Embed Size (px)
Citation preview

自動制御 目次 1. 実験目的 2 2. 基礎理論 2
2.1 自動制御 2 2.1.1 フィードバック制御 2 2.1.2 シーケンス制御 2
2.2 プログラマブルコントローラ 2 2.3 制御器具の基本動作とその信号 3
2.3.1 押しボタンスイッチ 3 2.3.2 リミットスイッチの動作 4
2.3.3 リレーの動作 4 2.4 シーケンスプログラミング 6
2.4.1 基本シーケンス命令 6 2.4.2 LD命令とOUT命令 7 2.4.3 LDI命令 8 2.4.4 AND命令とANI命令 9 2.4.5 OR命令とORI命令 9 2.4.6 ANB命令 9 2.4.7 ORB命令 10 2.4.8 補助(内部)リレーM 11 2.4.9 OUTT(タイマ)命令 11 2.4.10 OUTC(カウンタ)命令 12
2.5 シーケンスプログラムの注意 13 2.5.1 OUT命令の位置 13 2.5.2 ブリッジ回路 14 2.5.3 分岐出力回路 14 2.5.4 二重出力 15 3. 予習事項 15 4. 実験方法 16
4.1 予備実験 16 4.2 本実験 20 4.3 応用実験 22
5. 検討事項 22 6. 調査事項 23
Automatic Control-1

1. 実験目的 今日の日本の産業の隆盛を築くのに,FA(Factory Automation)技術が重要な役割を果たしてきた.この
FA 技術の中心的役割を担うのが自動制御技術である.自動制御はフィードバック制御とシーケンス制御に
大別されるが,今回の実験ではプログラマブルコントローラを使用したシーケンス制御の実験を行う.この実
験によりシーケンス制御の仕組みを理解し,制御対象の動作を確認する.さらにシーケンス制御の設計及び
プログラミングを習得する. 2. 基礎理論 2.1 自動制御
自動制御とは「人間が直接的にではなく,機械やプログラムを用いて,自動的に対象物を動作させる技術」
のことである.全自動洗濯機やビデオの自動録画,時計,信号機,産業ロボットなど幅広い分野で応用され
ており,今やこの技術は現代社会になくてはならないものである. この自動制御は「フィードバック制御」と「シーケンス制御」の2つに大きく分類することができる.
2.1.1 フィードバック制御
フィードバック制御とは,「フィードバックによって制御量を目標値と比較し,それらを一致させるように操作
量を生成する制御」と定義されている.制御した結果を目標とする値と比較して,目標値と結果が一致するよ
うに反復して制御を繰り返すところから,「反省の機能」をもつ制御とも言われ,閉ループシステムにより構成
される.例えば運転中の機械や装置に対して,その制御結果である温度や速度を目標値に近づくように制
御したり,動作速度を向上させたりすることに用いられる. 2.1.2 シーケンス制御
シーケンス制御とは「あらかじめ定められた順序又は手続きに従って制御の各段階を逐次進めていく制
御」と定義されている.次の段階で行うべき制御動作があらかじめ定められていて,前段階における制御動
作が完了した後あるいは一定時間を経過した後,次の動作に移る場合や,制御結果に応じて次に行うべき
動作を選定してから次の段階に移る場合などが組み合わされている.これらを用いて機械に行わせる動作
を順序正しく覚えさせておくことにより,始動ボタンを押すだけで,後は全部制御装置が仕事を行う場合など
に用いられる. FA の目的を達成するための基本的中心技術は自動制御技術であり,その中でもシーケンス制御技術が
非常に広範囲な分野で直接的に重要な役割を果たしている.今回の課題ではこのシーケンス制御について
実験を行う. 2.2 プログラマブルコントローラ
以前は,リレー回路によって構成されたシーケンス制御回路が普通であったが,現在では制御内容の複雑
化や高度化の要請が高まるにつれてディジタル技術,エレクトロニクス技術を応用した「プログラマブルコント
ローラ」が一般に用いられている(「プログラマブルコントローラ」は「シーケンサ」とも呼ばれる).これはノート
パソコンや専用の入力装置等を利用して,制御内容をあらかじめプログラムにより表現し,これを順次実行
することによりシーケンス制御を行う装置である.実験ではこのプログラマブルコントローラを用いて各種制
御を行う.
Automatic Control-2

