Embed Size (px)
DESCRIPTION
第七章 图像分割. 一、引言 图像分割的目的 —— 理解图像的内容,提取出我们感兴趣的对象。 图像分割按照具体应用的要求和具体图像的内容将图像分割成一块块区域。 图像分割是模式识别和图像分析的预处理阶段。 图像分割的方法 —— 通常采用聚类方法,假设图像中组成我们所感兴趣对象的像素具有一些相似的特征,如相同的灰度值、相同的颜色等。 图像分割技术 —— 基于区域的分割技术 ; 基于边界的分割技术 。. 图像分割的数学描述. - PowerPoint PPT Presentation
Citation preview
第七章 图像分割一、引言图像分割的目的——理解图像的内容,提取出我们感兴趣的对象。 图像分割按照具体应用的要求和具体图像的内容将图像分割成一块块区域。 图像分割是模式识别和图像分析的预处理阶段。图像分割的方法——通常采用聚类方法,假设图像中组成我们所感兴趣对象的像素具有一些相似的特征,如相同的灰度值、相同的颜色等。图像分割技术——基于区域的分割技术 ; 基于边界的分割技术 。
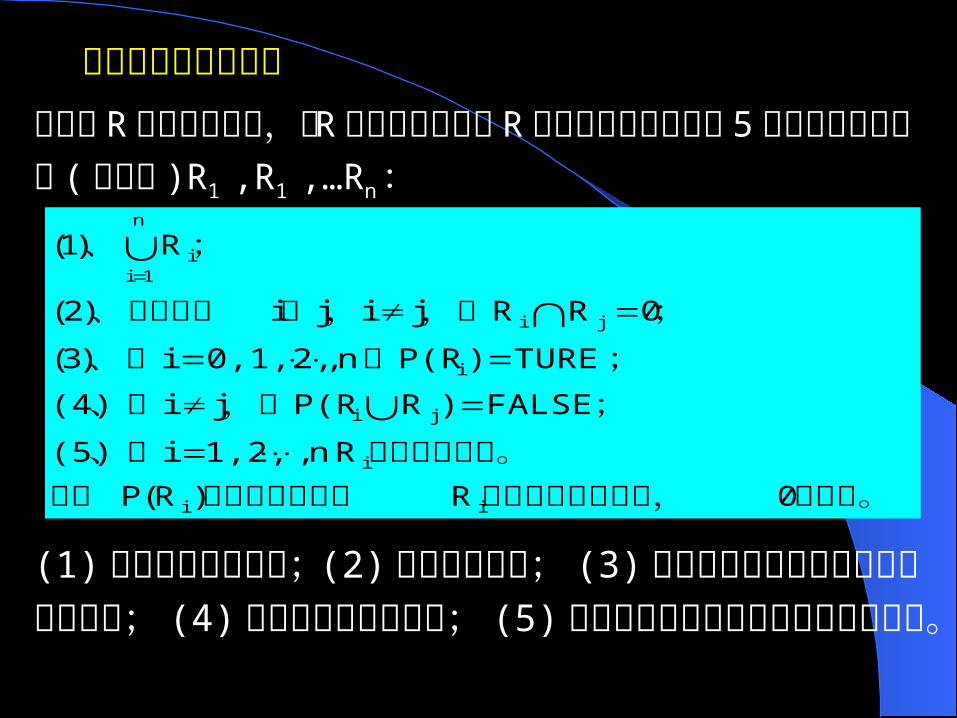
图像分割的数学描述令集合 R 代表整个区域,对 R 的分割可看作将 R 分成若干个满足以下 5 个条件的非空子集 ( 子区域 )R1 ,R1 ,…Rn :
是空集。中元素的逻辑谓词,是对所有在集合其中
是连通的区域。对、
;,有对、
;有对、
;,有,和对所有的、
;、
0R)R(PRn ,1,2,i (5)
FALSE)RP(Rji (4)
TURE)P(Rn ,0,1,2,i )3(
0RRjiji )2(
R )1(
ii
i
ji
i
ji
n
1ii
(1) 所有子集构成图像; (2) 各子集不重叠; (3) 每个子集中的像素有某种共同的属性; (4) 不同的子集属性不同; (5) 每个子集中的所有像素应该是连通的。
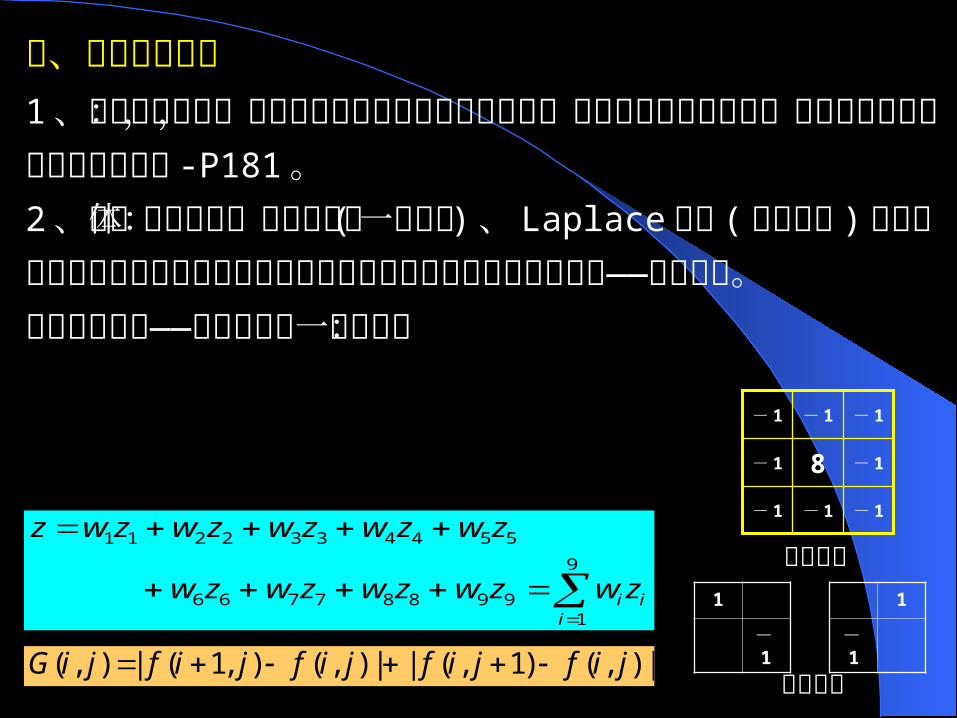
二、并行边界技术1 、边缘检测原理:利用边缘灰度变换较剧烈的特点,根据灰度变换的情况,选择不同的检测方法使边缘凸现 -P181 。2 、具体算子模板:用梯度算子 ( 一阶差分 ) 、 Laplace 算子 ( 二阶差分 )以及在图像增强中所讲的各类图像锐化算子模板都可以对图像进行锐化——空域卷积。以点模板为例——对模板的另一种理解:
9
199887766
5544332211
i
ii zwzwzwzwzw
zwzwzwzwzwz- 1- 1- 1
- 18- 1
- 1- 1- 1
二阶差分1
-1
1
-1一阶差分|),()1,(| |),(),1(|),( jifjifjifjifjiG
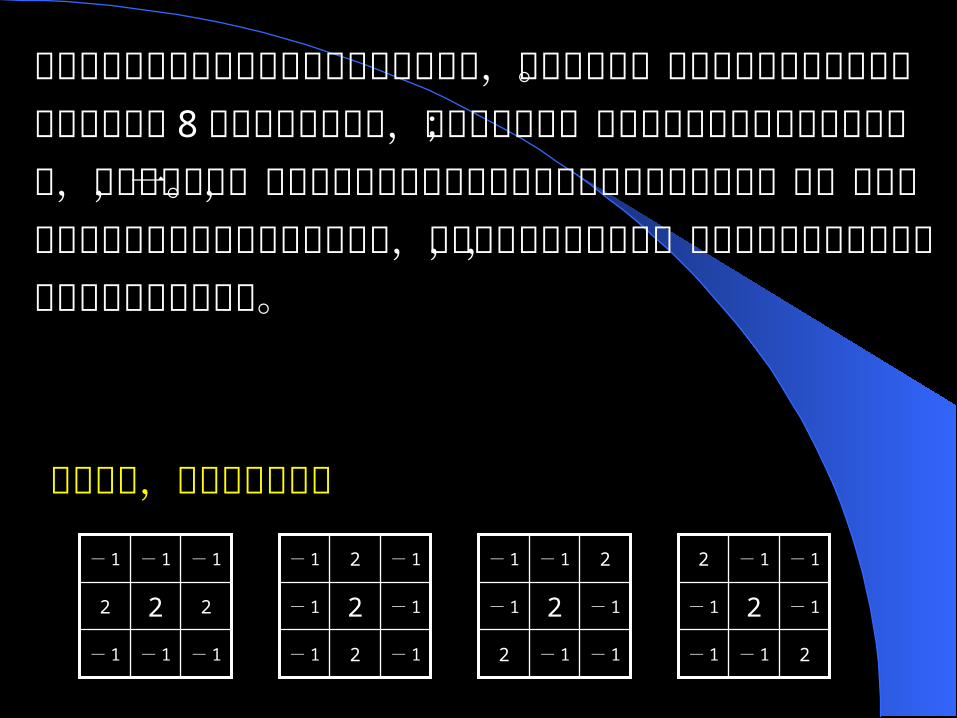
