Embed Size (px)
Citation preview
Copy Right by C.KANAMORI 2008 2
ベルト,チェーン,フリクション伝動装置巻き掛け伝動装置
ベルト伝動とチェーン伝動
ベルト伝動装置
長所と短所
平ベルトの特徴
ベルト伝動の力学
ベルトの張力と伝達動力
Vベルトの特徴
歯付きベルト
金属ベルト
チェーン伝動装置
特長
チェーンとスプロケット
摩擦伝動装置
Copy Right by C.KANAMORI 2008 3
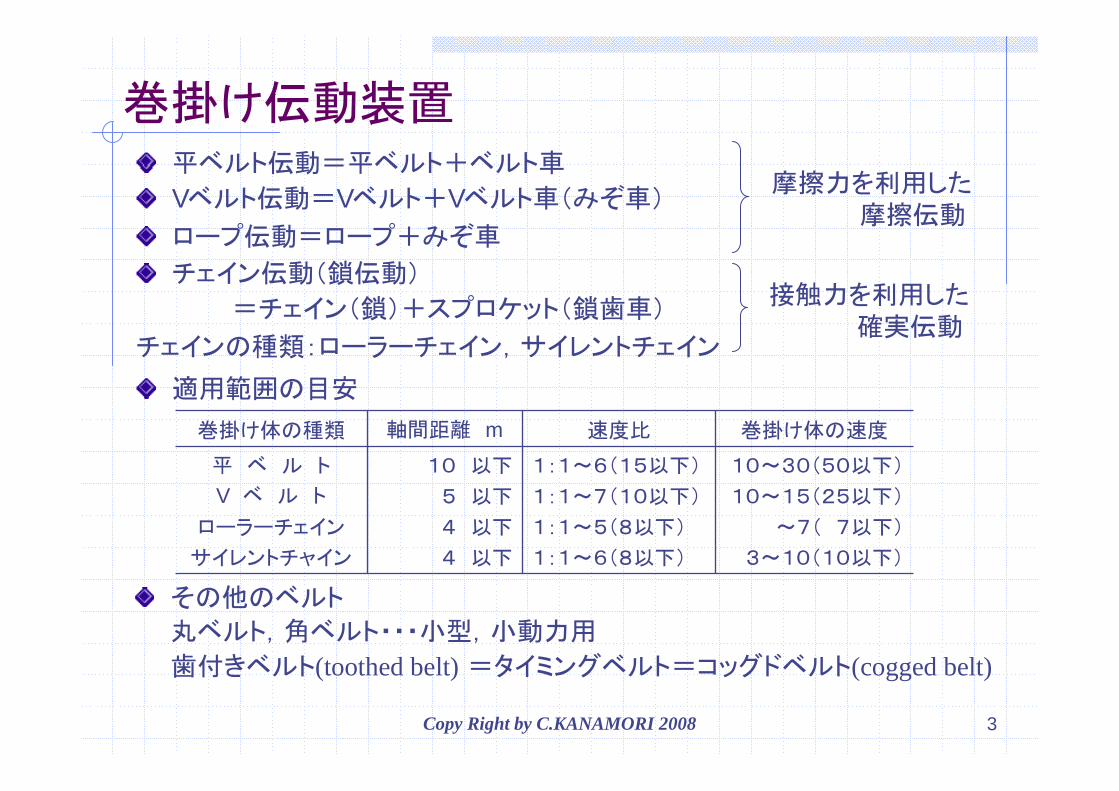
巻掛け伝動装置平ベルト伝動=平ベルト+ベルト車
Vベルト伝動=Vベルト+Vベルト車(みぞ車)
ロープ伝動=ロープ+みぞ車
チェイン伝動(鎖伝動)
=チェイン(鎖)+スプロケット(鎖歯車)
チェインの種類:ローラーチェイン,サイレントチェイン
その他のベルト
丸ベルト,角ベルト・・・小型,小動力用
歯付きベルト(toothed belt) =タイミングベルト=コッグドベルト(cogged belt)
摩擦力を利用した摩擦伝動
接触力を利用した確実伝動
適用範囲の目安
10~30(50以下)
10~15(25以下)
~7( 7以下)
3~10(10以下)
1:1~6(15以下)
1:1~7(10以下)
1:1~5(8以下)
1:1~6(8以下)
10 以下
5 以下
4 以下
4 以下
平 ベ ル ト
V ベ ル ト
ローラーチェイン
サイレントチャイン
巻掛け体の速度速度比軸間距離 m巻掛け体の種類
Copy Right by C.KANAMORI 2008 4
ベルト伝動(平・V)の長所と短所長所
(1) 構造が簡単、安価、潤滑装置が不要
(2) 静粛、振動小、振動を吸収(低、中速度)
(3) 軸間距離の制約がない
(4) 多軸伝動可能
(5) 効率が比較的良い(96~98%)
(6) 比較的簡単に大きな速度比が得られる(通常6以下)
短所
(1) ベルトとベルト車との間の摩擦が低下するとすべりが発生
すべりが発生すると回転比が一定でなくなる
→精密な回転比が要求される動力伝動では要注意
(良い面)過負荷運転時の安全装置の役目
(2) 大動力伝動は不向き→Vベルト+本数増加
(3) 速度制限あり←遠心力により摩擦力がなくなる
(4) 比較的場所を多く必要とする.
Copy Right by C.KANAMORI 2008 5
平ベルト伝動の特徴1.速度比は1:6位まで
2.軸間距離:10m以下
3.ベルトには常に張力が必要
4.周速度:10~30m/s5.すべりが大きい→回転角の伝達精度があまりよくない
高精度な回転伝達が必要な場合は,鋼ベルトを使用する。
6.軸の配置が自由→ベルトの掛け方
7.ベルトの横ずれ→ベルト車の外周面の形状を工夫
Copy Right by C.KANAMORI 2008 6
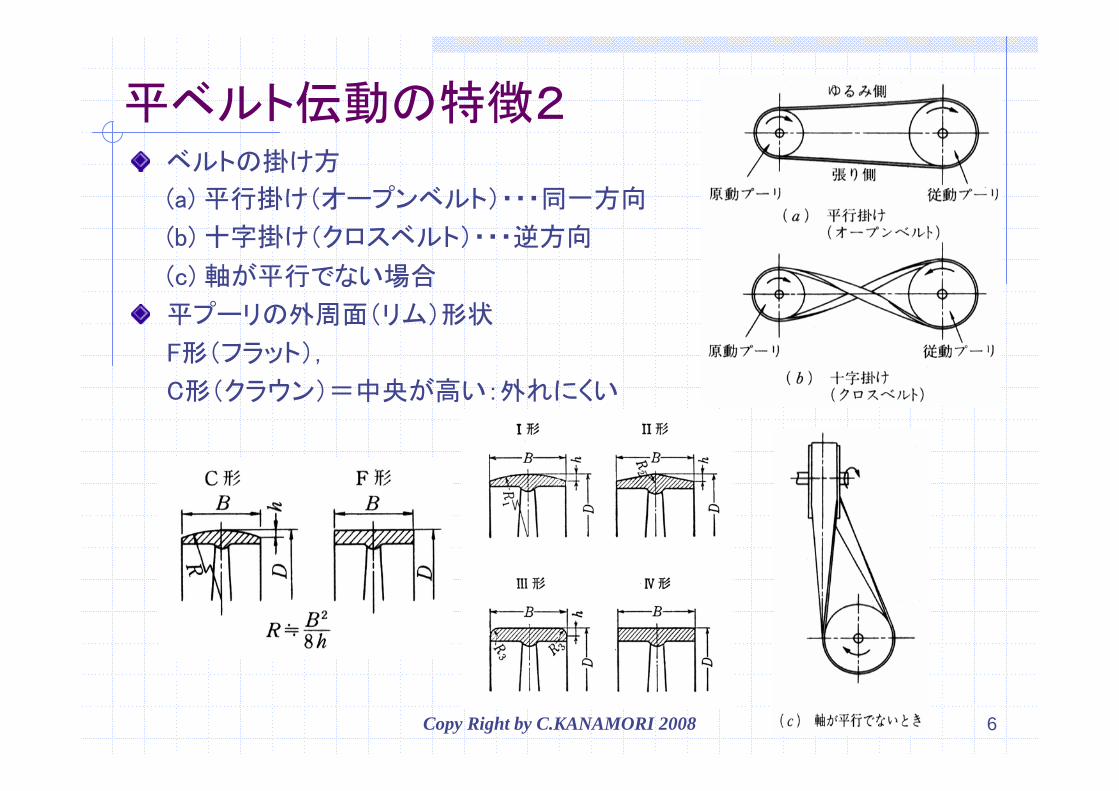
平ベルト伝動の特徴2ベルトの掛け方
(a) 平行掛け(オープンベルト)・・・同一方向
(b) 十字掛け(クロスベルト)・・・逆方向
(c) 軸が平行でない場合
平プーリの外周面(リム)形状
F形(フラット),
C形(クラウン)=中央が高い:外れにくい
Copy Right by C.KANAMORI 2008 7
ベルト伝動に必要な性能と材質ベルト伝動に必要な性能
摩擦係数,耐熱性,耐油性,耐酸性,機械的強度