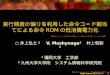
2.3 制御器具の基本動作とその信号 シーケンス制御では「ON」と「OFF」の二つの信号を使って制御を進めて行く.「ON」は,電気回路上の二
つの端子が電気的につながっている状態を言い,「OFF」は,二つの端子の間が電気的に切れている状態
を言う.図1に示すように,シーケンス制御システムは入力部,制御部,出力部から構成されている.
図1:シーケンス制御システム
入力部には操作部と検出部があり,制御部にはリレーやタイマを組み合わせたロジック回路がある.出力
部にはモータなどを駆動する駆動部と,運転状態を表示する表示部がある. これらのシーケンス制御器具のうち,操作器具である押しボタンスイッチ,検出器具であるリミットスイッチ,
及び制御器具であるリレー(電磁継電器)の動作を説明する. 2.3.1 押しボタンスイッチ
押しボタンスイッチは図2(a)のような構造で,指で押されたときに動作して信号を発する.通常はOFFで,
指で押されたときにONになる「A接点」と,通常はONの状態で,指で押されたときにOFFになる「B接点」が
ある.図2(b)はボタンを指で押したときの接点の状態を示す. 図2において,A1及びA2はA接点により接続されており,B1及びB2はB接点により接続されている.
Automatic Control-3

(a) 押しボタンスイッチの構造 (b) 押しボタンスイッチを押したときの状態
図2:押しボタンスイッチの構造 2.3.2 リミットスイッチの動作
リミットスイッチは図3(a)に示すように,カムやドッグによって機械的な力でプランジャーを押して接点を動
作させる.図3(b)はカムによって押されて,接点が動作している状態を示している.押されたときONになるA
接点と,押されたときにOFFになるB接点があるのは押しボタンスイッチと同様である.
(a) リミットスイッチの原理図 (b) リミットスイッチの動作状態
図3:リミットスイッチの構造 2.3.3 リレーの動作
リレー(電磁継電器)とは,電磁石の力によって接点を働かせる電気器具である.図4(a)にリレーの原理図
を示す.図の電磁石は,コイルに電流が流れると磁力を発生して,鉄片(磁性体)を吸引する.また電流を切
ると磁力が消滅する.従って図4(b)のようにスイッチを閉じて電流を流すと,スプリングの力に打ち勝って可
動鉄片を吸引する.可動鉄片は絶縁材料でできているロッドを介して接点を動作させる. 図4において,AとCはA接点,BとCはB接点により接続されている.
Automatic Control-4

図4:リレーの構造
これらの接点信号はONかOFFかのどちらかの状態のみをとる.従ってON-OFF信号,二値信号,バイ
ナリー信号と呼ばれる.以上の器具を接続図で表すときの記号を表1に示す.本書では JIS B 6015 の表
記法を用いる.
表1:シーケンス制御器具の接続図における記号(接続図の規格)
Automatic Control-5

2.4 シーケンスプログラミング 2.4.1 基本シーケンス命令
現在のシーケンス制御は,プログラムにより制御回路を作成することができる.ここでは基本的な制御命令
を表2に示す.
表2:基本シーケンス命令と回路表示図
Automatic Control-6

ここでは図5に示す最も基本的な制御回路を例に,シーケンス制御の動きを見ていく.
図5:最も基本的なシーケンス制御回路
押しボタンスイッチBS1を押すと,シーケンサ入力回路のリレーX001が働く.またその接点によってリレー
Y001が働き,出力接点Y001によってランプPL1が点灯する. プログラマブルコントローラのプログラミングは,上の基本命令を用いて制御部の回路を構成することにあ
たる.以下の節ではプログラマブルコントローラを用いた制御回路及び基本的なプログラムを示す.
2.4.2 LD命令とOUT命令 まず,「LD X1 GO」と入力すると図6(a)の回路ができる.この命令は,母線に入力信号のA接点X001
を接続する命令である. 続いて「OUT Y1 GO」と入力すると,図6(b)の回路が完成する.このOUT命令は,出力リレーコイルY0
01を反対側の母線(共通母線)に接続する命令である. プログラム終了の場合は必ず最後に「END GO」と入力する.
図6:LD命令とOUT命令
図7に回路図,リストプログラム及び入力手順を示す.
Automatic Control-7