如果在模板区域内所有图像的象素有相同的值,则其和为零。如果模板中心位于某个灰度值不同于其 8 邻域灰度值的点上,则其和不为零;如果该点在偏离模板中心的位置上,其和也不为零,但其响应幅度比起这个点位于模板中心的情况要小一些。这时,可以采用阈值法清除这类较弱的响应,如果其幅度值超过阈值,就意味着点检测出来了,如果低于阈值则忽略掉。同样道理,可以构造线模板
- 1- 1- 1
222
- 1- 1- 1
- 12- 1
- 12- 1
- 12- 1
- 1- 12
- 12- 1
2- 1- 1
2- 1- 1
- 12- 1
- 1- 12
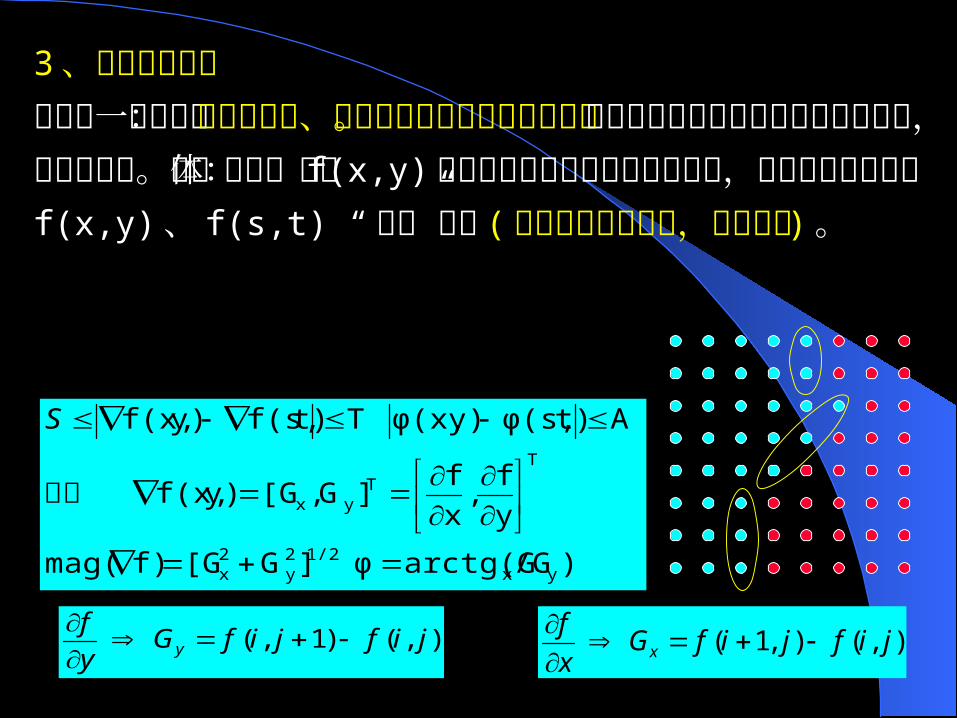
3 、边界闭合算法边界有一个特点:其梯度相似、梯度的方向角度的大小相似。将满足这两个条件的点赋予同等灰度,可构成边界。具体做法:求出 f(x,y) 邻域内所有像素的梯度和梯度角,将满足下列关系的 f(x,y) 、 f(s,t) “ 连接”起来 ( 赋予特殊的灰度值,如最大值 ) 。
)/Garctg(Gφ ]G[Gf)mag(
yf,
xf]G,[Gy)f(x,
At)φ(s,y)φ(x, Tt)f(s,y)f(x,
yx1/22
y2x
TT
yx
其中
S
),(),1( jifjifGxf
x ),()1,( jifjifG
yf
y
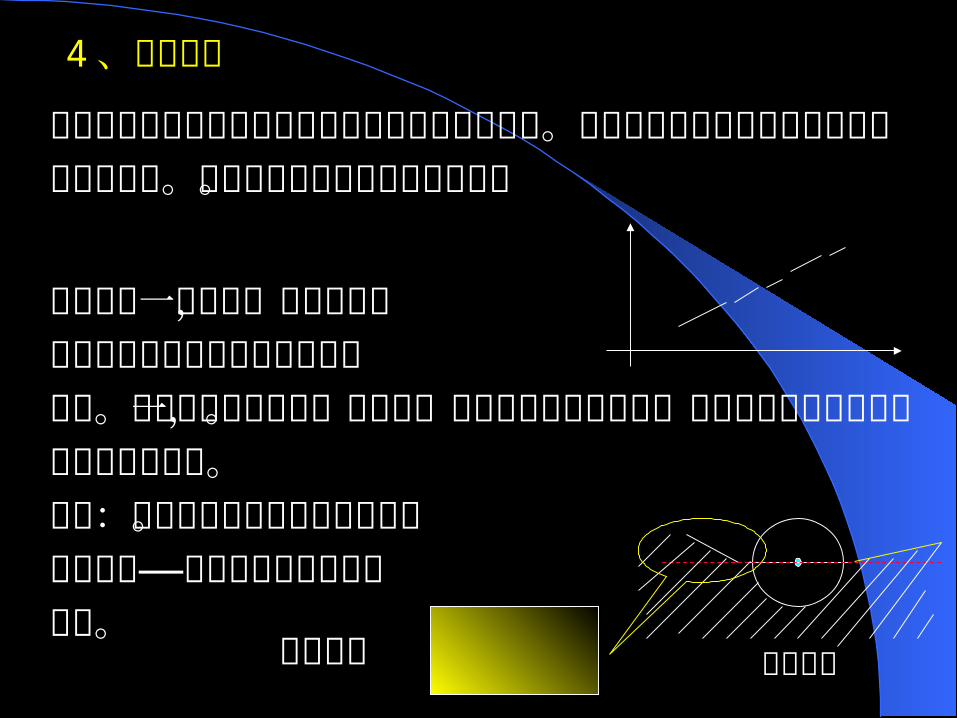
4、哈夫变换用哈夫变换可以检测出某些已知形状的目标的边界。前提条件是该目标边界的数学模型是已知的。哈夫变换具有较强的抗干扰性。某图像中一条直线,使用某种检测算子后有如图所示的边界提取结果。根据经验该边界是一条真线,可以用直线方程表达。使用哈夫变换可直接得出该边界的方程。实例:汽车大灯灯光截止线的测试。测试内容——截止线与水平基线的夹角。 右前大灯图像效果
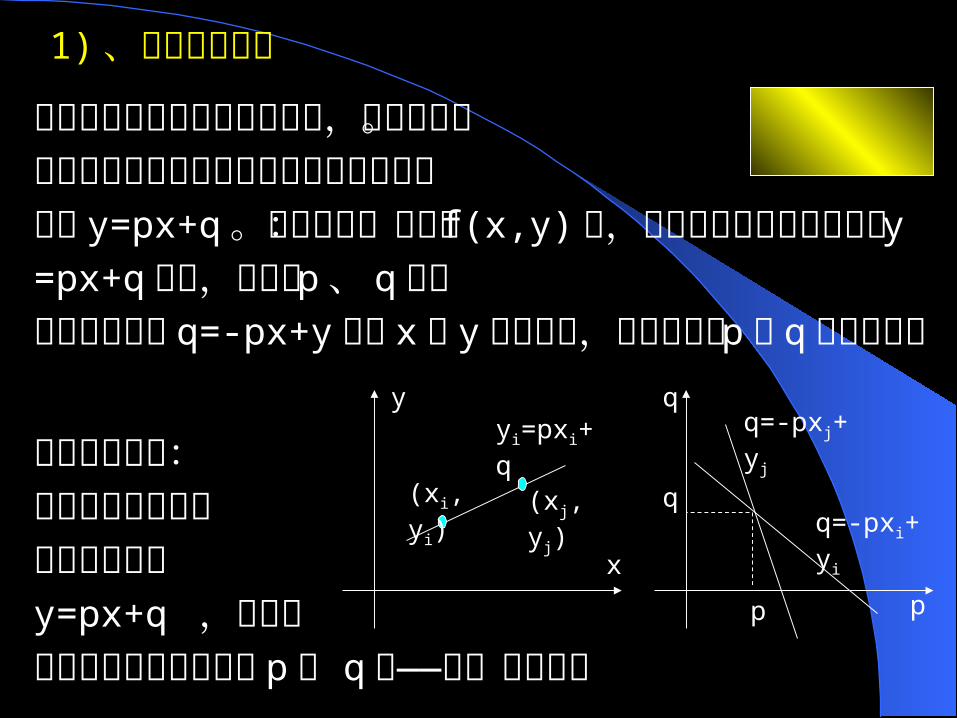
1) 、哈夫变换原理如果对上述得到的图像求导数,如图所示。问题变成求导数值最大的点所共线的直线方程 y=px+q。换句话说:在图像 f(x,y) 中,求取那些最多的满足方程 y=px+q的点,并确定 p 、 q值。将方程改写为 q=-px+y ,将 x , y 看成定数,则可以建立 p , q直线方程。
(xi,y
i)(xj,y
j)
yi=pxi+q
x
yq=-pxj+yj
q=-pxi+yi
p
q
p
q由图可以看出:通过求取共线点,构造直线方程y=px+q ,求取各直线的焦点即可确定点 p , q值——点-线变换。
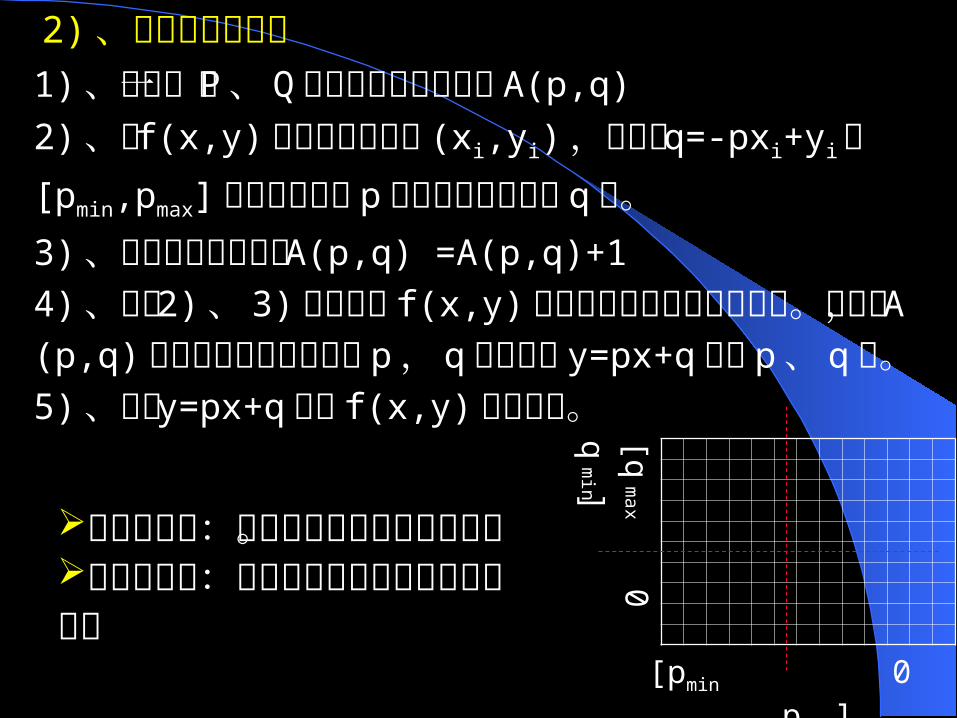
