Embed Size (px)
Citation preview

1ÊÙ ÄÚÅ
ùÙ¥§·òÄkïÄÔnXÚħ~XÄ!ZÄ!ɽÄ
ÚÍÜÄ"·òïÄaAÏÅ—Å6Ä350¥D /¤
ÅÅ"Å´ÄGD§´« ÊH$Ä/ª"ÄÚÅØ=3
åÆ¥! 3ÔnƥѴ$Ä/ª"
f
Ä
ZÄ
ɽÄ
ÍÜÄÚ
ÅÅ
1

1 f
Chapter Five
Linear oscillations
and normal modes
KEY FEATURESThe key features of this chapter are the properties of free undamped oscillations, free dampedoscillations, driven oscillations, and coupled oscillations.
Oscillations are a particularly important part of mechanics and indeed of physics as awhole. This is because of their widespread occurrence and the practical importance of oscil-lation problems. In this chapter we study the classical linear theory of oscillations, whichis important for two reasons: (i) the linear theory usually gives a good approximation to themotion when the amplitude of the oscillations is small, and (ii) in the linear theory, most prob-lems can be solved explicitly in closed form. The importance of this last fact should not beunderestimated! We develop the theory in the context of the oscillations of a body attached to aspring, but the same equations apply to many different problems in mechanics and throughoutphysics.
In the course of this chapter we will need to solve linear second order ODEs with constantcoefficients. For a description of the standard method of solution see Boyce & DiPrima [8].
5.1 BODY ON A SPRING
Suppose a body of mass m is attached to one end of a light spring. The other end ofthe spring is attached to a fixed point A on a smooth horizontal table, and the body slides on
x
m
v
Equilibrium position
In motion m
SR
G(t)Forces
FIGURE 5.1 The body m is attached to one end of a light spring and moves in astraight line.Äã¥f§ l²ï x§fÉåØ£E
åS = −kx§U)ZåRÚÜ°ÄåG(t)"bR = −bv§Ù
¥ b´K~ZXê§Ïdf$ħ
md2x
dt2+ b
dx
dt+ kx = G(t)
ù´~Xê5©§"XJ½Â
ω =
√k
m, K =
b
2m, F (t) =
G(t)
m
KT©§C
d2x
dt2+ 2K
dx
dt+ ω2x = F (t) (1)
2

2 Ä
vkZ!vk3°Äå§f¤f§ª (1)CXe5
ħµ
d2x
dt2+ ω2x = 0
·®²LNõÄ~f§Ù)
x = A cos(ωt + ϕ)
Ù¥ϕÐ §ωªÇ½ªÇ§AÌ"ıÏÚªÇ
T =2π
ω= 2π
√m
k, ν =
1
T=
1
2π
√k
m
â·±c(J§fÅUÅð§
E =1
2kA2
3

3 ZÄ
13.6 Damped Oscillations 409
force of the system is kx, we can write Newton’s second law as
(13.32)
The solution of this equation requires mathematics that may not be familiar to youyet; we simply state it here without proof. When the retarding force is small com-pared with the maximum restoring force—that is, when b is small—the solutionto Equation 13.32 is
(13.33)
where the angular frequency of oscillation is
(13.34)
This result can be verified by substituting Equation 13.33 into Equation 13.32.Figure 13.19a shows the displacement as a function of time for an object oscil-
lating in the presence of a retarding force, and Figure 13.19b depicts one such sys-tem: a block attached to a spring and submersed in a viscous liquid. We see thatwhen the retarding force is much smaller than the restoring force, the oscil-latory character of the motion is preserved but the amplitude decreases intime, with the result that the motion ultimately ceases. Any system that be-haves in this way is known as a damped oscillator. The dashed blue lines in Fig-ure 13.19a, which define the envelope of the oscillatory curve, represent the expo-nential factor in Equation 13.33. This envelope shows that the amplitude decaysexponentially with time. For motion with a given spring constant and blockmass, the oscillations dampen more rapidly as the maximum value of the retardingforce approaches the maximum value of the restoring force.
It is convenient to express the angular frequency of a damped oscillator in theform
where represents the angular frequency in the absence of a retardingforce (the undamped oscillator) and is called the natural frequency of the sys-tem. When the magnitude of the maximum retarding force the system is said to be underdamped. As the value of R approaches kA, the am-plitudes of the oscillations decrease more and more rapidly. This motion is repre-sented by the blue curve in Figure 13.20. When b reaches a critical value bc suchthat bc/2m 0 , the system does not oscillate and is said to be critically damped.In this case the system, once released from rest at some nonequilibrium position,returns to equilibrium and then stays there. The graph of displacement versustime for this case is the red curve in Figure 13.20.
If the medium is so viscous that the retarding force is greater than the restor-ing force—that is, if and —the system is over-damped. Again, the displaced system, when free to move, does not oscillate butsimply returns to its equilibrium position. As the damping increases, the time ittakes the system to approach equilibrium also increases, as indicated by the blackcurve in Figure 13.20.
In any case in which friction is present, whether the system is overdamped orunderdamped, the energy of the oscillator eventually falls to zero. The lost me-chanical energy dissipates into internal energy in the retarding medium.
b/2m 0R max bvmax kA
R max bvmax kA,
0 √k/m
√0
2 b2m
2
√ km
b2m
2
x Ae b2mt cos(t )
kx b dxdt
m d 2xdt2
Fx kx bv max A
x
0 t
A e
(a)
(b)
m
b2m
– t
Figure 13.19 (a) Graph of dis-placement versus time for adamped oscillator. Note the de-crease in amplitude with time. (b) One example of a damped os-cillator is a mass attached to aspring and submersed in a viscousliquid.
x
ab
c
t
Figure 13.20 Graphs of dis-placement versus time for (a) anunderdamped oscillator, (b) a criti-cally damped oscillator, and (c) anoverdamped oscillator.
ý¢ÔnXÚo´kZ§ÏXÚo´ÏLÃXÞÏ.ÑUþ"
?ùXÚgC$ħª¬ªu·G"
kZ!vk3°Ä姪 (1)CXeàg5§
d2x
dt2+ 2K
dx
dt+ ω2x = 0 (2)
ÄkÄK < ω/§¡jZ/"þã§)
x = Ae−Kt cos(√
ω2 −K2 t + ϕ)
Ù¥A > 0Úϕ~ê"§3ZÄ/e§Ì¬m¥êP~§
f¬8u·",¡§ZıÏ'ÃZ"4

112 Chapter 5 Linear oscillations
x
t
FIGURE 5.4 Three typical cases of over-damped simpleharmonic motion.
5.4 DRIVEN (FORCED) MOTION
We now include the effect of an external driving force G(t) which we suppose to bea given function of the time. In the case of a body suspended by a spring, we could apply sucha force directly, but, in practice, the external ‘force’ often arises indirectly by virtue of thesuspension point being made to oscillate in some prescribed way. The seismograph describedin the next section is an instance of this.
Whatever the origin of the driving force, the governing equation for driven motion is(5.4), namely
d2x
dt2+ 2K
dx
dt+ 2x = F(t), (5.14)
where 2mK is the damping constant, m2 is the spring constant and m F(t) is the drivingforce. Since this equation is linear and inhomogeneous, its general solution is the sum of (i)the general solution of the corresponding homogeneous equation (5.9) (the complementaryfunction) and (ii) any particular solution of the inhomogeneous equation (5.14) (the partic-ular integral). The complementary function has already been found in the last section, andit remains to find the particular integral for interesting choices of F(t). Actually there is a(rather complicated) formula for a particular integral of this equation for any choice of thedriving force m F(t). However, the most important case by far is that of time harmonic forc-ing and, in this case, it is easier to find a particular integral directly. Time harmonic forcing isthe case in which
F(t) = F0 cos pt, (5.15)
where F0 and p are positive constants; m F0 is the amplitude of the applied force and p is itsangular frequency.
2ÄK > ω/§¡LZ/"3T/e§§ (2))
x = e−Kt(Ae
√K2−ω2 t + Be−
√K2−ω2 t
)(3)
Ù¥AÚB~ê"§3LZ/Ø3"þ㥣±n«LZ
/§«O´Ð©ÝØÓ"
§K = ω/¡.Z/§3T/e§§ (2))
x = e−Kt (A + Bt)
Ù¥AÚB~ê".Z/LZ/aq"5

4 ɽÄ
Damped Driven Oscillator
m= 1k= 3.953 1581b= 0.361 361
x_init= 0v_init= 0
F_0= 0.5omega= 2.005 401delta_t= 0.021 211
omega_0= 1.988 37
Damped Driven Oscillator
-1
-0.5
0
0.5
1
0 10 20 30 40 50
t
x
2
02 cosd x dxm x F tdt dt
b k ω+ + =
·ÄXe°Äåµ
G(t) = G0 cos pt, F (t) =G0
mcos pt = F0 cos pt
Ù¥G0Ú pþK~ê"éud«/§§ (1))
x =F0√
(ω2 − p2)2 + 4K2p2cos(pt− γ) + x0(t), tan γ =
2Kp
ω2 − p2(0 < γ ≤ π)
Ù¥x0(t)°Äå"àg§)"c¡·®²?Øx0(t)§Ø+
´jZ!LZ´.Z/§§Ñ¬mP~""Ïd§~ò
)x0(t)¡]A§ þª¥1¡°ÄA"Ø+Щ^Û§²L
vm§½e°ÄA" 6