ベルトの材質
皮革:牛など動物の皮,摩擦係数大,放熱性あり,継手あり
→古くから使われてきた
織物:木綿,人絹,麻など.皮革より強い,継手なしもあり.
→小馬力高速伝動用,研磨車用,運搬用
ゴム:木綿,人絹などの布をゴムで張り合わせたもの.熱,油に弱い.
→JIS規格(標準寸法,強さ)
鋼:圧延鋼板,継目はつき合わせてロウ付け.
→正確な回転角の伝達用
ベルト車の材質(リムの許容周速度:遠心力で破壊しないための)
鋳 鉄 製 20 m/s,軽合金製,鉄板製,木製 30 m/s,鉄心木製 40 m/s,紙 製 40-50 m/s
Copy Right by C.KANAMORI 2008 8
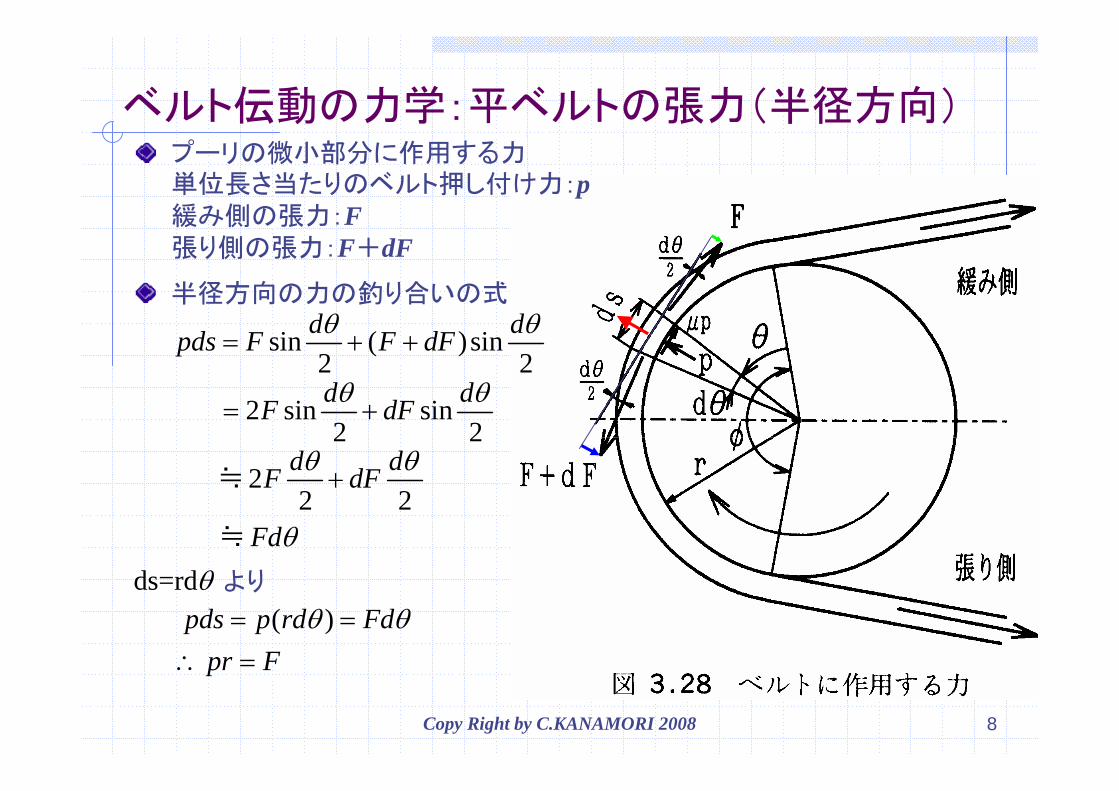
ベルト伝動の力学:平ベルトの張力(半径方向)プーリの微小部分に作用する力単位長さ当たりのベルト押し付け力:p緩み側の張力:F張り側の張力:F+dF
半径方向の力の釣り合いの式
sin ( )sin2 2
d dpds F F dFθ θ= + +
2 sin sin2 2
d dF dFθ θ= +
22 2
d dF dFθ θ+≒
ds=rdθ より
( )pds p rd Fdpr F
θ θ= =∴ =
Fdθ≒
Copy Right by C.KANAMORI 2008 9
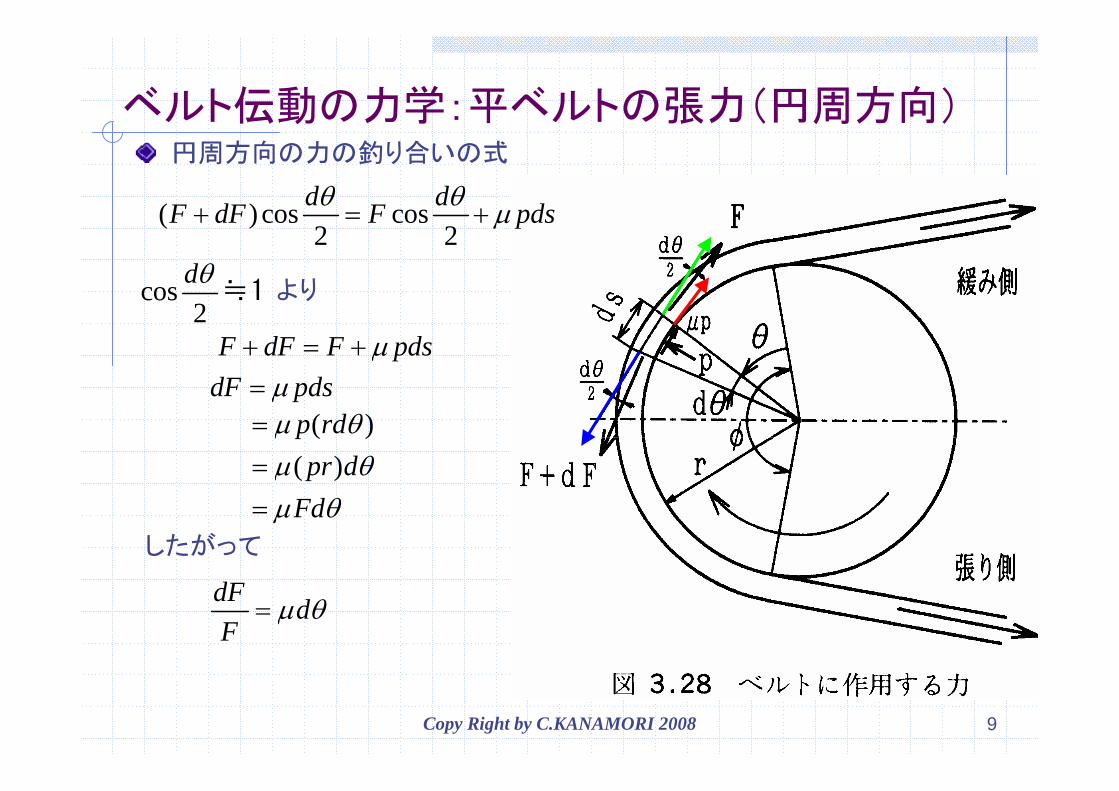
ベルト伝動の力学:平ベルトの張力(円周方向)円周方向の力の釣り合いの式
( ) cos cos2 2
d dF dF F pdsθ θ μ+ = +
よりcos2
dθ≒1
F dF F pdsμ+ = +dF pdsμ=
したがって
dF dF
μ θ=
( )( )p rdpr d
Fd
μ θμ θμ θ
===
Copy Right by C.KANAMORI 2008 10
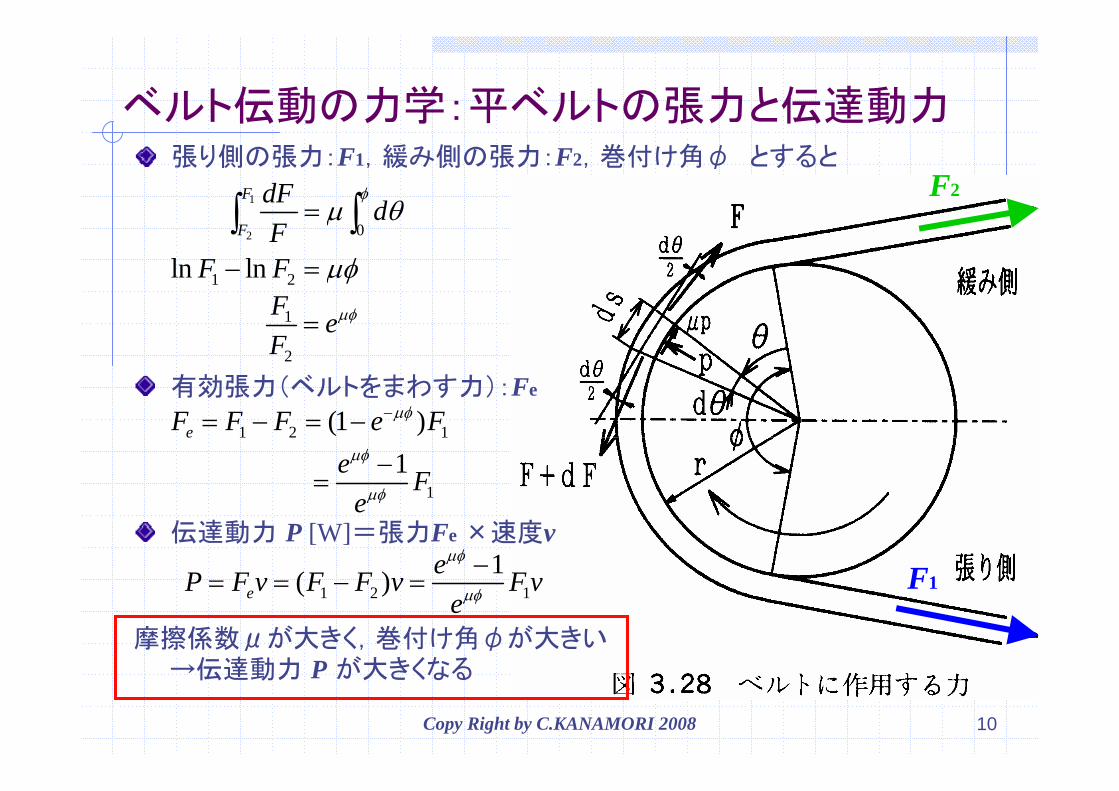
ベルト伝動の力学:平ベルトの張力と伝達動力張り側の張力:F1,緩み側の張力:F2,巻付け角φ とすると
有効張力(ベルトをまわす力):Fe
1
2 0
F
F
dF dF
φμ θ=∫ ∫
1 2ln lnF F μφ− =
1
2
F eF
μφ=
1 2 1(1 )eF F F e Fμφ−= − = −
11e F
e
μφ
μφ
−=
伝達動力 P [W]=張力Fe ×速度v
1 2 11( )e
eP F v F F v F ve
μφ
μφ
−= = − =
F2
F1
摩擦係数μが大きく,巻付け角φが大きい→伝達動力 P が大きくなる
Copy Right by C.KANAMORI 2008 11
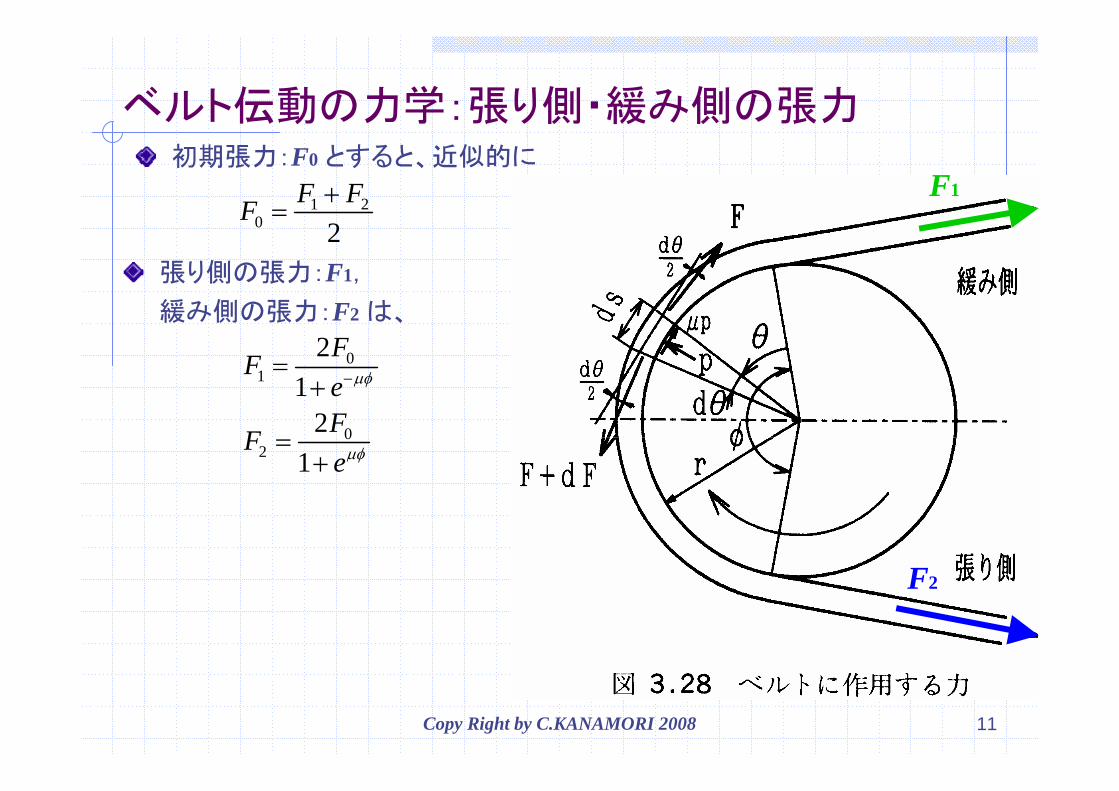
ベルト伝動の力学:張り側・緩み側の張力初期張力:F0 とすると、近似的に
1 20 2
F FF +=
01
02
21
21
FFeFFe
μφ
μφ
−=+
=+
F1
F2
張り側の張力:F1,
緩み側の張力:F2 は、
Copy Right by C.KANAMORI 2008 12
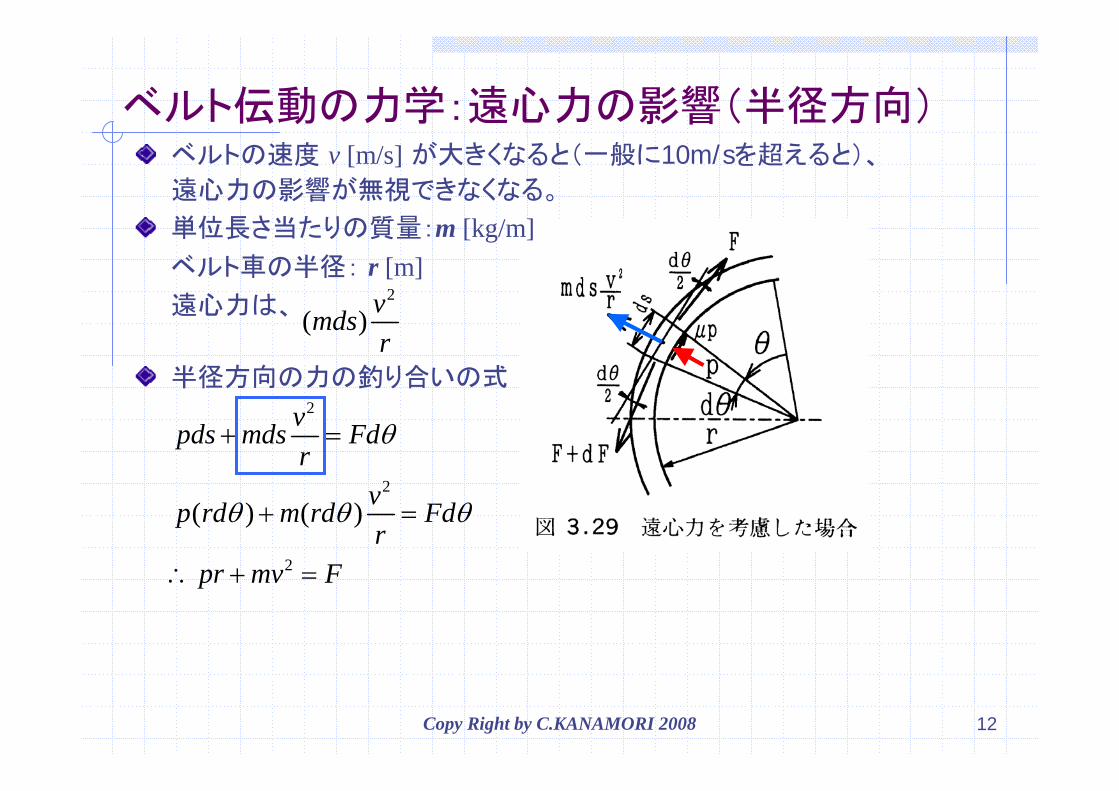
ベルト伝動の力学:遠心力の影響(半径方向)ベルトの速度 v [m/s] が大きくなると(一般に10m/sを超えると)、
遠心力の影響が無視できなくなる。