2) 、哈夫变换的操作1) 、构造一个 P 、 Q空间的二维累加数组 A(p,q)2) 、从 f(x,y) 的指定区域中取 (xi,yi) ,按方程q=-pxi+yi在[pmin,pmax]中遍取可能的 p 值计算得到可能的 q值。3) 、在对应的位置计算 A(p,q) =A(p,q)+14) 、重复 2) 、 3)直到将从 f(x,y) 的指定区域中的所有点取完。此时, A(p,q) 数组中最大值所对应的 p , q就是方程 y=px+q中的 p 、 q值。5) 、根据 y=px+q绘出 f(x,y) 中的直线。
[pmin 0 pmax]
[qm
ax 0 qm
in]
区域的选择:来自确认存在直线的区域。坐标的选择:来自对存在的直线参数的估测。
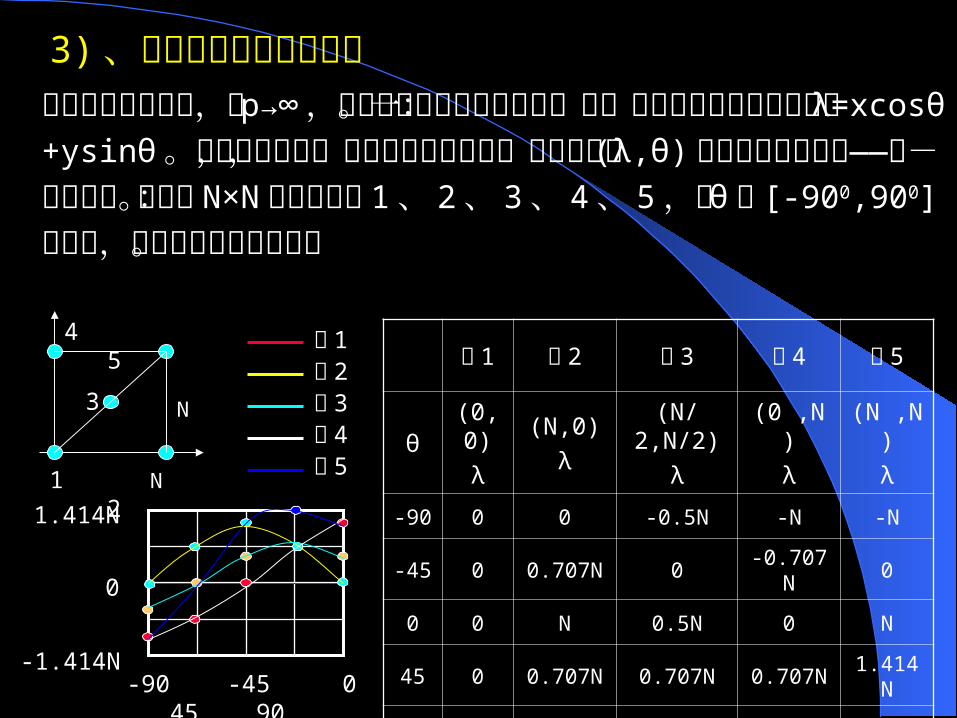
3) 、存在的问题即解决方法如果直线趋于垂直,则 p→∞,为直线的描述带来不方便。更一般的描述是用参数方程: λ=xcosθ+ysinθ。根据这个方程,图像中直线上的点,被映射成为 (λ,θ) 空间中的正弦曲线——点-曲线变换。例:某 N×N图像中有点 1 、 2 、 3 、 4 、 5 ,设 θ在[-900,900]中取值,画出它的哈夫变换图。
1 N 2
4 5
N 3
点 1 点 2 点 3 点 4 点 5θ (0,0)
λ(N,0)
λ(N/2,N/
2)λ
(0 ,N)λ
(N ,N)λ
-90 0 0 -0.5N -N -N
-45 0 0.707N 0 -0.707N 0
0 0 N 0.5N 0 N
45 0 0.707N 0.707N 0.707N 1.414N
90 0 0 0.5N N N-90 -45 0 45 90
1.414N
-1.414N
0
点 1点 2点 3点 4点 5
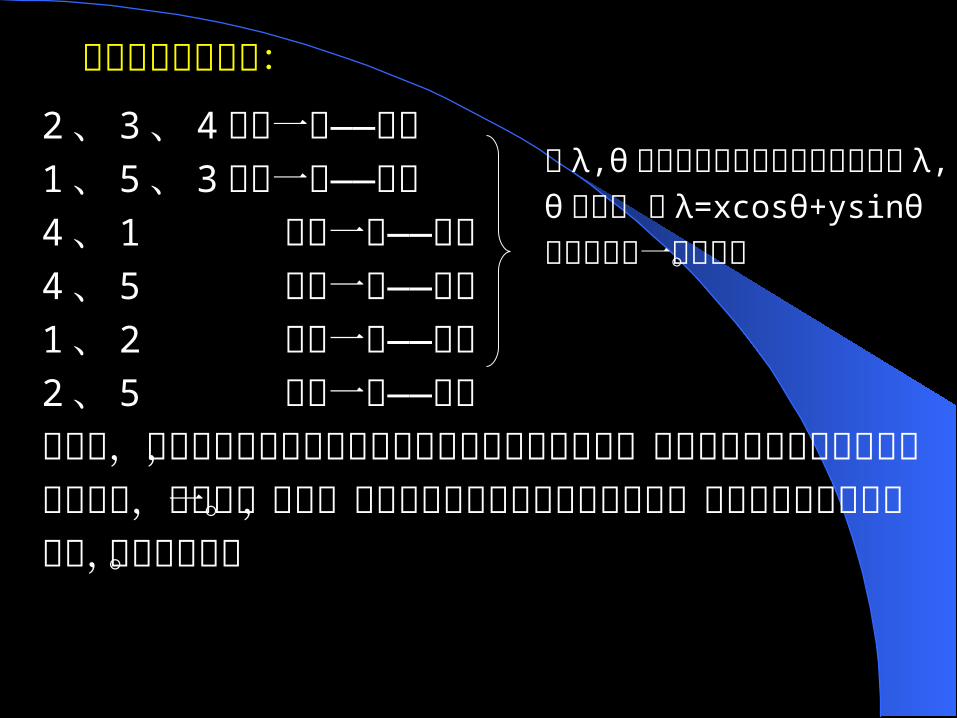
从曲线上可以看出:2 、 3 、 4交于一点——共线1 、 5 、 3交于一点——共线4 、 1 交于一点——共线4 、 5 交于一点——共线1 、 2 交于一点——共线2 、 5 交于一点——共线实际上,哈夫变换不仅可以对直线方程的共线点进行检测,也可以对曲线方程的共线点进行检测,道理是一样的。所不同的是随着未知参数的增加,所构造的数组维数会上升,计算量增加。
在 λ,θ数组中数值较高的单元所对应的 λ,θ值构成 的 λ=xcosθ+ysinθ为图像中的一条直线。
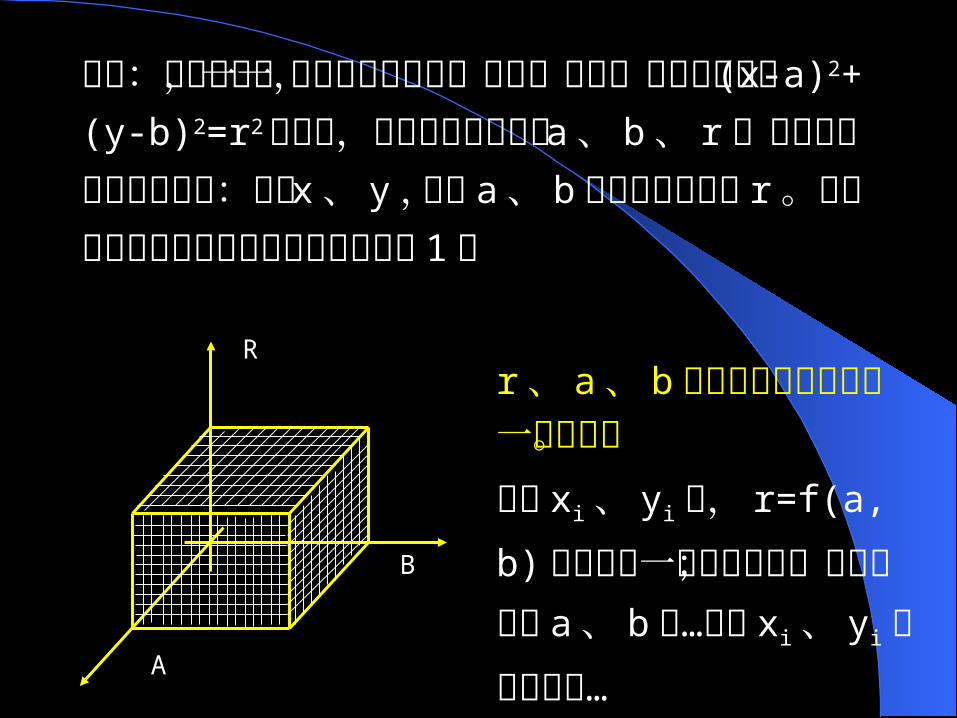
例如:根据经验,图像中的某目标一定是一个圆,其方程可以用 (x-a)2+(y-b)2=r2 来描述,其中有三个未知数 a 、 b、 r。通过哈夫变换可以求得:给定 x 、 y ,遍取 a 、 b的可能值计算出 r。并使对应的三维累加数组的对应位置增 1 。
A
B
R r、 a 、 b的取值范围事先应有一个估测。给定 xi 、 yi后, r=f(a,b) 的方程是一个圆的方程;遍取可能的 a 、 b值…改变 xi 、 yi ,重复操作…
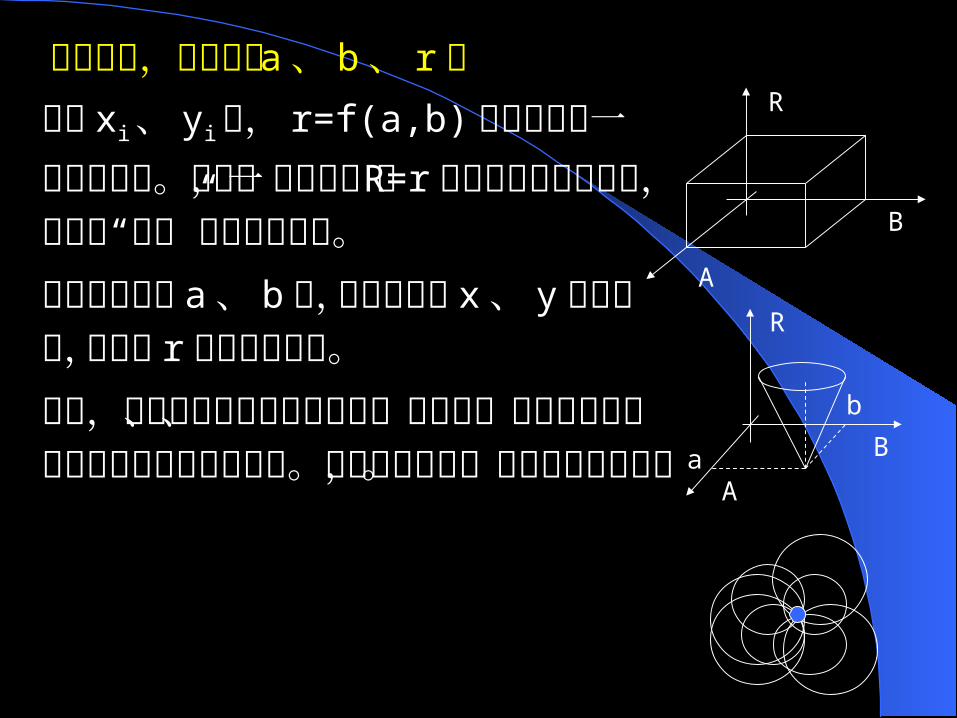
