Embed Size (px)
Citation preview
Análise de sistemas de comunicação para automação de minas subterrâneas com
tecnologias Modbus e Leaky Feeder
Carlos Eduardo de Oliveira
Thiago Madureira Braga
Celso Peixoto Garcia
Coordenação de curso de engenharia em Controle e Automação
Resumo – Este trabalho trata da avaliação e projeto de
tecnologias para implantação de um sistema de automação e
comunicação para minas subterrâneas, incluindo a análise de
viabilidade e levantamento de vantagens e desvantagens das
tecnologias disponíveis para este tipo de ambiente particular.
Será abordado o uso de sistemas de comunicação Modbus no
padrão RS485 e o meio semi-cabeado via Leaky Feeder para
controle automático em sistemas de ventilação e os respectivos
instrumentos para tal aplicação.
Palavras-chaves Automação, Modbus, Leaky Feeder e
instrumentos, minas subterrâneas.
I. INTRODUÇÃO
Nas atividades em mineração subterrânea existe o
desafio que é o de aplicar sistemas de comunicação e
automação visando atender toda cobertura, a segurança
e a automação para otimização dos processos,
minimização de falhas e redução de custos. Tal
atividade necessita do levantamento do perfil de
alcance da mina, tipo de geologia envolvida,
equipamentos mais adequados para automação e meio
físico ou sem fio que atendam as demandas de
comunicação e automação simultaneamente.
Projetos de automação para minas subterrâneas exigem
níveis de robustez e confiabilidade elevados, pois a
mineração engloba uma série de recursos e premissas
de segurança rigorosas. Diante disto, muitas vezes, o
desenvolvimento dos sistemas de automação visa a
adequação para sistemas de comunicação mais
simplificados com foco em minimizar as possibilidades
de falhas o que restringe os tipos de automação
possíveis. Neste sentido, faz-se necessário
compatibilizar a velocidade de comunicação com o
sistema de automação e meios físicos como requisito
para o desenvolvimento.
Citando o processo de ventilação, que é um dos
mais críticos, pois sem ele as atividades nos níveis mais
profundos podem ser letais aos operadores devido à
concentração de gases tóxicos como CO² advindos dos
maquinários e da poeira presente condensada devido a
não circulação do ar. Visando tal aspecto, insuflar ar e
exaurir os gases é uma operação primordial para
viabilizar os processos, além de efetuar o
sensoriamento de gases tóxicos. Portanto, neste projeto
o foco primário será a automação de ventilação e
controle de presença dos operadores, onde as
tecnologias envolvidas podem abranger mais que o
controle para ligar e desligar ventiladores à distância.
Para isso serão apresentados alguns conceitos e
tecnologias primordiais para o processo de elaboração e
concepção deste projeto.
II. REFERENCIAL TEÓRICO
A coleta de informações referentes à aplicação de
sistemas de comunicação subterrâneos no setor de
mineração trata-se de um dos trabalhos mais minuciosos
realizados para controle de operações em mineração e
sujeitos a diversas variáveis a serem consideradas.
Como um primeiro item a se avaliar será discutido a
característica das redes industriais, onde podemos
delinear o inicio do projeto.
A. Redes industriais para automação
Este é um item decisivo para projetos de mineração
e de alto valor agregado, tal como a maioria dos
sistemas de automação na busca e interação dos
controladores, atuadores e sensores, assim como o
monitoramento dinâmico para melhoria dos processos.
Neste aspecto as redes industriais são a melhor solução
para acompanhamento e atuação remota e
consequentemente flexibilizando o acesso aos dados dos
processos. Para projetar redes industriais são necessários
três grupos de elementos essenciais: meio(s) físico(s),
hardware(s) de interface e interfaces humanas.
Os meios físicos são os responsáveis pelo tráfego
das informações geradas pela automação como
dados dos controladores, atuadores e sensores.
As interfaces de hardware são geralmente
dispositivos eletrônicos responsáveis pela conversão,
padronização e interpretação dos sinais que trafegam
pelo(s) meio(s) físico(s) como repetidores, hubs e
roteadores.
As interfaces humanas são os dispositivos
responsáveis pela entrega dos dados aos operadores
do processo para interpretações, ações e relatórios
dos processos industriais, como computadores,
interfaces supervisórias e indicadores visuais.
Na sequência do desenvolvimento deve-se
classificar o tipo de rede quanto ao seu perfil de
cobertura podendo ser classificadas em dois tipos: LAN
ou WAN.
As redes LAN são redes locais para pequenas
distâncias, com grau de complexidade simples, muito
aplicadas em indústrias ou ambientes de pequeno
número de interfaces humanas, pois o mesmo é
limitado. Já as redes WAN são para longas distâncias e
números elevados de interfaces humanas. Em ambas a
velocidade de comunicação de dados pode variar de
quilo bytes por segundo até a ordem de Megabytes por
segundo, ou seja, a quantidade e velocidade de acesso
aos dados do processo onde a rede industrial está
presente dependem diretamente da velocidade da rede
por onde os dispositivos de automação estão
conectados. Por isso ao projetar sistemas de automação
deve-se avaliar qual tipo de rede industrial melhor
atende as necessidades do processo, sendo decisiva para
dimensionamento dos equipamentos a serem utilizados
e tipo de recursos possíveis.
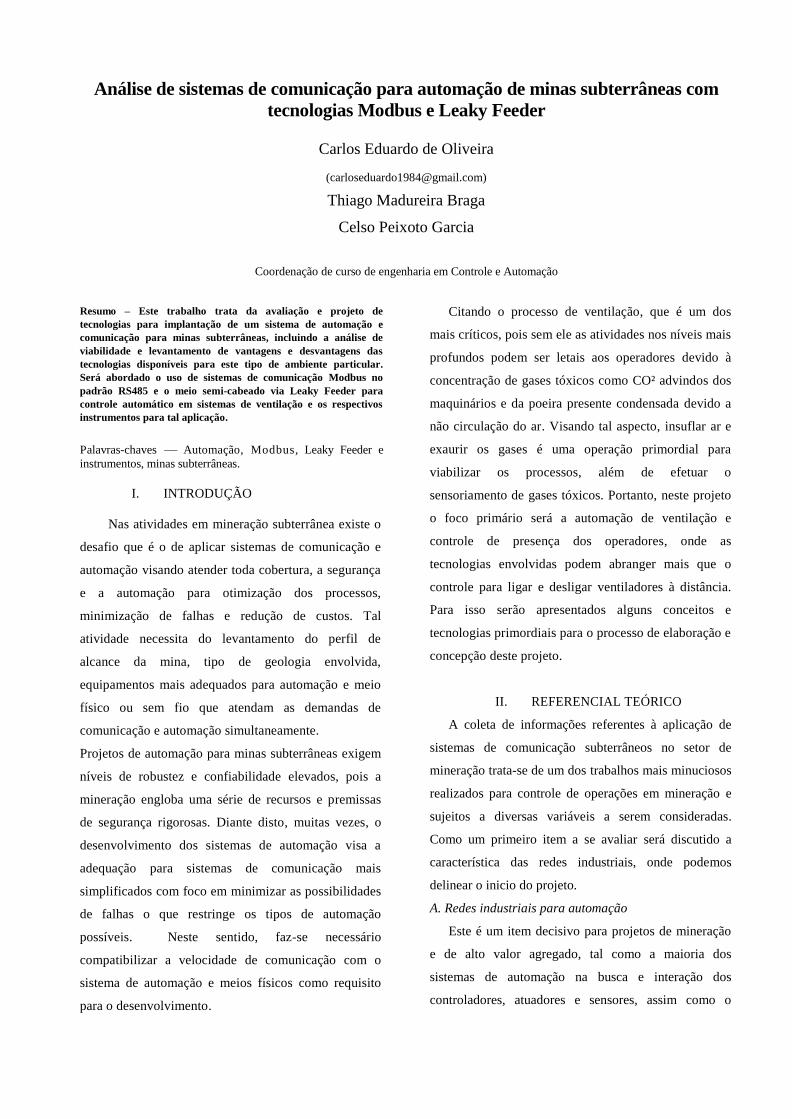
Também referente às redes industriais deve-se
mencionar o modelo OSI, criado pela Organização
Internacional para a Normalização (ISO) em 1984,
sendo um padrão permite uma analogia da comunicação
entre máquinas heterogêneas e definir conceitos
genéricos para uma construção de redes entre interfaces
humanas (de curta, média ou longa distância)
independente da tecnologia utilizada.
