Embed Size (px)
DESCRIPTION
Карпатські математичні публікації Т3 N1
Citation preview
Карпатськiматематичнiпублiкацiї
Науковий журнал
Т.3, 1
2011
Змiст
Артемович О.Д., Скаскiв Л.В. Групи асоцiйованi з брейсами . . . . . . . . . . . . 4
Величко О.В., Ткаченко I.Г. Про коректнiсть визначення тригонометричних
функцiй системою функцiональних рiвнянь . . . . . . . . . . . . . . . . . . . . 15
Герасимчук В.Г., Маслюченко О.В. Коливання нарiзно локально лiпшицевих фун-
кцiй . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Голубчак О.М. Гiльбертовi простори симетричних аналiтичних функцiй на `1 . 34
Дубей М.В., Загороднюк А.В. Лiнеаризацiя лiпшицево-полiномiальних та лiпши-
цево-аналiтичних вiдображень . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Заторський Р.А. Дослiдження функцiй матриць Хессенберга . . . . . . . . . . . . 49
Качановський М.О. Формули типу Кларка-Окона у майкснерiвському аналiзi
бiлого шуму . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Лозинська В.Я. Розподiли експоненцiального типу i узагальнене функцiональне
числення для генераторiв C0-груп . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Лопушанський А.О., Лопушанська Г.П., Пасiчник О.В. Слiди розв’язкiв пiвлiнiй-
них рiвнянь з дробовою похiдною за часом . . . . . . . . . . . . . . . . . . . . . 85
Махней О.В., Тацiй Р.М. Розвинення за власними вектор-функцiями у випадку
простих власних значень сингулярного диференцiального оператора . . . . . . 94
Овчар I.Є., Скаскiв О.Б. Про оцiнки iнтегралiв типу Лапласа, залежних вiд
малого параметра . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Пернай С.А., Черевко I.М. Схема апроксимацiї пiдвищеної точностi диференцi-
альних рiвнянь нейтрального типу . . . . . . . . . . . . . . . . . . . . . . . . . 112
Савченко О. Зауваження про стацiонарнi розмитi метричнi простори . . . . . 124
Семенчук А.В. Про деякi алгоритми обчислень для кубiчних полiв та полiв че-
твертого степеня . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130

Carpathianmathematicalpublications
Scientific journal
V.3, 1
2011
Contents
Artemovych O.D., Skaskiv L.V. Groups associated with braces . . . . . . . . . . . . . 4
Velichko E.V., Tkachenko I.G. On the correctness of the determination of trigonometric
functions by the system of functional equations . . . . . . . . . . . . . . . . . . . . 15
Herasymchuk V.H., Maslyuchenko O.V. The oscillation of separately locally Lipschitz
functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Holubchak O.M. Hilbert spaces of symmetric analytical functions on `1 . . . . . . . . 34
Dubei M.V., Zagorodnyuk A.V. Linearization of Lipschitz-polynomial and Lipschitz-
analytic mappings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Zatorsky R.A. Researching of Hessenberg’s matrix functions . . . . . . . . . . . . . . 49
Kachanovsky N.A. Clark-Ocone type formulas in the Meixner white noise analysis . . 56
Lozynska V.Ya. Exponential type distributions and a generalized functional calculus for
generators of C0-groups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Lopushansky A., Lopushanska H., Pasichnyk O. The traces of the solutions of the
semi-linear equations with fractional derivative with respect to time . . . . . . . . 85
Makhnei O.V., Tatsii R.M. Expansion by eigenvectors in case of simple eigenvalues of
singular differential operator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Ovchar I.Ye., Skaskiv O.B. On the estimates of the Laplace integrals on the small
parameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Pernay S.A., Cherevko I.M. Approximation scheme of higher accuracy of differential
equations of neutral type . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
Savchenko O. A remark on stationary fuzzy metric spaces . . . . . . . . . . . . . . . . 124
Semenchuk A.V. About some algorithms of calculations for the cube fields and fields of
fourth degree . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130

Карпатскиематематическиепубликации
Научный журнал
Т.3, 1
2011
Содержание
Артемович О.Д., Скаскив Л.В. Группы ассоциированные с брейсами . . . . . . . . 4
Величко Е.В., Ткаченко И.Г. О корректности определения тригонометрических
функций системой функциональных уравнений . . . . . . . . . . . . . . . . . . 15
Герасимчук В.Г., Маслюченко О.В. Колебания раздельно локально липшицевых
функций . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Голубчак О.М. Гильбертовы пространства симметрических функций на `1 . . . 34
Дубей М.В., Загороднюк А.В. Линеаризация липшицово-полиномиальных и лип-
шицово-аналитических функций . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Заторский Р.А. Исследование функций матриц Хессенберга . . . . . . . . . . . . . 49
Качановский Н.А. Формулы типа Кларка-Окона в майкснеровском анализе белого
шума . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Лозинская В.Я. Распределения экспоненциального типа и обощенное функцио-
нальное исчисление для генераторов C0-групп . . . . . . . . . . . . . . . . . . . 73
Лопушанский А.О., Лопушанская Г.П., Пасичник Е.В. Следы решений полули-
нейных уравнений с дробной производной по времени . . . . . . . . . . . . . . . 85
Махней А.В., Таций Р.М. Разложение по собственным вектор-функциям в случае
простых собственных значений сингулярного дифференциального оператора 94
Овчар И.Е., Скаскив О.Б. Об оценках интегралов типа Лапласа, зависимых от
малого параметра . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Пернай С.А., Черевко И.М. Схема аппроксимации повышенной точности диф-
ференциальных уравнений нейтрального типа . . . . . . . . . . . . . . . . . . 112
Савченко А. Замечание о стационарных нечетких метрических пространствах 124
Семенчук А.В. О некоторых алгоритмах вычислений для кубических полей и
полей четвертой степени . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130

Карпатськi математичнi Carpathian Mathematical
публiкацiї. Т.3, 1 Publications. V.3, .1
УДК 512.54
Artemovych O.D., Skaskiv L.V.
GROUPS ASSOCIATED WITH BRACES
Artemovych O.D., Skaskiv L.V. Groups associated with braces, Carpathian Mathematical Pub-
lications, 3, 1 (2011), 4–14.
We construct the group H(A) associated with a brace A and investigate the properties of
H(A).
Introduction
Let (A,+) be an abelian group with a multiplication “·”. As in [5] we call A a brace if Ais right distributive, i.e.
i) (a+ b) · c=(a · c) + (b · c) for all a, b, c ∈ A, and
ii) A is a group with respect to circle operation “” defined by the rule
a b = a+ b+ a · b.
A group (A, ) is called the adjoint group of a brace A and denoted by A. It is easy tosee that
a 0 = 0 = 0 a
and so 0 is the neutral element of A. The inverse of a ∈ A will be denoted by a(−1).An abelian group (M,+) is called a module [6] (with the neutral element e) over a brace
A if there exists a mappingM × A 3 (x, a) 7→ xa ∈M
such that the following hold for any elements x, y ∈M and a, b ∈ A:
m1) (x+ y)a = xa+ ya,
m2) x(a b) = (xa)b+ xa+ xb,
m3) x0 = e.
2000 Mathematics Subject Classification: 16W35.Key words and phrases: brace, nilpotent group.
c©Artemovych O.D., Skaskiv L.V., 2011

Groups associated with braces 5
Sinceea = (e+ e)a = ea+ ea,
we conclude thatea = e
for any a ∈ A. In view of x+ (−x) = e we also obtain that
0 = ea = (x+ (−x))a = xa+ (−x)a
and therefore(−x)a = −(xa) = −xa.
A non-empty set L ⊆ M is called a submodule of a module M if the following twoconditions hold:
s1) L is a subgroup of (M,+),
s2) la ∈ L for any l ∈ L and a ∈ A.
Let A be a brace, L a submodule of an A-module M , T a subgroup of A. On the set ofpairs
H(L, T ) = (l, t) | l ∈ L, t ∈ T
we define a multiplication by the rule
(x, y)(u, v) = (xv + x+ u, y v) (1)
for x, u ∈ L and y, v ∈ T . Then H(L, T ) is a group (see Lemma 1). We prove the following
Theorem 1. Let M be a module over a brace A, L a non-zero submodule of M , T a non-zerosubgroup of A. Then
H = H(L, T ) = E o F
is a Frobenius group with a kernel E and a complement F , where E is isomorphic to theadditive group L+ of L and F is isomorphic to a subgroup T , if and only if the followinghold:
(i) L = Lh for every non-zero element h ∈ T ,
(ii) annT l = t ∈ T | lt = e = 0 for every non-zero element l ∈ L.
Recall [5] thatAn+1 = A(An)
andA(n+1) = (A(n))A
for any positive integer n. Then An is a right ideal and A(n) is a two-sided ideal in A. A braceA is called right nilpotent (respectively left nilpotent) if A(n) = 0 for some positive integern. A minimal positive integer n with this property is called an index of right (respectivelyleft) nilpotency. In this way we obtain the following

6 Artemovych O.D., Skaskiv L.V.
Theorem 2. (1) If A is a non-zero left nilpotent brace, then
(i) H(A) is a nilpotent group;
(ii) annA 6= 0.
(2) If A is a right nilpotent brace, then H(A) is a solvable group.
Henceforth, H G means that H is a normal subgroup of a group G and E o F is asemidirect product of groups E,F with a normal subgroup E.
Any unexplaned terminology is standard as in [4].
1. The group associated with a brace. It is not difficult to prove the following
Lemma 1. Let M be a module over a brace A. If L is a submodule of M and T is asubgroup of A, then
H = H(L, T ) = E o F
is a group with the identity element (e, 0) under the operation (1) and, moreover, E = (l, 0) |l ∈ L is isomorphic to the additive group of L and F = (e, t) | t ∈ T is isomorphic to T .
Proof. It is easily verified that H(L, T ) is a group, for any a, l ∈ L, b ∈ T
(a, b)−1 = (−a− ab(−1), b(−1)) ∈ H
and(a, b) = (e, b)(a, 0) ∈ EF,
(l, 0)(a,b) = (a, b)−1(l, 0)(a, b) = (−a− ab(−1), b(−1))(l, 0)(a, b) = (lb+ l, 0) ∈ E,
so E is a normal subgroup of H,
E ∩ F = (e, 0).
Hence H = E o F is a semidirect product. Finally, the maps
ϕ : L 3 l 7→ (l, 0) ∈ E and ψ : T 3 t 7→ (e, t) ∈ F
are group isomorphisms.
Corollary 1. A group H(L, T ) is abelian if and only if LT = e and T is an abelian group.
A non-empty set S is called a subbrace of of a brace A (see [6]) if the following hold:
s1) (S,+) is a subgroup of (A,+),
s2) uv ∈ S for any u, v ∈ S.
It is obviously that 0 and A are trivial subbraces in A. Since A can be regarded as A-module, every submodule I of A-module A is called a right ideal of A [5] (there is no similarconcept of a left ideal). Therefore I is a right ideal of A if and only if the following hold:

Groups associated with braces 7
i1) (I,+) is a subgroup of (A,+),
i2) ia ∈ I for any i ∈ I and a ∈ A.
If, moreover, I satisfies the condition
i3) ai ∈ I for any i ∈ I and a ∈ A,
then I is called a two-sided ideal (for short an ideal) of A. Any (right or two-sided) ideal ofA is a subbrace in A. For any brace A
• the left annihilatorannlA = u ∈ A | uA = 0
is a right ideal of A,
• the right annihilatorannr A = v ∈ A | Av = 0
is a two-sided ideal of A. In [5] annr A is denoted by Soc(A). Obviously that annA =
annr A ∩ annlA is a two-sided ideal in A. Element a ∈ A is called a left (respectively right)zero divisor if it satisfies the following two conditions:
z1) a 6= 0,
z2) ab = 0 (respectively ca = 0) for some non-zero element b ∈ A (respectively c ∈ A).
Element a ∈ A that is a left and a right zero divisor is called a zero divisor of A.
Remark 1. If a brace A is left distributive, then A becomes a radical ring (i.e., an associativering which is a group with respect to the circle operation “”). The group H(A+, A), whereA is a radical ring, was constructed by Ya.P.Sysak [1] and called the associated group of aradical ring A. Similarly, we will say that the group H(A) = H(A+, A) is associated witha brace A.
Lemma 2. Let A be a brace with the associated group H(A) = E o F . If S is a subbraceof A with the associated group H(S) = U oW , then the following conditions hold:
(1) H(S) ≤ H(A), U ≤ E and W ≤ F ,
(2) if S is a right ideal of A, then U H(A),
(3) if S is an ideal of A, then U H(A) and H(S) H(A),
(4) if U H(A), then SA ⊆ S,
(5) if H(S) E oW , then AS ⊆ S,

8 Artemovych O.D., Skaskiv L.V.
(6) the centralizers
CE(F ) = (a, 0) ∈ E | a ∈ annlA and CF (E) = (0, u) ∈ F | u ∈ annr A;
in particular, is A not contains left and right zero divisors, then
CF (E) = CE(F ) = (0, 0).
Proof. (1) follows from definition of H(A).(2) Let S be a right ideal of A. Then sa ∈ S for any s ∈ S, a ∈ A and so
(s, 0)(a,b) = (−a− ab(−1), b(−1))(s, 0)(a, b) = (sb+ s, 0) ∈ U (2)
for any elements (a, b) ∈ H(A) and (s, 0) ∈ U . This means that U is a normal subgroup ofH(A).
(3) Assume that S is an ideal of A, (a, b) ∈ H(A) and (s, t) ∈ H(S). Then
(s, t)(a,b) = (−(at)b− at− ((ab(−1))t)b+ sb+ s− (ab(−1))t,
t+ tb+ (b(−1)t)b+ b(−1)t) ∈ H(S),
and hence H(S) is normal in H(A).(4) Since UH(A), from (2) it follows that sb+s ∈ S for any s ∈ S, b ∈ A and therefore
sb ∈ S.(5) Let us H(S) E oW . Then for any a ∈ A and u, v, w ∈ S we deduce that
H(S) 3 (u, v)(a,w) =
(−(av)w − ((aw(−1))v)w − aw − (aw(−1))w + uw − av−(aw(−1))v − aw(−1) + u,w(−1) v w) =
(−(av)w − ((aw(−1))v)w + uw − av − (aw(−1))v + u, v + vw + (w(−1)v)w + w(−1)v).
If w = 0, then we obtain that (−av + u, v) ∈ H(S), and so AS ⊆ S.(6) Assume that (a, 0) ∈ CE(F ). Then (a, 0)(0, b) = (0, b)(a, 0) for every b ∈ A and
consequently ab = 0. If (0, u) ∈ CF (E), then
(0 · 0 + 0 + b, u 0) = (0, u)(b, 0) = (b, 0)(0, u) = (bu+ b+ 0, 0 u)
and therefore bu = 0.
Lemma 3. If A is a brace and a, b ∈ A, then (a, b) ∈ Z(H(A)) if and only if aA = 0 andAb = 0 = bA.
Proof. (⇒) Let us (a, b) ∈ Z(H(A)). Then for any elements u, v ∈ A we see that
(av + a+ u, b v) = (a, b)(u, v) = (u, v)(a, b) = (ub+ u+ a, v b) (3)
if and only ifb v = v b,av = ub.
Hence bv = vb. If u = 0, then av = 0 (and we obtain that aA = 0). In the case v = 0 itfollows that ub = 0 ( and consequently Ab = 0).
(⇐) Since ub = 0 = av for any u, v ∈ A, we conclude that (u, v) ∈ Z(H(A)).

Groups associated with braces 9
Remark 2. (1) For any element a of a brace A the centralizers
CA(a) = z ∈ A | z a = a z and CA(a) = z ∈ A | za = az
are equal.(2) If
Z(A) = z ∈ A | za = az for every a ∈ A
andZ1(A
) = z ∈ A | z a = a z for every a ∈ A,
then Z(A) = Z1(A) is a normal subgroup in A.
Let S be a two-sided ideal of a brace A. On the set
A/S = a+ S | a ∈ S
we have two operations “+” and “ ·” (see [6]) given by the rules:
• (a1 + S) + (a2 + S) = (a1 + a2) + S,
• (a1 + S) · (a2 + S) = (a1a2) + S for a1, a2 ∈ A. Then (A/S,+, ·) is a brace (and A/S
is called the quotient brace of A with respect to an ideal S).
Lemma 4. If S is an ideal of a brace A, then the groups (A/S) and A/S are isomorphic.
Proof. In fact, the rule
ϕ : (A/S) 3 a+ S 7→ a S ∈ A/S
is a group isomorphism.
Lemma 5. If S is a two-sided ideal of a brace A, then the groups H(A)/H(S) and H(A/S)
are isomorphic.
Proof. Assume that H(A) = E o F , H(S) = U o W and H(A/S) = Q o R. Then, byLemma 2, we have that U ≤ E, W ≤ F and so
H(A)/H(S) = (E o F )/H(S) ∼= (EH(S)/H(S)) o (FH(S)/H(S)) =
= (EUW/UW ) o (FUW/UW ) ∼= (EW/UW ) o (FW/UW ).
Furthermore, we have the group isomorphisms
Q ∼= (A/S)+ ∼= A+/S+ ∼= E/U ∼= EW/UW
and, by Lemma 4,R ∼= (A/S) ∼= A/S ∼= F/W ∼= FU/WU.
The lemma is prowed.

10 Artemovych O.D., Skaskiv L.V.
2. Frobenius groups. Recall that a group H = E o F is called a Frobenius group witha kernel E and a complement F if
F ∩ F g = 1
for all g ∈ H \ F andE \ 1 = H \
⋃h∈H
F h.
Proof of Theorem 1. Assume that H = E o F is a Frobenius group with E ∼= L+ andF ∼= T . By Lemma 1.1 of [3], for any elements h ∈ T and l ∈ L there exists l1 ∈ L such that(l, 0) = [(l1, 0), (e, h)] and consequently (l, 0) = (l1, 0)−1(e, h)−1(l1, 0)(e, h) = (l1h, 0). Thenl = l1h and we conclude that L = Lh for any 0 6= h ∈ T .
Suppose that lt = e for some t ∈ T and 0 6= l ∈ L. Then
(e, 0) = F⋂
F (l,0) 3 (e, t)(l,0) = (−lt, 0), (4)
which implies that t = 0 and annT l = 0.(⇐) Assume that a groupH = EoF satisfies the conditions (i) and (ii). If 0 6= v ∈ T and
k ∈ L, then k = k1v for some k1 ∈ L and the commutator [(k1, 0), (0, e)] = (k1v, 0) = (k, 0)
for any (e, 0) 6= (e, t) ∈ F . This means that E = [E, (e, t)]. Moreover, for any elements(u, v) ∈ H and (e, t) ∈ F we see that
F (u,v) 3 (e, t)(u,v) = (−(ut)v − ut− ((uv(−1))t)v − (uv(−1))t, v(−1) t v).
If v = 0 and u 6= 0, then (−ut, t) = (e, t)(u,0) ∈ F (u,0). This gives that
H \⋃
(u,v)∈H
F (u,v) = E \ (e, 0).
Now we assume that (e, h)(u,v) ∈ F ∩ F (u,v) for some h, v ∈ T and 0 6= u ∈ L. Then
(e, h)(u,v) = (−u(v(−1) h v), v(−1) h v),
and therefore −u(v(−1) h v) = e. From this, in view of (ii), we have v(−1) h v = 0 andconsequently h = 0. Hence
F⋂
F (u,v) = (e, 0)
and H is a Frobenius group with a kernel E and a complement F . Let R be an associative ring with 1, A be a right R-module. If µ : A → U(R) is an
additive map andµ(aµ(b)) = µ(a)
for all a, b ∈ A, then (A,+, ·) is a brace (see Example 1 of [5]) with a multiplication “ ·” givenby the rule
ab = a(µ(b) − 1) (5)

Groups associated with braces 11
Example 1. As in Example 3 of [5], A = 0, 1, 2, 3, 4, 5, A+ ∼= Z6 and µ : A → U(Z6) issuch that
µ(0) = µ(2) = µ(4) = 1,
µ(1) = µ(3) = µ(5) = 0.
Then (A,+, ·) is a brace with the multiplication given by (5) (and depicted by Table):
· 0 1 2 3 4 50 0 0 0 0 0 01 0 4 0 4 0 42 0 2 0 2 0 23 0 0 0 0 0 04 0 4 0 4 0 45 0 2 0 2 0 2
If L = 0, 2, 4, then LA = L and so L is an A-module. Since T = 0, 5 is a subgroupin A,
L · 5 = 0 · 5, 2 · 5, 4 · 5 = 0, 2, 4 = L
andannT 2 = 0 = annT 4,
we conclude that H(L, T ) is a Frobenius group.
3. Nilpotent braces. In this section we investigate the properties of nilpotent braces.
Lemma 6. If A is a brace and k > 0, then A(k+1) is an ideal of A(k).
Proof. It is easy to seen that A(k+1) is a subgroup of A(k). Since
A(k+1)A(k) ⊆ A(k+1)A ⊆ A(k+2) ⊆ A(k+1)
andA(k)A(k+1) ⊆ A(k)A ⊆ A(k+1),
we obtain the result.
Remark 3. Let A be a brace and p a prime. Then
(1) H(A) is a torsion group if and only if A+ and A are torsion;
(2) H(A) is a p-group if and only if A+ and A are p-groups.
As in Lemma 2.4 of [2] we can prove the next
Theorem 3. Let A be a right nilpotent (respectively left nilpotent) brace, p a prime. Then
(1) A+ is a p-group if and only if A is a p-group;

12 Artemovych O.D., Skaskiv L.V.
(2) A+ is a torsion-free group if and only if A is a torsion-free group.
Proof. (a) Asuume that A is a right nilpotent brace of index n. We prove by induction onn. Since
A(n−1)A(n−1) ⊆ A(n−1)A = 0,
we conclude that A(n−1) is a commutative radical ring. Now we assume that the result istrue for right nilpotent braces of index < n. Since
(A/A(2))(2) ⊆ (A/A(2)) · (A/A(2)) = A(2)/A(2) = 0,
we have group isomorphisms
(A/A(2))+ ∼= (A/A(2)) ∼= A/(A(2))
and the assertion follows.(b) For arbitrary k, Ak is an ideal of A,
(Ak/Ak+1)+ ∼= (Ak/Ak+1)
and for a left nilpotent brace A the assertion is also true.
Lemma 7. Let A be a brace. Then Z(H(A)) 6= (0, 0) if and only if annlA 6= 0.
Proof. (⇐) If 0 6= a ∈ annlA, then, by Lemma 2, (a, 0) ∈ CE (F ) and therefore
(0, 0) 6= (a, 0) ∈ Z(H(A)).
(⇒) If (a, 0) ∈ Z(H(A)) for some 0 6= a ∈ A, then for any elements u, v ∈ A we obtain
(av + a+ u, v) = (a, 0)(u, v) = (u, v)(a, 0) = (u+ a, v).
This yields that av = 0 and so a ∈ annlA.
Corollary 2. Let A be a brace. If H(A) = E o F and Z(H(A)) 6⊆ E, then
Z(A) ∩ annr A 6= 0.
Proof. Assume that (a, b) ∈ Z(H(A)) and b 6= 0. Then for any u ∈ A we have
(a+ u, b) = (a, b)(u, 0) = (u, 0)(a, b) = (ub+ u+ a, b)
and(au+ a, b u) = (a, b)(0, u) = (0, u)(a, b) = (a, u b)
and consequently ub = 0, au = 0 and b u = u b. This yields that b ∈ Z(A).

Groups associated with braces 13
4. Proof of Theorem 2. (1) Let A be a non-zero left nilpotent brace of index n. Then(An−1)A = 0 and An−1 6= 0. This means that An−1 ⊆ annlA and, by Lemma 7,Z(H(A)) 6= (0, 0). Since An−1 is a two-sided ideal in A and
(A/An−1)n−1 = 0,
by induction on n we can prove that H(A) is a nilpotent group. Moreover, Z(A) A andso
0 6= (An−1)⋂
Z(A) ⊆ annA.
(2) We have A(n) = 0 for some positive integer n and thus
A(n−1) ⊆ annr A.
But annr A is a two-sided ideal in A and so (annr A) is an abelian normal subgroup of A.By induction on n we obtain the result.
Example 2. Let (F2)3 be a brace constructed in [5] (see Example 2) with the multiplication
“·” depicted by Table:
· 000 111 100 011 010 101 001 111
000 000 000 000 000 000 000 000 000
111 000 000 000 000 000 000 000 000
100 000 110 000 001 111 110 111 001
011 000 110 000 001 111 110 111 001
010 000 110 111 110 000 001 111 001
101 000 110 111 110 000 001 111 001
001 000 000 111 111 111 111 000 000
111 000 000 111 111 111 111 000 000
This brace has a series
A ⊃ A(2) = 000, 111, 001, 100 ⊃ A(3) = 000, 111 ⊃ A(4) = 000
andA ⊃ A2 = 000, 111, 001, 100 = A3.
This means that A is right nilpotent and A is not left nilpotent. Since
111 · 100 = 000 6= 110 = 100 · 111,
we conclude that 111 6∈ Z(A) and so A(3) ∩ Z(A) = 000. If a = 001, b = 100, then
A = 〈a〉o 〈b〉
is a dihedral group of order 8. Hence H(A) is a 2-group of order 64 and it is nilpotent. IfH(A) = E o F , then, by Corollary 2, we have Z(H(A)) ⊆ E.
14 Artemovych O.D., Skaskiv L.V.
References
1. Сысак Я.П. Произведения групп, связанные с радикальными кольцами. В: Произведения бесконеч-ных групп // Препринт 82.53: Институт математики АН УССР. – 1982. — С. 21–35.
2. Amberg B., Dickenschied O. On the adjoint group of a radical ring, Canad. Math. Bull., 38 (1995),262–270.
3. Artemovych O.D. On Frobenius groups associated with modules, Demonstratio Math., 31 (1998), 875–878.
4. Robinson D. J. S. A course in the theory of groups. Springer, 1982.
5. Rump W. Braces, radical rings, and quantum Yang-Baxter equations, J. Algebra, 307 (2007), 153–170.
6. Rump W. Modules over braces, Algebra and Discrete Math., 2 (2006), 127–137.
Institute of Mathematics, Cracow University of Technology,
Cracow, Poland
Precarpathian National University,
Ivano-Frankivsk, Ukraine
Received 06.03.2011
Артемович О.Д., Скаскiв Л.В. Групи асоцiйованi з брейсами // Карпатськi математичнiпублiкацiї. — 2011. — Т.3, 1. — C. 4–14.
У данiй статтi побудовано групу H(A), асоцiйовану з брейсом A, i дослiджено її вла-стивостi.
Артемович О.Д., Скаскив Л.В. Группы ассоциированные с брейсами // Карпатские мате-матические публикации. — 2011. — Т.3, 1. — C. 4–14.
В этой роботе построено группу H(A), ассоциированную с брейсом A, и исследованоеё свойства.
Карпатськi математичнi Carpathian Mathematical
публiкацiї. Т.3, 1 Publications. V.3, .1
УДК 517.965+517.18
Величко Е.В., Ткаченко И.Г.
О КОРРЕКТНОСТИ ОПРЕДЕЛЕНИЯ ТРИГОНОМЕТРИЧЕСКИХ
ФУНКЦИЙ СИСТЕМОЙ ФУНКЦИОНАЛЬНЫХ УРАВНЕНИЙ
Величко Е.В., Ткаченко И.Г. О корректности определения тригонометрических функцийсистемой функциональных уравнений // Карпатские математические публикации. — 2011.— Т.3, 1. — C. 15–21.
В работе показано, что система функциональных уравнений S(x + y) = S(x)C(y) +
S(y)C(x), C(x+ y) = C(x)C(y)−S(y)S(x) определяет более широкий класс функций, чемтригонометрические. Установлены дополнительные условия, которые необходимо доба-вить к этой системе, чтобы данная система имела единственное решение S(x) = sin ax,
C(x) = cos ax. При доказательстве использовался способ сведения функциональных ура-внений к дифференциальным.
Введение и анализ публикаций
Существуют различные подходы к определению функций. Анализ каждого из такихподходов позволяет сформулировать различные обобщения элементарных функций.Кроме того сравнение различных подходов интересно с методической точки зрения.При определении тригонометрических функций в основном используют такие способы:
- “геометрический подход”, в котором функции вводятся как отношения сторон впрямоугольном треугольнике;
- “дифференциальный подход”, в котором функции вводятся как решения задачКоши;
- “аналитический подход”, при котором функции описываются степенными ряда-ми;
- “функциональный подход”, при котором функции определяются как решенияфункциональных уравнений.
2000 Mathematics Subject Classification: 39B72.Ключевые слова и фразы: тригонометрические функции, функциональное уравнение, дыференциаль-ное уранение, ограниченные функции.
c©Величко Е.В., Ткаченко И.Г., 2011

16 Величко Е.В., Ткаченко И.Г.
В данной статье анализируется корректность определения основных тригономет-рических функций через функциональные уравнения. В многочисленных интернет-энциклопедиях, среди которых отметим Википедию и Вапедию, функции sinx и cosx
определяются как непрерывные решения системы (1), (2). Однако функции sin ax иcos ax так же являются решением, поэтому необходимо, как минимум, одно дополни-тельное условие для определения константы a.
В работе [1] авторы предлагают взять несколько другую систему:S(x− y) = S(x)C(y) − S(y)C(x),
C(x− y) = C(x)C(y) + S(x)S(y)
и дополнить ее условиями S(x) > 0, x ∈ (0; a),
S(a) = 1.
Доказательство того, что S(x) = sin(πx2a
), C(x) = cos
(πx2a
), проводится путем вычисле-
ния значений функций на некотором всюду плотном множестве и предельным перехо-дом с использованием непрерывности.
В работе [2] чешского автора Otomar’а Hajek’а анализируются обобщения уравненийтипа (1) и (2) при наличии дополнительных свойств, таких как дифференцируемость ианалитичность функций.
Целью данной статьи является решение в классе непрерывных функций системы (1),(2) с условием (3) и формулировка условий, обеспечивающих единственность решения.
1 Постановка задачи
Рассмотрим систему функциональных уравнений
S(x+ y) = S(x)C(y) + S(y)C(x), (1)
C(x+ y) = C(x)C(y) − S(y)S(x), (2)
которую дополним условием
limx→0
S(x)
x= a 6= 0. (3)
Будем искать непрерывные решения этой системы.Выясним, будут ли функции S(x) = sin ax и C(x) = cos ax единственными решения-
ми или нет.
2 Определение значений функций в точке 0
Найдем значение s0 = S(0) и c0 = C(0). Для этого в (2) и (3) подставим y = 0 иполучим
S(x) = S(x+ 0) = S(x)c0 + C(x)s0,
C(x) = C(x+ 0) = C(x)c0 − S(x)s0.

О корректности определения тригонометрических функций 17
Перепишем эти тождества в видеS(x)(1 − c0) − C(x)s0 = 0,
S(x)s0 + C(x)(1 − c0) = 0,
и рассмотрим как систему относительно неизвестных S(x), C(x). Для того, чтобы этасистема имела ненулевое решение (а иначе условие (3) не будет иметь места), необхо-димо и достаточно, чтобы ее определитель был равен нулю:
∆ =
∣∣∣∣1 − c0 −s0s0 1 − c0
∣∣∣∣ = (1 − c0)2 + s20 = 0.
Последнее равенство выполняется тогда и только тогда, когда
s0 = S(0) = 0, c0 = C(0) = 1. (4)
3 Исследование функций на четность
Исследуем, как связаны значения функций S(x) и C(x) в точках x и −x. Для этогоположим в (1) и (2) y = −x:
0 = S(0) = S(x− x) = S(x)C(−x) + C(x)S(−x),
1 = C(0) = C(x− x) = C(x)C(−x) − S(x)S(−x).
Выразим из этих соотношений функции S(−x) и C(−x), рассматривая их как системулинейных уравнений:
∆(x) =
∣∣∣∣ C(x) S(x)
−S(x) C(x)
∣∣∣∣ = C2(x) + S2(x) ≥ 0,
∆1 =
∣∣∣∣0 S(x)
1 C(x)
∣∣∣∣ = −S(x), ∆2 =
∣∣∣∣ C(x) 0
−S(x) 1
∣∣∣∣ = C(x).
Таким образом
S(−x) =−S(x)
∆(x), C(−x) =
C(x)
∆(x). (5)
4 Исследование функции ∆(x)
Положим в (1) y = −y и вычислим значение выражения S(x+ (−y)), используя (5):
S(x− y) = S(x)C(−y) + S(−y)C(x) =S(x)C(y) − S(y)C(x)
∆(y). (6)
Аналогично вычисляем S(y − x), используя (1), (5) и (6):
S(y − x) = S(y)C(−x) + S(−x)C(y) =S(y)C(x) − S(x)C(y)
∆(x)= −S(x− y)
∆(y)
∆(x). (7)

18 Величко Е.В., Ткаченко И.Г.
Мы так же можем подсчитать S(y − x), использовав тождества (5) и (7):
S(x− y) = S(−(y − x)) = −S(y − x)
∆(y − x)=S(x− y)∆(y)
∆(y − x)∆(x). (8)
Из соотношения (8) делаем вывод, что
∆(y − x) =∆(y)
∆(x).
Общее непрерывное решение функционального уравнения (5), которое называется ура-внением Коши [3], имеет вид
∆(x) = e2bx, (9)
где b — параметр, подлежащий определению.
5 Сведение функциональных уравнений к дифференциальным
Подставляя (9) в (5), получим, что S(−x) = −S(x)e−2bx, C(−x) = C(x)e−2bx. Найдемприращение функции S(x):
S(x+ y) − S(x− y) = S(x)C(y) + S(y)C(x) − S(x)C(−y) − C(x)S(−y) =
S(x)C(y) + S(y)C(x) − S(x)C(y)e−2by + C(x)S(y)e−2by =
S(x)C(y)(1 − e−2by) + C(x)S(y)(1 + e−2by).
Вычислим производную
S ′(x) = limy→0
S(x+ y) − S(x− y)
2y= S(x) lim
y→0
C(y)(1 − e−2by)
2y+
C(x) limy→0
S(y)(1 + e−2by)
2y= bS(x) + aC(x).
Найдем приращение функции C(x) и вычислим производную:
C(x+ y) − C(x− y) = C(x)C(y) − S(x)S(x) − C(x)C(y)e−2by−
S(x)S(y)e−2by = C(x)C(y)(1 − e2by) − S(x)S(y)(1 + e2by),
C ′(x) = limy→0
C(x+ y) − C(x− y)
2y= C(x) lim
y→0
C(y)(1 − e−2by)
2y−
S(x) limy→0
S(y)(1 + e−2by)
2y= bC(x) − aS(x).
Получаем, что функции S(x) и C(x) удовлетворяют системе дифференциальных урав-нений
S ′(x) = bS(x) + aC(x),
C ′(x) = −aS(x) + bC(x).(10)
О корректности определения тригонометрических функций 19
6 Решение системы дифференциальных уравнений
Решим систему (10) с условиями (4) методом сведения к одному уравнению. Про-дифференцируем первое уравнение системы:
S ′′(x) = bS ′(x)+aC ′(x) = b(bS(x)+aC(x))+a(−aS(x)+b(C(x)) = (b2−a2)S(x)+2abC(x) =
(b2 − a2)S(x) + 2b(S ′(x) − bS(x)) = 2bS ′(x) − (b2 + a2)S(x).
Получили тождество S ′′(x)− 2bS ′(x) + (b2 + a2)S(x) = 0, характеристическое уравнениекоторого имеет вид λ2 − 2bλ + (b2 + a2) = 0. Последовательно находим дискриминантD = 4b2 − 4b2 − 4a2 = (2ai)2 и корни λ1, 2 = b± ai. Таким образом, S(x) = ebx(A sin ax+
B cos ax). Из граничного условия S(0) = 0, полученного выше, найдем, что B = 0.С учетом этого S(x) = Aebx sin ax. Далее, из первого уравнения системы (10) найдемaC(x) = S ′(x) − bS(x) = Aa cos axebx + Ab sin axebx − Ab sin axebx. Приводя подобные,получим C(x) = A cos axebx. Подставляя условие C(0) = 1, получаем, что C(0) = A = 1.
На основании вышеизложенного приходим к выводу, что решения системы (1)–(3) нуж-но искать в виде
S(x) = ebx sin ax,
C(x) = ebx cos ax.(11)
Непосредственной проверкой убеждаемся, что при любом значении b эти функции будутудовлетворять указанной системе.
7 О дополнении исходной системы функциональных уравнений
Как показано выше, для того, что бы система (1)–(3) однозначно определяла фун-кции sin ax и cos(ax) необходимо добавить условие, обеспечивающее равенство b = 0 вформулах (11). В качестве такого предлагается взять условие ограниченности функцийS(x) и C(x):
∃M : ∀xmax|S(x)|, |C(x)| < M. (12)
Покажем, что система (1)–(3) и условие (12) однозначно определяют функции S(x) =
sin ax и C(x) = cos ax.Сначала доказывается (точно так же, как это было сделано выше), что имеют место
соотношения (4) и (5). Потом предполагаем, что ∃z : ∆z 6= 1. Применяя два разаформулу (5), получим что
S(x) = S(−(−x)) =−S(−x)
∆(−x)=
S(x)
∆(x)∆(−x).
Откуда делаем вывод, что ∀x ∆(x)∆(−x) = 1. Поскольку
∆(z) ≥ 0, ∆(−z) ≥ 0 ∨ ∆(z) 6= 1 ∨ ∆(z)∆(−z) = 1,
то значит ∃t ∈ −z; z, такое что
∆(t) = T > 1. (13)

20 Величко Е.В., Ткаченко И.Г.
Подставляя в (1) y = x, получаем, что S(2x) = 2S(x)C(x). Тогда, применив формулу(5), получим, что
S(−2x) = 2S(−x)C(−x) =−2S(x)C(x)
∆2(x)=
−S(2x)
∆2(x).
С другой стороны,
S(−2x) = −S(2x)
∆(2x).
Сравнивая последние два выражения, делаем вывод, что
∆(2x) = ∆2(x). (14)
Используя метод математической индукции и соотношения (13) и (14), легко показать,что ∀n ∈ N ∆(2nt) = T n.Поскольку последовательность T n возрастает и неограниченна,то выберем n0 так, чтобы T n0 > 2M2. Тогда ∆(2n0t) = S2(2n0t) + C2(2n0t) > 2M2, а,значит |S(2n0t)| > M ∨ |C(2n0t)| > M, что противоречит (12). Мы показали, что ∆(x) ≡1, и тогда из (5) следует, что S(−x) = −S(x), C(−x) = C(x). Найдем приращения ипроизводные:
S(x+ y) − S(x− y) = S(x)C(y) + S(y)C(x) − S(x)C(−y) − C(x)S(−y) = 2C(x)S(y),
S ′(x) = limy→0
S(x+ y) − S(x− y)
2y= lim
y→0
2C(x)S(y)
2y= C(x) lim
y→0
S(y)
y= aC(x).
C(x+ y) − C(x− y) = C(x)C(y) − S(y)S(x) − C(x)C(−y) + S(x)S(−y) = −2S(x)S(y),
C ′(x) = limy→0
C(x+ y) − C(x− y)
2y= lim
y→0
−2S(x)S(y)
2y= −S(x) lim
y→0
S(y)
y= −aS(x).
Теперь найдем вторую производную
S ′′(x) = (S ′(x))′ = (aC(x))′ = a(−aS(x)) = −a2S(x).
Найдем граничные условия: S(0) = 0, S ′(0) = aC(0) = a.Таким образом, функция S(x) является решением следующей задачи Коши:
y′′ + a2y = 0, y(0) = 0, y′(0) = a. (15)
Аналогично получается, что функция C(x) является решением следующей задачи Ко-ши:
y′′ + a2y = 0, y(0) = 1, y′(0) = 0. (16)
Из курса дифференциальных уравнений известно, что функции y(x) = sin ax иy(x) = cos ax являются единственными решениями задач (15) и (16) соответственно.Непосредственно проверяется, что функции
S(x) = sin ax, C(x) = cos ax
удовлетворяют функциональным уравнениям (1), (2) с условиями (3) и (12), и прове-денный выше анализ доказывает, что это решение единственно в классе непрерывныхфункций.
О корректности определения тригонометрических функций 21
Выводы
В работе показано, что система функциональных уравнений (1), (2) определяет фун-кции sin ax и cos ax только при наличии дополнительных условий, в качестве которыхможно взять условие (3), описывающее поведение функции S(x) в окрестности нуля,и условие ограниченности функций S(x) и C(x). Решение системы проводилось путемсведения функциональных уравнений к дифференциальным.
Список литературы
1. Андреев А.А., Костиков Д.В., Саушкин И.Н. Система функциональных уравнений тригонометри-ческих функций [Електронний ресурс]: http://ermine.narod.ru/MATH/STAT/DANILA/sect2.html
2. Otomar Hajek Function equations for trigonometric functions, Czechoslovak Mathematical Journal, 5, 3(1955), 432–434.
3. Acz’el J., Dhombres J. Functional Equations in Several Variables. Cambridge Univ. Press, Cambridge,
1989.
Запорожский национальный университет,
Запорожье, Украина
Поступило 15.09.2010
Velichko E.V., Tkachenko I.G. On the correctness of the determination of trigonometric func-
tions by the system of functional equations, Carpathian Mathematical Publications, 3, 1 (2011),
15–21.
The article shows that the system of the functional equations S(x + y) = S(x)C(y) +
S(y)C(x), C(x + y) = C(x)C(y) − S(y)S(x) defines a broader class of the functions than
the trigonometric equations. The conditions, which must be added to this system to obtain
the unique solution have been developed S(x) = sin ax, C(x) = cos ax. The method of the
reduction of the functional equations to the differential equations is used.
Величко О.В., Ткаченко I.Г. Про коректнiсть визначення тригонометричних функцiйсистемою функцiональних рiвнянь // Карпатськi математичнi публiкацiї. — 2011. — Т.3,1. — C. 15–21.
У роботi показано, що система функцiональних рiвнянь S(x+y) = S(x)C(y)+S(y)C(x),
C(x + y) = C(x)C(y) − S(y)S(x) визначає бiльш ширший клас функцiй, нiж тригономе-тричнi. Встановленi умови, якi необхiдно додати до цiєї системи, щоб вона мала єдинийрозв’язок S(x) = sin ax, C(x) = cos ax. При доведеннi використовувався спосiб зведенняфункцiональних рiвнянь до диференцiйних.
Карпатськi математичнi Carpathian Mathematical
публiкацiї. Т.3, 1 Publications. V.3, .1
УДК 517.51
Герасимчук В.Г., Маслюченко О.В.
КОЛИВАННЯ НАРIЗНО ЛОКАЛЬНО ЛIПШИЦЕВИХ ФУНКЦIЙ
Герасимчук В.Г., Маслюченко О.В. Коливання нарiзно локально лiпшицевих функцiй //Карпатськi математичнi публiкацiї. — 2011. — Т.3, 1. — C. 22–33.
Доведено, що функцiя, яка визначена на добутку двох берiвських метричних просторiв,є коливанням деякої нарiзно локально лiпшицевої функцiї тодi i тiльки тодi, коли вона єневiд’ємною напiвнеперервною зверху функцiєю, замикання носiя якої є навхрест нiде нещiльним.
1 Вступ
Дана робота iде в руслi цiлого ряду статей багатьох математикiв, таких як Р. Ке-шнер, Дж. Бреккенрiдж i Т. Нiшiура, П. Костирко, Й. Еверт, С. Пономарьов, В. Ма-слюченко, В. Михайлюк, О. Маслюченко, В. Герасимчук та iн.. Цi статтi присвяченiрозв’язанню задачi про опис множини точок розриву функцiй з того чи iншого фун-кцiонального класу, а також її уточненої версiї про опис коливань функцiй з певногофункцiонального класу.
Загальне формулювання цих двох задач виглядає так. Нехай P — деяка властивiстьфункцiй на певному топологiчному просторi X.
Задача A. Для яких множин E ⊆ X iснує така функцiя f : X → R, що має властивiстьP , для якої множина точок розриву D(f) рiвна E.
Задача B. Для яких функцiй g : X → [0,+∞] iснує така функцiя f : X → R, що маєвластивiсть P , для якої коливання ωf рiвне g.
В роботi [2] було охарактеризовано множину точок розриву нарiзно неперервно ди-ференцiйовних функцiй на R2. Крiм того, в [1] було наведено повний опис коливаньнарiзно неперервно диференцiйовних функцiй на добутку двох скiнченно вимiрних про-сторiв i нарiзно локально лiпшицевих функцiй на добутку двох локально компактнихметричних просторiв. Цi характеризацiї полягали в тому, що носiй функцiї g є локальнопроективно нiде не щiльним. Проте перенести цi результати на випадок коли простори
2000 Mathematics Subject Classification: 54C30, 54C10.Ключовi слова i фрази: коливання, ω-primitive, локально лiпшицева функцiя, нарiзно локально лiпши-цева функцiя, CL-функцiя.
c© Герасимчук В.Г., Маслюченко О.В., 2011

Коливання нарiзно локально лiпшицевих функцiй 23
не є локально компактними довший час не вдавалось. Виявляється, що причина поля-гає в тому, що умова локальної проективної нiде не щiльностi носiя, яка добре працюєу локально компактному випадку, не пiдходить у загальному випадку. Замiнником цiєївластивостi є навхрест нiде не щiльнiсть замикання носiя, яка в цiй роботi називаєтьсяhv-нiде не щiльнiстю.
Наступнi теореми є головними результатами цiєї роботи i були анонсованi у [3]. Вонивипливають з теорем 3, 4, 5 i наслiдку 4.1.
Теорема 1. Нехай P та Q — деякi локальнi однорiднi властивостi дiйснозначних фун-кцiй, якi сильнiшi за локальну лiпшицевiсть, X — P -регулярний берiвський метричнийпростiр, a Y — Q-регулярний берiвський метричний простiр. Для того, щоб функцiяg : X × Y → R була коливанням деякої PQ-функцiї f : X × Y → R, необхiдно i досить,щоб g була невiд’ємною напiвнеперервною зверху функцiєю, а її носiй suppg був hv-нiдене щiльним.
Теорема 2. Нехай P — деяка локальна однорiдна властивiсть дiйснозначних функцiй,що сильнiша за локальну лiпшицевiсть, X — берiвський метричний простiр, a Y —P -регулярний берiвський метричний простiр. Для того, щоб функцiя g : X × Y → Rбула коливанням деякої CP -функцiї f : X × Y → R, необхiдно i досить, щоб g буланевiд’ємною напiвнеперервною зверху функцiєю, а її носiй suppg був hv-нiде не щiльним.
2 Точкова та локальна лiпшицевiсть i диференцiйовнiсть
Для метричних просторiв X та Y , вiдображення f : X → Y , множини E ⊆ X iточки x ∈ X покладемо
λf (E) = supx′,x′′∈Ex′ 6=x′′
|f(x′) − f(x′′)|Y|x′ − x′′|X
i λf (x) = infU- окiл x
λf (U).
Функцiю λf : X → [0,+∞] називатимемо лiпшицевою похiдною вiдображення f.
Вiдображення f називається лiпшицевим на E, якщо λf (E) < +∞. Казатимемо, що f— локально лiпшицеве на X, якщо для довiльного x ∈ X iснує такий окiл U точки x,
для якого f є лiпшицевим на U . Ясно, що f буде локально лiпшицевим тодi i тiлькитодi, коли λf (x) < +∞ при x ∈ X.
Введемо тепер поняття точкової лiпшицевостi. Для метричних просторiв X та Y iвiдображення f : X → Y визначимо функцiю
lf (x) = infU - окiл x
supu∈Uu6=x
|f(u) − f(x)|Y|u− x|X
= lim supu→x
|f(u) − f(x)|Y|u− x|X
, x ∈ X,
яку називатимемо точковою лiпшицевою похiдною. Функцiя f називається точковолiпшицевою, якщо lf (x) <∞ для кожного x ∈ X.
Як вiдомо з [5, c.473], якщо вiдображення мiж нормованими просторами має непе-рервну похiдну Ґато, то вона буде її похiдною Фреше. Модифiкуючи доведення цьогорезультату, отримуємо наступний факт.