如此往复,可得参数 a 、 b、 r。给定 xi、 yi后, r=f(a,b) 的方程仍是一个圆的方程。因此,用任何一个 R=r 平面来切割三维数组,看到的“截面”都是圆的集合。累加值最高的 a 、 b值,就是共圆的 x 、y 点的个数,此时的 r就是圆的半径。同理,用哈夫变换可以检测椭圆、抛物线、指数曲线等可以用方程表达的各类曲线。未知参数越多,数组的维数越大。
A
B
R
A
B
R
a
b
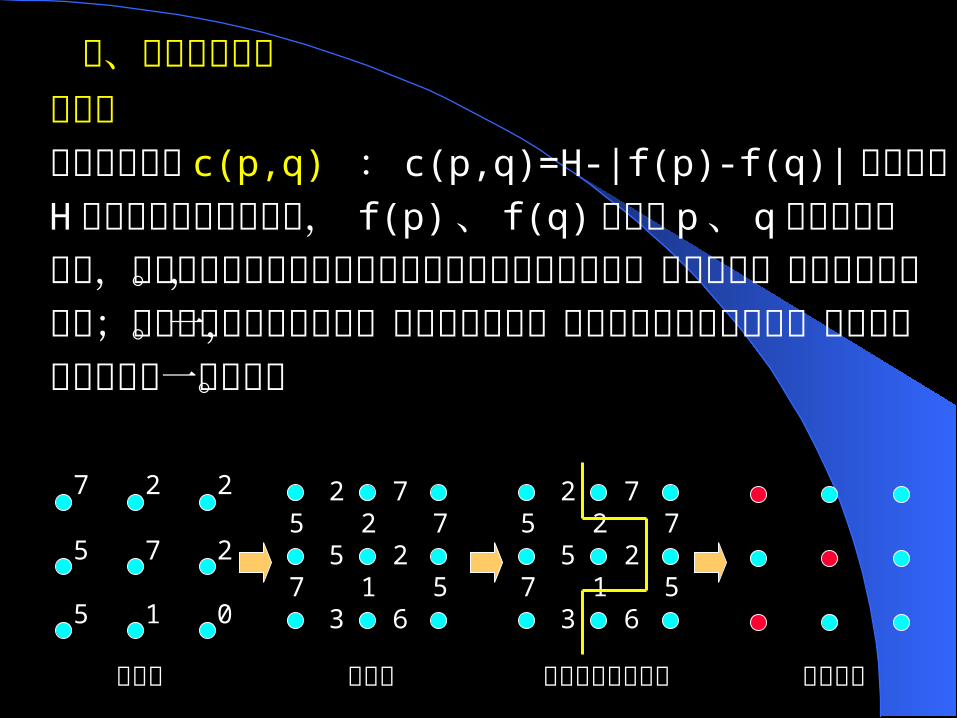
三、串行边界技术图搜索定义代价函数 c(p,q) : c(p,q)=H-|f(p)-f(q)|。其中,H为图像中的最大灰度值, f(p) 、 f(q) 为像素 p 、 q的灰度值。显然,代价函数的取值反比于像素间的灰度差值的绝对值。由此可得,代价大对应梯度小;反之代价小对应梯度大。如果能够发现一条累计代价最小的通路,这条通路就有可能是一个边界。
7 2 2
5 7 2
5 1 0
2 7
55 2 7
76
2
351
2 7
55 2 7
76
2
351
灰度图 代价图 累积代价最小通道 可能边界
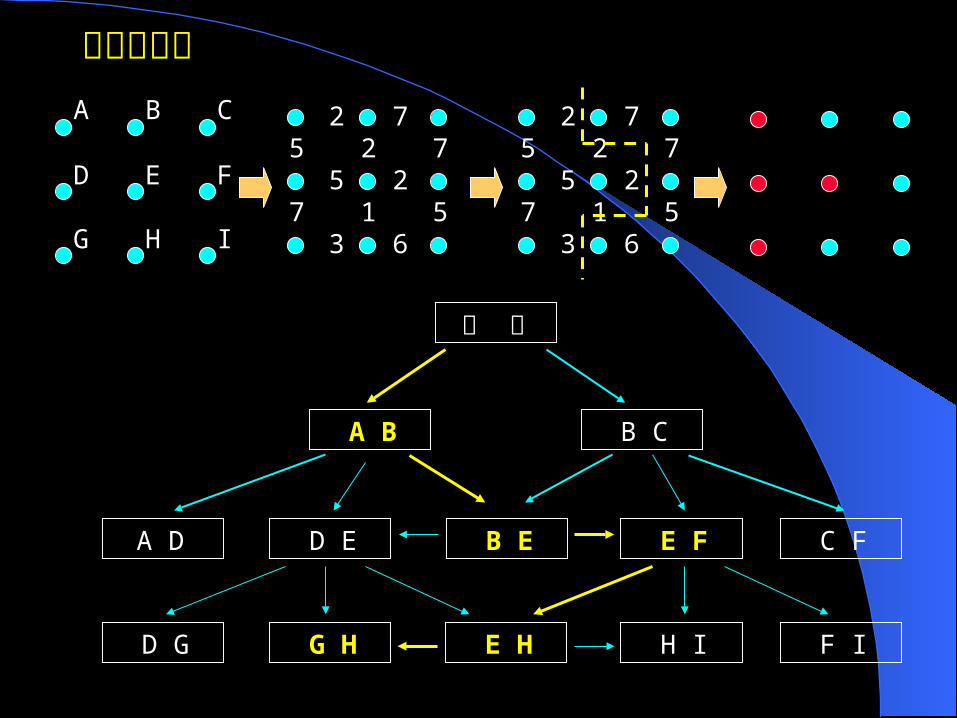
搜索决策图A B C
D E F
G H I
2 7
55 2 7
76
2
351
2 7
55 2 7
76
2
351
起 点
A B B C
A D B ED E C F
D G E H H I F I
E F
G H
四、并行区域技术——灰度阈值分割法 灰度阈值分割法是最古老的分割技术,常应用于图像中组成感兴趣对象的灰度值是较均匀的,并且和背景的灰度值不一样。事先决定一个阈值,当一个像素的灰度值超过这个阈值,我们就说这个像素属于我们所感兴趣的对象;反之则属于背景部分。 适合这种分割法的图像的直方图应是双峰模式,我们可以在两个峰值之间的低谷处找到一个合适的阈值。单一阈值方法不适合于由许多不同纹理组成一块块区域的图像。
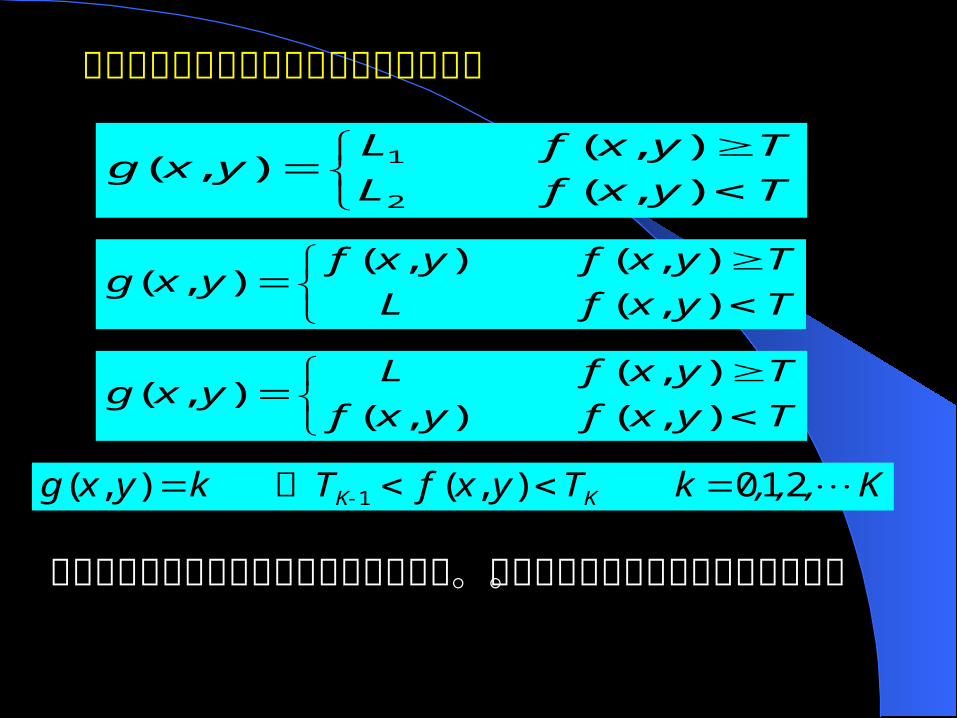
灰度阈值分割法图像分割技术的数学模型
灰度阈值分割法的关键是求出合适的阈值。于是产生出各种各样求阈值的方法。
TyxfTyxf
LL
yxg
),(),(
),(2
1
TyxfTyxf
Lyxf
yxg
),(),(
),(
),(
TyxfTyxf
yxfL
yxg
),(),(
),(
),(
K,,, kTyxfTkyxg KK- 210 ),( ),( 1 当
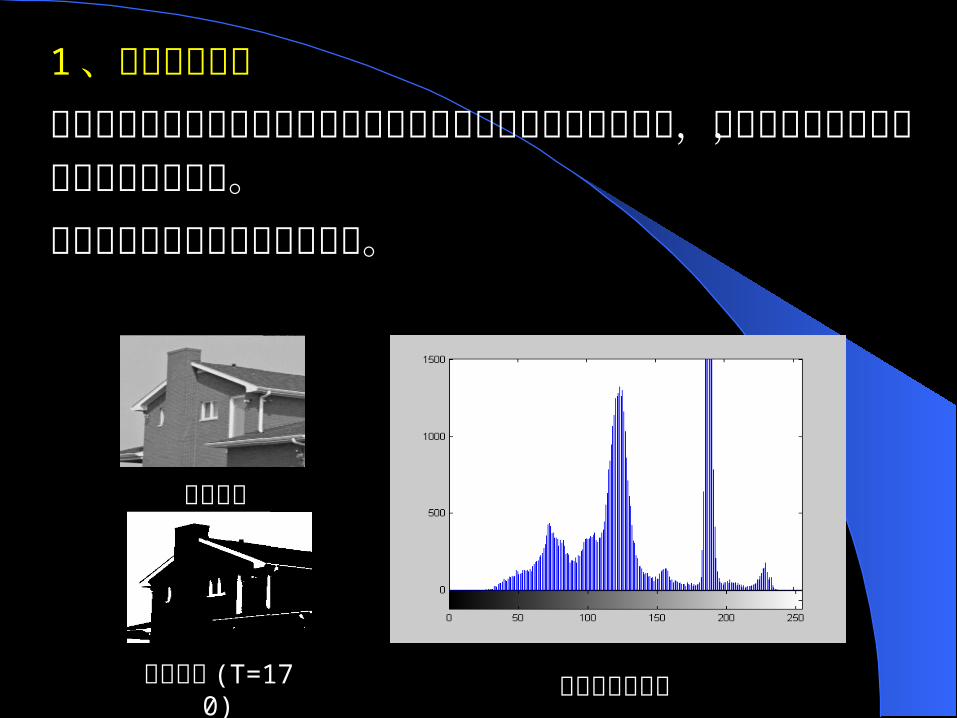
1 、极小值点阈值利用了被分割对象灰度与非被分割对象灰度之间的差异进行分割,可以用单阈值分割,也可用多阈值分割。其主要问题是如何选择最佳阈值。
原始图像
分割结果 (T=170)
原始图像直方图
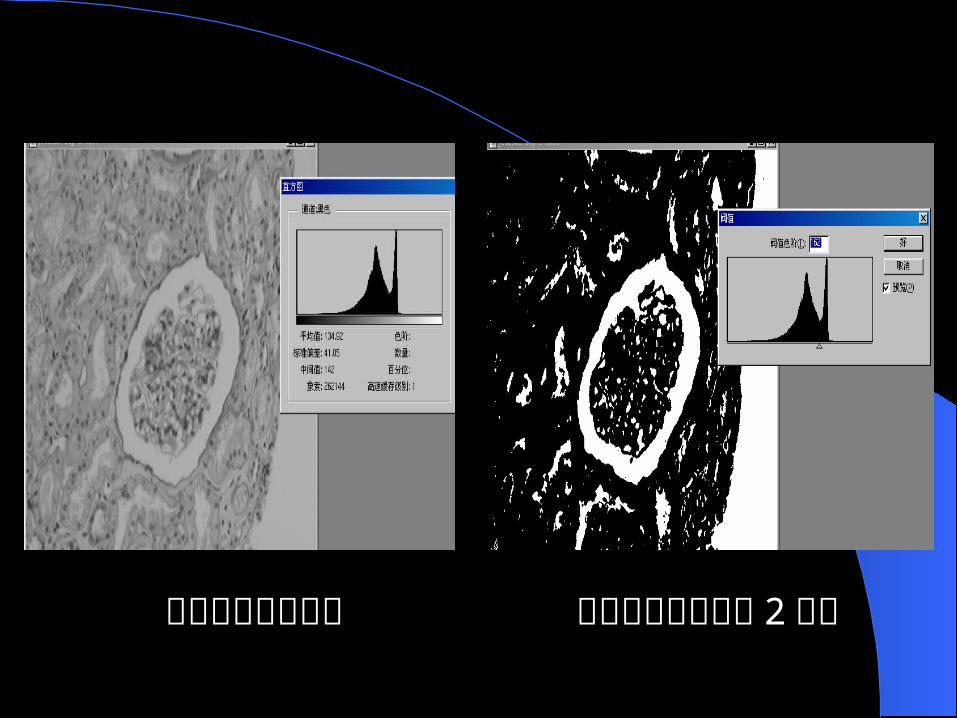
