Embed Size (px)
Citation preview

PCT/PC
Press series
CATALOG No.369
プレスシリーズ
新製品

1
ELECTRIC ACTUATORS Press series
PCTは、ボールねじを用いたシリンダタイプの電動アクチュエータです。
電動アクチュエータプレスシリーズ
PCT
サーボモータ
モータブラケット
フランジ
ベース
ロッド
給脂フタ
209-0405-P01-22.indd 1209-0405-P01-22.indd 1 12/11/19 13:5112/11/19 13:51

2
ELECTRIC ACTUATORSPress series
特長
プレス用アクチュエータアキシアル方向荷重の剛性に特化したことにより小型の圧入、かしめ機などの用途に使用可能です。
エアシリンダから電動への置き換えで高タクト化、高精度化、多点位置決めのメリットにより装置の生産性向上に貢献します。
電動化
ボールねじリード及び、モータ容量の組合せにより定格推力が約100~800Nの5種類のバリエーションからニーズに合わせた製品選択が可能です。
豊富なバリエーション
PCTはフランジでの取付、本体部のTスロットを使用することで柔軟な取付姿勢に対応可能です。また、モータは直結、モータ折り返しを選択可能です。(ロッド部にラジアル荷重およびモーメント荷重が負荷される場合は別途、案内を設けてください。)
自由な装置設計
折り返しモータブラケット
エコノミーシリーズEC
30201050
100
200
300
500
750
1000
定格推力(N)
ロッド径(mm)
プレスシリーズPCT
モータ折り返しタイプ外観図
209-0405-P01-22.indd 2209-0405-P01-22.indd 2 12/11/19 13:5112/11/19 13:51

3
ELECTRIC ACTUATORS Press series
コンパクト・高精度・高剛性サーボプレス用アクチュエータ
PCは精密ボールねじのナットとボールスプライン軸を一体構造とすることで、コンパクトで高推力を実現したサーボプレス用アクチュエータです。
電動アクチュエータプレスシリーズ
PC
サーボモータ
タイミングベルト
ボールねじ軸 回転ベアリングボールねじナット兼ボールスプライン軸
ボールスプラインナット
209-0405-P01-22.indd 3209-0405-P01-22.indd 3 12/11/19 13:5112/11/19 13:51

4
ELECTRIC ACTUATORSPress series
特長
精密ボールねじのナットとボールスプライン軸を一体構造とする事で、全長の大幅短縮を実現し、装置の省スペース化に貢献します。
コンパクト構造
全長を約 30%サイズダウン (ストローク50mm時)(当社比)
ボールねじ軸径を最大限に太くし、負荷回路数を多くすることで、高負荷容量を実現しています。
高負荷容量
高剛性案内にはボールスプラインLF形を採用しているため、すきまがなく軽く動き、剛性の高い案内が得られます。
耐圧縮荷重に特化した構造圧縮荷重に強いベアリング配列にしています。
送り機構には精密ボールねじを採用しているため、高い送り精度が得られます。
高精度送り
PC 従来品
ストローク
全長差
ストローク
スト
ク
全長
全長
ボールねじナット兼ボールスプライン軸
ボールねじ軸
ボールねじナット
ナットハウジング
ボールスプライン軸
ボールスプラインナット
209-0405-P01-22.indd 4209-0405-P01-22.indd 4 12/11/19 13:5112/11/19 13:51

5
ELECTRIC ACTUATORS Press series
コントローララインナップ
プレスシリーズ対応表
動作方式 ポジションステップデータ数※1 512入力電源 DC24V
ネットワーク※2 -※1 機能モードによって変わります。※2 ネットワーク対応はTHK電動アクチュエータ
サイトをご覧ください。(http://www.ea-thk.com/)
動作方式 ポジションステップデータ数※1 512
入力電源※2
主回路単相AC100V単相AC200V
制御回路単相AC100V単相AC200V
ネットワーク※3 -※1 機能モードによって変わります。※2 モータ定格出力750Wを選択した場合は、電源電圧は
200V仕様のみとなります。※3 ネットワーク対応はTHK電動アクチュエータサイトをご覧
ください。(http://www.ea-thk.com/)
TLC THC
用途・目的に合わせて6つのモードを用意しております。
機能モード 概 要 ステップデータ数 押付け動作
多点位置決めタイプ
0 : ポジション64タイプ64点の多点位置決め動作
エリア出力有り、Pエリア出力有り64 ○
1 : 外部入力教示タイプ64点の多点位置決め動作I/Oによる外部教示モード
エリア出力無し、Pエリア出力有り64 -
2 : ポジション256タイプ256点の多点位置決め動作
エリア出力無し、Pエリア出力有り256 ○
3 : ポジション512タイプ512点の多点位置決め動作
エリア出力無し、Pエリア出力無し512 ○
電磁弁タイプ
4 : ソレノイドモード1タイプ7点の多点位置決め動作直接移動指令入力
エリア出力有り、Pエリア出力有り7 ○
5 : ソレノイドモード2タイプ
3点の多点位置決め動作直接移動指令入力
位置検知オートスイッチ出力エリア出力、Pエリア出力有り
3 -
機能モード一覧
形番 PCT20(R) PCT25(R) PC30 PC40
組合せ制御機器 TLC THC
モータ定格出力 50W 100W 200W 400W 750W
動作方式 ポジション(押付け動作)
制御軸数 1
入力電源 DC24V AC100VまたはAC200V AC200V
エンコーダ方式 アブソリュート(インクリメンタル)
制御軸数 1
ステップデータ数※1 512
・選べる機能モード・アラーム履歴最大50件(パワーON含む)・アブソリュート対応
※ネットワーク対応はTHK電動アクチュエータサイトをご確認ください。(http://www.ea-thk.com/)
※1 機能モードによって変わります。
209-0405-P01-22.indd 5209-0405-P01-22.indd 5 12/11/19 13:5112/11/19 13:51

6
ELECTRIC ACTUATORSPress series
仕様一覧表
25kN
10kN
5kN
2.5kN
1kN
500
250
100
0 5 10 20 30 60
プレスシリーズPCT
エコノミーシリーズEC
プレスシリーズPC
ロッド径(mm)
定格推力(N)
注)発生推力で常用推力以上瞬時最大推力の範囲で押し付け動作をされる場合はTHKまでお問い合わせください。
形番モータ定格出力[W]
定格推力[N]
定格速度[mm/s]
最大ストローク[mm]
発生推力[N]
0 100 250 500 1000 1500 2500 5000PCT20-06N
50 133300
200 130PCT20R-06NPCT25-06N
100266
300
260PCT25R-06NPCT25-04N
400 200 400PCT25R-04NPCT25-06N
200536 300 500
PCT25R-06NPCT25-04N
804 200 800PCT25R-04N
常用推力 瞬時最大推力
402
796
1194
1600
2400
形番モータ定格出力[kW]
定格推力[kN]
定格速度[mm/s]
最大ストローク[mm]
発生推力[kN]
0 1 2 3 7.5 10 15 20 30 40PC30-06A 0.4 1.6 210
250
1.6PC40-06B 0.75 3.2 200 3.2PC40H-08C 1 5.6 150 5.6PC50-06D 1.5 8.4 150 8.4PC60-10E 2 10.9 150 10.9PC60H-10F 3.5 17.8 160 17.8
常用推力 瞬時最大推力
3.36.4
11.216.8
21.835.6
シリンダタイプ製品ラインナップ範囲
注)発生推力で常用推力以上瞬時最大推力の範囲で押し付け動作をされる場合はTHKまでお問い合わせください。
209-0405-P01-22.indd 6209-0405-P01-22.indd 6 12/11/19 13:5112/11/19 13:51

7
ELECTRIC ACTUATORS Press series
形番構成(サーボドライバコントローラTLC/THC組合せ)
オプション:モータ折返し方向又は給脂位置
形番①
リード、減速比②
ストローク③
制御機器⑤
モータ定格出力⑦
原点方式⑧
電源電圧⑨
PCT20PCT20R 06N 0050~0200mm TL:TLC M05
M05B 50WD00:モータ側または
R00:反モータ側
DC:DC24V
PCT25PCT25R
06Nまたは04N
0050~0300mm TH:THC
M10M10B 100W D1:100V
またはD2:200VM20
M20B 200W
PC30 06A0050~0250mm TH:THC
M40M40B 400W
D00モータ側
D1:100VまたはD2:200V
PC40 06B M75M75B 750W D2:200V
組合せ一覧
L(左向き)
D(下向き)
R(右向き)
給脂位置
L (左向き)
D (下向き)
R (右向き)
オプション選択は下図より選択ください。PCT:モータ直結もしくは折返しを選択PC:給脂位置を選択
Rはモータ折返しを表します。
ケーブル向き選択は右図より選択ください。
形番によりリード・減速比を表す記号になります以下の組合せ一覧より選択してください。
形番 リード、減速比 ストローク オプション 制御機器 モータケーブル向き
PCT25R - 0008 - 0300 - R - TH - R /① ② ③ ④ ⑤ ⑥
PCT20 04N 0050: 50mm N:直結 TL:TLC U:上
PCT25 06N 0100:100mm D:下 TH:THC D:下
PCT20R 06A 0150:150mm L:左 L:左
PCT25R 06B 0200:200mm R:右 R:右
PC30 0250:250mm
PC40 0300:300mm
(A側から見て)
PCTの場合折り返し方向の選択 PCの場合給脂位置を選択
A
209-0405-P01-22.indd 7209-0405-P01-22.indd 7 12/11/19 13:5112/11/19 13:51

8
ELECTRIC ACTUATORSPress series
モータケーブル向き 上 左 右記号 U L R
モータケーブル向き略図
(A側から見て)
モータケーブル向き(PCの場合)
直結時モータケーブル向き(PCT) 折返し時モータケーブル向き(PCT)
モータケーブル向きA
RL
U
形番によりモータ定格出力、原点方式、電源電圧は組合せ一覧より選択してください。
モータ、エンコーダ、ブレーキケーブルの種類、長さ選択ください。
モータ定格出力 原点方式 電源電圧 ケーブル種類、長さ
M20B D00 D2 F3
⑦ ⑧ ⑨ ⑩M05 : 50W D00:モータ側 DC:DC24V F3 :固定3m
M05B: 50W ブレーキ付き R00:反モータ側 D1:100V F5 :固定5m
M10 : 100W D2:200V FA :固定10m
M10B: 100W ブレーキ付き H3 :高屈曲3m
M20 : 200W H5 :高屈曲5m
M20B: 200W ブレーキ付き HA :高屈曲10m
M40 : 400W
M40B: 400W ブレーキ付き
M75 : 750W
M75B: 750W ブレーキ付き
U (上向き) D (下向き)
モータ取付方向(ケーブル向き本体側は不可)
R (右向き) (本図)L (左向き)
給脂位置 給脂位置
給脂位置給脂位置
(A側から見て)
A
A
209-0405-P01-22.indd 8209-0405-P01-22.indd 8 12/11/19 13:5112/11/19 13:51

9
ELECTRIC ACTUATORS Press series
記号末尾の「M」、「Y」はモータメーカーを示します。M:三菱電機㈱製Y :㈱安川電機製
PC形番構成(モータ、ドライバ組合せ)形番 リード、減速比 ストローク 給脂位置 適用モータ
(制御機器)モータケーブル
向きPC30 - 06A - 0050 - D - M040BM - U
① ② ③ ④ ⑤ ⑥PC30 06A 0050: 50mm D:下 M040M U:上
PC40 06B 0100:100mm L:左 M040BM(ブレーキ付) L :左
PC40H 08C 0150:150mm R:右 M040Y R:右
PC50 06D 0200:200mm M040BY(ブレーキ付)
PC60 10E 0250:250mm M075M
PC60H 10F M075BM(ブレーキ付)
M075Y
M075BY(ブレーキ付)
M085Y
M085BY(ブレーキ付)
M100M
M100BM(ブレーキ付)
M130Y
M130BY(ブレーキ付)
M150M
M150BM(ブレーキ付)
M180Y
M180BY(ブレーキ付)
M200M
M200BM(ブレーキ付)
M290Y
M290BY(ブレーキ付)
M350M
M350BM(ブレーキ付)
形番によりリード・減速比を表す記号になりますP.10組合せ一覧より選択してください。
システム構成
サーボパック PC本体
各種ケーブル(5m)モータ動力ケーブル、エンコーダケーブル、
ブレーキケーブル、モータ動力・ブレーキケーブルサーボアンプ
注)サーボアンプ/サーボパックのネットワーク対応品をご希望の場合は、THKまでお問い合わせください。
209-0405-P01-22.indd 9209-0405-P01-22.indd 9 12/11/19 13:5112/11/19 13:51

