Embed Size (px)
Citation preview

185
3.3. ПРИМЕР ОФОРМЛЕНИЯ РАСЧЕТНО-ПОЯСНИТЕЛЬНОЙ ЗАПИСКИ И ГРАФИЧЕСКОЙ ЧАСТИ
МИНИСТЕРСТВО ОБРАЗОВАНИЯ и НАУКИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
( Н а и м е н о в а н и е в у з а ) К а ф е д р а
Расчетно-пояснительная записка к курсовому проекту по
теории машин и механизмов на тему
« »
задание____ вариант____
Выполнил: студент гр.__________Иванов И.И. Руководитель: Петров П.П.
20___ г (город)

186
Содержание №
стр.
Содержание……………………………………………………… Задание……………………………………………………………Введение…………………………………………………………. 1. Структурный анализ механизма……………………………..
2. Кинематический анализ механизма……………………… 2.1. План положений………………………………………… 2.2. Планы скоростей и ускорений…………………………. 2.3. Кинематические диаграммы…………………………….
3. Силовой расчет……………………………………………….. 3.1. Обработка индикаторной диаграммы………………….. 3.2. Силовой расчёт группы Ассура второго класса……….
3.2.1. Определение сил инерции……………………….. 3.2.2. Определение сил тяжести………………………... 3.2.3. Определение реакций в кинематических парах...
3.3. Силовой расчёт механизма I класса……………………. 3.3.1. Определение силы тяжести……………………… 3.3.2. Определение реакций в кинематических парах...
3.4. Рычаг Жуковского………………………………………. 4. Динамический расчет…………………………………………
4.1. Определение приведенных моментов сил……………... 4.2. Определение кинетической энергии звеньев………….. 4.3. Определение момента инерции маховика……………... 4.4. Определение закона движения звена приведения……..
5. Синтез зубчатых механизмов………………………………... 5.1. Расчет элементов зубчатых колес……………………….5.2. Профилирование зубчатых колес……………………….
Результаты расчётов по программе ТММ1……………………. Результаты расчётов по программе ТММ2……………………. Список литературы………………………………………………
Примечание: нумерация страниц указывается студентом по фактиче-
скому выполнению расчетно-пояснительной записки

187
Задание

188
Введение Целью данного курсового проекта является проектирование и ис-
следование механизма ____________________.
1. Структурный анализ механизма Кривошипно-ползунный механизм состоит из четырех звеньев: 0 – стойка; 1 – кривошип; 2 – шатун; 3 – ползун. Также имеются четыре кинематические пары: I – стойка 0-кривошип OA II – кривошип OA-шатун AB III – шатун AB-ползун B IV – ползун B-стойка 0. I, II и III являются вращательными парами IV – поступательная
пара. Все кинематические пары являются низшими, т.е. pнп=_, pвп=_. Степень подвижности механизма определяется по формуле Че-
бышева:
W3n2pнпpвп, (1)
где n – число подвижных звеньев, n =_ pнп – число низших пар, pвп – число высших пар.
W__________.
По классификации И.И. Артоболевского данный механизм со-стоит из механизма I класса стойка 0-кривошип OA и структурной группы II класса второго порядка шатун AB-ползун B. Из этого сле-дует, что механизм является механизмом II класса.

189
Первоочередной задачей проектирования кривошипно-ползунного механизма является его синтез, т. е. определение разме-ров звеньев по некоторым первоначально заданным параметрам:
Ход ползуна S =__ м. Эксцентриситет равен e =___ Максимальный угол давления между шатуном и кривошипом
=___ Отношение длины кривошипа к длине шатуна
l1l2tg , (2)
tg _____.
Длину кривошипа l1 определяем из рассмотрения двух крайних положений механизма, определяющих ход ползуна S
SOB1OB2l1l2l2l12l1. (3)
Откуда
l1S2; (4)
l1___2___ м.
Длина шатуна:
l2l1; (5)
l2______ м
Расстояние от точки А до центра масс S2 шатуна
l3___l2, (6)
l3_______ м
Угловая скорость кривошипа 1
1____ c-1 (7)

190
2. Кинематический анализ механизма 2.1. План положений
План положений это графическое изображение механизма в n
последовательных положениях в пределах одного цикла. План стро-им в двенадцати положениях, равностоящих по углу поворота кри-вошипа. Причем все положения нумеруем в направлении вращения кривошипа 1 . Положения остальных звеньев находим путем засечек. За нулевое начальное положение принимаем крайнее положение, при котором ползун наиболее удален от кривошипного вала начало работы хода. Начальное положение кривошипа задается углом 0, отсчитанным от положительного направления горизонтальной оси кривошипного вала против часовой стрелки. Для данного механизма 0__ рад. Кривая, последовательно соединяющая центры S 0
2 …S 122
масс шатуна в различных его положениях, будет траекторией точки S2.
Выбираем масштабный коэффициент длин l:
ll1OA, (8)
где l1 действительная длина кривошипа, м OA изображающий её отрезок на плане положений, мм
l___ ммм.
Отрезок AB, изображающий длину шатуна l2 на плане положений, будет:
ABl2l,; (9)
AB___ мм.
Расстояние от точки А до центра масс S2 шатуна на плане поло-жений:
AS2l3l; (10)
AS2___ мм.

191
Вычерчиваем индикаторную диаграмму в том же масштабе пере-мещения s_ ммм, что и план положений механизма. Выбираем масштабный коэффициент давления
pрmaxyp, (11)
где рmax максимальное давление в поршне, МПа. yp отрезок, изображающий на индикаторной диаграмме рmax,
мм.
p___ МПамм.
2.2. Планы скоростей и ускорений
Планы скоростей и ускорений будем строить для ____ положе-ния.
Скорость точки А находим по формуле:
VA1l1, (12)
где 1 – угловая скорость кривошипа, с-1; l1 – длина кривошипа, м.
VA___ мс.
Выбираем масштабный коэффициент плана скоростей V:
VVAPa, (13)
где VA скорость точки A, мс Pa изображающий ее отрезок на плане скоростей, мм.
V___ ммсм /
.
Из полюса P в направлении вращения кривошипа перпендику-лярно к OA откладываем отрезок Pa, изображающий вектор скорости точки A, длиной _ мм.
Определяем скорость точки В:

192
V BV AV BA, (14)
где V BA – вектор скорости точки B при ее вращательном движении относительно точки A и перпендикулярен к звену AB.
Далее на плане скоростей из точки а проводим прямую перпен-дикулярно звену AB до пересечения с линией действия скорости точ-ки B (направления движения ползуна). Полученный отрезок Pb__ мм, является вектором абсолютной скорости точки B, а отрезок ab_ мм, – вектором скорости точки В относительно точки А.
Тогда
VBPbV; (15)
VB___ мc
VBAabV; (16)
VBA___ мс.
Скорость точки S2 находим из условия подобия:
as2abAS2AB. (17)
Откуда
as2AS2ABab; (18)
as2____ мм.
Соединив точку S2 с полюсом P, получим отрезок, изображаю-щий вектор скорости точки S2, т.е. Ps2_ мм.
Тогда
VS2Ps2V; (19)
VS2___ мс.
Исходя из результатов расчета программы ТММ1, из произволь-ной точки отложить вектор VS2 для всех двенадцати положений и со-единить их концы плавной кривой, то получим годограф скорости точки S2. Угловую скорость шатуна AB определяем по формуле:
2VBAl2; (20)

