Embed Size (px)
Citation preview

Министерство аграрной политики и продовольствия Украины Государственное агентство рыбного хозяйства Украины
Керченский государственный морской технологический университет
Кафедра «Электрооборудование судов и автоматизация производства»
АВТОМАТИЗИРОВАННЫЕ ГРЕБНЫЕ ЭЛЕКТРИЧЕСКИЕ УСТАНОВКИ
Конспект лекций
для студентов специальности 7.07010404 «Эксплуатация судового электрооборудования и средств автоматики»
дневной и заочной форм обучения
Керчь, 2011г.

2
2
УДК 681.5 Автор: Титов В.В., к.т.н., доцент кафедры ЭСиАП КГМТУ. Рецензент: Дворак Н.М., к.т.н., доцент кафедры КГМТУ. Конспект лекций рассмотрен и одобрен на заседании кафедры ЭСиАП КГМТУ, протокол № 2 от 18.10.2011 г. Конспект лекций утвержден и рекомендован к публикации на заседании методической комиссии МФ КГМТУ, протокол № 2 от 1.12.2011 г.
Керченский государственный морской технологический университет, 2011 г.

3
3
СОДЕРЖАНИЕ
ВВЕДЕНИЕ 5 1 ГРЕБНЫЕ ЭЛЕКТРИЧЕСКИЕ УСТАНОВКИ (ГЭУ) 6 1.1 Назначение и типы ГЭУ 6 1.2 Сопротивление воды и воздуха движению судна 7 1.3 Судовые движители 8 1.4 Рабочие характеристики винта 9 1.5 Реверсивная характеристика винта 9 2. ВЫБОР ОСНОВНЫХ ПАРАМЕТРОВ ГЭУ. ВЫБОР ТИПА ГЭУ 9 2.1 Выбор рода тока, напряжения, частоты 10 3 ВЫБОР ЧИСЛА И МОЩНОСТИ ГРЕБНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ 10 3.1 Порядок расчета мощности на валу гребного электродвигателя 10 4 ВЫБОР ГЛАВНЫХ ГЕНЕРАТОРОВ 11 4.1 Требования к качеству электроэнергии в ГЭУ 11 4.2 Пример расчета мощности ГЭД и главных генераторов 12 5 ГРЕБНЫЕ ЭЛЕКТРОДВИГАТЕЛИ, ГЕНЕРАТОРЫ И ВЕНТИЛЬНЫЕ ПРЕОБРАЗОВА-ТЕЛИ ТОКА И ЧАСТОТЫ
14
5.1 Общие положения 14 5.2 Возбудители генераторов и ГЭД 15 5.3 ГЭУ постоянного тока 16 5.3.1 Структура ГЭУ и схемы главного тока 16 5.3.2 Режимы экономичного хода и аварийные 17 5.3.3 Система возбуждения ГЭУ 18 5.3.3.1 Схема генератор-двигатель (Г-Д) с трёхобмоточным возбудителем 19 5.3.3.2 Система Г-Д с автоматическим регулированием мощности 21 5.3.3.3 Регулирование мощности изменением магнитного потока ГЭД 22 5.3.3.4 Защита ГЭУ постоянного тока 23 5.3.3.5 Регулирование мощности изменением магнитного потока ГЭД 24 5.3.4 Защита ГЭУ постоянного тока 24 5.3.4.1 Защита главных дизелей от непроизвольного реверса 25 5.3.4.2 Пуск и реверсирование ГЭД 25 5.4 ГЭУ переменного тока 27 5.4.1 Особенности работы и схемы главного тока ГЭУ 27 5.4.2 ДЭГУ 28 5.4.3 Параллельная работа синхронных генераторов 28 5.4.3.1 Самосинхронизация 28 5.4.3.2 Распределение нагрузки 29 5.4.4 Типы гребных двигателей 31 5.4.5 Асинхронные синхронизируемые машины 32 5.4.6 Асинхронно-вентильный каскад (АВК) 32 5.4.7 Электромеханический каскад 33 5.4.8 Электрические машины с водяным охлаждением 33 6 НОВЫЕ ИСТОЧНИКИ ЭЛЕКТРОЭНЕРГИИ 34 6.1 Магнитогидродинамические генераторы 34 6.2 Электрохимические генераторы (ЭХГ) 35 6.3 Термоэлектрические генераторы (ТЭГ) 36 7 РЕЖИМЫ РАБОТЫ ГЭУ ПЕРЕМЕННОГО ТОКА. РАБОТА ОДНОВАЛЬНОЙ ТЭГУ 37 7.1 Режимы экономичного хода и аварийные режимы 38 8 ЗАЩИТА ГЭУ ПЕРЕМЕННОГО ТОКА 39 8.1 Максимальная защита 39

4
4
8.2 Продольная дифференциальная защита 40 8.3 Защита обмотки возбуждения от замыкания на корпус 40 8.4 Защита гребных электродвигателей 41 9 ПУСК И РЕВЕРСИРОВАНИЕ ГЭД В ГЭУ ПЕРЕМЕННОГО ТОКА 41 9.1 Пуск ГЭД 41 9.2 Реверсирование ГЭД 42 10 ГЭУ ДВОЙНОГО РОДА ТОКА 43 11 ЕДИНАЯ СУДОВАЯ ЭЛЕКТРОСТАНЦИЯ С ГЭУ ПОСТОЯННОГО ТОКА НА УПРАВЛЯЕМЫХ ВЕНТИЛЯХ
44
12 ГЭУ С ГЭД ПЕРЕМЕННОГО ТОКА СО СТАТИЧЕСКИМИ ПРЕОБРАЗОВАТЕЛЯМИ ЧАСТОТЫ
44
12.1 Двухзвенный полупроводниковый преобразователь частоты 45 12.2 Непосредственный полупроводниковый преобразователь частоты 45 12.3 ЕСЭ с повышенным переменным напряжением 800В и ГЭД постоянного тока 46 12.4 Снижение высших гармоник в судовой сети при применении управляемых выпрями-телей и преобразователей частоты
47
13 СУДОВЫЕ СХЕМЫ ГЭУ ПЕРЕМЕННОГО ТОКА С ЕСЭ 48 14 ГЭУ СОВРЕМЕННЫХ СУДОВ И ИХ СИСТЕМЫ УПРАВЛЕНИЯ 50 14.1 ГЭУ парома-ледокола типа «А. Коробицын» 50 14.2 ГЭУ морских паромов типа «Сахалин» 53 14.3 ГЭУ линейных ледоколов типа «Ермак» 54 14.4 ГЭУ океанографического судна «Аранда» 55 14.5 Сравнительный анализ схем управления ГЭУ 56 14.6 ГЭУ промысловых судов 57 14.6.1 ГЭУ судов типа «Зверобой» 57 14.6.2 ГЭУ траулера проекта В 422 59 14.6.3 ГЭУ траулера "Arctic Trawler" 59 15 ВОПРОСЫ ЭКСПЛУАТАЦИИ ГЭУ 61 16 ЭЛЕКТРОБЕЗОПАСНОСТЬ И ПОЖАРОБЕЗОПАСНОСТЬ ГЭУ 64 17 ОПТИМИЗАЦИЯ ЭКСПЛУАТАЦИОННЫХ РЕЖИМОВ ГЭУ 66 17.1 ГЭУ как система подчиненного управления 66 17.2 Способ подчиненного управления со связью регулятора по нагрузке 67 17.3 Оптимизация параметров синхронизируемых регуляторов 70 18 АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ГЭУ 72 18.1 Способ и средства управления 72 СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 79

5
5
ВВЕДЕНИЕ
Первая гребная электрическая установка появилась в России в 1838 году. Это был катер с гребными колесами, курсирующий по Неве. Изобретателем был российский ученый, академик Б.С. Якоби, применивший для вращения гребных колес двигатель постоянного тока.
В 70-80-х годах 19-го века первые электроходы появились в Европе. В России в начале 20-го века первыми дизель-электроходами были «Вандал» и «Сармат».
В СССР строительство судов-электроходов началось в 30-е годы. Большое их количество построено в связи с освоением Северного морского пути и развитием рыболовного флота.
Электроходы могут удовлетворять самым различным условиям и требованиям со стороны эксплуатации, конструкции судна и технических характеристик, и для некоторых типов судов яв-ляются незаменимыми гребными электрическими установками оснащаются ледоколы, паромы, рыболовные суда, суда-спасатели, буксиры и др.
Перспективными направлениями развития систем электродвижения является внедрение установок на переменном токе с полупроводниковыми преобразователями частоты и ГЭД с век-торным управлением, а также использование главных машин со сверхпроводящими обмотками, позволяющих снизить массогабаритные характеристики и применить лучшую компоновку элек-трооборудования в машинном отделении судна.
Тематический план дисциплины и распределение учебного времени по темам занятий
Тема Количество часов
1. Гидродинамические и электротехнические характеристики ГЭУ. 12 2. Оборудование и структура ГЭУ постоянного тока. 12 3. Схемы ГЭУ постоянного тока. 13 4. Структура ГЭУ переменного тока. 11 5. Специальные схемы и оборудование ГЭУ переменного тока. 12 6. Работа ТЭГУ и ДЭГУ переменного тока. 12 7. Единая судовая электростанция, ТБ и эксплуатация ГЭУ. 8 8. Судовые схемы ГЭУ. 14 9. ГЭУ промысловых судов. 14

1. ГРЕБНЫЕ ЭЛЕКТРИЧЕСКИЕ УСТАНОВКИ (ГЭУ) 1.1 Назначение и типы ГЭУ Под электродвижением судов следует понимать их движение с использованием электри-
ческой энергии гребными электрическими установками. В состав ГЭУ входят: а) первичный двигатель (дизель или турбина); б) главные генераторы, питающие электроэнергией гребной двигатель; в) гребной двигатель, соединённый с движителем; г) движитель (винт), сообщающий движение судну. По роду тока ГЭУ подразделяются на установки постоянного и переменного ток. ГЭУ по-
стоянного тока применяются на судах, где требуется высокая маневренность и частое реверсирование гребного двигателя (ле-доколы, паромы, китобойные суда и др.). ГЭУ переменного тока применяют на судах, для которых наибольшее значение имеет экономичность установки.
По типу первичного двигателя ГЭУ подразделяются на дизель электрические (ДЭГУ) и турбоэлектрические (ТЭГУ). На рыбопромысловых судах, как правило, применяют ДЭГУ.
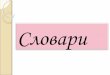
Мощность дизеля и его скорость регулируют, изменяя количество подаваемого в цилиндр топлива. Зависимость еМ и
еN от при предельной подаче топлива называют внешними
характеристиками (рисунок 1.1). Аналогично зависимости, по-лученные при меньшей подаче топлива, называют частичными характеристиками. Как на внеш-них, так и на частичных характеристиках момент почти не изменяется при изменении скорости дизеля.
Допустимые перегрузки для дизеля 10-15% нN .Номинальную скорость дизель развивает
при предельной подаче топлива. При н 15,11,1 срабатывает предельный регулятор, пре-
кращающий подачу топлива топливным насосом. Крупные дизели, кроме того, имеют всережим-ный регулятор, который может быть установлен на любое значение скорости.
ТЭГУ обычно работают на переменном токе, где используется свойство турбин изменять
скорость в широких пределах н%10025 путём простого изменения количества пара. Они до-
пускают перегрузку нР%4025 .
В настоящее время начинают применять и газотурбинные установки. По назначению ГЭУ делятся на главные (или автономные), вспомогательные и комбини-
рованные. В главных ГЭУ винт приводится во вращение только от гребного электродвигателя, пи-
тающегося от своих главных генераторов. Во вспомогательных ГЭУ главные генераторы питают в процессе работы производствен-
ные механизмы, а во время перехода – гребные электродвигатели. В комбинированных ГЭУ винт приводится во вращение как главным двигателем так и
электродвигателем, потребляющим свободную мощность вспомогательных генераторов. Допол-нительный гребной двигатель в этом случае используется либо в помощь основному, либо для са-мостоятельной работы на гребной винт на малых ходах судна, либо как генератор отбора мощно-сти.
К преимуществам ГЭУ относится: а) свобода выбора на судне места; б) возможность использования быстроходных, нереверсивных, малогабаритных дизелей; в) хорошие маневренные качества; г) возможность работы с неполным числом первичных агрегатов; д) высокая живучесть;
Рисунок 1.1 - Внешние характеристики дизеля.

7
7
0
QР Р2
Р1
VR
е) возможность работы в тяжелых усло- виях плавания, обеспечиваемая большой пере-грузочной способностью электрических машин;
ж) возможность использования главных генераторов для питания других потребителей; Недостатками ГЭУ по сравнению с дизельными и турбинными установками являются: а) низкий КПД из-за двойного превращения энергии; б) высокий удельный вес и стоимость; в) увеличенный персонал. 1.2 Сопротивление воды и воздуха движению судна
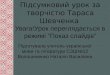
На судно неподвижно стоящее в воде, дей-ствуют силы давления, равнодействующая которых равна силе тяжести судна и направленная противо-положно ей (рисунок 1.2). При движении судна рав-нодействующая сил давления Р отклоняется от вер-тикального положения, а точка её приложения сме-щается по ДП в нос.
Рисунок 1.2 - Схема сил, действующих на судно.
Равновесие системы не нарушится, если к центру тяжести судна О приложить две проти-воположно направленные силы Р1 и Р2 равные по величине и параллельные Р. Полученная пара сил Р и Р1создаст момент, вызывающий дефект на корму.
Разложенная по взаимно перпендикулярным осям сила Р2 образует составляющие Q и R. Q-называют гидродинамической силой поддержания. R-сопротивление воды; направлена противоположно движению судна. Сопротивление воды R преодолевается силой упора движетеля, что вызывает давление
R д . Силы вязкости воды на границе с корпусом создают касательные силы R трения .
волновоеформыдавления RRR .
Тогда
вфтрдтр RRRRRR . (1.1)
SсмКR шеркрплтртр2
)(2
..
ν
, (1.2)
где плтр. - коэф. сопротивления терния гладкой пластины = 0,0315Rе 145,0 ,
Rе- число Рейнольдса
LRе
ν,
ν -скорость судна, м/с, L-длина судна по ГВЛ, м,
-кинетическая вязкость воды при t=4 C см /1057.1 64 ,
крК -коэф.кривизны корпуса, при L/В=6 крК =1,04, при L/В=12 крК =1,01, 310)7,03,0( шер у сварных судов коэффициент шероховатости корпуса судна,
3/1025 мкг -плотность морской воды.
S-смоченная поверхность судна, LВTSсм П )274,0(37.12 , (1.3)
где L,В,Т- длина между перпендикулярами, ширина и осадка судна, м.
LВТ
VП -коэф. полноты.

8
8
V- водоизмещение, м.
дR -определяют методом механического подобия Фруда (моделирование) или по методу
Кабачинского.
НVcRд323/2 10ν , (1.4)
где с = (2-4) и определяется по графикам Кабачинского. Мощность R необходимая для преодоления сопротивления R и сообщения судна скоро-
сти ν называется буксировочной. νRNP ; кроме того, необходимо учитывать сопротив-
ление воздуха движению судна:
SпарСR BВЗВЗВЗ
2
)(* 2νν
, (1.5)
где 8,0ВЗС -для воздуха; 3/197,1 мкгВЗ ;
S-парусная поверхность судна, 2м . hвТНВSпар *)(27,0 ,
где в, h-ширина и высота надстроек, м. 1.3 Судовые движители
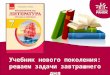
В большинстве случаев это гребные винты. Размер гребного винта характеризуется его диаметром «Д», т.е. диаметр окружности описываемой наиболее удаленной точкой лопасти.
Площадь круга радиусом R, образованного винтом при его вращении называется площа-дью диска винта. Геометрической характеристикой его является дисковое отношение
2*
4
Д
А
,
где А - площадь всех лопастей; RД 2 .
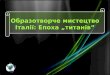
Если винтовую линию, соответствующую одному обо-роту радиуса «r» развернуть в прямую, то получим шаговый треугольник с катетом в основании, равным Пr2 и вторым ка-тетом, равным геометрическому шагу «Н».
При вращении винта в твердой среде элемент лопасти АВ за один оборот переместился бы в осевом направлении на
величину шага винта в положении ВА и осевая скорость была
бы равна
2Н . В воде, допускающей перемещение его ча-
стиц винт пройдет путь меньший - Ph , называемый поступью
винта. Тогда осевая скорость
2ν PP h , или
PPh
ν2 . (1.6)
ShH P - называется абсолютным скольжением;
H
hHs P - относительное скольжение;
РP
Д
h - относительная поступь винта;
Д
Н- шаговое отношение;
А
Нhр
А`
B`
B
Н
B
B`нос
корма
r2
Рисунок 1.3 - Схема действия винта.

9
9
КПД винта
22
1 РР
К
К ;
42
2
1**
4*
Д
РК
, (1.7)
где Р- упор винта, - плотность воды.
52
2
2**
*4*
Д
МК
, (1.8)
где 21 ,, ККр - можно определить по кри-
вым действия гребного винта.
1.4 Рабочие характеристики винта
2СМ
1. Основная, свободный ход при номинальной осадке. 2. Швартовая, при неподвижном судне. 3. Для ледоколов ход во льду. 4. Буксировочная при ходе судна с возом. 5. Свободный ход порожнем. 1.5 Реверсивная характеристика винта vн- полный ход вперед АБ - режим двигателя ВГ- гидравлический двигатель (турбина) ГД – гидравлический тормоз После выключения гребного двигателя (М=0) винт замедляется
до точки Б (≈73%vн). Чтобы затормозить винт (v=0) необходимо (≈73%Мн (точка В)
при v≈35%. Чтобы удержать винт в неподвижном состоянии надо
)(%40 точкаГМн . При разгоне винта в обратную сторону до35% vн
требуется ≈100%Мн (точка Д).
Вопросы для самоконтроля.
1 Назначение и типы ГЭУ. 2 Сопротивление воды и воздуха движению судна. 3 Судовые движители. 4. Рабочие характеристики винта. 5. Реверсивная характеристика винта.
2 ВЫБОР ОСНОВНЫХ ПАРАМЕТРОВ ГЭУ. ВЫБОР ТИПА ГЭУ ДГЭУ предпочтительны при небольших мощностях (дешевле, легче, быстрый пуск). При больших мощностях экономичнее ТЭГУ.
p
Рисунок 1.4 - Диаграмма гребного винта.
Рисунок 1.5 - Характеристики винта.
Рисунок 1.6 – Реверсивная характеристика винта.

10
10
2.1 Выбор рода тока, напряжения, частоты
Постоянный ток повышает маневренные качества. Переменный экономичнее и проще. Выбирают в зависимости от назначения судна.
Напряжение по Регистру: главные цепи – постоянного тока до 1200В, переменного Uл 6300В. Возбуждение до 230В. Цепи управления, сигнализации и защиты до 220В постоянного и до 380В переменного тока.
Более высокое напряжение при постоянном токе ограничивает коллектор, при низком напряжении чересчур большие токи и сечение проводов, что ограничивает мощность.
При переменном токе в фазах АбIд 1500.. в ГЭУ малой мощности и А2500 в ГЭУ большой мощности.
Частота по Регистру 50Гц для основного режима работы.
Вопросы для самоконтроля.
1. Выбор основных параметров ГЭУ. Выбор типа ГЭУ. 2. Выбор рода тока, напряжения, частоты.
3 ВЫБОР ЧИСЛА И МОЩНОСТИ ГРЕБНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
Выбор основывается на буксировой мощности, которую приближенно определяют по формуле Папмеля (есть еще метод адмиралтейских коэффициентов Эйра)
кВтX
CL
VN S
R ,736.03ν
. (3.1)
Sν - скорость судна в узлах.
V-водоизмещение, м 3 . С- коэффициент определяемый по диаграмме (для рыболовных судов ориентировочно
(60-80). Х=1 при 1 вале, 1,05 при 2 и 1,075 при 3. - поправочный множителью
100/3,07,0 L при .1,100 мL
- характеристика остроты корпуса судна = LВбП /*10 ;
LBTVбП / ;
L,B/T- длина, ширина, осадка судна. 3.1 Порядок расчета мощности на валу гребного электродвигателя
1. Полезная тяга (Ре) или буксировочное сопротивление (R)
;515.0, ννν
SR гдекН
NРе (3.2)
sν - скорость судна, узл.
2. Коэффициент попутного потока 1,05.01 ПбW - для одного винта или
16,05,02 ПбW - для 2-х винтов.
3. Коэффициент засасывания
11 *WKt ,
где К=0,5-0,7для обтекаемых рулей, К=0,9-1,05 для пластинчатых рулей.

11
11
Для двух винтовых судов:
14.025.0 22 Wt - для судов с валовыми рукавами;
06.07.0 22 Wt - для судов с кронштейнами гребных валов.
4. Полная сила упора винта
кНt
РеР
1 (3.3)
5. Осевая скорость винта смWP /)1(νν .
6. Диаметр гребных винтов: для одновинтовых
ТкД )75,06,0(1 ;
для двухвинтовых ТкД )7,06,0(2 ,
где Тк - осадка кормой, м. 7. Выбирают угловую скорость винта как можно меньше исходя из реальных электрома-
шин и с учетом, что чем меньше , тем больший КПД. Определяют
ДР
Р
ν2;
РN
М - мощность к гр. винту.
КПД винта – Р определяют как правило по диаграмме Папмеля, зная Р и К1.
8. Пропульсивный КПД
iW
tР
1
1 ,
где 0.197.0 i и учитывает неравномерность потока.
9. Мощность подводимая к гребному винту
RР
.
10. В
РДВР
· 98,095,0 вала (3.4)
По полученному значению Рдв выбирают число, тип и мощность гребных двигателей. Возбуждение двигателей обычно независимое.
Вопросы для самоконтроля.
1. Порядок расчета мощности на валу гребного электродвигателя.
4 ВЫБОР ГЛАВНЫХ ГЕНЕРАТОРОВ
Число генераторов будет выбранено правильно, если удастся обеспечить высокий КПД при разных режимах, небольшую стоимость, простоту обслуживания и надежность работы.
В ГЭУ постоянного тока мощностью более 1500 кВт обычно устанавливают 2 и более ге-нераторов. В ГЭУ переменного ток мощностью до 3000 кВт – один ДГ.
Мощность генераторов определяют по мощности гребных эл.двигателей. Скорость гене-раторов выбирают в соответствии со скоростью первичного двигателя.
4.1 Требования к качеству электроэнергии в ГЭУ
В главных генераторах ГЭУ при номинальном напряжении допускаются перегрузки по току до 10% в течении 2 часов и до 25% в течении 5 мин.

12
12
Генераторы постоянного тока должны выдерживать в маневренных режимах пере-грузки по току до 2Iн-5с и 1,6Iн-60с. Генераторы переменного тока – перегрузки по току до 4Iн-3с.
Главные генераторы постоянного тока мощностью более 600кВт должны допускать фор-сироровку возбуждения до 25%, а генераторы переменного тока 3,5 кратную от номинального значения 30с при пониженной на 20% частоте.
ГЭД постоянного тока допускают форсировку возбуждения до 25% в течение часа в швар-товом режиме, а ГЭД переменного тока – длительно до 15% для обеспечения работы установки при волнении моря.
Главные машины ГЭУ снабжаются принудительной вентиляцией. КПД главных генерато-ров д.б.91% при Р300кВт и не меньше 95% при Р>2500кВт на постоянном токе и на перемен-ном токе 95% при P<1000кВт и 97,5% при Р> 5000кВт.
КПД ГЭД д.б. 92-94% при Р5000кВт на постоянном токе и при переменном токе 95-97% при Р4000кВт.
Системы возбуждения главных генераторов постоянного тока должны иметь резерв по мощности не менее 20% мощности обмоток возбуждения и запас по напряжению не менее 50% от номинального.
Возбудители генераторов переменного тока должны обеспечивать кратковременную фор-сировку мощности генераторов в 3,5 раза при пусках и реверсах ГЭД, а также длительную форси-ровку до 15% сверх номинального значения при движении судна в условиях волнения моря.
При использовании ЭМУ с поперечным или продольным полем предусматривается их ра-бота на ненасыщенном участке кривой намагничивания. При применении магнитных усилителей (МУ) в системах возбуждения целесообразно использовать двухтактные схемы, в которых обмот-ка возбуждения главных машин делится на две равные части и включается по схеме электрическо-го моста.
Быстродействие системы возбуждения определяется скоростью нарастания напряжения возбуждения и величиной его форсировки. Величина постоянных времени цепей возбуждения со-ставляет 1-2с. Величина коэффициента форсировки находится в пределах 0,7-2,8 при однократной форсировке, в зависимости от величины постоянной времени возбудителя.
4.2 Пример расчета мощности ГЭД и главных генераторов Дано: Тип судна – плавбаза. Длина L=165,4м. Ширина В=21,8м. Осадка Т=8,08.
Водоизмещение V=16800г; 1025кг/м 3 .
Скорость Vs=15узлов. 1. Рассчитать буксировочную мощность R ;
x
cL
VN S
R
3ν736.0 .
V=16390м 3 (16800:1,025); ν =15·0.515=7.725м/c ν = Vs 0,515м/c. С=68 по диаграмме Пампеля при
14.165
7.015sνν
L
; 7.0
4.165
3.21*576.0*1010
L
ВбП .
576.008.83.214.165
16390
LBT
VбП ;
х =1,05 для двух валов;
086.1100
4.1653.07.0
1003.07.0
L .

13
13
кВтN R 5.26187.0086.1
05.1
68
15
4.165
16390736.0
3
.
2. Полезная тяга: кНN
Ре R 340725.7
5.2618
ν .
3. Коэффициент попутного потока для двухвинтовых судов 13,016,0576,0*5,016,05.02 ПбW .
4. Коэффициент засасывания: 15.006.013.0*7.006.0*7.0 22 Wt .
5. Полная сила упора, создаваемая гребными валами кНt
PP E 400
)15.01(
340
)1( 2
.
6. Осевая скорость винта смWp /72.6)13.01(725.7)1( 2νν .
7. Диаметр гребных винтов в кормовом подзоре 25,508,8*)7,06,0()7,06,0(2 ТД .
8. Угловая скорость винта «Vв», определяем величину коэффициента Р и К1:
Принимаем Vв =2рад/с.
68,025,556,12
72,622 ν
Д
pР ; 56,12222 ν в об/с.
1,025,556,1210025,1
1044004423
32
42
2
1
Д
РК .
9. КПД изолированного винта определяем по вспомогательной диаграмме Пампеля в за-
висимости от Р и К1:
625,0Р .
10. Пропульсивный КПД:
2
2
(1 )
(1 )Р t i
w
,
где i- множитель Фруда = 0,97-1, учитывающий неравномерность потока
64,0)13,01(
98,0)15,01(625,0
.
11. Мощность, подводимая к гребному винту: кВтN
N RP 4363
64.0
5.2618
.
12. Мощность на валу ГЭД: ;460095,0
4363кВт
NР
В
Pдв
где ηв = 0,95 - КПД валопровода. 13. Выбираем 2 двигателя по 2350кВт, т. ПГ150, U=1000В, 94,0ДВ , Iя=2500А, с неза-
висимым возбуждением.
14. Определяем мощность генераторов: кВтРГ 500094,0
23502
.
Вопросы для самоконтроля.
1. Требования к качеству электроэнергии в ГЭУ 2. Пример расчета мощности ГЭД и главных генераторов.