灰度图具有二峰性 二峰性的灰度图的 2 值化
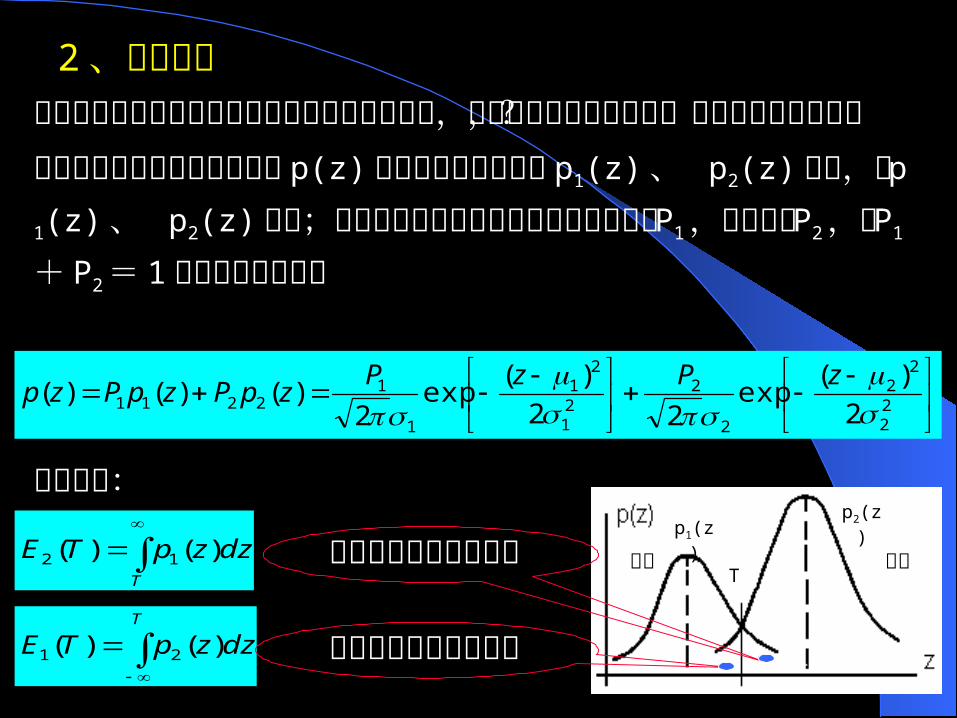
2 、最优阈值绝大部分图像的背景与目标的灰度值有重叠部分,如何才能选择最优阈值,减小误分割的概率?设背景与目标的概率密度之和 p(z) 是两个单峰密度函数 p1(z) 、 p2
(z)之和,且 p1(z) 、 p2(z) 已知;背景的象点数占图像总点数的百分比为 P1 ,目标点占 P2 ,且 P1+ P2= 1 则混合概率密度为
2
2
22
2
221
21
1
12211 2
)(exp22
)(exp2
)()()(
zPzPzpPzpPzp
T
dzzpTE )()( 21
T
dzzpTE )()( 12
误判概率:目标误判为背景的概率背景误判为目标的概率
p1(z)p2(z)
T目标 背景
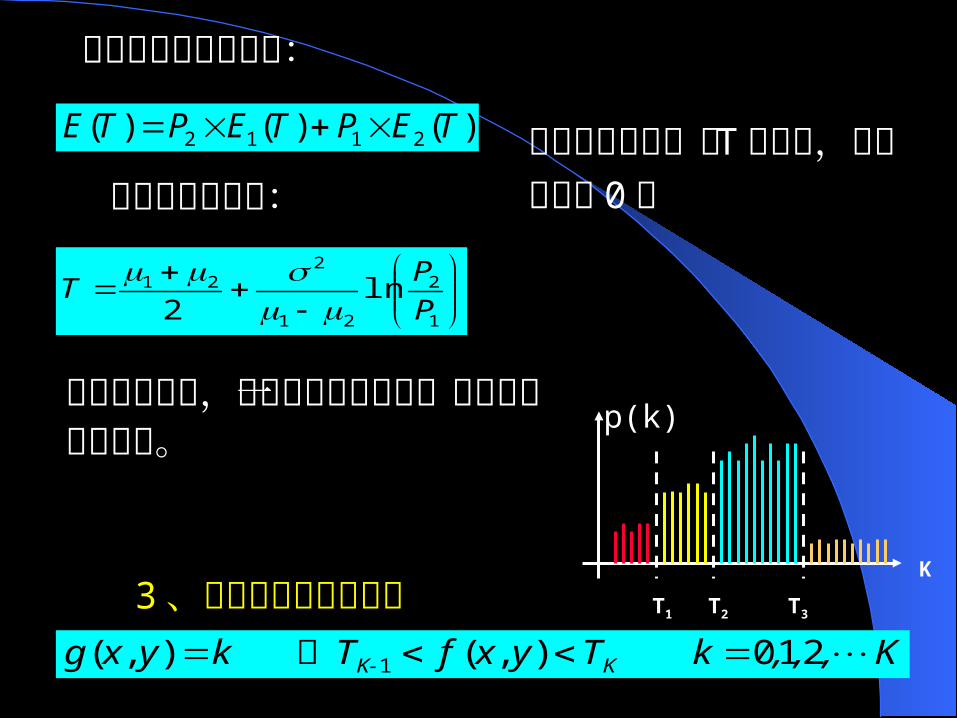
总的误判概率之和为:)()()( 2112 TEPTEPTE 为了使其最小,对 T 求导数,令导数等于 0 。解出最优阈值为:
1
2
21
221 ln
2 PPT
3、按幅度设置阈值分割 T1 T2 T3
K,,, kTyxfTkyxg KK- 210 ),( ),( 1 当
K
p(k)在实际工作中,概率密度的求取是一件非常困难的事情。
3、依赖区域的阈值选取对于具有明显双峰的直方图可以方便的选择阈值 T。但有一些图像,物体和背景的灰度差异不大或由于噪声的原因使峰谷被填平等原因,使得选择 T值变得困难。为此得寻找其它的方法来确定T值。1) 、直方图变换解决的问题是如何将原来峰谷差异不大的直方图,变成便于选择 T的峰谷差异较大的直方图。具体方法:对图像求梯度;做出梯度图像灰度的直方图,选择 T。
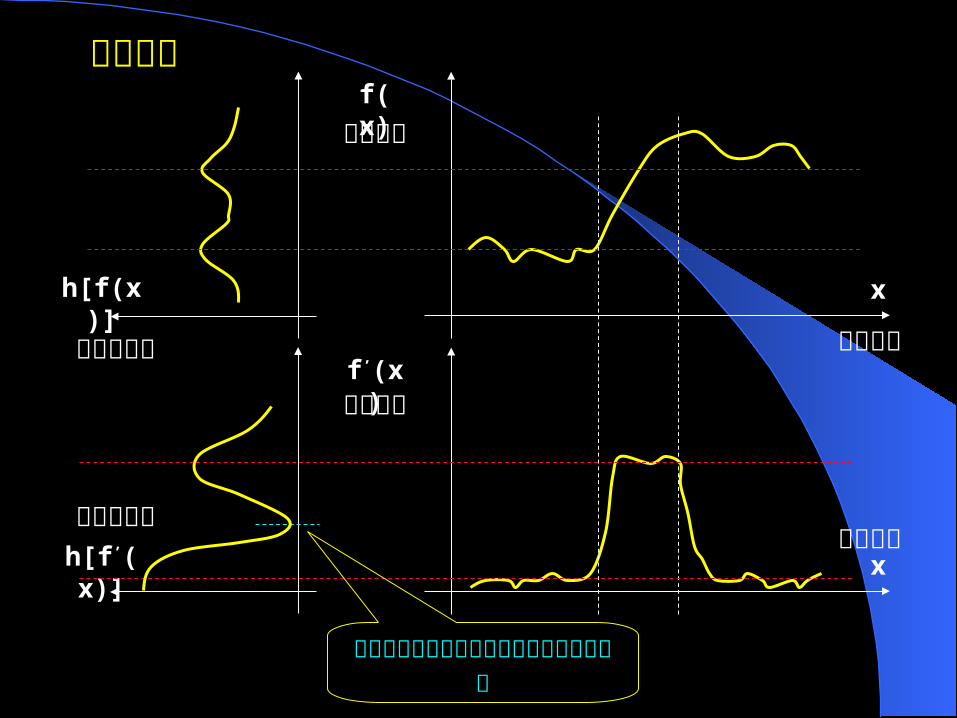
基本原理
x
f(x)
h[f(x)]
x
f’(x)
h[f’(x)]
空间坐标
空间坐标
灰度坐标
梯度坐标灰度直方图
梯度直方图
取双峰间梯度最小点所对应的灰度值为阈值
低梯度值直方图与高梯度值直方图
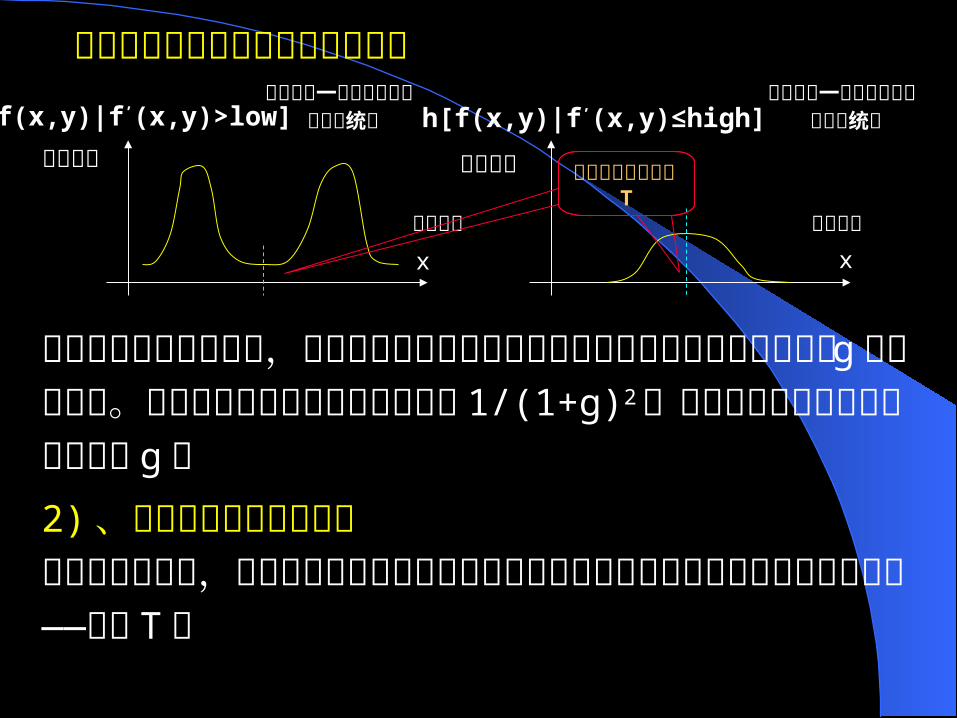
如果双峰特性仍不明显,在进行直方图统计时对像素点的灰度值根据该点的梯度 g做加权处理。低梯度值直方图的像素加权值为 1/(1+g)2 ;高梯度值直方图的像素加权值为 g 。2) 、灰度值和梯度值散射图对图像求梯度后,根据原图像的灰度分布和梯度图像的数值构造灰度值和梯度值散射图——选择 T。
xx
对高于某一个梯度值的像素进行统计对低于某一个梯度值的像素进行统计
h[f(x,y)|f’(x,y)>low] h[f(x,y)|f’(x,y)≤high]
空间坐标空间坐标频度坐标 频度坐标 取该点的灰度值为 T
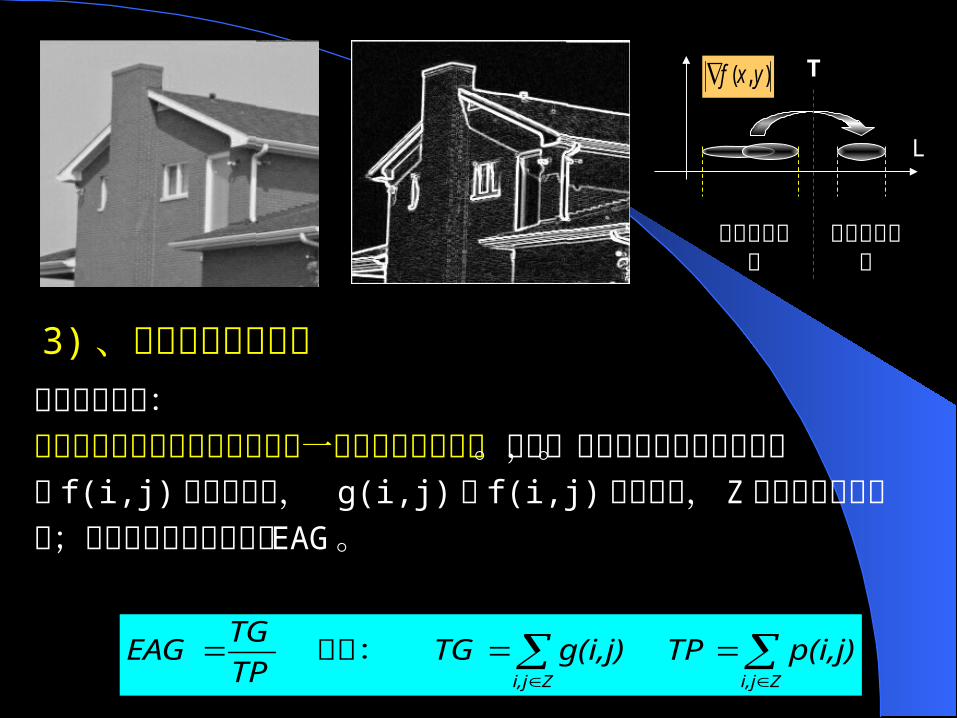