193
2__________ c-1.
Ускорение точки A по отношению к точке О при условии 1= const равно:
aA 21 l1; (21)
aA___2______ мс2.
Выбираем масштабный коэффициент плана ускорений a:
aaAPa, (22)
где aA – ускорение точки A, мс2 Pa – отрезок, изображающий его на плане ускорений, мм.
a__________ мс2мм.
Из полюса P откладываем отрезок Pa, являющийся вектором ус-корения точки A кривошипа, который направлен к центру вращения кривошипа.
Определяем ускорение точки B:
BAAB aaa , (23)
где BA
nBABA aaa вектор ускорения точки B при вращательном дви-
жении относительно точки A. Определяем ускорение a n
BA :
a nBAV 2
BA l2; (24)
a nBA___2_______ мc2.
На плане ускорений из точки a проводим прямую, параллельно звену AB и откладываем на ней в направлении от точки B к точке A отрезок an, представляющий собой нормальную компоненту ускоре-ния a n
BA в масштабе a:
ana nBA a; (25)
an__________ мc2мм.
Из точки n проводим прямую перпендикулярную звену AB до пе-ресечения с линией действия ускорения точки B (ползуна). Получен-

194
ный отрезок nb__ мм, представляет собой вектор касательного уско-рения точки B относительно точки А, а отрезок Pb__ мм, – вектор абсолютного ускорения точки B.
Тогда
a BAnba; (26)
a BA__________ мс2
aB Pba, (27)
aB__________ мc2.
Соединив точки a и b, получим отрезок ab__ мм, изображающий вектор ускорения точки B относительно точки А.
Тогда
aBAaba; (28)
aBA__________ мс2.
Ускорение точки S2 находим из условия подобия:
as2abAS2AB. (29)
Откуда
as2AS2ABab; (30)
as2____ мм.
Соединив точку S2 с полюсом P, получим отрезок, изображаю-щий вектор скорости точки S2, т.е. Ps2_ мм.
Тогда
aS2Ps2a; (31)
aS2__________ мс2.
Если из произвольной точки Р отложить двенадцать векторов (см. программу ТММ1) aS2 для всех соответствующих положений центра масс шатуна, соединив их концы плавной кривой, то получим годо-граф ускорения точки S2. Угловое ускорение шатуна AB определяем по формуле:

195
2 a BA l2; (32)
2__________ c-2.
2.3. Кинематические диаграммы
Строим диаграмму перемещений SBSB на основе двенадцати положений ползуна B0, B1, B2, …,B12, соответствующих положениям кривошипа A0, A1, …, A12. Ординату т.В в крайнем положении (В0) принимаем за ноль, остальные точки – в выбранном масштабе, кото-рые являются разницей текущего значения т.В по отношению к нуле-вому В0.
Находим масштабные коэффициенты: длины: S=k·l S=___·___=____ ммм,
где k – коэффициент пропорциональности; угла поворота кривошипа: 2 L, =2·______=____
радмм; времени: t2 1L, t=2·______·___=____ смм,
где L – отрезок на оси абсцисс в мм. Строим диаграмму скорости VBVB методом графического
дифференцирования диаграммы SBSB. Полюсное расстояние H1__ мм. Тогда масштабный коэффициент скорости V определим по формуле:
VS1 H1; (33)
V______________ мсмм.
Продифференцировав диаграмму VBVB, получим диаграмму aBaB . Полюсное расстояние H2___ мм. Масштабный коэффици-ент ускорения определим по формуле:
aV1 H2; (34)
a________________ мс2мм.

196
Таблица 1 Относительная погрешность вычислений
Метод расчета Параметр
Значение в положении
№____
Значение по результатам
расчета прогр. ТММ1
Относитель-ная погреш-
ность , %
VB, м/с VS2, м/с 2, с-1
aB, м/с2 aS2, м/с2
Метод планов
2, с-2 VB, м/с Метод
диаграмм aB, м/с2
3. Силовой расчет
Основной задачей силового расчета является определение реак- ций в кинематических парах меха-низма и внешней уравновешиваю-щей силы, являющейся реактивной нагрузкой со стороны отсоединен-ной части машинного агрегата.
В основу силового расчета положен принцип Даламбера, по-зволяющий применять уравнения равновесия кинетостатики, учи-тывая инерционную нагрузку для определения реакций связей. При этом рассматриваются статически определимые кинематические це-пи группы Ассура и механизм I
Таблица 2 Значения сил в точке В
№ yi, мм
рi мПа
Fд, Н
0 1 2 3 4 5 6 7 8 9
10 11 12
класса, т.е. звено кривошипа.

197
В качестве примера приведен алгоритм решения для механизма двигателя с четвертой схемой сборки.
3.1. Обработка индикаторной диаграммы
Индикаторная диаграмма представляет собой зависимость дви-жущих сил Fд от перемещений ползуна Fд=f(S).
Для определения значения движущих сил для всех рассматривае-мых положений механизма необходимо произвести графическую об-работку индикаторной диаграммы. Давление рi МПа на поршень в i-том положении определим путем измерения соответствующей орди-наты y i в мм на диаграмме с учетом масштабного коэффициента дав-лений p___ МПамм.
рipyi. (35)
Движущая сила, действующая на поршень Fi, Н будет равна:
Fi рiD24, (36)
где D – диаметр поршня, мм. Результаты расчета сведены в табл. 2.
3.2. Силовой расчет группы Ассура второго класса Для выполнения силового расчёта необходимо знать значения
сил, действующих на звенья механизма: силы тяжести, движущих сил и силы инерции этих звеньев. Силовой расчёт будем вести для ____ положения кривошипно-ползунного механизма. От механизма, начи-ная с исполнительного звена ползуна, отсоединяется группа Ассура, а точки разрыва этой группы заменяются реакциями.

198
3.2.1. Определение сил инерции
Модули сил инерции звеньев определяем по формуле:
Фuimiai, (37)
где mi – масса i-того звена, кг ai – ускорение центра масс i-того звена, мс2 . Подставив числовые значения, получим:
Фu2__·____ Н
Фu3_______ Н.
Направления сил инерции противоположны направлениям соот-ветствующих ускорений. Направление момента сил инерции проти-воположно угловому ускорению шатуна 2. Момент сил инерции ша-туна определяется по формуле:
MФ2 Jп S22; (38)
MФ2 ________ Нм.
Систему сил инерции шатуна, т.е. главный вектор сил инерции Фu2, приложенный в центре масс, и момент сил инерции МФ2 относи-тельно центра масс приводим к одной силе Фu2, приложенной в неко-торой точке K. Расстояние между линиями действия силы инерции и приведенной силой вычисляется по формуле:
lu
Ф
ФM
h
2
2; (39)
h________ мм.
Направление приведенной силы совпадает с направлением силы инерции, а направление момента приведенной силы относительно точки S2 совпадает с направлением момента MФ2.

199
3.2.2. Определение сил тяжести Силы тяжести определяем по формуле:
Gimi g, (40)
где mi масса i-того звена;
g ускорение силы тяжести.
Подставив числовые значения, получим:
G2__9,81___ Н
G3__9,81___ Н.
3.2.3. Определение реакций в кинематических парах
Определение реакций в кинематических парах начинаем с рас-
смотрения равновесия группы Ассура 2-3. На звенья этой группы действуют силы: движущая сила Fд, силы
тяжести G3, G2, результирующие силы инерции Фu3, Фu2, реакция R03, заменяющая действие стойки 0 на ползун 3 и реакция R12, заменяю-щая действие кривошипа 1 на шатун 2.
Силы, приложенные в точке B, приводим к одной силе F3. Вели-чину этой силы определяем по формуле:
;333 дu FGФF (41)
F3+___+__________ Н.
Знак показывает, что сила F3 направлена вверх. Условие равновесия группы 2-3 выражается следующим образом:
12R 2G 2uФ 3F 03R0. (42)
Реакцию R12 раскладываем на две составляющие: R n12 – дейст-
вующая вдоль оси звена AB и R 12 – перпендикулярно звену AB.
Составляющую R 12 определяем из уравнения суммы моментов
всех внешних сил относительно точки B, действующих на шатун AB.

