Embed Size (px)
Citation preview

Finding Lagrangian Coherent Structures Using Community Detection
Sang Hoon Lee Department of Energy Science, Sungkyunkwan University, South Korea
http://sites.google.com/site/lshlj82
in collaboration with Mohammad Farazmand (Georgia Tech), George Haller (ETH Zürich), and Mason A. Porter (Univ. of Oxford)
2015년 한국물리학회 봄학술논문발표회 통계물리학분과회 [B10.11], 2015년 4월 23일

Lagrangian Coherent Structures (LCSs)“time-evolving surfaces that shape trajectory patterns in non-autonomous dynamical systems, such as turbulent fluid flows”from Mohammad Farazmand’s Ph.D. thesis

Lagrangian Coherent Structures (LCSs)“time-evolving surfaces that shape trajectory patterns in non-autonomous dynamical systems, such as turbulent fluid flows”from Mohammad Farazmand’s Ph.D. thesis
www.physicstoday.org February 2013 Physics Today 41
In April 2010, fine, airborne ash from a volcaniceruption in Iceland caused chaos throughout European airspace. The same month, the explo-sion at the Deepwater Horizon drilling rig in theGulf of Mexico left a gushing oil well on the sea
floor that caused the largest offshore oil spill in UShistory. A year later the Tohoku tsunami hit the coastof Japan, causing great loss of life, the Fukushimanuclear-reactor disaster, and the release of substan-tial amounts of debris and radioactive contamina-tion into the Pacific Ocean.
Those three globally significant events, de-picted in figure 1, share a common theme. In eachcase, material was released into the environmentfrom what was essentially a point source, and pre-dicting where that material would be transportedby the surrounding oceanic or atmospheric flowwas of paramount importance.
To predict the outcomes of such events, thestandard approach is to run numerical simulationsof the atmosphere or the sea and use the resultingvelocity-field data sets to forecast pollutant trajec-tories. Although that approach does predict the fu-ture of individual fluid parcels, the predictions arehighly sensitive to small changes in the time and lo-cation of release. Attempts to address the excessivesensitivity to initial conditions include running sev-eral different models for the same scenario. But thattypically produces even larger distributions of ad-vected particles—those transported by the fluid
flow—and thus hides key organizing structures ofthat flow.
Furthermore, traditional trajectory analysis fo-cuses on full trajectory histories that yield convoluted“spaghetti plots” that are hard to interpret. Improvedunderstanding and forecasting therefore requiresnew concepts and methods that provide more insightinto why fluid flows behave as they do.
Lagrangian coherent structuresRecently, ideas that lie at the interface between non-linear dynamics—the mathematical discipline thatunderlies chaos theory—and fluid dynamics havegiven rise to the concept of Lagrangian coherentstructures (LCSs), which provides a new way of un-derstanding transport in complex fluid flows.
Although advances have been made in the de-tection of LCSs in fully three- dimensional flows,this article focuses primarily on the many advancesthat have been made for 2D flows. There, LCSs takethe form of material lines—continuous, smoothcurves of fluid elements advected by the flow. Theyare conceptually simpler than the 2D material sur-faces required for LCSs in 3D flows. Furthermore,2D flows are particularly relevant for studies of
New techniques promise better forecastingof where damaging contaminants in the
ocean or atmosphere will end up.
Thomas Peacock and George Haller
Thomas Peacock is a professor of mechanical engineering at the MassachusettsInstitute of Technology in Cambridge. George Haller is a professor of nonlineardynamics at ETH Zürich in Switzerland.
Lagrangiancoherent structures
The hidden skeleton of fluid flows
Downloaded 01 Feb 2013 to 195.176.113.187. Redistribution subject to AIP license or copyright; see http://www.physicstoday.org/about_us/terms
T. Peacock and G. Haller, Physics Today (February, 2013), pp. 41-47.

Lagrangian Coherent Structures (LCSs)“time-evolving surfaces that shape trajectory patterns in non-autonomous dynamical systems, such as turbulent fluid flows”from Mohammad Farazmand’s Ph.D. thesis
www.physicstoday.org February 2013 Physics Today 41
In April 2010, fine, airborne ash from a volcaniceruption in Iceland caused chaos throughout European airspace. The same month, the explo-sion at the Deepwater Horizon drilling rig in theGulf of Mexico left a gushing oil well on the sea
floor that caused the largest offshore oil spill in UShistory. A year later the Tohoku tsunami hit the coastof Japan, causing great loss of life, the Fukushimanuclear-reactor disaster, and the release of substan-tial amounts of debris and radioactive contamina-tion into the Pacific Ocean.
Those three globally significant events, de-picted in figure 1, share a common theme. In eachcase, material was released into the environmentfrom what was essentially a point source, and pre-dicting where that material would be transportedby the surrounding oceanic or atmospheric flowwas of paramount importance.
To predict the outcomes of such events, thestandard approach is to run numerical simulationsof the atmosphere or the sea and use the resultingvelocity-field data sets to forecast pollutant trajec-tories. Although that approach does predict the fu-ture of individual fluid parcels, the predictions arehighly sensitive to small changes in the time and lo-cation of release. Attempts to address the excessivesensitivity to initial conditions include running sev-eral different models for the same scenario. But thattypically produces even larger distributions of ad-vected particles—those transported by the fluid
flow—and thus hides key organizing structures ofthat flow.
Furthermore, traditional trajectory analysis fo-cuses on full trajectory histories that yield convoluted“spaghetti plots” that are hard to interpret. Improvedunderstanding and forecasting therefore requiresnew concepts and methods that provide more insightinto why fluid flows behave as they do.
Lagrangian coherent structuresRecently, ideas that lie at the interface between non-linear dynamics—the mathematical discipline thatunderlies chaos theory—and fluid dynamics havegiven rise to the concept of Lagrangian coherentstructures (LCSs), which provides a new way of un-derstanding transport in complex fluid flows.
Although advances have been made in the de-tection of LCSs in fully three- dimensional flows,this article focuses primarily on the many advancesthat have been made for 2D flows. There, LCSs takethe form of material lines—continuous, smoothcurves of fluid elements advected by the flow. Theyare conceptually simpler than the 2D material sur-faces required for LCSs in 3D flows. Furthermore,2D flows are particularly relevant for studies of
New techniques promise better forecastingof where damaging contaminants in the
ocean or atmosphere will end up.
Thomas Peacock and George Haller
Thomas Peacock is a professor of mechanical engineering at the MassachusettsInstitute of Technology in Cambridge. George Haller is a professor of nonlineardynamics at ETH Zürich in Switzerland.
Lagrangiancoherent structures
The hidden skeleton of fluid flows
Downloaded 01 Feb 2013 to 195.176.113.187. Redistribution subject to AIP license or copyright; see http://www.physicstoday.org/about_us/terms
T. Peacock and G. Haller, Physics Today (February, 2013), pp. 41-47.
https://vimeo.com/68802165“Density field and 3D Lagrangian coherent structures obtained from 7 million particle releases in a transitional multi-scale flow in which surface buoyancy driven frontal instabilities trigger deeper baroclinic instabilities. Dispersion characteristics of pollutants in such oceanic flows has been explored.”

The importance of
pollution transport on the ocean surface and on sur-faces of constant density in the atmosphere.
Generally speaking, the LCS approach pro-vides a means of identifying key material lines thatorganize fluid-flow transport. Such material linesaccount for the linear shape of the ash cloud in figure 1a, the structure of the oil spill in 1b, and thetendrils in the spread of radioactive contaminationin 1c. More specifically, the LCS approach is basedon the identification of material lines that play thedominant role in attracting and repelling neighbor-ing fluid elements over a selected period of time.Those key lines are the LCSs of the fluid flow. To de-velop an understanding of them, we must first con-sider several ideas.
Lagrange versus EulerThere are two different perspectives one can take indescribing fluid flow. The Eulerian point of viewconsiders the properties of a flow field at each fixedpoint in space and time. The velocity field is a primeexample of an Eulerian description. It gives the in-stantaneous velocity of fluid elements throughoutthe domain under consideration. The identity andprovenance of fluid elements are not important; atany given point and instant, the velocity field sim-ply refers to the motion of whatever fluid elementhappens to be passing.
By contrast, the Lagrangian perspective is con-cerned with the identity of individual fluid ele-ments. It tracks the changing velocity of individualparticles along their paths as they are advected bythe flow. It’s the natural perspective to use when
considering flow transport because patterns such asthose in figure 1 arise from material advection.
Another driving force behind the developmentof the LCS approach is the concept of objectivity, orframe invariance. Characterizations of flow struc-tures in terms of the properties of Eulerian fieldssuch as the velocity field tend not to be objective;they don’t remain invariant under time- dependentrotations and translations of the reference frame.For instance, a common way to visualize flow fieldsis to use streamlines, which are Eulerian entities thatfollow the local direction of the velocity field at agiven instant.
Traditionally, vortices in fluid flows have beenidentified as regions filled with closed streamlines.But velocity fields, and hence their streamlines,change when viewed from different referenceframes. So what looks like a domain full of closedstreamlines in one frame can appear completely dif-ferent when viewed from another frame. For exam-ple, an unsteady vortex flow may look like a steadysaddle-point flow in an appropriate rotating frame.
For unsteady flows, which are the rule ratherthan the exception in nature, there is no obvious pre-ferred frame of reference. So any conclusion abouttransport-guiding dynamic structures should holdfor any choice of reference frame. With regard to an
42 February 2013 Physics Today www.physicstoday.org
Lagrangian structures
a b
c
Figure 1. Large-scale contaminant flows. (a) A 150-km-wide view of theash cloud from the 2010 Icelandic volcano eruption. (b) A 300-km-wideview of the 2010 Deepwater Horizon oil spill in the Gulf of Mexico. (c) A prediction of the eastward spread of radioactive contaminationinto the Pacific Ocean from the 2011 Fukushima reactor disaster in Japan.
NA
SA
NA
SA
AS
R
Downloaded 01 Feb 2013 to 195.176.113.187. Redistribution subject to AIP license or copyright; see http://www.physicstoday.org/about_us/terms
Lagrangian Coherent Structures (LCSs)
T. Peacock and G. Haller, Physics Today (February, 2013), pp. 41-47.

The importance of
pollution transport on the ocean surface and on sur-faces of constant density in the atmosphere.
Generally speaking, the LCS approach pro-vides a means of identifying key material lines thatorganize fluid-flow transport. Such material linesaccount for the linear shape of the ash cloud in figure 1a, the structure of the oil spill in 1b, and thetendrils in the spread of radioactive contaminationin 1c. More specifically, the LCS approach is basedon the identification of material lines that play thedominant role in attracting and repelling neighbor-ing fluid elements over a selected period of time.Those key lines are the LCSs of the fluid flow. To de-velop an understanding of them, we must first con-sider several ideas.
Lagrange versus EulerThere are two different perspectives one can take indescribing fluid flow. The Eulerian point of viewconsiders the properties of a flow field at each fixedpoint in space and time. The velocity field is a primeexample of an Eulerian description. It gives the in-stantaneous velocity of fluid elements throughoutthe domain under consideration. The identity andprovenance of fluid elements are not important; atany given point and instant, the velocity field sim-ply refers to the motion of whatever fluid elementhappens to be passing.
By contrast, the Lagrangian perspective is con-cerned with the identity of individual fluid ele-ments. It tracks the changing velocity of individualparticles along their paths as they are advected bythe flow. It’s the natural perspective to use when
considering flow transport because patterns such asthose in figure 1 arise from material advection.
Another driving force behind the developmentof the LCS approach is the concept of objectivity, orframe invariance. Characterizations of flow struc-tures in terms of the properties of Eulerian fieldssuch as the velocity field tend not to be objective;they don’t remain invariant under time- dependentrotations and translations of the reference frame.For instance, a common way to visualize flow fieldsis to use streamlines, which are Eulerian entities thatfollow the local direction of the velocity field at agiven instant.
Traditionally, vortices in fluid flows have beenidentified as regions filled with closed streamlines.But velocity fields, and hence their streamlines,change when viewed from different referenceframes. So what looks like a domain full of closedstreamlines in one frame can appear completely dif-ferent when viewed from another frame. For exam-ple, an unsteady vortex flow may look like a steadysaddle-point flow in an appropriate rotating frame.
For unsteady flows, which are the rule ratherthan the exception in nature, there is no obvious pre-ferred frame of reference. So any conclusion abouttransport-guiding dynamic structures should holdfor any choice of reference frame. With regard to an
42 February 2013 Physics Today www.physicstoday.org
Lagrangian structures
a b
c
Figure 1. Large-scale contaminant flows. (a) A 150-km-wide view of theash cloud from the 2010 Icelandic volcano eruption. (b) A 300-km-wideview of the 2010 Deepwater Horizon oil spill in the Gulf of Mexico. (c) A prediction of the eastward spread of radioactive contaminationinto the Pacific Ocean from the 2011 Fukushima reactor disaster in Japan.
NA
SA
NA
SA
AS
R
Downloaded 01 Feb 2013 to 195.176.113.187. Redistribution subject to AIP license or copyright; see http://www.physicstoday.org/about_us/terms
Lagrangian Coherent Structures (LCSs)
T. Peacock and G. Haller, Physics Today (February, 2013), pp. 41-47.
Maria Antonova
@mashant
RETWEETS
2,635
FAVORITES
1,468
What happens when you flush a bunch of GPS trackers down a St. Petersburg toilet "@leprasorium: "
2:51 AM - 17 Nov 2014
Follow
Related headlines
Süddeutsche Zeitung @SZ18. November 2014
Reply to @mashant @leprasorium
Humble Gateau @kirschly · Nov 17@RobLawrence Well, I thought plants generally filter out solid objects before further processing. The one I visited years ago certainly did.
Home Notifications Messages Discover
Search Twitter

Lagrangian vs Eulerian viewpoint on fluid
Lagrangian Eulerian
from S. Takagi, K. Sugiyama, S. Ii, and Y. Matsumoto, J. Appl. Mech. 79, 010911 (2011).
Joseph-Louis Lagrange (1736-1813) Leonhard Euler (1707-1783)

“fluid-element network”

Community structure in network
“modularity” (the objective function to be maximized)
M. A. Porter, J.-P. Onnela, and P. J. Mucha, Not. Am. Math. Soc. 56, 1082 (2009); S. Fortunato, Phys. Rep. 486, 75 (2010).
Q =1
2m
X
ij
✓Aij � �
kikj2m
◆�(gi, gj)
where the adjacency matrix
Aij 6= 0 if nodes i and j are connected and Aij = 0 otherwise,
ki is the degree (number of neighboring nodes of i)or strength (sum of weights around i),gi is the community to which i belongs,and m is the total number of edges or sum of weights in the network
importing network dataidentifying community structure
visualizing
resolution parameter: controlling the characteristic size of communities
smal
ler
com
mun
ities
�TA
XO
NO
MIE
SO
FN
ET
WO
RK
SFR
OM
CO
MM
UN
ITY
STR
UC
TU
RE
PHY
SIC
AL
RE
VIE
WE
86,0
3610
4(2
012)
that
alle
dges
are
antif
erro
mag
netic
atre
solu
tion
λ=
"m
axan
dth
ereb
yfo
rces
each
node
into
itsow
nco
mm
unity
.
III.
ME
SOSC
OPI
CR
ESP
ON
SEFU
NC
TIO
NS
(MR
FS)
Tode
scri
beho
wa
netw
ork
disi
nteg
rate
sin
toco
mm
uniti
esas
the
valu
eof
λis
incr
ease
dfr
om"
min
to"
max
[see
Fig.
1(a)
fora
sche
mat
ic],
one
need
sto
sele
ctsu
mm
ary
stat
istic
s.T
here
are
man
ypo
ssib
lew
ays
tosu
mm
ariz
esu
cha
disi
nteg
ratio
npr
oces
s,an
dw
efo
cus
onth
ree
diag
nost
ics
that
char
acte
rize
fund
amen
talp
rope
rtie
sof
netw
ork
com
mun
ities
.Fi
rst,
we
use
the
valu
eof
the
Ham
ilton
ianH
(λ)(
1),w
hich
isa
scal
arqu
antit
ycl
osel
yre
late
dto
netw
ork
mod
ular
ityan
dqu
antifi
esth
een
ergy
ofth
esy
stem
[13,
14].
Seco
nd,
we
calc
ulat
ea
part
ition
entr
opy
S(λ
)to
char
acte
rize
the
com
mun
itysi
zedi
stri
butio
n.To
doth
is,
let
nk
deno
teth
enu
mbe
rof
node
sin
com
mun
ityk
and
defin
ep
k=
nk/N
tobe
the
prob
abili
tyto
choo
sea
node
from
com
mun
ityk
unif
orm
lyat
rand
om.T
hisy
ield
sa(S
hann
on)p
artit
ion
entr
opy
ofS
(λ)=
−!
η(λ
)k=
1p
klo
gp
k,w
hich
quan
tifies
the
diso
rder
inth
eas
soci
ated
com
mun
itysi
zedi
stri
butio
n.T
hird
,we
use
the
num
bero
fcom
mun
ities
η(λ
).
ξ=1,
η=3
4ξ=
0,η =
1ξ=
0.2,
η=8
ξ=0.
4, η
=12
ξ=0.
6, η
=17
ξ=0.
8, η
=24
ξ = 0
.2ξ =
0.4
ξ = 0
.6ξ =
0.8
ξ = 0
ξ = 1
0
0.2
0.4
0.6
0.81
ξ
ferr
omag
netic
link
sno
nlin
ksan
tifer
rom
agne
tic li
nks
(a)
(c)
(b)
Hef
f
Sef
fη ef
f
FIG
.1.
(Col
oron
line)
(a)
Sche
mat
icof
som
eof
the
way
sth
ata
netw
ork
can
brea
kup
into
com
mun
ities
asth
eva
lue
ofλ
(or
ξ)
isin
crea
sed.
(b)Z
acha
ryK
arat
eC
lub
netw
ork
[23]
ford
iffer
entv
alue
sof
the
effe
ctiv
efr
actio
nof
antif
erro
mag
netic
edge
sξ.A
llin
tera
ctio
nsar
eei
ther
ferr
omag
netic
oran
tifer
rom
agne
tic;i
.e.,
for
the
valu
esof
ξth
atw
eus
ed,
ther
ear
eno
neut
ral
inte
ract
ions
.W
eco
lor
edge
sin
blue
ifth
eco
rres
pond
ing
inte
ract
ions
are
ferr
omag
netic
,and
we
colo
rth
emin
red
ifth
ein
tera
ctio
nsar
ean
tifer
rom
agne
tic.W
eco
lor
the
node
sba
sed
onco
mm
unity
affil
iatio
n.(c
)T
heH
eff,
Sef
f,an
dη
eff
MR
Fs,
and
the
inte
ract
ion
mat
rix
Jfo
rdi
ffer
ent
valu
esof
ξ.
We
colo
rel
emen
tsof
the
inte
ract
ion
mat
rix
byde
pict
ing
the
abse
nce
ofan
edge
inw
hite
,fe
rrom
agne
ticed
ges
inbl
ue(d
ark
gray
),an
dan
tifer
rom
agne
ticed
ges
inre
d(l
ight
gray
).
Bec
ause
we
need
tono
rmal
izeH
,S,a
ndη
toco
mpa
reth
emac
ross
netw
orks
,we
defin
ean
effe
ctiv
een
ergy
Hef
f(λ
)=
H(λ
)−H
min
Hm
ax−
Hm
in=
1−
H(λ
)H
min
,(4
)
whe
reH
min
=H
("m
in)
andH
max
=H
("m
ax);
anef
fect
ive
entr
opy
Sef
f(λ
)=
S(λ
)−S
min
Sm
ax−
Sm
in=
S(λ
)lo
gN
,(5
)
whe
reS
min
=S
("m
in)
and
Sm
ax=
S("
max
);an
dan
effe
ctiv
enu
mbe
rof
com
mun
ities
ηef
f(λ
)=
η(λ
)−η
min
ηm
ax−
ηm
in=
η(λ
)−1
N−
1,
(6)
whe
reη
min
=η
("m
in)=
1an
dη
max
=η
("m
ax)=
N.
Som
ene
twor
ksco
ntai
na
smal
lnu
mbe
rof
entr
ies
"ij
that
are
orde
rsof
mag
nitu
dela
rger
than
mos
tot
her
entr
ies.
For
exam
ple,
inth
ene
twor
kof
Face
book
frie
ndsh
ips
atC
alte
ch[2
1,22
],98
%of
the
"ij
entr
ies
are
less
than
100,
but
0.02
%of
them
are
larg
erth
an80
00.
The
sela
rge
"ij
valu
esar
ise
whe
ntw
olo
w-s
tren
gth
node
sbe
com
eco
nnec
ted.
Usi
ngth
enu
llm
odel
Pij
=k i
k j/(
2m),
the
inte
ract
ion
betw
een
two
node
si
and
jbe
com
esan
tifer
rom
agne
ticw
hen
λ>
Aij/P
ij=
2mA
ij/(
k ik j
).If
ane
twor
kha
sa
larg
eto
tal
edge
wei
ght
but
both
ian
dj
have
smal
lst
reng
ths
com
pare
dto
othe
rno
des
inth
ene
twor
k,th
enλ
need
sto
bela
rge
tom
ake
the
inte
ract
ion
antif
erro
mag
netic
.In
prio
rst
udie
s,ne
twor
kco
mm
unity
stru
ctur
eha
sbee
nin
vest
igat
edat
diff
eren
tm
esos
copi
csc
ales
byco
nsid
erin
gpl
ots
ofva
riou
sdi
agno
stic
sas
afu
nctio
nof
the
reso
lutio
npa
ram
eter
λ[1
3,14
,17]
.In
the
pres
ent
exam
ple,
such
plot
sw
ould
bedo
min
ated
byin
tera
ctio
nsth
atre
quir
ela
rge
reso
lutio
n-pa
ram
eter
valu
esto
beco
me
antif
erro
mag
netic
.To
over
com
eth
isis
sue,
we
defin
eth
eef
fect
ive
frac
tion
ofan
tifer
rom
agne
ticed
ges
ξ=
ξ(λ
)=
ℓA(λ
)−ℓA
("m
in)
ℓA("
max
)−ℓA
("m
in)
∈[0
,1],
(7)
whe
reℓA
(λ)
isth
eto
tal
num
ber
ofan
tifer
rom
agne
ticin
-te
ract
ions
for
the
give
nva
lue
ofλ
.In
othe
rw
ords
,it
isth
enu
mbe
rof
"ij
elem
ents
that
are
smal
ler
than
λ.
Thu
s,ℓA
("m
in)
isth
ela
rges
tnu
mbe
rof
antif
erro
mag
netic
inte
rac-
tions
forw
hich
ane
twor
kst
illfo
rms
asi
ngle
com
mun
ity,a
ndth
eef
fect
ive
num
ber
ofan
tifer
rom
agne
ticin
tera
ctio
nsξ
(λ)
isth
enu
mbe
rof
antif
erro
mag
netic
inte
ract
ions
(nor
mal
ized
toth
eun
itin
terv
al)
inex
cess
ofℓA
("m
in).
The
func
tion
ξ(λ
)in
crea
ses
mon
oton
ical
lyin
λ.
Swee
ping
λfr
om"
min
to"
max
corr
espo
nds
tosw
eepi
ngth
eva
lue
ofξ
from
0to
1.(O
neca
nth
ink
ofλ
asa
cont
inuo
usva
riab
lean
dξ
asa
disc
rete
vari
able
that
chan
ges
with
even
ts.)
Asw
epe
rfor
msu
chsw
eepi
ngfo
ragi
ven
netw
ork,
the
num
ber
ofco
mm
uniti
esin
crea
sesf
rom
η(ξ
=0)
=1
toη
(ξ=
1)=
Nan
dyi
elds
ave
ctor
[Hef
f(ξ
),S
eff(ξ
),η
eff(ξ
)]w
hose
com
pone
nts
we
call
the
mes
osco
pic
resp
onse
func
tions
(MR
Fs)
ofth
atne
twor
k.(W
eal
soso
met
imes
refe
rto
the
vect
orits
elf
asan
MR
F.)
Bec
ause
Hef
f∈
[0,1
],S
eff∈
[0,1
],η
eff∈
[0,1
],an
dξ
∈[0
,1]f
orev
ery
netw
ork,
we
can
com
pare
the
MR
Fsac
ross
netw
orks
and
use
them
toid
entif
ygr
oups
ofne
twor
ksw
ithsi
mila
rm
esos
copi
cst
ruct
ures
.In
Fig.
1(b)
,w
esh
owth
eZ
acha
ryK
arat
eC
lub
netw
ork
[23]
for
diff
eren
tva
lues
of
0361
04-3
J.-P. Onnela et al., Phys. Rev. E 86, 036104 (2012).

