Embed Size (px)
Citation preview

Reazioni Vincolari
si consideri un corpo, schematizzabile in un elemento Eh, a contatto con un altro corpo S
che presenta una faccia piana π . Sull'elemento agiscono le forze interne al sistema S-Eh.
A causa del contatto tra l'elemento del corpo la superficie π si deforma in conseguenza del
moto dell'elemento. L'equazione fondamentale della dinamica ( ) Diviene del
tipo: ∑
Dove le Sono le forze che
intervengono nella deformazione del corpo. È piuttosto laborioso tenerne conto, per cui si
introduce un nuovo schema: vincolo rigido. Si suppone la superficieπ rigida e quindi
indeformabile rappresentabile con un vincolo olonomo. Assegnato il moto possibile per
l'elemento in contatto con il solido S, in un determinato istante rimane individuata la forza:
∑ Che viene esercitata da S su Eh e tale forza è
chiamata reazioni vincolare. Si indica con L'insieme delle reazioni vincolari
che al variare del moto l'elemento si mantiene in contatto con S.
Nel caso di un unico elemento per l'equazione fondamentale della dinamica dell'elemento
vincolato è: Con In questo modo vengono introdotte
delle incognite ausiliarie cioè le componenti della reazione vincolare. Il numero di tali
incognite eguaglia quello dei grandi di libertà eliminati dal vincolo.
Allo stesso modo partendo dall'equazione fondamentale della statica ( ) Si
ottiene l'equazione fondamentale della statica dell'elemento vincolato:
: Sono posizioni di equilibrio tutte e sole quelle per le quali
l'opposto della forza attiva totale calcolato in quelle posizioni in corrispondenza valore
nullo di v e per ogni t è una reazione che il vincolo può esplicare.
In maniera analoga si calcola, dal sistema fondamentale della dinamica
(
)) Si ottiene:
Mentre per quello della statica (
) Si ottiene analogamente:
Anche nelle equazioni globali della statica {
e della dinamica
{
compariranno le reazioni vincolare per il tramite della loro somma E
del loro momento totale rispetto al baricentro Introducendo sei incognite ausiliarie.

Forze e sollecitazioni conservative, energia potenziale Per determinare il valore del lavoro esplicato da una forza su un elemento durante un
moto bisogna conoscere la rappresentazione del moto cioè la: ( ) ( ( ) ( ) ) Il lavoro dipenderà dalla particolare traiettoria e dalla legge oraria. Se la forza è posizionale
il lavoro elementare si esprime con una forma differenziale lineare ( ) ( ) ( ) ( ) In questo caso il lavoro non dipende dalla
particolare parametrizzazione della traiettoria. Quando la forza è rappresentabile con un
campo scalare ( ) tale che il suo gradiente eguagli l'opposto della forza in
ogni punto: ( ) ( ) il lavoro elementare coincide con l'opposto del
differenziale: ( ) ( ) ( ) ( ) ( )
Alle forze di questo tipo si dà il nome di conservative e alla funzione U quella di energia potenziale. Il carattere conservativo di una forza è legato allo spazio di riferimento infatti se si considera una sua immagine in RΓ generalmente essa dipende dal tempo e quindi sicuramente non è conservativa. Per il calcolo del lavoro basta conoscere la posizione
occupata agli istanti t0 e t poiché valgono le relazioni: ∫
∫
( )
( ) e in particolare da quest'ultima si deduce che il lavoro di una forza conservativa lungo una linea chiusa è uguale a zero.
Una sollecitazione si dice conservativa se esiste un campo scalare ( )
Per i = 1,2,
… N per le sollecitazioni conservative il lavoro dipende soltanto dalle configurazioni assunte agli istanti t0 e t.
Un criterio sufficiente per verificare se una forza posizionale ( ) è conservativa deve soddisfare:
1. sia di classe C1 ed è finita in un campo connesso
2. verifiche le condizioni di Schwartz:
3. Il campo C sia a connessione lineare semplice
Sollecitazioni conservative in senso lagrangiano
il concetto di sollecitazione conservativa può essere generalizzato per un sistema a vincoli
regolari descritto dalle coordinate lagrangiane q1,q2,……,qn . Il lavoro virtuale di una
sollecitazione
∑
∑
∑ ∑
∑
Con ∑
Che sono le componenti lagrangiane della sollecitazione e sono
tanti quanti sono i gradi di libertà n. per la sollecitazione attiva: le forze attive ( )
Agenti su un elemento di un sistema olonomo si osserva che dipendono dalla
configurazione e dall'atto di moto che possono essere espresse in coordinate lagrangiane.
Le componenti lagrangiane della sollecitazione attiva Qha sono funzioni delle e delle
E ovviamente dal tempo: ( )
[ ( ) ( ) ]
( )
∑ ( )
( )
Affinché il lavoro virtuale sia nullo in corrispondenza a ogni spostamento virtuale è
necessario che risulti Q1=0 ,… , Qn=0 dunque un sistema si dice e a vincoli perfetti se tali
vincoli possono esplicare tutte le sollecitazioni vincolari tali che ∑
per
h=0,…,n.
se la sollecitazione è conservativa, per le componenti lagrangiane valgono le espressioni
analoghe alle sollecitazioni per componenti cartesiane. Il potenziale infatti è del tipo:
( ) [ ( ) ( ) ( ) Da cui si ottiene:
∑ [
∑ *
+ ∑
( ) L'esistenza di una funzione U le cui derivate parziali coincidono con
l'opposto delle componenti lagrangiane della sollecitazione è una conseguenza
dell'esistenza dell'energia potenziale della sollecitazione. Le componenti lagrangiane sono
delle particolari combinazioni delle forze che costituiscono la sollecitazione, e se tengono
conto soltanto dei valori che queste forze hanno in corrispondenza alle sole configurazioni
compatibili con i vincoli. Una sollecitazione { } Agente su un sistema con
vincoli regolari è conservativa se le sue componenti lagrangiane sono funzione
delle coordinate lagrangiane e ammettono un potenziale lagrangiano U, cioè se
esiste una funzione U( ) Tale che risulti:
Energia cinetica e il teorema del lavoro
energia cinetica: in un riferimento RC un elemento si muove con
velocità ( )
Che, per un sistema di
elementi diviene: ∑ Che ha una notevole importanza se si considera una
terna di riferimento RC’ del moto relativo al baricentro che, rispetto alla terna principale RC
ha moto rotatorio con velocità di traslazione uguale a quella del baricentro cioè .
Utilizzando il teorema dei modi relativi ( ) Dunque l'energia cinetica assume la
forma: ∑ ( ) ( )
∑
∑
.
L'ultimo termine è sempre nullo poiché il prodotto scalare tra la massa totale e la velocità
del baricentro è nulla, il primo termine corrisponde all'energia cinetica del moto del sistema
riferito al baricentro TG. Dunque si ottiene:
Che esprime il teorema di
König: in un riferimento RC(OXYZ) l'energia cinetica di un sistema particellare è la
somma del semi prodotto della massa totale del sistema per il quadrato della
velocità del baricentro e dell'energia cinetica corrispondente al moto relativo al
baricentro.