200
Применительно к рассматриваемой схеме механизма это уравне-ние можно записать так:
R 12 l2Фu2h1G2h20, (43)
откуда
R 12Фu2h1G2h2l2; (44)
R 12 _______________ Н.
План сил (42) строим в масштабе: F=___ Нмм. Из произвольной точки Р последовательно откладываем вектора
R12 , F3G2, Фu2. Через конечную точку вектора Фu2 проводим линию
действия реакции R03, а через начальную точку вектора R12 линию
действия силы Rn12 . Получим точку пересечения. Соединив конечную
точку вектора Фu2с точкой пересечения, получим вектор R03. Соеди-
нив точку пересечения с конечной точкой вектора R12 , получим век-
тор R12. Умножив соответствующие длины на масштабный коэффи-циент, получим R03_ H R12_ H.
По результатам расчета программы ТММ1 строим годограф ре-акции R12 в масштабе R=_ Нмм.
Если в каждом из двенадцати положений ползуна отложить век-тор R03 и соединить их конечные точки плавной кривой, то получим годограф реакции R03.
По результатам расчета программы ТММ1 строим годограф ре-акции R03R03SB в масштабе R_ Нмм, S_ ммм.
Реакцию R32 в паре шатун – ползун определяем из условия равно-весия ползуна:
23R 03R 3F0 (45)
и равенства:
2332 RR , (46)
или

201
.0;0
323
0323
FRRR
Y
X (47)
Тогда
R23X R03 _ H;
R23Y F3 _ H
R23 ;223
223 YX RR (48)
R23 22 __ _ Н;
R32 _ Н.
По результатам расчета программы ТММ1 строим диаграмму ре-акции R32R321 в масштабе: R=__ Нмм.
3.3. Силовой расчет механизма 1 класса
К кривошипу приложена сила тяжести G1, известная реак-ция 1221 RR . Неизвестная по значению и направлению реакция R01:
.021101 RGR Чтобы кривошип мог совершать вращение по заданному закону,
к нему со стороны отделенной части машинного агрегата должна быть приложена реактивная нагрузка в виде уравновешивающей си-лы Fy. Допустим, что неизвестная по модулю уравновешивающая си-ла приложена перпендикулярно кривошипу в точке А.
3.3.1. Определение сил тяжести
Силу тяжести кривошипа определяем по формуле:
G1m1g, (49)
где m1 – масса кривошипа g – ускорение силы тяжести.
G1_9,81_ Н

202
3.3.2. Определение реакций в кинематических парах
Реакция R01 в паре кривошип-стойка и уравновешивающий мо-мент My определяем из условия равновесия кривошипа ОА:
10121 GRR
0. (50)
Силу Fy находим из условия:
Fy l1 –R21h30. (51)
Откуда
FyR21h3l1; (52)
Fy____ Н.
План сил строим в масштабе: F=_ Нмм. Из произвольной точки последовательно откладываем вектора
R21, G1. Соединив конечную точку вектора G1 с начальной точкой вектора R21, получим вектор R01. Умножив полученную длину на масштабный коэффициент, получим: R01___ Н. По результатам рас-чета программы ТММ1 строим диаграмму реакции R01R011 в масштабе R=__ Нмм.
Уравновешивающий момент My определяется по формуле:
MyFyl1; (53)
My__=_Нм.
По результатам расчета программы ТММ1 строим диаграмму уравновешивающего момента MуMу1 в масштабе: M___ Нммм.
3.4. Рычаг Жуковского
С целью проверки правильности силового расчета механизма урав-новешивающий момент My определяем с помощью рычага Жуковского.
На план скоростей, предварительно повёрнутый на 90 градусов вокруг полюса, в соответствующие точки переносим все заданные силы, включая силы инерции и уравновешивающую силу Fy. Из ус-

203
ловия равновесия плана скоростей, как рычага, определяем уравно-вешивающую силу Fy, прикладывая ее в точке a, считая ее как бы приложенной в точке A кривошипа, и направляем перпендикулярно линии кривошипа ОА.
Таким образом:
FyPaФu2h4G2h5F3Pb0. (54) Откуда:
Fy Фu2h4G2h5F 3 PbPa; (55)
F y___ ____ ____ _______ Н.
Определяем величину уравновешивающего момента:
M уF у l1; (56)
M у_______ Нм.
Таблица 3
Относительная погрешность вычислений
Метод расчета
Параметр Значение
в положении №____
Значение по результатам расчета про-
граммы ТММ1
Относитель-ная погреш-ность , %
R12, Н R03, Н R32, Н R01, Н
My, Нм
Метод планов
R12, Н Рычаг
Жуковского My, Нм

204
4. Динамический расчет 4.1. Определение приведенных моментов сил
Приведенный момент движущих сил Мпд, приложенный к звену
приведения, определяется из условия равенства мгновенных мощно-стей. Мощность, развиваемая Мпд, равна сумме мощностей, развивае-мых силами и моментами сил, действующих на звенья машинного аг-регата. Так, для кривошипно-ползунного механизма с вертикальным движением ползуна, когда в качестве звена приведения принимается вал кривошипа, приведенный момент движущих сил и сил тяжести равен:
МпдF д V B cosF д ^VBG 3 V B cosG 3 ^V B
G 2 V 2S cosG 2 ^V 2S (57)
После подстановки числовых данных получим:
Мпд______________________ Нм.
Приведенный момент сил сопротивления Mпс в дальнейшем предполагается постоянным по величине, т.е. Mп с const, и находится из условия равенства работ движущих сил и сил сопротивления за цикл установившегося движения.
По распечатке ТММ1 строим диаграмму Mпд Mпд приведен-ных моментов движущих сил и сил тяжести в функции угла поворота звена приведения. Принимаем масштаб моментов равным M=__ Нммм, а масштаб углов поворота звена приведения: =__ радмм.
Интегрируем графически диаграмму Mпд=Mпд, принимая по-люсное расстояние H__ мм, в результате чего получаем диаграмму Aд=Aд работ движущих сил и сил тяжести.
Находим масштабный коэффициент работ
AмH; (58)
A_________ Джмм.

205
Тогда
Aдi=yAA, (59)
где yA – отрезок в рассматриваемом положении на диаграмме работ движущих сил, мм.
Aдi=__=_ Дж.
Полагая, что приведенный момент сил сопротивления Мпс имеет постоянную величину во всех положениях звена приведения, строим диаграмму Aс=Aс, соединив начальную и конечную точки диа-граммы Aд=Aд.
Тогда
Aci= yAA; (60)
Aci=____=___ Дж.
Дифференцируя диаграмму Aс=Aс по , получим прямую, па-раллельную оси абсцисс, которая является диаграммой моментов сил сопротивления MпсMпс.
4.2. Определение кинетической энергии звеньев
Вычитая из ординат диаграммы Aд=Aд соответствующие орди-
наты диаграммы Aс=Aс, и откладывая разность на соответствую-щих ординатах, получаем график TT масштаб диаграммы T
=___ Джмм. Определяем приращения кинетической энергии всей машины
вместе с маховиком
TiAдi - Aci; (61)
Ti_ - _ Дж.
Кинетическую энергию звеньев механизма определяем по фор-муле:
IIiT m2V 2
2S 2m3V 2B 2 Jп S2 2
2 2; (62)