5 ГРЕБНЫЕ ЭЛЕКТРОДВИГАТЕЛИ, ГЕНЕРАТОРЫ И ВЕНТИЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ ТОКА И ЧАСТОТЫ
5.1 Общие положения Электромашины и аппаратура для ГЭУ либо создаётся специально, либо общепромыш-
ленного типа приспосабливается к судовым условиям. Исполнение машин, как правило, защищен-ное. ГЭД имеет обычно небольшую частоту вращения порядка 100-120об/мин, но в зависимости от конструкции судна, винта и его диаметра обороты могут достигать до 700об/мин. При больших оборотах электродвигатель соединяется с валом через редуктор. Вентиляция ГЭД осуществляется по замкнутому циклу с воздухоохладителем. Вентиляторы устанавливают, как правило, на корпу-се ГЭД. Движители делают на двух стояковых подшипниках с принудительной смазкой и охла-ждением. Станины и подшипники со стороны гребного вала заземляются для защиты от блужда-ющих токов, а с противоположной стороны изолируются.
ГЭД постоянного тока обычно двухякорные, и каждый якорь имеет самостоятельную си-стему охлаждения. Двухякорное исполнение уменьшает диаметр и момент инерции машины, по-вышает надёжность и даёт возможность получать большую мощность. Имеют изоляцию обмоток класса «В» с применением стекловолокнистых материалов во влагостойком исполнении. Снабжа-ются компенсационными обмотками.
Генераторы постоянного тока имеют частоту вращения 500-1000об/мин и защищенное ис-полнение с принудительной вентиляцией.
Напряжение ГЭУ выбирается в зависимости от мощности электрических машин. В уста-новках большой мощности применяют более высокое напряжение с целью уменьшения сечения кабеля, токоведущих частей аппаратов в главной цепи и якорных обмоток электрических машин.
Напряжение электрических машин постоянного тока ограничивается предельно допусти-мым напряжением между коллекторными пластинами (не более16-18В во избежание кругового огня), расстоянием между разнополярными щётками, условиями коммутации, диаметром коллек-тора и якоря. Поэтому обычно напряжение не превышает 1200В.
В ГЭУ переменного тока используются двигатели синхронные и асинхронные (коротко-замкнутые, с фазным ротором и с переключением пар полюсов). Асинхронные двигатели (АД), особенно с короткозамкнутым ротором просты и надёжны, обладают хорошими пусковыми харак-теристиками, но имеют сравнительно низкий 87.085.0cos , а у тихоходных даже до 0,7, т.к.
по условиям сборки у них большой воздушный зазор, увеличивающий реактивный ток намагни-чивания.
Синхронные двигатели (СД) имеют пусковую короткозамкнутую обмотку, создающую достаточно большой пусковой момент. В конце асинхронного пуска обмотка возбуждения ротора подключается к возбудителю постоянного тока.
Основное преимущество СД – высокий сos = 1. Поэтому размеры СД меньше, чем АД
при той же активной мощности. КПД СД выше, чем у АД из-за уменьшения тока статора и мень-ших потерь в роторе. Благодаря большому воздушному зазору в СД уменьшается индуктивное со-
противление по продольной оси « dX », так как в этом случае снижается влияние МДС реакции
статора. При этом возрастает перегрузочная способность
1
max
dX
UEmM . (5.1)
СД менее чувствителен к колебаниям напряжения, т.к. его maxM пропорционален первой
степени напряжения, а у АД - второй. Некоторые иностранные фирмы используют быстроходные АД, соединяя их с гребным
валом через редуктор, что даёт возможность применения АД на подшипниках качения, с малым воздушным зазором, с повышенным сos (>0,83) и КПД. Иногда один гребной вал приводится во
вращение двумя АД. При мощностях порядка 1000 кВт выгоднее применять быстроходные АД, хотя и с редуктором или тихоходные СД без редуктора. При единой электростанции для ГЭУ и судовых потребителей применяют переменный ток, что значительно выгодней.

15
15
Генераторы переменного тока приме- няют защищённого исполнения с одним под-шипником (второй общий с приводным двигателем), с принудительной или самовентиляцией. Для дизель-генераторов (ДГ) обороты обычно 750-1500об/мин, а для тахогенераторов (ТГ)-3000об/мин. В ГЭУ в несколько тысяч киловатт применяют повышенное напряжение от 2 до 6,3кВ. Частота рекомендуется 50Гц. В ГЭУ постоянного тока для питания ГЭД используются не-управляемые выпрямители, присоединённые непосредственно к зажимам генератора и управляе-мые выпрямители, присоединённые к сборным шинам электростанции, которая может быть еди-ной для ГЭД и судовых потребителей. Обычно используются трёхфазные выпрямители. Среднее выпрямленное напряжение управляемость трёхфазного выпрямителя.
)(cos3
.
.
мл
фdмлd
E
XIEU
, (5.2)
где E мл. - линейное максимальное (амплитудное) значение питающего синусоидального
напряжения, В.
dI - величина выпрямленного тока, А.
фX - индуктивное сопротивление фазной обмотки, Ом.
- угол управления или отпирания.
Значения тока: cosR
E
R
UI
гн
мл
гн
dd
.
.
.
3 .
Для питания синхронных и асинхронных ГЭД используются часто вентильные преобразо-ватели частоты, обеспечивающие и регулирование оборотов.
Преобразователь частоты может быть со звеном постоянного тока - выпрямителем от ко-торого питается автономный инвертор. Частота и напряжение на выходе инвертора могут изме-нятся в широких пределах.
Применяются также непосредственные преобразователи частоты (НПЧ), в которых нет выпрямителя в явной форме; в этом случае выпрямление производится одними и теми же группа-ми вентилей. Происходит прямое преобразование постоянной частоты и напряжения в регулируе-мые на выходе. Но частота на выходе всегда ниже частоты на входе: 2f <0,5 1f . Чем больше 1f и
меньше 2f , тем плавней происходит изменение 2f . С уменьшением 2f необходимо пропорцио-
нально ей снижать амплитуду выходного напряжения, для чего приходится изменять угол откры-тия вентилей в течение периода 2Т .
5.2 Возбудители генераторов и ГЭД В ГЭУ для питания обмоток возбуждения генераторов и ГЭД применяют различные воз-
будители, которые дают возможность изменять большие токи возбуждения с помощью малых сигналов и в то же время позволяют получить статические и динамические характеристики ГЭУ. В качестве возбудителей применяют генераторы постоянного тока независимого возбуждения, элек-тромашинные усилители управление напряжением которых осуществляется непосредственным изменением токов возбуждения этих возбудителей, магнитные усилители и вентильные (тири-сторные) возбудители. Возбудителями могут быть также синхронные генераторы (СГ) с выпрями-телями на выходе. Для управления возбудителями иногда применяются подвозбудители, которы-ми служат ЭМУ, магнитные усилители или электронные усилители.
Машинные возбудители приводятся во вращение электродвигателями, получающими энергию от судовой сети. По правилам Регистра для главных генераторов и ГЭД – предусматри-ваются резервные возбудители. Системы возбуждения с магнитными усилителями и управляемы-ми вентилями питаются от судовой сети переменного тока.
Применяемые в качестве возбудителей генераторы постоянного тока, имеют обмотку не-зависимого возбуждения, в которой ток изменяется вручную или автоматически с помощью до-полнительных устройств – возбудителей и системы управления. Генератор постоянного тока

16
16
(ГПТ), являющийся возбудителем, работает на нагрузку с постоянным сопротивлением. Этим он отличается от генератора питающего сеть с постоянным напряжением. Ток возбуждения возбу-дителя и его напряжение могут изменяться от нуля до номинального значения. Вследствие этого рабочей характеристикой возбудителя является характеристика, выражающая зависимость напря-жения генератора от тока возбуждения при постоянном сопротивлении нагрузки.
Машина постоянного тока может рассматриваться как усилитель с малым быстродействи-ем, входным сигналом которого является напряжение обмотки возбуждения, а выходным - напря-жение на якоре. Для повышения быстродействия возбудителя и уменьшения сигнала управления применяются ЭМУ поперечного и продольного поля. ЭМУ обладают большим быстродействием, вследствие чего могут создавать форсированное возбуждение на короткое время и позволяет про-стыми средствами осуществлять управление ГЭУ. Для усиления форсировки возбуждения генера-тора или ГЭД режим работы ЭМУ-возбудителя должен соответствовать ненасыщенной части ре-гулировочной характеристики, которую с некоторым приближением можно считать линейной.
Возбуждение на управляемых вентилях представляет собой многофазный одно или двух-полупериодный мост, получающий питание от многофазной сети непосредственно или через трансформатор. Этот выпрямитель выполняет одновременно роль усилителя и выпрямителя и управляется сигналами малой мощности. Вентильные возбудители позволяют быстро гасить маг-нитное поле генераторов и ГЭД при остановках, реверсах и аварийном отключении электрических машин. Быстрое гашение магнитного поля, т.е. снижение тока возбуждения до нуля, происходит при противовключении возбудителя.
Тиристорные возбудители позволяют осуществить такое противовключение без разрыва и переключения цепи возбуждения. Для этого выпрямитель переводится в режим противовключения – вынужденный инверторный режим. В номинальном режиме ..нвU < max.dU соответствующего
0 , вследствие чего при необходимости можно значительно увеличить ток возбуждения. 5.3 ГЭУ постоянного тока 5.3.1 Структура ГЭУ и схемы главного тока ГЭУ постоянного тока применяются там, где требуется высокая маневренность. Они обеспечивают: а) легкость и плавность регулирования скорости в широких пределах; б) простоту дистанционного управления; в) полное использование машин при работе ГЭУ в различных условиях плавания.
Мощность ДГ и их количество (1-6) выбирают в зависимости от потребляемой мощности
движителем и КПД всех передач. При последовательном соединении «Г» в любом режиме каждый из ДГ развивает мощ-
ность равную номинальной (полностью используются генератор и дизель), а «ЭД» получает мощ-ность равную сумме мощностей работающих генераторов.
При параллельном соединении «Г», при необходимости отключить один или несколько агрегатов, приходится снижать напряжение оставшихся в работе, т.к. при неизменном напряжении «ЭД» будет вращаться с прежней скоростью и вызовет перегрузку ДГ. При этой схеме ДГ будет
Рисунок 5.1 - Зависимость расхода мощности.
Д Г
индикатормощность
Ni
м
Nе
Т
РГ
ИД
сети дв
Рдв
вал
Nр
на валу
NR- буксироваямощность
пропульсивный КПД

17
17
использоваться не полностью, а мощность, подводимая к «ЭД» окажется меньше, чем при последовательном соединении.
Кроме того, при параллельном соединении токи между генераторами распределяются не равномерно из-за различия их внешних характеристик и скоростей дизелей. Поэтому такое соеди-нение применяется редко.
Парал-лельное соеди-нение гребных ЭД, находя-щихся на од-ном валу прак-тически не
применяется из-за расхож-дения характе-ристик х.х., а
соответственно неравномерного распределения токов нагрузки. Этот недостаток устраняется при последовательном соединении, а для того чтобы напряжение между двумя любыми точками схе-мы не превышало напряжения одного генератора, применяют попеременно – последовательное
соединение генераторов и электродвигателей (схема «г»). 5.3.2 Режимы экономичного хода и аварийные
Режим экономичного хода – ход с пониженной скоростью, со значительной экономией
топлива, т.к. 3 . При этом отключают один или несколько ДГ. Аварийный режим – вынужденная остановка одного или нескольких ДГ, т.е. отличие
только в причине остановки. В ДЭГУ постоянного тока широко распространена схема со специальными кулачковыми
контроллерами (селекторные переключатели), с помощью которых производят набор схемы для различных режимов.
С помощью двух одинаковых переключателей 1ПГ и 2ПГ можно набрать 6 режимов и 33 варианта схемы включения:
1. Работа четырех «Г» на оба якоря ЭД (1 вариант). 2. Работа любых трех «Г» на оба якоря ЭД (4 варианта). 3. Работа любых двух «Г» на оба якоря ЭД (6 вариантов). 4. Работа любого одного «Г» на оба якоря ЭД (4 варианта). 5. Работа двух «Г» на оба якоря ЭД (10 вариантов). 6. Работа одного «Г» на оба якоря ЭД (8 вариантов). Вспомогательными контактами переключателя включаются цепи возбуждения, управле-
ния, блокировки и сигнализации. Предусмотрена блокировка электромагнитными замками не позволяющая переключать
главные цепи под нагрузкой и при наличии напряжения в цепях возбуждения. Иногда дополни-тельно ставят разъединители «Р».
Первый режим основной, остальные - режимы экономичного хода. Например, работают 3ДГ на 2ЭД.
75,04
3
н
;
908,075,033 ;
825,0908,0 22 М ;
Рисунок 5.2 - Схемы главного тока.

18
18
I=Iн;
825,0:
ММн
М
Iнс
Мн
Iс
М
нФ
ФФ
н
;
75,0908,0*825,0
Ф
Фс
Фс
Е
Е
U
UU
ннан
а
aн
aa
При последовательном включении «Г» также дают
aнa UU 75.0325.0 . Т.е. уменьшив мощность на 25% оборо-
ты винта, снижаются всего на 10% ориентировочно. Более точ-но снимают эту зависимость с действительной характеристики винта ).(fРВ
5.3.3 Система возбуждения ГЭУ
Генераторы и ГЭД получают возбуж-дение от возбудителей. Изменения тока воз-буждения у небольших генераторов делается в его обмотке, а у больших в обмотках возбужде-ния возбудителя.
В качестве возбудителей главных гене-раторов постоянного тока применяют двух и трех обмоточные возбудители, ЭМУ с попереч-ным и продольным полем.
В последнее время для возбуждения как «Г» так и ГЭД применяют не вращающиеся магнитные усилители.
ОВГ разделена на две равные части и вместе с вб rr 5.0 включена по мостовой схеме
на питание переменного тока через МУ1 и МУ2 и ВП1 и ВП2.
При питании от МУ1 и ВП1 ГЭД вра-щается в одну сторону, а если от МУ2 и ВП2 – то в другую.
Различают 3 вида систем возбуждения «Г» в ГЭУ постоянного тока: 1. Индивидуального возбуждения, где каждый возбудитель механически связан с «Г» и
питает ОВГ только своего «Г».
Н о м е р а к о н т а к т о в
1
2
3
4
5
6
0
Рисунок 5.3 - Контроллерная схема включения.
Рисунок 5.4 – График
зависимости ).(fРВ
Рисунок 5.5 Схема возбуждения.

19
19
Достоинства: а) не надо приводного двигателя; б) не надо подбирать внешние характеристики, т.к. нет параллельной работы. Недостатки: а) нет резерва; б) сложность схем при нескольких генераторах; в) большая длина агрегата; г) колебания напряжения (при изменении нагрузки меняются обороты дизеля). 2. Централизованное возбуждение, где возбудитель приводится во вращение отдельным
двигателем и питает цепи возбуждения нескольких «Г», иногда работая в параллель с другими возбудителями.
Достоинства: а) меньшая длина агрегата; б) возможность ремонта на ходу при наличии двух и более возбудителей; в) нет зависимости от загрузки дизелей и соответственно меньше колебания «U». Недостатки: а) наличие приводных двигателей; б) необходимость защищать дизеля от непроизвольного реверса; в) обязательность согласования внешних характеристик возбудителей на случай парал-
лельной работы. 3. Системы смешанного возбуждения – возбудители связаны механически с валами гене-
раторов, но имеют возможность питания обмоток возбуждения нескольких генераторов. Достоинства: а) отсутствие приводных двигателей; б) высокая живучесть благодаря резервированию. Недостатки: а) необходимость защищать дизеля от непроизвольного реверса; б) необходимость согласования внешних характеристик на случай параллельной работы; в) сложность схемы; г) большая длина агрегатов; д) непостоянство напряжения возбудителей из-за колебания скорости дизелей при изме-
нении их нагрузки.
5.3.3.1 Схема генератор-двигатель (Г-Д) с трёхобмоточным возбудителем
Исполнительный двигатель системы Г-Д имеет жёсткую механическую характеристику (3). Кривые 1 и 2 рабочие характеристики винта. Кривая 1 – основная и кривая 2 – швартовая. Точка А – полный ход судна на свободной воде
при н . Точка В – на швартовых
при н 1 и большем моменте.
Зависимость М=f(ω) показана на рис. 5.6.
По швартовой характери-стике торговых судов винт работа-ет только в период разгона судна.
Для ледоколов, рыболов-ных траулеров, буксиров нагрузка ГЭУ изменяется в диапа-зоне АВ, при этом желательно, чтобы механическая характе-ристика винта constММР нннгэд . .
Участок АВ – постоянной мощности; ОД – макси-
Рисунок 5.6 - Характери-стики исполнительного двигателя системы Г-Д
Рисунок 5.7 - Механическая характеристика ГЭД

20
20
мально допустимая скорость; ОС – момент сто- яния ГЭД при заклинивании винта (рис. 5.7). Если ГЭД работает с постоянным магнитным потоком, то его момент может изменяться
только в результате изменения тока главной цепи. Тогда для сохранения неизменной мощности
первичного двигателя у генератора должен быть: constIUIUNР нннeннг ..
ОД – напряжение, обеспечивающее максимальную скорость ГЭД. ОС – ток короткого замыкания нI25,1 , (рис. 5.8)
Подобный режим работы можно получить, осуще-ствив обратные связи по току и напряжению в системе Г-Д с трёхобмоточным возбудителем генератора (рис. 5.9).
ОНВВГ – обмотка независимого возбуждения возбу-дителя генератора, которая связана с постом управления и служит для задания необходимого режима работы ГЭУ.
ОТВВГ – обмотка отрицательной обратной связи по току, которая включена на падение напряжения в компенса-ционной обмотке КО и дополнительных полюсов ДП ГЭД.
ОШВВГ – обмотка параллельного возбуждения воз-будителя, благодаря которой возрастает зависимость напря-жения возбудителя и потока генератора от тока главной це-пи.
Возбудитель, обмотки которого включены таким образом, позволяют получить выпуклые крутопадающие внешнюю характеристику генератора и механическую ГЭД (кривые 4 на рис. 5.7 и 5.8).
Рисунок 5.9 - Система Г-Д с трехобмоточным возбудителем
Возбудитель выбирают по мощности потребляемой обмоткой возбуждения в режиме сво-
бодного полного хода судна (точка А)
вгвггв rimР 2.. , (5.3)
где m – число генераторов питающихся от этого возбудителя.
Выбирают возбудитель мощностью вгР05,22 и с напряжением вгU 02 . Это необходимо,
чтобы возбудитель работал на прямолинейном участке кривой намагничивания и обладал доста-точной чувствительностью при изменении управляющего воздействия тока в ОНВВГ 321 RRR слу-
жат для подгонки внешних характеристик и механической характеристики к необходимым пара-метрам.
Рисунок 5.8 - Внешняя характе-ристика генератора

21
21
5.3.3.2 Принцип поддержания постоянства мощности В ГЭУ грузовых и пассажирских судов момент вращения ГЭД и мощность генератора вы-
бираются по режиму полного хода судна в свободной воде (по точке А). При этом гребная элект-роустановка имеет наименьшую массу. Возможное превышение номинального тока при ходе суд-на на волне обеспечивается за счет допустимой перегрузки электрических машин. Постоянство мощности в ГЭУ поддерживается воздействием на магнитный поток главного генератора
( varrФ ), т.е. регулированием напряжения генератора в зависимости от тока нагрузки.
Правильный выбор главных машин, работающих условиях периодической перегрузки, де-лается на основании расчета тока главной цепи в переходном процессе при ходе судна на волне. По его величине определяется средний квадратичный ток, который и принимается в качестве но-минального для выбора главных генераторов и ГЭД. Принимая синусоидальное изменение тока,
соответствующего регулярному волнению моря, по выражению 2
1, 2 0,2sinнi I tT
получаем
средний квадратичный ток по формуле: 222
0 0
21, 2 0, 2sin 1, 24
T T
нэкв н
Ii dt tI dt I
T T T
(5.4)
где Т - период изменения момента сопротивления винта ( 6Т с .
В результате гидродинамических расчетов установлено, что среднее значение момента сопротивления винта при той же скорости хода при качке судна увеличивается на 7-8% по сравне-нию с величиной момента при ходе в спокойной воде. Поэтому необходимо главные машины вы-бирать с некоторым запасом или снижать скорость хода при качке, что часто делается для умень-шения ударов волн о корпус судна.
Для ледоколов и судов ледового плавания ход во льдах является длительным режимом, поэтому параметры ГЭУ для них выбираются по наиболее тяжелому режиму, близкому к шварто-вому (по точке В на рис. 5.7). То же характерно для паромов, земснарядов, аварийно-спасательных и промысловых судов, совершающих частые смены режима, маневры для выполнения технологи-ческих работ.
Постоянство мощности ГЭУ сохраняется воздействием на магнитный поток двигателя
( varдвФ ), уменьшая его в более легких режимах.
Генераторы выбираются на номинальную мощность швартовного режима и работают при одном и том же напряжении и токе. При поддержании постоянства мощности при varТФ возбу-
дитель главного генератора должен создавать круто падающую внешнюю характеристику генера-тора с регулированием U I const .
При поддержании постоянства мощности при varдвФ сохраняется постоянство напря-
жения и тока генератора. Поэтому эти системы работают как системы регулирования тока главной цепи, а регулирующим воздействием является магнитный поток ГЭД.
Регулирование тока может происходить как по отклонению регулируемой величины (тока главной цепи), так и по возмущению (изменение момента сопротивления на валу ГЭД). Измеряе-мые величины воздействуют на усилитель в системе возбуждения двигателя. Механические ха-рактеристики ГЭД изменяются так, что мощность, потребляемая двигателем, остается постоянной
н нM n M n const . При увеличении момента сопротивления на валу ГЭД магнитный поток
двигателя увеличивается вследствие изменения его тока. При этом вращающий момент ГЭД так же увеличивается пропорционально магнитному потоку двигателя. Скорость вращения ГЭД и в этом случае уменьшается. Но противоЭДС ГЭД остается постоянной, что обеспечивает постоян-ство тока и напряжение генератора.
A H E А А HU U c Ф п I R , (5.5)

22
22
B H E B B HU U c Ф п I R (5.6)
Вращающий момент, скорость вращения и магнитный поток гребного электродвигателя определяется по формулам:
A A B B H HM n M n M n const , (5.7)
A А В Вn Ф п Ф , (5.8)
/В А В АФ Ф М М . (5.9)
5.3.3.3 ГЭУ неизменного тока Преимущества ГЭУ неизменного тока за счет регулирования ГЕ позволяют регулировать
скорость вращения ГЭД, находящегося в контуре, независимо от других двигателей, плавно и в широких пределах производить реверс без переключений в схеме, обеспечить любое перераспре-деление мощности главных генераторов между электродвигателями. Кроме того, возможно глав-ное перераспределение мощности дизелей между судовой сетью и системой электродвижения, что позволяет снизить проектную мощность дизелей.
В этих установках обеспечивается ограничение момента н6а валу ГЭД в случае заклини-вания винта или остановки технологического механизма.
По сравнению с системой Г-Д они более надежны. При выходе из строя одного или части дизель-генераторов электродвигатели могут получать питание от оставшихся в контуре дизель-генераторов. Если не все потребители электроэнергии включаются одновременно на полную мощ-ность, то суммарная установленная мощность генераторов может быть меньше суммарной уста-новленной мощности потребителей, что повышает экономичность ГЭУ неизменного тока
ММ С I Ф к Ф , (5.10) 2М кФ М к п , (5.11)
кп Ф
к
. (5.12)
Регулирование «п» ГЭД осуществляется магнитным потоком при I const . Применение
установок с неизменным током целесообразно на судах, имеющих большое количество ЭД испол-нительных механизмов, мощность которых соизмерима с мощностью главных генераторов, что связано с необходимостью достижения высоких маневренных качеств судов (паромы с мощными подруливающими устройствами, траулеры с траловой лебедкой и мощными компрессорами и др.)
Рисунок 5.10 - Рисунок 5.11 - Внешняя характеристика Механическая характеристика ГЭД генератора неизменного тока неизменного тока
Uн
UГ
I Rя
Iн
I0
Eg
М
Ф1
n
1
2
Ф2
Ф3
Ф1 >Ф2>Ф3

23
23
5.3.3.4 Система Г-Д с автоматическим регулированием мощности Система Г-Д с трехобмоточным возбудителем поддерживает в статистических режимах
ГЭУ мощность, близкую к постоянной. В динамических режимах (на волне) могут возникнуть не-допустимые для дизелей перегрузки. Поэтому применяют быстродействующие системы автомати-ческого регулирования мощности с использованием ЭМУ и других малоинерционных усилителей.
В рассматриваемой системе (рис. 5.12) возбудителем генератора служит ЭМУ с попереч-
ным полем.. У него три обмотки ОУ1Г – задающие независимого возбуждения ОУ2Г – отрица-тельной обратной связи по току, ОУ3Г – стабилизирующая и обратной связи по скорости первич-ного двигателя. МДС ОУ1Г и ОУ2Г должны быть выбраны такими, чтобы при I н главной цепи
регулирующая ЭДС ЭМУ – ВГ, обеспечивала нU генератора. ВГ- возбудитель Г; ВД – возбудитель
ЭД. При возрастании тока нагрузки, размагничивающие действие обмотки ОУ2Г усиливается,
в результате чего уменьшается напряжение ЭМУ-ВГ, а затем и самого генератора. Таким образом, мощность ГЭУ остается примерно постоянной равной номинальной. Как только ток нагрузки уве-личивается до тока короткого замыкания гребного двигателя, МДС ОУ2Г размагнитит ЭМУ-ВГ, напряжение генератора уменьшится до значения равного падению напряжения в якоре ГЭД и се-ти, благодаря чему ГЭД остановиться при токе главной цепи нк II 8,15,1 .
Постоянство мощности генераторных агрегатов можно поддерживать также регулируя возбуждение генераторов в соответствии с изменением скорости двигателя т. е. посредством об-ратной связи по скорости от ТГ1 и ТГ2.Для этогоОУ3Г включают на разность напряжений тахо-
генераторов тгU и задающего напряжения сравнения срU .
При номинальной скорости тгU = срU и ток в ОУ3Г отсутствует. При перегрузке скорость
дизеля снижается и тгU < срU , в ОУ3г появляется ток, который создает МДС направленную про-
Рисунок 5.12 - Регулирование мощности изменением напряжения генератора
ГЭМУВГ
Г2
Г1
П4ЭД
ТГ1
ТГ2
ТГД
ВП1
П2
ГЭМУВГ
ТрСГ
ОВГ1
ОВГ2
R1
R2
R3
ОУ3Г
ОУ2Г
ОУ1Г
ВП3П1
ДПКО
ВП2
П3
ОУ1Д
ОУ2Д
ОУ3Д
ОУ4Д
R5
R4
R6
ВП4
ВП5

24
24
тив МДС ОУ1Г. Напряжение ЭМУ – ВГ и гене- ратора уменьшается, что вызывает уменьшение скорости ГЭД, а следовательно, и мощности генератора и дизеля. Эта система рекомендуется для ГЭУ с дизель – генераторами, которые не терпят перегрузки и при перегрузке снижают скорость. При перегрузке одного из дизелей его тахогенератор снижает мощность обоих ДГ. При большом числе ДГ система становиться неудобной.
5.3.3.5 Регулирование мощности изменением магнитного потока ГЭД Регулируя поток ГЭД можно при изменении нагрузки на винте поддерживать постоянство
тока в главной цепи, а следовательно, напряжение и мощность генератора и дизеля. ГЭД получает возбуждение от ЭМУ –ВД с четырьмя обмотками возбуждения.
ОУ1Д - независимого возбуждения (задающая). ОУ2Д – отрицательной обратной связи по напряжению возбудителя генератора (ЭМУ -
ВГ) или косвенной обратной связи по току главной цепи. ОУ3Д – стабилизирующая. ОУ4Д – отрицательной обратной связи по напряжению самого ЭМУ-ВД. Постоянство тока главной цепи поддерживается изменением магнитного потока ГЭД с
помощью ОУ2Д, включенной на разность напряжений возбудителя генератора (ЭМУ –ВГ) и напряжения сравнения срU .
В швартовом режиме эти напряжения равны и размагничивающий ток в ОУ2Д отсутству-ет. ГЭД при этом имеет наибольший магнитный поток.
Уменьшение момента сопротивления винта приводит к тому, что ток в главной цепи и в
ОУ2Г уменьшается. Напряжение ЭМУ–ВГ увеличивается и становится больше срU . В ОУ2Д под
действием этой разности напряжений появляется, размагничивающий ток и напряжение ЭМУ-ВД снижается, обуславливая уменьшение тока возбуждения и магнитного потока ГЭД. Это вызывает увеличение скорости ГЭД и тока главной цепи до почти номинального значения.
Таким образом, мощность ГЭД constММР вввд .. .
Обмотка ОУ2Д включена, кроме того, на разность напряжений срU и тгU (напряжение
контрольного тахогенератора ТГД) которые в номинальном режиме должны быть равны между собой. В случае резкого уменьшения момента сопротивления на валу ГЭД (оголение или потеря винта) скорость ГЭД возрастает и тгU > срU . В результате по ОУ2Д потечет ток увеличивающий
МДС направленную против МДС ОУ1Д. Напряжение ЭМУ –ВД и магнитный поток ГЭД умень-шается. Это вызывает увеличение тока в главной цепи близко к току стоянки, при котором благо-даря ОУ2Г напряжение генератора мало и скорость ГЭД лишь незначительно превысит скорость режима, несмотря на то, что поток ГЭД ослаблен.
5.3.4 Защита ГЭУ постоянного тока Защита от короткого замыкания и перегрузки. Эта защита осуществляется при помо-
щи: а) автоматических выключателей, разрывающих цепь главного тока; б) реле максимального тока снимающих возбуждение возбудителей генераторов и гребного двигателя. Катушки реле при этом должны быть выключены либо через шунты, либо непосредственно в рассечку цепи главного тока. Повторный запуск ГЭУ может производиться с нулевого положения поста управления. в) противокомпаудных обмоток, располагаемых на полюсах возбудителя генератора. В ГЭУ с ЭМУ, используемые в качестве возбудителей генераторов и гребных электродвигателей, защиту от пере-грузок осуществляют обратной связью по току главной цепи, а также всей системой поддержания постоянной мощности ГЭУ.