~ (°Äå^eÄ)µZf3°Äå^e$ħ
d2x
dt2+ 3
dx
dt+ 2x = 10 cos t
Щ§f·u:§¦Ù$Ä"
)µK¿
p = 1, F0 = 10, K = 1.5, ω =√
2
duK > ω§Ïd]Ax0(t)LZ/)§dª (3)
x0(t) = Ae−t + Be−2t
,¡§
tan γ =2Kp
ω2 − p2= 3, cos γ =
1√10
, sin γ =3√10
ÏdO°ÄA
F0√(ω2 − p2)2 + 4K2p2
cos(pt− γ) = cos t + 3 sin t
7

o§Tf$Ä
x = cos t + 3 sin t + Ae−t + Be−2t
âЩ^ 1 + A + B = 0
3− A− 2B = 0=⇒
A = −5
B = 4
(J§f$ÄdeªÑµ
x = cos t + 3 sin t︸ ︷︷ ︸°ÄA
−5e−t + 4e−2t︸ ︷︷ ︸]A
5.4 Driven (forced) motion 115
FIGURE 5.5 The solid curve is the actualresponse and the dashed curve the drivenresponse only.
x
t
Solving these simultaneous equations gives A = −5 and B = 4. The subsequentmotion of the oscillator is therefore given by
x = cos t + 3 sin t︸ ︷︷ ︸driven response
−5e−t + 4e−2t︸ ︷︷ ︸transient response
.
This solution is shown in Figure 5.5 together with the driven response only. In thiscase, the transient response is insignificant after less than one cycle of the drivingforce. The amplitude of the driven reponse is (12 + 32)1/2 = √
10 and the phase lagis tan−1(3/1) ≈ 72.
Resonance of an oscillating system
Consider the general formula
a = F0((2 − p2)2 + 4K 2 p2
)1/2
for the amplitude a of the driven response to the force m F0 cos pt (see equation (5.20)). Sup-pose that the amplitude of the applied force, the spring constant, and the resistance constantare held fixed and that the angular frequency p of the applied force is varied. Then a is afunction of p only. Which value of p produces the largest driven response? Let
f (q) = (2 − q)2 + 4K 2q.
Then, since a = F0/√
f (p2), we need only find the minimum point of the function f (q) lyingin q > 0. Now
f ′(q) = −2(2 − q) + 4K 2 = 2(
q − (2 − 2K 2))
so that f (q) decreases for q < 2 − 2K 2 and increases for q > 2 − 2K 2. Hence f (q) hasa unique minimum point at q = 2 − 2K 2. Two cases arise depending on whether this valueis positive or not.
Case 1. When 2 > 2K 2, the minimum point q = 2 − 2K 2 is positive and a has itsmaximum value when p = pR , where
pR = (2 − 2K 2)1/2.
8

116 Chapter 5 Linear oscillations
p/Ω
(Ω /F ) a02
1
1
FIGURE 5.6 The dimensionless amplitude (F0/2)aagainst the dimensionless driving frequency p/ for(from the top) K/ = 0.1, 0.2, 0.3, 1.
The angular frequency pR is called the resonant frequency of the oscillator. Thevalue of a at the resonant frequency is
amax = F0
2K (2 − K 2)1/2.
Case 2. When 2 ≤ 2K 2, a is a decreasing funcion of p for p > 0 so that a has no maximumpoint.
These results are illustrated in Figure 5.6. They are an example of the general physicalphenomenon known as resonance, which can be loosely stated as follows:
The phenomenon of resonance
Suppose that, in the absence of damping, a physical system can perform free oscillationswith angular frequency . Then a driving force with angular frequency p will induce alarge response in the system when p is close to , providing that the damping is not toolarge.
This principle does not just apply to the mechanical systems we study here. It is a generalphysical principle that also applies, for example, to the oscillations of electric currents incircuits and to the quantum mechanical oscillations of atoms.
Note that the resonant frequency pR is always less than , but is close to when K/
is small. The height of the resonance peak, amax, is given approximately by
amax ∼ F0
22
(
K
)−1
in the limit in which K/ is small; amax therefore tends to infinity in this limit. In the samelimit, the width of the resonance peak is directly proportional to K/ and consequently tendsto zero.
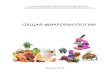
ÄþãɽÄe§°ÄAÌ
A =F0√
(ω2 − p2)2 + 4K2p2
§3Zé (=Ké)/§XJ°ÄåªÇ pCuXÚk
ªÇω§K¬¦XÚu)éÌ°ÄA§ù«y¡"þãpI
(ω2/F0
)A§îI p/ω§lþegéAK/ω = 0.1, 0.2, 0.3, 1"
9

/¤
120 Chapter 5 Linear oscillations
X(t)
L
L + x
Equilibrium position
FIGURE 5.9 A simple seismograph for measuring vertical ground motion.
5.5 A SIMPLE SEISMOGRAPH
The seismograph is an instrument that measures the motion of the ground on which itstands. In real earthquakes, the ground motion will generally have both vertical and horizontalcomponents, but, for simplicity, we describe here a device for measuring vertical motion only.
Our simple seismograph (see Figure 5.9) consists of a mass which is suspended from arigid support by a spring; the motion of the mass relative to the support is resisted by a damper.The support is attached to the ground so that the suspension point has the same motion asthe ground below it. This motion sets the suspended mass moving and the resulting springextension is measured as a function of the time. Can we deduce what the ground motion was?
Suppose the ground (and therefore the support) has downward displacement X (t) at timet and that the extension x(t) of the spring is measured from its equilibrium length. Then thedisplacement of the mass is x + X , relative to an inertial frame. The equation of motion (5.9)is therefore modified to become
md2(x + X)
dt2= −(2mK )
dx
dt− (m2)x,
that is,
d2x
dt2+ 2K
dx
dt+ 2x = −d2 X
dt2.
This means that the motion of the body relative to the moving support is the same as if thesupport were fixed and the external driving force −m(d2 X/dt2) were applied to the body.
First consider the driven response of our seismograph to a train of harmonic waves withamplitude A and angular frequency p, that is,
X = A cos pt.
The equation of motion for the spring extension x is then
d2x
dt2+ 2K
dx
dt+ 2x = Ap2 cos pt.
·?Ø«Uÿþ/¡3Yu)Ĥì"ã¥Ô¬d]!
3f5Nºà"f5N½3/¡þ§Ïdäk/¡Ó$Ä"
bvk/¡$ħ²ïÝL§Kk
mg = mω2(L− `) (4)
Ù¥ `´"±df5Nºà :!eïáI
X"y3b/¡äkYħ¦f5N3 t £X§Ý
l"KdÔ¬ X + l§ÙCzd±e§û½µ
md2(X + l)
dt2= mg − 2mK
dl
dt−mω2(l − `) (5)
10

dª (4)Ú (5)§Ýéu²ïÝLUCþx = l − LCz§
d2x
dt2+ 2K
dx
dt+ ω2x = −d2X
dt2
§/¡YÄJuéÔ¬\3°Äå−md2X/dt2"
b
X = A cos pt, −d2X
dt2= Ap2 cos pt
Ù¥AÚ pþ~ê"Kâc¡(J§°ÄA
x =Ap2√
(ω2 − p2)2 + 4K2p2cos(pt− γ), tan γ =
2Kp
ω2 − p2
Ïd§3ëêωÚZëêKÑ®¹e§ÏLÿþ°ÄAÌÚ
ªÇ§=/ëêAÚ p"
¢S¹vkùoü§Ï/ÅU´NõØÓªÇÚØÓÌÅS
\"·ÀJKÚω¦§Ñu¤kUÅªÇ p§K
½k γ = π, x ≈ −X§=x(t)P¹/¡Ä§ù(J/Å.´
Û«ÅS\Ã'" 11

