Embed Size (px)
Citation preview

CNN-RNN: A Unified Framework for Multi-label Image Classification
2016/7/24 @CV勉強会酒井 俊樹

自己紹介
名前:酒井 俊樹(@104kisakai)
所属:NTTドコモ
仕事:画像認識API/サービスの研究開発(NTT)
● 局所特徴量を用いた画像認識https://www.nttdocomo.co.jp/binary/pdf/corporate/technology/rd/technical_journal/bn/vol23_1/vol23_1_004jp.pdf
● Deep Learningを用いた画像認識https://www.nttdocomo.co.jp/binary/pdf/corporate/technology/rd/technical_journal/bn/vol24_1/vol24_1_007jp.pdf
● 画像認識APIhttps://dev.smt.docomo.ne.jp
本発表は個人で行うものであり、所属組織とは関係ありません。

この論文の概要
CNN-RNN: A Unified Framework for Multi-label Image Classification
● 著者:Jiang Wang et al.● Baidu researchの研究(著者の何人かはその後転職)
概要
● CNNとRNNを組み合わせたMulti labelでの画像分類フレームワークを提案○ SOTAを上回る精度
● 各labelが画像上のどこに着目しているか(attention)を可視化

Multi-label Image Classification● スマホユーザが撮影した画像
○ 様々なオブジェクト /シーンが混ざっている
○ “画像認識のため ”に撮っていない画像の
認識/ タグ付は難しい
● CNNを用いた画像認識(私見)○ Single label classification
■ 精度は高い
○ instance-based recognition■ ここまでやらなくて良い事も多い
■ 画像全体のシーン /activity等を認識できない
ひつじ
犬芝牧場
空
旅行
Multi-label Image Classification

Multi label classificationの課題
● labelの共起
(co-ocuurence dependency)○ 雲と空は共起しやすい
○ 水と車は共起しにくい
○ グラフを用いて表現できるが …
labelの数に応じてパラメタが増える
● labelの意味の重複
● 画像全体 or 局所○ 画像全体からしか推定できないタグ
■ 画像のシーン /アクティビティ
○ 画像全体から特徴量を抽出すると、
小さいオブジェクト等が見逃されがち
0.8
0.1
0.2
空
雲
人
ocean; sea; water
ship; boat; vessel; craft; vehicle; watercraft

提案手法: CNN-RNN● labelの共起
→RNNを用いて学習
● 画像全体 or 局所
→RNNによりAttentionをmodel化→画像中の一部分にattention
● labelの意味の重複
→image/label embedding spaceで表現
空 雲
空 雲
鳥
oceansea
shipboat
watercraft
people
船の画像

提案手法: CNN-RNN
CNNで抽出した特徴量
RNNの出力+画像特徴量
labelとimage featureのembedding space

提案手法: CNN-RNN
labelの1hot vectorを行列UIを用いてembedding space上のvectorに変換
vector sum
labelに逆変換

