Embed Size (px)
Citation preview
SIMULASI IRINGAN KENDARAAN MENGGUNAKAN METODE OPTIMAL VELOCITY
MODEL (OVM)
Tugas Akhir
Kelompok Keahlian : Pemodelan dan Simulasi
Abdulloh Azzam
1107110030
Program Studi Sarjana Ilmu Komputasi
Fakultas Informatika
Universitas Telkom
Bandung
2015
LEMBAR PERSETUJUAN
SIMULASI IRINGAN KENDARAAN MENGGUNAKAN METODE OPTIMAL VELOCITY
MODEL (OVM)
SIMULATION CAR FOLLOWING BEHAVIOUR USING OPTIMAL VELOCITY MODEL (OVM)
METHOD
Abdulloh Azzam
NIM : 1107110030
Tugas akhir ini diajukan dalam rangka memenuhi salah satu persyaratan untuk
menyelesaikan program Strata-1
Program Studi Sarjana Ilmu Komputasi
Fakultas Informatika Universitas Telkom
Bandung, 21 September 2015
Menyetujui
Pembimbing 1
Drs. Mahmud Imrona, MT.
NIP. 93670093-1
Pembimbing 2
Nurul Ikhsan, M.Si.
NIP. 14871408-2
i
LEMBAR PERNYATAAN ORISINALITAS
Menyatakan bahwa Tugas Akhir ini adalah hasil karya saya sendiri. Atas
pernyataan ini, saya siap menanggung risiko atau sanksi yang dijatuhkan kepada
saya apabila kemudian ditemukan adanya pelanggaran yang terjadi terhadap
kejujuran akademik dalam karya ini, atau ditemukannya bukti yang menyatakan
ketidakaslian karya ini.
Bandung, 01 Mei 2023
Abdulloh Azzam
DAFTAR ISI
ii
Nama : Abdulloh Azzam
NIM : 1107110030
Alamat : Jalan Apel 3 rt 03/10 no 3 perum Depok Jaya Agung
No. Tlp : 085782208499
Email : [email protected]
LEMBAR PERSETUJUAN.................................................................................................i
LEMBAR PERNYATAAN ORISINALITAS....................................................................ii
DAFTAR ISI......................................................................................................................iii
DAFTAR GAMBAR...........................................................................................................v
DAFTAR TABEL...............................................................................................................vi
ABSTRAK.........................................................................................................................vii
ABSTRACT.....................................................................................................................viii
LEMBAR PERSEMBAHAN.............................................................................................ix
KATA PENGANTAR.........................................................................................................x
BAB I PENDAHULUAN....................................................................................................1
1.1 Latar Belakang.....................................................................................................1
1.2 Perumusan Masalah.............................................................................................1
1.3 Tujuan..................................................................................................................2
1.4 Hipotesis..............................................................................................................2
1.5 Metodologi dan Penyelesaian Masalah................................................................2
1.6 Sistematika Penelitian..........................................................................................3
BAB II TINJAUAN PUSTAKA.........................................................................................5
2.1 Dinamika Molekul (Molecular Dynamics)..........................................................5
2.1.1 Simulation Molecular Dynamics (SMD).....................................................5
2.1.2 Traffic Dynamics (TD).................................................................................5
2.1.3 Heterogeneus Traffic (HT)..........................................................................5
2.1.4 Steady-State Equilibrium.............................................................................6
2.1.5 Highway Scenario........................................................................................6
2.1.6 City Scenario................................................................................................7
2.1.7 Trajectory Data............................................................................................7
2.2 Car Following Model (CFM)...............................................................................8
2.3 Generalized Force Model (GFM)........................................................................9
2.4 Optimal Velocity Model (OVM)........................................................................11
BAB III PERANCANGAN SISTEM................................................................................13
3.1 Deskripsi Sistem................................................................................................13
3.2 Rancangan Umum Sistem..................................................................................13
BAB IV HASIL DAN IMPLEMENTASI.........................................................................19
4.1 Data Lalu Lintas.................................................................................................19
4.2 Analisis Jarak, Kecepatan dan Waktu Kendaraan.............................................20
4.2.1 Time Space Diagram..................................................................................21
4.2.2 Crosss Section Data...................................................................................22
iii
4.3 Penerapan Metode Optimal Velocity Model......................................................22
4.3.1 Perhitungan Kendaraan Data dalam kondisi Lancar..................................23
4.3.2 Perhitungan Kendaraan Data dalam kondisi Padat....................................25
4.4 Grafik Trayektori Data pada Car Following Model dengan menggunakan software GNUPLOT.......................................................................................................27
4.4.1 Perintah baris pada GNUplot dalam kondisi Lancar dan kondisi Padat....28
4.4.2 Grafik Trayektori pada Kondisi Lancar Lalu Lintas Kendaraan pada Iringan Kendaraan......................................................................................................29
4.4.3 Grafik Trayektori pada Kondisi Padat Lalu Lintas Kendaraan pada Iringan Kendaraan..................................................................................................................34
4.5 Grafik kendaraan antara Kecepatan terhadap Waktu.........................................39
BAB V KESIMPULAN DAN SARAN............................................................................44
5.1 Kesimpulan........................................................................................................44
5.2 Saran..................................................................................................................44
DAFTAR PUSTAKA.........................................................................................................xi
LAMPIRAN.....................................................................................................................xiii
iv
DAFTAR GAMBARGambar 2.1 Ilustrasi Trajectory Data [1].............................................................................8
Gambar 2.2 Ilustrasi Car Following Model [1]...................................................................8
Gambar 2.3 Perbedaan Microscopic dan Macroscopic Model [1]....................................10
Gambar 2.4 Fungsi Optimal Velocity dan Hasil Parameter [1].........................................11
Gambar 3.1 Diagram Alir Rancangan Sistem secara umum.............................................13
Gambar 3.2 Diagram Alir Rancangan program yang telah dibuat....................................16
Gambar 4.1 Peta Lokasi Pengambilan Data......................................................................20
Gambar 4.2 Gambar Lokasi Lalu Lintas Kendaraan.........................................................20
Gambar 4.3 Contoh perintah baris pada gnuplot...............................................................28
Gambar 4.4 Grafik kondisi kendaraan lancar....................................................................31
Gambar 4.5 Grafik kondisi kendaraan lancar dibatasi iterasinya......................................34
Gambar 4.6 Grafik kondisi kendaraan padat.....................................................................37
Gambar 4.7 Grafik kondisi kendaraan padat dibatasi iterasinya.......................................39
Gambar 4.8 Grafik Kecepatan kendaraan pada kondisi lancar..........................................40
Gambar 4.9 Grafik kecepatan kendaraan pada kondisi padat............................................42
v
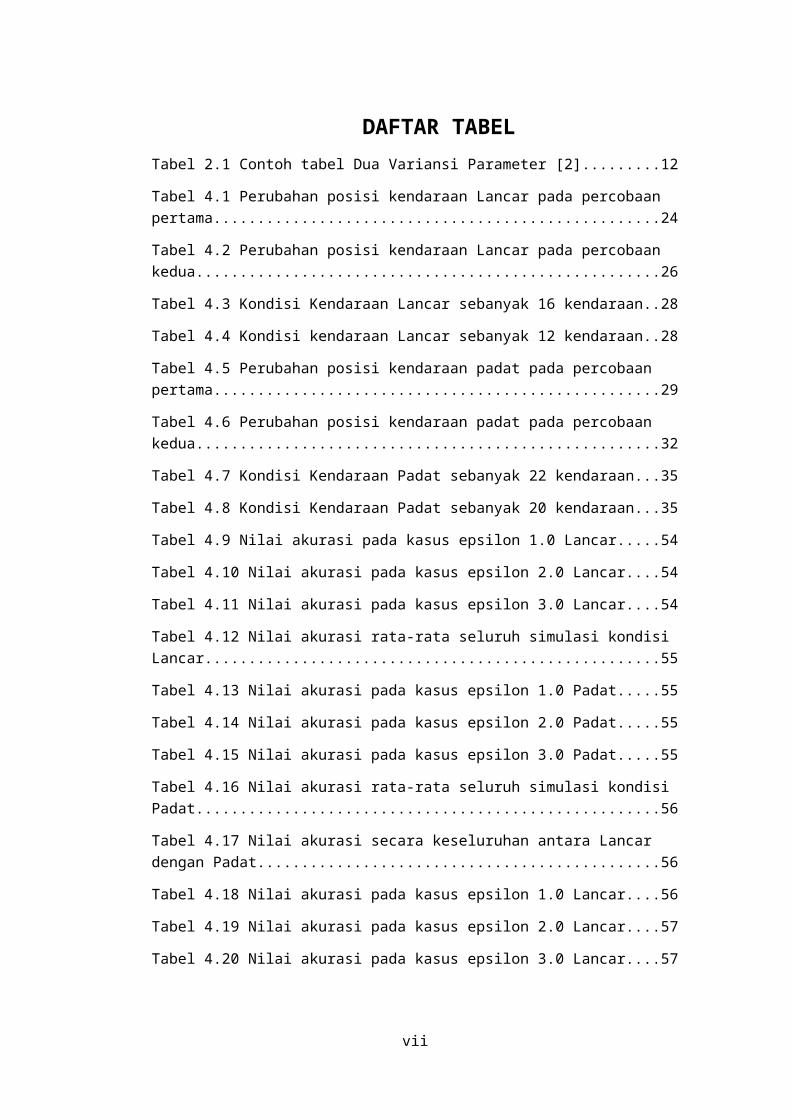
DAFTAR TABELTabel 2.1 Contoh tabel Dua Variansi Parameter [2]..........................................................12
Tabel 4.1 Perubahan posisi kendaraan Lancar pada percobaan pertama...........................24
Tabel 4.2 Perubahan posisi kendaraan Lancar pada percobaan kedua..............................26
Tabel 4.3 Kondisi Kendaraan Lancar sebanyak 16 kendaraan..........................................28
Tabel 4.4 Kondisi kendaraan Lancar sebanyak 12 kendaraan...........................................28
Tabel 4.5 Perubahan posisi kendaraan padat pada percobaan pertama.............................29
Tabel 4.6 Perubahan posisi kendaraan padat pada percobaan kedua.................................32
Tabel 4.7 Kondisi Kendaraan Padat sebanyak 22 kendaraan............................................35
Tabel 4.8 Kondisi Kendaraan Padat sebanyak 20 kendaraan............................................35
Tabel 4.9 Nilai akurasi pada kasus epsilon 1.0 Lancar......................................................54
Tabel 4.10 Nilai akurasi pada kasus epsilon 2.0 Lancar....................................................54
Tabel 4.11 Nilai akurasi pada kasus epsilon 3.0 Lancar....................................................54
Tabel 4.12 Nilai akurasi rata-rata seluruh simulasi kondisi Lancar...................................55
Tabel 4.13 Nilai akurasi pada kasus epsilon 1.0 Padat......................................................55
Tabel 4.14 Nilai akurasi pada kasus epsilon 2.0 Padat......................................................55
Tabel 4.15 Nilai akurasi pada kasus epsilon 3.0 Padat......................................................55
Tabel 4.16 Nilai akurasi rata-rata seluruh simulasi kondisi Padat.....................................56
Tabel 4.17 Nilai akurasi secara keseluruhan antara Lancar dengan Padat........................56
Tabel 4.18 Nilai akurasi pada kasus epsilon 1.0 Lancar....................................................56
Tabel 4.19 Nilai akurasi pada kasus epsilon 2.0 Lancar....................................................57
Tabel 4.20 Nilai akurasi pada kasus epsilon 3.0 Lancar....................................................57
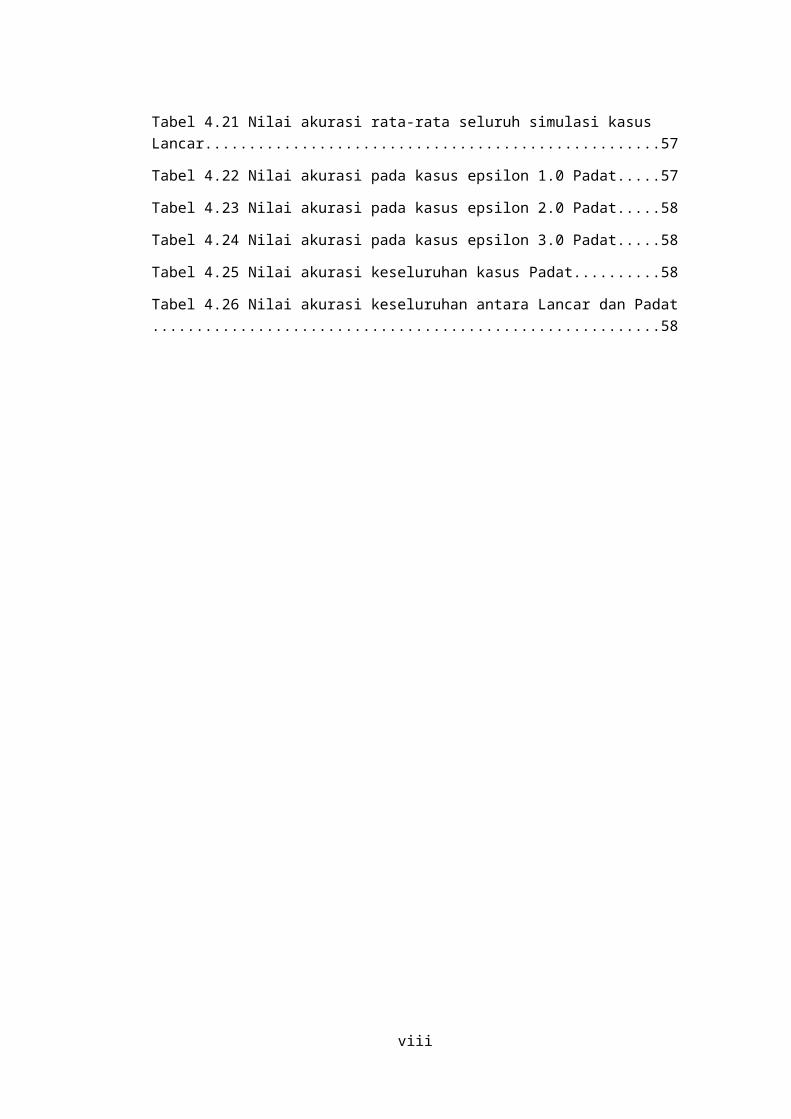
Tabel 4.21 Nilai akurasi rata-rata seluruh simulasi kasus Lancar.....................................57
Tabel 4.22 Nilai akurasi pada kasus epsilon 1.0 Padat......................................................57
Tabel 4.23 Nilai akurasi pada kasus epsilon 2.0 Padat......................................................58
Tabel 4.24 Nilai akurasi pada kasus epsilon 3.0 Padat......................................................58
Tabel 4.25 Nilai akurasi keseluruhan kasus Padat.............................................................58
Tabel 4.26 Nilai akurasi keseluruhan antara Lancar dan Padat.........................................58
vi
ABSTRAK
Perubahan partikel dari suatu tempat ke tempat yang lain dalam suatu lintasan disebut Simulasi Dinamika Molekul (SDM). Simulasi Dinamika Molekul juga dapat dilakukan pada pendekatan Car Following Model (CFM). Car Following Model juga dapat dijelaskan sebagai perubahan yang terjadi antara car follower dengan car leader untuk mendapatkan jarak aman berkendara. Dengan membandingkan menjadi dua kondisi yaitu kondisi Lancar dan Kondisi Padat agar telihat perubahan posisi dan perubahan kecepatan mobil. Dengan pendekatan tersebut dapat disimulasikan kondisi iringan kendaraan yang menjadi penyebab masalah tersebut. Pada penelitian ini dibahas kondisi iringan kendaraan dengan pendekatan metode Optimal Velocity Model (OVM) yang berfokus untuk mengamati perubahan posisi kendaraan, kecepatan kendaraan. Optimal Velocity Model adalah salah satu metode untuk memodelkan permasalahan lalu lintas yang ada seperti iringan kendaraan. Dalam metode ini dilakukan dua kali percobaan yakni, pada saat kondisi lancar dan pada saat kondisi padat kendaraan untuk mengetahui perbedaan dan perubahan yang terjadi diantara keduanya. Selain itu Optimal Velocity Model juga dapat untuk menentukan kondisi equilibrium yaitu kondisi iringan kendaraan stabil dan tidak stabil. Hasil yang didapat ada dua grafik yaitu, grafik trayektori posisi terhadap waktu dan grafik trayektori kecepatan terhadap waktu. Kesimpulan yang dapat diambil dari penelitian ini adalah dapat mengetahui perubahan posisi mobil, kecepatan mobil, pada saat kondisi lancar kecepatan rata-rata mobil mulai stabil pada iterasi ke-3 sedangkan pada kondisi padat mobil pada iterasi ke-5 dan akurasi yang diperoleh peneliti dari garfik trayektori adalah 88,88%. Dengan dibuatnya model iringan kendaraan diharapkan dapat membantu untuk mengurangi permasalahan lalu lintas yang ada di negeri ini.
Key Words : Car Following Model, Car Leader, Car Follower, Car Following
Model, Optimal Velocity Model.
vii
ABSTRACT
The particles change from one place to another in a track called Molecular Dynamics Simulation (SDM). Molecular dynamics simulations can also be performed on the approach Car Following Model (CFM). Car Following Model can also be described as the changes that occurred between the car and the car follower leader to get a safe distance away. By comparing to two conditions, namely conditions Current and Solid condition that seemingly change of position and change of speed of the car. With this approach can be simulated accompaniment vehicle condition that causes the problem. In this study discussed the condition of the vehicle accompaniment method approach Optimal Velocity Model (OVM) that is focused to observe changes in the vehicle's position, speed of the vehicle. Optimal Velocity Model is one of the methods to model the existing traffic problems as accompaniment of the vehicle. In this method the two trials that, when the current condition and when the condition of the vehicle dense to know the difference and the changes that occurred between the two. Besides the Optimal Velocity Model also able to determine the condition of equilibrium is the condition of the vehicle accompaniment stable and unstable. The results there are two graphs, charts the trajectory of the position versus time and velocity versus time graph trajectories. The conclusion of this study was able to determine changes in the car's position, speed of the car, when the condition of current average speed of the car began to stabilize in the 3rd iteration while in solid state auto iteration 5th and accuracy obtained by researchers from garfik trajectory is 88.88%. We make accompaniment model of the vehicle is expected to help to reduce traffic problems that exist in this country.
Key Words : Car Following Model, Car Leader, Car Follower, Car Following
Model, Optimal Velocity Model..
viii
LEMBAR PERSEMBAHAN
Pada kesempatan ini penulis ingin menyampaikan banyak terima kasih
kepada dosen pembimbing I, Pak Mahmud dan dosen pembimbing II, Pak Ikhsan
yang telah memberikan arahan, nasehat dan ilmu yang sangat bermanfaat
sehingga buku tugas akhir yang berjudul “PERBANDINGAN METODE
INVERSE DISTANCE WEIGHTED (IDW) DENGAN METODE ORDINARY
KRIGING UNTUK ESTIMASI SEBARAN POLUSI UDARA DI BANDUNG”
dapat diselesaikan tepat pada waktunya. Selain itu penulis juga ingin
mengucapkan terima kasih kepada :
1. Allah Subhanahu wa Ta’ala dan Rasulullah Sallahu a’laihi wassalam atas
segala limpahan dan kemudahan serta kelancaran sehingga penelitian tugas
akhir ini dapat selesai tepat pada waktunya, mengikuti sunnah sunnahnya agar
ilmu yang saya dapatkan berkah dan dapat berguna bagi sesama. Semoga
rahmat dan hidayahNya selalu tercurah untuk kita semua.
2. Kedua Orangtua, Ummi dan Ayah yang penulis sayangi dan hormati atas
segala dukungan dan doanya. Semoga hal ini menjadi salah satu kebanggaan
bagi Ummi dan Ayah dari penulis yang dapat persembahkan.
3. Pak Mahmud Imrona, MT. dan Pak Nurul Ikhsan, M.Si, yang telah
meyediakan waktu luangnya untuk membimbing saya dengan sangat sabar
dan ikhlas dalam menghadapi saya. Terima kasih atas ilmu dan waktunya
selama ini, semoga ilmu yang saya dapatkan berguna dan bermafaat untuk
kedepannya. Insyaallah
4. Ibu Sri Suryani, S.Si, M.Si. selaku dosen wali akademik IK3501 yang telah
memberikan arahan selama melaksanakan studi.
5. Seluruh dosen pengajar dan staf karyawan Program Studi Ilmu Komputasi
yang telah memberikan bimbingan dan ilmunya.
6. Sandi Heryandi dan Dimas Jati Kusuma yang telah memberikan waktu
luangnya serta masukkan dan membantu sedikit tentang program yang telah
dibuat.
ix
7. Teman kelas IK3501 yang selama perkuliahan menemani susah dan senang
menjalani kuliah, Yudha, Muklis, Rizky, Desianto, Fikri dan semuanya yang
tidak bisa dituliskan satu persatu tanpa mengurangi rasa terimakasih.
KATA PENGANTAR
Pertama-tama penulis ingin mengucapkan puji dan syukur kepada Allah
Subhanahu wa Ta’ala, atas ridhoNya lah sehingga Tugas Akhir yang berjudul
“SIMULASI IRINGAN KENDARAAN MENGGUNAKAN METODE
OPTIMAL VELOCITY MODEL (OVM)” dapat selesai, sebagai salah satu syarat
untuk menyelesaikan program Strata-1 Ilmu Komputasi Fakultas Informatika
Universitas Telkom.
Data sampel pada tugas akhir ini diperoleh dari jembatan tol buah batu di
daerah Ciganitri Bandung. Tugas akhir ini memberikan gambaran mengenai
proses iringan kendaraan yang sesuai dengan metode Optimal Velocity model
untuk mendapatkan jarak dan kecepatan mobil yang optimal, serta kecepatan
mobil yang stabil.
Dalam menyelesaikan Tugas Akhir ini, penulis sangat menyadari sangat
banyak hambatan yang menghalangi. Tetapi, semuanya dapat dilewati dengan
baik dan lancar atas doa dan dukungan dari berbagai pihak. Penulis ingin
mengucapkan terima kasih kepada seluruh pihak yang telah membantu dalam
pembuatan Tugas Akhir ini dan berbagai sumber yang telah digunakan sebagai
data dan fakta.
Penulis menyadari dalam menyelesaikan Tugas Akhir ini terdapat banyak
kekurangan, sehingga Penulis sangat mengharapkan kritik dan saran yang dapat
membangun dalam penyempurnaan Tugas Akhir ini. Semoga Tugas Akhir ini
dapat bermanfaat bagi semua. AMIN.
Bandung, Oktober 2015
x

Penulis
xi

BAB I PENDAHULUAN1.1 Latar Belakang
Perubahan partikel dari suatu tempat ke tempat yang lain dalam suatu lintasan disebut Simulasi Dinamika Molekul (SDM). Hal ini disebut juga sebagai perpindahan molekul yang dapat digambarkan dan diimplementasikan dalam kehidupan sehari hari diterapkan pada Car Following Model (CFM). Car Following Model juga dapat dijelaskan sebagai perubahan yang terjadi antara car follower dengan car leader untuk mendapatkan jarak aman berkendara [1].
Dengan populasi kendaraan yang meningkat pada beberapa tahun terakhir maka sangat dibutuhkan Traffic Dynamics yang sesuai dengan keadaaan pada saat ini. Traffic Dynamics sudah dikenal sejak lama, modelnya telah dikembangkan sejak tahun 1995. Setelah adanya kepadatan lalu lintas atau yang disebut kemacetan maka model Traffic Dynamics semakin dikembangkan. Istilah-istilah yang digunakan dalam Traffic Dynamics adalah lalu lintas rata-rata harian, satuan mobil penumpang, kapasitas penumpang, arus lalu lintas, waktu antara, kecepatan dan kerapatan. Mikroskopis adalah untuk meninjau arus lalu lintas dengan mengamati pergerakan dari masing-masing kendaraan. Pergerakkan kendaraan satu-persatu secara bertahap dengan cara mensimulasikan dalam bentuk model iringan mobil [2] [3].
Traffic Dynamics adalah dinamika kepadatan lalu lintas yang terjadi di masyarakat tidak bisa dihindari keberadaannya dan dapat terjadi dimanapun, serta hal-hal yang tidak diinginkan dengan cara mengantisipasinya. Data lalu lintas ini orisinil dengan cara merekam kendaraan untuk mengetahui jumlah kendaraan, perubahan posisi kendaraan dan kecepatan kendaraan.
Metode untuk menyelesaikan permasalahan lalu lintas yang terjadi di masyarakat, dengan melalui pendekatan Car Following Model dapat digambarkan simulasi yang terjadi di masyarakat yang berguna untuk mempermudah dalam memvisualisasikan kondisi kendaraan. Metode yang digunakan adalah Optimal Velocity Model yang berfokuskan untuk mengamati perubahan posisi kendaraan, kecepatan kendaraan dan percepatan kendaraan, sebagai salah satu metode Car Following Model. Optimal Velocity Model adalah salah satu metode untuk memodelkan permasalahan lalu lintas yang ada seperti iringan kendaraan. Dengan dibuatnya model iringan kendaraan diharapkan dapat membantu untuk mengurangi permasalahan lalu lintas yang ada di negeri ini.
1.2 Perumusan Masalah
Berdasarkan latar belakang diatas, maka rumusan masalah ini adalah :
1. Bagaimana memodelkan simulasi aliran kendaraan dengan menggunakan Car-Following Model (CFM) ?
1
2. Menentukan kondisi Equilibrium yaitu kondisi lalu lintas pada kondisi iringan stabil ?
1.3 Tujuan
Tujuan dari penelitian ini adalah :
1. Menggambarkan kondisi iringan kendaraan dengan pendekatan metode Optimal Velocity Model. Dalam bentuk grafik Trayektori Posisi kendaraan terhadap Waktu Tempuh dan grafik Trayektori Kecepatan kendaraan terhadap waktu iterasi.
2. Menentukan kondisi equilibrium yaitu kendaraan tersebut memiliki percepatan dan perlambatan yang optimal, yaitu kondisi iringan yang stabil atau tidak saling bertabrakan.
1.4 Hipotesis
Hipotesis dari tugas akhir ini yaitu dengan menggunakan Metode OVM dapat digunakan untuk memodelkan iringan kendaraan dengan cukup baik, pada kondisi lalu lintas kendaraan Lancar dan Padat.
1.5 Metodologi dan Penyelesaian Masalah
Metodologi yang digunakan untuk menyelesaikan permasalahan, meliputi :
1. Studi Literatur
Studi literatur atau kajian pustaka yang mendukung topik tugas akhir baik di text book, e-book, dan jurnal yang dapat digunakan untuk memahami konsep dasar kepada metode Optimum Velocity Model sebagai salah satu metode Car-Following Model.
2. Pengumpulan Data
Pengumpulan data ini dilakukan di jalan tol buah batu menggunakan video, sehingga data diperoleh kendaraan sejenis (mobil), kecepatan, jarak antar kendaraan dan waktu tempuh baik itu pada kendaraan lancar maupun pada kendaraan padat.
3. Analisis dan Perancangan Sistem
Analisis dan perancangan sistem dengan menggunakan konsep dasar dari skema Velocity Verlet pada rumus dasar dinamika molekul. Dengan menggunakan pendekatan Metode Optimal Velocity Model untuk menyelesaikan permasalahan lalu lintas serta peneliti mencoba untuk memodelkan perubahan posisi dan nilai dari kecepatan pengemudi kendaraan.
2
4. Implementasi
Sebelumnya juga peneliti telah melakukan pengujian model dan simulasi dengan melakukannya terhadap beberapa sampel kendaraan untuk mendapatkan hasil yang diinginkan, apabila sudah sesuai dengan harapan maka peneliti selanjutnya akan menerapkan metode Optimal Velocity Model dengan data yang sebenarnya. Hasil yang diperoleh dari simulasi, dibandingkan dengan kondisi di lapangan atau pada dunia nyata.
5. Pengujian akhir
Pada tahap ini, pengujian akhir dilakukan terhadap sistem yang telah ada dan parameter yang dibutuhkan dengan menggunakan rumus yang telah ditetapkan. Serta peneliti membandingkan hasil dari metode OVM dengan data yang telah ada, diharapkan hasil dari simulasinya mendekati atau tidak terlalu jauh dengan data riil.
6. Analisis hasil simulasi
Pada tahap ini, analisis hasil simulasi dilakukan dengan cara melakukan percobaan dengan menghitung posisi dan kecepatan total kendaraan secara keseluruhan.
7. Penyusunan Laporan
Pada tahap ini, peneliti menarik kesimpulan terhadap analisis pengujian dan hasil tugas akhir yang dibuat dalam bentuk laporan.
1.6 Sistematika Penelitian
1. BAB 1 PENDAHULUAN
Pada bagian ini menjelaskan tentang tugas akhir secara umum, meliputi latar belakang, perumusan masalah, tujuan, hipotesis, metodologi dan penyelesaian masalah dan sistematika penelitian.
2. BAB 2 TINJAUAN PUSTAKA
Pada bagian ini membahas tentang teori penunjang serta parameter penting seperti panjang lintasan (L) dan durasi waktu tempuh (t) yang memang sudah ditentukan yang digunakan dalam penerapan metode OVM.
3. BAB 3 PERANCANGAN SISTEM
Pada bagian ini berisi tentang simulasi, prediksi dan metode yang digunakan serta kedua kondisi yang digunakan yang berguna untuk membandingkan metode ini.
3
4. BAB 4 ANALISIS HASIL SIMULASI
Pada bagian ini membahas mengenai pengujian hasil simulasi yang telah dilakukan pada bab sebelumnya. Membandingkan data simulasi dengan data asli, serta tahap selanjutnya adalah tahap analisis dan tahap pengujian.
5. BAB 5 KESIMPULAN DAN SARAN
Pada bagian ini berisi tentang kesimpulan dari tugas akhir yang telah dibuat serta saran-saran yang diperlukan untuk pengembangan lebih lanjut.
4
BAB II TINJAUAN PUSTAKA
2.1 Dinamika Molekul (Molecular Dynamics)
Dinamika molekul salah satu bahasan pada metode komputasi fisika yang terkenal untuk menyimulasikan gerakan partikel. Dinamika molekul merupakan pengembangan dari hukum newton kedua, mengacu kepada hukum Lennard Jones dan skema Velocity Verlet. Hukum Lennard Jones digunakan pada molekul terkecil contohnya air, protein dan lain sebagainya. Sedangkan skema Velocity Verlet dapat digunakan untuk kehidupan sehari-hari serta dapat diterapkan pada Car Following Model untuk traffic dynamics yang dapat digunakan pada City Traffic. Oleh sebab itu, konsep dinamika molekul ini sangat berguna tidak hanya dibidang komputasi fisika saja namun juga dapat diterapkan pada komputasi kimia dan biologi, kemudian dinamika molekul melakukan pendekatan dengan metode Optimal Velocity Model [4] [5].
