Embed Size (px)
Citation preview
Un motor monofásico de fase partida es un motor de inducción con dos bobinados en
elestator, uno principal y otro auxiliar o de arranque.
El motor de fase partida es uno de los distintos sistemas ideados para el arranque de los
motores asíncronos monofásicos. Se basa en cambiar, al menos durante el arranque, el motor
monofásico por un bifásico (que puede arrancar sólo). El motor dispone de dosdevanados, el
principal y el auxiliar; además, lleva incorporado un interruptor centrífugo cuya función es la de
desconectar el devanado auxiliar después del arranque del motor.
Además del motor de fase partida existen otros sistemas para arrancar motores monofásicos
como es el caso de motores de arranque por condensador.
La necesidad del motor de inducción monofásico de fase partida se explica de la siguiente
forma: existen muchas instalaciones, tanto industriales como residenciales a las que la
compañía eléctrica solo suministra un servicio de c.a monofásico. Además, en todo lugar casi
siempre hay necesidad de motores pequeños que trabajen con suministro monofásico para
impulsar diversos artefactos electrodomésticos tales como máquinas de coser, taladros,
aspiradoras, acondicionadores de aire, etc.
La mayoría de los motores monofásicos de fase partida son motores pequeños de caballaje
fraccionario. Tanto para 115 v como para 230 v en servicio monofásico.
Los motores monofásicos de inducción de fase partida experimentan una grave desventaja.
Puesto que solo hay una fase en el devanado del estator, el campo magnético en un motor
monofásico de inducción no rota. En su lugar, primero pulsa con gran intensidad, luego con
menos intensidad, pero permanece siempre en la misma dirección. Puesto que no hay campo
magnético rotacional en el estator, un motor monofásico de inducción no tiene par de
arranque. Es por ello que se conecta en paralelo una bobina de arranque en forma paralela.
Para así poder crear un campo giratorio y de esta manera tener un torque de arranque, la
bobina de arranque es desconectada por medio de un interruptor centrífugo.
Partes principales de un motor de fase partida.
a.- ROTOR:
El rotor se compone de tres partes fundamentales. La primera de ellas es el núcleo, formado
por un paquete de láminas o chapas de hierro de elevada calidad magnética. La segunda es el
eje, sobre el cual va ajustado a presión el paquete de chapas. La tercera es el arrollamiento
llamado de jaula de ardilla, que consiste en una serie de barras de cobre de gran sección,
alojadas en sendas ranuras axiales practicadas en la periferia del núcleo y unidas en
cortocircuitos mediante dos gruesos aros de cobre, situados uno a cada extremo del núcleo.
En la mayoría de los motores de fase partida el arrollamiento rotorico es de aluminio y esta
fundido de una sola pieza.
b.- ESTÁTOR
El estátor se compone de un núcleo de chapas de acero con ranuras semicerradas, de una
pesada carcasa de acero o de fundición dentro de la cual esta introducido a presión el núcleo
de chapas, y de dos arrollamientos de hilo de cobre aislado alojados en las ranuras y llamados
respectivamente arrollamiento principal o de trabajo y arrollamiento auxiliar o de arranque. En
el instante de arranque están conectados uno y otro a la red de alimentación; sin embargo,
cuando la velocidad del motor alcanza un valor prefijado el arrollamiento de arranque es
desconectado automáticamente de la red por medio de un interruptor centrífugo montado en el
interior del motor.
c.- ESCUDOS O PLACAS TÉRMICAS
Los escudos o placas térmicas, están fijados a la carcasa del estátor por medio de tornillos o
pernos; su misión principal es mantener el eje del rotor en posición invariable. Cada escudo
tiene un orificio central previsto para alojar el cojinete, sea de bolas o de deslizamiento, donde
descansa el extremo correspondiente del eje rotorico. Los dos cojinetes cumplen las
siguientes funciones: sostener el peso del rotor, mantener a este exactamente centrado en el
interior del estátor, permitir el giro del rotor con la mínima fricción y evitar que el rotor llegue a
rozar con el estátor.
d.- INTERRUPTOR CENTRÍFUGO
El interruptor centrífugo va montado en el interior del motor. Su misión es desconectar el
arrollamiento de arranque en cuanto el rotor ha alcanzado una velocidad predeterminada. El
tipo más corriente consta de dos partes principales, una fija y otra giratoria. La parte fija está
situada por lo general en la cara interior del escudo frontal del motor y lleva dos contactos, por
lo que su funcionamiento es análogo al de un interruptor unipolar. En algunos motores
modernos la parte fija del interruptor está montada en el interior del cuerpo del estátor. La
parte giratoria va dispuesta sobre el rotor.
El funcionamiento de un interruptor es el siguiente: mientras el rotor esta en reposo o girando
apoca velocidad, la presión ejercida por la parte móvil del interruptor mantiene estrechamente
cerrados los dos contactos de la parte fija. Cuando el rotor alcanza aproximadamente el 75 %
de su velocidad de régimen, la parte giratoria cesa de presionar sobre dichos contactos y
permite por tanto que se separen, con lo cual el arrollamiento de arranque queda
automáticamente desconectado de la red de alimentación.
e.- ARROLLAMIENTO DE JAULA DE ARDILLA
Se compone de una serie de barras de cobre de gran sección, que van alojadas dentro de las
ranuras del paquete de chapas rotorico; dichas barras están soldadas por ambos extremos a