図7:LD命令とOUT命令を用いた制御プログラム
2.4.3 LDI命令
LDI(ロードインバース)命令は,母線にリレーのB接点を接続する命令である.OUT命令と併せて図8の
回路を作ることができる.
図8:LDI命令
Automatic Control-8

2.4.4 AND命令とANI命令 AND(アンド)命令は,図9(a)のように,すでに他の命令でプログラムされている接点に,新たにA接点を直
列に接続する命令である.同様に,ANI(アンドインバース)命令は,同図(b)のように,B接点を直列に接続
する命令である.
図9:AND命令とANI命令
LD命令とOUT命令を併せて用いると図9(c)の回路を作ることができる.同図(d)はそのリストプログラムで
ある. 2.4.5 OR命令とORI命令
OR(オア)命令は,図10(a)のように,すでにLD(またはLDI)命令などによりプログラムされた接点に,A
接点を並列に接続する命令である.ORI(オアインバース)命令は,同図(b)のように,B接点を並列に接続す
る命令で,同図(c)のような回路を作ることができる. 2.4.6 ANB命令 ANB(アンドブロック)命令は,図11(a)のように,いくつかの接点が並列に接続されている回路ブロックと,も
う一つの回路ブロックとを,直列に接続する命令である.ANB命令には,デバイス番号はつけない.同図(b)は(a)の回路を作るためのリストプログラムである.
Automatic Control-9

図10:OR命令とORI命令
図11:ANB命令
2.4.7 ORB命令 ORB(オアブロック)命令は,図12(a)のようにいくつかの接点が直列に接続されている回路ブロックに,他
のもう一つの回路ブロックを並列に接続する命令である.ANB命令と同様にデバイス番号はつけない.同図
(b)は(a)のリストプログラムである.
Automatic Control-10

図12:ORB命令
2.4.8 補助(内部)リレーM
外部に信号を出力する必要のないリレー,つまり内部の制御動作のためにのみ必要な補助リレーとしては,
Mを用いる.図13(a)に補助命令Mを用いた自己保持回路(出力状態が維持される回路)を,(b)にリストプロ
グラムを示す.この回路は,入力X001がONになるとM000がONとなり,その後X001がOFFとなってもM
000がONのまま(自己保持)する回路である.入力X002のB接点がOFFになると,M000もOFFとなり,
初期状態に戻る.
図13:補助リレーM
2.4.9 OUTT(タイマ)命令
プログラマブルコントローラでは様々なタイマ回路をプログラムで作ることができる.ここでは図14(a)に示
すオンディレータイマ(決められた時間のあと,リレーが働くタイマ)を例に説明する.同図(b)はリストプログラ
ムである. このリストプログラム中で,ステップ1がタイマのプログラムである.OUTT命令と設定値「K」に続く,10進
数値によって時間を設定する.単位は0.1秒で,入力X002がONしてから15秒後にY003がONすること
Automatic Control-11

になる.
図14:タイマ回路のプログラム
2.4.10 OUTC(カウンタ)命令
カウンタ回路も作ることができる.図15(a)にカウンタを用いた回路の例を示す.ステップ4がカウンタのプ
ログラムで,OUTC命令と設定値「K」に続く,10進数値によって回数を決められる.
図15:カウンタ回路のプログラム
Automatic Control-12

このプログラムでは,まず入力X001によってカウンタをゼロリセットする.以降,カウンタは計数入力接点
X003のON-OFFの回数をカウントして設定値に達すると動作し,その結果をY001によって出力する. リセット入力によって,カウンタの計数現在値はゼロリセットされ,出力接点もOFFされる. 2.5 シーケンスプログラムの注意 2.5.1 OUT命令の位置
OUT命令と右側の母線の間には,接点を書くことはできない.図16(a)は同図(b)のように書き換えてプロ
グラムする必要がある.
図16:OUT命令の正しい接続
Automatic Control-13