Subdividido em sete camadas e cada nível engloba
uma série de protocolos que definem a complexidade de
informações da rede conforme ilustrado na figura 1.
Figura 1. Modelo OSI (esquerda da figura) e modelo de redes para
automação (direita da figura). [12]
Em redes de automação para mineração os níveis de
protocolos das camadas: física, ligação ou enlace e
aplicação, geralmente atendem ao nível de comunicação
solicitada pelos dispositivos de rede para automação,
porém deve-se levar em consideração o tipo de dado e
velocidade necessários, pois quanto maior o nível de
precisão e velocidade exigidos pela rede maior é a
necessidade de protocolos mais complexos para atender
com confiabilidade a entrega de dados. Como exemplo
de redes de automação pode-se citar a rede Hart, um
tipo de rede dedicada ao monitoramento de vazão de
fluidos com nível de complexidade médio.
Para mineração o uso de sistemas com meios físicos
RS-485 ou RS-232 e enlace no protocolo Modbus tem
sido muito explorados, porém com limitações de taxa de
comunicação de no máximo 115200 Bps (Bytes por
segundo), ou ainda, 802.11 WiFi para galerias
subterrâneas maiores.[1]
Na maioria das vezes são redes mistas com a rede de
comunicação que geralmente é feita com meios
cabeados ou semi-cabeados, por fibra ótica ou Leaky
Feeder, para redução nas instalações. Nestas redes a
vantagem é que somente um cabo é necessário, porém
há o risco de perda de ambos os sistemas, comunicação
e automação, caso o meio físico sofra avarias.
Considerando tais informações o projeto para
interface de monitoramento em tempo real se faz
necessário para assegurar o pleno funcionamento das
operações na mineração.
B. Meio físico
Segundo o autor BANDYOPSDHYAY em seu livro
“Wireless Communication in Underground Mines” as
tecnologias de meio físicos mais utilizados para
comunicação em mineração subterrânea podem ser
definidos conforme a seguinte estrutura [1]:
Sistemas Cabeados
Estes sistemas são baseados em um meio físico
composto geralmente por pares de fios condutores
energizados, em alguns casos recobertos por uma
“blindagem” eletromagnética composta por uma malha
trancada metálica ou uma fina camada de papel
alumínio onde a mesma é conectada ao ponto de
aterramento do sistema de comunicação para dissipar
sinais externos de ruído aos filamentos do cabo interno e
é utilizado tanto para sistemas de telefonia como redes
industriais. Pode operar na ordem de quilômetros,
porém necessita de repetidores amplificadores no caso
de coberturas em longas distâncias (entre 350 e 1000
metros). Sua alimentação geralmente varia entre 12 a
48 volts contínuos, sendo a distância de alcance também
relacionada a esta magnitude. Outros fatores também
podem influenciar no alcance desta rede, sendo: a
resistividade do material dos filamentos, ruído da fonte
de alimentação, temperatura ambiente, umidade e
outros.
Sistemas Semi-cabeados
São sistemas que utilizam os sistemas cabeados,
porém também fornecem a cobertura sem fio em suas
proximidades graças ao efeito de irradiação decorrente
de seu arranjo de fabricação. Sua montagem é feita de
tal maneira que a blindagem externa contenha orifícios
que possibilitam a dispersão de sinais de rádio em suas
proximidades, cerca de até 40 metros em faixas que
variam do VHF (Very High Frequency – de 30 a
300MHz), UHF (Ultra High Frequency – de 300MHz a
3Ghz). [1] Esta tecnologia também é conhecida como
Leaky Feeder . Tecnologia desenvolvida desde a década
de 50 para mineração subterrânea. Indicada para
sistemas mistos onde a velocidade de trafego é exigida e
o acesso remoto é necessário para mobilidade.
Sistemas de Ondas Curtas
É a tecnologia que transmite sinais através das
paredes das galerias em minas subterrâneas baseado no
conceito de propagação de ondas de baixa frequência.
Capaz de atravessar até 35 metros em paredes
rochosas. Mesmo com baixo alcance é indicado para
aplicações para comunicação em situações de risco
como soterramento. Sua faixa de operação varia de 27 a
270 kHz e suas antenas tem tamanhos diferenciados,
geralmente entre 5 e 35 metros dependendo da
frequência e distancia de alcances desejados.
Sistemas Sem Fio
São projetados para propagação de sinal no vácuo
pelo principio de ondas eletromagnéticas, popularmente
conhecidas como ondas de rádio, necessitando de
antenas bem dimensionadas e dimensionamento dos
equipamentos de transmissão e recepção normatizados
para um bom desempenho. São regulamentados
geralmente por órgãos governamentais para controle de
telecomunicação, por exemplo: Anatel para Brasil e
FCC para Estados Unidos e Canadá. [7] Geralmente
operam nas faixas de VHF ou UHF e suas antenas
variam de 10 a 50 centímetros. Os equipamentos mais
conhecidos são os chamados rádio amadores, na maioria
das vezes nas faixas de 155 MHz ou 900MHz e Wifi na
faixa de UHF em 2,4GHz.
C. Interfaces de rede
Para qualquer um dos meios selecionados para
automação de minas subterrâneas as interfaces de rede
são necessárias para adaptação com o sistema de voz,
também nomeadas como dispositivos conversores
derivadores para adaptar os dados de automação ao
meio físico.