25
25
Защита главных дизель - генераторов от разноса. При остановке или реверсировании ГЭД, когда снижается напряжение генератора, ЭДС ГЭД сохраняется из-за продолжающего вра-щаться ГЭД под действием винта и, может превысить напряжение главной цепи. При этом генера-тор, перейдя в режим двигателя, создает вращающий момент, способный начать разгон дизеля. Для предотвращения разноса дизеля применяют центробежное реле, связанное с валом дизеля. При разгоне дизеля это реле размыкает цепь промежуточного контактора, который срабатывая, обесточит обмотки возбуждения генератора и электродвигателя.
Более целесообразно приме-нять схему, где РЦ2 приводит к включению СД2 в цепь возбуждения генератора, что уменьшает его ЭДС. Такая схема не прерывает работу ГЭУ.
Защита ГЭД от разноса. Недопустимое увеличение скорости ГЭД может произойти при внезап-ном уменьшении нагрузки на его ва-лу или, например, при оголении вин-та или среза его лопасти.
Возможный разнос ГЭД, предупреждается либо центробежным реле, механически связан-ным с гребным электродвигателем, либо реле максимального напряжения включенным на зажимы якоря ГЭД. Центробежное реле может работать либо на отключение возбуждения генераторов и ГЭД, или на включении в цепь потенциометра Пг добавочного сопротивления СД2 с целью ослаб-ления возбуждения генератора. В случае применения реле максимального напряжения разгон дви-гателя при сбросе нагрузки сопровождается увеличением напряжения в главной цепи до значения уставки реле. Срабатывая, реле непосредственно или через промежуточный контактор включает добавочное сопротивление в цепи потенциометра генератора, что уменьшает напряжение генера-тора и скорость ГЭД.
5.3.4.1 Защита главных дизелей от непроизвольного реверса Если в дизель подаётся меньше топлива, то ДГ снижает обороты, а затем, питаясь от дру-
гих генераторов, переходит в двигательный режим. При независимом возбуждении изменяет направление вращения и ломает дизель.
Защитой могут быть: реле давления масла, реле давления охлаждающей жидкости, или реле скорости, которые срабатывают при снижении оборотов и размыкают свои контакты в цепи контактора, отключающего возбуждение неисправного генератора или всех работающих машин. В некоторых ГЭУ предусматривают ещё и тепловую и минимальную защиту. Защиту от короткого замыкания в цепях управления и сигнализации осуществляют плавкими предохранителями. В главных цепях и цепях возбуждения ГЭУ установка плавких предохранителей запрещена Реги-стром. При срабатывании защиты вступает в действие световая и звуковая сигнализация.
5.3.4.2 Пуск и реверсирование ГЭД Перед пуском ГЭД запускают дизель, вспомогательные механизмы, агрегаты возбужде-
ния, набирают схему для задаваемого режима, включают цепи возбуждения, управления и защиты.
Рисунок 5.13 - Схема защиты ГЭУ.

26
26
Пуск ГЭД осуществляют поворотом рукоятки поста управления в положение, в котором
швартовой характеристике винта соответствует скорость ГЭД п и момент нМ (рис. 5.14).
ГЭД разгоняется за секунды, а судно за минуты. Потому при пуске ГЭД судно практиче-ски стоит и винт работает в швартовом режиме (точка В). По мере разгона судна ГЭД переходит
со швартовой 2 на промежуточную характеристику 4 из точки В в Е, где constп и еМ < нМ .
Поворотом рукоятки поста переводят ГЭД в точку К, где нМ и > п - и затем в точку А основ-
ной характеристики, где нМ и н .
Пуск ГЭД может сопровождаться броском тока нп II 8,15,1 из-за большой электро-
магнитной инерции обмоток возбуждения, из-за которой об-ратная связь по току не успевает ограничить ток.
Реверсирование ГЭД осуществляется рукояткой по-ста «ход назад» или наоборот. Реверсивная характеристика АБГД для наглядности изображена в 1 квадрате. АБ - режим движителя, БГ – гидравлической турбины и ГД – гидравли-
ческого тормоза. Если скорость ГЭД довести до н то
М>> нМ поэтому ограничивают на р при нМ (точка Д).
В ГЭУ с трёхобмоточным возбудителем реверсиро-вание осуществляется изменением направления магнитного потока генератора.
За время 1t (рис. 5.15) ЭДС генератора ге спадает,
но всё ещё больше, две поэтому пока режим не отличается от предыдущего. За время 2t винт рабо-
тая гидротурбиной переводит ГЭД в генераторный режим две > ге и ток главной цепи меняет
направление и достигает максимума. В этот период может возникнуть опасность разгона дизеля. В
точке «б» ЭДС генератора ге меняет знак, и ГЭД враща-
ясь по инерции в прежнем направлении, оказывается в ре-жиме противовключения в течении 3t . В точке «в» =0, а
за 4t ГЭД разгоняется в противоположном направлении до
заданной постом скорости. В ГЭУ с ЭМУ в качестве возбудителя реверсиро-
вание может быть осуществлено изменением магнитного потока:
а) главных генераторов; б) гребного электродвигателя. В обоих случаях торможение винта происходит в
режиме рекуперативного торможения и противовключе-ния ГЭД. При рекуперативном торможении мощность, пе-
редаваемая винтом на вал ДГ должна быть нР%25 , то
есть, равна механическим потерям. Для ТГ этот метод не допустим, так как очень малы механические потери, для
них рекомендуется принимать режим противовключения, где энергия идёт на нагрев цепи главно-го тока.
4
М
р
12
3
АВ
пБ
ДМн
Г
К
н
3
3
5
Рисунок 5.14 - Характеристика винта
Рисунок 5.15 - Характеристики ГЭУ.

5.4 ГЭУ переменного тока
5.4.1 Особенности работы и схемы главного тока ГЭУ
ГЭУ переменного тока имеет выше КПД, чем при постоянном токе. Но регулирование скоро-сти ГЭД требует изменения скорости ДГ или ПЧ, а реверсирование требует переключения фаз цепи главного тока, что требует снятия возбуждения, то есть маневрирование сложнее. После появления ак-тивных рулей, подруливающих устройств, поворот-ных винтовых колонок, обеспечивающих маневриро-вание, применение ГЭУ переменного тока расшири-лось.
Применение более высокого напряжения уменьшает потери, массу и габариты установки. От-сутствие коллекторов позволяет увеличить скорость ТЭГУ. Они, как правило, мощнее ДЭГУ. Частота вращения турбины, как правило, 3000об/мин, что обуславливает применение неявнополюсных СГ. Па-
ровые турбины позволяют регулировать обороты от 100 до 25%. Турбины и генераторы большой мощности имеют более высокий КПД и меньшую удельную массу. Поэтому их число выбирают, как правило, равным числу винтов. Цепи возбуждения питают от отдельных возбудителей.
На схеме (рисунок 5.16) главного тока ТЭГУ: П – реверсивный переключатель. В схеме 2-х вальных ТЭГУ применяют электромагнитную блокировку, предупреждающую включение гене-раторов на параллельную работу.
При отключенных выключателях цепи катушек электромагнитных защёлок замкнуты (ри-
сунок 5.17), и кулачковые диски допускают включение любого из 3 выключателей. При включе-нии выключателя 1 или 2 размыкается цепь электромагнита защёлки выключателя 3, что делает возможным работу каждого генератора только на свой ГЭД.
Если в начале включить 3, то потом можно включать либо 1 либо 2 и оба ГЭД будут пи-таться от одного генератора.
Рисунок 5.17 – Схема двухвальных ТЭГУ
1
3
2
От Г1 От Г2
к Д1 к Д2
Рисунок 5.16 - Схема главного тока ТЭГУ.

28
28
5.4.2 ДЭГУ
С целью уменьшения массы и габаритов в ДЭГУ используют быстроходные дизели, кото-рые имеют ограниченную мощность и обычно несколько ДГ работают параллельно на один ГЭД. Частота вращения обычно не превышает 1000 об/мин, что обуславливает применение в ДЭГУ синхронных генераторов с явно выраженными полюсами, ДГ питающие один ГЭД обычно имеют
общий возбудитель. Генера-торы работающие на один ГЭД (вал) включаются парал-лельно. Иногда на параллель-ную работу включают гене-раторы установки правого и левого бортов для чего при-меняют метод грубой син-
хронизации через реактор кР .
ГЭД имеет свой воз-будитель.
Некоторые схемы ГЭУ предусматривают воз-можность переключения ге-нераторов для работы на су-
довую сеть. 5.4.3 Параллельная работа синхронных генераторов В ГЭУ переменного тока для включения на параллельную работу СГ применяют точную
синхронизацию, а чаще самосинхронизацию и грубую синхронизацию, как вручную, так и автома-тически.
Точная синхронизация СГ требует:
а) сетиг UU ;
б) сг ff ;
в) совпадение по фазе гU и сU .
г) одинаковое чередование фаз – при монтаже; д) одинаковая форма кривой U при изготовлении. Выполнение пункта «а» обеспечивает регулированием тока возбуждения СГ и контроли-
руется вольтметром. Пункты «б» и «в» осуществляются регулированием скорости подключаемого дизель генератора, и проверяется частотомером и синхроноскопом.
Включение СГ при несоблюдении этих требований вызывает появление в цепи больших опасных токов.
5.4.3.1 Самосинхронизация Разгоняют невозбужденный СГ до скорости на %43 отличающейся от синхронной.
Обмотка возбуждения во избежание перенапряжений замыкается на разрядное сопротивление, а после включения статора на сеть сразу же переключается на питание от источника постоянного тока.
Преимущества:
Рисунок 5.18 - Схемы ДЭГУ на переменном токе

29
29
а) простота выполнения, исключающая ошибки; б) быстрота синхронизации; в) возможность синхронизации при изменяющихся частоте и напряжении. Включенный в сеть невозбуждённый СГ представляет собой асинхронную машину со
скольжением «S», абсолютная величина которого уменьшается под действием асинхронного мо-мента. Если скорость синхронизируемого генератора больше скорости работающих, то он оказы-вается в режиме асинхронного генератора и развивает момент, затормаживающий дизель до син-хронной скорости. Если же скорость меньше, то он оказывается в режиме асинхронного двигателя и развивает вращающий момент, ускоряющий дизель до синхронной скорости.
Способом самосинхронизации можно подключать только невозбуждённые (не несущие нагрузку генераторы). Для включения на параллельную работу генераторов, работающих под нагрузкой, применяют часто метод грубой синхронизации, которая производится при приближен-ном соблюдении условий точной синхронизации. Такое включение всегда сопровождается толч-ком тока. Для смягчения этого толчка включение проводят через реактор, который затем шунти-руется. Этот метод занимает меньше времени, чем точная синхронизация и не требует высокой квалификации персонала. Недостаток наличие громоздких реакторов.
5.4.3.2 Распределение нагрузки между СГ При параллельной работе СГ активная и реактивная нагрузки должны распределятся про-
порционально их мощностям, а при одинаковых мощностях – поровну. Следовательно, СГ долж-ны работать с одинаковым cos , в противном случае между ними потекут уравнительные токи,
разогревающие обмотки машин. Распределение активных нагрузок обеспечивается регулято-
рами скорости первичных двигателей, а распределение реактивных нагрузок – автоматическими регуляторами напряжения генераторов
Во время перевода нагрузки с одного СГ на другой напря-жение на шинах и частоту тока сети необходимо сохранять постоян-ными, для чего следует увеличить подачу топлива и ток возбужде-ния нагружаемого генератора, соответственно уменьшив эти вели-чины у разгружаемого ДГ.
Необходимо, чтобы при изменении нагрузки на винте СГ оставались загружёнными поровну. Для этого необходимо, чтобы регуляторы дизелей имели одинаковые характеристики, что как пра-вило, не бывает.
Значительно легче синхронизация вращения поддерживает-ся самими СГ.
Момент сопротивления, создаваемый СГ на валу дизеля определяется электромагнитной мощностью, передаваемой через воздушный зазор от ротора к статору. Для неявнополюсного СГ:
sin
Xd
EUsinθ
cosXd
cosEUcosIUP
, (5.13)
cosXdIАВ ,
sinEAB ,
sinθcosXd
EI
,
dX
UEР
max ,
Рисунок 5.19 – Диаграмма ЭДС

30
30
cosXd
EU
d
dPРсинх
θ (5.14)
- в переходный период при 090 , 0Рсинхр .
До 90º статическая устойчивость, после 90º не устойчиво.
нн
maxпер
sinθ
1
Р
РК
При 30º Sin 30º=0.5 2перК
При резком снижении U генератор с характеристикой 1
перейдёт на характеристику 2 с 1Р меньше двпрN . дизеля, ротор,
ускоряясь, перейдёт в точку «С» и по инерции далее. В точке «Д»
двпрN . < Р и ротор будет затормаживаться. Для явнополюсного
СГ:
sin2θXdXq
Umsinθ
Xd
EUmР
11
2
20
, (5.15)
где Xd и Xq – индуктивные сопротивления по продоль-ной и поперечной осям;
m – число фаз. Электромагнитный момент сопротивления
sin2θXd
1
Xq
1
2ω
Umsinθ
Xd
EUmM
c
2
c
0 . (5.16)
Вторые слагаемые называют реактивными мощностью и моментом (у неявнополюсных СГ где Xd=Xq они равны 0) Р и М являются синусоидальной функцией угла . Если прене-
бречь реактивными составляющими, которые малы, то угловые характеристики fР и
fM примут вид:
1. Электромагнитные мощность и момент. 2. Удельные синхронизирующие мощность и момент. При случайном замедлении или ускорении ротора любого из параллельно работающих
СГ, на его валу помимо электромагнитной мощности Р и момента М возникают дополнитель-
ные мощность и момент, которые называются синхронизирующими и определяют избыток или недостаток мощности и момента СГ по сравнению с соответствующими величинами первичного двигателя.
Синхронизирующий момент в пределе Δ :
Р
н
Рисунок 5.20 - Принцип действия Рисунок 5.21 - Диаграмма устойчивости
Sстатор
ротор
N
N
S
S
N
N
S
н
Рисунок 5.22 - Устойчивость

31
31
сММ ,
ММ с .
Величина сМ характеризует изменение вра-
щающего момента с изменением и называют удель-ным синхронизирующим моментом.
Аналогично удельная синхронизирующая
мощность ссс МР
Р
и полная синхронизиру-
ющая мощность в пределах Δ : сРР
Синхронизирующая мощность Δ Р при за-
медлении ротора СГ вызывает его ускорение, а при ускорении ротора его замедление и таким об-разом поддерживает устойчивую синхронную скорость машин при изменении угла в пределах
.
cosXd
UE
d
dPРс
. (5.17)
сМ наибольший при 0 и 0М с при 090 , таким образом, СГ наиболее устойчив
при малых углах , соответствующим малым нагрузкам ДГ. 5.4.4 Типы гребных двигателей В ГЭУ переменного тока применяют в качестве ГЭД: АД, СД и асинхронизированные СД.
Они могут быть тихоходными, соединяющиеся с валом напрямую, и быстроходными соединяю-щиеся с валом через редуктор. Из АД чаще применяют двигатели с фазным ротором и двухкле-точные. С фазовым ротором устанавливают на судах, где необходима повышенная манёвренность. «Манёвренные способности» АД с фазовым ротором объясняются применимостью к ним больше-го количества методов регулирования и возможностью с помощью реостата в цепи ротора воздей-ствовать на переходные процессы в двигателе, сокращая время его торможения и реверсирования.
Скорость АД можно регулировать: а) изменением частоты питающего тока; б) переключением пар полюсов; в) введением сопротивлений в цепь фазового ротора или статора. Преимущества АД по сравнению с СД: а) простота конструкции и надёжность; б) хорошие пусковые характеристики; в) отсутствие необходимости возбуждения постоянным током; г) возможность (хотя и ограниченная) регулировать скорость без изменения частоты пи-
тания. Но АД обладает и недостатками: а) меньший, чем у СД КПД; б) низкий cos не подающийся регулировке и приводящий к увеличению массы и габари-
тов. На судах, где важнее экономичность, чем манёвренность применяют синхронные и асин-
хронные синхронизированные машины. Регулирование скорости у СД, чаще всего частотой напряжения или реже переключением
пар полюсов, что сложно из-за необходимости менять число пар полюсов одновременно в роторе и статоре.
СД обладают достоинствами:
н
мах мах
Рис. 5.23 - Диаграмма нагрузок

32
32
а) высоким cos , вплоть до 1, что уменьшает размеры как ГЭД так и СГ;
б) более высоким КПД чем у АД; в) наличием большого воздушного зазора, что облегчает сборку, допускает большую про-
садку вала, уменьшает индуктивное синхронное сопротивление сХ и увеличивает максимальный
электромагнитный момент
cc X
EUmМ
0max . (5.18)
г) меньшая чувствительность к колебаниям напряжения. Недостатки: а) хуже пусковые свойства по сравнению с АД; б) потребность в постоянном токе для возбуждения. 5.4.5 Асинхронные синхронизируемые машины Асинхронные синхронизируемые машины обес-
печивают хорошие пусковые характеристики и cos .
Их пускают подобно АД с фазным ротором (ри-сунок 5.24), то есть при помощи « пr » с уставленным в
положение 1 переключателем «П». После разгона до полной асинхронной скорости «П» переводят в положе-ние 2. В результате чего обмотка ротора получает пита-ние постоянным током от возбудителя «В». Под действи-ем возникающего при этом синхронизирующего момента АД переходит в синхронный режим.
5.4.6 Асинхронно-вентильный каскад (АВК)
АВК обеспечивают плавное регулирование скорости АД без применения ВРШ, а также экономичность за счет реализации энергии скольжения.
Энергия скольжения может быть реализована путем непосредственной отдачи энергии в сеть (электрический АВК) или путем превращения ее в механическую энергию с последу-ющей передачей на вал главного двигателя (электромеханиче-ский АВК).
Электрический АВК (рис. 5.25) работает следующим об-разом. При работе в двигательном режиме ниже синхронной ско-
рости ток ротора АД выпрямляется с помощью пВ . В цепь вы-
прямленного тока введена добавочная ЭДС, представляющая со-бой среднее выпрямленное напряжение инвертора стВ (противо-
ЭДС). Напряжение ротора должно компенсировать противо ЭДС инвертора, а также падение напряжения, но активном сопротив-лении ротора и на вентилях. Момент, развиваемый АД пропор-
ционален току ротора. Следовательно, регулирование тока ротора изменением противо ЭДС позволяет регулиро-
вать величину момента и скорости вращения.
Рисунок 5.25 – Схема асинхронно-вентильного каскада
Рисунок 5.24 - Схема пуска

33
33
Величина противоЭДС изменяется пу- тем изменения угла открытия управляемых
вентилей « стВ ». Если переменная противоЭДС инвертора будет равна выпрямленному напряже-
нию ротора, то ток ротора и момент будут равны «0».При уменьшении противоЭДС ток ротора, момент и скорость вращения будут увеличиваться. При этом ускорение АД будет продолжаться до тех пор, пока снова не будет равенство напряжений в роторном контуре.
5.4.7 Электромеханический каскад Принцип аналогичен (рис. 5.26). Дополнительное ЭДС создается машиной «М», вращаю-
щейся с неизменной скоростью СГ, связанного с сетью. Изменение противоЭДС машины «М» осуществляется регулированием ее тока воз-буждения.
Напряжение ротора
RIUESE ddid , (5.19)
где S -скольжение АД,
diE - противоЭДС создаваемое «М»,
U - падение напряжения на вентилях;
dI – ток ротора АД;
R -эквивалентное сопротивление ротора. В двигательном режиме АД работает
одновременно как двигатель и трансформатор. При неподвижном роторе (S=1) вся электромагнитная мощность трансформируется в ротор в виде электрической и расходуется во вторичной цепи. При S=0 почти вся электромагнитная мощность передается ротору в виде механической и идет на полезную работу. При 0<S<1 часть мощности трансформируется в ротор и расходуется в его цепи ( эмР S) ,а другая часть [ эмР (1-S)] затрачивает-
ся на совершение механической работы. При работе в АВК АД потребляет из сети больше энергии, чем необходимо для соверше-
ния полезной работы и остаток ее возвращается. Рекуперация энергии скольжения происходит
следующим образом: электроэнергия переменного тока преобразуется выпрямителем пВ в энер-
гию постоянного тока, которая с помощью «М» передается на вал «СГ» и через него возвращается в сеть. КПД двигателя при работе на пониженных оборотах не снижается.
5.4.8 Электрические машины с водяным охлаждением При водяном охлаждении электрических машин
массогабаритные показатели ГЭУ могут быть улучшены в 2-3 раза.
При водяном охлаждении (рис. 5.27) отбор тепла осуществляется, либо непосредственно из полого медного проводника, либо его внутренним каналам в железе стато-ра и ротора.
Практически это означает, что все основное тепло, выделяемое за счет джоулевых потерь в меди и потерь на гистерезис и вихревые токи в стали, удаляются охлажда-ющей водой.
Водоохлаждаемый синхронный ГЭД выполняется с водяным охлаждением обмоток статора и ротора. Для
Рисунок 5.27 - Принцип действия: 1 - подвод холодной воды, 2 - стационарная коробка, 3 - вращающийся вал с системой двойных трубок, 4 - сильфонные уплот-нения, 5 - выход нагретой воды.
Рисунок 5.26 – Схема электромеханического каскада

34
34
подвода охлаждающей воды к ротору исполь- зуется водяной коллектор.
Вопросы для самоконтроля.
1. Возбудители генераторов и ГЭД. 2. Структура ГЭУ и схемы главного тока. 3. Режимы экономичного хода и аварийные. 4. Система возбуждения ГЭУ. 5. Схема генератор-двигатель (Г-Д) с трёхобмоточным возбудителем. 6. Принцип поддержания постоянства мощности. 7. ГЭУ неизменного тока. 8. Система Г-Д с автоматическим регулированием мощности. 9. Защита от короткого замыкания и перегрузки. 10. Защита главных дизель - генераторов от разноса. 11. Защита ГЭД от разноса. 12. Защита главных дизелей от непроизвольного реверса. 13. Пуск и реверсирование ГЭД. 14. Особенности работы и схемы главного тока ГЭУ. 15. ДЭГУ. 16. Параллельная работа синхронных генераторов. 17. Самосинхронизация, распределение нагрузки между СГ. 18. Типы гребных двигателей. 19. Асинхронные синхронизируемые машины. 20. Асинхронно-вентильный каскад (АВК).
6 НОВЫЕ ИСТОЧНИКИ ЭЛЕКТРОЭНЕРГИИ
6.1 Магнитогидродинамические генераторы
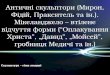
Одним из перспективных является применение МГД генераторов (рис. 6.1). В них происходит прямое преобразование тепловой энергии в электрическую. МГД-генератор явля-ется аналогом обычного электрического гене-ратора, в котором вращающаяся роторная об-мотка заменена газом, пропускаемым между полюсами магнита.
В конструкции МГД-генератора входит высокотемпературный источник тепла, а также
устройства для удержания плазмы, поскольку для получения электропроводящего газа его сначала требуется превратить в ионизирован-ную плазму.
МГД-генератор состоит (рисунок 6.2) из сопла, переходящего в канал с наружной обмоткой, служащей для создания магнитного поля. Электроды располагаются на верхней и нижней поверхностях канала. Нагретый иони-зированный газ поступает в сопло, расширяет-ся и при этом приобретает энергию поступа-тельного движения вследствие уменьшения давления и его внутренней энергии. При пере-сечении газом силовых линий электромагнит-
Рисунок 6.1 - Схема действия МГД – генератора
Рисунок 6.2 - Схема действия МГД 1 - ядерный реак-тор, 2 - ускоряющее сопло, 3 - МГД-генератор, 4 – хо-лодильник. 5 - электромагнитный насос.

