Embed Size (px)
Citation preview


Sensor táctilObserve la respuesta actual del sensor táctil en
lapantalla utilizando Ver [View]. Un cero [0] significa queno está presionado el botón del sensor táctil. Un uno [1]en la pantalla significa que está presionado el botóndel sensor táctil. Conecte el sensor táctil al puerto 1 del NXT.
Características -Le permiten al robot respondera obstáculos en el entorno
-El sensor táctil es un interruptor: puede presionarse o liberarse
-Puede agregar el sensor táctil a un modelo NXT y luegoprogramar el comportamiento del modelo para que cambiecuando se presiona o se libera el sensor táctil.
AplicaciónPuede agregar el sensor táctil a un modelo NXT y luego programar el comportamiento del modelo para que cambie cuando se presiona o se libera el sensor táctil.

Sensor acústicoEl sensor acústico detecta el nivel de decibeles: la
suavidad o intensidad de un sonido. El sensor acústico detecta dB y dBA.dBA: sonidos que el oído humano es capaz de oír.dB: todos los sonidos existentes, incluyendo los sonidos demasiado altos o bajos para el oído humano.
Características -Pruebe la capacidad del sensor acústico de medir el volumenacústico utilizando Ver [View]. Conecte el sensor acústico alpuerto 2 del NXT.
-Le permite al robot respondera los niveles de sonido.
AplicaciónPuede agregar el sensor acústico a un modelo NXT y luego programar el comportamiento del modelo para que cambie cuando se activa el sensor acústico.
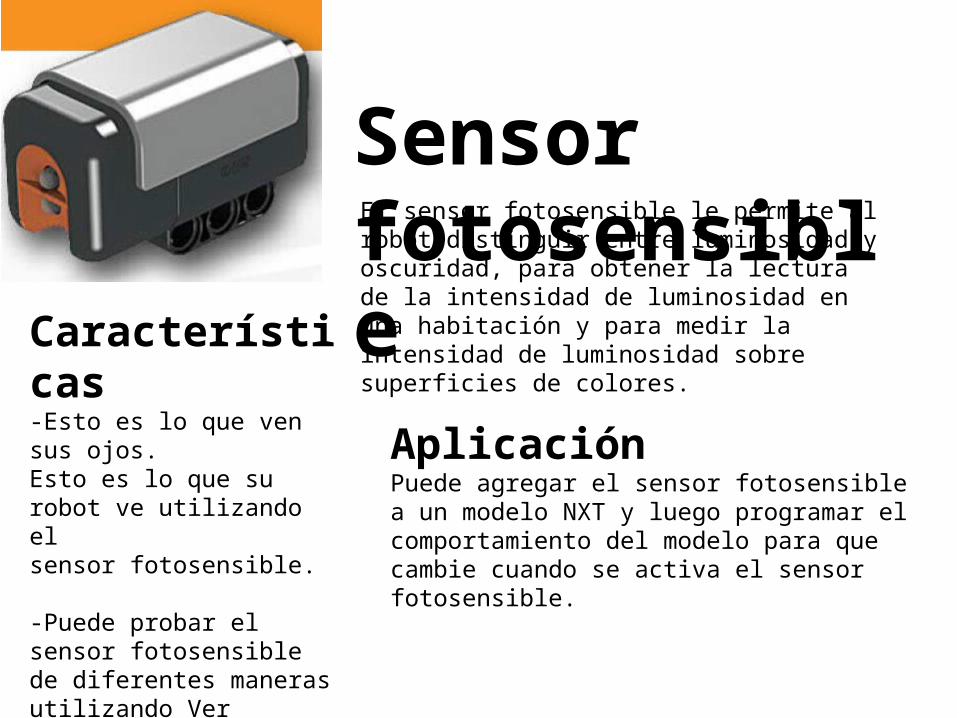
El sensor fotosensible le permite al robot distinguir entre luminosidad y oscuridad, para obtener la lectura de la intensidad de luminosidad en una habitación y para medir la intensidad de luminosidad sobresuperficies de colores.