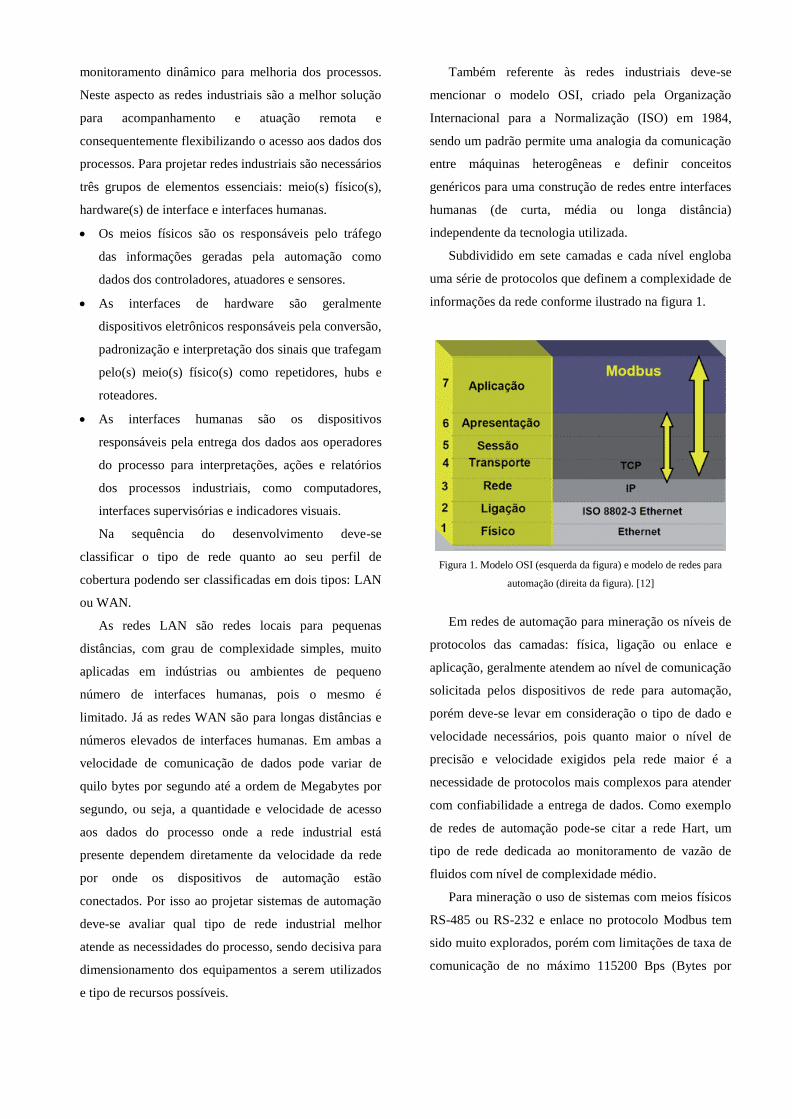
Um cuidado necessário para os dispositivos para
meios cabeados ou semi-cabeados é a compatibilização
da impedância característica, onde a mesma pode
atenuar os sinais e até mesmo derrubar todo o sistema
de comunicação caso não dimensionado corretamente.
Para enlaces de longa distância em meios cabeados ou
semi-cabeados são os necessários dispositivos
repetidores, geralmente “necessários em intervalos de
100 a 350 metros”.[1]
Os repetidores têm como finalidade principal manter
o nível de tensão e qualidade de sinal e basicamente são
compostos por um filtro amplificador na faixa da
frequência de operação do sistema em uso, no caso
VHF. Outro dispositivo também para manter a
impedância do sistema, são os terminadores, que devem
ser instalados nas terminações dos cabos para manter
sua impedância e evitar pontos desbalanceados
susceptíveis a ruídos externos. Por fim ao se mencionar
a característica de impedância, vale reforçar que todos
os dispositivos para meios cabeados ou semi-cabeados
devem conter a mesma impedância, caso contrário
perdas por reflexão de sinal podem ocorrer.
Figura 2. Diagrama de casamento de impedância em cabos [10].
D. Enlace ou ligação
Seguindo a estrutura para redes industriais um
segundo itens de relevância para o projeto é a camada
de enlace, também chamada de ligação. Nela é tratado o
protocolo de comunicação e o tipo de dados a serem
utilizados na rede e os padrões de comandos.
No projeto foi definido o protocolo Modbus para
estabelecer comunicação entre os dispositivos que irão
controlar os ventiladores e transmitir os dados de
posicionamento por RFID que será tratado em um
tópico especifico.
O enlace ou protocolo Modbus é utilizado como
meio de conexão entre o meio físico e os dispositivos de
Aplicação como computadores do sistema SCADA no
caso deste projeto.
O protocolo de enlace Modbus utiliza o algoritmo
cliente-servidor, também conhecido como mestre-
escravo que se comunica através do método de trocar de
dados por mensagens.[16]
A técnica mestre-escravo permite que somente um
dispositivo (mestre) possa iniciar a troca de informação
na rede e os outros dispositivos (escravos) respondem
de acordo com o pedido do mestre, ou de acordo com a
tarefa em questão.[16] Após o mestre iniciar a
comunicação um dos dispositivos escravos
(controladores de ventilação) processa a informação e
responde com a informação solicitada para o mestre.
Os comandos do protocolo de mensagem Modbus
são padronizados na forma de uma tabela de registro
onde funcionam como um mapa fixo para configuração
e controle de entrada e saída de dados na rede.
A transmissão pode ser realizada de duas formas no
protocolo Modbus: por ASCII ou RTU. Ambas definem
o conteúdo da mensagem a ser transmitida na rede e
como a informação da mensagem será tratada na roca de
mensagens.
O modo ASCII (American Standard Code for
Information Interchange) o protocolo opera da seguinte
forma: a em cada byte de caractere em uma mensagem
é enviado dois caracteres sem geração de erros. No
modo RTU (Remote Terminal Unit), cada mensagem é
tratada diferente, pois nele a cada 8 bits é inserido dois
caracteres hexadecimais de 4 bits.
Em ambos os bits ou bytes são reunidos e forma um
quadro de mensagens que é usado para marcar o início e
o fim da informação a ser enviada ou recebida. Desta
forma o dispositivo receptor determina qual dispositivo
está sendo endereçado e saber quando a mensagem está
completa.
Como padrão cada mensagem é colocada no quadro
e transmitida para o dispositivo com seu endereço de
destino. Cada quadro desta mensagem recebe um bit de
inicio, fim e de paridade.
“No modo ASCII, a palavra tem o tamanho de 7 bits
enquanto no modo RTU a palavra é de 8 bits. Todavia,
os 8 bits da mensagem RTU são na verdade 11 bits
quando adicionado o bit de start, stop e paridade neste
quadro. ”[16]
Em ASCII, os dispositivos ficam monitorando em
tempo real a rede, verificando se existe o início de uma
mensagem e se a mesma é direcionada a ele..
O primeiro dados de uma mensagem no protocolo
Modbus é o endereço e os caracteres seguintes
transmitem todos os campos hexadecimais de 0 a 9 e A
a F referentes a informação que se deseja transmitir. Ao
reconhecer o endereço apenas um dispositivo dá
procedimento a comunicação e os demais ficam em
modo “silêncio”, ou seja, aguardam um intervalo de
silêncio. Nele por alguns instantes os demais
dispositivos aguardam a troca de dados do mestre-
escravo e após este intervalo retornam sua comunicação
verificando se existem dados da rede conforme o padrão
do protocolo. Caso após o intervalo de silêncio a
mensagem não tenha sido transmitida por completo o
processo deve ser repetido até que o mestre confirme o
recebimento da mensagem.
Figura 3. Quadro de mensagem Modbus. [17]
Ao receber uma mensagem o escravo envia a
resposta, onde é inserido seu endereço que o mestre
identifique sua resposta.
