Embed Size (px)
DESCRIPTION
GPS/GNSS シンポジウム 東京海洋大学 Oct. 26, 2012. 準天頂衛星 L1-SAIF 信号における GLONASS エフェメリスの更新制御. 電子航法研究所 坂井 丈泰. はじめに. 準天頂衛星システム( QZSS ) : 準天頂衛星軌道上の測位衛星による衛星測位サービス。 GPS 補完信号に加え、補強信号を放送。補強信号: L1-SAIF 、 LEX の2種類。 初号機「みちびき」を2010年9月に打ち上げ、技術実証実験を実施中。 L1-SAIF 補強信号 : サブメータ級の測位精度を提供する補強信号。 - PowerPoint PPT Presentation
Citation preview

電子航法研究所 坂井 丈泰電子航法研究所 坂井 丈泰
準天頂衛星 L1-SAIF 信号におけるGLONASS エフェメリスの更新制御準天頂衛星 L1-SAIF 信号における
GLONASS エフェメリスの更新制御
GPS/GNSSGPS/GNSS シンポジウムシンポジウム東京海洋大学東京海洋大学Oct. 26, 2012Oct. 26, 2012

Oct. 2012Oct. 2012 - Slide - Slide 22
はじめにはじめに• 準天頂衛星システム(準天頂衛星システム( QZSSQZSS ))::
– 準天頂衛星軌道上の測位衛星による衛星測位サービス。準天頂衛星軌道上の測位衛星による衛星測位サービス。– GPSGPS 補完信号に加え、補強信号を放送。補強信号:補完信号に加え、補強信号を放送。補強信号: L1-SAIFL1-SAIF 、、 LEXLEX のの
2種類。2種類。– 初号機「みちびき」を2010年9月に打ち上げ、技術実証実験を実施初号機「みちびき」を2010年9月に打ち上げ、技術実証実験を実施
中。中。
• L1-SAIFL1-SAIF 補強信号補強信号::– サブメータ級の測位精度を提供する補強信号。サブメータ級の測位精度を提供する補強信号。– GPS L1 C/AGPS L1 C/A 信号と同一の周波数・変調方式:受信機ハードウェアは変信号と同一の周波数・変調方式:受信機ハードウェアは変
更不要。更不要。– 補強対象に補強対象に GLONASSGLONASS を加えることでアベイラビリティの改善を図る。を加えることでアベイラビリティの改善を図る。
→→ エフェメリスの更新制御が必要。エフェメリスの更新制御が必要。
• 内容内容: : (1) 準天頂衛星システム(1) 準天頂衛星システム L1-SAIFL1-SAIF 補強信号補強信号 (2) エフェメリス情報の更新制御(2) エフェメリス情報の更新制御 (3) 実験結果の例((3) 実験結果の例( GPS+GLONASSGPS+GLONASS の補強)の補強)

Oct. 2012Oct. 2012 - Slide - Slide 33
(1)(1)
準天頂衛星システム準天頂衛星システムL1-SAIFL1-SAIF 補強信号補強信号

Oct. 2012Oct. 2012 - Slide - Slide 44
準天頂衛星システムの構想準天頂衛星システムの構想
• 東経東経 135135 度を中心に配置度を中心に配置• 初号機「みちびき」:初号機「みちびき」:
離心率離心率 0.0750.075 、軌道傾斜角、軌道傾斜角 4343度度
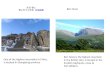
• 高仰角からサービスを提供可能。高仰角からサービスを提供可能。• 山間部や都市部における測位・放山間部や都市部における測位・放
送ミッションに有利。送ミッションに有利。• 高仰角から放送する情報により、高仰角から放送する情報により、
GPSGPS 衛星の捕捉を支援できる。衛星の捕捉を支援できる。
準天頂衛星( QZS )GPS や静止衛星

