-
Two Arms Design and Dynamic Analysis of Biped Walking
Robot
222000000777 222
-
...
()
()
()
2007 2
-
Two Arms Design and Dynamic Analysis of
Biped Walking Robot
GGGuuueeennn---WWWhhhaaaLLLiiimmm
DDDeeepppaaarrrtttmmmeeennntttooofffMMMeeeccchhhaaannniiicccaaalllEEEnnngggiiinnneeeeeerrriiinnngggGGGrrraaaddduuuaaattteeeSSSccchhhoooooolll,,,KKKooorrreeeaaaMMMaaarrriiitttiiimmmeeeUUUnnniiivvveeerrrsssiiitttyyy
AAABBBSSSTTTRRRAAACCCTTT
In this paper, I designed and constructed two light-weighted 12
d.o.f
robot arms for the humanoid robot and studied its kinematics
model. The
weight of one arm is light enough to be 9 Kg but capable of
delivering
10Kg pay load.
To find out the characteristics of the robot arm, an analysis on
the
kinematics and dynamics was performed. For appropriate design of
the
motor capacity, a computer simulation based on the analysis on
the
kinematics and dynamics was performed. Through this, the
required
torques for delivering the payload were capable of
measuring.
Since an ultra-light robot arm despite of heavy pay load was
designed,
an FEM analysis was performed using ANSYS tool to estimate
deformation
of the robot link. The accuracy of the analysis was verified
through the
actual pay load test measuring the deformation of the robot
link.
-
K
im i
V
L Lagrangian ( )VKL =( )S (skew symmetric matrix)
iI i (inertia moment)
vciJ i (Jacobian)
iJ i
D
C (Coriolis)
i i
iO i
iq i
il i
cil i
id
iF
i
H
Q
iM
-
AbstractAbstractAbstractAbstract
1 1 1 1
..........................................................................
1
2 2 2 2 ........................................ 3
2.1 .......................... 5
2.2 ......................................... 8
2.3 ................................ 11
3 3 3 3 ................................ 13
3.1 ................................................... 13
3.2
.................................................................
17
3.3 .......................................... 21
3.4 .......................................... 28
3.4.1 ............ 28
3.4.2 ......... 31
3.4.3 ............ 33
-
3.3.4 ....................... 35
3.3.5 ............... 35
4 4 4 4 ........................................ 37
4.1 4 ................. 37
5 5 5 5 ............................ 42
5.1 ..........................................................
42
5.2 ..........................................................
43
5.3 .................................................. 45
5.4 ......................................................
45
6 6 6 6
........................................................................
48
...............................................................................
49
-
Table 2.1 Specification of the KUBIR-2
..................................... 10
Table 2.2 Degrees-of-freedom of the KUBIR-2
......................... 10
Table 3.1 Link parameter for the KUBIR-2 arm
........................... 14
Table 4.1 Constants of the load torque in each joint
.................. 39
Table 5.1 Material property
....................................................... 43
Table 5.2 Element type and number
.......................................... 43
Table 5.3 Displacement FEM of the KUBIR-2 arm
...................... 43
Table 5.4 Experiment result of displacement of the KUBIR-2
arm
..............................................................................................