Teorema del lavoro: dalle definizioni di energia cinetica ( ∑ ) e di lavoro
( ∑ ) applicate al secondo principio della dinamica(
( )
( ) ) Moltiplicata scalarmente per lo spostamento elementare dello i-esimo
elemento, si ottiene dT=dLi+dLe cioè il lavoro della sollecitazione interna più il lavoro della
sollecitazione esterna, integrando si ottiene: T-T0=Li0,t+Le
0,t che rappresenta il teorema del
lavoro dell'energia cinetica: la variazione di energia cinetica subita da uno schema
particellare in un qualunque intervallo di tempo eguaglia il lavoro della
sollecitazione totale, interna ed esterna, agente sul sistema che compie nel
medesimo intervallo. Da quest'equazione si può trarre solo alcuni aspetti del moto ma
non le funzioni che lo rappresentano, poiché è diretta conseguenza del sistema
fondamentale della dinamica.
Teoremi di conservazione
Quando, sotto particolari condizioni nelle relazioni fondamentali ce ne sono alcune che
coinvolgono caratteri non differenziali queste sono del tipo: φ(P,υ,t)= cost dove φ è una
grandezza meccanica qualunque. Poiché il valore di questa grandezza meccanica rimane
costante (si conserva ) tali relazioni prendono il nome di teoremi di conservazione.
Conservazione della quantità di moto: 1)quando accade che la somma della sollecitazione
esterna ( ) ha una componente nulla secondo un qualunque orientamento per ogni
valore assunto dal tempo, dalla posizione e dall'atto di moto dalla prima equazione globale
si ottiene ( ) ( ) cioè si conserva la componente della
quantità di moto secondo l'orientamento u cioè secondo la componente u della velocità del
baricentro. 2) quando accade che ( ) è ortogonale ad un piano si hanno due
teoremi di conservazione secondo due orientamenti ortogonali e paralleli a tale piano. Un
esempio di tale forza è la forza peso che è sempre ortogonale a qualunque piano
orizzontale, dunque la componente della quantità di moto si conserva in ogni direzione
orizzontale. 3) se si ha che ( ) è nulla allora si conserva l'intera quantità di moto e
quindi anche la velocità del baricentro. Il moto sarà rettilineo e uniforme come se il sistema
fosse isolato. Un esempio di tale forza è il fenomeno del rinculo delle armi poiché
all'istante dello sparo l'arma carica è in quiete.
Conservazione del momento della quantità di moto: sia r una qualunque retta passante
per il punto O, 1)se il momento totale ( ) ha la componente nulla secondo la retta r
per ogni valore assunto dal tempo, dalla posizione dell'atto di moto per la seconda
equazione globale si ottiene Kr =cost si conserva il momento assiale rispetto a tale retta
della quantità di moto dello schema particellare. 2) se ( ) sia costantemente
ortogonale ad un piano si hanno due teoremi di conservazione indipendenti secondo i due
orientamenti paralleli a tale piano. 3) se ( ) è nullo allora si conserva il momento
polare della quantità di moto del sistema Originando tre teoremi indipendenti.
Conservazione dell'energia: se la sollecitazione totale interna ed esterna agente sul
sistema è conservativa il teorema del lavoro diviene: T-T0=Li0,t+Le
0,t =UO-U cioè:
T+U= T0 +UO = cost =E dove E è l'energia totale meccanica del sistema. Quest'ultima
relazione esprime il teorema di conservazione dell'energia: l'energia totale di uno
schema particellare soggetto ad una sollecitazione totale conservativa si mantiene
costante durante il moto. Se si aggiungono forze dissipative queste producono lavoro
negativo e quindi T+U≤T0 +UO =E che fornisce un limite superiore che sussiste durante
tutto il moto.
Quiete e posizioni in equilibrio
Le equazioni della dinamica non individuano un particolare moto ma la classe dei moti
compatibili con le forze attive e i vincoli assegnati, le equazioni della statica non
consentono di decidere se un elemento sia in quiete oppure no, ma individuano l'insieme
delle posizioni l'equilibrio nei quali l'elemento può rimanere in quiete. Si consideri un
elemento libero soggetto ad una forza posizionale, l'equazione fondamentale della statica
( ( ) ) assume la forma ( ) cioè se Pe è una soluzione di tale equazione essa
risulta tale qualunque sia la velocità cioè anche quando l'elemento occupa tale posizione
non in quiete. Se l'elemento è soggetto a un vincolo privo d'attrito e ad una forza attiva
posizionale ogni punto del vincolo risulta posizione di equilibrio, in questo caso tutti i moti
possibili sono uniformi. Il teorema del lavoro assume sempre la forma particolare: T=T0
che esprime la costanza dell'energia cinetica e quindi della velocità scalare. Se tutti i moti
possibili sono uniformi qualunque sia la posizione P0 dell'elemento occupata nell'istante
iniziale e la velocità iniziale resta nulla in ogni istante successivo la posizione P0 si dice
d'equilibrio.
Stabilità delle posizioni di equilibrio
Una posizione Pe si dice stabile se per ogni coppia di numeri reali positivi ε1, ε2 è
possibile determinare altri due numeri reali positivi δ1, δ2 tale che se |P0Pe|< δ1 e v0<
δ2 per il moto ( ) Corrispondente alle condizioni iniziali Risulti:
{| ( )|
( )
La definizione richiede che, imponendo le limitazioni alle condizioni iniziali, si realizzi un
moto che si discosti dalla quiete nella posizione di equilibrio meno di quanto prefissato
cioè, la stabilità può essere espressa nelle richieste:
( )
( )
Teorema di Dirichlet
Se la forza dotale agente sull'elemento materiale è sostanzialmente conservativa,
ogni punto di minimo relativo proprio dell'energia potenziale è posizione di
equilibrio stabile.
Tale teorema fornisce una condizione sufficiente per la stabilità e sussiste se la forza
totale e sull'elemento è sostanzialmente conservativa cioè per esempio ( ) Che, con
l'equazione fondamentale della statica assume la forma ( ) in particolare ogni
punto Pe di minimo relativo proprio dell'energia potenziale è sicuramente l'equilibrio.
Teorema di Liapounov
La condizione di Dirichlet è una condizione sufficiente ma non necessaria poiché sussiste
una parziale inversione di tale teorema che vale se e solo se la forza è conservativa in
senso stretto.
Per un elemento materiale soggetto d'una forza conservativa, sia Pe un punto di
stazionarietà dell'energia potenziale U. Se Pe NON è un punto di minimo relativo
proprio e se ciò risulta dall'esame dei valori che le derivate seconde assumono in
Pe, la posizione Pe è di equilibrio instabile.