10
ELECTRIC ACTUATORSPress series
形番別、適用モータ(制御機器)一覧
モータケーブル向き 上 左 右記号 U L R
モータケーブル向き略図
(A側から見て)
モータケーブル向き
給脂位置 下 左 右記号 D L R
給脂位置略図
(ロッド側から見て)L R
D
給脂位置向き
モータケーブル向きA
RL
U
形番、リード、減速比 記号 サ-ボモ-タ サ-ボアンプ/サーボパック エンコーダケーブル(5m) モータケーブル(5m) ブレーキケーブル(5m)
PC30-06A
M040M HF-KP43MR-J3-40A MR-J3ENCBL5M-A1-L MR-PWS1CBL5M-A1-L
-M040BM HF-KP43B MR-BKS1CBL5M-A1-LM040Y SGMJV-04ADA21
SGDV-2R8A01A JZSP-CSP01-05-EJZSP-CSM02-05-E -
M040BY SGMJV-04ADA2C JZSP-CSM12-05-E※1
PC40-06B
M075M HF-KP73MR-J3-70A MR-J3ENCBL5M-A1-L MR-PWS1CBL5M-A1-L
-M075BM HF-KP73B MR-BKS1CBL5M-A1-LM075Y SGMJV-08ADA21
SGDV-5R5A01A JZSP-CSP01-05-EJZSP-CSM03-05-E -
M075BY SGMJV-08ADA2C JZSP-CSM13-05-E※1
PC40-08C
M100M HF-SP102MR-J3-100A MR-J3ENSCBL5M-L SVPM-J3HF3-A-5※2
-M100BM HF-SP102B SVPM-J3HF2B-A-5※2
M085Y SGMGV-09ADA21SGDV-7R6A01A JZSP-CVP01-05-E
JZSP-UVA101-05-E※3 -M085BY SGMGV-09ADA2C JZSP-UVA131-05-E※4
PC50-06D
M150M HF-SP152MR-J3-200AN MR-J3ENSCBL5M-L SVPM-J3HF3-A-5※2
-M150BM HF-SP152B SVPM-J3HF2B-A-5※2
M130Y SGMGV-13ADA21SGDV-120A01A JZSP-CVP01-05-E
JZSP-UVA101-05-E※3 -M130BY SGMGV-13ADA2C JZSP-UVA131-05-E※4
PC60-10E
M200M HF-SP202MR-J3-200AN MR-J3ENSCBL5M-L SVPM-J3HF5-A-5※2
-M200BM HF-SP202B SVPM-J3HF2B-A-5※2
M180Y SGMGV-20ADA21SGDV-180A01A JZSP-CVP01-05-E
JZSP-UVA301-05-E※3 -M180BY SGMGV-20ADA2C JZSP-UVA331-05-E※4
PC60-10F
M350M HF-SP352MR-J3-350A MR-J3ENSCBL5M-L SVPM-J3HF6-A-5※2
-M350BM HF-SP352B SVPM-J3HF2B-A-5※2
M290Y SGMGV-30ADA21SGDV-330A01A JZSP-CVP01-05-E
JZSP-UVA701-05-E※3 -M290BY SGMGV-30ADA2C JZSP-UVA731-05-E※4
※1 モータ動力ケーブルとブレーキケーブルが一体型※2 ㈱ミスミ製※3 安川コントロール㈱製※4 モータ動力ケーブルとブレーキケーブルのセット形番:安川コントロール㈱製注) サーボモータ、アンプ/サーボパック、ケーブル類の仕様詳細につきましては各メーカーのカタログにてご確認ください。
209-0405-P01-22.indd 10209-0405-P01-22.indd 10 12/11/19 13:5112/11/19 13:51

11
ELECTRIC ACTUATORS Press series
PCT20 プレスシリーズロッド径:20mm モータ直結
寸法
□45
ML
4-∅5.5通シ
∅8(給脂穴)
M10×1.25
∅20(ロッド径)
16(2面幅)
∅30h7 0-0.021
22
L1
57
(1.5)
90
(2.7)(2.7)
68
10(向きはベース面に対して不定)
3
□40
(2)
(1.5)
L210
L
50
42ストローク
※(5)
※(5)
3344.5
D25
本図はモータ直結タイプにてモータケーブル向き:右(R)の図です。
D部詳細
六角ナット
四角ナット
3.3
5.8
1.5
3.5
(7.8)
5.5
M3×0.5
2.4
176
M10×1.25
(19.6)
仕様※1 定格推力は、モータ定格トルク時の推力です。※2 瞬時最大推力は、許容アキシアル荷重によって制限されています。※3 定格速度は、モータの定格回転数時の速度です。※4 最大可搬質量は、定格速度時の質量です。※5 走行寿命は以下の条件の場合です。
条件:最大可搬質量を負荷(LMガイドを併用)、定格速度、加減速度0.3G
モータ定格出力 [W] 50ボールねじリード [mm] 6定格推力※1 [N] 133瞬時最大推力※2 [N] 402ブレーキ保持力 [N] 133定格速度※3 [mm/s] 300
繰り返し位置決め精度 [mm] ±0.010ロストモーション [mm] 0.1 ロッド不回転精度 [°] ±1
最大可搬質量※4
[kg]加減速度
水平 0.3G 20垂直 0.3G 5
走行寿命※5 [km] 5000
ストローク[mm](メカストッパ間ストローク)
50(60) 100(110) 150(160) 200(210)
最高速度※1
[mm/s]ボールねじリード6mm 300 230
寸法※2[mm]
L 319.5(355.1) 369.5(405.1) 419.5(455.1) 469.5(505.1)L1 260 310 360 410L2 200 250 300 350ML 59.5(95.1)
質量※2[kg]モータ無し(メカのみ) 1.4 1.6 1.8 2.1
モータ付き 1.9(2.1) 2.1(2.3) 2.3(2.5) 2.5(2.7)
※1 最高速度は、モータの回転数(3000min-1)もしくはボールねじの許容回転数によって制限される速度です。※2 ( )内はブレーキ付きの値です。
※ メカストッパまでのストロークです。
209-0405-P01-22.indd 11209-0405-P01-22.indd 11 12/11/19 13:5112/11/19 13:51

12
ELECTRIC ACTUATORSPress series
PCT20R プレスシリーズロッド径:20mm モータ折返し
寸法
※(5)
25 D
ストローク
50
L
(1.5)
10L1
42
37
3
M10×1.25
(1.9) (1.9)
(3)
□40
ML
(41)
※(5)
∅8(給脂穴)
4-∅5.5通シ
22
10(向きはベース面に対して不定)
∅20(ロッド径)
5768
∅30h7 0-0.021
16(2面幅)
(2)
33
(54)117
44.5
90
(1.5)
□45
本図はモータ折返しタイプにてモータケーブル向き:右(R)の図です。
四角ナット
六角ナット
D部詳細
3.3
5.8
1.5
3.5
2.4
(7.8)
5.5
M3×0.5
(19.6)
M10×1.25
176
仕様※1 定格推力は、モータ定格トルク時の推力です。※2 瞬時最大推力は、許容アキシアル荷重によって制限されています。※3 定格速度は、モータの定格回転数時の速度です。 ※4 最大可搬質量は、定格速度時の質量です。※5 走行寿命は以下の条件の場合です。
条件:最大可搬質量を負荷(LMガイドを併用)、定格速度、加減速度0.3G
モータ定格出力 [W] 50ボールねじリード [mm] 6定格推力※1 [N] 133
瞬時最大推力※2 [N] 402ブレーキ保持力 [N] 133定格速度※3 [mm/s] 300
繰り返し位置決め精度 [mm] ±0.010ロストモーション [mm] 0.1 ロッド不回転精度 [°] ±1
最大可搬質量※4
[kg]加減速度
水平 0.3G 20垂直 0.3G 5
走行寿命※5 [km] 5000
ストローク[mm](メカストッパ間ストローク)
50(60) 100(110) 150(160) 200(210)
最高速度※1
[mm/s]ボールねじリード6mm 300 230
寸法※2[mm]L 247 297 347 397L1 200 250 300 350ML 59.5(95.1)
質量※2[kg]モータ無し(メカのみ) 1.6 1.8 2.0 2.2
モータ付き 2.0(2.2) 2.2(2.4) 2.4(2.6) 2.6(2.8)
※1 最高速度は、モータの回転数(3000min-1)もしくはボールねじの許容回転数によって制限される速度です。※2 ( )内はブレーキ付きの値です。
※ メカストッパまでのストロークです。
209-0405-P01-22.indd 12209-0405-P01-22.indd 12 12/11/19 13:5112/11/19 13:51

13
ELECTRIC ACTUATORS Press series
PCT25 プレスシリーズロッド径:25mm モータ直結 100W仕様
寸法
57
L2
ストローク
※(5)
3
M16×1.5
(2)
35
10(向きはベースに対して不定)
L1
(2.5)
ML
□40
(3.7)
60
(2.5)
※(5)
L
15
18(2面幅)
(3.7)
90
∅8(給脂穴)
□55
∅42h7 0-0.025
∅25(ロッド径)
本図はモータ直結タイプにてモータケーブル向き:右(R)の図です。
六角ナット
D部詳細
四角ナット
7
(9.9)
M4×0.7
3.2
(27.7)
10 241.5
4.5
7.3
4.3
M16×1.5
54.5
904-∅6.6通シ
D30
40
70
仕様※1 定格推力は、モータ定格トルク時の推力です。※2 瞬時最大推力は、許容アキシアル荷重によって制限されています。※3 定格速度は、モータの定格回転数時の速度です。※4 最大可搬質量は、定格速度時の質量です。※5 走行寿命は以下の条件の場合です。
条件:最大可搬質量を負荷(LMガイドを併用)、定格速度、加減速度0.3G
モータ定格出力 [W] 100ボールねじリード [mm] 6 4定格推力※1 [N] 266 400瞬時最大推力※2 [N] 796 1194ブレーキ保持力 [N] 266 400定格速度※3 [mm/s] 300 200
繰り返し位置決め精度 [mm] ±0.010ロストモーション [mm] 0.1 ロッド不回転精度 [°] ±1
最大可搬質量※4
[kg]加減速度
水平 0.3G 35 40垂直 0.3G 10 10
走行寿命※5 [km] 5000
ストローク[mm](メカストッパ間ストローク)
50(60) 100(110) 150(160) 200(210) 250(260) 300(310)
最高速度※1
[mm/s]ボールねじリード6mm 300 260 200 160ボールねじリード4mm 200 160 130
寸法※2[mm]
L 397.5(433.1) 447.5(483.1) 497.5(533.1) 547.5(583.1) 597.5(633.1) 647.5(683.1)L1 324 374 424 474 524 574L2 249 299 349 399 449 499ML 73.5(109.1)
質量※2[kg]モータ無し(メカのみ) 2.8 3.2 3.5 3.8 4.2 4.5
モータ付き 3.4(3.6) 3.7(3.9) 4.0(4.2) 4.4(4.6) 4.7(4.9) 5.0(5.2)
※1 最高速度は、モータの回転数(3000min-1)もしくはボールねじの許容回転数によって制限される速度です。※2 ( )内はブレーキ付きの値です。
※ メカストッパまでのストロークです。
209-0405-P01-22.indd 13209-0405-P01-22.indd 13 12/11/19 13:5112/11/19 13:51

14
ELECTRIC ACTUATORSPress series
PCT25R プレスシリーズロッド径:25mm モータ折返し 100W仕様
寸法
3
□55
(2)
※(5)
(5)
153.5
ML
(5)
□40
∅8(給脂穴)
(1.9)(1.9)
10(向きはベースに対して不定)
∅25(ロッド径)
∅42h7 0-0.025
18(2面幅)
※(5)
47
M16×1.5
L
35
(76.5)
L1
(4)
15
90
57ストローク
67本図はモータ折返しタイプにてモータケーブル向き:右(R)の図です。
六角ナット
D部詳細
四角ナット
3.2
7
(9.9)
M4×0.7
4.3
7.34.5
1.5
(27.7)
10 24
M16×1.5
(49)
4-∅6.6通シ90
54.5
30 D
70
40
仕様※1 定格推力は、モータ定格トルク時の推力です。※2 瞬時最大推力は、許容アキシアル荷重によって制限されています。※3 定格速度は、モータの定格回転数時の速度です。※4 最大可搬質量は、定格速度時の質量です。※5 走行寿命は以下の条件の場合です。
条件:最大可搬質量を負荷(LMガイドを併用)、定格速度、加減速度0.3G
モータ定格出力 [W] 100ボールねじリード [mm] 6 4定格推力※1 [N] 266 400
瞬時最大推力※2 [N] 796 1194ブレーキ保持力 [N] 266 400定格速度※3 [mm/s] 300 200
繰り返し位置決め精度 [mm] ±0.010ロストモーション [mm] 0.1 ロッド不回転精度 [°] ±1
最大可搬質量※4
[kg]加減速度
水平 0.3G 35 40垂直 0.3G 10 10
走行寿命※5 [km] 5000
ストローク[mm](メカストッパ間ストローク)
50(60) 100(110) 150(160) 200(210) 250(260) 300(310)
最高速度※1
[mm/s]ボールねじリード6mm 300 260 200 160ボールねじリード4mm 200 160 130
寸法※2[mm]L 311 361 411 461 511 561L1 249 299 349 399 449 499ML 73.5(109.1)
質量※2[kg]モータ無し(メカのみ) 3.1 3.4 3.8 4.1 4.4 4.7
モータ付き 3.6(3.8) 3.9(4.1) 4.3(4.5) 4.6(4.8) 4.9(5.1) 5.2(5.4)
※1 最高速度は、モータの回転数(3000min-1)もしくはボールねじの許容回転数によって制限される速度です。※2 ( )内はブレーキ付きの値です。
※ メカストッパまでのストロークです。
209-0405-P01-22.indd 14209-0405-P01-22.indd 14 12/11/19 13:5112/11/19 13:51

