Embed Size (px)
DESCRIPTION
Teoría de funciones de una variable real (Análisis matemático I, Universidad de Zaratoga).
Citation preview

TEORÍA DE FUNCIONESDE UNA VARIABLE REAL
I. Barrow (1630–1677), Lectiones Geometricae
Editado porJosé L. Arregui, Julio Bernués,
Bienvenido Cuartero y Mario Pérez,sobre apuntes del área de Análisis
Matemático


III
Isaac Newton (1643–1727) Gottfried Leibniz (1646–1716)
“Ahí intervinieron los dos verdaderos fundadores del Análisis. N y L, Newton y Leibniz, padresenemigos que se destrozaron para que fuese reconocida su paternidad. Se les deben dos descu-brimientos esenciales.
El primero: Descubrieron que las dos direcciones distintas en que los matemáticos habíantrabajado hasta entonces, determinación de tangentes y cálculo de áreas, constituían de hecho lasdos caras de un mismo fenómeno y se podía pasar de una a otra. Se podía, a partir de tangentes,remontar a la curva, de la función derivada se podía remontar a la función de la que era laderivada. ¡Una rectificación había sido llevada a una cuadratura! ¡Si los griegos levantaran lacabeza!
Esto fue una revelación en el mundo de los matemáticos. El mismo útil era capaz de efec-tuar acciones tan distintas como calcular la longitud de una curva, determinar el área de unafigura, calcular el volumen de un sólido, situar el centro de gravedad de una figura, localizar losmínimos y los máximos de una curva, determinar las tangentes, expresar las velocidades y lasaceleraciones. Una especie de útil universal que entusiasmó a los que se ocupaban de física. Lasvariaciones de toda clase de fenómenos podrían, en lo sucesivo, estudiarse con esta técnica. Seabría una gran puerta al conocimiento de los fenómenos físicos. ¡La física y la mecánica habíanencontrado su herramienta! La cual era matemática.
Consecuencia: el ‘movimiento’, excluido frecuentemente de las matemáticas, hacía una en-trada triunfal. A fines del siglo XVII, el mundo cristalizado de las figuras de la Grecia antigua seanimó. Se pasó de la fotografía al cine.
La segunda: ‘N y L’ hicieron de ese nuevo campo un ‘cálculo’, provisto de reglas, el cálculoinfinitesimal. La derivación se convirtió en una operación. Operación de nuevo género que actua-ba no sobre números sino sobre cantidades variables relacionadas con curvas. Operación que sepodía efectuar con ayuda de un algoritmo sistemático.”
(Denis Guedj, El teorema del loro. Ed. Anagrama, Barcelona (2000), pp. 376–377.)


Índice general
1. Números reales 11.1. Sistemas numéricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1. Números naturales: principio de inducción . . . . . . . . . . . . . . . . . . 11.1.2. Números enteros y racionales . . . . . . . . . . . . . . . . . . . . . . . . . 31.1.3. Números reales: operaciones algebraicas . . . . . . . . . . . . . . . . . . . 4
1.2. Ordenación de los números reales . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2.1. Desigualdades fundamentales en R . . . . . . . . . . . . . . . . . . . . . . 51.2.2. Valor absoluto de un número real. Desigualdades básicas . . . . . . . . . . . 61.2.3. Conjuntos acotados en R. El axioma del supremo . . . . . . . . . . . . . . . 81.2.4. Propiedad arquimediana de R: consecuencias . . . . . . . . . . . . . . . . . 81.2.5. Números irracionales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.6. Intervalos en R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3. Apéndice: expresión decimal de un número real . . . . . . . . . . . . . . . . . . . . 111.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2. Funciones reales de una variable real. Generalidades 172.1. Primeros conceptos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.1.1. Funciones. Clases particulares de funciones . . . . . . . . . . . . . . . . . . 172.1.2. Operaciones con funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.1.3. Ejemplos de funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.2. Funciones trascendentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.2.1. Funciones exponencial y logarítmica . . . . . . . . . . . . . . . . . . . . . . 242.2.2. Funciones trigonométricas. Funciones trigonométricas inversas . . . . . . . . 262.2.3. Funciones hiperbólicas. Funciones hiperbólicas inversas . . . . . . . . . . . 31
2.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3. Sucesiones de números reales 373.1. Sucesiones convergentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.1.1. Definición de sucesión. Sucesiones acotadas y sucesiones convergentes. Lí-mite de una sucesión convergente . . . . . . . . . . . . . . . . . . . . . . . 37
3.1.2. Sucesiones monótonas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.1.3. Operaciones con sucesiones . . . . . . . . . . . . . . . . . . . . . . . . . . 433.1.4. Desigualdades y límites. Regla del sandwich . . . . . . . . . . . . . . . . . 463.1.5. Subsucesiones. Teorema de Bolzano-Weierstrass . . . . . . . . . . . . . . . 483.1.6. Sucesiones de Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.2. Límites infinitos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
V

VI ÍNDICE GENERAL
3.2.1. Sucesiones divergentes. Propiedades. Operaciones con sucesiones divergentes 503.2.2. La recta ampliada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 543.2.3. Límite superior y límite inferior de una sucesión. Límites de oscilación . . . 56
3.3. Límites de sucesiones y funciones elementales . . . . . . . . . . . . . . . . . . . . . 603.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4. Continuidad 634.1. Límites de funciones reales de una variable real . . . . . . . . . . . . . . . . . . . . 63
4.1.1. Definición de límite de una función. Unicidad del límite. Límite por sucesiones 634.1.2. Límites infinitos y límites en el infinito . . . . . . . . . . . . . . . . . . . . 654.1.3. Cálculo de límites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 664.1.4. Límites laterales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 684.1.5. Límites de funciones elementales . . . . . . . . . . . . . . . . . . . . . . . 694.1.6. Límites y desigualdades . . . . . . . . . . . . . . . . . . . . . . . . . . . . 704.1.7. Condición de Cauchy para funciones . . . . . . . . . . . . . . . . . . . . . 724.1.8. Límites de restricciones y extensiones de funciones . . . . . . . . . . . . . . 73
4.2. Funciones continuas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 734.2.1. Definiciones de continuidad. Operaciones con funciones continuas . . . . . . 734.2.2. Propiedades de las funciones continuas: teoremas de Weierstrass, Bolzano y
Darboux; funciones continuas monótonas . . . . . . . . . . . . . . . . . . . 754.2.3. Clasificación de discontinuidades . . . . . . . . . . . . . . . . . . . . . . . 794.2.4. Continuidad uniforme. Teorema de Heine. Extensión de funciones continuas 80
4.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
5. Derivación 855.1. Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5.1.1. Concepto de derivada. Derivadas laterales . . . . . . . . . . . . . . . . . . . 855.1.2. Interpretación geométrica y física de la derivada . . . . . . . . . . . . . . . 865.1.3. Derivabilidad y continuidad . . . . . . . . . . . . . . . . . . . . . . . . . . 875.1.4. Cálculo de derivadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 875.1.5. Derivabilidad de la función inversa . . . . . . . . . . . . . . . . . . . . . . 88
5.2. El teorema del valor medio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 905.2.1. Extremos relativos y derivada nula . . . . . . . . . . . . . . . . . . . . . . . 905.2.2. Teoremas de Rolle y del valor medio (o de los incrementos finitos) . . . . . . 92
5.3. Aplicaciones del teorema del valor medio . . . . . . . . . . . . . . . . . . . . . . . 935.3.1. Funciones con derivada acotada y con derivada nula . . . . . . . . . . . . . 935.3.2. Signo de la derivada y monotonía . . . . . . . . . . . . . . . . . . . . . . . 945.3.3. Propiedad del valor intermedio para derivadas . . . . . . . . . . . . . . . . . 955.3.4. Teorema del valor medio generalizado. Regla de L’Hospital . . . . . . . . . 97
5.4. Aproximación polinómica local . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1005.4.1. Desarrollos polinómicos. Teorema de Taylor-Young . . . . . . . . . . . . . . 1005.4.2. Aplicación al cálculo de límites . . . . . . . . . . . . . . . . . . . . . . . . 1045.4.3. Fórmula de Taylor con resto . . . . . . . . . . . . . . . . . . . . . . . . . . 1055.4.4. Extremos relativos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1085.4.5. Convexidad y concavidad . . . . . . . . . . . . . . . . . . . . . . . . . . . 1105.4.6. Representación gráfica de funciones . . . . . . . . . . . . . . . . . . . . . . 113
5.5. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115

ÍNDICE GENERAL VII
6. La integral de Riemann 1196.1. Definición (de Darboux) de la integral de Riemann . . . . . . . . . . . . . . . . . . 119
6.1.1. Definición de integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1196.1.2. Propiedades básicas de las sumas de Darboux . . . . . . . . . . . . . . . . . 1226.1.3. Existencia de la integral: condición de Riemann. Integrabilidad de las funcio-
nes monótonas y de las funciones continuas . . . . . . . . . . . . . . . . . . 1246.1.4. Sumas de Riemann. Definición de integrabilidad de Riemann: comparación
con la de Darboux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1276.2. Propiedades básicas de la integral de Riemann . . . . . . . . . . . . . . . . . . . . . 130
6.2.1. Operaciones con funciones integrables . . . . . . . . . . . . . . . . . . . . . 1306.2.2. Integración en subintervalos . . . . . . . . . . . . . . . . . . . . . . . . . . 1336.2.3. Teoremas de la media (o del valor medio) del cálculo integral . . . . . . . . 137
6.3. Teoremas fundamentales del cálculo integral . . . . . . . . . . . . . . . . . . . . . . 1396.3.1. Regla de Barrow (primer teorema fundamental del cálculo integral) . . . . . 1396.3.2. Continuidad y derivabilidad de una integral con extremo de integración variable141
6.4. Apéndice: construcción de las funciones logarítmica y exponencial . . . . . . . . . . 1466.5. Apéndice: cálculo de áreas, longitudes y volúmenes . . . . . . . . . . . . . . . . . . 1496.6. Apéndice: cálculo de primitivas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
6.6.1. Métodos básicos de integración . . . . . . . . . . . . . . . . . . . . . . . . 1536.6.2. Integrales elementales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1536.6.3. Integración de algunos tipos de funciones . . . . . . . . . . . . . . . . . . . 154
6.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
7. Integrales impropias 1617.1. Definición de integral impropia y primeras propiedades . . . . . . . . . . . . . . . . 161
7.1.1. Integrales impropias: definición de integrales impropias convergentes, diver-gentes, oscilantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
7.1.2. Primeras propiedades de las integrales impropias . . . . . . . . . . . . . . . 1657.2. Convergencia de integrales impropias . . . . . . . . . . . . . . . . . . . . . . . . . 166
7.2.1. Convergencia de integrales impropias con integrando no negativo. Criteriosde comparación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
7.2.2. Integrales impropias de integrando cualquiera: convergencia absoluta y con-vergencia condicional. Criterios de Abel y Dirichlet . . . . . . . . . . . . . . 167
7.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
8. Series numéricas 1718.1. Definición y primeras propiedades . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
8.1.1. Series: términos y sumas parciales. Series convergentes, divergentes y oscilantes1718.1.2. Linealidad de la convergencia de series . . . . . . . . . . . . . . . . . . . . 1738.1.3. Series telescópicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1748.1.4. Condición necesaria para la convergencia de una serie. Condición general de
convergencia de Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1748.2. Series de términos no negativos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
8.2.1. Convergencia de una serie de términos no negativos. Criterios de comparación 1758.2.2. Otros criterios. Convergencia de algunas series de términos no negativos . . . 177
8.3. Series de términos cualesquiera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1798.3.1. Series alternadas: criterio de Leibniz . . . . . . . . . . . . . . . . . . . . . . 179

VIII ÍNDICE GENERAL
8.3.2. Series absolutamente convergentes . . . . . . . . . . . . . . . . . . . . . . . 1818.3.3. Criterios generales de Cauchy (de la raíz) y de D’Alembert (del cociente) . . 1828.3.4. Criterios de convergencia de Abel y Dirichlet . . . . . . . . . . . . . . . . . 183
8.4. Propiedad conmutativa para series . . . . . . . . . . . . . . . . . . . . . . . . . . . 1838.5. Apéndice: sumación de series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1858.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
9. Series de potencias. Desarrollos en serie de Taylor 1899.1. Series de potencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
9.1.1. Convergencia de las series de potencias . . . . . . . . . . . . . . . . . . . . 1899.1.2. Propiedades de las funciones representadas por series de potencias . . . . . . 192
9.2. Desarrollos en serie de Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1969.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
10. Sucesiones y series de funciones 20110.1. Sucesiones y series de funciones: convergencia puntual . . . . . . . . . . . . . . . . 20110.2. Convergencia uniforme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
10.2.1. Definición de convergencia uniforme . . . . . . . . . . . . . . . . . . . . . 20310.2.2. Convergencia uniforme y continuidad . . . . . . . . . . . . . . . . . . . . . 20410.2.3. Convergencia uniforme e integración . . . . . . . . . . . . . . . . . . . . . 20510.2.4. Convergencia uniforme y derivación . . . . . . . . . . . . . . . . . . . . . . 206
10.3. Una condición suficiente para la convergencia uniforme . . . . . . . . . . . . . . . . 208
11. Funciones elementales 20911.1. Funciones elementales y series de potencias . . . . . . . . . . . . . . . . . . . . . . 209
11.1.1. Función exponencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21011.1.2. Función logarítmica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21111.1.3. Funciones exponencial y logarítmica de base cualquiera . . . . . . . . . . . 21211.1.4. Funciones trigonométricas . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
11.2. Funciones trigonométricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21711.3. Apéndice: el número π es irracional . . . . . . . . . . . . . . . . . . . . . . . . . . 221
Retratos 223
Bibliografía 233
Índice de símbolos 235
Índice alfabético 237

Capítulo 1
Números reales
1.1. Sistemas numéricos1.1.1. Números naturales: principio de inducción
Los números 1, 2, 3, . . . , reciben el nombre de números naturales. Con ellos se realizan dos ope-raciones, la suma de números naturales y el producto de números naturales, que dan como resultadootro número natural perfectamente definido. Para dos números naturales cualesquiera m y n, su sumasuele representarse por m+n y su producto por m ·n o mn (si no hay lugar a confusión). Si denotamoscon N el conjunto de todos los números naturales, podemos pensar en la suma y el producto comoaplicaciones del producto cartesiano N×N en N:
+ : N×N → N, · : N×N → N.(m,n) → m+n (m,n) → m ·n
A continuación describimos las propiedades fundamentales de estas operaciones (m, n, p repre-sentan números naturales cualesquiera):
• Propiedad asociativa de la suma: (m+n)+ p= m+(n+ p).
• Propiedad conmutativa de la suma: m+n= n+m.
• Propiedad asociativa del producto: (mn)p= m(np).
• Propiedad conmutativa del producto: mn= nm.
• Elemento neutro (identidad) para el producto: hay un número natural, que denotamos por 1,tal que 1 ·n= n ·1= n.
• Propiedad distributiva del producto respecto de la suma: m(n+ p) = mn+mp.
Se puede asimismo comparar el tamaño de dos números naturales cualesquiera y establecer así unarelación de orden en N. Suele escribirse m ≤ n para indicar que m es menor o igual que n (o lo quees lo mismo, que n es mayor o igual que m, lo que también se escribe n ≥ m); y se escribe m < n (on>m) para expresar que m es estrictamente menor que n, es decir, que m es menor (y distinto) que n.Esta relación cumple las siguientes propiedades (m, n, p representan números naturales cualesquiera):
• Propiedad reflexiva: m≤ m.
1

2 Capítulo 1. Números reales
• Propiedad antisimétrica: si m≤ n y n≤ m, entonces m= n.
• Propiedad transitiva: si m≤ n y n≤ p, entonces m≤ p.
• Propiedad de orden total: siempre es m≤ n o n≤ m.
La ordenación de N no es independiente de la suma y el producto: para dos números naturales m,n se tiene m> n si y solo si m= n+ p para algún número natural p.
Principio de buena ordenación. Todo conjunto no vacío de números naturales posee un elementomínimo, es decir, dado S⊆ N no vacío, existe un elemento m en S tal que m≤ n para todo n ∈ S.
El principio de inducción. Esta es una de las propiedades de N que más vamos a usar durante elcurso. Se puede enunciar así:
• si un conjunto de números naturales contiene a 1 y por cada elemento n del conjunto tambiénn+1 pertenece a él, entonces el conjunto es N. Es decir, dado S ⊆ N tal que 1 ∈ S y n+1 ∈ Ssiempre que n ∈ S, es S= N.
En la práctica, el principio de inducción suele aplicarse en términos de propiedades más que en térmi-nos de conjuntos:
• supongamos que para cada número natural n se tiene una propiedad Pn que puede ser cierta ofalsa. Supongamos además que:
a) P1 es cierta;b) si para algún n ∈ N la propiedad Pn es cierta, entonces la propiedad Pn+1 también es
cierta.
Entonces, Pn es cierta para todo n ∈ N.
La siguiente variante se llama principio de inducción completa:
• supongamos que para cada número natural n se tiene una propiedad Pn que puede ser cierta ofalsa. Supongamos además que:
a) P1 es cierta;b) si para algún n∈N todas las propiedades P1, P2, . . . , Pn son ciertas, entonces Pn+1 también
es cierta.
Entonces, Pn es cierta para todo n ∈ N.
Es un hecho notable, señalado por el matemático italiano Peano en su obra Arithmetices principianova methodo exposita (Bocca, 1889) que todas las propiedades de los números naturales puedendeducirse de las siguientes, llamadas en su honor axiomas de Peano para los números naturales:
• Para todo número natural n existe otro número natural, ns, que se llama siguiente o sucesorde n.
• Existe un número natural, que denotamos por 1, tal que ns '= 1 cualquiera que sea el númeronatural n.

1.1. Sistemas numéricos 3
• Para números naturales cualesquiera m y n, es ms = ns si y solo si m= n.
• Principio de inducción: si un conjunto S de números naturales contiene a 1 y por cada elementon ∈ S también ns ∈ S, entonces S= N.
Las operaciones de suma y producto y la relación de orden se definen entonces en términos de si-guientes, véase por ejemplo [BIRKHOFF-MACLANE].
1.1.2. Números enteros y racionalesEl conjunto de los números enteros . . . ,−3,−2,−1, 0, 1, 2, 3, . . . , que amplía el de los naturales,
se denota por Z. En él hay definidas dos operaciones, suma y producto, y una relación de orden. Laspropiedades de la suma, el producto y el orden para los números naturales también las cumplen losnúmeros enteros. Y además:
• Elemento neutro (cero) para la suma: hay un número entero, que denotamos por 0, tal que0+n= n+0= n para cualquier entero n.
• Elemento opuesto para la suma: para cada entero n hay otro número entero (y solo uno), quedenotamos por −n, tal que (−n)+n= n+(−n) = 0.
Estas propiedades y las anteriores de la suma y el producto se resumen diciendo que Z, con estas dosoperaciones, es un anillo conmutativo. Para la relación de orden podemos añadir:
• Relación del orden con la suma: si a≤ b, entonces a+ c≤ b+ c.
• Relación del orden con el producto por números no negativos: si a≤ b y c≥ 0, entonces ac≤ bc.
Principio de buena ordenación de los conjuntos acotados inferiormente. El principio de buenaordenación de los números naturales no es válido para los números enteros: por ejemplo, el propioconjunto Z no tiene elemento mínimo, pues para cada n ∈ Z es n− 1 < n. Sin embargo, hay unapropiedad análoga para cierta clase de subconjuntos: los acotados inferiormente.
Un subconjunto S ⊆ Z no vacío se dice que está acotado inferiormente si existe algún númeroentero k ∈ Z tal que para todo n ∈ Z, k ≤ n. Todo conjunto no vacío S ⊆ Z acotado inferiormenteposee un elemento mínimo, es decir, existe un elemento m en S tal que para todo n ∈ S, m≤ n.
Un principio de inducción. En Z puede hablarse del siguiente a un número entero, en el sentidode que entre n y n+1 no hay ningún otro número entero. No se cumple, sin embargo, el principio deinducción, sino una propiedad similar aunque más débil:
• si un conjunto de números enteros contiene un número k y que por cada elemento n del conjuntotambién n+1 pertenece a él, entonces el conjunto contiene a todos los números enteros mayoreso iguales que k. Es decir, si k∈ S⊆Z y n+1∈ S siempre que n∈ S, entonces S⊇ {n∈Z : n≥ k}.
Los números racionales. En Z es posible la resta, pero no la división. Esta operación es posible(dividiendo por elementos distintos de 0) en el conjunto Q de los números racionales, que son co-cientes de números enteros (con denominador no nulo). En este conjunto están definidas la suma yel producto, y una relación de orden. Las propiedades de la suma, el producto y el orden para losnúmeros enteros también las cumplen los números racionales. Y además:

4 Capítulo 1. Números reales
• Elemento inverso para el producto: si a '= 0, hay un número racional (y solo uno) que denota-mos por a−1 o 1
a , tal que a−1a= aa−1 = 1.
Esta y las anteriores propiedades de la suma, el producto y el orden se resumen diciendo que Q es uncuerpo conmutativo totalmente ordenado.
Señalemos que en Q no hay ninguna propiedad similar al principio de inducción. Ni siquierapuede hablarse del siguiente a un número dado: concretamente, entre dos números racionales distintossiempre hay otro número racional. En efecto: si a< b, es fácil comprobar que a< a+b
2 < b.Es fácil descubrir huecos enQ: por ejemplo, ningún número racional puede representar la longitud
de la diagonal de un cuadrado de lado 1. Dicho de otra forma, no existe ningún número racional atal que a2 = 2. En efecto: sea a ∈Q; podemos escribirlo como a= m
n , con m y n enteros sin factoresprimos comunes y n '= 0. Si fuera a2 = 2 se seguiría que m2 = 2n2, luego m2 es par, y también debeserlo m; pero entonces m= 2p para algún entero p, y sustituyendo en m2 = 2n2 queda 4p2 = 2n2. Esdecir, 2p2 = n2; luego n2 es par, y también deber serlo n. En resumen, m y n son pares; pero habíamossupuesto que m y n no tenían factores comunes. La contradicción viene de suponer que a2 = 2.
Para poder hablar de números que representen estas cantidades se necesita una nueva ampliaciónde los sistemas numéricos. Así pasamos a considerar el conjunto R de los números reales o, másexactamente, las propiedades de R (sin entrar en su naturaleza: no decimos qué es un número real,sino cómo se manejan los números reales).
1.1.3. Números reales: operaciones algebraicasEn R hay dos operaciones, suma y producto, respecto de las cuales es un cuerpo conmutativo.
Esto significa que si a, b, c son números reales cualesquiera, se cumple:
a) Propiedad asociativa de la suma: (a+b)+ c= a+(b+ c).
b) Propiedad conmutativa de la suma: a+b= b+a.
c) Elemento neutro (cero) para la suma: hay un número real, que denotamos por 0, tal que 0+a=a+0= a.
d) Elemento opuesto para la suma: hay un número real (y solo uno), que denotamos por −a, talque (−a)+a= a+(−a) = 0.
e) Propiedad asociativa del producto: (ab)c= a(bc).
f) Propiedad conmutativa del producto: ab= ba.
g) Elemento neutro (identidad) para el producto: hay un número real distinto de 0, que denotamospor 1, tal que 1 ·a= a ·1= a.
h) Elemento inverso para el producto: si a '= 0, hay un número real (y solo uno) que denotamospor a−1 o 1/a, tal que a−1a= aa−1 = 1.
i) Propiedad distributiva del producto respecto de la suma: a(b+ c) = ab+ac.
Todas las propiedades que usamos habitualmente se deducen de estas. Por ejemplo, veamos en detallecómo se prueba que para todo número real x es x ·0= 0:
x ·0 c)= x(0+0) i)
= x ·0+ x ·0

1.2. Ordenación de los números reales 5
y de d) se sigue
0=−(x ·0)+ x ·0=−(x ·0)+ [(x ·0+ x ·0)] a)= [−(x ·0)+ x ·0]+ x ·0 d)= 0+ x ·0 c)
= x ·0.Los números reales se pueden representar gráficamente como puntos de una recta. Esto permite
ver, sobre todo, las relaciones de orden.
−2−2 −1 0 13121 π2
62 e 3 4 5 6 7 8 9 10
γ π2 π π2
1√2
√2
log2√3
La recta real, con algunos números señalados
1.2. Ordenación de los números reales1.2.1. Desigualdades fundamentales en R
EnR hay una relación de orden que extiende la de los números racionales. Las propiedades básicasson las siguientes (a, b, c representan números reales cualesquiera):
• Propiedad reflexiva: a≤ a.
• Propiedad antisimétrica: a≤ b y b≤ a=⇒ a= b.
• Propiedad transitiva: a≤ b y b≤ c=⇒ a≤ c.
• Propiedad de orden total: a≤ b ó b≤ a.
• Relación con la suma: a≤ b=⇒ a+ c≤ b+ c.
• Relación con el producto: c≥ 0, a≤ b=⇒ ac≤ bc; en particular, c≥ 0, b≥ 0=⇒ bc≥ 0.Dados a,b ∈ R, se escribe a< b si a≤ b y a '= b.
De estas propiedades pueden deducirse sucesivamente (es un ejercicio recomendable) las siguien-tes desigualdades, que utilizaremos de aquí en adelante sin más comentario según las necesitemos. Enlo que sigue, a, b, c, d, a1,. . . , an representan números reales cualesquiera.
• a≤ b, b< c=⇒ a< c.
• a< b, b≤ c=⇒ a< c.
• a< b=⇒ a+ c< b+ c.
• Suma de desigualdades: a≤ b, c≤ d =⇒ a+c≤ b+d, siendo entonces a+c= b+d si y solosi a= b y c= d.

6 Capítulo 1. Números reales
• a1, . . . ,an ≥ 0=⇒ a1+ · · ·+an ≥ 0; además, a1+ · · ·+an > 0 excepto si a1 = · · · = an = 0.
• a> 0, b> 0=⇒ ab> 0.
• a> 0, b< 0=⇒ ab< 0.
• a< 0, b< 0=⇒ ab> 0.
• a2 ≥ 0.• a '= 0=⇒ a2 > 0.
• 2ab≤ a2+b2.
• 1> 0, −1< 0.
• a< b, c> 0=⇒ ac< bc.
• a< b, c< 0=⇒ ac> bc.
• a≤ b, c≤ 0=⇒ ac≥ bc.
• 0≤ a≤ b=⇒ a2 ≤ b2.
• 0≤ a< b=⇒ a2 < b2.
• a> 0 ⇐⇒ 1a
> 0.
• 0< a≤ b=⇒ 1b≤ 1a.
• a≤ b< 0=⇒ 1b≤ 1a.
1.2.2. Valor absoluto de un número real. Desigualdades básicasEl valor absoluto de un número real a es el número real no negativo
|a| ={a, si a≥ 0;−a, si a≤ 0.
Gráficamente corresponde a la distancia de a al origen.
Definición 1.2.1 (distancia entre números reales). Dados a, b ∈ R, se llama distancia entre a y bal número real no negativo |a−b|.
Gráficamente, |a−b| mide la distancia geométrica entre los puntos a y b.Recogemos las propiedades del valor absoluto que son de mayor interés para el resto del curso. Si
a, b, c, d denotan números reales cualesquiera, se verifica:
• |1| = 1; |−1| = 1.
• |−a| = |a|.

1.2. Ordenación de los números reales 7
• −|a|≤ a≤ |a|.• |a|≤ b ⇐⇒ −b≤ a≤ b.
• |a| < b ⇐⇒ −b< a< b.
• |a| > b ⇐⇒ a> b ó a<−b.• |a|≥ 0.• |a| = 0 ⇐⇒ a= 0.
• |ab| = |a| · |b|.• |a−1| = |a|−1 siempre que a '= 0.
• a2 ≤ b2 ⇐⇒ |a|≤ |b|.• a2 = b2 ⇐⇒ |a| = |b|.
Desigualdad triangular. Si a y b son números reales cualesquiera,
|a+b|≤ |a|+ |b|.Esta desigualdad es muy útil, como iremos viendo. La demostración es sencilla: según las propiedadesanteriores,
−|a|≤ a≤ |a|, −|b|≤ b≤ |b|.Sumamos las desigualdades y resulta −|a|− |b|≤ a+b≤ |a|+ |b|, es decir,
−(|a|+ |b|)≤ a+b≤ (|a|+ |b|).Usamos otra de las propiedades anteriores (|c| ≤ d ⇐⇒ −d ≤ c ≤ d, cambiando la notación) ydeducimos que |a+b|≤ |a|+ |b|.
Desigualdad triangular inversa. Si a y b son números reales cualesquiera,∣∣∣|a|− |b|∣∣∣≤ |a−b|.
Esta desigualdad es consecuencia de la desigualdad triangular. En efecto: aplicando la desigualdadtriangular a los números b y a−b, resulta
|a| = |(a−b)+b|≤ |a−b|+ |b|,es decir,
|a|− |b|≤ |a−b|.Cambiando el papel de a y b, tenemos |b|− |a|≤ |b−a| = |a−b|, es decir,
−(|a|− |b|)≤ |a−b|.
De aquí se deduce que∣∣∣|a|− |b|
∣∣∣≤ |a−b|.

8 Capítulo 1. Números reales
1.2.3. Conjuntos acotados en R. El axioma del supremo
Dado un subconjunto S de R y un número real a, si a ≤ s para todo s ∈ S se dice que a es unacota inferior de S y que S está acotado inferiormente (por a). Si b es otro número real y b ≥ s paratodo s ∈ S, se dice que b es una cota superior de S y que S está acotado superiormente (por b). Si unconjunto S está acotado superior e inferiormente, se dice que está acotado.
Un número real m se dice que es el mínimo de un conjunto S si pertenece al conjunto y es unacota inferior. Es decir, si m ∈ S y m≤ s para todo s ∈ S. Se escribe entonces m=mınS.
Un número real M se dice que es el máximo de un conjunto S si pertenece al conjunto y es unacota superior. Es decir, si M ∈ S y M ≥ s para todo s ∈ S. En ese caso, se escribe M =maxS.
Un número real a se dice que es el ínfimo de un conjunto S si es la mayor cota inferior del S. Esdecir, si a ≤ s para todo s ∈ S y cada a′ > a no es cota inferior de S; de modo que se tendrá a′ > s′para algún s′ ∈ S. En ese caso, se escribe a= ınfS.
Dicho de otra forma, el ínfimo de un conjunto es el máximo del conjunto de cotas inferiores delprimero. Nótese que si a= ınfS, será a=mınS si y solo si a ∈ S.
Un número real b se dice que es el supremo de un conjunto S si es la menor cota superior del S.Es decir, si b≥ s para todo s ∈ S y cada b′ < b no es cota superior de S; de modo que se tendrá b′ < s′para algún s′ ∈ S. Se escribe b= supS.
Dicho de otra forma, el supremo de un conjunto es el mínimo del conjunto de cotas superiores delprimero. Nótese que si b= supS, será b=maxS si y solo si a ∈ S.
El axioma del supremo, o axioma de completitud de R, es la siguiente propiedad que caracterizala diferencia entre Q y R:
• Todo subconjunto no vacío de R acotado superiormente tiene supremo.
La propiedad simétrica (todo subconjunto no vacío de R acotado inferiormente tiene ínfimo) es con-secuencia de lo anterior.
1.2.4. Propiedad arquimediana de R: consecuencias
Teorema 1.2.2 (propiedad arquimediana de R). Dados dos números reales a, b, con a > 0, existealgún número natural n tal que na> b.
Demostración. Sean a,b∈R, con a> 0. Razonemos por reducción al absurdo: supongamos que la te-sis no es cierta, es decir, na≤ b para todo número natural n, y veamos que se llega a una contradicción.En tal caso, el conjunto S= {na : n∈N}, que no es vacío, estaría acotado superiormente (por b), luegopor el axioma del supremo tendría supremo. Sea s este supremo, es decir, s= supS= sup{na : n∈N}.Puesto que a > 0, s− a < s; según la definición de supremo, s− a ya no puede ser cota superior delconjunto S, de modo que existirá algún elemento en S estrictamente mayor que s−a. Dicho elementoserá de la forma ma con m ∈ N, y así s− a < ma. Pero esto implica que s < ma+ a = (m+ 1)a yobviamente (m+1)a ∈ S, con lo cual s no es una cota superior de S. Hemos llegado a una contradic-ción.
Aplicada al caso particular a = 1, la propiedad arquimediana muestra que el conjunto N de losnúmeros naturales no está acotado superiormente por ningún número real.
Como consecuencia de la propiedad arquimediana se puede probar que todo número real estácomprendido entre dos enteros consecutivos.

1.2. Ordenación de los números reales 9
Teorema 1.2.3 (parte entera de un número real). Dado x∈R, existe un número entero (y uno solo),que suele denotarse con [x], tal que
[x]≤ x< [x]+1.
El número [x] se llama la parte entera de x.
Demostración. La desigualdad del enunciado equivale a decir que [x] es el mayor número entero quees menor o igual que x. Para probar que existe, podemos utilizar uno cualquiera de los siguientescaminos:
Primer camino. Comenzamos por observar que todo conjunto no vacío de números enteros aco-tado superiormente tiene un elemento máximo, como se deduce del principio de buena ordenación delos conjuntos minorados sin más que tomar opuestos. Pero el conjunto
S= {n ∈ Z : n≤ x}
es no vacío, pues por la propiedad arquimediana existe n ∈ N tal que n > −x y así −n < x, luego−n ∈ S; además, S está acotado superiormente (por x o por cualquier número natural superior a x, sino queremos salirnos de Z). Por lo tanto, S tiene un elemento máximo, llamémosle m. Como m∈ S, setendrá m≤ x. Y como m es el máximo de S y m<m+1, se deduce que m+1 /∈ S, es decir, x<m+1.
Segundo camino. Utilizamos que todos los números naturales son mayores o iguales que 1 (de-mostrarlo por inducción) y que los números naturales son justamente los enteros positivos. Llamandonuevamente S al conjunto de enteros menores o iguales que x, S es no vacío por el argumento anteriory está acotado superiormente por x; aplicando el axioma del supremo, S tiene un supremo, al quevamos a llamar s. Como s−1 ya no es cota superior de S, por ser estrictemente menor que s, existirám ∈ S tal que s−1< m≤ s. Pero m también es cota superior de S, dado que si algún n ∈ S verificasen > m obtendríamos m < n ≤ s < m+ 1, de donde 0 < n−m < 1, y n−m sería un entero positivomenor que 1, imposible. Por tanto vemos que hay un elemento de S que es cota superior de S, es decir,que es el máximo de S, y como antes deberá cumplir m≤ x< m+1.
La propiedad arquimediana permite también deducir cómo están distribuidos en R los númerosracionales.
Teorema 1.2.4 (densidad deQ enR). Dados dos números reales a, b, con a< b, existe algún númeroracional r tal que a< r < b.
Observación. Si existe tal r, podrá escribirse en la forma r = m/n con m ∈ Z y n ∈ N, de modo quetenemos que encontrar m ∈ Z y n ∈ N tales que a< m/n< b o, lo que es lo mismo, na< m< nb. Esintuitivamente claro, pensando en la representación gráfica de R, que entre dos números a distanciamayor que 1 siempre se puede incluir un número entero (suponiendo los dos números positivos, porejemplo, superponiendo el segmento unidad consigo mismo hacia la derecha, la primera vez quesobrepasemos el número más cercano al origen, no habremos sobrepasado el otro número). Esta es laidea que vamos a tratar de utilizar.
Demostración. La propiedad arquimediana aplicada a b−a> 0 y a 1 nos asegura la existencia de unn ∈ N tal que n(b−a) > 1, con lo cual nb> na+1.
Sea ahora S = {p ∈ Z : p > na}. Este es un conjunto no vacío (¿por qué?) de números enterosacotado inferiormente enZ (¿por qué?); por lo tanto, posee un elemento mínimo. Llamandom=mınS,puesto que m∈ S es m> na; y como es el mínimo de S, m−1 no puede estar en S, lo que significa quem−1≤ na. Pero entonces m≤ na+1< nb; así pues, na< m< nb y finalmente a< m/n< b.

10 Capítulo 1. Números reales
1.2.5. Números irracionalesLos números reales que no son racionales se llaman números irracionales. Veamos que existen
números irracionales. Ya sabemos que no hay ningún número racional cuyo cuadrado es 2, así quevamos a probar que sí hay un número real positivo cuyo cuadrado es 2. Este número tendrá que serirracional.
Consideremos el conjunto S = {x ∈ R : x≥ 0, x2 ≤ 2}. Este es un conjunto no vacío de númerosreales (por ejemplo, 1 ∈ S). Y está acotado superiormente, ya que si x ∈ S,
x2 ≤ 2< 4= 22,
de donde se deduce que x≤ 2. Es decir, 2 es una cota superior de S. Luego el conjunto S tiene supremo.Sea v= supS; como 1 ∈ S, v≥ 1> 0. Comprobemos que no puede ser v2 > 2 ni v2 < 2.Si v2 > 2, entonces tomando h=mın{v,(v2−2)/2v} se tendría h> 0, v−h≥ 0 y
(v−h)2 = v2−2vh+h2 > v2−2vh≥ v2− (v2−2) = 2≥ x2,
para todo x ∈ S, de donde v− h ≥ x. Pero v− h no puede ser cota superior del conjunto S porque esmenor que su supremo.
Si v2 < 2, entonces tomando h=mın{v,(2− v2)/3v} se tendría h> 0, v+h> 0 y
(v+h)2 = v2+2vh+h2 ≤ v2+2vh+ vh= v2+3vh≤ v2+(2− v2) = 2,
o sea, v+h ∈ S. Pero esto no puede ser, porque v+h> v y en cambio para todo x ∈ S se tiene x≤ v.Queda así como única posibilidad v2 = 2. Este número positivo cuyo cuadrado es 2 se representa
por√2.
Teorema 1.2.5 (densidad de R \Q en R). Dados dos números reales a, b, con a < b, existe algúnnúmero irracional x tal que a< x< b.
Demostración. Sea y∈R\Q cualquiera (ya hemos visto que existe alguno). Puesto que a−y< b−y,según el teorema 1.2.4 existe algún r ∈Q tal que a−y< r< b−y, de donde a< r+y< b. Por último,r+ y es un número irracional, ya que si fuera racional se tendría y= (r+ y)+(−r) ∈Q.
1.2.6. Intervalos en RReciben el nombre de intervalos los subconjuntos de R definidos del siguiente modo (a, b son
números reales cualesquiera):
• intervalo acotado y abierto: (a,b) = {x ∈ R : a< x< b};• intervalo acotado, cerrado por la izquierda y abierto por la derecha: [a,b) = {x∈R : a≤ x< b};• intervalo acotado, abierto por la izquierda y cerrado por la derecha: (a,b] = {x∈R : a< x≤ b};• intervalo acotado y cerrado: [a,b] = {x ∈ R : a≤ x≤ b};• intervalo abierto, acotado inferiormente pero no superiormente: (a,+∞) = {x ∈ R : x> a};• intervalo cerrado, acotado inferiormente pero no superiormente: [a,+∞) = {x ∈ R : x≥ a};• intervalo abierto, acotado superiormente pero no inferiormente: (−∞,b) = {x ∈ R : x< b};

1.3. Apéndice: expresión decimal de un número real 11
• intervalo cerrado, acotado superiormente pero no inferiormente: (−∞,b] = {x ∈ R : x≤ b};• intervalo no acotado inferior ni superiormente: (−∞,+∞) = R.
Nótese que si a> b, (a,b) = /0, de modo que el conjunto vacío es un intervalo.Los intervalos de R se caracterizan por la propiedad de los valores intermedios:
Proposición 1.2.6 (caracterización de los intervalos reales). Un subconjunto I de R es un intervalosi y solo si dados x,y ∈ I, cada z ∈ R tal que x ≤ z ≤ y también pertenece a I (dicho de otro modo:con cada dos valores están también todos los intermedios).
Demostración. Para probar la implicación directa basta un examen de todos los casos. Por ejemplo,si I = (a,b), x, y ∈ I, y z ∈ R es tal que x ≤ z ≤ y, se tiene a < x ≤ z ≤ y < b, luego a < z < b y pordefinición z ∈ I.
La implicación inversa es trivial en el caso de que I = /0. Suponemos, pues, I '= /0. Pueden presen-tarse las siguientes situaciones: a) I es acotado; b) I es acotado superiormente pero no inferiormente;c) I es acotado inferiormente pero no superiormente; d) I no es acotado superior ni inferiormente.Veamos cada una de ellas.
a) I es acotado. Sea a = ınf I, b = sup I. Obviamente entonces (a,b) ⊆ I ⊆ [a,b], pues c ∈(a,b) ⇐⇒ a < c < b, y por definición de supremo e ínfimo existirán un x ∈ I con x < c y un y ∈ Icon c < y, luego c ∈ I; por otra parte, también por definición de supremo e ínfimo, de x ∈ I se siguea≤ x≤ b, o sea, x ∈ [a,b]. Ahora,
• si a,b ∈ I, [a,b] = (a,b)∪{a,b}⊆ I ⊆ [a,b], luego I = [a,b];
• si a ∈ I, b '∈ I, [a,b) = (a,b)∪{a}⊆ I ⊆ [a,b]\{b} = [a,b), luego I = [a,b);
• si a '∈ I, b ∈ I, (a,b] = (a,b)∪{b}⊆ I ⊆ [a,b]\{a} = (a,b], luego I = (a,b];
• si a '∈ I, b '∈ I, (a,b)⊆ I ⊆ [a,b]\{a,b} = (a,b), luego I = (a,b).b) I es acotado superiormente pero no inferiormente. Sea a = sup I, con lo que (−∞,a) ⊆ I ⊆
(−∞,a], pues para cada z ∈ I es z≤ a y dado z< a, existe y ∈ I con z< y (por definición de supremo)y existe x ∈ I con x< z (I no está acotado inferiormente), que con la hipótesis del enunciado da z ∈ I.En consecuencia,
• si a ∈ I, (−∞,a] = (−∞,a)∪{a}⊆ I ⊆ (−∞,a], luego I = (−∞,a];
• si a /∈ I, (−∞,a)⊆ I ⊆ (−∞,a]\{a} = (−∞,a), luego I = (−∞,a).Los restantes casos se analizan de forma análoga: en c) se obtiene I = (a,+∞) o I = [a,+∞), dondea= ınf I, y en d) queda I = R.
1.3. Apéndice: expresión decimal de un número realEn esta exposición seguimos esencialmente la que puede verse en [APOSTOL2, págs. 13–15].Los números reales de la forma
a0+a110 +
a2102 + · · ·+ an
10n ,
donde a0 es un número entero no negativo y a1, . . . , an son enteros que satisfacen 0 ≤ a j ≤ 9, seexpresan normalmente de la forma a0,a1a2 . . .an. Esta expresión se llama representación decimalfinita. Estos números son racionales, pero no todo número racional tiene una representación decimalfinita (véase [APOSTOL2, págs. 13–14]).

12 Capítulo 1. Números reales
Proposición 1.3.1 (aproximaciones decimales finitas de los números reales). Dado un número realx≥ 0, para todo n ∈ N existe un decimal finito rn = a0,a1a2 . . .an tal que
rn ≤ x< rn+110n .
En consecuencia,x= sup{rn : n ∈ N}.
Demostración. Para construir los rn basta tomar a0 = [x], ak = [10kx]− 10[10k−1x], 1 ≤ k ≤ n (verdetalles en [APOSTOL2, págs. 14–15]).
Por otra parte, x es cota superior de {rn : n ∈ N} por construcción, y es la menor de las cotassuperiores porque si y < x es posible encontrar un n ∈ N de manera que 10n >
1x− y (¿por qué?) y
para este n es rn > y (¿por qué?).
Que x es el supremo del conjunto {rn : n ∈ N} suele expresarse poniendo
x= a0,a1a2 . . .an . . .
y se dice entonces que a0,a1a2 . . .an . . . es una representación decimal infinita de x. En ciertos ca-sos, es posible obtener el mismo supremo para dos representaciones decimales infinitas distintas,ver [APOSTOL2, pág. 15].
Para x= 0, suele tomarse como representación decimal 0,00 . . .0 . . .; y para x< 0, se parte de unarepresentación decimal de −x y se coloca un signo − delante.
Hay una presentación más geométrica y computacional en [LAX, sec. 1.3].Si en lugar de potencias de 10 se utilizan potencias de 2, se obtiene la representación binaria
de los números reales; la representación hexadecimal resulta al tomar potencias de 16. Ambas sonmuy importantes (especialmente la primera) en relación con los ordenadores. Pueden verse detallesen [ABELLANAS-GALINDO, cap. 3] y [BARTLE-SHERBERT, pág. 73 y sigs.].
1.4. EjerciciosEjercicio 1.1. Sea x ∈ R. Demostrar que si |x| ≤ ε para todo ε > 0, entonces x = 0. ¿Qué númerosreales x cumplen que x≤ ε para todo ε > 0?
Ejercicio 1.2. Decir si cada una de las siguientes expresiones es cierta o falsa:
a)30∑j=1
j4 =30∑j=0
j4 b)100∑j=02= 200
c)20∑j=1
(2+ j2) = 2+20∑j=1
j2 d)100∑k=1
k2 =(100∑k=1
k)2
Ejercicio 1.3. Expresar con notación de sumatorio:a) 1
1 ·2 +12 ·3 +
13 ·4 + · · ·+ 1
10 ·11 b) 1+40+900+16000+250000+3600000
c) 1−2x+3x2−4x3+5x4 d) a5+a4b+a3b2+a2b3+ab4+b5
e) a5−a4b+a3b2−a2b3+ab4−b5 f) a0x4+a1x3+a2x2+a3x+a4

1.4. Ejercicios 13
Ejercicio 1.4. Sabiendo que 1j( j+1) =
1j− 1j+1, hallar la suma de
n∑j=1
1j( j+1) .
Ejercicio 1.5. Hallar las sumas siguientes (n ∈ N):
a)n∑j=1
(2 j−1) (usar la igualdad j2− ( j−1)2 = 2 j−1, j ∈ N).
b)n∑j=1
j (apoyarse en a)).
Ejercicio 1.6. Probar que xn−yn =(x−y)(xn−1+xn−2y+· · ·+xyn−2+yn−1) para cada n∈N, x,y∈R.Escribir el segundo miembro con notación de sumatorio. Esta expresión recibe el nombre de fórmulao ecuación ciclotómiica.
Ejercicio 1.7. Deducir de la ecuación ciclotómica la suma den∑j=0
x j, x '= 1. Hacer operaciones en la
expresión (1−x) n∑j=1
jx j para deducir la suma den∑j=1
jx j, x '= 1. Análogamente en (1−x) n∑j=1
j2x j para
deducir la suma den∑j=1
j2x j, x '= 1.
Ejercicio 1.8. Demostrar por inducción las propiedades siguientes (n ∈ N):a)
n∑k=1
k2 =n(n+1)(2n+1)
6 b)n∑k=1
k+4k(k+1)(k+2) =
n(3n+7)2(n+1)(n+2) .
c)n∑k=1
k3 =(n(n+1)2
)2. d)
n∑j=1
ar j−1 =a(rn−1)r−1 (r '= 1).
e)n∑k=1
1√k≥√n. f)
2n∑
k=n+1
1k
= ∑2nk=1(−1)k+1
k.
Ejercicio 1.9. Deducir de las ecuaciones
1= 11−4=−(1+2)
1−4+9= 1+2+31−4+9−16=−(1+2+3+4)
una fórmula general sencilla que incluya las anteriores como casos particulares, y demostrarla me-diante el principio de inducción.
Ejercicio 1.10. Probar la fórmula del binomio de Newton: para cada x,y ∈ R y cada n ∈ N,
(x+ y)n =n
∑j=0
(nj
)x jyn− j.
Deducir de ella que:
a) 1+n+(n2
)+ · · ·+
(n
n−1)
+1= 2n;
b) 1−n+(n2
)+ · · ·+(−1)n−1
(n
n−1)
+(−1)n = 0.

14 Capítulo 1. Números reales
Ejercicio 1.11. Demostrar que si un conjunto A de números naturales contiene a n0 y además cumplen ∈ A⇒ n+1 ∈ A, entonces A contiene a {n ∈N : n≥ n0}. ¿Puede asegurarse siempre la igualdad deestos conjuntos?
Ejercicio 1.12. Demostrar que 72n+1−48n−7 (n ∈ N) es divisible por 48.
Ejercicio 1.13. Demostrar que 22n+15n−1 (n ∈ N) es múltiplo de 9.
Ejercicio 1.14. Desigualdad de Bernoulli: probar que para todo x > −1 y todo n ∈ N se verifica(1+ x)n ≥ 1+nx.
Ejercicio 1.15. Probar las siguientes desigualdades para n ∈ N:a) n!> 2n−1 (n≥ 3) b) (2n)!< 22n(n!)2
c)
√n+
√n−1+ · · ·+
√2+√1<
√n+1
Ejercicio 1.16. Sean x,y> 0 y para cada k,n ∈ N, sea αk,n =n∑j=0
jk(nj)x jyn− j.
a) Probar, mediante la fórmula del binomio de Newton, que α1,n = nx(x+ y)n−1.
b) Hallar α2,n. Sugerencia: calcular antes β2,n =n∑j=0
j( j−1)(nj)x jyn− j.c) Obtener un procedimiento para calcular αk,n para cualesquiera k,n ∈ N.
Ejercicio 1.17. Desigualdad de Cauchy-Schwartz: probar que si x1, . . . ,xn,y1, . . . ,yn ∈ R, entonces(n
∑j=1
x jy j
)2
≤(
n
∑j=1
x2j
)(n
∑j=1
y2j
).
Deducir que, si a2+b2 = c2+d2 = 1, entonces |ac+bd|≤ 1.
Ejercicio 1.18. Sea P(n) la propiedadn∑k=1
k =(2n+1)2
8 .
a) Probar que si P(n) es cierta, entonces P(n+1) es cierta.
b) Discutir la afirmación: se deduce por inducción que P(n) es cierta para todo n ∈ N.
Ejercicio 1.19. Decidir para qué números naturales n es cierta la desigualdad 2n > n2. Demostrarlopor inducción.
Ejercicio 1.20. Comparar nn+1 y (n+ 1)n para n ∈ N, y enunciar y demostrar qué desigualdad severifica entre ambos números.
Ejercicio 1.21. Probar por inducción que si a1,a2, . . . ,an son números reales positivos tales quea1a2 . . .an = 1, entonces a1 + a2 + · · ·+ an ≥ n. Deducir de aquí que si x1,x2, . . . ,xn son númerosreales no negativos cualesquiera, entonces
x1+ x2+ · · ·+ xnn
≥ n√x1x2 . . .xn,
es decir, su media aritmética es siempre mayor o igual que su media geométrica.

1.4. Ejercicios 15
Ejercicio 1.22. Probar que para todo número natural n es(1+
1n
)n< 3.
Ejercicio 1.23. Demostrar que el cardinal del conjunto de las partes de un conjunto que tiene nelementos es 2n.
Ejercicio 1.24. Hallar las soluciones de las desigualdades siguientes:a) 2x2+9x+6≥ x+2 b) x+
1x
< 1 c) xx+5 < 0
d) 3x2−11+ x2
> 0 e) 2x−13x+2 ≤ 1 f) 2x2+9x+6
x+2 ≥ 1
g) x2−4x+41+ x3
> 0 h) x−13x+4 ≤
3x+2x
Ejercicio 1.25. Resolver las ecuaciones:a) |x2−5x+6| =−(x2−5x+6) b)
∣∣∣∣x−1x+1
∣∣∣∣ =x−1x+1
c) |(x2+4x+9)+(2x−3)| = |x2+4x+9|+ |2x−3| d) |x−1| |x+1| = 0
e) |x−1| |x+2| = 3
Ejercicio 1.26. Resolver las siguientes desigualdades:a) |x−1|+ |x+1| < 1 b) |x−5| < |x+1| c) |3x−5| < 3
d) |x2−1| < 1 e) |x2− x+1| > 1 f) 1< |x− 12 | < 2
g) x− |x| > 2 h) |x2− x|+ x> 1 i)∣∣x+ |x−1|∣∣ < 2
j) 11+|x−1| < |x−2| k) −1≤ |x3−1|
x−1 ≤ 2Ejercicio 1.27. Estudiar para qué números reales x se cumple:
a) |x|+1x
< 1 y −2|x|+1x
< 1 b)∣∣2x− |2x−1|∣∣ =−5x
Ejercicio 1.28. Calcular el supremo y el ínfimo, si existen, de los siguientes conjuntos, indicando sison máximo o mínimo respectivamente:
a) { 1n : n ∈ N}∪{0} b) { 2n+1n : n ∈ N}
c) {n± 1n : n ∈ N} d) {x ∈Q : |x| <√2}∪{x ∈Q : 1
x−5 > 7}
e) { 1n +(−1)n : n ∈ N} f)⋃∞n=1{x ∈ R : n2x2−n(3n−1)x+(2n2−3n−2) = 0}
g) { 1n : n ∈ N} h) {(−1)n n2+1n+1 : n ∈ N}
i) {x ∈ R : x2+ x−1< 0} j) {x ∈ R : x< 0, x2+ x−1< 0}
k) {x ∈ R : x2+ x+1≥ 0} l)⋃∞n=1
(−1n ,1n)
m)⋂∞n=1
(−1n ,1n)
n)⋂∞n=1
[ 12n ,
12n−1
]

16 Capítulo 1. Números reales
Ejercicio 1.29. Sean A un conjunto, s = supA y ε > 0. ¿Se puede asegurar que existe algún a ∈ Atal que s− ε < a < s? En caso afirmativo, demostrarlo. En caso negativo, dar un contraejemplo ymodificar las desigualdades anteriores para que sea cierto.
Ejercicio 1.30. Sean A y B dos conjuntos no vacíos, acotados, de números reales.
a) Demostrar que si A⊆ B, entonces
supA≤ supB, ınfA≥ ınfB.
b) Probar que si x≤ y para todos los x ∈ A, y ∈ B, entonces
supA≤ y para todo y ∈ B; x≤ ınfB para todo x ∈ A
y por lo tanto supA≤ ınfB.c) Demostrar que si supA < ınfB, entonces que a < b para todos los a ∈ A, b ∈ B. Justificar si escierto el recíproco.
Ejercicio 1.31. a) Sean A y B dos conjuntos acotados de números reales. Definimos el conjuntoA+B= {x+ y : x ∈ A, y ∈ B}. Demostrar que
sup(A+B) = supA+ supB, ınf(A+B) = ınfA+ ınfB.
b) Sean A= {x1,x2, . . . ,xn}⊆ R, B= {y1,y2, . . . ,yn}⊆ R, y consideremos el conjunto
C = {x1+ y1,x2+ y2, . . . ,xn+ yn}.
Demostrar quesupC ≤ supA+ supB, ınfC ≥ ınfA+ ınfB.
Dar algún ejemplo que muestre que las desigualdades pueden ser estrictas.

Capítulo 2
Funciones reales de una variable real.Generalidades
2.1. Primeros conceptos
2.1.1. Funciones. Clases particulares de funciones
Recordemos que una aplicación f : A→ B se define en términos conjuntistas como una terna(A,B,Gf ), donde A, B son conjuntos dados, llamados respectivamente el dominio y el codominioo conjunto final de f , y Gf , denominado gráfico o gráfica de f , es un subconjunto del productocartesiano A×B tal que para todo x ∈ A existe un elemento único y ∈ B de modo que (x,y) ∈ Gf (eseelemento y unívocamente asociado a x suele denotarse por f (x) y se llama valor de la aplicación fen el punto x o imagen de x por f ).
Definición 2.1.1. Una función real de variable real es una aplicación f : A→ B con A, B⊆ R.
Informalmente, dar una función f supone dar:
a) su dominio de definición A= dom f ;
b) su codominio B (al que habitualmente prestaremos menor atención en este curso);
c) una regla de correspondencia o regla de definición que permita asignar inequívocamente acada elemento x de A, sin excepción, un elemento f (x) de B perfectamente determinado por xy f .
Cambiar una cualquiera de estas tres cosas (el dominio, el conjunto final o la regla de definición) haceque la función cambie. Por ejemplo, si tenemos una función f : A→ B y consideramos un subconjuntoS de A, la restricción de f a S es la función f |S : S→ B tal que f |S(x) = f (x) para cada x ∈ S, queno es la misma función f (se ha cambiado el dominio), aunque venga dada por la misma regla decorrespondencia (a cada x de S, la restricción f |S hace corresponder el mismo valor que f ).
En la práctica raras veces se muestra una función como una terna, tal como requeriría su definiciónformal: lo habitual es especificar su dominio y la regla que permite determinar el valor de la funciónen cada elemento del dominio (ver los comentarios de [BARTLE-SHERBERT, sec. 1.2, págs. 22–25]). Encuanto al conjunto final de una función, cuando no se mencione explícitamente se sobrentenderá quedicho conjunto es R.
17

18 Capítulo 2. Funciones reales de una variable real. Generalidades
Suele chocar al principiante que a veces la regla de definición de una función aparece divididaen varias subreglas parciales (expresadas habitualmente mediante fórmulas), tendiendo a interpretarincorrectamente que se han definido tantas funciones como subreglas se enuncien. Por ejemplo, lafunción f : R→ R tal que
f (x) =
{x, si x≥ 0;−x, si x< 0,
es una sola función, la función valor absoluto, y no dos funciones, aunque sus valores coincidan enparte de su dominio (no en todo) con los que toman las dos funciones distintas g : x∈R→ g(x) = x∈Ry h : x ∈ R→ h(x) =−x ∈ R.
Dada una función f , emplearemos la expresión « f está definida en S» como sinónimo de que S esun subconjunto de dom f . El dominio de f es, en este sentido, el mayor subconjunto de R en el que festá definida.
Definición 2.1.2. Sea f una función con dominio A y sean S⊆ A, T ⊆R. Llamamos conjunto imagende S por f al conjunto
f (S) = { f (x) : x ∈ S},y conjunto antiimagen de T por f al conjunto
f−1(T ) = {x : f (x) ∈ T},que será un subconjunto (eventualmente vacío) de A.
El conjunto imagen del dominio de f suele denominarse, simplemente, conjunto imagen de f orango de f , y se denota a veces im f o rang f ; por tanto, se tiene
im f = f (dom f ) = { f (x) : x ∈ dom f}.Una función f se dice inyectiva si elementos distintos de su dominio tienen siempre imágenes
distintas: es decir, si dados x, y ∈ dom f , de x '= y se sigue f (x) '= f (y); o, equivalentemente, si dadosx, y ∈ dom f , de f (x) = f (y) se sigue x= y.
Una función f : A→ B se dice suprayectiva si f (A) = B, o sea, si el conjunto final y el conjuntoimagen de f coinciden; dicho de otra forma, si cada elemento de B es imagen de algún (o algunos)elemento(s) de A.
Una función se dice biyectiva si es simultáneamente inyectiva y suprayectiva.
Ejemplos. La función identidad id : x∈R→ id(x) = x∈R es trivialmente biyectiva. La función parteentera, que asocia a cada x ∈ R su parte entera (vista como aplicación de R en R) no es inyectiva nisuprayectiva.
Definición 2.1.3 (función inversa). Dada una función inyectiva f : A→ B, se llama función inversade f a la función f−1 : f (A)→ A tal que f−1(y) = x si y solo si f (x) = y.
En términos más formales, f−1 sería la función dada por la terna ( f (A),A,Gf−1), donde Gf−1 ={(y,x) : (x,y) ∈ Gf }, y Gf es, por supuesto, la gráfica de f . Para ser rigurosos, deberíamos compro-bar que tal terna define efectivamente una función; esto es una consecuencia inmediata de que f esinyectiva.
En muchos textos aparece definida la función inversa solamente para funciones biyectivas. Sinembargo, la práctica usual en análisis matemático recomienda ampliar la definición a todas las funcio-nes inyectivas, como acabamos de hacerlo. Obsérvese que, en cualquier caso, lo que hemos definido

2.1. Primeros conceptos 19
sería la función inversa de la función biyectiva f : A→ f (A) tal que f (x) = f (x), que, recordémoslo,salvo cuando f es además suprayectiva, es otra función —la biyección asociada a f— pues cambia elconjunto final.
Observación. Dada una función inyectiva f : A→ B, una función g es la inversa de f si y solo sig : f (A)→ A y
g( f (x)) = x para todo x ∈ A, f (g(y)) = y para todo y ∈ f (A).
Representación gráfica de una función. Dada una función f , para cada x ∈ dom f el par ordenadode números reales (x, f (x)) puede interpretarse como coordenadas de un punto del plano respecto deun sistema de coordenadas cartesianas, de modo que la gráfica de f , es decir, {(x, f (x)) : x ∈ dom f},vendrá representada por un subconjunto del plano, que da la representación gráfica de la función f .Observar esta representación puede proporcionar a veces información interesante sobre f , por lo quemás adelante nos ocuparemos con detalle de la representación gráfica de funciones.
El lector puede examinar cómo se refleja en su representación gráfica que una función es inyectivao suprayectiva, y qué relación hay entre las representaciones gráficas de una función inyectiva y la desu inversa.
Tabulación de funciones. Cuando el dominio de una función es finito (y con un número no dema-siado elevado de elementos) es a menudo útil describir la función escribiendo en forma de tabla losvalores del dominio y a su lado, correlativamente, los valores de la función en cada uno de ellos. Así,por ejemplo, suele procederse en la recogida de datos experimentales, cuando se estudian dos magni-tudes de las cuales una depende de la otra y, de hecho, las tablas de correspondencias entre númeroso magnitudes son históricamente muy anteriores a la idea misma de función.
También se procede a la tabulación de funciones aunque el dominio no sea finito, reflejando ental caso, por descontado, tan solo una parte finita del mismo. Cabe señalar que en la mayoría delas tablas de funciones que se usan en las ciencias, los valores de la función que aparecen en lastablas no son, por razones obvias, valores exactos, sino valores aproximados con un error que esnecesario controlar para poder utilizarlas adecuadamente. Existe una extensa bibliografía de libros detablas de funciones, sustituidos casi totalmente en la actualidad por los ordenadores e incluso por lascalculadoras científicas de bolsillo. Sin embargo, es muy conveniente conocer al menos uno de ellos,como [SPIEGEL-ABELLANAS].
Veamos ahora algunas clases particulares de funciones que aparecerán frecuentemente a lo largode todo el curso.
Definición 2.1.4. Una función f se dice monótona no creciente si dados cualesquiera x, y ∈ dom fcon x< y, es f (x)≥ f (y).
Una función f se dice monótona no decreciente si dados cualesquiera x, y ∈ dom f con x < y,es f (x)≤ f (y).
Una función f se dicemonótona estrictamente creciente si dados cualesquiera x, y∈ dom f conx< y, es f (x) < f (y).
Una función f se dice monótona estrictamente decreciente si dados cualesquiera x, y ∈ dom fcon x< y, es f (x) > f (y).
Una función monótona es una función de uno cualquiera de los tipos anteriores. Por brevedad, siS⊆ dom f , se dice que f es monótona en S si la restricción f |S es monótona.

20 Capítulo 2. Funciones reales de una variable real. Generalidades
Función monótona no creciente Función estrictamente creciente
Esta nomenclatura puede variar de unos textos a otros: por ejemplo, algunos autores llaman fun-ciones crecientes a las que nosotros denominamos monótonas no decrecientes, mientras que otrosutilizan el nombre de funciones crecientes para las que hemos definido como monótonas estrictamen-te crecientes. Hemos elegido por ello los nombres que nos parecen menos ambiguos para cada uno delos tipos considerados.
Observación. La monotonía no es una propiedad puntual de la función, sino que es una propiedadglobal. Esto significa que solo tiene sentido decir que una función es monótona en un determinadoconjunto, no que es monótona en un punto del conjunto. La expresión función monótona en un puntocarece de significado.
Ejemplo. Probar que la función f : R \ {0} → R definida mediante f (x) = 1/x es estrictamentedecreciente en (−∞,0) y en (0,+∞). Pero no es estrictamente decreciente en R\{0}, porque −1< 1y sin embargo f (−1) < f (1).
En general, dados dos conjuntos A,B ⊆ R y una función f : A∪B→ R, si f es estrictamentedecreciente en A∪B, puede asegurarse que f es estrictamente decreciente en A y que f es estrictamentedecreciente en B. Pero si f es estrictamente decreciente tanto en A como en B, no puede asegurarse quef sea estrictamente decreciente en A∪B. Lo mismo puede decirse con los demás tipos de monotonía.Definición 2.1.5. Se dice que una función f está acotada superiormente si su conjunto imagen estáacotado superiormente. En otras palabras, si existe un número fijo M ∈ R tal que, simultáneamentepara todos los x ∈ dom f , se tiene f (x) ≤ M (por comodidad, suele decirse entonces que f estáacotada superiormente por M o que M es una cota superior de f , en lugar de decir que el conjuntoimagen de f está acotado superiormente por M o que M es una cota superior de dicho conjunto).
Enteramente análoga es la definición de función acotada inferiormente.Por último, una función acotada es aquella que está acotada superior e inferiormente, es decir,
aquella cuyo conjunto imagen está acotado, de manera que existen constantes m, M ∈ R tales quepara cada x ∈ dom f se tiene m ≤ f (x) ≤M; equivalentemente, f está acotada si y solo si existe unK ∈ R tal que | f (x)|≤ K para todo x ∈ dom f .
El estudio de una función se simplifica cuando posee algún tipo de repetición. Concretamos estaidea en las siguientes definiciones.

2.1. Primeros conceptos 21
Definición 2.1.6. Sea f una función definida en R. Se dice que f es
a) par si para cada x ∈ R se cumple f (−x) = f (x) (su gráfica es entonces simétrica respecto deleje de ordenadas);
b) impar si para cada x ∈R se cumple f (−x) =− f (x) (su gráfica es entonces simétrica respectodel origen de coordenadas);
c) periódica de periodo T (T ∈ R \ {0}) si para cada x ∈ R se cumple f (x+ T ) = f (x) (sugráfica puede obtenerse entonces por traslación reiterada de la gráfica en cualquier intervalode longitud |T |).
Función par Función impar
Observación. Toda función f :R→R puede escribirse, además de manera única, como suma de unafunción par (su componente par) y una función impar (su componente impar). Concretamente, lascomponentes par e impar son
fP(x) =f (x)+ f (−x)
2 ,
fI(x) =f (x)− f (−x)
2 .
Es inmediato comprobar que fP es par, fI es impar y f = fP+ fI . Para ver que la descomposición esúnica, supongamos que f = g+h, con g par h impar. Entonces,
fP(x) =f (x)+ f (−x)
2 =[g(x)+h(x)]+ [g(−x)+h(−x)]
2 =g(x)+h(x)+g(x)−h(x)
2 = g(x)
y de la misma manera se comprueba que fI = h.
Nótese que la definición de función par y de función impar puede ampliarse de manera obvia afunciones f cuyo dominio sea simétrico (respecto al origen de coordenadas), es decir, tal que −x ∈dom f siempre que x ∈ dom f .
Función periódica

22 Capítulo 2. Funciones reales de una variable real. Generalidades
2.1.2. Operaciones con funcionesDadas dos funciones f y g, podemos construir a partir de ellas nuevas funciones de diferentes
maneras. Para nosotros, las más útiles son las que a continuación exponemos.
Definición 2.1.7. La composición de f y g, denotada g◦ f , es la función con dominiodom(g◦ f ) = f−1(domg)
dada por(g◦ f )(x) = g( f (x))
para cada x ∈ dom(g◦ f ) (obsérvese que tales x son justamente aquellos para los que g( f (x)) tienesentido).
Definición 2.1.8. La suma de f y g, denotada f +g, es la función con dominio
dom( f +g) = dom f ∩domgdada por
( f +g)(x) = f (x)+g(x)
para cada x ∈ dom( f + g) (obsérvese que tales x son justamente aquellos para los que f (x)+ g(x)tiene sentido).
Totalmente similar es la definición de la diferencia f −g y del producto f g de f y g.Definición 2.1.9. El cociente de f y g, es la función f/g con dominio
dom( f/g) = (dom f ∩domg)\g−1(0)dada por
( f/g)(x) =f (x)g(x)
para cada x ∈ dom( f/g) (obsérvese una vez más que tales x son exactamente aquellos para los quef (x)/g(x) tiene sentido).
En algunos textos, se da el nombre de dominios naturales a los dominios anteriormente definidos.
Ejemplo. Consideremos las funciones f ,g :R→R dadas por f (x) = x2−1, g(x) = x+1. Su cocientees la función
h(x) =f (x)g(x)
=x2−1x+1 ,
definida para x ∈ R \−1. Observemos que h(x) = x− 1 en todo su dominio. Sin embargo, h no esexactamente la función x−1, porque el dominio de esta función es R y el dominio de h es R\−1.
2.1.3. Ejemplos de funcionesSucesiones
Son funciones cuyo dominio es el conjuntoN de los números naturales. Desempeñan un destacadopapel en la elaboración de nuestra teoría, y a ellas dedicaremos específicamente el capítulo siguiente.

