Embed Size (px)
Citation preview
ҚАЗАҚСТАН РЕСПУБЛИКАСЫ БІЛІМ ЖӘНЕ ҒЫЛЫМ МИНИСТРЛІГІ
Қ.И. Сәтбаев атындағы Қазақ ұлттық техникалық университеті А.Бүркітбаев атындағы Өнеркәсіптік инженерия институты
«Қолданбалы механика және машиналарды құрылымдау негіздері» кафедрасы
СТУДЕНТТІҢ ПӘНДІК ОҚУ-ӘДІСТЕМЕЛІК КЕШЕНІ
«Механика 1» пәні бойынша
5В073800- «Материалдарды қысыммен өндеу технологиясы» мамандықтары үшін
АЛМАТЫ 2012
2
Қ.И.Сәтбаев атындағы ҚазҰТУ студенттеріне арналған 5В073800- «Материалдарды қысыммен өндеу технологиясы» Құрастырған:Именов И.М. – Алматы: ҚазҰТУ, 2012. 144 б.
Құрастырушы: Именов И.М.,аға оқытушы.
Аңдатпа (аннотация) Механика 1 пәнінің оқу-әдістемелік кешені «Кредиттік жүйе бойынша
оқитын студенттерге арналған пәндер оқу-әдістемеліккешенін құрастыружәне рәсімдеу туралы» әдістемелік нұсқауларының (ҚазҰТУ оқу-әдістемелік дерпартаменті) негізінде құрастырылған. Кешеннің құрамына теориялық механика мен материалдар кедергісі пәндерінен аталған нұсқаулар талап ететін материалдар: пәннің оқу бағдармламасы – SYLLABUS және негізгі таратылатын материалдар енгізілген.
Оқу-әдістемелік кешеннен студенттер Механика 1 жалпы инженерлік пән есебінде танып, оның заңдарын және оқу тәсілдерін меңгеруге, керекті жағдайда кейбір тақырыптарды өз бетінше үйренуге және білімін жетілдіруге мүмкіндік алады. Сонымен қатар бұл кешен өз бетінше орындалатын жұмыстарды дайындауда қосымша көмекші құрал болып табылады.
Өзін-өзі бақылауға арналған тест тапсырмалары студентке оқу үрдісінің кез келген сатысында пән бойынша өз білім деңгейін анықтауына және соған сәйкес қорытынды жасауына мүмкіндік береді.
© Қ.И.Сәтбаев атындағы Қазақ ұлттық техникалық университеті, 2012

3
1 ПӘННІҢ ОҚУ БАҒДАРЛАМАСЫ - SYLLABUS 1.1 Оқытушылар туралы мәліметтер:
Оқытушы туралы мәлімет: Именов Исмат Маметұлы, аға оқытушы, КазМПУ-тің физика және математика факультетін бітірген, механик, педагогикалық өтілі 40 жыл, ҚазҰТУ-да 18-жыл, теориялық механика, механикалық жүйе орнықтылығы, статистикалық механика және сенімділік теориясы пәндері бойынша бір оқу құралы, 18 әдістемелік жұмыстары жарық көрген. Кеңсе: «Теориялық және қолданбалы механика» кафедрасы Мекен-жайы: 480013, Алматы қаласы, Сәтбаев көшесі, 22. Бас оқу ғимараты, 1017 бөлме Тел.: 8(3272)577169 Факс:_____________________________________________________________
1.2 Пән туралы мәліметтер: Пән аты – «Механика 1» Кредит саны - 3 Өткізу орны – БОҒ кафедра, 307, 902, 909 аудиториялар
Оқу жоспарының көшірмесі Аптадағы академиялық сағаттар
Кур
с
Сем
естр
Кре
дитт
ер
Дәрістер
Лабораториялық сабақтар
СӨЖ
СОӨЖ
Барлығы
Бақылау түрі
1 2 3 4 5 7 8 9 10 2 3 3 2 1 3 3 9 емтихан
1.3 Пререквизиттері: жоғары математика, физика. 1.4 Постреквизиттері: сызба геометриясы,инженерлік графика. 1.5 Пәнді оқыту мақсаттары мен міндеттері 1.5.1 Пәнді оқыту мақсаты.
Студенттердің материялық денелер қозғалысына байланысты табиғи заңдылықтарды тануын ғылыми негізде қалыптастыру. Мамандықтардың сипатына сәйкес қазіргі заманғы техника мен арнайы пәндерді игеруге қажетті теориялық және ғылыми негіз дайындау.
Пәннің мақсаты: жалпы білім беру мәнінде, яғни механиканың негіздерін оқыту (анықтамаларын, теормаларын, заңдарын), оларды қолданудың практикалық тәсілдерін үйрету;
4
арнайы және жалпы инженерлік пәндерді оқуға дайындау; жекелеген түсініктердің жалпы байланысы мен себептерін айқындау; студенттердің техника мен жаратылыстанудың кейбір мәселелерін шешуде қажетті ойлау қабілетін, дербес ойлап табу дағдысын дамыту.
Пәнді оқыту міндеттері. Механика 1 пәнін оқыту мақсатына сәйкес студенттерде мынадай түсініктер болу керек:
механика және материалдар кедергісі пәндерінің басқа жаратылыстану, техникалық ғылымдар арасындағы орны туралы; қатаң логикалық ойлауға және заңдарға сүйеніп, практика арқылы дәлелденетін механика, материалдар кедергісі тәсілдерінің бірлігі, дұрыстығы және қуаттығы туралы;
Студенттер: бағдарламаға кірген негізгі ұғымдар мен заңдарды; кінематика, статика және динамиканың негізгі жағдайларын; ; беріктікке, қатаңдыққа және орнықтылыққа есептеудің негңзгі әдістерін олардың өзара және басқа да пәндермен байланысын білуі керек; өз пікірін нақты және толық етіп дәлелдеуді; үйренген материалды әр салада қолдануды үйренуі керек; материялық денелердің тепе-теңдігіне және қозғалысына байланысты есептерді шешуге; материалдардың механикалық сипаттамаларын анықтау бойынша экспериментальдық зерттеу өткізу; механиканың кейбір сұрақтарына байланысты оқулықтарды, ғылыми әдебиеттерді қолдана білуге дағдылануы керек.
1.5.2 Пәнді оқып үйренудегі міндеттер. “Механика 1” пәні болашақ инженерлерге (қандай салада болса да) аса
қажет пәндердің бірі болып саналады.Бұл пәнге теориялық механика және материалдар кедергісі пәндері кіреді. “Механика 1” әр саладағы мәшинелер, механизмдер, конструкцияларды жобалауға арналған арнаулы пәндерді меңгеруде кеңінен қолданылады.
Студенттердің алдына қойылатын міндеттер: - денеге әсер етуші күштердің тепе-теңдік күйін анықтау; -нүкте қозғалысының кинематикалық сипаттамаларын табу; - нақты объектілерге (мәшине бөлшектері мен құрылым элементеріне)
күштік талдау жасау тәсілдері мен олардың есептік сүлбесін (схемасын) құра білу;
-нүкте динамикасының жалпы теоремаларын нүкте қозғалысын зерттеуге қолдану;
- ішкі күштерді зерттеу принциптерін игеріп, сырықтың көлденең қимасындағы ішкі күштердің эпюрлерін сала білу;
- материалдардың механикалық сипаттамаларын анықтау әдістері мен сол сипат-тамаларға әр түрлі факторлардың әсерін бағалай білу;
5
- денелердің кернеулі күйін талдап, конструкцияның беріктігін бағалай білу;
- мәшине бөлшектері мен конструкциялар элементтерін әр түрлі жүктелу жағдайында беріктікке, қатандыққа және орнықтылыққа есептей білу.
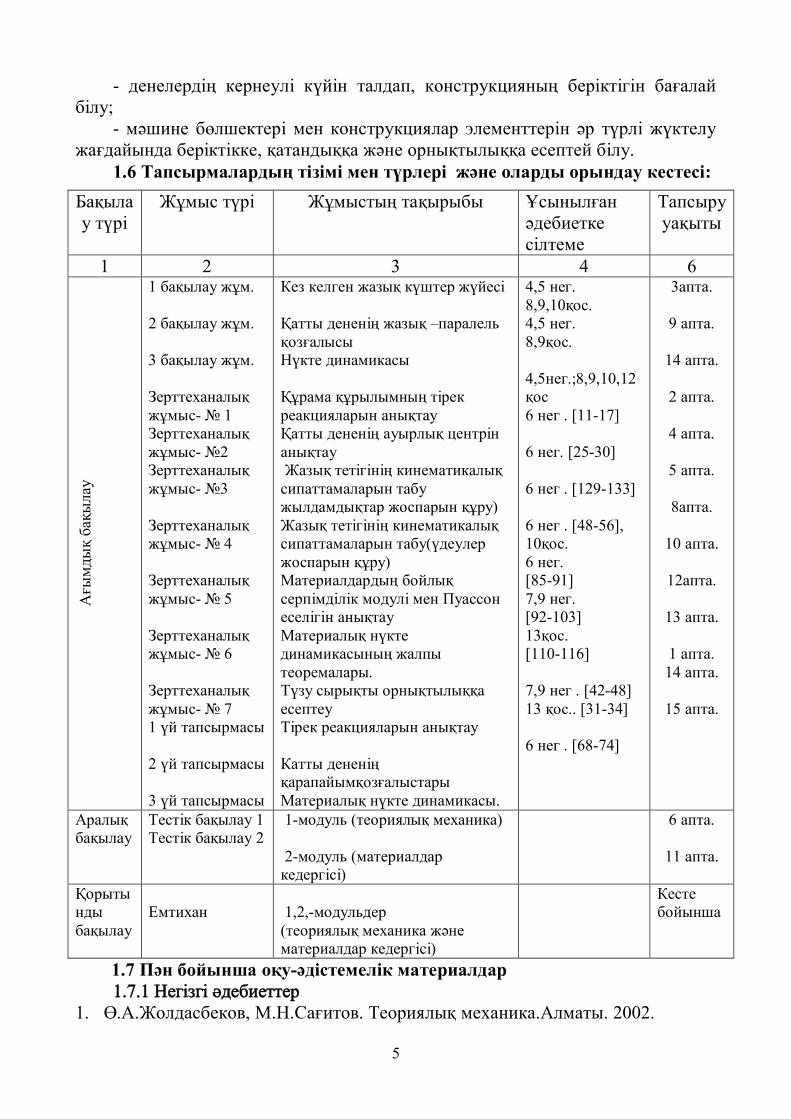
1.6 Тапсырмалардың тізімі мен түрлері және оларды орындау кестесі: Бақылау түрі
Жұмыс түрі Жұмыстың тақырыбы Ұсынылған әдебиетке сілтеме
Тапсыру уақыты
1 2 3 4 6
Ағы
мды
қ ба
қыла
у
1 бақылау жұм. 2 бақылау жұм. 3 бақылау жұм. Зерттеханалық жұмыс- № 1 Зерттеханалық жұмыс- №2 Зерттеханалық жұмыс- №3 Зерттеханалық жұмыс- № 4 Зерттеханалық жұмыс- № 5 Зерттеханалық жұмыс- № 6 Зерттеханалық жұмыс- № 7 1 үй тапсырмасы 2 үй тапсырмасы 3 үй тапсырмасы
Кез келген жазық күштер жүйесі Қатты дененің жазық –паралель қозғалысы Нүкте динамикасы Құрама құрылымның тірек реакцияларын анықтау Қатты дененің ауырлық центрін анықтау Жазық тетігінің кинематикалық сипаттамаларын табу жылдамдықтар жоспарын құру) Жазық тетігінің кинематикалық сипаттамаларын табу(үдеулер жоспарын құру) Материалдардың бойлық серпімділік модулі мен Пуассон еселігін анықтау Материалық нүкте динамикасының жалпы теоремалары. Түзу сырықты орнықтылыққа есептеу Тірек реакцияларын анықтау Катты дененің қарапайымқозғалыстары Материалық нүкте динамикасы.
4,5 нег. 8,9,10қос. 4,5 нег. 8,9қос. 4,5нег.;8,9,10,12қос 6 нег . [11-17] 6 нег. [25-30] 6 нег . [129-133] 6 нег . [48-56], 10қос. 6 нег. [85-91] 7,9 нег. [92-103] 13қос. [110-116] 7,9 нег . [42-48] 13 қос.. [31-34] 6 нег . [68-74]
3апта.
9 апта.
14 апта.
2 апта.
4 апта.
5 апта.
8апта.
10 апта.
12апта.
13 апта.
1 апта. 14 апта.
15 апта.
Аралық бақылау
Тестік бақылау 1 Тестік бақылау 2
1-модуль (теориялық механика) 2-модуль (материалдар кедергісі)
6 апта.
11 апта.
Қорытынды бақылау
Емтихан
1,2,-модульдер (теориялық механика және материалдар кедергісі)
Кесте бойынша
1.7 Пән бойынша оқу-әдістемелік материалдар 1.7.1 Негізгі әдебиеттер
1. Ө.А.Жолдасбеков, М.Н.Сағитов. Теориялық механика.Алматы. 2002.
6
2. А.Н.Төреқожаев, И.М.Именов, Қ.Б.Төлегенова. Теориялық механика пәнінің курстық және семестрлік жұмыстары. Алматы. 2003.
3. А. Іңкәрбеков. Теориялық механика (Статика және кинематика). Алматы. 2005.
4. А. Іңкәрбеков, С. Жүнісбеков, Ә. Қадырбаев, Ж Жұмағұлов. Техникалық механика. Алматы. 2009.
5. Ө.А.Жолдасбеков, А.Қ.Ахметов. Теориялық механика есептер жинағы. Алматы. 2003.
6. И.В.Мещерский. Сборник задач по теоретической механике. М. 1986. 7. Уркумбаев М.Ф.,Жунусбеков С. Материалдар кедергісі. Алматы,1994ж. 8. Тарг С.М. Краткий курс теоретической механики: Учебник. М., Наука, 1986. 9. Феодосьев В.И.Сопротивление материалов. М.,2000г. 10. А.Н.Төреқожаев, Қ.Б.Төлегенова “Материялық нүктенің түзу сызықты
тербелісі” . Алматы. 2003. 1.7.2.Қосымша әдебиет
11. Никитин Н.Н. Курс теоретической механики: Учебник. М., Наука, 1990. 12. Айзенберг Т.Б., Воронков И.М., Осецкий В.М. Руководство к решению
задач по теоретической механике: Учебное пособие. М., 1965. 13. Жолшара Ә., Абаев М.Т.Материалдармеханикасы пәнінен лабораториялық
жұмыстарды орындауға арналған әдістемелік нұсқау. Алматы,200ж. 14. Қ.Б.Төлегенова, Д.Т.Туғанбаева. Қатты дененің жазық-параллель
қозғалысы. Семестрлік тапсырманы орындауға әдістемелік нұсқау. Алматы,2002
15. Д.Т.Туғанбаева. Материалдық нүкте динамикасы. Теориялық механиканың практикалық сабақтарына арналған әдістемелік нұсқау. Алматы, 2004
16. М.Ж.Сергазиев, Д.Т.Туғанбаева. Механикалық жүйе динамикасы. Теориялық механиканың практикалық сабақтарына арналған әдістемелік нұсқау. Алматы, 2004
17. Ә.Н.Төреқожаев, И.М.Именов. Статика. Теориялық механиканың практикалық сабақтарына арналған әдістемелік нұсқау. Алматы, 2004
18. И.М.Именов. Кинематика. Теориялық механиканың практикалық сабақтарына арналған әдістемелік нұсқау. Алматы, 2004 1.8 Білімді бақылау және бағалау Қ.И.Сәтбаев атындағы ҚазҰТУ-дың барлық курс пен барлық пәндері
бойынша студенттердің білімін тексеруде рейтингтік бақылау қолданылады. Балдық-рейтингтік жүйеде іске асырылатын білімді бағалау туралы мәліметтер бақылаудың барлық түрі көрсетілетін шкала түрінде беріледі.
Мамандық бойынша оқу жұмыс жоспарына енгізілген әрбір пәннің рейтингі қорытынды бақыауға тәуелсіз 100 ұпайлық шкаламен бағаланады.
Әрбір пәнге келесі бақылау түрлері белгіленеді: ағымдық бақылау, аралық бақылау, қорытынды бақылау.
Ағымдық бақылау түріне: бақылау жұмысы, семестрлік тапсырмалар, үй жұмыстарын орындау жатады. Қорытынды бақылау – емтихан.
7
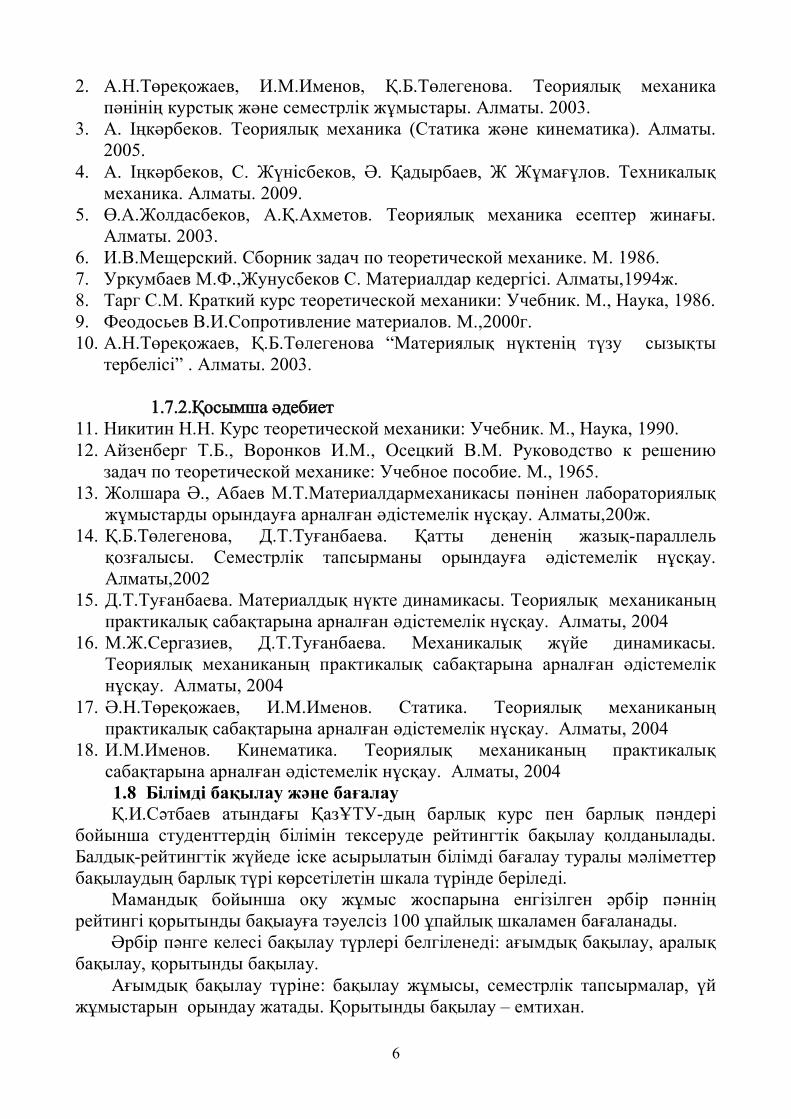
Рейтинг ұпайларының бақылау түрлері бойынша таратылуы Қорыт. бақылау түрі Бақылау түрі % Емтихан, Қорытынды бақылау 100 Аралық бақылау 100 Ағымдағы бақылау 100
«Қолданбалы механика» пәні бойынша
бақылаудың барлық түрлерін өткізудің күнтізбелік кестесі Апталар 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Бақылау Түрлері
Т1 Т2 Ү1 Т3 С1
Т4 Т5 АБ1
Т6 Т7 Т8 Ү2 С2 Б АБ2
Апталық бақылау саны
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
Бақылау түрлері: Ү-үй тапсырмасы; С-семестірлік тапсырма; АБ - аралық бақылау; Т- тәжірибелік сабақ.
Студент жалпы рейтинг көрсеткішінің кемінде 50 %-н алса, қорытынды бақылауға жіберіледі. Қорытынды бақылаудан ең үлкен көрсеткіштің кемінде 50 %-н алған жағдайда өтті деп есептеледі. Пәннің қорытынды бағасы төмендегі шкаламен анықталады.
Студенттердің білімдерін бағалау
Баға Әріптік эквивалент Пайызбен % Баллмен А 95-100 4 Өте жақсы А- 90-94 3,67 В+ 85-89 3,33 В 80-84 3,0
Жақсы
В- 75-79 2,67 С+ 70-74 2,33 С 65-69 2,0 С- 60-64 1,67 D+ 55-59 1,33
Қанағаттанарлық
D 50-54 1,0 Қанағаттанарлықсыз F 0-49 0
Модульдер мен аралық аттестация бойынша бақылау жүргізуге
арналған сұрақтар тізімі 1-модуль
1. Механиканың статика бөлімі қандай мәселелерді зерттейді? 2. Байланыстар, олардың реакцияларының шамалары мен бағыттарын анықтау. 3. Тоғысқан күштер жүйесінің тең әсерлі күшін геометриялық және
аналитикалық тәсілдермен анықтау. 4. Тоғысқан күштер жүйесінің тепе-теңдік шарттары. 5. Статиканың негізгі теоремасы. 6. Кез келген жазық күштер жүйесінің анықтамасы. 7. Кез келген жазық күштер жүйесінің аналитикалық тепе-теңдік шарттары (үш
түрі). 8. Таралған күштерді тең әсерлі күштермен алмастыру мақсаты.
8
9. Тұғыр түрлері және олардың реакциялары. 10. Кез келген кеңістіктік күштер жүйесінің аналитикалық тепе-теңдік шарт-
тары. 2-модуль
1. «Материалдар механикасы» пәнінің мақсаттары мент міндеттері. 2. Ішкі күштер және қималар тәсілі. 3. Кернеулер және олардың түрлері. 4. Созылу мен сығылу кезіндегі Гук заңы. 5. Материалдардың механикалық сипаттамаларын тәжірибе жүзінде анықтау
жолы. 6. Созылу мен сығылу кезінде беріктікке есептеу. 7. Бұралу кезінде беріктікке есептеу. 8. Иілу кезіндегі беріктік шарттары. 9. Дағдарыс күші. Эйлер формуласы. 10. Тетмайер-Ясинский формуласы.
Аралық аттестация 1. Статиканың негізгі теоремасы. 2. Кез келген жазық күштер жүйесінің анықтамасы. 3. Кез келген жазық күштер жүйесінің аналитикалық тепе-теңдік шарттары (үш
түрі ). 4. Таралған күштерді тең әсерлі күштермен алмастыру. 5. Тұғырлардың түрлері мен олардың реакциялары. 6. Кез келген кеңістіктетаралған күштер жүйесінің аналитикалық тепе-теңдік
шарттары . 7. «Материалдар механикасы» пәнінің міндеттері мен тәсілдері. 8. Қималар тәсілін пайдалану кезеңдері. 9. Кернеулер, физикалық мағынасы және өлшем бірліктері . 10. Созылу мен сығылу кезіндегі Гук заңы.
9
1.9 Курсты өту тәртібі Студенттер барлық аудиториялық (СОӨЖ – студенттің аудиторияда
дербес орындалатын жұмыстарын қоса) сабақтарға міндетті түрде қатысуға тиічті;
Барлық бақылау түрлерін өткізу барысында көшіруге тыйым салынады. Бұл ережені бұзған жағдайда студент үшін бақылау түрінің нәтижесі жойылады;
Бақылау жұмыстары және аралық бақылаулар (тестілеу) аудиторияда күнтізбелік кестеге сәйкес СОӨЖ сабақтарында жүргізіледі;
Семестрлік жұмыстарды студент өз бетімен СӨЖ (студенттің дербес жұмыстары) есебінде орындап, күнтізбелік кестеге сәйкес СОӨЖ сабақтарында қорғайды;
Үй тапсырмаларын студент өз бетінше СӨЖ (студенттің дербес жұмыстары) ретінде орындап, СОӨЖ сабақтарында күнтізбелік кестеге сәйкес аудиторияда тапсырады;
Уақытылы өткізілмеген бақылау түрлері СОӨЖ ретінде қосымша уақытта тапсырылады;
Күнтізбелік кестеде келтірілген бақылау түрлерін тапсыру тізімі пәнді оқу тәртібіне және пәннің модульдік жүйесіне сәйкес келтірілген.
Қалта телефондары сабақ кезінде ажыратылған күйде болуға тиісті.
2. Негізгі таратылатын материалдар мазмұны Курстың тақырыптық жоспары және әрбір оқу сабағының түріне қарай
көлемі 2.1 Оқу сабағының түріне қарай сағат бөлу
Академиялық сағат саны
Апт
а Н
өмір
і
Тақырып атауы Д
әріс
Зерт
хана
лық
саба
қ
СО
ӨЖ
СӨ
Ж
1 Кіріспе. Статика. Статикаға кіріспе. Жинақталатын күштер жүйесі.
2 1 3 3
2 Моменттер теориясы. Статиканың негізгі теоремасы. 2 3 3 3 Кез келген жазық күштер жүйесі. 2 2 3 3 4 Дененің ауырлық центрі. 2 2 3 3 5 Кинематика. Кинематикаға кіріспе. Нүкте
кинематикасы.Дененің қарапайым қозғалыстары. 2 3 3
6 Қатты дененің жазық-параллель қозғалысы. 2 4 3 3 7 Нүктенің күрделі қозғалысы. 2 3 3 8 Динамика.Динамикаға кіріспе.Нүкте динамикасының
жалпы теоремалары. Нүкте үшін Даламбер принципі. 2 3 3
9 . Механикалық жүйе. Жүйенің массасы мен массалар центрі.Ішкі күштердің қасиеттері.Қатты дененің
2 3 3
10
2.2 Дәрістік сабақ конспектілері 1-ші модуль. СТАТИКА Дәріс 1. Кіріспе. Статика. Жинақталған күштер жүйесі.
Заманға сай мамандарға инженерлік мәдениет негізін беретін, көптеген инженерлік пәндерге («Қолданбалы механика», «Тетіктер және мәшинелер теориясы», «Материалдар механикасы» және т.б.) негіз болып есептелетін «Теориялық механика» пәнімен танысып, білуді бастаймыз.
Бұл пән физиканың құрамдас бөлігі ретінде математика, табиғи құбылыстарды тану, әлем тану, техника тану пәндерінің қатарына жатады.
Техниканың дамуы инженерлердің алдына заманымызға сай тетіктердің, мәшинелердің, түрлі құрылым мен құрылыстардың беріктіктерін, қозғалыстарын зерттеу мәселелерін қояды.
Мәселелер соншалықты түрлі-түрлі болғанымен, шешулері жалпы бір негізге сүйенеді.
Материялық денелердің қозғалыс заңдарын зерттейтін ғылым теориялық механика болып табылады.
Қозғалыс деп механикада материялық нүктелердің, денелердің орын ауыстыруын атаймыз. Денелердің механикалық әсерлесуі деп, олардың қозғалыстарының өзгеруі аталады. Дененің әсерлесуінің өлшеуіші ретінде алынатын шама күш болып табылады.
Теориялық механика статика, кинематика, динамика деп аталатын үш бөлімнен тұрады. Кейде статика мен динамиканы қосып кинетика деп атайды.
инерция моменттері.Инерция радиусы. 10 Аналитикалық механика элементтері.Байланыстардың
түрлері.Жалпыланған күштер. Оларды есептеу жолдары.Мүмкін орын ауыстыру принципі. Жинамиканың жалпы теңдеуі .
4 2 3 3
11 Созылу мен сығылу. Созылу мен сығылу кезіндегі материалдардың механикалық сипаттамалары .
2 3 3
12 Созылу мен сығылу кезінде беріктік пен қатаңдыққа есептеу
2 2 3 3
13 Нүктедегі кернеулі және деформацияланған күй теориясы
2 3 3
14 Ығысу. Бұралу. Жазық қималардың геометриялық сипаттамалары
2 2 3 3
15 Серпімді деформацияланатын жүйелердің тепе-теңдігінің орнықтылығы
2 3 3
30 15 45 45
11
Статика аксиомалары. Статика аксиомаларға сүйенеді. Математикалық дәлелсіз қабылданатын
теңдеулер мен теоремалар аксиома деп аталады. Олардың шындығы адамзаттың, адам қоғамының тәжіребесінен туған. Аксиомалардың көбісі жалпы динамиканың заңдарынан шығады.
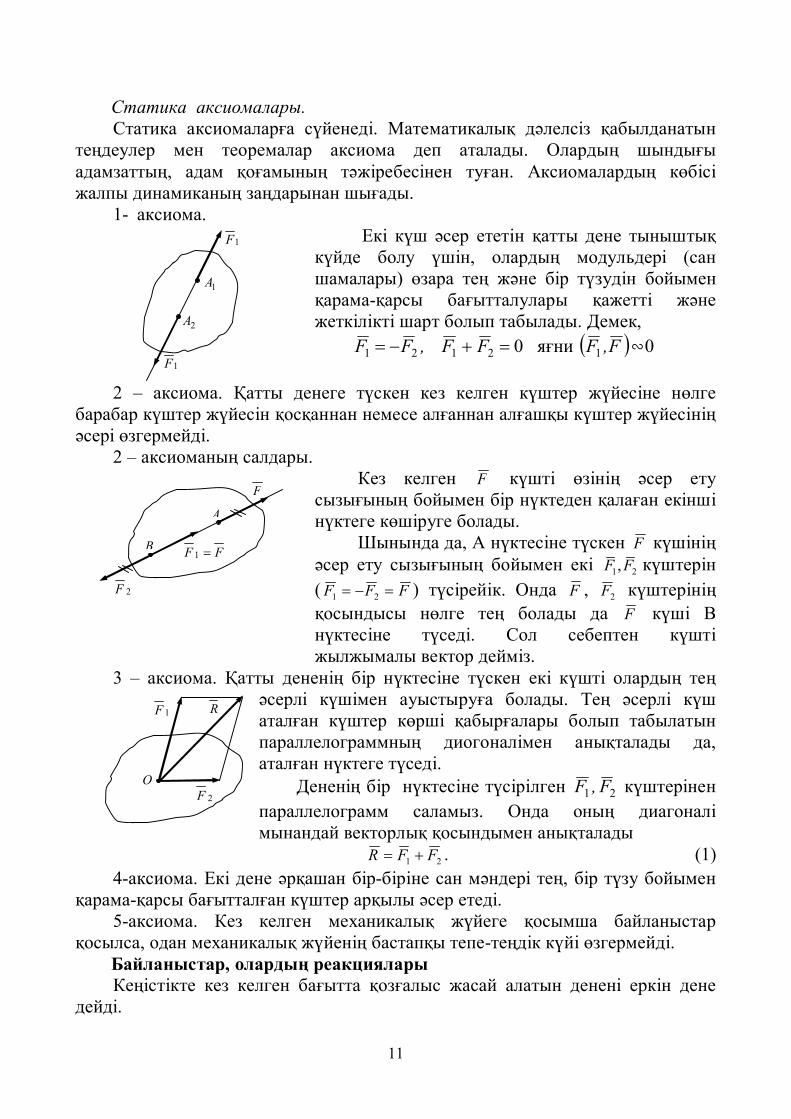
1- аксиома. Екі күш әсер ететін қатты дене тыныштық
күйде болу үшін, олардың модульдері (сан шамалары) өзара тең және бір түзудін бойымен қарама-қарсы бағытталулары қажетті және жеткілікті шарт болып табылады. Демек,
02121 FF,FF яғни F,F1 ∾0 2 – аксиома. Қатты денеге түскен кез келген күштер жүйесіне нөлге
барабар күштер жүйесін қосқаннан немесе алғаннан алғашқы күштер жүйесінің әсері өзгермейді.
2 – аксиоманың салдары. Кез келген F күшті өзінің әсер ету сызығының бойымен бір нүктеден қалаған екінші нүктеге көшіруге болады. Шынында да, А нүктесіне түскен F күшінің әсер ету сызығының бойымен екі 1 2,F F күштерін ( FFF 21 ) түсірейік. Онда F , 2F күштерінің қосындысы нөлге тең болады да F күші В нүктесіне түседі. Сол себептен күшті жылжымалы вектор дейміз.
3 – аксиома. Қатты дененің бір нүктесіне түскен екі күшті олардың тең әсерлі күшімен ауыстыруға болады. Тең әсерлі күш аталған күштер көрші қабырғалары болып табылатын параллелограммның диогоналімен анықталады да, аталған нүктеге түседі.
Дененің бір нүктесіне түсірілген 21 F,F күштерінен параллелограмм саламыз. Онда оның диагоналі мынандай векторлық қосындымен анықталады
21 FFR . (1) 4-аксиома. Екі дене әрқашан бір-біріне сан мәндері тең, бір түзу бойымен
қарама-қарсы бағытталған күштер арқылы әсер етеді. 5-аксиома. Кез келген механикалық жүйеге қосымша байланыстар
қосылса, одан механикалық жүйенің бастапқы тепе-теңдік күйі өзгермейді. Байланыстар, олардың реакциялары Кеңістікте кез келген бағытта қозғалыс жасай алатын денені еркін дене
дейді.
FF 1
2F
B
F A
1F
2F O
R
1F
2A
1F
1A
12
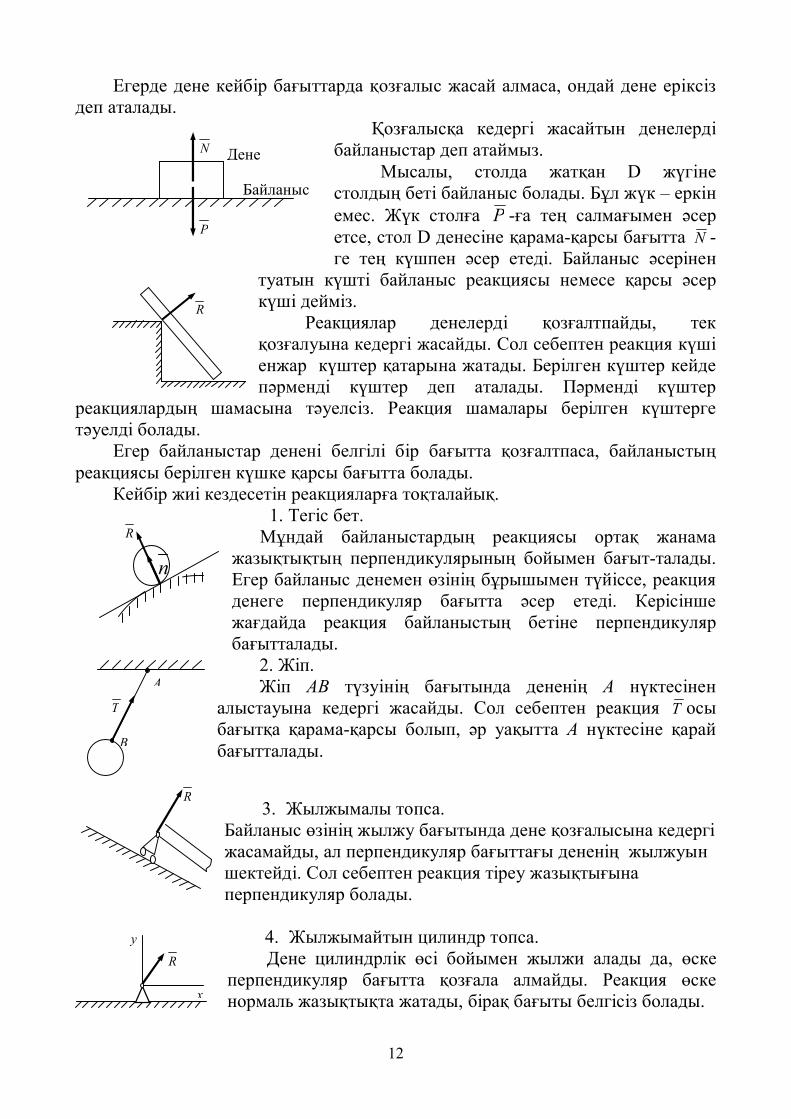
Егерде дене кейбір бағыттарда қозғалыс жасай алмаса, ондай дене еріксіз деп аталады.
Қозғалысқа кедергі жасайтын денелерді байланыстар деп атаймыз.
Мысалы, столда жатқан D жүгіне столдың беті байланыс болады. Бұл жүк – еркін емес. Жүк столға P -ға тең салмағымен әсер етсе, стол D денесіне қарама-қарсы бағытта N -ге тең күшпен әсер етеді. Байланыс әсерінен
туатын күшті байланыс реакциясы немесе қарсы әсер күші дейміз. Реакциялар денелерді қозғалтпайды, тек қозғалуына кедергі жасайды. Сол себептен реакция күші енжар күштер қатарына жатады. Берілген күштер кейде пәрменді күштер деп аталады. Пәрменді күштер
реакциялардың шамасына тәуелсіз. Реакция шамалары берілген күштерге тәуелді болады.
Егер байланыстар денені белгілі бір бағытта қозғалтпаса, байланыстың реакциясы берілген күшке қарсы бағытта болады.
Кейбір жиі кездесетін реакцияларға тоқталайық. 1. Тегіс бет.
Мұндай байланыстардың реакциясы ортақ жанама жазықтықтың перпендикулярының бойымен бағыт-талады. Егер байланыс денемен өзінің бұрышымен түйіссе, реакция денеге перпендикуляр бағытта әсер етеді. Керісінше жағдайда реакция байланыстың бетіне перпендикуляр бағытталады.
2. Жіп. Жіп АВ түзуінің бағытында дененің А нүктесінен
алыстауына кедергі жасайды. Сол себептен реакция Т осы бағытқа қарама-қарсы болып, әр уақытта А нүктесіне қарай бағытталады.
3. Жылжымалы топса.
Байланыс өзінің жылжу бағытында дене қозғалысына кедергі жасамайды, ал перпендикуляр бағыттағы дененің жылжуын шектейді. Сол себептен реакция тіреу жазықтығына перпендикуляр болады.
4. Жылжымайтын цилиндр топса. Дене цилиндрлік өсі бойымен жылжи алады да, өске
перпендикуляр бағытта қозғала алмайды. Реакция өске нормаль жазықтықта жатады, бірақ бағыты белгісіз болады.
Дене
Байланыс
P
N
R
n
R
B
A T
R
x
y R

13
Тоғысқан күштер жүйесі. Тоғысқан күштер жүйесінің тепе-теңдік шарттары
Механиканың І-ші заңын еске түсірейік. Егерде денеге күштер әсер етпесе, немесе, денеге түскен күштер жүйесінің тең әсерлі күші нөлге тең болса, дене тыныштық күйде немесе тұрақты жылдамдықты түзу сызықты қозғалыста болады.
1. Тепе-теңдік шартының векторлық түрі Тоғысқан күштер жүйесі түскен дене тепе-теңдігінің қажетті және жеткілікті шарты оның тең әсерлі күшінің нөлге тең болуы, яғни 0R , (2) немесе 0kF (3)
2. Тепе-теңдік шартының геометриялық түрі Тоғысқан күштер жүйесі түскен қатты дене тыныштықта болуы үшін күштерден құрылған көпбұрыш тұйық болуы қажет және жеткілікті.
3. Тоғысқан күштер жүйесінің тепе-теңдік шарттарының аналитикалық түрі. Тең әсерлі күш өзінің проекциялары арқылы анықталады
0222 zyx RRRR . (4) Бұл теңдіктен: 000 zyx R,R,R . Демек, 000 kzkykx F,F,F . (5) Кейде (5) теңдеуі 000 kkx Z,Y,X түрінде де жазылады. Демек, қатты денеге түскен тоғысқан күштер жүйесі тепе-теңдікте болуы үшін барлық күштердің z,y,x өстеріне проекцияларының қосындылары жеке-жеке нөлге тең болуы қажет және жеткілікті.
Негізгі әдебиеттер 1 нег. [10-15 б.] , 5 нег. [14-21 ,7], 6 нег. [11-14 б.] Қосымша әдебиеттер 15 қос. [7-12 б.] Бақылау сұрақтары:
1. Статиканың негізгі ұғымдары. 2. Статиканың аксиомалары. 3. Байланыстар және олардың реакциялары. 4. Күштерді геометриялық және аналитикалық жолмен қосу тәсілдері. 5. Бейпараллель үш күштің тепе-теңдігі. 6. Тоғысқан күштер жүйесінің тепе-теңдік шарттары.
Дәріс 2. Моменттер теориясы. Статиканың негізгі теоремасы.
1. Күштің нүктеге қатысты моменті Күш әсерінен қатты дене түзу сызықты қозғалыспен қатар нүктені, не өсті
айнала қозғалуы мүмкін. Денеге түскен күштің бұрушы әсерін момент деп атаймыз. Күштің бұрушы әсері:
14
1) күштің модулі және иінінің ұзындығымен (h ); 2) кеңістіктегі күш жазықтығының орнымен; 3) бұрушы күштің бағытымен анықталады.
Тек бір жазықтықта жатқан күштерді қарастырайық. Күш жазықтығы барлық күштерге ортақ болғандықтан кеңістіктегі жазықтықтың орнын анықтаудың қажеті жоқ.
Берілген күш денені сағаттың тілінің бағытына қарсы бағытта бұруға тырысатын болса, күш моменті оң деп, ал, керісінше, дененің бұрылу мүмкіндігі сағаттың тілімен бағыттас болса, теріс деп қабыдданады.
Күштің орталыққа қатысты моменті деп, оң не теріс таңбамен алынған күштің модулі мен иінінің көбейтіндісін атаймыз. Күштің орталыққа (мысалы О нүктесі) қатысты моментін Fm0 символымен белгілесек,
FhFm 0 (1) Бұл ереже оң бұранда ережесі деп аталады. “Плюс” – оң момент, “минус” –
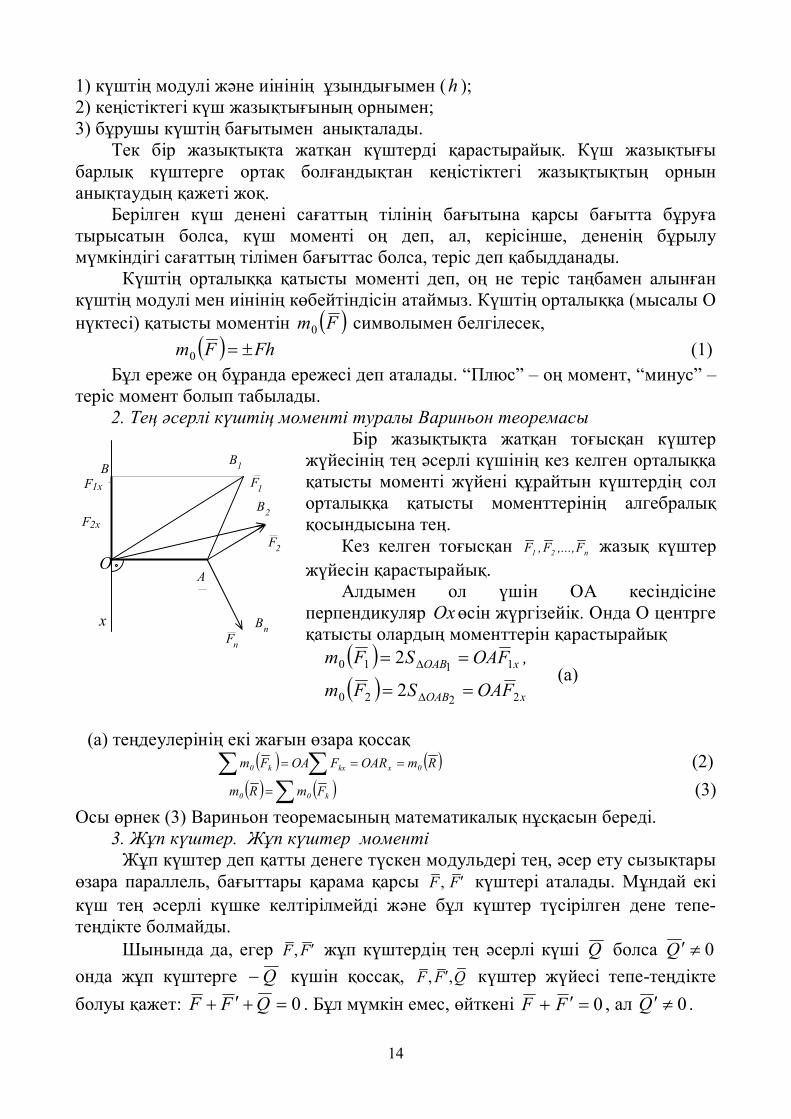
теріс момент болып табылады. 2. Тең әсерлі күштің моменті туралы Вариньон теоремасы
Бір жазықтықта жатқан тоғысқан күштер жүйесінің тең әсерлі күшінің кез келген орталыққа қатысты моменті жүйені құрайтын күштердің сол орталыққа қатысты моменттерінің алгебралық қосындысына тең.
Кез келген тоғысқан n21 F,...,F,F жазық күштер жүйесін қарастырайық.
Алдымен ол үшін ОА кесіндісіне перпендикуляр Ox өсін жүргізейік. Онда О центрге қатысты олардың моменттерін қарастырайық
xOAB
xOAB
FOASFm
,FOASFm
2220
1110
2
2
(а)
(а) теңдеулерінің екі жағын өзара қоссақ
RmOARFOAFm 0xkxk0 (2) k00 FmRm (3)
Осы өрнек (3) Вариньон теоремасының математикалық нұсқасын береді. 3. Жұп күштер. Жұп күштер моменті Жұп күштер деп қатты денеге түскен модульдері тең, әсер ету сызықтары
өзара параллель, бағыттары қарама қарсы ,F F күштері аталады. Мұндай екі күш тең әсерлі күшке келтірілмейді және бұл күштер түсірілген дене тепе-теңдікте болмайды. Шынында да, егер ,F F жұп күштердің тең әсерлі күші Q болса 0Q онда жұп күштерге Q күшін қоссақ, , ,F F Q күштер жүйесі тепе-теңдікте болуы қажет: 0 QFF . Бұл мүмкін емес, өйткені 0 FF , ал 0Q .
2B
A F
B F 1F
1B
O
nBnF
2F
x
F1x
F2x
15
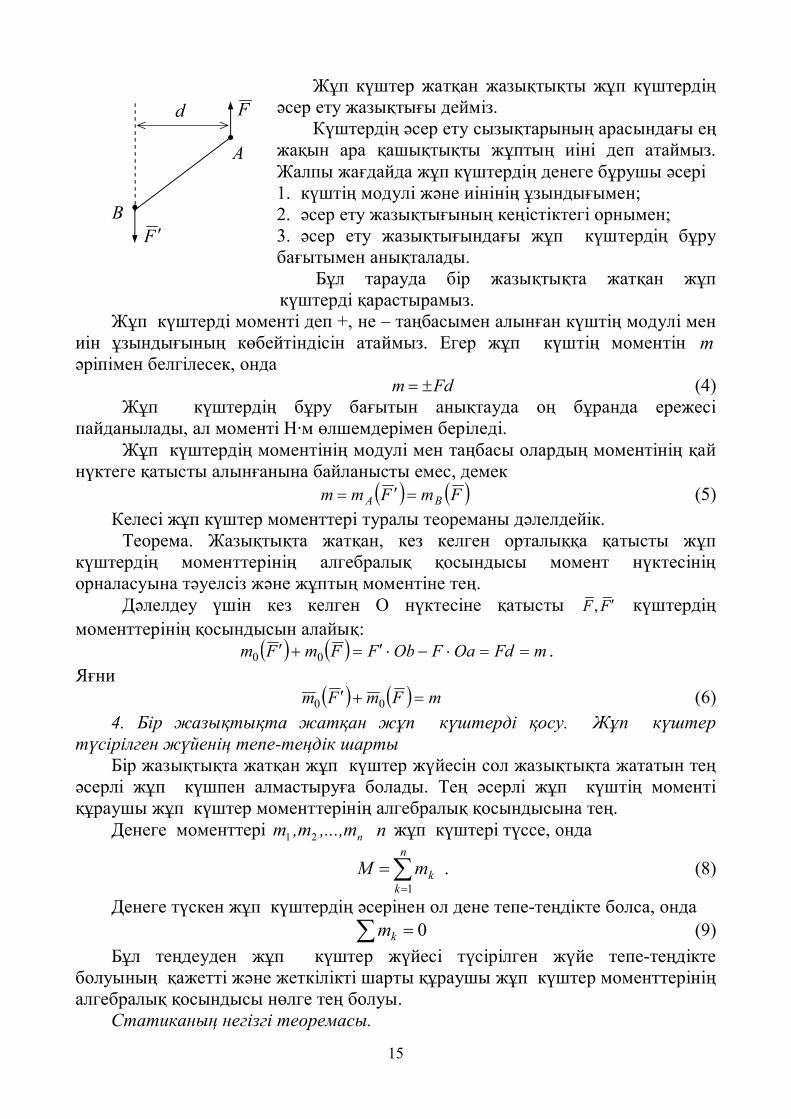
Жұп күштер жатқан жазықтықты жұп күштердің әсер ету жазықтығы дейміз.
Күштердің әсер ету сызықтарының арасындағы ең жақын ара қашықтықты жұптың иіні деп атаймыз. Жалпы жағдайда жұп күштердің денеге бұрушы әсері 1. күштің модулі және иінінің ұзындығымен; 2. әсер ету жазықтығының кеңістіктегі орнымен; 3. әсер ету жазықтығындағы жұп күштердің бұру бағытымен анықталады.
Бұл тарауда бір жазықтықта жатқан жұп күштерді қарастырамыз.
Жұп күштерді моменті деп +, не – таңбасымен алынған күштің модулі мен иін ұзындығының көбейтіндісін атаймыз. Егер жұп күштің моментін m әріпімен белгілесек, онда
Fdm (4) Жұп күштердің бұру бағытын анықтауда оң бұранда ережесі пайданылады, ал моменті Н∙м өлшемдерімен беріледі. Жұп күштердің моментінің модулі мен таңбасы олардың моментінің қай нүктеге қатысты алынғанына байланысты емес, демек
FmFmm BA (5) Келесі жұп күштер моменттері туралы теореманы дәлелдейік.
Теорема. Жазықтықта жатқан, кез келген орталыққа қатысты жұп күштердің моменттерінің алгебралық қосындысы момент нүктесінің орналасуына тәуелсіз және жұптың моментіне тең. Дәлелдеу үшін кез келген О нүктесіне қатысты ,F F күштердің моменттерінің қосындысын алайық:
mFdOaFObFFmFm 00 . Яғни
mFmFm 00 (6) 4. Бір жазықтықта жатқан жұп күштерді қосу. Жұп күштер
түсірілген жүйенің тепе-теңдік шарты Бір жазықтықта жатқан жұп күштер жүйесін сол жазықтықта жататын тең
әсерлі жұп күшпен алмастыруға болады. Тең әсерлі жұп күштің моменті құраушы жұп күштер моменттерінің алгебралық қосындысына тең.
Денеге моменттері nm,...,m,m 21 n жұп күштері түссе, онда
n
kkmM
1 . (8)
Денеге түскен жұп күштердің әсерінен ол дене тепе-теңдікте болса, онда 0km (9)
Бұл теңдеуден жұп күштер жүйесі түсірілген жүйе тепе-теңдікте болуының қажетті және жеткілікті шарты құраушы жұп күштер моменттерінің алгебралық қосындысы нөлге тең болуы.
Статиканың негізгі теоремасы.
F
d F
A
B
16
Жүйеге әсер ететін кез келген тәртіппен бағытталған күштер бір жазықтықта жатса, мұндай күштер жүйесін күштердің жазық жүйесі деп атаймыз.
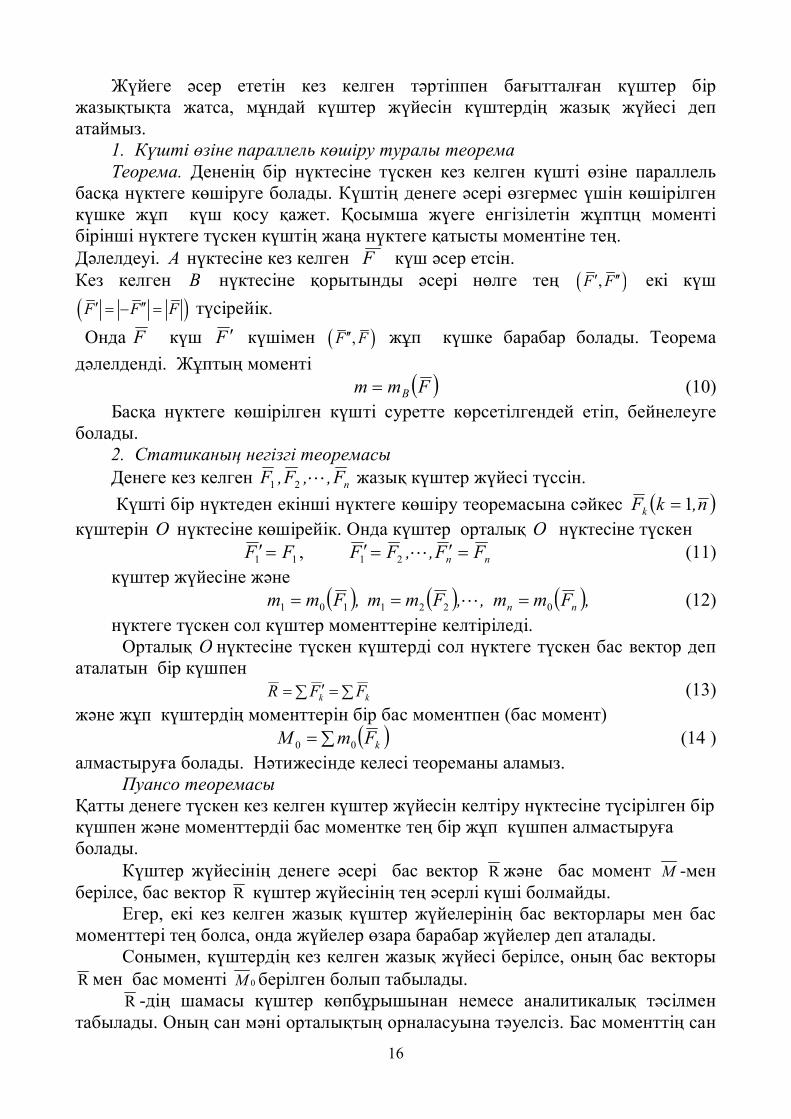
1. Күшті өзіне параллель көшіру туралы теорема Теорема. Дененің бір нүктесіне түскен кез келген күшті өзіне параллель
басқа нүктеге көшіруге болады. Күштің денеге әсері өзгермес үшін көшірілген күшке жұп күш қосу қажет. Қосымша жүеге енгізілетін жұптцң моменті бірінші нүктеге түскен күштің жаңа нүктеге қатысты моментіне тең. Дәлелдеуі. A нүктесіне кез келген F күш әсер етсін. Кез келген B нүктесіне қорытынды әсері нөлге тең ,F F екі күш F F F түсірейік. Онда F күш F күшімен ,F F жұп күшке барабар болады. Теорема дәлелденді. Жұптың моменті
Fmm B (10) Басқа нүктеге көшірілген күшті суретте көрсетілгендей етіп, бейнелеуге
болады. 2. Статиканың негізгі теоремасы Денеге кез келген nF,,F,F 21 жазық күштер жүйесі түссін. Күшті бір нүктеден екінші нүктеге көшіру теоремасына сәйкес n,kFk 1
күштерін O нүктесіне көшірейік. Онда күштер орталық O нүктесіне түскен 11 FF , nn FF,,FF 21 (11)
күштер жүйесіне және ,Fmm 101 ,,Fmm 221 ,Fmm nn 0 (12)
нүктеге түскен сол күштер моменттеріне келтіріледі. Орталық O нүктесіне түскен күштерді сол нүктеге түскен бас вектор деп
аталатын бір күшпен kk FFR (13)
және жұп күштердің моменттерін бір бас моментпен (бас момент) kFmM 00 (14 )
алмастыруға болады. Нәтижесінде келесі теореманы аламыз. Пуансо теоремасы
Қатты денеге түскен кез келген күштер жүйесін келтіру нүктесіне түсірілген бір күшпен және моменттердіі бас моментке тең бір жұп күшпен алмастыруға болады.
Күштер жүйесінің денеге әсері бас вектор R және бас момент M -мен берілсе, бас вектор R күштер жүйесінің тең әсерлі күші болмайды.
Егер, екі кез келген жазық күштер жүйелерінің бас векторлары мен бас моменттері тең болса, онда жүйелер өзара барабар жүйелер деп аталады.
Сонымен, күштердің кез келген жазық жүйесі берілсе, оның бас векторы R мен бас моменті 0M берілген болып табылады.
R -дің шамасы күштер көпбұрышынан немесе аналитикалық тәсілмен табылады. Оның сан мәні орталықтың орналасуына тәуелсіз. Бас моменттің сан
17
мәні жалпы жағдайда келтіру орталығына тәуелді. Сол себептен бас моментті беруде қай нүктеге қатысты алынатынын атау қажет.
Негізгі әдебиеттер 1 нег. [10-15 б.] , 5 нег. [14-21 ,7], 6 нег. [11-14 б.] Қосымша әдебиеттер 15 қос. [7-12 б.] Бақылау сұрақтары:
1. Нүктеге (орталыққа) қатысты күштер моментінің векторы. 2. Жұп күштер. 3. Жұп күштер моментінің векторы және теоремасы. 4. Жұп күштер жүйесінің тепе-теңдік шарттары. 5. Кез келген күштер жүйесін берілген орталыққа келтіру туралы
теорема. 6. Күштер жүйесінің бас векторы мен бас моменті. 7. Кез келген күштер жүйесінің векторлық тепе-теңдік шарттары. 8. Вариньон теоремасы.
Дәріс 3. Жазықтықтағы және кеңістіктегі кез келген күштер жүйесі. 1. Күштердің жазық жүйесін бір күшке немесе бір жұп күшке келтіру Пуансо теоремасына байланысты күштердің жазық жүйесі бір бас векторға
R , бір бас моментке 0M келтіріледі. Енді күштер жүйесінің дербес жағдайларын қарастырайық. 1. 0M,0R 0 болсын. Онда күштер жүйесі тепе-тендікте болады. 2. 0M,0R 0 болсын. Онда күштер жүйесі моменті RMM 00 бір жұп
күшке барабар болады. Жұп күштің моменті орталыққа тәуелсіз болады. 3. Егерде ,0R онда жазық күштер жүйесі бір тең әсерлі күшке келтіріледі.
Мұнда екі жағдай болуы мүмкін: а) ,0R 0M 0 . Күштер орталық O нүктесінен өтетін бір күшке
( R )келтіріледі. б) 0M,0R 0 , 0M *дің шамасын R,R жұп күштерінің моменті деп
қарастырылады. Мұнда ,RR,RR
0M R d (1) деп аламыз
R мен R жойылады. Демек, 0 ,M R жүйе C нүктесіне түскен жалғыз күшпен RR алмастырылады.
C нүктесі 0MOC d d
R
(2)
тендеуімен анықталады R,R жұп күштерінің денені бұру бағыты 0M моментіне сәйкес.
Қарастырылған жағдайлар тепе-тендікте тұрған жүйедегі күштер жүйесі бір күшке не бір жұпқа, ал жалпы жағдайда бір күш пен бір жұпқа келтірілетінін көрсетеді.
18
Күштердің кез келген жазық жүйесі дүсірілген дененің тепе-теңдікте болуының қажет және жеткілікті шарты оның бас векторы мен кез келген бір нүктесіне қатысты алынған бас моментінің нөлге тең болуы, яғни
0M,0R 0 . (3) Осы теңдеуден (3) туындайтын күштердің тепе-теңдік шартының үш түрін
аналитикалық түрде қарастырайық. 1. Кез келген жазық күштер жүйесінің тепе-теңдік шарттарының негізгі
түрі Бас вектор 0FmM,0RRR k00
2y
2x .
Мұнда
n
1kkyy
n
1kkxx FR,FR . Олай болса 0R болу үшін 0R,0R yx болу
керек. Демек, (3) орындалу үшін 0Fm,0F,0F k0kykx (4)
болу қажет. Сонымен, күштердің кез келген жазық жүйесі түсірілген дененің тепе-
теңдікке болуның қажетті және жеткілікті шарты –координат өстерінің әрқайсысына барлық күштердің проекцияларының қосындысы және күштер жазығындағы кез келген нүктеге қатысты алынған барлық күштердің моменттерінің қосындысы нөлге тең болуы.
Сонымен қатар (3) кез келген жазық күштер жүйесінің әсерінен жүйенің тыныштықта болуының шартын береді.
Теңдеулер жүйесінің (3) бірінші және екінші теңдеулері дененің x пен y өстері бойымен жылжымау шарттарын, үшінші теңдеу Oxy жазықтығында бұрылмау шартын сипаттайды.
2. Параллель күштер жүйесі 1. Бір бағыттағы екі параллель күшті
қосуу. Абсолют қатты дененің А және В
нүктелеріне бірыңғай бағытталған өзара параллель 1F және 2F күштері әсер етсін. Бұл күштердің қосындысының модулі
21 FFR .
Жоғарыда айтылғандай, күштердің жазық жүйесі бас векторға R , бас 0M моментке келеді. Немесе басқа С нүктесіне түскен жалғыз күшке RR келеді 0M c .
Онда С нүктесінің орнын табу қажет. С нүктесін АВ кесіндісінің бойынан алайық
0FmFmM 2c1cc . Бұдан
0BCFACF 21 шығады, яғни
2F
1F
BCA
R

19
12 FBC
FAC
. (5)
Бұл теңдеу С нүктесінің АВ кесіндісін 1F және 2F күштерінің шамаларына кері қатынастай етіп бөлетінін көрсетеді.
Пропорциялық қатынастан туынды пропорция аламыз
1212 FFBCAC
FBC
FAC
.
Немесе
RAB
FBC
FAC
12 . (6)
Егер R мен 1F (және АВ, ВС) берілсе, (5)-ден 2F - ні табуға болады. Бұл теңдеулер, яғни
RAB
FBC,
RAB
FAC
12 (7)
С нүктесінің орнын анықтайды. Сонымен екі өзара параллель күштердің тең әсерлі күші – сол күштерге
параллель, модулі олардың модульдерінің қосындысына тең, күштер түсірілген нүктелер арасын күштерге кері пропорционал қатынаста бөледі.
2. Қарама-қарсы бағытталған екі параллель күшті қосу. Қатты дененің А және В нүктелерінде
өзара параллель 1F және 2F ( 1F > 2F ) күштері түсірілген болсын.
Бұларды тең әсерлі күшке келтірейік. Ол үшін 1F күшін өзімен параллель, бір жаққа бағытталған екі күшке 22 FF,R жіктейік. RF,F,RF,F 2221 болады.
Демек, 1F күштің түсірілу нүктесі С (6), (7) теңдеулерімен анықталады. Мұндай
21 F,F екі күштің модулі 21 FFR . (8) Егер өзара параллель күштер жүйесі берілген болса, жүйенің тең әсерлі
күшінің модулі құраушы күштердің алгебралық қосындысына тең болады. Тең әсерлі күштің түскен нүктесі (8)-теңдеумен табылады. Ол нүктенің
координаттарын келесі тақырыпта анықтаймыз. 3. Өзара параллель күштер жүйесінің тепе-теңдік шарттары
Денеге өзара параллель n21 F,...,F,F күштер жүйесі әсер етсін.
Жазық координаттар жүйесінің бір өсін y осы күштерге параллель етіп алайық. Онда күштердің әрқайсысының екінші өске ( x ) проекциясы нөлге тең:
0Fkx . Онда параллель күштер жүйесі тепе-теңдікте
y
O x
nF
2F
1F
2F
2F
1F
B C A
R
20
болу үшін күштердің y өсіне проекцияларының қосын-дысы және олардың күштер жазықтығындағы кез келген нүктеге қатысты моменттерінің алгебралық қосындысы нөлге тең болуы қажетті және жеткілікті шарт болып табылады
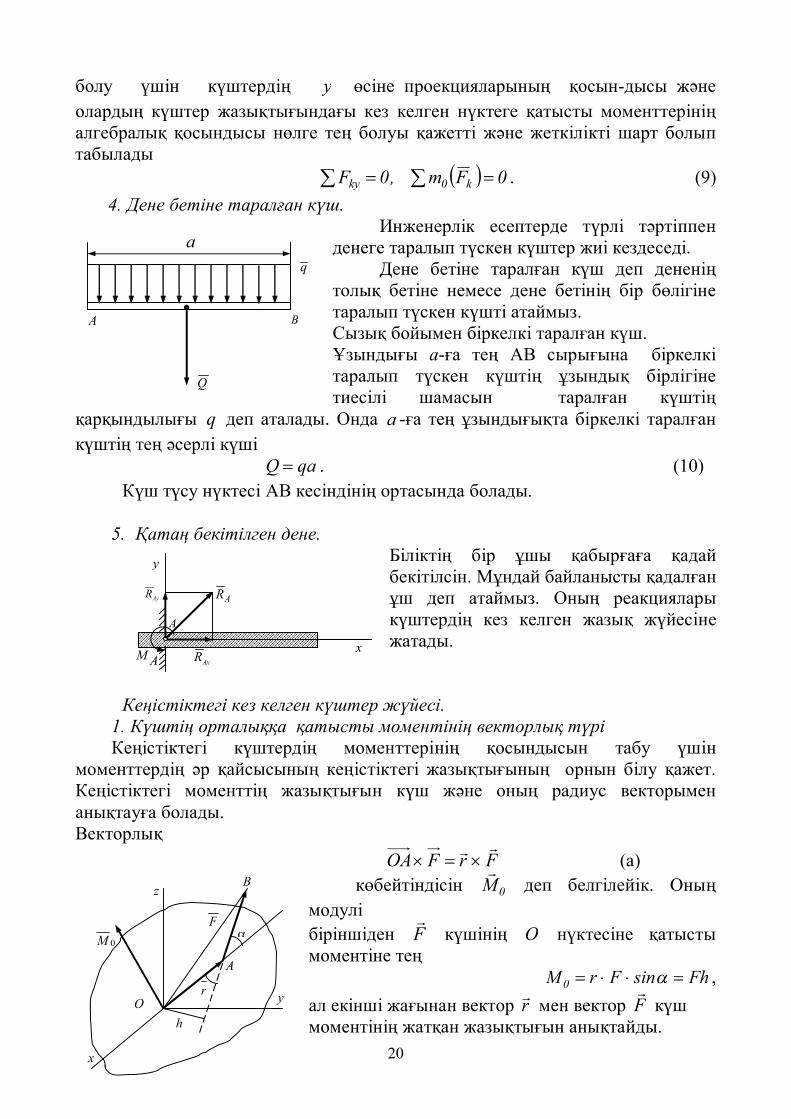
0Fm,0F k0ky . (9) 4. Дене бетіне таралған күш.
Инженерлік есептерде түрлі тәртіппен денеге таралып түскен күштер жиі кездеседі.
Дене бетіне таралған күш деп дененің толық бетіне немесе дене бетінің бір бөлігіне таралып түскен күшті атаймыз. Сызық бойымен біркелкі таралған күш. Ұзындығы а-ға тең АВ сырығына біркелкі таралып түскен күштің ұзындық бірлігіне тиесілі шамасын таралған күштің
қарқындылығы q деп аталады. Онда a -ға тең ұзындығықта біркелкі таралған күштің тең әсерлі күші
qaQ . (10) Күш түсу нүктесі АВ кесіндінің ортасында болады.