3) 、基于过渡区的方法过渡区的特点:任何背景与目标的过渡至少存在一个像素宽的过渡区。因此,过渡区是可以观察到的。设 f(i,j) 为数字图像, g(i,j) 为 f(i,j) 的梯度图, Z为图像的灰度集合;定义图像有效平均梯度 EAG。
背景灰度范围 目标灰度范围
T),( yxf
Zi,jZi,j
p(i,j) TPg(i,j)TGTPTGEAG 其中:
L
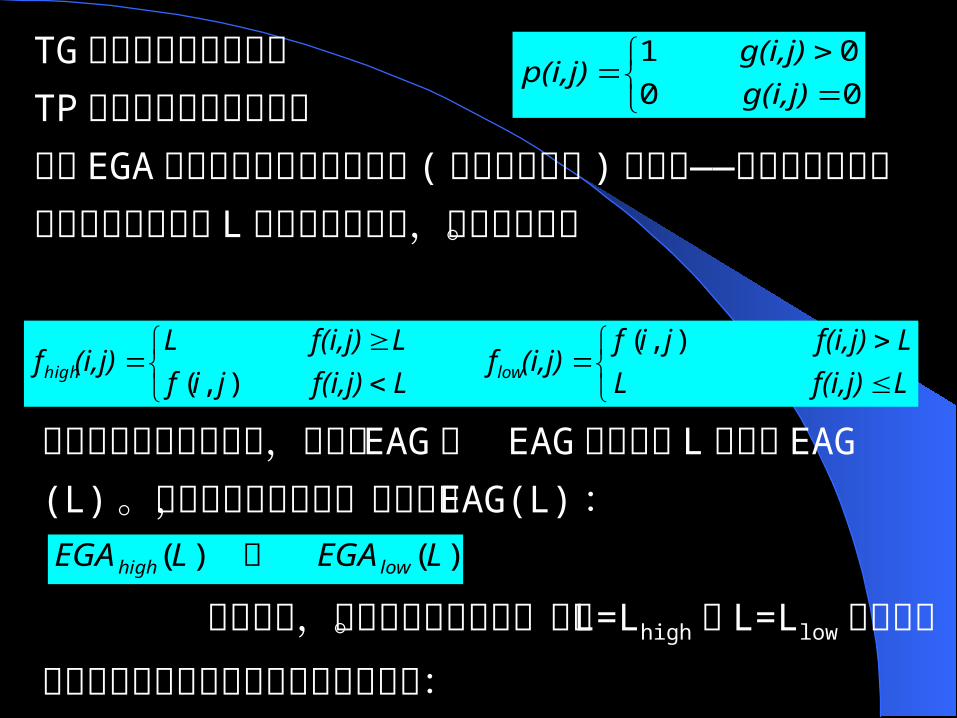
TG为梯度图的总梯度值TP 为非零梯度像素的总数可见 EGA为梯度的总值被有效梯度 ( 非零梯度像素 ) 所平均——有效平均梯度。如果设置分割阈值 L 对图像进行分割,有两种分法。
0001
g(i,j) g(i,j)
p(i,j)
Lf(i,j) L Lf(i,j) jif
(i,j)fLf(i,j) jifLf(i,j) L
(i,j)f lowhigh ),(
),(
对分割后的图像求梯度,而后求 EAG, EAG应是阈值 L 的函数 EAG(L) 。对应两种分割方法,应有两种 EAG(L) : 可以证明,它们都是单峰曲线。设当 L=Lhigh 和 L=Llow 时取得,可以证明这两个极值点有三个重要性质:
)( )( LEGALEGA lowhigh 和
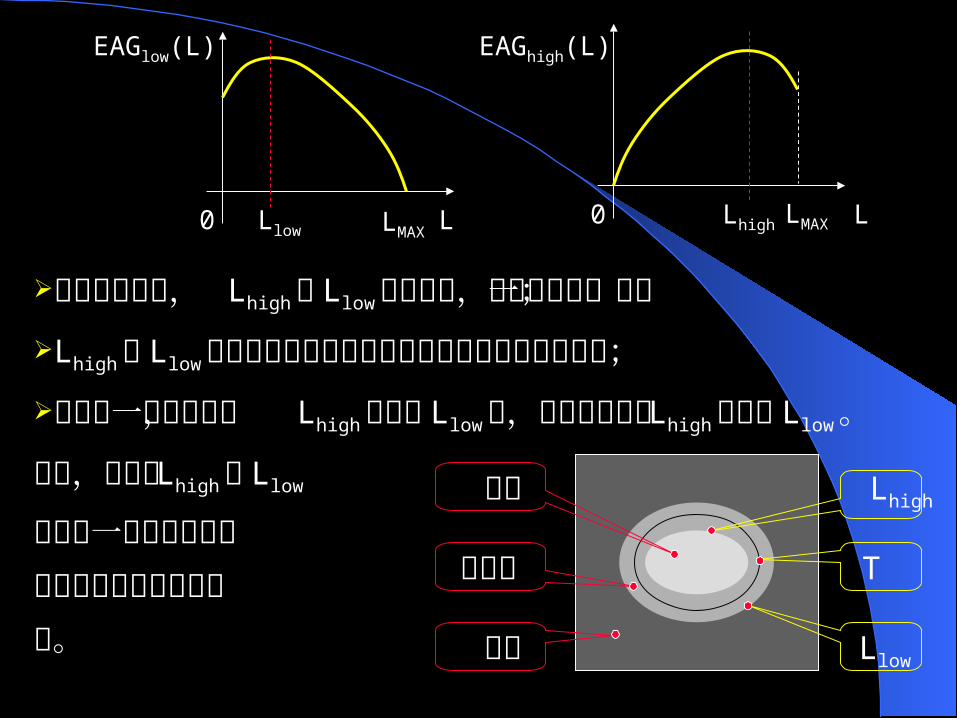
对每个过渡区, Lhigh和 Llow总是存在,并且只存在一个;Lhigh和 Llow所对应的灰度值都具有明显的像素特性区别能力;对于同一个过渡区, Lhigh不会比 Llow小,在实际图像中 Lhigh总大于 Llow。显然,在介于 Lhigh和 Llow之间取一个值作为分割阈值即可对图像进行分割。
LLlow0
EAGlow(L)
目标过渡区背景
Lhigh
Llow
T
LMAXLhigh L0
EAGhigh(L)
LMAX
4、依赖坐标的阈值选取对一幅图像中的物体,有时可以采用统一的一个阈值进行分割。而有时,由于图像的内容以及得到图像的方式导致不能采用统一的一个阈值进行分割,就需要将图像分成若干个子图像,对每个子图像采用不同的阈值进行目标与背景的分割。然后再将各子图像拼接起来。具体做法:将整幅图像分成一系列互相之间有 50%重叠的子图像;做出每个子图像的直方图;检测各个子图像的直方图是否为双峰;是,选最优阈值;否,不进行处理;根据得到的最优阈值通过插值的方法得到所有子图像的阈值;根据各子图像的阈值,通过差值得到所有像素的插值;对图像进行分割。
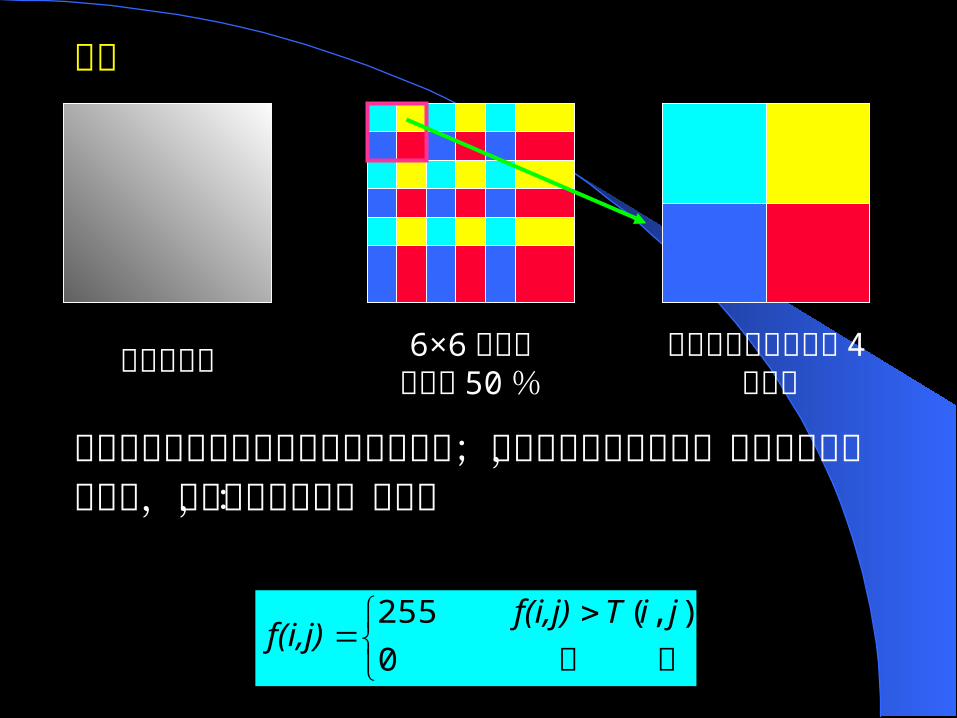
示例
将这四个阈值作为四个顶点像素的阈值;采用线性插值得方法,得到所有像素的阈值,对图像进行分割,例如:
待分割图像 6×6子图像各重叠 50%插值后每个子图像有 4 个阈值
它其 0
),(255