Oct. 2012Oct. 2012 - Slide - Slide 55
準天頂衛星の機能準天頂衛星の機能• GPSGPS 補完機能: 補完機能: L1C/A, L2C, L5, L1CL1C/A, L2C, L5, L1C 信号信号
– GPSGPS 補完信号として、補完信号として、 GPSGPS 信号に似た測位信号を放送。信号に似た測位信号を放送。– 天頂付近の高仰角から測位信号を提供することで、都市部や山岳地域天頂付近の高仰角から測位信号を提供することで、都市部や山岳地域
などで衛星数の不足を補い、いつでも位置情報が得られるようにする。などで衛星数の不足を補い、いつでも位置情報が得られるようにする。– ユーザ側は、既存ユーザ側は、既存 GPSGPS 受信機のソフトウェア改修程度で対応できる。受信機のソフトウェア改修程度で対応できる。– 宇宙航空研究開発機構(宇宙航空研究開発機構( JAXAJAXA )が技術実証実験を実施。)が技術実証実験を実施。
• GPSGPS 補強機能: 補強機能: L1-SAIF, LEXL1-SAIF, LEX 信号信号– すべてのすべての GPSGPS 衛星を対象として、ディファレンシャル補正情報等を衛星を対象として、ディファレンシャル補正情報等を
補強信号に乗せて放送する。補強信号に乗せて放送する。– L1-SAIFL1-SAIF 信号:移動体測位用。補強信号の国際標準信号:移動体測位用。補強信号の国際標準 SBASSBAS と同じ信号と同じ信号
形式。形式。– ユーザ側は、既存ユーザ側は、既存 SBASSBAS 対応受信機のソフトウェア改修程度で対応で対応受信機のソフトウェア改修程度で対応で
きる。きる。– 電子航法研究所が電子航法研究所が L1-SAIFL1-SAIF 補強信号の開発を担当。衛星打上げ後に技補強信号の開発を担当。衛星打上げ後に技
術実証実験を行い、現在も引き続き実験を実施中。術実証実験を行い、現在も引き続き実験を実施中。

Oct. 2012Oct. 2012 - Slide - Slide 66
L1-SAIFL1-SAIF 補強信号補強信号
ユーザユーザ(( GPSGPS 受信受信
機)機)
• 一つの補強信号で3つの機能:補完機能(レ一つの補強信号で3つの機能:補完機能(レンジング)・誤差補正(目標精度ンジング)・誤差補正(目標精度 =1m=1m )・信)・信頼性付与。頼性付与。
• ユーザ側では、1つのユーザ側では、1つの GPSGPS アンテナによりアンテナによりGPSGPS とと L1-SAIFL1-SAIF の両信号を受信:受信機の負の両信号を受信:受信機の負担軽減。担軽減。SAIFSAIF : : Submeter Augmentation with Integrity FunctionSubmeter Augmentation with Integrity Function
補強信号補強信号(補完機能)(補完機能)
補強信号補強信号(誤差補正)(誤差補正)
補強信号補強信号(信頼性付与)(信頼性付与)
準天頂衛星準天頂衛星GPSGPS 衛星群衛星群
測位信号測位信号
①① 補完機能補完機能一つの信号で3つの機能一つの信号で3つの機能
③③ 信頼性付与機能信頼性付与機能
②② 誤差補正機能誤差補正機能

Oct. 2012Oct. 2012 - Slide - Slide 77
サブメータ級補強の仕組みサブメータ級補強の仕組み
対流圏対流圏
電離層電離層測距機能測距機能
準天頂衛星準天頂衛星GPSGPS 衛星衛星
0100
1010
01…
…
0100
1010
01…
…補強情報補強情報
• さまざまな誤差を補さまざまな誤差を補正正
• 信頼性の情報信頼性の情報
高仰角高仰角
ユーザ(1周波ユーザ(1周波 GPSGPS アンテナ)アンテナ)
軌道誤差軌道誤差
クロック誤差クロック誤差