2.1.1 Simulation Molecular Dynamics (SMD)
Simulasi dinamika molekul adalah simulasi berupa perpindahan molekul yang dapat digambarkan untuk selanjutnya dapat dianalisis lebih lanjut, dikembangkan dan diimplementasikan di dalam kehidupan sehari-hari. Simulasi dinamika molekul dapat diterapkan pada Car Following Model. Dengan cara memvisualisasikan partikel-partikel pada dinamika molekul atau disebut juga Visual Molecular Dynamics. Selanjutnya adalah dari hasil Visual Molecular Dynamics pada lalu lintas kota dengan mengimplementasikan metode Optimal Velocity Model [5].
2.1.2 Traffic Dynamics (TD)
Teori aliran lalu lintas dimulai pada tahun 1930 dan dipopulerkan oleh Greenshields di Amerika. Namun sejak tahun 1990 telah banyak dikembangkan oleh para Peneliti agar memudahkan masyarakat dan waktu komputasi yang lebih cepat. Dinamika Lalu Lintas merupakan Arus Lalu Lintas yang secara terus menerus contohnya terdapat pada Lalu Lintas Kota dengan melakukan pendekatan Dinamika Molekul[2].
2.1.3 Heterogeneus Traffic (HT)
Heterogeneus Traffic merupakan keunggulan model mikroskopis adalah penggambaran pengemudi memiliki kendaraan yang berbeda dengan kendaraan lain. Termasuk pengemudi berbeda apabila memiliki batasan kecepatan, jarak antar jalan dan simulasi ketika terkait lalu lintas. Adapun cara menentukan Heterogeneus Traffic dengan dua cara, yaitu [2]:
a) Semua pengemudi kendaraan digambarkan dengan model sama namun dengan parameter berbeda.
5
b) Semua Pengemudi kendaraan digambarkan dengan model berbeda namun parameter berbeda.
2.1.4 Steady-State Equilibrium
Steady-State Equilibrium adalah keseimbangan jarak antar mobil pada saat kendaraan tersebut diam atau pada saat kendaraan tersebut sedang melaju. Keadaan berbeda pada Car-Following Model terletak pada lalu lintas Homogeneus dan Heterogeneus. Model yang digunakan adalah Optimal Velocity Model dan dapat diaplikasikan pada Car-Following Model. Rumus equilibrium bermacam macam sesuai dengan kondisi kendaraan pada saat itu, ini contoh salah satu rumus equilibrium. Optimal Velocity Model memiliki batasan jarak minimal yang harus dimiliki, maka jarak tersebut dirumuskan sebagai berikut [2] [3]:
D= 1N ∑
t=1
N
¿¿
Keterangan :D = Jarak keseluruhan atau Jarak antara mobil satu dengan yang lain.
N = Banyaknya kendaraan.
t = Waktu Durasi.
sα ( t ) = Simulasi Jarak berdasarkan waktu.
sαm (t ) = Simulasi Kendaraan yang diukur berdasarkan Jarak.
Dengan mencari jarak aman yang optimal maka telah didapatkan hasil terbaik agar metode tersebut dapat diimplementasikan dan dilakukan dalam kehidupan sehari-hari dan dapat digunakan dalam masalah Traffic Dynamics yang terjadi[1]. Karakteristik Steady-State Equilibrium adalah :
a) Homogeneus Traffic : semua pengemudi dengan kecepatan (v¿¿n=v)¿ sama dan jarak (s¿¿n=s )¿ yang sama pula.
b) No Acceleration : vn=0∨vn ( t+∆ t )=vn(t) untuk semua pengemudi.
2.1.5 Highway Scenario
Skenario jalan raya adalah menampilkan simulasi jalan raya di jalan pada jam-jam sibuk. Dalam rangka untuk menampilkan kemurnian karakteristik model maka kami mensimulasikan jalur tunggal bebas hambatan, kemudian dimodelkan arus lalu lintas yang bervariasi dengan simulasi kendaraan nilai tertinggi sebanyak 2.200 kendaraan/jam. Sedangkan kendaraan yang memasuki jalan diasumsikan konstan sebanyak 550 kendaraan/jam [2].
6
Kemuadian aspek dinamika lalu lintas yang dapat dibandingkan dengan dunia nyata :
Pengemudi bebas berlalu lintas. Karakteristik kendaraan dapat diperhitungkan apabila sudah dekat. Arus lalu lintas stabil dalam kondisi yang stabil dan padat.
2.1.6 City Scenario
Situasi kota dapat ditandai dengan adanya persimpangan dan lampu merah lalu lintas. Simulasi diawali dengan antrian sebanyak 20 kendaraan yang menunggu di belakang lampu merah lalu lintas pada saat t = 0 atau sesuai dengan kondisi pada daerah tersebut dan biasanya berkisar antara 30 detik bahkan ada suatu tempat yang mencapat hampir sekitar 5 menit. Mungkin itu juga bisa jadi penyebab salah satu faktor terjadinya kemacetan lalu lintas dikarenakan lampu merah yang terlalu lama sedangkan kendaraan pada saat itu sedang padat. Karakteristik dapat dibandingkan dengan kenyataan yang ada pada saat ini :
Tahap pertama : percepatan berkisar antara 1 – 2.5 m/s apabila sudah mendekati lampu merah lalu lintas.
Tahap kedua : pada tahapan ini pengendara dapat melakukan perjalanan sesuai dengan kecepatan yang diinginkan.
Tahap ketiga : semua kendaraan harus memperlambat dengan halus apabila sudah mendekati kendaraan lain.
2.1.7 Trajectory Data
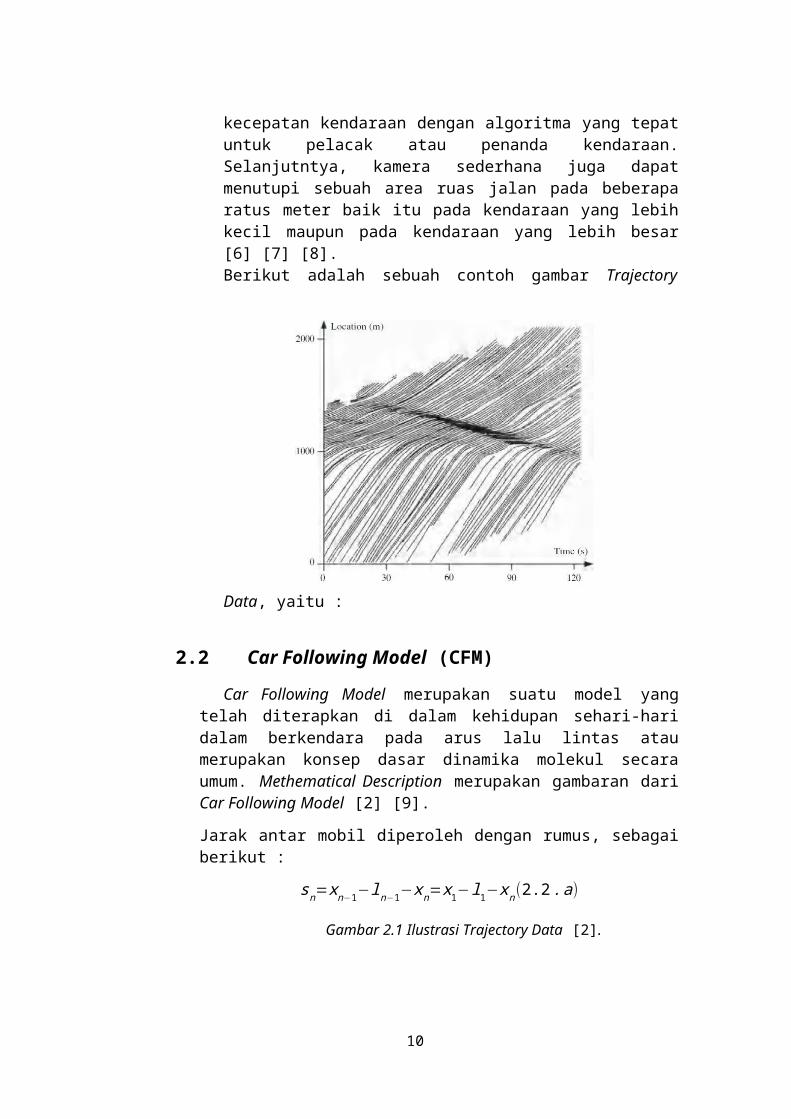
Lalu lintas kendaraan dapat diamati secara langsung dengan menggunakan kamera. Dengan demikian, Trajectory Data merupakan gambaran keseluruhan lalu lintas data yang telah tersedia atau dari data yang telah didapatkan [2]. Bagaimanapun juga, berdasarkan kamera hasil pengamatan mendapatkan data yang kompleks dan cenderung memiliki error yang mana membutuhkan system yang otomatis seperti sensor kecepatan kendaraan dengan algoritma yang tepat untuk pelacak atau penanda kendaraan. Selanjutntya, kamera sederhana juga dapat menutupi sebuah area ruas jalan pada beberapa ratus meter baik itu pada kendaraan yang lebih kecil maupun pada kendaraan yang lebih besar [6] [7] [8]. Berikut adalah sebuah contoh gambar Trajectory Data, yaitu :
7
2.2 Car Following Model (CFM)
Car Following Model merupakan suatu model yang telah diterapkan di dalam kehidupan sehari-hari dalam berkendara pada arus lalu lintas atau merupakan konsep dasar dinamika molekul secara umum. Methematical Description merupakan gambaran dari Car Following Model [2] [9].
Jarak antar mobil diperoleh dengan rumus, sebagai berikut :
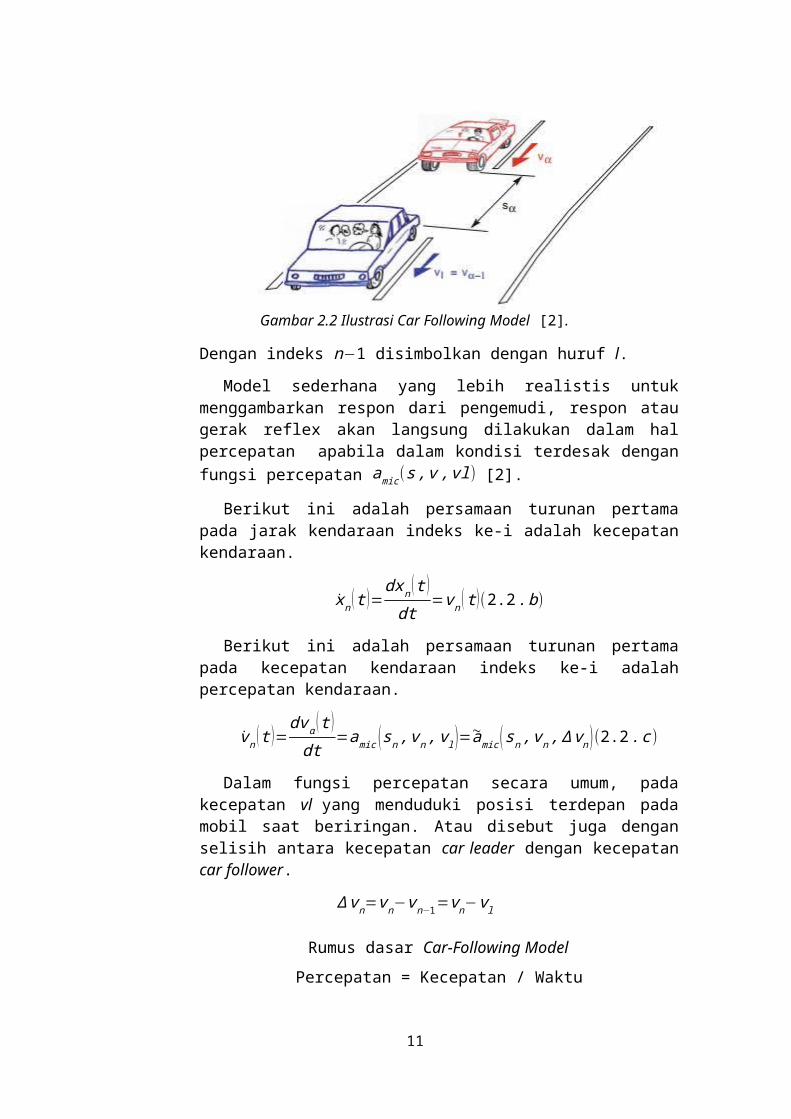
sn=xn−1−ln−1−xn=x1−l1−xn(2.2. a)
Gambar 2.2 Ilustrasi Car Following Model [2].
Dengan indeks n−1 disimbolkan dengan huruf l.
Model sederhana yang lebih realistis untuk menggambarkan respon dari pengemudi, respon atau gerak reflex akan langsung dilakukan dalam hal percepatan apabila dalam kondisi terdesak dengan fungsi percepatan amic(s , v , vl) [2].
Berikut ini adalah persamaan turunan pertama pada jarak kendaraan indeks ke-i adalah kecepatan kendaraan.
xn ( t )=dxn ( t )
dt=vn (t )(2.2 . b)
Berikut ini adalah persamaan turunan pertama pada kecepatan kendaraan indeks ke-i adalah percepatan kendaraan.
8
Gambar 2.1 Ilustrasi Trajectory Data [2].
vn ( t )=dvα (t )
dt=amic ( sn , vn , v l )=~amic (sn , vn , ∆ vn )(2.2 . c)
Dalam fungsi percepatan secara umum, pada kecepatan vl yang menduduki posisi terdepan pada mobil saat beriringan. Atau disebut juga dengan selisih antara kecepatan car leader dengan kecepatan car follower.
∆ vn=vn−vn−1=vn−v l
Rumus dasar Car-Following Model
Percepatan = Kecepatan / Waktu
amic ( sn , vn , v l )=vmic ( s , v , v l )−v
∆ t(2.2 . d)
Berikut keterangan dari rumus yang telah dituliskan, yaitu:
“ sn = adalah jarak antar mobil biru ke mobil merah dan sebaliknya,
amic = Pecepatan Mikroskopis,
vmic = Kecepatan Mikroskopis,
n = mobil ke- i (indeks mobil),
β = konstanta respon dari model OVM,
vn= kecepatan kendaraan,
an = percepatan,
∆ vn = adalah kecepatan relatif,
vn−1 = kecepatan dari kendaraan yang mengikuti,
ve = kecepatan yang stabil,
xn = lokasi bumper bagian depan kendaraan “ [10].
2.3 Generalized Force Model (GFM)
GFM merupakan pendekatan untuk menyimulasikan dinamika molekul, dalam hal ini dinamika lalu lintas mengacu pada banyaknya kendaraan. GFM sudah banyak dikembangkan di beberapa negara. Biasanya GFM diterapkan di iring-iringan mobil, traffic light dan lain sebagainya [3].
Konsep dinamika molekular dapat diaplikasikan di dalam kehidupan sehari-hari. Melakukan simulasi lalu lintas dapat dilakukan dengan pendekatan dinamika molekul. Selain itu Microscopis Traffic atau lalu lintas mikroskopis yang diusulkan untuk interaksi antar unit pengendara. Mesoscopic Model menggabungkan pendekatan Microscopis dan
9
Macroscopis. Makroskopis merupakan partikel terkecil pada suatu unsur yang dapat disimulasikan. Sedangkan Mikroskopis merupakan gambaran dari Car-Following Model pada lalu lintas kendaraan yang diterapkan dikehidupan sehari-hari yang lebih mengacu kepada Generalized Force Model. untuk menyimulasikan kendaraan tersebut yang berpindah dengan kecepatan sama bertujuan menghindari agar tidak terjadi benturan atau tabrakan antar mobil. Untuk mendapatkan hasil yang lebih baik lagi maka dikembangkan model Generalized model. Dimana pada setiap parameternya seperti, batasan kecepatan, percepatan, panjang rata-rata kendaraan, waktu reaksi, dan lain sebagainya. Generalized Force Model dapat mengatasi situasi tertentu agar tidak terjadi kecelakaan antar mobil[6].
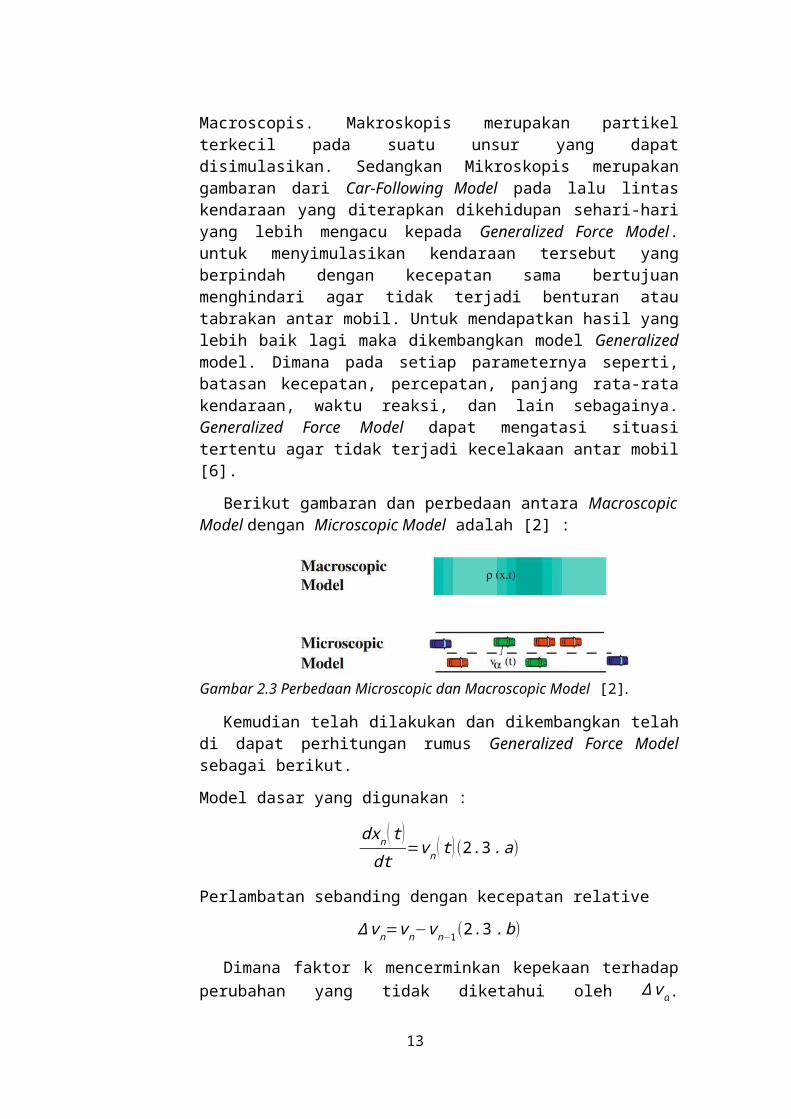
Berikut gambaran dan perbedaan antara Macroscopic Model dengan Microscopic Model adalah [2] :
Gambar 2.3 Perbedaan Microscopic dan Macroscopic Model [2].
Kemudian telah dilakukan dan dikembangkan telah di dapat perhitungan rumus Generalized Force Model sebagai berikut.
Model dasar yang digunakan :
dxn ( t )dt
=vn (t )(2.3 . a)
Perlambatan sebanding dengan kecepatan relative
∆ vn=vn−vn−1(2.3 . b)
Dimana faktor k mencerminkan kepekaan terhadap perubahan yang tidak diketahui oleh ∆ vα. Sensitivitas diasumsikan tergantung pada kecepatan kendaraan dan jarak.
sn=xn−1−xn(2.3 . c )
Dengan relaksasi waktu tertentu sebagai berikut :
sn=xn−1−ln−1−xn=x1−l1−xn(2.3 .d )
Jarak antar mobil pada Generelized Force Model juga nilainya sama dengan konsep diatas pada Car Following Model.
10
2.4 Optimal Velocity Model (OVM)
Optimal Velocity Model adalah model waktu kontinu yang mempunyai fungsi percepatan dari amic(s , v ). Berikut adalah gambar perbandingan dari fungsi dan parameter pada Optimal Velocity Model [2] [9].
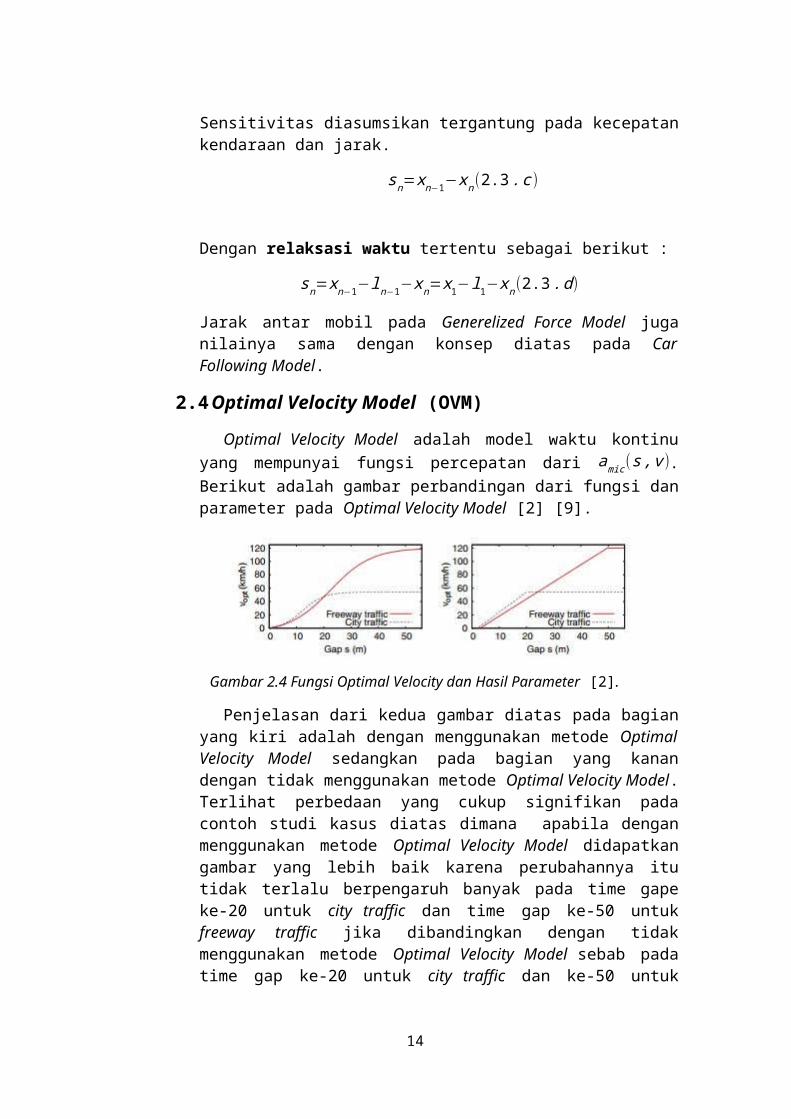
Gambar 2.4 Fungsi Optimal Velocity dan Hasil Parameter [2].
Penjelasan dari kedua gambar diatas pada bagian yang kiri adalah dengan menggunakan metode Optimal Velocity Model sedangkan pada bagian yang kanan dengan tidak menggunakan metode Optimal Velocity Model. Terlihat perbedaan yang cukup signifikan pada contoh studi kasus diatas dimana apabila dengan menggunakan metode Optimal Velocity Model didapatkan gambar yang lebih baik karena perubahannya itu tidak terlalu berpengaruh banyak pada time gape ke-20 untuk city traffic dan time gap ke-50 untuk freeway traffic jika dibandingkan dengan tidak menggunakan metode Optimal Velocity Model sebab pada time gap ke-20 untuk city traffic dan ke-50 untuk highway traffic barulah stabil grafik yang dihasilkan. Dari contoh grafik kecepatan diatas perubahan yang cukup signifikan disebut juga sebagai keadaan tidak stabil sedangkan pada grafik kecepatan yang hampir konstan garisnya atau nilainya maka disebut juga sebagai keadaan stabil pada kecepatan kendaraan rata-rata yang dihasilkan.
Berikut ini rumus umum pada OVM adalah :
v=vopt (s )−v
τ(2.4 . a)
Persamaan ini menggambarkan penyesuaian dari kecepatan yang sebenarnya v=v α dengan kecepatan yang optimal vopt pada skala waktu yang diberikan τ . Membandingkan persamaan percepatan dengan konsidi stady-state yang menerangkan bahwa kecepatan optimal setara dengan diagram mikroskopis [2].
v'opt (s ) ≥0 , vopt (0 )=0 , lim
s → ∞vopt ( s)=v0(2.4 .b)
Alangkah baiknya, apabila persamaan percepatan menjelaskan bagian dari model pada fungsi kecepatan optimal [2][1].
11
vopt ( s)=v0
tanh( s∆ s
−β )+tanhβ
1+tanhβ(2.4 . c)
Dengan menggunakan tangen hiperbolik dan τ yang relevan untuk model yang optimal. Terdapat tiga parameter tambahan yaitu, kecepatan v0
, rentang lebar transisi ∆ s dan dari bentuk mobil β [2].
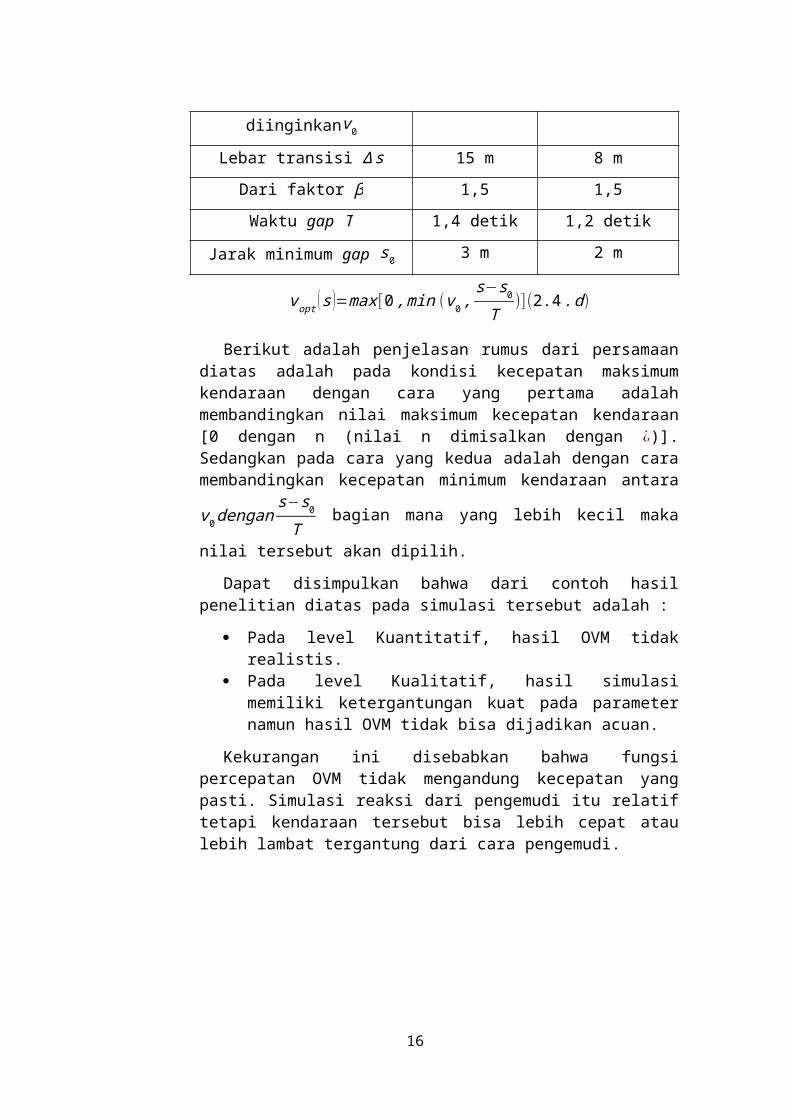
Tabel 2.1 Contoh tabel Dua Variansi Parameter [2].
Parameter Typical value
Highway
Typical value city
Traffic
Waktu adaptasi τ 0,65 detik 0,65 detik
Kecepatan yang diinginkanv0 120 km/jam 54 km/jam
Lebar transisi ∆ s 15 m 8 m
Dari faktor β 1,5 1,5
Waktu gap T 1,4 detik 1,2 detik
Jarak minimum gap s0 3 m 2 m
vopt ( s )=max [0 ,min (v0 ,s−s0
T)](2.4 . d )
Berikut adalah penjelasan rumus dari persamaan diatas adalah pada kondisi kecepatan maksimum kendaraan dengan cara yang pertama adalah membandingkan nilai maksimum kecepatan kendaraan [0 dengan n (nilai n dimisalkan dengan ¿)]. Sedangkan pada cara yang kedua adalah dengan cara membandingkan kecepatan minimum kendaraan antara
v0dengans−s0
T bagian mana yang lebih kecil maka nilai tersebut akan
dipilih.
Dapat disimpulkan bahwa dari contoh hasil penelitian diatas pada simulasi tersebut adalah :
Pada level Kuantitatif, hasil OVM tidak realistis. Pada level Kualitatif, hasil simulasi memiliki ketergantungan kuat
pada parameter namun hasil OVM tidak bisa dijadikan acuan.
Kekurangan ini disebabkan bahwa fungsi percepatan OVM tidak mengandung kecepatan yang pasti. Simulasi reaksi dari pengemudi itu relatif tetapi kendaraan tersebut bisa lebih cepat atau lebih lambat tergantung dari cara pengemudi.
12
BAB III PERANCANGAN SISTEMPada bab ini menjelaskan mengenai analisis dan perancangan sistem yang
telah dilakukan yaitu pembahasan alur atau flowchart dari proses Traffic Dynamics pada Car-Following Model dengan menggunakan metode Molecular Dynamics dan pendekatan Optimal Velocity Model.
3.1 Deskripsi Sistem
Secara garis besar, tugas ini telah menghasilkan suatu sistem yang dapat mengestimasi antar kendaraan agar menghindari terjadinya kecelakaan pada Car-Following Model (CFM). Dengan melakukan pendekatan Optimal Velocity Model (OVM).
3.2 Rancangan Umum Sistem
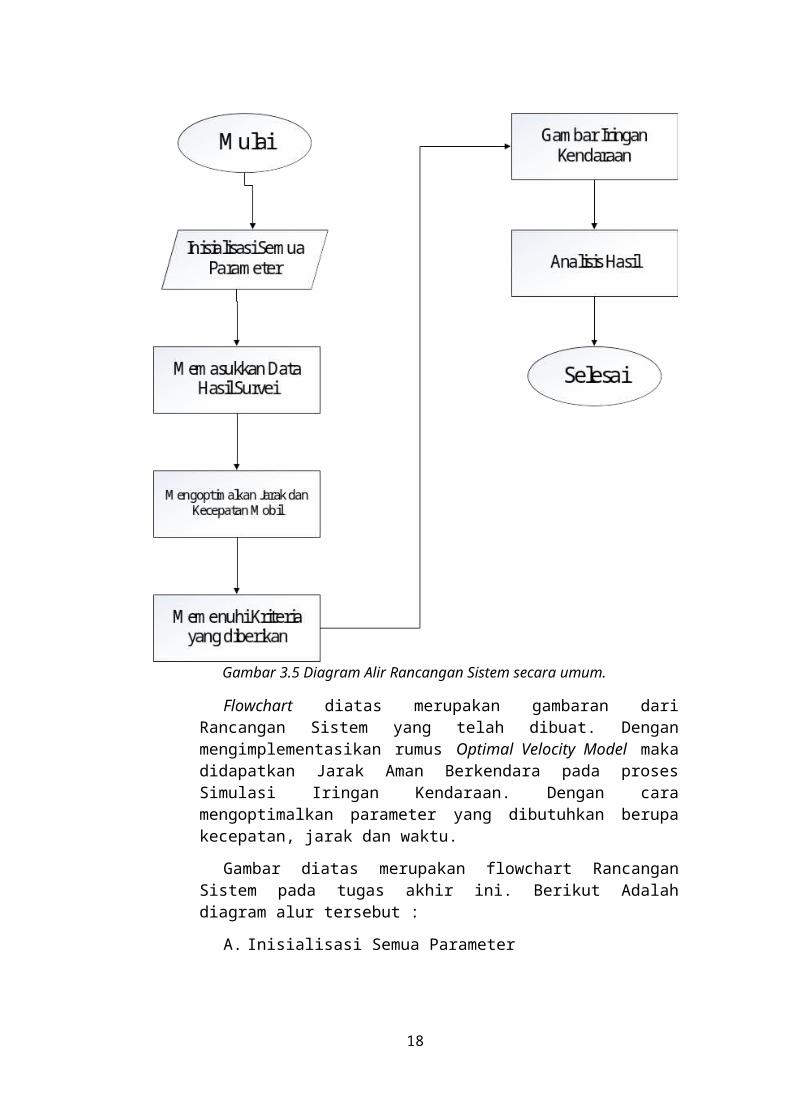
Berikut adalah flowchart tahapan proses pada Optimal Velocity Model :
Gambar 3.5 Diagram Alir Rancangan Sistem secara umum.
