Embed Size (px)
Citation preview

1
DGPS Concepts
Learning Objectives
After completing this lecture you will be able to:
– Explain errors in point positioning– List accuracy expected from various
GPS measurement techniques– Explain the process of Differential GPS– Describe how errors are minimised by
using DGPS
Lecture Outline• Introduction – context• Accuracy Issues• SA• Dilution of Precision (DOP)• Error sources• Satellite Visibility• Differential Correction
– Post-processed– Real-time
• Conclusion/Summary
LST

2
Introduction
• 3 Levels of accuracy:– Point Positioning (Codes)– Differential Positioning (Codes)– GPS Surveying (also a differential
technique but uses carrier phase)• Point positioning uses the code
observable• Point positioning is subject to many
error sources• Differential techniques (DGPS) can
minimise these errors
A Typical GPS Position
•Many organizations use GPS these days
•To query a position we may get the following:–Latitude - 41.342565555432134–Longitude – 114.7841234532983
•This Is Accurate…… . Right?
Physical Data Collection Method
•Lat -41.342565555432134
•Long –114.78412345329836
�When we lose knowledge on how data was created, we lose its accuracy ‘context’�16 decimal places ≠ high accuracy data
LST

3
Primary GPS Error Sources
•Wave path errors (ionospheric and tropospheric)
•Satellite orbit errors
•Multipath
•Satellite Geometry (High PDOP)
•Satellite Constellation Changes
Meters
S/A (now turned off)
Atmospheric
Ephemeris
Satellite Clocks
0 20 40 60 80 100
Point Positioning Errors
• System-wide errors - DGPS Correctable
Selective Availability (S/A)
• Turned of May 02 2000• Government may again degrade the
accuracy • To prevent hostile forces from using
GPS to full accuracy • By introducing intentional errors of
timing signals and/or satellite ephemeris
• Reduced using DGPS
LST

4
-200-180-160-140-120-100
-80-60-40-20
020406080
100120140160
0 1 2 3 4 5 6 7 8 9 10
Time of Day (Hours UTC)
Inst
anta
neou
s E
rror
(m
eter
s)
Horizontal Error (meters)Vertical Error (meters)
2 May 2000Colorado Springs, Colorado
ANALYSIS NOTES
- Data taken from Overlook PAN Monitor Station, equipped with Trimble SVeeSix Receiver- Single Frequency Civil Receiver- Four Satellite Position Solution at Surveyed Benchmark- Data presented is raw, no smoothing or editing
SPS CEP AFTER TRANSITION: 2.8 metersSPS SEP AFTER TRANSITION: 4.6 meters
May 2000
Satellite Orbit Errors
•Satellite isn’t really where it says it is
•2-3 meters of error
X2 Y2 Z2
X Y ZEphemeris (X
Y Z)
X
Constellation Changes
• Position P3 computed using ranges to satellites 1, 2, 3, 4, 5 and 6
• Position P4 computed using satellites 4, 5, 6, 7 and 8
P3
S1 S2
S3
S4
S5
S6 S7
S8
X XP1P2
XP4
LST

5
Atmospheric Errors
• Due to the ionosphere and troposphere, measured range to satellite is longer
True Range to SatelliteMeasured Range
Ionosphere
Troposphere
• Contributes around 4-5 meters of range error
Atmospheric Delay
• GPS signals are delayedas they pass throughthe atmosphere
Ionosphere
Baseline not too long
TroposphereBase
Rover
Receiver/Location Errors
DGPS won’t help:• Multipath
– Use a ground plane on antenna– Move away from multipath source
• Receiver Channel noise– Use a different GPS receiver
• 2-D fix with a bad altitude– Use Manual 3D when collecting data
• High PDOP– Wait for the geometry to change
LST

6
Multipath
• GPS computes position by measuring ranges to satellites
• Receiving a signal reflected off anything, will result in an incorrect range
• This results in an incorrect position computation
Dilution of Precision (DOP)
• A measure of Satellite geometry• Indicates the quality of position
fix• Can be expressed in different
dimensions– for example: PDOP, HDOP, VDOP,
TDOP
• Generally not reduced by DGPS
idealized situation
0.04 sec 0.06 sec
Dilution of Precision (DOP)
• Relative position of satellites can affect error LST

7
Dilution of Precision (DOP)
• Real situation - fuzzy circles
Point representing position is really a box
0.04 ‘ish sec 0.06 ‘ish sec
uncertainty uncertainty
Area of uncertainty becomes larger as satellites get closer together
Dilution of Precision (DOP)
• Even worse at some angles
Satellite Visibility and PDOP
• Use an almanac from a GPS receiver to calculate best times of day for GPS. LST