note: i and j are node indices, and s and r are “layer” indices.
The adjacency tensor Aijs 6= 0 if nodes i and j are connected
in layer s, and Aijs = 0 otherwise.
kis is the degree (or strength) of node i in layer s,ms is the number of edges (or sum of weights) in layer s,and �s = � is the resolution parameter in layer s.Cjsr = ! 6= 0 if layers s and r are connected via node j,and Cjsr = 0 otherwise.
The normalization factor 2µ =
Pijs Aijs +
Pjsr Cjsr for Qmultilayer 2 [�1, 1].
Qmultilayer =1
2µ
X
ijsr
✓Aijs � �s
kiskjs2ms
◆�sr + �ijCjsr
��(gis, gjr)
Community structure in time-dependent or “multilayer” network
Community Structure inTime-Dependent, Multiscale,and Multiplex NetworksPeter J. Mucha,1,2* Thomas Richardson,1,3 Kevin Macon,1 Mason A. Porter,4,5 Jukka-Pekka Onnela6,7
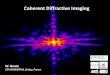
Network science is an interdisciplinary endeavor, with methods and applications drawn from acrossthe natural, social, and information sciences. A prominent problem in network science is thealgorithmic detection of tightly connected groups of nodes known as communities. We developed ageneralized framework of network quality functions that allowed us to study the communitystructure of arbitrary multislice networks, which are combinations of individual networks coupledthrough links that connect each node in one network slice to itself in other slices. This frameworkallows studies of community structure in a general setting encompassing networks that evolve overtime, have multiple types of links (multiplexity), and have multiple scales.
Thestudy of graphs, or networks, has a longtradition in fields such as sociology andmathematics, and it is now ubiquitous in
academic and everyday settings. An importanttool in network analysis is the detection ofmesoscopic structures known as communities (orcohesive groups), which are defined intuitively asgroups of nodes that are more tightly connected toeach other than they are to the rest of the network(1–3). One way to quantify communities is by aquality function that compares the number ofintracommunity edges to what one would expectat random.Given the network adjacencymatrixA,where the element Aij details a direct connectionbetween nodes i and j, one can construct a qual-ity functionQ (4, 5) for the partitioning of nodesinto communities as Q = ∑ ij (Aij − Pij)d(gi, gj),where d(gi, gj) = 1 if the community assignmentsgi and gj of nodes i and j are the same and 0otherwise, and Pij is the expected weight of theedge between i and j under a specified null model.
The choice of null model is a crucial con-sideration in studying network community struc-ture (2). After selecting a null model appropriateto the network and application at hand, one canuse a variety of computational heuristics to assignnodes to communities to optimize the quality Q(2, 3). However, such null models have not beenavailable for time-dependent networks; analyseshave instead depended on ad hoc methods to
piece together the structures obtained at differenttimes (6–9) or have abandoned quality functionsin favor of such alternatives as the MinimumDescriptionLength principle (10). Although tensordecompositions (11) have been used to clusternetwork data with different types of connections,no quality-function method has been developedfor such multiplex networks.
We developed a methodology to remove theselimits, generalizing the determination of commu-nity structure via quality functions to multislicenetworks that are defined by coupling multipleadjacency matrices (Fig. 1). The connectionsencoded by the network slices are flexible; theycan represent variations across time, variationsacross different types of connections, or evencommunity detection of the same network atdifferent scales. However, the usual procedure forestablishing a quality function as a direct count ofthe intracommunity edge weight minus that
expected at random fails to provide any contribu-tion from these interslice couplings. Because theyare specified by common identifications of nodesacross slices, interslice couplings are either presentor absent by definition, so when they do fall insidecommunities, their contribution in the count of intra-community edges exactly cancels that expected atrandom. In contrast, by formulating a null model interms of stability of communities under Laplaciandynamics, we have derived a principled generaliza-tion of community detection to multislice networks,
REPORTS
1Carolina Center for Interdisciplinary Applied Mathematics,Department of Mathematics, University of North Carolina,Chapel Hill, NC 27599, USA. 2Institute for Advanced Materials,Nanoscience and Technology, University of North Carolina,Chapel Hill, NC 27599, USA. 3Operations Research, NorthCarolina State University, Raleigh, NC 27695, USA. 4OxfordCentre for Industrial and Applied Mathematics, MathematicalInstitute, University of Oxford, Oxford OX1 3LB, UK. 5CABDyNComplexity Centre, University of Oxford, Oxford OX1 1HP, UK.6Department of Health Care Policy, Harvard Medical School,Boston, MA 02115, USA. 7Harvard Kennedy School, HarvardUniversity, Cambridge, MA 02138, USA.
*To whom correspondence should be addressed. E-mail:[email protected]
1
2
3
4
Fig. 1. Schematic of amultislice network. Four slicess= {1, 2, 3, 4} represented by adjacencies Aijs encodeintraslice connections (solid lines). Interslice con-nections (dashed lines) are encoded byCjrs, specifyingthe coupling of node j to itself between slices r and s.For clarity, interslice couplings are shown for only twonodes and depict two different types of couplings: (i)coupling between neighboring slices, appropriate forordered slices; and (ii) all-to-all interslice coupling,appropriate for categorical slices.
node
s
resolution parameters
coupling = 0
1 2 3 4
5
10
15
20
25
30
node
s
resolution parameters
coupling = 0.1
1 2 3 4
5
10
15
20
25
30
node
s
resolution parameters
coupling = 1
1 2 3 4
5
10
15
20
25
30
Fig. 2. Multislice community detection of theZachary Karate Club network (22) across multipleresolutions. Colors depict community assignments ofthe 34 nodes (renumbered vertically to groupsimilarly assigned nodes) in each of the 16 slices(with resolution parameters gs = {0.25, 0.5,…, 4}),for w = 0 (top), w = 0.1 (middle), and w =1 (bottom). Dashed lines bound the communitiesobtained using the default resolution (g = 1).
14 MAY 2010 VOL 328 SCIENCE www.sciencemag.org876
CORRECTED 16 JULY 2010; SEE LAST PAGE
on
Nov
embe
r 8, 2
011
ww
w.s
cien
cem
ag.o
rgD
ownl
oade
d fro
m
P. J. Mucha, T. Richardson, K. Macon, M. A. Porter, and J.-P. Onnela, Science 328, 876 (2010).
different slices: “time series”
nodes in individual slices
(weighted) edges
multilayer community index: for node i on layer s
with a single parameter controlling the interslicecorrespondence of communities.
Important to our method is the equivalencebetween themodularity quality function (12) [witha resolution parameter (5)] and stability of com-munities under Laplacian dynamics (13), whichwe have generalized to recover the null models forbipartite, directed, and signed networks (14). First,we obtained the resolution-parameter generaliza-
tion of Barber’s null model for bipartite networks(15) by requiring the independent joint probabilitycontribution to stability in (13) to be conditionalon the type of connection necessary to stepbetween two nodes. Second, we recovered thestandard null model for directed networks (16, 17)(again with a resolution parameter) by generaliz-ing the Laplacian dynamics to include motionalong different kinds of connections—in this case,
both with and against the direction of a link. Bythis generalization, we similarly recovered a nullmodel for signed networks (18). Third, weinterpreted the stability under Laplacian dynamicsflexibly to permit different spreading weights onthe different types of links, giving multiple reso-lution parameters to recover a general null modelfor signed networks (19).
We applied these generalizations to derive nullmodels for multislice networks that extend theexisting quality-function methodology, includingan additional parameter w to control the couplingbetween slices. Representing each network slice sby adjacencies Aijs between nodes i and j, withinterslice couplingsCjrs that connect node j in slicer to itself in slice s (Fig. 1), we have restricted ourattention to unipartite, undirected network slices(Aijs = Ajis) and couplings (Cjrs = Cjsr), but we canincorporate additional structure in the slices andcouplings in the same manner as demonstrated forsingle-slice null models. Notating the strengths ofeach node individually in each slice by kjs =∑iAijsand across slices by cjs = ∑rCjsr, we define themultislice strength by kjs = kjs + cjs. The continuous-time Laplacian dynamics given by
pis ¼ ∑jr
ðAijsdsr þ dijCjsrÞpjrkjr
− pis ð1Þ
respects the intraslice nature of Aijs and theinterslice couplings of Cjsr. Using the steady-stateprobability distribution p∗jr ¼ kjr=2m, where 2m =∑ jrkjr, we obtained the multislice null model interms of the probability ris| jr of sampling node i inslice s conditional on whether the multislice struc-ture allowsone to step from ( j, r) to (i, s), accountingfor intra- and interslice steps separately as
risj jrp∗jr ¼
kis2ms
kjrkjr
dsr þCjsr
cjr
cjrkjr
dij
! "kjr2m
ð2Þ
where ms = ∑jkjs. The second term in parentheses,which describes the conditional probability ofmotion between two slices, leverages the definitionof the Cjsr coupling. That is, the conditionalprobability of stepping from ( j, r) to (i, s) alongan interslice coupling is nonzero if and only if i = j,and it is proportional to the probability Cjsr/kjr ofselecting the precise interslice link that connects toslice s. Subtracting this conditional joint probabilityfrom the linear (in time) approximation of theexponential describing the Laplacian dynamics,weobtained a multislice generalization of modularity(14):
Qmultislice ¼12m
∑ijsr
h#Aijs − gs
kiskjs2ms
dsr$þ
dijCjsr
idðgis,gjrÞ ð3Þ
where we have used reweighting of the conditionalprobabilities, which allows a different resolution gsin each slice. We have absorbed the resolution pa-rameter for the interslice couplings into the mag-nitude of the elements ofCjsr, which, for simplicity,we presume to take binary values {0,w} indicatingthe absence (0) or presence (w) of interslice links.
1800 1820 1840 1860 1880 1900 1920 1940 1960 1980 2000
40PA, 24F, 8AA
151DR, 30AA, 14PA, 5F141F, 43DR
44D, 2R
1784R, 276D, 149DR, 162J, 53W, 84other
176W, 97AJ, 61DR, 49A,24D, 19F, 13J, 37other
3168D, 252R, 73other
222D, 6W, 11other
1490R, 247D, 19other
Year
Sen
ator
10 20 30 40 50 60 70 80 90 100 110CTMEMANHRI VTDE NJNY PAIL INMI OHWI IAKSMNMONENDSDVA ALAR FLGA LAMSNCSC TXKYMDOK TNWVAZCO IDMTNVNMUTWYCAORWAAK HI
Congress #
A
B
Fig. 3. Multislice community detection of U.S. Senate roll call vote similarities (23) withw = 0.5 couplingof 110 slices (i.e., the number of 2-year Congresses from 1789 to 2008) across time. (A) Colors indicateassignments to nine communities of the 1884 unique senators (sorted vertically and connected acrossCongresses by dashed lines) in each Congress in which they appear. The dark blue and red communitiescorrespond closely to the modern Democratic and Republican parties, respectively. Horizontal barsindicate the historical period of each community, with accompanying text enumerating nominal partyaffiliations of the single-slice nodes (each representing a senator in a Congress): PA, pro-administration;AA, anti-administration; F, Federalist; DR, Democratic-Republican; W, Whig; AJ, anti-Jackson; A, Adams; J,Jackson; D, Democratic; R, Republican. Vertical gray bars indicate Congresses in which three communitiesappeared simultaneously. (B) The same assignments according to state affiliations.
www.sciencemag.org SCIENCE VOL 328 14 MAY 2010 877
REPORTS
on
Nov
embe
r 8, 2
011
ww
w.s
cien
cem
ag.o
rgD
ownl
oade
d fro
m

An Example of LCS: simulated flow
Preliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
M. Farazmand and G. Haller, e-print arXiv:1402.4835.
Finding Lagrangian Coherent Structures Using Community Detection
Sang Hoon Lee,1, 2, ⇤ Mohammad Farazmand,3 George Haller,4 and Mason A. Porter2, 5
1Integrated Energy Center for Fostering Global Creative Researcher (BK 21 plus)and Department of Energy Science, Sungkyunkwan University, Suwon 440–746, Korea
2Oxford Centre for Industrial and Applied Mathematics (OCIAM),Mathematical Institute, University of Oxford, Oxford, OX2 6GG, United Kingdom3School of Physics, Georgia Institute of Technology, Atlanta, Georgia 30332, USA
4Institute of Mechanical Systems, ETH Zurich, Switzerland5CABDyN Complexity Centre, University of Oxford, Oxford, OX1 1HP, United Kingdom
Lagrangian coherent structures (LCSs) refer to dynamically distinct groups of fluid elements in fluid flowsand provide valuable mesoscale geographical information to identify the most essential elements of such flows.Using relative dispersion, we define the pairwise correlation between fluid elements and use the community de-tection for the systematic identification of LCSs as the community or modular structures underlying interactionsystems e↵ectively provide substructures behind the system of interest. We detect communities using modular-ity maximization with a tunable resolution for simulation data and two of real satellite-tracked drifter data inthe ocean to examine LCSs in various scales. In particular, to obtain more detailed spatiotemporal LCSs, wemaximize a multilayer version of modularity on a multilayer network in which temporal slices of interactionsare properly considered. We believe that our approach illustrates a new way to e�ciently detect LCSs for givendynamical systems and opens new possibilities of applications in dynamical systems in general.
PACS numbers: 45.20.Jj, 47.54.-r, 89.75.Fb, 89.75.Hc
Introduction.—Recent developments in the theory of dy-namical systems have given rise to new concepts of coherentstructures in fluid flow [1–4]. These methods seek exceptionalmaterial surfaces (or curves, in the case of two-dimensionalflow) that play a key role in mixing and transport over a giventime interval [5–8]. Their approach is Lagrangian in nature, incontrast to the Eulerian point of view that studies the instanta-neous velocity field [9].
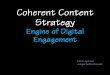
The Lagrangian methods each rely on specific mathemati-cal tools such as probability, di↵erential geometry and calcu-lus of variations. Here, we develop a new approach to coher-ent structure analysis using recent advances in network the-ory [10]. After laying down the theoretical frame work, weshow on two examples how our approach can complementearlier methods, as well as, providing new insight that is onlyaccessible to our network theory-based method.
Before turning to network theory, we present typical typesof Lagrangian coherent structures (LCSs) on an example: aturbulent flow. Figure 1 shows LCSs from a direct numericalsimulation of the forced Navier–Stokes equation
@u@t+ u · ru = �rp + ⌫r2u + f, r · u = 0, (1)
over the domain [0, 2⇡] ⇥ [0, 2⇡] with doubly periodic bound-ary conditions. The Lagrangian analysis is carried out over afew eddy turn-over times after the flow has reached its fullyturbulent state (see Ref. [11] for a detailed analysis).
The repelling and attracting LCSs (red and blue curves, re-spectively, in figure 1) are the main drivers of mixing throughextensive stretching and folding of nearby material elements.The green islands, in contrast, represent elliptic LCSs thatinhibit mixing by preserving their shape over relatively longtime scales.
Network Representation.—A fresh way to look at those
FIG. 1. (color online). Repelling (red), attracting (blue) and elliptic(green) Lagrangian coherent structures (LCSs).
systems for that purpose is to consider such systems as dis-crete interacting objects, as in the force-chain networks de-scribing granular material systems [12, 13] or the plumedetection problem in fluid [14]. General relationships be-tween community finding, transport, and partition are dis-cussed in Refs. [15, 16]. Another example of using thenetwork-theory tools to analyze the flow network is presentedin Refs. [17, 18], where the mass transport is represented asthe directed edges between geographical sub-areas (nodes),which in fact is rather in line with the spirit of the Eulerianpoint of view. We, by contrast, consider the fluid elementsthemselves as the nodes, so we can highlight more fundamen-tal structural properties of LCSs.
simulated flow from the forced Navier-Stokes equation
repelling LCSs attracting LCSs elliptic LCSs
pressure
external forceviscosity
u(x, t) is the velocity field
defined on the two-dimensional
domain U as x 2 U = [0, 2⇡]⇥ [0, 2⇡]at time t with doubly periodic
boundary conditions

An Example of LCS: simulated flow
Preliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
M. Farazmand and G. Haller, e-print arXiv:1402.4835.
Finding Lagrangian Coherent Structures Using Community Detection
Sang Hoon Lee,1, 2, ⇤ Mohammad Farazmand,3 George Haller,4 and Mason A. Porter2, 5
1Integrated Energy Center for Fostering Global Creative Researcher (BK 21 plus)and Department of Energy Science, Sungkyunkwan University, Suwon 440–746, Korea
2Oxford Centre for Industrial and Applied Mathematics (OCIAM),Mathematical Institute, University of Oxford, Oxford, OX2 6GG, United Kingdom3School of Physics, Georgia Institute of Technology, Atlanta, Georgia 30332, USA
4Institute of Mechanical Systems, ETH Zurich, Switzerland5CABDyN Complexity Centre, University of Oxford, Oxford, OX1 1HP, United Kingdom
Lagrangian coherent structures (LCSs) refer to dynamically distinct groups of fluid elements in fluid flowsand provide valuable mesoscale geographical information to identify the most essential elements of such flows.Using relative dispersion, we define the pairwise correlation between fluid elements and use the community de-tection for the systematic identification of LCSs as the community or modular structures underlying interactionsystems e↵ectively provide substructures behind the system of interest. We detect communities using modular-ity maximization with a tunable resolution for simulation data and two of real satellite-tracked drifter data inthe ocean to examine LCSs in various scales. In particular, to obtain more detailed spatiotemporal LCSs, wemaximize a multilayer version of modularity on a multilayer network in which temporal slices of interactionsare properly considered. We believe that our approach illustrates a new way to e�ciently detect LCSs for givendynamical systems and opens new possibilities of applications in dynamical systems in general.
PACS numbers: 45.20.Jj, 47.54.-r, 89.75.Fb, 89.75.Hc
Introduction.—Recent developments in the theory of dy-namical systems have given rise to new concepts of coherentstructures in fluid flow [1–4]. These methods seek exceptionalmaterial surfaces (or curves, in the case of two-dimensionalflow) that play a key role in mixing and transport over a giventime interval [5–8]. Their approach is Lagrangian in nature, incontrast to the Eulerian point of view that studies the instanta-neous velocity field [9].
The Lagrangian methods each rely on specific mathemati-cal tools such as probability, di↵erential geometry and calcu-lus of variations. Here, we develop a new approach to coher-ent structure analysis using recent advances in network the-ory [10]. After laying down the theoretical frame work, weshow on two examples how our approach can complementearlier methods, as well as, providing new insight that is onlyaccessible to our network theory-based method.
Before turning to network theory, we present typical typesof Lagrangian coherent structures (LCSs) on an example: aturbulent flow. Figure 1 shows LCSs from a direct numericalsimulation of the forced Navier–Stokes equation
@u@t+ u · ru = �rp + ⌫r2u + f, r · u = 0, (1)
over the domain [0, 2⇡] ⇥ [0, 2⇡] with doubly periodic bound-ary conditions. The Lagrangian analysis is carried out over afew eddy turn-over times after the flow has reached its fullyturbulent state (see Ref. [11] for a detailed analysis).
The repelling and attracting LCSs (red and blue curves, re-spectively, in figure 1) are the main drivers of mixing throughextensive stretching and folding of nearby material elements.The green islands, in contrast, represent elliptic LCSs thatinhibit mixing by preserving their shape over relatively longtime scales.
Network Representation.—A fresh way to look at those
FIG. 1. (color online). Repelling (red), attracting (blue) and elliptic(green) Lagrangian coherent structures (LCSs).
systems for that purpose is to consider such systems as dis-crete interacting objects, as in the force-chain networks de-scribing granular material systems [12, 13] or the plumedetection problem in fluid [14]. General relationships be-tween community finding, transport, and partition are dis-cussed in Refs. [15, 16]. Another example of using thenetwork-theory tools to analyze the flow network is presentedin Refs. [17, 18], where the mass transport is represented asthe directed edges between geographical sub-areas (nodes),which in fact is rather in line with the spirit of the Eulerianpoint of view. We, by contrast, consider the fluid elementsthemselves as the nodes, so we can highlight more fundamen-tal structural properties of LCSs.
simulated flow from the forced Navier-Stokes equation
repelling LCSs attracting LCSs elliptic LCSs
pressure
external forceviscosity
u(x, t) is the velocity field
defined on the two-dimensional
domain U as x 2 U = [0, 2⇡]⇥ [0, 2⇡]at time t with doubly periodic
boundary conditions

Network community analysis of LCSPreliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
Finding Lagrangian Coherent Structures Using Community Detection
Sang Hoon Lee,1, 2, ⇤ Mohammad Farazmand,3 George Haller,4 and Mason A. Porter2, 5
1Integrated Energy Center for Fostering Global Creative Researcher (BK 21 plus)and Department of Energy Science, Sungkyunkwan University, Suwon 440–746, Korea
2Oxford Centre for Industrial and Applied Mathematics (OCIAM),Mathematical Institute, University of Oxford, Oxford, OX2 6GG, United Kingdom3School of Physics, Georgia Institute of Technology, Atlanta, Georgia 30332, USA
4Institute of Mechanical Systems, ETH Zurich, Switzerland5CABDyN Complexity Centre, University of Oxford, Oxford, OX1 1HP, United Kingdom
Lagrangian coherent structures (LCSs) refer to dynamically distinct groups of fluid elements in fluid flowsand provide valuable mesoscale geographical information to identify the most essential elements of such flows.Using relative dispersion, we define the pairwise correlation between fluid elements and use the community de-tection for the systematic identification of LCSs as the community or modular structures underlying interactionsystems e↵ectively provide substructures behind the system of interest. We detect communities using modular-ity maximization with a tunable resolution for simulation data and two of real satellite-tracked drifter data inthe ocean to examine LCSs in various scales. In particular, to obtain more detailed spatiotemporal LCSs, wemaximize a multilayer version of modularity on a multilayer network in which temporal slices of interactionsare properly considered. We believe that our approach illustrates a new way to e�ciently detect LCSs for givendynamical systems and opens new possibilities of applications in dynamical systems in general.
PACS numbers: 45.20.Jj, 47.54.-r, 89.75.Fb, 89.75.Hc
Introduction.—Recent developments in the theory of dy-namical systems have given rise to new concepts of coherentstructures in fluid flow [1–4]. These methods seek exceptionalmaterial surfaces (or curves, in the case of two-dimensionalflow) that play a key role in mixing and transport over a giventime interval [5–8]. Their approach is Lagrangian in nature, incontrast to the Eulerian point of view that studies the instanta-neous velocity field [9].
The Lagrangian methods each rely on specific mathemati-cal tools such as probability, di↵erential geometry and calcu-lus of variations. Here, we develop a new approach to coher-ent structure analysis using recent advances in network the-ory [10]. After laying down the theoretical frame work, weshow on two examples how our approach can complementearlier methods, as well as, providing new insight that is onlyaccessible to our network theory-based method.
Before turning to network theory, we present typical typesof Lagrangian coherent structures (LCSs) on an example: aturbulent flow. Figure 1 shows LCSs from a direct numericalsimulation of the forced Navier–Stokes equation
@u@t+ u · ru = �rp + ⌫r2u + f, r · u = 0, (1)
over the domain [0, 2⇡] ⇥ [0, 2⇡] with doubly periodic bound-ary conditions. The Lagrangian analysis is carried out over afew eddy turn-over times after the flow has reached its fullyturbulent state (see Ref. [11] for a detailed analysis).
The repelling and attracting LCSs (red and blue curves, re-spectively, in figure 1) are the main drivers of mixing throughextensive stretching and folding of nearby material elements.The green islands, in contrast, represent elliptic LCSs thatinhibit mixing by preserving their shape over relatively longtime scales.
Network Representation.—A fresh way to look at those
FIG. 1. (color online). Repelling (red), attracting (blue) and elliptic(green) Lagrangian coherent structures (LCSs).
systems for that purpose is to consider such systems as dis-crete interacting objects, as in the force-chain networks de-scribing granular material systems [12, 13] or the plumedetection problem in fluid [14]. General relationships be-tween community finding, transport, and partition are dis-cussed in Refs. [15, 16]. Another example of using thenetwork-theory tools to analyze the flow network is presentedin Refs. [17, 18], where the mass transport is represented asthe directed edges between geographical sub-areas (nodes),which in fact is rather in line with the spirit of the Eulerianpoint of view. We, by contrast, consider the fluid elementsthemselves as the nodes, so we can highlight more fundamen-tal structural properties of LCSs.

Network community analysis of LCSPreliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
Finding Lagrangian Coherent Structures Using Community Detection
Sang Hoon Lee,1, 2, ⇤ Mohammad Farazmand,3 George Haller,4 and Mason A. Porter2, 5
1Integrated Energy Center for Fostering Global Creative Researcher (BK 21 plus)and Department of Energy Science, Sungkyunkwan University, Suwon 440–746, Korea
2Oxford Centre for Industrial and Applied Mathematics (OCIAM),Mathematical Institute, University of Oxford, Oxford, OX2 6GG, United Kingdom3School of Physics, Georgia Institute of Technology, Atlanta, Georgia 30332, USA
4Institute of Mechanical Systems, ETH Zurich, Switzerland5CABDyN Complexity Centre, University of Oxford, Oxford, OX1 1HP, United Kingdom
Lagrangian coherent structures (LCSs) refer to dynamically distinct groups of fluid elements in fluid flowsand provide valuable mesoscale geographical information to identify the most essential elements of such flows.Using relative dispersion, we define the pairwise correlation between fluid elements and use the community de-tection for the systematic identification of LCSs as the community or modular structures underlying interactionsystems e↵ectively provide substructures behind the system of interest. We detect communities using modular-ity maximization with a tunable resolution for simulation data and two of real satellite-tracked drifter data inthe ocean to examine LCSs in various scales. In particular, to obtain more detailed spatiotemporal LCSs, wemaximize a multilayer version of modularity on a multilayer network in which temporal slices of interactionsare properly considered. We believe that our approach illustrates a new way to e�ciently detect LCSs for givendynamical systems and opens new possibilities of applications in dynamical systems in general.
PACS numbers: 45.20.Jj, 47.54.-r, 89.75.Fb, 89.75.Hc
Introduction.—Recent developments in the theory of dy-namical systems have given rise to new concepts of coherentstructures in fluid flow [1–4]. These methods seek exceptionalmaterial surfaces (or curves, in the case of two-dimensionalflow) that play a key role in mixing and transport over a giventime interval [5–8]. Their approach is Lagrangian in nature, incontrast to the Eulerian point of view that studies the instanta-neous velocity field [9].
The Lagrangian methods each rely on specific mathemati-cal tools such as probability, di↵erential geometry and calcu-lus of variations. Here, we develop a new approach to coher-ent structure analysis using recent advances in network the-ory [10]. After laying down the theoretical frame work, weshow on two examples how our approach can complementearlier methods, as well as, providing new insight that is onlyaccessible to our network theory-based method.
Before turning to network theory, we present typical typesof Lagrangian coherent structures (LCSs) on an example: aturbulent flow. Figure 1 shows LCSs from a direct numericalsimulation of the forced Navier–Stokes equation
@u@t+ u · ru = �rp + ⌫r2u + f, r · u = 0, (1)
over the domain [0, 2⇡] ⇥ [0, 2⇡] with doubly periodic bound-ary conditions. The Lagrangian analysis is carried out over afew eddy turn-over times after the flow has reached its fullyturbulent state (see Ref. [11] for a detailed analysis).
The repelling and attracting LCSs (red and blue curves, re-spectively, in figure 1) are the main drivers of mixing throughextensive stretching and folding of nearby material elements.The green islands, in contrast, represent elliptic LCSs thatinhibit mixing by preserving their shape over relatively longtime scales.
Network Representation.—A fresh way to look at those
FIG. 1. (color online). Repelling (red), attracting (blue) and elliptic(green) Lagrangian coherent structures (LCSs).
systems for that purpose is to consider such systems as dis-crete interacting objects, as in the force-chain networks de-scribing granular material systems [12, 13] or the plumedetection problem in fluid [14]. General relationships be-tween community finding, transport, and partition are dis-cussed in Refs. [15, 16]. Another example of using thenetwork-theory tools to analyze the flow network is presentedin Refs. [17, 18], where the mass transport is represented asthe directed edges between geographical sub-areas (nodes),which in fact is rather in line with the spirit of the Eulerianpoint of view. We, by contrast, consider the fluid elementsthemselves as the nodes, so we can highlight more fundamen-tal structural properties of LCSs.
Preliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
where we can define the relative dispersion for each grid element as
maxB2nnhd(A)
|rf
(A, B)||r
i
(A, B)| , (2)
where nnhd(A) is the set of nodes in the nearest neighbors of A (four for each grid point) and Fig. 2
shows the relative dispersion map for the 512⇥ 512 original grid elements. The data including the
relative dispersion for the original grid elements is original dispersion matrix.txt.
W
(2)AB
=|r
i
(A, B)||F(A)r
i
(A, B)| , (3)
where ri
(A, B) = ri
(B) � ri
(A) [the vector from ri
(A) to ri
(B)], rf
(A, B) = rf
(B) � rf
(A) [the
vector from rf
(A) to rf
(B)], ri
(A) = [x
i
(A), yi
(A)] which is the initial point (t = 0) of the element
A], rf
(A) = [x
f
(A), yf
(A)] which is the final point (t = 50) of the element A], and F(A) is the
deformation gradient tensor at A, i.e., |F(A)ri
(A, B)| =p{F
xx
(A)[x
i
(B) � x
i
(A)] + F
xy
(A)[yi
(B) � y
i
(A)]}2 + {Fyx
(A)[x
i
(B) � x
i
(A)] + F
yy
(A)[yi
(B) � y
i
(A)]}2.
The distance measures such as ri
(A, B) and the coordinates such as ri
(A) take the shortest distance
among all the possible distances considering the PBC: x itself and x ± 2⇡ for x, and y itself and
y ± 2⇡ for y (9 combinations in total).
III. COMMUNITY DETECTION METHODS
• W
(1)AB
(= W
(1)BA
) in Eq. (1): the Louvainmethod [1, 2] with the Girvan-Newman null model [3]
and the resolution parameter � [4] is used for Fig. 3, where the number of communities and
the values of quality measure QGN are specified for four di↵erent � values. The communities
here describe the (mutually exclusive for now—we can extend this to take the “overlapping”
communities into account by using other methods) groups of nodes where the intra-group
interactions are significantly stronger than the inter-group interactions. For the resolution
parameter �, roughly speaking, the larger the value of � is, the smaller (in terms of typical
number of nodes in a community, thus larger number of communities) communities are
identified.
The modularity for the Girvan-Newman null model, which is the objective function QGN
where the purpose is to find the set of communities {gA
} that maximizes QGN, is given by
2
3
Supplemental Figure S1. The relative dispersion lnhmaxB2⌫(A) |r f (A, B)|/|ri(A, B)|
ifor the same grid elements as in Fig. 1 of the main text. The
set ⌫(A) is the set of nodes that are adjacent to node A.
3
Supp
lem
enta
lFig
ure
S1.T
here
lativ
edi
sper
sion
lnh m
axB2⌫(
A)|r f
(A,B
)|/|r i
(A,B
)|ifo
rthe
sam
egr
idel
emen
tsas
inFi
g.1
ofth
em
ain
text
.The
set⌫
(A)i
sth
ese
tofn
odes
that
are
adja
cent
tono
deA.
A, B: discretized 512✕512 grid cell indices

Network community analysis of LCSPreliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
Finding Lagrangian Coherent Structures Using Community Detection
Sang Hoon Lee,1, 2, ⇤ Mohammad Farazmand,3 George Haller,4 and Mason A. Porter2, 5
1Integrated Energy Center for Fostering Global Creative Researcher (BK 21 plus)and Department of Energy Science, Sungkyunkwan University, Suwon 440–746, Korea
2Oxford Centre for Industrial and Applied Mathematics (OCIAM),Mathematical Institute, University of Oxford, Oxford, OX2 6GG, United Kingdom3School of Physics, Georgia Institute of Technology, Atlanta, Georgia 30332, USA
4Institute of Mechanical Systems, ETH Zurich, Switzerland5CABDyN Complexity Centre, University of Oxford, Oxford, OX1 1HP, United Kingdom
Lagrangian coherent structures (LCSs) refer to dynamically distinct groups of fluid elements in fluid flowsand provide valuable mesoscale geographical information to identify the most essential elements of such flows.Using relative dispersion, we define the pairwise correlation between fluid elements and use the community de-tection for the systematic identification of LCSs as the community or modular structures underlying interactionsystems e↵ectively provide substructures behind the system of interest. We detect communities using modular-ity maximization with a tunable resolution for simulation data and two of real satellite-tracked drifter data inthe ocean to examine LCSs in various scales. In particular, to obtain more detailed spatiotemporal LCSs, wemaximize a multilayer version of modularity on a multilayer network in which temporal slices of interactionsare properly considered. We believe that our approach illustrates a new way to e�ciently detect LCSs for givendynamical systems and opens new possibilities of applications in dynamical systems in general.
PACS numbers: 45.20.Jj, 47.54.-r, 89.75.Fb, 89.75.Hc
Introduction.—Recent developments in the theory of dy-namical systems have given rise to new concepts of coherentstructures in fluid flow [1–4]. These methods seek exceptionalmaterial surfaces (or curves, in the case of two-dimensionalflow) that play a key role in mixing and transport over a giventime interval [5–8]. Their approach is Lagrangian in nature, incontrast to the Eulerian point of view that studies the instanta-neous velocity field [9].
The Lagrangian methods each rely on specific mathemati-cal tools such as probability, di↵erential geometry and calcu-lus of variations. Here, we develop a new approach to coher-ent structure analysis using recent advances in network the-ory [10]. After laying down the theoretical frame work, weshow on two examples how our approach can complementearlier methods, as well as, providing new insight that is onlyaccessible to our network theory-based method.
Before turning to network theory, we present typical typesof Lagrangian coherent structures (LCSs) on an example: aturbulent flow. Figure 1 shows LCSs from a direct numericalsimulation of the forced Navier–Stokes equation
@u@t+ u · ru = �rp + ⌫r2u + f, r · u = 0, (1)
over the domain [0, 2⇡] ⇥ [0, 2⇡] with doubly periodic bound-ary conditions. The Lagrangian analysis is carried out over afew eddy turn-over times after the flow has reached its fullyturbulent state (see Ref. [11] for a detailed analysis).
The repelling and attracting LCSs (red and blue curves, re-spectively, in figure 1) are the main drivers of mixing throughextensive stretching and folding of nearby material elements.The green islands, in contrast, represent elliptic LCSs thatinhibit mixing by preserving their shape over relatively longtime scales.
Network Representation.—A fresh way to look at those
FIG. 1. (color online). Repelling (red), attracting (blue) and elliptic(green) Lagrangian coherent structures (LCSs).
systems for that purpose is to consider such systems as dis-crete interacting objects, as in the force-chain networks de-scribing granular material systems [12, 13] or the plumedetection problem in fluid [14]. General relationships be-tween community finding, transport, and partition are dis-cussed in Refs. [15, 16]. Another example of using thenetwork-theory tools to analyze the flow network is presentedin Refs. [17, 18], where the mass transport is represented asthe directed edges between geographical sub-areas (nodes),which in fact is rather in line with the spirit of the Eulerianpoint of view. We, by contrast, consider the fluid elementsthemselves as the nodes, so we can highlight more fundamen-tal structural properties of LCSs.
Preliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
where we can define the relative dispersion for each grid element as
maxB2nnhd(A)
|rf
(A, B)||r
i
(A, B)| , (2)
where nnhd(A) is the set of nodes in the nearest neighbors of A (four for each grid point) and Fig. 2
shows the relative dispersion map for the 512⇥ 512 original grid elements. The data including the
relative dispersion for the original grid elements is original dispersion matrix.txt.
W
(2)AB
=|r
i
(A, B)||F(A)r
i
(A, B)| , (3)
where ri
(A, B) = ri
(B) � ri
(A) [the vector from ri
(A) to ri
(B)], rf
(A, B) = rf
(B) � rf
(A) [the
vector from rf
(A) to rf
(B)], ri
(A) = [x
i
(A), yi
(A)] which is the initial point (t = 0) of the element
A], rf
(A) = [x
f
(A), yf
(A)] which is the final point (t = 50) of the element A], and F(A) is the
deformation gradient tensor at A, i.e., |F(A)ri
(A, B)| =p{F
xx
(A)[x
i
(B) � x
i
(A)] + F
xy
(A)[yi
(B) � y
i
(A)]}2 + {Fyx
(A)[x
i
(B) � x
i
(A)] + F
yy
(A)[yi
(B) � y
i
(A)]}2.
The distance measures such as ri
(A, B) and the coordinates such as ri
(A) take the shortest distance
among all the possible distances considering the PBC: x itself and x ± 2⇡ for x, and y itself and
y ± 2⇡ for y (9 combinations in total).
III. COMMUNITY DETECTION METHODS
• W
(1)AB
(= W
(1)BA
) in Eq. (1): the Louvainmethod [1, 2] with the Girvan-Newman null model [3]
and the resolution parameter � [4] is used for Fig. 3, where the number of communities and
the values of quality measure QGN are specified for four di↵erent � values. The communities
here describe the (mutually exclusive for now—we can extend this to take the “overlapping”
communities into account by using other methods) groups of nodes where the intra-group
interactions are significantly stronger than the inter-group interactions. For the resolution
parameter �, roughly speaking, the larger the value of � is, the smaller (in terms of typical
number of nodes in a community, thus larger number of communities) communities are
identified.
The modularity for the Girvan-Newman null model, which is the objective function QGN
where the purpose is to find the set of communities {gA
} that maximizes QGN, is given by
2
3
Supplemental Figure S1. The relative dispersion lnhmaxB2⌫(A) |r f (A, B)|/|ri(A, B)|
ifor the same grid elements as in Fig. 1 of the main text. The
set ⌫(A) is the set of nodes that are adjacent to node A.
3
Supp
lem
enta
lFig
ure
S1.T
here
lativ
edi
sper
sion
lnh m
axB2⌫(
A)|r f
(A,B
)|/|r i
(A,B
)|ifo
rthe
sam
egr
idel
emen
tsas
inFi
g.1
ofth
em
ain
text
.The
set⌫
(A)i
sth
ese
tofn
odes
that
are
adja
cent
tono
deA.
A, B: discretized 512✕512 grid cell indices
A
B
C
D