15
ELECTRIC ACTUATORS Press series
PCT25 プレスシリーズロッド径:25mm モータ直結 200W仕様
仕様※1 定格推力は、モータ定格トルク時の推力です。※2 瞬時最大推力は、許容アキシアル荷重によって制限されています。※3 定格速度は、モータの定格回転数時の速度です。※4 最大可搬質量は、定格速度時の質量です。※5 走行寿命は以下の条件の場合です。
条件:最大可搬質量を負荷(LMガイドを併用)、定格速度、加減速度0.3G
モータ定格出力 [W] 200ボールねじリード [mm] 6 4定格推力※1 [N] 536 804瞬時最大推力※2 [N] 1600 2400ブレーキ保持力 [N] 536 804定格速度※3 [mm/s] 300 200
繰り返し位置決め精度 [mm] ±0.010ロストモーション [mm] 0.1 ロッド不回転精度 [°] ±1
最大可搬質量※4
[kg]加減速度
水平 0.3G 50 55垂直 0.3G 20 20
走行寿命※5 [km] 5000
ストローク[mm](メカストッパ間ストローク)
50(60) 100(110) 150(160) 200(210) 250(260) 300(310)
最高速度※1
[mm/s]ボールねじリード6mm 300 260 200 160ボールねじリード4mm 200 160 130
寸法※2[mm]
L 400.1(434.7) 450.1(484.7) 500.1(534.7) 550.1(584.7) 600.1(634.7) 650.1(684.7)L1 324 374 424 474 524 574L2 249 299 349 399 449 499ML 76.1(110.7)
質量※2[kg]モータ無し(メカのみ) 2.8 3.1 3.5 3.8 4.1 4.5
モータ付き 3.8(4.3) 4.1(4.6) 4.5(5.0) 4.8(5.3) 5.1(5.6) 5.4(5.9)
※1 最高速度は、モータの回転数(3000min-1)もしくはボールねじの許容回転数によって制限される速度です。※2 ( )内はブレーキ付きの値です。
寸法
∅25(ロッド径)∅42h7 0-0.025
(2.5)
□60
(3.7)
※(5)
3ストローク
57
※(5)
L2
(3.7)
15
18(2面幅)
60ML
L
(2.5)
L1 ∅8(給脂穴)
M16×1.5
10(向きはベースに対して不定)
(2)
35
□55
90
本図はモータ直結タイプにてモータケーブル向き:右(R)の図です。
六角ナット
四角ナット
D部詳細
7
(9.9)
M4×0.7
3.2
4.5
24
1.5
7.3
4.3
(27.7)
10
M16×1.5
90
54.5
4-∅6.6通シ
30 D
40
70※ メカストッパまでのストロークです。
209-0405-P01-22.indd 15209-0405-P01-22.indd 15 12/11/19 13:5212/11/19 13:52
16
ELECTRIC ACTUATORSPress series
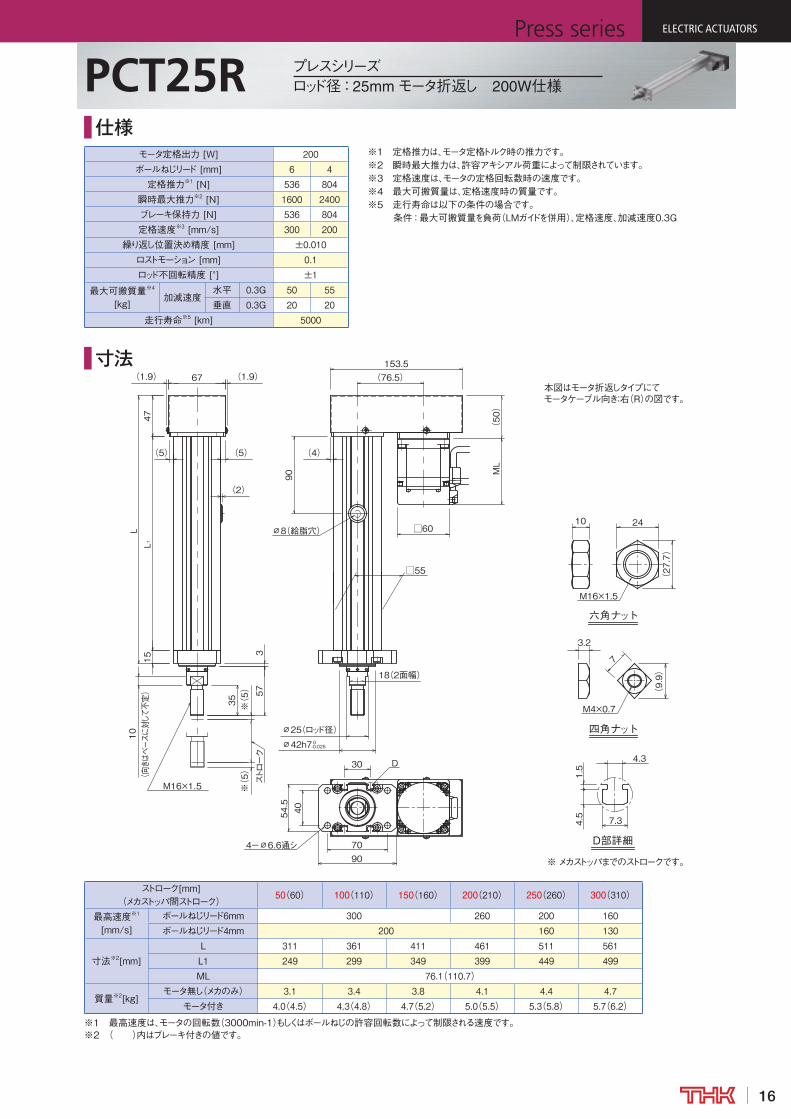
PCT25R プレスシリーズロッド径:25mm モータ折返し 200W仕様
仕様※1 定格推力は、モータ定格トルク時の推力です。※2 瞬時最大推力は、許容アキシアル荷重によって制限されています。※3 定格速度は、モータの定格回転数時の速度です。※4 最大可搬質量は、定格速度時の質量です。※5 走行寿命は以下の条件の場合です。
条件:最大可搬質量を負荷(LMガイドを併用)、定格速度、加減速度0.3G
モータ定格出力 [W] 200ボールねじリード [mm] 6 4定格推力※1 [N] 536 804
瞬時最大推力※2 [N] 1600 2400ブレーキ保持力 [N] 536 804定格速度※3 [mm/s] 300 200
繰り返し位置決め精度 [mm] ±0.010ロストモーション [mm] 0.1 ロッド不回転精度 [°] ±1
最大可搬質量※4
[kg]加減速度
水平 0.3G 50 55垂直 0.3G 20 20
走行寿命※5 [km] 5000
寸法
ML
(50)
(4)
57
※(5)
35 ※(5)
∅8(給脂穴)
(5)
∅25(ロッド径)
∅42h7 0-0.025
(5)
M16×1.5
L47
90
15L1
(76.5)(1.9)
(2)
153.5(1.9)
10(向きはベースに対して不定)
□60
67
3ストローク
□55
18(2面幅)
六角ナット
四角ナット
D部詳細
7(9.9)
M4×0.7
3.2
4.5
10
(27.7)
24
1.5
4.3
7.3
本図はモータ折返しタイプにてモータケーブル向き:右(R)の図です。
M16×1.5
4-∅6.6通シ
54.5
90
D30
40
70
ストローク[mm](メカストッパ間ストローク)
50(60) 100(110) 150(160) 200(210) 250(260) 300(310)
最高速度※1
[mm/s]ボールねじリード6mm 300 260 200 160ボールねじリード4mm 200 160 130
寸法※2[mm]L 311 361 411 461 511 561L1 249 299 349 399 449 499ML 76.1(110.7)
質量※2[kg]モータ無し(メカのみ) 3.1 3.4 3.8 4.1 4.4 4.7
モータ付き 4.0(4.5) 4.3(4.8) 4.7(5.2) 5.0(5.5) 5.3(5.8) 5.7(6.2)
※1 最高速度は、モータの回転数(3000min-1)もしくはボールねじの許容回転数によって制限される速度です。※2 ( )内はブレーキ付きの値です。
※ メカストッパまでのストロークです。
209-0405-P01-22.indd 16209-0405-P01-22.indd 16 12/11/19 13:5212/11/19 13:52

17
ELECTRIC ACTUATORS Press series
PC30-06A プレスシリーズロッド外径:30mm 定格推力:1.6kN
仕様※1 定格推力は、モータ定格トルク時の推力です。※2 瞬時最大推力は、許容アキシアル荷重によって制限されています。※3 最高速度は、モータの定格回転数時の速度です。※4 加減速度は、最大可搬質量搭載時になります。※5 許容アキシアル荷重は、アクチュエータが静止時に負荷できる荷重です。※6 メカ部が破損する恐れがありますので、モータは許容入力トルク以内にてご使用下さい。※7 最大可搬質量は、垂直姿勢(ロッドが地側)にて取付けた場合です。※8 動作寿命は下記条件の場合です。
・取付姿勢:垂直(ロッドが地側)・押付け荷重:定格推力・押付け方向:圧縮方向・押付け動作距離:15mm・搭載質量:最大可搬質量搭載時
モータ定格出力 [W] 400ボールねじリード [mm] 6
減速比 28/40定格推力※1 [kN] 1.6
瞬時最大推力※2 [kN] 3.3最高速度※3 [mm/s] 210加減速度※4 [G] 0.3
許容アキシアル荷重※5 [kN]押付け方向 3.3引張り方向 1.6
繰り返し位置決め精度 [mm] ±0.005バックラッシ [mm] 0.020
許容入力トルク※6 [N・m] 2.6最大可搬質量※7 [kg] 15押付け動作寿命※8 1500万回
寸法本図は給脂位置向き:D(下)モータケーブル向き:U(上)の図です。
R0.3以下
∅70h7
∅30h7∅20
※(5)ストローク
※(5)34
414
1412
(A)
(13)(□60)
(ML)
(48)
(2)(84.5)(42)(176)(179)MAX.
ボールスプライン軸先端詳細図
PCD25
30°30° 30°
30°
11-M2.5深サ5∅3H7深サ6
30°
8-∅6.6通シ
(86.2)
20°
25°
PCD100
25°
20°
∅115
105
85
有効ストロ-ク[mm](メカストッパ間ストローク)
50(60) 100(110) 150(160) 200(210) 250(260)
寸法[mm]
A 215 265 315 365 415
MLTHC:M40(M40B)※ 98.1(132.7)M040M(M040BM)※ 98.5(138)M040Y(M040BY)※ 98.5(138.5)
質量[kg]M040M(M040BM)※ 8.8(9.4) 9.9(10.5) 11(11.6) 12.1(12.7) 13.3(13.9)M040Y(M040BY)※ 8.6(9.2) 9.7(10.3) 10.8(11.4) 11.9(12.5) 13.1(13.7)
※ ( )内はブレーキ付きの値です。
※ メカストッパまでのストロークです。
209-0405-P01-22.indd 17209-0405-P01-22.indd 17 12/11/19 13:5212/11/19 13:52

18
ELECTRIC ACTUATORSPress series
PC40-06B プレスシリーズロッド外径:40mm 定格推力:3.2kN
仕様※1 定格推力は、モータ定格トルク時の推力です。※2 瞬時最大推力は、許容アキシアル荷重によって制限されています。※3 最高速度は、モータの定格回転数時の速度です。 ※4 加減速度は、最大可搬質量搭載時になります。※5 許容アキシアル荷重は、アクチュエータが静止時に負荷できる荷重です。※6 メカ部が破損する恐れがありますので、モータは許容入力トルク以内にてご使用下さい。※7 最大可搬質量は、垂直姿勢(ロッドが地側)にて取付けた場合です。※8 動作寿命は下記条件の場合です。
・取付姿勢:垂直(ロッドが地側)・押付け荷重:定格推力・押付け方向:圧縮方向・押付け動作距離:15mm・搭載質量:最大可搬質量搭載時
モータ定格出力 [W] 750ボールねじリード [mm] 6
減速比 32/48定格推力※1 [kN] 3.2瞬時最大推力※2 [kN] 6.4最高速度※3 [mm/s] 200加減速度※4 [G] 0.3
許容アキシアル荷重※5 [kN]押付け方向 6.4引張り方向 3.2
繰り返し位置決め精度 [mm] ±0.005バックラッシ [mm] 0.020
許容入力トルク※6 [N・m] 4.8最大可搬質量※7 [kg] 25押付け動作寿命※8 1500万回
寸法
本図は給脂位置向き:D(下)モータケーブル向き:U(上)の図です。
(208)MAX.
(47) (99.2)(7)
(55)
(ML)
(□80) (13)
(A)
1418
418
48ストローク
※(5)
※(5)
∅40h7(∅29)
∅90h7
2×2-M8深サ16(吊りボルト用)
(0.5)
(205)
R0.3以下
ボールスプライン軸先端詳細図
∅3H7深サ611-M3深サ6
PCD35
30°30° 30°
30°
30°
20°
25°25°
20°
130
8-∅9通シ
(97.4)
PCD118∅
140 100
有効ストロ-ク[mm](メカストッパ間ストローク)
50(60) 100(110) 150(160) 200(210) 250(260)
寸法[mm]
A 237 287 337 387 437
MLTHC:M75(M75B)※ 108.7(145.3)M075M(M075BM)※ 113.8(157)M075Y(M075BY)※ 115(160)
質量[kg]M075M(M075BM)※ 14.4(15.4) 16(17) 17.5(18.5) 19(20) 20.5(21.5)M075Y(M075BY)※ 14.2(15.1) 15.8(16.7) 17.3(18.2) 18.8(19.7) 20.3(21.2)
※ ( )内はブレーキ付きの値です。
※ メカストッパまでのストロークです。
209-0405-P01-22.indd 18209-0405-P01-22.indd 18 12/11/19 13:5212/11/19 13:52