8
The Proximity Factor
Activity - Quiz
Which of the following errors do you think can be reduced using DGPS?
• Multipath• Receiver Channel noise• High DOPs• Satellite clock errors• Atmospheric corrections• Poor ephemeris data
Differential Correction
• Base Station generates corrections for all satellites in view
• Roving GPS receiver uses corrections to reduce errors
• Differential correction can be performed in either real-time or post-processed mode
LST
9
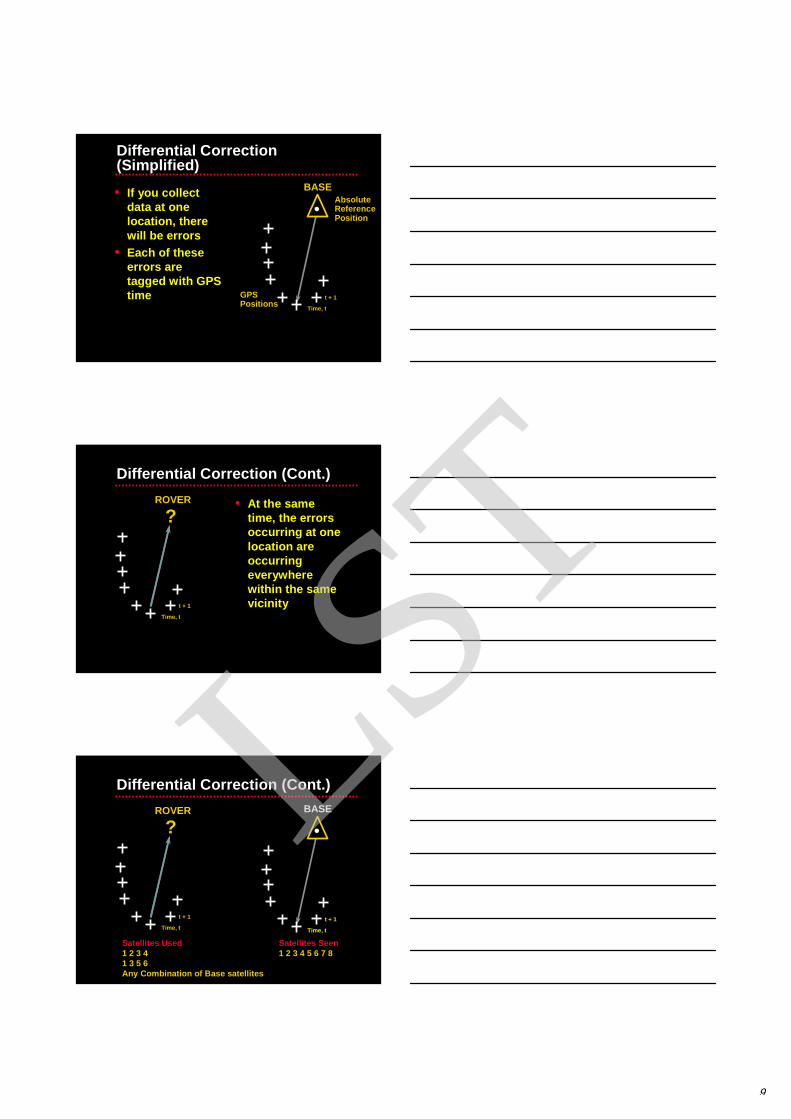
BASE
Time, t
t + 1GPS Positions
Absolute ReferencePosition
Differential Correction (Simplified)
• If you collect data at one location, there will be errors
• Each of these errors are tagged with GPS time
ROVER
Time, t
t + 1
?
Differential Correction (Cont.)
• At the same time, the errors occurring at one location are occurring everywhere within the same vicinity
Satellites Seen1 2 3 4 5 6 7 8
Satellites Used1 2 3 41 3 5 6Any Combination of Base satellites
ROVER
Time, t
t + 1
?BASE
Time, t
t + 1
Differential Correction (Cont.)LST

10
Base Receiver Known
Coordinates
Shift 10m South30m West
Block Shift Correction
RemoteReceiverMeasured
Coordinates
Apply same Block Shift
MeasuredCoordinates
FinalCoordinates
Base Receiver
Range Correction
RangeCorrection
Remote Receiver
RangeCorrection
Example of DGPS CorrectionsExample of DGPS Corrections
Uncorrected
Corrected
LST