2.1. Primeros conceptos 23
Funciones constantes
Son las que asignan a todos los valores de su dominio un mismo valor fijo, es decir, aquellasfunciones f para las que existe un a ∈ R tal que f (x) = a para todos los x ∈ dom f .
¿Puede una función constante ser inyectiva, suprayectiva o biyectiva? ¿Cómo es su representacióngráfica? ¿Es monótona? ¿De qué tipo? ¿Es acotada? ¿Es par, impar, periódica?
Función identidad
Dado un conjunto A⊆ R, la identidad en A es la función tal que f (x) = x para cada x ∈ A.¿Es la identidad siempre inyectiva, suprayectiva o biyectiva? ¿Es monótona? ¿Es acotada? ¿Cómo
es su representación gráfica? ¿Cuál es su inversa?
Potencias de exponente entero
Dado un número natural n, la función f : x ∈ R→ xn ∈ R (producto de n funciones iguales a laidentidad) tiene distinto comportamiento según n sea par o impar. Para n = 2k−1, k ∈ N, la funcióng : x ∈ R → x2k−1 ∈ R es estrictamente creciente y, por tanto, inyectiva. También es suprayectiva,aunque ahora no estamos todavía en condiciones de demostrarlo fácilmente.
Sin embargo, la función h : x ∈ R → x2k ∈ R no es inyectiva (es una función par), aunque larestricción de h a [0,+∞) es estrictamente creciente (luego inyectiva), y tiene por imagen el conjunto[0,+∞), como justificaremos más adelante.
La potencia de exponente 0 es la función constante con valor siempre igual a 1. Para exponentenegativo, n=−m con m ∈ N, se define
x ∈ R\{0}→ xn =(1xm
)=
(1x−n
)∈ R.
Raíces
Dado k ∈ N, se puede probar que la función g : x ∈ R→ x2k−1 ∈ R es biyectiva. Por tanto, poseeuna función inversa f :R→R, denominada raíz (2k−1)-ésima; su valor en un punto x ∈R se denotapor 2k−1√x o x1/(2k−1). De acuerdo con su definición, se tiene y= 2k−1√x si y solo si y2k−1 = x.
Sin embargo, puesto que la función h : x ∈ R→ x2k ∈ R no es inyectiva, no puede hablarse deraíz 2k-ésima en todo R. No obstante, la restricción de h a [0,+∞) es estrictamente creciente (luegoinyectiva), y tiene por imagen el conjunto [0,+∞): su inversa es la que llamamos función raíz 2k-ésima, de modo que dicha función tendrá ahora por dominio [0,+∞). Es decir, solo está definida enun número real x si x≥ 0: su valor en dicho punto se representa por 2k
√x o x1/(2k) excepto para el caso
k = 1 (raíz cuadrada), que se usa abreviadamente√x. Nótese que siempre es
√x ≥ 0 y, en general,
2k√x≥ 0.
Funciones polinómicas y funciones racionales
Las funciones que pueden obtenerse mediante sumas y productos de funciones constantes y de laidentidad en R reciben el nombre de funciones polinómicas. Por tanto, f es una función polinómica(o polinomio) si y solo si existen a0, a1, . . . , an ∈ R tales que
f (x) = a0+a1x+ · · ·+anxn

24 Capítulo 2. Funciones reales de una variable real. Generalidades
para cada x∈R (también suelen denominarse funciones polinómicas las restricciones de las anterioresa cualquier subconjunto de R.)
Las funciones racionales son aquellas que pueden expresarse como cociente de dos funcionespolinómicas. Su dominio es todo R salvo un conjunto finito (quizás vacío): el conjunto de los ceros oraíces del denominador. Es habitual utilizar el mismo nombre para las restricciones de estas funcionesa subconjuntos cualesquiera.
Funciones algebraicas
Reciben este nombre las funciones tales que se pueden encontrar polinomios p0, p1, . . . , pn demanera que para todo x ∈ dom f se verifica
p0(x)+ p1(x) f (x)+ · · ·+ pn(x) f (x)n = 0.
Obsérvese que las raíces anteriormente definidas quedan dentro de esta clase.
2.2. Funciones trascendentesLas funciones que vamos a describir ahora, aunque quedan como las anteriores dentro de las que
suelen denominarse genéricamente funciones elementales, y en buena parte son conocidas por ellector, requieren para su construcción técnicas de las que no disponemos todavía. No podemos, pues,definirlas, pero vamos a emplearlas admitiendo de momento que existen y tienen las propiedades queenunciamos.
2.2.1. Funciones exponencial y logarítmicaFunción exponencial
La función exponencial,exp : R→ R,
que construiremos más adelante, aparece en la descripción de los fenómenos en los que la variaciónde una magnitud es proporcional al valor de dicha magnitud.
El número exp(1) se denota por e. Es irracional; más todavía, es trascendente, lo que significa queno existe ningún polinomio con coeficientes enteros que se anule en e. Sus primeras cifras decimalesson
2,7182818284590452353602874713526624977572 . . .
(sobre su historia, ver [MAOR]).En lugar de exp(x) suele escribirse ex.
Proposición 2.2.1 (propiedades de la exponencial). a) e0 = 1.
b) Para cada x ∈ R,1ex
= e−x,
y, en particular, ex '= 0.
c) Dados x, y ∈ R,ex+y = ex · ey.

2.2. Funciones trascendentes 25
d) Dados n ∈ N y x ∈ R,enx = ex n· · ·ex.
e) Para cada x ∈ R,ex > 0.
f) La función exponencial es estrictamente creciente. En particular, es inyectiva.
g) El conjunto imagen de la función exponencial es (0,+∞).
Función logarítmica
La función logarítmicalog : (0,+∞)→ R
es la inversa de la función exponencial, de modo que logx= y si y solo si ey = x.Por tanto, está caracterizada por cumplir
log(ex) = x cualquiera que sea x ∈ R
yelogx = x cualquiera que sea x ∈ (0,+∞).
Sus propiedades son consecuencia de las de la función exponencial.
Proposición 2.2.2 (propiedades del logaritmo). a) log1= 0; loge= 1.
b) Para cada x ∈ (0,+∞),log 1
x=− logx.
c) Dados x,y ∈ (0,+∞),log(xy) = logx+ logy.
d) Dados n ∈ N y x ∈ (0,+∞),log(xn) = n logx.
e) El conjunto imagen de la función logarítmica es R.
f) La función logarítmica es estrictamente creciente. En particular, es inyectiva.
Funciones exponencial y logarítmica de base cualquiera
Definición 2.2.3. Dado un número real a> 0, la función exponencial de base a se define mediantela igualdad
ax = ex loga.
Cuando a > 1, esta función tiene propiedades similares a la función exponencial anteriormenteestudiada; si a = 1, es una función constantemente igual a 1, y si a < 1, la diferencia esencial con lafunción exponencial de base e estriba en que la función exponencial de base a es entonces estricta-mente decreciente.
Propiedades interesantes que se obtienen directamente de la definición y de lo que hemos vistopara las funciones ex y logx son las siguientes:

26 Capítulo 2. Funciones reales de una variable real. Generalidades
log
exp
12
4
6
8
10
1 2 4 6 8 10
Las funciones exponencial y logaritmo
Proposición 2.2.4 (propiedades de las potencias). Dados a,b,x,y ∈ R con a> 0, b> 0,
a) (ab)x = axbx.
b) (ax)y = axy.
Definición 2.2.5. Dado a> 0, a '= 1, la función logarítmica de base a se define en (0,+∞) mediantela fórmula
loga x=logxloga .
Es inmediato comprobar que esta función es la inversa de la función exponencial de base a. Comopropiedad adicional interesante se tiene: dados a,b,x ∈ R con 0< a '= 1 y b> 0,
loga(bx) = x loga b.
2.2.2. Funciones trigonométricas. Funciones trigonométricas inversas
Funciones trigonométricas
Reciben este nombre una serie de funciones de origen geométrico, ligadas con las medidas deángulos y la descripción de fenómenos periódicos.
La función senosen : R→ R
y la función cosenocos : R→ R
serán definidas más adelante. De momento, admitimos sin demostración que satisfacen las propieda-des que pasamos a enunciar.

2.2. Funciones trascendentes 27
Proposición 2.2.6 (propiedades del seno). a) El seno es una función impar, mientras que el co-seno es una función par: cualquiera que sea x ∈ R se tiene
sen(−x) =−senx, cos(−x) = cosx.
b) Para cada x ∈ R essen2 x+ cos2 x= 1.
c) Existe un número real positivo, denotado por π , tal que senπ = 0 y senx '= 0 si 0< x< π .Este número π es irracional (y trascendente) y sus primeras cifras decimales son
3,14159265358979 . . .
El número π , «área del círculo de radio 1, es de lejos la constante más célebre de las mate-máticas. Aparecida inicialmente en Geometría, interviene hoy en los dominios más variados:análisis, teoría de números, probabilidades y estadística, combinatoria, etc. Los más grandesmatemáticos se han interesado desde hace más de 2000 años por los problemas planteados poreste número» ([LE LIONNAIS, pág. 50]).
d) cosπ =−1.e) Las funciones sen y cos tienen por conjunto imagen el intervalo [−1,1].f) Dados x, y ∈ R tales que x2+ y2 = 1, existe un α ∈ R de modo que
cosα = x, senα = y
(gráficamente, esto significa que las funciones seno y coseno que hemos definido se correspon-den con las utilizadas en trigonometría).
g) Fórmulas de adición: dados x,y ∈ R,
sen(x+ y) = senxcosy+ cosxseny sen(x− y) = senxcosy− cosxsenycos(x+ y) = cosxcosy− senxseny cos(x− y) = cosxcosy+ senxseny
h) Las funciones sen y cos son periódicas de periodo 2π .
i) La función sen es estrictamente creciente en [0,π/2] y estrictamente decreciente en [π/2,π].
j) La función cos es estrictamente decreciente en [0,π/2] y estrictamente creciente en [π/2,π].
Damos ahora una tabla de algunos valores particulares de estas funciones.
grados x senx cosx0 0 0 115 π/12 1
4(√6−√2) 1
4(√6+√2)
30 π/6 1/2√3/2
45 π/4√2/2
√2/2
60 π/3√3/2 1/2
90 π/2 1 0

28 Capítulo 2. Funciones reales de una variable real. Generalidades
−1
1
−2π −3π/2 −π −π/2 2π3π/2ππ/2
La función seno
1
−1−2π −3π/2 −π −π/2 2π3π/2ππ/2
La función coseno
Definición 2.2.7. La función tangente tg, la función cotangente ctg, la función secante sec y lafunción cosecante cosec se definen a partir de las funciones seno y coseno mediante las fórmulas
tg=sencos , ctg=
cossen , sec=
1cos , cosec=
1sen .
¿Cuáles son los dominios de estas funciones?
0−3π2−π −π
23π2
ππ2
−2π
2π
La función tangente
0−3π2 −π −π
2 2π3π2π
π2
−2π
La función cotangente
Funciones trigonométricas inversas
Se conocen con el nombre de funciones trigonométricas inversas las de una colección de fun-ciones que son casi, pero no totalmente, inversas de las funciones tigonométricas que acabamos deconsiderar. Precisemos su definición.

2.2. Funciones trascendentes 29
1−2π −π −π2 2π
3π2π
−3π2
π2
La función cosecante
−1
−3π2 −π −π
23π2π
π2
−2π 2π
La función secante
La función seno no es inyectiva, por lo que no puede hablarse estrictamente de inversa de lafunción seno. Sin embargo, la restricción de la función seno al intervalo [−π/2,π/2] es estrictamentecreciente, luego inyectiva en particular, y su conjunto imagen es el intervalo [−1,1] (igual conjuntoimagen que la función seno).
La función arco seno,arcsen : [−1,1]→ [−π/2,π/2],
es, por definición, la inversa de la restricción de la función seno al intervalo [−π/2,π/2], de maneraque será una función estrictamente creciente, impar, acotada, y tal que dado x ∈ [−1,1]
arcsenx= y ⇐⇒{y ∈ [−π/2,π/2]seny= x,
con lo cualsen(arcsenx) = x para todo x ∈ [−1,1] = domarcsen
(es decir, la función arco seno es una inversa por la derecha de la función seno), mientras que
arcsen(senx) = x ⇐⇒ x ∈ [−π/2,π/2].
Pasando a la función coseno, su restricción al intervalo [0,π] es una función estrictamente decre-ciente cuyo conjunto imagen es [−1,1]. Análogamente a lo anterior, la función arco coseno
arccos : [−1,1]→ [0,π]
es por definición la inversa de la restricción de la función coseno al intervalo [0,π].Es una función estrictamente decreciente y acotada, con el mismo dominio que la función arco
seno, pero con distinto codominio.Dado x ∈ [−1,1], se tiene
arccosx= y ⇐⇒{y ∈ [0,π]cosy= x,

30 Capítulo 2. Funciones reales de una variable real. Generalidades
con lo cualcos(arccosx) = x para todo x ∈ [−1,1] = domarccos
(es decir, la función arco coseno es una inversa por la derecha de la función coseno), mientras que
arccos(cosx) = x ⇐⇒ x ∈ [0,π].
−1
−π/2
π/6π/4π/3
π/2
12
1√2
√32
1
La función arco seno
−1
π
π/3π/4π/6
12
1√2
√32
1
π/2
La función arco coseno
De manera similar, la función arco tangente
arc tg : R→ (−π/2,π/2)
es por definición la inversa de la restricción de la función tangente al intervalo abierto (−π/2,π/2).Es una función estrictamente creciente, impar, acotada, y tal que dado x ∈ R
arc tgx= y ⇐⇒{y ∈ (−π/2,π/2)tgy= x,
con lo cualtg(arc tgx) = x para todo x ∈ R = domarc tg
(es decir, la función arco tangente es una inversa por la derecha de la función tangente), mientras que
arc tg(tgx) = x ⇐⇒ x ∈ (−π/2,π/2).
Aunque se usa menos que las anteriores, podemos también definir: la función arco cotangente
arcctg : R→ (0,π)
es la inversa de la restricción de la función cotangente al intervalo (0,π).Las funciones arco secante y arco cosecante se usan raras veces. Su definición, con las notaciones
sec−1 y cosec−1, puede verse en [SPIEGEL-ABELLANAS].

2.2. Funciones trascendentes 31
−π/2
π/2
1√3
π/6
1
π/4
√3
π/3
La función arco tangente
2.2.3. Funciones hiperbólicas. Funciones hiperbólicas inversas
Funciones hiperbólicas
Definición 2.2.8. La función coseno hiperbólico, cosh : R→ R, está definida mediante
coshx=ex+ e−x
2 .
Es una función par (la componente par de la exponencial), estrictamente decreciente en (−∞,0] yestrictamente creciente en [0,+∞). Está acotada inferiormente por 1: para cualquier x ∈ R,
ex+ e−x
2 =e2x+12ex ≥ 1 porque e2x+1≥ 2ex > 0.
Su conjunto imagen es [1,+∞).
Definición 2.2.9. La función seno hiperbólico, senh : R→ R, está definida mediante
senhx=ex− e−x2 .
Es una función impar (la componente impar de la exponencial), estrictamente creciente y no aco-tada superior ni inferiormente: su conjunto imagen es todo R.
Estas funciones tienen un cierto parecido con el coseno y el seno trigonométricos, y pueden rela-cionarse geométricamente con la hipérbola de manera similar a como las funciones trigonométricasse relacionan con la circunferencia. Aumentando la semejanza, existen fórmulas para las funcioneshiperbólicas que, con variaciones en algunos signos, recuerdan las conocidas para las funciones trigo-nométricas: por ejemplo, calculando a partir de la definición se comprueba que
cosh2 x− senh2 x= 1,cosh(x+ y) = coshxcoshy+ senhxsenhy,senh(x+ y) = senhxcoshy+ coshxsenhy
cualesquiera que sean x, y ∈ R.
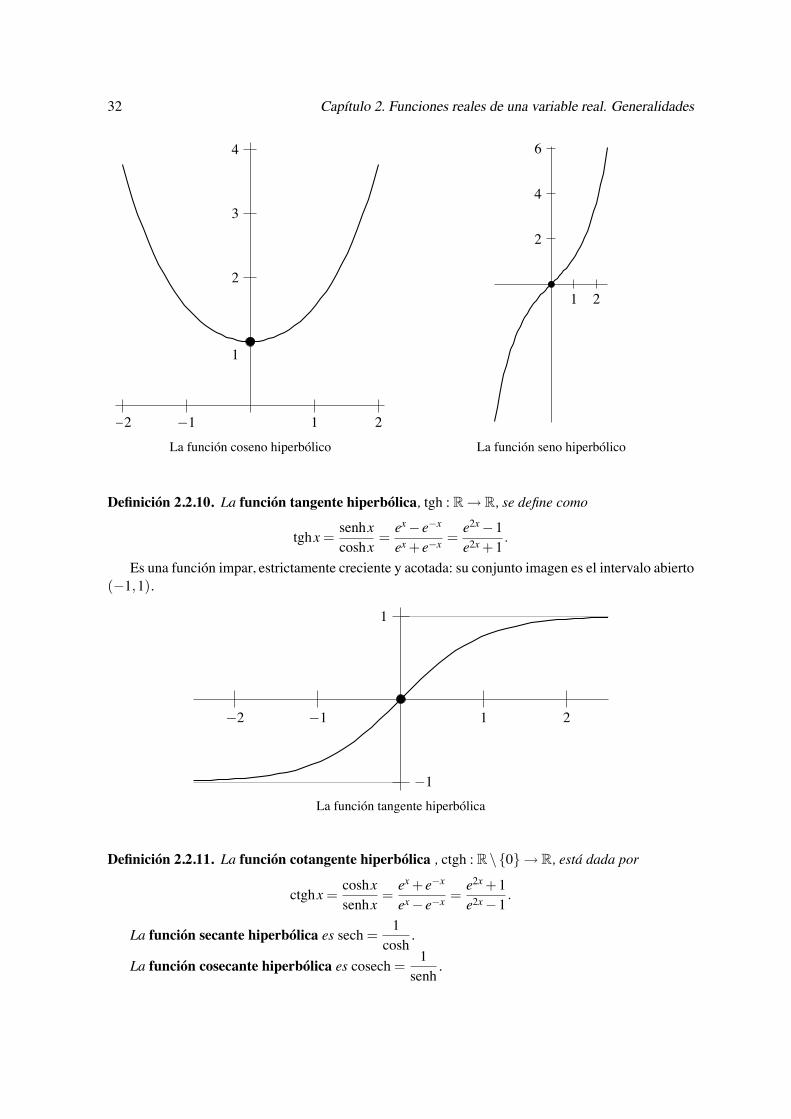
32 Capítulo 2. Funciones reales de una variable real. Generalidades
2
3
4
1
−2 −1 1 2La función coseno hiperbólico
2
4
6
1 2
La función seno hiperbólico
Definición 2.2.10. La función tangente hiperbólica, tgh : R→ R, se define como
tghx=senhxcoshx =
ex− e−xex+ e−x
=e2x−1e2x+1 .
Es una función impar, estrictamente creciente y acotada: su conjunto imagen es el intervalo abierto(−1,1).
1
−1
−2 −1 1 2
La función tangente hiperbólica
Definición 2.2.11. La función cotangente hiperbólica , ctgh : R\{0}→ R, está dada por
ctghx=coshxsenhx =
ex+ e−x
ex− e−x =e2x+1e2x−1 .
La función secante hiperbólica es sech=1cosh .
La función cosecante hiperbólica es cosech=1senh .

2.3. Ejercicios 33
Funciones hiperbólicas inversas
Definición 2.2.12. La función argumento coseno hiperbólico, argcosh : [1,+∞)→ [0,+∞), dadapor
argcoshx= log(x+√x2−1),
es la inversa de la restricción de la función coseno hiperbólico al intervalo [0,+∞).La función argumento seno hiperbólico, argsenh : R→ R, dada por
argsenhx= log(x+√x2+1),
es la inversa de la función seno hiperbólico.La función argumento tangente hiperbólica, arg tgh : (−1,1)→ R, dada por
arg tghx=12 log
1+ x1− x ,
es la inversa de la función tangente hiperbólica.La función argumento cotangente hiperbólica, argctgh : (−∞,−1)∪ (1,+∞)→ R, dada por
argctghx=12 log
x+1x−1 ,
es la inversa de la función cotangente hiperbólica.
−5 −4 −3 −2 −1 1 2 3 4 5
−2
−1
1
2
La función argumento seno hiperbólico
2.3. EjerciciosEjercicio 2.1. Probar que la función f :R→R definida por f (x) = 2x+ |x−3| es biyectiva y demos-trar que su función inversa puede escribirse en la forma f−1(x) = ax+b− |cx+d| para ciertos valoresa,b,c,d ∈ R.
Ejercicio 2.2. Describir la gráfica de g en términos de la gráfica de f , en los casos siguientes:a) g(x) = f (x)+ c b) g(x) = f (x+ c) c) g(x) = c f (x)
d) g(x) = f (−x) e) g(x) =− f (x) f) g(x) = f (|x|)
g) g(x) = | f (x)| h) g(x) =max{ f (x),0} i) g(x) =mın{ f (x),0}

34 Capítulo 2. Funciones reales de una variable real. Generalidades
1
2
3
4
1 2 3 4
argcosh
cosh
La función coseno hiperbólico
−2
−1
1
2
−1
1
La función argumento tangente hiperbólica
Por ejemplo, en el primer caso la gráfica de g se obtiene desplazando hacia arriba la gráfica de f unadistancia c si c≥ 0, o desplazando hacia abajo la gráfica de f una distancia |c| si c< 0.
Ejercicio 2.3. Probar que la función f : [1/2,+∞)→R definida mediante f (x) = x2−x+1 es estric-tamente creciente. En consecuencia, es inyectiva. ¿Cuál es su función inversa?
Ejercicio 2.4. Probar que la función f :R→R dada por f (x) =x
x2+1 está acotada. ¿Cuál es la cotainferior más ajustada que se puede encontrar? ¿Cuál la cota superior más ajustada?
Ejercicio 2.5. Probar que la función de Dirichlet
D(x) =
{1 si x es racional,0 si x es irracional
es periódica (comprobar que cada número racional no nulo es un periodo, y que ningún númeroirracional lo es). ¿Es D una función par? ¿Es una función impar? Responder a las mismas preguntaspara la función f (x) = x− [x].
Ejercicio 2.6. Sea f : x∈R→ f (x) =x√1+ x2
. Calcular f ◦ f . En general, si se define por recurrenciaf1 = f y fn+1 = f ◦ fn, n ∈ N, calcular fn.
Ejercicio 2.7. Comprobar que para x,y ∈ R arbitrarios es
senx− seny= 2cos x+ y2 sen x− y2 .
Deducir de aquí que senx = seny si y solo si existe algún k ∈ Z tal que x = y+ 2kπ o existe algúnk ∈ Z tal que x= (2k+1)π− y.Ejercicio 2.8. Dado n ∈ Z, sea f :
[nπ− π
2 ,nπ + π2]→ R definida por f (x) = senx. Comprobar que
f es inyectiva y expresar su inversa f−1 en términos de la función arco seno.

2.3. Ejercicios 35
Ejercicio 2.9. Dibujar las gráficas de las funciones sen◦arcsen y arcsen◦sen.Ejercicio 2.10. Probar que para todo x ∈ [−1,1] es
arcsenx+ arccosx=π2 .
Ejercicio 2.11. Probar que dados a,b ∈ R tales que a,b,a+b ∈ domtg,
tg(a+b) =tga+ tgb1− tga tgb .
¿Puede deducirse de aquí, haciendo tga= x y tgb= y e invirtiendo, que
arc tgx+ arc tgy= arc tg x+ y1− xy?
Precisar la respuesta.Ejercicio 2.12. Indicar el dominio de las siguientes funciones:
a)√x−2x+2 +
√x−1√1+ x
b)
√1− |x|2− |x|
c)
√(x−1)(x−2)(x−3)(x−4) −1 d)
√arcsen(x−1)
e) log x2−5x+6x2+4x+6 f)
√log 5x− x
2
4Ejercicio 2.13. Sabiendo que el dominio de la función f es [0,1], hallar el dominio de las funciones:
a) f (x2) b) f (senx) c) f (x−5) d) f (2x+3) e) f (tgx)Ejercicio 2.14. Probar que:a) Si f (x) = 1
1−x , entonces ( f ◦ f ◦ f )(x) = x.
b) Si f (x) = ax+b, con a '= 1, entonces ( f ◦ f ◦ (n). . .◦ f )(x) = anx+ban−1a−1 .
c) f ◦g '= g◦ f , donde f (x) =√x y g(x) = x2.
Ejercicio 2.15. Demostrar que si f es periódica con periodo T y a '= 0, entonces la función g(x) =f (ax+b) es periódica con periodo T
a .Ejercicio 2.16. Hallar el periodo de las siguientes funciones:
a) f (x) = tg2x b) f (x) = sen4 x+ cos4 x c) f (x) = ctg x2
d) f (x) = |cosx| e) f (x) = sen(2πx) f) f (x) = 2cos x−π3
Ejercicio 2.17. Estudiar si son pares o impares las siguientes funciones:a) f (x) = |x+1|− |x−1| b) f (x) = ax+a−x (a> 0)
c) f (x) = log 1+x1−x d) f (x) = log(x+√1+ x2)
Ejercicio 2.18. Hallar la inversa de las funciones siguientes y determinar su dominio:
a) f (x) =ex− e−xex+ e−x
b) f (x) =2x
1+2x c) f (x) = 3√1− x3
d) f (x) =x
1− |x| e) f (x) = x2 +
√x24 −1 f) f (x) = 3√1− x3

Capítulo 3
Sucesiones de números reales
Como libros de referencia para los temas de este capítulo, aunque haya algunas diferencias dedetalle entre su tratamiento y el nuestro, pueden consultarse [BARTLE-SHERBERT] (especialmente suscomentarios sobre algunos conceptos) y [ROSS], algo más conciso pero igualmente claro.
3.1. Sucesiones convergentes3.1.1. Definición de sucesión. Sucesiones acotadas y sucesiones convergentes. Límite
de una sucesión convergenteInformalmente, una sucesión de números reales es una lista ilimitada de números
s1,s2,s3,s4, . . . ,sn, . . .
(n indica el lugar que ocupa el número sn en la lista); puesto en forma de tabla
lugar 1 2 3 4 5 . . . n . . .valor s1 s2 s3 s4 s5 . . . sn . . .
es obvio que se trata justamente de una función real con dominio N. Esta es su definición formal.
Definición 3.1.1. Una sucesión de elementos de un conjunto es una aplicación con dominio N ycodominio dicho conjunto. En particular, una sucesión de números reales es una función real condominio N, o sea, una aplicación s : N→ R.
Tradicionalmente, el valor que una sucesión s toma en cada n ∈ N se denota por sn, en lugar des(n) como para las demás funciones. Normalmente nos referiremos a sn con el nombre de término n-ésimo de una sucesión, pero no debe perderse de vista que cada término lleva una doble información:su valor y el lugar n que ocupa.
Como el dominio N es común a todas las sucesiones, en vez de utilizar la notación s : N → Rpara una sucesión es más frecuente encontrar notaciones del tipo (sn)n∈N ó (sn)∞n=1 ó {sn}∞n=1 o algunasimilar, poniendo mayor énfasis en los términos. Aunque esta notación propicie a veces la confusión,no debería ser necesario insistir en la diferencia entre la propia sucesión y el conjunto de valores quetoma la sucesión, que es la misma que hay entre cualquier función y su conjunto de valores (conjuntoimagen o rango); obsérvese, por ejemplo, que una sucesión tiene siempre infinitos términos inclusoaunque tome un solo valor, como es el caso de las sucesiones constantes.
37

38 Capítulo 3. Sucesiones de números reales
Ejemplos. Los ejemplos más corrientes de sucesiones se indican dando una fórmula que defina eltérmino n-ésimo, como en los siguientes casos:
• sn = a, donde a es un número real prefijado (sucesión constante); la sucesión consta de lostérminos
a,a,a, . . . ,a, . . .
• sn = n (sucesión de los números naturales); la sucesión consta de los términos
1,2,3,4,5, . . . ,n, . . .
• sn = 1n ; la sucesión consta de los términos
1, 12 ,13 ,14 ,15 , . . . ,
1n, . . .
• sn = (−1)n; la sucesión consta de los términos
−1,1,−1,1,−1, . . . ,(−1)n, . . .
• Las fórmulas no tienen por qué referirse solo a operaciones algebraicas sencillas. Por ejemplo,considérese la sucesión
3,1; 3,14; 3,141; 3,1415; 3,14159; 3,141592; 3,1415926; 3,14159265; 3,141592653; . . .
formada por las aproximaciones decimales de π (el término n-ésimo sería la aproximacióndecimal con n cifras decimales exactas). Aunque no supiéramos escribir con todas sus cifrasel término 1 000 000 000 000 000, sabemos que ese término está perfectamente definido, y lomismo podemos decir de cualquier otro. En este caso podemos dar una fórmula explícita parael término n-ésimo con ayuda de la función parte entera: concretamente, para cada n ∈ N,
sn = 3+a110 +
a2102 + · · ·+ ak
10k + · · ·+ an10n ,
donde ak = [10kπ]− 10[10k−1π] (1 ≤ k ≤ n); el hecho de que esta fórmula no proporcione unalgoritmo de cálculo para los ak no obsta para que estos estén definidos sin ambigüedad y sinexcepción alguna.
• Sucesiones recurrentes. Reciben este nombre las sucesiones cuyos términos se definen en fun-ción de los anteriores (definición inductiva o recursiva). Un ejemplo muy citado de este tipo esla sucesión de Fibonacci, dada por
s1 = 1, s2 = 1, sn+2 = sn+1+ sn (n ∈ N),
cuyos primeros términos son
1,1,2,3,5,8,13,21,34,55,89,144, . . .
Las sucesiones definidas por recurrencia aparecen con frecuencia en cálculos con ordenadores:ver comentario en [BARTLE-SHERBERT, pág. 85].

3.1. Sucesiones convergentes 39
Otros ejemplos de sucesiones recurrentes son las progresiones aritméticas de primer término xy razón h, que pueden definirse recursivamente por
s1 = x, sn+1 = sn+h,
y las progresiones geométricas de primer término x y razón r, dadas por
s1 = x, sn+1 = sn · r.Se encuentran sin dificultad fórmulas explícitas en ambos casos: sn = x+ (n− 1)h para lasprimeras, sn = x · rn−1 para las segundas.
• La regla que define una sucesión no tiene por qué ser de carácter estrictamente matemático. Porejemplo, puede definirse una sucesión poniendo
sn =
{107/3 si el nombre en castellano del número n contiene la letra d√
π en caso contrario
(¿cuáles serían sus primeros términos?), o mediante cualquier otra condición que permita asegu-rar que a cada n ∈ N sin excepción se le asocia inequívocamente un número real perfectamentedefinido.
• Existen sucesiones cuyo rango es exactamente Z. Más difícil: existen sucesiones cuyo rango esexactamente Q; la construcción usual se hace mediante el proceso diagonal de Cantor y puedeverse en [BARTLE-SHERBERT, págs. 36–37], [SPIVAK, pág. 609].
• ¿Queda definida una sucesión si para cada n ∈ N ponemos
sn =max{x ∈ R : x2+2nx−1< 0}?¿Y si ponemos
sn =max{x ∈ R : x2+2nx−1≤ 0}?En caso afirmativo, ¿puede darse una expresión más directa para sn?
Notación. Por comodidad, a menudo se denotan las sucesiones simplemente por (sn) en vez de(sn)n∈N ó (sn)∞n=1 si esto no da lugar a imprecisiones.
Definición 3.1.2. Una sucesión (sn) es convergente si existe un número real a tal que para cadaε > 0 se puede encontrar un número natural N = N(ε) de modo que siempre que n > N se verifique|sn−a| < ε .
Se dice entonces que el número a es límite de la sucesión (sn), y se escribe a = lımnsn. También
decimos que (sn) converge al número a.
Usaremos a veces la fórmula sn→ a para indicar que la sucesión de término n-ésimo sn es con-vergente y tiene por límite a.
Nota. Recuérdese que la desigualdad |sn−a|< ε es equivalente a las dos desigualdades−ε < sn−a<ε , que equivalen a su vez a las desigualdades
a− ε < sn < a+ ε.

40 Capítulo 3. Sucesiones de números reales
aa− ε a+ ε
s6 s3 s8 s1 s11 s7 s10 s9 s2 s4 s5
|sn−a| < ε para n> 6
Ejemplos (sucesiones convergentes). a) Las sucesión constante sn = c (c ∈ R) converge al nú-mero c.
b) La sucesión (1/n) converge a 0 (consecuencia de la propiedad arquimediana, teorema 1.2.2).
Ejemplos (sucesiones no convergentes). a) La sucesión ((−1)n) no es convergente (si tuvieselímite a, no puede ser a = 1 puesto que entonces eligiendo ε = 2 > 0, cualquiera que fueseN bastaría tomar n = 2N+ 1 > N para conseguir que |sn− a| = |− 1− 1| = 2 &< ε; y si a &=1, eligiendo ahora ε = |1− a| > 0, cualquiera que fuese N bastaría tomar n = 2N > N paraconseguir que |sn−a| = |1−a| &< ε = |1−a|).
b) La sucesión (n) no puede ser convergente, pues si tuviese límite a, tomando ε = 1 en la defini-ción de convergencia, para algún N habría de ser n < a+1 siempre que n fuese mayor que N,lo cual es imposible (consecuencia una vez más de la propiedad arquimediana).
Proposición 3.1.3. Sea a ∈ R. Dada una sucesión (sn), son equivalentes entre sí:
a) (sn) es convergente con límite a; abreviadamente, a= lımnsn o sn→ a.
b) siempre que a′ < a, existe un n′ tal que para todo n> n′ es a′ < snysiempre que a< a′′, existe un n′′ tal que para todo n> n′′ es sn < a′′.
c) si a′, a′′ son números reales tales que a ∈ (a′,a′′), existe entonces un N tal que para todo n> Nes sn ∈ (a′,a′′).
Demostración. a) =⇒ b) Dado a′ < a, tomando ε = a−a′ > 0 existirá por hipótesis un N tal que sin> N entonces sn > a− ε = a− (a−a′) = a′. Para a< a′′ se razona de manera similar.
b)=⇒ c) Basta observar que x∈ (a′,a′′) significa que a′ < x< a′′. Por consiguiente, si a∈ (a′,a′′)existen n′ y n′′ tales que para todo n > n′ es sn > a′ y para todo n > n′′ es sn < a′′. Tomando ahoraN =max{n′,n′′}, siempre que n> N es simultáneamente n> n′ y n> n′′, luego para todo n> N seráa′ < sn < a′′ o, equivalentemente, sn ∈ (a′,a′′).
c) =⇒ a) Si ε > 0, se tendrá a ∈ (a− ε,a+ ε), por lo que debe existir un N tal que para todon> N es sn ∈ (a− ε,a+ ε), o lo que es lo mismo, |sn−a| < ε .
Corolario 3.1.4. Sea (sn) una sucesión convergente con límite a y sea c ∈ R. Se tiene:
a) Si existe m tal que para todo n> m es c≤ sn, entonces c≤ a.
b) Si existe m tal que para todo n> m es sn ≤ c, entonces a≤ c.
Demostración. Se prueba por reducción al absurdo aplicando la proposición 3.1.3.

3.1. Sucesiones convergentes 41
El corolario 3.1.4 no es cierto con desigualdades estrictas.
Corolario 3.1.5 (unicidad del límite de una sucesión convergente). Sea (sn) una sucesión conver-gente y sean a, b ∈ R tales que a= lım
nsn, b= lım
nsn. Entonces a= b.
Demostración. Si no, sea, por ejemplo, a< b. Tomando c tal que a< c< b, puesto que c< b y b eslímite de (sn), debe existir un n′ tal que para todo n > n′ sea sn > c; igualmente, puesto que a < c ya es límite de (sn), debe existir un n′′ tal que para todo n > n′′ es sn < c; tomando n = max{n′,n′′}llegamos a una contradicción: tendría que cumplirse c< sn < c.
El límite de una sucesión convergente es así el único número real al que la sucesión converge.Las definiciones de acotación de sucesiones se obtienen particularizando a sucesiones las que
dimos sobre acotación de funciones.
Definición 3.1.6. Una sucesión (sn)∞n=1 se dice que está acotada superiormente si existe algún nú-mero C ∈ R tal que para todo n ∈ N, sn ≤C.
Se dice que está acotada inferiormente si existe algún número K ∈ R tal que para todo n ∈ N,K ≤ sn.
Se dice que está acotada si lo está superior e inferiormente. Esto equivale a que exista un númeroM ≥ 0 tal que para todo n ∈ N, |sn|≤M.
Proposición 3.1.7. Toda sucesión convergente está acotada.
Demostración. Sea (sn) una sucesión convergente a un número a ∈ R. Tomamos, por ejemplo, ε = 1en la definición de límite y existirá algún número N ∈ N tal que |sn− a| < 1 para todo n > N. Siescribimos
B=max{1, |s1−a|, |s2−a|, . . . , |sN−a|},se tiene que |sn−a|≤ B, es decir,
a−B≤ sn ≤ a+B,
para todo n ∈ N. Luego la sucesión está acotada.
Aplicación. Dado x∈R tal que |x| > 1, la sucesión que tiene por término n-ésimo xn no es convergen-te. En efecto: si ponemos h = |x|−1, entonces |xn| = |x|n = (1+h)n ≥ 1+nh, según la desigualdadde Bernoulli. De aquí se deduce que la sucesión no está acotada.
Tampoco es convergente la sucesión de término n-ésimo sn = n.
3.1.2. Sucesiones monótonasLas definiciones sobre monotonía de sucesiones se obtienen particularizando a sucesiones las que
dimos sobre monotonía de funciones. Esto equivale a lo siguiente:
Definición 3.1.8. a) Una sucesión (sn) es monótona no decreciente si y solo si para todo n ∈ Nse verifica sn ≤ sn+1.
b) Una sucesión (sn) esmonótona no creciente si y solo si para todo n ∈ N se verifica sn ≥ sn+1.
c) Una sucesión (sn) es estrictamente creciente si y solo si para todo n ∈N se verifica sn < sn+1.
d) Una sucesión (sn) es estrictamente decreciente si y solo si para todo n ∈ N se verifica sn >sn+1.

42 Capítulo 3. Sucesiones de números reales
e) Una sucesión se dice que es monótona si es de alguno de los tipos anteriores.
Proposición 3.1.9. a) Sea (sn) una sucesión monótona no decreciente. Entonces (sn) es conver-gente si y solo si está acotada superiormente, en cuyo caso
lımnsn = sup{sn : n ∈ N}.
b) Sea (sn) una sucesión monótona no creciente. Entonces (sn) es convergente si y solo si estáacotada inferiormente, en cuyo caso
lımnsn = ınf{sn : n ∈ N}.
Demostración. Sea (sn) una sucesión monótona no decreciente. Según la proposición 3.1.7, si la su-cesión converge entonces está acotada (superiormente); esto demuestra una implicación del apartadoa). Supongamos ahora que la sucesión está acotada superiormente, sea a su supremo y veamos quela sucesión converge al punto a. Sea ε > 0. Como a− ε < a, el número a− ε no puede ser una cotasuperior de la sucesión, y por lo tanto existirá algún N ∈ N tal que
a− ε < aN .
Como la sucesión es no decreciente, para cada n> N se tendrá
aa− ε
s1 s2 s3 . . . sN . . .
toda sucesión no decreciente y acotada tiene límite
a− ε < aN ≤ aN+1 ≤ · · ·≤ an
y, por la definición de supremo,an ≤ a< a+ ε.
Por lo tanto, a− ε < an < a+ ε . Esto demuestra que la sucesión converge al punto a.La demostración del apartado b) es análoga.
Ejemplo (el número e). La sucesión de término n-ésimo
sn =(1+
1n
)n
es estrictamente creciente y acotada superiormente por 3. Lo primero puede probarse mediante ladesigualdad de Bernoulli observando que
sn+1sn
=
(1+ 1
n+1)n+1(
1+ 1n)n =
( n+2n+1
)n+1( n+1n
)n+1 nn+1
=[n(n+2)]n+1
((n+1)2)n+1· n+1
n=n+1n
(1− 1
(n+1)2
)n+1
>n+1n
(1+(n+1) −1
(n+1)2
)=n+1n
· nn+1 = 1.

3.1. Sucesiones convergentes 43
Que 3 acota superiormente a la sucesión puede deducirse del siguiente resultado, que a su vez sedemuestra por inducción: para cada n ∈N, si −1≤ h≤ 1
n se tiene (1+h)n ≤ 1+nh+n2h2 (ayuda: sinh≤ 1, también n2h3 ≤ nh2).
El límite de esta sucesión es el número e, base de los logaritmos neperianos y de la funciónexponencial ya presentados en el capítulo 2.
Ejemplo. La sucesión (xn) es monótona no decreciente y acotada si x ∈ [0,1]; veremos que su límitees 0 si x ∈ [0,1) y 1 si x = 1. Cuando x ∈ (1,+∞), la sucesión (xn) es estrictamente creciente yno acotada (para ver esto último, tómese h = x− 1 > 0 y aplíquese la desigualdad de Bernoulli axn = (1+h)n junto con la propiedad arquimediana) (teorema 1.2.2).
Ejemplo. La sucesión de término n-ésimo Hn = 1+ 12 + · · ·+ 1
n es estrictamente creciente y no aco-tada. Que es estrictamente creciente es inmediato:
Hn+1 = 1+12 +
13 · · ·+ 1
n+
1n+1 = Hn+
1n+1 > Hn.
Veamos que no está acotada, considerando los términos H2m :
H2m = 1+12 +
(13 +
14
)+
(15 +
16 +
17 +
18
)+
(19 + · · ·+ 1
16
)+ · · ·+
(1
2m−1+1 + · · ·+ 12m
)≥ 1+
12 +
(14 +
14
)+
(18 +
18 +
18 +
18
)+
(116 + · · ·+ 1
16
)+ · · ·+
(12m + · · ·+ 1
2m
)(el primer paréntesis tiene 2 sumandos, el segundo 4, el tercero 8..., el último tiene 2m−1)
= 1+12 +
24 +
48 +
816 + · · ·+ 2m−1
2m
(aparte del 1, hay m sumandos, todos iguales a 12 )
= 1+m2 ;
por lo tanto, H2m ≥ 1+ m2 y la sucesión Hn no está acotada.
Ejemplo. La sucesión de término n-ésimo sn = 1n+1+ 1
n+2+ · · ·+ 12n es estrictamente creciente (puesto
que sn+1− sn = 12n+1 − 1
2n+2 > 0) y acotada superiormente por 1 (obsérvese que sn ≤ 1n + 1
n + (n). . .+1n = 1).De su límite, por el momento, solo podemos asegurar que está entre s1 = 1
2 y 1 (o entre s2 = 13 + 1
4y 1, o entre s3 = 1
4 + 15 + 1
6 y 1, etcétera). Más adelante podremos probar que su valor exacto es log2.
3.1.3. Operaciones con sucesionesProposición 3.1.10. Sean (sn), (tn) sucesiones convergentes con límites
a= lımnsn, b= lım
ntn,
y sea c ∈ R. Entonces
a) (sn+ tn) es convergente y tiene límite a+b.

44 Capítulo 3. Sucesiones de números reales
b) (c · sn) es convergente y tiene límite c ·a.Demostración. a) Sea ε > 0. Usando la definición de convergencia de (sn) obtenemos que existe N1 ∈N tal que si n>N1, entonces |sn−a| < ε/2. De igual manera existe N2 ∈N tal que si n>N2, entonces|tn−b| < ε/2. Escribimos N =max{N1,N2}. Por tanto, si n> N, se verifican las dos desigualdades ala vez y así, |(sn+ tn)− (a+b)|≤ |sn−a|+ |tn−b| < ε/2+ ε/2= ε .
b) Si c= 0 el resultado es trivial. Suponer por tanto c &= 0. Usamos la definición de convergencia de(sn) y así, existe N1 ∈N tal que si n>N1, entonces |sn−a|< ε/|c|. Por tanto, |csn−ca|= |c| |sn−a|<|c|ε/|c| = ε
Proposición 3.1.11. Sean (sn), (tn) sucesiones convergentes con límites
a= lımnsn, b= lım
ntn.
Entonces (sn · tn) es convergente y tiene límite a ·b.Demostración. Como (sn) es convergente, está acotada por la proposición 3.1.7 y existe K > 0 tal que|sn|≤ K,∀n ∈ N.
Sea ε > 0. Como (sn) converge, existe N1 ∈ N tal que si n > N1 entonces |sn− a| < ε2|b|+1 . Por
otra parte, como (tn) converge, existe N2 ∈ N tal que si n> N2 entonces |tn−b| < ε2K .
Finalmente, si N =max{N1,N2} y n> N, se tiene
|sntn−ab| = |sntn− snb+ snb−ab|≤ |sn| |tn−b|+ |b| |sn−a|≤ K ε2K + |b| ε
2|b|+1 < ε
Ejemplo.1n2
=1n· 1n→ 0.
En general, aplicando reiteradamente el mismo argumento, 1np → 0 cualquiera que sea p ∈ N.
Proposición 3.1.12. Si (sn) es una sucesión acotada y (tn) es una sucesión convergente a 0, la suce-sión (sn · tn) converge a 0.Demostración. Sea ε > 0. Sea K > 0 tal que |sn|≤ K,∀n ∈ N. Usando la definición de convergenciade tn para ε/K, se tiene que existe N1 ∈ N tal que si n> N1 entonces |tn| < ε/K. Por tanto, |sn · tn|≤Kε/K = ε .
Ejemplo. La sucesión de término n-ésimo (−1)nn converge a 0 (tómese sn = (−1)n, tn = 1
n en la pro-posición 3.1.12)
Lema 3.1.13. Sea (tn) una sucesión convergente con límite b &= 0. Fijado r de modo que 0< r < |b|,existe m ∈ N tal que para n ∈ N se verifica
|tn| > r siempre que n> m.
Precisando más: si b> 0, estn > r siempre que n> m
y si b< 0,tn <−r siempre que n> m.
Demostración. Es consecuencia inmediata de la proposición 3.1.3.

3.1. Sucesiones convergentes 45
Proposición 3.1.14. Sea (sn) una sucesión convergente con límite a y (tn) una sucesión convergentecon límite b &= 0. Si (un) es una sucesión tal que
un =sntn
siempre que tn &= 0,
entonces (un) es convergente con límite a/b.
Demostración. Sea ε > 0. Relacionamos la definición de límite del cociente con el límite de cada unade las sucesiones de la forma siguiente:∣∣∣∣sntn − a
b
∣∣∣∣ =∣∣∣∣snb− tnabtn
∣∣∣∣ =|snb− tna|
|b||tn| =|snb+ sntn− sntn− tna|
|b||tn| ≤ |sn| |tn−b|+ |tn| |sn−a||b||tn|
Primeramente, usando el lema 3.1.13 con r = |b|/2, existe N1 ∈ N tal que si n > N1, se tiene |tn| >|b|/2. Ahora, por la proposición 3.1.7, existen constantes K1,K2 > 0 tales que |sn| < K1 y |tn| < K2para todo n ∈ N. Por otra parte, aplicamos la definición de límite de sn, y así existe N2 ∈ N tal que
si n > N2 entonces |sn− a| < ε|b|24K2
. Análogamente para tn, existe N3 ∈ N tal que si n > N3 entonces
|tn−b| < ε|b|24K1
. Finalmente, si n>max{N1,N2,N3} todas las acotaciones se verifican y
∣∣∣∣sntn − ab
∣∣∣∣≤ |sn| |tn−b|+ |tn| |sn−a||tn||b| <
K1 ε|b|24K1 +K2 ε|b|2
4K2|b||b|/2 = ε
Corolario 3.1.15. Sea (sn) una sucesión convergente con límite a y (tn) una sucesión convergente sintérminos nulos y con límite b &= 0. Entonces la sucesión (sn/tn) es convergente y
lımn
sntn
=ab.
Ejemplos. a) La sucesión de término n-ésimo
1+2+ · · ·+nn2
converge a 1/2: basta observar que
1+2+ · · ·+nn2
=n(n+1)2n2
=12(1+
1n).
b) La sucesión de término n-ésimo
1n
[(a+
1n)2+
(a+
2n)2+ · · ·+ (
a+n−1n
)2]converge al número a2+a+ 1
3 (¿por qué?).
c) Si (sn) es una sucesión cuyos términos son todos no negativos, convergente y con límite a,entonces la sucesión (
√sn) es convergente con límite √a. En el caso a = 0, esto se deduceinmediatamente de la definición de límite; en el caso a &= 0, se deduce de
√sn−
√a=
sn−a√sn+√a

46 Capítulo 3. Sucesiones de números reales
y de que (sn−a) converge a 0, mientras que 1/(√sn+
√a) está acotada:
0<1√sn+√a≤ 1√
a.
d) La sucesión de término n-ésimo √1+n−1n
converge a 0 (¿por qué?).
e) La sucesión de término n-ésimo √n2+1+
√n
4√n3+n−nconverge (¿a qué límite? ¿por qué?).
f) La sucesión de término n-ésimo √n+1−√n
converge (¿a qué límite? ¿por qué?).
g) La sucesión (sn) consn =
11 ·2 +
12 ·3 +
13 ·4 + · · ·+ 1
n(n+1)
converge a 1(
1k(k+1) = 1
k − 1k+1 =⇒ sn = 1− 1
n+1 → 1).
3.1.4. Desigualdades y límites. Regla del sandwichProposición 3.1.16. Si (sn) y (tn) son dos sucesiones convergentes y existe un m tal que
sn ≤ tn para todo n> m,
entonceslımnsn ≤ lımn tn.
Demostración. La sucesión tn− sn cumple la desigualdad 0 ≤ tn− sn para todo n > m y converge alımn tn− lımn sn. Por el corolario 3.1.4, 0≤ lımn tn− lımn sn, es decir, lımn sn ≤ lımn tn.
Ahora podemos enunciar cómodamente una versión del teorema de los intervalos encajados deCantor con una condición sencilla para que la intersección esté formada por un solo punto.
Teorema 3.1.17 (de Cantor de los intervalos encajados). Para cada n ∈ N, sea In = [an,bn] unintervalo cerrado (no vacío). Supongamos que para todo n se cumple In+1 ⊆ In, es decir,
an ≤ an+1 ≤ bn+1 ≤ bn,
y que ademáslımn
(bn−an) = 0.
Entonces⋂n∈N In se reduce a un punto; en concreto,⋂
n∈NIn = {x},

3.1. Sucesiones convergentes 47
dondex= lım
nan = lım
nbn.
Demostración. Obsérvese que, por hipótesis, la sucesión (an) es monótona no decreciente y acotadasuperiormente (por b1, por ejemplo), luego, por la proposición 3.1.9, converge a un número real x.Análogamente, la sucesión (bn) converge a un número real r y por la proposición 3.1.16, es an ≤x ≤ r ≤ bn para todo n ∈ N. Ahora, la condición lımn(bn− an) = 0 asegura que x = r y que {x} =∩n∈NIn.
Proposición 3.1.18 (regla del sandwich o de encajamiento). Sean (sn), (tn) y (un) sucesiones talesque existe un m ∈ N de manera que
sn ≤ tn ≤ un
para todo n> m. Si (sn) y (un) son sucesiones convergentes y con el mismo límite a, es decir,
lımnsn = lım
nun = a,
entonces (tn) es también convergente y tiene el mismo límite a, es decir,
lımntn = a.
Demostración. Sea ε > 0. Por la definición de límite existeN1 ∈N tal que si n>N1 entonces |sn−a|<ε , es decir, a− ε < sn < a+ ε . Análogamente, existe N2 ∈ N tal que si n> N2 entonces a− ε < un <a+ε . Entonces si n>max{m,N1,N2} se tiene a−ε < sn ≤ tn ≤ un < a+ε , es decir, |tn−a| < ε .
Ejemplos. a) Se verifica
1√n2+1
+1√n2+2
+ · · ·+ 1√n2+n
→ 1,
pues podemos encajar la sucesión entre
n√n2+n
y n√n2+1
.
b) Comprobando que la sucesión de término n-ésimo
n+1n2+1 +
n+2n2+2 + · · ·+ n+n
n2+n
está encajada entre
n+1n2+n
+n+2n2+n
+ · · ·+ n+nn2+n
=n ·n+(1+2+ · · ·+n)
n2+n=n2+ 1
2n(n+1)n2+n
yn+1n2+1 +
n+2n2+1 + · · ·+ n+n
n2+1 =n ·n+(1+2+ · · ·+n)
n2+1 =n2+ 1
2n(n+1)n2+1 ,
se deduce que la sucesión dada converge a 32 .

48 Capítulo 3. Sucesiones de números reales
3.1.5. Subsucesiones. Teorema de Bolzano-WeierstrassEliminando términos de una sucesión podemos extraer de ella nuevas sucesiones, cuyos términos
aparecen en la sucesión original en el mismo orden (tal vez no en el mismo lugar) que en la nueva: esdecir, vamos tomando infinitos términos, saltando algunos quizá, pero sin volver atrás. Por ejemplo,dada una sucesión
s1,s2,s3,s4,s5,s6,s7,s8,s9, . . . ,
si nos quedamos con los términos que ocupan lugar impar (eliminando los que ocupan lugar par),obtenemos una nueva sucesión
s1,s3,s5,s7,s9, . . . ,
cuyo término n-ésimo es s2n−1; si nos quedamos con los términos que ocupan lugar par (eliminandolos que ocupan lugar impar), obtenemos la nueva sucesión
s2,s4,s6,s8,s10, . . . ,
cuyo término n-ésimo es s2n. Podemos imaginar fácilmente otras muchas maneras de extraer suce-siones de la sucesión inicial con este procedimiento. Se obtienen así lo que se llaman subsucesionesde la sucesión dada; como iremos viendo a lo largo del curso, el manejo de subsucesiones facilitahabitualmente el estudio de la sucesión original, y permite demostrar varias propiedades esenciales dela teoría de funciones reales de variable real. Pasemos a formalizar este concepto.
Definición 3.1.19. Dada una sucesión (sn), se dice que otra sucesión (tn) es una subsucesión de (sn)si existe una función ϕ : N−→ N estrictamente creciente, es decir,
ϕ(1) < ϕ(2) < ϕ(3) < · · · < ϕ(n) < ϕ(n+1) < · · ·
de manera que para todo n ∈ N es tn = sϕ(n).
Ejemplos. ([BARTLE-SHERBERT, pág. 110], [ROSS, págs. 48–51])
a) Sea n0 ∈ N. Tomando ϕ(n) = n+n0 en la definición anterior, se obtiene la subsucesión
sn0+1,sn0+2,sn0+3,sn0+4,sn0+5,sn0+6,sn0+7, . . . ,
que resulta de la original suprimiendo los n0 primeros términos.
b) La sucesión de término n-ésimo tn = 4n2 es una subsucesión de la sucesión de término n-ésimosn = (−1)nn2, como se ve tomando ϕ(n) = 2n.
c) La sucesión(1, 13 ,
12 ,14 ,15 ,16 ,17 , . . .
)no es una subsucesión de
( 1n)∞n=1. Tienen los mismos térmi-
nos, pero no en el mismo orden. La sucesión(1,0, 13 ,0,
15 ,0,
17 ,0, . . . ,
1+(−1)n+12n , . . .
)tampoco es
una subsucesión de( 1n)∞n=1.
d) Toda sucesión es una subsucesión de sí misma (reflexividad). También hay transitividad: si (un)es una subsucesión de (tn) y (tn) es una subsucesión de (sn), a su vez (un) es una subsucesiónde (sn).
Proposición 3.1.20. Toda subsucesión de una sucesión convergente es también convergente y tiene elmismo límite.

3.1. Sucesiones convergentes 49
Demostración. Es una consecuencia inmediata de la definición de límite.
Aplicaciones. a) Ya vimos, con cierto esfuerzo, que ((−1)n) no es una sucesión convergente.Ahora es inmediato: la subsucesión de sus términos de lugar par converge a 1, la subsucesiónde sus términos de lugar impar converge a −1.
b) Para x ∈ [0,1), la sucesión (xn) converge a 0: puesto que es convergente, según probamos,y si lım
nxn = a, vemos que lım
nxn+1 = a · x. Pero (
xn+1)es una subsucesión de (xn) (la que
corresponde a ϕ(n) = n+1 en la definición), luego también lımnxn+1 = a, de donde a · x = a y
como x &= 1, finalmente a= 0. ¿Por qué no podemos utilizar estos cálculos si x> 1?
c) La enumeración diagonal de todos los números racionales forma una sucesión que no es con-vergente: tiene subsucesiones convergentes a cualquier número real (ver [ROSS, págs. 49–50]).
Proposición 3.1.21. Una sucesión (sn) es convergente si y solo si la subsucesión de términos delugar par (s2n) y la subsucesión de términos de lugar impar (s2n−1) son ambas convergentes y tienenel mismo límite.
Demostración. Por la proposición 3.1.20 basta con demostrar que si s2n→ a∈R y s2n−1→ a entoncessn→ a. Sea ε > 0. Por la definición de límite existen N1,N2 ∈ N tales que:
a) si k > N1 es |s2k−a| < ε;
b) si k > N2 es |s2k−1−a| < ε .
Ahora si n>max{2N1,2N2−1} se tiene, tanto si n es par como impar que |sn−a| < ε .
Lema 3.1.22. Toda sucesión posee una subsucesión monótona.
Demostración. Véase [SPIVAK, pág. 622].
Con ayuda del teorema de Cantor de los intervalos encajados (teorema 3.1.17) o bien del le-ma 3.1.22, puede demostrarse el siguiente resultado:
Teorema 3.1.23 (de Bolzano-Weierstrass). Toda sucesión acotada posee una subsucesión conver-gente.
Demostración. Sea (sn) una sucesión acotada y K > 0 de forma que −K ≤ sn ≤ K para todo n ∈ N.Vamos construyendo la subsucesión de la siguiente forma: bien en [0,K], bien en [−K,0], habrá infi-nitos términos de la sucesión (quizá incluso en los dos). Supongamos que en I1 = [0,K] hay infinitostérminos y elijamos cualquier elemento sϕ(1) ∈ I1. De nuevo repetimos la idea y, o bien en [0,K/2]o en [K/2,K], habrá infinitos términos de la sucesión. Nos quedamos uno de los intervalos que con-tenga infinitos sn; supongamos, por ejemplo, que es I2 = [K/2,K]. Elegimos un elemento sϕ(2) ∈ I2que además cumpla ϕ(2) > ϕ(1). Observemos que I2 ⊆ I1. El siguiente paso es de nuevo subdividirI2 en dos mitades, [K/2,3K/4] y [3K/4,K], elegir una mitad I3 que contenga infinitos términos dela sucesión y seleccionar un nuevo sϕ(3) ∈ I3 con ϕ(3) > ϕ(2). Construimos de esa forma una suce-sión de intervalos cerrados encajados I1 ⊇ I2 ⊇ · · · ⊇ In ⊇ . . . y una subsucesión (sϕ(n)) de (sn) consϕ(n) ∈ In para todo n ∈ N. Por comodidad escribimos In = [an,bn] con lo que an ≤ sϕ(n) ≤ bn paratodo n ∈ N y además, como la longitud de cada In es K/2n, se tiene bn− an = K/2n→ 0. Por tantopodemos aplicar el teorema 3.1.17 de los intervalos encajados y asegurar la existencia de x∈R tal quex= lım
nan = lım
nbn. Pero por la regla de sandwich (proposición 3.1.18) tenemos que sϕ(n) → x.

50 Capítulo 3. Sucesiones de números reales
3.1.6. Sucesiones de CauchyDefinición 3.1.24. Una sucesión (sn)∞n=1 se dice que es de Cauchy si para cada ε > 0 existe algúnN ∈ N (que puede depender de ε) de modo que
n,m> N =⇒ |sn− sm| < ε.
Lema 3.1.25. Toda sucesión de Cauchy está acotada.
Demostración. La definición, usada para ε = 1, asegura la existencia de N ∈N de modo que si n>N,entonces |sn− sN+1| < 1, es decir, sN+1− 1 < sn < sN+1+ 1. La sucesión (sn) está acotada inferior-mente por mın{s1, . . . ,sN ,sN+1−1} y superiormente por max{s1, . . . ,sN ,sN+1+1}.Proposición 3.1.26. Una sucesión es convergente si y solo si es de Cauchy.
Demostración. Sea sn → a ∈ R. Sea ε > 0. Por definición de límite, existe N ∈ N de modo que sin>N, entonces |sn−a| < ε/2. Por tanto, si n,m>N es |sn−sm| = |sn−a+a−sm|≤ |sn−a|+ |sm−a| < ε/2+ ε/2= ε .
Recíprocamente, sea (sn) una sucesión de Cauchy. Puesto que está acotada (lema 3.1.25), el teo-rema 3.1.23 de Bolzano-Weierstrass asegura la existencia de una subsucesión (sϕ(n)) convergente aun cierto a ∈ R.
Dado ε > 0, existe N ∈N de modo que si n,m>N, entonces |sn−sm|< ε/2. En particular se tiene|sn− sϕ(m)| < ε/2. Ahora, tomando límite en m se llega a que, si n> N es |sn−a|≤ ε/2< ε .
3.2. Límites infinitos3.2.1. Sucesiones divergentes. Propiedades. Operaciones con sucesiones divergentesDefinición 3.2.1. Decimos que una sucesión (sn) diverge a +∞, y escribimos lım
nsn = +∞, si para
todo M ∈ R existe algún N ∈ N que cumpla: n> N =⇒ sn >M.Decimos que una sucesión (sn) diverge a −∞, y escribimos lımn sn = −∞, si para todo M ∈ R
existe N ∈ N que cumpla: n> N =⇒ sn <M.Una sucesión divergente es una sucesión que diverge a +∞ o a −∞. Las sucesiones que no son
convergentes ni divergentes se denominan sucesiones oscilantes.
Nota. Se sigue directamente de la definición que una sucesión (sn) diverge a+∞ si y solo si su opuesta(−sn) diverge a −∞.Observación. En la definición de sucesión que diverge a +∞, en lugar de M ∈ R se puede ponerM > 0; y en la definición de sucesión que diverge a −∞ se puede poner M > 0:
a) Una sucesión (sn) diverge a +∞ si y solo si para todo M > 0 existe N ∈ N tal que siempre quen> N sea sn >M.
b) Una sucesión (sn) diverge a −∞ si y solo si para todo M < 0 existe N ∈ N tal que siempre quen> N sea sn <M.
Notas. a) En lo sucesivo, diremos que una sucesión tiene límite si es convergente o divergente, esdecir, si no es oscilante. Obsérvese que el límite (en este sentido ampliado) sigue siendo único:si a, b ∈ R∪{+∞,−∞} y lımn sn = a, lımn sn = b, es a= b.A veces nos referiremos a las sucesiones convergentes como sucesiones con límite finito y a lasdivergentes como sucesiones con límite infinito.

3.2. Límites infinitos 51
b) Si una sucesión diverge, no está acotada. Pero hay sucesiones no acotadas que oscilan, no sondivergentes.
Proposición 3.2.2. a) Sea (sn) una sucesión monótona no decreciente. Si no está acotada supe-riormente, (sn) diverge a +∞,
lımnsn = +∞.
b) Sea (sn) una sucesión monótona no creciente. Si no está acotada inferiormente, (sn) diverge a−∞,
lımnsn =−∞.
Demostración. Es consecuencia directa de las definiciones.
Corolario 3.2.3. Toda sucesión monótona tiene límite (finito si está acotada, infinito en caso contra-rio).
Ejemplo. Ya vimos que la sucesión de término n-ésimo
Hn = 1+12 +
13 + · · ·+ 1
n
es monótona estrictamente creciente y no está acotada superiormente. Luego diverge a +∞.
Proposición 3.2.4. a) Toda subsucesión de una sucesión divergente a +∞ es divergente a +∞.
b) Toda subsucesión de una sucesión divergente a −∞ es divergente a −∞.Demostración. Es consecuencia directa de la definición de límite.
Proposición 3.2.5. a) Una sucesión posee una subsucesión divergente a +∞ si y solo si no estáacotada superiormente.
b) Una sucesión posee una subsucesión divergente a−∞ si y solo si no está acotada inferiormente.
c) Una sucesión posee una subsucesión divergente si y solo si no está acotada.
Demostración. Es consecuencia directa de las definiciones.
Proposición 3.2.6. a) Si (sn) es una sucesión divergente a +∞ y (tn) es una sucesión acotadainferiormente, la sucesión (sn+ tn) diverge a +∞.
b) ) Si (sn) es una sucesión divergente a −∞ y (tn) es una sucesión acotada superiormente, lasucesión (sn+ tn) diverge a −∞.
Demostración. a) Por la definición de acotación inferior existe K ∈R tal que tn > K para todo n ∈N.Ahora sea M ∈ R. Por definición de límite existe N ∈ N tal que si n > N se tiene sn > M−K. Portanto, si n> N es sn+ tn >M−K+K =M. El caso b) es completamente análogo.
Corolario 3.2.7. a) Si (sn) es una sucesión divergente a +∞ y (tn) es una sucesión convergente odivergente a +∞, la sucesión (sn+ tn) diverge a +∞: abreviadamente,
lımnsn = +∞, lım
ntn = a ∈ R∪{+∞} =⇒ lım
n(sn+ tn) = +∞.

3.2. Límites infinitos 51
b) Si una sucesión diverge, no está acotada. Pero hay sucesiones no acotadas que oscilan, no sondivergentes.
Proposición 3.2.2. a) Sea (sn) una sucesión monótona no decreciente. Si no está acotada supe-riormente, (sn) diverge a +∞,
lımnsn = +∞.
b) Sea (sn) una sucesión monótona no creciente. Si no está acotada inferiormente, (sn) diverge a−∞,
lımnsn =−∞.
Demostración. Es consecuencia directa de las definiciones.
Corolario 3.2.3. Toda sucesión monótona tiene límite (finito si está acotada, infinito en caso contra-rio).
Ejemplo. Ya vimos que la sucesión de término n-ésimo
Hn = 1+12 +
13 + · · ·+ 1
n
es monótona estrictamente creciente y no está acotada superiormente. Luego diverge a +∞.
Proposición 3.2.4. a) Toda subsucesión de una sucesión divergente a +∞ es divergente a +∞.
b) Toda subsucesión de una sucesión divergente a −∞ es divergente a −∞.Demostración. Es consecuencia directa de la definición de límite.
Proposición 3.2.5. a) Una sucesión posee una subsucesión divergente a +∞ si y solo si no estáacotada superiormente.
b) Una sucesión posee una subsucesión divergente a−∞ si y solo si no está acotada inferiormente.
c) Una sucesión posee una subsucesión divergente si y solo si no está acotada.
Demostración. Es consecuencia directa de las definiciones.
Proposición 3.2.6. a) Si (sn) es una sucesión divergente a +∞ y (tn) es una sucesión acotadainferiormente, la sucesión (sn+ tn) diverge a +∞.
b) ) Si (sn) es una sucesión divergente a −∞ y (tn) es una sucesión acotada superiormente, lasucesión (sn+ tn) diverge a −∞.
Demostración. a) Por la definición de acotación inferior existe K ∈R tal que tn > K para todo n ∈N.Ahora sea M ∈ R. Por definición de límite existe N ∈ N tal que si n > N se tiene sn > M−K. Portanto, si n> N es sn+ tn >M−K+K =M. El caso b) es completamente análogo.
Corolario 3.2.7. a) Si (sn) es una sucesión divergente a +∞ y (tn) es una sucesión convergente odivergente a +∞, la sucesión (sn+ tn) diverge a +∞: abreviadamente,
lımnsn = +∞, lım
ntn = a ∈ R∪{+∞} =⇒ lım
n(sn+ tn) = +∞.

3.2. Límites infinitos 53
c) Si (sn) es una sucesión divergente a +∞ y (tn) es una sucesión convergente con límite negativoo divergente a −∞, la sucesión (sn · tn) diverge a −∞: abreviadamente,
lımnsn = +∞, lım
ntn = a ∈ {−∞}∪ (−∞,0) =⇒ lım
n(sn · tn) =−∞.
d) Si (sn) es una sucesión divergente a −∞ y (tn) es una sucesión convergente con límite negativoo divergente a −∞, la sucesión (sn · tn) diverge a +∞: abreviadamente,
lımnsn =−∞, lım
ntn = a ∈ {−∞}∪ (−∞,0) =⇒ lım
n(sn · tn) = +∞.
Demostración. Es consecuencia directa de la proposición 3.2.8 y la proposición 3.1.3.
Nota. El producto de una sucesión divergente a +∞ o a −∞ por una sucesión convergente a 0 puederesultar convergente, divergente a +∞, divergente a −∞ u oscilante.Proposición 3.2.10 (inversas de sucesiones divergentes). a) Una sucesión (sn) diverge a +∞ si
y solo si tiene como mucho un número finito de términos no positivos y su inversa converge a 0:abreviadamente,
lımnsn = +∞ ⇐⇒
{∃m;sn > 0 siempre que n> mlımn
1sn = 0
b) Una sucesión (sn) diverge a −∞ si y solo si tiene como mucho un número finito de términos nonegativos y su inversa converge a 0: abreviadamente,
lımnsn =−∞ ⇐⇒
{∃m;sn < 0 siempre que n> mlımn
1sn = 0
c) La sucesión de valores absolutos de una sucesión (sn) diverge a +∞ si y solo si tiene comomucho un número finito de términos no nulos y su inversa converge a 0: abreviadamente,
lımn
|sn| = +∞ ⇐⇒{∃m;sn &= 0 siempre que n> mlımn
1sn = 0
Demostración. a) Suponemos primeramente que sn → +∞. Por definición de límite, si n > N1 essn > 0, es decir, tiene como mucho un número finito de términos no positivos. Ahora, para ver ques−1n → 0, fijamos ε > 0. De nuevo por hipótesis, existe N2 ∈N tal que si n> N2 es sn > 1/ε . Luego sin>max{N1,N2} se tiene s−1n < ε .
Recíprocamente,supongamos que sn > 0 si n > N1 y que s−1n → 0. Para ver que sn → +∞ fi-jamos M > 0. Por definición de límite, existe N2 ∈ N tal que si n > N2 es s−1n < 1/M. Luego sin>max{N1,N2} se tiene sn >M.
Los otros apartados se demuestran análogamente.
Es fácil comprobar que una sucesión (sn) converge a 0 si y solo si la sucesión (|sn|) de sus valoresabsolutos converge a 0. En efecto, ambas propiedades equivalen a que para todo ε > 0 exista un N talque |sn| < ε para n> N. En general, sin embargo, solo puede afirmarse que si (sn) es convergente conlímite a, entonces (|sn|) es convergente con límite |a|; el recíproco no siempre es cierto si a &= 0. Deesto se deduce:

54 Capítulo 3. Sucesiones de números reales
Corolario 3.2.11. Una sucesión (sn) sin términos nulos converge a 0 si y solo si la sucesión (1/|sn|)de los valores absolutos de los inversos diverge a +∞: en símbolos, si sn &= 0 para todo n,
lımnsn = 0 ⇐⇒ lım
n
1|sn| = +∞.
Observación. Como sntn = sn · 1tn , el estudio de cocientes se reduce fácilmente a los casos anteriores.
Una muestra:
Corolario 3.2.12. Si (sn) es una sucesión divergente a +∞ y (tn) es una sucesión convergente conlímite positivo o una sucesión convergente a 0 que tiene a lo más un número finito de términos nopositivos, entonces
(sntn
)es una sucesión divergente a +∞.
Nota. Si la sucesión cociente( sntn
)está definida, puede ser convergente, divergente a +∞, divergente
a −∞ u oscilante, si estamos en alguno de los dos casos siguientes:a) (sn) y (tn) convergen a 0;
b) lım |sn| = lım |tn| = +∞.
Si (sn) tiene límite no nulo (finito o infinito) y (tn) converge a 0, su cociente es divergente salvo en elcaso de que tenga infinitos términos positivos e infinitos términos negativos.
Proposición 3.2.13 (encajamiento de sucesiones divergentes). Dadas dos sucesiones (sn) y (tn)para las que existe un m tal que
sn ≤ tn siempre que n> m,
se verifica:
a) si (sn) diverge a +∞, también (tn) diverge a +∞:
lımnsn = +∞=⇒ lım
ntn = +∞.
b) si (tn) diverge a −∞, también (sn) diverge a −∞:lımntn =−∞=⇒ lım
nsn =−∞.
Demostración. a) Es consecuencia directa de la definición. Si dadoM ∈R existe N ∈N de modo quesi n> N es sn >M, tambien se tiene tn ≥ sn >M. Análogamente se comprueba el apartado b).
3.2.2. La recta ampliadaLos resultados anteriores sugieren ampliar al conjunto R = R∪{+∞,−∞} la estructura de orden
de R, y (parcialmente) sus operaciones algebraicas. Concretamente:
a) Para todo x ∈ R,−∞≤ x≤+∞.
b) Para todo x ∈ R distinto de −∞,(+∞)+ x= x+(+∞) = +∞.