13
Flowchart diatas merupakan gambaran dari Rancangan Sistem yang telah dibuat. Dengan mengimplementasikan rumus Optimal Velocity Model maka didapatkan Jarak Aman Berkendara pada proses Simulasi Iringan Kendaraan. Dengan cara mengoptimalkan parameter yang dibutuhkan berupa kecepatan, jarak dan waktu.
Gambar diatas merupakan flowchart Rancangan Sistem pada tugas akhir ini. Berikut Adalah diagram alur tersebut :
A. Inisialisasi Semua Parameter
Pada tahap pertama ini kita menjelaskan semua parameter yang dibutuhkan dalam proses ini. Berupa banyaknya kendaraan yang melintas dalam satuan waktu dan dalam dua kondisi yang telah ditentukan.
B. Implementasi Rumus OVM
Pada tahapan ini, impelementasi rumus OVM. Hasil akhir sementara dapat berupa jarak pada iringan kendaraan. Namun, tidak hanya sebatas jarak antar kendaraan penggunaan rumus OVM juga dapat digunakan untuk perubahan posisi, kecepatan dan percepatan kendaraan.
C. Memasukkan data hasil survei
Pada tahapan ini, memasukkan data penelitian didapat di lapangan yang dilakukan oleh peneliti. Pengumpulan data yang telah dilakukan langsung di tempat yang sudah ditentukan dengan menggunakan data yang riil dan valid. Tempatnya berlokasi di jalan tol buah batu dilakukan survei langsung pengumpulan data pada kendaraan sejenis (mobil), baik itu pada volume kendaraan lengan maupun pada volume kendaraan padat.
D. Mengoptimalkan Jarak dan Kecepatan mobil
Memaksimalkan Jarak aman berkendara yang mengacu kepada dua parameter penting, yaitu Jarak dan mobil. Jarak yang dimaksud adalah jarak optimal antara suatu mobil dengan mobil yang lainnya, sedangkan Kecepatan mobil rata-rata nilainya hampir konstan atau disebut juga dengan istilah Equilibrium atau kondisi stabil pada mobil saat terjadinya iringan atau pada saat melintas bersamaan pada saat bersamaan.
E. Memenuhi Kriteria yang diberikan
Dengan memenuhi kedua kriteria yang telah ditentukan, yaitu Highway Criteria dan City Criteria. Maksudnya adalah pada Hihgway Criteria itu mengacu kepada aspek dinamika lalu lintas
14
sedangkan pada City Criteria itu mengacu kepada faktor pengemudi kendaraan tersebut.
F. Gambaran iringan kendaraan
Merupakan hasil visualisasi dari metode OVM pada CFM. apabila model tersebut adalah telah memenuhi semua parameter dan ketentuan yang telah diperolah maka metode OVM dapat digambarkan ke dalam grafik trayektori Posisi dan Kecepatan kendaraan.
G. Analisis hasil
Analisis dari penelitian yang telah dilakukan, sehingga mendapatkan hasil dari perhitungan menggunakan metode OVM pada Iringan kendaraan. Membandingkan hasil yang didapat dari data valid yang riil dengan simulasi program yang telah dibuat.
15
16
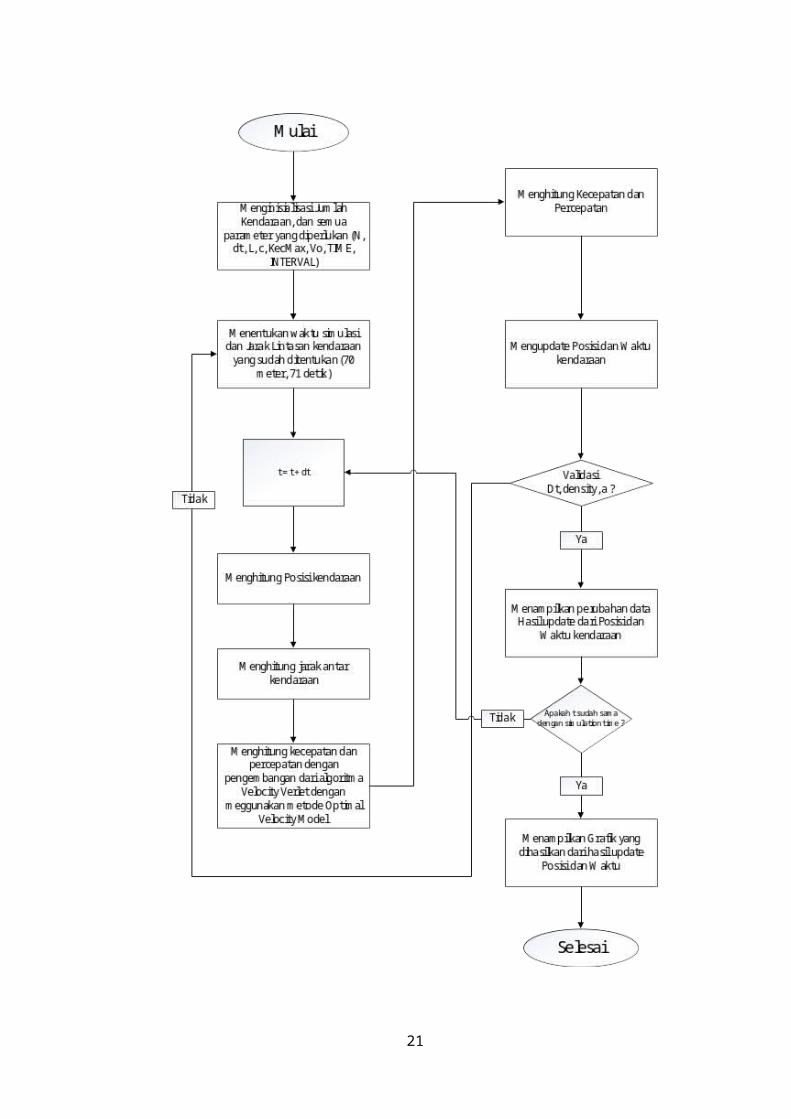
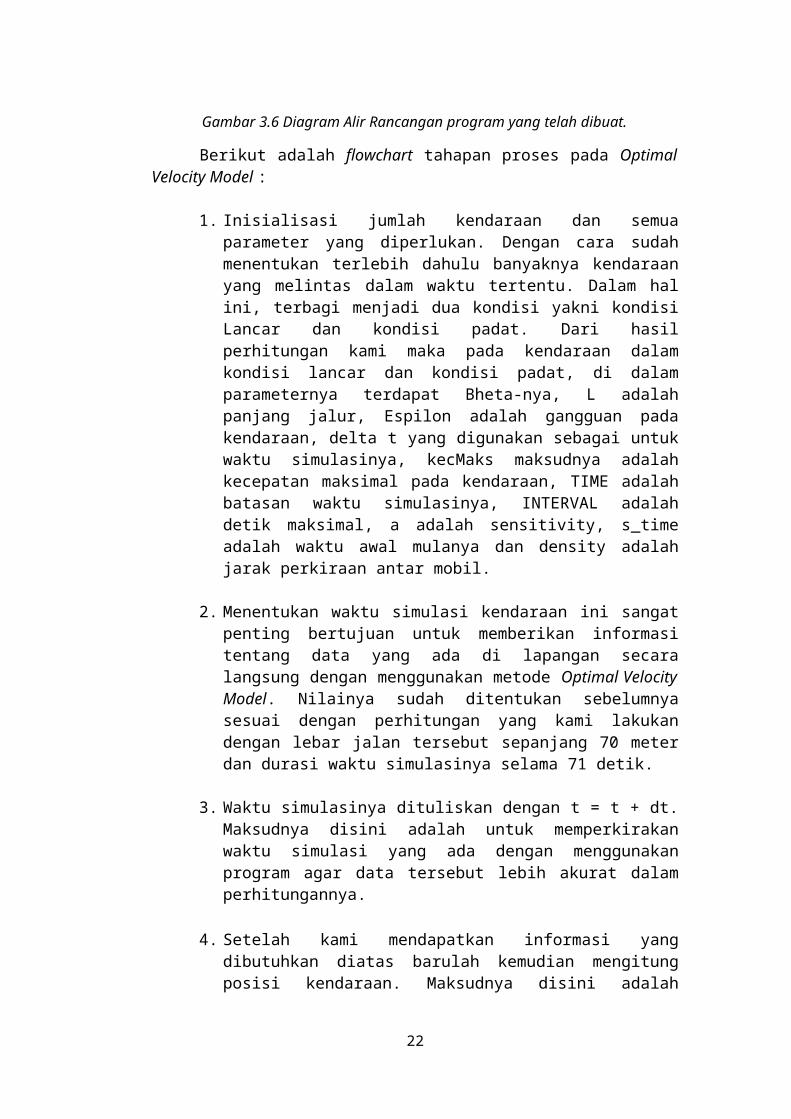
Gambar 3.6 Diagram Alir Rancangan program yang telah dibuat.
Berikut adalah flowchart tahapan proses pada Optimal Velocity Model :
1. Inisialisasi jumlah kendaraan dan semua parameter yang diperlukan. Dengan cara sudah menentukan terlebih dahulu banyaknya kendaraan yang melintas dalam waktu tertentu. Dalam hal ini, terbagi menjadi dua kondisi yakni kondisi Lancar dan kondisi padat. Dari hasil perhitungan kami maka pada kendaraan dalam kondisi lancar dan kondisi padat, di dalam parameternya terdapat Bheta-nya, L adalah panjang jalur, Espilon adalah gangguan pada kendaraan, delta t yang digunakan sebagai untuk waktu simulasinya, kecMaks maksudnya adalah kecepatan maksimal pada kendaraan, TIME adalah batasan waktu simulasinya, INTERVAL adalah detik maksimal, a adalah sensitivity, s_time adalah waktu awal mulanya dan density adalah jarak perkiraan antar mobil.
2. Menentukan waktu simulasi kendaraan ini sangat penting bertujuan untuk memberikan informasi tentang data yang ada di lapangan secara langsung dengan menggunakan metode Optimal Velocity Model. Nilainya sudah ditentukan sebelumnya sesuai dengan perhitungan yang kami lakukan dengan lebar jalan tersebut sepanjang 70 meter dan durasi waktu simulasinya selama 71 detik.
3. Waktu simulasinya dituliskan dengan t = t + dt. Maksudnya disini adalah untuk memperkirakan waktu simulasi yang ada dengan menggunakan program agar data tersebut lebih akurat dalam perhitungannya.
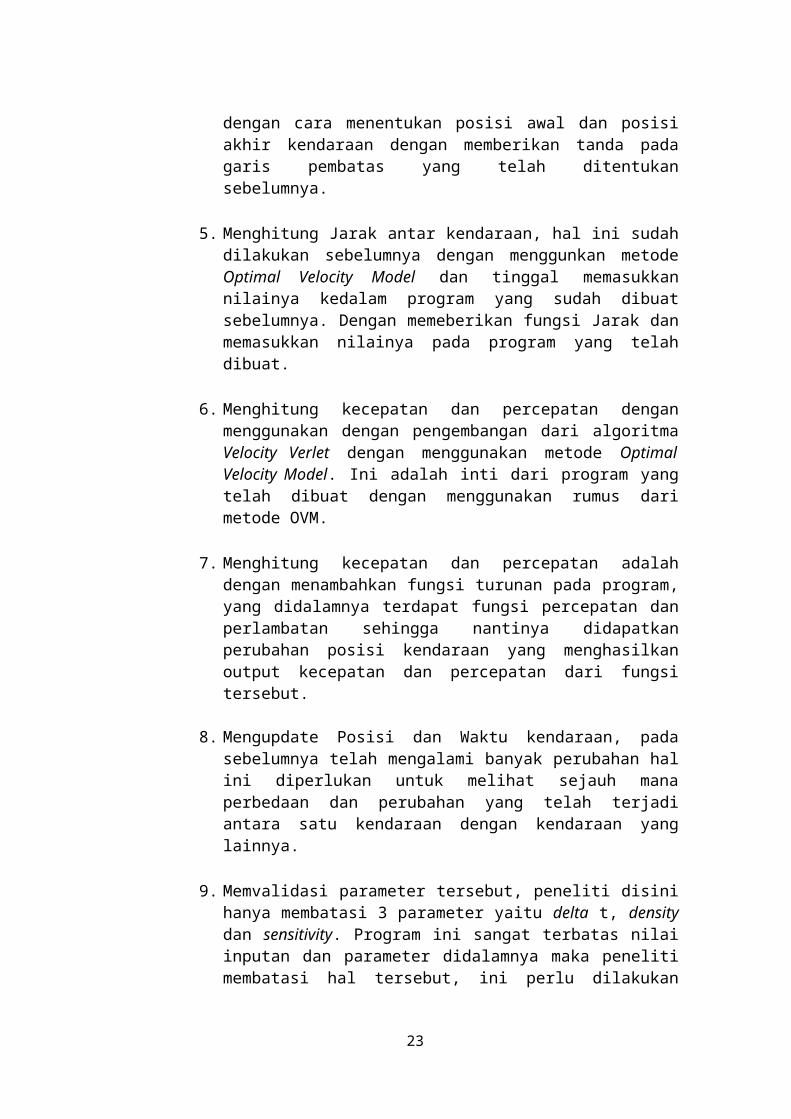
4. Setelah kami mendapatkan informasi yang dibutuhkan diatas barulah kemudian mengitung posisi kendaraan. Maksudnya disini adalah dengan cara menentukan posisi awal dan posisi akhir kendaraan dengan memberikan tanda pada garis pembatas yang telah ditentukan sebelumnya.
5. Menghitung Jarak antar kendaraan, hal ini sudah dilakukan sebelumnya dengan menggunkan metode Optimal Velocity Model dan tinggal memasukkan nilainya kedalam program yang sudah dibuat sebelumnya. Dengan memeberikan fungsi Jarak dan memasukkan nilainya pada program yang telah dibuat.
6. Menghitung kecepatan dan percepatan dengan menggunakan dengan pengembangan dari algoritma Velocity Verlet dengan menggunakan metode Optimal Velocity Model. Ini adalah inti dari program yang telah dibuat dengan menggunakan rumus dari metode OVM.
7. Menghitung kecepatan dan percepatan adalah dengan menambahkan fungsi turunan pada program, yang didalamnya terdapat fungsi
17
percepatan dan perlambatan sehingga nantinya didapatkan perubahan posisi kendaraan yang menghasilkan output kecepatan dan percepatan dari fungsi tersebut.
8. Mengupdate Posisi dan Waktu kendaraan, pada sebelumnya telah mengalami banyak perubahan hal ini diperlukan untuk melihat sejauh mana perbedaan dan perubahan yang telah terjadi antara satu kendaraan dengan kendaraan yang lainnya.
9. Memvalidasi parameter tersebut, peneliti disini hanya membatasi 3 parameter yaitu delta t, density dan sensitivity. Program ini sangat terbatas nilai inputan dan parameter didalamnya maka peneliti membatasi hal tersebut, ini perlu dilakukan agar dapat mengetahui apabila terjadi nilai dari parameter yang diinputkan sebelumnya tidak sesuai dengan program yang telah dibuat.
10. Menampilkan data Posisi Kendaraan dan Waktu tempuhnya hasil update dengan menggunakan dua tampilan yaitu, langsung pada saat program mulai di running sampai dengan selesai menggunakan Command Prompt dan menyimpannya di dalam sebuah file .csv bertujuan agar program tersebut dapat dilihat lagi dan diproses nilainya.
11. Di cek selanjutnya apakah waktu berakhirnya sama dengan batasan waktu simulasi yang sudah ditentukan sebelumnya, apabila belum selesai maka akan terus melakukan iterasi namun apabila sudah sama maka program berhenti.
12. Hasil dari data tersebut menghasilkan output nilai berupa Posisi dan Waktu, dikarenakan data tersebut sangat banyak nilai yang dihasilkan maka digambarkan berupa grafik dengan menggunakan software gnuplot.
“keterangan menggunakan bilangan randon pada v0 di program yang telah dibuat, agar dapat mengestimasikan nilai kisaran yang telah dibuat sesuai dengan data kisaran yang peneliti miliki agar hasilnya tidak terlalu jauh dengan data asli. Apabila datanya sangat banyak peneliti tidak mungkin dapat mengentry datanya satu persatu, sehingga dilakukanlah cara random agar lebih mudah untuk mendapatkan nilai kisarannya. Bertujuan agar dapat membandingkan nilai estimasi dengan data asli asli untuk mendapatkan nilai akurasinya.”
Rumus aslinya adalah sebagai berikut
vopt ( s)=max [0 ,min (v0 ,s−s0
T)]
18

Dengan menggunakan rumus ini kurang sesuai dengan kondisi dilapangan, karena rumus diatas hanyalah sebagai contoh untuk mencari nilai minimum dan nilai maksimum pada kecepatan optimal kendaraan. Dalam hal ini peneliti mengasumsikan bahwa v0 belum diketahui nilainya sesuai dengan data yang ada. Memang sebelumnya sudah diketahui kecepatan minimum dan kecepatan maksimum yang dihasilkan dari data hasil rekaman. Maka dengan demikian, peneliti menggunakan rumus ini :
vo=myrand∗( kecMin+kecMax )+kecMin
Setelah peneliti menggunakan rumus ini maka barulah selanjutnya peneliti menggunakan rumus utamanya yakni :
vopt ( s)=v0
tanh( s∆ s
−β )+tanhβ
1+tanhβRumus Optimal Velocity Model, yaitu rumus utama pada metode yang digunakan di program. Nilai dari v0 yang digunakan adalah nilai dari hasil rnadom kecepatan minimum dan kecepatan maksimum pada pada mobil dari data yang telah peneliti dapatkan.
19
BAB IV HASIL DAN IMPLEMENTASIPada BAB ini peneliti mencoba untuk menjelaskan dan menjabarkan
proses yang telah dilakukan tersebut. Dikarenakan metode Optimal Velocity Model dapat diterapkan didalam kehidupan sehari-hari namun, sangat disayangkan sekali apabila metode ini hanya baru bisa diterapkan di tol belum bisa diterapkan di jalan raya pada umumnya yang hanya dikhususkan untuk mobil saja tidak untuk kendaraan yang lainnya seperti motor, sepeda dan yang lainnya mungkin saja faktor jalanan yang terbatas yang tentu kita tidak bisa membandingkannya dengan Negara lain yang sudah maju perkembangannya. Berikut adalah analisis perancangan sistem yang telah dibuat sebelumnya yaitu.
4.1 Data Lalu Lintas
Data yang diperlukan dalam proses simulasi pada tugas akhir adalah berupa data sampel yang bersifat riil bertipe floating-car data (FCD) yang diambil langsung berdasarkan hasil pengamatan peneliti dan dibantu oleh beberapa pihak yang terkait dan orisinil. Lokasinya terletak diatas tempat penyebrangan pejalan kaki diatas tol Buah Batu.
Dalam hal ini, asal mula data dan simulasi pengujian sistem tersebut yang diperoleh mengacu pada pendekatan metode Car Following Model adalah sebagai berikut :
4.1.1 Dengan mencatat Trajectory Data pada semua kendaraan yang melintas dalam waktu tertentu. Hal ini penting dilakukan agar Trajectory Data yang kami dapatkan dari data tersebut kemudian diolah dan dilakukan perhitungan dengan menggunakan metode Optimal Velocity Model.[1]
4.1.2 Bertentangan dengan konsep Trajectory Data, Floating Car Data tidak merekam jalanan yang dihitung nantinya namun dengan memasangkan sistem akurasi pada GPS itu tidak tapi cara ini sepertinya lebih sulit dilakukan dalam waktu dekat ini karena masih terus dikembangkan sistemnya sampai dengan sekarang. Global Positionng Sytem atau GPS adalah sistem yang menentukan letak dipermukaan bumi dengan syncronization menggunakan satelit. Sistem ini menggunakan 24 satelit yang mengirimkan sinyal gelombang mikro ke Bumi. Sinyal ini diterima oleh alat di permukaan Bumi, dan digunakan untuk menentukan letak posisi, kecepatan, arah dan waktu agar lebih akurat lagi. Teknologi terbaru baru dikembangkan adalah GPS Tracker atau sering disebut juga sebagai GPS Tracking.
4.1.3 Model Floating Car Data (FCD) atau hampir sama dengan metode Optimal Velocity Model yang didalamnya terdapat informasi tambahan mengenai seperti, jarak antar kendaraan, posisi percepatan dan perlambatan kendaraan, mengaktivasikan dari turning signal dan dari perputaran stir mobil yang dikendalikan oleh pengemudi.[1] Secara visualisasinya Floating Car Data lebih
20
mirip kepada konsep Car Following Model atau yang menyebabkan iringan kendaraan.
Gambar 4.7 Peta Lokasi Pengambilan Data.
Dalam peta yang sudah digambarkan dapat kita lihat bahwa dengan batasan masalah hanya sebatas proses Iringan Kendaraan. Dengan menggunakan metode Optimal Velocity Model kita mencoba untuk dapat menentukan posisi dan waktu tempuh kendaraan sesuai dengan data yang telah didapat.
4.2 Analisis Jarak, Kecepatan dan Waktu Kendaraan
Setelah diperkirakan Jarak, Kecepatan dan Waktu kendaraan yang telah ditentukan sebelumnya dengan Data Kendaraan yang telah diperoleh. Dengan demikian setelah kami menentukan Jarak, Kecepatan dan Waktu kendaraan maka lebih mudah untuk diaplikasikan ke rumus-rumus berikut yang sudah ditentukan sebelumnya.
Gambaran kendaraan yang melintas dijalan tol sebagai berikut :
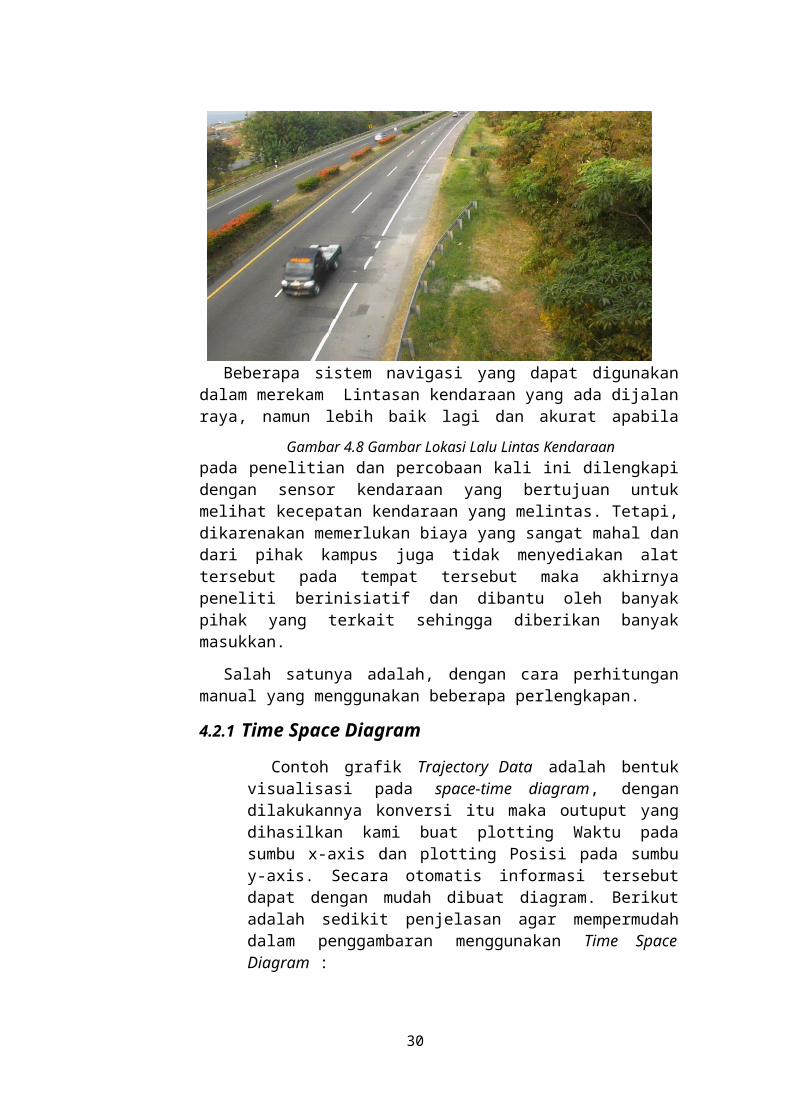
Beberapa sistem navigasi yang dapat digunakan dalam merekam Lintasan kendaraan yang ada dijalan raya, namun lebih baik lagi dan
21Gambar 4.8 Gambar Lokasi Lalu Lintas Kendaraan
akurat apabila pada penelitian dan percobaan kali ini dilengkapi dengan sensor kendaraan yang bertujuan untuk melihat kecepatan kendaraan yang melintas. Tetapi, dikarenakan memerlukan biaya yang sangat mahal dan dari pihak kampus juga tidak menyediakan alat tersebut pada tempat tersebut maka akhirnya peneliti berinisiatif dan dibantu oleh banyak pihak yang terkait sehingga diberikan banyak masukkan.
Salah satunya adalah, dengan cara perhitungan manual yang menggunakan beberapa perlengkapan.
4.2.1 Time Space Diagram
Contoh grafik Trajectory Data adalah bentuk visualisasi pada space-time diagram, dengan dilakukannya konversi itu maka outuput yang dihasilkan kami buat plotting Waktu pada sumbu x-axis dan plotting Posisi pada sumbu y-axis. Secara otomatis informasi tersebut dapat dengan mudah dibuat diagram. Berikut adalah sedikit penjelasan agar mempermudah dalam penggambaran menggunakan Time Space Diagram :
1) Dengan menentukan kecepatan pada mobil (jarak antar bumper mobil depan dengan jarak antar mobil dibelakangnya) pada posisi (yang dilambangkan dengan x) dan waktu tempuh kendaraan (yang dilambangkan dengan y) dan kami mengambil data tersebut dengan cara merekamnya.
2) The Time Headway atau simply headway, ∆ t∝ atau S∝ adalah jarak antar kedua bumper depan dan belakang kendaraan pada satu kendaraan satu dengan lainnya. Jarak ini juga sangat dibutuhkan pada metode Optimal Velocity Model yang bertujuan untuk mendapatkan percepatan kedaraan.
3) Trafiic Flow, dapat diefinisikan adalah banyaknya jumlah kendaraan pada saat melewati suatu waktu tertentu yang telah ditentukan. Traffic Flow bisa juga dikatakan sebagai waktu tempuh kendaraan, dalam hal ini khususnya Car Following.
4) The Distance Headway, adalah jarak vertikal antar kedua kendaraan pada lintasan dalam hal ini bertujuan agar memudahkan dalam melakukan pengukuran.
5) The Traffic Density, dapat definisikan sebagai jumlah banyaknya kendaraan (kemacetan lalu lintas) pada segmen waktu yang sudah ditentukan.
6) Lane adalah perubahan yang terjadi pada saat melakukan observasi dengan diberi tanda pada awal dan akhir lintasan. Pada bagian ini juga kami melakukan perintah ini pada saat melakukan observasi di lapangan.
Secara teori pada referensi yang kami pelajari sudah cukup sesuai dengan apa yang kami lakukan dan toeri yang sudah
22
dijelaskan. Time Space Diagram juga bisa disebut sebagai proses awal pengambilan data secara Riil yang dan kemudian nanti diolah setelahnya.
4.2.2 Crosss Section Data
Cross-Sectional Data merupakan gambaran stasioner dari induction loop, radar atau sensor infrared. Informasi yang didapatkan merupakan data langsung yang didapatkan pada data suatu kendaraan ataupun data kuantitas makroskopis atau lebih dikenal sebagai banyaknya banyaknya kualitas kendaraan.
1. Representasi dari Cross-Sectional Data
Pada bagian ini telah dilakukan penelitian dan mendiskusikan dengan cara memvisualisasikan gambar dari microskopis dan makroskopis cross-sectional data. Representasi Cross-Sectional Data tersebut bersifat Time Series yang mengacu pada kecepatan, flow dan jarak yang ditampilkan.
2. Rekonstruksi dari the Traffic State
Pada bagian ini berdasarkan hasil diskusi yang telah dilakukan oleh para peneliti terdapat macam-macam gambaran dari mikroskopis atau banyaknya partikel atom yang diibaratkan dengan gambaran banyaknya kendaraan yang melintas (bagaikan sebuah Cross-Sectional Data sebuah hasil data yang sama antara data simulasi dengan data riil dari hasil percobaan dilapangan).
4.3 Penerapan Metode Optimal Velocity Model
Dalam kehidupan bermasyarakat tentu saja peneliti berharap ada suatu saat metode terbaik yang dapat diaplikasikan oleh masyarakat, khususnya dapat diaplikasikan di Indonesia yang sepertinya sangat membutuhkan metode Optimal Velocity Model. Peneliti tahu bahwa Negara Indonesia ini sebagai Negara konsumen yang sudah dikenal oleh Negara lain. Salah satu produk yang digunakan dan dimanfaatkan oleh masyarakat banyak adalah mode transportasi masyarakat yaitu mobil. Sering terjadinya kecelakaan dan kemacetan yang ditimbulkan akibat semakin banyaknya kendaraan bermobil namun dengan akses jalan raya yang cukup sempit. Metode Optimal Velocity Model ini mengacu kepada Car Following Model adalah salah satu metode dari Molecular Dynamics yang merupakan turunan dari algoritma Velocity yang ada pada Molecular Dynamics.[1]
Traffic flow Dynamis cukup menarik karena banyak permasalahan yang dapat diselesaikan dengan konsep fisika. Metode baru yang sedang dikembangkan adalah dari tahun 1994 sampai dengan sekarang oleh peneliti bernama Yuki Sugiyama yang berasal dari Jepang yang sering disebut dengan Optimal Velocity Model. Diasumsikan mudahnya seperti
23
sebuah mobil dan pengemudi, dimana si pengemudi sebagai pengatur kendaraan baik itu yang posisinya berada di depannya ataupun posisinya berada di belakangya.[3]
Dengan menggunakan metode Optimal Velocity Model maka Iringan kendaraan yang terjadi tidak hanya Iringan kendaraan yang biasanya namun dengan menggunakan perhitungan yang ada pada metode tersebut. Apabila hasil perhitungan manual sama dengan hasil perhitungan dengan menggunakan model Optimal Velocity Model yang mengacu kepada konsep Car Following Model.