11
DGPS DGPS –– BenefitsBenefits
Red = Uncorrected GPS
Green = GPS after differential correction
Code GPS Errors and DGPS
•Wave path errors (ionospheric and troposperic) – corrected by DGPS
•Satellite orbit errors - corrected by DGPS
•Multipath•Satellite Geometry (High PDOP)•Satellite Constellation Changes –
corrected by DGPS
DDDD
DDDD
ffff
ffff
f
Activity - Quiz
• List different accuracies you might expect from:
– Point positioning using C/A code– Post-processed DGPS– Real-time DGPS
• Explain two general processes used to correct positions and minimise errors using DGPS
LST

12
Base Station Site Requirements
• Clear view to satellites• Known coordinates• Clear of transmitters (TV, radar)• Line of site to rover is not
necessary
Base Station: 15° Rover: 15°
Poor Situation – Satellite visible to Rover only. Base Station is not tracking it.
Possible Problem...
• setting the elevation masks
1°per 100 km distance between base and rover
Base Station: 10° Rover: 15°
Ideal Situation – Satellite is being tracked by both Rover and Base Station.
Solution...
• Set base elevation mask less than rover LST

13
Sources of Base Data for Post-Processed DGPS
Where does one get differential GPS base station data?
• Community Base Stations (CBS)– government, commercial or public
• Internet Access• Set up your own
– GPS Base Station– Virtual Reference Stations (VRS)– Rover units used as a base
RTCM Corrections
Reference Station at a known location
Real-Time Differential GPS
Sources of Real-Time CorrectionsWhere does one get real-time
differential GPS base station data?• AMSA or other Beacons• Satellite Services (OmniStar)• Set up your own real-time DGPS
– RequiredSource of DGPS correction in
RTCM-SC-104 formatData link, for example, a data radio
LST

14
EGNOS
• European Geostationary Overlay System• EGNOS V1 (Advanced Operation)
technically qualified in June 2005• EGNOS measured performance is
excellent (e.g. 1-3m HNSE; >99% APV availability)
• EGNOS Evolution Roadmap covering 2005-10 being defined (EGNOS V2 and EGNOS V3 concept)
– EGNOS Service extension, non geo-stationary broadcast, provision of new services, GPS modernisation, introduction of Galileo…..
IOR-W
EGNOS Geo-stationary satellite coverage
Mean Horizontal AccuracyMean Horizontal AccuracyMean Horizontal AccuracyMean Horizontal Accuracy
(95% of time)(95% of time)(95% of time)(95% of time)GPSGPSGPSGPS GPS & EGNOSGPS & EGNOSGPS & EGNOSGPS & EGNOS
GPS & EGNOS + GALILEOGPS & EGNOS + GALILEOGPS & EGNOS + GALILEOGPS & EGNOS + GALILEO
Note : single frequency user,error in meters.
LST

15
EGNOSWAAS MSAS
EGNOS is an integral part of 3 inter-regional systems
SBAS: A worldwide Initiative Today and …
EGNOSWAAS MSAS
MEDA
EAST EUROPE & RUSSIA
MIDAN
CHINA
SOUTH AMERICABRASIL AFRICA
APEC
GAGAN
… in the mid-term future
Mexico
Canada
VRSSydnetVicpos
Many Accuracies Can Be Achieved with GPS
These depend on some variables: • Design of receiver• Relative positions of satellites• Time spent on measurements• Use of Differential techniques
LST

16
< 10 m
SPS (C/A-Code)
RMS or 1 sigma
< 6 - 8 m
PPS P(Y) Code GPS
< 1- 5m
Base Station
Mapping Grade Receiver-DGPS
Post-Processed is slightly better than real-time
LST

17
< 0.5 - 1mBase Station
High Quality Mapping Receiver SPS-DGPS
< 1 – 2 cm
RTK Base Station
Real-Time Kinematic Surveying
Not DGPS
<1/2 cm
Base Station
Survey Grade GPS
Not DGPS
Post Processed
LST

18
10m2m
1m6m 1/2cm
1cm
Where Do You Need to Be?
Real-Time or Postprocessed?
Accuracy Requirements
• Code Phase GPS– 40 m - Navigation (air, sea,
land)– 10 m - Navigation to rural
property corners– 2 m - Rural GIS data capture– 1 m - Municipality GIS data
collection
• Carrier Phase GPS– 1 cm - Survey stake out– ½ cm - Control Surveys
Key Points on Accuracy
•Knowledge of how data was collected impacts understanding of accuracy
•Not all GPS errors are fixed through differential correction
• If accuracy is critical, you must use a GPS system that includes Post-Processing
LST

19
Conclusion
You can now:– Explain errors in point positioning – List accuracy expected from various
GPS measurement techniques– Explain the process of Differential GPS– Describe how errors are minimised by
using DGPS
Self Study
• Read relevant module in study books• Do self assessment quiz
Review Questions LST

20
Questions?
LST





