5. Қатаң бекітілген дене.
Біліктің бір ұшы қабырғаға қадай бекітілсін. Мұндай байланысты қадалған ұш деп атаймыз. Оның реакциялары күштердің кез келген жазық жүйесіне жатады.
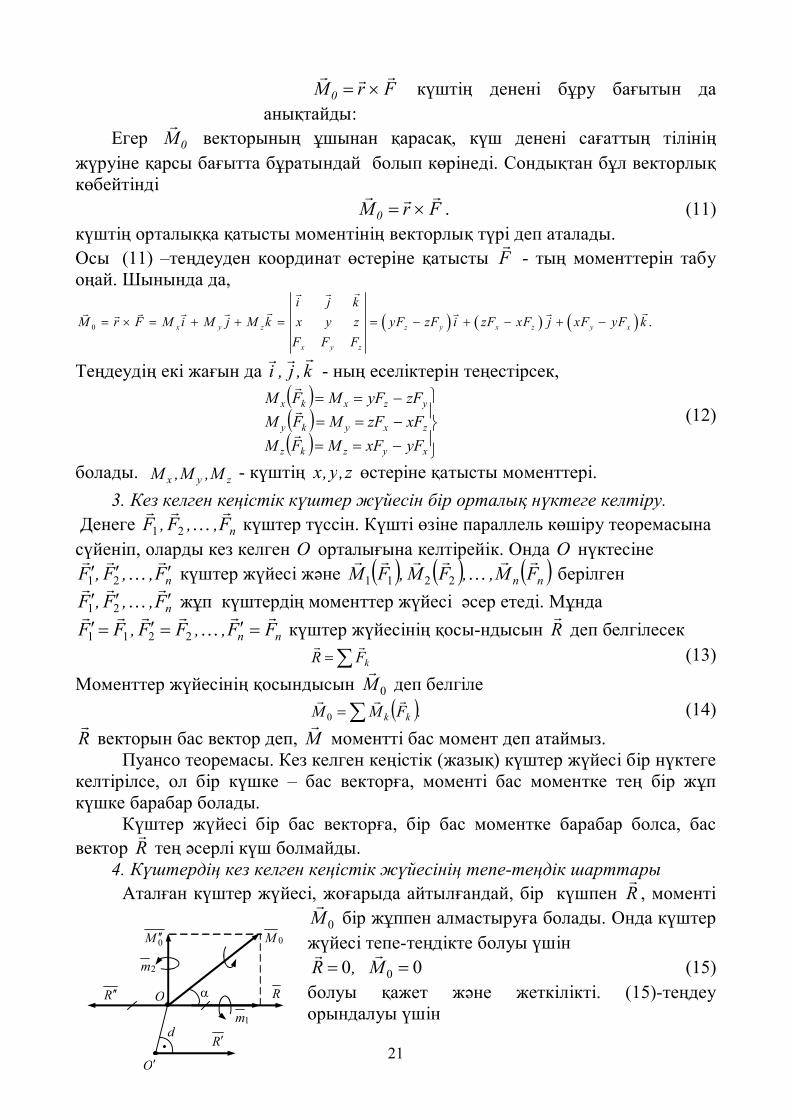
Кеңістіктегі кез келген күштер жүйесі. 1. Күштің орталыққа қатысты моментінің векторлық түрі Кеңістіктегі күштердің моменттерінің қосындысын табу үшін
моменттердің әр қайсысының кеңістіктегі жазықтығының орнын білу қажет. Кеңістіктегі моменттің жазықтығын күш және оның радиус векторымен анықтауға болады. Векторлық
FrFOA (а)
көбейтіндісін 0M
деп белгілейік. Оның модулі біріншіден F
күшінің O нүктесіне қатысты
моментіне тең FhsinFrM 0 ,
ал екінші жағынан вектор r мен вектор F
күш моментінің жатқан жазықтығын анықтайды.
AM
AR
y
x
A
AyR
AxR
aq
BA
Q
F
r A
B z
y
x
O h
0M
21
FrM 0
күштің денені бұру бағытын да
анықтайды: Егер 0M
векторының ұшынан қарасақ, күш денені сағаттың тілінің
жүруіне қарсы бағытта бұратындай болып көрінеді. Сондықтан бұл векторлық көбейтінді
FrM 0
. (11)
күштің орталыққа қатысты моментінің векторлық түрі деп аталады. Осы (11) –теңдеуден координат өстеріне қатысты F
- тың моменттерін табу
оңай. Шынында да,
0 .x y z z y x z y x
x y z
i j kM r F M i M j M k x y z yF zF i zF xF j xF yF k
F F F
Теңдеудің екі жағын да k,j,i
- ның еселіктерін теңестірсек,
xyzkz
zxyky
yzxkx
yFxFMFMxFzFMFMzFyFMFM
(12)
болады. zyx M,M,M - күштің z,y,x өстеріне қатысты моменттері. 3. Кез келген кеңістік күштер жүйесін бір орталық нүктеге келтіру.
Денеге nF,,F,F
21 күштер түссін. Күшті өзіне параллель көшіру теоремасына сүйеніп, оларды кез келген O орталығына келтірейік. Онда O нүктесіне
nF,,F,F
21 күштер жүйесі және nn FM,,FM,FM
2211 берілген
nF,,F,F
21 жұп күштердің моменттер жүйесі әсер етеді. Мұнда
nn FF,,FF,FF
2211 күштер жүйесінің қосы-ндысын R
деп белгілесек kFR
(13) Моменттер жүйесінің қосындысын 0M
деп белгіле .FMM kk
0 (14) R
векторын бас вектор деп, M
моментті бас момент деп атаймыз. Пуансо теоремасы. Кез келген кеңістік (жазық) күштер жүйесі бір нүктеге
келтірілсе, ол бір күшке – бас векторға, моменті бас моментке тең бір жұп күшке барабар болады. Күштер жүйесі бір бас векторға, бір бас моментке барабар болса, бас вектор R
тең әсерлі күш болмайды.
4. Күштердің кез келген кеңістік жүйесінің тепе-теңдік шарттары Аталған күштер жүйесі, жоғарыда айтылғандай, бір күшпен R
, моменті
0M
бір жұппен алмастыруға болады. Онда күштер жүйесі тепе-теңдікте болуы үшін
,R 0
00 M
(15) болуы қажет және жеткілікті. (15)-теңдеу орындалуы үшін
1m
2m
0M
R
O
O R
R
0M
d
22
000 zyx R,R,R және
000 zyx M,M,M болуы керек. Яғни,
0; 0;
0; 0;
0; 0,
kkx x
kky y
kkz z
F m F
F m F
F m F
(16)
кеңістік күштер тепе-теңдік теңдеулерінің саны алтау болады. Сонымен, кез келген күштердің кеңістік жүйесі әсер ететін жүйе тепе-
теңдікте болуы үшін үш өстің әрқайсысына күштер проекцияларының қосындысы және әр өске қатысты күштер моменттерінің проекцияларының нөлге тең болуы қажетті және жеткілікті шарттары болып табылады.
Негізгі әдебиеттер 1 нег. [10-15 б.] , 5 нег. [14-21 ,7], 6 нег. [11-14 б.] Қосымша әдебиеттер 15 қос. [7-12 б.]
Бақылау сұрақтары: 1. Нүктеге қатысты күш моменті мен жұп күш моментінің алгебралық мәні. 2. Кез келген жазық күштер жүйесінің бас векторы мен бас моментін есептеу. 3. Жазық күштер жүйесінің аналитикалық тепе-теңдік шарттары, олардың түрлері. 4. Өске қатысты күш моменті. 5. Координата өстеріне қатысты күш моменттерінің аналитикалық өрнектері. 6. Кеңістіктегі кез келген күштер жүйесінің бас векторы мен бас моментін есептеу. 7. Кеңістіктегі кез келген күштер жүйесінің аналитикалық тепе-теңдік шарттары; параллель күштер жағдайы. 8. Параллель күштер жүйесін тең әсерлі күшке келтіру. 9. Параллель күштер орталығы, оның радиус-векторы мен координаттары.
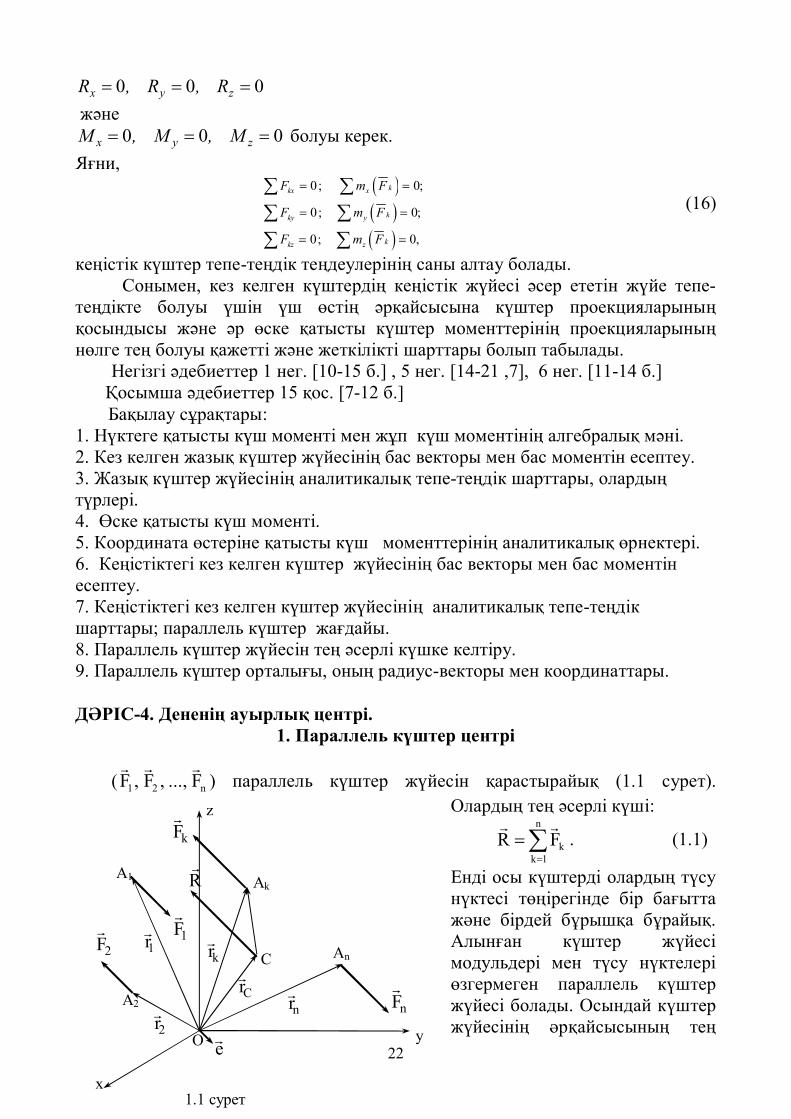
ДӘРІС-4. Дененің ауырлық центрі.
1. Параллель күштер центрі
( n21 F...,,F,F
) параллель күштер жүйесін қарастырайық (1.1 сурет). Олардың тең әсерлі күші:
n
1kkFR
. (1.1)
Енді осы күштерді олардың түсу нүктесі төңірегінде бір бағытта және бірдей бұрышқа бұрайық. Алынған күштер жүйесі модульдері мен түсу нүктелері өзгермеген параллель күштер жүйесі болады. Осындай күштер жүйесінің әрқайсысының тең
x
y
z
О
1F
2F
kF
nF
R
A1
A2
Ak
An C 1r
2r
kr
nr
Cr
e
1.1 сурет
23
әсерлі күшінің модулі бұрынғыдай, ал бағыты әртүрлі. Күштер жүйесін кез келген жаққа бұрғанда тең әсерлі күштің әсер ету сызығы бір С нүктесі арқылы өтетін болады. Осы нүкте параллель күштер центрі деп аталады.
Осы нүктенің радиус-векторын табайық. Ол үшін Вариньон теоремасын қолданамыз. R
күштер жүйесінің тең әсерлі күші болғандықтан, теорема
бойынша оның кез келген нүктеге қатысты моменті барлық күштердің сол нүктеге қатысты моменттерінің қосындысына тең. Момент алынатын нүкте етіп С нүктесін алайық. Сонда
n
1kkСС )F(m)R(m . (1.2)
R
күші С нүктесінен өтетін болғандықтан оның осы нүктеге қатысты моменті
нөлге тең, ал (1.2) теңдеуін қолданып kkkС FСА)F(m
екенін аламыз, сонда (1.2) теңдеуі былай жазылады:
n
1kkk 0FСА
. (1.3)
1.1 суреттен Ckk rrСА
екенін көреміз. Берілген күштерге параллель етіп е бірлік векторын ендірейік. Сонда кез келген күш векторын былай жаза аламыз:
,eFF *kk
егер kF
мен е векторлары бағыттас болса, бұл жердегі k*k FF , ал егер kF
мен
е векторлары қарсы бағытта болса, онда k*k FF . Осы айтылғанды ескеріп
(1.3) теңдеуін былай жазамыз:
.0е)FrFr(n
1k
*kC
*kk
Осыдан параллель күштер центрінің радиус-векторы өрнегін аламыз:
n
1k
*k
n
1k
*kk
C
F
Frr
(1.4)
мұндағы kr - kF
күшінің түсу нүктесінің радиус-векторы, ал *
kF күші бағытына қарай не kF -ға, не ( kF )-ға тең болады.
Сонда параллель күштер центрінің координаталары мынандай болады:
.F
Fzz,
F
Fyy,
F
Fxx n
1k
*k
n
1k
*kk
Cn
1k
*k
n
1k
*kk
Cn
1k
*k
n
1k
*kk
C
(1.5)
24
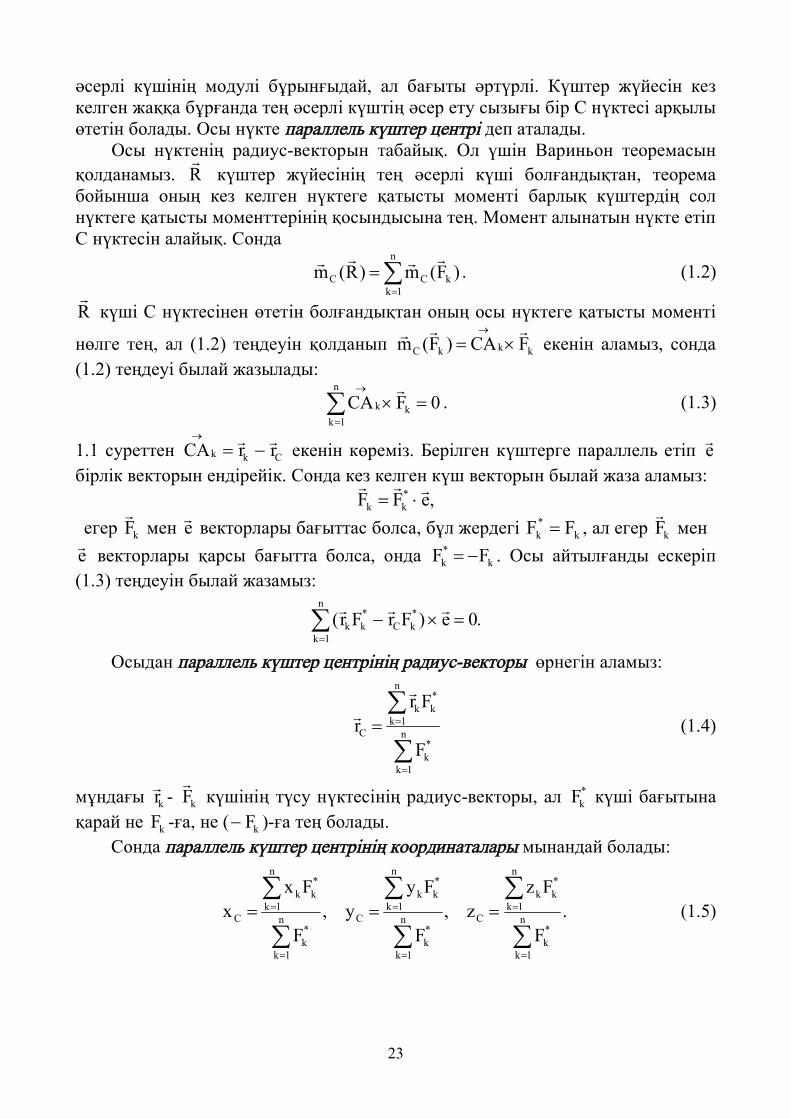
1.2 Қатты дененің ауырлық центрі
Жер бетіне жақын орналасқан дененің әр нүктесіне жердің центріне қарай вертикаль төмен бағытталған ауырлық күші әсер етеді (1.2 сурет). Егер дене өлшемдері жер өлшемдерінен әлдеқайда кіші болса, онда бұл күштерді шамалары тұрақты және бір біріне параллель деп есептеуге болады.
Берілген дене нүктелеріне әсер ететін n21 p...,,p,p
ауырлық күштердің тең әсерлісін P
деп белгілейік. Осы күштің модулі дененің салмағы болады. Денені қалай қарай бұрсақ та kp күштері бір біріне параллель және бір нүктеге түсірілген болып қала береді. Демек, осы күштердің тең
әсерлі күші
n
1kkpP
, параллель
күштер жүйесінің тең әсерлісі ретінде әрқашан бір нүктеден ғана өтетін болады. Дененің ауырлық
центрі деп оның барлық нүктелерінің ауырлық күштерін құратын параллель күштер жүйесінің центрін атайды. Дененің ауырлық центрінің радиус-векторын және координаталарын (1.4) пен (1.5) теңдеулеріне сәйкес мына өрнектермен анықтауға болады:
,Р
pr
p
prr
n
1kkk
n
1kk
n
1kkk
C
(1.6)
,Р
pzz,
Р
pyy,
Р
pxx
n
1kkk
C
n
1kkk
C
n
1kkk
C
(1.7)
мұндағы k,kkk zy,x,r – нүктелердің радиус-векторлары мен координаталары,
kp – нүктелердің салмақтары, ал Р – бүкіл дененің салмағы. Егер денені жеке нүктелерге бөлуге болмаса (тұтас орта немесе континуум
болса), онда денені kv элементар көлемдерге бөледі. Осындай көлемнің әрқайсысының салмағы көлемге пропорционал kk vp , ал дененің Р салмағы осы дененің V көлеміне пропорционал, яғни VP , мұндағы - элементар көлемнің меншікті салмағы. Біртекті дене үшін - тұрақты шама болғандықтан, kp мен Р -ның мәндерін (1.7) теңдігіне қойсақ, қосындылардағы ортақ көбейгіш ретінде жақшаның сыртына шығарылып,
x
y
z
0
1p
2p
np
P
C
1.2 сурет
25
бөлімдегі -мен қысқарады. Нәтижесінде, біртекті көлемнің ауырлық центрінің координаталарын аламыз:
.V
vzz,
V
vyy,
V
vxx
n
1kkk
C
n
1kkk
C
n
1kkk
C
(1.8)
Егер денені біртекті материалдық жазық дене деп алсақ, ауданның ауырлық центрінің координаталары мынандай болады:
,S
syy,
S
sxx
n
1kkk
C
n
1kkk
C
(1.9)
мұндағы ks - жазық дене бөлшектерінің ауданы, kk y,x - олардың ауырлық центрлерінің координаталары, S - бүкіл жазық дененің ауданы.
Материялық сызықтың ауырлық центрінің координаталары мына өрнектермен анықталады:
,L
zz,
L
yy,
L
xx
n
1kkk
C
n
1kkk
C
n
1kkk
C
(1.10)
мұндағы L - бүкіл сызықтың ұзындығы, k - оның бөлшектерінің ұзындығы. Сонымен, біртекті дененің ауырлық центрі сәйкес көлемнің, ауданның
немесе сызықтың ауырлық центрі сияқты анықталады.
1.3 Дененің ауырлық центрінің координаталарын анықтау әдістері
1. Симметрия әдісі. Егер біртекті дененің симметрия жазықтығы, симметрия өсі, не симметрия центрі бар болса, онда ол дененің ауырлық центрі симметрия жазықтығында, немесе симметрия өсінде, немесе симметрия центрінде жатады.
Мысалы, біртекті дененің симметрия жазықтығы оны екі бөлікке бөледі. Олардың ауырлық күштері PPP 21 тең, сондықтан R
тең әсерлі күш
аталған күштердің дәл ортасында, яғни симметрия жазықтығында жатады. 2. Бөлшектеу әдісі. Егер берілген дененің пішіні күрделі болса, онда оны
ауырлық центрлері оңай табылатын бірнеше бөлшекке бөлеміз де, бүкіл дененің ауырлық центрінің координаталарын (1.7) – (1.10) өрнектерімен санаймыз. Бұл жерде қосылғыштардың саны дене бөлінген бөлшектердің санына тең.
3. Теріс массалар әдісі. Бұл әдісті бөлшектеу әдісінің бір түрі деуге болады. Бұл әдісті қуысты денелердің ауырлық центрін анықтауда пайдаланады. Мұндай жағдайда қуыстарды теріс таңбалы көлемдер немесе аудандар деп есептейміз
4. Интегралдау әдісі. Егер денені ауырлық центрлері оңай табылатын бөлшектерге бөлуге болмаса, онда оны өте кіші элементар kV көлемдерге бөледі. Олар үшін (1.8) өрнек мына түрге келеді:
26
,V
vzz,
V
vyy,
V
vxx
n
1kkk
C
n
1kkk
C
n
1kkk
C
(1.11)
мұндағы kkk z,y,x - kV элементар көлем ішіндегі нүкте координаталары. Одан кейін (1.11) теңдіктеріндегі барлық kv элементар көлемдерді нөлге
ұмтылдырып, шекке өтеді, яғни осы көлемдерді бір нүктеге жинайды. Сонда теңдіктердегі қосындылар бүкіл көлемге таралған интегралдарға айналады да (1.11) теңдіктері мынаны береді:
V
CV
CV
C zdVV1z,ydV
V1y,xdV
V1x . (1.12)
Осы сияқты, аудан мен сызықтың ауырлық центрлерінің координаталары үшін (1.9) және (1.10) өрнектерінен мына өрнектерді аламыз:
)S(
С)S(
С ydSS1y,xdS
S1x . (1.13)
L
СL
СL
С zdL1z,yd
L1y,xd
L1x . (1.14)
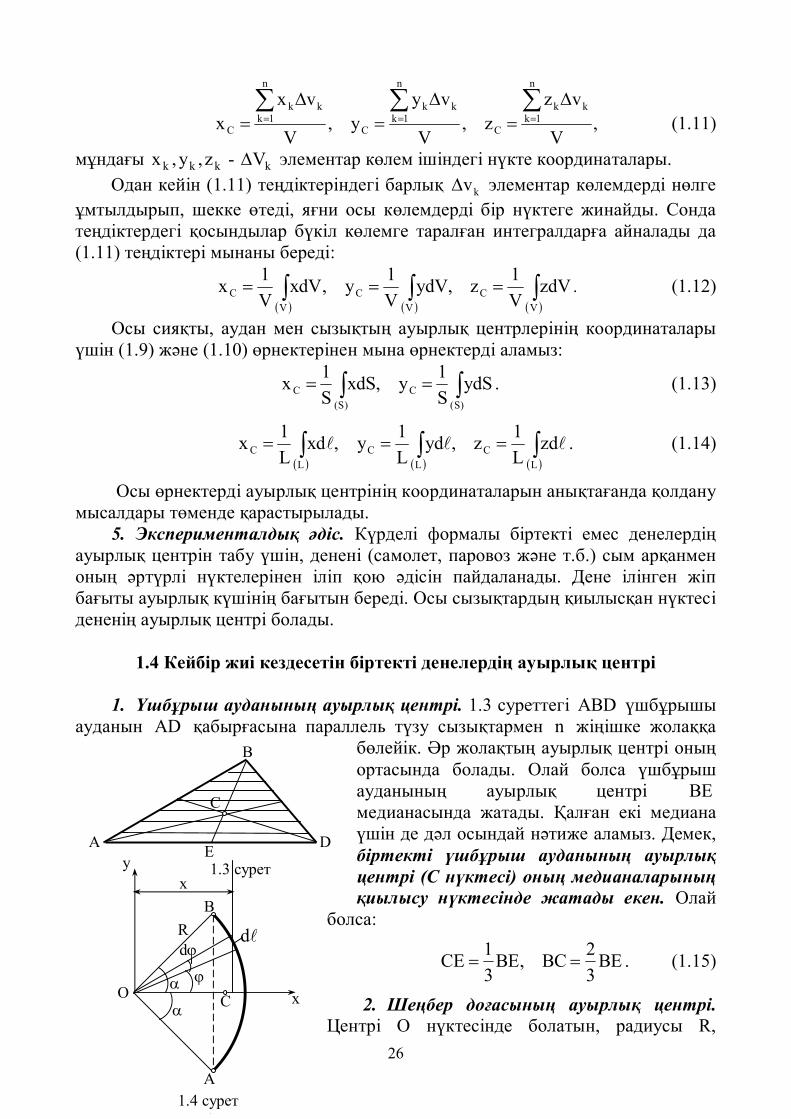
Осы өрнектерді ауырлық центрінің координаталарын анықтағанда қолдану мысалдары төменде қарастырылады.
5. Эксперименталдық әдіс. Күрделі формалы біртекті емес денелердің ауырлық центрін табу үшін, денені (самолет, паровоз және т.б.) сым арқанмен оның әртүрлі нүктелерінен іліп қою әдісін пайдаланады. Дене ілінген жіп бағыты ауырлық күшінің бағытын береді. Осы сызықтардың қиылысқан нүктесі дененің ауырлық центрі болады.
1.4 Кейбір жиі кездесетін біртекті денелердің ауырлық центрі
1. Үшбұрыш ауданының ауырлық центрі. 1.3 суреттегі ABD үшбұрышы ауданын AD қабырғасына параллель түзу сызықтармен n жіңішке жолаққа
бөлейік. Әр жолақтың ауырлық центрі оның ортасында болады. Олай болса үшбұрыш ауданының ауырлық центрі BE медианасында жатады. Қалған екі медиана үшін де дәл осындай нәтиже аламыз. Демек, біртекті үшбұрыш ауданының ауырлық центрі (С нүктесі) оның медианаларының қиылысу нүктесінде жатады екен. Олай
болса:
ВЕ32ВС,BE
31CE . (1.15)
2. Шеңбер доғасының ауырлық центрі. Центрі О нүктесінде болатын, радиусы R,
O
A
B
C x
x y
R d
d
1.4 сурет а)
A
B
D E
C
1.3 сурет
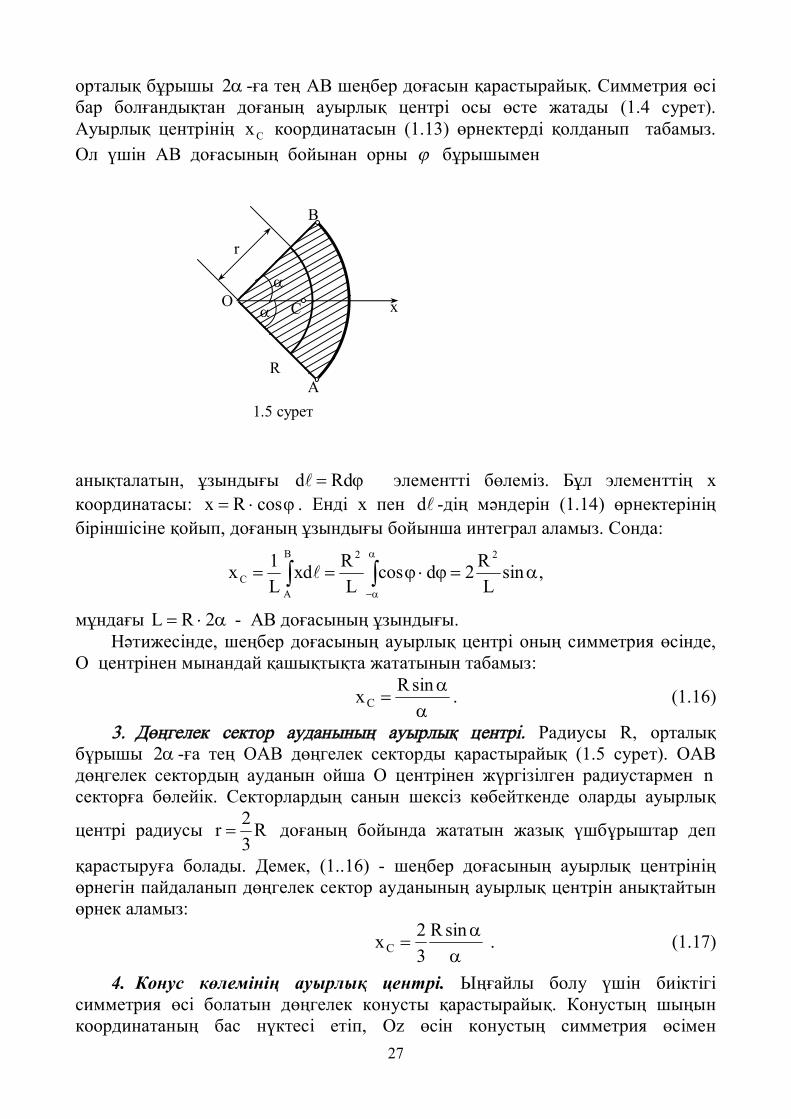
27
орталық бұрышы 2 -ға тең АВ шеңбер доғасын қарастырайық. Симметрия өсі бар болғандықтан доғаның ауырлық центрі осы өсте жатады (1.4 сурет). Ауырлық центрінің Cx координатасын (1.13) өрнектерді қолданып табамыз. Ол үшін АВ доғасының бойынан орны бұрышымен
анықталатын, ұзындығы Rdd элементті бөлеміз. Бұл элементтің х координатасы: cosRx . Енді х пен d -дің мәндерін (1.14) өрнектерінің біріншісіне қойып, доғаның ұзындығы бойынша интеграл аламыз. Сонда:
,sinL
R2dcosL
RxdL1x
22В
АС
мұндағы 2RL - АВ доғасының ұзындығы. Нәтижесінде, шеңбер доғасының ауырлық центрі оның симметрия өсінде,
О центрінен мынандай қашықтықта жататынын табамыз:
sinRxС . (1.16)
3. Дөңгелек сектор ауданының ауырлық центрі. Радиусы R, орталық бұрышы 2 -ға тең ОАВ дөңгелек секторды қарастырайық (1.5 сурет). ОАВ дөңгелек сектордың ауданын ойша О центрінен жүргізілген радиустармен n секторға бөлейік. Секторлардың санын шексіз көбейткенде оларды ауырлық
центрі радиусы R32r доғаның бойында жататын жазық үшбұрыштар деп
қарастыруға болады. Демек, (1..16) - шеңбер доғасының ауырлық центрінің өрнегін пайдаланып дөңгелек сектор ауданының ауырлық центрін анықтайтын өрнек аламыз:
sinR
32xС . (1.17)
4. Конус көлемінің ауырлық центрі. Ыңғайлы болу үшін биіктігі симметрия өсі болатын дөңгелек конусты қарастырайық. Конустың шыңын координатаның бас нүктесі етіп, Oz өсін конустың симметрия өсімен
O
A
B
C x
R
r
1.5 сурет
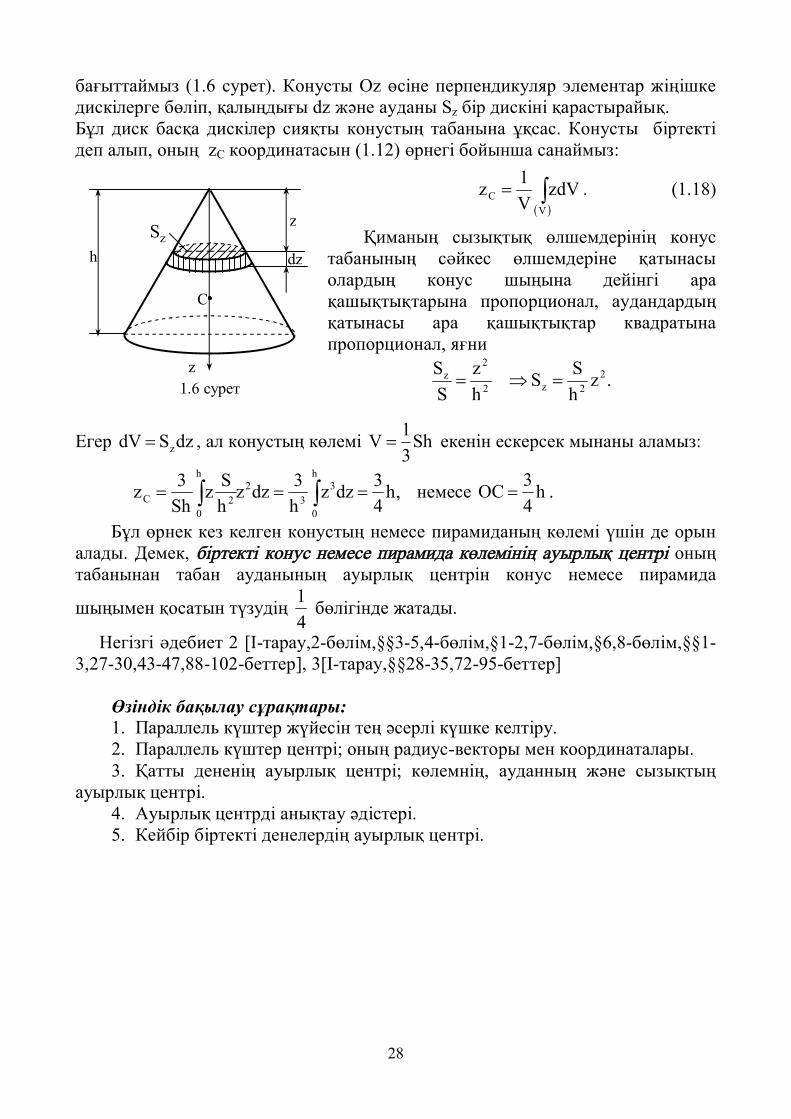
28
бағыттаймыз (1.6 сурет). Конусты Oz өсіне перпендикуляр элементар жіңішке дискілерге бөліп, қалыңдығы dz және ауданы Sz бір дискіні қарастырайық. Бұл диск басқа дискілер сияқты конустың табанына ұқсас. Конусты біртекті деп алып, оның zC координатасын (1.12) өрнегі бойынша санаймыз:
V
C zdVV1z . (1.18)
Қиманың сызықтық өлшемдерінің конус табанының сәйкес өлшемдеріне қатынасы олардың конус шыңына дейінгі ара қашықтықтарына пропорционал, аудандардың қатынасы ара қашықтықтар квадратына пропорционал, яғни
.zhSS
hz
SS 2
2z2
2z
Егер dzSdV z , ал конустың көлемі Sh31V екенін ескерсек мынаны аламыз:
,h43dzz
h3dzz
hSz
Sh3z
h
0
33
2h
02C немесе h
43OC .
Бұл өрнек кез келген конустың немесе пирамиданың көлемі үшін де орын алады. Демек, біртекті конус немесе пирамида көлемінің ауырлық центрі оның табанынан табан ауданының ауырлық центрін конус немесе пирамида
шыңымен қосатын түзудің 41 бөлігінде жатады.
Негізгі әдебиет 2 [I-тарау,2-бөлім,§§3-5,4-бөлім,§1-2,7-бөлім,§6,8-бөлім,§§1-3,27-30,43-47,88-102-беттер], 3[I-тарау,§§28-35,72-95-беттер]
Өзіндік бақылау сұрақтары: 1. Параллель күштер жүйесін тең әсерлі күшке келтіру. 2. Параллель күштер центрі; оның радиус-векторы мен координаталары. 3. Қатты дененің ауырлық центрі; көлемнің, ауданның және сызықтың
ауырлық центрі. 4. Ауырлық центрді анықтау әдістері. 5. Кейбір біртекті денелердің ауырлық центрі.
h
z
dz zS
z 1.6 сурет
C
29
2-ші модуль. Кинематика
Дәріс-5 Кинематика
2.1 Кинематикаға кіріспе
Кинематикада денелердің қозғалысы оған әсер ететін күштерге тәуелсіз, тек геометриялық тұрғыдан зерттеледі. Дененің қозғалысы деп оның басқа бір қозғалмайтын денеге қатысты орын ауыстыруын айтады. Осы қозғалмайтын денемен байланысқан координата жүйесін санақ жүйесі дейді.
Теориялық механикада уақыт үздіксіз өзгеріп отыратын шама болып есептеледі. Ол дене қозғалысына тәуелсіз, кез келген санақ жүйесінде және кеңістіктің кез келген нүктесінде бірдей, қайталанбайтын, оң таңбалы скаляр шама.
Жалпы жағдайда қозғалатын дененің нүктелері әртүрлі қозғалыс жасайды. Сондықтан алдымен нүкте қозғалысын қарастырамыз.
2.2 Нүкте кинематикасы
Жүріп өткен жолымен салыстырғанда өлшемі әлдеқайда кіші денені
кинематикада нүкте деп атайды. Нүкте қозғалысының негізгі кинематикалық сипаттамаларына оның жылдамдығы мен үдеуі жатады. Нүкте кинематикасы екі мәселе шешеді: 1) нүкте қозғалысының берілу әдістерін анықтау, 2) берілу әдістеріне қарай нүктенің жылдамдығы мен үдеуін анықтау.
2.3 Нүкте қозғалысының берілу әдістері
Нүкте қозғалысын беру деп кез келген уақытта нүктенің кеңістіктегі орнын
табуға мүмкіндік беретін әдісті алуды айтады. Кинематикада нүкте қозғалысы үш түрлі әдіспен беріледі.
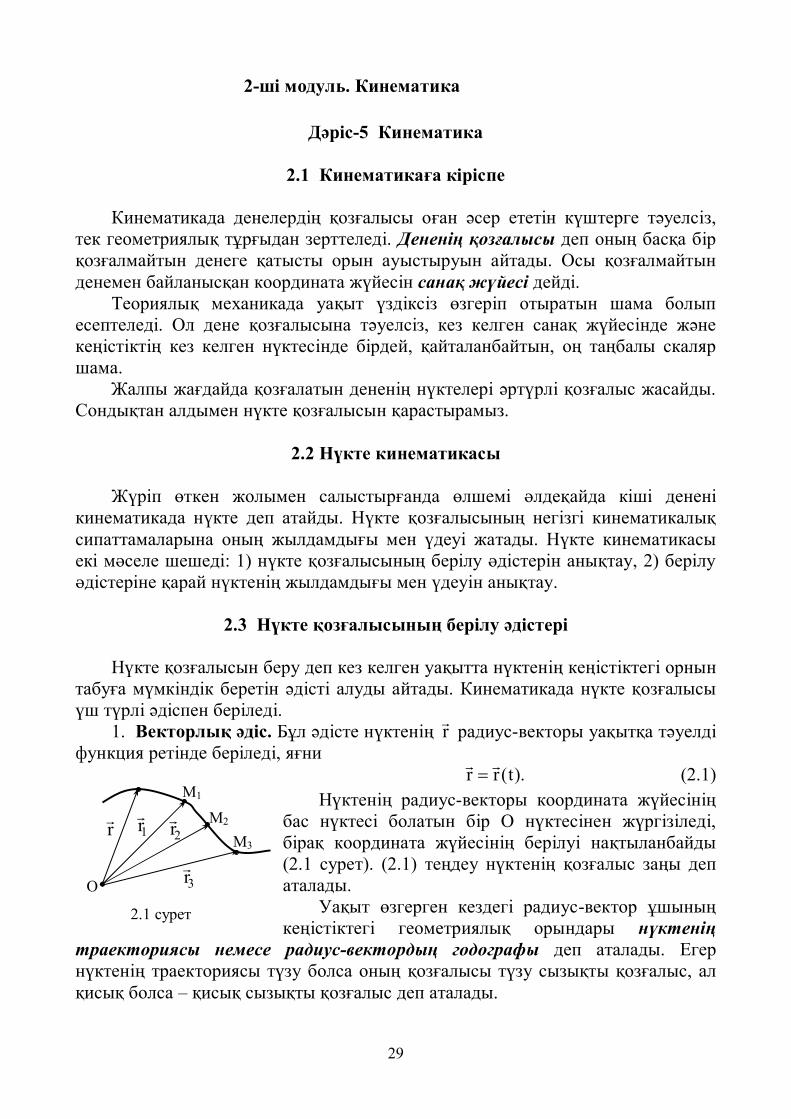
1. Векторлық әдіс. Бұл әдісте нүктенің r радиус-векторы уақытқа тәуелді функция ретінде беріледі, яғни
).t(rr (2.1)
Нүктенің радиус-векторы координата жүйесінің бас нүктесі болатын бір О нүктесінен жүргізіледі, бірақ координата жүйесінің берілуі нақтыланбайды (2.1 сурет). (2.1) теңдеу нүктенің қозғалыс заңы деп аталады.
Уақыт өзгерген кездегі радиус-вектор ұшының кеңістіктегі геометриялық орындары нүктенің
траекториясы немесе радиус-вектордың годографы деп аталады. Егер нүктенің траекториясы түзу болса оның қозғалысы түзу сызықты қозғалыс, ал қисық болса – қисық сызықты қозғалыс деп аталады.
О
r
М1
М2
М3 1r
2r
3r
2.1 сурет
30
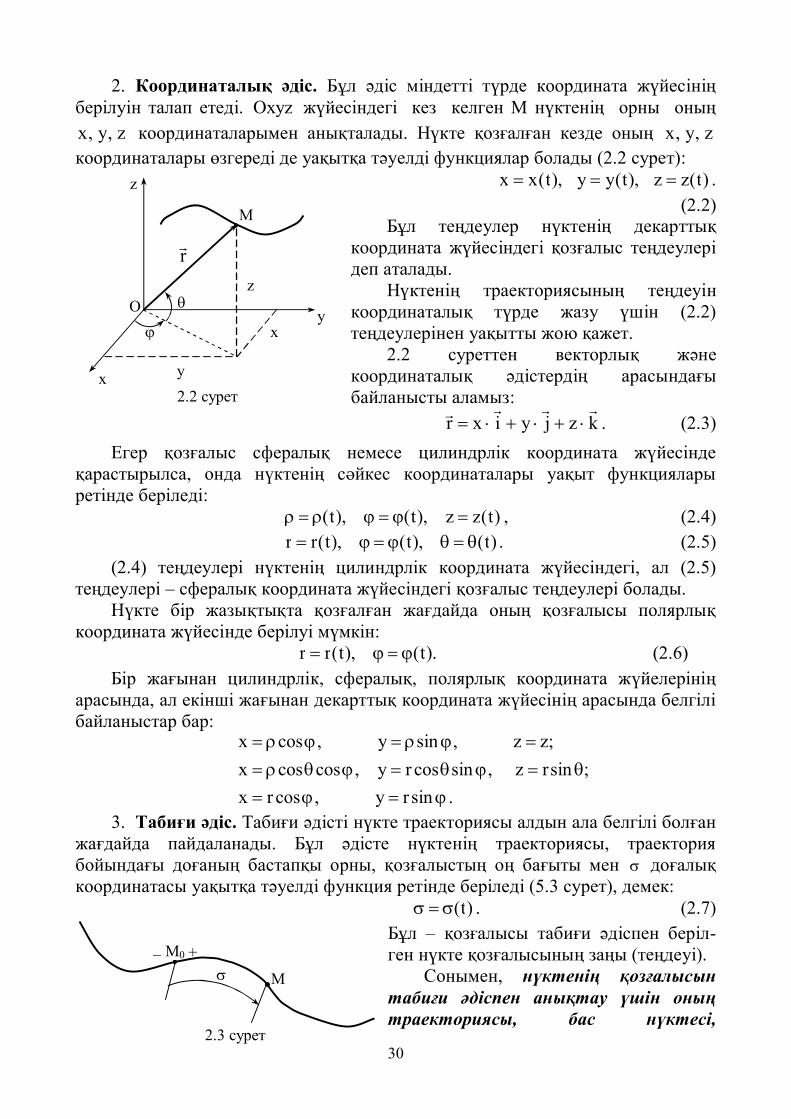
2. Координаталық әдіс. Бұл әдіс міндетті түрде координата жүйесінің берілуін талап етеді. Oxyz жүйесіндегі кез келген М нүктенің орны оның
z,y,x координаталарымен анықталады. Нүкте қозғалған кезде оның z,y,x координаталары өзгереді де уақытқа тәуелді функциялар болады (2.2 сурет):
),t(xx ),t(yy )t(zz . (2.2)
Бұл теңдеулер нүктенің декарттық координата жүйесіндегі қозғалыс теңдеулері деп аталады.
Нүктенің траекториясының теңдеуін координаталық түрде жазу үшін (2.2) теңдеулерінен уақытты жою қажет.
2.2 суреттен векторлық және координаталық әдістердің арасындағы байланысты аламыз:
kzjyixr . (2.3)
Егер қозғалыс сфералық немесе цилиндрлік координата жүйесінде қарастырылса, онда нүктенің сәйкес координаталары уақыт функциялары ретінде беріледі:
)t(zz),t(),t( , (2.4) )t(),t(),t(rr . (2.5)
(2.4) теңдеулері нүктенің цилиндрлік координата жүйесіндегі, ал (2.5) теңдеулері – сфералық координата жүйесіндегі қозғалыс теңдеулері болады.
Нүкте бір жазықтықта қозғалған жағдайда оның қозғалысы полярлық координата жүйесінде берілуі мүмкін:
).t(),t(rr (2.6) Бір жағынан цилиндрлік, сфералық, полярлық координата жүйелерінің
арасында, ал екінші жағынан декарттық координата жүйесінің арасында белгілі байланыстар бар:
.sinry,cosrx;sinrz,sincosry,coscosx
;zz,siny,cosx
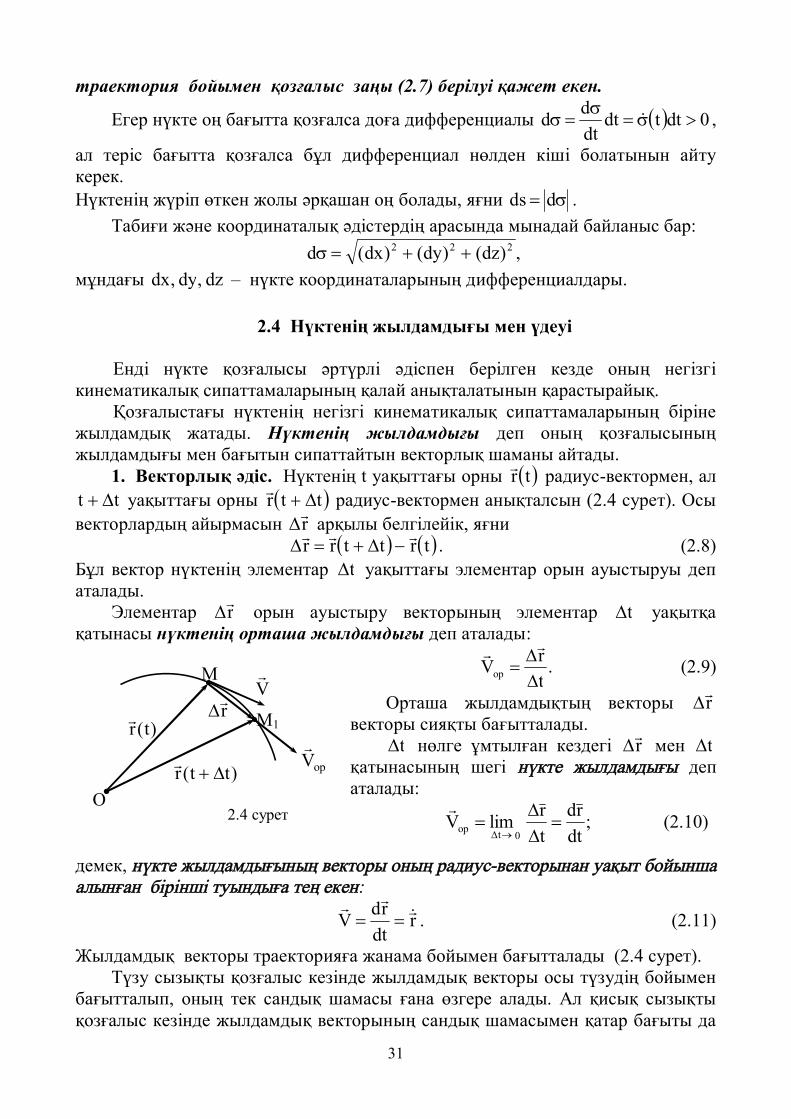
3. Табиғи әдіс. Табиғи әдісті нүкте траекториясы алдын ала белгілі болған жағдайда пайдаланады. Бұл әдісте нүктенің траекториясы, траектория бойындағы доғаның бастапқы орны, қозғалыстың оң бағыты мен доғалық координатасы уақытқа тәуелді функция ретінде беріледі (5.3 сурет), демек:
)t( . (2.7) Бұл – қозғалысы табиғи әдіспен беріл- ген нүкте қозғалысының заңы (теңдеуі).
Сонымен, нүктенің қозғалысын табиғи әдіспен анықтау үшін оның траекториясы, бас нүктесі,
z
x
y
z
x
y
M
r
О
2.2 сурет
М + М0 –
2.3 сурет
31
траектория бойымен қозғалыс заңы (2.7) берілуі қажет екен.
Егер нүкте оң бағытта қозғалса доға дифференциалы 0dttdtdtdd
,
ал теріс бағытта қозғалса бұл дифференциал нөлден кіші болатынын айту керек. Нүктенің жүріп өткен жолы әрқашан оң болады, яғни dds .
Табиғи және координаталық әдістердің арасында мынадай байланыс бар: ,)dz()dy()dx(d 222
мұндағы dz,dy,dx – нүкте координаталарының дифференциалдары.
2.4 Нүктенің жылдамдығы мен үдеуі Енді нүкте қозғалысы әртүрлі әдіспен берілген кезде оның негізгі
кинематикалық сипаттамаларының қалай анықталатынын қарастырайық. Қозғалыстағы нүктенің негізгі кинематикалық сипаттамаларының біріне
жылдамдық жатады. Нүктенің жылдамдығы деп оның қозғалысының жылдамдығы мен бағытын сипаттайтын векторлық шаманы айтады.
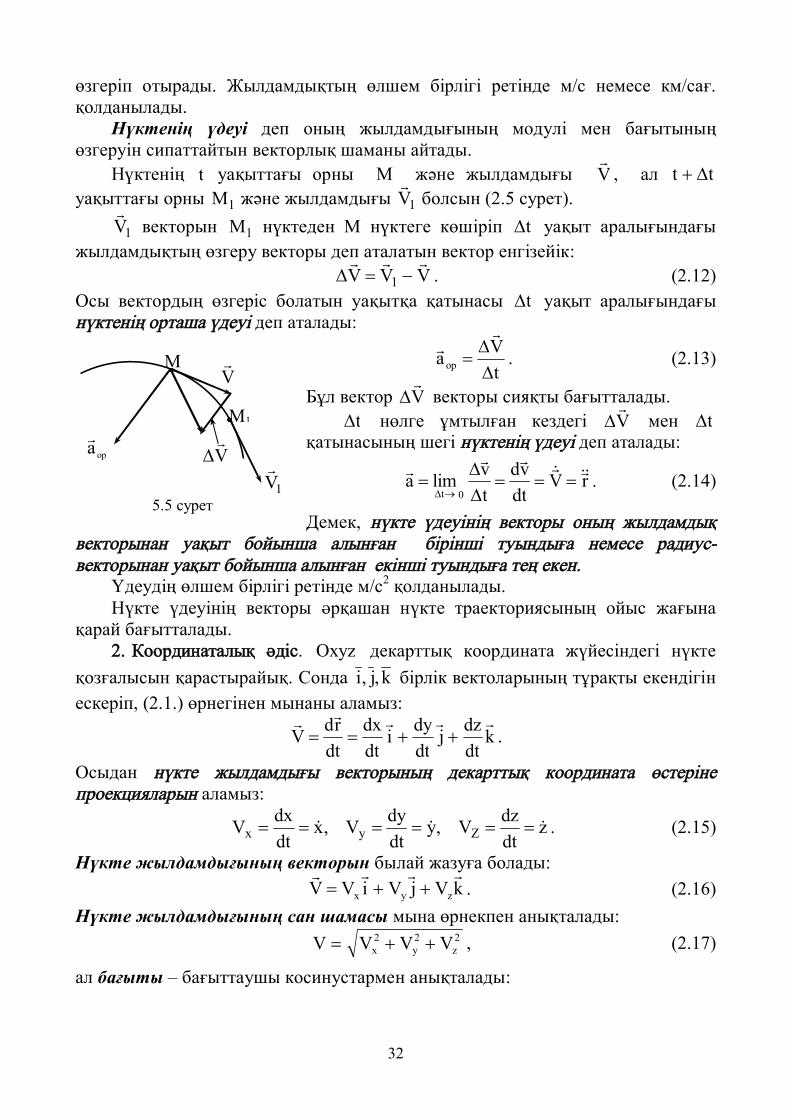
1. Векторлық әдіс. Нүктенің t уақыттағы орны tr радиус-вектормен, ал tt уақыттағы орны ttr
радиус-вектормен анықталсын (2.4 сурет). Осы векторлардың айырмасын r арқылы белгілейік, яғни
trttrr . (2.8)
Бұл вектор нүктенің элементар t уақыттағы элементар орын ауыстыруы деп аталады.
Элементар r орын ауыстыру векторының элементар t уақытқа қатынасы нүктенің орташа жылдамдығы деп аталады:
.trVop
(2.9)
Орташа жылдамдықтың векторы r векторы сияқты бағытталады.
t нөлге ұмтылған кездегі r мен t қатынасының шегі нүкте жылдамдығы деп аталады:
;dtrd
trlimV
0top
(2.10)
демек, нүкте жылдамдығының векторы оның радиус-векторынан уақыт бойынша алынған бірінші туындыға тең екен:
rdtrdV . (2.11)
Жылдамдық векторы траекторияға жанама бойымен бағытталады (2.4 сурет). Түзу сызықты қозғалыс кезінде жылдамдық векторы осы түзудің бойымен
бағытталып, оның тек сандық шамасы ғана өзгере алады. Ал қисық сызықты қозғалыс кезінде жылдамдық векторының сандық шамасымен қатар бағыты да
О
М
М1
r(t t)
r(t)
r
орV
V
2.4 сурет
32
өзгеріп отырады. Жылдамдықтың өлшем бірлігі ретінде м/с немесе км/сағ. қолданылады.
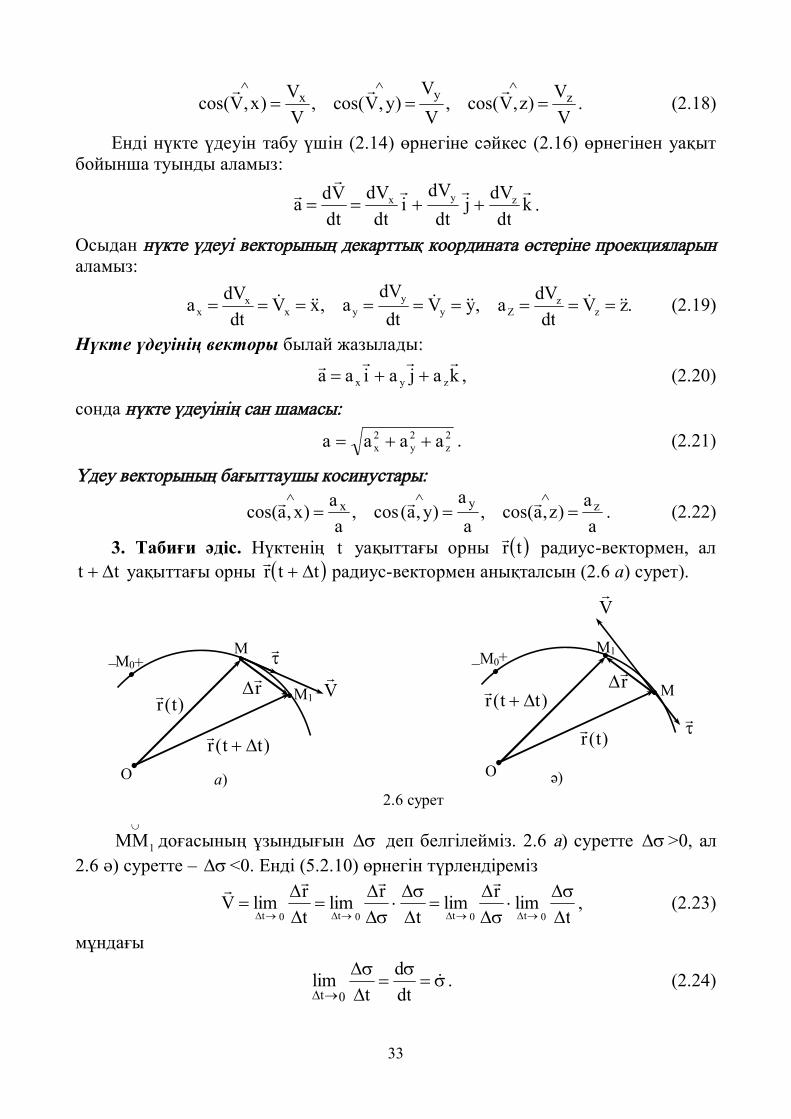
Нүктенің үдеуі деп оның жылдамдығының модулі мен бағытының өзгеруін сипаттайтын векторлық шаманы айтады.
Нүктенің t уақыттағы орны М және жылдамдығы V
, ал tt уақыттағы орны 1М және жылдамдығы 1V
болсын (2.5 сурет).
1V
векторын 1М нүктеден М нүктеге көшіріп t уақыт аралығындағы жылдамдықтың өзгеру векторы деп аталатын вектор енгізейік:
VVV 1
. (2.12) Осы вектордың өзгеріс болатын уақытқа қатынасы t уақыт аралығындағы нүктенің орташа үдеуі деп аталады:
tVa op
. (2.13)
Бұл вектор V
векторы сияқты бағытталады. t нөлге ұмтылған кездегі V
мен t
қатынасының шегі нүктенің үдеуі деп аталады:
rVdtvd
tvlima
0t
. (2.14)
Демек, нүкте үдеуінің векторы оның жылдамдық векторынан уақыт бойынша алынған бірінші туындыға немесе радиус-векторынан уақыт бойынша алынған екінші туындыға тең екен.
Үдеудің өлшем бірлігі ретінде м/с2 қолданылады. Нүкте үдеуінің векторы әрқашан нүкте траекториясының ойыс жағына
қарай бағытталады. 2. Координаталық әдіс. Oxyz декарттық координата жүйесіндегі нүкте
қозғалысын қарастырайық. Сонда k,j,i бірлік вектоларының тұрақты екендігін ескеріп, (2.1.) өрнегінен мынаны аламыз:
kdtdzj
dtdyi
dtdx
dtrdV
.
Осыдан нүкте жылдамдығы векторының декарттық координата өстеріне проекцияларын аламыз:
zdtdzV,y
dtdyV,x
dtdxV Zyx . (2.15)
Нүкте жылдамдығының векторын былай жазуға болады: kVjViVV zyx
. (2.16)
Нүкте жылдамдығының сан шамасы мына өрнекпен анықталады: 2z
2y
2x VVVV , (2.17)
ал бағыты – бағыттаушы косинустармен анықталады:
М
М1
V
1V
V
ора
5.5 сурет
33
VV)z,Vcos(,
VV
)y,Vcos(,VV)x,Vcos( zyx
. (2.18)
Енді нүкте үдеуін табу үшін (2.14) өрнегіне сәйкес (2.16) өрнегінен уақыт бойынша туынды аламыз:
kdt
dVjdt
dVi
dtdV
dtVda zyx
.
Осыдан нүкте үдеуі векторының декарттық координата өстеріне проекцияларын аламыз:
.zVdt
dVa,yVdt
dVa,xV
dtdVa z
zZy
yyx
xx (2.19)
Нүкте үдеуінің векторы былай жазылады:
kajaiaa zyx
, (2.20)
сонда нүкте үдеуінің сан шамасы: 2z
2y
2x aaaa . (2.21)
Үдеу векторының бағыттаушы косинустары:
a
a)z,аcos(,a
a)y,а(cos,
aa)x,аcos( zyx
. (2.22)
3. Табиғи әдіс. Нүктенің t уақыттағы орны tr радиус-вектормен, ал tt уақыттағы орны ttr
радиус-вектормен анықталсын (2.6 а) сурет).
1ММ доғасының ұзындығын деп белгілейміз. 2.6 а) суретте >0, ал 2.6 ә) суретте – <0. Енді (5.2.10) өрнегін түрлендіреміз
tlimrlim
trlim
trlimV
0t0t0t0t
, (2.23)
мұндағы
dtd
tlim
0t. (2.24)
О
М
М1
М0 + _
r(t)
r(t)
r(t t)
r
V
а) О
М
М1 М0 + _
r(t)
r(t t)
r
V
ә) 2.6 сурет
34
Егер >0 болса r векторы r векторымен бағыттас, ал <0 болса –
қарсы бағытта болады. Демек, екі жағдайда да доға санағының оң бағытына қарай бағытталады екен. Сонда сандық шамасы бірге тең
rlimddr
0t
векторы траекторияға жанама бойымен доға санағының оң
бағытына қарай бағытталатын болады. Бұл векторы жанаманың бірлік векторы деп аталады:
rlim
0t. (2.25)
(2.24) және (2.25) өрнектерін (2.23) өрнегіне қойып, қозғалысы табиғи әдіспен берілген нүкте жылдамдығы векторының өрнегін аламыз:
dtdV . (2.26)
Нүкте жылдамдығы векторының жанама өске проекциясын анықтайтын
белгілеу ендіруге болады (
dtdV ), сонда жылдамдықтың векторы былай
өрнектеледі:
VV . (2.27) Егер >0 болса жылдамдық векторы нүкте траекториясына жанама бойынша қозғалыстың оң бағытына қарай (2.6 а) сурет), ал <0 болса – теріс бағытына қарай бағытталады (2.6 ә) сурет). Жылдамдықтың сан шамасы мынау:
dtdVV . (2.28)
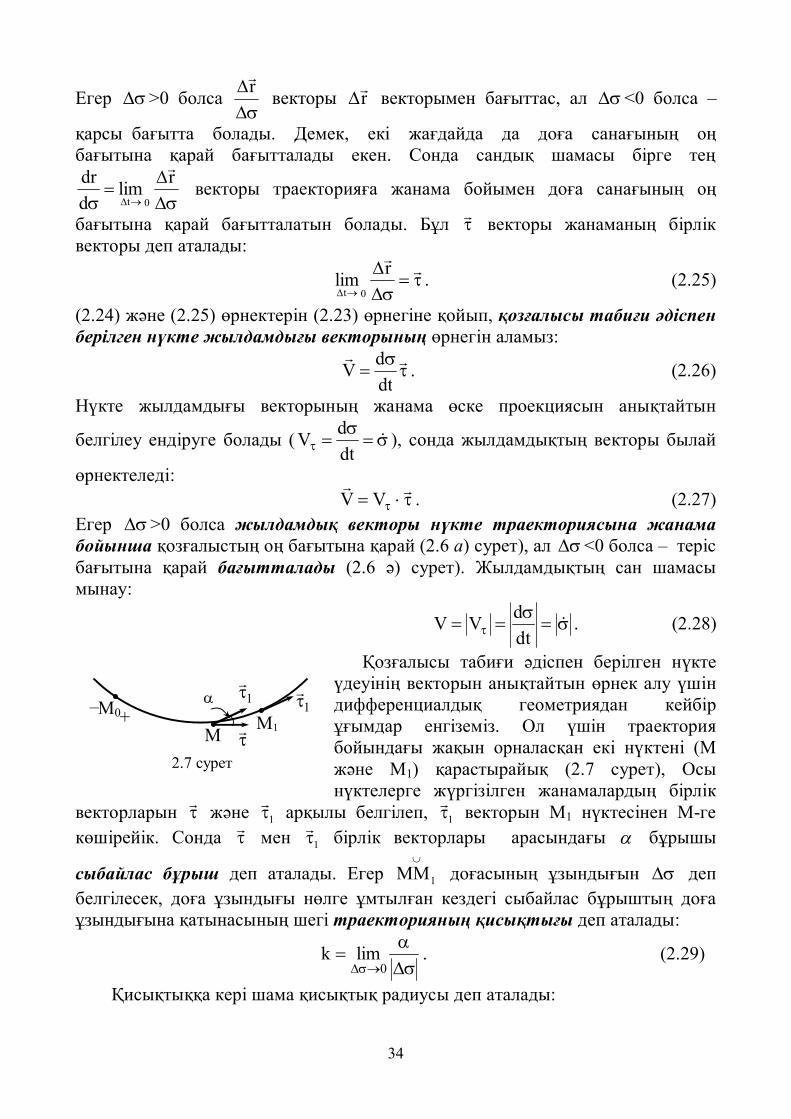
Қозғалысы табиғи әдіспен берілген нүкте үдеуінің векторын анықтайтын өрнек алу үшін дифференциалдық геометриядан кейбір ұғымдар енгіземіз. Ол үшін траектория бойындағы жақын орналасқан екі нүктені (М және М1) қарастырайық (2.7 сурет), Осы нүктелерге жүргізілген жанамалардың бірлік
векторларын және 1 арқылы белгілеп, 1
векторын М1 нүктесінен М-ге көшірейік. Сонда мен 1
бірлік векторлары арасындағы бұрышы
сыбайлас бұрыш деп аталады. Егер
1ММ доғасының ұзындығын деп белгілесек, доға ұзындығы нөлге ұмтылған кездегі сыбайлас бұрыштың доға ұзындығына қатынасының шегі траекторияның қисықтығы деп аталады:
0
limk . (2.29)
Қисықтыққа кері шама қисықтық радиусы деп аталады:
М0 + – М М1
1
1
2.7 сурет
35
k1
. (2.30)
Егер нүкте түзу сызықты қозғалыста болса нүктенің қисықтығы нөлге, ал қисықтық радиусы шексіздікке тең болады. Шеңбердің қисықтығы оның барлық нүктелерінде бірдей және шеңбер радиусына кері шамаға тең, ал қисықтық радиусы шеңбер радиусына тең.