ネットワーク構造
● CNN: VGG 16○ ImageNet2012のデータで事前学習
○ fine-tunngしない
● RNN: LSTM+rmsprop○ 入力層: 64 node/ 隠れ層: 512 node
● Loss関数○ softmaxで正規化した上で、cross entropy lossを利用
http://www.cs.toronto.edu/~frossard/post/vgg16/
http://qiita.com/t_Signull/items/21b82be280b46f467d1b
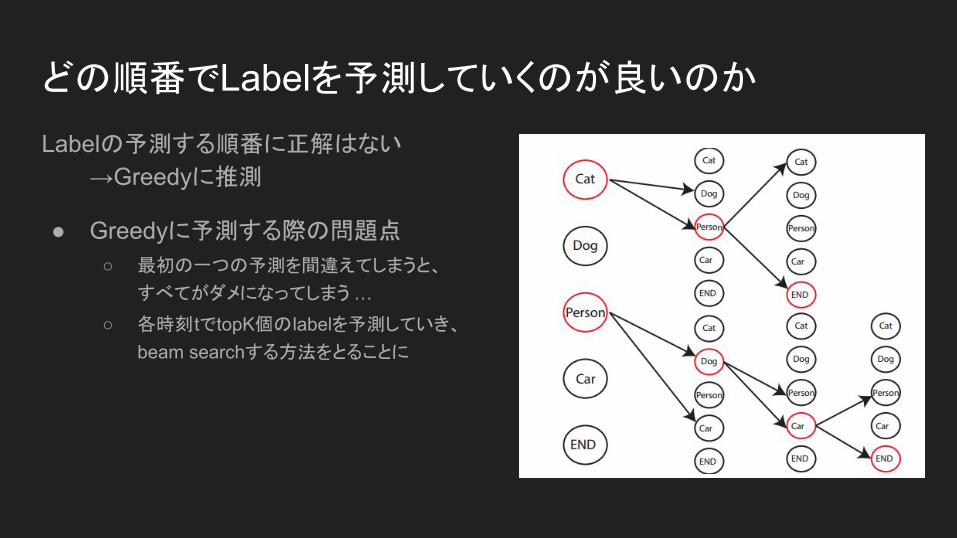
どの順番でLabelを予測していくのが良いのか
Labelの予測する順番に正解はない
→Greedyに推測
● Greedyに予測する際の問題点
○ 最初の一つの予測を間違えてしまうと、
すべてがダメになってしまう …
○ 各時刻tでtopK個のlabelを予測していき、
beam searchする方法をとることに
データ
● 以下の3つのベンチマークを利用○ NUS-WIDE:269,648 images from flickr, 1000 tags + 81 tags from human annotator○ MS COCO: 123,000 images, 80 class○ PASCAL VOC 2007: 9963 images
● 学習データ時のlabelの入力順序
○ 学習データでの当該 labelの出現頻度順で決定
(簡単な、典型的な labelから先に予測していく事を意図 )○ 順番をランダムにしたり、高度な順番付の手法 [28]をつかってみたが、特に効果はなかった …○ mini batchごとに順番をrandomにしたら、収束せず…
評価指標
● labelとground truthを比較○ 予測されたK番目までの labelを元にprecison/recall/F1を 算出/平均
■ precision = 正解数/生成された label数■ recall = 正解数/ground truthのlabel数■ classごとのprecision/recall/F1の平均(C-P,C-R)■ 全labelでのprecision/recall(O-P, O-R)
○ mean average precision(MAP)@top N■ 画像ごとでのprecisionの平均値
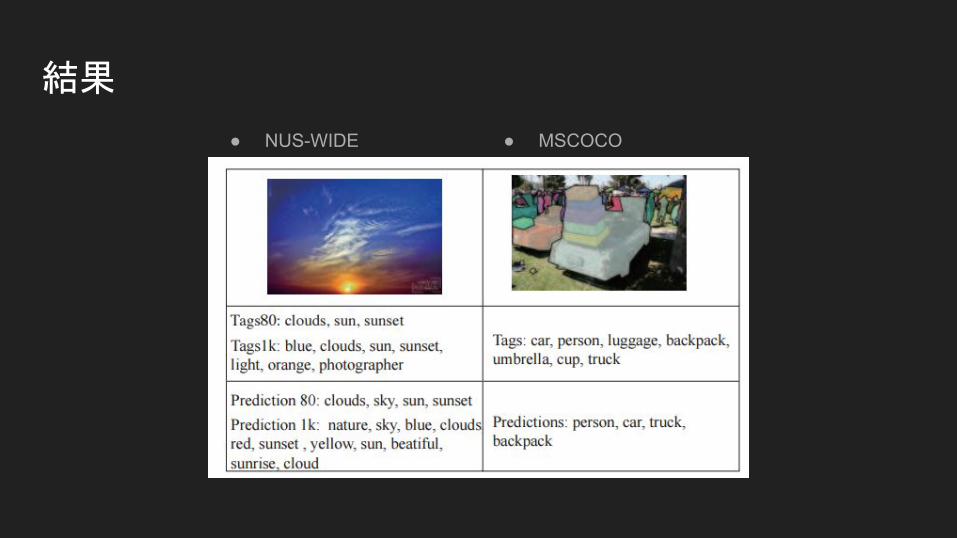
結果
● NUS-WIDE ● MSCOCO

