Embed Size (px)
DESCRIPTION
第四章 PLC 温度控制技术. PLC 应用技术. 第四章 PLC 温度控制技术. ●. 温度控制系统广泛应用于工业控制领域,如钢铁厂、化工厂、火电厂等锅炉的温度控制系统,电焊机的温度控制系统等。锅炉温度是一个大惯性系统,一般采用 PID 调节进行控制。本章首先介绍温度传感器的使用和 S7-300 PLC 中块的基本概念,然后对 PID 控制器的基本概念进行简单介绍,并结合一个水箱温度控制系统的实例,详细介绍 S7-300 PLC 中 PID 控制器的应用。. 4 . 1 温度的采集. ●. - PowerPoint PPT Presentation
Citation preview

第四章 PLC 温度控制技术

●● 第四章 PLC 温度控制技术• 温度控制系统广泛应用于工业控制领域,如钢铁厂、化工
厂、火电厂等锅炉的温度控制系统,电焊机的温度控制系统等。锅炉温度是一个大惯性系统,一般采用 PID 调节进行控制。本章首先介绍温度传感器的使用和 S7-300 PLC中块的基本概念,然后对 PID 控制器的基本概念进行简单介绍,并结合一个水箱温度控制系统的实例,详细介绍 S7-300 PLC 中 PID 控制器的应用。

●● 4 . 1 温度的采集
• 温度采集和压力、流量等一样,是一种工业控制中最普及的应用,它可以直接测量各种生产过程中液体、蒸汽、气体介质和固体表面的温度。常用的有热电阻、热电偶两种方式,此外还有非接触型的红外测温等产品,一个典型的应用例子是钢铁厂中的红外测温设备。这里我们主要介绍热电阻和热电偶。

●● 4.1.1 温度传感器与选型
• 温度采集和压力、流量等一样,是一种工业控制中最普及的应用,它可以直接测量各种生产过程中液体、蒸汽、气体介质和固体表面的温度。常用的有热电阻、热电偶两种方式,此外还有非接触型的红外测温等产品,一个典型的应用例子是钢铁厂中的红外测温设备。这里我们主要介绍热电阻和热电偶。

●● 1.1. 热电偶工业热电偶作为测量温度的传感器,通常和显示仪表、记录仪表和电子调节器配套使用,它可以直接测量各种生产过程中不同范围的温度。若配接输出 4-20mA 、 0-10V 等标准电流、电压信号的温度变送器,使用更加方便、可靠。对于实验室等短距离的应用场合,可以直接把热电偶信号引入 PLC 进行测量。热电偶的工作原理是 , 两种不同成份的导体 , 两端经焊接,形成回路,直接测量端叫工作端(热端),接线端子端叫冷端,当热端和冷端存在温差时,就会在回路里产生热电流,这种现象称为热电效应;接上显示仪表,仪表上就会指示所产生的热电动势的对应温度值,电动势随温度升高而增长。热电动势的大小只和热电偶的材质以及两端的温度有关,而和热电偶的长短粗细无关。

●● 1.1. 热电偶根据使用场合的不同,热电偶有铠装式热电偶、装配式热电偶、隔爆式热电偶等种类。装配式热电偶由感温元件(热电偶芯)、不锈钢保护管、接线盒以及各种用途的固定装置组成。铠装式热电偶比装配式热电偶具有外径小、可任意弯曲、抗震性强等特点,适宜安装在装配式热电偶无法安装的场合,它的外保护管采用不同材料的不锈钢管,可适合不同使用温度的需要,内部充满高密度氧化绝缘体物质,非常适合于环境恶劣的场合。隔爆式热电偶通常应用于生产现场伴有各种易燃、易爆等化学气体的场合,如果使用普通热电偶极易引起气体爆炸,则在这种场合必须使用隔爆热电偶。

●● 2.2. 热电阻热电阻是中低温区最常用的一种温度测量元件。热电阻是基于金属导体的电阻值随温度的增加而增加这一特性来进行温度测量的。当电阻值变化时,二次仪表便显示出电阻值所对应的温度值。它的主要特点是测量精度高,性能稳定。其中铂热电阻的测量精度是最高的。铂热电阻根据使用场合的不同与使用温度的不同,有云母、陶瓷、簿膜等元件。作为测温元件,它具有良好的传感输出特性,通常和显示仪、记录仪、调节仪以及其它智能模块或仪表配套使用,为它们提供精确的输入值。若做成一体化温度变送器,可输出 4-20mA标准电流信号或 0-10V标准电压信号,使用起来更为方便。

●● 2.2. 热电阻热电阻大都由纯金属材料制成,目前应用最多的是铂和铜。此外,现在已开始采用甸、镍、锰和铑等材料制造热电阻。根据使用场合的不同,热电阻也有铠装式热电阻、装配式热电阻、隔爆式热电阻等种类,与热电偶类似。铂电阻的工作原理是,在温度作用下,铂热电阻丝的电阻值随温度变化而变化,且电阻与温度的关系即分度特性符合 IEC 标准。分度号 Pt100 的含义为在 0℃时的名义电阻值为 100Ω,目前使用的一般都是这种铂热电阻。此外还有 Pt10 、 Pt200 、Pt500 和 Pt1000 等铂热电阻, Cu50 、 Cu100的铜热电阻等。

●● 2.2. 热电阻本章将要介绍的水箱温度控制系统,传感器采用本章将要介绍的水箱温度控制系统,传感器采用 Pt100Pt100 铂铂热电阻,型号热电阻,型号 WZP-035WZP-035,测量温度范围,测量温度范围 0-300℃0-300℃。表。表 4-14-1列出了范围为列出了范围为 0-100℃0-100℃ 的的 Pt100Pt100 铂热电阻的温度和电阻值铂热电阻的温度和电阻值的对应关系。的对应关系。

●● 表 4-1

●● 4.1.2 4.1.2 模拟量模块与选型模拟量模块与选型 模拟量模块包括模拟量输入模块模拟量模块包括模拟量输入模块 SM331SM331 、模拟量、模拟量输出模块输出模块 SM332SM332 和模拟量输入和模拟量输入 // 输出混合模块输出混合模块 SMSM334334 。对模拟量输入模块。对模拟量输入模块 SM331SM331 ,可选择的输入,可选择的输入信号类型有电压型、电流型、电阻型、热电阻型、信号类型有电压型、电流型、电阻型、热电阻型、热电偶型,而模拟量输出模块热电偶型,而模拟量输出模块 SM332SM332 提供有电压提供有电压和电流两种类型的信号输出。有的和电流两种类型的信号输出。有的 CPUCPU 模块集成了模块集成了这些信号输入输出功能,如这些信号输入输出功能,如 S7-300S7-300 的的 CPU313CCPU313C模块(订货号模块(订货号 6ES7 313-5BE01-0AB06ES7 313-5BE01-0AB0 ),不仅提),不仅提供供 2424 路的路的 DIDI 输入和输入和 1616 路的路的 DODO 输出,而且配置输出,而且配置了了 55路模拟量输入和路模拟量输入和 22路模拟量信号输出。路模拟量信号输出。

●● 1.1.模拟量模块的主要特性模拟量模块的主要特性 表表 4-24-2 、、 4-34-3 列出了模拟量输入模块列出了模拟量输入模块 SM331SM331 的主要特性,更详细的特的主要特性,更详细的特性说明请参阅相关技术文档。性说明请参阅相关技术文档。

●● 1.1.表表 4-34-3 表表 4-3 4-3 模拟量输入模块模拟量输入模块 SM331SM331 的主要特性的主要特性

●● 1.1.表表 4-44-4 表表 4-4 4-4 模拟量输出模块模拟量输出模块 SM332SM332 的主要特性的主要特性

●● 1.1.表表 4-54-5 表表 4-5 4-5 模拟量输出模拟量输出 //输出混合模块输出混合模块 SM334SM334 的主要特性的主要特性

●● 22 .模拟量模块的测量信号类型及测量范围设定.模拟量模块的测量信号类型及测量范围设定 由于模拟量输入或输出模块提供有不止一种类型信号的输入或输出,每种信号的测量范围又有多种选择,因此必须对模块信号类型和测量范围进行设定。一般采用 STEP7软件设定和量程卡设定两种方法。( 1)通过 STEP7软件设定以 CPU313C 模块为例进行设置。如上所述, CPU313C不仅是 CPU模块,而且提供了功能丰富的输入输出信号,其中模拟量输入第 0-3 通道为电压 /电流信号输入,第 4通道为电阻 / 铂电阻输入,其设置在 STEP7软件中进行,方法为:在图 4-1所示的“ HW Config”对话框中,双击“ AI5/AO2” 项,打开图 4-2的“ Properties” 属性对话框,该对话框有“ General”、“ Addresses”、“ Inputs”、“ Outputs”四个选项 ,选中“ Inputs” 项,画面如图4-2所示。

●● 1.1.图图 4-14-1 图图 4-1 “HW Config”4-1 “HW Config” 硬件组态对话框硬件组态对话框

●● 1.1.图图 4-14-1 对于第对于第 0-30-3 通道,可在“通道,可在“ Measurement type”Measurement type” 中选择中选择电压或电流输入,在“电压或电流输入,在“ Measuring range”Measuring range” 中根据需要选中根据需要选择测量范围,对于电压输入有择测量范围,对于电压输入有 0-10V0-10V、、±10V±10V两种选择,两种选择,对于电流输入有对于电流输入有 0-20mA0-20mA、、 4-20mA4-20mA 、、±20mA±20mA 三种选择。三种选择。第第 44通道为电阻通道为电阻 // 铂电阻测量通道,有铂电阻测量通道,有 R-2LR-2L 、、 RTD-2LRTD-2L 两两种选择,图中测量类型已选为种选择,图中测量类型已选为 RTD-2LRTD-2L ,, PT 100PT 100 ,用于测,用于测量传感器为量传感器为 PT 100PT 100铂热电阻的温度值。铂热电阻的温度值。

●● 1.1.图图 4-24-2 图图 4-24-2 设置设置 CPU313CCPU313C 模块模拟量输入信号的类型及量程模块模拟量输入信号的类型及量程

●● 1.1.图图 4-34-3 图图 4-34-3 设置设置 CPU313CCPU313C 模块输出信号的类型及量程模块输出信号的类型及量程

●● 1.1.图图 4-34-3 用同样的方法可对用同样的方法可对 CPU313CCPU313C模拟量输出通道进行设置,模拟量输出通道进行设置,可以设置为电压输出或电流输出,对于电压输出有可以设置为电压输出或电流输出,对于电压输出有 0-10V0-10V、、±10V±10V两种选择,对于电流输出有两种选择,对于电流输出有 0-20mA0-20mA、、 4-20mA4-20mA、、±20mA±20mA 三种选择,图三种选择,图 4-34-3 中第中第 00 通道设置为电压型,范通道设置为电压型,范围围 +/-10V+/-10V ,第,第 11通道设置为电流型,范围通道设置为电流型,范围 4-20mA4-20mA。。 对于其它类型的模拟量输入对于其它类型的模拟量输入 // 输出模块,根据模块的不同输出模块,根据模块的不同特性,其具体设置会各有特点,但其基本方法是一样的。特性,其具体设置会各有特点,但其基本方法是一样的。

●● 22 .模拟量模块的测量信号类型及测量范围设定.模拟量模块的测量信号类型及测量范围设定 ( 2)配有量程卡的模拟量模块的测量信号类型和测量范围的设定配有量程卡的模拟量模块,其量程卡在供货时已插入模块一侧,如果需要更改量程,必须重新调整量程卡,以更改测量信号的类型和测量范围。量程卡可以设定为“A”、“B”、“ C”、“ D”四个位置,各种测量信号类型和测量范围的设定在模拟量模块上有相应的标记指示,可以根据需要进行设定和调整。调整量程卡的步骤为:①用锣丝刀将量程卡从模拟量模块中松开;②将量程卡按测量要求和范围正确定位,然后插入模拟量模块中。

●● 33 .模拟值的表示.模拟值的表示 模拟值用二进制补码表示,宽度为 16 位,符号总在最高位。模拟量模块的精度最高为 15 位,如果少于 15 位,则模拟值左移调整,然后才保存到模块中。未用的低位填入“ 0”,如表 4-6所示,表中标有“ x”的位为“ 0”或“1”。