gruesos aros de cobre, que las cierran en cortocircuito. La mayoría de los motores de fase
partida llevan, sin embargo, un arrollamiento rotorico con barras y aros de aluminio, fundido de
una sola pieza.
f.- ARROLLAMIENTOS ESTATORICOS
Son los siguientes:
Un arrollamiento de trabajo o principal, a base de conductor de cobre grueso aislado,
dispuesto generalmente en el fondo de las ranuras estatoricas y un arrollamiento de arranque
o auxiliar, a base de conductor de cobre fino aislado, situado normalmente encima del
arrollamiento de trabajo. Ambos arrollamientos están unidos en paralelo. En el momento del
arranque uno y otro se hallan conectados a la red de alimentación, cuando el motor ha
alcanzado aproximadamente el 75% de su velocidad de régimen, el interruptor centrifugo se
abre y deja afuera y deja fuera de servicio el arrollamiento de arranque; el motor sigue
funcionando entonces únicamente con el arrollamiento de trabajo principal.
Durante la fase de arranque, las corrientes que circulan por ambos arrollamientos crean un
campo magnético giratorio en el interior del motor. Este campo giratorio induce corrientes en el
arrollamiento rotorico, las cuales generan a su vez otro campo magnético. Ambos campos
magnéticos reaccionan entre si y determinan el giro del rotor. El arrollamiento de arranque
solo es necesario para poner en marcha el motor, es decir, para engendrar el campo giratorio.
Una vez conseguido el arranque del motor ya no se necesita más, y por ello es desconectado
de la red por medio del interruptor centrífugo.

Temporizadores off delay son temporizadores que se caracterizan porque cuando
su bobina se energiza sus contactos cambian de posición de manera instantánea, pero el cambio
retardado de sus contactos lo realizan después que su bobina se dessenergia
Temporizadores on delay
estos son temporizadores que inicial su conteo o retardo de tiempo para hacer cambiar sus contactos en el mismo instante en que su bobina es energizada



On Delay y Off Delay - Laboratorio Nº 3
Curso: Controles Eléctricos y Automatización
Facultad: Ingeniería Electrónica UNMSM
Ciclo: 2011-I
1.- Objetivos
Familiarizar al alumno en el uso de los circuitos temporizadores.
Reconocer los diferentes tipos de temporizadores.
Realizar esquemas eléctricos de los problemas propuestos.
2.- Requerimientos de herramientas y materiales
Destornillador plano o estrella
Alicate de punta
Multímetro
Extensión
Cinta aislante
3.- Parte Experimental
3.1.- Manejo de un piloto luminoso mediante un temporizador ON DELAY - Implemente el
siguiente circuito
Elementos utilizados:
1 contactor
1 pulsador NA
1 temporizador ON DELAY
1 piloto luminoso