結果(NUS-WIDE)● NUS-WIDE
81 concept/ k = 3
1000 concept/ k = 10
● 各指標でSOTA(WARP)を上回る
● C-Rが低いのはkが小さいため
● 性別に関係するタグ (actor/actress)は特に
難しかった←学習データが ImageNetのた
め?
多分筆者のミス
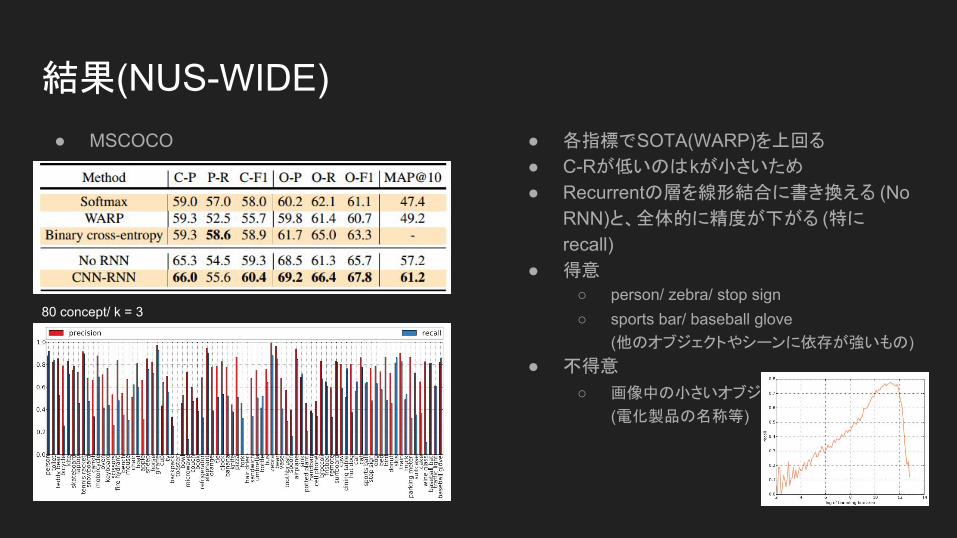
結果(NUS-WIDE)● MSCOCO ● 各指標でSOTA(WARP)を上回る
● C-Rが低いのはkが小さいため
● Recurrentの層を線形結合に書き換える (No RNN)と、全体的に精度が下がる (特に
recall)● 得意
○ person/ zebra/ stop sign○ sports bar/ baseball glove
(他のオブジェクトやシーンに依存が強いもの)● 不得意
○ 画像中の小さいオブジェクトの細かい違い
(電化製品の名称等)
○ CNNの入力画像が小さいため?
80 concept/ k = 3

結果(PASCAL VOC 2007)● ClassごとのPrecision

結果(その他)● 定性的な傾向
○ 学習されたEmbedding Space○ embedding space上でkNNを取ると、
classificationで学習するより、より fine-grainedな単語が学習できる
17
CNN-RNNで生成したEmbedding Space上でkNNした結果

結果(その他)
● attentionの可視化
○ Deconvolutional network(画像のどこに強く反応したかreconstructする
network[Zeiler et al 2010])を用いてattention を可視化
○ elephant→zebraと予測した時のattentionの変化
18
まとめ
● CNNとRNNを組み合わせたMulti labelでの画像分類フレームワークを提案○ SOTAを上回る制度
○ 重複した labelが出力されにくくなった
○ 注意の可視化も可能に