Embed Size (px)
DESCRIPTION
Manual de 8 semestre instrumentacion y control esiqie
Citation preview

Practica 3Transmisores
I) e t e r m i n are 1 tip 0 de error de los transmisoresy ,Ijustarlos en caso necesario.
1,( lS transmisores son dispositivos disenados para enviar senalesIlroporcionales a las variables que se estan midiendo; internacional-Illcnte se han escogido ciertos rangos para este fin, que son:
1a5mA
4 a 20 mA
10 a 50 mA
3 a 15 Ib/pull (21 a 105 kPa2)
6 a 30 Ib/pulg2 (42 a 210 kPa2)
20 a 100 kPa
La raz6n de estandarizar los rangos de las senales de salida delos transmisores es poder interconectar instrumentos de diversasmarcas y uniformar los receptores. Esto permite a los receptoresrecibir senales de cualquier variable, sin importar el rango de esasvariables, puesto que todos los transmisores tienen salidas estandar.
Los transmisores neumaticos estan constituidos de tres partesprincipales:

LABORATORIO DE INSTRUMENTAC/6N Y CONTROL
uministro(1.4kg(cm2)
Fuelledel relevador
9a) Elemento de medicion
b) Amplificador (relay) de salida (figura III.I)c) Fuelle de retroalimentacion
El elemento de medicion es la parte sensible alas cambios de lavariable y se conecta directamente al proceso; por tanto, estoselementos pueden ser: bourdones si el transmisor es de presion;sistemas termales Henos de gas, Iiquido 0 vapor si el transmisor esde temperatura, celda de presion diferencial si el transmisor va aUsarse para medir tlujo (caida de presion de placas de orificio,Venturis, etc.) 0 nivel de Iiquidos (figuras III.2, III.4, y IlL5).
En todos los casos el elemento de medicion esta mecanicamenteconectado a un obturador que tapa 0 destapa una tobera; esteconjunto Obturador-tobera forma parte del sistema de amplificacionde la senal (relay). Como es de cOmprender, el movimiento delobturador es muy pequeno, del rango de milesimas de pulgada, yen muchos casas no puede percibirse a simple vista, sin embargosus efectos son observados en el cambio de presion de salida deltransmiso
r. El sistema utilizado por los transmisores para enviar la
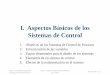
senal al receptor es variado, aunque puede generalizarse diciendoque se Usan relevadores (relays); en la figura III.I se muestra unrelevador tipico, que consta de las siguientes partes:
a) Cuerpob) Restriccionc) Valvula principald) Camara de la toberae) Diafragma de la camara de la toberaj) Resorte de cargag) Fuelle del relevadorh) Sistema Obturador-tobera
Salidadelfuelle ~
de retroalimentacion
Resorte be de carga RestriccionDiafragma f
de la camara de la tobera
~ Salida~c=J Venteo
c=J Suministro
Presion en tobera
A. Accion directa
EI principia en que se basa su funcionamiento es un equilibriade fuerza; estas fuerzas son aplicadas al diafragma «=), generadaspar la presion de salida del transmisor y por la presion entrampadaen la tobera.
EI relevador de accion directa funciona de la siguiente manera.EI suministro de aire de 20 lb/pulg2 Se divide en dos partes, una va

a la valvula principal (c) y la otra a la tobera (d), pasando por larestricci6n (b). La restricci6n sirve para disminuir la presi6n y el gastode aire en la tobera, con objeto de evitar un alto consumo de aire yel efecto de chorra sobre el obturador.
Sup6ngase que el obturador obstruye la salida de aire de la tobera,esto hace que la presi6n en la camara de la tobera (d) aumente, 10que pravoca que el diafragma (e) comprima el resorte CD y abra elpuerto de la valvula principal (c), permitiendo el paso del aire desuministra a la salida.
El fuelle del relevador sirve para amortiguar los cambios en lapresi6n cuando el obturador deja escapar la presi6n de la tobera; siefectua la operaci6n contraria, la valvula principal cerrara la entradade aire, 10 que permitira escapar por el venteo el airea presi6n dela salida, el cual es un sistema cerrado si consideramos que losreceptores suelen ser fuelles 0 diafragmas. El relevador descrito esconocido como de acci6n directa debido a que al aumentar lapresi6n en la camara de la tobera se incrementa la presi6n de salida;algunos relevadores son de acci6n inversa, esto es, que al aumentarla presi6n en la camara de la tobera, disminuye la presi6n de salida.
El relevador inverso funciona de la siguiente manera. Al obturarsela tobera se infla el pequeno diafragma del relevador, cerrando elpaso de aire de suministra que va a la salida del transmisor,permitiendo a la vez que la presi6n almacenada escape a laatm6sfera, pues, como es fkit notar, la valvula principal es unavalvula de tres vfas.
Al escapar la presi6n de la tobera se abre nuevamente el pasohacia la salida del transmisor, cerrando con ello el escape (figuraIII.I (b)).
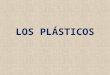
En la figura III.2, que muestra el esquema del transmisor detemperatura, se observa que el aparato esta compuesto de:
1. Dos balancines, primario y secundario (C) y (E), respectiva-mente, que como punto de apoyo tienen dos pivotes del tipode hoja flexible (fulcra).
2. Una capsula de diagrama (L) a la que se aplica la presi6n delfluido del sistema termal.
3. Un conjunto tobera (M) yobturador (Q) con amortiguador (R).4. Un fuelle praporcional (A).
A Fuelle de balanceB Tornillo de ceroC Barra primariao Jinete (ajusteamplitud)E Barra secundariaF Compensador barometricoG Compensador temp. ambienteH Tornillos compode temp.I Resorte de supresi6n
J Tornillo de fuerza
K Sosten del obturadorL Capsula de diafragmaM ToberaN Fulcro de supresi6no Muelle del obturadorP Bloque de pivoteQ ObturadorR AmortiguadorS Conector+ Fulcra (pivote
Figura m.2. Transmisor de temperatura.
Un fuelle de compensaci6n para variaciones de presi6n5.atmosferica (F). . / (1)
6. Un resorte para el ajuste del cera 0 la supreslon .7. Un termocompensador (G). d la8. Una valvula piloto que no se muestra en el esquema e
figura IlI.2 pero sf en la figura III.3. . d' . / la salida de aire e9 Un conjunto anticipatorio que se situa en
. compensar los atrasoslos transmisores de temperatura, para . ..que siempre estin presentes al medir temperatura. El pn~C1pio
1 . / . cida por el sistemade operaci6n es el siguiente: a presion eJer

F~~le 7balance .
/'Escape
Filtro
Restricci6n( en transmisi6nde temperatura)
Restricci6n( en transmisi6nde temperatura)
Valvulade
aguja tSuministro
de aireRestricci6n
desuministro
Unidad derivativaopcional entransmisi6n
de temperatura
Salidade aire
termal, en la capsula del diafragma (L), se convierte en unafuerza hacia arriba; esta fuerza, aplicada al balandn primariopor medio de un baHn de acero y del tornillo de empuje (J),se transforma en un MOMENTO en sentido contrario alasmanecillas del reloj.
Conforme el obturador se acerca a la tobera, aumenta la presi6ndel aire transmitido.
Esta presi6n de salida es amplificada por una valvula piloto ytransmitida al fuelle retroalimentador (A); la fuerza resultante seaplica al balandn primario a traves del balandn secundario (E), ensentido contrario a la fuerza ejercida por la 'capsula de diafragma.Se llega asi a un equilibria de las presiones entre la capsula dediafragma y el fuelle retroalimentador. Esto garantiza una propor-cionalidad de la presi6n transmitida con la variable medida, segunel coeficiente de multiplicaci6n que depende de la relaci6n de 10s
(Ios brazos de palanca separados por la posici6n del jinete de ajuste(I . rango fino, equilibrando la fuerza inicial debida a la presi6n en1;1capsula de diafragma. EI cero del aire transmitido C3 psi) corres-I)onde a la temperatura minima del rango.
EIfuelle de compensaci6n de presi6n atmosferica (F) esta armado,i1 vado y sellado hermeticamente. Su deformaci6n se da en funci6n,Iv la presi6n atmosferica y de las caracteristicas del material con que"~,I{t hecho. Este fuelle esta calculado de manera que el area de su,1I'ci6n transversal multiplicada por el brazo de palanca hasta el1,lvOledel balandn primario, sea igual al producto del area de la sec-, ()11transversal de la capsula de diafragma, multiplicado por la111~H:mciade su centro a dicho pivote. De tal manera, toda variaci6nI I" I'uerza en el tornillo de empuje debida a variaciones de presi6nI II 1:1capsula por efecto de vafiaciones atmosfericas, esta compen-1111:1por las fuerzas del vastago de empuje del fuelle de compensa-
I Ii Ill. Los MOMENTOS exactamente iguales y contrarios se eliminan.1':1 compensador de temperatura ambiente (G) consiste en un
Idill 'talico especial que opera en forma tal que a cualquier variaci6n,II It'mperatura, las dos barras de bimetal se contraen 0 expanden,II 111:1nera diferente. Esto varia el brazo de palanca entre el pivote deIlpll'~i6n (N) y el muelle de supresi6n (S), de modo que la fuerza
I IIIl'ida por el resorte de supresi6n (1) sobre el mismo varia,I 1IIIIp'nsado por las variaciones de temperatura ambiente. VariandoI I III)~i'i6n del tornillo de compensaci6n 0 ajuste (H) se puede" I 11I:lfla compensaci6n en diferentes rangos de temperatura del
tj, 11,110.
1/11 los aparatos transmisores de presi6n donde no se necesitaI 11111)('n~aci6n de temperatura, el tornillo de ajuste esta situ ado en
I I II I 1)()~i i6n donde no compensa por temperatura, es decir, en suI"' II Ion mas cercana al pivote (figura IlIA).
I I ,'(lIljunto de amortiguaci6n R (figura IlI.2) se utiliza para queI II 11I,~misorquede insensible alas variaciones causadas en el
I I'" ill por bombas reciprocantes, motores u atro equipo similar.I 1ll.ln~JTIisorde presi6n de la figura IlIA funciona con el mismo
111111 plo, 'xcepto que no viene equipado con el compensador deI I II III ,111110sfericani con el amortiguador de pulsaciones.
I II It )( lo~ los casos, los instrumentos estan basados en el principioII II'tl"oalimentaci6n; es una sefial de presi6n de salida que se

LABORATORIO DE INSTRUMENTACI6N Y CONTROL
Figura IDA. Transmisor de presion.
regresa al comienzo del circuito del instrumento, y que puede serpositiva 0 negativa. Cuando la retroalimentacion es positiva, la senalse suma a la senal de salida del instrumento.
Un ejempl0 c1asico es el de una habitacion que esta siendocalentada; cuando la temperatura es aha la retroalimentacion positivatendera a aumentarla mas, Ycuando la temperatura es baja, tenderaa enfriarla; como es logico, no se llegara a mantener temperatura enun punto fijo, sino que estara en un extremo 0 en otro.
En la retroalimentacion negativa el efecto es Contrario, y en estecaso sf se llega a un equilibrio, puesto que la retroalimentacionnegativa se opone a la senal de salida.
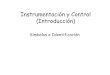
En la Figura HI.5 se ilustra un transmisor de presion diferencial,el cual envfa una senal proporcional a la diferencia de presionesaplicadas en las tomas de baja y aha presion; la presion diferencialpuede ser originada en un elemento primario de medicion de flujo(placa de orificio, Venturi, tobera u otro similar), 0 por nivel deliquido, conectando la toma de aha al fondo del recipiente y la tomade baja a la atmosfera si es tanque abierto 0 a la parte superior deltanque si es recipiente a presion 0 al vacio.
TRANSMISORES
. . to de la barra de equilibrioMovlmlen .al aumentar la diferenelal .•••••1--__
LenguetaAire
de suministro1.4 kg/em2
Inerementar
+Plaeadegama
+--'"Serialde salida---..
Ajuste de gama
Muelle de apoyo ty diafragma de sellO~isminUir
de labarrade equilibrio
Camara lIenade aceitedesilic6n
Anillos "8"para protecci6n
eontrsobre-
impresiones
Camarallenade aeeite de silie6n
Ajuste .de amortiguamlento
Diafragma flexiblede sella de metaleorrugado
Diafragma de mediei6n Muelle de tensi6nde metal eorrugado
. or de presion diferencial.Figura m.5. Transnus
1 . . nte manera Un aumento en 1aE1transmisor funciona de a slgu~e . da 10s 'tres diafragmas, de
. 1 e hacia 1alzqUlerPresion diferencla muev . ., t a una barra de fuerza que1 de medlclOn arras r . 1los cuales el centra 0 . d e el obturador Clerre e
flexible haclen 0 qu ( ,pivotea en el soporte , 1 alida del re1evador veaseb 10 que aumenta a s rescape de 1a to era, . , . ) Esta salida se retroa 1-1a Figura I1I.l(a) y la explicaClon respectIva .

menta mediante un fuelle que aplica una fuerza que se apane a lafuerza de las diafragmas, hacienda que el abturadar se aleje dela tabera y, par consiguiente, disminuya la presi6n de salida; estecielo se repite hasta lograr un equilibria.
Es 16gico que para cada presi6n diferencial se necesite una fuerzadeterminada para lograr el equilibria; como la fuerza va en funci6nde la presi6n en el fuelle de retroalimentaci6n, se deduce que lapresi6n de salida es proporcional a la presi6n diferencial.
Estos transrnisores pueden ser ajustados muy facilmente paradiferentes rangos. Si observamos la figura III.5, veremos que la fuerzade retroalimentaci6n que produce la presi6n en el fuelle es aplicadaa la barra de fuerza a traves de una placa donde se apoya el ajustede rango. Al cambiar la posici6n del ajuste de rango se modifica elmomenta de fuerza y, par consiguiente, la presi6n de salidanecesaria para obtener el equilibria.
La mayorfa de los transmisores de presi6n diferencial pueden sercalibrados des de su rango minima hasta 12 a 15 veces ese rango, asea de 0-20" a 0-300" de H20 en el mas comtin de los transrnisores.Estos transrnisores cubren rangos de 0-1" de H20 a 0-100 kg/cm2 yson capaces de resistir presiones hasta de 700 kg/cm2 en disefiosespeciales. Las protecciones por alta presi6n estatica en el cuerpodel transmisor impiden que los diafragmas se rompan par altapresi6n.
Para efectuar la practica de presi6n diferencial se requiere untransrnisor de presi6n diferencial can rango ajustable de 0-20 a 0-200cm de H20, el cual esta instalado en un simulador de nivel; la sefialde salida se indicara en un receptor de 3-15 psi (21 a 105 kPa)montado en un tablero; este circuito se representa en la figura III.6. La practica consiste en la construcci6n de la curva de calibraci6n del
transmisor de presi6n diferencial; la salida es recibida en unacolumna de mercurio a en un receptor de 3-15 psi, considerandoque el receptor 3-15 psi esta bien calibrado. Los pasos a seguir son:
1. Llene ei tanque de medici6n usando la bomba.

56 lABORATORIO DE INSTRUMENTACI6N Y CONTROL
2. Descargue el tanque Con la valvula, tomando lecturas en elreceptor cada 10 cm, y construya la Curva con esos datos.
3. Junto a la Curva construida y usando un lapiz rojo (depreferencia), trace la curva ideal de estos transmisores, con-siderando que 100% de nivel corresponde a 15 psig y 0% denivel corresponde a 3 psig.
4. Comparando ambas curvas, determine que tipo de error tieneel transmisor y d6nde estan localizados los ajustes paracorregir el 0 los errores (repase la practica de man6metros).
5. Escriba sus conclusiones.
1. Abra el suministro de aire. Confirme que esta a 20 psig.2. Use el simulador en MANUAL. Salida en 0% del indicador.3. Cierre las valvulas de descarga del tanque y arranque la
bomba.
4. Pare la bomba cuando el tanque este a punto de llenarse.5. Cierre la valvula automatica, llevando la salida a 100% (IS psi).
Tome lecturas del nivel y del indicador.6 Proceda a descargar parcialmente el tanque y tome lecturas
del nivel y del indicador; cuando menos son necesarios tresjuegos de lecturas.
7. Grafique Nivel contra Lectura del indicador. Trace sobre lamisma grafica la respuesta "ideal".
8. Determine el tipo de error y anote en su reporte el ajuste quedebe hacerse para corregirlo.
9. Anote las conclusiones de la practica.
INFORME DE LA PAACTICA 3
. r de presi6n diferencialCurva de calibraci6n de un transmlSO
Construcci6n de la curoa
Construyase la curva leyeodocuando menos seis puntosd la escala del nivel del tanque
e . mplo-n forma descendente; eJe .~5~ 40, 30, 20, 10 Y 5 de nive!,y apuntando las lecturas .correspondientes a cada mvel.
Alternativa: Anote la lectura de!indicador como base, y encuentreel valor correspondiente en laescala de nivel.
Nivel I Lectura-
-
-
I. d encontr6?1 a obtenida, ~cuales tip os e errorDe acuerdo con a curv
~C6mo se corrigen?: _Respuesta: _
Conclusiones: _
Nombre del alumno: _
Clave: _Fecha: _

Practica 4Receptores
Ens e n a r a 1 a 1 u m n 0 a identificar los errores de losreceptores, los cuales pueden ser indicadores 0 de uno 0 dospunteros, 0 registradores de una, dos, tres 0 cuatro plumillas.
Los receptores son aparatos disenados para recibir una senal neuma-tica 0 electrica de los transmisores; esta particularidad les perrniteindicar 0 registrar cualquier variable, y pueden intercambiarse entreS1. Normalmente la escala del receptor esta graduada en las rnismasunidades que la del transmisor; por 10 tanto, si se cambia la escal<:l(0 la grafica) se podra leer la senal de otro transmisor. Tambiellexisten escalas en porcentaje, en cuyo caso es necesario utilizar ullfactor para determinar el valor de la variable medida.
Las senales que pueden leer los receptores son las rnismas queenvlan los transmisores, 0 sea:
1-5 mA4-20 filA
10-50 mA
3-15 Ib/pull (21 a 105 kPa)6-30 Ib/pull (42 a 210 kPa)20-100 kPa