5 ÍÜÄÚ
5.6 Coupled oscillations and normal modes 121
x
mm
y
FIGURE 5.10 Two particles are connected between three springsand perform longitudinal oscillations.
The complex amplitude of the driven motion is
c = p2 A
−p2 + 2i K p + 2,
and the real driven motion is
x = a cos(pt − γ ),
where
a = |c | = A∣∣−1 + 2i(K/p) + (/p)2∣∣ . (5.26)
Thus, providing that the spring and resistance constants are accurately known, the angularfrequency p and amplitude A of the incident wave train can be deduced.
In practice, things may not be so simple. In particular, the incident wave train may be amixture of harmonic waves with different amplitudes and frequencies, and these are not easilydisentangled. However, if K and are chosen so that K/p and /p are small compared withunity (for all likely values of p), then c = −A and X = −x approximately. Thus, in thiscase, the record for x(t) is simply the negative of the ground motion X (t).∗ Since this resultis independent of the incident frequency, it should also apply to complicated inputs such as apulse of waves.
5.6 COUPLED OSCILLATIONS AND NORMAL MODES
Interesting new effects occur when two or more oscillators are coupled together. Fig-ure 5.10 shows a typical case in which two bodies are connected between three springs andthe motion takes place in a straight line. We restrict ourselves here to the classical theory inwhich the restoring forces are linear and damping is absent. If the springs are non-linear, thenthe displacements of the particles must be small enough so that the linear approximation isadequate.
Let x and y be the displacements of the two bodies from their respective equilibriumpositions at time t ; because two coordinates are needed to specify the configuration, the systemis said to have two degrees of freedom. Then, at time t , the extensions of the three springs arex , y − x and −y respectively. Suppose that the strengths of the three springs are α, 2α and
∗ What is actually happening is that the mass is hardly moving at all (relative to an inertial frame).
ã¥üÔ¬3n^e÷$Ä"blmn5X
ê©O k!2kÚ 4k§²ï§nþ?u" tüÔ¬g²ï
lþ©OxÚ y§Knþ©Ox!y − xÚ−y"ÑZ§
üÔ¬$ħ©O
mx = −kx + 2k(y − x)
my = −2k(y − x)− 4ky
-n =√
k/m§þªn
x + 3n2x− 2n2y = 0
y − 2n2x + 6n2y = 0(6)
12

ùüÍܧ)§·ÄkϦXe/ª)µ
x = A cos(ωt + ϕ)
y = B cos(ωt + ϕ)
Xd/ª)¡TfXÚ§\§| (6)
(3n2 − ω2)A− 2n2B = 0
−2n2A + (6n2 − ω2)B = 0(7)
T§|k²T)A = B = 0§éA²ï)x = y = 0§=fvk$Ä"XJ
¦T§|k²T)§KωL÷v
ω4 − 9n2ω2 + 14n4 = 0
T§kü)
ω1 =√
2n, ω2 =√
7n
Ïd§TfXÚkü§©Oäk ()ªÇ√
2nÚ√
7n"
13

éuú (ω1 =
√2n)§§| (7)
n2A− 2n2B = 0
−2n2A + 4n2B = 0
ùü§ÑA = 2B"Ïd·q)A = 2δ, B = δ§Ù¥ δ?¿
""Ïd§3ú¥üÔ¬ £Xe/ª
x = 2δ cos(√
2nt + ϕ)
y = δ cos(√
2nt + ϕ)
Ù¥ δÚϕ?¿"
aq/§3¯ (ω2 =√
7n)¥üÔ¬ £Xe/ª
x = δ cos(√
7nt + ϕ)
y = −2δ cos(√
7nt + ϕ)14

)du§| (6)¥ü§Ñ´5àg§§Ïd
x = 2δ1 cos(√
2nt + ϕ1) + δ2 cos(√
7nt + ϕ2)
y = δ1 cos(√
2nt + ϕ1)− 2δ2 cos(√
7nt + ϕ2)(8)
´§| (6))§Ù¥ δ1!δ2!ϕ1Úϕ2?¿¢ëê"
w,§·U(½ùoëꧦ±þS\)÷vdx(0), y(0), x(0), y(0)
ÑЩ^" ,¡§½Ð©^x(0), y(0), x(0), y(0)§·
TfXÚ$Ä)´"Ïd§S\) (8)´§| (6))!=T
fXÚ$Ä)"
TfXÚ$ıÏ5¿©7^´ü±ÏØknê§
=ω1/ω2knê"3d~¥§ω1/ω2 =√
2/7Ø´knê§ÏdTfXÚ$
ÄØ´±Ï5"
15

l l
m m
k
y x
~ (dëÓü)µXã§üÓü§Ñ l§¥þÑ
m§ü¥d5Xê kë§g,ÝÐuü]!
:mål"¦üüÄ"
)µ©OPü¥ £xÚ y§Küö$ħ©O
mx = −mgx
l− k(x− y)
my = −mgy
l+ k(x− y)
16

üükªÇω0 =√
g/l"Pn =√
k/m§þã$ħn
x + (ω20 + n2)x− n2y = 0
y − n2x + (ω20 + n2)y = 0
^c¡Ó§±¦ÑüªÇ
ω1 = ω0, ω2 =√
ω20 + 2n2
ú
x = −y = δ cos(ω0t + ϕ)
¯
x = y = δ cos
(√ω2
0 + 2n2 t + ϕ
)
17

x y
2m m
a a 2a
~ (îÄüfXÚ)µþ©O 2mÚmü:d-ë§-
üཧXÚ²ï XJ¤«"XÚ?u²ï§-fÜåT0"
ïÄü: l²ïî$Ä"¤¢î$ħ´ü:î
lxÚ yþu a§ -fÜåÄþ±ØCT0"
)µü:î$ħCq
2mx = −T0x
a+ T0
y − x
a
my = −T0y − x
a− T0
y
2a
-n =√
T0/(ma)§±þ§n
2x + 2n2x− n2y = 0
2y − 2n2x + 3n2y = 0(9)
18

^c¡Ó§±¦ÑüªÇ
ω1 =n√2, ω2 =
√2n
ú
x = δ cos(nt/√
2 + ϕ)
y = δ cos(nt/√
2 + ϕ)
¯
x = δ cos(√
2nt + ϕ)
y = −2δ cos(√
2nt + ϕ)
)
x = δ1 cos(nt/√
2 + ϕ1) + δ2 cos(√
2nt + ϕ2)
y = δ1 cos(nt/√
2 + ϕ1)− 2δ2 cos(√
2nt + ϕ2)
duω1/ω2 = 1/2knê§Ïd±Ï5$ħ±ÏT = 2√
2π/n" 19

6 ÅÅ
16.1 Wave Motion 491
ost of us experienced waves as children when we dropped a pebble into apond. At the point where the pebble hits the water’s surface, waves are cre-ated. These waves move outward from the creation point in expanding cir-
cles until they reach the shore. If you were to examine carefully the motion of aleaf floating on the disturbed water, you would see that the leaf moves up, down,and sideways about its original position but does not undergo any net displace-ment away from or toward the point where the pebble hit the water. The watermolecules just beneath the leaf, as well as all the other water molecules on thepond’s surface, behave in the same way. That is, the water wave moves from thepoint of origin to the shore, but the water is not carried with it.
An excerpt from a book by Einstein and Infeld gives the following remarksconcerning wave phenomena:1
A bit of gossip starting in Washington reaches New York [by word of mouth]very quickly, even though not a single individual who takes part in spreading ittravels between these two cities. There are two quite different motions in-volved, that of the rumor, Washington to New York, and that of the personswho spread the rumor. The wind, passing over a field of grain, sets up a wavewhich spreads out across the whole field. Here again we must distinguish be-tween the motion of the wave and the motion of the separate plants, which un-dergo only small oscillations... The particles constituting the medium performonly small vibrations, but the whole motion is that of a progressive wave. Theessentially new thing here is that for the first time we consider the motion ofsomething which is not matter, but energy propagated through matter.
The world is full of waves, the two main types being mechanical waves and elec-tromagnetic waves. We have already mentioned examples of mechanical waves:sound waves, water waves, and “grain waves.” In each case, some physical mediumis being disturbed—in our three particular examples, air molecules, water mole-cules, and stalks of grain. Electromagnetic waves do not require a medium to propa-gate; some examples of electromagnetic waves are visible light, radio waves, televi-sion signals, and x-rays. Here, in Part 2 of this book, we study only mechanical waves.
The wave concept is abstract. When we observe what we call a water wave, whatwe see is a rearrangement of the water’s surface. Without the water, there wouldbe no wave. A wave traveling on a string would not exist without the string. Soundwaves could not travel through air if there were no air molecules. With mechanicalwaves, what we interpret as a wave corresponds to the propagation of a disturbancethrough a medium.
M
1 A. Einstein and L. Infeld, The Evolution of Physics, New York, Simon & Schuster, 1961. Excerpt from“What Is a Wave?”
Interference patterns produced by outward-spreading waves from many drops of liquidfalling into a body of water.
ÅÅ´6Ä30¥D§§In^µ6Ä !6Ä0!±9
¦0¥Ü©m3p^ÔnéX"
A bit of gossip starting in Washington reaches New York [by word of mouth] very quickly,even though not a single individual who takes part in spreading it travels between these twocities. There are two quite different motions involved, that of the rumor, Washington to NewYork, and that of the persons who spread the rumor. The wind, passing over a field of grain,sets up a wave which spreads out across the whole field. Here again we must distinguishbetween the motion of the wave and the motion of the separate plants, which undergo onlysmall oscillations... The particles constituting the medium perform only small vibrations, butthe whole motion is that of a progressive wave. The essentially new thing here is that for thefirst time we consider the motion of something which is not matter, but energy propagatedthrough matter.
— The Evolution of Physics, A. Einstein and L. Infeld20

uþîÅ
Y
X
v
( ,0) ( )y x f x= ( , ) ( )y x t f x vt= −
O
vt
0x
ÄÃ.;u§±uþ,::O!÷XumX¶
!çþY ¶ïáIX"
þe~Äu০à:çÄ"duu¥Ü姬¦
:UÄå5§3çÄ"²*§¬uyuà (Å )6
ÄG¬÷X-f±½Ç v§¢/D:"duu¥:Ä
ÅDÂR§ù«Å¡îÅ"
:Ù²ï £ y = y(x, t)¡Å¼ê"m1Å3 t = 0ż
ê f (x)§K y(x, t) = f (x− vt)§=7x− vt¼ê§ tÅ/d
t = 0Å/m²£ vt"aq§1Åżê7x + vt¼
ê§ÙÅ/d t = 0Å/²£ vt" 21