4.3.1 Perhitungan Data Kendaraan dalam kondisi Lancar
Pada proses ini dilakukan untuk membandingan dua kondisi yaitu pada kondisi Lancar dan pada kondisi padat. Hanya waktu saja yang membedakan anatra kondisi Lancar dan kondisi padat, pada saat proses pengambilan data yang berupa video Lancar pada hari Sabtu pada percobaan pertama adalah sebanyak 16 kendaraan sedangkan Padat pada hari Minggu adalah sebanyak 22 kendaraan sedangkan pada percobaan kedua didapatkan sebanyak 12 kendaraan dan 20 kendaraan. Dengan keterbatasan alat dan bahan pada saat proses berlangsung dan proses perhitungan maka peneliti dalam mkenentukan waktu tempuh kendaraan dan panjang lintasan kendaraan. Namun, percobaan dan penelitian ini dibatasi dengan panjang lintasan pada kedua percobaan itu adalah sepanjang 70 meter dan waktu yang diperlukan 71 detik. Kami merasa bahwa panjang lintasan dan waktu yang sudah ditentukan itu sudah sangat cukup untuk mendapatkan sampel untuk dilakukannya simulasi Iringan Kendaraan dengan menggunakan data riil.
Kondisi Lancar disini merupakan kondisi dimana banyaknya kendaraan yang melintas dalam satuan waktu dengan jumlah kendaraan yang lebih sedikit. Dalam percobaan dan penelitian kali ini dilakukan pengambilan sampel dilapangan yang cukup banyak menghabiskan waktu dalam proses yang terjadi di lapangan.
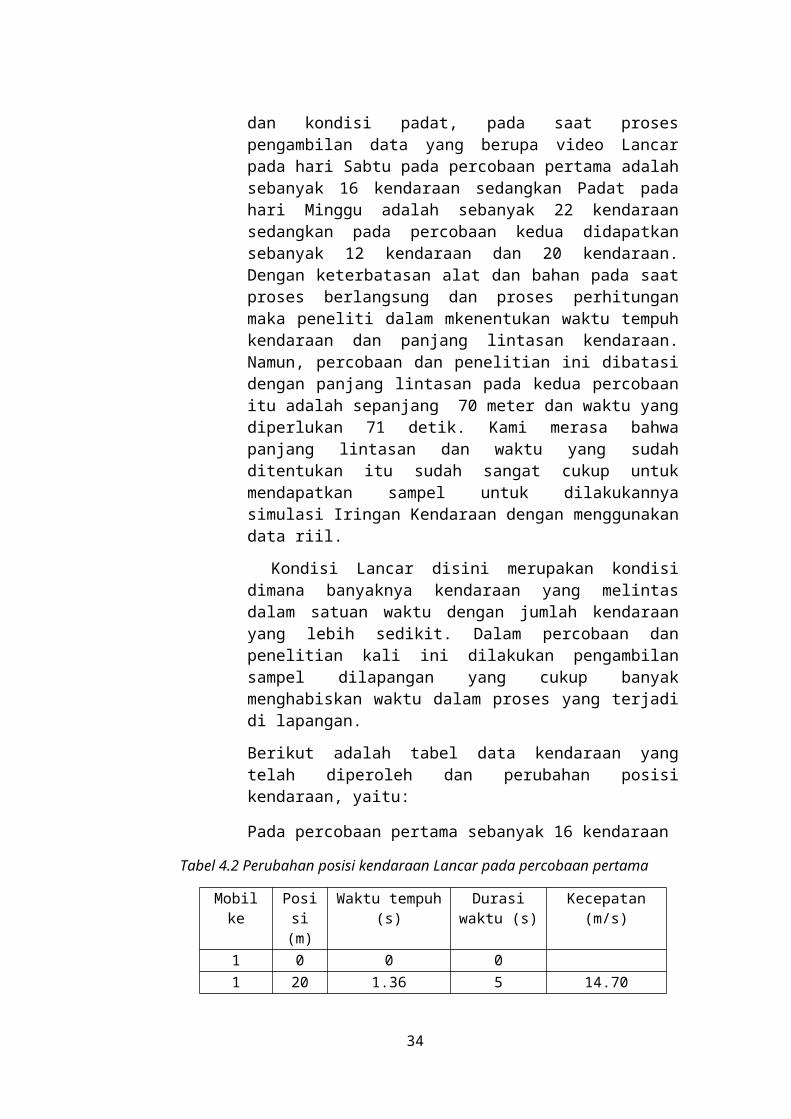
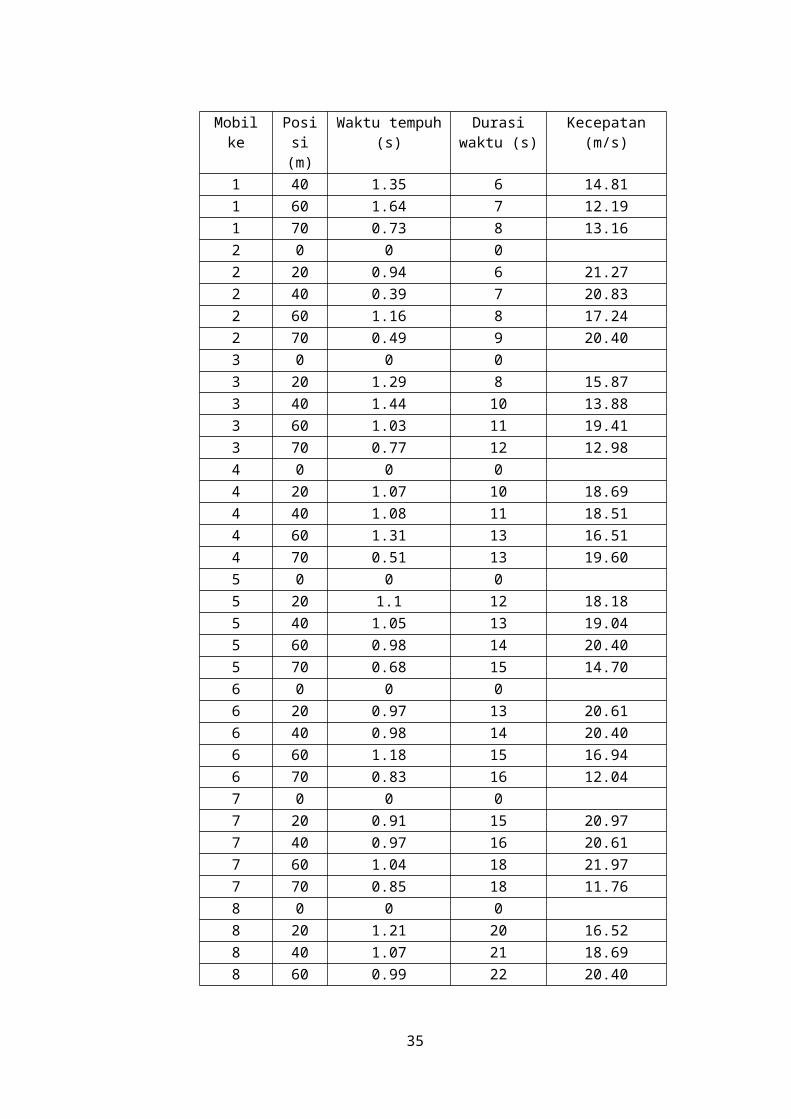
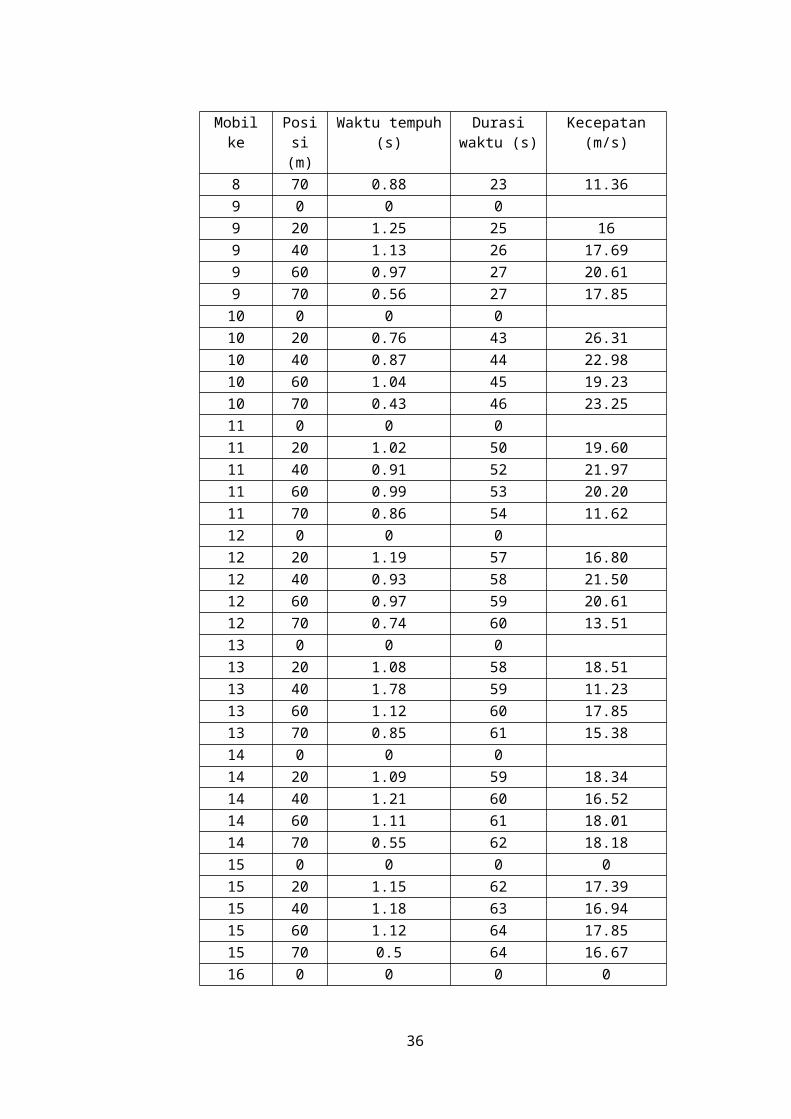
Berikut adalah tabel data kendaraan yang telah diperoleh dan perubahan posisi kendaraan, yaitu:
Pada percobaan pertama sebanyak 16 kendaraan
Tabel 4.2 Perubahan posisi kendaraan Lancar pada percobaan pertama
Mobil ke Posisi (m)
Waktu tempuh (s) Durasi waktu (s)
Kecepatan (m/s)
1 0 0 01 20 1.36 5 14.701 40 1.35 6 14.811 60 1.64 7 12.191 70 0.73 8 13.16
24
Mobil ke Posisi (m)
Waktu tempuh (s) Durasi waktu (s)
Kecepatan (m/s)
2 0 0 02 20 0.94 6 21.272 40 0.39 7 20.832 60 1.16 8 17.242 70 0.49 9 20.403 0 0 03 20 1.29 8 15.873 40 1.44 10 13.883 60 1.03 11 19.413 70 0.77 12 12.984 0 0 04 20 1.07 10 18.694 40 1.08 11 18.514 60 1.31 13 16.514 70 0.51 13 19.605 0 0 05 20 1.1 12 18.185 40 1.05 13 19.045 60 0.98 14 20.405 70 0.68 15 14.706 0 0 06 20 0.97 13 20.616 40 0.98 14 20.406 60 1.18 15 16.946 70 0.83 16 12.047 0 0 07 20 0.91 15 20.977 40 0.97 16 20.617 60 1.04 18 21.977 70 0.85 18 11.768 0 0 08 20 1.21 20 16.528 40 1.07 21 18.698 60 0.99 22 20.408 70 0.88 23 11.369 0 0 09 20 1.25 25 169 40 1.13 26 17.699 60 0.97 27 20.619 70 0.56 27 17.85
10 0 0 010 20 0.76 43 26.3110 40 0.87 44 22.98
25
Mobil ke Posisi (m)
Waktu tempuh (s) Durasi waktu (s)
Kecepatan (m/s)
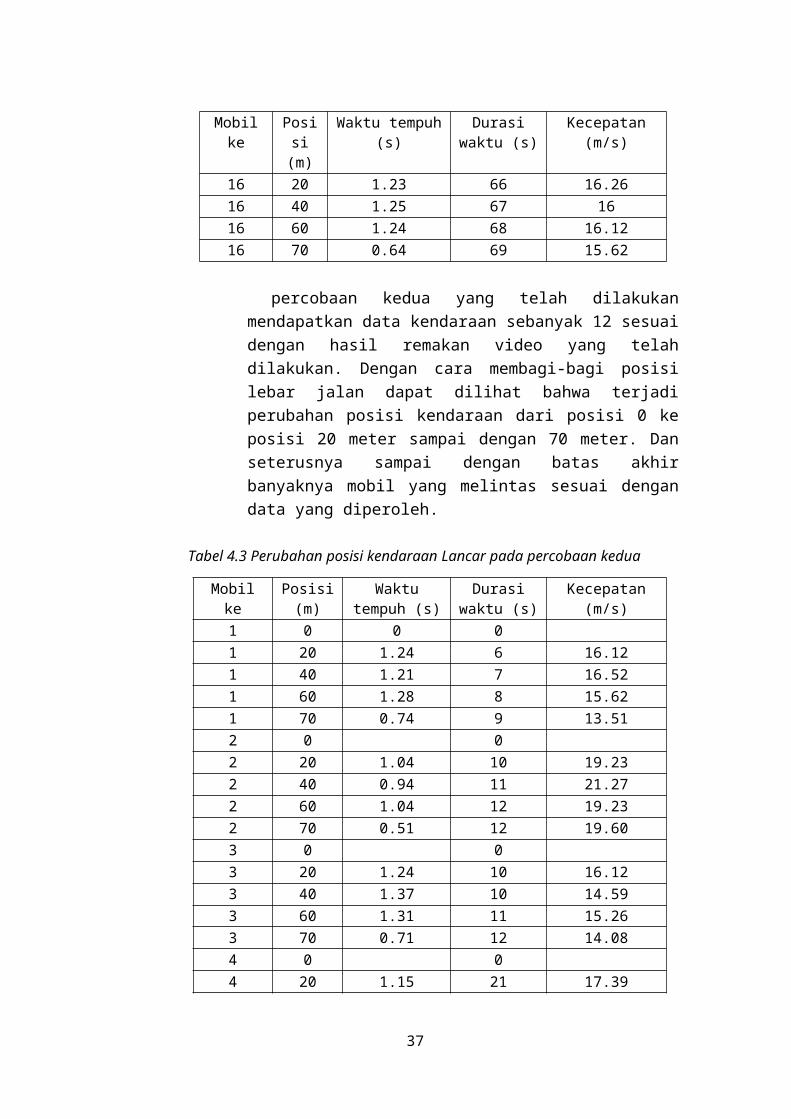
10 60 1.04 45 19.2310 70 0.43 46 23.2511 0 0 011 20 1.02 50 19.6011 40 0.91 52 21.9711 60 0.99 53 20.2011 70 0.86 54 11.6212 0 0 012 20 1.19 57 16.8012 40 0.93 58 21.5012 60 0.97 59 20.6112 70 0.74 60 13.5113 0 0 013 20 1.08 58 18.5113 40 1.78 59 11.2313 60 1.12 60 17.8513 70 0.85 61 15.3814 0 0 014 20 1.09 59 18.3414 40 1.21 60 16.5214 60 1.11 61 18.0114 70 0.55 62 18.1815 0 0 0 015 20 1.15 62 17.3915 40 1.18 63 16.9415 60 1.12 64 17.8515 70 0.5 64 16.6716 0 0 0 016 20 1.23 66 16.2616 40 1.25 67 1616 60 1.24 68 16.1216 70 0.64 69 15.62
percobaan kedua yang telah dilakukan mendapatkan data kendaraan sebanyak 12 sesuai dengan hasil remakan video yang telah dilakukan. Dengan cara membagi-bagi posisi lebar jalan dapat dilihat bahwa terjadi perubahan posisi kendaraan dari posisi 0 ke posisi 20 meter sampai dengan 70 meter. Dan seterusnya sampai dengan batas akhir banyaknya mobil yang melintas sesuai dengan data yang diperoleh.
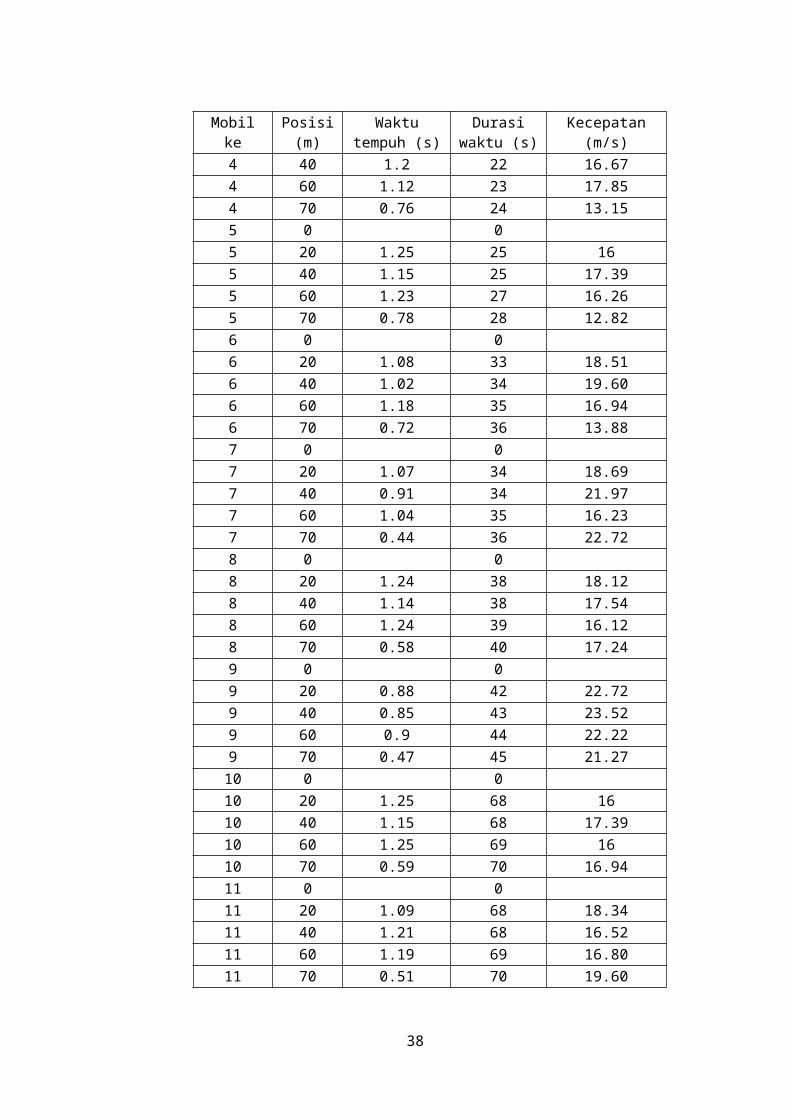
Tabel 4.3 Perubahan posisi kendaraan Lancar pada percobaan kedua
26
Mobil ke Posisi (m)
Waktu tempuh (s)
Durasi waktu (s)
Kecepatan (m/s)
1 0 0 01 20 1.24 6 16.121 40 1.21 7 16.521 60 1.28 8 15.621 70 0.74 9 13.512 0 02 20 1.04 10 19.232 40 0.94 11 21.272 60 1.04 12 19.232 70 0.51 12 19.603 0 03 20 1.24 10 16.123 40 1.37 10 14.593 60 1.31 11 15.263 70 0.71 12 14.084 0 04 20 1.15 21 17.394 40 1.2 22 16.674 60 1.12 23 17.854 70 0.76 24 13.155 0 05 20 1.25 25 165 40 1.15 25 17.395 60 1.23 27 16.265 70 0.78 28 12.826 0 06 20 1.08 33 18.516 40 1.02 34 19.606 60 1.18 35 16.946 70 0.72 36 13.887 0 07 20 1.07 34 18.697 40 0.91 34 21.977 60 1.04 35 16.237 70 0.44 36 22.728 0 08 20 1.24 38 18.128 40 1.14 38 17.548 60 1.24 39 16.128 70 0.58 40 17.249 0 09 20 0.88 42 22.729 40 0.85 43 23.52
27
Mobil ke Posisi (m)
Waktu tempuh (s)
Durasi waktu (s)
Kecepatan (m/s)
9 60 0.9 44 22.229 70 0.47 45 21.27
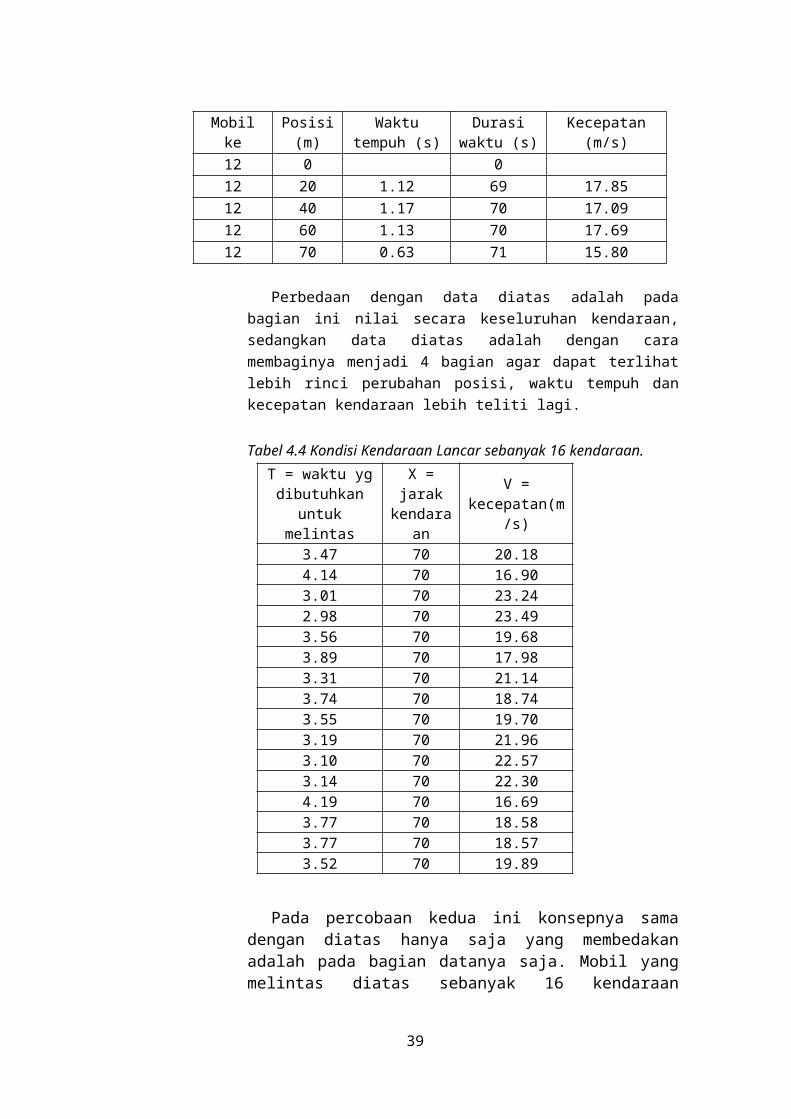
10 0 010 20 1.25 68 1610 40 1.15 68 17.3910 60 1.25 69 1610 70 0.59 70 16.9411 0 011 20 1.09 68 18.3411 40 1.21 68 16.5211 60 1.19 69 16.8011 70 0.51 70 19.6012 0 012 20 1.12 69 17.8512 40 1.17 70 17.0912 60 1.13 70 17.6912 70 0.63 71 15.80
Perbedaan dengan data diatas adalah pada bagian ini nilai secara keseluruhan kendaraan, sedangkan data diatas adalah dengan cara membaginya menjadi 4 bagian agar dapat terlihat lebih rinci perubahan posisi, waktu tempuh dan kecepatan kendaraan lebih teliti lagi.
Tabel 4.4 Kondisi Kendaraan Lancar sebanyak 16 kendaraan.
T = waktu yg dibutuhkan untuk
melintas
X = jarak kendaraa
n
V = kecepatan(m/s)
3.47 70 20.184.14 70 16.903.01 70 23.242.98 70 23.493.56 70 19.683.89 70 17.983.31 70 21.143.74 70 18.743.55 70 19.703.19 70 21.963.10 70 22.573.14 70 22.304.19 70 16.693.77 70 18.583.77 70 18.57
28
T = waktu yg dibutuhkan untuk
melintas
X = jarak kendaraa
n
V = kecepatan(m/s)
3.52 70 19.89
Pada percobaan kedua ini konsepnya sama dengan diatas hanya saja yang membedakan adalah pada bagian datanya saja. Mobil yang melintas diatas sebanyak 16 kendaraan sedangkan data mobil di tabel dibawah ini adalah sebanyak 12 kendaraan.
Tabel 4.5 Kondisi kendaraan Lancar sebanyak 12 kendaraan.
T = waktu yg dibutuhkan untuk
melintas
X = jarak antar waktu
V = kecepatan(m/s)
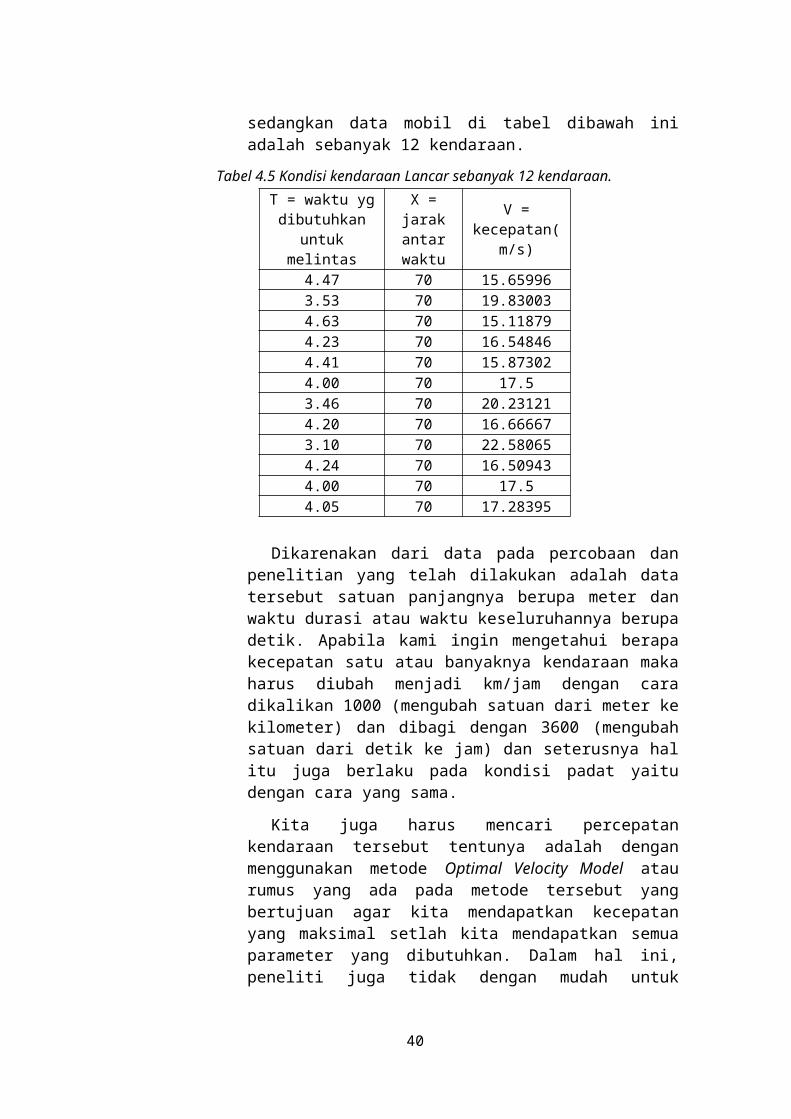
4.47 70 15.659963.53 70 19.830034.63 70 15.118794.23 70 16.548464.41 70 15.873024.00 70 17.53.46 70 20.231214.20 70 16.666673.10 70 22.580654.24 70 16.509434.00 70 17.54.05 70 17.28395
Dikarenakan dari data pada percobaan dan penelitian yang telah dilakukan adalah data tersebut satuan panjangnya berupa meter dan waktu durasi atau waktu keseluruhannya berupa detik. Apabila kami ingin mengetahui berapa kecepatan satu atau banyaknya kendaraan maka harus diubah menjadi km/jam dengan cara dikalikan 1000 (mengubah satuan dari meter ke kilometer) dan dibagi dengan 3600 (mengubah satuan dari detik ke jam) dan seterusnya hal itu juga berlaku pada kondisi padat yaitu dengan cara yang sama.
Kita juga harus mencari percepatan kendaraan tersebut tentunya adalah dengan menggunakan metode Optimal Velocity Model atau rumus yang ada pada metode tersebut yang bertujuan agar kita mendapatkan kecepatan yang maksimal setlah kita mendapatkan semua parameter yang dibutuhkan. Dalam hal ini, peneliti juga tidak dengan mudah untuk mendapatkan hasil simulasi yang sesuai dengan data riil. Dengan melakukan perhitungan dan percobaan secara terus menerus untuk mendapatkan hasil yang optimal maka peneliti juga harus
29

mengetahui waktu-waktu tertentu pada banyaknya kendaraan yang melintas.