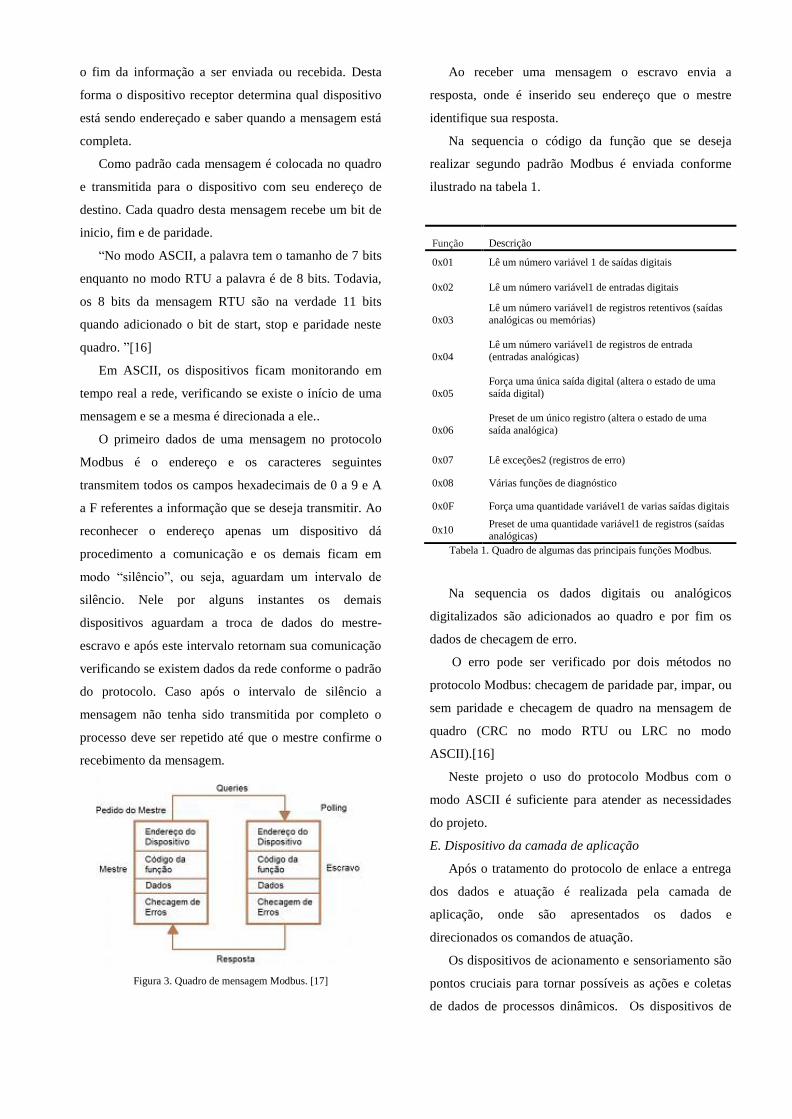
Na sequencia o código da função que se deseja
realizar segundo padrão Modbus é enviada conforme
ilustrado na tabela 1.
Função Descrição
0x01 Lê um número variável 1 de saídas digitais
0x02 Lê um número variável1 de entradas digitais
0x03
Lê um número variável1 de registros retentivos (saídas
analógicas ou memórias)
0x04
Lê um número variável1 de registros de entrada
(entradas analógicas)
0x05
Força uma única saída digital (altera o estado de uma
saída digital)
0x06
Preset de um único registro (altera o estado de uma
saída analógica)
0x07 Lê exceções2 (registros de erro)
0x08 Várias funções de diagnóstico
0x0F Força uma quantidade variável1 de varias saídas digitais
0x10 Preset de uma quantidade variável1 de registros (saídas analógicas)
Tabela 1. Quadro de algumas das principais funções Modbus.
Na sequencia os dados digitais ou analógicos
digitalizados são adicionados ao quadro e por fim os
dados de checagem de erro.
O erro pode ser verificado por dois métodos no
protocolo Modbus: checagem de paridade par, impar, ou
sem paridade e checagem de quadro na mensagem de
quadro (CRC no modo RTU ou LRC no modo
ASCII).[16]
Neste projeto o uso do protocolo Modbus com o
modo ASCII é suficiente para atender as necessidades
do projeto.
E. Dispositivo da camada de aplicação
Após o tratamento do protocolo de enlace a entrega
dos dados e atuação é realizada pela camada de
aplicação, onde são apresentados os dados e
direcionados os comandos de atuação.
Os dispositivos de acionamento e sensoriamento são
pontos cruciais para tornar possíveis as ações e coletas
de dados de processos dinâmicos. Os dispositivos de
acionamento devem assegurar a proteção adequada e
permitir ligar e desligar o(s) equipamento(s) alvo(s) do
controle que se deseja aplicar. Os atuadores mais
conhecidos são os contatores, soft-startes, chaves
seccionadoras e disjuntores. [3] A maioria das
aplicações na indústria baseiam-se no comando
automático ou à distância para eliminar risco e agilizar a
atuação em situações de risco.
Os sensores industriais são os responsáveis pela
coleta e medição das condições físicas ocorridas
geralmente em tempo real, seja de forma direta, como
chaves de fim de curso, ou de forma indireta, sensores
de temperatura PT-100, por exemplo, onde a
temperatura é medida por meio de sua variação de
resistência convertida em um sinal elétrico.
Com um conjunto de atuadores e sensores é possível
alimentar uma rede industrial com os dados necessários
para realização e avaliação de processos industriais
assim como na mineração subterrânea. Sendo assim é
necessário considerar as limitações físicas e tempos de
resposta de cada dos elementos de aplicação para
dimensionar de forma adequada as ações do sistema.
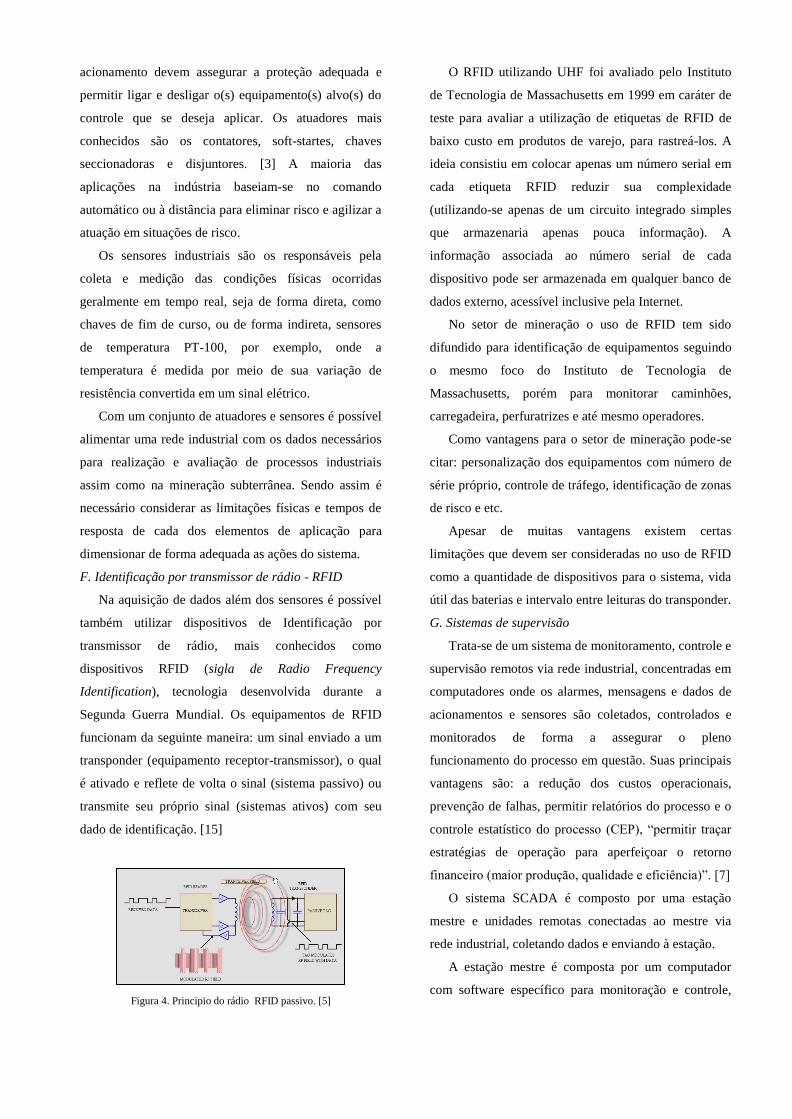
F. Identificação por transmissor de rádio - RFID
Na aquisição de dados além dos sensores é possível
também utilizar dispositivos de Identificação por
transmissor de rádio, mais conhecidos como
dispositivos RFID (sigla de Radio Frequency
Identification), tecnologia desenvolvida durante a
Segunda Guerra Mundial. Os equipamentos de RFID
funcionam da seguinte maneira: um sinal enviado a um
transponder (equipamento receptor-transmissor), o qual
é ativado e reflete de volta o sinal (sistema passivo) ou
transmite seu próprio sinal (sistemas ativos) com seu
dado de identificação. [15]
Figura 4. Principio do rádio RFID passivo. [5]
O RFID utilizando UHF foi avaliado pelo Instituto
de Tecnologia de Massachusetts em 1999 em caráter de
teste para avaliar a utilização de etiquetas de RFID de
baixo custo em produtos de varejo, para rastreá-los. A
ideia consistiu em colocar apenas um número serial em
cada etiqueta RFID reduzir sua complexidade
(utilizando-se apenas de um circuito integrado simples
que armazenaria apenas pouca informação). A
informação associada ao número serial de cada
dispositivo pode ser armazenada em qualquer banco de
dados externo, acessível inclusive pela Internet.