35
35
ного поля создается ЭДС. Образующийся элек- трический ток поступает во внешнюю сеть к нагрузке.
На судах с атомными энергетическими установками используются МГД-генераторы с за-мкнутым рабочим циклом. Тепло, отходящее от МГД-генератора, используется для питания судо-вых потребностей. Энергия самого МГД-генератора расходуется для электродвижения судна.
Жидкометаллический теплоноситель поступает в ядерный реактор, в котором полностью испаряется. Пары теплоносителя ионизируются и поступают в канал МГД-генератора, где часть энергии плазмы преобразуется в электроэнергию. По пути к насосу пары металла охлаждаются до их конденсации. Затем конденсат подается электромагнитным насосом в реактор.
6.2 Электрохимические генераторы (ЭХГ) Устройство, в котором часть энергии, возникающей в результате электрохимической ре-
акции, поддерживаемой непрерывным поступлением химических реагентов, превращается в элек-трическую, называют электрохимическим генератором (ЭХГ) и топливным элементом. (ТЭ).
В электроды поступают соответственно топливо-восстановитель и окислитель. Топливом в ТЭ могут служить водород, углеводороды, спирты и некоторые металлы, а окислителем - кисло-род, воздух, хлор или различные кислоты.
В качестве электролита могут применяться растворы едкого калия, расплавленные и твер-дые электролиты. Принцип работы (рисунок 6.3) поясним на примере водородно-кислородного элемента. На аноде 2, содержащем соответствующие катализаторы, молекулы поступающего во-дорода Н2 распадаются на атомы «Н», а из последних образуются положительно заряженные ионы Н+ и электроны «е». Электроны воспринимаются металлом анода, а катионы К+ располагаются на границе анод - электролит.
В результате анод приобретает отрицатель-ный потенциал. На катоде с помощью катализато-ров, молекулы поступающего кислорода О2 распа-даются на атомы «О». Атомы кислорода присоеди-няют электроны катода 4 и превращаются в отрица-
тельно заряженные ионы -2О .
Теряя электроны, катод приобретает поло-
жительный потенциал. Ионы -2О , взаимодействуя с
молекулами воды (Н2О) образуют отрицательные
ионы ОН , которые располагаются на границе электролит - катод.
При замкнутой внешней цепи электроны под действием разности потенциалов будут дви-
гаться от анода к катоду, а ионы ОН под действи-ем возникающего в электролите электрического по-ля будут двигаться к водородному электроду.
Большая часть ионов водорода и гидро-окислов в процессе работы ТЭ соединяются у анода в молекулы воды и удаляются. Электроны, проходящие от водородного электрода к кисло-родному через нагрузку R производят полезную работу. Выходное напряжение одного элемента 1-2В. Для получения более высокого напряжения их соединяют последовательно.
Для работы ТЭ необходимы системы хранения и подачи реагентов, отвода от ТЭ продуктов сгорания, перекачивающие насосы и устройства управления и регулирования. КПД у ТЭ достигает 80%.
Рисунок 6.3 - Принцип действия ЭХГ 1 - бак с электролитом, 2 - электрод отрицатель-ный, 3 – электролит, 4 - электрод положи-
тельный.
Рисунок 6.4 - Схема судового ЭХГ

36
36
ТЭ являются перспективными для ис- пользования в ГЭУ благодаря их высокому КПД и отсутствию шумности, высокой надежности и долговечности. ГЭУ с ЭХГ состоит из элек-трогенерирующей части, щита и двигателя электродвижения и отбора части мощности от ГЭУ к судовым потребителям.
Управление скоростью судна может осуществляться путем изменения напряжения ЭХГ за счет воздействия на его рабочие параметры, а также путем регулирования скорости вращения ГЭД обычными методами. Схема отличается надежностью и простотой конструкции, занимает меньший объем по сравнению с традиционными ГЭУ.
6.3 Термоэлектрические генераторы (ТЭГ) Простейший ТЭГ (термоэлемент) включает два плеча - термоэлектрода, состоящих из
разнородных материалов с полупроводниковыми свойствами (с электронной и дырочной прово-димостью). С одной стороны термоэлектроды соединены между собой коммутационным соедине-нием через коммутационный слой, а другие их концы подключаются к внешней нагрузке R (Рис. 6.5). В ТЭГ используется термоэлектрический эффект, заключающийся в возникновении разности
потенциалов (термо-ЭДС) на концах термоэлектронов, имеющих
разную температуру ( 01t и 0
2t ).
Под её действием в нагрузке появляется постоянный ток. Величина термо-ЭДС на одном элементе - доли Вольта и их со-единяют последовательно - параллельно.
Физические процессы в ТЭГ происходят следующим об-разом. При нагревании одного конца термоэлектрода с электрон-ной проводимостью скорость движения электронов в нем увели-чивается. При этом электроны путем диффузии перемещаются в сторону холодного конца, на котором накапливается отрицатель-ный потенциал по отношению к горячему концу. В результате действия возникшего электрического поля появляется обратный поток электронов. При определенной величине резкости потенци-алов между концами электрода наступает динамическое равнове-сие между двумя потоками заряженных частиц. Такой же процесс происходит и при нагревании одного конца термоэлектрода с ды-рочной проводимостью с той лишь разницей, что в этом случае к холодному концу перемещаются носители положительного заря-
да, а не электроны. На холодном конце электрода накапливается положительный потенциал по от-ношению к горячему. Мощности достаточные для судовых систем электродвижения можно полу-чить от атомных ТЭГ, расположенных в активной зоне ядерных реакторов с твердыми электрода-ми. Имеются варианты приложения ТЭГ в виде дополнительных каскадов к обычным ГЭУ для утилизации теплоты отходящих газов.
Достоинством ТЭГ является простота и компактность, отсутствие движущих частей, бес-шумность.
Недостаток - относительно малый КПД и зависимость их электрических характеристик от нагрузки.
Вопросы для самоконтроля.
1. Магнитогидродинамические генераторы. 2. Электрохимические генераторы (ЭХГ). 3. Термоэлектрические генераторы (ТЭГ).
1t
2t
Рисунок 6.5 - Схема ТЭГ: 1 и 4 - термоэлектроды с электрон-ной и дырочной проводимо-стью, 2 - коммутационный подслой, 3 – коммутационное соединение

7 Режимы работы ГЭУ переменного тока. Работа одновальной ТЭГУ Такая установка состоит (рис. 7.1) из турбогенератора и синхронного ГЭД. Электромаг-
нитная мощность генератора по условиям нагрева определяется током главной цепи, который в случае принудительного охлаждения во всех режимах может быть величиной постоянной равной номинальному значению, т.е. constII н . Если при этом поддерживать примерно постоянным и
ток возбуждения генератора, то его электромагнитный момент будет неизменным, а электромаг-
нитная мощность будет изменяться пропорционально частоте: fPconstМ ; .
С изменением частоты тока генератора изменяется скорость ГЭД, а при изменении скоро-сти ГЭД мощность на его валу изменяется пропорционально кубу частоты питающего тока
3P f .
При этом если возбуждение СГ и ГЭД останется практически постоянным и cos будет
равен единице, то напряжение главной цепи окажется связанным с частотой тока пропорциональ-ной зависимостью, а ток будет пропорционален квадрату частоты.
При уменьшении скорости винта и соответственного мощности ГЭУ резко падает КПД установки.
Для того чтобы с понижением скорости винта и нагрузки на валу ГЭД и КПД одновальной ТЭГУ оставался на достаточно высоком уровне, необходимо пропорционально частоте изменить ток возбуждения и напряжение в главной цепи. Регулирование возбуждения СГ и ГЭД пропорци-ональное изменение тока нагрузки, полезно еще и тем, что повышает устойчивость системы. Такое регулирование может осуществляться автоматически.
Обмотки возбуждения глав-ного генератора и ГЭД получают пи-тание от возбудителя «В»; для воз-буждения, которого используется электромашинный усилитель с попе-речным полем.
Усилитель ЭМУ имеет три обмотки управления: задающую ОУз, токовую ОУт и напряжения ОУн.
Обмотки управления вклю-чены так, чтобы МДС задающей и то-ковой обмоток совпадали по направ-лению, а МДС обмотки напряжения была бы направлена им встречно.
С помощью задающей об-мотки ОУз устанавливается необхо-димый ток возбуждения генератора и ГЭД при номинальном моменте сопротивления и cos = 1.
По мере увеличения нагрузки на винте возрастает ток главной цепи и уменьшается напряжение. В результате МДС обмотки ОУт воз-растает, а МДС обмотки ОУн уменьшается. Это приводит к усиле-нию результирующей МДС ЭМУ и, наконец, к увеличению тока возбуждения СГ и ГЭД. Благодаря равному изменению возбужде-ния СГ и ГЭД cos при всех нагрузках сохраняет свое значение,
обычно 1. Чтобы схема реагировала на изменение частоты тока глав-
ной цепи, последовательно с ОУн включен «Др», сопротивление которого изменяется с изменением частоты тока. Соответствующим подбором МДС обмоток управления и сопротивления дросселя можно найти оптимальное соотношение между напряжением и ча-
стотой главной цепи.
Рисунок 7.1 - Схема одновальной ТЭГУ
Г
дв
Рисунок 7.2 - Диаграмма ЭДС.

38
38
Однако это соотношение целесообразно лишь для одновальных ТЭГУ. При длительных малых ходах судов с ДЭГУ или с двухвальной ТЭГУ часть генераторов
отключают, с тем чтобы оставшиеся в работе генераторы имели большую загрузку.
7.1 Режимы экономичного хода и аварийные режимы
В ДЭГУ переменного тока на один ГЭД работает несколько генераторов. При снижении скорости судна один или несколько СГ отключают, а скорость работающих СГ снижают, чтобы уменьшить частоту тока, ибо при номинальной частоте ГЭД будет развивать номинальную ско-рость, и потреблять полную мощность всех генераторов. Если в работе будут не все СГ, то они окажутся перегруженными.
При неизменном номинальном токе СГ мощности ДГ уменьшаются пропорционально ча-стоте, а момент ДГ остается постоянным.
Момент на гребном валу при этом уменьшается пропорционально числу работающих ге-нераторов. Мощность ДЭГУ в экономичном и аварийном режимах уменьшается из-за:
а) уменьшения числа работающих СГ. б) из-за уменьшения мощности каждого СГ. При работе 4х СГ: МнМ 14 ,
3х СГ: МнМ 75,03 ,
2х СГ: МнМ 5,02 ,
1х СГ: МнМ 25,01 .
Исходя из зависимости для ГЭД 2сМ , получим:
Точки пересечения характеристик fРв и
fРг (рисунок 7.3) определяют скорости ГЭД в соответ-
ствующих режимах экономического хода. В двухвальных ТЭГУ каждый турбогенератор обычно
работает на «свой» ГЭД. В экономичном или аварийном ре-жиме один ТГ работает на два ГЭД. Чтобы не было перегруз-ки ТГ необходимо уменьшить его частоту, а соответственно и
скорость ГЭД, чтобы .2 двг РР , т.е. 31.1. 2 fРfР ндвнг , тогда
707,05,02 .
.1
ндв
нг
Р
Рf (7.1)
Пропорционально частоте уменьшается напряжение главной цепи U = 0,707 нU . Ток в ге-
нераторах остается номинальным, а в гребных электродвигателях он составляет половину номи-нального.
н
н
н IU
PI
707.0
707.01 , нРfР 707.011 .
Вопросы для самоконтроля.
1. Режимы работы ГЭУ переменного тока. Работа одновальной ТЭГУ. 2. Режимы экономичного хода и аварийные режимы.
Р Г
Чис
логе
нер
атор
ов
1 2 3 н
Рисунок 7.3 - Характеристики Р=f(w)

8 ЗАЩИТА ГЭУ ПЕРЕМЕННОГО ТОКА
В ГЭУ переменного тока главные генераторы и ГЭД защищают от внешних и внутренних
повреждений. К внешним относятся повреждения в распределительных устройствах, короткое за-мыкание (к.з.) в кабелях, обрыв фазы, замыкание на корпус в двух точках цепи возбуждения.
К внутренним относятся такие же повреждения, но внутри генератора и ГЭД, могут появ-ляться межвитковое замыкание и различные перенапряжения. Защищать ГЭУ надо не только от повреждений, но и от ненормальных режимов (перегрузка, выпадение из синхронизма и др).
Регистром требуются следующие защиты: Для генераторов: а) максимальная защита, отключающая возбуждение; б) дифференциальная защита, отключающая возбуждение; в) от заземления обмоток, работающая на сигнализацию. Для ГЭД: а) максимальная защита, отключающая возбуждение; б) дифференциальная защита, отключающая возбуждение. Отключение цепей возбуждения производится АГП который, кроме того, замыкает об-
мотку возбуждения на зарядное сопротивление вp rr 54 . При этом магнитная энергия гасится за
6-8с. Отключать главную силовую цепь поврежденного генератора нецелесообразно, т.к.
оставшиеся в работе ДГ могут перегрузиться и выйти из синхронизма из-за не одинакового сни-жения скорости дизелей. Поэтому при к.з. в одном генераторе защита действует на АПГ всех ма-шин. Кроме того, обычно предусматривают температурную сигнализацию при перегреве обмоток, магнитной системы и подшипников.
8.1 Максимальная защита
Эта защита (рисунок 8.1) от к.з. и перегрузок генераторов. Чтобы обеспечить защиту не
только от внешних, но и от внутренних к.з., трансформаторы следует включать со стороны нуле-вой точки обмотки статора.
Два токовых реле «Т» защищают от к.з. и срабатывают мгновенно и еще два «Т» защища-ют от перегрузки срабатывают с выдержкой времени. Все они воздействуют на промежуточное реле «П», замыкающее цепь АГП. О срабатывании защиты сигнализируют реле «У».
Рисунок 8.1 - Схема максимальной защиты
Г -
-
>1
>1 >1
>1
Т1
Т2 Т4
Т3
У
У П
к АГП1
в

40
40
Во избежание ложных отключений ток срабатывания защиты по к.з. выбирают больше пусковых токов, а выдержка времени при перегрузке должна быть больше времени пуска и ревер-сирования ГЭД.
8.2 Продольная дифференциальная защита
Эта защита от внутренних к.з. Она действует от разности токов в начале и в конце защищаемого участка. При к.з. в точке К1 схема (рис. 8.2)не работает, а сраба-тывает автомат т.к. ЭДС трансформаторов будет одина-ковым и направлено навстречу друг другу. При к.з. в точке К2 будет ЭДС только трансформатора 1 у второго будет 0 и реле Т сработает и включит АГП.
Для эквивалентной схемы (рис. 8.3) уравнение будут:
pp ZIZIE 111 ,
pp ZIZIE 222 (8.1)
pIII 21 ,
где pZZZ ;; 21 -комплексные сопротивления вторичных
обмоток трансформаторов и реле. Из этих уравнений
2121
1221
ZZZZZ
ZEZEI
P
p
, а так как ZZZ 21 , то
P
pZZ
EEI
221
(8.2)
При к.з. в точке К1 21 ЕЕ и 0pI
При к.з. в точке К2 02 ЕP
pZZ
EI
21
В случае подпитки точки к.з. К2 со стороны
нагрузки, ток трансформатора 2 и 2E меняют знаки и ток в
реле
P
pZZ
EEI
221
(8.3)
8.3 Защита обмотки возбуждения от замыкания на корпус
Замыкание на корпус в одной точке опас-ности не представляет, но при замыкании и во 2-й точке происходит шунтирование части обмотки, а это может быть причиной понижения магнитного потока СГ и появления больших реактивных токов при параллельной работе. Кроме того, ток, приходя между точками замыкания, может выжечь соседние витки оплавить железо сердечника.
Для защиты применяют токовое реле, воз-действующее на АГП.
Рисунок 8.2 - Схема дифференциальной защиты
Г
к АГП
К2
К1
1
2
И1
И2
И1
И2
I1
I2
Рисунок 8.3 - Эквивалентная схема
zp
Ip
z2
I2
z1
I1
E1
E2
N1
N2
И2
И1
Рисунок 8.4 - Схема защиты от замыкания на корпус

41
41
На зажимы ОВГ выключателем В1 включают потенциометр «П», между ползун-ком которого и корпусом параллельно включены mV, периодически замыкаемый кнопкой Кн и то-ковое реле «Т» цепь которого замыкается рубильником В2 (схема приведена на рис. 8.4).
При нормальном состоянии изоляции прибор и реле отключены. При периодической про-верке нажимают кнопку Кн. Если ОВГ замкнуть на корпус в т. «а» то mV покажет напряжение между «а» и ползункам «П». После перемещения ползунка в равно потенциальное с точкой «а» положение mVокажется включенным в диагональ уравновешенного моста (U=0). Затем включа-ют В2, подготавливая тем самым схему защиты к возможному замыканию на корпус еще в одной точке. Если это случится, например, в точке «б», то равновесие плеч моста нарушается и через ре-ле «Т» потечет ток, вызвав срабатывания защиты.
8.4 Защита гребных электродвигателей Для синхронных и асинхронных ГЭД характерны те же повреждения, что и для генерато-
ров, кроме ОВ для АД. Поэтому они имеют те же защиты и, кроме того, защиту от выпадения син-хронного ГЭД из синхронизма, работающую не сигнал. В одновальных ТЭГУ иногда применяют один комплект дифференциальной защиты для СГ и ГЭД. Часто защищают токовой защитой СГ, имеющей достаточно высокую чувствительность. В последнее время вместо релейной автоматики и аппаратуры защиты внедряются бесконтактные схемы на полупроводниковых элементах.
Вопросы для самоконтроля.
1. Максимальная защита ГЭУ переменного тока. 2. Продольная дифференциальная защита. 3. Защита обмотки возбуждения от замыкания на корпус. 4. Защита гребных электродвигателей.
9 ПУСК И РЕВЕРСИРОВАНИЕ ГЭД В ГЭУ ПЕРЕМЕННОГО ТОКА Пуск и реверсирование синхронного двигателя осуществляется в асинхронном режиме, в
виду чего СД и АД при пуске и реверсировании работают аналогично, но СД из асинхронного ре-жима затем должен перейти в синхронный, то осуществляется подачей тока возбуждения в ОВД.
9.1 Пуск ГЭД
При пуске ГЭД, мощность которого примерно равна мощности питающих СГ, напряжение главной цепи в результате реакции статоров генераторов резко снижается при этом момент и ГЭД пропорциональный квадрату напряжения может быть не в состоянии преодо-леть момент сопротивления винта. Для увеличе-ния пускового момента ГЭД применяют форси-ровку возбуждения генераторов в 3-6 раз (рис.9.1).
Для надежного вхождения СД в син-хронизм необходимо, чтобы его входной мо-мент на 25% превышал момент сопротивления
Для уменьшения момента сопротивле-
Рисунок 9.1 - Диаграмма пуска синхронного дви-гателя (СД): 1 - пусковая характеристика СД без форсировки СГ; 2 - с форсировкой; 3 - швартовная характеристика винта

42
42
ния винта может быть применен метод сниже- ния частоты (рис. 9.2). При этом пуск состоит из:
а) ГЭД подключают к генераторам с пониженной часто-той;
б) производят форсировку возбуждения СГ; в) после достижения ГЭД подсинхронной скорости
пc 95.0~ соответствующей пf , включают его возбуждение,
и он втягивается в синхронизм; г) уменьшают ток возбуждения СГ до номинального,
при этом ГЭД вращается с синхронной скоростью п (точка С).
Дальнейший разгон ГЭД производится повышением ча-
стоты СГ. При частоте ГЭД развивает скорость ш и нМ (точка
В) Затем по мере разгона судна и увеличения частоты генерато-ров рабочая точка переходит со швартовной характеристики 2 на
промежуточные и наконец на основную1 в точку А с н и нМ .
9.2 Реверсирование ГЭД При реверсировании, как и при пуске ГЭД работает в асинхронном режиме при понижен-
ном напряжении и следовательно уменьшенном моменте на валу. Характеристики ГЭД приведены на рисунке 9.3.
Чтобы снизить момент сопротивления винта .вM ; а также преодолеть махвM . для его за-
тормаживания, реверсирование производят при минимальной частоте рf . Однако, этого часто бы-
вает недостаточно (кривая 3). Поэтому прибегают к форсировке возбуждения СГ (кривая 4). Пока двигатель реверсируется и разгоняется в противоположную сторону, судно по инерции движется в прежнем направле-нии.
Реверсирование ГЭД возможно двумя способами:
а) ГЭД включают в режиме ди-намического торможения, затем останав-ливают механическим тормозом и, нако-нец, пускают в противоположном направлении.
б) ГЭД включают в обычный для АД режим противовключения. Этот спо-соб проще и производится следующим образом:
1.Снимают возбуждение СГ и ГЭД и выключают реверсивный пере-ключатель. Скорость дизелей снижают до минимальной. Винт затормаживается
от н до б .(АБ).
2.Переключателем включают ГЭД «ход назад» поменяв фазы (режим противовключения). При затормаживании винта от точки «Б» по характеристике 1 момент увеличивается до Мв mах (режим гидротурбины). Если ГЭД ра-ботает по характеристике 3, то в точке «В» моменты уравновешивают друг друга и наступает установившейся режим работы ГЭУ, который продолжается до тех пор, пока не уменьшится ско-
Рисунок 9.2 - Характеристики ГЭД
Рисунок 9.3 - Характеристики ГЭД: 1 и 2 – реверсивные характеристики винта, 3 и 4 – характеристики ГЭД

43
43
рость судна и соответственно момент и винт перейдет на характеристику «2». Это затягивает реверс и вызывает перегрев машин ГЭУ. Чтобы предотвратить такой режим, возбуждение СГ включают с необходимой форсировкой и ГЭД, работая по характеристике 4, сначала затормажива-ется (участок ГД) до 0 и, изменив направление вращения разгоняется до подсинхронной скорости (участок ДЕ).
3.При достижении подсинхронной скорости включается возбуждение (точка Е) и по-скольку ЕМ > вМ двигатель входит в синхронизм.
4.После вхождения ГЭД в синхронизм ток возбуждения СГ снижается до номинальной величины.
5.Дальнейший разгон ГЭД осуществляется увеличением частоты тока СГ. При этом кон-тролируется распределение нагрузки между параллельно работающими ДГ.
В ТЭГУ процесс реверсирования отличается тем, что отпадает надобность в синхрониза-ции генераторов и в контроле распределения нагрузки между ними.
Вопросы для самоконтроля.
1. Пуск ГЭД в ГЭУ переменного тока. 2. Реверсирование ГЭД.
10 ГЭУ ДВОЙНОГО РОДА ТОКА
Применение более экономичных и надежных генераторов переменного тока и легко управляемых и регулируемых двигателей постоянного тока привело к созданию ГЭУ переменно–постоянного тока с неуправляемыми выпрямителями или с тиристорными управляемыми выпря-мителями. В установках с неуправляемыми выпрямителями трехфазный ток СГ выпрямляется и подается к ГЭД постоянного тока (рис.10.1). Регулирование скорости ГЭД осуществляется изме-нением напряжения СГ за счет изменения тока в ОВВ, подключенной к МУ. Напряжение на зада-ющую обмотку МУ подается с потенциометра поста управления.
Для получения крутопадающих механических характеристик двигателя в МУ используется отри-цательная жесткая обратная связь по току, сигнал которой снимается с ДП и КО (компенсацион-ная) гребного двигателя. С целью получения скорости выше номинальной уменьшают ток в ОВД и соответственно его поток. Реверс ГЭД осуществляется изменением направления тока в ОВД. (применена на атомоходе Арктика).
Схема с управляемыми выпрямителями (рис.10.2) отличается тем, что она на тиристорах «Т», управление которыми осуществляется сигналами, вырабатываемыми в БУ, а соответственно и
Рисунок 10.1 - Схема ГЭУ двойного рода тока
Рисунок 10.2 - Схема с управляемы-ми выпрямителями

44
44
гребным двигателем. Здесь также используется обратная отрицательная связь по току якоря гребного двигателя.
11 ЕДИНАЯ СУДОВАЯ ЭЛЕКТРОСТАНЦИЯ С ГЭУ ПОСТОЯННОГО ТОКА
НА УПРАВЛЯЕМЫХ ВЕНТИЛЯХ
Один из вариантов схемы единой электростанции приведен на рисунке 11.1.
Частота вращения ГЭД изменяется вместе с напряже-нием управляемого выпрямителя (УВ), а реверс осуществляет-ся изменением направления тока возбуждения (достоинство).
Недостаток: Потребляемый выпрямителем ток содер-жит все нечетные гармоники, что увеличивает реактивную мощность.
Вопросы для самоконтроля.
1. ГЭУ двойного рода тока. 2. Единая судовая электростанция с ГЭУ постоянного
тока на управляемых вентилях.
12 ГЭУ С ГЭД ПЕРЕМЕННОГО ТОКА СО СТАТИЧЕСКИМИ ПРЕОБРАЗОВАТЕЛЯМИ ЧАСТОТЫ
Предпочтение в системах электродвижения отдается электрическим машинам переменно-
го тока. В ГЭУ, где генератор и двигатель связаны непосредственно, трудность использования мощных тихоходных машин определяется их количеством полюсов, которое при частоте 50Гц и
частоте вращения 10,8 рад/с (100об/мин) соответствует 60-72. В системах с преобразователем частоты используются машины, рассчитанные на более низкую частоту. Предпочте-ние отдается синхронным машинам. Они существенно легче машин по-стоянного тока, воздушный зазор в них больше, чем в асинхронных дви-гателях и они лучше воспринимают ударные и вибрационные нагрузки. В качестве ГЭУ с ПЧ рассматриваются варианты установок:
а)- на основе ПЧ с промежу-точным звеном постоянного тока – двухзвенный полупроводниковый
преобразователь частоты (ДППЧ) или синхронно-конверторный привод; б)- непосредственный преобразователь частоты (НППЧ) или циклоконверторный привод.
Рисунок 11.1 - Схема единой электростанции.
Рисунок 12.1 - Схема двухзвенного полупроводникового преоб-разователя частоты.
1 - первичный двигатель, 2 - генератор, 3 - регулятор напряже-ния, 4 - преобразователь частоты, 5 - регулятор напряжения ГЭД, 6 - регулятор частоты ГЭД, 7 – ГЭД, 8 - регулятор соs ГЭД, 9 -
ВРШ