206
IIiT ___22____22____22__ Дж.
Приведенный момент инерции определяем по формуле:
Jп II 2TiII/ 2
1 ; (63)
Jп II 2____2___ кгм2.
Изменение кинетической энергии звеньев машинного агрегата с постоянным приведенным моментом инерции, Дж:
IIiT Ti T II
i ; (64)
IIiT _______ Дж.
По результатам расчёта программы ТММ1 строим диаграммы TT, TII= TII, TITI в масштабе T =___ Джмм.
Далее определяются минимальные T IB и максимальное T I
А зна-чение из массива Ti
I, а затем максимальное изменение кинетической энергии звеньев с постоянным приведенным моментом инерции, Дж:
TImax T )( I
A T )( IB ; (65)
T Imax____ ___ Дж.
4.3. Определение момента инерции маховика
Приведенный постоянный момент инерции звеньев машинного
агрегата, необходимый для обеспечения требуемой неравномерности движения:
Jп I T Imax 1
2ср (66)
где – коэффициент неравномерности вращения кривошипа.
Jп I ___·_ ___ кгм2.
Дополнительное значение постоянной составляющей приведен-ного момента инерции, т.е. момент инерции маховика определяется из выражения:

207
Jп М Jп I Jп 0, (67)
где Jп 0 – приведенный к кривошипу момент инерции всех вращаю-щихся масс, кгм2.
Jп М _______ кгм2.
4.4. Определение закона движения звена приведения
Для определения истинного значения угловой скорости звена
приведения 1 вычисляются средние значения изменения кинетиче-ской энергии:
T Iср T I
A T IB 2; (68)
T Iср___2___ Дж.
И среднее значение кинетической энергии звеньев с постоянным приведенным моментом инерции
T Iср Jп I 2
1ср 2; (69)
T Iср ____2___ Дж.
Определяем кинетическую энергию I
iT T IсрT I
ср T IIi ; (70)
IiT ______ ___ Дж.
Определяем угловую скорость звена приведения:
1i Iп
I
JT102 ; (71)
1i __2 _ с1.
Угловое ускорение звена приведения берем из результатов расче-та программы ТММ1: 1i=___ с-2.

208
По результатам расчета программы ТММ1 строим диаграммы 11и 11 для которых масштабные коэффициенты равны:
___с-1/мм; ___ с-2/мм.
Таблица 4 Относительная погрешность вычислений
Метод расчета
Параметр Значение
в положении №____
Значение по результатам расчета про-
граммы ТММ1
Относитель-ная погреш-ность , %
Мпд, Нм Мпс, Нм Aд, Дж Aс, Дж T, Дж T2, Дж T1 , Дж Jп II, кгм2
Метод диаграмм
1, с-1
5. Синтез зубчатых механизмов
5.1. Расчет элементов зубчатых колес
Параметры зуборезной рейки:
модуль рейки m=_ мм,
угол профиля рейки 0=_.
Параметры нулевого зацепления.
Радиус делительной окружности:

209
r1mz12; (72) r1__2_ мм;
r2mz22; (73) r2__2_ мм.
Радиус основной окружности: rb1r1cos20 (74)
rb1_0,9397_ мм; rb2r2cos20 (75)
rb2_0,9397_ мм. Радиус начальной окружности:
rw1 r1_ мм; rw2 r2_ мм.
Радиус окружности впадин: rf1r1mhac (76)
rf1_____ мм; rf2r2mhac (77)
rf2_____ мм. Высота зуба:
hm2 ha c (78) h_2_)_ мм.
Радиус окружности вершин: ra1 rf1hа; (79)
ra1___ мм; ra2 rf2hа; (80)
ra2___ мм. Межосевое расстояние:
amz1z22; (81) a__+_2_ мм.
Шаг зацепления: Pm; (82)
P3,142__ мм. Толщина зуба по делительной окружности:
s1s20,5P; (83) s1s20,5__ мм.

210
Параметры корригированного зацепления рассчитываем по про-
грамме ТММ2. Исходные данные: число зубьев шестерни Z1=_, число
зубьев колеса Z2=_, модуль m=_ мм.
5.2. Профилирование зубчатых колес
Выбираем масштаб построения таким образом, чтобы высота зу-
ба h на чертеже была не менее 40-50 мм. При этом масштабный ко-
эффициент: l=_ ммм.
Выбираем положение центров О1 и О2 осей зубчатых колёс Z1 и
Z2, расстояние между которыми равно a. Из центров О1 и О2 прово-
дим окружности, радиусы которых соответствуют:
начальным окружностям: rw1=_ мм rw2=_ мм
делительным окружностям: r1=_ мм r2=_ мм
окружностям вершин: ra1=_ мм ra2=_ мм
окружностям впадин rf1=_ мм rf2=_мм
основным окружностям: rb1=_ мм rb2=_ мм. Проводим линию зацепления N1N2. Она должна проходить через
полюс зацепления П под углом 20 к линии, перпендикулярной межо-
севой линии О1О2, и при этом быть касательной к основным окруж-
ностям rb1 и rb2.
Находим активный участок линии зацепления АВ. Точки А и В
являются точками пересечения линии зацепления N1N2 с окружно-
стями вершин ra1 и ra2.
Последовательность построения зуба:
проводим ось симметрии зуба
проводим ряд радиусов ri в пределах от радиуса окружности выступов ra до радиуса основной окружности rb

211
откладываем на каждом из радиусов ri по обе стороны оси симметрии половину толщины зуба Si2
соединяем плавной линией полученные точки проводим окружность впадин rf и соединяем построенные
участки с окружностью впадин переходной кривой ρ 0,25m0,25__ мм.
Построенный профиль зуба устанавливаем на чертеже таким об-разом, чтобы он разместился между окружностями вершин ra и впа-дин rf, а полюс П касался его боковой поверхности. Аналогично строится профиль зуба колеса z2.
Проводим ось симметрии двух других зубьев шестерни и колеса. Строим рабочие участки профилей зубов, то есть те участки, которые участвуют в зацеплении. Чтобы найти эти участки, нужно на профиле шестерни найти точку, сопрягаемую с крайней точкой головки зуба колеса и наоборот. Для этого через точку А из центра O2 проводится дуга радиусом O2А до пересечения с профилем зуба колеса. Для того, чтобы выделить рабочие участки профилей зуба на расстоянии 1,5-2 мм проводим линии, параллельные боковым поверхностям зубьев и заштриховываем полученные области.
Построение графиков качественных показателей Проводим линии, перпендикулярные N1N2. По результатам расчета программы ТММ2 строим диаграмму коэф-
фициента скольжения fx, для которой выбираем масштаб: =_ _мм. На оси x откладываем расстояния x1, x2,…, а на оси значения i.
Полученные точки соединяем плавной линией.
Аналогично строим корригированное зацепление. Корригирован-
ное зацепление представляет собой зацепление с более благоприят-
ными качественными характеристиками по сравнению с нулевым за-
цеплением, в частности устранён подрез зубьев.