24 Герасимчук В.Г., Маслюченко О.В.
Твердження 2.1. Нехай X — вiдкрита пiдмножина деякого нормованого просторуX, Y — нормований простiр, i вiдображення f : X → Y має локально обмежену занормою похiдну за Ґато f ′. Тодi λf (x) = lim sup
u→x‖f ′(u)‖ при x ∈ X, i тому f — локально
лiпшицева. Якщо ж f — неперервно диференцiйовна, то λf (x) = ‖f ′(x)‖ при x ∈ X.
Доведення. Вiзьмемо деяку точку x ∈ X i позначимо α = lim supu→x
‖f ′(u)‖. Зафiксуємо
деяке число γ > α. Тодi iснує опуклий окiл U точки x, такий що ‖f ′(u)‖ ≤ γ при u ∈ U .Покажемо, що λf (U) ≤ γ. Вiзьмемо двi точки u1, u2 ∈ U i деякий функцiонал y∗ ∈ Y ∗ з‖y∗‖ = 1. Розглянемо числову функцiю
g(t) = y∗f(u1 + t(u2 − u1)
), t ∈ [0, 1].
Оскiльки f — диференцiйовна за Ґато, то g — також диференцiйовна i
g′(t) = y∗f ′(u1 + t(u2 − u1))(u2 − u1), t ∈ [0, 1].
Тодi|g′(t)| ≤ ‖y∗‖
∥∥f ′(u1 + t(u2 − u1))∥∥‖u2 − u1‖ ≤ γ‖u2 − u1‖
для кожного t ∈ [0, 1], адже u1+t(u2−u1) ∈ U . Далi, за формулою Лаґранжа матимемо,що ∣∣y∗(f(u2) − f(u1)
)∣∣ = |g(1) − g(0)| ≤ γ‖u2 − u1‖.
Таким чином, використовуючи вiдомий наслiдок з теореми Гана-Банаха, одержуємо,що
‖f(u2) − f(u1)‖ = sup‖y∗‖=1
∣∣y∗(f(u2) − f(u1))∣∣ ≤ γ‖u2 − u1‖
для довiльних u1, u2 ∈ U . Отже, λf (U) ≤ γ. Спрямувавши γ → α, одержуємо нерiвнiстьλf (x) ≤ α.
Вiзьмемо тепер γ < α. Розглянемо деякий вiдкритий окiл U точки x в X. Тодisupu∈U
‖f ′(u)‖ ≥ α > γ. Отже, iснує таке u0 ∈ U , для якого ‖f ′(u0)‖ > γ. Вiзьмемо
ε > 0, для якого B(u0, ε) ⊆ U . З означення норми у спряженому просторi матимемо,що ‖f ′(u0)e‖ > γ для деякого e ∈ X з ‖e‖ = 1. Таким чином,
γ < ‖f ′(u0)e‖ = limt→+0
1
t‖f(u0 + te) − f(u0)‖.
Тодi iснує таке додатне t < ε, для якого 1t‖f(u0+te)−f(u0)‖ > γ. Покладемо u1 = u0+te.
Оскiльки u0, u1 ∈ U то
λf (U) ≥ ‖f(u1) − f(u0)‖‖u1 − u0‖
=1
t‖f(u1) − f(u0)‖ > γ.
Таким чином, λf (x) ≥ γ. Спрямувавши γ → α, будемо мати, що λf (x) ≥ α.
Ще простiше доводиться наступний факт.

Коливання нарiзно локально лiпшицевих функцiй 25
Твердження 2.2. Нехай X — вiдкрита пiдмножина деякого нормованого простору X,Y — нормований простiр, вiдображення f : X → Y — диференцiйовне за Фреше i f ′ —її похiдна Фреше. Тодi lf (x) = ‖f ′(x)‖, x ∈ X. Зокрема, f — точково лiпшицева.
Доведення. Справдi, при x ∈ X матимемо, що з одного боку,
lf (x) = lim supu→x
‖f(u) − f(x)‖‖u− x‖
= lim supu→x
‖f ′(x)(u− x) + o(‖u− x‖)‖‖u− x‖
≤
lim supu→x
‖f ′(x)‖‖(u− x)‖ + ‖o(‖u− x‖)‖‖u− x‖
= ‖f ′(x)‖,
а з iншого боку,
lf (x) = lim supu→x
‖f(u) − f(x)‖‖u− x‖
= lim supu→x
‖f ′(x)(u− x) + o(‖u− x‖)‖‖u− x‖
≥
lim supu→x
‖f ′(x)‖‖(u− x)‖ − ‖o(‖u− x‖)‖‖u− x‖
= ‖f ′(x)‖.
Отже, lf (x) = ‖f ′(x)‖.
3 Локальнi властивостi функцiй i P -регулярнi простори
Нехай X, Y , Z — топологiчнi простори, P — деяка властивiсть Z-значних функцiйна X, а Q — деяка властивiсть Z-значних функцiй на Y . Казатимемо, що функцiяf : X × Y → Z має властивiсть PQ, якщо для довiльних x ∈ X i y ∈ Y функцiя fyмає властивiсть P, а функцiя fx має властивiсть Q (як звичайно, функцiї fy : X → Z
та fx : Y → Z визначаються формулою fy(x) = fx(y) = f(x, y)). Функцiї, що маютьвластивiсть P, ми коротше називатимемо називатимемо P -функцiями. Сукупнiсть усiхP -функцiй f : X → Z позначатимемо P (X,Z).
Нехай P — деяка властивiсть Z-значних функцiй f , якi визначенi на вiдкритихпiдмножинах X. Ми кажемо, що P — локальна властивiсть, якщо для довiльних G ⊆X i f : G → R виконується, що f є P -функцiєю тодi i тiльки тодi, коли для довiльноївiдкритої множини H ⊆ G звуження f |H є P -функцiєю.
В цiй роботi ми будемо використовувати наступнi локальнi властивостi:
• C — неперервнiсть;
• L — точкова лiпшицевiсть;
• L — локальна лiпшицевiсть;
• D — диференцiйовнiсть за Ґато;
• D — диференцiйовнiсть за Фреше;
• C1 — неперервна диференцiйовнiсть.

26 Герасимчук В.Г., Маслюченко О.В.
Властивостi, пов’язанi з лiпшицевiстю, стосуються метричних просторiв, а властиво-стi, пов’язанi з диференцiйовнiстю, стосуються нормованих просторiв. Для властивостiC1 ми не вказуємо, яка диференцiйовнiсть мається на увазi, адже, неперервна дифе-ренцiйовнiсть за Ґато рiвносильна неперервнiй диференцiйовностi за Фреше [5, c. 473].
Нехай X — топологiчний простiр i P — деяка властивiсть дiйсних функцiй на X.Казатимемо, що X є P -регулярним, якщо для довiльної точки a ∈ X i ї ї околу U iснуєP -функцiя f : X → [0, 1], така що f(a) = 1 i f(x) = 0 при x ∈ X \ U. Казатимемо, щовластивiсть P є однорiдною, якщо для довiльної P -функцiї f i числа α ∈ R функцiя αfмає властивiсть P .
Твердження 3.1. Кожний метричний простiр є L-регулярним.
Доведення. Функцiя ϕ : R → [0, 1], яка визначається формулою
ϕ(x) =
1 − |t|, |t| < 1,
0, |t| ≥ 1,
є лiпшицевою, причому ϕ(0) = 1 i suppϕ = (−1, 1). Тодi для метричного простору X,точки a ∈ X i числа ε > 0 матимемо, що для функцiї f : X → [0, 1], яка визначенаформулою f(x) = ϕ
(1ε|x − a|X
), x ∈ X, виконується, що f(a) = 1 i suppf = B(a, ε).
Крiм того, оскiльки∣∣|x′ − a|X − |x′′ − a|X
∣∣ ≤ |x′ − x′′|X , то вiдображення x 7→ |x− a|X єлiпшицевим. Тому f — лiпшицева, а значить, i локально лiпшицева.
Нехай P — деяка властивiсть дiйсних функцiй. Казатимемо, що нормований простiрX є P -згладжуваним, якщо на ньому є така еквiвалентна норма, яка має властивiстьP на X \ 0.
Твердження 3.2. Нехай P — це одна iз властивостей D, D чи C1 i X — вiдкритапiдмножина P -згладжуваного нормованого простору X. Тодi X є P -регулярним.
Доведення. Добре вiдомо, що функцiя ϕ, яка визначається формулою
ϕ(x) =
e1− 1
1−t2 , |t| < 1,
0, |t| ≥ 1,
є неперервно (навiть нескiнченно) диференцiйовною, причому ϕ′(0) = 0. Оскiльки ди-ференцiйовнiсть вiдносно еквiвалентних норм рiвносильна, то вважатимемо, що вихiднанорма ‖ · ‖ має властивiсть P на X \ 0. Покажемо, що i функцiя f(x) = ϕ
(1ε‖x− a‖
),
x ∈ X, має властивiсть P на всьому X. По-перше, оскiльки ϕ(t)−ϕ(0) = o(t) при t→ 0,то f(x)−f(a) = ϕ
(1ε‖x−a‖
)−ϕ(0) = o(‖x−a‖) при x→ a. Таким чином, похiдна Фреше
функцiї f в точцi a рiвна нулю. Нехай px — похiдна вiд норми в точцi x. Оскiльки длядовiльного e ∈ X маємо, що
|px(x)| = limt→+0
1
t
∣∣‖x+ te‖ − ‖x‖∣∣ ≤ ‖e‖,
то ‖px‖ ≤ 1. Але f ′(x) = 1εϕ′(1
ε‖x − a‖
)px−a. Тому ‖f ′(x)‖ ≤ 1
εϕ′(1
ε‖x − a‖
)→ 0 = f ′(0)
при x→ a. Таким чином, похiдна (Ґато чи Фреше) функцiї f неперервна в точцi a.

Коливання нарiзно локально лiпшицевих функцiй 27
За допомогою тензорного добутку функцiй одержується наступний результат.
Твердження 3.3. Нехай P та Q — деякi однорiднi властивостi дiйснозначних фун-кцiй, якi сильнiшi за неперервнiсть, X — P -регулярний метричний простiр, a Y — Q-регулярний метричний простiр, тодi X × Y є PQ ∧ C-регулярним.
Доведення. Нехай (a, b) — деяка точка з X × Y i W — деякий її окiл. Вiзьмемо такiоколи U точки a i V точки b, що U ×V ⊆W. Тодi iснують P -функцiя f : X → [0, 1] i Q-функцiя g : Y → [0, 1], такi що f(a) = g(b) = 1 i f(x) = g(y) = 0 при x ∈ X \U i y ∈ Y \V.Визначемо функцiю h : X×Y → R формулою h(x, y) = f(x)g(y). Оскiльки hx = f(x)g ihy = g(y)f , то з однорiдностi властивостей P та Q випливає, що h є PQ-функцiєю. Крiмтого, h очевидним чином є неперервною, h(a, b) = f(a)g(b) = 1 i h(x, y) = f(x)g(y) = 0
при (x, y) 6∈ U × V.
4 Необхiднi умови на множину точок розриву CL- i LL-функцiй
Нехай X та Y — топологiчнi простори i E,M ⊆ X×Y . Ми кажемо, що M є h-околом/v-околом/ множини E, якщо для довiльної точки (x, y) ∈ E iснує такий окiл U точкиx /V точки y/, що U × y ⊆ M /вiдповiдно, x × V ⊆ M/. Якщо M є h-околом /v-околом/ замикання E, то казатимемо, щоM є h-околом множини E. I нарештi, множинаM називається hv-околом , hv-околом, hv-околом, hv-околом множини E, якщо вона євiдповiдно h- чи h-околом E i v- чи v-околом E. Множина E називається h- /v-, hv-,hv-, hv-, hv-/ нiде не щiльною, якщо iснує така нiде не щiльна множина M , яка є h- /v-,hv-, hv-, hv-, hv-/ околом множини E. hv-окiл iнакше називається хрестом-околом, аhv-нiде не щiльна множина — навхрест нiде не щiльною.
Лема 4.1. Нехай X — топологiчний простiр, Y , Z — метричнi простори, γ > 0, A —щiльна в X i f : X × Y → Z — неперервна вiдносно першої змiнної функцiя, для якоїλfx(Y ) ≤ γ при x ∈ A. Тодi f — неперервна.
Доведення. По-перше, оскiльки f — неперервна вiдносно першої змiнної, то для довiль-них x ∈ X i y′, y′′ ∈ Y матимемо, що
|f(x, y′) − f(x, y′′)|Z = limA3u→x
|fu(y′) − fu(y′′)|Z ≤ limA3u→x
λfu(Y )|y′ − y′′|Y ≤ γ|y′ − y′′|Y .
Перевiримо тепер, що f — неперервна. Вiзьмемо x0 ∈ X, y0 ∈ Y i ε > 0. Оскiлькиf — неперервна вiдносно першої змiнної, то iснує такий окiл U точки x0, для якого|f(x, y0) − f(x0, y0)|Z < ε
2при x ∈ U . Нехай V = B
(y0,
ε2γ
). Тодi при x ∈ U i y ∈ V
матимемо, що
|f(x, y) − f(x0, y0)|Z ≤ |f(x, y) − f(x, y0)|Z+|f(x, y0) − f(x0, y0)|Z ≤
γ|y − y0|Y + ε2< γε
2γ+ ε
2= ε.
Таким чином, f — неперервна в точцi (x0, y0).

28 Герасимчук В.Г., Маслюченко О.В.
Лема 4.2. Нехай X — топологiчний простiр, Y , Z — метричнi простори, V — вiдкрита вY , γ > 0 i функцiя f : X×Y → Z — неперервна вiдносно першої змiнної. Тодi множина
Aγ(V ) =x ∈ prX
(D(f) ∩ (X × V )
): λfx(V ) ≤ γ
є нiде не щiльною в X.
Доведення. Нехай U = intAγ(V ) i A = U∩Aγ(V ). Припустимо, що U 6= ∅. Тодi, оскiлькиA ⊇ U , то за лемою 4.1 функцiя f буде неперервна на U × V . Але це неможливо, адже(U × V ) ∩D(f) 6= ∅. Таким чином, U = ∅, а значить, Aγ(V ) — нiде не щiльна.
Лема 4.3. Нехай X — берiвський топологiчний простiр, Y , Z — метричнi простори if : X × Y → Z — CL-функцiя. Тодi множина D(f) є hv-нiде не щiльною.
Доведення. Перевiримо спочатку нiде не щiльнiсть множини D(f). Нехай D(f) не єнiде не щiльною. Тодi iснують такi вiдкритi непорожнi множини U0 ⊆ X i V0 ⊆ Y , щоU0 × V0 ⊆ D(f). Вiзьмемо деяке y0 ∈ V0 i покладемо Vn = V0 ∩ B(y0,
1n). За лемою 4.2
множини Am,n = Am(Vn) — нiде не щiльнi. Зафiксуємо деяке x ∈ U0. Оскiльки λfx(y0) <
+∞, то iснує номер m > λfx(y0). Далi, знайдеться n ∈ N, для якого λfx(Vn) < m. Але
(x, y0) ∈ U0 × V0 ⊆ D(f). Тому x ∈ Am,n. Таким чином, U0 ⊆∞⋃
m,n=1
Am,n, що суперечить
беровостi X.Тепер, оскiльки f є нарiзно неперервною, то з [6, Theorem 6.4, Proposition 6.2] ви-
пливає, що D(f) є σ-навхрест нiде не щiльною (тобто подається у виглядi злiченногооб’єднання навхрест нiде не щiльних множин). Крiм того, там показано, що довiльнанiде не щiльна i σ-навхрест нiде не щiльна множина в добутку метризовних просторiвє навхрест нiде не щiльною [6, Proposition 6.3]. Таким чином, множина D(f) є навхрестнiде не щiльною.
Теорема 3. Нехай X — берiвський топологiчний простiр, Y , Z — метричнi простори if : X × Y → Z — CL-функцiя. Тодi множина D(f) є hv-нiде не щiльною.
Доведення. За лемою 4.3 множина D(f) є hv-нiде не щiльною. Тому залишається пере-вiрити v-нiде не щiльнiсть множини D(f).
За теоремою Стоуна [4, c.414] iснує локально скiнченне покриття Vn простору Y ,що вписане в покриття Y кулями радiуса 1
2n. Тодi для кожного V ∈ Vn матимемо, що
diamV ≤ 1n. Покладемо Mn =
⋃V ∈Vn
(An(V ) × V
)i M =
∞⋃n=1
Mn. За лемою 4.2 множини
An(V ) — нiде не щiльнi. Тому за рахунок локальної скiнченностi Vn матимемо, що Mn
— нiде не щiльнi.Покажемо, що M — нiде не щiльна. Нехай G0 — деяка вiдкрита непорожня пiдмно-
жина X × Y . Але за лемою 4.3 множина D(f) — нiде не щiльна. Тому iснують вiдкритiнепорожнi множини U0 ⊆ X i V0 ⊆ Y , такi, що U0 × V0 ⊆ G0 \ D(f). Вiзьмемо деякеy0 ∈ V0 i знайдемо такий номер m, для якого B(y0,
2m
) ⊆ V0. Нехай V1 = B(x, 1m
) iG1 = U0 × V1.
Покажемо, що G1 ∩ Mn = ∅ при n > m. Справдi, нехай G1 ∩ Mn 6= ∅. Вiзьме-мо (x1, y1) ∈ G1 ∩ Mn. Тодi iснує V ∈ Vn, таке що (x1, y1) ∈ An(V ) × V . Значить,

Коливання нарiзно локально лiпшицевих функцiй 29
x1 ∈ An(V ) ⊆ prX(D(f) ∩ (X × V )
). Отже, iснує y2 ∈ V , для якого (x1, y2) ∈ D(f). Тодi
y2 6∈ B(y0,2m
), адже(U0 × B(y0,
2m
))∩D(f) = ∅. Тому |y2 − y0|Y ≥ 2
m. Врахувавши, що
|y0 − y1|Y ≤ 1m
, матимемо, що 1m
≤ |y2 − y1|Y ≤ diamV ≤ 1n. Таким чином, n ≤ m.
Тепер, користуючись нiде не щiльнiстю множинMn матимемо, що вiдкрита множина
G2 = G1 \m⋃n=1
Mn — непорожня, причому G2∩Mn = ∅ для кожного n. Тому G2 ⊆ G0\M .
Отже, M — нiде не щiльна.Доведемо, що M є v-околом множини D(f). Вiзьмемо (x0, y0) ∈ D(f). Оскiль-
ки λfx0 (y0) < +∞, то iснує номер n0 > λfx0 (y0). Далi вiзьмемо n1 > n0, для якогоλfx0
(B(y0,
1n1
))< n0. Покладемо n = maxn0, n1. Оскiльки Vn покривають Y , то iснує
V ∈ Vn, для якого y0 ∈ V . Але diamV < 1n≤ 1
n1. Тому V ⊆ B(y0,
1n1
). Отже, λfx0 (V ) < n.Таким чином, x0 × V ⊆Mn ⊆M .
Наслiдок 4.1. Нехай X, Y , Z — метричнi простори, причому X та Y – берiвськi, if : X × Y → Z — LL-функцiя. Тодi множина D(f) є hv-нiде не щiльною.
5 Побудова функцiй з даним коливанням
Для функцiї f : X → R верхня та нижня граничнi функцiї f∨, f∧ : X → R визна-чаються формулами
f∨(x) = lim supu→x
f(u), f∧(x) = lim infu→x
f(u), x ∈ X.
Як вiдомо, коливання функцiї f : X → R обчислюється за формулою ωf = f∨ − f∧.Пiдмножину S метричного простору X називатимемо ε-вiдокремною, якщо нерiв-
нiсть |s− t|X ≥ ε виконується для довiльних рiзних точок s, t ∈ S. Казатимемо, що S —вiдокремна, якщо вона є ε-вiдокремною для деякого ε > 0. Множину S називатимемо
σ-дискретною, якщо iснує послiдовнiсть дискретних множин Sn, така що S =∞⋃n=1
Sn.
Лема 5.1. Нехай X — метричний простiр i E ⊆ X. Тодi iснує σ-дискретна множинаS ⊆ E, така що S ⊇ E.
Доведення. Ясно, що ε-вiдокремнiсть — це властивiсть скiнченного характеру. Томуза лемою Тейхмюллера-Тьюкi [4, c. 12] для кожного номера n iснує максимальна1n-вiдокремна пiдмножина Sn множини E. За рахунок максимальностi матимемо, що
для довiльного номера n i точки x ∈ E iснує s ∈ Sn, таке що |x− s|X < 1n. Таким чином,
σ-дискретна множина S =∞⋃n=1
Sn буде щiльною в E.
В попереднiй лемi σ-дискретна множина подається у виглядi злiченного об’єднаннявiдокремних множин. Проте виявляється, що таку властивiсть мають всi σ-дискретнiмножини.
Лема 5.2. Нехай X — метричний простiр i S — σ-дискретна пiдмножина X. Тодi iснує
диз’юнктна послiдовнiсть вiдокремних множин Tn, така що S =∞⊔n=1
Tn.

30 Герасимчук В.Г., Маслюченко О.В.
Доведення. Застосовуючи мiркування леми 5.1 до деякої дискретної множини E, по-будуємо послiдовнiсть вiдокремних множин, об’єднання яких щiльне в E, а значить, iрiвне E. Таким чином, i для σ-дискретної множини S iснує послiдовнiсть деяких вiд-
окремних пiдмножин Sn, така що S =∞⋃n=1
Sn. Покладаючи Tn = Sn \n−1⋃k=1
Sk, матимемо,
що Tn — вiдокремнi i S =∞⊔n=1
Tn.
Лема 5.3. Нехай X — метричний простiр i g : X → [0,+∞] — деяка напiвнеперервназверху функцiя. Тодi iснує функцiя h : X → [0,+∞] з σ-дискретним носiєм, така щоh∨ = g.
Доведення. Нехай Q+ = Q∩(0,+∞). Для кожного ε ∈ Q+ покладемо Fε = f−1([ε,+∞]).Оскiльки функцiя f — напiвнеперервна зверху, то множини Fε — замкненi. За лемою 5.1для кожного ε > 0 виберемо σ-дискретну множину Sε, таку що Sε = Fε. ПокладемоS =
⋃ε∈Q+
Sε i h = gχS, де χS — характеристична функцiя множини S. Покажемо, що h
— шукана. По-перше, носiй функцiї h рiвний S i тому вiн є σ-дискретним. Далi, оскiлькиh ≤ g i g — напiвнеперервна зверху, то h∨ ≤ g∨ = g.
Залишилось довести, що h∨ ≥ g. Нехай це не так i для деякого x0 ∈ X виконується,що h∨(x0) < g(x0). Вiзьмемо ε ∈ Q+, таке що h∨(x0) < ε < g(x0). Тодi x0 ∈ Fε. З iншогобоку, iснує окiл U точки x0, такий що h(x) < ε при x ∈ U . Але x0 ∈ Fε = Sε. Тому iснуєs ∈ Sε ∩ U . Тодi h(s) = g(s) ≥ ε, що неможливо.
Лема 5.4. Нехай X — метричний простiр, G — вiдкрита пiдмножина X i S — σ-дискретна пiдмножина X, така що S ⊆ G \ G. Тодi iснує сiм’я
(U sn
)s∈S,n∈N вiдкритих
непорожнiх пiдмножин G, для якої виконуються наступнi властивостi(i) U s
n ⊆ G при s ∈ S та n ∈ N;(ii) для довiльного s ∈ S виконується, що U s
n → s при n→ ∞;(iii) для довiльної множини T ⊆ S сiм’я
(U tn
)t∈T,n∈N — дискретна на X \ T .
Доведення. За лемою 5.2 iснують вiдокремнi множини Tk, такi що S =∞⊔k=1
Tk. Нехай
множини Tk є 3εk-вiдокремнi, причому не буде обмеженням вважати, що εk < 1 i εk ↓ 0.
Покладемо Sk =k⋃j=1
Tj. Зараз ми iндукцiєю по k визначимо сiм’ї(U tn
)t∈Tk,n∈N
вiдкритих
непорожнiх множин так, щоб виконувались наступнi властивостi:
U tn ⊆ G ∩B(t, εk
n) при t ∈ Tk i n ∈ N; (1)
сiм’я(U sn
)s∈Sk,n∈N
— диз’юнктна. (2)
Припустимо, що для деякого k ∈ N при j < k уже визначенi сiм’ї(U tn
)t∈Tj ,n∈N
так, щовиконуються властивостi аналогiчнi до (1) та (2). Вiзьмемо t ∈ Tk i побудуємо множиниU tn. Оскiльки вiдокремнi множини є замкненими, то множина Sk−1 також є замкненою.
Тодi iснує ε > 0, для якого B(t, 2ε)∩Sk−1 = ∅. Значить, за рахунок (1), B(t, ε)∩U sn = ∅

Коливання нарiзно локально лiпшицевих функцiй 31
при s ∈ Sk−1 i 1n< ε, адже εj < 1. Врахувавши, що сiм’ї
(B(t, εj)
)s∈Tj
— дискретнi приj < k i використавши (1) матимемо, що сiм’я
(U sn
)t∈Sk−1,n≤ 1
ε
— локально скiнченна. Тому
B(t, ε) ∩⋃
s∈Sk−1
∞⋃n=1
U sn ⊆
⋃s∈Sk−1
⋃n≤ 1
ε
U sn =
⋃s∈Sk−1
⋃n≤ 1
ε
U sn ⊆ G 63 t
Отже, множина U = X \⋃
s∈Sk−1
∞⋃n=1
U sn є околом точки e. Тому для множини H = G ∩ U
матимемо, що t ∈ H. Залишилось, iндукцiєю по n побудувати послiдовнiсть вiдкритихнепорожнiх множин U t
n так, щоб U tn ⊆ H ∩ B(t, εk
n) i послiдовнiсть
(U tn
)∞n=1
була бидиз’юнктною.
Доведемо, що побудована сiм’я(U sn
)s∈S,n∈N є шуканою. По-перше, з властивостей (1k)
випливають властивостi (i) та (ii). Перевiримо (iii). Вiзьмемо T ⊆ S i точку x ∈ X \ T .Зуважимо, що з властивостей (2k) випливає, що сiм’я
(U tn
)t∈T,n∈N — диз’юнктна. Тому
достатньо перевiрити локальну скiнченнiсть сiм’ї(U tn
)t∈T,n∈N в точцi x. Для цього вi-
зьмемо таке ε > 0, що B(x, 2ε) ∩ T = ∅. Тодi за рахунок (1) матимемо, що при n > 1ε
виконується, що εkn< 1
n< ε, а тому U t
n ∩ B(x, ε) = ∅ при t ∈ T . Далi, оскiльки εk ↓ 0,то iснує k, для якого εk < ε. Тодi B(x, ε) ∩ U t
n = ∅ при j ≥ k i t ∈ T ∩ Tj. Але сiм’ї(B(t, εj)
)t∈Tj
— дискретнi. Тому для довiльних n та j сiм’я(U tn
)t∈Tj
також є дискретною.Таким чином, сiм’я
(U tn
)t∈T,n∈N — локально скiнченна в точцi x.
Лема 5.5. Нехай P — деяка однорiдна локальна властивiсть дiйснозначних функцiй,яка сильнiша за неперервнiсть, X — P -регулярний метричний простiр, G — вiдкри-та пiдмножина X i g : X → [0,+∞] — така напiвнеперервна зверху функцiя, щоE = suppg ⊆ G \G. Тодi iснує функцiя f : X → R, що ωf = g, suppf ⊆ G i звужен-ня f |X\E є P -функцiєю.
Доведення. Перш за все виберемо h за лемою 5.3 i покладемо S = supph. Тодi S ⊆E ⊆ G \ G. Далi побудуємо сiм’ю
(U sn
)s∈S,n∈N за лемою 5.4. Для довiльних s ∈ S i
n ∈ N виберемо деяку точку asn ∈ U sn. Оскiльки X є P -регулярним, то iснує P -функцiя
ϕsn : X → R, така що ϕsn(asn)) = 1 i suppϕsn ⊆ U sn. Далi, нехай λsn = minn, h(s).
Покладемо f(x) =∑
s∈S,n∈Nλsnϕ
sn(x), x ∈ X. Доведемо, що функцiя f шукана.
По-перше, suppf =⋃
s∈S,n∈Nsuppϕsn ⊆
⋃s∈S,n∈N
U sn ⊆ G. Далi, оскiльки сiм’я
(U sn
)s∈S,n∈N
— дискретна поза S ⊆ E, i властивiсть P є локальною та однорiдною, то f |X\E є P -функцiєю. Залишилось довести, що ωf = g. Але h∨ = g. Тому досить показати, щоh ≤ ωf ≤ g. Оскiльки P сильнiша за неперервнiсть, то f — неперервна на X \ E. Томуωf (x) = 0 = g(x) = h(x) при x ∈ X \E. Зафiксуємо x ∈ E. Тодi f(x) = f∧(x) = 0. Отже,ωf (x) = f∨(x). Тому досить довести, що h(x) ≤ f∨(x) ≤ g(x).
Перевiримо спочатку нерiвнiсть h(x) ≤ f∨(x). Якщо x 6∈ S, то h(x) = 0 ≤ f∨(x).Нехай тепер x ∈ S. Тодi, оскiльки axn → x, то
f∨(x) = lim supu→x
f(u) ≥ lim supn→∞
f(axn) = limn→∞
λxn = limn→∞
minn, h(x) = h(x).

32 Герасимчук В.Г., Маслюченко О.В.
Доведемо тепер нерiвнiсть f∨(x) ≤ g(x). Вiзьмемо ε > 0. Оскiльки g — напiвнепе-рервна зверху, то iснує такий окiл U точки x, для якого g(u) ≤ g(x) + ε при u ∈ U .Нехай T = S \ U . Тодi сiм’я
(U tn
)t∈T,n∈N — дискретна в точцi x. Але U t
n ⊆ G 63 x приt ∈ T i n ∈ N. Тому iснує окiл V точки x, такий що V ⊆ U i V ∩ U t
n = ∅ при t ∈ T in ∈ N. Тодi при v ∈ V матимемо, що
f(v) ≤ sups∈S∩U,n∈N
λsn ≤ sups∈S∩U
h(s) ≤ suph(U) ≤ sup g(U) ≤ g(x) + ε.
Тодi f∨(x) ≤ sup f(V ) ≤ g(x) + ε. Спрямовуючи ε → 0, одержимо потрiбну нерiв-нiсть.
Теорема 4. Нехай P та Q — деякi локальнi однорiднi властивостi дiйснозначних фун-кцiй, якi сильнiшi за неперервнiсть, X — P -регулярний метричний простiр, a Y — Q-регулярний метричний простiр i g : X × Y → [0,+∞] — така напiвнеперервна зверхуфункцiя, що її носiй suppg є hv-нiде не щiльна. Тодi iснує PQ-функцiя f : X × Y → R,така що ωf = g.
Доведення. Нехай M — деякий нiде не щiльний hv-окiл множини E = suppg i G =
(X × Y ) \M . Покладемо P0 = PQ ∧ C. За лемою 3.3 добуток X × Y є P0-регулярним.Застосовуючи лему 5.5 до властивостi P0, функцiї g i множини G, побудуємо функцiюf : X × Y → R, таку що ωf = g, suppf ⊆ G i f |(X×Y )\E — P0-функцiя. Доведемо, що f єPQ-функцiєю.
Вiзьмемо (x, y) ∈ X × Y i покажемо, що fy є P -функцiєю. Якщо (x, y) 6∈ E, тозвуження f на окiл (X × Y ) \ E точки (x, y) є P0-функцiєю. Тому звуження fy надеякий вiдкритий окiл точки x є P -функцiєю. Нехай тепер (x, y) ∈ E. Оскiльки M єhv-околом E, то iснує вiдкритий окiл U точки x, для якого U × y ⊆ M . Але f рiвнанулю на M . Тому fy рiвне нулю на U . Але нульова функцiя має властивiсть P , аджеP — однорiдна властивiсть. Таким чином, для кожного x ∈ X звуження fy на деякийвiдкритий окiл точки x має властивiсть P . Отже, fy є P -функцiєю, адже P — локальнавластивiсть. Аналогiчно доводимо, що fx має властивiсть Q.
Теорема 5. Нехай P — деяка локальна однорiдна властивiсть дiйснозначних функцiй,яка сильнiша за неперервнiсть,X — метричний простiр, a Y — P -регулярний метричнийпростiр i g : X×Y → [0,+∞] — така напiвнеперервна зверху функцiя„ що її носiй suppg
є hv-нiде не щiльним. Тодi iснує CP -функцiя f : X × Y → R, така що ωf = g.
Доведення. Нехай M — деякий нiде не щiльний hv-окiл множини E = suppg i G =
(X × Y ) \M . Покладемо P0 = CP ∧ C. За лемою 3.3 добуток X × Y є P0-регулярним.Застосовуючи лему 5.5 до властивостi P0, функцiї g i множини G, побудуємо функцiюf : X × Y → R, таку що ωf = g, suppf ⊆ G i f |(X×Y )\E — P0-функцiя. Доведемо, що f єCP -функцiєю.
Вiзьмемо (x, y) ∈ X × Y i покажемо, що fx є P -функцiєю. Якщо (x, y) 6∈ E, тозвуження f на окiл (X × Y ) \ E точки (x, y) є P0-функцiєю. Тому звуження fx надеякий вiдкритий окiл точки y є P -функцiєю. Нехай тепер (x, y) ∈ E. Оскiльки M єhv-околом E, то iснує вiдкритий окiл V точки y, для якого x × V ⊆ M . Але f рiвна
Коливання нарiзно локально лiпшицевих функцiй 33
нулю на M . Тому fx рiвне нулю на V . Але нульова функцiя має властивiсть P , аджеP — однорiдна властивiсть. Таким чином, для кожного x ∈ X звуження fx на деякийвiдкритий окiл точки y має властивiсть P . Отже, fy є P -функцiєю, адже P — локальнавластивiсть.
Доведемо, що fy — неперервне в точцi x. Якщо (x, y) 6∈ E, то ωf (x, y)=g(x, y)=0.Отже, f — неперервна в точцi (x, y). А тому fy — неперервне в точцi x. Нехай тепер(x, y) ∈ E. Оскiльки M є hv-околом множини E, то iснує такий окiл U точки x, дляякого U × y ⊆ M . Тодi функцiя fy рiвна нулю на U , а значить, вона неперервна вточцi x.
Лiтература
1. Герасимчук В.Г. Розриви i коливання нарiзно диференцiйовних функцiй: Дис. ... кандидата фiз.-мат.наук: 01.01.01. /Василь Григорович Герасимчук. – Чернiвцi, 2008. – 122с.
2. Герасимчук В.Г., Маслюченко В.К. Михайлюк В.В. Рiзновиди лiпшицевостi i множини точок роз-риву нарiзно диференцiйовних функцiй // Наук. вiсн. Чернiвецького ун-ту. Математика. – Чернiвцi:Рута. – 134. – 2002. – С.22–29.
3. Герасимчук В.Г., Маслюченко О.В. Характеризацiя коливань нарiзно локально лiпшицевих функцiй// Мiжнар. конф. “Сучаснi проблеми аналiзу” присв. 70-рiччю кафедри математичного аналiзуЧернiвецького унiверситету (30 вересня – 3 жовтня). – Чернiвцi, 2010. – С.56–57.
4. Энгелькинг Р. Общая топология. – Москва: Мир, 1986. – 752с.
5. Колмогоров А. Н., Фомин С. В. Элеметны теории функций и функционального анализа. – Москва:Наука, 1968. – 496 с.
6. Maslyuchenko O.V. The oscillation of quasi-continuous functions on pairwise attainable spaces, HoustonJournal of Mathematics, 35, 1 (2009), 113–130.
Чернiвецький нацiональний унiверситет iменi Юрiя Федьковича,
Чернiвцi, Україна
Надiйшло 05.02.2011
Herasymchuk V.H., Maslyuchenko O.V. The oscillation of separately locally Lipschitz func-
tions, Carpathian Mathematical Publications, 3, 1 (2011), 22–33.
We prove that a function which defined on the product of two metric Baire spaces is the
oscillation of some separately locally Lipschitz function if and only if it is an upper semi-
continuous non-negative function which has a crosswise nowhere dense closure of its support.
Герасимчук В.Г., Маслюченко О.В. Колебания раздельно локально липшицевых функций// Карпатские математические публикации. — 2011. — Т.3, 1. — C. 22–33.
Доказано, что функция, которая определена на произведении двух бэровских метриче-ских пространств, является колебанием некоторой раздельно локально липшицевой функ-ции тогда и только тогда, когда она неотрицательна полунепрерывна сверху и замыканиеее носителя накрест нигде не плотно.
Карпатськi математичнi Carpathian Mathematical
публiкацiї. Т.3, 1 Publications. V.3, .1
УДК 517.98
Голубчак О.М.
ГIЛЬБЕРТОВI ПРОСТОРИ СИМЕТРИЧНИХ АНАЛIТИЧНИХ
ФУНКЦIЙ НА `1
Голубчак О.М. Гiльбертовi простори симетричних аналiтичних функцiй на `1 // Кар-патськi математичнi публiкацiї. — 2011. — Т.3, 1. — C. 34–39.
В роботi розглянуто поповнення простору симетричних полiномiв на `1 вiдносно деякоїгiльбертової норми i дослiджено умови, при яких отриманий простiр буде простором ана-лiтичних функцiй на `1. Розглянуто зв’язок з абстрактними просторами Фока.
Вступ
Нехай X — лiнiйний нормований простiр з безумовним базисом над полем K. Фун-
кцiя f : X → K називається симетричною, якщо f( ∞∑k=1
xkek
)= f
( ∞∑k=1
xkeσ(k)
)для
довiльної пiдстановки σ на деякiй скiнченнiй пiдмножинi натуральних чисел N.Функцiя P : X → K називається полiномом степеня n, якщо P = P0+P1+ ...+Pn, де
Pk(x) = Bk(x, x, ..., x) i Bk є k-лiнiйною формою Bk : X ×X × ...×X → K для кожного1 ≤ k ≤ n. При цьому P0 = const i Pn 6= 0.
Розглянемо простiр `1 абсолютно сумовних послiдовностей над полем комплекснихчисел C: `1 = (x1, x2, ..., xn, ...)|
∑∞k=1 |xk| <∞.
Простiр симетричних полiномiв на `1 позначимо Ps(`1). Вiдомо, що полiноми
Pk(x) =∞∑i=1
xki
утворюють алгебраїчний базис в Ps(`1). Також вiдомо, що полiноми вигляду Pλ = Pλ1 ·Pλ2 · ... ·Pλm утворюють лiнiйний базис в Ps(`1), де Pλk(x) =
∑∞i=1 x
λki , λ = (λ1, λ2, ..., λm)
— деяке розбиття натурального числа n, тобто λ1 + λ2 + ...+ λm = n.Симетричнi аналiтичнi функцiї вiд нескiнченної кiлькостi змiнних дослiджувались
в роботах [3, 4, 5]. У цiй роботi ми розглядаємо гiльбертовi простори, породженi симет-ричними полiномами на `1, i встановлюємо умови, при яких елементи цих просторiв
2000 Mathematics Subject Classification: 46J15, 46J20, 46E15.Ключовi слова i фрази: симетричнi аналiтичнi функцiї на банахових просторах, гiльбертовi просторианалiтичних функцiй.
c© Голубчак О.М., 2011

Гiльбертовi простори симетричних аналiтичних функцiй на `1 35
будуть аналiтичними функцiями у деякiй областi Ω ⊂ `1. У першому роздiлi доведенозагальний результат, який оцiнює радiус кулi в `1, що мiститься в Ω. У другому роздiлiпоказано, що Ω, в загальному випадку, не збiгається з цiєю кулею, i побудовано Ω дляодного конкретного випадку, використовуючи абстрактнi простори Фока.
Розглянемо на Ps(`1) деякий скалярний добуток 〈Pλ, Pµ〉 = bλµδλµ, де δλµ — символКронекера, bλλ = bλ > 0. Даний скалярний добуток породжує норму
‖Pλ‖ =√
〈Pλ, Pλ〉 =√bλ.
Поповнення простору Ps(`1) вiдносно даної норми позначимо Hs(`1). В цiй роботiдослiджуються умови на bλ, при яких простiр Hs(`1) є простором аналiтичних функцiйв деякiй областi `1.
На просторi Ps(`1) також можна визначити норму
‖P‖sup = sup‖x‖≤1
|P (x)|.
Легко бачити, що ‖Pλ‖sup = 1.
1 Простiр аналiтичних функцiй
Очевидно, що значення в точцi x ∈ `1 породжує функцiонал δx : P 7→ P (x), P ∈Ps(`1). Ми розглянемо питання: при яких x функцiонал δx буде неперервним?
Припустимо, що для деякого x ∈ `1, δx — неперервний. Тодi його можна продовжитиза неперервнiстю до лiнiйного функцiонала на Hs(`1). За теоремою Рiса iснує елементRx ∈ Hs(`1), такий що
δx(P ) = P (x) = 〈P,Rx〉.
Знайдемо цей елемент.
Якщо такий елемент Rx iснує та оскiлькиPλ
‖Pλ‖=
Pλ√bλ
— ортонормований базис в
Hs(`1), то δx( Pλ√
bλ
)=Pλ(x)√bλ
=⟨ Pλ√
bλ, Rx
⟩. Тому
Rx =∑λ
Pλ√bλ
Pλ(x)√bλ
=∑λ
PλbλPλ(x). (1)
Отже, Rx є визначеним для тих елементiв x, для яких ряд (1) збiгається в Hs(`1).Знайдемо область збiжностi даного ряду.
‖Rx‖Hs=∥∥∥∑
λ
PλbλPλ(x)
∥∥∥Hs
≤∞∑n=1
∥∥∥ ∑|λ|=n
PλbλPλ(x)
∥∥∥Hs
≤
∞∑n=1
∑|λ|=n
∥∥∥Pλbλ
∥∥∥Hs
|Pλ(x)| =∞∑n=1
∑|λ|=n
|Pλ(x)|√bλ
≤

36 Голубчак О.М.
∞∑n=1
∑|λ|=n
‖Pλ‖sup‖x‖n`1√bλ
=∞∑n=1
∑|λ|=n
‖x‖n`1√bλ.
Позначимо через p(n) — кiлькiсть розбиттiв λ натурального числа n. Нехай
dn = max|λ|=n
1√bλ. (2)
Тодi
‖Rx‖Hs≤
∞∑n=1
p(n)dn‖x‖n`1 .
Використовуючи формулу Кошi-Адамара та вiдому асимптотику для p(n), можнаоцiнити радiус збiжностi ряду:
r ≥ 1
lim supn→∞
(p(n)dn)1n
=1
lim supn→∞
d1nn
.
Таким чином, ми довели наступну теорему.
Теорема 1. Простiр Hs(`1) є простором аналiтичних функцiй в кулi з центром в нулiрадiуса
r =1
lim supn→∞
d1nn
в `1, де константи dn визначаються формулою (2).
З теореми 1 маємо, що коли ‖Pλ‖Hs ≥ 1 для довiльного розбиття λ, то Hs(`1) єпростором аналiтичних функцiй на одиничнiй кулi в `1.
2 Зв’язок з абстрактними просторами Фока
Зауважимо, що в деяких випадках можна зробити точнiшу оцiнку для областi збiж-ностi ряду (1). Нам потрiбнi будуть деякi вiдомi результати стосовно абстрактних прос-торiв Фока. Нехай E — гiльбертiв простiр з ортонормованим базисом (en). Скажемо, щогiльбертiв простiр F = F(E) з нормою ‖·‖η є (абстрактним) симетричним просторомФока над простором E, якщо вектори 1, e
(k)[i] = ek1i1 . . . e
knin
утворюють ортогональнийбазис в F , де n = |(k)| = k1 + · · · + kn ∈ N, kj ≥ 0, i1 < · · · < in,
ek1i1 . . . eknin
=1
n!
∑σ
k1︷ ︸︸ ︷eσ(i1) ⊗ · · · ⊗ eσ(i1) ⊗ · · · ⊗
kn︷ ︸︸ ︷eσ(in) ⊗ · · · ⊗ eσ(in)
є симетричним тензорним добутком векторiв.
Покладемо c(k)[i] :=∥∥∥e(k)[i]
∥∥∥−2
ηi c0 = 1. Розглянемо степеневий ряд
η(x) =∞∑
k1+···+kn=0
∑i1<···<in
ck1...kni1...inxk1i1 . . . x
kninek1i1 . . . e
knin
=∞∑
|(k)|=0
∑[i]
c(k)[i] x
(k)[i] e
(k)[i] (3)

Гiльбертовi простори симетричних аналiтичних функцiй на `1 37
для будь-якого x =∞∑i=1
xiei ∈ E.
Наступну теорему доведено в [2].
Теорема 2. Припустимо, що iснує константа S > 0 i послiдовнiсть додатних чисел(Mn), така що для кожного n lim supn→∞
n√Mn = M ≤ ∞ i
0 < c(k)[i] = ck1...kni1...in
≤ SM2n
(k1 + · · · + kn)!
k1! . . . kn!= SM2
n
n!
k1! . . . kn!, (4)
де n = k1 + · · · + kn. Тодi
(i) ряд (3) збiгається для кожного x ∈ E, ‖x‖ < 1/M i η є аналiтичним вiдображеннямна кулi B(0, 1/M) ⊂ E з центром в нулi радiуса 1/M зi значенням в F ;
(ii) для кожного ϕ ∈ F вiдображення fϕ(x) = 〈η(x) | ϕ〉 є аналiтичною функцiєю наB(0, 1/M) ⊂ E;
(iii) функцiя⟨η(x)
∣∣∣e(k)[i]
⟩є n-однорiдним полiномом i
⟨η(x)
∣∣∣e(k)[i]
⟩= xk1i1 . . . x
knin.
Твердження 2.1. Вiдображення
ξ : Pλ 7→ eλ1 . . . eλm , λ = (λ1, . . . , λm)
задає iзометричний iзоморфiзм простору Hs(`1) на абстрактний симетричний простiрФока F = F(E), для якого константи c
(k)[i] з формули (3) визначаються рiвнiстю c
(k)[i] =
‖P k1i1. . . P kn
in‖−2. Iзоморфiзм ξ є мультиплiкативним на пiдпросторi полiномiв у Hs(`1).
Доведення цього твердження безпосередньо випливає з означень. Зауважимо, щозамкнена лiнiйна оболонка Pn, n ∈ N є прообразом простору E при вiдображеннi ξ.
Позначимо Ω — область в `1
Ω = x ∈ `1 : |Pn(x)| < 1, n ∈ N.
Легко бачити, що Ω мiстить вiдкриту одиничну кулю простору `1 як власну пiдмножину.
Твердження 2.2. Множина Ω є необмеженою i вiдкритою пiдмножиною в `1. Крiмтого, для кожного x ∈ Ω
∑|Pn(x)| <∞.
Доведення. Покажемо, що iснує необмежена послiдовнiсть в `1, яка належить Ω. Роз-глянемо числову послiдовнiсть
xn = (−1)n6
π2n.
Нехай (z(m)) — послiдовнiсть з `1, така що z(m) = (x1, x2, . . . , xm, 0, 0, . . .).
Оскiльки Pn(z(m)) < 1 ∀n,m, то z(m) ∈ Ω. З iншого боку, очевидно, що ‖z(m)‖ → ∞при m→ ∞. Отже, Ω є необмеженою множиною.
Зауважимо, що коли x =∑xkek ∈ Ω, то |xk| < 1 для кожного k. Тобто Ω лежить у
вiдкритiй пiдмножинiD1 = x ∈ `1 : ∀k ∈ N |xk| < 1.