12.1 Двухзвенный полупроводниковый преобразователь частоты
Двухзвенный полупроводниковый преобразователь f (ДППЧ) содержит два трехфазных тиристорных моста, связанных через контур постоянного тока. Регулирование возбуждения ГЭД обеспечивается необходимая для коммутации тиристоров инвертора реактивная мощность.
Схема реверсивная, при реверсе возможна рекуперация энергии в питающую сеть. Реверс осуществляется посредством управления последовательностью открытия тиристоров инвертора. Выходной ток ДППЧ почти прямоугольной формы, содержащей пятую и седьмую гармоники. Следствием этого является изменение момента, приводящее к шуму, вибрации и неравномерному вращению ГЭД при частотах ниже 10% от номинальных. Для исключения этих явлений необхо-димо использовать обмотки двигателя специального исполнения и усложнить схему инвертора. Достоинство – отсутствие ограничений по частоте.
В ДППЧ переменный ток сначала выпрямляется, его пульсации сглаживаются с помощью фильтра, а затем с помощью инвертора постоянный ток снова превращается в переменный с тре-буемыми величинами напряжения и частоты. В качестве инверторов применяют АИН, в которых напряжение на нагрузке не зависит от ее величины, а определяется только очередностью коммута-ции управляемых вентилей в инверторе.
Преобразователь такого типа содержит пару встречновключенных трехфазных тиристор-ных моста в каждой фазе выхода (рис. 12.1). Каждый тиристор моста проводит ток половину пе-риода трехфазного питающего напряжения и таким образом получается хорошая синусоидальная форма выходного тока при низких частотах. Преобразователь позволяет также осуществлять ре-версирование режима с рекуперацией энергии в сеть.
12.2 Непосредственный полупроводниковый преобразователь частоты (НППЧ)
В НППЧ отсутствует преобразование переменного тока в постоянный и наоборот, преоб-разование частоты осуществляется за счет естественной коммутации вентилей. На вхо-
де напряжение U и частота 1f , за счет
коммутации вентильных групп на выходе схемы, куда подключается ГЭД, напряжение и частота изменяются до U 2 и 2f
Гармонический состав выходного напряжения характеризуется:
1. Коэффициентом искажения -
2
12
U
UКи , где 12U - действующее значение
выходного напряжения основной гармони-ки,
2U -действующее значение выходного
напряжения преобразователя. 2. Коэффициентом гармоник -
2
22
U
UК
k
г
,
где кU2 –действующее значение к-той гармоники выходного напряжения.
3. Относительным значением действующего выходного напряжения )1(2
1
UU
U
Рисунок 12.2 - Схема непосредственного полупроводни-кового преобразователя частоты: 1 - первичный двига-тель, 2 - генератор, 3 - регулятор напряжения генератора, 4 - преобразователь частоты с непосредственной связью, 5 - регулятор напряжения ГЭД, 6 - регулятор частоты ГЭД, 7 – ГЭД, 8 - система возбуждения ГЭД, 9 - ВФШ

46
46
В НППЧ наиболее широко применяется мостовая трехфазная схема выпрямлении, для
которой иK = 0,997-коэффициент искажения, и ГK =0,01 –коэффициент гармоник.
К достоинствам НППЧ относится высокий КПД и малая мощность тиристоров, отсутствие элементов искусственной коммутации тиристоров, что увеличивает надежность и снижает габари-ты преобразователя. Кроме того, имеется возможность получения низких частот при благоприят-ной форме выходного напряжения, а также простой обмен активной и реактивной энергией меж-ду СГ и ГЭД.
К недостаткам НППЧ можно отнести ограничение верхнего предела выходной частоты до 50% частоты питающего генератора, а также сложность коммутационного оборудования.
Структуры ГЭУ переменного тока с ППЧ принципиально не отличаются от установок без преобразователей частоты. Но в схемах ГЭУ с ППЧ имеется существенное отличие, связанное с тем, что регулирование напряжения и частоты ГЭД переменного тока осуществляется преобразо-вателем при неизменных параметрах напряжения и частоты на шинах электродвижения. Благодаря этому создается возможность применения единых ЭЭУ с использованием ГЭУ этого типа.
12.3 ЕСЭ с повышенным переменным напряжением 800В и ГЭД постоянного тока Повышение напряжения снижает токи генераторов и выпрямленный ток, что уменьшает
расход меди, массу и токи автоматов (рис.12.3.). Судовые потребители получают питание от трансформаторов или от отдельного СГ, а для ответственных ставят еще и отдельный преобразо-ватель.
Рисунок 12.5 - ЕСЭ 2000В с ГЭУ переменного тока
Рисунок 12.3 - ГЭУ переменного тока напряжением 800 В
Рисунок -12.4 - Схема ГЭУ переменного тока с ЕСЭ

47
47
ГЭУ переменного тока с ЕСЭ (рис.12.4). Пуск ГЭД осуществляется при по-ниженной частоте от двух любых генераторов при ВРШ в 0 положении, а затем работа при номи-нальной частоте. Регулирование скорости судна осуществляется ВРШ, а синхронный ГЭД враща-ется с постоянной скоростью. В случае перегрузки генераторов отключаются второстепенные по-требители, и уменьшается шаг ВРШ.
Схема ЕСЭ с напряжением 2000В с ГЭУ переменного тока (рис.12.5) Она похожа и на схему ЕСЭ 800В, но разница в том, что здесь ГЭД переменного тока, а регулирование оборотов ГЭД осуществляется преобразователем частоты.
12.4 Снижение высших гармоник в судовой сети при применении управляемых вы-
прямителей и преобразователей частоты Для снижения высших гармоник могут применяться конденсаторы, фильтры и дроссели.
Однако в связи с тем, что индуктивное сопротивление сети зависит от нагрузки и частоты, нару-шается настройка фильтров. Тоже касается и конденсаторов. Наиболее надежным является вклю-чение дросселей.
ф
др
ф
др ХК
ХКХ
,
0
др
др
ХL , (12.1)
где К v - имеемое отношение амплитуды высшей гармоники к амплитуде первой гармоники,
К др - требуемое отношение амплитуды высшей гармоники к амплитуде первой гармоники,
дрL - индуктивность дроселя,
фХ - комбинированное сопротивление,
- номер гармоники. Если коммутационное сопротивление выражено в относительных единицах, то
0
бдр
др
ZХL ,
где Z б - базисное сопротивление, равное б
б
Im
U
,а m-число генераторов.
Для трехфазной мостовой схемы выпрямления дроссель выбирается по пятой гармонике.
Пример: К v =К 5 =0,1
К др = 0,05 фХ = 0,15
Z б = ОмАГен
В
1,0
20002
400,
..15,015,005,0
15,01,0еоХ др
,
ГLдр51096,0
14,35
1,015,0
.
Дроссель состоит из нескольких параллельно включенных проводников, изолированных друг от друга, что снижает потери от высших гармоник в самом дросселе, и уменьшают его нагрев. Для снижения пульсаций выпрямленного тока и уменьшения их влияния на коммутацию ГЭД применяют ненасыщенные дроссели с сердечником. Дроссель выбирается из условий допу-
стимой величины пульсации тока, которая равна dнп IК 02,0 . Пульсации можно представить как
наложение синусоидального напряжения с частотой 06 и амплитудой dп UК на среднее вы-

48
48
прямленное напряжение. На этом основании можно считать, что создаваемое выпрямителем
синусоидальное напряжение, равное нdп UК . , должно вызывать в якорной цепи ГЭД с последова-
тельно включенным сглаживающим дросселем синусоидальный ток не превышающий 0,02 нdI . .
Этому условию соответствует равенство: анdнdп ZIUК .. 02,0 .
22xRRZ дaa ,
дрa LLLx 00 66 .
Пренебрегая малым активным сопротивлением, получим: LIUК нdнdп 0... 602,0 , то-
гда
a
нd
нdпaдр L
I
UKLLL
0.
.
602.0 , (12.2)
где L, L а соответственно индуктивности якорной цепи вместе с дросселями и якоря ГЭД.
Пульсации выпрямленного напряжения зависят от угла (рис.12.6). При напряжении судовой сети 380В, выпрямленное напря-жение трехфазного мостового выпрямителя для = 0 и угла коммутации
=30 будет:
B2
γαcoscosαUU лd 480
2
87.0138035.135.1
.
При меньших углах коммутации выпрямленное напряжение до-стигает 500В.
В случае большой мощности ГЭД желательно напряжение по-рядка 1000В. Для этого выпрямители питающиеся от разных станций соединяют последовательно, но это достаточно сложно. Значительно проще повысить напряжение судовой сети переменного тока до величины:
B
B
coscos
UU d
л 79287.0135.1
10002
35.1
2
.
Вопросы для самоконтроля.
1. Двухзвенный полупроводниковый преобразователь частоты. 2. Непосредственный полупроводниковый преобразователь частоты. 3. ЕСЭ с повышенным переменным напряжением 800В и ГЭД постоянного тока. 4. Снижение высших гармоник в судовой сети при применении управляемых выпрямителей и
преобразователей частоты.
13 СУДОВЫЕ СХЕМЫ ГЭУ ПЕРЕМЕННОГО ТОКА С ЕСЭ
Для отечественного рыболовного флота построе-ны морозильные суда и большие морозильные рыболов-ные траулеры с ДЭГУ, предназначенными для питания как ГЭД, так и всех остальных потребителей.
На морозильном судне «Октябрьск» отечествен-ной постройки установлены четыре ДГ переменного тока 400В, 700кВт и синхронный ГЭД мощностью 2400кВт, который приводит во вращение гребной винт регулируе-мого шага (ВРШ). Схема электростанции приведена на ри-сунке 13.1. Пуск ГЭД осуществляется при пониженной ча-стоте 20Гц от двух любых генераторов, включенных на шины электродвижения. Лопасти ВРШ находятся в нуле-вом положении и потребляемая ГЭД мощность – мини-мальна. Пониженной частоте вращения генераторов соот-
Рисунок 12.6 -График kп=f(α)
Рисунок 13.1 - Схема электростанции МРТ «Октябрьск»

49
49
ветствует значительный статизм регуляторов частоты дизелей, в связи с этим один из генера-торов может перейти в двигательный режим и всю нагрузку будет нести второй ДГ. В результате его мощность окажется недостаточной для пуска ГЭД. Поэтому перед пуском ГЭД необходимо его вал проворачивать валоповоротным устройством для уменьшения трения покоя и обеспечения пуска.
На БМРТ «Север» установлены три генератора по 700кВт и синхронный ГЭД с ВРШ мощностью 1500кВт. Схема электростанции приведена на рисунке 40.2. Пуск ГЭД осуществляется от одного ДГ при нулевом развороте ВРШ и 20Гц.
На траулере-заводе «Наталия Ковшова» построен-ном во Франции по заказу СССР, единая электростанция. Для питания судовой сети и синхронного ГЭД установлены три ДГ по 2100кВА при сos 0,8 ,напряжением 2кВ, ча-
стотой вращения 500об/мин с успокоительными обмотка-ми. Для удобства расположения в корме судне, повышения надежности и упрощения пуска применен двухякорный синхронный ГЭД, который приводит во вращении ВРШ.
Мощность каждого якоря 1470кВт, напряжение 2кВ, частота вращения 187,5об/мин, сos 1
Судовая сеть питается от общих шин напряжением 2кВ через два понижающих трансформатора ТС1 и ТС2. Во время стоянки судо-вая сеть получает питание от ДГ мощностью 340кВА с частотой вращения 500об/мин, подключен-ного к шинам 380В. Имеется также АДГ на 90кВА, 1500об/мин, 380В. Генераторы и ГЭД имеют тири-сторные возбудители, присоеди-ненные к клеммам машин через со-гласующие трансформаторы ТД или ТГ. Возбудители подключают-ся к обмоткам возбуждения генера-торов контакторами КВД и КВГ. Когда генераторы включены на шины судовой сети(2кВ), напряже-ние поддерживается регуляторами
напряжения, которые действуют по отключению через системы управления ТВГ, имеющего звено распределения реактивной нагрузки. Активная нагрузка распределяется регуляторами частоты ди-зелей, имеющими звено, связанное с измерителем активной мощности. Система возбуждения ГЭД снабжена регулятором, автоматически поддерживающим коэффициент мощности двигателя рав-ным 1.
Во время пуска ГЭД один из генераторов подключается к шинам ГЭД. Возбудитель гене-ратора не обеспечивает необходимой форсировки возбуждения при пониженной частоте (25Гц). Поэтому у всех генераторов обмотки возбуждения могут подключаться контакторами форсировки Фк неуправляемым выпрямителям ВФ, которые включены через согласующие трансформаторы на шины 380В. Эти же выпрямители используются для начального возбуждения через сопротивле-ние, которое затем шунтируется. Защита генераторов и ГЭД осуществляется автоматически вы-ключателями с воздействием на гашение магнитного поля. На всех судах с ЕСЭ и ВРШ в случае перегрузки генераторов автоматически отключаются второстепенные потребители и автоматиче-ски уменьшается шаг ВРШ.
Рисунок 13.2 - Схема электростанции БМРТ «Север»
Рисунок 13.3 - Схема электростанции траулера «Наталья Ковшова»

50
50
Килевая качка судов периодически из- меняет момент сопротивления на гребном вин-те и нагрузку ГЭД., что часто сказывается на периодическом изменении частоты вращения ДГ, ча-стоте и напряжении сети. Для устранения этого явления судовые потребители могут питаться че-рез преобразователи, напряжение и частота на выходе которых стабилизируется автоматической системой управления.
Большое количество траулеров, построенных в ряде стран, используют установки пере-менного тока с высокооборотными асинхронными короткозамкнутыми ГЭД, работающими на винт регулируемого шага (ВРШ) через редуктор.
Например, у траулера «Марсели-на Циризо» при мощности на валу свыше 1,5 МВт используются синхронные ГЭД, позволяющие повысить КПД и коэффици-ент мощности всей системы. Применяют-ся также системы с полюсопереключае-мыми асинхронными ГЭД. В режиме ма-лых скоростей ВРШ имеет худший по сравнению с ВФШ пропульсивный КПД. В предлагаемой установке ГЭД при рабо-те на 4х полюсных обмотках передает на винт через редуктор мощность 1470кВт при скорости вращения 1480об/мин, а при работе на 6 полюсных обмотках 880кВт при скорости вращения 980об/мин. Соот-ветствующее регулирование разворота лопастей ВРШ при работе на 6-ти полюс-ных обмотках позволяет увеличить мо-мент на винте на 10% и более, полно за-гружать дизель–генераторы на понижен-
ных скоростях хода судна в особенности в режиме траления. Высокая стоимость и меньшая надежность ВРШ обуславливает поиск путей построения электроэнергетической установки с ГЭД переменного тока и ВФШ. Один из таких вариантов был использован при постройке японских тунцеловных судов. В такой установке применено каскадное включение асинхронного ГЭД с фа-зовым ротором. Энергия скольжения ротора этого двигателя при регулировании скорости враще-ния 3:1 возвращалась в сеть с помощью преобразователя, ГЭД связанный с валом через редуктор был рассчитан на мощность 3160кВт при напряжении 3,3кВ и частоте 50Гц.
Вопросы для самоконтроля.
1. Судовые схемы ГЭУ переменного тока с ЕСЭ.
14 ГЭУ СОВРЕМЕННЫХ СУДОВ И ИХ СИСТЕМЫ УПРАВЛЕНИЯ 14.1 ГЭУ парома-ледокола типа "А. Коробицын" Системы управления ГЭУ судов довольно разнообразны. Автомобильно - пассажирские
ледокольные паромы типа "Андрей Коробицын" построены на судостроительном заводе им.А.А.Жданова в Санкт-Петербурге. В контур неизменного тока парома включены два гребных электродвигателя типа ПГ 178-8к (900 кВт), три главных генератора типа ГПМ 84/44-8-2 (760 кВт) и электродвигатель подруливающего устройства типа ПСГ 152-8к(370кВт).
Для приведения в действие главных машин служат два пяти-машинных возбудительных агрегата, каждый из которых состоит из трёх электромашинных усилителей типа ЭМУ-200 (для возбуждения ГЭД), одного электромашинного усилителя типа ЭМУ-400 (для возбуждения глав-ных генераторов) и приводного электродвигателя.
Рисунок 13.4 – Схема электростанции траулера «Марселина Циризо».

51
51
Системы неизменного тока поддержи- вают постоянство тока в главной цепи гребной электрической установки с целью обеспечения независимого действия электродвигателей, питаю-щихся от одних и тех же генераторов. Для этого главные генераторы, гребные электродвигатели и электродвигатели специальных механизмов (например, электродвигатели подруливающего устройства на паромах, электродвигатели грунтозаборных насосов на земснарядах и т.д.) соедине-ны в один общий контур. При этом электродвигатели расположены на разных валах.
В гребных установках неизменного тока напряжение генератора распределяется между электродвигателями, находящимися на разных гребных валах, согласно уравнению (рассматрива-ется случай с двумя электродвигателями):
1 1 2 2 1r E е AU C Ф С Ф i R .
При этом доля напряжения, приходящегося на каждый из якорей, зависит от момента со-противления на валу электродвигателя и от его магнитного потока.
В системе неизменного тока генераторы имеют внешнюю характеристику, показанную на рисунке 5.10. Работа генератора характеризуется вертикальной частью зависимости.
При характеристике генератора подобного вида регулирование скорости и реверс элек-тродвигателя осуществляются изменением величины и направления его магнитного потока. Управление скоростью вращения электродвигателей в системе неизменного тока производится путем регулирования потока возбуждения ГЭД, рисунок 5.11.
Автоматическая система неизменного тока парома представлена на рисунке 14.1. Для поддержания постоянства тока главной цепи используется статический регулятор тока, со-стоящий из звена сравнения ЗС и двухкаскадно-го усилителя, включающего в себя промежу-точный однотактный магнитный усилитель ПМУ и электромашинный усилитель ВГГ. Ре-гулятор тока создает падающие внешние харак-теристики генераторов для двух значений 1550 А и 500 А.
В звене сравнения напряжение OTU ,
пропорциональное току главной цепи, сравни-вается с эталонным напряжением ЗTU , опреде-
ляющим значение главного тока. Величина эта-лонного напряжения меняется с помощью рези-стора 39 СД в зависимости от положения руко-яток постов управления. Разность напряжений
ЗТ OTU U U является выходным сигна-
лом звена сравнения. Этот сигнал усиливается двухкаскадным усилителем до величины, до-статочной для управления возбуждением гене-ратора.
Магнитный усилитель является нелинейным звеном с характеристикой типа реле. Благо-даря наличию в цепи регулятора тока элемента сравнения и нелинейного магнитного усилителя система неизменного тока работает с токовой отсечкой.
Трансформатор постоянного тока (ТПТ) с вспомогательным устройством измерения (ВУИ) является измерительным элементом звена сравнения. Он представляет собой дроссель насыщения, который подмагничивается шиной главной цепи, проходящей через окно магнитопро-вода трансформатора.
Отрицательная обратная связь (ООС2) служит для повышения устойчивости системы и точности поддержания величины тока главной цепи. Коэффициент усиления магнитного усилите-ля определяется соотношением активных сопротивлений дросселя и резистора, включенного в цепь обмотки обратной связи.
Рисунок 14.1 - ГЭУ неизменного тока парома типа "Андрей Коробицын"

52
52
В статических режимах общее сопро- тивление дросселя определяется в основном его активным сопротивлением, при этом коэффициент усиления ПМУ наибольший. В переходном процессе общее сопротивление дросселя возрастает за счет увеличения его индуктивного сопро-тивления. Соотношение общих сопротивлений дросселя и резистора изменяется, что приводит к усилению токовой отрицательной обратной связи и, следовательно, к уменьшению коэффициента усиления магнитного усилителя в переходном процессе и повышению устойчивости всей системы.
Гибкие обратные связи (ООС/ и ООСЗ), создаваемые с помощью стабилизирующих трансформаторов напряжения (СТН) и тока (СТТ), служат для стабилизации системы и улучшения качества переходного процесса.
Обмотка смещения возбудителя генераторов необходима для согласования характеристик возбудителя и усилителя ПМУ. Дифференциальные; обмотки ДОВД служат для формирования механической характеристики электродвигателя. С их помощью осуществляется отрицательная обратная связь с отсечкой по скорости вращения ГЗД. Они включены на напряжение тахогенера-
тора (ТГ) последовательно со стабилитроном (СТ). На полном ходу ТГu превышает значения
напряжения стабилизации СТU . При этом через задающие обмотки возбудителя двигателя (ЗОВД)
протекают токи, создающие размагничивающие ампер-витки по сравнению с ампер-витками за-дающих обмоток.
При изменении нагрузки на гребном винте изменяется скорость вращения электродвига-теля и, благодаря изменению ДИФАW , изменяется магнитный поток и, следовательно, вращающий
момент электродвигателя. Мощность, потребляемая при этом двигателем, остается примерно по-стоянной.
С увеличением нагрузки на винте снижается скорость вращения электродвигателя и, сле-
довательно, напряжение тахогенератора ТГU . Когда скорость вращения снизится настолько, что
напряжение ТГU будет равно или меньше напряжения СТU , стабилитрон практически перестанет
проводить ток и обратная связь по скорости перестанет действовать ( 0ДИФАW ).
Когда величина тока электродвигателя достигнет номинального значения, можно перейти от регулирования при примерно постоянной мощности к регулированию при примерно постоян-ном моменте.
Для создания вращающих моментов электродвигателей, достаточных для преодоления со-противления гребных валов при страгивании судна с места, служит схема форсировки электродви-гателей.
При скорости.электродвигателя, равной нулю магнитный усилитель БМР, работающий в релейном режиме, включает: реле форсировки РФД, которое своим контактом шунтирует сопро-тивление в цепи обмоток ЗОВД, благодаря чему подается полный магнитный поток, обеспечива-ющий форсировку пусковою момента электродвигателя. При достижении некоторых малых обо-ротов реле БМР отключает реле РФД.
Условия эксплуатации парома характеризуются стесненной акваторией плавания, а в зим-ний период затрудняется тем, что фарватер забит крупным и мелким льдом (шугой), который ча-сто заклинивает гребной винт и замедляет разгон гребных электродвигателей. Учитывая это, при-менение гребной электрической установки неизменного тока является единственно правильным решением, т.к. она обеспечивает высокие маневренные качества, необходимые в указанных усло-виях плавания.
Но, как показывает опыт эксплуатации парома, гребная установка не лишена некоторых недостатков. При пуске и реверсах ГЭД наблюдаются большие колебания тока главной цепи (за-брос до 1900 - 2000 А с последующим провалом до 900 - 1000 А при номинальном токе главной цепи 1460 А). В случае попадания льдин под винт наблюдаются броски тока главной цепи боль-шие, чем при пусках и реверсах (до 2800 - 3200 А), что приводит к кратковременной перегрузке дизель-генераторов, а иногда к срабатыванию максимальной защиты и отключению всей установ-ки. Дизель-генераторы при перегрузке несколько теряют свою скорость, что приводит к кратко-временным провалам напряжения и частоты навешенных генераторов, несмотря на наличие у них регуляторов напряжения. Эти провалы оказывают влияние на скорость работающих судовых элек-

53
53
троприводов. В статических режимах наблю- даются автоколебания тока главной цепи, обу-словленные неудовлетворительной работой системы стабилизации тока
14.2 ГЭУ морских паромов типа "Сахалин" Морской паром "Сахалин" предназначен для перевозки железнодорожных составов и дру-
гих транспортных средств. В энергетическую установку парома входит шесть главных дизель-генераторов 14Д-100 с 1енераторами постоянного тока ГП-ЗОбА мощностью по 180 кВт и напря-жением 500 В при скорости вращения 84,8 рад/с (810 об/мин) и два гребных электродвигателя (но-совой и кормовой) постоянного тока, двухъякорных, типа 2ПП-2160-6К, мощностью 2х 2850 кВт, напряжением на якоре 1000 В, скоростью вращения 15,5/24,3 рад/с (144/230 об/мин).
Для питания судовых потребителей в ходовом режиме предусмотрены четыре генератора переменного трехфазного тока типа МС99-818 мощностью по 500 кВт, напряжением 400 В, скоро-стью вращения 78,5 рад/с (750 об/мин), имеющих привод от главных дизель-генераторов. При этом мощность главного генератора, работающего на схему ГЭУ, составляет 1200 кВт.
Схемы главного то-ка обоих ГЭД одноконтур-ные, с попеременно-последовательным соедине-нием генераторов и якорей ГЭД, рис. 14.2.
Схемы возбуждения и управления обоих ГЭД действуют по одинаковому принципу. Возбудители главных машин конструк-тивно объединены в три трехмашинных агрегата, каждый из которых состоит из возбудителя главных ге-нераторов (ВГГ), возбудите-
ля ГЭД (ВД) и приводного электродвигателя. Обмотка независимого возбуждения ВГГ питается от сети постоянного тока 220 В через задатчики мощности, а токовая обмотка ВГГ подключена на падение напряжения в обмотках дополнительных полюсов носового ГЭД.
Обмотки параллельного возбуждения якорей гребного электродвигателя получают пита-ние от возбудителя ВД. Сопротивление, включенное последовательно с обмоткой возбуждения ВД, служит для ослабления магнитного потока якорей ГЭД в экономических режимах при мень-шем количестве генераторов, питающих гребные электродвигатели.
Скорость вращения ГЭД изменяется с помощью регулирования напряжения генераторов, которое происходит путем изменения тока возбуждения в независимой обмотке ВГГ, а также с помощью ступенчатого изменения скорости вращения дизелей при наборе схемы главного тока гребной электроустановки.
Направление вращения ГЭД изменяется в результате изменения направления тока главной цепи при той же полярности в цепи возбуждения гребного электродвигателя.
Анализ работы схемы показывает, что она действует по отклонению регулируемой вели-чины от номинального значения. Влияние возмущающих факторов не учитывается в системе ав-томатического управления скоростью вращения ГЭД и напряжения главных генераторов ГЭУ.
14.3 ГЭУ линейных ледоколов типа "Ермак"
Рисунок 14.2. - Схема возбуждения и управления ГЭД парома типа "Сахалин"

54
54
Ледоколы финской постройки типа "Ермак" предназначены для проводки судов в районах Арктики. В энергетическую установку ледокола входят девять главных дизель-генераторов, каж-дый из которых состоит из дизеля Вяртсиля-Зульцер типа Z40/48 длительной мощностью 4600 л.с. (6254,2 кВт),и генератор постоянного тока мощностью 3080 кВт и напряжением 800 В при скоро-сти вращения 38,6 рад/с (380 об/мин). Три соединенных двухъякорных гребных электродвигателя постоянного тока имеют номинальную мощность 2 х 4410 кВт и напряжение 2x1200В. В качестве возбудителей генераторов и ГЭД используются статические тиристорные выпрямители .
Для питания судовых потребителей предусмотрено шесть вспомогательных ДГ перемен-ного трехфазного тока мощностью 1126 кВт каждый при напряжении 400 В и скорости вращения 78,5 рад/с (750 об/мин).
Схемы главного тока всех ГЭД одинаковы. В каждую из них входят три главных генера-тора и один двухъякорный гребной электродвигатель, соединенные попеременно-последовательно в один контур. В случае необходимости главные генераторы могут подключаться к различным гребным электродвигателям.
Обмотки возбуждения генераторов питаются от реверсивных тиристорных возбудителей, каждый из которых состоит из двух мостов, включенных встречно-параллельно. На каждые три генератора, питающих один ГЭД, вводятся два реверсивных возбудителя - основной и резервный, имеющие отдельные трансформаторы питания.
Изменение скорости вращения ГЭД производится изменением напряжения генераторов, а направление вращения гребного электродвигателя - путем перемены полярности тока возбужде-ния генераторов и, соответственно, изменения направления тока главной цепи, рис. 14.3.
Схема управления током возбуждения главных генераторов работает сле-дующим образом. Действи-тельное значение тока воз-буждения измеряется с по-мощью трансформатора на стороне переменного тока и выпрямляется преобразова-телем переменного тока. Поэтому полярность изме-ряемого тока всегда одина-кова и независима от направления тока в обмотке возбуждения генератора.
Ток заданной величины поступает из цепи управления на знакоинвертор. Так как полярность тока возбуждения генераторов определяется заданным направлением движения судна или направлени-ем вращения генераторов, знакоинвертор задает требуемую полярность сигнала в зависимости от положения транзисторного переключателя, который управляется с помощью логической схемы реверсирования. Заданный сигнал усиливается регулирующим усилителем и поступает на один из двух формирователей управляющих импульсов. В зависимости от полярности сигнала включается тиристорный возбудитель для входа "вперед" или "назад".
Управление током главной цепи происходит следующим образом. Сигнал задающей ве-личины тока поступает от схемы регулирования мощности или скорости вращения. Действитель-ное значение тока измеряется с помощью шунта главной цепи и преобразователем действительно-го значения тока. Далее перед поступлением на регулирующий усилитель оно может корректиро-ваться командным прибором главного механика. Мощность ГЭД определяется путем перемноже-ния действительных значений напряжения генератора и тока главной цепи. Множитель образует действительное значение мощности, которое сравнивается с заданным.
Рисунок 14.3 - Упрощенная схема возбуждения и управления ГЭУ ледо-колов типа «Ермак»