212
Результаты расчётов по программе ТММ1 Исполнитель: Иванов И.И. Группа: _-__-_ . Задание _____. Вариант:____. Исходные данные: Тип машинного агрегата TMА=___. Номер схемы кривошипно-ползунного механизма N=___. Направление вращения кривошипа K=___. Средняя угловая скорость кривошипа Omega_1=_ 1/c. Смещение направляющей ползуна (эксцентриситет) e=______ м. Длина кривошипа L1=__ м. Длина шатуна L2=__ м. Расстояние АS2 L3=__ м. Начальное положение кривошипа Phi0=___ градусов. Масса кривошипа m1=___ кг. Масса шатуна m2=___ кг. Масса ползуна m3=___ кг. Момент инерции шатуна Is2=___ кг*м^2. Сум.прив.мом-т всех вр.масс маш. агрегата Iп
0 =___ кг*м^2. Коэффициент неравномерности вращения delta=___. Значения Pпс (Fд) {H}:
212

213
КИНЕМАТИЧЕСКИЕ ПАРАМЕТРЫ ___________________________________________________________________________ N|УПК|У.С.Ш.| У.У.Ш. | С.П.| У.П. |vx s2|vy s2|vs 2| wx s2 | wy s2 | w s2 | ---------------------------------------------------------------------------- 0| | | | | | | | | | | | … 12| | | | | | | | | | | | ______________________________________________________________________________
РЕЗУЛЬТАТЫ СИЛОВОГО РАСЧЁТА ____________________________________________________________________ | N| R12X | R12Y | R12 | R03 | R32X | R32Y | |--------------------------------------------------------------------| | 0| | | | | | | … |12| | | | | | | |____________________________________________________________________| | N| R32 | R01X | R01Y | R01 | MUR | |---------------------------------------------------------| | 0| | | | | | … |12| | | | | | |_________________________________________________________ |
213

214
ДИНАМИЧЕСКИЕ ПАРАМЕТРЫ МАШИННОГО АГРЕГАТА ____________________________________________________________________ | N| IP2 | DIP2 | MPS | MPD | AD | AS | |--------------------------------------------------------------------| | 0| - |12| | |____________________________________________________________________| _________________________________________________________ | N| DT | T2 | DT1 | W1 | EPS | |---------------------------------------------------------| | 0| | | | | | … |12| | | | | |
214

215
Результаты расчетов по программе ТММ2.
Исполнитель: Иванов И.И. Группа: _-__-_ _. Задание _____ . Вариант:____. ИСХОДНЫЕ ДАННЫЕ ЧИСЛО ЗУБЬЕВ ШЕСТЕРНИ Z1=_ ЧИСЛО ЗУБЬЕВ КОЛЕСА Z2=_ МОДУЛЬ ЗУБЧАТОГО ЗАЦЕПЛЕНИЯ M=_
ГЕОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ:
____________________________________________________________________________ П А Р А М Е Т Р | БЕЗ СМЕЩЕНИЯ | СО СМЕЩЕНИЕМ | X1=X2=0 | X1=0.50 X2=0.00 ---------------------------------------------------------------------------- ДИАМЕТР ДЕЛИТЕЛЬНОЙ ОКРУЖНОСТИ D1= | | D2= | | ДИАМЕТР ОСНОВНОЙ ОКРУЖНОСТИ DB1= | | DB2= | | ДИАМЕТР НАЧАЛЬНОЙ ОКРУЖНОСТИ DW1= | | DW2= | | ДИАМЕТР ОКРУЖНОСТИ ВПАДИН DF1= | | DF2= | | ДИАМЕТР ОКРУЖНОСТИ ВЕРШИН DA1= | | DA2= | | МЕЖОСЕВОЕ РАССТОЯНИЕ A (AW)= | | УГОЛ ЗАЦЕПЛЕНИЯ, ГРАДУС ALF (ALW)= | | ВЫСОТА ЗУБА H= | | ТОЛЩИНА ЗУБА ПО ДЕЛИТЕЛЬНОЙ ОКРУЖНОСТИ S1= | |
215

216
S2= | |
ТОЛЩИНА ЗУБА ПО ОКРУЖНОСТИ ПРОИЗВОЛЬНОГО РАДИУСА ======================================================================= БЕЗ СМЕЩЕНИЯ | СО СМЕЩЕНИЕМ ( X1 = X2 = 0 ) | X1= 0.50 X2= 0.00 ----------------------------------------------------------------------- ШЕСТЕРНЯ Z1 | КОЛЕСО Z2 | ШЕСТЕРНЯ Z1 | КОЛЕСО Z2 ----------------------------------------------------------------------- РАДИУС | Т.З. | РАДИУС | Т.З. | РАДИУС | Т.З. | РАДИУС | Т.З. ----------------------------------------------------------------------- | | | | | | | _______________________________________________________________________
КАЧЕСТВЕННЫЕ ПОКАЗАТЕЛИ ПЕРЕДАЧИ (БЕЗ СМЕЩЕНИЯ) ============================================================================ ПАРАМЕТР | КООРДИНАТЫ ТОЧКИ, ОТСЧИТЫВАЕМОЙ ОТ НАЧАЛА | ТЕОРЕТИЧЕСКОЙ ЛИНИИ ЗАЦЕПЛЕНИЯ |------------------------------------------------ | | | | | | | ---------------------------------------------------------------------------- КОЭФФИЦИЕНТ | ШЕСТЕРНЯ | | | | | | | ОТНОСИТЕЛЬН.|-------------|------|------|------|------|------|------|------ СКОЛЬЖЕНИЯ | КОЛЕСО | | | | | | | ---------------------------|------------------------------------------------ КОЭФФИЦИЕНТ УДЕЛЬНОГО | **** | **** | **** | **** | **** | **** | **** ДАВЛЕНИЯ | **** | **** | **** | **** | **** | **** | **** ---------------------------|------------------------------------------------ КОЭФФИЦИЕНТ ПЕРЕКРЫТИЯ |
216

217
============================================================================ КАЧЕСТВЕННЫЕ ПОКАЗАТЕЛИ ПЕРЕДАЧИ (X1=_ X2=_)
============================================================================ ПАРАМЕТР | КООРДИНАТЫ ТОЧКИ, ОТСЧИТЫВАЕМОЙ ОТ НАЧАЛА | ТЕОРЕТИЧЕСКОЙ ЛИНИИ ЗАЦЕПЛЕНИЯ |------------------------------------------------ | | | | | | | ---------------------------------------------------------------------------- КОЭФФИЦИЕНТ | ШЕСТЕРНЯ | | | | | | | ОТНОСИТЕЛЬН.|-------------|------|------|------|------|------|------|------ СКОЛЬЖЕНИЯ | КОЛЕСО | | | | | | | ---------------------------|------------------------------------------------ КОЭФФИЦИЕНТ УДЕЛЬНОГО | **** | **** | **** | **** | **** | **** | **** ДАВЛЕНИЯ | **** | **** | **** | **** | **** | **** | **** ---------------------------|------------------------------------------------ КОЭФФИЦИЕНТ ПЕРЕКРЫТИЯ | ============================================================================
217