単位長さ当たりの質量:m [kg/m]ベルト車の半径: r [m]遠心力は、
半径方向の力の釣り合いの式2
2
2
( ) ( )
vpds mds Fdr
vp rd m rd Fdr
pr mv F
θ
θ θ θ
+ =
+ =
∴ + =
2
( ) vmdsr
Copy Right by C.KANAMORI 2008 13
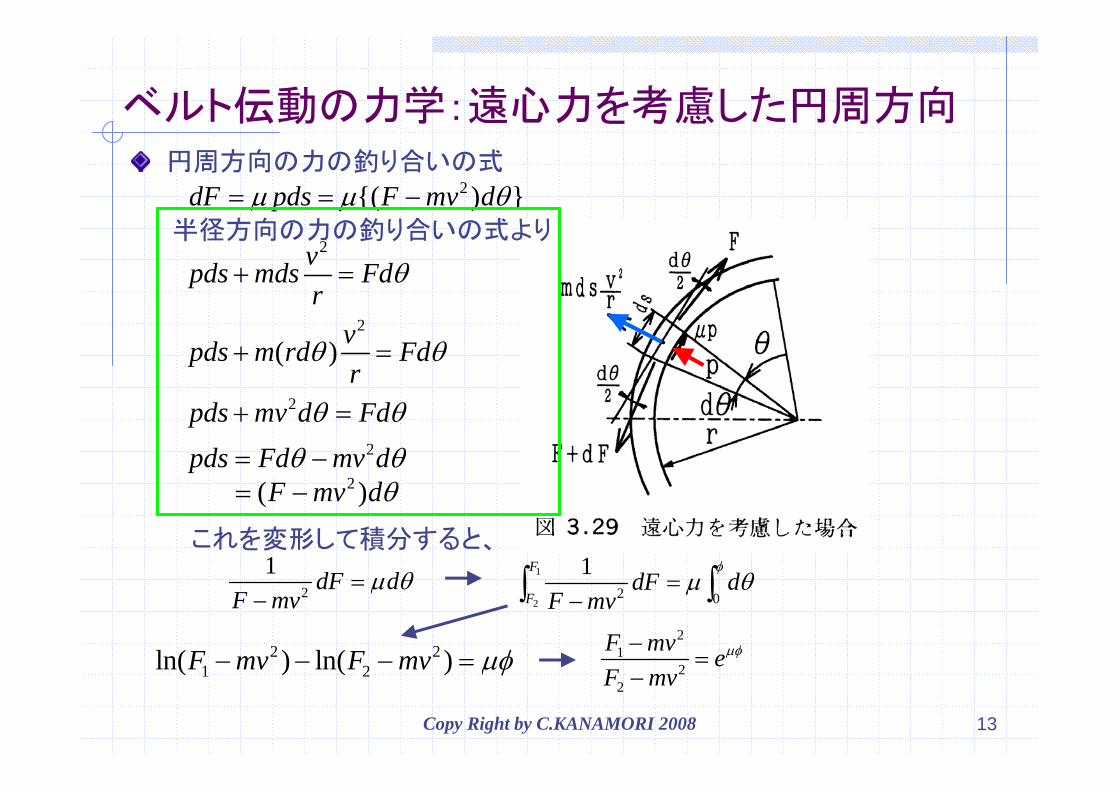
ベルト伝動の力学:遠心力を考慮した円周方向円周方向の力の釣り合いの式
2{( ) }dF pds F mv dμ μ θ= = −
2
2
2
2
( )
vpds mds Fdr
vpds m rd Fdr
pds mv d Fdpds Fd mv d
θ
θ θ
θ θ
θ θ
+ =
+ =
+ =
= −
半径方向の力の釣り合いの式より
2( )F mv dθ= −
これを変形して積分すると、
2
1 dF dF mv
μ θ=−
1
22 0
1F
FdF d
F mvφ
μ θ=−∫ ∫
21
22
F mv eF mv
μφ−=
−2 2
1 2ln( ) ln( )F mv F mv μφ− − − =
Copy Right by C.KANAMORI 2008 14
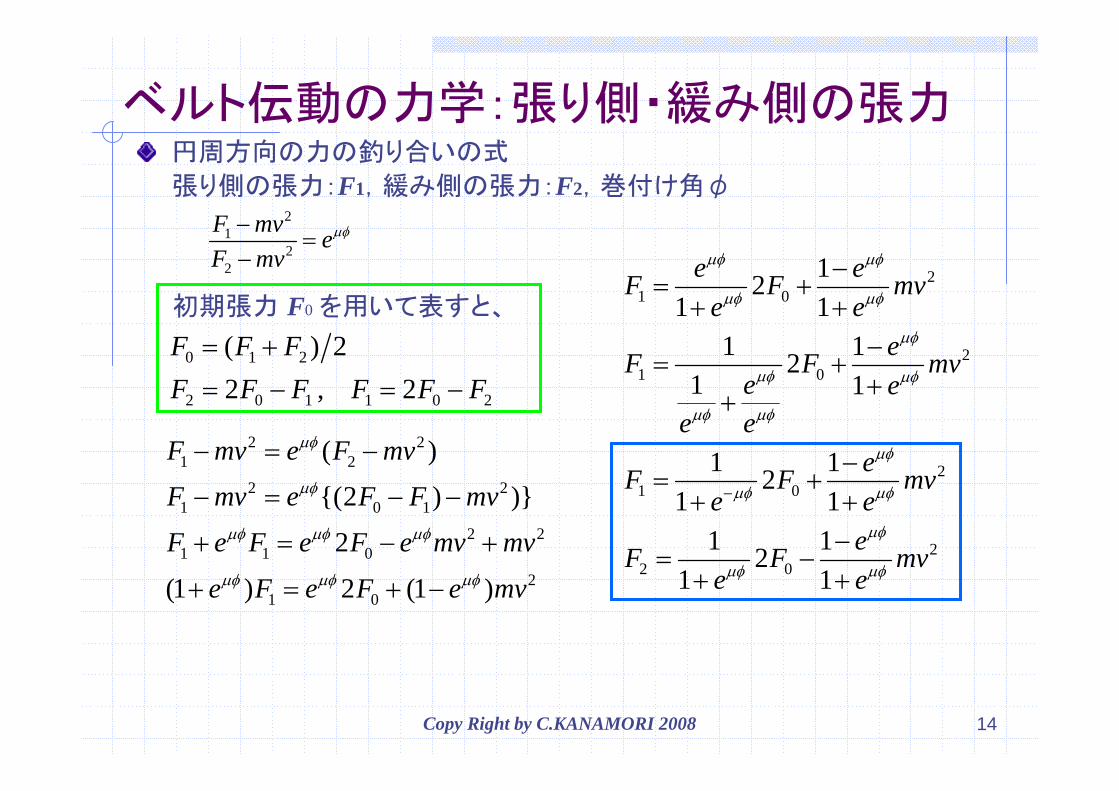
ベルト伝動の力学:張り側・緩み側の張力円周方向の力の釣り合いの式
張り側の張力:F1,緩み側の張力:F2,巻付け角φ
0 1 2
2 0 1 1 0 2
( ) 22 , 2
F F FF F F F F F
= +
= − = −
初期張力 F0 を用いて表すと、
21
22
F mv eF mv
μφ−=
−
2 21 2
2 21 0 1
2 21 1 0
21 0
( )
{(2 ) )}
2
(1 ) 2 (1 )
F mv e F mv
F mv e F F mv
F e F e F e mv mv
e F e F e mv
μφ
μφ
μφ μφ μφ
μφ μφ μφ
− = −
− = − −
+ = − +
+ = + −
21 0
21 0
21 0
22 0
121 1
1 121 1
1 121 1
1 121 1
e eF F mve e
eF F mve e
e eeF F mv
e eeF F mv
e e
μφ μφ
μφ μφ
μφ
μφ μφ
μφ μφ
μφ
μφ μφ
μφ
μφ μφ
−
−= +
+ +−
= +++
−= +
+ +−
= −+ +
Copy Right by C.KANAMORI 2008 15
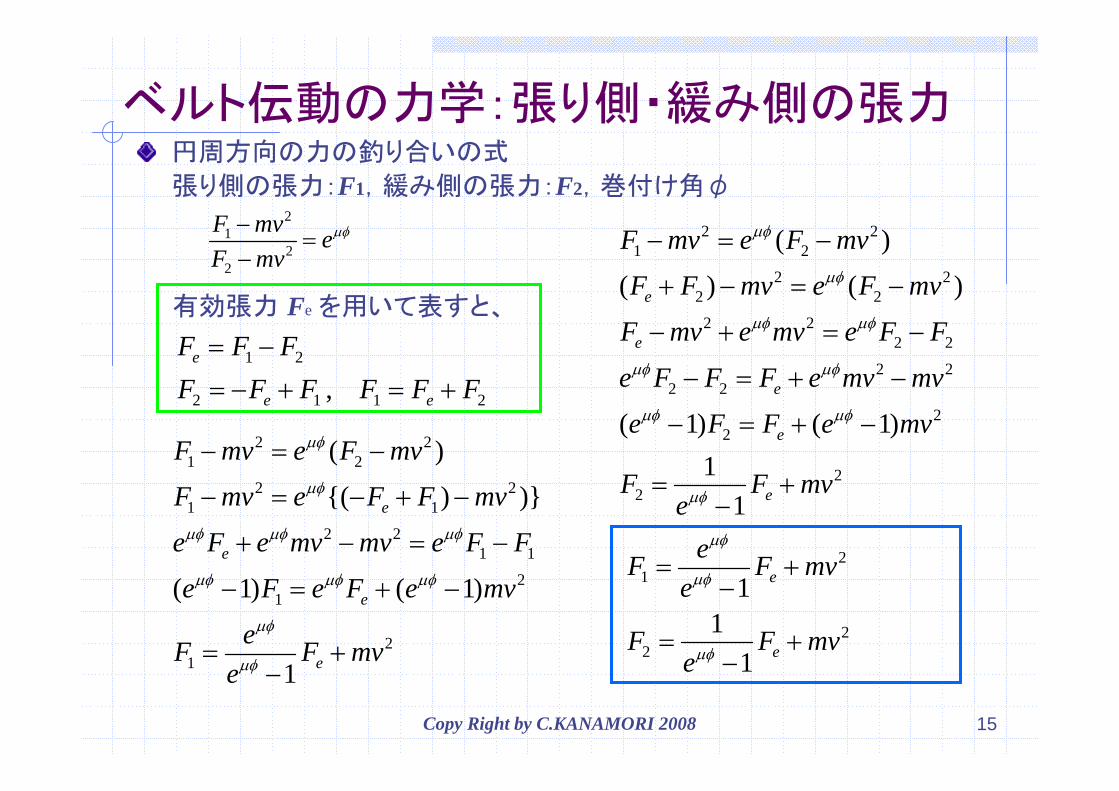
ベルト伝動の力学:張り側・緩み側の張力円周方向の力の釣り合いの式
張り側の張力:F1,緩み側の張力:F2,巻付け角φ
1 2
2 1 1 2,e
e e
F F FF F F F F F
= −
= − + = +
有効張力 Fe を用いて表すと、
21
22
F mv eF mv
μφ−=
−
2 21 2
2 21 1
2 21 1
21
21
( )
{( ) )}
( 1) ( 1)
1
e
e
e
e
F mv e F mv
F mv e F F mv
e F e mv mv e F F
e F e F e mv
eF F mve
μφ
μφ
μφ μφ μφ
μφ μφ μφ
μφ
μφ
− = −