No setor de mineração o uso de RFID tem sido
difundido para identificação de equipamentos seguindo
o mesmo foco do Instituto de Tecnologia de
Massachusetts, porém para monitorar caminhões,
carregadeira, perfuratrizes e até mesmo operadores.
Como vantagens para o setor de mineração pode-se
citar: personalização dos equipamentos com número de
série próprio, controle de tráfego, identificação de zonas
de risco e etc.
Apesar de muitas vantagens existem certas
limitações que devem ser consideradas no uso de RFID
como a quantidade de dispositivos para o sistema, vida
útil das baterias e intervalo entre leituras do transponder.
G. Sistemas de supervisão
Trata-se de um sistema de monitoramento, controle e
supervisão remotos via rede industrial, concentradas em
computadores onde os alarmes, mensagens e dados de
acionamentos e sensores são coletados, controlados e
monitorados de forma a assegurar o pleno
funcionamento do processo em questão. Suas principais
vantagens são: a redução dos custos operacionais,
prevenção de falhas, permitir relatórios do processo e o
controle estatístico do processo (CEP), “permitir traçar
estratégias de operação para aperfeiçoar o retorno
financeiro (maior produção, qualidade e eficiência)”. [7]
O sistema SCADA é composto por uma estação
mestre e unidades remotas conectadas ao mestre via
rede industrial, coletando dados e enviando à estação.
A estação mestre é composta por um computador
com software específico para monitoração e controle,
além de uma interface (placa) de rede conforme o
padrão selecionado (Modbus, Profibus, DeviceNet e
etc). As unidades remotas são dispositivas para interface
de rede, conforme padrão do mestre, para os
acionadores e instrumentos do sistema, de forma a atuar
e enviar os dados conforme premissas do sistema para
alcançar as metas de custo e processo. Como referência
mundial a IEC – Comissão Internacional de
Eletrotécnica desenvolveu a norma IEC60870 como
referência para o protocolo de comunicação SCADA em
nível mundial.
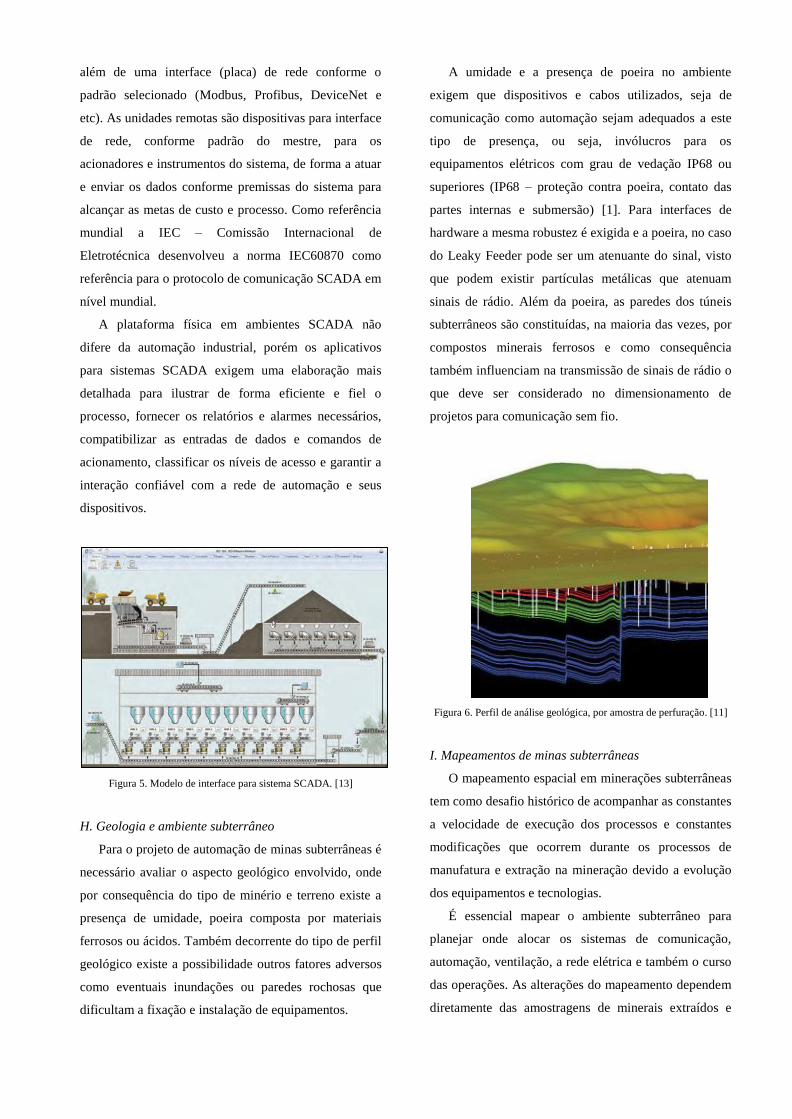
A plataforma física em ambientes SCADA não
difere da automação industrial, porém os aplicativos
para sistemas SCADA exigem uma elaboração mais
detalhada para ilustrar de forma eficiente e fiel o
processo, fornecer os relatórios e alarmes necessários,
compatibilizar as entradas de dados e comandos de
acionamento, classificar os níveis de acesso e garantir a
interação confiável com a rede de automação e seus
dispositivos.
Figura 5. Modelo de interface para sistema SCADA. [13]
H. Geologia e ambiente subterrâneo
Para o projeto de automação de minas subterrâneas é
necessário avaliar o aspecto geológico envolvido, onde
por consequência do tipo de minério e terreno existe a
presença de umidade, poeira composta por materiais
ferrosos ou ácidos. Também decorrente do tipo de perfil
geológico existe a possibilidade outros fatores adversos
como eventuais inundações ou paredes rochosas que
dificultam a fixação e instalação de equipamentos.
A umidade e a presença de poeira no ambiente
exigem que dispositivos e cabos utilizados, seja de
comunicação como automação sejam adequados a este
tipo de presença, ou seja, invólucros para os
equipamentos elétricos com grau de vedação IP68 ou
superiores (IP68 – proteção contra poeira, contato das
partes internas e submersão) [1]. Para interfaces de
hardware a mesma robustez é exigida e a poeira, no caso
do Leaky Feeder pode ser um atenuante do sinal, visto
que podem existir partículas metálicas que atenuam
sinais de rádio. Além da poeira, as paredes dos túneis
subterrâneos são constituídas, na maioria das vezes, por
compostos minerais ferrosos e como consequência
também influenciam na transmissão de sinais de rádio o
que deve ser considerado no dimensionamento de
projetos para comunicação sem fio.