3.2. Límites infinitos 55
c) Para todo x ∈ R distinto de +∞,
(−∞)+ x= x+(−∞) =−∞;
quedan sin definir (+∞)+(−∞) y (−∞)+(+∞).
d) −(+∞) =−∞, −(−∞) = +∞.
e) Para x, y ∈ R,x− y= x+(−y)
siempre que la suma tenga sentido; quedan sin definir (+∞)− (+∞) y (−∞)− (−∞).
f) Para todo x ∈ (0,+∞)∪{+∞},
(+∞) · x= x · (+∞) = +∞.
g) Para todo x ∈ {−∞}∪ (−∞,0),
(+∞) · x= x · (+∞) =−∞.
h) Para todo x ∈ (0,+∞)∪{+∞},
(−∞) · x= x · (−∞) =−∞.
i) Para todo x ∈ {−∞}∪ (−∞,0),
(−∞) · x= x · (−∞) = +∞;
quedan sin definir (+∞) ·0, 0 · (+∞), (−∞) ·0 y 0 · (−∞).
j) 1+∞ = 1
−∞ = 0.
k) Para x, y ∈ R,xy
= x ·(1y
)siempre que el producto tenga sentido; quedan sin definir 10 y por tanto
x0 cualquiera que sea
x ∈ R, así como +∞+∞ ,
+∞−∞ ,
−∞+∞ , y
−∞−∞ .
l) |+∞| = |−∞| = +∞.
Con la estructura resultante, R suele denominarse la recta ampliada.
Observación. En R puede hablarse también de cotas superiores e inferiores de un conjunto no vacío,y de supremo, ínfimo, máximo y mínimo. Todo subconjunto no vacío de R tiene siempre supremo(cota superior mínima) e ínfimo (cota inferior máxima) en R.
Notas. a) Dados dos elementos cualesquiera x, y ∈ R tales que x< y, se puede encontrar siempreun número real z que cumple x < z < y; en otras palabras, todo intervalo (x,y) ⊆ R contienenúmeros reales.

56 Capítulo 3. Sucesiones de números reales
b) Dados x, y, z ∈ R, se tienex≥ y=⇒ x+ z≥ y+ z
siempre que las sumas estén definidas.
c) Para todo x de R se tiene (−1) · x=−x.d) Se siguen verificando en R las propiedades del valor absoluto en todos los casos en que tengansentido.
Teorema 3.2.14. Dada una sucesión (sn) con límite a (finito o infinito) y una sucesión (tn) con límiteb (finito o infinito), se tiene:
a) si a+b está definido en R, (sn+ tn) tiene límite a+b.
b) si a−b está definido en R, (sn− tn) tiene límite a−b.c) si a ·b está definido en R, (sn · tn) tiene límite a ·b.d) si a/b está definido en R, (sn/tn) tiene límite a/b.
3.2.3. Límite superior y límite inferior de una sucesión. Límites de oscilaciónDefinición 3.2.15. Sea (sn) una sucesión acotada superiormente. La sucesión (xn) de números realesdefinida por
xn = sup{sk : k ≥ n}es monótona no creciente, por lo que tiene límite (que puede ser finito o −∞). Dicho límite recibe elnombre de límite superior de la sucesión (sn). Se denota por lımsup
nsn, de modo que
lımsupn
sn = lımn
(supk≥n
sk
)= ınf
n
(supk≥n
sk
).
Si (sn) no está acotada superiormente, se define
lımsupn
sn = +∞.
Definición 3.2.16. Sea (sn) una sucesión acotada inferiormente. La sucesión (yn) de números realesdefinida por
yn = ınf{sk : k ≥ n}es monótona no decreciente, por lo que tiene límite (que puede ser finito o +∞). Dicho límite recibeel nombre de límite inferior de la sucesión (sn). Se denota por lıminfn
sn, de modo que
lıminfn
sn = lımn
(ınfk≥n
sk)
= supn
(ınfk≥n
sk)
.
Si (sn) no está acotada inferiormente, se define
lıminfn
sn =−∞.

3.2. Límites infinitos 57
Nota. Una consecuencia inmediata de la definición es que siempre
lıminfn
sn ≤ lımsupn
sn.
Ejemplos. Pueden examinarse las siguientes sucesiones (en algunos casos no es sencillo demostrarcon rigor cuáles son el límite superior y el inferior):
a) lıminfn
(−1)n =−1, lımsupn
(−1)n = 1.
b) lıminfn
(−1)nn=−∞, lımsupn
(−1)nn= +∞.
c) lıminfn
(−1)nn
= 0, lımsupn
(−1)nn
= 0.
d) lıminfn
senn=−1, lımsupn
senn= 1.
e) (0,1,0,1,0,1, . . .); el límite inferior es 0 y el límite superior es 1.
f) (0,1,0,2,0,3, . . .); el límite inferior es 0 y el límite superior es +∞.
g) (0, 12 ,0,13 ,0,
14 , . . .); el límite inferior es 0 y el límite superior es 0, también.
h) (a,b,c,a,b,c, . . .); el límite inferior es mın{a,b,c} y el límite superior es max{a,b,c}.Proposición 3.2.17. Dada una sucesión (sn), se tiene:
a) (sn) es convergente con límite a si y solo si
lıminfn
sn = lımsupn
sn = a.
b) (sn) es divergente a +∞ si y solo si
lıminfn
sn = +∞,
y en tal caso también lımsupn
sn = +∞.
c) (sn) es divergente a −∞ si y solo si
lımsupn
sn =−∞,
y en tal caso también lıminfn
sn =−∞.
Demostración. a) Pongamos, para cada n ∈ N,
xn = sup{sk : k ≥ n}, yn = ınf{sk : k ≥ n}. (3.1)
Está claro que yn ≤ sn ≤ xn. Como lıminfnsn = lım
nyn y lımsup
nsn = lım
nxn, si lıminfn
sn = lımsupn
sn =
a ∈ R, basta aplicar la regla del sandwich (proposición 3.1.18) para obtener que (sn) es convergentecon límite a.

58 Capítulo 3. Sucesiones de números reales
Recíprocamente, si (sn) es convergente con límite a, dado ε > 0 hay un N tal que para todo n> Nes
a− ε2 < sn < a+
ε2 ,
con lo que para todo n > N el conjunto {sk : k ≥ n} está acotado superiormente por a+ ε2 e inferior-
mente por a− ε2 , y así para todo n> N es
a− ε < a− ε2 ≤ yn ≤ xn ≤ a+
ε2 < a+ ε,
y en definitiva,lıminf
nsn = lım
nyn = a= lım
nxn = lımsup
nsn.
b) Para que lıminfn
sn = +∞, la sucesión (sn) debe estar acotada inferiormente y, usando la no-tación (3.1), debe ser lım
nyn = +∞. Como yn ≤ sn, esto obliga a que (sn) sea también divergente a
+∞.Recíprocamente, si (sn) diverge a +∞ entonces no está acotada superiormente y por definición es
lımsupn
sn = +∞. También es lıminfn
sn = +∞, ya que dadoM ∈R existe un N tal que para todo n> Nse verifica sn >M+1, con lo que yn ≥ yN ≥M+1>M, es decir, lım
nyn = +∞.
c) Razonamiento análogo al anterior.
Corolario 3.2.18. Una sucesión (sn) tiene límite (en R) si y solo si
lıminfn
sn = lımsupn
sn.
Y en este caso, el límite es igual al límite superior y al límite inferior. La sucesión (sn) es oscilante siy solo si
lıminfn
sn < lımsupn
sn.
Demostración. Consecuencia inmediata de la proposición 3.2.17.
Una descripción interesante de los límites superior e inferior se expresa mediante el siguienteconcepto.
Definición 3.2.19. Se dice que un número a ∈ R es un límite de oscilación de una sucesión (sn) si aes límite de alguna subsucesión de (sn).
Corolario 3.2.20. Toda sucesión tiene al menos un límite de oscilación.
Demostración. Toda sucesión tiene una subsucesión monótona, y esta tiene límite (finito o infinito).
Proposición 3.2.21. El límite superior de una sucesión es el máximo (en R) de sus límites de oscila-ción. El límite inferior de una sucesión es el mínimo (en R) de sus límites de oscilación.
Demostración. Sea (sn) sucesión. Veamos primeramente que el límite superior (y análogamente severía el límite inferior) es límite de oscilación.
Caso 1: supongamos que lımsupsn = s ∈ R. Sea yn = supk≥n
sk con lo que s = ınfnyn. Ahora, por la
definición de ínfimo, existe N1 ∈ N tal que si n > N1 es s− 1 < yn < s+ 1, y por la definición de

3.2. Límites infinitos 59
supremo, existe ϕ(1) ∈N tal que s−1< sϕ(1) < s+1. Repitiendo la misma idea, existe ϕ(2) > ϕ(1)tal que s− 1/2 < sϕ(2) < s+ 1/2, y en general existe ϕ(n) > .. . > ϕ(1) tal que s− 1/n < sϕ(n) <s+1/n. Claramente, por la regla del sandwich, la subsucesión sϕ(n) converge a s.
Caso 2: ahora supongamos que lımsupsn = +∞. Con la notación anterior, y puesto que (yn) es nodecreciente, se tiene yn = +∞ para todo n ∈ N. Como consecuencia, para cada n ∈ N existe sϕ(n) talque sϕ(n) > n. Además, se puede suponer que ϕ(n) > .. . > ϕ(1). Por lo tanto, sϕ(n) →+∞.
Obsérvese que el caso lımsupsn =−∞ queda cubierto por la proposición 3.2.17.Para finalizar basta demostrar que cualquier otro límite de oscilación de (sn) está entre el límite
superior y el inferior. Sea (sϕ(n)) subsucesión convergente a un límite de oscilación. Claramente, conla notación de la definición, yn ≤ sϕ(n) ≤ xn y tomando límites se tiene la tesis del enunciado.
Otras propiedades de los límites superior e inferior se recogen en el siguiente enunciado.
Proposición 3.2.22. Sean (sn), (tn) sucesiones de números reales y c ∈ R.
a) si lımsupn
sn < c, existe un n0 tal que sn < c para todo n≥ n0 (es decir, solo hay un número finitode términos de la sucesión mayores o iguales que c).
b) si lımsupn
sn > c, existen infinitos n para los que sn > c.
c) si lıminfn
sn > c, existe un n0 tal que sn > c para todo n≥ n0 (es decir, solo hay un número finitode términos de la sucesión menores o iguales que c).
d) si lıminfn
sn < c, existen infinitos n para los que sn < c.
e) si para algún m es sn ≤ tn siempre que n> m, entonces
lıminfn
sn ≤ lıminfntn; lımsup
nsn ≤ lımsup
ntn.
f)
lıminfn
sn+ lıminfn
tn ≤ lıminfn(sn+ tn)≤ lıminfn
sn+ lımsupn
tn
≤ lımsupn
(sn+ tn)≤ lımsupn
sn+ lımsupn
tn.
g) si c≥ 0,lıminf
n(csn) = c lıminf
nsn; lımsup
n(csn) = c lımsup
nsn.
h) si c< 0,lıminf
n(csn) = c lımsup
nsn; lımsup
n(csn) = c lıminf
nsn.
i) si sn ≥ 0, tn ≥ 0,lıminf
nsn · lıminfn
tn ≤ lıminfn(sntn)≤ lıminfn
sn · lımsupn
tn ≤ lımsupn
(sntn)≤ lımsupn
sn · lımsupn
tn.
j) si sn > 0 para todo n,
lıminfn
sn+1sn
≤ lıminfn
n√sn ≤ lımsup
nn√sn ≤ lımsup
n
sn+1sn
.

60 Capítulo 3. Sucesiones de números reales
3.3. Límites de sucesiones y funciones elementalesSi f (x) representa una cualquiera de las funciones ex, logx, senx, cosx, tgx, arcsenx, arccosx,
arc tgx, xr, entonceslımnsn = a=⇒ lım
nf (sn) = f (a)
para cualquier punto a del dominio de la función y cualquier sucesión sn contenida en el dominio dela función. Otros límites son los siguientes:
lımnsn =−∞=⇒ lım
nesn = 0
lımnsn = +∞=⇒ lım
nesn = +∞
lımnsn = 0, sn > 0 para todo n=⇒ lım
nlogsn =−∞
lımnsn = +∞=⇒ lım
nlogsn = +∞
lımnsn =−∞=⇒ lım
narc tgsn =−π
2
lımnsn = +∞=⇒ lım
narc tgsn = π
2
lımnsn = 0, sn > 0 para todo n=⇒ lım
nsrn =
{0, si r > 0+∞, si r < 0
lımnsn = +∞=⇒ lım
nsrn =
{+∞, si r > 00, si r < 0
Si f (x) = arxr +ar−1xr−1+ · · ·+a0 es un polinomio (con r ∈ N y ar &= 0), entonces
lımnsn = +∞=⇒ lım
nf (sn) = +∞ (si ar > 0),
lımnsn = +∞=⇒ lım
nf (sn) =−∞ (si ar < 0).
Definición 3.3.1. Sean (sn) y (tn) dos sucesiones. Decimos que las dos sucesiones son equivalentesy escribimos
sn ∼ tnsi se verifica
lımn
sntn
= 1.
Las principales equivalencias de sucesiones son:• Si sn→ 0,
esn−1∼ sn log(1+ sn)∼ sn
sensn ∼ sn 1− cossn ∼ 12s2n
• Sea f (x) = arxr +ar−1xr−1+ · · ·+a0, con ar &= 0; si sn→+∞,
f (sn)∼ arsrn,log f (sn)∼ r logsn (si ar > 0).
• Fórmula de Stirling: n!∼ nne−n√2πn.

3.4. Ejercicios 61
3.4. EjerciciosEjercicio 3.1. ¿Para qué valores de a ∈ R es (an) una subsucesión de
( 1n)? ¿Y de
( 12n
)? ¿Y de
( 12n
)?
¿Y de( 12n−1
)?
Ejercicio 3.2. Estudiar el límite de la sucesión
4+31 ·3 ,
9−42 ·4 ,
16+53 ·5 ,
25−64 ·6 , . . .
Ejercicio 3.3. Calcular el límite de las sucesiones de término general:
a) 1n
[(a+
1n
)2+
(a+
2n
)2+ · · ·+
(a+
n−1n
)2]b) (12+22+ · · ·+n2)2
(1+2+ · · ·+n)3c) 1+22+32+ · · ·+n2
1+n+n2+n3
d) 3 3√n−4 5
√n2
3√n−3(4− 5√n)
e)√n√
n+√n+
√n
f)√4n2−1− (2n−1) g) 3√n3+an2− 3√n3−an2
h) n(
3
√1+
an−1
)i)
√n2+
√n−√
n2−√nn( 3
√n3+
√n− 3
√n3−√n)
j)√n2+n+1−√3n2−1−3n k)
√9n2−n− 3√27n3−5n2
l) (4n+3) log n+1n−2 m)
(n2+3n−2n2+n
) n3+22n2+1
n)(n+1n−1
)n2+2n−3 ñ)
(1+ log 3n
2+2n+13n2+5n
)4n+1
o)(1n
) 1log(3/n) p) (2+3n4)
13+2log(n+1)
q)(log(n2+1)log(n2−1)
)n2 lognr) 3
√(n+a)(n+b)(n+ c)−n
s) 22n(n!)2√n
(2n+1)! t) n(2 ·4 ·6 · · ·(2n−2)1 ·3 ·5 · · ·(2n−1)
)2u)
n√
(n+1)(n+2) · · ·(n+n)n
v) 1n
n√
(3n+1)(3n+2) · · ·(4n)
w) 1p+2p+ · · ·+np
np− np+1 (p ∈ N) x)
cos1+ cos 1√2 + · · ·+ cos 1√
n −nlog(n3+1)
y)√1 ·2 ·3+
√2 ·3 ·4+ · · ·+√
n(n+1)(n+2)n2√n

62 Capítulo 3. Sucesiones de números reales
z) log1− log2+ log3− · · ·+ log(2n−1)− log2nlogn
A)√2! tg 12 + 3√3! tg 13 + · · ·+ n√n! tg 1n√
n2+1B) n
√n√(n
1)(n2) · · ·(nn)
C) 1n2
+1
(n+1)2 + · · ·+ 1(n+n)2
D) (2n+3n)1/n
E) sen n2π2(n2+1) + sen n2π
2(n2+2) + · · ·+ sen n2π2(n2+n)
Ejercicio 3.4. Hallar una relación entre a, b y c para que
lımnna (n+1)b−nb
(n+1)c−nc
sea real y distinto de cero. En ese caso, hallar dicho límite.
Ejercicio 3.5. Discutir, según el valor de a ∈ R, la existencia y el valor de lımn
an+nan−1+2n .
Ejercicio 3.6. Sea un =1
1+n+
12+n
+1
3+n+ · · ·+ 1
n+n; probar que existe lım
nun y está compren-
dido entre 1/2 y 1.
Ejercicio 3.7. Hallar, si existe, el límite de la sucesión dada por un+1 =n
2n+1un.
Ejercicio 3.8. Sea (xn)∞n=1 una sucesión. Probar que si existen lımk x2k, lımkx2k−1 y lım
kx3k, entonces
existe lımnxn y coincide con los anteriores.
Ejercicio 3.9. Demostrar que si xn→ a, entonces x1+ x2+ · · ·+ xnn
→ a.
Ejercicio 3.10. Calcular el límite superior y el inferior de las sucesiones de término general:a) a+
(−1)nn
b) (−1)n+1n
c) (−1)nn
+1+(−1)n
d)(1+
(−1)nn
)ne) (−1)nn
2n+1 f) 2n+(−1)n(n+2)3n+3
g) (−1)n(3+
2n+13n+2
)h) a−n(−1)n i) (−1)n(n+1)
2n+1
j) sn =
2, si n es múltiplo de 40, si n es par y no es múltiplo de 41, si n es impar

Capítulo 4
Continuidad
4.1. Límites de funciones reales de una variable real4.1.1. Definición de límite de una función. Unicidad del límite. Límite por sucesionesDefinición 4.1.1. Dado a ∈ R, un conjunto V ⊆ R es un entorno de a si contiene un intervalo (a−ε,a+ ε) para algún ε > 0. Si V es un entorno de a, se dice que el conjunto V \ {a} es un entornoreducido de a.Ejemplos. a) Si b< a< c, los intervalos (b,c), [b,c), (b,c] y [b,c] son entornos de a. También lo
son los intervalos (b,+∞), [b,+∞), (−∞,c) y (−∞,c].
b) Todo conjunto que contenga un entorno de un punto es a su vez entorno de ese punto.
Definición 4.1.2. Sea A ⊆ R, a ∈ R; a es un punto de acumulación de A si todo entorno reducidode a contiene puntos de A; equivalentemente, si para cada ε > 0 existe algún y ∈ A tal que y $= a,|y−a| < ε , o sea, tal que 0< |y−a| < ε .
El conjunto de puntos de acumulación de un conjunto A suele denominarse conjunto derivado deA y representarse por A′.
Informalmente, a ∈ A′ si y solo si hay puntos de A, distintos de a, arbitrariamente próximos alpunto a.
Ejemplos. a) Si A es finito, A′ = /0.
b) N′ = Z′ = /0, Q′ = R.
c) (a,b)′ = [a,b]′ = [a,b].
d) Si A= {1/n : n ∈ N}, 0 ∈ A′ (aunque 0 /∈ A) y 1 /∈ A′ (aunque 1 ∈ A).Observación. Se puede probar que a∈ A′ si y solo si existe una sucesión (xn) de puntos de A distintosde a que converge al punto a.
Definición 4.1.3 (límite de una función en un punto). Sea A ⊆ R, f : A→ R, a ∈ A′, b ∈ R. Seescribe
lımx→a
f (x) = b
cuando se cumple lo siguiente: para cada ε > 0 existe algún δ > 0 tal que para todo x ∈ A con0< |x−a| < δ se tiene | f (x)−b| < ε .
Se dice entonces que b es límite de f (x) cuando x tiende al punto a.
63

64 Capítulo 4. Continuidad
b
f (a)
2ε
a2δ
0< |x−a| < δ $⇒ | f (x)−b| < ε
b
f (a)
2ε
a2δ
0< |x−a| < δ =⇒ | f (x)−b| < ε
La condición de que | f (x)−b| < ε para todo x ∈ A con 0< |x−a| < δ se puede escribir de estaotra forma:
f (U)⊆ (b− ε,b+ ε), U = [A∩ (a−δ ,a+δ )]\{a}.Podemos parafrasear esta definición diciendo que f (x) se acerca a b cuando x se acerca al punto adentro del dominio de f , o que b puede ser aproximado tanto como se quiera por valores de f enpuntos de su dominio suficientemente próximos al punto a, pero distintos de a.
Ejemplo. Si f : R→ R está dada por
f (x) =
{0 si x $= 0;1 si x= 0,
entonces lımx→0 f (x) = 0 (sin que importe que f (0) = 1).
Proposición 4.1.4 (unicidad del límite). Sea A⊆ R, f : A→ R, a ∈ A′, b1, b2 ∈ R. Si
lımx→a
f (x) = b1 y lımx→a
f (x) = b2
entonces b1 = b2.
Demostración. Supongamos, por ejemplo, que b1 < b2. Elijamos ε =b2−b12 . Deben existir un δ1 > 0
tal que para todo x ∈ A con 0< |x−a| < δ1 es f (x) < b1+ ε =b1+b22 y un δ2 > 0 tal que para todo
x ∈ A con 0< |x−a| < δ2 esb1+b22 = b2− ε < f (x). Definiendo δ =mın{δ1,δ2}, resulta que para
todo x ∈ A con 0< |x−a| < δ es b1+b22 < f (x) <
b1+b22 . Esto es una contradicción.
El resultado anterior también se puede obtener como una consecuencia de la proposición siguientey de la unicidad del límite para sucesiones.
Proposición 4.1.5 (límite a través de sucesiones). Sea A⊆R, f : A→R, a∈A′, b∈R. Las siguientespropiedades son equivalentes:
a) lımx→a
f (x) = b.

4.1. Límites de funciones reales de una variable real 65
b) para cada sucesión (sn) de puntos de A\{a} tal que lımnsn = a se verifica lım
nf (sn) = b.
Demostración. a)=⇒b) Supongamos que lımx→a
f (x) = b. Para cualquier ε > 0 se puede encontrar δ > 0de modo que para todo x ∈ A con 0< |x−a| < δ se cumple | f (x)−b| < ε . Sea (sn) una sucesión depuntos de A\{a} tal que lım
nsn = a. Dado δ > 0, existirá un N ∈N tal que para todo n> N se verifica
|sn−a| < δ , y como sn $= a, se deduce que | f (sn)−b| < ε; en otras palabras, lımnf (sn) = b.
b)=⇒a) Vamos a probar que si a) no se cumple, entonces b) tampoco. Que no se cumpla a)significa que existe algún ε > 0 tal que para todo δ > 0 hay al menos un xδ ∈ A que cumple 0 <|xδ −a| < δ y sin embargo | f (xδ )−b|≥ ε .
Para cada n ∈ N, elijamos δ = 1n . Hay algún punto sn ∈ A que cumple 0 < |sn− a| < 1
n y sinembargo | f (sn)−b|≥ ε . La sucesión (sn) así obtenida tiene las siguientes propiedades:
• está contenida en A\{a}, porque sn ∈ A, pero 0< |sn−a|;• lım
nsn = a, porque 0 < |sn− a| < 1
n (basta aplicar la definición de límite, o bien la regla delsandwich, proposición 3.1.18).
• pero la sucesión f (sn) no tiende a b, porque para todos los n ∈ N, | f (sn)−b|≥ ε .
Por lo tanto, no se cumple b).
4.1.2. Límites infinitos y límites en el infinitoDefinición 4.1.6. Un conjunto V ⊆R es un entorno reducido de +∞ o −∞ si exsite un r ∈R tal que(r,+∞)⊆V (respectivamente, (−∞,r)⊆V).Definición 4.1.7. Se dice que +∞ es un punto de acumulación de un conjunto A ⊆ R si A no estáacotado superiormente, en cuyo caso se escribe +∞ ∈ A′. Se dcie que −∞ es un punto de acumula-ción de un conjunto A⊆ R si A no está acotado inferiormente, y en ese caso se escribe −∞ ∈ A′.Definición 4.1.8 (límites infinitos y límites en el infinito). Sea A⊆ R, f : A→ R, a,b ∈ R∪{±∞},a ∈ A′. Se escribe
lımx→a
f (x) = b
si para cada entorno V de b existe un entorno reducido U de a tal que f (U)⊆V.Pueden darse definiciones en términos de desigualdades, desglosando los diferentes casos posi-
bles. Concretamente, sean A⊆ R, f : A→ R, a,b ∈ R.
a) lımx→a
f (x) = +∞ si para cadaM ∈R existe algún δ > 0 tal que todos los x∈ A con 0< |x−a|< δcumplen f (x) >M.
b) lımx→a
f (x) =−∞ si para cadaM ∈R existe algún δ > 0 tal que todos los x∈ A con 0< |x−a|< δcumplen f (x) <M.
c) lımx→+∞
f (x) = b si para cada ε > 0 existe algún K ∈R tal que todos los x ∈ A con x> K cumplen| f (x)−b| < ε .
d) lımx→+∞
f (x) = +∞ si para cada M ∈ R existe algún K ∈ R tal que todos los x ∈ A con x > Kcumplen f (x) >M.

66 Capítulo 4. Continuidad
e) lımx→+∞
f (x) = −∞ si para cada M ∈ R existe algún K ∈ R tal que todos los x ∈ A con x > Kcumplen f (x) <M.
f) lımx→−∞ f (x) = b si para cada ε > 0 existe algún K ∈R tal que todos los x ∈ A con x< K cumplen| f (x)−b| < ε .
g) lımx→−∞ f (x) = +∞ si para cada M ∈ R existe algún K ∈ R tal que todos los x ∈ A con x < Kcumplen f (x) >M.
h) lımx→−∞ f (x) = −∞ si para cada M ∈ R existe algún K ∈ R tal que todos los x ∈ A con x < Kcumplen f (x) <M.
Con esta ampliación, sigue habiendo unicidad de límite. Igualmente se mantiene la caracterizaciónmediante sucesiones:
Proposición 4.1.9. Sea A ⊆ R, f : A→ R, a,b ∈ R∪ {±∞}, a ∈ A′. Las siguientes propiedades sonequivalentes:
a) lımx→a
f (x) = b.
b) para cada sucesión (sn) de puntos de A\{a} tal que lımnsn = a se verifica lım
nf (sn) = b.
Demostración. Basta adaptar a cada caso la demostración de la proposición 4.1.5.
4.1.3. Cálculo de límitesProposición 4.1.10 (operaciones algebraicas con límites). Sean A⊆ R, a ∈ R∪{±∞} un punto deacumulación de A, c ∈ R y f ,g : A→ R. Se tiene:
a) lımx→a
( f (x)+g(x)) = lımx→a
f (x)+ lımx→a
g(x), si estos últimos límites existen y su suma está definidaen R∪{±∞}.
b) lımx→a
c f (x) = c lımx→a
f (x), si este último límite existe y su producto por c está definido enR∪{±∞}.
c) lımx→a
f (x)g(x) = lımx→a
f (x) lımx→a
g(x), si estos últimos existen y su producto está definido en R∪{±∞}.
d) lımx→a
f (x)g(x)
=lımx→a
f (x)
lımx→a
g(x), si estos últimos límites existen y su cociente está definido en R∪{±∞}.
Demostración. Basta aplicar la proposición 4.1.9 y el resultado análogo para sucesiones.
Proposición 4.1.11 (acotación y límite cero). Sean A⊆ R, a ∈ R∪{±∞} un punto de acumulaciónde A, y f ,g : A→ R. Supongamos que:
a) la función f está acotada, es decir, existe M > 0 tal que | f (x)|≤M para todo x ∈ A.b) lım
x→ag(x) = 0;
Entonces lımx→a
f (x)g(x) = 0.

4.1. Límites de funciones reales de una variable real 67
Demostración. Basta aplicar la proposición 4.1.9 y el resultado análogo para sucesiones.
Proposición 4.1.12 (cambios de variable). Sean A, B subconjuntos de R, a un punto de acumulaciónde A, b un punto de acumulación de B, f : A→ R y g : B→ R tales que f (A)⊆ B y supongamos que
lımx→a
f (x) = b, lımy→b
g(y) = c
Si b $∈ f (A), entonces existe lımx→a
g( f (x)) = c.
Demostración. Sea ε > 0. Como lımy→b
g(y) = c, existe algún r > 0 tal que para todo y ∈ B con 0 <
|y−b| < r, se tiene |g(y)− c| < ε .Ahora, como lım
x→af (x) = b, existe algún δ > 0 tal que para todo x ∈ A con 0< |x−a| < δ , se tiene
| f (x)−b| < r.Sea x ∈ A con 0 < |x− a| < δ . No solo es | f (x)− b| < r, sino que como b $∈ f (A) y f (A) ⊆ B,
resulta0< | f (x)−b| < r, f (x) ∈ B
Por lo tanto, |g( f (x))− c| < ε .
La hipótesis adicional b $∈ f (A) es suficiente, aunque no necesaria para que se verifique la tesis.Bastaría también, por ejemplo, que f fuese inyectiva; o que b ∈ B y c = g(b). Sin añadir algunacondición como estas, no puede garantizarse la validez del resultado final: considérese, por ejemplo,el caso de las funciones definidas en R por
f (x) = 0, g(y) =
{0 si y $= 01 si y= 0
.
Entonces g( f (x)) = 1 para todo x, y así
lımx→0 f (x) = 0, lım
y→0g(y) = 0, lımx→0g( f (x)) = 1.
A veces es útil en el cálculo de límites tener en cuenta las siguientes consecuencias inmediatas dela definición de límite:
Proposición 4.1.13. Si A⊆ R, a punto de acumulación de A y f : A→ R,
a) lımx→a
f (x) = b ∈ R⇐⇒ lımx→a
| f (x)−b| = 0.
b) lımx→a
f (x) = b ∈ R =⇒ lımx→a
| f (x)| = |b|.El recíproco solo es cierto, en general, cuando b= 0.
c) lımx→a
f (x) = b (a ∈ R)⇐⇒ lımt→0 f (a+ t) = b.

68 Capítulo 4. Continuidad
4.1.4. Límites lateralesSi en las definiciones de límites añadimos una de las dos condiciones x > a, x < a, entonces se
habla de límites laterales (por la derecha y por la izquierda, respectivamente). Se emplea la notaciónlımx→a+
f (x), lımx→a−
f (x).
Definición 4.1.14 (límites laterales: por la derecha y por la izquierda). Sean A ⊆ R, f : A→ R,a ∈ R un punto de acumulación de A y b ∈ R.
a) Se dice que lımx→a+
f (x) = b si para cada ε > 0 existe algún δ > 0 tal que todos los x ∈ A con0< x−a< δ cumplen | f (x)−b| < ε .
b) Se dice que lımx→a+
f (x) = +∞ si para cada M ∈R existe algún δ > 0 tal que todos los x ∈ A con0< x−a< δ cumplen f (x) >M.
c) Se dice que lımx→a+
f (x) =−∞ si para cada M ∈R existe algún δ > 0 tal que todos los x ∈ A con0< x−a< δ cumplen f (x) <M.
d) Se dice que lımx→a−
f (x) = b si para cada ε > 0 existe algún δ > 0 tal que todos los x ∈ A con0< a− x< δ cumplen | f (x)−b| < ε .
e) Se dice que lımx→a−
f (x) = +∞ si para cada M ∈R existe algún δ > 0 tal que todos los x ∈ A con0< a− x< δ cumplen f (x) >M.
f) Se dice que lımx→a−
f (x) =−∞ si para cada M ∈R existe algún δ > 0 tal que todos los x ∈ A con0< a− x< δ cumplen f (x) <M.
En términos de entornos reducidos, la definición anterior se puede escribir de manera más breve.Para los límites laterales se puede probar el resultado análogo a la proposición 4.1.9. También, y comoconsecuencia inmediata de las definiciones, tenemos:
Proposición 4.1.15. Sean A∈R, f : A→R y a∈R de modo que (a−δ ,a+δ )⊆ A para algún δ > 0.Sea b ∈ R∪{±∞}. Entonces,
lımx→a
f (x) = b ⇐⇒ lımx→a−
f (x) = lımx→a+
f (x) = b.
Las proposiciones siguientes demuestran que las funciones monótonas tienen límites laterales entodos los puntos.
Proposición 4.1.16. Sean A⊆ R, f : A→ R monótona no decreciente, a ∈ R∪{±∞}.a) si a ∈ [A∩ (−∞,a)]′, entonces f tiene límite por la izquierda en a (finito o infinito) y es
lımx→a−
f (x) = sup{ f (x) : x ∈ A∩ (−∞,a)}
(entendiendo que si el conjunto no está acotado superiormente, su supremo es +∞).
b) si a ∈ [A∩ (a,+∞)]′ entonces f tiene límite por la derecha en a (finito o infinito) y es
lımx→a+
f (x) = ınf{ f (x) : x ∈ A∩ (a,+∞)}
(entendiendo que si el conjunto no está acotado inferiormente, su ínfimo es −∞).

4.1. Límites de funciones reales de una variable real 69
Demostración. Solo demostramos el apartado a) y en el caso de que a ∈ R y el conjunto { f (x) : x ∈A∩ (−∞,a)} esté acotado. Los demás casos son similares.
Sea L= sup{ f (x) : x ∈ A∩ (−∞,a)} ∈ R. Sea ε > 0. Entonces, L− ε no es una cota superior delconjunto { f (x) : x ∈ A∩ (−∞,a)}, así que existe algún r ∈ A∩ (−∞,a) tal que L− ε < f (r). Si ahoraelegimos δ = a− r, todos los x ∈ A tales que 0< a− x< δ cumplen
r = a−δ < x,
luego L− ε < f (r)≤ f (x)≤ L< L+ ε , es decir: | f (x)−L| < ε .
La variante para funciones monótonas no crecientes, que enunciamos a continuación, se demuestrade igual manera.
Proposición 4.1.17. Sean A⊆ R, f : A→ R monótona no creciente, a ∈ R∪{±∞}.a) si a ∈ [A∩ (−∞,a)]′, entonces f tiene límite por la izquierda en a y es
lımx→a−
f (x) = ınf{ f (x) : x ∈ A∩ (−∞,a)}
(entendiendo que si el conjunto no está acotado inferiormente, su ínfimo es −∞).b) si a ∈ [A∩ (a,+∞)]′ entonces f tiene límite por la derecha en a y es
lımx→a+
f (x) = sup{ f (x) : x ∈ A∩ (a,+∞)}
(entendiendo que si el conjunto no está acotado superiormente, su supremo es +∞).
4.1.5. Límites de funciones elementalesSi f (x) representa una cualquiera de las funciones ex, logx, senx, cosx, tgx, arcsenx, arccosx,
arc tgx, xr, entonceslımx→a
f (x) = f (a)
para cualquier punto a del dominio de la función. Otros límites son los siguientes:
lımx→−∞e
x = 0 lımx→+∞
ex = +∞
lımx→0+
logx=−∞ lımx→+∞
logx= +∞
lımx→(π/2)−
tgx= +∞ lımx→(π/2)+
tgx=−∞
lımx→−∞arc tgx=−π
2 lımx→+∞
arc tgx=π2
lımx→0+
xr = 0 lımx→+∞
xr = +∞ (si r > 0)
lımx→0+
xr = +∞ lımx→+∞
xr = 0 (si r < 0)
Si f (x) = arxr +ar−1xr−1+ · · ·+a0 es un polinomio (con r ∈ N y ar $= 0), entonces
lımx→+∞
f (x) = +∞ (si ar > 0),
lımx→+∞
f (x) =−∞ (si ar < 0).

70 Capítulo 4. Continuidad
También se tiene el siguiente orden de infinitud, donde a> 0 y b> 1:
logx- xa- bx- xx (x→+∞).
Aquí, “ f (x)- g(x) cuando x→+∞” significa que
lımx→+∞
f (x)g(x)
= 0
(o bien que g(x)/ f (x)→+∞).
Definición 4.1.18. Sean A⊆R, a∈R∪{±∞} un punto de acumulación de A, y f , g :A→R. Decimosque f es equivalente a g cuando x tiende al punto a, y escribimos
f (x)∼ g(x) (x→ a)
si se verifica
lımx→a
f (x)g(x)
= 1.
Nota. Los resultados sobre sucesiones equivalentes se trasladan sin dificultad a funciones equivalen-tes.
En general, podemos traducir las equivalencias entre sucesiones a equivalencias entre funciones.Por ejemplo:
• Equivalencias de infinitésimos: cuando x→ 0,
ex−1∼ x log(1+ x)∼ x (1+ x)α −1∼ αxsenx∼ x 1− cosx∼ x2/2 tgx∼ x
arcsenx∼ x arc tgx∼ x
• Equivalencias de infinitos: sea f (x) = arxr +ar−1xr−1+ · · ·+a0, con ar $= 0; cuando x→+∞,
f (x)∼ arxr,log f (x)∼ r logx (si ar > 0).
4.1.6. Límites y desigualdades
Notación. Para abreviar y unificar algunos enunciados, a veces es cómoda la siguiente notación:dados a ∈ R∪{±∞}, r ∈ R,
E(a;r) =
{x ∈ R : 0< |x−a| < r} si a ∈ R (y entonces r > 0){x ∈ R : x> r} si a= +∞{x ∈ R : x< r} si a=−∞.
Proposición 4.1.19. Sean A⊆ R, a ∈ R∪{±∞} un punto de acumulación de A y f : A→ R para laque existe lım
x→af (x) = b ∈ R∪{±∞}. Se tiene:

4.1. Límites de funciones reales de una variable real 71
a) dado c< b, existe r tal quec< f (x) ∀x ∈ A∩E(a;r)
(en palabras, cuando el límite de f en a es mayor que c, también la función f se mantienemayor que c en puntos suficientemente próximos al punto a, pero distintos de a).
b) dado c> b, existe r tal quef (x) < c ∀x ∈ A∩E(a;r)
(en palabras, cuando el límite de f en a es menor que c, también la función f se mantienemenor que c en puntos suficientemente próximos al punto a, pero distintos de a).
Corolario 4.1.20. Sean A⊆R, a ∈R∪{±∞} un punto de acumulación de A y f ,g : A→R y supon-gamos que existen lım
x→af (x) = b ∈ R∪{±∞} y lım
x→ag(x) = c ∈ R∪{±∞}. Se tiene:
a) Si b> 0, entonces existe algún r > 0 tal que
0< f (x) ∀x ∈ A∩E(a;r).
b) Si b< 0, entonces existe algún r > 0 tal que
f (x) < 0 ∀x ∈ A∩E(a;r).
c) Si b< c, entonces existe algún r > 0 tal que
f (x) < g(x) ∀x ∈ A∩E(a;r).
En particular, f conserva el signo del límite en puntos suficientemente próximos al punto a, perodistintos de a (cuando el límite no es nulo).
Observación. En la proposición 4.1.19 y en el corolario 4.1.20, no se puede cambiar < por ≤.Corolario 4.1.21. Sean A⊆R, a ∈R∪{±∞} un punto de acumulación de A y f : A→ R, g : A→ Rfunciones para las que existen lım
x→af (x) = b ∈ R∪ {±∞}, lım
x→ag(x) = c ∈ R∪ {±∞}. Si existe algún
r > 0 tal quef (x)≤ g(x) para todo x ∈ A∩E(a;r),
entonces b≤ c.
Observación. En el enunciado anterior, no se puede cambiar ≤ por <.Proposición 4.1.22 (regla del sandwich para funciones con límite finito). Sean A ⊆ R, a ∈ R∪{±∞} un punto de acumulación de A y f : A→ R, g : A→ R, h : A→ R funciones tales que:
a) existe r de modo que f (x)≤ g(x)≤ h(x) para todo x ∈ A∩E(a;r).
b) existen lımx→a
f (x) = lımx→a
h(x) = b ∈ R.
Entonces también existe lımx→a
g(x) y es igual a b.
Demostración. Basta aplicar la caracterización del límite mediante sucesiones (proposición 4.1.9) yla regla del sandwich para sucesiones (proposición 3.1.18). O bien, se puede demostrar de manerasimilar al caso de las sucesiones.

72 Capítulo 4. Continuidad
La versión para límites infinitos es más simple:
Proposición 4.1.23 (regla del sandwich para funciones con límite infinito). Sean A ⊆ R, a ∈ R∪{±∞} un punto de acumulación de A y f : A→R, g : A→R funciones tales que existe r de modo que
f (x)≤ g(x) para todo x ∈ A∩E(a;r).
a) si lımx→a
f (x) = +∞, entonces también se tiene lımx→a
g(x) = +∞.
b) si lımx→a
g(x) =−∞, entonces también se tiene lımx→a
f (x) =−∞.
Demostración. Basta aplicar la proposición 4.1.9 y el resultado análogo para sucesiones.
4.1.7. Condición de Cauchy para funciones
Proposición 4.1.24. Sean A ⊆ R, a ∈ R∪ {±∞} un punto de acumulación de A y f : A→ R. Lassiguientes propiedades son equivalentes:
a) f tiene límite finito cuando x tiende al punto a;
b) se cumple la siguiente condición de Cauchy: para cada ε > 0 existe r ∈ R tal que para cua-lesquiera x,y ∈ A∩E(a;r) se verifica | f (x)− f (y)| < ε;
c) para cada sucesión (xn) de puntos de A \ {a} tal que lımnxn = a se verifica que la sucesión
( f (xn)) es de Cauchy.
Demostración. a) =⇒ b) Sea lımx→a
f (x) = b. Dado ε > 0 existe r ∈ R tal que para todo x ∈ A∩E(a;r)se tiene
| f (x)−b| < ε2 ,
luego para cualesquiera x,y ∈ A∩E(a;r) será
| f (x)− f (y)|≤ | f (x)−b|+ |b− f (y)| < ε2 +
ε2 = ε.
b) =⇒ c) Es una comprobación sencilla.c) =⇒ a) Dada una sucesión (xn) de puntos de A \ {a} tal que lım
nxn = a, como la sucesión
( f (xn)) es de Cauchy tendrá un límite b, posiblemente distinto para cada sucesión (xn). Según lacaracterización del límite mediante sucesiones (proposición 4.1.9), para completar la demostraciónserá suficiente que probemos que lım
nf (xn) es el mismo para todas las sucesiones (xn).
Sean, pues, (yn), (zn) sucesiones de puntos de A \ {a} tales que lımnyn = a = lım
nzn, y sean c =
lımnf (yn), d = lım
nf (zn). La sucesión (xn) definida por x2n−1 = yn, x2n = zn sigue siendo una sucesión
de puntos de A \ {a} con lımnxn = a, luego ( f (xn)) será una sucesión convergente. Si b es su límite,
como ( f (yn)), ( f (zn)) son subsucesiones suyas, debe cumplirse c= b= d.

4.2. Funciones continuas 73
4.1.8. Límites de restricciones y extensiones de funcionesProposición 4.1.25. Sean f : A ⊆ R → R, a ∈ R∪ {±∞} un punto de acumulación de A, b ∈ R∪{±∞}. Se cumple:a) si A1 ⊆ A, a ∈ A′1, f1 = f |A1 , entonces
lımx→a
f (x) = b=⇒ lımx→a
f1(x) = b.
El recíproco, en general, no es cierto. Sin embargo:
b) cuando A1 = A∩E(a;r) para algún r,
lımx→a
f (x) = b ⇐⇒ lımx→a
f1(x) = b
(nos referimos a este hecho diciendo que el concepto de límite es un concepto local).
c) si A= A1∪A2∪ · · ·∪Am y para 1≤ j ≤ m es a ∈ A′j, f j = f |Aj , entonceslımx→a
f j(x) = b (1≤ j ≤ m) =⇒ lımx→a
f (x) = b.
Observación. Suele ponerselımx→cx∈S
f (x)
en vez de lımx→c
( f |S)(x), y se lee «límite de f (x) cuando x tiende a c a través de S».
4.2. Funciones continuas4.2.1. Definiciones de continuidad. Operaciones con funciones continuasDefinición 4.2.1. Sea f : D ⊆ R→ R, a ∈ D. Se dice que f es continua en el punto a si para todoε > 0 existe δ > 0 tal que para cualquier x ∈ D con |x−a| < δ es | f (x)− f (a)| < ε .
f (a)2ε
a2δ
|x−a| < δ =⇒ | f (x)−b| < ε
Proposición 4.2.2. Sea f : D⊆ R→ R, a ∈ D. Se tiene:a) si a es un punto aislado de D, lo que significa que a /∈ D′, entonces f es continua en a.

74 Capítulo 4. Continuidad
b) si a es un punto de acumulación de D, a ∈ D′, entonces f es continua en a si y solo si existelımx→a
f (x) y es igual a f (a).
Definición 4.2.3. Sea f : D ⊆ R → R, S ⊆ D. Se dice que f es continua en el conjunto S si f escontinua en todos los puntos de S. Si S= D, decimos simplemente que f es continua.
Ejemplos. a) Dado c ∈ R, la función constante f (x) = c es continua (en todos los puntos).
b) La función identidad, f (x) = x, es continua.
c) La función valor absoluto, f (x) = |x|, es continua.d) Las funciones ex, logx, senx, cosx, tgx, arcsenx, arccosx, arc tgx, xr son todas ellas continuasen sus respectivos dominios de definición.
e) La función de Dirichlet,
f (x) =
{1 si x ∈Q0 si x /∈Q
no es continua en ningún punto.
f) La función f : R→ R dada por
f (x) =
{sen 1x si x $= 00 si x= 0
no es continua en 0.
g) La función f : R→ R dada por
f (x) =
{xsen 1x si x $= 00 si x= 0
es continua en 0.
Proposición 4.2.4. Sea f : D⊆ R→ R, a ∈ D. Las siguientes propiedades son equivalentes:a) f es continua en a;
b) si (xn) es una sucesión de puntos de D convergente al punto a, entonces la sucesión ( f (xn))converge a f (a);
Demostración. Análoga a la de la proposición 4.1.9.
Proposición 4.2.5. Sean f , g : D⊆ R→ R, a ∈ D, c ∈ R, y supongamos que f y g son continuas ena. Se tiene:
a) f +g es continua en a.
b) c f es continua en a.
c) f g es continua en a.

4.2. Funciones continuas 75
d) si g(a) $= 0, f/g es continua en a.
Demostración. Basta aplicar la proposición 4.2.4 y el resultado análogo para sucesiones.
Proposición 4.2.6. Sean f : D ⊆ R→ R, g : E ⊆ R→ R, a ∈ D, y supongamos que f (D) ⊆ E. Si fes continua en a y g es continua en f (a), entonces la composición g◦ f es continua en a.Demostración. Sea ε > 0. Como g es continua en el punto f (a), existe algún r > 0 tal que para todoy ∈ E con |y− f (a)| < r, se tiene |g(y)−g( f (a))| < ε .
Ahora, como f es continua en a, existe algún δ > 0 tal que para todo x ∈ D con |x− a| < δ , setiene | f (x)− f (a)| < r.
Sea x∈ dom(g◦ f ) [es decir, x∈D y f (x)∈ E] con |x−a|< δ . Entonces, | f (x)− f (a)|< r, luego|g( f (x))−g( f (a))| < ε .
Corolario 4.2.7. Sean f , g : D ⊆ R → R, a ∈ D. Si f y g son continuas en a, entonces max( f ,g),mın( f ,g) son también continuas en a.
Demostración. Es fácil comprobar que
max( f ,g) =f +g+ | f −g|
2 ,
mın( f ,g) =f +g− | f −g|
2 .
Ahora, la función f −g es continua en a; por la proposición 4.2.6 (tomando en el enunciado f −g enlugar de f y la función valor absoluto en lugar de g), la función | f −g| también es continua en a. Deaquí se deduce que max( f ,g) y mın( f ,g) son continuas en a.
4.2.2. Propiedades de las funciones continuas: teoremas de Weierstrass, Bolzano yDarboux; funciones continuas monótonas
Teorema 4.2.8 (deWeierstrass). Sea f una función continua en un intervalo cerrado y acotado [a,b],(donde a,b ∈ R, a< b). Entonces:
a) f está acotada;
b) f alcanza un valor mínimo y un valor máximo, es decir, existen puntos r,s ∈ [a,b] (no necesa-riamente únicos) tales que para todo x ∈ [a,b] es f (r)≤ f (x)≤ f (s).
Demostración. a) Sea f : [a,b]→R una función no acotada y probemos que entonces hay algún puntodel intervalo [a,b] donde la función no es continua. Dado que f no está acotada, para cada n ∈ N hayalgún punto xn ∈ [a,b] tal que | f (xn)| > n. En particular,
lımn
| f (xn)| = +∞.
Pero la sucesión (xn)∞n=1 sí está acotada, así que, por el teorema 3.1.23 de Bolzano-Weierstrass, hayalguna subsucesión suya que converge:
xϕ(n) → c ∈ [a,b].
Sabemos quelımn
| f (xϕ(n))| = +∞,

76 Capítulo 4. Continuidad
por ser una subsucesión de (| f (xn)|)∞n=1. Entonces, la función f no es continua en c, ya que si lo fueradebería ser
lımn
| f (xϕ(n))| = | f (c)|.
b) Sea f : [a,b]→R continua. Por el apartado anterior, ya sabemos que está acotada, de modo queel conjunto { f (x) : x ∈ [a,b]} tiene supremo e ínfimo en R; sean
M = sup{ f (x) : x ∈ [a,b]} ∈ R,
m= ınf{ f (x) : x ∈ [a,b]} ∈ R.
Se trata de probar que ese supremo y ese ínfimo se alcanzan, es decir, que existen ciertos r,s ∈ [a,b]tales que f (r) = m, f (s) =M.
Para cada n ∈ N, el número M− 1nno es una cota superior de f , de modo que podemos elegir
algún xn ∈ [a,b] tal que
M− 1n
< f (xn)≤M.
En particular,lımnf (xn) =M.
Como la sucesión (xn)∞n=1 está acotada, tendrá alguna subsucesión (xϕ(n))∞n=1 convergente:
xϕ(n) → s ∈ [a,b].
Por una parte, la función f es continua en todos los puntos de [a,b]; por otra,(f (xϕ(n))
)n∈N es una
subsucesión de(f (xn)
)n∈N. Entonces,
f (s) = lımnf (xϕ(n)) =M.
De manera análoga se demuestra que existe algún punto r ∈ [a,b] tal que f (r) = m.
Pasamos a ver dos resultados íntimamente relacionados entre sí, el teorema de Bolzano y el teo-rema de los valores intermedios o propiedad de Darboux. Algunos libros comienzan por probar elteorema de los valores intermedios (por ejemplo, [ROSS, teor. 18.2, pág. 96]) y el teorema de Bolzanoresulta como caso particular; otros proceden al revés, demostrando primero el teorema de Bolzanoy obteniendo después el teorema de los valores intermedios como consecuencia. Tomamos este se-gundo camino, que utiliza una demostración más constructiva que sugiere un procedimiento (un tantorudimentario) para obtener aproximaciones de raíces de ecuaciones.
Teorema 4.2.9 (de los ceros o de Bolzano). Sea f : [a,b]→R una función continua (a,b∈R, a< b).Supongamos que f (a) f (b) < 0. Entonces existe c ∈ (a,b) con f (c) = 0.
Demostración. Sea, por ejemplo, f (a) < 0< f (b). Veamos mediante inducción completa que pode-mos construir sucesiones (xn), (yn) tales que
a≤ x1 ≤ x2 ≤ · · ·≤ xn < yn ≤ · · ·≤ y1 ≤ b,
yn− xn =b−a2n , f (xn)≤ 0, f (yn) > 0 para todo n ∈ N.

4.2. Funciones continuas 77
Para ello, comencemos tomando z1 =a+b2 . O bien f (z1) ≤ 0, o bien f (z1) > 0. En el primer
caso, hagamos x1 = z1, y1 = b; en el segundo caso hagamos x1 = a, y1 = z1. En ambos casos, resultaa≤ x1 < y1 ≤ b, y1− x1 = (b−a)/2, f (x1)≤ 0, f (y1) > 0.
Supongamos construidos x1, . . . , xn, y1, . . . , yn, de manera que
a≤ x1 ≤ x2 ≤ · · ·≤ xn < yn ≤ · · ·≤ y1 ≤ b,
y j−x j = b−a2 j , f (x j)≤ 0, f (y j) > 0 (1≤ j≤ n). Tomamos entonces zn+1 =
xn+ yn2 ; o bien f (zn+1)≤
0, o bien f (zn+1) > 0. En el primer caso, hagamos xn+1 = zn+1, yn+1 = yn, en el segundo caso hagamosxn+1 = xn, yn+1 = zn; en ambos casos resulta
a≤ x1 ≤ x2 ≤ · · ·≤ xn ≤ xn+1 < yn+1 ≤ yn ≤ · · ·≤ y1 ≤ b,
yn+1− xn+1 =b−a2n+1 , f (xn+1)≤ 0, f (yn+1) > 0.
La sucesión (xn) es una sucesión monótona no decreciente, acotada superiormente por b. Entoncestiene un límite c, y necesariamente c≤ b. Análogamente, (yn) es una sucesión monótona no crecienteacotada inferiormente por a. Así que tiene límite y necesariamente lım
nyn ≥ a. Pero como lım
n(yn−
xn) = lımn
b−a2n = 0, resulta que lım
nyn = lım
nxn = c, con lo que a≤ c≤ b.
Puesto que para cada n ∈ N es f (xn) ≤ 0, f (yn) > 0, usando la continuidad de f en c se deducefinalmente
f (c) = lımnf (xn)≤ 0, f (c) = lım
nf (yn)≥ 0,
o sea, f (c) = 0 (lo que garantiza además que a $= c $= b).
Teorema 4.2.10 (teorema de los valores intermedios o de Darboux). Sea I un intervalo, f : I→ Rcontinua. Entonces f tiene la propiedad de los valores intermedios: si a < b y λ está entre f (a) yf (b), es decir, f (a) < λ < f (b) o f (a) > λ > f (b), entonces existe al menos un x ∈ (a,b) tal quef (x) = λ .
Demostración. Aplicar el teorema 4.2.9 de Bolzano a la función f (x)−λ en el intervalo [a,b].
Corolario 4.2.11. Sea I un intervalo, f : I→ R continua. Entonces f (I) es un intervalo.
Aplicaciones. a) Toda aplicación continua de [0,1] en [0,1] tiene un punto fijo (ver [ROSS, pág. 97]).En efecto, sea f : [0,1]→ [0,1] continua. Un número x se dice que es un punto fijo de f si f (x) = x.Definimos g : [0,1]→ R como g(x) = f (x)− x. La función g es continua, porque lo es f . Además,como 0≤ f (x)≤ 1, tenemos que
g(0) = f (0)−0= f (0)≥ 0,g(1) = f (1)−1≤ 0.
Si g(0) = 0, entonces f (0) = 0; si g(1) = 0, entonces f (1) = 1; si no, entonces g(0) > 0> g(1) y, porel teorema 4.2.9 de Bolzano o el teorema 4.2.10 de Darboux existirá algún x ∈ (0,1) tal que g(x) = 0,es decir, f (x) = x. En cualquier caso, hemos visto que f tiene algún punto fijo.
b) Dado m ∈ N (m > 1), todo y > 0 tiene raíz m-ésima positiva (ver [ROSS, pág. 97]). En efecto:se trata de probar que existe algún x > 0 tal que xm = y; sea f : R→ R dada por f (x) = xm. Es unafunción continua. Si y< 1, entonces tenemos
f (0) = 0< y< 1= f (1),

78 Capítulo 4. Continuidad
y basta aplicar el teorema 4.2.10 de Darboux a la función f : [0,1]→R. Si y= 1, trivialmente podemostomar x= 1. Si y> 1, entonces
f (0) = 0< y< ym = f (y),
y aplicamos el teorema 4.2.10 de Darboux a la función f : [0,y]→ R.
Lema 4.2.12. Sea g una función estrictamente monótona en un intervalo J y tal que g(J) es unintervalo I. Entonces g es continua en J.
Demostración. Podemos suponer que g es estrictamente creciente (en el otro caso, se sigue de formaanáloga). Sea c ∈ J. Entonces,
lımx→c−
g(x) = sup{g(x) : x ∈ J, x< c}≤ g(c),
lımx→c+
g(x) = ınf{g(x) : x ∈ J, x> c}≥ g(c)
(esto, en caso de que c no sea uno de los extremos del intervalo; si lo es, la demostración se reduce atomar el único límite lateral que tenga sentido).
Se trata de probar que las dos desigualdades son igualdades. Supongamos que, por ejemplo,
sup{g(x) : x ∈ J, x< c} < g(c)
(para la otra desigualdad se procede de manera similar). Elijamos cualquier λ tal que
sup{g(x) : x ∈ J, x< c} < λ < g(c).
Entonces, g(x) < λ para todos los x ∈ J, x < c. Y si x ∈ J, pero x ≥ c, resulta que λ < g(c) ≤ g(x).Así que λ /∈ g(J). Sin embargo, tomando cualquier x ∈ J tal que x < c, se tiene g(x) < λ < g(c),g(x) ∈ g(J), g(c) ∈ g(J). Por lo tanto, g(J) no es un intervalo, lo que contradice las hipótesis.Proposición 4.2.13. Sea I un intervalo, f : I→ R continua y estrictamente creciente (resp., estricta-mente decreciente), J = f (I) el intervalo imagen. Entonces la función inversa f−1 : J→ I es asimismocontinua y estrictamente creciente (resp., estrictamente decreciente).
Demostración. Es una consecuencia directa del lema 4.2.12, ya que la función inversa de una es-trictamente monótona es también estrictamente monótona (y del mismo tipo) y f−1(J) = I es unintervalo.
Teorema 4.2.14 (continuidad de la función inversa). Sea f una función continua e inyectiva enun intervalo I. Entonces f es estrictamente creciente o estrictamente decreciente, y la inversa f−1 :f (I)→ R es asimismo estrictamente monótona (del mismo tipo) y continua.
Demostración. De acuerdo con la proposición 4.2.13, basta demostrar que f es estrictamente monó-tona. Supongamos que f no es estrictamente decreciente; entonces existen ciertos a,b ∈ I tales que
a< b, f (a)≤ f (b).
Como f es inyectiva, se deduce que f (a) < f (b). Vamos a probar que f es estrictamente creciente, esdecir, que
∀r,s ∈ I con r < s, resulta que f (r) < f (s).

4.2. Funciones continuas 79
Consideramos seis casos: en los tres primeros uno de los dos puntos r, s es el punto a; en los tresúltimos ninguno es a. Tendremos en cuenta que la función es inyectiva, así que, por ejemplo, tenemosdescartado que sea f (r) = f (s).
a) r = a, s= b. Ya sabemos que f (a) < f (b).b) r = a, a < s, s $= b. Hay que probar que f (a) < f (s). Pero si fuera f (s) < f (a), entonces
f (a) estaría comprendido entre f (s) y f (b), luego habría algún c comprendido entre s y b tal quef (c) = f (a). Esto no puede ser, porque f es inyectiva.
c) s = a, r < a. Hay que probar que f (r) < f (a). Pero si fuera f (r) > f (a), entonces podríamostomar algún λ tal que
f (a) < λ < f (r),f (a) < λ < f (b).
Habría algún c comprendido entre r y a tal que f (c) = λ y algún d comprendido entre a y b tal quef (d) = λ . Esto no puede ser, porque f es inyectiva.
d) r < a< s. Según los apartados anteriores, ya sabemos que f (r) < f (a) < f (s).e) a< r < s. Ya sabemos que f (a) < f (r) y que f (a) < f (s). Si fuera f (r) > f (s), entonces f (s)
estaría comprendido entre f (a) y f (r), luego habría algún c∈ (a,r) tal que f (c) = f (s). Esto no puedeser, porque f es inyectiva.
f) r < s< a. Ya sabemos que f (r) < f (a) y que f (s) < f (a). Si fuera f (r) > f (s), entonces f (r)estaría comprendido entre f (s) y f (a), luego habría algún c∈ (s,a) tal que f (c) = f (r). Esto no puedeser, porque f es inyectiva.
4.2.3. Clasificación de discontinuidadesDefinición 4.2.15 (tipos de discontinuidades). Sea f : D→ R, c ∈ D′. Decimos que f tiene en cuna discontinuidad evitable si existe lım
x→cf (x) ∈ R pero o bien el límite no coincide con f (c), o bien
c /∈ D.Nótese que en tal caso, la función g definida por
g(t) =
{f (t) si t ∈ D\{c}lımx→c
f (x) si t = c
que es casi la misma que f , resulta continua en el punto c: hemos evitado la discontinuidad de fredefiniendo adecuadamente el valor en c como lım
x→cf (x). Este límite se denomina a veces el valor
asintótico de f en c.Decimos que f tiene en c una discontinuidad de salto si existen lım
x→c−f (x) ∈ R y lım
x→c+f (x) ∈ R,
pero son distintos. En algunos libros llaman a este tipo de discontinuidad discontinuidad de saltofinito. La diferencia lım
x→c+f (x)− lım
x→c−f (x) recibe el nombre de salto de f en c (hay textos que dan
este nombre al valor absoluto de la diferencia).
Corolario 4.2.16. Sea f : (a,b) → R una función monótona. Si c ∈ (a,b), entonces o bien f escontinua en c o bien f tiene en c una discontinuidad de salto.
Nota. Puede probarse que, como consecuencia de este resultado, el conjunto de discontinuidades deuna función monótona en un intervalo es finito o numerable.

80 Capítulo 4. Continuidad
lımx→a
f (x)
f (a)
aDiscontinuidad evitable
lımx→a−
f (x)
lımx→a+
f (x)
f (a)
aDiscontinuidad de salto
4.2.4. Continuidad uniforme. Teorema de Heine. Extensión de funciones continuas
Definición 4.2.17. Sea f : S ⊆ R→ R. Entonces f es uniformemente continua en S si para cadaε > 0 existe δ > 0 tal que para cualesquiera x, y ∈ S con |x− y| < δ es | f (x)− f (y)| < ε .
Nótese que una función uniformemente continua es, necesariamente, continua. El recíproco, engeneral, no es cierto.
Ejemplo. La funciónf : (0,1]→ R, f (x) =
1x
es continua, pero no uniformemente continua. Sin embargo, para cada a> 0, la función
g : [a,+∞)→ R, g(x) =1x
es uniformemente continua.
Nota. Por comodidad, diremos a veces que una función es uniformemente continua en un subconjuntode su dominio en lugar de decir que la restricción de la función a dicho subconjunto es uniformementecontinua. Así, en el ejemplo anterior, la función 1/x es uniformemente continua en [a,+∞) (paracualquier a> 0) pero no es uniformemente continua en (0,1].
Teorema 4.2.18 (de Heine). Si f es continua en un intervalo cerrado y acotado [a,b], entonces f esuniformemente continua en [a,b].
Demostración. Sea f : [a,b]→ R, supongamos que no es uniformemente continua en [a,b] y probe-mos que entonces hay algún punto de [a,b] donde f no es continua.
Como f no es uniformemente continua, existe algún ε > 0 tal que para cualquier δ > 0 hay almenos un par de puntos x,y ∈ [a,b] (que dependerán de δ ) para los cuales |x− y| < δ , pero | f (x)−f (y)|≥ ε .Entonces, para cada n ∈ N tenemos un par de puntos xn,yn ∈ [a,b] tales que
|xn− yn| < 1n, | f (xn)− f (yn)|≥ ε.
En particular, xn− yn→ 0. Dado que la sucesión (yn)∞n=1 está acotada, hay alguna subsucesión suyaconvergente:
yϕ(n) → c ∈ [a,b].

4.2. Funciones continuas 81
Por otra parte, y dado que xn− yn→ 0, también xϕ(n)− yϕ(n) → 0. Por lo tanto,
xϕ(n) = (xϕ(n)− yϕ(n))+ yϕ(n) → c.
Por último, la función f no puede ser continua en el punto c, ya que entonces se tendría
| f (xϕ(n))− f (yϕ(n))|→ | f (c)− f (c)| = 0
y, sin embargo,| f (xϕ(n))− f (yϕ(n))|≥ ε
para todos los n ∈ N.
Sin embargo, la continuidad en intervalos del tipo (a,b] o [a,+∞) no produce el mismo efecto: yahemos visto, por ejemplo, que
f : (0,1]→ R, f (x) =1x
no es uniformemente continua, pese a ser continua; también es continua, pero no uniformementecontinua, la función
g : [0,+∞)→ R, g(x) = x2
(considérense, por ejemplo, los valores de g en n+1ny n).
Proposición 4.2.19. Si f es uniformemente continua en un conjunto S y (sn) es una sucesión deCauchy contenida en S, entonces ( f (sn)) es una sucesión de Cauchy.
Demostración. Sea ε > 0. Como f es uniformemente continua, existe algún δ > 0 tal que para cua-lesquiera x,y ∈ S con |x− y| < δ , se tiene | f (x)− f (y)| < ε .
Ahora, como la sucesión (sn)∞n=1 es de Cauchy, existe algún K ∈ N tal que para cualesquieran,m > K se tiene |sn− sm| < δ . Y además, sn,sm ∈ S. Entonces, para cualesquiera n,m > K se tiene| f (sn)− f (sm)| < ε .
Por lo tanto, la sucesión ( f (sn))∞n=1 es de Cauchy.
Proposición 4.2.20. Una función f : (a,b)→ R es uniformemente continua si y solo si posee unaextensión continua en [a,b].
Demostración. Si f tiene una extensión continua g : [a,b]→ R, entonces g es uniformemente conti-nua, según el teorema 4.2.18 de Heine. Cualquier restricción de una función uniformemente continuatambién es uniformemente continua, y en particular, f .
Ahora supongamos que f es uniformemente continua en (a,b); se trata de probar que existen losdos límites
lımx→a+
f (x), lımx→b−
f (x)
y que son números reales, ya que entonces la siguiente función será una extensión continua de f alintervalo [a,b]:
g(x) =
f (x), si x ∈ (a,b)lımx→a+
f (x), si x= a
lımx→b−
f (x), si x= b

82 Capítulo 4. Continuidad
Solo vamos a probar que existe lımx→a+
f (x) y que es un número real; el otro límite se prueba de maneraanáloga.
Elijamos una sucesión (sn)∞n=1 contenida en el intervalo (a,b) y tal que lımnsn = a. Como es con-
vergente, la sucesión es de Cauchy; y como la función f es uniformemente continua, la sucesión( f (sn))∞n=1 es también de Cauchy y, por lo tanto, convergente. Sea
lımnf (sn) = L ∈ R.
Ahora sea (tn)∞n=1 una sucesión cualquiera contenida en el intervalo (a,b) y tal que lımntn = a. Defina-
mos la nueva sucesiónr2n = tn, r2n−1 = sn.
Por la misma razón que antes, la sucesión ( f (rn))∞n=1 es convergente. Como ( f (tn))∞n=1 y ( f (sn))∞n=1son dos subsucesiones suyas, deducimos que
lımnf (tn) = lım
nf (rn) = lım
nf (sn) = L.
Según la proposición 4.1.9,lımx→a+
f (x) = L ∈ R.
4.3. EjerciciosEjercicio 4.1. Calcular los límites siguientes:
a) lımx→+∞
x2+1logx = +∞ b) lım
x→+∞
x4+ x+2ex+5
= 0
c) lımx→+∞
x5 logx√x4+1
= +∞ d) lımx→+∞
(logx)3ex−1 = 0
e) lımx→+∞
(2x
ex+4
)x= 0 f) lım
x→0π
xctg πx2
=π2
2
g) lımx→0
√1+ x−√1− x
x= 1 h) lım
x→0
√a+ x−√a
x=
12√a
(a> 0)
i) lımx→0
√1+ x−1√1− x−1 =−1 j) lım
x→+∞
[√x+
√x+√x−√x
]=12
k) lımx→1
2x−23√26+ x−3 = 54 l) lım
x→1xp−1xq−1 =
pq
(q $= 0)
m) lımx→0
ex− esenxx− senx = 1 n) lım
x→0ax−bxcx−dx =
loga− logblogc− logd (a,b,c,d > 0)
ñ) lımx→0+
xx = 1 o) lımx→0+
xxx = 0
p) lımx→+∞
(2x2+32x2+5
)8x2+3= e−8 q) lım
x→+∞
(a1/x+b1/x+ c1/x
3
)x
= 3√abc (a,b,c> 0)
r) lımx→0
ex+ senx−1log(1+ x)
= 2 s) lımx→0
(sen2x−2senx)4(3+ cos2x−4cosx)3 = 8

4.3. Ejercicios 83
t) lımx→π/4
sec2 x−2tgx1+ cos4x =
12 u) lım
x→π/4tg2xctg
(π4 + x
)=12
v) lımx→π/6
sen(x− π6 )√
3−2cosx = 1 w) lımx→0
(sen2 π
2−ax)sec2 π
2−bx= e−a2/b2 (b $= 0)
x) lımx→π/3
sen(x−π/3)1−2cosx =
1√3
y) lımx→π/2
cosx3√
(1− senx)2
Ejercicio 4.2. Demostrar que los siguientes límites no existen:a) lım
x→∞cosx b) lım
x→0sen1x
c) lımx→0e
1/senx
Ejercicio 4.3. Hallar los siguientes límites laterales, si existen:
a) lımx→2±
f (x), donde f (x) =
{x+1, si x $= 20, si x= 2
b) lımx→1±
f (x), donde f (x) =
{−2x+3, si x≥ 13x−5, si x< 1
c) lımx→0±
√1− cos2x
xd) lım
x→0±
√1−√1− x2
xe) lım
x→0±|x|
x2+ x
f) lımx→1±
x2−1|x−1| g) lım
x→0±1
2−21/x h) lımx→1±
(x−1)ex/(x−1)
i) lımx→0±
1e1/x+1
j) lımx→0±
sen 1xe1/x+1
k) lımx→0±
e1/x sen 1x
l) lımx→0±
e1/x
e1/x−1 m) lımx→2±
x2−2xx2−4x+4 n) lım
x→2±x2+ x+6x2−4
Ejercicio 4.4. Estudiar la continuidad de las siguientes funciones:
a) f (x) =
0 si senx= 01/e si cos2x= 0(2sen2 x)1/cos2x en otro caso
b) f (x) =
{2(1+ e−1/x)−1 si x $= 02 si x= 0
c) f (x) =
1xsen 1
xsi x $= 0
0 si x= 0d) f (x) =
{xn si x ∈ R\Q0 si x ∈Q
Ejercicio 4.5. Para cada una de las siguientes funciones polinómicas, hallar un entero n tal que f (x) =0 para algún x comprendido entre n y n+1:
a) f (x) = x3− x+3 b) f (x) = 4x2−4x+1 c) f (x) = x5+ x+1
Ejercicio 4.6. Demostrar:
a) La ecuación x2x = 1 tiene al menos una solución positiva no mayor que 1.
b) La ecuaciónx179+
1631+ x2+ sen2 x = 119

84 Capítulo 4. Continuidad
tiene al menos una solución real.
c) La ecuación senx= x−1 tiene al menos una solución real.d) La ecuación π
2 − x− senx= 0 posee solución en [0, π2 ].
e) La ecuación xsenx− π4 = 0 posee al menos dos soluciones en [0,π].
Ejercicio 4.7. Sean I un intervalo y f : I→ R. Supongamos que existe K > 0 tal que | f (x)− f (y)|≤K|x−y| cualesquiera que sean x,y ∈ I. Una función de este tipo se llama lipschitziana. ¿Es f continuaen I? ¿Es uniformemente continua en I?