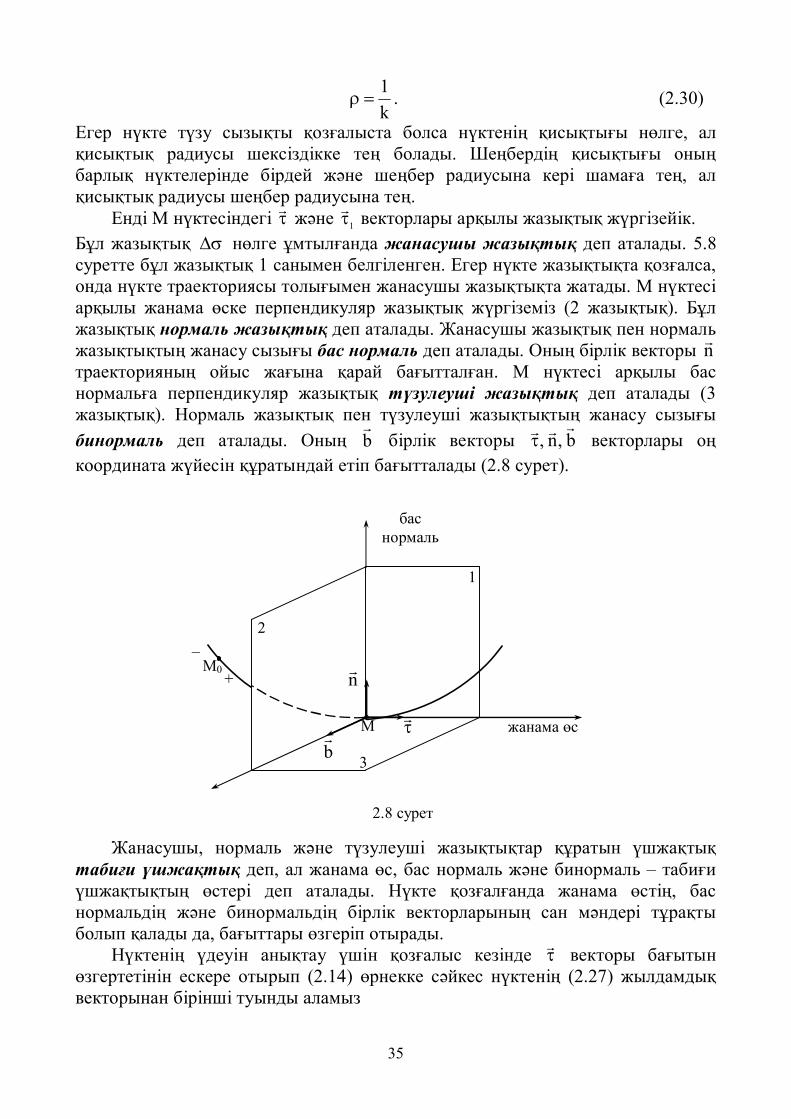
Енді М нүктесіндегі және 1 векторлары арқылы жазықтық жүргізейік.
Бұл жазықтық нөлге ұмтылғанда жанасушы жазықтық деп аталады. 5.8 суретте бұл жазықтық 1 санымен белгіленген. Егер нүкте жазықтықта қозғалса, онда нүкте траекториясы толығымен жанасушы жазықтықта жатады. М нүктесі арқылы жанама өске перпендикуляр жазықтық жүргіземіз (2 жазықтық). Бұл жазықтық нормаль жазықтық деп аталады. Жанасушы жазықтық пен нормаль жазықтықтың жанасу сызығы бас нормаль деп аталады. Оның бірлік векторы n траекторияның ойыс жағына қарай бағытталған. М нүктесі арқылы бас нормальға перпендикуляр жазықтық түзулеуші жазықтық деп аталады (3 жазықтық). Нормаль жазықтық пен түзулеуші жазықтықтың жанасу сызығы бинормаль деп аталады. Оның b
бірлік векторы b,n,
векторлары оң
координата жүйесін құратындай етіп бағытталады (2.8 сурет).
Жанасушы, нормаль және түзулеуші жазықтықтар құратын үшжақтық табиғи үшжақтық деп, ал жанама өс, бас нормаль және бинормаль – табиғи үшжақтықтың өстері деп аталады. Нүкте қозғалғанда жанама өстің, бас нормальдің және бинормальдің бірлік векторларының сан мәндері тұрақты болып қалады да, бағыттары өзгеріп отырады.
Нүктенің үдеуін анықтау үшін қозғалыс кезінде векторы бағытын өзгертетінін ескере отырып (2.14) өрнекке сәйкес нүктенің (2.27) жылдамдық векторынан бірінші туынды аламыз
М0
М
1
2
3
жанама өс
бас нормаль
+
–
n
b
2.8 сурет
36
dtdV
dtdV
dtVda
. (2.31)
Жанама өстің бірлік векторынан уақыт бойынша алынған туындыны біраз түрлендіруден кейін былай жазуға болады:
n1Vdtd
. (2.32)
(2.32)-ні (2.31)-ге қойып мынаны аламыз:
nVdt
dVa2
. (2.33)
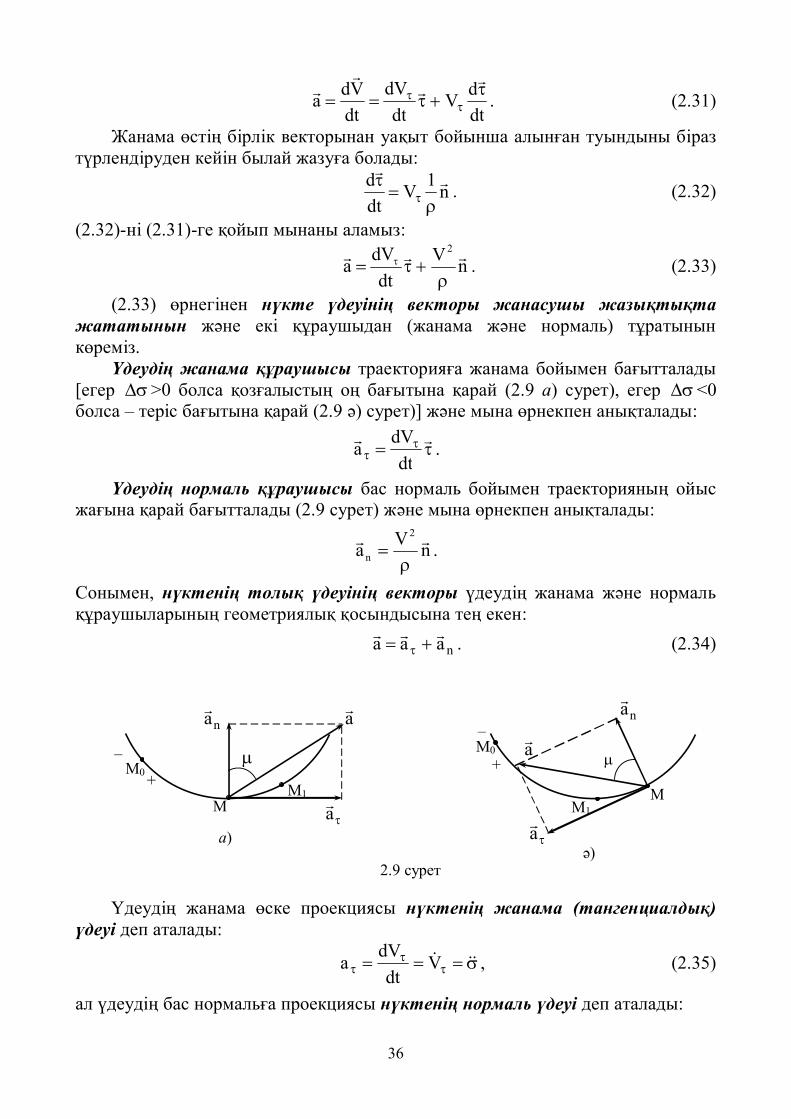
(2.33) өрнегінен нүкте үдеуінің векторы жанасушы жазықтықта жататынын және екі құраушыдан (жанама және нормаль) тұратынын көреміз.
Үдеудің жанама құраушысы траекторияға жанама бойымен бағытталады [егер >0 болса қозғалыстың оң бағытына қарай (2.9 а) сурет), егер <0 болса – теріс бағытына қарай (2.9 ә) сурет)] және мына өрнекпен анықталады:
dtdVa .
Үдеудің нормаль құраушысы бас нормаль бойымен траекторияның ойыс жағына қарай бағытталады (2.9 сурет) және мына өрнекпен анықталады:
nVa2
n
.
Сонымен, нүктенің толық үдеуінің векторы үдеудің жанама және нормаль құраушыларының геометриялық қосындысына тең екен:
naaa . (2.34)
Үдеудің жанама өске проекциясы нүктенің жанама (тангенциалдық) үдеуі деп аталады:
Vdt
dVa , (2.35)
ал үдеудің бас нормальға проекциясы нүктенің нормаль үдеуі деп аталады:
М0 +
–
М М1
a
na a
а)
М0 +
–
М М1
a
na
a
ә) 2.9 сурет
37
2
nVa , (2.36)
мұндағы – траекторияның қисықтық радиусы. Нүктенің толық үдеуінің сан шамасы (модулі):
2n
2 aaa . (2.37) Егер нүктенің толық үдеу векторының бас нормальмен құратын бұрышын
деп белгілесек, онда үдеу векторының бағыты осы бұрыштың тангенсімен анықталады (2.9 сурет):
naa
tg . (2.38)
2.5 Нүкте қозғалысының кейбір дербес жағдайлары
Нүкте қозғалысының кейбір дербес жағдайларын қарастырып, олардың
негізгі кинематикалық сипаттамаларын анықтайық. 1. Нүктенің түзу сызықты қозғалысы. Түзу сызықты қозғалыстағы
нүктенің қисықтық радиусы шексіздікке тең. Мұндай қозғалыста (2.36) өрнегінен нормаль үдеудің нөлге айналатынын, ал толық үдеудің жанама үдеуге тең екенін көреміз:
0an , демек aa .
Бұл жағдайда жылдамдықтың тек шамасы ғана өзгереді, демек жанама үдеу жылдамдық шамасының өзгеруін сипаттайды.
2. Бірқалыпты қозғалыс. Қозғалыс барысында жылдамдық шамасы әрқашан тұрақты болатын қозғалыс бірқалыпты қозғалыс деп аталады. Мұндай қозғалыс кезінде (2.35) өрнегіне сәйкес жанама үдеу нөлге тең, ал толық үдеу тек нормаль үдеуге тең болады:
0a , демек .aa n
Мұндай қозғалыста жылдамдықтың тек бағыты ғана өзгереді, сондықтан
нормаль үдеу жылдамдық бағытының өзгеруін сипаттайды. 3. Нүктенің бірқалыпты түзу сызықты қозғалысы. Нүкте бір мезгілде
бірқалыпты және түзу сызықты қозғалыс жасағандықтан оның жанама және нормаль үдеулері бір мезгілде нөлге айналады. Демек, мұндай қозғалыста нүктенің толық үдеуі де нөлге тең болады:
0a және 0an , демек 0a . Бірқалыпты және түзу сызықты қозғалыстағы нүкте жылдамдығының шамасы да, бағыты да тұрақты болады.
4. Бірқалыпты айнымалы қозғалыс. Қозғалыс барысында жанама үдеу әрқашан тұрақты болатын қозғалыс ( consta ) бірқалыпты айнымалы қозғалыс деп аталады. Бастапқы жылдамдықты 0V деп алып, (2.35) өрнегінің екі жағын да dt -ға көбейтіп, интеграл аламыз:
38
.dtadV,dtadV,adt
dV t
0
V
V0
Нәтижесінде бірқалыпты айнымалы қозғалыс кезіндегі жылдамдықтың өзгеру заңын аламыз:
taVV 0 .
Содан кейін dtdV
екенін ескеріп, бастапқы кезде 00 деп алып, соңғы
өрнекті dt -ға көбейтіп, интегралдаймыз:
t
0
t
00
t
00
00 tdtadtVdttaVd,tdtadtVd,
dtdV .
Нәтижесінде нүктенің бірқалыпты айнымалы қозғалыс заңын аламыз:
2tatV
2
0
Егер V мен a таңбалары бірдей болса, нүктенің қозғалысы бірқалыпты үдемелі, ал қарсы болса – бірқалыпты кемімелі болады.
ҚАТТЫ ДЕНЕНІҢ ҚАРАПАЙЫМ ҚОЗҒАЛЫСТАРЫ
Қатты дене кинематикасының мәселесін екіге бөлуге болады: 1) бүкіл
дененің қозғалысын беру және оның кинематикалық сипаттамаларын анықтау; 2) дененің жеке нүктелерінің қозғалысының кинематикалық сипаттамаларын анықтау.
Қатты дененің екі қарапайым қозғалысын қарастырамыз. Оған дененің ілгерілемелі қозғалысы мен тұрақты өсті айналуы жатады. Осы қозғалыстардың қосындыларынан күрделі қозғалыстар алуға болады.
2.6 Қатты дененің ілгерілемелі қозғалысы
Дене қозғалғанда оның бойындағы бір түзу кесінді өзіне өзі параллель болып қалса, дененің қозғалысы ілгерілемелі қозғалыс деп аталады (2.10 сурет).
x
y
z
O A
B
A1
В1
Ar
Br
2.10 сурет
39
Бұл жағдайда дене нүктелерінің қозғалысы келесі теоремамен анықталады: ілгерілемелі қозғалыстағы дененің барлық нүктелері бірдей траекториялар сызады, берілген уақытта барлық нүктелерінің жылдамдықтары мен үдеулері бірдей болады.
AB VV
, AB aa . (2.39)
Сонымен, ілгерілемелі қозғалыстағы дененің тек бір нүктесінің ғана қозғалысын қарастыруға болады екен, ал басқа нүктелері дәл осы нүкте сияқты қозғалады да, дене кинематикасының мәселесі нүкте кинематикасының мәселесіне тіреледі.
2.7 Қатты дененің тұрақты өсті айнала қозғалуы
Қозғалыстағы дененің кем дегенде екі нүктесі (А және В) қозғалмайтын
болса, онда қозғалыс қатты дененің тұрақты өсті айнала қозғалуы деп аталады (5.11 сурет). Қозғалмайтын екі нүктені қосатын түзу айналу өсі деп аталады. Айналу өсінде жататын нүктелердің барлығы қозғалмайды.
Ал айналу өсінде жатпайтын нүктелер центрлері айналу өсінде жататын, жазықтықтары айналу өсіне перпендикуляр шеңберлер сызады.
Дененің мұндай қозғалысын бір параметрмен, яғни оның айналу бұрышымен сипаттауға болады. Егер денені айналу өсі арқылы өтетін қозғалмайтын (1) және денемен бірге қозғалатын (2) жазықтықтармен қисақ (5.12 сурет), осы жазықтықтар арасындағы екі жақты бұрыш дененің айналу бұрышы деп аталады. Енді айналу өсінің бойымен Oz өсін бағыттаймыз. Сонда Oz өсінің ұшынан қарағандағы айналу бұрышының сағат тіліне қарсы бұрылу бағытын оң бағыт деп аламыз.
Дененің тұрақты өсті айналу заңы былай жазылады: t , (2.40)
мұндағы дененің айналу бұрышы. Айналу бұрышы радианмен өлшенеді.
А
В айналу өсі
2.11 сурет
1
2
O
O
2.12 сурет
40
Қатты дененің айналмалы қозғалысының негізгі кинематикалық сипаттамаларына бұрыштық жылдамдық пен бұрыштық үдеу жатады. Бұл ұғымдарды енгізу үшін дене ttt 1 уақытта бұрышқа бұрылды деп санаймыз (2.12 сурет). Сонда - дің t - ға қатынасы t уақыттағы дененің орташа бұрыштық жылдамдығы деп аталады:
tор
. (2.41)
t нөлге ұмтылғандағы бұл қатынастың шегін дененің бұрыштық жылдамдығының алгебралық мәні деп атайды:
dtd
tlim
0t. (2.42)
Сонымен, дененің бұрыштық жылдамдығының алгебралық шамасы айналу бұрышынан уақыт бойынша алынған бірінші туындыға тең екен. Осы шаманың модулін дененің бұрыштық жылдамдығы деп атаймыз:
dtd . (2.43)
Радиан өлшемсіз бірлік болғандықтан, бұрыштық жылдамдықтың өлшем бірлігі ретінде рад/с немесе 1/с )с( 1 қолданылады.
Дәл осылай дененің орташа бұрыштық үдеуін аламыз:
tор
, (2.44)
ал бұрыштық үдеудің алгебралық мәні мынандай:
2
2
0t dtd
dtd
tlim
немесе . (2.45)
Сонымен, дененің бұрыштық үдеуінің алгебралық шамасы бұрыштық жылдамдықтың алгебралық шамасынан уақыт бойынша алынған бірінші туындыға немесе айналу бұрышынан алынған екінші туындыға тең екен. Осы шаманың модулін дененің бұрыштық үдеуі дейтін боламыз:
2
2
dtd
dtd
немесе ( 2.46)
Бұрыштық үдеудің өлшем бірлігі рад/с2 немесе 1/с2.
Техникалық есептеулерде көбіне бұрыштық жылдамдықтың орнына n – дененің минутына жасайтын айналу саны, ал айналу бұрышының орнына N – айналу саны жиі қолданылады. Дене бір айналғанда 2 бұрышқа бұрылады, ал бір минутта 60 секунд бар екенін ескерсек, бұл шамалардың арасындағы байланыстар:
30n
60n2
және N2 (2.47)
z
z
а) ә) 2.13 сурет
41
Енді бұрыштық жылдамдық пен бұрыштық үдеу векторларының ұғымын ендіреміз. Бұл векторлардың модульдері (2.43) және (2.45) өрнектерімен анықталады, ал бағыттары олардың алгебралық мәндері ( мен ) нөлден үлкен болса айналу өсінің бойымен оң бағытта (2.13 а) сурет), нөлден кіші болса –
теріс бағытта (2.13 ә) сурет) бағытталады. Бұл жерде
dtd . Егер бұл
векторлар бір бағытта болса дененің айналуы үдемелі, ал қарсы бағытта болса – кемімелі деп аталады.
Суретте бұрыштық жылдамдық пен бұрыштық үдеу векторларын доға тілімен де бейнелейді. Олардың алгебралық мәндерінің таңбасы оң болса Oz өсінің ұшынан қарағанда доға тілдері сағат тіліне қарсы, ал теріс болса – сағат тілімен бағыттас (2.13 сурет) бағытталады.
2.8 Қатты дененің айналмалы қозғалысының дербес жағдайлары
Қатты дененің айналмалы қозғалысының дербес жағдайын қарастырайық.
1. Бірқалыпты айналу кезінде дененің бұрыштық жылдамдығы тұрақты болады ( =const). Бұрыштық жылдамдықтың алгебралық шамасы тек таңбасымен ерекшеленетін болғандықтан, ол да тұрақты: =const. Сонда (2.45) өрнегінен мынаны аламыз:
0 немесе 0 , (2.48) демек бірқалыпты айналу кезінде дененің бұрыштық үдеуі нөлге тең. Енді (2.42) өрнегін dt-ға көбейтіп, интегралдасақ қатты дененің бірқалыпты
айналу заңын алуға болады: t . (2.49)
2. Бірқалыпты айнымалы айналу кезінде дененің бұрыштық үдеуі тұрақты болады ( =const). Бұл жағдайда бұрыштық үдеудің алгебралық шамасы да тұрақты: =const.
(2.45) өрнегін dt-ға көбейтіп, интегралдаймыз:
ddt
t
0
dtd0
,
сонда бірқалыпты айнымалы айналу кезіндегі бұрыштық жылдамдықтың өзгеру заңын аламыз:
t0 . (2.50) Енді (2.50) өрнегінен дененің бірқалыпты айнымалы айналу заңы алынады:
t
dtd
0 tdtdtd 0 2tt
2
0 . (2.51)
Егер бұрыштық жылдамдық пен бұрыштық үдеудің таңбалары бірдей болса дененің айналуы бірқалыпты үдемелі, бірдей болмаса – бірқалыпты кемімелі деп аталады.
2.9 Айналмалы қозғалыстағы дене нүктелерінің жылдамдығы мен үдеуі
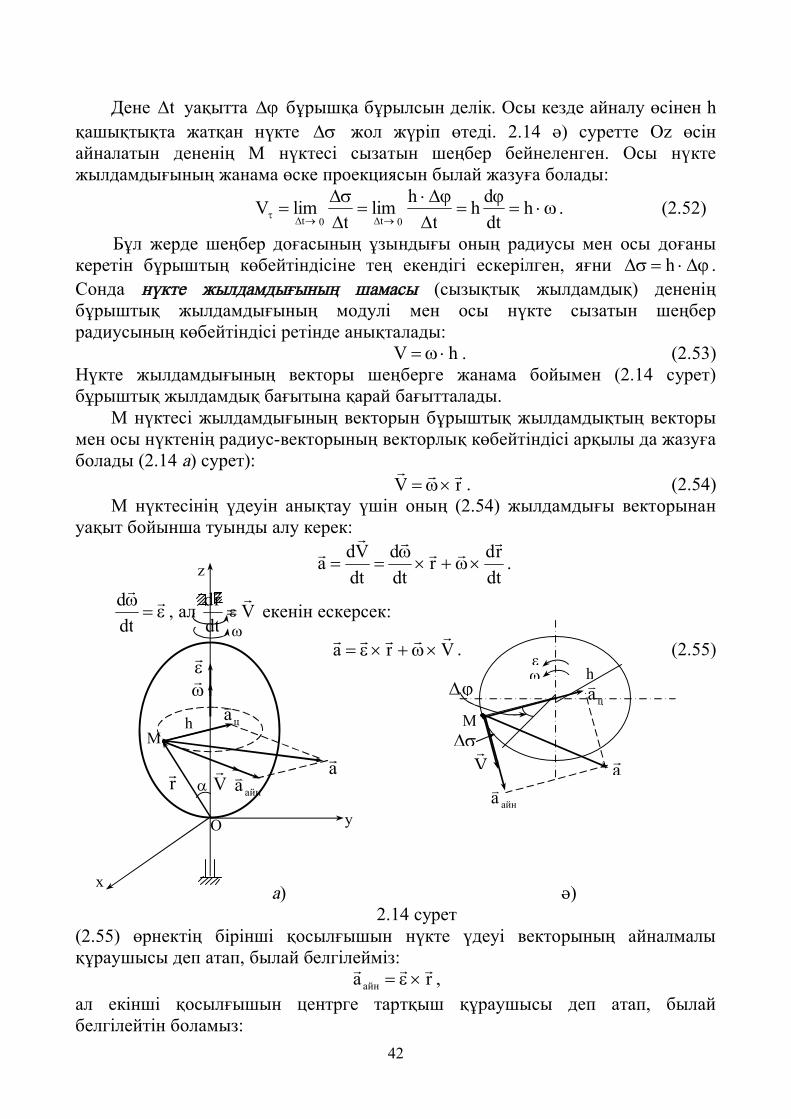
42
Дене t уақытта бұрышқа бұрылсын делік. Осы кезде айналу өсінен h
қашықтықта жатқан нүкте жол жүріп өтеді. 2.14 ә) суретте Oz өсін айналатын дененің М нүктесі сызатын шеңбер бейнеленген. Осы нүкте жылдамдығының жанама өске проекциясын былай жазуға болады:
h
dtdh
thlim
tlimV
0t0t. (2.52)
Бұл жерде шеңбер доғасының ұзындығы оның радиусы мен осы доғаны керетін бұрыштың көбейтіндісіне тең екендігі ескерілген, яғни h . Сонда нүкте жылдамдығының шамасы (сызықтық жылдамдық) дененің бұрыштық жылдамдығының модулі мен осы нүкте сызатын шеңбер радиусының көбейтіндісі ретінде анықталады:
hV . (2.53) Нүкте жылдамдығының векторы шеңберге жанама бойымен (2.14 сурет) бұрыштық жылдамдық бағытына қарай бағытталады.
М нүктесі жылдамдығының векторын бұрыштық жылдамдықтың векторы мен осы нүктенің радиус-векторының векторлық көбейтіндісі арқылы да жазуға болады (2.14 а) сурет):
rV . (2.54)
М нүктесінің үдеуін анықтау үшін оның (2.54) жылдамдығы векторынан уақыт бойынша туынды алу керек:
dtrdr
dtd
dtVda
.
dtd , ал V
dtrd
екенін ескерсек:
Vra
. (2.55)
а) ә)
2.14 сурет (2.55) өрнектің бірінші қосылғышын нүкте үдеуі векторының айналмалы құраушысы деп атап, былай белгілейміз:
rа айн
, ал екінші қосылғышын центрге тартқыш құраушысы деп атап, былай белгілейтін боламыз:
M
h
V
ца
айна
а
М
V
ца
айна а
x
y
z
O
r
h
43
Vац
.
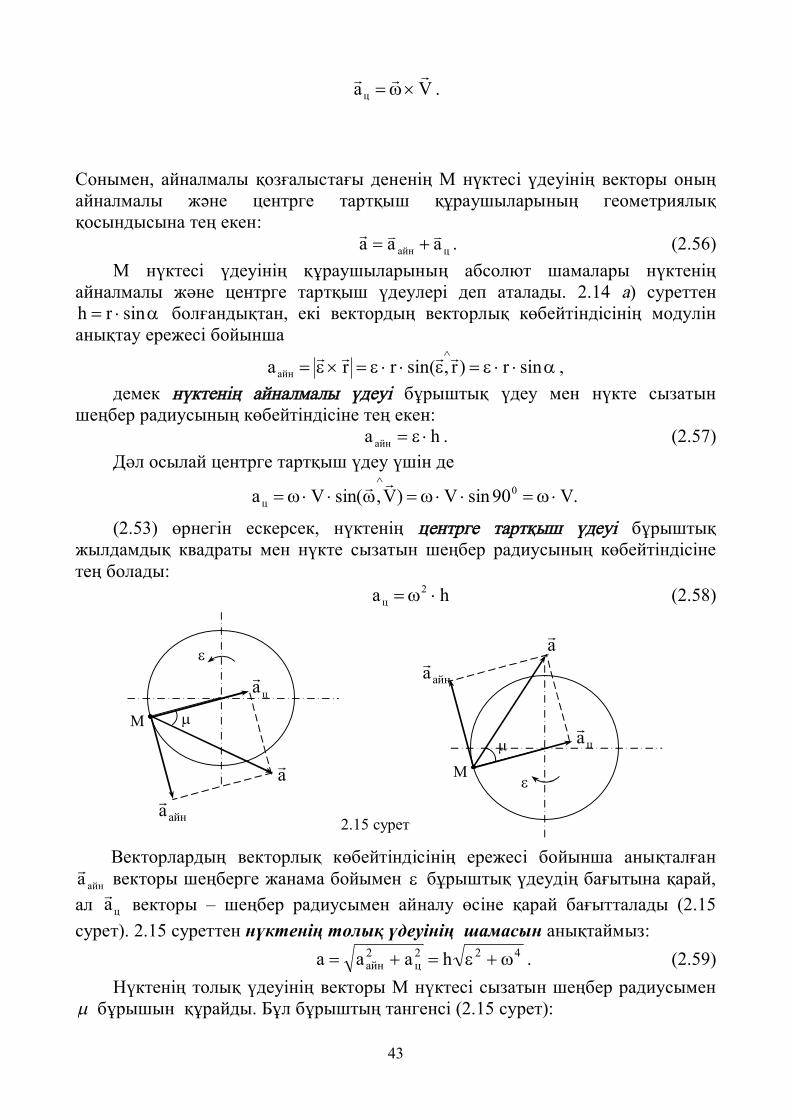
Сонымен, айналмалы қозғалыстағы дененің М нүктесі үдеуінің векторы оның айналмалы және центрге тартқыш құраушыларының геометриялық қосындысына тең екен:
цайн ааа . (2.56)
М нүктесі үдеуінің құраушыларының абсолют шамалары нүктенің айналмалы және центрге тартқыш үдеулері деп аталады. 2.14 а) суреттен
sinrh болғандықтан, екі вектордың векторлық көбейтіндісінің модулін анықтау ережесі бойынша
sinr)r,sin(rrа айн ,
демек нүктенің айналмалы үдеуі бұрыштық үдеу мен нүкте сызатын шеңбер радиусының көбейтіндісіне тең екен:
hа айн . (2.57) Дәл осылай центрге тартқыш үдеу үшін де
.V90sinV)V,sin(Vа 0ц
(2.53) өрнегін ескерсек, нүктенің центрге тартқыш үдеуі бұрыштық жылдамдық квадраты мен нүкте сызатын шеңбер радиусының көбейтіндісіне тең болады:
hа 2ц (2.58)
Векторлардың векторлық көбейтіндісінің ережесі бойынша анықталған
айна векторы шеңберге жанама бойымен бұрыштық үдеудің бағытына қарай, ал ца векторы – шеңбер радиусымен айналу өсіне қарай бағытталады (2.15 сурет). 2.15 суреттен нүктенің толық үдеуінің шамасын анықтаймыз:
422ц
2айн hааа . (2.59)
Нүктенің толық үдеуінің векторы М нүктесі сызатын шеңбер радиусымен бұрышын құрайды. Бұл бұрыштың тангенсі (2.15 сурет):
М
ца
айнаа
М
ца
айнаа
2.15 сурет
44
ц
айн
aa
tg
немесе (2.57) пен (2.58) өрнектерін ескере отырып мынаны аламыз:
2tg
. (2.60)
Негізгі әдебиет 2 [II-тарау,1-бөлім,§§1-5, 2-тарау,§1-3,03-121, 135-144], 2-бөлім,§§36-44, §§ 48-51, 95-112, 117-122-беттер]
Қосымша әдебиет 7 [1-т.,§9.1-9.8, ,§10.1-10.2, 121-145, 157-166-беттер]
Өзіндік бақылау сұрақтары: 1. Кинематика нені зерттейді және оның негізгі мәселелері. 2. Нүкте қозғаласының берілу әдістері (векторлық, координаталық,
табиғи). 3. Қозғалысы векторлық, координаталық әдістермен берілген нүктенің
жылдамдығы мен үдеуін анықтау. 4. Қозғалысы табиғи әдіспен берілген нүктенің жылдамдығын анықтау. 5. Траекторияның қисықтығы мен қисықтық радиусы жайлы түсініктер. 6. Табиғи үшжақтық, оның жазықтықтары мен өстері. 7. Қозғалысы табиғи әдіспен берілген нүктенің үдеуін анықтау. Жанама
және нормаль үдеулер. 8. Нүкте қозғалысының дербес жағдайлары (түзу сызықты қозғалыс,
бірқалыпты қозғалыс, түзу сызықты бірқалыпты қозғалыс, бірқалыпты айнымалы қозғалыс), нүктенің үдеуі, жылдамдығы және қозғалыс заңы.
9. Қатты дененің ілгерілемелі қозғалысының анықтамасы. 10. Ілгерілемелі қозғалыстағы дене нүктелерінің траекториясы,
жылдамдығы мен үдеуі туралы теорема. 11. Қатты дененің айналмалы қозғалысының анықтамасы. Айналу өсі. 12. Айналу бұрышы мен айналу саны, бұрыштық жылдамдық пен айналу
жиілігі арасындағы байланыстар. 13. Айналмалы қозғалыстағы дененің бұрыштық жылдамдығы мен
бұрыштық үдеуі. Олардың алгебралық және векторлық шамалары. 14. Айналмалы қозғалыстағы дененің кез келген нүктесінің сызықтық
жылдамдығы және оның шамасы мен бағытын анықтау. 15. Айналмалы қозғалыстағы дененің кез келген нүктесінің үдеуі. 16. Нүктенің айналмалы және центрге тартқыш үдеуінің анықтамасы және
олардың шамасы мен бағытын анықтау.
Дәріс-6. Қатты дененің жазық паралель қозғалысы
45
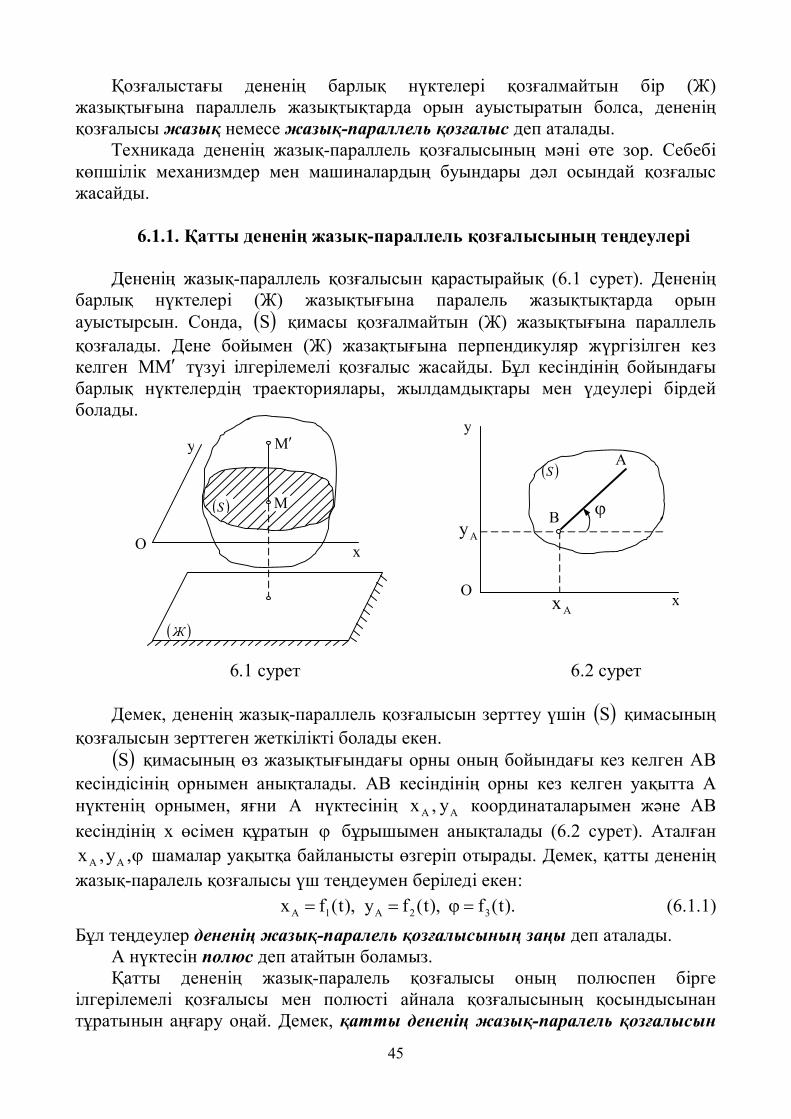
Қозғалыстағы дененің барлық нүктелері қозғалмайтын бір (Ж) жазықтығына параллель жазықтықтарда орын ауыстыратын болса, дененің қозғалысы жазық немесе жазық-параллель қозғалыс деп аталады.
Техникада дененің жазық-параллель қозғалысының мәні өте зор. Себебі көпшілік механизмдер мен машиналардың буындары дәл осындай қозғалыс жасайды.
6.1.1. Қатты дененің жазық-параллель қозғалысының теңдеулері
Дененің жазық-параллель қозғалысын қарастырайық (6.1 сурет). Дененің
барлық нүктелері (Ж) жазықтығына паралель жазықтықтарда орын ауыстырсын. Сонда, S қимасы қозғалмайтын (Ж) жазықтығына параллель қозғалады. Дене бойымен (Ж) жазақтығына перпендикуляр жүргізілген кез келген MM түзуі ілгерілемелі қозғалыс жасайды. Бұл кесіндінің бойындағы барлық нүктелердің траекториялары, жылдамдықтары мен үдеулері бірдей болады.
6.1 сурет 6.2 сурет Демек, дененің жазық-параллель қозғалысын зерттеу үшін S қимасының
қозғалысын зерттеген жеткілікті болады екен. S қимасының өз жазықтығындағы орны оның бойындағы кез келген АВ
кесіндіcінің орнымен анықталады. АВ кесіндінің орны кез келген уақытта А нүктенің орнымен, яғни A нүктеcінің AA y,x координаталарымен және АВ кесіндінің x өсімен құратын бұрышымен анықталады (6.2 сурет). Аталған
,y,x AA шамалар уақытқа байланысты өзгеріп отырады. Демек, қатты дененің жазық-паралель қозғалысы үш теңдеумен беріледі екен:
).t(f),t(fy),t(fx 32A1A (6.1.1) Бұл теңдеулер дененің жазық-паралель қозғалысының заңы деп аталады.
А нүктесін полюс деп атайтын боламыз. Қатты дененің жазық-паралель қозғалысы оның полюспен бірге
ілгерілемелі қозғалысы мен полюсті айнала қозғалысының қосындысынан тұратынын аңғару оңай. Демек, қатты дененің жазық-паралель қозғалысын
O
Ж
y
x
S
M
M
S A
В
Ax
Ay
О
y y
x
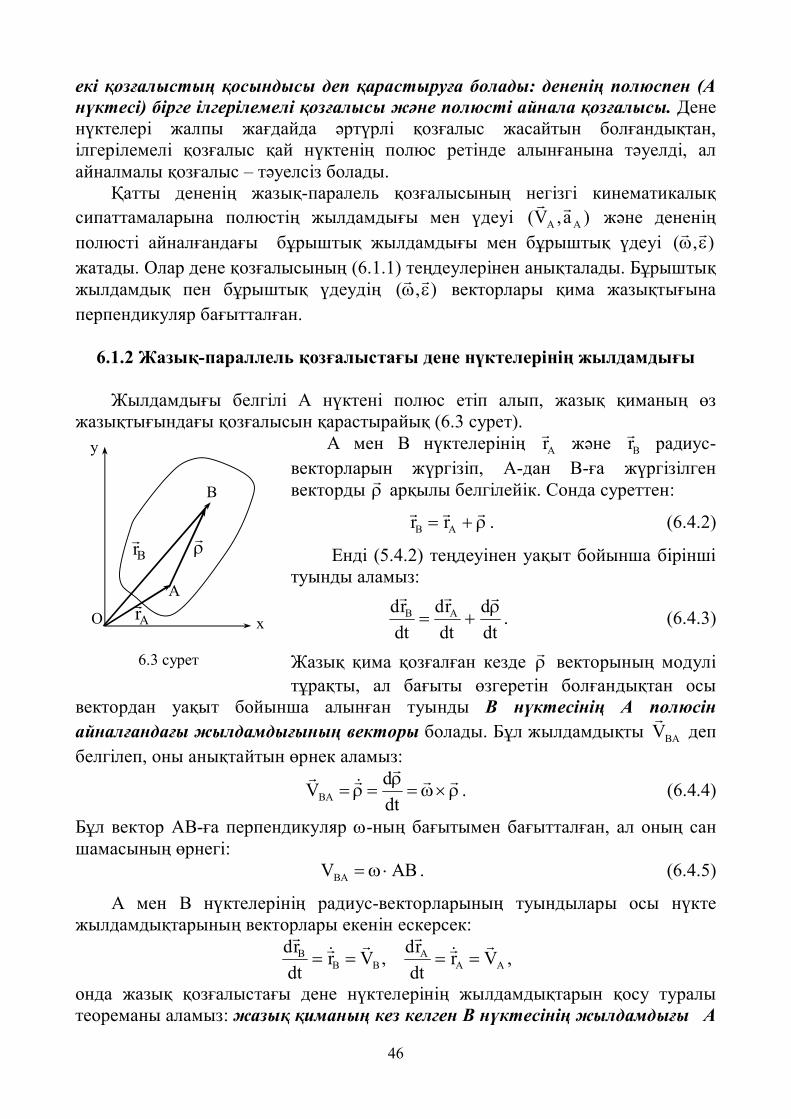
46
екі қозғалыстың қосындысы деп қарастыруға болады: дененің полюспен (А нүктесі) бірге ілгерілемелі қозғалысы және полюсті айнала қозғалысы. Дене нүктелері жалпы жағдайда әртүрлі қозғалыс жасайтын болғандықтан, ілгерілемелі қозғалыс қай нүктенің полюс ретінде алынғанына тәуелді, ал айналмалы қозғалыс – тәуелсіз болады.
Қатты дененің жазық-паралель қозғалысының негізгі кинематикалық сипаттамаларына полюстің жылдамдығы мен үдеуі )a,V( AA
және дененің
полюсті айналғандағы бұрыштық жылдамдығы мен бұрыштық үдеуі ),(
жатады. Олар дене қозғалысының (6.1.1) теңдеулерінен анықталады. Бұрыштық жылдамдық пен бұрыштық үдеудің ),(
векторлары қима жазықтығына перпендикуляр бағытталған.
6.1.2 Жазық-параллель қозғалыстағы дене нүктелерінің жылдамдығы
Жылдамдығы белгілі А нүктені полюс етіп алып, жазық қиманың өз
жазықтығындағы қозғалысын қарастырайық (6.3 сурет). А мен В нүктелерінің Ar
және Br радиус-
векторларын жүргізіп, А-дан В-ға жүргізілген векторды арқылы белгілейік. Сонда суреттен:
АB rr . (6.4.2)
Енді (5.4.2) теңдеуінен уақыт бойынша бірінші туынды аламыз:
dtd
dtrd
dtrd AB
. (6.4.3)
Жазық қима қозғалған кезде векторының модулі тұрақты, ал бағыты өзгеретін болғандықтан осы
вектордан уақыт бойынша алынған туынды В нүктесінің А полюсін айналғандағы жылдамдығының векторы болады. Бұл жылдамдықты BAV
деп
белгілеп, оны анықтайтын өрнек аламыз:
dtdVBA . (6.4.4)
Бұл вектор АВ-ға перпендикуляр -ның бағытымен бағытталған, ал оның сан шамасының өрнегі:
ABVBA . (6.4.5)
А мен В нүктелерінің радиус-векторларының туындылары осы нүкте жылдамдықтарының векторлары екенін ескерсек:
AAA
BBB Vr
dtrd,Vr
dtrd
,
онда жазық қозғалыстағы дене нүктелерінің жылдамдықтарын қосу туралы теореманы аламыз: жазық қиманың кез келген В нүктесінің жылдамдығы А
x
y
O
A
B
Ar
Br
6.3 сурет
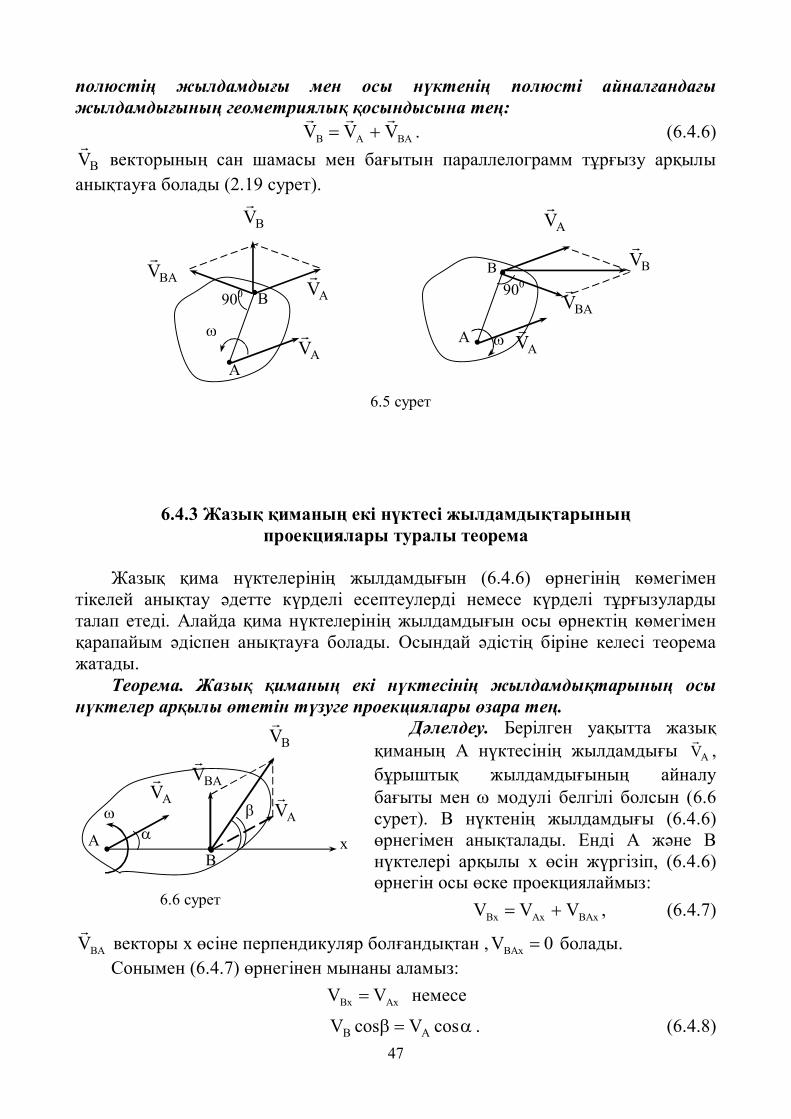
47
полюстің жылдамдығы мен осы нүктенің полюсті айналғандағы жылдамдығының геометриялық қосындысына тең:
BAAB VVV
. (6.4.6)
BV
векторының сан шамасы мен бағытын параллелограмм тұрғызу арқылы анықтауға болады (2.19 сурет).
6.4.3 Жазық қиманың екі нүктесі жылдамдықтарының проекциялары туралы теорема
Жазық қима нүктелерінің жылдамдығын (6.4.6) өрнегінің көмегімен
тікелей анықтау әдетте күрделі есептеулерді немесе күрделі тұрғызуларды талап етеді. Алайда қима нүктелерінің жылдамдығын осы өрнектің көмегімен қарапайым әдіспен анықтауға болады. Осындай әдістің біріне келесі теорема жатады.
Теорема. Жазық қиманың екі нүктесінің жылдамдықтарының осы нүктелер арқылы өтетін түзуге проекциялары өзара тең.
Дәлелдеу. Берілген уақытта жазық қиманың А нүктесінің жылдамдығы AV
,
бұрыштық жылдамдығының айналу бағыты мен модулі белгілі болсын (6.6 сурет). В нүктенің жылдамдығы (6.4.6) өрнегімен анықталады. Енді А және В нүктелері арқылы х өсін жүргізіп, (6.4.6) өрнегін осы өске проекциялаймыз:
BAxAxBx VVV , (6.4.7)
BAV
векторы х өсіне перпендикуляр болғандықтан , 0VBAx болады. Сонымен (6.4.7) өрнегінен мынаны аламыз:
AxBx VV немесе
cosVcosV AB . (6.4.8)
А
AV
AV
BAV
BV
В 900
А AV
AV
BAV
BV
В 900
6.5 сурет
А В
х
AV
BAV
AV
BV
6.6 сурет
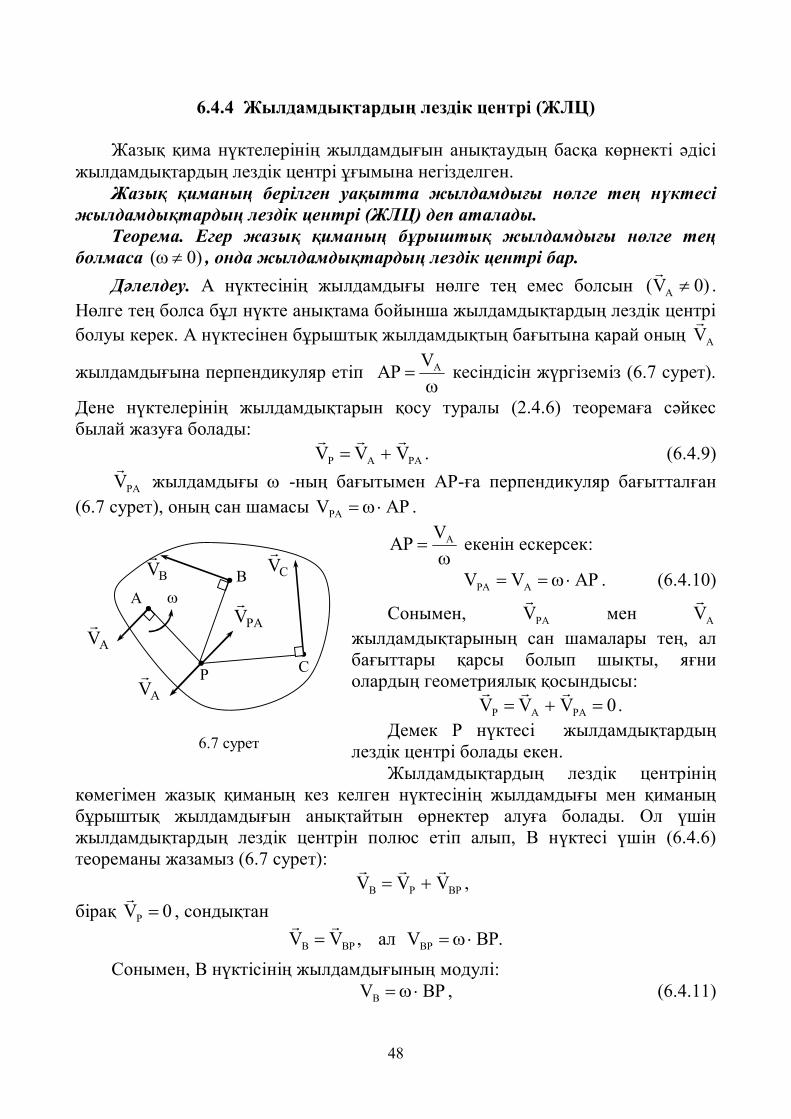
48
6.4.4 Жылдамдықтардың лездік центрі (ЖЛЦ)
Жазық қима нүктелерінің жылдамдығын анықтаудың басқа көрнекті әдісі
жылдамдықтардың лездік центрі ұғымына негізделген. Жазық қиманың берілген уақытта жылдамдығы нөлге тең нүктесі
жылдамдықтардың лездік центрі (ЖЛЦ) деп аталады. Теорема. Егер жазық қиманың бұрыштық жылдамдығы нөлге тең
болмаса )0( , онда жылдамдықтардың лездік центрі бар. Дәлелдеу. А нүктесінің жылдамдығы нөлге тең емес болсын )0V( A
.
Нөлге тең болса бұл нүкте анықтама бойынша жылдамдықтардың лездік центрі болуы керек. А нүктесінен бұрыштық жылдамдықтың бағытына қарай оның AV
жылдамдығына перпендикуляр етіп
AVАР кесіндісін жүргіземіз (6.7 сурет).
Дене нүктелерінің жылдамдықтарын қосу туралы (2.4.6) теоремаға сәйкес былай жазуға болады:
РAAР VVV
. (6.4.9)
РAV
жылдамдығы -ның бағытымен АР-ға перпендикуляр бағытталған (6.7 сурет), оның сан шамасы АРVРA .
AVАР екенін ескерсек:
АРVV AРA . (6.4.10)
Сонымен, РAV
мен AV
жылдамдықтарының сан шамалары тең, ал бағыттары қарсы болып шықты, яғни олардың геометриялық қосындысы:
0VVV РAAР
. Демек Р нүктесі жылдамдықтардың
лездік центрі болады екен. Жылдамдықтардың лездік центрінің
көмегімен жазық қиманың кез келген нүктесінің жылдамдығы мен қиманың бұрыштық жылдамдығын анықтайтын өрнектер алуға болады. Ол үшін жылдамдықтардың лездік центрін полюс етіп алып, В нүктесі үшін (6.4.6) теореманы жазамыз (6.7 сурет):
BРРB VVV
, бірақ 0VР
, сондықтан
,VV BРB
ал .ВРVBР
Сонымен, В нүктісінің жылдамдығының модулі: ВРVВ , (6.4.11)
А
Р
AV
PAV
AV
В BV
С
CV
6.7 сурет

49
ал жылдамдық векторы ВР-ға перпендикуляр -ның бағытымен бағытталады (6.7 сурет).
Дәл осылай С нүктесі үшін де СРС VV
, яғни: СРVС (6.4.12)
бұл жылдамдықтың векторы СР-ға перпендикуляр -ның бағытымен бағытталады (6.7 сурет).
(6.4.10) – (6.4.12) өрнектерінен мынаны аламыз:
CPV
BPV
APV CBA . (6.4.13)
Сонымен, жазық қиманың кез келген нүктесінің жылдамдығы нүктеден ЖЛЦ-іне дейінгі ара қашықтыққа пропорционал, ал нүкте жылдамдығының векторы осы нүктені ЖЛЦ-імен қосатын кесіндіге (лездік радиусқа) перпендикуляр бағытталады.
6.4.5 Жылдамдықтардың лездік центрінің орнын анықтаудың
дербес жағдайлары
Жылдамдықтардың лездік центрінің негізгі қасиеттерін қолданып, жазық қиманың нүктелерінің жылдамдықтарының әртүрлі бағыттары үшін жылдамдықтардың лездік центрінің орнын анықтауға болады.
1. Егер жазық қиманың бір нүктесі (А нүктесі) жылдамдығының шамасы
мен бағыты, ал екінші нүктесінің (В нүктесі) жылдамдығының тек бағыты белгілі болса (6.8 сурет), онда ЖЛЦ (Р нүктесі) А және В нүктелерінен олардың жылдамдық векторларының бағыттарына жүргізілген перпендикуляр- лардың қиылысу нүктесінде жатады. AV
векторының
бағытымен BV
және векторларының
бағыты анықталады. (6.4.13) өрнегінен жазық қиманың кез келген нүктесінің жылдамдығы және қиманың бұрыштық жылдамдығы табылады.
2. Егер жазық қиманың екі нүктесінің (А мен В) жылдамдықтарының векторлары параллель,
А AV
В BV
6.10 сурет
А
Р
AV
В BV
А
Р
AV
В BV
6.9 сурет
А
Р AV
В
BV
6.8 сурет
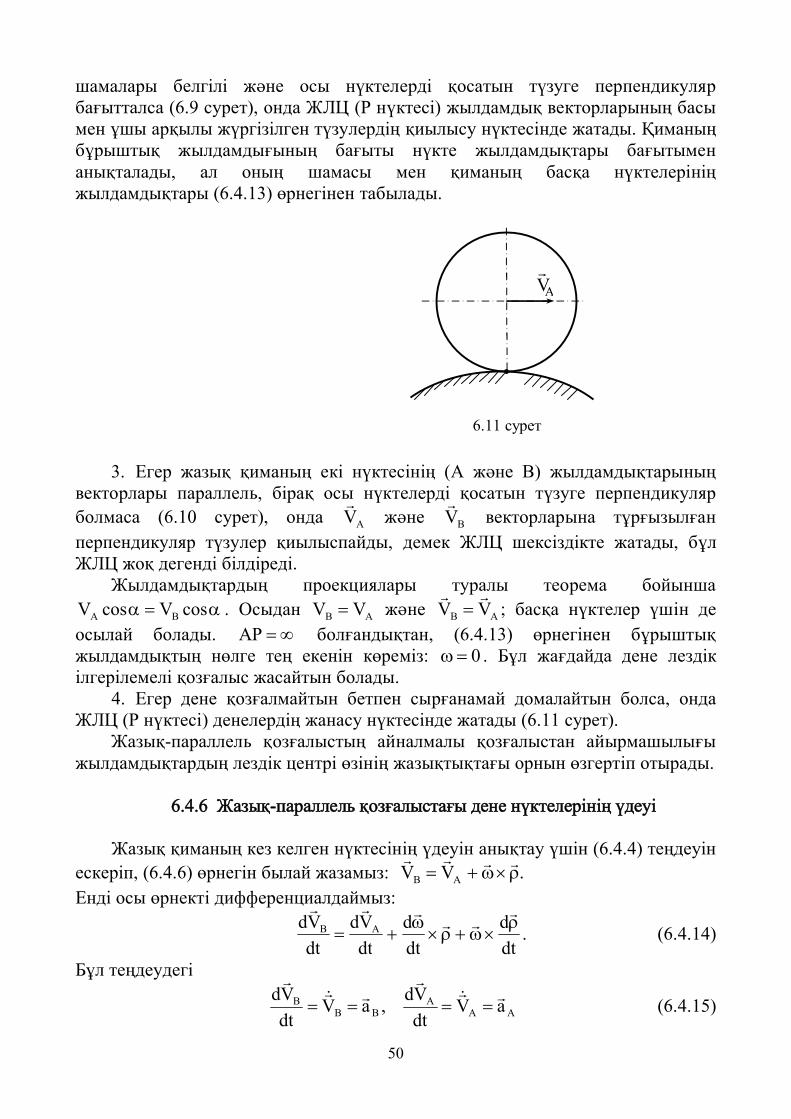
50
шамалары белгілі және осы нүктелерді қосатын түзуге перпендикуляр бағытталса (6.9 сурет), онда ЖЛЦ (Р нүктесі) жылдамдық векторларының басы мен ұшы арқылы жүргізілген түзулердің қиылысу нүктесінде жатады. Қиманың бұрыштық жылдамдығының бағыты нүкте жылдамдықтары бағытымен анықталады, ал оның шамасы мен қиманың басқа нүктелерінің жылдамдықтары (6.4.13) өрнегінен табылады.
3. Егер жазық қиманың екі нүктесінің (А және В) жылдамдықтарының векторлары параллель, бірақ осы нүктелерді қосатын түзуге перпендикуляр болмаса (6.10 сурет), онда AV
және BV
векторларына тұрғызылған
перпендикуляр түзулер қиылыспайды, демек ЖЛЦ шексіздікте жатады, бұл ЖЛЦ жоқ дегенді білдіреді.
Жылдамдықтардың проекциялары туралы теорема бойынша cosVcosV BA . Осыдан АB VV және АB VV
; басқа нүктелер үшін де
осылай болады. АР болғандықтан, (6.4.13) өрнегінен бұрыштық жылдамдықтың нөлге тең екенін көреміз: 0 . Бұл жағдайда дене лездік ілгерілемелі қозғалыс жасайтын болады.
4. Егер дене қозғалмайтын бетпен сырғанамай домалайтын болса, онда ЖЛЦ (Р нүктесі) денелердің жанасу нүктесінде жатады (6.11 сурет).
Жазық-параллель қозғалыстың айналмалы қозғалыстан айырмашылығы жылдамдықтардың лездік центрі өзінің жазықтықтағы орнын өзгертіп отырады.
6.4.6 Жазық-параллель қозғалыстағы дене нүктелерінің үдеуі
Жазық қиманың кез келген нүктесінің үдеуін анықтау үшін (6.4.4) теңдеуін
ескеріп, (6.4.6) өрнегін былай жазамыз: .VV АB
Енді осы өрнекті дифференциалдаймыз:
dtd
dtd
dtVd
dtVd АB
. (6.4.14)
Бұл теңдеудегі
AAА
BBB aV
dtVd,aV
dtVd
(6.4.15)
AV
6.11 сурет
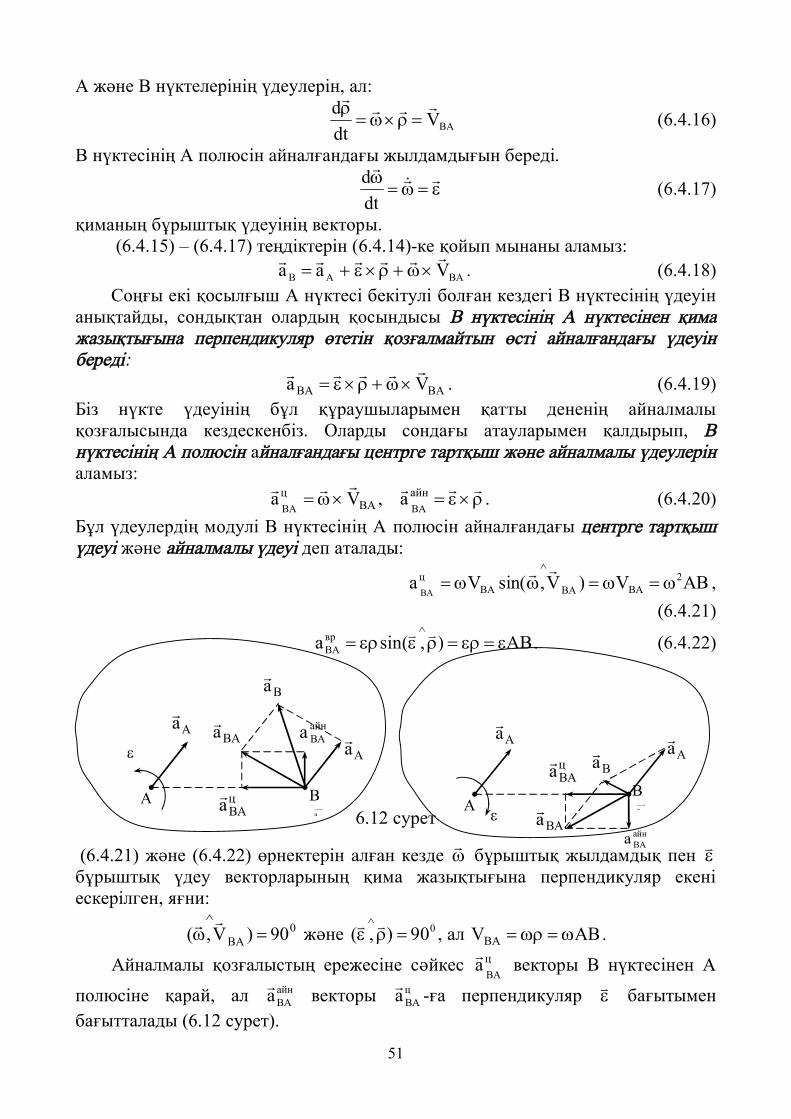
51
А және В нүктелерінің үдеулерін, ал:
BAVdtd
(6.4.16)
В нүктесінің А полюсін айналғандағы жылдамдығын береді.
dtd (6.4.17)
қиманың бұрыштық үдеуінің векторы. (6.4.15) – (6.4.17) теңдіктерін (6.4.14)-ке қойып мынаны аламыз:
BAAB Vaa
. (6.4.18) Соңғы екі қосылғыш А нүктесі бекітулі болған кездегі В нүктесінің үдеуін
анықтайды, сондықтан олардың қосындысы В нүктесінің А нүктесінен қима жазықтығына перпендикуляр өтетін қозғалмайтын өсті айналғандағы үдеуін береді:
BABА Va
. (6.4.19) Біз нүкте үдеуінің бұл құраушыларымен қатты дененің айналмалы қозғалысында кездескенбіз. Оларды сондағы атауларымен қалдырып, В нүктесінің А полюсін айналғандағы центрге тартқыш және айналмалы үдеулерін аламыз:
айн
BAц
BАBАa,Va . (6.4.20)
Бұл үдеулердің модулі В нүктесінің А полюсін айналғандағы центрге тартқыш үдеуі және айналмалы үдеуі деп аталады:
АВV)V,sin(Vа 2ВАВАВА
цВА
,
(6.4.21)
АВ),sin(а врВА
. (6.4.22)
6.12 сурет
(6.4.21) және (6.4.22) өрнектерін алған кезде бұрыштық жылдамдық пен бұрыштық үдеу векторларының қима жазықтығына перпендикуляр екені ескерілген, яғни:
0ВА 90)V,(
және 090),( , ал АВVВА .
Айналмалы қозғалыстың ережесіне сәйкес цBА
a векторы В нүктесінен А
полюсіне қарай, ал айнВАа векторы ц
ВАa -ға перпендикуляр бағытымен бағытталады (6.12 сурет).
А В
Aa
Аа Aa
Ва цBAa
ВАа айнВАа
А В
Aa
Аа Aa
Ва
цBAa
ВАа айнВАа
52
(6.4.19) бен (6.4.20) теңдіктерін ескере отырып (5.4.18) теңдеуін былай жазуға болады:
врВА
цВААВААВ аааааа , (6.4.23)
бұл теңдеу жазық-параллель қозғалыстағы дене нүктелерінің үдеулерін қосу туралы теореманы береді. Сонымен, жазық қозғалыстағы дененің кез келген нүктесінің үдеуі полюстің (А нүктесі) үдеуі мен осы нүктенің (В нүктесі) полюсті айналғандағы центрге тартқыш және айналмалы үдеулерінің геометриялық қосындысына тең екен.
В нүктесінің үдеуінің модулі мен бағыты 6.12 суретте келтірілген. А нүкте қисық сызықты қозғалыс жасаған жағдайда оның үдеуі жанама
және нормаль үдеулердің геометриялық қосындысы ретінде, немесе айналмалы қозғалыстағы дене нүктесі болған жағдайда айналмалы және центрге тартқыш үдеулердің геометриялық қосындысы ретінде анықталады, яғни
цААА ааа , немесе ц
АайнАА ааа .
Сонда (6.4.23) теңдеуі мына түрде жазылады: айнВА
цВА
цА
айнАВААВ ааааааа . (6.4.24)
В нүктесі қисық сызықты қозғалыс жасаған жағдайда немесе айналмалы қозғалыстағы дене нүктесі болған жағдайда бұл нүктенің үдеуін мынандай қосындымен ауыстыруға болады:
цВВВ ааа , немесе ц
ВайнВВ ааа .
Сонда үдеулерді қосу туралы (6.4.24) теорема былай жазылады: айнВА
цВА
айнА
цАВАА
цВ
айнВ аааааааа . (6.4.25)
В нүктенің А полюсті айналғандағы үдеуінің модулі былай анықталады: 42
ВА АВа , (6.4.26) осы үдеудің ВАа векторының АВ түзуімен құратын бұрышы мына өрнекпен анықталады:
2tg
. (6.4.27)
Соңғы өрнектен бұрышының полюске тәуелсіз екенін көреміз.
Негізгі әдебиет 2 [I-тарау, 3-бөлім,§ §1-7, 148-161-беттер], 3[I-тарау§§ 52- 58,127-145-беттер]
Қосымша әдебиет 7 [т-1..,§11.1-11.7, 166-189-беттер]
Өзіндік бақылау сұрақтары: 1. Қатты дененің жазық-параллель қозғалысының анықтамасы мен оның
негізгі кинематикалық сипаттамалары. 2. Қатты дененің жазық-параллель қозғалысының жіктелуі. 3. Жазық қозғалыстағы дененің кез келген нүктесінің жылдамдығын
анықтау (жылдамдықтарды қосу туралы теорема).
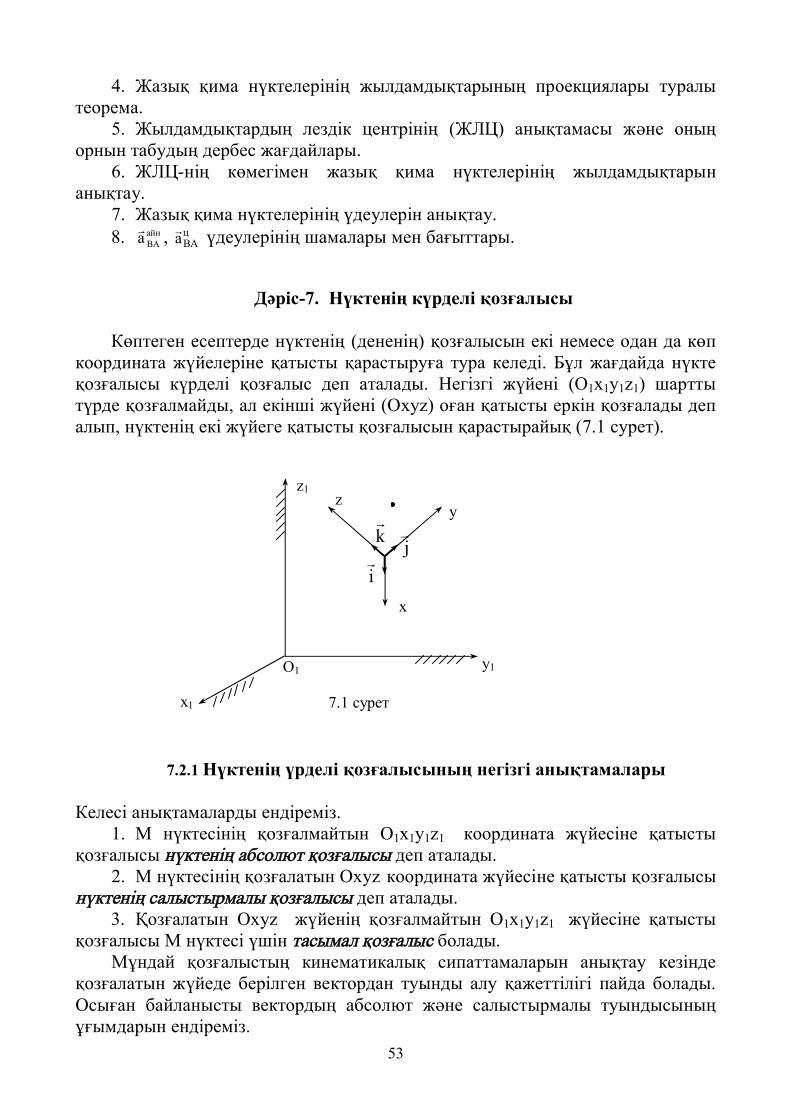
53
4. Жазық қима нүктелерінің жылдамдықтарының проекциялары туралы теорема.