Figura 6. Perfil de análise geológica, por amostra de perfuração. [11]
I. Mapeamentos de minas subterrâneas
O mapeamento espacial em minerações subterrâneas
tem como desafio histórico de acompanhar as constantes
a velocidade de execução dos processos e constantes
modificações que ocorrem durante os processos de
manufatura e extração na mineração devido a evolução
dos equipamentos e tecnologias.
É essencial mapear o ambiente subterrâneo para
planejar onde alocar os sistemas de comunicação,
automação, ventilação, a rede elétrica e também o curso
das operações. As alterações do mapeamento dependem
diretamente das amostragens de minerais extraídos e

suas respectivas qualidades (índice de concentração de
dado mineral). No passado o trabalho de mapeamento
era baseado em diagramas e mapas desenhados
manualmente, onde as coordenadas eram coletadas e
atualizadas conforme o andamento das operações,
porém um trabalho demorado e impreciso muitas vezes.
A partir da década de 80 com o surgimento de
novas tecnologias na área de computação as ferramentas
de desenho assistido por computador (CAD) foram
desenvolvidas para auxiliar a indústria e possibilitar
desenvolvimentos mais ágeis e detalhamentos mais
dinâmicos do ambiente de mineração. Em consequência
destas evoluções na década de 90 surgem também os
primeiros equipamentos de escâner com princípio ótico
e o radar de superfície, ambos com foco em coletar
coordenadas em tempo real para área de geologia e
mapeamento de minas. Estes recursos possibilitaram a
redução do tempo de mapeamento na ordem de meses
para dias, em alguns casos em horas.
III. LIMITAÇÕES PARA PROJETOS EM
MINAS
Diante das tecnologias mencionadas certas
considerações devem ser mencionadas como:
Para sistemas cabeados a comunicação fica limitada
em pontos fixos o que restringe a cobertura e acesso
dos operadores;
Para sistemas de ondas curtas o alcance somente
atende condições de desastres e não de operação;
Para sistemas de rádio a poeira pode acarretar em
uma cobertura ineficaz;
A rede de automação deve ser confiável e
simplificada de forma a atender os níveis de robustez
para ambientes subterrâneos, assim como os
instrumentos utilizados para automação;
A geologia e mapeamento devem ser fidedignos ao
perfil real do ambiente do projeto, representando
corretamente os níveis e galerias para evitar cálculos
errôneos e falta de cobertura da rede de comunicação
e automação;
Assim como o mapeamento o sistema de supervisão
deve representar de forma eficiente e fiel o processo
para contribuir de forma efetiva no controle,
monitoramento e supervisão dos processos de
mineração subterrânea.
IV. SELEÇÃO DOS COMPONENTES DO
PROJETO
Diante da variedade de meios existentes para minas
subterrâneas, os critérios para seleção e do ponto de
vista do processo de mineração pode-se citar que “a
automação deve responder com aumento de
produtividade, flexibilidade, qualidade e segurança”. [8]
Considerando esta observação o meio de
comunicação deve manter sistemas existentes e agregar
soluções de mobilidade visando à adaptabilidade as
constantes mudanças de operação e extração de
minérios, basicamente: manter a mobilidade de
operadores, caminhões, escavadeira e perfuratrizes. Os
sistemas mais comuns são rádios na faixa de VHF, de
155 a 175MHz, com canais de 20Khz distribuídos ao
longo desta faixa e com a distribuição por Leaky
Feeder, o que possibilita o uso de interfaces para rede
Modbus para acoplar os instrumentos de automação.
Figura 7. Cabo Leaky Feeder [1].
Com base nestes dados o meio semi-cabeado Leaky
Feeder é o indicado para implantar a rede de automação
devido à possibilidade de operar como uma rede física e
possibilitar o uso de dispositivos móveis em redes sem
fio que no caso possibilitara a montagem de uma rede
industrial mista com o sistema de comunicação de voz.
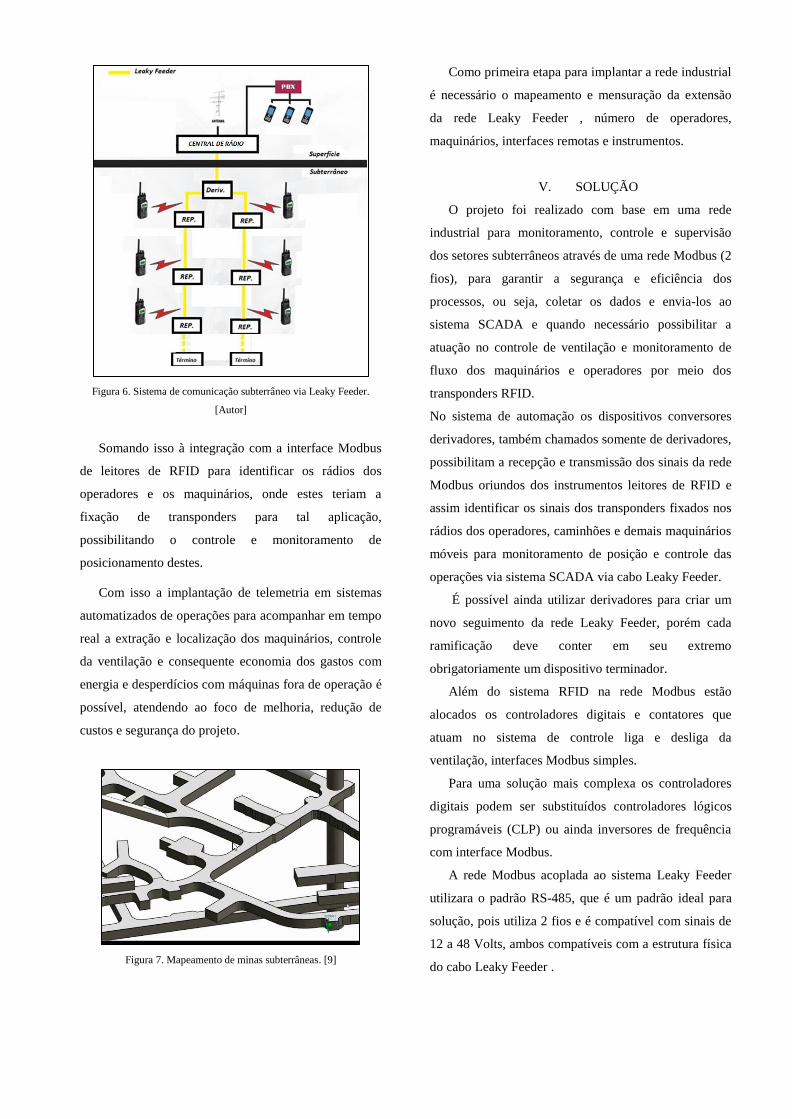
Figura 6. Sistema de comunicação subterrâneo via Leaky Feeder.
[Autor]
Somando isso à integração com a interface Modbus
de leitores de RFID para identificar os rádios dos
operadores e os maquinários, onde estes teriam a
fixação de transponders para tal aplicação,
possibilitando o controle e monitoramento de
posicionamento destes.
Com isso a implantação de telemetria em sistemas
automatizados de operações para acompanhar em tempo
real a extração e localização dos maquinários, controle
da ventilação e consequente economia dos gastos com
energia e desperdícios com máquinas fora de operação é
possível, atendendo ao foco de melhoria, redução de
custos e segurança do projeto.
Figura 7. Mapeamento de minas subterrâneas. [9]
Como primeira etapa para implantar a rede industrial
é necessário o mapeamento e mensuração da extensão
da rede Leaky Feeder , número de operadores,
maquinários, interfaces remotas e instrumentos.