19
ELECTRIC ACTUATORS Press series
PC40H-08C プレスシリーズロッド外径:40mm 定格推力:5.6kN
仕様※1 定格推力は、モータ定格トルク時の推力です。※2 瞬時最大推力は、許容アキシアル荷重によって制限されています。※3 最高速度は、モータの定格回転数時の速度です。
( )内は、安川電機㈱製モータ時の値です。※4 加減速度は、最大可搬質量搭載時になります。※5 許容アキシアル荷重は、アクチュエータが静止時に負荷できる荷重です。※6 メカ部が破損する恐れがありますので、モータは許容入力トルク以内にてご使用下さい。※7 最大搭載質量は、垂直姿勢(ロッドが地側)にて取付けた場合です。※8 動作寿命は下記条件の場合です。
・取付姿勢:垂直(ロッドが地側)・押付け荷重:定格推力・押付け方向:圧縮方向・押付け動作距離:15mm・搭載質量:最大搭載質量搭載時
モータ定格出力 [kW] 1ボールねじリード [mm] 8
減速比 25/44定格推力※1 [kN] 5.6
瞬時最大推力※2 [kN] 11.2最高速度※3 [mm/s] 150(112.5)加減速度※4 [G] 0.1
許容アキシアル荷重※5 [kN]押付け方向 11.2引張り方向 5.6
繰り返し位置決め精度 [mm] ±0.005バックラッシ [mm] 0.020
許容入力トルク※6 [N・m] 9.54最大可搬質量※7 [kg] 50押付け動作寿命※8 1500万回
有効ストロ-ク[mm](メカストッパ間ストローク)
50(60) 100(110) 150(160) 200(210) 250(260)
寸法[mm]A 271 321 371 421 471
MLM100M(M100BM)※ 140.5(175)M085Y(M085BY)※ 137(173)
質量[kg]M100M(M100BM)※ 23.6(25.6) 25.2(27.2) 26.8(28.8) 28.4(30.4) 30(32)M085Y(M085BY)※ 22.6(24.6) 24.2(26.2) 25.8(27.8) 27.4(29.4) 29(31)
※ ( )内はブレーキ付きの値です。形番末尾の「M」、「Y」はモータメーカを示します。M:三菱電機㈱製、Y:㈱安川電機製
寸法
本図は給脂位置向き:D(下)モータケーブル向き:U(上)の図です。アングルタイプのモータコネクタをご希望の場合は、THKまでお問い合わせください。
20°25° 25°
20°
(135.4)
(289)MAX.
(287)
(140)(65)
(A)
※(5)
ストローク
48
※(5)
14
418
(∅29)
∅40h7
∅90h7
R0.3以下
必要スペース(220)(□130)
(73)
(ML)
8-∅9通シ100
∅140 PC
D118
130
18.5
(0.5)
2×2-M8深サ16(吊りボルト用)
PCD35
11-M3深サ6∅3H7深サ6
30°
30°
30°30°
30°
ボールスプライン軸先端詳細図
※ メカストッパまでのストロークです。
209-0405-P01-22.indd 19209-0405-P01-22.indd 19 12/11/19 13:5212/11/19 13:52
20
ELECTRIC ACTUATORSPress series
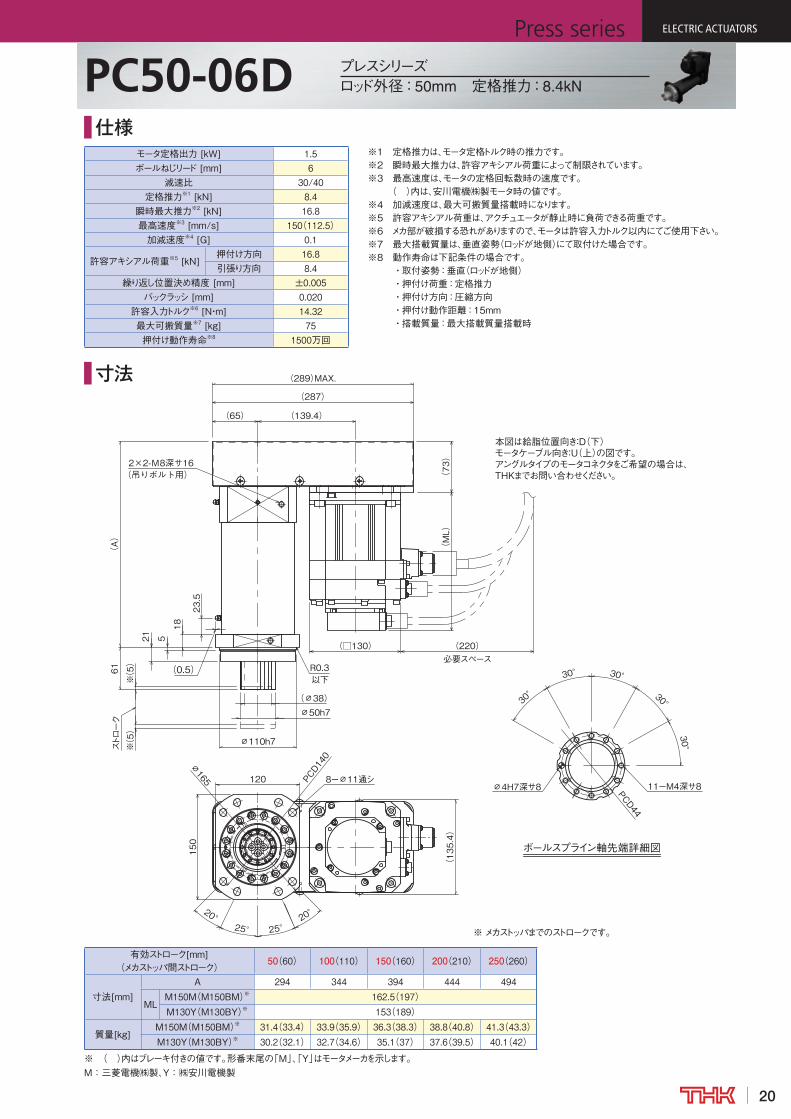
PC50-06D プレスシリーズロッド外径:50mm 定格推力:8.4kN
仕様※1 定格推力は、モータ定格トルク時の推力です。※2 瞬時最大推力は、許容アキシアル荷重によって制限されています。※3 最高速度は、モータの定格回転数時の速度です。
( )内は、安川電機㈱製モータ時の値です。※4 加減速度は、最大可搬質量搭載時になります。※5 許容アキシアル荷重は、アクチュエータが静止時に負荷できる荷重です。※6 メカ部が破損する恐れがありますので、モータは許容入力トルク以内にてご使用下さい。※7 最大搭載質量は、垂直姿勢(ロッドが地側)にて取付けた場合です。※8 動作寿命は下記条件の場合です。
・取付姿勢:垂直(ロッドが地側)・押付け荷重:定格推力・押付け方向:圧縮方向・押付け動作距離:15mm・搭載質量:最大搭載質量搭載時
モータ定格出力 [kW] 1.5ボールねじリード [mm] 6
減速比 30/40定格推力※1 [kN] 8.4瞬時最大推力※2 [kN] 16.8最高速度※3 [mm/s] 150(112.5)加減速度※4 [G] 0.1
許容アキシアル荷重※5 [kN]押付け方向 16.8引張り方向 8.4
繰り返し位置決め精度 [mm] ±0.005バックラッシ [mm] 0.020
許容入力トルク※6 [N・m] 14.32最大可搬質量※7 [kg] 75押付け動作寿命※8 1500万回
有効ストロ-ク[mm](メカストッパ間ストローク)
50(60) 100(110) 150(160) 200(210) 250(260)
寸法[mm]A 294 344 394 444 494
MLM150M(M150BM)※ 162.5(197)M130Y(M130BY)※ 153(189)
質量[kg]M150M(M150BM)※ 31.4(33.4) 33.9(35.9) 36.3(38.3) 38.8(40.8) 41.3(43.3)M130Y(M130BY)※ 30.2(32.1) 32.7(34.6) 35.1(37) 37.6(39.5) 40.1(42)
※ ( )内はブレーキ付きの値です。形番末尾の「M」、「Y」はモータメーカを示します。M:三菱電機㈱製、Y:㈱安川電機製
寸法 (289)MAX.
(287)
(65) (139.4)
61(A)
21 5
※(5)
※(5)
ストローク
18
(73)
(ML)
(□130) (220)必要スペース
(∅38)∅50h7
∅110h7
R0.3以下
2×2-M8深サ16(吊りボルト用)
∅4H7深サ8 11ーM4深サ8PCD44
30°
30° 30°
30°
30°
ボールスプライン軸先端詳細図
20°25° 25°
20°
150
∅165 PC
D140
120 8ー∅11通シ
(135.4)
23.5
(0.5)
本図は給脂位置向き:D(下)モータケーブル向き:U(上)の図です。アングルタイプのモータコネクタをご希望の場合は、THKまでお問い合わせください。
※ メカストッパまでのストロークです。
209-0405-P01-22.indd 20209-0405-P01-22.indd 20 12/11/19 13:5212/11/19 13:52

21
ELECTRIC ACTUATORS Press series
PC60-10E プレスシリーズロッド外径:60mm 定格推力:10.9kN
仕様※1 定格推力は、モータ定格トルク時の推力です。※2 瞬時最大推力は、許容アキシアル荷重によって制限されています。※3 最高速度は、モータの定格回転数時の速度です。
( )内は、安川電機㈱製モータ時の値です。※4 加減速度は、最大可搬質量搭載時になります。※5 許容アキシアル荷重は、アクチュエータが静止時に負荷できる荷重です。※6 メカ部が破損する恐れがありますので、モータは許容入力トルク以内にてご使用下さい。※7 最大搭載質量は、垂直姿勢(ロッドが地側)にて取付けた場合です。※8 動作寿命は下記条件の場合です。
・取付姿勢:垂直(ロッドが地側)・押付け荷重:定格推力・押付け方向:圧縮方向・押付け動作距離:15mm・搭載質量:最大搭載質量搭載時
モータ定格出力 [kW] 2ボールねじリード [mm] 10
減速比 28/60定格推力※1 [kN] 10.9
瞬時最大推力※2 [kN] 21.8最高速度※3 [mm/s] 150(112.5)加減速度※4 [G] 0.1
許容アキシアル荷重※5 [kN]押付け方向 21.8引張り方向 10.9
繰り返し位置決め精度 [mm] ±0.005バックラッシ [mm] 0.020
許容入力トルク※6 [N・m] 19.1最大可搬質量※7 [kg] 100押付け動作寿命※8 1500万回
有効ストロ-ク[mm](メカストッパ間ストローク)
50(60) 100(110) 150(160) 200(210) 250(260)
寸法[mm]
A 305 355 405 455 505
MLM200M(M200BM)※ 143.5(193)M180Y(M180BY)※ 171(207)
CM200M、M200BM □176M180Y、M180BY □130
DM200M、M200BM 230M180Y、M180BY 240
質量[kg]M200M(M200BM)※ 49.7(55.7) 53.2(59.2) 56.7(62.7) 60.3(66.3) 63.8(69.8)M180Y(M180BY)※ 46.3(48.7) 49.8(52.2) 53.3(55.7) 56.9(59.3) 60.4(62.8)
※ ( )内はブレーキ付きの値です。形番末尾の「M」、「Y」はモータメーカを示します。M:三菱電機㈱製、Y:㈱安川電機製
寸法 (362)MAX.(360)
(∅44)
(A)
72※(5)
520
※(5)
ストローク
22
∅60h7
∅125h7
R0.3以下
(90) (175.2)(90)
(ML)
(C)必要スペース(D)
∅190 PC
D160
140 8ー∅13.5通シ
170
(186.6)
20°25° 25°
20°
30°
30° 30°
30°30°
∅5H7深サ10 11ーM5深サ10
PCD52
2×2-M10深サ20(吊りボルト用)
28
ボールスプライン軸先端詳細図
本図は給脂位置向き:D(下)モータケーブル向き:U(上)の図です。アングルタイプのモータコネクタをご希望の場合は、THKまでお問い合わせください。
※ メカストッパまでのストロークです。
209-0405-P01-22.indd 21209-0405-P01-22.indd 21 12/11/19 13:5212/11/19 13:52