5. Жылдамдықтардың лездік центрінің (ЖЛЦ) анықтамасы және оның орнын табудың дербес жағдайлары.
6. ЖЛЦ-нің көмегімен жазық қима нүктелерінің жылдамдықтарын анықтау.
7. Жазық қима нүктелерінің үдеулерін анықтау. 8. айн
ВАа , ц
BAa үдеулерінің шамалары мен бағыттары.
Дәріс-7. Нүктенің күрделі қозғалысы
Көптеген есептерде нүктенің (дененің) қозғалысын екі немесе одан да көп
координата жүйелеріне қатысты қарастыруға тура келеді. Бұл жағдайда нүкте қозғалысы күрделі қозғалыс деп аталады. Негізгі жүйені (О1x1y1z1) шартты түрде қозғалмайды, ал екінші жүйені (Oxyz) оған қатысты еркін қозғалады деп алып, нүктенің екі жүйеге қатысты қозғалысын қарастырайық (7.1 сурет).
7.2.1 Нүктенің үрделі қозғалысының негізгі анықтамалары Келесі анықтамаларды ендіреміз.
1. М нүктесінің қозғалмайтын О1x1y1z1 координата жүйесіне қатысты қозғалысы нүктенің абсолют қозғалысы деп аталады.
2. М нүктесінің қозғалатын Oxyz координата жүйесіне қатысты қозғалысы нүктенің салыстырмалы қозғалысы деп аталады.
3. Қозғалатын Oxyz жүйенің қозғалмайтын О1x1y1z1 жүйесіне қатысты қозғалысы М нүктесі үшін тасымал қозғалыс болады.
Мұндай қозғалыстың кинематикалық сипаттамаларын анықтау кезінде қозғалатын жүйеде берілген вектордан туынды алу қажеттілігі пайда болады. Осыған байланысты вектордың абсолют және салыстырмалы туындысының ұғымдарын ендіреміз.
z1
О1
x1
y1
z y
x
i
j
k
7.1 сурет
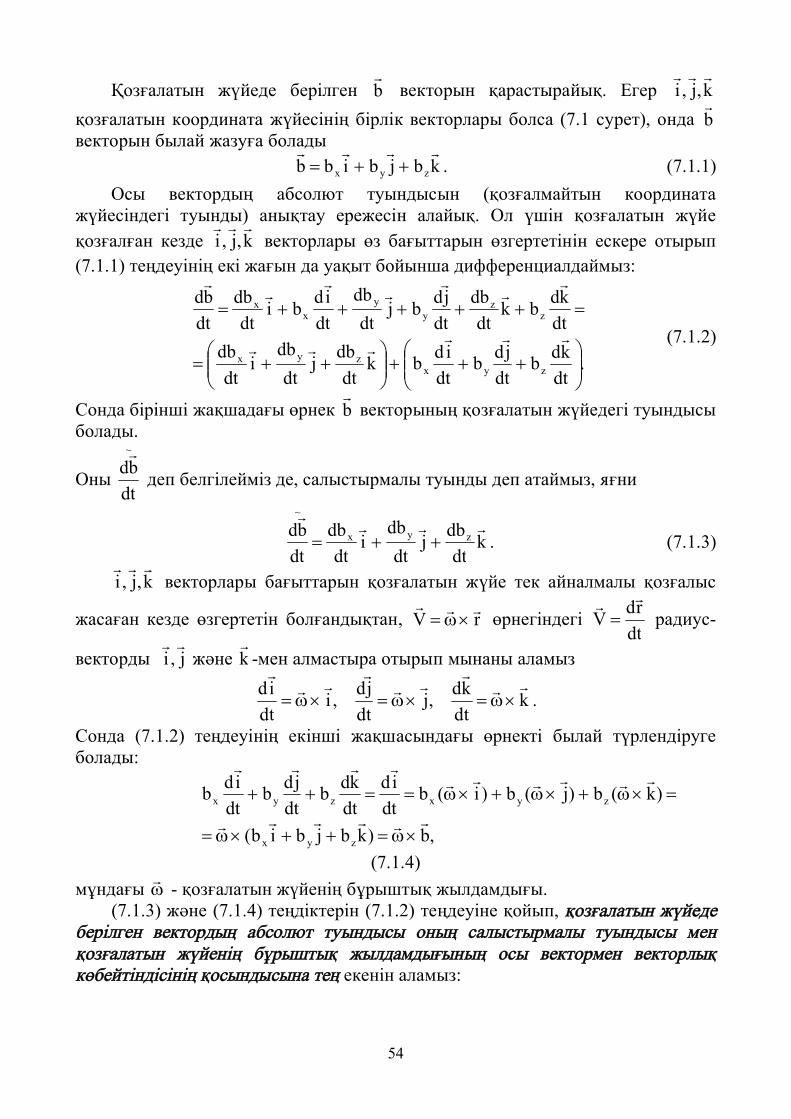
54
Қозғалатын жүйеде берілген b
векторын қарастырайық. Егер k,j,i
қозғалатын координата жүйесінің бірлік векторлары болса (7.1 сурет), онда b
векторын былай жазуға болады kbjbibb zyx
. (7.1.1)
Осы вектордың абсолют туындысын (қозғалмайтын координата жүйесіндегі туынды) анықтау ережесін алайық. Ол үшін қозғалатын жүйе қозғалған кезде k,j,i
векторлары өз бағыттарын өзгертетінін ескере отырып
(7.1.1) теңдеуінің екі жағын да уақыт бойынша дифференциалдаймыз:
.
dtkdb
dtjdb
dtidbk
dtdbj
dtdb
idt
dbdtkdbk
dtdb
dtjdbj
dtdb
dtidbi
dtdb
dtbd
zyxzyx
zz
yy
xx
(7.1.2)
Сонда бірінші жақшадағы өрнек b
векторының қозғалатын жүйедегі туындысы болады.
Оны
~
dtbd
деп белгілейміз де, салыстырмалы туынды деп атаймыз, яғни
kdt
dbjdt
dbi
dtdb
dtbd zyx
~
. (7.1.3)
k,j,i
векторлары бағыттарын қозғалатын жүйе тек айналмалы қозғалыс
жасаған кезде өзгертетін болғандықтан, rV өрнегіндегі
dtrdV
радиус-
векторды j,i
және k
-мен алмастыра отырып мынаны аламыз
kdtkd,j
dtjd,i
dtid
.
Сонда (7.1.2) теңдеуінің екінші жақшасындағы өрнекті былай түрлендіруге болады:
,b)kbjbib(
)k(b)j(b)i(bdt
iddtkdb
dtjdb
dtidb
zyx
zyxzyx
(7.1.4) мұндағы - қозғалатын жүйенің бұрыштық жылдамдығы.
(7.1.3) және (7.1.4) теңдіктерін (7.1.2) теңдеуіне қойып, қозғалатын жүйеде берілген вектордың абсолют туындысы оның салыстырмалы туындысы мен қозғалатын жүйенің бұрыштық жылдамдығының осы вектормен векторлық көбейтіндісінің қосындысына тең екенін аламыз:
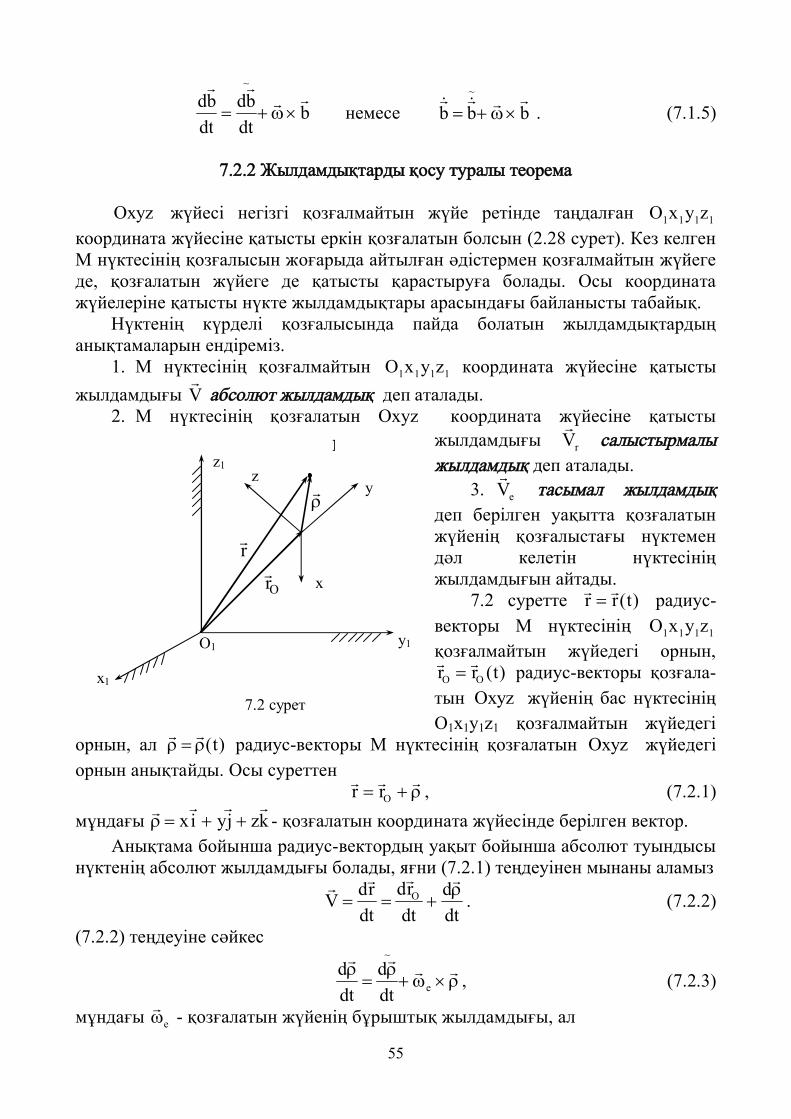
55
bdtbd
dtbd
~
немесе bbb~ . (7.1.5)
7.2.2 Жылдамдықтарды қосу туралы теорема
Oxyz жүйесі негізгі қозғалмайтын жүйе ретінде таңдалған 1111 zyxO
координата жүйесіне қатысты еркін қозғалатын болсын (2.28 сурет). Кез келген М нүктесінің қозғалысын жоғарыда айтылған әдістермен қозғалмайтын жүйеге де, қозғалатын жүйеге де қатысты қарастыруға болады. Осы координата жүйелеріне қатысты нүкте жылдамдықтары арасындағы байланысты табайық.
Нүктенің күрделі қозғалысында пайда болатын жылдамдықтардың анықтамаларын ендіреміз.
1. М нүктесінің қозғалмайтын 1111 zyxO координата жүйесіне қатысты жылдамдығы V
абсолют жылдамдық деп аталады.
2. М нүктесінің қозғалатын Oxyz координата жүйесіне қатысты жылдамдығы rV
салыстырмалы
жылдамдық деп аталады. 3. еV
тасымал жылдамдық
деп берілген уақытта қозғалатын жүйенің қозғалыстағы нүктемен дәл келетін нүктесінің жылдамдығын айтады.
7.2 суретте )t(rr радиус-
векторы М нүктесінің 1111 zyxO қозғалмайтын жүйедегі орнын,
)t(rr OO
радиус-векторы қозғала- тын Oxyz жүйенің бас нүктесінің О1x1y1z1 қозғалмайтын жүйедегі
орнын, ал )t( радиус-векторы М нүктесінің қозғалатын Oxyz жүйедегі орнын анықтайды. Осы суреттен
Orr , (7.2.1) мұндағы kzjyix
- қозғалатын координата жүйесінде берілген вектор.
Анықтама бойынша радиус-вектордың уақыт бойынша абсолют туындысы нүктенің абсолют жылдамдығы болады, яғни (7.2.1) теңдеуінен мынаны аламыз
dtd
dtrd
dtrdV O
. (7.2.2)
(7.2.2) теңдеуіне сәйкес
е
~
dtd
dtd , (7.2.3)
мұндағы е - қозғалатын жүйенің бұрыштық жылдамдығы, ал
z1
О1
x1
y1
z y
x
M
Or
r
7.2 сурет
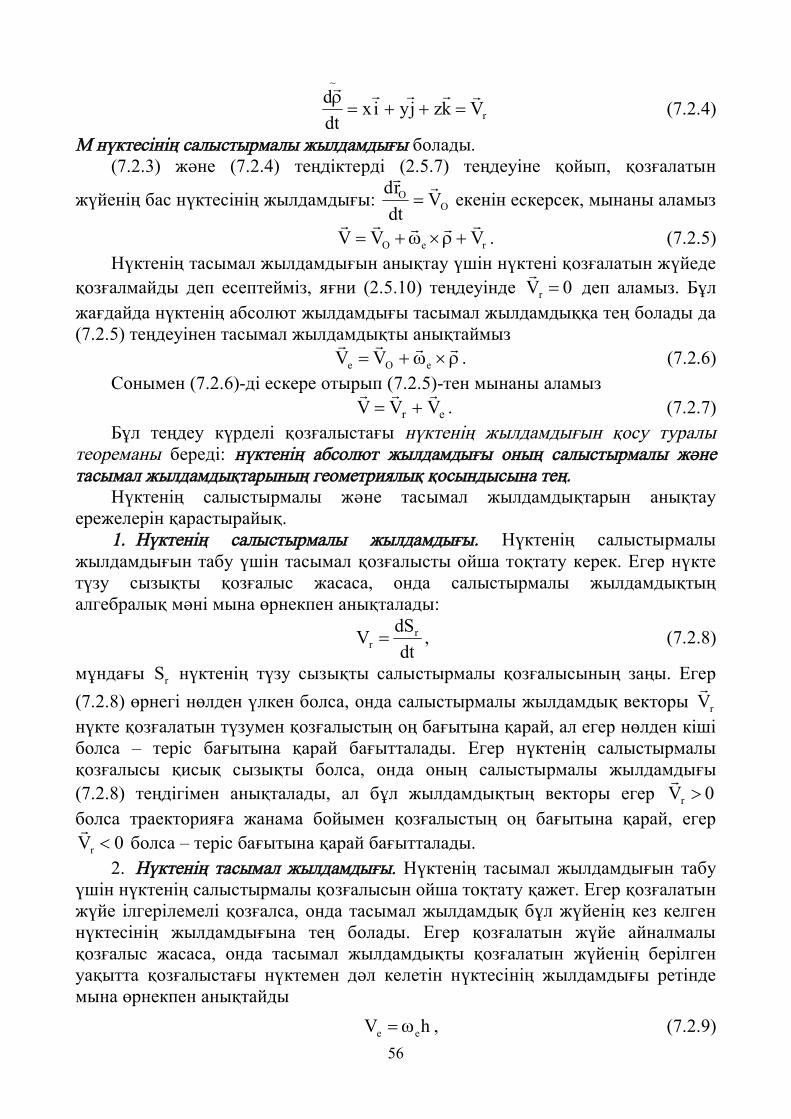
56
r
~
Vkzjyixdtd
(7.2.4)
М нүктесінің салыстырмалы жылдамдығы болады. (7.2.3) және (7.2.4) теңдіктерді (2.5.7) теңдеуіне қойып, қозғалатын
жүйенің бас нүктесінің жылдамдығы: OO V
dtrd
екенін ескерсек, мынаны аламыз
rеO VVV
. (7.2.5) Нүктенің тасымал жылдамдығын анықтау үшін нүктені қозғалатын жүйеде
қозғалмайды деп есептейміз, яғни (2.5.10) теңдеуінде 0Vr
деп аламыз. Бұл жағдайда нүктенің абсолют жылдамдығы тасымал жылдамдыққа тең болады да (7.2.5) теңдеуінен тасымал жылдамдықты анықтаймыз
еOе VV . (7.2.6) Сонымен (7.2.6)-ді ескере отырып (7.2.5)-тен мынаны аламыз
еr VVV
. (7.2.7) Бұл теңдеу күрделі қозғалыстағы нүктенің жылдамдығын қосу туралы
теореманы береді: нүктенің абсолют жылдамдығы оның салыстырмалы және тасымал жылдамдықтарының геометриялық қосындысына тең.
Нүктенің салыстырмалы және тасымал жылдамдықтарын анықтау ережелерін қарастырайық.
1. Нүктенің салыстырмалы жылдамдығы. Нүктенің салыстырмалы жылдамдығын табу үшін тасымал қозғалысты ойша тоқтату керек. Егер нүкте түзу сызықты қозғалыс жасаса, онда салыстырмалы жылдамдықтың алгебралық мәні мына өрнекпен анықталады:
dtdSV r
r , (7.2.8)
мұндағы rS нүктенің түзу сызықты салыстырмалы қозғалысының заңы. Егер (7.2.8) өрнегі нөлден үлкен болса, онда салыстырмалы жылдамдық векторы rV
нүкте қозғалатын түзумен қозғалыстың оң бағытына қарай, ал егер нөлден кіші болса – теріс бағытына қарай бағытталады. Егер нүктенің салыстырмалы қозғалысы қисық сызықты болса, онда оның салыстырмалы жылдамдығы (7.2.8) теңдігімен анықталады, ал бұл жылдамдықтың векторы егер 0Vr
болса траекторияға жанама бойымен қозғалыстың оң бағытына қарай, егер 0Vr
болса – теріс бағытына қарай бағытталады.
2. Нүктенің тасымал жылдамдығы. Нүктенің тасымал жылдамдығын табу үшін нүктенің салыстырмалы қозғалысын ойша тоқтату қажет. Егер қозғалатын жүйе ілгерілемелі қозғалса, онда тасымал жылдамдық бұл жүйенің кез келген нүктесінің жылдамдығына тең болады. Егер қозғалатын жүйе айналмалы қозғалыс жасаса, онда тасымал жылдамдықты қозғалатын жүйенің берілген уақытта қозғалыстағы нүктемен дәл келетін нүктесінің жылдамдығы ретінде мына өрнекпен анықтайды
hV ее , (7.2.9)
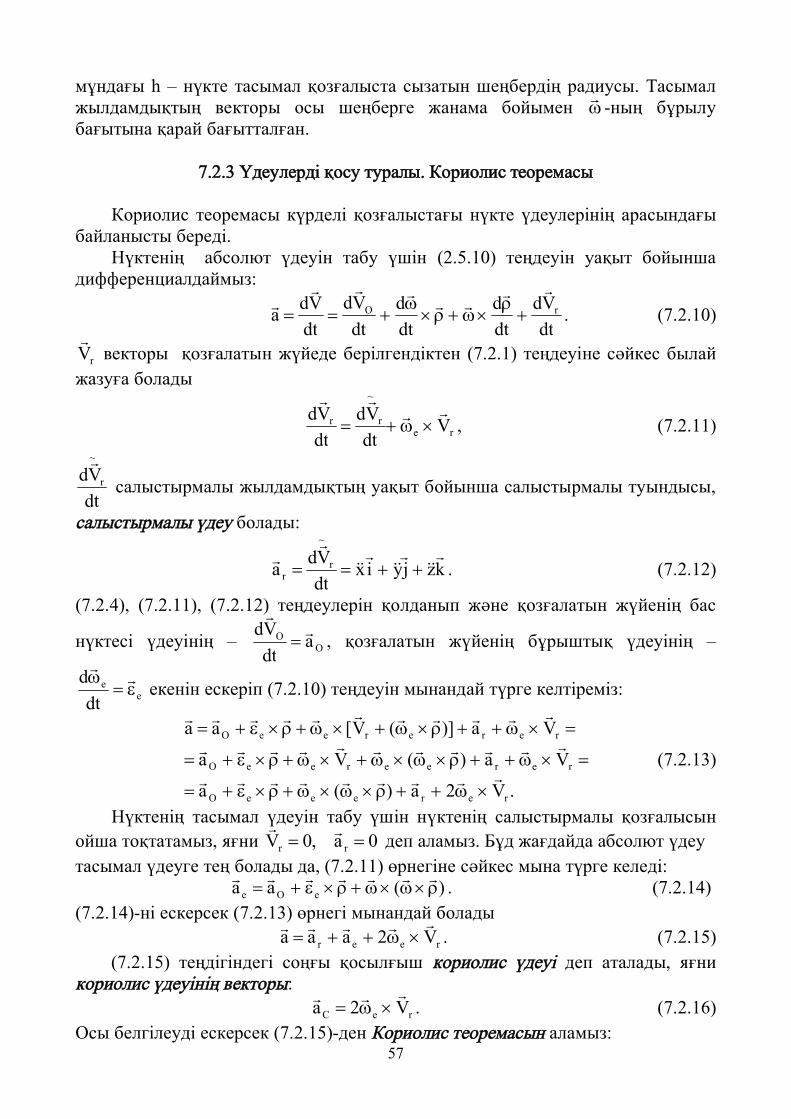
57
мұндағы h – нүкте тасымал қозғалыста сызатын шеңбердің радиусы. Тасымал жылдамдықтың векторы осы шеңберге жанама бойымен
-ның бұрылу бағытына қарай бағытталған.
7.2.3 Үдеулерді қосу туралы. Кориолис теоремасы
Кориолис теоремасы күрделі қозғалыстағы нүкте үдеулерінің арасындағы байланысты береді.
Нүктенің абсолют үдеуін табу үшін (2.5.10) теңдеуін уақыт бойынша дифференциалдаймыз:
dtVd
dtd
dtd
dtVd
dtVda rO
. (7.2.10)
rV
векторы қозғалатын жүйеде берілгендіктен (7.2.1) теңдеуіне сәйкес былай жазуға болады
rе
~
rr VdtVd
dtVd
, (7.2.11) ~
r
dtVd
салыстырмалы жылдамдықтың уақыт бойынша салыстырмалы туындысы,
салыстырмалы үдеу болады:
kzjyixdtVda
~
rr
. (7.2.12)
(7.2.4), (7.2.11), (7.2.12) теңдеулерін қолданып және қозғалатын жүйенің бас
нүктесі үдеуінің – OO a
dtVd
, қозғалатын жүйенің бұрыштық үдеуінің –
ее
dtd
екенін ескеріп (7.2.10) теңдеуін мынандай түрге келтіреміз:
.V2a)(a
Va)(Va
Va)](V[aa
rеrеееO
rеrееrееO
rеrеrееO
(7.2.13)
Нүктенің тасымал үдеуін табу үшін нүктенің салыстырмалы қозғалысын ойша тоқтатамыз, яғни 0а,0V rr
деп аламыз. Бұд жағдайда абсолют үдеу
тасымал үдеуге тең болады да, (7.2.11) өрнегіне сәйкес мына түрге келеді: )(aa еOе
. (7.2.14) (7.2.14)-ні ескерсек (7.2.13) өрнегі мынандай болады
rееr V2aaa
. (7.2.15) (7.2.15) теңдігіндегі соңғы қосылғыш кориолис үдеуі деп аталады, яғни
кориолис үдеуінің векторы: rеC V2a
. (7.2.16) Осы белгілеуді ескерсек (7.2.15)-ден Кориолис теоремасын аламыз:
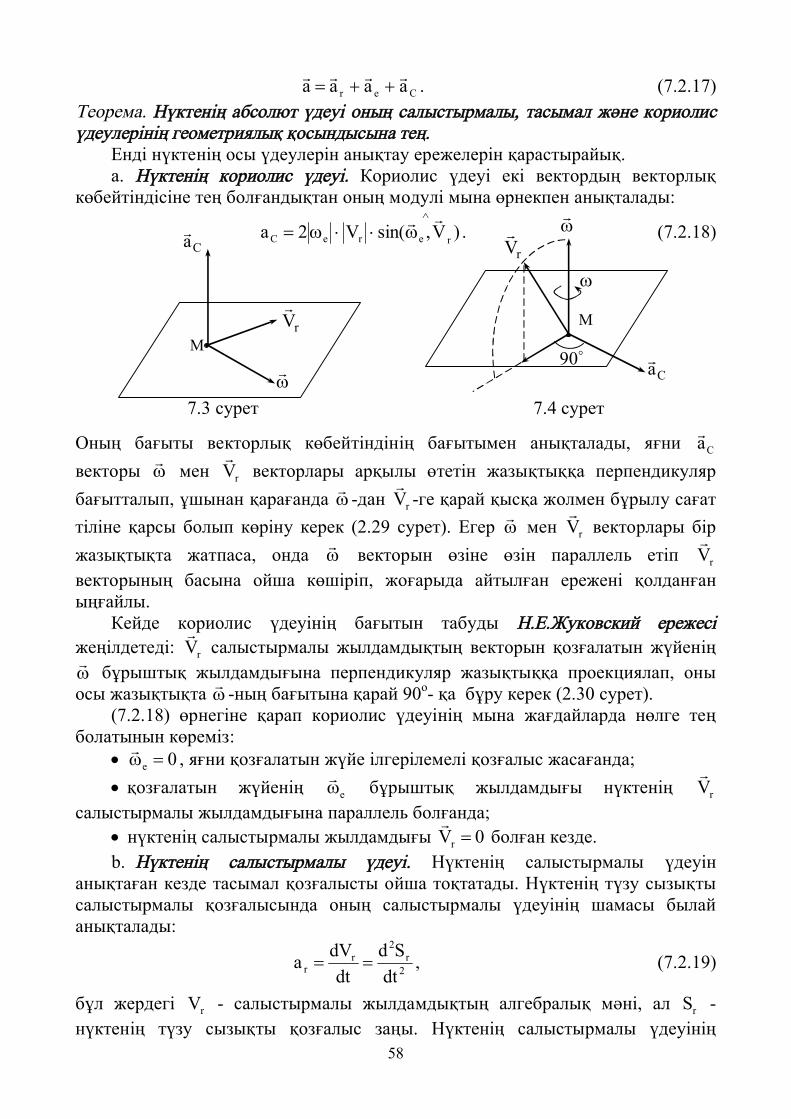
58
Cеr aaaa . (7.2.17)
Теорема. Нүктенің абсолют үдеуі оның салыстырмалы, тасымал және кориолис үдеулерінің геометриялық қосындысына тең.
Енді нүктенің осы үдеулерін анықтау ережелерін қарастырайық. a. Нүктенің кориолис үдеуі. Кориолис үдеуі екі вектордың векторлық
көбейтіндісіне тең болғандықтан оның модулі мына өрнекпен анықталады:
)V,sin(V2a rеrеC
. (7.2.18)
7.3 сурет 7.4 сурет
Оның бағыты векторлық көбейтіндінің бағытымен анықталады, яғни Ca векторы мен rV
векторлары арқылы өтетін жазықтыққа перпендикуляр
бағытталып, ұшынан қарағанда -дан rV
-ге қарай қысқа жолмен бұрылу сағат тіліне қарсы болып көріну керек (2.29 сурет). Егер мен rV
векторлары бір
жазықтықта жатпаса, онда векторын өзіне өзін параллель етіп rV
векторының басына ойша көшіріп, жоғарыда айтылған ережені қолданған ыңғайлы.
Кейде кориолис үдеуінің бағытын табуды Н.Е.Жуковский ережесі жеңілдетеді: rV
салыстырмалы жылдамдықтың векторын қозғалатын жүйенің
бұрыштық жылдамдығына перпендикуляр жазықтыққа проекциялап, оны осы жазықтықта -ның бағытына қарай 90о- қа бұру керек (2.30 сурет).
(7.2.18) өрнегіне қарап кориолис үдеуінің мына жағдайларда нөлге тең болатынын көреміз:
0е , яғни қозғалатын жүйе ілгерілемелі қозғалыс жасағанда;
қозғалатын жүйенің е бұрыштық жылдамдығы нүктенің rV
салыстырмалы жылдамдығына параллель болғанда; нүктенің салыстырмалы жылдамдығы 0Vr
болған кезде.
b. Нүктенің салыстырмалы үдеуі. Нүктенің салыстырмалы үдеуін анықтаған кезде тасымал қозғалысты ойша тоқтатады. Нүктенің түзу сызықты салыстырмалы қозғалысында оның салыстырмалы үдеуінің шамасы былай анықталады:
2r
2r
r dtSd
dtdVа , (7.2.19)
бұл жердегі rV - салыстырмалы жылдамдықтың алгебралық мәні, ал rS -нүктенің түзу сызықты қозғалыс заңы. Нүктенің салыстырмалы үдеуінің
М
rV
Ca
М
rV
Ca 90
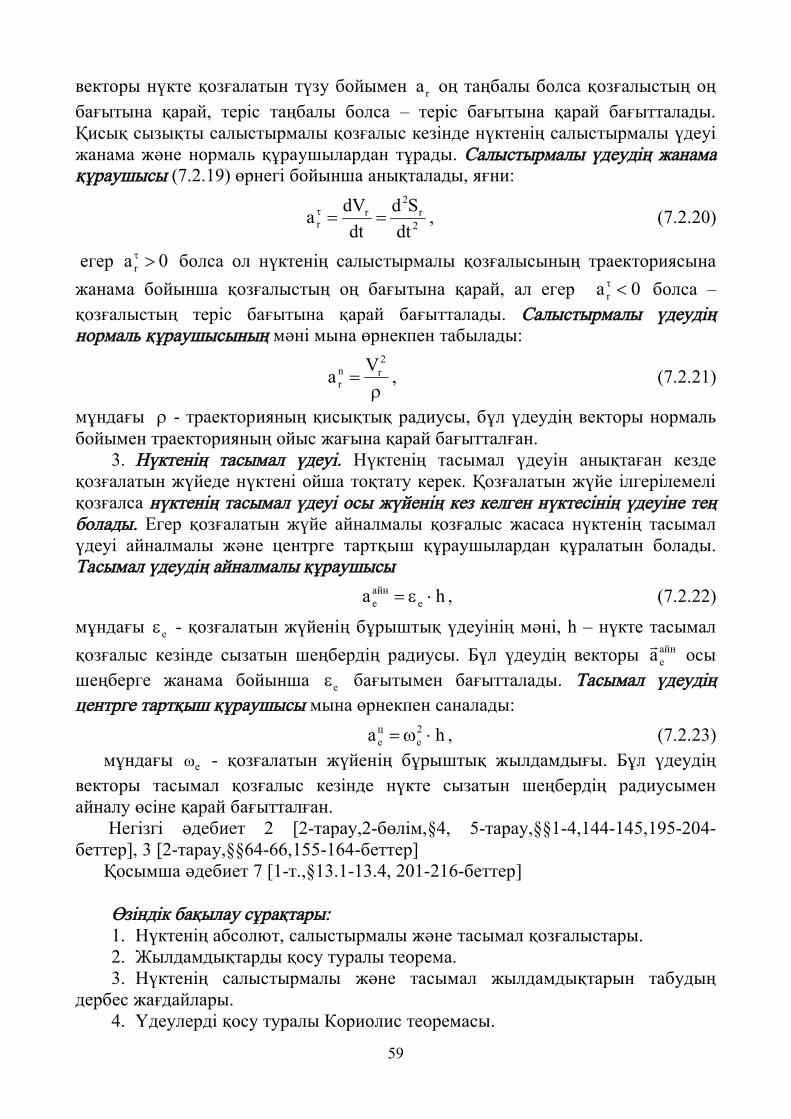
59
векторы нүкте қозғалатын түзу бойымен rа оң таңбалы болса қозғалыстың оң бағытына қарай, теріс таңбалы болса – теріс бағытына қарай бағытталады. Қисық сызықты салыстырмалы қозғалыс кезінде нүктенің салыстырмалы үдеуі жанама және нормаль құраушылардан тұрады. Салыстырмалы үдеудің жанама құраушысы (7.2.19) өрнегі бойынша анықталады, яғни:
2r
2r
r dtSd
dtdVа , (7.2.20)
егер 0a r болса ол нүктенің салыстырмалы қозғалысының траекториясына
жанама бойынша қозғалыстың оң бағытына қарай, ал егер 0a r болса –
қозғалыстың теріс бағытына қарай бағытталады. Салыстырмалы үдеудің нормаль құраушысының мәні мына өрнекпен табылады:
2rn
rVa , (7.2.21)
мұндағы - траекторияның қисықтық радиусы, бұл үдеудің векторы нормаль бойымен траекторияның ойыс жағына қарай бағытталған.
3. Нүктенің тасымал үдеуі. Нүктенің тасымал үдеуін анықтаған кезде қозғалатын жүйеде нүктені ойша тоқтату керек. Қозғалатын жүйе ілгерілемелі қозғалса нүктенің тасымал үдеуі осы жүйенің кез келген нүктесінің үдеуіне тең болады. Егер қозғалатын жүйе айналмалы қозғалыс жасаса нүктенің тасымал үдеуі айналмалы және центрге тартқыш құраушылардан құралатын болады. Тасымал үдеудің айналмалы құраушысы
ha еайне , (7.2.22)
мұндағы е - қозғалатын жүйенің бұрыштық үдеуінің мәні, h – нүкте тасымал қозғалыс кезінде сызатын шеңбердің радиусы. Бұл үдеудің векторы айн
еa осы шеңберге жанама бойынша е бағытымен бағытталады. Тасымал үдеудің центрге тартқыш құраушысы мына өрнекпен саналады:
ha 2е
це , (7.2.23)
мұндағы e - қозғалатын жүйенің бұрыштық жылдамдығы. Бұл үдеудің векторы тасымал қозғалыс кезінде нүкте сызатын шеңбердің радиусымен айналу өсіне қарай бағытталған.
Негізгі әдебиет 2 [2-тарау,2-бөлім,§4, 5-тарау,§§1-4,144-145,195-204-беттер], 3 [2-тарау,§§64-66,155-164-беттер]
Қосымша әдебиет 7 [1-т.,§13.1-13.4, 201-216-беттер]
Өзіндік бақылау сұрақтары: 1. Нүктенің абсолют, салыстырмалы және тасымал қозғалыстары. 2. Жылдамдықтарды қосу туралы теорема. 3. Нүктенің салыстырмалы және тасымал жылдамдықтарын табудың
дербес жағдайлары. 4. Үдеулерді қосу туралы Кориолис теоремасы.
60
5. Кориолис үдеуінің шамасын және бағытын анықтау. 6. Нүктенің салыстырмалы және тасымал үдеулерін табудың дербес
жағдайлары.
3-модуль 8-Дәріс.
3. Материалық нүкте динамикасы
3.1 Динамикаға кіріспе Динамика – материалдық денелердің қозғалысын оларға әсер ететін күштермен бірге зерттейтін теориялық механиканың бөлімі. Динамикада тек тұрақты күштер ғана емес, сонымен бірге уақытқа (тарту күштері), координатаға (гравитациялық тартылыс күштері, кулондық тартылыс күштері, серпімділік күштері) және жылдамдыққа (ортаның кедергі күштері) тәуелді айнымалы күштер де қарастырылады. Айнымалы күштер тұрақты күштердің заңдарына бағынады, яғни оларды қосуға, жіктеуге болады, олардың моменттері және т.б. болады.
3.2 Материалық нүкте динамикасы
Дене қозғалысы жалпы жағдайда дененің кескініне (формасына), дәлірек айтсақ дене бөлшектерінің өзара орналасуына, яғни массаларының таралуына тәуелді болады. Сондықтан динамикада дененің кескінін (массасының таралуын) елемей, массасы бар материялық нүкте ұғымын енгізеді. Материялық нүкте деп қозғалысын зерттегенде өлшемдерін ескермеуге болатын материалдық денені айтады.
3.3 Нүкте динамикасының негізгі заңдары
Ньютонның үш заңы материялық нүкте динамикасының негізгі заңдары болады. 1.Ньютонның бірінші заңы. Егер материялық нүктеге сырттан ешбір күш әсер етпесе немесе әсер ететін күштер жүйесі нөлге пара-пар болса, онда нүкте тыныштық күйде немесе бірқалыпты түзу сызықты қозғалыста болады. Ньютонның бірінші заңы орындалатын санақ жүйелері инерциалдық санақ жүйелері деп аталады. 2.Ньютонның екінші заңы (динамиканың негізгі заңы). Материялық нүктенің үдеуі оған әсер етуші күшке тура пропорционал, бағыты күшпен бағыттас. Нүкте массасы пропорционалдық коэффициенті болады. Бұл заңның математикалық өрнегі:
,maF amF . (3.3.1)
61
Егер денеге бірнеше n21 F...,,F,F
күштер әсер етсе Ньютонның екінші заңы былай жазылады:
n
1kkFam . (3.3.2)
3.Ньютонның үшінші заңы. Екі материялық нүкте бір-біріне модульдері тең, осы нүктелерді қосатын түзудің бойымен қарама-қарсы бағытталған күштермен әсер етеді (3.1 сурет).
Сондықтан, 12 FF
, ал 12 FF
.
3.4. Нүкте динамикасының негізгі мәселелері
Материялық нүктенің негізгі мәселелері еркін және еркін емес нүктелер үшін айтылады. Қозғалысы басқа денелермен шектелмеген нүктені еркін материялық нүкте дейміз. Осындай нүкте үшін динамиканың екі негізгі мәселесі қарастырылады: 1.Динамиканың бірінші негізгі мәселесі: Нүктенің массасы мен қозғалыс заңын біле отырып, оған әсер ететін күштерді анықтау. 2.Динамиканың екінші негізгі мәселесі: Нүктенің массасы мен оған әсер ететін күштерді біле отырып, оның қозғалыс заңын анықтау. Екі мәселе де Ньютонның екінші (3.2.2) заңының көмегімен шешіледі. Қозғалысы басқа денелермен шектелген нүкте еркін емес материялық нүкте деп аталады. Мұндай нүкте үшін оған әсер ететін барлық актив
n21 F...,,F,F
күштерге реакция күштерін қосу қажет. Оларды бір R
күшпен белгілейміз. Сонда Ньютонның екінші заңы былай жазылады:
RFamn
1kk
. (3.3.3)
(3.3.3) өрнегімен еркін емес нүкте үшін де динамиканың екі негізгі мәселесі шешіледі: 1.Динамиканың бірінші негізгі мәселесі: Нүктенің массасын, қозғалыс заңын және оған әсер ететін актив күштерді біле отырып, реакция күштерін анықтау. 2.Динамиканың екінші негізгі мәселесі: Нүктенің массасын және оған әсер ететін актив күштерді біле отырып, оның қозғалыс заңын және реакция күштерін анықтау.
3.5 Нүкте динамикасының бірінші негізгі мәселесінің шешуі Бұл мәселенің шешуін мысалдармен көрсетейік.
1F
2F
1 2 1
2
1F
2F
3.1 сурет
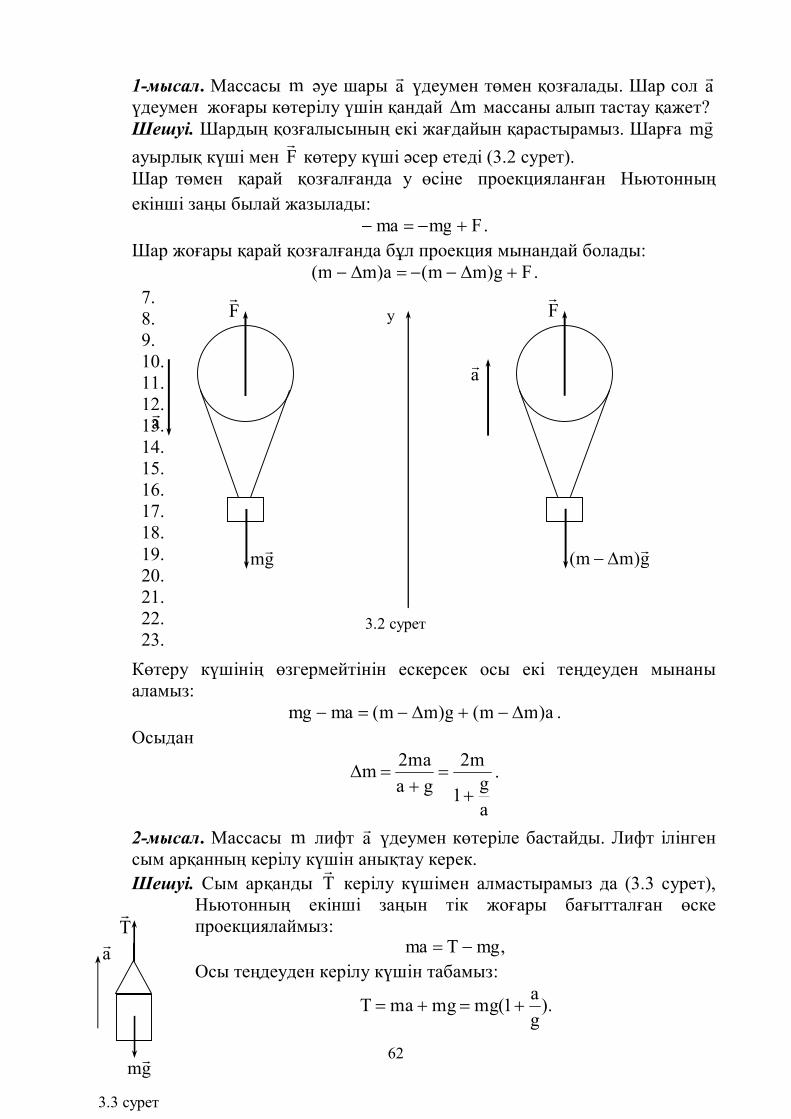
62
1-мысал. Массасы m әуе шары a үдеумен төмен қозғалады. Шар сол a үдеумен жоғары көтерілу үшін қандай m массаны алып тастау қажет? Шешуі. Шардың қозғалысының екі жағдайын қарастырамыз. Шарға gm ауырлық күші мен F
көтеру күші әсер етеді (3.2 сурет).
Шар төмен қарай қозғалғанда y өсіне проекцияланған Ньютонның екінші заңы былай жазылады:
Fmgma . Шар жоғары қарай қозғалғанда бұл проекция мынандай болады:
Fg)mm(a)mm( . 7. 8. 9. 10. 11. 12. 13. 14. 15. 16. 17. 18. 19. 20. 21. 22. 23.
Көтеру күшінің өзгермейтінін ескерсек осы екі теңдеуден мынаны аламыз:
a)mm(g)mm(mamg . Осыдан
ag1
m2ga
ma2m
.
2-мысал. Массасы m лифт a үдеумен көтеріле бастайды. Лифт ілінген сым арқанның керілу күшін анықтау керек. Шешуі. Сым арқанды Т
керілу күшімен алмастырамыз да (3.3 сурет),
Ньютонның екінші заңын тік жоғары бағытталған өске проекциялаймыз:
,mgТma Осы теңдеуден керілу күшін табамыз:
).gа1(mgmgmaТ
mg
F
a
(m m)g
F
a
у
3.2 сурет
mg
T
a
3.3 сурет
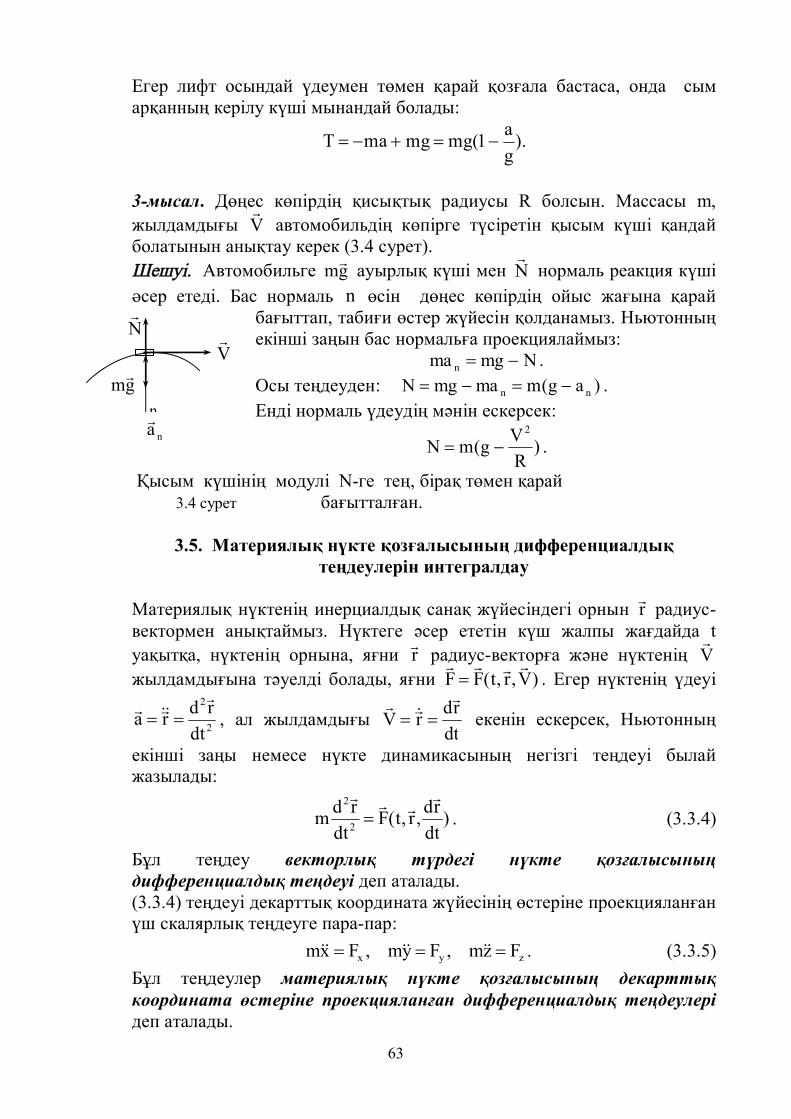
63
Егер лифт осындай үдеумен төмен қарай қозғала бастаса, онда сым арқанның керілу күші мынандай болады:
).gа1(mgmgmaТ
3-мысал. Дөңес көпірдің қисықтық радиусы R болсын. Массасы m, жылдамдығы V
автомобильдің көпірге түсіретін қысым күші қандай
болатынын анықтау керек (3.4 сурет). Шешуі. Автомобильге gm ауырлық күші мен N
нормаль реакция күші
әсер етеді. Бас нормаль n өсін дөңес көпірдің ойыс жағына қарай бағыттап, табиғи өстер жүйесін қолданамыз. Ньютонның екінші заңын бас нормальға проекциялаймыз:
Nmgma n . Осы теңдеуден: )ag(mmamgN nn . Енді нормаль үдеудің мәнін ескерсек:
)RVg(mN
2
.
Қысым күшінің модулі N-ге тең, бірақ төмен қарай 3.4 сурет бағытталған.
3.5. Материялық нүкте қозғалысының дифференциалдық
теңдеулерін интегралдау
Материялық нүктенің инерциалдық санақ жүйесіндегі орнын r радиус-вектормен анықтаймыз. Нүктеге әсер ететін күш жалпы жағдайда t уақытқа, нүктенің орнына, яғни r радиус-векторға және нүктенің V
жылдамдығына тәуелді болады, яғни )V,r,t(FF
. Егер нүктенің үдеуі
2
2
dtrdra
, ал жылдамдығы
dtrdrV
екенін ескерсек, Ньютонның
екінші заңы немесе нүкте динамикасының негізгі теңдеуі былай жазылады:
)dtrd,r,t(F
dtrdm 2
2
. (3.3.4)
Бұл теңдеу векторлық түрдегі нүкте қозғалысының дифференциалдық теңдеуі деп аталады. (3.3.4) теңдеуі декарттық координата жүйесінің өстеріне проекцияланған үш скалярлық теңдеуге пара-пар:
zyx Fzm,Fym,Fxm . (3.3.5) Бұл теңдеулер материялық нүкте қозғалысының декарттық координата өстеріне проекцияланған дифференциалдық теңдеулері деп аталады.
V
n gm
N
na
64
Егер жанама үдеу 2
2
dtd
dtdVa
, нормаль үдеу
2
nVa , ал толық
үдеудің бинормальға проекциясы 0а b екенін ескерсек, табиғи өстерге проекцияланған нүкте қозғалысының дифференциалдық теңдеулерін аламыз:
.F0,Fvm,FdtdVm bn
2
(3.3.6)
Соңғы өрнектен материялық нүктені қозғалысқа келтіретін күштің жанасушы жазықтықта жататынын көреміз. Нүкте қозғалысының дифференциалдық теңдеулері (3.3.5) және (3.3.6) түрінде жиі қолданылады. Нүкте динамикасының екінші мәселесінің шешуі оның қозғалысының (3.3.5) дифференциалдық теңдеулерін интегралдауға тіреледі Алдымен бұл теңдеулерді төмендегідей етіп жазамыз
).z,y,x,z,y,x,t(Fzm),z,y,x,z,y,x,t(Fym),z,y,x,z,y,x,t(Fxm
z
y
x
(3.3.7)
(3.3.7) теңдеулері x, y, z белгісіз функцияларға қатысты екінші ретті үш дифференциалдық теңдеулер жүйесін береді. Біз осы теңдеулер жүйесін интегралдап, С1,С2,…,С6 алты интегралдау тұрақтыларына тәуелді жалпы шешімін алдық делік:
).C,,C,C,t(fz),C,,C,C,t(fy),C,,C,C,t(fx
6213
6212
6211
(3.3.8)
Интегралдау тұрақтылары әртүрлі мәнге ие бола алады, сондықтан бірдей күш әсер ететін нүкте түрлі қозғалыс жасай алады. Сонымен, нүкте қозғалысының нақты заңын анықтау үшін тек күштің берілуі жеткіліксіз екен. (3.3.8) шешімі нақты мәселеге сәйкес болу үшін қозғалыстың бастапқы шарттарын беру қажет, яғни нүктенің бастапқы орны мен бастапқы жылдамдығын беру керек. Егер 0t бастапқы уақыт болса, осы уақыттағы координаталар мен жылдамдықтар нүкте қозғалысының бастапқы шарттары деп аталатын болады:
t=0:
.жылдамд.бастапzz,yy,xxорны.бастапzz,yy,xx
000
000
(3.3.9)
(3.3.9) бастапқы шарттар (3.3.8) шешімдері мен олардың бірінші туындыларына қойылады:
65
).C,,C,C,0(zz),C,,C,C,0(zz),C,,C,C,0(yy),C,,C,C,0(yy),C,,C,C,0(xx),C,,C,C,0(xx
62106210
62106210
62106210
(3.3.10)
Осылай алынған теңдеулерден интегралдау тұрақтылары табылады: ).6,...,3,2,1i(),z,y,x,z,y,x(C 000000ii (3.3.11)
Табылған тұрақтыларды (3.3.8) жалпы шешімге қойып, берілген бастапқы шарттарға сәйкес келетін есептің шешуін алатын боламыз.
НҮКТЕ ДИНАМИКАСЫНЫҢ ЖАЛПЫ ТЕОРЕМАЛАРЫ
Нүкте динамикасының жалпы теоремалары қозғалыстың
дифференциалдық теңдеулерін түрлендіру арқылы есеп шығаруға ыңғайлы қозғалыс сипаттамалары арасындағы тәуелділікті алуға мүмкіндік береді.
3.6 Нүктенің қозғалыс мөлшері. Күш импульсі
Нүкте қозғалысының негізгі динамикалық сипаттамаларының бірі –
қозғалыс мөлшері. Нүктенің қозғалыс мөлшері деп оның массасы
мен жылдамдық векторының көбейтіндісіне тең векторлық шаманы айтады: Vmq
.
Қозғалыс мөлшерінің векторы әрқашан нүктенің 3.5 сурет жылдамдығымен бағыттас болады (3. 5 сурет), модулі: Vmq .
Қозғалыс мөлшерінің өлшем бірлігі cH немесе .смкг Күш импульсі белгілі уақыт аралығындағы күш әсерін сипаттайды. Күштің
элементар импульсі деп күш векторының элементар уақытқа көбейтіндісіне тең векторлық шаманы айтады:
dtFSd
. (3.3.12) Бұл вектор күштің әсер ету сызығына бағыттас. Шекті уақыт аралығындағы күш импульсі 0-ден t1-ге дейінгі элементар
импульстен алынған интегралға тең:
1t
0
dtFS
. (3.3.13)
Күш импульсін екі жағдайда санауға болады. 1. Егер күштің модулі мен бағыты тұрақты болса ( constF
), онда
1tFS
. 2. Егер күш уақытқа тәуелді функция болса. Егер күш нүктенің орнына не жылдамдығына тәуелді болса, онда күштің
импульсін санау үшін нүктенің қозғалыс заңын білу қажет.
M V
Vmq
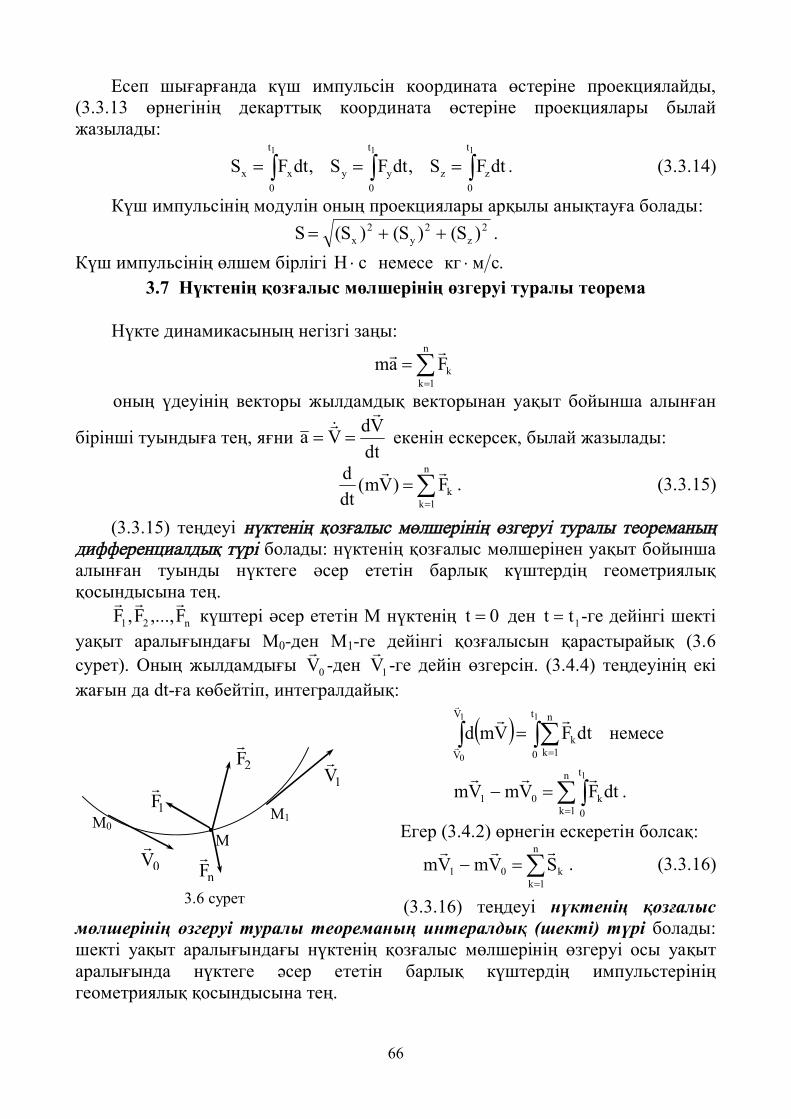
66
Есеп шығарғанда күш импульсін координата өстеріне проекциялайды, (3.3.13 өрнегінің декарттық координата өстеріне проекциялары былай жазылады:
111 t
0zz
t
0yy
t
0xx dtFS,dtFS,dtFS . (3.3.14)
Күш импульсінің модулін оның проекциялары арқылы анықтауға болады: 2
z2
y2
x )S()S()S(S . Күш импульсінің өлшем бірлігі cH немесе .смкг
3.7 Нүктенің қозғалыс мөлшерінің өзгеруі туралы теорема
Нүкте динамикасының негізгі заңы:
n
1kkFam
оның үдеуінің векторы жылдамдық векторынан уақыт бойынша алынған
бірінші туындыға тең, яғни dtVdVa
екенін ескерсек, былай жазылады:
n
1kkF)Vm(
dtd
. (3.3.15)
(3.3.15) теңдеуі нүктенің қозғалыс мөлшерінің өзгеруі туралы теореманың дифференциалдық түрі болады: нүктенің қозғалыс мөлшерінен уақыт бойынша алынған туынды нүктеге әсер ететін барлық күштердің геометриялық қосындысына тең.
n21 F,...,F,F
күштері әсер ететін М нүктенің 0t ден 1tt -ге дейінгі шекті уақыт аралығындағы М0-ден М1-ге дейінгі қозғалысын қарастырайық (3.6 сурет). Оның жылдамдығы 0V
-ден 1V
-ге дейін өзгерсін. (3.4.4) теңдеуінің екі
жағын да dt-ға көбейтіп, интегралдайық:
11
0
t
0
n
1kk
V
V
dtFVmd
немесе
n
1k
t
0k01
1
dtFVmVm
.
Егер (3.4.2) өрнегін ескеретін болсақ:
n
1kk01 SVmVm
. (3.3.16)
(3.3.16) теңдеуі нүктенің қозғалыс мөлшерінің өзгеруі туралы теореманың интералдық (шекті) түрі болады: шекті уақыт аралығындағы нүктенің қозғалыс мөлшерінің өзгеруі осы уақыт аралығында нүктеге әсер ететін барлық күштердің импульстерінің геометриялық қосындысына тең.
М0 М1
М
1F
2F
nF
0V
1V
3.6 сурет
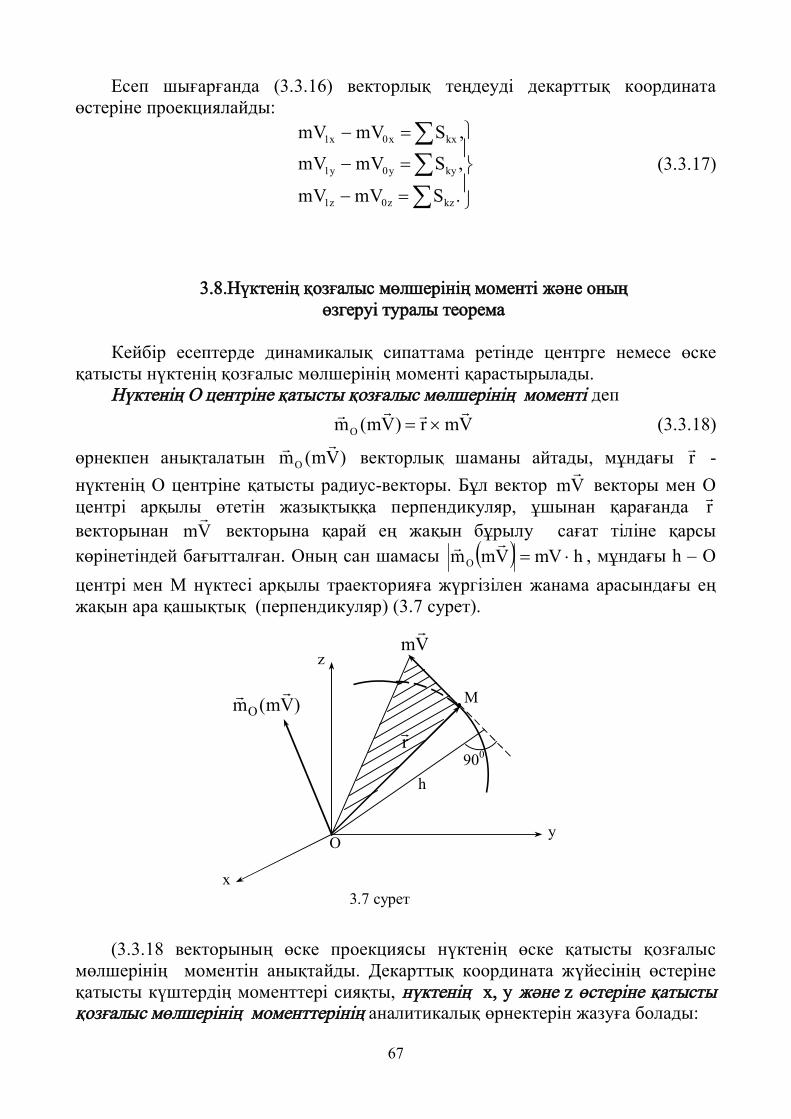
67
Есеп шығарғанда (3.3.16) векторлық теңдеуді декарттық координата өстеріне проекциялайды:
.SmVmV
,SmVmV
,SmVmV
kzz0z1
kyy0y1
kxx0x1
(3.3.17)
3.8.Нүктенің қозғалыс мөлшерінің моменті және оның өзгеруі туралы теорема
Кейбір есептерде динамикалық сипаттама ретінде центрге немесе өске
қатысты нүктенің қозғалыс мөлшерінің моменті қарастырылады. Нүктенің О центріне қатысты қозғалыс мөлшерінің моменті деп
Vmr)Vm(mO
(3.3.18)
өрнекпен анықталатын )Vm(mO
векторлық шаманы айтады, мұндағы r - нүктенің О центріне қатысты радиус-векторы. Бұл вектор Vm
векторы мен О
центрі арқылы өтетін жазықтыққа перпендикуляр, ұшынан қарағанда r векторынан Vm
векторына қарай ең жақын бұрылу сағат тіліне қарсы
көрінетіндей бағытталған. Оның сан шамасы hmVVmmO , мұндағы h – О
центрі мен М нүктесі арқылы траекторияға жүргізілен жанама арасындағы ең жақын ара қашықтық (перпендикуляр) (3.7 сурет).
(3.3.18 векторының өске проекциясы нүктенің өске қатысты қозғалыс
мөлшерінің моментін анықтайды. Декарттық координата жүйесінің өстеріне қатысты күштердің моменттері сияқты, нүктенің x, y және z өстеріне қатысты қозғалыс мөлшерінің моменттерінің аналитикалық өрнектерін жазуға болады:
О
x
y
z mV
r
h 900
M Om (mV)
3.7 сурет
68
.mVymVxVmm
,mVxmVzVmm
,mVzmVyVmm
xyz
zxy
yzx
(3.3.19)
Бұл теңдеулердегі x, y, z - нүкте координаталары, Vx, Vy, Vz – нүкте жылдамдығының координата өстеріне проекциялары.
Нүктенің қозғалыс мөлшері моментінің өзгеруі туралы теорема уақыт өткен сайынғы VmmO
векторының өзгеруін анықтайды. Дәлелдеу үшін М нүктесіне F
күші әсер етсін делік. Бұл күштің О центріне қатысты моменті
бізге статикадан белгілі теңдікпен анықталады: FrFmO
. (3.3.20)
Динамиканың amF негізгі заңын сол жағынан нүктенің r радиус-
векторымен векторлық көбейтеміз. Нәтижесінде мынаны аламыз: Framr
. (3.3.21)
Егер dtVdVa
екенін ескерсек, осы теңдеудің сол жағын былай
түрлендіруге болады:
Vmdtrd)Vmr(
dtd
dtVdmramr
.
Бірақ Vdtrd
, ал параллель векторлардың VmV
векторлық көбейтіндісі
нөлге тең. Сондықтан )Vmr(dtdamr
болады да (3.3.21) теңдеуін былай
жазамыз:
Fr)Vmr(dtd
.
Енді (3.3.20) өрнегін ескереміз, сонда:
Fm)Vmr(dtd
O
. (3.3.22)
Бұл теңдеу нүктенің центрге қатысты қозғалыс мөлшері моментінің өзгеруі туралы теореманы білдіреді: нүктенің кез келген О центріне қатысты қозғалыс мөлшері моментінен уақыт бойынша алынған туынды нүктеге әсер ететін күштің осы центрге қатысты моментіне тең.
(3.3.22) векторлық теңдеу үш скалярлық теңдеуге пара-пар. О нүктесін декарттық координата жүйесінің бас нүктесі етіп алып,
векторлық көбейтіндіні үшінші ретті анықтауыш ретінде жазсақ, (3.3.22)-дің орнына мынаны аламыз:
,FFFzyxkji
mVmVmVzyxkji
dtd
zyxzyx
69
осыдан анықтауыштарды бірінші қатары бойынша ашып және k,j,i
-ның коэффициенттерін теңестірсек:
.FyFx)mVymVx(dtd
,FxFz)mVxmVz(dtd
,FzFy)mVzmVy(dtd
xyxy
zxzx
yzyz
Осы теңдіктердің оң жағындағы өрнектер бізге статикадан белгілі F
күшінің z,y,x координата өстеріне қатысты моменттері болады. Сонымен, нәтижесінде:
).F(m)mVymVx(dtd
),F(m)mVxmVz(dtd
),F(m)mVzmVy(dtd
zxy
yzx
xyz
(3.3.23)
(3.3.23) теңдеулері нүктенің x, y, z координата өстеріне қатысты қозғалыс мөлшері моменттерінің өзгеруі туралы теорема болады: нүктенің кез келген өске қатысты қозғалыс мөлшері моментінен уақыт бойынша алынған туынды нүктеге әсер ететін күштің осы өске қатысты моментіне тең.
Қозғалыс мөлшері моментінің екі сақталу заңы бар: 1. Егер әсер ететін күштің бір центрге қатысты моменті нөлге тең болса,
онда нүктенің осы центрге қатысты қозғалыс мөлшері моментінің сандық мәні мен бағыты тұрақты болады. Бұл тұжырым (3.3.22) өрнегінен алынады. Себебі
0Fm0 болғандықтан 0)Vmr(
dtd
болады, демек .constVmr
2. Егер әсер ететін күштің бір өске қатысты моменті нөлге тең болса, онда нүктенің осы өске қатысты қозғалыс мөлшерінің моменті тұрақты болады. Бұл тұжырымды (3.3.23) өрнектері береді. Мысалы, 0Fmz
болсын, сонда
0)mVymVx(dtd
xy , демек .const)mVymVx( xy
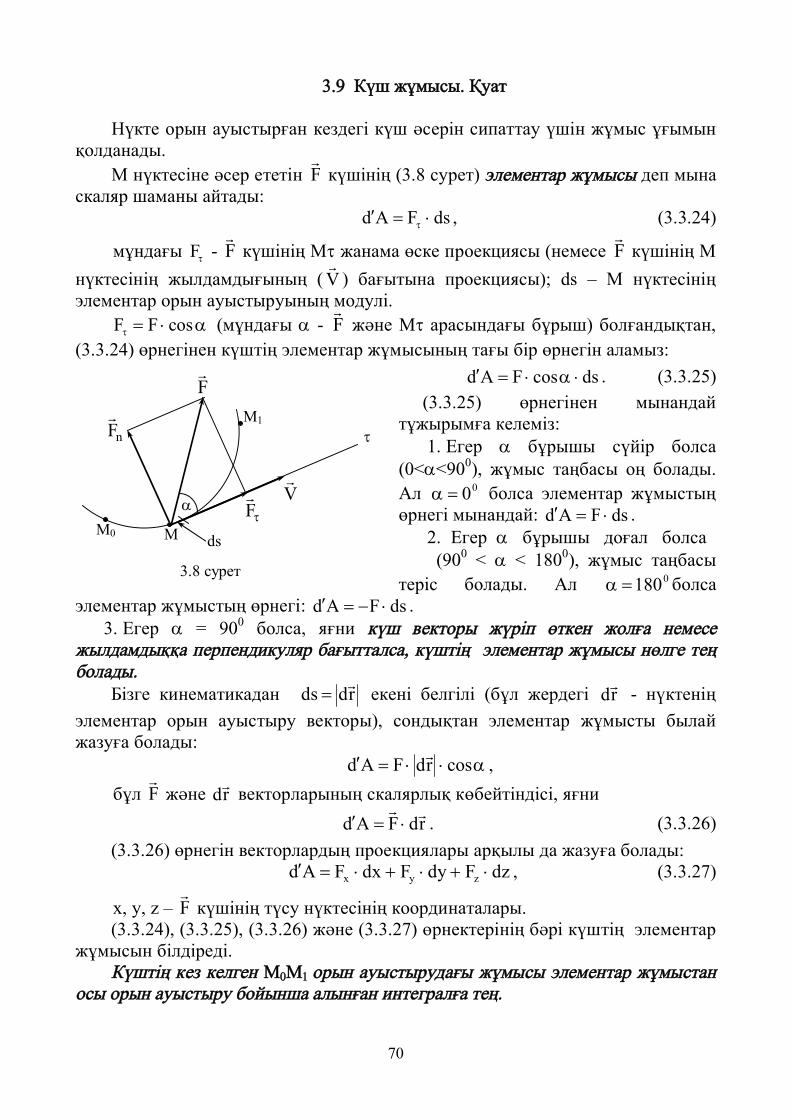
70
3.9 Күш жұмысы. Қуат
Нүкте орын ауыстырған кездегі күш әсерін сипаттау үшін жұмыс ұғымын қолданады.