●● 表表 4-6 4-6 模拟值的精度表示模拟值的精度表示 模拟值的精度表示模拟值的精度表示

●● 表表 4-7 4-7 电压测量范围电压测量范围 ±±10 V - 10 V - ±±1V1V 的模拟值表示的模拟值表示

●● 表表 4-8 4-8 电流测量范围电流测量范围为为 0-20mA0-20mA 和和 4-20mA4-20mA 的模拟值表示的模拟值表示

●● 表表 4-9 4-9 标准标准 Pt x100 RTDPt x100 RTD 温度传感器的模拟值表示如表温度传感器的模拟值表示如表 4-94-9所示以所示以 CPU31CPU313C3C模块为例,模拟量精度为模块为例,模拟量精度为 1212 位,由表位,由表 4-64-6 可知,十六位数 中最可知,十六位数 中最后三位为后三位为 00 ,因此分辨率,因此分辨率为为 0808HH 。再由表。再由表 4-94-9可知,对应的温度分辨可知,对应的温度分辨率为率为 0.80.8℃℃ 。。对于其它模拟量输入信号的模拟值信号以及模拟量输出信号的表示,对于其它模拟量输入信号的模拟值信号以及模拟量输出信号的表示,参阅相关技术文档。参阅相关技术文档。

●● 表表 4-9 4-9 表表 4-9 4-9 标准标准 Pt x100 RTDPt x100 RTD 温度传感器的模拟值表示温度传感器的模拟值表示

●● 4.2 STEP 74.2 STEP 7 中的块(二)中的块(二)
STEP 7STEP 7 中的块主要包括组织块(中的块主要包括组织块( OBOB )、功能()、功能( FFCC )、功能块()、功能块( FBFB )、系统功能()、系统功能( SFCSFC )、系统功能)、系统功能块(块( SFBSFB )、背景数据块()、背景数据块( IDBIDB )、共享数据块()、共享数据块( SDSDBB ),它们是一些独立的程序或数据单元,在),它们是一些独立的程序或数据单元,在 STEP 7 STEP 7 的的 BlocksBlocks 文件夹下,如图文件夹下,如图 4-44-4 所示。组织块和功能在所示。组织块和功能在前面已作介绍,本节主要介绍后面五种块。前面已作介绍,本节主要介绍后面五种块。

●● 图图 4-4 4-4 图图 4-4 STEP 74-4 STEP 7 中的块中的块

●● 4.2 .1 4.2 .1 功能块功能块
功能块功能块 FBFB (( Function BlockFunction Block )与功能)与功能 FCFC (( FunctiFunctionon )一样,都是用户自己编写的程序模块,可以被其)一样,都是用户自己编写的程序模块,可以被其它程序块(它程序块( OBOB 、、 FCFC 、、 FBFB )调用,这与)调用,这与 CC 语言中的语言中的函数非常类似,而且也有自己的参数。在函数非常类似,而且也有自己的参数。在 FBFB 中以名称中以名称的方式给出的参数称作形式参数(形参),在调用的方式给出的参数称作形式参数(形参),在调用 FBFB时给形式参数赋的具体值就是实际参数(实参)。时给形式参数赋的具体值就是实际参数(实参)。 FBFB不同于不同于 FCFC 的是,的是, FBFB 拥有自己的存储区,即后面拥有自己的存储区,即后面要介绍的背景数据块,而要介绍的背景数据块,而 FCFC没有自己的没有自己的存储区。在调存储区。在调用任何一个用任何一个 FBFB时,都必须指定一个背景数据块。当调时,都必须指定一个背景数据块。当调用用 FBFB时,如果没有传送实参,则将使用背景数据块中时,如果没有传送实参,则将使用背景数据块中保存的值。保存的值。

●● 11 .. FBFB 的创建 的创建
创建一个创建一个 FBFB 的方法为:在的方法为:在 BlocksBlocks 目录下的右侧空白目录下的右侧空白区域单击右键,在弹出的快捷菜单中选择“区域单击右键,在弹出的快捷菜单中选择“ Insert NeInsert New Object”-“Function Block”w Object”-“Function Block” ,如图,如图 4-54-5 所示,即所示,即插入了一个插入了一个 FBFB ,这时弹出如图,这时弹出如图 4-64-6 所示的对话框,只所示的对话框,只要填入要填入 FBFB 的名称如的名称如 FB1FB1 、输入符号名和注释,并选择、输入符号名和注释,并选择编程语言,如编程语言,如 LADLAD ,单击,单击 OKOK ,就完成了功能块,就完成了功能块 FB1FB1的插入和属性设置。的插入和属性设置。

●● 图 图 4-5 4-5 图图 4-5 4-5 在在 BlocksBlocks 目录下插入一个目录下插入一个 FBFB

●● 图 图 4-64-6图图 4-6 FB4-6 FB 属性设置对话框属性设置对话框

●● 图 图 4-74-7
在在 BlocksBlocks 目录下双击目录下双击 FB1FB1 ,打开如图,打开如图 4-74-7 梯型图编辑梯型图编辑器画面,右上半部分是变量声明表,器画面,右上半部分是变量声明表,右下半部分是程序右下半部分是程序指令区,左边是指令列表。变量声明表示出了指令区,左边是指令列表。变量声明表示出了 FB1FB1的参的参数和变量类型设置界面,用于声明本块中专用的变量即数和变量类型设置界面,用于声明本块中专用的变量即局域变量,包括块的形参和参数的属性。通过设置局域变量,包括块的形参和参数的属性。通过设置 ININ(输入变量)、(输入变量)、 OUTOUT (输出变量)和(输出变量)和 IN_OUTIN_OUT (输入(输入// 输出变量),声明块调用时的软件接口(即形参)。输出变量),声明块调用时的软件接口(即形参)。临时变量(临时变量( TEMPTEMP )在声明后在局域数据堆栈中开辟有)在声明后在局域数据堆栈中开辟有有效的存储空间。有效的存储空间。 STATSTAT (静态变量)是(静态变量)是 FBFB 特有的,特有的,是为配合使用背景数据块而保留的空间。用户在功能块是为配合使用背景数据块而保留的空间。用户在功能块中声明的变量,除临时变量外,它们将自动出现在功能中声明的变量,除临时变量外,它们将自动出现在功能块对应的背景数据块中。块对应的背景数据块中。

●● 图 图 4-74-7图图 4-7 FB4-7 FB 编辑器界面编辑器界面

●● 22 .变量的创建.变量的创建
在图在图 4-74-7 中,变量声明表左边给出了该表的总体结构,中,变量声明表左边给出了该表的总体结构,点击某一变量类型,例如点击某一变量类型,例如 ININ ,在表的右边将显示出该,在表的右边将显示出该类型变量的详细信息,用户可以在这里创建变量。如图类型变量的详细信息,用户可以在这里创建变量。如图4-84-8 所示,在所示,在 ININ 类型中建立了类型中建立了 Motor_OnMotor_On 、、 Motor_OMotor_Offff 、、 Motor_TimerMotor_Timer 三个变量,在三个变量,在 OUTOUT 类型中建立了类型中建立了变量变量 Motor_WorkingMotor_Working ,在,在 STATSTAT 类型中建立了静态变类型中建立了静态变量量 Delay_Time,Delay_Time, 在在 TEMPTEMP 类型中建立了临时变量类型中建立了临时变量 TemTemp_Offp_Off,所有变量均作了注释。,所有变量均作了注释。

●● 图 图 4-84-8 (( 1-21-2 ))在变量声明表中建立变量在变量声明表中建立变量 图图 4-8-14-8-1 在变量声明表中建立变量在变量声明表中建立变量
图图 4-8-24-8-2

●● 图 图 4-84-8 (( 3-43-4 ))图图 4-8-34-8-3 在变量声明表中建立变量在变量声明表中建立变量
图图 4-8-44-8-4

●● 功能块的说明功能块的说明下面是对图下面是对图 4-84-8 中所示功能块中所示功能块 55种类型变量的使用说明:种类型变量的使用说明:(( 11)) ININ(输入变量):由调用(输入变量):由调用 FBFB 的块提供的输入参数;的块提供的输入参数;(( 22)) OUTOUT(输出变量):返回给调用(输出变量):返回给调用 FBFB 的块的输出参数;的块的输出参数;(( 33 )) IN_OUTIN_OUT(输入(输入 //输出变量):初值由调用输出变量):初值由调用 FBFB 的块提供,的块提供,被被 FBFB 修改后返回给调用它的块;修改后返回给调用它的块;(( 44 )) TEMPTEMP (临时变量):暂时保存在局域数据区中的变量,(临时变量):暂时保存在局域数据区中的变量,只在使用块时使用临时变量,执行完后不再保存临时变量的数值。只在使用块时使用临时变量,执行完后不再保存临时变量的数值。(( 55 )) STATSTAT (静态变量):在功能块的背景数据块中使用。(静态变量):在功能块的背景数据块中使用。关闭功能块后,其静态数据保持不变。功能关闭功能块后,其静态数据保持不变。功能 FCFC没有静态变量。没有静态变量。需要注意的是,在变量声明表中输入各种参数时,不需要指定存需要注意的是,在变量声明表中输入各种参数时,不需要指定存储器地址,只要选择了各变量的数据类型,储器地址,只要选择了各变量的数据类型, STEP7STEP7 会自动为所会自动为所有局域变量指定存储器地址。有局域变量指定存储器地址。

●● 33 .编制.编制 FBFB 程序程序在图在图 4-7 FB4-7 FB 编辑器界面的右下半部分是程序指令区,用户可以编辑器界面的右下半部分是程序指令区,用户可以在这里输入程序。以电机启停控制的功能块在这里输入程序。以电机启停控制的功能块 FB1FB1 为例,要求输为例,要求输入启动信号后电机运行状态为入启动信号后电机运行状态为 TrueTrue ,输入停止信号并经一定延,输入停止信号并经一定延时后电机运行状态为时后电机运行状态为 FalseFalse 。功能块中用到的各变量在图。功能块中用到的各变量在图 4-84-8中都已建立。中都已建立。 LADLAD 程序如下所示:程序如下所示:

●● Network(pg1)Network(pg1)

●● Network(pg2-3)Network(pg2-3)

●● 33 .编制.编制 FBFB 程序程序在在 FBFB 编辑器中编好的编辑器中编好的 FBFB 程序,可以在其它程序中进行调用。程序,可以在其它程序中进行调用。图图 4-94-9 是在是在 OB1OB1 中调用的一个实例,可以在图形编辑器左侧指中调用的一个实例,可以在图形编辑器左侧指令列表的“令列表的“ FB blocks”FB blocks” 下找到“下找到“ FB1 Motor Control”FB1 Motor Control” 功功能块,把它直接拖到能块,把它直接拖到 OB1OB1 程序编辑区中即可。注意要指定背景程序编辑区中即可。注意要指定背景数据块,这部分内容在数据块,这部分内容在 4.2.44.2.4 背景数据块中进行讲解。背景数据块中进行讲解。

●● 图图 4-94-9FBFB 的调用的调用

●● 44.. 22.. 2 2 系统功能系统功能 系统功能系统功能 SFCSFC (( System FunctionSystem Function)是预先编好的固化)是预先编好的固化在在 S7S7 系列系列 CPUCPU 中的程序,是可供用户程序调用的中的程序,是可供用户程序调用的 FCFC ,,因此称为“系统功能”。与因此称为“系统功能”。与 FCFC相同,相同, SFCSFC 不具有存储能不具有存储能力。通常力。通常 SFCSFC 提供一些系统级的功能调用,如通讯功能、提供一些系统级的功能调用,如通讯功能、时间功能、块传送功能等。时间功能、块传送功能等。SFCSFC 与下面将要介绍的系统功能块与下面将要介绍的系统功能块 SFBSFB的差别是,的差别是, SFCSFC没有存储功能。没有存储功能。各种具体的各种具体的 CPUCPU 支持的支持的 SFCSFC 是不同的,用户可以通过查是不同的,用户可以通过查阅相关阅相关 CPUCPU 技术文档了解这方面的详细信息和资料。技术文档了解这方面的详细信息和资料。