2.5.2 ブリッジ回路 図17(a)のようなブリッジ回路は,同図(b)のように書き換えてプログラムする必要がある.
図17:ブリッジ回路の接続
2.5.3 分岐出力回路
図18(a)のように,分岐後に接点を通して駆動されるOUT命令が2個以上ある場合は,同図(b)のようにプ
ログラムする必要がある.
Automatic Control-14

図18:分岐回路
次の回路及びそのプログラムは可能である.
Y001
Y000 X000
0 1 2
LD X000 OUT Y000
OUT Y001
(a) 可能な分岐回路 (b) リストプログラム
図19:可能な分岐回路 2.5.4 二重出力
同一デバイスナンバーのOUT命令があった場合は,後ろ側のOUT命令が優先される. 3. 予習事項
(1) 基本回路命令であるLD,OUT,AND,ORの動作について調べよ. (2) シーケンスにおける自己保持回路について調べよ. (3) インターロックについて調べよ.
Automatic Control-15

4. 実験方法 4.1 予備実験 (1) 押しボタンPB1を押すと,赤ランプを点灯させるプログラムをプログラミングパネル(FX-10P)に入力
し,動作実行を行う.
① プログラミングパネル(FX-10P)と本体の接続 (I) 電源をOFF状態にする. (II) プログラミングパネル(FX-10P)を本体と接続する.
(III) RUN/STOPスイッチをSTOPに入れる.
② 結線 実験機の押しボタンやランプ,モータなどとシーケンサ間を結線する.プログラムで指定する要素番
号と装置間をコードで結線する.押しボタンやセンサなどの入力はシーケンサのXと,ランプやモータな
どへの出力はシーケンサのYと結線する. この場合,シーケンサのINPUT側の「X0」とTB4内の「4」を,OUTPUT側の「Y0」とTB3内の「2」を
それぞれ結線する.
(注意)結線する時は,必ず電源をOFF状態にして行うこと!
③ プログラムの入力
実行プログラム 0 1 2
LD X000 OUT Y000
END
プログラムをオールリセットして,問題のプログラムを入力する.以下に入力の手順を示す. (I) 電源をON状態にする.
(II) 読出/書込 を何度か押して「W」(書き込み状態)に合わせる. (W・書き込み状態 R・読み込み状態)
(III) , と順に押す.
(IV) を押して,オールクリア受付状態を確認し,再び を押す.
(V) , , , の順に押す.
(VI) , , , の順に押す.
(VII) を押す.
Automatic Control-16

④ 実際に実行させる
RUN/STOPスイッチをRUNに入れてから押しボタンPB1を押して,赤ランプがつくことを確認す
る.確認した後はRUN/STOPスイッチをSTOPに入れる.
以降,②結線,③プログラムの入力及び④実行は,上と同様の手順で行うこと. (注意)故障の原因となるのでモータは手で無理に移動させないこと!
(2) 押しボタンPB1とPB2を同時に押している間,モータ2(M2)を正転させるプログラムを入力し,それ
ぞれ動作実行を行う.
シーケンサのINPUT側の「X0」とTB4内の「4」を,シーケンサのINPUT側の「X1」とTB4内の「5」
を,OUTPUT側の「Y0」とTB2内の「4」をそれぞれ結線する.
0 1 2 3
LD X000 AND X001 OUT Y000 END
実行プログラム (3) 押しボタンPB1とPB2どちらか一つ,または二つ同時に押している間,モータ1(M1)を正転させるプ
ログラムを入力し,それぞれ動作実行を行う.
シーケンサのINPUT側の「X0」とTB4内の「4」を,シーケンサのINPUT側の「X1」とTB4内の「5」
を,OUTPUT側の「Y0」とTB2内の「2」をそれぞれ結線する.
0 1 2 3
LD X000 OR X001 OUT Y000 END
実行プログラム (4) 実行時にすでに白ランプが点灯していて,押しボタンPB1を押すと消灯するプログラムを入力し,動作
実行を行う.
シーケンサのINPUT側の「X0」とTB4内の「4」をOUTPUT側の「Y0」とTB3内の「3」をそれぞれ結
線する.
実行プログラム
Automatic Control-17
0 1 2
LDI X000 OUT Y000
END