55
55
Для управления током возбуждения ГЭД действительное его значение измеряется трансформатором, затем преобразуется измерительным преобразователем переменного тока и по-ступает на регулирующий усилитель тока возбуждения. Задаваемое значение тока возбуждения поступает через избиратель на этот же регулирующий усилитель из источника заданного значения основного магнитного потока или через функциональные цепи усиления потока в зависимости от того, какое из них больше по абсолютной величине. Заданное значение магнитного потока ГЭД может изменяться в зависимости от установленной величины скорости вращения первичных дви-гателей и от количества включенных главных генераторов.
Величина же сигнала из функциональной цепи усиления потока зависит от силы тока главной цепи: если она превышает установленный предел, то ток возбуждения гребных электро-двигателей увеличивается. Величина, пропорциональная току главной цепи, сравнивается с пре-дельным значением начала усиления магнитного потока.
Анализ работы схем управления тока возбуждения генераторов, тока главной цепи, тока возбуждения, мощности и скорости вращения ГЭД показывает, что каждая из рассмотренных схем действует по принципу отклонения регулируемой величины.
14.4 ГЭУ океанографического судна "Аранда"
Океанографическое судно "Аранда" финской постройки имеет дизель-электрическую гребную установку переменного тока. На судне установлен кормовой ГЭД переменного тока (син-хронный двигатель), который питается от тиристорного преобразователя скорости с непосред-ственной связью (циклоконвертор). Частота тока, подаваемого к ГЭД от циклоконвертора, плавно регулируется в диапазоне 0 -г 15 Гц. Скорость вращения ГЭД можно регулировать в диапазоне от 0 до 18,8 рад/с (180 об/мин). Мощность ГЭД устанавливается свободно, даже более 10 МВт рис. 14.4
Дополнительно на судне имеются три электропривода постоянного тока с тиристорным управлением, в том числе один ЭД для носового гребного механизма и два ЭД подруливающих устройств. Носовой ГЭД постоянного тока, мощностью 630 кВт, напряжением 450 В, током 1500 А, скоростью вращения 0ч29,3рад/с (0 280 об/мин). Его си-стема управления работает по принци-пу регулирования по мощности. Два ЭД подруливающих устройств [215 кВт, 440 В, 557 А, 0 ч- 150,5 рад/с (0 1400об/мин)], их система управле-ния работает по принципу регулирова-ния скорости (по якорному напряже-нию).
Циклоконвертор состоит из трех встречно-параллельно включенных трехфазных тиристорных мостов. Каждый половинный мост формирует полупериод выходного напряжения. Управляющее напряжение тиристорных мо-стов имеет синусоидальную форму и формируется с помощью микро-ЭВМ. При подаче нагрузки циклоконвертор имеет coscp близкий к единице во всем рабочем диапазоне. На стороне сети cos
изменяется в зависимости от требуемого двигателем напряжения в диапазоне от 0,7 до 1,0. Пита-ющее напряжение циклоконвертора - 400 В при частоте 50 Гц, напряжение на выходе 0340 В при частоте 15Гц, выходной ток - 2000 А.
Рисунок. 14.4 - ГЭУ электрохода "Аранда"

56
56
Для управления системой "циклокон- вертор - синхронный электродвигатель" приме-няется векторная система управления, в которой управляющим элементом является сам двигатель. Действует она с использованием микро-ЭВМ.
Развиваемый электродвигателем момент в векторном выражении M I ,
где I - вектор тока; - вектор потока воздушного зазора электродвигателя.
Оптимальное регулирование происходит в тех случаях, когда вектор I перпендикулярен вектору . Установленный на роторе указатель положения дает непрерывную информацию о по-
ложении ротора для микро-ЭВМ в цифровой форме. На микро-ЭВМ вычисляются заданные зна-чения выходного тока циклоконвертера, при этом используется модель ЭД, запрограммированная ЭВМ. Оптимальный результат достигается с точностью до 02,0% во всем рабочем диапазоне двигателя. Электродвигатель работает при cos =1, что обеспечивается при оптимальном резуль-
тате управления. Общий коэффициент нелинейных искажений, вызываемых циклоконвертером,(1112%)
меньше, чем коэффициент нелинейных искажений у обычного преобразователя постоянного тока (18 22%).
14.5 Сравнительный анализ схем управления ГЭУ В настоящее время на судах получили широкое распространение различные варианты си-
стем электродвижения на переменном токе, с тиристорными преобразователями частоты, а также выполненные на основе применения машинно-вентильных каскадов.
В ГЭУ с синхронным турбогенератором и асинхронным ГЭД, управляемой по схеме вен-тильного каскада или машины двойного питания, изменение скорости вращения гребного элек-тродвигателя происходит с помощью преобразователя частоты в цепи ротора ЭД, а реверсирова-ние - с помощью контактного или бесконтактного реверсора в цепи статора. Применяются греб-ные электроустановки с двойным машинно-вентильным каскадом, состоящим из двух асинхрон-ных ЭД и преобразователя частоты. Обмотка статора первого ЭД питается от генераторов. Обмот-ки роторов соединены последовательно, обмотка статора второго ЭД соединена с ПЧ.
В ГЭУ с синхронным турбогенератором, ТПЧ и синхронным или асинхронным ГЭД регу-лирование скорости вращения и реверсирование двигателя осуществляется с помощью преобразо-вателя. Величины напряжения ГЭД и генератора выбираются независимо друг от друга (для ТГ 100-200 Гц, для ГЭД 15-25 Гц). Возможно использование как НПЧ, так и ПЧ со звеном постоянно-го тока, в которых применяется импульсное и широтно-импульсное регулирование в цепи посто-янного и переменного тока, импульсно-фазовое управление напряжением полупроводниковых вентилей.
Имеются схемы электродвижения, которые выполнены с применением НПЧ с эквива-лентными двенадцатифазными схемами обмоток СГ и ГЭД. Современные тиристоры позволяют создать ПЧ мощностью до 20000 кВт. Управляемые выпрямители используются и для возбужде-ния генераторов и ЭД, обеспечивая быстрое нарастание и гашение электромагнитного поля ма-шин.
В гребных электрических установках с преобразователями частоты количество турбогене-раторов не зависит от количества ГЭД. Синхронные генераторы могут работать на общие шины или на две системы шин для обеспечения большей надежности установки. В ГЭУ переменного то-ка возможно осуществление отбора мощности от главных генераторов для питания общесудовых потребителей. Все параметры ГЭД регулируются с применением преобразователя частоты.
На основании сравнительного анализа систем управления гребных электрических устано-вок современных судов различного назначения можно заключить, что наиболее распространен-ными системами автоматического управления, несмотря на их большое разнообразие, являются системы, действующие по принципу отклонения регулируемой величины. При этом контуры ре-гулирования скорости вращения ГЭД, тока возбуждения и тока нагрузки главных генераторов

57
57
действуют независимо друг от друга и связаны через объект управления в динамических ре-жимах их работы. Это характерно для схем управления ГЭУ ледоколов и паромов как отечествен-ной, так и иностранной постройки.
Получили дальнейшее развитие ГЭУ с подчиненным и векторным управлением, обеспе-чивающие эффективное функционирование специальных электроприводов в условиях частоты изменений режимов их работы и требований изменения параметров электрических машин в широ-ких пределах.
В системах управления гребных электроустановок рассматриваемых судов имеются от-дельные контуры управления различными электрическими параметрами. Связь между контурами в системах, работающих по принципу отклонения, не используется. Это характерно для большин-ства схем управления ГЭУ. Между тем использование этих связей, действующих в переходных процессах, повысит эффективность функционирования схем управления электродвижения, позво-лит получить оптимальные параметры переходных процессов, повысит качество управления ГЭД в динамических режимах.
14.6 ГЭУ промысловых судов Интенсификация морского промысла и связанные с этим увеличение скоростей хода,
применение большого количества орудий лова, рост объема обработки и замораживания продук-ции определяют необходимость постоянного совершенствования и поиска наиболее рациональ-ных энергетических установок, их структур для промысловых судов. При этом в качестве основ-ных задач рассматриваются такие, как обеспечение минимума массы и стоимости, возможность компоновки механизмов и оборудования в единые агрегаты, снижение удельного расхода топлива на номинальных и долевых нагрузках за счет уменьшения потерь при генерировании, распределе-нии и преобразовании электроэнергии, высокая степень автоматизации установки.
Актуальным является и вопрос об использовании на промысловых судах гребных элек-трических установок. Несмотря на высокую первоначальную стоимость, установки этого типа обеспечивают лучшую маневренность, а также более удобное размещение энергетической уста-новки. Увеличение мощности ЭЭУ промысловых судов сопряжено со все более широким внедре-нием переменного тока и использованием средств полупроводниковой преобразовательной техни-ки в приводах гребного винта и траловых лебедок.
14.6.1 ГЭУ судов типа « Зверобой» В состав гребной электроустановки зверобойно-рыболовного тока типа P=990/8/300S
мощностью 750 кВт каждый, напряжением 625 В, номинальным током 1200 А, скоростью враще-ния 80,7 рад/с (750 об/мин) с приводом от трех главных дизелей типа 6А25-70 Цегельски-Зульцер польской постройки мощностью 810кВт каждый; двухъякорный ГЭД постоянного тока типа 2P-1500/12/540S/03 мощностью каждого якоря 845 кВт при напряжении 760 В и токе 1200 А, скоро-стью вращения 18,8 рад/с(175 об/мин).
Главные машины соединены в контур неизменного тока, куда кроме указанных машин входят также два электродвигателя пре образователей тока мощностью 350 кВт с трехфазными синхронными генераторами на валах, обеспечивающими электроэнерги ей судовые потребители напряжением 380 В и ЭД траловой лебедки мощностью 290 кВт, рисунок 14.5
При включении в работу всех ЭД величина неизменного тока в контуре составляет 1200 А. Для режима хода во льдах исполь зуются два главных генератора для питания ГЭД с управле-нием по системе "генератор-двигатель". При этом один главный генератор работает на оставшиеся двигатели с поддержанием постоянства тока главного контура. Предусмотрен также вариант с включением трех генераторов на гребной электродвигатель в режиме "генератор-двигатель". При

58
58
этом судовые потребители получают питание от вспомогательного ДГ. Кроме того, с помо-щью автоматического выключателя А возможно соединение двух генераторов и двухъякорного ГЭД в один независимый (средний) контур, а также одного генератора и ЭД преобразователей и траловой лебедки в другой независимый (малый) контур. Если контакты выключателя А замкну-ты, средний контур работает в режиме "генератор-двигатель", а малый контур - в режиме постоян-ства тока. Главные машины включены в контур так, что напряжение между двумя любыми точка-ми схемы составляет не более 1200 В.
Поддержание постоянства тока осуществляется с помощью регулятора тока интегрально-пропорционального типа. При по-стоянстве тока главной цепи регу-лирование величины скорости вра-щения и его реверс ГЭД произво-дится путем изменения величины его магнитного потока.
В системе регулирования
тока сигнал 3I с задатчика тока ЗТ
подается на регулятор тока РТ, где сравнивается с сигналом действи-
тельного значения тока ДI , снима-
емого с шунта в главной цепи через датчик тока ДТГ. Усиленный сиг-
нал рассогласования З ДI I I
подается через бесконтактный переключатель на вход регулятора тока возбуждения РТВ генера-
тора в виде заданного значения тока возбуждения ВЗI , где сравнивается с сигналом действитель-
ного значения тока возбуждения ВДI . Усиленный сигнал рассогласования В ВЗ ВДI I I через ло-
гическое переключающее устройство ЛУГ поступает на вход управляющего блока БУГ, который вырабатывает импульсы на управляющие электроды тиристоров выпрямительного моста ВГ, пи-тающего обмотки возбуждения ОВГ главных генераторов.
В системе регулирования скорости вращения ГЭД задающий сигнал п3, снимаемый с по-тенциометра поста управления ПУ, подается через задатчик интенсивности ЗИ на вход регулятора скорости вращения РЧВ, где сравнивается с сигналом действительного значения скорости враще-
ния пд, снимаемым с тахогенератора гребного вала ТГ. Сигнал рассогласования з Дn n п в виде
заданного значения тока возбуждения ГЭД 3В ДI через бесконтактный переключатель подается на
вход регулятора РТВ тока возбуждения ГЭД. Здесь оно сравнивается с действительным значением
тока возбуждения ВДДI , поступающим через датчик тока ДТД с шунта, включенного в цепь обмо-
ток возбуждения ОВД якорей ГЭД. Выходной сигнал РТВ через логическое переключающее устройство ЛУД поступает на управляющий блок БУД, с которого управляющие импульсы посту-пают на тиристорный выпрямительный мост ВД, питающий обмотки возбуждения ОВД гребных электродвигателей.
При работе системы в режиме "генератор-двигатель" регулирование скорости вращения ГЭД происходит путем изменения магнитных потоков генераторов. Ток возбуждения ГЭД, снима-емый с задатчика тока возбуждения ЗТВ и поступающий на вход РТВ через бесконтактный пере-ключатель, остается в процессе регулирования неизменным.
Рисунок 14.5 - Функциональная схема ГЭУ промыслового судна ти-па "Зверобой"

14.6.2 ГЭУ траулера проекта В 422 Современные промысловые суда с электродвижением характеризуются большим разнооб-
разием установок. Большинство" схем выполнено на постоянном токе, в том числе по схеме неиз-менного тока, позволяющей объединить в один контур электродвигатели как гребных винтов, так и ваерных лебедок. На рис.14.6 представлена схема такой системы, которая применяется на зве-робойно-рыболовных траулерах проекта В 422 польской постройки. На основании эксплуатацион-ных данных система неизменного тока с двумя генераторами имеет такую же надежность, как и система «генератор-двигатель» с тремя генераторами. В этом режиме она позволяет использовать оба генератора одновременно и для движения, и для траления. Даже при работе только одного ге-нератора эта схема позволяет осуществлять траление на ходу, что невозможно в системе "генера-тор-двигатель".
В системах неизменного тока установленная мощность генераторов всегда может быть меньше суммар-ной мощности потребителей. На со-временных траулерах используются схемы установок неизменного тока с синхронными генераторами, вклю-ченными в контур через неуправляе-мые выпрямители. К преимуществам таких систем можно отнести: повы-шенную надежность вследствие «не-чувствительности» к коротким замы-каниям и практического отсутствия перебоев в питании; упрощение схе-мы управления за счет возможности несинхронной работы генераторов; работа дизелей при частичных нагрузках на пониженных оборотах, позволяющая снизить расход топлива и повысить моторесурс.
В качестве источников электроэнергии рассматриваются синхронные генераторы без успокоительных обмоток, оформленные конструктивно в единый блок с НВП. Параметры генера-торов рассчитываются для совместной работы с выпрямителями на контур неизменного тока. Их переходное сопротивление составляет около 30 %, и величина тока короткого замыкания не пре-вышает три номинальные величины. Поэтому отпадает необходимость в защитной аппаратуре между генератором и выпрямителями, срабатывающей при коротком замыкании, предусматрива-ется только контроль вентилей. В этих системах величина выходного тока поддерживается неиз-менной при изменяющемся значении нагрузки даже без регулирования тока возбуждения генера-торов.
14.6.3 ГЭУ траулера "Arctic Trawler" В единой ЭЭУ американского промыслового траулера "Arctic Trawler" (рисунок. 14.7) ис-
пользуется ГЭУ неизменного тока. В состав установки входят два ДГ мощностью по 1000 кВт и один 670 кВт, два вращаю-
щихся преобразователя по 500 кВА для питания судовых потребителей переменным током, два ГЭД мощностью по ПО кВт, работающих на один вал через суммирующий редуктор 5:1, и два электродвигателя по 191 кВт для привода шестибарабанной траловой лебедки. Ток главной цепи, протекающий постоянно через все якоря машин, включенных в главный контур, поддерживается
Рисунок 14.6. Принципиальная схема ЕЭЭУ траулера про-екта В 422: 1 - ГЭД; 2 - главные дизель-генераторы; 3 - ЭД привода траловой лебедки; 4 - преобразователи; 5 - вспо-могательный ДГ

60
60
на заданном уровне с помощью регулятора тока возбуждения генераторов, включающего об-ратную связь по напряжению и суммирующую систему на магнитных усилителях. Генераторы по-стоянного тока приводятся во вращение от дизелей мощностью, соответственно 1100 кВт и 720кВт.
Генераторы постоянного тока до-пускают работу в диапазоне скоростей вра-щения от 69,9 рад/с (650 об/мин) до 83,3 рад/с (800 об/мин). Все три генератора управляются одиночным вращающимся воз-будителем, управляемым в свою очередь трехкаскадным магнитным усилителем. Для уменьшения пульсаций тока, а также для повышения чувствительности и точности управления магнитные усилители питаются от отдельного источника с частотой тока 480 Гц.
Управление ГЭД осуществляется аналогично. Для предотвращения разогрева обмотки якоря на стоянке они имеют мощ-ные замыкающие контакты, шунтирующие ток через щетки при остановке вала. Напря-жение возбудителя ГЭД ограничено для за-щиты тока главной цепи от уменьшения ни-же номинального значения (1,35 к А) при перегрузках. Практически это также являет-ся защитой от перегрузки главных генерато-ров и их приводных двигателей.
Судовые потребители переменного тока обеспечиваются электроэнергией с по-мощью вращающихся преобразователей по 500 кВА, каждый из которых имеет отдель-
ный возбудитель, управляемый двухкаскадным магнитным усилителем. Система управления име-ет обратную связь по скорости вращения через тахогенератор и позволяет обрабатывать значи-тельные изменения нагрузки в пределах шести циклов переменного тока.
На судне имеется стояночный ДГ мощностью 250 кВА, использующийся также в качестве аварийного генератора в ходе рейса. Режим его запуска и потребители определяются переключа-телями, расположенными в машинном отделении.
Таким образом, в данной схеме реализованы основные достоинства систем неизменного тока. Система управления с МУ, являясь бесконтактной, простой в эксплуатации и сравнительно недорогой, имеет также преимущества перед тиристорными системами в том, что она не подвер-жена электромагнитным воздействиям.
Вопросы для самоконтроля.
1. ГЭУ парома-ледокола типа "А. Коробицын". 2. ГЭУ морских паромов типа "Сахалин". 3. ГЭУ линейных ледоколов типа "Ермак". 4. ГЭУ океанографического судна "Аранда". 5. Сравнительный анализ схем управления ГЭУ. 6. ГЭУ промысловых судов. 7. ГЭУ судов типа « Зверобой». 8. ГЭУ траулера "Arctic Trawler"
Рисунок 14.7 Принципиальная схема ЕЭЭУ траулера "Arctic Trawler": 1 - ДГ мощностью 1000 кВт; 2 - ДГ мощностью 670 кВт; 3 - ГЭД; 4 - ЭД привода траловой лебедки; 5 - преобразователь для питания судовых по-требителей; 6 - стояночный ДГ.

15 ВОПРОСЫ ЭКСПЛУАТАЦИИ ГЭУ Эксплуатация щеточно-коллекторного аппарата главных машин. Щеточные аппара-
ты и коллекторы главных электрических машин являются наименее надежными элементами элек-трических машин постоянного тока. Согласно статистике повреждений машин постоянного тока во время эксплуатации, около 20 % общего числа отказов происходит из-за неисправностей кол-лекторно-щеточного узла. К повреждениям коллекторов следует отнести: 1) нецилиндричность их поверхности из-за неравномерно го ее износа при трении щеток в течение длительной работы; 2) нарушения полировки поверхности коллектора с возникновением на ней царапин вследствие не-равномерного нажатия отдельных щеток на коллектор и их разной твердости; 3) подгорания пла-стин при неблагоприятной коммутации; 4) повреждения из-за высоких плотностей токов под щет-ками при неполном их прилегании к поверхности коллектора, что сопровождается повышенным нагревом щеточно-коллекторных узлов.
Механические факторы износа коллекторов: 1) трение щеток о коллектор; 2) вибрация щеток; 3) высокая окружная частота вращения; 4) биения коллектора и др. Возрастание темпера-туры контактных поверхностей и нарушение постоянства контактов между коллектором и щетка-ми вызывают дополнительное искрение и обгорание щеток и коллекторных пластин.
Химические факторы износа коллектора. 1) образование контактной пленки на поверхно-сти коллектора; 2) состав и влажность окружающего воздуха; 3) наличие в среде активных газов и др.
При вращении коллектора площади прилегания щеток изменяются по указанным причи-нам. Это приводит к перемещению точечных контактов поверхностей щеток с коллекторов и об-разованием в них чрезмерных плотностей токов и высоких местных нагревов. В результате этого может наступить термическая ионизация щеточных контактов. Размыкание и замыкание контакт-ных точек на поверхности коллектора с образованием малых электрических дуг приводит к раз-рушению этой поверхности. Этот же процесс вызывает значительные изменения переходного со-противления контакта щеток, на которое влияет влажность окружающего воздуха, состояние кон-тактной пленки, окружная частота вращения коллектора и др.
Важным средством уменьшения износа коллектора является улучшение условий комму-тации машины путем настройки добавочных полюсов, подбора марки и размеров щеток для дан-ной мощности, напряжения и окружной частоты вращения коллектора, а также правильного выбо-ра нажатия щеток на коллектор.
Во время эксплуатации, прежде всего, необходимо следить за износом коллектора, так как из-за трения о щетки коллектор приобретает достаточно сложную форму. Практически щетки не удается поставить так, чтобы был равномерный износ, поэтому коллектор по всей длине принима-ет ступенчатую форму. Из-за наличия зазора в концевом подшипнике скольжения и в подшипнике приводного двигателя в процессе работы генератора коллектор приобретает форму эллипса. Сту-пенчатость коллектора легко устранить специальными шлифовальными камнями. Устранить эл-липсоидность коллектора можно проточкой; на главных генераторах это можно делать без разбор-ки.
При сильном загрязнении коллектор достаточно только промыть спиртом. Пыль и грязь между ламелями удаляют кистями, промывают чистой ветошью, слегка смоченной в растворителе. Протирают коллектор вдоль пластины. Биение коллектора определяют индикатором, закреплен-ным на одном из щеткодержателей. Разность между наибольшим и наименьшим показаниями ин-дикатора определяет значение эксцентриситета.
Основные требования к коллектору: при вращении нагреве он должен сохранять точную цилиндрическую форму, отдельные пластины не должны западать или выступать за окружность коллектора. У новых машин деформация коллектора проявляется не сразу, а приблизительно через 100 часов работы под нагрузкой.
Значение нажатия щеток устанавливается пружинными весами. Для равномерного сраба-тывания коллектора по его длине тетки одних пальцев щеткодержателя должны быть сдвинуты по отношению к другим так, чтобы поверхность коллектора перекрывалась равномерно как положи-тельными, так и отрицательными тетками.

62
62
Работы, связанные с обеспечением нормальной работы коллекторно-щеточного аппарата главных электрических машин ГЭУ, стоят в числе первых по трудозатратам на обслужи-вание ГЭУ. В процессе эксплуатации ГЭУ экипажу приходится заниматься доводкой машин. Ка-чество коммутации оценивается визуально. При измерении импульсов коммутационных напряже-ний на сбегающем крае щетки в качестве датчика используется специальная измерительная щетка, установленная на уровне сбегающего края рабочих щеток. Электрические сигналы от щеткодатчи-ка передаются на индикатор искрения, где они суммируются, усредняются и передаются на при-бор стрелочного типа, который показывает среднее значение импульсов. Для анализа процесса коммутации его можно осциллографировать, что является наиболее объективной оценкой состоя-ния коммутации. При фотоэлектрической индикации искрения в качестве датчика используется фотоэлемент на сбегающем крае одной из щеток. Импульсы фототока усиливаются и передаются на экран электроннолучевой трубки.
Уход за коллектором и щетками сводится к периодической замене износившихся щеток, продувке коллектора и щеток сжатым воздухом и периодической протирке коллектора спиртом. Практика эксплуатации показывает, что при хорошо налаженной коммутации и надлежащем кон-троле щеточный аппарат может длительно работать без каких-либо изменений.
Мероприятия по повышению сопротивления изоляции. Сопротивление изоляции меж-ду токоведущими частями и корпусом является одним из основных показателей техническою со-стояния судового электрооборудования.
Качество электрической изоляции характеризуется следующими параметрами: 1) сопро-тивлением изоляции; 2) коэффициентом абсорбции; 3) электрической прочностью.
Для измерения сопротивления изоляции используются мегомметры, выпускаемые в зави-симости от значения выходного напряжения (от 100 до 2500 В) и наибольшего значения измеряе-мо го сопротивления. Сопротивление изоляции значительно зависит от температуры, следователь-но, сравнивая с нормой результаты ее измерения, следует вносить поправки (см. табл.15. 1).
Таблица 15.1 – Зависимость сопротивления изоляции от температуры.
Температура об-мотки, 0С
110-114 115-119 120-124 125-129 130
Сопротивление изоляции, % от нормы
100 80 60 40 30
Сопротивление изоляции обмоток электрических машин снижается приблизительно в 2
раза на каждые 20 электрических градусов повышения температуры сверх номинального значе-ния.
Качество изоляции характеризуется также отношением значений сопротивления изоляции при различной длительности приложения напряжения. Для этого измеряют сопротивление изоля-ции мегаомметром спустя 15 и 60 с от момента приложения напряжения при одной и той же ча-стоте вращения рукоятки и определяют отношение показаний мегаомметра 60 15/R R K , где К ко-
эффициент абсорбции. Значения К всегда больше 1 и увеличиваются по мере высыхания изоля-ции; при сухой изоляции они могут достичь значений 2-3. При К=1,25 изоляцию необходимо су-шить. Значение коэффициента К зависит и от температуры обмотки - для просушенной обмотки К уменьшается с повышением температуры. Для определения К можно использовать специальные приборы, например прибор контроля влажности ПКВ-7, с помощью которого по соотношению емкости изоляции при частотах 2 и 50 Гц судят о состоянии изоляции обмотки.
Электрическая прочность изоляции характеризует способность материала сохранять свои свойства при испытании его напряжением и численно выражается значением напряжения, при ко-тором материал разрушается и теряет изоляционные свойства. Испытания электрической прочно-сти обычно проводятся на заводах-изготовителях.
Профилактические мероприятия по поддержанию и повышению сопротивления изоляции можно разделить на следующие: 1) сушка машины; 2) продувка и протирка; 3) промывка; 4) про-питка.