LABORATORIO DE INSTRUMENTACI6N Y CONTROL
Para manejar la senal proveniente de un transmisor, el receptorrecibe esta senal en un fuelle 0 capsula, el cual se infla Contraun resorte y amplifica el desplazamiento obtenido por medio de unjuego de palancas, ala plumilla (Figura IY.l), El mecanismo trabajade la siguiente manera, Se recibe la presi6n en el fuelle 0), este asu vez transmite un movimiento sobre su eje a la palanca de salidadel mismo fuelle, esta palanca pivotea en el eje fijo (3), transmitiendoa su vez el movimiento hasta el eje de la plumilla 0 puntero yconvirtiendo el movimiento lineal en angular. La carrera del fuelle,que depende del resorte del mismo (normalmente ubicado en elinterior) y de la presi6n que recibe, de be ser transformada en unmovimiento angular tal que corresponda al rango del transmisorcuando la pluma recorra 100% de la escala,
Por supuesto que los receptores son susceptibles de ser ajustados(calibrados) para llenar el requisito de exactitud del instrumento; enel mercado se garantiza 1% maximo de error para ellOO % del rango,
Estos instrumentos deben ser comparados COntra un man6metrode calibraci6n 0 una columna de mercurio; los ajustes que se hagandependeran del tipo de error que tenga el instrumento; si el errores lineal se hace el ajuste de cero que normalmente se localiza en elpunto 4 de la Figura IY.1; si el error es de multiplicaci6n se ajustael tornillo deslizante de la palanca de llegada al eje de la pluma (5),aunque algunas veces se tiene otro ajuste de rango en la palancade la salida del fuelle; finalmente, si el error es de angularidad seajusta la longitud del eslab6n (6),
Normalmente los ajustes se hacen alternadamente; se inicia conel ajuste angular, continua con el de multiplicaci6n y concluyeajustando el lineal, hasta que el error sea cuando mas de 1% encualquier punto de la escala; al corregir el error angular se afectanlos otros errores; al corregir el error de multiplicaci6n se afecta elerror lineal; el ajuste del error lineal no afecta a los otros errores,
En los receptores con registro la gratica es impulsada medianteun motor sincr6nico 0 un impulsor mecanico (de cuerda); enregistradores mas modernos existe la Opci6n de un motor neUmatico,que no es mas que un fuelle que recibe una senal pulsante de presi6nde aire y que hace mover un tren de engranes con una una,
Los registradores pueden ser de gratica circular 0 de gratica derollo; en ambos casos la velocidad con que avanza la gratica puede
, , dentro de 10 que ofrece el' d ntre vanas 0pClones, ,ser selecClona a e de re istrador MECI utilizado en la practica t~enel'abricante: El modelo , gd 1 mlml'n y es de cuatro plunullas,'dad d graflCa e c .una veloCl e , ecanismo y estan montadascada una de las cuales tiebnesu P:~J~os:cruzan al moverse (observede modo que no se estor en c~ ,
, 1 fectuar la practlca),cl mecamsmo a e , ntado en el tablero es un registrador 3-15
El receptor que ~sta mo da una de ellas es independiente de laspsi de cuatro plumillas, c~ d'f te' ro)'o azul verde y violetalor de tmta I eren, , ,demas, con un co t' ene un mecanisme electrico para impulsar(Indigo), Este reglst:ador \ " con el mecanisme de medici6n,la grafica, que, no tlene ,re aC~u:tro receptaculos donde se colocan
Para el e~tlnt~do e:ls:~~dricos; cada uno recibe, a traves de suunos pequenos tmtero 11 I fondo y que se conecta con'd 'as una larga que ega atapon, os agu) , '1 'II Y otra corta que lleva una' su respectlVa p unu a,una manguenta a _ t bo al frente del registrador; en estemanguerita hasta un pe,que~: h~le ara bombear aire, presurizar altubo se inserta una penlla p hacI'a la plumilla Se bombea' 1 tinta a avanzar "tintero y obhgar a a t en la punta de la pluma; despues yahe aparezca una go a , 'd d
asta qu , , , , fluyendo por capilan a ,no es necesano, la tI~ta1seg~~r~el instrumento, el aire a presi6n que
AI extraer el carro e a ca) , en cada enchufe hay una1 no escapara, porque ,
llega alas pumas 'd 'lvula de bicicleta) que Clerravalvula de retem:i6n (del tlpO e una vaal retirar el carro,

El indicador del tablero, calibrado de 21 a 105 kPa (3-15 Ib/pulg2) y
conectado en la linea de entrada al receptor, se considera comopatron y debera ajustarse el registrador (0 determinar el tipo de errorsegun indique el maestro).
En la figura IV.1 aparecen los ajustes: lineal (4), de multiplicacion(5) y angular (2). Antes de efectuar los ajustes de be hacerse unacorrida de valores por la escala para determinar el tipo de errorencontrado, asi como su signo. Los errores deben corregirse en elsiguiente orden: primero el angular, en seguida el de multiplicaciony al final el lineal; consulte con el maestro la mecanica de lacalibracion.
Utilizando el transmisor de presion diferencial montado en elsimulador de nivel, envie una sefial de presion de aire al receptorpara obtener tres lecturas, minima entre 10 y 90% de la escala delreceptor. Siga los siguientes pasos:
1. Conecte la energfa electrica del simulador de nivel.2. Abra el suministro de aire a 20 lb/puli y asegurese de que el
transmisor tenga salida y de que envie una sefial de aire receptor.3. Alimente agua con la bomb a al tanque intermedio (el de me-
dicion), para que al subir el nivel aumente la presion de salidadel transmisor. Suspenda la adicion de agua cuando la presionsea mayor de 21 kPa (3 Ib/pulg2) y la plumilla de registradorindique arriba del cero. Anote ambos valores.
4. Repita la adicion de agua hasta obtener 3 0 4 lecturas a 10
largo de la escala.5. Con los datos obtenidos, compare la presion del indicador
patron con el registrador y determine el tipo de error.6. Escriba sus conclusiones.
NOTA: las presiones pueden ser desde 3 hasta 15 lb/pulg2• El
cuadro IV.1 proporciona las equivalencias en porcentaje deescala.
63RECEPTORES
Presion
kg/cm2 kpa %Psig
21 03.0 0.21
29 104.2 0.29
38 205.4 0.38
0.42 42 256.0
0.46 46 306.6
0.54 54 407.8
0.63 63 509.0 6010.2 0.71 71
80 7011.4 0.80
0.84 84 7512.0
88 8012.6 0.88
0.96 96 9013.8
105 10015.0 1.05

Lecturadel indicador
Lectura delregistrador
Grdfica de respuesta contraindicador
Nombre del alumno: -----------------Fecha: --------
Practica 5Curva de calibraci6n
de un medidor de flujo de area constante
o b ten e r 1 a cur v a d e calibracion de una placa deorificio con transmisor de presion diferencial neumatico y receptorcon escala lineal en porcentaje, as! como el error producido por unainstalacion defectuosa.
Como se sabe, en la industria existen multiples y variados medidoresde flujo para controlar los procesos industriales; generalmente sedesea conocer la cantidad que entra y sale del proceso. Debido aque la mayorfa de los materiales son transportados como fluidos,siempre que sea posible debera medirse la velocidad a la cual estospasan a traves de una tuberfa 0 canal. Los metodos para medircorrientes de flujo se clasifican como sigue:
1. Medidores de pesada directa.2. Medidores dinamicos 0 de area fija (orificio, venturi, etc.).3. Medidores de area variable (rotametros).4. Medidores de corriente (medidores de cop a y de propela).5. Medidores de desplazamiento positivo (disco, piston, rotato-
rios).6. Medidores de canal abierto (vertederos V-Notch, Cipolletti,
Parshall).7. Medidore.s electricos (magneticos, turbinas).

IDOR DE FLUJOCURVA DE CALIBRACI6N DE UN MED
Tomade bajaEImetodo mas usual para determinar el gasto de un fluido a traves
de una tuberia es restringiendo el paso del fluido mediante ladisminucion del area a traves de la cual fluye. La medicion del flujopor este metodo se logra con un elemento primario de medicion,que produce la diferencial de presi6n, y un elemento secundario demedicion que mide dicha diferenciai.
EI elemento primario de rnedici6n es una restriccion en la lineade flujo que hace que el fluido se contraiga, y como el gasto esconstante, su velocidad aumenta y la presion estatica disminuye, almismo tiempo, la diferencial representa un indice de velocidad delflujo; para obtener el flujo se multiplica el indice de velocidad porel area.
Simplificando, la perdida de presion causada por la restriccion esproporcional al cuadrado de l~ velocidad del flujo; segun Bernoulli,el fluido se contrae, el flujo es constante, la velocidad aumenta y lapresion estatica disminuye. Eo la Figura V.I se ilustran algunos deestos elementos de area const~nte y velocidad del flujo.
EI elemento secundario de medicion es un dispositivo conocidocomo transmisor depresi6n diferencial, que consiste esencialmenteen dos camaras opuestas que reciben las presiones de antes ydespues del elemento primario y las restan para obtener la diferen-cial, a la que pueden convertir en un movimiento para manipularuna plumiIIa en caso de tratarse de un registrador de flujo, 0 en unmovimiento para obtener una salida en presion 0 corriente directaen caso de usarse un transmisor de presi6n diferendal (vease lapractica de transmisores).
Actualmente la placa de orificio es el elemento primario demedicion mas empleado en la industria; su diseiio y construccionson muy senciIIos. Sin embargo tiene varias desventajas en compa-racion con el venturi y la tobera; sus perdidas por friccion perma-nentes son comparativamente Il1ucho mayores; la cantidad de flujoque entrega es 37.5% menos que un venturi 0 una tobera. Susventajas son basicamente economicas, ya que es el elemento demenor costo y de mas facil adquisicion.
La placa de or{ficio tiene diversas formas segun el tipo de fluidoque se quiera medir (figura Y.2); las hay concentricas, excentricas,segmentales y de arista redond{l. Las concentricas se utilizan parafluidos limpios; las excentricas para liquidos con gases ocluidos 0
/
Entrada Tobera de f1ujoTubode Dall
Tubo pitot estatico
. d fl . de area constante.F· V 1 Elementos primanos e uJo19ura ..
Orificioconcentrico
Figura V.2. Tipos de placa de orificio.
Orificiosegmental
Orificioexcentrico

CURVA DE CALIBRACI6N DE UN MEDIDOR DE FLUJO 69
El uso de la placa lleva ya gran tiempo en la industria para lamedicion comercial de fluidos, de tal forma que se ha establecido unronjunto de normas y cualidades que debe Ilena<una placa deorificio para realizar una buena medicion, Las cualidades son:
1. Ser de un material resistente, capaz de evitar deformacionesal someterse a esfuerzos de presion ordinarios, 0 bien alchoque de un fluido sin presentar corrosion,
2, En cuanto al espesor del orificio, este va en relacion con eldiametro del mismo: para tuberias de hasta 4" de diam
etro
se usan placas con espesor de 1/16"; para tuberias con undiametro de entre 4 y 16" se usan placas con un espes
orde
1/8", Y finalmente, para tuberias mayores de 16" se usan
placas con espesor de 1/4",3. La cara de la placa correspondiente a la altapresion debemontarse perpendicular al eje de la tuberia Y su bordetorneado a escuadra y pulido a espejo para mejores resultados,En la placa de arista redondeada, la cara plana va hacia la
descarga,4. El borde del orificio no debe tener un grosor mayor de 1/8",y para placas con un orificio menor de 1/2" el gru
esodel
borde no debe exceder de 1/16", Si para lograr esto esnecesario biselar el borde, se hara en ellado de baja presiony a un angulo no menor de 45 grados. .
5, Ladistancia minima requerida, de tramo de tuberia recta antesy despues de la placa de orificia, esta normada por la ASME Ydepende de la configuracion de la tuberia donde se monta laplaca, Mas adelante se explica dicha norma,
I-.... I
.0 I,8
6 ~./
-/
../
1 --., "L --l ..J'/
.j
'" 0.>2·Ol~ o.c:·0'(jj~ 0.4a..
Flgura V.3. Distribucion d 'e preSlones ede orificio concentrico. n una placa
gases que arrastran liquidos' laporcentaje de solidos l' s segmentales para liquid 'viscosidad variable ,y as de arista redandeada oSflc?n baJo
La f
,' para Uldos de
19uraV 3 'I,lustra un orif 'medida del gasto, Si el lClOconcentrico que se utiI'debera sufrl'r' corte del orificio esta' f'l d lza para lanmguna p' d'd a 1a 0 el fl 'datravesar el orif ' er 1 a en la velocidad Ul 0 nod I '00. En es'" mis f que adquiece Ip;es:.:::~~s~nes; se no'" ",mb:: ~~ase ~bs.e","la distribud6~flujoen la PI~c60%de la p"si6n dife"nci.r~'da permanente dea. Xlma creada por el
La FiguravA indica diferentes metodos para efectuar las tomasde presion en un orificio. Las perforacianes de tama en la tuberia,que no apa"cen en la figu",, se utiliZ"" con delta rreco
enda; el
metodo mas utilizado Y a la vez el [l1as sencillo en la practica, estaladrar los agujeros para las conexiones de toma en las bridas quesoportan el orificio. Los agujeros de raffia en la vena cantraida se
encuentran con menos' frecuencia,Las tomas para la diferencial de presion en una placade orificiopueden realizarse de cinco diferentes rnaneras:

DISENO E INSTALACION DE LA PLACA DE ORIFICIO
Toma de vena contracta
/ /Toma de radio ~
/' Tomi\"da 1TomadeeSqUin;~
-( ( /.-- D1"
~
~ \
+V,D (•=- ~ Distancia media para D
~
Direcci6n del flujo la colocaci6n de laI I) vena contracta ))j Placa de orificio~ ,
Figura V.4. Tipos de tomas de presion.
1. Toma de esquina. La medicion de las presiones se hace sobre lascaras de la piaca. Se usa cuando la tuberfa es menor de 1 1/2" NPT.
2. Toma de brida. Las mediciones se hacen una pulgada antes yuna pulgada despues de la cara de la placa. Las tomas de brida sonampliamente usadas, puesto que las bridas se consiguen ya prepa-radas para instalar y en forma roscada, soldables 0 de alta presion.
3. Toma de radio. La toma antes de la placa se hace a 1 diametrode distancia, la toma despues de la placa a 1/2 diametro (un radio).
4. Toma de vena contracta. Debe usarse si se desea aprovecharla maxima diferencial de presion. La medicion se hace un diametrode tuberfa antes y la distancia despues de la placa esta determinadapor la relacion de diametros Cfigura Y.5).
5. Toma de tuberia. La medicion se hace 8 diametros de tuberfaantes de la placa y 2.5 diametros de tuberfa despues de la placa.
Debe existir una longitud suficiente de tuberfa recta y de diametrauniforme, aguas arriba del orificio, para obtener disposicion normal
~ 0.5Di
\1\
0.0
0.2
Diametros de tuberiaa partir de la placa de orificio
Figura V.5. Ubicacion de conexion de la presion de salidapara la toma de vena contracta.
del flujo en eI orificio. La presencia de bridas, codos, valvulas y otrasaccesorios situados cerca del orificio hacen preciso, en la practica,calibrar el aparato en su situacion verdadera.
Es muy importante que antes y despues del orificio existasuficiente longitud de tuberfa recta, con eI fin de que el tipo de flujosea normal y no este distorsionado por valvulas, accesorios u otrasaparatos. Si no ocurre asf, la distribucion de velocidad sera anormaly eI coeficiente de derrame estara afectado en una forma imprede-cible. Se dispone de datos para la longitud minima de tuberfa rectaque debe existir aguas arriba y abajo del orificio, para asegurar unadistribucion normal de velocidad, la norma es de la American Societyof Mechanical Engineering (ASME) de julio de 1945.

Si no se dispone de la longitud necesaria de tuberia recta aguasarriba del orificio, se podran instalar paletas de enderezamiento, con10 que la longitud minima aguas arriba entre las pal etas y el orificiose reducira. Otra forma mas recomendable es introducir en la tuberiaun haz de pequenos tubos que llenen completamente la secci6ntransversal; el diametro maximo del tubo debe ser de un cuartodel diametro de la tuberia, y la longitud, por 10 menos diez vecessu diametro.
Las paletas de enderezamiento destruyen las corrientes transver-sales y de esta forma ayudan a restablecer la distribuci6n normal develocidad.
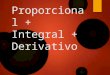
La figura v.6 muestra una norma de las distancias necesariaseditada por la ASME. Disposiciones mas complicadas de accesorios ~la presencia de valvulas parcialmente cerradas aguas arriba delorificio precisan una gran longitud de tuberia recta para establecerla distribuci6n normal de velocidades.
El coeficiente de un orificio es mas empirico que el de un tuboventuri; por tanto; se dispone en la bibliograffa de normas rigurosasy detalladas para medidores de orificio, que han de seguirseexactamente si se pretende utilizar el medidor sin calibrado previo.Para un diseno aproximado 0 preliminar se emplea satisfactoriamen-te la ecuaci6n siguiente:
velocidad a traves del orificio (mlseg)
relaci6n entre el diametro del orificio y el diametrointerior del tubopresiones en los puntos antes y despues del orificio
coeficiente de orificiofactor de conversi6n de la gravedad, ley de Newton,9.8067 (mkg/kg seg2
)
densidad (kg/m3)
velocidad de flujo de masa, (kg/seg)diametro de la tuberia,
Uo=~=
PaY Pb=co=
A causa de las elevadas perdidas por fricci6n debidas a losremolinos que se generan en la reexpansi6n del chorro, una vezsobrepasada la vena contracta la recuperaci6n de presi6n en unmedidor de orificio se vuelve muy deficiente. La perdida de potenciaque se origina es una de las desventajas del medidor de orificio. Larracci6n de la presi6n diferencial que se pierde permanentemented pende del valor de la relaci6n entre el diametro del orificio y elliametro del tubo, segun se observa en la figura Y.7.
La ecuaci6n que rige a los medidores de area constante, determi-l1ada por Torricelli, es:
t1onde:
Q = gasto maximoC = coeficiente de descarga en la restricci6nA = area de la restricci6ng = aceleraci6n de la gravedadh = caida de presi6n a gasto maximo
2&( F:.- 1;,)Ua = 0.61 ----
P
~2 = . 4m0.61n D~~2&( F:. -p,,) p
Seglin esta ecua,ci6n la medici6n de gasto es una funci6n cuadraticatit' la presi6n diferencial (h); este hecho limita el uso de tal tipo deIIIVdidor,porque abajo de 50% del gasto el coeficiente de descargalit· la placa de orificio no es constante y la ecuaci6n resulta falsa.