218
П л а н п о л о ж е н и й l = 0 , 0 0 1 м
м м
S
В . М . Т .
Н . М . Т .
Р а с ш и р е н и е
С ж а т и е
S 2
В
А
О
1
0 1
2
3
4
5 6
7
8
9
1 0
1 1 1 2
6 5 7
4 8
3 9
2 1 0
1
0
1 1
1 2 Р , М П а
0 , 5 0 1 , 5 2 , 0 2 , 5 3 , 0 3 , 5 1 , 0 S B
П л а н с к о р о с т е й
V = 0 , 1 0 8 5 м / с м м Р 1 1
V A V S 2 V B
V B A
П л а н у с к о р е н и й
a = 1 6 , 8 1 7 5 м / с 2
м м
Р 1 1
a b
s 2
a b a b
n a b
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2
S B
1 t
К и н е м а т и ч е с к и е д и а г р а м м ы S B , V B , a B , 2 , 2
S = 0 , 0 0 0 5 м
м м = 0 , 0 2 0 4
р а д м м
t = 0 , 0 0 0 0 6 5 9 c
м м
V = 0 , 2 0 6 м / с м м
Р
H
V B
4 , 0
Г о д о г р а ф с к о р о с т и V S 2
V = 0 , 1 7 1 м / с м м
1 0
0
1
2 3
4
5
6
7
8 9
1 1
1 2
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2
Р
H
a B
1 t
1 t
a = 5 2 , 4 2 7 м / с м м 1 0
0 1
2
3
4
5 6 7
8
9
1 1 1 2
Г о д о г р а ф у с к о р е н и я V S 2
a = 3 6 , 7 7 м / с 2
м м
= 1 . 1 7 5 с
- 1
м м
= 1 4 7 , 9 1 с
- 2
м м
, с - 1
, с - 2
0 1 2 4 5 6 7 8 9 1 0 1 1 1 2
1 t
3
М а с с а М а с ш т а б И з м . Л и с т № д о к у м . П о д п . Д а т а
Л и т .
Р а з р а б . П р о в . Т . к о н т р . Л и с т Л и с т о в
Н . к о н т р . У т в .
1 : 1
Т М М № з а д а н и я . № в а р и а н т а . № л и с т а
К и н е м а т и ч е с к и й а н а л и з
И в а н о в И . И . П е т р о в П . П .
1 3
В у з , ф а к у л ь т е т , № г р у п п ы И
н
в
. №
п
о
д
л
.
П
о
д
п
. и
д
а
т
а
В
з
а
м
.
и
н
в
.
№
И
н
в
.
№
д
у
б
л
.
П
о
д
п
. и
д
а
т
а
С
п
р
а
в
.
№
П
е
р
в
.
п
р
и
м
е
н
.
Т М М № з а д а н и я . № в а р и а н т а . № л и с т а
К о п и р о в а л Ф о р м а т A 1 КОМПАС-3D LT V8 Plus (некоммерческая версия)
КОМПА
С 3D
LT
(с) 1
989-
2006
ЗАО
АСК
ОН, Р
осси
я. Вс
е пр
ава
защищ
ены.
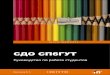
Р и с. 3.3.1. Пример оформления 1 листа курсового проекта
218

219
П л а н п о л о ж е н и й l = 0 , 0 0 1 м
м м
В
F 3
S 2
А
G 2
R 0 3
R 1 2 n
2
3
R 0 3
R 1 2 n
R 1 2
R 1 2
F 3
П л а н с и л
F = 1 1 9 , 7 6 Н
м м
Г р у п п а А с с у р а ( 2 - 3 )
l = 0 , 0 0 1 м
м м
S 2
В
А
О
1
1 0
1 0
a В
F п с
G 3
u 3
G 2
u 2
a S 2
G 1
1
2
3
M U 2
2
К
h
р
А
О
G 1
1 R 2 1
F у R 0 1
Р 1 0
V A
V S 2
V B
V B A
F 3
G 2
р
К
р
F у
р
К
R 0 1 n
R 0 1
М е х а н и з м I к л а с с а Р = 2 4 4
н м м
R 2 1
Р ы ч а г Ж у к о в с к о г о
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2
1 2
3
4
5 6
7 8 9 1 0 1 1 1 2 0
М у
М = 1 0 Н м
м м
Д и а г р а м м а у р а в н о в е ш и в а ю ш е г о м о м е н т а
= 0 , 0 2 6 р а д м м
1
1
Д и а г р а м м ы р е а к ц и й R 0 1 и R 3 2
R = 1 0 0 Н
м м
R
R Г о д о г р а ф р е а к ц и и R 0 3
R = 5 6 Н
м м S = 0 , 0 0 1
м м м
R 3 2
R 0 1
S B
Г о д о г р а ф р е а к ц и й R 1 2
R = 1 1 9 , 7 6 Н
м м
;
R 1 2
0 1 2
1
2 3
4
5
6
7
8
9
1 0
1 1
М а с с а М а с ш т а б И з м . Л и с т № д о к у м . П о д п . Д а т а
Л и т .
Р а з р а б . П р о в . Т . к о н т р . Л и с т Л и с т о в
Н . к о н т р . У т в .
1 : 1
Т М М № з а д а н и я . № в а р и а н т а . № л т с т а
С и л о в о й р а с ч е т И в а н о в И . И . П е т р о в П . П .
2 3
В у з , ф а к у л ь т е т , № г р у п п ы И
н
в
.
№
п
о
д
л
.
П
о
д
п
. и
д
а
т
а
В
з
а
м
.
и
н
в
.
№
И
н
в
.
№
д
у
б
л
.
П
о
д
п
. и
д
а
т
а
С
п
р
а
в
.
№
П
е
р
в
.
п
р
и
м
е
н
.
Т М М № з а д а н и я . № в а р и а н т а . № л т с т а
К о п и р о в а л Ф о р м а т A 1 КОМПАС-3D LT V8 Plus (некоммерческая версия)
КОМПА
С 3D
LT
(с) 1
989-
2006
ЗАО
АСК
ОН, Р
осси
я. Вс
е пр
ава
защищ
ены.
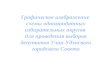
Р и с. 3.3.2. Пример оформления 2 листа курсового проекта
219

220
Д и а г р а м м а д в и ж у щ и х с и л F = 2 0 0 H M M = 0 , 0 2 6 р а д M M
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2
Д и а г р а м м ы п р и в е д ё н н ы х м о м е н т о в
M = 1 0
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2
H * м M M
F д
1
1
1
1
M п р , М п р
A Д и а г р а м м ы р а б о т А = 1 0 Д ж
М М
Т
Д и а г р а м м а п р и р а щ е н и я к и н е т и ч е с к о й э н е р г и и м а ш и н ы T = 1 0 Д ж М М
P
H
д
с
Д и а г р а м м а к и н е т и ч е с к о й э н е р г и и з в е н ь е в T = 1 0
Д и а г р а м м а п р и р а щ е н и я к и н е т и ч е с к о й э н е р г и и м а х о в и к а T = 1 0 Д ж М М
Д ж М М
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2 1
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2 1
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2 1
0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2 1
Г р а ф и к и з м е н е н и я у г л о в о г о у с к о р е н и я к р и в о ш и п а
1 0 2
1
= 1 c - 2
M M
Г р а ф и к и з м е н е н и я у г л о в о й с к о р о с т и к р и в о ш и п а
= 0 , 0 1 M M с - 1
Т ( 2 )
Т ( 1 )
1
М п р с
M п р д
A д
А с
М а с с а М а с ш т а б И з м . Л и с т № д о к у м . П о д п . Д а т а
Л и т .
Р а з р а б . П р о в . Т . к о н т р . Л и с т Л и с т о в
Н . к о н т р . У т в .
Т М М № з а д а н и я . № в а р и а н т а . № л и с т а
Д и н а м и ч е с к о е и с с л е д о в а н и е И в а н о в И . И .
П е т р о в П . П . 3 3
В у з , ф а к у л ь т е т , № г р у п п ы И
н
в
. №
п
о
д
л
.
П
о
д
п
. и
д
а
т
а
В
з
а
м
.
и
н
в
.
№
И
н
в
.
№
д
у
б
л
.
П
о
д
п
. и
д
а
т
а
С
п
р
а
в
.
№
П
е
р
в
.
п
р
и
м
е
н
.
Т М М № з а д а н и я . № в а р и а н т а . № л и с т а
К о п и р о в а л Ф о р м а т A 1 КОМПАС-3D LT V8 Plus (некоммерческая версия)
КОМПА
С 3D
LT
(с) 1
989-
2006
ЗАО
АСК
ОН, Р
осси
я. Вс
е пр
ава
защищ
ены.
Р и с. 3.3.3. Пример оформления 3 листа курсового проекта
220