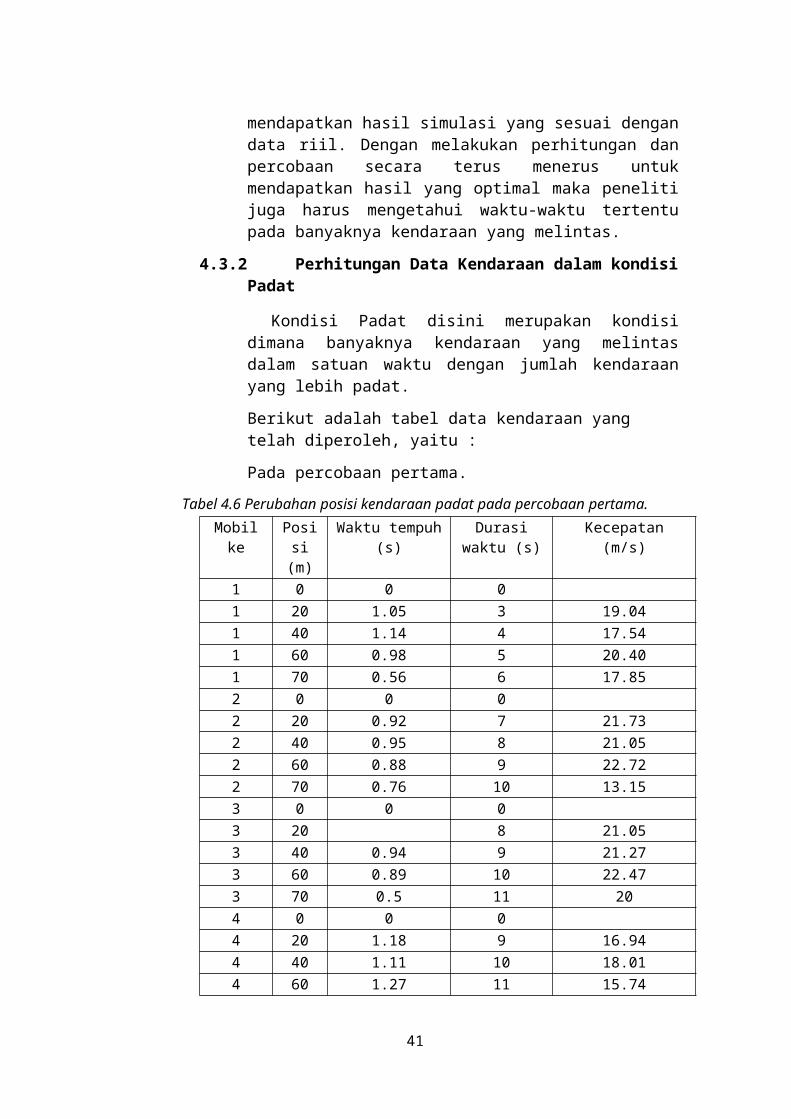
4.3.2 Perhitungan Data Kendaraan dalam kondisi Padat
Kondisi Padat disini merupakan kondisi dimana banyaknya kendaraan yang melintas dalam satuan waktu dengan jumlah kendaraan yang lebih padat.
Berikut adalah tabel data kendaraan yang telah diperoleh, yaitu :
Pada percobaan pertama.
Tabel 4.6 Perubahan posisi kendaraan padat pada percobaan pertama. Mobil ke Posisi
(m)Waktu tempuh (s) Durasi waktu
(s)Kecepatan (m/s)
1 0 0 01 20 1.05 3 19.041 40 1.14 4 17.541 60 0.98 5 20.401 70 0.56 6 17.852 0 0 02 20 0.92 7 21.732 40 0.95 8 21.052 60 0.88 9 22.722 70 0.76 10 13.153 0 0 03 20 8 21.053 40 0.94 9 21.273 60 0.89 10 22.473 70 0.5 11 204 0 0 04 20 1.18 9 16.944 40 1.11 10 18.014 60 1.27 11 15.744 70 0.58 12 17.245 0 0 05 20 1.16 16 17.245 40 1.08 17 18.515 60 1.17 19 17.095 70 0.73 19 13.696 0 0 06 20 0.91 17 21.976 40 0.93 18 21.506 60 0.93 19 21.506 70 0.51 20 19.607 0 0 0
30
Mobil ke Posisi (m)
Waktu tempuh (s) Durasi waktu (s)
Kecepatan (m/s)
7 20 1.19 20 16.807 40 0.96 20 20.837 60 1.05 21 19.047 70 0.53 21 18.868 0 0 08 20 0.89 20 22.478 40 0.96 22 22.228 60 0.89 23 22.478 70 0.56 23 17.859 0 0 09 20 0.91 21 21.979 40 0.98 24 20.409 60 0.91 25 21.979 70 0.66 26 15.15
10 0 010 20 0.92 25 21.7310 40 0.93 27 21.5010 60 1.04 27 19.2310 70 0.44 30 22.7211 0 011 20 0.9 27 22.2211 40 0.97 28 20.6111 60 0.96 29 20.8311 70 0.68 30 14.7012 0 012 20 1.19 29 16.8012 40 1.17 30 17.0912 60 1.25 31 1612 70 0.66 32 15.1513 0 013 20 1.02 30 19.6013 40 1.09 31 18.3413 60 1.12 31 17.8513 70 0.55 33 18.1814 0 014 20 1.19 32 19.6014 40 1.51 33 13.2414 60 1.66 35 12.0414 70 0.72 36 13.8815 0 015 20 1.1 35 18.1815 40 1.26 37 15.8715 60 1.34 38 14.92
31
Mobil ke Posisi (m)
Waktu tempuh (s) Durasi waktu (s)
Kecepatan (m/s)
15 70 0.71 39 14.0816 0 016 20 1.04 41 19.2316 40 0.97 42 20.6116 60 0.92 44 21.7316 70 0.71 44 14.0817 0 017 20 1.01 44 19.8017 40 1.03 46 19.4117 60 1.06 47 18.8617 70 0.63 48 15.8718 0 018 20 0.93 52 21.5018 40 0.9 53 22.2218 60 0.89 54 22.4718 70 0.61 54 16.3919 0 019 20 1.11 54 18.0119 40 0.93 55 19.2319 60 1.16 56 17.2419 70 0.56 57 17.8520 0 020 20 1.05 62 19.0420 40 1.04 63 21.5020 60 1.92 64 21.7320 70 0.46 65 21.7321 0 021 20 1.12 65 17.8521 40 1.16 65 17.2421 60 1.09 67 18.3421 70 0.59 67 16.9422 0 022 20 0.91 68 21.9722 40 1.11 69 18.0122 60 1.02 70 19.6022 70 0.52 70 19.23
Pada percobaan pertama ini sama konsepnya dengan yang dibagian atas namun hanya berbeda pada datanya saja. Tujuan untuk dilakukannya percobaan kedua ini adalah dengan membandingkan data simulasi dari program yang telah dibuat dengan data asli hasil rekaman dibawah ini untuk mendapatkan hasil akhirnya berupa akurasi dari data yang dihasilkan.
32
Tabel 4.7 Perubahan posisi kendaraan padat pada percobaan kedua.Mobil ke Posisi
(m)Waktu tempuh (s) Durasi waktu
(s)Kecepatan (m/s)
1 0 0 01 20 1.02 8 19.601 40 1.05 8 19.041 60 1.18 9 16.941 70 0.05 10 18.182 0 02 20 0.9 10 22.222 40 1.05 11 19.042 60 1.24 12 16.122 70 0.51 13 19.603 0 03 20 1.07 13 18.693 40 1.32 14 15.153 60 1.28 15 15.623 70 0.73 16 13.694 0 04 20 0.98 14 20.404 40 1.21 15 16.524 60 1.27 16 15.744 70 0.69 17 14.495 0 05 20 0.98 16 20.405 40 1.08 17 18.515 60 1.79 18 11.175 70 0.65 19 15.386 0 06 20 1.08 16 18.516 40 1.28 17 15.626 60 1.66 18 12.046 70 0.68 19 14.707 0 07 20 1.1 18 18.187 40 1.06 18 18.867 60 0.86 19 23.257 70 0.48 20 20.838 0 08 20 1.02 18 19.608 40 0.98 19 20.408 60 1.67 20 11.978 70 0.73 21 13.699 0 09 20 0.91 21 21.97
33
Mobil ke Posisi (m)
Waktu tempuh (s) Durasi waktu (s)
Kecepatan (m/s)
9 40 0.85 22 23.529 60 1.28 23 15.629 70 0.6 24 16.67
10 0 010 20 1.01 28 19.8010 40 0.95 28 21.0510 60 1.63 30 12.2610 70 0.71 31 14.0811 0 011 20 1.02 29 19.6011 40 0.98 30 20.4011 60 1.17 31 17.9011 70 0.43 32 23.2512 0 012 20 1.02 20 19.6012 40 0.94 21 21.2712 60 0.96 22 20.8312 70 0.58 23 17.2413 0 013 20 1.41 37 14.1813 40 1.31 38 15.2613 60 1.51 39 13.2413 70 0.57 40 17.5414 0 014 20 1.12 38 17.8514 40 1.3 39 15.3814 60 1.8 40 11.1114 70 0.48 41 20.8315 0 015 20 1.05 46 19.0415 40 1.4 47 18.5115 60 1.26 48 15.8715 70 0.74 49 13.5116 0 016 20 0.85 47 23.5216 40 1.1 48 18.1816 60 0.97 49 20.6116 70 0.58 50 17.2417 0 017 20 1.05 52 19.0417 40 1.08 53 18.5117 60 0.62 54 32.25
34
Mobil ke Posisi (m)
Waktu tempuh (s) Durasi waktu (s)
Kecepatan (m/s)
17 70 0.55 55 18.1818 0 018 20 1.13 61 17.6918 40 1.07 62 18.6918 60 1.25 63 1618 70 0.69 64 14.4919 0 019 20 0.98 61 20.4019 40 0.92 62 21.7319 60 0.91 63 21.9719 70 0.56 64 17.8520 0 020 20 0.95 66 21.0520 40 0.9 67 22.2220 60 1.04 68 19.2320 70 0.57 69 17.54
Pada percobaan pertama ini sama konsepnya dengan yang dibagian atas namun hanya berbeda pada datanya saja yaitu sebanyak 22 kendaraan sedangkan pada bagian diatas hanya sebanyak 20 kendaraan saja.
Tabel 4.8 Kondisi Kendaraan Padat sebanyak 22 kendaraan.
T = waktu yg dibutuhkan
untuk melintas
X = jarak antar waktu
V = kecepatan(m/s)
3.73 70 18.773.51 70 19.943.28 70 21.344.14 70 16.914.14 70 16.913.28 70 21.343.73 70 18.773.24 70 21.603.46 70 20.233.33 70 21.023.51 70 19.943.86 70 18.133.78 70 18.523.86 70 18.133.77 70 18.573.64 70 19.23
35
T = waktu yg dibutuhkan
untuk melintas
X = jarak antar waktu
V = kecepatan(m/s)
3.73 70 18.773.33 70 21.023.87 70 18.093.46 70 20.233.96 70 17.683.64 70 19.23
Dalam kondisi padat sebanyak 20 kendaraan, telihat beberapa perubahan yang cukup siginifikan antara tabel percobaan pertama dengan mobil sebanyak 22 kendaraan dengan tabel percobaan kedua berikut.
Tabel 4.9 Kondisi Kendaraan Padat sebanyak 20 kendaraan.
T = waktu yg dibutuhkan
untuk melintas
X = jarak antar waktu
V = kecepatan(m/s)
3.80 70 18.421053.70 70 18.918924.40 70 15.909094.15 70 16.867474.50 70 15.555564.70 70 14.893623.50 70 204.40 70 15.909093.64 70 19.230774.30 70 16.279073.60 70 19.444443.50 70 204.80 70 14.583334.70 70 14.893624.45 70 15.730343.50 70 203.30 70 21.212124.14 70 16.908213.37 70 20.771513.46 70 20.23121
Pada perhitungan kali ini peneliti juga tidak banyak melakukan perbedaan perhitungan, masih dengan menggunakan rumus yang sama hanya saja peneliti memberikan lebih banyak gangguan pada kondisi kendaraan padat ini jika dibandingkan dengan kondisi
36
Lancar atau Lancar. Namun, untuk data pada rumus diatas dilakukan perhitungan untuk mendapatkan kecepatan kendaraan simulasi yang sesuai dengan data riil kendaraan lalu lintas.
Dikarenakan kondisi pada jalan raya tol Buah Batu posisinya agak berbelok sedikit maka kecepatan yang diperoleh antara 60 km/jam sampai dengan 81 km/jam. Perbandingan kecepatannya juga tidak terlalu signifikan selisihnya antara kendaraan Lancar dan kendaraan Padat.
4.4 Grafik Trayektori Data pada Car Following Model dengan menggunakan software GNUPLOT
Grafik Trayektory Data merupakan output yang dihasilkan dengan menggunakan algoritma yang sesuai pada metode tersebut. Hasilnya adalah berupa hasil simulasi berupa suatu kumpulan data berupa waktu kendaraan dan posisi kendaraan yang bergerak dari posisi awal kendaraan (initial state) sampai dengan posisi akhir kendaraan (final state). Diakrenakan hasil tersebut berupa data excel yang format .csv dan tidak bisa asal menampilkan garfik data tersebut dengan sembarang. Maka perlu dilakukannya software pembantu yang bertujuan agar mempermudah dalam memvisualisasikan data yang telah didapatkan sehingga lebih mudah untuk dibaca, dipelajari dan dijelaskan lebih lanjut data tersebut yang digambarkan dengan menggunakan software. Berikut adalah software yang digunakan dalam percobaan dan penelitian kali ini adalah GNUplot.
GNUplot adalah suatu program untuk memvisualisasikan grafik yang berbasis dengan Command-Line Interface (CLI). Software GNUplot adalah suatu software yang memang dikhususkan dalam menampilkan grafik apabila data yang dihasilkan lumayan banyak dan dengan tingkat ketelitian yang cukup tinggi apabila dengan menggunakan software yang lainnya. GNUplot merupakan suatu program perintah baris yang fleksibel baik itu grafik dua dimensi maupun grafik tiga dimensi. GNUplot dibuat pada tahun 1986.
Berikut adalah gambaran dari metode Optimal Velocity Model berupa grafik pada metode Optimal Velocity Model. Kami disini pada Iringan Kendaraan yaitu dengan membandingkan metode tersebut pada saat kondisi kendaraan Lancar (lancar) dan kendaraan padat.
4.4.1 Perintah baris pada GNUplot dalam kondisi Lancar dan kondisi Padat
Seperti yang sudah dijelaskan sebelumnya bahwa pada saat peneliti ingin mencoba untuk memvisualisasikan grafik, maka digunakanlah software GNUplot sebagai berikut baik itu dalam kondisi lancar atau Lancar maupun dalam kondisi padat. Sudah tentu bahwa sebelum kami menggunakan software ini maka kami juga menginstall program ini terlebih dahulu sebelum
37
menggunakannya. Sebagai mahasiswa dan bahkan peneliti sekalipun pastinya dihadapkan untuk pembuatan software dan grafik, kurva, histogram dan lain sebagainya.perankat visualisasi yang digunakan sering sekali ditentukan untuk melihat output yang dihasilkan oleh program.
GNUplot juga memiliki keunggulan dalam hal ketepatan dan keakuratan data dalam menampilkan grafis yang dihasilkan jika dibandingkan dengan software yang lainnya, hal ini sudah peneliti buktikan sendiri dan ingin coba untuk membandingkannya dengan menggunakan salah satunya bernama GUIplot. Terlihat cukup berberda sekali perubahan yang dihasilkan setelah menggunakan kedua program tersebut. Bahwa GNUplot terlihat lebih unggul apabila dibandingkan dengan GUIplot dalam mencoba untuk menampilkan output yang sama.
Gambar 4.9 Contoh perintah baris pada gnuplot.
Seperti yang terlihat diatas, bahwa kami tidak bisa sembarangan dalam memasukkan perintah pada program berikut. Kami juga harus mempelajari lebih dalam lagi dikarenakan bahwa GNUplot telah terbukti dan teruji untuk menampilkan grafik, baik itu mulai dari grafik yang sesederhana mungkin sampai dengan grafik yang rumit sekalipun itu sepertinya juga mampu dibaca oleh program ini.
Pada gambar tersebut sedikit penjelasan tentang penggunaan software tersebut adalah :
a) Pengguna harus dapat masuk kedalam folder yang diinginkan.
b) Setelah itu barulah menulis sintaks default yang memang disediakan oleh GNUplot. “Plot” disini maksudnya adalah grafik, “nama_file” jangan lupa untuk disertakan juga format yang ada dalam file tersebut, “u 1:2” maksudnya adalah peneliti disini menggunakan perbandingan keduanya bagian kiri adalah
38
iterasinya dan bagian kanan adalah urutan kendaraannya, dan “dots” disini adalah banyaknya titik yang terhubung dari gambar yang telah dihasilkan.
c) (set xlabel “Waktu”) dan (set xlabel “Posisi”) disini yang dimaksudkan adalah agar kami dapat membedakan keduanya dengan cara memberikan label pada garis tersebut.
d) “set xrange [0:300]” adalah bertujuan untuk memberikan batas atas dan batas pada sumbu x pada grafik tersebut.
4.4.2 Grafik Trayektori pada Kondisi Lancar Lalu Lintas Kendaraan pada Iringan Kendaraan
Setelah semua langkah dilakukan dengan cara meperhitung jumlah kendaraan dengan menggunakan metode Optimal Velocity Model. Maka langkah selanjutnya adalah dengan menggunkan software yang telah dibuat dan diaplikasikan. Dalam hal ini peneliti melakukan percobaan sebnyak tiga kali yakni pada saat epsilon 1.0, epsilon 2.0 dan pada saat epsilon 3.0.
Tentunya adalah dengan cara kami menuliskan perintah baris pada gnuplot bertujuan agar dapat menampilkan grafik yang ada pada data yang telah dihasilkan pada eps 1.0, eps 2.0 dan eps 3.0.
Berikut ini adalah gambaran visualisasi Grafik Trayektori pada kondisi Lancar :
Sepanjang 70 meter pada kedua percobaan yang berbeda.
Pada saat eps 1.0
39
Pada saat eps 2.0
40
41
Pada saat eps 3.0
Gambar 4.10 Grafik kondisi kendaraan lancar.
Iterasi ini pada grafik adalah waktu simulasi yang sudah ditentukan. Pada proses ini waktu sebenarnya adalah 71 detik sedangkan pada saat menajalankan program waktu sebenarnya dikalikan dengan dt = 0,05. Jadi 1420 adalah 71 detik dikalikan dengan 0,05 atau dapat juga dituliskan Iterasi=waktusebenarnya (71 detik )∗dt (0.05). Sengaja dalam hal ini waktu iterasi atau waktu simulasinya dikalikan dengan dt agar mendapatkan hasil yang optimal, pada percobaan kali ini apabila semakin banyak iterasi yang ada maka akan semakin akurat data yang dihasilkan namun terlebih itu juga pada saat proses me-run program lebih lama prosesnya dan semakin berat untuk dijalankan apabila datanya itu terhitung sangat banyak.
Bisa dilihat bahwa grafik diatas cumup rumit untuk dibaca dan dipahami lebih lanjut, karena waktu diatas adalah waktu simulasi atau waktu prediksi pada saat ingin menggambarkan grafik adalah dengan cara mengaklikan antara waktu sebenarnya dikalikan
42
dengan waktu interval agar mendapatkan waktu yang sesuai waktu interval X ∆t atau waktu iterasinya. Agar terlihat lebih detail setiap langkahnya dan terus berulang sampai mencapai waktu dan posisi yang telah ditentukan sebelumnya.
Pada saat eps 1.0
43
Pada saat eps 2.0
Pada saat eps 3.0
44
Gambar 4.11 Grafik kondisi kendaraan lancar dibatasi iterasinya.
Pada grafik kali ini yang membedakan dengan grafik sebelumya diatas adalah pada bagian ini diperkecil batasan waktu pada simulasi agar mudah dalam dicek secara manual. Dengan cara membaginya menjadi 4 bagian pada Posisi atau sumbu Y-nya, (20 meter pertama, 20 meter kedua, 20 meter ketiga dan 10 meter terakhir) sedangkan pada sumbu X-nya hanya tinggal menyesuaikan saja dengan garis yang menghubungkan sumbu X-nya.
Untuk mengetaui kecepatan pada masing-masing kendaraan dilakukan perhitungan sebagai berikut :
( posisi akhir−posisi awal )∗dt2
=waktu simulasi( t )
V= X ( jarak kendaraan)t (waktu tempuh)
Dengan demikian maka akan didapatkan kecepatan kendaraannya, satu garis pada grafik trayektori digambarkan seperti urutan kendaraan dan terus melakukan pengulangan hingga iterasinya selesai.
4.4.3 Grafik Trayektori pada Kondisi Padat Lalu Lintas Kendaraan pada Iringan Kendaraan
Pada bagian ini tidak terlalu signifikan perbedaan antara kondisi padat dengan kondisi Lancar pada bagian atas. Hanya saja kami ingin tahu lebih lanjut perbedaan dan perbandingan yang terjadi apabila pada panjang jalur dan waktu tempuh kendaraan yang melintas sama namun dengan kondisi yang berbeda antara keduanya sehingga dapat membandingkannya. Memang dikarenakan peneliti memakai data riil sebagai data tugas akhir ini maka peneliti juga berharap hasil yang didapatkan juga sesuai
45
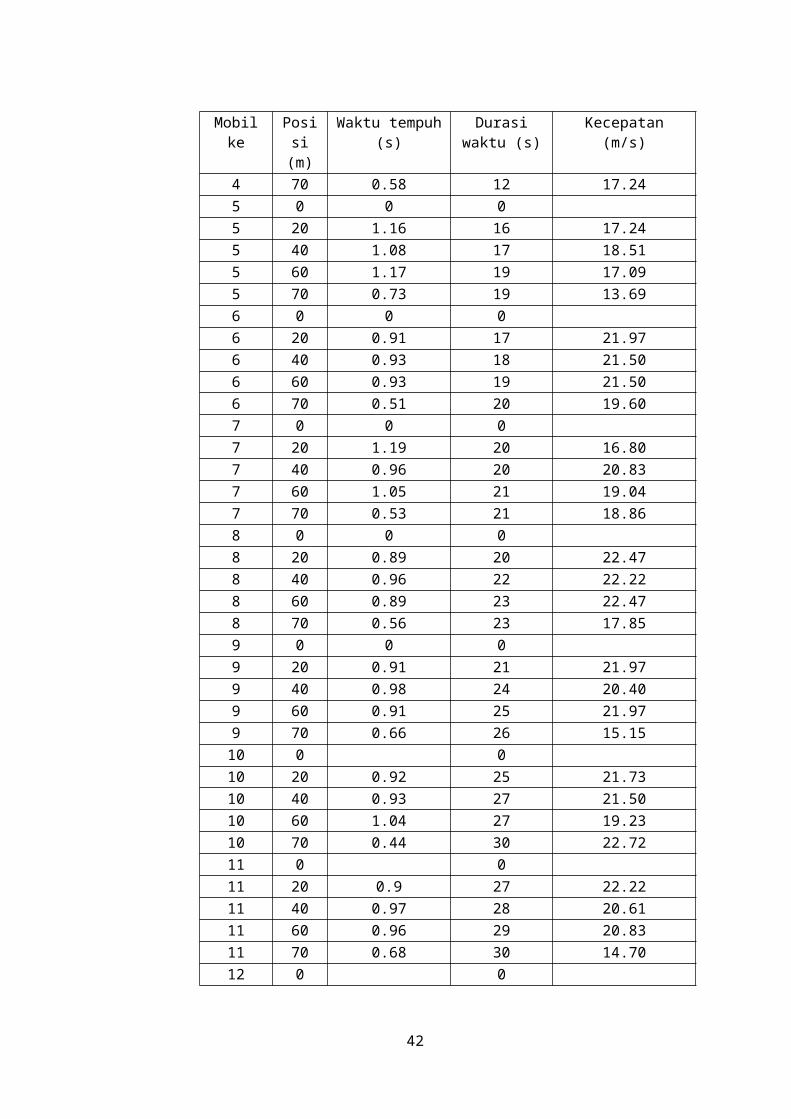
dengan kondisi yang terjadi di lapangan. Apabila data hasil simulasi dengan menggunakan metode Optimal Velocity Model sama dengan kondisi yang terjadi dilapangan maka model tersebut layak untuk digunakan didalam kehidupan sehari-hari.
Berdasarkan hasil pengamatan dan perhitungan untuk menggunakan metode ini kami juga mendapatkan banyak sekali hambatan yang terjadi disana pada saat proses pengambilan data riil dengan cara merekam video tersebut dan kemudian setelah itu dilakukan perhitungan dengan menggunakan rumus-rumus yang ada pada metode Optimal Velocity Model dengan nilai epsilon yang sudah ditentukan 1.0 atau disebut juga gangguan yang diberikan pada pengendara agar telihat perubahan kendaraannya.
Pada saat eps 1.0
46
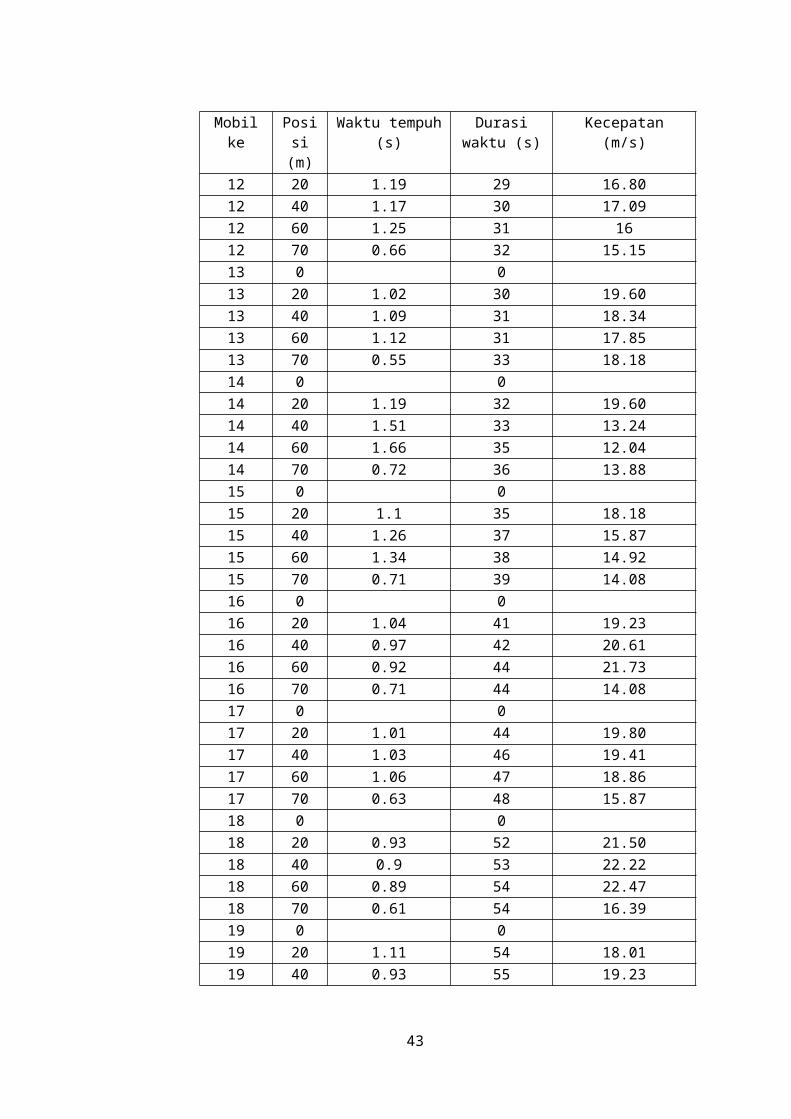
Pada saat eps 2.0
47
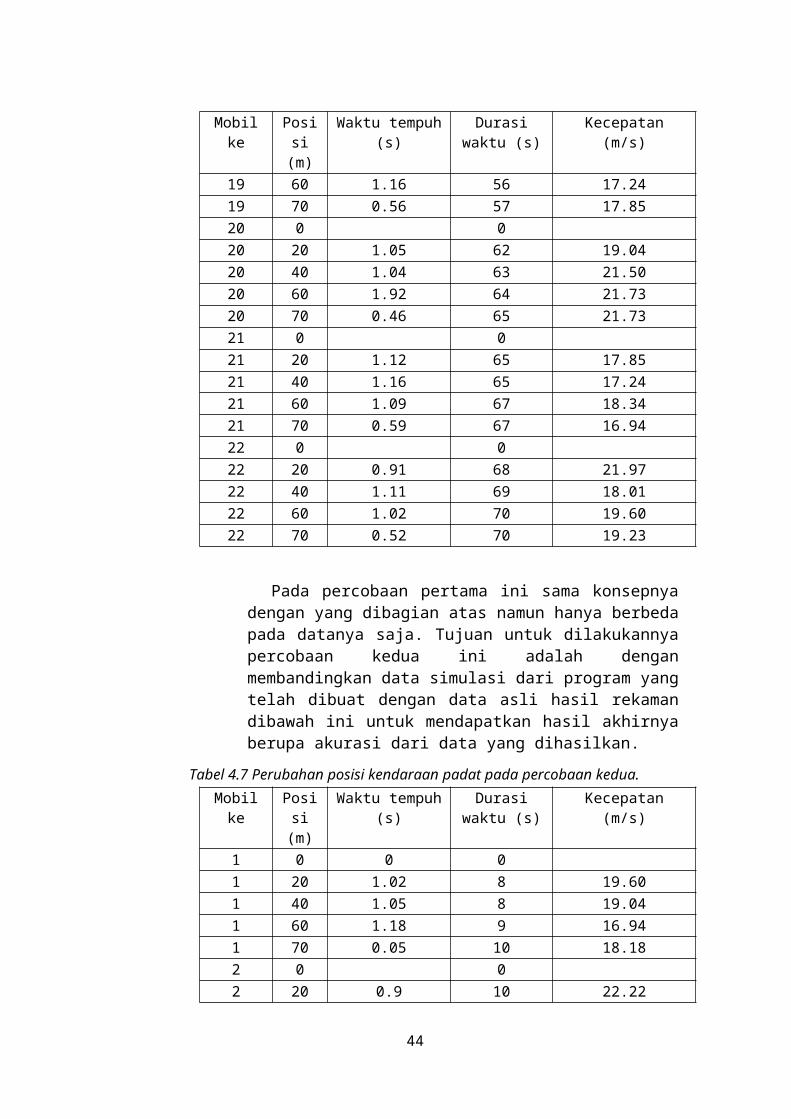
Pada saat eps 3.0
Gambar 4.12 Grafik kondisi kendaraan padat.
Cara berikut ini sedikit berbeda dengan mengubah gangguan yang ada pada program. Hal ini bertujuan agar terlihat perubahan yang lebih signifikan antara percepatan dan perlambatan dalam praktiknya. Apabila pada garis dibawah ini saling maerapat perlu dilakukan perlambatan atau mengerem hal ini bertujuan agar tidak terjadinya tabrakan antar kendaraan yang melintas di Jalan Raya Lalu Lintas, sedangkan apabila pada garis tersebut saling barjuahan maka perlu dilakukannya percepatan atau meng-gas kendaraanya agar mendapatkan hasil kecepatan kendaraan yang optimal atau yang diinginkan agar jarak yang berjauhan tidak terbuang sia-sia oleh si pengendara.