Network community analysis of LCSPreliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
Finding Lagrangian Coherent Structures Using Community Detection
Sang Hoon Lee,1, 2, ⇤ Mohammad Farazmand,3 George Haller,4 and Mason A. Porter2, 5
1Integrated Energy Center for Fostering Global Creative Researcher (BK 21 plus)and Department of Energy Science, Sungkyunkwan University, Suwon 440–746, Korea
2Oxford Centre for Industrial and Applied Mathematics (OCIAM),Mathematical Institute, University of Oxford, Oxford, OX2 6GG, United Kingdom3School of Physics, Georgia Institute of Technology, Atlanta, Georgia 30332, USA
4Institute of Mechanical Systems, ETH Zurich, Switzerland5CABDyN Complexity Centre, University of Oxford, Oxford, OX1 1HP, United Kingdom
Lagrangian coherent structures (LCSs) refer to dynamically distinct groups of fluid elements in fluid flowsand provide valuable mesoscale geographical information to identify the most essential elements of such flows.Using relative dispersion, we define the pairwise correlation between fluid elements and use the community de-tection for the systematic identification of LCSs as the community or modular structures underlying interactionsystems e↵ectively provide substructures behind the system of interest. We detect communities using modular-ity maximization with a tunable resolution for simulation data and two of real satellite-tracked drifter data inthe ocean to examine LCSs in various scales. In particular, to obtain more detailed spatiotemporal LCSs, wemaximize a multilayer version of modularity on a multilayer network in which temporal slices of interactionsare properly considered. We believe that our approach illustrates a new way to e�ciently detect LCSs for givendynamical systems and opens new possibilities of applications in dynamical systems in general.
PACS numbers: 45.20.Jj, 47.54.-r, 89.75.Fb, 89.75.Hc
Introduction.—Recent developments in the theory of dy-namical systems have given rise to new concepts of coherentstructures in fluid flow [1–4]. These methods seek exceptionalmaterial surfaces (or curves, in the case of two-dimensionalflow) that play a key role in mixing and transport over a giventime interval [5–8]. Their approach is Lagrangian in nature, incontrast to the Eulerian point of view that studies the instanta-neous velocity field [9].
The Lagrangian methods each rely on specific mathemati-cal tools such as probability, di↵erential geometry and calcu-lus of variations. Here, we develop a new approach to coher-ent structure analysis using recent advances in network the-ory [10]. After laying down the theoretical frame work, weshow on two examples how our approach can complementearlier methods, as well as, providing new insight that is onlyaccessible to our network theory-based method.
Before turning to network theory, we present typical typesof Lagrangian coherent structures (LCSs) on an example: aturbulent flow. Figure 1 shows LCSs from a direct numericalsimulation of the forced Navier–Stokes equation
@u@t+ u · ru = �rp + ⌫r2u + f, r · u = 0, (1)
over the domain [0, 2⇡] ⇥ [0, 2⇡] with doubly periodic bound-ary conditions. The Lagrangian analysis is carried out over afew eddy turn-over times after the flow has reached its fullyturbulent state (see Ref. [11] for a detailed analysis).
The repelling and attracting LCSs (red and blue curves, re-spectively, in figure 1) are the main drivers of mixing throughextensive stretching and folding of nearby material elements.The green islands, in contrast, represent elliptic LCSs thatinhibit mixing by preserving their shape over relatively longtime scales.
Network Representation.—A fresh way to look at those
FIG. 1. (color online). Repelling (red), attracting (blue) and elliptic(green) Lagrangian coherent structures (LCSs).
systems for that purpose is to consider such systems as dis-crete interacting objects, as in the force-chain networks de-scribing granular material systems [12, 13] or the plumedetection problem in fluid [14]. General relationships be-tween community finding, transport, and partition are dis-cussed in Refs. [15, 16]. Another example of using thenetwork-theory tools to analyze the flow network is presentedin Refs. [17, 18], where the mass transport is represented asthe directed edges between geographical sub-areas (nodes),which in fact is rather in line with the spirit of the Eulerianpoint of view. We, by contrast, consider the fluid elementsthemselves as the nodes, so we can highlight more fundamen-tal structural properties of LCSs.
Preliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
where we can define the relative dispersion for each grid element as
maxB2nnhd(A)
|rf
(A, B)||r
i
(A, B)| , (2)
where nnhd(A) is the set of nodes in the nearest neighbors of A (four for each grid point) and Fig. 2
shows the relative dispersion map for the 512⇥ 512 original grid elements. The data including the
relative dispersion for the original grid elements is original dispersion matrix.txt.
W
(2)AB
=|r
i
(A, B)||F(A)r
i
(A, B)| , (3)
where ri
(A, B) = ri
(B) � ri
(A) [the vector from ri
(A) to ri
(B)], rf
(A, B) = rf
(B) � rf
(A) [the
vector from rf
(A) to rf
(B)], ri
(A) = [x
i
(A), yi
(A)] which is the initial point (t = 0) of the element
A], rf
(A) = [x
f
(A), yf
(A)] which is the final point (t = 50) of the element A], and F(A) is the
deformation gradient tensor at A, i.e., |F(A)ri
(A, B)| =p{F
xx
(A)[x
i
(B) � x
i
(A)] + F
xy
(A)[yi
(B) � y
i
(A)]}2 + {Fyx
(A)[x
i
(B) � x
i
(A)] + F
yy
(A)[yi
(B) � y
i
(A)]}2.
The distance measures such as ri
(A, B) and the coordinates such as ri
(A) take the shortest distance
among all the possible distances considering the PBC: x itself and x ± 2⇡ for x, and y itself and
y ± 2⇡ for y (9 combinations in total).
III. COMMUNITY DETECTION METHODS
• W
(1)AB
(= W
(1)BA
) in Eq. (1): the Louvainmethod [1, 2] with the Girvan-Newman null model [3]
and the resolution parameter � [4] is used for Fig. 3, where the number of communities and
the values of quality measure QGN are specified for four di↵erent � values. The communities
here describe the (mutually exclusive for now—we can extend this to take the “overlapping”
communities into account by using other methods) groups of nodes where the intra-group
interactions are significantly stronger than the inter-group interactions. For the resolution
parameter �, roughly speaking, the larger the value of � is, the smaller (in terms of typical
number of nodes in a community, thus larger number of communities) communities are
identified.
The modularity for the Girvan-Newman null model, which is the objective function QGN
where the purpose is to find the set of communities {gA
} that maximizes QGN, is given by
2
3
Supplemental Figure S1. The relative dispersion lnhmaxB2⌫(A) |r f (A, B)|/|ri(A, B)|
ifor the same grid elements as in Fig. 1 of the main text. The
set ⌫(A) is the set of nodes that are adjacent to node A.
3
Supp
lem
enta
lFig
ure
S1.T
here
lativ
edi
sper
sion
lnh m
axB2⌫(
A)|r f
(A,B
)|/|r i
(A,B
)|ifo
rthe
sam
egr
idel
emen
tsas
inFi
g.1
ofth
em
ain
text
.The
set⌫
(A)i
sth
ese
tofn
odes
that
are
adja
cent
tono
deA.
A, B: discretized 512✕512 grid cell indices
|ri(A,B)|A
B
C
D|ri(C,D)|

Network community analysis of LCSPreliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
Finding Lagrangian Coherent Structures Using Community Detection
Sang Hoon Lee,1, 2, ⇤ Mohammad Farazmand,3 George Haller,4 and Mason A. Porter2, 5
1Integrated Energy Center for Fostering Global Creative Researcher (BK 21 plus)and Department of Energy Science, Sungkyunkwan University, Suwon 440–746, Korea
2Oxford Centre for Industrial and Applied Mathematics (OCIAM),Mathematical Institute, University of Oxford, Oxford, OX2 6GG, United Kingdom3School of Physics, Georgia Institute of Technology, Atlanta, Georgia 30332, USA
4Institute of Mechanical Systems, ETH Zurich, Switzerland5CABDyN Complexity Centre, University of Oxford, Oxford, OX1 1HP, United Kingdom
Lagrangian coherent structures (LCSs) refer to dynamically distinct groups of fluid elements in fluid flowsand provide valuable mesoscale geographical information to identify the most essential elements of such flows.Using relative dispersion, we define the pairwise correlation between fluid elements and use the community de-tection for the systematic identification of LCSs as the community or modular structures underlying interactionsystems e↵ectively provide substructures behind the system of interest. We detect communities using modular-ity maximization with a tunable resolution for simulation data and two of real satellite-tracked drifter data inthe ocean to examine LCSs in various scales. In particular, to obtain more detailed spatiotemporal LCSs, wemaximize a multilayer version of modularity on a multilayer network in which temporal slices of interactionsare properly considered. We believe that our approach illustrates a new way to e�ciently detect LCSs for givendynamical systems and opens new possibilities of applications in dynamical systems in general.
PACS numbers: 45.20.Jj, 47.54.-r, 89.75.Fb, 89.75.Hc
Introduction.—Recent developments in the theory of dy-namical systems have given rise to new concepts of coherentstructures in fluid flow [1–4]. These methods seek exceptionalmaterial surfaces (or curves, in the case of two-dimensionalflow) that play a key role in mixing and transport over a giventime interval [5–8]. Their approach is Lagrangian in nature, incontrast to the Eulerian point of view that studies the instanta-neous velocity field [9].
The Lagrangian methods each rely on specific mathemati-cal tools such as probability, di↵erential geometry and calcu-lus of variations. Here, we develop a new approach to coher-ent structure analysis using recent advances in network the-ory [10]. After laying down the theoretical frame work, weshow on two examples how our approach can complementearlier methods, as well as, providing new insight that is onlyaccessible to our network theory-based method.
Before turning to network theory, we present typical typesof Lagrangian coherent structures (LCSs) on an example: aturbulent flow. Figure 1 shows LCSs from a direct numericalsimulation of the forced Navier–Stokes equation
@u@t+ u · ru = �rp + ⌫r2u + f, r · u = 0, (1)
over the domain [0, 2⇡] ⇥ [0, 2⇡] with doubly periodic bound-ary conditions. The Lagrangian analysis is carried out over afew eddy turn-over times after the flow has reached its fullyturbulent state (see Ref. [11] for a detailed analysis).
The repelling and attracting LCSs (red and blue curves, re-spectively, in figure 1) are the main drivers of mixing throughextensive stretching and folding of nearby material elements.The green islands, in contrast, represent elliptic LCSs thatinhibit mixing by preserving their shape over relatively longtime scales.
Network Representation.—A fresh way to look at those
FIG. 1. (color online). Repelling (red), attracting (blue) and elliptic(green) Lagrangian coherent structures (LCSs).
systems for that purpose is to consider such systems as dis-crete interacting objects, as in the force-chain networks de-scribing granular material systems [12, 13] or the plumedetection problem in fluid [14]. General relationships be-tween community finding, transport, and partition are dis-cussed in Refs. [15, 16]. Another example of using thenetwork-theory tools to analyze the flow network is presentedin Refs. [17, 18], where the mass transport is represented asthe directed edges between geographical sub-areas (nodes),which in fact is rather in line with the spirit of the Eulerianpoint of view. We, by contrast, consider the fluid elementsthemselves as the nodes, so we can highlight more fundamen-tal structural properties of LCSs.
Preliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
where we can define the relative dispersion for each grid element as
maxB2nnhd(A)
|rf
(A, B)||r
i
(A, B)| , (2)
where nnhd(A) is the set of nodes in the nearest neighbors of A (four for each grid point) and Fig. 2
shows the relative dispersion map for the 512⇥ 512 original grid elements. The data including the
relative dispersion for the original grid elements is original dispersion matrix.txt.
W
(2)AB
=|r
i
(A, B)||F(A)r
i
(A, B)| , (3)
where ri
(A, B) = ri
(B) � ri
(A) [the vector from ri
(A) to ri
(B)], rf
(A, B) = rf
(B) � rf
(A) [the
vector from rf
(A) to rf
(B)], ri
(A) = [x
i
(A), yi
(A)] which is the initial point (t = 0) of the element
A], rf
(A) = [x
f
(A), yf
(A)] which is the final point (t = 50) of the element A], and F(A) is the
deformation gradient tensor at A, i.e., |F(A)ri
(A, B)| =p{F
xx
(A)[x
i
(B) � x
i
(A)] + F
xy
(A)[yi
(B) � y
i
(A)]}2 + {Fyx
(A)[x
i
(B) � x
i
(A)] + F
yy
(A)[yi
(B) � y
i
(A)]}2.
The distance measures such as ri
(A, B) and the coordinates such as ri
(A) take the shortest distance
among all the possible distances considering the PBC: x itself and x ± 2⇡ for x, and y itself and
y ± 2⇡ for y (9 combinations in total).
III. COMMUNITY DETECTION METHODS
• W
(1)AB
(= W
(1)BA
) in Eq. (1): the Louvainmethod [1, 2] with the Girvan-Newman null model [3]
and the resolution parameter � [4] is used for Fig. 3, where the number of communities and
the values of quality measure QGN are specified for four di↵erent � values. The communities
here describe the (mutually exclusive for now—we can extend this to take the “overlapping”
communities into account by using other methods) groups of nodes where the intra-group
interactions are significantly stronger than the inter-group interactions. For the resolution
parameter �, roughly speaking, the larger the value of � is, the smaller (in terms of typical
number of nodes in a community, thus larger number of communities) communities are
identified.
The modularity for the Girvan-Newman null model, which is the objective function QGN
where the purpose is to find the set of communities {gA
} that maximizes QGN, is given by
2
3
Supplemental Figure S1. The relative dispersion lnhmaxB2⌫(A) |r f (A, B)|/|ri(A, B)|
ifor the same grid elements as in Fig. 1 of the main text. The
set ⌫(A) is the set of nodes that are adjacent to node A.
3
Supp
lem
enta
lFig
ure
S1.T
here
lativ
edi
sper
sion
lnh m
axB2⌫(
A)|r f
(A,B
)|/|r i
(A,B
)|ifo
rthe
sam
egr
idel
emen
tsas
inFi
g.1
ofth
em
ain
text
.The
set⌫
(A)i
sth
ese
tofn
odes
that
are
adja
cent
tono
deA.
A, B: discretized 512✕512 grid cell indices
|rf (A,B)|
|ri(A,B)|
A
BA
B
C
D|ri(C,D)|

Network community analysis of LCSPreliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
Finding Lagrangian Coherent Structures Using Community Detection
Sang Hoon Lee,1, 2, ⇤ Mohammad Farazmand,3 George Haller,4 and Mason A. Porter2, 5
1Integrated Energy Center for Fostering Global Creative Researcher (BK 21 plus)and Department of Energy Science, Sungkyunkwan University, Suwon 440–746, Korea
2Oxford Centre for Industrial and Applied Mathematics (OCIAM),Mathematical Institute, University of Oxford, Oxford, OX2 6GG, United Kingdom3School of Physics, Georgia Institute of Technology, Atlanta, Georgia 30332, USA
4Institute of Mechanical Systems, ETH Zurich, Switzerland5CABDyN Complexity Centre, University of Oxford, Oxford, OX1 1HP, United Kingdom
Lagrangian coherent structures (LCSs) refer to dynamically distinct groups of fluid elements in fluid flowsand provide valuable mesoscale geographical information to identify the most essential elements of such flows.Using relative dispersion, we define the pairwise correlation between fluid elements and use the community de-tection for the systematic identification of LCSs as the community or modular structures underlying interactionsystems e↵ectively provide substructures behind the system of interest. We detect communities using modular-ity maximization with a tunable resolution for simulation data and two of real satellite-tracked drifter data inthe ocean to examine LCSs in various scales. In particular, to obtain more detailed spatiotemporal LCSs, wemaximize a multilayer version of modularity on a multilayer network in which temporal slices of interactionsare properly considered. We believe that our approach illustrates a new way to e�ciently detect LCSs for givendynamical systems and opens new possibilities of applications in dynamical systems in general.
PACS numbers: 45.20.Jj, 47.54.-r, 89.75.Fb, 89.75.Hc
Introduction.—Recent developments in the theory of dy-namical systems have given rise to new concepts of coherentstructures in fluid flow [1–4]. These methods seek exceptionalmaterial surfaces (or curves, in the case of two-dimensionalflow) that play a key role in mixing and transport over a giventime interval [5–8]. Their approach is Lagrangian in nature, incontrast to the Eulerian point of view that studies the instanta-neous velocity field [9].
The Lagrangian methods each rely on specific mathemati-cal tools such as probability, di↵erential geometry and calcu-lus of variations. Here, we develop a new approach to coher-ent structure analysis using recent advances in network the-ory [10]. After laying down the theoretical frame work, weshow on two examples how our approach can complementearlier methods, as well as, providing new insight that is onlyaccessible to our network theory-based method.
Before turning to network theory, we present typical typesof Lagrangian coherent structures (LCSs) on an example: aturbulent flow. Figure 1 shows LCSs from a direct numericalsimulation of the forced Navier–Stokes equation
@u@t+ u · ru = �rp + ⌫r2u + f, r · u = 0, (1)
over the domain [0, 2⇡] ⇥ [0, 2⇡] with doubly periodic bound-ary conditions. The Lagrangian analysis is carried out over afew eddy turn-over times after the flow has reached its fullyturbulent state (see Ref. [11] for a detailed analysis).
The repelling and attracting LCSs (red and blue curves, re-spectively, in figure 1) are the main drivers of mixing throughextensive stretching and folding of nearby material elements.The green islands, in contrast, represent elliptic LCSs thatinhibit mixing by preserving their shape over relatively longtime scales.
Network Representation.—A fresh way to look at those
FIG. 1. (color online). Repelling (red), attracting (blue) and elliptic(green) Lagrangian coherent structures (LCSs).
systems for that purpose is to consider such systems as dis-crete interacting objects, as in the force-chain networks de-scribing granular material systems [12, 13] or the plumedetection problem in fluid [14]. General relationships be-tween community finding, transport, and partition are dis-cussed in Refs. [15, 16]. Another example of using thenetwork-theory tools to analyze the flow network is presentedin Refs. [17, 18], where the mass transport is represented asthe directed edges between geographical sub-areas (nodes),which in fact is rather in line with the spirit of the Eulerianpoint of view. We, by contrast, consider the fluid elementsthemselves as the nodes, so we can highlight more fundamen-tal structural properties of LCSs.
Preliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
where we can define the relative dispersion for each grid element as
maxB2nnhd(A)
|rf
(A, B)||r
i
(A, B)| , (2)
where nnhd(A) is the set of nodes in the nearest neighbors of A (four for each grid point) and Fig. 2
shows the relative dispersion map for the 512⇥ 512 original grid elements. The data including the
relative dispersion for the original grid elements is original dispersion matrix.txt.
W
(2)AB
=|r
i
(A, B)||F(A)r
i
(A, B)| , (3)
where ri
(A, B) = ri
(B) � ri
(A) [the vector from ri
(A) to ri
(B)], rf
(A, B) = rf
(B) � rf
(A) [the
vector from rf
(A) to rf
(B)], ri
(A) = [x
i
(A), yi
(A)] which is the initial point (t = 0) of the element
A], rf
(A) = [x
f
(A), yf
(A)] which is the final point (t = 50) of the element A], and F(A) is the
deformation gradient tensor at A, i.e., |F(A)ri
(A, B)| =p{F
xx
(A)[x
i
(B) � x
i
(A)] + F
xy
(A)[yi
(B) � y
i
(A)]}2 + {Fyx
(A)[x
i
(B) � x
i
(A)] + F
yy
(A)[yi
(B) � y
i
(A)]}2.
The distance measures such as ri
(A, B) and the coordinates such as ri
(A) take the shortest distance
among all the possible distances considering the PBC: x itself and x ± 2⇡ for x, and y itself and
y ± 2⇡ for y (9 combinations in total).
III. COMMUNITY DETECTION METHODS
• W
(1)AB
(= W
(1)BA
) in Eq. (1): the Louvainmethod [1, 2] with the Girvan-Newman null model [3]
and the resolution parameter � [4] is used for Fig. 3, where the number of communities and
the values of quality measure QGN are specified for four di↵erent � values. The communities
here describe the (mutually exclusive for now—we can extend this to take the “overlapping”
communities into account by using other methods) groups of nodes where the intra-group
interactions are significantly stronger than the inter-group interactions. For the resolution
parameter �, roughly speaking, the larger the value of � is, the smaller (in terms of typical
number of nodes in a community, thus larger number of communities) communities are
identified.
The modularity for the Girvan-Newman null model, which is the objective function QGN
where the purpose is to find the set of communities {gA
} that maximizes QGN, is given by
2
3
Supplemental Figure S1. The relative dispersion lnhmaxB2⌫(A) |r f (A, B)|/|ri(A, B)|
ifor the same grid elements as in Fig. 1 of the main text. The
set ⌫(A) is the set of nodes that are adjacent to node A.
3
Supp
lem
enta
lFig
ure
S1.T
here
lativ
edi
sper
sion
lnh m
axB2⌫(
A)|r f
(A,B
)|/|r i
(A,B
)|ifo
rthe
sam
egr
idel
emen
tsas
inFi
g.1
ofth
em
ain
text
.The
set⌫
(A)i
sth
ese
tofn
odes
that
are
adja
cent
tono
deA.
A, B: discretized 512✕512 grid cell indices
|rf (A,B)|
|ri(A,B)|
A
BA
B
C
D
D
C
|ri(C,D)|
|rf (C,D)|

belonging to the different coherent structures (small )W (1)
CD
Network community analysis of LCSPreliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
Finding Lagrangian Coherent Structures Using Community Detection
Sang Hoon Lee,1, 2, ⇤ Mohammad Farazmand,3 George Haller,4 and Mason A. Porter2, 5
1Integrated Energy Center for Fostering Global Creative Researcher (BK 21 plus)and Department of Energy Science, Sungkyunkwan University, Suwon 440–746, Korea
2Oxford Centre for Industrial and Applied Mathematics (OCIAM),Mathematical Institute, University of Oxford, Oxford, OX2 6GG, United Kingdom3School of Physics, Georgia Institute of Technology, Atlanta, Georgia 30332, USA
4Institute of Mechanical Systems, ETH Zurich, Switzerland5CABDyN Complexity Centre, University of Oxford, Oxford, OX1 1HP, United Kingdom
Lagrangian coherent structures (LCSs) refer to dynamically distinct groups of fluid elements in fluid flowsand provide valuable mesoscale geographical information to identify the most essential elements of such flows.Using relative dispersion, we define the pairwise correlation between fluid elements and use the community de-tection for the systematic identification of LCSs as the community or modular structures underlying interactionsystems e↵ectively provide substructures behind the system of interest. We detect communities using modular-ity maximization with a tunable resolution for simulation data and two of real satellite-tracked drifter data inthe ocean to examine LCSs in various scales. In particular, to obtain more detailed spatiotemporal LCSs, wemaximize a multilayer version of modularity on a multilayer network in which temporal slices of interactionsare properly considered. We believe that our approach illustrates a new way to e�ciently detect LCSs for givendynamical systems and opens new possibilities of applications in dynamical systems in general.
PACS numbers: 45.20.Jj, 47.54.-r, 89.75.Fb, 89.75.Hc
Introduction.—Recent developments in the theory of dy-namical systems have given rise to new concepts of coherentstructures in fluid flow [1–4]. These methods seek exceptionalmaterial surfaces (or curves, in the case of two-dimensionalflow) that play a key role in mixing and transport over a giventime interval [5–8]. Their approach is Lagrangian in nature, incontrast to the Eulerian point of view that studies the instanta-neous velocity field [9].
The Lagrangian methods each rely on specific mathemati-cal tools such as probability, di↵erential geometry and calcu-lus of variations. Here, we develop a new approach to coher-ent structure analysis using recent advances in network the-ory [10]. After laying down the theoretical frame work, weshow on two examples how our approach can complementearlier methods, as well as, providing new insight that is onlyaccessible to our network theory-based method.
Before turning to network theory, we present typical typesof Lagrangian coherent structures (LCSs) on an example: aturbulent flow. Figure 1 shows LCSs from a direct numericalsimulation of the forced Navier–Stokes equation
@u@t+ u · ru = �rp + ⌫r2u + f, r · u = 0, (1)
over the domain [0, 2⇡] ⇥ [0, 2⇡] with doubly periodic bound-ary conditions. The Lagrangian analysis is carried out over afew eddy turn-over times after the flow has reached its fullyturbulent state (see Ref. [11] for a detailed analysis).
The repelling and attracting LCSs (red and blue curves, re-spectively, in figure 1) are the main drivers of mixing throughextensive stretching and folding of nearby material elements.The green islands, in contrast, represent elliptic LCSs thatinhibit mixing by preserving their shape over relatively longtime scales.
Network Representation.—A fresh way to look at those
FIG. 1. (color online). Repelling (red), attracting (blue) and elliptic(green) Lagrangian coherent structures (LCSs).
systems for that purpose is to consider such systems as dis-crete interacting objects, as in the force-chain networks de-scribing granular material systems [12, 13] or the plumedetection problem in fluid [14]. General relationships be-tween community finding, transport, and partition are dis-cussed in Refs. [15, 16]. Another example of using thenetwork-theory tools to analyze the flow network is presentedin Refs. [17, 18], where the mass transport is represented asthe directed edges between geographical sub-areas (nodes),which in fact is rather in line with the spirit of the Eulerianpoint of view. We, by contrast, consider the fluid elementsthemselves as the nodes, so we can highlight more fundamen-tal structural properties of LCSs.
Preliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
where we can define the relative dispersion for each grid element as
maxB2nnhd(A)
|rf
(A, B)||r
i
(A, B)| , (2)
where nnhd(A) is the set of nodes in the nearest neighbors of A (four for each grid point) and Fig. 2
shows the relative dispersion map for the 512⇥ 512 original grid elements. The data including the
relative dispersion for the original grid elements is original dispersion matrix.txt.
W
(2)AB
=|r
i
(A, B)||F(A)r
i
(A, B)| , (3)
where ri
(A, B) = ri
(B) � ri
(A) [the vector from ri
(A) to ri
(B)], rf
(A, B) = rf
(B) � rf
(A) [the
vector from rf
(A) to rf
(B)], ri
(A) = [x
i
(A), yi
(A)] which is the initial point (t = 0) of the element
A], rf
(A) = [x
f
(A), yf
(A)] which is the final point (t = 50) of the element A], and F(A) is the
deformation gradient tensor at A, i.e., |F(A)ri
(A, B)| =p{F
xx
(A)[x
i
(B) � x
i
(A)] + F
xy
(A)[yi
(B) � y
i
(A)]}2 + {Fyx
(A)[x
i
(B) � x
i
(A)] + F
yy
(A)[yi
(B) � y
i
(A)]}2.
The distance measures such as ri
(A, B) and the coordinates such as ri
(A) take the shortest distance
among all the possible distances considering the PBC: x itself and x ± 2⇡ for x, and y itself and
y ± 2⇡ for y (9 combinations in total).
III. COMMUNITY DETECTION METHODS
• W
(1)AB
(= W
(1)BA
) in Eq. (1): the Louvainmethod [1, 2] with the Girvan-Newman null model [3]
and the resolution parameter � [4] is used for Fig. 3, where the number of communities and
the values of quality measure QGN are specified for four di↵erent � values. The communities
here describe the (mutually exclusive for now—we can extend this to take the “overlapping”
communities into account by using other methods) groups of nodes where the intra-group
interactions are significantly stronger than the inter-group interactions. For the resolution
parameter �, roughly speaking, the larger the value of � is, the smaller (in terms of typical
number of nodes in a community, thus larger number of communities) communities are
identified.
The modularity for the Girvan-Newman null model, which is the objective function QGN
where the purpose is to find the set of communities {gA
} that maximizes QGN, is given by
2
3
Supplemental Figure S1. The relative dispersion lnhmaxB2⌫(A) |r f (A, B)|/|ri(A, B)|
ifor the same grid elements as in Fig. 1 of the main text. The
set ⌫(A) is the set of nodes that are adjacent to node A.
3
Supp
lem
enta
lFig
ure
S1.T
here
lativ
edi
sper
sion
lnh m
axB2⌫(
A)|r f
(A,B
)|/|r i
(A,B
)|ifo
rthe
sam
egr
idel
emen
tsas
inFi
g.1
ofth
em
ain
text
.The
set⌫
(A)i
sth
ese
tofn
odes
that
are
adja
cent
tono
deA.
A, B: discretized 512✕512 grid cell indices
belonging to the same coherent structure (large )W (1)
AB
|rf (A,B)|
|ri(A,B)|
A
BA
B
C
D
D
C
|ri(C,D)|
|rf (C,D)|