38 Голубчак О.М.
Розглянемо вiдображення Ψ(x) = (P1(x), . . . , Pn(x), . . .). У роботi [4] показано, що Ψ
— неперервне вiдображення i Ψ: D1 → `1. Тому∑
|Pn(x)| < ∞. З iншого боку, Ω єпрообразом вiдкритої множини D1 при вiдображеннi Ψ. Тому Ω — вiдкрита пiдмно-жина.
Розглянемо абстрактний простiр Фока F з нормою∥∥∥e(k)[i]
∥∥∥η
= 1. Згiдно формули (3),
цiй нормi вiдповiдає вiдображення η:
η(y) =∞∏i=1
∞∑k=0
yki eki =
∞∑|(k)|=0
∑[i]
y(k)[i] e
(k)[i] ,
де yi = (y, ei) — координати вектора y ∈ `. В роботi [1] показано, що η є аналiтичнимвiдображенням з D2 ⊃ D1 в F , де
D2 = x ∈ `2 : ∀k ∈ N |xk| < 1
є вiдкритою пiдмножиною в `2.Оскiльки вiдображення ξ є iзометричним iзоморфiзмом з Hs(`1) в F , то ξ(Rx) ∈ F
для кожного x ∈ `1, ‖x‖ < 1. Покажемо, що елемент Rx коректно визначений для всiхx ∈ Ω. Для цього достатньо показати, що ξ(Rx) ∈ F при x ∈ Ω. З формули (1) маємо
ξ(Rx) = ξ(∑
λ
PλPλ(x))
=∑λ
eλPλ(x). (5)
Оскiльки |Pn(x)| < 1 i ряд∑
|Pn(x)| збiгається для кожного x ∈ Ω, то∑λ
|Pλ(x)|2 ≤∞∏i=1
∞∑k=0
|Pi(x)|2k =∞∏i=1
1
1 − |Pi(x)|2.
З iншого боку,
ln( ∞∏i=1
1
1 − |Pi(x)|2)
= − ln∞∏i=1
(1 − |Pi(x)|2) ≤ −∞∑i=1
(−|Pi(x)|2) =∞∑i=1
|Pi(x)|2.
Тому
‖ξ(Rx)‖2 =∑λ
|Pλ(x)|2 ≤ exp( ∞∑i=1
|Pi(x)|2)<∞.
Отже, ξ(Rx) ∈ F , тобто Rx ∈ Hs(`1) для всiх x ∈ Ω. Таким чином, ми довели наступнутеорему.
Теорема 3. Нехай ‖Pλ‖ = 1 для довiльного розбиття λ. Тодi Hs(`1) є простором аналi-тичних функцiй на Ω. При цьому
F (x) = 〈F,Rx〉 = 〈ξ(F ), ξ(Rx)〉, x ∈ Ω, F ∈ Hs(`1).
Зауважимо, що коли x /∈ Ω, то для деякого m |Pm(x)| > 1. Тодi у формулi (5) рядбуде мiстити розбiжний доданок
∑k e
km(Pm(x))k. Тому Rx не буде коректно визначеним.
Отже, область Ω у теоремi 3 не може бути розширеною.
Гiльбертовi простори симетричних аналiтичних функцiй на `1 39
Лiтература
1. А.В. Загороднюк, М.А. Митрофанов, Аналiтичнi функцiї на одиничному диску гiльбертовогопростору // Вiсник Львiв. ун-ту, серiя мех.-мат. – 2004. – Т.63. – С. 80–87.
2. А. Загороднюк, З. Можировська, Гiльбертовi простори цiлих функцiй вiд нескiнченної кiлькостiзмiнних// Математичний вiсник НТШ. – 2006. – Т.3. – С. 44–55.
3. R. Alencar, R. Aron, P. Galindo, and A. Zagorodnyuk, Algebras of symmetric holomorphic functionson `p, Bull. Lond. Math. Soc. 35 (2003), 55–64.
4. I. Chernega, P. Galindo, and A. Zagorodnyuk, Some algebras of symmetric analytic functions and theirspectra. Proc. Edinburgh Math. Soc. (to appear).
5. M. Gonzalez, R. Gonzalo and J. Jaramillo, Symmetric polynomials on rearrangement invariant functionspace, J. London Math. Soc. 59, 2 (1999), 681–697.
Iнститут прикладних проблем механiки i математики НАН України,
Львiв, Україна
Надiйшло 15.12.2010
Holubchak O.M. Hilbert spaces of symmetric analytical functions on `1, Carpathian Mathema-
tical Publications, 3, 1 (2011), 34–39.
We consider completions of the space of symmetric polynomials on `1 with respect to some
Hilbert norm and investigate conditions under which the obtained spaces consist of analytic
functions with domains in `1. Some connections with abstract Fock spaces are established.
Голубчак О.М. Гильбертовы пространства симметрических функций на `1 // Карпат-ские математические публикации. — 2011. — Т.3, 1. — C. 34–39.
В работе рассмотрены пополнения пространства симметрических полиномов на `1относительно некоторой гильбертовой нормы и исследованы условия, при которых полу-ченное пространство будет пространством аналитических функций на `1. Рассмотренасвязь с абстрактными пространствами Фока.
Карпатськi математичнi Carpathian Mathematicalпублiкацiї. Т.3, 1 Publications. V.3, .1
УДК 517.98
Дубей М.В., Загороднюк А.В.
ЛIНЕАРИЗАЦIЯ ЛIПШИЦЕВО-ПОЛIНОМIАЛЬНИХ ТА
ЛIПШИЦЕВО-АНАЛIТИЧНИХ ВIДОБРАЖЕНЬ
Дубей М.В., Загороднюк А.В. Лiнеаризацiя лiпшицево-полiномiальних та лiпшицево-аналiтичних вiдображень // Карпатськi математичнi публiкацiї. — 2011. — Т.3, 1. — C.40–48.
У статтi введено поняття лiпшицево-полiномiальних та лiпшицево-аналiтичних функ-цiй, аналоги тензорного та симетричного тензорного добутку метричних просторiв. Вико-ристовуючи аналоги тензорного добутку метричних просторiв та процес лiнеаризацiї ана-лiтичних функцiй, здiйснено глобальну лiнеаризацiю лiпшицево-полiномiальних та лiпши-цево-аналiтичних вiдображень.
Вступ
Нехай X — непорожнiй метричний простiр, зафiксуємо у ньому деяку точку θx.Такий метричний простiр називається простором з вiдмiченою точкою. Нагадаємо, щовiдображення f мiж метричними просторами X та Y називається лiпшицевим, якщоiснує стала Lf така, що для довiльних елементiв x1, x2 ∈ X справедлива нерiвнiстьρY (f(x1), f(x2)) ≤ LfρX(x1, x2), де найменша з можливих сталих Lf називається сталоюЛiпшица. Простiр усiх лiпшицевих вiдображень з метричного простору X з вiдмiченоюточкою θx у метричний простiр Y з вiдмiченою точкою θy, якi переводять θx в θy,позначається Lip 0(X,Y ). У випадку, коли Y є лiнiйним простором, ми завжди вважа-тимемо, що θy = 0. Загальна теорiя лiпшицевих вiдображень викладена у монографiяхН. Вiвера [11], I. Бенiамiнi, Ж. Лiнденштрауса [4]. У роботi В. Пестова [10] доведено, щодля довiльного метричного простору X з вiдмiченою точкою θx iснує єдиний (з точнiстюдо iзометричного iзоморфiзму) банахiв простiр B(X) такий, що метричний простiр Xвкладається у банахiв простiр B(X) i кожне вiдображення f(x) ∈ Lip 0(X,E) можебути продовжене до лiнiйного оператора f(x) : B(X) → E для довiльного нормованогопростору E, причому ‖f‖ = Lf . Позначимо через spanX лiнiйну оболонку простору
X, а елементи з лiнiйної оболонки через x. За побудовою, елементи виглядуn∑k=1
λkxk є
щiльними у просторi B(X). Простiр B(X) називається вiльним банаховим простором.
2000 Mathematics Subject Classification: 26А16, 45G25.Ключовi слова i фрази: тензорний добуток, лiпшицеве вiдображення, метричний простiр, вiльний ба-нахiв простiр.
c©Дубей М.В., Загороднюк А.В., 2011
Лiнеаризацiя лiпшицево-полiномiальних та лiпшицево-аналiтичних вiдображень 41
Деякий клас F(X,Y ) нелiнiйних вiдображень з X в Y допускає глобальну лiнеари-зацiю, якщо iснує лiнiйний простiр W (X) та iн’єктивне вiдображення UF(X,Y ) : X →W (X) таке, що для довiльного F ∈ F(X, Y ) iснує лiнiйний оператор LF ∈ L(W (X), Y ),для яких наступна дiаграма є комутативною.
XF−→ Y
UF(X,Y ) ↓ LF
W (X)
(1)
Вiдображення UF(X,Y ) при цьому називається канонiчним вiдображенням у данiй лi-неаризацiїї.
Вiльний банахiв простiр B(X) та вiдображення ν : X → B(X), ν(x) = x задаютьлiнеаризацiю нелiнiйних функцiй з класу Lip 0(X,E). Лiнеаризацiю лiпшицевих фун-кцiй дослiджували Д. Райков [2], Р. Аренс та Ж. Iлс [3], Ж. Флуд [7], Ж. Годефруа,Н. Калтон [8] та iншi. В роботi [6] автори дослiджують властивостi вiльних банаховихпросторiв.
Добре вiдомо, що полiномiальнi та деякi класи аналiтичних вiдображень банахо-вого простору допускають глобальну лiнеаризацiю, з використанням тензорних добу-ткiв та їх топологiчних сум. Метою цiєї роботи є поєднання технiки вiльних банаховихпросторiв та тензорних добуткiв для лiнеаризацiї i дослiдження широкого класу вiдо-бражень на метричних просторах, якi в роботi названо лiпшицево-полiномiальними талiпшицево-аналiтичними.
У першому роздiлi дослiджено аналоги тензорних добуткiв метричних просторiв iвведено лiпшицево-полiномiальнi вiдображення.
У другому роздiлi розглянуто широкий клас аналiтичних вiдображень на комплек-сних банахових просторах, який допускає глобальну лiнеаризацiю, i застосовано йогодля дослiдження лiпшицево-аналiтичних вiдображень.
1 Тензорнi добутки метричних просторiв
Нехай X, Y – метричнi простори. Побудуємо множину
ΩX = x− x′ |x, x′ ∈ X, x 6= x′ ∪ θx ⊂ B(X),
аналогiчно можна побудувати множину ΩY . Розглянемо лiнiйний простiр Σ формальнихсум
∑i
λi(xi, yi), де (xi, yi) ∈ ΩX × ΩY . Очевидно, що множина елементiв
Σ0 =∑k
γk(xk, θy) +∑j
µj(θx, yj)
є лiнiйним пiдпростором Σ.Розглянемо фактор-простiр Σ = Σ/Σ0. Позначимо клас еквiвалентностi елемента
(x, y) через xy. Тензорним добутком метричних просторiвX, Y називатимемо множинуX Y = x y |x ∈ ΩX , y ∈ ΩY . Для кожного елемента ω ∈ Σ визначимо норму
‖ω‖ := inf∑k
|λk|‖uk − u′k‖‖vk − v′k‖, (2)

42 Дубей М.В., Загороднюк А.В.
де iнфiмум береться по всiх зображеннях елемента ω у такому виглядi:
ω =∑k
λk(uk − u′k) (vk − v′k) (3)
де uk, u′k ∈ X, vk, v′k ∈ Y . У статтi [1] доведено наступне твердження.
Твердження 1.1. Поповнення простору Σ вiдносно норми (2) iзометрично iзоморфнепроективному тензорному добутку B(X)
⊗πB(Y ) банахових просторiв B(X) та B(Y ).
Зокрема, з цiєї теореми випливає, що X Y вкладається в B(X)⊗πB(Y ). Проективнатензорна норма простору B(X)⊗πB(Y ) iндукує метрику на X Y, яка має вигляд
ρ((x1 − x′1) (y1 − y′1), (x2 − x′2) (y2 − y′2)) =
‖(x1 − x′1) (y1 − y′1) − (x2 − x′2) (y2 − y′2)‖ = (4)
‖(x1 − x′1) ⊗ (y1 − y′1) − (x2 − x′2) ⊗ (y2 − y′2)‖π.Таким чином, X Y є метричним простором з вiдмiченою точкою θX θY .Нехай Z — метричний простiр з вiдмiченою точкою θz. Побудуємо тензорний добуток
(X Y ) Z. Лiнiйний простiр формальних сум запишеться у такому виглядi:
Σ =∑i
λi(xi yi, zi),
де (xi yi, zi) ∈ ΩXY × ΩZ , i ΩZ = z − z′|z, z′ ∈ Z, z 6= z′ ∪ θz, а множина ΩXY маєнаступне зображення
ΩXY = x y − x′ y′ |x y, x′ y′ ∈ X Y ∪ θx θy ⊂ B(X Y ),
де x y та x′ y′ не належать до одного класу еквiвалентностi.Покладемо у вiдповiднiсть елементу з простору (X Y ) × Z елемент з простору
X × Y × Z за таким правилом:
(xi yi, zi) = ((xi, yi) + (θx, yi) + (xi, θy), zi) = (xi, yi, zi) + (θx, yi, zi) + (xi, θy, zi). (5)
Тодi Σ =∑i
λi((xi, yi, zi)+(xi, θy, zi)+(θx, yi, zi)). Пiдпростiр Σ0 у цьому випадку матиме
вигляд Σ0 =∑k
αk(xk yk, θz) +∑j
βj(θx θy, zj). Враховуючи (5), отримаємо, що
Σ0 =∑k
αk((xk, yk) + (xk, θy) + (θx, yk), θz)) +∑j
βj(θx, θy, zj) =
∑k
αk((xk, yk, θz) + (xk, θy, θz) + (θx, yk, θz)) +∑j
βj(θx, θy, zj).
Розглянемо фактор-простiр Σ = Σ/Σ0. Аналогiчно, як у випадку двох просторiв,клас еквiвалентностi елемента ((x, y), z) позначимо через (xy)z. Тензорним добутком(X Y ) Z метричного простору X Y та метричного простору Z назвемо множинукласiв еквiвалентностi (x y) z, тобто
(X Y ) Z = (x y) z|x y ∈ ΩXY , z ∈ Z.
Аналогiчно можна побудувати тензорний добуток
X (Y Z) = x (y z)|x ∈ X, y z ∈ ΩY Z.
Лiнеаризацiя лiпшицево-полiномiальних та лiпшицево-аналiтичних вiдображень 43
Твердження 1.2. Простори (X Y ) Z та X (Y Z) є iзометрично iзоморфними.
Доведення. Побудуємо вiдображення I : (xy)z 7→ x(yz), яке кожному класу (xy)zставить у вiдповiднiсть клас x (y z). Запишемо метрику простору (X Y ) Z:
ρ((x1 y1) z1, (x2 y2) z2) = ‖(x1 y1) z1 − (x2 y2) z2‖ =
‖(x1 ⊗ y1) ⊗ z1 − (x2 ⊗ y2) ⊗ z2‖π = ‖x1 ⊗ y1 ⊗ z1 − x2 ⊗ y2 ⊗ z2‖π.
Метрика простору X (Y Z) матиме такий вигляд:
ρ(x1 (y1 z1), x2 (y2 z2)) = ‖x1 (y1 z1) − x2 (y2 z2)‖ =
‖x1 ⊗ (y1 ⊗ z1) − x2 ⊗ (y2 ⊗ z2)‖π = ‖x1 ⊗ y1 ⊗ z1 − x2 ⊗ y2 ⊗ z2‖π.
Очевидно, що I є бiєктивним iзометричним вiдображенням, тому простори (X Y ) Zта X (Y Z) є iзометрично iзоморфними.
Таким чином, ми можемо побудувати тензорний добуток трьох метричних просторiвдвома способами, i цi множини спiвпадуть з точнiстю до iзометричного iзоморфiзму.Позначимо його X Y Z. Зауважимо, що тензорний добуток X Y Z вкладається упростiр B(X)⊗πB(Y )⊗πB(Z) i проективна тензорна норма iндукує метрику на XY Z.
Тензорний добуток трьох метричних просторiв також буде метричним простором звiдмiченою точкою θx θy θz.
Аналогiчно, за iндукцiєю, якщо ми побудували тензорний добуток n−1 метричногопростору, то n-тий тензорний добуток метричних просторiв можна ввести як тензорнийдобуток просторуXn та тензорного добутку метричних просторiв Xi, де i = 1, 2, ..., n−1,тобто X1 X2 · · · Xn−1 Xn = (X1 X2 · · · Xn−1) Xn або X1 X2 · · · Xn−1 Xn =X1 (X2 · · · Xn−1 Xn). Тензорний добуток n метричних просторiв вкладається у⊗n
πB(Xi) = B(X1 X2 · · · Xn), де i = 1, 2, ..., n i проективна тензорна норма iндукуєметрику на X1 X2 · · · Xn−1 Xn, тому тензорний добуток n метричних просторiвтакож буде метричним простором з вiдмiченою точкою θx1 θx1 · · · θxn .
Для метричного простору X можна ввести поняття симетричного тензорного добут-ку. Симетричним тензорним добутком назвемо таку множину
X s X = x1 s x2|x1, x2 ∈ ΩX,
деx1 s x2 =
x1 x2 + x2 x12
.
Зауважимо, що X sX ⊂ X X. Аналогiчно можна будувати n-тий симетричний тензор-ний степiнь nsX метричного простору X. Очевидно, що при цьому B(nsX) = ⊗n
s,πB(X).Тому B′(nsX) = L(nB(X)) — простiр всiх n-лiнiйних симетричних вiдображень наB(X). Будемо позначати x x · · · x︸ ︷︷ ︸
n
через xn, а x⊗ x⊗ · · · ⊗ x︸ ︷︷ ︸n
— через x⊗n. Вiдо-
мо [5], що на ⊗n
s,πB(X) iснує норма, еквiвалентна до норми, iндукованої з ⊗n
πB(X), iтака, що для кожного u ∈ B(X)
‖u⊗n‖ = sup|P (u)|P ∈ P(nB(X)), ‖P‖ ≤ 1,

44 Дубей М.В., Загороднюк А.В.
де P(nB(X)) — банахiв простiр n-однорiдних неперервних полiномiв на B(X). Звуженняцiєї норми на nsX породжує метрику, яка буде лiпшицево еквiвалентною до метрики,iндукованої з nsX. Нагадаємо, що метрика ρ1 є лiпшицево еквiвалентною до метрикиρ2, якщо iснують сталi c1 > 0, c2 > 0, такi що
c2ρ2(x1, x2) ≤ ρ1(x1, x2) ≤ c1ρ2(x1, x2)
для всiх елементiв x1, x2 метричного простору X.Нехай X,Y — метричнi простори, позначимо через P(nX, Y ) множину вiдображень
з X в Y таких, що для довiльного вiдображення F ∈ P(nX, Y ) iснує n-однорiднийнеперервний полiном PF ∈ P(nB(X), B(Y )), для якого PF (x) = F (x) для довiльногоx ∈ X. Елементи класу P(nX,Y ) будемо називати n-однорiдними лiпшицево-полiно-мiальними вiдображеннями з простору X у простiр Y .
Твердження 1.3. Для кожного F ∈ P(nX,Y ) iснує лiпшицеве вiдображення ΦF (nsX, Y ),
таке щоΦF (xx) = F (x) i LΦF
= ‖P‖.
Доведення. Нехай PF — n-однорiдний полiном з B(X) в B(Y ), який вiдповiдає вiдобра-женню F . Цьому полiному вiдповiдає лiнiйний оператор
PF : ⊗n
s,πB(X) → B(Y ),
такий що PF (x⊗n) = PF (x).Оскiльки ⊗n
s,πB(X) = B(ns,πX), то лiнiйному оператору PF вiдповiдає лiпшицевевiдображення ΦF : nsX → B(Y ), таке що ΦF (xn) = PF (x) = F (x). Образ F (x) мiститьсяв Y , тому F (x) ⊂ νY (Y ), де νY : y 7→ y — iзометричне вкладення. Покладемо
ΦF = ν−1Y ΦF ,
це i буде шуканим вiдображенням, крiм того,
LΦF= LΦF
= ‖PF‖ = ‖P‖.
З твердження 1.3 випливає, що P(nX, Y ) є банаховим простором, iзоморфним допростору P(nB(X), B(Y )) n-однорiдних полiномiв з B(X) в B(Y ).
Нехай γ — деяка тензорна норма на B(X). Тодi ⊗n
s,πB(X) ⊂ ⊗n
s,γB(X). Тому простiрлiнiйних неперервних операторiв з ⊗n
s,γB(X) в довiльний банахiв простiр E є природноiзоморфний до деякого пiдпростору n-однорiдних полiномiв у P(nB(X), E).
Розглянемо випадок, коли Y = E — лiнiйний метричний простiр. Тодi можна визна-чити неперервне полiномiальне вiдображення P ∈ P(nB(X), E). Позначимо через h0вiдображення, яке кожному елементу z ∈ spanE, z =
∞∑k=1
akxk ставить у вiдповiднiсть
елемент h0(z) =n∑k=1
akxk ∈ E. У [6] показано, що коли E — банахiв простiр, то h0 —
лiнiйний обмежений оператор, який можна продовжити за лiнiйнiстю i неперервнiстюдо оператора h : B(E) → E, причому ‖h‖ = 1 i вiдображення x 7→ h(x) є лiпшицевоюретракцiєю з B(E) в E ⊂ B(E).

Лiнеаризацiя лiпшицево-полiномiальних та лiпшицево-аналiтичних вiдображень 45
Теорема 1. Нехай E — лiнiйний метричний простiр, такий що вiдображення
h : B(E) → E
коректно визначене i є лiнiйним неперервним оператором. Тодi для кожного
F ∈ P(nX,E)
iснує полiном P ∈ P(nB(X), E) такий, що P (x) = F (x) для всiх x ∈ X. I навпаки, якщоP ∈ P(nB(X), E), то P (x) ∈ P(nX,E).
Доведення. Нехай F ∈ P(nX,E) , тодi PF ∈ P(nB(X), B(E)). Визначимо вiдображенняP = h PF , тодi P (x) = h(PF (x)) = h(F (x)) = F (x).
Навпаки, нехай P ∈ P(nB(X), E). Полiному P вiдповiдає лiпшицеве вiдображенняΦ : nsX → E з лiпшицевою константою LΦ = ‖P‖. Тому вiдображення ψ : nsX →B(E), ψ(u) = Φ(u), буде лiпшицевим i Lψ = LΦ = ‖P‖. Вiдображенню ψ вiдповi-дає n-однорiдний неперервний полiном, який ми позначимо PF , PF : B(X) → B(E),PF (z) = ψ(zn) для довiльного z ∈ B(X). Тодi PF (x) = P (x) i F (x) = h(P (x)) = P (x) ∈P(nX,E).
Наслiдок 1.1. В умовах теореми вiдображення P (x) 7→ P (x) є iзоморфiзмом банаховихпросторiв P(nB(X), E) та P(nX,E).
2 Лiнеаризацiя аналiтичних та лiпшицево-аналiтичних функцiй
Простiр всiх аналiтичних вiдображень на вiдкритiй множинi U зi значеннями у бана-ховому просторi Y будемо позначати через H(U, Y ). Аналiтичнi функцiї також допуска-ють лiнеаризацiю з використанням тензорного добутку. Вiдомостi з теорiї аналiтичнихфункцiй на банахових просторах можна знайти у [5].
Нехай ξ(z) =∞∑n=0
cnzn — деяка аналiтична функцiя однiєї комплексної змiнної в
околi нуля радiуса ρ0 = 1
lim sup |cn|1n. Нехай X — комплексний банахiв простiр, ⊗n
γ,sX− n-тий симетричний тензорний степiнь простору X, поповнений вiдносно деякої тензорної
норми γ. Позначимо через Fξ(x) формальний ряд∞∑n=0
cnx⊗n. Нехай Fα,γ = Fα,γ(X) —
простiр (∞⊕n=0
)α⊗n
γ,sX скiнченних прямих сум∞⊕n=0
⊗nγ,sX, поповнений вiдносно деякої
норми α.Нагадаємо означення радiуса рiвномiрної збiжностi та радiуса обмеженостi аналi-
тичної функцiї [5]. Нехай f ∈ H(U, Y ), де U — вiдкрита пiдмножина в X i x ∈ U. Радiусрiвномiрної збiжностi %x(f) функцiї f в точцi x визначається як супремум тих λ, λ ∈ C,що x + λB ⊂ U i ряд Тейлора функцiї f в околi точки x збiгається до f рiвномiрно намножинi x+ λB, де B — одинична куля в X. Радiус обмеженостi f в точцi x визнача-ється як супремум тих λ, λ ∈ C, що f є обмеженою функцiєю на множинi x+λB. Вiдомо[5], що радiус рiвномiрної збiжностi аналiтичної функцiї дорiвнює радiусу обмеженостi.
Твердження 2.1. Fξ є аналiтичним вiдображенням з вiдкритої кулi Bρ0(ξ) в X з цен-тром в нулi радiуса ρ0 в Fα,γ тодi Fξ є обмеженим на кулi будь-якого меншого радiусуз центром в нулi.

46 Дубей М.В., Загороднюк А.В.
Доведення. Розглянемо n-ту однорiдну компоненту вiдображення Fξ:
Fξ,n = cnx⊗n.
Вiдомо [5], що радiус рiвномiрної збiжностi в нулi (дорiвнює радiусу обмеженостi в нулi)функцiї Fξ можна знайти за формулою:
%0(Fξ) =1
lim sup ‖Fξn‖1n
=1
lim sup |cn|1n
= ρ0.
Тому Fξ буде аналiтичною функцiєю в околi нуля радiуса ρ0.
Зауважимо, що для кожного лiнiйного неперервного функцiоналу ϕ ∈ F ′α,γ компо-
зицiя ϕFξ буде аналiтичною функцiєю обмеженого типу в кулi Bρ0(ξ). Позначимо Φξ =ϕ Fξ : ϕ ∈ F ′
α,γ. Тодi при заданих ξ, α, γ пара Fξ,Fα,γ задає лiнеаризацiю функцiй зкласу Φξ на Bρ0(ξ). Аналогiчно, якщо A — лiнiйний оператор з Fα,γ в деякий нормованийпростiр Y, то A Fξ буде аналiтичним вiдображенням з Bρ0(ξ) в Y. Вiдображення Fξбудемо називати породжуючою функцiєю для класу Φξ.
Приклад 2.1. Нехай ξ(z) = az+b−cz+d = az+b
d(1− cdz)
= az+bd
∑∞n=0
cn
dnzn — дробово-лiнiйне вiдо-
браження з C в C, визначене в кулi з центром в нулi радiуса dc, тодi
Fξ(x) =ax+ b
d
∞∑n=0
cn
dnx⊗n.
Нехай ϕ ∈ F ′α,γ, тодi ϕFξ(x) = p+ aϕ(x)+b
d
∞∑n=1
cn
dnϕn(x), де ϕn — n-однорiдний полiном,
що є звуженням ϕ на⊗n
γ,sX.
У випадку, коли ϕn(x) =p∑
k=1
gnk (x), ϕ0(1) = p, де g ∈ X ′, ‖g‖ ≤ dc, отримаємо, що
ϕ Fξ(x) =ag(x) + b
d
∞∑n=0
cn
dn
p∑k=1
gnk (x) =
(1 +
ag1(x) + b
d
∞∑n=1
cn
dngn1 (x)
)+(
1 +ag2(x) + b
d
∞∑n=1
cn
dngn2 (x)
)+ · · ·+
(1 +
agp(x) + b
d
∞∑n=1
cn
dngnp (x)
)=
ag1(x) + b
d(1 − cdg1(x))
+ag2(x) + b
d(1 − cdg2(x))
+ · · · +agp(x) + b
d(1 − cdgp(x))
=
p∑k=1
agk(x) + b
−cgk(x) + d.
Цей приклад показує, як можна лiнеаризувати дробово-лiнiйнi вiдображення. Зокре-
ма, для випадку ξ = 11−z =
∞∑n=0
zn, ϕn = fn + gn, де f, g ∈ X ′, X = C2 = x = (x1, x2) =
x2e2 + x2e2, отримуємо x⊗n = (x2e2 + x2e2)⊗n =
n∑k=0
cknxk1x
n−k2 e⊗n1 e⊗n−k2 , ‖f‖ ≤ 1, ‖g‖ ≤ 1
i ϕ0(1) = 2, тодi
ϕ Fξ =∞∑n=0
ϕn(x) = 2 +∞∑n=1
fn(x) +∞∑n=1
gn(x) =1
1 − f(x)+
1
1 − g(x).

Лiнеаризацiя лiпшицево-полiномiальних та лiпшицево-аналiтичних вiдображень 47
В загальному випадку, клас функцiй ϕ Fξ може бути дуже широким. Наприклад,X = C, ξ = 1
1−z , α — `2-норма, γ — стандартна метрика в C. Тодi кожна аналiтичнафункцiя в одиничному крузi D ⊂ C, яка належить класу Хардi H2(D), має виглядϕFξ. Справдi, в цьому випадку простiр Fα,γ iзометрично iзоморфний до H2(D). Коженлiнiйний функцiонал ϕ на H2(D) визначається деякою функцiєю f ∈ H2(D), такою що
ϕ(g) =
∫S
g(z)f(z)dz.
Зокрема, ϕ Fξ(z) =∫S
f(z)1−z dz = f(z) (за формулою Кошi).
Якщо у нас визначено двi породжуючi функцiї Fξ1 та Fξ2 , то за певних умов їхкомпозицiя буде породжуючою функцiєю для деякого класу Φ.
Виберемо простiр X, тензорну норму γ та норму α так, щоб
Fα,γ ⊗γ,s Fα,γ ⊂ Fα,γ. (6)
Для цього достатньо, щоб простiр X був iзоморфним до ⊗nγ,sX для довiльного n та
iзоморфним до Fα,γ. У [9] доведено, що коли X — банахiв простiр з безумовним базисом,то вказанi умови виконуються для деяких α i γ. Зокрема, якщо X = `1, то включення(6) виконується, коли γ — проективна тензорна норма i α — `1-норма на Fα,γ, тобто‖∑ωn‖α = ‖
∑ωn‖γ, де ωn ∈ ⊗n
γ,sX. Якщо X = c0, то γ буде iн’єктивною тензорноюнормою, а α — c0-норма на Fα,γ . У випадку, коли X = `2, замiсть γ можна вибратигiльбертову тензорну норму, а α — `2-норма на Fα,γ. Припустимо, що ξ1, ξ2 — функцiїкомплексного аргументу, аналiтичнi в кулях Br1 i Br2 вiдповiдно. Нехай r > 0 — такечисло, що ∀z ∈ Br2 |z| < r, ξ2(z) ∈ Br2 , тодi Fξ1 Fξ2 є аналiтичним вiдображенням зBr ⊂ X в Fα,γ. Оскiльки ξ 7→ Fξ є лiнiйним i мультиплiкативним, то Fξ1 Fξ2 = Fξ1ξ2буде породжуючою функцiєю для класу аналiтичних функцiй Φξ1ξ2 на Br1 .
Нехай X — метричний простiр з вiдмiченою точкою. Розглянемо простiр Fα,γ(B(X))для довiльних норм α та γ i канонiчного вкладення Fξ. Визначимо клас вiдображень
Φξ(X,E) = A Fξ ν|A ∈ L(Fα,γ(B(X)), E).
Таким чином, пара Fξ ν та Fα,γ задає лiнеаризацiю вiдображень з класу Φξ(X,E).Будемо називати вiдображення f з X в E лiпшицево-аналiтичними, якщо f ∈ Φξ(X,E)для деякої аналiтичної функцiї ξ, норм α i γ. У випадку, коли γ — проективна норма,простiр Fα,π(B(X)) буде поповненням формальної суми просторiв nsX вiдносно деякоїнорми, яка iндукується нормою α.
Лiтература
1. Дубей М.В. Аналог тензорного добутку метричних просторiв // Наук. вiсн. Чернiв. ун-ту. Мате-матика. — 2010. — Вип.501. — С.33–38.
2. Райков Д.А. Свободные локально выпуклые подпространства равномерных пространств // Мат.сб. — 1964. — Т.63, 4. — С. 582–590.
3. Arens R., Eells J. On embedding uniform and topological spaces, Pacic J. Math., 6 (1959), 397–403.
4. Benyamini Y., Lindenstrauss J. Geometric nonlinear functional analysis, Providence, Amer. Math. Society,2000.
48 Дубей М.В., Загороднюк А.В.
5. Dineen S. Complex Analysis on infinite dimensional space, Monographs in mathematics, Springer, NewYork, 1999.
6. Dubei M., Tymchatyn E. D., Zagorodnyuk A. Free Banach Spaces and Extension of Lipschitz Maps,Topology, Elsevier, 48, 2 (2009), 203–213.
7. Flood J. Free topological vector spaces, Canberra, Australian National university, Ph. D. thesis, 1975.
8. Godefroy G., Kalton N. Lipschitz-free Banach spaces, Studia Math., 159, 1 (2003), 121–141.
9. Lopuhanky O.V., Zagorodnyuk A.V. Hilbert spaces of analytic functions of infinitely many variables,Annales pol. mathem., 81, 2 (2003), 111–122.
10. Pestov V. Free Banach spaces and representation of topological groups, Func. Anal. Appl., 20 (1986),70–72.
11. Weaver N. Lipschitz algebras, Singapore, New Jersey, London, New York, World Scientific, 1999.
Прикарпатський нацiональний унiверситет iменi В. Стефаника,Iвано-Франкiвськ, Україна
Iнститут прикладних проблем механiки i математики iменi Я.С. Пiдстригача НАН України,Львiв, Україна
Надiйшло 04.04.2011
Dubei M.V., Zagorodnyuk A.V. Linearization of Lipschitz-polynomial and Lipschitz-analytic
mappings, Carpathian Mathematical Publications, 3, 1 (2011), 40–48.
We introduce and study Lipschitz-analytic and Lipcshitz-polynomial functions, analogues of
tensor and symmetric tensor products of metric spaces. Using the analogues of tensor products
of metric spaces and linearizations of analytic functions we construct a global linearization of
Lipschitz-polynomial and Lipschitz-analytic maps.
Дубей М.В., Загороднюк А.В. Линеаризация липшицово-полиномиальных и липшицово-аналитических функций // Карпатские математические публикации. — 2011. — Т.3, 1.— C. 40–48.
В статье вводится понятие липшицово-полиномиальных и липшицово-аналитическихфункций, аналоги тензорного и симметрического тензорного произведения метрическихпространств. Используя аналоги тензорного произведения метрических пространств ипроцесс линеаризации аналитических функций, осуществляется глобальная линеариза-ция липшицево-полиномиальных и липшицево-аналитических отображений.
Карпатськi математичнi Carpathian Mathematical
публiкацiї. Т.3, 1 Publications. V.3, 1
УДК 512.64
Заторський Р.А.
ДОСЛIДЖЕННЯ ФУНКЦIЙ МАТРИЦЬ ХЕССЕНБЕРГА
Заторський Р.А. Дослiдження функцiй матриць Хессенберга // Карпатськi математичнiпублiкацiї. — 2011. — Т.3, 1. — C. 49–55.
В роботi вивчаються зв’язки функцiй матриць Хессенберга iз парадетермiнантами тапараперманентами.
Вступ
Важливим класом квадратних матриць є матрицi Хессенберга [6]. Вони виникають упiдпросторах Крилова1 [3] в процесi побудови ортогональних базисiв, у задачах на зна-ходження власних значень матрицi QR-методом (методом послiдовних елементарнихперетворень), а також у теорiї симетричних многочленiв — у детермiнантних виражен-нях симетричних многочленiв [4]. Виявляється, що детермiнанти матриць Хессенбергаможна подати у виглядi парадетермiнантiв трикутних матриць, властивостi яких добревивченi. Позаяк квазiтрикутнi матрицi [2] є частковим випадком матриць Хессенберга,то зв’язок останнiх з парадетермiнантами дозволяє узагальнити ряд теорем численнятрикутних матриць, зокрема теорему Пойа [8], [7] про зв’язок перманентiв iз детермi-нантами.
Матрицi Хессенберга з’являються також при дослiдженнi характеру та швидкостiзбiжностi рацiональних вкорочень рекурентних дробiв.
2000 Mathematics Subject Classification: 15A15.Ключовi слова i фрази: матрицi Хессенберга, параперманент, парадетермiнант.
1Пiдпростором Крилова розмiрностi m породженим вектором v ∈ Cn i квадратною матрицею A ∈Cn × Cn називають лiнiйний простiр
Km(v, A) = spanv, Av, A2v, . . . , Am−1v.
c© Заторський Р.А., 2011
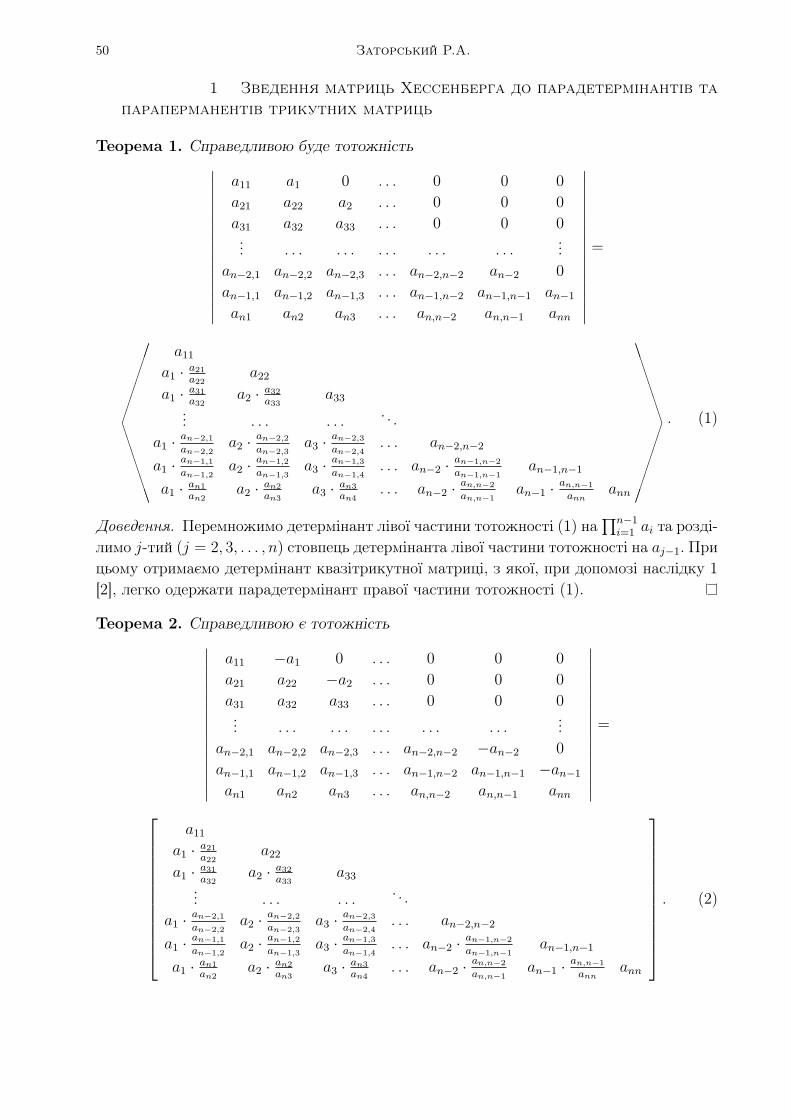
50 Заторський Р.А.
1 Зведення матриць Хессенберга до парадетермiнантiв тапараперманентiв трикутних матриць
Теорема 1. Справедливою буде тотожнiсть∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
a11 a1 0 . . . 0 0 0
a21 a22 a2 . . . 0 0 0
a31 a32 a33 . . . 0 0 0... . . . . . . . . . . . . . . .
...an−2,1 an−2,2 an−2,3 . . . an−2,n−2 an−2 0
an−1,1 an−1,2 an−1,3 . . . an−1,n−2 an−1,n−1 an−1
an1 an2 an3 . . . an,n−2 an,n−1 ann
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
=
£££££££
BBBBBBB
a11
a1 · a21
a22a22
a1 · a31
a32a2 · a32
a33a33
... . . . . . .. . .
a1 · an−2,1
an−2,2a2 · an−2,2
an−2,3a3 · an−2,3
an−2,4. . . an−2,n−2
a1 · an−1,1
an−1,2a2 · an−1,2
an−1,3a3 · an−1,3
an−1,4. . . an−2 · an−1,n−2
an−1,n−1an−1,n−1
a1 · an1
an2a2 · an2
an3a3 · an3
an4. . . an−2 · an,n−2
an,n−1an−1 · an,n−1
annann
BB
BB
BBB
££
££
£££
. (1)
Доведення. Перемножимо детермiнант лiвої частини тотожностi (1) на∏n−1
i=1 ai та роздi-лимо j-тий (j = 2, 3, . . . , n) стовпець детермiнанта лiвої частини тотожностi на aj−1. Прицьому отримаємо детермiнант квазiтрикутної матрицi, з якої, при допомозi наслiдку 1[2], легко одержати парадетермiнант правої частини тотожностi (1).
Теорема 2. Справедливою є тотожнiсть∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
a11 −a1 0 . . . 0 0 0
a21 a22 −a2 . . . 0 0 0
a31 a32 a33 . . . 0 0 0... . . . . . . . . . . . . . . .
...an−2,1 an−2,2 an−2,3 . . . an−2,n−2 −an−2 0
an−1,1 an−1,2 an−1,3 . . . an−1,n−2 an−1,n−1 −an−1
an1 an2 an3 . . . an,n−2 an,n−1 ann
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
=
a11
a1 · a21
a22a22
a1 · a31
a32a2 · a32
a33a33
... . . . . . .. . .
a1 · an−2,1
an−2,2a2 · an−2,2
an−2,3a3 · an−2,3
an−2,4. . . an−2,n−2
a1 · an−1,1
an−1,2a2 · an−1,2
an−1,3a3 · an−1,3
an−1,4. . . an−2 · an−1,n−2
an−1,n−1an−1,n−1
a1 · an1
an2a2 · an2
an3a3 · an3
an4. . . an−2 · an,n−2
an,n−1an−1 · an,n−1
annann
. (2)

Дослiдження функцiй матриць Хессенберга 51
Доведення. Спочатку скористаємося теоремою 1 i переходимо вiд детермiнанта лiвоїчастини тотожностi (2) до вiдповiдного парадетермiнанта. Потiм, використовуючи тео-рему про зв’язок параперманента з парадетермiнантом, вiд отриманого парадетермi-нанта переходимо до параперманента правої частини тотожностi (2).
Зауваження 1.1. Теорема 1 узагальнює теорему про зв’язок детермiнанта iз параде-термiнантом iз [2] та теорему про зв’язок перманентiв iз детермiнантами [5].
Приклад 1. Нехай
σk(x1, x2, . . . , xn) =∑
i1<i2<...<ik
xi1xi2 · . . . · xik ,
sk(x1, x2, . . . , xn) = xk1 + xk
2 + . . . + xkn,
pk(x1, x2, . . . , xn) =∑
i1+i2+...+in=k
xi11 xi2
2 · . . . · xinn
є вiдповiдно елементарнi симетричнi многочлени, степеневi суми та повнi однорiднi си-метричнi многочлени, тодi справедливi [4] детермiнантнi представлення елементарнихсиметричних многочленiв та повних однорiдних симетричних многочленiв через степе-невi суми:
σk =1
k!
∣∣∣∣∣∣∣∣∣∣∣
s1 1 0 . . . 0
s2 s1 2 . . . 0... . . . . . . . . .
...sk−1 sk−2 sk−3 . . . k − 1
sk sk−1 sk−2 . . . s1
∣∣∣∣∣∣∣∣∣∣∣
, pk =1
k!
∣∣∣∣∣∣∣∣∣∣∣
s1 −1 0 . . . 0
s2 s1 −2 . . . 0... . . . . . . . . .
...sk−1 sk−2 sk−3 . . . −(k − 1)
sk sk−1 sk−2 . . . s1
∣∣∣∣∣∣∣∣∣∣∣
.
Тодi, внаслiдок теорем 1, 2, їх можна виразити вiдповiдно через парадетермiнант тапараперманент трикутної матрицi
A =
s1
1 · s2
s1s1
1 · s3
s22 · s2
s1s1
... . . . . . .. . .
1 · sk
sk−12 · sk−1
sk−23 · sk−2
sk−3. . . s1
,
причому справедливими будуть тотожностi:
σk =1
k!ddet(A), pk =
1
k!pper(A).
Останнi тотожностi дозволяють перейти до вiдповiдних рекурентних спiввiдношень.Для цього достатньо розкласти парадетермiнант та параперманент матрицi A за елемен-тами останнього рядка.
52 Заторський Р.А.
2 Деякi теореми числення матриць
Доведемо двi теореми, якi використовуються при дослiдженнi характеру та швидко-стi збiжностi рацiональних вкорочень рекурентних дробiв та мають деяке вiдношеннядо матриць Хессенберга.
Нехай задана трикутна матриця
An =
a11
a21 a22
... . . .. . .
am1 am2 . . . amm
am+1,1 am+1,2 . . . am+1,m am+1,m+1
am+2,1 am+2,2 . . . am+2,m am+2,m+1 am+2,m+2
... . . . . . . . . . . . . . . .. . .
an1 an2 . . . anm an,m+1 an,m+2 . . . ann
n
, (3)
тодi рiг
Rm1 =
a11
a21 a22
... . . .. . .
am1 am2 . . . amm
цiєї матрицi природно позначити через Am. На основi рогу
Rn,m+1 =
am+1,m+1
am+2,m+1 am+2,m+2
... . . .. . .
an,m+1 an,m+2 . . . ann
побудуємо матрицi
Bj =
bj1
bj2 am+2,m+2
... . . .. . .
bj,n−m an,m+2 . . . ann
,
де
bji =m+1∏
k=j
am+i,k, i = 1, 2, . . . , n−m, j = 1, 2, . . . , m + 1. (4)
Теорема 1. Для матрицi (3) виконуються тотожностi
pper(An) =m∑
r=0
pper(Ar) · pper(Br+1), (5)
ddet(An) =m∑
r=0
(−1)m−rddet(Ar) · ddet(Br+1). (6)

Дослiдження функцiй матриць Хессенберга 53
Доведення. Доведемо тотожнiсть (5).
1. Доведемо, що число доданкiв лiвої частини тотожностi рiвне числу доданкiв пра-вої. Число доданкiв лiвої частини дорiвнює числу впорядкованих розбиттiв натураль-ного числа n на натуральнi доданки i дорiвнює 2n−1. Знайдемо число доданкiв правоїчастини тотожностi. Число доданкiв кожного iз параперманентiв Bj, j = 1, 2, . . . , m+1,
становить 2n−m−1, тому маємо суму
2n−m−1(1 +m∑
r=1
2r−1) = 2n−m−1(1 + 2m − 1) = 2n−1.
2. Доведемо, що всi доданки правої частини тотожностi побудованi з елементiв, якiутворюють нормальнi набори елементiв матрицi параперманента з лiвої частини тото-жностi. З цiєю метою дослiдимо доданки, що утворюються в результатi добутку пара-перманентiв ArBr+1, r = 0, 1, . . . , m.
a) Кожен доданок добутку матиме n рiзних спiвмножникiв, що є елементами матрицiпараперманента An, бо параперманент Ar має порядок r, а в кожен доданок параперма-нента Br+1 входитиме n− (r + 1)− 1 = n− r спiвмножникiв.
b) Кожен доданок добутку, внаслiдок задання елементiв bji рiвнiстю (4), можнаподати у виглядi факторiальних добуткiв ключових елементiв параперманента An.
3. Доведемо, що всi доданки добутку рiзнi, а це випливає iз того, що першi стовпцiпараперманентiв Br+1, r = 0, 1, . . . , m, рiзнi.
Доведемо тотожнiсть (6).Перш за все вiдзначимо, що знак нормального набору ключових елементiв матрицi
n-го порядку залежить вiд парностi числа n−k, де k — число ключових елементiв цьогонабору. Знайдемо суму порядкiв парадетермiнантiв матриць Ar i Br+1. Параперманентматрицi Br+1 при довiльному r = 0, 1, . . . , m має порядок n − m, а парадетермiнантматрицi Ar — порядок r, тому сума порядкiв парадетермiнантiв цих матриць дорiвнюєn + r −m. Парадетермiнант матрицi An має порядок n.
Розглянемо деякий фiксований нормальний набiр k ключових елементiв матрицi An,
до складу якого входить факторiальний добуток asr, r < m 6 s 6 n. Алгебраїчнимдоповненням до цього факторiального добутку у матрицi An є добуток парадетермiнан-та Ar на парадетермiнант рогу Rn,s+1. Алгебраїчним доповненням до факторiальногодобутку елемента asr · . . . · as,m+1 у парадетермiнантi Br+1 є парадетермiнант рогуRn,s+1. Таким чином, зрiвнявши знак (−1)n−k фiксованого нормального набору параде-термiнанта матрицi An iз знаком (−1)n+r−m−k того ж набору елементiв у добутку ddetAr·ddetBr+1, прийдемо до рiвностi (−1)n−k = (−1)n+r−m−k. Пiсля вiдповiдного скороченняприходимо до висновку, що добуток ddetAr · ddetBr+1 правої частини рiвностi (6) маєзнак (−1)m−r.
54 Заторський Р.А.
Наслiдок 1. Справедливими будуть тотожностi
pper(An) =m∑
r=0
pper(Ar)n−m∑i=1
m+1∏
k=r+1
am+i,kpper(Rn,m+i+1),
ddet(An) =m∑
r=0
(−1)m−rddet(Ar)n−m∑i=1
m+1∏
k=r+1
am+i,kddet(Rn,m+i+1),
де Rn,m+i+1 — рiг матрицi An.
Нехай задано квадратну матрицю
A =
a10 −1 0 . . . 0 0 0
a21 a11 −1 . . . 0 0 0
a32 a22 a12 . . . 0 0 0... . . . . . . . . . . . . . . .
...an−1,n−2 an−2,n−2 an−3,n−2 . . . a1,n−2 −1 0
an,n−1 an−1,n−1 an−2,n−1 . . . a2,n−1 a1,n−1 −1
an+1,n an,n an−1,n . . . a3n a2n a1n
n+1
.
Позначимо детермiнант матрицi утвореної видаленням iз матрицi A першого рядка таk-го стовпця (нумерацiя стовпцiв ведеться вiд нульового до n-го) через Ak,n.
Теорема 2. Справедливе рекурентне спiввiдношення
Ak,n = −a1,k−1Ak−1,n + a2,k−1Ak−2,n − . . . + (−1)k−1ak−1,k−1A1,n + (−1)kak,k−1A0,n. (7)
Доведення. Позаяк у детермiнантi лiвої частини спiввiдношення (7) внаслiдок видален-ня k-го стовпця вiдсутнi елементи a1,k, . . . , an−k+1,n, то у детермiнантах правої частиницього спiввiдношення цi елементи можна замiнити нулями. Розкладаючи всi утворенiдетермiнанти правої частини спiввiдношення за елементами k-го стовпця, отримаєморозклад детермiнанта лiвої частини цього спiввiдношення за елементами k-го рядка.
Лiтература
1. Заторський Р.А. Про паравизначники i параперманенти трикутних матриць // Математичнiстудiї. — 2002. — Т.17, 1. – С. 3–17.
2. Заторський Р.А., Лiщинський I.I. Про зв’язок детермiнантiв з парадетермiнантами // Матема-тичнi студiї. – 2006. – Т. 25, 1. – С. 97–102.
3. Крылов А.Н. О численном решении уравнения, которым в технических вопросах определяютсячастоты малых колебаний материальных систем. — 1931. — С. 26.
4. Прасолов В.В. Задачи и теоремы линейной алгебры. — М.: Наука, 2008. — 536 с.
5. Тараканов В.Е., Заторский Р.А. О связи детерминантов с перманентами // Матем. заметки. —2009. — Т.85, 2. — С. 292–299.
Дослiдження функцiй матриць Хессенберга 55
6. Hessenberg K. Thesis. Dartmstadt, Germany, Technische Hochschule, 1942.
7. Marcus M., Minc H. On the relation between the determinant and the permanent, Illinois J. Math., 5(1961), 376–381.
8. Polya G., Aufgabe 424, Arch. Math. Phys. (3) 20 (1913), 271.
Прикарпатський нацiональний унiверситет iм. В. Стефаника,
Iвано-Франкiвськ, Україна
e-mail: [email protected]
Надiйшло 28.02.2011
Zatorsky R.A. Researching of Hessenberg’s matrix functions, Carpathian Mathematical Publi-cations, 3, 1 (2011), 49–55.
In this work we research the connections of Hessenberg’s matrix functions with paradeter-minants and parapermanents.
Заторский Р.А. Исследование функций матриц Хессенберга // Карпатские математиче-ские публикации. — 2011. — Т.3, 1. — C. 49–55.
В работе изучаются связи функций матриц Хессенберга с парадетерминантами и пара-перманентами.