63
63
Сушка машины - неотъемлемая опера- ция при всех видах восстановления сопротив-ления изоляции, в том числе и после консервации, транспортировки и длительного бездействия машины.
Лучшие результаты сушки будут при повышении температуры внутренних слоев изоля-ции, которые обычно нагреваются током, протекающим по обмоткам. Интенсивность сушки по-вышается при охлаждении внешних частей изоляции электрической машины. В судовых условиях самыми распространенными видами сушки являются: 1 - использование постороннего источника теплоты; 2 - посредством нагрева током обмоток возбуждения и 3 -нагрев током якоря.
При сушке от постороннего источника теплоты нагрев осуществляется грелками, лампами и другими приборами, помещенными внутрь машины, а также переносными калориферами, состо-ящими из вентилятора и электронагревателя. Чтобы обеспечить нормальное повышение темпера-туры для электрических машин с замкнутой системой вентиляции, необходимо иметь нагреватель не менее 0,5-2,0 Вт на 1 кг массы машины.
При сушке током обмотки возбуждения вентилятор, подающий охлажденный воздух, включается периодически. Обмотка возбуждения обязательно должна иметь разрядное сопротив-ление или шунтирующие диоды. Необходим тщательный контроль за сушкой, особенно в началь-ной ее стадии.
При сушке током якоря запускается первичный двигатель генератора, к обмотке возбуж-дения подводится пониженное напряжение. Схема главного тока закорачивается за пределами шунта, контролирующего ток главной цепи, генератор работает в режиме короткого замыкания. Принудительную вентиляцию включают на все время сушки. Ток в главном контуре не должен превышать номинального значения для данной машины. Во избежание самовозбуждения генера-тора постоянного тока траверсу сдвигают по вращению на 2-3 коллекторные пластины. Компенса-ционные обмотки должны быть отключены или включены встречно. Сушка ГЭД проводится при отключенном возбуждении машины. Двигатель соединяется с валоповоротным устройством и по-стоянно поворачивается во время сушки. Ток главной цепи не должен превышать предельно допу-стимое значение. В машинах с самовентиляцией ток главной цепи должен быть не выше 0,7 номи-нального значения.
Сушка током якоря может применяться при сопротивлении изоляции не ниже 0,2 МОм. В период сушки вахтенные электромеханики должны вести наблюдение и контроль Предельно до-пустимая температура воздуха при сушке не должна превышать допустимую температуру дня данного класса изоляции. При этом в эксплуатации выдерживают машину нагретой до 110 - 120°С в течение 4-6 часов, а затем охлаждают до 40-45°С. Отметим, что для бесщеточных генераторов с изоляцией класса «В» фирма «Стрёмберг» (Финляндия) рекомендует температуру обмоток сер-дечника и корпусных деталей поддерживать не выше 80-90°С, в особенности для машин закрыто-го исполнения.
Профилактические мероприятия по поддержанию и повышению сопротивления изоляции можно разделить на проводимые по графикам осмотров и без их учета. К ним относятся продувка и протирка, промывка и пропитка.
Восстановление сопротивления изоляции после затопления машины морской водой про-изводится в следующем порядке: сначала необходимо удалить из изоляционных покрытий соль и масло; затем мыть дистиллатом с температурой 50-70°С. Несколько раз промыть проточной водой, потом вентилировать в течение 2-3 часов, а затем дважды просушить. При сушке температура по-вышается постепенно не более 5°С в час. Конечное значение температуры определяется классом изоляции машины. При достижении устойчивого сопротивления изоляции обмотки покрывают лаком или эмалями
Анализ аварийных ситуации ГЭУ. Наиболее вероятные причины аварийных ситуаций ГЭУ несовершенство схемных решений Схема должна обеспечивать возможность набора различ-ных вариантов включения якорей главных машин с целью достижения высокой надежности и жи-вучести установки. При этом переключения в главной цепи должны происходить без перевода ру-коятки поста управления в нулевое положение для недопущения отключения главных машин при работе в сложных маневренных режимах

64
64
Количество аварийных ситуаций может быть сокращено в результате использования более совершенных быстродействующих систем возбуждения и управления. Особо это относится к судам, где необходимо автоматически изменять величину момента ГЭД при резких и значитель-ных колебаниях нагрузки на гребном валу, что характерно для промысловых судов, ледоколов. В таких условиях необходимо поддержание постоянства мощности ГЭД при изменении момента со-противления гребного винта от режима полного хода в свободной воде до швартовной характери-стики и выше нее. При увеличении момента сопротивления вращению винта гребной электродви-гатель также должен развивать повышенный момент для предотвращения остановки и заклинива-ния гребного винта. При этом характер переходного процесса тока главной цепи должен исклю-чать всплески выше максимальной величины, обусловленной нагревом и коммутацией главных генераторов и ГЭД, Величина и время всплеска тока главной цепи ограничиваются, главным обра-зом, перегрузочной способностью дизелей по моменту. Для этого схемы управления главных ма-шин должны содержать обратные связи, регулирующие значение главного тока. От надежности работы и уровня технического совершенства зависит экономическая эффективность эксплуатации гребных электроустановок.
Вопросы для самоконтроля.
1. Эксплуатация щеточно-коллекторного аппарата главных машин. 2. Мероприятия по повышению сопротивления изоляции. 3. Анализ аварийных ситуации ГЭУ.
16 ЭЛЕКТРОБЕЗОПАСНОСТЬ И ПОЖАРОБЕЗОПАСНОСТЬ ГЭУ
Безопасная эксплуатация гребных электрических установок обеспечивается рядом техни-ческих мероприятий. В ГЭУ электропитание гребных и специальных технологических механизмов осуществляется, главным образом, от систем переменного тока с изолированной нейтралью, а также от двухпроводных систем постоянного тока, изолированных от корпуса судна.
В электроустановках, изолированных от корпуса судна, прикосновение человека к одному из фазных проводов является безопасным, а замыкание любого проводника на корпус судна не от-носится к режиму короткого замыкания. Указанные положения справедливы при условии хороше-го состояния изоляции электрических цепей относительно корпуса судна.
Безопасность эксплуатации ГЭУ определяется величиной и длительностью протекания тока через тело человека Электротравмы могут возникнуть в результате прикосновения к токове-дущим частям, находящимся под напряжением, или прикосновения к металлическим корпусам, оказавшимся под напряжением при повреждении изоляции. Чаще рассматривается однофазное прикосновение, поскольку случаи прикосновения к двум фазам редки.
Величина тока, проходящего через тело человека при однофазном прикосновении в трех-фазной изолированной сети переменного тока, определяется по формуле:
2 2 2 2
6/ 1
9 1
из Ч изЧ ф Ч
r R rI U R
R r C
.
В двухпроводной изолированной сети постоянного тока / 2Ч Л Ч изI U R r ,
где ФU , ЛU - фазное напряжение и напряжение линии, В;
ЧR - активная составляющая сопротивления тела человека, Ом;
1 2 3изr r r r активные составляющие сопротивления изоляции фаз. Ом;
1 2 3С С С С - емкости фаз сети относительно корпуса судна, Ф;
- угловая частота переменного тока.
Безопасная эксплуатация ПЗУ может быть обеспечена при величине тока ЧI менее допу-
стимых значений, безопасных для жизни и здоровья человека, составляющих 6 мА при перемен-

65
65
ном токе частотой 50 Гц и 30 мА при постоян- ном токе. Величины предельно допустимых емкостей составляют 0,029 мкФ при напряжении 380 В и 0,088 мкФ при напряжении 127 В трех-фазного переменного тока. Сопротивление тела человека принимается равным 1 кОм.
Токи, проходящие через тело человека, будут меньше указанных безопасных значении при величине сопротивления изоляции гребных электроустановок не менее 100 кОм при напряже-нии 380 В, и не менее 30 кОм при напряжении .127 В переменного тока частотой 50 Гц. Поэтому необходимо проведение постоянного контроля за состоянием изоляции относительно корпуса судна с помощью приборов контроля сопротивления изоляции. Обнаруженное понижение сопро-тивления изоляции требуется немедленно устранить.
При напряжениях постоянного тока. 12 и 24 В токи, протекающие через тело человека, меньше допустимых значений, ко при напряжения! 110 и 220 В они превышают безопасные зна-чения при низком сопротивлении изоляций (менее 5 кОм), что обусловливает принятие необходи-мых мер защиты.
К средствам защиты обслуживающего персонала от поражения электрическим током от-носится специальный инструмент с изолирующими ручками, диэлектрические галоши и изолиру-ющие коврики. Близко расположенные токоведущие части ограждаются изолирующими перего-родками или электрокартоном. Изолирующие средства должны находиться в сухом состоянии и должны иметь клеймо с указанием последней даты их проверки.
Одной из основных мер защиты от поражения током при прикосновении к металлическим корпусам, оказавшимся под напряжением по каким-либо причинам, является защитное заземле-ние, то есть соединение электрооборудования с .металлическим корпусом судна. При этом между металлическим корпусом электрооборудования и землей устанавливается электрическое соедине-ние с малым сопротивлением, чтобы при прикосновении к корпусу электрооборудования величи-на тока, проходящего через тело человека, была безопасной для его жизни и здоровья.
Причиной пожаров на судах часто является неисправность электрооборудования. Пожар возникает, как правило, в результате воспламенения изоляции электрооборудования и кабелей. Источником пожара может быть электрическая дуга, сильный местный нагрев проводников или однофазное замыкание кабелей.
При сопротивлении замыкании, соизмеримым с величиной полного сопротивления изоля-ции, энергия, выделяемая в месте замыкания, резко возрастает и может образовать очаг пожара. Пожаробезопасность кабельной трассы можно повысить за счет ее уплотнения и соответственного уменьшения объема воздуха по отношению к объему кабеля в трассе.
При перетирании изоляции кабеля в месте замыкания в результате вибрации возникает переменный контакт с корпусом, приводящий к появлению искрового разряда. Искробезопасность повышается путем прокладки кабелей в трубах, утолщением изоляции, а также применением раз-делительных трансформаторов, снижающих единичную емкость в электрической цепи.
Для обеспечения пожаробезопасности при обслуживании электрооборудования, имеюще-го подвижные контактные блоки необходимо следить за их коммутацией и не допускать значи-тельного искрения. Контакты должны иметь хорошо пригнанные поверхности без просветов и пе-рекосов. Кабели должны иметь герметизирующие оболочки, надежное уплотнение в перебороч-ных сальниках и соединительных коробках
Не следует допускать работу электрооборудования при пониженном напряжении и на двух фазах потребителей трехфазной системы для избегания его перегрева или сваривания кон-тактов.
При возгорании электрооборудования необходимо прежде всею снять с него напряжение Электрооборудование в обесточенном состоянии можно тушить любыми судовыми средствами пожаротушения. В случае горения электрооборудования, находящегося под напряжением, для ту-шения пожара применяется воздушно-механическая пена, приготовленная с использованием прес-ной или дистиллированной воды, либо углекислота из огнетушителей.
Вопросы для самоконтроля.
1. Электробезопасность ГЭУ. 2. Пожаробезопасность ГЭУ.

17 ОПТИМИЗАЦИЯ ЭКСПЛУАТАЦИОННЫХ РЕЖИМОВ ГЭУ 17.1 ГЭУ как системы подчиненного управления Многоконтурную систему неизменного тока, в конечном счете, можно представить в виде
двухконтурной системы, в которой первый контур является регулятором тока, а второй контур - регулятором мощности.
В системе неизменного тока регулирование осуществляется по отклонению тока в цепи генератор-двигатель (главной цепи) и по отклонению скорости вращения электродвигателя. Эти системы регулирования связаны только через противо-э.д.с. электродвигателя в момент его вра-щения, т.е. через объект регулирования.
Первая система регулирования поддерживает постоянство тока в главной цепи по прин-ципу его отклонения. Вторая система изменяет магнитный поток электродвигателя и является ре-гулятором мощности. Внешняя взаимосвязь между регуляторами отсутствует. Скорость вращения электродвигателя не поддерживается неизменной, а ее отклонение служит косвенным измерением возмущения по нагрузке. Отклонение скорости вращения электродвигателя вызывает изменение его магнитного потока, пропорциональное увеличению нагрузки на гребном винте или в техноло-гическом механизме, второй регулятор действует по возмущению. Таким образом, система регу-лирования гребной установки является комбинированной.
Во время движения в свободной воде, при отсутствии возмущения по нагрузке (нет вол-нения), скорость вращения гребного электродвигателя и его магнитный поток остаются постоян-ными. В этом случае действует только регулятор тока. То же самое происходит при движении в ледовых условиях. Магнитный поток электродвигателя максимальный, скорость вращения ГЭД не превышает значения, установленного регулятором мощности, поэтому действует также только ре-гулятор тока. Регулятор мощности действует при переменных нагрузках.
Следовательно, в указанных режимах система регулирования тока должна действовать независимо от регулятора мощности и быть устойчивой. Это позволяет, в первом приближении, рассматривать регулятор тока независимо от регулятора мощности.
Постоянство тока должно сохраняться и в режиме заклинивания гребных винтов, когда в контуре главного тока отсутствует противо-э.д.с. гребного электродвигателя. Это еще в большей степени упрощает задачу и позволяет исследовать систему регулирования тока без учета противо - э.д.с. ГЭД и регулятора мощности.
Переходный процесс в регуляторе мощности происходит значительно медленнее, чем пе-реходный процесс в регуляторе тока. Это объясняется более медленным изменением скорости вращения ГЭД по сравнению с частотой изменения тока при одном и том же возмущении. Э.д.с. электродвигателя изменяется прямо пропорционально его скорости вращения, а ток определяется разностью между напряжением генератора и э.д.с. электродвигателя. Эта разность мала, вслед-ствие чего малое отклонение скорости приводит к большому изменению тока главной цепи.
Регулятор тока имеет больший коэффициент усиления, чем регулятор мощности, вслед-ствие чего создается большое форсирование (или дефорсирование) возбуждения генератора по сравнению с гребным электродвигателем. Все это приводит к более быстрому установлению тока главной цепи.
В теории автоматического регулирования считается, что если переходный процесс в од-ной из взаимосвязанных систем имеет меньшее время, то устойчивость таких систем может рас-сматриваться независимо. Примером могут служить все турбо- и дизель-генераторы, у которых регуляторы скорости вращения и регуляторы напряжения проектируются и изготавливаются неза-висимо друг от друга. Это позволяет рассматривать регулятор мощности независимо от регулято-ра тока, принимая ток главной цепи постоянным.
Разделение систем является первым и существенным упрощением. Это позволяет проек-тировать регулятор тока и регулятор мощности для систем неизменного тока отдельно, независи-мо друг от друга.
В действительности же системы влияют друг на друга и изменяют качество переходных процессов. Если каждая из систем в отдельности устойчива и имеет большой запас устойчивости,

67
67
то их взаимное влияние сказывается только на качестве переходного процесса. При этом раз-ница во времени действия не отражается на первом перерегулировании, а только на времени пере-ходного процесса.
Системы неизменного тока можно отнести к автоматическим системам с подчиненным регулированием параметров (системы "трансидин").Впервые такие системы были разработаны фирмой "Сименс" и исследовались применительно к вентильному электроприводу.
В системах с подчиненным регулированием параметров на входе регулятора каждого из контуров сравниваются сигналы, пропорциональные заданному и действительному значениям ре-гулируемого в данном контуре параметра, а выходное напряжение регулятора служит задающим сигналом для регулятора последующего контура.
Поддержание постоянства тока главной цепи в системе неизменного тока имеет большое значение. Точность системы в установившемся режиме из условия нагрева электрических машин теоретически должна составлять 0,97÷0,98 (погрешность 0,02÷0,03).
Решением проблемы может служить синтез регулятора тока, т. е. предлагается система ре-гулирования тока с астатической активной последовательной коррекцией. Введение астатического регулятора тока позволяет сохранить высокую точность в системе неизменного тока при сниже-нии коэффициента усиления.
При исследовании синтезированной гребной установки неизменного тока некоторое сни-жение быстродействия не ухудшает работу системы. Время переходного процесса находится в пределах, удовлетворяющих требованиям по качеству регулирования, и составляет десятые доли секунды.
При этом величина перерегулирования тока главной цепи в переходном процессе не должна превышать определенного заранее выбранного значения, устанавливаемого в соответствии с типовой оптимальной настройкой.
17.2 Способ подчиненного управления со связью регуляторов по нагрузке Основные положения подчиненного управления по нагрузке такие же, как в традицион-
ном подчиненном управлении со связью регуляторов со стороны управления. Эти положения за-ключаются в следующем:
количество управляемых переменных величин в системах подчиненного управления (СПУ) по нагрузке должно быть равно числу звеньев объекта управления;
объект управления представляет собой последовательное соединение линейных апе-риодических (реже интегральных) звеньев;
число регуляторов должно быть равным количеству управляемых переменных пара-метров системы;
ограничение величины управляемых параметров осуществляется путем ограничения величины выходного сигнала предыдущего регулятора;
на выходе регулятора целесообразно устанавливать электрический фильтр для регу-лирования полосы пропускания сигнала и защиты от внешних помех.
Регуляторы параметров в СПУ по нагрузке соединены каскадно, но связь с последующим регулятором происходит не путем подачи выходного сигнала предыдущего регулятора на вход последующего, а на объект управления и далее через внутреннюю обратную связь в переходном процессе на последующий регулятор
Как правило, системы подчиненного управления со связью регуляторов по нагрузке явля-ются двухконтурными. К таким системам можно отнести валогенераторные установки судов, гребные электрические установки, дизель-генераторные установки, особенно в тех случаях, когда скорость вращения приводного двигателя не стабильна.
В СПУ по нагрузке внутренним контуром является регулятор напряжения или тока, а внешним - регулятор скорости вращения.

68
68
Передаточные функции регуляторов целесообразно выбирать с учетом компенсации этих функций звеньями объекта управления. В качестве требуемых передаточных функций конту-ров регулирования желательно иметь стандартные оптимальные передаточные функции.
Порядок дифференциального уравнения последующего контура управления на единицу больше, чем порядок дифференциального уравнения предыдущего контура. Тогда в качестве тре-буемой передаточной функции замкнутого k-го контура необходимо использовать стандартную передаточную функцию Dk+l(р)(k + 1) порядка.
Передаточную функцию замкнутого оптимально настроенного k-го контура можно запи-сать в общем случае следующим образом:
G3K(р) = Dk+1(р)= l/2kTmр 1
( )kD p+ 1, (17.1)
где Dk(p) - стандартная передаточная функция k-го порядка. Поскольку в СПУ обратные связи в контурах управления приняты единичными, требуе-
мая передаточная функция разомкнутого контура записывается в виде GK(p)=Dk(p)/2kTmp . (17.2)
В каждом k-м контуре имеется регулятор с передаточной функцией Gpk(p), оптимально настроенный замкнутый контур (к-1), контур с передаточной функцией G3(к-1)(p) = Dk(p) и объект управления с передаточной функцией GОК(p). Следовательно, для передаточной функции разо-мкнутого k-го контура справедливо выражение
GK(p) = GРК(p) G3(К-1)(p)GОК(p) = GPK(p)Dk (p)G0K(p) (17.3) Передаточная функция регулятора k-го контура, обеспечивающая оптимальную настройку
данного контура, получается путем приравнивания выражения (17.2) и (17.3) и имеет вид GPK(p) = l/GOK(p)/2kTmp. (17.4)
Анализ выражения (17.4) показывает, что в передаточной функции регулятора каждого контура управления имеется сомножитель, компенсирующий передаточную функцию объекта управления данного контура.
Поэтому в зависимости от типа звеньев объекта управления регулятор будет также соот-ветствующего типа. Если объект управления содержит одно апериодическое звено, регулятор бу-дет интегрально-пропорциональным (ИП-регулятор). Если в объекте управления имеются два по-следовательно включенных апериодических звена, то регулятор будет интегрально-пропорционально-дифференциального типа (ИПД-регулятор). При наличии в объекте управления интегрального звена регулятор будет пропорциональным (П-регулятор ). Интегральный регулятор (И-регулятор) применяется в случаях, когда в системе управления имеется несколько переменных параметров, связанных пропорциональными зависимостями.
Для устранения помех уменьшить быстродействие в системе управления можно путем включения в нее фильтра, а не отладкой времени переходного процесса регулятора. Для уменьше-ния влияния помех фильтры устанавливаются на выходах измерительных устройств, ограничивая пропускание помех на входы систем управления.
При установке фильтра с постоянной времени Тф на входе (к-1) регулятора в задающей цепи от к-го регулятора получим
( 1) 1
1 1( )
1 (2 ) 1З k k
ф m ф
G pT р T T p
. (17.5)
Из выражения (7.5) следует, что при наличии фильтра в к-ом контуре СПУ эквивалентная постоянная времени этого контура управления может быть записана в следующем виде:
Tmk = 2 к-1 Tm+Тф = Tm(к-1)+ ТФ. При наличии фильтра быстродействие контура управления уменьшается, а запас по фазе
получается большим, чем в СПУ без фильтра. С увеличением постоянной времени фильтра Тф ве-личина перерегулирования в переходном процессе становится ближе к стандартной для СПУ вто-рого порядка.
Однако для k-го контура управления замкнутый (к-1) контур выполняет аналогичные функции, как и фильтр с постоянной времени Т для первого контура управления. Это видно из формулы (7.2), где в передаточную функцию разомкнутого внутреннего контура управления вхо-

69
69
дит передаточная функция фильтра D1(p) = 1/(1+Tmp), а в передаточную функцию разо-мкнутого к-го контура включена передаточная функция замкнутого (к-1) контура.
В соответствии с (17.1) замкнутый (к-1) контур представляется в виде апериодического звена вида
G3(к-1)(р)=l/2 к-1 Tmp+1, (17.6) а каждый k-й контур рассматривается в первом приближении в виде системы управления второго порядка, эквивалентная постоянная времени которой равна Tmk = 2 к-1Tm.
Количественные данные погрешности при такой замене по запасу устойчивости для двух-контурной СПУ не превышают 0,12÷0,14, что говорит о приближенном характере замены переда-точной функции (17.1) выражением (17.6), но может быть использовано в теории СПУ по нагруз-ке.
Величина постоянной времени Tm играет важную роль в СПУ по нагрузке, поскольку она определяет динамические свойства системы управления, а не параметры объекта управления. При использовании стандартных систем управления только величина Tm может изменить параметры качества переходного процесса в СПУ.
В системах управления судовых ЭЭС система подчиненного управления является двух-контурной. В этом случае фильтр на выходе системы управления можно не устанавливать. При этом для внутреннего контура целесообразно использовать ИПД-регулятор, компенсируя, таким образом, большие постоянные времени объекта управления. В этом случае эквивалентная посто-янная времени контура управления принимается равной малым постоянным времени объекта управления.
Для повышения быстродействия и помехозащищенности СПУ, исходя из принятой при расчете величины постоянной времени Tm, требуется производить компенсацию всех постоянных времени объекта управления с тем, чтобы сумма оставшихся была во много раз меньше величины Tm, т.е.
1
n
mk
T� .
В регуляторе при этом целесообразно оставить одну постоянную времени ТФ1 или обеспе-чить выполнение соотношения
1
m
m фkk
T T� .
В этом случае, при отклонении от расчетных данных величин
1 1
m n
фk okk k
T и T .
Это не приводит практически к изменению быстродействия от расчетного значения, по-скольку величина Tm от указанных постоянных времени зависит в слабой степени.
В системах подчиненного управления по нагрузке, характерных для судовых электроэнер-гетических установок, в объекте управления кроме последовательного соединения апериодиче-ских и интегральных звеньев имеются и внутренние обратные связи, через которые осуществляет-ся подчинение внутреннего регулятора (напряжения или тока) и внешнего (регулятора скорости вращения). Если учитывать внутреннюю обратную связь, то поведение СПУ будет зависеть не только от параметров электрического фильтра с постоянной времени Tm, но и от количественных данных объекта управления. Это приведет к тому, что параметры СПУ будут отличаться от опти-мальных и заданные свойства системы не будут обеспечиваться регулятором. Расчет такой систе-мы управления отличается от стандартного. Для оптимизации переходного процесса в такой си-стеме требуется компенсация внутренней обратной связи объекта управления.
Компенсирующую связь в СПУ целесообразно вводить через фильтр. Существуют раз-личные способы введения компенсирующей связи. На вход (k-l)-гo регулятора подается единичная обратная связь, если в качестве передаточной функции фильтра принять передаточную функцию замкнутого (к-1) контура управления.