46
Table 5.5 Adjusted displacement by servo motor
........................ 46
-
Fig. 2.1 Structure of the KUBIR-1 arm
........................................ 3
Fig. 2.2 Structure of the KUBIR-2 arm
........................................ 4
Fig. 2.3 Structure of for bar link
................................................. 5
Fig. 2.4 3 dimensional model of the one axis actuator
................. 6
Fig. 2.5 Structure of the one axis
actuator.................................... 7
Fig. 2.6 Structure of the two axis
actuator.................................... 7
Fig. 2.7 System composition of the KUBIR-2 arm
........................ 8
Fig. 2.8 3 dimensional model of the KUBIR-2 arm
..................... 12
Fig. 3.1 D-H coordinate frame assignment for the KUBIR-2 arm
..14
Fig. 3.2 Four-bar-link structure for shoulder joint
....................... 28
Fig. 3.3 Four-bar-link structure for elbow joint
.......................... 31
Fig. 3.4 Four-bar-link structure for wrist joint
............................ 33
Fig. 4.1 Torque analysis of the shoulder joint
............................. 37
Fig. 4.2 Torque analysis of the elbow joint
................................ 38
Fig. 4.3 Torque analysis of the wrist joint
................................ 38
Fig. 4.4 Load torque of the shoulder joint
................................ 40
Fig. 4.5 Load torque of the elbow joint
..................................... 40
Fig. 4.6 Load torque of the wrist joint
....................................... 41
Fig. 5.1 Finite element model
................................................... 42
Fig. 5.2 FEM result of KUBIR-2 arm
.......................................... 44
Fig. 5.3 Comparison result of FEM analysis and experiment
........ 47
Pic. 5.1 Experiment setup of the KUBIR-2 arm for
displacement
measure
.................................................................................
45
-
1
1 1 1 1
.
. ,
HRP-2, I-FOOT, KAIST [1-3] 50kg
.
.
,
, .
[4], 2R SCARA 3R
, , [5],
[6],
[7], A Mechatronics
Approach to the design of light-weight arms and multifingered
hands[8]
.
. 2
-
2
. 3
. 4
. 5 .
6 .
-
3
2 2 2 2
(KUBIR-1) 5
. 0, 1 DC
2 DC -
(gripper) 3, 4
RC . Fig. 2.1
.
(KUBIR-2) .
6 . 0, 4 DC
1, 2, 3, 4 4
. Fig. 2.2 .
Fig. 2.1 Structure of the KUBIR-1 arm
-
4
Fig. 2.2 Structure of the KUBIR-2 arm
-
5
2.1
KUBIR-2
. ,
.
,
. KUBIR-2 4
.
. Fig. 2.3 .
Fig. 2.3 Structure of four bar link
-
6
1 2 1
1.5kg 2 3.5kg . Fig. 2.5
3 Fig. 2.6, 2.7 1 2
.
Fig. 2.4 3 dimensional model of the one axis actuator
-
7
Fig. 2.5 Structure of the one axis actuator
Fig. 2.6 Structure of the two axis actuator
-
8
2.2
(KUBIR-2) 173cm, 92kg, 13,
12, 4 29 .
CCD 2
. 6
yaw-pitch-pitch-pitch-roll-pitch
(ball screw) 4
. 6
yaw-roll-pitch-pitch-pitch-roll
.
-
9
Fig. 2.7 System composition of the KUBIR-2
-
10
Table. 2.1 Specification of the KUBIR-2
Height 160[cm]
Weight 75[kg]
Actuator
Arm
DC Servo motor + Harmonic speed reducer
DC Servo motor + Ball screw
Leg
DC Servo motor + Harmonic speed reducer
DC Servo motor + Ball screwHead DC motor
Control unit
ArmTMS320LF2407 + Motor DriverLeg
Head
Power Capacity
Arm24V/50AHLeg
Head
SensorUSB cam, Tilt sensor, FSR,
Magnetic sensor, Proximity sensor
Table. 2.2 Degrees-of-freedom of the KUBIR-2
HeadNeck 2 DOF
Eye 1 DOF 2eye = 2DOF
Arm
Left 5 DOF(shoulder 2 + elbow 1 + wrist 1)
Right 5 DOF(shoulder 2 + elbow 1 + wrist 1)
Hand 1 DOF 2hand = 2DOF
Leg
Left 6 DOF(hip 3 + knee 1 + ankle 2)
Right 6 DOF(hip 3 + knee 1 + ankle 2)
Waist 1 DOF
Total 29 DOF
-
11
2.3
76cm, 9kg
(gripper) 2 (roll-pitch), 1
(pitch), 2 (pitch-yaw) 6
.
(gripper) 4
, .
(gripper)
4 . 4
DC .
4 .
Fig. 2.4 3 .
-
12
Fig. 2.8 3 dimensional model of the KUBIR-2 arm
-
13
3 3 3 3
.