A..•.•.•••1 I11 I
~!riie~~B~Ejes, ratornos 'I0 bOqUiI'l ~ Vuetta
de tuba de flup deo vuelta; \" ......a- radio largo
de radio largo ""---A-..?B~ . '-...... Ori:CiO
Enderezador ./ boquilla~rFB doftup
~
(( 2diam.
I A·Codos 1-Vuelta Orificio 0 vuetlas 40.0
. de 0 boquilla de tubo:.~$r"'"'30.0 ~ /;; A· Vueltas r LJ2 de radio largo.
20.0 e1E.~i5
. .~ A----iB-l
t1 ~ Ejes, ratamos~ ~ ,yvueltas
de radio largoEnderezador'-.,.(,1= 1
2 d~m, t--- C --t B -lI--- A'----i
A· Codasvuellas de tubo
/I
40.0
30.0 ~0.0
".20.0 ~
~Jiji5
10.0
.~ A ----lB-l
~~ EJes, retorn~s~ ~,yvueltas
de radio fargoEnderezador'-.,.(,1= 1 /
2 diam t-- c --tB -i J'1--- A'----i
f
,/ -If
Para orilidos y boquillascon reduccion y expansion
Orfflc,o 0 boqu,lIa de fluJo
-L -+ =1:1:)
>-"dComo S9 ~era L:-~
por accesorios anteriores
40.0
f0
30.0 i.8
! il
"20.0-0
2;;E,~
10.0Clm-'
II I I III
Para ori/icios y boquillas con lodos los accesorios en el mismo plano
O,iieio 0 boquilla do ftU\
~~¥r=--r= -l1-:-t-to; ~r;£ador I
~ 2dJm.-C-B-
Tanqu~=do
lambor- A
Separador 8 0=6 diam. f=0 l---.t
B
o~.
20.0 "C
~.~i5 0.0
0.1 0.2 0,3 0.4 0.5 0.6 0.70.8 0.9
Relaci6n de diametro
Orificio¥"o boquilla de f1ujo
=0 III--A---tB-4
Enderezador----..=t::l= ..c!i!
40.0
30.0 ~e2a
20.0 {l
~.~i5
10.0
Para or~icios y boquillasen loma almoS/erica
0.0 0.1 0.2 0.3 0.4 0,5 0.6 07 0.8 o.go.oRelaci6nde diametro
Accesarios permttidlls a la salidaen Iugar dBtUbarecto
1. Tes 1.!as
2. Codos de 45° 2.Juntasde expansi6n
3. Valvulas de compuerta 3.Valvulasde compuerta
4. Separadores 4.Yes
5. Yes 5.Separadores(si el cuellode la entrada es
6. Juntas de expansi6n 10 longitudinal)
0,0 • o.s R n.•• n.R R
1. Valvulas de compuerta l.Valvulasde compuerta
2. Yes 2·Codode radio largo
3. Separadores (si alcuello de entradaas 1 0 longitudinal)
Figura v.6. Instalaci6n de placas de orificio(Trans, ASME, julio de 1945, p. 346),
200 ~2il.
10.0 ~
!i5

1.0.Q
~0 0.8Qi"0
~ 0.6Q)
"0c:-0 0.4'uu:c:Q) 0.2'"I1l"0
~oQ)a..
Relaci6n g~do = diametro del orificioOi = diametro interior de la tuberia
1, Cron6metro.2, Simulador de flujo, Es un equipo disenado para la ensenanza.
Consta de dos tanques, uno de alimentaci6n y otro demedici6n de 25 cm de diametro, con una escala graduada encentimetros. El agua circula mediante una bomba a traves deuna valvula de control de operaci6n neumitica y de una placade orificio conectada a un transmisor de presi6n diferencial.
3. Transmisor de presi6n diferencial. Es neumatico y envia unasenal de 3 a 15 psig, proporcional a la presi6n diferencial aun instrumento receptor instalado en un tablero; en ese tablerohay tambien una estaci6n de carga manual que se usa paraoperar la valvula neumatica (Figura V.8).
1. Abra la valvula de suministro de aire y compruebe que elregulador de presi6n este ajustado a 20 psig 0.4 kg/cm
2).
2, Abra las valvulas manuales instaladas en el simulador, pardonde debera circular el agua.
3, Ajuste la posici6n de la valvula neumatica con la estaci6n decarga manual, a 80% aproximadamente.
4, Arranque la bomba,5, Ajuste la posici6n de la valvula neumatica hasta que el
puntero rojo del instrumento receptor senale 100 por ciento.

6. Cierre las dos valvulas manuales que circulan el agua del tanquede medici6n al tanque de retorno, pellllitiendo que el nivel deagua suba en el tanque de medici6n. Con un cron6metro midala diferencia de niveles obtenida en un minuto, 0 el tiempo enque el tanque de medici6n alcanza cierta altura.
7. Abra nuevamente las valvulas manuales de circulaci6n y parela bomba.
8. Calcule el gasto y ese sera el rango del instrumento.9. Repita los pasos 5, 6 y 7 para 4 y 9% de la lectura del receptor
a tres minutos. Calcule los gastos.10. Repita los pasos 5, 6 y 7 para 16 y 25% de la lectura del
receptor ados minutos. Calcule los gastos.11. Repita los pasos 5, 6 y 7 para 36 y 49% de la lectura del
receptor a 1.5 minutos. Calcule los gastos.12. Repita los pasos 5, 6 y 7 para 64 y 81%, de la lectura del
receptor a un minuto. Calcule los gastos.13. Pare la bomba y cierre la valvula de suministro de aire.14. Con los datos obtenidos en los pasos 8, 9, 10, 11 Y 12,
construya una grafica de lectura del instrumento receptorcontra gasto calculado.
1. Abra la valvula de suministro de aire y compare que elregulador de presi6n este ajustado a 20 psig 0.4 kg/cm2).
2. Abra la valvula de alimentaci6n y retorno por donde debecircular el agua.
3. Ponga el controlador en AUTomatico y coloque el puntero deajuste en el valor que el maestro solicite.
4. Arranque la bomba y espere a que la variable se estabiliceenfrente del punto de control. Si no se estabiliza en el valorexacto, recorra el puntero para que la variable se encuentreen el valor solicitado por el maestro.
5. Cierre la valvula de descarga del tanque de medici6n yarranque el cron6metro en el valor de nivel que elija.
6. Pare el cron6metro cuando el nivel au mente 30 cm (valor delnivel al estabilizar el flujo mas 30 cm). Anote el tiempo.
7. Coloque la palanca del switch AUTO-MAN en la posiclOnTRANsjerencia (para mantener la valvula en su ultima posi-ci6n).
8. Pare la bomba y abra las valvulas de retorno. Espere a que eltanque se vade.
9. Repita las operaciones 3 a 8 para cada lectura del indicadorque el maestro solicite.
El cilculo de cada una de las lecturas de nivel se hace aplicando lasiguiente f6rmula:
Q = 0.785 D2 L _1_1000 T min
Q = gasto (en IImin)D = diametro del tanque (en cm)L = nivel obtenido (en cm)T= tiempo (en minutos)
Q = 0.49 ~= (l/min) (MANual)
Q 14.7 (1/ . ( ,.)=T = mm AUTomatlCo
Para calcular la curva, matematica 0 "ideal" y obtener conc1usio-nes de la practica, utilice la ecuaci6n de Torricelli, en donde elproducto de las constantes Co, A y 2g es igual a 1.

Practica 6Calibraci6n de una celda par presi6n diferencial
Datos: Diametro del tanque: 25 cmDiferencia de niveles: 30 cm en AUTomatico
Lecturadel Flujo Flujo Flujo Error
receptor Tiempo Nivel real real ideal deflujo% (min) (cm) (llmin) (%) (%) (%)
049
162536496481
100
C a 1i bra run ace 1d a transmisora de presi6n diferenciala una diferencial dada.
Las ce1das de presi6n diferencial se montan normalmente en unsoporte de tubo de 2", horizontal 0 vertical, mediante una abraza-dera que se sujeta con tornillos al cuerpo de la celda. Al montarlasdebe asegurarse que los diafragmas sensores esten en plano vertical.
Cada una de las bridas que corresponden alas tomas de alta ybaja presi6n deben acomodarse de modo que la valvula de venteo(0 purga) quede en la parte superior para desalojar los gases cuandose midan Hquidos, 0 en la parte inferior para desalojar e1condensadocuando se midan gases; para lograrlo desmonte las bridas y hagalasgirar hasta la posici6n conveniente.
El s~ministro de aire debe ser de 20 psig; si es necesario, puedemont~ise un regulador de presi6n adyacente.
Los transmisores de presi6n, diferencial, ademas de medir lapropia presi6n diferencial, se utilizan para medir las siguientesvariables:
NOTA:Anexe la grafica. Dos curvas: lectura del receptor en % con-tra flujo real en % y flujo ideal en %.
Conclusiones: ---------------------
Nombre del alumno: _
Fecha: Clave: _ Presion manometrica. Dejando la toma de baja a la atm6sfera.Flujo. Carda de presi6n de una restricci6n en la tubeda.

82 LABORATORIO DE INSTRUMENTACI6N Y CONTROL
Nive/. Como presi6n hidrosttitica, conectando la toma de baja ala parte superior del recipiente si es cerrado.
Densidad. Mide la diferencial de dos columnas de igual altura; latoma de baja se conecta a la columna de agua y la de baja alproceso.
.,./,/
,./
.••...... V.....-.••......
.••......
V/'
/V
V0
0 /
0 /
0
~70 80 90 100
Cuando se usa un elemento primario de medici6n de flujo a partirdel principio de crear una cafda de presi6n en el fluido, como porejemplo: placa de orificio,tubo venturi, tubo dall, pitot, etc., la celdade presi6n diferencial es el instrumento secundario adecuado paraconvertir la cafda de presi6n en una selial de 3-15 psi (0 de 4-20mAsi es electr6nica), compatible con el resto de los instrumentos delcircuito de control.
Debe recordarse que la salida de la celda es proporCional a lapresi6n diferencial, pero la presi6n diferencial es proporcionalal cuadrado del flujo; por tanto, el flujo es proporcional a la raizcuadrada de la sefial de salida (figura VI.l).
Para interconectar la celda alas tomas del elemento primario sedebe utilizar tuberfa de 318" como mfnimo, y tener la precauci6nde evitar fugas; de preferencia debe usarse tubo de cobre flexible.
Para el caso de una placa de orificio existen cinco tipos de tomassegun se vio en la practica correspondiente: toma de esquina, tomade brida, toma de radio, toma de vena contracta y toma de tuberfa(consulte la practica 5).
Para que la medici6n no tenga errores por presiones transversalesen la tuberfa del proceso ("ruido"),debe dejarse un tramo recto antesy otro despues del elemento primario; cada uno de estos elementostiene sus propias especificaciones que se deben cumplir. En la Figurav.6 se dan las distancias mfnimas recomendadas por la ASME (6a. ed.,1971) para orificios, toberas de flujo y tubos venturi.
A continuaci6n se dan las normas para montar las celdas enfunci6n del tipo de fluido.
10 20 30 40 50 60 755 15 25 35 45 55 65
Figura VI.I. Curva de flujo contra presi6n diferencial.
a) Gas seco no corrosivo
Lastomas de presi6n deben estar en la parte superior ~e la tUbr~a,con la celda montada arriba de la tuberfa para preve~l~quel~ag~:condensado que pudiera formarse entre a la celda. 51 a ce d
b' deben poner trampas epuede montarse arriba de la tu ena, secondensado entre las tomas de presi6n y la celda.
b) Liquidos no corrosivos
Lastomas de presi6n en tuberfa horizontal se localizan a un la~o ~ela tuberfa principal. Cualquier burbu.ja de. ~ire de~; ~e~::~:: e~por la valvula de venteo, sin embargo, SI a ~ant1 a r as en laexcesiva deben instalarse acumuladores de alre con pu gparte m~s alta de las tuberfas del proceso, antes del tramo rectorequerido.

c) Gas humedo (no condensable) y liquido .con s6lidos en suspensi6n
Un gas humedo no condensable es aquel que lleva un alto porcentajede humedad pero no condensa normalmente, como en el caso delvapor saturado.
Las tomas se localizan a los lados de la tuberfa principal, y debenllevar trampas de condensado para purgarse peri6dicamente; esteproblema no debe existir si la celda se monta arriba de la tuberfaprincipaL La misma situaci6n se presenta cuando se manejanlfquidos con s6lidos en suspensi6n (recuerdese que en este caso nopuede usarse la placa de orificio concentrica).
Aquf debe tenerse mayor cuidado, ya que las tuberfas de interco-nexi6n del elemento primario a la celda estan siempre llenas decondensado (agua 0 cualquier otro lfquido); el peso del condensadodebe ser igual en ambas tomas cuando la celda esta montada abajode la tuberfa. Si se monta arriba, la lfnea debera ser capaz de soportarla columna de condensado del transmisor al elemento primario, Nodeben existir burbujas de aire, por tanto, de be purgarse en elarranque.
Para casos en que la temperatura del fluido es' muy altfl, no de bemontarse la celda cerca ni permitir que el condensado que esta encontacto con la celda alcance mas de 120°C.
Las valvulas de venteD para eliminar gases deben quedar en laparte superior para permitir purgar, En casos donde se arrastrens6lidos deberan ponerse trampas para eliminar el sedimento,
Para este caso se debe usar un lfquido de sello mas denso que elfluido que mide, ademas de no mezclarse ni reaccionar. Es esencialque no haya fugas para no perder ellfquido de sella. Una conexi6nen cruz puede usarse para el llenado del lfquido de sello, con la
6N DE UNA CELDA DE PRESI6N DIFERENCIAL
CALIBRACI
la toma inferior para la conexi6n a la1111\\:.1 superior para elllenado, ectarse a la tuberfa principalI 1'1 la y las tomas horizontales par~ co~ , 1 'Y.\ la valvula igualadora de presi~n dlferenCla . .
Aplicaci6n en medici6n de nivel
" diferencial puede usarse para medirI.a celda transmisora de presIon. dos a presi6n 0 al vado;
. 1 t ques ablertoS Y cerra(':Ilubios de Olve en an , arriba del nivel cero del recipiente,,\ lemas, puede montarse aba)o °d elevada 0 suprimida para
- 1 d rda pue e serYa que la sena e sa 1 t la celda y el nivel cero
. , de la columna en re('ompensar la preslon 1 resi6n de la columna es:d '1 recipiente (cabeza). Recuerde que a p
Presi6n = altura . densidad del lIquido
, d una de las aplicaciones para laA continuaci6n se exphcan ca a
medici6n del niveL.
a) Tanque abierto1 do HP (presi6n alta) al punto del
Se conecta 1;,1celda por el ai' 1 cero (no es forzosamented d sea' tener e Olve 1recipiente don e se e (. , baja) se ventea a a
el fondo del tanque). El lado LP preslonplano verticaL La linead', f as deben estar en , I
atm6sfera, Los la ragm. d 10s diafragmas se llama nxveimaginaria que pasa por el centro e
'de referencia, . del nivel cero debe hacers~ unaSi la celda se monta abaJo 1 1 a' en caso de rnontarse.' pensar a co umn , '. ,
elevaci6n del cero para com up.-nsi6n de cero .•Tanto la, 1 d be hacerse una s 'C'. . . ,arriba del Olve cero e . l'ml'tantes ConsultenseI . , de cera Henen 1 '
supresi6n como la e evacwn . l' to la elevaci6n como lalas especificaciones del Ifabn~~t~~ b;~(figura Ill.S).supresi6n se hacen con e reso

Se considera Ifquido no condensable aquel que no evapora atemperatura ambiente.
Debe conectarse el lado de alta presi6n (HP) al nivel cero y ellado de baja presi6n al domo del tanque; el lado de baja presi6npermanece vado ya que el vapor dellfquido no condensa y puedeponerse una valvula de purga cerca del transmisor para eliminarcualquier formaci6n ocasional de condensado.
En caso de que la celda se monte abajo del nivel cero, debehacerse una elevaci6n de cero para compensar la pierna de la tomade alta presi6n.
Aqul se cone eta el lado de alta presi6n al nivel cero y el de bajapresi6n al domo del tanque. La conexi6n de baja presi6n estarasiempre llena de condensado del mismo fluido, por tanto se de behacer una supresi6n de cero. Es necesario consultar las especifica-ciones del fabricante para determinar el alcance de la supresi6n. Elmismo caso se aplica cuando la celda se monta abajo del nivel de re-ferencia. Si el condensado es corrosivo de be usarse un Ifquido desella mas denso, que no se mezcle ni reaccione con el condensado.Debe tomarse en cuenta la densidad de la columna de baja presi6n(pierna humeda) para hacer la supresi6n de cero (figura VI.2).
La densidad de un fluido del proceso puede medirse con untransmisor de presi6n diferencial; dos son los metodos mas comunespara hacerlo: el doble tubo de burbujeo y la camara de densidad enIfnea.
Debe recordarse la diferencia entre densidad y gravedad esped-fica: la densidad se expresa en peso par unidad de volumen y lagravedad espedfica es adimensional y es la relaci6n de densidadesde un fluido con el agua (con aire si es gas).
Figura VI.2. Instalaci6n de celdas de nivel.
a) Metodo del doble tubo de burbujeo
. f d' dades dos tubos en unConsiste en sumergir a dlferentes pro un 1 d' Ell d detanque donde se encuentra ellfquido que se va a me lr. ~ ~ .alta presi6n de la c~lda se conecta al tubo mas profundo y el e aJa
presi6n al otro tubo (figura VI.3). I d'fAmbos tubos son alimentados con aire a flujo constante; a 1~-
rencia de presiones es proporcional a la densidad, ya q~ed auede ver en segm a:diferencia de alturas es constante, como se P

Aire 3-15 psi
•fj Purg6metro
p= 2(h+y)••
+-0 Agua
+- p= Up
limpias y asegurar que ellado de baja no se contamine con el fluidodel proceso.
Nuevamente tenemos el caso de que la altura es igual para amboslados de la celda, pero la presion hidrostatica es diferente, ya queestin afectados por la gravedad especffica respectiva.
d= PI - Pzh
Ahora bien, como la profundidad de los tubos es constante ladiferencia de presiones (PI - Pz) es proporcional a la grave~adespecffica (d).
(Vease la figura VI.5). Coloque el ajuste de rango en el valor indica dopor el profesor (la escala del transmisor que sirve de referencia noes exacta, s610 aproxima la calibraci6n).
En este metodo se compara una columna del liquido del procesocon otra columna de igual altura, de agua (figura VIA). Ellado dealta se conecta a la columna del proceso, que suele ser un tubode gran diam~tr?, intercalado en la tuberfa del proceso, con obje-to de que la fncClon por flujo sea practicamente nula. Ellado de bajatambien se conecta a la columna, pero a una altura h de la toma dealta presi6n. Ambas tomas se alimentan con agua para mantenerlas
1. Mantenga venteadas a la atm6sfera ambas conexi ones delproceso (HI' y LP).
2. Abra el suministro de aire a 20 psi.3. Ajuste el resorte de cera para producir una salida de 3 psi
(figura III.5).

Manometrode
precision Manometrode mercuriotipocubeta
NOTA' Al hacer este ajuste, el aire de suministro debe cerrarsepara facilitar el movimiento de la tuerca de ajuste de rango.
Repita el ajuste de cera y alternativamente el ajuste de rango5. hasta que se obtenga la salida de 3-15 psi para el rango espe-
cificado.
Bajl'il(vente9c:la)
1. Determine el rango al cual debe ajustarse la celda; este rangode presion diferencial puede ser de nivel:
2. veotee la toma de baja presion (LP).
3. coo leisuministro de aire cerrado, coloque el ajuste de rangoal v~ or calculado en 1 (figura III.5).
4. Ab(~ el aire a 20 psi; la salida debeni ser de 15 psi; si no seobtiene, afine la posicion del ajuste de rango hasta obtener lasalida deseada.