~ (m1ÅóÀ)µ÷X¶mDÂÅóÀżê
y(x, t) =2
(x− 3.0t)2 + 1
Ù¥xÚ yü cm§tü s"xÑ t = 0, t = 1.0 s, t = 2.0 sżê"
)µ
496 C H A P T E R 1 6 Wave Motion
A Pulse Moving to the RightEXAMPLE 16.1
We now use these expressions to plot the wave function ver-sus x at these times. For example, let us evaluate at
cm:
Likewise, at cm, cm, and at cm, cm. Continuing this procedure for
other values of x yields the wave function shown in Figure16.7a. In a similar manner, we obtain the graphs of y(x, 1.0)and y(x, 2.0), shown in Figure 16.7b and c, respectively.These snapshots show that the wave pulse moves to the rightwithout changing its shape and that it has a constant speed of3.0 cm/s.
y(2.0, 0) 0.402.0x y(1.0, 0) 1.0x 1.0
y(0.50, 0) 2
(0.50)2 1 1.6 cm
x 0.50y(x, 0)
y(x, 2.0) 2
(x 6.0)2 1 at t 2.0 s
y(x, 1.0) 2
(x 3.0)2 1 at t 1.0 s
A wave pulse moving to the right along the x axis is repre-sented by the wave function
where x and y are measured in centimeters and t is measuredin seconds. Plot the wave function at and
s.
Solution First, note that this function is of the formBy inspection, we see that the wave speed is
cm/s. Furthermore, the wave amplitude (the maxi-mum value of y) is given by cm. (We find the maxi-mum value of the function representing y by letting
The wave function expressions are
y(x, 0) 2
x2 1 at t 0
x 3.0t 0.)
A 2.0v 3.0y f(x vt).
t 2.0t 1.0 s,t 0,
y(x, t) 2
(x 3.0t)2 1
time dt later, the crest is at Therefore, in a time dt, the crest hasmoved a distance Hence, the wave speed is
(16.3)v dxdt
dx (x0 v dt) x0 v dt.x x0 v dt.
y(cm)
2.0
1.5
1.0
0.5
0 1 2 3 4 5 6
y(x, 0)
t = 0
3.0 cm/s
(a)
x(cm)
y(cm)
2.0
1.5
1.0
0.5
0 1 2 3 4 5 6
y(x, 1.0)
t = 1.0 s
3.0 cm/s
(b)
x(cm)
y(cm)
2.0
1.5
1.0
0.5
0 1 2 3 4 5 6
y(x, 2.0)
t = 2.0 s
3.0 cm/s
(c)
x(cm)
7
7 8
22

Åħ
éum1ŧ- z = x− vt§Kâ
∂y
∂x=
dy
dz
∂z
∂x=
dy
dz,
∂y
∂t=
dy
dz
∂z
∂t= −v
dy
dz
∂y
∂t= −v
∂y
∂x
éu1ŧÓ
∂y
∂t= v
∂y
∂x
?Ú¦ ê§K¬uyØØ´m1Å´1ŧþ÷vXeÅħµ
∂2y
∂t2= v2∂
2y
∂x2(10)
ù§ò:\ÝÚT?Å/§ÝéXå5"
23

·®²y²§/ y(x, t) = f (x± vt)¼êþÅħ (10))"¢S
þ§Åħ)/ y(x, t) = f1(x + vt) + f2(x− vt)§ù´IͶÔn
Æ[!êÆ[ÚU©Æ[ Jean le Rond d’Alembert (1717¨1783)ó" 24

uþÅDÂÝ
Y
X O
T
T
x x dx+
ds
θ
dθ θ+
!uÝ ρ"buħ٥ÜåT ±ØC"
dsãumàX¶Y©O θÚ θ + dθ§KTãu3îþ
¤ÉÜåT sin(θ + dθ)− T sin θ"du θé§ÏdTÜå
T tan(θ + dθ)− T tan θ = T
[(∂y
∂x
)x+dx
−(
∂y
∂x
)x
]= T
∂2y
∂x2dx
Tãuþ ρdx§âÚî1½Æ
ρdx∂2y
∂t2= T
∂2y
∂x2dx =⇒ ∂2y
∂t2=
T
ρ
∂2y
∂x2
Ïd§ÅDÂÝu¥ÜåÚÝ'kXe'Xµ
v =√
T/ρ25

ÅS\n
16.4 Superposition and Interference 497
SUPERPOSITION AND INTERFERENCEMany interesting wave phenomena in nature cannot be described by a single mov-ing pulse. Instead, one must analyze complex waves in terms of a combination ofmany traveling waves. To analyze such wave combinations, one can make use ofthe superposition principle:
16.4
If two or more traveling waves are moving through a medium, the resultantwave function at any point is the algebraic sum of the wave functions of the in-dividual waves.
Waves that obey this principle are called linear waves and are generally character-ized by small amplitudes. Waves that violate the superposition principle are callednonlinear waves and are often characterized by large amplitudes. In this book, wedeal only with linear waves.
One consequence of the superposition principle is that two traveling wavescan pass through each other without being destroyed or even altered. For in-stance, when two pebbles are thrown into a pond and hit the surface at differentplaces, the expanding circular surface waves do not destroy each other but ratherpass through each other. The complex pattern that is observed can be viewed astwo independent sets of expanding circles. Likewise, when sound waves from twosources move through air, they pass through each other. The resulting sound thatone hears at a given point is the resultant of the two disturbances.
Figure 16.8 is a pictorial representation of superposition. The wave functionfor the pulse moving to the right is y1, and the wave function for the pulse moving
Linear waves obey thesuperposition principle
(c)
(d)
(b)
(a)
y2 y 1
y 1+ y2
y 1+ y2
y2y 1
Figure 16.8 (a–d) Two wave pulses traveling on a stretched string in opposite directions passthrough each other. When the pulses overlap, as shown in (b) and (c), the net displacement ofthe string equals the sum of the displacements produced by each pulse. Because each pulse dis-places the string in the positive direction, we refer to the superposition of the two pulses as con-structive interference. (e) Photograph of superposition of two equal, symmetric pulses traveling inopposite directions on a stretched spring.
(e)
498 C H A P T E R 1 6 Wave Motion
to the left is y2 . The pulses have the same speed but different shapes. Each pulse isassumed to be symmetric, and the displacement of the medium is in the positive ydirection for both pulses. (Note, however, that the superposition principle applieseven when the two pulses are not symmetric.) When the waves begin to overlap(Fig. 16.8b), the wave function for the resulting complex wave is given by y1 y2 .
Figure 16.9 (a–e) Two wave pulses traveling in opposite directions and having displacementsthat are inverted relative to each other. When the two overlap in (c), their displacements partiallycancel each other. (f) Photograph of superposition of two symmetric pulses traveling in opposite directions, where one pulse is inverted relative to the other.
Interference of water waves producedin a ripple tank. The sources of thewaves are two objects that oscillate per-pendicular to the surface of the tank.
(a)
(b)
(d)
(e)
y 1
y 2
y 1
y 2
y 2
y 1
y 2
y 1
(c)y 1+ y 2
(f)
ü½õÅÓÏL,0§0¥?:żê´Å¼êÚ"ù
¡ÅS\n§ÙêÆÄ:3uÅħ (10)5©§"
âÅS\n§1.ÅDÂØÉÙ§ÅK¶2.ü½õÅ
§¬u)Zy"26

