Embed Size (px)
Citation preview

1
Karthik Visvanathan, Farah Shariff, Seow Yuen Yee and Amar S. BasuKarthik Visvanathan, Farah Shariff, Seow Yuen Yee and Amar S. BasuDepartment of Mechanical Engineering, University of Michigan, Ann Arbor, USADepartment of Mechanical Engineering, University of Michigan, Ann Arbor, USA
Department of Electrical Engineering and Computer Science, University of Michigan, Ann Arbor, Department of Electrical Engineering and Computer Science, University of Michigan, Ann Arbor, USAUSA
指導教授:劉承賢 教授指導教授:劉承賢 教授學生:劉景文學生:劉景文

2
IntroductionLiterature reviewExperimentResultConclusion/future workReference

3
Marangoni FlowThe mass transfer along an interface due to surface tension
gradientLiquid with a high surface tension pulls more strongly on the
surrounding liquidGradient in surface tension will naturally cause the liquid to flow
away from regions of low surface tension
4
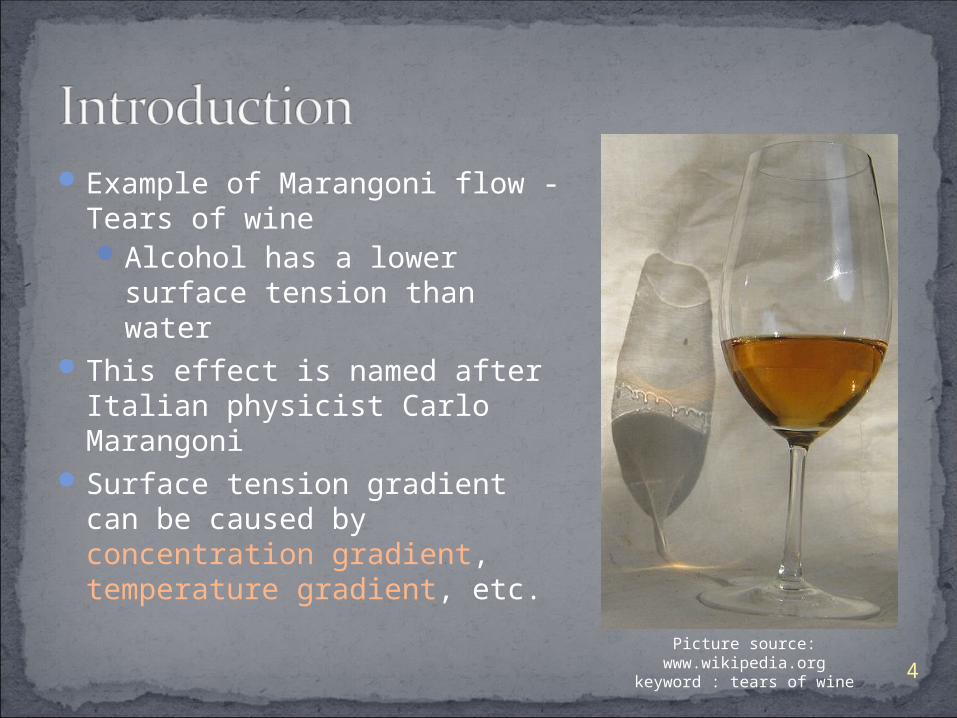
Example of Marangoni flow - Tears of wineAlcohol has a lower surface
tension than waterThis effect is named after Italian
physicist Carlo MarangoniSurface tension gradient can be
caused by concentration gradient, temperature gradient, etc.
Picture source: www.wikipedia.org keyword : tears of wine