Network community analysis of LCSPreliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
Finding Lagrangian Coherent Structures Using Community Detection
Sang Hoon Lee,1, 2, ⇤ Mohammad Farazmand,3 George Haller,4 and Mason A. Porter2, 5
1Integrated Energy Center for Fostering Global Creative Researcher (BK 21 plus)and Department of Energy Science, Sungkyunkwan University, Suwon 440–746, Korea
2Oxford Centre for Industrial and Applied Mathematics (OCIAM),Mathematical Institute, University of Oxford, Oxford, OX2 6GG, United Kingdom3School of Physics, Georgia Institute of Technology, Atlanta, Georgia 30332, USA
4Institute of Mechanical Systems, ETH Zurich, Switzerland5CABDyN Complexity Centre, University of Oxford, Oxford, OX1 1HP, United Kingdom
Lagrangian coherent structures (LCSs) refer to dynamically distinct groups of fluid elements in fluid flowsand provide valuable mesoscale geographical information to identify the most essential elements of such flows.Using relative dispersion, we define the pairwise correlation between fluid elements and use the community de-tection for the systematic identification of LCSs as the community or modular structures underlying interactionsystems e↵ectively provide substructures behind the system of interest. We detect communities using modular-ity maximization with a tunable resolution for simulation data and two of real satellite-tracked drifter data inthe ocean to examine LCSs in various scales. In particular, to obtain more detailed spatiotemporal LCSs, wemaximize a multilayer version of modularity on a multilayer network in which temporal slices of interactionsare properly considered. We believe that our approach illustrates a new way to e�ciently detect LCSs for givendynamical systems and opens new possibilities of applications in dynamical systems in general.
PACS numbers: 45.20.Jj, 47.54.-r, 89.75.Fb, 89.75.Hc
Introduction.—Recent developments in the theory of dy-namical systems have given rise to new concepts of coherentstructures in fluid flow [1–4]. These methods seek exceptionalmaterial surfaces (or curves, in the case of two-dimensionalflow) that play a key role in mixing and transport over a giventime interval [5–8]. Their approach is Lagrangian in nature, incontrast to the Eulerian point of view that studies the instanta-neous velocity field [9].
The Lagrangian methods each rely on specific mathemati-cal tools such as probability, di↵erential geometry and calcu-lus of variations. Here, we develop a new approach to coher-ent structure analysis using recent advances in network the-ory [10]. After laying down the theoretical frame work, weshow on two examples how our approach can complementearlier methods, as well as, providing new insight that is onlyaccessible to our network theory-based method.
Before turning to network theory, we present typical typesof Lagrangian coherent structures (LCSs) on an example: aturbulent flow. Figure 1 shows LCSs from a direct numericalsimulation of the forced Navier–Stokes equation
@u@t+ u · ru = �rp + ⌫r2u + f, r · u = 0, (1)
over the domain [0, 2⇡] ⇥ [0, 2⇡] with doubly periodic bound-ary conditions. The Lagrangian analysis is carried out over afew eddy turn-over times after the flow has reached its fullyturbulent state (see Ref. [11] for a detailed analysis).
The repelling and attracting LCSs (red and blue curves, re-spectively, in figure 1) are the main drivers of mixing throughextensive stretching and folding of nearby material elements.The green islands, in contrast, represent elliptic LCSs thatinhibit mixing by preserving their shape over relatively longtime scales.
Network Representation.—A fresh way to look at those
FIG. 1. (color online). Repelling (red), attracting (blue) and elliptic(green) Lagrangian coherent structures (LCSs).
systems for that purpose is to consider such systems as dis-crete interacting objects, as in the force-chain networks de-scribing granular material systems [12, 13] or the plumedetection problem in fluid [14]. General relationships be-tween community finding, transport, and partition are dis-cussed in Refs. [15, 16]. Another example of using thenetwork-theory tools to analyze the flow network is presentedin Refs. [17, 18], where the mass transport is represented asthe directed edges between geographical sub-areas (nodes),which in fact is rather in line with the spirit of the Eulerianpoint of view. We, by contrast, consider the fluid elementsthemselves as the nodes, so we can highlight more fundamen-tal structural properties of LCSs.
Preliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
where we can define the relative dispersion for each grid element as
maxB2nnhd(A)
|rf
(A, B)||r
i
(A, B)| , (2)
where nnhd(A) is the set of nodes in the nearest neighbors of A (four for each grid point) and Fig. 2
shows the relative dispersion map for the 512⇥ 512 original grid elements. The data including the
relative dispersion for the original grid elements is original dispersion matrix.txt.
W
(2)AB
=|r
i
(A, B)||F(A)r
i
(A, B)| , (3)
where ri
(A, B) = ri
(B) � ri
(A) [the vector from ri
(A) to ri
(B)], rf
(A, B) = rf
(B) � rf
(A) [the
vector from rf
(A) to rf
(B)], ri
(A) = [x
i
(A), yi
(A)] which is the initial point (t = 0) of the element
A], rf
(A) = [x
f
(A), yf
(A)] which is the final point (t = 50) of the element A], and F(A) is the
deformation gradient tensor at A, i.e., |F(A)ri
(A, B)| =p{F
xx
(A)[x
i
(B) � x
i
(A)] + F
xy
(A)[yi
(B) � y
i
(A)]}2 + {Fyx
(A)[x
i
(B) � x
i
(A)] + F
yy
(A)[yi
(B) � y
i
(A)]}2.
The distance measures such as ri
(A, B) and the coordinates such as ri
(A) take the shortest distance
among all the possible distances considering the PBC: x itself and x ± 2⇡ for x, and y itself and
y ± 2⇡ for y (9 combinations in total).
III. COMMUNITY DETECTION METHODS
• W
(1)AB
(= W
(1)BA
) in Eq. (1): the Louvainmethod [1, 2] with the Girvan-Newman null model [3]
and the resolution parameter � [4] is used for Fig. 3, where the number of communities and
the values of quality measure QGN are specified for four di↵erent � values. The communities
here describe the (mutually exclusive for now—we can extend this to take the “overlapping”
communities into account by using other methods) groups of nodes where the intra-group
interactions are significantly stronger than the inter-group interactions. For the resolution
parameter �, roughly speaking, the larger the value of � is, the smaller (in terms of typical
number of nodes in a community, thus larger number of communities) communities are
identified.
The modularity for the Girvan-Newman null model, which is the objective function QGN
where the purpose is to find the set of communities {gA
} that maximizes QGN, is given by
2
3
Supplemental Figure S1. The relative dispersion lnhmaxB2⌫(A) |r f (A, B)|/|ri(A, B)|
ifor the same grid elements as in Fig. 1 of the main text. The
set ⌫(A) is the set of nodes that are adjacent to node A.
3
Supp
lem
enta
lFig
ure
S1.T
here
lativ
edi
sper
sion
lnh m
axB2⌫(
A)|r f
(A,B
)|/|r i
(A,B
)|ifo
rthe
sam
egr
idel
emen
tsas
inFi
g.1
ofth
em
ain
text
.The
set⌫
(A)i
sth
ese
tofn
odes
that
are
adja
cent
tono
deA.
A, B: discretized 512✕512 grid cell indices
without involving differential terms such as the deformation-gradient tensor
2
FIG. 1. (Color online) Repelling (red), attracting (blue), and elliptic(green filled regions) LCSs in a direct numerical simulation of two-dimensional turbulence. MAP:do we need to worry about using thecolor green with the red with respect to people who are color-blind? SHL:I added “filled regions” after “green” that I hope willcircumvent that problem at least for some degree.
General relationships between community-finding, transport,and partitioning are discussed in Refs. [9, 11]. The Jacobianmatrix in dynamical systems has also been analyzed explicitlyusing a network-based approach to examine mesoscale struc-tures [12].
Community detection has been useful in flow problemssuch as the detection of plumes in fluids [13] and the analysisof force networks in granular materials [14, 15]. Network-theoretic tools, including community detection, were used toanalyze fluid flow networks in Refs. [16–18]. Note, how-ever, that Refs. [16, 17] represented mass transport GH:Howis mass transport Eulerian? via directed edges between ge-ographical areas (nodes), and they thus took what is essen-tially an Eulerian perspective. A particular type of vortexdynamics governed by the Biot-Savart law is investigated inRef. [18], where the spectral sparsification technique in thespectral graph theory is used to reduce the number of vortex-to-vertex interactions, rather than general type of coherentstructures in fluid. In our computations, by contrast, we ex-plicitly take a Lagrangian approach for general types of dy-namics in fluid.
MAP:the above paragraph needs some more work; also,should it be above or in the introduction section? I madechanges, and the accuracy of the various statements needto be double-checked; we should also distinguish what wedo from what is in [18]; GH:! Important! additionally,people like Gary Froyland have used spectra of Laplacianmatrices for LCS; GH:! These are almost invariant sets,not LCS. that is a very old form of community detection, sowe need to deepen our contributions with respect to ”clas-sical” things; I feel like this stu↵ should probably be in the
introductory section for the most part rather than here;anyway, the point is that I think that we need to makethings stronger in establishing the context of what we dovs the rest of the literature
SHL:I added a sentence describing Ref. [18], although Iam not 100% sure about the accuracy of the sentence de-scribing the paper. Please take a look at it for double-checking. I also moved the texts up to this point to theintroduction section.
Network Representation.—A pair of fluid elements A and Bhas a relative dispersion of
W (1)AB =
|ri(A, B)||r f (A, B)| , (1)
where ri = [xi, yi] and r f = [x f , y f ] denote the initial and finalpositions of the fluid element. The initial and final distancesbetween the fluid elements A and B are given by |ri(A, B)| =|ri(B) � ri(A)| and |r f (A, B)| = |r f (B) � r f (A)|. We also definethe relative dispersion for each grid element as
maxB2⌫(A)
|r f (A, B)||ri(A, B)| , (2)
where ⌫(A) is the set of nodes in a prescribed neighborhoodof A. If the fluid elements are initially given on a rectangulargrid, then ⌫(A) is given by the four closest neighbors consti-tute. In Fig. S1 of the SM [5], we show the relative dispersionsfor the same simulation as in Fig. 1.
An alternative way to define the relative dispersion is touse the deformation-gradient tensor [19] to obtain the instan-taneous displacement instead of the final position. This yields
W (2)AB =
|ri(A, B)||F(A)ri(A, B)| , (3)
where F(A) is the deformation-gradient tensor applied to thelocation of node A defined as the Jacobian @(x f , y f )/@(xi, yi)of the flow map. The relative dispersions W (1)
AB and W (2)AB in
Eqs. (1) and (3) give the weighted adjacency-matrix elementsbetween nodes A and B [7]. Larger values of these matrix ele-ments indicate stronger connections between the two fluid el-ements A and B. For each of the measures, distance measuressuch as ri(A, B) and coordinates such as ri(A) use the shortestdistance among all of the possible distances. (Note that we useperiodic boundary conditions for the simulation data, in con-trast to the real drifter data, GH:This does not appear to givea generally usable approach to ocean data SHL:I added abit of comments to avoid the possible confusion. so x itselfand x ± 2⇡ both yield x; and y and y ± 2⇡ both yield y.)
Community Detection.—There are several methods to de-tect communities in networks [8]. In our paper, we will ap-ply methods based on the maximization of a quality functioncalled “modularity,” the most popular approach to communitydetection. We partition a network’s node set V into sets called“communities” (with each node assigned to one community),such that intra-community interactions between nodes are sig-nificantly stronger than the inter-community interactions. We
2
FIG. 1. (Color online) Repelling (red), attracting (blue), and elliptic(green filled regions) LCSs in a direct numerical simulation of two-dimensional turbulence. MAP:do we need to worry about using thecolor green with the red with respect to people who are color-blind? SHL:I added “filled regions” after “green” that I hope willcircumvent that problem at least for some degree.
General relationships between community-finding, transport,and partitioning are discussed in Refs. [9, 11]. The Jacobianmatrix in dynamical systems has also been analyzed explicitlyusing a network-based approach to examine mesoscale struc-tures [12].
Community detection has been useful in flow problemssuch as the detection of plumes in fluids [13] and the analysisof force networks in granular materials [14, 15]. Network-theoretic tools, including community detection, were used toanalyze fluid flow networks in Refs. [16–18]. Note, how-ever, that Refs. [16, 17] represented mass transport GH:Howis mass transport Eulerian? via directed edges between ge-ographical areas (nodes), and they thus took what is essen-tially an Eulerian perspective. A particular type of vortexdynamics governed by the Biot-Savart law is investigated inRef. [18], where the spectral sparsification technique in thespectral graph theory is used to reduce the number of vortex-to-vertex interactions, rather than general type of coherentstructures in fluid. In our computations, by contrast, we ex-plicitly take a Lagrangian approach for general types of dy-namics in fluid.
MAP:the above paragraph needs some more work; also,should it be above or in the introduction section? I madechanges, and the accuracy of the various statements needto be double-checked; we should also distinguish what wedo from what is in [18]; GH:! Important! additionally,people like Gary Froyland have used spectra of Laplacianmatrices for LCS; GH:! These are almost invariant sets,not LCS. that is a very old form of community detection, sowe need to deepen our contributions with respect to ”clas-sical” things; I feel like this stu↵ should probably be in the
introductory section for the most part rather than here;anyway, the point is that I think that we need to makethings stronger in establishing the context of what we dovs the rest of the literature
SHL:I added a sentence describing Ref. [18], although Iam not 100% sure about the accuracy of the sentence de-scribing the paper. Please take a look at it for double-checking. I also moved the texts up to this point to theintroduction section.
Network Representation.—A pair of fluid elements A and Bhas a relative dispersion of
W (1)AB =
|ri(A, B)||r f (A, B)| , (1)
where ri = [xi, yi] and r f = [x f , y f ] denote the initial and finalpositions of the fluid element. The initial and final distancesbetween the fluid elements A and B are given by |ri(A, B)| =|ri(B) � ri(A)| and |r f (A, B)| = |r f (B) � r f (A)|. We also definethe relative dispersion for each grid element as
maxB2⌫(A)
|r f (A, B)||ri(A, B)| , (2)
where ⌫(A) is the set of nodes in a prescribed neighborhoodof A. If the fluid elements are initially given on a rectangulargrid, then ⌫(A) is given by the four closest neighbors consti-tute. In Fig. S1 of the SM [5], we show the relative dispersionsfor the same simulation as in Fig. 1.
An alternative way to define the relative dispersion is touse the deformation-gradient tensor [19] to obtain the instan-taneous displacement instead of the final position. This yields
W (2)AB =
|ri(A, B)||F(A)ri(A, B)| , (3)
where F(A) is the deformation-gradient tensor applied to thelocation of node A defined as the Jacobian @(x f , y f )/@(xi, yi)of the flow map. The relative dispersions W (1)
AB and W (2)AB in
Eqs. (1) and (3) give the weighted adjacency-matrix elementsbetween nodes A and B [7]. Larger values of these matrix ele-ments indicate stronger connections between the two fluid el-ements A and B. For each of the measures, distance measuressuch as ri(A, B) and coordinates such as ri(A) use the shortestdistance among all of the possible distances. (Note that we useperiodic boundary conditions for the simulation data, in con-trast to the real drifter data, GH:This does not appear to givea generally usable approach to ocean data SHL:I added abit of comments to avoid the possible confusion. so x itselfand x ± 2⇡ both yield x; and y and y ± 2⇡ both yield y.)
Community Detection.—There are several methods to de-tect communities in networks [8]. In our paper, we will ap-ply methods based on the maximization of a quality functioncalled “modularity,” the most popular approach to communitydetection. We partition a network’s node set V into sets called“communities” (with each node assigned to one community),such that intra-community interactions between nodes are sig-nificantly stronger than the inter-community interactions. We
: the Jacobian of the flow map, so that
2
FIG. 1. (Color online) Repelling (red), attracting (blue), and elliptic(green filled regions) LCSs in a direct numerical simulation of two-dimensional turbulence. MAP:do we need to worry about using thecolor green with the red with respect to people who are color-blind? SHL:I added “filled regions” after “green” that I hope willcircumvent that problem at least for some degree.
General relationships between community-finding, transport,and partitioning are discussed in Refs. [9, 11]. The Jacobianmatrix in dynamical systems has also been analyzed explicitlyusing a network-based approach to examine mesoscale struc-tures [12].
Community detection has been useful in flow problemssuch as the detection of plumes in fluids [13] and the analysisof force networks in granular materials [14, 15]. Network-theoretic tools, including community detection, were used toanalyze fluid flow networks in Refs. [16–18]. Note, how-ever, that Refs. [16, 17] represented mass transport GH:Howis mass transport Eulerian? via directed edges between ge-ographical areas (nodes), and they thus took what is essen-tially an Eulerian perspective. A particular type of vortexdynamics governed by the Biot-Savart law is investigated inRef. [18], where the spectral sparsification technique in thespectral graph theory is used to reduce the number of vortex-to-vertex interactions, rather than general type of coherentstructures in fluid. In our computations, by contrast, we ex-plicitly take a Lagrangian approach for general types of dy-namics in fluid.
MAP:the above paragraph needs some more work; also,should it be above or in the introduction section? I madechanges, and the accuracy of the various statements needto be double-checked; we should also distinguish what wedo from what is in [18]; GH:! Important! additionally,people like Gary Froyland have used spectra of Laplacianmatrices for LCS; GH:! These are almost invariant sets,not LCS. that is a very old form of community detection, sowe need to deepen our contributions with respect to ”clas-sical” things; I feel like this stu↵ should probably be in the
introductory section for the most part rather than here;anyway, the point is that I think that we need to makethings stronger in establishing the context of what we dovs the rest of the literature
SHL:I added a sentence describing Ref. [18], although Iam not 100% sure about the accuracy of the sentence de-scribing the paper. Please take a look at it for double-checking. I also moved the texts up to this point to theintroduction section.
Network Representation.—A pair of fluid elements A and Bhas a relative dispersion of
W (1)AB =
|ri(A, B)||r f (A, B)| , (1)
where ri = [xi, yi] and r f = [x f , y f ] denote the initial and finalpositions of the fluid element. The initial and final distancesbetween the fluid elements A and B are given by |ri(A, B)| =|ri(B) � ri(A)| and |r f (A, B)| = |r f (B) � r f (A)|. We also definethe relative dispersion for each grid element as
maxB2⌫(A)
|r f (A, B)||ri(A, B)| , (2)
where ⌫(A) is the set of nodes in a prescribed neighborhoodof A. If the fluid elements are initially given on a rectangulargrid, then ⌫(A) is given by the four closest neighbors consti-tute. In Fig. S1 of the SM [5], we show the relative dispersionsfor the same simulation as in Fig. 1.
An alternative way to define the relative dispersion is touse the deformation-gradient tensor [19] to obtain the instan-taneous displacement instead of the final position. This yields
W (2)AB =
|ri(A, B)||F(A)ri(A, B)| , (3)
where F(A) is the deformation-gradient tensor applied to thelocation of node A defined as the Jacobian @(x f , y f )/@(xi, yi)of the flow map. The relative dispersions W (1)
AB and W (2)AB in
Eqs. (1) and (3) give the weighted adjacency-matrix elementsbetween nodes A and B [7]. Larger values of these matrix ele-ments indicate stronger connections between the two fluid el-ements A and B. For each of the measures, distance measuressuch as ri(A, B) and coordinates such as ri(A) use the shortestdistance among all of the possible distances. (Note that we useperiodic boundary conditions for the simulation data, in con-trast to the real drifter data, GH:This does not appear to givea generally usable approach to ocean data SHL:I added abit of comments to avoid the possible confusion. so x itselfand x ± 2⇡ both yield x; and y and y ± 2⇡ both yield y.)
Community Detection.—There are several methods to de-tect communities in networks [8]. In our paper, we will ap-ply methods based on the maximization of a quality functioncalled “modularity,” the most popular approach to communitydetection. We partition a network’s node set V into sets called“communities” (with each node assigned to one community),such that intra-community interactions between nodes are sig-nificantly stronger than the inter-community interactions. We