22
ELECTRIC ACTUATORSPress series
PC60H-10F プレスシリーズロッド外径:60mm 定格推力:17.8kN
仕様※1 定格推力は、モータ定格トルク時の推力です。※2 瞬時最大推力は、許容アキシアル荷重によって制限されています。※3 最高速度は、モータの定格回転数時の速度です。
( )内は、安川電機㈱製モータ時の値です。※4 加減速度は、最大可搬質量搭載時になります。※5 許容アキシアル荷重は、アクチュエータが静止時に負荷できる荷重です。※6 メカ部が破損する恐れがありますので、モータは許容入力トルク以内にてご使用下さい。※7 最大搭載質量は、垂直姿勢(ロッドが地側)にて取付けた場合です。※8 動作寿命は下記条件の場合です。
・取付姿勢:垂直(ロッドが地側)・押付け荷重:定格推力・押付け方向:圧縮方向・押付け動作距離:15mm・搭載質量:最大搭載質量搭載時
モータ定格出力 [kW] 3.5ボールねじリード [mm] 10
減速比 30/60定格推力※1 [kN] 17.8瞬時最大推力※2 [kN] 35.6最高速度※3 [mm/s] 160(125)加減速度※4 [G] 0.1
許容アキシアル荷重※5 [kN]押付け方向 35.6引張り方向 17.8
繰り返し位置決め精度 [mm] ±0.005バックラッシ [mm] 0.020
許容入力トルク※6 [N・m] 33.4最大可搬質量※7 [kg] 150押付け動作寿命※8 1500万回
有効ストロ-ク[mm](メカストッパ間ストローク)
50(60) 100(110) 150(160) 200(210) 250(260)
寸法[mm]
A 356 406 456 506 556
MLM350M(M350BM)※ 183.5(233)M290Y(M290BY)※ 160(208)
CM350M、M350BM □176M290Y、M290BY □180
DM350M、M350BM 245M290Y、M290BY 285
質量[kg]M350M(M350BM)※ 62(68) 65.5(71.5) 69.1(75.1) 72.6(78.6) 76.1(82.1)M290Y(M290BY)※ 56.5(62.5) 60(66) 63.6(69.6) 67.1(73.1) 70.6(76.6)
※ ( )内はブレーキ付きの値です。形番末尾の「M」、「Y」はモータメーカを示します。M:三菱電機㈱製、Y:㈱安川電機製
寸法
20°25° 25°
20°
∅190
140
170
PCD160
8ー∅13.5通シ
ボールスプライン軸先端詳細図
(362)MAX.
(90)(360)(175.8)
(102)
(ML)
(C)必要スペース(D)
R0.3以下
(∅44)∅60h7
∅125h7
※(5)
ストローク
※(5)72
20
22 5
(A)
(186.6)
28
本図は給脂位置向き:D(下)モータケーブル向き:U(上)の図です。アングルタイプのモータコネクタをご希望の場合は、THKまでお問い合わせください。
∅5H7深サ10 PCD52
11ーM5深サ10
30°
30° 30°
30°30°
2×2-M10深サ20(吊りボルト用)
※ メカストッパまでのストロークです。
209-0405-P01-22.indd 22209-0405-P01-22.indd 22 12/11/19 13:5212/11/19 13:52

23
ELECTRIC ACTUATORS Press series
PCT形番構成(モータ無しタイプ)
形番①
リード、減速比②
ストローク③
PCT20PCT20R 06N 0050~0200mm
PCT25PCT25R
06Nまたは04N
0050~0300mm
組合せ一覧
モータ直結時は無記号モータ折返しの場合は右図から折返し方向を指定ください。
Rはモータ折返しを表します。
使用モータは下表の取付は下記の対応表より選択ください。
形番によりリード・減速比を表す記号になります組合せは下表一覧より選択してください。
形番 リード、減速比 ストローク オプション モータ有無 モータブラケット
PCT20R - 06N - 0200 - R - 0 - A
① ② ③ ④ ⑤ ⑥PCT20 04N 0050: 50mm N:直結 0:モータ無し A1
PCT25 06N 0100:100mm D:下 A2
PCT20R 0150:150mm L:左 K1
PCT25R 0200:200mm R:右 K2
0250:250mm B1
0300:300mm B2
209-0405-P23-26.indd 23209-0405-P23-26.indd 23 12/11/22 18:5712/11/22 18:57
24
ELECTRIC ACTUATORSPress series
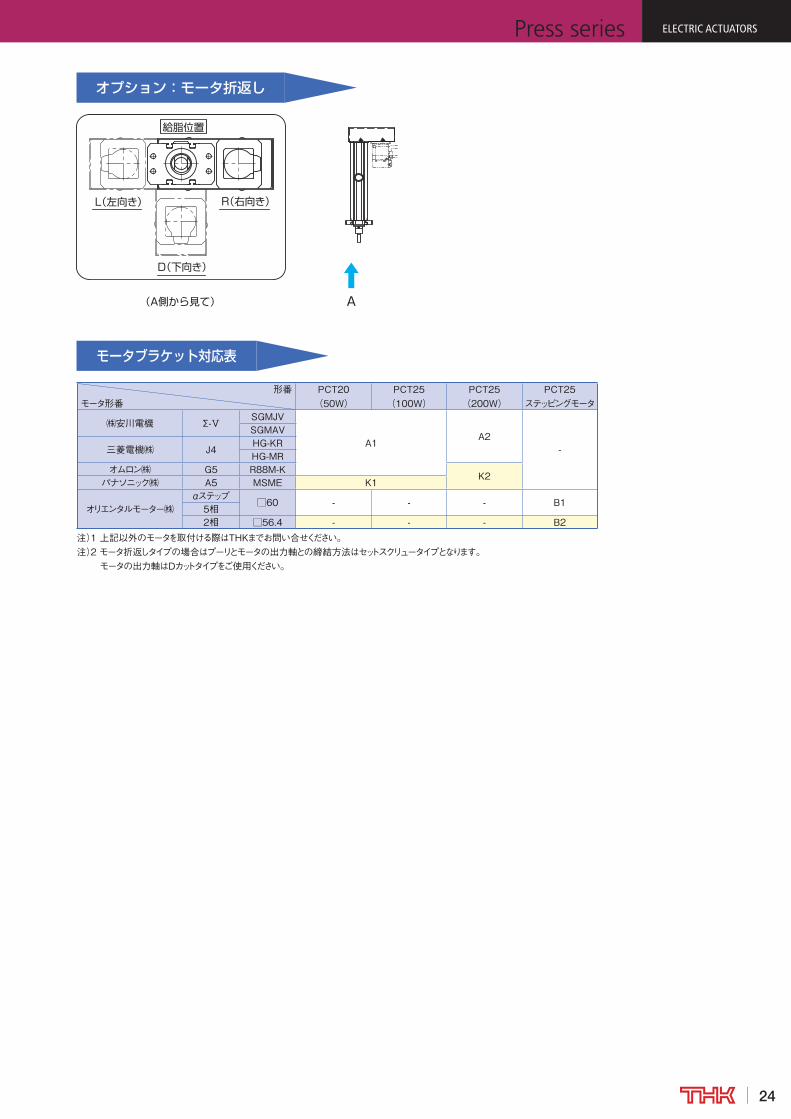
モータブラケット対応表
オプション:モータ折返し
L(左向き)
D(下向き)
R(右向き)
給脂位置
(A側から見て) A
形番モータ形番
PCT20(50W)
PCT25(100W)
PCT25(200W)
PCT25ステッピングモータ
㈱安川電機 Σ-ⅤSGMJV
A1A2
-
SGMAV
三菱電機㈱ J4HG-KRHG-MR
オムロン㈱ G5 R88M-KK2
パナソニック㈱ A5 MSME K1
オリエンタルモーター㈱αステップ
□60 - - - B15相2相 □56.4 - - - B2
注)1 上記以外のモータを取付ける際はTHKまでお問い合せください。注)2 モータ折返しタイプの場合はプーリとモータの出力軸との締結方法はセットスクリュータイプとなります。
モータの出力軸はDカットタイプをご使用ください。
209-0405-P23-26.indd 24209-0405-P23-26.indd 24 12/11/22 18:5712/11/22 18:57

25
ELECTRIC ACTUATORS Press series
PCT技術資料
PCT20 PCT25モータ容量(定格出力)[W] 50 100 200
ボールねじ部
軸径[mm] 8 12 14 12 14リード[mm] 6 6 4 6 4
基本動定格荷重Ca[N] 1950 4910 5500 4910 5500基本静定格荷重Coa[N] 3510 9600 11500 9600 11500
谷径[mm] 6.872 9.872 11.5 9.872 11.5ボール中心径[mm] 8.4 12.65 14.4 12.65 14.4
軸受部(固定側)
アキシアル方向
基本動定格荷重Ca[N] 8000 13800静的許容荷重Poa[N] 3240 5850
起動トルク※1[N・cm] 1.6 3.2 2.8 3.2 2.8最大入力トルク※2[N・m] 0.48 1.91(0.95) 1.91
※1 プーリ、タイミングベルトは含まれておりません。※2 ( )内は折返しタイプを選択時に制限される値です。
仕様
推奨カップリング形番
PCT2050W
PCT25100W
PCT25200W
カップリング形番 SFC-010DA2 SFC-020DA2 SFC-025DA2メーカ 三木プーリ㈱
折返し部(タイミングベルト)形番
PCT20R50W
PCT25R100W
PCT25R200W
タイミングベルト形番 196-2GT-6 273-3GT-6 273-3GT-9メーカ ゲイツ・ユニッタ・アジア㈱
取付張力[N] 15.8~19.8 29~36 44~55ベルト単位質量[g/mm幅×m長] 1.6 2.5 2.5
ベルト幅[mm] 6 6 9ベルトスパン[mm] 54 76.5 76.5
注) モータ折返しタイプの場合はプーリとモータの出力軸との締結方法はセットスクリュータイプとなります。 モータの出力軸はDカットタイプをご使用ください。
209-0405-P23-26.indd 25209-0405-P23-26.indd 25 12/11/22 18:5712/11/22 18:57

26
ELECTRIC ACTUATORSPress series
直結タイプ
PCT20 PCT25(100W)
PCT25(200W) PCT25(ステッピング)
折返しタイプ
PCT20R
PCT25R
記号:A1 記号:K1
記号:A2 記号:K2
153.5
(76.5)
プーリ穴径
記号「A1、K1」∅8H7
記号「A2」∅14H7
記号「K2」∅11H7
200W:7100W:6
200W:26.5100W:23.5
4-M5通シ
PCD70
∅51
65
60
32.5
30
65
4-M3通シ
60
30
32.56532.5
30
60
4-M4通シ
PCD46∅
31 PCD45∅
31∅51
65
60
PCD70
30
32.5
4-M4通シ
記号:A1
記号:K1
4-M3通シ
PCD45
4-M4通シ
PCD46
∅8h7
32 20
4(公差範囲)
∅30H7
記号:A1 記号:K1
21.2
プーリ穴径
∅8H7
6
117
(54)
50
4-M4通シ
2525
PCD46
24
∅31 PC
D45
48
2-M3通シ
4824
50
∅31
モータブラケット一覧
記号:A1
記号:K1∅30H7
3(公差深サ)
∅6h7 1527
PCD46PCD45 4-M3通シ
4-M4通シ
記号:A2
記号:K2
2032
PCD70PCD70
4-M4通シ
4-M5通シ
∅8h7
4
∅38
50H7 記号:B1
記号:B2
∅8h7
4-M4通シ
47.1
50
5047.1
4-M4通シ
32 20
∅36H7(αステップ、5相)
∅38.1+0.06
+0.03(2相)
4(公差範囲)
209-0405-P23-26.indd 26209-0405-P23-26.indd 26 12/11/22 18:5712/11/22 18:57