ÅÚßÄ.;Ý ρ1Ã!u (−∞ < x ≤ 0 )ÚÝ ρ2Ã!
u ( 0 ≤ x < +∞ )"u¥ÜåT"·5Äm1Å3x = 0?
ß"\żê fi(t− x/v1)¶ßżê ft(t− x/v2)¶Å¼ê (
1Å) fr(t + x/v1)"Ïd§3x = 0!mýżê©O
yL(x, t) = fi
(t− x
v1
)+ fr
(t +
x
v1
), yR(x, t) = ft
(t− x
v2
)âuëY5x = 0?>.^µ
yL(0, t) = yR(0, t) =⇒ fi(t) + fr(t) = ft(t) (11)
qâ3.?îå"
T∂yL(x, t)
∂x
∣∣∣∣x=0
= T∂yR(x, t)
∂x
∣∣∣∣x=0
=⇒ − 1
v1f ′i (t) +
1
v1f ′r(t) = − 1
v2f ′t(t)
éþªÈ©§¿Ä fi(t) = 0§k fr(t) = ft(t) = 0§
v2fi(t)− v2fr(t) = v1ft(t) (12)27

ÅÚß⪠(11)Ú (12)
fr(t) =v2 − v1
v1 + v2fi(t) =
√ρ1 −
√ρ2√
ρ1 +√
ρ2fi(t)
ft(t) =2v2
v1 + v2fi(t) =
2√
ρ1√ρ1 +
√ρ2
fi(t)
Ïd§Ådu\u (= ρ1 < ρ2)§Å¬u)=§
Kج"
502 C H A P T E R 1 6 Wave Motion
REFLECTION AND TRANSMISSIONWe have discussed traveling waves moving through a uniform medium. We nowconsider how a traveling wave is affected when it encounters a change in themedium. For example, consider a pulse traveling on a string that is rigidly at-tached to a support at one end (Fig. 16.13). When the pulse reaches the support,a severe change in the medium occurs—the string ends. The result of this changeis that the wave undergoes reflection—that is, the pulse moves back along thestring in the opposite direction.
Note that the reflected pulse is inverted. This inversion can be explained asfollows: When the pulse reaches the fixed end of the string, the string produces anupward force on the support. By Newton’s third law, the support must exert anequal and opposite (downward) reaction force on the string. This downward forcecauses the pulse to invert upon reflection.
Now consider another case: this time, the pulse arrives at the end of a string thatis free to move vertically, as shown in Figure 16.14. The tension at the free end ismaintained because the string is tied to a ring of negligible mass that is free to slidevertically on a smooth post. Again, the pulse is reflected, but this time it is not in-verted. When it reaches the post, the pulse exerts a force on the free end of thestring, causing the ring to accelerate upward. The ring overshoots the height of theincoming pulse, and then the downward component of the tension force pulls the ring back down. This movement of the ring produces a reflected pulse that isnot inverted and that has the same amplitude as the incoming pulse.
Finally, we may have a situation in which the boundary is intermediate be-tween these two extremes. In this case, part of the incident pulse is reflected andpart undergoes transmission—that is, some of the pulse passes through theboundary. For instance, suppose a light string is attached to a heavier string, asshown in Figure 16.15. When a pulse traveling on the light string reaches theboundary between the two, part of the pulse is reflected and inverted and part istransmitted to the heavier string. The reflected pulse is inverted for the same rea-sons described earlier in the case of the string rigidly attached to a support.
Note that the reflected pulse has a smaller amplitude than the incident pulse.In Section 16.8, we shall learn that the energy carried by a wave is related to its am-plitude. Thus, according to the principle of the conservation of energy, when thepulse breaks up into a reflected pulse and a transmitted pulse at the boundary, thesum of the energies of these two pulses must equal the energy of the incidentpulse. Because the reflected pulse contains only part of the energy of the incidentpulse, its amplitude must be smaller.
16.6
(a)
(b)
(c)
(d)
(e) Reflectedpulse
Incidentpulse
Incidentpulse
(a)
(b)
(c)
Reflectedpulse
(d)
Incidentpulse
Transmittedpulse
Reflectedpulse
(a)
(b)
Figure 16.13 The reflection of atraveling wave pulse at the fixedend of a stretched string. The re-flected pulse is inverted, but itsshape is unchanged.
Figure 16.14 The reflection of atraveling wave pulse at the free endof a stretched string. The reflectedpulse is not inverted.
Figure 16.15 (a) A pulse travelingto the right on a light string attachedto a heavier string. (b) Part of the inci-dent pulse is reflected (and inverted),and part is transmitted to the heavierstring.
16.7 Sinusoidal Waves 503
When a pulse traveling on a heavy string strikes the boundary between theheavy string and a lighter one, as shown in Figure 16.16, again part is reflected andpart is transmitted. In this case, the reflected pulse is not inverted.
In either case, the relative heights of the reflected and transmitted pulses de-pend on the relative densities of the two strings. If the strings are identical, there isno discontinuity at the boundary and no reflection takes place.
According to Equation 16.4, the speed of a wave on a string increases as themass per unit length of the string decreases. In other words, a pulse travels moreslowly on a heavy string than on a light string if both are under the same tension.The following general rules apply to reflected waves: When a wave pulse travelsfrom medium A to medium B and vA vB (that is, when B is denser than A),the pulse is inverted upon reflection. When a wave pulse travels frommedium A to medium B and vA vB (that is, when A is denser than B), thepulse is not inverted upon reflection.
SINUSOIDAL WAVESIn this section, we introduce an important wave function whose shape is shown inFigure 16.17. The wave represented by this curve is called a sinusoidal wave be-cause the curve is the same as that of the function sin plotted against . The si-nusoidal wave is the simplest example of a periodic continuous wave and can beused to build more complex waves, as we shall see in Section 18.8. The red curverepresents a snapshot of a traveling sinusoidal wave at and the blue curverepresents a snapshot of the wave at some later time t. At the function de-scribing the positions of the particles of the medium through which the sinusoidalwave is traveling can be written
(16.5)
where the constant A represents the wave amplitude and the constant is thewavelength. Thus, we see that the position of a particle of the medium is the samewhenever x is increased by an integral multiple of . If the wave moves to the rightwith a speed v, then the wave function at some later time t is
(16.6)
That is, the traveling sinusoidal wave moves to the right a distance vt in the time t,as shown in Figure 16.17. Note that the wave function has the form andf(x vt)
y A sin 2
(x vt)
y A sin 2
x
t 0,t 0,
16.7
P
Q
Figure 16.16 (a) A pulse travelingto the right on a heavy string attachedto a lighter string. (b) The incidentpulse is partially reflected and partiallytransmitted, and the reflected pulse isnot inverted.
Incidentpulse
Reflectedpulse
Transmittedpulse
(a)
(b)
t = 0 t
y
x
vvt
Figure 16.17 A one-dimensionalsinusoidal wave traveling to theright with a speed v. The red curverepresents a snapshot of the wave at
and the blue curve representsa snapshot at some later time t.t 0,
28