Oct. 2012Oct. 2012 - Slide - Slide 88
• L1-SAIFL1-SAIF 実験局(実験局( L1SMSL1SMS :: L1-SAIF Master StationL1-SAIF Master Station )) ::– L1-SAIFL1-SAIF 補強メッセージをリアルタイムに生成し、 補強メッセージをリアルタイムに生成し、 JAXAJAXA 地上局(つくば)に送地上局(つくば)に送
信する。信する。– 電子航法研究所構内(東京都調布市)に設置。電子航法研究所構内(東京都調布市)に設置。– 補強メッセージの生成に使う補強メッセージの生成に使う GPSGPS 測定データについては、国土地理院電子基準点測定データについては、国土地理院電子基準点ネットワーク(ネットワーク( GEONETGEONET )から取得する。)から取得する。
L1-SAIFL1-SAIF 実験局(実験局( L1SMSL1SMS ))
L1SMSL1SMSGEONETGEONET
準天頂衛星準天頂衛星
QZSSQZSS主制御局主制御局
GPSGPS 衛星衛星
測定測定データデータ
L1-SAIFL1-SAIFメッセージメッセージ
国土地理院国土地理院(配信拠点=新宿)(配信拠点=新宿)
電子航法研究所電子航法研究所(東京都調布市)(東京都調布市)
JAXAJAXA 地上局地上局(つくば)(つくば)
L1-S
AIF
L1-S
AIF信号信号測位信号
測位信号測位信号
測位信号
アップ
リンク
アップ
リンクループループ
アンテナアンテナ

Oct. 2012Oct. 2012 - Slide - Slide 99
L1-SAIFL1-SAIF 実験局の外観実験局の外観電子基準点データ電子基準点データ
リアルタイムリアルタイム収集システム収集システム
補正情報リアルタイム補正情報リアルタイム生成・配信装置生成・配信装置
通信用ルータ装置通信用ルータ装置
データデータサーバサーバ

Oct. 2012Oct. 2012 - Slide - Slide 1010
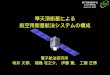
リアルタイム動作試験リアルタイム動作試験
• 電子基準点電子基準点 940058940058 (高山)におけるユ(高山)におけるユーザ測位誤差。ーザ測位誤差。
• モニタ局配置は、札幌・茨城・東京・神モニタ局配置は、札幌・茨城・東京・神戸・福岡・那覇の戸・福岡・那覇の 66局構成。局構成。
• 実験期間: 実験期間: 20082008 年年 11 月月 1919~~ 2323日 (日 ( 55日間)日間)
水平水平測位誤差測位誤差
垂直垂直測位誤差測位誤差
1.45 m1.45 m 2.92 m2.92 m
6.02 m6.02 m 8.45 m8.45 m
システムシステム
GPSGPS単独単独
0.29 m0.29 m 0.39 m0.39 m
1.56 m1.56 m 2.57 m2.57 mL1-SAIFL1-SAIF
補強補強
RMSRMS
最大最大
RMSRMS
最大最大
L1-SAIF 補強GPS 単独測位
東西方向誤差( m )
南北
方向
誤差
(m
)

Oct. 2012Oct. 2012 - Slide - Slide 1111
(2)(2)
エフェメリス情報の更新制御エフェメリス情報の更新制御

Oct. 2012Oct. 2012 - Slide - Slide 1212
GLONASSGLONASS の利用の利用準天頂衛星準天頂衛星
• 衛星数の増加によるアベイラビリティ改善。衛星数の増加によるアベイラビリティ改善。• 単一の補強信号により、単一の補強信号により、 GPSGPS とと GLONASSGLONASS の両方を同時に補強する。の両方を同時に補強する。• 補強情報生成にあたっての補強情報生成にあたっての GPSGPS とと GLONASSGLONASS の違い:の違い:
FDMAFDMA を採用を採用 エフェメリスにエフェメリスに IODEIODE がないがない 時刻系と座標系が異なる時刻系と座標系が異なる 衛星位置の計算手順 衛星位置の計算手順 PRNPRN番号番号
GPSGPS 衛星衛星 GLONASSGLONASS 衛星を衛星を併用併用
補強信号による補強信号による補強補強

Oct. 2012Oct. 2012 - Slide - Slide 1313
GLONASSGLONASS 衛星のエフェメリス衛星のエフェメリスItem Bits Range Resolution Contents
tb 7 15~ 1425 min 15 min Epoch time
n 22 2-9 s 2-30 s Clock correction (const)
n 11 2-30 s/s 2-40 s/s Clock correction (1st order)
x 27 27000 km 2-11 km Position X in ECEF
y 27 27000 km 2-11 km Position Y in ECEF
z 27 27000 km 2-11 km Position Z in ECEF
vx 24 4.3 km/s 2-20 km/s Velocity X in ECEF
vy 24 4.3 km/s 2-20 km/s Velocity Y in ECEF
vz 24 4.3 km/s 2-20 km/s Velocity Z in ECEF
5 6.2 m/s2 2-30 km/s2 Acceleration X in ECEF (only perturbation)
5 6.2 m/s2 2-30 km/s2 Acceleration Y in ECEF (only perturbation)
5 6.2 m/s2 2-30 km/s2 Acceleration Z in ECEF (only perturbation)
Total 208
xx
yy
zz
....
....
....

