Embed Size (px)
Citation preview

CAPTURA DE LA REALIDAD Y DIGITALIZACIÓN

2 ▌2 ▌
Introducción

3 ▌
Introducción
DATA

4 ▌4 ▌
VisióntécnicaConcepto Tecnologías
Plataformas Servicios

Visión Técnica
5 ▌
Concepto
Visión Técnica
6 ▌
Concepto
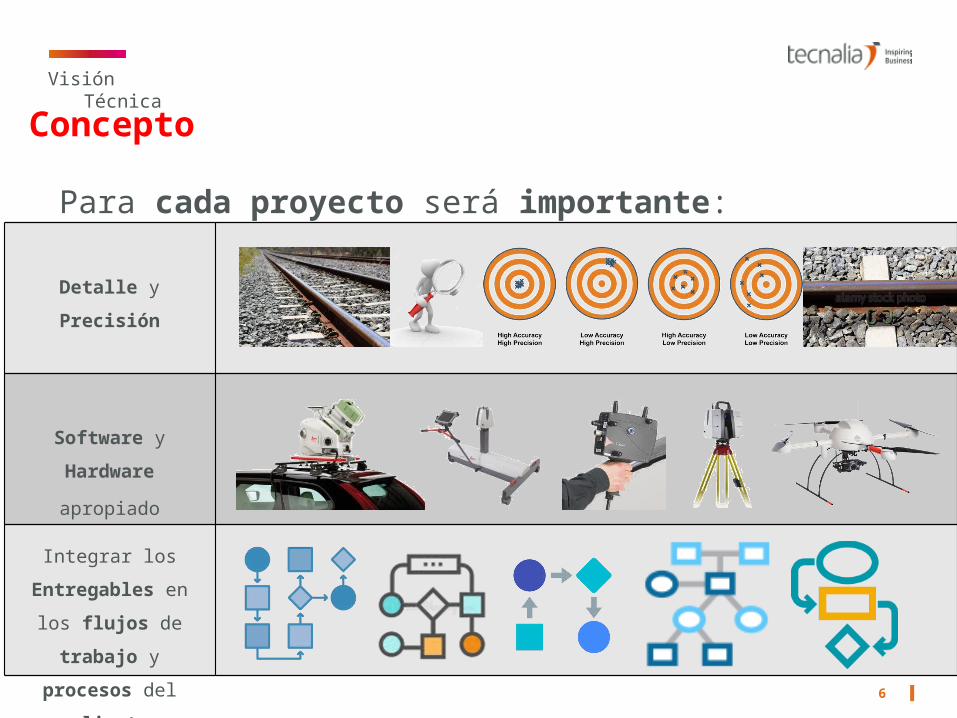
Para cada proyecto será importante:
Integrar los
Entregables en los
flujos de trabajo y
procesos del cliente
Detalle y Precisión
Software y Hardware
apropiado
Visión Técnica
7 ▌
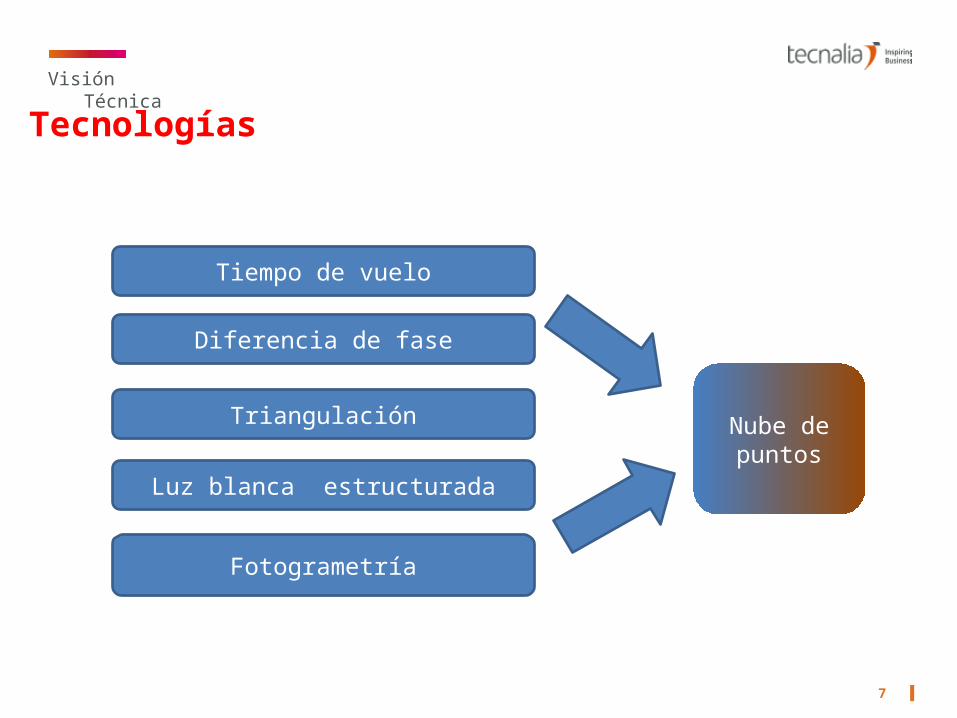
Nube de puntos
Tiempo de vuelo
Fotogrametría
Diferencia de fase
Triangulación
Luz blanca estructurada
Tecnologías