Explique su funcionamiento:
Tal como se pudo observar en la experiencia de laboratorio, el temporizador ON DELAY es un
módulo que se engancha en la parte superior del contactor, para que trabaje con este de manera
conjunta. Si traducimos al español ON DELAY, significaría retardo en encendido, pues es así como
trabaja este dispositivo, empezando a trabajar una vez que la bobina del contactor haya sido
energizada. Es desde este momento que el temporizador comienza a contar hasta el tiempo
prefijado por el ajuste de la perilla que se encuentra en la parte superior del mismo, creando un
retardo, que al finalizar cerrará su contacto normalmente abierto y abrirá el normalmente cerrado,
hasta que la bobina de el contactor se encuentre energizada.
Como se pudo observar, este dispositivo permite activar o desactivar algún actuador luego de un
período de tiempo preestablecido, permitiéndole al circuito realizar alguna tarea antes de esta
acción.
3.2.- Manejo de un piloto luminoso mediante un temporizador OFF DELAY - Implemente el
siguiente circuito
Elementos utilizados:
1 contactor
1 pulsador NA
1 temporizador OFF DELAY
1 piloto luminoso

Explique su funcionamiento:
Al igual que en el caso anterior, este dispositivo es también un módulo que se engancha en la
parte superior del contactor. Si traducimos al español OFF DELAY, significaría retardo en apagado,
lo que indicaría, que comenzará a contar una vez que se haya retirado la energía de la bobina del
contactor, hasta el tiempo prefijado, cerrando su contacto normalmente abierto y abriendo el
normalmente cerrado.
Este dispositivo, podría ser empleado con la finalidad de desactivar o activar alguna acción final
después de haber desconectado la bobina del contactor.
3.3.- Problema
Se desea controlar un piloto luminoso para que realice la siguiente secuencia.
Para hacer que el piloto luminoso realice la secuencia anteriormente mostrada hago uso de dos
temporizadores ON Delay, cada uno calibrado para que actúe después de 5 segundos. Para tal
efecto los conectamos de la siguiente manera:

Al energizarse el circuito, la primera bobina K1 (asociada al temporizador 1) se alimenta a través
del contacto NC del segundo temporizador, donde empezará a contar hasta llegar a los cinco
segundos. Asimismo, paralelo a la alimentación colocamos en serie un contacto NC del primer
temporizador con la lámpara H1, la cual permanecerá encendida hasta que el primer temporizador
termine de contar los 5 segundos.
Al finalizar el conteo del primer temporizador, se abrirá el contacto que alimenta la lámpara
pasando del estado alto a bajo, y a su vez se cerrará el segundo contacto NA del primer
temporizador, que alimentará a la bobina K2 (asociada al temporizador 2).
Una vez que haya sido alimentada la bobina K2, el segundo temporizador comenzará a contar
hasta los cinco segundos, donde abrirá el contacto NC del segundo temporizador, donde
momentáneamente desconectará a la primera bobina y por consiguiente a la segunda,
inmediatamente el contacto asociado a la primera bobina se volverá a cerrar, reiniciándose el
proceso.
Cabe señalar, que el circuito se diagramó y simuló en el software CADe SIMU, el cual puede ser
descargado desde el siguiente enlace http://personales.ya.com/canalPLC/cade_sim.htm
4.- Cuestionario
4.1.- Esquematice y explique el funcionamiento del circuito estrella – triángulo para arranque
de un motor
Sólo es posible utilizar este modo de arranque en motores en los que las dos extremidades de
cada uno de los tres devanados estatóricos vuelvan a la placa de bornes. Por otra parte, el
bobinado debe realizarse de manera que el acoplamiento en triángulo corresponda con la tensión
de la red: por ejemplo, en el caso de una red trifásica de 380 V, es preciso utilizar un motor
bobinado a 380 V en triángulo y 660 V en estrella.