jiTf(i,j) f(i,j)
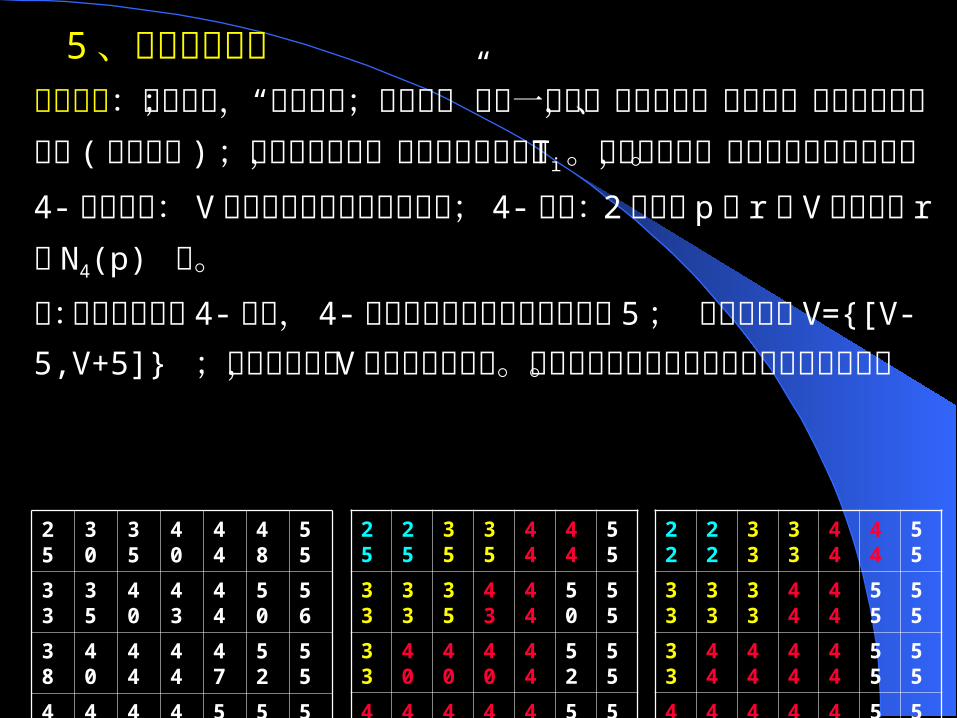
5、连通区域标记像素标记:定义连通;“从左到右,从上到下”扫描;进入一个像素后,考虑左、上方元素的连通性 (先左后上 ) ;不同的连通域,赋予不同的灰度值 Ti。标记完成后,进行第二次扫描分割。4- 连通定义: V表示定义连接的灰度值集合; 4- 连通: 2 个象素p 和 r在 V中取值且 r在 N4(p) 中。例:定义连通域为 4- 连通, 4- 邻域像素值之差的绝对值小于 5 ; 灰度集合为 V={[V-5,V+5]} ;连通域不同, V的取值范围不同。用连通区域标记法对下面的图像进行分割。25 30 35 40 44 48 55
33 35 40 43 44 50 56
38 40 44 44 47 52 55
45 48 48 49 50 54 58
47 50 53 56 56 58 66
22 22 33 33 44 44 55
33 33 33 44 44 55 55
33 44 44 44 44 55 55
44 44 44 44 44 55 55
44 44 55 55 55 55 66
25 25 35 35 44 44 55
33 33 35 43 44 50 55
33 40 40 40 44 52 55
45 45 45 45 45 54 54
45 45 53 53 53 53 66
五、串行区域技术什么是区域 ?—— 一般用以下性质来定义区域:在同一区域的像素点必须相连。这就意味着我们可以从现在所处的像素点出发,按照某种连接方式到达任何一个邻近的像素点。常用的有两种各向同性连通方式:四连通和八连通。 区域之间不能重叠,也就是说一个像素只能有一个“标记”。 在区域 Ri 中每一个像素点必须遵从某种规则 P(Ri) 。例如我们说 P(Ri) 为真,当区域 Ri 中所有像素具有相似的灰度 ( 相似性在一定的范围内 ) 。 两个不同的区域 Ri 和 Rj 具有的规则不同。
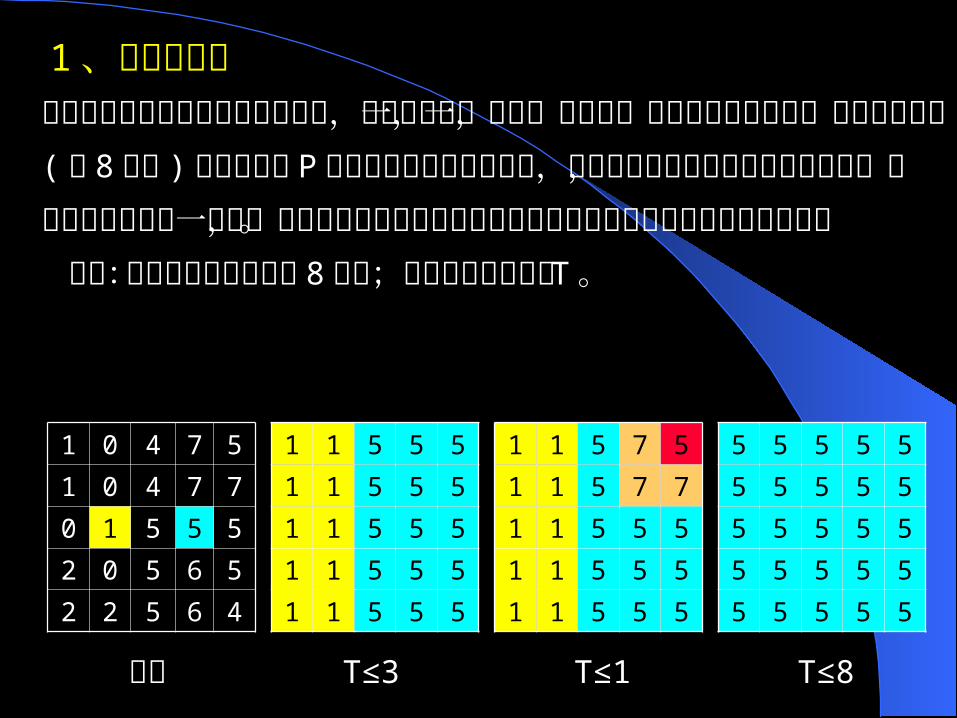
1 、区域生长法最简单的区域生长法是将像素聚类,为了达到这一目的,可以从一个种子像素点出发,按照某种连通 ( 如 8 连通 ) 方式和规则 P 来检查周围邻近的像素点,如果具有和种子像素点相似的性质,就说明它们属于同一区域,怎样获得初始的种子像素点和制定生长规则是区域生长法的关键。 例如:生长规则的连通性为 8 连通;连通邻域的差值为 T。
1 0 4 7 51 0 4 7 70 1 5 5 52 0 5 6 52 2 5 6 4
1 1 5 5 51 1 5 5 51 1 5 5 51 1 5 5 51 1 5 5 5
1 1 5 7 51 1 5 7 71 1 5 5 51 1 5 5 51 1 5 5 5
5 5 5 5 55 5 5 5 55 5 5 5 55 5 5 5 55 5 5 5 5
