Embed Size (px)
Citation preview

1
Fondamenti di Automatica per Ing. Elettrica
Prof. Patrizio Colaneri2
I. Esercizio 1
Si consideri il sistema nonlineare
x1(t) = −x1(t) + x1(t)x2(t) + x2(t)− u(t)
x2(t) = −x2(t) + x3(t)x2(t) + x3(t)− u(t)
x3(t) = −x3(t) + x3(t)x1(t) + x1(t)− u(t)
• Si ricavino i due stati di equilibrio x corrispondenti all’ingresso u(t) = u = 1.• Si discuta la stabilita degli stati di equilibrio.
SOLUZIONI Il sistema con u(t) = 1 si riscrive come
x1(t) = (x1 + 1)(x2 − 1)
x2(t) = (x2 + 1)(x3 − 1)
x3(t) = (x3 + 1)(x1 − 1)
Quindi i due stati di equilibrio sono
x = ±
111
Le matrici A dei corrispondenti sistemi linearizzati sono:
A =
0 2 00 0 22 0 0
, −2 0 0
0 −2 00 0 −2
Il primo equilibrio e instabile, il secondo e asintiticamente stabile.
2 Dipartimento di Elettronica, Informazione e Bioingeneria, Politecnico di Milano, 20133 Milano, Italy, email:

2
II. Esercizio 2
Si consideri il sistema in figura, dove
G1(s)
u(t)
y(t) G2(s)
G1(s) =s+ 1
s(s+ α), G2(s) =
1− s(s+ 1)
sono le funzioni di trasferimento di due sistemi, rispettivamnte del secondo e primo ordine.
• Si studi la stabilita asintotica del sistema retroazionato in funzione di α.• Si studi la stabilita BIBO del sistema con ingresso u e uscita y in funzione di α..• Si studi la raggiungibilta da u in funzione di α.• Si studi l’osservabilita da y in funzione di α.
SOLUZIONI La funzione di trasferimento da u a y e:
G(s) =s(1− s)(s+ α)
(s+ 1)(s2 + (α− 1)s+ 1)
Il sistema retroazionato (del terzo ordine) e asintoticamente stabile per α > 1. Il sistema da u a y e BIBOstabile se α > 1. Il sistema con ingresso u e raggiungibile per α 6= −1. Il sistema con uscita y e osservabileper α 6= −1.

3
III. Esercizio 3
Si consideri il sistema retroazionato in figura, dove
R(s) yo(t)
y(t) G(s)
dr(t)
G(s) =0.1
(1 + 0.1s)(1 + s), yo(t) = sca(t), dr(t) = sin(10t)
Si ricavi R(s) in maniera tale che:
• L’errore sia in media nullo a regime permanente• L’errore sia attenuato in ampiezza sull’errore di almeno 10 volte• ωc ≥ 1 rad/sec• φm ≥ 60o
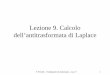
SOLUZIONI Perche l’errore sia in media nullo occorre che il regolatore sia di tipo 1, quindi
R1(s) =µrs
Scriviamo allora
L1(s) =0.1µr
s(1 + 0.1s)(1 + s)
scegliamo µr = 20 in maniera da avere ωc ' 2 e usiamo una rete anticipatrice
R2(s) =1 + s
1 + 0.1s
in modo da avere un’attenuazione di circa 20db a 10 radianti al secondo. Quindi
L(s) =2
s(1 + 0.1s)2
-200
-150
-100
-50
0
50
Mag
nitu
de (
dB)
10-2 10-1 100 101 102 103-270
-180
-90
Pha
se (
deg)
Bode Diagram
Frequency (rad/s)
-150
-100
-50
0
50
Mag
nitu
de (
dB)
10-1 100 101 102 103-270
-180
-90
Pha
se (
deg)
Bode DiagramGm = 20 dB (at 10 rad/s) , Pm = 68.2 deg (at 1.93 rad/s)
Frequency (rad/s)

4
IV. Esercizio 4
Si consideri il sistema in figura
L(s)
dove
L(s) = ρs− 1
(s+ 1)(s+ 5)2
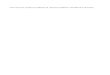
• Si tracci il luogo delle radici (diretto e inverso) e si studi la stabilita del sistema retroazionato in funzionedi ρ
• Si disegni il diagramma di Nyquist di L(s) e si confermino i risultati ottenuti al punto precedente.
SOLUZIONI Si ha stabilita per −30 < ρ < 25.Per ρ = −30 il polinomio caratteristico del sistema in anello
-6 -5 -4 -3 -2 -1 0 1 2-25
-20
-15
-10
-5
0
5
10
15
20
25
0.4
0.030.060.090.130.190.26
0.4
0.65
0.030.060.090.130.190.26
0.65
5
10
15
20
25
5
10
15
20
25
Root Locus
Real Axis (seconds-1)
Imag
inar
y A
xis
(sec
onds
-1)
System: LGain: 4.93Pole: -5.2 + 2.58iDamping: 0.896Overshoot (%): 0.178Frequency (rad/s): 5.81
-30 -25 -20 -15 -10 -5 0 5 10 15-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
11
0.820.9550.9820.9910.996
0.998
0.999
1
0.820.9550.9820.9910.996
0.998
0.999
1
51015202530
Root Locus
Real Axis (seconds-1)
Imag
inar
y A
xis
(sec
onds
-1)
chiuso e: (s+ 11)(s2 + 5). Il diagramma di L(s) con ρ = 1 e disegnato in figura. Il diagramma passa sull’asse
-1 -0.8 -0.6 -0.4 -0.2 0 0.2-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.040 dB -20 dB-10 dB-6 dB-4 dB-2 dB20 dB 10 dB 6 dB 4 dB 2 dB
Nyquist Diagram
Real Axis
Imag
inar
y A
xis
reale nei punti −1/25 (per ω = 0) e in 1/30 (per ω =√
5).

5
V. Esercizio 5
L(s) yo*(k)
y*(k)
ZOH
dove i convertitori operano in sincronia e in fase con periodo T = ln(2).
L(s) =1
(s+ 2)(1 + s)
• Si studi la stabilita del sistema retroazionato a tempo discreto (segnali campionati).• Si ricavi il valore di y ∗ (0), y∗(1) e y∗(∞) quando yo∗(k) = sca∗(k).
SOLUZIONI
L(s) =1
s+ 1− 1
s+ 2
Quindi
L∗(z) =1− e−T
z − e−T− 0.5(1− e−2T )
z − e−2T=
0.5
z − 0.5− 3/8
z − 0.25=
1/8(z + 0.5)
(z − 0.5)(z − 0.25)
e il polinomio caratteristico del sistema in anello chiuso e:
z2 − 5/8z + 3/16
che ha radici all’interno del cerchio di raggio 1. Il sistema e asintoticamente stabile. La funzione di sensitivitacomplementare e:
F (z) =1/8(z + 0.5)
z2 − 5/8z + 3/16
e quindi y∗(0) = 0, y∗(1) = 1/8, y∗(∞) = 1/3.