Anche nel caso in cui la forza è conservativa il teorema di Liapounov non costituisce una
totale inversione del teorema di Dirichlet poiché si riconosce dall'esame della forma
quadratica dell'energia potenziale(con Pe punto che annulla la derivata prima) che se è
positiva (Q>0) per il teorema di Dirichlet in Pe è una posizione di equilibrio stabile
altrimenti, se la forma quadratica è negativa (Q<0) opera il teorema di Liapounov e Pe è
posizione di equilibrio instabile. Se la forma quadratica è semidefinita allora si procede con
un'analisi più raffinata fino alla derivata del quarto ordine. Se invece Pe non è punto di
minimo proprio non si può concludere nulla.
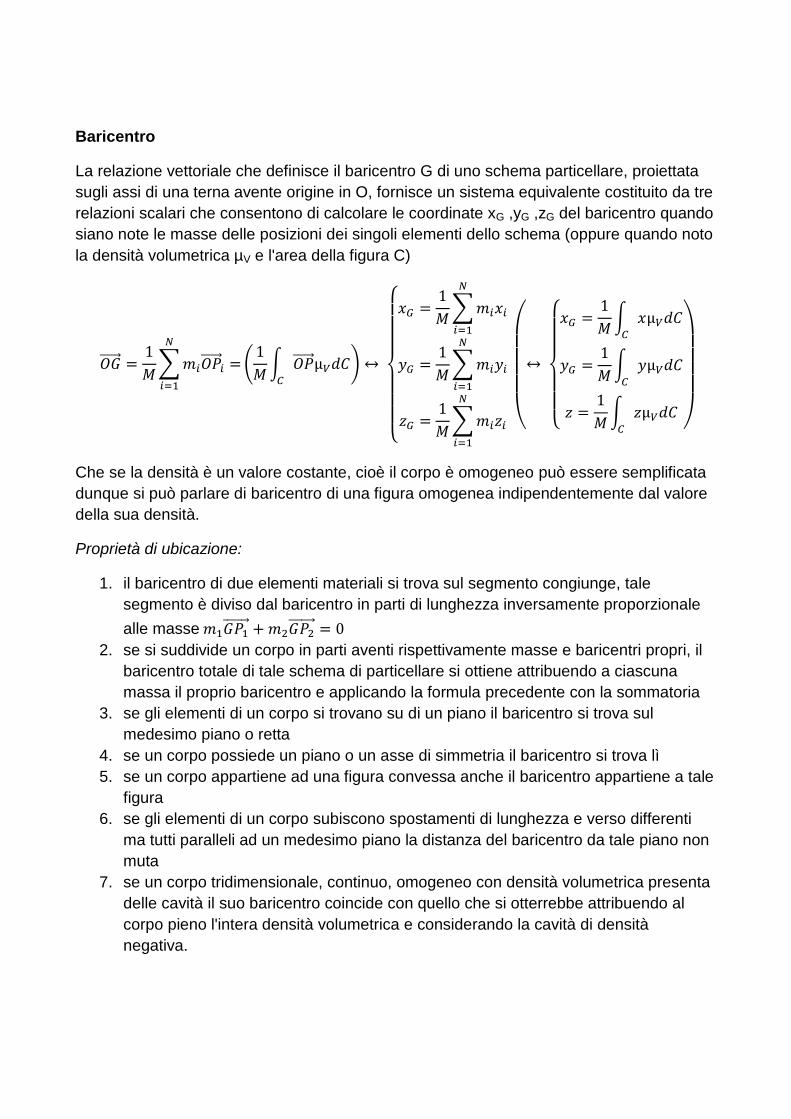
Baricentro
La relazione vettoriale che definisce il baricentro G di uno schema particellare, proiettata
sugli assi di una terna avente origine in O, fornisce un sistema equivalente costituito da tre
relazioni scalari che consentono di calcolare le coordinate xG ,yG ,zG del baricentro quando
siano note le masse delle posizioni dei singoli elementi dello schema (oppure quando noto
la densità volumetrica µV e l'area della figura C)
∑
(
∫
)
{
∑
∑
∑
(
{
∫
∫
∫
)
Che se la densità è un valore costante, cioè il corpo è omogeneo può essere semplificata
dunque si può parlare di baricentro di una figura omogenea indipendentemente dal valore
della sua densità.
Proprietà di ubicazione:
1. il baricentro di due elementi materiali si trova sul segmento congiunge, tale
segmento è diviso dal baricentro in parti di lunghezza inversamente proporzionale
alle masse
2. se si suddivide un corpo in parti aventi rispettivamente masse e baricentri propri, il
baricentro totale di tale schema di particellare si ottiene attribuendo a ciascuna
massa il proprio baricentro e applicando la formula precedente con la sommatoria
3. se gli elementi di un corpo si trovano su di un piano il baricentro si trova sul
medesimo piano o retta
4. se un corpo possiede un piano o un asse di simmetria il baricentro si trova lì
5. se un corpo appartiene ad una figura convessa anche il baricentro appartiene a tale
figura
6. se gli elementi di un corpo subiscono spostamenti di lunghezza e verso differenti
ma tutti paralleli ad un medesimo piano la distanza del baricentro da tale piano non
muta
7. se un corpo tridimensionale, continuo, omogeneo con densità volumetrica presenta
delle cavità il suo baricentro coincide con quello che si otterrebbe attribuendo al
corpo pieno l'intera densità volumetrica e considerando la cavità di densità
negativa.

Momenti di inerzia
si definisce momento di inerzia Ja di un corpo rispetto ad una retta a la grandezza:
∑ ∫
La sua misura non è mai negativa e si annulla soltanto se tutti gli
elementi appartengono all'asse dei momenti a. Il momento di inerzia individua una
caratteristica strutturale del corpo nel caso in cui il corpo rigido con asse solidale al corpo.
Se si ipotizza che uno degli assi coordinati della terna RΓ esempio ζ’ sovrapposto ad a
∑ (
) ∫ ( )
e alla grandezza √
si dà il nome di
raggio di girazione: è la distanza da a a cui deve essere posto un elemento di massa M
affinché il suo momento di inerzia risulti uguale a quello del corpo.
Momenti di inerzia rispetto ad assi paralleli: teorema di Huyghens
il momento di inerzia di un corpo rispetto a un asse a si ottiene aggiungendo al
momento di inerzia rispetto all'asse baricentrale aG parallelo ad a, il prodotto della
massa totale del corpo per il quadrato della distanza di a dal baricentro
∑ [( )
∑ (
)
∑
il termine ∑ È sempre uguale a zero poiché l'asse ζ’ Passa per G e il momento di
inerzia rispetto a ζ’ Coincide con il momento di inerzia del corpo rispetto ad aG.
tale teorema implica:
1. tra tutte le rette che hanno una medesima direzione, quella cui corrisponde il minimo
momento d’inerzia è la retta baricentrale
2. un corpo ha il medesimo momento d’inerzia rispetto a tutte le generatrici di un cilindro
rotondo il cui asse passa per G.