М нүктесіне әсер ететін F
күшінің (3.8 сурет) элементар жұмысы деп мына скаляр шаманы айтады:
dsFAd , (3.3.24)
мұндағы F - F
күшінің М жанама өске проекциясы (немесе F
күшінің М нүктесінің жылдамдығының ( V
) бағытына проекциясы); ds – М нүктесінің
элементар орын ауыстыруының модулі. cosFF (мұндағы - F
және М арасындағы бұрыш) болғандықтан,
(3.3.24) өрнегінен күштің элементар жұмысының тағы бір өрнегін аламыз: dscosFAd . (3.3.25)
(3.3.25) өрнегінен мынандай тұжырымға келеміз:
1. Егер бұрышы сүйір болса (0<<900), жұмыс таңбасы оң болады. Ал 00 болса элементар жұмыстың өрнегі мынандай: dsFAd .
2. Егер бұрышы доғал болса (900 < < 1800), жұмыс таңбасы
теріс болады. Ал 0180 болса элементар жұмыстың өрнегі: dsFAd .
3. Егер = 900 болса, яғни күш векторы жүріп өткен жолға немесе жылдамдыққа перпендикуляр бағытталса, күштің элементар жұмысы нөлге тең болады.
Бізге кинематикадан rdds екені белгілі (бұл жердегі rd - нүктенің
элементар орын ауыстыру векторы), сондықтан элементар жұмысты былай жазуға болады:
cosrdFAd , бұл F
және rd векторларының скалярлық көбейтіндісі, яғни
rdFAd . (3.3.26)
(3.3.26) өрнегін векторлардың проекциялары арқылы да жазуға болады: dzFdyFdxFAd zyx , (3.3.27)
x, y, z – F
күшінің түсу нүктесінің координаталары. (3.3.24), (3.3.25), (3.3.26) және (3.3.27) өрнектерінің бәрі күштің элементар
жұмысын білдіреді. Күштің кез келген М0М1 орын ауыстырудағы жұмысы элементар жұмыстан
осы орын ауыстыру бойынша алынған интегралға тең.
М М0
М1
ds
V
F
F
nF
3.8 сурет
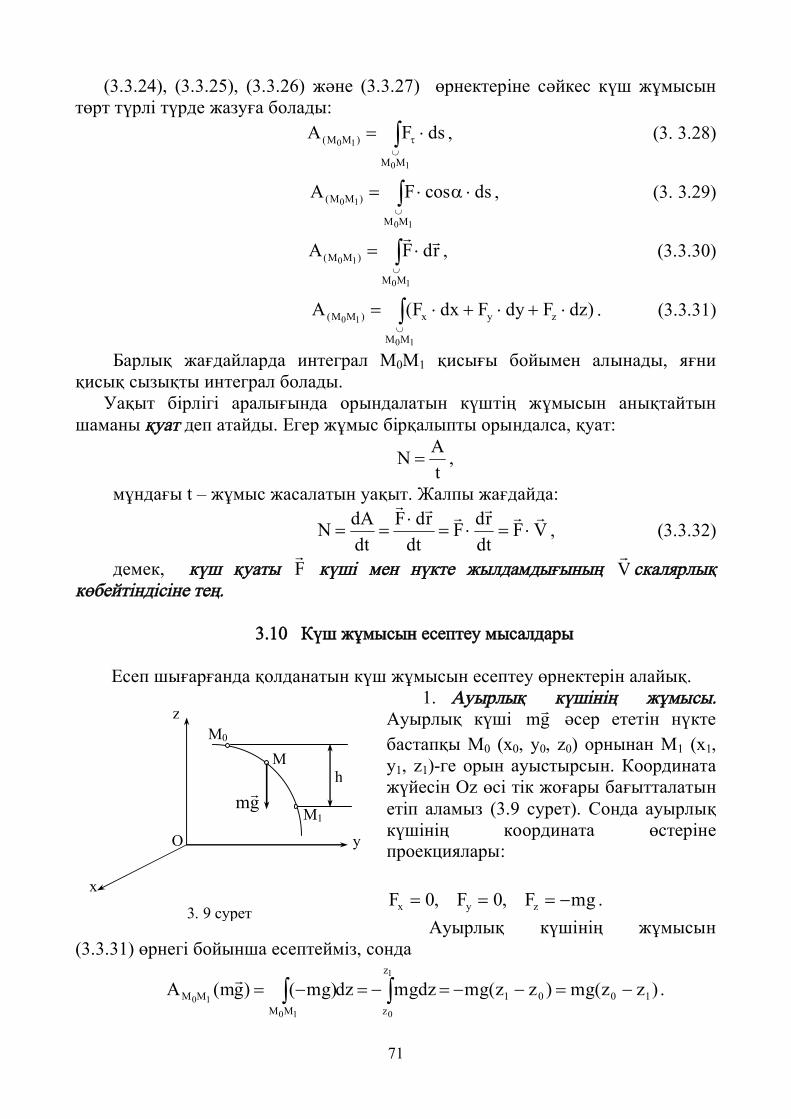
71
(3.3.24), (3.3.25), (3.3.26) және (3.3.27) өрнектеріне сәйкес күш жұмысын төрт түрлі түрде жазуға болады:
10
10
MM
)MM( dsFA , (3. 3.28)
10
10
MM
)MM( dscosFA , (3. 3.29)
10
10
MM
)MM( rdFA , (3.3.30)
10
10
MM
zyx)MM( )dzFdyFdxF(A . (3.3.31)
Барлық жағдайларда интеграл М0М1 қисығы бойымен алынады, яғни қисық сызықты интеграл болады.
Уақыт бірлігі аралығында орындалатын күштің жұмысын анықтайтын шаманы қуат деп атайды. Егер жұмыс бірқалыпты орындалса, қуат:
tAN ,
мұндағы t – жұмыс жасалатын уақыт. Жалпы жағдайда:
VFdtrdF
dtrdF
dtdAN
, (3.3.32)
демек, күш қуаты F
күші мен нүкте жылдамдығының V
скалярлық көбейтіндісіне тең.
3.10 Күш жұмысын есептеу мысалдары
Есеп шығарғанда қолданатын күш жұмысын есептеу өрнектерін алайық.
1. Ауырлық күшінің жұмысы. Ауырлық күші gm әсер ететін нүкте бастапқы М0 (x0, y0, z0) орнынан М1 (x1, y1, z1)-ге орын ауыстырсын. Координата жүйесін Oz өсі тік жоғары бағытталатын етіп аламыз (3.9 сурет). Сонда ауырлық күшінің координата өстеріне проекциялары:
mgF,0F,0F zyx .
Ауырлық күшінің жұмысын (3.3.31) өрнегі бойынша есептейміз, сонда
)zz(mg)zz(mgmgdzdz)mg()gm(A 10
z
z01
MMMM
1
01010
.
М0
М1
М
О
x
y
z
h mg
3. 9 сурет
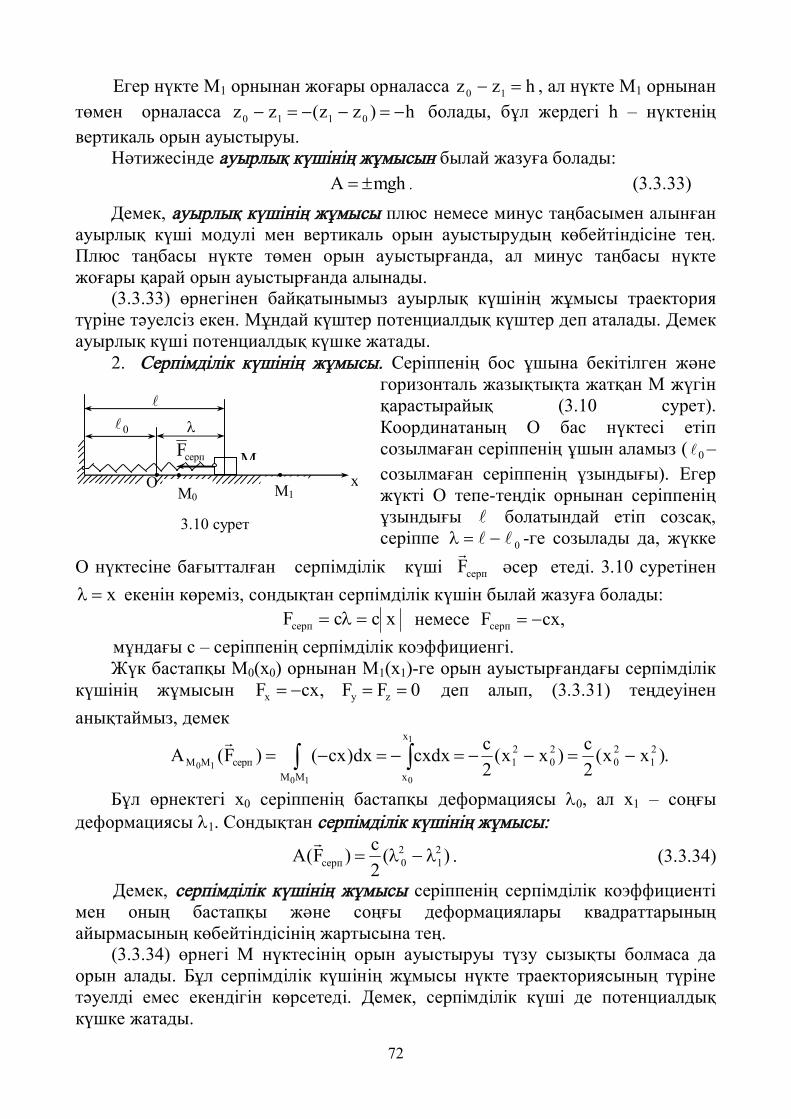
72
Егер нүкте М1 орнынан жоғары орналасса hzz 10 , ал нүкте М1 орнынан төмен орналасса h)zz(zz 0110 болады, бұл жердегі h – нүктенің вертикаль орын ауыстыруы.
Нәтижесінде ауырлық күшінің жұмысын былай жазуға болады: mghA . (3.3.33)
Демек, ауырлық күшінің жұмысы плюс немесе минус таңбасымен алынған ауырлық күші модулі мен вертикаль орын ауыстырудың көбейтіндісіне тең. Плюс таңбасы нүкте төмен орын ауыстырғанда, ал минус таңбасы нүкте жоғары қарай орын ауыстырғанда алынады.
(3.3.33) өрнегінен байқатынымыз ауырлық күшінің жұмысы траектория түріне тәуелсіз екен. Мұндай күштер потенциалдық күштер деп аталады. Демек ауырлық күші потенциалдық күшке жатады.
2. Серпімділік күшінің жұмысы. Серіппенің бос ұшына бекітілген және горизонталь жазықтықта жатқан М жүгін қарастырайық (3.10 сурет). Координатаның О бас нүктесі етіп созылмаған серіппенің ұшын аламыз ( 0 –созылмаған серіппенің ұзындығы). Егер жүкті О тепе-теңдік орнынан серіппенің ұзындығы болатындай етіп созсақ, серіппе 0 -ге созылады да, жүкке
О нүктесіне бағытталған серпімділік күші серпF
әсер етеді. 3.10 суретінен x екенін көреміз, сондықтан серпімділік күшін былай жазуға болады:
xccFсерп немесе ,cxFсерп мұндағы с – серіппенің серпімділік коэффициенгі. Жүк бастапқы М0(х0) орнынан М1(х1)-ге орын ауыстырғандағы серпімділік
күшінің жұмысын 0FF,cxF zyx деп алып, (3.3.31) теңдеуінен анықтаймыз, демек
.)xx(2с)xx(
2сcxdxdx)cx()F(A
10
1
010
MМ
21
20
20
21
x
xсерпMM
Бұл өрнектегі х0 серіппенің бастапқы деформациясы 0, ал х1 – соңғы деформациясы 1. Сондықтан серпімділік күшінің жұмысы:
)(2с)F(A 2
120серп
. (3.3.34)
Демек, серпімділік күшінің жұмысы серіппенің серпімділік коэффициенті мен оның бастапқы және соңғы деформациялары квадраттарының айырмасының көбейтіндісінің жартысына тең.
(3.3.34) өрнегі М нүктесінің орын ауыстыруы түзу сызықты болмаса да орын алады. Бұл серпімділік күшінің жұмысы нүкте траекториясының түріне тәуелді емес екендігін көрсетеді. Демек, серпімділік күші де потенциалдық күшке жатады.
x
серпF М O
0
М1 М0
3.10 сурет
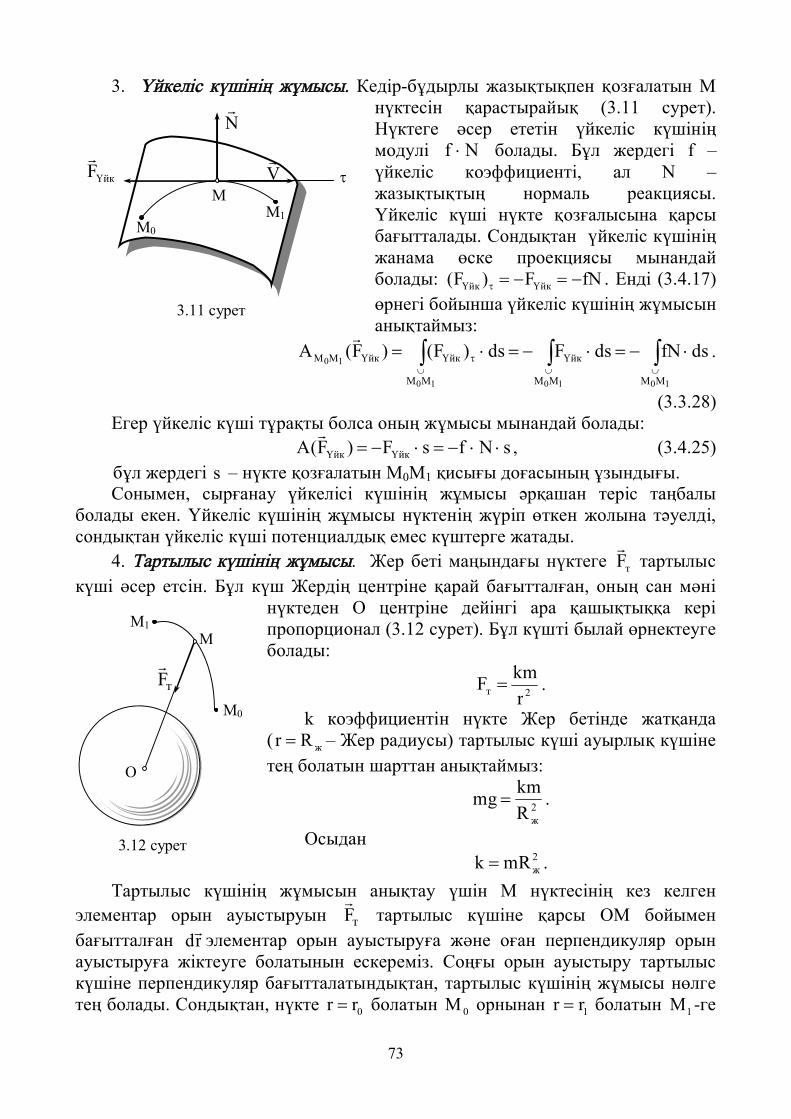
73
3. Үйкеліс күшінің жұмысы. Кедір-бұдырлы жазықтықпен қозғалатын М нүктесін қарастырайық (3.11 сурет). Нүктеге әсер ететін үйкеліс күшінің модулі Nf болады. Бұл жердегі f – үйкеліс коэффициенті, ал N – жазықтықтың нормаль реакциясы. Үйкеліс күші нүкте қозғалысына қарсы бағытталады. Сондықтан үйкеліс күшінің жанама өске проекциясы мынандай болады: fNF)F( йкйк . Енді (3.4.17) өрнегі бойынша үйкеліс күшінің жұмысын анықтаймыз:
101010
10
MMMM
йк
MM
йкйкMM dsfNdsFds)F()F(A
.
(3.3.28) Егер үйкеліс күші тұрақты болса оның жұмысы мынандай болады:
sNfsF)F(A йкйк
, (3.4.25)
бұл жердегі s – нүкте қозғалатын М0М1 қисығы доғасының ұзындығы. Сонымен, сырғанау үйкелісі күшінің жұмысы әрқашан теріс таңбалы
болады екен. Үйкеліс күшінің жұмысы нүктенің жүріп өткен жолына тәуелді, сондықтан үйкеліс күші потенциалдық емес күштерге жатады.
4. Тартылыс күшінің жұмысы. Жер беті маңындағы нүктеге тF
тартылыс күші әсер етсін. Бұл күш Жердің центріне қарай бағытталған, оның сан мәні
нүктеден О центріне дейінгі ара қашықтыққа кері пропорционал (3.12 сурет). Бұл күшті былай өрнектеуге болады:
2т rkmF .
k коэффициентін нүкте Жер бетінде жатқанда ( жRr – Жер радиусы) тартылыс күші ауырлық күшіне тең болатын шарттан анықтаймыз:
2жR
kmmg .
Осыдан 2жmRk .
Тартылыс күшінің жұмысын анықтау үшін М нүктесінің кез келген элементар орын ауыстыруын тF
тартылыс күшіне қарсы ОМ бойымен
бағытталған rd элементар орын ауыстыруға және оған перпендикуляр орын ауыстыруға жіктеуге болатынын ескереміз. Соңғы орын ауыстыру тартылыс күшіне перпендикуляр бағытталатындықтан, тартылыс күшінің жұмысы нөлге тең болады. Сондықтан, нүкте 0rr болатын 0М орнынан 1rr болатын 1М -ге
М
М0 М1
V
йкF
N
3.11 сурет
О
тF
М0
М1 М
3.12 сурет
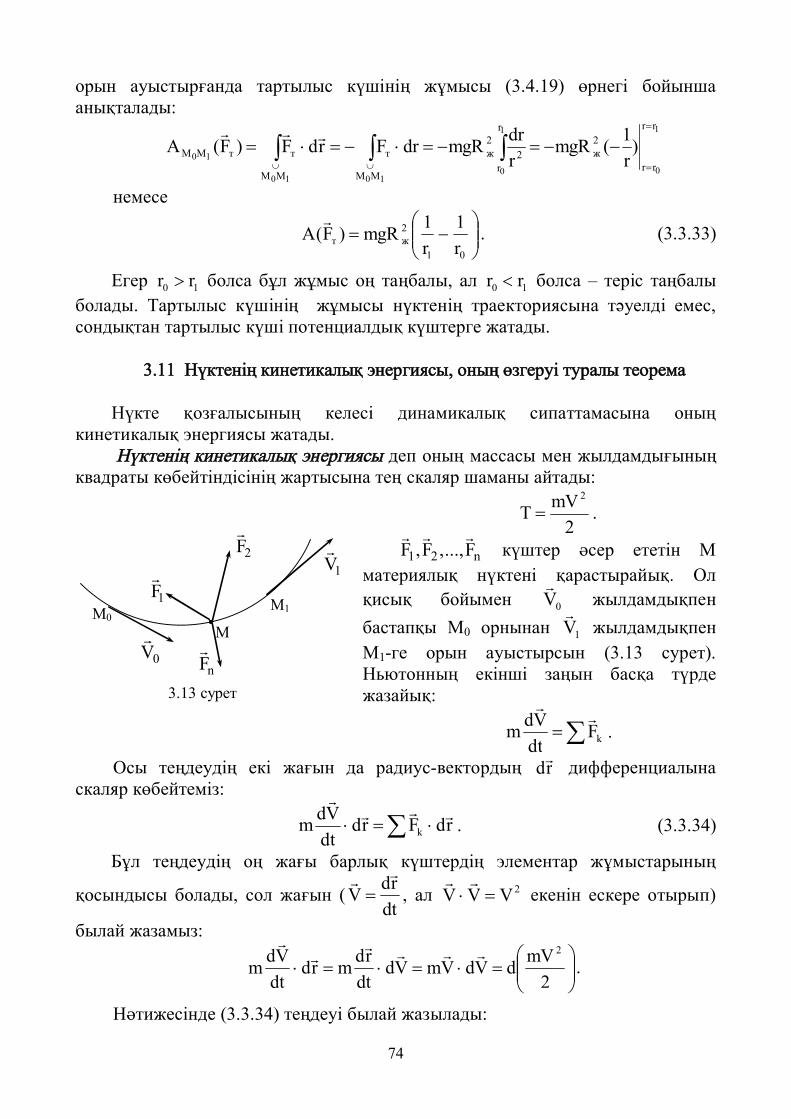
74
орын ауыстырғанда тартылыс күшінің жұмысы (3.4.19) өрнегі бойынша анықталады:
1
0
1
01010
10
rr
rr
2ж
r
r2
2ж
MM
т
MM
ттMM )r1(mgR
rdrmgRdrFrdF)F(A
немесе
01
2жт r
1r1mgR)F(A
. (3.3.33)
Егер 10 rr болса бұл жұмыс оң таңбалы, ал 10 rr болса – теріс таңбалы болады. Тартылыс күшінің жұмысы нүктенің траекториясына тәуелді емес, сондықтан тартылыс күші потенциалдық күштерге жатады.
3.11 Нүктенің кинетикалық энергиясы, оның өзгеруі туралы теорема
Нүкте қозғалысының келесі динамикалық сипаттамасына оның
кинетикалық энергиясы жатады. Нүктенің кинетикалық энергиясы деп оның массасы мен жылдамдығының
квадраты көбейтіндісінің жартысына тең скаляр шаманы айтады:
2mVT
2
.
n21 F...,,F,F
күштер әсер ететін М материялық нүктені қарастырайық. Ол қисық бойымен 0V
жылдамдықпен
бастапқы М0 орнынан 1V
жылдамдықпен М1-ге орын ауыстырсын (3.13 сурет). Ньютонның екінші заңын басқа түрде жазайық:
kFdtVdm
.
Осы теңдеудің екі жағын да радиус-вектордың rd дифференциалына скаляр көбейтеміз:
rdFrddtVdm k
. (3.3.34)
Бұл теңдеудің оң жағы барлық күштердің элементар жұмыстарының
қосындысы болады, сол жағын (dtrdV
, ал 2VVV
екенін ескере отырып)
былай жазамыз:
2mVdVdVmVd
dtrdmrd
dtVdm
2
.
Нәтижесінде (3.3.34) теңдеуі былай жазылады:
М0 М1
М
1F
2F
nF
0V
1V
3.13 сурет
75
k
2
Ad2
mVd , (3.3.35)
бұл теңдеу нүктенің кинетикалық энергиясының өзгеруі туралы теореманың дифференциалдық түрі деп аталады: нүктенің кинетикалық энергиясының толық дифференциалы нүктеге әсер ететін барлық күштердің элементар жұмыстарының қосындысына тең.
Егер (3.3.28) теңдеуіндегі барлық мүшелерді уақытқа тәуелді функция деп қарастырсақ және (3.3.34) өрнегін ескеріп, (3.3.35) теңдеуін dt -ға бөлсек мынаны аламыз:
k
k2
NdtAd
2mV
dtd . (3.3.36)
яғни нүктенің кинетикалық энергиясының толық дифференциалы нүктеге әсер ететін барлық күштердің қуаттарының қосындысына тең.
Нүкте бастапқы М0 орыннан М1-ге орын ауыстырғанда оның бастапқы жылдамдығы 0V
-ден 1V
-ге дейін өзгеретінін ескеріп, (3.3.36) теңдеуін
интегралдаймыз, сонда:
10
1
0 MMk
V
V
2
Ad2
mVd .
Осыдан
k
20
21 A
2mV
2mV . (3.3.37)
(3.3.37) теңдеуі нүктенің кинетикалық энергиясының өзгеруі туралы теореманың интералдық (шекті) түрін береді: нүкте шекті орын ауыстырғанда оның кинетикалық энергиясының өзгеруі осы орын ауыстыруда нүктеге әсер ететін барлық күштердің жұмыстарының алгебралық қосындысына тең.
Материалық нүкте үшін Даламбер принципі Материялық нүкте үшін Даламбер принципі нүкте динамикасының
есептерін статиканың қарапайым әдістерімен шығаруға мүмкіндік береді. n21 F,...,F,F
актив күштері мен N
реакция күші әсер ететін материялық нүктені қарастырайық. Бұл нүкте үшін динамиканың негізгі заңы:
NFam k
.
Осы заңды былай жазайық: 0)am(NFk
. (3.3.38) Мынадай белгілеу енгізейік:
amФ . (3.3.39)
Ф
векторы материялық нүктенің инерция күші деп аталады. Бұл күштің модулі нүктенің массасы мен үдеуінің көбейтіндісіне тең, ал бағыты үдеу векторына қарсы бағытталады.
(3.3.39) өрнегін ескерсек (3.3.38 теңдеуі мынадай түрге келеді:
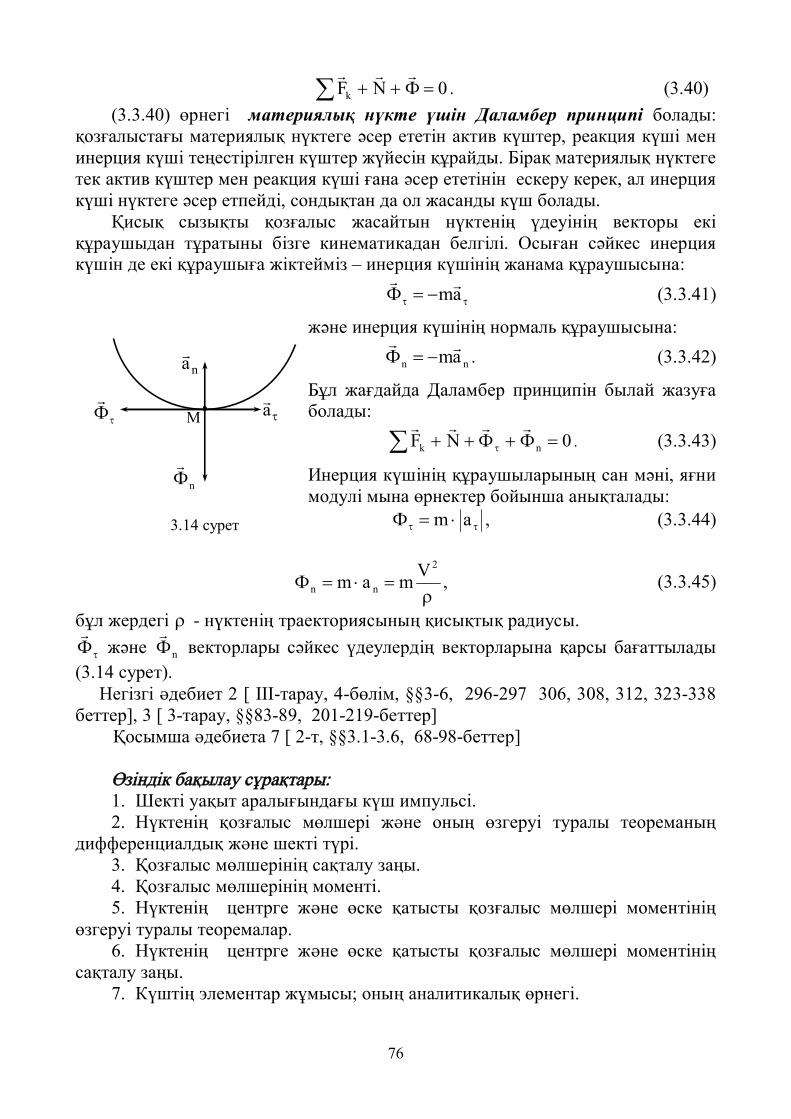
76
0ФNFk
. (3.40) (3.3.40) өрнегі материялық нүкте үшін Даламбер принципі болады:
қозғалыстағы материялық нүктеге әсер ететін актив күштер, реакция күші мен инерция күші теңестірілген күштер жүйесін құрайды. Бірақ материялық нүктеге тек актив күштер мен реакция күші ғана әсер ететінін ескеру керек, ал инерция күші нүктеге әсер етпейді, сондықтан да ол жасанды күш болады.
Қисық сызықты қозғалыс жасайтын нүктенің үдеуінің векторы екі құраушыдан тұратыны бізге кинематикадан белгілі. Осыған сәйкес инерция күшін де екі құраушыға жіктейміз – инерция күшінің жанама құраушысына:
amФ (3.3.41)
және инерция күшінің нормаль құраушысына:
nn amФ . (3.3.42)
Бұл жағдайда Даламбер принципін былай жазуға болады:
0ФФNF nk
. (3.3.43)
Инерция күшінің құраушыларының сан мәні, яғни модулі мына өрнектер бойынша анықталады:
amФ , (3.3.44)
2
nnVmamФ , (3.3.45)
бұл жердегі - нүктенің траекториясының қисықтық радиусы.
Ф
және nФ
векторлары сәйкес үдеулердің векторларына қарсы бағаттылады (3.14 сурет).
Негізгі әдебиет 2 [ III-тарау, 4-бөлім, §§3-6, 296-297 306, 308, 312, 323-338 беттер], 3 [ 3-тарау, §§83-89, 201-219-беттер]
Қосымша әдебиета 7 [ 2-т, §§3.1-3.6, 68-98-беттер]
Өзіндік бақылау сұрақтары: 1. Шекті уақыт аралығындағы күш импульсі. 2. Нүктенің қозғалыс мөлшері және оның өзгеруі туралы теореманың
дифференциалдық және шекті түрі. 3. Қозғалыс мөлшерінің сақталу заңы. 4. Қозғалыс мөлшерінің моменті. 5. Нүктенің центрге және өске қатысты қозғалыс мөлшері моментінің
өзгеруі туралы теоремалар. 6. Нүктенің центрге және өске қатысты қозғалыс мөлшері моментінің
сақталу заңы. 7. Күштің элементар жұмысы; оның аналитикалық өрнегі.
М a
na
Ф
nФ
3.14 сурет
77
8. Ауырлық күшінің, серпімділік күшінің, үйкеліс күшінің және тартылыс күшінің жұмысы.
9. Нүктенің кинетикалық энергиясының өрнегі. 10. Нүктенің кинетикалық энергиясының өзгеруі туралы теореманың
дифференциалдық және интегралдық түрі. 11. Күш өрісі мен потенциалдық күш өрісі ұғымдары. 12. Потенциалдық күш өрісінің күштік функциясы және оның әсер етуші
күшпен байланысы. 13. Нүкте потенциалдық күш өрісінде қозғалғандағы күш жұмысының
анықтамасы. 14. Потенциалдық энергия. 15. Ауырлық күші, серпімділік күші және тартылыс күші өрістерінің
потенциалдық энергиясының өрнектері. 16. Материялық нүкте үшін Даламбер принципі. 17. Инерция күші. 18. Инерция күшінің жанама және нормаль құраушылары. Олардың модулі
мен бағыты.
Дәріс -9.
4 Механикалық жүйе динамикасына кіріспе
4.1 Механикалық жүйе динамикасына кіріспе
Нүкте динамикасында күштер әсеріндегі бір материялық нүктенің қозғалыс заңдары зерттелді. Енді материялық нүктелердің механикалық жүйесінің қозғалысын қарастырамыз.
Қозғалыстары мен орны өзара тәуелді болып келетін материялық нүктелер жиынтығы механикалық жүйе деп аталады. Қатты дене өзгермейтін механикалық жүйе болып табылады.
Механикалық жүйе ретінде күн жүйесін қарастыруға болады, өйткені бұл жүйенің барлық денелері өзара тартылыс күштерімен байланысады.
4.1.1 Механикалық жүйенің массасы және массалар центрі
Жүйедегі нүктелердің массаларының қосындысына тең шама жүйенің
массасы деп аталады:
,mMn
1kk
(4.1.1)
мұндағы mk – k - нөмірлі нүктенің массасы, ал n – жүйедегі нүктелер саны. Механикалық жүйенің массалар центрі немесе инерция центрі деп
радиус-векторы мына өрнекпен анықталатын геометриялық нүктені айтады:
78
,M
rmr
k
n
1kk
C
(4.1.2)
осыдан массалар центрінің координаталарын аламыз:
.M
zmz,
M
ymy,
M
xmx
k
n
1kk
C
k
n
1kk
C
k
n
1kk
C
(4.1.3)
Бұл өрнектердегі kr
мен kkk z,y,x – k - нөмірлі нүктенің радиус-векторы мен координаталары.
4.1.2 Күштердің классификациясы
Статика бөлімі мен нүкте динамикасындағыдай, жүйеге әсер ететін
күштерді байланыстарға тәуелсіз актив күштерге және реакция күштеріне бөлуге болады.
Сонымен қатар механикалық жүйе динамикасында күштерді сыртқы және ішкі күштер деп те бөледі. Жүйеге кірмейтін денелердің жүйе нүктелеріне әсерінен пайда болатын күштер сыртқы күштер деп аталады. Жүйе нүктелерінің өзара әсерінен туатын күштер ішкі күштер деп аталады. Сыртқы күштерді eF
, ал ішкі күштерді iF
деп белгілейміз. Мұндағы «e» және «i»
индекстері француздың exterieur – сыртқы және interieur – ішкі деген сөздерінің бірінші әріптері.
Бір күштің өзі кейде сыртқы, кейде ішкі күш болуы мүмкін. Мысалы, күн жүйесін қарастырғанда жердің күнге тартылыс күші ішкі күшке жатады. Егер жердің жалғыз өзінің траекториясы мен қозғалысын қарастырсақ, аталған күш сыртқы күш болады.
Жүйенің ішкі күштерінің екі қасиеті бар. Бірінші қасиет. Барлық ішкі күштердің геометриялық қосындысы нөлге
тең:
0Fn
1k
ik
. (4.1.4)
Екінші қасиет. Жүйенің барлық ішкі күштерінің кез келген центрге қатысты моменттерінің геометриялық қосындысы нөлге тең:
0)F(mn
1k
ik0
. (4.1.5)
(4.1.4) және (4.1.5) теңдіктері ішкі күштер жүйенің әртүрлі нүктесіне түскендіктен, олардың бірін-бірі теңестіретінін білдірмейді.
4.2 ИНЕРЦИЯ МОМЕНТТЕРІ
Механикалық жүйенің қозғалысы оның массасына, әсер ететін күштерге
және жүйедегі массаның таралуына тәуелді. Жүйедегі массаның таралуы оның массалар центрінің орнымен және инерция моментімен сипатталады.
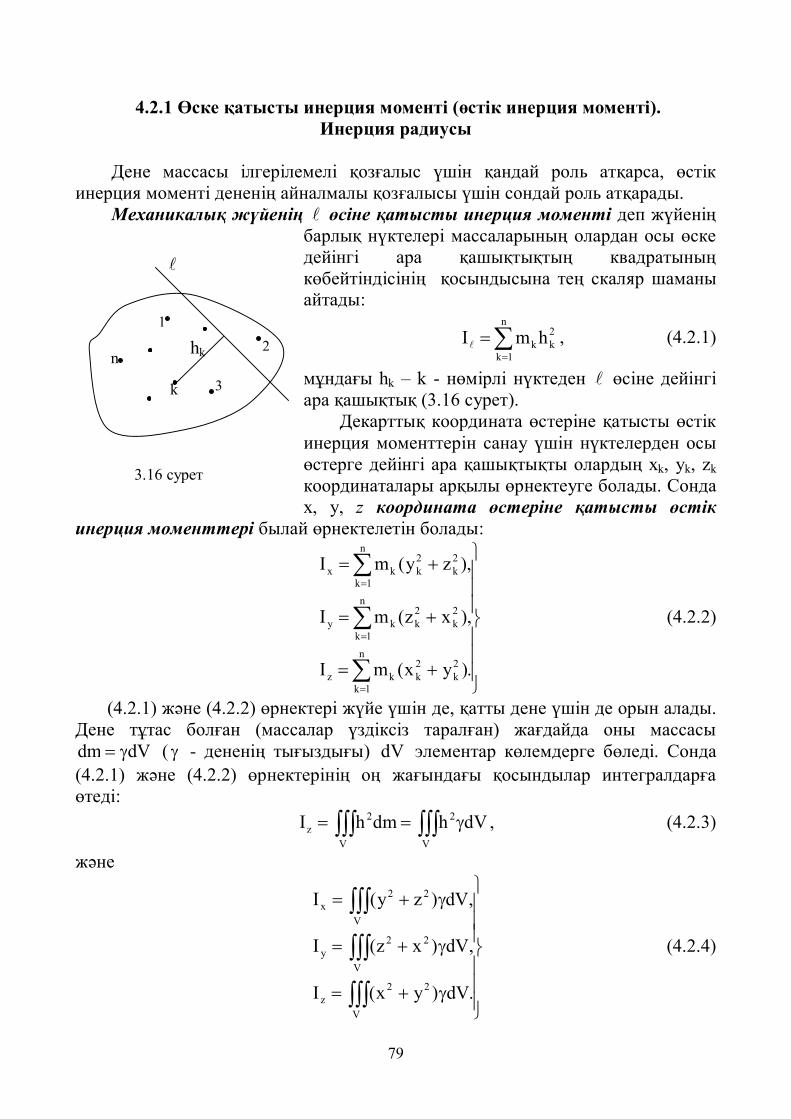
79
4.2.1 Өске қатысты инерция моменті (өстік инерция моменті).
Инерция радиусы
Дене массасы ілгерілемелі қозғалыс үшін қандай роль атқарса, өстік инерция моменті дененің айналмалы қозғалысы үшін сондай роль атқарады.
Механикалық жүйенің өсіне қатысты инерция моменті деп жүйенің барлық нүктелері массаларының олардан осы өске дейінгі ара қашықтықтың квадратының көбейтіндісінің қосындысына тең скаляр шаманы айтады:
n
1k
2kk hmI , (4.2.1)
мұндағы hk – k - нөмірлі нүктеден өсіне дейінгі ара қашықтық (3.16 сурет).
Декарттық координата өстеріне қатысты өстік инерция моменттерін санау үшін нүктелерден осы өстерге дейінгі ара қашықтықты олардың xk, yk, zk координаталары арқылы өрнектеуге болады. Сонда x, y, z координата өстеріне қатысты өстік
инерция моменттері былай өрнектелетін болады:
.)yx(mI
,)xz(mI
,)zy(mI
n
1k
2k
2kkz
n
1k
2k
2kky
n
1k
2k
2kkx
(4.2.2)
(4.2.1) және (4.2.2) өрнектері жүйе үшін де, қатты дене үшін де орын алады. Дене тұтас болған (массалар үздіксіз таралған) жағдайда оны массасы
dVdm ( - дененің тығыздығы) dV элементар көлемдерге бөледі. Сонда (4.2.1) және (4.2.2) өрнектерінің оң жағындағы қосындылар интегралдарға өтеді:
V V
22z dVhdmhI , (4.2.3)
және
.dV)yx(I
,dV)xz(I
,dV)zy(I
V
22z
V
22y
V
22x
(4.2.4)
1
2
k 3
n hk
3.16 сурет
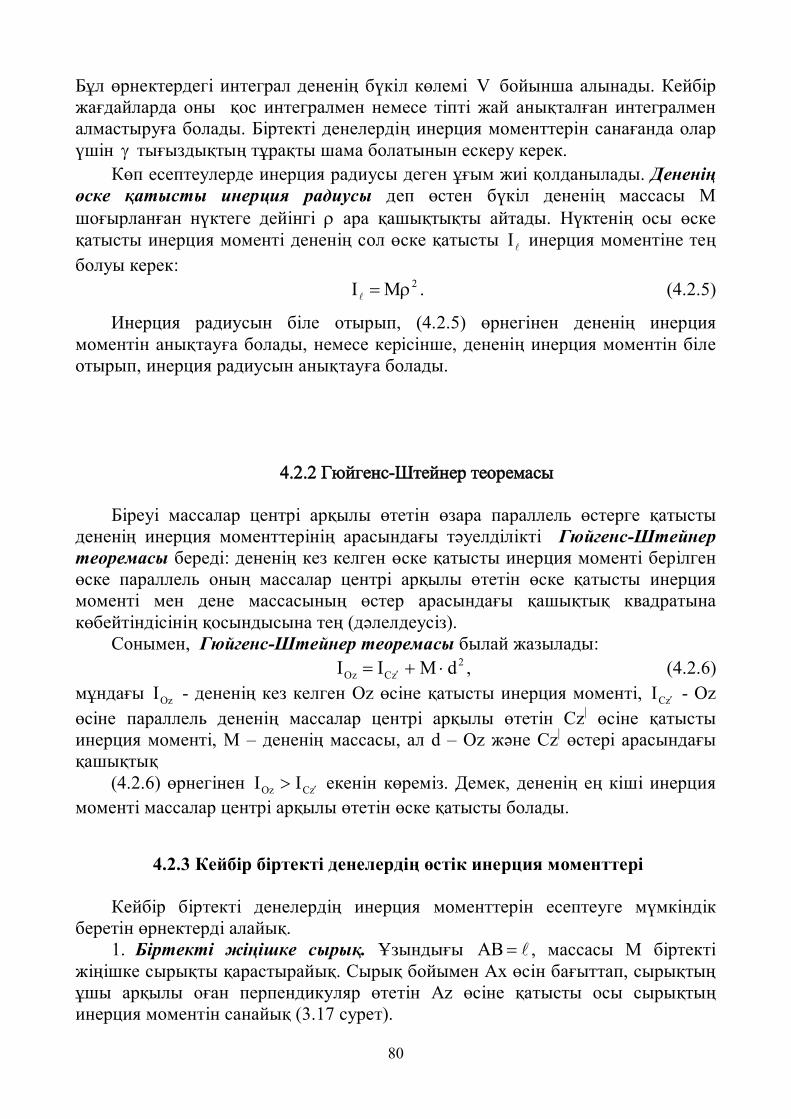
80
Бұл өрнектердегі интеграл дененің бүкіл көлемі V бойынша алынады. Кейбір жағдайларда оны қос интегралмен немесе тіпті жай анықталған интегралмен алмастыруға болады. Біртекті денелердің инерция моменттерін санағанда олар үшін тығыздықтың тұрақты шама болатынын ескеру керек.
Көп есептеулерде инерция радиусы деген ұғым жиі қолданылады. Дененің өске қатысты инерция радиусы деп өстен бүкіл дененің массасы М шоғырланған нүктеге дейінгі ара қашықтықты айтады. Нүктенің осы өске қатысты инерция моменті дененің сол өске қатысты I инерция моментіне тең болуы керек:
2MI . (4.2.5)
Инерция радиусын біле отырып, (4.2.5) өрнегінен дененің инерция моментін анықтауға болады, немесе керісінше, дененің инерция моментін біле отырып, инерция радиусын анықтауға болады.
4.2.2 Гюйгенс-Штейнер теоремасы Біреуі массалар центрі арқылы өтетін өзара параллель өстерге қатысты
дененің инерция моменттерінің арасындағы тәуелділікті Гюйгенс-Штейнер теоремасы береді: дененің кез келген өске қатысты инерция моменті берілген өске параллель оның массалар центрі арқылы өтетін өске қатысты инерция моменті мен дене массасының өстер арасындағы қашықтық квадратына көбейтіндісінің қосындысына тең (дәлелдеусіз).
Сонымен, Гюйгенс-Штейнер теоремасы былай жазылады: 2
zCOz dMII , (4.2.6) мұндағы OzI - дененің кез келген Oz өсіне қатысты инерция моменті, zCI - Oz өсіне параллель дененің массалар центрі арқылы өтетін Cz| өсіне қатысты инерция моменті, М – дененің массасы, ал d – Oz және Cz| өстері арасындағы қашықтық
(4.2.6) өрнегінен OzI zCI екенін көреміз. Демек, дененің ең кіші инерция моменті массалар центрі арқылы өтетін өске қатысты болады.
4.2.3 Кейбір біртекті денелердің өстік инерция моменттері
Кейбір біртекті денелердің инерция моменттерін есептеуге мүмкіндік
беретін өрнектерді алайық. 1. Біртекті жіңішке сырық. Ұзындығы АВ , массасы М біртекті
жіңішке сырықты қарастырайық. Сырық бойымен Ах өсін бағыттап, сырықтың ұшы арқылы оған перпендикуляр өтетін Az өсіне қатысты осы сырықтың инерция моментін санайық (3.17 сурет).
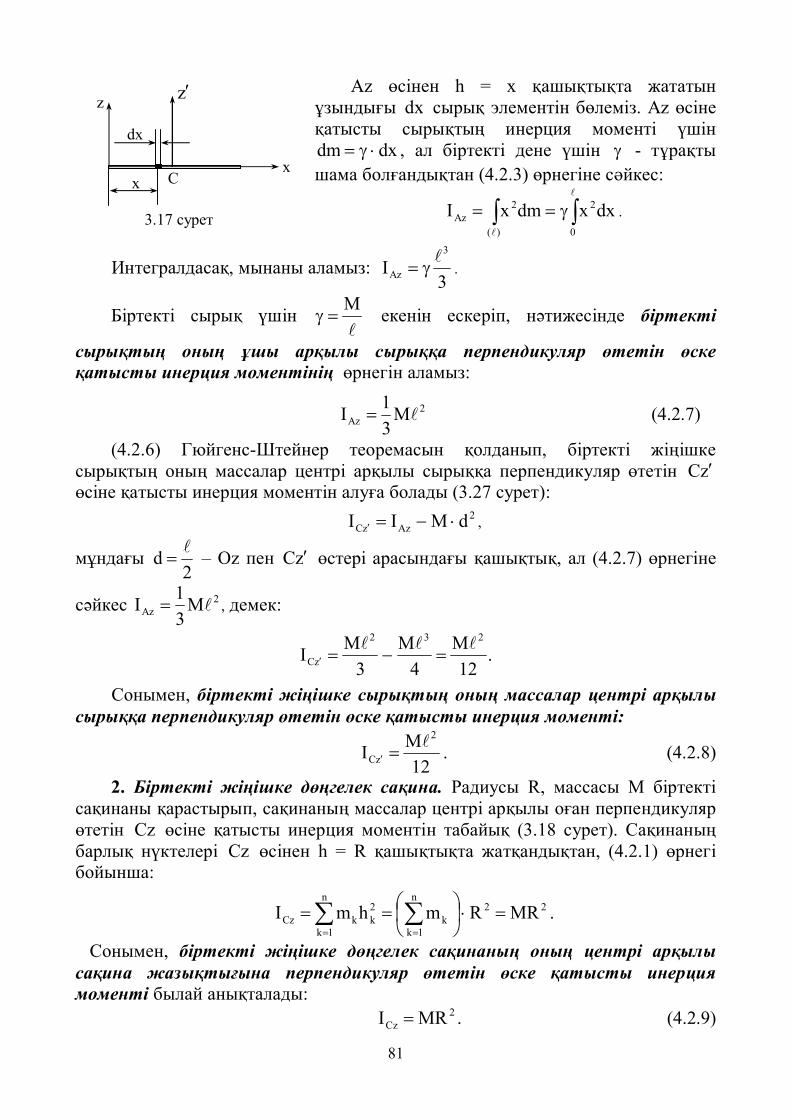
81
Az өсінен h = x қашықтықта жататын ұзындығы dx сырық элементін бөлеміз. Az өсіне қатысты сырықтың инерция моменті үшін
dxdm , ал біртекті дене үшін - тұрақты шама болғандықтан (4.2.3) өрнегіне сәйкес:
)( 0
22Az dxxdmxI
.
Интегралдасақ, мынаны аламыз: 3
I3
Az
.
Біртекті сырық үшін
М екенін ескеріп, нәтижесінде біртекті
сырықтың оның ұшы арқылы сырыққа перпендикуляр өтетін өске қатысты инерция моментінің өрнегін аламыз:
2Az M
31I (4.2.7)
(4.2.6) Гюйгенс-Штейнер теоремасын қолданып, біртекті жіңішке сырықтың оның массалар центрі арқылы сырыққа перпендикуляр өтетін zС өсіне қатысты инерция моментін алуға болады (3.27 сурет):
2AzzС dMII ,
мұндағы 2
d – Oz пен zС өстері арасындағы қашықтық, ал (4.2.7) өрнегіне
сәйкес 2Az M
31I , демек:
.12
M4
M3
MI232
zС
Сонымен, біртекті жіңішке сырықтың оның массалар центрі арқылы сырыққа перпендикуляр өтетін өске қатысты инерция моменті:
12МI
2
zС
. (4.2.8)
2. Біртекті жіңішке дөңгелек сақина. Радиусы R, массасы М біртекті сақинаны қарастырып, сақинаның массалар центрі арқылы оған перпендикуляр өтетін Сz өсіне қатысты инерция моментін табайық (3.18 сурет). Сақинаның барлық нүктелері Сz өсінен h = R қашықтықта жатқандықтан, (4.2.1) өрнегі бойынша:
22n
1kk
n
1k
2kkСz MRRmhmI
.
Сонымен, біртекті жіңішке дөңгелек сақинаның оның центрі арқылы сақина жазықтығына перпендикуляр өтетін өске қатысты инерция моменті былай анықталады:
2Сz MRI . (4.2.9)
x
z
x
dx
С
z
3.17 сурет
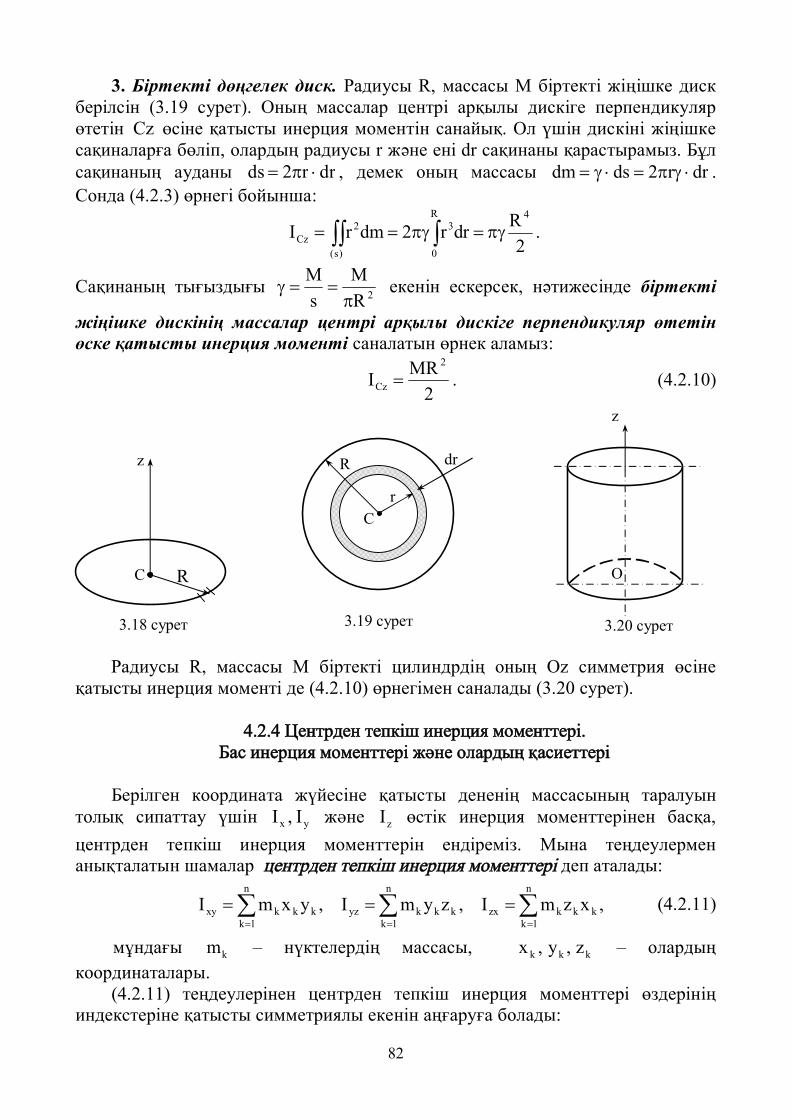
82
3. Біртекті дөңгелек диск. Радиусы R, массасы М біртекті жіңішке диск берілсін (3.19 сурет). Оның массалар центрі арқылы дискіге перпендикуляр өтетін Сz өсіне қатысты инерция моментін санайық. Ол үшін дискіні жіңішке сақиналарға бөліп, олардың радиусы r және ені dr сақинаны қарастырамыз. Бұл сақинаның ауданы drr2ds , демек оның массасы drr2dsdm . Сонда (4.2.3) өрнегі бойынша:
2Rrdr2dmrI
4
)s(
R
0
32Cz .
Сақинаның тығыздығы 2RM
sM
екенін ескерсек, нәтижесінде біртекті
жіңішке дискінің массалар центрі арқылы дискіге перпендикуляр өтетін өске қатысты инерция моменті саналатын өрнек аламыз:
2
МRI2
Cz . (4.2.10)
Радиусы R, массасы М біртекті цилиндрдің оның Oz симметрия өсіне қатысты инерция моменті де (4.2.10) өрнегімен саналады (3.20 сурет).
4.2.4 Центрден тепкіш инерция моменттері.
Бас инерция моменттері және олардың қасиеттері Берілген координата жүйесіне қатысты дененің массасының таралуын
толық сипаттау үшін yx I,I және zI өстік инерция моменттерінен басқа, центрден тепкіш инерция моменттерін ендіреміз. Мына теңдеулермен анықталатын шамалар центрден тепкіш инерция моменттері деп аталады:
n
1kkkk
n
1kzxkkk
n
1kyzkkkxy ,xzmI,zymI,yxmI (4.2.11)
мұндағы km – нүктелердің массасы, kkk z,y,x – олардың координаталары.
(4.2.11) теңдеулерінен центрден тепкіш инерция моменттері өздерінің индекстеріне қатысты симметриялы екенін аңғаруға болады:
R C
z
3.18 сурет
С
R
r
dr
3.19 сурет
O
z
3.20 сурет
83
.II,II,II xzzxzyyzyxxy
Тұтас денелер үшін (4.2.11) теңдеулері (4.2.4) теңдеулері тәрізді жазылады:
.dVxzdmxzI
,dVzydmzyI
,dVyxdmyxI
VVz
VVy
VVx
(4.2.12)
Центрден тепкіш инерция моменттерін қалай болса солай беруге болмайды. Шынында да,
0)yx(mn
1k
2kkk
теңсіздігінен мынаны аламыз:
n
1kkkk
n
1k
22k yxm2)yx(m
kk,
немесе (4.2.2) және (4.2.11) теңдеулерін қолдансақ,
zxy I21I .
Осы сияқты мынаны көрсетуге болады:
xyz I21I , yzx I
21I .
Центрден тепкіш инерция моменттері координата өстерінің бағытына ғана емес, координатаның бас нүктесіне де тәуелді.
Центрден тепкіш инерция моменттерінің өстік инерция моменттерінен ерекшелігі олардың таңбасы әртүрлі бола алады және олар нөлге де айнала алады. Дене инерциясының бас өсі деп индекстерінде осы өс бар центрден тепкіш инерция моменттерінің екеуі де нөлге тең болатын өсті айтады. Мысалы, егер 0II yzxz болса, онда z өсі инерцияның бас өсі болады. Дененің массалар центрі арқылы өтетін инерцияның бас өсі инерцияның бас центрлік өсі деп аталады.
Өстің сипатын бірден анықтауға болатын екі дербес жағдайды атап өтейік. 1. Егер дененің симметрия жазықтығы бар болса, онда оның барлық
нүктелері үшін симметрия жазықтығына перпендикуляр өс инерцияның бас өсі болады.
2. Егер дененің симметрия өсі бар болса, онда бұл өс инерцияның бас центрлік өсі болады да, динамикалық симметрия өсі деп аталады.
Дененің инерцияның бас өстеріне қатысты инерция моменттері дененің бас инерция моменттері деп аталады.
Инерцияның бас өстері туралы ұғым қатты дене динамикасында үлкен роль атқарады. Егер инерцияның бас өстерімен Oxyz координата өстерін бағыттасақ, барлық центрден тепкіш инерция моменттері нөлге айналады да, сәйкес теңдеулер немесе өрнектер қарапайым түрге келеді.
84
Негізгі әдебиет 2 [ III-тарау, 2-бөлім,§§1-3, 3-бөлім,§§1-4, 260-269, 293-296,298-315-беттер], 3 [3-тарау, §§91-93, ,§§100-104, 223-232, 263-271-беттер]
Қосымша әдебиет 7 [2-т., §§6.1-6.3, §§ 7.1-7.3, §§12.3-12.8, 151-168,171-176, 268-285-беттер]
Өзіндік бақылау сұрақтары: 1. Механикалық жүйенің анықтамасы. 2. Жүйенің массасы дегеніміз не? 3. Жүйе массасының центрі мен оның координаталары қалай анықталады? 4. Сыртқы және ішкі күштердің анықтамалары. 5. Ішкі күштердің қасиеттері. 6. Жүйенің және қатты дененің өске қатысты инерция моменті; олардың
координата өстеріне қатысты аналитикалық өрнектері. 7. Инерция радиусы. 8. Гюйгенс-Штейнер теоремасы. 9. Кейбір денелердің өстік инерция моменттері. 10. Центрден тепкіш инерция моменттері. 11.Бас инерция моменттері мен инерцияның бас центрлік өсінің анықтамалары.
Дәріс-10
4.6 АНАЛИТИКАЛЫҚ МЕХАНИКА
Аналитикалық механикада идеалды байланыстардың реакцияларын
енгізбестен жүйе қозғалысының дифференциалдық теңдеулерін құруға мүмкіндік беретін жалпы әдістер алынады.
4.6.1 Байланыстар және олардың классификациясы Жүйе нүктелерінің координаталары мен жылдамдықтарына қойылған
шектеулер механикалық жүйенің байланыстары деп аталады. Олар теңдеулер немесе теңсіздіктер түрінде жазылуы мүмкін. Іс жүзінде байланыстар топсалар, беттер, бағыттаушылар, сырықтар, жіптер және т.б. арқылы беріледі.
Теңдіктермен берілетін байланыстар ұстай алатын байланыстар деп аталады. Теңсіздікпен берілетін байланыстарды ұстай алмайтын байланыстар дейді.
Ұзындығы , қатаң, салмақсыз сырықпен жалғанған координаталары ( 111 z,y,x ) және ( 222 z,y,x ) екі материялық нүкте үшін байланыс теңдеуі мынандай болады:
2212
212
212 zzyyxx
немесе 0zzyyxx 22
122
122
12 , демек бұл – ұстай алатын байланыс.
85
Ұзындығы , салмақсыз, созылмайтын жіппен жалғанған координаталары ( 111 z,y,x ) және ( 222 z,y,x ) екі материялық нүкте үшін байланыс теңдеуі:
2212
212
212 zzyyxx
немесе 0zzyyxx 22
122
122
12 , демек бұл – ұстай алмайтын байланыс. Егер жіп керілген болса, байланыс теңдеуінде теңдік болады.
Тендеуіне уақыт ашық кірмейтін байланыс стационарлы байланыс деп аталады. Егер де теңдеуіне уақыт ашық енсе, байланыс стационарлы емес байланыс деп аталады.
Жоғарыда келтірілген мысалдар стационарлы байланыстардың мысалдары болады.
Егер барабанға оралғанда салбыраған ұшы t заңдылығымен қысқаратын жүкті көтеріп жатқан арқан жіпті қарастырсақ, онда осы жүктің координаталары мына шартты қанағаттандыруы керек:
tzyx 2222 .
Демек бұл – ұстай алмайтын, стационарлы емес байланыс. Егер байланыс теңдеулеріне координаталардың уақыт бойынша
туындылары немесе координата дифференциалдары кірмейтін болса олар голономды байланыстар деп аталады. Бұл байланыстар нүктелердің не тек координаталарын шектейді, не координаталар арқылы өрнектеуге болатын жылдамдықтарын шектейді.
Теңдеулеріне интегралданатын координаталардың уақыт бойынша туындылары немесе координата дифференциалдары кіретін байланыстар голономды емес байланыстар деп аталады. Бұл байланыстар нүктелердің тек координаталарын емес, сонымен қатар олардың жылдамдықтар арасындағы тәуелділікті координаталар арасындағы тәуелділікке әкелуге болмайтын жылдамдықтарын да шектейді.
Келтірілген мысалдардың бәрі голономды байланыстарға жатады. Голономды емес байланыстың мысалы ретінде мұз бетіндегі коньки
қозғалысын қарастырамыз. Конькидің қыры дөңес болыпмұзбен бір нүктеде жанассын делік. Конькидің мұзбен жанасу нүктесінің жылдамдығы конькимен бағытталуы керек, яғни коньки оның қырына перпендикуляр бағытта сырғымау керек. Конькидің орнын үш параметрмен беруге болады: оның мұзбен жанасу нүктесінің хС, уС координаталары және жылдамдық векторының х өсімен құратын бұрышы. Сонда сырғудың жоқтығын білдіретін шарт мынау болады:
tgyx
C
C
немесе .cosysinx CC
Бұд теңдеуді dt -ға көбейтсек мынаны аламыз .cosdysindx CC
86
Бұл теңдеуді интегралдауға болмайды, сондықтан байланыс құрамында жылдамдық бар математикадық теңдеумен өрнектеледі. Демек, мұндай байланыс (коньки оның қырына перпендикуляр бағытта қозғала алмағандықтан) голономды емес байланыс болады.
Жалпы жағдайда голономды, стационарлы емес, ұстай алатын байланыстың теңдеуі былай жазылады:
0)t,z,y,x,...,z,y,x(f nnn111 , ал голономды, стационарлы, ұстай алмайтын байланыстың теңдеуі мынау:
0)z,y,x,...,z,y,x(f nnn111 . Бұдан былай тек голономды байланыстарды қарастыратын боламыз.
4.6.2 Нүкте мен жүйенің ықтимал орын ауыстырулары Нүктенің немесе жүйенің байланыстарын олардың реакциялары арқылы
ғана емес, сондай-ақ байланысы бар нүктенің жасауы мүмкін орын ауыстыру арқылы да есепке алуға болады.
Нүктенің ықтимал орын ауыстыруы деп белгіленген уақыттағы нүкте байланыстарын бұзбайтын сондай аз r ойша орын ауыстыруды айтады.
Механикалық жүйенің ықтимал орын ауыстыруы деп белгіленген уақыттағы жүйе байланыстарын бұзбайтын оның жеке нүктелерінің сондай аз n21 r...,,r,r
ойша орын ауыстыруларын айтады. Қозғалыстағы нүктенің dt уақытта жасайтын rd нағыз орын ауыстыруы
мен нүкте жасамайтын, бірақ берілген уақытта нүктенің байланыстарды бұзбай жасауы мүмкін ықтимал орын ауыстыруын ажырата білу керек. Стационарлы байланыстар кезінде жүйенің кез келген нүктесінің rd шын орын ауыстыруы оның ықтимал орын ауыстыруларының бірі болады. Стационарлы емес байланыстар кезінде rd шын орын ауыстыру ықтимал орын ауыстырулардың ешқайсымен дәл келмейді.
Жалпы жағдайда механикалық жүйе көптеген түрлі ықтимал орын ауыстыруға ие бола алады, бірақ кез келген жүйе үшін өзара тәуелсіз біраз ықтимал орын ауыстыруларды көрсетуге болады.
Жүйенің өзара тәуелсіз ықтимал орын ауыстырулар саны осы жүйенің еркіндік дәреже саны деп аталады.
Байланыстары тек координаталарға тәуелді жүйенің орнын анықтайтын тәуелсіз координаталар саны жүйенің еркіндік дәреже санымен бірдей болады. Мысалы, жазықтық бетіндегі нүктенің еркіндік дәреже саны екіге тең; еркін материялық нүктенің еркіндік дәреже саны – үшеу; айналшақты-сырғақты механизмнің еркіндік дәреже саны – біреу; айналмалы қозғалыс жасайтын дененің еркіндік дәреже саны – біреу; еркін дененің еркіндік дәреже саны – алтау.
Сондай-ақ нүкте ықтимал орын ауыстырғанда осы нүктеге әсер ететін күштің жасауы мүмкін элементар жұмысы сияқты А ықтимал жұмыс туралы ұғымды ендіреміз, яғни rFА
.
87
Егер жүйенің кез келген ықтимал орын ауыстыруында барлық байланыс реакциялары жұмыстарының қосындысы нөлге тең болса байланыстар идеал байланыс деп аталады.
Егер kR
– жүйенің k-нөмірлі нүктесіне түскен барлық байланыс реакцияларының тең әсерлісі болса, онда идеал байланыстар шартын былай жазуға болады:
0rRkk
. (4.6.1) Атап айтсақ, үйкеліссіз байланыстар осындай байланыстарға жатады.
4.6.3 Ықтимал орын ауыстыру принципі Бұл принцип механикалық жүйенің жалпы тепе-теңдік шартын алуға
мүмкіндік береді. Бұл жерде нүкте тепе-теңдікте болу үшін барлық күштер қосындысының нөлге тең болуынан басқа нүктенің бастапқы жылдамдығының да нөлге тең болуын қосымша талап ету қажет екендігін айта кету керек. Осыған байланысты материялық нүктелер жүйесінің жалпы тепе-теңдік шарттарын былай айтуға болады: материялық нүктелер жүйесі тепе-теңдікте болу үшін жүйенің әрбір нүктесіне әсер ететін барлық күштердің қосындысы мен барлық нүктенің бастапқы уақыттағы жылдамдықтарының нөлге тең болуы қажет және жеткілікті:
0rFkk
. (4.6.2)
Ықтимал орын ауыстыру принципін түрлі техникалық есептеулерде кең қолданады. Егер идеал емес байланыстар бар болса олардың реакцияларын (мысалы, үйкеліс күштері) актив күштерге жатқызу керек. Идеал байланыстың реакциясын анықтауды талап ететін жағдайларда байланысты ойша алып тастап, сәйкес реакция күшімен алмастыру керек.
4.6.4 Динамиканың жалпы теңдеуі
Ықтимал орын ауыстыру принципін пайдаланып статиканың әртүрлі
мәселелерін шешуге болады. Сонымен қатар Даламбер принципі динамика мәселелерін статика мәселелеріне келтіруге мүмкіндік береді.