Oct. 2012Oct. 2012 - Slide - Slide 1414
L1-SAIFL1-SAIF の長期補正情報の長期補正情報
• 長期補正:衛星位置とクロックの補正値(クロックは別に高速補正も長期補正:衛星位置とクロックの補正値(クロックは別に高速補正もある)。ある)。
• メッセージタイプメッセージタイプ 24 or 2524 or 25 で送信。で送信。• IODIOD== GPSGPS 衛星のエフェメリスの衛星のエフェメリスの IODEIODE
(( IS-QZSS v1.4IS-QZSS v1.4 より)より)

Oct. 2012Oct. 2012 - Slide - Slide 1515
エフェメリスの更新制御(GPS)エフェメリスの更新制御(GPS)• GPSGPS エフェメリスの発行番号エフェメリスの発行番号 IODEIODE ::
– エフェメリス情報には発行番号エフェメリス情報には発行番号 IODEIODE (( Issue of Data, EphemerisIssue of Data, Ephemeris )が付けられて)が付けられており、おり、 IODEIODE の変化によりエフェメリス情報が更新されたことを知ることができの変化によりエフェメリス情報が更新されたことを知ることができる。る。
– IODCIODC (( Issue of Data, ClockIssue of Data, Clock )もあるが、下)もあるが、下 88 ビットは常にビットは常に IODEIODE と同一。クロと同一。クロック補正情報だけが更新されることはない。ック補正情報だけが更新されることはない。
• エフェメリスの更新制御:エフェメリスの更新制御:– ディファレンシャル補正を正しく行うには、センタ側とユーザ側で使用するエフディファレンシャル補正を正しく行うには、センタ側とユーザ側で使用するエフ
ェメリス情報を一致させることが必要。ェメリス情報を一致させることが必要。– 各衛星の長期補正情報には、それぞれ各衛星の長期補正情報には、それぞれ IODIOD (( Issue of DataIssue of Data )番号が付けられてい)番号が付けられてい
る。る。– ユーザ受信機は、それぞれの衛星について、ユーザ受信機は、それぞれの衛星について、 IODIOD と一致すると一致する IODEIODE をもつエフェをもつエフェ
メリスを使用する。メリスを使用する。 ユーザ受信機が必要なエフェメリスを確実に受信するよう、エフェメリスの切替えからユーザ受信機が必要なエフェメリスを確実に受信するよう、エフェメリスの切替えから
IODIOD を変更するまでに遅れをもたせている(後の説明のパラメータを変更するまでに遅れをもたせている(後の説明のパラメータ DD )。)。 RTCM SC-104RTCM SC-104 メッセージのディファレンシャル補正情報も同じ。メッセージのディファレンシャル補正情報も同じ。Ephemeris #2 (IODE=2)Ephemeris #2 (IODE=2)Ephemeris #1 (IODE=1)Ephemeris #1 (IODE=1) Ephemeris #3 (IODE=3)Ephemeris #3 (IODE=3)
LTC #2LTC #2IOD=2IOD=2
LTC #3LTC #3IOD=2IOD=2
LTC #4LTC #4IOD=2IOD=2
LTC #1LTC #1IOD=1IOD=1
LTC #5LTC #5IOD=3IOD=3