Considerazioni sulla seconda equazione della stereodinamica
Unendo le equazioni ottenute dal sistema precedente rispetto a θ(t) ψ(t) ϕ(t) a
quelle che si ottengono proiettando la prima equazione cardinale sugli assi di RC, si
ottiene un sistema di sei equazioni differenziali scalari del secondo ordine, di forma
normale e completo. Tale sistema differenziale ammette una e una sola soluzione
soddisfacente ad assegnate condizioni iniziali. Per il teorema di Cauchy risulta così
dimostrato che, nel caso di un corpo rigido libero, le equazioni cardinali sono
sufficienti ad individuare tutti e soli i moti compatibili con la sollecitazione attiva
(data). La soluzione generale dell'equazioni cardinali per il corpo libero è costituita
dalla totalità delle soluzioni particolari nelle quali compaiono 12 costanti arbitrarie
e, per determinarle, occorrono altrettante condizioni iniziali. In conseguenza
dell'elevato numero di equazioni differenziali in generale la risoluzione dei problemi
stereo dinamici offre notevoli difficoltà. Per semplificarle si utilizzerà il concetto
delle sollecitazioni equivalenti in modo tale che le sollecitazioni agenti equivalenti
sul corpo rigido siano in numero minore rispetto alle totali.
Teorema del lavoro: conservazione dell'energia
grazie all'equazioni cardinali possiamo esprimere il teorema del lavoro per uno schema di
corpo rigido libero, ricordandoci l'espressione per un generico schema particellare
(dT=dLint+dLext). Osserviamo che: il lavoro della sollecitazione interna è nullo per ogni
spostamento rigido e quindi il lavoro delle sollecitazioni interne è uguale a zero; il lavoro della
sollecitazione esterna si riduce a quello effettuato dalla sollecitazione attiva che si esprime in
funzione della somma del momento baricentrale totale di tale sollecitazione:
In base al teorema di König (
) L’ Energia
cinetica di uno schema particellare è espressa dal primo termine contenente la velocità del
baricentro che non richiede adattamenti rispetto allo schema del corpo rigido, mentre per
quanto riguarda il secondo termine TG esso corrisponde al moto relativo all'baricentro nel caso
in cui vi sia un atto di moto rotatorio con asse passante per G. Indicando con JG il momento di
inerzia del corpo rispetto ad una retta baricentrale parallela a Sì ha:
Poiché al
variare nel tempo l'orientamento di ω Muta sia rispetto allo spazio di riferimento sia rispetto al
corpo rigido il momento di inerzia rispetto ad una retta baricentrale è espresso come:
(
) che, sostituendo si ha:
(
). Un'altra espressione può essere
.
Andando ad applicare tali considerazioni al lavoro della sollecitazione esterna in funzione
della somma e del momento baricentrale totale per un elemento disposto a distanza d dal
baricentro si ottiene:
(
)
Si
esprime il teorema di lavoro nel caso di corpo rigido libero. Tale teorema è conseguenza delle
equazioni cardinali.

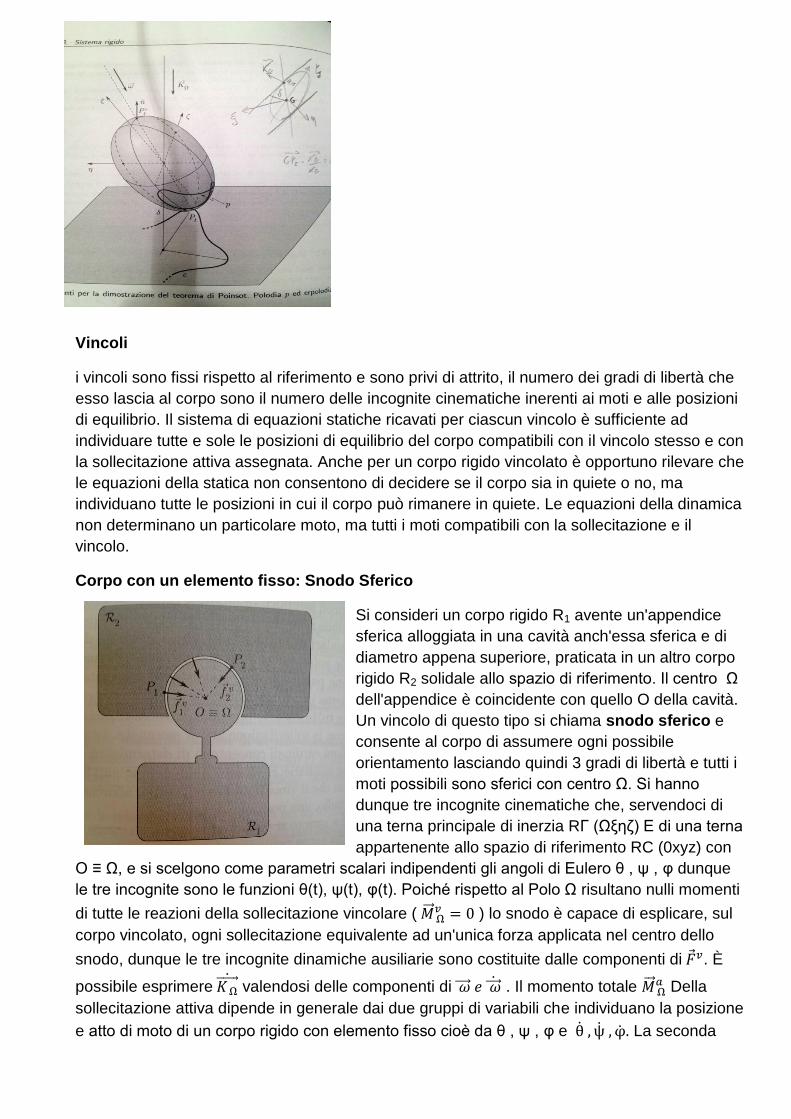
Moti alla Poinsot
nei moti di un corpo rigido, in cui un elemento Ω del corpo resta fisso in un punto O
dello spazio di riferimento, e la sollecitazione esterna ha momento nullo rispetto a Ω,
l'ellissoide d'inerzia, relativo a Ω, si mantiene in contatto, senza strisciare, con due
piani fissi, equidistanti da Ω, e ortogonali a ; inoltre la velocità angolare del corpo è
proporzionale alla distanza di Ω dai punti di contatto.
si chiamano moti alla Poinsot di un corpo rigido, i moti nei quali un elemento Ω del corpo resta
fisso in un punto O dello spazio di riferimento e la sollecitazione totale ha un momento
rispetto a Ω =O. Sono di questo tipo i moti relativi al baricentro di un corpo rigido
soggetto solo al peso, infatti in tali moti la forza peso al momento nullo rispetto al baricentro.