●●44.. 22.. 3 3 系统功能系统功能块块
系统功能块系统功能块 SFBSFB(( System Function BlockSystem Function Block)与系统)与系统功能功能 SFCSFC 一样,是为用户提供的固化在一样,是为用户提供的固化在 S7S7 系列系列 CPUCPU操操作系统中的作系统中的 FBFB。。 SFBSFB作为操作系统的一部分,不占用户作为操作系统的一部分,不占用户程序空间。在用户程序中可以调用这些块,但用户不能进程序空间。在用户程序中可以调用这些块,但用户不能进行修改。行修改。 与与 FBFB 相同,相同, SFBSFB 也是“具有存储能力”的块。用户调也是“具有存储能力”的块。用户调用用 SFBSFB时也必须为时也必须为 SFBSFB生成背景数据块,或指定背景数生成背景数据块,或指定背景数据块名,由系统自动生成背景数据块。据块名,由系统自动生成背景数据块。 SFBSFB 提供一些系统级的功能调用,如提供一些系统级的功能调用,如 PIDPID 功能块功能块 SFB41SFB41、、SFB42SFB42、、 SFB43SFB43 。关于。关于 PIDPID 部分内容将在本章后部分内部分内容将在本章后部分内容中作详细介绍,关于其它容中作详细介绍,关于其它 SFBSFB,可通过查阅相关,可通过查阅相关 CPUCPU技术文档了解这方面的详细信息和资料。技术文档了解这方面的详细信息和资料。

●● 44.. 22 .. 4 4 背景数据背景数据块块 S7S7 系列系列 PLCPLC 具有强大的数据块功能。数据块是用于存具有强大的数据块功能。数据块是用于存放执行用户程序所需变量的数据区,分为背景数据块放执行用户程序所需变量的数据区,分为背景数据块 IDBIDB(( Instance Data BlockInstance Data Block)和共享数据块)和共享数据块 SDBSDB(( ShareShared Data Blockd Data Block)。)。 STEP 7STEP 7按数据生成的顺序自动为数按数据生成的顺序自动为数据块中的变量分配地址。据块中的变量分配地址。 IDBIDB是与是与 FBFB 相关联的,只能用相关联的,只能用来被指定的来被指定的 FBFB访问,因此在创建访问,因此在创建 IDBIDB时,必须指定它所时,必须指定它所属的属的 FBFB,并且该,并且该 FBFB 必须已经存在。在调用一个必须已经存在。在调用一个 FBFB时,时,也必须指明也必须指明 IDBIDB的编号或符号。的编号或符号。

●● 11.在.在 BlocksBlocks 目录下创建背景数据块目录下创建背景数据块 IDBIDB
背景数据块背景数据块 IDBIDB 中的数据信息是自动生成的,它们是中的数据信息是自动生成的,它们是 FBFB变量声明表中的内容(不包括临时变量变量声明表中的内容(不包括临时变量 TEMPTEMP ),也即),也即应首先生成功能块应首先生成功能块 FBFB ,然后生成它的的背景数据块。功,然后生成它的的背景数据块。功能块能块 FBFB 建好后,创建背景数据块的方法为:建好后,创建背景数据块的方法为:在在 BlocksBlocks 目录下的右侧空白区域单击右键,在弹出的快目录下的右侧空白区域单击右键,在弹出的快捷菜单中选择“捷菜单中选择“ Insert New Object”-“Data Block”Insert New Object”-“Data Block”插入一个插入一个 DBDB ,弹出如图,弹出如图 4-104-10 所示的对话框。在“所示的对话框。在“ NamName and type”e and type”中填入名称为中填入名称为 DB4DB4 、选择背景数据块“、选择背景数据块“ InInstance DB”stance DB”和上面已经建立的功能块“和上面已经建立的功能块“ FB1”FB1”,单击,单击OKOK ,即完成背景数据块的插入和属性设置。,即完成背景数据块的插入和属性设置。

●● 11.在.在 BlocksBlocks 目录下创建背景数据块目录下创建背景数据块 IDBIDB
这时双击这时双击 BlocksBlocks 中已生成的中已生成的 DB4DB4,可以看到,可以看到 DB4DB4 中已中已经自动生成了数据,如图经自动生成了数据,如图 4-114-11 所示。注意,所示。注意, DB4DB4 中的内中的内容与功能块容与功能块 FB1FB1 变量声明表中定义的内容完全一致(临变量声明表中定义的内容完全一致(临时变量时变量 TEMPTEMP除外)。除外)。 可以对图可以对图 4-114-11 中的参数进行修改。背景数据块有两种显中的参数进行修改。背景数据块有两种显示方式:数据显示“示方式:数据显示“ Data View”Data View” 方式和声明表显示方式和声明表显示““ Declaration View”Declaration View” 方式。点击菜单方式。点击菜单 ViewView ,若选中,若选中数据显示方式“数据显示方式“ Data View”Data View” 选项,可对参数进行修改,选项,可对参数进行修改,如可把定时器的参数“如可把定时器的参数“ Actual Value”Actual Value” 改为改为 1000mS1000mS ;;若选中声明表显示方式“若选中声明表显示方式“ Declaration View”Declaration View” 选项,则选项,则不能修改数据不能修改数据 ..。。

●● 22 .调用.调用 FBFB 时自动创建背景数据块时自动创建背景数据块 IDBIDB
除了按以上方法在除了按以上方法在 BlocksBlocks 文件夹中创建文件夹中创建 IDBIDB ,也可以在,也可以在调用调用 FBFB 时自动创建时自动创建 IDBIDB 。在图。在图 4-94-9 调用调用 FB1FB1 时输入背时输入背景数据块名称为景数据块名称为 DB5DB5 ,而这时在,而这时在 BlocksBlocks 目录中并没有目录中并没有名为名为 DB5DB5 的背景数据块,因此这时系统提示是否自动创的背景数据块,因此这时系统提示是否自动创建背景数据块,选择自动创建,则在建背景数据块,选择自动创建,则在 BlocksBlocks 目录中就自目录中就自动创建了一个背景数据块动创建了一个背景数据块 FB5FB5 。双击把它打开,并把定。双击把它打开,并把定时器的参数“时器的参数“ Actual Value”Actual Value” 改为改为 2000mS2000mS 。其内容如。其内容如图图 4-124-12 所示。所示。

●● 图 图 4-104-10 创建背景数据块创建背景数据块

●● 图 图 4-(11-12)4-(11-12)背景数据块背景数据块 DB4DB4 中的数据中的数据
背景数据块背景数据块 DB5DB5中的数据中的数据

●● 图图 4-134-13一个一个 FBFB 可以和多个背景数据块相对应,这非常适合于生可以和多个背景数据块相对应,这非常适合于生产工艺相同但配方或生产过程不同的场合。如上例,背景产工艺相同但配方或生产过程不同的场合。如上例,背景数据块数据块 DB4DB4 和和 DB5DB5 的定时器参数不同,调用背景数据的定时器参数不同,调用背景数据 DDB5B5 如图如图 4-94-9 ,调用背景数据,调用背景数据 DB4DB4 如图如图 4-134-13 ,两者实现,两者实现的电机停止延时控制过程是不一样的。的电机停止延时控制过程是不一样的。需要注意的是,需要注意的是, SFBSFB 虽然是由操作系统提供的,但其背虽然是由操作系统提供的,但其背景数据块仍需由用户生成。可以采用上面介绍的两种方法景数据块仍需由用户生成。可以采用上面介绍的两种方法之一。之一。

●● 图 图 4-134-13背景数据块背景数据块 DB4DB4的调用的调用

●● 44.. 22 .. 5 5 共享数据块共享数据块共享数据块共享数据块 SDBSDB 存储的是全局数据,可被所有的存储的是全局数据,可被所有的 OBOB 、、FCFC 、、 FBFB 读取或将数据写入到读取或将数据写入到 SDBSDB 。与。与 IDBIDB 一样,一样, SDSDBB 中的数据是不会被删除的,即具有数据保存功能,其数中的数据是不会被删除的,即具有数据保存功能,其数据的容量与具体的据的容量与具体的 PLCPLC 有关。有关。SDBSDB 的生成步骤与的生成步骤与 IDBIDB 基本相同。在基本相同。在 BlocksBlocks 目录下的目录下的右侧空白区域单击右键,在弹出的快捷菜单中选择“右侧空白区域单击右键,在弹出的快捷菜单中选择“ InsInsert New Object”-“Data Block”ert New Object”-“Data Block” 插入一个插入一个 DBDB ,弹出,弹出如图如图 4-144-14 所示的对话框,在“所示的对话框,在“ Name and type”Name and type” 中填中填入名称为入名称为 SDB1SDB1 ,选择,选择 Shared Data BlockShared Data Block ,则,则 FBFB 选选项框自动变灰不能选择。项框自动变灰不能选择。

●● 图 图 4-144-14创建共享数据块创建共享数据块 SDBSDB

●● 说明说明 (1)(1)双击双击 SDB1SDB1 ,自动打开数据编辑器。共享数据块与背景数,自动打开数据编辑器。共享数据块与背景数据块不同,数据不会自动生成,变量名和数据类型必须一据块不同,数据不会自动生成,变量名和数据类型必须一一输入,地址则是自动生成;为提高效率,也可以采用一输入,地址则是自动生成;为提高效率,也可以采用 AARRAYRRAY 等复杂数据类型。在菜单等复杂数据类型。在菜单 ViewView 中可采用 “中可采用 “ DeclaDeclaration View” ration View” 声明表显示和 “声明表显示和 “ Data View” Data View” 数据显示数据显示两种方式显示数据,分别如图两种方式显示数据,分别如图 4-154-15 和和 4-164-16所示。所示。

●● 说明说明 (2)(2)声明表显示方式用于定义和修改共享数据块中的变量,指声明表显示方式用于定义和修改共享数据块中的变量,指定它们的名称、类型和初值并可输入注释,定它们的名称、类型和初值并可输入注释, STEP 7STEP 7 根据根据数据类型给出默认的初值,用户可以修改,地址由数据类型给出默认的初值,用户可以修改,地址由 CPUCPU自动指定。图中采用了数组自动指定。图中采用了数组 ARRAY[1..20]ARRAY[1..20] ,其创建方法,其创建方法为:先在“为:先在“ Name”Name” 列输入名称,再在“列输入名称,再在“ Type”Type” 中选中选择择 ARRAYARRAY 类型,在“类型,在“ []”[]” 中输入数组的大小,并在下一中输入数组的大小,并在下一行紧接着选择数据类型,如行紧接着选择数据类型,如 INTINT 。。数据显示方式下显示声明表中的全部信息和变量的实际值,数据显示方式下显示声明表中的全部信息和变量的实际值,用户只能改变每个元素的实际值。复杂数据类型变量的元用户只能改变每个元素的实际值。复杂数据类型变量的元素如数组中的各元素用全名列出。在数据显示状态下用菜素如数组中的各元素用全名列出。在数据显示状态下用菜单“单“ Edit”Edit” 下的“下的“ Inicialize Data Block”Inicialize Data Block” 可使变量恢可使变量恢复为初始值。复为初始值。

●● 图 图 4-154-15声明表显示方式下的共享数据块声明表显示方式下的共享数据块 SDB1SDB1

●● 图 图 4-164-16数据显示方式下的共享数据块数据显示方式下的共享数据块 SDB1SDB1

●● 44.. 22.. 6 6 工程数值换算功能工程数值换算功能 FC105FC105的应的应用用 工程数值换算功能工程数值换算功能 FC105FC105 用来将一个输入的整型值(例用来将一个输入的整型值(例如模拟量如模拟量 I/OI/O 格式的整型值)转换为实型值,在工程中具格式的整型值)转换为实型值,在工程中具有广泛的应用。有广泛的应用。FC105FC105 输入输出参数关系如表输入输出参数关系如表 4-104-10 。。