Practica 7Determinacion de la curva de un rotametro
Calibraci6n de una celda de presi6n diferencial
Rango de calibracion: ----------
Tentativas
Primera Segunda Tercera
Cero
Rango
Cuarta Quinta Sexta
Cero
Rango
G r a fie a r 1 are s P u est a de un rotametro.
Los medidores de flujo de area variable, comunmente llamadosrotametros 0 flujometros, son dispositivos que, basados en la ecua-cion de Torricelli: Q == CA {2 gh, manteniendo constante la caidade presi6n h a rango total y haciendo variar el area A, permiten unalectura proporcional del gasto que se esta midiendo respecto a la carrerade la restricci6n que en este aparato recibe el nombre de flotado
r
(figura V1I.l), que se desplaza a 10 largo de un tubo conico vertical.En ciertos modelos el flotador es guiado por una varilla que pasa
por su centro Y que se extiende a 10 largo del rotametro. Y quedalibre para moverse longitudinalmente a 10 largo de esta guia, pero
no hay movimiento lateral.Estos instrumentos constan de un tubo conico de vidrio 0
metalico, en cuyo interior se halla el flotador, "suspendido" por elfluido en cualquier punto del tubo gracias al equilibrio que mantie-nen las fuerzas del mismo fluido contra el peso del flotador. Semontan verticalmente con la entrada de menor diametro en la parte
inferior (figura V1I.2).La gamabilidad de un rotametro es de casi 12.5:1, esto significa
que el rango del instrumento es 12.5 veces mayor que el flujo minimoque se va a medir con exactitud. En otras palabras, si el rango deun rota metro es, digamos, 100 litros por minuto, un flujo de 8 litros
93
Conclusiones: --------~-
Nombre del alumno:Fecha: ----------------
________ Clave: ----------

o o o por minuto es el valor del flujo minimo que se puede medir conprecision. Para flujos mas pequenos las inexactitudes se incremen-tarian rapidamente; asi entonces, el medidor no debe usarse pararelaciones de flujo mayores de 1:10.
Cuando no hay flujo el flotador descansa en la parte baja del tubomedidor, donde el diametro maximo del flotador es casi el mis-mo que el del tubo. Cuando el fluido entra al tubo medidor el efectoboyante del principio de Arquimedes hara subir el flotador;pero como tiene una mayor densidad que el fluido, el efecto boyanteno sera suficiente para levantarlo.
La forma del flotador depende del tipo de servicio para el coal foedisenado. Por ejemplo, un flotador pudo haber side disenado para quesea sensible a la viscosidad del fluido medido 0 bien para que seapracticamente inmune al efecto de viscosidad. EIpeso del flotador y eldiametro interior del tuba determinan la capacidad del rotametro.
Existe un pequeno espacio anular abierto entre el flotador y eltubo. La caida de presion se aplica sobre el flotador haciendoloascender para aumentar el area entre ellos, asi como el gasto hastaque las fuerzas hidraulicas ascendentes que actuan sobre el flotadoresten balanceadas por su peso.
EI flotador se halla inmerso en la corriente. Cuando el movimientoascendente del flotador tiende hacia el extrema del tuba, el areaanular aumenta; mientras esto sucede, la presion diferencial a travesdel flotador decrece.
Cualquier aumento en la velocidad ocasiona que el flotadorascienda dentro del tubo; una disminucion provoca su descenso.Cada posicion del flotador corresponde a una velocidad particulary no es la misma para fluidos de distinta densidad.
Es necesario que el tubo este provisto de una escala calibradapara que el flujo pueda ser determinado por observacion directa dela posicion del flotador dentro del tubo medidor. Los construidosde metal son usados en aplicaciones donde el vidrio no es satisfac-torio por corrosion, altas presiones 0 altas temperaturas (figuraVII.2). En este caso la posicion del flotador debera ser determinadaindirectamente por tecnicas de acoplamiento magnetico.
En caso de determinacion indirecta se provee tambien .de otrosmedios para lograr la indicacion visual directa, par ejemplo contransmisores electronicos, neumaticos 0 senales pulsantes.
I
I

LA80RATORIO DE INSTRUMENTACION Y CONTROL
Entrada
Figura VU.2. Rotametros de vidrio y metal.
Tubo ijde extension ---. ~
Bridade la extension
AdaPt~de brida
(si se requierej ~
Salida
Extension superiordel flotador
TUbodel medidor
Extension inferiordel ffotador
Topey guia inferior
Los rota metros son relativamente insensibles alas variaciones enla viscosidad; aunque los muy pequenos, con flotadores esfericos,,~fresponden a los cambios de numero de Reynolds, 10 cuallos haceIi 'nsibles a variaciones en la viscosidad y la densidad. EI tamanomas grande es el menos sensible.
La viscosidad de entrada puede ser tan alta como 100 cpo Losl11edidores pueden ser operados arriba del limite de viscosidad, encuyo caso el medidor es calibrado para condiciones de viscosidadlistintas y la lectura es corregida con ayuda de las curvas que son
I roporcionadas para tal efecto.La densidad del material del flotador tambien determina la
'apacidad de medicion del flujo; aunque practicamente puede serutilizado cualquier material, los fabricantes utilizan los siguientes:
Caja prensaesto~as ~ ~que se apneta aqui ~ __.~,.
con atornillador angular .' ~.Prensaestopas
Tornillo de aprietedel prensaestopas
Cierre de fa cajaprensaestopas
Escala de medidadef gasto grabada
en el vidrioFlotador rndicador ,,::b
Caja prensaestopas d~l~que se aprieta aqui ~.'L "if:
t ~con a ornrllador~ngUla~J 'Vidrio de densidad constante
Zafiro
Acero inoxidable
Monel
Niquel
Hastelloy CTantalo
2.28
3.988.02
8.84
8.91
8.9416.60
Balance dimimico:peso del flotador menos
peso del f1uidodesplazado
++Presion debida
a la velocidaddel ffuido
Tubo+medidor
\f;1 Antes de seleccionar el material del flotador, es importante tomaren cuenta la corrosividad del fluido, ya que el peso del flotador de bepermanecer invariable para evitar cualquier error en la medicion; lacorrosion desgasta al flotador y su di<imetro disminuye.
Presiones de diseno estandar. En rota metros con tubo de vidrio,soportan como promedio maximo 24 kg/cm2
; en tubos de metalreisten hasta 50 kg/cm2
, aunque existen disenos especiales quesoportao hasta 400 kg/cm2
•

DETERMINACION DE LA CURVA DE UN ROTAMETRO
7. Es bastante exacto Y su curva es predecible te6ricamente,con un error maximo de 2 por ciento. .
8. Su gamabilidad de 12.5:1 es mejor que la de 4:1 que tlenen
los de area fija.
Temperatura de diseiio estandar. En tubos de vidrio la tempera-tura de disefi.o es de alrededor de 200°C, y en modelos de metal dealrededor de 540°C.
Tipos de fluido. Lfquidos, gases y vapores que no condensen.Rango deflujo. Miden flujos de Hquidos desde cero a 6.01 cm3/min
hasta cero a 15000 lImin. En gases, des de cero a 0.3 cm3/min hastacero a 36 m3/min.
Porcentaje de error. De ± 0.5% a ± 1.0%, dependiendo del tamafi.ode la escala, tipo de rotametro y calibraci6n.
VlI.3. DETERMINACI6N DE LA ECUACI6N DEL ROTAMETRO
A == area del orificio anularAf== area mayor del flotadorC = coeficiente de descargaDf == diametro de la cabeza
del flotadorDt == diametro interno del tuboK == coeficiente del rotametro
PI == presi6n de entradapz == presi6n de salidaQ == gasto volumerrico del fluido
\1'== volumen del flotadorW == gasto masa del fluidoWf== peso del flotadorg == aceleraci6n de la gravedadh == presi6n del fluidov == velocidad del fluido
f3 == relaci6n de diametro l~jP == densidad del fluidoPf== densidad del flotador
A continuaci6n se desarrolla una ecuac~6~ de bal~nc~ d; f~~~Z;: ~~flotador esta en equilibrio en una posIcion en e tu 0 ,
fuerzas que actuan sobre el flotador son:
Tubos. De vidrio borosilicato, acero inoxidable, monel y alloy 20.Flotador. Tipo convencional, lat6n, bronce, acero inoxidable,
hastelloy, monel, alloy 20, niquel, titanio y plasticos especiales.Herrajes (accesorios). Lat6n, bronce, acero inoxidable 0 alloy 20
para fluidos corrosivos.Empaquetadura. Generalmente se usan elast6meros y anillo de
materiales disponibles, como hule, tefl6n, etcetera.Estos medidores de flujo tienen las siguientes limitaciones respec-
to a los de area fija:
A. Su costo es prohibitivo en gran des gastos de fluido.B. Son fuertemente afectados por la densidad del fluido; aunque
tienen las siguientes ventajas:
1. Linearidad de la escala.2. Flexibilidad, por su rapido intercambio de flotadores y tubos.3. Sencillez en sus componentes, pues el mismo aparato es
medidor primario y receptor secundario; si es necesarioconvertirlo en transmisor, no se altera su simplicidad.
4. Puede medir con mucha exactitud flujos muy pequefi.os.0.1 cm3/min de Hquido 0 1.0 cm3/min de gas.
5. Por su construcci6n no permite que se acumule suciedaden el area de medici6n.
6. En condiciones ideales, las pulsaciones 0 vibraciones per-miten obtener correctamente un promedio de lectura.
Figura Vll.3. Esquemade un rotametro.
1. Atracci6n de la gravedad. . d A uimedes2. Empuje hacia arriba por el principw e rq .

3. Presion PI, aplicada al area del flotador.4. Presion Pz, que se opone a Pl.
La suma algebraica de estas fuerzas debe ser cera si el flotadoresta en equilibrio.
La carda de presion a traves del flotador es igual a una constantey por ello es independiente de la posicion del tubo 0 de la velocidaddel fluido. Como:
WfVj== -'PI
WQ==-
P
W==CA 2gWJ(PJ_p)
P pA JpJ
~
gW== CA -
AJ
Si se pone AICarea del flotador) en funcion del diametra:
1tA == (D,2 - D}) 4'
y se considera la relacion de diametros como ~:

k= ~1t (132 -1)f!Finalmente, la ecuacion queda:
Valvulade
retorno
Si.~OnSideramos .que para un rotametro en particular la relacionde dlametros del tubo y el flotador, as! como su coeficiente C dedescarga, no cambian, tendremos:
_ Esta formula se llama: ecuaci6n bdsica de medidores de flujo dearea variable. .
Deben obtenerse valores de cuando menos seis gastos repartidos enla escala del rotametro. Los datos iniciales para la practica son:
1. Peso del flotador.2. Densidad del flotador.3. Diametro del flotador.4. Densidad del fluido.5. Diametro del tanque de aforo.
Un rotametro de 1/2" montado en el simulador de nivel, con eltanque de medici6n para efectuar el aforo del flujo. Cronometro yescala en centfmetros (figura VIlA).
Procedimiento. Para la determinacion de cada gasto, siga lossiguientes pasos:

Arranque la bomba.
Ajuste el gasto escogido en la escala del rota metro (%) conla valvula que esta a la salida. 'Permita que toda el agua retorne al tan que de alimentaci6n.Cierre la valvula de retorno y mida el tiempo (t) que tarda eltanque de aforo en a1canzar cierta diferencia de nivel (L).Ca1culeel gasto y determine el valor de k a 100 por ciemo.
Peso del flotador Diametro del tanque: 25 cm
Densidad del flotador Densidad del fluido: 1.0 glcm3
Diametro del flotador: 12.7 mm
0.785 D2 LEcuaci6n: Q = t
Porcentaje de DiferenciaFlujolectura de niuel Tiempo
Conc1usiones: _
Nombre del alumno: _
Pecha: Clave: _

Practica 8Respuesta de un controlador de dos posiciones
D e t e r m i n are 1 e f e c t 0 del cambio de carga en larespuesta de un controlador de dos posiciones.
V1II.2. TEORlA DEL MODO DE CONTROL DE DOS POSICIONES
Por su simplicidad, este tipo de control es muy popular, ya seaneumatico, electrico a mec:inico. SU acci6n es esencialmente dclica,aunque en condiciones casi ideales la magnitud de la variaci6n dela variable controlada· puede ser extremadamente pequena. Sepuede considerar que siempre hay un pequeno cambia en el valorde la variable Hamada diferencial, dentro del cual el elemento fi-nal de control mantiene sus posiciones extremas.
Consideremos un caso ideal: un controlador de dos posicionesse aplica a un proceso sin autorregulaci6n; el controlador se suponesin atrasoS. Este caso es similar al del control de un nivel de lIquidoen un tanque abierto que recibe agua par la parte superior del tanquey descarga par media de una bomba de desplazamiento positivo
(figura V1II.l).Si el controlador tiene una diferencial, el nivel aumenta constan-
temente hasta alcanzar el limite superior de esta. En ese momentala valvula que admite agua se cierra y el nivel empieza a bajar a unavelocidad constante hasta llegar al limite inferior de la diferencial.
Como se muestra en la curva A de la figura V1II.2, la variable
oscila entre los Hmites de la diferencial.

Figura VIll.2. Efecto de la velocidad de reacci6nsin tiempo muerto.
Velocidad de reacci6ndel proceso
ro~~.o-ro 0~§
uCurva A
roQl"O:oE.~ e~g
uCurva B
roQl"O:OEro 0
~§u
El proceso del ejemplo tiene una velocidad de reacci6n donde lacapacidad es dominante; el resto de los retrasos se considerandespreciables.
Con una capacitancia del proceso como se muestra en la curvaAA, el periodo del cicio es comparativamente pequeno. Si lacapacitancia del proceso es aumentada de tal manera que la velo-cidad de cambio de nivel sea inferior a su valor inicial, como semuestra en la curva BB, el periodo del cielo aumenta, como se veen la curva B.
La amplitud del cielo permanece constante puesto que es nume-ricamente igual a la anchura de la diferencial. Si reducimos ladiferencial, el periodo y la amplitud del cielo se veran tambienreducidos, como se ve en la curva C.
Si el sistema tiene un tiempo muerto considerable, la amplituddel cielo sera proporcional a la velocidad de reacci6n, puesto quemientras mas grande sea la velocidad de reacci6n del proceso, mayorsera la desviaci6n antes de que la variable controlada pueda volveral punto de ajuste.
La amplitud del cielo en caso de haber tiempo muerto encualquier variable es inversamente proporcional a la velocidad dereacci6n del proceso, y directamente proporcional a la amplitudde la diferencial y a la duraci6n del tiempo muerto.
Cuando hay un tiempo muerto, la capacitancia del proceso 0 lavelocidad de reacci6n del proceso correspondiente adquieren graninfluencia en la amplitud del cielo. En la Figura VIII.3 se ilustran dossistemas controlados, con el mismo tiempo muerto pero diferentesvelocidades de reacci6n.
Cuando se usa un control de dos posiciones con diferencial enel proceso que tiene mayor velocidad de reacci6n (curva AA), laamplitud del cielo es de 1.7 unidades. Si se reduce la velocidad dereacci6n (curva BB) la amplitud del cielo disminuye a una unidad.
El caso practico difiere del ideal por el atraso en la transmisi6n,que incrementan los atrasos de medici6n y del controlador. Ademas,el proceso en sf muestra un atraso, mas si se considera que el controlde dos posiciones es muy usual en procesos termicos.
N6tese que en el proceso con velocidad de reacci6n mas lenta lavariable se mantiene mas cerca de la diferencial. El periodo del cieloaumenta con una velocidad de reacci6n lenta.

---tt-1.0-- -
Figura VIll.3. Efecto de la velocidad de reacci6ncon tiempo muerto.
Los atrasos en el sistema controlado redondean los picos de laonda de la variable controlada, que debe aparecer como ondasenoidal.
Al variar las condiciones de carga del proceso, el ciclo adquiereapariencia asimetrica si se aplica un control de dos posiciones a unsistema que tiene atrasos en la transmisi6n. En un proceso termico,par ejemplo, para obtener mayor demanda de calor, el tiempo queel elemento final de control permanezca energizado (valvula abierta)debera ser mayor que el tiempo que permanece desconectado(valvula cerrada).
En la figura VIllA se puede apreciar que la magnitud de la variablecontrolada es menor cuando la demanda es alta, a fin de proveermayor cantidad de calor. La variable se separa mucho del punto deajuste cuando hay un cambio de carga, porque el calor suministradoes inadecuado para la nueva demanda.
De 10' anteriormente descrito se pueden deducir las siguientesconclusiones.
Cerrado:IIIIII
Q) I:0 I<Il
l
-+-
-CiiQ) C"'O~c 0:Q CU Q).~ ~ CerradoD.Qi
Limiteinferior

T TI 1I II II II II II II 11 I
__JI
--1 II I1 1I I1 II I
IV'I I I 'd ~_-- __ I JavuasoenOI e ------
II II 0
contactos se abren y cierran cuando la variable pasa par el puntade ajuste. Estos contactos son llamados alto y bajo y la diferencialentre ellos constituye un pequeno porcentaje de la escala total, amenos que el controlador sea construido intencionalmente can unadiferencial. Una diferencial de 0 % de la escala es imposible deobtener. En la mayoria de los controladores electricos de dosposiciones la diferencial constituye mas a menos 10/0 de la escalatotal.
La diferencial se usa a fin de disminuir el usa excesivo delmecanismo de control y generalmente es menor de 20/0 de la escalatotal. Si se utiliza un controlador electrico de dos posiciones paraoperar un relay a una valvula solenoide, el atraso del control, estoes, el tiempo que tarda para que abra a cierre un contacto en elcontrolador, sera despreciable; no es asi si el elemento final de con-trol es movido par un motor de dos posiciones, ya que la carrera deestos tarda mas de dos y menos de 120 segundos, dependiendo delmotor (figura VIII.6).
1. Aumenta can una velocidad de reacci6n menor.2. Aumenta can los atrasos en la transmisi6n.3. Aumenta can el tiempo muerto.4. Aumenta can la diferencial del controlador.
Escala~1. Aumenta can una velocidad de reacci6n mayor.2. Aumenta can atrasos de la transmisi6n.3. Aumenta can el tiempo muerto.4. Aumenta can la diferencial del controlador. Amplificador ~
La mas importante para obtener una amplitud de cicIo pequenaes que los atrasos en la transmisi6n y el tiempo muerto sean tanpequ~nos como sea posible. En los procesos que tienen altaveloCldad de respuesta el tiempo muerto debe ser casi cero.
Una velocidad de reacci6n menor permite un ligero tiempomuerto. Un atraso grande en la medici6n produciria un errordinamico serio y el valor de la variable no seria el verdadero. Unproceso can velocidad de respuesta lenta permite tener un controlde dos p~siciones bastante exacto. Pero si el periodo fuese muylargo debldo a una velocidad de respuesta muy baja, el controladorreacc~onaria demasiado lento para un cambia de carga a para unc~mblO en el ~unto de ajuste. Para un periodo de 30 minutos, pareJemplo, la vanable controlada tardaria en estabilizarse 1 a 1.5 horas.
En resumen, el control de dos posiciones es satisfactorio cuando:
1. Los atrasos de transmisi6n y tiempo muerto son despreciables.2. La velocidad de respuesta del proceso es lenta.3. Los atrasos de medici6n y control son pequenos.4. Los cambios de carga no son grandes a frecuentes.
,Lo~ controlad~res de dos posiciones mas usados son del tipoelectnco a electronico (figura VIII.S). EI elemento final de controlsuele ser un relevador electrico, una valvula solenoide a un motorque opera una valvula. EI mecanismo de control es tal que los

Ctlc E
-0 :::J:~ a.en Ctl0-a.. Q)
"C
Ctlc"S
-0 ~:2 -~2.!!1a.. Q)
"C Cerrada
Figura VIll.6. Caracterfstica del control de dos posiciones,con valvula motorizada.
Se utiliza un controlador proporcional con ajuste de banda propor-cional, minima para acercarse 10 mas posible a un modo de dosposiciones.
En el mismo simulador de nivel utilizado en practicas anteriores,se conecta un circuito de control, como se ve en la figura VIII.7.
1. Abra el aire de suministro a 20 psig.2. Coloque el punto de ajuste entre 20 y 40% (el maestro
seleccionara el dato). Ponga el controlador en 0% BP Y enposicion AUTO (automatico).
3. Arranque la bomba con la valvula de descarga del tanque demedicion semiabierta. Espere hasta que el proceso se hagarepetitivo (50% de carga).
4. Anote los datos de nivel minimo y maximo (para establecerla diferencial).
5. Con un cronometro, tome el tiempo que tarda el nivel en llegardel Hmite inferior de la diferencial, al Hmite supeiior (treslecturas).
6. Tome ahora el tiempo cuando el nivel se mueve del Hmitesuperior al inferior (para establecer el tiempo del periodo).
20 psig
J7. Repita los pasos 4, 5 y 6 con la valvula de descarga totalmente
abierta (100% de carga).8. Efectue nueva mente todo el proceso para un punto de ajuste
entre 60 y 80 por ciento.9. Trace las cuatro graficas (nivel contra tiempo) y obtenga las
conclusiones por cambio de carga en demanda y en posiciondel punto de ajuste.