(gripper) (kinematics)
(jacobian)
.
, 5 (manipulator)
.
.
3.1
(homogeneous transform)
.
Denavit Hartenberg(D-H)
. 4
.
=
100
0cossin
0sincos
,
zR
=
cossin0
sincos0
001
,xR
=
cos0sin
010
sin0cos
,yR
iiii xaxdzziRotTransTransRotA ,,,,=
-
14
, , , 4 (parameter).
(length), (twist),
(offset), (angle) .
4 3 1 . ,
, .
Fig. 3.1 D-H coordinate frame assignment for the KUBIR-2 arm
Table 3.1 Link parameter for the KUBIR-2 arm
Link
1 90 0
2 0 0
3 0 0
4 0 90 0
5 0 0
-
15
.
=
1000
0010
sincos0sin
cossin0cos*
11*
1*
1
*11
*1
*1
1
a
a
A
=
1000
0100
sin0cossin
cos0sincos*22
*2
*2
*22
*2
*2
2
a
a
A
=
1000
0100
sin0cossin
cos0sincos*33
*3
*3
*33
*3
*3
3
a
a
A
=
1000
0010
0cos0sin
0sin0cos*4
*4
*4
*4
4
A
=
1000
100
00cossin
00sincos
5
*5
*5
*5
*5
5d
A
543210
5 AAAAAT =
.
-
16
=
1000333231
232221
131211
50
z
y
x
prrr
prrr
prrr
T
11 5 1 4 2 3 2 3 1 4 2 3 2 3 1 5{ ( ) ( )}r c c c c c s s c s s
c c s s s= + +
12 5 1 4 2 3 2 3 1 4 2 3 2 3 1 5{ ( ) ( )}r s c c c c s s c s s
c c s s c= + +
13 1 4 2 3 2 3 1 4 2 3 2 3( ) ( )r c s c c s s c c c c s s=
+
21 5 1 4 2 3 2 3 1 4 2 3 2 3 1 5{ ( ) ( )}r c s c c c s s s s s
c c s c s= +
22 5 1 4 2 3 2 3 1 4 2 3 2 3 1 5{ ( ) ( )}r s s c c c s s s s s
c c s c c= +
23 1 4 2 3 2 3 1 4 2 3 2 3( ) ( )r s s c c s s s c s c c s= +
+
31 5 4 2 3 2 3 4 2 3 2 3{ ( ) ( )}r c c s c c s s c c s s= +
+
32 5 4 2 3 2 3 4 2 3 2 3{ ( ) ( )}r s c s c c s s c c s s= +
+
33 4 2 3 2 3 4 2 3 2 3( ) ( )r c c c s s s s c c s= + +
, p .
5 1 4 2 3 2 3 1 4 2 3 2 3 1 1 2 2 3 3 2 3 3 2{ ( ) ( )} ( )xP d
c c s c c s c s c c s s c a a c a c c a s s= + + + + +
5 1 4 2 3 2 3 1 4 2 3 2 3 1 1 2 2 3 3 2 3 3 2{ ( ) ( )} ( )yP d
s c s c c s s s c c s s s a a c a c c a s s= + + + + +
5 4 3 2 2 3 4 2 3 2 3 2 2 3 3 2 3 3 2{ ( ) ( )}zP d s c s c s c
c c s s a s a s c a c s= + + + +
-
17
3.2
,
.
5,...,1,10
)()(
)(),...,()(
00
110
=
=
=
nqdqR
qAqAqTnn
nnn
(3. 1)
, .
,
.
.
.
,
Tnnn RRS )()( 000 &&= (3. 2)
. .
0 0n nv d= & (3. 3)
, .
-
18
5,...,1,)()(,)( === iqqJqRqqJv iTiiivci c
&& (3. 4)
.
.
5,...,1,)(
1
1 =
=
iz
OOzJ
i
inii
(3. 5)
,
.
Fig. 3.1
.
,
.
-
19
-
20
-
21
3.3
Euler-Lagrange , .
