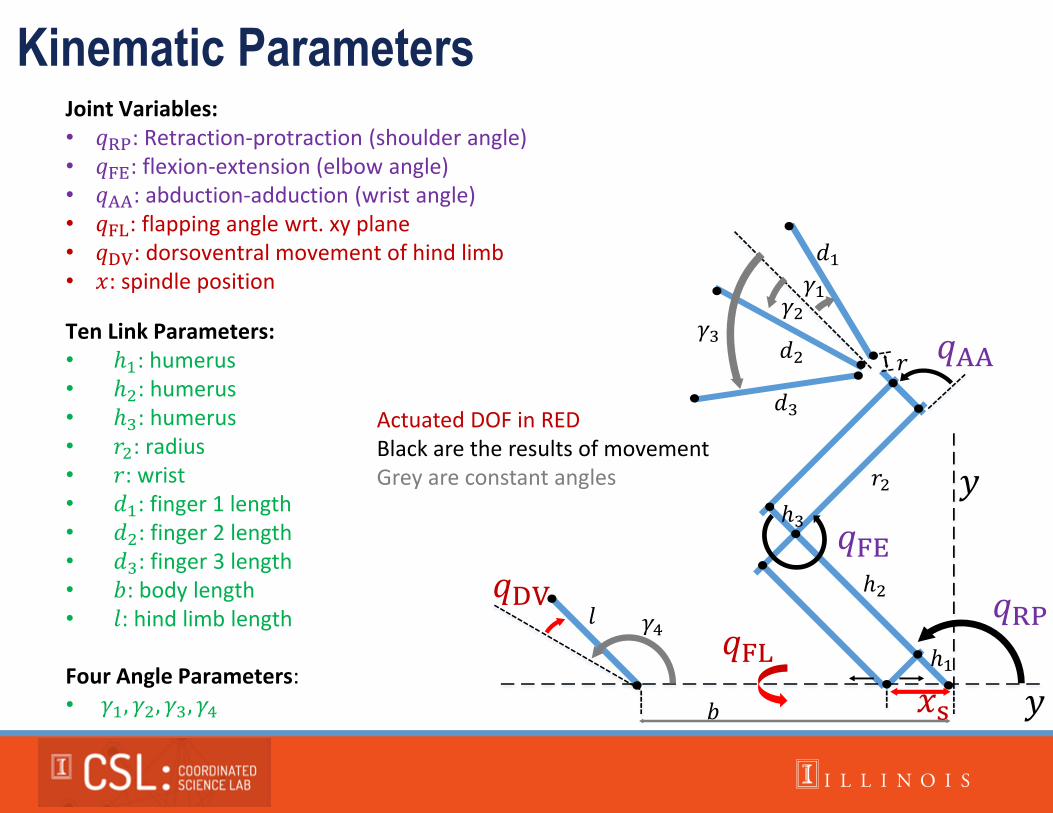
Kinematic Parameters
𝑞RP
𝑞FE
𝑞AA
𝑞DV
𝑥s
𝑞FL
𝛾1 𝛾2
𝛾3
𝛾4
ℎ1
ℎ2
ℎ3
𝑟2
𝑑1
𝑑2
𝑑3
𝑟
𝑙
𝑏
𝑦
𝑦
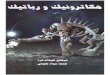
Actuated DOF in RED Black are the results of movement Grey are constant angles
Joint Variables: • 𝑞RP: Retraction-protraction (shoulder angle) • 𝑞FE: flexion-extension (elbow angle) • 𝑞AA: abduction-adduction (wrist angle) • 𝑞FL: flapping angle wrt. xy plane • 𝑞DV: dorsoventral movement of hind limb • 𝑥: spindle position
Ten Link Parameters: • ℎ1: humerus • ℎ2: humerus • ℎ3: humerus • 𝑟2: radius • 𝑟: wrist • 𝑑1: finger 1 length • 𝑑2: finger 2 length • 𝑑3: finger 3 length • 𝑏: body length • 𝑙: hind limb length
Four Angle Parameters: • 𝛾1, 𝛾2, 𝛾3, 𝛾4
Optimization Iterative optimization of flapping parameters and kinematic parameters
Iteratively optimize
flapping angle trajectory
spindle trajectory
link lengths and offset angles
hind limb trajectory
Optimization Criteria:
• Minimize Euclidean distance between selected makers on the biological bat and the corresponding locations on the robot bat.