Карпатськi математичнi Carpathian Mathematical
публiкацiї. Т.3, 1 Publications. V.3, 1
УДК 517.98
Kachanovsky N.A.
CLARK-OCONE TYPE FORMULAS
IN THE MEIXNER WHITE NOISE ANALYSIS
Kachanovsky N.A. Clark-Ocone type formulas in the Meixner white noise analysis, Carpathian
Mathematical Publications, 3, 1 (2011), 56–72.
In the classical Gaussian analysis the Clark-Ocone formula allows to reconstruct an inte-
grand if we know the Ito stochastic integral. This formula can be written in the form
F = EF +
∫E∂tF |Ft
dWt,
where a function (a random variable) F is square integrable with respect to the Gaussian mea-
sure and differentiable by Hida; E — the expectation; E |Ft
— the conditional expectation
with respect to a full σ-algebra Ft that is generated by the Wiener process W up to the point
of time t; ∂·F — the Hida derivative of F ;∫(t)dWt — the Ito stochastic integral with respect
to the Wiener process.
In this paper we explain how to reconstruct an integrand in the case when instead of the
Gaussian measure one considers the so-called generalized Meixner measure µ (depending on pa-
rameters, µ can be the Gaussian, Poissonian, Gamma measure etc.) and obtain corresponding
Clark-Ocone type formulas.
Introduction
Denote by D the Schwartz space of infinite-differentiable real-valued functions on R+ :=
[0,+∞) with compact supports; by D′ the distribution space that is dual of D; by 〈·, ·〉 thepairing between elements of D′ and D, this pairing is generated by the scalar product in thespace of square integrable with respect to the Lebesgue measure functions on R+; by thesubindex C complexifications of spaces. The notation 〈·, ·〉 will be preserved for pairing intensor powers and complexifications of spaces.
Let µ be the standard Gaussian measure on (D′, C(D′)) (here and below C(D′) is theσ-algebra on D′ that is generated by cylindrical sets), i.e., a probability measure with theLaplace transform
lµ(λ) =
∫D′e〈x,λ〉µ(dx) = e〈λ,λ〉/2, λ ∈ DC.
2000 Mathematics Subject Classification: 47B99, 60H05.Key words and phrases: generalized Meixner measure, Meixner process, Clark-Ocone formula.
c©Kachanovsky N.A., 2011

Clark-Ocone type formulasin the Meixner white noise analysis 57
As it is well known (e.g., [6, 25, 21]), any square integrable with respect to µ and differentiableby Hida complex-valued function F on D′ can be presented in the form
F = EF +
∫E∂tF |Ft
dWt, (1)
where E is the expectation and E |Ft
is the conditional expectation with respect to a
full σ-algebra Ft that is generated by the Wiener process W up to the point of time t, i.e.,Ft = σ(Ws : s ≤ t); ∂·F — the Hida derivative of F and
∫(t)dWt — the Ito stochastic
integral with respect to W (usually for stochastic integrals on R+ we do not write limits ofintegration for simplification of notations). Formula (1) is called the Clark-Ocone formula.As we can see, this formula allows us to reconstruct a version of the integrand (this integrandis not unique, generally speaking) if we know the result of stochastic integration.
As it is known (e.g., [8, 30]), formula (1) holds true (up to clear modifications) if insteadof the Gaussian measure one considers the Poissonian one. Moreover, one can easily avoida restrictive assumption that F must be differentiable by Hida: it is sufficient to generalizethe Clark-Ocone formula to spaces of generalized functions (see, e.g., [7, 9]).
Clark-Ocone formulas and their generalizations (in this paper they will be called Clark-Ocone type formulas) have applications in the stochastic analysis and in the financial mathe-matics, see, e.g., [18, 4, 9, 23, 10, 26, 22, 12, 8, 30] and references therein. In order to satisfydemands of applications (for example, in some problems it is necessary to reconstruct anintegrand by the result of integration, in another problems it is necessary to recontsruct arandom variable by the family of conditional expectations of its stochastic derivative, etc.),different variants of such formulas on various spaces, with different stochastic derivativesand with stochastic integrals with respect to various random processes and measures wereobtained, see, in particular, [19, 21, 4, 7, 5, 20, 9, 22, 30, 8]. For example, in [21, 20] aClark-Ocone type formula that is connected with Levy processes was obtained, this formulacontains stochastic integrals with respect to a Wiener process and with respect to a com-pensated Poissonian random measure. In [9] an another way of construction of Clark-Oconetype formulas that are connected with Levy processes was offered, this way is based on theNualart-Schoutens representation for a square integrable random variable [24, 28]; now theClark-Ocone type formulas contain integrals with respect to special random processes. More-over, these formulas were obtained in [9] not only for square integrable random variables,but also for generalized ones.
In this paper we obtain Clark-Ocone type formulas in the so-called Meixner white noiseanalysis. This analysis is connected with the generalized Meixner measure µ [27] (see alsoSubsection 1.1) which, depending on parameters, can be the Gaussian, Poissonian, Gammameasure etc., and with the corresponding Meixner random processM (the derivative of whichis the Meixner white noise that is connected with µ). Note that under some assumptions (seeSubsection 1.3) M is a Levy process. Nevertheless, our constructions essentially differ fromthe constructions of [21, 20] and [9]: we try to preserve a “classical” form of Clark-Oconetype formulas and therefore exploit a Hida stochastic derivative and stochastic integrals withrespect to M only. Of course, in the particular cases when µ is the Gaussian or Poissonianmeasure, our formulas reduce to the corresponding classical Clark-Ocone formulas.

58 Kachanovsky N.A.
The paper is organized in the following manner. In the first section we recall necessarydefinitions and results (the generalized Meixner measure, properties of the correspondingspace of square integrable functions, the extended (Skorohod) stochastic integral, the Hidastochastic derivative, properties of these operators). In the second section we deal withClark-Ocone type formulas and related matters. Note that here we obtain these formulason the space of square integrable with respect to the generalized Meixner measure functionsonly, the case of spaces of generalized functions will be considered in another paper.
1 Preliminaries
1.1 The generalized Meixner measure
Let us define the generalized Meixner measure (see [27] for more details and explanations).Let ρ, ν : R+ → C be smooth functions such that
θdef= ρ− ν : R+ → R, η
def= ρν : R+ → R+ (2)
and, moreover, θ and η are bounded on R+. Further, for each t ∈ R+ let vρ(t),ν(t)(ds) be aprobability measure on (R,B(R)) (here B(R) is the Borel σ-algebra on R) which is definedby its Fourier transform∫
Reiζsvρ(t),ν(t)(ds) = exp
− iζ
(ρ(t) + ν(t)
)+
2∞∑m=1
(ρ(t)ν(t)
)mm
[ ∞∑n=2
(−iζ)n
n!
(νn−2(t) + νn−3(t)ρ(t) + · · · + ρn−2(t)
)]m.
Definition. A probability measure µ on the measurable space (D′, C(D′)) with the Fouriertransform ∫
D′ei〈x,ξ〉µ(dx) = exp
∫R+
dt
∫Rvρ(t),ν(t)(ds)
1
s2(eisξ(t) − 1 − isξ(t)
)is called the generalized Meixner measure.
Depending on parameters ρ and ν, µ we can get, in particular, the Gaussian, Poissonian,Pascal, Meixner or Gamma measure.
It was proved in [27] that the generalized Meixner measure µ is the measure of a gen-eralized random process [11] with independent values; and the Laplace transform lµ(·) =∫D′ exp〈x, ·〉µ(dx) of µ is a holomorphic at 0 ∈ DC function.
1.2 The space of square integrable functions
Let (L2) := L2(D′, µ) be the space of complex-valued square integrable with respect tothe generalized Meixner measure µ functions on D′. We construct now a natural orthogonalbasis in (L2). For n ∈ N denote by Pn the closure in (L2) of the set of all continuouspolynomials on D′ of degree ≤ n, P0 := C. Denote also (L2
n) := Pn Pn−1 (the orthogonal

Clark-Ocone type formulasin the Meixner white noise analysis 59
complemention in (L2)), (L20) := C. Since µ has a holomorphic at zero Laplace transform,
the set of continuous polynomials on D′ is dense in (L2) [29], therefore (L2) =∞⊕n=0
(L2n).
Denote by ⊗ a symmetric tensor product. For each f (n) ∈ D⊗nC , n ∈ Z+ (D⊗0
C := C), wedefine :〈x⊗n, f (n)〉 : as the orthogonal projection of 〈x⊗n, f (n)〉 onto (L2
n), x ∈ D′. It followsfrom results of [27] that :〈x⊗n, f (n)〉 : = 〈Pn(x), f (n)〉, where Pn(x) ∈ D′⊗n are the kernels of(generalized Appell) polynomials with a generating function γ(λ) exp〈x, α(λ)〉, λ ∈ DC,i.e.,
γ(λ) exp〈x, α(λ)〉 =∞∑n=0
1
n!〈Pn(x), λ⊗n〉,
where α(λ) = λ+∞∑n=2
λn
n(ρn−1 + ρn−2ν + · · · + νn−1) and
γ(λ) =1
lµ(α(λ))=
exp
−∫R+
(λ2(t)2
+∞∑n=3
λn(t)
n
(ρn−2(t) + ρn−3(t)ν(t) + · · · + νn−2(t)
))dt
.
Let us define (real, i.e., bilinear) scalar products 〈·, ·〉ext on D⊗nC , n ∈ Z+, by setting for
f (n), g(n) ∈ D⊗nC
〈f (n), g(n)〉ext :=1
n!
∫D′〈Pn(x), f (n)〉〈Pn(x), g(n)〉µ(dx).
It follows from results of [27] that
〈f (n), g(n)〉ext =∑
k,lj ,sj∈N: j=1,...,k, l1>l2>···>lk,l1s1+···+lksk=n
n!
ls11 . . . lskk s1! . . . sk!×
∫Rs1+···+sk+
f (n)(t1, . . . , t1︸ ︷︷ ︸l1
, . . . , ts1 , . . . , ts1︸ ︷︷ ︸l1
, . . . , ts1+···+sk , . . . , ts1+···+sk︸ ︷︷ ︸lk
)×
g(n)(t1, . . . , t1︸ ︷︷ ︸l1
, . . . , ts1 , . . . , ts1︸ ︷︷ ︸l1
, . . . , ts1+···+sk , . . . , ts1+···+sk︸ ︷︷ ︸lk
)ηl1−1(t1) . . . ηl1−1(ts1)×
ηl2−1(ts1+1) . . . ηl2−1(ts1+s2) . . . η
lk−1(ts1+···+sk−1+1) . . . ηlk−1(ts1+···+sk) dt1 . . . dts1+···+sk .
(3)
So, for example, for n = 1 〈f (1), g(1)〉ext = 〈f (1), g(1)〉 =∫R+f (1)(t)g(1)(t)dt, for n = 2
〈f (2), g(2)〉ext = 〈f (2), g(2)〉 +∫R+f (2)(t, t)g(2)(t, t)η(t)dt. If (see (2)) η = 0 (the case of Gaus-
sian or Poissonian µ) then 〈f (n), g(n)〉ext = 〈f (n), g(n)〉, in the general case 〈f (n), g(n)〉ext =
〈f (n), g(n)〉 + . . . .Let | · |ext denotes the norm which is generated by the scalar product 〈·, ·〉ext, i.e., for
n ∈ Z+ |f (n)|ext :=
√〈f (n), f (n)〉ext. Denote by H(n)
ext the Hilbert space which is the closure
of D⊗nC with respect to | · |ext (in particular, H(0)
ext = C).

60 Kachanovsky N.A.
Let H := L2(R+) be the space of complex-valued square integrable with respect to theLebesgue measure functions on R+. It is clear that H(1)
ext = H. For n ∈ N\1 the space H(n)ext
can be understood as an extension of H⊗n in a generalized sense: let F (n) ∈ H⊗n, f (n) ∈ F (n)
be a representative (a function) from the equivalence class F (n) with a “zero diagonal”, i.e.,f (n)(t1, . . . , tn) = 0 if there exist i, j ∈ 1, . . . , n such that i 6= j but ti = tj. It is easyto show ([16]), that the function f (n) generates an equivalence class in H(n)
ext which can beidentified with F (n).
Note that, of course, the space H(n)ext depends on the parametric function η, see (2) (for
example, if η = 0 then H(n)ext = H⊗n), but we do not use η in the designation of this space for
simplification of notation.For F (n) ∈ H(n)
ext, n ∈ Z+, we define a polynomial 〈Pn, F (n)〉 ∈ (L2) as
〈Pn, F (n)〉 := (L2)−limk→∞
〈Pn, f (n)k 〉,
where D⊗nC 3 f
(n)k → F (n) in H(n)
ext as k → ∞ (this difinition is well-posed, as is easy to verify).The forthcoming statement easily follows from the construction of polynomials 〈Pn, F (n)〉 (seealso [27]).
Theorem. A function F ∈ (L2) if and only if there exists a sequence of kernels(F (n) ∈ H(n)
ext
)∞n=0
such that F can be presented in the form
F =∞∑n=0
〈Pn, F (n)〉, (4)
where the series converges in (L2), i.e., the (L2)-norm of F
‖F‖2(L2) =∞∑n=0
n!|F (n)|2ext <∞. (5)
Moreover, the system〈Pn, F (n)〉, F (n) ∈ H(n)
ext, n ∈ Z+
is an orthogonal basis in (L2) in the
sense that for F,G ∈ (L2) of form (4) the (real) scalar product in (L2)
(F,G)(L2) =∞∑n=0
n!〈F (n), G(n)〉ext.
1.3 The extended stochastic integral
By analogy with the Gaussian analysis, on the probability triplet (D′, C(D′), µ) we definethe Meixner random process M by setting for each t ∈ R+ Mt := 〈P1, 1[0,t)〉 ∈ (L2), here andbelow 1B(y) is the indicator of the event y ∈ B.
Remark. If the parametric functions ρ and ν (see Subsection 1.1) are constants then M is aLevy process; but, in general, it is not the case (M can be a not time-homogeneous process).

Clark-Ocone type formulasin the Meixner white noise analysis 61
Using results of [27] one can show that M is a locally square integrable normal martingale(with respect to the generated by M flow of full σ-algebras) with orthogonal independentincrements, therefore one can consider the Ito stochastic integral with respect to M .
Let us recall the construction of the extended (Skorohod) stochastic integral with respectto M (see [16] for details). Let G ∈ (L2) ⊗ H. It follows from above-posed results that Gcan be presented in the form
G(·) =∞∑n=0
〈Pn, G(n)· 〉, (6)
G(n)· ∈ H(n)
ext ⊗H, with ‖G‖2(L2)⊗H =∞∑n=0
n!|G(n)· |2
H(n)ext⊗H
<∞.
If in addition G is such that the kernels G(n)· belong to H⊗n ⊗ H ⊂ H(n)
ext ⊗ H (theembedding in the generalized sense described above) then one can show [16] that F can bepresented in the form
G(·) =∞∑n=0
n!
∫ ∞
0
∫ tn
0
. . .
∫ t2
0
G(n)· (t1, . . . , tn)dMt1 . . . dMtn , (7)
i.e., as a series of repeated Ito stochastic integrals with respect to the Meixner process. Inthis case one can define the extended stochastic integral of G with respect to M as∫
G(t)dMt :=∞∑n=0
(n+ 1)!
∫ ∞
0
∫ t
0
∫ tn
0
. . .
∫ t2
0
G(n)(t1, . . . , tn, t)dMt1 . . . dMtndMt =
∞∑n=0
〈Pn+1, G(n)〉 ∈ (L2)
(8)
(cf. [2, 3, 1]), where G(n) ∈ H⊗n+1 ⊂ H(n+1)ext are the projections of G(n)
· onto H⊗n+1, if thisseries converges in (L2). Note that if in addition G is integrable by Ito then series (8) is theresult of term by term integration of series (7), the convergence of (8) in (L2) follows in thiscase from the condition G ∈ (L2) ⊗H.
For a general G ∈ (L2) ⊗H the above mentioned definition cannot be accepted becauseit is impossible to project elements of H(n)
ext ⊗ H onto H(n+1)ext , generally speaking. Never-
theless, the following natural generalization is possible. Let G(n)· ∈ H(n)
ext ⊗ H. We select arepresentative (a function) g(n)· ∈ G
(n)· with the property g
(n)t (t1, . . . , tn) = 0 if there exists
j ∈ 1, . . . , n such that tj = t. Let us define the element G(n) ∈ H(n+1)ext as the equivalence
class in H(n+1)ext that is generated by the symmetrization of g(n)· with respect to n+1 variables
(note that for n = 0 we have H(0)ext ⊗ H = H 3 G
(0)· = G(0) ∈ H = H(1)
ext). It was proved in[16] that G(n) is well-defined and |G(n)|ext ≤ |G(n)
· |H(n)ext⊗H.
Definition. Let G ∈ (L2)⊗H and be such that∞∑n=0
(n+1)!|G(n)|2ext <∞, where the elements
G(n) ∈ H(n+1)ext were constructed above by the kernels G(n)
· ∈ H(n)ext ⊗ H from decomposition
(6) for G. We define the extended stochastic integral with respect to M∫G(t)dMt ∈ (L2)
by setting ∫G(t)dMt :=
∞∑n=0
〈Pn+1, G(n)〉.

62 Kachanovsky N.A.
In particular cases, when the generalized Meixner measure µ is the Gaussian or Poissonianone, the operator
∫(t)dMt is the classical extended Skorohod stochastic integral [2, 3, 1].
The forthcoming statement explains why we preserve this term in a general case.
Theorem. ([16]) Let G ∈ (L2) ⊗ H and be integrable by Ito with respect to M (i.e., beadapted with respect to the generated by M flow of σ-algebras). Then G is integrable in theextended sense, and
∫G(t)dMt =
∫G(t)dMt (the last integral is the Ito one).
1.4 The Hida stochastic derivative
Finally, let us recall the notion of the Hida stochastic derivative in the Meixner whitenoise analysis (see [14, 15] for more details). First we note that, as it was proved in [16], anyF (n) ∈ H(n)
ext, n ∈ N, can be considered as an element F (n)(·) of the space H(n−1)ext ⊗ H, and
|F (n)(·)|H(n−1)ext ⊗H ≤ |F (n)|ext.
Definition. Let F ∈ (L2) and be such that
∞∑n=1
n!n|F (n)(·)|2H(n−1)
ext ⊗H<∞, (9)
where F (n)(·) are the kernels from decomposition (4) for F , in point as elements of H(n−1)ext ⊗H.
We define the Hida stochastic derivative ∂·F ∈ (L2) ⊗H by setting
∂·F :=∞∑n=1
n〈Pn−1, F(n)(·)〉.
Theorem. ([16]) The extended stochastic integral∫(t)dMt : (L2) ⊗ H → (L2) and the
Hida stochastic derivative ∂· : (L2) → (L2)⊗H are adjoint one to another, and, in particular,are closed operators.
2 Clark-Ocone type formulas and related matters
2.1 A Clark-Ocone formula in the simplest particular case and problems of thegeneral case
Let µ be the generalized Meixner measure on (D′, C(D′)). In the case when µ is not theGaussian or Poissonian measure (η 6= 0, see (2)), but F ∈ (L2) is differentiable by Hida andis such that all kernels F (n) from decomposition (4) belong to H⊗n (now we consider H⊗n
as a subspace of H(n)ext in the generalized sense described in Subsection 1.2), the analog of
classical Clark-Ocone formula (1) has a form
F = EF +
∫E∂tF |Ft
dMt, (10)
where the notation as in (1) up to obvious modifications (for example, Ft = σ(Ms : s ≤ t)).Using the definitions of the Hida stochastic derivative, of the extended stochastic integral

Clark-Ocone type formulasin the Meixner white noise analysis 63
and the fact that for an integrable by Ito integrand this integral coincides with the Ito one,of the expectation (EF =
∫D′ F (x)µ(dx)), and the fact that for F ∈ (L2) of form (4)
EF |Ft
= 〈P0, F
(0)〉 +∞∑n=1
〈Pn, F (n)1[0,t)n〉 (11)
[17], one can conclude that (10) is valid if for any n ∈ N\1 and for each F (n) ∈ H⊗n
nPr(F (n)(·1, . . . , ·n−1, ·n)1[0,·n)n−1(·1, . . . , ·n−1)
)= F (n)
in H⊗n, here and below Pr denotes a symmetrization with respect to all variables. But thisequality is fulfilled in H⊗n = L2(R+,m)⊗n (m is the Lebesgue measure on R+) because ift1, . . . , tn are mutually different then Pr1[0,tn)n−1(t1, . . . , tn−1) = 1
n, and m⊗n(t1, . . . , tn :
∃i, j ∈ 1, . . . , n : i 6= j, ti = tj)
= 0. Note that one can prove (1) and its Poissoniancounterpart by the same way.
In the general case not each F ∈ (L2) can be presented even in the form
F = EF +
∫G(t)dMt, (12)
G ∈ (L2) ⊗H (see Proposition 2.1 below for details). But even if F ∈ (L2) is representablein form (12), formula (10) can be not valid. For example, let F = 〈P3, F
(3)〉, F (3) ∈ H(3)ext.
Then EF = 0 and it is not difficult to calculate that∫E∂tF |Ft
dMt = 〈P3, F
(3)(·1, ·2, ·3)(1[0,·3)2(·1, ·2) + 1[0,·2)2(·3, ·1) + 1[0,·1)2(·2, ·3)
)〉,
therefore using (5) and (3) we obtain
‖F −∫
E∂tF |Ft
dMt‖2(L2) = 6|F (3)
(1 − [1[0,·3)2(·1, ·2) + 1[0,·2)2(·3, ·1) + 1[0,·1)2(·2, ·3)]
)|2ext =
18
∫R2+
|F (3)(t1, t1, t2)|21t1≥t2η(t1)dt1dt2 + 12
∫R+
|F (3)(t1, t1, t1)|2η2(t1)dt1.
If F (3) is such that∫R+
|F (3)(t1, t1, t1)|2η2(t1)dt1 = 0 then 〈P3, F(3)〉 can be presented in form
(12) (see Poposition 2.1 below), but, as we can see from the calculation above, even underthis condition it is possible that F 6=
∫E∂tF |Ft
dMt.
Remark 2.1. It is easy to understand intuitively why Clark-Ocone formula (10) is not validin the general case: in order to calculate the norms in H(n)
ext, n > 2, one has to use nonsym-metrical functions, e.g., Q(t1, t2) := F (3)(t1, t1, t2); but applying the conditional expectationwe “cut off” such functions and therefore lose an information.
In what follows, we clarify a condition of representability of F ∈ (L2) in form (12), andexplain how to reconstruct an integrand G.

64 Kachanovsky N.A.
2.2 A belonging of square integrable functions to the range of values of theextended stochastic integral
We begin from a simple example. Let F = 〈P2, F(2)〉, F (2) ∈ H(2)
ext. It is clear that if Fis representable in form (12) then G(·) = 〈P1, G
(1)· 〉, G(1)
· ∈ H(1)ext ⊗H, and F (2) = G(1) (see
Subsection 1.3). But since by construction G(1) contains a representative g(1) such that foreach t ∈ R+ g(1)(t, t) = 0, we have a necessary condition of representability of 〈P2, F
(2)〉 inform (12): F (2) must contain a representative f (2) such that for each t ∈ R+ f (2)(t, t) = 0.Moreover, it is easy to see that this condition is sufficient: one can set G(1)
· := F (2)(·) (i.e.,we consider F (2) as an element of H(1)
ext ⊗H).In a general case the situation is quite similar. Namely, we have the following statement.
Proposition 2.1. Let F ∈ (L2). The following statements are equivalent:
(1) F can be presented in form (12) with an integrand G ∈ (L2) ⊗H;
(2) for each n ∈ N\1 the kernel F (n) ∈ H(n)ext from decomposition (4) for F has a rep-
resentative f (n) such that f (n)(t1, . . . , tn) = 0 if for each i ∈ 1, . . . , n there existsj ∈ 1, . . . , n such that i 6= j, but ti = tj.
Remark 2.2. If, for example, η = 0 (see (2)) then for each F ∈ (L2) the condition ofstatement (2) is automatically fulfilled. In fact, it follows from (3) that considering propertiesof representatives of F (n) ∈ H(n)
ext, n ∈ N\1, one can ignore families of arguments t1, . . . , tnfor which there exist i, j ∈ 1, . . . , n such that i 6= j, ti = tj, η(ti) = 0 (i.e., one can redefinethese representatives on described families of arguments in compliance with necessity).
Proof. First we prove this proposition for F = 〈Pn, F (n)〉, F (n) ∈ H(n)ext, n ∈ N\1.
1) (“(2)⇒(1)”) Let f (n) be a representative of F (n) that is described in the condition ofstatement (2). Without loss of generality one can assume that f (n) is a symmetric function.We set
hn(t1, . . . , tn) = Pr1t1 6=tn,t2 6=tn,...,tn−1 6=tn =
1
n
[1t1 6=tn,t2 6=tn,...,tn−1 6=tn + 1tn 6=tn−1,t1 6=tn−1,...,tn−2 6=tn−1 + · · · + 1t2 6=t1,t3 6=t1,...,tn 6=t1
] (13)
(1B is the indicator of the event B),
g(n−1)t (t1, . . . , tn−1) :=
f (n)(t1,...,tn−1,t)hn(t1,...,tn−1,t)
, if hn(t1, . . . , tn−1, t) 6= 0
0, if hn(t1, . . . , tn−1, t) = 0(14)
(note that if hn(t1, . . . , tn−1, t) = 0 then f (n)(t1, . . . , tn−1, t) = 0 by the condition of state-ment (2)). Using (3), nonatomicity of the Lebesgue measure, the equality
hn(t1, . . . , t1︸ ︷︷ ︸l1
, . . . , ts1+···+sk , . . . , ts1+···+sk︸ ︷︷ ︸lk
, t) =1
n1lk>1 +
sk + 1
n1lk=1
Clark-Ocone type formulasin the Meixner white noise analysis 65
for different t1, . . . , ts1+···+sk , t (here k, l·, s· ∈ N, l1 > · · · > lk, l1s1 + · · · + lksk = n− 1), andthe condition from statement (2) (in the last inequality of the forthcoming calculation), weobtain
|g(n−1)· |2
H(n−1)ext ⊗H
=∑
k,lj ,sj∈N: j=1,...,k, l1>l2>···>lk,l1s1+···+lksk=n−1
(n− 1)!
ls11 . . . lskk s1! . . . sk!×
∫Rs1+···+sk+1+
|g(n−1)t (t1, . . . , t1︸ ︷︷ ︸
l1
, . . . , ts1+···+sk , . . . , ts1+···+sk︸ ︷︷ ︸lk
)|2×
ηl1−1(t1) . . . ηlk−1(ts1+···+sk)dt1 . . . dts1+···+skdt =
n∑
k,lj ,sj∈N: j=1,...,k, l1>···>lk>1,l1s1+···+lksk+1=n
n!
ls11 . . . lskk s1! . . . sk!×
∫Rs1+···+sk+1+
|f (n)(t1, . . . , t1︸ ︷︷ ︸l1
, . . . , ts1+···+sk , . . . , ts1+···+sk︸ ︷︷ ︸lk
, t)|2×
ηl1−1(t1) . . . ηlk−1(ts1+···+sk)dt1 . . . dts1+···+skdt+
n∑
k,lj ,sj∈N: j=1,...,k, l1>···>lk=1,l1s1+···+lk−1sk−1+sk+1=n
n!
ls11 . . . lsk−1
k−1 s1! . . . (sk + 1)!(sk + 1)×
∫Rs1+···+sk+1+
|f (n)(t1, . . . , t1︸ ︷︷ ︸l1
, . . . , ts1+···+sk−1+1, . . . , ts1+···+sk , t)|2×
ηl1−1(t1) . . . ηlk−1−1(ts1+···+sk−1
)dt1 . . . dts1+···+skdt ≤ n|F (n)|2ext <∞.
Therefore the function g(n−1)· generates an element (an equivalence class)G(n−1)
· ∈ H(n−1)ext ⊗H.
It is easy to see that G(n−1) = F (n) (see Subsection 1.3): for the representative g(n−1)· ∈
G(n−1)· which is defined by (14) g(n−1)(·1, . . . , ·n) = g
(n−1)·n (·1, . . . , ·n−1) · hn(·1, . . . , ·n) =
f (n)(·1, . . . , ·n) ∈ F (n) because f (n) is a symmetric function described in the condition ofstatement (2). Set G(·) := 〈Pn−1, G
(n−1)· 〉. Now F =
∫G(t)dMt, so, the condition of state-
ment (1) is fulfilled.2) (“(1)⇒(2)”) Let the condition of statement (1) be fulfilled, i.e.,
〈Pn, F (n)〉 =
∫〈Pn−1, G
(n−1)t 〉dMt, G(n−1)
· ∈ H(n−1)ext ⊗H.
By definition of the extended stochastic integral it means that F (n) = G(n−1), but an elementG(n−1) ∈ H(n)
ext satisfies the condition from statement (2) by construction.The carryover of the result to the general case is trivial; we note only that if F ∈ (L2) and
satisfies the condition of statement (2) then the formally constructed integrand G belongsto (L2) ⊗H because for each n ∈ N we have |G(n−1)
· |2H(n−1)
ext ⊗H≤ n|F (n)|2ext (for n = 1, G
(0)· =
F (1) ∈ H = H(1)ext), therefore ‖G‖2(L2)⊗H =
∑∞n=1(n−1)!|G(n−1)
· |2H(n−1)
ext ⊗H≤∑∞
n=1 n!|F (n)|2ext ≤‖F‖2(L2) <∞.

66 Kachanovsky N.A.
Remark 2.3. Let F ∈ (L2) and be presentable in the form F = EF +∫G(t)dMt, where
G(·) =∑∞
n=1〈Pn−1,G(n−1)· 〉, G(n−1)
· ∈ H(n−1)ext ⊗ H, is a formal series (i.e., this series can
diverge in (L2) ⊗ H) and∫G(t)dMt is a formal stochastic integral, i.e.,
∫G(t)dMt =∑∞
n=1〈Pn, G(n−1)〉. As is easy to see, now for each n ∈ N F (n) = G(n−1) in H(n)ext, there-
fore F satisfies the condition of statement (2) of Proposition 2.1 whence it follows that Fcan be presented in form (12) with an integrand G ∈ (L2) ⊗H (note that G 6= G, generallyspeaking). So, in what follows, in corresponding places we will write “F can be presented inform (12)” without the reminder that G ∈ (L2) ⊗H.
Remark 2.4. If F = 〈Pn, F (n)〉, n ∈ N\1, cannot be presented in form (12), one still candefine the function g
(n−1)· by (14) and construct the corresponding element G(n−1) ∈ H(n)
ext.But now F (n) 6= G(n−1) in H(n)
ext and |G(n−1)|ext < |F (n)|ext (the norm |F (n)−G(n−1)|ext containsintegrals by families of arguments for which hn is equal to zero).
Corollary. If F ∈ (L2) and is presentable in form (12) then the kernels G(n−1)· ∈ H(n−1)
ext ⊗Hfrom decomposition (6) of an integrand can be constructed by representatives (14).
2.3 Clark-Ocone type formulas
It is described above how for a representable in form (12) random variable F ∈ (L2) toreconstruct a corresponding integrand G ∈ (L2)⊗H. But such a description is not convenientfor applications. In this subsection we prove statements, in which an integrand G for a givenF is presented in a more convenient for applications form.
We begin from some preparation. For n ∈ N\1 and t1, . . . , tn ∈ R+ set ~n(t1, . . . , tn) :=
nhn(t1, . . . , tn), where the functions hn are defined in (13); set also ~1 ≡ 1. Further, forG
(n)· ∈ H(n)
ext ⊗H, n ∈ Z+, set
G(n)· (·1, . . . , ·n) :=
G
(n)· (·1,...,·n)
~n+1(·1,...,·n,·) , if ~n+1(·1, . . . , ·n, ·) 6= 0
0, if ~n+1(·1, . . . , ·n, ·) = 0.
It is easy to see that G(n)· ∈ H(n)
ext ⊗H and
|G(n)· |H(n)
ext⊗H ≤ |G(n)· |H(n)
ext⊗H. (15)
For G ∈ (L2) ⊗H we define
(AG)(·) :=∞∑n=0
〈Pn, G(n)· 〉,
where the kernels G(n)· are constructed by the kernels G(n)
· from decomposition (6) for G. Itfollows from estimate (15) that A is a linear continuous operator in (L2) ⊗H.
Theorem 1. Let F ∈ (L2), be presentable in form (12) (see Proposition 2.1) and belongsto the domain of the Hida stochastic derivative (see (9)). Then the representation
F = EF +
∫A∂tF dMt (16)
is valid, where∫A∂tF dMt :=
∫(A∂·F )(t)dMt.

Clark-Ocone type formulasin the Meixner white noise analysis 67
Remark 2.5. In the classical Gaussian (and Poissonian) analysis one can reconstruct F−EF
for differentiable by Hida F ∈ (L2) by using of the Clark-Ocone formula if ∂·F is known.But in the Meixner white noise analysis it is not the case: now it is impossible to reconstructeven 〈Pn, F (n)〉 (n ∈ N\1) if ∂·〈Pn, F (n)〉 is known, generally speaking, because differentF (n) ∈ H(n)
ext can coincide as elements of H(n−1)ext ⊗ H. Nevertheless, for F satisfying the
conditions of Theorem 1 F − EF can be reconstructed if ∂·F is known. But for such areconstruction one has to use the extended stochastic integral in Clark-Ocone type formula(16) because A∂·F can be nonintegrable by Ito.
Proof. It is sufficient to prove the theorem for F = 〈Pn, F (n)〉, F (n) ∈ H(n)ext, n ∈ N\1 (the
cases n = 0 and n = 1 are trivial). Let us accept by definition 00
:= 0. Using the definitionsof the Hida stochastic derivative and of the operator A, we can write
A∂·F = n〈Pn−1, F(n)(·)〉 = n
⟨Pn−1,
f (n)(·1, . . . , ·n−1, ·)~n(·1, . . . , ·n−1, ·)
⟩=⟨Pn−1,
f (n)(·1, . . . , ·n−1, ·)hn(·1, . . . , ·n−1, ·)
⟩,
where f (n) ∈ F (n) ∈ H(n)ext is a symmetric function described in statement (2) of Proposi-
tion 2.1 (note that if for a family of arguments t1, . . . , tn−1, t ∈ R+ hn(t1, . . . , tn−1, t) = 0 thenf (n)(t1, . . . , tn−1, t) = 0). But by construction of the kernels of the extended stochastic inte-
gral (see Subsection 1.3) we have now f (n)
hn= f (n) ∈ F (n), whence
∫(A∂·〈Pn, F (n)〉)(t)dMt =
〈Pn, F (n)〉, which is what had to be proved.
Corollary. If F ∈ (L2), can be presented in form (12) and belongs to the domain of theHida stochastic derivative then an integrand G from (12) can be presented in the form
G(·) = A∂·F.
Formula (16) can be interpreted as a Clark-Ocone type formula in the Meixner white noiseanalysis, but this formula is not a direct analog of classical Clark-Ocone formula (1). In fact,if µ is the Gaussian or Poissonian measure then, as is easily seen, for G ∈ (L2) ⊗H we have(AG)(·) =
∑∞n=0〈Pn,
G(n)·
n+1〉, where G(n)
· ∈ H⊗n ⊗ H are the kernels from decomposition (6)for G. On the other hand, one can understand G as the family of functions gα : R+ → (L2)
(‖gα‖(L2)⊗H <∞, α ∈ Θ—some set of indexes) that is defined by an arbitrary representativegα ∈ G and is such that for arbitrary α1, α2 ∈ Θ ‖gα1 − gα2‖(L2)⊗H = 0. In this caseEG(·)|F·
∈ (L2) ⊗ H is an equivalense class in (L2) ⊗ H that contains the family of
functions R+ 3 t 7→ Egα(t)|Ft
, α ∈ Θ, and even for G of form G(·) = ∂·F , F ∈ (L2), we
have EG(·)|F·
=∑∞
n=0〈Pn, G(n)· 1[0,·)n〉 6= (AG)(·), generally speaking.
Let us obtain a direct analog of formula (1) in the Meixner white noise analysis. Forn ∈ N and t1, . . . , tn, t ∈ R+ set
χn,t(t1, . . . , tn) :=
1, if ∀i ∈ 1, . . . , n :
(∀j ∈ 1, . . . , n\i ti 6= tj
)ti < t,
0, in other cases,
i.e., χn,t(t1, . . . , tn) = 1 if all ti of the multiplicity one are smaller than t. For example,χ3,5(6, 6, 4) = 1 (4 < 5, 6 has the multiplicity two), but χ3,5(6, 4, 4) = 0 (6 > 5, 6 has

68 Kachanovsky N.A.
the multiplicity one). Set also χ0,· ≡ 1. For F ∈ (L2) and t ∈ R+ define an operatorEF |Ft
∈ (L2) by setting
EF |Ft
:=
∞∑n=0
〈Pn, F (n)χn,t〉, (17)
where F (n) ∈ H(n)ext are the kernels from decomposition (4) for F . As is easily seen, we have
|F (n)χn,t|ext ≤ |F (n)|ext, therefore E |Ft
is a linear continuous operator in (L2).
Remark 2.6. We use for the operator E|Ft
the notation that is similar to the designation
of a conditional expectation because these operators are similar in a sense: cf. (17) and(11). Moreover, it is easy to see that in the Gaussian and Poissonian cases E
|Ft
=
E |Ft
because for n ∈ N χn,t = 1[0,t)n in H⊗n (i.e., these two functions belong to the same
equivalence class in this space).
Theorem 2. Let F ∈ (L2), be presentable in form (12) (see Proposition 2.1) and belong tothe domain of the Hida stochastic derivative (see (9)). Then the representation
F = EF +
∫E∂tF |Ft
dMt (18)
is valid.
Remark 2.7. If the kernels F (n) from decomposition (4) for F can be considered as elementsof H⊗n (see Subsection 1.2) then formula (18) reduces to (10).
Proof. It is sufficient to prove the theorem for F = 〈Pn, F (n)〉, F (n) ∈ H(n)ext, n ∈ N\1 (the
cases n = 0 and n = 1 are trivial). Let f (n) ∈ F (n) and be a symmetric function described instatment (2) of Proposition 2.1. Then for almost all (with respect to the Lebesgue measure)t ∈ R+ ∂t〈Pn, f (n)〉 = n〈Pn−1, f
(n)(t)〉, E∂t〈Pn, f (n)〉|Ft
= n〈Pn−1, f
(n)(t)χn−1,t〉, and∫E∂t〈Pn, F (n)〉|Ft
dMt =
∫E∂t〈Pn, f (n)〉|Ft
dMt = n〈Pn, f (n)(·)χn−1,·〉.
Therefore we have to show that n f (n)(·)χn−1,· ∈ F (n) in H(n)ext. Using the construction of
f (n)(·)χn−1,·, (3), nonatomicity of the Lebesgue measure and the fact that f (n) is a symmetricfunction satisfying the condition from statement (2) of Proposition 2.1, we obtain∣∣F (n) − n f (n)(·)χn−1,·
∣∣2ext
=∣∣f (n) − n f (n)(·)χn−1,·
∣∣2ext
=∑k,lj ,sj∈N: j=1,...,k, l1>l2>···>lk=1,
l1s1+···+lk−1sk−1+sk=n
n!
ls11 . . . lsk−1
k−1 s1! . . . sk!×
∫Rs1+···+sk+
∣∣∣f (n)(t1, . . . , t1︸ ︷︷ ︸l1
, . . . , ts1+···+sk−1, . . . , ts1+···+sk−1︸ ︷︷ ︸lk−1
, ts1+···+sk−1+1, . . . , ts1+···+sk)×
[1 − 1ts1+···+sk−1+1<ts1+···+sk
,ts1+···+sk−1+2<ts1+···+sk,...,ts1+···+sk−1<ts1+···+sk
−
1ts1+···+sk<ts1+···+sk−1,ts1+···+sk−1+1<ts1+···+sk−1,...,ts1+···+sk−2<ts1+···+sk−1 − · · ·−
1ts1+···+sk−1+2<ts1+···+sk−1+1,ts1+···+sk−1+3<ts1+···+sk−1+1,...,ts1+···+sk<ts1+···+sk−1+1
]∣∣∣2×ηl1−1(t1) . . . η
lk−1−1(ts1+···+sk−1)dt1 . . . dts1+···+sk = 0

Clark-Ocone type formulasin the Meixner white noise analysis 69
(for different ts1+···+sk−1+1, . . . , ts1+···+sk one and only one indicator in this calculation is equalto one; other cases can be ignored because
m⊗sk(ts1+···+sk−1+1, . . . , ts1+···+sk :
∃i, j ∈ s1 + · · · + sk−1 + 1, . . . , s1 + · · · + sk : i 6= j, ti = tj)
= 0,
where m is the Lebesgue measure on R+).
Remark 2.8. One can introduce a linear continuous operator E (·)|F·
in (L2) ⊗H by
setting (cf. (17))
EG(·)|F·
:=
∞∑n=0
〈Pn, G(n)· χn,·〉, (19)
where G(n)· ∈ H(n)
ext⊗H are the kernels from decomposition (6) for G. In this case formula (18)holds true if we accept by definition
∫E∂tF |Ft
dMt :=
∫E∂·F |F·
(t)dMt (cf. Theorem 1).
Note that if G ∈ (L2) ⊗H and g ∈ G is a representative of G then the function R+ 3 t 7→Eg(t)|Ft
∈ (L2) (see (17)) generates the equivalence class in (L2)⊗H that coincides with
EG(·)|F·
(see (19)).
Remark 2.9. Clark-Ocone type formulas (16) and (18) were proved under a very restrictiveassumption that a random variable F ∈ (L2) is differentiable by Hida. But one can easilyavoid this restriction considering ∂· as a linear continuous operator acting from (L2) to(L2)0−1 ⊗ H, where (L2)0−1 is the so-called parametrized Kondratiev-type space of regulargeneralized functions [13], and introducing A and E
|Ft
as linear continuous operators in
(L2)0−1 ⊗H and (L2)0−1 correspondingly by analogy with definitions given above.
As we can see, the use of the extended stochastic integral and of special operators inClark-Ocone type formulas is stipulated by properties of the generalized Meixner measure.Nevertheless, in some particular cases one can use the Ito stochastic integral and the condi-tional expectation. Let us consider the question about this possibility in more details.
Theorem 3. Let F ∈ (L2) and belong to the domain of the Hida stochastic derivative (see(9)). Then the following statements are equivalent:
(1) F can be presented in form (10);
(2) for each n ∈ N\1 the kernel F (n) ∈ H(n)ext from decomposition (4) for F has a repre-
sentative f (n) ∈ F (n) such that f (n)(t1, . . . , tn) = 0 if there exist i, j ∈ 1, . . . , n, i 6= j,such that maxt1, . . . , tn = ti = tj (i.e., if the multiplicity of maximal t· ∈ t1, . . . , tnis greater than one).
Remark 2.10. It is easy to see, if for some F ∈ (L2) the condition of statement (2) of thistheorem is fulfilled (for example, it is so in the case η = 0 (see (2))) then the condition ofstatement (2) of Proposition 2.1 is fulfilled too.

70 Kachanovsky N.A.
Proof. It is sufficient to prove the theorem for F = 〈Pn, F (n)〉, F (n) ∈ H(n)ext, n ∈ N\1.
1) ("(2)⇒(1)") Let f (n) be a representative of F (n) that is described in the condition ofstatement (2). Without loss of generality one can assume that f (n) is a symmetric function.Using (11), properties of the extended stochastic integral (see Subsection 1.3), and thefact that if Pr1[0,tn)n−1(t1, . . . , tn−1) = 0 then f (n)(t1, . . . , tn) = 0 by the condition fromstatement (2) (because Pr1[0,tn)n−1(t1, . . . , tn−1) = 0 if and only if the multiplicity of maximalt· ∈ t1, . . . , tn is greater than one), we obtain∫
E∂tF |Ft
dMt =
∫E∂t〈Pn, f (n)〉|Ft
dMt =
∫n〈Pn−1, f
(n)(t)1[0,t)n−1〉dMt =
〈Pn, nf (n)Pr1[0,·n)n−1(·1, . . . , ·n−1)〉 = 〈Pn, f (n)〉 = F.
2) ("(1)⇒(2)") If F = 〈Pn, F (n)〉 can be presented in form (10) then, as is easy to cal-culate, n F (n)(·)1[0,·)n−1 = F (n). But by construction the equivalence class n F (n)(·)1[0,·)n−1 ∈H(n)ext contains a function f (n) that satisfies the condition from statement (2): one can consider
a symmetric function f (n) ∈ F (n) in H(n)ext and set
f (n)(t1, . . . , tn) :=
f (n)(t1, . . . , tn), if Pr1[0,tn)n−1(t1, . . . , tn−1) 6= 0
0, if Pr1[0,tn)n−1(t1, . . . , tn−1) = 0.
Proposition 2.2. Let F ∈ (L2), belong to the domain of the Hida stochastic derivative(see (9)) and be presentable in form (10) (see Theorem 3). Then E
∂·F |F·
= E
∂·F |F·
in (L2) ⊗H (see Remark 2.8).
Proof. It is sufficient to prove the statement for F = 〈Pn, F (n)〉, F (n) ∈ H(n)ext, n ∈ N\1
(the cases n = 0 and n = 1 are trivial). Let f (n) be a representative of F (n) that is describedin the condition of statement (2) of Theorem 3. It is sufficient to show that f (n)(·)χn−1,· =
f (n)(·)1[0,·)n−1 in H(n−1)ext ⊗ H. Let t1, . . . , tn−1, t ∈ R+ and be such that f (n)(t1, . . . , tn−1, t)
is well-defined. As is easy to see, if χn−1,t(t1, . . . , tn−1) − 1[0,t)n−1(t1, . . . , tn−1) 6= 0 tnen themultiplicity of maxt1, . . . , tn−1, t is greater then one, but in this case f (n)(t1, . . . , tn−1, t) =
0. So, in any case f (n)(t1, . . . , tn−1, t)[χn−1,t(t1, . . . , tn−1) − 1[0,t)n−1(t1, . . . , tn−1)] = 0 andtherefore |f (n)(·)[χn−1,· − 1[0,·)n−1 ]|H(n−1)
ext ⊗H = 0, which is what had to be proved.
References
1. Кабанов Ю.М. Расширенные стохастические интегралы // Теория вероятностей и ее приложения.— 1975. — Т.20, 4. — С. 725–737.
2. Кабанов Ю.М., Скороход А.В. Расширенные стохастические интегралы // Материалы школы–семинара по теории случайных процессов, Вильнюс, Ин-т физики и математики. — 1975. — Т.I. —С. 123–167.
3. Скороход А.В. Об обобщении стохастического интеграла // Теория вероятностей и ее приложения.— 1975. — Т.20, 2. — С. 223–238.
4. Aase K., Oksendal B., Privault N., Uboe J. White noise generalizations of the Clark-Haussmann-Ocone
theorem with application to mathematical finance, Finance Stochastics, 4, 4 (2000), 465–496.
Clark-Ocone type formulasin the Meixner white noise analysis 71
5. Benth F.E., Di Nunno G., Lokka A., Oksendal B., Proske F. Explicit representation of the minimal
variance portfolio in markets driven by Levy processes, Math. Finance, 13, 1 (2003), 55–72.
6. Clark J.M. The representation of functionals of Brownian motion by stochastic integrals, Ann. Math.
Stat., 41, 4 (1970), 1282–1295.
7. De Faria M., Oliveira M.J., Streit L. A generalized Clark-Ocone formula, Random Oper. Stoch. Equ., 8,
2 (2000), 163–174.
8. Di Nunno G., Oksendal B., Proske F., Malliavin calculus for Levy processes with applications to finance.
Universitext. Springer-Verlag, Berlin, 2009. — XIV+413 p.
9. Di Nunno G., Oksendal B., Proske F. White noise analysis for Levy processes, J. Funct. Anal., 206, 1
(2004), 109–148.
10. Es-Sebaiy K., Tudor C.A. Levy processes and Ito-Skorokhod integrals, Theory Stoch. Process., 14, 2
(2008), 10–18.
11. Gelfand I.M., Vilenkin N.Ya., Generalized Functions: Vol. 4. Applications of harmonic analysis. Aca-
demic Press, New York–London, 1964. — XIV+384 p.
12. Grecksch W., Roth C., Anh V.V. Q-fractional Brownian motion in infinite dimensions with application
to fractional Black-Scholes market, Stoch. Anal. Appl., 27, 1 (2009), 149–175.
13. Kachanovsky N.A. An extended stochastic integral and a Wick calculus on parametrized Kondratiev-type
spaces of Meixner white noise, Infin. Dimens. Anal. Quantum Probab. Relat. Top., 11, 4 (2008), 541–564.
14. Kachanovsky N.A. Generalized stochastic derivatives on a space of regular generalized functions of
Meixner white noise, Meth. Func. Anal. and Top., 14, 1 (2008), 32–53.
15. Kachanovsky N.A. Generalized stochastic derivatives on parametrized spaces of regular generalized func-
tions of Meixner white noise, Meth. Func. Anal. and Top., 14, 4 (2008), 334–350.
16. Kachanovsky N.A. On an extended stochastic integral and the Wick calculus on the connected with the
generalized Meixner measure Kondratiev-type spaces, Meth. Func. Anal. and Top., 13, 4 (2007), 338–379.
17. Kachanovsky N.A., Tesko V.A. Stochastic integral of Hitsuda-Skorohod type on the extended Fock space,
Ukr. Math. J., 61, 6 (2009), 873–907.
18. Karatzas I., Ocone D. A generalized Clark representation formula, with application to optimal portfolios,
Stochastics Rep., 34, 3-4 (1991), 187–220.
19. Karatzas I., Ocone D., Li, J. An extension of Clark’s formula, Stochastics Rep., 37, 3 (1991), 127–131.
20. Lokka A. Martingale representation of functionals of Levy Processes, Stoch. Anal. Appl., 22, 4 (2004),
867–892.
21. Lokka A., Martingale Representation, Chaos Expansion and Clark-Ocone Formulas. Research Report,
Centre for Mathematical Physics and Stochastics, University of Aarhus, Denmark, 22, 1999. — 24 p.
22. Maas J., van Neerven J. A Clark-Ocone formula in UMD Banach spaces, Electron. Commun. Probab.,
13 (2008), 151–164.
23. Peccati G., Taqqu M.S. Stable convergence of generalized L2 stochastic integrals and the principle of
conditioning, Electron. J. Probab., 12, 15 (2007), 447–480.
24. Nualart D., Schoutens W. Chaotic and predictable representations for Levy processes, Stochastic Proc.
Appl., 90, 1 (2000), 109–122.
25. Ocone D.Malliavin’s calculus and stochastic integral: representation of functionals of diffusion processes,
Stochastics, 12, 3-4 (1984), 161–185.
26. Osswald H. Malliavin calculus on extensions of abstract Wiener spaces, J. Math. Kyoto Univ., 48, 2
(2008), 239–263.
72 Kachanovsky N.A.
27. Rodionova I.V. Analysis connected with generating functions of exponential type in one and infinite
dimensions, Meth. Func. Anal. and Top., 11, 3 (2005), 275–297.
28. Schoutens W., Stochastic processes and orthogonal polynomials. Lecture Notes in Statistics 146.
Springer, New York, 2000. — XIV+163 p.
29. Skorohod A.V., Integration in Hilbert Space. Springer, New York–Heidelberg, 1974. — XII+177 p.
30. Zhang Xi. Clark-Ocone formula and variational representation for Poisson functionals, An. Probab.,
37, 2 (2009), 506–529.
Institute of Mathematics of NAS of Ukraine,
Kyiv, Ukraine
Received 17.02.2011
Качановський М.О. Формули типу Кларка-Окона у майкснерiвському аналiзi бiлого шу-му // Карпатськi математичнi публiкацiї. — 2011. — Т.3, 1. — C. 56–72.
У класичному гауссiвському аналiзi формула Кларка-Окона дозволяє вiдтворити пiд-iнтегральну функцiю, якщо вiдомий стохастичний iнтеграл Iто. Цю формулу можна за-писати у виглядi
F = EF +
∫E∂tF |Ft
dWt,
де функцiя (випадкова величина) F є квадратично iнтегровною за гауссiвською мiрою тадиференцiйовною за Хiдою; E — математичне сподiвання; E
|Ft
— умовне математичне
сподiвання вiдносно повної σ-алгебри Ft, породженої вiнерiвським процесом W до момен-ту часу t; ∂·F — похiдна Хiди F ;
∫(t)dWt — стохастичний iнтеграл Iто за вiнерiвським
процесом.У цiй статтi ми пояснюємо як вiдтворити пiдiнтегральну функцiю у випадку, коли
замiсть гауссiвської мiри розглядається так звана узагальнена мiра Майкснера µ (в залеж-ностi вiд параметрiв µ може бути гауссiвською, пуассонiвською, гамма мiрою та iн.), таотримуємо вiдповiднi формули типу Кларка-Окона.
Качановский Н.А. Формулы типа Кларка-Окона в майкснеровском анализе белого шума// Карпатские математические публикации. — 2011. — Т.3, 1. — C. 56–72.
В классическом гауссовском анализе формула Кларка-Окона позволяет восстановитьподынтегральную функцию, если известен стохастический интеграл Ито. Эту формулуможно записать в виде
F = EF +
∫E∂tF |Ft
dWt,
где функция (случайная величина) F квадратично интегрируема по гауссовской мере идифференцируема по Хиде; E — математическое ожидание; E
|Ft
— условное мате-
матическое ожидание относительно полной σ-алгебры Ft, порожденной винеровским про-цессом W до момента времени t; ∂·F — производная Хиды F ;
∫(t)dWt — стохастический
интеграл Ито по винеровскому процессу.В этой статье мы объясняем как восстановить подынтегральную функцию в случае,
когда вместо гауссовской меры рассматривается так называемая обобщенная мера Майкс-нера µ (в зависимости от параметров µ может быть гауссовской, пуассоновской, гаммамерой и др.), и получаем соответствующие формулы типа Кларка-Окона.