Network community analysis of LCSPreliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
Finding Lagrangian Coherent Structures Using Community Detection
Sang Hoon Lee,1, 2, ⇤ Mohammad Farazmand,3 George Haller,4 and Mason A. Porter2, 5
1Integrated Energy Center for Fostering Global Creative Researcher (BK 21 plus)and Department of Energy Science, Sungkyunkwan University, Suwon 440–746, Korea
2Oxford Centre for Industrial and Applied Mathematics (OCIAM),Mathematical Institute, University of Oxford, Oxford, OX2 6GG, United Kingdom3School of Physics, Georgia Institute of Technology, Atlanta, Georgia 30332, USA
4Institute of Mechanical Systems, ETH Zurich, Switzerland5CABDyN Complexity Centre, University of Oxford, Oxford, OX1 1HP, United Kingdom
Lagrangian coherent structures (LCSs) refer to dynamically distinct groups of fluid elements in fluid flowsand provide valuable mesoscale geographical information to identify the most essential elements of such flows.Using relative dispersion, we define the pairwise correlation between fluid elements and use the community de-tection for the systematic identification of LCSs as the community or modular structures underlying interactionsystems e↵ectively provide substructures behind the system of interest. We detect communities using modular-ity maximization with a tunable resolution for simulation data and two of real satellite-tracked drifter data inthe ocean to examine LCSs in various scales. In particular, to obtain more detailed spatiotemporal LCSs, wemaximize a multilayer version of modularity on a multilayer network in which temporal slices of interactionsare properly considered. We believe that our approach illustrates a new way to e�ciently detect LCSs for givendynamical systems and opens new possibilities of applications in dynamical systems in general.
PACS numbers: 45.20.Jj, 47.54.-r, 89.75.Fb, 89.75.Hc
Introduction.—Recent developments in the theory of dy-namical systems have given rise to new concepts of coherentstructures in fluid flow [1–4]. These methods seek exceptionalmaterial surfaces (or curves, in the case of two-dimensionalflow) that play a key role in mixing and transport over a giventime interval [5–8]. Their approach is Lagrangian in nature, incontrast to the Eulerian point of view that studies the instanta-neous velocity field [9].
The Lagrangian methods each rely on specific mathemati-cal tools such as probability, di↵erential geometry and calcu-lus of variations. Here, we develop a new approach to coher-ent structure analysis using recent advances in network the-ory [10]. After laying down the theoretical frame work, weshow on two examples how our approach can complementearlier methods, as well as, providing new insight that is onlyaccessible to our network theory-based method.
Before turning to network theory, we present typical typesof Lagrangian coherent structures (LCSs) on an example: aturbulent flow. Figure 1 shows LCSs from a direct numericalsimulation of the forced Navier–Stokes equation
@u@t+ u · ru = �rp + ⌫r2u + f, r · u = 0, (1)
over the domain [0, 2⇡] ⇥ [0, 2⇡] with doubly periodic bound-ary conditions. The Lagrangian analysis is carried out over afew eddy turn-over times after the flow has reached its fullyturbulent state (see Ref. [11] for a detailed analysis).
The repelling and attracting LCSs (red and blue curves, re-spectively, in figure 1) are the main drivers of mixing throughextensive stretching and folding of nearby material elements.The green islands, in contrast, represent elliptic LCSs thatinhibit mixing by preserving their shape over relatively longtime scales.
Network Representation.—A fresh way to look at those
FIG. 1. (color online). Repelling (red), attracting (blue) and elliptic(green) Lagrangian coherent structures (LCSs).
systems for that purpose is to consider such systems as dis-crete interacting objects, as in the force-chain networks de-scribing granular material systems [12, 13] or the plumedetection problem in fluid [14]. General relationships be-tween community finding, transport, and partition are dis-cussed in Refs. [15, 16]. Another example of using thenetwork-theory tools to analyze the flow network is presentedin Refs. [17, 18], where the mass transport is represented asthe directed edges between geographical sub-areas (nodes),which in fact is rather in line with the spirit of the Eulerianpoint of view. We, by contrast, consider the fluid elementsthemselves as the nodes, so we can highlight more fundamen-tal structural properties of LCSs.
Preliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
where we can define the relative dispersion for each grid element as
maxB2nnhd(A)
|rf
(A, B)||r
i
(A, B)| , (2)
where nnhd(A) is the set of nodes in the nearest neighbors of A (four for each grid point) and Fig. 2
shows the relative dispersion map for the 512⇥ 512 original grid elements. The data including the
relative dispersion for the original grid elements is original dispersion matrix.txt.
W
(2)AB
=|r
i
(A, B)||F(A)r
i
(A, B)| , (3)
where ri
(A, B) = ri
(B) � ri
(A) [the vector from ri
(A) to ri
(B)], rf
(A, B) = rf
(B) � rf
(A) [the
vector from rf
(A) to rf
(B)], ri
(A) = [x
i
(A), yi
(A)] which is the initial point (t = 0) of the element
A], rf
(A) = [x
f
(A), yf
(A)] which is the final point (t = 50) of the element A], and F(A) is the
deformation gradient tensor at A, i.e., |F(A)ri
(A, B)| =p{F
xx
(A)[x
i
(B) � x
i
(A)] + F
xy
(A)[yi
(B) � y
i
(A)]}2 + {Fyx
(A)[x
i
(B) � x
i
(A)] + F
yy
(A)[yi
(B) � y
i
(A)]}2.
The distance measures such as ri
(A, B) and the coordinates such as ri
(A) take the shortest distance
among all the possible distances considering the PBC: x itself and x ± 2⇡ for x, and y itself and
y ± 2⇡ for y (9 combinations in total).
III. COMMUNITY DETECTION METHODS
• W
(1)AB
(= W
(1)BA
) in Eq. (1): the Louvainmethod [1, 2] with the Girvan-Newman null model [3]
and the resolution parameter � [4] is used for Fig. 3, where the number of communities and
the values of quality measure QGN are specified for four di↵erent � values. The communities
here describe the (mutually exclusive for now—we can extend this to take the “overlapping”
communities into account by using other methods) groups of nodes where the intra-group
interactions are significantly stronger than the inter-group interactions. For the resolution
parameter �, roughly speaking, the larger the value of � is, the smaller (in terms of typical
number of nodes in a community, thus larger number of communities) communities are
identified.
The modularity for the Girvan-Newman null model, which is the objective function QGN
where the purpose is to find the set of communities {gA
} that maximizes QGN, is given by
2
3
Supplemental Figure S1. The relative dispersion lnhmaxB2⌫(A) |r f (A, B)|/|ri(A, B)|
ifor the same grid elements as in Fig. 1 of the main text. The
set ⌫(A) is the set of nodes that are adjacent to node A.
3
Supp
lem
enta
lFig
ure
S1.T
here
lativ
edi
sper
sion
lnh m
axB2⌫(
A)|r f
(A,B
)|/|r i
(A,B
)|ifo
rthe
sam
egr
idel
emen
tsas
inFi
g.1
ofth
em
ain
text
.The
set⌫
(A)i
sth
ese
tofn
odes
that
are
adja
cent
tono
deA.
A, B: discretized 512✕512 grid cell indices
without involving differential terms such as the deformation-gradient tensor
2
FIG. 1. (Color online) Repelling (red), attracting (blue), and elliptic(green filled regions) LCSs in a direct numerical simulation of two-dimensional turbulence. MAP:do we need to worry about using thecolor green with the red with respect to people who are color-blind? SHL:I added “filled regions” after “green” that I hope willcircumvent that problem at least for some degree.
General relationships between community-finding, transport,and partitioning are discussed in Refs. [9, 11]. The Jacobianmatrix in dynamical systems has also been analyzed explicitlyusing a network-based approach to examine mesoscale struc-tures [12].
Community detection has been useful in flow problemssuch as the detection of plumes in fluids [13] and the analysisof force networks in granular materials [14, 15]. Network-theoretic tools, including community detection, were used toanalyze fluid flow networks in Refs. [16–18]. Note, how-ever, that Refs. [16, 17] represented mass transport GH:Howis mass transport Eulerian? via directed edges between ge-ographical areas (nodes), and they thus took what is essen-tially an Eulerian perspective. A particular type of vortexdynamics governed by the Biot-Savart law is investigated inRef. [18], where the spectral sparsification technique in thespectral graph theory is used to reduce the number of vortex-to-vertex interactions, rather than general type of coherentstructures in fluid. In our computations, by contrast, we ex-plicitly take a Lagrangian approach for general types of dy-namics in fluid.
MAP:the above paragraph needs some more work; also,should it be above or in the introduction section? I madechanges, and the accuracy of the various statements needto be double-checked; we should also distinguish what wedo from what is in [18]; GH:! Important! additionally,people like Gary Froyland have used spectra of Laplacianmatrices for LCS; GH:! These are almost invariant sets,not LCS. that is a very old form of community detection, sowe need to deepen our contributions with respect to ”clas-sical” things; I feel like this stu↵ should probably be in the
introductory section for the most part rather than here;anyway, the point is that I think that we need to makethings stronger in establishing the context of what we dovs the rest of the literature
SHL:I added a sentence describing Ref. [18], although Iam not 100% sure about the accuracy of the sentence de-scribing the paper. Please take a look at it for double-checking. I also moved the texts up to this point to theintroduction section.
Network Representation.—A pair of fluid elements A and Bhas a relative dispersion of
W (1)AB =
|ri(A, B)||r f (A, B)| , (1)
where ri = [xi, yi] and r f = [x f , y f ] denote the initial and finalpositions of the fluid element. The initial and final distancesbetween the fluid elements A and B are given by |ri(A, B)| =|ri(B) � ri(A)| and |r f (A, B)| = |r f (B) � r f (A)|. We also definethe relative dispersion for each grid element as
maxB2⌫(A)
|r f (A, B)||ri(A, B)| , (2)
where ⌫(A) is the set of nodes in a prescribed neighborhoodof A. If the fluid elements are initially given on a rectangulargrid, then ⌫(A) is given by the four closest neighbors consti-tute. In Fig. S1 of the SM [5], we show the relative dispersionsfor the same simulation as in Fig. 1.
An alternative way to define the relative dispersion is touse the deformation-gradient tensor [19] to obtain the instan-taneous displacement instead of the final position. This yields
W (2)AB =
|ri(A, B)||F(A)ri(A, B)| , (3)
where F(A) is the deformation-gradient tensor applied to thelocation of node A defined as the Jacobian @(x f , y f )/@(xi, yi)of the flow map. The relative dispersions W (1)
AB and W (2)AB in
Eqs. (1) and (3) give the weighted adjacency-matrix elementsbetween nodes A and B [7]. Larger values of these matrix ele-ments indicate stronger connections between the two fluid el-ements A and B. For each of the measures, distance measuressuch as ri(A, B) and coordinates such as ri(A) use the shortestdistance among all of the possible distances. (Note that we useperiodic boundary conditions for the simulation data, in con-trast to the real drifter data, GH:This does not appear to givea generally usable approach to ocean data SHL:I added abit of comments to avoid the possible confusion. so x itselfand x ± 2⇡ both yield x; and y and y ± 2⇡ both yield y.)
Community Detection.—There are several methods to de-tect communities in networks [8]. In our paper, we will ap-ply methods based on the maximization of a quality functioncalled “modularity,” the most popular approach to communitydetection. We partition a network’s node set V into sets called“communities” (with each node assigned to one community),such that intra-community interactions between nodes are sig-nificantly stronger than the inter-community interactions. We
2
FIG. 1. (Color online) Repelling (red), attracting (blue), and elliptic(green filled regions) LCSs in a direct numerical simulation of two-dimensional turbulence. MAP:do we need to worry about using thecolor green with the red with respect to people who are color-blind? SHL:I added “filled regions” after “green” that I hope willcircumvent that problem at least for some degree.
General relationships between community-finding, transport,and partitioning are discussed in Refs. [9, 11]. The Jacobianmatrix in dynamical systems has also been analyzed explicitlyusing a network-based approach to examine mesoscale struc-tures [12].
Community detection has been useful in flow problemssuch as the detection of plumes in fluids [13] and the analysisof force networks in granular materials [14, 15]. Network-theoretic tools, including community detection, were used toanalyze fluid flow networks in Refs. [16–18]. Note, how-ever, that Refs. [16, 17] represented mass transport GH:Howis mass transport Eulerian? via directed edges between ge-ographical areas (nodes), and they thus took what is essen-tially an Eulerian perspective. A particular type of vortexdynamics governed by the Biot-Savart law is investigated inRef. [18], where the spectral sparsification technique in thespectral graph theory is used to reduce the number of vortex-to-vertex interactions, rather than general type of coherentstructures in fluid. In our computations, by contrast, we ex-plicitly take a Lagrangian approach for general types of dy-namics in fluid.
MAP:the above paragraph needs some more work; also,should it be above or in the introduction section? I madechanges, and the accuracy of the various statements needto be double-checked; we should also distinguish what wedo from what is in [18]; GH:! Important! additionally,people like Gary Froyland have used spectra of Laplacianmatrices for LCS; GH:! These are almost invariant sets,not LCS. that is a very old form of community detection, sowe need to deepen our contributions with respect to ”clas-sical” things; I feel like this stu↵ should probably be in the
introductory section for the most part rather than here;anyway, the point is that I think that we need to makethings stronger in establishing the context of what we dovs the rest of the literature
SHL:I added a sentence describing Ref. [18], although Iam not 100% sure about the accuracy of the sentence de-scribing the paper. Please take a look at it for double-checking. I also moved the texts up to this point to theintroduction section.
Network Representation.—A pair of fluid elements A and Bhas a relative dispersion of
W (1)AB =
|ri(A, B)||r f (A, B)| , (1)
where ri = [xi, yi] and r f = [x f , y f ] denote the initial and finalpositions of the fluid element. The initial and final distancesbetween the fluid elements A and B are given by |ri(A, B)| =|ri(B) � ri(A)| and |r f (A, B)| = |r f (B) � r f (A)|. We also definethe relative dispersion for each grid element as
maxB2⌫(A)
|r f (A, B)||ri(A, B)| , (2)
where ⌫(A) is the set of nodes in a prescribed neighborhoodof A. If the fluid elements are initially given on a rectangulargrid, then ⌫(A) is given by the four closest neighbors consti-tute. In Fig. S1 of the SM [5], we show the relative dispersionsfor the same simulation as in Fig. 1.
An alternative way to define the relative dispersion is touse the deformation-gradient tensor [19] to obtain the instan-taneous displacement instead of the final position. This yields
W (2)AB =
|ri(A, B)||F(A)ri(A, B)| , (3)
where F(A) is the deformation-gradient tensor applied to thelocation of node A defined as the Jacobian @(x f , y f )/@(xi, yi)of the flow map. The relative dispersions W (1)
AB and W (2)AB in
Eqs. (1) and (3) give the weighted adjacency-matrix elementsbetween nodes A and B [7]. Larger values of these matrix ele-ments indicate stronger connections between the two fluid el-ements A and B. For each of the measures, distance measuressuch as ri(A, B) and coordinates such as ri(A) use the shortestdistance among all of the possible distances. (Note that we useperiodic boundary conditions for the simulation data, in con-trast to the real drifter data, GH:This does not appear to givea generally usable approach to ocean data SHL:I added abit of comments to avoid the possible confusion. so x itselfand x ± 2⇡ both yield x; and y and y ± 2⇡ both yield y.)
Community Detection.—There are several methods to de-tect communities in networks [8]. In our paper, we will ap-ply methods based on the maximization of a quality functioncalled “modularity,” the most popular approach to communitydetection. We partition a network’s node set V into sets called“communities” (with each node assigned to one community),such that intra-community interactions between nodes are sig-nificantly stronger than the inter-community interactions. We
: the Jacobian of the flow map, so that
2
FIG. 1. (Color online) Repelling (red), attracting (blue), and elliptic(green filled regions) LCSs in a direct numerical simulation of two-dimensional turbulence. MAP:do we need to worry about using thecolor green with the red with respect to people who are color-blind? SHL:I added “filled regions” after “green” that I hope willcircumvent that problem at least for some degree.
General relationships between community-finding, transport,and partitioning are discussed in Refs. [9, 11]. The Jacobianmatrix in dynamical systems has also been analyzed explicitlyusing a network-based approach to examine mesoscale struc-tures [12].
Community detection has been useful in flow problemssuch as the detection of plumes in fluids [13] and the analysisof force networks in granular materials [14, 15]. Network-theoretic tools, including community detection, were used toanalyze fluid flow networks in Refs. [16–18]. Note, how-ever, that Refs. [16, 17] represented mass transport GH:Howis mass transport Eulerian? via directed edges between ge-ographical areas (nodes), and they thus took what is essen-tially an Eulerian perspective. A particular type of vortexdynamics governed by the Biot-Savart law is investigated inRef. [18], where the spectral sparsification technique in thespectral graph theory is used to reduce the number of vortex-to-vertex interactions, rather than general type of coherentstructures in fluid. In our computations, by contrast, we ex-plicitly take a Lagrangian approach for general types of dy-namics in fluid.
MAP:the above paragraph needs some more work; also,should it be above or in the introduction section? I madechanges, and the accuracy of the various statements needto be double-checked; we should also distinguish what wedo from what is in [18]; GH:! Important! additionally,people like Gary Froyland have used spectra of Laplacianmatrices for LCS; GH:! These are almost invariant sets,not LCS. that is a very old form of community detection, sowe need to deepen our contributions with respect to ”clas-sical” things; I feel like this stu↵ should probably be in the
introductory section for the most part rather than here;anyway, the point is that I think that we need to makethings stronger in establishing the context of what we dovs the rest of the literature
SHL:I added a sentence describing Ref. [18], although Iam not 100% sure about the accuracy of the sentence de-scribing the paper. Please take a look at it for double-checking. I also moved the texts up to this point to theintroduction section.
Network Representation.—A pair of fluid elements A and Bhas a relative dispersion of
W (1)AB =
|ri(A, B)||r f (A, B)| , (1)
where ri = [xi, yi] and r f = [x f , y f ] denote the initial and finalpositions of the fluid element. The initial and final distancesbetween the fluid elements A and B are given by |ri(A, B)| =|ri(B) � ri(A)| and |r f (A, B)| = |r f (B) � r f (A)|. We also definethe relative dispersion for each grid element as
maxB2⌫(A)
|r f (A, B)||ri(A, B)| , (2)
where ⌫(A) is the set of nodes in a prescribed neighborhoodof A. If the fluid elements are initially given on a rectangulargrid, then ⌫(A) is given by the four closest neighbors consti-tute. In Fig. S1 of the SM [5], we show the relative dispersionsfor the same simulation as in Fig. 1.
An alternative way to define the relative dispersion is touse the deformation-gradient tensor [19] to obtain the instan-taneous displacement instead of the final position. This yields
W (2)AB =
|ri(A, B)||F(A)ri(A, B)| , (3)
where F(A) is the deformation-gradient tensor applied to thelocation of node A defined as the Jacobian @(x f , y f )/@(xi, yi)of the flow map. The relative dispersions W (1)
AB and W (2)AB in
Eqs. (1) and (3) give the weighted adjacency-matrix elementsbetween nodes A and B [7]. Larger values of these matrix ele-ments indicate stronger connections between the two fluid el-ements A and B. For each of the measures, distance measuressuch as ri(A, B) and coordinates such as ri(A) use the shortestdistance among all of the possible distances. (Note that we useperiodic boundary conditions for the simulation data, in con-trast to the real drifter data, GH:This does not appear to givea generally usable approach to ocean data SHL:I added abit of comments to avoid the possible confusion. so x itselfand x ± 2⇡ both yield x; and y and y ± 2⇡ both yield y.)
Community Detection.—There are several methods to de-tect communities in networks [8]. In our paper, we will ap-ply methods based on the maximization of a quality functioncalled “modularity,” the most popular approach to communitydetection. We partition a network’s node set V into sets called“communities” (with each node assigned to one community),such that intra-community interactions between nodes are sig-nificantly stronger than the inter-community interactions. We

Network community analysis of LCSPreliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
Finding Lagrangian Coherent Structures Using Community Detection
Sang Hoon Lee,1, 2, ⇤ Mohammad Farazmand,3 George Haller,4 and Mason A. Porter2, 5
1Integrated Energy Center for Fostering Global Creative Researcher (BK 21 plus)and Department of Energy Science, Sungkyunkwan University, Suwon 440–746, Korea
2Oxford Centre for Industrial and Applied Mathematics (OCIAM),Mathematical Institute, University of Oxford, Oxford, OX2 6GG, United Kingdom3School of Physics, Georgia Institute of Technology, Atlanta, Georgia 30332, USA
4Institute of Mechanical Systems, ETH Zurich, Switzerland5CABDyN Complexity Centre, University of Oxford, Oxford, OX1 1HP, United Kingdom
Lagrangian coherent structures (LCSs) refer to dynamically distinct groups of fluid elements in fluid flowsand provide valuable mesoscale geographical information to identify the most essential elements of such flows.Using relative dispersion, we define the pairwise correlation between fluid elements and use the community de-tection for the systematic identification of LCSs as the community or modular structures underlying interactionsystems e↵ectively provide substructures behind the system of interest. We detect communities using modular-ity maximization with a tunable resolution for simulation data and two of real satellite-tracked drifter data inthe ocean to examine LCSs in various scales. In particular, to obtain more detailed spatiotemporal LCSs, wemaximize a multilayer version of modularity on a multilayer network in which temporal slices of interactionsare properly considered. We believe that our approach illustrates a new way to e�ciently detect LCSs for givendynamical systems and opens new possibilities of applications in dynamical systems in general.
PACS numbers: 45.20.Jj, 47.54.-r, 89.75.Fb, 89.75.Hc
Introduction.—Recent developments in the theory of dy-namical systems have given rise to new concepts of coherentstructures in fluid flow [1–4]. These methods seek exceptionalmaterial surfaces (or curves, in the case of two-dimensionalflow) that play a key role in mixing and transport over a giventime interval [5–8]. Their approach is Lagrangian in nature, incontrast to the Eulerian point of view that studies the instanta-neous velocity field [9].
The Lagrangian methods each rely on specific mathemati-cal tools such as probability, di↵erential geometry and calcu-lus of variations. Here, we develop a new approach to coher-ent structure analysis using recent advances in network the-ory [10]. After laying down the theoretical frame work, weshow on two examples how our approach can complementearlier methods, as well as, providing new insight that is onlyaccessible to our network theory-based method.
Before turning to network theory, we present typical typesof Lagrangian coherent structures (LCSs) on an example: aturbulent flow. Figure 1 shows LCSs from a direct numericalsimulation of the forced Navier–Stokes equation
@u@t+ u · ru = �rp + ⌫r2u + f, r · u = 0, (1)
over the domain [0, 2⇡] ⇥ [0, 2⇡] with doubly periodic bound-ary conditions. The Lagrangian analysis is carried out over afew eddy turn-over times after the flow has reached its fullyturbulent state (see Ref. [11] for a detailed analysis).
The repelling and attracting LCSs (red and blue curves, re-spectively, in figure 1) are the main drivers of mixing throughextensive stretching and folding of nearby material elements.The green islands, in contrast, represent elliptic LCSs thatinhibit mixing by preserving their shape over relatively longtime scales.
Network Representation.—A fresh way to look at those
FIG. 1. (color online). Repelling (red), attracting (blue) and elliptic(green) Lagrangian coherent structures (LCSs).
systems for that purpose is to consider such systems as dis-crete interacting objects, as in the force-chain networks de-scribing granular material systems [12, 13] or the plumedetection problem in fluid [14]. General relationships be-tween community finding, transport, and partition are dis-cussed in Refs. [15, 16]. Another example of using thenetwork-theory tools to analyze the flow network is presentedin Refs. [17, 18], where the mass transport is represented asthe directed edges between geographical sub-areas (nodes),which in fact is rather in line with the spirit of the Eulerianpoint of view. We, by contrast, consider the fluid elementsthemselves as the nodes, so we can highlight more fundamen-tal structural properties of LCSs.
Preliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
where we can define the relative dispersion for each grid element as
maxB2nnhd(A)
|rf
(A, B)||r
i
(A, B)| , (2)
where nnhd(A) is the set of nodes in the nearest neighbors of A (four for each grid point) and Fig. 2
shows the relative dispersion map for the 512⇥ 512 original grid elements. The data including the
relative dispersion for the original grid elements is original dispersion matrix.txt.
W
(2)AB
=|r
i
(A, B)||F(A)r
i
(A, B)| , (3)
where ri
(A, B) = ri
(B) � ri
(A) [the vector from ri
(A) to ri
(B)], rf
(A, B) = rf
(B) � rf
(A) [the
vector from rf
(A) to rf
(B)], ri
(A) = [x
i
(A), yi
(A)] which is the initial point (t = 0) of the element
A], rf
(A) = [x
f
(A), yf
(A)] which is the final point (t = 50) of the element A], and F(A) is the
deformation gradient tensor at A, i.e., |F(A)ri
(A, B)| =p{F
xx
(A)[x
i
(B) � x
i
(A)] + F
xy
(A)[yi
(B) � y
i
(A)]}2 + {Fyx
(A)[x
i
(B) � x
i
(A)] + F
yy
(A)[yi
(B) � y
i
(A)]}2.
The distance measures such as ri
(A, B) and the coordinates such as ri
(A) take the shortest distance
among all the possible distances considering the PBC: x itself and x ± 2⇡ for x, and y itself and
y ± 2⇡ for y (9 combinations in total).
III. COMMUNITY DETECTION METHODS
• W
(1)AB
(= W
(1)BA
) in Eq. (1): the Louvainmethod [1, 2] with the Girvan-Newman null model [3]
and the resolution parameter � [4] is used for Fig. 3, where the number of communities and
the values of quality measure QGN are specified for four di↵erent � values. The communities
here describe the (mutually exclusive for now—we can extend this to take the “overlapping”
communities into account by using other methods) groups of nodes where the intra-group
interactions are significantly stronger than the inter-group interactions. For the resolution
parameter �, roughly speaking, the larger the value of � is, the smaller (in terms of typical
number of nodes in a community, thus larger number of communities) communities are
identified.
The modularity for the Girvan-Newman null model, which is the objective function QGN
where the purpose is to find the set of communities {gA
} that maximizes QGN, is given by
2
3
Supplemental Figure S1. The relative dispersion lnhmaxB2⌫(A) |r f (A, B)|/|ri(A, B)|
ifor the same grid elements as in Fig. 1 of the main text. The
set ⌫(A) is the set of nodes that are adjacent to node A.
3
Supp
lem
enta
lFig
ure
S1.T
here
lativ
edi
sper
sion
lnh m
axB2⌫(
A)|r f
(A,B
)|/|r i
(A,B
)|ifo
rthe
sam
egr
idel
emen
tsas
inFi
g.1
ofth
em
ain
text
.The
set⌫
(A)i
sth
ese
tofn
odes
that
are
adja
cent
tono
deA.
A, B: discretized 512✕512 grid cell indices
without involving differential terms such as the deformation-gradient tensor
2
FIG. 1. (Color online) Repelling (red), attracting (blue), and elliptic(green filled regions) LCSs in a direct numerical simulation of two-dimensional turbulence. MAP:do we need to worry about using thecolor green with the red with respect to people who are color-blind? SHL:I added “filled regions” after “green” that I hope willcircumvent that problem at least for some degree.
General relationships between community-finding, transport,and partitioning are discussed in Refs. [9, 11]. The Jacobianmatrix in dynamical systems has also been analyzed explicitlyusing a network-based approach to examine mesoscale struc-tures [12].
Community detection has been useful in flow problemssuch as the detection of plumes in fluids [13] and the analysisof force networks in granular materials [14, 15]. Network-theoretic tools, including community detection, were used toanalyze fluid flow networks in Refs. [16–18]. Note, how-ever, that Refs. [16, 17] represented mass transport GH:Howis mass transport Eulerian? via directed edges between ge-ographical areas (nodes), and they thus took what is essen-tially an Eulerian perspective. A particular type of vortexdynamics governed by the Biot-Savart law is investigated inRef. [18], where the spectral sparsification technique in thespectral graph theory is used to reduce the number of vortex-to-vertex interactions, rather than general type of coherentstructures in fluid. In our computations, by contrast, we ex-plicitly take a Lagrangian approach for general types of dy-namics in fluid.
MAP:the above paragraph needs some more work; also,should it be above or in the introduction section? I madechanges, and the accuracy of the various statements needto be double-checked; we should also distinguish what wedo from what is in [18]; GH:! Important! additionally,people like Gary Froyland have used spectra of Laplacianmatrices for LCS; GH:! These are almost invariant sets,not LCS. that is a very old form of community detection, sowe need to deepen our contributions with respect to ”clas-sical” things; I feel like this stu↵ should probably be in the
introductory section for the most part rather than here;anyway, the point is that I think that we need to makethings stronger in establishing the context of what we dovs the rest of the literature
SHL:I added a sentence describing Ref. [18], although Iam not 100% sure about the accuracy of the sentence de-scribing the paper. Please take a look at it for double-checking. I also moved the texts up to this point to theintroduction section.
Network Representation.—A pair of fluid elements A and Bhas a relative dispersion of
W (1)AB =
|ri(A, B)||r f (A, B)| , (1)
where ri = [xi, yi] and r f = [x f , y f ] denote the initial and finalpositions of the fluid element. The initial and final distancesbetween the fluid elements A and B are given by |ri(A, B)| =|ri(B) � ri(A)| and |r f (A, B)| = |r f (B) � r f (A)|. We also definethe relative dispersion for each grid element as
maxB2⌫(A)
|r f (A, B)||ri(A, B)| , (2)
where ⌫(A) is the set of nodes in a prescribed neighborhoodof A. If the fluid elements are initially given on a rectangulargrid, then ⌫(A) is given by the four closest neighbors consti-tute. In Fig. S1 of the SM [5], we show the relative dispersionsfor the same simulation as in Fig. 1.
An alternative way to define the relative dispersion is touse the deformation-gradient tensor [19] to obtain the instan-taneous displacement instead of the final position. This yields
W (2)AB =
|ri(A, B)||F(A)ri(A, B)| , (3)
where F(A) is the deformation-gradient tensor applied to thelocation of node A defined as the Jacobian @(x f , y f )/@(xi, yi)of the flow map. The relative dispersions W (1)
AB and W (2)AB in
Eqs. (1) and (3) give the weighted adjacency-matrix elementsbetween nodes A and B [7]. Larger values of these matrix ele-ments indicate stronger connections between the two fluid el-ements A and B. For each of the measures, distance measuressuch as ri(A, B) and coordinates such as ri(A) use the shortestdistance among all of the possible distances. (Note that we useperiodic boundary conditions for the simulation data, in con-trast to the real drifter data, GH:This does not appear to givea generally usable approach to ocean data SHL:I added abit of comments to avoid the possible confusion. so x itselfand x ± 2⇡ both yield x; and y and y ± 2⇡ both yield y.)
Community Detection.—There are several methods to de-tect communities in networks [8]. In our paper, we will ap-ply methods based on the maximization of a quality functioncalled “modularity,” the most popular approach to communitydetection. We partition a network’s node set V into sets called“communities” (with each node assigned to one community),such that intra-community interactions between nodes are sig-nificantly stronger than the inter-community interactions. We
2
FIG. 1. (Color online) Repelling (red), attracting (blue), and elliptic(green filled regions) LCSs in a direct numerical simulation of two-dimensional turbulence. MAP:do we need to worry about using thecolor green with the red with respect to people who are color-blind? SHL:I added “filled regions” after “green” that I hope willcircumvent that problem at least for some degree.
General relationships between community-finding, transport,and partitioning are discussed in Refs. [9, 11]. The Jacobianmatrix in dynamical systems has also been analyzed explicitlyusing a network-based approach to examine mesoscale struc-tures [12].
Community detection has been useful in flow problemssuch as the detection of plumes in fluids [13] and the analysisof force networks in granular materials [14, 15]. Network-theoretic tools, including community detection, were used toanalyze fluid flow networks in Refs. [16–18]. Note, how-ever, that Refs. [16, 17] represented mass transport GH:Howis mass transport Eulerian? via directed edges between ge-ographical areas (nodes), and they thus took what is essen-tially an Eulerian perspective. A particular type of vortexdynamics governed by the Biot-Savart law is investigated inRef. [18], where the spectral sparsification technique in thespectral graph theory is used to reduce the number of vortex-to-vertex interactions, rather than general type of coherentstructures in fluid. In our computations, by contrast, we ex-plicitly take a Lagrangian approach for general types of dy-namics in fluid.
MAP:the above paragraph needs some more work; also,should it be above or in the introduction section? I madechanges, and the accuracy of the various statements needto be double-checked; we should also distinguish what wedo from what is in [18]; GH:! Important! additionally,people like Gary Froyland have used spectra of Laplacianmatrices for LCS; GH:! These are almost invariant sets,not LCS. that is a very old form of community detection, sowe need to deepen our contributions with respect to ”clas-sical” things; I feel like this stu↵ should probably be in the
introductory section for the most part rather than here;anyway, the point is that I think that we need to makethings stronger in establishing the context of what we dovs the rest of the literature
SHL:I added a sentence describing Ref. [18], although Iam not 100% sure about the accuracy of the sentence de-scribing the paper. Please take a look at it for double-checking. I also moved the texts up to this point to theintroduction section.
Network Representation.—A pair of fluid elements A and Bhas a relative dispersion of
W (1)AB =
|ri(A, B)||r f (A, B)| , (1)
where ri = [xi, yi] and r f = [x f , y f ] denote the initial and finalpositions of the fluid element. The initial and final distancesbetween the fluid elements A and B are given by |ri(A, B)| =|ri(B) � ri(A)| and |r f (A, B)| = |r f (B) � r f (A)|. We also definethe relative dispersion for each grid element as
maxB2⌫(A)
|r f (A, B)||ri(A, B)| , (2)
where ⌫(A) is the set of nodes in a prescribed neighborhoodof A. If the fluid elements are initially given on a rectangulargrid, then ⌫(A) is given by the four closest neighbors consti-tute. In Fig. S1 of the SM [5], we show the relative dispersionsfor the same simulation as in Fig. 1.
An alternative way to define the relative dispersion is touse the deformation-gradient tensor [19] to obtain the instan-taneous displacement instead of the final position. This yields
W (2)AB =
|ri(A, B)||F(A)ri(A, B)| , (3)
where F(A) is the deformation-gradient tensor applied to thelocation of node A defined as the Jacobian @(x f , y f )/@(xi, yi)of the flow map. The relative dispersions W (1)
AB and W (2)AB in
Eqs. (1) and (3) give the weighted adjacency-matrix elementsbetween nodes A and B [7]. Larger values of these matrix ele-ments indicate stronger connections between the two fluid el-ements A and B. For each of the measures, distance measuressuch as ri(A, B) and coordinates such as ri(A) use the shortestdistance among all of the possible distances. (Note that we useperiodic boundary conditions for the simulation data, in con-trast to the real drifter data, GH:This does not appear to givea generally usable approach to ocean data SHL:I added abit of comments to avoid the possible confusion. so x itselfand x ± 2⇡ both yield x; and y and y ± 2⇡ both yield y.)
Community Detection.—There are several methods to de-tect communities in networks [8]. In our paper, we will ap-ply methods based on the maximization of a quality functioncalled “modularity,” the most popular approach to communitydetection. We partition a network’s node set V into sets called“communities” (with each node assigned to one community),such that intra-community interactions between nodes are sig-nificantly stronger than the inter-community interactions. We
: the Jacobian of the flow map, so that
2
FIG. 1. (Color online) Repelling (red), attracting (blue), and elliptic(green filled regions) LCSs in a direct numerical simulation of two-dimensional turbulence. MAP:do we need to worry about using thecolor green with the red with respect to people who are color-blind? SHL:I added “filled regions” after “green” that I hope willcircumvent that problem at least for some degree.
General relationships between community-finding, transport,and partitioning are discussed in Refs. [9, 11]. The Jacobianmatrix in dynamical systems has also been analyzed explicitlyusing a network-based approach to examine mesoscale struc-tures [12].
Community detection has been useful in flow problemssuch as the detection of plumes in fluids [13] and the analysisof force networks in granular materials [14, 15]. Network-theoretic tools, including community detection, were used toanalyze fluid flow networks in Refs. [16–18]. Note, how-ever, that Refs. [16, 17] represented mass transport GH:Howis mass transport Eulerian? via directed edges between ge-ographical areas (nodes), and they thus took what is essen-tially an Eulerian perspective. A particular type of vortexdynamics governed by the Biot-Savart law is investigated inRef. [18], where the spectral sparsification technique in thespectral graph theory is used to reduce the number of vortex-to-vertex interactions, rather than general type of coherentstructures in fluid. In our computations, by contrast, we ex-plicitly take a Lagrangian approach for general types of dy-namics in fluid.
MAP:the above paragraph needs some more work; also,should it be above or in the introduction section? I madechanges, and the accuracy of the various statements needto be double-checked; we should also distinguish what wedo from what is in [18]; GH:! Important! additionally,people like Gary Froyland have used spectra of Laplacianmatrices for LCS; GH:! These are almost invariant sets,not LCS. that is a very old form of community detection, sowe need to deepen our contributions with respect to ”clas-sical” things; I feel like this stu↵ should probably be in the
introductory section for the most part rather than here;anyway, the point is that I think that we need to makethings stronger in establishing the context of what we dovs the rest of the literature
SHL:I added a sentence describing Ref. [18], although Iam not 100% sure about the accuracy of the sentence de-scribing the paper. Please take a look at it for double-checking. I also moved the texts up to this point to theintroduction section.
Network Representation.—A pair of fluid elements A and Bhas a relative dispersion of
W (1)AB =
|ri(A, B)||r f (A, B)| , (1)
where ri = [xi, yi] and r f = [x f , y f ] denote the initial and finalpositions of the fluid element. The initial and final distancesbetween the fluid elements A and B are given by |ri(A, B)| =|ri(B) � ri(A)| and |r f (A, B)| = |r f (B) � r f (A)|. We also definethe relative dispersion for each grid element as
maxB2⌫(A)
|r f (A, B)||ri(A, B)| , (2)
where ⌫(A) is the set of nodes in a prescribed neighborhoodof A. If the fluid elements are initially given on a rectangulargrid, then ⌫(A) is given by the four closest neighbors consti-tute. In Fig. S1 of the SM [5], we show the relative dispersionsfor the same simulation as in Fig. 1.
An alternative way to define the relative dispersion is touse the deformation-gradient tensor [19] to obtain the instan-taneous displacement instead of the final position. This yields
W (2)AB =
|ri(A, B)||F(A)ri(A, B)| , (3)
where F(A) is the deformation-gradient tensor applied to thelocation of node A defined as the Jacobian @(x f , y f )/@(xi, yi)of the flow map. The relative dispersions W (1)
AB and W (2)AB in
Eqs. (1) and (3) give the weighted adjacency-matrix elementsbetween nodes A and B [7]. Larger values of these matrix ele-ments indicate stronger connections between the two fluid el-ements A and B. For each of the measures, distance measuressuch as ri(A, B) and coordinates such as ri(A) use the shortestdistance among all of the possible distances. (Note that we useperiodic boundary conditions for the simulation data, in con-trast to the real drifter data, GH:This does not appear to givea generally usable approach to ocean data SHL:I added abit of comments to avoid the possible confusion. so x itselfand x ± 2⇡ both yield x; and y and y ± 2⇡ both yield y.)
Community Detection.—There are several methods to de-tect communities in networks [8]. In our paper, we will ap-ply methods based on the maximization of a quality functioncalled “modularity,” the most popular approach to communitydetection. We partition a network’s node set V into sets called“communities” (with each node assigned to one community),such that intra-community interactions between nodes are sig-nificantly stronger than the inter-community interactions. We
applicable for most real data such assparsely released drifters or data on non-uniform grid