El principio consiste en arrancar el motor acoplando los devanados en estrella a la tensión de la
red, lo que equivale a dividir la tensión nominal del motor en estrella por raíz de 3.
La punta de corriente durante el arranque se divide por 3:
Is = 1,5 a 2,6 In
Donde:
In = Intensidad nominal
Is = Intensidad de arranque
Un motor de 380 V/660 V acoplado en estrella a su tensión nominal de 660 V absorbe una
corriente raíz de 3 veces menor que si se acopla en triángulo a 380 V. Dado que el acoplamiento
en estrella se realiza a 380 V, la corriente se divide nuevamente por raíz de 3. Por tanto, se divide
por un total de 3.
El par de arranque se divide igualmente por 3, ya que es proporcional al cuadrado de la tensión de
alimentación:
Td = 0,2 a 0,5 Tn
Donde:
Tn = Par nominal
Ts = Par de arranque
La velocidad del motor se estabiliza cuando se equilibran el par del motor y el par resistente,
normalmente entre el 75 y 85% de la velocidad nominal. En ese momento, los devanados se
acoplan en triángulo y el motor rinde según sus características naturales. Un temporizador se
encarga de controlar la transición del acoplamiento en estrella al acoplamiento en triángulo. El

cierre del contactor de triángulo se produce con un retardo de 30 a 50 milisegundos tras la apertura
del contactor de estrella, lo que evita un cortocircuito entre fases al no poder encontrarse ambos
cerrados al mismo tiempo.
La corriente que recorre los devanados se interrumpe con la apertura del contactor de estrella y se
restablece con el cierre del contactor de triángulo. El paso al acoplamiento en triángulo va
acompañado de una punta de corriente transitoria, tan breve como importante, debida a la fcem
(fuerza contraelectromotriz) del motor.
El arranque estrella-triángulo es apropiado para las máquinas cuyo par resistente es débil o que
arrancan en vacío.
Dependiendo del régimen transitorio en el momento del acoplamiento en triángulo, puede ser
necesario utilizar una variante que limite los fenómenos transitorios cuando se supera cierta
potencia:
– temporización de 1 a 2 segundos al paso estrella-triángulo.
Esta medida permite disminuir la fcem y, por tanto, la punta de corriente transitoria.
Esta variante sólo puede utilizarse en máquinas cuya inercia sea suficiente para evitar una
deceleración excesiva durante la temporización.
– arranque en 3 tiempos: estrella-triángulo + resistencia-triángulo.
El corte se mantiene, pero la resistencia se pone en serie aproximadamente durante tres segundos
con los devanados acoplados en triángulo. Esta medida reduce la punta de corriente transitoria.
– arranque en estrella-triángulo + resistencia-triángulo sin corte.
La resistencia se pone en serie con los devanados inmediatamente antes de la apertura del
contactor de estrella. Esta medida evita cualquier corte de corriente y, por tanto, la aparición de
fenómenos transitorios.
El uso de estas variantes conlleva la instalación de componentes adicionales y el consiguiente
aumento del coste total. En muchos casos, el uso de un arrancador estático de tipo Altistart
(arrancador progresivo de estado sólido de la marca Telemecanique) es una solución preferible.
4.2.- Esquematice y explique el funcionamiento del circuito de arranque de un motor por
resistencia rotórica
Un motor de anillos no puede arrancar en directo (devanados rotóricos cortocircuitados) sin
provocar puntas de corriente inadmisibles. Es necesario insertar en el circuito rotórico resistencias
que se cortocircuiten progresivamente, al tiempo que se alimenta el estator a toda la tensión de
red.