Қозғалысы s стационарлы, ұстай алатын, идеал және голономды байланыстармен шектелген n материялық нүктеден тұратын механикалық жүйенің қозғалысын қарастырайық. Егер жүйенің әрбір k-нөмірлі нүктесіне барлық актив күштердің kF
және реакция күштерінің kR
тең әсерлі күштерінен
басқа kkk amФ инерция күштерін қоссақ, Даламбер принципіне сәйкес жүйе
тепе-теңдікте болады. Ықтимал орын ауыстыру принципі бойынша, егер жүйе тепе-теңдікте болса онда барлық күштердің жүйенің кез келген ықтимал орын ауыстыруындағы жұмыстарының қосындысы нөлге тең болуы керек, яғни мына теңдік орындалуы керек:
88
0ААА RФа
kkk , (4.6.3)
мұндағы kk
а rFАk
– жүйе кез келген ықтимал орын ауыстырғандағы
актив күштердің жұмыстарының қосындысы, kk
Ф rФАk
– инерция
күштері жұмыстарының қосындысы, kk
R rRАk
– реакция күштері
жұмыстарының қосындысы. Жүйе қозғалысын идеал байланыстар шектегендіктен (4.6.3) өрнегінің
соңғы қосылғышы нөлге тең, сондықтан: 0АА Фа
kk . (4.6.4)
(4.6.4) теңдеуі Даламбер-Лагранж принципін береді: идеал байланыстары бар жүйе қозғалғанда оған әсер ететін барлық актив күштер мен инерция күштерінің жүйе ықтимал орын ауыстырғандағы жұмыстарының қосындысы әрқашан нөлге тең.
(4.6.4) теңдеуін динамиканың жалпы теңдеуі деп те атайды. Инерция күшінің мәнін ескерсек бұл теңдеуді былай жазуға болады:
0r)amF(kkkk
. (4.6.5)
Ықтимал орын ауыстыру принципі сияқты, динамиканың жалпы теңдеуін де әртүрлі есептерді шығаруда қолдануға болады.
4.6.5 Жалпыланған координаталар мен жалпыланған жылдамдықтар
Егер жалпыланған координаталар ұғымын енгізсек, онда механиканың
көптеген есептерінің шешуі жеңілдейді. n материялық нүктеден тұратын механикалық жүйенің қозғалысын
қарастырайық. Жүйенің әр нүктесінің орны үш координатамен (xk, yk, zk) анықталады, демек бүкіл жүйенің орны 3n координатамен анықталады екен.
Жүйенің қозғалысы h голономды, идеал, ұстай алатын байланыстармен шектелсін деп есептейік:
0)t,z,y,x...,,z,y,x(f nnn111j , )h...,,2,1j( (4.6.6) 3n координата байланыстардың h теңдеулерін қанағаттандыратын
болғандықтан, олар тәуелсіз болмайды. Жүйенің орнын анықтайтын тәуелсіз координаталар саны мынаған тең болады:
hn3s . (4.6.7) Басқа координаталарды байланыс теңдеулері арқылы өрнектеп, жүйенің
орнын анықтайтын тәуелсіз координаталар ретінде 3n декарттық координаталардан s координаталарды таңдауға болады. Бірақ жүйенің орнын бір мәнді анықтайтын кез келген s параметрлерді енгізу әлдеқайда ыңғайлы. Тәуелсіз координаталар саны жүйенің еркіндік дәреже санына тең болғандықтан бұл параметрлердің саны да жүйенің еркіндік дәреже санына тең болуы керек.
89
Өзара тәуелсіз, саны жүйенің еркіндік дәреже санына тең, әр уақытта жүйенің орнын бір мәнді анықтайтын параметрлер жалпыланған координаталар деп аталады. Олар q әрпімен белгіленеді.
Жалпы жағдайда жалпыланған координаталардың геометриялық және механикалық мағынасы әртүрлі болуы мүмкін. Сызықтық және бұрыштық шамалар, сондай-ақ өлшемі ауданның, көлемнің өлшем бірлігіндей болатын параметрлер жалпыланған координаталар бола алады.
Сондықтан, жүйенің орны жалпыланған координаталармен анықталады: s21 q...,,q,q .
Жүйенің әрбір нүктесі оның kr радиус-векторымен анықталатындықтан,
бұл радиус-вектор жалпыланған координаталардың функциясы болады, яғни )n...,,2,1k()t,q...,,q,q(rr s21kk
. (4.6.8) Бұл n векторлық теңдік 3n скаляр теңдікке пара-пар:
).n...,,2,1k(),t,q...,,q,q(zz),t,q...,,q,q(yy),t,q...,,q,q(xx
s21kk
s21kk
s21kk
Байланыстар стационарлы болғанда жалпыланған координаталарды (4.6.8) теңдіктері құрамына t уақыт ашық кірмейтіндей етіп таңдауға болады.
Жүйе қозғалғанда оның жалпыланған координаталары уақыт өткен сайын үздіксіз өзгеріп отырады:
)t(qq...,),t(qq),t(qq ss2211 . (4.6.9) (4.6.9) теңдеулерін механикалық жүйе қозғалысының жалпыланған координаталардағы кинематикалық теңдеулері деп атауға болады.
Жалпыланған координаталардың туындылары жалпыланған жылдамдықтар деп аталады және былай белгіленеді:
s21 q...,,q,q . Олардың өлшем бірлігі сәйкес жалпыланған координаталардың өлшем бірлігіне тәуелді. Егер q – метрмен өлшенетін сызықтық шама болса, онда q – м/с-пен өлшенетін сызықтық жылдамдық, егер q – радианмен өлшенетін бұрыш болса, онда q – бұрыштық жылдамдық және рад/с-пен өлшенеді, егер q – м2-мен өлшенетін аудан болса, онда q – секторлық жылдамдық және м2/с- пен өлшенеді және т.б.
4.6.6 Жалпыланған күштер Жүйенің ықтимал орын ауыстыруындағы барлық актив күштердің
жұмысын санайық (егер үйкеліс күштері бар болса, онда олар актив күштерге қосылады):
0rFА k
n
1kk
. (4.6.10)
90
(4.6.8) теңдігін пайдаланып kr -ны жалпыланған координаталар арқылы
өрнектейміз:
ss
k2
2
k1
1
kk q
qr...q
qrq
qrr
немесе
j
s
1j j
kk q
qrr
. (4.6.11)
kr -ны санағанда ықтимал орын ауыстыру берілген уақытта, яғни белгіленген t уақытта, болатынын ескеру керек.
(4.6.11)-дегі kr -ның мәнін (4.6.10)-ға қойып мынаны аламыз:
j
s
1j j
kn
1kkk
n
1kk q
qrFrFА
.
Қосындылау ретін өзгертеміз, сонда:
j
s
1j
n
1k j
kk q
qrFА
. (4.6.12)
Енді жалпыланған күш деп аталатын, jq координатасына сәйкес келетін мынандай белгілеу енгізейік:
n
1k j
kkj q
rFQ
)s...,,2,1j( , (4.6.13)
сонда (4.6.12) өрнегі мына түрге келеді:
ss2211
s
1jjj qQ...qQqQqQА
. (4.6.14)
(4.6.14) өрнегі жүйе ықтимал орын ауыстырғандағы барлық күштер жұмысының қосындысы болады. Сонымен, жалпыланған күштер дегеніміз барлық күштердің ықтимал жұмыстарының өрнектеріндегі жалпыланған координаталар өсімдерінің коэффициенттеріне тең шамалар екен.
Жалпыланған күш өлшемі – жұмыс өлшемі бөлінген жалпыланған координата өлшемі. Егер q – метрмен өлшенетін сызықтық шама болса, онда Q – Дж - мен өлшенетін кәдімгі жұмыс, егер q – радианмен өлшенетін бұрыш болса, онда Q – моменттің өлшем бірлігіндей, Нм-мен өлшенеді, егер q – м3 -пен өлшенетін көлем болса, онда Q – жылдамдық қысымы және Н/м2 - пен өлшенеді және т.б.
Жалпыланған күштерді есептеу әдістерін қарастырайық. 1. Жалпыланған күштерді тікелей (4.6.13) өрнегі бойынша анықтауға
болады. Ол үшін осы өрнекті былай жазамыз:
)qzF
qyF
qxF(Q
j
kkz
j
kky
n
1k j
kkxj
, (4.6.15)
мұндағы kzkykx F,F,F – kF
күшінің декарттық координата өстеріне проекциялары.
91
2. Мысалы, 1Q жалпыланған күшті табу үшін жүйеге тек 1q жалпыланған координата 1q шамаға өзгеретіндей етіп ықтимал орын ауыстыру береміз, ал қалған жалпыланған координаталар өзгермейді, яғни 32s1 qq0q,0q
0q... s . Осы орын ауыстырудағы жүйеге түскен барлық актив күштердің жұмысын
санаймыз. (4.6.14) өрнегі бойынша мынаны аламыз:
111 qQ)А( .
1q -дің алдындағы көбейгіш бірінші жалпыланған күшке тең болады. Қалған жалпыланған күштердің бәрі дәл осылай саналады.
3. Бұл әдіс жүйеге әсер ететін күштердің бәрі потенциалды болғанда, яғни жүйе потенциалдық күш өрісінде қозғалғанда қолданылады. Сонда күш проекциялары теріс таңбамен алынған жүйенің потенциалдық энергиясына сәйкес координаталар бойынша алынған дербес туындыға тең:
,zПF,
yПF,
xПF
kkz
kky
kkx
мұндағы П – жүйенің потенциалдық энергиясы. Бұл өрнектерді (4.6.15)-ке қойып, мынаны аламыз:
)qz
zП
qy
yП
qx
xП(Q
j
k
kj
k
kj
k
k
n
1kj
,
немесе, потенциалдық энергия жалпыланған координаталарға тәуелді екенін ескеріп, оны декарттық координаталар арқылы жазуға болады:
)s...,,2,1j(qПQ
jj
. (4.6.16)
Сонымен, егер жүйеге әсер ететін күштердің бәрі потенциалды болса, онда жалпыланған күш кері таңбамен алынған потенциалдық энергиядан сәйкес жалпыланған координата бойынша алынған дербес туындыға тең.
4.6.7 Жалпыланған координаталардағы тепе-теңдік шарттары
Ықтимал орын ауыстыру принципі бойынша байланыстары идеал,
стационарлы, голономды және ұстай алатын механикалық жүйе тепе-теңдікте болу үшін жүйе нүктелерінің бастапқы жылдамдықтары нөлге тең болып, жүйе кез келген ықтимал орын ауыстырғанда барлық актив күштер жұмыстарының қосындысы нөлге тең болуы қажет және жеткілікті, яғни 0)0(Vk
болғанда:
0A . Егер жүйенің орнын s21 q...,,q,q жалпыланған координаталармен
анықтасақ, онда соңғы теңдеу (4.6.14)-ке сәйкес мына түрде жазылады: 0qQqQqQ ss2211 . (4.6.17)
92
Жалпыланған координаталар бір бірінен тәуелсіз болғандықтан, (4.6.17) теңдігі тек қана барлық жалпыланған күштер нөлге тең болғанда орындалады:
,0Q...,,0Q,0Q s21 (4.6.18) Шынында да, тек қана sq жалпыланған координата өзгеріп, ал қалғандары
өзгермейтіндей етіп жүйеге ықтимал орын ауыстыру берейік, демек ,0q s 0q...qq 1s21 . Осы мәндерді (4.6.17)-ге қойсақ мынаны аламыз:
0qQ ss . Бірақ 0q s болғандықтан, тепе-теңдік кезінде 0Qs болады. Осылайша (4.6.18)-дің қалған теңдеулері алынады.
(4.6.18) теңдеулері механикалық жүйенің тепе-теңдік шарттары болады: байланыстары идеал, стационарлы және голономды жүйе тепе-теңдікте болу үшін жүйенің барлық жалпыланған күштері нөлге тең болуы қажет және жеткілікті (барлық нүктенің бастапқы жылдамдығы нөлге тең деп есептейміз).
Егер жүйеге потенциалдық күштер әсер ететін болса, (4.6.16) теңдіктеріне орай (4.6.18) теңдеулері мына түрде жазылады:
0qП...,,0
qП,0
qП
s21
. (4.6.19)
(4.6.19) өрнектері бірнеше айнымалылар функциясының экстремумының шарттары болады, сондықтан потенциалдық күштер әсер ететін жүйе жүйенің потенциалдық энергиясының экстремумы (максимумы немесе минимумы) бар болған орындарда тепе-теңдікте болады.
4.6.8 Екінші текті Лагранж теңдеулері
Динамиканың жалпы теңдеуі механикалық жүйе қозғалысының
дифференциалдық теңдеулерін құруға мүмкіндік береді. Олардың құрамында идеал байланыстардың реакциялары болмайды. Бұл теңдеулерді күрделі жүйелер үшін қолдану күрделі түрлендірулерге әкеледі. Мұндай жағдайда жалпыланған координаталардағы жүйе қозғалысының теңдеулерін қолданған ыңғайлы болады.
Бұл теңдеулерді (4.6.5) динамиканың жалпы теңдеуінен біраз математикалық түрлендірулер жасағаннан кейін алуға болады. Ол үшін алдымен динамиканың жалпы теңдеуін қайта жазайық:
0r)dtVdmF(
n
1kk
kkk
.
Нәтижесінде: 0qQVm21
qVm
21
qdtd
j
s
1j
n
1kj
2kk
j
2kk
j
.
Қосындыны k бойынша екіге бөліп, туынды белгісін қосындының сыртына шығарамыз:
0qQ2Vm
q2Vm
qdtd
j
s
1j
n
1kj
n
1k
2kk
j
2kk
j
.
93
Анықтама бойынша T2Vmn
1k
2kk
–жүйенің кинетикалық энергиясы, сондықтан
динамиканың жалпы теңдеуі былай жазылады:
0qQqT
qT
dtd
j
s
1jj
jj
. (4.6.20)
Жалпыланған координаталар тәуелсіз болғандықтан, (4.6.20) теңдеуі осы өрнектегі жақшалардың бәрі нөлге тең болғанда ғана орындалатын болады:
)s...,,2,1j(0QqT
qT
dtd
jjj
.
Сонымен, жалпыланған координаталардағы жүйе қозғалысының дифференциалдық теңдеулері төмендегідей жазылады:
sss
222
111
QqT
qT
dtd
.........................
,QqT
qT
dtd
,QqT
qT
dtd
. (4.6.21)
(4.6.21) теңдеулері екінші текті Лагранж теңдеулері деп аталады.
Егер жүйеге потенциалдық күштер әсер ететін болса, онда j
j qПQ
екенін
ескрсек екінші текті Лагранж теңдеулері мына түрге келеді:
.qП
qT
qT
dtd
............................
,qП
qT
qT
dtd
,qП
qT
qT
dtd
sss
222
111
П – потенциалдық энергия тек қана координатаға тәуелді, ал жалпыланған
жылдамдықтардан тәуелсіз болғандықтан барлық j үшін 0qП
j
болады.
Сондықтан соңғы теңдеулерді мына түрде қайта жазуға болады:
)s...,,2,1j(0q
)ПT(q
)ПT(dtd
jj
.
94
Жалпыланған координаталар мен жалпыланған жылдамдықтарға тәуелді, кинетикалық энергия мен потенциалдық энергияның айырмасына тең функция енгізейік: ПTL . Бұл функция Лагранж функциясы деп аталады.
Cонда потенциалдақ күштер әсер еткен жағдайда екінші текті Лагранж теңдеулері мына түрге келеді:
.0qL
qL
dtd
.......................
,0qL
qL
dtd
,0qL
qL
dtd
ss
22
11
(4.6.22)
Соңында механикалық жүйе үшін екінші текті Лагранж теңдеулерінің саны жүйенің еркіндік дәреже санына тең екенін айта кетейік.
Негізгі әдебиет 2 [ III-тарау,6-бөлім,§§1-7, 8,381-391,399-416-беттер], 3 [3-тарау,§§137-145, 357-379-беттер]
Қосымша әдебиет 7 [2-т.,§§18.1-18.7, 19.1-19.4 400-447-беттер] Өзіндік бақылау сұрақтары: 1. Байланыстар және олардың теңдеулері. 2. Стационарлы және стационарлы емес, ұстайтын және ұстамайтын,
голономды және голономды емес байланыстардың анықтамасы. 3. Нүкте мен жүйенің ықтимал орын ауыстыруы. 4. Жүйенің ықтимал орын ауыстыру саны. 5. Ықтимал жұмыстың анықтамасы. 6. Идеал байланыстың анықтамасы. 7. Ықтимал орын ауыстыру принципі. 8. Динамиканың жалпы теңдеуі. 9. Нүкте мен жүйенің жалпыланған координаталары. 10. Жалпыланған координаталардың саны нешеу? 11. Жалпыланған күштер және оларды есептеу әдістері. 12. Механикалық жүйенің жалпыланған координаталардағы тепе-теңдік
шарттары. Потенциалдық күштер жағдайы. 13. Екінші текті Лагранж теңдеулері. Потенциалдық күштер жағдайы. 14. Лагранж функциясы дегеніміз не? 4-модуль. Материалдар кедергісі Дәріс -11. Созылу және сығылу. Созылу мен сығылу кезіндегі
материалдардың механикалық сипаттамалары. Созылу және сығылу Егер дененің кез келген көлденең қимасында тек қана бойлық күш Nz
пайда болса, ал қалған күш факторлары нөлге тең болса, онда бұндай
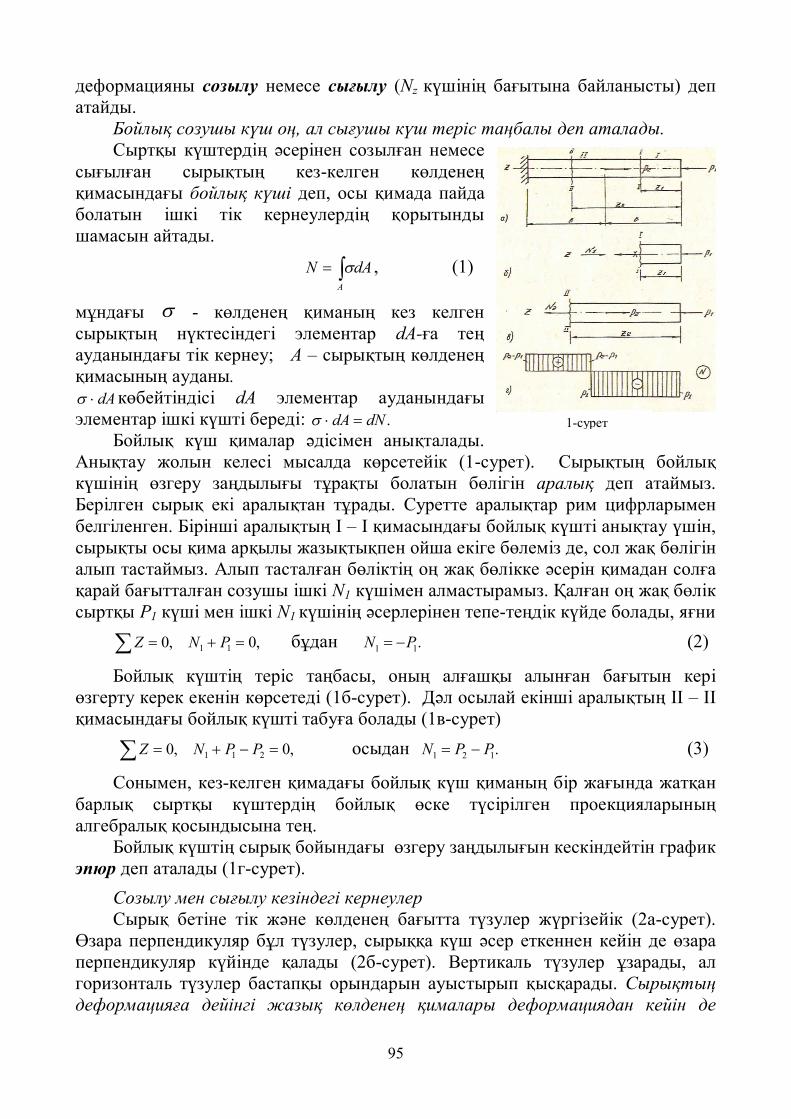
95
деформацияны созылу немесе сығылу (Nz күшінің бағытына байланысты) деп атайды.
Бойлық созушы күш оң, ал сығушы күш теріс таңбалы деп аталады. Сыртқы күштердің әсерінен созылған немесе
сығылған сырықтың кез-келген көлденең қимасындағы бойлық күші деп, осы қимада пайда болатын ішкі тік кернеулердің қорытынды шамасын айтады.
A
dAN , (1)
мұндағы - көлденең қиманың кез келген сырықтың нүктесіндегі элементар dA-ға тең ауданындағы тік кернеу; A – сырықтың көлденең қимасының ауданы.
dA көбейтіндісі dA элементар ауданындағы элементар ішкі күшті береді: .dA dN
Бойлық күш қималар әдісімен анықталады. Анықтау жолын келесі мысалда көрсетейік (1-сурет). Сырықтың бойлық күшінің өзгеру заңдылығы тұрақты болатын бөлігін аралық деп атаймыз. Берілген сырық екі аралықтан тұрады. Суретте аралықтар рим цифрларымен белгіленген. Бірінші аралықтың І – І қимасындағы бойлық күшті анықтау үшін, сырықты осы қима арқылы жазықтықпен ойша екіге бөлеміз де, сол жақ бөлігін алып тастаймыз. Алып тасталған бөліктің оң жақ бөлікке әсерін қимадан солға қарай бағытталған созушы ішкі N1 күшімен алмастырамыз. Қалған оң жақ бөлік сыртқы P1 күші мен ішкі N1 күшінің әсерлерінен тепе-теңдік күйде болады, яғни
,0,0 11 PNZ бұдан .11 PN (2)
Бойлық күштің теріс таңбасы, оның алғашқы алынған бағытын кері өзгерту керек екенін көрсетеді (1б-сурет). Дәл осылай екінші аралықтың ІІ – ІІ қимасындағы бойлық күшті табуға болады (1в-сурет)
,0,0 211 PPNZ осыдан .121 PPN (3)
Сонымен, кез-келген қимадағы бойлық күш қиманың бір жағында жатқан барлық сыртқы күштердің бойлық өске түсірілген проекцияларының алгебралық қосындысына тең.
Бойлық күштің сырық бойындағы өзгеру заңдылығын кескіндейтін график эпюр деп аталады (1г-сурет).
Созылу мен сығылу кезіндегі кернеулер Сырық бетіне тік және көлденең бағытта түзулер жүргізейік (2а-сурет).
Өзара перпендикуляр бұл түзулер, сырыққа күш әсер еткеннен кейін де өзара перпендикуляр күйінде қалады (2б-сурет). Вертикаль түзулер ұзарады, ал горизонталь түзулер бастапқы орындарын ауыстырып қысқарады. Сырықтың деформацияға дейінгі жазық көлденең қималары деформациядан кейін де
1-сурет
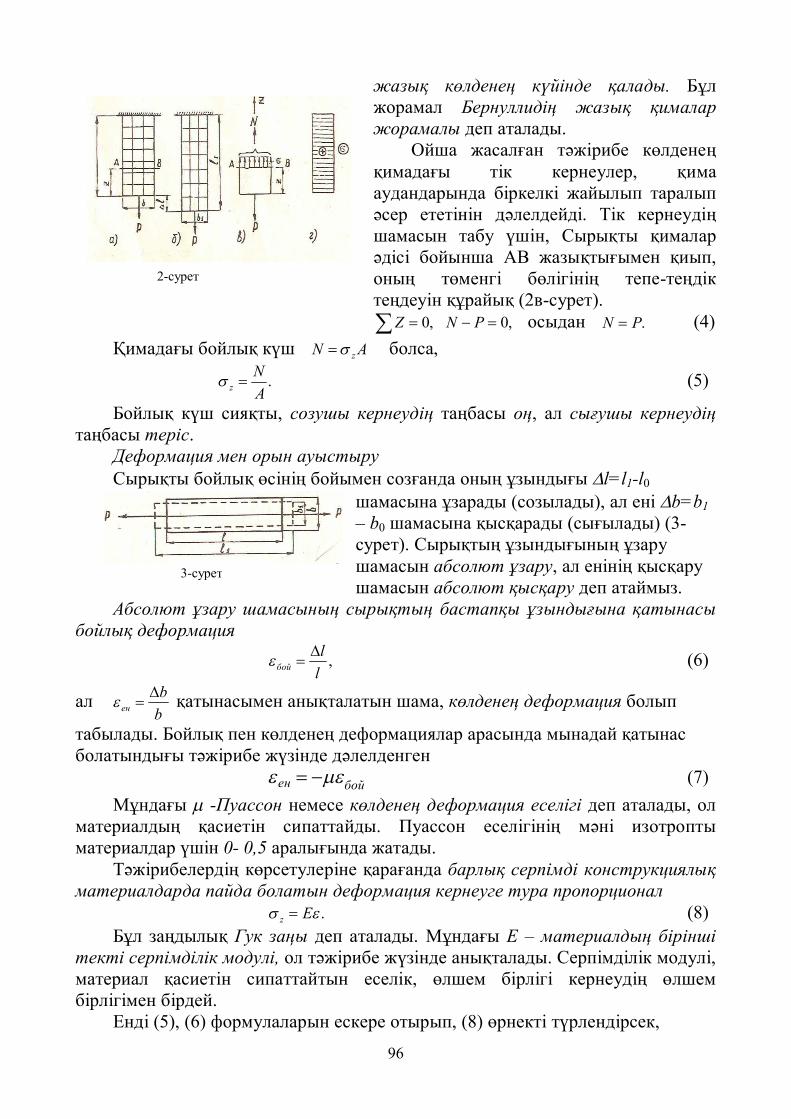
96
жазық көлденең күйінде қалады. Бұл жорамал Бернуллидің жазық қималар жорамалы деп аталады.
Ойша жасалған тәжірибе көлденең қимадағы тік кернеулер, қима аудандарында біркелкі жайылып таралып әсер ететінін дәлелдейді. Тік кернеудің шамасын табу үшін, Сырықты қималар әдісі бойынша АВ жазықтығымен қиып, оның төменгі бөлігінің тепе-теңдік теңдеуін құрайық (2в-сурет). ,0,0 PNZ осыдан .PN (4)
Қимадағы бойлық күш AN z болса,
.AN
z (5)
Бойлық күш сияқты, созушы кернеудің таңбасы оң, ал сығушы кернеудің таңбасы теріс.
Деформация мен орын ауыстыру Сырықты бойлық өсінің бойымен созғанда оның ұзындығы l=l1-l0
шамасына ұзарады (созылады), ал ені b=b1 – b0 шамасына қысқарады (сығылады) (3-сурет). Сырықтың ұзындығының ұзару шамасын абсолют ұзару, ал енінің қысқару шамасын абсолют қысқару деп атаймыз.
Абсолют ұзару шамасының сырықтың бастапқы ұзындығына қатынасы бойлық деформация
,ll
бой
(6)
ал bb
ен
қатынасымен анықталатын шама, көлденең деформация болып
табылады. Бойлық пен көлденең деформациялар арасында мынадай қатынас болатындығы тәжірибе жүзінде дәлелденген
ен бой (7) Мұндағы -Пуассон немесе көлденең деформация еселігі деп аталады, ол
материалдың қасиетін сипаттайды. Пуассон еселігінің мәні изотропты материалдар үшін 0- 0,5 аралығында жатады.
Тәжірибелердің көрсетулеріне қарағанда барлық серпімді конструкциялық материалдарда пайда болатын деформация кернеуге тура пропорционал
. Ez (8) Бұл заңдылық Гук заңы деп аталады. Мұндағы Е – материалдың бірінші
текті серпімділік модулі, ол тәжірибе жүзінде анықталады. Серпімділік модулі, материал қасиетін сипаттайтын еселік, өлшем бірлігі кернеудің өлшем бірлігімен бірдей.
Енді (5), (6) формулаларын ескере отырып, (8) өрнекті түрлендірсек,
2-сурет
3-сурет
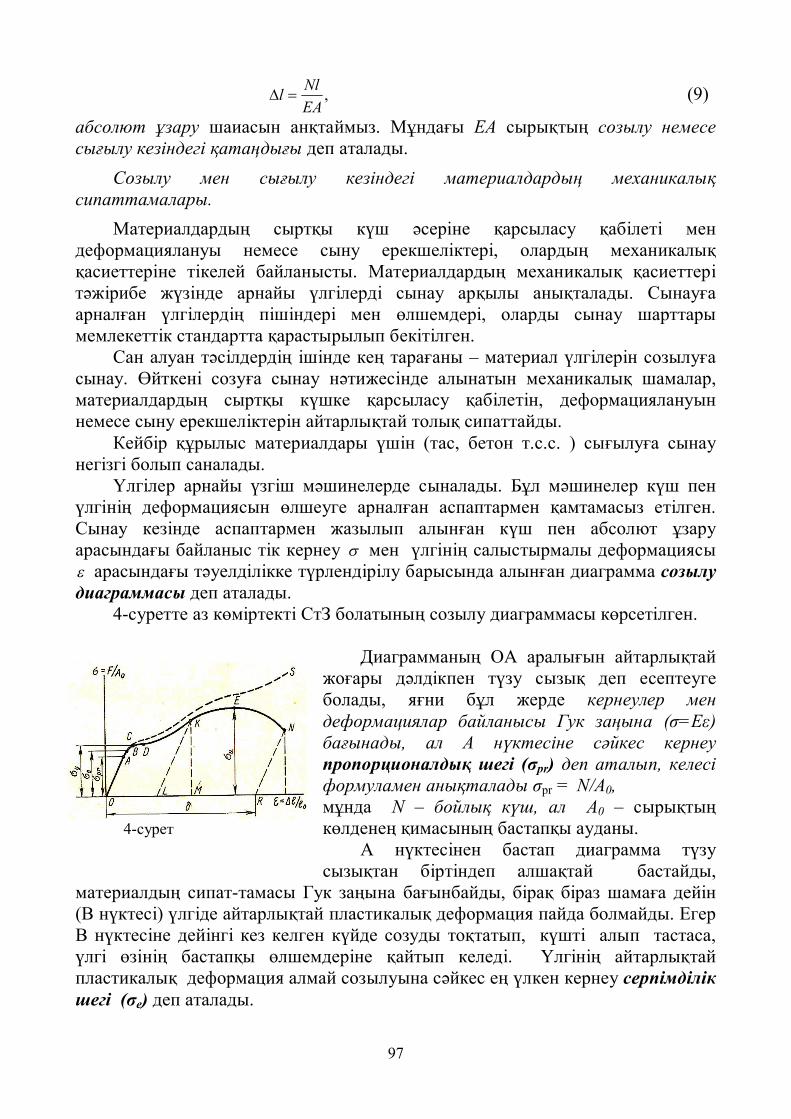
97
,EANll (9)
абсолют ұзару шаиасын анқтаймыз. Мұндағы EА сырықтың созылу немесе сығылу кезіндегі қатаңдығы деп аталады.
Созылу мен сығылу кезіндегі материалдардың механикалық сипаттамалары.
Материалдардың сыртқы күш әсеріне қарсыласу қабілеті мен деформациялануы немесе сыну ерекшеліктері, олардың механикалық қасиеттеріне тікелей байланысты. Материалдардың механикалық қасиеттері тәжірибе жүзінде арнайы үлгілерді сынау арқылы анықталады. Сынауға арналған үлгілердің пішіндері мен өлшемдері, оларды сынау шарттары мемлекеттік стандартта қарастырылып бекітілген.
Сан алуан тәсілдердің ішінде кең тарағаны – материал үлгілерін созылуға сынау. Өйткені созуға сынау нәтижесінде алынатын механикалық шамалар, материалдардың сыртқы күшке қарсыласу қабілетін, деформациялануын немесе сыну ерекшеліктерін айтарлықтай толық сипаттайды.
Кейбір құрылыс материалдары үшін (тас, бетон т.с.с. ) сығылуға сынау негізгі болып саналады.
Үлгілер арнайы үзгіш мәшинелерде сыналады. Бұл мәшинелер күш пен үлгінің деформациясын өлшеуге арналған аспаптармен қамтамасыз етілген. Сынау кезінде аспаптармен жазылып алынған күш пен абсолют ұзару арасындағы байланыс тік кернеу мен үлгінің салыстырмалы деформациясы арасындағы тәуелділікке түрлендірілу барысында алынған диаграмма созылу диаграммасы деп аталады.
4-суретте аз көміртекті СтЗ болатының созылу диаграммасы көрсетілген.
Диаграмманың ОА аралығын айтарлықтай жоғары дәлдiкпен түзу сызық деп есептеуге болады, яғни бұл жерде кернеулер мен деформациялар байланысы Гук заңына (σ=Eε) бағынады, ал А нүктесiне сәйкес кернеу пропорционалдық шегi (σpr) деп аталып, келесі формуламен анықталады σpr = N/А0, мұнда N – бойлық күш, ал А0 – сырықтың көлденең қимасының бастапқы ауданы.
А нүктесiнен бастап диаграмма түзу сызықтан бiртiндеп алшақтай бастайды,
материалдың сипат-тамасы Гук заңына бағынбайды, бiрақ бiраз шамаға дейiн (В нүктесi) үлгiде айтарлықтай пластикалық деформация пайда болмайды. Егер В нүктесiне дейiнгi кез келген күйде созуды тоқтатып, күштi алып тастаса, үлгi өзiнiң бастапқы өлшемдерiне қайтып келедi. Үлгiнiң айтарлықтай пластикалық деформация алмай созылуына сәйкес ең үлкен кернеу серпiмдiлiк шегi (σe) деп аталады.
4-сурет
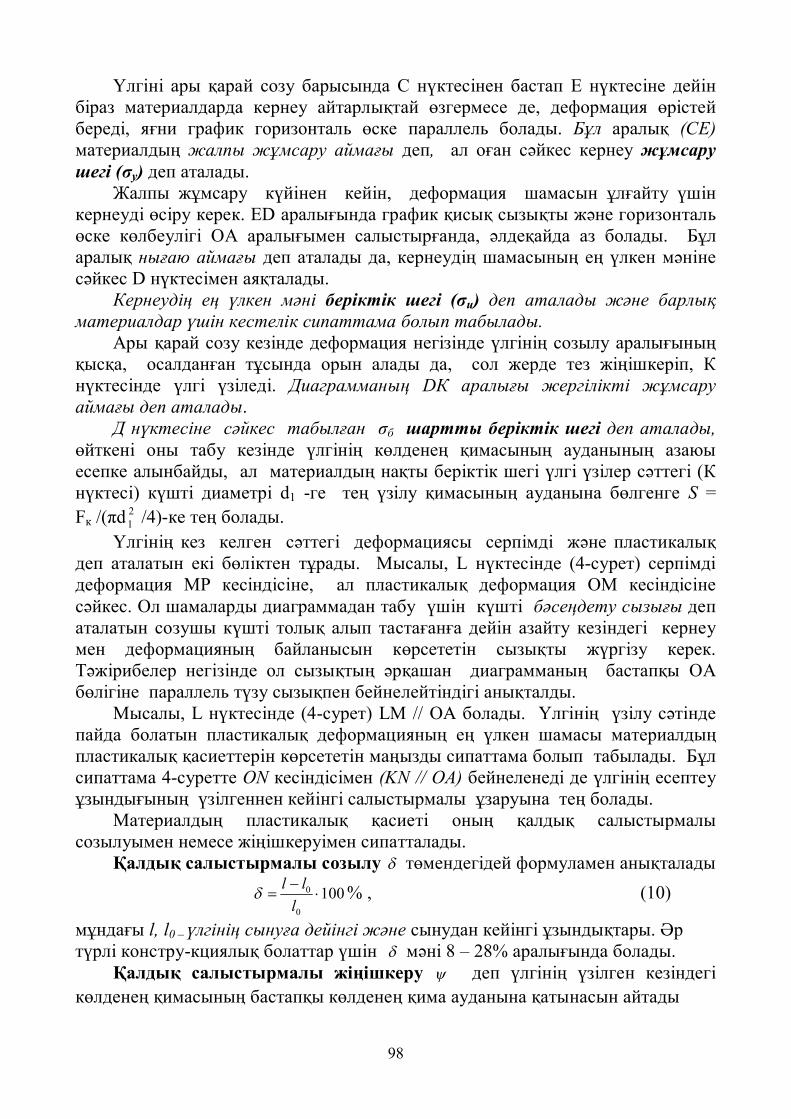
98
Үлгiнi ары қарай созу барысында С нүктесiнен бастап Е нүктесiне дейiн бiраз материалдарда кернеу айтарлықтай өзгермесе де, деформация өрістей береді, яғни график горизонталь өске параллель болады. Бұл аралық (СЕ) материалдың жалпы жұмсару аймағы деп, ал оған сәйкес кернеу жұмсару шегi (σy) деп аталады.
Жалпы жұмсару күйiнен кейiн, деформация шамасын ұлғайту үшiн кернеудi өсiру керек. ED аралығында график қисық сызықты және горизонталь өске көлбеулiгi ОА аралығымен салыстырғанда, әлдеқайда аз болады. Бұл аралық нығаю аймағы деп аталады да, кернеудiң шамасының ең үлкен мәнiне сәйкес D нүктесiмен аяқталады.
Кернеудiң ең үлкен мәнi берiктiк шегi (σu) деп аталады және барлық материалдар үшiн кестелік сипаттама болып табылады.
Ары қарай созу кезiнде деформация негiзiнде үлгiнiң созылу аралығының қысқа, осалданған тұсында орын алады да, сол жерде тез жiңiшкерiп, К нүктесiнде үлгi үзiледi. Диаграмманың DК аралығы жергiлiктi жұмсару аймағы деп аталады.
Д нүктесiне сәйкес табылған σб шартты берiктiк шегi деп аталады, өйткенi оны табу кезiнде үлгiнiң көлденең қимасының ауданының азаюы есепке алынбайды, ал материалдың нақты берiктiк шегi үлгi үзiлер сәттегi (К нүктесi) күштi диаметрi d1 -ге тең үзiлу қимасының ауданына бөлгенге S = Fк /(πd 2
1 /4)-ке тең болады. Үлгiнiң кез келген сәттегi деформациясы серпiмдi және пластикалық
деп аталатын екi бөлiктен тұрады. Мысалы, L нүктесiнде (4-сурет) серпiмдi деформация МР кесiндiсiне, ал пластикалық деформация ОМ кесiндiсiне сәйкес. Ол шамаларды диаграммадан табу үшiн күштi бәсеңдету сызығы деп аталатын созушы күштi толық алып тастағанға дейiн азайту кезiндегi кернеу мен деформацияның байланысын көрсететiн сызықты жүргiзу керек. Тәжiрибелер негiзiнде ол сызықтың әрқашан диаграмманың бастапқы ОА бөлiгiне параллель түзу сызықпен бейнелейтiндiгi анықталды.
Мысалы, L нүктесiнде (4-сурет) LM // ОА болады. Үлгiнiң үзiлу сәтiнде пайда болатын пластикалық деформацияның ең үлкен шамасы материалдың пластикалық қасиеттерiн көрсететiн маңызды сипаттама болып табылады. Бұл сипаттама 4-суретте ON кесiндiсiмен (KN // OA) бейнеленедi де үлгiнiң есептеу ұзындығының үзiлгеннен кейiнгi салыстырмалы ұзаруына тең болады.
Материалдың пластикалық қасиеті оның қалдық салыстырмалы созылуымен немесе жіңішкеруімен сипатталады.
Қалдық салыстырмалы созылу төмендегідей формуламен анықталады 100
0
0
l
ll % , (10)
мұндағы l, l0 – үлгінің сынуға дейінгі және сынудан кейінгі ұзындықтары. Әр түрлі констру-кциялық болаттар үшін мәні 8 – 28% аралығында болады.
Қалдық салыстырмалы жіңішкеру деп үлгінің үзілген кезіндегі көлденең қимасының бастапқы көлденең қима ауданына қатынасын айтады
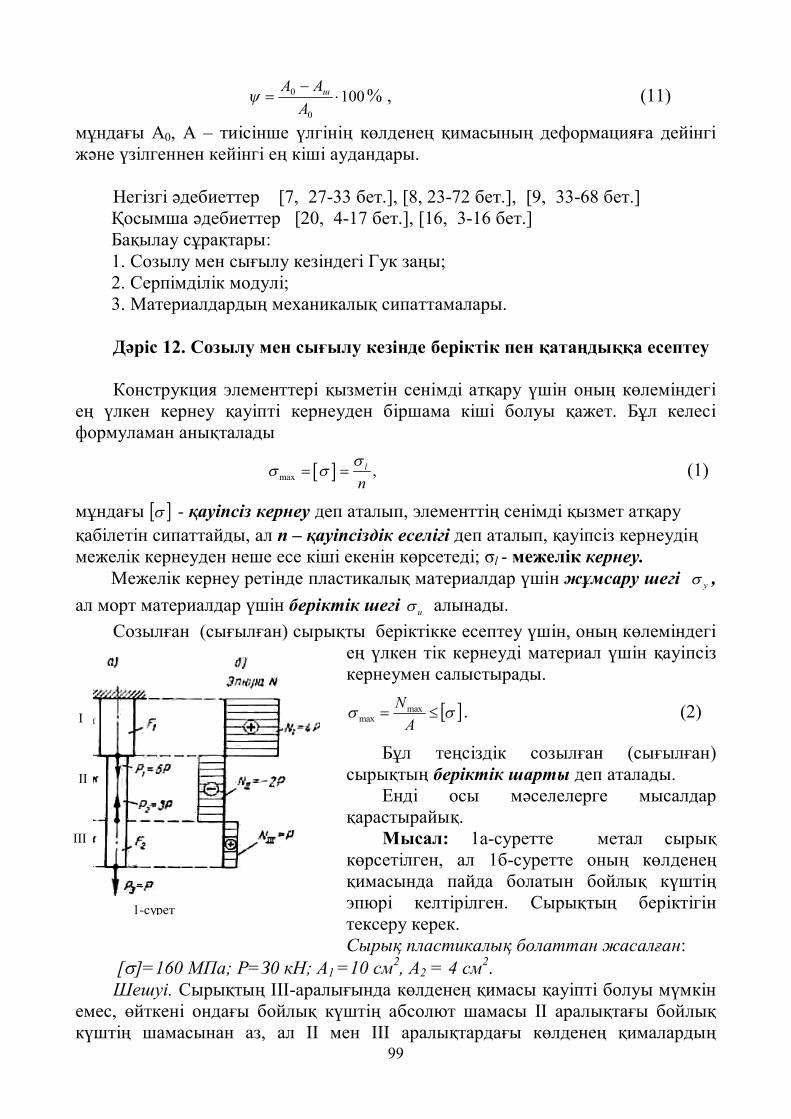
99
1000
0
A
AA ш % , (11)
мұндағы А0, А – тиісінше үлгінің көлденең қимасының деформацияға дейінгі және үзілгеннен кейінгі ең кіші аудандары.
Негізгі әдебиеттер [7, 27-33 бет.], [8, 23-72 бет.], [9, 33-68 бет.] Қосымша әдебиеттер [20, 4-17 бет.], [16, 3-16 бет.] Бақылау сұрақтары: 1. Созылу мен сығылу кезіндегі Гук заңы; 2. Серпімділік модулі; 3. Материалдардың механикалық сипаттамалары. Дәріс 12. Созылу мен сығылу кезінде беріктік пен қатаңдыққа есептеу Конструкция элементтері қызметін сенімді атқару үшін оның көлеміндегі
ең үлкен кернеу қауіпті кернеуден біршама кіші болуы қажет. Бұл келесі формуламан анықталады
max ,l
n
(1)
мұндағы - қауіпсіз кернеу деп аталып, элементтің сенімді қызмет атқару қабілетін сипаттайды, ал n – қауіпсіздік еселігі деп аталып, қауіпсіз кернеудің межелік кернеуден неше есе кіші екенін көрсетеді; σl - межелік кернеу.
Межелік кернеу ретінде пластикалық материалдар үшін жұмсару шегі y , ал морт материалдар үшін беріктік шегі u алынады.
Созылған (сығылған) сырықты беріктікке есептеу үшін, оның көлеміндегі ең үлкен тік кернеуді материал үшін қауіпсіз кернеумен салыстырады.
A
Nmaxmax . (2)
Бұл теңсіздік созылған (сығылған) сырықтың беріктік шарты деп аталады.
Енді осы мәселелерге мысалдар қарастырайық.
Мысал: 1а-суретте метал сырық көрсетілген, ал 1б-суретте оның көлденең қимасында пайда болатын бойлық күштің эпюрі келтірілген. Сырықтың беріктігін тексеру керек. Сырық пластикалық болаттан жасалған:
[]=160 МПа; Р=З0 кН; A1 =10 cм2, A2 = 4 см2. Шешуі. Сырықтың ІІІ-аралығында көлденең қимасы қауіпті болуы мүмкін
емес, өйткені ондағы бойлық күштің абсолют шамасы ІІ аралықтағы бойлық күштің шамасынан аз, ал ІІ мен ІІІ аралықтардағы көлденең қималардың
1-сурет
ІІІ
І
ІІ
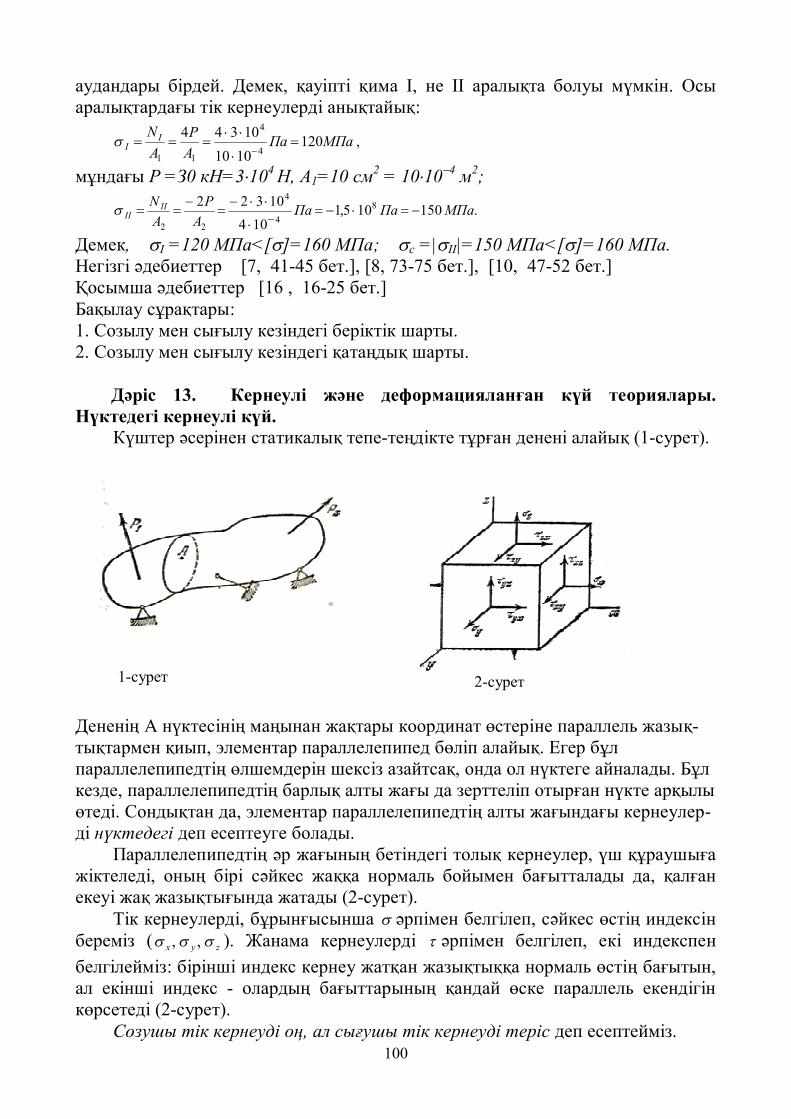
100
аудандары бірдей. Демек, қауіпті қима І, не ІІ аралықта болуы мүмкін. Осы аралықтардағы тік кернеулерді анықтайық:
,1201010
103444
4
11МПаПа
AP
AN I
I
мұндағы P =З0 кH=3104 H, A1=10 см2 = 10104 м2;
.150105,1104
10322 84
4
22МПаПаПа
AP
AN II
II
Демек, I =120 МПа<[]=160 МПа; c =|II|=150 МПа<[]=160 МПа. Негізгі әдебиеттер [7, 41-45 бет.], [8, 73-75 бет.], [10, 47-52 бет.] Қосымша әдебиеттер [16 , 16-25 бет.] Бақылау сұрақтары: 1. Созылу мен сығылу кезіндегі беріктік шарты. 2. Созылу мен сығылу кезіндегі қатаңдық шарты.
Дәріс 13. Кернеулі және деформацияланған күй теориялары.
Нүктедегі кернеулі күй. Күштер әсерінен статикалық тепе-теңдікте тұрған денені алайық (1-сурет).
Дененің А нүктесінің маңынан жақтары координат өстеріне параллель жазық-тықтармен қиып, элементар параллелепипед бөліп алайық. Егер бұл параллелепипедтің өлшемдерін шексіз азайтсақ, онда ол нүктеге айналады. Бұл кезде, параллелепипедтің барлық алты жағы да зерттеліп отырған нүкте арқылы өтеді. Сондықтан да, элементар параллелепипедтің алты жағындағы кернеулер-ді нүктедегі деп есептеуге болады.
Параллелепипедтің әр жағының бетіндегі толық кернеулер, үш құраушыға жіктеледі, оның бірі сәйкес жаққа нормаль бойымен бағытталады да, қалған екеуі жақ жазықтығында жатады (2-сурет).
Тік кернеулерді, бұрынғысынша әрпімен белгілеп, сәйкес өстің индексін береміз ( zyх ,, ). Жанама кернеулерді әрпімен белгілеп, екі индекспен белгілейміз: бірінші индекс кернеу жатқан жазықтыққа нормаль өстің бағытын, ал екінші индекс - олардың бағыттарының қандай өске параллель екендігін көрсетеді (2-сурет).
Созушы тік кернеуді оң, ал сығушы тік кернеуді теріс деп есептейміз.
1-сурет 2-сурет
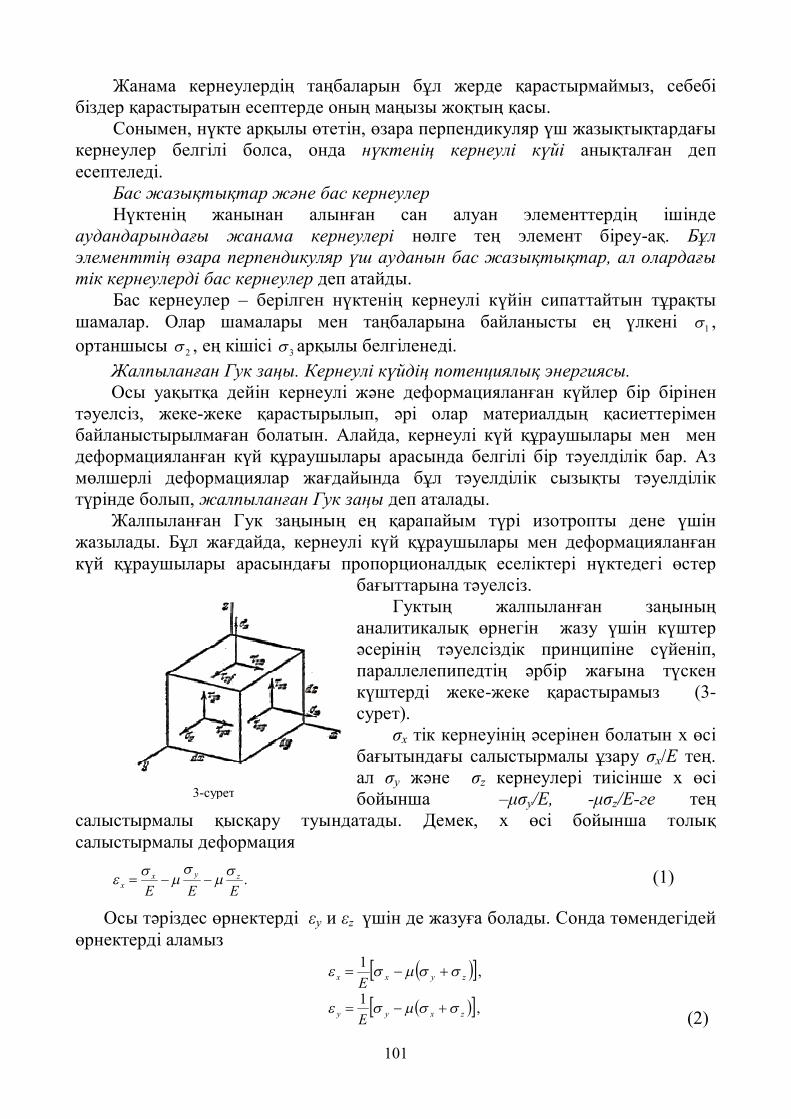
101
Жанама кернеулердің таңбаларын бұл жерде қарастырмаймыз, себебі біздер қарастыратын есептерде оның маңызы жоқтың қасы.
Сонымен, нүкте арқылы өтетін, өзара перпендикуляр үш жазықтықтардағы кернеулер белгілі болса, онда нүктенің кернеулі күйі анықталған деп есептеледі.
Бас жазықтықтар және бас кернеулер Нүктенің жанынан алынған сан алуан элементтердің ішінде
аудандарындағы жанама кернеулері нөлге тең элемент біреу-ақ. Бұл элементтің өзара перпендикуляр үш ауданын бас жазықтықтар, ал олардағы тік кернеулерді бас кернеулер деп атайды.
Бас кернеулер – берілген нүктенің кернеулі күйін сипаттайтын тұрақты шамалар. Олар шамалары мен таңбаларына байланысты ең үлкені 1 , ортаншысы 2 , ең кішісі 3 арқылы белгіленеді.
Жалпыланған Гук заңы. Кернеулі күйдің потенциялық энергиясы. Осы уақытқа дейін кернеулі және деформацияланған күйлер бір бірінен
тәуелсіз, жеке-жеке қарастырылып, әрі олар материалдың қасиеттерімен байланыстырылмаған болатын. Алайда, кернеулі күй құраушылары мен мен деформацияланған күй құраушылары арасында белгілі бір тәуелділік бар. Аз мөлшерлі деформациялар жағдайында бұл тәуелділік сызықты тәуелділік түрінде болып, жалпыланған Гук заңы деп аталады.
Жалпыланған Гук заңының ең қарапайым түрі изотропты дене үшін жазылады. Бұл жағдайда, кернеулі күй құраушылары мен деформацияланған күй құраушылары арасындағы пропорционалдық еселіктері нүктедегі өстер
бағыттарына тәуелсіз. Гуктың жалпыланған заңының
аналитикалық өрнегін жазу үшін күштер әсерінің тәуелсіздік принципіне сүйеніп, параллелепипедтің әрбір жағына түскен күштерді жеке-жеке қарастырамыз (3-сурет).
σx тік кернеуінің әсерінен болатын х өсі бағытындағы салыстырмалы ұзару σx/Е тең. ал σy және σz кернеулері тиісінше х өсі бойынша –μσy/E, -μσz/E-ге тең
салыстырмалы қысқару туындатады. Демек, х өсі бойынша толық салыстырмалы деформация
.EEE
zyxx
(1)
Осы тәріздес өрнектерді εу и εz үшін де жазуға болады. Сонда төмендегідей өрнектерді аламыз
,1zyxx E
,1
zxyy E (2)
3-сурет
102
.1xyzz E
Дене серпімді деформацияланғанда, ондағы ығысу деформациясының сызықты деформацияға әсері жоқтың қасы болғандықтан, алынған формулалар (2) кернеулі күйдегі элементтердің кернеулері мен деформациялары арасындағы тәуелділікті өрнектеп, изотропты дене үшін жалпыланған Гук заңы деп аталады.
Алынған теңдіктердің оң және сол жақтарын мүшелеп қосып, көлемдік деформация өрнегін аламыз
.)(21zyxE
e
(3)
Серпімді деформацияланған дененің көлемінде жиналған энергия деформацияның потенциялық энергиясы деп аталады.
Жалпыланған Гук заңын ескере отырып, көлем бірлігіне тиесілі потенциялық энергияны төмендегідей формуламен өрнектеуге болады
)(21)(2
21 222222
0 xyzxyzxyzxzyzyx GEU . (4)
Бұл формуланы бас кернеулер арқылы өрнектесек: .)(2
21
12313223
22
210
EU (5)
Толық потенциялық энергияны табу үшін U0 өрнегін элементар көлемге көбейткеннен кейін интегралдау керек
0V
U U dV . (6)
Толық потенциялық энергия шартты түрде екіге – көлем өзгерту энергиясына (U0к) және пішін өзгерту энергиясына (U0п) бөлінеді. Оларды қорытып жатпай-ақ, тек қорытынды формулаларын келтіреміз
1 2 301 2 ( )6kU E
; (7)
2 2 20 1 2 3 2 3 1 3 2 3
13nU E ;
немесе 2
132
322
210 61
E
U n. (8)
Егер соңғы формуланы кез келген өстер жүйесіндегі кернеулер арқылы өрнектесек:
2222220 2
16
1zxyzxyxzzyyxn GE
U
. (9)
Негізгі әдебиеттер [7, 57-68 бет.], [8, 143-159 бет.], [9, 252-283 бет.] Қосымша әдебиеттер [16 , 16-25 бет.], [18] Бақылау сұрақтары: 1. Тік және жанама кернеулер.. 2. Сызықтық, өстік және көлемдік кернеулі күйлер. 3. Гуктың жалпыланған заңы.
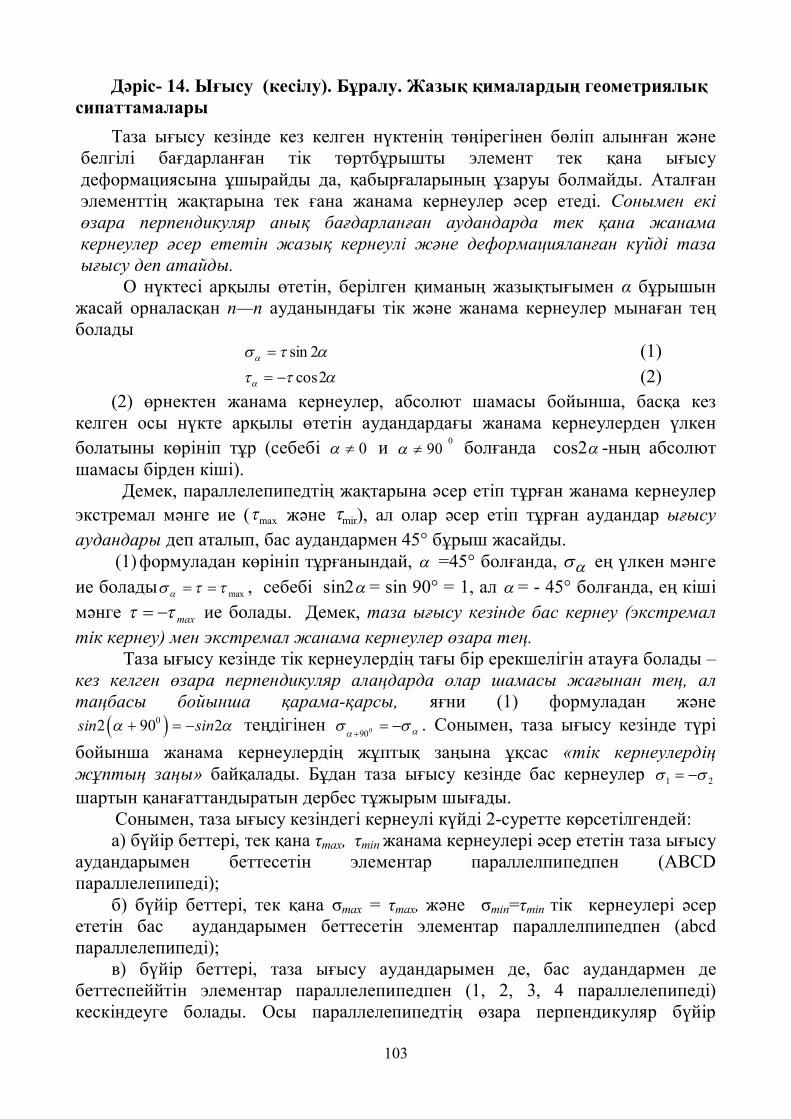
103
Дәріс- 14. Ығысу (кесілу). Бұралу. Жазық қималардың геометриялық сипаттамалары
Таза ығысу кезiнде кез келген нүктенiң төңiрегiнен бөлiп алынған және белгілі бағдарланған тiк төртбұрышты элемент тек қана ығысу деформациясына ұшырайды да, қабырғаларының ұзаруы болмайды. Аталған элементтiң жақтарына тек ғана жанама кернеулер әсер етедi. Сонымен екi өзара перпендикуляр анық бағдарланған аудандарда тек қана жанама кернеулер әсер ететiн жазық кернеулi және деформацияланған күйдi таза ығысу деп атайды.
О нүктесі арқылы өтетін, берілген қиманың жазықтығымен α бұрышын жасай орналасқан п—п ауданындағы тік және жанама кернеулер мынаған тең болады
2sin (1) 2cos (2)
(2) өрнектен жанама кернеулер, абсолют шамасы бойынша, басқа кез келген осы нүкте арқылы өтетін аудандардағы жанама кернеулерден үлкен болатыны көрініп тұр (себебі 0 и 090 болғанда cos2 -ның абсолют шамасы бірден кіші).
Демек, параллелепипедтің жақтарына әсер етіп тұрған жанама кернеулер экстремал мәнге ие ( max және min ), ал олар әсер етіп тұрған аудандар ығысу аудандары деп аталып, бас аудандармен 45° бұрыш жасайды.
(1) формуладан көрініп тұрғанындай, =45° болғанда, ең үлкен мәнге ие болады max , себебі sin2 = sin 90° = 1, aл = - 45° болғанда, ең кіші мәнге max ие болады. Демек, таза ығысу кезінде бас кернеу (экстремал тік кернеу) мен экстремал жанама кернеулер өзара тең.
Таза ығысу кезiнде тiк кернеулердiң тағы бip ерекшелiгiн атауға болады – кез келген өзара перпендикуляр алаңдарда олар шамасы жағынан тең, ал таңбасы бойынша қарама-қарсы, яғни (1) формуладан және
02 90 2sin sin теңдiгiнен
090 . Сонымен, таза ығысу кезiнде түрi бойынша жанама кернеулердiң жұптық заңына ұқсас «тiк кернеулердiң жұптың заңы» байқалады. Бұдан таза ығысу кезiнде бас кернеулер 21 шартын қанағаттандыратын дербес тұжырым шығады.
Сонымен, таза ығысу кезіндегі кернеулі күйді 2-суретте көрсетілгендей: а) бүйір беттері, тек қана τmax, τmin жанама кернеулері әсер ететін таза ығысу
аудандарымен беттесетін элементар параллелпипедпен (ABCD параллелепипеді);
б) бүйір беттері, тек қана σmax = τmax, және σmin=τmin тік кернеулері әсер ететін бас аудандарымен беттесетін элементар параллелпипедпен (abcd параллелепипеді);
в) бүйір беттері, таза ығысу аудандарымен де, бас аудандармен де беттеспеййтін элементар параллелепипедпен (1, 2, 3, 4 параллелепипеді) кескіндеуге болады. Осы параллелепипедтің өзара перпендикуляр бүйір
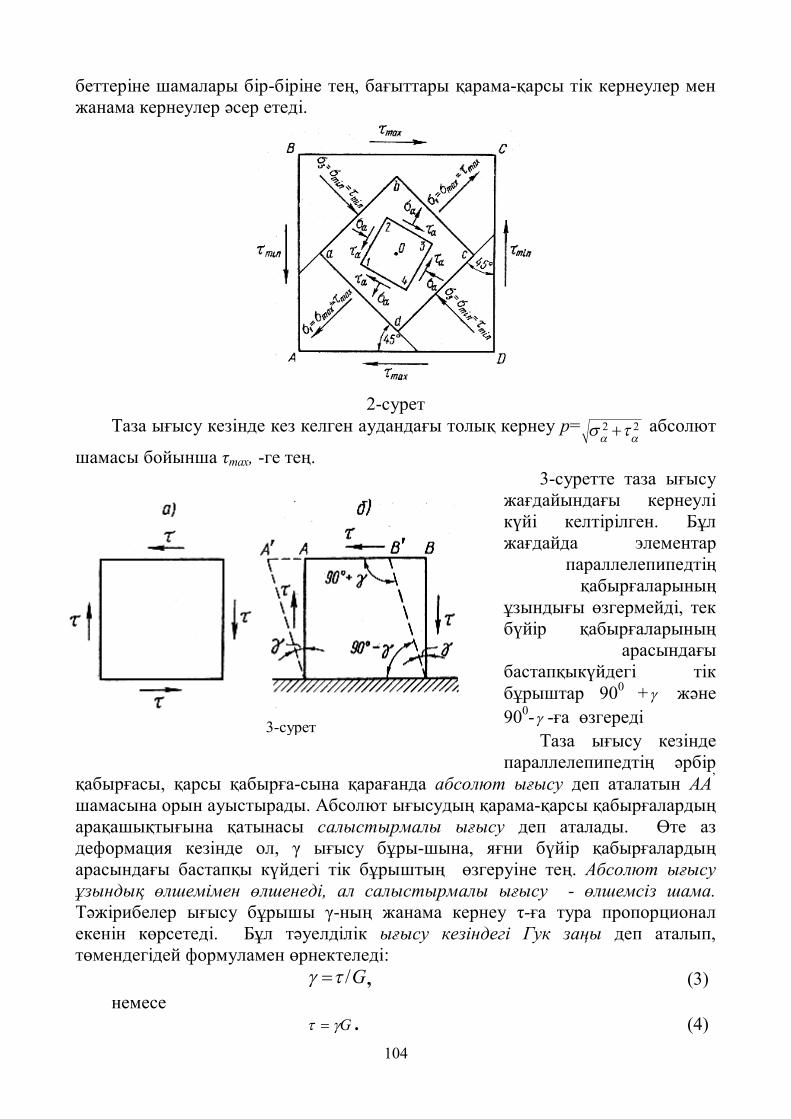
104
беттеріне шамалары бір-біріне тең, бағыттары қарама-қарсы тік кернеулер мен жанама кернеулер әсер етеді.
