Embed Size (px)
Citation preview

Курсове по Роботика сArduino 1.0

Кои сме ние?

Robotics@Vratsa

Кои сте вие?



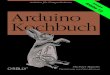
Една от първите версии на Arduino

Дигиталнипинове
Аналоговипинове
Пинове зазахранване
Бутон зарестарт
USB
DC
адаптер
LED заВкл./Изкл.
LED напин 13
LEDта приобмен наданни
Микрочип(процесор)

Бредборд

Бредборд

Jumper (кабели)
Мъжки
Женски
Крокодилски

Резистори

Резистори
DEN
IED

LED

Инсталиране на Arduino IDE


//КоментарНе се чете от програмата, а само от потребителите.
// Коментар на един ред
/* КоментарНаНяколкоРеда*/

pinModeЗадава режим на пин. Режимът може да еOUTPUT – ако ще изкарва ток от пина, иINPUT – ако ще се използва за вкарване наток. Използва се в setup().
pinMode(<пин>, <РЕЖИМ>);
Пр: pinMode(8, OUTPUT);

digitalWriteЗадава състоянието на OUTPUT дигитален пин. Състоянието може да е HIGH, за да включваме токна пина, и LOW, за да изключим ток на пина. Използва се предимно в loop().
digitalWrite(<пин>, <СЪСТОЯНИЕ>);
Пр: digitalWrite(8, HIGH);digitalWrite(6, LOW);

delayСпира програмата за зададено, в милисекунди, време.
delay(<милисек.>);
Пр: delay(1000); //спира програмата за 1 сек.
1000 милисек. = 1 сек.


























![[Arduino Workshop] Arduino Fundamentals @Globant Córdoba](https://img.pdfslide.tips/doc/110x75/5871f0d41a28ab5c348b57f5/arduino-workshop-arduino-fundamentals-globant-cordoba.jpg)