27
ELECTRIC ACTUATORS Press series
特長
簡単操作
機能
TLC/THC コントローラシリーズ単軸用 サーボドライバコントローラ
難しい設定は不要で、初めての場合でもすぐに使えます。
パソコンセットアップツール D-STEPもしくはデジタルオペレータ TDOを使うことにより、搭載された豊富な機能を簡単に利用することが可能です。
・ 選べる機能モード(ポジション64タイプ、外部入力教示タイプ、ポジション256タイプ、ポジション512タイプ、ソレノイドモード1、ソレノイドモード2)
・ステップデータ数 最大512点(機能モードにより異なります)・アラーム履歴 最大50件(パワーON履歴含む)・オート/マニュアル切替え、ブレーキ解除スイッチ・選べる制御方法(位置決め、押付け)
※ ネットワーク対応はTHK電動アクチュエータサイトをご覧ください。(http://www.ea-thk.com/)
低容量サーボドライバコントローラ
TLC大容量サーボドライバコントローラ
THC
209-0405-P27-H4.indd 27209-0405-P27-H4.indd 27 12/11/22 18:5912/11/22 18:59
28
ELECTRIC ACTUATORSPress series
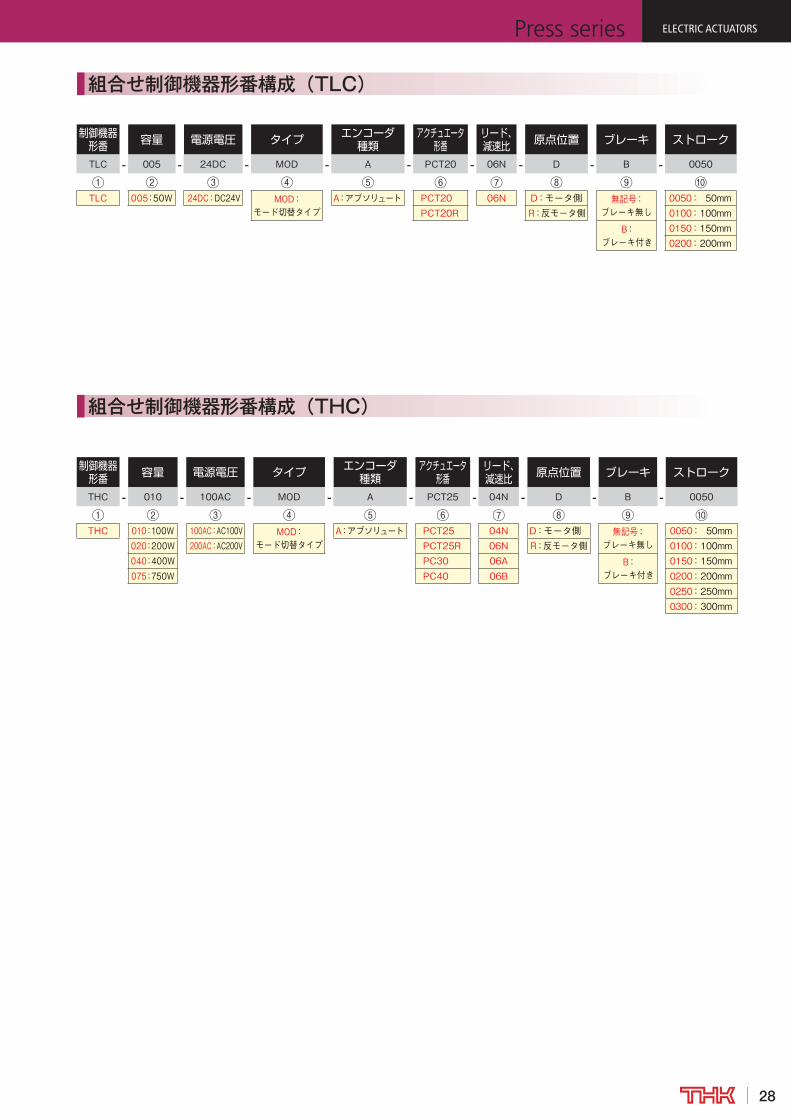
制御機器形番 容量 電源電圧 タイプ エンコーダ
種類アクチュエータ
形番リード、減速比 原点位置 ブレーキ ストローク
TLC - 005 - 24DC - MOD - A - PCT20 - 06N - D - B - 0050
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩TLC 005:50W 24DC:DC24V MOD:
モード切替タイプA:アブソリュート PCT20 06N D:モータ側 無記号:
ブレーキ無し 0050: 50mm
PCT20R R:反モータ側 0100: 100mmB:
ブレーキ付き 0150: 150mm 0200: 200mm
制御機器形番 容量 電源電圧 タイプ エンコーダ
種類アクチュエータ
形番リード、減速比 原点位置 ブレーキ ストローク
THC - 010 - 100AC - MOD - A - PCT25 - 04N - D - B - 0050
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩THC 010:100W 100AC:AC100V MOD:
モード切替タイプA:アブソリュート PCT25 04N D:モータ側 無記号:
ブレーキ無し 0050: 50mm
020:200W 200AC:AC200V PCT25R 06N R:反モータ側 0100: 100mm040:400W PC30 06A B:
ブレーキ付き 0150: 150mm
075:750W PC40 06B 0200: 200mm 0250: 250mm 0300: 300mm
組合せ制御機器形番構成(TLC)
組合せ制御機器形番構成(THC)
209-0405-P27-H4.indd 28209-0405-P27-H4.indd 28 12/11/22 18:5912/11/22 18:59

29
ELECTRIC ACTUATORS Press series
仕様 TLC
機種形番 TLC容量 50W
入力電源主回路
DC24V±10%制御回路電源容量[A] 定格6A(最大16A)
制御
制御軸数 1軸モータ種類 ACサーボモータ制御方式 フィードバック制御(セミクローズドループ)位置検出方式 アブソリュート加減速方式 台形加減速、S字加減速
プログラム機能モード ポジション64タイプ 外部入力教示タイプ ポジション256タイプ ポジション512タイプ ソレノイドモード1 ソレノイドモード2
ステップデータ数 64点 64点 256点 512点 7点 3点データ入出力方式 パソコンセットアップツール D‒STEPもしくはデジタルオペレータ TDO
入出力専用入出力
入力点数 16点(スタート、原点復帰、一時停止、リセット、サーボON、ステップNo.指定など)※
出力点数 16点(原点復帰完了、インポジション、サーボレディ、アラーム、非常停止中など)※
入出力用外部電源 DC24V±10%(貴社にてご用意ください)
通信 シリアル通信接続機器 デジタルオペレータまたはパソコンソフト通信方式 RS‒485ポート数 ミニDIN×1
使用条件
使用温度/保存温度 0~ 40℃(凍結なきこと)/-20~ 85℃(凍結なきこと)使用・保存湿度 90%RH以下(結露なきこと)
周辺雰囲気屋内(直射日光が当たらないこと)、腐食性ガス、引火性ガス、オイルミスト、塵埃なきこと
水、油、薬品がかからないこと
一般仕様
保護機能 過負荷、過電圧、位置偏差過大、ソフトウェアオーバーエラーなど
付属品電源コネクタ×1I/Oコネクタ×1
オプション(別売)デジタルオペレータTDO(ケーブル長さ5m)
I/Oケーブル3m,5m,7m,10m通信ケーブル(ミニDIN⇔USB)
外形寸法[mm] 36.4mm(W)×199.2mm(H)×112.6mm(D)質量(バッテリー除く) 0.4kg以下
※ 機能モードによって変わります。
(日本語/英語の2ヶ国語に対応)
I/OコネクタはTLCに付属します。
貴社にて配線が必要です。別途手配が必要です。付属のケーブルです。
サーボドライバコントローラ
TLCの設定にはTDOまたはD-STEPのどちらかが必要です。
CN1
CN3
CN5
CN6
CN2
CN4
上位PLCなど
デジタルオペレータ
TDO
パソコンセットアップツール
D-STEPパソコンセットアップツールは、アクチュエータサイトにログイン後、無償でダウンロード可能です。(日本語/英語/中国語(簡体字)の3ヶ国語に対応)http://www.ea-thk.com/
TLC
ケーブルはアクチュエータ本体に付属します。
DC24V供給※ 電源は貴社にてご用意ください。
電源コネクタはTLCに付属します。
アクチュエータ
アブソリュートバッテリー用コネクタ
システム構成図
209-0405-P27-H4.indd 29209-0405-P27-H4.indd 29 12/11/22 18:5912/11/22 18:59
30
ELECTRIC ACTUATORSPress series
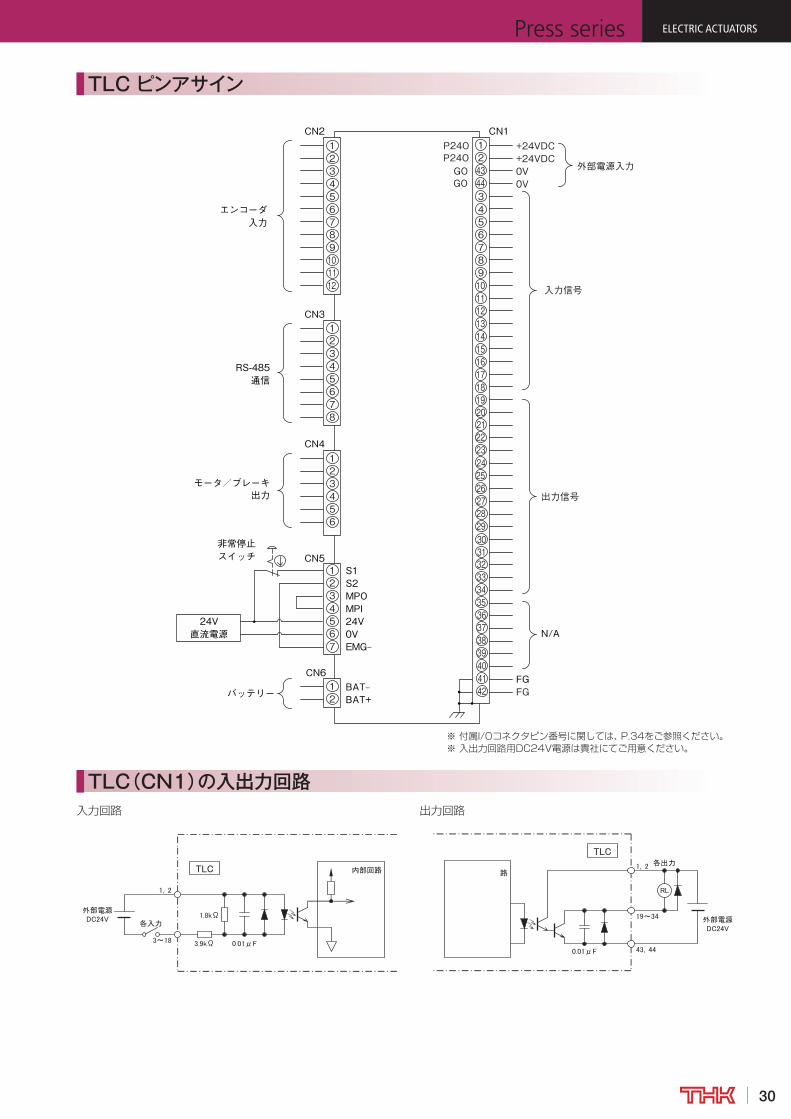
P24OP24OGOGO
入力信号
FG
出力信号
+24VDC+24VDC0V0V
外部電源入力
CN2
CN3
CN4
CN5
CN1
S1S2
24V0V
MPOMPI
EMG‒
エンコーダ
モータ/ブレーキ
入力
RS-485通信
出力
24V直流電源
非常停止スイッチ
CN6BAT‒BAT+
FG
N/A
バッテリー
2021222324252627282930313233343536373839404142
444321
345678910111213141516171819
21
3456789101112
21
345678
21
3456
21
21
34567
※ 付属I/Oコネクタピン番号に関しては、P.34をご参照ください。※ 入出力回路用DC24V電源は貴社にてご用意ください。
入力回路 出力回路
TLC ピンアサイン
TLC(CN1)の入出力回路
209-0405-P27-H4.indd 30209-0405-P27-H4.indd 30 12/11/22 18:5912/11/22 18:59

31
ELECTRIC ACTUATORS Press series
システム構成図
仕様 THC
機種形番 THC
容量AC100V仕様 AC200V仕様
100W 200W 400W 100W 200W 400W 750W
入力電源
主回路単相 AC100V, 50/60Hz(許容電圧 90~ 120V)
単相 AC200V, 50/60Hz(許容電圧 170~ 250V)
制御回路単相 AC100V, 50/60Hz(許容電圧 90~ 120V)
単相 AC200V, 50/60Hz(許容電圧 170~ 250V)
電源容量[kVA] 0.5 0.9 1.3 0.5 0.9 1.6 2.4
制御
制御軸数 1軸モータ種類 ACサーボモータ制御方式 フィードバック制御(セミクローズドループ)位置検出方式 アブソリュート加減速方式 台形加減速、S字加減速
プログラム機能モード ポジション64タイプ 外部入力教示タイプ ポジション256タイプ ポジション512タイプ ソレノイドモード1 ソレノイドモード2
ステップデータ数 64点 64点 256点 512点 7点 3点データ入出力方式 パソコンセットアップツール D‒STEPもしくはデジタルオペレータ TDO
入出力専用入出力
入力点数 16点(スタート、原点復帰、一時停止、リセット、サーボON、ステップNo.指定など)※
出力点数 16点(原点復帰完了、インポジション、サーボレディ、アラーム、非常停止中など)※
入出力用外部電源 DC24V±10%(貴社にてご用意ください)
通信 シリアル通信接続機器 デジタルオペレータまたはパソコンソフト通信方式 RS‒485ポート数 ミニDIN×1
使用条件
使用温度/保存温度 0~ 40℃(凍結なきこと)/-20~ 85℃(凍結なきこと)使用・保存湿度 90%RH以下(結露なきこと)
周辺雰囲気屋内(直射日光が当たらないこと)、腐食性ガス、引火性ガス、オイルミスト、塵埃なきこと
水、油、薬品がかからないこと
一般仕様
保護機能 過負荷、過電圧、位置偏差過大、ソフトウェアオーバーエラーなど
付属品電源コネクタ×1I/Oコネクタ×1
オプション(別売)デジタルオペレータTDO(ケーブル長さ5m)
I/Oケーブル3m,5m,7m,10m通信ケーブル(ミニDIN⇔USB)
外形寸法[mm]200W以下:58mm(W)×208.6mm(H)×120mm(D)400W以上:67.5mm(W)×208.6mm(H)×120mm(D)
質量(バッテリー除く) 1.3kg以下 1.3kg以下 1.3kg以下 1.3kg以下 1.3kg以下 1.3kg以下 1.5kg以下※ 機能モードによって変わります。
I/OコネクタはTHCに付属します。
貴社にて配線が必要です。別途手配が必要です。付属のケーブルです。
CN1
CN9
CN8
CN4
CN2
CN5
CN6
CN3
CN7
上位PLCなど
サーボドライバコントローラ
THC
(日本語/英語の2ヶ国語に対応)
THCの設定にはTDOまたはD-STEPのどちらかが必要です。
デジタルオペレータ
TDO
パソコンセットアップツール
D-STEPパソコンセットアップツールは、アクチュエータサイトにログイン後、無償でダウンロード可能です。(日本語/英語/中国語(簡体字)の3ヶ国語に対応)http://www.ea-thk.com/
100V または 200V供給※ 電源は貴社にてご用意ください。 電源コネクタはTHCに付属します。
ケーブルはアクチュエータ本体に付属します。
アクチュエータ
THCをご使用の際には回生抵抗ユニットが必要になる場合があります。詳しくは、THK電動アクチュエータサイトをご確認ください。(http://www.ea-thk.com/)
ブレーキ用電源コネクタはTHCに付属します。
回生抵抗ユニット
ブレーキ用電源コネクタ
非常停止用コネクタ
アブソリュートバッテリー用コネクタ
209-0405-P27-H4.indd 31209-0405-P27-H4.indd 31 12/11/22 18:5912/11/22 18:59