●● 表表 4-104-10 FC105FC105 输入输出参数关系输入输出参数关系

●● 44.. 22.. 6 6 工程数值换算功能工程数值换算功能 FC105FC105的应的应用用 FC105FC105的数值换算公式为:的数值换算公式为:OUTOUT=((=((FLOAT FLOAT ))IN IN --K1K1)/()/(K2K2--K1K1)*()*(HI_LIM-LO_LIM HI_LIM-LO_LIM )+)+LOLO_LIM_LIM对双极性,输入值范围为对双极性,输入值范围为 -27648-27648 到到 2764827648 ,对应,对应 K1 K1 =-2=-276487648,, K2 K2 =+27648=+27648 ,,对单极性,输入值范围为对单极性,输入值范围为 00 到到 2764827648 ,对应,对应 K1 K1 =0=0 ,, K2K2 =+27648=+27648。。图图 4-174-17 是用是用 FC105FC105 进行室温温度转换的一个实例,参数进行室温温度转换的一个实例,参数设置如下:设置如下:采用单极性,即采用单极性,即 BIPOLAR=0BIPOLAR=0因此因此 K1 K1 =0=0 ,, K2 K2 =+27648.0=+27648.0程序中设定程序中设定 HI_LIM HI_LIM =2764.8=2764.8,, LO_LLMLO_LLM =0 =0输入信号输入信号 ININ 来自来自 CPU313CCPU313C 模块的模拟量输入第模块的模拟量输入第 44 通道,通道,为铂电阻输入信号,采样的是环境温度值,数值为为铂电阻输入信号,采样的是环境温度值,数值为 304304 ,,通过通过 FC105FC105变换后,得到实际温度值为变换后,得到实际温度值为 30.430.4℃℃。。

●● 图图 4-174-17
用用 FC105FC105 进行温度转换应用实例进行温度转换应用实例

●● 44 .. 3 PID3 PID 控制原理控制原理44.. 33 .. 1 PID1 PID 控制器基本概念控制器基本概念在过程控制中,按偏差的比例(在过程控制中,按偏差的比例( PP )、积分()、积分( II )和微分()和微分( DD )进行)进行控制的控制的 PIDPID 控制器(亦称控制器(亦称 PIDPID 调节器)是应用最广泛的一种自动控制调节器)是应用最广泛的一种自动控制器。它具有原理简单,易于实现,适用面广,控制参数相互独立,参数器。它具有原理简单,易于实现,适用面广,控制参数相互独立,参数选定比较简单,调整方便等优点;而且在理论上可以证明,对于过程控选定比较简单,调整方便等优点;而且在理论上可以证明,对于过程控制的典型对象──“一阶滞后+纯滞后”与“二阶滞后+纯滞后”的控制的典型对象──“一阶滞后+纯滞后”与“二阶滞后+纯滞后”的控制对象,制对象, PIDPID 控制器是一种最优控制。控制器是一种最优控制。 PIDPID 调节规律是连续系统动态调节规律是连续系统动态品质校正的一种有效方法,它的参数整定方式简便,结构改变灵活(如品质校正的一种有效方法,它的参数整定方式简便,结构改变灵活(如可为可为 PIPI 调节,调节, PDPD 调节,等)。长期以来,调节,等)。长期以来, PIDPID 控制器被广大科技人控制器被广大科技人员及现场操作人员所采用,并积累了大量的经验。员及现场操作人员所采用,并积累了大量的经验。PIDPID 控制器就是根据系统的误差控制器就是根据系统的误差 ,, 利用比例、积分、微分计算出控制量利用比例、积分、微分计算出控制量来进行控制。当被控对象的结构和参数不能完全掌握,或得不到精确的来进行控制。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时、控制理论的其它技术难以采用时数学模型时、控制理论的其它技术难以采用时 ,, 系统控制器的结构和参系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用数必须依靠经验和现场调试来确定,这时应用 PIDPID 控制技术最为方便。控制技术最为方便。即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时来获得系统参数时 ,,最适合采用最适合采用 PIDPID 控制技术。控制技术。

●● 44.. 33 .. 1 PID1 PID 控制器基本概念控制器基本概念11 .比例(.比例( PP )控制)控制比例控制是一种最简单的控制方式。其控制器的输出与输入比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差(误差( Steady-state errorSteady-state error )。)。22 .积分(.积分( II )控制)控制在积分控制中在积分控制中 ,, 控制器的输出与输入误差信号的积分成正比控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统关系。对一个自动控制系统 ,, 如果在进入稳态后存在稳态误如果在进入稳态后存在稳态误差差 ,, 则称这个控制系统是有稳态误差的或简称有差系统(则称这个控制系统是有稳态误差的或简称有差系统( SySystem with Steady-state Errorstem with Steady-state Error )。为了消除稳态误差)。为了消除稳态误差 ,,在控制器中必须引入“积分项”。积分项对误差的运算取决在控制器中必须引入“积分项”。积分项对误差的运算取决于时间的积分,随着时间的增加,积分项会增大。这样,即于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大,使稳态误差进一步减小,直到等于零。因制器的输出增大,使稳态误差进一步减小,直到等于零。因此,采用比例此,采用比例 ++ 积分积分 (PI)(PI) 控制器控制器 ,, 可以使系统在进入稳态后可以使系统在进入稳态后无稳态误差。无稳态误差。

●● 44.. 33 .. 1 PID1 PID 控制器基本概念控制器基本概念33 .微分(.微分( DD )控制)控制 在微分控制中在微分控制中 ,, 控制器的输出与输入误差信号的微分(即误控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。 自动控制系统在克服误差的调节差的变化率)成正比关系。 自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大过程中可能会出现振荡甚至失稳。其原因是由于存在有较大的惯性组件(环节)或有滞后的惯性组件(环节)或有滞后 (delay)(delay) 组件,具有抑制误差组件,具有抑制误差的作用,其变化总是落后于误差的变化。解决的办法是使抑的作用,其变化总是落后于误差的变化。解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。这就是说,在控制器中仅引入“比差的作用就应该是零。这就是说,在控制器中仅引入“比例”项往往是不够的,比例项的作用仅是放大误差的幅值,例”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例这样,具有比例 ++ 微分的控制器就能够提前使抑制误差的控微分的控制器就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免被控量的严重超调。制作用等于零,甚至为负值,从而避免被控量的严重超调。所以对有较大惯性或滞后的被控对象所以对有较大惯性或滞后的被控对象 ,, 比例比例 ++ 微分微分 (PD)(PD) 控制控制器能改善系统在调节过程中的动态特性。器能改善系统在调节过程中的动态特性。

●● 44.. 33.. 22 闭环控制系统特点 闭环控制系统特点 控制系统一般包括开环控制系统和闭环控制系统。开环控控制系统一般包括开环控制系统和闭环控制系统。开环控制系统制系统 (Open-loop Control System)(Open-loop Control System) 是指被控对象的输出是指被控对象的输出(( 被控制量被控制量 )) 对控制器对控制器 (controller)(controller) 的输出没有影响,在这种的输出没有影响,在这种控制系统中控制系统中 ,, 不依赖将被控制量反送回来以形成任何闭环回不依赖将被控制量反送回来以形成任何闭环回路。闭环控制系统路。闭环控制系统 (Closed-loop Control System)(Closed-loop Control System) 的特点的特点是系统被控对象的输出是系统被控对象的输出 (( 被控制量被控制量 )) 会反送回来影响控制器会反送回来影响控制器的输出的输出 ,, 形成一个或多个闭环。闭环控制系统有正反馈和负形成一个或多个闭环。闭环控制系统有正反馈和负反馈反馈 ,, 若反馈信号与系统给定值信号相反若反馈信号与系统给定值信号相反 ,, 则称为负反馈则称为负反馈 ( N( Negative Feedback)egative Feedback) ;若极性相同,则称为正反馈。一般闭;若极性相同,则称为正反馈。一般闭环控制系统均采用负反馈,又称负反馈控制系统。可见,闭环控制系统均采用负反馈,又称负反馈控制系统。可见,闭环控制系统性能远优于开环控制系统。环控制系统性能远优于开环控制系统。

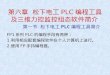
●● 44.. 33.. 22 闭环控制系统特点 闭环控制系统特点 PIDPID 就是应用最广泛的闭环控制器。如图就是应用最广泛的闭环控制器。如图 4-184-18 所示系统是用于电所示系统是用于电厂化学水加药系统的厂化学水加药系统的 PIDPID 闭环控制系统,常用的有加氨、加联氨、闭环控制系统,常用的有加氨、加联氨、加磷酸盐等多种方法。以加磷酸盐进行协调磷酸盐处理的闭环控制加磷酸盐等多种方法。以加磷酸盐进行协调磷酸盐处理的闭环控制系统为例,系统目标设定值为期望的磷酸盐指标,闭环控制器的反系统为例,系统目标设定值为期望的磷酸盐指标,闭环控制器的反馈值通过化学仪表(磷表)测得,并经馈值通过化学仪表(磷表)测得,并经 A/DA/D 变换转换为数字量;变换转换为数字量;目标设定值与磷表的反馈信号相减,其差送入目标设定值与磷表的反馈信号相减,其差送入 PIDPID 控制器,经比控制器,经比例、积分、微分运算,得到叠加的一个数字量;该数字量经过上限、例、积分、微分运算,得到叠加的一个数字量;该数字量经过上限、下限限位处理后进行下限限位处理后进行 D/AD/A 变换,输出一个电流信号去控制加药变变换,输出一个电流信号去控制加药变频器的输入频率,并进而控制加药电机的转速,以控制加药泵的输频器的输入频率,并进而控制加药电机的转速,以控制加药泵的输出流量。该系统的出流量。该系统的 PIDPID 控制器一般采用控制器一般采用 PLCPLC 提供的专用模块,也提供的专用模块,也可以采用编程的方法(如可以采用编程的方法(如 PLCPLC 编程、高级语言编程或组态软件编编程、高级语言编程或组态软件编程等)生成一个数字程等)生成一个数字 PIDPID 控制器。同时,其它功能如控制器。同时,其它功能如 A/DA/D 、、 D/AD/A都由都由 PLCPLC 实现,磷表的反馈信号直接送实现,磷表的反馈信号直接送 PLCPLC 采集,控制加药变频采集,控制加药变频器的电流信号也由器的电流信号也由 PLCPLC 送出,去控制加药变频器的频率,进而控送出,去控制加药变频器的频率,进而控制加药泵的输出量,从而达到控制磷酸盐加药量的目的。制加药泵的输出量,从而达到控制磷酸盐加药量的目的。

●● 图图 4-184-18
电厂化学水加药系统的闭环控制系统应用实例电厂化学水加药系统的闭环控制系统应用实例

●● 44.. 33.. 3 PID3 PID 控制器的参数整定 控制器的参数整定 PIDPID 控制器的参数整定是控制系统设计的核心内容。它是根据被控过程控制器的参数整定是控制系统设计的核心内容。它是根据被控过程的特性,确定的特性,确定 PIDPID 控制器的比例系数、积分时间和微分时间的大小。控制器的比例系数、积分时间和微分时间的大小。 PIPIDD 控制器参数整定的方法很多控制器参数整定的方法很多 ,,概括起来有如下两大类:概括起来有如下两大类:一是理论计算整定法。它主要依据系统的数学模型,经过理论计算确定一是理论计算整定法。它主要依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接使用控制器参数。这种方法所得到的计算数据未必可以直接使用 ,, 还必须通过还必须通过工程实际进行调整和修改。工程实际进行调整和修改。二是工程整定法。它主要依赖于工程经验,直接在控制系统的试验中进二是工程整定法。它主要依赖于工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。行,且方法简单、易于掌握,在工程实际中被广泛采用。 PIDPID 控制器参控制器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。这三种数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。这三种方法各有其特点,其共同点都是通过试验,然后按照工程经验公式对控方法各有其特点,其共同点都是通过试验,然后按照工程经验公式对控制器参数进行整定。但无论采用哪一种方法所得到的控制器参数,都需制器参数进行整定。但无论采用哪一种方法所得到的控制器参数,都需要在实际运行中进行最后的调整与完善。要在实际运行中进行最后的调整与完善。现在一般采用的是临界比例法。利用该方法进行现在一般采用的是临界比例法。利用该方法进行 PIDPID 控制器参数的整定控制器参数的整定步骤如下:步骤如下:(1)(1)首先预选择一个足够短的采样周期让系统工作;首先预选择一个足够短的采样周期让系统工作;(2)(2) 仅加入比例控制环节仅加入比例控制环节 ,, 直到系统对输入的阶跃响应出现临界振荡直到系统对输入的阶跃响应出现临界振荡 ,, 记记下这时的比例放大系数和临界振荡周期;下这时的比例放大系数和临界振荡周期;(3)(3)在一定的控制度下通过公式计算得到在一定的控制度下通过公式计算得到 PIDPID 控制器的参数控制器的参数。。