5
Floating mini-robot based on thermal Marangoni flow

6
Steve H. Suhr et al. designed and built the first controllable water strider robot
Picture source: “Biologically Inspired Miniature Water Strider Robot”
Steve H. Suhr, Yun Seong Song, Sang Jun Lee, and Metin Sitti, Member, IEEE
7
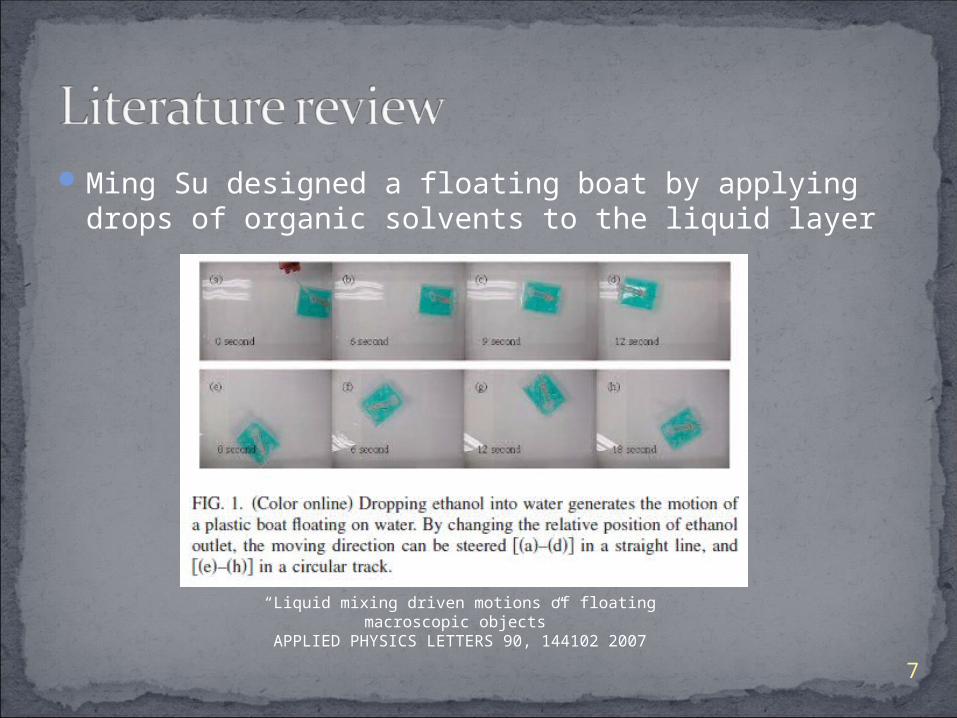
Ming Su designed a floating boat by applying drops of organic solvents to the liquid layer
“Liquid mixing driven motions of floating macroscopic objects”APPLIED PHYSICS LETTERS 90, 144102 2007

8
A similar work using isopropyl alcohol as a propellant
“Propulsion of microboats using isopropyl alcohol as a propellant”J. Micromech. Microeng. 18 (2008) 067002 (6pp)

9
ExperimentWater based mini robots for environmental sensing
applications and/or military applicationsMarangoni flow based on local thermal gradient for
propulsion and steeringCompared with solution based propulsion limited
fuel may be a challengeCompared with propeller based propulsion noise
and vibration may be a challengeIn a macro system, marangoni flow is usually
ignored; but in a micro system, marangoni flow becomes dominant

10
ExperimentSix legged design provides three DOF of
movementHigh temperature induces low surface tension,
exerting a tangential force to propel the robot

11
ExperimentLift force increases with increasing contact angle
and saturates at contact angle greater than 90°To increase lift force leg of the robot can be
covered with a hydrophobic material

12
ExperimentA 10mm x 300μm x 300μm leg with a 2mm x 200μm x 1μm heater
Minimum gap of 10mm between the legs required to prevent temperature gradient from one leg to affect the other

13
ExperimentAt 60℃ for each leg
maximum flow velocity 15.3mm/spropulsion force 0.638mN

14
ResultA H-shaped structure was constructed to test the
feasibility of the proposed mini-robotH-shaped robot tested in Fluorinert FC 3283
solution

15
ResultLinear, clockwise, counter-clockwise motion of
the H-shaped structure demonstratedSpot heated using a soldering iron, the structure
was observed to move from regions of lower surface tension (high temperature region) to higher surface tension (low temperature region)

16
Conclusion/future workThis paper reports a novel propulsion mechanism
utilizing a thermal gradient based Marangoni flows
Preliminary experiments demonstrate the feasibility of the proposed propulsion mechanism
The actual proposed device is expected to perform betterhydrophobic material will increase total lift forcepropulsion force can be increased by increasing
temperature of the heater and the number of legs
17
Reference Wikipedia “Biologically Inspired Miniature Water Strider Robot” Steve H. Suhr, Yun Seong
Song, Sang Jun Lee, and Metin Sitti, Member, IEEE “Propulsion of microboats using isopropyl alcohol as a propellant” J. Micromech.
Microeng. 18 (2008) 067002 (6pp) “Liquid mixing driven motions of floating macroscopic objects” APPLIED
PHYSICS LETTERS 90, 144102 (2007)

18
Thank you for listening





