70
70
Если компенсация требуется для внут- реннего контура управления, то компенсирую-щая обратная связь может подаваться на вход k-го регулятора через звено, передаточная функция которого имеет вид:
2( ) ( )
1/ ( )
km
kn pk
ok
T pG p G p
G p
В судовых СПУ по нагрузке k-тое звено объекта управления является апериодическим. В этом случае компенсацию целесообразно реализовать с помощью дифференцирующего звена, представляющего собой звено с гибкой связью и не влияющее на стационарный процесс в к-м
контуре системы управления. Компенси-рующая связь должна иметь полярность противоположного знака по отношению к внутренней обратной связи.
Компенсация тем более эффек-тивна, чем больше быстродействие внут-реннего (к-1) контура, т.е. чем меньше величина Tm. Рассмотренная компенсация внутренней обратной связи не является полной, так как влияние передаточных функций составляющих звеньев объекта управления частично сохраняется. Одна-ко полная компенсация путем введения обратной связи с выхода n-го звена объ-екта управления через звено с передаточ-ной функцией, обратной передаточной функции замкнутого (к-1) контура, прак-тически сложно осуществляется; ее вве-дение повышает уровень помех, отрица-тельно влияющих на работу СПУ.
Компенсирующая связь может быть подана в систему управления и че-рез нелинейный элемент с характеристи-кой, обратной характеристике НЭ объек-та управления, включаемой на выходе (k-l)-гo регулятора. Компенсация внутрен-ней обратной связи будет тем эффектив-нее, чем более инерционны управляющие
и возмущающие факторы, влияющие на систему управления. С учетом связей регуляторов, рода тока и назначения можно предложить классификацию
СПУ электроэнергетических установок, представленную на рис. 17.1. Классификация систем подчиненного управления производится по принципу передачи
сигналов управления с выхода предыдущего регулятора на вход последующего, а также с учетом рода тока и назначения установок, отличающихся количеством машин, постоянная времени кото-рых компенсируется регулятором.
17.3 Оптимизация параметров синтезированных регуляторов В системах подчиненного управления задающая величина изменяется по ступенчатому
закону. С учетом отсутствия статической ошибки в рассматриваемых СПУ величина установив-шегося значения регулируемого параметра Z∞ должна быть равна заданной величине параметра ZЗ∞, т.е. Z∞ = ZЗ∞. Переходный процесс, при котором Z(t) = ZЗ (t), является идеальным, но практи-чески не осуществим.
Рисунок 17.1 - Классификация систем подчиненного управления
Системы подчиненногоуправления со связью
регуляторов
по управлению по нагрузке
дляэ/привода
дляЭЭУ
дляЭЭУ
дляэ/привода
на переменномтоке
на постоянномтоке

71
71
Прежде чем детально исследовать предлагаемую систему неизменного тока, необ-ходимо определить оптимальные параметры системы.
Интегральная квадратичная оценка выбранного критерия оптимальности имеет вид
J= 21
0
i
dt.
Вторым этапом после выбора вида критерия решения задачи нахождения оптимальных параметров систем неизменного тока является вычисление интегральной квадратичной оценки.
Третий этап - минимизация оценки. При этом определяются значения параметров, при ко-торых имеет место минимум выбранной интегральной квадратичной оценки. В заключение для проверки строится график переходного процесса при выбранных значениях параметров.
В данном случае структура системы неизменного тока и вид ее передаточных функций за-даны, возмущающие силы детерминированы и приводятся к ступенчатым или импульсным воз-действиям. Принимаем в качестве варьируемых параметров (коэффициентов) системы неизменно-го тока коэффициент усиления выбранного ИПД-регулятора тока kу и постоянную времени Tm. Остальные параметры системы задаем постоянными.
Значения варьируемых параметров kу и Tm, при которых обеспечивается оптимальный пе-реходный процесс тока главной цепи, определяются по минимуму выбранной интегральной квад-
ратичной оценки. Поскольку порядок дифференциальных
уравнений исследуемой системы превышает 4-5, аналитическое решение задачи вызывает затрудне-ния. Целесообразно для вычисления квадратичной оценки и её минимизации использовать аналоговые вычислительные машины типа МН-7. На АВМ набираются уравнения системы неизменного тока при Ф1
= const. Кроме того, используется блок квадратора (блок произведений) и интегрирующий блок. При по-даче на вход модели ступенчатого задающего воздей-ствия ток главной цепи подается на вход квадратора, а выходная величина квадратора поступает на инте-грирующий блок, на выходе которого по истечении времени переходных процессов получаем величину, равную интегралу квадрата тока.
Электронная блок-схема набора на АВМ для вычисления и минимизации интегральной квадратич-ной оценки представлена на рис. 17.2.
Результаты вычисления и минимизации оценки представлены на рис. 17.3. Как видно из рис. 17.3а, интегральная квадратичная оценка имеет минимум 0,12 о.е., чему соответствует об-ласть оптимальных значений коэффициента усиления регулятора тока kу от 4 дБ до 8 дБ.
Как видно из рис. 17.3б, интегральная квадратичная оценка имеет минимум 0,08 о.е., чему соответствует область оптимальных значений постоянной времени интегрирования регулятора то-ка Tm, от 0,55 с до 0,9 с. ИПД-регулятор замкнутой системы неизменного тока можно использовать с учетом внутренней обратной связи по э.д.с. ЭД, так как он обеспечивает требуемое качество пе-реходного процесса.
Вопросы для самоконтроля.
1. ГЭУ как системы подчиненного управления. 2. Способ подчиненного управления со связью регуляторов по нагрузке. 3. Оптимизация параметров синтезированных регуляторов.
Рисунок 17.2 - Электронная блок-схема моделиро-вания на АВМ системы неизменного тока
Рисунок 17.3 - Зависимость интегральной квад-ратичной оценки от коэффициента усиления РТ (а) и от постоянной времени интегрирования (б)

18 АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ГЭУ 18.1 Способ и средства управления 18.1.1. Назначение автоматического управления. Гребные электрические установки состо-
ят из нескольких частей и в этом смысле являются сложными системами. Для облегчения управ-ления и сокращения обслуживающего персонала вводится комплексная автоматизация ГЭУ, охва-тывающая тепло-производящую установку, тепловой двигатель, генератор, распределительные и преобразовательные устройства и системы управления всех перечисленных частей.
Тепловой двигатель и электрическая передача (генератор и гребной электродвигатель) снабжаются системами автоматического регулирования (САР). У теплового двигателя регулирует-ся частота вращения, а в системе генератор — двигатель — ток главной цепи, момент вращения или мощность.
В дальнейшем рассматриваются только САР, относящиеся к электрической части ГЭУ, т. е. генератору и ГЭД со всеми промежуточными устройствами, системами возбуждения и управле-ния.
К САР ГЭУ предъявляются различные требования в зависимости от назначения судна, уровня технической оснащенности и обслуживания. Назначение САР состоит в том, чтобы полу-чать наибольшую эффективность действия ГЭУ, т. е. иметь наилучшие показатели качества по всем или главным управляемым величинам координат. Такое управление является оптимальным.
Точность поддержания заданных значений регулируемых координат зависит от совершен-ства измерительных устройств; нижний предел погрешности регулирования устанавливается 1—2%. Погрешность регулирования в процентах е равна ста процентам минус точность регулирова-ния заданной координаты в процентах.
18.1.2. Критерии оптимального управления. Эксплуатация является оптимальной, когда перевозится наибольшее количество груза с наименьшими затратами и в заданные сроки, достига-ется наибольшая скорость судна, наибольшее усилие при движении во льдах или при ходе с возом.
ГЭУ действуют в условиях переменного момента сопротивления (наличие качки судна или движение во льдах). В этом случае управление можно считать оптимальным, если имеет место минимум расхода энергии (топлива) и сохранение срока службы тепловых двигателей.
В работе решается задача определения оптимального управления судном, движущимся при нерегулярном волнении с минимальным расходом энергии на расстояние S за время Т. Задан-ные условия удовлетворяются при постоянной частоте вращения гребного винта (n = const). Для уменьшения максимальных моментов на гребном винте снижают частоту вращения гребного вин-та, а следовательно, и скорость судна. Такой способ управления является оптимальным для судов с непосредственным или редукторным соединением теплового двигателя с гребным валом и судов с ГЭУ переменного тока по системе СГ — СД или АД.
Для судов с ГЭУ постоянного тока, выполненных по системам СГ — В—Д, Г — Д или вентильных, во время качки возможно использование тепловых двигателей при неизменных ча-стоте и моменте вращения, что улучшает условия работы двигателей и увеличивает срок их служ-бы, главным образом дизелей. Это позволяет увеличить скорость судна, так как изменения момен-та сопротивления на гребном винте воспринимаются только электродвигателем.
Система автоматического управления изменяет магнитный поток генератора обратно про-порционально току главной цепи, изменяющемуся пропорционально моменту сопротивления на гребном винте, вследствие чего момент сопротивления генератора поддерживается постоянным, и тепловой двигатель работает с постоянной частотой вращения.
Тот же результат можно получить, если изменять магнитный поток ГЭД обратно пропор-ционально его частоте вращения, вследствие чего противо-ЭДС электродвигателя остается, посто-янной, а вместе с ней остается неизменным ток главной цепи и момент сопротивления генератора, так как его магнитный поток не регулируется. ГЭД действует с переменными частотой и момен-том вращения.
В работе также рассмотрена задача определения оптимального закона управления для судна, движущегося с переменным сопротивлением (ход во льдах) на заданном участке пути в

73
73
определенное время. Решение приводит к получению постоянного расхода энергии или иначе — постоянной мощности СЭУ. В этом случае автоматическая система управления ГЭУ ледокола и буксира должна поддерживать постоянство мощности, воздействуя на магнитный поток ГЭД.
Системы управления должны также иметь требуемое качество переходного процесса. Наиболее частыми переходными процессами являются пуски, реверсы, остановки и изменения скорости судна. Время изменения режима движения судна измеряется минутами, а время электро-механического переходного процесса ГЭД — несколькими секундами, вследствие чего продолжи-тельность переходного процесса не влияет существенно на время изменения скорости судна при разгоне или торможении.
Большое значение имеют переходные процессы при ограничениях токов, напряжений, моментов и частоты вращения во время возникновения перегрузок на гребном винте и при восста-новлении прежнего режима. Поэтому необходимо так оптимизировать переходный процесс в ГЭУ, чтобы было возможно наиболее быстрое приведение величин к заданным значениям при до-пустимом перерегулировании.
18.1.3. Выбор управляющих устройств (регуляторов). Метод последовательной коррек-ции. В теории и практике проектирования электропривода пользуются методом последовательной коррекции, который дает возможность сразу получить устойчивую систему с требуемым каче-ством переходного процесса.
Последовательное включение корректирующих звеньев, которые являются и управляю-щими органами, стало возможным благодаря применению электронных усилителей и вентильных (тиристорных) преобразователей. Для управления тиристорными преобразователями, являющими-ся мощными усилителями, требуются сигналы малой мощности, что позволяет применять опера-ционные усилители и интегральные схемы с различными суммирующими, интегрирующими и другими блоками. Нашей промышленностью разработаны и выпускаются универсальные блоки системы регулирования (УБСР) на интегральных схемах для управления вентильными преобразо-вателями. Эти блоки могут использоваться и для управления другими элементами, например ма-шинными усилителями в сочетании с промежуточными электронными или вентильными усилите-лями.
Метод последовательной коррекции и подчиненного управления достаточно подробно описан в литературе. Однако этот метод не нашел широкого применения в ГЭУ. Здесь дается его краткое изложение и приводится выбор управляющих устройств автоматической системы.
Система управления является оптимальной по качеству переходного процесса в случае стремления к минимуму функционала
2
2
0
dyJ y T dt
dt
, (18.1)
где Т = const — постоянная времени; у(t) — отклонение управляемой величины, или ошибка. Экстремалью данного функционала, т. е. кривой, дающей минимальное значение инте-
грала (18.1), является экспонента 1
0
tTy t y e
при начальном значении у = у0. Если у0 = 1, то Jmin
= Т, что получается прямым интегрированием. В общем случае Jmin = J* вычисляется для каждого типа системы и соответствует требуемой кривой переходного процесса.
Функционал (18.1) представляет интегральный критерий качества переходного процесса и позволяет найти связь между параметрами системы и параметрами переходного процесса без по-строения кривой у(t).
Для систем промышленного электропривода считается оптимальным процесс, имеющий максимальное перерегулирование σтах управляемой величины не выше 5%, ограниченное время регулирования tpeг и ошибку, укладывающуюся в требуемые пределы.
В ГЭУ могут быть приняты эти же значения перерегулирования и ошибка, не превышаю-щая 2% (ε ≤ 2%).

74
74
График процесса, соответствующего так называемому «техническому оптимуму», показан на рис. 18.1. Такой гра-фик может быть получен в системе управления, переходные процессы которой описываются уравнением второго порядка
(T12p2 + T2p + l)y(t) = k(t),
и после приведения к относительному времени τ = t/Т1 имеет
характеристическое уравнение вида р2 + Ар + 1=0,
где А = Т2/Т1, р = d/dt. Решением уравнения является экспонента, как и экс-
тремаль функционала (5.1), которая может дать оптимальный переходный процесс. Это имеет место, когда А =√2, при τ = 1.
В ГЭУ при возмущающих воздействиях отклонение тока может значительно превосхо-дить номинальный, и переходный процесс уже носит иной характер, чем при управляющем воз-действии, но точность управления не нару-шается. С целью получения оптимального переходного процесса необходимо систему линейных дифференциальных уравнений, описывающих переходный процесс автома-тической системы и преобразованных по Лапласу, привести к уравнению второго порядка, для чего используются последовательно включа-емые регуляторы, одновременно являющиеся и корректирующими звеньями.
Метод последовательной коррекции основан на алгебраических преобразованиях переда-точных функций автоматических систем. В простейшем случае математическая модель объекта управления состоит из цепи апериодических звеньев направленного действия, что характерно для электропривода (рис. 18.2), и описывается системой дифференциальных уравнений первой степе-ни.
Передаточная функция разомкнутой цепи равна
1 1
v nv
ov v
KW s
sT
. (18.2)
Для компенсации инерционных звеньев системы управления необходимо последователь-но с объектом включить управляющее устройство (регулятор) с передаточной функцией
Wy(s) = Ky
1
v n
v
(1+sTv), (18.3)
в результате чего передаточная функция разомкнутой скорректированной системы управ-ления преобразуется к виду
Wраз.ск(s) = Ky K1 K2 Кп, (18.4) а замкнутой системы с коэффициентом обратной связи Ко.с:
Wзамк_ (s) =1 2
. 1 2
.......
1 .......
y n
o c y n
K K K K
K K K K K. (18.5)
Приведенная полная компенсация не только невозможна, но и вредна, так как выходная величина должна мгновенно изменяться вместе с входной, для чего потребуется большое быстро-действие и форсировочная способность регулирующих органов, в том числе возбудителей генера-торов и ГЭД ГЭУ, а следовательно, увеличение их мощности. Система окажется чувствительной ко всем внутренним и внешним факторам, будет не защищенной от помех.
Практически найдено, что можно компенсировать апериодические звенья с большой по-стоянной времени, не увеличивая мощность соответствующих органов, и оставлять нескомпенси-рован-ными малые постоянные времени. Кроме того, для повышения точности и снижения аста-тизма применяют интегрирующие звенья при ограниченном коэффициенте усиления.
В результате передаточная функция разомкнутой скорректированной системы должна иметь вид
Рисунок 18.1 - График же-лаемого переходного про-цесса в САУ
Рисунок 18.2 - Структурная схема разомкнутой системы объекта управления

75
75
Wраз.ск(s)= Wо(s) Wу(s)=
01
1
1v n
vv l
sT sT
. (18.6)
Компенсация больших постоянных времени действует только при малых отклонениях. При больших отклонениях управляющей или возмущающей величины происходит запаздывание, вызванное ограничением мощности и форсировки регулирующих органов. Оставшиеся неском-пенсированными п — l звеньев имеют малые постоянные времени, и без особой погрешности можно пренебречь их произведением, оставив только сумму:
1
1 1v n
vv l
sT sT
, (18.7)
где
1
v n
vv l
T T
.
Исследования показывают, что если Т0 >2Тμ, то погрешность весьма незначительна. Если замкнутая система с К = 1 и Ко.с. = 1 имеет характеристическое уравнение
sT0(l+sТμ)+l=0, то при Т0 = 2Тμ перерегулирование не превосходит 5%, а при Т0 =4Тμ процесс будет апери-
одическим. Коэффициент усиления разомкнутой скомпенсированной системы на основании выраже-
ний (18.4) и (18.6) должен быть равен
Краз = 0
1
T=Ky K1 K2 Кп Ко.с.,
откуда
Ку =0 1 2 .
1
....... n o cT K K K K. (18.8)
Здесь Т0 и Ко.с. малы, поэтому Ку может быть достаточно большим. Для получения (18.6) управляющее устройство должно иметь следующую передаточную
функцию:
Wy(s) = . 1
0 0 . . 1 2
(1 )( )
( ) ......
v l
vраз ск v
o c n
sTW s
W s sT K K K K
. (18.9)
Разомкнутая скомпенсированная система показана на рис. 18.3. Для получения структур-ной схемы с единичной обратной связью Ко.с. введено в Ку (18.8). В этом случае передаточная функция замкнутой системы принимает вид
Wзамк(s) = 0 . .
1 1
(1 ) 1 o csT sT K
. (18.10)
Как показали исследования, в системе с передаточной функцией (18.10) минимальная длительность переходного процесса обеспечивается в случае Т0 = 2 Тμ, при этом перерегулирова-ние составляет около 5%. Когда Т0 > 2Тμ, перерегулирование уменьшается, и когда Т0 = 4Тμ, про-цесс становится апериодическим. Следовательно, процесс будет оптимальным при условии 2Тμ<Т0 <4 Тμ.
Рисунок 18.3 - Структурная схема скомпенсированной разомкнутой системы управления

76
76
Метод подчиненного управления. Гребная электрическая установка имеет не-сколько переменных, подлежащих управлению: это — ток электродвигателя, частота вращения, мощность или момент вращения. Система управления является многоконтурной, с перекрещива-ющимися связями.
Изложенные выше способ выбора управляющего устройства и условия оптимизации справедливы и для многоконтурных систем ГЭУ.
Многоконтурные системы с последовательным включением управляющих устройств (рис.18.4) получили название систем подчиненного управления. Для таких систем разработан сле-дующий способ синтеза. На рис. 6.4 W01, W02, . . . , Won— передаточные функции объектов управ-ления; Wy1, Wy2, ... , Wyn — передаточные функции управляющих устройств; y1, у2, ... , уn — управ-ляемые переменные величины. Входной сигнал увх проходит через все n управляющих устройств и n объектов управления и задает
выходную величину уn. Промежуточные управляющие устройства накладывают ограни-
чения на все управляемые величины y1, у2, ... , уn-1 в соответствии с заданными законами управле-ния. Такая система применяется в случае взаимосвязанных управляемых величин, как это имеет место в ГЭУ.
Передаточная функция первого объекта управления W01 состоит из компенсируемой Wо.к1 и некомпенсируемой Wо.н1, частей: W01 = Wо.к1Wо.н1. После компенсации с принятой оптимизацией передаточная функция первого замкнутого контура Wз1 имеет вид (18.10). Множитель 1/Ко.с вхо-дит в Wy1.
Передаточная функция для управляемой величины у2 состоит из произведения передаточ-ных функций внутреннего замкнутого контура Wз1(s) и второго объекта управления:
W02раз(s) = 02
1
2 (1 ) 1W
sT sT . (18.11)
В знаменателе этого выражения пренебрегают членом второго порядка, принимая 2sТμ(1+sТμ) + 1=2s2Т2
μ+2sТμ + 1 ≈2sТμ +1. (18.12) В общем случае
W0vраз(s) = 01
( )
2 1v
v
W s
sT
. (18.13)
Передаточная функция v-й управляемой величины включает в себя в качестве нескомпен-сированной части линейное приближение передаточной функции замкнутого (v — 1)-го контура.
По условию оптимальности Т0 = 2 Тμ. В этом случае Тμv = 2v-1 Тμ1 и передаточная функция v -го управляющего устройства равна:
Wyv(s) =1
0 0 0 0 0
1 1 1 1
2 2(2 ) 2v vv v v vsT W sT W sT W sT W
. (18.14)
Передаточная функция v-гo замкнутого контура при Ко. с = 1 имеет вид
Wзамк(s)=1
1
2 (2 1) 1v vsT sT
. (18.15)
Системы повышенного быстродействия. В ГЭУ автоматическая система должна реагиро-вать на управляющие и возмущающие воздействия, при этом она должна обладать достаточно большим быстродействием при изменениях нагрузки (возмущениях), особенно для ледоколов и ГЭУ неизменного тока. Системы, настроенные по техническому оптимуму, могут иметь недоста-
Рисунок 18.4 - Структурная схема многократно замкнутой системы подчиненного управления

77
77
точное быстродействие. В этих случаях приме- няются АС с большим быстродействием с управляющими устройствами, включаемыми в каждый контур управления.
ГЭУ состоит из направленных апериодических звеньев. Путем разделения контуров по методу подчиненного управления структурная схема ГЭУ приводится к системе с последователь-ным соединением звеньев, что позволяет легко найти в общем виде передаточную функцию регу-лятора, приводящего реальную передаточную функцию к третьему порядку с желаемой ЛАЧХ.
Такое построение системы управления и приведение передаточной функции к желаемой сделано для систем электропривода. Метод получил название симметричного оптимума. В этом случае регулятор, включаемый последовательно на вход системы управления и компенсирующий два апериодических звена с постоянными времени Т1 и Т2, должен иметь передаточную функцию вида
Wy(s)= 2
3
1 2
(1 8 )
128( )
i
i
s T
Ks T
TT
, (18.16)
где ∑Тi,- — сумма некомпенсируемых малых постоянных времени исходной системы; К — коэффициент усиления объекта управления.
Передаточные функции разомкнутой и замкнутой систем управления будут:
Wраз (s)= 2
3 3
(1 8 )
128( ) (1 )
i
i i
s T
s T s T
; (18.17)
Wзамк(s)= 2
2 2 3 2
(1 8 )
1 16 64( ) 128( ) (1 )
i
i i ii
s T
s T s T s T s T
. (5.18)
Изложенные выше способы последовательной коррекции совпадают с частотным методом построения желаемой ЛАЧХ и ЛФЧХ.
В ГЭУ регуляторы, как правило, действуют одновременно только в режимах, определяе-мых точками излома механической характеристики ГЭД. Обычно регуляторы действуют раздель-но. Поэтому и выбирать их следует независимо друг от друга, что упрощает как отыскание пере-даточной функции регулятора, так и настройку системы.
18.2.1. Уравнения ГЭУ и их линеаризация. Системы автоматического управления широко используются в ГЭУ постоянного тока на судах с тяжелыми или меняющимися условиями плава-ния. В дальнейшем рассматриваются системы автоматического управления в применении к ГЭУ постоянного тока, т. е. системы СГ — В - Д и Г - Д.
Для синтеза систем управления используются уравнения для расчета переходных процес-сов. Эти уравнения подвергаются линеаризации известными методами с заменой производных приращениями переменных величин.
После линеаризации система уравнений ГЭУ постоянного тока принимает следующий вид:
уравнение движения ГЭД Фд.k*Δi* + ik*ΔФд* = n2
k*Δk в* +2k вk * nk*Δn* + Тмр Δn*, (18.19) где
Тм=.30
н
м Д н н
Jn
С Ф I
, р=
d
dt,
уравнение якорной цепи Δег* = К1Δi*(1 + Тар) + К2Фдk*Δn* + К2nk*ΔФд*, (18.20)
уравнение цепи возбуждения генератора Δив*= (1+ Твр) Δег*, (18.21)
уравнение возбудителя генератора
КТ. в 1
1n
i yi B yi
K u u T p
, (18.22)
уравнение цепи возбуждения ГЭД

78
78
Δивд*= (1+ Тдр)ΔФд*, (18.23) уравнение возбудителя ГЭД
Кт.в.д . .1
1n
Дi y Д yД B Дi
K u T p u
, (18.24)
где 1
.
н a
Г н
I RK
E . .
2
. .
e Д н н Д н
Г н Г н
C Ф п ЕK
Е Е ,
aa
a
LT
R , . 2
нB н
н
Мk
п
уравнение звена сравнения и регулятора тока (Δиз.т* - КТΔi*) Wy.T(p) = Δиу.Т*. (18.25)
уравнение звена сравнения и регулятора мощности генератора, действующего на возбуждение ге-нератора,
(Δиз.Р* -KPik* Δеr*- KP еГk* Δi*)WyP(p)= Δиу.P*, (18.26) уравнение звена сравнения и регулятора напряжения генератора
(Δиз.u* - КuΔи*) Wy.u(p) = Δиу.u*, (18.27) уравнение звена сравнения и регулятора частоты вращения ГЭД
(Δиз.n* - Кn*Δn*) Wy.n(p) = Δиу.n*, (18.28) уравнение звена сравнения и регулятора мощности ГЭД, действующего на возбуждение ГЭД
(Δиз.Д* -KД*ik* ΔеГ*- KД*еГk* Δi*)WyД(p)= Δиу.Д*. (18.29) В последних уравнениях Wy.T, WyP, Wyu, Wyn, Wy.д — соответственно передаточные функции
регуляторов тока, мощности генератора, напряжения, частоты вращения ГЭД и мощности ГЭД. Если линеаризация произведена в точке номинального режима, то все постоянные значе-
ния переменных на данном участке отклонения от номинального режима в о.е., обозначенные ин-дексом «k», равны единице:
ФДk = ФД.н; ik = Iн; nk = nн; kBk = kB.н, ФДk*= ik*= nk*= kBk*=1.
После такой замены, принимая Δх = х, уравнения (18.19) — (18.29) приведем к следующе-му упрощенному виду:
i +ФД=kB+2n+ TMpn, (18.30) еГ = K1i (1 + Тар)+К2п + К2ФД, (18.31) иВ.Г = (1+Т В.Г р)еГ, (18.32)
КТ. В 1
1n
i yi y Bi
K u T p u
, (18.33)
ивД=(1+ ТДр)ФД, (18.34)
КТ.В.Д .1
1n
Дi yД yД B Дi
K u T p u
, (18.35)
(из.Т - i)Wy.Т(p) = иy.Т, (18.36) (из.Р - еГ- i)Wy.Р(p) = иy.Р, (18.37) (из.u - uГ)Wy Гu (p) = иу Гu , (18.38)
(из.n - n)Wyn(p) = иуn, (18.39) (из.Д – i-еГ)WyД(p)=иу.Д. . (18.40)
18.2.2. Функциональные схемы управления. Предпосылки к выбору схемы. Выбор схемы управления зависит от назначения гребной электрической установки и, следовательно, от предъ-являемых к ней требований. Требуемые механические характеристики ГЭД и внешние характери-стики генератора могут быть получены разными средствами. Оптимальная в эксплуатационном отношении установка в режимах переменного сопротивления движению судна может поддержи-вать постоянство мощности тепловых двигателей в широких пределах изменением тока и напря-жения генератора или в ограниченных пределах (от швартовной характеристики до хода в свобод-ной воде) изменением магнитного потока ГЭД. Аналогичным образом регулирование частоты вращения ГЭД можно осуществлять изменением напряжения генератора или ослаблением маг-

79
79
нитного потока ГЭД, так как магнитный поток ГЭД не может быть больше номинального зна-чения, соответствующего наиболее тяжелому режиму.
Вопросы для самоконтроля.
1. Назначение автоматического управления. 2. Критерии оптимального управления. 3. Выбор управляющих устройств (регуляторов). 4. Уравнения ГЭУ и их линеаризация. 5. Функциональные схемы управления.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 1. Богомолов В.С. Гребные электрические установки : теория и эксплуатация. – Калинин-
град : Калининградское книжное издательство, 1998. - 223 с. 2. Хайкин А.Б., Васильев В.Н., Полонский В.И. Автоматизированные гребные электриче-
ские установки. – М. : Транспорт, 1986. - 424 с. 3. Рукавишников С.Б. Автоматизированные гребные электрические установки. – Л. : Су-
достроение, 1983. - 240 с. 4. Теория судового электропривода : учебное пособие / К.А.Чекунов. – Л. : Судостроение,
1982. - 336 с. 5. Правила классификации и постройки морских судов. Регистр. - Л. : Транспорт, 1995. 6. Гребные электрические установки : cправочник / Е.Б. Айзенштадт, Ю.М. Гилерович,
Б.А. Горбунов, Сержантов В.В. – 2-е изд., перераб. и доп. – Л. : Судостроение, 1985. – 304 с.

80
80
Титов Владимир Владимирович
АВТОМАТИЗИРОВАННЫЕ ГРЕБНЫЕ ЭЛЕКТРИЧЕСКИЕ УСТАНОВКИ
Конспект лекций
для студентов специальности 7.07010404 «Эксплуатация судового электрооборудования и средств автоматики»
дневной и заочной форм обучения
Тираж ____ экз. Подписано к печати _________ Заказ № ____. Объём 4,77 п.л.
Изд-во "Керченский государственный морской технологический университет" 98309 г. Керчь, ул. Орджоникидзе, 82