Sensor fotosensible Característic
as -Esto es lo que ven sus ojos.Esto es lo que su robot ve utilizando elsensor fotosensible.
-Puede probar el sensor fotosensible de diferentes manerasutilizando Ver [View]. Al detectar la luz reflejada se enciendeel foco reflector en el sensor.
AplicaciónPuede agregar el sensor fotosensible a un modelo NXT y luego programar el comportamiento del modelo para que cambie cuando se activa el sensor fotosensible.

Sensor ultrasónicoEl sensor ultrasónico le permite al robot ver y reconocer objetos, evitar obstáculos, medir distancias y detectar movimiento.El sensor ultrasónico utiliza el mismo principio científico que los murciélagos: mide la distancia calculando el tiempo que demora una onda de sonido en golpear un objeto y volver, al igual que un eco.
Características-Le permite al robot respondera las variaciones del nivel deluz y de color.-El sensor ultrasónico le permite al robot ver y reconocer objetos, evitar obstáculos, medir distancias y detectar movimiento.El sensor ultrasónico utiliza el mismo principio científico que los murciélagos: mide la distancia calculando el tiempo que demora una onda de sonidoen golpear un objeto y volver, al igual que un eco
Aplicaciones Puede agregar el sensor ultrasónico a un modelo NXT y luego programar el comportamiento del modelo para que cambie cuando se activa elsensor ultrasónico.
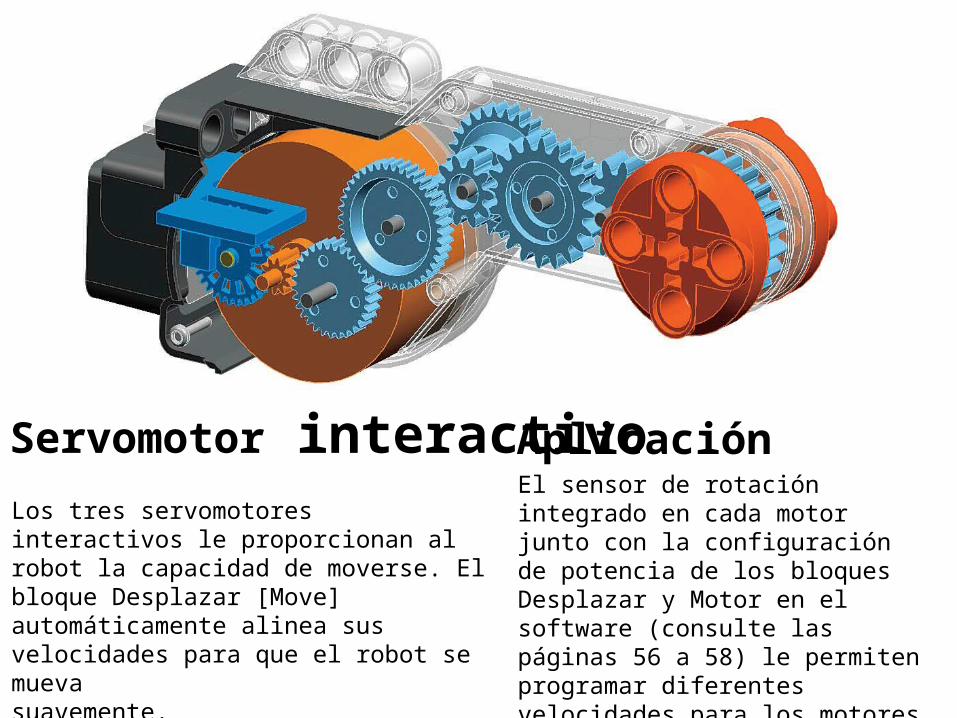
Servomotor interactivo Los tres servomotores interactivos le proporcionan al robot la capacidad de moverse. El bloque Desplazar [Move] automáticamente alinea sus velocidades para que el robot se muevasuavemente.