221
Р и с. 3.3.4. Пример оформления 4 листа курсового проекта
221

222
Список литературы
Основная литература
1. К.В. Фролов, С.А. Попов, А.К. Мусатов и др. Теория механизмов и механика машин: учебн. для втузов. – М.: Высш. шк., 2005. – 496 с.
2. Г.А.Тимофеев. Теория механизмов и машин: Курс лекций: учеб. пособие / Моск. Гос. Техн. Ун-т им. Н.Э.Баумана. – М.: Высш. образова-ние, 2009. – 352 с.: ил., табл. (Основы наук)
3. С.И. Марченко, Е.П. Марченко, Н.В. Логинова. Теория механизмов и машин. – Ростов н/Д.; Феникс, 2003. – 263 с.
4. Е.К. Кичаев, А.М. Лашманов, П.Е. Кичаев, Л.А. Довнар. Теория механизмов и машин: учеб. пособие. – Самара: Самар. гос. техн. ун-т, 2007. – 134 с.
5. С.А. Попов. Курсовое проектирование по теории механизмов и машин: учеб. пособие / С.А. Попов, Г.А. Тимофеев. Под ред. К.В. Фроло-ва. – 6-е изд., стер. – М.: Высш. шк., 2008. – 458 с.: ил.
6. А.С. Кореняко и др. Курсовое проектирование по теории механиз-мов и машин: учеб. пособие для вузов. Под ред. канд. тех. наук А.С. Коре-няко. – 6-е изд., стереотипное. Перепечатка с издания 1970 г. – М.: ООО «МедиаСтар», 2006. – 332 с.
Дополнительная литература
7. А.И. Смелягин. Теория механизмов и машин. – М.: Инфр А. – М.: НГТУ, 2003. – 263 с.
8. И.И. Артоболевский. Теория механизмов и машин. – М.: Нау-ка, 1975. – 640 с.
9. А.М. Неймарк, А.К. Федосеев. Методические указания к кур-совому проекту по теории механизмов и машин «Кинематическое и динамическое исследование кривошипно-ползунных механизмов с применением ЭВМ в диалоговом режиме». – Самара: Самарский по-литехнический ин-т, 1990. – 36 с.

223
3.4. Перечень вопросов, выносимых на защиту курсового проекта
Структура и кинематика механизма: 1. Какие задачи решаются при структурном анализе механизма? 2. Что такое механизм, звено, кинематическая пара? 3. Что называется структурной и кинематической схемой? 4. Что понимается под степенью подвижности механизма? 5. Каким свойством обладают структурные группы механизма?
Как понимать W=1; W=3? 6. Какие признаки групп Асура 2 и 3 классов и базовых меха-
низмов? 7. Для чего нужно знать класс механизма, кинематической пары? 8. В чем отличие формул степени подвижности плоских и про-
странственных механизмов? 9. Какие задачи решаются при кинематическом анализе меха-
низмов? 10. Что называется обобщенной координатой, функцией поло-
жения, передаточным отношением? 11. Какова связь между скоростью и ее аналогом, ускорением и
его аналогом? 12. Как определяются масштабные коэффициенты длины, скоро-
сти и ускорения? Какова их размерность? 13. Как определяются угловые скорости и угловые ускорения
звеньев механизма? 14. Что называется абсолютной и относительной скоростью, ус-
корением? 15. Почему вектор относительного ускорения состоит из нор-
мальной и тангенциальной компонент и ускорения Кориоли-са? В каких частных случаях каждая из них равняется нулю?
16. В каких случаях удобно использовать метод планов, диа-грамм?
17. В чем суть метода замкнутого векторного контура? 18. С какой целью проводится кинематический анализ механизмов?

224
19. Когда удобно применять методы графического дифференци-рования, интегрирования?
Силовой анализ механизма: 1. Для чего необходим силовой расчет? 2. Какими методами пользуются при силовом расчете? 3. Сила инерции – как она определяется? 4. Как направлена реакция в поступательной кинематической
паре? 5. Какие допущения приняты при силовом расчете? 6. Уравновешивающая сила. Уравновешивающий момент. Как
они определяются? 7. Как определить величину и направление силы (момента)
производственного сопротивления механизма? 8. Почему расчет ведется по группам Ассура? Его последова-
тельность. 9. Для чего нужна схема звена со всеми силами? 10. Как составить уравнение моментов сил относительно точки
для какого-либо звена? 11. Как составить векторное уравнение равновесия сил для како-
го-либо звена? 12. Как расшифровать реакции R23, R45 и т.п.? 13. Как определяются тангенциальные и нормальные состав-
ляющие реакции в каком-либо шарнире?
Динамический анализ механизма: 1. Что называется внешними, внутренними силами? 2. Что такое график силы (момента) производственного сопро-
тивления? 3. Какие силы действуют на звенья машины? 4. Что такое цикл движения машины? 5. Что такое уравнения движения машины? 6. Как определяется полезная мощность машины и расчетная
мощность двигателя при установившемся режиме работы?

225
7. Как вычислить КПД машины? 8. Каковы причины неравномерности хода при установившемся
режиме работы машины? 9. С какой целью в машинах устанавливают маховик? 10. Как влияет неравномерность хода на размеры маховика? 11. Какие допущения приняты при расчете маховика методом
Мерцалова? 12. Как определяется момент инерции маховика? Как учитыва-
ются массы остальных звеньев? 13. Что такое приведенный момент инерции масс и приведенный
момент сил? Как они определяются? 14. Как строится график работ? 15. Как строится график Мп()? 16. Каков характер движения звена приведения на отдельных
участках? 17. Какое звено может служить звеном приведения при расчетах? 18. Где выгоднее устанавливать маховик? Почему? 19. В каких случаях маховик не требуется?
Проектирование зубчатого зацепления: 1. Как определить аw, i(u), r, rf, ra, α, ε, S? 2. Какие окружности называются начальными, делительными,
базовыми? 3. Что называется линией зацепления? 4. Что такое дуга зацепления? 5. Как найти рабочие участки профилей? 6. Что называется коэффициентом перекрытия? Как определяется? 7. Почему в машиностроении чаще других кривых для зубьев
используется эвольвента? 8. Как нарезаются зубья? 9. Какие параметры зубьев и колеса определяют станочное за-
цепление? 10. Что дает смещение (сдвиг) инструмента? Что меняется при
изменении коэффициентов смещения (какие параметры)?

226
11. Как определяется направление вращения колес? 12. Где приложена и как направлена действующая в зацеплении сила? 13. Что называется модулем зацепления? По какой окружности
модуль стандартный и почему? 14. Как подсчитать передаточное число многоступенчатой передачи? 15. Как вычислить передаточное отношение планетарной передачи?
4. ОЦЕНКА ЗНАНИЯ КУРСА
Методика оценки знаний основных разделов курса ТММ и итогового контроля
По каждому из восьми разделов курса осуществляется самокон-троль, рубежный и итоговый контроль. Вопросы самоконтроля по разделам курса представлены после каждой лекции.
Рубежный контроль в соответствии с календарным планом про-водится следующим образом:
1. Студент получает подробные сведения о форме проведения и знакомится с интерфейсом программы «Система тестирования АСТ».
2. Студент просматривает контрольные вопросы по соответст-вующему разделу с вариантами ответов.
3. Студент отвечает на вопросы раздела с неизвестными вариан-тами ответов и получает количество баллов и оценку освоенного ма-териала (см. блок-схему рис. 4.1).
Итоговый контроль: студент отвечает на 8 вопросов по курсу ТММ, произвольно выбранных из каждого раздела, по аналогии блок-схемы на рис. 4.1, получая соответствующую оценку. В случае неудовлетворительной оценки (менее 40 баллов) предоставляется возможность повторного тестирования.
Более подробная информация о порядке тестирования нахо-дится на сайте
www.samgtu.ru/structure/faculties/mf/meh/