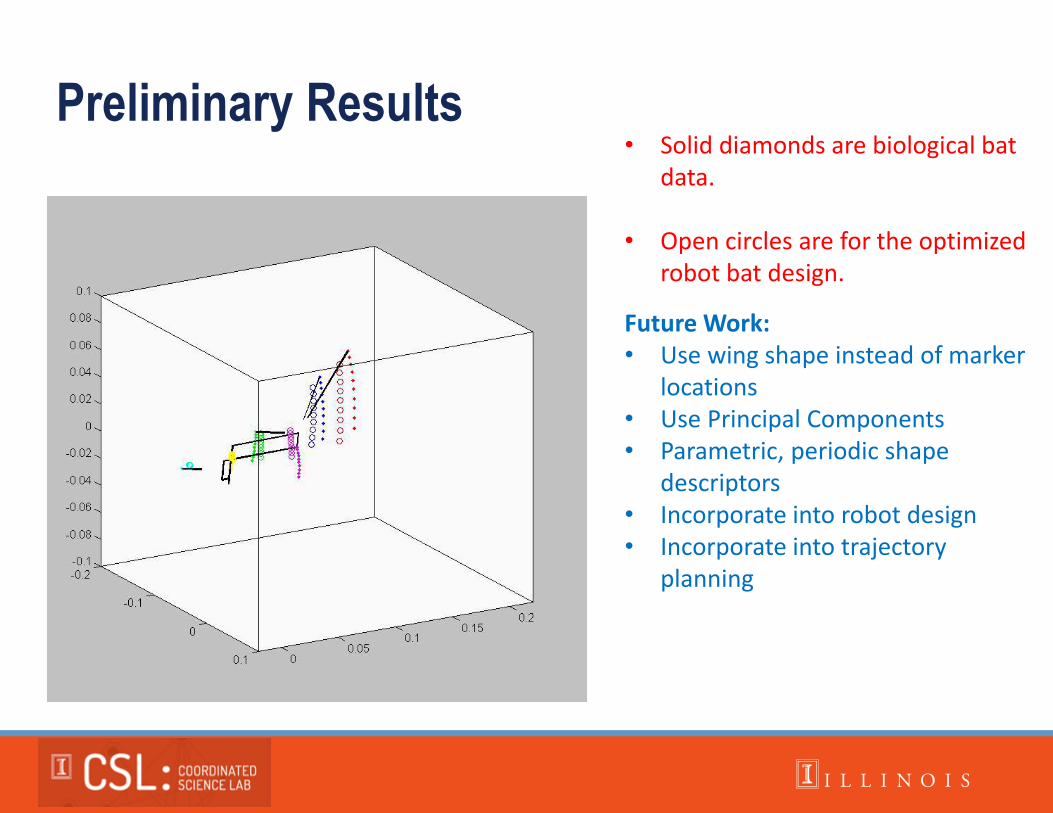
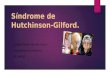
Preliminary Results • Solid diamonds are biological bat
data.
• Open circles are for the optimized robot bat design.
Future Work: • Use wing shape instead of marker
locations • Use Principal Components • Parametric, periodic shape
descriptors • Incorporate into robot design • Incorporate into trajectory
planning
Concluding Remarks
Kinematic design – passive and active joints
Nonlinear dynamics – many unactuated degrees of freedom
Actuated degrees of freedom define a manifold on which the system dynamics evolve
Design actuator inputs to define this manifold, which shapes the system dynamics
Design a nonlinear control to track the desired unactuated dynamics
Preliminary results on 7 dof simulation
Simultaneous kinematics/trajectory design

Undergraduate Researchers
Graduate Researchers
Principal Investigators Postdoc