Карпатськi математичнi Carpathian Mathematical
публiкацiї. Т.3, 1 Publications. V.3, 1
УДК 517.98
Lozynska V.Ya.
EXPONENTIAL TYPE DISTRIBUTIONS AND A GENERALIZED
FUNCTIONAL CALCULUS FOR GENERATORS OF C0-GROUPS
Lozynska V.Ya. Exponential type distributions and a generalized functional calculus for gener-
ators of C0-groups, Carpathian Mathematical Publications, 3, 1 (2011), 73–84.
The properties of a dual space to a space of entire functions of exponential type of many
complex variables, that on the real subspace belongs to Lp(Rn) (1 ≤ p < ∞) are described.
A functional calculus for generators of strongly continuous groups of bounded linear operators
on an arbitrary Banach space in a Fourier-image of such dual space is constructed.
Introduction
In this paper we consider a space of entire functions of exponential type for which theirrestriction onto the real subspace belong to Lp(Rn) (1 ≤ p <∞). This space has a propertyto be invariant with respect to the action of partial differential operators. This property al-lows us to introduce in the dual space of linear continuous functionals (so called exponentialtype distributions) a convolution operation and we can consider this space as a convolu-tion topological algebra. In the Fourier-image of such algebra we construct a functionalcalculus for generators of strongly continuous multi-parameter groups on a Banach space.This functional calculus is a generalization of the well-known Fourier operator transform forconvolution algebras of measures [8],[2] and the calculus for generators of nonquasianalyticgroups in algebras of entire functions of exponential type [12]. This approach gives an effec-tive method for investigation of differential operators and functions of them. We constructthe functional calculus as generalized functions of generators of C0–groups. In practice somegeneralized functions (δ–functions) of concrete operators appear in the Quantum theory [3],[4].
The existence of the structure of the convolution algebra on the space of exponential typedistributions follows from the invariant properties in this space with respect to differentialoperators and plays a crucial role to construct the functional calculus. The invariant proper-ties of subspaces of exponential type of entire functions in a wide context exponential typevectors of unbounded linear operators on the Banach spaces are used in the operator calculus[14], [10], [5], in the theory of Differential equations [14], [6] and in the Approximation theoryin Banach spaces [6], [15].
2000 Mathematics Subject Classification: 47A60.Key words and phrases: exponential type distributions, generalized functional calculus, Fourier-image.
c© Lozynska V.Ya., 2011

74 Lozynska V.Ya.
1 Algebras of exponential type distributions
1.1 Spaces of entire functions of exponential type
We define a space of test functions and prove its basic properties. Let Lp(Rn) (1 ≤ p <∞)
be a complex Banach space of functions ϕ(t), t = (t1, . . . , tn) ∈ Rn, with the norm
‖ϕ‖Lp :=
(∫Rn
|ϕ(t)|p dt)1/p
.
We use next notations k = (k1 , . . . , kn) ∈ Zn+, |k| = k1 + . . . + kn, k! = k1! · . . . · kn!,kr = (k1r , . . . , knr) for r ∈ C, Dk = Dk1
1 . . . Dknn , where Dj = −i∂/∂tj for all j = 1, . . . , n.
The domain of the operator of partial differentiationDkjj is: dom (D
kjj ) ≡
ϕ ∈ dom (D
kj−1j ) :
Djϕ ∈ dom (Dkj−1j )
for kj ≥ 1, dom (D0
j ) = Lp for kj = 0 for all j = 1, . . . , n. Hence,
dom (Dk) =n⋂j=1
dom (Dkjj ) is the domain of the operator Dk.
If ϕ ∈ Lp(Rn) and ψ ∈ Lq(Rn), where1
p+
1
q= 1, then convolution is defined by
(ϕ∗ψ)(t) :=∫Rn
ϕ(s)ψ(t− s) ds. For p = 1 the space L1(Rn) is a Banach algebra with respect
to the convolution.Let us consider on Lp(Rn) the following isometric shift group
Ts = e−i(s1D1+...+snDn) : ϕ(t) −→ ϕ(t− s), s = (s1, . . . , sn) ∈ Rn,
where D1 = −i∂/∂t1, . . . , Dn = −i∂/∂tn are the operators of partial differentiation.For an arbitrary vector ν = (ν1, . . . , νn), νj > 0 (j = 1, . . . , n) we define the space
Eνp :=ϕ ∈
⋂k∈Zn
+
dom (Dk) : ‖ϕ‖Eνp
= supk∈Zn
+
‖Dkϕ‖Lp
νk<∞
,
where k = (k1, . . . , kn), νk = νk11 · . . . · νknn , Dk = Dk11 . . . Dkn
n . From the next inequality‖ϕ‖Lp ≤ ‖ϕ‖Eν
pwhich is true for an arbitrary ϕ ∈ Eνp it follows that the embedding Eνp ⊂
Lp(Rn) is continuous.In the class of entire analytic functions of n complex variables Cn 3 t+ iτ −→ Φ(t+ iτ) ∈
C we consider a subspace Mνp = Mν
p(Cn) of functions Φ such that for each fixed vectorτ = (τ1, . . . , τn) ∈ Rn a corresponding function of n real variables Rn 3 t −→ Φ(t + iτ)
belongs to the space Lp(Rn) such that the norm
‖Φ‖Mνp
= supτ∈Rn
exp( n∑j=1
−νj|τj|)[∫
Rn
|Φ(t+ iτ)|pdt]1/p
is finite. It is know [13] that the spaces Mνp consist of the functions of exponential type.
Functions Φ(t+ iτ) from the class Mνp such that each ϕ(t) = Φ(t+ i0) ∈ Lp(Rn) satisfies
the Bernstein’s inequality ([13], III, 3.2.2) ([1], IV, 8.3) on Rn:
‖Dkϕ‖Lp ≤ νk ‖ϕ‖Lp , (1)
where νk = νk11 · . . . · νknn .

Exponential type distributions and a generalized functional calculus 75
Theorem 1. (i) The mapping Mνp 3 Φ(t+ iτ) −→ ϕ(t) := Φ(t+ i0) ∈ Eνp is an isometry of
the normed spaces.(ii) The embeddings Eνp ⊂ Lp(Rn) are isometric.(iii) The spaces Eνp are invariant with respect to the action of the group T−s, and the
restriction T−s : Eνp −→ Eνp is an isometry of the normed spaces.
Proof. (i) Let Φ ∈ Mνp. A restriction ϕ(t) = Φ |Rn of a functions Φ(t+ iτ) ∈ Mν
p on the realsubspace Rn satisfies the Bernstein’s inequality (1)
‖Dkϕ‖Lp ≤ νk‖ϕ‖Lp (∀Φ ∈ Mνp), (2)
where νk ≡ νk11 · . . . · νknn . From (2) we obtain ‖ϕ‖Eνp≤ ‖ϕ‖Lp . From the definition of the
norm of the space Mνp it follows ‖ϕ‖Lp ≤ ‖Φ‖Mν
p(∀Φ ∈ Mν
p), i.e. Mνp |Rn ⊂ Eνp .
Conversely, let ϕ ∈ Eνp . Let us consider the power series ϕ(t+ iτ) =∞∑
|k|=0
(iτ)kDkϕ
k!. The
following inequalities(∫Rn
|ϕ(t+ iτ)|pdt)1/p
≤∞∑
|k|=0
|τ k| ‖Dkϕ‖Lp
k!≤ ‖ϕ‖Lp exp
( n∑j=1
νj|τj|)
are valid so ‖Φ‖Mνp≤ ‖ϕ‖Lp . The series is convergent and the function ϕ(t+ iτ) is an entire
function of class Mνp. Hence Eνp ⊂ Mν
p |Rn and we obtain Eνp = Mνp |Rn .
(ii) Since ‖ϕ‖Lp ≤ ‖ϕ‖Eνp, then ‖ϕ‖Lp ≤ ‖ϕ‖Eν
p≤ ‖ϕ‖Lp ≤ ‖Φ‖Mν
p≤ ‖ϕ‖Lp (∀ϕ ∈ Eνp )
and a necessary isometric isomorphism is Eνp = Mνp |Rn . In particular Eνp ⊂ Lp(Rn).
(iii) For all k ∈ Zn+ and s ∈ Rn next equality ‖T−sDkϕ‖Lp = ‖Dkϕ‖Lp is valid. Fromthe identity Dkψ(s) = T−tD
kϕ(s), where ψ : Rn 3 s → T−sϕ(t), we obtain ‖Dkψ(s)‖Lp =
‖Dkϕ(s)‖Lp . Then the inequality (1) has the view ‖Dkψ‖Lp ≤ νk ‖ϕ‖Lp . From this we obtainthe inequality (∫
Rn
|ψ(t+ iτ)|pdt)1/p
≤ ‖ϕ‖Lp exp( n∑
j=1
νj|τj|),
then ψ ∈ Mνp.
Theorem 2. Eνp are Banach spaces.
Proof. Each of operators Dj on Lp(Rn) (j = 1, . . . , n) is a generator of a one-parameterisometric shift group [9]
ϕ(t) −→ ϕ(t1, . . . , tj−1, tj − ξj, tj+1, . . . , tn).
We use the inequality ‖Dkϕ‖Lp ≤ νk‖ϕ‖Eνp, ϕ ∈ Eνp for all k ∈ Zn+. If ϕm is a Cauchy
sequence in Eνp , then Dkϕm is the same sequence in Lp(Rn) for every fixed k. To theinduction (by k) and thatDj in Lp(Rn) is closed it follows that there is a function ϕ ∈ Lp(Rn),for which
limm→∞
‖Dkϕm −Dkϕ‖Lp = 0 (3)

76 Lozynska V.Ya.
for any k. Then for any ε > 0 there is a number m(ε) such that
‖ϕm − ϕl‖Eνp< max
0≤|k|≤m(ε)
‖Dkϕm −Dkϕl‖Lp
νk+ε
2<ε
2+ε
2= ε (4)
for all m, l ≥ m(ε). Thus ‖ϕl‖Eνp≤ ‖ϕm(ε)‖Eν
p+ ‖ϕm(ε) − ϕl‖Eν
p< ‖ϕm(ε)‖Eν
p+ ε for all
l ≥ m(ε).We take a limit in the last inequality for l → ∞ and use the inequality (4), weobtain ‖ϕ‖Eν
p≤ ‖ϕm(ε)‖Eν
p+ ε. Thus, ϕ ∈ Eνp . We take a limit in (4) for l → ∞ and use (3),
we obtain ‖ϕm − ϕ‖Eνp≤ ε for allm ≥ m(ε). The theorem is proved.
LetEp :=
⋃νEνp = lim ind
νEνp
be the union of spaces endowed with a topology of the inductive limit, where the embeddingsEνp ⊂ Eµp are continuous. The vector µ = (µ1, . . . , µn) is such that ν1 ≤ µ1, . . . , νn ≤ µn.
The locally convex space Ep we will call a space of test functions. The space Ep belongs tothe domain of differential operators Dj and is invariant relatively to their action. From aproperty of regular inductive limits (see [10], [14]) it follows that every bounded subset S ofthe space Ep is bounded in some Eνp .
1.2 Distributions of exponential type
We introduce exponential type distributions. We show that the space of exponential typedistributions is a convolution algebra.
By E ′p we denote a dual space of Ep with a weak topology. The duality 〈E ′
p | Ep〉 can bedetermined by a bilinear form 〈f | ϕ〉 := 〈fν | ϕ〉, where ν is an arbitrary vector such thatϕ ∈ Eνp and fν := f|Eν
p. Functionals f ∈ E ′
p will be called exponential type distributions.For any f ∈ E ′
p and ϕ ∈ Ep the following relation
〈Dkf | ϕ〉 = (−1)|k|〈f | Dkϕ〉 (k ∈ Zn+)
correctly defines an operation of a generalized differentiation of distributions.
Theorem 3. [11] The continuous and dense embeddings Ep ⊂ Lp(Rn), Lp(Rn) ⊂ E ′q, where
1
p+
1
q= 1 are valid.
A convolution of a distribution f ∈ E ′p and a function ϕ ∈ Ep will be defined as the
relation
(f ? ϕ)(t) := 〈f(s) | ϕ(t+ s)〉 = 〈f(s) | T−sϕ(t)〉 = 〈f(s) | T−tϕ(s)〉,
where f(s) denotes an action of a functional f on a function T−s ϕ(t) by s.Let L(Ep) be an algebra of linear continuous operators on the space Ep with a strong
operator topology.

Exponential type distributions and a generalized functional calculus 77
Theorem 4. Let f, g ∈ E ′p and ϕ ∈ Ep. The space E ′
p is a commutative algebra with respectto a convolution defined by the relation
(f ∗ g) ? ϕ := f ? (g ? ϕ).
The mapping E ′p 3 f −→ Kf ∈ L(Ep), where Kfϕ := f ? ϕ, is an algebraic isomorphism on
a commutant of the group T−s in the algebra L(Ep). The convolution has properties
Dk(f ? ϕ) = f ? (Dkϕ) = (−1)|k|(Dkf) ? ϕ,
Dk(f ∗ g) = (Dkf) ∗ g = f ∗ (Dkg)
for any k ∈ Zn+.
Proof. For ϕ ∈ Eνp we have ‖Kfϕ‖Eνp≤ ‖fν‖ ‖T−sϕ‖Eν
p. From Theorem 1 (iii) ‖T−sϕ‖Eν
p=
‖ϕ‖Eνp, then Kf ∈ L(Eνp ), ∀ ν. Thus, Kf ∈ L(Ep).
From Theorem 3 there are functions gγ ∈ Lq(Rn) such that limγ gγ = g in E ′p. The
duality 〈Lq(Rn) | Lp(Rn)〉 is defined by 〈gγ | ϕ〉 =∫Rn
gγ(r)ϕ(r) dr, then (gγ ? ϕ)(t) =∫Rn
gγ(r)T−tϕ(r) dr. The function Rn 3 r −→ T−s−tϕ(r) ∈ Eνp is continuous for fixed t. And
thenf ? (gγ ? ϕ) =
⟨f(s) | T−s(gγ ? ϕ)(t)
⟩=⟨f(s) |
∫Rn
gγ(r)T−s−tϕ(r) dr⟩
=
∫Rn
gγ(r)〈f(s) | T−s−tϕ(r)〉 dr =⟨gγ(r) | 〈f(s) | T−s−tϕ(r)〉
⟩= gγ ? (f ? ϕ).
From this f ? (g ? ϕ) = limγ f ? (gγ ? ϕ) = limγ gγ ? (f ? ϕ) = g ? (f ? ϕ).
Let us prove an isomorphism of the space E ′p to a commutant of the group T−s. Let f ∈ E ′
p
and ϕ ∈ Eνp . From the definition of the convolution and Theorem 1, we obtain ‖f ? ϕ‖Eνp≤
‖f‖Eνp‖ϕ‖Lp , where ‖f‖Eν
p– the norm of restriction of a functional f on Eνp . Then from
Dk(f ?ϕ)(t) =⟨f(s) , T−sD
kϕ(t)⟩
= (f ?Dkϕ)(t) it follows ‖f ?ϕ‖Eνp
= supk
‖f ? Dkϕ‖Lp
νk≤
‖f‖Eνp‖ϕ‖Eν
p. The embeddings Eνp ⊂ Ep are continuous then F ∈ L(Eνp ) and we have F ∈
L(Ep). The relationKfT−sϕ = T−sKfϕ (∀ϕ ∈ Ep, s ∈ Rn) (5)
follows from the equalities (f ? T−sϕ)(t) = (f ? ϕ)(t+ s) = T−s(f ? ϕ)(t).
To prove the converse, let ϕ ∈ Ep. The mapping f : ϕ→ (Fϕ)(0) is a functional f ∈ E ′p.
From this we obtain (Fϕ)(0) = 〈f , ϕ〉 = (f ? ϕ)(0). Replacing ϕ by T−tϕ and using (5), wehave Kf : Ep 3 ϕ −→ f ? ϕ .
Now we prove differential properties of the convolution. Obviously, Dk(f ?ϕ)(t) =⟨f(s) |
T−sDkϕ(t)
⟩= (f ? Dkϕ)(t). Next relations
(f ? ϕ)(t) = 〈f(s) | T−tϕ(s)〉 = 〈f(s+ t− t) | ϕ(s+ t)〉 = 〈T−rf(−t) | ϕ(r)〉
are valid. Then we have Dk(f ? ϕ)(t) = (−1)|k|⟨T−r(D
kf)(−t) | ϕ(r)⟩
= (−1)|k|(Dkf ? ϕ)(t)
and Dk(f ∗g)?ϕ =(−1)|k|(f ∗g)?Dkϕ =(−1)|k|f ? (g ?Dkϕ) = f ? (Dkg ?ϕ) = (f ∗Dkg)?ϕ.
Using the commutation we obtain Dk(f ∗ g) = Dk(g ∗ f) = g ∗Dkf.

78 Lozynska V.Ya.
Corollary 1.1. For an arbitrary distribution f ∈ E ′p and a vector ν the subspace Eνp is
invariant relatively to Kf and Kfν ∈ L(Eνp ).
Corollary 1.2. Let f ∈ E ′p and ϕ ∈ Ep, ψ ∈ Eq, where
1
p+
1
q= 1. Then (f?ϕ)∗ψ = f?(ϕ∗ψ).
Proof. Since f ? ϕ ∈ Ep then [(f ? ϕ) ∗ ψ](t) =∫Rn
〈f(s) | T−sϕ(r)〉Trψ(t) dr = 〈f(s) |
T−s∫Rn
ϕ(r)Trψ(t) dr〉 = [f ? (ϕ ∗ ψ)](t).
1.3 The Fourier transformation
We introduce the Fourier transformation onto the space of exponential type distribution.
For p = 1 let us denote E1 :=
ϕ(ξ) =
∫Rn
e−it·ξϕ(t) dt : ϕ ∈ Ep
, for 1 < p < ∞
Ep :=ϕ(ξ) = F(ϕ) : ϕ ∈ Ep
, where t · ξ := t1ξ1 + . . .+ tnξn for any ξ = (ξ1, . . . , ξn) ∈ Rn.
The Fourier transformation is a linear isomorphism F : Ep 3 ϕ(t) −→ ϕ(ξ) ∈ Ep. Weendowed Ep with a topology relatively to the mapping F .
Using the isometry Eνp ' Mνp(Cn) from Theorem 1 and the fact that Fourier-images of
exponential type functions are finite [13] we can define an inverse transformation by theformula for p = 1
F−1 : E1 3 ϕ(ξ) −→ ϕ(t) =1
(2π)n
∫Rn
eit·ξϕ(ξ) dξ ∈ E1,
for 1 < p <∞ that is an inverse mapping F−1 : Ep 3 ϕ(ξ) −→ ϕ(t) ∈ Ep.The duality 〈E ′
p | Ep〉 defines an adjoint mapping to the inverse one
F# := 2π(F−1)′ : E ′p 3 f −→ f ∈ E ′
p, where 〈f | ϕ〉 := (2π)n〈f | ϕ〉.
Its image E ′p, that generates a duality 〈E ′
p | Ep〉, we endow with a weak topology that coincideswith an inductive topology relatively to F#.
We use the symbols ϕ−(t) := ϕ(−t).
Theorem 5. For any f, g ∈ E ′p, ϕ ∈ Ep, ψ ∈ Eq, where
1
p+
1
q= 1, the Fourier transform
has properties ϕ ∗ ψ = ϕ · ψ, f ? ϕ = f · ϕ−, where 〈f · ϕ− | ψ〉 = 〈f | ϕ− · ψ〉 and thespace E ′
p is a commutative algebra with respect to the multiplication, that is defined by therelation 〈g · f | ϕ〉 = 〈g | f · ϕ〉. Moreover, the following equalities g ∗ f = g · f , Dkf =
(−ξ)kf , (∀ k ∈ Z+) are valid.
Proof. Using the Corollary 1.1, we have
〈f ? ϕ | ψ〉 = (2π)n〈f ? ϕ | ψ〉 = (2π)n[(f ? ϕ) ? ψ](0) = (2π)n[f ? (ϕ ? ψ)](0) =
(2π)n〈f | ϕ ? ψ〉 = 〈f | ϕ ? ψ〉 = 〈f | ϕ− · ψ〉 = 〈f · ϕ− | ψ〉.

Exponential type distributions and a generalized functional calculus 79
The correctness of definition of the multiplication follows from next equalities
〈g ? f | ϕ〉 = (2π)n〈g ? f | ϕ〉 = (2π)n[(g ? f) ? ϕ](0) = (2π)n[g ? (f ? ϕ)](0) =
(2π)n〈g | f ? ϕ〉 = 〈g | f ? ϕ〉 = 〈g | f · ϕ−〉 = 〈g · f | ϕ−〉.
Since Dkϕ ∈ Ep(Rn), then (Dkϕ)(ξ) = ξkϕ(ξ) ∈ Ep(Rn). Hence
〈Dkf | ϕ〉 = (2π)n〈Dkf | ϕ〉 = (2π)n(−1)k〈f | Dkϕ〉 = (−1)k〈f | Dkϕ〉 =
(−1)k〈f | ξkϕ〉 = 〈(−ξ)kf | ϕ〉.
2 Functional calculus
2.1 Finite functions of the generators of C0-groups
We construct finite functions of generators of strongly continuous groups of boundedlinear operators on an arbitrary Banach space.
Let X, ‖·‖ be a complex Banach space, L(X) be an algebra of linear bounded operatorson X with a uniform norm ‖ · ‖L(X) and U : Rn 3 t −→ Ut ∈ L(X) be an n-parameterC0–group on X. For every index j = 1, . . . , n generators are determined by DjUtx|t=0 =
−Ajx, where x ∈ D(Aj). Let the operators Aj : D(Aj) ⊂ X −→ X be closed and densydetermined. We denote A := (A1, . . . , An). An example: if Ut = Tt and X = Lp(Rn) thenDjTtϕ = −∂/∂tjTtϕ for ϕ ∈ Lp(Rn).
Let us assume
‖Utx‖q :=
(∫Rn
‖Utx‖q dt
)1/q
, ‖U‖q := infc : ‖Utx‖q ≤ c ‖x‖, x ∈ X
,
where1
p+
1
q= 1. Let the group satisfies the condition
‖Utx‖q ≤ ‖U‖q‖x‖ (∀x ∈ X). (6)
In the case p = 1 the condition (6) is equivalent to a uniform bound of the group. Forexample, the condition (6) is true for the shift group Ut = Tt on X = Lp(Rn).
Theorem 6. Let ϕ ∈ Ep and the group U satisfy the condition (6). Then the operators thatare defined by the formula
ϕ(A) :=
∫Rn
Utϕ(t) dt
belong to the Banach algebra L(X) and satisfies the relation (Djϕ)(A) = Ajϕ(A) (j =
1, . . . , n). If p = 1 and the group Ut is uniformly bounded then (ϕ ∗ ψ)(A) = ϕ(A) · ψ(A)(∀ ϕ, ψ ∈ E1
).

80 Lozynska V.Ya.
Proof. Let ϕ ∈ Eνp . By Theorem 1 and condition (6), we have
‖ϕ(A)x‖ ≤∫Rn
‖Utx‖ |ϕ(t)| dt ≤ ‖Utx‖q ‖ϕ‖Eνp≤ ‖U‖q‖ϕ‖Eν
p‖x‖ (∀x ∈ X). (7)
It is know ([13],III,3.2.5) that functions ϕ ∈ Ep have the property limt→∞
ϕ(t) = 0. Thenintegrating by parts and using the property, that a generator of group is closed, we obtain
(Djϕ)(A) =
∫Rn
Ut(Djϕ)(t) dt = −∫Rn
DjUtϕ(t) dt = Ajϕ(A).
For p = 1 we determine convolution of functions and next equalities
ϕ(A) · ψ(A) =
∫Rn
Utϕ(t) dt[ ∫Rn
Usψ(s) ds]
=
∫Rn
ϕ(t)[ ∫Rn
Us+tψ(s) ds]dt =
∫Rn
[ ∫Rn
Urϕ(r − s)ψ(s) ds]dr =
∫Rn
Ur
[ ∫Rn
ϕ(r − s)ψ(s) ds]dr = (ϕ ∗ ψ)(A)
are valid.
2.2 Functional calculus in algebras of exponential type distributions
We construct the functional calculus as generalized functions for generators of C0-groups.Let X⊗Lp(Rn) be a completion of a projective tensor product of X and Lp(Rn). In the
case p = 1, as it is known ([16], III, 3.2.5), we have the isometric representation L1(Rn;X) 'X⊗L1(Rn), where L1(Rn;X) is a Banach space of all X–valued functions Rn 3 t −→ x(t) ∈X with the norm ‖x‖L1(X) :=
∫Rn
‖x(t)‖ dt.
Using the isometric embedding Eνp (Rn) ⊂ Lp(Rn) for every vector ν we can determine thesubspace Eνp (Rn;X) := X⊗Eνp (Rn) ⊂ X⊗Lp(Rn). The embeddings Eνp (Rn;X) ⊂ Eµp (Rn;X)
(ν1 ≤ µ1, . . . , νn ≤ µn) are continuous, then on a union of all these spaces we can define astructure of an inductive limit space
Ep(Rn;X) :=⋃ν
Eνp (Rn;X) = lim indν
Eνp (Rn;X) ⊂ X⊗Lp(Rn).
A convolution of an arbitrary distribution f ∈ E ′p(Rn) and a vector-valued function x(t) ∈
Ep(Rn;X) is used to define by (f ? x)(t) := (I ⊗Kf )x(t), where I is the identity operator inX.
The topological isomorphism lim indν
Eνp (Rn;X) ' X⊗ lim indν
Eνp (Rn) = X⊗Ep(Rn) isvalid. This assertion is a corollary of a known property of the inductive limit and a projectivetensor products [7]. From this assertion and known Grothendieck’s representation ([16], III,§6) it follows that for every function x(t) ∈ Ep(Rn;X) there is a vector ν such that x(t)
belongs to the space Eνp (Rn;X) and is represented in the form of the absolute convergentseries
x(t) =∞∑j=1
xj ⊗ ϕj(t), where xj ∈ X, ϕj(t) ∈ Eνp (Rn). (8)

Exponential type distributions and a generalized functional calculus 81
Using this representation for any distribution f ∈ E ′p(Rn) and a vector-valued function
x(t) ∈ Ep(Rn;X), we obtain (f ? x)(t) =∞∑j=1
xj ⊗ (f ? ϕj)(t).
Lemma 2.1. The convolution has properties
(f ∗ g) ? x = f ? (g ? x),
Dk(f ? x) = f ? (Dkx) = (−1)|k|(Dkf) ? x
for any f, g ∈ E ′p(Rn), x = x(t) ∈ Eνp (Rn;X) and k ∈ Zn+.
Proof. From the definition of the convolution and by Theorem 4 next equalities follow
(f ∗ g) ? x =∞∑j=1
xj ⊗ (f ∗ g) ? ϕj = f ?
∞∑j=1
xj ⊗ (g ? ϕj) = f ? (g ? x),
Dk(f ? x) =∞∑j=1
xj ⊗Dk(f ? ϕj) =∞∑j=1
xj ⊗ (−1)|k|(Dkf) ? ϕj = (−1)|k|(Dkf) ? x.
Lemma 2.2. Let the group U satisfies the condition (6). Then each of the subspaces
Eνp (X) :=
x =
∫Rn
(Ut ⊗ I)x(t) dt : x(t) ∈ Eνp (Rn;X)
is a Banach space respectively to the norm induced by the mapping
Eνp (Rn;X) 3 x(t) −→ x ∈ Eνp (X).
Proof. Let us show that the mapping Eνp (Rn;X) 3 x(t) −→ x ∈ X is continuous. From (8)we obtain
x =
∫Rn
[ ∞∑j=1
Utxj ⊗ ϕj(t)]dt =
∞∑j=1
∫Rn
Utxj ⊗ ϕj(t) dt =∞∑j=1
ϕj(A)xj.
From this and using the estimate (7), we have
‖x‖ ≤∞∑j=1
‖xj‖ ‖ϕj(A)‖L(X ) ≤ ‖U‖q∞∑j=1
‖xj‖ ‖ϕj‖Eνp.
Using the arbitrary presentation x(t) by absolute convergent series we obtain
‖x‖ ≤ ‖U‖q ‖x(t)‖Eνp (Rn;X)
and the continuity is proved. A kernel of the continuous mapping Eνp (Rn;X) −→ X is closedthen a corresponding factor-space in this kernel is a Banach space. By the definition of thenorm in the space Eνp (X), it is isometric to the constructed factor-space.

82 Lozynska V.Ya.
Lemma 2.3. Let the group U satisfies the condition (6). Then each of the subspaces Eνp (X)
is invariant respectively to the operator
Kf : Eνp (X) 3 x −→ Kf x :=
∫Rn
(Ut ⊗Kf )x(t) dt.
Proof. Taking into account (8) for elements x(t) ∈ Eνp (Rn;X) for any f ∈ E ′p(Rn) we obtain
‖(I ⊗Kf )x(t)‖ ≤∞∑j=1
‖xj‖ ‖Kfϕj‖Eνp≤ ‖Kf‖L(Eν
p )
∞∑j=1
‖xj‖ ‖ϕj‖Eνp
or ‖(I⊗Kf )x(t)‖ ≤ ‖Kf‖L(Eνp (Rn)) ‖x(t)‖Eν
p (Rn;X). Thus the space Eνp (Rn;X) is invariant withrespect to the acting operator I ⊗Kf .
Since Ut ⊗ Kf = (Ut ⊗ I)(I ⊗ Kf ) and I ⊗ Kf : Eνp (Rn;X) −→ Eνp (Rn;X) then byLemma 2.2 for any vector-valued function x(t) ∈ Eνp (Rn;X) we have Kf x ∈ Eνp (X). ThenKf : Eνp (X) −→ Eνp (X). The lemma is proved.
The embeddings Eνp (Rn;X) ⊂ Eµp (Rn;X) are continuous. From this it follows that thenext embeddings Eνp (X) ⊂ Eµp (X) are also continuous. Then a union of these spaces can berepresented as an inductive limit
Ep(X) :=⋃ν
Eνp (X) = lim indν
Eνp (X).
Let us define by L(Ep(X)) an algebra of all linear continuous operators on Ep(X) with astrong operator topology.
Theorem 7. Let the group U satisfies the condition (6). Then the mapping E ′p(Rn) 3 f −→
f(A) ∈ L(Ep(X)), where the linear operator f(A) is defined by the relation
f(A) : Ep(X) 3 x −→ f(A)x :=
∫Rn
(Ut ⊗Kf )x(t) dt ∈ Ep(X),
is a continuous homomorphism of the algebra of symbols E ′p(Rn) onto a subalgebra of algebra
L(Ep(X)) of operators
K : Ep(X) 3 x −→ Kx :=
∫Rn
(Ut ⊗K)x(t) dt ,
where the operator K ∈ L(Ep(Rn)) belongs to the commutant of the group Ts. And we have(Djf)(A) = Aj f(A) (j = 1, . . . , n).
Proof. From Theorem 4 and Corollary 1.1 any operator, that belongs to a commutant ofgroup Ts, has the form Kf , where f ∈ E ′
p(Rn). From Lemma 2.3 and the definition of thespace Eνp (X) it follows that Kf : Eνp (X) −→ Eνp (X) for every ν. From the definition of thenorm in Eνp (X) we have xm → x if and only if xm(t) → x(t) in the space Eνp (Rn;X). If
Exponential type distributions and a generalized functional calculus 83
xm(t) → x(t) then from continuity of Kf it follows, that (I ⊗Kf )xm(t) → (I ⊗Kf )x(t) inthe space Eνp (Rn;X). From this by the definition of the norm in the space Eνp (X) we obtain(I⊗Kf )xm(t) → (I⊗Kf )x(t). Thus, Kf ∈ L(Eνp (X)) for any ν and therefore Kf ∈ L(Ep(X)) .
From the equality Kf∗g = Kf ·Kg for arbitrary f, g ∈ E ′p(Rn) it follows Kf∗g = Kf · Kg.
Thus, the functional calculus is an algebraic homomorphism from the convolution algebraof distribution onto an algebra of continuous operators on the space Ep(X).
We now prove a continuity of the functional calculus. As in the space E ′p(Rn) a topology
is inducted from E ′p(Rn), and the space E ′
p(Rn) is given a weak topology, then it is enoughto show a continuity of the mapping E ′
p(Rn) 3 f −→ f(A)x ∈ Ep(X) for every x ∈ Eνp (X).
The continuity of E ′p(Rn) 3 f −→ Kf ∈ L(Eνp (Rn)) we obtain from ‖f ? ϕ‖Eν
p≤ ‖fν‖ ‖ϕ‖Eν
p,
where fν is a restricted functional on the subspace Eνp (Rn). Then it will be continuous themapping E ′
p(Rn) 3 f −→ (I ⊗Kf )x(t) ∈ Eνp (Rn;X) for every x(t) ∈ Eνp (Rn;X). Let fm → f
in the space E ′p(Rn). Then (I ⊗ Kfm)x(t) → (I ⊗ Kf )x(t) in the space Eνp (Rn;X). By the
definition of the norm in Eνp (X), we have Kfmx → Kf x in the space Eνp (X). Thus, themapping E ′
p(Rn) 3 f −→ Kf x ∈ Ep(X) is continuous.The rest assertions of the theorem follow from Lemmas 2.1, 2.3 and Theorem 6. The
theorem is proved.
Thus, we found the integral image of the Fourier operator transform in a case of thealgebra of linear continuous functionals on a space of entire function of exponential type,that on the real subspace belongs to Lp(Rn) (1 ≤ p <∞). We also established its multiplicateproperties relatively to the convolution and described its image by way of commutant of thescalar many-parameter shift group.
References
1. Akhiezer N. Lectures on the Theory of Approximation, Moscow, 1965.
2. Balakrishnan A.V. Fractional powers of closed operators and the semigroups generated by them, PacificJ. Math., 10, 2 (1960), 419–439.
3. Bogolyubov N.N., Shyrkov D.V. Introduction in the Theory of Quantum Fields, Moscow, 1984.
4. Bogolyubov N.N., Logunov A.A., Todorov I.T. Basis of Axiomatic Approach in Quantum Field Theory,Moscow, 1969.
5. Dmytryshyn M.I., Lopushansky O.V. Operator calculus on the exponential type vectors of the operatorwith point spectrum, General topology in Banach spaces. – Huntington, New York: NOVA Sci. Publ.,(2001), 137–145.
6. Gorbachuk M.L., Gorbachuk V.I. On the approximation of smooth vectors of a closed operator by entirevectors of exponential type, Ukr. Math. Journal., 47, 5 (1995), 616–628.
7. Grothendieck A. Produits tensoriels topologigues et espases nucleaire, Mem. Amer. Math. Soc., 16 (1955),1–140.
8. Hille E., Phillips R. Functional Analysis and Semi-Groups. AMS, 1957.
9. Iosida K. Functional Analysis. Springer–Verlag, 1965.
10. Lopushansky O.V. Operator calculus on ultrasmooth vectors, Ukr. Math. Journal, 44, 4 (1992), 502–513.
84 Lozynska V.Ya.
11. Lopushansky O.V., Lozynska V.Ya. Analytic distributions of exponential type, Mathematical Methodsand Physicomechanical fields, 42, 4 (1999), 46–55.
12. Lyubich Yu.I., Matsaev V.I. Operators with a Separable Spectrum, Amer. Math. Soc. Transl. (2), 47(1965), 89–129.
13. Nikolsky S.M. Approximation of Functions of Several Variables and Embeddings Theorems, Moscow,1977.
14. Radyno Ya.V. Vectors of exponential type in operator calculus and differential equations, Differentialequations, 21, 9 (1985), 1559–1569.
15. Radzievsky G.V. Direct and inverse theorems in problems of approximation by vectors of finite degree,Math.Sb., 189, 4 (1998), 83–124.
16. Schaefer H. Topological Vector Spaces, Moscow, 1971.
Institute for Applied Problems of Mechanics and Mathematics of NAS of Ukraine,
Lviv, Ukraine
Received 20.11.2009
Revised 15.02.2011
Лозинська В.Я. Розподiли експоненцiального типу i узагальнене функцiональне численнядля генераторiв C0-груп // Карпатськi математичнi публiкацiї. — 2011. — Т.3, 1. — C.73–84.
Описано властивостi простору спряженого до простору цiлих функцiй експоненцiаль-ного типу багатьох комплексних змiнних, що на дiйсному пiдпросторi належать до Lp(Rn)
(1 ≤ p < ∞). У Фур’є–образi цього простору побудовано функцiональне числення длягенераторiв сильно неперервних груп обмежених лiнiйних операторiв, що дiють на довiль-ному банаховому просторi.
Лозинская В.Я. Распределения экспоненциального типа и обощенное функциональное ис-числение для генераторов C0-групп // Карпатские математические публикации. — 2011.— Т.3, 1. — C. 73–84.
Описаны свойства сопряженного пространства к пространству целых функций экспо-ненциального типа многих комплексных переменных, которые на дейсвительном подпро-странстве принадлежат к Lp(Rn) (1 ≤ p < ∞). В Фурье–образе этого пространства по-строено функциональное исчисление для генераторов сильно непрерывных груп ограни-ченных линейных операторов, которые действуют на произвольном банаховом простран-стве.
Карпатськi математичнi Carpathian Mathematical
публiкацiї. Т.3, 1 Publications. V.3, 1
УДК 517.95
Лопушанський А.О.1, Лопушанська Г.П.2, Пасiчник О.В.2
СЛIДИ РОЗВ’ЯЗКIВ ПIВЛIНIЙНИХ РIВНЯНЬ З ДРОБОВОЮ
ПОХIДНОЮ ЗА ЧАСОМ
Лопушанський А.О., Лопушанська Г.П., Пасiчник О.В. Слiди розв’язкiв пiвлiнiйних рiв-нянь з дробовою похiдною за часом // Карпатськi математичнi публiкацiї. — 2011. — Т.3,1. — C. 85–93.
Знайдено достатнi умови iснування узагальнених початкових значень регулярних вобластi розв’язкiв пiвлiнiйних рiвнянь дифузiї при збуреннях дробової похiдної за часом.
Вступ
Багато властивостей розв’язкiв диференцiальних рiвнянь з частинними похiднимипоширюється на випадок рiвнянь iз псевдодиференцiальними операторами, зокремарiвнянь з дробовими похiдними (наприклад, [1], [5], [8], [14], [16], [9], [19]).
У працях [4], [6]-[7], [12], [13], [15], [10] та iнших дослiджувались узагальненi крайовiзначення регулярних в областi розв’язкiв лiнiйних, а в [11] — i пiвлiнiйних гiпоелiпти-чних рiвнянь з частинними похiдними. Доведено, що такi розв’язки належать до ваго-вих просторiв Лебега з вагами порядкiв степенiв вiдстанi вiд точки областi до межi(степiнь залежить вiд характеру сингулярностей узагальнених крайових значень такихрозв’язкiв) i розв’язки з певних вагових Lp-просторiв набувають на межi узагальненихкрайових значень.
У роботi встановлено подiбний результат для пiвлiнiйних рiвнянь з дробовою похiд-ною за часом.
1 Основнi позначення та допомiжнi твердження
Нехай QT = (x, t) : x ∈ R, t ∈ (0, T ], L1,loc(QT ) — простiр функцiй, iнтегровних укожнiй обмеженiй областi, розмiщенiй строго всерединi QT , D(R) = C∞
0 (R), D(QT ) =
2000 Mathematics Subject Classification: 35K55.Ключовi слова i фрази: пiвлiнiйне рiвняння, узагальнена функцiя, ваговий функцiйний простiр, згор-тка, похiдна дробового порядку.
c©Лопушанський А.О., Лопушанська Г.П., Пасiчник О.В., 2011

86 Лопушанський А.О., Лопушанська Г.П., Пасiчник О.В.
C∞0 (QT ), D(QT ) = C
∞,(0)0 (QT ) = ϕ ∈ C∞
0 (QT ) : Dltϕ |t=T = 0, l = 0, 1, 2, . . . — про-
стiр нескiнченно диференцiйовних функцiй з компактними носiями в Qτ , τ < T , D′(R),D′(QT ) — простори лiнiйних неперервних функцiоналiв (узагальнених функцiй) вiд-повiдно на просторах D(R), D(QT ) [3], [17], (f, ϕ) — значення узагальненої функцiїf ∈ D′(Rn) на основнiй функцiї ϕ ∈ D(Rn), n = 1, 2.
Через ∗ позначаємо операцiю згортки узагальненої функцiї g з основною функцiєюϕ ([17, с.111])
(g∗ϕ)(x) = (g(ξ), ϕ(x+ ξ)), g ∈ D′(R), ϕ ∈ D(R).
Зауважимо, що f(x)∗ϕ(x) = f(−x) ∗ ϕ(x) ([3, с.80]).Функцiонал f ∗ g ∈ D′(R), який дiє за правилом (f ∗ g, ϕ) = (f, g∗ϕ), ∀ϕ ∈ D(R),
називається згорткою узагальнених функцiй f та g ([17, с.111]).Для f, g ∈ D′(R), ϕ ∈ D(R) при iснуваннi f∗g правильна рiвнiсть (f∗g)∗ϕ = f ∗(g∗ϕ).
Справдi,
((f ∗ g)∗ϕ)(x) = ((f ∗ g)(ξ), ϕ(x+ ξ)) = (f(y), (g(ξ), ϕ(x+ ξ + y)) =
(f(y), (g∗ϕ)(x+ y)) = (f ∗(g∗ϕ))(x).
Також використовуємо той факт, що при f, g ∈ L1,loc(R)⋂D′
+(R), ϕ ∈ D(R) правильноює рiвнiсть f ∗(g ∗ ϕ) = g ∗ (f ∗ϕ).
Через D′+(R) позначають простiр узагальнених функцiй iз D′(R), якi дорiвнюють
нулю при t < 0 ([3, ст.87]). Простiр D′+(R) є асоцiативною та комутативною алгеброю,
якщо за операцiю множення взяти операцiю згортки, одиницею в D′+(R) є δ-функцiя:
(δ, ϕ) = ϕ(0) для довiльної ϕ ∈ D(R).Використовуємо функцiю fλ ∈ D′
+(R), яка залежить вiд числового параметра λ i єтакою, що fλ(t) = θ(t)tλ−1
Γ(λ)при λ > 0 та fλ(t) = f ′
1+λ(t) при λ ≤ 0, де θ(t) — функцiяХевiсайда, Γ(λ) — гамма-функцiя ([3, с.87]). Справедливими будуть спiввiдношення
fλ ∗ fµ = fλ+µ ([3, c.87]), fλ∗fµ = fλ+µ ([2, c.145]).
При λ > 0 оператор згортки (f−λ∗) в алгебрiD′+(R) називають оператором дробового
диференцiювання (Рiмана-Лiувiлля), а оператор (f−λ∗) — оператором дробового дифе-ренцiювання Вейля ([2, c.133]).
Нехай α ∈ (0; 1). Для v ∈ D(QT ) визначено
f−α(t)∗v(x, t) = f ′1−α(t)∗v(x, t) = −f1−α(t)∗vt(x, t) =
− 1
Γ(1 − α)
T∫t
vη(x, η)
(η − t)αdη = − 1
Γ(1 − α)
∂
∂t
T∫t
v(x, η)
(η − t)αdη, (x, t) ∈ QT .
У [18] введено регуляризовану похiдну Dαt v функцiї v порядку α ∈ (0; 1)
Dαt v(x, t) =
1
Γ(1 − α)
∂
∂t
t∫0
v(x, τ)
(t− τ)αdτ − f1−α(t)v(x, 0), (x, t) ∈ QT .

Слiди розв’язкiв пiвлiнiйних рiвнянь з дробовою похiдною за часом 87
Зауважимо, що за умови iснування неперервної функцiї vt(x, t), (x, t) ∈ QT ,
1
Γ(1 − α)
t∫0
vτ (x, τ)
(t− τ)αdτ =
1
Γ(1 − α)
∂
∂t
t∫0
v(x, τ)
(t− τ)αdτ − f1−α(t)v(x, 0), (x, t) ∈ QT ([2, c.135]).
Нехай ε0 ∈ (0, T ], ε ∈ [0, ε0], QT,ε = (x, t) ∈ QT : ε < t ≤ T.Позначаємо через C2,α(QT ) клас функцiй v(x, t), (x, t) ∈ QT , неперервних, обмеже-
них, двiчi неперервно диференцiйовних за змiнною x в QT , рiвних нулю при t > T , дляяких при кожному ε ∈ (0, ε0] iснують неперервнi в QT,ε функцiї
(f−α(t) ∗ v(x, t))ε =1
Γ(1 − α)
∂
∂t
t∫ε
v(x, τ)
(t− τ)αdτ − f1−α(t− ε)v(x, ε).
Зауважимо, що за умови iснування неперервної vt(x, t), (x, t) ∈ QT маємо
(f−α(t) ∗ v(x, t))ε =
t∫ε
f1−α(t− τ)vτ (x, τ)dτ.
Введемо оператори:Lα : (Lαv)(x, t) ≡ f−α(t)∗v(x, t) − vxx(x, t), (x, t) ∈ QT , v ∈ D(QT ),
Lεα : (Lεαv)(x, t) ≡ (f−α(t) ∗ v(x, t))ε − vxx(x, t), x ∈ R, t ∈ (ε, T ], v ∈ C2,α(QT ),
Lregα : (Lregα v)(x, t) ≡ Dαt v(x, t) − vxx(x, t), (x, t) ∈ QT , v ∈ C2,α(QT ) ∩ C(QT ).
Зауважимо, що для v ∈ C2,α(QT )∩C(QT ) визначено (f−α(t) ∗ v(x, t))0 = Dαt v(x, t), а,
отже, L0αv = Lregα v для v ∈ C2,α(QT ) ∩ C(QT ).
Нехай ρ(t) — нескiнченно диференцiйовна невiд’ємна на [0;T ], додатна на (0;T ]
функцiя, яка має порядок tα2 при t → 0 ( lim
t→0+
ρ(t)
tα2
= const) та ρ1(t) ≤ 1 при t ∈ [0;T ].
Прикладом є така функцiя: ρ ∈ C∞[0, T ], що ρ(t) = tα2 при t ∈ [0, ε0
2], ρ(t) = 1 при
t ∈(ε0, T ], ε0 ∈(0, T ), 0 ≤ ρ1(t) ≤ 1 при t ∈ [0;T ]. Її iснування випливає з леми в [3, с.18].Вводимо ваговий функцiйний простiр
Mk(QT ) = u ∈ L1,loc(QT ) : ‖u‖k =
∫QT
ρk(t)|u(x, t)|dxdt < +∞, k ∈ N⋃
0.
Зауважимо, що M0(QT ) = L1(QT ).
Використовуємо функцiйнi простори Dk(QT ) = ϕ ∈ D(QT ) : ρ−kϕ ∈ C(QT ),Xk(QT ) = ϕ ∈ D(QT ) : Lαϕ ∈ Dk(QT ).
Вважаємо, що ϕl → 0, при l → ∞ у Dk(QT ), якщо %−kϕl → 0, при l → ∞ рiвномiрнов QT . Вiдповiдно визначено збiжнiсть ϕl → 0, при l → ∞ уXk(QT ): ϕl → 0 та %−kLαϕl →0, l → ∞ рiвномiрно в QT .
Лема 1.1. Для довiльних числа m ∈ N ∪ 0, функцiї ϕ ∈ D(R) iснують такi функцiїψi ∈ Xm(QT ), i = 1, 2, що ψ1(x, 0) = ϕ(x), (f1−α(t)∗ψ2(x, t))t=0 = ϕ(x), x ∈ R.