Per valutarli a livello geometrico si introduce l’ ellissoide di inerzia relativo a Ω, l'ellissoide è
solidale al corpo e per caratterizzare i moti di quest'ultimo basta caratterizzare quelli del suo
ellissoide relativo al punto fisso. In base alla seconda equazione cardinale i moti sferici di un
corpo rigido sono caratterizzati dall’equazione: ⟺
cioè, nei modi alla Poinsot il momento della
quantità di moto si mantiene costante nello spazio di riferimento. Anche l'energia cinetica si
mantiene costante poiché Sono nulli e quindi:
(
)
cioè tra gli ∞1 piani dello spazio di riferimento ce ne sono in ogni istante 2 ( π e π’) ortogonali
alla direzione costante di e tangenti alle ellissoide d'inerzia relativo a Ω . Nei punti di
contatto, la normale al piano tangente coincide con la normale all'ellissoide Che ha direzione
di , si vede che i punti di contatto dell'ellissoide con i due piani coincidono con i punti Pt e
Pt’ in cui l'asse istantaneo di rotazione interseca l'ellissoide. Sia è inoltre π il piano tangente in
Pt e siano ξt , ηt , ζt le coordinate di Pt rispetto alla terna principale di inerzia terna
R. Durante il moto tale punto Descrive una curva appartenente a π a cui si dà il
nome di erpolodia ed una appartenente all'ellissoide chiamata polodia. Dato che
Hanno lo stesso orientamento indicando con k un coefficiente di proporzionalità positivo si
ottiene: {
⟺ E k lo si ottiene dall'equazione delle ellissoide:
si ottiene: √
E quindi durante il moto alla Poinsot il coefficiente
k si mantiene costante. L'angolo che forma con È acuto o addirittura nullo, dunque per
ricavare la distanza δ >0 di π da Ω valendosi del sistema precedente e del valore di k e
ricordando che Si ottiene √
cioè δ si mantiene costante e quindi il
piano π risulta fisso nello spazio di riferimento. La velocità di strisciamento del ellissoide sul
piano π eguaglia la velocità assoluta dell'elemento del corpo che in quell'istante occupa il
punto di contatto e, tale velocità è nulla poiché il punto di contatto appartiene all'asse
istantaneo di rotazione, cioè non vi è strisciamento ne con il piano π ne con π’ . Sebbene non
vi sia strisciamento, i moti alla Poinsot non sono di puro rotolamento poiché l'asse istantaneo
di rotazione passa per il centro dell'ellissoide che non appartiene al piano tangente ad esso.
Vincoli
i vincoli sono fissi rispetto al riferimento e sono privi di attrito, il numero dei gradi di libertà che
esso lascia al corpo sono il numero delle incognite cinematiche inerenti ai moti e alle posizioni
di equilibrio. Il sistema di equazioni statiche ricavati per ciascun vincolo è sufficiente ad
individuare tutte e sole le posizioni di equilibrio del corpo compatibili con il vincolo stesso e con
la sollecitazione attiva assegnata. Anche per un corpo rigido vincolato è opportuno rilevare che
le equazioni della statica non consentono di decidere se il corpo sia in quiete o no, ma
individuano tutte le posizioni in cui il corpo può rimanere in quiete. Le equazioni della dinamica
non determinano un particolare moto, ma tutti i moti compatibili con la sollecitazione e il
vincolo.
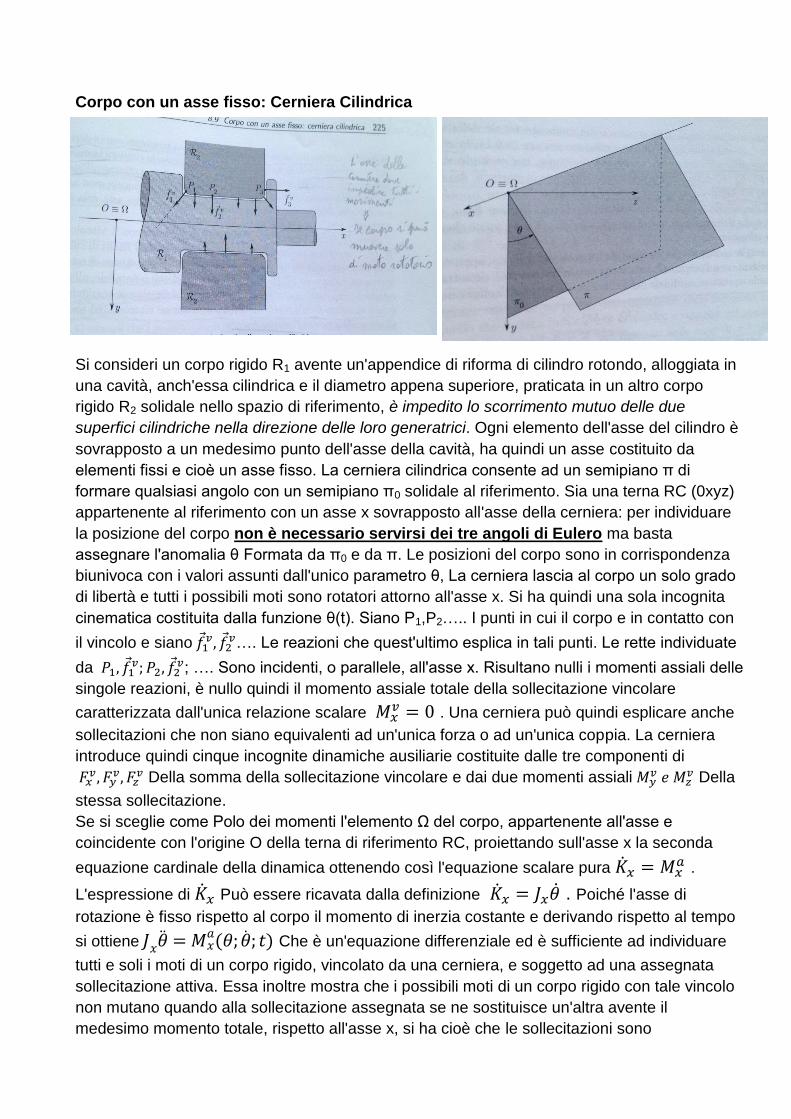
Corpo con un elemento fisso: Snodo Sferico
Si consideri un corpo rigido R1 avente un'appendice
sferica alloggiata in una cavità anch'essa sferica e di
diametro appena superiore, praticata in un altro corpo
rigido R2 solidale allo spazio di riferimento. Il centro Ω
dell'appendice è coincidente con quello O della cavità.