− = − + −
+ − = −
− = + −
= +−
2 21 2
2 22 2
2 22 2
2 22 2
22
22
( )
( ) ( )
( 1) ( 1)1
1
e
e
e
e
e
F mv e F mv
F F mv e F mv
F mv e mv e F F
e F F F e mv mv
e F F e mv
F F mve
μφ
μφ
μφ μφ
μφ μφ
μφ μφ
μφ
− = −
+ − = −
− + = −
− = + −
− = + −
= +−
21
22
11
1
e
e
eF F mve
F F mve
μφ
μφ
μφ
= +−
= +−
Copy Right by C.KANAMORI 2008 16
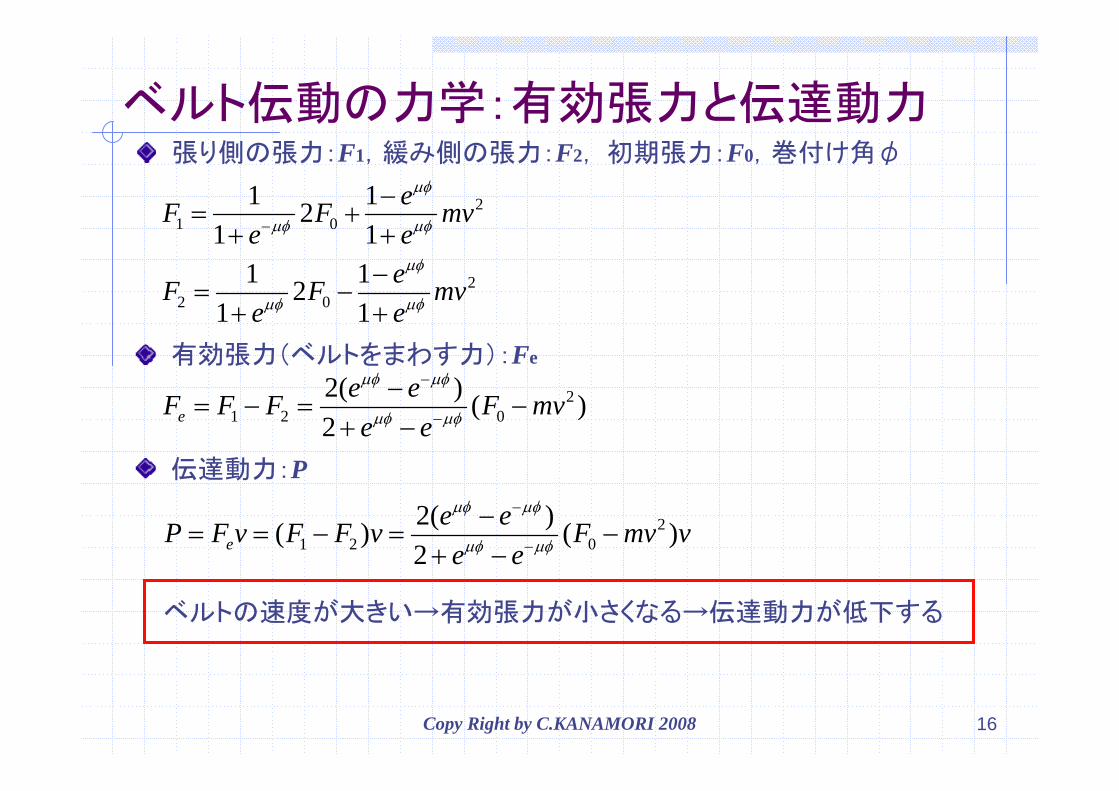
ベルト伝動の力学:有効張力と伝達動力張り側の張力:F1,緩み側の張力:F2, 初期張力:F0,巻付け角φ
21 0
22 0
1 121 1
1 121 1
eF F mve e
eF F mve e
μφ
μφ μφ
μφ
μφ μφ
−
−= +
+ +−
= −+ +
伝達動力:P
21 2 0
2( ) ( )2e
e eF F F F mve e
μφ μφ
μφ μφ
−
−
−= − = −
+ −
有効張力(ベルトをまわす力):Fe
21 2 0
2( )( ) ( )2e
e eP F v F F v F mv ve e
μφ μφ
μφ μφ
−
−
−= = − = −
+ −
ベルトの速度が大きい→有効張力が小さくなる→伝達動力が低下する
Copy Right by C.KANAMORI 2008 17
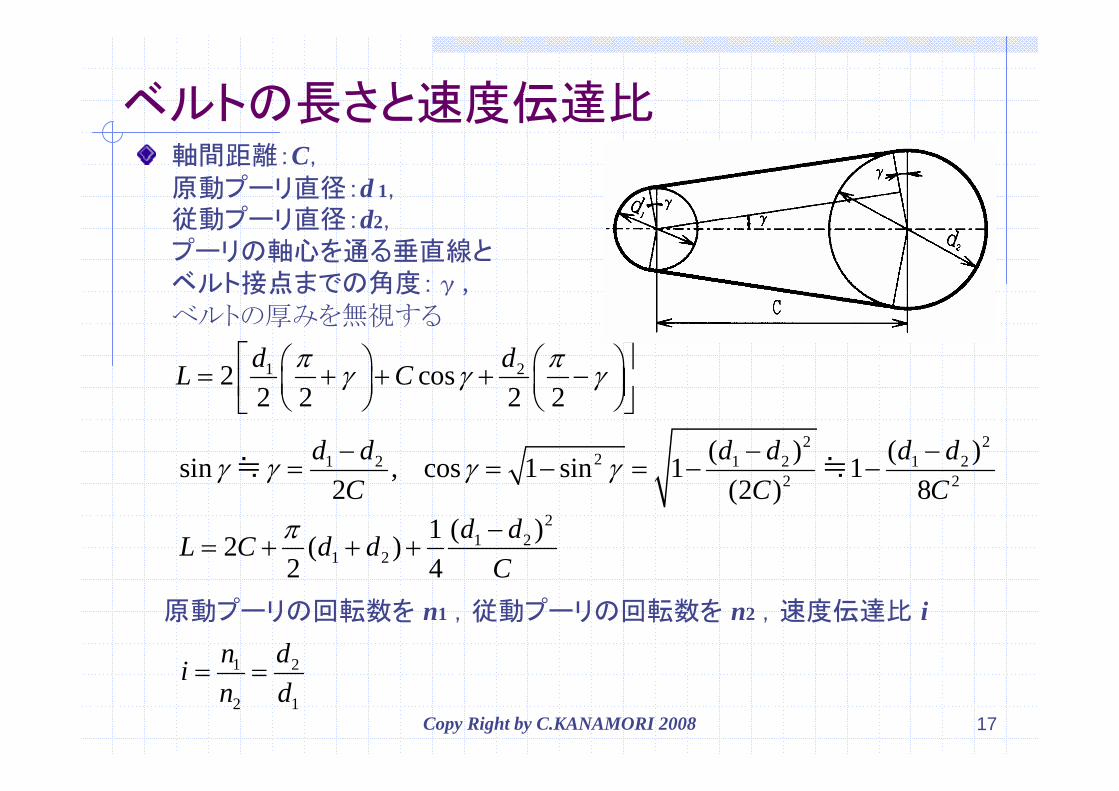
ベルトの長さと速度伝達比軸間距離:C,原動プーリ直径:d 1,従動プーリ直径:d2,プーリの軸心を通る垂直線とベルト接点までの角度:γ,ベルトの厚みを無視する
1 22 cos2 2 2 2d dL Cπ πγ γ γ⎡ ⎤⎛ ⎞ ⎛ ⎞= + + + −⎜ ⎟ ⎜ ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠⎣ ⎦
2 221 2 1 2 1 2
2 2
( ) ( )sin , cos 1 sin 1 12 (2 ) 8
d d d d d dC C C
γ γ γ γ− − −= = − = − −≒ ≒
原動プーリの回転数を n1 ,従動プーリの回転数を n2 ,速度伝達比 i
21 2
1 2( )12 ( )
2 4d dL C d d
Cπ −
= + + +
1 2
2 1
n din d
= =
Copy Right by C.KANAMORI 2008 18
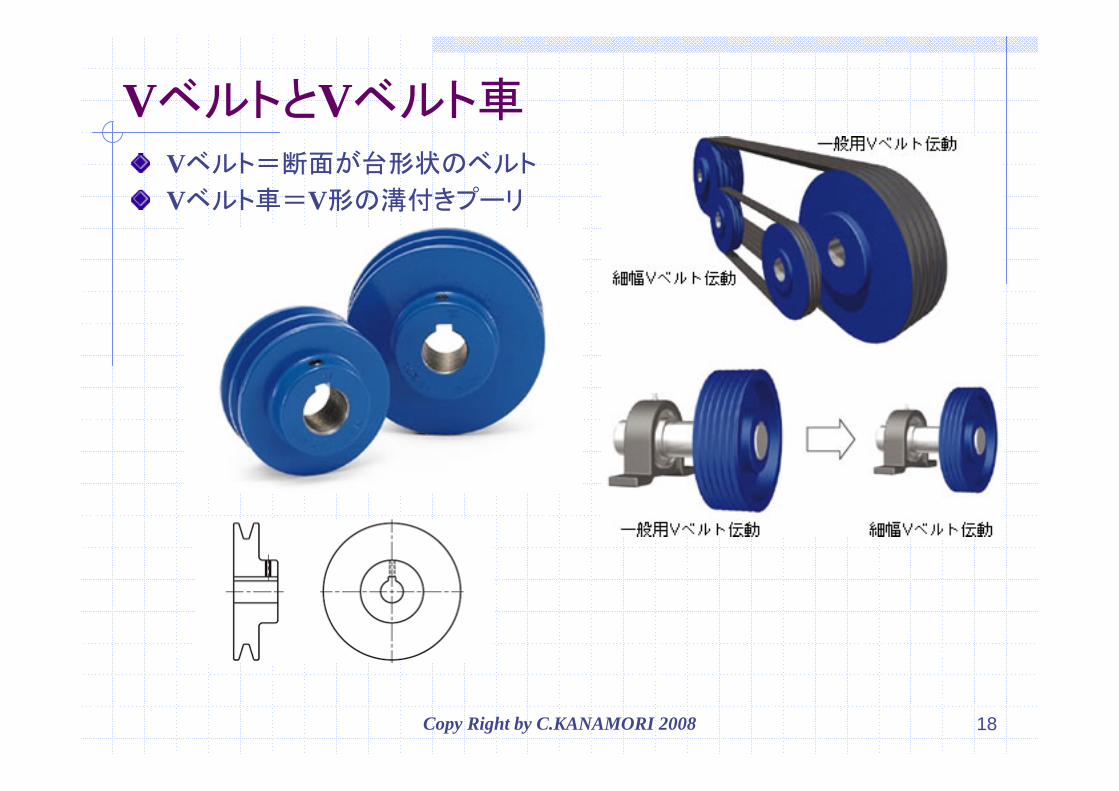
VベルトとVベルト車Vベルト=断面が台形状のベルト
Vベルト車=V形の溝付きプーリ
Copy Right by C.KANAMORI 2008 19
Vベルト伝動の特徴1.速度比は1:7位まで
2.軸間距離:a,
大車の直径<a<(大車の直径+小車の直径)
3.ベルトには常に張力が必要
4.周速度15m/s以下、より大きな周速度の場合は平ベルトを使う
5.ベルトを多段掛けにする場合には、各ベルトの張力を同じにする
6. を 0.6 以下とする
→ベルトとベルト車の間のすべりを小さくするため