Network community analysis of LCSPreliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
Finding Lagrangian Coherent Structures Using Community Detection
Sang Hoon Lee,1, 2, ⇤ Mohammad Farazmand,3 George Haller,4 and Mason A. Porter2, 5
1Integrated Energy Center for Fostering Global Creative Researcher (BK 21 plus)and Department of Energy Science, Sungkyunkwan University, Suwon 440–746, Korea
2Oxford Centre for Industrial and Applied Mathematics (OCIAM),Mathematical Institute, University of Oxford, Oxford, OX2 6GG, United Kingdom3School of Physics, Georgia Institute of Technology, Atlanta, Georgia 30332, USA
4Institute of Mechanical Systems, ETH Zurich, Switzerland5CABDyN Complexity Centre, University of Oxford, Oxford, OX1 1HP, United Kingdom
Lagrangian coherent structures (LCSs) refer to dynamically distinct groups of fluid elements in fluid flowsand provide valuable mesoscale geographical information to identify the most essential elements of such flows.Using relative dispersion, we define the pairwise correlation between fluid elements and use the community de-tection for the systematic identification of LCSs as the community or modular structures underlying interactionsystems e↵ectively provide substructures behind the system of interest. We detect communities using modular-ity maximization with a tunable resolution for simulation data and two of real satellite-tracked drifter data inthe ocean to examine LCSs in various scales. In particular, to obtain more detailed spatiotemporal LCSs, wemaximize a multilayer version of modularity on a multilayer network in which temporal slices of interactionsare properly considered. We believe that our approach illustrates a new way to e�ciently detect LCSs for givendynamical systems and opens new possibilities of applications in dynamical systems in general.
PACS numbers: 45.20.Jj, 47.54.-r, 89.75.Fb, 89.75.Hc
Introduction.—Recent developments in the theory of dy-namical systems have given rise to new concepts of coherentstructures in fluid flow [1–4]. These methods seek exceptionalmaterial surfaces (or curves, in the case of two-dimensionalflow) that play a key role in mixing and transport over a giventime interval [5–8]. Their approach is Lagrangian in nature, incontrast to the Eulerian point of view that studies the instanta-neous velocity field [9].
The Lagrangian methods each rely on specific mathemati-cal tools such as probability, di↵erential geometry and calcu-lus of variations. Here, we develop a new approach to coher-ent structure analysis using recent advances in network the-ory [10]. After laying down the theoretical frame work, weshow on two examples how our approach can complementearlier methods, as well as, providing new insight that is onlyaccessible to our network theory-based method.
Before turning to network theory, we present typical typesof Lagrangian coherent structures (LCSs) on an example: aturbulent flow. Figure 1 shows LCSs from a direct numericalsimulation of the forced Navier–Stokes equation
@u@t+ u · ru = �rp + ⌫r2u + f, r · u = 0, (1)
over the domain [0, 2⇡] ⇥ [0, 2⇡] with doubly periodic bound-ary conditions. The Lagrangian analysis is carried out over afew eddy turn-over times after the flow has reached its fullyturbulent state (see Ref. [11] for a detailed analysis).
The repelling and attracting LCSs (red and blue curves, re-spectively, in figure 1) are the main drivers of mixing throughextensive stretching and folding of nearby material elements.The green islands, in contrast, represent elliptic LCSs thatinhibit mixing by preserving their shape over relatively longtime scales.
Network Representation.—A fresh way to look at those
FIG. 1. (color online). Repelling (red), attracting (blue) and elliptic(green) Lagrangian coherent structures (LCSs).
systems for that purpose is to consider such systems as dis-crete interacting objects, as in the force-chain networks de-scribing granular material systems [12, 13] or the plumedetection problem in fluid [14]. General relationships be-tween community finding, transport, and partition are dis-cussed in Refs. [15, 16]. Another example of using thenetwork-theory tools to analyze the flow network is presentedin Refs. [17, 18], where the mass transport is represented asthe directed edges between geographical sub-areas (nodes),which in fact is rather in line with the spirit of the Eulerianpoint of view. We, by contrast, consider the fluid elementsthemselves as the nodes, so we can highlight more fundamen-tal structural properties of LCSs.
community detection (considering only nearest neighbor interactions
on the 2D square lattice)
initial positions final positions
community detection method: GenLouvain[Generalized Louvain: http://netwiki.amath.unc.edu/GenLouvain/GenLouvain original Louvain: V. D. Blondel et al., J. Stat. Mech. 2008, P10008 (2008)]
3
(a) (b)
FIG. 2. (Color online) Ten communities (each of a di↵erent color), which we detect algorithmically from a network constructed from nearest-neighbor interactions, from the simulated data that we show in Fig. 1. Panels (a) and (b), respectively, show the fluid elements at the initial andfinal times. We detect the communities using the relative dispersion W (1)
AB in Eq. (1) and the modularity QNG in Eq. (4). The resolution-parametervalue is � = 0.005. See Figs. S2–S5 in SM [5] for similar results using the modularity QLN and various resolution-parameter values.
that intra-community interactions between nodes are signif-icantly stronger than the inter-community interactions. Wedetect the set {gA | A 2 V} of communities, where node Ais assigned to community gA, such that modularity is maxi-mized. We use di↵erent null models for the relative disper-sion W (1)
AB (which is symmetric) and the deformation-gradienttensor W (2)
AB (which is not).For the relative dispersion between nodes A and B, we use
the modularity QNG for the Newman–Girvan (NG) null model[8, 20]:
QNG =1
2m
X
AB
W (1)
AB � �kAkB
2m
!� (gA, gB) , (4)
where kA =P
B W (1)AB =
PB W (1)
BA is the sum of weights corre-sponding to the interactions of A, the quantity 2m =
PA kA is
the total sum of weights in all of the interactions, � is a reso-lution parameter, and �(gA, gB) = 1 if A and B are in the samecommunity and 0 if they are not. The normalization constant1/(2m) enforces Q 2 [�1, 1]. Larger resolution-parameter val-ues � tend to result in smaller communities (with respect to thetypical number of nodes in a community).
For the deformation-gradient tensor between nodes A andB, we use the modularity QLN with the Leicht–Newman (LN)null model [21]:
QLN =1m
X
AB
0BBBB@W (2)
AB � �kin
A koutB
m
1CCCCA � (gA, gB) , (5)
where kinA =
PB W (2)
BA (respectively, koutA =
PB W (2)
AB) is the sumof incoming (respectively, outgoing) weights corresponding
to the interactions of A, and m =P
A kinA =
PA kout
A is the totalsum of weights for all of the interactions. (This sum is nec-essarily the same for both incoming and outgoing weights.)To detect the communities for both Eqs. (4) and (5), we usethe GenLouvain code [22], which is an implementation of amethod that is similar to the locally-greedy Louvain methodof Ref. [23].
Results for Simulation Data.—The turbulence-simulationdata consists of 512 ⇥ 512 grid points = 262144 nodes andtheir interactions given by Eqs. (1) and (3). For computationaltractability, we only consider the four nearest-neighbor inter-actions in the 2D grid system. This corresponds to setting allof the interactions between non-nearest-neighboring nodes inEqs. (1) and (3) to zero. The initial time is tinit = 0, and thefinal time is tfinal = 50 in the simulation time units. In Fig. 2,we show the ten detected communities using W (1)
AB [see Eq. (1)]with � = 0.005 [24]. For small values of �, one detects a smallnumber of large communities. They have blob-like structuresthat do not undergo substantial filamentation. Larger valuesof �, however, yield a larger number of communities, whichexhibit spiral patterns that correspond to vortex filaments. InFigs. S2–S5 of the SM [5], we show the dependence of thedetected communities for a set of values of � and using theweight function W (2)
AB. We find that the weight functions W (1)AB
and W (2)AB yield similar communities for the same value of �.
In Figs. S6–S9 of the SM [5], we present results for sam-pled grid points in which we use every fourth element (whichyields a 128⇥128 grid points and thus 16384 nodes) along thex and y axes. In this case, we also include all of their global
maximizing
Preliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
where we can define the relative dispersion for each grid element as
maxB2nnhd(A)
|rf
(A, B)||r
i
(A, B)| , (2)
where nnhd(A) is the set of nodes in the nearest neighbors of A (four for each grid point) and Fig. 2
shows the relative dispersion map for the 512⇥ 512 original grid elements. The data including the
relative dispersion for the original grid elements is original dispersion matrix.txt.
W
(2)AB
=|r
i
(A, B)||F(A)r
i
(A, B)| , (3)
where ri
(A, B) = ri
(B) � ri
(A) [the vector from ri
(A) to ri
(B)], rf
(A, B) = rf
(B) � rf
(A) [the
vector from rf
(A) to rf
(B)], ri
(A) = [x
i
(A), yi
(A)] which is the initial point (t = 0) of the element
A], rf
(A) = [x
f
(A), yf
(A)] which is the final point (t = 50) of the element A], and F(A) is the
deformation gradient tensor at A, i.e., |F(A)ri
(A, B)| =p{F
xx
(A)[x
i
(B) � x
i
(A)] + F
xy
(A)[yi
(B) � y
i
(A)]}2 + {Fyx
(A)[x
i
(B) � x
i
(A)] + F
yy
(A)[yi
(B) � y
i
(A)]}2.
The distance measures such as ri
(A, B) and the coordinates such as ri
(A) take the shortest distance
among all the possible distances considering the PBC: x itself and x ± 2⇡ for x, and y itself and
y ± 2⇡ for y (9 combinations in total).
III. COMMUNITY DETECTION METHODS
• W
(1)AB
(= W
(1)BA
) in Eq. (1): the Louvainmethod [1, 2] with the Girvan-Newman null model [3]
and the resolution parameter � [4] is used for Fig. 3, where the number of communities and
the values of quality measure QGN are specified for four di↵erent � values. The communities
here describe the (mutually exclusive for now—we can extend this to take the “overlapping”
communities into account by using other methods) groups of nodes where the intra-group
interactions are significantly stronger than the inter-group interactions. For the resolution
parameter �, roughly speaking, the larger the value of � is, the smaller (in terms of typical
number of nodes in a community, thus larger number of communities) communities are
identified.
The modularity for the Girvan-Newman null model, which is the objective function QGN
where the purpose is to find the set of communities {gA
} that maximizes QGN, is given by
2
3
Supplemental Figure S1. The relative dispersion lnhmaxB2⌫(A) |r f (A, B)|/|ri(A, B)|
ifor the same grid elements as in Fig. 1 of the main text. The
set ⌫(A) is the set of nodes that are adjacent to node A.
3
Supp
lem
enta
lFig
ure
S1.T
here
lativ
edi
sper
sion
lnh m
axB2⌫(
A)|r f
(A,B
)|/|r i
(A,B
)|ifo
rthe
sam
egr
idel
emen
tsas
inFi
g.1
ofth
em
ain
text
.The
set⌫
(A)i
sth
ese
tofn
odes
that
are
adja
cent
tono
deA.
A, B: discretized 512✕512 grid cell indices

initial positions final positions
Preliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
using relative-dispersion-based weights
using deformation-gradient-tensor-based weights
2
FIG. 1. (Color online) Repelling (red), attracting (blue), and elliptic(green filled regions) LCSs in a direct numerical simulation of two-dimensional turbulence. MAP:do we need to worry about using thecolor green with the red with respect to people who are color-blind? SHL:I added “filled regions” after “green” that I hope willcircumvent that problem at least for some degree.
General relationships between community-finding, transport,and partitioning are discussed in Refs. [9, 11]. The Jacobianmatrix in dynamical systems has also been analyzed explicitlyusing a network-based approach to examine mesoscale struc-tures [12].
Community detection has been useful in flow problemssuch as the detection of plumes in fluids [13] and the analysisof force networks in granular materials [14, 15]. Network-theoretic tools, including community detection, were used toanalyze fluid flow networks in Refs. [16–18]. Note, how-ever, that Refs. [16, 17] represented mass transport GH:Howis mass transport Eulerian? via directed edges between ge-ographical areas (nodes), and they thus took what is essen-tially an Eulerian perspective. A particular type of vortexdynamics governed by the Biot-Savart law is investigated inRef. [18], where the spectral sparsification technique in thespectral graph theory is used to reduce the number of vortex-to-vertex interactions, rather than general type of coherentstructures in fluid. In our computations, by contrast, we ex-plicitly take a Lagrangian approach for general types of dy-namics in fluid.
MAP:the above paragraph needs some more work; also,should it be above or in the introduction section? I madechanges, and the accuracy of the various statements needto be double-checked; we should also distinguish what wedo from what is in [18]; GH:! Important! additionally,people like Gary Froyland have used spectra of Laplacianmatrices for LCS; GH:! These are almost invariant sets,not LCS. that is a very old form of community detection, sowe need to deepen our contributions with respect to ”clas-sical” things; I feel like this stu↵ should probably be in the
introductory section for the most part rather than here;anyway, the point is that I think that we need to makethings stronger in establishing the context of what we dovs the rest of the literature
SHL:I added a sentence describing Ref. [18], although Iam not 100% sure about the accuracy of the sentence de-scribing the paper. Please take a look at it for double-checking. I also moved the texts up to this point to theintroduction section.
Network Representation.—A pair of fluid elements A and Bhas a relative dispersion of
W (1)AB =
|ri(A, B)||r f (A, B)| , (1)
where ri = [xi, yi] and r f = [x f , y f ] denote the initial and finalpositions of the fluid element. The initial and final distancesbetween the fluid elements A and B are given by |ri(A, B)| =|ri(B) � ri(A)| and |r f (A, B)| = |r f (B) � r f (A)|. We also definethe relative dispersion for each grid element as
maxB2⌫(A)
|r f (A, B)||ri(A, B)| , (2)
where ⌫(A) is the set of nodes in a prescribed neighborhoodof A. If the fluid elements are initially given on a rectangulargrid, then ⌫(A) is given by the four closest neighbors consti-tute. In Fig. S1 of the SM [5], we show the relative dispersionsfor the same simulation as in Fig. 1.
An alternative way to define the relative dispersion is touse the deformation-gradient tensor [19] to obtain the instan-taneous displacement instead of the final position. This yields
W (2)AB =
|ri(A, B)||F(A)ri(A, B)| , (3)
where F(A) is the deformation-gradient tensor applied to thelocation of node A defined as the Jacobian @(x f , y f )/@(xi, yi)of the flow map. The relative dispersions W (1)
AB and W (2)AB in
Eqs. (1) and (3) give the weighted adjacency-matrix elementsbetween nodes A and B [7]. Larger values of these matrix ele-ments indicate stronger connections between the two fluid el-ements A and B. For each of the measures, distance measuressuch as ri(A, B) and coordinates such as ri(A) use the shortestdistance among all of the possible distances. (Note that we useperiodic boundary conditions for the simulation data, in con-trast to the real drifter data, GH:This does not appear to givea generally usable approach to ocean data SHL:I added abit of comments to avoid the possible confusion. so x itselfand x ± 2⇡ both yield x; and y and y ± 2⇡ both yield y.)
Community Detection.—There are several methods to de-tect communities in networks [8]. In our paper, we will ap-ply methods based on the maximization of a quality functioncalled “modularity,” the most popular approach to communitydetection. We partition a network’s node set V into sets called“communities” (with each node assigned to one community),such that intra-community interactions between nodes are sig-nificantly stronger than the inter-community interactions. We
initial positions final positions
6
(a) (b)
(c) (d)
Supplemental Figure S4. In this figure, we detect communities, which we label by color, using the simulated data from Fig. 1 of the maintext. We keep only near-neighbor interactions between fluid elements. We measure the interaction strength between nodes using the relativedispersion W (2)
AB in Eq. (S2) and LN modularity in Eq. (S3). We consider di↵erent resolution-parameter values in the di↵erent panels. (a)� = 0.001 (3 communities and QLN ⇡ 0.99931), (b) � = 0.002 (8 communities and QLN ⇡ 0.99904), (c) � = 0.005 (16 communities andQLN ⇡ 0.99817), and (d) � = 0.01 (263 communities and QLN ⇡ 0.97818). MAP:for the methods with near neighbors, the values of � usedare really tiny; it seems like we at least need some sort of comment about this in the SM text SHL:I added Sec. S5 to address that point.
7
(a) (b)
(c) (d)
Supplemental Figure S5. Communities from the final positions of the fluid elements using the same data and community-detection method fromFig. S4. Corresponding panels in the figures use the same value of the resolution parameter �. MAP:similar question as in past final-positionfigs SHL:addressed in Fig. S7.

initial positions final positions
Preliminary Results of Community Detection in Flow Maps (last updated: January 1, 2014)
I. FLOW MAP DATA
FIG. 1. Original flow map.
• Original flow map: Fig. 1 [512 ⇥ 512 uniform grid points corresponding to [0, 2⇡) ⇥ [0, 2⇡)
with the periodic boundary condition (PBC)—all the metrics such as distance between two
points consider the PBC, as presented in Sec. II].
• Sampled flow map: sampling every fourth (n = 4) element for x and y axes, which yields
(128 ⇥ 128 grid points = 16 384 nodes and their interactions)
II. DEFINITION OF WEIGHTS
W
(1)AB
=|r
i
(A, B)||r
f
(A, B)| , (1)
1
using relative-dispersion-based weights
using deformation-gradient-tensor-based weights
2
FIG. 1. (Color online) Repelling (red), attracting (blue), and elliptic(green filled regions) LCSs in a direct numerical simulation of two-dimensional turbulence. MAP:do we need to worry about using thecolor green with the red with respect to people who are color-blind? SHL:I added “filled regions” after “green” that I hope willcircumvent that problem at least for some degree.
General relationships between community-finding, transport,and partitioning are discussed in Refs. [9, 11]. The Jacobianmatrix in dynamical systems has also been analyzed explicitlyusing a network-based approach to examine mesoscale struc-tures [12].
Community detection has been useful in flow problemssuch as the detection of plumes in fluids [13] and the analysisof force networks in granular materials [14, 15]. Network-theoretic tools, including community detection, were used toanalyze fluid flow networks in Refs. [16–18]. Note, how-ever, that Refs. [16, 17] represented mass transport GH:Howis mass transport Eulerian? via directed edges between ge-ographical areas (nodes), and they thus took what is essen-tially an Eulerian perspective. A particular type of vortexdynamics governed by the Biot-Savart law is investigated inRef. [18], where the spectral sparsification technique in thespectral graph theory is used to reduce the number of vortex-to-vertex interactions, rather than general type of coherentstructures in fluid. In our computations, by contrast, we ex-plicitly take a Lagrangian approach for general types of dy-namics in fluid.
MAP:the above paragraph needs some more work; also,should it be above or in the introduction section? I madechanges, and the accuracy of the various statements needto be double-checked; we should also distinguish what wedo from what is in [18]; GH:! Important! additionally,people like Gary Froyland have used spectra of Laplacianmatrices for LCS; GH:! These are almost invariant sets,not LCS. that is a very old form of community detection, sowe need to deepen our contributions with respect to ”clas-sical” things; I feel like this stu↵ should probably be in the
introductory section for the most part rather than here;anyway, the point is that I think that we need to makethings stronger in establishing the context of what we dovs the rest of the literature
SHL:I added a sentence describing Ref. [18], although Iam not 100% sure about the accuracy of the sentence de-scribing the paper. Please take a look at it for double-checking. I also moved the texts up to this point to theintroduction section.
Network Representation.—A pair of fluid elements A and Bhas a relative dispersion of
W (1)AB =
|ri(A, B)||r f (A, B)| , (1)
where ri = [xi, yi] and r f = [x f , y f ] denote the initial and finalpositions of the fluid element. The initial and final distancesbetween the fluid elements A and B are given by |ri(A, B)| =|ri(B) � ri(A)| and |r f (A, B)| = |r f (B) � r f (A)|. We also definethe relative dispersion for each grid element as
maxB2⌫(A)
|r f (A, B)||ri(A, B)| , (2)
where ⌫(A) is the set of nodes in a prescribed neighborhoodof A. If the fluid elements are initially given on a rectangulargrid, then ⌫(A) is given by the four closest neighbors consti-tute. In Fig. S1 of the SM [5], we show the relative dispersionsfor the same simulation as in Fig. 1.
An alternative way to define the relative dispersion is touse the deformation-gradient tensor [19] to obtain the instan-taneous displacement instead of the final position. This yields
W (2)AB =
|ri(A, B)||F(A)ri(A, B)| , (3)
where F(A) is the deformation-gradient tensor applied to thelocation of node A defined as the Jacobian @(x f , y f )/@(xi, yi)of the flow map. The relative dispersions W (1)
AB and W (2)AB in
Eqs. (1) and (3) give the weighted adjacency-matrix elementsbetween nodes A and B [7]. Larger values of these matrix ele-ments indicate stronger connections between the two fluid el-ements A and B. For each of the measures, distance measuressuch as ri(A, B) and coordinates such as ri(A) use the shortestdistance among all of the possible distances. (Note that we useperiodic boundary conditions for the simulation data, in con-trast to the real drifter data, GH:This does not appear to givea generally usable approach to ocean data SHL:I added abit of comments to avoid the possible confusion. so x itselfand x ± 2⇡ both yield x; and y and y ± 2⇡ both yield y.)
Community Detection.—There are several methods to de-tect communities in networks [8]. In our paper, we will ap-ply methods based on the maximization of a quality functioncalled “modularity,” the most popular approach to communitydetection. We partition a network’s node set V into sets called“communities” (with each node assigned to one community),such that intra-community interactions between nodes are sig-nificantly stronger than the inter-community interactions. We
initial positions final positions
6
(a) (b)
(c) (d)
Supplemental Figure S4. In this figure, we detect communities, which we label by color, using the simulated data from Fig. 1 of the maintext. We keep only near-neighbor interactions between fluid elements. We measure the interaction strength between nodes using the relativedispersion W (2)
AB in Eq. (S2) and LN modularity in Eq. (S3). We consider di↵erent resolution-parameter values in the di↵erent panels. (a)� = 0.001 (3 communities and QLN ⇡ 0.99931), (b) � = 0.002 (8 communities and QLN ⇡ 0.99904), (c) � = 0.005 (16 communities andQLN ⇡ 0.99817), and (d) � = 0.01 (263 communities and QLN ⇡ 0.97818). MAP:for the methods with near neighbors, the values of � usedare really tiny; it seems like we at least need some sort of comment about this in the SM text SHL:I added Sec. S5 to address that point.
7
(a) (b)
(c) (d)
Supplemental Figure S5. Communities from the final positions of the fluid elements using the same data and community-detection method fromFig. S4. Corresponding panels in the figures use the same value of the resolution parameter �. MAP:similar question as in past final-positionfigs SHL:addressed in Fig. S7.
capturing the similar coherent structures without the differential term F(A) involved!