¿Qué es TLS? Terrestrial Laser Scanner
8 ▌8 ▌
• Sistema de medición 3D estacionario.
• Basado en la emisión y análisis de un
haz láser que refleja en la superficie del
objeto
• Preciso, rápido y sin contacto.
• Resultado nubes de puntos del objeto
escaneado. Adquiere datos de forma
masiva.
• Información adicional como valores de
intensidad e imagen.
• Rango: hasta 350 m
• Velocidad: 1 millón puntos / s
• Precisión: 1 mm – 2 mm
• Software utilizado:
• Gestión de nubes de puntos• Modelización, exportable a programas más
populares (CAD, Catia, Rhino, Solidworks…)
¿Qué es TLS? Terrestrial Laser Scanner
9 ▌9 ▌

¿Qué es HLS? Handheld Laser Scanner
10 ▌10 ▌

• Sistema de medición 3D movil.
• Basado en la emisión de luz blanca
estructurada, o triangulación, que refleja en
la superficie del objeto
• Preciso, rápido y sin contacto.
• Resultado nubes de puntos del objeto
escaneado. Adquiere datos de forma
masiva.
• Captura datos adicionales como color.
• Rango: de 1,2 m – 3,6 m (max 3 m3)
• Velocidad: 200.000 a 500.000 mediciones/s
• Precisión: 0,03 mm – 0,1 mm
• Software utilizado:
• Gestión de nubes de puntos y/o superficie NURBS
• Modelización, exportable a programas más populares (CAD, Catia, Rhino, Solidworks…)
¿Qué es HLS? Handheld Laser Scanner
11 ▌11 ▌

¿Qué es SLS? Subsea Laser Scanner
12 ▌12 ▌

• Sistema de medición 3D submarino.
• Basado en la emisión y análisis de un haz
láser que refleja en la superficie del objeto
• Embarcable en ROV.
• Rango: de 2 m – 45 m
• Campo de visión: 30º x 30º
• Precisión: 4 mm – 6 mm
• Depth: max 3000 m
• Software utilizado:
• Gestión de nubes de puntos• Modelización, exportable a programas más
populares (CAD, Catia, Rhino, Solidworks…)
¿Qué es SLS? Subsea Laser Scanner
13 ▌13 ▌

¿Qué es MLS? Mobile Laser Scanner
14 ▌14 ▌

• Sistema de medición móvil, sobre vehículo,
vagón o persona.
• Captura imágenes, además de nube de
puntos, conformando imágenes 360 con
posibilidad de medición.
• Rango: de 40 m – 270 m
• Velocidad: 1 millón puntos / s
• Precisión: 0,5 mm – 4 mm
• Foto 360
• Software utilizado:
• Gestión de nubes de puntos• Modelización, exportable a programas más
populares (CAD, Catia, Rhino, Solidworks…)
¿Qué es MLS? Mobile Laser Scanner
15 ▌15 ▌