ÅÚßAO/§ ρ2 = ∞§~Xup9é§\Å¿=§ ßÅ"¶ ρ2 = 0§~Xumàgdà§\ÅØ="
502 C H A P T E R 1 6 Wave Motion
REFLECTION AND TRANSMISSIONWe have discussed traveling waves moving through a uniform medium. We nowconsider how a traveling wave is affected when it encounters a change in themedium. For example, consider a pulse traveling on a string that is rigidly at-tached to a support at one end (Fig. 16.13). When the pulse reaches the support,a severe change in the medium occurs—the string ends. The result of this changeis that the wave undergoes reflection—that is, the pulse moves back along thestring in the opposite direction.
Note that the reflected pulse is inverted. This inversion can be explained asfollows: When the pulse reaches the fixed end of the string, the string produces anupward force on the support. By Newton’s third law, the support must exert anequal and opposite (downward) reaction force on the string. This downward forcecauses the pulse to invert upon reflection.
Now consider another case: this time, the pulse arrives at the end of a string thatis free to move vertically, as shown in Figure 16.14. The tension at the free end ismaintained because the string is tied to a ring of negligible mass that is free to slidevertically on a smooth post. Again, the pulse is reflected, but this time it is not in-verted. When it reaches the post, the pulse exerts a force on the free end of thestring, causing the ring to accelerate upward. The ring overshoots the height of theincoming pulse, and then the downward component of the tension force pulls the ring back down. This movement of the ring produces a reflected pulse that isnot inverted and that has the same amplitude as the incoming pulse.
Finally, we may have a situation in which the boundary is intermediate be-tween these two extremes. In this case, part of the incident pulse is reflected andpart undergoes transmission—that is, some of the pulse passes through theboundary. For instance, suppose a light string is attached to a heavier string, asshown in Figure 16.15. When a pulse traveling on the light string reaches theboundary between the two, part of the pulse is reflected and inverted and part istransmitted to the heavier string. The reflected pulse is inverted for the same rea-sons described earlier in the case of the string rigidly attached to a support.
Note that the reflected pulse has a smaller amplitude than the incident pulse.In Section 16.8, we shall learn that the energy carried by a wave is related to its am-plitude. Thus, according to the principle of the conservation of energy, when thepulse breaks up into a reflected pulse and a transmitted pulse at the boundary, thesum of the energies of these two pulses must equal the energy of the incidentpulse. Because the reflected pulse contains only part of the energy of the incidentpulse, its amplitude must be smaller.
16.6
(a)
(b)
(c)
(d)
(e) Reflectedpulse
Incidentpulse
Incidentpulse
(a)
(b)
(c)
Reflectedpulse
(d)
Incidentpulse
Transmittedpulse
Reflectedpulse
(a)
(b)
Figure 16.13 The reflection of atraveling wave pulse at the fixedend of a stretched string. The re-flected pulse is inverted, but itsshape is unchanged.
Figure 16.14 The reflection of atraveling wave pulse at the free endof a stretched string. The reflectedpulse is not inverted.
Figure 16.15 (a) A pulse travelingto the right on a light string attachedto a heavier string. (b) Part of the inci-dent pulse is reflected (and inverted),and part is transmitted to the heavierstring.
502 C H A P T E R 1 6 Wave Motion
REFLECTION AND TRANSMISSIONWe have discussed traveling waves moving through a uniform medium. We nowconsider how a traveling wave is affected when it encounters a change in themedium. For example, consider a pulse traveling on a string that is rigidly at-tached to a support at one end (Fig. 16.13). When the pulse reaches the support,a severe change in the medium occurs—the string ends. The result of this changeis that the wave undergoes reflection—that is, the pulse moves back along thestring in the opposite direction.
Note that the reflected pulse is inverted. This inversion can be explained asfollows: When the pulse reaches the fixed end of the string, the string produces anupward force on the support. By Newton’s third law, the support must exert anequal and opposite (downward) reaction force on the string. This downward forcecauses the pulse to invert upon reflection.
Now consider another case: this time, the pulse arrives at the end of a string thatis free to move vertically, as shown in Figure 16.14. The tension at the free end ismaintained because the string is tied to a ring of negligible mass that is free to slidevertically on a smooth post. Again, the pulse is reflected, but this time it is not in-verted. When it reaches the post, the pulse exerts a force on the free end of thestring, causing the ring to accelerate upward. The ring overshoots the height of theincoming pulse, and then the downward component of the tension force pulls the ring back down. This movement of the ring produces a reflected pulse that isnot inverted and that has the same amplitude as the incoming pulse.
Finally, we may have a situation in which the boundary is intermediate be-tween these two extremes. In this case, part of the incident pulse is reflected andpart undergoes transmission—that is, some of the pulse passes through theboundary. For instance, suppose a light string is attached to a heavier string, asshown in Figure 16.15. When a pulse traveling on the light string reaches theboundary between the two, part of the pulse is reflected and inverted and part istransmitted to the heavier string. The reflected pulse is inverted for the same rea-sons described earlier in the case of the string rigidly attached to a support.
Note that the reflected pulse has a smaller amplitude than the incident pulse.In Section 16.8, we shall learn that the energy carried by a wave is related to its am-plitude. Thus, according to the principle of the conservation of energy, when thepulse breaks up into a reflected pulse and a transmitted pulse at the boundary, thesum of the energies of these two pulses must equal the energy of the incidentpulse. Because the reflected pulse contains only part of the energy of the incidentpulse, its amplitude must be smaller.
16.6
(a)
(b)
(c)
(d)
(e) Reflectedpulse
Incidentpulse
Incidentpulse
(a)
(b)
(c)
Reflectedpulse
(d)
Incidentpulse
Transmittedpulse
Reflectedpulse
(a)
(b)
Figure 16.13 The reflection of atraveling wave pulse at the fixedend of a stretched string. The re-flected pulse is inverted, but itsshape is unchanged.
Figure 16.14 The reflection of atraveling wave pulse at the free endof a stretched string. The reflectedpulse is not inverted.
Figure 16.15 (a) A pulse travelingto the right on a light string attachedto a heavier string. (b) Part of the inci-dent pulse is reflected (and inverted),and part is transmitted to the heavierstring.
29

Å506 C H A P T E R 1 6 Wave Motion
If the wave at is as described in Figure 16.19b, then the wave functioncan be written as
We can use this expression to describe the motion of any point on the string. Thepoint P (or any other point on the string) moves only vertically, and so its x coordi-nate remains constant. Therefore, the transverse speed vy (not to be confusedwith the wave speed v) and the transverse acceleration ay are
(16.16)
(16.17)
In these expressions, we must use partial derivatives (see Section 8.6) because y de-pends on both x and t. In the operation for example, we take a derivativewith respect to t while holding x constant. The maximum values of the transversespeed and transverse acceleration are simply the absolute values of the coefficientsof the cosine and sine functions:
(16.18)
(16.19)
The transverse speed and transverse acceleration do not reach their maximum val-ues simultaneously. The transverse speed reaches its maximum value (A) when
whereas the transverse acceleration reaches its maximum value (2A) whenFinally, Equations 16.18 and 16.19 are identical in mathematical form to
the corresponding equations for simple harmonic motion, Equations 13.10 and13.11.
y A.y 0,
ay, max 2A
vy, max A
y/t,
ay dvy
dt x constant
vy
t 2A sin(kx t)
vy dydt x constant
yt
A cos(kx t)
y A sin(kx t)
t 0
P
(a)
A
y
Vibratingblade
(c)
P
P
P
(b)
(d)
λ
Figure 16.19 One method for producing a train of sinusoidal wave pulses on a string. The leftend of the string is connected to a blade that is set into oscillation. Every segment of the string,such as the point P, oscillates with simple harmonic motion in the vertical direction.
eÅ ÄħTÄ3u¥D /¤Å¡Å
30

Å
16.7 Sinusoidal Waves 503
When a pulse traveling on a heavy string strikes the boundary between theheavy string and a lighter one, as shown in Figure 16.16, again part is reflected andpart is transmitted. In this case, the reflected pulse is not inverted.
In either case, the relative heights of the reflected and transmitted pulses de-pend on the relative densities of the two strings. If the strings are identical, there isno discontinuity at the boundary and no reflection takes place.
According to Equation 16.4, the speed of a wave on a string increases as themass per unit length of the string decreases. In other words, a pulse travels moreslowly on a heavy string than on a light string if both are under the same tension.The following general rules apply to reflected waves: When a wave pulse travelsfrom medium A to medium B and vA vB (that is, when B is denser than A),the pulse is inverted upon reflection. When a wave pulse travels frommedium A to medium B and vA vB (that is, when A is denser than B), thepulse is not inverted upon reflection.
SINUSOIDAL WAVESIn this section, we introduce an important wave function whose shape is shown inFigure 16.17. The wave represented by this curve is called a sinusoidal wave be-cause the curve is the same as that of the function sin plotted against . The si-nusoidal wave is the simplest example of a periodic continuous wave and can beused to build more complex waves, as we shall see in Section 18.8. The red curverepresents a snapshot of a traveling sinusoidal wave at and the blue curverepresents a snapshot of the wave at some later time t. At the function de-scribing the positions of the particles of the medium through which the sinusoidalwave is traveling can be written
(16.5)
where the constant A represents the wave amplitude and the constant is thewavelength. Thus, we see that the position of a particle of the medium is the samewhenever x is increased by an integral multiple of . If the wave moves to the rightwith a speed v, then the wave function at some later time t is
(16.6)
That is, the traveling sinusoidal wave moves to the right a distance vt in the time t,as shown in Figure 16.17. Note that the wave function has the form andf(x vt)
y A sin 2
(x vt)
y A sin 2
x
t 0,t 0,
16.7
P
Q
Figure 16.16 (a) A pulse travelingto the right on a heavy string attachedto a lighter string. (b) The incidentpulse is partially reflected and partiallytransmitted, and the reflected pulse isnot inverted.
Incidentpulse
Reflectedpulse
Transmittedpulse
(a)
(b)
t = 0 t
y
x
vvt
Figure 16.17 A one-dimensionalsinusoidal wave traveling to theright with a speed v. The red curverepresents a snapshot of the wave at
and the blue curve representsa snapshot at some later time t.t 0,
m1Å3 t = 0żê
y(x, 0) = A sin kx
K tżê
y(x, t) = A sin[k(x− vt)]
§6ıÏT = 2π/(kv)"½ÂÅλ3±Ï¥6ÄDÂål§=
λ = vT =2π
k
K y(x, t)
y(x, t) = A sin
[2π
λ(x− vt)
]= A sin
[2π
(x
λ− t
T
)]= A sin (kx− ωt)
Ù¥ω = 2π/T 6ĪÇ" 31

(m)Y
(m)XO
0t = 0.25st =
P·
0.15
0.2
~ (Å)µ÷XDÂŧt = 0Å/Xã¥J¤«§
²L 0.25 sÅmD 0.15 m"¦P :ħÚTÅżê"
)µP :ħ yP (t) = A cos(ωt + ϕP )"dã
A = 0.2 m, λ = 0.6 m, T = 1 s, v =λ
T= 0.6 m · s−1, ω =
2π
T= 2π s−1
?Úd t = 0 yP = 0Ú (∂y/∂t)P > 0ϕP = −π/2"u´P :ħ
yP (t) = 0.2 sin 2πt
TÅżê
y(x, t) = 0.2 sin 2π
(t− x− xP
v
)= 0.2 sin
(2πt− 10π
3x + π
)32