88 Лопушанський А.О., Лопушанська Г.П., Пасiчник О.В.
Доведення. Розглянемо функцiю ψ(x, t) = fγ(t)∗( m∑i=0
f iα2
(t) ∗ ϕi(x, t)), де γ ∈ (−1, 0],
ϕi ∈ D(QT ), i = 0,m, ϕ0(x, 0) = ϕ(x), а ϕi при i = 1,m будуть нижче визначатись черезϕ0. Застосовуючи вищезазначенi властивостi згорток, матимемо
(Lαψ)(x, t) = fγ−α(t)∗( m∑i=0
f iα2
(t) ∗ ϕi(x, t))− fγ(t)∗
( m∑i=0
f iα2
(t) ∗ ϕixx(x, t))
=
m∑i=0
f ′1−α+γ(t)∗(f iα
2(t) ∗ ϕi(x, t)) − fγ(t)∗
( m∑i=0
f iα2
(t) ∗ ϕixx(x, t))
=
f ′1−α+γ(t)∗ϕ0(x, t) −
m∑i=1
f1−α+γ(t)∗(f (i−1)α2
+α2−1
(t) ∗ ϕi(x, t))−
fγ(t)∗( m∑i=0
f iα2
(t) ∗ ϕixx(x, t))
= −f1−α+γ(t)∗ϕ0t(x, t)−
m−1∑j=0
f1−α+γ(t)∗(f jα
2(t) ∗ fα
2−1(t) ∗ ϕj+1(x, t)
)− fγ(t)∗
( m∑j=0
f jα2
(t) ∗ ϕjxx(x, t))
=
−f1−α+γ(t)∗ϕ0t(x, t) − fmα2
(t) ∗(fγ(t)∗ϕmxx(x, t)
)−
m−1∑j=0
f jα2
(t) ∗(f1−α+γ(t)∗(fα
2−1(t) ∗ ϕj+1(x, t)) + fγ(t)∗ϕjxx(x, t)
)=
−f1−α+γ(t)∗[ϕ0t(x, t) + fα2−1(t) ∗ ϕ1(x, t)] − fγ(t)∗ϕ0xx(x, t)−
m−1∑j=1
f jα2
(t) ∗(f1−α+γ(t)∗(fα
2−1 ∗ϕj+1(x, t)) + fγ(t)∗ϕjxx(x, t)
)− fmα
2(t) ∗
(fγ(t)∗ϕmxx(x, t)
).
Вибираємо f1−α+γ(t)∗[ϕ0t(x, t) + fα2−1(t) ∗ ϕ1(x, t)] + fγ(t)∗ϕ0xx(x, t) = 0,
f1−α+γ(t)∗(fα2−1 ∗ ϕj+1(x, t)) + fγ(t)∗ϕjxx(x, t), j = 1,m− 1,
тобтоϕ0t(x, t) + fα
2−1(t) ∗ ϕ1(x, t) + fα−1(t)∗ϕ0xx(x, t) = 0,
fα2−1(t) ∗ ϕj+1(x, t) + fα−1(t)∗ϕjxx(x, t) = 0, j = 1,m− 1,
звiдки визначаємо ϕj ∈ D(QT ), j = 1,m:
ϕ1(x, t) = f1−α2(t) ∗ [fα(t)∗ϕ0xxt(x, t) − ϕ0t(x, t)],
ϕj+1(x, t) = f1−α2(t) ∗ [fα(t)∗ϕjxxt(x, t)], j = 1,m− 1.
Тодi (Lαψ)(x, t) = −fmα2
(t) ∗(fγ(t)∗ϕmxx(x, t)
).
Оскiльки функцiя ϕm(x, t) = −fγ(t)∗ϕmxx(x, t) = fγ+1(t)∗ϕmxxt(x, t) належить D(QT )
(а, отже, обмежена в QT ), то стає зрозумiло, що

Слiди розв’язкiв пiвлiнiйних рiвнянь з дробовою похiдною за часом 89
ρ−m(t)Lαψ(x, t) = ρ−m(t)(fmα2
(t) ∗ ϕm(x, t)) =ρ−m(t)
m!
t∫0
(t− τ)mα2
−1ϕm(x, τ)dτ
є неперервною функцiєю в QT .При γ = 0 матимемо шукану функцiю ψ1(x, t), а при γ = α − 1 — функцiю ψ2(x, t).
Справдi, за побудовою
ψ1(x, 0) =m∑i=0
(f iα2
(t) ∗ ϕi(x, t))t=0 = (f0(t) ∗ ϕ0(x, t))t=0 +m∑i=1
(f iα2
(t) ∗ ϕi(x, t))t=0 =
(δ(t) ∗ ϕ0(x, t))t=0 = ϕ0(x, 0) = ϕ(x),
(f1−α(t)∗ψ2(x, t))|t=0 =[f1−α(t)∗
(fα−1(t)∗
m∑i=0
(f iα2
(t) ∗ ϕi(x, t)))]∣∣∣
t=0=
m∑i=0
(f iα2
(t) ∗ ϕi(x, t))|t=0 = ϕ0(x, 0) = ϕ(x).
2 Узагальненi початковi значення регулярних розв’язкiв
Означення 2.1. Кажуть ([17, c.46]), що узагальнена функцiя f ∈ D′(R) має порядоксингулярностi s(f) ≤ p, якщо
(f, ϕ) =
p∑i=0
∫ +∞
−∞ϕ(i)(x)fi(x)dx ∀ϕ ∈ D(R), fi ∈ L1,loc(R), i = 0, p.
Нехай Cp[a, b] — банахiв простiр p раз неперервно диференцiйовних функцiй на вiд-рiзку [a, b] з нормою ||ϕ||Cp[a,b] = ||ϕ||′p = max
0≤i≤psupx∈[a,b]
|( ∂∂x
)iϕ(x)|, Cp0 (R) — простiр функцiй
iз Cp(R) з компактними носiями на R, Cp0 [a, b] = ϕ ∈ Cp
0 (R) : suppϕ ⊂ [a, b].Згiдно з означенням порядку узагальненої функцiї в [3], теоремою 3 з [3], с. 22 та
зауваженням на с. 23, узагальнена функцiя f ∈ D′(R) має порядок ≤ p, якщо iснуєдодатна стала K, така що для довiльного вiдрiзка [a, b], довiльної ϕ ∈ C∞
0 [a, b]
|(f, ϕ)| ≤ K||ϕ||Cp[a,b]. (1)
Зрозумiло, що для узагальненої функцiї f iз s(f) ≤ p в сенсi [17, c.46], виконується(1) i навпаки, iз (1) випливає, що s(f) ≤ p в сенсi означення з [17]. Така f ∈ (Cp
0 (R))′.
Теорема 1. Нехай функцiя g(x, t, z) ((x, t) ∈ QT , z ∈ R) — неперервна, функцiї uε ∈C2,α(QT,ε) є розв’язками рiвнянь
(Lεαu)(x, t) = g(x, t, u(x, t)), (x, t) ∈ QT,ε, (2)
iснує така u ∈Mk(QT ), що:

90 Лопушанський А.О., Лопушанська Г.П., Пасiчник О.В.
1) uε → u в Mk(QT ) при ε→ 0,
2)∫
QT,ε
g(x, t, uε(x, t))dxdt→∫QT
g(x, t, u(x, t))dxdt, ε→ 0.
Тодi uε(x, ε) набувають при ε = 0 деяких узагальнених початкових значень u0 ∈ D′(R)
порядку сингулярностi ≤ 2k + 2, а саме, iснує така u0 ∈ D′(R), s(u0) ≤ 2k + 2, що
limε→0
+∞∫−∞
uε(x, ε)ϕ(x)dx = (u0, ϕ) ∀ϕ ∈ D(R). (3)
Доведення. Для довiльної ψ ∈ Xk(QT ) визначимо ψε(x, t) = ψ(x, t − ε), t ∈ [ε, T + ε],ε ∈ [0, ε0/2]. Тодi ψε(x, t) → ψ(x, t) та %−k(t − ε)(Lαψε)(x, t) → %−k(t)(Lαψ)(x, t), ε → 0
рiвномiрно в QT (ψε → ψ в Xk(QT )).В областi QT,ε для v ∈ C2,α(QT ) та вибраної ψε правильною буде формула Грiна
∫QT,ε
(Lεαv)(x, t)ψε(x, t)dxdt =
∫QT,ε
v(x, t)(Lαψε)(x, t)dxdt−+∞∫
−∞
v(x, ε)[f1−α(t)∗ψε(x, t)
]∣∣∣t=εdx. (4)
Справдi,∫QT,ε
v(x, t)(Lαψε)(x, t)dxdt =
∫QT,ε
v(x, t)(f−α(t)∗ψε(x, t) − ψεxx(x, t)
)dxdt;
∫QT,ε
v(x, t)(f−α(t)∗ψε(x, t)
)dxdt = −
+∞∫−∞
dx
T∫ε
v(x, τ)(f1−α(τ)∗∂ψε(x, τ)
∂τ
)dτ =
−+∞∫
−∞
dx
T+ε∫ε
( t∫ε
f1−α(t− τ)v(x, τ)dτ)∂ψε(x, t)
∂tdt =
+∞∫−∞
dx
T∫ε
( ∂∂t
t∫ε
f1−α(t− τ)v(x, τ)dτ)ψε(x, t)dt =
+∞∫−∞
dx
T∫ε
ψε(x, t)(f−α(t) ∗ v(x, t))εdt+
+∞∫−∞
v(x, ε)dx
T+ε∫ε
f1−α(t− ε)ψε(x, t)dt.
Також ∫QT
v(x, t)ψεxx(x, t)dxdt =
∫QT
vxx(x, t)ψε(x, t)dxdt,
T+ε∫ε
f1−α(t− ε)ψε(x, t)dt =[f1−α(t)∗ψε(x, t)
]∣∣∣t=ε
=
T∫0
f1−α(t)ψ(x, t)dt =[f1−α(t)∗ψ(x, t)
]∣∣∣t=0.

Слiди розв’язкiв пiвлiнiйних рiвнянь з дробовою похiдною за часом 91
Враховуючи цi перетворення, будемо мати формулу (4).Нехай функцiя uε ∈ C2,α(QT,ε) i є розв’язком рiвняння (2) в QT,ε. Iз формули (4) для
v = uε та побудованої вище ψε маємо∫QT,ε
uε(x, t)(Lαψε)(x, t)dxdt−∫
QT,ε
g(x, t, uε(x, t))ψε(x, t)dxdt =
+∞∫−∞
uε(x, ε)[f1−α(t)∗ψε(x, t)
]∣∣∣t=εdx.
(5)Виберемо тепер ψε(x, t) за функцiєю ψ2(x, t), визначеною лемою 1.1 для довiльної ϕ ∈D(R) при m = k. Тодi за лемою 1.1
(f1−α(t)∗ψε(x, t)) |t=ε = (f1−α(t)∗ψ2(x, t)) |t=0 =
T∫0
f1−α(t)ψ2(x, t)dt = ϕ(x), (6)
(Lαψε)(x, t) = %k(t− ε) · %−k(t− ε)(Lαψε)(x, t) = %k(t− ε) · ϕε(x, t),
де функцiя ϕε(x, t) — нескiнченно диференцiйовна й обмежена в QT,ε, а за побудовоюϕε → ϕ, ε→ 0 у D(QT ).
За умовою 1 теореми послiдовнiсть функцiоналiв∫
QT,ε
uε(x, t)%k(t) · ϕ(x, t)dxdt обме-
жена та iснує limε→0
∫QT,ε
uε(x, t)%k(t) · ϕ(x, t)dxdt =∫QT
u(x, t)%k(t) · ϕ(x, t)dxdt. Тодi за влас-
тивiстю збiжної послiдовностi узагальнених функцiй uε(x, t) (лема з [17, с.70]) iснує
limε→0
∫QT,ε
uε(x, t)%k(t− ε) · ϕε(x, t)dxdt = limε→0
∫QT,ε
uε(x, t) limε→0
(%k(t− ε) · ϕε(x, t)
)dxdt =
limε→0
∫QT,ε
uε(x, t)%k(t) · ϕ(x, t)dxdt =
∫QT
u(x, t)%k(t) · ϕ(x, t)dxdt.
З умови 2 теореми так само одержуємо iснування границi
limε→0
∫QT,ε
g(x, t, uε(x, t))ψε(x, t)dxdt = limε→0
∫QT,ε
g(x, t, uε(x, t))(limε→0
ψε(x, t))dxdt
= limε→0
∫QT,ε
g(x, t, uε(x, t))ψ(x, t)dxdt =
∫QT,0
g(x, t, u(x, t)ψ(x, t)dxdt.
В (5) при вибранiй ψε(x, t) за функцiєю ψ2(x, t) спрямуємо ε до нуля. Зi встановленоговище iснування границi при ε→ 0 лiвої частини рiвностi (5), а отже, й правої, та iз (6)
випливає iснування limε→0
+∞∫−∞
uε(x, ε)ϕ(x)dx ∀ϕ ∈ D(R).
Введемо функцiонал u0 на D(R) наступним чином (u0, ϕ) = limε→0
+∞∫−∞
uε(x, ε)ϕ(x)dx,
∀ϕ ∈ D(R). Очевидно, вiн — лiнiйний. З формули (5) випливає, що
(u0, ϕ) =
∫QT
u(x, t)(Lαψ2)(x, t)dxdt−∫QT
g(x, t, u(x, t))ψ2(x, t)dxdt. (7)
92 Лопушанський А.О., Лопушанська Г.П., Пасiчник О.В.
З доведення леми 1.1 видно, що вибрана функцiя ψ2 є лiнiйною функцiєю похiднихдопомiжної функцiї ϕ0 за змiнною x до порядку 2k та за змiнною t до порядку k, аρ−k(t)(Lαψ)(x, t) = ϕ(x, t), де ϕ лiнiйно виражається через функцiю ϕ0 та її похiднi заx до порядку 2k + 2 та за t до порядку k + 1. Функцiя ϕ0 є довiльним продовженнямфункцiї ϕ з D(R) до функцiї iз D(QT ), таким що ϕ0(x, 0) = ϕ(x). Можна вибратиϕ0(x, t) = η(t) · ϕ(x), де η ∈ C∞[0, T ], η(t) = 1 для t ∈ [0, ε0/2], η(t) = 0 для t ∈ [ε0, T ].
Нехай [a, b] = suppϕ, B = [a, b]× [0, T ]. Тодi supB
|ψ| ≤ C‖ϕ‖′2k, Lαψ(x, t) = ρk(t)ϕ(x, t)
та supB
|ϕ| ≤ C‖ϕ‖′2k+2, де C, C — додатнi сталi.
Тепер iз (7) одержуємо, що для довiльної ϕ ∈ D(R)
|(u0, ϕ)| ≤ C‖u‖k · ‖ϕ‖′2k+2 + C
∫QT
|g(x, t, u(x, t))|dxdt · ‖ϕ‖′2k ≤ C‖ϕ‖′2k+2,
де C = C(u, k) — додатна стала. Отже, функцiонал u0 — неперервний на C2k+20 (R).
Згiдно з означенням порядку сингулярностi узагальненої функцiї, s(u0) ≤ 2k + 2.
Одержаний результат поширюється на випадок рiвняння
f−α(t) ∗ u = A(x,D)u+ g(x, t, u), (x, t) ∈ Rn × (0;T ],
де A(x,D) — лiнiйний елiптичний диференцiальний вираз другого порядку з нескiнчен-но диференцiйовними коефiцiєнтами в Rn.
Лiтература
1. Агранович М.С. Эллиптические сингулярные интегро-дифференциальные операторы // Успехиматем. наук. — 1965. — Т.20, 5. — C. 3–120.
2. Бейтмен Г., Эрдейи А. Таблицы интегральных преобразований. Преобразования Бесселя. Инте-гралы от специальных функций (Серия: СМБ). — М.: Наука, 1970. — 328 c.
3. Владимиров В.С. Обобщенные функции в математической физике — М.: Наука, 1979. — 320 с.
4. Горбачук В.И., Горбачук М.Л. О начальных данных гладких решений некоторых классов парабо-лических уравнений // Успехи мат. наук. — 1979. — Т.34, 4. — С. 164.
5. Городецкий В.В., Дринь Я.М. Параболические псевдодифференциальные уравнения в простран-стве обобщенных функций // Препр. АН Украины. Ин-т прикл. пр. мех. и мат. 4–91. — Львов,1991. — 57 с.
6. Грушин В.В. О поведении решений дифференциальных уравнений вблизи границы // Докл. АНСССР. — 1964. — Т.158. — С. 264–267.
7. Гупало А.С., Лопушанская Г.П. Об обобщенных граничных значениях решения однородного па-раболического уравнения второго порядка // Методы исследования дифференциальных и интер-гральных операторов. —К.: Наук. думка, — 1989.— C.54–59.
8. Кочубей А.Н. Диффузия дробного порядка // Дифференциальные уравнения. — 1990. — Т.26, 4.— C. 660–670.
9. Лопушанська Г.П. Основнi граничнi задачi для одного рiвняння в дробових похiдних // Укр. мат.журн. — 1999. — Т.51, 1. — C. 48–59.
Слiди розв’язкiв пiвлiнiйних рiвнянь з дробовою похiдною за часом 93
10. Лопушанська Г.П. Крайовi задачi у просторi узагальнених функцiй D′: Монографiя. — Львiв:Видавничий центр ЛНУ iменi Iвана Франка, 2002. — 287с.
11. Лопушанська Г., Чмир О. Узагальненi крайовi значення розв’язкiв пiвлiнiйних елiптичних тапараболiчних рiвнянь // Нелiнiйнi граничнi задачi. — 2007. — Т.17. — C. 50–73.
12. Лопушанский А.О. Абстрактная параболическая задача Коши в комплекмных интерполяционныхшкалах // Дифференц. уравнения. — 2010. — Т.46, 12. — C. 1799–1803.
13. Михайлов В.П. О граничных свойствах решений эллиптических уравнений // Мат. заметки. —1980. — Т.27, 1. – С. 137–145.
14. Мурач А.А. Эллиптические псевдодифференциальные операторы в уточненной шкале прос-транств // Укр. матем. журн. — 2007. — Т.59, 6. — С. 798–814.
15. Петрушко И.М. О граничных и начальных значениях решений параболического уравнения второгопорядка // Докл. АН СССР. — 1962. — Т.266, 3. — С. 557–560.
16. Эйдельман С.Д., Дринь Я.М. Построение и исследование классических фундаментальных реше-ний задачи Коши равномерно параболических псевдодифференциальных уравнений // Матем. ис-следования (Кишинев). — 1981. — Вып. 63. — С. 18–83.
17. Шилов Г.Е. Математический анализ. Второй специальний курс. —М.: Наука, 1965. — 328 с.
18. Caputo M. Liner model of dissipation whose Q is almost frequency independent, II. Geophys. J. R. Astr.
Soc. 13 (1967), 520–539.
19. S.D. Eidelman, S.D. Ivasyshen, A.N. Kochubei, Analytic methods in the theory of differential and
pseudo-differential equations of parabolic type, Birkhauser Verlag, Basel-Boston-Berlin, 2004. — 390 p.
1Iнститут математики Жешувського унiверситету,
Жешув, Польща,
2Львiвський нацiональний унiверситет iменi Iвана Франка,
Львiв, Україна
Надiйшло 05.01.2011
Lopushansky A., Lopushanska H., Pasichnyk O. The traces of the solutions of the semi-linear
equations with fractional derivative with respect to time, Carpathian Mathematical Publica-
tions, 3, 1 (2011), 85–93.
The sufficient conditions of the existence of the generalized initial values of the regular
in domain solutions for semi-linear diffusion equations under perturbations of the fractional
derivative with respect to time are obtained.
Лопушанский А.О., Лопушанская Г.П., Пасичник Е.В. Следы решений полулинейныхуравнений с дробной производной по времени // Карпатские математические публикации.— 2011. — Т.3, 1. — C. 85–93.
Найдены достаточные условия существования обобщенных начальных значений регу-лярных в области решений полулинейных уравнений диффузии при возмущениях дробнойпроизводной по времени.
Карпатськi математичнi Carpathian Mathematical
публiкацiї. Т.3, 1 Publications. V.3, 1
УДК 517.927
Махней О.В.1, Тацiй Р.М.2
РОЗВИНЕННЯ ЗА ВЛАСНИМИ ВЕКТОР-ФУНКЦIЯМИ У ВИПАДКУ
ПРОСТИХ ВЛАСНИХ ЗНАЧЕНЬ СИНГУЛЯРНОГО
ДИФЕРЕНЦIАЛЬНОГО ОПЕРАТОРА
Махней О.В., Тацiй Р.М. Розвинення за власними вектор-функцiями у випадку простихвласних значень сингулярного диференцiального оператора // Карпатськi математичнiпублiкацiї. — 2011. — Т.3, 1. — C. 94–105.
Асимптотичнi формули при великих значеннях параметра для розв’язкiв сингулярногодиференцiального рiвняння дозволяють оцiнити функцiю Ґрiна крайової задачi. За допо-могою цiєї оцiнки побудовано розвинення за власними вектор-функцiями сингулярногодиференцiального оператора у випадку простих власних значень.
Вступ
Лiнiйнi диференцiальнi оператори, породженi диференцiальними виразами з глад-кими коефiцiєнтами, вивчено досить добре (див., наприклад, [9]). Однак, в задачахприкладного характеру часто зустрiчаються розривнi чи навiть узагальненi функцiї вкоефiцiєнтах. Такi задачi є значно гiрше дослiдженими.
Ще в серединi 50-х рокiв минулого столiття вивчались крайовi задачi для звичайнихдиференцiальних рiвнянь другого й четвертого порядкiв, що описують вiльнi коливанняструни i балки, якi крiм неперервно розподiленої маси несуть на собi ще й зосередженiточковi маси — бусинки (див. [3]). В монографiї [1] дослiджується оператор Шредiнгерана необмеженому промiжку у випадку, коли сингулярний потенцiал є, наприклад, скiн-ченною чи нескiнченною сумою δ-функцiй Дiрака. У випадку скалярного сингулярногодиференцiального оператора побудовано функцiю Ґрiна та дослiджено асимптотичнуповедiнку власних значень i власних функцiй, а також здiйснено розвинення за остан-нiми у роботах [4, 7, 5].
Слiд зазначити, що спряженi диференцiальнi вирази мiстять доданки вигляду(P (x)Y )(j), якi при недостатнiй гладкостi не можна звести за допомогою j-кратногодиференцiювання до звичайних диференцiальних. Щоб пiдкреслити цю обставину, їх улiтературi називають квазiдиференцiальними.
2000 Mathematics Subject Classification: 34B05, 34L10.Ключовi слова i фрази: власнi функцiї, розподiли, мiри.
c©Махней О.В., Тацiй Р.М., 2011

Розвинення за власними вектор-функцiями 95
Квазiпохiднi — це компоненти вектора, за допомогою якого здiйснюється зведен-ня квазiдиференцiального рiвняння до системи диференцiальних рiвнянь першого по-рядку. Мабуть, першим, хто ввiв поняття квазiпохiдних, яке дозволяє вiдмовитись вiдвимог гладкостi коефiцiєнтiв у квазiдиференцiальних виразах, був Д. Шин [13].
Ця стаття присвячена побудовi розвинення вектора за власними вектор-функцiямидиференцiального оператора, породженого диференцiальним виразом з розривними чинавiть узагальненими матрицями-коефiцiєнтами i регулярними крайовими умовами, щоузагальнює результати § 9 монографiї [9].
1 Постановка задачi
Розглянемо диференцiальний вираз
Ln(Y ) ≡ Y (n) + A2(x)Y (n−2) + A3(x)Y (n−3) + . . .+ An(x)Y ,
де Ai = B′i, Bi(x) (i = 2, n) — матрицi-функцiї l-го порядку, елементами яких є непе-
рервнi справа функцiї обмеженої на промiжку [a, b] варiацiї, Y (x) — вектор-стовпець.Тут штрихом позначено узагальнене диференцiювання, i тому елементи матриць Ai(x)
є мiрами (див. [12]). Розглянемо також вiдповiдне диференцiальному виразу Ln(Y ) рiв-няння
Ln(Y ) = λY , (1)
де λ — комплексний параметр, i крайовi умови
Uν(Y ) ≡ Γν Y(kν)(a) + ∆ν Y
(kν)(b) +kν−1∑j=0
ΓνjY(j)(a) +
kν−1∑j=0
∆νjY(j)(b), ν = 1, n, (2)
якi задаються за допомогою n лiнiйно незалежних форм Uν(Y ); Γν , ∆ν , Γνj, ∆νj — сталiматрицi l-го порядку; n − 1 ≥ k1 ≥ k2 ≥ . . . ≥ kn ≥ 0, ks+2 < ks, причому для кожногозначення iндексу ν хоча б одна з матриць Γν , ∆ν вiдрiзняється вiд нульової.
Поряд з крайовою задачею (1), (2) для векторного диференцiального рiвняння роз-глянемо також асоцiйовану їй крайову задачу для матричного диференцiального рiвня-ння
Ln(Y ) = λY, (3)
Uν(Y ) ≡ ΓνY(kν)(a) + ∆νY
(kν)(b) +kν−1∑j=0
ΓνjY(j)(a) +
kν−1∑j=0
∆νjY(j)(b), ν = 1, n, (4)
де Y (x) — квадратна матриця l-го порядку.За допомогою прямокутної матрицi Y = (Y, Y ′, . . . , Y (n−1))T матричне рiвняння (3)
зводиться до системи диференцiальних рiвнянь першого порядку
Y ′ = B′(x)Y (5)

96 Махней О.В., Тацiй Р.М.
або в розгорнутому (блочному) виглядiY
Y ′
· · ·Y (n−2)
Y (n−1)
′
=
0 E · · · 0 0
0 0. . . 0 0
· · · · · · · · · . . . · · ·0 0 · · · 0 E
λ− An −An−1 · · · −A2 0
Y
Y ′
· · ·Y (n−2)
Y (n−1)
.
Крайовi умови (4) теж можна переписати у матричному виглядi
WaY(a) +WbY(b) = 0,
де блочнi матрицi Wa = (Γν,j−1)nν,j=1, Wb = (∆ν,j−1)
nν,j=1. Оскiльки для стрибка матрицi-
функцiї B(x) має мiсце тотожнiсть [∆B(x)]2 ≡ 0, то система (5) є коректною (див. [10]).Пiд розв’язком матричного диференцiального рiвняння будемо розумiти першу бло-
чну компоненту Y (x) прямокутної матрицi Y(x) системи (5), що задовольняє його в сенсiтеорiї узагальнених функцiй. В роботi [11] встановлено, що розв’язок початкової задачiдля рiвняння (3) iснує i єдиний, причому вiн разом зi своїми похiдними до порядку n−2
включно є абсолютно неперервним, а його (n − 1)-ша похiдна складається з функцiй,якi мають обмежену варiацiю на промiжку [a, b] i є там неперервними справа.
Диференцiальний вираз Ln(Y ) i крайовi умови (2) породжують диференцiальнийоператор L, який дiє з простору абсолютно неперервних вектор-функцiй у простiрвекторiв-мiр.
Система, спряжена до системи (5), визначається матричною рiвнiстю
Z ′ = −(B∗(x))′Z, (6)
де Z =(Zn−1, . . . , Z1, Z
)T , “*” — ермiтове спряження, а фiгурнi дужки означаютьквазiпохiднi в сенсi спряженого рiвняння (див. [11]). В роботi [11] встановлено, що вонивизначаються формулами
Z0 df=Z, Zi = A∗iZ −
(Zi−1)′ , i = 1, n− 1.
З (6) видно (див. [11]), що спряжене до (3) диференцiальне рiвняння має вигляд
L∗n(Z) ≡ (−1)nZ(n) +
n∑i=1
(−1)n−i(A∗iZ)(n−i) = λZ,
де риска над λ означає комплексне спряження.Диференцiальний вираз L∗
n(Y ) i крайовi умови, спряженi до (2) (вони побудованi вроботi [6]), породжують диференцiальний оператор L∗, який дiє з простору абсолютнонеперервних вектор-функцiй у простiр векторiв-мiр.
Означення 1.1. При непарному n (n = 2µ−1) крайовi умови (2) назвемо регулярнимидля розглядуваної задачi (1), (2), якщо числа θ0 i θl, що визначаються спiввiдношенням
θ0 + θ1s+ . . .+ θlsl =
∣∣∣∣∣∣∣∣∣Γ1ω
k11 · · · Γ1ω
k1µ−1 (Γ1 + s∆1)ω
k1µ ∆1ω
k1µ+1 · · · ∆1ω
k1n
Γ2ωk21 · · · Γ2ω
k2µ−1 (Γ2 + s∆2)ω
k2µ ∆2ω
k2µ+1 · · · ∆2ω
k2n
· · · · · · · · · · · · · · · · · · · · ·Γnω
kn1 · · · Γnω
knµ−1 (Γn + s∆n)ωknµ ∆nω
knµ+1 · · · ∆nω
knn
∣∣∣∣∣∣∣∣∣ ,

Розвинення за власними вектор-функцiями 97
вiдрiзняються вiд нуля. При парному n (n = 2µ) крайовi умови (2) називатимемо ре-гулярними для цiєї задачi, якщо будуть вiдмiнними вiд нуля числа θ−l i θl, що визна-чаються рiвнiстю
θ−lsl
+ . . .+θ−1
s+ θ0 + θ1s+ . . .+ θls
l =∣∣∣∣∣∣∣∣∣Γ1ω
k11 · · · Γ1ω
k1µ−1 (Γ1 + s∆1)ω
k1µ
(Γ1 + 1
s∆1
)ωk1µ+1 ∆1ω
k1µ+2 · · · ∆1ω
k1n
Γ2ωk21 · · · Γ2ω
k2µ−1 (Γ2 + s∆2)ω
k2µ
(Γ2 + 1
s∆2
)ωk2µ+1 ∆2ω
k2µ+2 · · · ∆2ω
k2n
· · · · · · · · · · · · · · · · · · · · · · · ·Γnω
kn1 · · · Γnω
knµ−1 (Γn + s∆n)ωknµ
(Γn + 1
s∆n
)ωknµ+1 ∆nω
knµ+2 · · · ∆nω
knn
∣∣∣∣∣∣∣∣∣ .
2 Оцiнка функцiї Ґрiна
Не втрачаючи загальностi, будемо вважати, що LY = 0 лише при Y = 0. Справдi,в протилежному випадку досить замiнити Ln(Y ) виразом Ln(Y ) − cY , де c — довiльнечисло, вiдмiнне вiд усiх власних значень оператора L. Таке число iснує, оскiльки асимп-тотичнi формули свiдчать, що цей оператор має лише злiченну множину власних зна-чень (див. [8]). Нехай усi власнi значення оператора L є простими, G(x, t, λ) — функцiяҐрiна задачi (3), (4), оператор L має матрицю-функцiю Ґрiна G(x, t) = G(x, t, 0).
Покладемо тепер λ = −ρn i розiб’ємо всю комплексну ρ-площину на 2n секторiв Sq,q = 0, 2n− 1, де Sq = ρ : qπ/n ≤ arg ρ ≤ (q + 1)π/n. Через Tq позначимо сектор (звершиною у точцi ρ = −c), що утворюється з Sq шляхом зсуву ρ→ ρ+ c.
Розглянемо в комплекснiй λ-площинi послiдовнiсть кiл Γk, k = 1, 2, . . ., зi спiльнимцентром у початку координат, якi мають такi властивостi:
1) радiус Rk кола Γk необмежено зростає при k → ∞;2) iснує додатне число δ, таке, що прообрази ρk в S0∪S1 власних значень оператора L
при вiдображеннi λ = −ρn знаходяться для досить великих k на вiдстанi, не меншiй нiжδ, вiд прообразiв кожного з кiл Γk. На пiдставi асимптотичних властивостей власнихзначень такi кола Γk iснують.
Розглянемо також iнтеграл Ik = 12πi
∫Γk
G(x,t,λ)λ
dλ. Застосувавши до нього теорему про
лишки, отримаємо
Ik = G(x, t) +
mk∑ν=1
Qν(x, t)
λν, (7)
де Qν(x, t) — лишок функцiї G(x, t, λ) вiдносно її полюса λν (який припускаємо про-стим), а mk — число цих полюсiв у крузi Γk.
Теорема 1. У випадку регулярних крайових умов на колах Γk кожен елемент матрицi-функцiї G(x, t, λ) задовольняє нерiвнiсть
|Gij(x, t, λ)| ≤M |λ|1−nn , i, j = 1, l, (8)
де M — деяка стала.

98 Махней О.В., Тацiй Р.М.
Доведення. При вiдповiдному виборi arg ρ при вiдображеннi λ = −ρn коло Γk пере-ходить у дугу γk кола з центром у початку координат i центральним кутом 2π
n, що
проходить у двох сусiднiх областях S0, S1 комплексної ρ-площини. Розглянемо окремовипадки парного i непарного n.
а) Нехай n — непарне, n = 2µ − 1. Нехай числа ω1, ω2, . . . , ωn — рiзнi коренi n-гостепеня з числа −1, занумерованi так, що для ρ ∈ S0 виконується ланцюг нерiвностей(див. [9, с. 53])
Re(ρω1) ≤ Re(ρω2) ≤ . . . ≤ Re(ρωn).
Крiм того, можна показати [9, с. 75], що при ρ ∈ S0 маємо
Re(ρω1) ≤ 0, . . . , Re(ρωµ−1) ≤ 0, Re(ρωµ+1) ≥ 0, . . . , Re(ρωn) ≥ 0. (9)
Нехай γ′k — та частина дуги γk, що знаходиться в областi S0 i на якiй Re(ρωµ) ≤ 0,а γ′′k — та її частина, що теж мiститься у цiй областi i на якiй Re(ρωµ) ≥ 0. Оцiнимофункцiю Ґрiна Gij(x, t, λ) на дузi γ′k, скориставшись формулами з [6]:
G(x, t, λ) = (−1)nl1
∆(λ)
Q11 · · · Q1l
· · · · · · · · ·Ql1 · · · Qll
, (10)
де∆(λ) = det
(Uν(K
∗k−1∗(x, a, λ))nν,k=1
,
Qij(x, t, λ) =
∣∣∣∣∣∣∣∣∣Ki1(x, a, λ) · · · K
∗n−1∗il (x, a, λ) Pij(x, t, λ)
U1(K11(x, a, λ)) · · · U1(K∗n−1∗1l (x, a, λ)) U1(P1j(x, t, λ))
· · · · · · · · · · · ·Un(Kl1(x, a, λ)) · · · Un(K
∗n−1∗ll (x, a, λ)) Un(Plj(x, t, λ))
∣∣∣∣∣∣∣∣∣ , (11)
Pij(x, t, λ) =
Kij(x, t, λ), x > t,
0, x < t,i, j = 1, l,
K(x, t, λ) — матриця-функцiя Кошi рiвняння (3) (за першою змiнною вона задовольняєце рiвняння, крiм того, K(i)(s, s) = 0, i = 0, n− 2, K(n−1)(s, s) = E, E — одиничнаматриця l-го порядку).
Матрицi-функцiї K(x, a, λ), K∗1∗(x, a, λ), . . . , K∗n−1∗(x, a, λ) утворюють фунда-ментальну систему розв’язкiв матричного рiвняння (3). У той же час їх можна податияк лiнiйну комбiнацiю деякої iншої лiнiйно незалежної системи розв’язкiв цього рiв-няння. Нехай Yk = (ykij)
li,j=1 — будь-яка фундаментальна система розв’язкiв матричного
рiвняння (3). Тодi K∗p−1∗(x, t, λ) =n∑k=1
Yk(x, λ)Ckp(t, λ), p = 1, n, i, як наслiдок,
Uν(K∗p−1∗(x, t, λ)) =
n∑k=1
Uν(Yk(x, λ))Ckp(t, λ), p = 1, n.

Розвинення за власними вектор-функцiями 99
Отже, використовуючи блочне множення матриць, запишемо: U1(Y1) · · · U1(Yn)
· · · · · · · · ·Un(Y1) · · · Un(Yn)
·
C11 · · · C1n
· · · · · · · · ·Cn1 · · · Cnn
=
U1(K(x, t, λ)) · · · U1(K∗p−1∗(x, t, λ))
· · · · · · · · ·Un(K(x, t, λ)) · · · Un(K∗p−1∗(x, t, λ))
.
Враховуючи властивiсть визначникiв, отримаємо, що ∆(λ) = ∆(λ)C(λ), де ∆(λ) =
det (Uν(Yk))nν,k=1, C(λ) = det (Cνk)
nν,k=1. Аналогiчними мiркуваннями, з урахуванням то-
го, що (11) можна записати за елементами останнього стовпця i першого рядка, вста-новлюємо, що Qij(x, t, λ) = Qij(x, t, λ)C(λ), де
Qij(x, t, λ) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
y1i1 · · · y1il · · · yni1 · · · ynil PijU1(y111) · · · U1(y11l) · · · U1(yn11) · · · U1(yn1l) U1(P1j)
· · · · · · · · · · · · · · · · · · · · · · · ·U1(y1l1) · · · U1(y1ll) · · · U1(ynl1) · · · U1(ynll) U1(Plj)
· · · · · · · · · · · · · · · · · · · · · · · ·Un(y111) · · · Un(y11l) · · · Un(yn11) · · · Un(yn1l) Un(P1j)
· · · · · · · · · · · · · · · · · · · · · · · ·Un(y1l1) · · · Un(y1l) · · · Un(ynl1) · · · Un(ynll) Un(Plj)
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣. (12)
Тодi формулу (10) перепишемо у виглядi
Gij(x, t, λ) = (−1)nlQij(x, t, λ)
∆(λ), i, j = 1, l. (13)
Функцiї Yj можна вибрати так, щоб вони разом зi своїми похiдними при доситьвеликих |ρ| задовольняли спiввiдношення
Y(ν)k (x, ρ) = ρνeρωk(x−a)
[ωνkE +O
(1
ρ
)], ν = 0, n− 1, k = 1, n, (14)
де E — одинична матриця l-го порядку, O(
1ρ
)позначає матрицю A(x,ρ)
ρ, а A(x, ρ) —
матрична функцiя, всi елементи якої є обмеженими при досить великому |ρ| (див. [8]).
Згiдно з [14], маємо, що K [j](x, t, λ) =n∑k=1
Y[j]k (x, λ)Zk(t, λ), де кожен елемент матрицi
Zk(t, λ) = (zkpq(t, λ))lp,q=1 є вiдношенням алгебричного доповнення елемента ((n−1)l+q)-го рядка i ((k− 1)l+ p)-го стовпця у визначнику W . Пiдставивши формули (14) замiстьY
[ν]k (t) у вираз для Zk(t, λ) i скоротивши у кожному елементi цiєї матрицi чисельник i
знаменник на ρl, ρ2l, . . . , ρ(n−2)l, ρ(n−1)(l−1), elρωs(t−a), s = 1, n, s 6= k, e(l−1)ρωk(t−a), будемомати
Zk(t, λ) = e−ρωk(t−a) 1
ρn−1〈γkγ〉, (15)

100 Махней О.В., Тацiй Р.М.
де 〈A〉 = A+O(1/ρ) — матриця,
γ =
∣∣∣∣∣∣∣∣∣E E · · · E
ω1E ω2E · · · ωnE
· · · · · · · · · · · ·ωn−11 E ωn−1
2 E · · · ωn−1n E
∣∣∣∣∣∣∣∣∣ ,E — одинична матриця l-го порядку, γk = (γkpq)
lp,q=1, а γkpq — алгебричне доповнення
елемента, що лежить на перетинi ((n − 1)l + q)-го рядка i ((k + 1)l + p)-го стовпця увизначнику γ.
За формулою Фробенiуса [2, с. 56], якщо
M =
(A B
C D
),
де A i D — квадратнi матрицi, причому |A| 6= 0, то
M−1 =
(A−1 + A−1BH−1CA−1 −A−1BH−1
−H−1CA−1 H−1
), H = D − CA−1B.
Застосуємо n − 1 разiв формулу Фробенiуса до матрицi, що вiдповiдає визначнику γ.За матрицю A кожного разу будемо брати помножену на скаляр одиничну матрицюl-го порядку. Матриця H складатиметься з деякої кiлькостi таких самих блокiв, щой вихiдна матриця, внаслiдок властивостей блочного множення матриць i того, щообернена до одиничної матрицi теж є одиничною. На пiдставi цього матриця M−1 тежскладатиметься з n2 подiбних блокiв. Тому γkpq = 0 для всiх k i p 6= q (внаслiдок зв’язкуалгебричних доповнень елементiв матрицi з оберненою до неї).
У той же час повиннi виконуватись спiввiдношення
n∑k=1
ωjkγkppγ
=
0, j = 0, n− 2,
1, j = n− 1,p = 1, l.
Ця система має єдиний розв’язок. З iншого боку, вона справджується при γkppγ
= −ωk
n,
оскiльки ωnk = −1. Отже, формула (15) набуває вигляду
Zk(t, λ) =1
nρn−1e−ρωk(t−a)〈−ωkE〉, k = 1, n. (16)
Пiдставивши вирази (14) у форми Uν(Y ), матимемо
Uν(Yj) = (ρωj)kν 〈Γν〉 + (ρωj)
kνeρωj(b−a)〈∆ν〉. (17)
Отже, на пiдставi нерiвностей (9) справджуються формули
Uν(Ys) =
(ρωs)
kν 〈Γν〉, s = 1, µ− 1,
(ρωs)kν〈Γν〉 + eρωµ(b−a)〈∆ν, s = µ,
(ρωs)kνeρωs(b−a)〈∆ν〉, s = µ+ 1, n.
(18)

Розвинення за власними вектор-функцiями 101
Пiдставивши їх у ∆(λ), отримаємо
∆(λ) =n∏ν=1
ρlkνn∏
s=µ+1
elρωs(b−a)l∑
2=0
〈θs〉esρωµ(b−a) =n∏ν=1
ρlkνn∏
s=µ+1
elρωs(b−a)θl
l∏s=1
〈eρωµ(b−a) − ξs〉,
(19)
причому θs тут тi самi, що й в означеннi регулярних крайових умов, а ξs — коренiрiвняння θ0 + θ1ξ + . . .+ θlξ
l = 0.Розглянемо матрицю-функцiю G(x, t, λ) при x > t (у випадку x < t мiркування
будуть аналогiчними). Тодi останнiй елемент 1-го рядка у визначнику буде Kij(x, t, λ).Помножимо по l стовпцiв визначника Qij(x, t, λ), починаючи з (µl + 1)-го, ((µ + 1)l +
1)-го, . . . , ((n − 1)l + 1)-го, на j-й стовпець матриць −Zµ+1(t), −Zµ+2(t), . . . , −Zn(t)
вiдповiдно i додамо до останнього стовпця. Визначник внаслiдок цього не змiниться.Тодi враховуючи (14), (16) i (17), елементами останнього стовпчика в Qij(x, t, λ) будуть:
1
nρn−1P0 =
〈0〉, i 6= j,
− 1nρn−1
µ∑k=1
eρωk(x−t)〈ωk〉, i = j,
ρkν
nρn−1P0p = − ρkν
nρn−1
µ∑s=1
eρωs(b−t)〈ωkν+1s ∆νpj〉 −
n∑s=µ+1
e−ρωs(t−a)〈ωkν+1s Γνpj〉
,
де ν = 1, n, p = 1, l. Пiдставимо тепер (12), (14), (16), (18), (19), а також вирази дляостаннього стовпця Qij(x, t, λ) в (13) i розподiлимо множники знаменника ∆(λ) такимчином: на ρkν роздiлимо ((ν−1)l+2)-й, ((ν−1)l+3)-й, . . . , (νl+1)-й рядки, на eρωs(b−a) —((s− 1)l+ p)-тi стовпцi, s = µ+ 1, r, p = 1, l, i на 〈eρωµ(b−a)− ξp〉 подiлимо ((µ− 1)l+ p)-тiстовпцi вiдповiдно. Тодi формула (13) набуде вигляду
Gij(x, t, λ) =(−1)l
nρn−1θlD,
де перший рядок визначника D порядку nl має вигляд(〈0〉, . . . , 〈0〉, eρω1(x−a)〈1〉, 〈0〉, . . . , 〈0〉, eρωµ−1(x−a)〈1〉, 〈0〉, . . . , 〈0〉, eρωµ(x−a)〈1〉
〈eρω1(b−a) − ξi〉,
〈0〉, . . . , 〈0〉, eρωµ+1(x−b)〈1〉, 〈0〉, . . . , 〈0〉, eρωn(x−b)〈1〉, 〈0〉, . . . , 〈0〉, P0
),
причому вiдмiннi вiд 〈0〉 елементи знаходяться на останньому i ((s− 1)l+ i)-х мiсцях, а((ν − 1)l + p+ 1)-й рядок побудовано так:(
〈ωkν1 Γνp1〉, . . . , 〈ωkν1 Γνpl〉, . . . , 〈ωkνµ−1Γνpl〉,ωkνµ 〈Γνp1 + eρωµ(b−a)∆νp1〉
〈eρωµ(b−a) − ξ1〉, . . . ,
ωkνµ 〈Γνpl + eρωµ(b−a)∆νpl〉〈eρωµ(b−a) − ξl〉
, 〈ωkνµ+1∆νp1〉, . . . , 〈ωkνr ∆νpl〉, Pνp
).