V. SOLUÇÃO
O projeto foi realizado com base em uma rede
industrial para monitoramento, controle e supervisão
dos setores subterrâneos através de uma rede Modbus (2
fios), para garantir a segurança e eficiência dos
processos, ou seja, coletar os dados e envia-los ao
sistema SCADA e quando necessário possibilitar a
atuação no controle de ventilação e monitoramento de
fluxo dos maquinários e operadores por meio dos
transponders RFID.
No sistema de automação os dispositivos conversores
derivadores, também chamados somente de derivadores,
possibilitam a recepção e transmissão dos sinais da rede
Modbus oriundos dos instrumentos leitores de RFID e
assim identificar os sinais dos transponders fixados nos
rádios dos operadores, caminhões e demais maquinários
móveis para monitoramento de posição e controle das
operações via sistema SCADA via cabo Leaky Feeder.
É possível ainda utilizar derivadores para criar um
novo seguimento da rede Leaky Feeder, porém cada
ramificação deve conter em seu extremo
obrigatoriamente um dispositivo terminador.
Além do sistema RFID na rede Modbus estão
alocados os controladores digitais e contatores que
atuam no sistema de controle liga e desliga da
ventilação, interfaces Modbus simples.
Para uma solução mais complexa os controladores
digitais podem ser substituídos controladores lógicos
programáveis (CLP) ou ainda inversores de frequência
com interface Modbus.
A rede Modbus acoplada ao sistema Leaky Feeder
utilizara o padrão RS-485, que é um padrão ideal para
solução, pois utiliza 2 fios e é compatível com sinais de
12 a 48 Volts, ambos compatíveis com a estrutura física
do cabo Leaky Feeder .
No controle do sistema de ventilação os comandos
serão realizados via protocolo de enlace Modbus e
monitorados pelo sistema SCADA.
Na interface SCADA o acionamento da ventilação é
correlacionado com a presença de operadores mapeados
em determinado setor com auxílio do sistema RF ID
direcionando a operação dos ventiladores para
ambientes com maior concentração de operadores e
maquinários.
Para segurança pode ser adicionado ao projeto o uso
de sensores de gases tóxicos como CO² (gás carbônico)
e incorporá-los à rede Modbus e assim ampliar os
algoritmos de segurança na interface SCADA,
adicionando alertas na tela caso ocorra alta concentração
em determinado sensor.
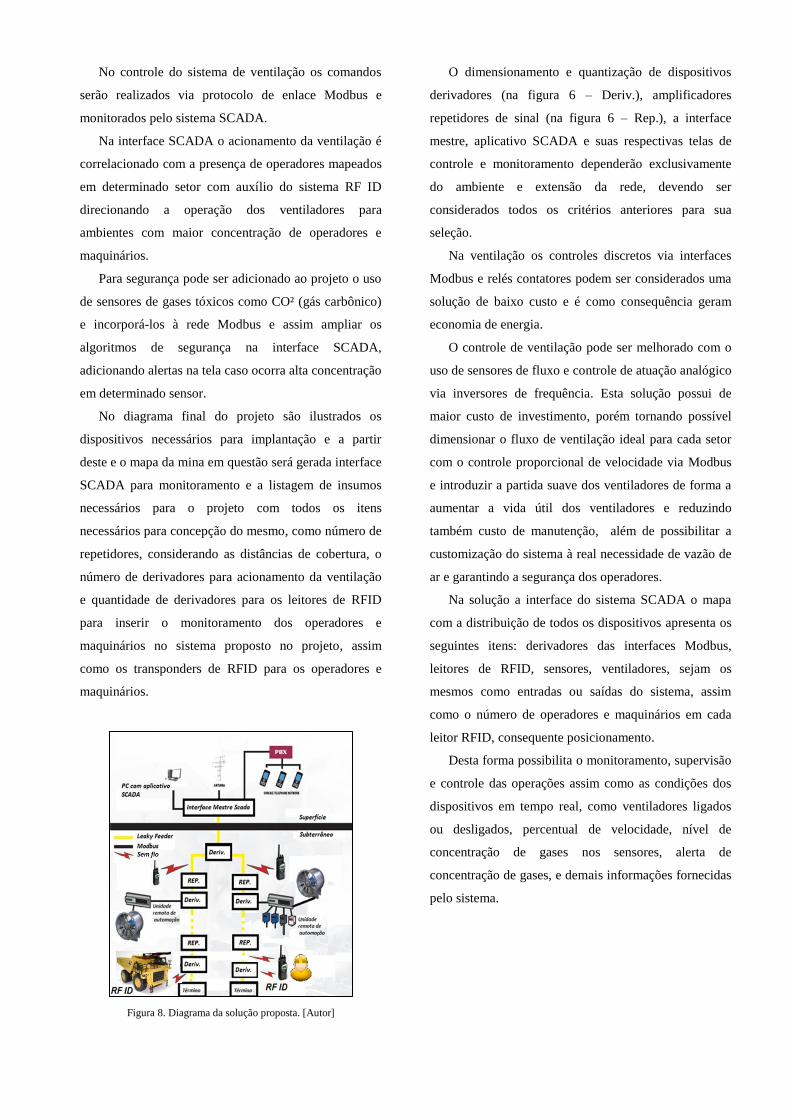
No diagrama final do projeto são ilustrados os
dispositivos necessários para implantação e a partir
deste e o mapa da mina em questão será gerada interface
SCADA para monitoramento e a listagem de insumos
necessários para o projeto com todos os itens
necessários para concepção do mesmo, como número de
repetidores, considerando as distâncias de cobertura, o
número de derivadores para acionamento da ventilação
e quantidade de derivadores para os leitores de RFID
para inserir o monitoramento dos operadores e
maquinários no sistema proposto no projeto, assim
como os transponders de RFID para os operadores e
maquinários.
Figura 8. Diagrama da solução proposta. [Autor]
O dimensionamento e quantização de dispositivos
derivadores (na figura 6 – Deriv.), amplificadores
repetidores de sinal (na figura 6 – Rep.), a interface
mestre, aplicativo SCADA e suas respectivas telas de
controle e monitoramento dependerão exclusivamente
do ambiente e extensão da rede, devendo ser
considerados todos os critérios anteriores para sua
seleção.
Na ventilação os controles discretos via interfaces
Modbus e relés contatores podem ser considerados uma
solução de baixo custo e é como consequência geram
economia de energia.
O controle de ventilação pode ser melhorado com o
uso de sensores de fluxo e controle de atuação analógico
via inversores de frequência. Esta solução possui de
maior custo de investimento, porém tornando possível
dimensionar o fluxo de ventilação ideal para cada setor
com o controle proporcional de velocidade via Modbus
e introduzir a partida suave dos ventiladores de forma a
aumentar a vida útil dos ventiladores e reduzindo
também custo de manutenção, além de possibilitar a
customização do sistema à real necessidade de vazão de
ar e garantindo a segurança dos operadores.
Na solução a interface do sistema SCADA o mapa
com a distribuição de todos os dispositivos apresenta os
seguintes itens: derivadores das interfaces Modbus,
leitores de RFID, sensores, ventiladores, sejam os
mesmos como entradas ou saídas do sistema, assim
como o número de operadores e maquinários em cada
leitor RFID, consequente posicionamento.
Desta forma possibilita o monitoramento, supervisão
e controle das operações assim como as condições dos
dispositivos em tempo real, como ventiladores ligados
ou desligados, percentual de velocidade, nível de
concentração de gases nos sensores, alerta de
concentração de gases, e demais informações fornecidas
pelo sistema.