2-сурет
Таза ығысу кезінде кез келген аудандағы толық кернеу р= 22 абсолют
шамасы бойынша τmax, -ге тең. 3-суретте таза ығысу
жағдайындағы кернеулі күйі келтірілген. Бұл жағдайда элементар
параллелепипедтің қабырғаларының
ұзындығы өзгермейді, тек бүйір қабырғаларының
арасындағы бастапқыкүйдегі тік бұрыштар 900 + және 900- -ға өзгереді
Таза ығысу кезінде параллелепипедтің әрбір
қабырғасы, қарсы қабырға-сына қарағанда абсолют ығысу деп аталатын АА’ шамасына орын ауыстырады. Абсолют ығысудың қарама-қарсы қабырғалардың арақашықтығына қатынасы салыстырмалы ығысу деп аталады. Өте аз деформация кезінде ол, γ ығысу бұры-шына, яғни бүйір қабырғалардың арасындағы бастапқы күйдегі тік бұрыштың өзгеруіне тең. Абсолют ығысу ұзындық өлшемімен өлшенеді, ал салыстырмалы ығысу - өлшемсіз шама. Тәжірибелер ығысу бұрышы γ-ның жанама кернеу τ-ға тура пропорционал екенін көрсетеді. Бұл тәуелділік ығысу кезіндегі Гук заңы деп аталып, төмендегідей формуламен өрнектеледі:
G/ , (3) немесе G . (4)
3-сурет
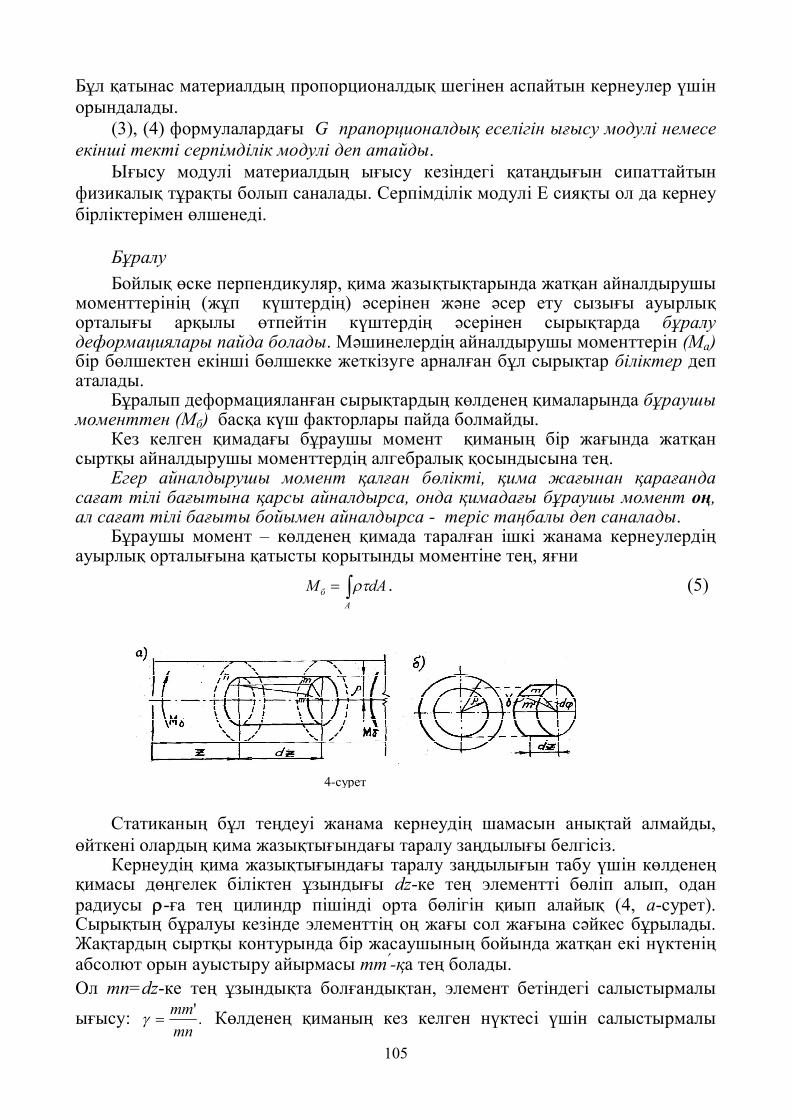
105
Бұл қатынас материалдың пропорционалдық шегінен аспайтын кернеулер үшін орындалады.
(3), (4) формулалардағы G прапорционалдық еселігін ығысу модулі немесе екінші текті серпімділік модулі деп атайды.
Ығысу модулі материалдың ығысу кезіндегі қатаңдығын сипаттайтын физикалық тұрақты болып саналады. Серпімділік модулі Е сияқты ол да кернеу бірліктерімен өлшенеді.
Бұралу Бойлық өске перпендикуляр, қима жазықтықтарында жатқан айналдырушы
моменттерінің (жұп күштердің) әсерінен және әсер ету сызығы ауырлық орталығы арқылы өтпейтін күштердің әсерінен сырықтарда бұралу деформациялары пайда болады. Мәшинелердің айналдырушы моменттерін (Ма) бір бөлшектен екінші бөлшекке жеткізуге арналған бұл сырықтар біліктер деп аталады.
Бұралып деформацияланған сырықтардың көлденең қималарында бұраушы моменттен (Мб) басқа күш факторлары пайда болмайды.
Кез келген қимадағы бұраушы момент қиманың бір жағында жатқан сыртқы айналдырушы моменттердің алгебралық қосындысына тең.
Егер айналдырушы момент қалған бөлікті, қима жағынан қарағанда сағат тілі бағытына қарсы айналдырса, онда қимадағы бұраушы момент оң, ал сағат тілі бағыты бойымен айналдырса - теріс таңбалы деп саналады.
Бұраушы момент – көлденең қимада таралған ішкі жанама кернеулердің ауырлық орталығына қатысты қорытынды моментіне тең, яғни
A
б dAM . (5)
Статиканың бұл теңдеуі жанама кернеудің шамасын анықтай алмайды, өйткені олардың қима жазықтығындағы таралу заңдылығы белгісіз.
Кернеудің қима жазықтығындағы таралу заңдылығын табу үшін көлденең қимасы дөңгелек біліктен ұзындығы dz-ке тең элементтi бөліп алып, одан радиусы -ға тең цилиндр пішінді орта бөлiгiн қиып алайық (4, а-сурет). Сырықтың бұралуы кезiнде элементтiң оң жағы сол жағына сәйкес бұрылады. Жақтардың сыртқы контурында бip жасаушының бойында жатқан екi нүктенiң абсолют орын ауыстыру айырмасы mm-қа тең болады. Ол mn=dz-ке тең ұзындықта болғандықтан, элемент бетiндегi салыстырмалы ығысу: .'
mnmm
Көлденең қиманың кез келген нүктесi үшiн салыстырмалы
4-сурет
106
ығысу берiлген нүктеден білік өсiне дейiнгi қашықтыққа пропорционал болады. Егер оң қиманың бойлық өске қатысты бұрылуын d арқылы белгiлесек, онда mmd (4, б-сурет), ал салыстырмалы ығысу
.dzd (6)
Қиманың әpбip нүктесi үшiн салыстырмалы ығысу бұл нүктенiң сырық өсiнен қашықтығына пропорционал.
Бұралу серпiмдiлiк аймағында қарастырылатындықтан, Гук заңына сәйкес сырық элементiнiң салыстырмалы ығысу шамасы бойынша жанама кернеудi анықтауға болады. Бұл үшiн ығысу кезіндегі Гук заңын
G (7)
өрнектейтiн формуланы пайдаланып, -ны (6) формуладан табылған мәнiмен ауыстырғанда
dzdG (8)
түріндегі кернеу формуласын табамыз. Мұндағы — қиманың iшiнен бөліп алынған кез келген аудан элементіндегі кернеу; — бұл элементтен киманың орталығына дейiнгi қашықтық (4б-сурет).
Енді (5) формулаға сүйеніп, 2б
A A
GdM dA dAdz екенін көреміз. Мұндағы
IdAA
2 - қиманың полюстік инерция моменті. Олай болса
GIM
dzd б . (8)
формуланы ескеріп, жанама кернеу үшін төмендегідей өрнекті аламыз
IM б . (9)
max болғанда, жанама кернеу ең үлкен мәніне ие болады
,maxmax
WM
IM бб (10)
мұндағы max
IW - полюстік қарсылық моменті деп аталады.
Тұтас дөңгелек қима үшiн: 3
16pdW
, (11)
ал сақина тәрізді қима үшiн 3
4(1 ),16pDW c
(12)
с – сақинаның ішкі диаметрінің сыртқы диаметріне қатынасы. Бұралған біліктерді беріктік пен қатаңдыққа есептеу. Бұралған білік үшін беріктік шарты мына түрде жазылады
,maxmax
W
Mб (13)
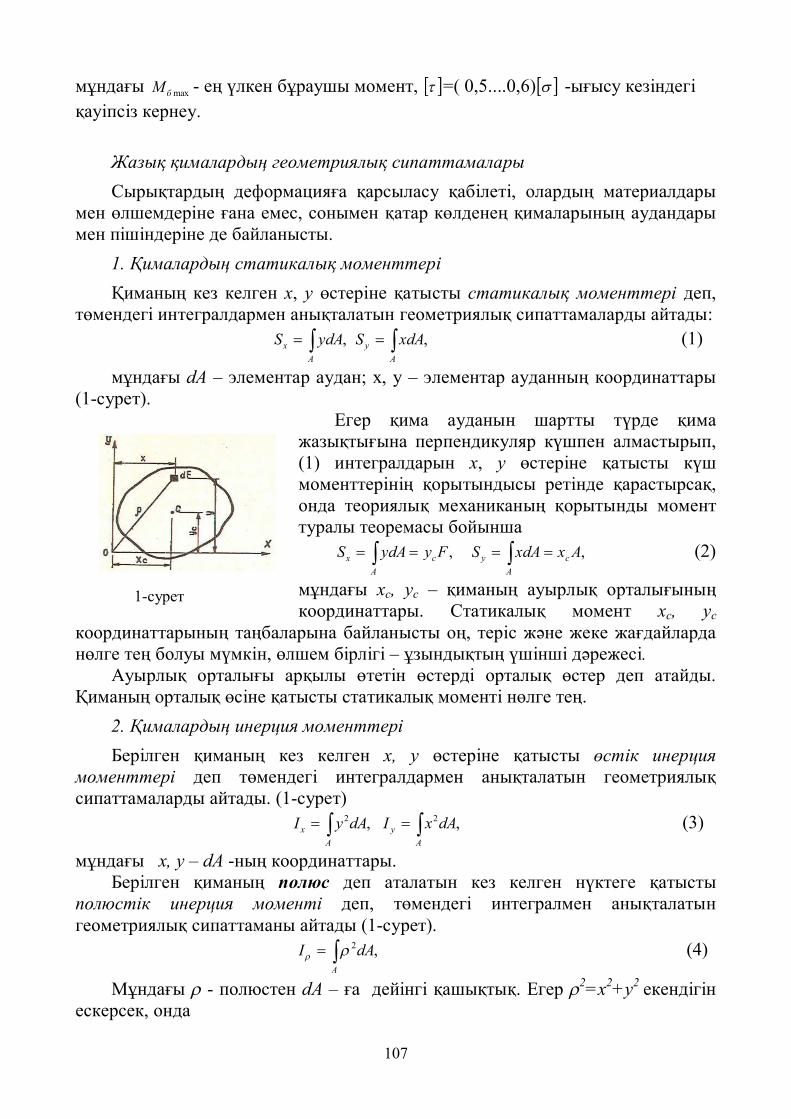
107
мұндағы maxбM - ең үлкен бұраушы момент, =( 0,5....0,6) -ығысу кезіндегі қауіпсіз кернеу.
Жазық қималардың геометриялық сипаттамалары Сырықтардың деформацияға қарсыласу қабілеті, олардың материалдары
мен өлшемдеріне ғана емес, сонымен қатар көлденең қималарының аудандары мен пішіндеріне де байланысты.
1. Қималардың статикалық моменттері Қиманың кез келген х, у өстеріне қатысты статикалық моменттері деп,
төмендегі интегралдармен анықталатын геометриялық сипаттамаларды айтады: , ,x y
A A
S ydA S xdA (1)
мұндағы dА – элементар аудан; х, у – элементар ауданның координаттары (1-сурет).
Егер қима ауданын шартты түрде қима жазықтығына перпендикуляр күшпен алмастырып, (1) интегралдарын х, y өстеріне қатысты күш моменттерінің қорытындысы ретінде қарастырсақ, онда теориялық механиканың қорытынды момент туралы теоремасы бойынша
, ,x c y cA A
S ydA y F S xdA x A (2)
мұндағы xc, yc – қиманың ауырлық орталығының координаттары. Статикалық момент xc, yc
координаттарының таңбаларына байланысты оң, теріс және жеке жағдайларда нөлге тең болуы мүмкін, өлшем бірлігі – ұзындықтың үшінші дәрежесі.
Ауырлық орталығы арқылы өтетін өстерді орталық өстер деп атайды. Қиманың орталық өсіне қатысты статикалық моменті нөлге тең.
2. Қималардың инерция моменттері Берілген қиманың кез келген x, y өстеріне қатысты өстік инерция
моменттері деп төмендегі интегралдармен анықталатын геометриялық сипаттамаларды айтады. (1-сурет)
2 2, ,x yA A
I y dA I x dA (3)
мұндағы x, y – dА -ның координаттары. Берілген қиманың полюс деп аталатын кез келген нүктеге қатысты
полюстік инерция моменті деп, төмендегі интегралмен анықталатын геометриялық сипаттаманы айтады (1-сурет).
2 ,A
I dA (4)
Мұндағы - полюстен dА – ға дейінгі қашықтық. Егер 2=x2+y2 екендігін ескерсек, онда
1-сурет
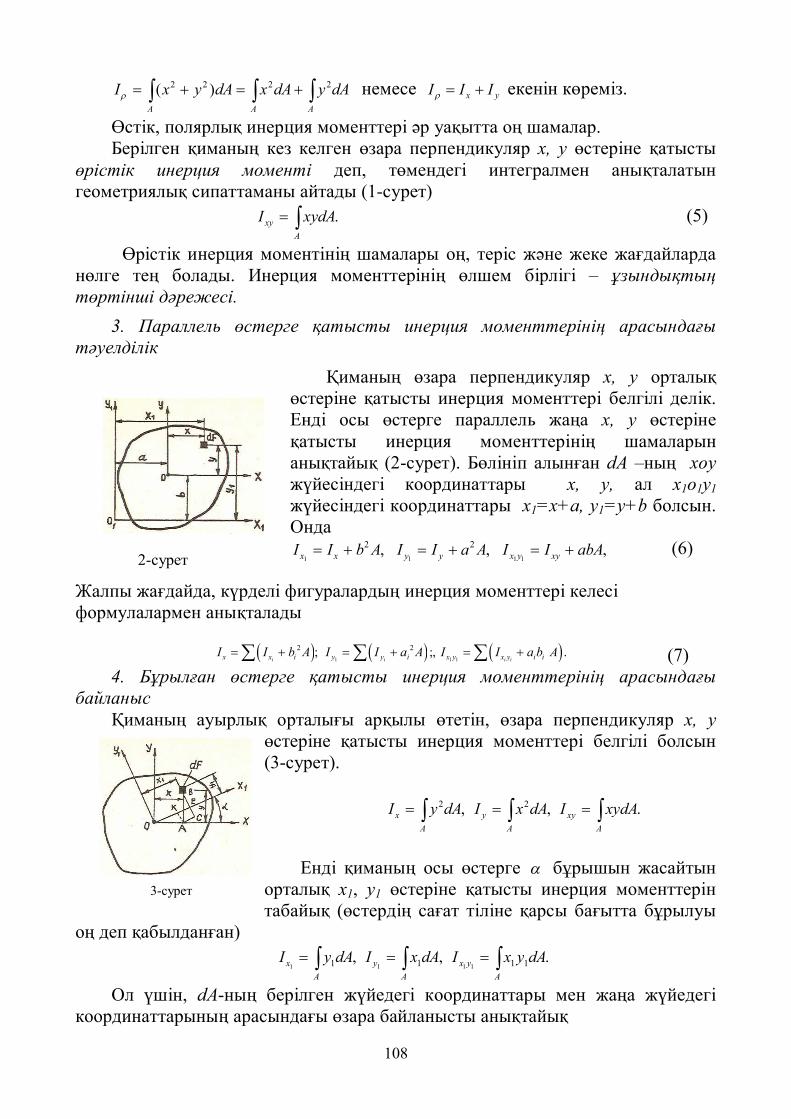
108
1 1 1 1
2 2, , ,x x y y x y xyI I b A I I a A I I abA
1 1 1
2 2; ;, .i i i ix x i y y i x y x y i iI I b A I I a A I I a b A
2 2 2 2( )A A A
I x y dA x dA y dA немесе yx III екенін көреміз.
Өстік, полярлық инерция моменттері әр уақытта оң шамалар. Берілген қиманың кез келген өзара перпендикуляр x, y өстеріне қатысты
өрістік инерция моменті деп, төмендегі интегралмен анықталатын геометриялық сипаттаманы айтады (1-сурет)
.xyA
I xydA (5)
Өрістік инерция моментінің шамалары оң, теріс және жеке жағдайларда нөлге тең болады. Инерция моменттерінің өлшем бірлігі – ұзындықтың төртінші дәрежесі.
3. Параллель өстерге қатысты инерция моменттерінің арасындағы тәуелділік
Қиманың өзара перпендикуляр x, y орталық өстеріне қатысты инерция моменттері белгілі делік. Енді осы өстерге параллель жаңа x, y өстеріне қатысты инерция моменттерінің шамаларын анықтайық (2-сурет). Бөлініп алынған dА –ның xoy жүйесіндегі координаттары x, y, ал x1o1y1 жүйесіндегі координаттары x1=x+a, y1=y+b болсын. Онда
(6)
Жалпы жағдайда, күрделі фигуралардың инерция моменттері келесі формулалармен анықталады
(7)
4. Бұрылған өстерге қатысты инерция моменттерінің арасындағы байланыс
Қиманың ауырлық орталығы арқылы өтетін, өзара перпендикуляр x, y өстеріне қатысты инерция моменттері белгілі болсын (3-сурет).
2 2, , .x y xy
A A A
I y dA I x dA I xydA
Енді қиманың осы өстерге бұрышын жасайтын
орталық x1, y1 өстеріне қатысты инерция моменттерін табайық (өстердің сағат тіліне қарсы бағытта бұрылуы
оң деп қабылданған)
1 1 1 11 1 1 1, , .x y x yA A A
I y dA I x dA I x y dA
Ол үшін, dA-ның берілген жүйедегі координаттары мен жаңа жүйедегі координаттарының арасындағы өзара байланысты анықтайық
2-сурет
3-сурет

109
4
.2 64x y
I dI I
.sincos,sincos 11 xyCEBCBEyyxKEOKOEx Олай болса
,2sinsincos 221
xyyxx IIII (8) ,2sincossin 22
1 xyyxy IIII (9) .2sin)(2cos 2
111
yxxyyx IIII (10) Алынған (8) және (9) өрнектерін қоссақ yxyx IIII
11екенін көреміз.
Енді қарапайым қималардың инерция моменттерін қарастырайық.
1. Тік төртбұрыш. Қиманың ауырлық ортадығы арқылы өтетін өстерге қатысты өстік инерция моменттерін табайық (4-сурет). Анықтама бойынша x өсіне қатысты өстік инерция моменті
2x
A
I y dA , мұндағы dA dyb . Олай болса
2
2
32 2 .
12
h
hx
A
bhI y dA b y dy
Дәл осылай dA hdx деп қабылдап, y өсіне қатысты өстік инерция моменті 2
2
32
12
b
by
hbI h x dx
екенін көреміз. Төртбұрыштың табаны арқылы өтетін өске қатысты инерция моменті
.30
32
1 h
xbhdyybI
2. Дөңгелек. Алдымен полюстік инерция моментін анықтайық (ІІ.7-сурет). Анықтама бойынша
2 ,A
I d A мұндағы 2 .dA d
Олай болса
,2
24
0
3 rdIr немесе
4 4
.2 32r dI
xyyx IIIII , болғандықтан,
Негізгі әдебиеттер [7, 17-27 бет., 76-92 бет.,], [8, 76--93 бет.], [9, 89-132
бет.] Қосымша әдебиеттер [16 , 25-40 бет.], [23] Бақылау сұрақтары: 1. Ығысу кезіндегі кернеулер. 2. Бұралу кезіндегі беріктік, қатаңдық шарттары. 3. Бұралу кезіндегі Гук заңы.
4-сурет
5-сурет
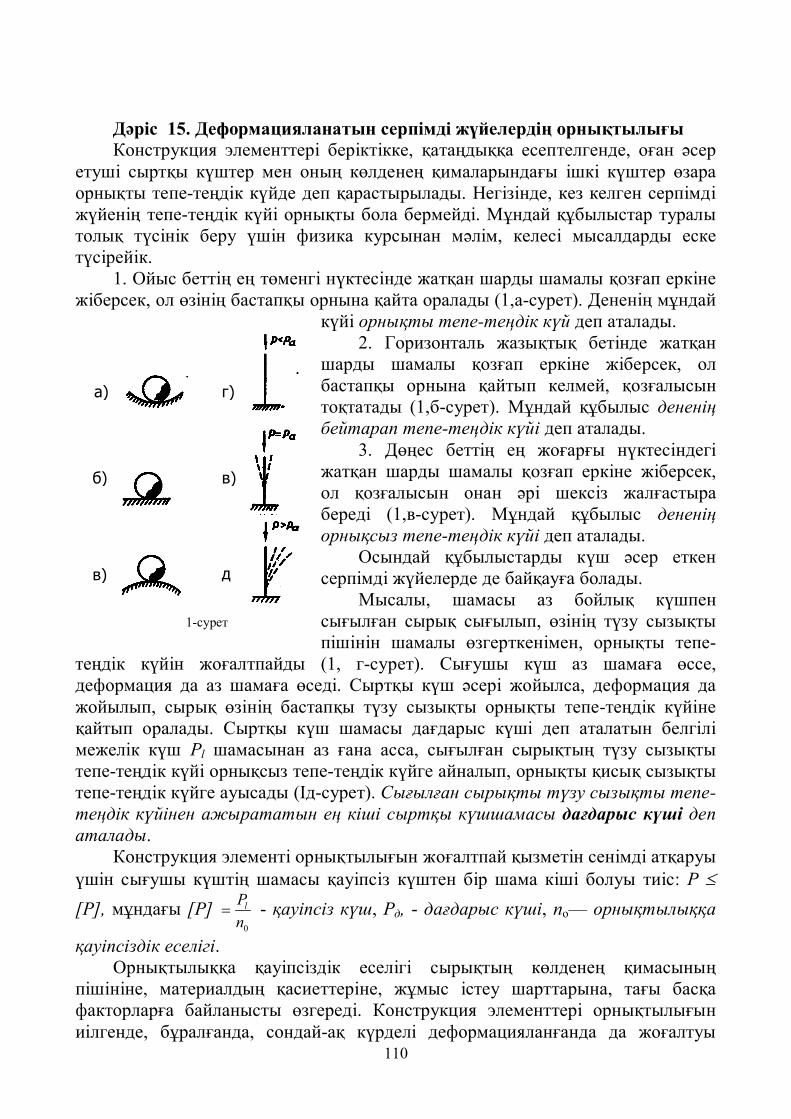
110
Дәріс 15. Деформацияланатын серпімді жүйелердің орнықтылығы Конструкция элементтері беріктікке, қатаңдыққа есептелгенде, оған әсер
етуші сыртқы күштер мен оның көлденең қималарындағы ішкі күштер өзара орнықты тепе-теңдік күйде деп қарастырылады. Негізінде, кез келген серпімді жүйенің тепе-теңдік күйі орнықты бола бермейді. Мұндай құбылыстар туралы толық түсінік беру үшін физика курсынан мәлім, келесі мысалдарды еске түсірейік.
1. Ойыс беттің ең төменгі нүктесінде жатқан шарды шамалы қозғап еркіне жіберсек, ол өзінің бастапқы орнына қайта оралады (1,а-сурет). Дененің мұндай
күйі орнықты тепе-теңдік күй деп аталады. 2. Горизонталь жазықтық бетінде жатқан
шарды шамалы қозғап еркіне жіберсек, ол бастапқы орнына қайтып келмей, қозғалысын тоқтатады (1,б-сурет). Мұндай құбылыс дененің бейтарап тепе-теңдік күйі деп аталады.
3. Дөңес беттің ең жоғарғы нүктесіндегі жатқан шарды шамалы қозғап еркіне жіберсек, ол қозғалысын онан әрі шексіз жалғастыра береді (1,в-сурет). Мұндай құбылыс дененің орнықсыз тепе-теңдік күйі деп аталады.
Осындай құбылыстарды күш әсер еткен серпімді жүйелерде де байқауға болады.
Мысалы, шамасы аз бойлық күшпен сығылған сырық сығылып, өзінің түзу сызықты пішінін шамалы өзгерткенімен, орнықты тепе-
теңдік күйін жоғалтпайды (1, г-сурет). Сығушы күш аз шамаға өссе, деформация да аз шамаға өседі. Сыртқы күш әсері жойылса, деформация да жойылып, сырық өзінің бастапқы түзу сызықты орнықты тепе-теңдік күйіне қайтып оралады. Сыртқы күш шамасы дағдарыс күші деп аталатын белгілі межелік күш Рl шамасынан аз ғана асса, сығылған сырықтың түзу сызықты тепе-теңдік күйі орнықсыз тепе-теңдік күйге айналып, орнықты қисық сызықты тепе-теңдік күйге ауысады (Ід-сурет). Сығылған сырықты түзу сызықты тепе-теңдік күйінен ажырататын ең кіші сыртқы күшшамасы дағдарыс күші деп аталады.
Конструкция элементі орнықтылығын жоғалтпай қызметін сенімді атқаруы үшін сығушы күштің шамасы қауіпсіз күштен бір шама кіші болуы тиіс: Р [Р], мұндағы [P]
0
lPn
- қауіпсіз күш, Рд, - дағдарыс күші, nо— орнықтылыққа
қауіпсіздік еселігі. Орнықтылыққа қауіпсіздік еселігі сырықтың көлденең қимасының
пішініне, материалдың қасиеттеріне, жұмыс істеу шарттарына, тағы басқа факторларға байланысты өзгереді. Конструкция элементтері орнықтылығын иілгенде, бұралғанда, сондай-ақ күрделі деформацияланғанда да жоғалтуы
а) г)
в) б)
в) д(
1-сурет
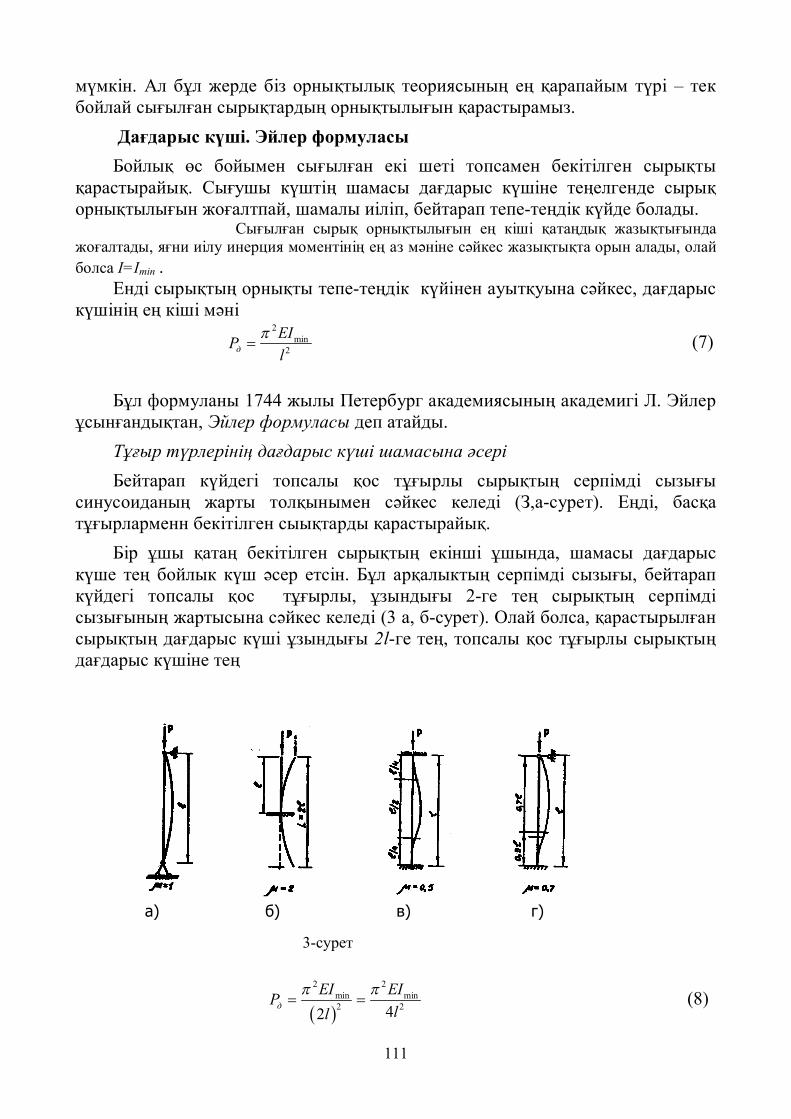
111
мүмкін. Ал бұл жерде біз орнықтылық теориясының ең қарапайым түрі – тек бойлай сығылған сырықтардың орнықтылығын қарастырамыз.
Дағдарыс күші. Эйлер формуласы Бойлық өс бойымен сығылған екі шеті топсамен бекітілген сырықты
қарастырайық. Сығушы күштің шамасы дағдарыс күшіне теңелгенде сырық орнықтылығын жоғалтпай, шамалы иіліп, бейтарап тепе-теңдік күйде болады.
Сығылған сырық орнықтылығын ең кіші қатаңдық жазықтығында жоғалтады, яғни иілу инерция моментінің ең аз мәніне сәйкес жазықтықта орын алады, олай болса I=Imin .
Енді сырықтың орнықты тепе-теңдік күйінен ауытқуына сәйкес, дағдарыс күшінің ең кіші мәні
2min
2дEIPl
(7)
Бұл формуланы 1744 жылы Петербург академиясының академигі Л. Эйлер
ұсынғандықтан, Эйлер формуласы деп атайды. Тұғыр түрлерінің дағдарыс күші шамасына әсері Бейтарап күйдегі топсалы қос тұғырлы сырықтың серпімді сызығы
синусоиданың жарты толқынымен сәйкес келеді (З,а-сурет). Еңді, басқа тұғырларменн бекітілген сыықтарды қарастырайық.
Бір ұшы қатаң бекітілген сырықтың екінші ұшында, шамасы дағдарыс күше тең бойлык күш әсер етсін. Бұл арқалыктың серпімді сызығы, бейтарап күйдегі топсалы қос тұғырлы, ұзындығы 2-ге тең сырықтың серпімді сызығының жартысына сәйкес келеді (3 а, б-сурет). Олай болса, қарастырылған сырықтың дағдарыс күші ұзындығы 2l-ге тең, топсалы қос тұғырлы сырықтың дағдарыс күшіне тең
2 2min min2 242
дEI EIP
ll
(8)
а) б) в) г)
3-сурет
112
Енді екі ұшы катаң бекітілген бейтарап күйдегі сырықты қарастырайық. Сырықтың серпімді сызығы синусоиданың екі жарты толқынына сәйкес келеді (З, в-сурет). Бейтарап күйдегі қос тұғырлы сырықтың серпімді сызығымен салыстырып,
2min
2
4д
EIPl
(9)
екенін көреміз (3 а, в-сурет). Дәл осылай бір ұшы қатаң, ал екінші ұшы топсалы тұғырларға бекітілген
бейтарап күйдегі сырықтың дағдарыс күшін табамыз. (3, а, г-сурет)
2min
20,7д
EIPl
(10)
Бейтарап күйдегі, тұғырлары әр түрлі сырықтардың дағдарыс күштерін анықтайтын Эйлер формуласын жалпы түрге келтіруге болады
2min2д
EIPl
. (11)
Мұндағы l- сырықтың ұзындығы; - тұғырлардың түрлеріне байланысты кабылданатын, келтірілген ұзындық еселігі; l = l,0 – сырықтың келтірілген ұзыңдығы.
Келтірілген ұзындық деп, дағдарыс күші берілген сырықтың дағдарыс күшіне тең топсалы қос тұғырлы сырықтың ұзындығын айтады.
Кернеулері пропорционалдық шегінен асқан жағдайдағы сырықтың орнықтылығын жоғалтуы туралы түсінік Бейтарап тепе-теңдік күйдегі сырықтың көлденең қимасындағы тік
кернеу келесі формуламен анықталады
2 2min
2
min
, .дд д
P EI EнемесеА ll А
i
Мұндағы
min
min2min ,
il
FIi - сырықтыңь икемділігі деп аталып, сырықтың
өлшемдері мен тұғыр түрлерінің дағдарыс күшінің шамасына әсерін сипаттайтын өлшемсіз шама. Сонымен, дағдарыс кернеуі
2
2
Ea . (12)
Эйлер формуласын қорытьп шығарғанда сырықтың серпімді өсінің дифференциалдық теңдеуі пайдаланылады. Бұл теңдеу, сырықтың серпімді деформацияланужағдайында ғана күшін сақтайды. Сондықтан, Эйлер формуласын сығылған сырықтың көлденең қимасындағы тік кернеу пропорционалдық шектен аспайтын жағдайда ғана пайдалануға болады
2
2a
a пц a пцP EнемесеF
бұдан Эйлер формуласының қолдану шарты
113
2м
пц
E (14)
Демек, м болғанда Эйлер формуласын пайдалануға болмайды. Мысалы, Ст3 болатынан жасалған сырық үшін ( пц = 200 МПа)
2 53.14 2 10 100200м
.
Тік кернеулері пропорционалдық шектерінен үлкен, сығылған сырықтар үшін дағдарыс күшін анықтау - күрделі мәселелердің бірі. Көптеген тәжірибелік зерттеулердің нәтижелеріне сүйеніп Ф.С. Ясинский икемділік шамасы кіші ( м ) сырықтардың дағдарыс кернеулерін анықтауға келесі формуланы ұсынған
д a b (15) Мұндағы a,b—материалға байланысты қабылданатын тәжірибеден
анықталатын еселіктер. Қарастырылған Ст3 болаты үшін a=310 МПа, b=1,14 МПа. Икемділік шамасы 40 100 болғанда болат сырықтың дағдарыс кернеулері Ясинский формуласымен анықталады. Икемділік шамасы < 40 болса сырықты орнықты деп қарастырылып, тек беріктікке есептеледі.
Сығылған сырық беріктік қасиетін немесе орнықтылығын жоғалтса, жүк көтеру қабілетінен айрылады. Сондықтан, сығылған сырықттар беріктікке есептелумен қатар, міндетті түрде орнықтылыққа да тексеріледі
Орнықтылық шарты мына түрде жазылады 0 z
мұндағы 00
д
n
- орнықтылыққа қауіпсіз кернеу; n0 –орнықтылыққа
қауіпсіздік еселігі. Орнықтылықтың қауіпсіз кернеуін сығылу кезіндегі негізгі қауіпсіз
кернеумен l
n
- салыстырайық
0
l l
д
nn
.
Бұдан 0
0
дl
l
nn
Негізгі қауіпсіз кернеуді азайту еселігі деп аталатын 0
д
l
nn
шаманы
енгізіп, 0 , l қауіпсіз кернеулерінің арасындағы байланысты мына түрде жазуға болады
0 l (16) Mұңдағы -негізгі қауіпсіз кернеуді кеміту еселігі.
Негізгі қауіпсіз кернеуді кеміту еселігін сырықтың кез келген икемділігі ( ) үшін есептеп шығаруға болады.
114
Негізгі қауіпсіз кернеудің кеміту еселігін ( ) пайдаланып сығылған сырықтың орнықтылығын тексеру тәртібі мынандай болады:
1. Өлшемдері мен пішіні белгілі қиманың ең кіші инерция радиусы мен сырықтың иілгіштігі анықталады
min
minmin ,
il
FIi
2. Сырықтың икемділігі -ға сәйкес анықтамалықтардан алынып, орнықтылыққа қауіпсіз кернеуі анықталады 0 , l .
3. Сығылған сырықтың тік кернеуі орнықтылыққа қауіпсіз кернеуімен салыстырылып, орнықтылығы тексеріледі 0 z .
Сығылған сырық үшін жобалау есебі келесі теңсіздік бойынша шешіледі
l
PA
Бұл теңсіздікте А, белгісіз. Сондықтан, олардың бірі белгілі деп есептеліп (мысалы, алғашқы жуықтауда 1
’=0.5) , қима ауданы
0,5
PA
инерция радиусы minmin
IiA
сырықтың икемділігі анықталады Кестеден –ға сәйкес шамасы алынып '
1 -мен салыстырылады. Егер / пен -дің арасындағы айырмашылық 4-5% тен аспаса, есеп шешілген деп
есептеледі. Егер асса -дің орнына келесі жуықтау кезеңінде 2
/
/
қойылып, /1 min 1 1, , ,A i шамалары қайта анықталады. Анықталған 1 шамасы
1 / -мен қайта салыстырылады т.с.с.
Негізгі әдебиеттер [7, 158-167 бет..], [8,1200-216 бет.], [9, 413-429 бет., 447-450 бет.], [10, 264-275 бет.]
Қосымша әдебиеттер [25] Бақылау сұрақтары: 1. Эйлер формуласы және оның қолданылу аясы. 2. Тұғыр түрлерінің дағдарыс күшіне әсері. 3. Ясинский формуласы. Сығылған сырықтардың орнықтылық шарты.
115
2.3 Зерттеханалық сабақтардың жоспары. №1-модуль «Статика» № 1-зерттеханалық жұмыс «Қатты дененің тірек реакцияларын
анықтау.» Қатты дененің тірек реакцияларын анықтау. Бекітілу тәсіліне сәйкес қатты дененің тірек реакцияларын анықтау. Сабақтың мақсаты. Жинақталатын күштер әсер ететің дененің
байланыстар реакцияларын табудың негізін қалыптастыру. Әдістемелік нұсқаулар Сабақты өткізу үшін және осы тақырыптың жұмысын орындау үшін нені
білу керек: Статиканың негізгі ұғымдары мен анықтамаларын. Статиканың
аксиомаларын. Байланыстардың негізгі түрлерін және олардың реакцияларын. Синустар мен косинустар теоремасын (элементар математикадағы). Тепе-теңдік шарттарын; үш күш туралы теореманы. Сабақты өткізу реті. Тепе-теңдігі қарастырылатын денені (немесе нүктені) белгілеу. 1. Осы денені байланыстардан босатып, суретте оған әсер ететін актив
күштер мен байланыс реакцияларын кескіндеу. 2. Координата жүйесін енгізіп, тепе-теңдік теңдеулерін құру. Егер
координа- та өсінің біреуін белгісіз реакция күшінің әсер ету сызығына перпендикуляр бағыттасақ, онда құрылған теңдеулерді шешу жеңіл болады. Есепті аяғына дейін жалпы түрде шешкен ыңғайлы. Сонда белгісіз шамалар үшін алынған формулалар есептің нәтижесін талдауға мүмкіндік береді. Сандық мәндерді тек соңғы формулаларға қойған абзал.
3. Егер тепе-теңдіктегі жинақталатын күштердің саны үшеу болса, ондай есептерді шешу үшін геометриялық әдісті қолдануға болады. Бұл жағдайда тепе-теңдік теңдеулерінің орнына күштер үшбұрышы тұрғызылады. Геометриялық тепе-теңдік шарттары бойынша күштер үшбұрышы тұйық болу керек. Бұл үшбұрышты тұрғызуды белгілі күштен бастаған дұрыс. Синустар (косинустар) теоремасын қолданып күштер үшбұрышын шешу арқылы белгісіз шамаларды табамыз.
Негізгі әдебиет 4 [№№ 2.8; 2.20; 2.29; 2.31(а); 2.33] Қосымша әдебиет 10 [5-10,22-34], 14 [4-9] Бақылау сұрақтары: 1. Байланыстардың негізгі түрлерінің реакциялары 2. Жинақталатын күштер жүйесінің геометриялық тепе-теңдік шарттары. 3. Күштің өске проекциясы. 4. Жинақталатын күштер жүйесінің аналитикалық тепе-теңдік шарттары. 5. Параллель емес үш күш туралы теорема.
116
1 № 2-зерттеханалық жұмыс «Қатты дененің ауырлық центрін табу»
2 Ауырлық центрінің координаталарын анықтау тәсілдерін меңгеріп, оны берілген күрделі денеге қолдану .
Әдістемелік ұсыныстар Есептерді шешу үшін нені білу керек: Ауырлық центрі ұғымының анықтамасы. Денелердің ауырлық центрінің координаталарын анықтаудың жалпы
өрнектері. Ауырлық центрінің координаталарын анықтау әдістері. Шеңбер доғасының, дөңгелек сектор ауданының, жарты шеңбер
ауданының, пирамида көлемінің ауырлық центрінің орны. Берілгені:Өлшемдері суретте көрсетілген екі немесе үш өлшемді пішіндер[6, 49-51-беттер].
Есептерді шығару реті. Біртекті дененің ауырлық центрінің координаталарын табуға есеп
шешкенде: 1. егер дененің симметрия центрі, симметрия өсі немесе симметрия
жазықтығы бар болса симметрия әдісін қолдану керек; 2. егер денені ауырлық центрі белгілі бөлшектерге бөлуге болатын болса,
бөлшектеу әдісін қолдану керек; 3. егер дене ойылған болса немесе қуыс болса, теріс массалар әдісін
қолдану керек. Негізгі әдебиет 4 [№№ 9.2; 9.4; 9.8; 9.11] Қосымша әдебиет 10 [125-141], 14 [33-35] Бақылау сұрақтары.
1.Дененің ауырлық центрін анықтайтын өрнектер. 2.Ауырлық центрдің координаталарын анықтау әдістері. 3.Кейбір біртекті денелердің ауырлық центрлерінің координаталары.
Әдістемелік ұсыныстар Теориядан нені білу керек: Күштің центрге (нүктеге) қатысты моментін. Жазықтықтағы кез келген күштер жүйесінің аналитикалық тепе-теңдік
шарттарының үш түрі. Қадалған және таралған күштердi; қатаң бекітпенің реакцияларын. Денелер жүйесі тепе-теңдігінің шарттарын. Байланыс реакцияларының түрлері
Берілгені: 1 – Сынық сызықты өсті білеу; 2 – екі білеуден тұратын білеу. Өлшемдер суретте көрсетілген. [6, 8-14, 18-22-беттер].
117
Жұмысты орындау реті. 1. Берілген масштабта үш түрлі бекіту тәсіліне сәйкес үш сүлбені әсер
етуші күштермен бірге кескіндейміз. 2. Байланыстарды реакциялармен алмастырамыз 3. Әр сүлбе үшін бір немесе екі тепе-теңдік теңдеулерін құрамыз 4. Реакция мәні ең кіші болатын сүлбені қарастырамыз 5. Алынған сүлбе үшін тепе-теңдік теңдеулерден реакцияларды табамыз. 6. Табылған шамалардың дұрыстығын тексереміз. 7. Анықталған шамалардың кестесін құрамыз.
Негізгі әдебиет 4 [№№4.7; 4.11; 4.13; 4.26; 4.28,4.29,4.30,4.25, 4.34; 4.35; 4.37; 4.41]
Қосымша әдебиет 9 [ 49-68-беттер], 10 [ 10-17-беттер] Бақылау сұрақтары: 1. Байланыстардың негізгі түрлерінің реакциялары. 2. Күштің өске проекциясы. 3. Күштің центрге қатысты моментінің алгебралық шамасы. 4. Жазықтықтағы кез келген күштер жүйесінің аналитикалық тепе-теңдік
шарттары. 5. Қос күш және оның моменті. 6. Таралған күштер. 7. Денелер жүйесінің тепе-теңдік шарттары.
№3--зерттеханалық жұмыс «Жазық тетігінің кинематикалық
талдауы». Жұмыстың мақсаты. Жазық-параллель қозғалыстағы дене нүктелерінің
жылдамдықтары мен дененің бұрыштық жылдамдығы табу (жылдамдықтар планын құру)
Әдістемелік ұсыныстар : Есептерді шығару үшін нені білу керек:
Жылдамдықтардың лездік центрінің орнын анықтау. Жазық қиманың екі нүктесі жылдамдықтарының сол нүктелер арқылы
өтетін өске проекцияларының теңдігі туралы теорема. Жазық қима нүктелерінің жылдамдықтарын анықтау.
Берілгені:Жазық тетіктің орны мен өлшемдері[6, 68-75-беттер , стр. 68-75]. Жұмысты орындау реті. 1. Полюстің жылдамдығын анықтау (егер ол алдын ала берілмесе). 2. Жазық қиманың екінші нүктесінің жылдамдығының бағытын анықтау. 3. Осы нүктенің жылдамдығын жылдамдықтардың проекциялары туралы
теореманың көмегімен немесе ЖЛЦ тұрғызып, жылдамдықтардың қатынасын пайдаланып табу.
Негізгі әдебиет 4 [№№ 16.11;16.17;16.24;16.35; 16.39;16.31;16.22;16.18;18.10; 18.13; 18,22; 18.37]
118
Қосымша әдебиет 9 [ 162-178-беттер, 183-197], 10 [ 40-42-беттер], 11 [ 10-11-беттер]
Бақылау сұрақтары: 1.Қатты дененің жазық-параллель қозғалысы. 2.Дене нүктелерінің жылдамдықтарының проекциялары туралы теорема. 3.Жылдамдықтардың лездік центрі және оның орнын анықтаудың дербес
жағдайлары. 4.Дененің бұрыштық жылдамдығын анықтайтын өрнек.
№4-зерттеханалық жұмыс «Жазық тетігінің кинематикалық талдауы». Жұмыстың мақсаты. Жазық-параллель қозғалыстағы дене нүктелерінің
үдеулерін және дененің бұрыштық үдеуін табу (үдеулер планын құру) Әдістемелік ұсыныстар : Есептерді шығару үшін нені білу керек:
Жазық қима нүктелерінің үдеулерін анықтау. Жазық қозғалыстағы дене нүктелерінің үдеулерін қосу туралы теорема. Жазық қозғалыстағы дененің бұрыштық үдеуін анықтау әдістері.
Берілгені:Жазық тетіктің орны мен өлшемдері[6, 68-75-беттер , стр. 68-75]. Жұмысты орындау реті. 1.Полюстің үдеуін анықтау (егер ол алдын ала берілмесе).
2.Жазық қозғалыстағы дене нүктелерінің үдеулері туралы теореманың көмегімен барлық үдеулердің векторларын тұрғызып, анықтауға болатындарын санап, дененің екінші нүктесінің үдеуі мен бұрыштық үдеуін анықтау.
Негізгі әдебиет 4 [№№ 16.11;16.17;16.24;16.35; 16.39;16.31;16.22;16.18;18.10; 18.13; 18,22; 18.37]
Қосымша әдебиет 9 [ 162-178-беттер, 183-197], 10 [ 40-42-беттер], 11 [ 10-11-беттер]
Бақылау сұрақтары:
1.Жазық қиманың кез келген нүктесінің үдеуін анықтау. 2.Нүктенің полюсті айналғандағы центрге тартқыш және айналмалы үдеулерінің шамасы мен бағытын анықтау.
3.Жазық қиманың бұрыштық үдеуін анықтайтын өрнектер.
№ 5-зерттеханалық жұмыс «Материалдардың бойлық серпімділік модулі мен Пуассон еселігін анықтау
1. Бойлық серпімділік модулін (Юнга модулі) анықтау. 2. Пуассон еселігін анықтау.
Жұмыстың маќсаты – материалдың бойлыќ серпімділік (Юнг) модулін және көлденең деформация (Пуассон) еселігін созылу жағдайында тәжірибелік жолмен аныќтау.
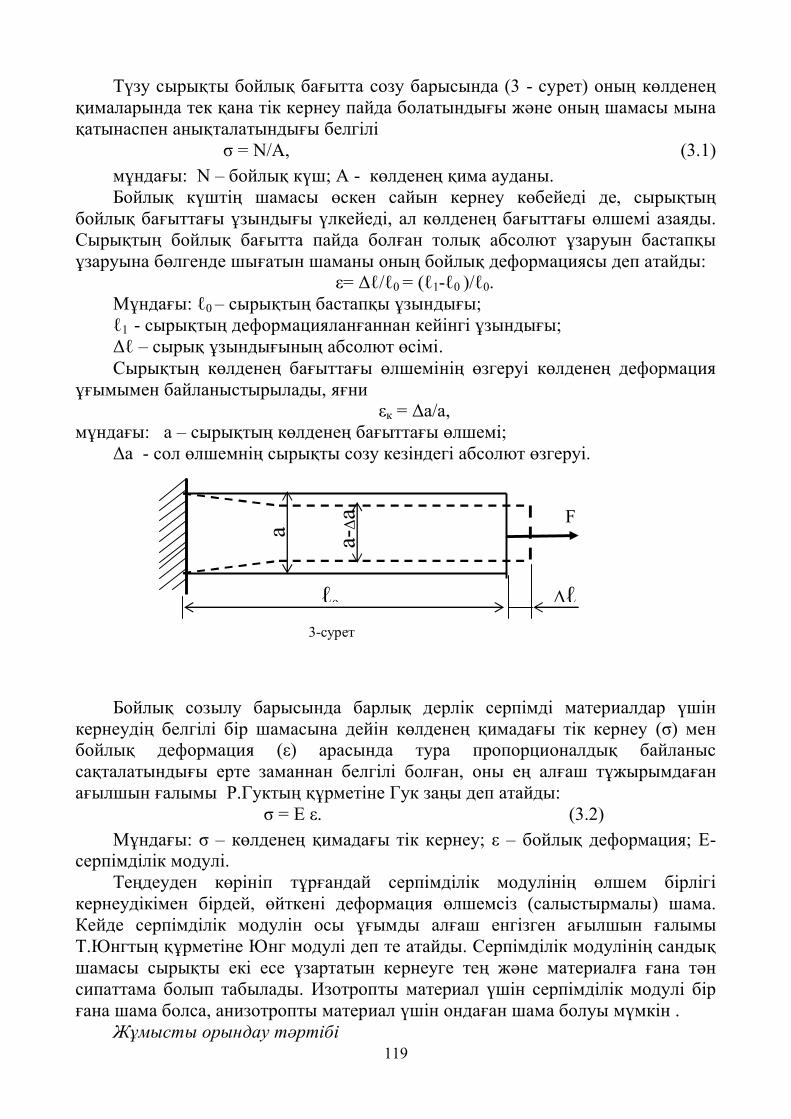
119
Түзу сырыќты бойлыќ бағытта созу барысында (3 - сурет) оның көлденең ќималарында тек ќана тік кернеу пайда болатындығы және оның шамасы мына ќатынаспен аныќталатындығы белгілі
σ = N/A, (3.1) мұндағы: N – бойлыќ күш; A - көлденең ќима ауданы. Бойлыќ күштің шамасы өскен сайын кернеу көбейеді де, сырыќтың
бойлыќ бағыттағы ұзындығы үлкейеді, ал көлденең бағыттағы өлшемі азаяды. Сырыќтың бойлыќ бағытта пайда болған толыќ абсолют ұзаруын бастапќы ұзаруына бөлгенде шығатын шаманы оның бойлыќ деформациясы деп атайды:
ε= Δℓ/ℓ0 = (ℓ1-ℓ0 )/ℓ0. Мұндағы: ℓ0 – сырыќтың бастапќы ұзындығы; ℓ1 - сырыќтың деформацияланғаннан кейінгі ұзындығы; Δℓ – сырыќ ұзындығының абсолют өсімі. Сырыќтың көлденең бағыттағы өлшемінің өзгеруі көлденең деформация
ұғымымен байланыстырылады, яғни εк = Δa/a,
мұндағы: а – сырыќтың көлденең бағыттағы өлшемі; Δa - сол өлшемнің сырыќты созу кезіндегі абсолют өзгеруі.
Бойлыќ созылу барысында барлыќ дерлік серпімді материалдар үшін кернеудің белгілі бір шамасына дейін көлденең ќимадағы тік кернеу (σ) мен бойлыќ деформация (ε) арасында тура пропорционалдыќ байланыс саќталатындығы ерте заманнан белгілі болған, оны ең алғаш тұжырымдаған ағылшын ғалымы Р.Гуктың ќұрметіне Гук заңы деп атайды:
σ = E ε. (3.2) Мұндағы: σ – көлденең ќимадағы тік кернеу; ε – бойлыќ деформация; Е-
серпімділік модулі. Теңдеуден көрініп тұрғандай серпімділік модулінің өлшем бірлігі
кернеудікімен бірдей, өйткені деформация өлшемсіз (салыстырмалы) шама. Кейде серпімділік модулін осы ұғымды алғаш енгізген ағылшын ғалымы Т.Юнгтың ќұрметіне Юнг модулі деп те атайды. Серпімділік модулінің сандыќ шамасы сырыќты екі есе ұзартатын кернеуге тең және материалға ғана тән сипаттама болып табылады. Изотропты материал үшін серпімділік модулі бір ғана шама болса, анизотропты материал үшін ондаған шама болуы мүмкін .
Жұмысты орындау тәртібі
F
Δℓ ℓо
а-Δа
a
3-сурет
120
1. Келтірілген үлгіге сәйкес лабораториялыќ журналды дайындаңыз! 2. Үлгінің ќажетті өлшемдерін өлшеп және приборлардың сипаттамаларын
журналға жазып, лабораториялыќ ќондырғының сүлбелік суретін салыңыз! 3. Үлгіні сынау мәшинесіне орналастырып жұмысќа дайындаңыз! 4. Үлгіге күштің бірінші сатысын түсіріп, тензометрлердің көрсетулерін
таблицаға жазып алыңыз! 5. Күшті келесі сатыға ( ΔF ) бірнеше рет өсіріп, тензометр көрсету-лерін
жазып алыңыз! 6. Үлгіні созушы күштен толыќ босатыңыз! 7. Күштің әр сатысына сәйкес тензометр көрсетулерінің айырмасын (Δniор)
аныќтаңыз! 8. .Бойлыќ және көлденең бағыттарда орналасќан әр тензометр жұптарына
сәйкес көрсетулердің орташа шамасын аныќтаңыз: Δnб = (Δn2ор + Δn4ор )/2 ; Δnк = (Δn1ор + Δn3ор )/2 .
9. Бойлыќ және көлденең деформациялар шамаларын есептеп шығарыңыз ε = Δ nбк; εк = Δ nкк;
мұндағы: к - өлшеуіш аппаратураның масштабтыќ еселігі. 10. Күш сатысына сәйкес кернеуді (3.1) формуласымен есептеп шығарыңыз! 11. Серпімділік модулін (3.2) формуласымен есептеп шығарыңыз! 12. Пуассон еселігін (3.3) формуласымен аныќтаңыз! 13. Аныќталған тәжірибе нәтижелерін белгілі таблицалыќ мәндермен
салыстырып, олардың алшаќтығын аныќтаңыз!
Негізгі әдебиет 7,9 [92-103 беттер] Қосымша әдебиет 13 [110-116 беттер]
Бақылау сұрақтары: 1. Гук заңы ќандай шамаларды байланыстырады? 2. Материалдардың ќандай серпімділік тұраќтыларын білесіз? 3. Пуассон еселігінің мәні ќандай шамада болады? 4. Бойлыќ деформация деген не? 5. Көлденең деформация ќалай аныќталады? 6. Серпімділік модулі неге тәуелді? 7. Серпімді деформация деген не?
№ 6-зерттеханалық жұмыс «Нүкте динамикасының жалпы
теоремалары ». Жұмыстың мақсаты. Динамиканың жалпы теоремаларын және Даламбер
принципін қозғалыс сипаттамаларын , қысым күшін табуға қолдану. Әдістемелік ұсыныстар : Есептерді шығару үшін нені білу керек: Нүктенің қозғалыс мөлшері, шекті уақыт аралығындағы күш импульсі. Материялық нүктенің кинетикалық энергиясы.
121
Шекті орын ауыстырудағы айнымалы және тұрақты күштердің жұмысын анықтау; ауырлық, серпімділік, үйкеліс күштерінің жұмыстарын анықтау.
Материялық нүктенің кинетикалық энергиясының өзгеруі туралы теореманың дифференциалдық және интегралдық түрлері.
Даламбер принципін,жанама және нормаль инерция күштерін,олардың бағыттарын.
Берілгені: Түтіктің ішіндегі дененің қозғалысы, оның схемасы және есептеуге керекті шамалар [6, 160-163-беттер].
Жұмысты орындау реті. 1. Есептің шартына байланысты оны қандай теореманың көмегімен
шығару қажет екенін анықтау керек. 2. Нүктенің қозғалыс мөлшерінің өзгеруі туралы теореманы қолданғанда
оны өстерге проекциялап, күштердің импульстерін анықтайды. 3. Егер есеп кинетикалық энергияның өзгеруі туралы теореманың
көмегімен шығарылса, онда күштердің жұмыстарын белгілі өрнектерді қолданып табады.
4. Есептеген кезде кейбір шамаларды Халықаралық жүйеге келтіру керек. Негізгі әдебиет 4 [№№28.1; 28.2; 28.3; 28.6; 28.10; 28.11; 28.17; 30.5;
30.11; 30.16; 30.17] Қосымша әдебиет 10 [280-324], 12 [15-21] Бақылау сұрақтары:
1. Күш импульсінің және оның проекцияларының өрнектері. 2. Нүктенің қозғалыс мөлшері және оның өзгеруі туралы теорема. 3. Нүктенің қозғалыс мөлшері моментінің центрге және өске қатысты
моменттері және олардың өзгеруі туралы теоремалар. 4. Материялық нүктеге әсер ететін күштердің жұмысы. 5. Нүктенің кинетикалық энергиясы және оның өзгеруі туралы теорема. 6. Даламбер принципі. 7. Инерция күштерінің формулалары.
№ 7-зерттеханалық жұмыс « Түзу сырықты орнықтылыққа есептеу». Жұмыстың мақсаты. Болат сырықтың орнықтылығының жоғалуына тәжірибе жасап бақылау және кризистік күштің мәнін анықтап, нәтижелерін есептеп салыстыру.
Серпімді теңдік орныќты болады, егер деформациаланған дене өзінің тыныштыќ күйінен сәл ауытќып сыртќы күш әсерін тоќтатќан кезде бастапќы күйіне келсе. Серпімді теңдік орныќсыз болады, егер деформациаланған дене сыртќы күш әсерінен ауытќып бастапќы күіне келмесе. Бұл екі теңдік аралығында кризистік деп аталатын ауыспалы жағдай болады. Кризистік жағдайдағы деформациаланған дене бейжай күйде болады. Біріншіден, ол бастапќы берілген формасын саќтай алады, ал екіншіден елеусіз күш әсерінен бастапќы формасын жоғалтуы мүмкін.
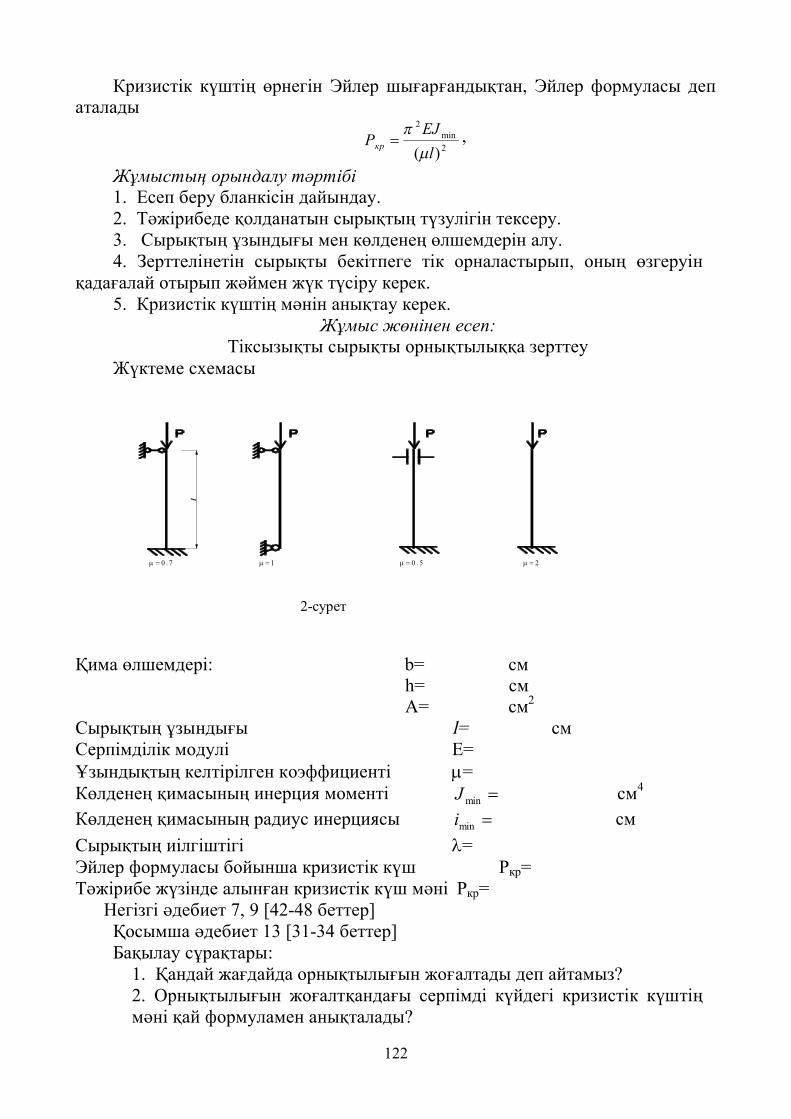
122
Кризистік күштің өрнегін Эйлер шығарғандыќтан, Эйлер формуласы деп аталады
2min
2
)( lЕJ
Ркр
,
Жұмыстың орындалу тәртібі 1. Есеп беру бланкісін дайындау. 2. Тәжірибеде ќолданатын сырыќтың түзулігін тексеру. 3. Сырыќтың ұзындығы мен көлденең өлшемдерін алу. 4. Зерттелінетін сырыќты бекітпеге тік орналастырып, оның өзгеруін
ќадағалай отырып жәймен жүк түсіру керек. 5. Кризистік күштің мәнін аныќтау керек.
Жұмыс жөнінен есеп: Тіксызыќты сырыќты орныќтылыќќа зерттеу
Жүктеме схемасы
Ќима өлшемдері: b= см
h= см A= см2
Сырыќтың ұзындығы l= см Серпімділік модулі Е= Ұзындыќтың келтірілген коэффициенті = Көлденең ќимасының инерция моменті minJ см4
Көлденең ќимасының радиус инерциясы mini см Сырыќтың иілгіштігі = Эйлер формуласы бойынша кризистік күш Ркр= Тәжірибе жүзінде алынған кризистік күш мәні Ркр=
Негізгі әдебиет 7, 9 [42-48 беттер] Қосымша әдебиет 13 [31-34 беттер] Бақылау сұрақтары:
1. Ќандай жағдайда орныќтылығын жоғалтады деп айтамыз? 2. Орныќтылығын жоғалтќандағы серпімді күйдегі кризистік күштің мәні ќай формуламен аныќталады?
l
2-сурет
123
3. Эйлер формуласын ќолдану үшін ќандай шекаралар алынады? 4. Кризистік күштің мәнін тәжірибе жүзінде ќалай аныќталады? 5. Орныќтылығын жоғалтќандағы пластикалыќ күйдегі кризистік күштің мәні ќай формуламен аныќталады? 6. Ст.3 маркалы болат сырыќ үшін ќандай иілгіштікте Ясинский формуласы ќолданылады?
2.4 Студенттің оқытушының көмегімен орындайтын өздік жұмысының жоспары(СОӨЖ).
пта. Тапсырма Өткіз
у түрі Әдістемелік нұсқаулар Әдебиет
. №2 модуль бойынша үй тапсырмасын қабылдау.
Тренинг
1 Бір нүктеге жинақталған күштер мен кез келген бағыттағы күштердің тепе-теңдік теңдеулерін құруды білу.Күштер жүйесінің тепе-теңдік шарттарын білу.
4 [§ 2, №№ 10, 15,30(б),31(б)]
6 [ 5-11-беттер]
. №1-зерттеханалық жұмысты қорғау
Өзіндік жұмысты ортаға салу
Әртүрлі байланыстардың реакцияларын анықтау. Жазық күштердің тепе-теңдік теңдеулерін құру.
ОӘК 6 [18-25]
. №1-бақылау жұмысы
Жазбаша шығару
Жазық күштердің тепе-теңдік теңдеулерін құруға қажетті теориялық материалды қайталау.
4 [§ 4, №№ 7; 11;13;26;28;29; 30;34;35;37]
. №-2 зерттеханалық жұмысты қорғау
Өзіндік жұмысты ортаға салу
Қатты дененің ауырлық центрін табу.
Негізгі әдебиет 4 [№№4.7; 4.11; 4.13; 4.26; 4.28,4.29,4.30,4.25, 4.34; 4.35; 4.37; 4.41] Қос. әдебиет 9 [ 49-68-беттер], 10 [ 10-17-беттер]
. №-2 зерттеханалық жұмысты қорғау
Өзіндік жұмысты ортаға салу
Қатты дененің ауырлық центрін табу.
Негізгі әдебиет 4 [№№4.7; 4.11; 4.13; 4.26; 4.28,4.29,4.30,4.25, 4.34; 4.35; 4.37; 4.41] Қосымша әдебиет 9 [ 49-68-беттер], 10 [ 10-17-беттер]
. №-3 зерттеханалық жұмысты қорғау
Өзіндік жұмысты ортаға салу
Жазық тетігінің кинематикалық талдауы.
ОӘК 6 [45-50]
124
. № 1-модуль бойынша аралық бақылау
Тесттер
Бірінші модуль бойынша бақылау сұрақтарына дайындалу.
ОӘК
. №2 модуль бойынша үй тапсырмасын қабылдау.
Өзіндік жұмысты ортаға салу
Материалық нүктенің және қатты дененің кинематикалық сипаттамаларын табуды білу
4[§12, №№5, 7,10,13,2
1,23, 27]
. №-4 зерттеханалық жұмысты қорғау
Өзіндік жұмысты ортаға салу
Жазық тетігінің кинематикалық талдауы.
ОӘК 6 [68-76]
. № 2-бақылау жұмысы
Жазбаша шығару
Есеп шығару барысында лездік жылдамдықтар центрін пайдалану.Оның көмегімен дененің бұрыштыұ жылдамдығы мен дене нүктелерінің жылдамдықтары мен үдеулерін анықтау.
4 [§ 16, №№ 11;17;24;35;39;31;22;18] 9 [ 162-178, 183-197]
0. №-5 зерттеханалық жұмысты қорғау
Өзіндік жұмысты ортаға салу
Материалдардың бойлық серпімділік модулі мен Пуассон еселігін анықтау.
Негізгі әдебиет 7,9 [92-103 беттер] Қосымша әдебиет 13 [110-116 беттер]
1. №2-аралық бақылау Тестт
ер Екінші модуль бойынша
бақылау сұрақтарына дайындалу. ОӘК
2. №3 модуль бойынша үй тапсырмаларын қабылдау
Өзіндік жұмысты ортаға салу.
Материалық нүкте қозғалысының дифференциалдық тендеулерін интегралдауды білу.
4 [№№ 27.2; 27.17;27.29; 27.36;27.40; 27.42;27.55]
3. № 6 –зерттеханалық жұмысты қорғау
Өзіндік жұмысты ортаға салу
Нүкте динамикасының жалпы теоремаларын, күштердің жұмыстарының өрнегін және Даламбер принципін қайталау
ОӘК 6 [160-166]
4 №3-бақылау жұмысы
Жазбаша шығару
Динамиканың жалпы теоремаларын қатысты сұрақтар дайындау.
4 [§28, №№ 4 5,9,12,18; §30,№№ 4,10,12, 14,28;§31,№3,5,7,14,15]
5. №7-зерттеханалық жұмысты қорғау
Өзіндік жұмысты ортаға салу
Түзу сырықты орнықтылыққа есептеу.
Негізгі әдебиет 7, 9 [42-48 беттер] Қосымша әдебиет 13 [31-
125
34 беттер]
2.5 Студенттің өздік жұмысының жоспары (СӨЖ)
пта Тапсырма Әдістемелік нұсқау Әдебиет
№ 1-модуль бойынша үй тасырмасы.
Бір нүктеге жинақталған күштер мен кез келген бағыттағы күштердің тепе-теңдік теңдеулерін құруды білу.Күштер жүйесінің мепе-теңдік шарттарын білу.