Capítulo 5
Derivación
5.1. Generalidades
5.1.1. Concepto de derivada. Derivadas laterales
Definición 5.1.1. Sea f una función real definida en un intervalo abierto I y sea a un punto de I.Se dice que f es derivable en a si existe (en R) el límite del cociente de incrementos o cociente dediferencias
lımx→a
f (x)− f (a)x−a . (5.1)
Cuando f es derivable en a, el valor del límite (5.1) recibe el nombre de derivada de f en a, ysuele denotarse por f ′(a); es decir,
f ′(a) := lımx→a
f (x)− f (a)x−a
si tal límite existe y es finito.
También se usan otras notaciones: ddx
f (a), d fdx
∣∣∣∣x=a, etc.
Nota. En realidad, para definir la derivada no es necesario que el dominio de la función f sea unintervalo: la definición anterior tiene sentido para cualquier tipo de dominio D con tal de que el puntoa, además de estar en D, sea punto de acumulación de D. Adviértase igualmente que incluso podemosconsiderar límites laterales, definiendo entonces de manera obvia la derivada por la derecha y laderivada por la izquierda de una función en un punto, cuando los límites laterales del cociente deincrementos tengan sentido.
Definición 5.1.2. Sea f : D ⊆ R→ R una función derivable en algún punto, y sea S el subconjuntode puntos de D en los que f es derivable (naturalmente, puede ser S %=D). La función derivada de fse define haciendo corresponder a cada x ∈ S el valor de la derivada de f en el punto x.
Por razones obvias, esta función suele denotarse por f ′, de manera que
f ′ : x ∈ S→ f ′(x) = lımy→x
f (y)− f (x)y− x ∈ R.
85

86 Capítulo 5. Derivación
Observación. En este punto conviene deshacer un equívoco, que surge quizá del manejo habitual delas derivadas de las funciones elementales: la definición de derivada en un punto es previa a la defunción derivada, y no al revés. Por ejemplo, no es que la derivada de la función seno en un punto x escosx porque el coseno sea la función derivada del seno, sino al revés: el coseno es la función derivadadel seno porque la derivada de la función seno en un punto cualquiera x resulta ser igual a cosx, esdecir, que existe
lımy→x
seny− senxy− x
y vale cosx.
5.1.2. Interpretación geométrica y física de la derivada
El cociente de incrementos(f (x)− f (a)
)/(x− a) corresponde gráficamente a la pendiente de
la cuerda que une el punto (a, f (a)) con el punto (x, f (x)), con lo que en el límite tenemos que laderivada f ′(a) (suponiendo que exista) corresponde a la pendiente de la tangente a la gráfica de f enel punto (a, f (a)).
f (a)
a
Interpretación geométrica de la derivada:la recta tangente tiene pendiente f ′(a)
En Física, si a cada valor x de una determinada magnitud (la variable independiente) le corres-ponde el valor f (x) de una segunda magnitud (la variable dependiente), el cociente de incrementos(f (x)− f (a)
)/(x− a) corresponde a la variación media de la variable dependiente en el intervalo
[a,x] de variación de la variable independiente, y la derivada f ′(a) (suponiendo que exista) correspon-de a la variación instantánea de la variable dependiente. Por ejemplo, si la variable independiente esel tiempo, cuando la variable dependiente es el espacio tenemos los conceptos de velocidad media yvelocidad instantánea; cuando la variable dependiente es la velocidad, pasamos a la acelación mediay la aceleración instantánea.
No es sorprendente la gran cantidad de aplicaciones que encuentra el concepto de derivada, sise tiene en cuenta la formación histórica de este concepto: véanse, por ejemplo, [DURÁN, cap. 3],[RÍBNIKOV, págs. 182–186], [HAIRER-WANNER, pág. 80 y sigs.]. En este último libro, como motivacionespara la introducción de la derivada a partir de la pendiente de la tangente se señalan:
• El cálculo del ángulo bajo el que se cortan dos curvas (Descartes).• La construcción de telescopios (Galileo) y de relojes (Huygens, 1673).• La búsqueda de máximos y mínimos de una función (Fermat, 1638).

5.1. Generalidades 87
• El estudio de la velocidad y aceleración de un movimiento (Galileo, 1638, y Newton, 1686).• En Astronomía, la verificación de la Ley de Gravitación (Kepler, Newton).
5.1.3. Derivabilidad y continuidadProposición 5.1.3. Si f es una función derivable en un punto a, entonces f es continua en el punto a.
Demostración.
lımx→a
f (x) = lımx→a
[f (a)+
f (x)− f (a)x−a (x−a)
]= f (a)+ f ′(a) ·0= f (a).
El recíproco no es cierto: una función puede ser continua en un punto y no ser derivable en esepunto. Por ejemplo, la función
f (x) = |x|, f : R→ R
es continua en todos los puntos, pero no es derivable en 0. Tiene derivadas laterales: la derivada porla izquierda es −1 y la derivada por la derecha es 1. La función g : R→ R dada por
g(x) =
{xsen 1x si x %= 00 si x= 0
es continua en todos los puntos, pero en 0 no es derivable y ni siquiera tiene derivadas laterales.
5.1.4. Cálculo de derivadasTeorema 5.1.4 (operaciones algebraicas con funciones derivables). Sean D⊆R, a ∈D∩D′, c ∈Ry f , g : D→ R funciones derivables en a. Se tiene:
a) f +g es derivable en a, con derivada ( f +g)′(a) = f ′(a)+g′(a).
b) c f es derivable en a, con derivada (c f )′(a) = c f ′(a).
c) f g es derivable en a, con derivada ( f g)′(a) = f ′(a)g(a)+ f (a)g′(a).
d) si g(a) %= 0, entonces f/g es derivable en a, con derivada ( f/g)′(a) =f ′(a)g(a)− f (a)g′(a)
g(a)2.
Demostración. Se deducen fácilmente de las hipótesis y las siguientes propiedades:
a) ( f +g)(x)− ( f +g)(a)x−a =
f (x)− f (a)x−a +
g(x)−g(a)x−a .
b) (c f )(x)− (c f )(a)x−a = c f (x)− f (a)
x−a .
c) f es continua en a y ( f g)(x)− ( f g)(a)x−a = f (x)g(x)−g(a)
x−a +g(a) f (x)− f (a)x−a .
d) g(x) %= 0 cerca de a; g es continua en a;
( f/g)(x)− ( f/g)(a)x−a =
[g(a) f (x)− f (a)
x−a − f (a)g(x)−g(a)x−a
]· 1g(x)g(a)
.

88 Capítulo 5. Derivación
Ejemplo. Teniendo en cuenta la fórmula ciclotómica, se prueba que fijado n ∈ N, la función xn esderivable en todos los puntos y su derivada en un punto x vale nxn−1.
Ejemplo. Dados c0, c1, . . . , cn ∈ R, la función
P(x) = cnxn+ cn−1xn−1+ · · ·+ c0
es derivable en todos los puntos, y su derivada en un punto x vale
P′(x) = cnnxn−1+ cn−1(n−1)xn−2+ · · ·+ c1.
Teorema 5.1.5 (derivación de funciones compuestas: la regla de la cadena). Sean f : D→ R yg : E→R tales que f (D)⊆ E y supongamos que f es derivable en un punto a y que g es derivable enf (a). Entonces la función compuesta g ◦ f es derivable en a y su derivada en este punto viene dadapor la regla de la cadena:
(g◦ f )′(a) = g′( f (a)) f ′(a).
Demostración. Definamos h(y) =g(y)−g( f (a))
y− f (a), si y∈E \{ f (a)}. Entonces, lım
y→ f (a)h(y) = g′( f (a)).
Definamos h( f (a)) = g′( f (a)), con lo cual tenemos h : E −→ R continua en el punto f (a). Además,
[y− f (a)]h(y) = g(y)−g( f (a)) ∀y ∈ E
En efecto: si y %= f (a), es cierto por la definición de h; si y = f (a) se trata de la igualdad 0 = 0. Enparticular, para cada x ∈ D se tiene f (x) ∈ E, luego
[ f (x)− f (a)]h( f (x)) = g( f (x))−g( f (a)).
De aquí,f (x)− f (a)x−a (h◦ f )(x) =
(g◦ f )(x)− (g◦ f )(a)x−a , ∀x ∈ D\{a}.
Pero
• lımx→a
f (x)− f (a)x−a = f ′(a),
• lımx→a
(h◦ f )(x) = (h◦ f )(a), ya que f es continua en a (por ser derivable) y h lo es en f (a).
Por consiguiente,
∃ lımx→a
(g◦ f )(x)− (g◦ f )(a)x−a = f ′(a)h( f (a)) = f ′(a)g′( f (a)) ∈ R.
5.1.5. Derivabilidad de la función inversaProposición 5.1.6 (condición necesaria para la derivabilidad de la función inversa). Si f es unafunción inyectiva, derivable en un punto c, y su función inversa f−1 es asimismo derivable en b= f (c),necesariamente se tiene f ′(c) %= 0. Además
(f−1
)′ (b) =1
f ′(c).

5.1. Generalidades 89
Demostración. Aplicando la regla de la cadena a f−1 ◦ f = id, como la derivada de la identidad entodos los puntos vale 1, queda (
f−1)′ (b) f ′(c) = 1.
Aplicación. La función arcsen no es derivable en 1 y−1. En efecto, basta tomar f = sen : [−π2 ,
π2 ]→
[−1,1]; entonces, f−1 = arcsen : [−1,1]→ [−π2 ,
π2 ]. Tomamos c= ±π
2 . Entonces, con la notación dela proposición anterior, b = ±1. Entonces f es derivable en c, pero f ′(c) = 0, así que f−1 no puedeser derivable en b.
Sin hipótesis adicionales, que la derivada no se anule no implica la derivabilidad de la inversa. Unrecíproco parcial, suficiente en la práctica, es el siguiente:
Teorema 5.1.7 (condición suficiente para la derivabilidad de la función inversa). Sea f una fun-ción continua e inyectiva en un intervalo I y sea J = f (I). Si f es derivable en c ∈ I y f ′(c) %= 0,entonces f−1 es derivable en b= f (c) con derivada(
f−1)′ (b) =
1f ′(c)
.
Demostración. Señalemos primero que J es un intervalo abierto, puesto que f ha de ser estrictamentemonótona. Además, sabemos que f−1 es continua en b (aplicar el teorema 4.2.14 de continuidad dela función inversa). Para mayor comodidad, ponemos g= f−1. Con esta notación, g(b) = c.
Definamos h : I→ R haciendo, para cada x ∈ I,
h(x) =
f (x)− f (c)x− c si x %= c
f ′(c) si x= c
Evidentemente, h es continua en c.Tomando ahora y ∈ J distinto de b, sea x = g(y) ∈ I, por lo que y = f (x) y x %= c, lo que permite
escribirg(y)−g(b)
y−b =x− c
f (x)− f (c)=
1h(x)
=1
h(g(y)).
En resumen, para todo y ∈ J distinto de b,g(y)−g(b)
y−b =1
h(g(y)).
Pero g es continua en b y h es continua en c = g(b), luego h◦g es continua en b, de donde podemosconcluir que existe
g′(b) = lımy→b
g(y)−g(b)y−b =
1h(g(b))
=1h(c)
=1
f ′(c).
Nota. Repasando la demostración, se observa que los mismos argumentos prueban en realidad losiguiente: dada una función inyectiva f : D ⊆ R → R, si f es derivable en un punto c ∈ D′ conf ′(c) %= 0, b := f (c) ∈ [ f (D)]′ y f−1 es continua en b, entonces f−1 es derivable en b = f (c) conderivada (
f−1)′ (b) =
1f ′(c)
.
No obstante, el enunciado previo es más directo de utilizar en muchas aplicaciones prácticas.

90 Capítulo 5. Derivación
Ejemplo. La función arcsen es derivable en (−1,1). Basta aplicar el teorema 5.1.7 a la funciónf = sen y los intervalos I = (−π
2 ,π2 ), J = (−1,1). La función f es inyectiva en I y derivable en
cualquier c ∈ I y además f ′(c) = cosc %= 0. Tomemos b ∈ (−1,1) cualquiera; podemos aplicar elteorema con c= arcsenb y resulta que la función arcsen es derivable en b y la derivada es
(arcsen)′(b) =1
(sen)′(c) =1cosc =
1√1− sen2 c =
1√1−b2 ,
donde hay que tener en cuenta que cosc> 0, ya que c ∈ (−π2 ,
π2 ).
Ejemplo. Sean f (x) = ex, f : R→ R, y g(x) = logx, g : (0,∞)→ R.
• si sabemos que f es derivable para cada x ∈ R y f ′(x) = f (x), entonces deducimos que g esderivable para cada x ∈ (0,+∞) y g′(x) = 1/x;
• si sabemos que g es derivable para cada x ∈ (0,+∞) y g′(x) = 1/x, entonces deducimos que fes derivable para cada x ∈ R y f ′(x) = f (x).
5.2. El teorema del valor medio
5.2.1. Extremos relativos y derivada nula
Definición 5.2.1. Sea f : D⊆ R→ R y c ∈ D. Se dice que f tiene un máximo relativo en c si existeun δ > 0 tal que para todo x ∈ D con |x− c| < δ es f (x) ≤ f (c) (también se dice que f tiene unmáximo local en c).
Se dice que f tiene un máximo relativo estricto en c si existe un δ > 0 tal que para todo x ∈ Dcon 0< |x− c| < δ es f (x) < f (c) (también se dice que f tiene un máximo local estricto en c).
Se dice que f tiene un mínimo relativo en c si existe un δ > 0 tal que para todo x ∈ D con|x− c| < δ es f (x)≥ f (c) (también se dice que f tiene un mínimo local en c).
Se dice que f tiene un mínimo relativo estricto en c si existe un δ > 0 tal que para todo x ∈ Dcon 0< |x− c| < δ es f (x) > f (c) (también se dice que f tiene un mínimo local estricto en c).
Que f tiene un extremo relativo en c significa que tiene un máximo relativo o un mínimo relativo.
Extremos relativos y absolutos de una función
Definición 5.2.2. Sea S ⊆ R y c ∈ R. Se dice que c es un punto interior de S si para algún δ > 0 severifica que (c−δ ,c+δ )⊆ S.

5.2. El teorema del valor medio 91
Ejemplo. Si S es un intervalo, los extremos no son puntos interiores, mientras que los demás puntossí son interiores a S.Proposición 5.2.3. Sea f : D⊆ R→ R y c un punto interior de D. Si f es derivable en c y tiene en cun extremo relativo, entonces f ′(c) = 0.Demostración. Supongamos que f tiene en c un máximo relativo (si tiene un mínimo relativo solohay que cambiar de sentido algunas desigualdades o pasar a la función opuesta). Como c es un puntointerior deD y f es derivable en c, se deduce que existen las dos derivadas laterales de f en c. Además,
f ′(c) = lımx→c+
f (x)− f (c)x− c = lım
x→c−f (x)− f (c)x− c .
Pero según las hipótesis existen un δ1 > 0 tal que f (x)≤ f (c) siempre que x ∈ D y |x− c| < δ1, y unδ2 > 0 tal que (c−δ2,c+δ2)⊆ D. Tomando δ =mın{δ1,δ2}, encontramos que
• si x ∈ (c−δ ,c), entonces x ∈ D y f (x)− f (c)x− c ≥ 0,
• si x ∈ (c,c+δ ), entonces x ∈ D y f (x)− f (c)x− c ≤ 0,
de donde se deduce que
f ′(c) = lımx→c−
f (x)− f (c)x− c ≥ 0,
f ′(c) = lımx→c+
f (x)− f (c)x− c ≤ 0,
y finalmente que f ′(c) = 0.
Nota. En la demostración anterior solo se utiliza realmente que c es un punto interior para poderasegurar que tienen sentido las dos derivadas laterales, de modo que esta condición puede sustituirsepor la (más complicada de enunciar) de que c sea punto de acumulación de los conjuntos D∩ [c,+∞)y D∩ (−∞,c].
Cuando no se impone ninguna condición de este tipo a c, el resultado es falso. Por ejemplo, lafunción f (x) = x definida en el intervalo [0,1] tiene extremos en los puntos 0 y 1, y f es derivable enlos dos puntos, pero su derivada no es 0, sino 1 en ambos.Definición 5.2.4. Sea f : D⊆ R→ R y c un punto de D∩D′. Se dice que c es un punto crítico de fsi f es derivable en c y f ′(c) = 0.Corolario 5.2.5. Supongamos que f :D⊆R→R tiene un extremo relativo en un punto c. Entonces,o bien c es un punto crítico de f , o bien c no es un punto interior de D, o bien f no es derivable en c.Ejemplos. a) x ∈ [−1,1]→ x ∈ R; sus extremos relativos son ±1, que no son puntos interiores
del dominio.
b) x ∈ [−1,1]→ x2 ∈ R; sus extremos relativos son ±1, que no son puntos interiores, y 0, que esun punto crítico.
c) x ∈ [−1,1]→ x3 ∈R; sus extremos relativos son ±1, que no son puntos interiores del dominio.Hay un punto crítico, 0, que no es extremo relativo.
d) x ∈ [−1,1]→ |x| ∈ R; sus extremos relativos son ±1, que no son puntos interiores, y 0, dondela función no es derivable.
e) x ∈ R→ [x] ∈ R; la función no tiene extremos relativos.

92 Capítulo 5. Derivación
5.2.2. Teoremas de Rolle y del valor medio (o de los incrementos finitos)Teorema 5.2.6 (de Rolle). Sea f : [a,b]→ R (donde a,b ∈R, a< b) una función continua en [a,b] yderivable en el intervalo abierto (a,b) y supongamos que f (a) = f (b). Entonces existe al menos unx ∈ (a,b) tal que f ′(x) = 0.
Demostración. Puesto que f es continua en [a,b], tiene máximo y mínimo absolutos en [a,b], por elteorema 4.2.8 de Weierstrass.
Si ambos extremos absolutos están en a y b, entonces f tiene que ser constante, ya que f (a) =f (b). Y f ′ se anula en todos los puntos de (a,b).En caso contrario, f tiene algún extremo absoluto (que también es relativo) en un punto interior
x ∈ (a,b). Y es derivable en x, así que sabemos que f ′(x) = 0.
Geométricamente, que la función valga lo mismo en dos puntos obliga a que haya tangente hori-zontal en algún punto intermedio de la gráfica.
Nota. Una vez más, si el dominio de f no es un intervalo el resultado no es cierto. Basta considerarfunciones definidas en un intervalo menos un punto para encontrar derivada distinta de cero en todoel dominio aunque tengamos el mismo valor en los extremos; por ejemplo, la función valor absolutoen [−1,0)∪ (0,1].
a bc
Teorema de Rolle
a c b
Teorema del valor medio
Teorema 5.2.7 (del valor medio o de los incrementos finitos). Sea f : [a,b]→ R (donde a,b ∈ R,a < b) una función continua en [a,b] y derivable en el intervalo abierto (a,b). Entonces existe almenos un x ∈ (a,b) tal que
f (b)− f (a) = f ′(x)(b−a).
Demostración. Basta definir en el intervalo [a,b] la función g(x) = f (x)− f (b)− f (a)b−a (x− a), que
cumple las hipótesis del teorema 5.2.6 de Rolle. Por lo tanto, existe al menos un x ∈ (a,b) tal que
g′(x) = 0, es decir, f ′(x) =f (b)− f (a)b−a .

5.3. Aplicaciones del teorema del valor medio 93
Dicho de otra manera, la variación media de f en el intervalo coincide con la variación instantáneaen algún punto del intervalo. Por ejemplo, si un vehículo ha recorrido 180 km en 2 horas, en algúninstante ha marchado exactamente a 90 km/h.
Geométricamente, la pendiente de la cuerda que une los extremos de la gráfica coincide con lapendiente de la tangente en algún punto.
5.3. Aplicaciones del teorema del valor medio
5.3.1. Funciones con derivada acotada y con derivada nula
Corolario 5.3.1. Sea f una función continua en un intervalo I y derivable en todos los puntos inte-riores del intervalo. Si la derivada está acotada, entonces f es uniformemente continua en I.
Demostración. Hay alguna constante K > 0 tal que | f ′(x)|≤ K en todo punto x interior a I. Sean dospuntos cualesquiera a,b ∈ I (por ejemplo, con a < b); como f es continua en [a,b] y derivable en(a,b), será
f (b)− f (a) = f ′(x)(b−a)para algún x ∈ (a,b), y por lo tanto
| f (b)− f (a)|≤ K|b−a|.
Las funciones que satisfacen una desigualdad como esta se llaman funciones de Lipschitz. Y cualquierfunción de Lipschitz es uniformemente continua, ya que, dado ε > 0, basta tomar δ = ε/K y resultaque
a,b ∈ I, |b−a| < δ =⇒ | f (b)− f (a)| < ε.
Corolario 5.3.2. Sea f una función continua en un intervalo I y derivable en todos los puntos inte-riores del intervalo. Si f ′(x) = 0 en cada x interior a I, entonces f es constante en I.
Demostración. La función f toma el mismo valor en todos los puntos de I, pues dados dos puntoscualesquiera a,b ∈ I (por ejemplo, con a< b) como f es continua en [a,b] y derivable en (a,b), será
f (b)− f (a) = f ′(x)(b−a)
para algún x ∈ (a,b), por el teorema 5.2.7 del valor medio. Por lo tanto,
f (b)− f (a) = 0.
Corolario 5.3.3. Sean f y g dos funciones continuas en un intervalo I y derivables en todos los puntosinteriores del intervalo. Si f ′(x) = g′(x) en cada x interior a I, entonces hay una constante c ∈ R talque f (x) = g(x)+ c en todo punto de I.
Demostración. Basta aplicar el corolario 5.3.2 a la función f −g.
Nota. Estas conclusiones no son aplicables a funciones cuyos dominios no son intervalos.

94 Capítulo 5. Derivación
5.3.2. Signo de la derivada y monotoníaCorolario 5.3.4. Sea f una función continua en un intervalo I y derivable en todos los puntos inte-riores del intervalo. Se tiene:
a) si f ′(x) > 0 en todo punto interior de I, entonces f es estrictamente creciente en I.
b) si f ′(x) < 0 en todo punto interior de I, entonces f es estrictamente decreciente en I.
c) f ′(x)≥ 0 en todo punto interior de I ⇐⇒ f es monótona no decreciente en I.
d) f ′(x)≤ 0 en todo punto interior de I ⇐⇒ f es monótona no creciente en I.
Demostración. a) Sean a,b ∈ I con a< b. Como f es continua en [a,b] y derivable en (a,b), será
f (b)− f (a) = f ′(x)(b−a)para algún x ∈ (a,b), por el teorema 5.2.7 del valor medio. Dado que x es interior a I, f ′(x) > 0 porhipótesis, y se sigue
f (b)− f (a) > 0,
o sea, f (a) < f (b), que es lo que necesitábamos probar.La demostración de b) es similar, así como las implicaciones =⇒ de c) y d). Falta demostrar las
implicaciones ⇐= de c) y d). Supongamos, por ejemplo, que f es monótona no decreciente en elintervalo I. Si x es un punto interior de I, entonces existen y ∈ I tales que x< y; para estos, se tiene
f (y)− f (x)y− x ≥ 0,
ya que f es no decreciente. Luego
f ′(x) = lımy→x+
f (y)− f (x)y− x ≥ 0.
Esto demuestra la implicación⇐= de c). La otra es análoga.
Nota. Sin embargo, los recíprocos de a) y b) no son ciertos. Si la función f es estrictamente crecienteen I, su derivada puede que se anule en algunos puntos (eso sí, según el apartado c), f ′(x) ≥ 0 paratodos los x).
Por ejemplo, la función f (x) = x3 es derivable en todos los puntos y estrictamente creciente, perohay algún punto donde su derivada se anula.
Ejemplo. Veamos que para todo x > 0, x− 13x3 < arc tgx. En efecto: tomamos la función f : R→ R
dada por f (x) = arc tgx− x+ 13x3. Es una función derivable y su derivada es
f ′(x) =1
1+ x2−1+ x2 =
x4
1+ x2.
Por lo tanto, f ′(x) > 0 para todo x ∈ (0,+∞) y la función f es estrictamente creciente en el intervalocerrado [0,+∞). En particular, para todo x> 0 se tiene f (0) < f (x), es decir,
0< arc tgx− x+13x
3,
que es lo que queríamos demostrar.

5.3. Aplicaciones del teorema del valor medio 95
y= arc tgx
y= x− 13x3
Las funciones arc tgx y x− 13x3
Ejemplo. Sea g(x) = x− e logx, definida en el intervalo (0,+∞). Es una función derivable y paracada x> 0
g′(x) = 1− ex
=x− ex
.
Luego g′(x) < 0 si x ∈ (0,e). Por lo tanto, g es estrictamente decreciente en el intervalo (0,e] (obser-vemos que podemos incluir el punto e, pero no 0). Por otra parte, g′(x) > 0 si x ∈ (e,+∞), así que g esestrictamente creciente en el intervalo [e,+∞) (de nuevo, podemos incluir el punto e). Es fácil deducirde aquí que g tiene un mínimo absoluto estricto en e. Es decir, para todo x> 0, x %= e, se tiene
0= g(e) < g(x) = x− e logx.Puesto de otra forma: e logx< x. Además, la función g no tiene más extremos relativos ni absolutos.
e
y= x− e logx
La función x− e logx
5.3.3. Propiedad del valor intermedio para derivadasSi una función es la derivada de otra en un intervalo, puede que no sea continua (ver por ejem-
plo [ROSS, ejr. 28.4, pág. 160]). Pero en el siguiente resultado se prueba que, lo mismo que las funcio-nes continuas, tiene la propiedad de los valores intermedios.

96 Capítulo 5. Derivación
Teorema 5.3.5 (del valor intermedio para derivadas). Sea f una función derivable en un intervaloI. Si la derivada f ′ toma dos valores, toma también todos los valores intermedios; es decir, si a,b ∈ I,a< b, y λ está entre f ′(a) y f ′(b), existe al menos un x ∈ (a,b) tal que f ′(x) = λ .
Demostración. Supongamos, por ejemplo, que f ′(a) < λ < f ′(b); si fuera f ′(a) > λ > f ′(b) se pro-cedería de manera análoga.
Definamos la función g(x) = f (x)−λx, para x ∈ [a,b]. Es una función derivable en [a,b], porquelo es f . Además, g′(x) = f ′(x)−λ para cada x ∈ [a,b]. En particular, g es continua en [a,b], así quetiene mínimo absoluto (por el teorema 4.2.8 de Weierstrass). Ahora bien,
lımx→a+
g(x)−g(a)x−a = g′(a) = f ′(a)−λ < 0,
luego existe x∈ (a,b] tal que g(x)−g(a)x−a < 0 y, por lo tanto, g(x) < g(a). Esto significa que el mínimo
absoluto de g no está en a. Análogamente,
lımx→b−
g(x)−g(b)x−b = g′(b) = f ′(b)−λ > 0,
de donde se deduce que existe x ∈ [a,b) tal que g(x)−g(b)x−b > 0; como x−b< 0, resulta que g(x) <
g(b). Esto significa que el mínimo absoluto de g tampoco está en b.Por lo tanto, el mínimo absoluto de g está en algún punto x∈ (a,b). Y como es un extremo relativo
de g en el interior del intervalo y g es derivable, se tendrá g′(x) = 0, por la proposición 5.2.3. Es decir,f ′(x) = λ .
Notas. a) Este resultado indica que, dada una función arbitraria g, puede que no exista ningunafunción derivable cuya derivada sea g (es decir, una función primitiva de g). Basta con que gno cumpla la propiedad de los valores intermedios. Por ejemplo, la función
g(x) =
{1 si x≥ 00 si x< 0
no es la derivada de ninguna función f : R→ R.
b) Cuando hayamos definido la integral, probaremos que cualquier función continua en un inter-valo tiene primitiva.
Corolario 5.3.6. Sea f una función continua en un intervalo I y derivable en todos los puntos inte-riores del intervalo. Si la derivada f ′ no se anula en ninguno de esos puntos, entonces la función f esestrictamente monótona en I (o bien estrictamente creciente o bien estrictamente decreciente).
Demostración. Existen las siguientes posibilidades:
a) f ′(x) > 0 en todos los puntos x interiores a I. En tal caso f es estrictamente creciente.
b) f ′(x) < 0 en todos los puntos x interiores a I. En tal caso f es estrictamente decreciente.
c) Hay puntos x1, x2, interiores a I, tales que f ′(x1) < 0 < f ′(x2). Pero esto no puede suceder,porque el teorema 5.3.5 del valor intermedio para derivadas obligaría entonces a que la derivadase anulase en algún punto entre x1 y x2.

5.3. Aplicaciones del teorema del valor medio 97
5.3.4. Teorema del valor medio generalizado. Regla de L’Hospital
Teorema 5.3.7 (del valor medio generalizado). Sean f y g funciones continuas en un intervalo [a,b](donde a,b∈R, a< b) y derivables en el intervalo abierto (a,b). Existe al menos un x ∈ (a,b) tal que
f ′(x)[g(b)−g(a)] = g′(x)[ f (b)− f (a)].
Demostración. Basta definir en el intervalo [a,b] la función h(x) = f (x)[g(b)− g(a)]− g(x)[ f (b)−f (a)], que cumple las hipótesis del teorema 5.2.6 de Rolle. Luego existe al menos un x ∈ (a,b) tal queh′(x) = 0, es decir, f ′(x)[g(b)−g(a)] = g′(x)[ f (b)− f (a)].
Proposición 5.3.8 (regla de L’Hospital). Sean I un intervalo, f ,g : I→ R y a ∈ R∪{±∞} un puntode acumulación de I. Denotemos mediante s uno de los símbolos a, a+, a−. Supongamos que:
a) f y g son derivables en I \{a} y g′(x) %= 0 en cada x ∈ I \{a}.b) se verifica alguna de las tres condiciones siguientes:
• lımx→s
f (x) = lımx→s
g(x) = 0.
• lımx→s
g(x) = +∞.
• lımx→s
g(x) =−∞.
c) existe
lımx→s
f ′(x)g′(x)
= L ∈ R∪{±∞}.
Entonces, existe el límite de f (x)/g(x) y es igual a L:
lımx→s
f (x)g(x)
= lımx→s
f ′(x)g′(x)
= L.
Demostración. Para empezar, veamos que basta considerar el caso a= 0 y s= 0+. En efecto, una vezdemostrado este caso se deducen los demás:
• Si a %= 0 y s = a+, hacemos el cambio y = x− a, aplicamos la regla en el caso conocido ydeshacemos el cambio:
lımx→a+
f (x)g(x)
= lımy→0+
f (y+a)g(y+a)
= lımy→0+
f ′(y+a)g′(y+a)
= lımx→a+
f ′(x)g′(x)
.
• Si a ∈ R y s= a−, hacemos el cambio y=−x.• Si a ∈ R y s= a, hacemos los dos límites laterales.
• Si a= ±∞, hacemos el cambio y= 1/x; por ejemplo,
lımx→+∞
f (x)g(x)
= lımy→0+
f (1/y)g(1/y) = lım
y→0+
− 1y2 f
′(1/y)− 1y2 g′(1/y)
= lımy→0+
f ′(1/y)g′(1/y) = lım
x→+∞
f ′(x)g′(x)
.

98 Capítulo 5. Derivación
Así que a partir de ahora, suponemos que a= 0 y s= 0+.Aparte de esto, el caso lım
x→0+g(x) = −∞ se deduce del caso lım
x→0+g(x) = +∞ tomando la función
G(x) = −g(x) en lugar de g, y el caso L = −∞ del caso L = +∞, tomando la función F(x) = − f (x)en lugar de f .
En resumen, solo necesitamos considerar los siguientes casos:
a) lımx→0+
f (x) = lımx→0+
g(x) = 0.
b) lımx→0+
g(x) = +∞ y lımx→0+
f ′(x)g′(x)
= L ∈ R.
c) lımx→0+
g(x) = +∞ y lımx→0+
f ′(x)g′(x)
= +∞.
a) Supongamos que lımx→0+
f (x) = lımx→0+
g(x) = 0. Definamos las siguientes funciones:
F(x) =
{f (x) si x> 0, x ∈ I0 si x= 0.
G(x) =
{g(x) si x> 0, x ∈ I0 si x= 0.
Las dos funciones F yG son continuas en 0 por la derecha y derivables en I\{0}. Además, del teoremade Rolle 5.2.6 se deduce que para cada x > 0 tiene que ser G(x) %= G(0), ya que de lo contrario setendría 0= G′(c) = g′(c) para algún c.
Por el teorema 5.3.7 del valor medio generalizado, para cada x > 0, x ∈ I, existe algún c tal que0< c< x y
f (x)g(x)
=F(x)−F(0)G(x)−G(0) =
F ′(c)G′(c)
=f ′(c)g′(c)
.
Ahora sea (xn) ⊆ I una sucesión cualquiera tal que xn > 0 para todo n ∈ N y xn → 0. Si para cadan ∈ N tomamos un cn que cumpla la fórmula anterior, entonces cn→ 0+ y
lımn
f (xn)g(xn)
= lımn
f ′(cn)g′(cn)
= L.
Por la caracterización del límite mediante sucesiones (proposición 4.1.9), deducimos que
lımx→0+
f (x)g(x)
= L.
b) Supongamos que lımx→0+
g(x) = +∞ y que lımx→0+
f ′(x)g′(x)
= L ∈ R.
Dado que g′(x) %= 0 para todo x∈ I, x> 0, deducimos del teorema de Rolle 5.2.6 que g es inyectivaen I∩ (0,+∞).
Para cada par de puntos distintos x,y ∈ I positivos, podemos escribirf (x)g(x)
=f (x)− f (y)g(x)−g(y) · g(x)−g(y)
g(x)+f (y)g(x)
.

5.3. Aplicaciones del teorema del valor medio 99
Por el teorema 5.3.7 del valor medio generalizado,
f (x)g(x)
=f ′(c)g′(c)
·(1− g(y)
g(x)
)+f (y)g(x)
=f ′(c)g′(c)
+1
g(x)
[− f ′(c)g′(c)
·g(y)+ f (y)]
para algún c comprendido entre x e y. Por lo tanto,∣∣∣∣ f (x)g(x)−L
∣∣∣∣ =∣∣∣∣ f ′(c)g′(c)
−L+1
g(x)
[− f ′(c)g′(c)
·g(y)+ f (y)]∣∣∣∣
≤∣∣∣∣ f ′(c)g′(c)
−L∣∣∣∣+ 1
|g(x)|[∣∣∣∣ f ′(c)g′(c)
∣∣∣∣ · |g(y)|+ | f (y)|]
≤∣∣∣∣ f ′(c)g′(c)
−L∣∣∣∣+ 1
|g(x)|[∣∣∣∣ f ′(c)g′(c)
−L∣∣∣∣ · |g(y)|+ |L| · |g(y)|+ | f (y)|
].
Sea ε > 0. Existe algún r > 0 tal que∣∣∣∣ f ′(c)g′(c)−L
∣∣∣∣ <ε2 , si 0< c< r.
Fijemos y= r. Ahora existe algún δ > 0, con δ < r, tal que
g(x) >2ε·[ε2 |g(r)|+ |L| · |g(r)|+ | f (r)|
], si 0< x< δ .
Entonces, para cada x con 0< x< δ se tiene (teniendo en cuenta que 0< x< c< y= r)∣∣∣∣ f (x)g(x)−L
∣∣∣∣≤ ∣∣∣∣ f ′(c)g′(c)−L
∣∣∣∣+ 1|g(x)|
[∣∣∣∣ f ′(c)g′(c)−L
∣∣∣∣ · |g(r)|+ |L| · |g(r)|+ | f (r)|]
<ε2 +
ε2 = ε.
Esto prueba que
lımx→0+
f (x)g(x)
= L.
c) Supongamos que lımx→0+
g(x) = +∞ y que lımx→0+
f ′(x)g′(x)
= +∞. Volvemos a la expresión
f (x)g(x)
=f ′(c)g′(c)
·(1− g(y)
g(x)
)+f (y)g(x)
,
donde c está comprendido entre x e y. Dado M > 0, existe algún número r > 0 tal que
f ′(c)g′(c)
> 2(M+1), si 0< c< r.
Fijamos y= r y ahora existe algún δ1 > 0 tal que
1− g(r)g(x)
>12 , si 0< x< δ1
y también algún δ2 > 0 tal que
f (r)g(x)
>−1, si 0< x< δ2.

100 Capítulo 5. Derivación
Elegimos δ =mın{r,δ1,δ2}. Para cada x con 0< x< δ , teniendo en cuenta también que 0< x< c<y= r, resulta que
f (x)g(x)
=f ′(c)g′(c)
·(1− g(r)
g(x)
)+f (r)g(x)
> 2(M+1) · 12 −1=M.
Esto prueba que
lımx→0+
f (x)g(x)
= +∞.
Corolario 5.3.9. Sea I un intervalo, a ∈ I, f una función definida en I. Supongamos que:a) f es continua en a;
b) para algún r > 0, f es derivable en {x ∈ I : 0< |x−a| < r};c) existe lım
x→af ′(x) = c.
Entonces f es también derivable en a y f ′(a) = c.
Demostración. Basta aplicar la regla de L’Hospital 5.3.8 a las funciones F y G dadas por F(x) =f (x)− f (a), G(x) = x−a.
5.4. Aproximación polinómica local
5.4.1. Desarrollos polinómicos. Teorema de Taylor-Young
Definición 5.4.1 (derivadas de orden superior). Sea f una función derivable en un conjunto D.Dado c ∈ D∩D′, si la función derivada f ′ es derivable en c se dice que f es dos veces derivable enc, y la derivada de f ′ en c, que se denota por f ′′(c), se llama derivada segunda de f en c.
Se dice que f es dos veces derivable en un conjunto D si es dos veces derivable en cada puntode D. Si esto sucede, la función f ′′ definida en D, que asocia a cada x ∈ D el valor f ′′(x) se llamafunción derivada segunda de f en D.
Reiterando, se define para cada n ∈ N el concepto de función n veces derivable en un punto, enun conjunto, la derivada de orden n en un punto, que se escribe f (n)(c), y la función derivada deorden n.
Teorema 5.4.2 (de Taylor-Young). Sea I un intervalo, c un punto de I, f una función definida en I.Supongamos que f es derivable en todos los puntos hasta el orden n−1 (n≥ 1) y que existe f (n)(c).Entonces
lımx→c
1(x− c)n
[f (x)− f (c)− f ′(c)(x− c)− f ′′(c)
2 (x− c)2− · · ·− f (n)(c)n! (x− c)n
]= 0.
Demostración. Lo probamos por inducción sobre n. Fijados I y c ∈ I, seaPn la propiedad: dada unafunción f : I→R derivable en todos los puntos hasta el orden n−1 y tal que existe f (n)(c), se verifica
lımx→c
1(x− c)n
[f (x)− f (c)− f ′(c)(x− c)− f ′′(c)
2 (x− c)2− · · ·− f (n)(c)n! (x− c)n
]= 0.

5.4. Aproximación polinómica local 101
La propiedadP1 es cierta, puesto que tenemos entonces una función f derivable en c y, por la defini-ción de derivada en un punto, será
lımx→c
1(x− c)
[f (x)− f (c)− f ′(c)(x− c)] = lım
x→c
[f (x)− f (c)
(x− c) − f ′(c)]
= 0.
Veamos ahora que si es ciertaPn, también lo esPn+1. Sea f : I→ R una función derivable en todoslos puntos hasta el orden n y tal que existe f (n+1)(c). Su función derivada f ′ : I→ R es una funciónderivable en todos los puntos hasta el orden n− 1 para la que existe la derivada de orden n en c.Aplicando la hipótesis de inducción a f ′,
lımx→c
1(x− c)n
[f ′(x)− f ′(c)− f ′′(c)(x− c)− f ′′′(c)
2 (x− c)2− · · ·− f (n+1)(c)n! (x− c)n
]= 0.
Definamos F : I→ R por
F(x) = f (x)− f (c)− f ′(c)(x− c)− f ′′(c)2 (x− c)2− · · ·− f (n)(c)
n! (x− c)n− f (n+1)(c)(n+1)! (x− c)n+1.
La función F es derivable en cada x ∈ I con derivada
F ′(x) = f ′(x)− f ′(c)− f ′′(c)(x− c)− f ′′′(c)2 (x− c)2− · · ·− f (n+1)(c)
n! (x− c)n;teniendo en cuenta la regla de L’Hospital 5.3.8 se deduce que existe
lımx→c
1(x− c)n+1
[f (x)− f (c)− f ′(c)(x− c)− f ′′(c)
2 (x− c)2− · · ·− f (n+1)(c)(n+1)! (x− c)n+1
]
= lımx→c
F(x)(x− c)n+1 = lım
x→c
F ′(x)(n+1)(x− c)n = 0.
Podemos expresar el teorema 5.4.2 de Taylor-Young de otras formas, introduciendo algunos con-ceptos nuevos.
Definición 5.4.3. Dada una función f derivable n veces en un punto c, se llama polinomio de Tayloren c de orden n al polinomio
Pn,c, f (x) = f (c)+ f ′(c)(x− c)+f ′′(c)2 (x− c)2+ · · ·+ f (n)(c)
n! (x− c)n
(nótese que se trata de un polinomio de grado menor o igual que n).
Entonces, la fórmula del teorema 5.4.2 de Taylor-Young se puede escribir así:
lımx→c
f (x)−Pn,c, f (x)(x− c)n = 0.
Si definimos
u(x) =
f (x)−Pn,c, f (x)
(x− c)n , si x %= c
0, si x= centonces la fórmula del teorema 5.4.2 de Taylor-Young es:
f (x) = Pn,c, f (x)+(x− c)nu(x),con una función u continua en c y u(c) = 0. También se suele usar la notación o pequeña de Landau:

102 Capítulo 5. Derivación
Definición 5.4.4. Si f y g son dos funciones, se dice que f (x) = o(g(x)) cuando x→ c si
lımx→c
f (x)g(x)
= 0.
También se escribe f (x) = h(x)+o(g(x)) si f (x)−h(x) = o(g(x)), es decir, si
lımx→c
f (x)−h(x)g(x)
= 0.
Con esto, la fórmula del teorema 5.4.2 de Taylor-Young es
f (x) = Pn,c, f (x)+o((x− c)n), x→ c.
Es interesante saber que para una función dada solo puede haber un polinomio de grado menor oigual que n que cumpla esa condición, como pasamos a demostrar.
Proposición 5.4.5 (unicidad de la aproximación polinómica). Sea I un intervalo, c ∈ I, f : I→ R,n ∈ N. Supongamos que existen polinomios P y Q de grado menor o igual que n tales que
lımx→c
f (x)−P(x)(x− c)n = lım
x→c
f (x)−Q(x)(x− c)n = 0
Entonces P= Q.
Demostración. Como P−Q es un polinomio de grado menor o igual que n, se tendrá queP(x)−Q(x) = b0+b1(x− c)+ · · ·+bn(x− c)n
para ciertos coeficientes b0, b1, . . . , bn. Y como
lımx→c
P(x)−Q(x)(x− c)n = lım
x→c
[ f (x)−Q(x)]− [ f (x)−P(x)](x− c)n = 0,
resulta en primer lugar que
b0 = lımx→c
[P(x)−Q(x)] = lımx→c
P(x)−Q(x)(x− c)n · (x− c)n = 0.
Luego realmenteP(x)−Q(x) = b1(x− c)+ · · ·+bn(x− c)n.
Pero entoncesb1 = lım
x→c
P(x)−Q(x)x− c = lım
x→c
P(x)−Q(x)(x− c)n · (x− c)n−1 = 0,
y reiterando el proceso,b2 = · · · = bn = 0,
es decir, P= Q.
Este resultado permite denominar a P el desarrollo polinómico de f de orden n en el punto c (seusa también el nombre de desarrollo limitado). No toda función admite un desarrollo polinómico; elteorema 5.4.2 de Taylor-Young da una condición suficiente, aunque no necesaria, para su existencia.

5.4. Aproximación polinómica local 103
Ejemplo. La función
f (x) =
cosx+ x3 sen 1x
si x %= 0
1 si x= 0
no tiene derivada segunda en el origen, pero es fácil comprobar que
f (x) = 1− 12x2+o(x2)
cuando x→ 0.
Ejemplo. La función
f (x) =
{x2 logx si x %= 00 si x= 0
es derivable en el origen, y por tanto admite un desarrollo polinómico en el origen de orden 1. Sinembargo, no admite desarrollos polinómicos de orden superior a 1.
Observación. En algunas ocasiones, podemos calcular derivadas n-ésimas en un punto a partir delteorema 5.4.2 de Taylor-Young y de la unicidad del desarrollo. Por ejemplo, sea f (x) = 1/(1− x).Como
11− x = 1+ x+ x2+ x3+ x4+ x5+ x6+
x7
1− x
y x7
1− x es una o(x6) cuando x→ 0, se deduce que
P6,0, f (x) = 1+ x+ x2+ x3+ x4+ x5+ x6.
Es decir,
f (0) = f ′(0) = 1, f ′′(0) = 2, f ′′′(0) = 3!, f (4)(0) = 4!, f (5)(0) = 5!, f 6(0) = 6!.
Si conocemos el desarrollo polinómico de la derivada de una función podemos obtener fácilmenteun desarrollo polinómico para la función misma. Concretamente:
Proposición 5.4.6. Sea I un intervalo, c ∈ I, f : I→ R, n ∈ N. Supongamos que f es continua en I yderivable en I \{c}. Si
f ′(x) = a0+a1(x− c)+ · · ·+an(x− c)n+o((x− c)n) , x→ c,
entonces
f (x) = f (c)+a0(x− c)+a12 (x− c)2+ · · ·+ an
n+1(x− c)n+1+o((x− c)n+1) , x→ c.
Demostración. Es una consecuencia inmediata de la regla de L’Hospital 5.3.8:
lımx→c
f (x)− f (c)−a0(x− c)− a12 (x− c)2− · · ·− an
n+1(x− c)n+1(x− c)n+1
= lımx→c
f ′(x)−a0−a1(x− c)− · · ·−an(x− c)n(n+1)(x− c)n = 0.

104 Capítulo 5. Derivación
5.4.2. Aplicación al cálculo de límites
Corolario 5.4.7. Sea I un intervalo, c un punto de I, f una función definida en I. Supongamos quef es derivable en todos los puntos hasta el orden n− 1 (n ≥ 1) y que existe f (n)(c). Si f (n)(c) %= 0,entonces
f (x)− f (c)− f ′(c)(x−c)− f ′′(c)2 (x−c)2− · · ·− f (n−1)(c)
(n−1)! (x−c)n−1 ∼ f (n)(c)n! (x−c)n, x→ c.
Demostración. Basta tener en cuenta que para x→ c,
f (x)− f (c)− f ′(c)(x− c)− f ′′(c)2 (x− c)2− · · ·− f (n−1)(c)
(n−1)! (x− c)n−1( f (n)(c)/n!)(x− c)n −1
=f (x)− f (c)− f ′(c)(x− c)− · · ·− f (n−1)(c)
(n−1)! (x− c)n−1− f (n)(c)n! (x− c)n
( f (n)(c)/n!)(x− c)n −→ 0.
Nota. Las equivalencias que vimos para funciones elementales se obtienen como caso particular deeste corolario, conociendo los valores de las derivadas de tales funciones. Además, podemos afinaresas equivalencias, lo que resulta especialmente útil cuando hay que manejar sumas o diferencias defunciones conocidas.
Observación. Este resultado, junto con el teorema 5.4.2 de Taylor-Young, permite en muchos casosresolver con comodidad indeterminaciones del tipo “0/0” en el cálculo de límites. Disponemos asíde procedimientos que en algunos casos sustituyen con ventaja a la aplicación repetida de la regla deL’Hospital 5.3.8.
Ejemplo. Calculemos el límite
lımx→0
(senx− x)2− 136x
6
x8.
Para empezar, utilizando el teorema 5.4.2 de Taylor-Young, se deduce que
senx= x− 16x3+
1120x
5+o(x5),
cuando x→ 0. Por lo tanto,senx− x=−16x
3+1120x
5+o(x5),
cuando x→ 0. Elevando al cuadrado, es fácil comprobar que
(senx− x)2 =136x
6− 1360x
8+o(x8)
cuando x→ 0. Entonces,(senx− x)2− 1
36x6
x8=− 1
360 +o(x8)x8
cuando x→ 0 y, finalmente,
lımx→0
(senx− x)2− 136x
6
x8=− 1
360 .

5.4. Aproximación polinómica local 105
5.4.3. Fórmula de Taylor con resto
Seguimos la exposición de [ORTEGA, pág. 119 y sigs.].
Teorema 5.4.8 (de Taylor). Sea f una función n+ 1 veces derivable en un intervalo I. Entonces,dados a, x ∈ I, se cumple
f (x) = f (a)+ f ′(a)(x−a)+f ′′(a)2 (x−a)2+ · · ·+ f (n)(a)
n! (x−a)n+Rn(x,a)
(esta expresión se llama fórmula de Taylor), donde Rn(x,a) (resto de Taylor o término comple-mentario) es una función que depende de x y de a y que puede expresarse de las siguientes formas:
a) Término complementario de Lagrange: existe un punto s interior al intervalo de extremos ay x [equivalentemente: existe un s= λa+(1−λ )x con λ ∈ (0,1)] tal que
Rn(x,a) =f (n+1)(s)(n+1)! (x−a)n+1. (5.2)
b) Término complementario de Cauchy: existe un punto c interior al intervalo de extremos a yx [equivalentemente: existe un c= λa+(1−λ )x con λ ∈ (0,1)] tal que
Rn(x,a) =f (n+1)(c)
n! (x−a)(x− c)n. (5.3)
Demostración. Está claro que
Rn(x,a) = f (x)−[f (a)+ f ′(a)(x−a)+
f ′′(a)2 (x−a)2+ · · ·+ f (n)(a)
n! (x−a)n]
.
Lo que hay que probar es que Rn(x,a) puede escribirse como en (5.2) y (5.3) (fórmulas de Lagrangey de Cauchy, respectivamente).
Definamos h : I→ R de la siguiente manera:
h(t) = f (t)+(x− t) f ′(t)+(x− t)2 f′′(t)2 + · · ·+(x− t)n−1 f
(n−1)(t)(n−1)! +(x− t)n f
(n)(t)n!
(obsérvese que la variable es t, y que x es una constante). Según las hipótesis, h es derivable en I.Además, para cada t ∈ I,
h′(t) = f ′(t)+[− f ′(t)+(x− t) f ′′(t)]+
[−(x− t) f ′′(t)+(x− t)2 f
′′′(t)2
]+ . . .
+
[−(x− t)n−2 f
(n−1)(t)(n−2)! +(x− t)n−1 f (n)(t)
(n−1)!
]+
[−(x− t)n−1 f (n)(t)
(n−1)! +(x− t)n f(n+1)(t)n!
]
= (x− t)n f(n+1)(t)n! .
Demostremos ahora las fórmulas de Lagrange y de Cauchy, empezando por esta última.

106 Capítulo 5. Derivación
b) Por el teorema 5.2.7 del valor medio, existe algún c comprendido entre x y a tal que h(x) =h(a)+h′(c)(x−a), es decir,
f (x) = f (a)+(x−a) f ′(a)+(x−a)2 f′′(a)2 + · · ·+(x−a)n−1 f
(n−1)(a)(n−1)! +(x−a)n f
(n)(a)n!
+(x− c)n f(n+1)(c)n! (x−a).
Esto demuestra la fórmula de Cauchy para el resto Rn(x,a).a) Ahora consideremos la función g(t) = (x− t)n+1. Por el teorema 5.3.7 del valor medio genera-
lizado, existe algún s comprendido entre x y a tal que
h(x)−h(a)g(x)−g(a) =
h′(s)g′(s)
=−(x− s)n f (n+1)(s)n!(n+1)(x− s)n =− f (n+1)(s)
(n+1)! ,
es decir,
f (x) = h(x) = h(a)− f (n+1)(s)(n+1)! [g(x)−g(a)]
= f (a)+(x−a) f ′(a)+(x−a)2 f′′(a)2 + · · ·+(x−a)n−1 f
(n−1)(a)(n−1)! +(x−a)n f
(n)(a)n!
+f (n+1)(s)(n+1)! (x−a)n+1.
Esto demuestra la fórmula de Lagrange para el resto Rn(x,a).
El resto de Taylor es el error cometido al sustituir la función por su polinomio de Taylor. Elteorema 5.4.8 proporciona expresiones explícitas del resto, muy útiles en la práctica para controlarese error. Nótese que los resultados obtenidos pueden reescribirse del siguiente modo:
f (x) = f (a)+ f ′(a)(x−a)+ · · ·+ f (n)(a)n! (x−a)n+
f (n+1)(s)(n+1)! (x−a)n+1
= f (a)+ f ′(a)(x−a)+ · · ·+ f (n)(a)n! (x−a)n+
f (n+1)(c)n! (x−a)(x− c)n
para s, c adecuados.La fórmula de Taylor-Young nos daba también una expresión del resto de Taylor, aunque menos
informativa sobre su tamaño: tan solo da idea de su comportamiento en el límite (aunque con menosexigencias sobre la función).
Aplicación. El número e es irracional. Vamos a demostrarlo por reducción al absurdo: supongamosque e = a
b , con a,b ∈ N y lleguemos a una contradicción. Tomamos un número n ∈ N que cumplan ≥ b y n ≥ e. Aplicamos el teorema 5.4.8 de Taylor, con la fórmula (5.3) para el resto, a la funciónexp en el punto a= 0; para todo j ∈ N, exp( j)(0) = exp(0) = 1. Luego
ex = 1+ x+12x
2+13!x
3+ · · ·+ 1n!x
n+es
(n+1)! ,
donde s es un número comprendido entre 0 y x. Sustituimos x= 1:
e= 1+1+12 +
13! + · · ·+ 1
n! +es
(n+1)! ,

5.4. Aproximación polinómica local 107
donde 0< s< 1. Por lo tanto,
ab−1−1− 12 −
13! − · · ·− 1
n! =es
(n+1)! .
Como b≤ n, el miembro de la izquierda se puede reunir en una sola fracción con denominador n!:
Kn! =
es
(n+1)! ,
y, multiplicando por n!,K =
es
n+1 .
Aquí, K es un número entero. Ahora bien, exp(s) > 0 para cualquier s ∈ R; luego K es un númeronatural y por lo tanto
1≤ K ≤ es
n+1 .
Además, la función exp es esctrictamente creciente y 0< s< 1, luego es < e. De aquí se deduce que
1<e
n+1 ,
es decir, n+1 < e, lo que no es cierto. Hemos llegado a una contradicción. Luego el numero e tieneque ser irracional.
Nota. La fórmula y el polinomio de Taylor se llaman de Taylor-Maclaurin en el caso particular a= 0.
Algunos desarrollos de Taylor-Maclaurin. A continuación indicamos los desarrollos de las prin-cipales funciones elementales. En unos casos es la fórmula de Taylor-Maclaurin (con la fórmula deLagrange del resto) y en otros la fórmula de Taylor-Young, es decir, con la notación de la o pequeñade Landau.
a) 11− x = 1+ x+ x2+ x3+ · · ·+ xn+
1(1− t)n+2 x
n+1
b) ex = 1+ x+12!x
2+13!x
3+ · · ·+ 1n!x
n+et
(n+1)!xn+1
c) log(1+ x) = x− 12x2+
13x
3− 14x4+ · · ·+ (−1)n+1
nxn+
(−1)nxn+1(n+1)(1+ t)n+1
d) (1+ x)α = 1+αx+α(α−1)
2! x2+ · · ·+(
αn
)xn+
( αn+1
) xn+1
(1+ t)n+1−α
e) senx= x− 13!x
3+15!x
5− 17!x
7+ · · ·+ (−1)n(2n+1)!x
2n+1+(−1)n+1 cos t
(2n+3)! x2n+3
f) cosx= 1− 12!x
2+14!x
4− 16!x
6+ · · ·+ (−1)n(2n)! x
2n+(−1)n+1 cos t
(2n+2)! x2n+2
g) tgx= x+13x
3+215x
5+17315x
7+o(x8)

108 Capítulo 5. Derivación
h) secx= 1+12x
2+524x
4+61720x
6+o(x7)
i) arcsenx= x+16x
3+340x
5+ · · ·+ 1 ·3 ·5 · · · · · (2n−1)2 ·4 ·6 · · · · · (2n) · x
2n+1
2n+1 +o(x2n+2)
j) arc tgx= x− 13x3+
15x
5− 17x7+ · · ·+ (−1)n
2n+1x2n+1+o(x2n+2)
k) senhx= x+13!x
3+15!x
5+17!x
7+ · · ·+ 1(2n+1)!x
2n+1+cosh t
(2n+3)!x2n+3
l) coshx= 1+12!x
2+14!x
4+16!x
6+ · · ·+ 1(2n)!x
2n+cosh t
(2n+2)!x2n+2
m) tghx= x− 13x3+
215x
5− 17315x
7+o(x8)
n) argsenhx= x− 16x3+
340x
5+ · · ·+(−1)n 1 ·3 ·5 · · · · · (2n−1)2 ·4 ·6 · · · · · (2n) · x2n+1
2n+1 +o(x2n+2)
ñ) arg tghx= x+13x
3+15x
5+17x
7+ · · ·+ 12n+1x
2n+1+o(x2n+2)
−1
1
−π −π/2 ππ/2
La función seno y su polinomio de Taylor-Maclaurin de quinto grado
5.4.4. Extremos relativosRecordemos que, por definición, una función f : D→ R tiene en un punto a ∈ D un máximo
relativo si existe un δ > 0 tal que para todo x ∈ D con |x− a| < δ es f (a) ≥ f (x). Se dice queel máximo relativo es estricto si existe un δ > 0 tal que para todo x ∈ D con 0 < |x− a| < δ esf (a) > f (x). Análogamente, f tiene un mínimo relativo en a si existe un δ > 0 tal que para todo x∈Dcon |x−a| < δ es f (a) ≤ f (x). Y es un mínimo relativo estricto si existe un δ > 0 tal que para todox ∈ D con 0 < |x−a| < δ es f (a) < f (x). Se dice que f tiene un extremo relativo en a si tiene en aun máximo relativo o un mínimo relativo.
Según la proposición 5.2.3, si una función f : D ⊆ R→ R tiene un extremo relativo en un puntointerior de D y es derivable en ese punto, entonces la derivada de f en ese punto tiene que ser 0.Tenemos así una condición necesaria para la existencia de extremos relativos que, según sabemos,no es condición suficiente. Usando el teorema 5.4.2 de Taylor-Young se puede dar una condiciónsuficiente mediante las derivadas de orden superior.

5.4. Aproximación polinómica local 109
Teorema 5.4.9 (condiciones para la existencia de extremos relativos). Sea f una función derivablen−1 veces (n> 1) en un intervalo abierto I; sea a ∈ I tal que existe f (n)(a) y además
f ′(a) = f ′′(a) = · · · = f (n−1)(a) = 0, f (n)(a) %= 0.
Entonces:
a) n par, f (n)(a) > 0 =⇒ f tiene en a un mínimo relativo estricto;
b) n par, f (n)(a) < 0 =⇒ f tiene en a un máximo relativo estricto;
c) n impar =⇒ f no tiene un extremo relativo en a.
Demostración. Observemos que podemos aplicar el corolario 5.4.7 y, por lo tanto,
f (x)− f (a)− f ′(a)(x−a)− f ′′(a)2 (x−a)2− · · ·− f (n−1)(a)
(n−1)! (x−a)n−1 ∼ f (n)(a)n! (x−a)n, x→ a.
Comof ′(a) = f ′′(a) = · · · = f (n−1)(a) = 0,
quedará
f (x)− f (a)∼ f (n)(a)n! (x−a)n, x→ a,
de dondelımx→a
f (x)− f (a)(x−a)n =
f (n)(a)n! .
Puesto que f (n)(a) %= 0 se sigue que, para algún r > 0, se cumplirá para todo x ∈ I con 0< |x−a| < rque
signo f (x)− f (a)(x−a)n = signo f
(n)(a)n! = signo f (n)(a).
Estudiemos ahora los distintos casos posibles.
a) Si n es par y f (n)(a) > 0, para los x ∈ I con 0< |x−a| < r es
signo( f (x)− f (a)) = signo f (x)− f (a)(x−a)n = signo f (n)(a).
ya que por ser n par, se tiene (x−a)n > 0. Luego para todo x ∈ I con 0< |x−a| < r queda
f (x) > f (a)
y f tiene en a un mínimo relativo estricto.
b) Si n es par y f (n)(a) < 0, se procede de la misma manera y se llega a que f tiene en a un máximorelativo estricto.
c) Si n es impar, entonces (x−a)n < 0 si x < a; y (x−a)n > 0 si x > a. Luego f (x)− f (a) tieneun signo si x ∈ I∩ (a− r,a) y el signo contrario si x ∈ I∩ (a,a+ r). Por lo tanto, f no tiene unextremo relativo en a.

110 Capítulo 5. Derivación
5.4.5. Convexidad y concavidadSea I un intervalo y f : I −→ R una función. Recordemos que si a y b son dos puntos distintos de
I, la recta (en R2) que pasa por los puntos (a, f (a)) y (b, f (b)) tiene la ecuación:
y(x) = f (a)+f (b)− f (a)b−a (x−a)
o, de otra manera,y(x) = f (b)+
f (b)− f (a)b−a (x−b).
Definición 5.4.10. Sea f : I −→R, I un intervalo. Se dice que f es convexa en I si para cualesquieraa, b, c ∈ I tales que a< c< b se tiene
f (c)≤ f (a)+f (b)− f (a)b−a (c−a)
(es decir, la gráfica de f está por debajo de todas las cuerdas) o, lo que es igual,
f (c)− f (a)c−a ≤ f (b)− f (a)
b−a(es decir, la pendiente de la cuerda crece al crecer una de las abscisas).
Se dice que f es cóncava en I si para cualesquiera a, b, c ∈ I tales que a< c< b se tiene
f (c)≥ f (a)+f (b)− f (a)b−a (c−a)
o, lo que es igual,f (c)− f (a)c−a ≥ f (b)− f (a)
b−a .
Observación. Que c ∈ (a,b) equivale a que c= λa+(1−λ )b, con λ ∈ (0,1). Es fácil ver entoncesque
f (c)≤ f (a)+f (b)− f (a)b−a (c−a) ⇐⇒ f (c)≤ λ f (a)+(1−λ ) f (b).
Función convexa Función cóncava
El siguiente resultado se deduce inmediatamente de las definiciones.

5.4. Aproximación polinómica local 111
Proposición 5.4.11. Sea f : I −→ R, I un intervalo. La función f es cóncava en I si y solo si − f esconvexa en I.
Teorema 5.4.12. Sea f una función derivable en un intervalo I (derivable lateralmente en los extre-mos si estos pertenecen al intervalo). Son equivalentes:
a) f es convexa en I;
b) la gráfica de f está por encima de sus tangentes:
f (b)≥ f (a)+ f ′(a)(b−a) ∀ a,b ∈ I;c) f ′ es no decreciente en I.
Demostración. a)=⇒ b): sean a,b∈ I; supongamos que a< b. Entonces, para todo x∈ (a,b) se tienef (x)− f (a)x−a ≤ f (b)− f (a)
b−a ;
puesto que f es derivable en a, haciendo x−→ a+ se obtiene
f ′(a)≤ f (b)− f (a)b−a
y como b−a> 0, resulta f ′(a)(b−a)+ f (a)≤ f (b), como teníamos que demostrar.Si, por el contrario, b< a, entonces se tiene para todo x ∈ (b,a)
f (x)≤ f (b)+f (a)− f (b)a−b (x−b) = f (a)+
f (b)− f (a)b−a (x−a),
de donde, haciendo x−→ a−,f ′(a)≥ f (b)− f (a)
b−a ;
y como b−a< 0, resulta también en este caso f ′(a)(b−a)+ f (a)≤ f (b).b) =⇒ c): sean a,b ∈ I, a< b. Por hipótesis,
f ′(a)(b−a)≤ f (b)− f (a)
y, cambiando los papeles de a y b,
f (b)− f (a)≤ f ′(b)(b−a);luego f ′(a)(b−a)≤ f ′(b)(b−a) y, por ser b−a> 0, f ′(a)≤ f ′(b). Es decir, f ′ es no decreciente.
c) =⇒ a): sean a,b,c ∈ I, a< c< b. Por el teorema 5.2.7 del valor medio,
∃ α ∈ (a,c) tal que f (c)− f (a) = f ′(α)(c−a);∃ β ∈ (c,b) tal que f (b)− f (c) = f ′(β )(b− c).
Por hipótesis, f ′(α)≤ f ′(β ), luego
f (b)− f (a) = f ′(α)(c−a)+ f ′(β )(b− c)≥ f ′(α)(c−a)+ f ′(α)(b− c) = f ′(α)(b−a) =
f (c)− f (a)c−a (b−a);
como b−a> 0, se deduce quef (c)− f (a)c−a ≤ f (b)− f (a)
b−a .
Y f es convexa.

112 Capítulo 5. Derivación
Corolario 5.4.13. Sea f derivable en un intervalo I (derivable lateralmente en los extremos si estospertenecen al intervalo). Son equivalentes:
a) f es cóncava en I;
b) la gráfica de f está por debajo de sus tangentes:
f (b)≤ f (a)+ f ′(a)(b−a) ∀ a,b ∈ I;
c) f ′ es no creciente en I.
Corolario 5.4.14. Sea f derivable dos veces en un intervalo I. Son equivalentes:
a) f es convexa en I;
b) f ′′(x)≥ 0 para todo x ∈ I.Corolario 5.4.15. Sea f derivable dos veces en un intervalo I. Son equivalentes:
a) f es cóncava en I;
b) f ′′(x)≤ 0 para todo x ∈ I.Definición 5.4.16. Sea f una función y sea a ∈ dom f . Se dice que f tiene en a un punto de inflexiónsi existe δ > 0 tal que (a−δ ,a+δ )⊆ dom f y o bien f es convexa en (a−δ ,a] y cóncava en [a,a+δ ),o bien es cóncava en (a−δ ,a] y convexa en [a,a+δ ).
a
El punto a es un punto de inflexión
Proposición 5.4.17. Sea f : D⊆ R→ R y a un punto interior de D. Supongamos que f es derivableen un intervalo abierto I ⊆ D tal que a ∈ I. Entonces, si f tiene un punto de inflexión en a y existef ′′(a), necesariamente f ′′(a) = 0.
Demostración. Por hipótesis existe δ > 0 tal que f es convexa en (a− δ ,a] y cóncava en [a,a+ δ )(si es al revés, se procede de manera análoga). A su vez, para algún ρ > 0 se tendrá (a−ρ,a+ρ)⊆ I.Haciendo r=mın{δ ,ρ}, la función f es derivable en (a−r,a+r)⊆ I, convexa en (a−r,a] y cóncavaen [a,a+ r).
En consecuencia la función f ′ es monótona no decreciente en (a− r,a] y monótona no crecienteen [a,a+r), por lo que tiene en a un máximo relativo; como f ′ es derivable en a, su derivada se anula;es decir, f ′′(a) = 0.