Visión Técnica
16 ▌
¿Qué es UAV? Unmanned Aerial Vehicle
• Autonomía de vuelo ±20 mins
• Precisión de fotogrametría ± 2/3 cm
• Posibilidad de medición dimensional (distancias, superficies y volúmenes)
• Capacidad multisensor
• Software de restitución fotogramétrica y de piloto automático
¿Qué es UAV? Unmanned Aerial System
• Vehículo Aéreo no Tripulado
• Controlado de forma Remota
• Operado automático / manual • Transporta una serie de sensores en
función de cada aplicación
• Puntos de vista elevados y más allá del alcance visual
• “Ver” y “Medir”

Visión Técnica
18 ▌
Nube de puntos

Visión Técnica
19 ▌
Nube de puntos
Living Room 5mm
Living Room 10mm
Bush Cloud

ServiciosVisión Técnica
20 ▌
Modelado 3DProcesado de nube de puntos
SCAN-to-CAD/BIM/CFD/FEA
SCAN-to-PRINT/Additive ManufacturingPiping / MEP
Inspección 3DControl de Calidad Dimensional
Ingeniería Inversa
Gestión de Activos
Inspección de Superficies
Análisis de Interferencias

21 ▌21 ▌
Aplicaciones
Ferroviario Industrial
Minería AECO
Oil&Gas

Aplicaciones
22 ▌
• Captación y digitalización de entornos de línea ferroviaria
Pérdidas de suelo, subsidencias en balasto

Aplicaciones
23 ▌
• Captación y digitalización de entornos de línea ferroviaria
Caracterización geométrica de túneles
Divergencia de real (nube puntos) vs ideal (proyecto)

Aplicaciones
24 ▌
• Captación y digitalización de entornos de línea ferroviaria
Extracción de vía, inventario de señalética, distancias a elementos…

Aplicaciones
25 ▌
• Captación y digitalización de entornos de línea ferroviaria
Análisis de interferencias/colisiones
Elementos en estaciones, túneles… Vegetación en exterior…

Aplicaciones
26 ▌
• Captación y digitalización de entornos industriales complejos
Tuberías, accesorios, bombas y demás equipos, estructuras metálicas de soporte…

Aplicaciones
27 ▌
• Captación y digitalización de túneles carreteros y ferroviarios
En fase OBRA.
Captura Geométrica de Excavación, de Gunita y de Revestimiento

Aplicaciones
28 ▌
• Captación y digitalización de túneles carreteros y ferroviarios
En fase EXPLOTACIÓN.
Captura Geométrica de Excavación, de Gunita y de Revestimiento