7.無段変速機が簡単に作れる
8.平行軸間の動力伝達のみ(ベルトが外れる心配はない)
1 2 1 2( ) ( )F F F F− +
※張り側の張力:F1,緩み側の張力:F2 は、
初期張力:F0,有効張力(ベルトをまわす力):Fe
1 2 0 1 2, 2eF F F F F F= − = +
Copy Right by C.KANAMORI 2008 20
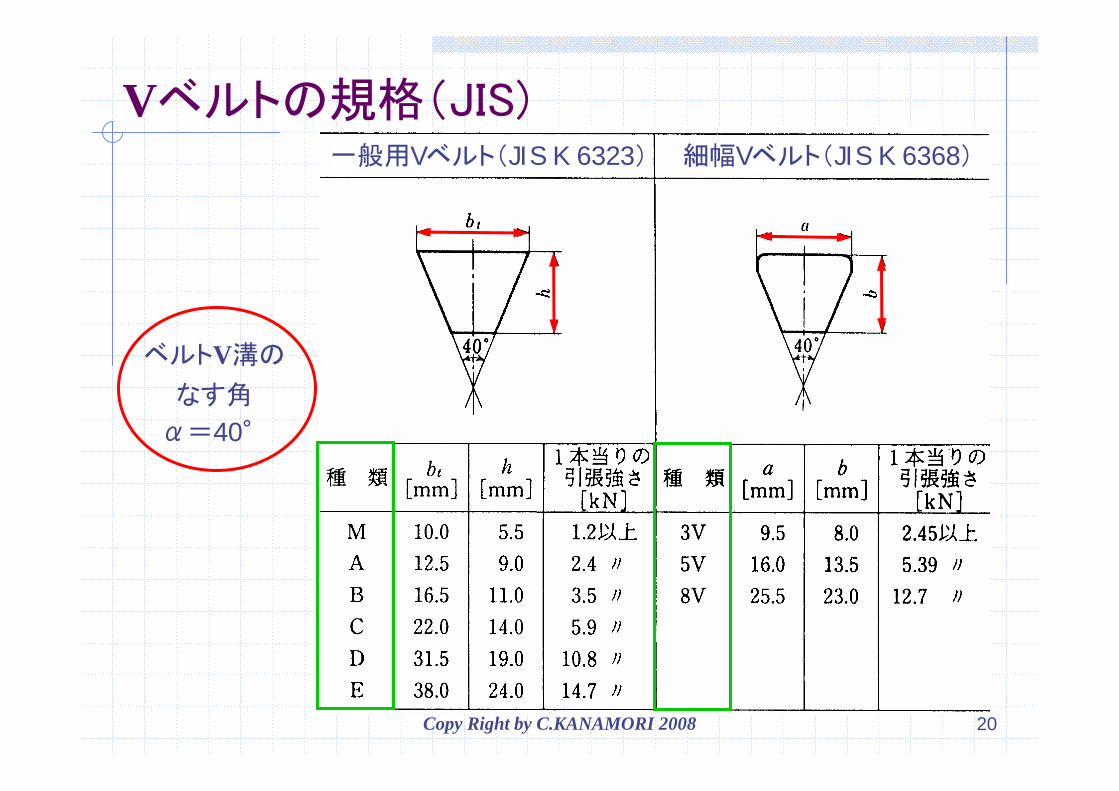
Vベルトの規格(JIS)一般用Vベルト(JIS K 6323) 細幅Vベルト(JIS K 6368)
ベルトV溝の
なす角
α=40°
Copy Right by C.KANAMORI 2008 21
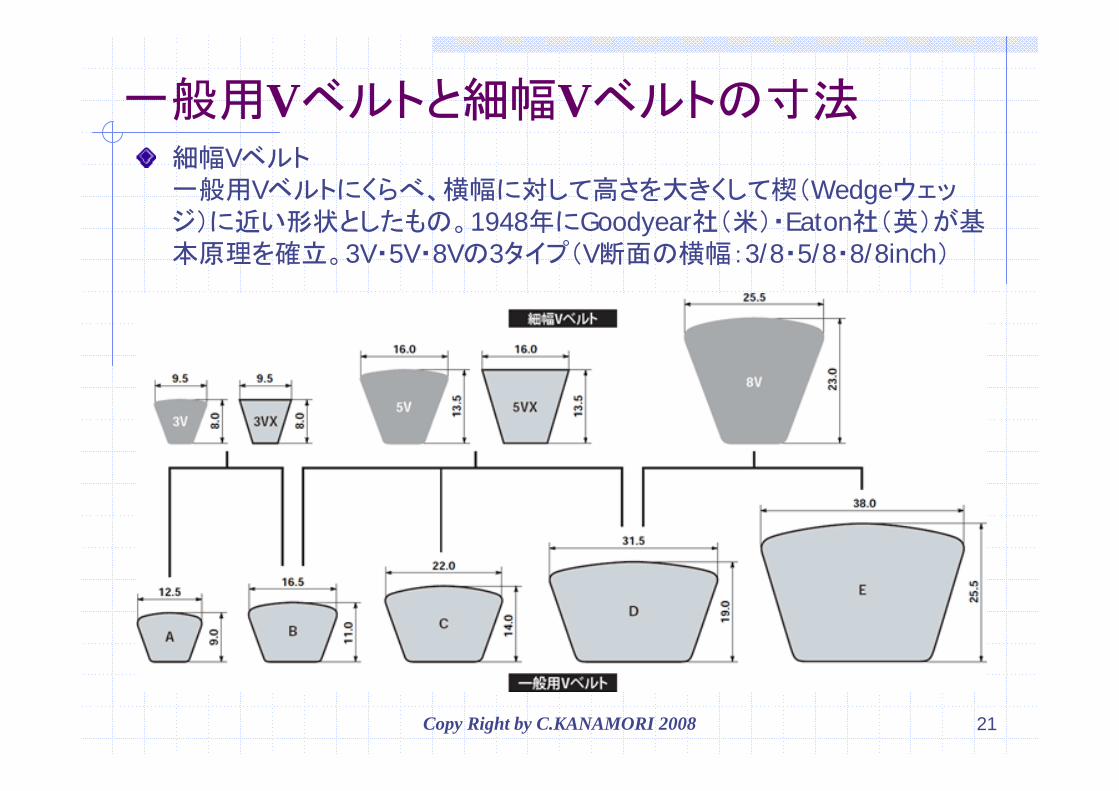
一般用Vベルトと細幅Vベルトの寸法細幅Vベルト一般用Vベルトにくらべ、横幅に対して高さを大きくして楔(Wedgeウェッジ)に近い形状としたもの。1948年にGoodyear社(米)・Eaton社(英)が基本原理を確立。3V・5V・8Vの3タイプ(V断面の横幅:3/8・5/8・8/8inch)
Copy Right by C.KANAMORI 2008 22
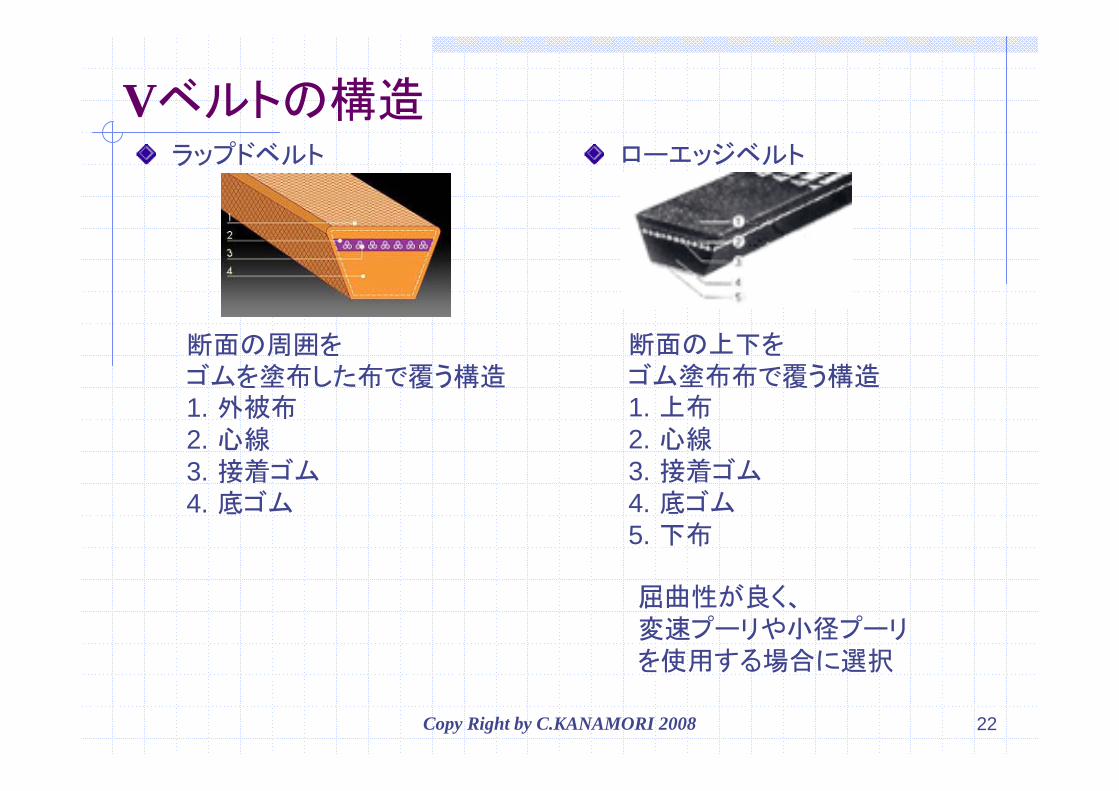
Vベルトの構造ラップドベルト
断面の周囲をゴムを塗布した布で覆う構造1. 外被布2. 心線3. 接着ゴム4. 底ゴム
断面の上下をゴム塗布布で覆う構造1. 上布2. 心線3. 接着ゴム4. 底ゴム5. 下布
ローエッジベルト
屈曲性が良く、変速プーリや小径プーリを使用する場合に選択
Copy Right by C.KANAMORI 2008 23
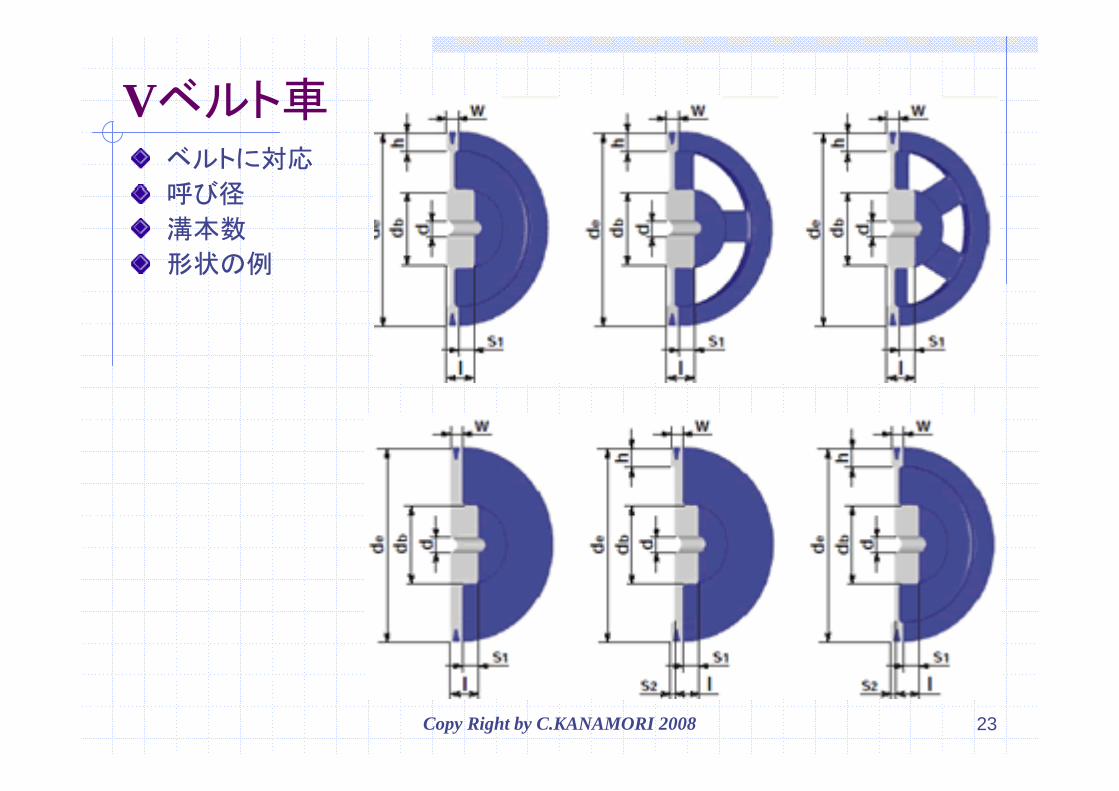
Vベルト車ベルトに対応
呼び径
溝本数
形状の例
Copy Right by C.KANAMORI 2008 24
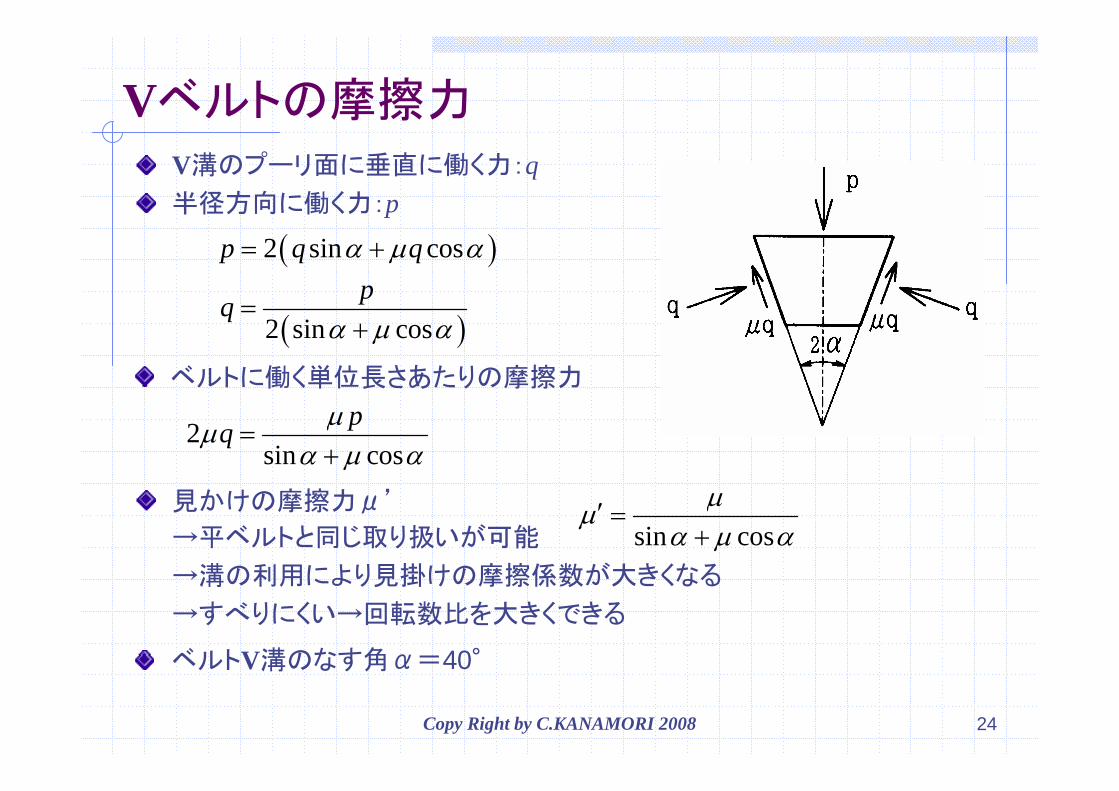
Vベルトの摩擦力V溝のプーリ面に垂直に働く力:q半径方向に働く力:p
( )2 sin cosp q qα μ α= +
2sin cos
pq μμα μ α
=+
ベルトに働く単位長さあたりの摩擦力
( )2 sin cospq
α μ α=
+
見かけの摩擦力μ’
→平ベルトと同じ取り扱いが可能
→溝の利用により見掛けの摩擦係数が大きくなる
→すべりにくい→回転数比を大きくできる
sin cosμμ
α μ α′ =
+
ベルトV溝のなす角α=40°
Copy Right by C.KANAMORI 2008 25
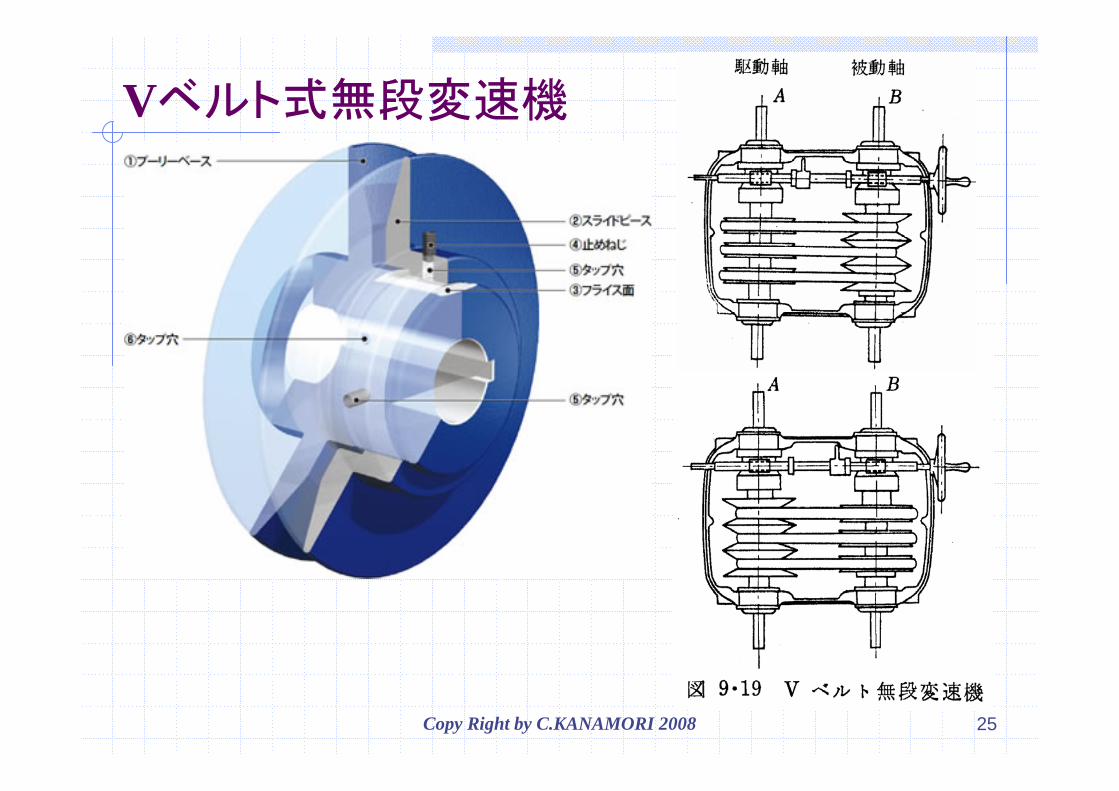
Vベルト式無段変速機
Copy Right by C.KANAMORI 2008 26
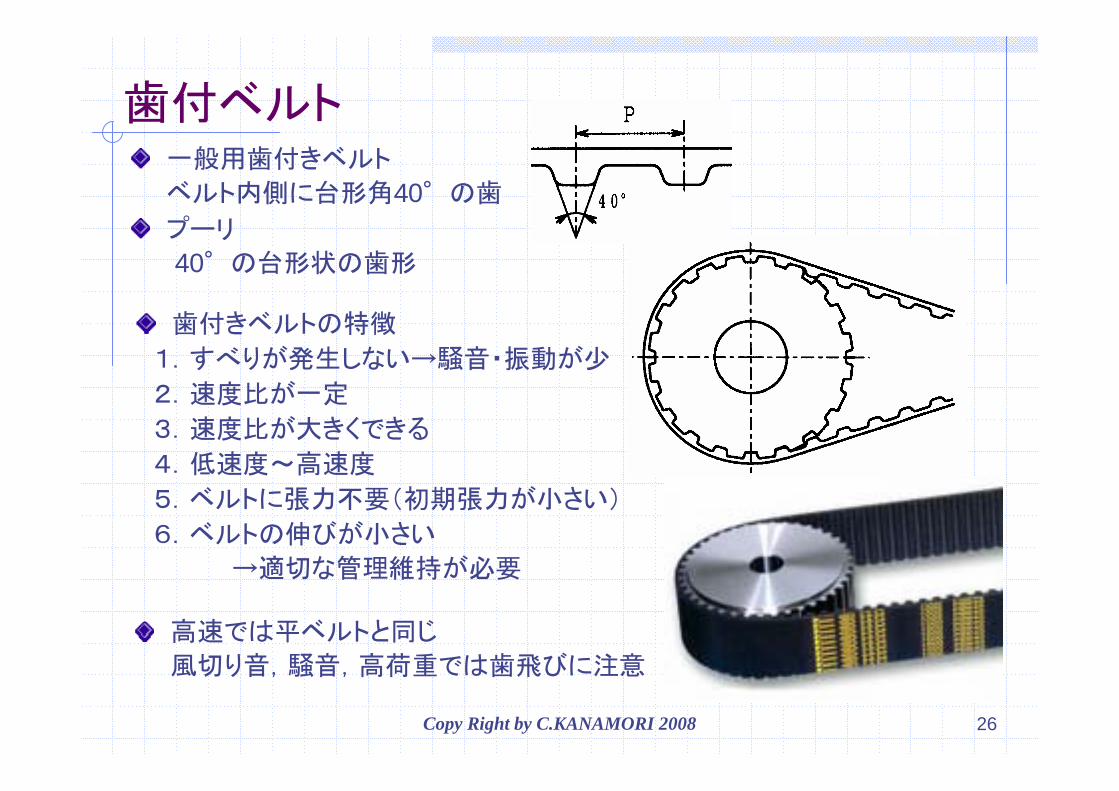
歯付ベルト一般用歯付きベルト
ベルト内側に台形角40°の歯
プーリ
40°の台形状の歯形
歯付きベルトの特徴
1.すべりが発生しない→騒音・振動が少
2.速度比が一定
3.速度比が大きくできる
4.低速度~高速度
5.ベルトに張力不要(初期張力が小さい)
6.ベルトの伸びが小さい
→適切な管理維持が必要
高速では平ベルトと同じ
風切り音,騒音,高荷重では歯飛びに注意