32
ELECTRIC ACTUATORSPress series
THC ピンアサイン
21
3456
21
3456
78
21
21
21
21
P24OP24OGOGO
入力信号
出力信号
+24VDC+24VDC0V0V
外部電源入力
CN2
CN3
CN4
CN5
CN1
L1CL2CL1L2
入力
RS-485通信
出力
CN6BAT‒BAT+
CN7EMGAEMGB 非常停止
CN9P24BGB
電源
CN8R+R‒ 回生抵抗
FGFG
N/A
2021222324252627282930313233343536373839404142
444321
345678910111213141516171819
21
34567891011121314151617181920
エンコーダ
モータ/ブレーキ
ブレーキ用電源
主回路/制御回路
バッテリー
21
34
※ 付属I/Oコネクタピン番号に関しては、P.34をご参照ください。※ 入出力回路用DC24V電源は貴社にてご用意ください。
入力回路 出力回路
THC(CN1)の入出力回路
209-0405-P27-H4.indd 32209-0405-P27-H4.indd 32 12/11/22 18:5912/11/22 18:59

33
ELECTRIC ACTUATORS Press series
機能モード別ピンアサイン(TLC/THC共通)
I/OCN1ピン番号
信号名機能モード「0」 機能モード「1」 機能モード「2」 機能モード「3」 機能モード「4」 機能モード「5」ポジション64タイプ 外部入力教示タイプ ポジション256点タイプ ポジション512点タイプ ソレノイドモード1 ソレノイドモード2
入力
3 PI 0 PI 0 PI 0 PI 0 ST 0 ST 04 PI 1 PI 1 PI 1 PI 1 ST 1 ST 15 PI 2 PI 2 PI 2 PI 2 ST 2 ST 26 PI 3 PI 3 PI 3 PI 3 ST 3 -7 PI 4 PI 4 PI 4 PI 4 ST 4 -8 PI 5 PI 5 PI 5 PI 5 ST 5 -9 - MODE PI 6 PI 6 ST 6 -10 - JOG/INCHING PI 7 PI 7 - -11 - JOG P - PI 8 - -12 BKRL JOG N BKRL BKRL BKRL BKRL13 STRT STRT/PWRT STRT STRT - -14 MANU MANU MANU MANU MANU MANU15 HOME HOME HOME HOME HOME HOME16 PAUSE PAUSE PAUSE PAUSE PAUSE PAUSE17 REST REST REST REST REST REST18 SV-ON SV-ON SV-ON SV-ON SV-ON SV-ON
出力
19 PO 0 PO 0 PO 0 PO 0 PE 0 LS 020 PO 1 PO 1 PO 1 PO 1 PE 1 LS 121 PO 2 PO 2 PO 2 PO 2 PE 2 LS 222 PO 3 PO 3 PO 3 PO 3 PE 3 -23 PO 4 PO 4 PO 4 PO 4 PE 4 -24 PO 5 PO 5 PO 5 PO 5 PE 5 -25 MOVE MOVE PO 6 PO 6 PE 6 -26 AREA MODES PO 7 PO 7 AREA AREA27 P AREA P AREA P AREA PO 8 P AREA P AREA28 MANU S MANU S MANU S MANU S MANU S MANU S29 HEND HEND HEND HEND HEND HEND30 INPS INPS INPS INPS INPS -31 LOAD/TRQS WEND LOAD/TRQS LOAD/TRQS LOAD/TRQS -32 SVRDY SVRDY SVRDY SVRDY SVRDY SVRDY33 EMGS EMGS EMGS EMGS EMGS EMGS34 ALM ALM ALM ALM ALM ALM
209-0405-P27-H4.indd 33209-0405-P27-H4.indd 33 12/11/22 18:5912/11/22 18:59

34
ELECTRIC ACTUATORSPress series
入力信号機能詳細
入力信号名 内容 備考
MANU 運転モード I/OからのAUTO/MANUAL切替え。オンでMANUAL、オフでAUTO。STRT スタート プログラムステップのスタート信号。オンでプログラムスタート。
PI0~PI8 指令ポジション番号ポジション番号指定用入力。各信号のレベルでプログラム指定。プログラムステップを選択し、「STRT」信号にてプログラムスタート。
PAUSE 一時停止 動作を一時的に中断する。オフでPAUSE入力状態。(N.C.接仕様)HOME 原点復帰 原点復帰動作を開始する。オンで原点復帰開始。オフで停止。SV-ON サーボオン サーボON/OFFを行う。オンでサーボON、オフでサーボOFF。REST アラームリセット アラームのリセットを行う。一時停止中の残移動量リセットを行う。オンでリセット。BKRL ブレーキ解除 ブレーキを強制的に解除する。オンでブレーキ解除。MODE 外部入力教示モード 信号オンで、教示モードに移行する。オンで教示モード。PWRT 外部入力教示時 現在位置書き込み 教示モード中、書き込みポジションを指定して本信号を20ms以上オンで、位置を書き込み。JOG/INCHING 外部入力教示時 手動作切替 教示モード中の手動動作の切替え。オンでINCHING動作、オフでJOG動作選択。JOG P 外部入力教示時 移動方向 + 教示モード中の動作方向及び動作スタート信号。オンで+各ソフトリミットまで移動、移動中オフで減速停止。JOG N 外部入力教示時 移動方向 - 教示モード中の動作方向及び動作スタート信号。オンで-各ソフトリミットまで移動、移動中オフで減速停止。
ST0~6 シリンダタイプSTARTポジション番号「ST0~6」のプログラムスタート信号。パラメータNo.13「移動指令方式」にて信号をレベル/エッジを選択可能。なお、2点以上の同時オンの場合は、数値の小さい信号が優先。
出力信号名 内容 備考MANU S 運転モードステータス 運転モード(AUTO/MANUAL)の状態出力。オンでMANUAL、オフでAUTO。PO1~PO8 完了ポジション番号 位置決め完了後に到達したポジションの番号を出力(バイナリ出力)。MOVE 移動中 モータ動作中に信号出力。INPS 位置決め完了 位置決め完了幅内にモータが入ると出力。SVRDY 運転準備完了 サーボON時に信号出力。ALM アラーム アラーム出力信号。MODES 運転モードステータス 教示モード/通常動作モードの判定出力信号。オンで教示モード。オフで通常動作モード。WEND 書き込み完了 常時モード移行後はOFFで、PWRT信号による書き込みが完了した時点で、30ms間ON。HEND 原点復帰完了 原点復帰動作完了時に信号出力。AREA エリア上限/下限 アクチュエータの現在位置が、パラメータの設定範囲内でON。P AREA ポジションエリア アクチュエータの現在位置が、プログラムステップの設定範囲内でON。EMGS 非常停止状態 非常停止入力の判定出力。通常状態でON、非常停止回路が遮断状態でOFF。LOAD 負荷出力判定ステータス 判定範囲内で指令トルクが一定時間、しきい値を越えた時ON。TRQS トルクレベルステータス 移動中に負荷しきい値に達した場合ON。負荷しきい値を切った時OFF。PE0~PE6 シリンダタイプ到達完了出力 ポジション番号0動作終了後に出力する信号。LS0~LS2 シリンダタイプ位置検出出力 現在位置が各 (々3点)の位置決め幅内に入った時、出力。
115
16
30
3144
※ 本図はプラグとのはめあい面から見た図です。
出力信号機能詳細
I/Oコネクタピン番号
209-0405-P27-H4.indd 34209-0405-P27-H4.indd 34 12/11/22 18:5912/11/22 18:59

35
ELECTRIC ACTUATORS Press series
コントローラ寸法図コントローラ寸法図
D
1 9
CF
4A
23E B
70
5
86
AUTOBRK
CN
S1
OFF
OFFDBK
1
ID
2CN
24VMPIMPOS2
0VEMG-
3CN
4CN
5CN
6CN
PWR
OFF
ALM
BRK
SV/
MOT
MANU
15.5
182.6
31
192.2
1.636.4 112.6
173
(199.2)
∅5
(5.6)
(4)
7.85
R2.5
(9.6)
TLC
209-0405-P27-H4.indd 35209-0405-P27-H4.indd 35 12/11/22 18:5912/11/22 18:59

36
ELECTRIC ACTUATORSPress series
コントローラ寸法図
DBKOFF
6
8
5
0
7
BE
3
2
6CN
CN
7CN
3CN
1
GA
91
CF D
P5C
ALM
GB
AUTOBRKOFF
MANU
P5P
P24E
SV/
CHAR
P24B
BRKOFF
P15P
ID2
CN9
L2C
CN8
CN4
L1C
CN5
4
A
EM
L1
L2
GB
CN
EM
CN
182.2
192.2
5
5 48∅5通シ
58 120
5
5
R2.5
192.2
(208.6)
4
THC(100~200W)
CN
EM
CN
GB
L2
L1
EM
A
4
5CN
L1C
4CN
8CN
L2C
9CN
2ID
P15P
BRKOFF
P24B
CHAR
SV/
P24E
P5P
MANU
OFFBRK
AUTO
GB
ALM
P5C
DF C
1 9
GA
1
CN3
CN7
CN
CN6
2
3
E B
7
0
5
8
6
OFFDBK
∅5通シ
5
5182.2
57.512067.5
192.2
4
5
5
R2.5
(208.6)
THC(400,750W)
209-0405-P27-H4.indd 36209-0405-P27-H4.indd 36 12/11/22 18:5912/11/22 18:59

37
ELECTRIC ACTUATORS Press series
(16)
(25)
*m
(55)
(29)
(23)
φ7.8max(固定用)φ8.2max(高屈曲)
(17)
TLC用モータ・ブレーキケーブル:CBL‒TLC‒ACP‒ ** F(固定用) CBL‒TLC‒ACP‒ ** R(高屈曲)**はケーブル長さ(03:3 m,05:5 m,10:10m)
*m
(23)
(30)
(23)
(25)
(55)
(29)
φ7.8max(固定用)φ8.2max(高屈曲)
THC用モータ・ブレーキケーブル:CBL‒THC‒ACP‒ ** F(固定用) CBL‒THC‒ACP‒ ** R(高屈曲)**はケーブル長さ(03:3 m,05:5 m,10:10m)
*m
(28)
(22) (20)
(17)
(53)
(29)
φ7.5max(固定用)φ6.3max(高屈曲)
TLC用エンコーダケーブル:CBL‒TLC‒ACS‒ ** F(固定用) CBL‒TLC‒ACS‒ ** R(高屈曲)**はケーブル長さ(03:3 m,05:5 m,10:10m)
アクチュエータケーブル
(20)
(17)
(10)
(25)
*m
(34)
(42)
(53)
(29)
φ10.9max(固定用)φ10.8max(高屈曲)
THC用エンコーダ・センサケーブル:CBL‒THC‒ACS‒ ** F(固定用) CBL‒THC‒ACS‒ ** R(高屈曲)**はケーブル長さ(03:3 m,05:5 m,10:10m)
209-0405-P27-H4.indd 37209-0405-P27-H4.indd 37 12/11/22 18:5912/11/22 18:59