Un vincolo di questo tipo si chiama snodo sferico e
consente al corpo di assumere ogni possibile
orientamento lasciando quindi 3 gradi di libertà e tutti i
moti possibili sono sferici con centro Ω. Si hanno
dunque tre incognite cinematiche che, servendoci di
una terna principale di inerzia RΓ (Ωξηζ) E di una terna
appartenente allo spazio di riferimento RC (0xyz) con
O ≡ Ω, e si scelgono come parametri scalari indipendenti gli angoli di Eulero θ , ψ , φ dunque
le tre incognite sono le funzioni θ(t), ψ(t), φ(t). Poiché rispetto al Polo Ω risultano nulli momenti
di tutte le reazioni della sollecitazione vincolare ( ) lo snodo è capace di esplicare, sul
corpo vincolato, ogni sollecitazione equivalente ad un'unica forza applicata nel centro dello
snodo, dunque le tre incognite dinamiche ausiliarie sono costituite dalle componenti di . È
possibile esprimere valendosi delle componenti di . Il momento totale
Della
sollecitazione attiva dipende in generale dai due gruppi di variabili che individuano la posizione
e atto di moto di un corpo rigido con elemento fisso cioè da θ , ψ , φ e La seconda

equazione globale diviene del tipo
( ) Da
cui si ricava il sistema equivalente
{
( ) ( )
( ) ( )
( ) ( )
Che rappresentano le particolari forme assunte dalla seconda equazione della stereodinamica
e dalle equazioni di Eulero. Tali equazioni consentono di trattare tutti i problemi in cui
Dipende dallo Stato cinetico del corpo soltanto per il tramite di ωξ , ωη , ωζ . Tale sistema è
sufficiente ad individuare tutti e soli i moti di un corpo rigido, vincolato da uno snodo, e
soggetto ad un assegnata sollecitazione attiva nelle tre incognite cinematiche θ(t), ψ(t), φ(t).
Inoltre il precedente sistema unito alla seconda equazione globale (sempre precedente)
mostrano che i possibili moti di un corpo rigido non mutano quando alla sollecitazione è
assegnata se ne sostituisce un'altra avente il medesimo momento totale rispetto a Ω, si ha
cioè che le sollecitazioni sono dinamicamente equivalenti se hanno eguali in momenti rispetto
al centro dello snodo espressi in funzione di E tale proprietà sussiste anche se le due
sollecitazioni hanno somme diverse, cioè non sono equivalenti dal loro. Per determinare le
componenti di Ci si serve delle tre equazioni scalari che si ricavano proiettando la prima
equazione cardinale della dinamica sugli assi di RC oppure si può procedere in forma
vettoriale. Affinché la forza vincolare non dipenda direttamente dal moto è necessario
sufficiente che, in ogni istante, risulti: e quindi che l'elemento fisso Ω coincida con il
baricentro. Scelto Ω come il polo dei momenti poiché la per il teorema del lavoro
( ) Si ottiene
Cioè il lavoro della sollecitazione agente
sul corpo coincide con quello della parte attiva della sollecitazione. Per l'energia cinetica T non
conviene usare il teorema di König basta osservare che ogni atto di moto è rotatorio con asse
istantaneo passante per Ω cioè:
( )
(
) che unendo le
espressioni si ottiene il teorema del lavoro:
(
) .
Per individuare tutte e sole le posizioni di equilibrio di un corpo rigido, vincolato ad uno snodo,
e soggetto a un’assegnata sollecitazione attiva si ha un’equazione vettoriale pura
( ) dunque sono di equilibrio tutte e sole le posizioni nelle quali, in
corrispondenza a un atto di moto nullo, la sollecitazione attiva è equivalente a un’unica forza
applicata al centro dello snodo. Se quest'ultima è assegnata la condizione è sufficiente ad
individuare tutte e sole le posizioni di equilibrio. Infine per determinare le tre incognite
ausiliarie, cioè le componenti della somma Rispetto agli assi di RC si può procedere in
forma vettoriale oppure con gli angoli di Eulero nella posizione di equilibrio θe ψe φe. L'ultima
equazione mostra che le posizioni di equilibrio non mutano quando, alla sollecitazione
assegnata, se ne sostituisca un'altra avente il medesimo momento totale rispetto a Ω e
sussiste anche quando l'uguaglianza dei momenti si verifica soltanto in corrispondenza ad un
atto di moto nullo.
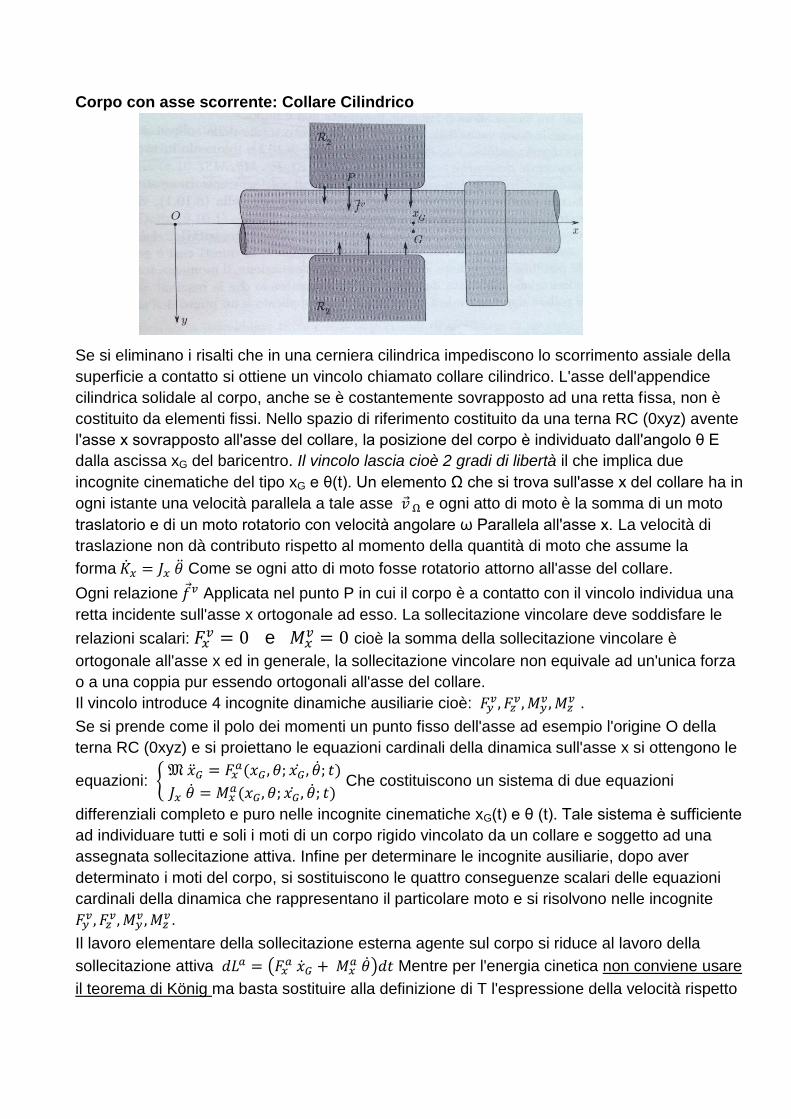
Corpo con un asse fisso: Cerniera Cilindrica
Si consideri un corpo rigido R1 avente un'appendice di riforma di cilindro rotondo, alloggiata in
una cavità, anch'essa cilindrica e il diametro appena superiore, praticata in un altro corpo
rigido R2 solidale nello spazio di riferimento, è impedito lo scorrimento mutuo delle due
superfici cilindriche nella direzione delle loro generatrici. Ogni elemento dell'asse del cilindro è
sovrapposto a un medesimo punto dell'asse della cavità, ha quindi un asse costituito da
elementi fissi e cioè un asse fisso. La cerniera cilindrica consente ad un semipiano π di
formare qualsiasi angolo con un semipiano π0 solidale al riferimento. Sia una terna RC (0xyz)
appartenente al riferimento con un asse x sovrapposto all'asse della cerniera: per individuare
la posizione del corpo non è necessario servirsi dei tre angoli di Eulero ma basta
assegnare l'anomalia θ Formata da π0 e da π. Le posizioni del corpo sono in corrispondenza
biunivoca con i valori assunti dall'unico parametro θ, La cerniera lascia al corpo un solo grado
di libertà e tutti i possibili moti sono rotatori attorno all'asse x. Si ha quindi una sola incognita
cinematica costituita dalla funzione θ(t). Siano P1,P2….. I punti in cui il corpo e in contatto con
il vincolo e siano
…. Le reazioni che quest'ultimo esplica in tali punti. Le rette individuate
da
; …. Sono incidenti, o parallele, all'asse x. Risultano nulli i momenti assiali delle
singole reazioni, è nullo quindi il momento assiale totale della sollecitazione vincolare
caratterizzata dall'unica relazione scalare . Una cerniera può quindi esplicare anche
sollecitazioni che non siano equivalenti ad un'unica forza o ad un'unica coppia. La cerniera
introduce quindi cinque incognite dinamiche ausiliarie costituite dalle tre componenti di
Della somma della sollecitazione vincolare e dai due momenti assiali
Della
stessa sollecitazione.