ÅUþDÑ
16.8 Rate of Energy Transfer by Sinusoidal Waves on Strings 507
A sinusoidal wave is moving on a string. If you increase the frequency f of the wave, how dothe transverse speed, wave speed, and wavelength change?
Quick Quiz 16.4
A Sinusoidally Driven StringEXAMPLE 16.4Because cm 0.120 m, we have
Exercise Calculate the maximum values for the transversespeed and transverse acceleration of any point on the string.
Answer 3.77 m/s; 118 m/s2.
y A sin(kx t) (0.120 m) sin(1.57x 31.4t)
A 12.0The string shown in Figure 16.19 is driven at a frequency of5.00 Hz. The amplitude of the motion is 12.0 cm, and thewave speed is 20.0 m/s. Determine the angular frequency and angular wave number k for this wave, and write an ex-pression for the wave function.
Solution Using Equations 16.10, 16.12, and 16.13, we findthat
1.57 rad/mk
v
31.4 rad/s20.0 m/s
31.4 rad/s 2
T 2f 2(5.00 Hz)
RATE OF ENERGY TRANSFER BY SINUSOIDALWAVES ON STRINGS
As waves propagate through a medium, they transport energy. We can easilydemonstrate this by hanging an object on a stretched string and then sending apulse down the string, as shown in Figure 16.20. When the pulse meets the sus-pended object, the object is momentarily displaced, as illustrated in Figure 16.20b.In the process, energy is transferred to the object because work must be done forit to move upward. This section examines the rate at which energy is transportedalong a string. We shall assume a one-dimensional sinusoidal wave in the calcula-tion of the energy transferred.
Consider a sinusoidal wave traveling on a string (Fig. 16.21). The source of theenergy being transported by the wave is some external agent at the left end of thestring; this agent does work in producing the oscillations. As the external agentperforms work on the string, moving it up and down, energy enters the system ofthe string and propagates along its length. Let us focus our attention on a segmentof the string of length x and mass m. Each such segment moves vertically withsimple harmonic motion. Furthermore, all segments have the same angular fre-quency and the same amplitude A. As we found in Chapter 13, the elastic poten-tial energy U associated with a particle in simple harmonic motion is where the simple harmonic motion is in the y direction. Using the relationship 2 k/m developed in Equations 13.16 and 13.17, we can write this as
U 12ky2,
16.8
m
m
(a)
(b)
Figure 16.20 (a) A pulse travel-ing to the right on a stretchedstring on which an object has beensuspended. (b) Energy is transmit-ted to the suspended object whenthe pulse arrives.
Figure 16.21 A sinusoidal wavetraveling along the x axis on astretched string. Every segmentmoves vertically, and every segmenthas the same total energy.
∆m
Å y(x, t) = A sin (kx− ωt)÷umDÂ"∆mÄUÚ³U©O
∆K =1
2∆m
(∂y
∂t
)2
=1
2∆mω2A2 cos2(kx− ωt)
∆U = T[√
(∆x)2 + (∆y)2 −∆x]
= T∆x
√1 +
(∂y
∂x
)2
− 1
≈ 1
2T∆x
(∂y
∂x
)2
=1
2(ρ∆x)v2A2k2 cos2(kx− ωt) =
1
2∆mω2A2 cos2(kx− ωt)
Ù¥®Ä∆y ∆x"Ïd§λÄU!³UÚoUþ
Kλ = Uλ =
∫ x0+λ
x0
1
2ρdxω2A2 cos2(kx−ωt) =
1
4ρω2A2λ, Eλ = Kλ+Uλ =
1
2ρω2A2λ
UþDÑÇ
P =Eλ
T=
1
2ρω2A2 λ
T=
1
2ρω2A2v
33

ÅZ
548 C H A P T E R 1 8 Superposition and Standing Waves
justed such that the path difference 3/2, . . . , n/2(for n odd), thetwo waves are exactly rad, or 180°, out of phase at the receiver and hence canceleach other. In this case of destructive interference, no sound is detected at the receiver. This simple experiment demonstrates that a phase difference may arisebetween two waves generated by the same source when they travel along paths ofunequal lengths. This important phenomenon will be indispensable in our investi-gation of the interference of light waves in Chapter 37.
r /2,
y
= 0°
y1 and y
2 are identical
x
yy
1 y2 y
x
x
y
(a)
(b)
(c)
φ
yy
1 y2
= 180°φ
= 60°φ
y
Figure 18.1 The superposition of two identical waves y1 and y2 (blue) to yield a resultant wave(red). (a) When y1 and y2 are in phase, the result is constructive interference. (b) When y1 andy2 are rad out of phase, the result is destructive interference. (c) When the phase angle has avalue other than 0 or rad, the resultant wave y falls somewhere between the extremes shown in(a) and (b).
r 1
r 2
R
Speaker
S
PReceiver
Figure 18.2 An acoustical system for demon-strating interference of sound waves. A soundwave from the speaker (S) propagates into thetube and splits into two parts at point P. The twowaves, which superimpose at the opposite side,are detected at the receiver (R). The upper pathlength r2 can be varied by sliding the upper sec-tion.
üå§ÄüªÇ!Å!ÌþÓm1Å
y1(x, t) = A sin(kx− ωt), y2(x, t) = A sin(kx− ωt + φ)
S\´ªÇÚÅØC!ÌCzm1ŧÙżê
y = y1 + y2 = 2A cosφ
2sin(kx− ωt +
φ
2)
34

7Å
ÄüªÇ!Å!ÌþÓDÂÅ
y1(x, t) = A sin(kx− ωt), y2(x, t) = A sin(kx + ωt)
S\żê
y = y1 + y2 = 2A sin kx cos ωt
ù´7Å"1ÅØÓ´§ùp®²wØÑ6Ä÷?D§:
ÑħÌxk'"18.2 Standing Waves 551
same amplitude and the same frequency and in which the amplitude of the wave isthe same as the amplitude of the simple harmonic motion of the particles.
The maximum displacement of a particle of the medium has a minimumvalue of zero when x satisfies the condition sin that is, when
Because these values for kx give
1, 2, 3, . . . (18.4)
These points of zero displacement are called nodes.The particle with the greatest possible displacement from equilibrium has an
amplitude of 2A, and we define this as the amplitude of the standing wave. Thepositions in the medium at which this maximum displacement occurs are calledantinodes. The antinodes are located at positions for which the coordinate x satis-fies the condition sin that is, when
Thus, the positions of the antinodes are given by
3, 5, . . . (18.5)
In examining Equations 18.4 and 18.5, we note the following important fea-tures of the locations of nodes and antinodes:
x
4,
3
4,
5
4, . . .
n
4 n 1,
kx
2,
3
2,
5
2, . . .
kx 1,
x
2, ,
3
2, . . .
n
2 n 0,
k 2/ ,
kx , 2, 3, . . .
kx 0,
Antinode Antinode
Node
2A sin kx
Node
Figure 18.4 Multiflash photograph of a standing wave on a string. The time behavior of the ver-tical displacement from equilibrium of an individual particle of the string is given by cos t. Thatis, each particle vibrates at an angular frequency . The amplitude of the vertical oscillation of anyparticle on the string depends on the horizontal position of the particle. Each particle vibrateswithin the confines of the envelope function 2A sin kx.
The distance between adjacent antinodes is equal to /2.The distance between adjacent nodes is equal to /2.The distance between a node and an adjacent antinode is /4.
Displacement patterns of the particles of the medium produced at varioustimes by two waves traveling in opposite directions are shown in Figure 18.5. Theblue and green curves are the individual traveling waves, and the red curves are
Position of antinodes
Position of nodes
35