227
Р и с . 4.1. Блок-схема самоконтроля и итогового контроля по каждому из разделов курса
ЗАКЛЮЧЕНИЕ
В пособии описаны методы структурного, кинематического и ди-намического анализа рычажных механизмов. Рассмотрены основные принципы синтеза зубчатых механизмов. Материал изложен с учетом требований и стандартов; представлены как графоаналитические, так и аналитические методы определения параметров механизмов и машин. Пособие предназначено для студентов технических вузов очной и за-очной формы обучения при решении самостоятельных практических работ и выполнении курсового проекта по теории механизмов и ма-
шин. Оно также может быть рекомендовано для студентов дневной и заочной форм обучения по направлениям 130500, 150000, 190000,
200500, 280000 при изучении курса «Теория механизмов и машин».
Тренировочный тест по теме
Тест пройден правильно: (100-80 баллов) – 5 (80-60 баллов) – 4 (60-40 баллов) – 3
Тест пройден неудовлетворительно:
менее 40 баллов - 2
Повторное изучение материалов лекции и ссылок на основную
литературу с указанием страниц соответствую-щего конкретного раз-
дела
Фиксирование полу-ченной оценки
Переход к следующей теме Повторное тестирова-
ние
Зачет по теме

228
ПРИЛОЖЕНИЯ Таблица П.1
Условные обозначения звеньев № п/п
Наименование Обозначение Характер движения
Примеча-ние
1 Стойка
Отсутствует
2 Кривошип
Колебатель-ное
Полный оборот
3 Коромысло
4 Шатун Плоскопарал-
лельное
Нет пар, связанных со стойкой
5 Ползун
Поступатель-ное
6 Кулиса
Колебатель-ное, враща-
тельное
Направ-ляющая ползуна
7 Кулачок
Вращательное
Поступатель-ное
Профиль
определяет движение ведомого
звена
8 Зубчатое колесо
Вращательное
Без учета конструк-ционных особенно-
стей

229
Окончание табл. П.1
№ п/п Наименование Обозначение
Характер движения
Примеча-ние
9
Соединение звеньев: Жесткое
Шарнирное
10
Толкатели:
Роликовые
Тарельчатые
Поступатель-ное
Конструк-ционный вариант коромы-словый
(не показа-но)
Таблица П.2
Условные обозначения основных величин и единиц измерения в ТММ
Наименование Обозначение Ед. измерения СТРУКТУРА МЕХАНИЗМА Число подвижных звеньев n Число степеней свободы W Кинематические пары А, В, С... Номер стойки, звена 0, 1, 2, 3... КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ Путь (перемещение) точки, например точки В
S,Sв м
Угол поворота звена i относительно звена j ij град
Расстояние между точками В и С, длины i-того звена iвс ,
м
Скорость точки (например В и С) ),( cв VVV м/с
Частота вращения i-того звена ni (n1,n2...) об/мин Обобщенная координата град Аналоги скорости и ускорения точки С
CC SS ;

230
Окончание табл. П.2
Наименование Обозначение Ед. измерения Передаточное отношение угловых скоро-стей выходного и входного звеньев Un1=
1
n
Ускорение точки (например, В или С) св ааa ,, м/с2
Ускорение точки абсолютное, тангенци-альное, нормальное, Кориолиса
,,, naaa ka м/с2
Угловое ускорение i-того звена i с-2
Масштабные коэффициенты длин, скоро-стей и ускорений
аvе ,,
м/мм,
ммс/м ,
ммс/м 2
.
Время t с СИЛОВЫЕ ХАРАКТЕРИСТИКИ Сила, действующая на звено
iF H
Сила, действующая на звено j со стороны звена i (реакция в кинематической паре)
)( 21,32 RRRij H
Сила тяжести звена i iG H Составляющие реакции относительно оси звена, осей Х и У
ij
nij RR , y
ijxij RR , Н
Главный вектор сил инерции i-того звена, иiФ Н Момент силы относительно точки В, от-носительно осей
МВ,Мx, Мy Н М
Работа сил A ДЖ Масса i-того звена mi кг Момент инерции i-того звена относитель-но центральной оси
Jsi
кг м2
Главный момент сил инерции i-того звена фiМ Н М Кинетическая энергия i-того звена Ti ДЖ Мощность силы N Вт Коэффициент неравномерности движения механизма
Приведенная сила Fп Н Приведенный момент Мп Н М Приведенный момент инерции механизма Jп Кг м2

231
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. К.В. Фролов, С.А. Попов, А.К. Мусатов и др. Теория механизмов и механика машин: учебн. для втузов. – М.: Высш. шк., 2005. – 496 с.
2. Г.А. Тимофеев. Теория механизмов и машин: курс лекций: уч. по-собие / Моск. Гос. Техн. Ун-т им. Н.Э.Баумана. – М.: Высш. обра-зование, 2009. – 352 с.: ил., табл.
3. С.И. Марченко, Е.П. Марченко, Н.В. Логинова. Теория механиз-мов и машин. – Ростов н/Д.: Феникс, 2003. – 263 с.
4. Е.К. Кичаев, А.М. Лашманов, П.Е. Кичаев, Л.А. Довнар. Теория механизмов и машин: учебн. Пособие. – Самара: Самар. гос. техн. ун-т., 2007. 134 с.
5. С.А. Попов. Курсовое проектирование по теории механизмов и машин: учеб. пособие / С.А. Попов, Г.А. Тимофеев. Под ред. К.В. Фролова. – 6-е изд., стер. – М.: Высш. шк., 2008. – 458 с.: ил.
6. А.С. Кореняко и др. Курсовое проектирование по террии механиз-мов и машин: учебн. пособие для вузов / Под ред. канд. тех. наук А.С. Кореняко. – 6-е изд., стер. Перепечатка с издания 1970 г. – М.: ООО «МедиаСтар», 2006. – 332 с.
7. И.П. Филонов, П.П. Анципорович, В.К. Акулич и др. Методическое пособие по курсовому проектированию курса «Теория механизмов и машин». – Минск: Белорусск. политехн. ин-т, 1988. – 110 с.
8. А.М. Неймарк, А.К. Федосеев. Методические указания к курсово-му проекту по теории механизмов и машин «Кинематическое и динамическое исследование кривошипно-ползунных механизмов с применением ЭВМ в диалоговом режиме». – Самара: Самарский политехнический ин-т, 1990. – 36 с.
9. А.М. Неймарк, И.Н. Булавинцев. Проектирование зубчатых меха-низмов с применением ЭВМ в диалоговом режиме: метод. указ. к курсовому проекту по теории механизмов и машин. – Самара: Са-марск. гос. техн. ун-т, 2004. – 32 с.

232
Учебное издание
Кичаев Евгений Константинович Лашманов Александр Михайлович
Кичаев Петр Евгеньевич Довнар Любовь Анатольевна
Теория механизмов и машин
2-е издание
Редактор Е.В. Абрамова Компьютерная верстка Е.А. Образцова
Выпускающий редактор Ю.А. Петропольская
Подписано в печать 11.04.12 Формат 60х84 1/32. Бумага офсетная
Усл. п. л. 13,48. Уч.-изд. л. 13,43 Тираж 100 экз. Рег. № 7/12
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования «Самарский государственный технический университет»
443100, г. Самара, ул. Молодогвардейская, 244. Главный корпус
Отпечатано в типографии Самарского государственного технического университета
443100, г. Самара, ул. Молодогвардейская, 244. Корпус №8