48
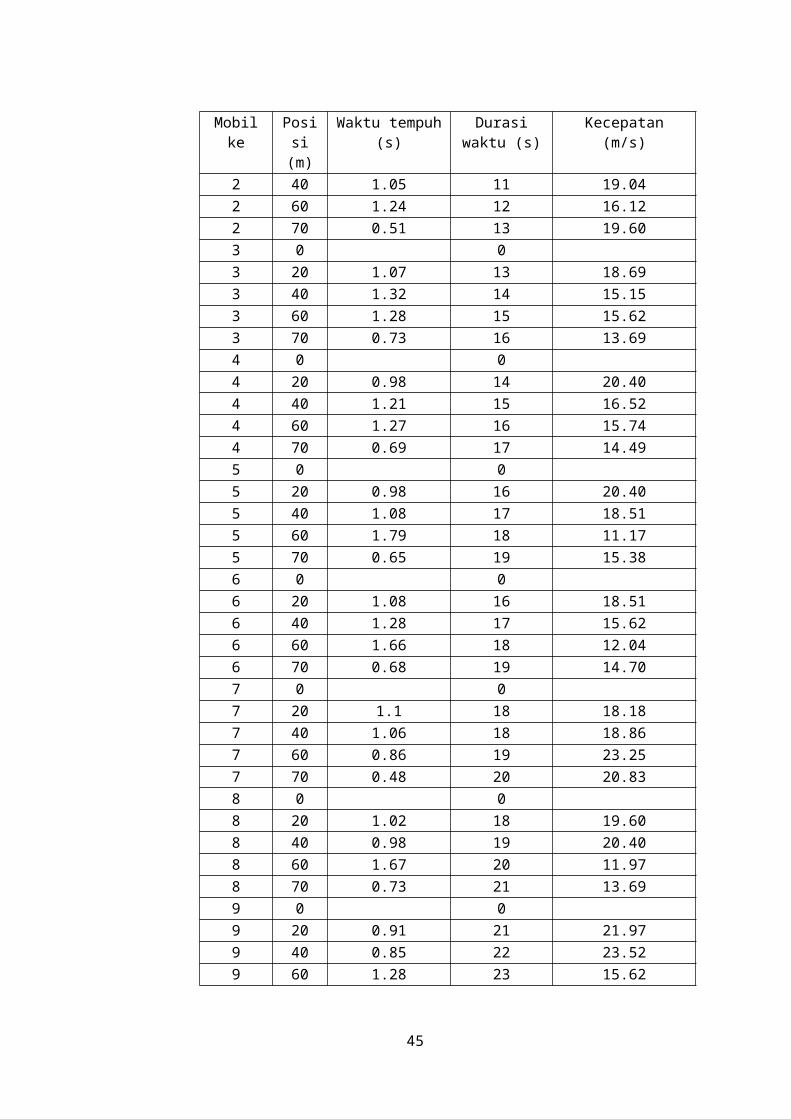
Pada saat eps 1.0
Pada saat eps 2.0
49
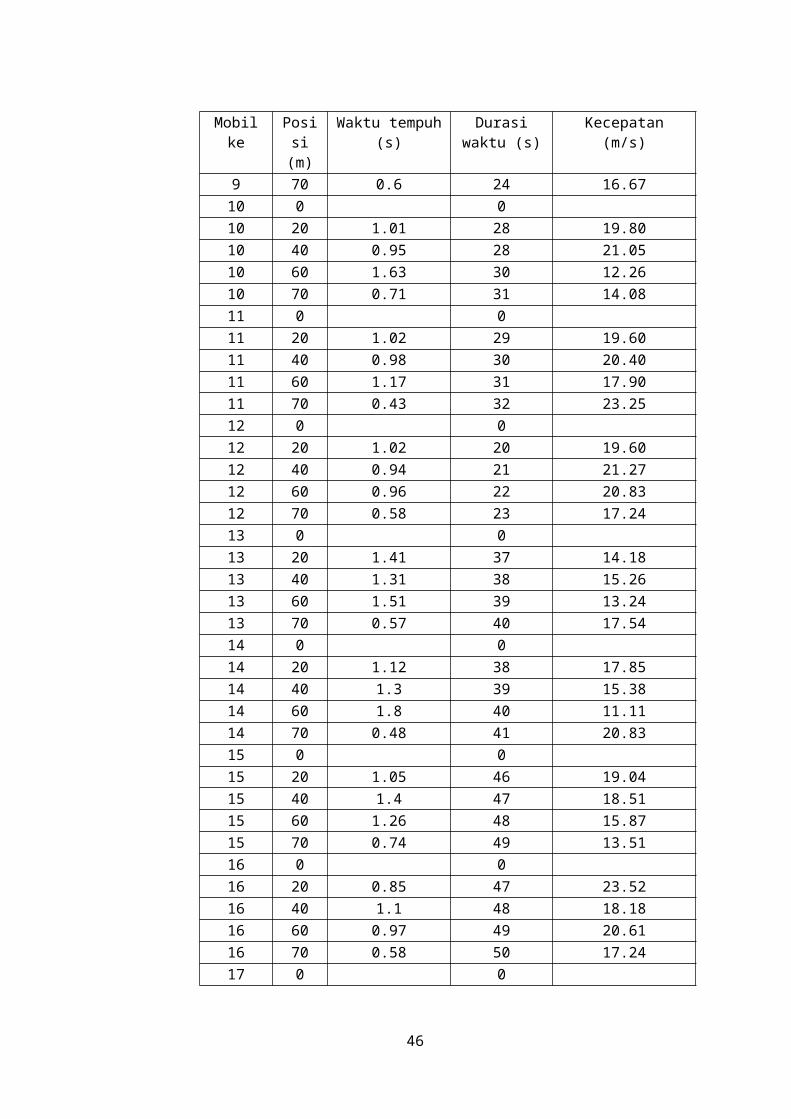
Pada saat eps 3.0
Gambar 4.13 Grafik kondisi kendaraan padat dibatasi iterasinya.
Pada bagian ini digambarkan grafik perubahan kendaraan pada kondisi padat yang sangat terlihat perbedaanya antara grafik yang sebelumnya ditampilkan. Gambar diatas terlihat perbedaan posisi
50
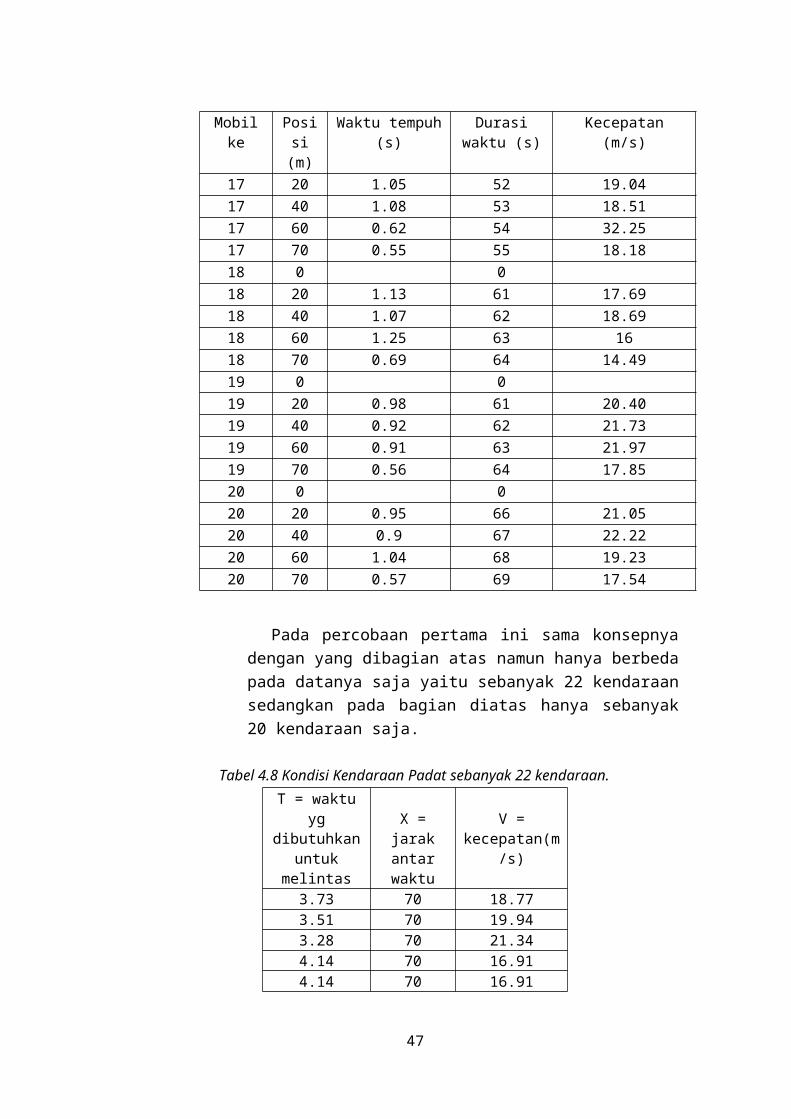
kendaraan pada saat Padat dengan perbedaan kondisi kendaraan pada saat Lancar. Hal itu terjadi karena kendaraan yang berada didepan sangat mempengaruhi kendaraan yang berada di mengikuti dibelakangnya. Pada gambar ini perubahan perbedaan pada saat kondisi kendaraan Padat lebih renggang, lebih padat dan serta tidak beraturan posisinya sesuai dengan kondisi riil yang ada dilapangan.
4.5 Grafik Kecepatan Kendaraan terhadap Waktu Iterasi
Dapat kita lihat sebelumnya grafik Trayektori Optimal Velocity Model yang digambarkan grafik berupa Posisi terhadap Waktu. Setelah itu, Pada bagian ini peneliti menampilkan grafik sesuai dengan data yang ada dengan cara menampilkan grafik Kecepatan terhadap Waktu. Dengan membaginya menjadi dua kondisi maka peneliti dapat membandingkan perubahan kondisi kendaraan baik itu pada perubahan posisi kendaraan maupun juga dengan perubahan kecepatan kendaraan.
4.5.2 Perubahan Kecepatan Kendaraan Pada Kondisi Lancar
Pada bagian ini digambarkan grafik kecepatan kendaraan pada kondisi Lancar dan dibatasi jumlah iterasinya agar terlihat perubahan kondisi stabil pada kecepatan kendaraannya :
Pada percobaan pertama
Pada percobaan kedua
51
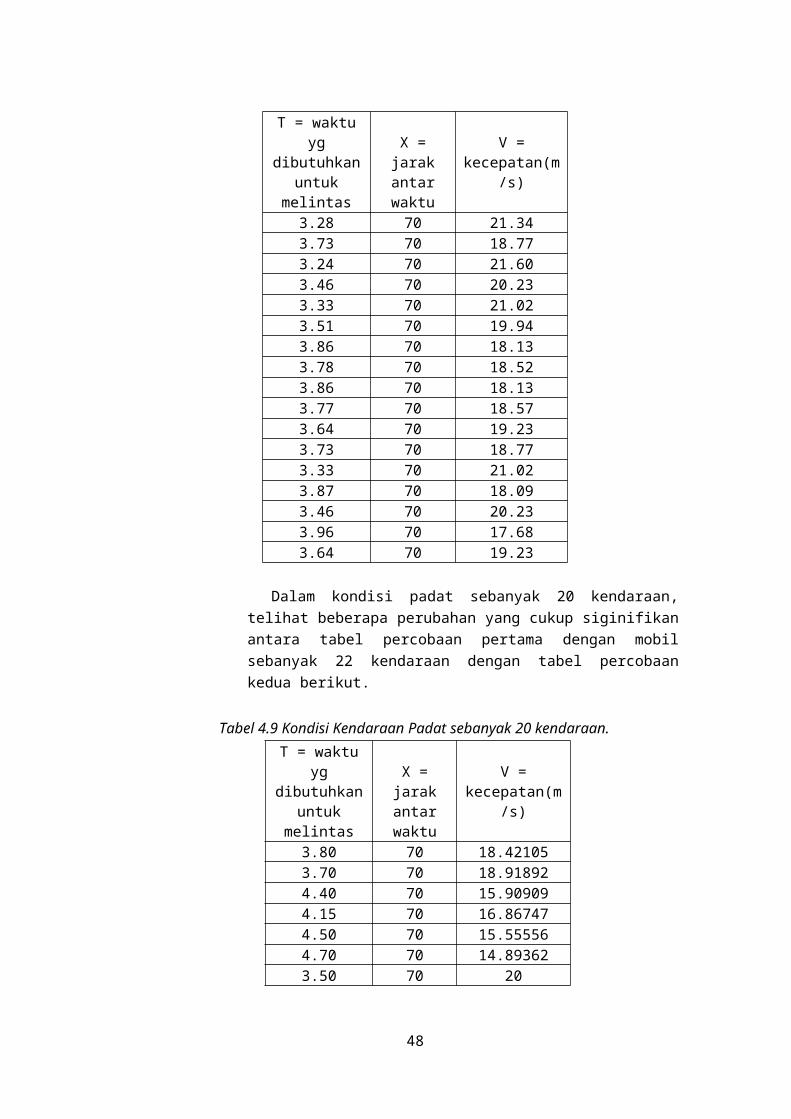
Gambar 4.14 Grafik Kecepatan kendaraan pada kondisi lancar.
Dari keempat gambar diatas peneliti menampilkan grafik dari hasil percobaan yang telah dilakukan sebanyak dua kali. Iterasi diatas sama dengan pada saat proses iterasi grafik trayektori yang telah dibuat agar lebih teliti dalam menampikan hasilnya.
Dari program yang telah dibuat dapat kita lihat bahwa kendaraan pada kondisi lancar apabila digambarkan berupa grafik maka dihasilkan grafik seperti gambar diatas. Dengan kisaran minimal pada kecepatan itu adalah berkisar antara 16,97 m/s sampai dengan 18.23 m/s atau apabila diubah nilainya menjadi kilometer per jam maka akan berkisar antara 60 km/hr sampai dengan 81 km/hr. hal diatas digambarkan sebagai grafik kecepatan terhadap waktu simulasi (dari banyaknya jumlah kendaraan yang melintas) kendaraan atau dari banyaknya kendaraan yang melintas dan kendaraannya itu diibaratkan dengan simbol tambah atau titik ujung pada grafik. Sedangkan pada percobaan kedua yang dilakukan oleh peneliti didapatkan kecepatan yang hampir constant sebesar 17,38 m/s. Grafik Trayektori posisi diatas pada iterasi ke 0,1 sampai dengan detik ke 5,20 pada data nilai yang dioutputkan hampir konstan atau memenuhi kondisi Equilibrium Distance atau jarak aman berkendara yang baik dan benar sehingga, dapat disimpulkan hampir sama sekali tidak terjadi kecelakaan dan kemacetan yang ada pada simulasi lalulintas yang saya lakukan. Kondisi tersebut memenuhi dengan stabil dan tidak stabil, pada saat kondisi tidak stabil ini yang sangat menpengaruhi perubahan yang terjadi
52
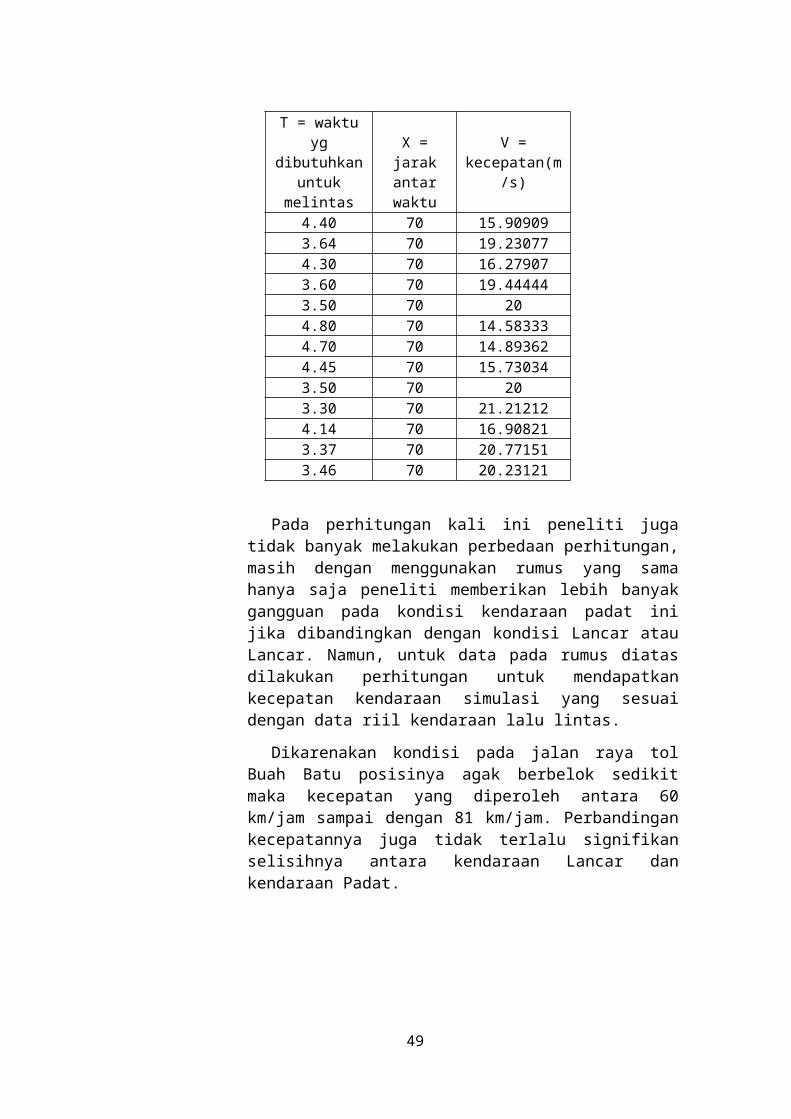
pada kecepatan mobil untuk mendapatkan kecepatan rata-rata yang sesuai, sedangkan pada saat hampir stabil atau disebut juga sebagai equilibrium maka kecepatan kendaraan akan hampir hampir konstan nilainya pada saat hampir menyerupai sebuah garis lurus pada Grafik Trayektori Kecepatan terhadap waktu iterasi yang telah ditentukan.
4.5.2 Perubahan Kecepatan Kendaraan Pada Kondisi Padat
Pada bagian ini adalah kondisi sebaliknya daripada kondisi diatas yaitu pada kondisi padat :
Pada percobaan pertama
53
Pada percobaan kedua
Gambar 4.15 Grafik kecepatan kendaraan pada kondisi padat.
Sedangkan dari program yang telah dibuat ini maka dapat kita lihat bahwa kendaraan pada kondisi lancar lebih cepat sedikit melaju kecepatan mobil yang melintas di tol Cileunyi arah Buah Batu apabila digambarkan berupa grafik maka dihasilkan grafik seperti gambar diatas. Dengan kisaran nilai minimal pada kecepatan pada kondisi padat adalah berkisar antara 16,97 m/s sampai dengan 19.25 m/s atau apabila diubah nilainya menjadi kilometer per jam berkisar antara 63 km/hr sampai dengan 78 km/hr. namun dapat kita lihat bersama hasil yang dihasilkan pada grafik dalam kondisi padat lebih rapat hasilnya jika dibandingkan dengan grafik pada kondisi lancar diatas. Sedangkan pada percobaan kedua yang dilakukan oleh peneliti didapatkan kecepatan yang hampir constant sebesar 17,62 m/s. Sehingga kecepatan yang dihasilkannya juga bervaiasi sangat berpengaruh terhadap kondisi pada jalan raya diatas apabila kondisinya dalam keadaaan lancar maka kecepatan yang dihasilkan juga lebih cepat jika dibandingkan dengan keadaan kondisi kendaraan pada saat padat. Grafik Trayektori Kecepatan baik itu untuk simulasi dalam kondisi kondisi lancar maupun dalam kondisi padat dan terlihat hampir sama dan terlihat tegak lurus kekanan. Namun, sekilas terlihat output yang dihasilkan mengalami perubahan yang tidak terlalu signifikan pada grafik Trayektori kecepatan dalam padat. Apabila kami amati lebih lanjut output
54
dari CLI maka terlihat perubahannya namun hanya sedikit dihampir setiap iterasi.
Berikut adalah penjelasan tentang perhitungan akurasi yang telah dilakukan setelah peneliti mengetahui kecepatan rata-rata pada mobil dengan cara membandingkan data hasil simulasi dengan data hasil rekaman kendaraan yang telah dilakukan. Dengan demikian, dilakukan hal ini diharapkan mendapat hasil yang maksimal sehingga metode Optimal Velocity Model (OVM) dapat diterima oleh masyarakat Indonesia. Akurasi juga dapat disebut sebagai hasil yang diinginkan kemudian dikurangi dengan error pada perhitungan yang telah dilakukan.
Perhitungan errornya adalah sebagai berikut :
perhitunganerror=hasil simulasi+hasil rekaman videohasil simulasi
∗100
Perhitungan akurasinya adalah sebagai berikut :
perhitungan akurasi ( %)=100−error
Percobaan pada rekaman video pada percobaan pertama.
Dalam bentuk tabel untuk kasus epsilon 1.0 dan LancarTabel 4.10 Nilai akurasi pada kasus epsilon 1.0 Lancar
Posisi Kecepatan dari Video
Kecepatan simulasi
Akurasi (%) Keterangan
20 66.78 67.19 98.3340 65.73 66.80 98.4060 68.18 66.89 98.0470 55.95 68.04 82.23
Rata rata 64.15 67.23 94.51
Dalam bentuk tabel untuk kasus epsilon 2.0 dan LancarTabel 4.11 Nilai akurasi pada kasus epsilon 2.0 Lancar
Posisi Kecepatan dari Video
Kecepatan simulasi
Akurasi (%) Keterangan
20 66.78 75.80 88.0440 65.73 83.31 78.8960 68.18 75.43 90.3870 55.95 75.65 73.96
Rata rata 64.15 77.55 82.82
55
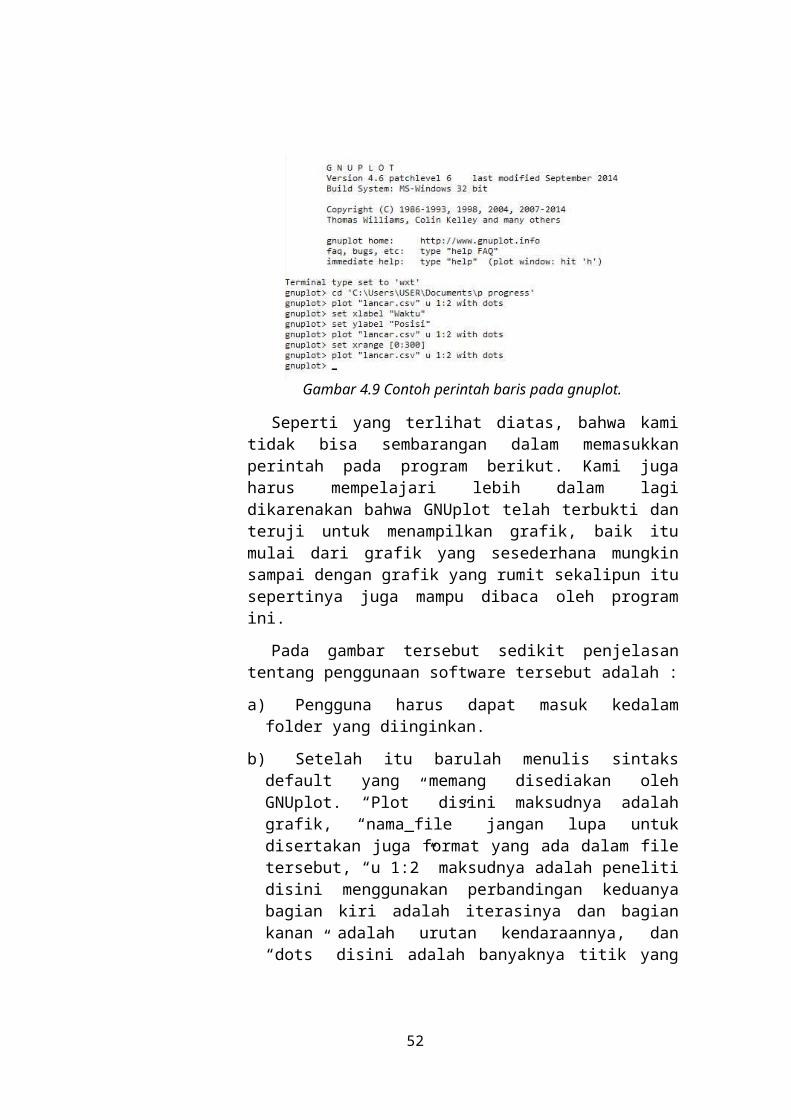
Dalam bentuk tabel untuk kasus epsilon 3.0 dan LancarTabel 4.12 Nilai akurasi pada kasus epsilon 3.0 Lancar
Posisi Kecepatan dari Video
Kecepatan simulasi
Akurasi (%) Keterangan
20 66.78 75.57 88.3240 65.73 75.57 86.9860 68.18 75.57 90.2170 55.95 77.65 72.05
Rata rata 64.15 76.09 84.39
Rata-Rata seluruh simulasi kasus LancarTabel 4.13 Nilai akurasi rata-rata seluruh simulasi kondisi LancarEpsilon Kecepatan dari
VideoKecepatan simulasi
Akurasi (%) Keterangan
1.0 64.15 67.23 94.512.0 64.15 77.55 82.923.0 64.15 76.09 84.39
Rata rata 64.15 73.62 87.27
Dalam bentuk tabel untuk kasus epsilon 1.0 dan PadatTabel 4.14 Nilai akurasi pada kasus epsilon 1.0 Padat
Posisi Kecepatan dari Video
Kecepatan simulasi
Akurasi (%) Keterangan
20 70.70 72.74 97.1840 69.76 68.68 98.4260 69.44 70.11 99.0470 61.25 67.57 90.63
Rata rata 67.78 69.78 96.32
Dalam bentuk tabel untuk kasus epsilon 2.0 dan PadatTabel 4.15 Nilai akurasi pada kasus epsilon 2.0 Padat
Posisi Kecepatan dari Video
Kecepatan simulasi
Akurasi (%) Keterangan
20 70.70 75.36 93.8140 69.76 75.08 92.9060 69.44 75.55 91.9070 61.25 75.33 81.30
Rata rata 67.78 75.33 89.98
56
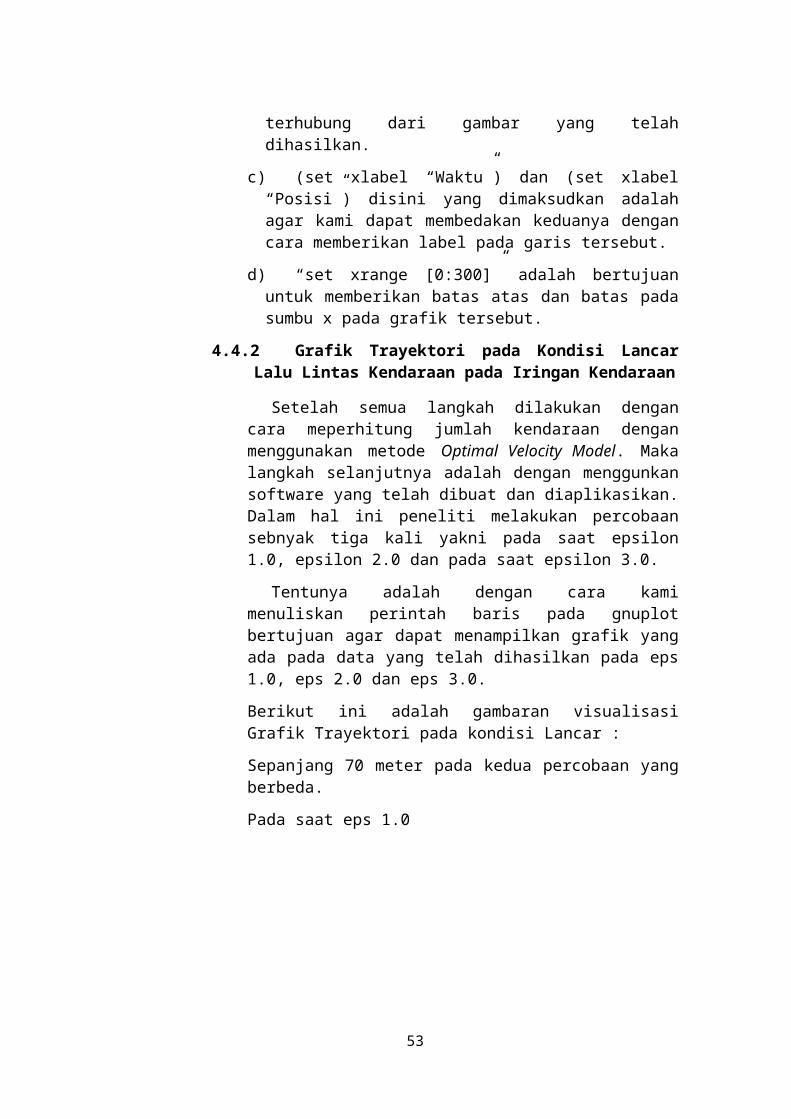
Dalam bentuk tabel untuk kasus epsilon 3.0 dan PadatTabel 4.16 Nilai akurasi pada kasus epsilon 3.0 Padat
Posisi Kecepatan dari Video
Kecepatan simulasi
Akurasi (%) Keterangan
20 70.70 75.46 93.6940 69.76 74.92 93.1060 69.44 75.08 92.4870 61.25 76.27 80.30
Rata rata 67.68 75.43 89.89
Rata-Rata seluruh simulasi kasus PadatTabel 4.17 Nilai akurasi rata-rata seluruh simulasi kondisi PadatPosisi Kecepatan dari
VideoKecepatan simulasi
Akurasi (%) Keterangan
1.0 67.68 69.78 96.322.0 67.68 75.33 89.983.0 67.68 75.43 89.89
Rata rata 67.68 75.31 92.06
Rata-Rata seluruh simulasi kasus Lancar dan PadatTabel 4.18 Nilai akurasi secara keseluruhan antara Lancar dengan Padat
Posisi Kecepatan dari Video
Kecepatan simulasi
Akurasi (%) Keterangan
1.0 65.96 68.50 95.412.0 65.96 76.44 86.43.0 65.96 75.76 87.14
Rata rata 65.96 73.56 89.65
Pada percobaan kedua pada rekaman video yang bertujuan untuk membandingkan apakah metode ini layak atau tidak digunakan dan diimplementasikan.