102 Махней О.В., Тацiй Р.М.
Аналогiчно, як у [9, с. 78] можна показати, що внаслiдок регулярностi крайових умовзнаменник 〈eρωµ(b−a) − ξp〉, p = 1, l, обмежується знизу одним i тим самим числом. Тодi,з огляду на умови (9), всi елементи визначника D на дузi γ′k обмеженi зверху, оскiлькиекспоненти там мають недодатну дiйсну частину. Отже, на дугах γ′k справджуєтьсянерiвнiсть
|Gij(x, t, λ)| ≤ M
|ρ|n−1 , M = const. (20)
Якщо тепер у визначнику Qij(x, t, λ) помножити групи по l стовпчикiв, починаючиз ((µ − 1)l + 1)-го, (µl + 1)-го, . . . , ((n − 1)l + 1)-го, на j-й стовпець матриць −Zµ(t),−Zµ+1(t), . . . , −Zn(t) вiдповiдно та додати до останнього стовпця, то, повторивши по-переднi мiркування, легко переконатись у правильностi нерiвностi (20) i на дугах γ′′k .
Таким чином, нерiвнiсть (20) доведено для тiєї частини дуги γk, що розмiщена всекторi S0. Оскiльки цi самi мiркування застосовнi до будь-якої областi Sν , вони да-ють той самий результат на дузi γk i в секторi S1. Переходячи вiд ρ до λ, отримуємотвердження леми для випадку непарного n.
б) Нехай n — парне, n = 2µ. Оскiльки
Uν(Yµ) = (ρωµ)kν〈Γν〉 + eρωµ(b−a)〈∆ν〉, Uν(Yµ+1) = (ρωµ+1)kν〈Γν〉 + eρωµ(b−a)〈∆ν〉,
то цей випадок вiдрiзняється вiд попереднього лише тим, що ∆(λ) мiстить вираз
θl2l∏s=1
〈eρωµ(b−a) − ξs〉 у тих же позначеннях. Тут ((µ − 1)l + s)-тi стовпцi потрiбно по-
дiлити на 〈eρωµ(b−a) − ξs〉, s = 1, 2l, вiдповiдно. Решта мiркувань у доведеннi теоремибудуть аналогiчними до випадку дуги γ′k. Теорему доведено.
Зауваження 2.1. З доведення випливає, що нерiвнiсть (8) справджується для великих|λ| i в областi Oδ, отриманiй з λ-площини вiдкиданням образiв кiл |ρ− ρk| < δ привiдображеннi λ = −ρn.
3 Основнi результати
Теорема 2. Функцiя Ґрiна G(x, t) диференцiального оператора L, породженого регу-лярними крайовими умовами (2), розвивається в рiвномiрно збiжний вiдносно x i t з[a, b] ряд
G(x, t) = −∞∑ν=1
Qν(x, t)
λν. (21)
Доведення. Користуючись теоремою 1 i зауваженням до неї, отримаємо оцiнки (тутRk — радiус кола Γk):
|Ikij(x, t)| 61
2π
M
Rn−1n
k Rk
2πRk =M
Rn−1n
k
,
∣∣∣∣Qkij(x, t)
λk
∣∣∣∣ =
∣∣∣∣∣∣∣1
2πλk
∫|ρ−ρk|=δ
nρn−1Gij(x, t,−ρn)dρ
∣∣∣∣∣∣∣ 6nMδ
|λk|, i, j = 1, l,

Розвинення за власними вектор-функцiями 103
з яких безпосередньо випливають спiввiдношення
limk→∞
Ik(x, t) = 0, limk→∞
Qk(x, t)
λk= 0, (22)
причому збiжнiсть є рiвномiрною вiдносно x i t з [a, b]. Внаслiдок (7) i (22) буде матимiсце формула (21), що й доводить теорему.
Теорема 3. Якщо всi власнi значення оператора L, породженого регулярними крайо-вими умовами, є простими нулями функцiї ∆(λ), то для його функцiї Ґрiна при вико-наннi умови нормованостi
b∫a
Z∗ν (x)Yν(x) dx = 1 (23)
iснує розвинення у рiвномiрно збiжний ряд
G(x, t) =∞∑ν=1
Yν(x)Z∗ν (t)
λν. (24)
Доведення. Оскiльки Qν(x, t) — лишок функцiї G(x, t, λ) вiдносно її полюса λν , а всiвласнi значення оператора L — простi нулi функцiї ∆(λ), то згiдно з формулою, якадоводиться аналогiчно, як у [9, с. 48–50], Qν(x, t) = Yν(x)Z∗
ν (t), де Yν(x), Zν(t) — власнiфункцiї операторiв L i L∗, що вiдповiдають власним значенням λν та λν i пронормованiтак, щоб виконувались спiввiдношення (23). Теорему доведено.
З цiєї теореми легко отримати теорему про розвинення заданої вектор-функцiї f(x).
Теорема 4. Нехай L— оператор, породжений регулярними крайовими умовами, i нехайвсi його власнi значення є простими нулями функцiї ∆(λ). Тодi будь-яка вектор-функцiяf(x) з областi визначення оператора L розвивається у рiвномiрно збiжний ряд за йоговласними функцiями
f(x) =∞∑ν=1
αν Yν(x), (25)
де при виконаннi умови (23)
αν =
b∫a
Z∗ν (t)f(t) dt,
а Yν(x), Zν(x) — власнi функцiї операторiв L i L∗, що вiдповiдають власним значеннямλν i λν .
Доведення. Покладемо Lf = ϕ′, L∗Zν = ψ′ν , де ϕ i ψν — вектор-функцiї обмеженої на
[a, b] варiацiї, неперервнi справа. Тодi
f(x) =
b∫a
G(x, t) dϕ(t), Zν(x) =
b∫a
H(x, t) dψν(t), (26)
104 Махней О.В., Тацiй Р.М.
де H(x, t) — функцiя Ґрiна оператора L∗. Пiдставимо в формулу (26) замiсть функцiїG(x, t) її розвинення (24). Внаслiдок рiвномiрної збiжностi останнього, можемо йогоiнтегрувати почленно. Отже, справджується формула (25), де
αν =1
λν
b∫a
Z∗ν (t) dϕ(t). (27)
Оскiльки G(x, t) = H∗(t, x) (див. [6]), то буде виконуватись також i рiвнiсть
b∫a
dψ∗ν(x)
b∫a
G(x, t) dϕ(t) =
b∫a
dψ∗ν(x)
b∫a
H∗(t, x) dϕ(t),
звiдки, враховуючи (26), отримаємо спiввiдношенняb∫
a
dψ∗ν(x)f(x) =
b∫a
Z∗ν (x) dϕ(x).
З iншого боку, L∗Zν = λ∗νZν . Тодi ψν(x) =x∫a
λ∗νZν(t) dt. Пiдставивши цю рiвнiсть у
(27), отримаємо, що
αν =1
λν
b∫a
dψ∗ν(x)f(x) =
1
λν
b∫a
(λ∗νZν(x))∗f(x) dx =
b∫a
Z∗ν (x)f(x) dx,
що й потрiбно було довести.
Отже, за допомогою оцiнки матрицi-функцiї Ґрiна крайової задачi побудовано ро-звинення у ряд за власними вектор-функцiями диференцiального оператора L будь-якоївектор-функцiї з областi визначення оператора L (тобто з множини вектор-функцiй,якi разом зi своїми похiдними до порядку n − 2 є абсолютно неперервними на [a, b],а компоненти (n − 1)-ї похiдної мають там обмежену варiацiю i неперервнi справа, iякi, крiм того, задовольняють крайовi умови (2)). Отриманi результати полегшуютьдослiдження коливань i стiйкостi будiвельних конструкцiй.
Лiтература
1. Альбеверио С., Гестези Ф., Хёэг-Крон Р., Хольден Х. Решаемые модели в квантовой механике. —М.: Мир, 1991. — 566 с.
2. Гантмахер Ф.Р. Теория матриц. — М.: Наука, 1988. — 550 с.
3. Кац И.С., Крейн М.Г. О спектральных функциях струны // Дискретные и непрерывные граничныезадачи / Ф. Аткинсон. — М.: Мир — 1968. — С. 648–731.
4. Махней О.В. Асимптотика власних значень i власних функцiй сингулярного диференцiальногооператора на скiнченному iнтервалi // Мат. методи та фiз.-мех. поля. — 2001. — Т.44, 2. — С.17–25.
5. Махней О. В. Розвинення за власними функцiями сингулярного диференцiального оператора //Математичнi методи та фiзико-механiчнi поля. — 2004. — Т.47, 4. — С. 88–94.
Розвинення за власними вектор-функцiями 105
6. Махней О.В. Функцiя Ґрiна крайової задачi для сингулярного квазiдиференцiального рiвняння //Вiсник НУ “Львiвська полiтехнiка”. Фiзико-математичнi науки. — 2009. — 643. — С. 64–72.
7. Махней О.В. Функцiя Грiна сингулярного диференцiального оператора та її властивостi // Ма-тем. студiї. — 2002. — Т.18, 2. — С. 147–156.
8. Махней А.В., Таций Р.М. Асимптотика собственных значений краевой задачи для векторногосингулярного дифференциального уравнения // Дифференциальные уравнения. — 2009. — Т.45,6. — С. 788–796.
9. Наймарк М.А. Линейные дифференциальные операторы. — М.: Наука, 1969. — 528 с.
10. Стасюк М. Ф., Тацiй Р. М. Матричнi iнтегральнi рiвняння та диференцiальнi системи з мiрами// Вiсник нац. ун-ту “Львiвська полiтехнiка”. Фiз.-мат. науки. — 2006. — 566. — С. 33–40.
11. Тацiй Р.М. Узагальненi квазiдиференцiальнi рiвняння. // Препр. НАН України. Iн-т прикл. про-блем механiки i математики iм. Я. С. Пiдстригача, 2–94. — Львiв, 1994. — 56 с.
12. Халанай А., Векслер Д. Качественная теория импульсных систем. — М.: Мир, 1971. — 312 с.
13. Шин Д.Ю. О решениях линейного квазидифференциального уравнения n-го порядка // Мат. сб.— 1940. — Т.7(49), 3. — С. 479–532.
14. Makhney O.V., Tatsiy R.M. The structure of Cauchy function of the vector quasidifferential equation //Математичнi Студiї. — 2004. — Т.21, 2. — С. 221–224.
1 Прикарпатський нацiональний унiверситет iменi Василя Стефаника,
Iвано-Франкiвськ, Україна2 Львiвський державний унiверситет безпеки життєдiяльностi,
Львiв, Україна
Надiйшло 09.09.2010
Makhnei O.V., Tatsii R.M. Expansion by eigenvectors in case of simple eigenvalues of singular
differential operator, Carpathian Mathematical Publications, 3, 1 (2011), 94–105.
The asymptotic formulas with large values of parameter for solutions of singular differential
equation allow us to estimate Green’s function of the boundary-value problem. With the help
of this estimation the expansion of singular differential operator by eigenvectors in the case of
simple eigenvalues is constructed.
Махней А.В., Таций Р.М. Разложение по собственным вектор-функциям в случае про-стых собственных значений сингулярного дифференциального оператора // Карпатскиематематические публикации. — 2011. — Т.3, 1. — C. 94–105.
Асимптотические формулы при больших значениях параметра для решений сингу-лярного дифференциального уравнения позволяют оценить функцию Грина краевой за-дачи. С помощью этой оценки построено разложение по собственным вектор-функциямсингулярного дифференциального оператора в случае простых собственных значений.
Карпатськi математичнi Carpathian Mathematicalпублiкацiї. Т.3, 1 Publications. V.3, 1
УДК 515.12+512.58
Овчар I.Є., Скаскiв О.Б.
ПРО ОЦIНКИ IНТЕГРАЛIВ ТИПУ ЛАПЛАСА,
ЗАЛЕЖНИХ ВIД МАЛОГО ПАРАМЕТРА
Овчар I.Є., Скаскiв О.Б. Про оцiнки iнтегралiв типу Лапласа, залежних вiд малогопараметра // Карпатськi математичнi публiкацiї. — 2011. — Т.3, 1. — C. 106–111.
Встановлюються асимптотичнi оцiнки iнтегралiв типу Лапласа.
Нехай f(x) — довiльна невiд’ємна вимiрна функцiя на R+ := [0; +∞), а ν — злiченно-адитивна на R+ мiра з необмеженим носiєм. Розглянемо функцiї F (σ), визначенi наR− := (−∞; 0) за допомогою збiжного для всiх σ ∈ R− iнтегралу
F (σ) =
∫R+
f(x)eσxν(dx). (1)
Через I0(ν) позначимо клас таких функцiй вигляду (1), а через ν(E) — позначаємоν-мiру ν-вимiрної множини E ⊂ R+, тобто ν(E) =
∫R+∩E ν(dx).
Зазначимо, що у статтях [5, 6] встановалювались оцiнки додатних iнтегралiв вигляду(1) (збiжних для всiх σ ∈ R+ в [5], кратних iнтегралiв типу Лапласа в [6]), при цьомуотриманi оцiнки використовувались при дослiдженнi асимптотичних властивостей рядiвДiрiхле. Виявляється, що можна отримувати оцiнки зверху iнтегралiв вигляду (1) черезмаксимум пiдiнтегрального виразу без додаткових припущень стосовно функцiї f , крiмприпущень додатностi i неперервностi. У статтi [5] такi оцiнки отримано за умов лишена мiру ν, при цьому отримуванi оцiнки виконуються зовнi деяких виняткових множин.В [5] також вiдзначено, що в загальному не можна отримати оцiнки iнтегралiв вигляду(1) зверху через µ(σ, F ) без виняткових множин. В [2, с.190–191] функцiя, подiбна доµ(σ, F ), вводиться для вивчення цiлих функцiй, що є перетвореннями Фур’є деякоїфункцiї f . А в [1] вiдзначено природнiсть задачi дослiдження асимптотичних власти-востей iнтегралiв Лебега-Стiльтьєса в залежностi вiд властивостей мiри ν(dt) = dv(t),де v(t) — додатна монотонна функцiя.
У цiй статтi отримаємо деякi асимптотичнi оцiнки iнтегралiв вигляду (1) з класуI0(ν) та застосуємо їх до абсолютно збiжних у пiвплощинi z : Re z < 0 рядiв Дiрiхлез додатними показниками.
2000 Mathematics Subject Classification: 18B30, 54B30.Ключовi слова i фрази: iнтеграл типу Лапласа, вимiрна функцiя, мiра з необмеженим носiєм.
c©Овчар I.Є., Скаскiв О.Б., 2011

Про оцiнки iнтегралiв типу Лапласа, залежних вiд малого параметра 107
Нехай L— клас додатних неперервних на [0,+∞) функцiй ψ(t), таких що ψ(t) → +∞(t→ +∞); L+ — пiдклас L, в який входять зростаючi до +∞ при x→ +∞ функцiї;L1 — клас функцiй ψ ∈ L, таких що∫ +∞
0
dt
ψ(t)< +∞,
L+1 = L1 ∩ L+. Для Φ ∈ L+ та h ∈ L+ введемо класи функцiй
Lh,Φ :=ψ ∈ L1 : h(t)
∫ +∞
Φ(t)/2
du
ψ(u)→ 0 (t→ +∞)
, L+
h,Φ := Lh,Φ ∩ L+1 .
Для Φ ∈ L+ визначимо клас
I0(ν,Φ) = F ∈ I0(ν) : lnF (σ) ≥ Φ(1/|σ|) (σ ∈ (σ0; 0)).
Для функцiї h ∈ L+ та вимiрної множини E ⊂ (−∞; 0) асимптотичною h-щiльнiстюмножини E у точцi σ = 0 назвемо величину
Dh(E) := limr→−0
h(1/|r|) meas(E ∩ [r, 0)
)dx,
де meas (E1) =∫E1dx — Лебегова мiра на R вимiрної множини E1.
Зауваження. Вiдзначимо, що поняття асимптотичної h-щiльностi множини E у точцiσ = 0 є змiстовним лише у випадку, коли lim
t→+∞h(t)/t > 0, позаяк у протилежному
випадку Dh(E) = 0 для E = [−1; 0).
Метод доведень цього повiдомлення є близьким до методу доведень з [5, 6], якийпо-сутi експлуатує ту ж iдею, що й у П. Розенблума [8]. Як i в [5, 6], нескладно переко-нуємось, що при фiксованому σ < 0 на ймовiрнiсному просторi Ω = R+ з мiрою
P (dx) =f(x)eσx
F (σ)ν(dx)
для випадкової величини ξ = x математичне сподiвання Mξ i дисперсiя Dξ дорiвнюютьвiдповiдно
Mξ =
∫R+
ξ(x)P (dx) = g′(σ), Dξ = g′′(σ), g(σ) = lnF (σ),
а за нерiвнiстю Чебишова для ε =√cDξ, c > 1, маємо
1
F (σ)
∫|x−g′(σ)|≥
√cg′′(σ)
eσxf(x)ν(dx) = P|ξ −Mξ| ≥ ε ≤ Dξ
ε2=
1
c.
Звiдси
F (σ) ≤ c
c− 1
∫|x−g′(σ)|<
√cg′′(σ)
eσxf(x)ν(dx) (2)
для всiх σ < 0.

108 Овчар I.Є., Скаскiв О.Б.
Наступна лема є по-сутi варiантом вiдповiдних тверджень з [7, c. 390] та [5, 6].
Лема. Нехай g0(t) — додатна диференцiйовна неспадна на (−∞, 0) функцiя, ψ — до-датна локально iнтегровна на (0,+∞) функцiя, а множина
E(g0, ψ) := t < 0: g′0(t) ≥ ψ(g0(t)).
Тодi
meas (E ∩ [r,R]) ≤g0(R)∫g0(r)
dt
ψ(t), −∞ < r < R < 0.
Доведення. Справдi,
meas(E ∩ [r,R]) =
∫E∩[r,R]
dt ≤∫
E∩[r,R]
g′0(t)
ψ(g0(t))dt =
∫g0(E∩[r,R])
dx
ψ(x)≤
g8(R)∫g0(r)
dx
ψ(x).
Нехай supp ν — носiй мiри ν в R+, тобто замкнена множина E ≡ supp ν є такою, щоν(R+ \ E) = 0 i ν(x ∈ R+ : |x− x0| < r) > 0 для кожних x0 ∈ E i r > 0.
Для σ < 0 та F ∈ I0(ν) позначимо
µ∗(σ, F ) = supf(x)eσx : x ∈ supp ν.
Нехайν(a, b] = ν(x ∈ R+ : a < x ≤ b).
Доведемо таку теорему.
Теорема 1. Нехай Φ ∈ L+, F ∈ I0(ν,Φ). Якщо
(∃ψ ∈ Lh,Φ) : limt→+∞
ν(t−√ψ(t); t+
√ψ(t)
]≤ d < +∞, (3)
тоF (σ) ≤ (d+ o(1))µ∗(σ, F )
при σ → −0 (σ /∈ E), де виняткова множина E ⊂ R− є такою, що Dh(E) = 0.
Доведення. Нехай θ > 0 є таким, що dθ < 1. Для довiльного ε > 0 приймемо
a =1 − dθ
1 + εθ
та виберемо c > 1 так, щоб c/(c−1) < 1+εθ. За умовою (3) з деякою функцiєю ψ1 ∈ Lh,Φ
ν(t−√ψ1(t); t+
√ψ1(t)
]≤ d+ aε (t ≥ t0). (4)

Про оцiнки iнтегралiв типу Лапласа, залежних вiд малого параметра 109
Зауважуючи, що за вибором (1+εθ)(d+aε) = d+ε, звiдси за нерiвнiстю (2), послiдовноскориставшись лемою з g0(t) = g′(t), ψ(t) = ψ1(t)/c, та нерiвнiстю (4), при σ → −0(σ /∈ E(g′, ψ)) отримуємо
F (σ) < (1 + ε/2)µ∗(σ, F )ν(g′(σ) −√ψ1(g′(σ)); g′(σ) +
√ψ1(g′(σ))] ≤ (d+ ε)µ∗(σ, F ). (5)
Позаяк з монотонностi g′ випливає, що
g′(σ) ≥ (1 + σ)g′(σ) ≥∫ σ
−1
g′(t) = g(σ) − g(−1) ≥ Φ(1/|σ|)/2 (σ → −0),
то для асимптотичної h-щiльностi множини E1 := E(g′, ψ)) отримуємо
0 ≤ Dh(E1) ≤ limr→−0
h(1/|r|)∫ +∞
g′(r)
dx
ψ(x)≤ ch(1/|r|)
∫ +∞
Φ(1/|r|)/2
dx
ψ1(x)= 0,
тобто Dh(E1) = 0.Нехай σ(ε) i E1(ε) є такими, що нерiвнiсть (5) виконується для всiх σ ∈ (σ(ε); 0) \
E1(ε), при цьому
r(1/|r|) meas(E1(ε) ∩ [r; 0)) ≤ ε (r ∈ (σ(ε); 0)).
Виберемо тепер послiдовностi εn = 2−n, rn = σ(εn) 0 (n→ +∞), множину
E2 =+∞⋃n=1
([rn; rn+1)
⋂E1(εn)
)та функцiю ε = ε(σ) : [r1, 0) → (0,+∞) таку, що
ε(σ) = εn для σ ∈ [rn; rn+1).
Тодi, за доведеним, для всiх σ ∈ [r1; 0) \ E2 отримуємо
F (σ) ≤ (d+ ε(σ))µ∗(σ, F ),
при цьому ε(σ) → 0 (σ → −0).Для оцiнки h-щiльностi множини E2 при r ∈ [rn; rn+1) i n→ +∞ маємо
h(1/|r|)meas(E2 ∩ [r; 0)) ≤ h(1/|r|)(2−n1/h(1/|r|) +
+∞∑k=n+1
2−k/h(1/|rk|))≤
+∞∑k=n
2−k = o(1),
тобто Dh(E2) = 0. Теорему 1 доведено.
Зауваження. 1. Твердження теореми 1 є елементарним у випадку, коли умова (3)виконується з функцiєю ψ ∈ Lh,Φ такою, що
t−√ψ(t) = O(1) (t→ +∞),
позаяк у цьому випадку з умови (3) випливає, що ν(R+) < +∞.2. Якщо Φ(t) = τtρ, τ ∈ (0,+∞), ρ ∈ (1,+∞), то, наприклад, у випадку, коли
умова (3) виконується з ψ(t) ≥ t1+1/ρ1 , ρ1 ∈ (1, ρ), твердження теореми 1 перестає бутитривiальним.

110 Овчар I.Є., Скаскiв О.Б.
З теореми 1 можна отримати наслiдки для абсолютно збiжних у пiвплощинiz : Re z < 0 рядiв Дiрiхле вигляду
F (z) =+∞∑n=0
Fnezλn , (1)
де (λn) — така послiдовнiсть, що 0 = λ0 < . . . < λn < λn+1 → +∞ (1 ≤ n → +∞),якi при d = 1 доповнюють вiдповiднi результати з [4, 3] у частинi уточнення описувеличини виняткої множини.
Для цього досить вибрати мiру ν таку, що для кожної обмеженої множини E ⊂ R+
ν(E) =∑λn∈E
δλn(E),
де δλ — одинична мiра Дiрака, зосереджена в точцi λ, i застосувати теорему 1 до рядуДiрiхле
M(σ, F ) =+∞∑n=0
|Fn|eσλn =
∫ +∞
0
f(x)exσdν(x)def= I(σ),
де f — невiд’ємна функцiя така, що f(λn) = |Fn| i f(x) = 0 для всiх x /∈ λn : n ≥ 0.Тодi µ∗(σ, I) = µ(σ, F )
def= |Fn|eσλn : n ≥ 0. I, якщо виконуються умови теореми 1 для
I(σ), то негайно за допомогою нерiвностей µ(σ, F ) ≤M(σ, F ) ≤ M(σ, F ) отримаємо, що
M(σ, F ) = (1 + o(1))µ(σ, F ) (2)
при σ → −0 (σ /∈ E, Dh(E) = 0). Залишається зауважити, що умови теореми 1 дляфункцiї I(x) виконуються як тiльки lnM(σ, F ) ≥ Φ(1/|σ|) (σ ∈ (σ0; 0)) та
limR→+∞
h(ϕ(2λn+1))+∞∑k=n
1
λk − λk−1
= 0, (3)
де функцiя ϕ — обернена до функцiї Φ. Для того, щоб у цьому переконатись доситьвибрати у рамках теореми 1 функцiю ψ таку, що√
ψ(t) = ln +ln+1 − lnbn+1 − bn
(t− bn) (t ∈ [bn, bn+1)),
де bn = (λn + λn−1)/2, ln = (λn − λn−1)/2 (n ≥ 1), i зауважити, що∫ bn+1
bn
dt
ψ(t)= 2( 1
λn − λn−1
+1
λn+1 − λn
),
∫ bn+1
λn
dt
ψ(t)=( 1
λn − λn−1
+1
λn+1 − λn
),
i, тому, для R ∈ [ϕ(2λn), ϕ(2λn+1))
h(R)
∫Φ(R)/2
dt
ψ(t)≤ 5 · h(ϕ(λn+1))
+∞∑k=n
1
λk − λk−1
.
Отже, доведено такий наслiдок.

Про оцiнки iнтегралiв типу Лапласа, залежних вiд малого параметра 111
Наслiдок. Нехай Φ ∈ L, h ∈ L, i для абсолютно збiжного у пiвплощинi z : Re z < 0ряду Дiрiхле вигляду (1) виконуються умови lnM(σ, F ) ≥ Φ(1/|σ|) (σ ∈ (σ0, 0)) та (3).Тодi спiввiдношення (2) виконується при σ → −0 (σ /∈ E, Dh(E) = 0).
На завершення висловимо таке припущення.
Припущення. Твердження наслiдку залишиться правильним, якщо умову (3) замiни-ти умовою
limr→+∞
h(R)∑
λn≥RΦ(R)
1
λn+1 − λn= 0,
яка в загальному є слабшою за умову (3).
Лiтература
1. Бойчук В.С., Гольдберг А.А. К теореме о трех прямых // Мат. заметки. — 1974. — Т.25, 1.— С. 45–53.
2. Евграфов М.А. Асимптотические оценки и целые функции. — М.: Наука, 1979. — 320 с.
3. Сало Т., Скаскiв О. Про максимум модуля i максимальний член абсолютно збiжних рядiв Дiрi-хле // Матем. Вiсник НТШ. — 2007. — Т.3. — С.764–574.
4. Скаскив О.Б. К теореме Вимана о минимуме модуля аналитической в единичном круге фун-кции // Изв. АН СССР, сер. мат. — 1989. — Т.53, 4. — С.833–850.
5. Скаскив О.Б. О некоторых соотношениях между максимумом модуля и максимальным членомцелого ряда Дирихле // Матем. заметки. — 1999. — Т.66, 2. — С.282–292.
6. Скаскiв О.Б., Тракало О.М. Асимптотичнi оцiнки iнтегралiв типу Лапласа // Мат. Студiї. —2002. — Т.18, 2. — С.125–146.
7. Hayman W.K. Subharmonic functions. V.2. — London etc.: Acad.Press, 1989. — XXI+591 pp.
8. Rosenbloom P.C. Probability and entire functions // Studies Math. Anal. and Related Topics. — Stanford:Calif. Univ. Press, 1962, 325–330.
Львiвський нацiональний унiверситет iменi Iвана Франка,Львiв, Україна
Надiйшло 23.12.2010
Ovchar I.Ye., Skaskiv O.B. On the estimates of the Laplace integrals on the small parameter,Carpathian Mathematical Publications, 3, 1 (2011), 106–111.
Asymptotic estimates for the Laplace integrals are established.
Овчар И.Е., Скаскив О.Б. Об оценках интегралов типа Лапласа, зависимых от малогопараметра // Карпатские математические публикации. — 2011. — Т.3, 1. — C. 106–111.
Устанавливаются асимптотические оценки интегралов типа Лапласа.
Карпатськi математичнi Carpathian Mathematical
публiкацiї. Т.3, 1 Publications. V.3, 1
УДК 517.51
Пернай С.А., Черевко I.М.
СХЕМА АПРОКСИМАЦIЇ ПIДВИЩЕНОЇ ТОЧНОСТI
ДИФЕРЕНЦIАЛЬНИХ РIВНЯНЬ НЕЙТРАЛЬНОГО ТИПУ
Пернай С.А., Черевко I.М. Схема апроксимацiї пiдвищеної точностi диференцiальнихрiвнянь нейтрального типу // Карпатськi математичнi публiкацiї. — 2011. — Т.3, 1.— C. 112–123.
Дослiджено властивостi розв’язку початкової задачi для диференцiально-рiзницевогорiвняння нейтрального типу. Уточнено оцiнку наближення елемента запiзнення схемоюпiдвищеної точностi, за допомогою якої побудовано та обгрунтовано схему апроксимацiїпiдвищеної точностi рiвняння нейтрального типу послiдовнiстю систем звичайних дифе-ренцiальних рiвнянь.
Вступ
Схема апроксимацiї лiнiйних диференцiально-рiзницевих рiвнянь (ДРР) послi-довнiстю систем звичайних диференцiальних рiвнянь вперше була запропонованаМ.М. Красовським [1] при дослiдженнi задачi про синтез оптимального регулятора всистемах iз запiзненням. Точнiсть апроксимацiї нелiнiйних ДРР iз запiзненням дослi-джена Ю.М. Рєпiним в [6]. У цiй роботi вперше дослiджується апроксимацiя скаляр-ного елемента запiзнення у випадку, коли його вхiдна функцiя є диференцiйованою,або задовольняє умову Лiпшиця. Подальше вивчення схем апроксимацiї ДРР в про-сторах неперервних функцiй на скiнченому iнтервалi здiйснено в роботах I.М. Черевката Л.А. Пiддубної [4, 5]. Дослiдження схеми апроксимацiї системи диференцiально-рiзницевого та рiзницевого рiвнянь дозволило поширити схему Красовського-Рєпiна навипадок ДРР нейтрального типу за Хейлом [8]. Аналiз точностi апроксимацiї векторно-го елемента запiзнення для рiзних вхiдних функцiй та узагальнення схем апроксимацiїдля систем ДРР запiзнюючого i нейтрального типiв здiйснено в роботах I.М. Черев-ка та О.В. Матвiя [2, 3]. Схема апроксимацiї ДРР iз запiзненням пiдвищеної точностiзапропонована у роботах [11, 9]. Метою даної роботи є поширення схеми апроксимацiїпiдвищеної точностi для ДРР нейтрального типу.
2000 Mathematics Subject Classification: 34K07, 34K28, 34K40.Ключовi слова i фрази: схема апроксимацiї пiдвищеної точностi, диференцiально-рiзницеве рiвняння,диференцiальнi рiвняння нейтрального типу, оцiнка наближення.
c©Пернай С.А., Черевко I.М., 2011

Схема апроксимацiї диференцiальних рiвнянь нейтрального типу 113
1 Постановка задачi. Схема апроксимацiї
Розглянемо диференцiально-рiзницеве рiвняння нейтрального типу
x′(t) = f(t, x(t), x(t− τ), x′(t− τ)), t ∈ [0, T ], (1)
з початковою умовою
x(t) = ϕ0(t), x′(t) = ϕ′
0(t), t ∈ [−τ, 0], (2)
де τ > 0; f(t, u0, u1, u′1) — неперервна функцiя, визначена для t ∈ [0, T ], u0, u1, u
′1 ∈ R,
що задовольняє умову Лiпшиця
|f(t1, u0, u1, u′1) − f(t2, v0, v1, v
′1)| ≤ K(|t1 − t2| + |u0 − v0| + |u1 − v1| + |u′1 − v′1|), (3)
K > 0, t1, t2 ∈ [0, T ]; ϕ0(t) — задана при t ∈ [−τ, 0] диференцiйовна функцiя, похiднаякої задовольняє умову Лiпшиця
|ϕ′0(t1) − ϕ′
0(t2)| ≤ L0|t1 − t2|, L0 > 0, t1, t2 ∈ [−τ, 0]. (4)
Визначимо функцiї zj(t), j = 0,m, як розв’язки системи звичайних диференцiаль-них рiвнянь
z′0(t) = f(t, z0(t), zm(t), z′m(t)),
12
(τm
)2z′′j + τ
mz′j + zj = zj−1, j = 1,m
(5)
з початковими умовами
z0(0) = ϕ0(0), zj(0) = ϕ0(− jτm
), z′j(0) = ϕ′0(−
jτm
), j = 1,m. (6)
Вважатимемо, що розв’язок задачi Кошi (5)–(6) апроксимує розв’язок початковоїзадачi (1)–(2), якщо∣∣x (t− τj
m
)− zj(t)
∣∣→ 0, j = 0,m, t ∈ [0, T ] при m→ ∞.
2 Властивостi розв’язкiв початкової задачi (1)–(2)
При наведених в першому пунктi умовах розв’язок початкової задачi (1)–(2) буденеперервно-диференцiйовною функцiєю на [−τ, T ] за можливим винятком точок t =
kτ, k = 0, 1, . . . . Для iснування похiдної розв’язку в точцi t = 0 необхiдно i досить, щобвиконувалась умова склейки (див. [10])
ϕ′0(0) = f(0, ϕ0(0), ϕ0(−τ), ϕ′
0(−τ)). (7)
Легко бачити, що при виконаннi умови (7) розв’язок задачi (1)–(2) також непе-рервно-диференцiйовний в точках t = kτ, k = 1, 2, . . . .

114 Пернай С.А., Черевко I.М.
Лема 2.1. Нехай справджуються умови (3),(4) та виконується умова склейки (7). Тодiрозв’язок x(t) початкової задачi (1)–(2) — неперервно-диференцiйовний на [−τ, T ] i x′(t)задовольняє умову Лiпшиця
|x′(t1) − x′(t2)| ≤ L|t1 − t2|, L > 0, t1, t2 ∈ [−τ, T ]. (8)
Доведення. Розв’язуючи задачу (1)–(2) методом крокiв, дiстаємо послiдовнiсть задачКошi для звичайних диференцiальних рiвнянь
x′(t) = f(t, x(t), ϕk(t− τ), ϕ′k(t− τ)), t ∈ [kτ, (k + 1)τ ], (9)
x(kτ) = ϕk(kτ), k = 0, 1, 2, . . . . (10)
При виконаннi умови (3) iснує єдиний розв’язок x(t) = ϕk+1(t), k = 0, 1, 2, . . . , задачi(9)–(10), причому ϕk+1(t) ∈ C1[kτ, (k + 1)τ ], k = 0, 1, 2, . . . .
Якщо умова (7) справджується, тодi розв’язок початкової задачi (1)–(2) буденеперервно-диференцiйовний в точцi t = 0 [10] i, як видно з рiвняння (1), x′(t) буденеперервною в точках t = kτ, k = 1, 2, . . . . Таким чином, при виконаннi умов (3),(7)розв’язок початкової задачi (1)–(2) — неперервно-диференцiйовний на [−τ, T ].
Покажемо, що умова (8) також справджується. Спочатку розглянемо вiдрiзок[−τ, τ ].
1) Якщо t1, t2 ∈ [−τ, 0], то (8) справджується згiдно умови (4) при L = L0.2) Нехай t1, t2 ∈ [0, τ ]. При t ∈ [0, τ ] розв’язок x(t) = ϕ1(t) початкової задачi (1)–(2)
неперервно-диференцiйовний. Тодi, використовуючи властивостi функцiй ϕ0(t), ϕ1(t) iумови (3)–(4), маємо
|x′(t1) − x′(t2)| = |f(t1, x(t1), ϕ0(t1 − τ), ϕ′0(t1 − τ)) − f(t2, x(t2), ϕ0(t2 − τ), ϕ′
0(t2 − τ))| ≤
K(|t1 − t2| + |ϕ1(t1) − ϕ1(t2)| + |ϕ0(t1 − τ) − ϕ0(t2 − τ)| + |ϕ′0(t1 − τ) − ϕ′
0(t2 − τ)|) ≤
K(|t1 − t2| + maxs∈[0,τ ]
|ϕ′1(s)||t1 − t2| + max
s∈[−τ,0]|ϕ′
0(s)||t1 − t2| + L0|t1 − t2|) =
K(1 + maxs∈[0,τ ]
|ϕ′1(s)| + max
s∈[−τ,0]|ϕ′
0(s)| + L0)|t1 − t2|.
3) Якщо t1 ∈ [−τ, 0], а t2 ∈ [0, τ ], то одержуємо
|x′(t1)−x′(t2)| = |ϕ′0(t1)−x′(t2)| = |ϕ′
0(t1)−ϕ′0(0)+ϕ′
0(0)−x′(t2)| ≤ |ϕ′0(t1)−ϕ′
0(0)|+|x′(0)−
x′(t2)| ≤ L0|t1 − 0| + |f(0, ϕ1(0), ϕ0(−τ), ϕ′(−τ)) − f(t2, ϕ1(t2), ϕ0(t2 − τ), ϕ′0(t2 − τ))| ≤
L0|t1 − t2| +K(|0 − t2| + maxs∈[0,τ ]
|ϕ′1(s)||0 − t2| + max
s∈[−τ,0]|ϕ′
0(s)||0 − t2| + L0|0 − t2|) ≤
(L0 +K(1 + maxs∈[0,τ ]
|ϕ′1(s)| + max
s∈[−τ,0]|ϕ′
0(s)| + L0))|t1 − t2|.
Отже, x′(t) задовольняє умову Лiпшиця на [−τ, τ ] :
|x′(t1) − x′(t2)| ≤ L1|t1 − t2|, L1 > 0, t1, t2 ∈ [−τ, τ ],
де L1 = L0 +K(1 + maxs∈[0,τ ]
|ϕ′1(s)| + max
s∈[−τ,0]|ϕ′
0(s)| + L0).

Схема апроксимацiї диференцiальних рiвнянь нейтрального типу 115
Припустимо, що розв’язок задачi (1)–(2) задовольняє умову (8) при t ∈ [−τ, jτ ],j ≥ 1, з L = Lj. Покажемо, що ця умова справедлива для t ∈ [−τ, (j + 1)τ ].
1) Якщо t1, t2 ∈ [−τ, jτ ], то властивiсть (8) справджується за припущення з L = Lj.2) Нехай t1, t2 ∈ [jτ, (j + 1)τ ]. На цьому вiдрiзку розв’язок x(t) = ϕj+1(t) початкової
задачi (1)–(2) — неперервно-диференцiйовний. Тодi, використовуючи властивостi фун-кцiй ϕj(t), ϕj+1(t) i умову (3), маємо
|x′(t1) − x′(t2)| = |f(t1, x(t1), ϕj(t1 − τ), ϕ′j(t1 − τ)) − f(t2, x(t2), ϕj(t2 − τ), ϕ′
j(t2 − τ))| ≤
K(1 + maxs∈[jτ,(j+1)τ ]
|ϕ′j+1(s)| + max
s∈[(j−1)τ,jτ ]|ϕ′j(s)| + Lj)|t1 − t2|.
3) Якщо t1 ∈ [pτ, (p+ 1)τ ], 0 ≤ p ≤ j, t2 ∈ [jτ, (j + 1)τ ], то маємо
|x′(t1) − x′(t2)| = |f(t1, x(t1), ϕp(t1 − τ), ϕ′p(t1 − τ)) − f(t2, x(t2), ϕj(t2 − τ), ϕ′
j(t2 − τ))| ≤
K(|t1 − t2| + |ϕp+1(t1) − ϕj+1(t2)| + |ϕp(t1 − τ) − ϕj(t2 − τ)| + |ϕ′p(t1 − τ) − ϕ′
j(t2 − τ)|) ≤
K(|t1 − t2| + |ϕp+1(t1) − ϕp+1((p+ 1)τ) + ϕp+2((p+ 1)τ) − . . .+ ϕj+1(jτ) − ϕj+1(t2)|+
|ϕp(t1−τ)−ϕp(pτ)+ϕp+1(pτ)−...+ϕj((j−1)τ)−ϕj(t2−τ)||ϕ′p(t1−τ)−ϕ′
p(pτ)+ϕ′p+1(pτ)−...+
ϕ′j((j − 1)τ) − ϕ′
j(t2 − τ)| ≤ K(1 + maxs∈[(p−1)τ,pτ ]
|ϕ′p(s)| + 2( max
s∈[pτ,(p+1)τ ]|ϕ′p+1(s)| + . . .+
maxs∈[(j−1)τ,jτ ]
|ϕ′j(s)|) + max
s∈[jτ,(j+1)τ ]|ϕ′j+1(s)| + Lp + Lp+1 + . . .+ Lj)|t1 − t2|.
4) При t1 ∈ [−τ, 0], t2 ∈ [jτ, (j + 1)τ ] аналогiчно одержуємо, що
|x′(t1) − x′(t2)| ≤ (L0 +K(1 + maxs∈[−τ,0]
|ϕ′0(s)| + 2( max
s∈[0,τ ]|ϕ′
1(s)| + . . .+
maxs∈[(j−1)τ,jτ ]
|ϕ′j(s)|) + max
s∈[jτ,(j+1)τ ]|ϕ′j+1(s)| + L0 + . . .+ Lj)|t1 − t2| ≤ Lj+1|t1 − t2|.
Отже, x′(t) задовольняє умову Лiпшиця при t ∈ [−τ, (j + 1)τ ] з L = Lj+1. Оскiлькиj — довiльне цiле, то умова (8) справджується при t ∈ [−τ, T ]. Лема 2.1 доведена.
3 Апроксимацiя елемента запiзнення
Лема 3.1. Розглянемо задачу Кошi для системи лiнiйних диференцiальних рiвнянь12( τm
)2z′′1 (t) + τmz′1(t) + z1(t) = x(t),
12( τm
)2z′′j (t) + τmz′j(t) + zj(t) = zj−1(t), j = 2,m,
(11)
zj(0) = x(− jτm
), z′j(0) = x′(− jτm
), j = 1,m, (12)
де x(t) — функцiя, визначена на [−τ, T ], похiдна якої задовольняє умову Лiпшиця, τ, T —сталi. Тодi для m > 2τ справедливими будуть спiввiдношення∣∣∣zj(t) − x(t− jτ
m)∣∣∣ ≤ A1
m, j = 1,m, t ∈ [0, T ], (13)∣∣∣z′j(t) − x′(t− jτ
m)∣∣∣ ≤ A2
m, j = 1,m, t ∈ [0, T ], (14)
де A1, A2 > 0 — сталi, що не залежить вiд j та m.

116 Пернай С.А., Черевко I.М.
Доведення. Розглянемо спочатку задачу
τ 2
2z′′(t) + τz′(t) + z(t) = x(t), z(0) = x(−τ), z′(0) = x′(−τ). (15)
Позначимо y(t) = x(t − τ) i оцiнимо рiзницi ε(t) = z(t) − y(t) та ε′(t) = z′(t) − y′(t).
Згiдно (15), ε(t) є розв’язком задачi Кошi
ε′′(t) +2
τε′(t) +
2
τ 2ε(t) = ϕ(t), ε(0) = 0, ε′(0) = 0, (16)
де ϕ(t) = 2τ2
[x(t)−x(t−τ)−τx′(t−τ)]−x′′(t−τ). Якщо x′′(t) задовольняє умову Лiпшицяiз сталою K2, то |ϕ(t)| ≤ K2τ . Для розв’язку задачi (16) маємо зображення
ε(t) =
t∫0
τe−t−sτ sin
t− s
τϕ(s)ds, (17)
ε′(t) = −t∫
0
e−t−sτ sin
t− s
τϕ(s)ds+
t∫0
e−t−sτ cos
t− s
τϕ(s)ds. (18)
Враховуючи оцiнку для ϕ(t), iз (17) та (18) одержуємо
|ε(t)| ≤ K2τ3, (19)
|ε′(t)| ≤ 2K2τ2. (20)
Розглянемо тепер систему диференцiальних рiвнянь (11). Позначимо yj(t) = x(t− jτm
)
i оцiнимо рiзницi εj(t) = zj(t) − yj(t), ε′j(t) = z′j(t) − y′j(t). Виходячи iз оцiнок (19) та(20), маємо
|ε1(t)| = |z1(t) − y1(t)| ≤ K2
( τm
)3,
|ε′1(t)| = |z′1(t) − y′1(t)| ≤ 2K2
( τm
)2.
Оскiльки z1(t) = y1(t) + ε1(t), то представимо z2 = z12 + z22 , де z12 i z22 є розв’язками такихзадач Кошi
1
2
( τm
)2(z12(t))′′ +
τ
m(z12(t))′ + z12(t) = y1(t), z
12(0) = y2(0), (z12(0))′ = y′2(0); (21)
1
2
( τm
)2(z22(t))′′ +
τ
m(z22(t))′ + z22(t) = ε1(t), z
22(0) = 0, (z22(0))′ = 0. (22)
В цьому випадку одержуємо
|ε2(t)| = |z2(t) − y2(t)| ≤ |z12(t) − y2(t)| + |z22(t)| ≤ K2
( τm
)3+ |z22(t)|,
|ε′2(t)| = |z′2(t) − y′2(t)| ≤ |(z12(t))′ − y′2(t)| + |(z22(t))′| ≤ 2K2
( τm
)2+ |(z22(t))′|.
Для розв’язку задачi (22) маємо явне зображення z22(t) =t∫0
τme−
mτ(t−s) sin m
τ(t−s)ε1(s)ds.

Схема апроксимацiї диференцiальних рiвнянь нейтрального типу 117
Тодi
|z22(t)| =∣∣∣ t∫0
τ
me−
mτ(t−s) sin
m
τ(t− s)ε1(s)ds
∣∣∣ ≤ K2
( τm
)3 t∫0
τ
me−
mτ(t−s)ds ≤ K2
( τm
)3 τ 2m2
,
|(z22(t))′| =∣∣∣− t∫
0
e−mτ(t−s) sin
m
τ(t− s)ε1(s)ds+
t∫0
e−mτ(t−s) cos
m
τ(t− s)ε1(s)ds
∣∣∣≤ 2K2
( τm
)3 t∫0
e−mτ(t−s)ds ≤ 2K2
( τm
)4.
Отже, маємо
|ε2(t)| ≤ K2
( τm
)3+K2
( τm
)3 τ 2m2
= K2
( τm
)3(1 +
τ 2
m2
),
|ε′2(t)| ≤ 2K2
( τm
)2+ 2K2
( τm
)4= 2K2
( τm
)2(1 +
τ 2
m2
).
Продовжуючи аналогiчно, одержимо при m > 2τ
|εj(t)| ≤ K2
( τm
)3(1 +
τ 2
m2+τ 4
m4+ . . .+
τ 2(j−1)
m2(j−1)
)≤
K2
( τm
)3(1 +
1
4+
1
16+ . . .+
1
22j+ . . .
)=
4
3K2
( τm
)3, j = 1,m, (23)
|ε′j(t)| ≤ 2K2
( τm
)2(1 +
τ 2
m2+τ 4
m4+ . . .+
τ 2(j−1)
m2(j−1)
)≤
2K2
( τm
)2(1 +
1
4+
1
16+ . . .+
1
22j+ . . .
)=
8
3K2
( τm
)2, j = 1,m. (24)
Звiдси випливає, що zj(t) → x(t− jτm
) i z′j(t) → x′(t− jτm
), j = 1,m, рiвномiрно на [0, T ]
при m → ∞. Послабимо тепер умови на x(t). Припустимо, що x′(t) задовольняє умовуЛiпшиця iз сталою K1 i |x′(t)| < M1 при t ∈ [−τ, T ]. Продовжимо функцiю x(t) наiнтервал [−τ, T + h], h > 0, поклавши x(t) = 0 при t 6∈ [−τ, T ]. Розглянемо згладженуфункцiю
x1(t) =1
h
t+h∫t
x(s)ds, t ∈ [−τ, T ],
друга похiдна якої задовольняє умову Лiпшиця зi сталою 2K1
h.
Оцiнимо функцiю x2(t) = x(t) − x1(t) i ї ї похiдну
|x2(t)| =∣∣∣x(t) − 1
h
t+h∫t
x(s)ds∣∣∣ =
∣∣∣x(t) − 1
h
t+h∫t
[x(t) + x′(θs)(s− t)]ds∣∣∣ ≤ M1h
2, (25)

118 Пернай С.А., Черевко I.М.
|x′2(t)| =∣∣∣x′(t)− 1
h(x(t+ h)− x(t))
∣∣∣ =∣∣∣1h
t+h∫t
(x′(t)− x′(s))ds∣∣∣ ≤ ∣∣∣1
h
t+h∫t
K1(t− s)ds∣∣∣ =
K1h
2.
(26)Розглянемо тепер задачу (15), де x(t) = x1(t) + x2(t). Покладемо z(t) = z1(t) + z2(t),z1(t) i z2(t) — розв’язки таких задач
τ 2
2z′′1 (t) + τz′1(t) + z1(t) = x1(t), z1(0) = x1(−τ), z′1(0) = x′1(−τ); (27)
τ 2
2z′′2 (t) + τz′2(t) + z2(t) = x2(t), z2(0) = x2(−τ), z′2(0) = x′2(−τ). (28)
Оцiнимо рiзницi z(t) − x(t− τ) i z′(t) − x′(t− τ). Маємо
|z(t)−x(t−τ)| = |z1(t)+z2(t)−x1(t−τ)−x2(t−τ)| ≤ |z1(t)−x1(t−τ)|+ |z2(t)|+ |x2(t−τ)|.
Тодi |z′(t) − x′(t− τ)| ≤ |z′1(t) − x′1(t− τ)| + |z′2(t)| + |x′2(t− τ)|. Оскiльки друга похiднафункцiї x1(t) задовольняє умову Лiпшиця iз сталою 2K1
h, то, згiдно (19) та (20),
|z1(t) − x1(t− τ)| ≤ 2K1
hτ 3, (29)
|z′1(t) − x′1(t− τ)| ≤ 4K1
hτ 2. (30)
Для x2(t− τ) та x′2(t− τ) справедливi оцiнки (25),(26), тому
|x2(t− τ)| ≤ M1h
2, |x′2(t− τ)| ≤ K1h
2.
Функцiя z2(t) є розв’язком задачi (28), тому мають мiсце рiвностi
z2(t) = x2(−τ)e−tτ cos
t
τ+ (τx′2(−τ) + x2(−τ))e−
tτ sin
t
τ+
t∫0
τe−t−sτ sin
t− s
τx2(s)ds.
z′2(t) = −1
τx2(−τ)e−
tτ cos
t
τ− 1
τx2(−τ)e−
tτ sin
t
τ− 1
τ(τx′2(−τ) + x2(−τ))e−
tτ sin
t
τ
+1
τ(τx′2(−τ) + x2(−τ))e−
tτ cos
t
τ−
t∫0
e−t−sτ sin
t− s
τx2(s)ds+
t∫0
e−t−sτ cos
t− s
τx2(s)ds.
Тодi маємо оцiнки
|z2(t)| ≤∣∣∣x2(−τ)e−
tτ cos
t
τ
∣∣∣+ ∣∣∣(τx′2(−τ) +x2(−τ))e−tτ sin
t
τ
∣∣∣+ t∫0
∣∣∣τe− t−sτ sin
t− s
τx2(s)
∣∣∣ds ≤M1h
2+τK1h
2+M1h
2+ τ 2
M1h
2(1 − e−
tτ ) ≤ h
(M1 +
τK1
2+M1τ
2
2
),
|z′2(t)| ≤∣∣∣− 1
τx2(−τ)e−
tτ cos
t
τ
∣∣∣+∣∣∣− 1
τx2(−τ)e−
tτ sin
t
τ
∣∣∣+∣∣∣− 1
τ(τx′2(−τ)+

Схема апроксимацiї диференцiальних рiвнянь нейтрального типу 119
x2(−τ))e−tτ sin
t
τ
∣∣∣+∣∣∣1τ
(τx′2(−τ) + x2(−τ))e−tτ cos
t
τ
∣∣∣+
t∫0
∣∣∣− e−t−sτ
∣∣∣∣∣∣ sin t− s
τ
∣∣∣∣∣∣x2(s)∣∣∣ds+t∫
0
e−t−sτ
∣∣∣ cost− s
τ
∣∣∣∣∣∣x2(s)∣∣∣ds ≤ 2M1h
τ+K1h+M1hτ
(1 − e−
tτ
)≤ h
(2M1
τ+K1 +M1τ
).
Отже,
|z(t) − x(t− τ)| ≤ 2K1
hτ 3 + h
(3
2M1 +
τK1
2+τ 2M1
2
),
|z′(t) − x′(t− τ)| ≤ 4K1
hτ 2 + h
(2M1
τ+
3K1
2+M1τ
).
Розглядаючи тепер систему рiвнянь (11), де x(t) = x1(t) + x2(t), i проводячи аналогiчнiоцiнки, одержуємо∣∣∣zj(t) − x(t− jτ
m)∣∣∣ ≤ 8K1
3h
( τm
)3+ h(3
2M1 +
τK1
2+M1τ
2
2
)=
8K1
3h
( τm
)3+ hB1, B1 =
(3
2M1 +
τK1
2+M1τ
2
2
). (31)∣∣∣z′j(t) − x′
(t− jτ
m
)∣∣∣ ≤ 32K1
3h
( τm
)2+ h(2M1
τ+
3K1
2+M1τ
)=
32K1
3h
( τm
)2+ hB2, B2 =
(2M1
τ+
3K1
2+M1τ
). (32)
Покладемо в нерiвностях (31),(32) h = τm
, маємо∣∣∣zj(t) − x(t− jτ
m)∣∣∣ ≤ 1
m
(8K1τ2
3m+ τB1
)≤ A1
m, A1 =
8K1τ
3+ τB1,
∣∣∣z′j(t) − x′(t− jτ
m)∣∣∣ ≤ 1
m
(32K1τ
3+ τB2
)=A2
m, A2 =
32K1τ
3+ τB2.
Лема 3.1 доведена.
4 Обгрунтування схеми апроксимацiї
Теорема 1. Нехай zj(t), j = 0,m — розв’язок задачi Кошi (5)–(6), а x(t) — розв’язокпочаткової задачi (1)–(2) i справджуються умови (3),(4),(7). Тодi розв’язок задачi Кошi(5)–(6) апроксимує розв’язок початкової задачi (1)–(2), i мають мiсце спiввiдношення∣∣∣x(t− τj
m
)− zj(t)
∣∣∣ ≤ B1
m, j = 0,m, t ∈ [0, T ], (33)
∣∣∣x′(t− τj
m
)− z′j(t)
∣∣∣ ≤ B2
m, j = 0,m, t ∈ [0, T ], (34)
де B1, B2 > 0 — сталi, що не залежать вiд j та m.