El cálculo de la resistencia insertada en cada fase permite determinar con rigor la curva de par-
velocidad resultante:
Para un par dado, la velocidad es menor cuanto mayor sea la resistencia. Como resultado, la
resistencia debe insertarse por completo en el momento del arranque y la plena velocidad se
alcanza cuando la resistencia está completamente cortocircuitada.
La corriente absorbida es prácticamente proporcional al par que se suministra. Como máximo, es
ligeramente superior a este valor teórico.
Por ejemplo, la punta de corriente correspondiente a un par de arranque de 2 Tn es
aproximadamente de 2 In. Por tanto, la punta es considerablemente más débil, y el par máximo de
arranque más elevado, que en el caso de un motor de jaula, en el que el valor normal se sitúa en
torno a 6 In para 1,5 Tn.
El motor de anillos con arranque rotórico se impone, por tanto, en todos los casos en los que las
puntas de corriente deben ser débiles y cuando las máquinas deben arrancar a plena carga.
Por lo demás, este tipo de arranque es sumamente flexible, ya que resulta fácil adaptar el número
y el aspecto de las curvas que representan los tiempos sucesivos a los requisitos mecánicos o
eléctricos (par resistente, valor de aceleración, punta máxima de corriente, etc.).
4.3.- Esquematice y explique el funcionamiento del circuito de arranque de un motor por
resistencia estatórica
El principio consiste en arrancar el motor bajo tensión reducida mediante la inserción de
resistencias en serie con los devanados.