Copy Right by C.KANAMORI 2008 27
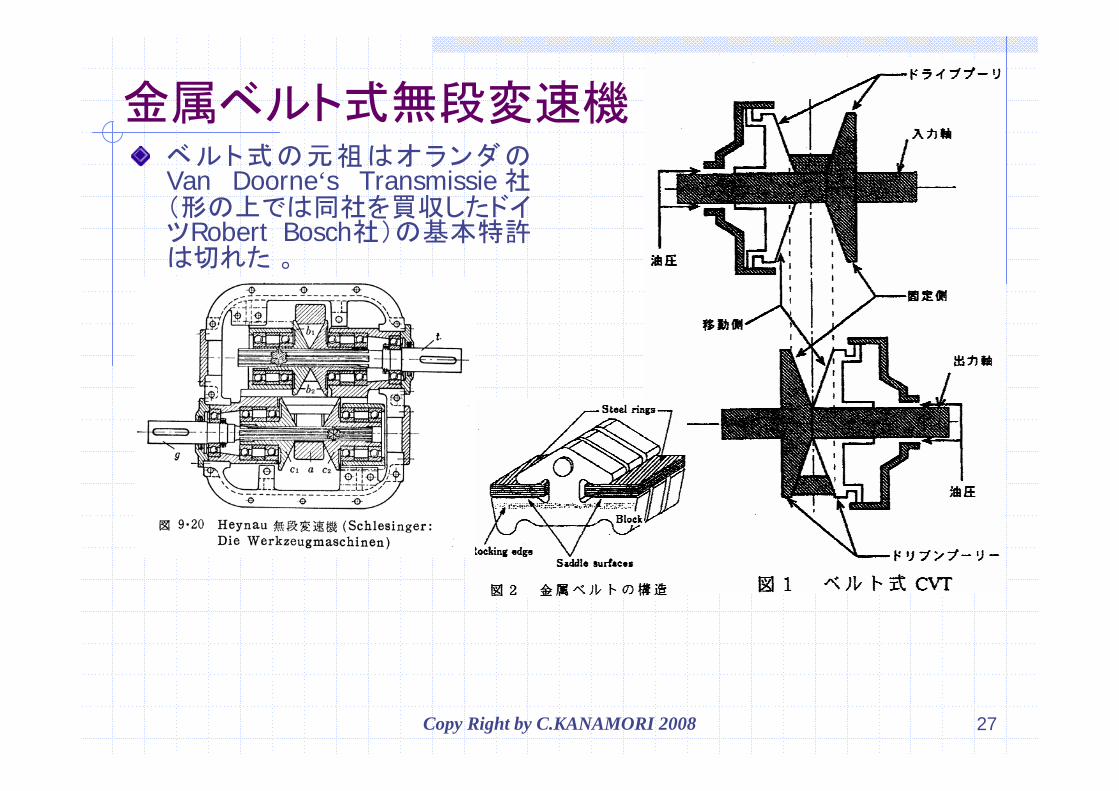
金属ベルト式無段変速機ベルト式の元祖はオランダのVan Doorne‘s Transmissie 社(形の上では同社を買収したドイツRobert Bosch社)の基本特許は切れた 。
Copy Right by C.KANAMORI 2008 28
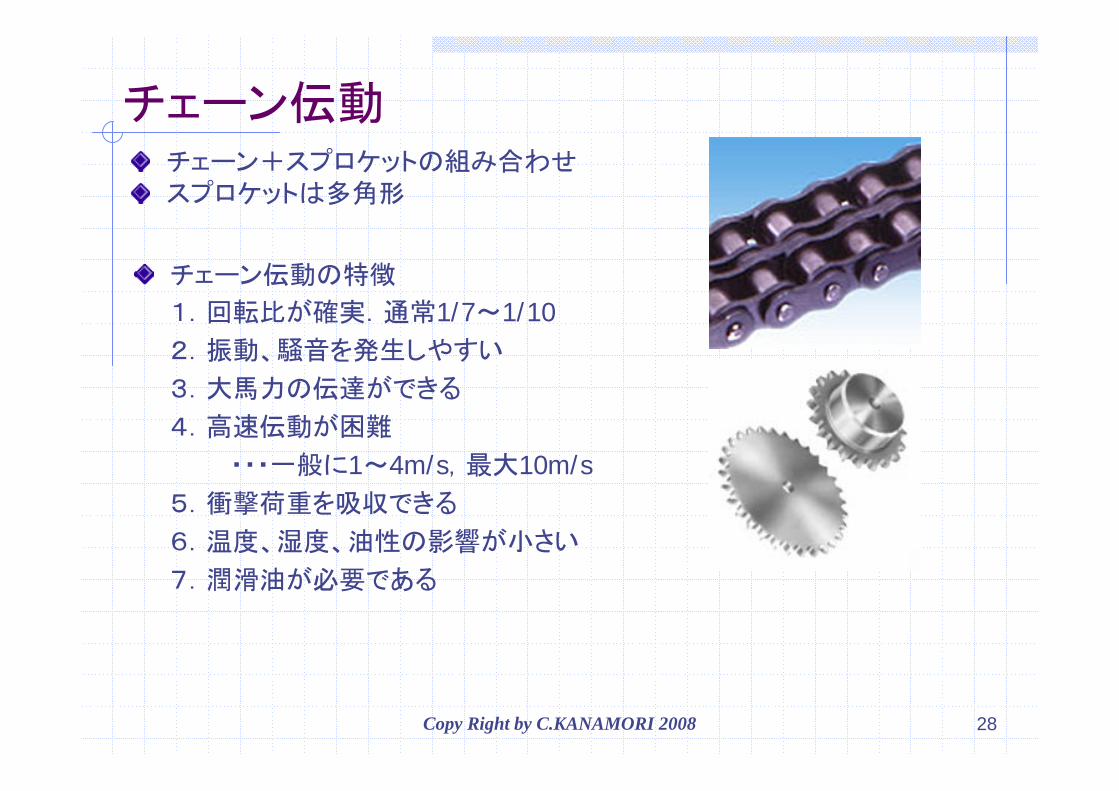
チェーン伝動チェーン+スプロケットの組み合わせスプロケットは多角形
チェーン伝動の特徴
1.回転比が確実.通常1/7~1/102.振動、騒音を発生しやすい
3.大馬力の伝達ができる
4.高速伝動が困難
・・・一般に1~4m/s,最大10m/s5.衝撃荷重を吸収できる
6.温度、湿度、油性の影響が小さい
7.潤滑油が必要である
Copy Right by C.KANAMORI 2008 29
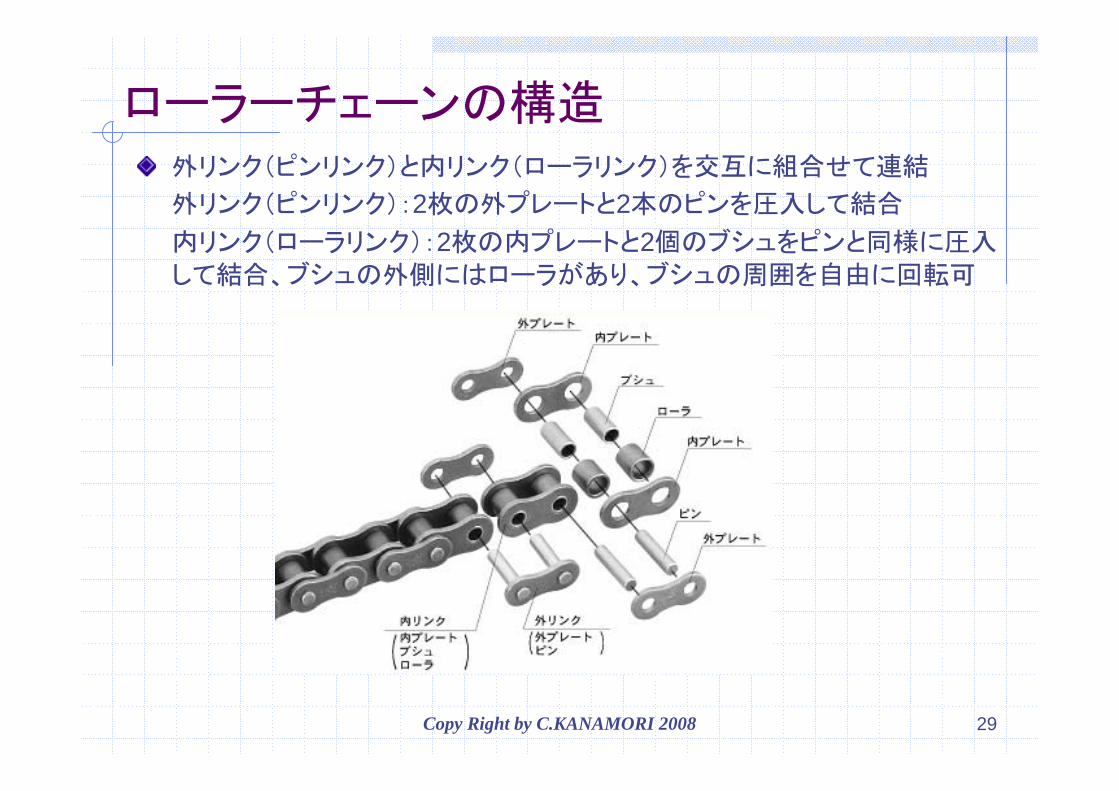
ローラーチェーンの構造外リンク(ピンリンク)と内リンク(ローラリンク)を交互に組合せて連結
外リンク(ピンリンク):2枚の外プレートと2本のピンを圧入して結合
内リンク(ローラリンク):2枚の内プレートと2個のブシュをピンと同様に圧入して結合、ブシュの外側にはローラがあり、ブシュの周囲を自由に回転可
Copy Right by C.KANAMORI 2008 30
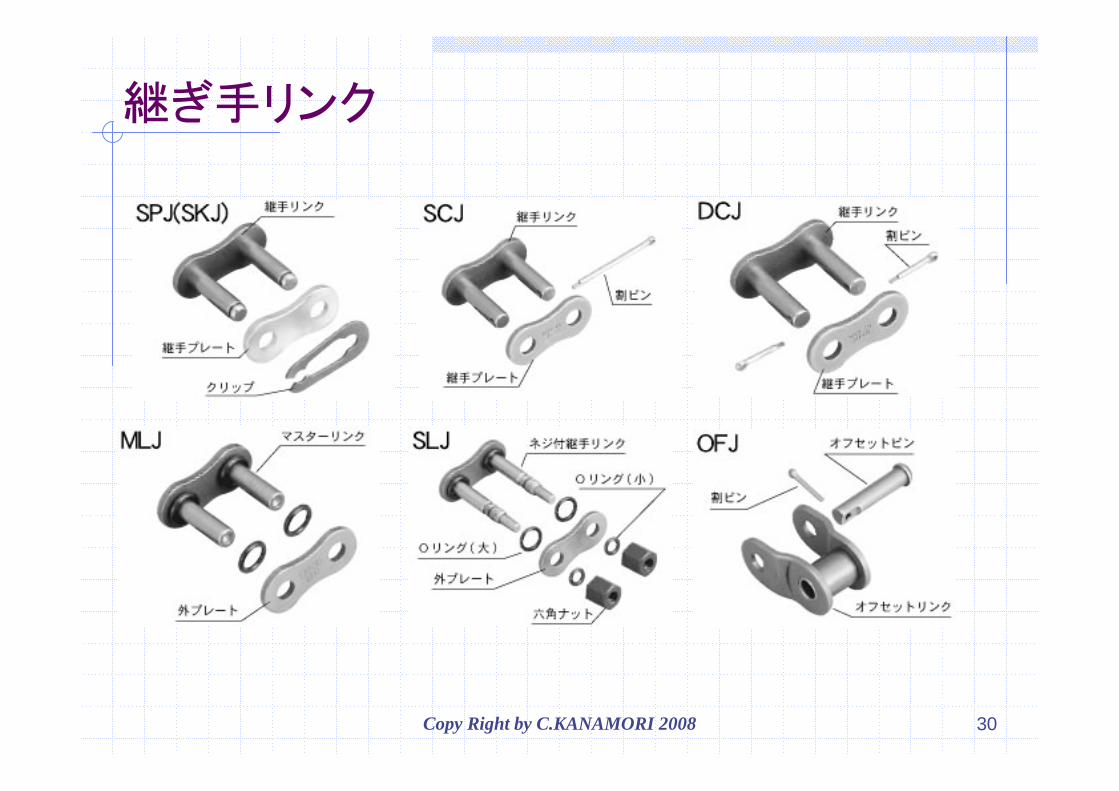
継ぎ手リンク
Copy Right by C.KANAMORI 2008 31
各部品の役割プレート
チェーンに荷重がかかった時にこれを受け持つ部品。
ブシュ
ブシュは、主としてピンと軸受の作用。真円度を有する軸受面を持つ。
ピン
プレートを介してせん断と曲げ応力を受けます。スプロケットと噛み合うときにブシュの中ですべり運動。
ローラ
チェーンがスプロケットに噛み込むときに歯面との衝突による衝撃荷重を受ける。また、歯面とブシュ面とで挟まれて歯面を移動するため、圧縮荷重と摩擦力を受ける。
Copy Right by C.KANAMORI 2008 32
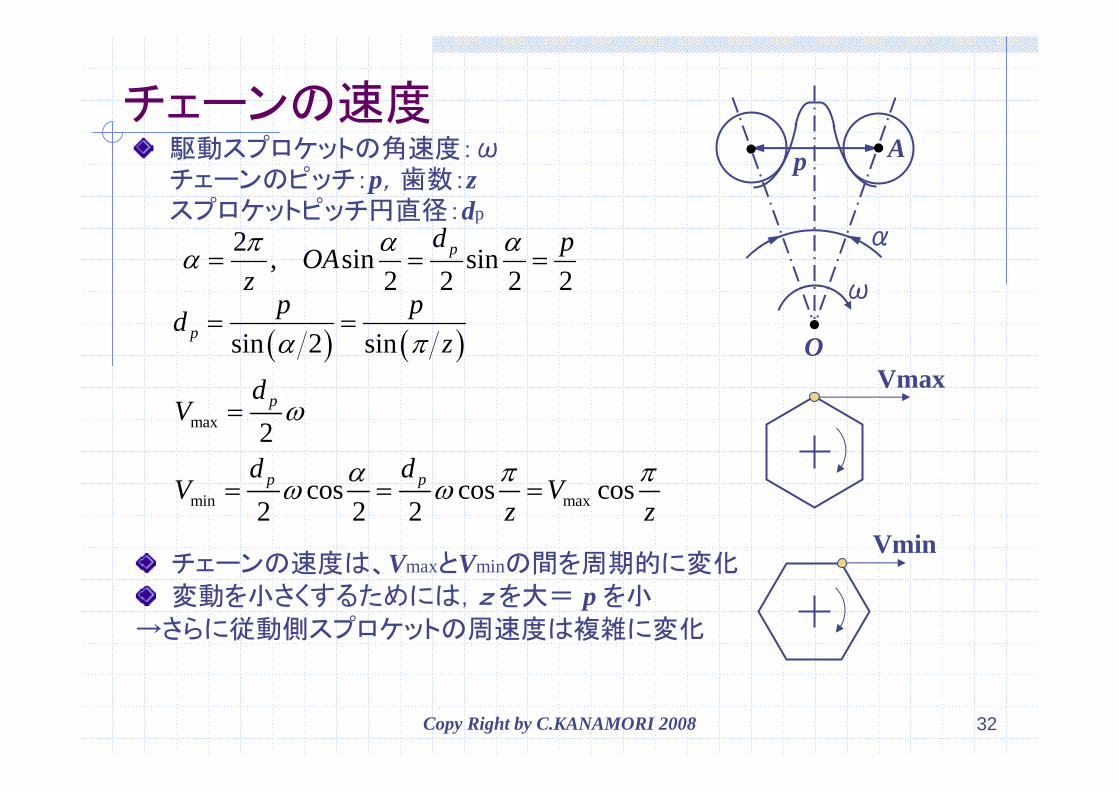
チェーンの速度駆動スプロケットの角速度:ωチェーンのピッチ:p,歯数:zスプロケットピッチ円直径:dp
ω
α
p A
OVmax
Vmin
2 , sin sin2 2 2 2
pd pOAzπ α αα = = =
( ) ( )sin 2 sinpp pd
zα π= =
max
min max
2
cos cos cos2 2 2
p
p p
dV
d dV V
z z
ω
α π πω ω
=
= = =
チェーンの速度は、VmaxとVminの間を周期的に変化変動を小さくするためには,z を大= p を小
→さらに従動側スプロケットの周速度は複雑に変化
Copy Right by C.KANAMORI 2008 33
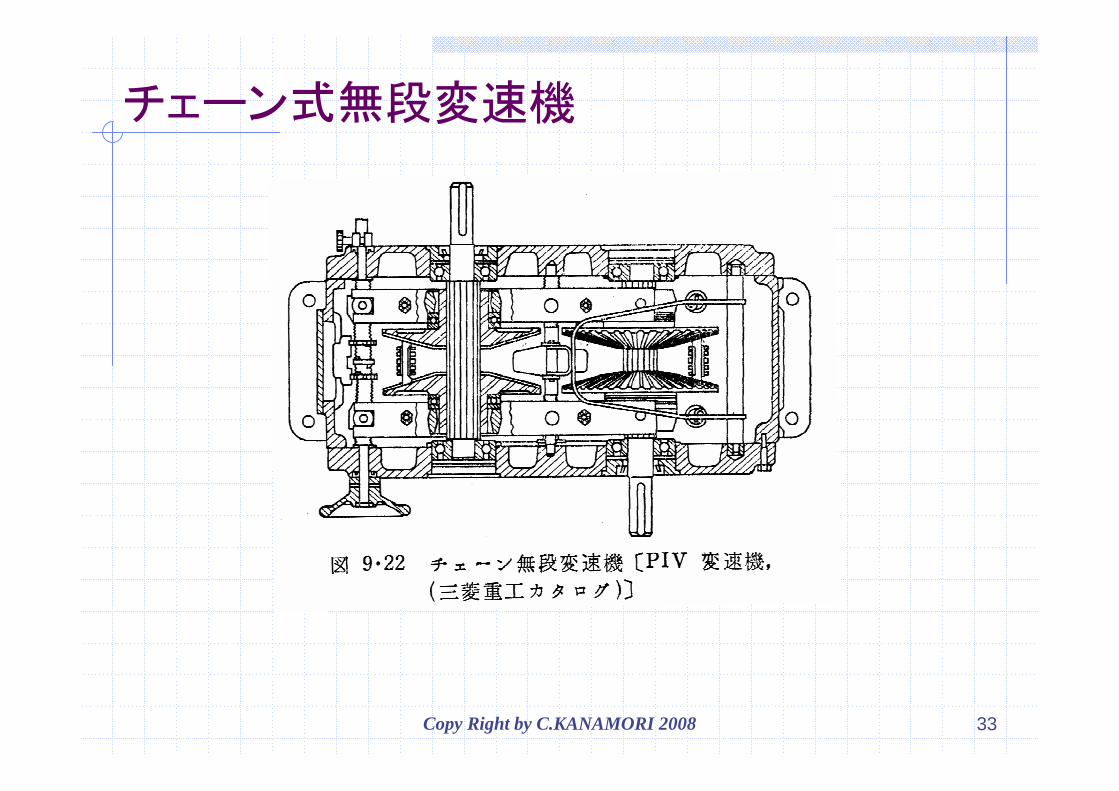
チェーン式無段変速機
Copy Right by C.KANAMORI 2008 34
摩擦伝動装置(friction drive)直接接触による摩擦力を利用した伝動装置
・・・転がり接触により回転を伝動する.