T≤3 T≤1 T≤8原图
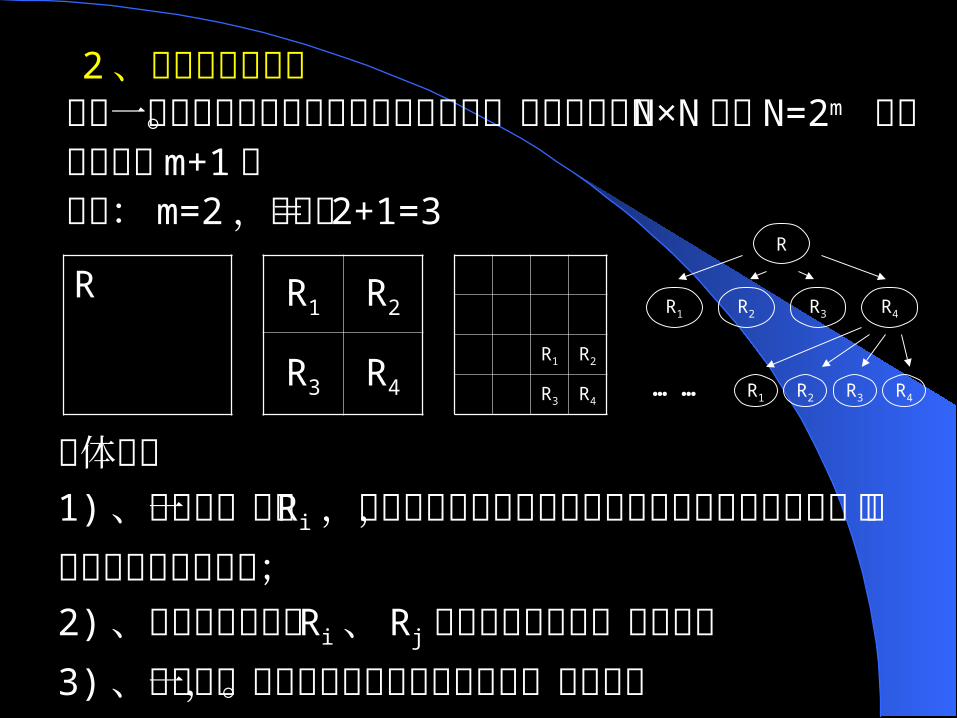
2 、区域分割与合并 任何一幅图像都可以用多层四叉树来表示。若图像大小为 N×N,且N=2m 时,其层数为m+1 。例如:m=2 ,层数= 2+1=3R1 R2
R3 R4
R
R1 R2
R3 R4
R
R4R3R2R1
R1 R2 R3 R4… …
具体步骤1) 、对任何一区域 Ri ,如果区域内某种特征的均匀性不符合设定的准则,就按四叉树原则继续分割;2) 、相邻的工作区域 Ri 、 Rj符合设定的准则,就合并;3) 、如果进一步的合并和分裂都不可能了,则结束。
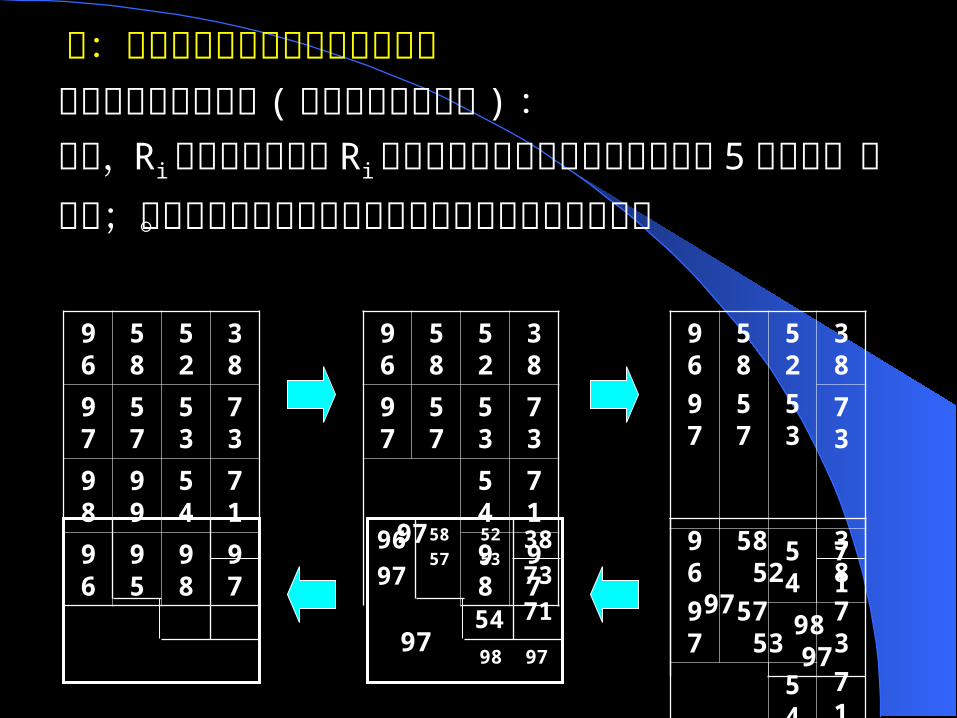
例:用分割与合并法对下图进行处理
96 58 52 3897 57 53 7398 99 54 7196 95 98 97
分割与合并的准则为 (准则是多种多样的 ) :例如, Ri 内的平均灰度与 Ri 内各像素之间的差的绝对值有超过 5 的像素,则分割;反之合并且合并区域的灰度以合并后的平均值取代。
96 58 52 3897 57 53 73
9754 7198 97
9697
5857
5253
3873
9754 7198 97
9697
58 5257 53
387371
97
54
98 97
98 9754
97
387371
58 5257 53
9697
六、分割评价分割方法多种多样,什么样的分割技术分割的效果更好一些——分割技术的评价。1 、对分割方法的基本要求应具有通用性应采用定量的和客观的性能评价准则应选取通用的图像进行测试仪评价以具有可比性2 、评价方法分类分析法——直接研究分割算法的原理特性,通过分析推理得到算法性能。实验法——用待平价的算法去分割图像,然后借助一定的质量测度来判断分割结果的优劣。
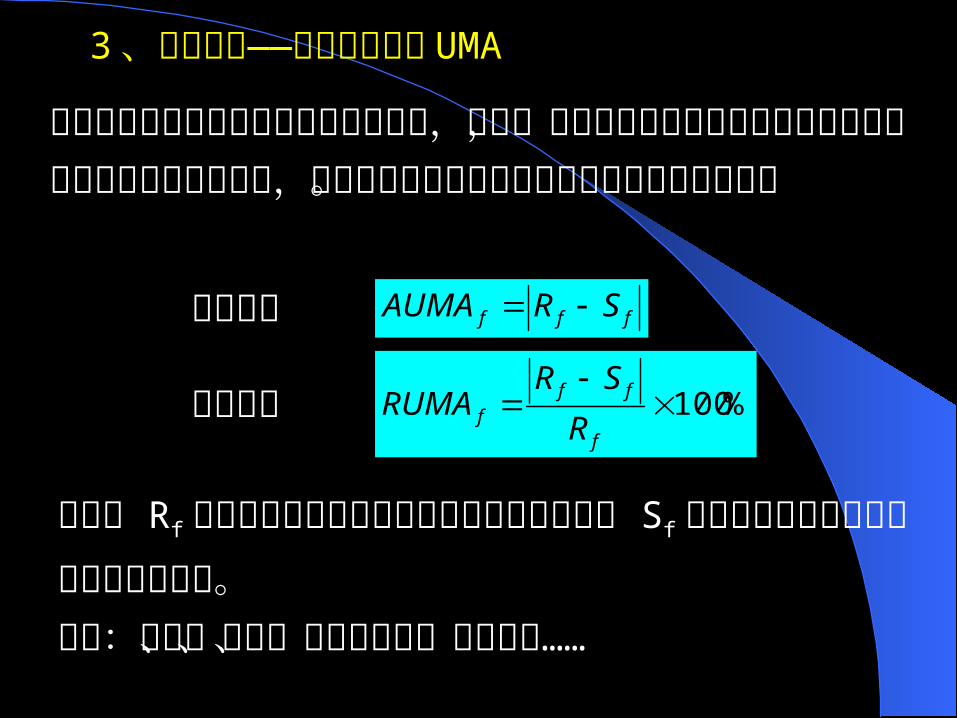
3、评价准则——最终测量精度 UMA
分割的目的是将感兴趣的目标分离出来,因此,通过对原始目标特征值和分割出的目标特征值进行精确测量,根据结果来评价分割方法的优劣是常用的方法。
fff SRAUMA
%100
f
fff R
SRRUMA
绝对误差相对误差
其中, Rf 代表从作为参考图像中获得的原始特征值;Sf 代表从分割图像中获得的实际特征量值。例如:重心、面积、长短轴之比、边缘误差……
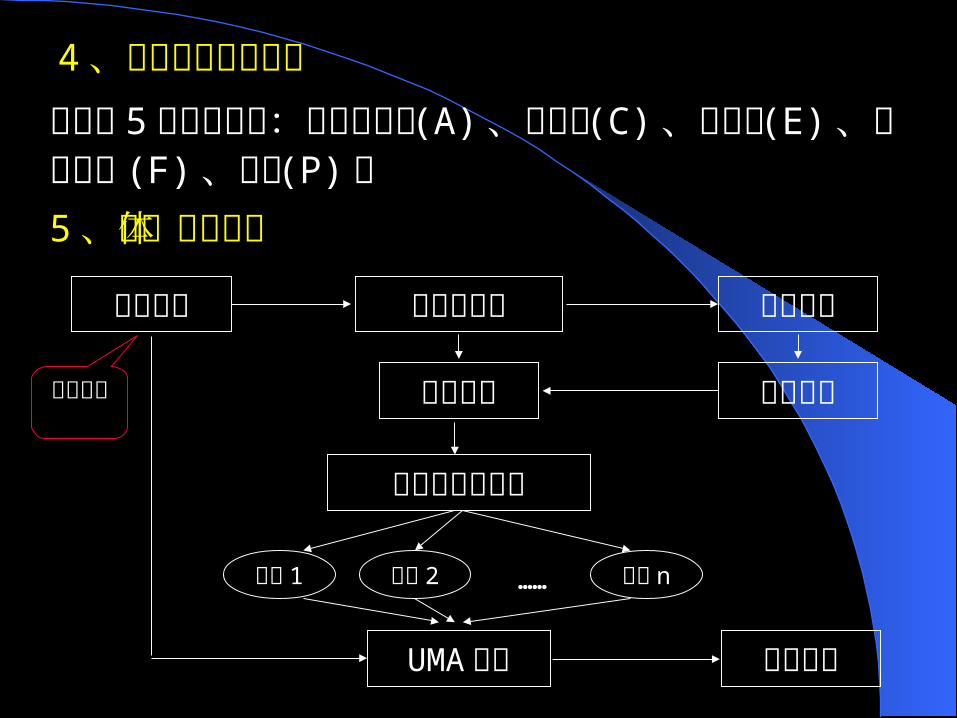
4 、常用的目标特征值主要有 5 个参数组成:目标的面积 (A) 、圆形性 (C) 、偏心率 (E) 、形状参数 (F) 、周长 (P) 。5 、具体操作步骤
合成图像 分割试验图 参数控制图像分割 分割算法
实际分割图序列
UMA计算 评价结果特征 1 特征 2 特征 n……
人为构成