Aplicaciones
29 ▌
• Volumetrías de acopios de materiales.
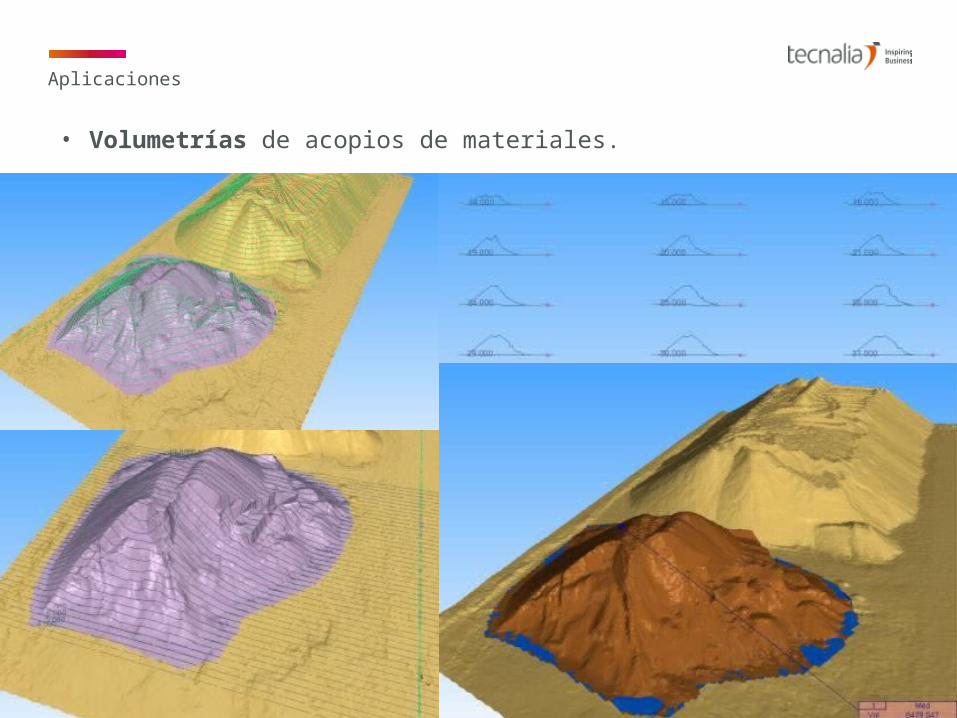
Aplicaciones
30 ▌
• Volumetrías de acopios de materiales.
Aplicaciones
31 ▌
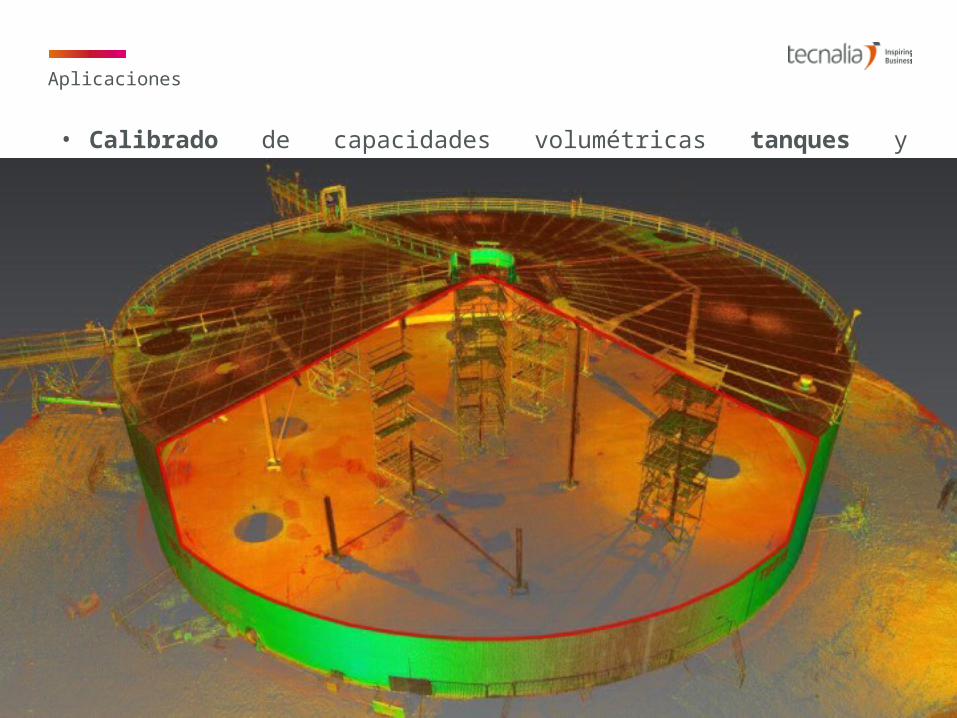
• Calibrado de capacidades volumétricas tanques y depósitos.
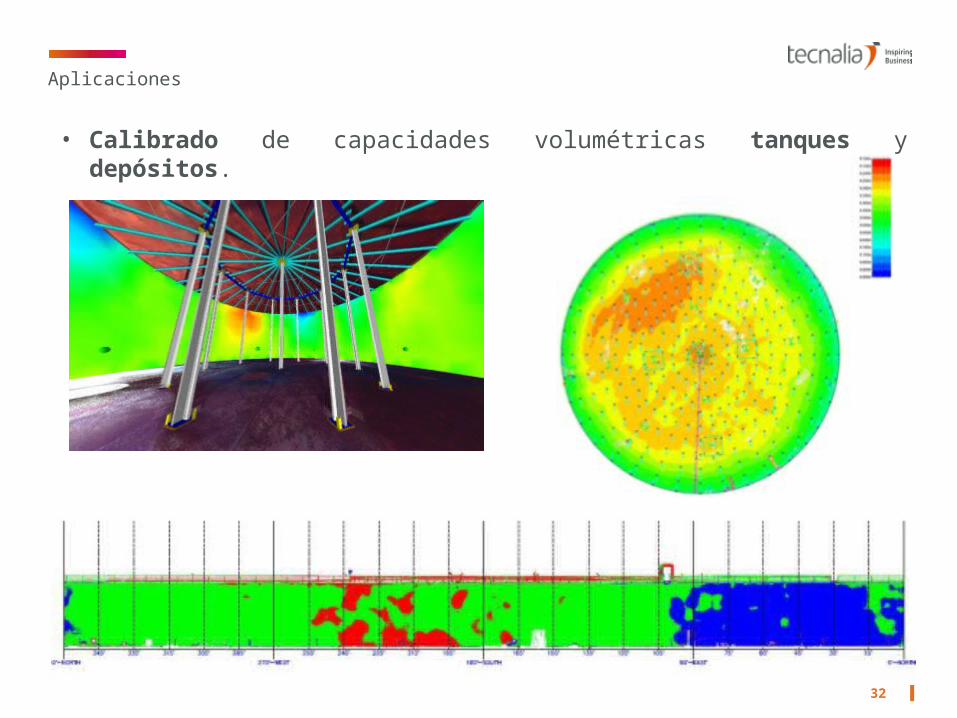
Aplicaciones
32 ▌
• Calibrado de capacidades volumétricas tanques y depósitos.
Aplicaciones
33 ▌
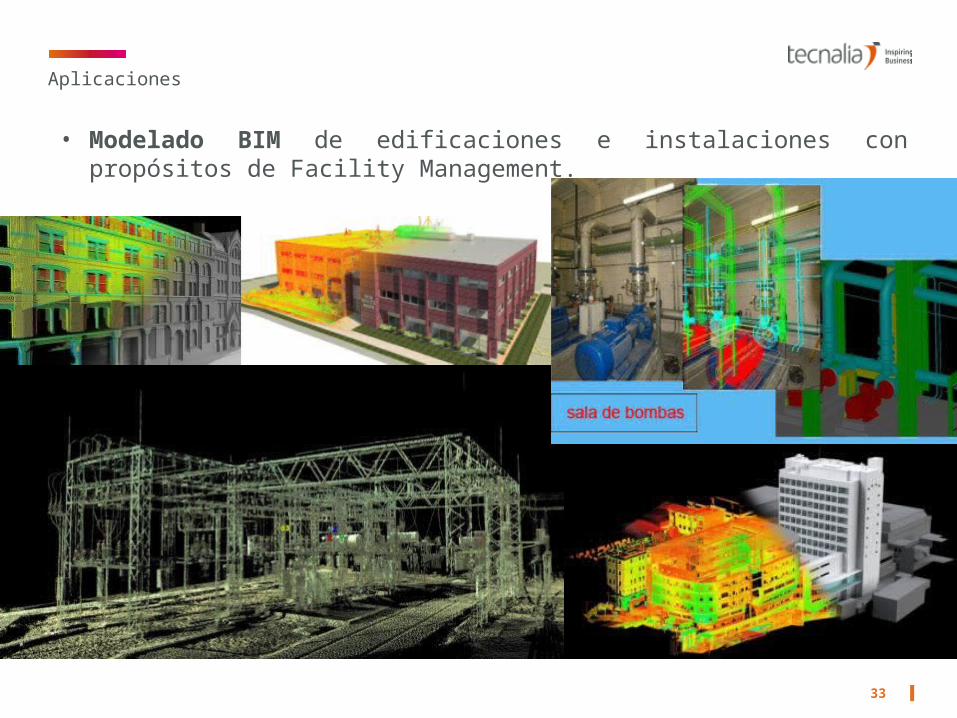
• Modelado BIM de edificaciones e instalaciones con propósitos de Facility Management.

Aplicaciones
34 ▌
• Inspección geométrica superficial no destructiva de tuberíasCORROSIÓN DAÑO MECÁNICO
35 ▌35 ▌
Conclusiones

Conclusiones
36 ▌
• Mercado cada vez más pujante y que afecta a multitud de verticales.
• Funcionamiento de proyecto y toma de decisiones con información real
• Seguro, mediciones a distancia. No interrumpe la producción.
• Rápido y preciso. Coste-efectivo.
• Servicio al alcance de vuestra mano.
Visita nuestro blog:http://blogs.tecnalia.com/inspiring-blog/
www.tecnalia.com
Abel Capelastegui | [email protected] | +34 647 406 427
Muchas gracias





