120 Пернай С.А., Черевко I.М.
Доведення. Розглянемо систему звичайних диференцiальних рiвнянь (5) з початковимиумовами (6). Нехай
Nj(t) = max0≤s≤t
∣∣∣x(s− τj
m
)− zj(s)
∣∣∣, j = 0,m, t ∈ [0, T ]. (35)
Mj(t) = max0≤s≤t
∣∣∣x′(s− τj
m
)− z′j(s)
∣∣∣, j = 0,m, t ∈ [0, T ]. (36)
Представимо zj(t), j = 1,m у виглядi суми zj(t) = z(1)j (t) + z
(2)j (t), де z(1)j (t) та z(2)j (t) є
розв’язками таких задач Кошi:12( τm
)2z′′(1)1 + τ
mz′(1)1 + z
(1)1 = x(t),
12( τm
)2z′′(1)j + τ
mz′(1)j + z
(1)j = z
(1)j−1(t), j = 2,m,
z(1)j (0) = x(− jτ
m), z
′(1)j (0) = x′(− jτ
m), j = 1,m;
(37)
12( τm
)2z′′(2)1 + τ
mz′(2)1 + z
(2)1 = z0(t) − x(t),
12( τm
)2z′′(2)j + τ
mz′(2)j + z
(2)j = z
(2)j−1(t), j = 2,m,
z(2)j (0) = 0, z
′(2)j (0) = 0, j = 1,m.
(38)
Оцiнимо рiзницi |zj(t) − x(t − jτm
)| та |z′j(t) − x′(t − jτm
)|. Враховуючи вигляд систем(37),(38), маємо∣∣∣zj(t) − x
(t− jτ
m
)∣∣∣ =∣∣∣z(1)j (t) + z
(2)j (t) − x
(t− jτ
m
)∣∣∣ ≤ ∣∣∣z(1)j (t) − x(t− jτ
m
)∣∣∣+ |z(2)j (t)|,∣∣∣z′j(t) − x′(t− jτ
m
)∣∣∣ ≤ ∣∣∣z′(1)j (t) − x′(t− jτ
m
)∣∣∣+ |z′(2)j (t)|.
Покажемо методом математичної iндукцiї, що для доданкiв |z(2)j (t)| та |z′(2)j (t)| справе-дливi оцiнки
|z(2)j (t)| ≤ N0(t), j = 1,m, t ∈ [0, T ], (39)
|z′(2)j (t)| ≤ 2N0(t), j = 1,m, t ∈ [0, T ]. (40)
Для розв’язку рiвняння 12( τm
)2z′′(2)1 + τ
mz′(2)1 + z
(2)1 = z0(t) − x(t), з початковими умовами
z(2)1 (0) = 0, z
′(2)1 (0) = 0, z(2)1 (t) має вигляд
z(2)1 (t) =
τ
m
t∫0
e−mτ(t−s) sin
(mτ
(t− s))
[z0(s) − x(s)]ds.
Тодi при m > τ
|z(2)1 (t)| ≤( τm
)2N0(t) ≤ N0(t),
|z′(2)1 (t)| ≤( τm
)22N0(t) ≤ 2N0(t).
Припустимо, що нерiвностi (39),(40) справджується при k = j, а саме |z(2)j (t)| ≤ N0(t),|z′(2)j (t)| ≤ 2N0(t). Покажемо, що вони будуть справедливi при k = j + 1:
|z(2)j+1(t)| =τ
m
t∫0
e−m(t−s)
τ
∣∣∣ sin m(t− s)
τ
∣∣∣|z(2)j (s)|ds ≤ τ
mN0(t)
t∫0
e−m(t−s)
τ ds ≤ N0(t),

Схема апроксимацiї диференцiальних рiвнянь нейтрального типу 121
|z′(2)j+1(t)| = 2τ
m
t∫0
e−m(t−s)
τ |z(2)j (s)|ds ≤ 2τ
mN0(t)
t∫0
e−m(t−s)
τ ds ≤ 2N0(t).
Отже, нерiвнiстi (39),(40) мають мiсце.Для системи (37) виконуються умови леми 3.1, тому∣∣∣z(1)j (t) − x
(t− jτ
m
)∣∣∣ ≤ A1
m, j = 1,m, t ∈ [0, T ], A1 > 0,∣∣∣z′(1)j (t) − x′
(t− jτ
m
)∣∣∣ ≤ A2
m, j = 1,m, t ∈ [0, T ], A2 > 0.
Отже, ∣∣∣zj(t) − x(t− jτ
m
)∣∣∣ ≤ A1
m+N0(t), j = 1,m, t ∈ [0, T ], (41)∣∣∣z′j(t) − x′
(t− jτ
m
)∣∣∣ ≤ A2
m+ 2N0(t), j = 1,m, t ∈ [0, T ]. (42)
Нерiвностi (41),(42) справджується для всiх t ∈ [0, T ]. Тому, враховуючи позначення(35),(36), маємо
Nj(t) ≤ N0(t) +A1
m, j = 1,m, t ∈ [0, T ], (43)
Mj(t) ≤ 2N0(t) +A2
m, j = 1,m, t ∈ [0, T ]. (44)
Оцiнимо тепер рiзницi |x(t) − z0(t)| та |x′(t) − z′0(t)|. Записуючи рiвняння (1) i (5) уiнтегральному виглядi та враховуючи властивостi функцiї f(t, u0, u1, u
′1), одержуємо
|x(t) − z0(t)| ≤t∫
0
|f(s, x(s), x(s− τ), x′(s− τ)) − f(s, z0(s), zm(s), z′m(s))|ds ≤
L
t∫0
(4N0(s) +1
m(A1 + A2))ds ≤ 4L
t∫0
N0(s)ds+L
m(A1 + A2)T. (45)
Нерiвнiсть (45) справджується для всiх t ∈ [0, T ], тому, враховуючи позначення (35),маємо
N0(t) ≤ 4L
t∫0
N0(s)ds+L
m(A1 + A2)T.
Застосовуючи нерiвнiсть Гронуолла-Белмана [11], отримаємо
N0(t) ≤L
m(A1 + A2)Te
4LT .
Тепер iз нерiвностей (43),(44) маємо
Nj(t) ≤L
m(A1 + A2)Te
4LT +A1
m≤ B1
m, t ∈ [0, T ], j = 1,m,
де B1 = L(A1 + A2)Te4LT + A1,
Mj(t) ≤2L
m(A1 + A2)Te
4LT +A2
m≤ B2
m, t ∈ [0, T ], j = 1,m,
де B2 = 2L(A1 + A2)Te4LT + A2.
Теорема доведена.

122 Пернай С.А., Черевко I.М.
5 Приклад
Розглянемо початкову задачу
x′(t) = x(t) + 2x(t− 1) + x′(t− 1), t ∈ [0, 1],
x(t) = 2t+ 23, t ∈ [−1, 0],
x′(t) = 2, t ∈ [−1, 0].
(46)
Точний розв’язок задачi (46), знаходимо методом крокiв на [0,1]
xт(t) = 4et − 4t− 10
3, x′т(t) = 4et − 4.
Наближений розв’язок xн задачi (46), знайдений як розв’язок апроксимуючої задачiКошi для системи звичайних диференцiальних рiвнянь (5). Для числового iнтегруваннясистеми звичайних диференцiальних рiвнянь використовуємо рiзницеву схему Гiра пер-шого порядку. Результати числових експериментiв при рiзних m наведено в таблицях1, 2.
Таблиця 1
t xm xн(m = 8) 41 xн(m = 13) 42
0,000000 0,666667 0,666667 0,000000 0,666667 0,0000000,200000 0,752278 0,752253 -0,000024 0,752253 -0,0000240,400000 1,033965 1,033903 -0,000063 1,033906 -0,0000600,600000 1,555142 1,554397 -0,000745 1,554990 -0,0001520,800000 2,368830 2,353762 -0,015068 2,363890 -0,004941
Таблиця 2
t x′m x′н(m = 8) 41 xн(m = 13) 42
0,000000 0,000000 0,000000 0,000000 0,000000 0,0000000,200000 0,885611 0,885587 -0,000024 0,885587 -0,0000240,400000 1,967299 1,967124 -0,000175 1,967239 -0,0000600,600000 3,288475 3,275736 -0,012739 3,287066 -0,0014090,800000 4,902164 4,717788 -0,184276 4,816214 -0,085950
Лiтература
1. Красовський Н.Н. Об аппроксимации одной задачи аналитического конструирования регуляторовв системе с запаздыванием // ПММ. — 1964. — Т.28, 4. – С. 716–725.
2. Матвiй О.В., Черевко I.М. Про апроксимацiю систем iз запiзненням та їх стiйкiсть // Нелiнiйнiколивання. — 2004. — Т.7, 2. — С. 208–216.
3. Матвiй О.В., Черевко I.М. Про наближення систем диференцiально-рiзницевих рiвнянь нейтраль-ного типу системами звичайних диференцiальних рiвнянь // Нелiнiйнi коливання. — 2007. — Т.10,3. — С. 329–335.
Схема апроксимацiї диференцiальних рiвнянь нейтрального типу 123
4. Пiддубна Л.А., Черевко I.М. Алгоритм апроксимацiї диференцiально-рiзницевих рiвнянь i моде-лювання процесiв електродинамiки // Вiсник Київського ун-ту. Сер. фiз. - мат. наук. – 1998. – 2. – С. 111–118.
5. Пiддубна Л.А., Черевко I.М. Апроксимацiя систем диференцiально- рiзницевих рiвнянь система-ми звичайних диференцiальних рiвнянь // Нелiнiйнi коливання. – 1999. – N1. – С.42–50.
6. Репин Ю.М. О приближенной замене систем с запаздыванием обыкновенными дифференциаль-ными уравнениями // ПММ. – 1965. – Т.29, 2. – С.226–245.
7. Хартман Ф. Обыкновенные дифференциальные уравнения. – М.: Мир, 1970. – 720 с.
8. Хейл Дж. Теория функционально-дифференциальных уравнений. - М.: Мир, 1984. – 421 с.
9. Черевко I.М. Апроксимацiя диференцiально-рiзницевих рiвнянь i наближення неасимптотичнихкоренiв квазiполiномiв // Нелiнiйнi диференцiальнi рiвняння та їх застосування. – К. :Iн-т мате-матики АН України. – 1992. – С. 74-84.
10. Эльсгольц Л.Э., Норкин С.Б. Введение в теорию дифференциальных уравнений с отклоняющимсяаргументом. – М.: Наука, 1971. – 296 с.
11. Piddubna L.A., Cherevko I.M. Approximations of differential-difference equations and calculations ofnonasymptotic roots of quasipolynomials, Revue d’analyse numerique et de theorie de l’approximations,28, 1 (1999), 15-21.
Чернiвецький нацiональний унiверситет iменi Юрiя Федьковича,
Чернiвцi, Україна
Надiйшло 01.02.2011
Pernay S.A., Cherevko I.M. Approximation scheme of higher accuracy of differential equations
of neutral type, Carpathian Mathematical Publications, 3, 1 (2011), 112–123.
The properties of solution of initial problem for differential-difference equation of neutral
type were researched. An approximate estimate of element delay was specified by scheme of
higher accuracy. The approximate scheme of higher accuracy of neutral equation by a sequence
of ordinary differential equations system was constructed and analyzed.
Пернай С.А., Черевко И.М. Схема аппроксимации повышенной точности дифферен-циальных уравнений нейтрального типа // Карпатские математические публикации. —2011. — Т.3, 1. — C. 112–123.
Исследованы свойства решения начальной задачи для дифференциально-разностногоуравнения нейтрального типа. Уточнена оценка приближения элемента запаздывания схе-мой повышенной точности, с помощью которой построена и обоснована схема аппрокси-мации повышенной точности уравнения нейтрального типа последовательностью системобыкновенных дифференциальных уравнений.

Карпатськi математичнi Carpathian Mathematical
публiкацiї. Т.3, 1 Publications. V.3, 1
УДК 515.12+512.58
Savchenko O.
A REMARK ON STATIONARY FUZZY METRIC SPACES
Savchenko O. A remark on stationary fuzzy metric spaces, Carpathian Mathematical Publica-
tions, 3, 1 (2011), 124–129.
The main result states that the category of stationary fuzzy metric spaces (with respect
to an archimedean t-norm) and nonexpanding maps is isomorphic to a full subcategory of the
category of metric spaces and nonexpanding maps. The case of non-archimedean t-norms is
also discussed.
Introduction
The notion of fuzzy metric space is tightly connected with the notion of probabilisticmetric space. The latter is a generalization of the notion of metric space in which thedistances take their values in the class of distribution functions. The fuzzy metric spacesfound numerous applications, e.g., to the theory of image processing.
The theory of fuzzy metric spaces is developed in different directions. In particular,many authors considered the problem of existence of fixed points in the fuzzy setting (see,e.g. [3], [4]). Also, some functorial constructions in the categories of fuzzy metric spaceswere investigated.
There are two main theories of the fuzzy metric spaces. One of them is based on thenotion introduced by Kramosil and Michalek in [6]. Another class of fuzzy metric spaces,more restrictive, is defined by George and Veeramani [2]. In this note we deal with asubclass of the latter class, namely, with the so-called stationary fuzzy metric spaces. Theobtained results demonstrate that the stationary fuzzy metric spaces with respect to givenarchimedean (and some non-archimedean) t-norm are tightly connected with the ordinarymetric spaces.
In the last section we formulate some open problems related to the results of this note.
2000 Mathematics Subject Classification: 54E70, 54E40,54B30.Key words and phrases: fuzzy metric space, stationary fuzzy metric, ultrametric.
c© Savchenko O., 2011

A remark on stationary fuzzy metric spaces 125
1 Preliminaries
A binary operation ∗ : [0, 1] × [0, 1] → [0, 1] is called a continuous t-norm if ([0, 1], ∗) isan abelian topological monoid with the unit 1 such that a ∗ b ≤ c ∗ d whenever a ∗ c and b ∗ dfor all a, b, c, d ∈ [0, 1].
In the sequel, we will consider the following examples of t-norms:
1. a ∗ b = mina, b;
2. a ∗ b = ab;
3. a ∗ b = maxa+ b− 1, 0 ( Lukasiewicz t-norm);
4. a ∗ b =ab
maxa, b, α.
A t-norm ∗ is said to be archimedean provided for every x, y ∈ (0, 1) there exists n ∈ Nsuch that x ∗ x ∗ x · · · ∗ x < y (here ∗ appears n− 1 times).
It is well-known (see, e.g. [7]) that any archimedean t-norm ∗ can be represented bymeans of a continuous additive generator, i.e. a continuous strictly decreasing functiont : [0, 1] → [0,∞] with t(1) = 0 such that
x ∗ y = t(−1)(t(x) + t(y)), x, y ∈ [0, 1]
(hereafter, t(−1)(u) = t−1(min(u, t(0))) is the pseudoinverse of t).
Definition 1.1. A triplet (X,M, ∗) is a FM-space if X is an arbitrary set, ∗ is a continuous t-norm and M is a fuzzy set in X2×[0,∞) satisfying the following conditions for all x, y, z ∈ X
and t, s > 0:
(i) M(x, y) > 0;
(ii) M(x, y, t) = 1 for all t > 0 if and only if x = y;
(iii) M(x, y, t) = M(y, x, t);
(iv) M(x, y, t) ∗M(y, z, t) ≤M(x, z, t+ s);
(v) M(x, y,−) : [0,∞) → [0, 1] is continuous.
Let (Xi,Mi, ∗), i = 1, 2, be fuzzy metric spaces. A map f : X1 → X2 is called non-expanding if M1(x, y, t) ≤ M2(f(x), f(y), t) for any x, y ∈ X1 and t > 0. The fuzzy metricspaces and non-expanding maps form a category, which we denote FMS(∗).
If (X,M, ∗) is a fuzzy metric space, x ∈ X, r ∈ (0, 1) and t > 0, then the set
B(x, r, t) = y ∈ X |M(x, y, t) > 1 − r
is called the ball of radius r centered at x for t. It is known that the family of all balls is abase of a metrizable topology for every fuzzy metric space X (see [2]).

126 Savchenko O.
A fuzzy metric M is called stationary if the function M(x, y,−) : [0,∞) → [0, 1] isconstant for every x, y ∈ X. We write M(x, y) instead of M(x, y, t), and B(x, r) instead ofB(x, r, t) for any stationary fuzzy metric M . We denote by SFMS(∗) the full subcategoryof the category FMS(∗) whose objects are stationary fuzzy metric spaces.
We say that a metric space (X, d) is of strong diameter c if d(x, y) < c for all x, y ∈ X.
Theorem 1. Let (X,M) be a stationary fuzzy metric space with respect to an archimedeant-norm ∗. Then the function d = t M , where t is a continuous additive generator of M , isa metric on X of strong diameter t(0). The topologies on X induced by M and d coincide.
Moreover, this construction determines a functor from the category SFMS(∗) into thecategory of metric spaces and nonexpanding maps.
Proof. Let x, y, z ∈ X.If d(x, y) = 0, then, since t is strictly decreasing, M(x, y) = 1 and therefore x = y. Also
d(x, x) = t(M(x, y)) = t(1) = 0.Clearly, d(x, y) = d(y, x).Prove the triangle inequality. We have
M(x, y) ∗M(y, z) =t(−1)(t(M(x, y)) + t(M(y, z))) =
t−1(mint(M(x, y)) + t(M(y, z)), 0) ≤M(x, z),
and therefore applying t to both sides of the above inequality we obtain
d(x, y) + d(x, z) = t(M(x, y)) + t(M(y, z)) ≥mint(M(x, y)) + t(M(y, z)), 0 ≥t(M(x, z)) = d(x, z).
Remark also that, since M(x, y) > 0, we obtain d(x, y) < t(0).Let Bd(x, r) = y ∈ X | d(x, y) < r. From the fact that Bd(x, r) = B(x, 1 − t−1(r)) it
follows that the topologies generated by M and d coincide.If (Xi,Mi), i = 1, 2, are stationary fuzzy metric spaces and a map f : X1 → X2 is
nonexpanding, then this map is easily seen to be nonexpanding with respect to the inducedmetrics.
Recall that an ultrametric d on a set X is a metric satisfying
d(x, z) ≤ maxd(x, y), d(y, z), x, y, z ∈ X.
Proposition 1.1. Let ∗ = min. The category SFMS(∗) is isomorphic to the category ofultrametric spaces and nonexpanding maps.
Proof. Define d(x, y) = 1 −M(x, y). One can easily prove that d is an ultrametric on X.Moreover, the topologies on X induced by d and M coincide.
Proposition 1.2. Let ∗ = ·. The category SFMS(∗) is isomorphic to the category ofmetric spaces and nonexpanding maps.

A remark on stationary fuzzy metric spaces 127
Proof. Since t = − ln is clearly the continuous additive generator for the t-norm ·, theassertion follows from Theorem 1.
Proposition 1.3. Let ∗ be the Lukasiewicz t-norm. The category SFMS(∗) is isomorphicto the category of metric spaces of strong diameter 1 and nonexpanding maps.
Proof. It is known (and can be easily seen) that the function t defined by the formulat(x) = 1−x is the continuous additive generator for the Lukasiewicz t-norm. Since t(0) = 1,the assertion follows from Theorem 1.
2 K-ultrametric spaces
Let X be a set and K ∈ [0,∞]. A metric d on X is called a K-ultrametric if d(x, y) ≤maxd(x, z), d(z, y) whenever mind(x, z), d(z, y) ≤ K.
Note that any 0-ultrametric is a metric and any ∞-ultrametric is an ultrametric.Below we describe a construction which allows us to produce examples of K-ultrametric
space. Let (X, %) be an ultrametric space and let ∼K denote its decomposition into disjointclosed balls of radius K. Denote by q : X → X/ ∼K the quotient map. For any metric D onX/ ∼K , the function d : X ×X → R defined by the formula d(x, y) = %(x, y) +D(q(x), q(y))
is a K-ultrametric on X. Indeed, if x, y, z ∈ X and %(x, z) ≤ K, %(z, y) ≤ K, thenq(x) = q(z) = q(y) and therefore
d(x, y) = %(x, y) +D(q(x), q(y)) ≤max%(x, z), %(x, z) +D(q(x), q(z)) +D(q(z), q(y)) ≤max%(x, z), %(y, z) = maxd(x, z), d(y, z),
and, if, say, %(x, z) ≤ K, %(z, y) > K, then q(x) = q(z) and therefore
d(x, y) = %(x, y) +D(q(x), q(y)) ≤max%(x, z), %(y, z) +D(q(z), q(y)) =
%(y, z) +D(q(z), q(y)) = d(y, z) ≤ maxd(x, z), d(y, z).
Theorem 2. Let a ∗ b = abmaxa,b,α , where α ∈ (0, 1). Then the category SFMS(∗) is
isomorphic to the category of K-ultrametric spaces and nonexpanding maps.
Proof. Let M be a stationary fuzzy metric. Define d : X ×X → R by the formula d(x, y) =
− lnM(x, y). Then, suppose that x, y, z ∈ X and mind(x, z), d(z, y) ≥ − lnα. ThenM(x, y) ≤ elnα = α, M(y, z) ≤ α and therefore
M(x, z) ≥M(x, y) ∗M(y, z) =M(x, y)M(y, z)
α,
which in turn implies that d(x, y) + d(y, z) ≥ d(x, z) + α ≥ d(x, z).
We are going to prove that d is a K-ultrametric on X with K = − lnα. Suppose thatx, y, z ∈ X and mind(x, z), d(z, y) ≤ K. Then, say, M(x, y) ≥ α, whence
M(x, z) ≥M(x, y) ∗M(y, z) =M(x, y)M(y, z)
maxM(x, y),M(y, z), α≥
M(x, y)M(y, z)
M(x, y)≥ M(x, y)M(y, z)
maxM(x, y),M(y, z)≥ minM(x, y),M(y, z),
and therefore d(x, y) ≤ maxd(x, y), d(x, z). The rest of the proof is left to the reader.

128 Savchenko O.
By expX we denote the hyperspace of a topological space X, i.e. the family of nonemptyclosed subsets in X. It is known [8] that every fuzzy metric M on X generates a fuzzy metricMH on expX (the fuzzy Hausdorff metric) as follows:
MH(A,B, t) = min
infa∈A
M(a,B, t), infb∈B
M(A, b, t)
for every A,B ∈ expX and t > 0. Here M(a,B, t) = supM(a, b, t) | b ∈ B, a ∈ X,B ∈ expX.
Corollary 2.1. The hyperspace of any K-ultrametric space is again a K-ultrametric space.
Proof. The result follows from the previous theorem and from the fact that for any stationaryfuzzy metric space the fuzzy Hausdorff stationary metric is again a stationary fuzzy metric.
3 Remarks
Let (Xi,Mi, ∗), i = 1, 2, be fuzzy metric spaces. A map f : X1 → X2 is called a con-traction if M1(x, y, t) < M2(f(x), f(y), t) for any x, y ∈ X1 and t > 0. The results of theprevious sections can be also formulated for the category of (stationary fuzzy) metric spacesand contractions.
For any k ∈ (0, 1) a map f : X → X of a fuzzy metric space (X,M, ∗) is called ak-contraction if
1
M(f(x), f(y), t)− 1 ≤ k
(1
M(x, y, t)− 1
)for every x, y ∈ X. A metric analogue of this notion is unknown.
It is known (see, e.g., [1]) that for any continuous t-norm ∗ there exists a unique (finiteor countable) index set A, unique pairwise disjoint intervals (aα, eα) ⊂ [0, 1], and uniquecontinuous archimedean t-norms ∗α such that
x ∗ y =
aα + (eα − aα)(x−aαeα−aα ∗α y−aα
eα−aα
), if (x, y) ∈ (aα, eα),
minx, y, otherwise.
The above results lead us to the following question. Is there a category of metric spaceswhich is isomorphic to the category SFMS(∗)?
In the theory of metric spaces, one of the most important roles is played by the Urysohnuniversal metric spaces [10]. Recall that a metric space (U, d) is called Urysohn universal ifU is separable and complete and has the following property: given any finite metric space X,any point x ∈ X, and any isometric embedding f : X \ x → U , there exists an isometricembedding F : X → U that extends f . The classical Urysohn theorem asserts that anUrysohn universal metric space exists and is unique up to isometry.
A counterpart of the notion of universal Urysohn metric space in the class of ultrametricspaces is discussed in [9]. Also, there are Urysohn universal spaces for the class of metricspaces of diameter ≤ 1 (see, e.g., [5]).
This allows us to formulate the following problem. Is there a counterpart of the universalUrysohn space for (some subclasses of) the class of separable fuzzy metric spaces?
A remark on stationary fuzzy metric spaces 129
References
1. Clifford A.H., Preston G.B. The Algebraic Theory of Semigroups. Amer. Math. Soc., Providence, RI,
1961.
2. George A., Veeramani P. On some results of analysis for fuzzy metric spaces, Fuzzy Sets and Systems,
90 (1997), 365–368.
3. Grabiec M. Fixed points in fuzzy metric spaces, Fuzzy Sets and Systems, 27 (1988), 385–389.
4. Gregori V., Sapena A. On fixed-point theorems in fuzzy metric spaces, Fuzzy Sets and Systems, 125, 2
(2002), 245–252.
5. Katetov M. On universal metric spaces, in: Frolik Z.(ed.), General Topology and its Relations to Modern
Analysis and Algebra VI. Proceedings of the Sixth Prague Topological Symposium 1986, Heldermann
Verlag, Berlin, 1988, 323–330.
6. Kramosil I., Michalek J. Fuzzy metric and statistical metric spaces, Kybernetica, 11 (1975), 326–334.
7. Ling C.M. Representation of associative functions. Publ. Math. Debrecen, 12 (1965), 189–212.
8. Rodrıguez-Lopez J., Romaguera S. The Hausdorff fuzzy metric on compact sets, Fuzzy Sets and Systems,
147, 2 (2004), 273–283.
9. Su Gao, Chuang Shao. Polish ultrametric Urysohn spaces and their isometry groups, Topology and its
Applications, 158 (2011), 492–508.
10. Urysohn P. Sur un espace metrique universel, Bull. Sci. Math., 51 (1927), 43–64, 74–90.
Kherson agrarian university,
Kherson, Ukraine
Received 14.04.2011
Савченко О. Зауваження про стацiонарнi розмитi метричнi простори // Карпатськiматематичнi публiкацiї. — 2011. — Т.3, 1. — C. 124–129.
Доведено, що категорiя стацiонарних розмитих метричних просторiв (вiдносно архi-медової t-норми) i нерозтягуючих вiдображень iзоморфна повнiй пiдкатегорiї категорiїметричних просторiв i нерозтягуючих вiдображень. Розглянуто також випадок неархi-медової t-норми.
Савченко А. Замечание о стационарных нечетких метрических пространствах // Кар-патские математические публикации. — 2011. — Т.3, 1. — C. 124–129.
Доказано, что категория стационарных нечетких метрических просторанств (по отно-шению к архимедовой t-норме) и нерастягивающих отображений изоморфна полной под-категории категории метрических пространств и нерастягивающих отображений. Рассмо-трено также случай неархимедовой t-нормы.
Карпатськi математичнi Carpathian Mathematical
публiкацiї. Т.3, 1 Publications. V.3, 1
УДК 517.98
Семенчук А.В.
ПРО ДЕЯКI АЛГОРИТМИ ОБЧИСЛЕНЬ ДЛЯ КУБIЧНИХ ПОЛIВ ТА
ПОЛIВ ЧЕТВЕРТОГО СТЕПЕНЯ
Семенчук А.В. Про деякi алгоритми обчислень для кубiчних полiв та полiв четвертогостепеня // Карпатськi математичнi публiкацiї. — 2011. — Т.3, 1. — C. 130–138.
Побудовано ефективнi алгоритми обчислень у кубiчних полях та полях четвертогостепеня.
Вступ
Вивченню (n,m)-форм s0 + s1 n√m + . . . + sn−1
n√mn−1 числового поля Q(m) степеня
n присвячено чимало робiт. При цьому основна увага аналiтикiв була зосереджена навивченнi їх цiлочислових базисiв та одиниць. Випадок n = 2 в основному дослiдженийВаллiсом в Commercium aepistolicum (1657 р.) Проте окремi аспекти дослiджень у цьомунапрямку проводяться i нинi [4]. Випадок n = 3 бiльш складний. Його дослiджувалиЯкобi, Пуанкаре, Гурвiц. Вороний проводив свої дослiдження на основi узагальненьнеперервних дробiв [1]. Технiцi роботи з (3,m)-формами, якi Делоне та Фадеєв нази-вають кубiчними числами у [2] присвячено цiлий роздiл. Алгоритми обчислення сте-пенiв (n,m)-форм кориснi при дослiдженнi структури множини фундаментальних оди-ниць у кiльцi цiлих чисел полiв.
У роботi, при допомозi апарату числення трикутних матриць [3] побудовано рекур-сивнi алгоритми роботи iз (n,m)-формами третього та четвертого порядку та наведеноряд прикладiв, що iлюструють їх ефективнiсть у порiвняннi з алгоритмами, запропо-нованими у [2].
1 Кубiчнi рiвняння та iррацiональностi
Розглянемо кубiчнi iррацiональностi виду
x = a+ b 3√n+ c
3√n2, (1)
2000 Mathematics Subject Classification: 46-02, 46E30, 46J20.Ключовi слова i фрази: кубiчнi поля, параперманенти, алгебраїчнi iррацiональностi.
c©Семенчук А.В., 2011

Про деякi алгоритми обчислень для кубiчних полiв та полiв четвертого степеня 131
де a, b, c, n — деякi рацiональнi числа, що назваються кубiчними формами [3].Коефiцiєнти кубiчного рiвняння
x3 = qx2 + px+ r, (2)
яке задовольняє кубiчна форма (1), можна знайти, розв’язавши вiдповiдну системурiвнянь, або простiше, при допомозi перетворень Чирнгаузена [2].
Маємо: q = 3a,
p = 3(cbn− a2),
r = b3n+ c3n2 + a3 − 3abcn
(3)
Якщо норма кубiчної форми дорiвнює одиницi, то довiльний її степiнь також до-рiвнює одиницi. В зв’язку з цим виникають циклiчнi групи одиниць. Для генеруванняелементiв таких груп корисними виявляються наступнi двi теореми.
Теорема 1. Якщо x3 = qx2 + px+ r i xm = Qmx2 +Pmx+Rm, то виконуються рiвностi:
Qm =
qpq
qrp
pq
q
0 rp
pq
q
0 0 rp
pq
q... . . . . . . . . . . . .
. . .0 0 0 . . . r
ppq
q
m−2
, Pm =
prq
q
0 pq
q
0 rp
pq
q
0 0 rp
pq
q... . . . . . . . . . . . .
. . .0 0 0 . . . r
ppq
q
m−2
,
Rm =
r
0 q
0 pq
q
0 rp
pq
q
0 0 rp
pq
q... . . . . . . . . . . . .
. . .0 0 0 . . . r
ppq
q
m−2
, m = 3, 4, . . . .
Доведення. Маємо xm+1 = Qm+1x2 + Pm+1x+Rm+1. З iншого боку, маємо рiвностi
xm+1 = Qmx3 + Pmx
2 +Rmx = Qm(qx2 + px+ r) + Pmx2 +Rmx =
(qQm + Pm)x2 + (pQm +Rm)x+Qmr,
але коефiцiєнти qQm + Pm, pQm + Rm, Qmr є вiдповiдно розкладом параперманентiвQm+1, Pm+1, Rm+1 за елементами першого стовпця.
Розкладаючи параперманент Qm у теоремi 1 за елементами останнього рядка, ма-ємо лiнiйне рекурентне рiвняння третього порядку Qm = qQm−1 + pQm−2 + rQm−3 зпочатковими умовами Q2 = 1, Q<2 = 0.

132 Семенчук А.В.
Розкладаючи параперманент для Pm за елементами першого стовпця, дiстанемо ре-курсiю Pm = pQm−1 + rQm−2, m = 3, 4, . . . . Аналогiчно можна одержати рекурсiюRm = rQm−1, m = 3, 4, . . . . Таким чином, коефiцiєнти Qm, Pm, Rm, m = 3, 4, . . . , утеоремi 1 можна знайти iз рекурсiй
Qm = qQm−1 + pQm−2 + rQm−3, Q2 = 1, Q<0 = 0,
Pm = pQm−1 + rQm−2, Rm = rQm−1, m = 3, 4, . . . ,
що дають простий алгоритм їх обчислення.
Теорема 2. Нехай x = a+ b 3√n+ c
3√n2 є коренем рiвняння x3 = qx2 + px+ r, тодi
xm = Am +Bm3√n+ Cm
3√n2,
причому
3Am =
q2pq
q3rp
pq
q
0 rp
pq
q
0 0 rp
pq
q... . . . . . . . . . . . .
. . .0 0 0 . . . r
ppq
q
m
, (4)
Bm =
bnc2−ab
0 pq
q
0 rp
pq
q
0 0 rp
pq
q... . . . . . . . . . . . .
. . .0 0 0 . . . r
ppq
q
m
, Cm =
cb2−acq
q
0 pq
q
0 rp
pq
q
0 0 rp
pq
q... . . . . . . . . . . . .
. . .0 0 0 . . . r
ppq
q
m
.
Доведення. Розкладаючи параперманент (4) за елементами першого стовпця, можнаотримати рiвностi:
3Am = q[]m−1 + 2p[]m−2 + 3r[]m−3 = q(q[]m−2 + p[]m−3 + r[]m−4) + 2p[]m−2 + 3r[]m−3 =
(q2 + 2p)[]n−2 + (qp+ 3r)[]m−3 + qr[]m−4,
де символом []m позначено параперманент
Qm =
qpq
qrp
pq
q
0 rp
pq
q
0 0 rp
pq
q... . . . . . . . . . . . .
. . .0 0 0 . . . r
ppq
q
m
.

Про деякi алгоритми обчислень для кубiчних полiв та полiв четвертого степеня 133
З iншого боку, згiдно з теоремою 1, маємо рiвностi
xm = Qmx2 + Pmx+Rm =(
(a2 + 2bcn) + (c2n+ 2ab) 3√n+ (b2 + 2ac)
3√n2)Qm + (a+ b 3
√n+ c
3√n2)Pm +Rm =(
(a2 + 2bcn)Qm + aPm +Rm
)+((c2n+ 2ab)Qm + bPm
)3√n+
((b2 + 2ac)Qm + cPm
) 3√n2.
Тому справедливою буде рiвнiсть
Am = (a2 + 2bcn)Qm + aPm +Rm.
Але, згiдно з рiвностями (3), маємо a2 + 2bcn = 13(q2 + 2p) i a = q
3, отже,
3Am = (q2 + 2p)[]m−2 + q(p[]m−3 + r[]m−4) + 3r[]m−3 =
(q2 + 2p)[]m−2 + (qp+ 3r)[]m−3 + qr[]m−4.
Параперманент Qm задовольняє рекурсiю
Qm = qQm−1 + pQm−2 + rQm−3, Q0 = 1, Q<0 = 0.
Коефiцiєнти Am, Bm, Cm можна знайти iз рекурсiй
3Am = qQm−1 + 2pQm−2 + 3rQm−3,
Bm = bQm−1 + (nc2 − ab)Qm−2,
Cm = cQm−1 + (b2 − ac)Qm−2, m = 1, 2, . . . .
2 Рiвняння та iррацiональностi четвертого степеня
Розглянемо iррацiональностi четвертого степеня виду
x = a+ b 4√n+ c
4√n2 + d
4√n3, (5)
де a, b, c, d, n — деякi рацiональнi числа.Знаходимо коефiцiєнти рiвняння четвертого степеня
x4 = qx3 + px2 + rx+ s,
яке задовольняє форма (5). Вони дорiвнюютьq = 4a,
p = 2(c2n+ 2bdn− 3a2),
r = 4(a3 + b2cn+ cd2n2 − ac2n− 2abdn)
s = d4n3−c4n2+b4n−a4−2b2d2n2+4bc2dn2−4a2bdn+2a2c2n−4ab2cn−4acd2n2
(6)
Знайшовши один корiнь дiофантового рiвняння
d4n3−c4n2+b4n−a4−2b2d2n2+4bc2dn2−4a2bdn+2a2c2n−4ab2cn−4acd2n2 = 1,
послiдовним пiднесенням до степеня можна отримати ряд нових його розв’язкiв. Томукорисними виявляються наступнi теореми.

134 Семенчук А.В.
Теорема 3. Якщо x4 = qx3 + px2 + rx + s i xm = Qmx3 + Pmx
2 + Rmx + Sm, то вико-нуються рiвностi
Qm =
qpq
qrp
pq
qsr
rp
pq
q
0 sr
rp
pq
q
0 0 sr
rp
pq
q... . . . . . . . . . . . . . . .
. . .0 0 0 . . . s
rrp
pq
q
m−3
, Pm =
prq
qsp
pq
q
0 rp
pq
q
0 sr
rp
pq
q
0 0 sr
rp
pq
q... . . . . . . . . . . . . . . .
. . .0 0 0 . . . s
rrp
pq
q
m−3
,
Rm =
rsq
q
0 pq
q
0 rp
pq
q
0 sr
rp
pq
q
0 0 sr
rp
pq
q... . . . . . . . . . . . . . . .
. . .0 0 0 . . . s
rrp
pq
q
m−3
, Sm =
s
0 q
0 pq
q
0 rp
pq
q
0 sr
rp
pq
q
0 0 sr
rp
pq
q... . . . . . . . . . . . . . . .
. . .0 0 0 . . . s
rrp
pq
q
m−3
,
де m = 4, 5, . . . .
Доведення. Маємо xm+1 = Qm+1x3 + Pm+1x
2 +Rm+1x+ Sm+1. Але
xm+1 = Qmx4 + Pmx
3 +Rmx2 + Smx = Qm(qx3 + px2 + rx+ s) + Pmx
3 +Rmx2 + Smx =
(qQm + Pm)x3 + (pQm +Rm)x2 + (rQm + Sm)x+ sQm.
Позаяк коефiцiєнти qQm +Pm, pQm +Rm, rQm +Sm, sQm є вiдповiдно розкладом пара-перманентiв Qm+1, Pm+1, Rm+1, Sm+1 за елементами першого стовпця, то теорема вико-нується.
Розкладаючи параперманент Qm у теоремi 3 за елементами останнього рядка, маємолiнiйне рекурентне рiвняння четвертого порядку
Qm = qQm−1 + pQm−2 + rQm−3 + sQm−4, Q3 = 1, Q<3 = 0.
Розкладаючи параперманент для Pm за елементами першого стовпця, дiстанемо ре-курсiю Pm = pQm−1 + rQm−2 + sQm−3, m = 4, 5, . . . . Аналогiчно можна одержати ре-курсiї Rm = rQm−1 + sQm−2, Sm = sQm−1, m = 4, 5, . . . . Таким чином, коефiцiєнтиQm, Pm, Rm, Sm, m = 3, 4, . . . , у теоремi 3 можна знайти iз рекурсiй
Qm = qQm−1 + pQm−2 + rQm−3 + sQm−4, Q2 = 1, Q<0 = 0,
Pm = pQm−1 + rQm−2 + sQm−3, m = 4, 5, . . . ,

Про деякi алгоритми обчислень для кубiчних полiв та полiв четвертого степеня 135
Rm = rQm−1 + sQm−2, m = 4, 5, . . . ,
Sm = sQm−1, m = 4, 5, . . . ,
що дають простий алгоритм обчислення коефiцiєнтiв.
Приклад 2.1. Нехай x4 = 16x3 − 56x2 + 256x− 862, тодi x7 = Q7x3 + P7x
2 +R7x+ S7.Користуючись рекурсiями
Qm = 16Qm−1 − 56Qm−2 + 256Qm−3 − 862Qm−4, Q3 = 1, Q<3 = 0,
Pm = −56Qm−1 + 256Qm−2 − 862Qm−3,
Rm = 256Qm−1 − 862Qm−2,
Sm = −862Qm−1, m = 4, 5, . . . ,
отримаємоS4 = −862, R4 = 256, P4 = −56, Q4 = 16,
S5 = −13792, R5 = 3234, P5 = −640, Q5 = 200,
S6 = −172400, R6 = 37408, P6 = −7966, Q6 = 2560,
S7 = −2206720, R7 = 482960, P7 = −105952, Q7 = 32994.
Отже, x7 = 32994x3 − 105952x2 + 482960x− 2206720.
Теорема 4. Нехай x = a+b 4√n+c
4√n2+d
4√n3 є коренем рiвняння x4 = qx3+px2+rx+s,
тодixm = Am +Bm
4√n+ Cm
4√n2 +Dm
4√n3,
причому
4Am =
q2pq
q3rp
pq
q4sr
rp
pq
q
0 sr
rp
pq
q
0 0 sr
rp
pq
q... . . . . . . . . . . . . . . .
. . .0 0 0 . . . s
rrp
pq
q
m
, (7)
Bm =
b2cdn−2ab
αp
pq
q
0 rp
pq
q
0 sr
rp
pq
q
0 0 sr
rp
pq
q... . . . . . . . . . . . . . . .
. . .0 0 0 . . . s
rrp
pq
q
m
,

136 Семенчук А.В.
Cm =
cb2+d2n−2ac
βp
pq
q
0 rp
pq
q
0 sr
rp
pq
q
0 0 sr
rp
pq
q... . . . . . . . . . . . . . . .
. . .0 0 0 . . . s
rrp
pq
q
m
,
Dm =
c2bc−2ad
γp
pq
q
0 rp
pq
q
0 sr
rp
pq
q
0 0 sr
rp
pq
q... . . . . . . . . . . . . . . .
. . .0 0 0 . . . s
rrp
pq
q
m
,
де α = d3n2 + a2b + bc2n − b2dn − 2acdn, β = a2c − ab2 − ad2n − c3n + 2bcdn, γ =
a2d− bd2n+ c2dn− 2abc+ b3.
Доведення. Розкладаючи параперманент (7) за елементами першого стовпця, можнаотримати рiвностi:
4Am = q[]m−1 + 2p[]m−2 + 3r[]m−3 + 4s[]m−4 = q(q[]m−2 + p[]m−3 + r[]m−4 + s[]m−5)+
2p[]m−2 + 3r[]m−3 + 4s[]m−4 = (q2 + 2p)[]m−2 + (qp+ 3r)[]m−3 + (qr + 4s)[]m−4 + qs[]m−5,
де символом []m позначено параперманент
Qm =
qpq
qrp
pq
qsr
rp
pq
q
0 sr
rp
pq
q
0 0 sr
rp
pq
q... . . . . . . . . . . . . . . .
. . .0 0 0 . . . s
rrp
pq
q
m
.
З iншого боку, згiдно з теоремою 3, маємо рiвностi
xm = Qmx3 + Pmx
2 +Rmx+ Sm =
((a3 + 6abdn+ 3ac2n+ 3cd2n2 + 3b2cn) + (d3n2 + 3a2b+ 3bc2n+ 3b2dn+ 6acdn) 4√n+

Про деякi алгоритми обчислень для кубiчних полiв та полiв четвертого степеня 137
(3a2c+ 3ab2 + 3ad2n+ c3n+ 6bcdn)4√n2 + (3a2d+ 3bd2n+ 3c2dn+ 6abc+ b3)
4√n3)Qm+(
(a2 + 2bdn+ c2n) + (2cdn+ 2ab) 4√n+ (b2 + d2n+ 2ac)
4√n2 + (2bc+ 2ad)
4√n3)Pm+
(a+ b 4√n+ c
4√n2 + d
4√n3)Rm + Sm =(
(a3 + 6abdn+ 3ac2n+ 3cd2n2 + 3b2cn)Qm + (a2 + 2bdn+ c2n)Pm + aRm + Sm)
+((d3n2 + 3a2b+ 3bc2n+ 3b2dn+ 6acdn)Qm + (2cdn+ 2ab)Pm + bRm
)4√n+(
(3a2c+ 3ab2 + 3ad2n+ c3n+ 6bcdn)Qm + (b2 + d2n+ 2ac)Pm + cRm
) 4√n2+(
(3a2d+ 3bd2n+ 3c2dn+ 6abc+ b3)Qm + (2bc+ 2ad)Pm + dRm
) 4√n3.
Тому справедливою буде рiвнiсть
Am = (a3 + 6abdn+ 3ac2n+ 3cd2n2 + 3b2cn)Qm + (a2 + 2bdn+ c2n)Pm + aRm + Sm.
Але, згiдно з рiвностями (6), маємо a3 +6abdn+3ac2n+3cd2n2 +3b2cn = 14(q3 +3qp+3r),
a2 + 2bdn+ c2n = 14(q2 + 2p) i a = q
4, отже,
4Am = (q3+3qp+3r)[]m−3+(q2+2p)(p[]m−4+r[]m−5+s[]m−6)+q(r[]m−4+s[]m−5)+4s[]m−4 =
(q2 + 2p)[]m−2 + (qp+ 3r)[]m−3 + (qr + 4s)[]m−4 + qs[]m−5.
Для параперманента Qm справедливою є рекурсiя
Qm = qQm−1 + pQm−2 + rQm−3 + sQm−4, Q0 = 1, Q<0 = 0,
коефiцiєнти Am, Bm, Cm, Dm можна знайти iз рекурсiй
4Am = qQm−1 + 2pQm−2 + 3rQm−3 + 4sQm−4,
Bm = bQm−1 + (2cdn− 2ab)Qm−2 + αQm−3,
Cm = cQm−1 + (b2 + d2n− 2ac)Qm−2 + βQm−3,
Dm = dQm−1 + (2bc− 2ad)Qm−2 + γQm−3, m = 1, 2, . . . .
Приклад 2.2. Нехай x = 4 + 3 4√
2 + 24√
22 +4√
23 є коренем рiвняння x4 = 16x3 − 56x2 +
256x− 862, тодix5 = A5 +B5
4√
2 + C54√
22 +D54√
23.
Користуючись рекурсiями
4Am = 16Qm−1 − 112Qm−2 + 768Qm−3 − 3448Qm−4,
Bm = 3Qm−1 − 16Qm−2 + 26Qm−3, Cm = 2Qm−1 − 5Qm−2 − 4Qm−3,
Dm = Qm−1 + 4Qm−2 − 3Qm−3, Qm = 16Qm−1 − 56Qm−2 + 256Qm−3 − 862Qm−4,
Q0 = 1, Q<0 = 0, m = 1, 2, . . .
138 Семенчук А.В.
отримаємо4A1 = 16, B1 = 3, C1 = 2, D1 = 1, Q1 = 16,
4A2 = 144, B2 = 32, C2 = 27, D2 = 20, Q2 = 200,
4A3 = 2176, B3 = 370, C3 = 316, D3 = 261, Q3 = 2560,
4A4 = 27400, B4 = 4896, C4 = 4056, D4 = 3312, Q4 = 32994,
4A5 = 339616 ⇒ A5 = 84904, B5 = 63222, C5 = 52388, D5 = 42634.
Отже, x5 = 84904 + 63222 4√
2 + 523884√
22 + 426344√
23.
Лiтература
1. Вороной Г.Ф. Об одном обобщении алгоритма непрерывных дробей. Докторская диссертация, Вар-шава, 1896 г.
2. Делоне Б.Н., Фаддеев Д.К. Теория иррациональностей третьей степени – М.: Изд-во АН СССР,1940. – 340 с.
3. Заторський Р.А. Числення трикутних матриць та його застосування – Iвано-Франкiвськ: Вид-воСiмик, 2010. – 508 с.
4. Steuding J., Diophantine Analysis, Chapman-Hall, CRC Press, 2005.
Iнститут прикладних проблем механiки i математики iменi Я.С. Пiдстригача НАН України
Львiв, Україна.
Надiйшло 28.02.2011
Semenchuk A.V. About some algorithms of calculations for the cube fields and fields of fourth
degree, Carpathian Mathematical Publications, 3, 1 (2011), 130–138.
The effective algorithms of calculations are built in the cube fields and fields of fourth
degree.
Семенчук А.В. О некоторых алгоритмах вычислений для кубических полей и полей че-твертой степени // Карпатские математические публикации. — 2011. — Т.3, 1. — C.130–138.
Построены эффективные алгоритмы вычислений в кубических полях и полях четвер-той степени.