Community Structure inTime-Dependent, Multiscale,and Multiplex NetworksPeter J. Mucha,1,2* Thomas Richardson,1,3 Kevin Macon,1 Mason A. Porter,4,5 Jukka-Pekka Onnela6,7
Network science is an interdisciplinary endeavor, with methods and applications drawn from acrossthe natural, social, and information sciences. A prominent problem in network science is thealgorithmic detection of tightly connected groups of nodes known as communities. We developed ageneralized framework of network quality functions that allowed us to study the communitystructure of arbitrary multislice networks, which are combinations of individual networks coupledthrough links that connect each node in one network slice to itself in other slices. This frameworkallows studies of community structure in a general setting encompassing networks that evolve overtime, have multiple types of links (multiplexity), and have multiple scales.
Thestudy of graphs, or networks, has a longtradition in fields such as sociology andmathematics, and it is now ubiquitous in
academic and everyday settings. An importanttool in network analysis is the detection ofmesoscopic structures known as communities (orcohesive groups), which are defined intuitively asgroups of nodes that are more tightly connected toeach other than they are to the rest of the network(1–3). One way to quantify communities is by aquality function that compares the number ofintracommunity edges to what one would expectat random.Given the network adjacencymatrixA,where the element Aij details a direct connectionbetween nodes i and j, one can construct a qual-ity functionQ (4, 5) for the partitioning of nodesinto communities as Q = ∑ ij (Aij − Pij)d(gi, gj),where d(gi, gj) = 1 if the community assignmentsgi and gj of nodes i and j are the same and 0otherwise, and Pij is the expected weight of theedge between i and j under a specified null model.
The choice of null model is a crucial con-sideration in studying network community struc-ture (2). After selecting a null model appropriateto the network and application at hand, one canuse a variety of computational heuristics to assignnodes to communities to optimize the quality Q(2, 3). However, such null models have not beenavailable for time-dependent networks; analyseshave instead depended on ad hoc methods to
piece together the structures obtained at differenttimes (6–9) or have abandoned quality functionsin favor of such alternatives as the MinimumDescriptionLength principle (10). Although tensordecompositions (11) have been used to clusternetwork data with different types of connections,no quality-function method has been developedfor such multiplex networks.
We developed a methodology to remove theselimits, generalizing the determination of commu-nity structure via quality functions to multislicenetworks that are defined by coupling multipleadjacency matrices (Fig. 1). The connectionsencoded by the network slices are flexible; theycan represent variations across time, variationsacross different types of connections, or evencommunity detection of the same network atdifferent scales. However, the usual procedure forestablishing a quality function as a direct count ofthe intracommunity edge weight minus that
expected at random fails to provide any contribu-tion from these interslice couplings. Because theyare specified by common identifications of nodesacross slices, interslice couplings are either presentor absent by definition, so when they do fall insidecommunities, their contribution in the count of intra-community edges exactly cancels that expected atrandom. In contrast, by formulating a null model interms of stability of communities under Laplaciandynamics, we have derived a principled generaliza-tion of community detection to multislice networks,
REPORTS
1Carolina Center for Interdisciplinary Applied Mathematics,Department of Mathematics, University of North Carolina,Chapel Hill, NC 27599, USA. 2Institute for Advanced Materials,Nanoscience and Technology, University of North Carolina,Chapel Hill, NC 27599, USA. 3Operations Research, NorthCarolina State University, Raleigh, NC 27695, USA. 4OxfordCentre for Industrial and Applied Mathematics, MathematicalInstitute, University of Oxford, Oxford OX1 3LB, UK. 5CABDyNComplexity Centre, University of Oxford, Oxford OX1 1HP, UK.6Department of Health Care Policy, Harvard Medical School,Boston, MA 02115, USA. 7Harvard Kennedy School, HarvardUniversity, Cambridge, MA 02138, USA.
*To whom correspondence should be addressed. E-mail:[email protected]
1
2
3
4
Fig. 1. Schematic of amultislice network. Four slicess= {1, 2, 3, 4} represented by adjacencies Aijs encodeintraslice connections (solid lines). Interslice con-nections (dashed lines) are encoded byCjrs, specifyingthe coupling of node j to itself between slices r and s.For clarity, interslice couplings are shown for only twonodes and depict two different types of couplings: (i)coupling between neighboring slices, appropriate forordered slices; and (ii) all-to-all interslice coupling,appropriate for categorical slices.
node
s
resolution parameters
coupling = 0
1 2 3 4
5
10
15
20
25
30
node
s
resolution parameters
coupling = 0.1
1 2 3 4
5
10
15
20
25
30
node
s
resolution parameters
coupling = 1
1 2 3 4
5
10
15
20
25
30
Fig. 2. Multislice community detection of theZachary Karate Club network (22) across multipleresolutions. Colors depict community assignments ofthe 34 nodes (renumbered vertically to groupsimilarly assigned nodes) in each of the 16 slices(with resolution parameters gs = {0.25, 0.5,…, 4}),for w = 0 (top), w = 0.1 (middle), and w =1 (bottom). Dashed lines bound the communitiesobtained using the default resolution (g = 1).
14 MAY 2010 VOL 328 SCIENCE www.sciencemag.org876
CORRECTED 16 JULY 2010; SEE LAST PAGE
on
Nov
embe
r 8, 2
011
ww
w.s
cien
cem
ag.o
rgD
ownl
oade
d fro
m
multilayer community detection method:P. J. Mucha, T. Richardson, K. Macon, M. A. Porter, and J.-P. Onnela, Science 328, 876 (2010).
0
10
20
30
40
50
60
70
0 0.5 1 1.5 2 2.5 3 3.5
drite
r ID
time (day)
Time interval of drifters
Supplemental Figure S11. The time intervals of drifters recorded are shown with the blue vertical lines
corresponding to the spacing for the multilayer network analysis. tinit = 0.1 (day), tfinal = 3.1 (day), and
tres = 0.1 (day).
13
Preliminary Results of Community Detection of the 72 Drifters (last updated: February 12, 2014)
I. DRIFTER DATA
40.7 40.8 40.9 41 41.1 41.2 41.3 41.4 41.5 41.6 41.7
−71.1
−71
−70.9
−70.8
−70.7
−70.6
−70.5
−70.4
lat
lon
FIG. 1. The figure of drifters’ trajectories by Hosein Amini.
• Figure 1: the figure of drifters’ trajectories.
A. Drifters’ Time Interval
• As shown in Fig. 2, the initial and final time points are all di↵erent for di↵erent drifters.
Therefore, we first set the initial time t = tinit = 0.2 (day) and consider several di↵erent final
time points as t = tfinal = 0.3, 1.5, and 3.0 (day) for single-layer networks in Sec. II. For
multilayer networks in Sec. III, we set t = tinit = 0.1 (day) and t = tfinal = 3.1 (day) and
divide the time interval into pieces as time windows (see Fig. 4).
• Only the drifters whose time interval entirely contains [tinit, tfinal] are considered for each
case of tfinal, so the numbers of nodes are smaller for larger tfinal (as noted in the caption of
Fig. 6).
1
latitude
long
itude
real ocean flow: Northern Atlantic region (global interactions)
4
interactions (i.e., all of the nonzero elements in the weightfunctions W (l)
AB, where l 2 {1, 2}). Because we use all of theglobal interactions, we obtain much more spiral-like commu-nities (see Figs. S6–S9 of the SM [5]), compared to blob-likecommunities shown in Fig. 2.
Results for Snapshots of Drifter Data.—GH:Where is thisfrom? Irina Rypina, maybe. MAP:we also need to brieflydescribe what is in the data, so that readers know whatwe’re talking about; the first sentence below comes acrossas a non sequitur SHL:I think we need more informationfrom Irina Rypina (starting this section with such infor-mation would make the transition much smoother), as wellas the permission to use it in our paper. In Fig. S10 of theSM [5], we show the drifter trajectories. The drifters are re-leased at di↵erent times, and their trajectories are recordedfor di↵erent time intervals. (See Fig. S11 of the SM [5].) Forconsistency, we need a common time interval [tinit, tfinal] overwhich the trajectories are known for all drifters. The earliestinitial time is tinit = 0.2 (days). For the final time tfinal, weconsider several values: tfinal = 0.3, tfinal = 1.5, and tfinal = 3.0(days). For each final time, we only include drifters whosetime interval of recorded trajectory contains the entire interval[tinit, tfinal] are as nodes in a network. Consequently, the num-ber of network nodes is smaller for later tfinal. (See Fig. S12of the SM [5].)
For all of the drifters, we take the common initial time tinitand the final time tfinal as we described in the previous para-graph. The weight between two drifters A and B is based onrelative dispersion W (1)
AB defined in Eq. (1), where |ri(A, B)| and|r f (A, B)|, respectively, give the initial and final Euclidean dis-tances in the 2D (longitude, latitude) plane [25]. Note that thedeformation-gradient tensor F(A) in Eq. (3) is unknown for thedrifter data, so we cannot use W (2)
AB in Eq. (3) in those cases.The modularity for the NG null model is given by Eq. (4). InFig. S12 of the SM [5], we show the detected communities forfour di↵erent values of the resolution parameter �.
MAP:the discussion of what a community is above seemsrather redundant with earlier discussions? I suspect spacemay be an issue, in which case it should be shortened toonly what we need, but it also seems like we may wish toshorten it to minimize redundancy anyway; I am trying tofigure out what it’s contributing
SHL:I commented out that part, and I moved the Gen-Louvain part to the methodology section because GenLou-vain is used throughout the work.
MAP:should time-dependent community structure start anew section in order to emphasize it?
SHL:I separated the sections.Results for Time-Dependent Drifter Data.—To gain in-
sights into the dynamics of LCSs, it is also helpful to ex-amine time-dependent community structure. To do this,we will split up the full temporal dynamics into a se-ries of intervals. The simplest approach is to divide thetime interval [tinit, tfinal] uniformly into S “layers” usinga temporal resolution of tres. This yields the time in-tervals {[t0 = tinit, t1 = t0 + tres], [t1, t2], · · · , [tS�1, tS = tfinal]},
and similar to W (1)AB in Eq. (2), we define the weight between
nodes A and B in layer s 2 {1, . . . , S } as
W (1)ABs =
|rt=ts�1 (A, B)||rt=ts (A, B)| , (6)
where rt(A, B) is the Euclidean distance between thenodes A and B at time t [see Eq. (1)]. First, we treateach layer separately and detect communities as be-fore. We set tinit = 0.1 days and tfinal = 3.1 days. InFig. S13 of the SM [5], we show results for � = 1.We divide the time interval [tinit = 0.1, tfinal = 3.1]is uniformly into S = 30 non-overlapping intervals{[t0 = tinit = 0.1, 0.2), [0.2, 0.3), · · · , [3.0, tS = tfinal = 3.1]}with a temporal resolution of tres = 0.1.
We then apply multilayer community detection [26] to ourtime-dependent networks by using a generalized version ofthe modularity function in Eq. (4) for multilayer networks:
Qmulti =1
2µ
X
ABsr
" W (1)
ABs � �skAskBs
2ms
!�sr + �ABTBsr
#� (gAs, gBr) ,
(7)where A and B index nodes (i.e., fluid elements) as in the orig-inal modularity function in Eq. (4), and s and r index the timelayers in the multilayer network. (See Refs. [27, 28] for a re-view of multilayer networks.) That is, for each layer s, thereexists a separate network described by the adjacency-matrixelements W (1)
ABs. The quantity W (1)ABs, which describes the
strength of the interaction between fluid elements A and B attime s, is thus an element of an adjacency tensor [26, 27, 29].The intralayer interactions W (1)
ABs , 0 if nodes A and B areconnected in layer s, and W (1)
ABs = 0 otherwise. Additionally,kAs =
PB W (1)
ABs, we normalize in each layer s separately usingms =
PAB W (1)
ABs, and �s is the resolution parameter in layer s.To connect fluid elements to themselves when they are present
0 0.5
1 1.5
2 2.5
3
0 10 20 30 40 50 60 70initi
al p
oint
of t
ime
slic
e (d
ay)
node index
FIG. 3. (Color online) Multilayer (time-dependent) communitystructure of drifters for tinit = 0.1 day, tfinal = 3.1 day, and tres = 0.1.The resolution-parameter value is � = 1, and the interlayer couplingstrength is ! = 25. The vertical axis gives the initial point of timelayers ts in [ts, ts+1) where s = 0, 1, . . . , 29. MAP:I was unable todiscern what was meant by the description, and I am not entirelysure of the axis label either, so we need to adjust phrasing SHL:Ihope it’s clear now, and the horizontal axis indicates the node index.We indicate di↵erent communities by using di↵erent colors and sym-bols (also used in Fig. 4). The solid horizontal lines in the interiorcorrespond to the snapshots in Fig. 4.
4
interactions (i.e., all of the nonzero elements in the weightfunctions W (l)
AB, where l 2 {1, 2}). Because we use all of theglobal interactions, we obtain much more spiral-like commu-nities (see Figs. S6–S9 of the SM [5]), compared to blob-likecommunities shown in Fig. 2.
Results for Snapshots of Drifter Data.—GH:Where is thisfrom? Irina Rypina, maybe. MAP:we also need to brieflydescribe what is in the data, so that readers know whatwe’re talking about; the first sentence below comes acrossas a non sequitur SHL:I think we need more informationfrom Irina Rypina (starting this section with such infor-mation would make the transition much smoother), as wellas the permission to use it in our paper. In Fig. S10 of theSM [5], we show the drifter trajectories. The drifters are re-leased at di↵erent times, and their trajectories are recordedfor di↵erent time intervals. (See Fig. S11 of the SM [5].) Forconsistency, we need a common time interval [tinit, tfinal] overwhich the trajectories are known for all drifters. The earliestinitial time is tinit = 0.2 (days). For the final time tfinal, weconsider several values: tfinal = 0.3, tfinal = 1.5, and tfinal = 3.0(days). For each final time, we only include drifters whosetime interval of recorded trajectory contains the entire interval[tinit, tfinal] are as nodes in a network. Consequently, the num-ber of network nodes is smaller for later tfinal. (See Fig. S12of the SM [5].)
For all of the drifters, we take the common initial time tinitand the final time tfinal as we described in the previous para-graph. The weight between two drifters A and B is based onrelative dispersion W (1)
AB defined in Eq. (1), where |ri(A, B)| and|r f (A, B)|, respectively, give the initial and final Euclidean dis-tances in the 2D (longitude, latitude) plane [25]. Note that thedeformation-gradient tensor F(A) in Eq. (3) is unknown for thedrifter data, so we cannot use W (2)
AB in Eq. (3) in those cases.The modularity for the NG null model is given by Eq. (4). InFig. S12 of the SM [5], we show the detected communities forfour di↵erent values of the resolution parameter �.
MAP:the discussion of what a community is above seemsrather redundant with earlier discussions? I suspect spacemay be an issue, in which case it should be shortened toonly what we need, but it also seems like we may wish toshorten it to minimize redundancy anyway; I am trying tofigure out what it’s contributing
SHL:I commented out that part, and I moved the Gen-Louvain part to the methodology section because GenLou-vain is used throughout the work.
MAP:should time-dependent community structure start anew section in order to emphasize it?
SHL:I separated the sections.Results for Time-Dependent Drifter Data.—To gain in-
sights into the dynamics of LCSs, it is also helpful to ex-amine time-dependent community structure. To do this,we will split up the full temporal dynamics into a se-ries of intervals. The simplest approach is to divide thetime interval [tinit, tfinal] uniformly into S “layers” usinga temporal resolution of tres. This yields the time in-tervals {[t0 = tinit, t1 = t0 + tres], [t1, t2], · · · , [tS�1, tS = tfinal]},
and similar to W (1)AB in Eq. (2), we define the weight between
nodes A and B in layer s 2 {1, . . . , S } as
W (1)ABs =
|rt=ts�1 (A, B)||rt=ts (A, B)| , (6)
where rt(A, B) is the Euclidean distance between thenodes A and B at time t [see Eq. (1)]. First, we treateach layer separately and detect communities as be-fore. We set tinit = 0.1 days and tfinal = 3.1 days. InFig. S13 of the SM [5], we show results for � = 1.We divide the time interval [tinit = 0.1, tfinal = 3.1]is uniformly into S = 30 non-overlapping intervals{[t0 = tinit = 0.1, 0.2), [0.2, 0.3), · · · , [3.0, tS = tfinal = 3.1]}with a temporal resolution of tres = 0.1.
We then apply multilayer community detection [26] to ourtime-dependent networks by using a generalized version ofthe modularity function in Eq. (4) for multilayer networks:
Qmulti =1
2µ
X
ABsr
" W (1)
ABs � �skAskBs
2ms
!�sr + �ABTBsr
#� (gAs, gBr) ,
(7)where A and B index nodes (i.e., fluid elements) as in the orig-inal modularity function in Eq. (4), and s and r index the timelayers in the multilayer network. (See Refs. [27, 28] for a re-view of multilayer networks.) That is, for each layer s, thereexists a separate network described by the adjacency-matrixelements W (1)
ABs. The quantity W (1)ABs, which describes the
strength of the interaction between fluid elements A and B attime s, is thus an element of an adjacency tensor [26, 27, 29].The intralayer interactions W (1)
ABs , 0 if nodes A and B areconnected in layer s, and W (1)
ABs = 0 otherwise. Additionally,kAs =
PB W (1)
ABs, we normalize in each layer s separately usingms =
PAB W (1)
ABs, and �s is the resolution parameter in layer s.To connect fluid elements to themselves when they are present
0 0.5
1 1.5
2 2.5
3
0 10 20 30 40 50 60 70initi
al p
oint
of t
ime
slic
e (d
ay)
node index
FIG. 3. (Color online) Multilayer (time-dependent) communitystructure of drifters for tinit = 0.1 day, tfinal = 3.1 day, and tres = 0.1.The resolution-parameter value is � = 1, and the interlayer couplingstrength is ! = 25. The vertical axis gives the initial point of timelayers ts in [ts, ts+1) where s = 0, 1, . . . , 29. MAP:I was unable todiscern what was meant by the description, and I am not entirelysure of the axis label either, so we need to adjust phrasing SHL:Ihope it’s clear now, and the horizontal axis indicates the node index.We indicate di↵erent communities by using di↵erent colors and sym-bols (also used in Fig. 4). The solid horizontal lines in the interiorcorrespond to the snapshots in Fig. 4.
maximizing

Community Structure inTime-Dependent, Multiscale,and Multiplex NetworksPeter J. Mucha,1,2* Thomas Richardson,1,3 Kevin Macon,1 Mason A. Porter,4,5 Jukka-Pekka Onnela6,7
Network science is an interdisciplinary endeavor, with methods and applications drawn from acrossthe natural, social, and information sciences. A prominent problem in network science is thealgorithmic detection of tightly connected groups of nodes known as communities. We developed ageneralized framework of network quality functions that allowed us to study the communitystructure of arbitrary multislice networks, which are combinations of individual networks coupledthrough links that connect each node in one network slice to itself in other slices. This frameworkallows studies of community structure in a general setting encompassing networks that evolve overtime, have multiple types of links (multiplexity), and have multiple scales.
Thestudy of graphs, or networks, has a longtradition in fields such as sociology andmathematics, and it is now ubiquitous in
academic and everyday settings. An importanttool in network analysis is the detection ofmesoscopic structures known as communities (orcohesive groups), which are defined intuitively asgroups of nodes that are more tightly connected toeach other than they are to the rest of the network(1–3). One way to quantify communities is by aquality function that compares the number ofintracommunity edges to what one would expectat random.Given the network adjacencymatrixA,where the element Aij details a direct connectionbetween nodes i and j, one can construct a qual-ity functionQ (4, 5) for the partitioning of nodesinto communities as Q = ∑ ij (Aij − Pij)d(gi, gj),where d(gi, gj) = 1 if the community assignmentsgi and gj of nodes i and j are the same and 0otherwise, and Pij is the expected weight of theedge between i and j under a specified null model.
The choice of null model is a crucial con-sideration in studying network community struc-ture (2). After selecting a null model appropriateto the network and application at hand, one canuse a variety of computational heuristics to assignnodes to communities to optimize the quality Q(2, 3). However, such null models have not beenavailable for time-dependent networks; analyseshave instead depended on ad hoc methods to
piece together the structures obtained at differenttimes (6–9) or have abandoned quality functionsin favor of such alternatives as the MinimumDescriptionLength principle (10). Although tensordecompositions (11) have been used to clusternetwork data with different types of connections,no quality-function method has been developedfor such multiplex networks.
We developed a methodology to remove theselimits, generalizing the determination of commu-nity structure via quality functions to multislicenetworks that are defined by coupling multipleadjacency matrices (Fig. 1). The connectionsencoded by the network slices are flexible; theycan represent variations across time, variationsacross different types of connections, or evencommunity detection of the same network atdifferent scales. However, the usual procedure forestablishing a quality function as a direct count ofthe intracommunity edge weight minus that
expected at random fails to provide any contribu-tion from these interslice couplings. Because theyare specified by common identifications of nodesacross slices, interslice couplings are either presentor absent by definition, so when they do fall insidecommunities, their contribution in the count of intra-community edges exactly cancels that expected atrandom. In contrast, by formulating a null model interms of stability of communities under Laplaciandynamics, we have derived a principled generaliza-tion of community detection to multislice networks,
REPORTS
1Carolina Center for Interdisciplinary Applied Mathematics,Department of Mathematics, University of North Carolina,Chapel Hill, NC 27599, USA. 2Institute for Advanced Materials,Nanoscience and Technology, University of North Carolina,Chapel Hill, NC 27599, USA. 3Operations Research, NorthCarolina State University, Raleigh, NC 27695, USA. 4OxfordCentre for Industrial and Applied Mathematics, MathematicalInstitute, University of Oxford, Oxford OX1 3LB, UK. 5CABDyNComplexity Centre, University of Oxford, Oxford OX1 1HP, UK.6Department of Health Care Policy, Harvard Medical School,Boston, MA 02115, USA. 7Harvard Kennedy School, HarvardUniversity, Cambridge, MA 02138, USA.
*To whom correspondence should be addressed. E-mail:[email protected]
1
2
3
4
Fig. 1. Schematic of amultislice network. Four slicess= {1, 2, 3, 4} represented by adjacencies Aijs encodeintraslice connections (solid lines). Interslice con-nections (dashed lines) are encoded byCjrs, specifyingthe coupling of node j to itself between slices r and s.For clarity, interslice couplings are shown for only twonodes and depict two different types of couplings: (i)coupling between neighboring slices, appropriate forordered slices; and (ii) all-to-all interslice coupling,appropriate for categorical slices.
node
s
resolution parameters
coupling = 0
1 2 3 4
5
10
15
20
25
30
node
s
resolution parameters
coupling = 0.1
1 2 3 4
5
10
15
20
25
30
node
s
resolution parameters
coupling = 1
1 2 3 4
5
10
15
20
25
30
Fig. 2. Multislice community detection of theZachary Karate Club network (22) across multipleresolutions. Colors depict community assignments ofthe 34 nodes (renumbered vertically to groupsimilarly assigned nodes) in each of the 16 slices(with resolution parameters gs = {0.25, 0.5,…, 4}),for w = 0 (top), w = 0.1 (middle), and w =1 (bottom). Dashed lines bound the communitiesobtained using the default resolution (g = 1).
14 MAY 2010 VOL 328 SCIENCE www.sciencemag.org876
CORRECTED 16 JULY 2010; SEE LAST PAGE
on
Nov
embe
r 8, 2
011
ww
w.s
cien
cem
ag.o
rgD
ownl
oade
d fro
m
multilayer community detection method:P. J. Mucha, T. Richardson, K. Macon, M. A. Porter, and J.-P. Onnela, Science 328, 876 (2010).
0
10
20
30
40
50
60
70
0 0.5 1 1.5 2 2.5 3 3.5
drite
r ID
time (day)
Time interval of drifters
Supplemental Figure S11. The time intervals of drifters recorded are shown with the blue vertical lines
corresponding to the spacing for the multilayer network analysis. tinit = 0.1 (day), tfinal = 3.1 (day), and
tres = 0.1 (day).
13
Preliminary Results of Community Detection of the 72 Drifters (last updated: February 12, 2014)
I. DRIFTER DATA
40.7 40.8 40.9 41 41.1 41.2 41.3 41.4 41.5 41.6 41.7
−71.1
−71
−70.9
−70.8
−70.7
−70.6
−70.5
−70.4
lat
lon
FIG. 1. The figure of drifters’ trajectories by Hosein Amini.
• Figure 1: the figure of drifters’ trajectories.
A. Drifters’ Time Interval
• As shown in Fig. 2, the initial and final time points are all di↵erent for di↵erent drifters.
Therefore, we first set the initial time t = tinit = 0.2 (day) and consider several di↵erent final
time points as t = tfinal = 0.3, 1.5, and 3.0 (day) for single-layer networks in Sec. II. For
multilayer networks in Sec. III, we set t = tinit = 0.1 (day) and t = tfinal = 3.1 (day) and
divide the time interval into pieces as time windows (see Fig. 4).
• Only the drifters whose time interval entirely contains [tinit, tfinal] are considered for each
case of tfinal, so the numbers of nodes are smaller for larger tfinal (as noted in the caption of
Fig. 6).
1
latitude
long
itude
real ocean flow: Northern Atlantic region (global interactions)
4
interactions (i.e., all of the nonzero elements in the weightfunctions W (l)
AB, where l 2 {1, 2}). Because we use all of theglobal interactions, we obtain much more spiral-like commu-nities (see Figs. S6–S9 of the SM [5]), compared to blob-likecommunities shown in Fig. 2.
Results for Snapshots of Drifter Data.—GH:Where is thisfrom? Irina Rypina, maybe. MAP:we also need to brieflydescribe what is in the data, so that readers know whatwe’re talking about; the first sentence below comes acrossas a non sequitur SHL:I think we need more informationfrom Irina Rypina (starting this section with such infor-mation would make the transition much smoother), as wellas the permission to use it in our paper. In Fig. S10 of theSM [5], we show the drifter trajectories. The drifters are re-leased at di↵erent times, and their trajectories are recordedfor di↵erent time intervals. (See Fig. S11 of the SM [5].) Forconsistency, we need a common time interval [tinit, tfinal] overwhich the trajectories are known for all drifters. The earliestinitial time is tinit = 0.2 (days). For the final time tfinal, weconsider several values: tfinal = 0.3, tfinal = 1.5, and tfinal = 3.0(days). For each final time, we only include drifters whosetime interval of recorded trajectory contains the entire interval[tinit, tfinal] are as nodes in a network. Consequently, the num-ber of network nodes is smaller for later tfinal. (See Fig. S12of the SM [5].)
For all of the drifters, we take the common initial time tinitand the final time tfinal as we described in the previous para-graph. The weight between two drifters A and B is based onrelative dispersion W (1)
AB defined in Eq. (1), where |ri(A, B)| and|r f (A, B)|, respectively, give the initial and final Euclidean dis-tances in the 2D (longitude, latitude) plane [25]. Note that thedeformation-gradient tensor F(A) in Eq. (3) is unknown for thedrifter data, so we cannot use W (2)
AB in Eq. (3) in those cases.The modularity for the NG null model is given by Eq. (4). InFig. S12 of the SM [5], we show the detected communities forfour di↵erent values of the resolution parameter �.
MAP:the discussion of what a community is above seemsrather redundant with earlier discussions? I suspect spacemay be an issue, in which case it should be shortened toonly what we need, but it also seems like we may wish toshorten it to minimize redundancy anyway; I am trying tofigure out what it’s contributing
SHL:I commented out that part, and I moved the Gen-Louvain part to the methodology section because GenLou-vain is used throughout the work.
MAP:should time-dependent community structure start anew section in order to emphasize it?
SHL:I separated the sections.Results for Time-Dependent Drifter Data.—To gain in-
sights into the dynamics of LCSs, it is also helpful to ex-amine time-dependent community structure. To do this,we will split up the full temporal dynamics into a se-ries of intervals. The simplest approach is to divide thetime interval [tinit, tfinal] uniformly into S “layers” usinga temporal resolution of tres. This yields the time in-tervals {[t0 = tinit, t1 = t0 + tres], [t1, t2], · · · , [tS�1, tS = tfinal]},
and similar to W (1)AB in Eq. (2), we define the weight between
nodes A and B in layer s 2 {1, . . . , S } as
W (1)ABs =
|rt=ts�1 (A, B)||rt=ts (A, B)| , (6)
where rt(A, B) is the Euclidean distance between thenodes A and B at time t [see Eq. (1)]. First, we treateach layer separately and detect communities as be-fore. We set tinit = 0.1 days and tfinal = 3.1 days. InFig. S13 of the SM [5], we show results for � = 1.We divide the time interval [tinit = 0.1, tfinal = 3.1]is uniformly into S = 30 non-overlapping intervals{[t0 = tinit = 0.1, 0.2), [0.2, 0.3), · · · , [3.0, tS = tfinal = 3.1]}with a temporal resolution of tres = 0.1.
We then apply multilayer community detection [26] to ourtime-dependent networks by using a generalized version ofthe modularity function in Eq. (4) for multilayer networks:
Qmulti =1
2µ
X
ABsr
" W (1)
ABs � �skAskBs
2ms
!�sr + �ABTBsr
#� (gAs, gBr) ,
(7)where A and B index nodes (i.e., fluid elements) as in the orig-inal modularity function in Eq. (4), and s and r index the timelayers in the multilayer network. (See Refs. [27, 28] for a re-view of multilayer networks.) That is, for each layer s, thereexists a separate network described by the adjacency-matrixelements W (1)
ABs. The quantity W (1)ABs, which describes the
strength of the interaction between fluid elements A and B attime s, is thus an element of an adjacency tensor [26, 27, 29].The intralayer interactions W (1)
ABs , 0 if nodes A and B areconnected in layer s, and W (1)
ABs = 0 otherwise. Additionally,kAs =
PB W (1)
ABs, we normalize in each layer s separately usingms =
PAB W (1)
ABs, and �s is the resolution parameter in layer s.To connect fluid elements to themselves when they are present
0 0.5
1 1.5
2 2.5
3
0 10 20 30 40 50 60 70initi
al p
oint
of t
ime
slic
e (d
ay)
node index
FIG. 3. (Color online) Multilayer (time-dependent) communitystructure of drifters for tinit = 0.1 day, tfinal = 3.1 day, and tres = 0.1.The resolution-parameter value is � = 1, and the interlayer couplingstrength is ! = 25. The vertical axis gives the initial point of timelayers ts in [ts, ts+1) where s = 0, 1, . . . , 29. MAP:I was unable todiscern what was meant by the description, and I am not entirelysure of the axis label either, so we need to adjust phrasing SHL:Ihope it’s clear now, and the horizontal axis indicates the node index.We indicate di↵erent communities by using di↵erent colors and sym-bols (also used in Fig. 4). The solid horizontal lines in the interiorcorrespond to the snapshots in Fig. 4.
4
interactions (i.e., all of the nonzero elements in the weightfunctions W (l)
AB, where l 2 {1, 2}). Because we use all of theglobal interactions, we obtain much more spiral-like commu-nities (see Figs. S6–S9 of the SM [5]), compared to blob-likecommunities shown in Fig. 2.
Results for Snapshots of Drifter Data.—GH:Where is thisfrom? Irina Rypina, maybe. MAP:we also need to brieflydescribe what is in the data, so that readers know whatwe’re talking about; the first sentence below comes acrossas a non sequitur SHL:I think we need more informationfrom Irina Rypina (starting this section with such infor-mation would make the transition much smoother), as wellas the permission to use it in our paper. In Fig. S10 of theSM [5], we show the drifter trajectories. The drifters are re-leased at di↵erent times, and their trajectories are recordedfor di↵erent time intervals. (See Fig. S11 of the SM [5].) Forconsistency, we need a common time interval [tinit, tfinal] overwhich the trajectories are known for all drifters. The earliestinitial time is tinit = 0.2 (days). For the final time tfinal, weconsider several values: tfinal = 0.3, tfinal = 1.5, and tfinal = 3.0(days). For each final time, we only include drifters whosetime interval of recorded trajectory contains the entire interval[tinit, tfinal] are as nodes in a network. Consequently, the num-ber of network nodes is smaller for later tfinal. (See Fig. S12of the SM [5].)
For all of the drifters, we take the common initial time tinitand the final time tfinal as we described in the previous para-graph. The weight between two drifters A and B is based onrelative dispersion W (1)
AB defined in Eq. (1), where |ri(A, B)| and|r f (A, B)|, respectively, give the initial and final Euclidean dis-tances in the 2D (longitude, latitude) plane [25]. Note that thedeformation-gradient tensor F(A) in Eq. (3) is unknown for thedrifter data, so we cannot use W (2)
AB in Eq. (3) in those cases.The modularity for the NG null model is given by Eq. (4). InFig. S12 of the SM [5], we show the detected communities forfour di↵erent values of the resolution parameter �.
MAP:the discussion of what a community is above seemsrather redundant with earlier discussions? I suspect spacemay be an issue, in which case it should be shortened toonly what we need, but it also seems like we may wish toshorten it to minimize redundancy anyway; I am trying tofigure out what it’s contributing
SHL:I commented out that part, and I moved the Gen-Louvain part to the methodology section because GenLou-vain is used throughout the work.
MAP:should time-dependent community structure start anew section in order to emphasize it?
SHL:I separated the sections.Results for Time-Dependent Drifter Data.—To gain in-
sights into the dynamics of LCSs, it is also helpful to ex-amine time-dependent community structure. To do this,we will split up the full temporal dynamics into a se-ries of intervals. The simplest approach is to divide thetime interval [tinit, tfinal] uniformly into S “layers” usinga temporal resolution of tres. This yields the time in-tervals {[t0 = tinit, t1 = t0 + tres], [t1, t2], · · · , [tS�1, tS = tfinal]},
and similar to W (1)AB in Eq. (2), we define the weight between
nodes A and B in layer s 2 {1, . . . , S } as
W (1)ABs =
|rt=ts�1 (A, B)||rt=ts (A, B)| , (6)
where rt(A, B) is the Euclidean distance between thenodes A and B at time t [see Eq. (1)]. First, we treateach layer separately and detect communities as be-fore. We set tinit = 0.1 days and tfinal = 3.1 days. InFig. S13 of the SM [5], we show results for � = 1.We divide the time interval [tinit = 0.1, tfinal = 3.1]is uniformly into S = 30 non-overlapping intervals{[t0 = tinit = 0.1, 0.2), [0.2, 0.3), · · · , [3.0, tS = tfinal = 3.1]}with a temporal resolution of tres = 0.1.
We then apply multilayer community detection [26] to ourtime-dependent networks by using a generalized version ofthe modularity function in Eq. (4) for multilayer networks:
Qmulti =1
2µ
X
ABsr
" W (1)
ABs � �skAskBs
2ms
!�sr + �ABTBsr
#� (gAs, gBr) ,
(7)where A and B index nodes (i.e., fluid elements) as in the orig-inal modularity function in Eq. (4), and s and r index the timelayers in the multilayer network. (See Refs. [27, 28] for a re-view of multilayer networks.) That is, for each layer s, thereexists a separate network described by the adjacency-matrixelements W (1)
ABs. The quantity W (1)ABs, which describes the
strength of the interaction between fluid elements A and B attime s, is thus an element of an adjacency tensor [26, 27, 29].The intralayer interactions W (1)
ABs , 0 if nodes A and B areconnected in layer s, and W (1)
ABs = 0 otherwise. Additionally,kAs =
PB W (1)
ABs, we normalize in each layer s separately usingms =
PAB W (1)
ABs, and �s is the resolution parameter in layer s.To connect fluid elements to themselves when they are present
0 0.5
1 1.5
2 2.5
3
0 10 20 30 40 50 60 70initi
al p
oint
of t
ime
slic
e (d
ay)
node index
FIG. 3. (Color online) Multilayer (time-dependent) communitystructure of drifters for tinit = 0.1 day, tfinal = 3.1 day, and tres = 0.1.The resolution-parameter value is � = 1, and the interlayer couplingstrength is ! = 25. The vertical axis gives the initial point of timelayers ts in [ts, ts+1) where s = 0, 1, . . . , 29. MAP:I was unable todiscern what was meant by the description, and I am not entirelysure of the axis label either, so we need to adjust phrasing SHL:Ihope it’s clear now, and the horizontal axis indicates the node index.We indicate di↵erent communities by using di↵erent colors and sym-bols (also used in Fig. 4). The solid horizontal lines in the interiorcorrespond to the snapshots in Fig. 4.
maximizing
16
(a) (b) (c)
0
10
20
30
40
50
60
70
0 0.5 1 1.5 2 2.5 3
node
inde
xinitial point of time slice (day)
0
10
20
30
40
50
60
70
0 0.5 1 1.5 2 2.5 3
node
inde
x
initial point of time slice (day)
0
10
20
30
40
50
60
70
0 0.5 1 1.5 2 2.5 3
node
inde
x
initial point of time slice (day)
(d) (e) (f)
0
10
20
30
40
50
60
70
0 0.5 1 1.5 2 2.5 3
node
inde
x
initial point of time slice (day)
0
10
20
30
40
50
60
70
0 0.5 1 1.5 2 2.5 3
node
inde
x
initial point of time slice (day)
0
10
20
30
40
50
60
70
0 0.5 1 1.5 2 2.5 3
node
inde
x
initial point of time slice (day)
Supplemental Figure S14. Multilayer (i.e., time-dependent) community structure of drifters for tinit = 0.1 day, tfinal = 3.1 day, and tres = 0.1. Weuse a resolution-parameter value of � = 1 and various values of the interlayer coupling !. We measure the interaction strength between nodesusing the relative dispersion W (1)
ABs in Eq. (6) of the main text and multilayer modularity in Eq. (7) of the main text. (a) ! = 2 (Qmulti ⇡ 0.89478),(b) ! = 4 (Qmulti ⇡ 0.80002), (c) ! = 20 (Qmulti ⇡ 0.55415), (d) ! = 25 (Qmulti ⇡ 0.55697), (e) ! = 30 (Qmulti ⇡ 0.57146), and (f) ! = 40(Q ⇡ 0.60159). The horizontal axes gives the initial point of time layers ts in [ts, ts+1) where s = 0, 1, . . . , 29, and the vertical axes gives thenode index. MAP:why did you transpose this from the main text? we need to be consistent; note that I am confused about the ”timeorder” label, just as in the main text We represent the communities using di↵erent colors and symbols (also used in Fig. S15). The solidvertical lines in the interior of (d) correspond to the snapshots in Fig. S15. SHL:I transposed it in the main text due to the space issue. Irealized that the limited palette does not a↵ect this plot as I used the di↵erent symbols as well, so I removed that part.