Una vez estabilizada la velocidad, las resistencias se eliminan y el motor se acopla directamente a
la red. Normalmente, se utiliza un temporizador para controlar la operación.
Durante este tipo de arranque, el acoplamiento de los devanados del motor no se modifica. Por
tanto, no es necesario que las dos extremidades de cada devanado sobresalgan de la placa de
bornes.
El valor de la resistencia se calcula en base a la punta de corriente que no se debe superar durante
el arranque, o al valor mínimo del par de arranque necesario teniendo en cuenta el par resistente
de la máquina accionada.
Generalmente, los valores de corriente y de par de arranque son:
Is = 4,5 In
Ts = 0,75 Tn
Durante la fase de aceleración con las resistencias, la tensión que se aplica a las bornes del motor
no es constante.
Equivale a la tensión de la red menos la caída de tensión que tiene lugar en la resistencia de
arranque.
La caída de tensión es proporcional a la corriente absorbida por el motor. Dado que la corriente
disminuye a medida que se acelera el motor, sucede lo mismo con la caída de tensión de la
resistencia. Por tanto, la tensión que se aplica a las bornes del motor es mínima en el momento del
arranque y aumenta progresivamente.
Dado que el par es proporcional al cuadrado de la tensión de las bornes del motor, aumenta más
rápidamente que en el caso del arranque estrella-triángulo, en el que la tensión permanece
invariable mientras dura el acoplamiento en estrella.
Este tipo de arranque es, por tanto, apropiado para las máquinas cuyo par resistente crece con la
velocidad, por ejemplo los ventiladores.
Su inconveniente consiste en que la punta de corriente es relativamente importante durante el
arranque. Sería posible reducirla mediante el aumento del valor de la resistencia, pero esta medida
conllevaría una caída de tensión adicional en las bornes del motor y, por tanto, una considerable
reducción del par de arranque.
Por el contrario, la eliminación de la resistencia al finalizar el arranque se lleva a cabo sin
interrumpir la alimentación del motor y, por tanto, sin fenómenos transitorios.
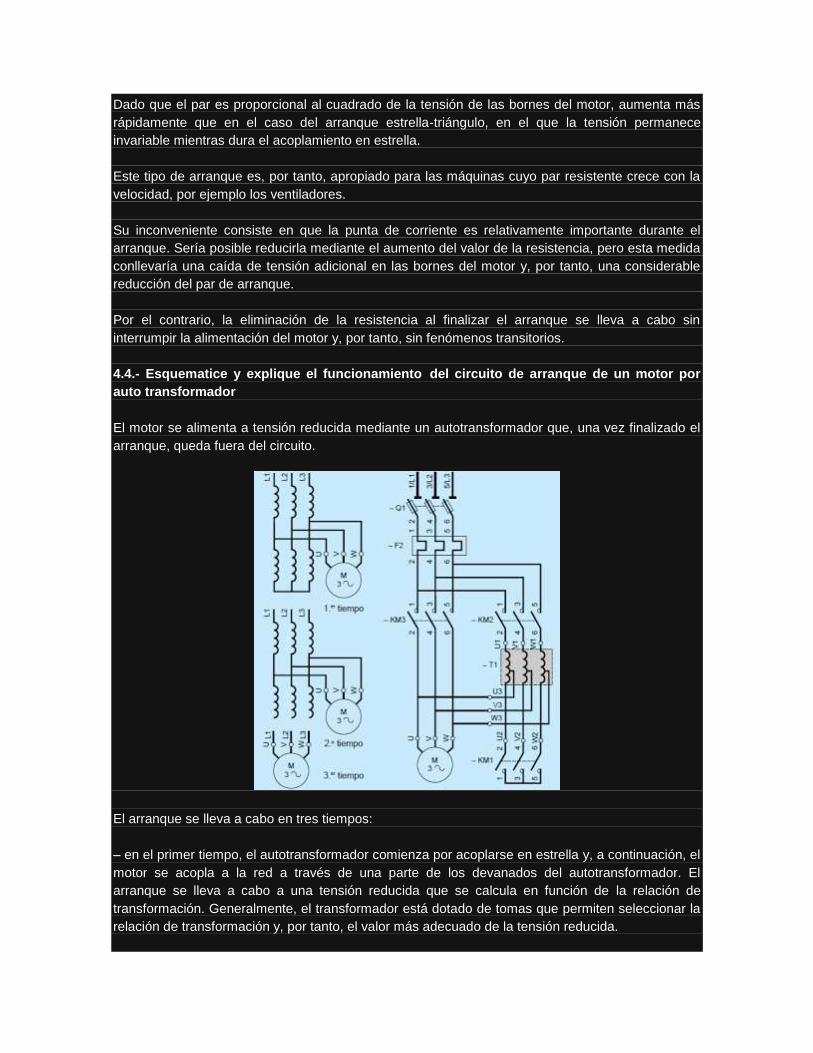
4.4.- Esquematice y explique el funcionamiento del circuito de arranque de un motor por
auto transformador
El motor se alimenta a tensión reducida mediante un autotransformador que, una vez finalizado el
arranque, queda fuera del circuito.
El arranque se lleva a cabo en tres tiempos:
– en el primer tiempo, el autotransformador comienza por acoplarse en estrella y, a continuación, el
motor se acopla a la red a través de una parte de los devanados del autotransformador. El
arranque se lleva a cabo a una tensión reducida que se calcula en función de la relación de
transformación. Generalmente, el transformador está dotado de tomas que permiten seleccionar la
relación de transformación y, por tanto, el valor más adecuado de la tensión reducida.