5,...,1,)()()( ==++ kqqqqcqqd kkjiijkj
jkj &&&& (3. 6)
. (3. 6)
2 ,
1 Coriolis
,
.
. 5
Euler-Lagrange
.
( ) ( , ) ( )D q q C q q q q + + =&& & & (3.
7)
, 155555 )(,),(,)( RqRqqCRqD & .
.
,
.
-
22
.
.
.
-
23
-
24
, .
:
: ()
:
: ()
: Gripper
: ()
:
Chrostoffel
Coriolis
.
.
-
25
-
26
5
.
.
.
-
27
Euler-Lagrange
.
. .
-
28
3.4
4
.
.
.
3.4.1
Fig. 3.2 Four-bar-link structure for shoulder joint
4
Fig. 3.2 .
. .
-
29
. .
,
.
(3. 8)
(3. 8) 1 2 .
(3. 9)
(3. 10)
.
(3. 11)
.
-
30
(3. 12)
(3. 13)
-
31
3.4.2
Fig. 3.3 Four-bar-link structure for elbow joint
4 Fig. 3.3
. .
.
. .
,
.
(3. 14)
1 2 .
-
32
(3. 15)
(3. 16)
.
(3. 17)
.
(3. 18)
(3. 19)
-
33
3.4.3
Fig. 3.4 Four-bar-link structure for wrist joint
4 Fig. 3.4
. .
.
. .
,
.
(3. 20)
1 2 .
-
34
(3. 21)
(3. 22)
.
(3. 23)
.
(3. 24)
(3. 25)
-
35
3.4.4
F .
, ,
,
.
iiii pF sin= (3.26)
i , ip .
)/cos( iii pda= (3.27)22
2 adp ii +=
3,2,1=i , , a
cb, .
3.4.5
. ,
Euler-Lagrange
. (3.26)
-
36
. ,
5
Euler-Lagrange (3.6)
.
,
.
( ) ( , ) ( )fH d d Q d d d h d LF+ + =&& & &
(3.28),
3 1( ) ( ) ( ), ( , ) ( , ) ( ) ( )ij ij i ij j jH d D d R d Q d
d C d d H d R d d= = +& & &
. (3.28) L 2
.
-
37
4 4 4 4
4
, ,
. 10kg (gripper)
. , ,
.
,
.
4.1 4
Fig.
4.1~4.3 .
Fig. 4.1 Torque analysis of the shoulder joint
-
38
Fig. 4.2 Torque analysis of the elbow joint
Fig. 4.3 Torque analysis of the wrist joint
.
.
-
39
1111
121211
CosL
CosLMF
=
(4.1)
2121
222222
CosL
CosLMF
=
(4.2)
3131
323233
CosL
CosLMF
=
(4.3)
, .
16.7kgf, 13.2kgf, 11.7kgf .
(4.4) ,
(4.5) .
i
ia Cos
FF
=
(4.4)
A
lF baMotorloadi
=
2)( (4.5)
bl , , A
Table 4.1 .
Table 4.1 Constants of the load torque in each joint
Body name
Lead of ballscrew
bl [mm]
Efficiency of ballscrew
[%]Reduction
Motor
Max. continuous torque
Shoulder 2 mm 90% 1 : 4.3 181Nmm
Elbow 1 mm 90% 1 : 1.75 94.8Nmm
Wrist 1 mm 90% 1 : 1.75 94.8Nmm
-
40
, (4.5)
Fig. 4.4~4.6 .
,
.
0
20
40
60
80
100
120
140
160
-100 -80 -60 -40 -20 0
q2 (deg)
Torq
ue (
Nm
m)
Fig. 4.4 Load torque of the shoulder joint
0
10
20
30
40
50
60
70
80
90
100
-100 -80 -60 -40 -20 0 20
q3 (deg)
Torq
ue (
Nm
m)
Fig. 4.5 Load torque of the elbow joint
-
41
0
10
20
30
40
50
60
70
80
-60 -40 -20 0 20 40 60
q4 (deg)
Torq
ue (
Nm
m)
Fig. 4.6 Load torque of the wrist joint
Fig. 4.4~4.6
.