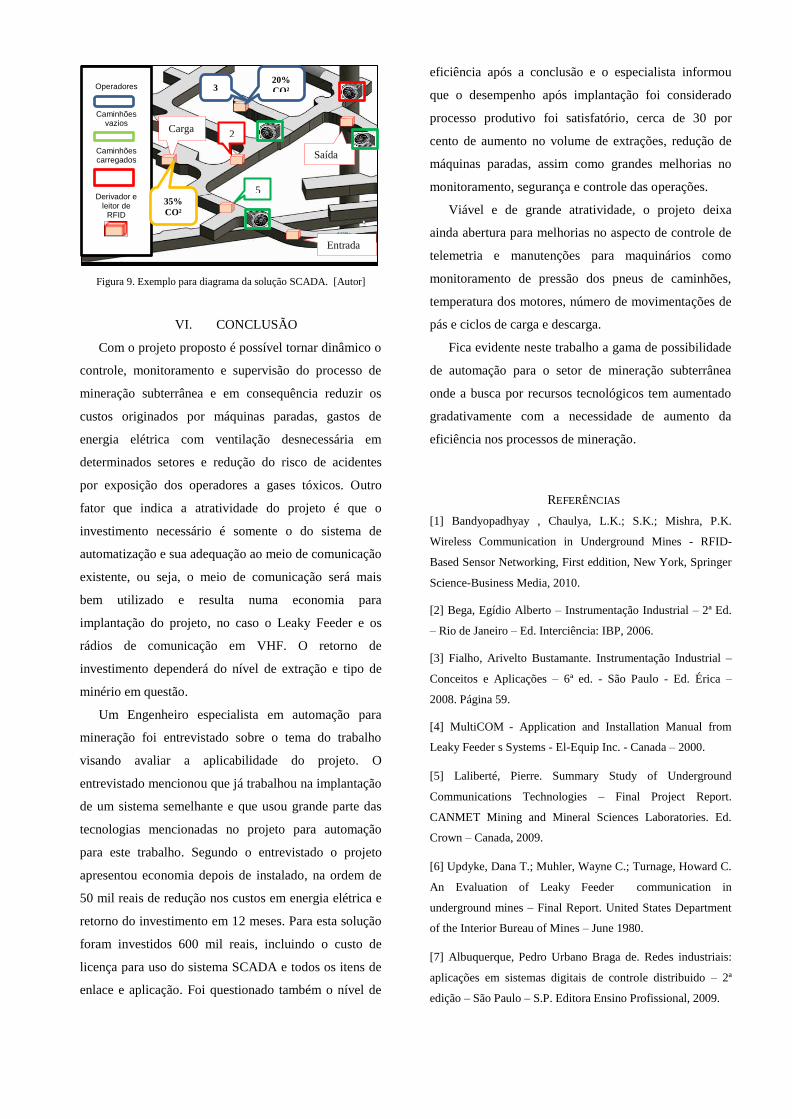
Figura 9. Exemplo para diagrama da solução SCADA. [Autor]
VI. CONCLUSÃO
Com o projeto proposto é possível tornar dinâmico o
controle, monitoramento e supervisão do processo de
mineração subterrânea e em consequência reduzir os
custos originados por máquinas paradas, gastos de
energia elétrica com ventilação desnecessária em
determinados setores e redução do risco de acidentes
por exposição dos operadores a gases tóxicos. Outro
fator que indica a atratividade do projeto é que o
investimento necessário é somente o do sistema de
automatização e sua adequação ao meio de comunicação
existente, ou seja, o meio de comunicação será mais
bem utilizado e resulta numa economia para
implantação do projeto, no caso o Leaky Feeder e os
rádios de comunicação em VHF. O retorno de
investimento dependerá do nível de extração e tipo de
minério em questão.
Um Engenheiro especialista em automação para
mineração foi entrevistado sobre o tema do trabalho
visando avaliar a aplicabilidade do projeto. O
entrevistado mencionou que já trabalhou na implantação
de um sistema semelhante e que usou grande parte das
tecnologias mencionadas no projeto para automação
para este trabalho. Segundo o entrevistado o projeto
apresentou economia depois de instalado, na ordem de
50 mil reais de redução nos custos em energia elétrica e
retorno do investimento em 12 meses. Para esta solução
foram investidos 600 mil reais, incluindo o custo de
licença para uso do sistema SCADA e todos os itens de
enlace e aplicação. Foi questionado também o nível de
eficiência após a conclusão e o especialista informou
que o desempenho após implantação foi considerado
processo produtivo foi satisfatório, cerca de 30 por
cento de aumento no volume de extrações, redução de
máquinas paradas, assim como grandes melhorias no
monitoramento, segurança e controle das operações.
Viável e de grande atratividade, o projeto deixa
ainda abertura para melhorias no aspecto de controle de
telemetria e manutenções para maquinários como
monitoramento de pressão dos pneus de caminhões,
temperatura dos motores, número de movimentações de
pás e ciclos de carga e descarga.
Fica evidente neste trabalho a gama de possibilidade
de automação para o setor de mineração subterrânea
onde a busca por recursos tecnológicos tem aumentado
gradativamente com a necessidade de aumento da
eficiência nos processos de mineração.
REFERÊNCIAS
[1] Bandyopadhyay , Chaulya, L.K.; S.K.; Mishra, P.K.
Wireless Communication in Underground Mines - RFID-
Based Sensor Networking, First eddition, New York, Springer
Science-Business Media, 2010.
[2] Bega, Egídio Alberto – Instrumentação Industrial – 2ª Ed.
– Rio de Janeiro – Ed. Interciência: IBP, 2006.
[3] Fialho, Arivelto Bustamante. Instrumentação Industrial –
Conceitos e Aplicações – 6ª ed. - São Paulo - Ed. Érica –
2008. Página 59.
[4] MultiCOM - Application and Installation Manual from
Leaky Feeder s Systems - El-Equip Inc. - Canada – 2000.
[5] Laliberté, Pierre. Summary Study of Underground
Communications Technologies – Final Project Report.
CANMET Mining and Mineral Sciences Laboratories. Ed.
Crown – Canada, 2009.
[6] Updyke, Dana T.; Muhler, Wayne C.; Turnage, Howard C.
An Evaluation of Leaky Feeder communication in
underground mines – Final Report. United States Department
of the Interior Bureau of Mines – June 1980.
[7] Albuquerque, Pedro Urbano Braga de. Redes industriais:
aplicações em sistemas digitais de controle distribuido – 2ª
edição – São Paulo – S.P. Editora Ensino Profissional, 2009.
5
2
Entrada
Saída
Carga
3 Operadores
Caminhões vazios
Caminhões carregados
Derivador e leitor de
RFID
20%
CO²
35%
CO²
[8] Filippo Filho, Guilherme. Automação de processos e
sistemas – 1ª edição –São Paulo – S.P. Editora Érica, 2014.
[9] Acedido pelo site http://www.maptek.com em maio de
2015.
[10] Apostila de Ondas e Propagação da UDESC, Prof. Dr.
Airton Ramos.
[11] Acedido pelo site http://www.br.srk.com em maio de
2015.
[12] Revista Controle & Instrumentação – Ed. nº 119 – 2006.
[13] Revista Minérios & Minerales – Ed. nº 364 – 2015.
[14] Nota de esclarecimento: Fundamentos da RFID:
Entendendo e usando a identificação por radiofrequência .
Acedido por http://www.intermec.com.br/ em maio de 2015.
[15] Artigo: RFID(Radio-Frequency IDentification).
Acedido por http://www.ppgia.pucpr.br/ em maio de 2015.
[16] O Protocolo Modbus. Vitor Amadeu Souza. Acedido por
http://www.cerne-tec.com.br/Modbus.pdf em maio de 2015.
[17] Protocolo MODBUS. Revista Mecatrônica Atual. Nº42
de 20 de agosto de 2013.





