– antes de pasar al acoplamiento a plena tensión, la estrella se abre. En ese momento, la fracción
de bobinado conectada a la red crea una inductancia en serie con el motor. Esta operación se
realiza cuando se alcanza la velocidad de equilibro, al final del primer tiempo.
– el acoplamiento a plena tensión interviene a partir del segundo tiempo, normalmente muy corto
(una fracción de segundo). Las inductancias en serie con el motor se cortocircuitan y, a
continuación, el autotransformador queda fuera del circuito. La corriente y el par de arranque
varían en la misma proporción. Se dividen por (U red / U reducida)2 y se obtienen los valores
siguientes:
Is = 1,7 a 4 In
Ts = 0,5 a 0,85 Tn
El arranque se lleva a cabo sin interrupción de corriente en el motor, lo que evita que se produzcan
fenómenos transitorios.
No obstante, si no se toman ciertas precauciones pueden aparecer fenómenos transitorios de igual
naturaleza durante el acoplamiento a plena tensión. De hecho, el valor de la inductancia en serie
con el motor tras la apertura de la estrella es importante si se compara con la del motor. Como
consecuencia, se produce una caída de tensión considerable que acarrea una punta de corriente
transitoria elevada en el momento del acoplamiento a plena tensión. El circuito magnético del
autotransformador incluye un entrehierro que disminuye el valor de la inductancia para paliar este
problema. Dicho valor se calcula de modo que, al abrirse la estrella en el segundo tiempo, no haya
variación de tensión en las bornes del motor.
El entrehierro aumenta la corriente magnetizante del autotransformador. Dicha corriente aumenta
la corriente solicitada en la red durante el primer tiempo del arranque.
Este modo de arranque suele utilizarse en los motores con potencia superior a 100 kW. Sin
embargo, el precio de los equipos es relativamente alto debido al elevado coste del
autotransformador.
temporizador al trabajo/al reposo
1.0 TEMPORIZADORES O RELES DE TIEMPO.
Son dispositivos los cuales abren o cierran determinados contactos, llamados contactos
temporizados, después de cierto tiempo, debidamente preestablecido.
1.1 TEMPORIZADOR AL TRABAJO.(on delay)

son Aquellos contactos temporizados actúan después de cierto tiempo de que se ha energizado.
En el momento de energizar el temporizador, los contactos temporizados que tiene siguen en la
misma posición de estado de reposo y solamente cuando ha transcurrido el tempo programado,
cambian de estado, es decir que el contacto NA se cierra y el contacto NC se abre.
1.2 CARACTERISTICAS
· Los contactos cambian de posición pasado el tiempo prefijado
· Retornan a la posición de reposo cuando se desactiva la bobina
· La bobina tiene que estar más tiempo alimentada que el tiempo prefijado
· Los contactos instantáneos cambian de posición con la alimentación de la bobina
1.3 funcionamiento
En un temporizador al trabajo los contactos temporizados cambian de posición pasado un tiempo
,prefijado previamente, y vuelven a la posición de reposo cuando la bobina se desactiva.
En el caso de que la bobina este menos tiempo activada que el tiempo prefijado, los contactos
temporizados no cambiaran de posición.
Los contactos instantáneos cambian de posición con la alimentación de la bobina como en un relé
normal.
1.4 diagrama de tiempo y esquema
2.1 TEMPORIZADOR AL REPOSO.(off delay)
este tipo de temporizador, los contactos temporizados actúan como temporizados después de
cierto tiempo de haber sido desenergizado. Cuando se energiza el temporizador, sus contactos
temporizados actúan inmediatamente como si fueran contactos instantáneos, manteniéndose en
esa posición todo el tiempo que el temporizador esté energizado.
2.2 CARACTERISTICAS
· Los contactos cambian de posición cuando se alimenta la bobina
· Retornan a la posición de reposo cuando se desactiva la bobina y transcurre e l tiempo
prefijado
· La bobina basta con que este un instante alimentada, pulso.
· Los contactos instantáneos cambian de posición con la alimentación de la bobina
2.3 funcionamiento
En un temporizador al reposo los contactos temporizados cambian al alimentar la bobina y
vuelven a la posición de reposo pasado un tiempo, prefijado previamente, desde que se quita la

alimentación de la bobina.
Con que se alimente un mínimo instante de tiempo la bobina el temporizador funciona y los
contactos cambian de posición.
Los contactos instantáneos cambian de posición con la alimentación de la bobina como en un relé
normal.
2.4 diagrama de tiempo y esquema
2.5 CONCLUSIONES
mediante este trabajo ampliamos nuestros conocimientos abriendo la puertas a miles
espectativas de sistemas de control por medio de temporizador el cual nos servira en una vida
practica muy proxima.