.
-
42
5 5 5 5
CATIA ANSYS
. ,
.
1kg
10kg 1kg .
5.1
SOLID ,
BEAM .
4
.
Fig. 5.1 .
Fig. 5.1 Finite element model
-
43
(AL6061) .
Table 5.1 ,
Table 5.2 .
Table 5.1 Material property
Elastic
Modulus()
Tensile
Strength()Poisson's Ratio Density()
AL6061 68.9 225 0.35 2710
Table 5.2 Element type and number
SOLID 104642 283229
BEAM 360 691
5.2
1kg 10kg 1kg
. FEM
Table 5.2 , Fig. 5.2 10kg
.
Table 5.3 Displacement FEM of the KUBIR-2 arm
Weight(kg) Displacement(mm)
1 1.47
2 2.94
3 4.43
4 5.93
5 7.42
6 8.92
7 10.41
8 11.9
9 13.4
10 14.76
-
44
Fig. 5.2 FEM result of KUBIR-2 arm
-
45
5.3
(gripper) 1kg 10kg
1kg
. Pic. 5.1 .
Pic. 5.1 Experimental setup of the KUBIR-2 arm for displacement
measure
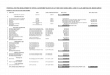
5.4
Table 5.3 ,
.
Table 5.4 .
-
46
Table 5.4 Experiment result of displacement of the KUBIR-2
arm
Weight(kg) Displacement(mm)
1 3
2 6
3 8
4 11.5
5 13.5
6 16
7 18
8 21
9 23
10 26
Table 5.5 Adjusted displacement by servo motor
Weight(kg)Wrist
(pulse)
Elbow
(pulse)
Shoulder
(pulse)
Displacement of
gripper(mm)
1 46.4 80 566.7 1.53
2 92.7 160.7 1133.3 3.05
3 104.3 180.9 1275 3.42
4 150.6 261.5 1841.7 4.94
5 185.4 322 2266.7 6.08
6 208.6 362.4 2550 6.84
7 231.7 402.7 2833.3 7.59
8 278 483.3 3400 9.1
9 289.6 503.5 3541.7 9.49
10 336 584.18 4108.3 11
-
47
. Fig. 5.3 .
FEM .
0
2
4
6
8
10
12
14
16
0 5 10 15
Carrying weight (kg)
Dis
pla
cem
ent (m
m)
FEM analysis
Experiment
Fig. 5.3 Comparison result of FEM analysis and experiment
-
48
6 6 6 6
.
(closed chain)
.
9kg ,
10kg .
. ,
,
,
.
.
ANSYS
,
.
.
FEM
.
-
49
[1] http://asimo.honda.com/
[2] K. Harada, et al, A Humanoid Robot Carrying a Heavy Object,
Proc. IEEE
International Conf. on Robotics and Automation, pp. 1724-1729,
2005.
[3] J.H Kim, S.W Park, I.W Park, and J. H. Oh, Development of a
Humanoid
Biped Walking Robot Platform KHR-1 - Initial Design and Its
Performance
Evaluation, in Proceedings of 3rd IARP Int.Workshop on Humanoid
and Human
Friendly Robotics, pp. 14-21, Tsukuba, Japan, Dec. 2003.
[4] , ,
, 15 2, pp. 523-536, 1991.
[5] , , , , ,
15 2, pp. 515-522, 1991.
[6] , , ,
1 1, pp. 178-181, 1991.
[7] , , , , ,
10 5, pp. 611-617, 1986.
[8] G. Hirzinger, J. Batterfag, M. Fischer, M. Grebenstein, M.
Hahnle, H. Liu, I.
Schaefer, and N. Sporer, "A Mechatronics Approach to the Design
of Light
Weight Arms and Multi-Singered Hands", ICRA, pp. 46-54,
2000.
[9] , , , KSME 25 ,
1 2 2.1 2.2 2.3
3 3.1 3.2 3.3 3.4 3.4.1 3.4.2 3.4.3 3.4.4 3.4.5
4 4.1 4
5 5.1 5.2 5.3 5.4
6