Practica 9Modo de control proporcional
Punto de Demanda Limite Limite Tiempo Tiempo IIajuste (%) alto bajo bajando subiendo
, .NOTA: Trace las grafIcas en una sola hoja de papel milimetrico, con el punto de ajusteen las Olclenadas y la carga en las absClsas. Acljunte la hoja al informe.
o b ten e rIa cur v a d e respuesta de un controladorproporcional y determinar el porcentaje de error del dial de la bandaproporcional.
Controlproporcional 0 modulante. Es aquel en el cual la salida delcontrolador es proporcional a la magnitud de la desviaci6n. Ladesviaci6n de la variable respecto al punto de ajuste dentro de labanda proporcional es transformada en una posici6n de salida.
Banda proporcional. Es el porcentaje de la escala que deberecorrer la variable para cambiar la salida del controlador de unaposici6n extrema a la otra (0-100%).
Con una banda proporcional angosta, s610 se requiere unapequena desviaci6n de la variable para cambiar en 100% la salida.Si se trata de una banda proporcional ancha,se requiere unadesviaci6n grande en la variable controlada para cambiar 100% lasalida.
La figura IX.1 representa la relaci6n entre la variable controladay la posici6n de salida para diferentes bandas proporcionales.N6tese que cuando la banda proporcional rebasa el 100%, esimposible obtener 0 0 100% de la salida aun cuando la variablecontrolada se sitlle en cero 0 en 100% de la escala del controlador.
~n un sistema automatico opera do con el modo proporcional, ladesviaci6n de la variable produce un cambio en la posici6n de salida
Nombre del alumna: -----------------Fecha: Clave: -------------

Punto de controlIIIIIII
73 --------------------------------------....-----------------'
40 60I
5040 60
50Posicion de la variable (%)
en la direcci6n adecuada para regresar la variable al punta de ajuste;si la desviaci6n de la variable es provocada por un cambio dedemanda en el proceso, conocido como cambia de carga, la salidaintentara corregir la desviaci6n cambiando de posici6n y llegando aun punto de equilibrio en el cual la posici6n de salida es diferentede la que tenia antes del cambio de carga, aunque la variablemantiene una desviaci6n sostenida. Esto es faci! de comprender sise parte del hecho de que a cada posici6n de salida corresponde
una posici6n de apertura de la valvula y hay un gasto determinadode la variable manipulada.
En un cambio de carga es necesario un cambio en el gasto de lavariable manipulada para mantener a la variable controlada en elpunto de ajuste.
En la figura IX.l la valvula permanece 50% abierta cuando lavariable esta en el punto de ajuste. Si hay un cambio de carga, puedeser necesario mantener cualquier apertura en la valvula para un valorparticular del punto de ajuste.

EI reajuste (reset) manual se usa para variar la posicion de salidacuando la variable controlada tiene una desviacion permanente(figura IX, 2).
En la figura IX.2 se ilustra como, si se ajusta el reset manual, secorre la banda proparcional a traves de la escala del controladorpara obtener 38 y 73% de apertura de la valvula cuando la variableesta en el punto de ajuste.
A fin de analizar la accion dinamica del control proporcional, setraza la respuesta de la salida, que resulta de diferentes cambios enla variable. La respuesta es proparcional al valor de la bandaproporcional (figura IX,3).
La ecuacion del controladar proporcional puede ser desarrolladade las dos figuras anteriores, y expresarse como una relacion de laposicion de salida a la variable controlada. La posicion de salida estadada, asumiendo un controlador de escala lineal, por:
E-P- Y=--+MB
Y= Posicion de la valvula en %/100 (esta es la salida delcontrolador).
B = Banda proporcional en %/100.M = Constante que depende de la posicion del reset manual
%/100.E = Posicion de la variable en %/100.P = Posicion del punto de control en %/100.
Figura IX.3. Respuesta del control a cambios repentino y lento.
B = 0.20 Y que la variable esta 7% fuera delSi asumimos quepunto de control,
1_ Y = - (0.07 + 0.50)0.20EI signo negativo se incluye en la ecuacion para representar la
oposicion que causa el control automatico.La accion de la salida de control debe producir siempre un cambio
en la variable controlada, opuesto al que causa la primera accioncorrectiva.
Cuando la salida esta en 50% de su carrera y no existe desviacion,Mes 0.5 y
1- Y=i3(E-P)+O.5
En estas condiciones la valvula se movera de 50 a 85 por ci~nto.Ahara bien, si consideramos que a menor ba~d~ proporcwnal
corresponde una accion correctiva mas grande y hmlt~s de controlmas estrechos, consecuentemente en control proparClonal resultaventajoso aplicarse en procesos con capacitancia grande.

Ademas, practicamente es posible aplicar el control proporcionala procesos con mas de una capacidad, donde hay un atraso detransmisi6n apreciable. Como la mayoria de los procesos termicostienen al menos dos capacidades y una resistencia, se nos presentaun problema practico.
La respuesta del control y su estabilidad dependen del valor dela banda proporcional: una banda proporcional muy angosta pro-duce demasiada oscilaci6n antes de estabilizar la variable; por otrolade, una banda proporcional ancha produce una desviaci6n exce-siva.
En la Figura IX.4 se muestra la variaci6n de la desviaci6n sostenidadesviaci6n que depende de la banda proporcional, pues se hac~mas pequena si la banda proporcional se reduce.
Puesto que para procesos con atraso en transmisi6n es necesariauna banda proporcional ancha, los cambios de carga causaran unamayor desviaci6n sostenida.
La velocidad de reacci6n del proceso, junto con los atrasos detransmisi6n y el tiempo muerto, determinan el valor dela bandaproporcional.
Si la velocidad de respuesta del proceso se incrementa, esindispensable ampliar la banda; el periodo de oscilaci6n disminuyepero la desviaci6n sostenida aumenta. (El efecto de tiempo muertosignifica aumentar el periodo de oscilaci6n.)
Si aumentamos la banda para disminuir el exceso de oscilaci6nel tiempo muerto grande ocasionara serias consecuencias en eicontrol automatico.
1. Una velocidad de respuesta lenta permite una banda propor-cional angosta.
2. Los atrasos de transmisi6n y tiempo muerto pequeno requie-ren una banda proporcional ancha.
3. Un cambio de carga grande causa una desviaci6n sostenidade la variable.
Figura lX.4. Control proporcional-desviaci6n sostenida.
Si se tiene un proceso intermitente (bache) de gran capacidad,atraso de transmisi6n Ytiempo muerto pequenos, la banda propor-cional apropiada debera ser pequena: 10% 0 menor. AS1,la desvia-ci6n sostenida que acompana a un cambio de carga sera desprecia-ble puesto que la desviaci6n generalmente no puede ser m.ayor queuna fracci6n de la banda; esto disminuye la importanCla de un
cambio de carga.
Aplicaciones del control proporcional
1. Cuando no hay cambios de carga frecu~ntes ni grandes.2. Cuando no hay grandes atrasos de transmisi6n y tiempo
muerto.3. Cuando la velocidad de reacci6n del proceso es lenta.

IX.3. OPERACI6N DE UN CONTROLADOR
DE BANDA PROPORCIONAL
Los controladores son dispositivos disefiados para efectuar correc-ciones en un proceso comparando dos sefiales, una que provienede la variable (y que puede ser detectada directamente 0 mediante.un transmisor) y otra que el operador fija manualmente; ambassefiales deben ser compatibles.
Los controladores que usamos en esta practica son del tiponeumatico, es decir,"las sefiales de la variable y del punto de ajusteson neumaticas de 3-15 psi (figura IX.5). Los controladores puedentrabajar en acci6n directa 0 en acci6n inversa. (Se entiende que uncontrolador es de acci6n directa cuando al aumentar la variable conel punto de ajuste fijo, aumenta la sefial de salida; en tanto que enun controlador de acci6n inversa al aumentar la variable, disminuyela sefial de salida.)
En el caso de los instrumentos neumaticos cuyo rango deoperaci6n es de 3 a 15 psi, siempre se alimentan con una presi6nregulada a 20 psi, y aunque las presiones de entrada y salida varianentre 0 y 20 psi, el rango aprovechable es de 3 a 15 psi, ya que entreestos valores la salida es proporcional a la distancia obturador-tobera.
El controlador funciona bajo el principio de balance de momentosy usa los fuelles como elementos sensores.
Los cuatro fuelles estan colocados en cruz: los de la variable y elpunto de ajuste sobre el eje de las X, y los de retroalimentaci6n yde reajuste sobre el eje de las Y, en tanto que el perno se encuentraen el origen. El mecanisme obturador-tcibera se apoya en este pernoy es capaz de girar alrededor de el, moviendo la caratula de bandaproporcional; por tanto, el ajuste de banda proporcional va adepender de la posici6n relativa del mecanisme obturador-toberarespecto a los ejes X-Y.
Condici6n indispensable para el ajuste de este controlador es que,sin importar el valor de la banda proporcional, la presi6n de salidade be ser constante cuando los valores de la variable y del punto deajuste sean iguales. Si no se llena este requisito, el mismo aparatociJenta con dos tornillos para ajuste, uno sobre el eje de las X queopera cuando la banda proporcional es angosta Olamado de ajusteA), y otro sobre el eje de las Y, que opera cuando la banda
Sincronizaci6n (B)
~ =========p=ro=c=es=o=
L-,! Suministro psi
proporcional es ancha (llamado de aj.u?~ B); ajustando alternada-mente ambos tornillos se logra el eqUlltbno deseado.
Es de hacer notar que en el eje de las Y, uno de los fuelles (el dereajuste) puede estar venteado a la atm6sfer~ en algunas marcas deinstrumentos Y no recibe presi6n de 3 a 15 pSI, por tanto, para lograrel equilibrio se agrega un resorte que puede ser ajustado parasustituir la fuerza que ejerceria la presi6n si se conectara al fuelle;esta es una fuerza fija. Dicho resorte es operado por el ajuste B,tambien llamado de reajuste manual, que corresponde a la Men laecuaci6n del controlador.
La practica consiste en el estudio de un controlador de bandaproporcional en condiciones estatica y dinamica. Un esquema delsimulador de nivel se muestra en la figura IX.6.
--------------------

1. Llene de agua el simulador de nive! hasta aproximadamente50%; en estas condiciones la salida del transmisor debe ser decasi 9 psi (63 kPa).
2. Mueva el punto de ajuste hasta que su indice quede frente alindice de la variable; en estas condiciones la salida delcontrolador debe senalar entre 3 y 15 psi y E = P; por tanto,en la ecuacion de banda proporcional:
E-P- Y=--+M
B
Observese que en esta condicion M corresponde a la posicion desalida cuando el proceso esta en equilibrio.
3. Tomando varios valores de la variable controlada, grafiqueloscontra posiciones de salida para una banda proporcionaldeterminada, cuyo valor sera dado por el maestro.
20 psig
J1. Abra la valvula de descarga, arranque la bomba, coloque el
ajuste de banda proporcional en el valor minimo y observelas oscilaciones del nive!.
2. -Ajuste la banda proporcional hasta que las oscilaciones cesencon la minima banda posible. Si hay desviacion entre lavariable y el punto de ajuste, anotela.
3. Cambie bruscamente la posicion del punto de ajuste y observesi la variable reacciona al cambio y si las oscilaciones reapa-recen. Reajuste la banda proporcional si es necesario, y an atela desviacion del punto de ajuste y la variable (en caso dehaber/a).
4. Compare las desviaciones permanentes entre los pasos 2 y 3.

Condici6n estaticaBanda proporcional: M =
Datos para construir la grafica:
Punto de ajuste:
Banda proporcional:
Desviacion C%):
Nombre del alumno: -------------------Fecha: Clave: -------------
Practica 10Control auto matico de dos modos:
banda proporcional con reajuste automatico
o b ten e rIa g r a f i c a de respuesta integral en uncontrolador de dos modos y el porcentaje de error en el dial.
En esta forma de controlla salida controlada se mueve gradualmentede su posicion inicial, en cualquier direccion, dependiendo de quela variable controlada este arriba 0 abajo del punto de ajuste. Enotras palabras, la salida es gradualmente aumentada 0 disminuida yflota en una posicion intermedia.
Los cuatro tipos de control adores flotantes son: flotante de unasola velocidad, flotante de una sola velocidad con zona neutra,flotante con varias velocidades y flotante de velocidad proporcional.
a) El control jlotante de una sola velocidad no reconoce lavelocidad 0 magnitud de la desviacion y reacciona solamenteen el tiempo de la desviacion. La velocidad es constante peropuede ajustarse. El controlador flotante tiene una pequenazona muerta alrededor del punto de ajuste.
b) El control jlotante de una velocidad can zona neutra operade la misma manera, con excepcion de una zona neutra quese emplea para evitar las oscilaciones demasiado frecuentesde la salida; esta zona tambien puede ajustarse.

c) El control Jlotante de varias velocidades es aquel donde las~lida' de control se mueve a diferentes velocidades, depen-dtendo de si la variable controlada esta cerca 0 lejos del puntode ajuste. Este tipo, por 10 tanto, reconoce tiempo y magni-tud de la desviacion, es generalmente electrico y mueve unavalvula motorizada reversible. La alta velocidad es la maximadel motor; la baja se obtiene por medio de un interruptorelectrico que envfa impulsos al motor en fracciones de unciclo fijo. Este interruptor permanece fuera del circuito cuandola alta velocidad asflo requiere.
Igual que el controlador de dos posiciones, este controlador espor naturaleza dclico; sin embargo, para ciertas condiciones se pue-de obtener una salida estable tal que la variable permanezca en lazona neutra.
El caso ideal existe cuando el sistema no tiene atraso en latransmision, ni tam poco tiempo muerto y el controlador tiene unazona neutra. En este caso, una desviacion de la variable controladafuera de la zona neutra causa un cambio en ja salida y el cambioposterior en la variable controlada. En este aspecto es similar alcontrol de dos posiciones y la amplitud del ciclo es igual a la anchurade la zona neutra.
Para estabilizar la variable y evitar oscilacion, el proceso debeposeer autorregulaci6n. Esto se aplica en general para todos lostipos de control flotante.
La autorregulacion provee la relacion entre la magnitud de lavariable controlada y el valor del flujo del agente de control. Si elproceso tiene la ventaja de la autorregulaci6n, esta provee el flujonecesano del agente de control para mantener la variable en la zonaneutra.
La velocidad de reaccion del proceso conviene que sea tan grandecomo sea posible, 10 cual se logra en procesos de pequena capaci-tancia.
Los atrasos en la transmisi6n practicamente estan presentes yasea en el proceso 0 en forma de atrasos de medici6n. El atraso delproceso causado por los atrasos de transmisi6n y tiempo muertoproducen una desviacion excesiva y una gran amplitud de ciclo. Lazona neutra es intttil en estas circunstancias ya que no se pueden
obtener condiciones estables. Si los atrasos son grandes, la amplituddel ciclo aumenta continuamente; en este caso dicho tipo decontrolador actua como el de dos posiciones.
El control flotante no debe ser ni muy rapido ni muy lento si sedesea obtener un control efectivo. En la figura X.I se observa elefecto de las diferentes velocidades en un control flotante cuandohay cambios de carga. Demasiada velocidad produce excesivadesviacion y oscilacion puesto que los cambios en el flujo del agentede control se hacen rapidamente. Si en cambio la velocidad es muylenta hay una desviacion excesiva de larga duracion, ya que la salidade control no se mueve a velocidad suficiente para contrarrestar enpoco tiempo el cambio que existe en la variable controlada.
La mayor ventaja que se obtiene de este tipo de control es quelos cambios graduales son contrarrestados gradualmente por elmovimiento de salida.
Si todos los atrasos son pequenos, la acci6n correctiva se lograC0n muy poca desviacion de la zona neutra. Si el cambio de cargaes repentino, la desviacion no se puede evitar.
Resumiendo, el control flotante de una velocidad es aplicable
cuando:
1. Los atrasos de transmision y tiempo muerto son pequenos.2. La velocidad de reaccion del proceso es grande.3. La autorregulaci6n del proceso es grande.4. El atraso de medicion es pequeno.5. Los cambios de carga son lentos.
El control flotante de una velocidad tiene la ventaja de los cambiosgraduales en la posicion del elemento final de control. Cuando lacarga cambia rapidamente, el control jl.otante de velocidad multiplepermite limitar la desviacion. La velocidad aumenta cuando lavariable estl alejada del punto de ajuste, produce correcciones masrapidas y tiende a reducir la amplitud de la oscilacion.
Como en el control de dos posiciones, la reaccion inmediata delproceso y del controlador es de primordial importancia. En estascircunstancias los cambios de .carga no causan una desviaci6n
excesiva.