5.4. Aproximación polinómica local 113
Observación. Aun suponiendo que f sea derivable en a, que f tenga en a un punto de inflexión notiene ninguna relación con el valor de f ′(a) y, en particular, no tiene por qué ser f ′(a) = 0.
Proposición 5.4.18 (condición suficiente para la existencia de puntos de inflexión). Sea f unafunción derivable n− 1 veces (n ≥ 3) en un intervalo abierto I; sea a ∈ I tal que existe f (n)(a) yademás
f ′′(a) = f ′′′(a) = · · · = f (n−1)(a) = 0, f (n)(a) %= 0.
Si n es impar, entonces f tiene en a un punto de inflexión.
Demostración. Por el corolario 5.4.7 (aplicado a la función f ′′),
f ′′(x)∼ ( f ′′)(n−2)(a)(n−2)! (x−a)n−2,
luego
lımx→a
f ′′(x)(x−a)n−2 =
f (n)(a)(n−2)! %= 0
y f ′′(x)/(x−a)n−2 tiene signo constante en (a−δ ,a+δ )\{a} para algún δ > 0; por ser n−2 impar,resulta que f ′′ tiene un signo en (a− δ ,a) y el otro en (a,a+ δ ). Como f ′′(a) = 0, se deduce queo bien f es convexa en (a− δ ,a] y cóncava en [a,a+ δ ) o al revés. Es decir, f tiene un punto deinflexión en a.
Corolario 5.4.19. Sea f una función derivable n−1 veces (n≥ 3) en un intervalo abierto I; sea a∈ Ital que existe f (n)(a) y además
f ′(a) = f ′′(a) = · · · = f (n−1)(a) = 0, f (n)(a) %= 0.
Si n es impar, entonces f tiene en a un punto de inflexión con tangente horizontal y no un extremolocal.
Demostración. Ver la proposición 5.4.18 y el teorema 5.4.9.
5.4.6. Representación gráfica de funcionesSi f es una función real de una variable real, su estudio y representación gráfica puede sistema-
tizarse en los siguientes pasos (de los que han de llevarse a cabo tan solo los que resulten imprescin-dibles para responder a las cuestiones que se traten de resolver, y siempre de la manera más sencillaposible):
1) Generalidades.
a) Determinación de su dominio.b) Simplificación del estudio: paridad [ f (−x) = f (x)] o imparidad [ f (−x) =− f (x)]; perio-dicidad [ f (x+ p) = f (x)]. Otras simetrías. Regiones planas sin puntos de la gráfica.
c) Límites de la función en puntos del dominio; continuidad.d) Límites de la función en los puntos de acumulación del dominio que no pertenezcan a él.En particular, asíntotas verticales: si para algún punto a de acumulación del dominio def se cumple lım
x→a−f (x) = +∞, la recta x= a es una asíntota vertical (lo mismo si el límite
es −∞ o si el límite es por la derecha).

114 Capítulo 5. Derivación
e) Comportamiento en el infinito: asíntotas horizontales y oblicuas.• Si el dominio de f no está acotado superiormente y para algún b ∈R es lım
x→+∞f (x) =
b, la recta y= b es una asíntota horizontal.• Si existen a,b ∈ R tales que lım
x→+∞[ f (x)− (ax+ b)] = 0, la recta y = ax+ b es una
asíntota oblicua. En este caso,
a= lımx→+∞
f (x)x
, b= lımx→+∞
[ f (x)−ax].
Una asíntota horizontal es un caso particular de asíntota oblicua, con a= 0.
• Si existe a ∈ R tal que a= lımx→+∞
f (x)x, la recta y= ax es una dirección asintótica de
la gráfica (aun cuando no exista asíntota). En este caso, si lımx→+∞
[ f (x)−ax] = +∞ sedice que la gráfica de f tiene una rama parabólica de dirección asintótica y= ax.
• Lo mismo para x→−∞ (si el dominio de f no está acotado inferiormente).
Asíntota horizontal, vertical y oblicua
f) Crecimiento y decrecimiento.
2) Estudio de la derivada.
a) Derivabilidad de la función. Puntos con tangente vertical.b) Signo de la derivada: crecimiento y decrecimiento; extremos relativos y absolutos.c) Crecimiento y decrecimiento de la derivada: convexidad y concavidad; puntos de infle-xión.
d) Puntos críticos o singulares.

5.5. Ejercicios 115
3) Estudio de la derivada segunda.
a) Existencia de la derivada segunda.b) Signo de la derivada segunda: convexidad y concavidad; puntos de inflexión.
4) Otras consideraciones: valores particulares de la función o de sus derivadas; cortes con los ejes;cortes con las asíntotas.
5.5. EjerciciosEjercicio 5.1 (derivadas sucesivas de un producto: regla de Leibniz). Sea I un intervalo, c un puntode I, f y g funciones definidas en I. Dado n ∈N, si f y g son funciones derivables hasta el orden n enel punto c, entonces el producto f g es derivable hasta el orden n en el punto c, y se tiene
( f g)(n)(c) =n
∑k=0
(nk
)f (k)(c)g(n−k)(c).
Ejercicio 5.2. Estudiar la derivabilidad de las siguientes funciones y hallar f ′(x), f ′′(x), donde seaposible.
a) f (x) =√|x| b) f (x) =
{x2, si x≤ 0−x2, si x> 0
c) f (x) = |x|3
Ejercicio 5.3. Hallar y′, simplificando si es posible, en los siguientes casos:
a) y(x) =senx+ cosxsenx− cosx b) y(x) = (x2+1)arc tgx
c) y(x) = log(x+√x2+1) d) y(x) = log(x+
√x2−1)
e) y(x) = log√1− cosx1+ cosx f) y(x) = x1/ logx
g) y(x) = arc tg√1− x1+ x
h) y(x) = log√x2+ x+1− 1√
3arc tg 2x+1√
3
i) y(x) = arcsen senasenx1− cosacosx j) y(x) = xarcsenx+
√1− x2
Ejercicio 5.4. Hallar el número de soluciones reales que tienen las siguientes ecuaciones y dos enterosconsecutivos entre los que se encuentra cada solución:
a) 3x5+15x−8= 0 b) 2x3−9x2+12x=−1 c) x5−5x= 1
d) 3−x = x e) ex = 1+ x f) x5+2x+1= 0
Ejercicio 5.5. Demostrar las siguientes desigualdades:
a) x− x3
3 < arc tgx< x− x3
6 , x ∈ (0,1] b) ex > ex, x %= 1
c) x1+ x
< log(1+ x) < x, x>−1, x %= 0 d) 2x< sen2x+ tgx, x ∈ (0,π/2)

116 Capítulo 5. Derivación
e) tgx> x+x3
3 , x ∈ (0,π/2) f) ex ≥ 1+ x+x2
2 , x≥ 0
g) x− x3
6 < senx< x, x> 0
Ejercicio 5.6. Demostrar que arc tgx− arc tgy < x− y, si x > y. Deducir que la función arc tg esuniformemente continua en R.
Ejercicio 5.7. Probar que arcsenx+ arccosx=π2 para todo x ∈ [−1,1].
Ejercicio 5.8. Probar que arccos 1√1+ x2
= arc tgx para todo x≥ 0. ¿Y si x< 0?
Ejercicio 5.9. Sean f ,g : [0,1]→R continuas en [0,1], derivables en (0,1), con f (0) = 0, g(0) = 2 y| f ′(x)|≤ 1, |g′(x)|≤ 1 para todo x ∈ (0,1). Probar que f (x)≤ g(x) para cada x ∈ [0,1].
Ejercicio 5.10. Calcular los siguientes límites:
a) lımx→+∞
logxxε = 0 (ε > 0) b) lım
x→0+xa logx= 0 (a> 0)
c) lımx→0
(1x2− ctgx
x
)=13 d) lım
x→1(2− x)tg(πx/2) = e2/π
e) lımx→0+
(logctgx)tgx = 1 f) lımx→1x
1/(1−x) = 1/e
g) lımx→0
(1
log(x+√1+ x2)
− 1log(1+ x)
)=−12 h) lım
x→0
(ctgx− 1
x
)= 0
i) lımx→0 log(1+ sen2 x)ctg log2(1+ x) = 1 j) lım
x→0e1/(1−cosx) senx ( % ∃)
k) lımx→+∞
2+2x+ sen2x(2x+ sen2x)esenx ( % ∃) l) lım
x→0+x1/ log(ex−1) = e
m) lımx→0+
xsenx(1x2− coshxxsenhx
)=−13 n) lım
x→0
(1x− 1ex−1
)=12
ñ) lımx→0
x(ex+1)−2(ex−1)x3
=16 o) lım
x→1
(1logx −
1x−1
)=12
p) lımx→0
e− (1+ x)1/x
x=e2 q) lım
x→0sen3x2
logcos(2x2− x) =−6
Ejercicio 5.11. Hallar los intervalos de crecimiento y decrecimiento de las funciones siguientes:
a) f (x) = 4x3−21x2+18x+20 b) f (x) = senx+ cosx, x ∈ [0,2π]
c) f (x) =2x
1+ x2d) f (x) = cosx− x
e) f (x) = 3x4−4x3−12x2+12 f) f (x) = x2e−x
Ejercicio 5.12. Hallar los extremos relativos de las funciones siguientes:

5.5. Ejercicios 117
a) f (x) = 3 3√x2− x2 b) f (x) = 3√
(x−1)2+ 3√
(x+1)2
c) f (x) = 2x3−15x2−82x+8 d) f (x) = 2senx+ cos2x
e) f (x) = ex senx, x ∈ [−2,2]Ejercicio 5.13. Hallar los máximos y mínimos absolutos, si existen, en los casos siguientes:
a) f (x) = x3− x2−8x+1, en [−2,2] b) f (x) = x5+ x+1, en [−1,1]
c) f (x) = arcsen(1+ x), en su dominio d) f (x) =1
2x4− x+1, en (0,1], [0,1] y R
e) f (x) = e−x2 , en [−1,1], (0,1) y R f) f (x) = x2 logx, en [e−1,e] y (0,+∞)
Ejercicio 5.14. Sea f (x) =
x4 sen2 1x
si x %= 0,
0 si x= 0.
a) Demostrar que f tiene en 0 un mínimo local.
b) Demostrar que f ′(0) = f ′′(0) = 0 y que no existe f ′′′(0).
Ejercicio 5.15. Sea f (x) = ax− x3
1+ x2. Probar que f es creciente en R si y solo si a≥ 9/8.
Ejercicio 5.16. ¿Qué número es mayor, eπ o πe? Probar que si x> e, entonces ex > xe.
Ejercicio 5.17. Escribir x4 + x3 − 3x2 + 4x− 4 como una suma de potencias de (x− 1). Escribirx4−11x3+43x2−60x+14 como una suma de potencias de (x−3).Ejercicio 5.18. Escribir la fórmula de Maclaurin de orden n, o la de Young, de las funciones siguien-tes:
a) f (x) = ex2 b) f (x) = (1+ ex)2 c) f (x) = xex
d) f (x) = log 1√1− x e) f (x) = log 1+ x
1− x f) f (x) = (1+ x) log(1+ x)
Ejercicio 5.19. Escribir la fórmula de Taylor de orden n de:
a) f (x) = (2− x)−1, en potencias de (x−1).
b) f (x) = sen 3x2 , en potencias de (x−π).
c) f (x) = logx, en potencias de (x−2).d) f (x) = ex, en potencias de (x−1).e) f (x) =
√1+ x, en potencias de (x−3).
f) f (x) = log2x− 1x−1, en potencias de (x−2).
Ejercicio 5.20. Probar que el error cometido al sustituir senx por x− 16x3+ 1
120x5 es menor que 10−4,
si |x|≤ π4 .

118 Capítulo 5. Derivación
Ejercicio 5.21. Probar que el error cometido al sustituir sen(ex−1) por x+ 12x2 es menor que 3 ·10−3,
si |x|≤ 110 .
Ejercicio 5.22. Probar que el error cometido al sustituir cos2(3x) por 1− 9x2+ 27x4 es menor que4 ·10−5, si |x|≤ 1
10 .
Ejercicio 5.23. Probar que el error cometido al sustituir esenx por 1+ x+ 12x2 es menor que 3 · |x|3.
Ejercicio 5.24. Hallar en cada caso p ∈ N tal que lımx→a
f (x)(x−a)p es finito y no nulo (se dice entonces
que f (x) es un infinitésimo de orden p cuando x→ a):a) f (x) = senx, a= 0 b) f (x) = log(1+ x), a= 0
c) f (x) = 1− x+ logx, a= 1 d) f (x) = 1− cosx, a= 0
e) f (x) = tgx− senx, a= 0 f) f (x) =√x−2, a= 4
g) f (x) = ex−1, a= 0 h) f (x) = cosx− e−x2/2, a= 0
i) f (x) = senx2− log(1+ x2), a= 0
Ejercicio 5.25. Calcular los límites siguientes, utilizando la fórmula de Young:
a) lımx→0
3senax−3ax−a3x36bx−6senbx+b3x3
b) lımx→1
1− x+ logx1−√2x− x2
c) lımx→0
senx− xarc tgx− x d) lım
x→0senx− xcosxx(x2− sen2 x)1/2
e) lımx→+∞
x2(1−√
x(1+ x) log 1+ xx
)f) lım
x→0senhx− tgxsenx− arcsenx
g) lımx→0
senx− tgxarcsenx− arc tgx h) lım
x→0cosx−√1− x
senx
i) lımx→0
(sen3x−3senx)2(cos2x− cosx)3
Ejercicio 5.26. Estudiar el crecimiento, los extremos y la convexidad de las siguientes funciones, ydibujar su gráfica.
a) f (x) =x3
(x+1)2 b) f (x) =x2+1x2−4
c) f (x) =√4x2− x d) f (x) =
1logx
e) f (x) =ex
xf) f (x) = 3
√x− 3√x+1
g) f (x) = tg2 x h) f (x) = x6−3x4+3x2−5

Capítulo 6
La integral de Riemann
Vamos a dar una definición precisa de la integral de una función definida en un intervalo. Estetiene que ser un intervalo cerrado y acotado, es decir [a,b] con a< b ∈R, y la definición que daremosde integral solo se aplica a funciones acotadas, y no a todas, sino a las funciones que llamaremosintegrables.
En el siguiente capítulo veremos cómo, en un sentido más amplio, podemos hablar de integralesde funciones no acotadas o definidas en intervalos no acotados.
Seguimos básicamente el desarrollo que puede verse, entre otros muchos textos, en [ROSS, cap. VI,pág. 184 y sigs.] o en [BARTLE-SHERBERT, cap. 6, pág. 251 y sigs.]. Como complemento puede con-sultarse [GUZMÁN, cap. 12]. La evolución histórica de la integral está muy bien contada (sobre todo laaportación de Newton y Leibniz) en [DURÁN]; de carácter más técnico es el libro [GRATTAN-GUINNESS].
6.1. Definición (de Darboux) de la integral de Riemann6.1.1. Definición de integralDefinición 6.1.1. Una partición de un intervalo [a,b] es un conjunto finito de puntos de [a,b] queincluye a los extremos. Una partición P la representamos ordenando sus puntos de menor a mayor,comenzando en a y terminando en b:
P= {xi}ni=0 ≡ {a= x0 < x1 < x2 < .. . < xn−1 < xn = b}.El conjunto de las particiones de [a,b] lo indicamos con P([a,b]). Una partición como la indicadadivide el intervalo [a,b] en n subintervalos [xi−1,xi], cada uno de longitud xi− xi−1.Definición 6.1.2 (sumas de Darboux). Sea f una función acotada definida en [a,b], y sea P ∈P([a,b]), P≡ {a= x0 < x1 < x2 < .. . < xn−1 < xn = b}. Sean, para cada i= 1, . . . ,n,
Mi = sup{ f (x) : x ∈ [xi−1,xi]}; mi = ınf{ f (x) : x ∈ [xi−1,xi]}.La suma inferior de f asociada a P se define como
S( f ,P) =n
∑i=1
mi(xi− xi−1),
y la suma superior de f asociada a P es
S( f ,P) =n
∑i=1
Mi(xi− xi−1).
119

120 Capítulo 6. La integral de Riemann
a x1 x2 . . . xn−1 b
f (x)
Suma inferior asociada a una partición
a x1 x2 . . . xn−1 b
f (x)
Suma superior asociada a una partición
Observación. Para cualquier P ∈P([a,b]) tenemos que S( f ,P)≤ S( f ,P), ya que mi ≤Mi para cadai. También, poniendoM = sup{ f (x) : x ∈ [a,b]}, m= ınf{ f (x) : x ∈ [a,b]}, se deduce que m(b−a)≤S( f ,P)≤ S( f ,P)≤M(b−a) cualquiera que sea la partición P (y por consiguiente, tanto el conjuntode las sumas superiores como el de las sumas inferiores están acotados, superiormente por M(b−a),inferiormente por m(b−a)).Nota (relación entre la integral y la medida de áreas). Supongamos que f es una función nonegativa y consideremos la región que delimita su gráfica con las rectas y= 0, x= a y x= b. Si el áreade dicha región es A, entonces
S( f ,P)≤ A≤ S( f ,P),
ya que las respectivas sumas son las áreas que obtenemos si cambiamos f en cada [xi−1,xi) por mi oMi, y los hemos definido de forma quemi≤ f ≤Mi (de hecho hemos tomado los valores más ajustadosque cumplen dichas desigualdades).
a x1 x2 . . . xn−1 b
Suma superior, área y suma inferior
En la figura, se representan en distinto color la diferencia entre la suma superior y el área A yla diferencia entre A y la suma inferior. Parece claro que si tomamos una partición suficientementenutrida de puntos podemos conseguir que estas zonas sean muy pequeñas, de forma que tanto la sumasuperior como la inferior sean arbitrariamente próximas al área A.
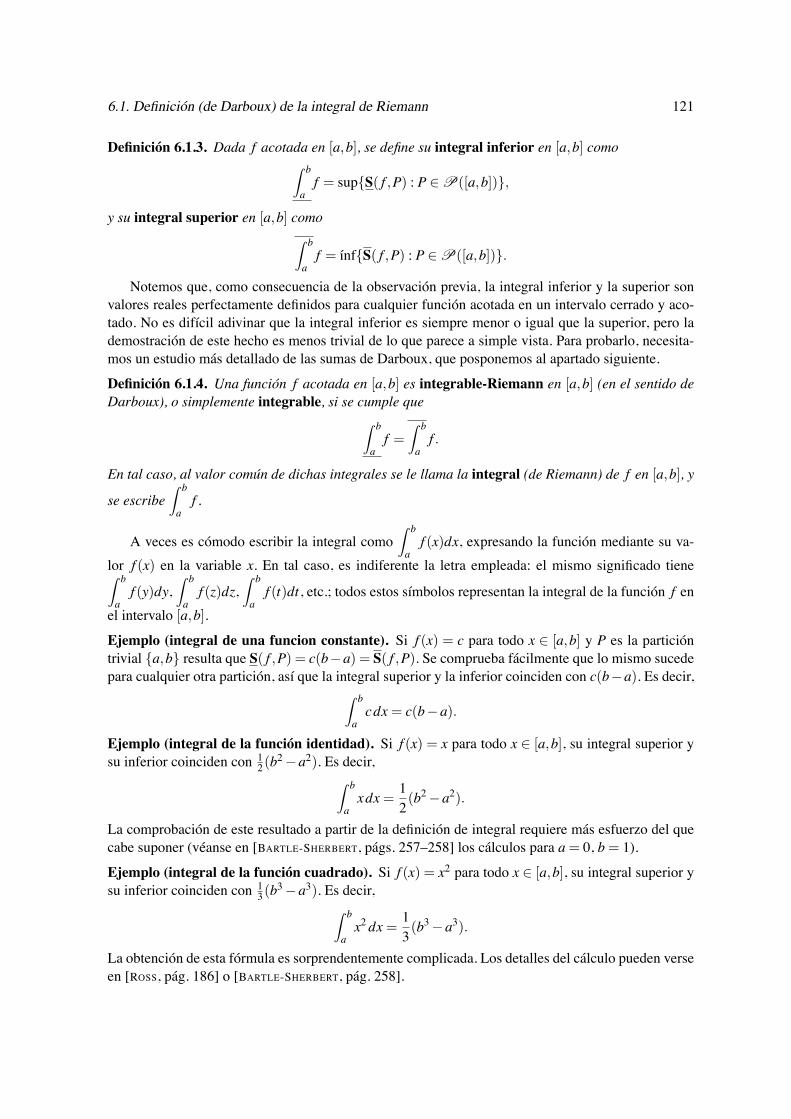
6.1. Definición (de Darboux) de la integral de Riemann 121
Definición 6.1.3. Dada f acotada en [a,b], se define su integral inferior en [a,b] como∫ b
af = sup{S( f ,P) : P ∈P([a,b])},
y su integral superior en [a,b] como∫ b
af = ınf{S( f ,P) : P ∈P([a,b])}.
Notemos que, como consecuencia de la observación previa, la integral inferior y la superior sonvalores reales perfectamente definidos para cualquier función acotada en un intervalo cerrado y aco-tado. No es difícil adivinar que la integral inferior es siempre menor o igual que la superior, pero lademostración de este hecho es menos trivial de lo que parece a simple vista. Para probarlo, necesita-mos un estudio más detallado de las sumas de Darboux, que posponemos al apartado siguiente.Definición 6.1.4. Una función f acotada en [a,b] es integrable-Riemann en [a,b] (en el sentido deDarboux), o simplemente integrable, si se cumple que∫ b
af =
∫ b
af .
En tal caso, al valor común de dichas integrales se le llama la integral (de Riemann) de f en [a,b], y
se escribe∫ b
af .
A veces es cómodo escribir la integral como∫ b
af (x)dx, expresando la función mediante su va-
lor f (x) en la variable x. En tal caso, es indiferente la letra empleada: el mismo significado tiene∫ b
af (y)dy,
∫ b
af (z)dz,
∫ b
af (t)dt, etc.; todos estos símbolos representan la integral de la función f en
el intervalo [a,b].Ejemplo (integral de una funcion constante). Si f (x) = c para todo x ∈ [a,b] y P es la particióntrivial {a,b} resulta que S( f ,P) = c(b−a) = S( f ,P). Se comprueba fácilmente que lo mismo sucedepara cualquier otra partición, así que la integral superior y la inferior coinciden con c(b−a). Es decir,∫ b
acdx= c(b−a).
Ejemplo (integral de la función identidad). Si f (x) = x para todo x ∈ [a,b], su integral superior ysu inferior coinciden con 1
2(b2−a2). Es decir,∫ b
axdx=
12(b2−a2).
La comprobación de este resultado a partir de la definición de integral requiere más esfuerzo del quecabe suponer (véanse en [BARTLE-SHERBERT, págs. 257–258] los cálculos para a= 0, b= 1).Ejemplo (integral de la función cuadrado). Si f (x) = x2 para todo x ∈ [a,b], su integral superior ysu inferior coinciden con 1
3(b3−a3). Es decir,∫ b
ax2 dx=
13(b3−a3).
La obtención de esta fórmula es sorprendentemente complicada. Los detalles del cálculo pueden verseen [ROSS, pág. 186] o [BARTLE-SHERBERT, pág. 258].

122 Capítulo 6. La integral de Riemann
Este ejemplo y el anterior ponen de manifiesto la necesidad de hallar procedimientos indirectosde cálculo que permitan evaluar cómodamente al menos integrales de funciones tan sencillas comoestas. Veremos algunos más adelante.
Ejemplo (una función acotada que no es integrable). Sea f : [0,1] → R la dada por f (x) = 1si x ∈ Q y f (x) = 0 si x /∈ Q (la función de Dirichlet). Por la densidad de los racionales y de losirracionales, en cualquier intervalo [xi−1,xi], asociado a cualquier partición P, f toma los valores 0y 1, luego resulta que S( f ,P) = 1 y S( f ,P) = 0. Por lo tanto la integral inferior vale 0 y la integralsuperior vale 1. La función de Dirichlet no es integrable-Riemann.
Nota (¿la integral es el área?). Dada una función f acotada y no negativa, ya hemos visto queS( f ,P)≤ A≤ S( f ,P) para cada partición P, si A es el área de la región que limita la gráfica de f . Portanto A es una cota superior del conjunto de las sumas inferiores y una cota inferior del conjunto delas sumas superiores, y entonces ∫ b
af ≤ A≤
∫ b
af . (6.1)
Si f es integrable, los dos extremos de (6.1) coinciden con∫ b
af , así que el área A es igual a la integral.
Pero hay que señalar un matiz importante: mientras que la integral es un concepto que hemos definido
a b
∫ b
af (x)dx
La integral y el área
rigurosamente, nos hemos valido de una noción intuitiva e ingenua de la medida de áreas.
6.1.2. Propiedades básicas de las sumas de Darboux
Lema 6.1.5. Sea f una función acotada en un intervalo cerrado y acotado [a,b]. Si P y Q son parti-ciones de [a,b] y P⊆ Q (se dice en tal caso que Q es más fina que P), entonces
S( f ,P)≤ S( f ,Q)≤ S( f ,Q)≤ S( f ,P),
y en consecuenciaS( f ,Q)−S( f ,Q)≤ S( f ,P)−S( f ,P).

6.1. Definición (de Darboux) de la integral de Riemann 123
Demostración. Basta probarlo en el caso en que Q tiene un elemento más que P; para el caso generalbasta reiterar el razonamiento, añadiendo en cada paso un punto nuevo hasta obtener Q. Ponemosentonces Q= P∪{c}, con P≡ {a= x0 < x1 < x2 < .. . < xn−1 < xn = b} y Q≡ a= x0 < .. . < xk−1 <c< xk < .. . < xn = b. Se trata de probar que S( f ,P)≤ S( f ,Q) y S( f ,Q)≤ S( f ,P).
Sean mi los ínfimos correspondientes a la partición P y sean
α1 = ınf{ f (x) : x ∈ [xk−1,c]},α2 = ınf{ f (x) : x ∈ [c,xk]}
(ver la figura). Entonces, mk ≤ α1, mk ≤ α2. Por lo tanto,
mk α2
xk−1 c xk
α1
Diferencia entre las sumas inferiores correspondientes a P y Q
S( f ,Q)−S( f ,P) = α1(c− xk−1)+α2(xk− c)−mk(xk− xk−1)≥ mk(c− xk−1+ xk− c)−mk(xk− xk−1) = 0.
Análogamente, sean Mi los supremos correspondientes a P y sean β1 = sup{ f (x) : x ∈ [xk−1,c]} yβ2 = sup{ f (x) : x ∈ [c,xk]}. Entonces, Mk ≥ β1, Mk ≥ β2 y
S( f ,Q)−S( f ,P) = β1(c− xk−1)+β2(xk− c)−Mk(xk− xk−1)≤ 0.
Lema 6.1.6. Sea f una función acotada en un intervalo cerrado y acotado [a,b]. Si P y Q son parti-ciones cualesquiera de [a,b], entonces
S( f ,P)≤ S( f ,Q).
Demostración. Por el lema 6.1.5, si tomamos P∪Q ∈P([a,b]) entonces
S( f ,P)≤ S( f ,P∪Q)≤ S( f ,P∪Q)≤ S( f ,Q);
la primera desigualdad se da porque P⊆ P∪Q, y la tercera porque Q⊆ P∪Q.

124 Capítulo 6. La integral de Riemann
a x1 x2 . . . xn−1 bSuma inferior y suma superior para particiones distintas
Teorema 6.1.7. Si f es una función acotada en [a,b], entonces su integral inferior es siempre menoro igual que su integral superior: ∫ b
af ≤
∫ b
af
Demostración. Según el lema 6.1.6, si Q es una partición cualquiera de [a,b],
∫ b
af = sup{S( f ,P) : P ∈P([a,b])}≤ S( f ,Q).
Por lo tanto, ∫ b
af ≤ ınf{S( f ,Q) : Q ∈P([a,b])} =
∫ b
af .
6.1.3. Existencia de la integral: condición de Riemann. Integrabilidad de las funcionesmonótonas y de las funciones continuas
«Al abordar la integral de Riemann uno se enfrenta a dos cuestiones. Primero, para una funciónacotada en un intervalo, se encuentra la cuestión de la existencia de la integral. Segundo, cuando sesabe que existe la integral, surge entonces el problema de evaluarla» ([BARTLE-SHERBERT, pág. 259]).
Para ver si una función es integrable, ¿es preciso considerar todas las sumas de Darboux y calcularla integral superior e inferior? Por suerte, en el siguiente teorema vamos a demostrar que no es nece-sario: basta probar que hay particiones cuyas sumas de Darboux están suficientemente próximas. Esteresultado servirá además para deducir que las funciones continuas y las monótonas son integrables.
Teorema 6.1.8 (condición de integrabilidad de Riemann). Una función f acotada en [a,b] es inte-grable en dicho intervalo si y solo si para cada ε > 0 existe una partición P= Pε de [a,b] tal que
S( f ,P)−S( f ,P) < ε.
Demostración. Supongamos primero que f es integrable. Como∫ b
af es el supremo de las sumas
inferiores y el ínfimo de las sumas superiores, para ε > 0 resulta que ni∫ b
af − ε/2 es cota superior

6.1. Definición (de Darboux) de la integral de Riemann 125
de las primeras ni∫ b
af + ε/2 es cota inferior de las segundas, así que existen dos particiones P1 y P2
tales que ∫ b
af − ε/2< S( f ,P1), S( f ,P2) <
∫ b
af + ε/2.
Si P= P1∪P2 entonces S( f ,P1)≤ S( f ,P) y S( f ,P)≤ S( f ,P2), luego∫ b
af − ε/2< S( f ,P), S( f ,P) <
∫ b
af + ε/2
y por tanto S( f ,P)−S( f ,P) < ε .Recíprocamente, si esto así para alguna P entonces∫ b
af ≤ S( f ,P) < S( f ,P)+ ε ≤
∫ b
af + ε,
luego 0≤ ∫ ba f −
∫ ba f < ε , y si esto es así para todo ε > 0 entonces
∫ ba f −
∫ ba f = 0.
Definición 6.1.9. Dada una partición P ∈P([a,b]), su norma ‖P‖ es el máximo de {xi− xi−1 : i =1, . . . ,n}.
La norma de una partición es la mayor distancia entre dos puntos consecutivos de la misma.Gráficamente, se trata de la anchura máxima de los intervalos parciales [xi−1,xi]; controla la holgurade la partición, de modo que cuanto menor sea, más tupida es la partición, sus puntos están máspróximos.
Observación. Podemos tomar particiones de norma arbitrariamente pequeña: para conseguir que lanorma sea menor que un δ > 0 prefijado, basta elegir un n tal que h= b−a
n < δ y tomar
P= {a,a+h,a+2h,a+3h, . . . ,a+nh= b}.Teorema 6.1.10 (integrabilidad de las funciones monótonas). Toda función monótona en un inter-valo [a,b] es integrable.
Demostración. Supongamos que f es una función no decreciente en [a,b]. Entonces f está acotada(inferiormente por f (a), superiormente por f (b)).
Dada P≡ {a= x0 < x1 < x2 < .. . < xn−1 < xn = b}, la monotonía dice que, para cada i,Mi ≡ sup{ f (x) : x ∈ [xi−1,xi]} = f (xi);mi ≡ ınf{ f (x) : x ∈ [xi−1,xi]} = f (xi−1).
Por lo tanto,
S( f ,P)−S( f ,P) =n
∑i=1
(Mi−mi)(xi− xi−1) =n
∑i=1
( f (xi)− f (xi−1))(xi− xi−1)
< ‖P‖n
∑i=1
( f (xi)− f (xi−1)) = ‖P‖( f (b)− f (a)).
Ahora, dado ε > 0 basta tomar una partición P de modo que ‖P‖( f (b)− f (a)) < ε para probar quese cumple la condición de integrabilidad de Riemann (teorema 6.1.8).
Si f es no creciente la demostración es análoga.
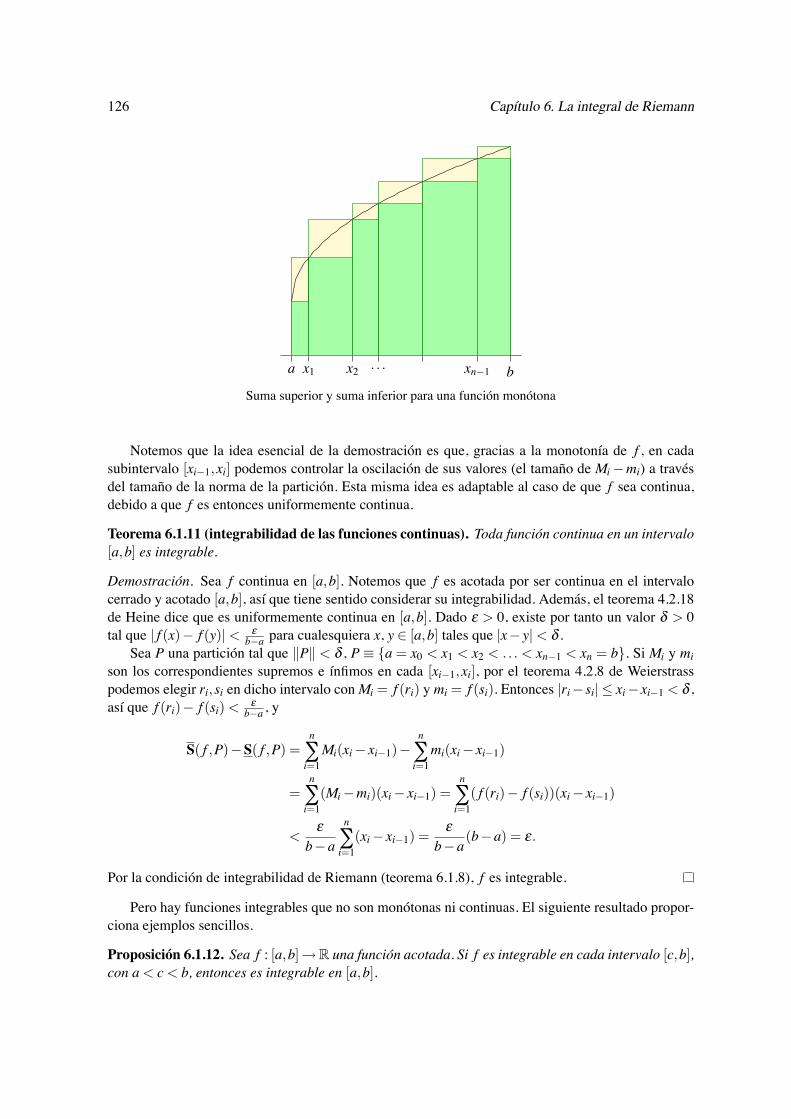
126 Capítulo 6. La integral de Riemann
a x1 x2 . . . xn−1 bSuma superior y suma inferior para una función monótona
Notemos que la idea esencial de la demostración es que, gracias a la monotonía de f , en cadasubintervalo [xi−1,xi] podemos controlar la oscilación de sus valores (el tamaño de Mi−mi) a travésdel tamaño de la norma de la partición. Esta misma idea es adaptable al caso de que f sea continua,debido a que f es entonces uniformemente continua.
Teorema 6.1.11 (integrabilidad de las funciones continuas). Toda función continua en un intervalo[a,b] es integrable.
Demostración. Sea f continua en [a,b]. Notemos que f es acotada por ser continua en el intervalocerrado y acotado [a,b], así que tiene sentido considerar su integrabilidad. Además, el teorema 4.2.18de Heine dice que es uniformemente continua en [a,b]. Dado ε > 0, existe por tanto un valor δ > 0tal que | f (x)− f (y)| < ε
b−a para cualesquiera x, y ∈ [a,b] tales que |x− y| < δ .Sea P una partición tal que ‖P‖ < δ , P ≡ {a = x0 < x1 < x2 < .. . < xn−1 < xn = b}. Si Mi y mi
son los correspondientes supremos e ínfimos en cada [xi−1,xi], por el teorema 4.2.8 de Weierstrasspodemos elegir ri,si en dicho intervalo conMi = f (ri) y mi = f (si). Entonces |ri− si|≤ xi−xi−1 < δ ,así que f (ri)− f (si) < ε
b−a , y
S( f ,P)−S( f ,P) =n
∑i=1
Mi(xi− xi−1)−n
∑i=1
mi(xi− xi−1)
=n
∑i=1
(Mi−mi)(xi− xi−1) =n
∑i=1
( f (ri)− f (si))(xi− xi−1)
<ε
b−an
∑i=1
(xi− xi−1) =ε
b−a(b−a) = ε.
Por la condición de integrabilidad de Riemann (teorema 6.1.8), f es integrable.
Pero hay funciones integrables que no son monótonas ni continuas. El siguiente resultado propor-ciona ejemplos sencillos.
Proposición 6.1.12. Sea f : [a,b]→R una función acotada. Si f es integrable en cada intervalo [c,b],con a< c< b, entonces es integrable en [a,b].

6.1. Definición (de Darboux) de la integral de Riemann 127
Demostración. Sea B > 0 una cota de | f | en [a,b]. Dado ε > 0, tomemos c ∈ (a,b) de manera quec−a < ε
4B . Como f es integrable en [c,b], en virtud de la condición de Riemann se puede encontraruna partición Pbc del intervalo [c,b] tal que S( f ,Pbc )−S( f ,Pbc ) < ε
2 . Añadiendo el punto a a la particiónPbc , obtenemos una partición P de [a,b] para la que
S( f ,P)−S( f ,P) = sup f ([a,c]) · (c−a)+S( f ,Pbc )− ınf f ([a,c]) · (c−a)−S( f ,Pbc )
≤ B · (c−a)+S( f ,Pbc )+B · (c−a)−S( f ,Pbc )
< 2B · (c−a)+ε2 <
ε2 +
ε2 = ε,
y en consecuencia f es integrable en [a,b].
Ejemplo. La función f : [0,1]→ R definida mediante f (0) = 1 y
f (x) = sen 1x
si 0< x≤ 1
es integrable-Riemann en [0,1]. En efecto, claramente está acotada y además es integrable en cadaintervalo [c,1], con 0< c< 1, porque es continua en [c,1].
Este es un ejemplo interesante de una función integrable que no es continua ni monótona.
Comentario: discontinuidades de las funciones integrables-Riemann (condición de in-tegrabilidad de Lebesgue)
Las funciones continuas son integrables, aunque no todas las funciones integrables son continuas:valen de ejemplo las funciones monótonas con discontinuidades. Pero las funciones integrables nopueden tener demasiadas discontinuidades, según demostró Lebesgue. Concretamente:
Teorema 6.1.13 (condición de integrabilidad de Lebesgue). Una función f acotada en [a,b] esintegrable si y solo si para cada ε > 0 se puede encontrar una sucesión (Jn) de intervalos tal que:
a) lımn
n
∑k=1
|Jk| < ε , donde |Jk| es la longitud del intervalo Jk;
b) el conjunto de puntos de [a,b] en los que f es discontinua está contenido en ∪nJn.Cuando se conozca la medida de Lebesgue, se verá que esto significa que el conjunto de puntos de
discontinuidad de f es de medida nula. Los conjuntos finitos quedan dentro de esta categoría; tambiénlos conjuntos numerables, es decir, los conjuntos infinitos que pueden escribirse en forma de sucesión,como N, Z o Q.
6.1.4. Sumas de Riemann. Definición de integrabilidad de Riemann: comparación conla de Darboux
El control de las oscilaciones de f a través de la norma de la partición que hemos visto parafunciones monótonas o continuas puede llevarse a cabo para cualquier función integrable:
Teorema 6.1.14. Una función f acotada en [a,b] es integrable si y solo si para cada ε > 0 existe unδ > 0 tal que toda partición P de [a,b] con norma ‖P‖< δ cumple que
S( f ,P)−S( f ,P) < ε.

128 Capítulo 6. La integral de Riemann
Demostración. Supongamos que f es integrable. Fijado ε > 0, sea P0 ∈P([a,b]) tal que
S( f ,P0)−S( f ,P0) <ε2 ,
pongamos que P0 tiene n puntos y sea K > 0 tal que | f (x)|≤ K para todo x ∈ [a,b].Sea P una partición de [a,b],
P≡ {a= t0 < t1 < .. . < tm−1 < tm = b}.y tomemosQ=P0∪P. Como máximo,Q tiene n−2 puntos más que P, los de P0\{a,b}. Supongamosque fuese Q= P∪{c}, con t j−1 < c< t j. Entonces sería
S( f ,P)−S( f ,Q) =Mj(t j− t j−1)−α1(c− t j−1)−α2(t j− c)donde Mj, α1 y α2 son los supremos de los valores de f en [t j−1, t j], [t j−1,c] y [c, t j] respectivamente.Como |Mj|≤ K, |α1|≤ K, |α2|≤ K y 0< t j− t j−1 ≤ ‖P‖, deducimos que
S( f ,P)−S( f ,Q)≤ K(t j− t j−1)+K(c− t j−1)+K(t j− c)≤ 2K‖P‖.Reiterando lo anterior (añadiendo cada vez un punto hasta obtener Q) es fácil ver que en generaltenemos
S( f ,P)−S( f ,Q)≤ 2(n−2)K‖P‖< 2nK‖P‖,y análogamente se ve que
S( f ,Q)−S( f ,P) < 2nK‖P‖.También tenemos que S( f ,Q)−S( f ,Q) < ε/2, porque Q es más fina que P0. Por lo tanto,
S( f ,P) < S( f ,Q)+2nK‖P‖< S( f ,Q)+ ε/2+2nK‖P‖< S( f ,P)+ ε/2+4nK‖P‖.
Ahora basta tomar δ = ε8nK y si ‖P‖< δ , entonces S( f ,P)−S( f ,P) < ε .
El recíproco es consecuencia directa de la condición de integrabilidad de Riemann (teorema 6.1.8).
Definición 6.1.15. Dada una partición P≡ {a= x0 < x1 < x2 < .. . < xn−1 < xn = b} y una funciónf definida en [a,b], para cada elección de valores si ∈ [xi−1,xi] se dice que
S =n
∑i=1
f (si)(xi− xi−1)
es una suma de Riemann de f asociada a P.Provisionalmente, decimos que f es ℜ-integrable o integrable según la definición de Riemann
en [a,b] si existe un número real R tal que, dado ε > 0 arbitrario, se puede encontrar un δ > 0 demanera que
|S −R| < ε
para cualquier suma de Riemann S de f asociada a una partición P de norma ‖P‖ < δ . Cuando
esto suceda, decimos que R es la ℜ-integral de f en [a,b], y ponemos (provisionalmente) R ℜ=∫ b
af .

6.1. Definición (de Darboux) de la integral de Riemann 129
Observación. Dado que mi ≤ f (si) ≤ Mi para cada i, cualquier suma de Riemann asociada a P deuna función acotada f cumple que
S( f ,P)≤S ≤ S( f ,P).
El resultado siguiente prueba que la integral según la definición de Darboux y la integral según ladefinición de Riemann son iguales.
Teorema 6.1.16. Una función acotada en un intervalo [a,b] es integrable según la definición 6.1.15de Riemann si y solo si es integrable según la definición 6.1.4 de Darboux, y en ese caso las dosintegrales coinciden.
Demostración. Sea f integrable con la definición de Darboux y sea ε > 0. Por el teorema 6.1.14,existe δ tal que S( f ,P)−S( f ,P) < ε siempre que ‖P‖< δ ; si S es una suma de Riemann asociadaa P entonces S( f ,P) ≤ S ≤ S( f ,P), y como también S( f ,P) ≤ ∫ b
a f ≤ S( f ,P) concluimos que ladistancia entre S y
∫ ba f es menor que ε . Es decir, cualquier suma de Riemann S asociada a una
partición P ∈P([a,b]) con ‖P‖< δ cumple que∣∣∣S −∫ b
af∣∣∣ < ε.
Por lo tanto, f es integrable en [a,b] según la definición de Riemann, con integral igual a∫ b
af .
Para probar el recíproco, supongamos que f es integrable según la definición de Riemann en [a,b],con integral R. Dado ε > 0, si δ es como en la definición 6.1.15 y P ≡ {a = x0 < x1 < x2 < .. . <xn−1 < xn = b}, ‖P‖< δ , podemos tomar si ∈ [xi−1,xi] de manera que f (si) >Mi− ε (1≤ i≤ n). Lacorrespondiente suma de RiemannS verifica simultáneamente
S ≥ S( f ,P)− ε(b−a), |S −R| < ε.
Entonces, ∫ b
af ≤ S( f ,P)≤S + ε(b−a) < R+ ε + ε(b−a),
y como ε es arbitrario, ∫ b
af ≤ R.
De manera análoga se prueba que∫ ba f ≥ R, por lo cual
∫ ba f =
∫ ba f = R, f es integrable en el sentido
de Darboux y ∫ b
af = R.
Corolario 6.1.17. Sea f una función integrable en [a,b], (Pn) una sucesión de particiones de [a,b]tal que lım
n‖Pn‖ = 0. Si para cada n se considera una suma de Riemann Sn correspondiente a la
partición Pn y a la función f , entonces
lımn
Sn =∫ b
af .
Ejemplo. Para toda función f integrable en [0,1], lımn
1n
n
∑k=1
f(kn
)=
∫ 1
0f .

130 Capítulo 6. La integral de Riemann
6.2. Propiedades básicas de la integral de Riemann6.2.1. Operaciones con funciones integrables
Empezaremos probando la linealidad de la integral. Para ello nos conviene observar antes lo si-guiente:
Lema 6.2.1. Sea A un conjunto acotado y no vacío de números reales. Entonces:
a) sup(−A) =− ınfA; ınf(−A) =−supA.b) Para todo α > 0 se cumple que sup(αA) = α supA, ınf(αA) = α ınfA.
c) supA− ınfA= sup{|x− y| : x,y ∈ A}.Demostración. a) Si y = ınfA y x ∈ A resulta que −x ≤ −y, luego −y es cota superior de −A, y portanto sup(−A)≤− ınfA. Si s= sup(−A), dado x ∈ A tenemos que −x≤ s, es decir que −s≤ x, luego−s es una cota inferior de A y entonces −sup(−A)≤ ınfA, o sea − ınfA≤ sup(−A). Ya tenemos quesup(−A) =− ınfA, y entonces supA= sup(−(−A)) =− ınf(−A), luego ınf(−A) =−supA.
b) Si s = supA, dado x ∈ A tenemos que αx ≤ αs, luego αs es una cota superior de αA; portanto sup(αA)≤ α supA. Por la misma razón tenemos que supA= sup 1α αA≤ 1
α sup(αA), y entoncesα supA ≤ sup(αA). Por tanto sup(αA) = α supA. Y de a) se deduce que α ınfA = −α sup(−A) =−sup(−αA) = ınf(αA).
c) Recordemos que, dados dos conjuntos acotados A y B, sup(A+B) = supA+ supB. Notemosque el conjunto {|x− y| : x,y ∈ A} es la intersección con [0,+∞) de {x− y : x,y ∈ A} = A+(−A),luego su supremo es igual al de este y, por a), sup(A+(−A)) = supA+ sup(−A) = supA− ınfA.Teorema 6.2.2. Sean f y g funciones integrables en [a,b] y sea α un número real. Entonces
a) α f es integrable y∫ b
a(α f ) = α
∫ b
af .
b) f +g es integrable y∫ b
a( f +g) =
∫ b
af +
∫ b
ag.
Demostración. a) Notemos primero que f es acotada, y entonces α f también lo es.Si α = 0 el resultado es inmediato. Si α > 0, para cada partición P de [a,b] se obtiene, usando
la parte b) del lema 6.2.1, que S(α f ,P) = αS( f ,P) y S(α f ,P) = αS( f ,P). Por la misma razón, sededuce que ∫ b
aα f = α
∫ b
af = α
∫ b
af ,∫ b
aα f = α
∫ b
af = α
∫ b
af ,
luego α f es integrable y∫ b
a(α f ) = α
∫ b
af .
Para ver que− f es integrable (α =−1) utilizamos la parte a) del lema: resulta que, para cualquierP, S(− f ,P) =−S( f ,P) y S(− f ,P) =−S( f ,P), luego∫ b
a(− f ) =−
∫ b
af =−
∫ b
af ,
∫ b
a(− f ) =−
∫ b
af =−
∫ b
af .

6.2. Propiedades básicas de la integral de Riemann 131
Por último, si α es cualquier valor negativo lo reducimos a los casos anteriores: α f = −|α| f esintegrable, con integral igual a
−∫ b
a(|α| f ) =−|α|
∫ b
af = α
∫ b
af .
b) Notemos primero que f +g está acotada, porque f y g lo están. Dado A⊆ [a,b], para cada t ∈ Atenemos que
f (t)+g(t)≤ sup{ f (x) : x ∈ A}+ sup{g(x) : x ∈ A},luego
sup{ f (t)+g(t) : t ∈ A}≤ sup{ f (t) : t ∈ A}+ sup{g(t) : t ∈ A}y análogamente
ınf{ f (t) : t ∈ A}+ ınf{g(t) : t ∈ A}≤ ınf{ f (t)+g(t) : t ∈ A}.Cuando tomamos como A los subintervalos [xi−1,xi] que define una partición P ∈P([a,b]), se sigueque
S( f +g,P)≤ S( f ,P)+S(g,P),S( f ,P)+S(g,P)≤ S( f +g,P).
Dado ε > 0, podemos tomar dos particiones P1 y P2 tales que S( f ,P1)−S( f ,P1) < ε/2 y S(g,P2)−S(g,P2) < ε/2. Si P= P1∪P2, también S( f ,P)−S( f ,P) < ε/2 y S(g,P)−S(g,P) < ε/2, y de aquíse deduce que S( f + g,P)−S( f + g,P) < ε . Por la condición de integrabilidad de Riemann (teore-ma 6.1.8), f +g es integrable. Además tenemos que∫ b
af +
∫ b
ag− ε =
∫ b
af − ε/2+
∫ b
ag− ε/2< S( f ,P)+S(g,P)
≤ S( f +g,P)≤∫ b
a( f +g)≤ S( f +g,P)
≤ S( f ,P)+S(g,P) <∫ b
af + ε/2+
∫ b
ag+ ε/2
=∫ b
af +
∫ b
ag+ ε.
Es decir, para cualquier ε > 0 resulta que∫ ba f +
∫ ba g− ε <
∫ ba ( f + g) <
∫ ba f +
∫ ba g+ ε , y entonces∫ b
a ( f +g) =∫ ba f +
∫ ba g.
Nota. El teorema 6.2.2 dice que el conjuntoR([a,b]) formado por todas las funciones integrables en[a,b] es un espacio vectorial, y que la aplicaciónR([a,b])−→ R dada por f *→ ∫ b
a f es lineal.
El siguiente resultado expresa la monotonía de la integral con respecto al integrando:
Teorema 6.2.3. Sean f y g funciones integrables en [a,b] tales que
f (x)≤ g(x) para cada x ∈ [a,b].
Entonces ∫ b
af ≤
∫ b
ag.

132 Capítulo 6. La integral de Riemann
Demostración. Si f ≤ g tenemos que 0≤ g− f , y es inmediato comprobar que S(g− f ,P)≥ 0 paracualquier partición P del intervalo [a,b]. Como además g− f es integrable, se deduce que
0≤ S(g− f ,P)≤∫ b
a(g− f ) =
∫ b
ag−
∫ b
af .
Nota. En particular, si h es integrable en [a,b] y h≥ 0, entonces∫ b
ah≥ 0.
Aunque no es tan sencillo de demostrar, también se cumple la monotonía estricta: si h es integrableen [a,b] y h(x) > 0 para todo x ∈ [a,b], entonces
∫ ba h > 0. Como consecuencia, si dos funciones f y
g son integrables y se cumple que f (x) < g(x) en todo x ∈ [a,b], podemos asegurar que∫ ba f <
∫ ba g.
Teorema 6.2.4. Si f es integrable en [a,b], entonces | f | es integrable en [a,b] y∣∣∣∣∫ b
af∣∣∣∣≤ ∫ b
a| f |.
Demostración. Como f es integrable, está acotada. Y por lo tanto, la función | f | también está acotada.Dada una partición
P≡ {a= x0 < x1 < x2 < .. . < xn−1 < xn = b} ∈P([a,b])
tenemos que
S( f ,P)−S( f ,P) =n
∑i=1
(Mi−mi)(xi− xi−1),
S(| f |,P)−S(| f |,P) =n
∑i=1
(M′i −m′i)(xi− xi−1),
donde, usando la parte (c) del lema,
Mi−mi = sup{ f (t) : t ∈ [xi−1,xi]}− ınf{ f (t) : t ∈ [xi−1,xi]} = sup{| f (t)− f (s)| : s, t ∈ [xi−1,xi]}para cada i. Análogamente,
M′i −m′i = sup{∣∣| f (t)|− | f (s)|∣∣ : s, t ∈ [xi−1,xi]}.
Como para cada t y s la desigualdad triangular inversa dice que∣∣| f (t)|− | f (s)|∣∣≤ | f (t)− f (s)|, resulta
queM′i −m′i ≤Mi−mi para cada i, y por tanto que S(| f |,P)−S(| f |,P)≤ S( f ,P)−S( f ,P) para toda
P. Por la condición de integrabilidad de Riemann resulta que si f integrable también lo es | f |.Ahora, como f ≤ | f | y − f ≤ | f |, por los teoremas 6.2.3 y 6.2.2 tenemos que ∫ b
a f ≤∫ ba | f | y∫ b
a (− f ) =−∫ ba f ≤
∫ ba | f |, luego∣∣∫ b
af∣∣ =max
{∫ b
af ,−
∫ b
af}≤
∫ b
a| f |.
En cierto sentido, este resultado puede verse como una generalización de la desigualdad trian-gular, cambiando sumas por integrales. Pronto iremos comprobando que es tan útil como la propiadesigualdad triangular.

6.2. Propiedades básicas de la integral de Riemann 133
Corolario 6.2.5. Sean f y g dos funciones integrables en [a,b]. Entonces las funciones max( f ,g),mın( f ,g) son también integrables en [a,b].
Demostración. Basta tener en cuenta que
max{ f (x),g(x)} =12
[f (x)+g(x)+ | f (x)−g(x)|
],
mın{ f (x),g(x)} =12
[f (x)+g(x)− | f (x)−g(x)|
].
Teorema 6.2.6. Sean f y g funciones integrables en [a,b]. Entonces:
a) f 2 es integrable en [a,b];
b) la función producto f g es integrable en [a,b].
Demostración. a) f está acotada, así que existe K > 0 tal que | f (x)|<K para todo x∈ [a,b]. Entonces0≤ f (x)2≤K2 para todo x, luego f 2 también está acotada. Dado ε > 0, sea P∈P(I) tal que S( f ,P)−S( f ,P) < ε
2K . Si P≡ {a= x0 < x1 < x2 < .. . < xn−1 < xn = b}, entonces, como en el teorema 6.2.4,resulta que S( f ,P)−S( f ,P) = ∑n
i=1 ri(xi− xi−1), donderi = sup{| f (t)− f (s)| : s, t ∈ [xi−1,xi]},
y análogamente S( f 2,P)−S( f 2,P) = ∑i r′i(xi− xi−1), donder′i = sup{| f 2(t)− f 2(s)| : s, t ∈ [xi−1,xi]}.
Como para cada s y t tenemos que
| f 2(t)− f 2(s)| = | f (t)+ f (s)| · | f (t)− f (s)|≤ (| f (t)|+ | f (s)|)| f (t)− f (s)|≤ 2K| f (t)− f (s)|,
resulta que r′i ≤ 2Kri para cada i, y por tanto que S( f 2,P)−S( f 2,P)≤ 2K(S( f ,P)−S( f ,P)
)< ε , y
así vemos que f 2 es integrable, por la condición de integrabilidad de Riemann.b) Por el apartado a), son integrables tanto f 2 como g2 y ( f + g)2 (ya que f + g es integrable).
Perof g=
12(( f +g)2− f 2−g2),
y así vemos que f g es integrable.
Observación. Los teoremas 6.2.4 y 6.2.6 no admiten recíproco: una función f puede ser no integrablepese a que | f | y f · f = f 2 sí lo sean. Como ejemplo podemos tomar, en I = [0,1], la función dada porf (x) = 1 si x ∈Q y f (x) =−1 si x /∈Q, de forma que f 2 = | f | = 1.
6.2.2. Integración en subintervalosTeorema 6.2.7. Sea f una función definida en un intervalo cerrado y acotado [a,b]. Dado c ∈ [a,b],son equivalentes:
a) f es integrable en [a,b];
b) f es integrable en [a,c] y en [c,b].

134 Capítulo 6. La integral de Riemann
Además, cuando f es integrable en [a,b] se tiene:
c)∫ b
af =
∫ c
af +
∫ b
cf .
Demostración. b) =⇒ a) Como f es integrable en [a,c] y en [c,b], en particular f está acotada en[a,c] y en [c,b]: en consecuencia, f está acotada en [a,b].
Además, usando la condición de Riemann, la integrabilidad de f garantiza que para todo ε > 0existen una partición Pca de [a,c] y una partición Pbc de [c,b] tales que
S( f ,Pca )−S( f ,Pca ) <ε2 , S( f ,Pbc )−S( f ,Pbc ) <
ε2 .
Considerando ahora la partición Pba de [a,b] obtenida al tomar todos los puntos de Pca y los de Pbc , sesigue directamente aplicando la definición que
S( f ,Pba ) = S( f ,Pca )+S( f ,Pbc ), S( f ,Pba ) = S( f ,Pca )+S( f ,Pbc ),
luego∫ b
af ≤ S( f ,Pba ) = S( f ,Pca )+S( f ,Pbc ) < S( f ,Pca )+
ε2 +S( f ,Pbc )+
ε2 ≤
∫ c
af + ε
2 +∫ b
cf + ε
2 .
Es decir, ∫ b
af <
∫ c
af +
∫ b
cf + ε
para cualquier ε > 0. De aquí se obtiene que∫ b
af ≤
∫ c
af +
∫ b
cf .
Análogamente,∫ b
af ≥ S( f ,Pba ) = S( f ,Pca )+S( f ,Pbc ) > S( f ,Pca )−
ε2 +S( f ,Pbc )− ε
2 ≥∫ c
af − ε
2 +∫ b
cf − ε
2 .
Es decir, ∫ b
af >
∫ c
af +
∫ b
cf − ε
para cualquier ε > 0. De ahí se deduce que∫ b
af ≥
∫ c
af +
∫ b
cf .
Como∫ ba f ≥
∫ ba f , resulta ∫ b
af =
∫ b
af =
∫ c
af +
∫ b
cf ,
lo que nos dice que f es integrable en [a,b], con∫ b
af =
∫ c
af +
∫ b
cf .

6.2. Propiedades básicas de la integral de Riemann 135
a) =⇒ b) Si f es integrable en [a,b], para cada ε > 0 existirá una partición Qba del intervalo [a,b]
tal queS( f ,Qb
a)−S( f ,Qba) < ε.
Sea Pba la partición de [a,b] obtenida al añadir a Qba el punto c (si es que no figura ya en Qb
a), ydescompongamos Pba en sendas particiones Pca y Pbc de [a,c] y de [c,b], respectivamente. Se tiene
S( f ,Pca )−S( f ,Pca )+S( f ,Pbc )−S( f ,Pbc ) = S( f ,Pba )−S( f ,Pba )≤ S( f ,Qba)−S( f ,Qb
a) < ε,
y como S( f ,Pca )− S( f ,Pca ) y S( f ,Pbc )− S( f ,Pbc ) son no negativos, cada uno de ellos será menor oigual que su suma, por lo que
S( f ,Pca )−S( f ,Pca ) < ε, S( f ,Pbc )−S( f ,Pbc ) < ε,
y por consiguiente f es integrable en [a,c] y en [c,b].
Corolario 6.2.8. Sea f : [a,b]→ R acotada, y sean a = c0 < c1 < c2 < .. . < cn = b. Se cumple quef es integrable en [a,b] si y solo si lo es en [ci−1,ci] para cada i= 1, . . . ,n, y en tal caso∫ b
af =
n
∑i=1
∫ ci
ci−1f .
Demostración. Aplicar inducción sobre n y el teorema 6.2.7.
El siguiente resultado permite ampliar ligeramente la noción de integral y dar ejemplos adicionalesde funciones integrables.
Lema 6.2.9. Sean f y g dos funciones definidas en un intervalo cerrado y acotado [a,b] que coincidenexcepto posiblemente en a y b, es decir, tales que
f (x) = g(x) para todo x ∈ (a,b).
Entonces f es integrable en [a,b] si y solo si lo es g. Si son integrables,∫ b
af =
∫ b
ag.
Demostración. Basta probar que la función h= f −g es una función integrable en [a,b] con integralnula. Ahora bien: h se anula en (a,b), por lo que para cada partición P≡ {t0 = a< t1 < · · · < tn−1 <tn = b} será
S(h,P) =max{h(a),0} · (t1−a)+max{h(b),0} · (b− tn−1)≥ 0,S(h,P) =mın{h(a),0} · (t1−a)+mın{h(b),0} · (b− tn−1)≤ 0.
Dado ε > 0, tomemos B>max{|h(a)|, |h(b)|} y Pε de manera que
t1−a<ε2B , b− tn−1 <
ε2B .
Resulta ∫ b
ah≤ S(h,Pε) < B ε
2B +B ε2B = ε,
∫ b
ah≥ S(h,Pε) >−B ε
2B −Bε2B =−ε,
luego∫ ba h ≤ 0 ≤
∫ ba h. Por lo tanto,
∫ ba h =
∫ ba h = 0, es decir, h es integrable en [a,b] con integral
nula.

136 Capítulo 6. La integral de Riemann
Corolario 6.2.10. Sea g una función integrable en [a,b], y sea f una función igual a g excepto en unconjunto finito de puntos de [a,b]. Entonces f es integrable, y
∫ ba f =
∫ ba g.
Demostración. Por inducción sobre el número de puntos, con ayuda del lema.
Definición 6.2.11. Una función f : [a,b]→ R se dice continua a trozos si existe una partición a =t0 < t1 < t2 < .. . < tn−1 < tn = b tal que f es continua en cada intervalo (ti−1, ti) y existen y son realeslos límites laterales en cada ti.
Una función f : [a,b]→ R se dice monótona a trozos si existe una partición a = t0 < t1 < t2 <.. . < tn−1 < tn = b tal que f es monótona (de cualquier clase) en cada intervalo (ti−1, ti).
Por ejemplo, la función de la figura no es continua ni monótona, pero sí continua a trozos ymonótona a trozos.
a bFunción continua a trozos y monótona a trozos
Teorema 6.2.12. Si f es un función continua a trozos o una función acotada y monótona a trozos en[a,b], entonces f es integrable en [a,b].
Demostración. Si f es continua a trozos y ti son como en la definición, para cada i existe una extensióncontinua (y por tanto integrable) de f
∣∣(ti−1,ti)
al intervalo [ti−1, ti]. Esta extensión es integrable en elintervalo [ti−1, ti], por ser continua, y coincide con f en (ti−1, ti), luego f es integrable en [ti−1, ti], porel lema 6.2.9. Por el corolario 6.2.8, resulta que f es integrable en [a,b].
Si f es monótona a trozos y acotada y ti son como en la definición, entonces existen y son realeslos límites laterales en cada ti. La demostración sigue de manera análoga a la de funciones continuasa trozos.
No obstante, hay funciones que son integrables en un intervalo [a,b] y no son continuas a trozosni monótonas a trozos. Un ejemplo es la función definida en [0,1] mediante
f (x) =
{1, si x= 0,sen 1x , si 0< x≤ 1,
que vimos que era integrable en [0,1].

6.2. Propiedades básicas de la integral de Riemann 137
6.2.3. Teoremas de la media (o del valor medio) del cálculo integralTeorema 6.2.13. Sea f una función integrable en el intervalo cerrado y acotado [a,b] y sean m, Mtales que para todo x ∈ [a,b] se cumpla
m≤ f (x)≤M.
Entonces el número1
b−a∫ b
af ,
denominado promedio integral de f en [a,b], está en [m,M], es decir
m≤ 1b−a
∫ b
af ≤M.
Demostración. Puesto que m≤ f ≤M, por la monotonía de la integral
m(b−a) =∫ b
am≤
∫ b
af ≤
∫ b
aM =M(b−a),
y como b−a> 0, podemos dividir para obtener
m≤ 1b−a
∫ b
af ≤M.
Cuando f es continua en [a,b], su promedio integral está en el rango de valores de f :
Corolario 6.2.14 (teorema de la media del cálculo integral). Sea f una función continua (y portanto integrable) en el intervalo cerrado y acotado [a,b]. Existe entonces al menos un punto x0 ∈ [a,b]tal que
1b−a
∫ b
af = f (x0).
Demostración. Por el teorema 4.2.8 de Weierstrass el conjunto { f (x) : x ∈ [a,b]} tiene mínimo ymáximo, a los que llamamos m y M respectivamente. Se cumple así que
m(b−a) =∫ b
am≤
∫ b
af ≤
∫ b
aM =M(b−a).
Es decir,m≤ 1
b−a∫ b
af ≤M.
Por el teorema 4.2.10 de Darboux (o de los valores intermedios), existe x0 ∈ [a,b] en el que f tomadicho valor entre m y M, y así f (x0) = 1
b−a∫ ba f .
Ejemplo. Sea 1< a< b. Para cada x ∈ [a,b],
1≤ x+√x
x−√x =√x+1√x−1 = 1+
2√x−1 ≤ 1+
2√a−1 .
Por lo tanto,1≤ 1
b−a∫ b
a
x+√x
x−√x dx≤ 1+2√a−1 . (6.2)

138 Capítulo 6. La integral de Riemann
En algunas ocasiones, no es necesario calcular el valor exacto de una integral, sino que basta conestimaciones aproximadas. Por ejemplo, de (6.2) se deduce que
lıma→+∞
∫ a+1
a
x+√x
x−√x dx= 1.
El corolario 6.2.14 puede mirarse como una lectura inversa del teorema 5.2.7 del valor medio delcálculo diferencial. De hecho, otra demostración del corolario 6.2.14 consiste en aplicar el teoremadel valor medio a la función F : [a,b]→ R dada por F(x) =
∫ xa f , que es derivable y cuya derivada es
F ′(x) = f (x) (según probaremos en el siguiente apartado).
Teorema 6.2.15. Sea f una función integrable en el intervalo cerrado y acotado [a,b], sea g unafunción no negativa, integrable en el intervalo cerrado y acotado [a,b] y sean m, M tales que paratodo x ∈ [a,b] se cumple
m≤ f (x)≤M.
Entonces existe µ ∈ [m,M] tal que ∫ b
af g= µ
∫ b
ag
(el número µ es una especie de promedio ponderado de f respecto a la densidad de masa g).
Demostración. Puesto que g≥ 0, se verifica
mg≤ f g≤Mg.
Todas estas funciones son integrables, luego podemos poner
m∫ b
ag≤
∫ b
af g≤M
∫ b
ag.
Si∫ ba g= 0, cualquier µ ∈ [m,M] cumple la igualdad del enunciado. Si
∫ ba g .= 0, entonces
∫ ba g> 0,
y basta tomar como µ el cociente entre∫ ba f g y
∫ ba g.
Corolario 6.2.16. Sea f una función continua (y por tanto integrable) en el intervalo cerrado yacotado [a,b] y sea g una función no negativa, integrable en [a,b]. Existe entonces al menos un puntox0 ∈ [a,b] tal que ∫ b
af g= f (x0)
∫ b
ag.
Demostración. La función f tiene máximo y mínimo absolutos sobre [a,b], por el teorema 4.2.8 deWeierstrass. Si el máximo y el mínimo se alcanzan en c y d, respectivamente, podemos aplicar elteorema 6.2.15 con m= f (c) y M = f (d). Por el teorema 4.2.10 de Darboux, hay al menos un puntox0 ∈ [a,b] tal que f (x0) = µ , donde µ es el valor del teorema 6.2.15.
Proposición 6.2.17 (segundo teorema de la media del cálculo integral). Sean f y g funcionesintegrables en un intervalo cerrado y acotado [a,b].
a) Si g≥ 0 y es no creciente, existe x0 ∈ [a,b] tal que∫ b
af g= g(a)
∫ x0
af .

6.3. Teoremas fundamentales del cálculo integral 139
b) Si g≥ 0 y es no decreciente, existe x0 ∈ [a,b] tal que∫ b
af g= g(b)
∫ b
x0f .
c) Si g es monótona, existe x0 ∈ [a,b] tal que∫ b
af g= g(a)
∫ x0
af +g(b)
∫ b
x0f .
Demostración. Ver [GARAY-CUADRA-ALFARO, pág. 212].
6.3. Teoremas fundamentales del cálculo integral6.3.1. Regla de Barrow (primer teorema fundamental del cálculo integral)Teorema 6.3.1 (regla de Barrow). Sea f una función integrable en un intervalo [a,b] y supongamosque existe otra función g continua en [a,b], derivable en (a,b) y tal que g′(x) = f (x) para todox ∈ (a,b). Entonces, ∫ b
af = g(b)−g(a).
Demostración. Sea P una partición cualquiera de [a,b],
P≡ {a= x0 < x1 < x2 < .. . < xn−1 < xn = b}.
Según el teorema 5.2.7 del valor medio,
g(b)−g(a) = g(xn)−g(x0) =n
∑i=1
(g(xi)−g(xi−1))
=n
∑i=1
g′(ci)(xi− xi−1) =n
∑i=1
f (ci)(xi− xi−1),
donde ci ∈ (xi−1,xi) para cada i. Puesto que
ınf{ f (t) : t ∈ [xi−1,xi]}≤ f (ci)≤ sup{ f (t) : t ∈ [xi−1,xi]},
se deduce queS( f ,P)≤ g(b)−g(a)≤ S( f ,P).
Como esto es cierto para cualquier partición P, tomando supremos e ínfimos resulta que
∫ b
af ≤ g(b)−g(a)≤
∫ b
af .
Pero sabemos que f es integrable, así que∫ ba f =
∫ ba f =
∫ ba f . Por lo tanto,∫ b
af = g(b)−g(a).