(5) 実行するとM2が逆転して,押しボタンPB1とPB2のどちらか,あるいは同時に押している間,M2を
停止させるプログラムを入力し,それぞれ動作実行を行う.
シーケンサのINPUT側の「X0」とTB4内の「4」を,シーケンサのINPUT側の「X1」とTB4内の「5」
を,OUTPUT側の「Y0」とTB2内の「3」をそれぞれ結線する.
0 1 2 3
LDI X000 ANI X001 OUT Y000 END
実行プログラム (6) 実行すると白ランプが点灯し,押しボタンPB1,PB2を同時に押している間,白ランプを消灯させるプ
ログラムを入力し,それぞれ動作実行を行う.
シーケンサのINPUT側の「X0」とTB4内の「4」を,シーケンサのINPUT側の「X1」とTB4内の「5」
を,OUTPUT側の「Y0」とTB3内の「3」をそれぞれ結線する.
0 1 2 3
LDI X000 ORI X001 OUT Y000 END
実行プログラム (7) 押しボタンPB1を押すと緑ランプを点灯しつづけ,押しボタンPB2を押すと消灯させるプログラムを入
力し,それぞれ動作実行を行う.(自己保持回路:出力状態が維持される回路)
シーケンサのINPUT側の「X0」とTB4内の「4」を,シーケンサのINPUT側の「X1」とTB4内の「5」
を,OUTPUT側の「Y0」とTB3内の「4」をそれぞれ結線する.
実行プログラム (8) 押しボタンPB1を押すこ とで5秒後にM2が正転し,
押しボタンPB2を押すとM2が停止するプログラムを作成する.この際に自己保持回路を使用する.
0 1 2 3 4
LD X000 OR Y000 ANI X001 OUT Y000 END
シーケンサのINPUT側の「X0」とTB4内の「4」を,シーケンサのINPUT側の「X1」とTB4内の「5」
を,OUTPUT側の「Y0」とTB2内の「4」をそれぞれ結線する.
Automatic Control-18

0 1 2 3 4 5 8 9 10
LD X000 OR M000 ANI X001 OUT M000
LD M000 OUT T0 SP K50 LD T0 OUT Y000 END
実行プログラム (9) 押しボタンPB1を5回押すことで緑ランプが点灯し,押しボタンPB2を押すと緑ランプが消灯するプロ
グラムを作成する.この際に自己保持回路を使用する.
シーケンサのINPUT側の「X0」とTB4内の「4」を,シーケンサのINPUT側の「X1」とTB4内の「5」
を,OUTPUT側の「Y0」とTB3内の「4」をそれぞれ結線する.
0
1 3 4 7 8 9
LD X001 RST C0 LD X000 OUT C0 SP K5 LD C0 OUT Y000 END
実行プログラム
(10) 切り替えスイッチをAにすることで白ランプが点灯する.切り替えスイッチがAのときの消灯条件は,押し
ボタンスイッチPB1,PB2を同時に押している間だけで消灯する.そして切り替えスイッチをBにすると,
無条件に白ランプは消灯するプログラムを作成せよ.その際にANB命令を使用する.
シーケンサのINPUT側の「X0」とTB4内の「2」を,シーケンサのINPUT側の「X1」とTB4内の「4」
を,シーケンサのINPUT側の「X2」とTB4内の「5」を,OUTPUT側の「Y0」とTB3内の「4」をそれぞ
れ結線する.
実行プログラム
Automatic Control-19
0 1 2 3 4 5
LD X000 LDI X001 ORI X002 ANB OUT Y000 END

(11) 切り替えスイッチをAに入れるとM2が逆転し,切り替えスイッチをBにして,さらに押しボタンスイッチP
B1を押すことではじめて停止するプログラムを作る.この際に自己保持回路とORB命令を使用する.
シーケンサのINPUT側の「X0」とTB4内の「2」を,シーケンサのINPUT側の「X1」とTB4内の「4」
を,OUTPUT側の「Y0」とTB2内の「3」をそれぞれ結線する.
実行プログラム 0 1 2 3 4 5
LD X000 LD Y000 ANI X001 ORB OUT Y000 END
4.2 本実験
(1) 押しボタンPB1を押している間白ランプが点灯し,押しボタンPB2を押している間緑ランプが点灯する
プログラムを作成し,動作させよ.
(2) 切り替えスイッチがAになっているときのみに,(1)の動作を行うことができ,切り替えスイッチがBのと
きは動作しないようにする.
(3) 押しボタンPB1を押している間,モータ1と2が正転して,押しボタンPB2を押している間モータ1と2が
逆転し続けるプログラムを作成し,動作させよ. また次の回路図を参考に,どちらかのボタンを押しているときは逆のボタンを押しても無効になるように
プログラムを修正せよ(これをインターロックと呼ぶ).
Y001
Y000Y001
X001 Y000
X000
END
図20:インターロック回路
Automatic Control-20