Dalam bentuk tabel untuk kasus epsilon 1.0 dan LancarTabel 4.19 Nilai akurasi pada kasus epsilon 1.0 Lancar
Posisi Kecepatan dari Video
Kecepatan simulasi
Akurasi (%) Keterangan
20 63.94 68.54 93.2840 66.04 68.68 96.1560 62.78 67.13 93.5270 60.22 68.06 88.48
Rata rata 63.24 68.10 92.86
57
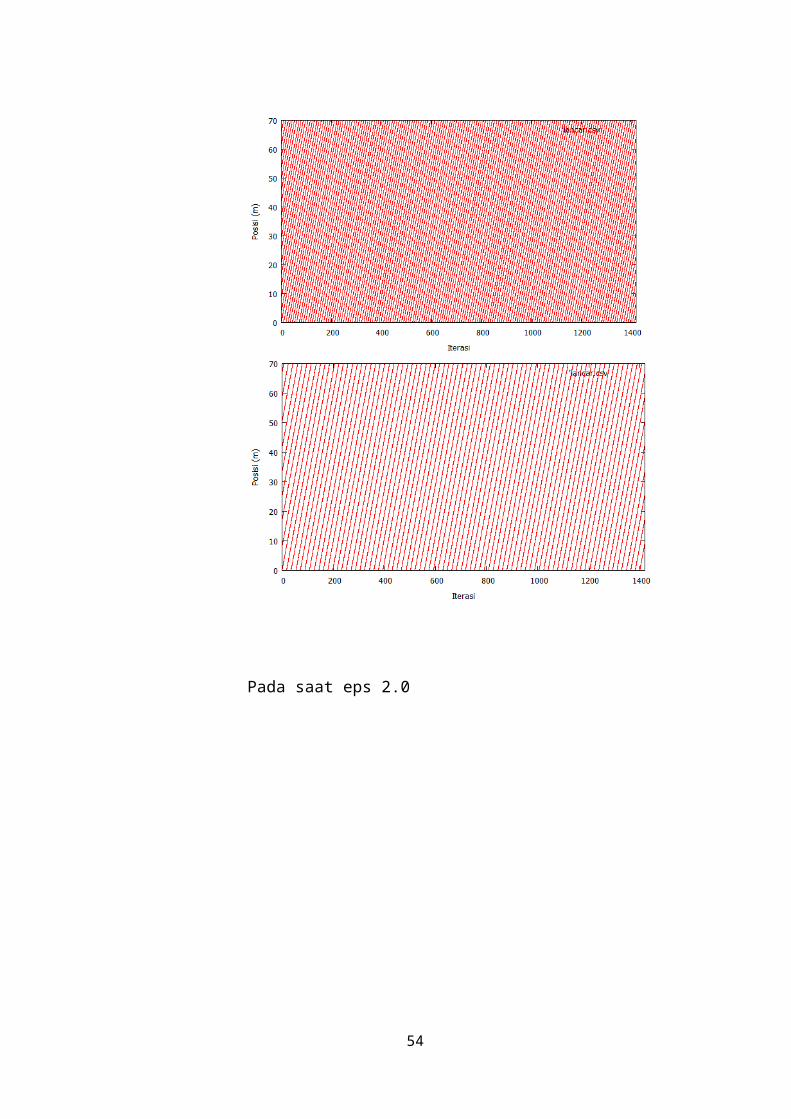
Dalam bentuk tabel untuk kasus epsilon 2.0 dan LancarTabel 4.20 Nilai akurasi pada kasus epsilon 2.0 Lancar
Posisi Kecepatan dari Video
Kecepatan simulasi
Akurasi (%) Keterangan
20 63.94 75.01 85.2440 66.04 73.44 89.9160 62.78 77.72 80.7770 60.22 77.38 80.96
Rata rata 63.24 75.14 84.22
Dalam bentuk tabel untuk kasus epsilon 3.0 dan LancarTabel 4.21 Nilai akurasi pada kasus epsilon 3.0 Lancar
Posisi Kecepatan dari Video
Kecepatan simulasi
Akurasi (%) Keterangan
20 63.94 75.20 85.0340 66.04 75.83 87.0860 62.78 75.07 85.9170 60.22 77.68 79.57
Rata rata 63.24 74.94 84.40
Rata-Rata seluruh simulasi kasus LancarTabel 4.22 Nilai akurasi rata-rata seluruh simulasi kasus Lancar
Epsilon Kecepatan dari Video
Kecepatan simulasi
Akurasi (%) Keterangan
1.0 63.24 68.10 92.872.0 63.24 75.14 84.223.0 63.24 74.94 84.40
Rata rata 63.24 72.72 87.16
Dalam bentuk tabel untuk kasus epsilon 1.0 dan Padat pada bagian hampir sama konsepnya dengan percobaan pertama hanya saja yang membedakan adalah datanya saja.
Dalam bentuk tabel untuk kasus epsilon 1.0 dan PadatTabel 4.23 Nilai akurasi pada kasus epsilon 1.0 Padat
Posisi Kecepatan dari Video
Kecepatan simulasi
Akurasi (%) Keterangan
20 70.46 67.80 96.0840 67.27 67.65 99.4460 61.02 66.82 91.3270 61.03 62.08 90.97
Rata rata 64.94 67.34 94.45
58
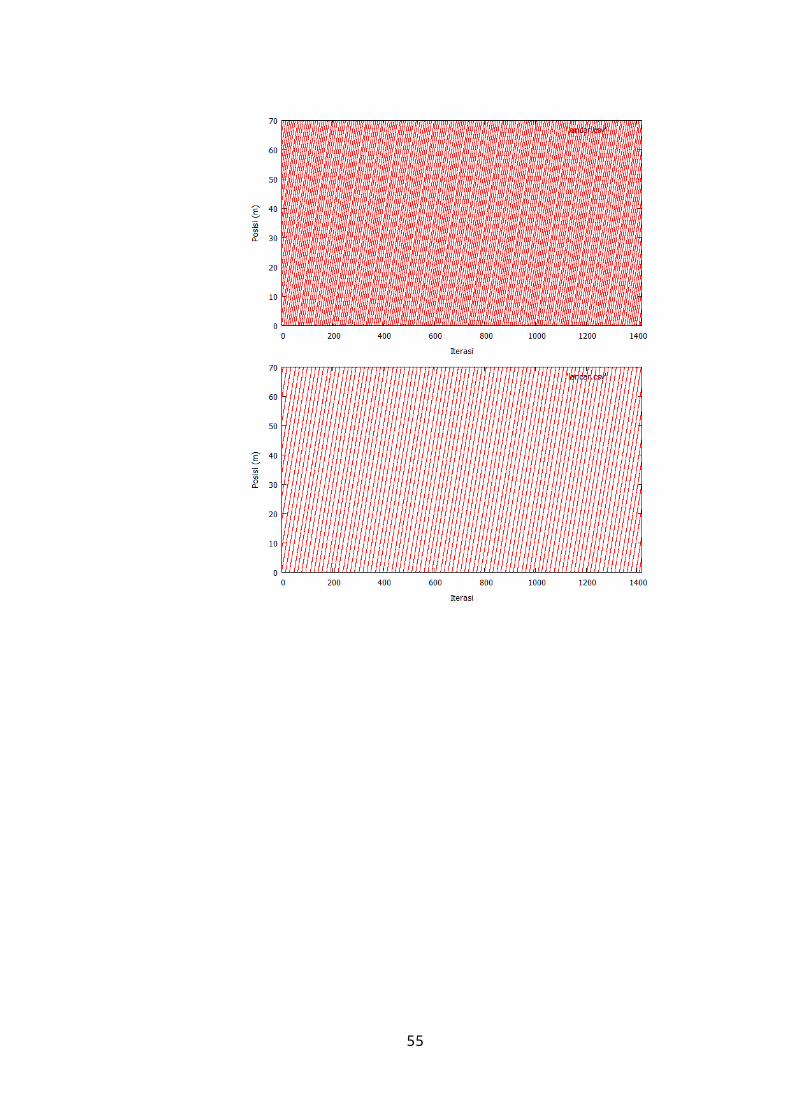
Dalam bentuk tabel untuk kasus epsilon 2.0 dan PadatTabel 4.24 Nilai akurasi pada kasus epsilon 2.0 Padat
Posisi Kecepatan dari Video
Kecepatan simulasi
Akurasi (%) Keterangan
20 70.46 75.86 92.8840 67.27 75.01 89.6860 61.02 75.27 81.0770 61.03 75.97 80.32
Rata rata 64.94 75.53 85.99
Dalam bentuk tabel untuk kasus epsilon 3.0 dan PadatTabel 4.25 Nilai akurasi pada kasus epsilon 3.0 Padat
Posisi Kecepatan dari Video
Kecepatan simulasi
Akurasi (%) Keterangan
20 70.46 74.99 93.9540 67.27 74.87 89.8460 61.02 74.59 81.8170 61.03 75.45 80.87
Rata rata 64.94 74.98 86.62
Rata-Rata seluruh simulasi kasus PadatTabel 4.26 Nilai akurasi keseluruhan kasus Padat
Epsilon Kecepatan dari Video
Kecepatan simulasi
Akurasi (%) Keterangan
1.0 64.94 67.34 94.452.0 64.94 75.53 85.993.0 64.94 74.98 86.62
Rata rata 64.94 72.61 89.02
Rata-Rata seluruh simulasi kasus Lancar dan PadatTabel 4.27 Nilai akurasi keseluruhan antara Lancar dan Padat
Epsilon Kecepatan dari Video
Kecepatan simulasi
Akurasi (%) Keterangan
1.0 64.94 67.72 93.652.0 64.94 75.33 85.193.0 64.94 74.96 85.51
Rata rata 64.94 72.67 88.12
Jadi rata-rata akurasi total keseluruhan adalah, sebagai berikut : Pada percobaan pertama didapatkan nilai total akurasinya sebesar
89.65 %. Pada percobaan kedua didapatkan nilai total akurasinya sebesar
88.12 %.
59
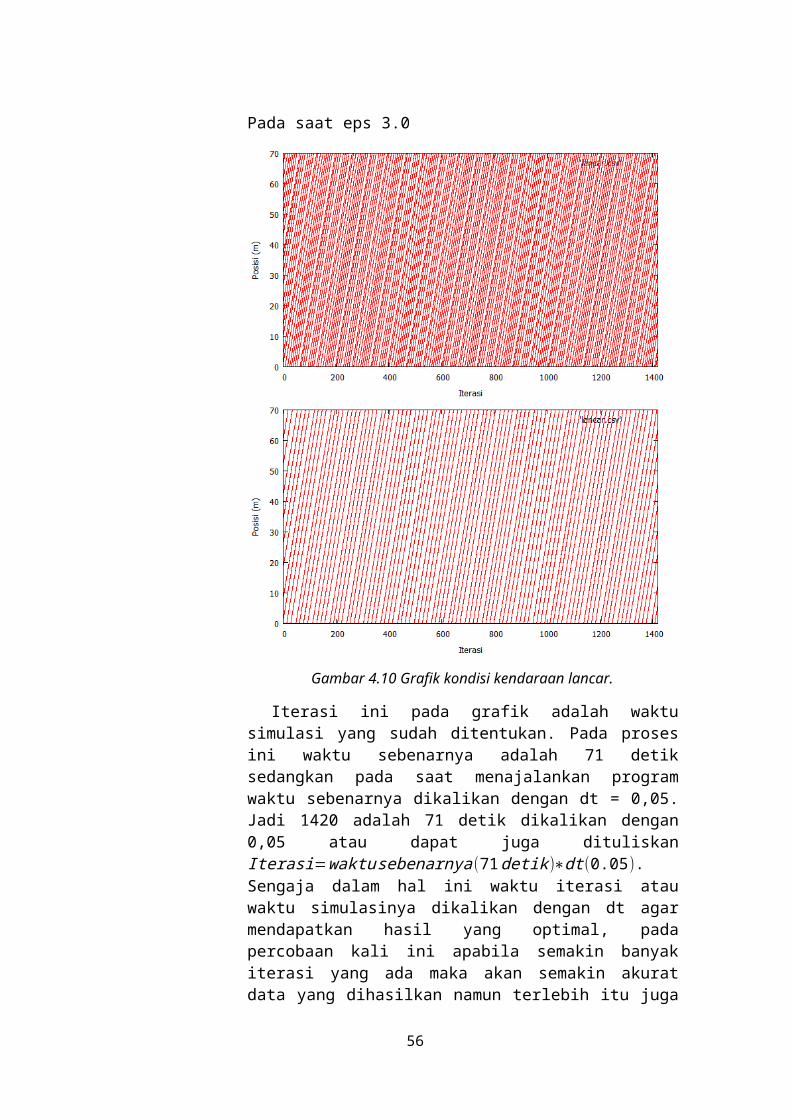
BAB V KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan hasil analisis dan hasil perhitungan yang telah diperoleh adalah :
(1) Dari grafik trayektori Posisi mobil dan hasil Perhitungan yang telah dilakukan didapatkan kemiringan yang berbeda-beda. Akurasi yang didapat peneliti dari kedua percobaan yang telah dilakukan adalah didapatkan 88.88 %.
(2) Grafik Trayektori Kecepatan mobil terhadap iterasi (maka didapatkan hasil untuk kondisi kendaraan yang lancar adalah kecepatan rata-rata kendaraan 18,51 m/s Sedangkan untuk kendaraan yang yang padat adalah kecepatan rata-rata kendaraan 18,21 m/s dan hasil dari kedua data tersebut adalah hampir konstan atau memenuhi kondisi equilibrium).
(3) Pada grafik trayektori kecepatan terlihat saat kondisi lancar kecepatan rata-rata mobil mulai stabil pada iterasi ke-3 sedangkan pada kondisi padat mobil pada iterasi ke-5 dan seterusnya sampai dengan iterasinya selesai.
5.2 Saran
Saran dari peneliti tentang Laporan yang telah dibuat sebagai berikut :
(1) Untuk kedepannya disarankan dengan menggunakan sensor yang dilengkapi pada mobil dan alat tersebut saling terhubung, sehingga lebih akurat, meminimalisir error namun, alat ini masih jarang dan tergolong cukup mahal.
(2) Dalam penyelesaian metode ini didalamnya hanya digabungkann dengan metode Range-Kutta orde 4. Namun, lebih baik lagi jika ditambah lagi dengan metode yang lain atau membandingkan kedua atau ketiga metode yang telah dibuat (metode Optimal Velocity Model yang didalamnya terdapat metode Range-Kutta untuk mengetahui hasil dari jumlah mobil, iterasi dan waktu komputasinya).
60
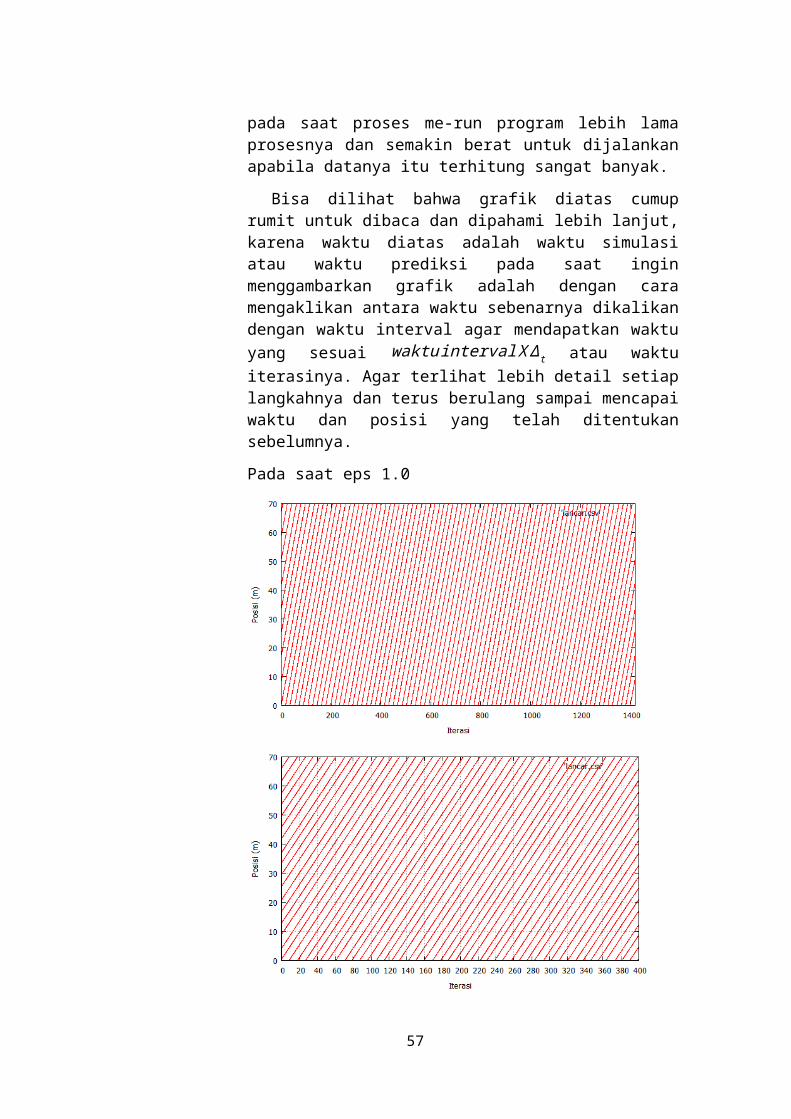
DAFTAR PUSTAKA
[1] E.-Z. H, B. Z and B. A , "The Optimal Velocity Traffic Flow Models With Open Boundary," Juny 2004.
[2] Y. Sugiyama, "Optimal velocity model for traffic flow," Computer Physics Communications, p. 399–401, 1999.
[3] T. S. Komatsu and S. Shin-ichi, "Kink soliton characterizing trafBc congestion," vol. 52, June 1995.
[4] P. J. Jin and B. Ran, "Bi-directional Control Characteristics of General Motors (GM) and Optimal Velocity Car-1 Following Models: Implications for Coordinated Driving in Connected Vehicle Environment," 2012.
[5] B. M, H. K, N. A, S. A and S. Y, "Dynamics Model of Traffic congestion and numerical simulation," vol. 51, February 1995.
[6] S. Sawada, "Generalized Force Model Of Traffic Dynamics".
[7] The University of Edinburgh, "School of GeoSciences," [Online]. Available: http://www.geos.ed.ac.uk/homes/s0198247/variograms.html. [Accessed 29 April 2014].
[8] M. Treiber and A. Kesting, "Traffic Flow Dynamics," Data, Models and Simulation, pp. 164-175, 2013.
[9] M. Bando, K. Hasebe, K. Nakanishi and A. Nakayama, "Analysis of Optimal Velocity Model with Explicit Delay," 12 May 1999.
[10] C. W. Sauer, G. J. Andersen and A. Saidpour, "CAR FOLLOWING BY OPTICAL PARAMETERS," in PROCEEDINGS of the Second International Driving Symposium on Human Factors in Driver Assessment, Training and Vehicle Design.
[11] T. V. Mathew and V. K. Rao, "Introduction to Transportation Engineering," Microscopic traffic flow modelling, pp. 34.1-34.9, 2007.
[12] D. C. Rapaport, The Optimal Velocity Traffic Flow Models With Open Boundary, Cambridge, New York, Melbourne, Madrid, Cape Town, Singapore, São Paulo, 2004.
[13] T. Martin, A. Hennecke and D. Heilbing, "Microscopic Simulation of Congested Traffic".
[14] M. Prado, "Optimal Velocity Planning of Wheeled Mobile," February 2007.
[15] S. Mammar, S. Mammar and H. Haj-Salem, "A MODIFIED OPTIMAL VELOCITY MODEL," 2005.
xi
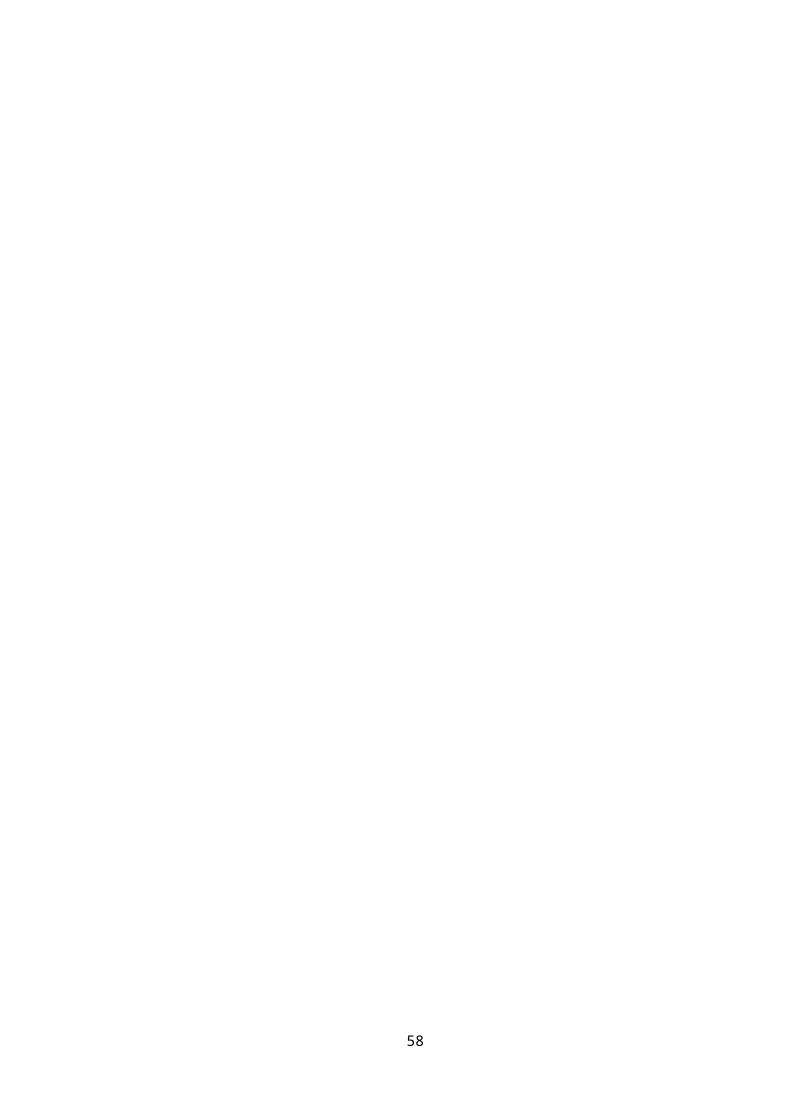
[16] B. M, H. K, N. A, S. A and S. A, "Structure Stability of Congestion in Traflic Dynamics," 10 January 1994.
xii
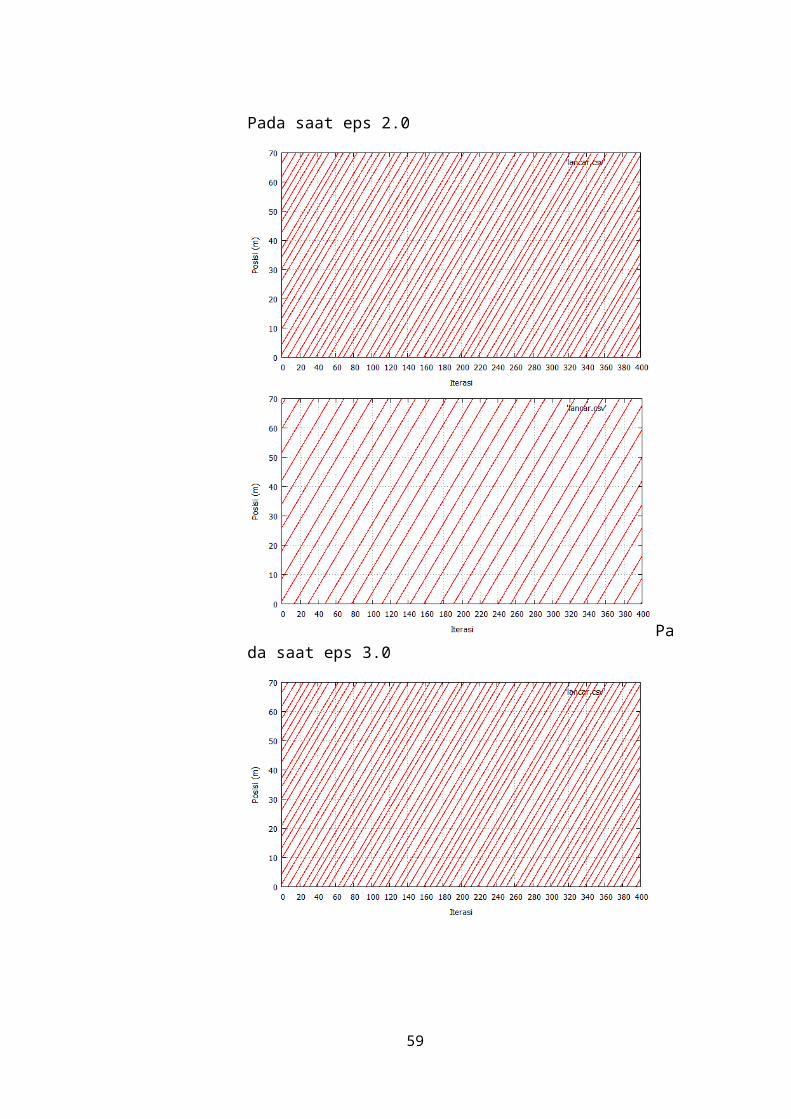
LAMPIRANI. Lampiran Hasil output kendaraan dari program yang telah dibuat.
Diagram Trayektori PosisiKondisi Lancar Kondisi Padat
Diagram Trayektori KecepatanKondisi Lancar Kondisi Padat
II. Lampiran Souce Code yang telah dibuat Diagram Trayektori PosisiKondisi Lancar maupun kondisi padat (hanya berbeda pada banyaknya kendaraan)
#include <iostream>#include <math.h>#include <stdlib.h>#include <fstream>#include <conio.h>#define COL_LENGTH 999
using namespace std;
// Constant Variablesconst int N = 16; // Number of vehiclesconst double dt = 0.05; // Time Intervalconst double L = 70; // System Sizeconst double c = 2.0;
const double kecMax = 23.49; // kecepatan Maks kendaraan 71const double Vo = kecMax * (rand() / double(RAND_MAX));
const int TIME = 1420; // Total Time to simulateconst int INTERVAL = 71; // Time interval to observe
// Grobal Variablesdouble a = 1.0; // Sensitivitydouble s_time = 0; // Simulation Timeconst double density = L/(double)N; //jarak antar kendaraan
// pada simulasi kali ini baru hanya mengubah saja inputan yang ada pada program
xiii
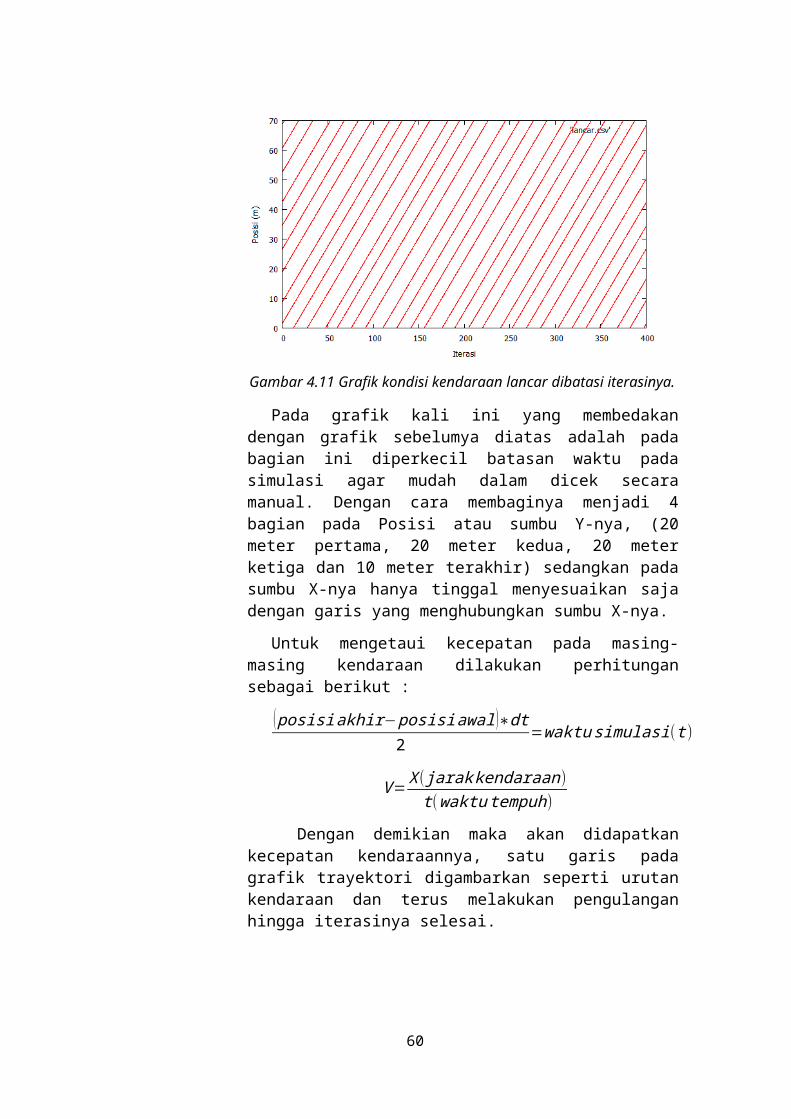
// masih belum mengerti cara mengubah grafik agar mendapatkan hambatan yang akan menyebabkan accelerasi dan deacelerasi
//---------------------------------------------------------------------
/*** Random Number Generator ***/
inline double myrand(void){ return (double)rand()/(double)RAND_MAX;}//----------------------------------------------------------------------
//penggunaan rumus OVM yang ada pada E-book referensiinline double Vl(double S){ // function, double s/ds == dx)
double SS[N] = {22.49, 42.86, 43.73, 38.91, 38.17, 43.55, 37.86, 37.04, 34.67, 30.01,
30.45, 33.26, 38.16, 41.76, 44.27, 42.54, };
double T = 1.4; double So = 3; double Vn = 120; double jarak, n, Vopt;
jarak = (S-So)/T;
if (Vn < jarak) { n = Vn; } else { n = jarak; }
if (n < 0) { Vopt = 0; } else { Vopt = n; }
return Vopt;
}//----------------------------------------------------------------------inline double V(double dx){ // function, double s/ds == dx) //double s = 3; double s; return Vo * tanh (s/dx - c) + tanh(c) / (1 + tanh(c));}//----------------------------------------------------------------------
xiv
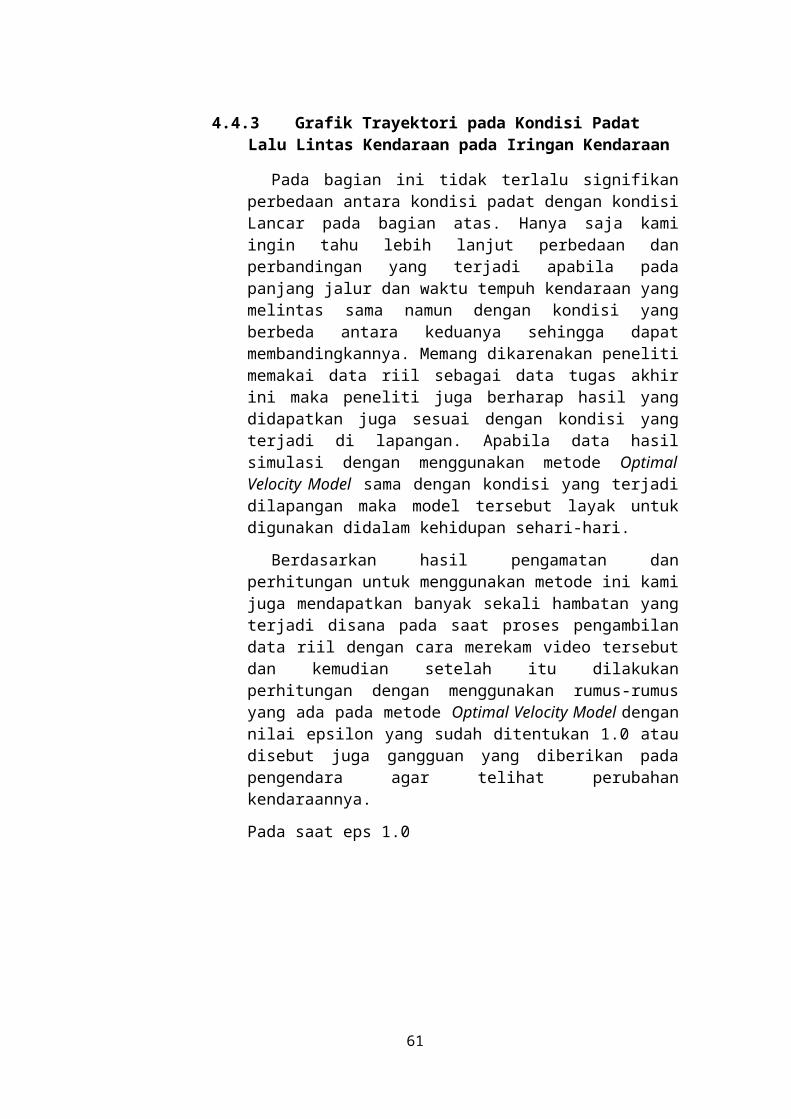
/*** | Calculate Differential of x and v | Input: x,v | Output: x' = fx, v' = fv | ***/
// sebelumnya L = 0.5 dan sekarang diubah menjadi 0.6, maka apa yang akan terjadi
void calcf(double x[], double v[], double fx[], double fv[]){
for(int i=0;i<N;i++){ double dx; if(i != N-1){ dx = x[i+1] - x[i]; } else{ dx = x[0] - x[N-1]; } if(dx <-L*0.6) dx += L; // waktusistem size yang dikalikan
denagan dt ?