Se si sceglie come Polo dei momenti l'elemento Ω del corpo, appartenente all'asse e
coincidente con l'origine O della terna di riferimento RC, proiettando sull'asse x la seconda
equazione cardinale della dinamica ottenendo così l'equazione scalare pura .
L'espressione di Può essere ricavata dalla definizione . Poiché l'asse di
rotazione è fisso rispetto al corpo il momento di inerzia costante e derivando rispetto al tempo
si ottiene ( ) Che è un'equazione differenziale ed è sufficiente ad individuare
tutti e soli i moti di un corpo rigido, vincolato da una cerniera, e soggetto ad una assegnata
sollecitazione attiva. Essa inoltre mostra che i possibili moti di un corpo rigido con tale vincolo
non mutano quando alla sollecitazione assegnata se ne sostituisce un'altra avente il
medesimo momento totale, rispetto all'asse x, si ha cioè che le sollecitazioni sono

dinamicamente equivalenti se hanno uguali i momenti assiali rispetto all'asse della cerniera
espressi in funzione di θ, ,t.
Individuato il particolare moto che soddisfa le condizioni iniziali occorre determinare le cinque
incognite ausiliarie, cioè le tre componenti della somma Della sollecitazione cioè i momenti
della sollecitazione stessa
. Il procedimento consiste nel sostituire in ciascuna
equazione le variabili θ, che figurano nelle leggi
oppure nelle espressioni di
rispettivamente con la funzione θ(t). Si dice che un corpo rigido vincolato con una
cerniera è bilanciato staticamente se la somma non dipende direttamente dal moto, si dice
bilanciato dinamicamente rispetto ad un punto Ω dell'asse della cerniera se non dipende
direttamente dal moto, se dice bilanciato se lo è sia staticamente che dinamicamente.
Il teorema del lavoro nel caso di un corpo rigido vincolato da una cerniera assume una forma
più semplificata poiché il corpo possiede un asse fisso passante per Ω, infatti la funzione J(t) si
riduce alla semplice costante Jx mentre il lavoro elementare assume la forma
Si ottiene dunque:
( )
.
Quando la sollecitazione è sostanzialmente conservativa e il secondo membro dell'equazione
precedente è uguale al differenziale dell'energia potenziale U che è funzione della sola
variabile θ Ed integrando si ottiene:
( )
( ) Che esprime il
teorema di conservazione dell'energia per un corpo rigido vincolato da una cerniera. Al variare
di E nel campo reale tale equazione individua le equazioni orarie rispetto al tempo di tutti e soli
i moti compatibili con la sollecitazione e il vincolo. Tale equazione è valida anche quando la
sollecitazione attiva non è sostanzialmente conservativa.
Tenendo ben presente la caratterizzazione del vincolo ( ) dalla seconda equazione
cardinale della statica, proiettata sull'asse x, si ottiene l'equazione scalare pura:
( ) essa è sufficiente ad individuare tutte sole le posizioni di equilibrio di un
corpo rigido. In base a tale formula per un corpo rigido, vincolato da una cerniera, sono di
equilibrio tutte sole le posizioni nelle quali, in corrispondenza ad un atto di moto nullo e per
ogni t, la sollecitazione attiva ha momento nullo rispetto all'asse della cerniera. Le posizioni di
equilibrio di un corpo rigido, vincolato da una cerniera, non mutano quando, alla sollecitazione
assegnata, se ne sostituisce un'altra avente il medesimo momento totale rispetto all'asse della
cerniera in corrispondenza ad un atto di moto nullo.
Corpo con asse scorrente: Collare Cilindrico
Se si eliminano i risalti che in una cerniera cilindrica impediscono lo scorrimento assiale della
superficie a contatto si ottiene un vincolo chiamato collare cilindrico. L'asse dell'appendice
cilindrica solidale al corpo, anche se è costantemente sovrapposto ad una retta fissa, non è
costituito da elementi fissi. Nello spazio di riferimento costituito da una terna RC (0xyz) avente
l'asse x sovrapposto all'asse del collare, la posizione del corpo è individuato dall'angolo θ E
dalla ascissa xG del baricentro. Il vincolo lascia cioè 2 gradi di libertà il che implica due
incognite cinematiche del tipo xG e θ(t). Un elemento Ω che si trova sull'asse x del collare ha in
ogni istante una velocità parallela a tale asse e ogni atto di moto è la somma di un moto
traslatorio e di un moto rotatorio con velocità angolare ω Parallela all'asse x. La velocità di
traslazione non dà contributo rispetto al momento della quantità di moto che assume la
forma Come se ogni atto di moto fosse rotatorio attorno all'asse del collare.
Ogni relazione Applicata nel punto P in cui il corpo è a contatto con il vincolo individua una
retta incidente sull'asse x ortogonale ad esso. La sollecitazione vincolare deve soddisfare le
relazioni scalari: e
cioè la somma della sollecitazione vincolare è
ortogonale all'asse x ed in generale, la sollecitazione vincolare non equivale ad un'unica forza
o a una coppia pur essendo ortogonali all'asse del collare.
Il vincolo introduce 4 incognite dinamiche ausiliarie cioè:
.