4 [§2, №№ 10, 15, 30(б),31(б);
№ 1зерттеханалық жұмысты орындауға қажетті материалды меңгеру.
Екі дене жүйесі реакциаларын анықтауға қажетті материалды дайындау.
ОӘК 9 [ 49-68-беттер], 10 [ 10-17-беттер]
№1-бақылау жұмысына дайындалу
Әртүрлі байланыстардың реакцияларын, тепе-теңдік теңдеулерін құруға қажетті материалды қайталау .
ОӘК, 4 [§ 4, №№ 10, 21, 29]
№ 2-зерттеханалық
жұмысты орындауғақажетті материалды оқу.
Қатты дененің ауырлық центрін анықтау
ОӘК 9 [ 58-85, 100-114-беттер], 10 [ 29-33-беттер]
№ 3-зерттеханалық жұмысты орындауғақажетті материалды оқу.
Жазық тетігінің кинематикалық талдауы
ОӘК 9 [ 125-141-беттер], 10 [33-35-беттер]
№ 1-аралық бақылауға дайындалу
Бірінші модуль бойынша теориялық және тәжрибелік материалдарды қайталау.
ОӘК
№2-модуль бойынша
үй тапсырмасы. Нүктенің және қатты дененің кинематикалық сипаттамаларын табу.
4 [§ 12№№ 6; 22;25;14; § 13 №№ 6;12; §14 № 5]
№4-зерттеханалық жұмысты орындауғақажетті материалды оқу.
Жазық тетігінің кинематикалық талдауы у.
ОӘК 9 [ 162-178, 183-197-беттер], 10 [ 40-42-беттер], 11 [ 10-11-беттер]
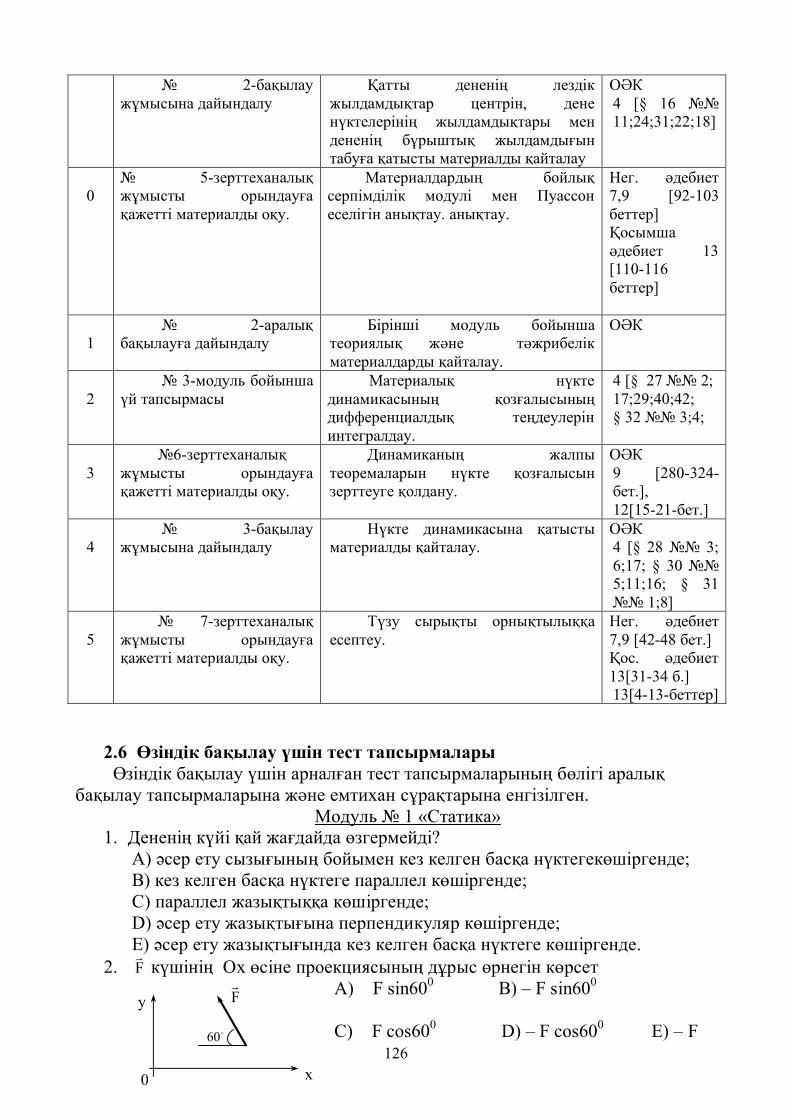
126
№ 2-бақылау жұмысына дайындалу
Қатты дененің лездік жылдамдықтар центрін, дене нүктелерінің жылдамдықтары мен дененің бұрыштық жылдамдығын табуға қатысты материалды қайталау
ОӘК 4 [§ 16 №№ 11;24;31;22;18]
0 № 5-зерттеханалық жұмысты орындауға қажетті материалды оқу.
Материалдардың бойлық серпімділік модулі мен Пуассон еселігін анықтау. анықтау.
Нег. әдебиет 7,9 [92-103 беттер] Қосымша әдебиет 13 [110-116 беттер]
1 № 2-аралық
бақылауға дайындалу Бірінші модуль бойынша
теориялық және тәжрибелік материалдарды қайталау.
ОӘК
2 № 3-модуль бойынша
үй тапсырмасы Материалық нүкте
динамикасының қозғалысының дифференциалдық теңдеулерін интегралдау.
4 [§ 27 №№ 2; 17;29;40;42; § 32 №№ 3;4;
3 №6-зерттеханалық
жұмысты орындауға қажетті материалды оқу.
Динамиканың жалпы теоремаларын нүкте қозғалысын зерттеуге қолдану.
ОӘК 9 [280-324-бет.], 12[15-21-бет.]
4 № 3-бақылау
жұмысына дайындалу Нүкте динамикасына қатысты
материалды қайталау. ОӘК 4 [§ 28 №№ 3; 6;17; § 30 №№ 5;11;16; § 31 №№ 1;8]
5 № 7-зерттеханалық
жұмысты орындауға қажетті материалды оқу.
Түзу сырықты орнықтылыққа есептеу.
Нег. әдебиет 7,9 [42-48 бет.] Қос. әдебиет 13[31-34 б.] 13[4-13-беттер]
2.6 Өзіндік бақылау үшін тест тапсырмалары
Өзіндік бақылау үшін арналған тест тапсырмаларының бөлігі аралық бақылау тапсырмаларына және емтихан сұрақтарына енгізілген.
Модуль № 1 «Статика» 1. Дененің күйі қай жағдайда өзгермейді?
A) әсер ету сызығының бойымен кез келген басқа нүктегекөшіргенде; B) кез келген басқа нүктеге параллел көшіргенде; C) параллел жазықтыққа көшіргенде; D) әсер ету жазықтығына перпендикуляр көшіргенде; E) әсер ету жазықтығында кез келген басқа нүктеге көшіргенде.
2. F
күшінің Ох өсіне проекциясының дұрыс өрнегін көрсет A) F sin600 B) – F sin600
C) F cos600 D) – F cos600 E) – F 60
F
x
y
0
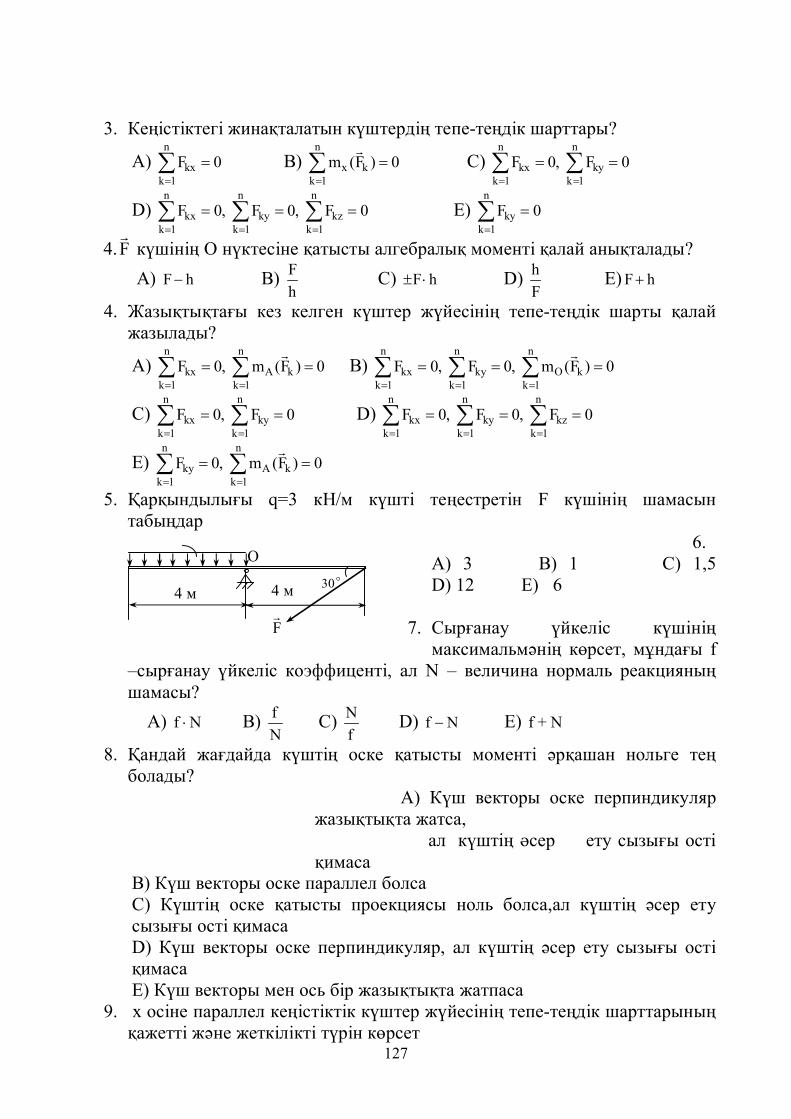
127
3. Кеңістіктегі жинақталатын күштердің тепе-теңдік шарттары?
А) n
kxk 1
F 0
B) n
x kk 1
m (F ) 0
C) n n
kx kyk 1 k 1
F 0, F 0
D) n n n
kx ky kzk 1 k 1 k 1
F 0, F 0, F 0
E) n
kyk 1
F 0
4.F
күшiнiң О нүктесiне қатысты алгебралық моментi қалай анықталады? A) F h B) F
h C) F h D) h
F E) F h
4. Жазықтықтағы кез келген күштер жүйесiнiң тепе-теңдiк шарты қалай жазылады?
А) n n
kx A kk 1 k 1
F 0, m (F ) 0
B) n n n
kx ky O kk 1 k 1 k 1
F 0, F 0, m (F ) 0
C) n n
kx kyk 1 k 1
F 0, F 0
D) n n n
kx ky kzk 1 k 1 k 1
F 0, F 0, F 0
E) n n
ky A kk 1 k 1
F 0, m (F ) 0
5. Қарқындылығы q=3 кН/м күшті теңестретін F күшінің шамасын табыңдар
6. A) 3 B) 1 C) 1,5 D) 12 E) 6
7. Сырғанау үйкеліс күшінің
максимальмәнің көрсет, мұндағы f –сырғанау үйкеліс коэффиценті, ал N – величина нормаль реакцияның шамасы?
A) f N B) fN
C) Nf
D) f N E) f + N
8. Қандай жағдайда күштің оске қатысты моменті әрқашан нольге тең болады?
A) Күш векторы оске перпиндикуляр жазықтықта жатса,
ал күштің әсер ету сызығы ості қимаса
B) Күш векторы оске параллел болса C) Күштің оске қатысты проекциясы ноль болса,ал күштің әсер ету сызығы ості қимаса D) Күш векторы оске перпиндикуляр, ал күштің әсер ету сызығы ості қимаса E) Күш векторы мен ось бір жазықтықта жатпаса
9. х осіне параллел кеңістіктік күштер жүйесінің тепе-теңдік шарттарының қажетті және жеткілікті түрін көрсет
4 м 4 м
F
O 30

128
А) n n
kx x kk 1 k 1
F 0, m (F ) 0
В) n n n
kx y k z kk 1 k 1 k 1
F 0, m (F ) 0, m (F ) 0
С)n n n
ky z k x kk 1 k 1 k 1
F 0, m (F ) 0, m (F ) 0
D)n n n
kz x k y kk 1 k 1 k 1
F 0, m (F ) 0, m (F ) 0
E)n n n
kx ky kzk 1 k 1 k 1
F 0, F 0, F 0
10. Үшбұрыштың ауырлық центрі қай нүктеде? A) Биіктіктерінің қиылусы нүктесінде B)Үшбұрыштың бір қабырғасының бойында C)Медианалардың қиылысу нүктесінде D) Биссектрислардың қиылысу нүктесінде E) Үшбұрыштың бір төбесінде
Модуль № 2 «Кинематика» 1. Векторлық тәсілмен берілген нүктенің жылдамдығы
A) drrdt
B) 2r C) r2
D) r r
E) 2
2d rrdt
2. Нүктенің қандай қозғалысында нормальүдеу нольге тең болады? А) Бірқалыпты қисық сызықты қозғалыста В) Үдемелі қисық сызықты қозғалыста С) Шеңбер бойымен қозғалғанда D) Түзы сызықты қозғалыста E) Кемімелі қисық сызықты қозғалыста
3. Бірқалыпты айнымалы қозғалыс заңдылығы?
A) V t B) a t C) 2
0tV t a2 D)
2
0tV2
E) ta2
4. Нүктенің қозғалыс теңдеулері x cos(2 t), y sin(2 t) . t=1с мезеттегі нұктенің үдеуі неге тең? A) 2 B)
2 C) 4 2 D) 2 E) 1
5. Остен h қашықтықта жататын нүктенің толық үдеуінің формуласы? A) 2h( ) B) 2 4h C) 2h D) 2 4h( ) E) 2 2h 6. Жазық-параллель қозғалыстағы В нүктенің жылдамдық векторының
формуласы ?
A) BAAB VVV
B) 2
VVV BA
AB
C) BAAB VVV
D) A
BAB V
VV
E) ABAB VVV
7. АВ сырығы жазықтықта қозғалады.А нүктесінің үдеуі 2
A с/м1a , бұрыштық
А В
Aa
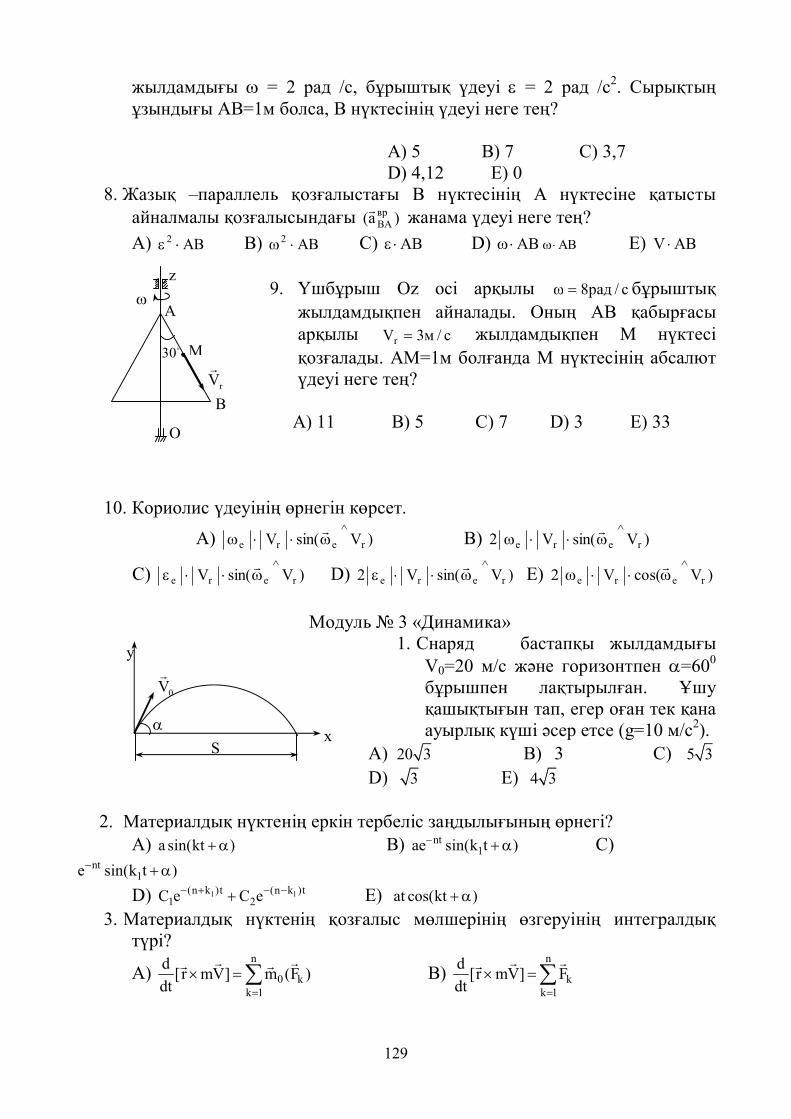
129
жылдамдығы = 2 рад /с, бұрыштық үдеуі = 2 рад /с2. Сырықтың ұзындығы АВ=1м болса, В нүктесінің үдеуі неге тең?
А) 5 В) 7 С) 3,7 D) 4,12 Е) 0
8. Жазық –параллель қозғалыстағы В нүктесінің А нүктесіне қатысты айналмалы қозғалысындағы )a( вр
BA жанама үдеуі неге тең?
A) АВ2 B) АВ2 C) АВ D) АВ AB E) АВV
9. Үшбұрыш Oz осі арқылы с/рад8 бұрыштық жылдамдықпен айналады. Оның АВ қабырғасы арқылы с/м3Vr жылдамдықпен М нүктесі қозғалады. АМ=1м болғанда М нүктесінің абсалют үдеуі неге тең?
A) 11 B) 5 C) 7 D) 3 E) 33
10. Кориолис үдеуінің өрнегін көрсет.
A) )Vsin(V rere
B) )Vsin(V2 rere
C) )Vsin(V rere
D) )Vsin(V2 rere
E) )Vcos(V2 rere
Модуль № 3 «Динамика»
1. Снаряд бастапқы жылдамдығы V0=20 м/с және горизонтпен =600
бұрышпен лақтырылған. Ұшу қашықтығын тап, егер оған тек қана ауырлық күші әсер етсе (g=10 м/с2).
A) 20 3 B) 3 C) 5 3 D) 3 E) 4 3
2. Материалдық нүктенің еркін тербеліс заңдылығының өрнегі?
A) a sin(kt ) B) nt1ae sin(k t ) C)
nt1e sin(k t )
D) 1 1(n k )t (n k )t1 2C e C e E) at cos(kt )
3. Материалдық нүктенің қозғалыс мөлшерінің өзгеруінің интегралдық түрі?
A) n
0 kk 1
d [r mV] m (F )dt
B)
n
kk 1
d [r mV] Fdt
z
A
B
O
M
rV
30
y
x
0V
S
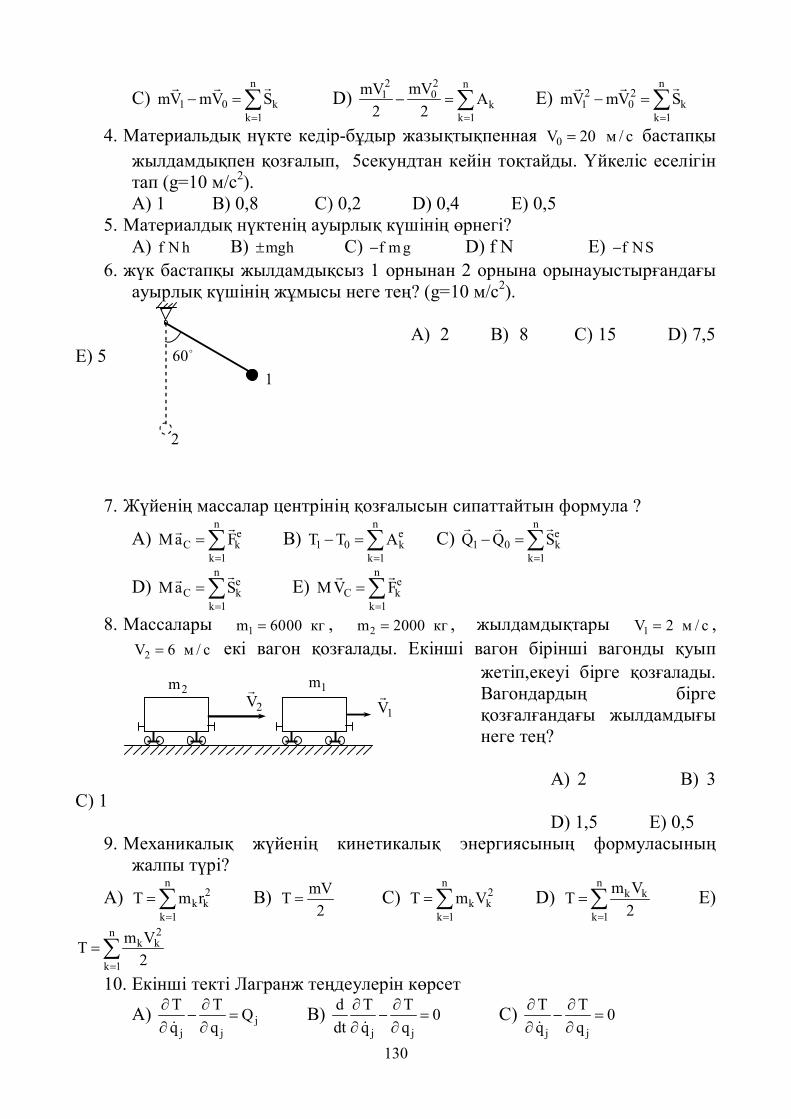
130
C) n
1 0 kk 1
mV mV S
D) 22 n01
kk 1
mVmV A2 2
E) n
2 21 0 k
k 1mV mV S
4. Материальдық нүкте кедір-бұдыр жазықтықпенная 0V 20 м / с бастапқы жылдамдықпен қозғалып, 5секундтан кейін тоқтайды. Үйкеліс еселігін тап (g=10 м/с2). A) 1 B) 0,8 C) 0,2 D) 0,4 E) 0,5
5. Материалдық нүктенің ауырлық күшінің өрнегі? A) f N h B) mgh C) f m g D) f N E) f NS
6. жүк бастапқы жылдамдықсыз 1 орнынан 2 орнына орынауыстырғандағы ауырлық күшінің жұмысы неге тең? (g=10 м/с2).
A) 2 B) 8 C) 15 D) 7,5 E) 5
7. Жүйенің массалар центрінің қозғалысын сипаттайтын формула ?
A) n
eC k
k 1Ma F
B) n
e1 0 k
k 1T T A
C)
ne
1 0 kk 1
Q Q S
D) n
eC k
k 1Ma S
E) n
eC k
k 1M V F
8. Массалары 1m 6000 кг , 2m 2000 кг , жылдамдықтары 1V 2 м / с , 2V 6 м / с екі вагон қозғалады. Екінші вагон бірінші вагонды қуып
жетіп,екеуі бірге қозғалады. Вагондардың бірге қозғалғандағы жылдамдығы неге тең?
A) 2 B) 3 C) 1 D) 1,5 E) 0,5
9. Механикалық жүйенің кинетикалық энергиясының формуласының жалпы түрі?
A) n
2k k
k 1T m r
B) mVT
2 C)
n2
k kk 1
T m V
D) n
k k
k 1
m VT2
E)
2nk k
k 1
m VT2
10. Екінші текті Лагранж теңдеулерін көрсет A) j
j j
T T Qq q
B) j j
d T T 0dt q q
C)
j j
T T 0q q
1
2
60
1V
2V
2m 1m
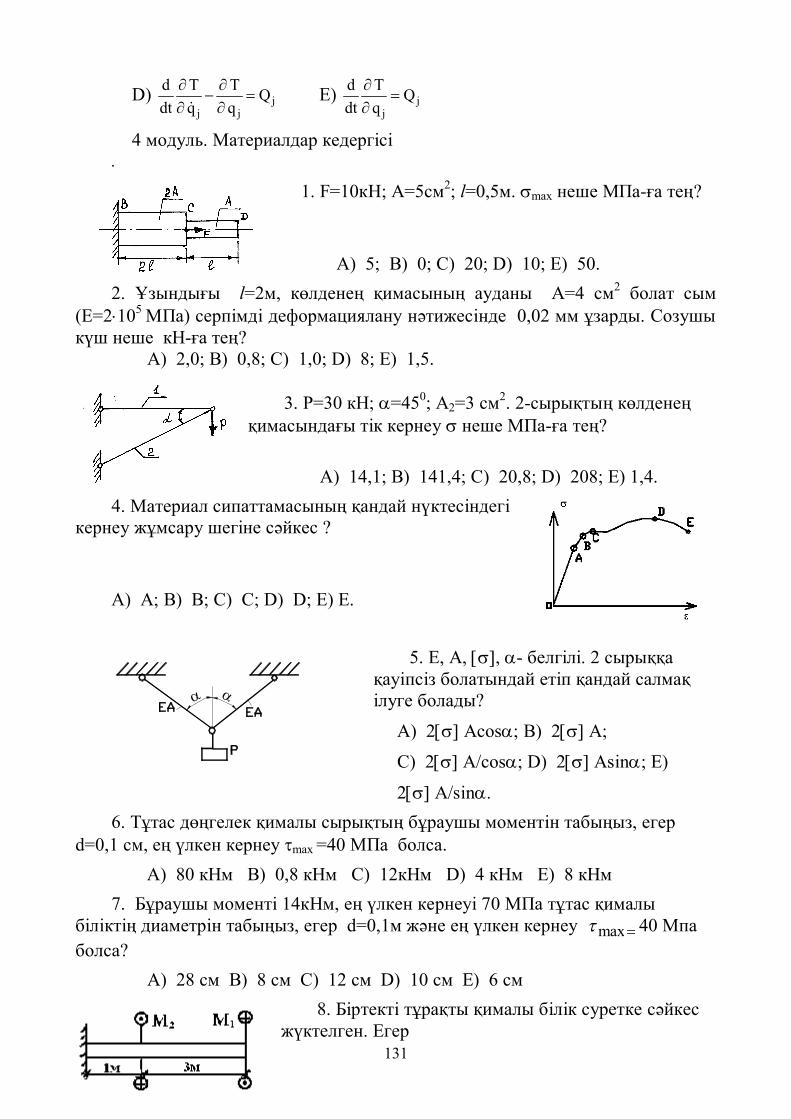
131
D) jj j
d T T Qdt q q
E) j
j
d T Qdt q
4 модуль. Материалдар кедергісі
. 1. F=10кН; А=5см2; l=0,5м. max неше МПа-ға тең?
A) 5; B) 0; C) 20; D) 10; E) 50. 2. Ұзындығы l=2м, көлденең қимасының ауданы А=4 см2 болат сым
(Е=2105 МПа) серпімді деформациялану нәтижесінде 0,02 мм ұзарды. Созушы күш неше кН-ға тең?
A) 2,0; B) 0,8; C) 1,0; D) 8; E) 1,5.
3. Р=30 кН; =450; А2=3 см2. 2-сырықтың көлденең қимасындағы тік кернеу неше МПа-ға тең?
A) 14,1; B) 141,4; C) 20,8; D) 208; E) 1,4.
4. Материал сипаттамасының қандай нүктесіндегі кернеу жұмсару шегіне сәйкес ?
A) А; B) B; C) C; D) D; E) E.
5. Е, А, , - белгілі. 2 сырыққа
қауіпсіз болатындай етіп қандай салмақ ілуге болады?
A) 2 Аcos; B) 2 А;
C) 2 А/cos; D) 2 Аsin; E)
2 А/sin.
6. Тұтас дөңгелек қималы сырықтың бұраушы моментін табыңыз, егер d=0,1 см, ең үлкен кернеу max =40 МПа болса.
A) 80 кНм B) 0,8 кНм C) 12кНм D) 4 кНм E) 8 кНм 7. Бұраушы моменті 14кНм, ең үлкен кернеуі 70 МПа тұтас қималы
біліктің диаметрін табыңыз, егер d=0,1м және ең үлкен кернеу max 40 Мпа болса?
A) 28 см B) 8 см C) 12 см D) 10 см E) 6 см 8. Біртекті тұрақты қималы білік суретке сәйкес
жүктелген. Егер
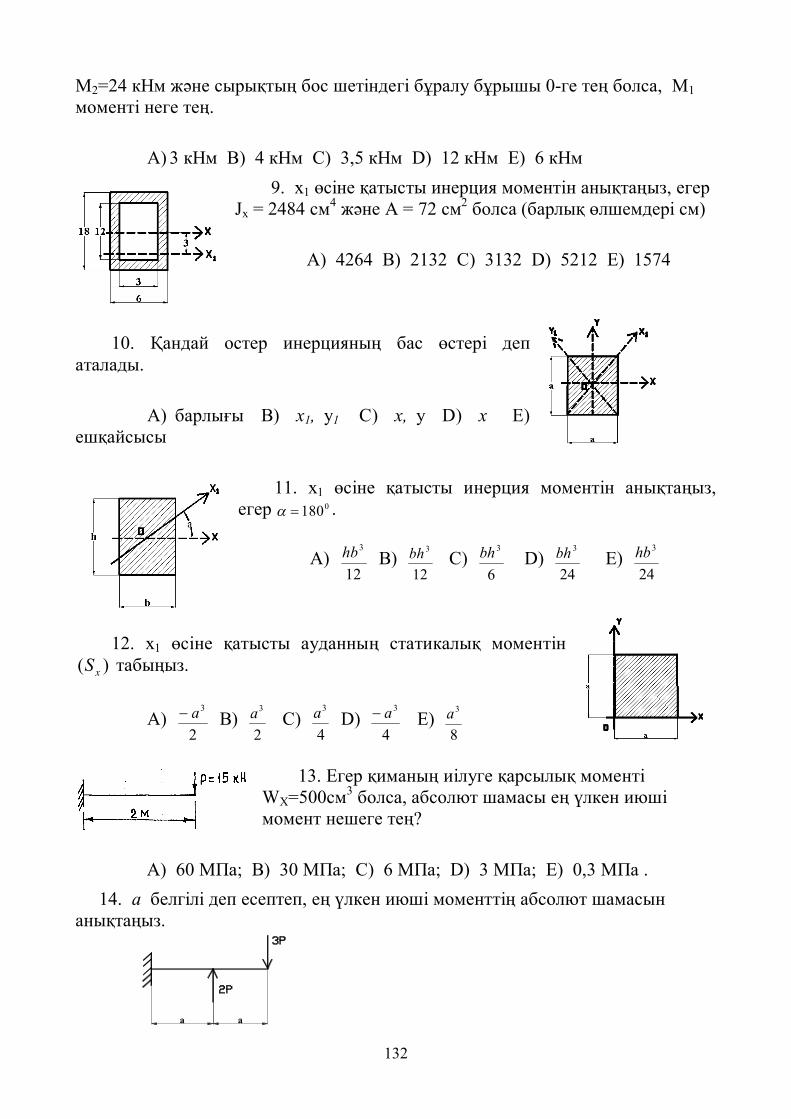
132
М2=24 кНм және сырықтың бос шетіндегі бұралу бұрышы 0-ге тең болса, М1 моменті неге тең.
A) 3 кНм B) 4 кНм C) 3,5 кНм D) 12 кНм E) 6 кНм
9. х1 өсіне қатысты инерция моментін анықтаңыз, егер Jx = 2484 см4 және А = 72 см2 болса (барлық өлшемдері см)
A) 4264 B) 2132 C) 3132 D) 5212 E) 1574
10. Қандай остер инерцияның бас өстері деп
аталады.
A) барлығы B) х1, у1 C) х, у D) х E) ешқайсысы
11. х1 өсіне қатысты инерция моментін анықтаңыз,
егер 0180 .
A) 12
3hb B) 12
3bh C) 6
3bh D) 24
3bh E) 24
3hb
12. х1 өсіне қатысты ауданның статикалық моментін
)( хS табыңыз.
A) 2
3а B) 2
3а C) 4
3а D) 4
3а E) 8
3а
13. Егер қиманың иілуге қарсылық моменті
WX=500см3 болса, абсолют шамасы ең үлкен июші момент нешеге тең?
A) 60 МПа; B) 30 МПа; C) 6 МПа; D) 3 МПа; E) 0,3 МПа .
14. а белгілі деп есептеп, ең үлкен июші моменттің абсолют шамасын анықтаңыз.
a a
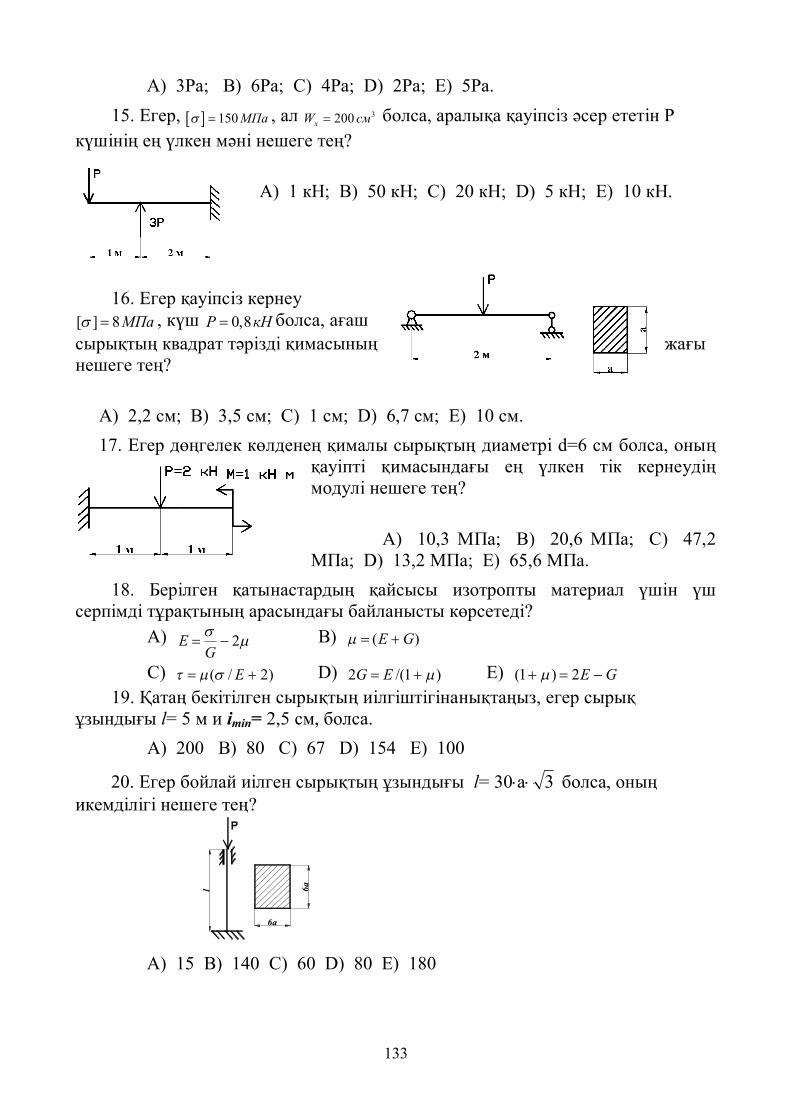
133
A) 3Ра; B) 6Ра; C) 4Ра; D) 2Ра; E) 5Ра. 15. Егер, 150 МПа , ал 3200xW см болса, аралықа қауіпсіз әсер ететін Р
күшiнiң ең үлкен мәні нешеге тең? A) 1 кН; B) 50 кН; C) 20 кН; D) 5 кН; E) 10 кН.
16. Егер қауіпсіз кернеу
[ ] 8 МПа , күш 0,8Р кН болса, ағаш сырықтың квадрат тәрізді қимасының жағы нешеге тең?
A) 2,2 см; B) 3,5 см; C) 1 см; D) 6,7 см; E) 10 см. 17. Егер дөңгелек көлденең қималы сырықтың диаметрі d=6 см болса, оның
қауіпті қимасындағы ең үлкен тік кернеудің модулі нешеге тең?
A) 10,3 МПа; B) 20,6 МПа; C) 47,2
МПа; D) 13,2 МПа; E) 65,6 МПа. 18. Берілген қатынастардың қайсысы изотропты материал үшін үш
серпімді тұрақтының арасындағы байланысты көрсетеді? A) 2
GE B) )( GE
C) )2/( Е D) )1/(2 EG E) GЕ 2)1( 19. Қатаң бекітілген сырықтың иілгіштігінанықтаңыз, егер сырық
ұзындығы l= 5 м и imin= 2,5 см, болса. A) 200 B) 80 C) 67 D) 154 E) 100
20. Егер бойлай иілген сырықтың ұзындығы l= 30a 3 болса, оның икемділігі нешеге тең?
6a
6al
A) 15 B) 140 C) 60 D) 80 E) 180
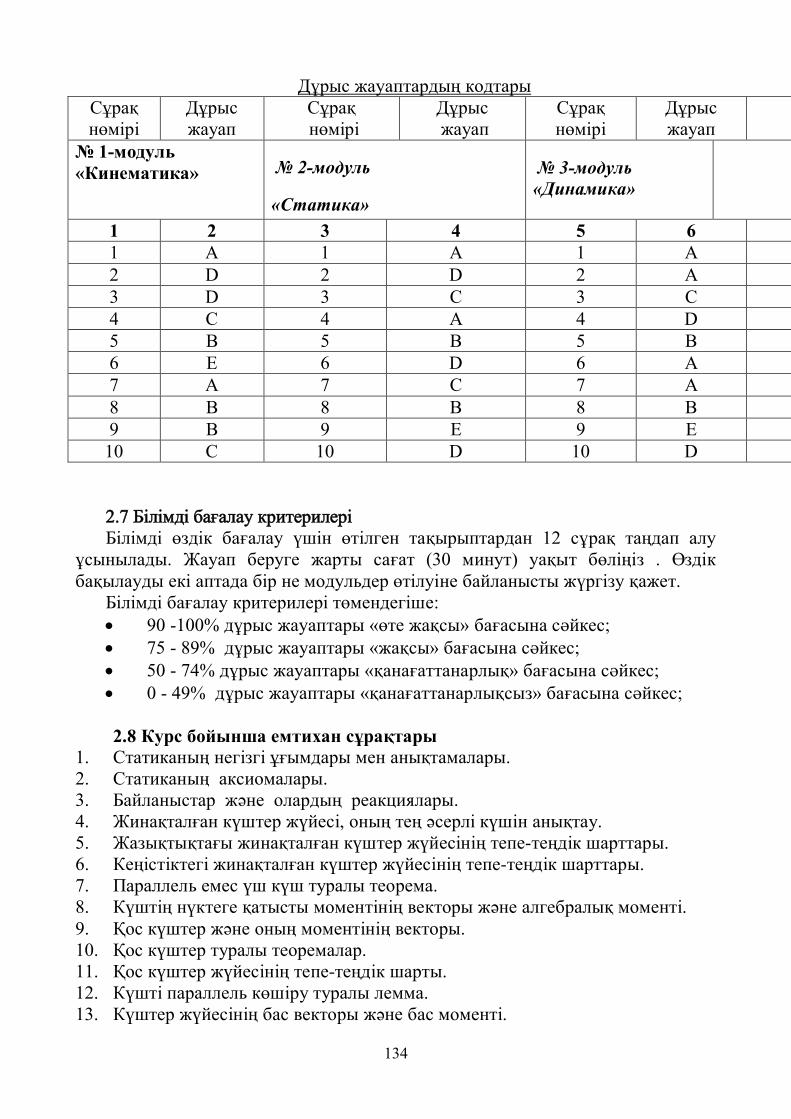
134
Дұрыс жауаптардың кодтары Сұрақ нөмірі
Дұрыс жауап
Сұрақ нөмірі
Дұрыс жауап
Сұрақ нөмірі
Дұрыс жауап
№ 1-модуль «Кинематика» № 2-модуль
«Статика»
№ 3-модуль «Динамика»
1 2 3 4 5 6 1 A 1 A 1 A 2 D 2 D 2 A 3 D 3 C 3 C 4 C 4 A 4 D 5 B 5 B 5 B 6 E 6 D 6 A 7 A 7 C 7 A 8 B 8 B 8 B 9 B 9 E 9 E
10 C 10 D 10 D
2.7 Білімді бағалау критерилері Білімді өздік бағалау үшін өтілген тақырыптардан 12 сұрақ таңдап алу
ұсынылады. Жауап беруге жарты сағат (30 минут) уақыт бөліңіз . Өздік бақылауды екі аптада бір не модульдер өтілуіне байланысты жүргізу қажет.
Білімді бағалау критерилері төмендегіше: 90 -100% дұрыс жауаптары «өте жақсы» бағасына сәйкес; 75 - 89% дұрыс жауаптары «жақсы» бағасына сәйкес; 50 - 74% дұрыс жауаптары «қанағаттанарлық» бағасына сәйкес; 0 - 49% дұрыс жауаптары «қанағаттанарлықсыз» бағасына сәйкес;
2.8 Курс бойынша емтихан сұрақтары
1. Статиканың негізгі ұғымдары мен анықтамалары. 2. Статиканың аксиомалары. 3. Байланыстар және олардың реакциялары. 4. Жинақталған күштер жүйесі, оның тең әсерлі күшін анықтау. 5. Жазықтықтағы жинақталған күштер жүйесінің тепе-теңдік шарттары. 6. Кеңістіктегі жинақталған күштер жүйесінің тепе-теңдік шарттары. 7. Параллель емес үш күш туралы теорема. 8. Күштің нүктеге қатысты моментінің векторы және алгебралық моменті. 9. Қос күштер және оның моментінің векторы. 10. Қос күштер туралы теоремалар. 11. Қос күштер жүйесінің тепе-теңдік шарты. 12. Күшті параллель көшіру туралы лемма. 13. Күштер жүйесінің бас векторы және бас моменті.
135
14. Статиканың негізгі теоремасы. 15. Жазық күштер жүйесі тепе-теңдігінің геометриялық шарттары 16. Жазық күштер жүйесі. 17. Қос күштердің алгебралық моменті. 18. Жазық күштер жүйесінің тепе-теңдік шарттары (үш түрі). 19. Таралған күштер және олардың тең әсерлі күшін анықтау. 20. Денелер жүйесінің тепе-теңдігі. 21. Сырғанау үйкелісі, үйкеліс еселігі, үйкеліс конусы, үйкеліс бұрышы. 22. Сырғанау үйкелісі бар жағдайдағы тепе-теңдік шарттар. 23. Домалау үйкелісі. 24. Параллель күштер жүйесінің центрі, оның радиус-векторын және
координаталарын анықтау. 25. Дененің ауырлық центрі, оның радиус-векторын және координаталарын
анықтау. 26. Біртекті денелердің ауырлық центрін анықтау формулалары (көлем, аудан,
ұзындық арқылы). 27. Ауырлық центрін анықтау әдістері (симметрия, бөлшектеу, теріс
массалар). 28. Кейбір біртекті денелердің ауырлық центрлері. 29. Нүкте қозғалысының берілу әдістері. 30. Қозғалысы векторлық әдіспен берілген нүктенің жылдамдығын және
үдеуін анықтау. 31. Қозғалысы координаттық әдiспен берiлген нүктенiң жылдамдығын және
үдеуін анықтау. 32. Қозғалысы табиғи әдiспен берiлген нүктенiң жылдамдығын және үдеуін
анықтау. 33. Жанама және нормаль үдеулер (мәндері және бағыттары). 34. Нүкте қозғалысының дербес жағдайлары – түзу сызықты, бірқалыпты,
бірқалыпты айнымалы. 35. Қатты дененің ілгерілемелі қозғалысы. 36. Қатты дененiң айналмалы қозғалысы және оның негізгі
кинематикалық сипаттамалары. 37. Айналмалы қозғалыстағы дене нүктелерінің жылдамдығы мен үдеулерін
анықтау. 38. Қатты дененің жазық-параллель қозғалысы және оның негізгі
кинематикалық сипаттамалары. 39. Жылдамдықтарды қосу туралы теорема. 40. Жылдамдықтардың лездік центрі. 41. Дене нүктелерінің жылдамдықтарын және дененің бұрыштық
жалдамдығын жылдамдықтардың лездік центрі көмегімен анықтау. 42. Жазық-параллель қозғалыс үшін үдеулерді қосу туралы теорема. 43. Нүктенің күрделі қозғалысы (салыстырмалы, тасымал және абсолют
қозғалыстарды). 44. Күрделі қозғалыстағы нүкте үшін жылдамдықтарды қосу туралы теорема.
136
45. Күрделі қозғалыстағы нүкте үшін үдеулерді қосу туралы теорема (Кориолис теоремасы).
46. Кориолис үдеуі. 47. Материялық нүкте динамикасының негізгі заңдары. 48. Еркін және еркін емес нүкте динамикасының негізгі мәселелері. 49. Нүкте динамикасының бірінші негізгі мәселесін шешу. 50. Нүкте динамикасының екінші негізгі мәселесін шешу. 51. Материялық нүкте қозғалысының дифференциалдық теңдеулерін
интегралдау. Интегралдық тұрақтыларды анықтау. 52. Күш импульсы. 53. Материялық нүктенiң қозғалыс мөлшерi. 54. Материялық нүктенiң қозғалыс мөлшерiнің өзгеруі туралы теоремалар. 55. Нүктеге және өске қатысты кинетикалық моменттер. 56. Нүктеге және өске қатысты кинетикалық моменттің өзгеруі туралы
теоремалар. 57. Нүктенің қозғалыс мөлшері моментінің санталу заңдары. 58. Материялық нүктенің шектеулі орын ауыстыруындағы күш жұмысы. 59. Материялық нүктеге әсер ететін кейбір күштердің жұмыстарын есептеу. 60. Материялық нүктенiң кинетикалық энергиясы. 61. Материялық нүктенiң кинетикалық энергиясының өзгеруі туралы теорема. 62. Материялық нүкте үшін Даламбер принципі. 63. Жанама және нормаль инерция күштері. 64. Механикалық жүйе, оның массасы және массалар центрі. 65. Сыртқы және ішкі күштер, жүйенің ішкі күштерінің қасиеттері. 66. Дененің нүктеге және өске қатысты инерция моменттері. 67. Дененің координата өстеріне қатысты инерция моменттері. 68. Инерция радиусы. 69. Кейбір денелердің өстерге қатысты инерция моменттері (сырық, жіңішке
сақина, диск, цилиндр). 70. Штейнер-Гюйгенс теоремасы. 71. Жүйенің массалар центрінің қозғалысы туралы теорема. 72. Механикалық жүйенің қозғалыс мөлшерi. 73. Механикалық жүйенің қозғалыс мөлшерiнің өзгеруі туралы теорема
(дифференциалды және интегралды түрлері ). 74. Жүйенің нүктеге қатысты кинетикалық моменті. 75. Жүйенің координаталар өстеріне қатысты кинетикалық моменттері. 76. Механикалық жүйенің кинетикалық моментінің өзгеруі туралы теорема. 77. Механикалық жүйеге әсер ететін кейбір күштердің жұмыстары (ауырлық
күші, айналдыру моменті, домалау үйкелісінің моменті). 78. Механикалық жүйенің кинетикалық энергиясы. 79. Ілгерілемелі, айналмалы, жазық параллель қозғалыстағы дененің
кинетикалық энергиясы. 80. Механикалық жүйенің кинетикалық энергиясының өзгеруі туралы
теорема. 81.Материалдар механикасы пәнінің міндеттері.
137
82.Денелерді, күштерді және материалды ықшамдау жорамалдары. 83.Қималар тәсілі. 84.Кернеулер. 85.Созылу мен сығылу кезіндегі Гук заңы. 86.Материалдардың механикалық сипаттамаларын тәжірибе жүзінде анықтау.. 87.Беріктік қоры еселігі. Қауіпсіз кернеу. 88.Созылу мен сығылу кезінде беріктікке есептеу. 89.Бір бағытта созылу (сығылу) кезінде көлбеу қимадағы кернеу. 90.Жанама кернеулердің жұптастық заңы.. 91.Созылу мен сығылу кезіндегі деформацияның потенциялық энергиясы. 92.Созылу мен сығылу кезіндегі статикалық түрде анықталмайтын есептер. 93.Ығысу. Негізгі түсініктер. Ығысудағы Гук заңы. 94.Ығысу кезінде беріктікке есептеу. 95., G және серпімділік тұрақтылары арасындағы байланыс. 96.Ығысудағы потенциалдық энергия. 97.Бұралу. Негізгі түсініктер. 98.Бұралу кезінде ішкі күш эпюрлерін салу. 99.Бұралу кезінде дөңгелек қималы біліктердің кернеулер эпюрлерін салу. 100.Бұралу кезіндегі біліктердің деформациясы. Эпюрлерін салу. 101.Бұралу кензіндегі Гук заңы. 102.Бұралу кезінде беріктікке есептеу 103.Бұралу кезінде қатаңдыққа есептеу 104.Бұралу кезіндегі статикалық түрде анықталмайтын есептер. 105.Бұралу кезіндегі деформацияның потенциялық энергиясы. 106.Иілу . Иілу түрлері. 107.Q және M эпюрлерін салу.. 108.q, Q және M араларындағы дифференциалдық байланыс. 109.Иілу кезіндегі тік кернеулерді анықтау. 110.Иілу кезіндегі тік кернеулер арқылы өрнектелген беріктік шарты. 111.Иілу кезіндегі жанама кернеулерді анықтау. 112.Иілу кезіндегі деформацияның потенциялық энергиясы. 113.Орнықтылық туралы түсінік. 114.Дағдарыс күші. Эйлер формуласы. 115.Сырық ұштарының бекіту тәсілдерінің дағдарыс күшіне ықпалы. 116.Эйлер формуласының қолданылу аясы. 117.Тетмайер-Ясинский формуласы. 118.Орнықтылыққа есептеу формулалары.
138
Глоссарий
Абсолют қатты деп кез келген екі нүктесінің аралығы (ешқандай жағдайда) өзгермейтін дене.
Автотербелістер – периодты мәжбүр тербелістер. Жүйенің өз қозғалысымен реттелетін тербеліссіз энергия көзінен туындайды.
Айналу жиілігі – дененің айналмалы қозғалысын сипаттайтын бірлік. Дененің бір минуттағы толық айналым санын анықтайды.
Айналшақ – механизмнің айналмалы қозғалыс жасайтын буыны. Айналшақты-сырғақты механизм – айналшақ пен сырғақтан тұратын
механизм. Айналмалы қозғалысты ілгерілемеліге немесе ілгерілемелі қозғалысты айналмалыға түрлендіру үшін қызмет етеді.
Апериодты қозғалыс – тербелмелі жүйенің үлкен кедергілі ортадағы қозғалысы; гиперболалық функциялармен сипатталады.
Байланыс голономдық – нүктенің шекті координаталары арасындағы қатынаспен немесе интегралданатын дифференциалдық теңдеумен өрнектелетін байланыс.
Байланыс голономдық емес – интегралданбайтын дифференциалдық теңдеумен өрнектелетін байланыс.
Байланыс идеалдық – ықтимал орын ауыстыруда реакция күшінің жұмысы нөлге тең байланыс.
Байланыс реакциясы – байланыс тарапынан денеге әсер ететін күш. Байланыс стационарлық – уақыт айқын кірмейтін теңдеумен
сипатталатын байланыс. Бастапқы шарттар – дене қозғалысының бастапқы кездегі көрсеткіштері
(уақыт, координаталар, жылдамдық). Беріктік кепілдігі. Межелік (сындырушы) күштің немесе кернеудің іс
жүзінде әсер етіп тұрған күшке немесе кернеуге қатынасы. Син. – Беріктік кепілдігінің еселігі; күрделі кернеулі күй жағдайында кернеулі күйдің құраушыларының барлығын бірге кернеулі күй межелік кернеулі күй болу үшін неше өсе көбейту керек екенін көрсететін еселік.
Беріктік шегі. Үлгі төтеп бере алатын ең үлкен кернеу. Беріктік. Қатты дененің сыртқы күштер әсеріне сынбай төтеп беру
қабілеті. Кең мағынада беріктік - материалдың сынуға төтеп берумен қатар оның өз формасын қайтымсыз (пластикалық) өзгертуге қарсыласу қабілеті.
Верещагин әдісі. Екі функцияның көбейтіндісінен алынатын интегралды сол функциялардың графиктерін арнаулы жолмен “көбейту” әдісі.
Винт динамикалық (динама) – күш пен оған перпендикуляр жазықтықта жатқан қос күштің жиынтығы.
Винт кинематикалық – бұрыштық жылдамдықтың (векторы) және ілгерілемелі қозғалыстың оған параллель жылдамдығының жиынтығы.
Гироскоп – бір нүктесі қозғалмайтын симметрия өсіне қатысты айналатын қатты дене.
139
Гироскоптық момент – сан шамасы гироскоптың тірек шеңберіне түсірілген реакция-қос күшінің моментіне тең, ал бағыты оған қарама қарсы қос күштің моменті.
Гироскоптық әсер -гироскоптық моменттің тәжрибедегі көрінісі Даламбер қағидасы. Қозғалыстағы материялық нүктелер жүйесі үшін
барлық тегеурінді күштердің, реакция күштерінің, инерция күштерінің векторлық қосындысы және осы аталған күштердің бас моменттерінің қос ындысы нольге тең болады.
Девиация –материалдық нүктенің қозғалыс траекториясынан ауытқуы. Деформация абсолюттік – сыртқы күштердің әсерінен болатын
деформацияға дейінгі және деформациядан кейінгі дене мөлшерінің айырмасы. Деформация салыстырмалы – абсолюттік деформация мәнінің дененің
бастапқы мөлшеріне қатынасымен анықталатын шама. Диссипативтік күштер-жылдамдықтарға тәуелді және толық механикалық
энергияның бәсендеуіне әеклетін кедергі күштер. Деформацияның потенциялық энергиясы. Деформацияның серпімді
құраушыларының арқасында пайда болып, күшті алып тастаған кезде жүйенің сыртқы жұмысына айнала алатын деформация энергиясы.
Динамикалық түрде күш түсіру. 1. Деформацияланатын дене бөлшектерінің жылдамдығы едеуір болып, яғни қозғалыстағы массаның кинетикалық энергиясы сыртқы күштер жұмысының айтарлықтай бөлігін құрайтындай жағдай туғызатын күш түсіру түрі. 2. Пластикалық деформациялар толық пайда бола алмайтындай күш түсіру түрі. Син. – Тез өзгеретін жүктеме.
Есептеу сүлбесі. Қарастырылатын нақты объектінің есептеу мақсатына айтарлықтай әсері жоқ ерекшеліктері алып тасталған түрі (Модель дегенді де қараңыз).
Жазық қималар болжамы. Сырықтың көлденең қимасы күш түсірілгенге дейін жазық және бойлық өске перпендикуляр болса, күш түсірілгеннен кейін де жазық және бойлық еске перпендикуляр күйінде қалады деген тұжырымға негізделген болжам. Қараңыз. – Бернулли болжамы.
Жазық фигураның бас инерция моменті. Жазық фигураның бас өстеріне қатысты инерция моменттері.
Жазық фигураның орталық бас өстері. Қиманың ауырлық орталығынан өтетін бас өстері.
Жалпыланған координаталар – жүйенің орнын анықтайтын тәуелсіз шамалар.
Жалпыланған күш – жалпыланған координатаға сәйкес қозғалысқа келтіретін күш немесе күш моменті.
Жалпыланған жылдамдық – жалпыланған координатадан уақыт бойынша алынған туынды.
Жанама кернеу. Берілген қимадағы толық кернеу векторының қима жазықтығына проекциясы.
Жаншылу. Шекті өлшемді беттескен беттердегі тік кернеудің әсерінен бұйым материалының беткі қабатының пластикалық деформация алуы.
140
Жұмсару шегі. Үлгідегі деформацияның кернеуге тәуелсіз айтарлықтай өсетін кезіне сәйкес кернеудің мәні.
Жылжу жолақтары (Людерс-Чернов сызықтары). Беті жылтырата тегістелген үлгіні жалпы жұмсару аймағында созуға сынау кезінде оның бетінде бойлық өске 450 көлбеу бағытта пайда пайда болатын сызықтар.
Изотроптық. Денеден бөліп алынған үлгінің қасиеттерінің кеңістіктегі бағыттардан тәуелсіздігі. Керісінше дененің материалы анизотропты деп аталады. Икемділік-қатаңдыққа кері шама.
Инерция радиусы –дененің өстік инерция моментін анықтағанда оның массасы шоғырланатын нүктеден өске дейінгі қашықтықты білдіретін шартты шама
Иілу. Сырықтың көлденең қимасында июші момент туындататын күш түсіру түрі; иілу тік (жазық) және қиғаш болып бөлінеді; сонымен қатар бойлық және бойлық-көлденең иілу түрлері кездеседі.
Ішкі күштер. Сыртқы күштер әсерінен туындайтын жүйенің элементтерінің немесе дененің бөліктерінің өзара әсер күштері. Олар қарастырырылатын көлемдегі немесе нүкте маңындағы сыртқы күштер өсерін теңгереді.
Қабық. Бір өлшемі (қалындығы) басқа өлшемдерінен әлдеқайда кіші болып келетін ішінара немесе толық тұйықталған дене.
Қажуға беріктік. Құрылма элементінің, материалының айнымалы кернеу әсеріне төтеп беру қабілеті; айнымалы күштержүйесі әсеріне беріктік.
Кастилиано теоремасы. Серпімді жүйенің толық потенциялық энергиясынан күшке қатысты алынған дербес туынды сол күш түсірілген нүктенің күш бағытындағы орын ауыстыруына тең болады.
Қатаңдық. Қатты дененің сыртқы әсерлерді өзінің бастапқы геометриялық формасы мен өлшөемдерін айтарлықтай өзгертпей төтеп беру қабілеті.
Қатты дененің өске қатысты инерция моменті (өстік инерция моменті) – айналмалы қозғалыстағы қатты дененің инерттілік өлшемі. Дене нүктелері массаларының олардан өске дейінгі ара қашықтық квадратының көбейтіндісінің қосындысы ретінде анықталады.
Кернеу. Сыртқы күштер әсерінен туатын денедегі ішкі күштердің таралуын сипаттайтын шама; аудан бірлігіне келетін ішкі күштер үлесі.
Кернеулер эллипсоиды. Нүктедегі толық кернеу векторының ұшының геометриялық орны.
Кернеулі күйдің бас алаңдары. Кернеулі күйдің бас өстеріне сәйкес өзара перпендикуляр жазықтықтар.
Кесілу. Жанама кернеудің әсерінен бұйым материалының бір бөлігінің екінші бөлігіне қарағанда жазықтық бойымен ығысуының нәтижесінде сынуы.
Қима өзегі. Көлденең қиманың барлық ңүктелерінде бір таңбалы кернеу туындататын орталықтан тыс түсірілген бойлық күштердің түсу нүктелерінің жиынтығы.
141
Қималар тәсілі. Жүйедегі (денедегі) ішкі күштерді табу төсілі. Ол үшін жүйені қажет жерден ойша кесіп, бір бөлігін алып Кинетика – құрамына статика мен динамика кіретін механиканың жалпы бөлімінің атауы.
Кинетостатика әдісі (Даламбер принципі) – статика теңдеулері түрінде жазылған теңдеулер арқылы динамикалық құбылыстарды зерттейтін әдіс.
Қозғалысты қайтару әдісі (Виллис әдісі) – механизмнің барлық буындарының салыстырмалы қозғалысы сақталғанда, қозғалмалы буынды ойша тоқтату арқылы механизмдерді зерттеу әдісі.
тастаса, оның қалған бөліктің тепе-теңдігін қамтамасыз өтетін әсері ішкі күшті береді.
Күш – денелердің өзара әсерлесуінің қарқыны мен бағытын анықтайтын өлшем.
Күш ілінісу – кедір-бұдырлы беттегі қатты дене сыртқы күштер әсерінен тепе теңдікте болғандағы үйкеліс күшінің мәні.
Күштер әсерлерінің тәуелсіздігі қағидасы. Бірнеше сыртқы әсердің (күштер, температура, қысым және т.б.) нәтижесі сол әсерлердің әрқайсысының нәтижелерінің қос ымдысына теңдігі және оларды түсіру тәртібіне тәуелсіздігі болжамына негізделген қағида. Син. – Қондыра қос у қағидасы.
Күшті статикалық түрде түсіру. Күштің өзгеру жылдамдағы дене бөліктерінің кинетикалық энергиясына айтарлықтай әсер етпейтіндей күш түсіру түрі.
Үйкеліс бұрышы – тангенсі үйкеліс коэффициентіне тең бұрыш. Үйкеліс конусы – конустың симметрия өсімен үйкеліс бұрышына тең
бұрыш құрайтын бағыттаушы арқылы тұрғызылған конус. Маятник математикалық – созылмайтын салмақсыз жіпке ілінген және
вертикаль жазықтықта тербелетін материалдық нүкте. Маятник физикалық – ауырлық күшінің әсерінен ауырлық центрден
өтпейтін қозғалмайтын горизонталь өске қатысты тербелетін материалдық қатты дене.
Механизм – бір немесе бірнеше қатты дененің қозғалысын керекті қозғалысқа түрлендіретін денелер жүйесі.
Мор интегралы. Сызықты серпімді жүйелердегі орын ауыстыруды табу
үшін Мор тәсілін қолданғанда пайдаланылатын интегралдар. Нормаль-қисық жанамасына перпиндикуляр бағытталған сызық .
Орнықтылық. Жүйенің сыртқы әсерлерге төтеп бере отырып өзінің бастапқы қалпын сақтау қабілеті.
Орталықтан тыс созылу (сығылу). Тең әсерлісі сырықтың көлденең қимасының ауырлық орталығынан тыс жерден өтетін бойлық бағытпен түсірілген күштер жүйесінен туындайтын деформация; мұны созылу (сығылу) және бір немесе екі бас өске қатысты иілудің біріккен әсері деп қарастыру ыңғайлы.
Ықтимал орын ауыстыру (мүмкін) – жүйенің байланыстар әсерінен ойша шексіз кіші орын ауыстыруы.
142
Параметр-жүйенің,құбылыстың және процесстің қасиетін сипаттайтын шама.
Параметрлік тербелістер-нүктенің немесе жүйенің айнымалы көрсеткішті тербелісі.
Перигелий-жер орбитасының Күнге жақын нүктесі. Пластикалық материалдар. Стандартталған үлгілері қалыпты
температурада статикалық түрде үзілуге дейін созылуға сынағанда салыстырмалы ұзаруы мен салыстырмалы жіңішкеруі (10...60) % - тен кем болмайтын материалдар. Кей жағдайларда пластикалық материалдан жасалған бөлшектердің де морт сынуы мүмкін.
Полюстік инерция моменті. Дөңгелек немесе сақина тәрізді қималы сырықтардағы бұралу кезіндегі кернеулер мен деформацияларды табу үшін қолданылатын геометриялық сипаттама.
Полюстік қарсылық моменті. Дөңгелек немесе сақина тәрізді қималы сырықтардың бұралу кезінде ең үлкен жанама кернеулерді анықтауцға пайдаланылатын шама; өлшем бірлігі -ұзындық өлшемінің үшінші дәрежесі.
Пропорционалдық шегі. Материалдың қасиеттерінің Гук заңына бағынатын аралығындағы ең үлкен кернеу.
Радиус-вектор – қозғалыстағы нүктенің кез келген уақыттағы орнын көрсететін, шамасы мен бағыты уақытқа тәуелді өзгеретін бағытталған кесінді.
Сен-Венан қағидасы. Жүйенің (дененің) күш түсірілген нүктесінен жеткілікті дәрежеде алыс жатқан нүктелердегі кернеулер мен деформациялар күштің нақты түсірілу әдісіне тәуелсіздігі жайындағы ереже. Бұл қағидаға сүйеніп түсірілген күш жүйесін оған барабар қарапайым жүйемен алмастыруға болады.
Серпімділік. Дененің өлшемдері мен формасын сыртқы күш әсері тоқтағаннан кейін қайтадан қалпына келтіре алу қабілеті.
Созылу. Сырықтың көлденең қимасында тек оң (созушы)бойлық күш әсер ететін, ал басқа ішкі күш факторлары нөлге тең болатын күш түсірудің (деформацияның) түрі.
Соққы. Екі қатты дененің әрқайсысының энергиясын шекті шамаға өзгертетіндей деңгейдегі аз уақыт аралығында өзара әсерлесуінің айрықша түрі.
Статикалық түрде анықталмайтын жүйе. Тұғыр реакциялары тек тепе-тендік теңдеулері арқылы, ал ішкі күштері қималар тәсілімен анықталмайтын жүйе.
Сырғақ (поршень) – бағыттаушылар бойымен қозғалатын буын. Сырық. Бір өлшемі басқа екі өлшемінен әлдеқайда үлкен дене.
Сырықтар жүйесі. Элементтері сырық болып табылатын құрылма Табиғи өстер (табиғи үшжақтық) – бас нүктесі қозғалыстағы нүктемен дәл келетін, ал өстерінің біреуі траекторияға жанама, екіншісі бас нормаль, үшіншісі бинормаль бойынша бағытталған тікбұрышты қозғалатын координаталар жүйесі.
Тербелістердің декременті – тербелістердің өшу процесін сипаттайтын шама.
143
Тербелістің логарифмдік декременті – тербеліс декрементінің өрнегіндегі e санының дәреже көрсеткіші.
Тісті беріліс-тісті дөңгелектер арқылы қозғалыстың берілуін іске асыратын механизм.
Төртбуынды топса-топсалармен байланысқанүш сырықтан тұратын иінтіректі механизм.
Тұтқыр кедергі – жылдамдыққа пропорционал кедергі. Төртінші (Хубер-Мизес-Генки) беріктік теориясы. Материалда
пластикалық деформация меншікті форма өзгерту энергиясы сол материалға тән белгілі мөлшерге жеткенде пайда болады.
Үшінші (Треска-Сен-Венан) беріктік теориясы. Материалда пласти-калық деформация ең үлкен жанама кернеудің мәні (кернеулі күйдің басқа құраушылары қандай болмасын) сол материалға тән белгілі шамаға жеткенде пайда болады.
Эпюр. Шаманың (мысалы, ішкі күш, кернеу немесе орын ауыстыру) бір сызықтың (сырықтың бойлық осі, қиманың биіктігі т.с.с.) бойымен өзгеруін көрсету графигі.
144
Шығу туралы мәліметтер
СП ОӘК қолданбалы механика және машиналарды құрылымдау негіздері кафедрасының мәжілісінде талқыланған 2012ж. «16» қараша №5 хаттамасы СП ОӘК Машина жасау институтының ғылыми-әдістемелік кеңесінде талқыланып мақұлданған 2012ж .«06» қараша №2 хаттамасы
5B073800 – «МАТЕРИАЛДАРДЫ ҚЫСЫММЕН ӨНДЕУ» мамандығы үшін
Механика 1 пәні бойынша
ОҚУ-ӘДІСТЕМЕЛІК КЕШЕНІ
Именов Исмат Мамет ұлы
Басуға __.__.201__ж. қол қойылды. Пішімі 60х84 1/16. Кітап-журнал қағазы.
Көлемі __,__ес.-б.т. Таралымы __ дана. Тапсырыс №___.
Қ.И.Сәтбаев атындағы баспа типографиясында басылған Алматы қаласы, Ладыгин көшесі, 32