(4) 緑ランプがついているとき(待機状態)に押しボタンPB1を押すと,モータ2が常時正転し続け,緑ラ
ンプが消灯,赤ランプが点灯する(動作中状態).押しボタンPB2を押すことでモータ2が停止し,再
び待機状態となるプログラムを作成し,動作させよ.
(5) 次の結線及び回路図は,PB1を押すとM2が正転し始め,センサーLS4を◎マークが5回触れると
停止する回路である.この回路図のプログラムを作成し,動作を確認しなさい.
シーケンサのINPUT側の「X0」とTB4内の「4」を,シーケンサのINPUT側の「X1」とTB1内の「5」を,
OUTPUT側の「Y0」とTB2内の「4」をそれぞれ結線する.
RST C0
Y000 C0
K5 X001
Y000X000 C0
X000
END
図21:5回正転回路
(6) PB1を押すと5秒間M2が正転し,その後停止する結線,回路図及びプログラムを作成し,動作を
確認しなさい.
(7) 次の結線及び回路図は,PB1を押すとM1が正転し始め,M1がセンサーLS3に触れると逆転を開
始し,最後にM1がセンサーLS1に触れると停止する回路である.この回路図のプログラムを作成し,
動作を確認しなさい.
シーケンサのINPUT側の「X0」とTB4内の「4」を,シーケンサのINPUT側の「X1」とTB1内の「2」を,
シーケンサのINPUT側の「X2」とTB1内の「4」を,OUTPUT側の「Y0」とTB2内の「2」を,OUTPUT側
の「Y1」とTB2内の「1」をそれぞれ結線する.
Automatic Control-21

Y001
Y001
X002X000 Y000
Y000
X002 X001
END
図22:M1往復回路 (8) PB1を押すとM2が正転し始め,センサーLS4を◎マークが10回触れると逆転を開始し,10秒間
逆転した後停止する結線,回路図及びプログラムを作成し,動作を確認しなさい. (9) PB1を押すとM1が正転し始め,M1がセンサーLS3に触れると1秒間停止し,その後逆転を開始
し,最後にM1がセンサーLS1に触れると停止する結線,回路図及びプログラムを作成し,動作を確認
しなさい. 4.3 応用実験
各自今まで学習した内容を踏まえ,自由にシーケンス回路を設計及びプログラミングし,動作を確認
しなさい.少なくとも一人1回路は作成すること.
5. 検討事項 (1) 予備実験,本実験及び応用実験の全ての回路図を示せ. (2) 本実験,応用実験のプログラムを示せ. (3) 本実験及び応用実験の回路に対し,どの部分が何を行っているのか,回路の部位と対応する動作を
詳しく説明せよ.
Automatic Control-22

Automatic Control-23
6. 調査事項 (1) リレー制御とプログラマブルコントローラ(PC)制御の制御内容の可変性,信頼性,汎用性などの性能
についてそれぞれ調査し,比較せよ. (2) 現在では一般的に使用されている家庭用品や工業機器は,シーケンス制御とフィードバック制御の2
つとも含んでいるものが一般的である.それらの機器をいくつか上げ,それぞれのシーケンス制御の
働きとフィードバック制御の働きを調べ,説明せよ.


![Z80命令説明書Z80命令説明書userweb.alles.or.jp/chunichidenko/nd3setumeisyo/nd3_z80...1 Z80命令説明書 [はじめに] Z80はザイログ社が開発した8ビットCPUで、8080(インテル社)の命令の全てを含み、さらにその上全く新しい多くの命令を実行](https://img.pdfslide.tips/doc/110x75/5e2a926c08e1b36d51021776/z80ez80e-1-z80e-z80fcoeec8ffffcpu8080ifffcieoe.jpg)