Se si prende come il polo dei momenti un punto fisso dell'asse ad esempio l'origine O della
terna RC (0xyz) e si proiettano le equazioni cardinali della dinamica sull'asse x si ottengono le
equazioni: {
( )
( )
Che costituiscono un sistema di due equazioni
differenziali completo e puro nelle incognite cinematiche xG(t) e θ (t). Tale sistema è sufficiente
ad individuare tutti e soli i moti di un corpo rigido vincolato da un collare e soggetto ad una
assegnata sollecitazione attiva. Infine per determinare le incognite ausiliarie, dopo aver
determinato i moti del corpo, si sostituiscono le quattro conseguenze scalari delle equazioni
cardinali della dinamica che rappresentano il particolare moto e si risolvono nelle incognite
.
Il lavoro elementare della sollecitazione esterna agente sul corpo si riduce al lavoro della
sollecitazione attiva (
) Mentre per l'energia cinetica non conviene usare
il teorema di König ma basta sostituire alla definizione di T l'espressione della velocità rispetto

al baricentro dunque si ha:
(
) . Da cui si ricava il teorema del lavoro nel
caso di un corpo rigido vincolato da un collare:
(
) (
) .
Dalle equazioni e
e dalle equazioni cardinali della statica, proiettate
sull'asse x si ottiene sistema di equazioni scalari pure: {
( )
( )
Che è sufficiente
ad individuare tutte le sole le posizioni di equilibrio di un corpo rigido vincolato da un collare e
soggetto ad una assegnata sollecitazione attiva.
Si usa talvolta un collare sottile per indicare un collare avente uno spessore piccolo rispetto al
diametro ed si può ammettere che le relazioni esplicate dal collare siano equivalenti ad
un'unica forza applicata ad un punto dell'asse chiamato centro del collare sottile, tale collare
sottile introduce solamente 2 incognite dinamiche ausiliarie.
In base a tale sistema precedente , per un corpo rigido vincolato da un collare sono di
equilibrio tutte e sole le posizioni nelle quali, in corrispondenza ad un atto di moto nullo e per
ogni istante di tempo, la sollecitazione attiva ha somma ortogonale all'asse e momento nullo
rispetto ad esso.
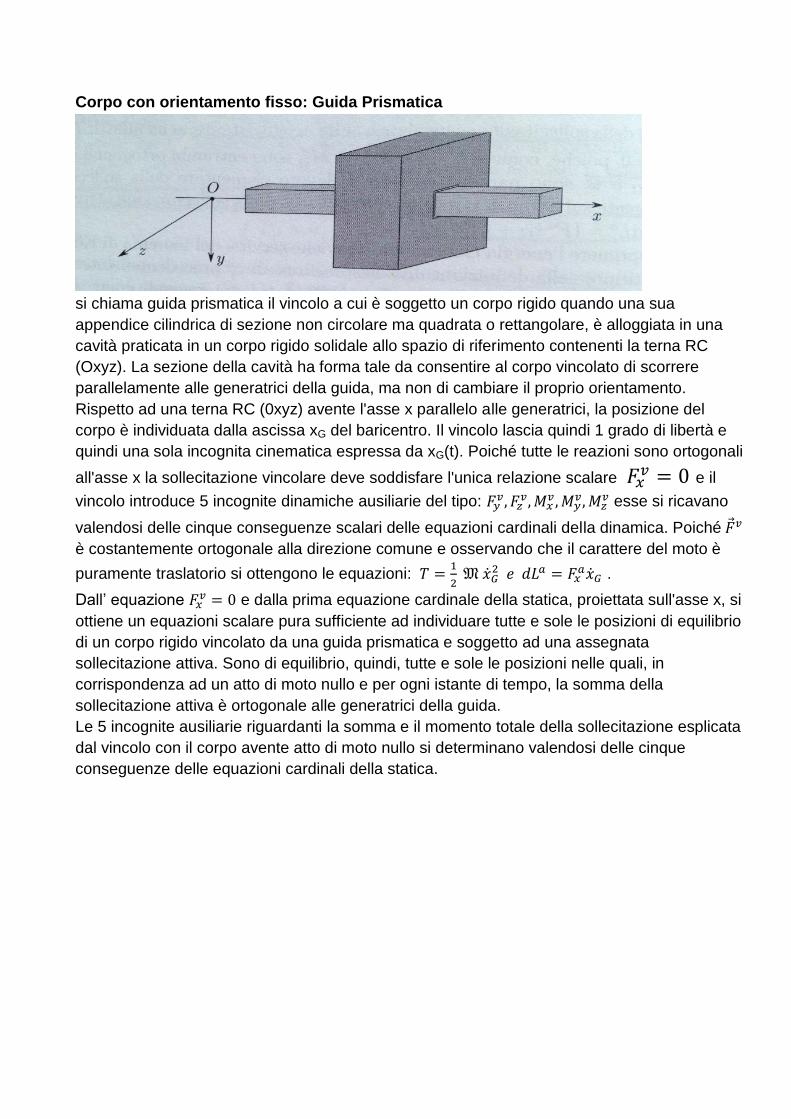
Corpo con orientamento fisso: Guida Prismatica
si chiama guida prismatica il vincolo a cui è soggetto un corpo rigido quando una sua
appendice cilindrica di sezione non circolare ma quadrata o rettangolare, è alloggiata in una
cavità praticata in un corpo rigido solidale allo spazio di riferimento contenenti la terna RC
(Oxyz). La sezione della cavità ha forma tale da consentire al corpo vincolato di scorrere
parallelamente alle generatrici della guida, ma non di cambiare il proprio orientamento.
Rispetto ad una terna RC (0xyz) avente l'asse x parallelo alle generatrici, la posizione del
corpo è individuata dalla ascissa xG del baricentro. Il vincolo lascia quindi 1 grado di libertà e
quindi una sola incognita cinematica espressa da xG(t). Poiché tutte le reazioni sono ortogonali
all'asse x la sollecitazione vincolare deve soddisfare l'unica relazione scalare e il
vincolo introduce 5 incognite dinamiche ausiliarie del tipo:
esse si ricavano
valendosi delle cinque conseguenze scalari delle equazioni cardinali della dinamica. Poiché
è costantemente ortogonale alla direzione comune e osservando che il carattere del moto è
puramente traslatorio si ottengono le equazioni:
.
Dall’ equazione e dalla prima equazione cardinale della statica, proiettata sull'asse x, si
ottiene un equazioni scalare pura sufficiente ad individuare tutte e sole le posizioni di equilibrio
di un corpo rigido vincolato da una guida prismatica e soggetto ad una assegnata
sollecitazione attiva. Sono di equilibrio, quindi, tutte e sole le posizioni nelle quali, in
corrispondenza ad un atto di moto nullo e per ogni istante di tempo, la somma della
sollecitazione attiva è ortogonale alle generatrici della guida.
Le 5 incognite ausiliarie riguardanti la somma e il momento totale della sollecitazione esplicata
dal vincolo con il corpo avente atto di moto nullo si determinano valendosi delle cinque
conseguenze delle equazioni cardinali della statica.





