38
ELECTRIC ACTUATORSPress series
*m(26)
(34) (23)
(25)
(55)
(29)
φ7.8max(固定用)φ8.2max(高屈曲)
TLC/THC用延長モータ・ブレーキケーブル:CBL‒ACP‒EXT01‒ ** F(固定用) CBL‒ACP‒EXT01‒ ** R(高屈曲)**はケーブル長さ(01:1 m,03:3 m,05:5 m)
注1) 可動用としてご使用する場合は、高屈曲または固定用ケーブルを選択し曲げ半径は、ケーブル中心でR95以上を推奨します(可動部以外は、R50以上を推奨します)注2) サーボドライバコントローラTLCをご使用される際は、モータ・ブレーキケーブルとエンコーダケーブルはそれぞれ11m以内としてください。
延長ケーブルは最大2本まで接続可能です。注3) サーボドライバコントローラTHCをご使用される際は、モータ・ブレーキケーブルとエンコーダ・センサケーブルはそれぞれ16m以内としてください。
延長ケーブルは最大2本まで接続可能です。
*m
(31)
(18)
(17)
(20)(53)(29)
φ7.5max(固定用)φ6.8max(高屈曲)
TLC用延長エンコーダケーブル:CBL‒ACS‒EXT01‒ ** F(固定用) CBL‒ACS‒EXT01‒ ** R(高屈曲)**はケーブル長さ(01:1 m,03:3 m,05:5 m)
*m
(22)
(18)
(31)
(25)
(17)
(20)
(10)
(25)
(53)
(29)
φ10.9max(固定用)φ10.8max(高屈曲)
THC用延長エンコーダ・センサケーブル:CBL‒ACS‒EXT02‒** F(固定用) CBL‒ACS‒EXT02‒**R(高屈曲)**はケーブル長さ(01:1 m,03:3 m,05:5 m)
209-0405-P27-H4.indd 38209-0405-P27-H4.indd 38 12/11/22 18:5912/11/22 18:59

39
ELECTRIC ACTUATORS Press series
TDO デジタルオペレータ 別途手配が必要です
パソコン不要で簡単かつスピーディにTLC/THCの操作・設定が可能です。
見やすくデザインされたキーシートとバックライト付き液晶を搭載(20文字×4行)しています。
・ステップデータとパラメータの確認、編集・ アクチュエータ操作 (原点復帰、ジョグ動作、インチング動作、プログラム実行、サーボON/OFF、電磁ブレーキON/OFF)・モニタ(I/O、現在位置、位置指令、電流指令、Ver.表示)・アラーム(履歴表示、履歴クリア、発生時割り込み表示、アラームリセット)・ 設定(バックライト輝度、LCDコントラスト、ビープ音、バックライト自動OFF)・イネーブルスイッチ(3ポジション) ・保護構造 IP54(ケーブルコネクタ部除く) ・表示言語(日本語/英語)外形寸法:110mm(W)×218.3mm(H)×66.6mm(D) ※ 突起部を除く本体質量:400g ※ ケーブルを除く ケーブル長さ:5m※ TLC,THCはVer.1.03以降から対応となります。
キーシート
イネーブルスイッチ
分かりやすいインターフェースで多機能なTLC/THCをサポートします。
パソコン上でTLC/THCの操作・設定が可能です。各種データのバックアップや動作状態のロギングなど、メンテナンスに便利な機能を搭載しています。
・ステップデータの確認、編集、バックアップ、オフライン編集・パラメータの確認、編集、バックアップ、オフライン編集・ アクチュエータ操作(原点復帰、ジョグ動作、インチング動作、プログラム実行、サーボON/OFF)・モニタ(I/O、現在位置、位置指令、電流指令) ・ロギング(速度・電流波形表示)・アラーム(履歴表示、履歴クリア、アラームリセット) ・表示言語(日本語/英語/中国語(簡体字))対応OS:Windows XP/Windows Vista/Windows 7D-STEPはTHK電動アクチュエータサイトより無償でダウンロード可能です。(http://www.ea-thk.com/)
3ヶ国語に対応 分かりやすいインターフェース
D-STEP パソコンセットアップツール
機能
機能
特長
特長
簡単操作
簡単操作
バックライト付き液晶
形番構成
形番 タイプ
TDO - N
① ②
TDO N:カテゴリ2※1対応タイプ
※1 ISO 13849-1
209-0405-P27-H4.indd 39209-0405-P27-H4.indd 39 12/11/22 18:5912/11/22 18:59

40
ELECTRIC ACTUATORSPress series
パソコン通信ケーブル:CBL-COM-03(別売)
I/Oケーブル:CBL-TSC-IO- **(**はケーブル長さ:03:3m、05:5m、07:7m、10:10m)(別売)
※ バラ線側の端末は未処理で出荷されます。
(ケーブル長さ)
54
39
P24OGOCN1-3CN1-4CN1-5
CN1-33CN1-34
(3000) (1500)
ケーブル
209-0405-P27-H4.indd 40209-0405-P27-H4.indd 40 12/11/22 18:5912/11/22 18:59

41
ELECTRIC ACTUATORS Press series
メンテナンス
標準グリース:FS2(リューベ㈱製)ボールねじ部への給脂は、プラグを外して直接ボールねじ軸へ塗布してください。
ベアリング給脂用ニップル(A-MT6×1)
ボールスプライン給脂用ニップル(A-MT6×1)
ボールねじ給脂用穴(プラグ:MSWZS20-10 ミスミ㈱)
(2)
∅8(給脂穴)
PCT20:ボールねじ給脂可能位置95mm以上PCT25:ボールねじ給脂可能位置110mm以上
PCT
PC
アクチュエータの性能を十分に発揮するためには、定期的な給脂が必要です。THKのシリンダタイプアクチュエータには以下に給脂用の穴が付いております。
※給脂手順の詳細は取扱説明書にてご確認ください。
標準グリース:AFB-LFボールねじ部への給脂は、プラグを外して直接ボールねじ軸へ塗布してください。
209-0405-P27-H4.indd 41209-0405-P27-H4.indd 41 12/11/22 18:5912/11/22 18:59

42
ELECTRIC ACTUATORSPress series
MEMO
209-0405-P27-H4.indd 42209-0405-P27-H4.indd 42 12/11/22 18:5912/11/22 18:59

無断転載を禁ずる
●「LMガイド」「ボールリテーナ」「 」はTHK株式会社の登録商標です。●本カタログ記載の図・写真と実際の製品とでは異なる場合があります。●改良のため予告なしに、外観・仕様等を変更することがありますので、ご採用の時は事前にお問い合わせください。●カタログの制作には慎重を期しておりますが、誤字・脱字等により生じた損害については、責任を負いかねますのでご了承ください。●弊社製品・技術の輸出及び輸出の為の販売につきましては、外国為替及び外国貿易法、及びその他の法令の遵守を基本方針としております。 尚、弊社製品の単品での輸出については、予めご相談ください。
ご使用上の注意点●取扱い・アクチュエータおよび制御機器類をむやみに分解しないでください。ごみの侵入や機能を損失する原因となります。・アクチュエータおよび制御機器類を落下させたり、叩いたりしないでください。けがや破損の原因となります。また、衝撃を与えた場合、外観に破損が見られなくとも機能を損失する可能性があります。
●使用環境アクチュエータと制御機器類は、使用環境が悪いと故障の原因となりますので、次のような場所で使用してください。・アクチュエータ:周囲温度0~40℃の範囲内、周囲湿度:20~80%RH以下、および凍結/結露が生じない場所・サーボアンプ/サーボパック:周囲温度0~55℃の範囲内、周囲湿度90%RH以下、および凍結/結露が生じない場所・腐食性ガスや可燃性ガスがない場所・鉄粉等の誘電性のある粉体、塵埃、オイルミスト、切削液、水分、塩分、有機溶剤が飛散しない場所・直射日光、輻射熱が当たらない場所・強電界、強磁界の発生しない場所・振動や衝撃が本体に伝わらない場所・点検や清掃のしやすい場所
●安全上の注意・アクチュエータの作動中または作動できる状態のときは、移動部には絶対に触れないでください。また、アクチュエータの作動範囲に立ち入らないでください。
・アクチュエータおよび接続されている関連機器の設置、調整、点検、保守作業を行う際は、必ず全ての電源を遮断してください。また、作業者以外が電源を投入できないようにする対策を講じてください。
・複数の人が作業を行う場合は、手順、合図、異常等の措置を予め確認し、別途作業を監視する人をおいてください。・作業の前に、JIS規格「産業用マニピュレーティング-安全性」(JIS B8433)および厚生労働省「労働安全衛生規則」を精読し、遵守してください。・トルク制限値を超えてのご使用は部品の破損や事故につながります。パラメータのトルク制限にて設定は弊社の仕様値内としてください。・PCTの折り返しタイプおよびPCには、タイミングベルトが切れた場合の安全装置がありません。安全の為に、装置側に安全装置を設置してください。・製品の内部にはストッパが取付けてありますが、ストローク制限を目的としているため強く衝突した際には破損する可能性があります。・PCには、押付け方向負荷を基本とした設計になっています。引張り方向負荷がかかる場合は、寿命が著しく低下することがあります。・ロッドへ回転トルクまたはモーメント荷重が作用する場合は、THKまでお問い合せください。・PCには、本体質量が20kgを超える重量物があります。本製品を移動させる場合は、吊りボルトを使用し吊り上げて移動してください。本体に吊りベルトのみを引っ掛けて吊り上げないでください。設置する場合など、垂直で移動する場合はモータ側及びロッド側の2本を使用してください。水平状態で移動する場合は、モータ側とロッド側の2本または4本を使用してください。形番によって重心位置の偏りにより吊った際に本体が傾く場合があります。
●保管・アクチュエータは、弊社の梱包および荷姿で、高温、低温、多湿を避け、水平な状態で保管してください。・制御機器類は、高温、低温、多湿を避けて保管してください。
●潤滑アクチュエータの機能を十分に発揮させるためには、潤滑が必要です。潤滑が不足すると転がり部の摩耗が増加したり、早期寿命の原因となる場合があります。・性状の異なる潤滑剤を混合しての使用は避けてください。・特殊な潤滑剤を使用される場合は、THKまでお問い合わせください。・給脂間隔は使用条件により異なりますので、初期点検による給脂間隔の決定を推奨いたします。
プレスシリーズ PCT / PC
【製品・技術に関するお問い合わせ先】 THK株式会社 IMT事業部 〒144-0033 東京都大田区東糀谷4-9-16(テクノセンター) TEL 03(5735)0228 FAX 03(5735)0273
【THKカスタマーサポート】
0120-998-745 受付時間:月曜日~金曜日 9:00~18:00 土曜日 9:00~17:00 (日曜祝日、年末年始、夏季の休業日を除く)
Global site : http:/ /www.thk.com/
中部営業統括部 名古屋支店 TEL 052(883)0851 FAX 052(883)0855 豊 田 支 店 TEL 0566(82)3007 FAX 0566(82)3870 小 牧 支 店 TEL 0568(72)2031 FAX 0568(73)1894 金 沢 支 店 TEL 076(238)6158 FAX 076(238)0246 中部O F C TEL 052(857)0311 FAX 052(857)0315 西日本第一営業統括部 大 阪 支 店 TEL 06(6222)8211 FAX 06(6222)8212 京 滋 支 店 TEL 077(553)2431 FAX 077(553)2421 明 石 支 店 TEL 078(923)0621 FAX 078(923)6067 西日本OFC TEL 077(553)6301 FAX 077(553)6341
西日本第二営業統括部 福 岡 支 店 TEL 092(474)4471 FAX 092(474)5429 広 島 支 店 TEL 082(286)0789 FAX 082(286)0794 福 山 支 店 TEL 084(973)1501 FAX 084(973)1502 松 山 支 店 TEL 089(972)7411 FAX 089(972)7511 熊 本 支 店 TEL 096(212)3630 FAX 096(212)3633 海外営業統括部 TEL 03(5434)0351 FAX 03(5434)0353
東日本第一営業統括部 東 京 支 店 TEL 03(5434)0341 FAX 03(5434)0345 上 野 支 店 TEL 03(5812)2071 FAX 03(3832)3051 川 越 支 店 TEL 049(224)7180 FAX 049(225)3187 仙 台 支 店 TEL 022(206)1301 FAX 022(206)1305 秋田営業所 TEL 018(892)6061 FAX 018(839)9560 宇都宮支店 TEL 028(683)2225 FAX 028(663)4113 長 岡 支 店 TEL 0258(37)1011 FAX 0258(37)0853 日 立 支 店 TEL 029(271)9311 FAX 029(271)9313 東日本第二営業統括部 八王子支店 TEL 042(645)8101 FAX 042(646)0509 厚 木 支 店 TEL 046(229)0808 FAX 046(229)0809 静 岡 支 店 TEL 054(251)8261 FAX 054(251)8265 沼津営業所 TEL 055(924)4001 FAX 055(923)4854 浜 松 支 店 TEL 053(413)7871 FAX 053(413)7874 甲 府 支 店 TEL 055(273)6827 FAX 055(273)1159 諏 訪 支 店 TEL 0266(53)1144 FAX 0266(53)1146 上田営業所 TEL 0268(23)8506 FAX 0268(23)8507
©THK CO., LTD. 201211050 J8 Printed in Japan
209-0405-P27-H4.indd 43209-0405-P27-H4.indd 43 12/11/22 18:5912/11/22 18:59








![[PC40-170] - BATTLE2020.09.10 J CBR600RR〔CBR600R3M〕 フレーム号機 PC40-1700001~ グランプリレッド(R-380) 〔フォトNO.1〕 *車体色は印刷のため実物と多少異なる場合があります。1](https://img.pdfslide.tips/doc/110x75/60fe6dfc04e7ed6a8568499a/pc40-170-20200910-j-cbr600rrcbr600r3m-ffff-pc40-1700001i.jpg)