Q) Q)"0 _
:§ ~ Iu '"'00 >o "'I0.. -,
I
Q)"0 '"c:"O'0 =:Q ~ .....• Lento
<Jl '" '"0-0.. -'"Rapido " .......
•••••••••••
3
Tiempo (min)
Figura X.2. Efecto de velocidades en el control flotante.
2
Tiempo (min)
X3. TEORfA DEL CONTROL FLOTANTE DE VELOCIDAD PROPORCIONAL ble) corresponde un cambio en la senal correctiva del controlador.Al estudiar la relaci6n entre la entrada y la salida del controlador sedetermina la respuesta Y del modo de control.
La respuesta del controlador a un cambio dado se muestra en lafigura X2.
Cuando la variable aumenta subitamente, la salida se empieza amover a una velocidad fija. En la mayorfa de los controladores deeste tipo es posible ajustar esa· velocidad; la acci6n del controlflotante de velocidad proporcional se puede tomar como unarespuesta integradora ya que reconoce el tiempo y la magnitud dela desviaci6n.
EL controlador responde a un cambio estable, como se ve en lafigura X3, en donde la variable controlada se desvia gradualmentey vuelve al punto de ajuste, El controlador responde al area limitada
En este tipo de co~trol la salida se mueve a Una velocidad quedepend~ de la magnttud de la desviaci6n. Por ejemplo, si la variablese de~vla del punto de ajuste, la salida empieza a moverse a unavelOCldad co~stante. Si la desviaci6n se duplica, la salida se muevea ~oble veloCl~ad, Cuando la variable esta en el punto de ajuste lasahda no cambIa.
Aunque el control flotante de velocidad proporcional se puedeusar solo, muy a menu do se combina con el control proporcional,'se co~oee entonees como proporcional con reajuste automatico.
A fm de estudi~r la acei6n dinamica de este controlador, se puedesup~n~r que el r:usmo no esta aplieado a un proceso y que a ciertomOVlmlento del mdieador (que corresponde a eambios en la varia-

por la curva de desviacion y la salida finalmente se situa en unaposicion diferente.
La velocidad de salida depende de la desviacion; en el punto demayor desviacion el cambio de la salida es mas rapido. La ecuaciondel controlador se puede determinar por las respuestas mostradasen las dos figuras anteriores. Asumiendo una escala lineal para elcontrolador, tenemos:
Q)!c:O-o.g;!'0 m'(ji >o III0..-
Q)"0
_!E!.=!(E_P)dt
IIIc"o'0 =.- III.2 en(/) III0-a.. Q)
"0
2Tiempo (min)
y = posicion de la salida (en %/100)t = tiempo en minutos!= velocidad flotante en las siguientes unidades:
% mov. de la salidamin % desviacion
t
- y =!f (E - P) dt + ko
E = posicion de la variable (en %/100)P = posicion del punto de control (en %/100) El ajuste de la velocidad flotante es similar a un factor de
integra cion y solo selecciona la magnitud de la respuesta delcontrolador cuando esta relacionada con cielta area de desviacion.Este tipo de control se lleva a cabo por medios neumaticos,hidraulicos y electricos.
Para un caso ideal, supongase que el control flotante de velocidadproporcional se aplica a un proceso de una sola capacidad, comose ilustra en la analogia hidraulica de la figura X.4. Asumamos unaaccion lineal para el proceso y para la valvula, sin ningun atraso.
La ecuacion de este proceso eS:
El signa negativo representa la oposicion causada en el controlautomatico. La accion de salida del controlador de be siempreproducir un cambio en la variable controlada, opuesto a 10 que causala primera accion correctiva.
La velocidad flotante se define como el porcentaje por minuto decambio de salida, causado por una desviaci6n de 1% de la variablecontrolada.
La ecuacion del controlador puede ser integrada, y la posicion desalida dependera del tiempo y magnitud de la desviacion.
k = constante de integracion, determinada por la posicion inicialde la salida.
C = capacidad del procesoF 1 = flujo de entrada

Fz = flujo de salidat= tiempox= error
Con ~utorregulacion en el proceso, el flujo de salida dependedel myel y de la resistencia de la valvula de salida R.
XFz =-R
dx XFI = c-+-dt R
La ecuacion para el control flotante de la velocidad proporcional es:
dFI- --;jt = f(E - P)
d.onde f es la v~locidad ~otante del controlador y P es el punto deaJuste. Ahora, SI dlferenClamos la ecuacion en funcion del tiempo:
dFI dZ x 1 dxeft = C dtZ + R dt
(E - P)" + ;C (E - p)' + f (E - P) = 0E= variablex = seiial de entradaP = punto de ajuste
Las primas indican la primera y segunda derivadas.
Es posible investigar la naturaleza de esta accion sin resolver laecuacion directamente. La magnitud de los coeficientes de la ecua-cion determina cuando la accion dinamica es oscilante y cuando es
estable.Las ralces imaginarias se determinan por:
donde a, bye son los coeficientes de cada termino en la ecuacion
anterior.
1. La estabilidad del sistema controlado es excesiva cuando:
1f<--. 4 RZ C
Cuando la velocidad flotante es menor que el valor de lasconstantes del proceso, la respuesta es muy lenta.
2. La accion es criticamente amortiguada cuando:
1f= 4 RZ C
La variable se aproxima entonces a un nuevo balance, sin salirsedemasiado Y sin una estabilidad excesiva.
3. La ecuacion es oscilatoria pero amortiguada cuando:
1f> 4 RZ C
Como se ve en la figura x'5, d control flotarite de velocidadproporcional no requiere una zona neutra para mantener una ace ionestable. Esto proviene del hecho de que la operacion de la valvuladepende de la desviacion de la variable. Cuando la desviacion escero la valvula no se mueve. En este tipo de control se requiereautorregulaci6n en el proceso para obtener estabilidad.

CONTROL AUTO MATICO DE DOS MODOS
LABORATORIO DE INSTRUMENTACI6N Y CONTROL
~ Conl'oladm
o 0 La salida del flujo es constante Y el segundo termino de la ecuaci6nX.7 desaparece; esta ultima es una ecuaci6n de movimiento arm6-nico simple. La variable cambia a amplitud constante, por consi-guiente se necesita la autorregulaci6n para mantener una acci6n
estable.Otra caracteristica del control es que la variable regresa alpunto de ajuste para diferentes cargas. En la ecuaci6n X.7 lasvelocidades de cambio son cero euando la variable se vuelve estable
y la desviaci6n resultante es cero.En procesos con mayor velocidad de respuesta, el controlflotante
de velocidad proporcional es mas efectivo; esto esta indicado en laecuaci6n x'5, donde la velocidad flotante es menor que euando la ca-pacidad del proceso es menor Y la velocidad de reacci6n aumenta.
Practicamente un atraso 0 un tiempo muerto apreciable producenun aumento del periodo y una disminuci6n de la velocidad flotante.En consecuencia, los atrasos Yel tiempO muerto deben ser pequenos,aunque una velocidad de reacci6n grande 0 instantanea tendera a
vencer esas dificultades.El control flotante de velocidad proporcional no corrige de
inmediato los cambios repentinos de carga, aunque finalmente la
variable vuelve al punto de ajuste.Una gran velocidad del proceso permitira una velocidad flotante
suficientemente rapida, de tal manera que la variable vuelva prontoal punto de ajuste. Este tipo de control dara buen resultado euando:
Si el proceso no tiene autorregulaci6n, entonces:
(E- P)" + f(E- P) =: 0
Elemento medidorde nivel
aJ'0'0 0)0-_ c0) rn>00)<0='0'eft
1. Los atrasos en la transmisi6n Ytiempo muerto sean pequenos.2. La velocidad de reacci6n sea grande.3. El proceso tenga autorregulaci6n.4. Los atrasos de la medici6n sean pequenos.5. El atraso del controlador sea pequeno.6. Haya cambios de carga de cualquier tamano, pero lentos.
0.1 0.2 0.3 0 4F. . 0.5
19ura X.5. Efecto del controlador flotante de velocidadproporcional.
Este modo de control puede contrarrestar los cambioS de carga.Cuando la desviaci6n de la variable es grande se produce una acci6n

correctiva grande, puesto que la velocidad de movimiento de lasalida depende de la velocidad de la desviaci6n. Por consiguiente,este tipo de control es mas sensible a los cambios de carga que elflotante de una velocidad.
Cuando el control flotante de velocidad proporcional se combinacon el control proporcional, la combinaci6n recibe el nombre decontrol proporcional con reajuste automatico (reset).
En la practica 9 se via que en el control proporcional esnecesario mover el reajuste manual para dar diferentes aperturasa la valvula cuando la variable esta estabilizada fuera del puntode ajuste. Este ajuste manual se vuelve automatico por medio delreajuste automatico del controlador; en otras palabras, el reajuste(reset) recorre la banda proporcional a un lado u otro de la escalahasta obtener una apertura de valvula tal que vuelva la variable alpunto de ajuste. La operaci6n se muestra graficamente en la figu-ra x.6. La linea vertical representa el punto de ajuste y la zonasombreada representa la banda proporcional. La apertura de lavalvula esta dada por la posici6n de la variable en la bandaproporcional.
En la figura X.7 se representa un cambio subito de la variabley se desprecia el atraso del controlador. La acci6n opuesta alcontrolador se ilustra por la oposici6n de direcciones del cambiode la variable y de la respuesta del control. La suma algebraica delas dos respuestas es la acci6n del control proporcional con reset.La valvula 0 cualquier otro elemento final de control se mueverapidamente, y continua moviendose en forma gradual. Si lavariable no responde al cabo de cierto tiempo, la salida se va a unextrema de la escala. Un cambio estable de la variable se ilustraen la figura X.B. La suma algebraica de las dos respuestas es laacci6n del control proporcional con reajuste automatico. Primerola valvula se cierra rapidamente y luego se abre un poco a unavelocidad menor, cuando la variable vuelve al punto de ajuste. Porultimo, la valvula permanece en una posici6n ligeramente mascerrada que cuando principi6 el cambio.
20 BP = 30%I ••••Cerrar Abrir
00 20 40 60 80 100
Respuestareset
Tiempo ~
Figura X.7. Comparaci6nde controles de uno y dos modosa cambio fijo.

t = tiempo (en minutos)k = constante de integracion 0 posicion inicial de la valvula (en
%/100)
Las unidades de velocidad del reset (rJ son los minutos. Lavelocidad de reajuste se define entonces como el numero de vecespor minuto que la respuesta del control proporcional es repetida porla acci6n integral.
Supongamos que la desviacion de la variable es constante e iguala 0.03, el reajuste automatico es de 0.05 rep./min y la bandaproparcional es 0.20; la ecuaci6n anterior se resuelve de la siguiente
manera:
_ 0.03 x 0.05 0.03 k- y- 0.20 t+ 0.20 +
La posici6n de la valvula en cualquier instante estaria dada par:
Figura X.S. Comparacion de controles de uno y dos modosconectados al proceso.
El control proporcional con reajuste automatico tiene dos perillas,una de banda proporcionaly otra de velocidad de reajuste automatico.
La ecuaci6n del controlador proporcional con reajuste automaticoes la suma de las dos respuestas individuales. Si asumimos uncontrolador con escala lineal:
y = posici6n de la valvula (en %/100)r = velocidad del reajuste (en repeticiones por minuto)B = banda proporcional (en %/100)E = posici6n de la variable (en %/100)P = posici6n del punto de ajuste (en %/100)
r fl 1-Y=[j (E-P)dt+[j(E-P)+k
o
o sea 16% abierta suponiendo que al principio estaba completamen-te cerrada, de tal manera que la integraci6n k era igual a cero.
Existe otra forma de representar la ecuacion basica si 10 quedeseamos es expresar la velocidad de movimiento de salida en vezde la posici6n de salida.
Si diferenciamos la ecuaci6n base:

Tiempo (min)
Figura X.9. Efecto del cambio de carga a reajuste variable.
3. Con una mayor velocidad del reajuste automatico (r=. 0.20), elregreso de la variable al punto de ajuste ~e ha:e relatlvamenterapido sin tener una oscilaci?n exceslv~ .. Este es el valoroptimo de la velocidad de reaJuste automa~l~o. ,
4. Para una velocidad del reajuste automatIco ~un Im~~~r(r= 0.60), se produce un cidaje excesivo antes e ~ ca run valor estable. Algunas veces, cuando la v~loCld.ad dereajuste automatico es excesiva, la varia~l~ osclla mlentrasaumenta en amplitud, y as! continua indefmldamente.
La banda proporcional en este tipo de controlador se puedeajustar par separado (figura X,10). .
Un cambio en la banda afecta proporcionalmente la :,eloCldad dereajuste automatico. As!, si la banda se reduce a la mltad, la velo-
dy 0.05 1- dt = 0.20 0.03 + 0.20 0.0 = 0.0075 «l
'0«lec0()
«l'0«lec0()
Q)
:0«l
~
Q)
:0«l
~
0
Esto muestra que la valvula se moverfa por la accion del reajusteautomatico y tambien por la accion de la banda proporcional.
En el ejemplo de la banda proporcional de 20%, el movimientode la valvula serfa de 0.75% de la carrera de la valvula por minuto.
Con una banda de 10%, la velocidad de movimiento serfa:
- 4l; = g~~0.03 = 0.015
o 1.5% por minuto.
Entonces, si la banda proporcional se reduce a la mitad lavelocidad del reajuste automatico se duplica, aunque la perilla delreajuste automatico no se cambie.
EI control proporcional con reajuste automatico es el mas usualde todos los tipos de control. Supongamos que utilizamos estetipo de control en un proceso con una velocidad de reaccion y unatraso de transmision moderados, con un tiempo muerto muypequeno. Cuando hay un cambio de carga hay una accion delcontrol, como se muestra en la figura x'9.
Para hacer la comparacion de la accion integral, la Qanda propor-cional tiene un valor constante para todas las curvas.
1. Cuando la velocidad de reajuste es cero, el control se llevaa cabo tlllicamente por el modo proporcional. La desvia-cion sostenida de la variable es tfpica del control propor-cional.
2. Cuando la velocidad del reajuste automatico tiene un valorpequeno (r = 0.06), el regreso de la variable al punto de ajustese vuelve lento, y finalmente la des viacion sostenida seelimina. Este es el objetivo del reajuste automatico. La curvaindica que la velocidad del reajuste automatico debe sermayor.

10 20 30
Tiempo (min)
cidad del reajuste automatico aumenta al doble. Aunque la velocidadbasica de reajuste automatico es identica para todas las curvas, elaumento en la banda disminuye su velocidad de reajuste automaticohasta volver estable la accion del control.
Si disminuimos la banda proporcional, es posible conseguir unretorno mas rapido al punto de ajuste, pero tambien se produce unaoscilacion. En este ejemplo la banda proporcional optima es de 50por ciento.
~ u~~ banda proporcional menor regularmente corresponde unaoscllaclOn exce.siva, de tal manera que se necesita mucho tiempopara que la van able se estabilice en el punto de ajuste.
EI control proporcional con reajuste auto matico usualmente seaplica en procesos que tienen caracterfsticas que se adaptan al modoproporclOnal 0 proporcional flotante por separado.
En el cuadro Xl se muestra la influencia de las caracterfsticas delproceso en el valor relativo de banda proporcional y reajuste en uncontrolador proporcional con reajuste automatico.
CONTROLAUTOMATICODEDOSMODOS 147
CUADROXl.
Caracteristicas Banda Velocidad
delproceso proporcional de reajuste
N Pequena
D Pequena Angosta Rapida
N Grande
D Pequena Moderada Rapida
N Pequena
D Grande Moderada Lenta
N Grande
D Grande Ancha Lenta
N = velocidad de reacci6n del procesoD = atraso en la transmisi6n 0 tiempo muerto
x.s. OPERACI6N DE UN CONTROLADOR DE DOS MODOS:
BANDA PROPORCIONAL CON REAJUSTE AUTO MATICO
Los controladores neumaticos de dos modos, aunque son aparente-mente iguales a los de banda proporcional, difieren en que tienenun ajuste mas: una valvula con caratula graduada en rep.lmin,colocada en el conducto que lleva la presion de retroalimentacion(presion de salida) al fuelle de reajuste (reset). La funcion de estavalvula es retrasar el momenta en que se logra el equilibrio, ya queel controlador funciona con el principio de balance de momentos
(figura XlI).A diferencia del controlador de banda proporcional, este contro-
lador envia al mismo tiempo la presion de salida a los fuelles deretroalimentacion Y a los de reajuste (los cuales son opuestos), queestan colocados en el eje de las Y, solo que la presion operalibremente en el fuelle de retroalimentacion Y es restringida en elfuelle de reajuste (retroalimentacion positiva).
Cuando hay una desviacion entre la variable y el punto de ajuste,la salida del controlador cambia proporcionalmente al valor de la
--- ------ -

detendra, pero la nueva posici6n del elemento final de control.seradiferente que al inicio de la operaci6n, aunque el punt~ de aJusteno se haya movido ni la variable se encuentre frente a el; esto es,que todo el circuito de control este en equilibrio.
En conclusi6n, en los controladores de banda proporcional ~ura,la posici6n de la salida depende de la desviaci6n de l~ ~~nablerespecto al punta de ajuste, y es proporcional a esa desvlac;on. Enlos controladores de banda proporcional con reaJuste automatlco, laposici6n de salida depende, ademas ~e la condi~i6n anterior~ deltiempo que dura esa desviaci6n y del aJuste de la valvula de reaJusteautomatico.
ll _
Puntode control
1. Simulador de nivel.2. Controlador proporcional mas reajuste automatico.3. Cron6metro.
La practica consiste en el estudio del comportamiento de .~ncontrolador proporcional con reajuste automatico, en cond1Clonestatica, 0 sea, sin cerrar el circuito de control.
La practica se efect(la en un simulador de nivel, cuyo esquema semuestra en la figura x'12.banda proporcional; cambia por tanto la presi6n de retroalimenta-
ci6n y se establece un desequilibrio entre los fuelles de retroalimen-taci6n y reajuste.
Suponiendo que la variable no regresa inmediatamente al puntode ajuste, el desequilibrio va a ocasionar que la presi6n de salida (ypor supuesto la retroalimentaci6n) siga desplazandose en la direc-ci6n original hasta que la variable vuelva al punto de ajuste y elequilibrio se restablezca.
Si por alguna causa la variable no vuelve al punto de ajuste, lapresi6n de salida se ira a 0 0 a 20 psig, dependiendo de la direcci6nen que se desplace la presi6n. Si se logra el equilibrio dentro delrango de 3 a 15 psig, la presi6n de salida dejara de variar y elelemento final de control (que recibe la presi6n de salida) se
1. Ponga el equipo en operaci6n. Conecte el interruptor y abrael aire de suministro a 20 psig.
2. Arranque la bomba y suba el nivel a 30% aproximadamente.3. Pare la bomba y cierre la valvula.4 Mientras mantiene cerrado el reset (en 50 del dial, ya que las
. unidades se dan en min/rep.), ajuste la banda proporcionala un valor dado por el profesor.
5. Iguale el punto de ajuste con el nivel obtenido.6. Lea la salida del controlador en % para E = P; (y = k).