140 Capítulo 6. La integral de Riemann
La regla de Barrow nos dice cómo calcular la integral de una función f integrable entre a y b: si ges continua en [a,b] y es una primitiva de f en (a,b), entonces∫ b
af (x)dx= g(b)−g(a).
La diferencia g(b)−g(a) suele escribirse como g(x)∣∣∣x=bx=a. Es decir:
∫ b
af (x)dx= g(x)
∣∣∣x=bx=a
.
Ejemplo. La función arcsen es continua, luego integrable, en el intervalo [0,1]. Calculando por partesuna primitiva, encontramos la función xarcsenx+
√1− x2, continua en [0,1] y derivable claramente
en el intervalo [0,1), con derivada arcsenx en ese intervalo; menos claro es lo que sucede en el punto1, pero según el teorema 6.3.1 no necesitamos saberlo para garantizar que∫ 1
0arcsenxdx=
[1 · arcsen1+
√1−12
]−
[0 · arcsen0+
√1−02
]=
π2 −1.
Si aplicamos la regla de Barrow para calcular una integral, puede ser conveniente utilizar losresultados empleados en el cálculo de primitivas, como el teorema de integración por partes queacabamos de citar o el teorema de cambio de variable. Ambos tienen su versión para integrales. Vemosprimero la de integración por partes:
Teorema 6.3.2 (integración por partes). Si u y v son funciones continuas en [a,b] derivables en(a,b) y sus derivadas u′ y v′ son integrables en [a,b], entonces∫ b
auv′ = u(b)v(b)−u(a)v(a)−
∫ b
au′v.
Demostración. Notemos que u′v y uv′ son integrables porque lo son u′,v′ (estas por hipótesis) ytambién u y v (porque son continuas). Entonces también es integrable (uv)′ = u′v+uv′, y por la reglade Barrow ∫ b
auv′+
∫ b
au′v=
∫ b
a(uv)′ = u(b)v(b)−u(a)v(a),
de donde obtenemos la fórmula del enunciado.
Observación. Este resultado no se puede utilizar en el ejemplo anterior; ¿por qué?
Ejemplo. Veamos que, para cualesquiera m y n enteros no negativos,∫ 1
0xm(1− x)ndx=
m!n!(m+n+1)! .
Probémoslo por inducción sobre n. Primero vemos que la fórmula es válida para n= 0 y cualquier m,usando la regla de Barrow:∫ 1
0xmdx=
xm+1
m+1
∣∣∣x=1x=0
=1
m+1 =m!0!
(m+0+1)! .

6.3. Teoremas fundamentales del cálculo integral 141
Ahora, si n ∈ N y suponemos que la fórmula es cierta para n−1 y cualquier m, integrando por partesconcluimos que lo es para n y cualquier m: para ello tomamos u(x) = (1−x)n y v(x) = xm+1/(m+1),con lo que ∫ 1
0xm(1− x)ndx=
∫ 1
0u(x)v′(x)dx= u(x)v(x)
∣∣∣x=1x=0
−∫ 1
0u′(x)v(x)dx
=n
m+1
∫ 1
0xm+1(1− x)n−1dx,
que por hipótesis de inducción es
nm+1 ·
(m+1)!(n−1)!((m+1)+(n−1)+1
)!=
m!n!(m+n+1)! .
Corolario 6.3.3 (fórmula de Taylor con resto integral). Sea I un intervalo, c un punto de I, f unafunción definida en I, n ∈ N. Supongamos que f es derivable en I hasta el orden n y que f (n) escontinua en I. Entonces para cada x ∈ I es
f (x) = f (c)+ f ′(c)(x− c)+f ′′(c)2 (x− c)2+ · · ·+ f (n−1)(c)
(n−1)! (x− c)n−1
+1
(n−1)!∫ x
c(x− t)n−1 f (n)(t)dt.
Demostración. Basta integrar por partes reiteradamente
1(n−1)!
∫ x
c(x− t)n−1 f (n)(t)dt
(ver [BARTLE-SHERBERT, teor. 6.3.14, pág. 281]).
6.3.2. Continuidad y derivabilidad de una integral con extremo de integración varia-ble
El teorema 6.3.1 (regla de Barrow) viene a decir que al integrar la derivada de f recuperamos f(ya que f (x) = f (a) +
∫ xa f ′). Para que podamos decir del todo que integrar y derivar son procesos
inversos, la pregunta natural sería: ¿podemos decir que derivando una función dada por la integral def recuperamos f ? Es tanto como decir: ¿podemos expresar una primitiva de f mediante integrales def ? La respuesta es afirmativa, como vamos a comprobar.
Convenio. Si a> b y f es integrable en [b,a], escribimos∫ b
af =−
∫ a
bf .
Si a= b, escribimos∫ ba f = 0.
Notemos que, con este convenio, la regla de Barrow vale también para integrales∫ ba f con a≥ b.
Además, la relación entre las integrales de f y de | f | es en general∣∣∣∫ b
af∣∣∣≤ ∣∣∣∫ b
a| f |
∣∣∣

142 Capítulo 6. La integral de Riemann
(si a < b el término de la derecha es∫ ba | f |, como hasta ahora). En cuanto a la monotonía, notemos
que si 0≤ f ≤ g son funciones integrables podemos asegurar que∣∣∣∫ b
af∣∣∣≤ ∣∣∣∫ b
ag∣∣∣,
ya que si a> b esta desigualdad es∫ ab f ≤
∫ ab g. Por último, si las integrales tienen sentido entonces∫ c
af +
∫ b
cf =
∫ b
af
cualquiera que sea el orden entre a,b y c.
Teorema 6.3.4 (teorema fundamental del cálculo integral (segundo)). Sea f una función integrableen [a,b]. Definamos F : [a,b]→ R mediante
F(x) =∫ x
af .
Entonces:
a) F es continua en [a,b];
b) si f es continua en algún x0 ∈ [a,b], entonces F es derivable en x0 y
F ′(x0) = f (x0).
Demostración. a) La función f es integrable, así que está acotada; sea K > 0 tal que | f (x)|≤ K paratodo x ∈ [a,b]. Veamos que para cada x,y ∈ [a,b], |F(x)−F(y)|≤ K|x− y|.
Si x= y, no hay nada que probar. Si no, podemos suponer que x> y, por ejemplo. Entonces,
|F(x)−F(y)| =∣∣∣∣∫ x
af (t)dt−
∫ y
af (t)dt
∣∣∣∣ =∣∣∣∣∫ x
yf (t)dt
∣∣∣∣≤ ∫ x
y| f (t)|dt ≤ K|x− y|,
como queríamos probar. Ahora, dado ε > 0, tenemos: para cada x,y ∈ [a,b] con |x− y| < ε/K, secumple que |F(x)−F(y)| < ε . Es decir, la función F es continua en [a,b] (de hecho hemos probadoque es uniformemente continua).
b) Supongamos que f es continua en algún x0 ∈ [a,b]. Se trata de probar que
lımh→0
F(x0+h)−F(x0)h
= f (x0).
Tanto si h> 0 como si h< 0,
F(x0+h)−F(x0) =∫ x0+h
af (t)dt−
∫ x0
af (t)dt =
∫ x0+h
x0f (t)dt,
luego
F(x0+h)−F(x0)h
− f (x0) =1h
∫ x0+h
x0f (t)dt− 1
h
∫ x0+h
x0f (x0)dt =
1h
∫ x0+h
x0[ f (t)− f (x0)]dt.
Entonces, ∣∣∣∣F(x0+h)−F(x0)h
− f (x0)∣∣∣∣ =
1|h|
∣∣∣∣∫ x0+h
x0[ f (t)− f (x0)]dt
∣∣∣∣ .

6.3. Teoremas fundamentales del cálculo integral 143
Sea ε > 0. Como f es continua en x0, existe algún δ > 0 tal que | f (t)− f (x0)| < ε , si |t− x0| < δ .Sea ahora |h| < δ . Si h> 0, entonces∣∣∣∣F(x0+h)−F(x0)
h− f (x0)
∣∣∣∣ =1h
∣∣∣∣∫ x0+h
x0[ f (t)− f (x0)]dt
∣∣∣∣≤ 1h
∫ x0+h
x0ε dt = ε;
y si h< 0,∣∣∣∣F(x0+h)−F(x0)h
− f (x0)∣∣∣∣ =
1−h
∣∣∣∣∫ x0
x0+h[ f (t)− f (x0)]dt
∣∣∣∣≤ 1−h
∫ x0
x0+hε dt = ε.
En resumen, ∣∣∣∣F(x0+h)−F(x0)h
− f (x0)∣∣∣∣≤ ε,
si |h| < δ . Hemos probado que, en efecto,
lımh→0
F(x0+h)−F(x0)h
= f (x0).
Realmente, se cumple un resultado más general:
Teorema 6.3.5. Sea f una función definida en un intervalo no trivial I cualquiera, que sea integrableen cualquier intervalo cerrado y acotado contenido en I. Fijado un punto a ∈ I, definamos F : I→ Rmediante
F(x) =∫ x
af .
Entonces:
a) F está bien definida y es continua en todo I;
b) en cada punto x0 ∈ I donde f sea continua, F es derivable y
F ′(x0) = f (x0).
Demostración. Para puntos a la derecha de a, basta aplicar el teorema 6.3.4 a la función
F(x) =∫ x
af , x ∈ [a,b],
para algún b ∈ I, b> a. Y para los puntos a la izquierda de a, basta considerar la función
G(x) =∫ x
bf , x ∈ [b,a],
para algún b ∈ I, b< a y tener en cuenta que F(x) = G(x)−G(a).
Corolario 6.3.6. Toda función f continua en un intervalo no trivial I cualquiera admite una primitivaen dicho intervalo.
Demostración. Basta observar que, por ser continua, f es integrable en cada intervalo cerrado y aco-tado contenido en I, y si fijamos un punto a ∈ I y consideramos la función F : I→ R dada por
F(x) =∫ x
af ,
por el teorema 6.3.5 resulta que F ′ = f en I.

144 Capítulo 6. La integral de Riemann
Aplicación. Podemos construir la función logarítmica como la primitiva de la función 1/x que seanula para x= 1 (ver Apéndice).
Corolario 6.3.7. Sea f una función definida en un intervalo no trivial I cualquiera, integrable encualquier intervalo cerrado y acotado contenido en I y sea α : J→ I derivable en x0 ∈ J. Dado a ∈ I,sea G : J→ R la función dada por
G(x) =∫ α(x)
af .
Si f es continua en α(x0), entonces G es derivable en x0, con
G′(x0) = α ′(x0) f(α(x0)
).
Demostración. Si definimos F en J como F(x) =∫ x
af , x ∈ J, entonces G = F ◦α , y por la regla de
la cadena (teorema 5.1.5) y el teorema fundamental del cálculo integral (teorema 6.3.4), resulta que
G′(x0) = α ′(x0)F ′(α(x0)
)= α ′(x0) f
(α(x0)
).
Ejemplo. Sea F : [0,+∞) → R dada por F(x) =∫ 2x
xe−t2 dt. Nos proponemos hallar sus extremos
relativos y absolutos y sus puntos de inflexión.No podemos expresar una primitiva de e−t2 como combinación de funciones elementales, y en-
tonces no podemos aplicar la regla de Barrow (teorema 6.3.1) para calcular la integral y obtener otraexpresión de F . Pero sí que podemos obtener una expresión manejable de la derivada de F , graciasal teorema fundamental del cálculo integral (teorema 6.3.4) y al corolario 6.3.7, que podemos aplicarporque e−t2 es continua y 2x es derivable.
Como F(x) =∫ 2x
0e−t2 dt−
∫ x
0e−t2 dt, resulta que para cualquier x≥ 0,
F ′(x) = 2e−4x2− e−x2 = e−x2(2e−3x2−1) = e−x2(elog2−3x2−1).Vemos que F ′ tiene el mismo signo que log2− 3x2, luego es positiva en [0,
√(log2)/3) y negativa
en (√
(log2)/3,+∞). Por tanto F es creciente en [0,√
(log2)/3] y decreciente en [√
(log2)/3,+∞),y alcanza su máximo absoluto en
√(log2)/3. Su mínimo absoluto lo tiene en 0, ya que F(0) = 0 y,
para cualquier x > 0, F(x) es positiva por ser la integral de una función positiva en el intervalo notrivial [x,2x].
De la expresión de F ′ obtenemos que
F ′′(x) = 16xe−4x2(18e3x2−1) = 16xe−4x2(e3x2−3log2−1),
de donde su signo es el de x2− log2, y deducimos que F es cóncava en [0,√log2] y convexa en
[√log2,+∞). Tenemos un único punto de inflexión en
√log2.
Es fácil ver, además, que el límite de F en+∞ es 0. Basta acotar el valor de F usando la monotoníade la integral: como e−t2 es decreciente en [0,+∞), para todo t en el intervalo [x,2x] se cumple quee−t2 ≤ e−x2 , y entonces
F(x) =∫ 2x
xe−t2 dt ≤
∫ 2x
xe−x2 dt = xe−x2 .
Por la regla de L’Hospital 5.3.8 vemos que lımx→+∞
xex2
= 0, luego también lımx→+∞
F(x) = 0.

6.3. Teoremas fundamentales del cálculo integral 145
Teorema 6.3.8 (cambio de variable). Sea u una función derivable en un intervalo abierto J tal queu′ es continua y sea I un intervalo abierto tal que u(J) ⊆ I. Si f es continua en I, entonces f ◦ u escontinua en J y ∫ b
af (u(x))u′(x)dx=
∫ u(b)
u(a)f (t)dt (6.3)
para cualesquiera a,b ∈ J.Demostración. Sea F una primitiva de f en I. Entonces (F ◦u)′ = ( f ◦u)u′, y como f y ( f ◦u)u′ sonintegrables en intervalos cerrados y acotados (porque son continuas), por la regla de Barrow resultaque ∫ u(b)
u(a)f = F(u(b))−F(u(a)) = (F ◦u)(b)− (F ◦u)(a) =
∫ b
a( f ◦u)u′.
Ejemplo. Calculemos el valor de∫ √
3
−√3
√4− x2 dx.
Ponemos ∫ √3
−√3
√4− x2 dx=
∫ √3
−√32√1− (x/2)2 dx=
∫ √3
−√34√1− (x/2)2 12 dx
(hacemos el cambio de variable t = x/2 según la fórmula (6.3), de izquierda a derecha)
=∫ √
3/2
−√3/24√1− t2 dt
(ahora hacemos el cambio de variable t = seny según la fórmula (6.3), de derecha a izquierda)
=∫ π/3
−π/34√1− sen2 ycosydy=
∫ π/3
−π/34|cosy|cosydy=
∫ π/3
−π/34cos2 ydy
=∫ π/3
−π/32(1+ cos2y)dy= (2y+ sen2y)
∣∣∣y=π/3
y=−π/3=4π3 +
√3.
Ejemplo (integrales de funciones pares e impares). Si f es par e integrable en [−a,a], entonces∫ a
−af = 2
∫ a
0f .
Esto se puede demostrar a partir de la definición de integral o mediante la condición de integrabilidadde Riemann (teorema 6.1.8). El significado geométrico es claro, dado que la gráfica de f es simétricarespecto de x= 0.
En el caso particular de que f sea continua, esta propiedad se puede demostrar de manera mássencilla con un cambio de variable, ya que
∫ a−a f =
∫ 0−a f +
∫ a0 f y∫ 0
−af (x)dx t=−x= −
∫ 0
af (−t)dt =
∫ a
0f (−t)dt =
∫ a
0f (t)dt.
Análogamente, si f es impar entonces∫ a
−af = 0.

146 Capítulo 6. La integral de Riemann
6.4. Apéndice: construcción de las funciones logarítmica y exponencialYa hemos usado las propiedades de la función logarítmica en ejemplos y ejercicios. Ahora dispo-
nemos de las herramientas necesarias para poder construirla, probando con todo rigor su existencia ysus propiedades básicas.
Recordemos que las potencias de exponente racional se definen en R+ = (0,+∞) de la siguientemanera: xn = x · x · · ·x (n veces) si n ∈ N, y x1/n es la función inversa. Dado m otro número natural,xm/n = (x1/n)m, y por último x0 = 1 y x−a = 1/xa.
Resulta que la derivada de la función dada por xa es axa−1, de manera que una primitiva de xaen R+ es 1
a+1xa+1, pero esto solo vale si a .=−1. Como x−1 = 1/x es continua en R+, podemos usar
el teorema fundamental del cálculo integral (teorema 6.3.4) para definir una primitiva en este caso(a = −1), la dada por ∫ x
c (1/t)dt, cualquiera que sea c > 0. Elegimos c = 1, y la función que resultacumple todos los requisitos que buscamos para el logaritmo neperiano.
Proposición 6.4.1. La función L : (0,+∞)→ R dada por
L(x) =∫ x
1
1tdt
está bien definida, es estrictamente creciente (luego inyectiva) y suprayectiva. Es asimismo derivableen todos los puntos de su dominio y para cada x ∈ (0,+∞)
L′(x) =1x;
en particular, es cóncava en su dominio.
1 x
y= 1x
L(x) es el área de la figura
Demostración. La función f : (0,+∞)→R dada por f (t) = 1t es continua, luego L está bien definida,
es derivable en cada x ∈ (0,+∞) y su derivada es la función L′(x) = f (x) = 1x .
Puesto que L′ = f es estrictamente positiva, L es estrictamente creciente. Como es continua (por-que es derivable), su imagen L
((0,+∞)
)es un intervalo, y para ver que este intervalo es todoR bastará
probar que la función L no está acotada superior ni inferiormente.Ahora bien: dados a> 0 y n ∈ N, el cambio de variable t = un permite escribir
L(an) =∫ an
1
1tdt =
∫ a
1
nun−1
undu= n
∫ a
1
1udu= nL(a).
Tomando a > 1, como L(a) > L(1) = 0, se deduce que L no está acotada superiormente; tomando0< a< 1, como L(a) < L(1) = 0, se deduce que L no está acotada inferiormente.

6.4. Apéndice: construcción de las funciones logarítmica y exponencial 147
Con esta información es suficiente para comprobar que su gráfica tiene la forma que ya conocemos(complétese el estudio de la función de la manera habitual). En cuanto a la propiedad esencial dellogaritmo de transformar productos en sumas, tenemos:
Proposición 6.4.2. Para cualesquiera x,y ∈ (0,+∞), la función L cumple L(xy) = L(x)+L(y).
Demostración. Utilizando el cambio de variable t = u/x,
L(xy)−L(x) =∫ xy
1
1tdt−
∫ x
1
1tdt =
∫ xy
x
1tdt =
∫ y
1
xudux
=∫ y
1
duu
= L(y).
Observación. También puede darse otra demostración usando solo el valor de la derivada: fijadoarbitrariamente y> 0, sea fy la función dada por fy(x) = L(xy). Entonces
f ′y(x) = y ·L′(xy) = y · 1xy
=1x
= L′(x)
para todo x, luego fy(x) = L(x)+C, para cierta constante C, en todo x> 0. Si tomamos x= 1 vemosqueC = L(y).
Observación. La sucesión(1+ 1
n)n es convergente, y denotando su límite por e, resulta L(e) = 1. En
efecto:
L[(1+
1n
)n]= nL
(1+
1n
)=L
(1+ 1
n)−L(1)1/n → L′(1) =
11 = 1;
la función inversa de L es continua, porque L es estrictamente creciente y continua, así que la sucesión(1+ 1
n)n tiene límite y (
1+1n
)n= L−1L
[(1+
1n
)n]→ L−1(1).
Es fácil, igualmente, obtener las equivalencias conocidas y el desarrollo de Taylor-Maclaurin paraL(1+ x). Lo dejamos como ejercicio para el lector.
Por último, la función inversa L−1 : R → (0,+∞), tiene todas las propiedades admitidas para lafunción ex, de modo que tenemos aquí una manera de introducir rigurosamente la función exponencial.
Definición 6.4.3. Se llama función exponencial a la función exp : R → R definida por exp(x) =L−1(x).
Así pues, exp(x) = y si y solo si L(y) = x; en particular, exp(0) = 1 y exp(1) = e. Suele escribirseex en lugar de exp(x).
Proposición 6.4.4. a) La función exponencial es derivable (indefinidamente) y su derivada es ellamisma: para cada x ∈ R, exp′(x) = exp(x).
b) e0 = 1.
c) Para cada x ∈ R, 1ex
= e−x y, en particular, ex .= 0.
d) Dados x, y ∈ R, ex+y = ex · ey.e) Dados n ∈ N y x ∈ R, enx es el producto de n factores iguales a ex: enx = ex n· · ·ex.

148 Capítulo 6. La integral de Riemann
f) Para cada x ∈ R, ex > 0.
g) La función exponencial es estrictamente creciente y convexa. En particular, es inyectiva.
h) Se tienelımx→+∞
ex = +∞, lımx→−∞e
x = 0.
En consecuencia, el conjunto imagen de la función exponencial es (0,+∞).
Demostración. a) Como L es derivable e inyectiva en el intervalo (0,+∞), su inversa exp es deri-vable, según el teorema 5.1.7 de derivación de la función inversa. Además,
exp′(x) =1
L′(exp(x)) =1
1/exp(x) = exp(x), x ∈ R.
Es decir, la derivada de la función exp es ella misma, luego resulta indefinidamente derivable(igual a todas sus derivadas sucesivas).
b) Obvio.
c) Sea f : x ∈ R→ f (x) = exe−x ∈ R. Derivando de acuerdo con a),
f ′(x) = exe−x− exe−x = 0,
luego f toma constantemente el valor f (0) = 1.
d) Fijado y, sea f : x ∈ R→ f (x) = ex+yex ∈ R. Teniendo en cuenta a),
f ′(x) =ex+y · ex− ex+y · ex
(ex)2= 0,
luego f toma constantemente el valor f (0) = ey.
e) Se prueba por inducción sobre n utilizando d).
f) ex =(ex/2
)2 ≥ 0 y ex .= 0.
g) La derivada primera y la derivada segunda de la función exponencial (que son iguales a lafunción exponencial) son estrictamente positivas.
h) Puesto que la función exponencial es estrictamente creciente,
e= e1 > e0 = 1,
luego lımnen = +∞. De nuevo por la monotonía de la función exponencial, esto basta para probar
quelımx→+∞
ex = +∞.
Finalmente,lımx→−∞e
x = lımy→+∞
e−y = lımy→+∞
1ey
= 0.
Del teorema 4.2.10 de Darboux (o de los valores intermedios) se sigue que el conjunto imagende la función exponencial es todo el intervalo (0,+∞).
En esta demostración se observa que todas las propiedades básicas de la función exponencial sededucen realmente de a) y b), que en este sentido pueden ser consideradas sus propiedades fundamen-tales.

6.5. Apéndice: cálculo de áreas, longitudes y volúmenes 149
6.5. Apéndice: cálculo de áreas, longitudes y volúmenes
Aunque no vamos a definir con rigor qué es una curva plana, a menudo viene dada como la gráficade una función f : I→ R, donde I es un intervalo y se pide que f sea continua, o continua a trozos,o derivable. . . Esta forma de representar una curva plana se llama explícita. Por ejemplo, la gráfica dela función y = x2 es una parábola. También pueden venir definidas en forma paramétrica, es decir,como puntos de la forma (x(t),y(t)), donde x : I→ R, y : I→ R son dos funciones e I es un intervalo.Por ejemplo, la circunferencia con centro en el origen de coordenadas y radio 1 se puede expresar enforma paramétrica como
x= cos t, y= sen t,t ∈ [0,2π]
Otra manera de describir una curva plana es en coordenadas polares: si representamos por ρ el radioy por θ un argumento de un punto del plano, los puntos que cumplen ρ = 1 son la circunferencia concentro en el origen de coordenadas y radio 1. La ecuación ρ = θ es la de una espiral. En general, unacurva en coordenadas polares es una relación ρ = ϕ(θ).
Una curva en forma explícita (y = f (x)) se puede expresar siempre en forma paramétrica: x = t,y = f (t). Una curva en forma polar (ρ = ϕ(θ)) también se puede expresar siempre en forma para-métrica: x = ϕ(θ)cosθ , y = ϕ(θ)senθ . En cambio, no toda curva en forma paramétrica se puedeexpresar en forma explícita ni en forma polar. Y no toda curva en forma explícita se puede poner enforma polar ni viceversa.
A continuación recogemos, sin demostración, diversas fórmulas que permiten calcular la longitudde una curva plana y el área de una superficie o el volumen de un cuerpo asociados a curvas planas.En cada caso se supone que las funciones que aparecen son continuas a trozos, o derivables a trozos,según haga falta para que las integrales estén bien definidas.
Área de una figura plana
a b
y= f (x)
El área de la figura es∫ ba f (x)dx,
si f (x)≥ 0 para todo x ∈ [a,b]
a
b
y= f (x)
El área de la figura es∫ ba | f (x)|dx

150 Capítulo 6. La integral de Riemann
ab
y= f (x)y= g(x)
El área de la figura es∫ ba | f (x)−g(x)|dx
(x(t0),y(t0)) = (x(t1),y(t1))
El área de la figura es∣∣∣∫ t1t0 y(t)x′(t)dt∣∣∣,
si la curva es cerrada
β
α
ρ = ρ(θ)
El área de la figura es 12∫ β
α ρ(θ)2 dθ
Longitud de una curva plana
a
b
y= f (x)
La longitud de la curva es∫ ba
√1+ f ′(x)2 dx
(x(t1),y(t1))
(x(t0),y(t0))
La longitud de la curva es∫ t1t0
√x′(t)2+ y′(t)2 dt

6.5. Apéndice: cálculo de áreas, longitudes y volúmenes 151
ρ = ρ(θ)β
α
El área de la figura es∫ β
α√
ρ(θ)2+ρ ′(θ)2 dθ
Volumen de un cuerpo de revolución
a
b
y= f (x)
El volumen del cuerpo generado al girar la figuraalrededor del eje x es
∫ ba π f (x)2 dx
a
b
y= f (x)
El volumen del cuerpo generado al girar la figuraalrededor del eje x es
∫ ba 2πx| f (x)|dx, si a,b≥ 0
(x(t1),y(t1))(x(t0),y(t0))
El volumen del cuerpo generado al girar la figuraalrededor del eje x es
∣∣∣∫ t1t0 πy(t)2x′(t)dt∣∣∣,
si y(t)≥ 0 para todo t ∈ [t0, t1]
βα
ρ = ρ(θ)
El volumen del cuerpo generado al girar la figuraalrededor del eje x es
∫ βα2π3 ρ(θ)3 senθ dθ ,
si 0≤ α ≤ β ≤ π
Volumen de un cuerpo de secciones conocidas

152 Capítulo 6. La integral de Riemann
x
área S(x)
El volumen de la figura es∫ ba S(x)dx, donde S(x) es
el área de la sección perpendicular al eje en x
Área de una superficie de revolución
a
b
y= f (x)
El área de la superficie generada al girar la curvaalrededor del eje x es
∫ ba π f (x)2 dx
(x(t1),y(t1))(x(t0),y(t0))
El área de la superficie generada al girar la curvaalrededor del eje x es
∣∣∣∫ t1t0 πy(t)2x′(t)dt∣∣∣,
si y(t)≥ 0 para todo t ∈ [t0, t1]
βα
ρ = ρ(θ)
El área de la superficie generada al girar la curva alrededordel eje x es
∫ βα2π3 ρ(θ)3 senθ dθ , si 0≤ α ≤ β ≤ π

6.6. Apéndice: cálculo de primitivas 153
6.6. Apéndice: cálculo de primitivas
6.6.1. Métodos básicos de integraciónIntegración por partes: si f y g son dos funciones derivables,∫
f (x)g′(x)dx= f (x)g(x)−∫f ′(x)g(x)dx.
Cambio de variable: Si∫f (t)dt = F(t), esto es, F ′(t) = f (t), y ϕ es una función derivable, enton-
ces∫f (ϕ(x))ϕ ′(x)dx= F(ϕ(x)). Abreviadamente,∫
f (ϕ(x))ϕ ′(x)dx=∫f (t)dt = F(t) = F(ϕ(x)).
En el primer paso “se hace el cambio de variable t = ϕ(x), dt = ϕ ′(x)dx”; en el último paso “sedeshace el cambio t = ϕ(x)”.
6.6.2. Integrales elementales
a)∫
(x+a)r dx=(x+a)r+1
r+1 +C, si r .=−1
b)∫ dxx+a
= log |x+a|+C
c)∫ex dx= ex+C
d)∫cosxdx= senx+C
e)∫senxdx=−cosx+C
f)∫coshxdx= senhx+C
g)∫senhxdx= coshx+C
h)∫ dxcos2 x =
∫(1+ tg2 x)dx= tgx+C
i)∫ dxsen2 x =−ctgx+C
j)∫ dx
(x+a)2+b2=1barc tg x+a
b+C =−1
barcctg x+a
b+D, si b .= 0
k)∫ 2(x+a)
(x+a)2+bdx= log |(x+a)2+b|+C
l)∫ 2(x+a)
[(x+a)2+b]ndx=
1/(1−n)[(x+a)2+b]n−1
+C, si n .= 1

154 Capítulo 6. La integral de Riemann
m)∫ dx√
(x+a)2+b= log
∣∣∣∣x+a+√
(x+a)2+b∣∣∣∣+C
n)∫ dx√
b2− (x+a)2= arcsen x+a
b+C =−arccos x+a
b+D, si b> 0
ñ)∫ dxx2+1 = arc tgx+C =−arcctgx+D (es un caso particular de j))
o)∫ dx√
x2+1= argsenhx+C = log(x+
√x2+1)+C (es un caso particular de m))
p)∫ dx√
x2−1 = argcoshx+C = log∣∣∣x+
√x2−1
∣∣∣+C (es un caso particular de m))
q)∫ dx√
1− x2 = arcsenx+C =−arccosx+D (es un caso particular de n))
6.6.3. Integración de algunos tipos de funcionesFunciones integrables por partes:
∫f (x)g(x)dx, donde f (x) es un polinomio y g(x) es una de
las funciones siguientes: eax, senax, cosax, arcsenax, arc tgax, logx, (x+a)n . . . ; o bien f (x) es unafunción seno o coseno y g(x) es una función exponencial. Se puede intentar el método de integraciónpor partes.
Funciones racionales (cocientes de polinomios):
a) In =∫ dx
(1+ x2)n, donde n ∈ N. Se resuelve de forma recurrente: I1 = arc tgx+C; si n≥ 2,
In =1
2n−2 ·x
(1+ x2)n−1+2n−32n−2 · In−1
b)∫ dx
(x2+ax+b)n, donde a2−4b< 0 y n ∈ N. Se reduce al caso anterior haciendo cuadrados y
el cambio de variable y= 1√b− a2
4
x+ a2 :
∫ dx(x2+ax+b)n
= (b− a2
4 )12−n
∫ dy(1+ y2)n
c)∫ Mx+N
(x2+ax+b)ndx, donde a2−4b < 0 y n ∈ N. Se reduce a una integral inmediata y otra del
tipo anterior:∫ Mx+N(x2+ax+b)n
dx=M2
∫ 2x+a(x2+ax+b)n
dx+(N− aM2 )
∫ dx(x2+ax+b)n
d)∫ P(x)Q(x)
dx, donde P y Q son polinomios cualesquiera. Se reduce a integrales inmediatas y de
los tipos anteriores, descomponiendo P(x)Q(x)
en fracciones simples: una suma de un polinomio y
una o varias funciones racionales de las formas Mx+N(x2+ax+b)n
, A(x+ c)m
.

6.6. Apéndice: cálculo de primitivas 155
Funciones trigonométricas:
a)∫R(senx)cosxdx, donde R es una función racional. Se reduce a la integral de una funciónracional con el cambio t = senx.
b)∫R(cosx)senxdx, donde R es una función racional. Se reduce a la integral de una funciónracional con el cambio t = cosx.
c)∫R(tgx)dx, donde R es una función racional. Se reduce a la integral de una función racionalcon el cambio t = tgx.
d)∫R(senx,cosx)dx, donde R es una función racional. Se reduce a la integral de una función
racional con el cambio t = tg x2, dx=2dt1+ t2
, cosx=1− t21+ t2
, senx=2t
1+ t2.
e) Los productos de funciones trigonométricas se transforman en sumas, mediante las fórmulassiguientes:
2senasenb= cos(a−b)− cos(a+b)2cosacosb= cos(a−b)+ cos(a+b)2senacosb= sen(a−b)+ sen(a+b)
En particular: cos2 a=1+ cos2a
2 ; sen2 a=1− cos2a
2 .
Algunas funciones irracionales:
a)∫R(x,xm/n, . . . ,xr/s)dx, donde R es una función racional. Se reduce a la integral de una función
racional mediante el cambio x= tk, donde k es un comúnmúltiplo de los denominadores n, . . . ,s.
b)∫R
(x,
(ax+bcx+d
)1/n)dx, donde R es una función racional. Se reduce a la integral de una
función racional con el cambio ax+bcx+d
= tn.
c)∫ dx√
ax2+bx+ c. Si a= 0 es inmediata. Y si a .= 0 también, ya que
∫ dx√ax2+bx+ c
=∫ dx√
a(x+b2a)2+ c− b2
4a
.
d)∫ P(x)√
ax2+bx+ cdx, donde P es un polinomio. Se hallan una constante K y un polinomio Q de
grado menor que P, tales que∫ P(x)√ax2+bx+ c
dx= Q(x)√ax2+bx+ c+K
∫ dx√ax2+bx+ c
.
e)∫ dx
(x−u)m√ax2+bx+ c. Se hace el cambio x−u=
1ty se reduce a una de las anteriores.

156 Capítulo 6. La integral de Riemann
f)∫R(x,
√a2− (x+b)2)dx, donde R es una función racional. Se reduce a la integral de una
función de tipo trigonométrico mediante uno de los dos cambios x+b= acos t, x+b= asen t.
g)∫R(x,
√(x+b)2−a2)dx, donde R es una función racional. Se reduce a la integral de una
función de tipo trigonométrico mediante uno de los dos cambios x+b=acos t , x+b=
asen t .
h)∫R(x,
√a2+(x+b)2)dx, donde R es una función racional. Se reduce a la integral de una
función de tipo trigonométrico mediante uno de los dos cambios x+b= a tg t, x+b=atg t .
i)∫R(x,
√ax2+bx+ c)dx, donde R es una función racional. O bien se expresa como uno de los
tres tipos anteriores, o bien se reduce a la integral de una función racional mediante un cambiode variable de Euler:
• √ax2+bx+ c= t± x√a, si a> 0;
• √ax2+bx+ c= tx±√c, si c> 0;• √ax2+bx+ c= t(x−u), si au2+bu+ c= 0.
j)∫xr(a+ bxs)p dx, donde r, s y p son números racionales. Solo se integran en los siguientes
casos:
• Si p ∈ N, se desarrolla (a+bxs)p y es inmediata.• Si p es un entero negativo, se hace el cambio x = tk, donde k es un denominador comúnde las fracciones r y s.
• Si r+1s
∈ Z, se hace el cambio a+bxs = tk, donde k es el denominador de la fracción p.
• Si r+1s
+ p ∈ Z, se hace el cambio a+ bxs = xstk, donde k es el denominador de lafracción p.
6.7. EjerciciosEjercicio 6.1. Calcular las primitivas de las siguientes funciones:
1) (1+√x)3
x1/32) (arcsenx)2√
1− x2 3) 1√x− x2
4) 4cos3 x−3cosxsenx 5) sen3 x√cosx
6) 1a2ex+b2e−x
7) x5√1− x3 8) 1
x(x7+1) 9) 1senx+ cosx
10) arc tgx 11) cosx log(1+ cosx) 12) log2 x
13) cos2xex
14) xarcsenx√1− x2 15) x tg2 x

6.7. Ejercicios 157
16) xex
(1+ x)217) x2−3x+3
x2−3x+2 18) 1(x2−4x+3)(x2+4x+5)
19) xx4+(a+b)x2+ab
20) 3x+5(x2+2x+2)2 21) 1
x4+ x2+1
22) 1x4+1 23) 1
x√x2−1 24)
√x− x2x4
25) (1+√x)2
2+√x
26) 1+ x1+
√x
27) 1x√2x+1
28) 1x(√1+ x−2) 29) 3x2/3−7
x−7x1/3+630) 3
x+3(x+4)2/3
31) x+√x+1
x−√x+132)
√x+1+2
(x+1)2−√x+133) 1
x+1
√3+ xx−1
34) sec3 x 35) 1(a+bcosx)senx 36) 1
2+3tgx
37) x2√2x− x2 38) x2−3x+7√
2x2+4x+539) x2√
3x2− x+1
Ejercicio 6.2. Calcular los límites siguientes mediante integrales definidas:
a) lımn
1n
(cos x
n+ cos 2x
n+ · · ·+ cos nx
n
)b) lım
n
(n
n2+12 +n
n2+22 + · · ·+ nn2+n2
)c) lım
n
(1√n4+1
+2√
n4+24+ · · ·+ n√
n4+n4
)
d) lımn
1k +2k + · · ·+nk
nk+1, (k ≥ 0)
Ejercicio 6.3. Sea f continua en [0,a]. Comprobar que∫ a
0f (x)dx=
∫ a
0f (a− x)dx
y calcular, para n= 1 y n= 3,∫ π
0
xsenn x1+ cos2 x dx.
Ejercicio 6.4. Calcular las integrales definidas siguientes:
a)∫ √
3
−√3
√4− x2 dx b)
∫ 4
2
√x2−4x4
dx c)∫ π/2
0
senx3+ sen2 x dx
d)∫ 1
0
√2x− x2 dx e)
∫ 1
0
log(1+ x)(1+ x)2
dx f)∫ π/2
−π/2
√cosx− cos3 xdx

158 Capítulo 6. La integral de Riemann
Ejercicio 6.5. Probar que las siguientes funciones son derivables y hallar sus derivadas:
a) F(x) =∫ x3
asen3 t dt
b) F(x) =∫ b
af (x+ t)dt, con f continua
c) F(x) =∫ x
0x f (t)dt, con f continua
d) F(x) =∫ g(x)
f (x)h(t)dt, con h continua y f y g derivables
Ejercicio 6.6. Demostrar que si f es continua,∫ x
0f (u)(x−u)du=
∫ x
0
(∫ u
0f (t)dt
)du.
Ejercicio 6.7. Hallar el siguiente límite: lımx→0+
∫ x
x2
et −1sen t2 dt
logx .
Ejercicio 6.8. Demostrar que∫ π/2
0senn xdx =
n−1n
∫ π/2
0senn−2 xdx, para cada n ≥ 2. Probar que
para cada n≥ 1 se tiene:
a)∫ π/2
0sen2n+1 xdx=
2 ·4 ·6 . . .2n3 ·5 ·7 . . .(2n+1)
b)∫ π/2
0sen2n xdx=
π2 · 1 ·3 ·5 . . .(2n−1)
2 ·4 ·6 . . .2n
Ejercicio 6.9. Hallar el área de la figura limitada por la parábola y=−x2−2x+3, su tangente en elpunto (2,−5) y el eje y.Ejercicio 6.10. Calcular el área de la figura limitada por la curva y2 = x(x−1)2.Ejercicio 6.11. La corona circular centrada en el origen y de radio interior
√2 y radio exterior
√6 se
corta con la parábola de ecuación x= y2. Hallar el área de una de las dos superficies que se forman.
Ejercicio 6.12. Hallar el valor del parámetro λ para el que la curva y = λ cosx divide en dos partesde igual área la región limitada por el eje x, la curva y= senx y la recta x= π/2.
Ejercicio 6.13. Hallar la longitud del arco que la recta x= 4/3 corta en la curva y2 = x3.
Ejercicio 6.14. Calcular la longitud del arco de la curva y = logcosx entre los puntos de abscisasx= 0, x= π/4.
Ejercicio 6.15. Hallar la longitud del arco de la curva x=14y2− 12 logy entre los puntos y= 1 e y= 2.
Ejercicio 6.16. Hallar la longitud de la astroide x2/3+ y2/3 = a2/3, donde a> 0.
Ejercicio 6.17. Hallar el volumen del sólido obtenido al girar la curva a2y2 = ax3− x4 alrededor deleje x (a> 0).

6.7. Ejercicios 159
Ejercicio 6.18. Calcular el volumen del sólido engendrado al girar alrededor del eje x la figura limi-tada por y= acosh x
ay las rectas x= c, x=−c (a,c> 0).
Ejercicio 6.19. La figura limitada por la sinusoide y = senx (0 ≤ x ≤ π/2), el eje de ordenadas y larecta y= 1 gira alrededor del eje y. Calcular el volumen del sólido de revolución así engendrado.
Ejercicio 6.20. Hallar el área del elipsoide formado al girar alrededor del eje x la elipse de ecuaciónx2
a2+y2
b2= 1 (a> b> 0).
Ejercicio 6.21. Hallar el área de la superficie generada al girar alrededor del eje y la porción de lacurva y= x2/2 cortada por la recta y= 3/2.
Ejercicio 6.22. Hallar el área de la superficie generada al girar alrededor del eje x la porción de lacurva y2 = 4+ x cortada por la recta x= 2.

Capítulo 7
Integrales impropias
7.1. Definición de integral impropia y primeras propiedades
El concepto de integral se extiende de manera casi espontánea a situaciones más generales quelas que hemos examinado hasta ahora. Consideremos, por ejemplo, la función no acotada
f : (0,1]→ R, f (t) = log t.
Puesto que f es continua, para cada x ∈ (0,1] existe su integral en [x,1], que vale
∫ 1
xf =
∫ 1
xlog t dt = [t log t− t]t=1t=x =−1− x logx+ x;
y como
lımx→0+
∫ 1
xf = lım
x→0+[−1− x logx+ x] =−1,
parece natural escribir, simplemente, ∫ 1
0f =−1.
Igualmente, si en el intervalo no acotado [0,+∞) tomamos la función continua f (t) = e−t , para cadax ∈ [0,+∞) tenemos ∫ x
0f =
∫ x
0e−t dt = [−e−t ]t=xt=0 =−e−x+1,
lımx→+∞
∫ x
0f = lım
x→+∞
(−e−x+1) = 1,
lo que sugiere escribir ∫ +∞
0e−t dt = 1.
Siguiendo estas ideas podemos definir en distintas situaciones una integral generalizada o integralimpropia, lo que nos llevará a estudiar diferentes tipos de condiciones que permitan asegurar su exis-tencia.
161

162 Capítulo 7. Integrales impropias
7.1.1. Integrales impropias: definición de integrales impropias convergentes, diver-gentes, oscilantes
Definición 7.1.1. Sea A⊆R. Se dice que una función f : A→ R es localmente integrable en A si esintegrable en cada intervalo cerrado y acotado contenido en A.
Por ejemplo, todas las funciones continuas y todas las funciones monótonas, acotadas o no, sonlocalmente integrables.
Obsérvese que si −∞< a< b≤+∞, una función f es localmente integrable en [a,b) si y solo sies integrable en cada intervalo [a,x]⊆ [a,b). Análogamente, si −∞ ≤ a < b < +∞, una función f eslocalmente integrable en (a,b] si y solo si es integrable en cada intervalo [x,b]⊆ (a,b].
Consideremos en primer lugar funciones definidas en intervalos del tipo [a,b), donde b es finito o+∞.
Definición 7.1.2. Dada una función f : [a,b)→R localmente integrable,−∞< a< b≤+∞, si existeel límite
lımx→b−
∫ x
af (t)dt (7.1)
y es finito, decimos que la integral impropia∫ ba f es convergente, y al valor de dicho límite lo llama-
mos integral impropia de f en el intervalo [a,b); se denota por∫ ba f . Si el límite (7.1) existe, pero es
+∞ o −∞, decimos que la integral impropia diverge a +∞ o −∞, y si no existe el límite decimos quela integral impropia no existe, o que no tiene sentido, o que es oscilante (esta última denominaciónse reserva en algunos textos para otro concepto distinto).
Si la integral impropia de una función en un intervalo es convergente se dice que la función esintegrable en sentido impropio en dicho intervalo.
De manera enteramente análoga puede definirse la integral impropia de una función en un inter-valo (a,b], −∞≤ a< b< +∞:
Definición 7.1.3. Dada una función f : (a,b]→R localmente integrable,−∞≤ a< b< +∞, decimosque la integral impropia
∫ ba f es convergente si existe el límite
lımx→a+
∫ b
xf (t)dt (7.2)
y es finito, y al valor de dicho límite lo llamamos integral impropia de f en el intervalo (a,b]; sedenota por
∫ ba f . Si el límite (7.2) existe, pero es +∞ o −∞, decimos que la integral impropia diverge
a +∞ o −∞, y si no existe el límite decimos que la integral impropia no existe, o no tiene sentido, oque es oscilante.
La definición de integral impropia de funciones localmente integrables en intervalos abiertos pue-de hacerse mediante límites en dos variables o reduciéndola a las definiciones anteriores del siguientemodo:
Definición 7.1.4. Dada una función f : (a,b)→R localmente integrable,−∞≤ a< b≤+∞, decimosque la integral impropia
∫ ba f es convergente si existe un c ∈ (a,b) tal que
∫ ca f y
∫ bc f son ambas
convergentes; en ese caso, se define ∫ b
af =
∫ c
af +
∫ b
cf .

7.1. Definición de integral impropia y primeras propiedades 163
Del siguiente resultado (y de su análogo para intervalos semiabiertos por la izquierda) se deduceque en esta definición es indiferente el punto c que se elija. También se deduce que la convergenciade una integral impropia es un concepto local, que depende solo del comportamiento del integrandocerca del punto impropio, en un entorno del extremo conflictivo.
Proposición 7.1.5. Sea f : [a,b)→ R una función localmente integrable y sea a< c< b. La funciónf es integrable en sentido impropio en [a,b) si y solo si es integrable en sentido impropio en [c,b), encuyo caso se tiene ∫ b
af =
∫ c
af +
∫ b
cf . (7.3)
Demostración. Basta tener en cuenta que para cada x ∈ (c,b) es∫ x
af =
∫ c
af +
∫ x
cf .
Por tanto, el límite cuando x→ b− de la primera integral existe si y solo si existe el límite de la terceraintegral, y cuando esto suceda, pasando al límite se obtiene la relación (7.3).
Los conceptos anteriores se extienden al caso de funciones definidas en una unión finita de inter-valos disjuntos. Por ejemplo:
Definición 7.1.6. Sea J = ∪nk=1Ik, donde (Ik)nk=1 es una familia de intervalos disjuntos. Si f es unafunción localmente integrable en J, se dice que la integral impropia
∫J f es convergente si converge
cada una de las integrales∫ bkak f , donde ak y bk son los extremos de Ik; en ese caso, se define∫
Jf =
n
∑k=1
∫ bk
akf .
Nota. Cuando los intervalos (Ik) son contiguos, es decir, cuando b1 = a2, . . . ,bk−1 = ak, . . . ,bn−1 = an,suele escibirse
∫ bna1 f en vez de
∫J f .
Ejemplos. a) Dado α ∈ R, las integrales impropias∫ b
a
dt(t−a)α y
∫ b
a
dt(b− t)α son convergentes
si α < 1, y divergen a +∞ si α ≥ 1.
b) La integral impropia∫ +∞
1
dttαes convergente si α > 1. Si α ≤ 1, diverge a +∞.
c) La integral impropia∫ +∞
0e−αt dt es convergente si α > 0. Si α ≤ 0, diverge a +∞.
d) La funciónf (x) =
1√1− x2
es localmente integrable en (−1,1) porque es continua. Su integral impropia es convergente:∫ 1
−1dx√1− x2 =
∫ 0
−1dx√1− x2 +
∫ 1
0
dx√1− x2 =−(−π
2 )+π2 = π
( f tiene como primitiva la función arcsen).

164 Capítulo 7. Integrales impropias
Nota. Para más sencillez, solo vamos a considerar por lo general integrales impropias en intervalosdel tipo [a,b), donde −∞ < a < b ≤ +∞. Dejamos al lector escribir las modificaciones pertinentespara los otros casos.
La noción de integral impropia se reduce a la de integral de Riemann cuando tratamos con fun-ciones integrables-Riemann.
Proposición 7.1.7. Sea f : [a,b]→ R una función integrable-Riemann en [a,b]. Entonces f es inte-grable en sentido impropio en [a,b) y su integral impropia es igual a la integral de Riemann.
Demostración. Según el teorema fundamental del cálculo integral (teorema 6.3.4), la función
F(x) =∫ x
af
es continua en b, así que ∫ b
af = lım
x→b−
∫ x
af .
Esto demuestra que f es integrable en sentido impropio en [a,b) y que su integral impropia es igual ala integral de Riemann.
La misma idea sirve para demostrar que si una función es continua en [a,b) y en b tiene unadiscontinuidad evitable, entonces es integrable en sentido impropio en [a,b):
Proposición 7.1.8. Sea−∞< a< b< +∞. Si f : [a,b)→R es una función continua y existe el límitelımx→b−
f (x) ∈ R, entonces f es integrable en sentido impropio en [a,b) y
∫ b
af =
∫ b
ag,
donde g es la extensión continua de f a [a,b].
Demostración. La función g es integrable Riemann, ya que es continua en [a,b]. Según la definiciónde integral impropia, ∫ b
af = lım
x→b−
∫ x
af = lım
x→b−
∫ x
ag=
∫ b
ag,
donde en la última igualdad se usa el teorema fundamental del cálculo integral (teorema 6.3.4).
Observación. Con la misma demostración, se puede probar que si f es una función localmente inte-grable en [a,b) y se puede extender a una función integrable-Riemann en [a,b], entonces la integralimpropia ∫ b
af
es convergente.

7.1. Definición de integral impropia y primeras propiedades 165
7.1.2. Primeras propiedades de las integrales impropias
Algunas propiedades de la integral de Riemann se trasladan sin dificultad a las integrales impro-pias, como muestran las proposiciones siguientes.
Proposición 7.1.9. Sean f , g funciones integrables en sentido impropio en un intervalo [a,b). Dadosλ , µ ∈ R, la integral impropia ∫ b
a(λ f + µg)
es convergente, y se cumple ∫ b
a(λ f + µg) = λ
∫ b
af + µ
∫ b
ag.
Proposición 7.1.10 (regla de Barrow para integrales impropias). Sea g una función derivable en[a,b) y tal que g′ es localmente integrable en [a,b). La integral impropia
∫ b
ag′ es convergente si y
solo si el límite lımx→b−
g(x) existe y es finito. Y si eso ocurre, entonces se verifica
∫ b
ag′ = lım
x→b−g(x)−g(a).
Proposición 7.1.11 (integración por partes en integrales impropias). Sean u, v funciones deriva-bles en [a,b) y tales que u′, v′ son localmente integrables en [a,b). Si existen y son reales dos de loslímites siguientes:
lımx→b−
∫ x
auv′, lım
x→b−u(x)v(x), lım
x→b−
∫ x
au′v,
entonces el otro también existe y es real y se verifica
∫ b
auv′ = lım
x→b−u(x)v(x)−u(a)v(a)−
∫ b
au′v.
Proposición 7.1.12 (cambio de variable en integrales impropias). Sean I y J intervalos abiertos,[a,b)⊆ J, f : I→ R una función continua, u : J→ I una función derivable tal que existe lım
y→b−u(y) =
! ∈ R∪{±∞} y con derivada u′ continua. Entonces la integral∫ b
af (u(x))u′(x)dx
converge si y solo si converge la integral
∫ !
u(a)f (t)dt,
en cuyo caso ambas integrales son iguales:
∫ b
af (u(x))u′(x)dx=
∫ !
u(a)f (t)dt.

166 Capítulo 7. Integrales impropias
7.2. Convergencia de integrales impropias
7.2.1. Convergencia de integrales impropias con integrando no negativo. Criterios decomparación
En el caso particular de que la función sea no negativa, el estudio de la convergencia de su integrales más sencillo:
Proposición 7.2.1. Sea f una función localmente integrable y no negativa en [a,b). La integral im-propia
∫ ba f es convergente si y solo si la función
F(x) =∫ x
af , x ∈ [a,b)
está acotada. En caso contrario, la integral diverge a +∞.
Demostración. Como f es no negativa, la función F es monótona no decreciente. Recordando que
lımx→b−
F(x) = sup{F(x) : x ∈ [a,b)},
se deduce que el límite es finito si F está acotada (superiormente), mientras que si no está acotada ellímite es +∞.
Una consecuencia importante de este resultado es el siguiente criterio de comparación, que per-mite reducir el estudio de la convergencia de una integral impropia al de otras conocidas.
Proposición 7.2.2 (criterio de comparación por mayoración). Sean f , g funciones no negativaslocalmente integrables en un intervalo [a,b). Supongamos que existen una constante K y algún c ∈[a,b) tales que f (x) ≤ Kg(x) siempre que c < x < b. Si la integral impropia
∫ ba g es convergente,
entonces también la integral impropia∫ ba f es convergente.
Demostración. Para cada x ∈ [a,b) es ∫ x
af ≤
∫ c
af +K
∫ b
cg,
así que el resultado se deduce de la proposición 7.2.1.
Proposición 7.2.3 (criterio de comparación por paso al límite). Sean f , g funciones no negativaslocalmente integrables en un intervalo [a,b). Supongamos que existe
lımx→b−
f (x)g(x)
= ! ∈ [0,+∞)∪{+∞}.
a) Si ! < +∞ y la integral impropia∫ ba g converge, entonces la integral impropia
∫ ba f también
converge.
b) Si 0< ! y la integral impropia∫ ba g diverge, entonces la integral impropia
∫ ba f también diverge.
c) Si 0< ! <∞, las dos integrales∫ ba f y
∫ ba g tienen el mismo carácter: o las dos son convergentes,
o las dos son divergentes.

7.2. Convergencia de integrales impropias 167
Demostración. a) Si ! <∞, tomemos ! < K <∞; existe un c tal que f (x) < Kg(x) si c< x< b. Bastaentonces aplicar el criterio 7.2.2 de mayoración.
b) Si 0 < !, tomemos 0 < K < !; existe algún c tal que f (x) > Kg(x) si c < x < b. Por el crite-rio 7.2.2 de mayoración, si la integral impropia
∫ ba g diverge necesariamente la integral impropia
∫ ba f
debe divergir.c) Es una consecuencia inmediata de a) y b).
Nótese que si, en particular, es f (x)∼ g(x) cuando x→ b−, entonces∫ ba f y
∫ ba g tienen el mismo
carácter.Examinando los ejemplos que hemos visto de convergencia y divergencia, del criterio 7.2.3 se
deduce:
Corolario 7.2.4 (criterio de Pringsheim). a) Sea f una función no negativa, localmente integra-ble en un intervalo [a,+∞) y tal que para algún α existe el límite
lımx→+∞
xα f (x) = ! ∈ [0,+∞)∪{+∞}.
Entonces:
• si α ≤ 1 y ! > 0, la integral∫ +∞a f diverge (a +∞).
• si α > 1 y ! += +∞, la integral∫ +∞a f converge.
b) Sea f una función no negativa, localmente integrable en un intervalo [a,b), con −∞< a< b<+∞, y tal que para algún α existe el límite
lımx→b−
(b− x)α f (x) = ! ∈ [0,+∞)∪{+∞}.
Entonces:
• si α ≥ 1 y ! > 0, la integral∫ ba f diverge (a +∞).
• si α < 1 y ! += +∞, la integral∫ ba f converge.
7.2.2. Integrales impropias de integrando cualquiera: convergencia absoluta y conver-gencia condicional. Criterios de Abel y Dirichlet
Definición 7.2.5. Sea f una función localmente integrable en [a,b). Decimos que la integral impropiade f en [a,b) es absolutamente convergente si la integral impropia∫ b
a| f (t)|dt
es convergente.
Proposición 7.2.6. Toda integral impropia absolutamente convergente es convergente.
Demostración. Sea f : [a,b)→R localmente integrable y supongamos que la integral impropia∫ ba | f |
es convergente. Definamos
f+(x) =max{ f (x),0},f−(x) =max{− f (x),0}.

168 Capítulo 7. Integrales impropias
Las funciones f+ y f− son localmente integrables y es fácil comprobar que
0≤ f+ ≤ | f |, 0≤ f− ≤ | f |,
así que las integrales impropias∫ ba f+ y
∫ ba f− son convergentes. También es fácil comprobar que
f = f+− f−, luego la integral∫ ba f es convergente.
ff+
f−
Las funciones f , f+ y f−
Como la convergencia absoluta de una integral impropia es la convergencia de la integral de unafunción no negativa, la proposición 7.2.6 permite aprovechar en muchos casos los métodos de com-paración de integrandos no negativos. Por ejemplo:
a) la integral∫ +∞
1
cosxx2
dx es convergente, porque es absolutamente convergente (0≤ ∣∣ cosxx2
∣∣≤ 1x2
y la integral∫ +∞
1
dxx2converge);
b) la integral∫ +∞
0
senxx
dx es convergente, puesto que integrando por partes
∫ y
1
senxx
dx=−[cosx
x
]y1−
∫ y
1
cosxx2
dx
y el segundo miembro de esta igualdad tiene límite finito para y→+∞, como consecuencia dea).
Sin embargo, hay integrales impropias convergentes que no son absolutamente convergentes. Elejemplo estándar es precisamente la integral
∫ +∞0
senxx dx, como vemos a continuación.
Ejemplo. La integral∫ +∞0
|senx|x dx no es convergente. En efecto: para cada n ∈ N,
∫ nπ
(n−1)π|senx|x
dx≥ 1nπ
∫ nπ
(n−1)π|senx|dx=
2nπ≥ 2
π
∫ n+1
n
dxx
.
Luego ∫ Nπ
0
|senx|x
dx≥ 2π
∫ N+1
1
dxx
=2πlog(N+1)→+∞.
Definición 7.2.7. Si una integral impropia es convergente pero no es absolutamente convergente, sedice que es condicionalmente convergente.

7.3. Ejercicios 169
Como hay integrales impropias condicionalmente convergentes, es importante disponer de crite-rios de convergencia que no dependan de la convergencia absoluta; de ellos, los que más se usan en lapráctica son los criterios de Abel y Dirichlet.
Proposición 7.2.8 (criterio de Abel). Sea f una función integrable en sentido impropio en un in-tervalo [a,b) y g una función monótona y acotada en dicho intervalo. Entonces la integral
∫ ba f g es
convergente.
Proposición 7.2.9 (criterio de Dirichlet). Sea f una función localmente integrable en un interva-
lo [a,b) y tal que supa<x<b
∣∣∣∣∫ x
af∣∣∣∣ es finito y sea g una función monótona en [a,b) con lım
x→b−g(x) = 0.
Entonces la integral∫ ba f g es convergente.
7.3. EjerciciosEjercicio 7.1. Estudiar la convergencia de la integral∫ +∞
−1dx√|x(1− x2)| .
Ejercicio 7.2. Determinar el carácter de las siguientes integrales impropias:
a)∫ +∞
0
dx1+ x2
b)∫ +∞
0
dxx+1 c)
∫ +∞
0
dx|x−1| d)
∫ 1
0logxdx
e)∫ 1/2
0
dxx logx f)
∫ +∞
1
logxx
dx g)∫ +∞
0
xdx√x4+3
h)∫ 2
1
dx(x3−4x2+4x)1/3
i)∫ π/2
0
dxcosx j)
∫ 1
0
dx√1− x2 k)
∫ +∞
0
x2 dxx4+1 l)
∫ +∞
0
dx(1+ x5)1/6
m)∫ +∞
0
dxx2+
√x
n)∫ 3
0
dx(x2−1)2 ñ
∫ 4
2
dx√−x2+6x−8 o)∫ 3
0
dx(x(3− x))1/3
p)∫ +∞
0
x2e−x
1+ x2dx q)
∫ +∞
2e−x3 dx r)
∫ +∞
−∞senx1+ x2
dx s)∫ 1
0(logx)sen 1
xdx
t)∫ +∞
2
dxlogx
Ejercicio 7.3. Estudiar la convergencia de las siguientes integrales y, si convergen, calcular su valor:
a)∫ +∞
1
dxx(1+ x2)
b)∫ +∞
2
dxx2−1 c)
∫ 0
−∞xex dx d)
∫ 1
0x| logx|dx
e)∫ π
0
dx2+ cosx f)
∫ π
0
cos2 x1+ cos2 x dx g)
∫ +∞
1
dxx√x2−1 h)
∫ 2
−2x2 dx√4− x2
i)∫ +∞
1
e−x
1+ exdx j)
∫ +∞
0|x−3|e−x dx k)
∫ +∞
0xe|x−2| dx l)
∫ 3
1|x−2| logxdx
m)∫ 1
−1
√1+ x1− x dx

170 Capítulo 7. Integrales impropias
Ejercicio 7.4 (funciones gamma y beta de Euler). Probar que dados t,u,v ∈ (0,+∞), las siguientesintegrales son convergentes:
Γ(t) =∫ +∞
0xt−1e−x dx,
B(u,v) =∫ 1
0xu−1(1− x)v−1 dx.
Ejercicio 7.5. a) Probar que Γ(t+1) = tΓ(t), para todo t > 0.
b) Probar que Γ(n+1) = n! para todo entero n≥ 0.Ejercicio 7.6. Teniendo en cuenta la función Γ y sabiendo que Γ(12) =
√π , calcular estas integrales:
a)∫ +∞
0x2e−x2 dx b)
∫ +∞
03−4x2 dx c)
∫ +∞
−∞x2e−|x−1| dx d)
∫ 1
0x2 log4 xdx
e)∫ +∞
−∞x3e−x2 dx f)
∫ +∞
0(x−3)e−x2 dx g)
∫ +∞
0(x2+1)e−
√x dx

Capítulo 8
Series numéricas
8.1. Definición y primeras propiedades
Informalmente, una serie es una suma de infinitos sumandos (ver antecedentes históricos y co-mentarios en [APOSTOL1, cap. 10] y en [DURÁN, pág. 184 y sigs.]). Estas sumas se usan implícitamente,por ejemplo, al considerar desarrollos decimales ilimitados de los números reales: así, la igualdad73 = 2,333 . . . significa
73 = 2+
310 +
3100 +
31000 + . . . ,
suma con infinitos sumandos de la forma 310n , n ∈ N. En general, consideraremos una sucesión cual-
quiera (an) y su suma ∑∞n=1 an. ¿Qué sentido habrá que darle a esta suma? La respuesta se impone de
modo natural: ∑∞n=1 an tiene que ser lımm→∞
m
∑n=1
an.
Analizando el proceso anterior, se trata de formar mediante la sucesión de sumandos (an) unanueva sucesión de sumas (sm) dada por sm = a1 + a2 + · · ·+ am, m ∈ N, y determinar el límite (siexiste) de esta última sucesión. Esquemáticamente:
lugar 1 2 3 4 . . . n . . .término a1 a2 a3 a4 . . . an . . .suma a1 a1+a2 a1+a2+a3 a1+a2+a3+a4 . . . a1+ · · ·+an . . . → ?
Ahora bien: si, en definitiva, vamos a parar al estudio de la convergencia de una sucesión, ¿quénovedad vamos a encontrar respecto a lo que ya sabemos de sucesiones? El cambio radica en el puntode partida: tomando como dato la sucesión de sumandos (an), nos planteamos determinar propiedadesde la sucesión de sumas (sn) basándonos en propiedades de los términos an. Pasemos a formalizarestas ideas.
8.1.1. Series: términos y sumas parciales. Series convergentes, divergentes y oscilantes
Definición 8.1.1. Una serie ∑∞n=1 an es un par ordenado de sucesiones ((an),(sn)) relacionadas por
la condición de que para cada n ∈ N es
sn = a1+a2+ · · ·+an.
171

172 Capítulo 8. Series numéricas
El término n-ésimo de la primera sucesión, an, recibe el nombre de término n-ésimo de la serie; eltérmino n-ésimo de la segunda sucesión, sn, recibe el nombre de suma parcial n-ésima de la serie.
Se dice que la serie ∑∞n=1 an es convergente si la sucesión (sn) de sus sumas parciales es conver-
gente, es decir, si
∃ lımmsm = lım
m
m
∑n=1
an ∈ R.
Decimos que la serie ∑∞n=1 an es divergente a +∞, divergente a −∞ u oscilante si la sucesión de sus
sumas parciales es divergente a +∞, divergente a −∞ u oscilante, respectivamente.Si una serie ∑∞
n=1 an es convergente, se llama suma de dicha serie al límite de la sucesión de sussumas parciales; si la serie diverge a+∞ o a−∞, se dice que su suma es+∞ o−∞, respectivamente.Con un abuso de notación que no suele conducir a error, se denota la suma con el mismo símbolo quela serie. Es decir, se escribe
∞
∑n=1
an = lımm
m
∑n=1
an,
cuando este límite existe.
Nota. A veces es cómodo considerar series de la forma ∑∞n=m an, donde m es un número entero: las
sumas parciales serán entonces s1 = am, s2 = am+am+1,. . . , sn = am+ · · ·+am+n−1, . . .Se utiliza también la notación am+am+1+ · · ·+an+ · · · en vez de ∑∞
n=m an y, cuando no da lugara confusión, se abrevia en ∑an.
Ejemplo. Una serie ∑∞n=1 an es una serie geométrica si existe un r ∈ R tal que para todo n ∈ N es
an+1 = ran (o an+1/an = r si a1 %= 0); de otro modo, si es de la forma∑∞n=0 arn. Si sn es su suma parcial
n-ésima, se tendrá
sn = a+ar+ · · ·+arn−1 =
{a1−rn1−r si r %= 1an si r = 1
.
Excluyendo el caso trivial a= 0, se sigue:
a) si |r| < 1, la serie∞
∑n=0
arn es convergente y la suma es a1− r ;
b) si r ≥ 1, la serie es divergente a +∞ (si a> 0) o a −∞ (si a< 0);
c) si r =−1, la serie es oscilante, aunque las sumas parciales están acotadas;d) si r <−1, la serie es oscilante y las sumas parciales tienden, en valor absoluto, a +∞.
Ejemplo. La serie∞
∑n=1
1n
se llama serie armónica Se comprueba que, para cada n, su suma parcial n-ésima, denotada habitual-mente por Hn, cumple
Hn =n
∑k=1
1k≥
n
∑k=1
∫ k+1
k
dxx
=∫ n+1
1
dxx
= log(n+1),
luego la serie armónica diverge a +∞ a pesar de que lımn
1n
= 0.

8.1. Definición y primeras propiedades 173
El carácter de una serie no cambia si se prescinde de un número finito de sumandos (aunque sípuede cambiar el valor de la suma). Dicho de forma más precisa,
Proposición 8.1.2. Dada una serie ∑∞n=1 an y un entero m> 1, se tiene:
a) ∑∞n=1 an converge si y solo si converge ∑∞
n=m an. Si convergen, entonces
∞
∑n=1
an =m−1∑n=1
an+∞
∑n=m
an.
b) ∑∞n=1 an diverge a +∞ si y solo si ∑∞
n=m an diverge a +∞.
c) ∑∞n=1 an diverge a −∞ si y solo si ∑∞
n=m an diverge a −∞.d) ∑∞
n=1 an es oscilante si y solo si ∑∞n=m an es oscilante.
Demostración. Basta observar que para todo p> m es
p
∑n=1
an =m−1∑n=1
an+p
∑n=m
an,
donde ∑m−1n=1 an está fijo (independiente de p), y aplicar las definiciones previas y los resultados cono-
cidos para sucesiones.
8.1.2. Linealidad de la convergencia de seriesProposición 8.1.3. Sean ∑∞
n=1 an, ∑∞n=1 bn dos series convergentes. Para cualesquiera α , β ∈ R, la
serie ∑∞n=1(αan+βbn) es convergente y se tiene
∞
∑n=1
(αan+βbn) = α∞
∑n=1
an+β∞
∑n=1
bn.
Demostración. Basta tener en cuenta que
N
∑n=1
(αan+βbn) = αN
∑n=1
an+βN
∑n=1
an.
Corolario 8.1.4. Si ∑∞n=1 an converge y ∑∞
n=1 bn no es convergente, entonces ∑∞n=1(an + bn) no es
convergente.
Demostración. Si la serie ∑∞n=1(an+bn) convergiera, entonces la serie
∞
∑n=1
bn =∞
∑n=1
((an+bn)+(−1)an
)también convergería, según la proposición 8.1.3.
Ejemplos. La serie ∑(1n + 12n ) no converge, pues ∑
1n no es convergente y ∑
12n sí.
Sin embargo, al sumar dos series no convergentes, la suma puede ser tanto convergente como noconvergente: examínense los casos an = bn = 1 y an = 1, bn =−1.

174 Capítulo 8. Series numéricas
8.1.3. Series telescópicasProposición 8.1.5. Sean (an) y (bn) dos sucesiones de números reales tales que para todo n ∈ N secumple
an = bn−bn+1.Entonces la serie ∑∞
n=1 an (denominada serie telescópica) es convergente si y solo si la sucesión (bn)tiene límite real, en cuyo caso tenemos
∞
∑n=1
an = b1− lımn bn.
Demostración. Basta tener en cuenta que las sumas parciales de la serie ∑∞n=1 an son
sN =N
∑n=1
an = (b1−b2)+(b2−b3)+ · · ·+(bN−1−bN)+(bN−bN+1) = b1−bN+1.
Ejemplo. Si an =1
n(n+1) =1n− 1n+1, entonces la suma parcial N-ésima es simplemente
SN =N
∑n=1
1n(n+1) =
N
∑n=1
(1n− 1n+1
)= 1− 1
N+1 ,
con lo que lımNSN = 1. Es decir, la serie ∑∞
n=1 an converge y su suma es 1:
∞
∑n=1
1n(n+1) = 1.
Ejemplo. Sea ahora an = log(1+
1n). La suma parcial de orden N es
N
∑n=1
an =N
∑n=1log
(1+
1n)
=N
∑n=1
(log(n+1)− logn) = log(N+1)− log1= log(N+1)
y tiende a +∞. Es decir, la serie∞
∑n=1log
(1+
1n)diverge a +∞.
Nota. Toda serie ∑∞n=1 an se puede ver trivialmente como una serie telescópica: basta poner
b1 = 0, bn+1 =−(a1+a2+ · · ·+an) (n ∈ N),
lo que no añade nada interesante al estudio de la serie. Como es obvio, el resultado que hemos obtenidosolo es útil cuando la sucesión (bn) es una sucesión conocida, cuyo comportamiento sabemos deantemano.
8.1.4. Condición necesaria para la convergencia de una serie. Condición general deconvergencia de Cauchy
Proposición 8.1.6 (condición necesaria para la convergencia de una serie). Si la serie ∑∞n=1 an
converge, necesariamentelımnan = 0.

