Embed Size (px)
Citation preview

Prof. MSc. Adry Lima.
Universidade Federal do ParáDepartamento de Engenharia Mecânica
Grupo de Vibrações e Acústica
Notas de Aula 3
Disciplina:Cinemática e Dinâmica dos Mecanismos
Carga Horária: 90 horas

Cinemática de Corpos Rígidos e Mecanismos
Movimento Plano Geral: movimento relativo.
OBSERVAÇÃO: No caso geral, os pontos A e B são posicionados a partir de uma referência fixa que não necessariamente é a mesma, mas os vetores unitários i e j na definição de rA e rB tem que estarem na mesma direção e sentido.

Cinemática de Corpos Rígidos e Mecanismos
Movimento Plano Geral = translação (definida por drA, onde A move-se para a sua posição final e B se move para B’ ) + rotação (giro d em torno de A, com B’ sofrendo um deslocamento relativo drB/A , B atinge a sua posição final.
Portanto,
ABAB ddd /rrr
Devido à translação e à rotaçãoDevido à translação
Devido à rotação

Cinemática de Corpos Rígidos e Mecanismos
Movimento Plano Geral
ABAB ddd /rrr
Velocidade:
dtd
dtd
dtd ABAB /rrr
ABAB /vvv
Velocidades absolutas medidas no sistema x,y.
Velocidade de B em relação a A, então denominada velocidade relativa. É medida por um observador fixo no sistema em translação x’,y’.

Cinemática de Corpos Rígidos e Mecanismos
ABAB /vvv ABAB // rωv ABAB /rωvv
vB = vetor velocidade do ponto B; vA = vetor velocidade do ponto A; rB/A = vetor de posição do ponto B em relação a A; e = vetor
velocidade angular do corpo.

Cinemática de Corpos Rígidos e Mecanismos
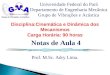
EXERCÍCIO 1:A barra mostrada na Figura abaixo é guiada pelos blocos A e B, que se movem nas ranhuras fixas. Se a velocidade de A é de 2 m/s para baixo, determine a velocidade de B no instante em que = 45o.

Cinemática de Corpos Rígidos e Mecanismos
SOLUÇÃO
Dados do Problema:
Pede-se:
oA smv 45;/2
?Bv
Equação da velocidade: ABAB rvv /
jirjisenrkivvjv
ABoo
AB
BBAˆ1414,0ˆ1414,0ˆ)45cos(*2,0ˆ)45(*2,0
ˆ;ˆ;ˆ2
//
ijjivjikjiv BB .̂1414,0.̂1414,0ˆ2ˆ)ˆ1414,0ˆ1414,0(ˆˆ2ˆ
Da igualdade conclui-se:
smvvv BBB /214,14*1414,01414,0
srd/14,141414,021414,020

Cinemática de Corpos Rígidos e Mecanismos
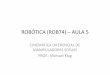
EXERCÍCIO 2:A manivela AB gira a 500 rad/s em torno de um eixo fixo passando A. Determine a velocidade do pistão no instante em que ele passa pela posição mostrada na figura.

Cinemática de Corpos Rígidos e Mecanismos
SOLUÇÃODados do Problema:
Pede-se:
mCBmBAsrd oAB .5,0.;.1,0;60;/..500
?Cv
Equação da velocidade: BCBC rvv /
jirjsenirkjvvjvv
ABoo
BC
CCBBˆ43,0ˆ25,0ˆ)60(*5,0ˆ)60cos(*5,0
ˆ;ˆ;ˆ
//
ijjjvjikjjv CC .̂43,0.̂25,0ˆ50ˆ)ˆ43,0ˆ25,0(ˆˆ50ˆ
Da igualdade conclui-se:043,00
smvv CC /5025,050
smvBAv BABB /501,0*500*

Cinemática de Corpos Rígidos e Mecanismos
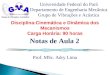
EXERCÍCIO 3:A rotação da barra AB impõe um movimento oscilatório à engrenagem F. Se AB tem velocidade angular de 6 rd/s, determine a velocidade angular da engrenagem F na situação mostrada na figura. A engrenagem E está ligada rigidamente ao braço CD e pode girar em torno do ponto fixo D.

Cinemática de Corpos Rígidos e Mecanismos
SOLUÇÃODados do Problema:
Pede-se:mrmrmDCmCB
mBAsrdFE
oAB
.025,0.;.1,0.;.15,0;1,0
.075,0;30;/.6
?FEquação da velocidade: BCBC rvv /
jirjsenirkivvivv
BCoo
BC
CCBBˆ05,0ˆ0866,0ˆ)30(*1,0ˆ)30cos(*1,0
ˆ;ˆ;ˆ
//
)ˆ05,0ˆ0866,0(ˆˆ45,0ˆ.15,0 jikiiCD
smvBAv BABB /.45,0075,0*6*
CDCCDCDC vDCv .15,015,0**
ijiiCD .̂.05,0.̂.0866,0ˆ45,0ˆ.15,0

Cinemática de Corpos Rígidos e Mecanismos
ijiiCD .̂.05,0.̂.0866,0ˆ45,0ˆ.15,0
.05,045,0.15,0 CD 0.0866,00
srdCDCD /.315,045,0
Sendo a velocidade tangencial no ponto de contato igual nas duas engrenagens, tem-se:
F
ECDFFFECD rrrr **
srdFF /.12025,01,03