伝動力を大きくするためには→摩擦係数の大きな材料を選定→変形が大きい→精密な運動伝達が不可能
伝動を接触面の摩擦に依存→ある程度のすべりが避けられない
使用する材質により応力が異なる→応力の設計が必要
◎精密な測定機など軽荷重の場合に用いられてきた!→一定の速度が得られ,こまかい速度比の変動がない→精密な運動伝達に向く
大きな動力の伝動装置としては不適当であるとされていた☆☆近年,そのイメージが払拭されるできごとが!
→ハーフトロイダル減速機
Copy Right by C.KANAMORI 2008 35
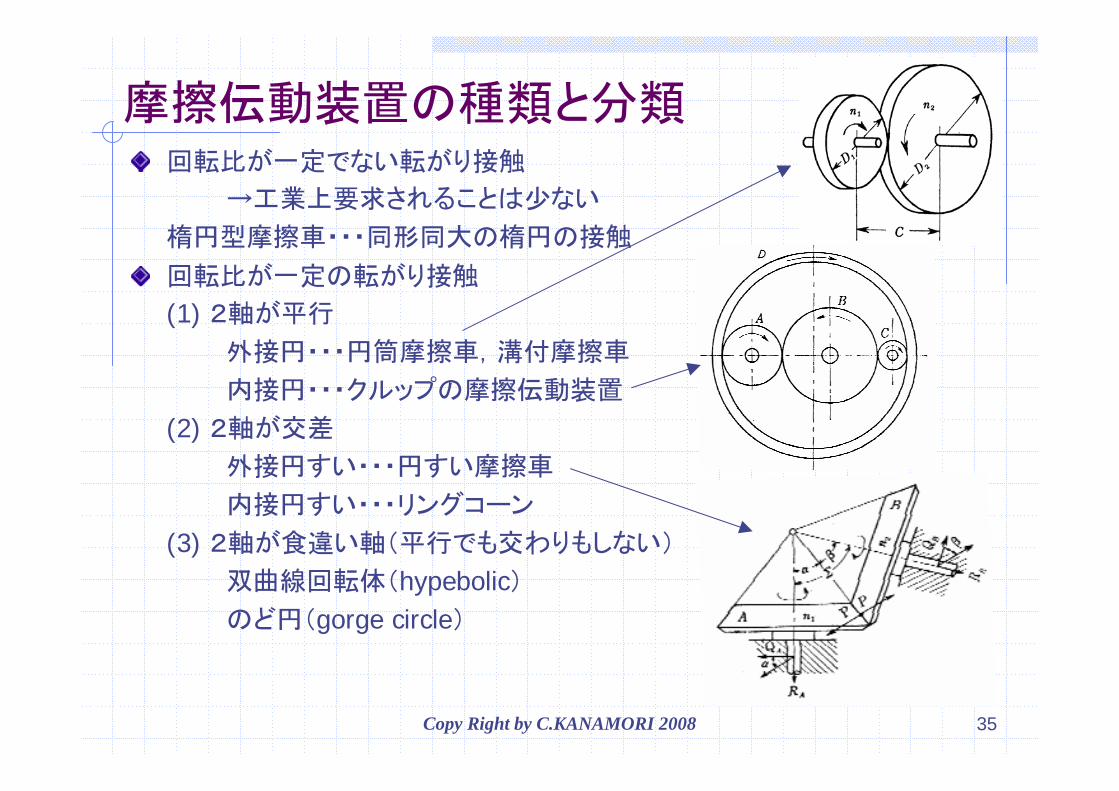
摩擦伝動装置の種類と分類回転比が一定でない転がり接触
→工業上要求されることは少ない
楕円型摩擦車・・・同形同大の楕円の接触
回転比が一定の転がり接触
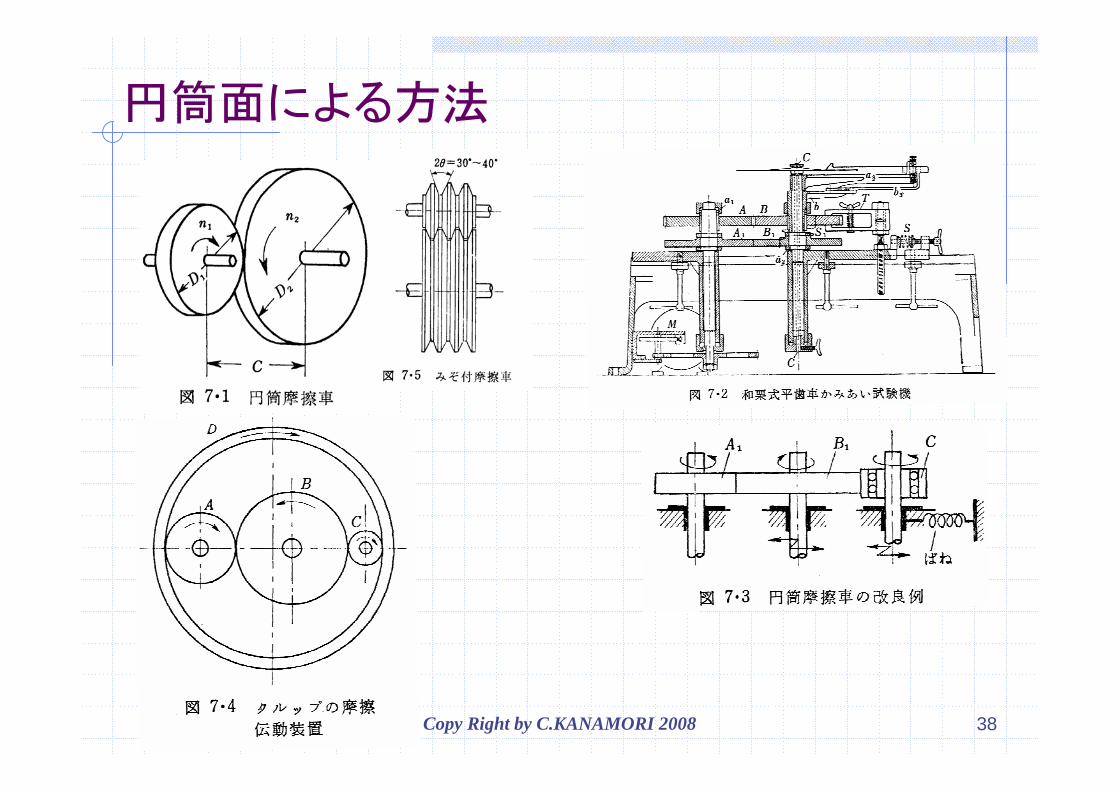
(1) 2軸が平行
外接円・・・円筒摩擦車,溝付摩擦車
内接円・・・クルップの摩擦伝動装置
(2) 2軸が交差
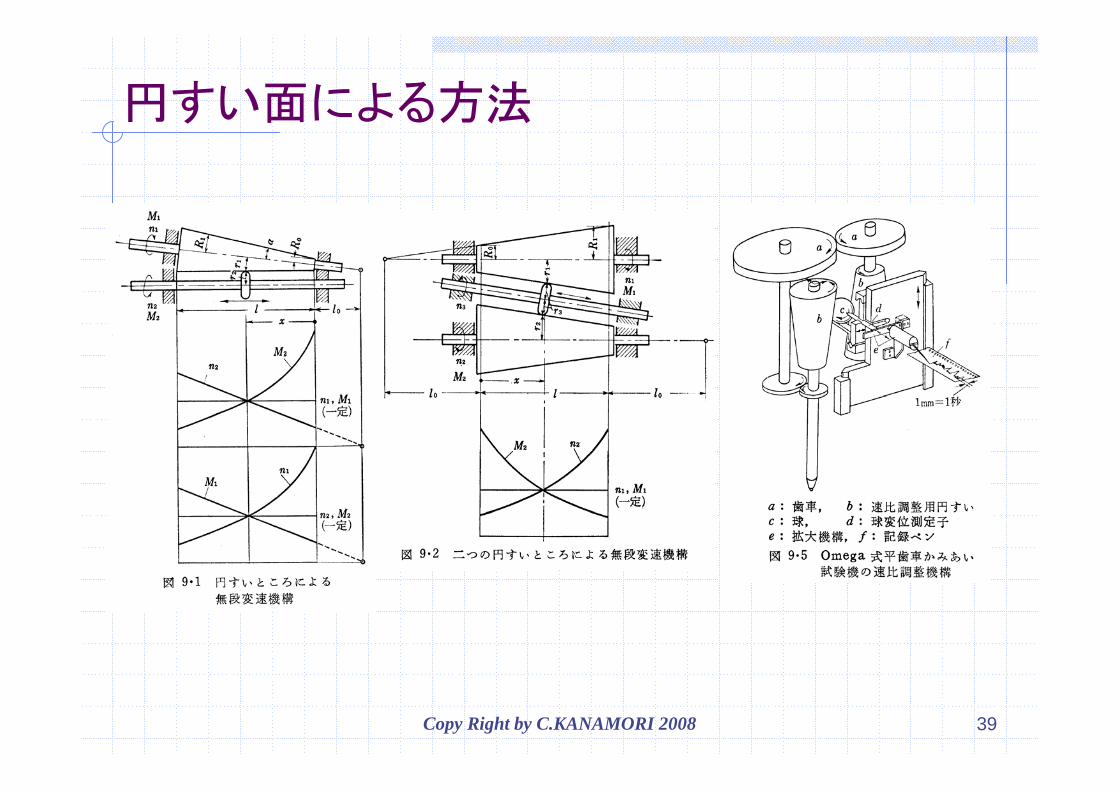
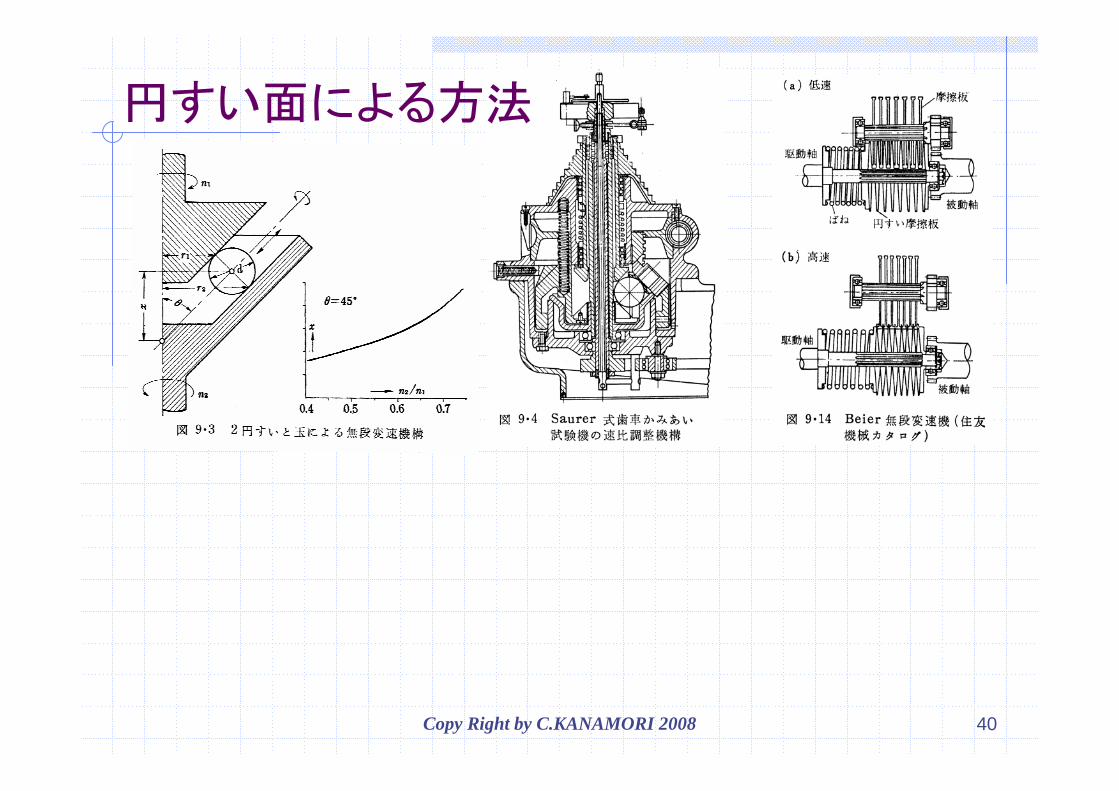
外接円すい・・・円すい摩擦車
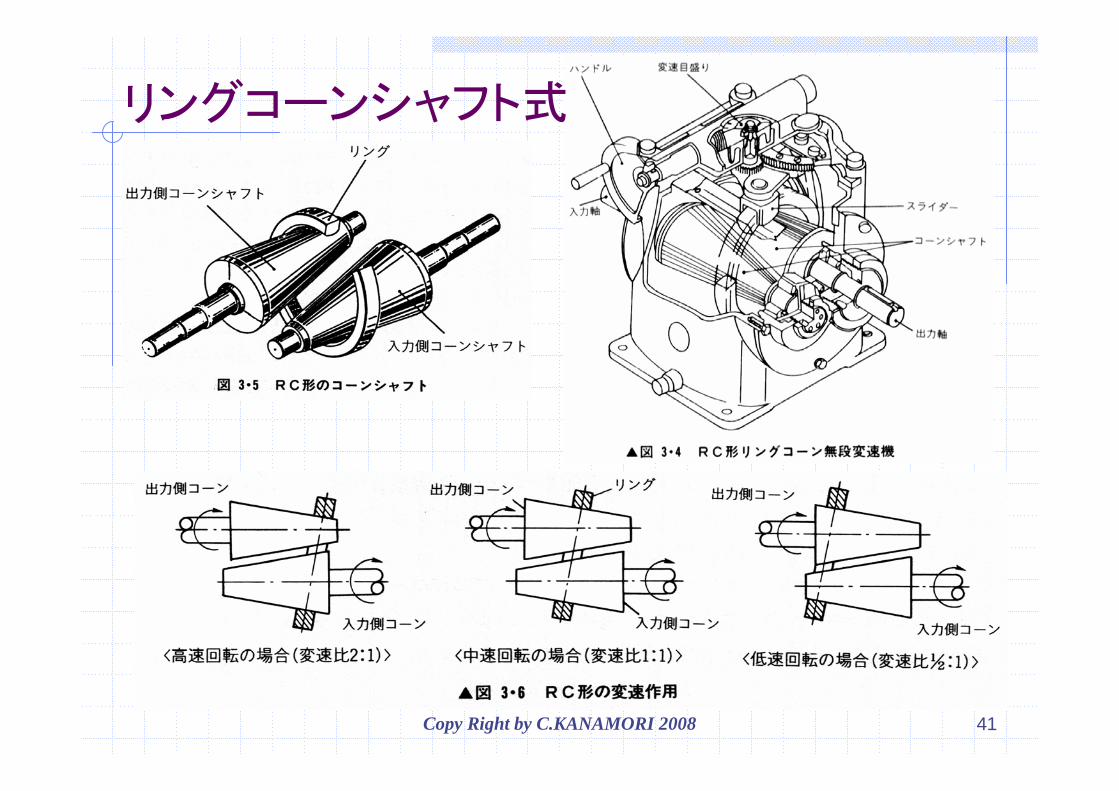
内接円すい・・・リングコーン
(3) 2軸が食違い軸(平行でも交わりもしない)
双曲線回転体(hypebolic)
のど円(gorge circle)
Copy Right by C.KANAMORI 2008 36
摩擦車の特徴1.静粛性が高い
2.無段変速機を作りやすい・・・運転中に変速可能.