8.2. Series de términos no negativos 175
Demostración. Si (sN) es la sucesión de las sumas parciales, es decir,
sN =N
∑n=1
an,
entonces∃ lım
NsN ∈ R.
Como aN = sN− sN−1, se deduce que
lımNaN = lım
NsN− lımN sN−1 = 0.
Esta condición no es suficiente para la convergencia de una serie: veremos numerosos ejemplos deseries no convergentes cuya sucesión de términos tiende a 0; el más sencillo es quizá la serie armónica
∞
∑n=1
1n
= 1+12 +
13 + · · ·+ 1
n+ · · · ,
que ya hemos estudiado.
Teorema 8.1.7 (condición de Cauchy para la convergencia de una serie). Una serie ∑∞n=1 an es
convergente si y solo si para cada ε > 0 existe un N = N(ε) tal que para cualesquiera m,n ∈ N conm≥ n> N se cumple ∣∣∣∣∣ m
∑k=n
ak
∣∣∣∣∣ < ε.
Demostración. La serie es convergente si y solo si lo es la sucesión (sn) de sus sumas parciales, loque equivale a que (sn) sea una sucesión de Cauchy, y esto a su vez es es equivalente a que para cadaε > 0 exista un N = N(ε) tal que para cualesquiera m, n ∈N con m≥ n> N sea |sm− sn−1| < ε; pero
sm− sn−1 =m
∑k=1
ak−n−1∑k=1
ak =m
∑k=n
ak.
8.2. Series de términos no negativos
8.2.1. Convergencia de una serie de términos no negativos. Criterios de comparación
El estudio del carácter de una serie se simplifica cuando esta es de términos no negativos.
Proposición 8.2.1. Sea ∑∞n=1 an una serie tal que an ≥ 0 para cada n ∈N. Entonces ∑∞
n=1 an convergesi y solo si la sucesión (sn) de sus sumas parciales está acotada superiormente. En caso contrario, laserie diverge a +∞.
Demostración. Puesto que para cada n ∈ N es
sn+1− sn = an+1 ≥ 0,
la sucesión (sn) es monótona no decreciente. Luego o bien está acotada superiormente y converge, obien no está acotada superiormente y diverge a +∞.

176 Capítulo 8. Series numéricas
Este resultado permite deducir en algunos casos la convergencia (o divergencia) de una serie apartir del carácter de otra serie conocida.
Teorema 8.2.2 (criterio de comparación por mayoración). Sean ∑∞n=1 an y ∑∞
n=1 bn dos series yn0 ∈ N de modo que para n≥ n0 es 0≤ an ≤ bn. Si ∑∞
n=1 bn converge, también converge ∑∞n=1 an. En
consecuencia, si ∑∞n=1 an diverge, ∑∞
n=1 bn es asimismo divergente.
Demostración. Sabemos que ∑∞n=1 an tiene el mismo carácter que ∑∞
n=n0 an, y que ∑∞n=1 bn tiene el
mismo carácter que ∑∞n=n0 bn. Denotando por (sn) la sucesión de sumas parciales de ∑∞
n=n0 an y por(tn) la de ∑∞
n=n0 bn, se sigue que para cada n ∈ N es sn ≤ tn, luego si (tn) está acotada superiormente,(sn) estará acotada superiormente. Y si (sn) no está acotada superiormente, (tn) tampoco puede estaracotada superiormente. Basta aplicar ahora la proposición 8.2.1.
Otra forma de comparar dos series es estudiar el cociente de sus términos:
Teorema 8.2.3 (criterio de comparación por paso al límite). Sean ∑∞n=1 an, ∑∞
n=1 bn series de tér-minos no negativos. Supongamos que existe
lımn
anbn
= ! ∈ [0,+∞)∪{+∞}.
a) Si ! < +∞ y la serie ∑∞n=1 bn converge, entonces la serie ∑∞
n=1 an también converge.
b) Si 0< ! y la serie ∑∞n=1 bn diverge, entonces la serie ∑∞
n=1 an también diverge.
c) Si 0< ! < +∞, entonces las dos series ∑∞n=1 an y ∑∞
n=1 bn tienen el mismo carácter.
Demostración. a) Sea C ∈ (!,+∞) (por ejemplo C = ! + 1). Entonces existe algún n0 ∈ N tal quean/bn ≤ C para todo n ≥ n0, es decir, 0 ≤ an ≤ Cbn para todo n ≥ n0. Si la serie ∑∞
n=1 bn converge,entonces también la serie ∑∞
n=1Cbn converge y, por el criterio 8.2.2 de maroración, la serie ∑∞n=1 an
converge.b) Sea C ∈ (0,!). Existe algún n0 ∈ N tal que an/bn ≥C para todo n≥ n0, es decir, an ≥Cbn ≥ 0
para todo n ≥ n0. Si la serie ∑∞n=1 bn diverge, entonces también la serie ∑∞
n=1Cbn diverge y, por elcriterio 8.2.2 de mayoración, la serie ∑∞
n=1 an diverge.c) Basta aplicar a) y b).
Corolario 8.2.4 (series de términos equivalentes). Sean ∑∞n=1 an, ∑∞
n=1 bn dos series de términos nonegativos. Supongamos que (an)∼ (bn). Entonces ∑∞
n=1 an y ∑∞n=1 bn tienen el mismo carácter.
Por supuesto, en este resultado las dos series pueden tener distinta suma.La comparación con las series geométricas proporciona dos criterios muy útiles en la práctica: el
criterio de la raíz y el criterio del cociente. Después veremos versiones más generales para series detérminos cualesquiera, así que dejamos la demostración para entonces.
Proposición 8.2.5 (criterio de la raíz o de Cauchy). Sea ∑∞n=1 an una serie de términos no negativos
tal que existe R= lımn→∞
n√an.
a) Si R< 1, la serie ∑∞n=1 an es convergente.
b) Si R> 1, entonces an %→ 0 y la serie ∑∞n=1 an es divergente.
Proposición 8.2.6 (criterio del cociente o de D’Alembert). Sea ∑∞n=1 an una serie de términos no
negativos tal que existe R= lımn→∞
an+1an
.

8.2. Series de términos no negativos 177
a) Si R< 1, la serie ∑∞n=1 an es convergente.
b) Si R> 1, entonces an %→ 0 y la serie ∑∞n=1 an es divergente.
Un complemento interesante del criterio del cociente es el criterio de Raabe.
Proposición 8.2.7 (criterio de Raabe). Sea ∑∞n=1 an una serie de términos no negativos tal que existe
R= lımn→∞
n(1− an+1an
). Entonces:
a) Si R> 1, la serie ∑∞n=1 an es convergente.
b) Si R< 1, la serie ∑∞n=1 an diverge a +∞.
Demostración. Ver [GARAY-CUADRA-ALFARO, teor. 5.28, págs. 101–102].
8.2.2. Otros criterios. Convergencia de algunas series de términos no negativosProposición 8.2.8 (criterio de la integral). Sea f : [1,+∞)→ [0,+∞) no creciente. Entonces:
a) La integral impropia∫ +∞
1f es convergente si y solo si la serie
∞
∑n=1
f (n) converge.
b) Existe C = lımn
(n
∑k=1
f (k)−∫ n
1f)∈ [0,+∞).
c) Para cada n ∈ N se tienen
∑k=1
f (k) =∫ n
1f +C+ εn, con 0≤ εn ≤ f (n)− lım
x→+∞f (x).
Demostración. Para cada n ∈ N, pongamos
sn =n
∑k=1
f (k), tn =∫ n
1f , dn = sn− tn.
Entonces
dn =n
∑k=1
f (k)−n−1∑k=1
∫ k+1
kf = f (n)+
n−1∑k=1
(f (k)−
∫ k+1
kf (x)dx
)= f (n)+
n−1∑k=1
∫ k+1
k[ f (k)− f (x)]dx≥ 0.
Como
dn−dn+1 = sn− tn− sn+1+ tn+1 =∫ n+1
nf (x)dx− f (n+1)
=∫ n+1
n[ f (x)− f (n+1)]dx≥ 0,
se sigue que (dn) es monótona no creciente y acotada inferiormente por 0, con lo que existe C =lımndn ∈ [0,+∞) y, en consecuencia, (sn) y (tn) serán simultáneamente convergentes o divergentes.
Puesto que f ≥ 0, la convergencia de (tn) equivale asimismo a la de la integral∫ +∞1 f , luego esta
integral converge si y solo si converge la serie ∑∞n=1 f (n). Con esto hemos demostrado a) y b).

178 Capítulo 8. Series numéricas
En cuanto a c), la igualdad se cumple trivialmente si definimos εn = sn− tn−C = dn−C; lo quehay que probar es que
0≤ εn ≤ f (n)− lımx→+∞
f (x).
Observemos que
0≤ dn−dn+1 =∫ n+1
nf (x)dx− f (n+1)≤
∫ n+1
nf (n)dx− f (n+1) = f (n)− f (n+1).
Reiterando, para cualquier número natural m> n resulta:
0≤ dn−dn+1 ≤ f (n)− f (n+1),0≤ dn+1−dn+2 ≤ f (n+1)− f (n+2),
. . .
0≤ dm−1−dm ≤ f (m−1)− f (m).
Al sumar las desigualdades resulta que
0≤ dn−dm ≤ f (n)− f (m).
Pasando al límite en m, y teniendo en cuenta que lımx→+∞
f (x) existe por ser f monótona no creciente,obtenemos
0≤ dn−C ≤ f (n)− lımx→+∞
f (x).
Como εn = dn−C, hemos terminado la demostración.Aplicaciones. a) La constante γ de Euler. Aplicando los resultados que acabamos de obtener a lafunción f dada por f (x) = 1/x y teniendo en cuenta que∫ n
1
1xdx= logn,
podemos escribir la suma parcial n-ésima de la serie armónica como
Hn =n
∑k=1
1k
= logn+ γ + εn,
donde 0≤ εn ≤ 1/n yγ = lım
n
(n
∑k=1
1k− logn
)= 0,5772156649 . . .
es un número introducido por Euler en 1734 en el estudio de la función Γ, definida también por él.Euler obtuvo sus dieciséis primeras cifras decimales en 1781. No se sabe todavía si es un númeroracional o irracional (ver [LE LIONNAIS, pág. 28]).
b) La función ζ de Riemann. El criterio 8.2.8 de la integral permite comprobar fácilmente que laserie
∞
∑n=1
1ns
converge si y solo si s> 1. La función
ζ (s) =∞
∑n=1
1ns
, s> 1,

8.3. Series de términos cualesquiera 179
se denomina función zeta de Riemann y tiene importantes aplicaciones (especialmente en teoría denúmeros). Hay expresiones más o menos sencillas para ζ (2n), n ∈ N, pero no para otros valores. Se
sabe por ejemplo que ζ (2) =π2
6 , ζ (4) =π4
90 . Hasta fechas recientes (R. Apéry, 1978) no se habíapodido probar siquiera que ζ (3) es irracional: ver [LE LIONNAIS, pág. 36].
c) Series logarítmicas. También mediante el criterio de la integral se prueba que la serie
∞
∑n=2
1n(logn)s
converge si y solo si s> 1 (ver [APOSTOL1, pág. 486]).
Por comparación con las series anteriores se deducen inmediatamente los siguientes criterios deconvergencia:
Proposición 8.2.9 (criterio de Pringsheim). Sea ∑∞n=1 an una serie de términos no negativos tal que
para algún α ∈ R existe el límitelımn→∞
nαan = ! ∈ [0,+∞].
Entonces:
a) Si α > 1 y ! < +∞, la serie ∑∞n=1 an converge.
b) Si α ≤ 1 y ! > 0, la serie ∑∞n=1 an diverge (a +∞).
Proposición 8.2.10 (criterios logarítmicos). Sea ∑∞n=1 an una serie de términos no negativos tal que
existe alguno de los dos límites A= lımn→∞
− loganlogn , B= lım
n→∞
− log(nan)log(logn) . Entonces:
a) Si A> 1, la serie ∑∞n=1 an es convergente; si A< 1, diverge a +∞.
b) Si B> 1, la serie∑∞n=1 an es convergente; si B< 1, diverge a +∞.
8.3. Series de términos cualesquiera
8.3.1. Series alternadas: criterio de LeibnizProposición 8.3.1 (criterio de Leibniz). Sea ∑∞
n=1 xn una serie alternada, es decir, una serie talque para cada n ∈ N es xn = (−1)n+1an con an ≥ 0. Si (an) es una sucesión no creciente con límite0, entonces la serie ∑∞
n=1 xn = ∑∞n=1(−1)n+1an es convergente. Además, denotando con sn la suma
parcial n-ésima de la serie y con s su suma, se verifican para todo n ∈ N las desigualdades
0≤ (−1)n(sn+2− sn)≤ an+1, (8.1)0≤ (−1)n(s− sn)≤ an+1. (8.2)
Nota. De (8.1) se sigue que las sumas de orden par forman una sucesión no decreciente y las sumasde orden impar una sucesión no creciente. Las desigualdades (8.2) pueden interpretarse del siguientemodo: si tomamos sn como valor aproximado de s, el error que cometemos es menor o igual quean+1, de modo que si (an) converge rápidamente a 0 obtenemos una buena aproximación de la sumamediante una suma parcial de pocos términos.

180 Capítulo 8. Series numéricas
Demostración. Obsérvese que dado k ∈ N, la diferencia
−(s2k+1− s2k−1) = a2k−a2k+1es mayor o igual que 0 por ser (an) decreciente, y menor o igual que a2k por ser a2k+1 ≥ 0, lo queda (8.1) en el caso n= 2k−1. Para n= 2k es
s2k+2− s2k = a2k+1−a2k+2,que análogamente es mayor o igual que 0 y menor o igual que a2k+1, lo que completa la prueba de (8.1)para todos los casos. Además, hemos obtenido que (s2k) es una sucesión no decreciente. Como
s2k = a1− [(a2−a3)+ · · ·+(a2k−2−a2k−1)+a2k]≤ a1,
(s2k) está acotada superiormente, luego es convergente. Sea s su límite. Puesto que
s2k−1 = s2k +a2k
y a2k→ 0, resulta que
lımks2k−1 = lım
k(s2k +a2k) = lım
ks2k + lım
ka2k = s+0= s.
Es decir: tanto la subsucesión de términos pares como la de términos impares de (sn) son convergentescon límite s. Esto permite afirmar que (sn) es convergente con límite s, es decir, que ∑+∞
n=1 xn = s.Finalmente, puesto que para cada n ∈ N es
s= x1+ · · ·+ xn++∞
∑k=n+1
xk = sn++∞
∑k=n+1
(−1)k+1ak,
se sigue que
(−1)n(s− sn) =+∞
∑k=n+1
(−1)n+k+1ak
= an+1−an+2+ lımm
[(an+3−an+4)+ · · ·+(an+2m+1−an+2m+2)]
≥ an+1−an+2 ≥ 0y que
(−1)n(s− sn) =+∞
∑k=n+1
(−1)n+k+1ak
= an+1− lımm [(an+2−an+3)+ · · ·+(an+2m−an+2m+1)]
≤ an+1,
lo que prueba (8.2).
Ejemplo. La serie armónica alternada∞
∑n=1
(−1)n−1n

8.3. Series de términos cualesquiera 181
es convergente. Además, su suma se calcula fácilmente utilizando la constante de Euler. En efecto:para cada n ∈ N, sumando y restando términos, se tiene
2n
∑k=1
(−1)k+1k
= 1− 12 +13 −
14 + · · ·+ 1
2n−1 −12n
= 1+12 +
13 +
14 + · · ·+ 1
2n−1 +12n −2
(12 +
14 + · · ·+ 1
2n
)= H2n−Hn = log2n+ γ + ε2n− logn− γ− εn = log2+ ε2n− εn.
Como sabemos ya que la serie armónica alternada es convergente, podemos escribir:
+∞
∑k=1
(−1)k+1k
= lımm
m
∑k=1
(−1)k+1k
= lımn
2n
∑k=1
(−1)k+1k
= log2.
Ejemplo. La serie∞
∑n=2
(−1)n lognn
es convergente. En efecto, es fácil comprobar que la función f (x) =logxx
es decreciente en [3,+∞)
(por ejemplo, calculando f ′). Además, lognn
≥ 0 y lognn
→ 0. De aquí se deduce que la serie converge,sumando desde n= 3, y por lo tanto también sumando desde n= 2..
8.3.2. Series absolutamente convergentes
Definición 8.3.2. Una serie ∑∞n=1 an se dice absolutamente convergente si la serie ∑∞
n=1 |an| es con-vergente.
El ejemplo más sencillo de serie convergente que no converge absolutamente es la serie armónicaalternada.
Observación. Si ∑∞n=1 an y ∑∞
n=1 bn son dos series absolutamente convergentes y r,s ∈ R, entoncesla serie ∑∞
n=1(ran + sbn) también es absolutamente convergente. Esto se deduce de la desigualdad|ran+ sbn|≤ |r||an|+ |s||bn| y el criterio 8.2.2 de mayoración.
Definición 8.3.3. Para un número real cualquiera x, escribamos
x+ =max{x,0}, x− =max{−x,0}. (8.3)
Es fácil comprobar que |x| = x+ + x−, x= x+− x−, x+ ≥ 0, x− ≥ 0.
Proposición 8.3.4. Toda serie absolutamente convergente es convergente: dicho de otro modo, si∑∞n=1 |an| converge, entonces la serie ∑∞
n=1 an también converge. Y en ese caso,∣∣∣∣∣ ∞
∑n=1
an
∣∣∣∣∣≤ ∞
∑n=1
|an|.

182 Capítulo 8. Series numéricas
Demostración. Con la notación (8.3),
0≤ a+n ≤ |an|, 0≤ a−n ≤ |an|,
luego las dos series ∑∞n=1 a+
n y ∑∞n=1 a−n convergen. Como an = a+
n − a−n , la serie ∑∞n=1 an también
converge. Además, para cada n ∈ N ∣∣∣∣∣ n
∑k=1
ak
∣∣∣∣∣≤ n
∑k=1
|ak|,
por la desigualdad triangular. Pasando al límite (una vez que ya sabemos que las dos series convergen),∣∣∣∣∣ ∞
∑k=1
ak
∣∣∣∣∣≤ ∞
∑k=1
|ak|.
8.3.3. Criterios generales de Cauchy (de la raíz) y de D’Alembert (del cociente)Los criterios que hemos visto sobre convergencia de series de términos no negativos se traducen
de manera obvia en criterios de convergencia absoluta para series de términos cualesquiera. Así:
Proposición 8.3.5 (criterio de la raíz o de Cauchy). Sea ∑∞n=1 an una serie tal que existe R =
lımn→∞
n√
|an|.a) Si R< 1, la serie ∑∞
n=1 an converge absolutamente.
b) Si R> 1, entonces an %→ 0 y la serie ∑∞n=1 an no es convergente.
Demostración. a) Supongamos que R< 1. Sea R< c< 1. Entonces existirá algún n0 tal que n√|an|≤ c
para todo n≥ n0. Por lo tanto,0≤ |an|≤ cn, n≥ n0.
Como 0 < c < 1, la serie geométrica ∑∞n=n0 c
n converge y por lo tanto la serie ∑∞n=n0 |an| converge, y
la serie ∑∞n=1 |an| también converge.
b) Supongamos que R> 1. Entonces existirá algún n0 tal que n√|an|≥ 1 para todo n≥ n0. Por lo
tanto,|an|≥ 1, n≥ n0.
Entonces, an %→ 0 y la serie ∑∞n=1 an no es convergente.
Proposición 8.3.6 (criterio del cociente o de D’Alembert). Sea ∑∞n=1 an una serie tal que existe
R= lımn→∞
|an+1||an| .
a) Si R< 1, la serie ∑∞n=1 an converge absolutamente.
b) Si R> 1, entonces an %→ 0 y la serie ∑∞n=1 an no es convergente.
Demostración. a) Supongamos que R< 1. Sea R< c< 1. Entonces existirá algún n0 tal que |an+1||an| ≤ c
para todo n≥ n0. Por lo tanto,|an+1|≤ c|an|, n≥ n0.
De aquí es fácil deducir por inducción que
0≤ |an|≤ |an0 |cn0
cn, n≥ n0.

8.4. Propiedad conmutativa para series 183
Como 0 < c < 1, la serie geométrica ∑∞n=n0 c
n converge y por lo tanto la serie ∑∞n=n0 |an| converge, y
la serie ∑∞n=1 |an| también converge.
b) Supongamos que R > 1. Entonces existirá algún n0 tal que |an+1||an| ≥ 1 para todo n ≥ n0. Por lo
tanto,|an+1|≥ |an|, n≥ n0.
Entonces, la sucesión |an| no tiende a 0 (es no decreciente), luego an %→ 0 y la serie ∑∞n=1 an no es
convergente.
8.3.4. Criterios de convergencia de Abel y DirichletEl criterio 8.3.1 de Leibniz nos ha permitido encontrar series que convergen pero no absolutamen-
te. Para ampliar la lista de criterios que no se refieren a la convergencia absoluta añadimos los másconocidos, de Abel y Dirichlet, que se obtienen de una interesante fórmula de sumación por partes:
Lema 8.3.7 (fórmula de sumación por partes de Abel). Sean (an)∞n=1, (bn)∞n=1 dos sucesiones arbi-trarias, y llamemos, para cada n,
An =n
∑k=1
ak
(suma parcial n-ésima de la serie ∑∞n=1 an) Entonces
n
∑k=1
akbk = Anbn+1+n
∑k=1
Ak(bk−bk+1)
cualquiera que sea n ∈ N.
Demostración. Ver [APOSTOL1, pág. 497].
Proposición 8.3.8 (criterio de Abel). Si (an)∞n=1 es una sucesión monótona y acotada, y ∑∞n=1 bn es
una serie convergente, la serie ∑∞n=1 anbn es convergente.
Demostración. Ver [APOSTOL1, pág. 498].
Proposición 8.3.9 (criterio de Dirichlet). Si (an)∞n=1 es una sucesión monótona que converge a 0, y∑∞n=1 bn es una serie cuya sucesión de sumas parciales está acotada, la serie∑∞
n=1 anbn es convergente.
Demostración. Ver [APOSTOL1, págs. 497–498].
8.4. Propiedad conmutativa para series¿Qué sucede cuando en una serie se cambia el orden de los sumandos? Se puede demsotrar que
las únicas series inalterables por estos cambios son las absolutamente convergentes; en general, pues,las series no mantienen la propiedad conmutativa de las sumas finitas. Precisemos estos conceptos.
Definición 8.4.1. Dada una serie ∑∞n=1 an, se dice que otra serie ∑∞
n=1 bn es una reordenación suyasi existe una aplicación biyectiva r : N→ N tal que, para cada n ∈ N,
bn = ar(n).
Nótese que, recíprocamente, ∑∞n=1 an es una reordenación de ∑∞
n=1 bn, pues la inversa r−1 es igual-mente una biyección.

184 Capítulo 8. Series numéricas
Informalmente, una serie es una reordenación de otra si tiene exactamente los mismos términos,pero en otro orden. Que una serie tenga la propiedad conmutativa significará, así, que tenga suma yque cualquier reordenación suya tenga la misma suma. Vamos a dar un nombre especial a las seriesconvergentes con la propiedad conmutativa.
Definición 8.4.2. Una serie se denomina incondicionalmente convergente si es convergente y sitoda reordenación suya es asimismo convergente, y con la misma suma.
Decimos que una serie es condicionalmente convergente si es convergente pero no incondicio-nalmente convergente, de modo que alguna reordenación suya o bien no es convergente o converge auna suma distinta.
Lema 8.4.3. Dada una serie ∑∞n=1 an de términos no negativos y una reordenación suya ∑∞
n=1 bn, setiene:
a) si ∑∞n=1 an es convergente con suma s, también ∑∞
n=1 bn es convergente con suma s.
b) si ∑∞n=1 an es divergente a +∞, también ∑∞
n=1 bn es divergente a +∞.
Demostración. a) Sea r : N→ N tal que bn = ar(n) para cada n ∈ N. Para cada n ∈ N definamos
m(n) =max{r(1),r(2), . . . ,r(n)}.
Denotando con tn la suma parcial n-ésima de ∑∞n=1 bn será entonces
tn = ar(1) +ar(2) + · · ·+ar(n) ≤ a1+a2+ · · ·+am(n) ≤ s,
lo que prueba que∑∞n=1 bn es convergente con suma menor o igual que s. Como a su vez∑∞
n=1 an es unareordenación de ∑∞
n=1 bn, por el mismo motivo su suma será menor o igual que la suma de ∑∞n=1 bn, lo
que implica la igualdad entre ambas sumas.b) En caso contrario, ∑∞
n=1 bn sería convergente y entonces ∑∞n=1 an, reordenación suya, también
convergería.
Proposición 8.4.4. Toda serie absolutamente convergente es incondicionalmente convergente.
Demostración. Si la serie ∑∞n=1 |an| converge, aplicamos el lema 8.4.3 a las series ∑∞
n=1 a+n y ∑∞
n=1 a−n(que también convergen) y por último recordamos que an = a+
n −a−n .El recíproco también es cierto: más aún, una serie convergente que no converja absolutamente po-
see reordenaciones que van a parar donde se desee: convergentes con suma arbitrariamente prefijada,divergentes a+∞, divergentes a−∞, oscilantes a capricho. Este es el contenido de un célebre teoremade Riemann.
Teorema 8.4.5 (de Riemann). Si una serie es convergente pero no absolutamente convergente, paracada ! ∈ [−∞,+∞] existe una reordenación suya con suma !; en general, dados !1, !2, . . . , !k, existeuna reordenación cuya sucesión de sumas parciales contiene subsucesiones que convergen a !1, !2,. . . , !k.
Demostración. Ver [GARAY-CUADRA-ALFARO, teor. 5.33, pág. 105], [ORTEGA, teor. 9.20, pág. 303].
Corolario 8.4.6 (teorema de Dirichlet). Una serie es incondicionalmente convergente si y solo si esabsolutamente convergente.

8.5. Apéndice: sumación de series 185
8.5. Apéndice: sumación de series
Resumimos las ideas fundamentales sobre el cálculo de las sumas de algunos tipos particulares deseries.
Series telescópicas
Si para cada n puede ponerse an = bn− bn+1, la serie∞
∑n=1
an converge si y solo si es convergente
la sucesión (bn), y si este es el caso,∞
∑n=1
an = b1− lımn bn.
Series geométricas
Si a %= 0, entonces la serie∞
∑n=1
arn−1 converge si y solo si |r| < 1; si converge,∞
∑n=1
arn−1 =a
1− r .
Series aritmético-geométricas
Si P es un polinomio no constante, la serie∞
∑n=0
P(n)rn converge si y solo si |r| < 1. Llamando S a
su suma, (1− r)S= P(0)+∞
∑n=1
[P(n)−P(n−1)]rn = P(0)+∞
∑n=1
Q(n)rn, donde Q es un polinomio de
grado menor que P; reiterando, se llega a una serie geométrica.
Series hipergeométricas
Son de la forma∞
∑n=1
an conan+1an
=αn+βαn+ γ
, α > 0. La serie converge si y solo si γ > α +β , con
suma γa1γ−α−β
Series racionales o de cocientes de polinomios
Series del tipo∑P(n)Q(n)
, donde P y Q son polinomios (el nombre no es estándar). Cuando conver-
gen, puede hallarse a veces su suma descomponiendo P/Q en fracciones simples y calculando la sumaparcial n-ésima, relacionándola con sumas de series conocidas. Pueden ser de ayuda las siguientes:
• Serie armónicaHn = 1+
12 +
13 + · · ·+ 1
n= logn+ γ + εn, donde γ es la constante de Euler y lımn εn = 0
• Función ζ de Riemann ζ (s) =∞
∑n=1
1ns, s> 1. En particular
ζ (2) =∞
∑n=1
1n2
=π2
6 , ζ (4) =∞
∑n=1
1n4
=π4
90 .

186 Capítulo 8. Series numéricas
Reordenadas de la serie armónica alternadaEn algunos casos pueden hallarse expresiones simplificadas de ciertas sumas parciales en términos
de Hn, y deducir así el comportamiento de la serie.
Series que se reducen a la exponencial
Partiendo de que para todo x ∈ R es∞
∑n=0
xn
n! = ex, se pueden sumar series de la forma∑P(n)n! xn,
donde P es un polinomio de grado m, sin más que reescribir
P(n) = a0n(n−1) · · ·(n−m+1)+a1n(n−1) · · ·(n−m+2)+ · · ·+am−1n+am
para coeficientes a0, . . . , am adecuados, y observar que
n(n−1) · · ·(n− k)n! =
1(n− k−1)! ,
si n> k.
8.6. EjerciciosEjercicio 8.1. Escribiéndolas como series telescópicas, estudiar las siguientes series:
a)∞∑n=1
12n · n+2
n(n+1) (descomponern+2
n(n+1) en fracciones simples).
b)∞∑n=13n sen3 a3n (obsérvese que senx= 3sen x3 −4sen
3 x3).
c)∞∑n=12n−1 tg2 a2n tg
a2n−1 (utilizar que tgx=
2tg x21− tg2 x2
).
d)∞∑n=1sen 12n cos
32n (tener en cuenta que cosxseny=
12 [sen(x+ y)− sen(x− y)]).
e)∞∑n=1
14n cos2(x/2n) (0< x< π/2; usar que 1
4cos2 a =1
sen2 2a −1
4sen2 a ).
Ejercicio 8.2. Estudiar el carácter de las series de término general:
a) sen4 nn2
b) 1√n−2/3 c) 1+n2
n!
d) cosn(a+
bn
)(0< a< π/2) e) n2+1
nan(a %= 0) f) n!
nn
g) 3nn2+1 h)
(n+1n
)−n3i) 1
logn
j) 1na+b
, (a,b) %= (0,0) k) sen(nx)n2
l) 1n−3/2

8.6. Ejercicios 187
m) 1n(n+1)(n+2) n) 1+ sen2(nx)
n2ñ) 1
nsen 1
n
o)√n+1−√n
np) n(n+1)
n2+2n q)(1n
)n+1/n
r) log(n+1)−1(1+n)2
s) 13− cos(1/n) t)
( xn
)nn!
u) 1
n(1+12 + · · ·+ 1
n)
v)1+
12 + · · ·+ 1
nn3 logn w) 1
(logn)2n
x) log n+1n
y) e−√n2+1 z) 1
(logn)p
A) xn√n
B) lognnp
C) log(1+
xn
)D) (−1)n
1+12 + · · ·+ 1
n
E) (−1)n(n+1)n! F) (n2+1)xn
(n+1)!
G) e1/n2− e1/(n2+1) H) (−1)n+1 nn2+1 I) (n!)2
(2n)!x2n
Ejercicio 8.3. Hallar la suma, si convergen, de las series de término general (para n ≥ 1, si no seindica otra cosa):
a) 4n−1(n+2)(n−1)2 , n≥ 2 b) 1
n(n+1) c) 2n+3n(n−1)(n+2) , n≥ 2
d) 1n2−1, n≥ 2 e) 1
4n2+16n+7 f) 1(n+1)2−4, n≥ 2
g) 3n2+7n+6n(n+1)(n+2)(n+3) i) 1
(n−1+√3)(n−2+
√3)(n+
√3)
h) n2+3n+1n2(n+1)2 j) n2(n+1)2
n! k) 3n(n−3)n!
l) n3−n+1n!3n m) 3n2+8n+6
(n+2)! , n≥ 3 n) n−1n!(n+2)
ñ) n3−1n! o) n2+1
(n+1)! p) n2+5n+7(n+2)! , n≥ 2
q) (−1)n−1 2n+1n(n+1) r) n(n+1)
2n s) n2
3n
t) (n+1)xn u) (−1)n n2−n3n v) 1
n√n+1+(n+1)
√n
w) log(
nn+1
)n− 12n +1
Ejercicio 8.4. Hallar la suma de las series:

188 Capítulo 8. Series numéricas
a) 1− 12 +13 −
14 +
15 −
16 + . . .
b) 14 −13 +
18 −
19 +
112 −
115 +
116 −
121 +
120 − . . .
c) 1+13 +
15 +
17 −
12 +
19 +
111 +
113 +
115 −
14 + . . .
d) 1+13 −
12 −
14 −
16 +
15 +
17 −
18 −
110 −
112 + . . .
e) 1+122 +
132 +
152 +
162 +
172 +
192 + . . .

Capítulo 9
Series de potencias. Desarrollos en seriede Taylor
En la representación (e incluso en la construcción) de funciones, desempeñan un papel especial-mente destacado cierto tipo de series, denominadas series de potencias. Los aspectos profundos de suestudio corresponden a la teoría de funciones de variable compleja más que a la teoría de funcionesde variable real, por lo que aquí damos simplemente algunas propiedades sencillas, suficientes paranuestros propósitos. Como referencia utilizamos [APOSTOL1].
9.1. Series de potencias
9.1.1. Convergencia de las series de potencias
Definición 9.1.1. Recibe el nombre de serie de potencias toda serie de la forma
∞
∑n=0
an(x− c)n.
El número real an se denomina coeficiente n-ésimo de la serie de potencias (obsérvese que el términon-ésimo de la serie es an(x− c)n). Si los coeficientes a0, a1, am−1 son nulos, la serie suele escribirse∞
∑n=m
an(x− c)n.
En cierto modo, se trata de una especie de polinomio con infinitos términos. Vamos a ver quelas funciones definidas como suma de una serie de potencias comparten muchas propiedades con lospolinomios.
¿Para qué valores de x converge una serie de potencias? Obviamente, es segura la convergenciapara x= c, con suma a0, y puede suceder que éste sea el único punto en el que la serie converge. Fuerade este caso extremo, la situación es bastante satisfactoria: veamos algunos ejemplos.
Ejemplos. a) La serie geométrica∞
∑n=0
xn
converge (absolutamente) si y solo si x ∈ (−1,1) (con suma 11−x , como sabemos).
189

190 Capítulo 9. Series de potencias. Desarrollos en serie de Taylor
b) La serie∞
∑n=1
xn
n
converge si y solo si x ∈ [−1,1). Si x ∈ (−1,1), converge absolutamente.c) La serie
∞
∑n=1
xn
n2
converge (absolutamente) si y solo si x ∈ [−1,1].d) La serie
∞
∑n=1
(−1)nx2nn
converge si y solo si x ∈ [−1,1]. Si x ∈ (−1,1), converge absolutamente.e) La serie
∞
∑n=0
xn
n!
converge (absolutamente) para todo x ∈ R (y la suma es ex).
f) La serie∞
∑n=0
n!xn
converge solamente para x= 0.
Lema 9.1.2. Si para algún r ∈ (0,+∞) la sucesión (anrn) está acotada, entonces para cada x ∈R tal
que |x− c| < r la serie∞
∑n=0
an(x− c)n es absolutamente convergente.
Demostración. Sea M tal que para todo n≥ 0 se tenga |anrn|≤M. Entonces
0≤ |an(x− c)n| = |an|rn( |x− c|
r
)n≤M
( |x− c|r
)n
y como la serie geométrica∞
∑n=0
( |x− c|r
)n
converge, se deduce que la serie∞
∑n=0
|an(x− c)n| también converge.
Definición 9.1.3. Dada una serie de potencias∞
∑n=0
an(x− c)n, su radio de convergencia es el valor(finito o infinito) dado por
R= sup{|x− c| :∞
∑n=0
an(x− c)n converge}.
Si R> 0, el intervalo (c−R,c+R) se denomina intervalo de convergencia de la serie de potencias.

9.1. Series de potencias 191
Teorema 9.1.4. Dada una serie de potencias∞
∑n=0
an(x− c)n con radio de convergencia R, se tiene:
a) Si |x− c| < R, la serie∞
∑n=0
an(x− c)n converge absolutamente.
b) Si |x− c| > R, la serie no converge y la sucesión (an(x− c)n) no está acotada.
Nota. Según los ejemplos previos, cuando R es finito no puede decirse nada en general sobre laconvergencia en los puntos c+R, c−R.
Demostración. De la definición de R se deduce que si |x− c| < R, debe existir un punto x1 tal que
|x− c| < |x1− c| y∞
∑n=0
an(x1− c)n converge. Aplicando el lema 9.1.2,∞
∑n=0
an(x− c)n debe convergerabsolutamente. Esto demuestra a). La parte b) es una consecuencia directa de la definición de R.
Ejemplos. a) La serie∞
∑n=1
xn tiene radio de convergencia 1. Para x= 1 diverge a+∞ y para x=−1es oscilante.
b) La serie∞
∑n=1
xn
ntiene radio de convergencia 1. Para x = 1 diverge a +∞ y para x = −1 es
convergente (pero no absolutamente).
c) La serie∞
∑n=1
xn
n2tiene radio de convergencia 1. Para x= 1 y para x=−1 es convergente (absolu-
tamente).
Observación. Existe una fórmula que permite expresar el radio de convergencia de una serie de
potencias∞
∑n=0
an(x−c)n en función de sus coeficientes. Se trata de la fórmula de Cauchy-Hadamard:
R=1
lımsupn n√|an|
.
Sin embargo, en los ejemplos habituales es más cómodo realizar directamente el estudio de la con-vergencia de las series para los distintos valores de x, generalmente con ayuda del criterio 8.3.6 delcociente o del criterio 8.3.5 de la raíz.
En la fórmula de Cauchy-Hadamard, an es exactamente el coeficiente de (x− c)n, de modo que sise quiere utilizar por ejemplo para hallar el radio de convergencia de la serie
∞
∑n=0
x2n, hay que calcular
(lımsup n√|an|)−1 donde an = 1 si n es par y an = 0 si n es impar (¿cuál es este límite superior?);
por suerte, en este y en casi todos los ejemplos usuales podemos evitar este cálculo si recurrimos a ladefinición de radio de convergencia y al estudio directo de la convergencia de las series.
Este ejemplo muestra también por qué hay que usar obligadamente límite superior en la fórmula:el límite no tiene por qué existir.

192 Capítulo 9. Series de potencias. Desarrollos en serie de Taylor
9.1.2. Propiedades de las funciones representadas por series de potencias
La suma de una serie de potencias de radio no nulo define en su intervalo de convergencia unafunción
f (x) =∞
∑n=0
an(x− c)n.
Se dice entonces que la serie representa a la función f en el intervalo de convergencia y que es eldesarrollo en serie de potencias de la función f en el punto c.
Se plantean entonces de manera natural dos problemas (ver [APOSTOL1, págs. 528–529]):
• dada la serie, hallar propiedades de la función suma;• dada una función, averiguar si se puede representar por una serie de potencias (suele decirseentonces que la función es desarrollable en serie de potencias).
Lema 9.1.5. Sea∞
∑n=0
an(x−c)n una serie de potencias con radio de convergencia R. Entonces la serie∞
∑n=1
nan(x− c)n−1 tiene también radio de convergencia R.
Demostración. Se trata de probar que la serie∞
∑n=1
nan(x−c)n−1 converge (absolutamente) si |x−c| <R y que no converge si |x− c| > R.
Sea |x− c| < R. Podemos elegir algún y ∈ R tal que |x− c| < |y− c| < R; entonces,
|nan(x− c)n−1| = |an(y− c)n| ·∣∣∣∣n(x− c)n−1(y− c)n
∣∣∣∣ .Como
lımn
∣∣∣∣n(x− c)n−1(y− c)n∣∣∣∣ = lım
n
n|y− c|
∣∣∣∣x− cy− c∣∣∣∣n−1 = 0,
esta sucesión está acotada, es decir, hay alguna constanteM > 0 tal que para todo n∣∣∣∣n(x− c)n−1(y− c)n∣∣∣∣≤M.
Por lo tanto, para todo n|nan(x− c)n−1|≤M|an(y− c)n|.
Según el teorema 9.1.4, la serie∞
∑n=1
|an(y− c)n| converge, así que la serie∞
∑n=1
nan(x− c)n−1 convergeabsolutamente.
Si, por el contrario, |x−c|>R, entonces la sucesión (an(x− c)n) no está acotada, luego la sucesión(nan(x− c)n) tampoco lo está y la serie
∞
∑n=1
nan(x− c)n−1
no converge.

9.1. Series de potencias 193
Teorema 9.1.6. Sea∞
∑n=0
an(x− c)n una serie de potencias de radio R> 0 y sea
f (x) =∞
∑n=0
an(x− c)n,
definida si |x− c| < R. Entonces la función f es derivable y si |x− c| < R se tiene
f ′(x) =∞
∑n=1
nan(x− c)n−1.
Demostración. Supongamos, para simplificar la notación, que c= 0. Es decir,
f (x) =∞
∑n=0
anxn,
definida si |x| < R, y se trata de probar que f es derivable y que
f ′(x) =∞
∑n=1
nanxn−1,
si |x| < R. Sea |x| < s< R y sea y ∈ (−s,s), y &= x. Entonces,f (y)− f (x)y− x =
∞
∑n=0
anyn− xny− x =
∞
∑n=1
anyn− xny− x .
Según el lema 9.1.5, la serie∞
∑n=1
nanxn−1 converge.
f (y)− f (x)y− x −
∞
∑n=1
nanxn−1 =∞
∑n=1
an[yn− xny− x −nxn−1
]=
∞
∑n=2
an[yn− xny− x −nxn−1
].
Ahora bien, para cada n≥ 2,yn− xny− x −nxn−1 =
(yn−1+ yn−2x+ yn−3x2+ · · ·+ yxn−2+ xn−1
)−nxn−1= (y− x)(yn−2+2yn−3x+3yn−4x2+ · · ·+(n−2)yxn−3+(n−1)xn−2) .
Tomando valores absolutos y teniendo en cuenta que |x| < s, |y| < s, se deduce que∣∣∣∣yn− xny− x −nxn−1∣∣∣∣≤ |y− x|(1+2+3+ · · ·+(n−1))sn−2 = |y− x|n(n−1)2 sn−2.
Según el lema 9.1.5, aplicado dos veces, y el teorema 9.1.4, la serie∞
∑n=2
n(n− 1)ansn−2 converge
absolutamente. Sea M =∞
∑n=2
n(n−1)|an|sn−2. Hemos demostrado que∣∣∣∣∣ f (y)− f (x)y− x −
∞
∑n=1
nanxn−1∣∣∣∣∣≤ ∞
∑n=2
|an| |y− x|n(n−1)2 sn−2 =M|y− x|2 .
Por consiguiente,
lımy→x
f (y)− f (x)y− x −
∞
∑n=1
nanxn−1 = 0,
que es lo que teníamos que demostrar.

194 Capítulo 9. Series de potencias. Desarrollos en serie de Taylor
La aplicación reiterada de este resultado permite afirmar:
Corolario 9.1.7. Sea∞
∑n=0
an(x− c)n una serie de potencias de radio R> 0 y sea
f (x) =∞
∑n=0
an(x− c)n
si |x− c| < R. Entonces f tiene derivadas de todos los órdenes en (c−R,c+R), y se cumple
f (k)(x) =∞
∑n=k
n(n−1) · · ·(n− k+1)an(x− c)n−k.
En consecuenciaan =
f (n)(c)n! ,
de manera que las sumas parciales de la serie son los correspondientes polinomios de Taylor de f enel punto c.
Demostración. La primera parte se prueba por inducción sobre k. Para la segunda, tomando en par-ticular x= c, se sigue que f (n)(c) = n!an.
Corolario 9.1.8. Si dos series de potencias∞
∑n=0
an(x− c)n y∞
∑n=0
bn(x− c)n tienen la misma función
suma f en un cierto entorno del punto c, entonces las dos series tienen los mismos coeficientes: enrealidad, para todo n≥ 0 se cumple
an = bn =f (n)(c)n! .
El teorema 9.1.6 muestra que la derivación de una serie de potencias se hace derivando cada unode sus términos, como si fuese un polinomio; esto permite sumar fácilmente determinadas series apartir de otras de sumas conocidas.
Ejemplo. Puesto que∞
∑n=0
xn =1
1− x si |x| < 1, para estos valores de x se tiene∞
∑n=1
nxn−1 =1
(1− x)2 ;
y, en general,∞
∑n=k
n(n−1) · · ·(n− k+1)xn−k = k!(1− x)−k−1.
También es útil comprobar que se puede integrar término a término.
Teorema 9.1.9. Sea∞
∑n=0
an(x− c)n una serie de potencias de radio R> 0 y sea
f (x) =∞
∑n=0
an(x− c)n, x ∈ (c−R,c+R).
Entonces la serie∞
∑n=0
ann+1(x− c)n+1
tiene radio R, y si F es una primitiva de f en (c−R,c+R), para cada x ∈ (c−R,c+R) se verifica
F(x) = F(c)+∞
∑n=0
ann+1(x− c)n+1.

9.1. Series de potencias 195
Demostración. Ya sabemos, por el lema 9.1.5, que las series∞
∑n=0
ann+1(x− c)n+1,
∞
∑n=0
an(x− c)n
tienen el mismo radio de convergencia. Sea
g(x) =∞
∑n=0
ann+1(x− c)n+1, x ∈ (c−R,c+R).
El teorema 9.1.9 prueba que g tiene derivada en (c−R,c+R) igual a f , es decir, que g es una primitivade f en (c−R,c+R), por lo que F y g difieren en una constante. Como g(c) = 0, se sigue que
F(x)−g(x) = F(c).
Ejemplo. Partimos de∞
∑n=0
xn =1
1− x , que es válido si |x| < 1, y sustituimos x por −x:
∞
∑n=0
(−1)nxn =1
1+ x;
es válido si |− x| < 1, es decir, si |x| < 1. Como log(1+ x) es una primitiva de 11+x en (−1,1),
deducimos que
log(1+ x) = log1+∞
∑n=0
(−1)nn+1 x
n+1 =∞
∑n=1
(−1)n−1n
xn,
si x ∈ (−1,1).
Ejemplo. Partimos de nuevo de∞
∑n=0
xn =1
1− x , que es válido si |x| < 1, y sustituimos x por −x2:
∞
∑n=0
(−1)nx2n =1
1+ x2;
esto es válido si |− x2| < 1, es decir, si |x| < 1. Como arc tgx es una primitiva de 11+x2 , resulta que
arc tgx= arc tg0+∞
∑n=0
(−1)n2n+1x
2n+1 =∞
∑n=0
(−1)n2n+1x
2n+1,
si x ∈ (−1,1).Hemos visto que en los extremos del intervalo de convergencia la serie puede no converger; si lo
hace, es interesante disponer de algún resultado que, bajo ciertas condiciones, garantice que la funcióndefinida por la serie sea cuando menos continua, como el siguiente lema (su demostración puede verseen [ROSS, teor. 26.6, págs. 147–148]).
Lema 9.1.10 (de Abel). Sea∞
∑n=0
an(x−c)n una serie de potencias de radio de convergencia R positivo
y finito, y supongamos que la serie∞
∑n=0
anRn es convergente. Entonces
∞
∑n=0
anRn = lımx→(c+R)−
∞
∑n=0
an(x− c)n.

196 Capítulo 9. Series de potencias. Desarrollos en serie de Taylor
Ejemplo. Demostrar mediante el lema de Abel que∞
∑n=1
(−1)n−1n
= log2;∞
∑n=0
(−1)n2n+1 =
π4 .
9.2. Desarrollos en serie de TaylorEl teorema 5.4.8 de Taylor y el corolario 9.1.7 pueden inducir a pensar que si una función f tiene
derivadas de todos los órdenes, es representable como suma de su serie de Taylor
f (x) =∞
∑n=0
f (n)(c)n! (x− c)n
(como una especie de fórmula de Taylor llevada al límite) en la parte del dominio de f donde tal serieconverja. Sin embargo, la situación real no es tan satisfactoria. Por ejemplo, la función
f (x) =
{e−1/x2 si x> 0,0 si x≤ 0,
tiene derivadas de todos los órdenes en cada punto de R, y en 0 es f (n)(0) = 0 para cada n ∈ N. Por
consiguiente, la fórmula f (x) =∞
∑n=0
f (n)(0)n! xn solo se cumple para x= 0.
Se puede demostrar que para que una función f coincida con la suma de su serie de Taylor esnecesario que sus derivadas sucesivas no tengan un tamaño desmesurado. En aplicaciones concretases suficiente comprobar que las derivadas están acotadas por potencias sucesivas de una constante,como vamos a ver ahora.
Proposición 9.2.1. Sea f una función con derivadas de todos los órdenes en un intervalo (c−R,c+R). Supongamos que existan números reales no negativos A y B tales que
| f (n)(x)|≤ B ·An siempre que |x− c| < R.
Entonces, para todo x ∈ (c−R,c+R) se verifica
f (x) =∞
∑n=0
f (n)(c)n! (x− c)n.
Demostración. Sea |x−c| < R. Si x &= c, dado m ∈N, aplicando la fórmula de Taylor (teorema 5.4.8)podemos escribir, para algún tm comprendido entre x y c,∣∣∣∣∣ f (x)− m
∑n=0
f (n)(c)n! (x− c)n
∣∣∣∣∣ =∣∣ f (m+1)(tm)
∣∣(m+1)! |x− c|m+1 ≤ B Am+1
(m+1)! |x− c|m+1.
Por lo tanto, la expresión de la izquierda tiende a 0 cuando m→ ∞, es decir, la serie converge y susuma es f (x).
Ejemplo. La función f (x) = senx cumple | f (n)(x)|≤ 1 para todo n≥ 0 y todo x ∈R. Tomamos c= 0en la proposición 9.2.1 y deducimos que
f (x) =∞
∑n=0
f (n)(0)n! xn

9.2. Desarrollos en serie de Taylor 197
para todo x ∈ R. Ahora bien,
f (n)(0) =
{(−1)n/2 sen0= 0, si n es par,(−1)(n−1)/2 cos0= (−1)(n−1)/2, si n es impar,
luego en la serie solo aparecen los sumandos con n= 2k+1 y queda
senx=∞
∑k=0
(−1)k(2k+1)!x
2k+1,
para todo x ∈ R. El mismo razonamiento con la función coseno prueba que
cosx=∞
∑k=0
(−1)k(2k)! x
2k,
para todo x ∈ R. También se puede obtener derivando el desarrollo de la función seno.
Ejemplo. Tomemos ahora f (x) = ex. Fijado cualquier R> 0, tenemos
0≤ f (n)(x)≤ eR,
para todo n≥ 0 y todo x∈ (−R,R). Tomamos c= 0 en la proposición 9.2.1 y como f (n)(0) = 1 resulta
ex =∞
∑n=0
1n!x
n
para todo x ∈ (−R,R). Como R es arbitrario, el desarrollo es válido para cualquier x ∈ R.
Nota. Si reflexionamos un momento, tenemos ante nosotros una manera rigurosa de construir lasfunciones seno, coseno, exponencial. Las series que hemos escrito son series de potencias de radio+∞, que definen sendas funciones en R; otra cuestión es que resulte fácil o complicado demostrar queestas funciones gozan de las propiedades que venimos utilizando en relación con el seno, el coseno yla exponencial. Dedicaremos a su estudio el último capítulo, para que sirva a su vez de muestra de laenorme potencia de los conocimientos que hemos ido adquiriendo a lo largo del curso.
Para comprobar la validez de ciertos desarrollos es a veces más conveniente usar otros recursos,en lugar de la fórmula de Taylor.
Ejemplo (serie binómica). Veamos que para cada α ∈ R es
(1+ x)α =∞
∑n=0
(αn
)xn, siempre que |x| < 1.
Para α ∈ N∪ {0}, esta fórmula se reduce a la del binomio de Newton y es válida para todo x ∈ R.Suponemos, pues, α /∈ N∪{0}. El criterio 8.3.6 del cociente nos da que el radio de convergencia dela serie es 1, luego podemos definir una función
f (x) =∞
∑n=0
(αn
)xn, x ∈ (−1,1),

198 Capítulo 9. Series de potencias. Desarrollos en serie de Taylor
que, en principio, no tiene por qué coincidir con (1+ x)α en dicho intervalo. Pero como
f ′(x) =∞
∑n=1
n(
αn
)xn−1,
de
n(
αn
)+(n+1)
(α
n+1
)= nα(α−1) · · ·(α−n+1)
n! +(n+1)α(α−1) · · ·(α−n+1)(α−n)(n+1)!
= nα(α−1) · · ·(α−n+1)n! +
α(α−1) · · ·(α−n+1)(α−n)n!
= [n+(α−n)]α(α−1) · · ·(α−n+1)n!
= α(
αn
),
se deduce que f ′(x)(1+ x) = α f (x), por lo que f (x)/(1+ x)α tiene derivada nula y por tanto semantiene constante en todo el intervalo (−1,1). Tomando x= 0 se sigue que el valor de tal constantees 1, es decir, que f (x) = (1+ x)α para todo x ∈ (−1,1).
De especial interés resulta el caso particular α =−1/2. Entonces,(−1/2n
)=
(−12) · (−3
2) · (−5
2) · · ·(−1
2 −n+1)n!
= (−1)n 1 ·3 ·5 · · ·(2n−1)2n(n!)
= (−1)n 1 ·3 ·5 · · ·(2n−1)2 ·4 ·6 · · ·(2n) ,
con lo cual1√1+ x
=∞
∑n=0
(−1)n 1 ·3 ·5 · · ·(2n−1)2 ·4 ·6 · · ·(2n) xn, −1< x< 1.
Del criterio 8.3.1 de Leibniz y del lema 9.1.10 de Abel se sigue que esta fórmula también es válidapara x= 1.
A veces se escribe abreviadamente
1 ·3 ·5 · · ·(2n−1) = (2n−1)!!, 2 ·4 ·6 · · ·(2n) = (2n)!!.
Aplicación. A partir del desarrollo de su derivada se obtiene
arcsenx=∞
∑n=0
1 ·3 ·5 · · ·(2n−1)2 ·4 ·6 · · ·(2n) · x
2n+1
2n+1 , −1< x< 1,
válido también para |x| = 1, por el lema de Abel.
Ponemos final a este capítulo con una lista de los desarrollos en serie de Taylor-Maclaurin de lasfunciones que más frecuentemente aparecen en los ejercicios.
a) 11− x =
∞∑n=0
xn = 1+ x+ x2+ · · ·+ xn+ . . . , si −1< x< 1.

9.3. Ejercicios 199
b) (1+x)α =∞∑n=0
(αn
)xn = 1+αx+ α(α−1)
2! x2+ · · ·+ α(α−1) . . .(α−n+1)n! xn+ . . . , si−1<
x< 1.
c) log(1+ x) =∞∑n=1
(−1)n−1n
xn = x− 12x2+
13x
3− 14x4+ . . . , si −1< x≤ 1.
d) ex =∞∑n=0
1n!x
n = 1+ x+12x
2+13!x
3+14!x
4+ . . . , para todo x ∈ R.
e) senx=∞∑n=0
(−1)n(2n+1)!x
2n+1 = x− 13!x
3+15!x
5− 17!x
7+ . . . , para todo x ∈ R.
f) cosx=∞∑n=0
(−1)n(2n)! x
2n = 1− 12!x
2+14!x
4− 16!x
6+ . . . , para todo x ∈ R.
g) arcsenx=∞∑n=0
1 ·3 ·5 · · ·(2n−1)2 ·4 ·6 · · ·(2n) · x
2n+1
2n+1 = x+16x
3+340x
5+ . . . , si −1≤ x≤ 1.
h) arc tgx=∞∑n=0
(−1)n2n+1x
2n+1 = x− 13x3+
15x
5− 17x7+ . . . , si −1≤ x≤ 1.
9.3. EjerciciosEjercicio 9.1. Determinar el intervalo de convergencia de las series de potencias de término n-ésimo:
a)(
n!3 ·5 . . .(2n+1)
)2xn b)
(2nn
)xn c) n( n√2−1)xn d) n(logn)/n(sen 1√
n)xn
e) 2nn2xn f) 2n
n! xn g) 3n
n4n xn h) (−1)n
n24n xn
i)√nxn j) xn! k) n−
√n xn l) 3n√
nx2n+1
m) n!( xn
)nn) logn
nxn ñ) xn tg a2n , a> 0
Ejercicio 9.2. Desarrollar en series de potencias de x las siguientes funciones, indicando en quéintervalos son válidos los desarrollos:
a) 2x2−3(x−1)2 b) x
9+ x2c) 1
4− x4
d) log(1+ x−2x2) e) log 1+ x1− x f) log(x+
√1+ x2)
g) 3√8+ x h) (1+ ex)3 i) (1+ x)e−x
j) cos2 x k) cosxsen2 x l) sen2 2x
m) log a+bxa−bx , a,b> 0 n) log(1−2x) ñ)
√1+ x3

200 Capítulo 9. Series de potencias. Desarrollos en serie de Taylor
o) xa2−b2x2 , a,b> 0 p) (x2+1)e2x q) senx− xcosx
r) 1x−1 + x2 senx s)
∫ x
0e−z2 dz t)
∫ x
0
dz√1− z4
Ejercicio 9.3. Sea f (x) =∫ x
0
√8− t3 dt, para x ∈ (−∞,2]. Desarrollar f en serie de potencias de x
(centrada en 0). Hallar el radio y el intervalo de convergencia del desarrollo. Hallar f (7(0) y f (11(0).
Ejercicio 9.4. Desarrollar en series de potencias de (x− x0) las siguientes funciones, indicando enqué intervalos son válidos los desarrollos:
a) (a+bx)−1, x0 = 1, a,b> 0 b) sen 3x2 , x0 = π
c)√1+ x, x0 = 3 d) log2x− 1
x−1, x0 = 2
Ejercicio 9.5. Desarrollar en serie de potencias de x la función
f (x) =∫ x
0
t dt(3− t)(t+2) , −2< x< 3,
y determinar el radio y el intervalo de convergencia de la serie.
Ejercicio 9.6. Determinar el dominio de convergencia y la suma de las series:
a) 1+∞∑n=1
(−1)n x4n−1
4n b) x1 ·2 +
x2
2 ·3 +x3
3 ·4 +x4
4 ·5 + . . .
Ejercicio 9.7. Hallar el dominio de convergencia de la serie∞∑n=1
x4n−1
4n−1 y probar que su suma es
14 log
1+ x1− x −
12 arc tgx.
Ejercicio 9.8. Encontrar la única serie de potencias f (x) =∞∑n=0
anxn con radio de convergencia no
nulo que cumple f ′′+ f = 0, f (0) = 1, f ′(0) = 0. Identificar esta función.
Ejercicio 9.9. Hallar el radio y el intervalo de convergencia de la serie∞∑n=1
x3n
n(3n−1) y sumarla en el
intervalo abierto. Hallar la suma de la serie∞∑n=1
(−1)nn(3n−1) .
Ejercicio 9.10. Hallar el radio y el intervalo de convergencia de la serie∞∑n=1
x3n
n(3n+1) y sumarla en
el intervalo abierto. Hallar la suma de la serie∞∑n=1
(−1)nn(3n+1) .
Ejercicio 9.11. Hallar el intervalo de convergencia de la serie de potencias f (x) =∞∑n=2
2n(n−1)n2+n
xn+1.
Probar que f (x) = (x−1) log(1−2x)−2x en ese intervalo.

Capítulo 10
Sucesiones y series de funciones
Exponemos este tema siguiendo el capítulo 11 de [APOSTOL1], completado con algunas partes delcapítulo 7 de [BARTLE-SHERBERT].
10.1. Sucesiones y series de funciones: convergencia puntual
Definición 10.1.1. Sea A un subconjunto de R. Supongamos que para cada número natural n estádada una función fn : A → R; la aplicación n "→ fn recibe el nombre de sucesión de funciones(definidas en A, si es necesaria la precisión). La función fn asociada al número natural n recibe elnombre de término n-ésimo de la sucesión.
Informalmente, una sucesión de funciones es una lista sin fin
f1, f2, . . . , fn, . . .
de funciones definidas en el conjunto A. Como hicimos con las sucesiones de números reales, deno-tamos la sucesión de funciones cuyo término n-ésimo es fn con ( fn)n∈N o, simplificando si no hayconfusión, con ( fn).
Para cada punto x ∈ A podemos considerar la sucesión de números reales que tiene por términon-ésimo el número real fn(x), valor en x de la función fn. Esta sucesión podrá ser convergente o no.
El conjunto C de todos los puntos x ∈ A para los que la sucesión de números ( fn(x)) convergesuele llamarse campo de convergencia de la sucesión de funciones ( fn); si C $= /0, podemos definiruna nueva función f :C→ R haciendo corresponder a cada x ∈C el número real f (x) = lım
nfn(x).
Hablamos entonces de convergencia puntual (o punto a punto) de la sucesión ( fn) a la función f ,concepto que vamos a definir en general.
Definición 10.1.2. Sea ( fn) una sucesión de funciones definidas en un conjunto A, S un subconjuntode A y f una función definida en S. Si para cada x ∈ S, f (x) = lım
nfn(x), se dice que la sucesión ( fn)
converge puntualmente a f en S, o que converge punto a punto a f en S.En este caso a f se le llama el límite puntual de la sucesión ( fn) en S.Cuando existe tal función f , decimos que la sucesión ( fn) es convergente punto a punto en S, o
que la sucesión ( fn) es convergente puntualmente en S.
201

202 Capítulo 10. Sucesiones y series de funciones
Ejemplos. a) La sucesión (xn) converge puntualmente en el intervalo cerrado [0,1] a la función fdefinida en dicho intervalo por
f (x) =
{0 si 0≤ x< 11 si x= 1.
b) La sucesión(
xn
1+ xn
)converge puntualmente en [0,+∞) a la función f definida en tal intervalo
por
f (x) =
0 si 0≤ x< 11/2 si x= 1.1 si x> 1.
c) La sucesión (sennπx) converge puntualmente a 0 en todos los x ∈ Z. Menos trivial es probarque en los demás puntos no converge. En efecto: sea x ∈ R y supongamos que sennπx→ !;desde luego, debe ser ! ∈ R y entonces
! = lımnsen2nπx= lım
n2sennπxcosnπx= lım
n2!cosnπx.
De aquí se deduce que o bien ! = 0, o bien lımncosnπx=
12.
• No puede ser lımncosnπx=
12, ya que tendríamos
12 = lım
ncos2nπx= lım
n2cos2 nπx−1=−12 .
• Así que debe ser ! = 0, luego lımn
|cosnπx| = lımn
√1− sen2 nπx= 1. Como
sen(n+1)πx= sennπxcosπx+ cosnπxsenπx,
queda lımncosnπxsenπx= 0 y, por lo tanto, senπx= 0. Es decir, x ∈ Z.
Pueden verse más ejemplos con sus gráficas en [BARTLE-SHERBERT, págs. 312–315].
Observación. La convergencia puntual puede expresarse en términos similares a los de la convergen-cia de sucesiones numéricas. Concretamente:
• Sea ( fn) una sucesión de funciones definidas en un conjunto A, S un subconjunto de A, f unafunción definida en S. La sucesión ( fn) converge puntualmente a f en S si y solo si para cadax ∈ S y para cada ε > 0 existe un N = N(ε,x) tal que siempre que n > N(ε,x) se verifica| fn(x)− f (x)| < ε .
En consecuencia, tenemos la siguiente condición de Cauchy para la convergencia puntual:
• Sea ( fn) una sucesión de funciones definidas en un conjunto A, S un subconjunto de A. Lasucesión ( fn) converge puntualmente en S (a una cierta función) si y solo si para cada x ∈S y para cada ε > 0 existe un N = N(ε,x) tal que siempre que m, n > N(ε,x) se verifica| fm(x)− fn(x)| < ε .

10.2. Convergencia uniforme 203
Las definiciones de serie de funciones y convergencia puntual de una serie de funciones son fácil-mente adivinables.
Definición 10.1.3. Una serie de funciones∞
∑n=1
fn es un par ordenado de sucesiones de funciones(( fn),(sn)
)relacionadas por la condición de que para cada n ∈ N es
sn = f1+ f2+ · · ·+ fn.
Para cada n∈N, el término n-ésimo de la primera sucesión, fn, recibe el nombre de término n-ésimode la serie; el término n-ésimo de la segunda sucesión, sn, recibe el nombre de suma parcial n-ésimade la serie.
Decimos que una serie de funciones converge puntualmente a una función f en un conjunto Ssi lo hace la sucesión de sus sumas parciales. En tal caso, la función f es la suma de la serie en elconjunto S.
Ejemplo. La serie de funciones ∑∞n=1 xn−1 converge puntualmente en (−1,1) y su suma es la función
f (x) =1
1− x , si −1< x< 1.
10.2. Convergencia uniformeEl estudio de las sucesiones de funciones abre al menos dos interesantes opciones: de un lado,
podemos construir nuevas funciones como límites de funciones conocidas; de otro, podemos pensaren sustituir, en ciertos problemas, una función dada por funciones que la aproximan y que puedentener un comportamiento mejor controlado respecto a la situación que nos interese. En cualquiera delos dos casos, la primera tarea es examinar qué propiedades de las funciones que forman la sucesiónse traspasan a la función límite. El resultado de un primer análisis no puede ser más descorazonador,como muestran los siguientes ejemplos (ver [APOSTOL1, pág. 518]).
Ejemplos. a) Sucesión de funciones continuas con función límite discontinua: la sucesión fn(x) =xn en [0,1] converge puntualmente a la función que vale 1 en x= 1 y 0 en los demás puntos.
b) Sucesión de funciones cuyas integrales no convergen a la integral de la función límite: la suce-sión ( fn) definida por
fn(x) = nx(1− x2)n, 0≤ x≤ 1,converge puntualmente a 0 en [0,1]. Sin embargo,
lımn
∫ 1
0fn(x)dx=
12 $= 0=
∫ 1
0lımnfn(x)dx.
Peor aún es lo que ocurre con la derivación, como veremos posteriormente. A la vista de estosejemplos, está claro que hay que introducir una noción más fuerte de convergencia (ver comentariosen [APOSTOL1, págs. 518–519]).
10.2.1. Definición de convergencia uniformeDefinición 10.2.1. Sea ( fn) una sucesión de funciones definidas en un conjunto A, S un subconjuntode A, f una función definida en S. Se dice que la sucesión ( fn) converge uniformemente a f en Ssi para cada ε > 0 existe un N = N(ε) tal que siempre que n > N(ε), para todo x ∈ S se verifica| fn(x)− f (x)|≤ ε .

204 Capítulo 10. Sucesiones y series de funciones
Desde luego, el último ≤ puede sustituirse por < y la definición es equivalente. Ver comentariose interpretación gráfica en [APOSTOL1, págs. 519–520].
Comparando esta definición con la reformulación que dimos anteriormente para la convergenciapuntual, es obvio que toda sucesión ( fn) que converge uniformemente a una función f en S, tambiénconverge puntualmente a f en S.
Una manera útil de expresar la definición de convergencia uniforme es la siguiente:
Proposición 10.2.2. Sea ( fn) una sucesión de funciones definidas en un conjunto A, S un subconjuntode A, f una función definida en S. La sucesión ( fn) converge uniformemente a f en S si y solo si
sup{| fn(x)− f (x)| : x ∈ S} n−→ 0.
Demostración. Si para cada n ∈ N escribimos
Mn = sup{| fn(x)− f (x)| : x ∈ S},entonces que la sucesión ( fn) converja uniformemente a f en S significa, según la definición, que paracada ε > 0 existe un N = N(ε) tal que siempre que n> N(ε),Mn ≤ ε . Pero esto a su vez significa quelımnMn = 0.
Aplicación. La sucesión(sennx
n
)converge uniformemente a 0 en R, ya que
sup{∣∣∣sennxn
−0∣∣∣ : x ∈ R
}≤ 1n→ 0.
Sin embargo, la sucesión ( fn) con fn(x) = xn no converge uniformemente en [0,1], pues en casoafirmativo tendría que hacerlo a la función f a la que converge puntualmente, y para todo n ∈ N es
sup{| fn(x)− f (x)| : x ∈ [0,1]} = sup[{xn : x ∈ [0,1)}∪{0}] = 1 $→ 0
(ver este y otros ejemplos en [BARTLE-SHERBERT, págs. 316–317]).
Proposición 10.2.3 (condición de Cauchy para la convergencia uniforme). Sea ( fn) una sucesiónde funciones definidas en un conjunto A, S un subconjunto de A. Entonces ( fn) converge uniforme-mente en S a alguna función si y solo si para cada ε > 0 existe un N(ε) tal que para todos los númerosnaturales m,n≥ N(ε) se cumple
sup{| fm(x)− fn(x)| : x ∈ S}≤ ε.
Demostración. No la desarrollamos, pero la comprobación de que es condición suficiente resulta muyilustrativa. Puede verse en detalle en [BARTLE-SHERBERT, págs. 317–318].
10.2.2. Convergencia uniforme y continuidadA diferencia de la convergencia puntual, la convergencia uniforme conserva la continuidad, como
pasamos a comprobar.
Teorema 10.2.4. Sea ( fn) una sucesión de funciones que converge uniformemente en un conjunto Sa una función f con dominio S, y sea x un punto de S. Si cada función fn es continua en x, entonces ftambién es continua en x.