●● 44.. 33.. 3 PID3 PID 控制器的参数整定 控制器的参数整定连续系统连续系统 PIDPID 控制器的输出为:控制器的输出为: U(s)=K.(1+1/T1s+TDs)E(s)U(s)=K.(1+1/T1s+TDs)E(s)增量式数字增量式数字 PIDPID 控制算式为:控制算式为:其中,其中,,为采样周期。,为采样周期。比例调节器对于偏差是及时反应的,一旦偏差产生,调节器立即产比例调节器对于偏差是及时反应的,一旦偏差产生,调节器立即产生控制作用,使被控量朝着减小偏差的方向变化,控制作用的强弱生控制作用,使被控量朝着减小偏差的方向变化,控制作用的强弱取决于比例系数。比例调节器虽然简单快速,但是对于具有自平衡取决于比例系数。比例调节器虽然简单快速,但是对于具有自平衡性的控制对象存在静差。加大比例系数可以减小静差,但过大的比性的控制对象存在静差。加大比例系数可以减小静差,但过大的比例系数可能导致系统动荡而处于闭环不稳定状态。例系数可能导致系统动荡而处于闭环不稳定状态。为了消除比例调节器中的残存的静差,可以在比例调节的基础上加为了消除比例调节器中的残存的静差,可以在比例调节的基础上加入积分调节。积分时间大,则积分作用弱,反之积分作用强。积分入积分调节。积分时间大,则积分作用弱,反之积分作用强。积分时间越大,消除静差越慢,但可以减小超调,提高系统的稳定性。时间越大,消除静差越慢,但可以减小超调,提高系统的稳定性。但它的不足之处在于积分作用存在滞后特性,积分控制作用太强会但它的不足之处在于积分作用存在滞后特性,积分控制作用太强会使控制的动态性能变差,以至于使系统不稳定。使控制的动态性能变差,以至于使系统不稳定。

●● 44.. 33.. 3 PID3 PID 控制器的参数整定 控制器的参数整定加入积分调节环节,虽然减小了静差,但是降低了系统的响应速度。加加入积分调节环节,虽然减小了静差,但是降低了系统的响应速度。加入微分环节,能敏感出误差的变化趋势,将有助于减小超调,克服系统入微分环节,能敏感出误差的变化趋势,将有助于减小超调,克服系统震荡,使系统趋于稳定,能改善系统的动态性能。它的缺点是对干扰同震荡,使系统趋于稳定,能改善系统的动态性能。它的缺点是对干扰同样敏感,使系统抑制干扰的能力降低。根据不同的控制对象适当地整定样敏感,使系统抑制干扰的能力降低。根据不同的控制对象适当地整定 PPIDID 的三个参数,可以获得比较满意的控制效果。实践证明,这种参数整的三个参数,可以获得比较满意的控制效果。实践证明,这种参数整定的过程,实际上是对比例、积分、微分三部分控制作用的折衷。但是,定的过程,实际上是对比例、积分、微分三部分控制作用的折衷。但是,PIDPID 本质上是一种线性控制器,并且上面讨论时是忽略了纯滞后时间的,本质上是一种线性控制器,并且上面讨论时是忽略了纯滞后时间的,实际系统中,如果(是纯滞后时间,是系统总的惯性时间常数),用实际系统中,如果(是纯滞后时间,是系统总的惯性时间常数),用 PIPIDD 控制器的效果就不理想了。而实际工业对象具有较大的惯性和纯滞后控制器的效果就不理想了。而实际工业对象具有较大的惯性和纯滞后特性,以及其动力学系统的内部不确定性和外部干扰的不确定性,所有特性,以及其动力学系统的内部不确定性和外部干扰的不确定性,所有这些都给这些都给 PIDPID 控制带来了困难和复杂性。控制带来了困难和复杂性。一般来说,要获得满意的控制性能,单纯采用线性控制方式还是不够的,一般来说,要获得满意的控制性能,单纯采用线性控制方式还是不够的,还必须引进一些非线性控制方式,采取灵活有效的手段,如变增益、智还必须引进一些非线性控制方式,采取灵活有效的手段,如变增益、智能积分、智能采样等多种途径,主要依靠专家经验、启发式直观判断、能积分、智能采样等多种途径,主要依靠专家经验、启发式直观判断、直觉推理等智能控制方法,有利于解决系统控制中的稳定性和准确性的直觉推理等智能控制方法,有利于解决系统控制中的稳定性和准确性的矛盾。可以说智能矛盾。可以说智能 PIDPID赋予传统赋予传统 PIDPID 以新的生命。以新的生命。

●● 44.. 33.. 5 PID5 PID 控制器的主要优点 控制器的主要优点PIDPID 控制器成为应用最广泛的控制器,它具有以下优点:控制器成为应用最广泛的控制器,它具有以下优点:(( 11 )) PIDPID 算法蕴涵了动态控制过程中过去、现在、将来的主算法蕴涵了动态控制过程中过去、现在、将来的主要信息,而且其配置几乎最优。其中,比例(要信息,而且其配置几乎最优。其中,比例( PP )代表了当前)代表了当前的信息,起纠正偏差的作用,使过程反应迅速。微分(的信息,起纠正偏差的作用,使过程反应迅速。微分( DD )在)在信号变化时有超前控制作用,代表将来的信息。在过程开始时信号变化时有超前控制作用,代表将来的信息。在过程开始时强迫过程进行,过程结束时减小超调,克服振荡,提高系统的强迫过程进行,过程结束时减小超调,克服振荡,提高系统的稳定性,加快系统的过渡过程。积分(稳定性,加快系统的过渡过程。积分( II )代表了过去积累的)代表了过去积累的信息,它能消除静差,改善系统的静态特性。此三种作用配合信息,它能消除静差,改善系统的静态特性。此三种作用配合得当,可使动态过程快速、平稳、准确,收到良好的效果。得当,可使动态过程快速、平稳、准确,收到良好的效果。(( 22 )) PIDPID 控制适应性好,有较强的鲁棒性,对各种工业应用控制适应性好,有较强的鲁棒性,对各种工业应用场合,都可在不同的程度上应用。特别适于“一阶惯性环节场合,都可在不同的程度上应用。特别适于“一阶惯性环节 ++纯滞后”和“二阶惯性环节纯滞后”和“二阶惯性环节 ++ 纯滞后”的过程控制对象。纯滞后”的过程控制对象。(( 33 )) PIDPID 算法简单明了,各个控制参数相对较为独立,参数算法简单明了,各个控制参数相对较为独立,参数的选定较为简单,形成了完整的设计和参数调整方法,很容易的选定较为简单,形成了完整的设计和参数调整方法,很容易为工程技术人员所掌握。为工程技术人员所掌握。

●● 44.. 33.. 5 PID5 PID 控制器的主要优点 控制器的主要优点(( 44 )) PIDPID 控制根据不同的要求,针对自身的缺陷进行了不少控制根据不同的要求,针对自身的缺陷进行了不少改进,形成了一系列改进的改进,形成了一系列改进的 PIDPID 算法。例如,为了克服微分带算法。例如,为了克服微分带来的高频干扰的滤波来的高频干扰的滤波 PIDPID 控制,为克服大偏差时出现饱和超调控制,为克服大偏差时出现饱和超调的的 PIDPID 积分分离控制,为补偿控制对象非线性因素的可变增益积分分离控制,为补偿控制对象非线性因素的可变增益PIDPID 控制,等。这些改进算法在一些应用场合取得了很好的效控制,等。这些改进算法在一些应用场合取得了很好的效果。同时当今智能控制理论的发展,又形成了许多智能果。同时当今智能控制理论的发展,又形成了许多智能 PIDPID 控控制方法。制方法。

●● 44 .. 4 PID4 PID 指令及应用指令及应用 S7-300S7-300 及及 400400 提供有提供有 PIDPID 控制功能块来实现控制功能块来实现 PIDPID 控制。控制。 STESTEP7P7 提供了系统功能块提供了系统功能块 SFB41SFB41 、、 SFB42SFB42 、、 SFB43SFB43 实现实现 PIDPID 闭闭环控制,其中环控制,其中 SFB41“CONT_C”SFB41“CONT_C” 用于连续控制,用于连续控制, SFB42“CSFB42“CONT_S”ONT_S” 用于步进控制,用于步进控制, SFB43“PULSEGEN”SFB43“PULSEGEN” 用于脉冲宽用于脉冲宽度调制,它们位于文件夹“度调制,它们位于文件夹“ \Libraries\Standard Library\PI\Libraries\Standard Library\PID Controller”D Controller” 中。位于文件夹“中。位于文件夹“ \Libraries\Standard Libr\Libraries\Standard Library\PID Controller”ary\PID Controller” 的的 FB41FB41 、、 FB41FB41、、 FB43FB43 与与 SFB41SFB41、、SFB42SFB42 、、 SFB43SFB43 兼容,兼容, FB58FB58 、、 FB59FB59 则用于则用于 PIDPID 温度控制。温度控制。它们是系统固化的它们是系统固化的纯软件控制器,运行过程中循环扫描、计算纯软件控制器,运行过程中循环扫描、计算所需的全部数据存储在分配给所需的全部数据存储在分配给 FBFB 或或 SFBSFB 的背景数据块里,因的背景数据块里,因此可以无限次调用。此可以无限次调用。本章以连续本章以连续 PIDPID 控制器控制器 SFB41SFB41 模块为例进行详细介绍。其它模块为例进行详细介绍。其它 PPIDID 模块的应用是相类似的。模块的应用是相类似的。STEP 7STEP 7 的在线帮助文档提供了各种的在线帮助文档提供了各种 PIDPID 功能块应用的帮助信息。功能块应用的帮助信息。

●● 44.. 44.. 1 PID1 PID指令主要参数的意义指令主要参数的意义 SFB41SFB41 的输入参数和输出参数及其意义说明分别在表的输入参数和输出参数及其意义说明分别在表 4-114-11 、、4-124-12中列出中列出

●● 表表 4-114-11
SFB41SFB41输入参数输入参数

●● 表表 4-11-24-11-2
SFB41SFB41输入参数输入参数

●● 表表 4-11-34-11-3
SFB41SFB41输入参数输入参数

●● 表表 4-124-12
SFB41SFB41输出参数输出参数

●●44.. 44.. 2 SFB412 SFB41原理框原理框图图 SFC41 CONT_CSFC41 CONT_C的控制原理框图如图的控制原理框图如图 4-194-19所示。所示。