7. Establezca un error aumentando nuevamente el nivel(Ei: P).
8. Lea la salida proporcional en % del controlador (Yp); lacorrecci6n proporcional sera 1p - K.
9. Abra la valvula de reajuste a 0.2 min/rep., haciendo funcionaral mismo tiempo el cron6metro. r= 5 rep.lmin.
10. Detenga el cron6metro cuando la salida sea de 100%(Yp = 100%), ten minutos.
11. Trace la grafica, que debera aparecer como la de la FiguraX.U (suponiendo t = 3.5 min).
dy (100 - k)12. Calcule -d ' 0 sea .
t mln
13. Compmebe si 11= (1p - k), 0 sea, si la correcci6n integralesta dentro de lot especificado.
Yp = salida proporcional
K = salida inicial

Practica 11Elementos finales de control
Banda Variable Ajuste I K Yp T
o b ten e r 1a s cur vas caracterfsticas inherente e instalada
de una valvula de control neumatica.
El elemento final de control es un mecanismo que varfa el gasto delagente de control 0 la energia que entra en el proceso en respuestaa la acci6n del control automatico.
Aunque por 10 regular es algun tipo de valvula, los elementosfinales de control pueden ser de otra clase, como persianas, resis-tencias, relevadores 0 interruptores electricos, segun como se realice
el control.El agente de control puede ser vapor, gas, un llquido, 0 simple-
mente corriente electriCa. Dicho agente determina en gran parte eltipo de elemento final necesario para una aplicaci6n particular; loselementos suelen constituir, en el elemento final propiamente dicho,una unidad motriz que 10 acciona.
Un ejemplo interesante de elemento final de control es elinterruptor de un pir6metro para homos electricos, en el cual lacorriente que alimenta las resistencias del homo es manejada pordicho interruptor sin usar relevadores auxiliares. En este caso elinterruptor es el elemento final de control. Sin embargo, si se usaraun relevador auxiliar, este seria el elemento final de control.
Conclusiones: ----------
Nombre del alumno:Fecha: -~~~~-C-Ia-v-e-:------------
----------

En resumen, el elemento final de control es el mecanismo quealtera el valor de la variable manipulada en respuesta de una seiialde salida del controlador automatico.
Una valvula de control neumatica consiste generalmente en:
a) Un actuador, que transforma la seiial de salida del controladoren la posici6n de un vastago capaz de ejercer una fuerzaconsiderable.
b) Un cuerpo de valvula con un tap6n que, accionado par elactuador, es capaz de hacer variar la variable manipulada.
Los actuadores neumaticos operan directamente la seiial de salidade un controlador neumatico 0 pueden utilizar una fuente inde-pendiente de aire comprimido, para convertir la presi6n en movi-miento.
EI actuador de resorte opera directamente con la seiial de salidadel controlador, para dar una posici6n de salida proporcional a lapresi6n de aire de entrada, que normalmente es de 3 a 15 psig, 0
sea, 12 psig de alcance. Existen actuadores de 4, 6, 9 y 24 psig dealcance, para aplicaciones especiales.
EI diafragma, generalmente hecho de un material flexible, semueve por la acci6n de dos fuerzas:
1. La producida por una presi6n de aire que actua sobre eldiafragma.
2. La ejercida por el resorte cuando se comprime y actua contrala presi6n de aire, como se muestra en la figura XI. 1.
A = area del diafragmaK = constante elastica del resortex = movimiento del vasta go
Generalmente el rango de operaci6n de los actuadores es de entre3 15 psi EI movimiento del vasta go se situa entre 1/4 y 3 pulga~~s.
yTe6ric~mente la posici6n del vastago es proporcional a la presIOn
aplicada. . j'd d debidaEn la practica existe una desviaci6n de la proporClona 1 a
a diversos factares.
La fricci6n entre el vastago y las partes fijas del actuadar y del1.cuerpo de la valvula.
2. La no linearidad del resorte. .' I d3. Las fuerzas que ejerce sobre el vasta go el flUldo mampu a 0
por la valvula.
Todos esos problemas pueden ser eliminados mediante undispositivo Hamado posicionador.

Una vez seleccionados el diafragma y el resorte, no es posiblealterar la relacion entre los cambios de presion de aire y losdesplazamientos del vastago, pues la parte motriz no t~ene ning~ndispositivo para ello, es decir, no tiene ajuste de amphtud y act~ade acuerdo con el coeficiente de elasticidad del resorte. En camblO,si hay un ajuste de cera y es posible modificar la posici~n del vastagopara que corresponda a una presion de aire determmada. Ello seobtendria moviendo la tuerca de ajuste para dar mayor 0 menorcompresion al resorte.
En la figura XI.3 se muestran las distintas partes ~el cuerpo. de unavalvula. En esta, para impedir que escape el flUldo que Clrcula atraves de ella, se hace pasar el vastago a traves de un estopera.
Como se puede apreciar, hay algunas piezas que no formanunidad con el cuerpo, como el asiento, sobre el cual descan~a eltap on; las piezas que sirven de guia a la parte movi~,y alg.unas plezasmetalicas que forman parte del estopera; dichas plezas, Junto con laparte movil, integran 10 que se conoce como partes interio~es, lascuales suelen ser de un material distinta al del cuerpo de la valvula.
El cuerpo que se presenta en la figura XI.? es del tip~ que tambiense puede invertir; esto es, que al bajar el vastago la v~lvula abre enlugar de cerrar. Ademas, si el cuerpo es de un s~lo aSl~nto, y comonormalmente la presion entra pOI' abajo, la dlferenClal crea unafuerza que tiende a levantar el tapon, haciendo que este tomeuna posicion diferente de la requerida. Con un cuerpo de dobleasiento se reduce al minimo este efecto.
POI'otra parte, en la figura XI.3 se puede apreciarque la ~resi?nde entrada tiende a mover el tapon superior hacia arnba y el mfenorhacia abajo. Sin embargo, como pOI'razones de montaje el dian:e~radel tapon superior es mayor que el del inferior, la fuerza que ~ngmala diferencia de presiones no se elimina completamente. Las valvulasde doble asiento tienen la desventaja de que no cierran de manera
hermetica.La direccion del flujo opuesta a la de cierre del tapon tiene la
siguiente ventaja: en gran parte de las aplicaciones, a medida que
El actuador que se ha estado considerando es de acci6n directa:cuando la presion aumenta, el vasta go baja; aunque por otra partetambien existe el de acci6n inversa, en la cual el vastago sube alaumentar la presion. En caso de que estos dos tipos se usaran enconjunto con un cuerpo que se pudiera invertir, se podrian obtenerlas combinaciones que indica la figura XI.2. En los casos a) y b) senecesitara presion de aire para cerrar; en los casos b) y c), presionde aire para abrir.
El tipo de accion adecuado se selecciona a partir de la condicionde seguridad que convendria que efectuara la valvula en caso defaltar el aire a presion. Por ejemplo, si el proceso requiere que lavalvula cierre al aumen tar la variable controlada debera en este casoelegirse la valvula de la figura XI.2a y un controlador de ace iondirecta, 0 bien la valvula de la figura XI.2b y un contralador deaccion inversa. Sin embargo, si fallara el aire a presion el resorteharia que la primera valvula quedara abierta y la segunda cerrada.
En el punto donde se une el vastago del actuador con el vastagodel cuerpo de la valvula, hay un indicador sobre una pequeiia escalaque seiiala la posicion del tapon (figura XI.3). Dicha escala puedeser desplazada verticalmente si se de sea obtener indicaciones co-rrectas. Cuando la valvula esta completamente cerrada, se tiene unpunta de referencia para fijar la posicion de la escala mencionada.

A. Cuerpo de la valvulaB. Asiento reemplazableC. DiscosD. Vastago guia de la valvulaE. Pieza guiaF. Sombrerete de la valvulaG. Anillo so porteH. Brazos del so porteJ. DiafragmaK. Acoplamiento entre el diafragma
y el vastago de la valvulaL. Varilla de retenci6n del muelleM. MuelleN. Asiento del muelleO. Conexi6n (Fisher) turbulencias que se producen en el fluido a su paso par la ~<"ilvula;
su uso es recomendable en el caso de llquidos con s6hdos ensuspensi6n 0 de llquidos que se evap~ran ~l pas~r, a traves. de lavalvula euando son sometidos a la mas baJa presion de sahda. Apesar de la tendencia de la valvula a cerrar ~e go~p~, la direcci6nusual del flujo es la indicada en la figura XI.4 Sl el obJetivo es obteneren mayor grado la disminuci6n de turbulencias.
La figura XI.5 representa una valvula de tres ~i~s, muy usual comomezcladara 0 diversora de dos flujos. La relaClon entre los valoresde ambos flujos podria cambiar en la medida en que el tap6n fueramodificando su posici6n.
La valvula Saunders, que se muestra en la figura X!.6, e,s reco-mendable en aquellas aplicaciones donde se manepn hqUldos
EB-C
la valvula cierra, la caida de presi6n a traves de ella aumenta,incrementando asi la fuerza que tiende a mover el tap6n. Si el flujoavanza en la direcci6n contraria, euando el tap6n este cerca delasiento dicha fuerza sera 10 suficientemente grande como paraveneer la fuerza del resorte, con 10 que cerrara de goipe el tap6n.
Otros tipos de cuerpo son el de forma angular y el de tres viasCfiguras XI.4 y XI.5). El primero tiene la particularidad de reducir las

viscosos 0 corrosivos, 0 que contengan s6lidos en suspensi6n;asimismo, cuando se desea que la valvula cierre hermeticamente.Ademas, como el vastago no qued,tt en contacto con el llquidocirculante, el cierre se obtiene mediante un diafragma. En esteaspecto, debido a la gran superficie del diafragma, la fuerza origi-nada por la cafda de presi6n a traves de este tipo de valvula esmucho mayor que en otros tipos, 10que evita que se pueda fijar conprecisi6n la posici6n del diafragma. Por esta raz6n, la valvulaSaunders es especialmente apropiada para mantener el control dedos posiciones. Sin embargo, se puede obtener acci6n proporcionalmediante un posicionadorj mas adelante se menciona c6mo funcio-na este.
La Figura XI.3 muestra algunos detalles del estopero. La empa-quetadura esta formada por varios anillos que rodean el vastago yson sometidos a presi6n con un prensaestopa. Con objeto de quela fricci6n producida por el estopero no sea excesiva, es necesarioemplear un lubricador, como se representa en la misma Figura XI.3.La pieza metalica que rodea al vastago y queda frente allubricadordistribuye ellubricante en forma adecuada.
Los anillos que forman la empaquetadura pueden ser de asbestoimpregnado de grafito, de asbesto impregnado de tefl6n, 0 envuel-to en una hoja de aleaci6n a base de aluminio, 0 bien de teflon. Eneste ultimo caso no hay necesidad de usar lubricante.
Ya se mencion6 arriba que en algunas aplicaciones la parte m6vilde la valvula queda sujeta no s610 a la influencia de las fuerzasgeneradas por la presi6n de aire y al resorte, sino tambien a otrasfuerzas que pueden tener un valor apreciable. En tal caso, la posici6ndel tap6n no podrfa fijarse con precisi6n. Una manera de resolvereste problema es con el uso de un posicionador.
Cuando se usa un posicionador, este recibe la presi6n delcontrolador y no la valvula (figura XI.7); recibe a la vez unaindicaci6n de la posici6n de la valvula, y hace una comparaci6n delas dos senales recibidas. Si no hay correspondencia entre ellas envfaa la valvula la presi6n de aire necesaria para que esta tome laposici6n que debe corresponder a la presi6n que esta enviando elcontrolador.
Por ejemplo, supongamos que una valvula necesita aire paracerrar, y que la presi6n enviada por el controlador es de 9 psi; la
I
°r-.t Presion
a la valvulaAire
de suministro
Figura XI.7. Esquema Y dibujo de posicionador.
valvula deberfa tener una apertura de 500/0. Si la cafda de. presi6ndel fluido a traves de la valvula es excesiva y tiende a abnrla, estase apartara de la posici6n mencionada y no :~lvera a ella a meno~que la presi6n de aire sup ere las 9 psi. El posiClonador,se encargarade producir dicho aumento de presi6n hasta que ,la valvula. vuelvaa quedar con una apertura de 500/0. La pre~ion de sahda ~elposicionador podrfa ser de hasta 40 psi, dependiendo de la presiOn
que se Ie suministre. . , ' ..Por 10 anterior, sabemos que la presiOn que enVia el posiClona-
dor a la valvula es la necesaria para obtener la posici6n deseada,independientemente de los valores que puedan tener las demasfuerzas que actuan sobre la parte m6vil, incluyendo la fuerz~ delresorte. Ademas, si se utiliza el posicionador se pueden obtener otrosresultados utiles, como disponer de mayor potencia y rapidez derespuesta. Asimismo, es posible utilizar dos v~~vulas de control,de tal manera que una funcione cuando la presion del controladorvarfe entre 9 y 15 psi, aun cuando las valvulas tuvieran resortes conrangos de 3 a 15 psi. Habrfa que usar un posicion~dor para cadavalvula con rangos de 3 a 9 psi y 9 a 15 pSi respectlvamente.
Decir que el rango de un posicionador es de 3.~ 9 psi significaque si recibe 3 psi la valvula tomara una de sus poslCiones extremas,y si recibe 9 psi tomara la otra, independientemente de que el rango

del resorte fuera de 3 a 9, de 9 a 15, de 3 a 15, 0 de 6 a 30 psi. Losrangos usuales de los posicionadores son 3 a 9, 9 a 15, 3 a 15 y 6 a30 psi.
La c~racteristica de una valvula, es decir, la forma en que vacamblando el valor del flujo a medida que el tap6n de la valvula semueve a 10 largo de su carrera, puede quedar indicada por mediode una grafica 0 un cuadro. .
La curva B de la Figura XI.8 corresponde a una valvula decar~cterfstica lineal. Tanto la apertura de la valvula como el flujoestan expresados como porcentajes de los valores maximos corres-pondientes.
Si consideramos que la caida de presi6n a traves de la valvula seha mantenido constante mientras el tap6n se mueve de extrema aextrema de su carrera, entonces diremos que la grafica representala caracteristica inherente de la valvula.
La curva C representa la caracterfstica inherente de una valvulade apertura rapida. Como se puede apreciar, con tan s610 unaapertura de 30% el flujo adquiere un valor igual a 75% del maximo.
Aparentemente una valvula de caracterfstica inherente linealdeberia ser ideal para utilizarse en un sistema de control con acci6nproporcional, si las variaciones sufridas por el flujo, que vendria aser la variable manipulada, son proporcionales a los desplazamien-tos del tap6n, estos proporcionales a los cambios de presi6n del airecontrolado y a su vez proporcionales a los cambios de la varia-ble controlada. Sin embargo, hay algunas razones para preferir, enmuch os casos, una valvula con caracteristica diferente.
La caracteristica de igual porcentaje corresponde a una graficasemejante a A en la Figura XI.8. En este tipo de caracteristica, cuandoel tap6n admite un desplazamiento con valor determinado, elaumento en porcentaje de posici6n genera un incremento igual enporcentaje del flujo que habia antes del desplazamiento. Por ejem-plo, si el tap6n tuviera un incremento en su desplazamiento de 10%de la carrera, el flujo aumentarfa 40%, independientemente de queel tap6n pase, por ejemplo, de 30 a 40% de apeltura, 0 de 80 a 90%.Esta relaci6n entre apertura Yflujo tiene la particularidad de que alser representada por medio de una grafica semilogarftmica, da lugara una linea recta (figura XI.9).
Segun 10 anterior, aun cuando la caracteristica inherente de lavalvula fuera lineal, la caracteristica efectiva, que es la importante
~~
:lt 50
:l
Q)
t0.
m<:
a.«if.
10
Flujo
Figura X1.9. Caracteristica de igual porcentaje.Escala semilogarftmica.

en las aplicaciones, podria no serlo. La manera de obtener unaefectiva caracterfstica lineal, 0 aproximadamente lineal, consiste enusar una valvula con una caracteristica inhetente como la repre-sentada en la grafica A de la figura XI.S, la cual podria deformarsepudiendo dar, en una determinada aplicaci6n, una curva caracteris~tica efectiva semejante a la curva B.
La caracteristica lineal que se ha considerado es una caracteristicainherente, es decir, se obtiene cuando la cafda de presi6n a travesde la valvula es la misma para los distintos valores de la apertura.En algunas aplicaciones se cumple esta condici6n, como sucede enel caso representado en la figura XI.IO, en el cual se supone que elHquido contenido en el tanque, cuyo nivel se mantiene constante,recibe calor mediante la inyecci6n de vapor.
Si la presi6n de entrada de este fuera fija, la cafda de presi6n atraves de la valvula seria constante, independientemente de laapertura. Sin embargo, en muchas aplicaciones no se cumple estacondici6n. Es muy frecuente el caso en que la cafda de presi6naumenta a medida que la valvula va cerrando, como ocurre cuandola valvula esta conectada a otras resistencias en serie. En estascondiciones, la curva que representa la relaci6n entre apertura de lavalvula y el flujo sufre una deformaci6n.
Suponiendo, por ejemplo, que en cierto caso la diferencia depresiones a traves de la valvula y otras resistencias, necesaria paraproducir el flujo, se mantiene constante en SOpsi, que 50% de dichadiferencia constituye la cafda de presi6n a traves de la valvula siesta permanece completamente abierta, y que en estas condicio~esel flujo es de 100 l/min. Si la valvula tuviese caracteristica inherentelineal, la recta mostrada en la figura XI.ll daria la relaci6n lineal
50Flujo (I/min)
Figura XI.tt. Caracterfstica instalada.
entre la apertura y el flujo, siempre y cuando la cafd~ de presi6n ~traves de la valvula se mantuviera constante, 0 sea, Ig~al a 40 pSI.En tal caso con 50% de apertura se obtendrfan 50 l/mm.
Sin emb~rgo, al reducir la valvula su apeltura, el flujo ~endria q~edisminuir y la cafda de presi6n a traves de la tu~ena y de~~sresistencias tambien disminuirfa, haciendo que la calda de presiona traves de la valvula fuera de mas de 40 psi Y 50% de apertura, /0
sea, mayor que 50 l/min. En la representaci6n grafica se obtendnael punto B, que quedarfa a la derecha del A. /
Como 10 mismo ocurrirfa para otras aperturas de la valvula, elconjunto de todos los puntos obtenidos en esta forma, 0 sea la curvaB deberfa dar la relaci6n que en realidad habrfa entre la aperturad~ la valvula y el flujo. Dicha Clllva repres~~tarfa la .car~cterfsticaefectiva de la valvula, en la aplicaci6n especlftca consl~elada.
Aun cuando para todas las aplicaciones hubiera s~empre u~avalvula que tomara una caracterfstica efectiva lineal, no slempre. senadicha caracterfstica la mas adecuada, pues esta quedarfa determmadapor las peculiaridades del proceso por controlar y por los valoresque se deseara obtener para la variable controlada. .
Cuando el proceso requiriera una banda propor/Clonal a~gosta(10% 0 menos), la caracterfstica de la valvula tendn.a poca I~por~tancia, ya que cualquiera que esta fuera, a un camblo pequeno ~la variable corresponderfa un cambio relativamente grande del fluJo.