7Å
§÷v
kx = nπ n = 0,±1,±2,±3, . . .
=
x =nλ
2n = 0,±1,±2,±3, . . .
:©ªØħ¡Å!" ÷v
x =nλ
4n = ±1,±3,±5, . . .
:̧¡ÅJ"552 C H A P T E R 1 8 Superposition and Standing Waves
the displacement patterns. At (Fig. 18.5a), the two traveling waves are inphase, giving a displacement pattern in which each particle of the medium is expe-riencing its maximum displacement from equilibrium. One quarter of a periodlater, at (Fig. 18.5b), the traveling waves have moved one quarter of awavelength (one to the right and the other to the left). At this time, the travelingwaves are out of phase, and each particle of the medium is passing through theequilibrium position in its simple harmonic motion. The result is zero displace-ment for particles at all values of x—that is, the displacement pattern is a straightline. At (Fig. 18.5c), the traveling waves are again in phase, producing adisplacement pattern that is inverted relative to the pattern. In the standingwave, the particles of the medium alternate in time between the extremes shownin Figure 18.5a and c.
Energy in a Standing Wave
It is instructive to describe the energy associated with the particles of a medium inwhich a standing wave exists. Consider a standing wave formed on a taut stringfixed at both ends, as shown in Figure 18.6. Except for the nodes, which are alwaysstationary, all points on the string oscillate vertically with the same frequency butwith different amplitudes of simple harmonic motion. Figure 18.6 represents snap-shots of the standing wave at various times over one half of a period.
In a traveling wave, energy is transferred along with the wave, as we discussedin Chapter 16. We can imagine this transfer to be due to work done by one seg-ment of the string on the next segment. As one segment moves upward, it exerts aforce on the next segment, moving it through a displacement—that is, work isdone. A particle of the string at a node, however, experiences no displacement.Thus, it cannot do work on the neighboring segment. As a result, no energy istransmitted along the string across a node, and energy does not propagate in astanding wave. For this reason, standing waves are often called stationary waves.
The energy of the oscillating string continuously alternates between elastic po-tential energy, when the string is momentarily stationary (see Fig. 18.6a), and ki-netic energy, when the string is horizontal and the particles have their maximumspeed (see Fig. 18.6c). At intermediate times (see Fig. 18.6b and d), the string par-ticles have both potential energy and kinetic energy.
t 0t T/2
t T/4
t 0
(a) t = 0
y1
y2
yN N N N N
AA
(b) t = T/4
y2
y1
y
(c) t = T/2
y1
A A
y2
yN N N N N
A A
Figure 18.5 Standing-wave patterns produced at various times by two waves of equal amplitudetraveling in opposite directions. For the resultant wave y, the nodes (N) are points of zero dis-placement, and the antinodes (A) are points of maximum displacement.
Figure 18.6 A standing-wave pat-tern in a taut string. The five “snap-shots” were taken at half-cycle in-tervals. (a) At the string ismomentarily at rest; thus, and all the energy is potential en-ergy U associated with the verticaldisplacements of the string parti-cles. (b) At the string is inmotion, as indicated by the brownarrows, and the energy is half ki-netic and half potential. (c) At
the string is moving buthorizontal (undeformed); thus,
and all the energy is kinetic.(d) The motion continues as indi-cated. (e) At the string isagain momentarily at rest, but thecrests and troughs of (a) are re-versed. The cycle continues untilultimately, when a time intervalequal to T has passed, the configu-ration shown in (a) is repeated.
t T/2,
U 0,
t T/4,
t T/8,
K 0,t 0,
NN Nt = 0
(a)
(b) t = T/ 8
t = T/4(c)
t = 3T/ 8(d)
(e) t = T/ 2
36

~ (7Å/¤)µ÷um1Åżê y(x, t) = A cos 2π(10t− 0.5x)§Ù
¥xÚ yü m§tü s"Å3x = 11m?½à"¦T
ÅÅÚŶÅżê¶7Åżê±9Å! "
)µdużê y(x, t) = A cos π(x− 20t)§
T =2π
20π= 0.1 s, v = 20 m · s−1, λ = vT = 2 m
Å3x = 11m?ħ yr(11, t) = −A cos π(11− 20t) = A cos 20πt§Ï
dżê
yr(x, t) = A cos 20π
(t +
x− 11
v
)= −A cos 2π(10t + 0.5x)
7Åżê
ys(x, t) = y(x, t) + yr(x, t) = 2A sin πx sin 20πt
Å!
πx = nπ =⇒ x = n m n = 11, 10, . . . , 0,−1,−2,−3, . . .37

üà½uþÄLüà½u§Ùþ?6IJüà=¤üDÂ
ŧS\¤7Å"ùukXg,Ä㧡"w,§üà
:7Å!§ âÅ!målλ/2§Å
λn =2L
nn = 1, 2, 3, . . .
ªÇK
νn =v
λn= n
v
2L=
n
2L
√T
ρn = 1, 2, 3, . . .
554 C H A P T E R 1 8 Superposition and Standing Waves
In general, the motion of an oscillating string fixed at both ends is describedby the superposition of several normal modes. Exactly which normal modes arepresent depends on how the oscillation is started. For example, when a guitarstring is plucked near its middle, the modes shown in Figure 18.7b and d, as wellas other modes not shown, are excited.
In general, we can describe the normal modes of oscillation for the string by im-posing the requirements that the ends be nodes and that the nodes and antinodesbe separated by one fourth of a wavelength. The first normal mode, shown in Figure18.7b, has nodes at its ends and one antinode in the middle. This is the longest-wavelength mode, and this is consistent with our requirements. This first normalmode occurs when the wavelength 1 is twice the length of the string, that is,
The next normal mode, of wavelength 2 (see Fig. 18.7c), occurs when thewavelength equals the length of the string, that is, The third normal mode(see Fig. 18.7d) corresponds to the case in which In general, the wave-lengths of the various normal modes for a string of length L fixed at both ends are
2, 3, . . . (18.6)
where the index n refers to the nth normal mode of oscillation. These are the pos-sible modes of oscillation for the string. The actual modes that are excited by agiven pluck of the string are discussed below.
The natural frequencies associated with these modes are obtained from the re-lationship where the wave speed v is the same for all frequencies. UsingEquation 18.6, we find that the natural frequencies fn of the normal modes are
(18.7)
Because (see Eq. 16.4), where T is the tension in the string and is itslinear mass density, we can also express the natural frequencies of a taut string as
(18.8)fn n
2L √ T
n 1, 2, 3, . . .
v √T/
fn vn
n v
2L n 1, 2, 3, . . .
f v/,
n 2Ln
n 1,
3 2L/3.2 L.
1 2L.
Frequencies of normal modes asfunctions of wave speed andlength of string
Wavelengths of normal modes
Frequencies of normal modes asfunctions of string tension andlinear mass density
L
(a) (c)
(b) (d)
n = 2
n = 3
L = λ2
L = – λ332
n = 1 L = – λ112
f1 f3
f2
N
A
N
λ
λλ
Figure 18.7 (a) A string of length L fixed at both ends. The normal modes of vibration form aharmonic series: (b) the fundamental, or first harmonic; (c) the second harmonic; (d) the third harmonic.
38

6N¥pÅ
x x dx+
0SP 0SP
x y+ x dx y dy+ + +
SP ( )S P dP+
kÃÎN+§Ùî¡¡ÈS"+¥Ck6N (N½í
N)§ÙÝ ρ"§·§ØrP0"àk¹lpħT6Ä
ò÷+fmD§٥6N¥:Ä6ÄDÂÓ§ÏdT
6ÄD¡pÅ"
·6N¥.¡x.¡x + dxmã"bÉ6ħ3 tü
.¡ £©O yÚ y + dy§.¡x?ØrCP!.¡x + dx?ØrC
P + dP"ØrCzþü NÈCzþ'´x6N5~ê§
¡NÈ5þµ
K = − P − P0
Sdy/(Sdx)= −P − P0
dy/dx
39

yÚP Ñ´xÚ t¼ê§Ïd
P = P0 −K∂y
∂x(13)
|^Úî1½Æ
SP − S(P + dP ) = (Sρdx)∂2y
∂t2=⇒ −dP = ρdx
∂2y
∂t2
dP = Px+dx − Px =∂P
∂xdx
Ïd§
−∂P
∂xdx = ρdx
∂2y
∂t2=⇒ ∂P
∂x= −ρ
∂2y
∂t2
(ܪ (13)
−K∂2y
∂x2= −ρ
∂2y
∂t2=⇒ ∂2y
∂t2=
K
ρ
∂2y
∂x2
Ïd§TpÅ÷vÅħ (10)§ÙDÂÝ
v =√
K/ρ40




![ä v t æ u v t r s { | x v x v 5 ° á á ï ï DL 34.pdf · î ¬ ä ä ä s ] / v v U í ò l ó ï ï í ó ì WKZ EKE ~WE ï ä ä ä á u } P } ~W ï ñ ì í í U s ] o v î](https://img.pdfslide.tips/doc/110x75/5f37ec63d813ed3d6e057a09/-v-t-u-v-t-r-s-x-v-x-v-5-dl-34pdf-s-.jpg)








![TYPO3 Schulungsunterlagen 7.6.16 - Karl-Franzens ... · dzWK ï rD v µ o ^ ] ï À } v ï ð s ä ò](https://img.pdfslide.tips/doc/110x75/5ae56fc07f8b9a8b2b8bd72d/typo3-schulungsunterlagen-7616-karl-franzens-rd-v-o-v-s-.jpg)










![TYPO3 Schulungsunterlagen 8 - Universität Graz€¦ · dzWK ï rD v µ o ^ ] ï À } v ï ð s ä ò](https://img.pdfslide.tips/doc/110x75/5ed992141b54311e7967cf3b/typo3-schulungsunterlagen-8-universitt-graz-dzwk-rd-v-o-v.jpg)