Aplicación El sensor de rotación integrado en cada motor junto con la configuración de potencia de los bloques Desplazar y Motor en el software (consulte las páginas 56 a 58) le permiten programar diferentes velocidades para los motores y mover el robot con precisión.
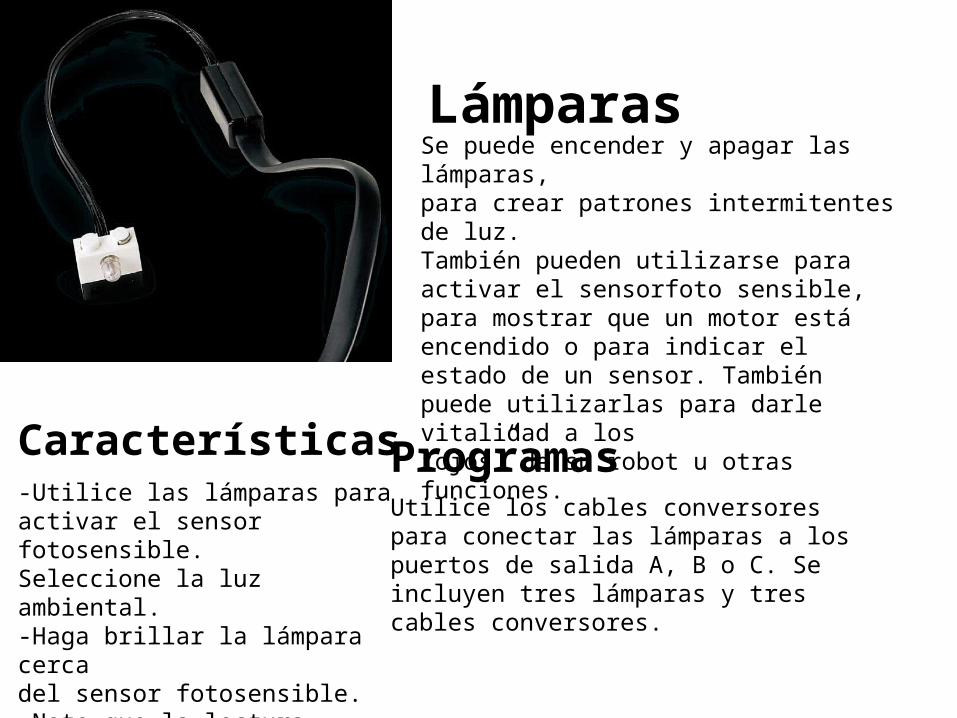
Lámparas Se puede encender y apagar las lámparas,para crear patrones intermitentes de luz.También pueden utilizarse para activar el sensorfoto sensible, para mostrar que un motor está encendido o para indicar el estado de un sensor. También puede utilizarlas para darle vitalidad a los“ojos” de su robot u otras funciones.
Características-Utilice las lámparas paraactivar el sensor fotosensible.Seleccione la luz ambiental.-Haga brillar la lámpara cercadel sensor fotosensible.-Note que la lectura cambia.
Programas Utilice los cables conversores para conectar las lámparas a los puertos de salida A, B o C. Se incluyen tres lámparas y tres cables conversores.
El Bluetooth es una tecnología de comunicación que hace posible el envío y la recepción de datos sin cables. Utilizandolas funciones del Bluetooth, puede instalar una conexión inalámbrica entre su NXT y otros dispositivos Bluetooth, como otras unidades NXT, teléfonos móviles y ordenadores
Características-Descargar programas desde su ordenador sin la utilizaciónde un cable USB.-Enviar programas desde otros dispositivos además de su ordenador, incluyendo su propio NXT.-Enviar programas a varias unidades NXT individualmenteo en grupos. Un grupo puede contener hasta tres dispositivos NXT.
Programas
Asegúrese de que el NXT está encendido. También asegúresede que el Bluetooth está configurado en Activado [On] y que el NXT está configurado como Visible [Visible]. (Lea cómo hacerlo en el submenú Bluetooth en la página 40). También asegúrese de que el Bluetooth está instalado y activado en su ordenador.