Embed Size (px)
DESCRIPTION
NIPS2013読み会の発表資料
Citation preview

“Playing Atari with Deep Reinforcement Learning”
藤田康博
January 23, 2014

自己紹介
• 名前:藤田康博• 修士 1年• ゲーム AI,強化学習など• NIPS読み会初参加
◦ お手柔らかにお願いします
2 / 14

読む論文
• Playing Atari with Deep Reinforcement Learning◦ Volodymyr Mnih, Koray Kavukcuoglu, David Silver, Alex
Graves, Ioannis Antonoglou, Daan Wierstra, Martin RiedmillerNIPS Deep Learning Workshop, 2013.• 本会議でなくてすみません…
• 選んだ理由◦ ゲーム+深層学習+強化学習として(たぶん)初◦ 深層学習+強化学習も少ない◦ 結果がすごい
3 / 14

要旨
• 深層学習+強化学習(Deep Q-Learning)◦ 行動価値関数Q(s, a)を畳み込みニューラルネットワークで表現(Deep Q-Network)
• Atari 2600の 7つのゲームで評価
→(既存研究みたいに背景削除とかしてないのに)6/7で既存研究に勝利!→ さらに 3/7で Expert Human Playerにも勝利! 優秀!
4 / 14

要旨
• 深層学習+強化学習(Deep Q-Learning)◦ 行動価値関数Q(s, a)を畳み込みニューラルネットワークで表現(Deep Q-Network)
• Atari 2600の 7つのゲームで評価
→(既存研究みたいに背景削除とかしてないのに)6/7で既存研究に勝利!
→ さらに 3/7で Expert Human Playerにも勝利! 優秀!
4 / 14

要旨
• 深層学習+強化学習(Deep Q-Learning)◦ 行動価値関数Q(s, a)を畳み込みニューラルネットワークで表現(Deep Q-Network)
• Atari 2600の 7つのゲームで評価
→(既存研究みたいに背景削除とかしてないのに)6/7で既存研究に勝利!→ さらに 3/7で Expert Human Playerにも勝利! 優秀!
4 / 14

Arcade Learning Environment
• Atari 2600シミュレータ+学習用インタフェース
• プレイヤが観測できるのは画面のみ◦ 210× 160 & 128 colors
• 現在のスコアがわかる• 終了判定ができる• http://www.arcadelearningenvironment.org/
5 / 14

強化学習タスクとしてのALE
• ALEは部分観測マルコフ決定過程(POMDP)◦ 観測できる画面からだけでは現在の状況がわからない
• そこで時間ステップ tにおける状態を次のように定義◦ st = x1, a1, x2, · · · , at−1, xt◦ x は観測した画面,aは入力した行動→ 有限マルコフ決定過程になり,スタンダードな強化学習手法が使える
6 / 14

行動価値関数
• 最大化したいもの:将来の(割引)報酬 Rt =!T
t′=t γt′−trt′
• 方策 π : S $→ A• (最適)行動価値関数
Q∗(s, a) = maxπ
E [Rt |st = s, at = a, π]
有限マルコフ決定過程なら,これはBellman方程式の唯一解
Q∗(s, a) = E [rt+1 + γmaxa′
Q∗(st+1, a′)|st = s, at = a]
7 / 14

行動価値関数の関数近似
• Q(s, a; θ) ≈ Q∗(s, a)とおき,Bellman方程式の誤差を最小化
Li(θi) = E [(yi − Q(s, a; θi)2]
yi = E [rt+1 + γmaxa′
Q(st+1, a′; θi−1)|st = s, at = a]
∇θiLi(θi)
= E [(rt+1 + γmaxa′
Q(st+1, a′; θi−1)− Q(s, a; θi))∇θiQ(s, a; θi)]
• 今回はこれを RMSPropを使って逆伝搬
8 / 14

Rprop
• 勾配の大きさは見ず符号だけを見て重みを更新する逆伝搬法• では更新量はどう決める?
◦ 符号が 2連続で同じだったら更新量を増やす e.g. 1.2倍◦ そうでなければ減らす e.g. 0.5倍
• 利点◦ 勾配が小さい場所(plateau)から速やかに脱出できる
• 欠点◦ ミニバッチ学習ではうまくいかない
e.g. 9個のミニバッチの勾配が+0.1,10個目が−0.9の場合
9 / 14

RMSProp
• Rpropをミニバッチ学習に使えるようにしたもの◦ 勾配の大きさの 2乗の移動平均MeanSquare(w , t)を保持
MeanSquare(w , t) = 0.9MeanSquare(w , t − 1) + 0.1(∂E
∂w(t))2
◦ 勾配を"
MeanSquare(w , t)で割る◦ まだ論文になっておらず,Courseraの講義ビデオのみ
• “Neural Networks for Machine Learning”の Lecture 6.5
10 / 14

Experience Replay
• 過去の遷移 (st , at , rt , st+1)を replay memoryに保存• そこからランダムサンプリングした遷移に対して誤差最小化• 利点
◦ プレイヤの振る舞いが過去にわたって平均化されるため,パラメータが振動・発散するのを防ぐ効果がある
11 / 14

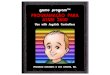
Deep Q-Network
84x84x4
input1st hidden
layer2nd hidden
layer
8x8x4 filterstride 4
20x20x16
4x4x16 filterstride 2
9x9x32
3rd hiddenlayer
fullyconnected
256
output
fullyconnected
4~18
• 入力:ラスト 4フレームの画面(縮小とグレイスケール化)• 出力:各アクションの行動価値
12 / 14

結果
• 人間に勝利:Breakout,Pong,Enduro• 人間に全く敵わない:Q*bert, Seaquest,Space Invaders
◦ 比較的長期的な戦略が必要
13 / 14

感想
• ついにゲーム AIにもディープの波が来たか…• 他のゲームにも使える? e.g. 将棋,囲碁,StarCraft,etc.
◦ おそらく先読みが重要なゲームでは難しい◦ でも使ってみたいしきっと使われる
14 / 14