10.2. Convergencia uniforme 205
Demostración. Sea ε > 0. Según la definición de convergencia uniforme, hay algún n ∈ N tal quepara todo t ∈ S
| fn(t)− f (t)|≤ ε/3
(de hecho, cualquier n> N(ε/3) vale). Fijamos n y como fn es continua en x, ahora hay algún δ > 0tal que
| fn(y)− fn(x)|≤ ε/3,
siempre que sea |y− x| < δ . Entonces, si |y− x| < δ se tiene
| f (y)− f (x)| = | f (y)− fn(y)+ fn(y)− fn(x)+ fn(x)− f (x)|≤ | f (y)− fn(y)|+ | fn(y)− fn(x)|+ | fn(x)− f (x)|≤ ε/3+ ε/3+ ε/3= ε.
Es decir, f es continua en x.
Los resultados sobre sucesiones de funciones tienen su equivalente en términos de series de fun-ciones. La convergencia uniforme de una serie de funciones se define de manera análoga a la conver-gencia puntual:
Definición 10.2.5. Una serie de funciones ∑∞n=1 fn se dice que converge uniformemente a una función
f en un conjunto S cuando la sucesión (sn) de sus sumas parciales,
sn = f1+ f2+ · · ·+ fn,
converge uniformemente a f en el conjunto S.
Corolario 10.2.6. Si una serie de funciones ∑∞n=1 fn converge uniformemente hacia la función suma
f en su dominio S y si cada término fn es una función continua en un punto x de S, entonces tambiénf es continua en x.
10.2.3. Convergencia uniforme e integraciónLa convergencia puntual no conserva la integrabilidad: hay sucesiones de funciones integrables-
Riemann que convergen puntualmente a funciones que, por el contrario, no son integrables-Riemann(véáse, por ejemplo, [BARTLE-SHERBERT, ejr. 13, pág. 325]). Una vez más, la situación es distinta conconvergencia uniforme.
Teorema 10.2.7. Sea ( fn) una sucesión de funciones continuas en un intervalo [a,b] que convergenuniformemente en [a,b] a una función f . Entonces f es integrable en [a,b] y se cumple
lımn
∫ b
afn =
∫ b
af .
Demostración. La función f es integrable, porque es continua, según el teorema 10.2.4. Para cadan ∈ N, ∣∣∣∣∫ b
afn(x)dx−
∫ b
af (x)dx
∣∣∣∣ =∣∣∣∣∫ b
a[ fn(x)− f (x)]dx
∣∣∣∣≤
∫ b
a| fn(x)− f (x)| dx
≤ (b−a)sup{| fn(x)− f (x)| : x ∈ [a,b]}.

206 Capítulo 10. Sucesiones y series de funciones
Que la sucesión ( fn) converja a f uniformemente en [a,b] significa que
lımnsup{| fn(x)− f (x)| : x ∈ [a,b]} = 0,
así que también
lımn
∣∣∣∣∫ b
afn−
∫ b
af∣∣∣∣ = 0,
que es lo que queríamos probar.
Nota. De la misma manera puede probarse que si se define gn(x) =∫ xa fn y g(x) =
∫ xa f , entonces la
sucesión de funciones (gn) converge uniformemente a la función g en el intervalo [a,b].
Observación. En realidad, no hace falta imponer que las funciones sean continuas. El teorema 10.2.7si las funciones fn son integrables, pero entonces no es inmediato que f sea también integrable. Lademostración puede verse en [BARTLE-SHERBERT, teor. 7.2.4, págs. 323–324].
El teorema 10.2.7 afirma que, con las hipótesis adecuadas,
lımn
∫ b
afn =
∫ b
alımnfn.
Este es un primer resultado dentro de una larga lista de teoremas de paso al límite bajo el signointegral. La necesidad de aligerar sus hipótesis es una de las razones que impulsaron la generalizaciónde Lebesgue del concepto de integral.
Corolario 10.2.8. Sea ∑∞n=1 fn una serie de funciones continuas que converge uniformente hacia la
función suma f en un intervalo [a,b]. Entonces, la serie ∑∞n=1
∫ ba fn converge y
∞
∑n=1
∫ b
afn =
∫ b
af ,
es decir,∞
∑n=1
∫ b
afn =
∫ b
a
∞
∑n=1
fn.
10.2.4. Convergencia uniforme y derivaciónSobre derivación no cabe esperar enunciados tan sencillos como los obtenidos para la continuidad
y la integrabilidad, ni siquiera cuando hay convergencia uniforme, según ponen de manifiesto lossiguientes ejemplos.
Ejemplo. Una sucesión de funciones derivables que converge uniformemente a una función no deri-vable:
fn(x) =√x2+
1n→ f (x) = |x| uniformemente en −1≤ x≤ 1.
Ejemplo. Una sucesión de funciones derivables que converge uniformemente a una función derivable,mientras que la sucesión de sus derivadas no converge en ningún punto:
fn(x) =sennx√
n→ f (x) = 0 uniformemente en R
(ver [GELBAUM-OLMSTED, págs. 76–77]).

10.2. Convergencia uniforme 207
Ejemplo. Una sucesión de funciones derivables que converge uniformemente a una función derivable,mientras que la sucesión de sus derivadas converge a una función que no es límite de las derivadas:
fn(x) =xn
n→ f (x) = 0 uniformemente en 0≤ x≤ 1.
Ejemplo. Una sucesión de funciones derivables que no converge en ningún punto, mientras que lasucesión de sus derivadas converge uniformemente:
fn(x) = (−1)n; f ′n(x) = 0→ 0 uniformemente en R.
Vista la situación, es menos sorprendente que vayamos a parar a un enunciado como el que sigue.
Teorema 10.2.9. Sea ( fn) una sucesión de funciones definidas en un intervalo [a,b]. Supongamos que
a) existe un c ∈ [a,b] tal que la sucesión ( fn(c)) converge;
b) todas las funciones fn son derivables y las derivadas son continuas;
c) la sucesión de derivadas ( f ′n) converge uniformemente en [a,b] a una función g.
Entonces la sucesión ( fn) converge uniformemente en [a,b] a una función f derivable en [a,b] yademás f ′ = g.
Demostración. Para cada x ∈ [a,b],
fn(x) = fn(c)+ fn(x)− fn(c) = fn(c)+∫ x
cf ′n(t)dt.
Sea λ = lımnfn(c) y definamos ahora
f (x) = λ +∫ x
cg(t)dt, x ∈ [a,b].
Observemos que la función g es continua, por el teorema 10.2.4, así que la función f es derivable yademás f ′ = g, según el teorema fundamental del cálculo integral (teorema 6.3.4). Se trata de probarque la sucesión de funciones ( fn) converge uniformemente a f en [a,b].
Para cada x ∈ [a,b],
| fn(x)− f (x)| =∣∣∣∣ fn(c)−λ +
∫ x
c[ f ′n(t)−g(t)]dt
∣∣∣∣≤ | fn(c)−λ |+
∣∣∣∣∫ x
c[ f ′n(t)−g(t)]dt
∣∣∣∣ .Si, por ejemplo, x≥ c, entonces
| fn(x)− f (x)|≤ | fn(c)−λ |+∫ x
c| f ′n(t)−g(t)|dt
≤ | fn(c)−λ |+(b−a)sup{| f ′n(t)−g(t)| : t ∈ [a,b]}.Si es x< c se llega a la misma conclusión, pero en la desigualdad intermedia hay que cambiar
∫ xc por∫ c
x . Por lo tanto,
sup{| fn(x)− f (x)| : x ∈ [a,b]}≤ | fn(c)−λ |+(b−a)sup{| f ′n(t)−g(t)| : t ∈ [a,b]}.

208 Capítulo 10. Sucesiones y series de funciones
Por la hipótesis c) y como λ = lımnfn(c), se deduce que
sup{| fn(x)− f (x)| : x ∈ [a,b]} n−→ 0,
es decir, la sucesión de funciones ( fn) converge uniformemente a f en [a,b].
El lector puede enunciar y demostrar la traducción de este resultado a series de funciones.
Nota. En realidad, no hace falta que las funciones f ′n sean continuas ([BARTLE-SHERBERT, teor. 7.2.3,págs. 322–323]).
10.3. Una condición suficiente para la convergencia uniforme de seriesTeorema 10.3.1 (criterio M de Weierstrass). Sea ∑∞
n=1 fn una serie de funciones definidas en unconjunto para la que se puede encontrar una serie numérica convergente ∑∞
n=1Mn de términos nonegativos de manera que se cumple, cualquiera que sea n ∈ N, | fn(x)|≤Mn para todo x ∈ S.
Entonces la serie ∑∞n=1 fn converge uniformemente en S y absolutamente en cada punto de S.
Demostración. Dado n ∈ N, seasn =
n
∑k=1
fk
la suma parcial n-ésima de la serie. Tenemos que probar que la sucesión de funciones (sn) convergeuniformemente en S, para lo que es suficiente demostrar que cumple la condición de Cauchy (propo-sición 10.2.3). Pero suponiendo que m> n, para cualquier x ∈ S es
|sm(x)− sn(x)| =∣∣∣∣∣ m
∑k=n+1
fk(x)
∣∣∣∣∣≤ m
∑k=n+1
| fk(x)|≤m
∑k=n+1
Mk.
Sea ε > 0. Como la serie ∑∞n=1Mn converge, hay algún N(ε) ∈ N tal que para cada m> n> N(ε)
m
∑k=n+1
Mk ≤ ε
(condición de Cauchy para una serie numérica convergente). Por lo tanto,
sup{|sm(x)− sn(x)| : x ∈ S}≤ ε
siempre que m> n> N(ε). De la proposición 10.2.3 se deduce que la serie converge uniformementeen S. La convergencia absoluta es una consecuencia inmediata de la desigualdad | fn(x)|≤Mn.
Observación. En el teorema 10.3.1, basta tener | fn(x)|≤Mn desde un n en adelante.
Ejemplo. La serie∞
∑n=1
xn
n2es uniformemente convergente en [−1,1].

Capítulo 11
Funciones elementales
La familiaridad que a través del uso hemos llegado a adquirir con funciones como la exponencial,el logaritmo, las funciones trigonométricas, pueden habernos hecho olvidar que en realidad nuncahemos establecido una definición analítica rigurosa de todas ellas. Mediante consideraciones gráficas,en algunos casos, o confiando en la autoridad en otros, hemos aceptado ciertas propiedades (entreellas, nada menos que su existencia), de las que hemos ido deduciendo las demás.
Excepciones notables a esta situación han sido la función logaritmo y la función exponencial.En el capítulo de integración, el teorema fundamental del cálculo integral (teorema 6.3.4) nos pro-porcionó un método de construcción de la función logaritmo como primitiva de la función 1/x, ydefinimos luego la función exponencial como inversa del logaritmo. No es esta la única manera deconstruir estas funciones, como vamos a probar a continuación, invirtiendo el proceso: definiremosprimero la función exponencial como suma de una serie, y después el logaritmo como inversa de laexponencial. Igualmente definiremos las funciones seno y coseno como sumas de ciertas series depotencias, y demostraremos después que las funciones así definidas tienen todas las propiedades quemanejamos habitualmente. En la última sección, veremos cómo también es posible construir las fun-ciones trigonométricas por el método de las primitivas, empezando con las funciones trigonométricasinversas.
Nos situamos, pues, en el principio de los tiempos, como si nunca hubiéramos oído hablar deestas funciones, y sin más herramientas que los conocimientos teóricos aprendidos a lo largo delcurso (que no se apoyan en las propiedades de estas funciones) vamos a definirlas partiendo de cero,bien mediante series de potencias, bien mediante primitivas.
11.1. Funciones elementales: construcción mediante series de potencias
Vimos cómo, dando por conocidas las propiedades básicas de derivación de las funciones elemen-tales, se obtiene una representación de estas funciones mediante series de potencias. Sin embargo,desde el punto de vista del desarrollo lógico del Análisis Matemático, sería más conveniente procederal revés, es decir, tomar como punto de partida las series para definir las funciones elementales y ob-tener de esa definición todas sus propiedades. Esbozamos en lo que sigue cómo se puede llevar a caboeste programa.
209

210 Capítulo 11. Funciones elementales
11.1.1. Función exponencial
La serie de potencias+∞
∑n=0
xn
n! tiene radio de convergencia +∞, por lo que podemos definir en todo
R una función como suma de tal serie.
Definición 11.1.1. Se llama función exponencial a la función exp : R→ R definida por
exp(x) =+∞
∑n=0
xn
n! .
El número exp(1) se denota por e, y se escribe ex en lugar de exp(x), lo que se justifica por lapropiedad e) que probamos a continuación.
Propiedades 11.1.2. a) La función exponencial es derivable (indefinidamente) y su derivada esella misma: para cada x ∈ R,
(ex)′ = ex.
b) e0 = 1.
c) Para cada x ∈ R,
e−x =1ex
,
y, en particular, ex %= 0.
d) Dados x, y ∈ R,ex+y = ex · ey.
e) Dados n ∈ N y x ∈ R, enx es el producto de n factores iguales a ex,
enx = ex n· · ·ex.
f) Para cada x ∈ R,ex > 0.
g) La función exponencial es estrictamente creciente y convexa. En particular, es inyectiva.
h) Se tienelımx→+∞
ex = +∞, lımx→−∞e
x = 0.
En consecuencia, el conjunto imagen de la función exponencial es (0,+∞).
Demostración. Según vimos en el capítulo 6, es suficiente probar las dos primeras propiedades (yavimos cómo se obtenían las demás a partir de ellas). Pero la segunda es trivial y para obtener la primerabasta aplicar la regla de derivación de una función definida mediante una serie de potencias.

11.1. Funciones elementales y series de potencias 211
11.1.2. Función logarítmicaUna vez conocidas las propiedades básicas de la función exponencial, podemos introducir cómo-
damente la función logarítmica como su función inversa, y deducir de ahí sus propiedades.
Definición 11.1.3. La función logarítmica
log : (0,+∞)→ R
es la inversa de la función exponencial, de modo que logx= y si y solo si x= ey.
Por tanto, está caracterizada por cumplir
log(ex) = x cualquiera que sea x ∈ R
yelogx = x cualquiera que sea x ∈ (0,+∞).
Sus propiedades son consecuencias de las de la función exponencial.
Propiedades 11.1.4. a) La función logarítmica es derivable indefinidamente, y su derivada es lafunción 1/x.
b) log1= 0, loge= 1.
c) Para cada x ∈ (0,+∞),log 1
x=− logx.
d) Dados x,y ∈ (0,+∞),log(xy) = logx+ logy.
e) Dados n ∈ N y x ∈ (0,+∞),log(xn) = n logx.
f) El conjunto imagen de la función logarítmica es R.
g) La función logarítmica es estrictamente creciente y cóncava. En particular, es inyectiva.
h) Se tienelımx→0+ logx=−∞, lım
x→+∞logx= +∞.
Demostración. a) La exponencial es una aplicación biyectiva de R sobre (0,+∞) y continua, luego ellogaritmo, que es su inversa, también es continua (teorema 4.2.14). Estamos en condiciones de aplicarel teorema 5.1.7 de derivación de la función inversa para concluir que el logaritmo es derivable encada x ∈ (0,+∞), con derivada
log′ x=1
exp′(logx) =1
exp(logx) =1x.
b) Obvio.c) Basta tener en cuenta que
elog1x =
1x
=1
elogx= e− logx.

212 Capítulo 11. Funciones elementales
d) Análogamenteelog(xy) = xy= elogx · elogy = elogx+logy.
e) Consecuencia inmediata de d).f) Como la exponencial es biyectiva de R en (0,+∞), el logaritmo es biyectiva de (0,+∞) en R.g) Para todo x ∈ (0,+∞),
log′ x=1x
> 0, log′′ x=− 1x2
< 0.
h) Como la función logaritmo es creciente, estos límites son, respectivamente, el ínfimo y el su-premo del conjunto imagen, que es R.
11.1.3. Funciones exponencial y logarítmica de base cualquieraDefinición 11.1.5. Dado un número real a> 0, la función exponencial de base a se define mediantela igualdad
ax = ex loga.
Cuando a > 1, esta función tiene propiedades similares a la función exponencial anteriormenteestudiada; si a = 1, es una función constantemente igual a 1, y si a < 1, la diferencia esencial con lafunción exponencial de base e estriba en que la función exponencial de base a es entonces estricta-mente decreciente.
Propiedades interesantes que se obtienen directamente de la definición y de lo que hemos vistopara las funciones ex y logx son las siguientes:
Propiedades 11.1.6. Dados a, b, x, y ∈ R con a> 0, b> 0,
a) (ab)x = axbx.
b) (ax)y = axy.
Demostración. Aplicar la definición y las propiedades de la exponencial y el logaritmo.
Definición 11.1.7. Dado a> 0, a %= 1, la función logarítmica de base a se define en (0,+∞)mediantela fórmula
loga x=logxloga .
Es inmediato comprobar que esta función es la inversa de la función exponencial de base a. Comopropiedad adicional interesante se tiene: dados a,b,x ∈ R con 0< a %= 1, b> 0,
loga(bx) = x loga b.
11.1.4. Funciones trigonométricasDefinición 11.1.8. La función seno es la función sen : R→ R definida por
senx=∞
∑n=0
(−1)nx2n+1(2n+1)! ,
y la función coseno es la función cos : R→ R definida por
cosx=∞
∑n=0
(−1)nx2n(2n)! .

11.1. Funciones elementales y series de potencias 213
Estas funciones están bien definidas, ya que las dos series de potencias tienen radio de convergen-cia +∞.
Propiedades 11.1.9. a) El seno y el coseno son funciones derivables indefinidamente y se cumplepara todo x ∈ R
sen′ x= cosx, cos′ x=−senx.
b) El seno es una función impar, mientras que el coseno es una función par; es decir, cualquieraque sea x ∈ R se tiene
sen(−x) =−senx, cos(−x) = cosx.
c) sen0= 0; cos0= 1.
d) Para cada x ∈ R,sen2 x+ cos2 x= 1.
e) Fórmulas de adición: dados x, y ∈ R,
sen(x+ y) = senxcosy+ cosxseny; cos(x+ y) = cosxcosy− senxseny;sen(x− y) = senxcosy− cosxseny; cos(x− y) = cosxcosy+ senxseny.
Demostración. a), b) y c) son consecuencia inmediata de la definición y de las propiedades de lasseries de potencias.
d)Más cómodo que manejar las series es proceder por derivación: definiendo f :R→Rmediantef (x) = sen2 x+ cos2 x, a partir de a) obtenemos
f ′(x) = 2senxcosx−2cosxsenx= 0
para todo x de R, luego f toma constantemente el valor f (0) = 1.e) Probamos solamente las dos primeras identidades: las otras se siguen de estas aplicando b).
Fijado y, sean f y g las funciones definidas en R por
f (x) = sen(x+ y), g(x) = senxcosy+ cosxseny.
Está claro que, como consecuencia de d), para todo t ∈R es |sen t|≤ 1, |cos t|≤ 1. Se sigue fácilmentepor inducción, usando a), que | f (n)|≤ 1 y |g(n)|≤ 2 para cada n, luego según la proposición 9.2.1
f (x) =∞
∑n=0
f (n)(0)n! xn, g(x) =
∞
∑n=0
g(n)(0)n! xn
para todo x ∈ R. Observemos que f (0) = g(0) = seny. Resulta que f ′(x) = cos(x+ y), g′(x) =cosxcosy− senxseny, luego también f ′(0) = g′(0) = cosy. Derivando de nuevo vemos que f ′′ =− fy g′′ = −g, de donde se deduce que f (n)(0) = g(n)(0) para todo n. Por su expresión como seriesde potencias, obtenemos que f = g, y entonces f ′ = g′, que son las dos igualdades que había queprobar.
Nótese que d) es un caso particular de e) (tomar y=−x en la segunda fórmula).

214 Capítulo 11. Funciones elementales
Proposición 11.1.10 (definición y propiedades de π). a) La función seno tiene ceros positivos,es decir,
{x> 0 : senx= 0} %= /0.
Este conjunto tiene un elemento mínimo, que denotamos por π:
π def= mın{x> 0 : senx= 0}.
En el intervalo (0,π), el seno toma valores estrictamente positivos.
b) cosπ =−1; cos π2 = 0; sen π
2 = 1.
c) Para conocer la función seno en R es suficiente conocerla en el intervalo[0, π2]. En concreto,
• para cada x ∈ R essen(π− x) = senx=−sen(x+π); (11.1)
• para cualesquiera x ∈ R y k ∈ Z,
sen(x+2kπ) = senx, (11.2)
es decir, el seno es una función periódica de periodo 2π .
d) Para conocer la función coseno enR es suficiente conocerla en el intervalo[0, π2]. En concreto,
• para cada x ∈ R escos(π− x) =−cosx= cos(x+π);
• para cualesquiera x ∈ R y k ∈ Z,
cos(x+2kπ) = cosx,
es decir, el coseno es una función periódica de periodo 2π .
e) La restricción de la función seno al intervalo[−π
2 ,π2]es una función estrictamente creciente
(en particular, inyectiva); su imagen es el intervalo [−1,1].f) La restricción de la función coseno al intervalo [0,π] es una función estrictamente decreciente(en particular, inyectiva); su imagen es el intervalo [−1,1].
g) Dado x ∈ R, se verifica senx= 0 si y solo si para algún k ∈ Z es x= kπ .
h) Dado x ∈ R, se verifica cosx= 0 si y solo si para algún k ∈ Z es x= π2 + kπ .
Demostración. a) Agrupando sumandos convenientemente en la definición de la función senocomo una serie de potencias, es fácil ver que
senx> x− x3
3! > 0, 0< x≤ 1, (11.3)
y que
sen4< 4− 43
3! +455! −
477! +
499! < 0,

11.1. Funciones elementales y series de potencias 215
de donde se deduce que el seno no se anula en (0,1] pero que, según el teorema 4.2.9 de Bolzano,debe anularse al menos en un punto comprendido entre 1 y 4. Por tanto, está perfectamentedeterminado el número real
π = ınf{x> 0 : senx= 0}y es mayor o igual que 1 (luego es mayor que 0). Para asegurar que π es el mínimo del conjunto,o sea, que pertenece a él, basta tener en cuenta que es un punto de acumulación del conjunto yemplear la continuidad de la función seno.
Así senx %= 0 para todo x ∈ (0,π) y por continuidad el seno debe mantener el signo en todo esteintervalo. De acuerdo con (11.3), debe ser senx> 0 para todo x ∈ (0,π).
b) Como sen2π +cos2π = 1, se deduce que cos2π = 1 y por tanto cosπ =±1. Pero además, la fun-ción coseno es estrictamente decreciente en el intervalo [0,π], porque su derivada es−senx< 0para todo x ∈ (0,π). Como cos0= 1, debe ser cosπ =−1.Puesto que cosπ = 2cos2 π
2 − 1, debe ser cos π2 = 0, lo que obliga a que sen2 π
2 = 1. Como0< π
2 < π , sen π2 debe ser positivo y por tanto igual a 1.
c) Las igualdades (11.1) son consecuencia de las fórmulas de adición y de los valores previamentecalculados. La fórmula (11.2) se comprueba por inducción.
Con esto, conociendo los valores del seno en el intervalo[0, π2], podemos obtener los valores
en el intervalo[π2 ,π
]usando que senx = sen(π− x); por ser el seno impar, pasamos entonces
a todo el intervalo [−π,π] y ya por periodicidad a todo R.
d) Similar al apartado anterior.
e) Para cada x ∈ R la igualdad sen2 x+ cos2 x = 1 asegura que |senx| ≤ 1, |cosx| ≤ 1. Comosen π
2 = 1 y por lo tanto sen(−π
2)=−1, la continuidad del seno y el teorema 4.2.10 de Darboux
dan como conjunto imagen de[−π
2 ,π2]exactamente el intervalo [−1,1].
Para demostrar que la función seno (que es continua) es estrictamente creciente en[−π
2 ,π2],
usamos que es estrictamente positiva en (0,π). En consecuencia, el coseno (cuya derivada es−sen) es estrictamente decreciente en [0,π], lo que permite afirmar que los valores que alcanzaen el intervalo
[0, π2)son estrictamente mayores que cos π
2 = 0; como el coseno es par, lo mismovale en
(−π2 ,
π2); y finalmente, como el coseno es la derivada del seno, vemos que este último
es estrictamente creciente en[−π
2 ,π2].
f) Repasar el apartado anterior.
g) Es inmediato que si para algún k ∈ Z es x= kπ , se verifica que senx= 0.
Recíprocamente, sea x ∈ R tal que senx= 0. Para un k ∈ Z será
x ∈ ((k− 1
2)
π,(k+ 1
2)
π].
Entonces t = x− kπ ∈ (−π2 ,
π2]y sen t = senxcoskπ − cosxsenkπ = 0, luego forzosamente
t = 0 y x= kπ .
h) Similar al apartado anterior.

216 Capítulo 11. Funciones elementales
Tenemos ahora dos versiones de las funciones seno y coseno: la versión analítica, que venimosexplorando, y la versión geométrica de la trigonometría (medición de triángulos). La siguiente propo-sición prueba que una versión es coherente con la otra.
Proposición 11.1.11. Dados x, y ∈ R tales que x2+ y2 = 1, existe algún α ∈ R de modo que
cosα = x, senα = y.
Además, para que un β ∈ R cumpla igualmente que
cosβ = x, senβ = y,
es necesario y suficiente que exista un k ∈ Z tal que β = α +2kπ .
Demostración. Como x ∈ [−1,1], existe al menos un t ∈ R tal que cos t = x. Entonces sen2 t = y2, dedonde o bien sen t = y, y tomaríamos α = t, o bien sen t =−y, y bastaría tomar α =−t.
Por periodicidad, igualmente cos(α +2kπ) = x, sen(α +2kπ) = y para todo k ∈ Z. Supongamosahora que encontramos β ∈ R para el que cosβ = x, senβ = y. Entonces
sen(β −α) = yx− xy= 0,
luego por el apartado g) de la proposición 11.1.10 existirá un m ∈ Z tal que β −α = mπ . Si m fuesede la forma 2k+1, k ∈ Z, resultaría cos(β −α) =−1; sin embargo,
cos(β −α) = xx+ yy= x2+ y2 = 1,
por lo que debe ser m= 2k para algún k ∈ Z y finalmente β = α +2kπ .
De la proposición anterior se deduce que podemos parametrizar la circunferencia x2+ y2 = 1 deesta forma:
x(t) = cos t, y(t) = sen t,t ∈ [0,2π].
Tomemos un punto P= (x,y) de la circunferencia distinto de (1,0), sea α ∈ (0,2π) tal que x= cosα ,y= senα y veamos que α es el ángulo que forma el punto P con el origen de coordenadas y el semiejex positivo.
P= (x,y)
x 1
y

11.2. Funciones trigonométricas 217
Pero este ángulo es la longitud del arco de circunferencia desde el punto (1,0) hasta el punto P. Ycomo (1,0) = (x(0),y(0)), la longitud del arco es∫ α
0
√x′(t)2+ y′(t)2 dt =
∫ α
0
√sen2 t+ cos2 t dt =
∫ α
0dt = α,
como queríamos ver. Por lo tanto, esta definición analítica del seno y el coseno coinciden con ladefinición geométrica.
En resumen, en este apartado hemos definido las funciones seno y coseno, y hemos demostradotodas las propiedades fundamentales que usamos habitualmente. En este punto, podemos continuarrigurosamente el estudio de las restantes funciones trigonométricas (tangente, cotangente, secante,cosecante) y de las funciones trigonométricas inversas, que como sabemos son inversas parcialesde las anteriores, es decir, inversas de la restricción de las funciones trigonométricas a subdominiosadecuados. Sería muy largo completar todos los detalles, pero queremos al menos detenernos en lafunción arco seno y ver que se puede construir y estudiar mediante integración, como hicimos en sumomento con el logaritmo.
11.2. Funciones trigonométricas: construcción mediante integralesDe nuevo nos situamos en el principio de los tiempos, olvidando lo que acabamos de aprender
sobre las funciones trigonométricas, y partimos de cero para crear la función arco seno como primitivaconstruida por integración.
Proposición 11.2.1 (función arco seno). La función A : [−1,1]→ R dada por
A(x) =∫ x
0
1√1− t2 dt
está bien definida, es impar, continua en [−1,1] y derivable en (−1,1), con
A′(x) =1√1− x2 y A′′(x) =
x(1− x2)3/2 .
En consecuencia,lımx→±1A
′(x) = +∞,
A es estrictamente creciente en [−1,1], convexa en [0,1) y cóncava en (−1,0].Demostración. La función
√1− t2 está bien definida para t ∈ [−1,1] (recordemos que todo número
real no negativo tiene una raíz cuadrada no negativa perfectamente determinada), es continua y solose anula para t = 1 o t =−1. Además,
0≤ 1√1− t2 ∼
1√2
1(1− t)1/2 , (t→ 1)
0≤ 1√1− t2 ∼
1√2
1(1+ t)1/2
, (t→−1),
con lo cual la función1√1− t2
es impropiamente integrable en (−1,1). Por lo tanto, la función A está bien definida en [−1,1] y escontinua. La derivabilidad en (−1,1) y el valor de la derivada se sigue del teorema fundamental delcálculo integral (teorema 6.3.4). Lo demás ya es rutinario.

218 Capítulo 11. Funciones elementales
Nota. Una vez más, la interpretación analítica y la geométrica concuerdan. Dado y ∈ [−1,1], su arcoseno A(y) es la longitud del arco de la circunferencia unidad que tiene y por seno (ver la figura 11.1).En efecto: si parametrizamos la semicircunferencia de la derecha por
−1≤ t ≤ 1→{x(t) =
√1− t2
y(t) = t,
un cálculo elemental prueba que √x′(t)2+ y′(t)2 =
1√1− t2 ,
así que la longitud del arco desde el punto de ordenada 0 hasta el punto de ordenada y es∫ y
0
√x′(t)2+ y′(t)2 dt =
∫ y
0
1√1− t2 dt = A(y).
En particular, la longitud de la semicircunferencia será igual a
arcseny
y
1
−1
Figura 11.1: el arco seno de y es la longitud del arco
∫ 1
−11√1− t2 dt = 2
∫ 1
0
1√1− t2 dt,
lo que explica la siguiente definición.
Definición 11.2.2 (el número π).π def= 2
∫ 1
0
1√1− t2 dt.
Es muy fácil ver con esta definición que 3 < π < 4: por un lado, para cada t ∈ (0,1) se cumpleque 1− t2 = (1− t)(1+ t) > 1− t, y por tanto
π = 2∫ 1
0
1√1− t2 dt <
∫ 1
0
2√1− t dt =
[−4√1− t
]t=1t=0
= 4.

11.2. Funciones trigonométricas 219
Por otra parte, como 1− t2 < 1 también tenemos que 1√1−t2 > 1; y como 1− t2 = (1+ t)(1− t) <
2(1− t), resulta que 1√1−t2 > 1√
21√1−t . Usamos la primera desigualdad en (0,1/2) y la segunda en
(1/2,1) para obtener
π >∫ 1/2
02dt+
∫ 1
1/2
√2√1− t dt = 1+
[−2√2√1− t
]t=1t=1/2
= 1+2= 3.
Como consecuencia inmediata de las propiedades de la función A y de la definición de π se tiene:
Corolario 11.2.3. La función A aplica biyectivamente [−1,1] sobre [−π/2,π/2].
−1
−π/2
1
π/2
Gráfica de la función A (arco seno)
Ya hemos comentado cómo se relaciona la definición que hemos dado de π con la definicióngeométrica más habitual, en función de la longitud de la circunferencia unidad. Vimos en su momentocómo se corresponde la noción de área con la integral, y conforme a ello reencontramos π como valordel área del círculo unidad.
Proposición 11.2.4. π es el área de un círculo de radio unidad.
Demostración. Sea f la función definida en [−1,1] por f (x) = 12A(x)+ 1
2x√1− x2. Es continua en
[−1,1], y si x ∈ (−1,1) entonces f ′(x) =√1− x2. Por la regla de Barrow (teorema 6.3.1),∫ 1
−1
√1− x2 dx=
∫ 1
−1f ′(x)dx= f (1)− f (−1) =
12A(1)− 12A(−1) =
π2 .
Dejamos como ejercicio probar que el área de un círculo de radio R es πR2 (y que la longitud desu circunferencia es 2πR).
El número π tiene una historia milenaria, por lo que no es extraño que abunde el folklore en tornoa él. Dos referencias interesantes son [BERGGREN-BORWEIN-BORWEIN] y [DELAHAYE].
Para obtener ahora el seno y el coseno, podemos proceder así: dado que A es biyectiva, existesu inversa, a la que llamamos S. Así, S aplica biyectivamente [−π/2,π/2] sobre [−1,1] y es cre-ciente. Como A′ no se anula en (−1,1) resulta que S es derivable en (−π/2,π/2), con S′(x) =

220 Capítulo 11. Funciones elementales
−1
−π/2
1
π/2
Gráfica de la función S (seno) en [−π/2,π/2]
1A′(S(x)) =
√1−S2(x). De hecho, S es derivable también en los puntos ±π/2, ya que por la regla
de L’Hospital 5.3.8
lımx→π/2
S(x)−S(π/2)x−π/2 = lım
x→π/2S′(x) = lım
x→π/2
√1−S2(x) = 0
y por tanto S′(π/2) = 0, y análogamente S′(−π/2) = 0. De modo que
S′(x) =√1−S2(x)
en todo el intervalo cerrado [−π/2,π/2].Sea C : [−π/2,π/2] → R la función derivada de S, es decir C(x) =
√1−S2(x). Por el teore-
ma 5.1.5 (regla de la cadena), si 1−S2(x) %= 0, o sea si x ∈ (−π/2,π/2), tenemos
C′(x) =−2S(x)S′(x)2√1−S2(x) =−S(x),
y con la regla de L’Hospital es fácil ver queC′ =−S en todo el intervalo cerrado [−π/2,π/2].Como, para cada n, las derivadas C(n) y S(n) son iguales a ±C o ±S, resulta que |C(n)(x)| ≤ 1 y
|S(n)(x)|≤ 1 para cada x ∈ [−π/2,π/2]. Por lo tantoC y S coinciden en todo el intervalo con su seriede Taylor-Maclaurin; es decir,
S(x) =∞
∑n=0
S(n)(0)n! xn, C(x) =
∞
∑n=0
C(n)(0)n! xn
para todo x∈ [−π/2,π/2]. Al ser S(0) = 0 yC(0) =√1−S2(0) = 1, resulta que las series anteriores,
suprimiendo los términos nulos, toman la forma
S(x) =∞
∑n=0
(−1)n(2n+1)!x
2n+1, C(x) =∞
∑n=0
(−1)n(2n)! x
2n.
Reencontramos las series de potencias conocidas en nuestra anterior definición del seno y el coseno,ambas con radio de convergencia +∞, y por tanto las funciones que definen en R extienden a S y C.De este modo cerramos el círculo, y podemos remitirnos a la sección anterior en cuanto se refiere asus propiedades.

11.3. Apéndice: el número π es irracional 221
11.3. Apéndice: el número π es irracionalLa demostración de la irracionalidad de π que vamos a exponer se debe originalmente a Ni-
ven [NIVEN], y aparece en [HARDY-WRIGHT, pág. 47], junto a una prueba similar de que logx es irracio-nal para todo x racional positivo y distinto de 1.
Teorema 11.3.1. π y π2 son números irracionales.
Demostración. Basta probar que π2 es irracional.Para cada n ∈ N, consideramos la función f dada por f (x) = xn(1−x)n
n! . Es claro que, si 0< x < 1,tenemos que 0< f (x) < 1/n!. Existen ciertos ck enteros tales que
f (x) =1n!
2n
∑k=n
ckxk.
f es un polinomio, y esta expresión es la serie de Taylor-Maclaurin de f , así que f (k)(0) = 0 si k < nó k > 2n (de hecho, f (k) = 0 si k > 2n). Si n≤ k ≤ 2n, entonces f (k)(0) = k!
n!ck es un número entero.Como f (x) = f (1− x), f y todas sus derivadas toman también valores enteros en x= 1.
Supongamos que π2 = ab , con a, b∈N, y lleguemos a una contradicción. Elegimos entonces n∈N
tal que πann! < 1 (podemos hacerlo, porque an
n! → 0). Para este valor de n tomamos f como hemos dicho,y definimos
G(x) = bnn
∑k=0
(−1)kπ2n−2k f (2k)(x),
H(x) = G′(x)senπx−πG(x)cosπx.
Tenemos que H(1) = πG(1), H(0) =−πG(0), luego
G(1)+G(0) =1πH(1)− 1
πH(0) =
∫ 1
0
1πH ′(x)dx.
Pero
H ′(x) = G′′(x)senπx+π2G(x)senπx
= bn(
n
∑k=0
(−1)kπ2n−2k f (2k+2)(x)+n
∑k=0
(−1)kπ2n−2k+2 f (2k)(x))senπx
(teniendo en cuenta que f (2n+2) = 0)
= bn(n−1∑k=0
(−1)kπ2n−2k f (2k+2)(x)+n
∑k=0
(−1)kπ2n−2k+2 f (2k)(x))senπx
(hacemos el cambio j = k+1 en el primer sumatorio)
= bn(
n
∑j=1
(−1) j−1π2n−2 j+2 f (2 j)(x)+n
∑k=0
(−1)kπ2n−2k+2 f (2k)(x))senπx
= bnπ2n+2 f (x)senπx= π2an f (x)senπx,

222 Capítulo 11. Funciones elementales
ya que estamos suponiendo que bπ2 = a. Es decir,
G(0)+G(1) =∫ 1
0πan f (x)senπxdx.
De aquí se deduce que0< G(0)+G(1) < π a
n
n! < 1,
porque 0< f (x) < 1/n! y 0< senπx≤ 1 para cada x ∈ (0,1). Sin embargo, tanto
G(0) = bnn
∑k=0
(−1)kπ2n−2k f (2k)(0) =n
∑k=0
(−1)kan−kbk f (2k)(0)
comoG(1) = bn
n
∑k=0
(−1)kπ2n−2k f (2k)(1) =n
∑k=0
(−1)kan−kbk f (2k)(1)
son números enteros, y entonces G(0)+G(1) es un número entero del intervalo (0,1). Esto no puedeser.

Retratos
Niels Henrik Abel(Finnoy, Noruega, 1802 – Froland, Noruega, 1829)
Isaac Barrow(Londres, 1630 – Londres, 1677)
223
224 Capítulo 11. Retratos
Johann Bernoulli(Basilea, 1667 – Basilea, 1748)
Bernard Placidus Johann Nepomuk Bolzano(Praga, 1781 – Praga,1848)
Georg Ferdinand Ludwig Philipp Cantor(San Petersburgo, Rusia, 1845 – Halle, Alemania,
1918)
Augustin Louis Cauchy(París, 1789 – Sceaux, Francia, 1857)

Retratos 225
Jean le Rond d’Alembert(París, 1717 – París, 1783)
Jean Gaston Darboux(Nimes, 1842 – París, 1917)
René Descartes(La Haye, Francia, 1596 – Estocolmo, 1650)
Johann Peter Gustav Lejeune Dirichlet(Düren, Imperio Francés, hoy Alemania, 1805 –
Gotinga, Hannover,1859)

226 Capítulo 11. Retratos
Leonhard Euler(Basilea, Suiza, 1707 – San Petersburgo, 1783)
Pierre de Fermat(Beaumont-de-Lomagne, Francia, 1601 – Castres,
Francia, 1665)
Leonardo Pisano Fibonacci(Pisa, hacia 1170 – hacia 1250)
Galileo Galilei(Pisa, 1564 – Arcetri, Florencia, 1642)

Retratos 227
Jacques Solomon Hadamard(Versalles, 1865 – París, 1963)
Heinrich Eduard Heine(Berlín, 1821 – Halle, Alemania, 1881)
Christiaan Huygens(La Haya, 1629 – La Haya, 1695)
Johannes Kepler(Weil der Stadt, Sacro Imperio Romano Germánico,hoy Alemania, 1571 – Regensburg, hoy Alemania,
1630)

228 Capítulo 11. Retratos
Guillaume François Antoine, Marqués de l’Hospital(París, 1661 – París, 1704)
Joseph Louis Lagrange(Turín, 1736 – París, 1813)
Edmund Georg Hermann Landau(Berlín, 1877 – Berlín, 1938)
Henri Léon Lebesgue(Beauvais, Francia, 1875 – París, 1941)

Retratos 229
Gottfried Wilhelm von Leibniz(Leipzig, 1646 – Hannover, 1716)
Rudolf Otto Sigismund Lipschitz(Königsberg, hoy Kaliningrado, 1832 – Bonn,
Alemania, 1903)
Colin Maclaurin(Kilmodan, Escocia, 1698 – Edimburgo, 1746)
Isaac Newton(Woolsthorpe, Inglaterra, 1643 – Londres, 1727)

230 Capítulo 11. Retratos
Ivan Morton Niven(Vancouver, 1915 – Eugene, Oregón, 1999)
Giuseppe Peano(Spinetta, Italia, 1858 – Turín, 1932)
Alfred Israel Pringsheim(Ohlau, Baja Silesia, hoy Olawa, Polonia, 1850 –
Zúrich, 1941)
Joseph Ludwig Raabe(Brody, Imperio Austro-húngaro, hoy Ucrania, 1801
– Zúrich, 1859)

Retratos 231
Georg Friedrich Bernhard Riemann(Breselenz, Hannover, 1826 – Selasca, Italia, 1866)
Brook Taylor(Edmonton, Inglaterra, 1685 – Londres, 1731)
Karl Theodor Wilhelm Weierstrass(Ostenfelde, Westfalia, hoy Alemania, 1815 – Berlín,
1897)
William Henry Young(Londres, 1863 – Lausana, Suiza, 1942)


Bibliografía
[ABELLANAS-GALINDO] Abellanas, L.; Galindo, A.: Métodos de cálculo. Serie Schaum, McGraw-Hill/Interamericana de España, Madrid, 1989.
[APOSTOL1] Apostol, T. M.: Calculus, vol. I (segunda edición). Reverté, Barcelo-na, 1989.
[APOSTOL2] Apostol, T. M.: Análisis Matemático (segunda edición). Reverté, Bar-celona, 1991.
[BARTLE] Bartle, R. G.: Introducción al Análisis Matemático (sexta reimpre-sión). Limusa, México, 1992.
[BARTLE-SHERBERT] Bartle, R. G.; Sherbert, D. R.: Introducción al Análisis Matemáticode una Variable. Limusa, México, 1990.
[BERGGREN-BORWEIN-BORWEIN] Berggren, L.; Borwein, J.; Borwein, P.: Pi: A Source Book (segundaedición). Springer, Nueva York, 2000.
[BIRKHOFF-MACLANE] Birkhoff, G.; MacLane, S.: Algebra moderna. Teide, Barcelona,1960.
[DELAHAYE] Delahaye, J. P.: Le fascinant nombre π . Pour la science, París, 1997.
[DURÁN] Durán, A. J.: Historia, con personajes, de los conceptos del cálculo.Alianza, Madrid, 1996.
[GARAY-CUADRA-ALFARO] Garay, J.; Cuadra, J. L.; Alfaro, M.: Una introducción al cálculoinfinitesimal. (Ed. de los autores) Zaragoza, 1974.
[GELBAUM-OLMSTED] Gelbaum, B. R.; Olmsted, J. M. H.: Counterexamples in Analysis.Holden-Day, San Francisco, 1964.
[GRATTAN-GUINNESS] Grattan-Guinness, I. (comp.): Del cálculo a la teoría de conjuntos,1630–1910. Una introducción histórica. Alianza Editorial, Madrid,1984.
[GUZMÁN] Guzmán, M.: El rincón de la pizarra: Ensayos de visualización enanálisis matemático. Pirámide, Madrid, 1996.
[HAIRER-WANNER] Hairer, E.; Wanner, G.: Analysis by Its History. Springer, NuevaYork, 1996.
233

234 BIBLIOGRAFÍA
[HARDY-WRIGHT] Hardy, G. H.; Wright, E. M.: An Introduction to the Theory of Num-bers (quinta edición). Oxford University Press, 1978, rev. 2000.
[LAX] Lax, P.; Burstein, S.; Lax, A.: Calculus with Applications and Com-puting. Springer, Berlín, 1976.
[LE LIONNAIS] Le Lionnais, F.: Les nombres remarquables. Hermann, París, 1983.
[MAOR] Maor, E.: e. The Story of a Number. Princeton University Press, Prin-ceton, N.J., 1994.
[NIVEN] Niven, I.:A Simple Proof that π is Irrational, Bulletin of the AmericanMathematical Society 53 (1947), página 509.
[ORTEGA] Ortega, J. M.: Introducción al Análisis Matemático. Labor, Barcelo-na, 1995.
[RÍBNIKOV] Ríbnikov, K.: Historia de las Matemáticas.Mir, Moscú, 1987.
[ROSS] Ross, K.A.: Elementary Analysis: The Theory of Calculus. Springer,Berlín, 1980.
[SPIEGEL-ABELLANAS] Spiegel, M.R.: Abellanas, L.: Fórmulas y tablas de matemática apli-cada.McGraw Hill (colección Schaum), 1991.
[SPIVAK] Spivak, M.: Calculus. Cálculo Infinitesimal (segunda edición). Re-verté, Barcelona, 1990.

Índice de símbolos∫J , 163∫ ba , 121, 141, 162∫ ba ,
∫ ba , 121
|a|, 6[x], 9‖P‖, 125∣∣x=bx=a, 140", 70∼, 60, 70A′, 63arccos, 29arcctg, 30arcsen, 29arc tg, 30argcosh, 33argctgh, 33argsenh, 33arg tgh, 33
cos, 26cosec, 28cosech, 32cosh, 31ctg, 28ctgh, 32
dom, 17
e, 24exp, 24
f |S, 17f ′, 85f ′′, 100f (n), 100
Γ, 178γ , 178
Hn, 172
im, 18ınf, 8
lım, 39, 63, 68lıminf, 56lımsup, 56log, 25loga, 26
max, 8Mi, 119mi, 119mın, 8
N, 1
o(g(x)), 102
π , 27P([a,b]), 119Pn,c, f (x), 101
Q, 3
R, 4R+, 146R, 54rang, 18Rn(x,a), 105
sec, 28sech, 32sen, 26senh, 31S( f ,P), S( f ,P), 119∑∞n=m, 171sup, 8
tg, 28
235

236 ÍNDICE DE SÍMBOLOS
tgh, 32
Z, 3ζ , 179

Índice alfabético
Abel, véase criterio de Abel, véase fórmula deAbel, véase lema de Abel
Apéry, 179arco coseno, véase función arco cosenoarco cotangente, véase función arco cotangentearco seno, véase función arco senoarco tangente, véase función arco tangenteárea, 27, 120, 122, 219argumento coseno hiperbólico, véase función
argumento coseno hiperbólicoargumento cotangente hiperbólica, véase fun-
ción argumento cotangente hiperbóli-ca
argumento seno hiperbólico, véase función ar-gumento seno hiperbólico
argumento tangente hiperbólica, véase funciónargumento tangente hiperbólica
arquimediana, véase propiedad arquimedianaasíntota
horizontal, 114oblicua, 114vertical, 113
axiomade completitud, véase axioma del supremodel supremo, 8, 9
axiomas de Peano, 2
Barrow, véase regla de BarrowBernoulli, véase desigualdad de Bernoullibinomio de Newton, 13, 197Bolzano, véase teorema de Bolzano-Weierstrass,
véase teorema de Bolzano
cambio de variable, 145–147de Euler, 156para integrales impropias, 165
Cantor, véase proceso diagonal de Cantor, véa-se teorema de Cantor
Cauchy, véase condición de Cauchy, véase cri-terio de Cauchy, véase fórmula de Cauchy-Hadamard, véase fórmula de Cauchy,véase sucesión de Cauchy
codominio, véase función, codominio de unacomposición, véase funciones, composición decondición
de Cauchy, 72, 202, 204, 208para series, 175
de Lebesgue, 127de Riemann, 124–128, 131–134, 145
conjuntoacotado, 8, 11, 120, 130inferiormente, 3, 8, 9, 11superiormente, 8–11, 20
antiimagen, 18cota inferior de un, 8, 122, 125, 130cota superior de un, 8, 10, 12, 122, 124,
130derivado, 63imagen, 18, 20, 23, 25, 27, 29, 31, 32, 146,
148, 210, 211, 214ínfimo de un, 8, 11, 55, 58, 68, 69, 76, 123,
124, 126, 139, 212máximo de un, 8, 9, 58mínimo de un, 8, 9, 58, 214, 215supremo de un, 8, 10–12, 55, 59, 68, 69,
76, 124, 126, 130, 139, 212constante γ de Euler, 5, 178, 181, 185cosecante, véase función cosecantecosecante hiperbólica, véase función cosecante
hiperbólicacoseno, véase función cosenocoseno hiperbólico, véase función coseno hi-
perbólicocota
inferior, véase conjunto, cota inferior deun
237

238 ÍNDICE ALFABÉTICO
superior, véase conjunto, cota superior deun
cotangente, véase función cotangentecotangente hiperbólica, véase función cotangen-
te hiperbólicacriterio
de Abel, 169, 183de Cauchy, véase criterio de la raízde comparación, 166por mayoración, 166, 176, 181por paso al límite, 166, 176
de D’Alembert, véase criterio del cocientede Dirichlet, 169, 183de la integral, 177–179de la raíz, 176, 182, 191de Leibniz, 179, 183, 198de Pringsheim, 167, 179de Raabe, 177del cociente, 176, 182, 191, 197logarítmico, 179M de Weierstrass, 208
curva planaen coordenadas polares, 149en forma explícita, 149en forma paramétrica, 149
D’Alembert, véase criterio de D’AlembertDarboux, véase función integrable-Darboux, véa-
se integral de Darboux, véase sumade Darboux, véase teorema de Dar-boux
densidadde los números irracionales, 10, 122de los números racionales, 9, 122
derivada, véase también función derivadaacotada, 93, 196de orden n, 100, 103de una función en un punto, 85, 87, 101,
112por la derecha, 85por la izquierda, 85segunda, 100
desarrollode Taylor, véase fórmula de Taylorpolinómico, 102
Descartes, 86desigualdad
de Bernoulli, 14, 41–43de Caouchy-Schwartz, 14triangular, 7, 132, 182triangular inversa, 7, 132
Dirichlet, véase criterio de Dirichlet, véase fun-ción de Dirichlet, véase teorema deDirichlet
discontinuidad, 127de salto, 79evitable, 79, 164
dominio de definición, véase función, dominiode definición de una
entorno, 63, 65, 163, 194reducido, 63, 65
Euler, 178, véase constante de Euler, véase fun-ción beta de Euler, véase función gam-ma de Euler
exponencial, véase función exponencialextremo
absoluto, 92, 114, 144relativo, 90, 91, 108, 114, 144
Fermat, 86Fibonacci, véase sucesión de Fibonaccifórmula
ciclotómica, 13, 88de Abel, véase fórmula de sumación por
partesde adición, 27, 213, 215de Cauchy, 105de Cauchy-Hadamard, 191de Lagrange, 105de Stirling, 60de sumación por partes, 183de Taylor, 141, 196, 197, véase también
teorema de Taylorde Taylor-Maclaurin, 107, 147de Taylor-Young, 106
funciónacotada, 20, 29, 30, 32, 66, 75, 119, 121–
124, 126, 127, 129–136, 142, 166, 169inferiormente, 20, 31superiormente, 20, 166
algebraica, 24arco coseno, 29arco cotangente, 30

ÍNDICE ALFABÉTICO 239
arco seno, 29, 198, 217arco tangente, 30, 198argumento coseno hiperbólico, 33argumento cotangente hiperbólica, 33argumento seno hiperbólico, 33argumento tangente hiperbólica, 33beta de Euler, 170biyectiva, 18, 23, 33, 183, 211, 219codominio de una, 17, 29, 37cóncava, 110–112, 114, 144, 146, 211, 217continua, 73–80, 87, 89, 92–94, 96, 97,
100, 101, 103, 126, 127, 137–145, 147,162, 164, 165, 195, 204–207, 211, 217
a trozos, 136convexa, 110–112, 114, 144, 148, 210, 217cosecante, 28cosecante hiperbólica, 32coseno, 26, 29, 197, 198, 209, 212, 214,
219, 220coseno hiperbólico, 31cota superior de una, 20, 76cotangente, 28cotangente hiperbólica, 32de Dirichlet, 34, 74, 122de Lipschitz, 93derivable, 85, 87–89, 91–94, 96, 97, 100,
103–105, 108, 109, 111–113, 139–147,165, 193, 206, 207, 210, 211, 213, 217,219
derivable n veces, 100derivada, 85, 96, 103, 114, 140, 141, 165,
194, 198, 220dominio de definición de una, 17, 18, 21–
24, 29, 37, 60, 64, 69, 74, 80, 85, 92,93, 113, 146, 196, 204, 205
elemental, 24, 60, 69, 86, 104, 144, 209estrictamente creciente, 19, 23, 25, 27, 29–
32, 78, 94, 144, 146–148, 210, 211,214, 217
estrictamente decreciente, 19, 25, 27, 29,31, 78, 94, 144, 212, 214
estrictamente monótona, 78, 89, 96exponencial, 24, 31, 43, 147, 186, 197, 198,
209–212exponencial de base a, 25, 212extensión continua de una, 81, 136, 164gamma de Euler, 170, 178
gráfica de una, 19, 21, 86, 92, 93, 110–113, 120, 122
hiperbólica, 31hiperbólica inversa, 33identidad, 18, 23, 74, 121impar, 21, 27, 29–32, 113, 145, 213, 217integrable, 121, 125–127, 129, 130, 132,
133, 135, 136, 162, 164, 205integrable en sentido impropio, 162–165,
169integrable-Darboux, véase función integra-
bleintegrable-Riemann, véase función integra-
bleinversa, 18, 23, 25, 29, 30, 33, 78, 88, 89,
146, 147, 211, 212, 219inyectiva, 18, 23, 25, 29, 78, 88, 146, 148,
210, 211, 214localmente integrable, 162, 163, 165–167,
169logarítmica, 25, 144, 146, 198, 209, 211,
212logarítmica de base a, 26, 212monótona, 19, 79, 125, 139, 162, 169a trozos, 136no creciente, 19, 69, 94, 112, 138, 177no decreciente, 19, 68, 94, 111, 139, 166
no negativa, 138, 166, 167par, 21, 27, 31, 113, 145, 213periódica, 21, 27, 113, 214polinómica, véase polinomioprimitiva, 96, 140, 143–146, 163, 194, 217promedio integral de una, 137racional, 24real de variable real, 17restricción de una, 17, 19, 23, 29, 30, 33,
81, 214secante, 28secante hiperbólica, 32seno, 26, 27, 29, 197, 198, 209, 212, 214,
219, 220seno hiperbólico, 31suprayectiva, 18, 146tangente, 28tangente hiperbólica, 32trascendente, 24trigonométrica, 26, 212, 217
240 ÍNDICE ALFABÉTICO
trigonométrica inversa, 28, 217uniformemente continua, 80, 81, 93, 126zeta de Riemann, 179, 185
funcionescomposición de, 22, 75equivalencia de, 70, 104, 147
Galileo, 87gráfica, véase función, gráfica de una
Hadamard, véase fórmula de Cauchy-HadamardHeine, véase teorema de HeineHuygens, 86
inducción, véase principio de induccióninducción completa, véase principio de induc-
ción completaínfimo de un conjunto, véase conjunto, ínfimo
de uninfinitésimo, 118integración por partes, 140, 141, 168
para integrales impropias, 165integral, 121
de Darboux, véase integralde Riemann, 164, 165, véase integralimpropia, 161, 162, 164absolutamente convergente, 167condicionalmente convergente, 168convergente, 162, 164–167, 169, 170, 177divergente, 162, 166oscilante, 162
inferior, 121, 122, 124superior, 121, 122, 124
intervalo, 10, 11, 27, 29, 30, 32, 33, 46, 77, 78,81, 85, 89, 92–94, 96, 97, 100, 102–105, 109–113, 115, 141, 143–145, 162,163, 165–167, 169, 196, 198, 202, 205–207, 214, 215, 220, 222
cerrado y acotado, 75, 80, 119, 121–123,126, 133, 135, 137, 138, 143–145, 162
de convergencia, 190, 192, 195
Kepler, 87
L’Hospital, véase regla de L’HospitalLagrange, véase fórmula de LagrangeLandau, véase o pequeña de Landau
Lebesgue, 206, véase también condición de Le-besgue
Leibniz, 119, véase también criterio de Leib-niz, véase también regla de Leibniz
lema de Abel, 195, 198límite
a través de sucesiones, 64, 66, 67, 72, 98de oscilación, 58de una función, 63, 66, 71–73, 79, 97, 104,
113, 164, 165de una sucesión, 39, 40, 43–45, 47, 50, 51,
54, 56, 58, 147, 172en el infinito, 65inferior, 56, 58infinito, 65lateral, 68, 136por la derecha, 68, 69por la izquierda, 68, 69superior, 56, 58, 191unicidad del, 41, 64
Lipschitz, véase función de Lipschitzlogaritmo, véase función logarítmica
Maclaurin, véase fórmula de Taylor-Maclaurin,véase serie de Taylor-Maclaurin
máximoabsoluto, 75, 92, 137, 144relativo, 90, 108, 112relativo estricto, 90, 109
máximo de un conjunto, véase conjunto, maxi-mo de un
mínimoabsoluto, 75, 92, 96, 137, 144relativo, 90, 108relativo estricto, 90, 109
mínimo de un conjunto, véase conjunto, míni-mo de un
Newton, 87, 119, véase también binomio deNewton
Niven, 221número
e, 5, 24, 42, 106entero, 3irracional, 10, 34, 178, 179, 221natural, 1π , 5, 27, 214, 218, 219, 221

ÍNDICE ALFABÉTICO 241
racional, 3, 34, 178real, 4trascendente, 24, 27
o pequeña de Landau, 101orden de infinitud, 70
parte entera de un número real, 9partición de un intervalo, 119, 120, 122–129,
132, 134–136, 139norma de una, 125
Peano, véase axiomas de Peanopolinomio, 23, 24, 60, 69, 102, 185, 186, 221
de Taylor, 101, 106, 194principio de inducción, 2–4, 43, 100, 135, 136,
140, 148, 182, 194, 213, 215completa, 2, 76
Pringsheim, véase criterio de Pringsheimproceso diagonal de Cantor, 39progresión, véase sucesiónpropiedad
arquimediana, 8, 9, 40, 43de los valores intermedios, 11, 77, 96
puntoaislado, 73crítico, 91de acumulación, 63, 65–68, 70–74, 97, 113,
215de inflexión, 112–114, 144fijo, 77interior, 90, 91, 94, 96, 108, 112
Raabe, véase criterio de Raaberadio de convergencia, 190–195, 197, 210, 213,
220raíz, 23, 77, 217rama parabólica, 114rango de una función, véase conjunto imagenrecta ampliada, 54recta tangente, 86, 92, 93, 111–114regla
de Barrow, 139–141, 144, 145, 219para integrales impropias, 165
de L’Hospital, 97, 100, 101, 103, 104, 144,220
de la cadena, 88, 89, 144, 220de Leibniz, 115del sandwich, 47, 49, 57, 59, 65, 71, 72
representaciónbinaria, 12decimal, 11, 12hexadecimal, 12
representación gráfica, véase función, gráficade una
resto de Taylor, 105, 106restricción de una función, véase función, res-
tricción de unaRiemann, véase condición de Riemann, véa-
se función integrable-Riemann, véasefunción zeta de Riemann, véase inte-gral de Riemann, véase suma de Rie-mann, véase teorema de Riemann
Rolle, véase teorema de Rolle
secante, véase función secantesecante hiperbólica, véase función secante hi-
perbólicaseno, véase función senoseno hiperbólico, véase función seno hiperbó-
licoserie, 171
absolutamente convergente, 181, 184, 190alternada, 179aritmético-geométrica, 185armónica, 172, 185alternada, 180, 181, 186
binómica, 197carácter de una, 173condicionalmente convergente, 184convergente, 172–175, 181, 183de funciones, 203absolutamente convergente, 208convergente puntualmente, 203suma parcial de una, 203, 208término n-ésimo de una, 203uniformemente convergente, 205, 206,208
de potencias, 189, 209, 210, 213coeficiente n-ésimo de una, 189desarrollo en, 192
de Taylor, 196de Taylor-Maclaurin, 198, 220, 221de términos equivalentes, 176de términos no negativos, 175–177, 179,
184, 208

242 ÍNDICE ALFABÉTICO
divergente, 172geométrica, 172, 183, 185, 189, 190hipergeométrica, 185incondicionalmente convergente, 184logarítmica, 179oscilante, 172racional, 185reordenación de una, 183, 184suma de una, 172, 185suma parcial de una, 172, 174–176, 178,
179, 183–186, 194telescópica, 174, 185término n-ésimo de una, 172
Stirling, véase fórmula de Stirlingsubsucesión, 48, 49, 51, 58
convergente, 49, 80divergente, 51monótona, 49, 58
sucesionesequivalencia de, 60, 70
sucesión, 22, 37, 63, 65–67, 71, 72, 74–76, 98,171, 183
acotada, 41, 44, 46, 49, 50, 80, 183, 190–192
inferiormente, 41, 42, 51, 56, 58, 77, 177superiormente, 41, 42, 47, 51, 56, 58,77, 175, 176, 180
aritmética, 39convergente, 39–41, 43–50, 54, 57, 147de Cauchy, 50, 72, 81, 82, 175de Fibonacci, 38de funciones, 201–203campo de convergencia de una, 201convergente puntualmente, 201límite puntual de una, 201término n-ésimo de una, 201uniformemente convergente, 203–208
divergente, 50–54estrictamente creciente, 41–43, 48, 51estrictamente decreciente, 41geométrica, 39monótona, 42, 51, 183no creciente, 41, 42, 56, 77, 177, 179no decreciente, 41–43, 47, 56, 77, 175,183
oscilante, 50, 58recurrente, 38
término n-ésimo de una, 37suma
de Darboux, 119, 122de Riemann, 128, 129inferior de Darboux, 119superior de Darboux, 119
supremo de un conjunto, véase conjunto, su-premo de un
tangente, véase función tangente, véase rectatangente
tangente hiperbólica, véase función tangente hi-perbólica
Taylor, véase fórmula de Taylor, véase poli-nomio de Taylor, véase resto de Tay-lor, véase serie de Taylor, véase teo-rema de Taylor-Young, véase teoremade Taylor
teoremade Bolzano, 76, 77, 215de Bolzano-Weierstrass, 49, 50, 75de Cantor de los intervalos encajados, 46,
49de Darboux, 77, 137, 148, 215de Dirichlet, 184de Heine, 80, 81, 126de la media del cálculo integral, 137de la media del cálculo integral, segundo,
138de los incrementos finitos, véase teorema
del valor mediode los valores intermedios, véase teorema
de Darbouxde Riemann, 184de Rolle, 92, 97, 98de Taylor, 105, 196, véase también fórmu-
la de Taylorde Taylor-Young, 100–104, 108de Weierstrass, 75, 92, 96, 126, 137del valor medio, 92–94, 106, 111, 138, 139del valor medio generalizado, 97–99, 106fundamental del cálculo integral, 142, 144,
146, 164, 207, 209, 217fundamental del cálculo integral, primer,
véase regla de Barrow

ÍNDICE ALFABÉTICO 243
valor absoluto, 6, 18, 53, 54, 56, 74, 92, 172,193
valor asintótico, 79
Weierstrass, véase criterio M de Weierstrass,véase teorema de Bolzano-Weierstrass,véase teorema de Weierstrass
Young, véase teorema de Taylor-Young

ÁREA DE ANÁLISIS MATEMÁTICO, UNIVERSIDAD DE ZARAGOZA
Docencia Investigación Seminario Rubio de Francia Otros enlaces
ANÁLISIS MATEMÁTICO ILa asignatura de Análisis Matemático I pertenece al plan de estudios de la licenciatura deMatemáticas (Facultad de Ciencias). Se trata de una asignatura troncal de primer curso, decarácter anual y de 16,5 créditos. Su docencia está asignada al área de Análisis Matemático.
Esta asignatura forma parte del campus virtual de la Universidad de Zaragoza (Anillo DigitalDocente).
Programa de la asignatura:
NÚMEROS REALESOperaciones algebraicas, valor absoluto y desigualdades.Supremos e ínfimos. Axioma de completitud.Funciones reales de variable real: generalidades y ejemplos.
1.
SUCESIONES DE NÚMEROS REALESDefiniciones básicas y resultados fundamentales.Subsucesiones. Sucesiones de Cauchy.Operaciones con sucesiones. Cálculo de límites.
2.
CONTINUIDADLímites de funciones. Operaciones con límites.Funciones continuas. Propiedades: teoremas de Weierstrass, Bolzano y Darboux.Clasificación de discontinuidades.
3.
DERIVACIÓNDefinición. Interpretación geométrica. Operaciones con derivadas.Teoremas de Rolle y del valor medio. Regla de L'Hôpital.Derivadas de orden superior. Teoremas de Taylor y Young.Aplicaciones: estudio y representación gráfica de funciones.
4.
INTEGRACIÓNLa integral de Riemann: estudio de funciones integrables Riemann y propiedadesbásicas.Teorema fundamental del cálculo integral. Regla de Barrow. Existencia de primitivapara una función continua. Cambio de variable.Cálculo de integrales y aplicaciones: métodos para el cálculo de primitivas, cálculode áreas y límites.La integral en intervalos no acotados o para funciones no acotadas.
5.
SERIES NUMÉRICASSeries de términos positivos. Criterios de convergencia.Series de términos cualesquiera. Convergencia absoluta. Series alternadas: criteriode Leibniz.Métodos para sumar series.
6.
SUCESIONES Y SERIES DE FUNCIONESConvergencias puntual y uniforme. Criterios de convergencia uniforme. Relación dela convergencia uniforme con la continuidad, derivación e integración.Series de potencias. Radio de convergencia. Introducción a las funciones analíticas.
7.
ANÁLISIS MATEMÁTICO - UNIVERSIDAD DE ZARAGOZA http://www.unizar.es/analisis_matematico/analisis1/prg_analisis1.html
1 de 3 9/12/2009 7:50 PM

Bibliografía:
Apostol, T.M.: Calculus, Vol I. Reverté, Barcelona, 1999.Bartle, R. G. y Sherbert, D. R.: Introducción al Análisis Matemático de una variable.Editorial Limusa, México, 1990.Fuertes, J. y Martínez, J.: Problemas de Cálculo Infinitesimal. Col. Schaum. McGraw-Hill,Madrid 1997.Ortega, J. M.: Introducción al Análisis Matemático. Editorial Labor, 1995.Pestana, D.; Rodríguez, J. M.; Romera, E.; Tourís, E.; Álvarez, V. y Portilla, A.: Cursopráctico de cálculo y precálculo. Editorial Ariel, Barcelona, 2000.
Apuntes:
Portada e índice general1.Números reales2.Funciones reales de una variable real. Generalidades3.Sucesiones de números reales4.Continuidad5.Derivación6.La integral de Riemann7.Integrales impropias8.Series numéricas9.Series de potencias. Desarrollos en serie de Taylor10.Sucesiones y series de funciones11.Funciones elementales (fuera de programa)12.Retratos, bibliografía, índice de símbolos e índice alfabético13.
Guiones:
Operaciones con límites1.Fórmula de Taylor2.Representación gráfica de funciones3.Métodos básicos de integración4.Áreas, longitudes, volúmenes, baricentros y momentos5.Series de potencias6.
Hojas de problemas:
Símbolo sumatorio1.Desigualdades y módulo2.Números reales: supremos e ínfimos3.Funciones. Generalidades4.Sucesiones de números reales5.Límites y continuidad de funciones6.Derivabilidad y extremos7.Extremos de funciones. Crecimiento y decrecimiento. Fórmula de Taylor8.Cálculo de primitivas9.Integración10.Integrales impropias11.Aplicaciones del cálculo integral12.Series13.Series de potencias14.
ANÁLISIS MATEMÁTICO - UNIVERSIDAD DE ZARAGOZA http://www.unizar.es/analisis_matematico/analisis1/prg_analisis1.html
2 de 3 9/12/2009 7:50 PM

Prácticas:
Introducción a Maple (formatos: Maple para Macintosh, Maple para Windows y PDF)1.Desigualdades y funciones (Maple-Mac, Maple-Windows, PDF)2.Sucesiones (Maple-Mac, Maple-Windows, PDF)3.Límites y continuidad de funciones (Maple-Mac, Maple-Windows, PDF)4.Continuidad y derivabilidad (Maple-Mac, Maple-Windows, PDF)5.Extremos de funciones. Fórmula de Taylor. Gráficas (Maple-Mac, Maple-Windows, PDF)6.Representación gráfica de curvas y superficies: guion (Maple-Mac, Maple-Windows, PDF)y ejercicios (Maple-Mac, Maple-Windows, PDF)
7.
Cálculo de primitivas (Maple-Mac, Maple-Windows, PDF)8.Cálculo de primitivas (continuación)9.Aplicaciones del cálculo integral (Maple-Mac, Maple-Windows, PDF)10.Aplicaciones del cálculo integral (continuación)11.Series (Maple-Mac, Maple-Windows, PDF)12.
Exámenes:
Primer parcial: 2001-02, 2002-03, 2003-04, 2006-07, 2007-08.1.Convocatoria de Junio: 2001-02, 2002-03, 2003-04, 2007-08.2.Convocatoria de Septiembre: 2001-02, 2002-03, 2007-08.3.Guiones: primer parcial, segundo parcial.4.
El área de Análisis matemático imparte las siguientes asignaturas: en la licenciatura deMatemáticas, Análisis matemático I, Números y conjuntos, Análisis matemático II, Medida eintegración, Variable compleja, Análisis funcional, Ampliación de análisis complejo, Análisis deFourier, Distribuciones y teoría espectral, Fundamentos de análisis matemático, Teoría analíticade números; en la licenciatura de Físicas, Métodos matemáticos I; en la diplomatura deEstadística, Análisis matemático, Ampliación de análisis matemático; en la diplomatura deÓptica y Optometría, Matemáticas.
Comentarios sobre esta página: Última modificación: 15-9-2008
ANÁLISIS MATEMÁTICO - UNIVERSIDAD DE ZARAGOZA http://www.unizar.es/analisis_matematico/analisis1/prg_analisis1.html
3 de 3 9/12/2009 7:50 PM





