●● 44.. 44 .. 3 PID3 PID 指令的使用注意事项指令的使用注意事项11 .. PIDPID 控制器的选取控制器的选取PIDPID 控制器的性能和处理速度只与所采用的控制器的性能和处理速度只与所采用的 CPUCPU 的性能有关。对于的性能有关。对于任意给定的任意给定的 CPUCPU ,控制器的数量和每个控制器被调用的频率是相互,控制器的数量和每个控制器被调用的频率是相互矛盾的。控制环执行的速度,也即在每个时间单元内操作值必须被更矛盾的。控制环执行的速度,也即在每个时间单元内操作值必须被更新的频率决定了可以安装的控制器的数量。对要控制的过程类型没有新的频率决定了可以安装的控制器的数量。对要控制的过程类型没有限制,迟延系统(温度、液位等)和快速系统(流量、电机转速等)限制,迟延系统(温度、液位等)和快速系统(流量、电机转速等)都可以作为被控对象。都可以作为被控对象。过程分析时应注意:控制过程的静态性能(比例)和动态性能(时间过程分析时应注意:控制过程的静态性能(比例)和动态性能(时间延迟、死区和重设时间等)对被控过程控制器的构造和设计以及静态延迟、死区和重设时间等)对被控过程控制器的构造和设计以及静态(比例)和动态参量(积分和微分)的维数选取有着很大的影响。准(比例)和动态参量(积分和微分)的维数选取有着很大的影响。准确地了解控制过程的类型和特性数据是非常必要的。确地了解控制过程的类型和特性数据是非常必要的。控制器选取时应注意:控制环的特性由被控过程或被控机械的物理特控制器选取时应注意:控制环的特性由被控过程或被控机械的物理特性决定,并且设计中可以改变的程度不是很大。只有选用了最适合被性决定,并且设计中可以改变的程度不是很大。只有选用了最适合被控对象的控制器并使其适应过程的响应时间,才能得到较高的控制质控对象的控制器并使其适应过程的响应时间,才能得到较高的控制质量。不用通过编程就可以生成控制器的大部分功能(构造、参数设置量。不用通过编程就可以生成控制器的大部分功能(构造、参数设置和在程序中的调用等),前提是必须已经掌握和在程序中的调用等),前提是必须已经掌握 STEP 7STEP 7 的编程基础知的编程基础知识。识。

●● 44.. 44 .. 3 PID3 PID 指令的使用注意事项指令的使用注意事项22 .. SFB41SFB41 各子功能的详细描述 各子功能的详细描述 (( 11 )设定值的输入)设定值的输入如图如图 4-194-19 ,设定点的值以浮点数格式在,设定点的值以浮点数格式在 SP_INTSP_INT (内部设定(内部设定值)处输入。值)处输入。(( 22 )过程变量的输入过程变量即反馈值可以用两种方法输)过程变量的输入过程变量即反馈值可以用两种方法输入:入:一种中用一种中用 PV-INPV-IN 浮点数格式输入过程变量,这时控浮点数格式输入过程变量,这时控制制 I/OI/O 输输入过程变量的开关量入过程变量的开关量 PVPEPVPER_ONR_ON 应处于应处于 OffOff 状态。状态。另一种是从外设直接输入另一种是从外设直接输入 I/OI/O 量到量到 PV_PERPV_PER ,功能,功能 CRP_INCRP_IN将从外设来的模拟量输入模块采样的数字值将从外设来的模拟量输入模块采样的数字值 PV_PERPV_PER 转化成转化成范围在范围在 -100%-100% ~~ 100%100% 之间的浮点数格式。这时控制之间的浮点数格式。这时控制 I/OI/O 输输入过程变量的开关量入过程变量的开关量 PVPEPVPER_ONR_ON 应处于应处于 OnOn状态。状态。

●● 44.. 44 .. 3 PID3 PID 指令的使用注意事项指令的使用注意事项(( 33 )外设输入过程变量的值转换为浮点数格式)外设输入过程变量的值转换为浮点数格式模拟量输入模块采样的数字值的最大值为模拟量输入模块采样的数字值的最大值为 2764827648 (十六进制表示为(十六进制表示为6C00H6C00H ),功能),功能 CRP_INCRP_IN 根据下面的公式将根据下面的公式将 PV_PERPV_PER 转换为转换为 -100-100%%~~ 100%100%之间的浮点数格式数值:之间的浮点数格式数值:CRP_INCRP_IN 的输出的输出 = = PV_PERPV_PER*100/27648 *100/27648 (( 44 )外设输入过程变量值的标准化)外设输入过程变量值的标准化功能功能 PV_NORMPV_NORM 根据下面的公式使根据下面的公式使 CRP_INCRP_IN 的输出标准化:的输出标准化:PV_NORMPV_NORM 的输出 的输出 = (= ( CRP_IN CRP_IN 的输出的输出 ) * ) * PV_FACPV_FAC + + PV_OFFPV_OFF式中,式中, PV_FACPV_FAC 为过程变量的系数,为过程变量的系数, PV_OFFPV_OFF 为过程变量的偏移为过程变量的偏移量,默认值分别为量,默认值分别为 1.01.0 和和 00 。它们用来调节过程输入的范围。。它们用来调节过程输入的范围。如果内部设定值如果内部设定值 SP_INTSP_INT 是有物理意义的,则通过上面的转换就可是有物理意义的,则通过上面的转换就可将外设输入过程变量(即反馈值)的值转换为该物理值。图将外设输入过程变量(即反馈值)的值转换为该物理值。图 4-194-19中中 PVPV 为过程变量格式化后的输出值,它是一个中间变量。为过程变量格式化后的输出值,它是一个中间变量。

●● 44.. 44 .. 3 PID3 PID 指令的使用注意事项指令的使用注意事项(( 55 )误差信号及死区处理)误差信号及死区处理误差是设定值点误差是设定值点 SP_INTSP_INT 和过程变量之间的差值。为了抑制由于控和过程变量之间的差值。为了抑制由于控制量量化而引起的小扰动,可将死区功能制量量化而引起的小扰动,可将死区功能 DEADBANDDEADBAND 运用在误运用在误差信号上。如果将差信号上。如果将 DEADB_WDEADB_W 设为设为 00 ,则死区将不起作用。,则死区将不起作用。(( 66 )) PIDPID运算运算在这里在这里 PIDPID 控制算法是位置式的,比例、积分和微分作用并联并控制算法是位置式的,比例、积分和微分作用并联并且可以通过开关量且可以通过开关量 P_SELP_SEL 、、 I_SELI_SEL 、、 D_SELD_SEL 分别激活或取消激分别激活或取消激活。这样就可以分别构造活。这样就可以分别构造 PP 、、 PIPI 、、 PDPD 以及以及 PIDPID 控制器,纯积分控制器,纯积分控制或纯微分控制也是可以的。控制或纯微分控制也是可以的。(( 77 )手动值控制)手动值控制通过通过 MAN_ONMAN_ON 变量可以在手动和自动模式之间进行切换。在手动变量可以在手动和自动模式之间进行切换。在手动模式(模式( MAN_ON=1MAN_ON=1 )下,操作值可以设定为一个手动选择值,积)下,操作值可以设定为一个手动选择值,积分器在内部设定为分器在内部设定为 LMNLMN (操作值)、(操作值)、 LMN_PLMN_P (比例操作值)、(比例操作值)、DISVDISV (扰动),(扰动), 微分器设定为微分器设定为 00 ,并且在内部进行同步,这意味,并且在内部进行同步,这意味着当转换到自动模式(着当转换到自动模式( MAN_ON=0MAN_ON=0 )后,不会引起操作值的突然)后,不会引起操作值的突然改变。改变。

●● 44.. 44 .. 3 PID3 PID 指令的使用注意事项指令的使用注意事项(( 88 )输出限幅)输出限幅利用功能利用功能 LMNLIMITLMNLIMIT 可以将输出值限定在所选择的范围内,即上限可以将输出值限定在所选择的范围内,即上限值为值为 LMN_HLMLMN_HLM ,下限值为,下限值为 LMN_LLMLMN_LLM ,输出超界情况会在,输出超界情况会在 QLMQLMN_HLMN_HLM (超上限)和(超上限)和 QLMN_LLMQLMN_LLM (超下限)信号输出位上表现出(超下限)信号输出位上表现出来。来。(( 99 )控制器输出值的格式化)控制器输出值的格式化功能功能 LMN_NORMLMN_NORM 根据下面的公式将输出限幅后的根据下面的公式将输出限幅后的 LMNLIMITLMNLIMIT 的输的输出进行格式化后输出出进行格式化后输出 LMNLMN::LMNLMN==LMNLIMITLMNLIMIT 的输出的输出 ××LMN_FACLMN_FAC++LMN_OFFLMN_OFFLMN_FACLMN_FAC 为输出系数,为输出系数, LMN_OFFLMN_OFF 为输出偏移量,其默认值分别为为输出偏移量,其默认值分别为1.01.0 和和 00 。。(( 1010 )) LMNLMN 控制器输出值转换为控制器输出值转换为 I/OI/O格式的输出值格式的输出值功能功能 CRP_OUTCRP_OUT 将浮点数格式的输出值将浮点数格式的输出值 LMNLMN 根据下面的公式转化成根据下面的公式转化成能直接输出到外设能直接输出到外设 I/OI/O 的值:的值:LMN_PERLMN_PER= = LMNLMN×100/27648×100/27648(( 1111 )前馈控制)前馈控制扰动可以作为前馈信号从扰动可以作为前馈信号从 DISVDISV处输入。处输入。

●● 33 .. PIDPID 参数的设定参数的设定
PIDPID 调节器参数是根据控制对象的惯量来确定的。大惯量如调节器参数是根据控制对象的惯量来确定的。大惯量如大烘房的温度控制,一般大烘房的温度控制,一般 PP 可在可在 1010 以上,以上, I=3-10I=3-10 ,, D=1D=1 左左右。小惯量如一个小电机带一个水泵进行压力闭环控制,一右。小惯量如一个小电机带一个水泵进行压力闭环控制,一般只用般只用 PIPI 控制,控制, P=1-10P=1-10 ,, I=0.1-1I=0.1-1 ,, D=0D=0 ,这些要在现场,这些要在现场调试时进行修正,主要是靠经验及对生产工艺的熟悉,参考调试时进行修正,主要是靠经验及对生产工艺的熟悉,参考对测量值的跟踪与设定值的曲线,从而调整对测量值的跟踪与设定值的曲线,从而调整 PP 、、 II 、、 DD 的大的大小。小。下面具体说明经验法的整定步骤:下面具体说明经验法的整定步骤:(( 11 )让调节器参数的积分系数)让调节器参数的积分系数 I=0I=0 ,微分系数,微分系数 D=0D=0 ,控制,控制系统投入闭环运行,由小到大改变比例系数系统投入闭环运行,由小到大改变比例系数 PP ,让扰动信号,让扰动信号作阶跃变化,观察控制过程,直到获得满意的控制过程为止。作阶跃变化,观察控制过程,直到获得满意的控制过程为止。(( 22 )取比例系数)取比例系数 PP 为当前的值乘以为当前的值乘以 0.830.83 ,由小到大增加积,由小到大增加积分系数分系数 II ,同样让扰动信号作阶跃变化,直至得到满意的控,同样让扰动信号作阶跃变化,直至得到满意的控制过程。制过程。

●● 33 .. PIDPID 参数的设定参数的设定
(( 33 )积分系数)积分系数 II 保持不变,改变比例系数保持不变,改变比例系数 PP ,观察控制过程,观察控制过程有无改善,如有改善则继续有无改善,如有改善则继续调整,直到满意为止。否则,将原调整,直到满意为止。否则,将原比例系数比例系数 PP 增大一些,再调整积分系数增大一些,再调整积分系数 II ,力求改善控制过程。,力求改善控制过程。如此反复试凑,直到找到满意的比例系数如此反复试凑,直到找到满意的比例系数 PP 和积分系数和积分系数 II 为止。为止。(( 44 )引入适当的微分系数)引入适当的微分系数 DD ,此时可适当增大比例系数,此时可适当增大比例系数 PP 和和积分系数积分系数 II 。和前述步骤相同,微分系数的整定也需反复调整,。和前述步骤相同,微分系数的整定也需反复调整,直到控制过程满意为止。直到控制过程满意为止。需要注意的是:仿真系统所采用的需要注意的是:仿真系统所采用的 PIDPID 调节器与传统的工业调节器与传统的工业 PIPIDD 调节器有所不同,其各个参数之间是相互隔离的,因而互不调节器有所不同,其各个参数之间是相互隔离的,因而互不影响,用其观察调节规律十分方便。影响,用其观察调节规律十分方便。经验法实质上是一种试凑法,它是在生产实践中总结出来的行经验法实质上是一种试凑法,它是在生产实践中总结出来的行之有效的方法,并在现场中得到了广泛的应用。经验法简单可之有效的方法,并在现场中得到了广泛的应用。经验法简单可靠,但需要有一定的现场运行经验,整定时易带有主观片面性。靠,但需要有一定的现场运行经验,整定时易带有主观片面性。当采用当采用 PIDPID 调节器时,由于有多个整定参数,反复试凑的次数调节器时,由于有多个整定参数,反复试凑的次数增多,因此增加了得到最佳整定参数的难度。增多,因此增加了得到最佳整定参数的难度。