Tampoco tendrfa importancia el tipo de caracterfstica en aquelloscasos donde, aun cuando la banda proporcional fuera ancha, loscambios de carga fueran muy pequeflos y ademas no hubieranecesidad de estar modificando la posicion del punto de ajuste; ental caso la valvula funcionarfa siempre con la misma aperturaaproximada, saliendose un poco de ella.
En el caso general, 0 sea cuando la banda proporcional nopudiera ser angosta y ademas se presentaran cambios de cargarelativamente grandes, habrfa distintas posibilidades, determinadaspor la naturaleza del proceso.
En algunos procesos se podrfa obtener buen control con unavalvula de caracterfstica efectiva lineal, si se utiliza cierta amplitudde banda proporcional, independientemente del valor que tuvieranla carga y el punto de ajuste; esto significaria que cierto cambio de lavariable originaria siempre el mismo cambio de flujo, 0 en otraspalabras, que la relacion entre el cambio de flujo y el cambio devariable serfa constante. Estas condiciones son adecuadas para elcontrol de procesos de una sola capacitancia 0 para el controldel flujo.
En cambio hay procesos para los cuales convendrfa que larelacion entre el cambio de flujo y el cambio de variable disminuyeracuando la carga (y por consiguiente el flujo) fuera pequefla. Esteresultado se podrfa obtener con una valvula que tuviera unacaracterfstica efectiva del tipo de la grafica A (figura XI.S), sinnecesidad de que la banda proparcional aumente de amplitud aldisminuir la carga y el flujo. En general, los procesos de capacitanciam(Utiple son de este tipo.
Por ultimo, podria presentarse el caso de procesos en que lademanda no sufriera cambios de consideracion, pero si cambiosfrecuentes en el punto de ajuste. En tales condiciones podria sucederque se obtuviera buen control con una relacion constante entrecambio de flujo y cambio de variable, 0 que dicha relacion, comoocurre con frecuencia, tuviera que bajar al disminuir el punto deajuste. En el primer caso convendria usar una caracterfstica efectivadel tipo B, yen el segundo del tipo A (figura XI.S).
Como se deduce de 10 anteriarmente dicho, la caracterfsticainherente que se utiliza en la mayorfa de las aplicaciones es laque tiene igual porcentaje, si tomamos en cuenta, como ya se vio,
que una caracteristica inherente tiende a dar una caracteri~ticaefectiva de otra forma y, ademas, que en muchos procesos conVlenetener una caracteristica efectiva del tipo B (figura XI.S).
XI.4. CALCULO DEL COEFlCIENTE DE FLUJO DE LA vALVULA
La valvula es el elemento que opera el flujo del age~t~ de contr~l;par consiguiente, debe ser dimensionada en f;xnClon del fluJomaximo que se pretenda hacer pasar por la tubena. .
Existe un patron universal (establecido par la I:A) que define a~coeficiente de flujo Cv para dimensionar por una valvula de control,este es: Cv es el numero de galones por minuto de agua ~ 600
p qu~pasan por una valvula de control, con una caida depresion de 1pSI.
Asi por ejemplo, si en cierta valvula Cv = 6 a 100% de ~pertura,esto significa que al estar totalmente abierta dejaria pasar ? gpm ,deagua con 1 psi de caida a traves de ella, y 12 gpm con 4 PSl de calda
de presion. . dLa gravedad especifica del fluido influye en el fluJo que pue a
manejar una valvula. .' .En general, las formulas para dimenslOnar las valvulas se enllstan
en el cuadro XI.1:

Flujo crftico!1P? 0.5 C} Pj
ELEMENTOSFINALESDECONTROL 169
CUADROXl.2. Factor de flujo critico
Valvula Asiento Caracteristica Flujo cierra Flujo abre
Globo Sencillo Lineal 0.85 0.90
Globo Sencillo Igual % 0.94 0.94
Globo Sencillo Parab6lica 0.81 0.94
Globo Doble Lineal 0.90 0.80
Globo Doble Igual % 0.98 0.95
Angulo Sencillo Lineal 0.93
Angulo Sencillo Igual % 0.84 0.87
Angulo Sencillo Venturi 0.46
Excentrico Disco Dos pos. 0.69 0.87
Bola Esferico Igual % 0.60 0.60
Mariposa Disco Dos pos. 60° 0.67 0.67
Mariposa Disco Dos pos. 90° 0.46 0.46
CUADROXl.l. Formulas para el calculo de valvulas
LiquidoCv = q~Gf
!1PFlujo subcr/tico!1P< 0.5 C} Pj
C =gv963
W3.22
GT!1P(~ + Pz)
Vapor Cvsobrecalentado
W(l + 0.0007 Tsh)2.1~!1P(~ + Pz) Cv= (1 + 0.0007 Tsh) W
1.83 0Pj
Cv: coeficiente de flujoG: gravedad especfficaPI: presi6n entrada (psi)1:1P: presi6n diferencial (psi)q: flujo volumetrico (gpm)Tsh: sobrecalentamiento ofCf factor de flujo critico (cuadro XI.2)Gf G a temperatura del fluidoE7.: presi6n salida (psi)T temperatura del fluido (OR)Q: q de gas a condiciones normales (SCFH)W,. fluJo masa de gas 0 vapor (lb/hr)
1. Simulador de nivel.2. Valvula de control neumatica de 1/2", normalmente abierta.3. Transmisor de presi6n diferencial rango 0-10 psi.4. Estaci6n manual de control, 3-15 psi escala lineal.5. Receptor 3-15 psi de presi6n diferencial, escala lineal.6. Cron6metro.
Los instrumentos deben estar conectados como se observa en la
Figura Xl.12.

4. Lea el valor de la presion diferencial en el indicador (rango0-10 psi). Vigile que esta D.Pno cambie a 10 largo de la prueba;en caso de que 10 haga, tome el promedio como D.P real.
5. Detenga el cronometro cuando el nivel haya aumentado30 cm cuando menos.
6. Pare la bomba y descargue el tanque.7. Calcule el flujo con el volumen acumulado en el tanque
aforador y el tiempo utilizado en alcanzar dicho volumen.Calcule el CV con el flujo obtenido y las D.P leidas en elindicador (rango 0-10 psi); use la formula adecuada.
8. Repita todo el procedimiento para obtener los valores de flujoy Cv en intervalos de 10% de posicion del vastago de la valvulahasta 100% de apertura.
9. En papel milimetrico grafique ambas curvas (% flujo contra %pos y % Cv contra % pos) y determine la caracteristica instalada(operacion) y de disefio (inherente).
Operaci6n
En esta practica pa ad'inst I'd d 1 " r etermmar la caracteristica de diseno y laa a a e a valvula se de be obt .
vastago de la valvul ( e.ner, a partir de la posicion deltanque de descarga (:fo;~d~:rcentaJe).', el fluj~ real, cubicando elinstalada); y calcular el C ) en ~unclon del tlempo (caracteristica
, v, toman 0 en cuenta la caida de presioa traves de la valvula (caracteristica de diseno 0 inherente). n
1. P~nga el e,quipo en condiciones de operacion.2. AJuste la valvula con una apertura de 10% (900/< 1 . ,manual l' 0 en a estaClon
, ya que a valvula es aire-cierra)3. c~n lavalvula de descarga del tanque afo~ador cerrada ponga
a unClOnar la bomba y simultaneamente el cron6metro.

Practica 12Sintonla de controladores
F6rmulas utilizadas:Datos y resultados de los d.lculos:
Caida Nivel TiempoPosicion de presion (psi) (cm) (min) Flujogpm Cv
0 0 0 0 0 0102030405060708090
100- .
o b ten e r I a est a b i lid a d de un circuito de controlde flujo con un controlador en modo PI.
Se define ganancia como la relaci6n de cambio en la salida entrecambio en la entrada; este concepto se aplica tanto a un elementode un circuito de control como a todo el circuito.
En un circuito de control retroalimentado, la ganancia total (GTJes el producto de las ganancias de cada uno de sus elementos (figu-
ra XII.I).
La ganancia del proceso (GpJ es el comportamiento de la variablecontrolada en el equipo industrial; raramente la Gp es lineal respecto-ala escala del controlador, puesto que por 10 general dicha respuestaes un logaritmo matematico complicado. Sin embargo, para fines deestabilidad se considera una pendiente en el valor del punto de
ajuste.La ganancia del transmisor (GtJ respecto a la escala del controla-
dor puede ser lineal, raiz cuadrada, logaritmica 0 exponencial,dependiendo de la ecuaci6n que desarrolle el elemento primario de
medici6n.
Conclusiones: ---------------_ ..
Nombre del alumno: -----------------Fecha: Clave: -------------

/
.,goritmo Grmaternatico Salida
-..-
nespuesta rapida Lineal
I Gv
Lineal GtRaiz cuadrada
Parabolica LogarftmicaIgual porcentaje Exponencial
G
Gc Constante Grajustable
=
Los controladores de este laboratorio no se acoplan a los procesospor SI mismos y deben ser ajustados cuidadosamente a las condicio-nes particulares de cada proceso. Actualmente la mayoria de loscontroladores electr6nicos tienen la opci6n de autosintonizarse.
La estabilidad se obtiene si logramos que GT< 1, como se trat6en el parrafo anterior. Sin embargo, para diferentes valores de GT larespuesta de la variable controlada cambia desde estable sobreamor-tiguado hasta inestable (figura XII.2).
El criterio para escoger la curva de estabilidad de un circuito decontrol esta en funci6n de los prop6sitos y requerimientos del con-trol autoJ!latico, dependiendo de los factores de aplicaci6n; uncriterio satisfactorio seleccionado para un sistema de control puedeno ser 6ptimo para otro.
Ahora bien, se aceptan tres criterios de estabilidad para definir el"buen control", 0 sea, la curva de respuesta de la variable controladadespues de un disturbio (figura XII.3).
Minima amplitud. Se reduce la desviaci6n respecto al punto deajuste, 10 que produce un ciclaje excesivo; sin embargo, haysuficiente estabilidad para que las oscilaciones terminen. Se utilizaen procesos donde la desviaci6n de la variable controlada causaproblemas en el proceso; por ejemplo, en control de temperaturade pasteurizaci6n, y se prefiere que el proceso tenga ademasautorregulaci6n apreciable.
G,=1VV\J
r>1~
<1~
Figura XII.I. Ganancia total del circuito de control.
La ganancia de la valvula (Gv) respecto a la posici6n de salidadel. controlador p~ede ser de respuesta rapida, lineal, parab6lica 0
de 19ual porcentaJe, dependiendo de la caracteristica instalada dela valvula; si la valvula fue bien seleccionada, GT debe ser lineal.
. La ganancia del controlador (Gc) es constante pero de valoraJustable, dependiendo de la marca del instrumento; en el caso delcontrolador del simulador de este laboratorio, el valor es ajustableentre 2 y 50 por ciento.
En el circuito de control (figura XII. 1) la variable controlada debeser estabilizada en la salida. Suponiendo una entrada de seiialsenoidal, si GT= 1 la salida sera de igual amplitud, si GT> 1, laamplitud en la salida aumentara con cada cicio, y si GT< 1 la am-plitud en la salida ira disminuyendo hasta que la salida final mentedeje de oscilar.
Por 10 tanto, para estabilizar la variable la ganancia total debe~er menor que 1. Como las ganancias Gp, Gt Y Gv son caracteristicasmhe~~ntes a cada ~no de los elementos, no son susceptibles demodlflCarse; debe aJustarse el valor de la ganancia del controladorpara que el producto de todas las ganancias sea menor que 1. Figura XII.2. Respuesta de la variable controlada a disturbio.

BA= 0.25 Amplitud de la segunda onda _ 1.Amplitud de la primera onda - 4
1. Ponga el sistema en control MANual.2. Haga un cambio en la posici6n de la valvula y registre la curva
de la variable medida. Esta es la curua de reacci6n (figu-ra XII.4).
3. Trace una tangente sobre la curva en el punto de maximapendiente. Esta es la velocidad de reacci6n R en % E/min).
4. Calcule la ve10cidad de reacci6n unitaria (Rl) dividiendo Rentre el porcentaje de cambio de posici6n de la valvula.
Minimo disturbio. Se ajusta al controlador para que la variablecontrolada vuelva al punto de ajuste en el minimo tiempo, sin oscilar.Se utiliza cuando la salida del proceso es la entrada de otro proceso;se sacrifica la calidad de control con e1 prop6sito de evitar que elsegundo proceso reciba una oscilaci6n que representaria un cambiode carga en demanda. El retorno de la variable controlada al puntode ajuste es paulatino.
Minima area. Este es el criterio mas usual; las acciones delcontrolador se ajustan para lograr que e1 area bajo la curva derecuperaci6n sea minima. Se aplica en procesos donde es importantetanto la magnitud como el tiempo de desviaci6n; este criterio seutiliza en la mayorfa de los ajustes de sintonia.
% E/minR1 = % y
5. Determine el retraso efectivo (L en min) en la grafica, desdeel momento en que se movi6 la valvula hasta el punto don-de la tangente corta la linea de punto de control.
6. Los ajustes del controlador son:
Modo Ganancia Reset Derivada
P l/Rj L - -
PI 0.9/Rj L 0.2/L -
PID 1.2/Rj L 0.3/L 0.8 L
EI ajuste de los controladores se bas a comunmente en el equilibriodel criterio de dominio de tiempo en oposici6n al criterio de dominiode frecuencia.
Son cinco los metodos mas usuales. El primero de ellos se llamade cuarta declinaci6n y tiene la ventaja de obtenerse facilmente, yaque esta basado en dos mediciones. Al igual que e1 primero, e1segundo tambien es de Zeigler-Nichols y se llama velocidad dereacci6n; se aplica en un sistema con circuito abierto. Los otros tresson matematicos. El metodo de Ziegler-Nichols utiliza el criterio deminima area para obtener la cuarta declinaci6n; sin embargo, debetomarse en cuenta que mas de una combinaci6n de ajuste delcontrolador puede producir la misma respuesta, pero s610 una deellas sera la 6ptima.
Los metodos de Ziegler y Nichols se desarrollaron considerandoprocesos sin autorregulaci6n. Para tomar en cuenta la autorregula-ci6n en los procesos, Cohen y Coon introdujeron un indice deautorregulaci6n (uJ que se define como: u = RL/ Rl.

Los tres metodos que enlistamos a continuaci6n son mas exactosque los anteriores si se trata de ajustar un controlador con dos 0 tresmodos; los tres son metodos integrales Y sus valores se calculanmaternaticamente, aunque sus parametros son mas dificiles de
medir.
1. Integral minima del cuadrado del error (ISE). Actua cuandoocurren grandes desviaciones, mejorando la respuesta con menortiempo de cambio en la salida.
ISE = JX2 dtI-+1 LI I 2. Integral minima del tiempo y del error absoluto (ITAE).' Actua
cuando ocurren pequenos errores retrasados, mejorando la respues-ta con tiempos cortos de alineaci6n.
• Tiempo (min)
Figura XII.4. Curva de reacci6n del proceso,
Para desarrolla.r su metodo Ziegler y N' h 1 'd_. ' IC 0 S cons I eraronU - 0, 0 sea SIn autorregulaci6n. Los valores de R L R1 b .did . , ' y se 0 tlenene a curva e reaCClon del proceso.
Las siguientes ecuaciones empiricas fueron propuestas por Coheny Coon. .
3. Integral mmzma del error absoluto (AiE). Este metodo esintermedio entre los dos anteriores, y la respuesta frecuentementetiene una relaci6n de declinaci6n cercana a 1/4.
Ganancia:
Ganancia:
Mediante el circuito de control de flujo del simulador se lleva a cabola practica, utilizando el metodo de sintonia de "ultima ganancia" 0
de "llitima banda proporcional", el cual ya modificado se conocecomo metoda de cuarta declinaci6n Y se basa en una prueba encireuito cerrado en automatico.

1. Con el circuito de flujo funcionando en automatico, eliminela acci6n de reajuste automatico; mantenga cerrada la valvulade reset (no hay acci6n derivada ya que la variable es flujo).Tambien debe eliminarse la acci6n derivada abriendo lavalvula de desvlo cuando exista en el controlador.
2. Ajuste la ganancia (0 banda proporcionaI) hasta que GT= 1.Provoque disturbios con el puntero de control para confirmarla respuesta. Mida el periodo de oscilaci6n (p) en minutos.
3. Ajuste la ganancia (0 banda proporcionaI) hasta obtener unarespuesta de cuarta declinaci6n, como en la Figura XII.S.Provoque disturbios con el puntero de control para confirmarla respuesta. El valor obtenido es la iiltimaganancia 0 "bandaproporcional" .
4. Ajuste el reset del controlador (y la derivada, si existe) deacuerdo con el siguiente cuadro:
• Simulador de flujo• Llave de la valvula de reset• Cron6metro
1. Coloque el puntero de control en 20 por ciento.2. Determine el tiempo del cicio (P).
I' 0 obtenga con el cronometroNOTA: Para mayor precision en e
dt1em~. '.da entre 600 para obtener
el valor de 10 cielos en segun os Y IVI
cielos/min.
Determine la amplitud del periodo.3.
ResetModo Rep.lmin Minlrep. Derivada
PI liP P -
PID 1.SIP PI1.S PI6
Resultados de lapractica. Trace la grafica con los resultados:Periodo p = mm
Amplitud a =
Banda prop. =
5. Repita el paso 3 y modifique la ganancia (0 banda proporcio-nal) del controlador hasta encontrar nuevamente la relaci6nB/ A = 1/4.
Reset = _-------min/rep.