Community Structure inTime-Dependent, Multiscale,and Multiplex NetworksPeter J. Mucha,1,2* Thomas Richardson,1,3 Kevin Macon,1 Mason A. Porter,4,5 Jukka-Pekka Onnela6,7
Network science is an interdisciplinary endeavor, with methods and applications drawn from acrossthe natural, social, and information sciences. A prominent problem in network science is thealgorithmic detection of tightly connected groups of nodes known as communities. We developed ageneralized framework of network quality functions that allowed us to study the communitystructure of arbitrary multislice networks, which are combinations of individual networks coupledthrough links that connect each node in one network slice to itself in other slices. This frameworkallows studies of community structure in a general setting encompassing networks that evolve overtime, have multiple types of links (multiplexity), and have multiple scales.
Thestudy of graphs, or networks, has a longtradition in fields such as sociology andmathematics, and it is now ubiquitous in
academic and everyday settings. An importanttool in network analysis is the detection ofmesoscopic structures known as communities (orcohesive groups), which are defined intuitively asgroups of nodes that are more tightly connected toeach other than they are to the rest of the network(1–3). One way to quantify communities is by aquality function that compares the number ofintracommunity edges to what one would expectat random.Given the network adjacencymatrixA,where the element Aij details a direct connectionbetween nodes i and j, one can construct a qual-ity functionQ (4, 5) for the partitioning of nodesinto communities as Q = ∑ ij (Aij − Pij)d(gi, gj),where d(gi, gj) = 1 if the community assignmentsgi and gj of nodes i and j are the same and 0otherwise, and Pij is the expected weight of theedge between i and j under a specified null model.
The choice of null model is a crucial con-sideration in studying network community struc-ture (2). After selecting a null model appropriateto the network and application at hand, one canuse a variety of computational heuristics to assignnodes to communities to optimize the quality Q(2, 3). However, such null models have not beenavailable for time-dependent networks; analyseshave instead depended on ad hoc methods to
piece together the structures obtained at differenttimes (6–9) or have abandoned quality functionsin favor of such alternatives as the MinimumDescriptionLength principle (10). Although tensordecompositions (11) have been used to clusternetwork data with different types of connections,no quality-function method has been developedfor such multiplex networks.
We developed a methodology to remove theselimits, generalizing the determination of commu-nity structure via quality functions to multislicenetworks that are defined by coupling multipleadjacency matrices (Fig. 1). The connectionsencoded by the network slices are flexible; theycan represent variations across time, variationsacross different types of connections, or evencommunity detection of the same network atdifferent scales. However, the usual procedure forestablishing a quality function as a direct count ofthe intracommunity edge weight minus that
expected at random fails to provide any contribu-tion from these interslice couplings. Because theyare specified by common identifications of nodesacross slices, interslice couplings are either presentor absent by definition, so when they do fall insidecommunities, their contribution in the count of intra-community edges exactly cancels that expected atrandom. In contrast, by formulating a null model interms of stability of communities under Laplaciandynamics, we have derived a principled generaliza-tion of community detection to multislice networks,
REPORTS
1Carolina Center for Interdisciplinary Applied Mathematics,Department of Mathematics, University of North Carolina,Chapel Hill, NC 27599, USA. 2Institute for Advanced Materials,Nanoscience and Technology, University of North Carolina,Chapel Hill, NC 27599, USA. 3Operations Research, NorthCarolina State University, Raleigh, NC 27695, USA. 4OxfordCentre for Industrial and Applied Mathematics, MathematicalInstitute, University of Oxford, Oxford OX1 3LB, UK. 5CABDyNComplexity Centre, University of Oxford, Oxford OX1 1HP, UK.6Department of Health Care Policy, Harvard Medical School,Boston, MA 02115, USA. 7Harvard Kennedy School, HarvardUniversity, Cambridge, MA 02138, USA.
*To whom correspondence should be addressed. E-mail:[email protected]
1
2
3
4
Fig. 1. Schematic of amultislice network. Four slicess= {1, 2, 3, 4} represented by adjacencies Aijs encodeintraslice connections (solid lines). Interslice con-nections (dashed lines) are encoded byCjrs, specifyingthe coupling of node j to itself between slices r and s.For clarity, interslice couplings are shown for only twonodes and depict two different types of couplings: (i)coupling between neighboring slices, appropriate forordered slices; and (ii) all-to-all interslice coupling,appropriate for categorical slices.
node
s
resolution parameters
coupling = 0
1 2 3 4
5
10
15
20
25
30
node
s
resolution parameters
coupling = 0.1
1 2 3 4
5
10
15
20
25
30
node
s
resolution parameters
coupling = 1
1 2 3 4
5
10
15
20
25
30
Fig. 2. Multislice community detection of theZachary Karate Club network (22) across multipleresolutions. Colors depict community assignments ofthe 34 nodes (renumbered vertically to groupsimilarly assigned nodes) in each of the 16 slices(with resolution parameters gs = {0.25, 0.5,…, 4}),for w = 0 (top), w = 0.1 (middle), and w =1 (bottom). Dashed lines bound the communitiesobtained using the default resolution (g = 1).
14 MAY 2010 VOL 328 SCIENCE www.sciencemag.org876
CORRECTED 16 JULY 2010; SEE LAST PAGE
on
Nov
embe
r 8, 2
011
ww
w.s
cien
cem
ag.o
rgD
ownl
oade
d fro
m
multilayer community detection method:P. J. Mucha, T. Richardson, K. Macon, M. A. Porter, and J.-P. Onnela, Science 328, 876 (2010).
0
10
20
30
40
50
60
70
0 0.5 1 1.5 2 2.5 3 3.5
drite
r ID
time (day)
Time interval of drifters
Supplemental Figure S11. The time intervals of drifters recorded are shown with the blue vertical lines
corresponding to the spacing for the multilayer network analysis. tinit = 0.1 (day), tfinal = 3.1 (day), and
tres = 0.1 (day).
13
Preliminary Results of Community Detection of the 72 Drifters (last updated: February 12, 2014)
I. DRIFTER DATA
40.7 40.8 40.9 41 41.1 41.2 41.3 41.4 41.5 41.6 41.7
−71.1
−71
−70.9
−70.8
−70.7
−70.6
−70.5
−70.4
lat
lon
FIG. 1. The figure of drifters’ trajectories by Hosein Amini.
• Figure 1: the figure of drifters’ trajectories.
A. Drifters’ Time Interval
• As shown in Fig. 2, the initial and final time points are all di↵erent for di↵erent drifters.
Therefore, we first set the initial time t = tinit = 0.2 (day) and consider several di↵erent final
time points as t = tfinal = 0.3, 1.5, and 3.0 (day) for single-layer networks in Sec. II. For
multilayer networks in Sec. III, we set t = tinit = 0.1 (day) and t = tfinal = 3.1 (day) and
divide the time interval into pieces as time windows (see Fig. 4).
• Only the drifters whose time interval entirely contains [tinit, tfinal] are considered for each
case of tfinal, so the numbers of nodes are smaller for larger tfinal (as noted in the caption of
Fig. 6).
1
latitude
long
itude
real ocean flow: Northern Atlantic region (global interactions)
4
interactions (i.e., all of the nonzero elements in the weightfunctions W (l)
AB, where l 2 {1, 2}). Because we use all of theglobal interactions, we obtain much more spiral-like commu-nities (see Figs. S6–S9 of the SM [5]), compared to blob-likecommunities shown in Fig. 2.
Results for Snapshots of Drifter Data.—GH:Where is thisfrom? Irina Rypina, maybe. MAP:we also need to brieflydescribe what is in the data, so that readers know whatwe’re talking about; the first sentence below comes acrossas a non sequitur SHL:I think we need more informationfrom Irina Rypina (starting this section with such infor-mation would make the transition much smoother), as wellas the permission to use it in our paper. In Fig. S10 of theSM [5], we show the drifter trajectories. The drifters are re-leased at di↵erent times, and their trajectories are recordedfor di↵erent time intervals. (See Fig. S11 of the SM [5].) Forconsistency, we need a common time interval [tinit, tfinal] overwhich the trajectories are known for all drifters. The earliestinitial time is tinit = 0.2 (days). For the final time tfinal, weconsider several values: tfinal = 0.3, tfinal = 1.5, and tfinal = 3.0(days). For each final time, we only include drifters whosetime interval of recorded trajectory contains the entire interval[tinit, tfinal] are as nodes in a network. Consequently, the num-ber of network nodes is smaller for later tfinal. (See Fig. S12of the SM [5].)
For all of the drifters, we take the common initial time tinitand the final time tfinal as we described in the previous para-graph. The weight between two drifters A and B is based onrelative dispersion W (1)
AB defined in Eq. (1), where |ri(A, B)| and|r f (A, B)|, respectively, give the initial and final Euclidean dis-tances in the 2D (longitude, latitude) plane [25]. Note that thedeformation-gradient tensor F(A) in Eq. (3) is unknown for thedrifter data, so we cannot use W (2)
AB in Eq. (3) in those cases.The modularity for the NG null model is given by Eq. (4). InFig. S12 of the SM [5], we show the detected communities forfour di↵erent values of the resolution parameter �.
MAP:the discussion of what a community is above seemsrather redundant with earlier discussions? I suspect spacemay be an issue, in which case it should be shortened toonly what we need, but it also seems like we may wish toshorten it to minimize redundancy anyway; I am trying tofigure out what it’s contributing
SHL:I commented out that part, and I moved the Gen-Louvain part to the methodology section because GenLou-vain is used throughout the work.
MAP:should time-dependent community structure start anew section in order to emphasize it?
SHL:I separated the sections.Results for Time-Dependent Drifter Data.—To gain in-
sights into the dynamics of LCSs, it is also helpful to ex-amine time-dependent community structure. To do this,we will split up the full temporal dynamics into a se-ries of intervals. The simplest approach is to divide thetime interval [tinit, tfinal] uniformly into S “layers” usinga temporal resolution of tres. This yields the time in-tervals {[t0 = tinit, t1 = t0 + tres], [t1, t2], · · · , [tS�1, tS = tfinal]},
and similar to W (1)AB in Eq. (2), we define the weight between
nodes A and B in layer s 2 {1, . . . , S } as
W (1)ABs =
|rt=ts�1 (A, B)||rt=ts (A, B)| , (6)
where rt(A, B) is the Euclidean distance between thenodes A and B at time t [see Eq. (1)]. First, we treateach layer separately and detect communities as be-fore. We set tinit = 0.1 days and tfinal = 3.1 days. InFig. S13 of the SM [5], we show results for � = 1.We divide the time interval [tinit = 0.1, tfinal = 3.1]is uniformly into S = 30 non-overlapping intervals{[t0 = tinit = 0.1, 0.2), [0.2, 0.3), · · · , [3.0, tS = tfinal = 3.1]}with a temporal resolution of tres = 0.1.
We then apply multilayer community detection [26] to ourtime-dependent networks by using a generalized version ofthe modularity function in Eq. (4) for multilayer networks:
Qmulti =1
2µ
X
ABsr
" W (1)
ABs � �skAskBs
2ms
!�sr + �ABTBsr
#� (gAs, gBr) ,
(7)where A and B index nodes (i.e., fluid elements) as in the orig-inal modularity function in Eq. (4), and s and r index the timelayers in the multilayer network. (See Refs. [27, 28] for a re-view of multilayer networks.) That is, for each layer s, thereexists a separate network described by the adjacency-matrixelements W (1)
ABs. The quantity W (1)ABs, which describes the
strength of the interaction between fluid elements A and B attime s, is thus an element of an adjacency tensor [26, 27, 29].The intralayer interactions W (1)
ABs , 0 if nodes A and B areconnected in layer s, and W (1)
ABs = 0 otherwise. Additionally,kAs =
PB W (1)
ABs, we normalize in each layer s separately usingms =
PAB W (1)
ABs, and �s is the resolution parameter in layer s.To connect fluid elements to themselves when they are present
0 0.5
1 1.5
2 2.5
3
0 10 20 30 40 50 60 70initi
al p
oint
of t
ime
slic
e (d
ay)
node index
FIG. 3. (Color online) Multilayer (time-dependent) communitystructure of drifters for tinit = 0.1 day, tfinal = 3.1 day, and tres = 0.1.The resolution-parameter value is � = 1, and the interlayer couplingstrength is ! = 25. The vertical axis gives the initial point of timelayers ts in [ts, ts+1) where s = 0, 1, . . . , 29. MAP:I was unable todiscern what was meant by the description, and I am not entirelysure of the axis label either, so we need to adjust phrasing SHL:Ihope it’s clear now, and the horizontal axis indicates the node index.We indicate di↵erent communities by using di↵erent colors and sym-bols (also used in Fig. 4). The solid horizontal lines in the interiorcorrespond to the snapshots in Fig. 4.
4
interactions (i.e., all of the nonzero elements in the weightfunctions W (l)
AB, where l 2 {1, 2}). Because we use all of theglobal interactions, we obtain much more spiral-like commu-nities (see Figs. S6–S9 of the SM [5]), compared to blob-likecommunities shown in Fig. 2.
Results for Snapshots of Drifter Data.—GH:Where is thisfrom? Irina Rypina, maybe. MAP:we also need to brieflydescribe what is in the data, so that readers know whatwe’re talking about; the first sentence below comes acrossas a non sequitur SHL:I think we need more informationfrom Irina Rypina (starting this section with such infor-mation would make the transition much smoother), as wellas the permission to use it in our paper. In Fig. S10 of theSM [5], we show the drifter trajectories. The drifters are re-leased at di↵erent times, and their trajectories are recordedfor di↵erent time intervals. (See Fig. S11 of the SM [5].) Forconsistency, we need a common time interval [tinit, tfinal] overwhich the trajectories are known for all drifters. The earliestinitial time is tinit = 0.2 (days). For the final time tfinal, weconsider several values: tfinal = 0.3, tfinal = 1.5, and tfinal = 3.0(days). For each final time, we only include drifters whosetime interval of recorded trajectory contains the entire interval[tinit, tfinal] are as nodes in a network. Consequently, the num-ber of network nodes is smaller for later tfinal. (See Fig. S12of the SM [5].)
For all of the drifters, we take the common initial time tinitand the final time tfinal as we described in the previous para-graph. The weight between two drifters A and B is based onrelative dispersion W (1)
AB defined in Eq. (1), where |ri(A, B)| and|r f (A, B)|, respectively, give the initial and final Euclidean dis-tances in the 2D (longitude, latitude) plane [25]. Note that thedeformation-gradient tensor F(A) in Eq. (3) is unknown for thedrifter data, so we cannot use W (2)
AB in Eq. (3) in those cases.The modularity for the NG null model is given by Eq. (4). InFig. S12 of the SM [5], we show the detected communities forfour di↵erent values of the resolution parameter �.
MAP:the discussion of what a community is above seemsrather redundant with earlier discussions? I suspect spacemay be an issue, in which case it should be shortened toonly what we need, but it also seems like we may wish toshorten it to minimize redundancy anyway; I am trying tofigure out what it’s contributing
SHL:I commented out that part, and I moved the Gen-Louvain part to the methodology section because GenLou-vain is used throughout the work.
MAP:should time-dependent community structure start anew section in order to emphasize it?
SHL:I separated the sections.Results for Time-Dependent Drifter Data.—To gain in-
sights into the dynamics of LCSs, it is also helpful to ex-amine time-dependent community structure. To do this,we will split up the full temporal dynamics into a se-ries of intervals. The simplest approach is to divide thetime interval [tinit, tfinal] uniformly into S “layers” usinga temporal resolution of tres. This yields the time in-tervals {[t0 = tinit, t1 = t0 + tres], [t1, t2], · · · , [tS�1, tS = tfinal]},
and similar to W (1)AB in Eq. (2), we define the weight between
nodes A and B in layer s 2 {1, . . . , S } as
W (1)ABs =
|rt=ts�1 (A, B)||rt=ts (A, B)| , (6)
where rt(A, B) is the Euclidean distance between thenodes A and B at time t [see Eq. (1)]. First, we treateach layer separately and detect communities as be-fore. We set tinit = 0.1 days and tfinal = 3.1 days. InFig. S13 of the SM [5], we show results for � = 1.We divide the time interval [tinit = 0.1, tfinal = 3.1]is uniformly into S = 30 non-overlapping intervals{[t0 = tinit = 0.1, 0.2), [0.2, 0.3), · · · , [3.0, tS = tfinal = 3.1]}with a temporal resolution of tres = 0.1.
We then apply multilayer community detection [26] to ourtime-dependent networks by using a generalized version ofthe modularity function in Eq. (4) for multilayer networks:
Qmulti =1
2µ
X
ABsr
" W (1)
ABs � �skAskBs
2ms
!�sr + �ABTBsr
#� (gAs, gBr) ,
(7)where A and B index nodes (i.e., fluid elements) as in the orig-inal modularity function in Eq. (4), and s and r index the timelayers in the multilayer network. (See Refs. [27, 28] for a re-view of multilayer networks.) That is, for each layer s, thereexists a separate network described by the adjacency-matrixelements W (1)
ABs. The quantity W (1)ABs, which describes the
strength of the interaction between fluid elements A and B attime s, is thus an element of an adjacency tensor [26, 27, 29].The intralayer interactions W (1)
ABs , 0 if nodes A and B areconnected in layer s, and W (1)
ABs = 0 otherwise. Additionally,kAs =
PB W (1)
ABs, we normalize in each layer s separately usingms =
PAB W (1)
ABs, and �s is the resolution parameter in layer s.To connect fluid elements to themselves when they are present
0 0.5
1 1.5
2 2.5
3
0 10 20 30 40 50 60 70initi
al p
oint
of t
ime
slic
e (d
ay)
node index
FIG. 3. (Color online) Multilayer (time-dependent) communitystructure of drifters for tinit = 0.1 day, tfinal = 3.1 day, and tres = 0.1.The resolution-parameter value is � = 1, and the interlayer couplingstrength is ! = 25. The vertical axis gives the initial point of timelayers ts in [ts, ts+1) where s = 0, 1, . . . , 29. MAP:I was unable todiscern what was meant by the description, and I am not entirelysure of the axis label either, so we need to adjust phrasing SHL:Ihope it’s clear now, and the horizontal axis indicates the node index.We indicate di↵erent communities by using di↵erent colors and sym-bols (also used in Fig. 4). The solid horizontal lines in the interiorcorrespond to the snapshots in Fig. 4.
maximizing
16
(a) (b) (c)
0
10
20
30
40
50
60
70
0 0.5 1 1.5 2 2.5 3
node
inde
xinitial point of time slice (day)
0
10
20
30
40
50
60
70
0 0.5 1 1.5 2 2.5 3
node
inde
x
initial point of time slice (day)
0
10
20
30
40
50
60
70
0 0.5 1 1.5 2 2.5 3
node
inde
x
initial point of time slice (day)
(d) (e) (f)
0
10
20
30
40
50
60
70
0 0.5 1 1.5 2 2.5 3
node
inde
x
initial point of time slice (day)
0
10
20
30
40
50
60
70
0 0.5 1 1.5 2 2.5 3
node
inde
x
initial point of time slice (day)
0
10
20
30
40
50
60
70
0 0.5 1 1.5 2 2.5 3
node
inde
x
initial point of time slice (day)
Supplemental Figure S14. Multilayer (i.e., time-dependent) community structure of drifters for tinit = 0.1 day, tfinal = 3.1 day, and tres = 0.1. Weuse a resolution-parameter value of � = 1 and various values of the interlayer coupling !. We measure the interaction strength between nodesusing the relative dispersion W (1)
ABs in Eq. (6) of the main text and multilayer modularity in Eq. (7) of the main text. (a) ! = 2 (Qmulti ⇡ 0.89478),(b) ! = 4 (Qmulti ⇡ 0.80002), (c) ! = 20 (Qmulti ⇡ 0.55415), (d) ! = 25 (Qmulti ⇡ 0.55697), (e) ! = 30 (Qmulti ⇡ 0.57146), and (f) ! = 40(Q ⇡ 0.60159). The horizontal axes gives the initial point of time layers ts in [ts, ts+1) where s = 0, 1, . . . , 29, and the vertical axes gives thenode index. MAP:why did you transpose this from the main text? we need to be consistent; note that I am confused about the ”timeorder” label, just as in the main text We represent the communities using di↵erent colors and symbols (also used in Fig. S15). The solidvertical lines in the interior of (d) correspond to the snapshots in Fig. S15. SHL:I transposed it in the main text due to the space issue. Irealized that the limited palette does not a↵ect this plot as I used the di↵erent symbols as well, so I removed that part.
40.9
41
41.1
41.2
41.3
41.4
41.5
-71.1 -71 -70.9 -70.8 -70.7 -70.6 -70.5 -70.4
latit
ude
longitude
ω=25.0, γ=1.0, 1 community (Q=0.55697)
final positions at t=tfinal=0.2: (61 nodes), time slice of tinit=0.1 and tfinal=0.2)
40.9
41
41.1
41.2
41.3
41.4
41.5
-71.1 -71 -70.9 -70.8 -70.7 -70.6 -70.5 -70.4la
titud
elongitude
ω=25.0, γ=1.0, 9 communities (Q=0.55697)
final positions at t=tfinal=1.0: (54 nodes), time slice of tinit=0.9 and tfinal=1.0)
40.9
41
41.1
41.2
41.3
41.4
41.5
-71.1 -71 -70.9 -70.8 -70.7 -70.6 -70.5 -70.4
latit
ude
longitude
ω=25.0, γ=1.0, 1 community (Q=0.55697)
final positions at t=tfinal=0.5: (55 nodes), time slice of tinit=0.4 and tfinal=0.5)
40.9
41
41.1
41.2
41.3
41.4
41.5
-71.1 -71 -70.9 -70.8 -70.7 -70.6 -70.5 -70.4
latit
ude
longitude
ω=25.0, γ=1.0, 7 communities (Q=0.55697)
final positions at t=tfinal=2.0: (45 nodes), time slice of tinit=1.9 and tfinal=2.0)
40.9
41
41.1
41.2
41.3
41.4
41.5
-71.1 -71 -70.9 -70.8 -70.7 -70.6 -70.5 -70.4
latit
ude
longitude
ω=25.0, γ=1.0, 9 communities (Q=0.55697)
final positions at t=tfinal=1.3: (50 nodes), time slice of tinit=1.2 and tfinal=1.3)
40.9
41
41.1
41.2
41.3
41.4
41.5
-71.1 -71 -70.9 -70.8 -70.7 -70.6 -70.5 -70.4
latit
ude
longitude
ω=25.0, γ=1.0, 2 communities (Q=0.55697)
final positions at t=tfinal=3.0: (33 nodes), time slice of tinit=2.9 and tfinal=3.0)

real ocean flow: The Global Drifter Program (global interactions)
http://www.aoml.noaa.gov/phod/dac/index.php

real ocean flow: The Global Drifter Program (global interactions)
http://www.aoml.noaa.gov/phod/dac/index.php
a small sample data in the Northern Atlantic region: Sep. 1-30, 2013
10
20
30
40
50
60
-70 -60 -50 -40 -30 -20
latit
ude
longitude
γ=1.0, 6 communities (Q=0.030906)Sep. 1-30, 2013, wAB = dAB(t=tinit)/dAB(t=tfinal): snapshot on Sep. 1
10
20
30
40
50
60
-70 -60 -50 -40 -30 -20la
titud
elongitude
γ=1.0, 6 communities (Q=0.030906)Sep. 1-30, 2013, wAB = dAB(t=tinit)/dAB(t=tfinal): snapshot on Sep. 30
September 1, 2013 September 30, 2013
3
(a) (b)
FIG. 2. (Color online) Ten communities (each of a di↵erent color), which we detect algorithmically from a network constructed from nearest-neighbor interactions, from the simulated data that we show in Fig. 1. Panels (a) and (b), respectively, show the fluid elements at the initial andfinal times. We detect the communities using the relative dispersion W (1)
AB in Eq. (1) and the modularity QNG in Eq. (4). The resolution-parametervalue is � = 0.005. See Figs. S2–S5 in SM [5] for similar results using the modularity QLN and various resolution-parameter values.
that intra-community interactions between nodes are signif-icantly stronger than the inter-community interactions. Wedetect the set {gA | A 2 V} of communities, where node Ais assigned to community gA, such that modularity is maxi-mized. We use di↵erent null models for the relative disper-sion W (1)
AB (which is symmetric) and the deformation-gradienttensor W (2)
AB (which is not).For the relative dispersion between nodes A and B, we use
the modularity QNG for the Newman–Girvan (NG) null model[8, 20]:
QNG =1
2m
X
AB
W (1)
AB � �kAkB
2m
!� (gA, gB) , (4)
where kA =P
B W (1)AB =
PB W (1)
BA is the sum of weights corre-sponding to the interactions of A, the quantity 2m =
PA kA is
the total sum of weights in all of the interactions, � is a reso-lution parameter, and �(gA, gB) = 1 if A and B are in the samecommunity and 0 if they are not. The normalization constant1/(2m) enforces Q 2 [�1, 1]. Larger resolution-parameter val-ues � tend to result in smaller communities (with respect to thetypical number of nodes in a community).
For the deformation-gradient tensor between nodes A andB, we use the modularity QLN with the Leicht–Newman (LN)null model [21]:
QLN =1m
X
AB
0BBBB@W (2)
AB � �kin
A koutB
m
1CCCCA � (gA, gB) , (5)
where kinA =
PB W (2)
BA (respectively, koutA =
PB W (2)
AB) is the sumof incoming (respectively, outgoing) weights corresponding
to the interactions of A, and m =P
A kinA =
PA kout
A is the totalsum of weights for all of the interactions. (This sum is nec-essarily the same for both incoming and outgoing weights.)To detect the communities for both Eqs. (4) and (5), we usethe GenLouvain code [22], which is an implementation of amethod that is similar to the locally-greedy Louvain methodof Ref. [23].
Results for Simulation Data.—The turbulence-simulationdata consists of 512 ⇥ 512 grid points = 262144 nodes andtheir interactions given by Eqs. (1) and (3). For computationaltractability, we only consider the four nearest-neighbor inter-actions in the 2D grid system. This corresponds to setting allof the interactions between non-nearest-neighboring nodes inEqs. (1) and (3) to zero. The initial time is tinit = 0, and thefinal time is tfinal = 50 in the simulation time units. In Fig. 2,we show the ten detected communities using W (1)
AB [see Eq. (1)]with � = 0.005 [24]. For small values of �, one detects a smallnumber of large communities. They have blob-like structuresthat do not undergo substantial filamentation. Larger valuesof �, however, yield a larger number of communities, whichexhibit spiral patterns that correspond to vortex filaments. InFigs. S2–S5 of the SM [5], we show the dependence of thedetected communities for a set of values of � and using theweight function W (2)
AB. We find that the weight functions W (1)AB
and W (2)AB yield similar communities for the same value of �.
In Figs. S6–S9 of the SM [5], we present results for sam-pled grid points in which we use every fourth element (whichyields a 128⇥128 grid points and thus 16384 nodes) along thex and y axes. In this case, we also include all of their global
maximizing

a small sample data in the Northern Atlantic region: Sep. 1-30, 2013
10
20
30
40
50
60
-70 -60 -50 -40 -30 -20
latit
ude
longitude
γ=1.0, 6 communities (Q=0.030906)Sep. 1-30, 2013, wAB = dAB(t=tinit)/dAB(t=tfinal): snapshot on Sep. 1
10
20
30
40
50
60
-70 -60 -50 -40 -30 -20
latit
ude
longitude
γ=1.0, 6 communities (Q=0.030906)Sep. 1-30, 2013, wAB = dAB(t=tinit)/dAB(t=tfinal): snapshot on Sep. 30
September 1, 2013 September 30, 2013

a small sample data in the Northern Atlantic region: Sep. 1-30, 2013
10
20
30
40
50
60
-70 -60 -50 -40 -30 -20
latit
ude
longitude
γ=1.0, 6 communities (Q=0.030906)Sep. 1-30, 2013, wAB = dAB(t=tinit)/dAB(t=tfinal): snapshot on Sep. 1
10
20
30
40
50
60
-70 -60 -50 -40 -30 -20
latit
ude
longitude
γ=1.0, 6 communities (Q=0.030906)Sep. 1-30, 2013, wAB = dAB(t=tinit)/dAB(t=tfinal): snapshot on Sep. 30
September 1, 2013 September 30, 2013
-60-40-20
0 20 40 60 80
-150 -100 -50 0 50 100 150
latit
ude
longitude
γ=1.0, 6 communities (Q=0.023324)Sep. 1-30, 2013, wAB = dAB(t=tinit)/dAB(t=tfinal): snapshot on Sep. 1
-60-40-20
0 20 40 60 80
-150 -100 -50 0 50 100 150
latit
ude
longitude
γ=1.0, 6 communities (Q=0.023324)Sep. 1-30, 2013, wAB = dAB(t=tinit)/dAB(t=tfinal): snapshot on Sep. 30

Summary and Outlook
• analysis of Lagrangian coherent structures (LCSs) in terms of interrelated fluid particles or “networks”• advantage: based on the observable relative dispersion
without involving the differential terms in contrast to the conventional variational approach (more practical for real data)
• single- and multilayer (temporal + spatial) community identifications
• future work• more systematic approach by controlling the resolution
parameter, interlayer coupling strength, etc.• any insight from the network approach applicable to the
system that cannot be revealed by conventional fluid dynamics approaches?
these slides in .pdf: http://www.slideshare.net/lshlj82/finding-lagrangian-coherent-structures-using-community-detection-47177457