3.ある程度のすべりは避けられない
4.高速,高荷重には不向き
5.荷重Pを大きくすると軸受の負荷が大きくなる
Copy Right by C.KANAMORI 2008 37
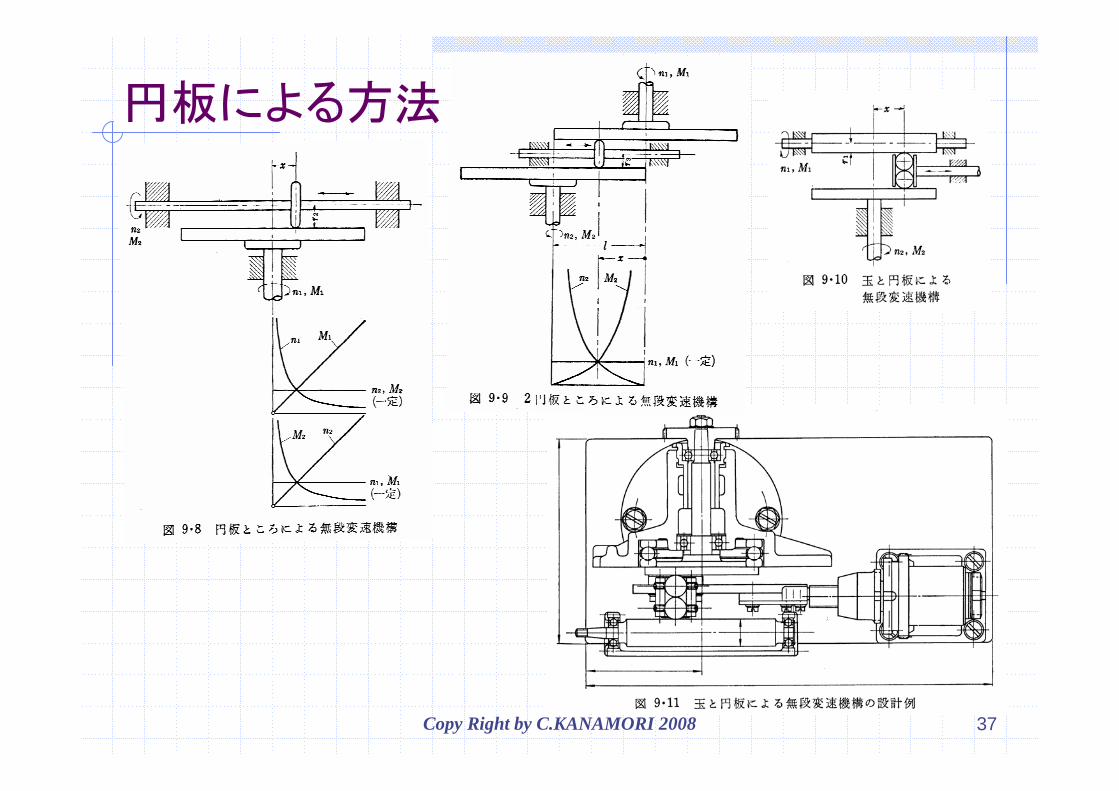
円板による方法
Copy Right by C.KANAMORI 2008 38
円筒面による方法
Copy Right by C.KANAMORI 2008 39
円すい面による方法
Copy Right by C.KANAMORI 2008 40
円すい面による方法
Copy Right by C.KANAMORI 2008 41
リングコーンシャフト式
Copy Right by C.KANAMORI 2008 42
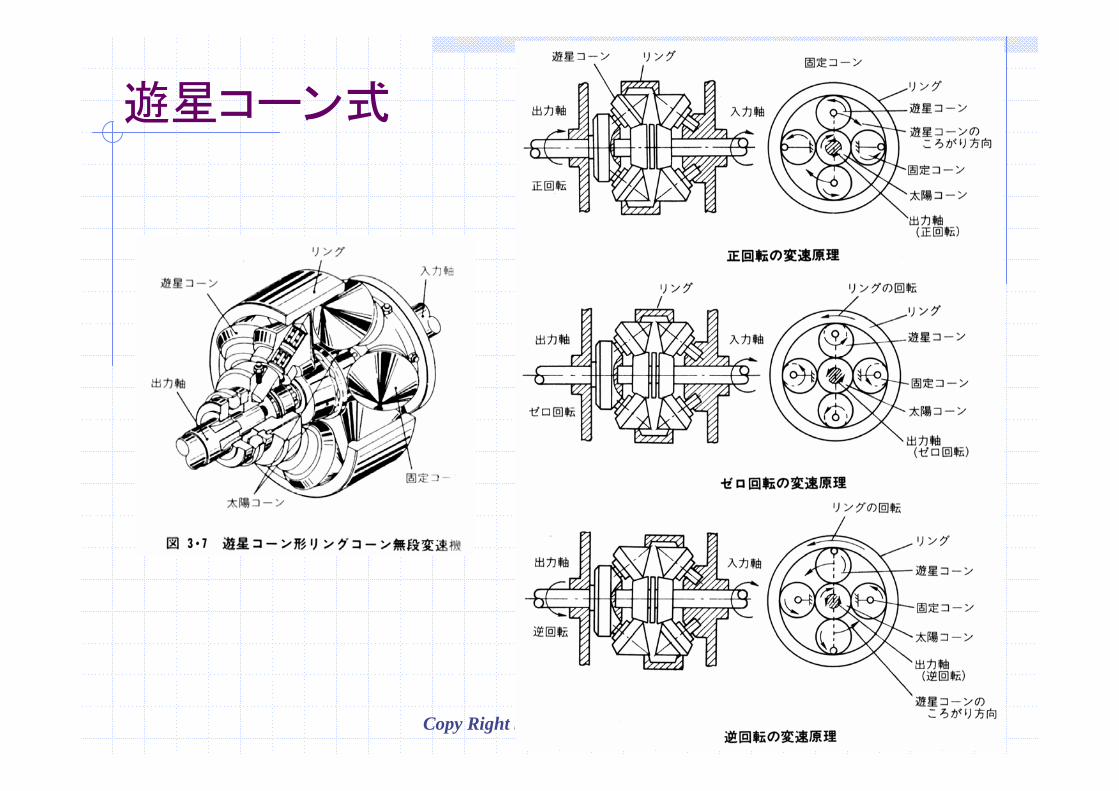
遊星コーン式
Copy Right by C.KANAMORI 2008 43
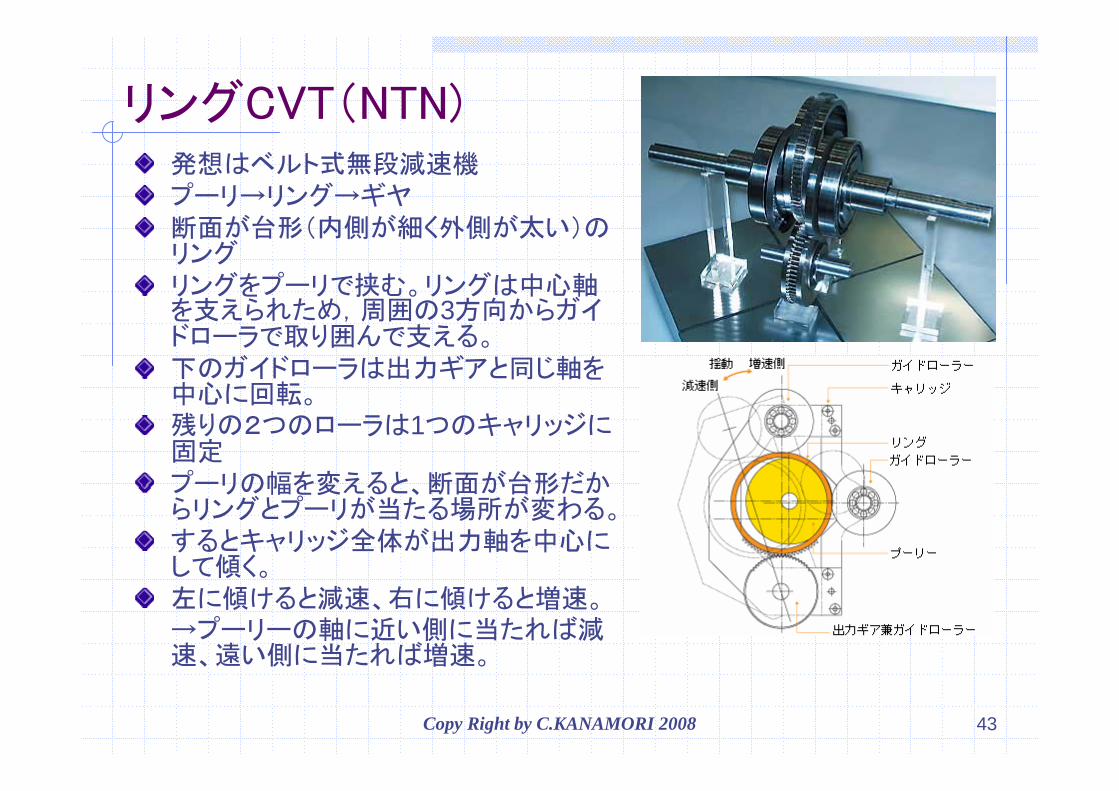
リングCVT(NTN)発想はベルト式無段減速機プーリ→リング→ギヤ断面が台形(内側が細く外側が太い)のリングリングをプーリで挟む。リングは中心軸を支えられため,周囲の3方向からガイドローラで取り囲んで支える。下のガイドローラは出力ギアと同じ軸を中心に回転。残りの2つのローラは1つのキャリッジに固定プーリの幅を変えると、断面が台形だからリングとプーリが当たる場所が変わる。するとキャリッジ全体が出力軸を中心にして傾く。左に傾けると減速、右に傾けると増速。→プーリーの軸に近い側に当たれば減速、遠い側に当たれば増速。
Copy Right by C.KANAMORI 2008 44
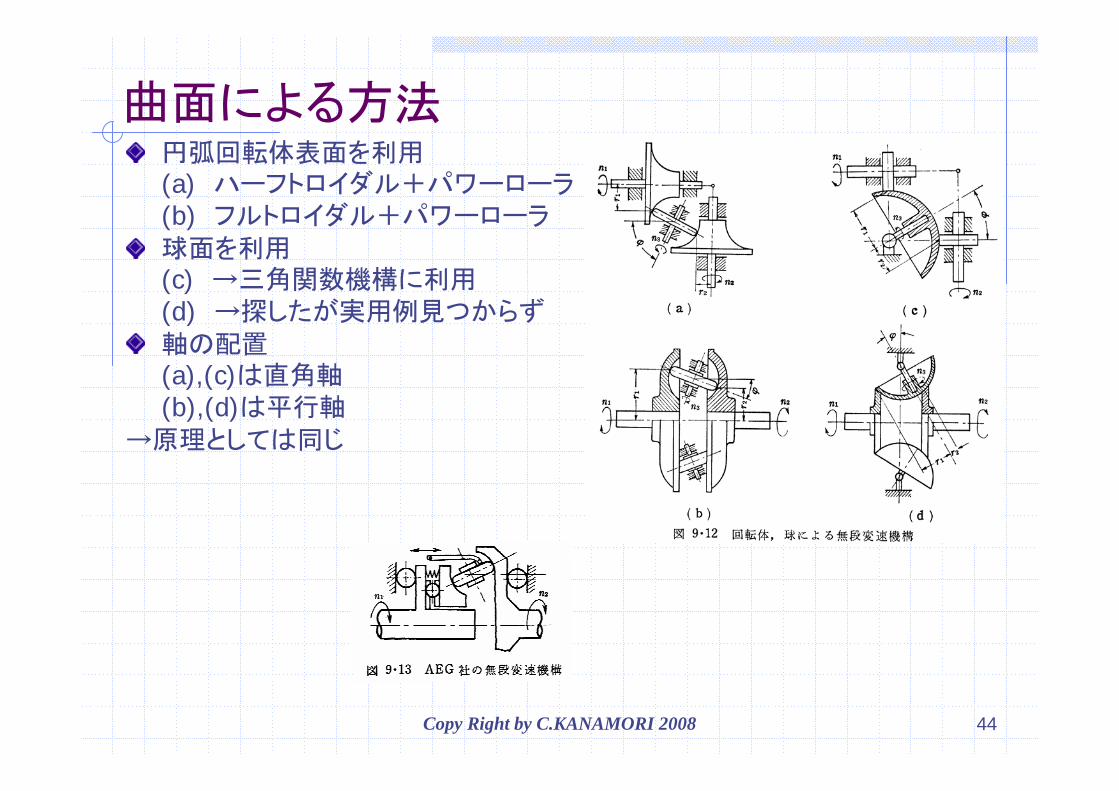
曲面による方法円弧回転体表面を利用(a) ハーフトロイダル+パワーローラ(b) フルトロイダル+パワーローラ球面を利用(c) →三角関数機構に利用(d) →探したが実用例見つからず軸の配置(a),(c)は直角軸(b),(d)は平行軸
→原理としては同じ

Copy Right by C.KANAMORI 2008 45
ハーフトロイダルCVTパワートロスユニットハーフトロイダルCVTは、2つのディスク(入力ディスクと出力ディスク)に挟まれたパワーローラーを制御することで無段変速を実現した画期的な変速機 です。無段変速による滑らかで静粛性に優れた変速と、省エネルギーにも貢献する高効率なハーフトロイダルCVTパワートロスユニットは、NSKのトライボ ロジー技術の結晶ともいえる夢の無段変速機。
(日産自動車,日本精工,出光興産)






















![[ H30.8改 ] Leeチェアシステム LeLe eチェア リー eチェア テーブル 背シート 胸ベルト 股ベルト 背シート 体幹パッド 股ベルト 背シート 撮影用に](https://img.pdfslide.tips/doc/110x75/5ccf6e0b88c993ea048c4032/-h308-lee-lele-e-e-.jpg)