●● 44.. 44.. 4 PID4 PID 指令对温度的控制编程 指令对温度的控制编程 PIDPID 指令每隔一定时间运行一次,其间隔时间根据工程运行情指令每隔一定时间运行一次,其间隔时间根据工程运行情况可作修改,一般放在定时循环中断如况可作修改,一般放在定时循环中断如 OB35OB35中调用。中调用。(( 11)在启动时执行的组织块)在启动时执行的组织块 OB100OB100 中调用初始化值,程序如中调用初始化值,程序如下:下:S DB2.DBX 0.0 //S DB2.DBX 0.0 // 重启动重启动 PIDPID ,复位,复位 PIDPID 内部参数内部参数R DB2.DBX 0.0 //R DB2.DBX 0.0 //进入正常运行进入正常运行(( 22 )在)在 OB35OB35 中调用连续中调用连续 PIDPID 控制功能块控制功能块 SFB41SFB41 。。 OB35OB35执行的时间间隔即执行的时间间隔即 PIDPID 控制器运行的周期,在控制器运行的周期,在 CPUCPU 属性设置对属性设置对话框的循环中断选项卡中设置,最大为话框的循环中断选项卡中设置,最大为 10000ms10000ms ,如图,如图 4-204-20所示设置为所示设置为 1S1S 。。调用调用 SFB41SFB41 应指定相应的背景数据块,在应指定相应的背景数据块,在 OOB35B35 中插入中插入 SFB41SFB41 时指定背景数据块为时指定背景数据块为 DB2DB2 ,系统会自动提,系统会自动提问是否创建该背景数据块,选择建立。问是否创建该背景数据块,选择建立。背景数据块背景数据块 DB2DB2的内容如图的内容如图 4-214-21。。

●● 图图 4-204-20定时循环中断定时循环中断 OB35OB35 属性设置属性设置

●● 图图 4-214-21背景数据块背景数据块 DB2DB2

●● 图图 4-224-22OB35OB35组织块中插入组织块中插入 SFB41SFB41并指定输入参数,如图并指定输入参数,如图 4-224-22所示。所示。

●● 44.. 44.. 4 PID4 PID 指令对温度的控制编程 指令对温度的控制编程 SP_INTSP_INT 设定为浮点数格式的温度控制目标值。由于模拟量模设定为浮点数格式的温度控制目标值。由于模拟量模块采集的是块采集的是 I/OI/O 格式的整型数,因此连接至格式的整型数,因此连接至 PV_PERPV_PER ,将开关,将开关PVPER_ONPVPER_ON 置为置为 ONON ,这样通过功能,这样通过功能 CRP_INCRP_IN 和和 PV_NORMPV_NORM就能直接将温度采集的整型数值转换为浮点数格式的数值,该就能直接将温度采集的整型数值转换为浮点数格式的数值,该值即为值即为 PVPV ,请参阅图,请参阅图 4-194-19 ;也可以通过专门的功能如;也可以通过专门的功能如 FC105FC105进行数值转换。进行数值转换。

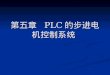
●● 44 .. 5 5 实训九:利用实训九:利用 PIDPID 进行温度控制进行温度控制 44.. 55.. 1 1 温度控制系统的控制要求温度控制系统的控制要求本温度控制系统实现对如图本温度控制系统实现对如图 4-234-23 所示的实验水箱进所示的实验水箱进行恒温控制,采用行恒温控制,采用 PIDPID闭环控制方式。通过电磁阀闭环控制方式。通过电磁阀SV1SV1 控制一路冷水进、控制一路冷水进、 SV2SV2 控制一路热水出,以加控制一路热水出,以加快水箱温度的变化;搅拌电机快水箱温度的变化;搅拌电机 MM使水箱中水的温度使水箱中水的温度保持均匀,保证铂电阻保持均匀,保证铂电阻 TSTS 测温的准确;加热器测温的准确;加热器 HH用来加热水温,其工作功率受用来加热水温,其工作功率受 PIDPID 调节,具体地受调节,具体地受双向晶闸管的调节。当水箱设备确定后,双向晶闸管的调节。当水箱设备确定后, PIDPID 参数参数主要受进出水流量、水箱水温设定控制温度、室温主要受进出水流量、水箱水温设定控制温度、室温等因素影响。等因素影响。

●● 图图 4-234-23实验水箱温度控制系统实验水箱温度控制系统

●● 表表 4-134-13
表表 4-134-13 实验水箱温度控制系统符号描述实验水箱温度控制系统符号描述

●● 图图 4-244-24
系统系统 PIDPID闭环控制的原理图见图闭环控制的原理图见图 4-244-24,温度设定值与铂电阻测量的温,温度设定值与铂电阻测量的温度反馈值之差(度反馈值之差( errorerror)经比例)经比例 PP 、积分、积分 II 、微分、微分 DD运算后,输出一运算后,输出一个模拟信号去控制加热器工作。个模拟信号去控制加热器工作。 系统系统 PIDPID闭环控制原理图闭环控制原理图

●● 44.. 55.. 33 温度控制系统的资源分配温度控制系统的资源分配本温度自动控制系统的核心是本温度自动控制系统的核心是 PLCPLC 及其及其 PIDPID 自动控制,其自动控制,其 PLCPLC配置为:配置为:硬件:硬件: SIEMENS S7-300SIEMENS S7-300 系列之系列之 CPU313C CPUCPU313C CPU ,自带,自带 2424 路路 DIDI/16DO/5AI/2AO/16DO/5AI/2AO 。。软件:软件: STEP 7STEP 7 ,, V5.2V5.2。。根据图根据图 4-254-25温度控制系统所示,各控制元件对应温度控制系统所示,各控制元件对应 I/OI/O变量的资源变量的资源配置如表配置如表 4-154-15。。

●● 图图 4-254-25温度控制系统的电气控制原理图温度控制系统的电气控制原理图
图中符号意义除表图中符号意义除表 4-134-13 已注外,其余已注外,其余如表如表 4-144-14 。。

●● 表表 4-144-14
实验水箱温度控制系统实验水箱温度控制系统电气控制原理图电气控制原理图符号描述符号描述

●● 44.. 55.. 33 温度控制系统的资源分配温度控制系统的资源分配本温度自动控制系统的核心是本温度自动控制系统的核心是 PLCPLC 及其及其 PIDPID自动自动控制,其控制,其 PLCPLC 配置为:配置为:硬件:硬件: SIEMENS S7-300SIEMENS S7-300 系列之系列之 CPU313C CPUCPU313C CPU ,,自带自带 2424 路路 DI/16DO/5AI/2AODI/16DO/5AI/2AO 。。软件:软件: STEP 7STEP 7 ,, V5.2V5.2 。。根据图根据图 4-254-25温度控制系统所示,各控制元件对应温度控制系统所示,各控制元件对应 I/I/OO 变量的资源配置如表变量的资源配置如表 4-154-15 。。

●● 表表 4-154-15温度控制系统的温度控制系统的 I/OI/O资源配置表资源配置表

●● 44.. 55.. 4 STEP74 STEP7创建温度控制项目创建温度控制项目
本节主要讨论在本节主要讨论在 STEP 7STEP 7 环境中创建上面的温度控制项目,环境中创建上面的温度控制项目,采用用户定制的方法,项目名称为采用用户定制的方法,项目名称为 ProTempCtrProTempCtr 。。创建步骤如下:创建步骤如下:(( 11 )打开)打开 SIMATIC ManagerSIMATIC Manager 管理器,如果已有项目,管理器,如果已有项目,则用菜单“则用菜单“ File”File” 下的“下的“ Close”Close”命令将其关闭。在菜命令将其关闭。在菜单“单“ File”File” 下选择“下选择“ New”,New”, 打开“打开“ New Project”New Project”对对话框,在“话框,在“ Name”Name”中输入中输入 ProTempCtrProTempCtr,“,“ Type”Type”中选择“中选择“ Project”,“Storage location”Project”,“Storage location” 中选择所建中选择所建工程的存放路径例如工程的存放路径例如 D:\TemCtrD:\TemCtr,如图,如图 4-264-26所示。单所示。单击击 OKOK 退出该对话框。退出该对话框。

●● 图图 4-264-26
创建温度控制项目工程创建温度控制项目工程

●● 44.. 55.. 4 STEP74 STEP7创建温度控制项目创建温度控制项目
(( 22 )这时)这时 SIMATIC ManagerSIMATIC Manager 中已生成一个空的项目。右击中已生成一个空的项目。右击空白处,弹出插入新对象“空白处,弹出插入新对象“ Insert New Object”Insert New Object” 的弹出式菜的弹出式菜单,如图单,如图 4-274-27 ,我们选择插入“,我们选择插入“ SIMATIC 300 Station”SIMATIC 300 Station” 。。点击“点击“ +”+” 号展开,这时项目号展开,这时项目 ProTempCtrProTempCtr 下多了一项下多了一项 SIMASIMATIC 300TIC 300 (( 11 ),选中),选中 SIMATIC 300SIMATIC 300 (( 11 ),双击右侧浏览),双击右侧浏览区域中的“区域中的“ Hardware”Hardware” ,打开一个空白的“,打开一个空白的“ HW Config”HW Config”对话框。对话框。(( 33 )在“)在“ HW Config”HW Config” 对话框中展开右上角窗口中的“对话框中展开右上角窗口中的“ SISIMATIC 300”MATIC 300” ,再展开“,再展开“ RACK 300”RACK 300” 项,将项,将 RailRail 拖至左边拖至左边空白区,即插入了一个基架。接着依次展开“空白区,即插入了一个基架。接着依次展开“ CPU-300”CPU-300” 、、““ CPU 313C”CPU 313C” ,将“,将“ 6ES7 313-5BE00-0AB0”6ES7 313-5BE00-0AB0” 拖至基架第拖至基架第二行,结果如图二行,结果如图 4-284-28 。在菜单“。在菜单“ Station”Station” 下选择“下选择“ Save aSave and Compile”nd Compile” ,运行后系统自动在,运行后系统自动在 SIMATIC ManagerSIMATIC Manager 的项的项目目 ProTempCtrProTempCtr 下生成了下生成了 CPU313CCPU313C 项,其中包括项,其中包括 BlocksBlocks 项,项,见图见图 4-294-29。。

●● 44.. 55.. 4 STEP74 STEP7创建温度控制项目创建温度控制项目
至此,项目就创建完成了。至此,项目就创建完成了。当然,完全可以采用向导等其它方法来创建项目。当然,完全可以采用向导等其它方法来创建项目。

●● 图图 4-274-27
插入插入 SIMATIC 300 StationSIMATIC 300 Station对象对象

●● 图图 4-284-28
插入插入 CPU313CCPU313C 对象对象

●● 图图 4-294-29图图 4-29 4-29 含有含有 BlocksBlocks 项的界面项的界面

●●44.. 55.. 5 5 通过通过 HW ConfigHW Config进行硬件组进行硬件组态态
如图如图 4-284-28 ,我们可以对,我们可以对 S7-300 PLCS7-300 PLC 进行硬件组态,如添加进行硬件组态,如添加数字量输入输出模块、模拟量输入输出模块及通讯模块等,方数字量输入输出模块、模拟量输入输出模块及通讯模块等,方法同上面添加法同上面添加 CPU313CCPU313C 模块的方法相同,即只要在图模块的方法相同,即只要在图 4-284-28右侧的设备库中展开需要的模块即可。也可以对右侧的设备库中展开需要的模块即可。也可以对 CPUCPU 及输入及输入输出模块的属性进行设置。输出模块的属性进行设置。本系统采用的本系统采用的 CPUCPU 模块本身已具有模块本身已具有 2424 路开关量输入、路开关量输入、 1616 路路开关量输出、开关量输出、 55 路模拟量输入和路模拟量输入和 22 路模拟量输出,完全可以完路模拟量输出,完全可以完成系统控制功能的要求,因此不必再添加其它开关量及模拟量成系统控制功能的要求,因此不必再添加其它开关量及模拟量模块。模块。CPU313CCPU313C 模块的具体模块的具体 I/OI/O 配置为:配置为: DI24×DC24V/16DO×DDI24×DC24V/16DO×DC24V/AI5×12Bit/AO2×12BitC24V/AI5×12Bit/AO2×12Bit ,, AIAI 第第 0-30-3 通道为电压或电通道为电压或电流输入,第流输入,第 44通道为二线制的通道为二线制的 RR 或或 RTDRTD (( Pt100Pt100 )方式。)方式。根据表根据表 4-154-15 的的 I/OI/O 资源分配表,需在“资源分配表,需在“ HW Config”HW Config” 对话框对话框中对中对 CPU313CCPU313C模块进行组态,具体步骤如下:模块进行组态,具体步骤如下:

●●44.. 55.. 5 5 通过通过 HW ConfigHW Config进行硬件组进行硬件组态态
(( 11 )在图)在图 4-284-28 对话框中双击“对话框中双击“ DI24/DO16”DI24/DO16” 栏,弹出属性栏,弹出属性对话框,有“对话框,有“ General”General” 通用、“通用、“ Addresses”Addresses” 地址、“地址、“ InInputs”puts” 输入三个属性设置页。在通用页中可以更改名称,缺省输入三个属性设置页。在通用页中可以更改名称,缺省的即为“的即为“ DI24/DO16”DI24/DO16” ,在地址页中可以重新设置开关量输,在地址页中可以重新设置开关量输入输出模块的地址,在输入页面可以对硬件中断触发方式、输入输出模块的地址,在输入页面可以对硬件中断触发方式、输入延时时间参数进行设置。图入延时时间参数进行设置。图 4-304-30 为修改地址的页面,系统为修改地址的页面,系统缺省分配地址为开关量输入范围缺省分配地址为开关量输入范围 124-126124-126 ,开关量输出范围,开关量输出范围 1124-12524-125 ,把“,把“ System selection”System selection” 复选框中的钩去掉,即可复选框中的钩去掉,即可以在“以在“ Start”Start” 中对地址进行修改,“中对地址进行修改,“ End”End” 中的内容自动生中的内容自动生成。在“成。在“ Inputs”Inputs” 、“、“ Outputs”Outputs” 中的“中的“ Start”Start” 框中分别框中分别输入地址输入地址 00 、、 00 ,则地址自动生成为:开关量输入范围,则地址自动生成为:开关量输入范围 0-20-2 ,,开关量输出范围开关量输出范围 0-10-1。。(( 22 )双击“)双击“ AI5/AO2”AI5/AO2” 栏,同(栏,同( 11 )的方法将系统缺省分)的方法将系统缺省分配的地址修改为:模拟量输入范围配的地址修改为:模拟量输入范围 3-123-12,模拟量输出范围,模拟量输出范围 3-63-6 。。以上两步执行后的结果画面即如图以上两步执行后的结果画面即如图 4-14-1所示。所示。

●●44.. 55.. 5 5 通过通过 HW ConfigHW Config进行硬件组进行硬件组态态
(( 33 )将双击“)将双击“ AI5/AO2”AI5/AO2” 后弹出的对话框切换至“后弹出的对话框切换至“ InputInputs”s” 页,在温度单元选择为“页,在温度单元选择为“ Degrees Celsius”Degrees Celsius” 即摄氏温度,即摄氏温度,第第 44 通道的测量类型选择为“通道的测量类型选择为“ RTD-2L”RTD-2L” ,测量范围自动调整,测量范围自动调整为“为“ Pt100 std”Pt100 std” 且不可修改。如图且不可修改。如图 4-314-31 所示。所示。(( 44 )将上面的对话框切换至“)将上面的对话框切换至“ Outputs”Outputs” 页,将第页,将第 00 通道通道的输出量程修改为的输出量程修改为 0-10V0-10V。。

●● 图图 4-304-30设置开关量输入输出地址设置开关量输入输出地址

●● 图图 4-314-31修改模拟量输入模块的量程修改模拟量输入模块的量程

●●44.. 55.. 5 5 通过通过 HW ConfigHW Config进行硬件组进行硬件组态态
修改修改 CPU313CCPU313C 属性的步骤如下:属性的步骤如下:(( 11 )在图)在图 4-284-28 对话框中双击“对话框中双击“ CPU 313C”CPU 313C” ,弹出,弹出 CCPU 313CPU 313C 的属性对话框,见图的属性对话框,见图 4-324-32 。点击“。点击“ PropertieProperties”s” ,弹出修改,弹出修改 CPUCPU 地址的对话框,如图地址的对话框,如图 4-334-33 ,在“,在“ AAddress”ddress” 中可选择地址,缺省的地址是中可选择地址,缺省的地址是 22。。(( 22 )对定时循环中断组织块)对定时循环中断组织块 OB35OB35 进行属性设置,选进行属性设置,选择图择图 4-224-22 中“中“ Cyclic Interrupt”Cyclic Interrupt” 页,中断时间设置为页,中断时间设置为1000010000 ,单位为,单位为 msms,如图,如图 4-204-20 所示。所示。(( 33 )其它选项可根据需要进行设置。)其它选项可根据需要进行设置。最后需对组态的内容进行保存。最后需对组态的内容进行保存。

●● 图图 4-324-32修改修改 CPU 313CCPU 313C 的属性的属性

●● 图图 4-334-33CPU 313CCPU 313C地址修改对话框地址修改对话框

●● 44.. 55.. 6 6 通过通过 LAD/STL/FBDLAD/STL/FBD 进行编程进行编程
系统编程用到组织块系统编程用到组织块 OB100OB100 、、 OB35OB35 、、 OB1OB1 。在。在 OB1OB10000 中对参数进行初始化,如对中对参数进行初始化,如对 PIDPID 控制模块控制模块 SFB41SFB41 的初的初始化,循环定时中断始化,循环定时中断 OB35OB35 主要对主要对 SFB41SFB41 进行操作,这进行操作,这两部分内容已在两部分内容已在 4.44.4 节温度控制编程部分作了介绍。这里节温度控制编程部分作了介绍。这里主要针对上述温度主要针对上述温度 PIDPID 闭环控制系统,在闭环控制系统,在 4.44.4 节内容的节内容的基础上进行补充。基础上进行补充。系统中系统中 I0.0I0.0 、、 I0.1I0.1 、、 I0.2I0.2 、、 I0.3I0.3 、、 I0.4I0.4 为运行状态或为运行状态或故障信号,一般送上位机组态软件如故障信号,一般送上位机组态软件如 WinCCWinCC 或触摸屏中或触摸屏中进行监视。进行监视。 I1.0I1.0 、、 I1.1I1.1 、、 I1.2I1.2 、、 I1.3I1.3 为为 PLCPLC 控制电机、控制电机、加热器、电磁阀加热器、电磁阀 SV1SV1 、、 SV2SV2 等工作的开关信号,当采用等工作的开关信号,当采用WinCCWinCC或触摸屏控制时,可用内存变量代替。或触摸屏控制时,可用内存变量代替。

●● 组织块组织块 OB1OB1中的主程序中的主程序

●● 组织块组织块 OB1OB1中的主程序中的主程序水箱水温测量值水箱水温测量值 I/OI/O 格式转换为浮点数格式,其中格式转换为浮点数格式,其中 IW11IW11 为铂电阻采为铂电阻采集的模拟值,集的模拟值, DB2.DBD10DB2.DBD10 为为 SFB41SFB41 背景数据块背景数据块 DB2DB2 的数据单元,的数据单元,对应对应 PIDPID 的输入的输入 PV_INPV_IN 。。
在组织块在组织块 OB35OB35 中中 SFB41SFB41系统功能块的输出系统功能块的输出 LMN_PERLMN_PER (( DB2.DDB2.DBD76BD76 )为)为 I/OI/O 格式的输出,数值范围为格式的输出,数值范围为 0-276480-27648 ,可以直接赋值,可以直接赋值给模拟量输出模块(地址给模拟量输出模块(地址 QW3QW3 )) ,,对应电压输出范围为对应电压输出范围为 0-10V0-10V ,,OB1OB1 中的程序为:中的程序为:

●● 组织块组织块 OB1OB1中的主程序中的主程序
以上是基本的以上是基本的 LADLAD 程序,可根据系统功能的要求,在此基础上对程程序,可根据系统功能的要求,在此基础上对程序进行扩展。序进行扩展。

●● 44.. 55.. 7 7 下载调试下载调试 PLCPLC 硬件组态和软件编程完成后,必须将其下载至硬件组态和软件编程完成后,必须将其下载至 PLCPLC 中,中, PLCPLC 才才能运行。前提是能运行。前提是 PLCPLC 与与 PCPC 机的机的 STEP 7STEP 7 环境已建立良好的通讯,特环境已建立良好的通讯,特别要注意别要注意 STEP 7STEP 7 与与 PLCPLC 中地址的一致。中地址的一致。(( 11)硬件下载)硬件下载在图在图 4-254-25 中点击 按提示即可将 中点击 按提示即可将 PLCPLC硬件信息下载至硬件信息下载至 PLCPLC 中。中。(( 22)软件下载)软件下载本系统中软件下载包括下载组织块本系统中软件下载包括下载组织块 OB1OB1、、 OB35OB35、、 OB100OB100 ,背景数,背景数据块据块 DB2DB2 ,功能,功能 FC105FC105 ,系统功能块,系统功能块 SFB41SFB41等内容,如图等内容,如图 4-314-31 所所
示。 示。

●●44.. 55.. 7 7 下载调试下载调试(图(图3-4) 3-4) 软件下载的内容软件下载的内容

●● 44.. 55.. 7 7 下载调试下载调试 可以对图可以对图 4-344-34 中的对象一个一个下载,方法为选中所需下载的中的对象一个一个下载,方法为选中所需下载的对象后点击 ,按提示将信息下载至对象后点击 ,按提示将信息下载至 PLCPLC 中,也可以单击鼠标右中,也可以单击鼠标右键,选中键,选中 PLCPLC 菜单下的“菜单下的“ Download”Download” 进行下载。进行下载。也可以一次将所有程序下载至也可以一次将所有程序下载至 PLCPLC 中,方法为右击图中,方法为右击图 4-344-34 中的中的““ Blocks”Blocks” 项,然后点击 ,按提示将信息下载至项,然后点击 ,按提示将信息下载至 PLCPLC 中,也中,也可以单击鼠标右键,选中可以单击鼠标右键,选中 PLCPLC 菜单下的“菜单下的“ Download”Download” 进行下进行下载。载。(( 33 )系统调试)系统调试需对需对 PIDPID 控制器设置初值控制器设置初值 SP_INTSP_INT ,即水箱期望控制的温度值,,即水箱期望控制的温度值,在图在图 4-354-35 的的 DB2.DBD6DB2.DBD6 单元中进行设置。该对话框通过点击单元中进行设置。该对话框通过点击图形编辑器中“图形编辑器中“ PLC”PLC” 菜单下的“菜单下的“ Monitor/Modify VariableMonitor/Modify Variables”s” 选择项打开。选择项打开。PIDPID 参数的设置可参照4参数的设置可参照4 .3.3 节中的方法进行,参数节中的方法进行,参数 PP 、、 II 、、 DD分别在图分别在图 4-354-35 的的 DB2.DBD20DB2.DBD20 、、 DB2.DBD24DB2.DBD24 、、 DB2.DBD28DB2.DBD28单元中进行设置。当然,在本系统中,完全可以考虑采用单元中进行设置。当然,在本系统中,完全可以考虑采用 PIPI 调调节的方式。节的方式。

●● 图图 4-354-35 调试参数的输入窗口调试参数的输入窗口

●● 图图 4-354-35 当采用当采用 WinCCWinCC 或触摸屏对该温度控制系统进行监控时,或触摸屏对该温度控制系统进行监控时,期望温度值、期望温度值、 PIDPID 参数等的设定就可根据参数等的设定就可根据 WinCCWinCC或触摸或触摸屏的屏的 HMIHMI (( Human Machine InterfaceHuman Machine Interface)人机操作界)人机操作界面进行设置或更改,非常方便。面进行设置或更改,非常方便。