Oct. 2012Oct. 2012 - Slide - Slide 1616エフェメリスの更新制御(GLONエフェメリスの更新制御(GLONASS)ASS)
ttLTLT
VVLL
Ephemeris #2Ephemeris #2
LTC #2LTC #2
Ephemeris #1Ephemeris #1 Ephemeris #3Ephemeris #3
ttLTLT
VVLL
LTC #1LTC #1
ttLTLT
VVLL
LTC #3LTC #3
• GLONASSGLONASS エフェメリスの更新制御:エフェメリスの更新制御:– GLONASSGLONASS エフェメリスには、エフェメリスには、 GPSGPS エフェメリスのエフェメリスの IODEIODE に相当する情報が存に相当する情報が存
在しない。在しない。– このため、このため、 IODIOD を有効時間(を有効時間( VV )と遅れ時間()と遅れ時間( LL )から構成する()から構成する( SBASSBAS 規格規格
での措置)。での措置)。– ユーザ受信機は、それぞれの衛星について、ユーザ受信機は、それぞれの衛星について、 IODIOD に示された時間範囲内に受信しに示された時間範囲内に受信し
たエフェメリスを使用する。たエフェメリスを使用する。 ttLTLT :長期補正情報のエポック時刻、:長期補正情報のエポック時刻、ttrr :エフェメリス情報を受信した時刻。:エフェメリス情報を受信した時刻。
遅れ時間(L):エフェメリスの切替えがあった場合に、一定時間の間は古いエフェメ遅れ時間(L):エフェメリスの切替えがあった場合に、一定時間の間は古いエフェメリスを使用する必要があることから設けられている値。リスを使用する必要があることから設けられている値。
有効時間(V):なるべく長いほうが好ましいが、エフェメリスの切替えに配慮して有効時間(V):なるべく長いほうが好ましいが、エフェメリスの切替えに配慮して設定する。設定する。
項目 ビット配置 分解能 有効範囲有効時間( V )
IOD の上位 5 ビット
30秒 30~ 960秒
遅れ時間( L )
IOD の下位 3 ビット
30秒 0~ 120秒
を満たすことを満たすこと

Oct. 2012Oct. 2012 - Slide - Slide 1717
IODIOD パラメータの計算方法パラメータの計算方法
ttupdateupdate
DD
ttbbttbb
ttLTLT
VVLL
Ephemeris #1 (Ephemeris #1 (ttbb=00:00)=00:00) Ephemeris #2 (Ephemeris #2 (ttbb=00:30)=00:30)
LTC #1LTC #1
ttLTLT
LTC #3LTC #3
ttcutovercutover
ttLTLTLL LTC #2LTC #2
VV
LL=0=0
ttot,firstot,firstttot,firstot,first
VV
GLONASSGLONASS が放送すが放送するる
エフェメリスの更新エフェメリスの更新
使用する使用するエフェメリスを変エフェメリスを変
更更余裕時間余裕時間エポック時刻エポック時刻
←←このように計算するのがひとつの方法。このように計算するのがひとつの方法。
ユーザ側条件:ユーザ側条件:
①
②③
①
②
③

Oct. 2012Oct. 2012 - Slide - Slide 1818
(3)(3)
実験結果の例実験結果の例(( GPS+GLONASSGPS+GLONASS の補強)の補強)

Oct. 2012Oct. 2012 - Slide - Slide 1919
GLONASSGLONASS 補強の実験補強の実験• L1-SAIFL1-SAIF 実験局ソフトウェアを改実験局ソフトウェアを改
修して、修して、 GPS+GLONASSGPS+GLONASS 補強の補強の実験を実施した。実験を実施した。
• 国土地理院国土地理院 GEONETGEONET ののGLONASS/ QZSSGLONASS/ QZSS 対応基準局を利対応基準局を利用。用。
• データフォーマット:データフォーマット:RINEX 2.12 OBS/NAVRINEX 2.12 OBS/NAV ファイル。ファイル。
エポック間隔= エポック間隔= 3030秒秒
• 実験で使用した実験で使用した GEONETGEONET 局:局: メッセージ生成に使用:メッセージ生成に使用:基準局 基準局 (1)(1)~~ (8)(8) の の 88局局
性能評価に使用:性能評価に使用:ユーザ局 ユーザ局 (a)(a)~~ (c)(c) の の 33局局(ここではこのうち(ここではこのうち (b)(b) のみをのみを紹介)紹介)
• データ期間:データ期間: 20122012 年年 77 月月 1818~~ 2020日日

Oct. 2012Oct. 2012 - Slide - Slide 2020
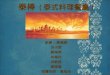
性能評価例:測位誤差(5度)性能評価例:測位誤差(5度)
• 仰角マスク仰角マスク 55 度での水平測位誤差。ユーザ位置=度での水平測位誤差。ユーザ位置= (b)(b)• GPS+GLONASS+QZSSGPS+GLONASS+QZSS :: 0.310m RMS0.310m RMS• GLONASS/QZSSGLONASS/QZSS の使用により、多少の性能改善がみられる。の使用により、多少の性能改善がみられる。

Oct. 2012Oct. 2012 - Slide - Slide 2121
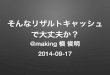
性能評価例:測位誤差(30度)性能評価例:測位誤差(30度)
• 仰角マスク仰角マスク 3030 度での水平測位誤差。ユーザ位置=度での水平測位誤差。ユーザ位置= (b)(b)• GPS+GLONASS+QZSSGPS+GLONASS+QZSS :: 0.372m RMS0.372m RMS• GLONASS/QZSSGLONASS/QZSS の使用により、高い仰角マスクでも良好なアベイラビの使用により、高い仰角マスクでも良好なアベイラビ
リティ。リティ。

Oct. 2012Oct. 2012 - Slide - Slide 2222
ユーザ側性能評価:測位精度ユーザ側性能評価:測位精度
• 基準局ネットワーク(基準局ネットワーク( 88局)の重心付近のユーザ局(静岡県清水市)での測位精局)の重心付近のユーザ局(静岡県清水市)での測位精度。度。
• GPS+GLONASS+QZSSGPS+GLONASS+QZSS の使用により、仰角マスクの使用により、仰角マスク 55~~ 4040 度を通して安定した度を通して安定した測位を実現。測位を実現。
0.602m0.602m

Oct. 2012Oct. 2012 - Slide - Slide 2323ユーザ側性能評価:アベイラビリテユーザ側性能評価:アベイラビリティィ
• 有効な測位ができたエポック数の、全エポック数に対する割合。有効な測位ができたエポック数の、全エポック数に対する割合。 仰角マスクの増加にともないアベイラビリティは低下する。仰角マスクの増加にともないアベイラビリティは低下する。
• GPS+GLONASS+QZSSGPS+GLONASS+QZSS の使用:仰角マスクの使用:仰角マスク 40%40% でもでも 100%100% のアベイラのアベイラビリティ。ビリティ。
100% 100% AvailabilityAvailability
@ User (b)@ User (b)

Oct. 2012Oct. 2012 - Slide - Slide 2424
まとめまとめ• 準天頂衛星システム(準天頂衛星システム( QZSSQZSS ) ) L1-SAIFL1-SAIF 補強信号補強信号::
– 準天頂衛星は、準天頂衛星は、 GPSGPS 補完信号に加え、補強信号を放送する。補完信号に加え、補強信号を放送する。– 補強信号:すべての補強信号:すべての GPSGPS 衛星に対して、測位性能を改善する補強情衛星に対して、測位性能を改善する補強情
報を提供する。報を提供する。– L1-SAIFL1-SAIF 信号:信号: GPS L1 C/AGPS L1 C/A と同一形式の補強信号。当所が開発を担と同一形式の補強信号。当所が開発を担
当。当。
• L1-SAIFL1-SAIF 信号の信号の GLONASSGLONASS 対応対応::– 衛星数の増加によるアベイラビリティの改善。衛星数の増加によるアベイラビリティの改善。– GLONASSGLONASS のエフェメリスにはのエフェメリスには IODEIODE がないことから、がないことから、 IODEIODE を使用を使用
せずにエフェメリスの更新制御を行う必要がある。せずにエフェメリスの更新制御を行う必要がある。 IODIOD により指定された時間範囲内に放送されたエフェメリス情報を使用すにより指定された時間範囲内に放送されたエフェメリス情報を使用す
ることとする。ることとする。– IODIOD の設定方法を提案。実験の結果は良好に作用した。の設定方法を提案。実験の結果は良好に作用した。
実際に補強実験を実施して、良好に作用することを確認した。実際に補強実験を実施して、良好に作用することを確認した。