if(dx <0){ cerr << "Invalid Time Step" << endl; exit(1); } /// Perubahan Percepatan fv[i] = a*(V(dx)-v[i]); // pemanggilan fungsi OV Function, tapi
masih belum ngerti maksudnya } for(int i=0;i<N;i++){ fx[i] = v[i]; /// Perubahan kecepatan // turunan dari jarak
itu sama dengan kecepatan // turunan dari kecepatan itu sama dengan
percepatan }}//----------------------------------------------------------------------
/*** Integration Scheme Euler Method (1st Order) ***/
void integrate_Euler(double x[], double v[]){ static double fv[N]; static double fx[N]; calcf(x,v,fx,fv);
for(int i=0;i<N;i++){ x[i] += fx[i]*dt; v[i] += fv[i]*dt; }
xv
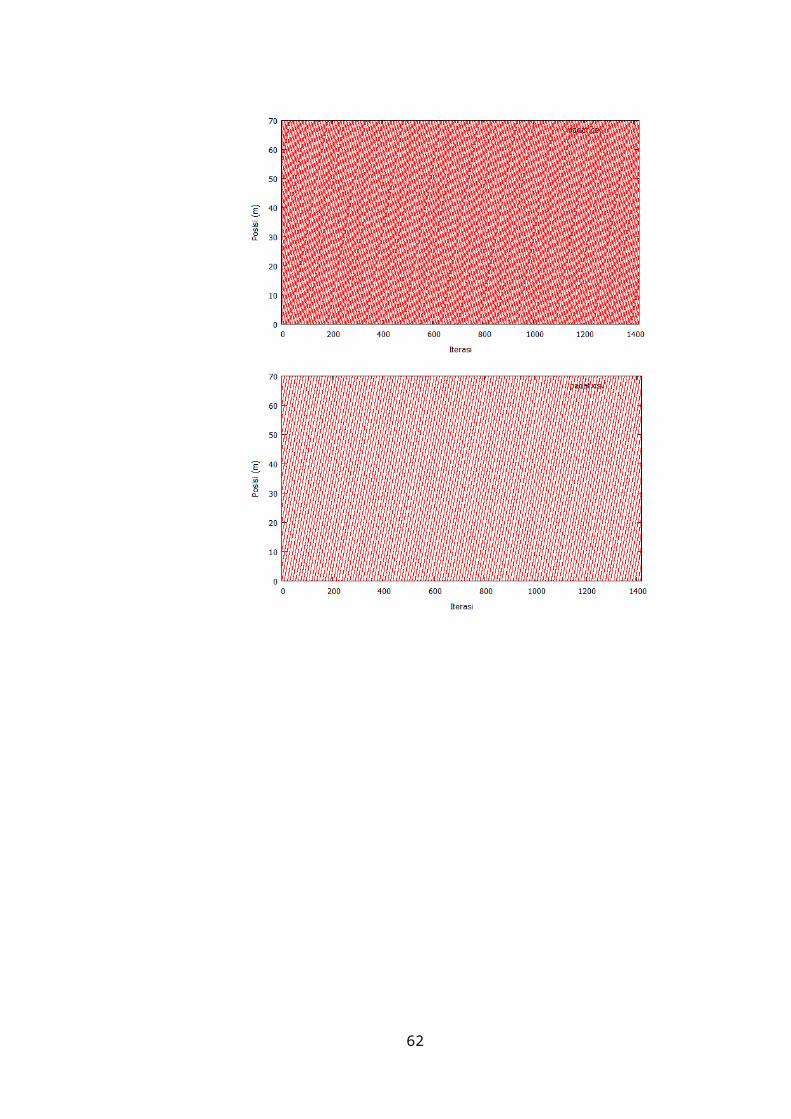
}//----------------------------------------------------------------------
/*** Integration Scheme Runge-Kutta (4th Order) ***/
void integrate_RungeKutta(double x[], double v[]){
static double kx1[N],kv1[N]; static double kx2[N],kv2[N]; static double kx3[N],kv3[N]; static double kx4[N],kv4[N]; static double tx[N],tv[N];
calcf(x,v,kx1,kv1); // memanggil fungsi turunan diatas
for(int i=0;i<N;i++){ tx[i] = x[i] + kx1[i]*dt*0.5; tv[i] = v[i] + kv1[i]*dt*0.5; }
calcf(tx,tv,kx2,kv2); for(int i=0;i<N;i++){ tx[i] = x[i] + kx2[i]*dt*0.5; tv[i] = v[i] + kv2[i]*dt*0.5; }
calcf(tx,tv,kx3,kv3); for(int i=0;i<N;i++){ tx[i] = x[i] + kx3[i]*dt; tv[i] = v[i] + kv3[i]*dt; }
calcf(tx,tv,kx4,kv4); for(int i=0;i<N;i++){ // 2.0 diubah menjadi 1.0 x[i] += (kx1[i]+2.0*kx2[i]+2.0*kx3[i]+kx4[i])/6.0*dt; v[i] += (kv1[i]+2.0*kv2[i]+2.0*kv3[i]+kv4[i])/6.0*dt; }}//----------------------------------------------------------------------
/*** Integration ***/
void integrate(double x[], double v[]){
integrate_RungeKutta(x,v);
for(int i=0;i<N;i++){ //Treat Periodic Boundary Condition
xvi
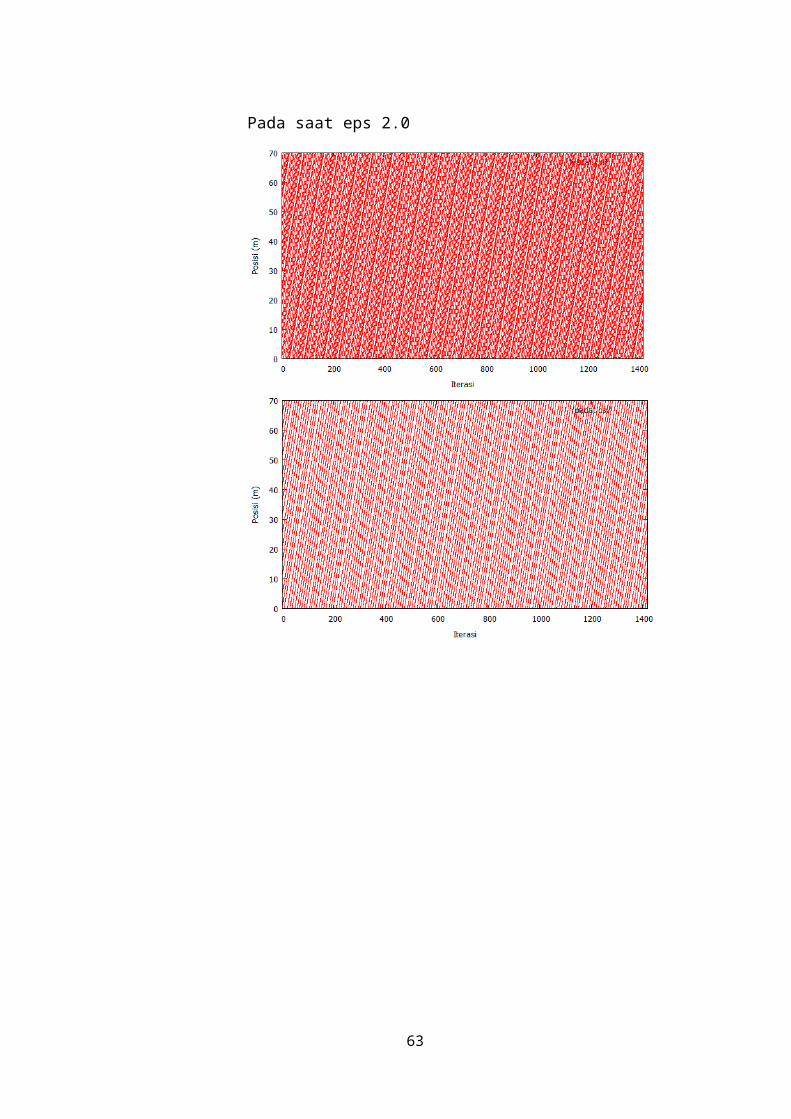
if(x[i] > L) x[i] -= L; // tadi isen-iseng bagian ini yang diubah -= menjadi += penasaran aja hasilnya berubah juga apa nggak (maka kesimpulannya apabila pada bagian diubah maka hasilnya akan kacau)
} s_time += dt;}//----------------------------------------------------------------------
/*** Metode Optimal Velocity Model ***///inline double
//V(double vt){// return V (double dx) - v / TIME;//}//----------------------------------------------------------------------
/*** Initialization putting small perturbation to the uniform flow with amplitude eps ***/
void init(double x[], double v[]){
const double eps = 1.0; //gangguan pada grafik yang paling berpengaruh
double dx = L/(double)N; double iv = V(dx);
for(int i=0;i<N;i++){ x[i] = L/(double)N*(double)i + eps*myrand(); v[i] = iv; }
cout << "# dt = " << dt << endl; cout << "# density = " << density << endl; cout << "# a = " << a << endl;}//----------------------------------------------------------------------
/*** Main Function ***/
int main(void){ ofstream myfile("lancar.csv"); if(myfile.is_open()) { static double x[N],v[N]; init(x,v); for(int i=0;s_time<TIME;i++){ integrate(x,v); if(i%INTERVAL){ for(int j=0;j<N;j++){
xvii
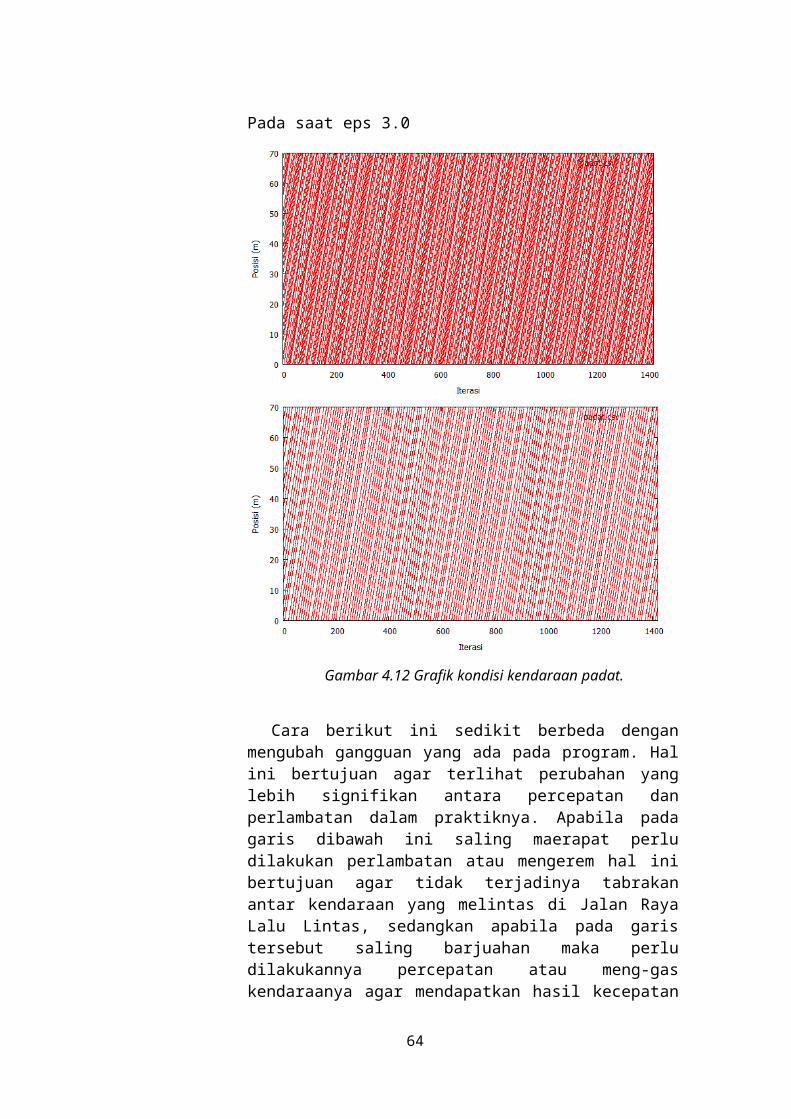
cout << s_time << " " << x[j] << endl; myfile << s_time << " " << x[j] << endl; } } }
}
system("PAUSE");
return 0;}//----------------------------------------------------------------------// End of ov.cc//----------------------------------------------------------------------
Diagram Trayektori KecepatanKondisi Lancar maupun kondisi padat (hanya berbeda pada banyaknya kendaraan)
#include <iostream>#include <cstdlib>#include <ctime>#include <math.h>#include <stdlib.h>#include <fstream>#include <conio.h>#define COL_LENGTH 999
using namespace std;
// Constant Variablesconst int N = 16; // Number of vehiclesconst double dt = 0.05; // Time Intervalconst double L = 70; // System Sizeconst double c = 2.0;
double Vo; // set maksimum kecepatan kendaraan // Kecepatan rata - rata maksimal kendaraanconst int TIME = 400; // Total Time to simulateconst int INTERVAL = 71; // Time interval to observe
// Grobal Variablesdouble a = 1.0; // Sensitivitydouble s_time = 0; // Simulation Timeconst double density = L/(double)N; //jarak antar kendaraan//const double velocity = density/s_time;
xviii
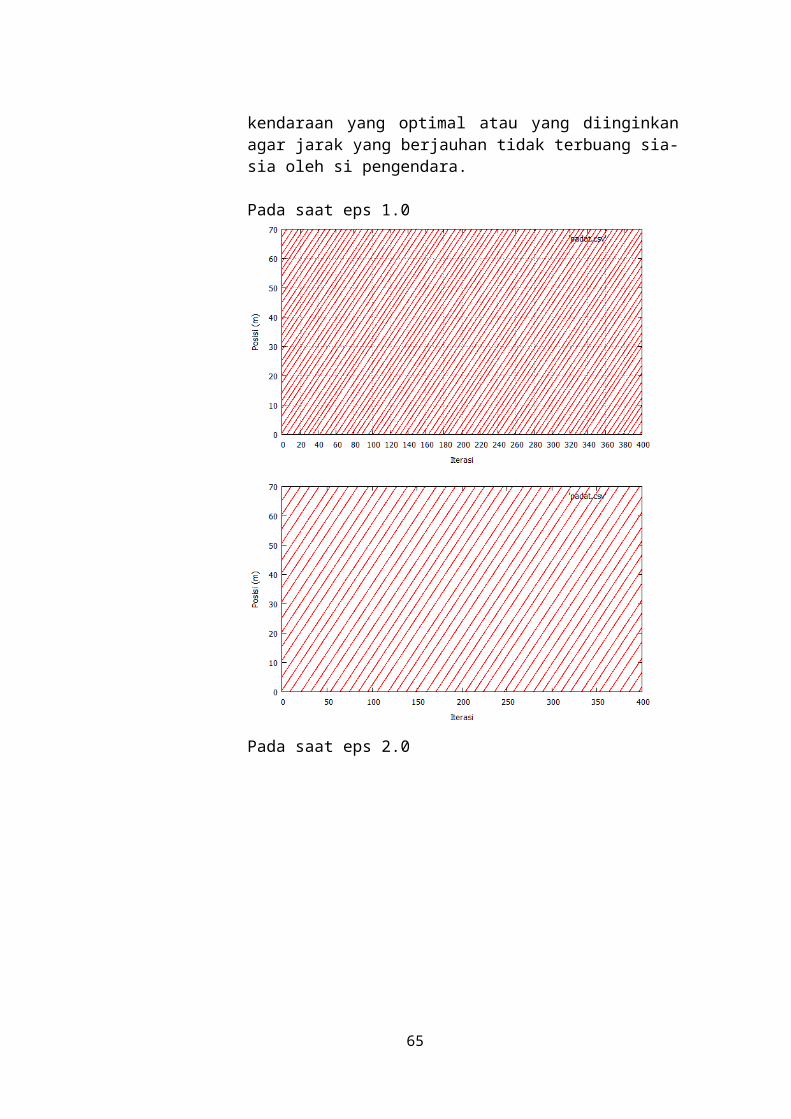
/*** Random Number Generator ***/
inline double myrand(void){ return (double)rand()/(double)RAND_MAX;}//----------------------------------------------------------------------
//penggunaan rumus OVM yang ada pada E-book referensiinline double Vl(double S){ // function, double s/ds == dx)
double SS[N] = {22.49, 42.86, 43.73, 38.91, 38.17, 42.54, 41.27, 41.61, 42.88, 43.27, 43.55, 37.86, 37.04, 34.67, 30.01, };
double T = 1.4; double So = 3; double Vn = 120; double jarak, n, Vopt;
jarak = (S-So)/T;
if (Vn < jarak) { n = Vn; } else { n = jarak; }
if (n < 0) { Vopt = 0; } else { Vopt = n; }
return Vopt;
}//----------------------------------------------------------------------
/*** Function Vopt(s) == V(doubel dx) ***/inline double V(double ds){ // function, double s/ds == dx)
double S; // Jarak antar kendaraan double kecMin = 16.69; double kecMax = 23.49;
srand(time(0));
xix
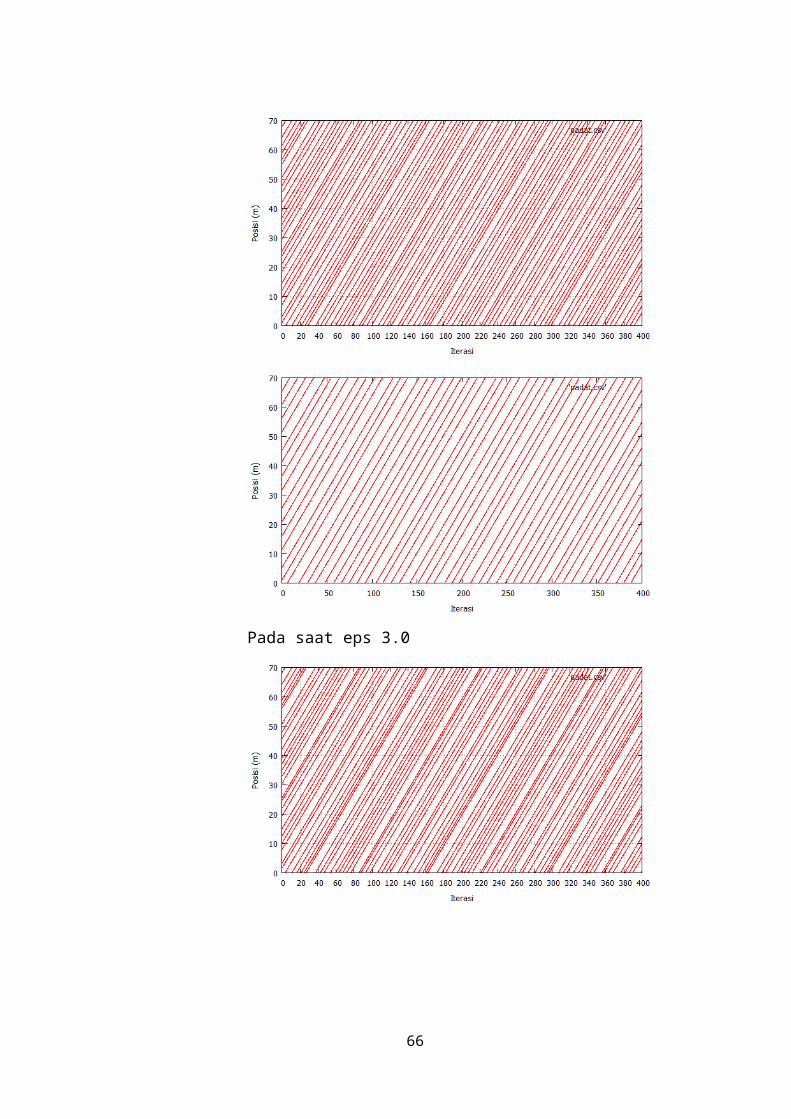
//Vo = ((rand()/RAND_MAX)*(kecMax-kecMin))+kecMin; Vo = (myrand()*(kecMax-kecMin))+kecMin;
//return V(S) * (tanh (S/ds - c) + tanh(c)) / (1 + tanh(c)); return Vo * (tanh (S/ds - c) + tanh(c)) / (1 + tanh(c)); //return tanh(dx - b) + tanh(b);}
/*** | Calculate Differential of x and v | Input: x,v | Output: x' = fx, v' = fv | ***/
void calcf(double x[], double v[], double fx[], double fv[]){
/* double SS[N] = {22.49, 42.86, 43.73, 38.91, 38.17, 42.54, 41.27, 41.61, 42.88, 43.27, 43.55, 37.86, 37.04, 34.67, 30.01, 30.45, 33.26, 38.16, 41.76, 44.27, 44.60, 44.55, 43.53, 40.56, 40.14}; */
for(int i=0;i<N;i++){
/*double S;
if(i != N-1){ S = x[i+1] - x[i]; S = v[i+1] - v[i]; }else{ S = x[0] - x[N-1]; S = x[0] - x[N-1]; }
if(S < -L*0.5) S += L; /// Deacceleration
if(S <0){ cerr << "Invalid Time Step" << endl; exit(1); }*/ double ds; /// Acceleration Function // eksekusi function Vopt if(i != N-1){ // melebihi dari jumlah N (banyaknya kenadraan) ds = x[i+1] - x[i]; // selisih nilai deltaX adalah (mobil belakang menambah kec - mobil depan yang melaju konstan) ds = v[i+1] - v[i]; } else{
xx
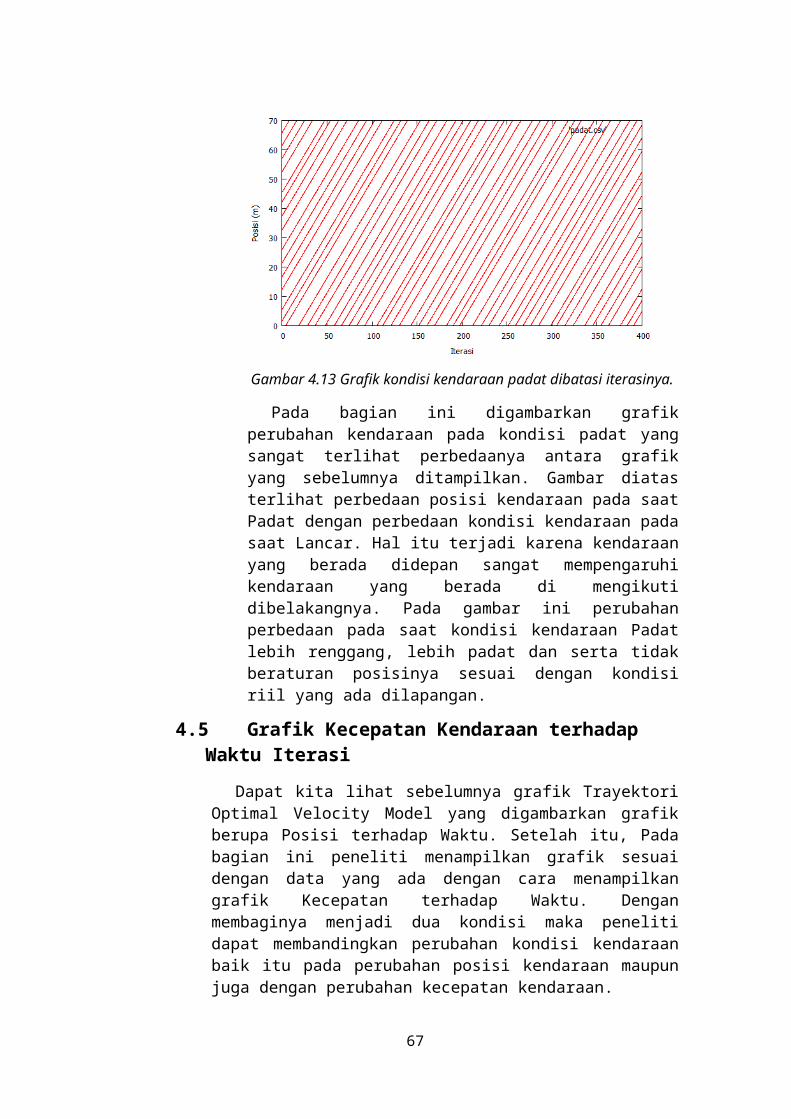
ds = x[0] - x[N-1]; // atau lainnya selisih nilai deltaX adalah ( mobil belakang melaju konstan - mobil depan mengurangi kecepatan) ds = v[0] - v[N-1]; } if(ds < -L*0.5) ds += L; /// Deacceleration
if(ds <0){ cerr << "Invalid Time Step" << endl; exit(2); }
//fv[i] = a*(V(SS[i])-v[i]); // pemanggilan fungsi OV Function, tapi masih belum ngerti maksudnya fv[i] = a*(V(ds)-v[i]); } for(int i=0;i<N;i++){ fx[i] = v[i]; // turunan dari jarak itu sama dengan kecepatan // turunan dari kecepatan itu sama dengan percepatan }}//----------------------------------------------------------------------
//Dengan memakai metode ODE, untuk Euler, modified Euler, 4th order Runge-Kutta
/*** Integration Scheme Euler Method (1st Order) ***/
void integrate_Euler(double x[], double v[]){ static double fv[N]; // memanggil fungsi dari N static double fx[N]; calcf(x,v,fx,fv); // memanggil fungsi Differensial yang telah dituliskan diatas
for(int i=0;i<N;i++){ x[i] += fx[i]*dt; /// hasil perubahan posisi,fx[i]*dt ditambah terhadap x[i]; // belum tau apa ya maksudnya ? v[i] += fv[i]*dt; /// fv[i] ditambah terhadap v[i]; }}//----------------------------------------------------------------------
/*** Integration Scheme Runge-Kutta (4th Order) ***/
void integrate_RungeKutta(double x[], double v[]){
static double kx1[N],kv1[N]; // memanggil fungsi dari N
xxi
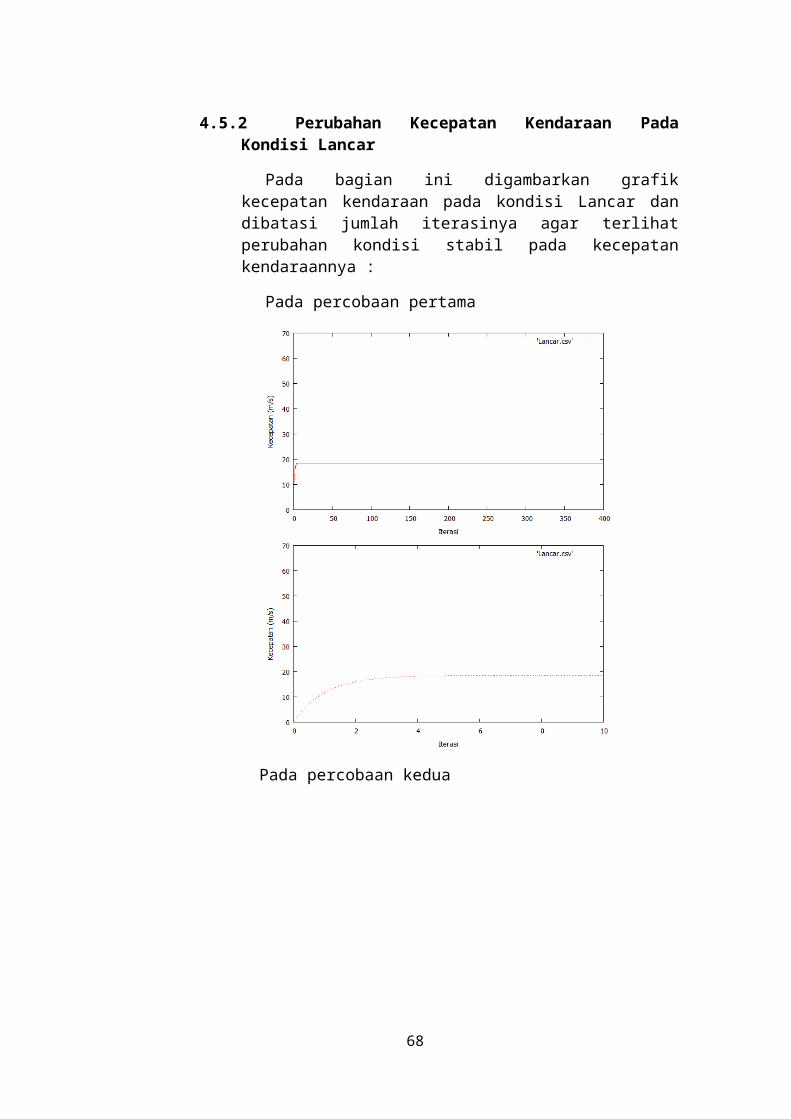
static double kx2[N],kv2[N]; static double kx3[N],kv3[N]; static double kx4[N],kv4[N]; static double tx[N],tv[N];
calcf(x,v,kx1,kv1); // memanggil fungsi dari N
for(int i=0;i<N;i++){ // angka 0.5 diubah menjadi 0.6 apa yang akan terjadi tx[i] = x[i] + kx1[i]*dt*0.5; // tv[i] = v[i] + kv1[i]*dt*0.5; // }
calcf(tx,tv,kx2,kv2); for(int i=0;i<N;i++){ tx[i] = x[i] + kx2[i]*dt*0.5; tv[i] = v[i] + kv2[i]*dt*0.5; }
calcf(tx,tv,kx3,kv3); for(int i=0;i<N;i++){ tx[i] = x[i] + kx3[i]*dt; tv[i] = v[i] + kv3[i]*dt; }
calcf(tx,tv,kx4,kv4); for(int i=0;i<N;i++){ // 2.0 adalah suatu ketetapan c (panjang kendaraan) x[i] += (kx1[i]+2.0*kx2[i]+2.0*kx3[i]+kx4[i])/6.0*dt; /// Menambahkan ketiga fungsi diatas dan dibagi 6 baik jarak ataupun kecepatannya v[i] += (kv1[i]+2.0*kv2[i]+2.0*kv3[i]+kv4[i])/6.0*dt; }}//----------------------------------------------------------------------
/*** Integration ***/
void integrate(double x[], double v[]){ /// Fungsi Integral, menghubungkan antara range kutta dan Integral
integrate_RungeKutta(x,v); // Memanggil fungsi inegrated Range Kutta diatas
for(int i=0;i<N;i++){ // Treat Periodic Boundary Condition //posisi if(x[i] > L) x[i] -= L; //
xxii
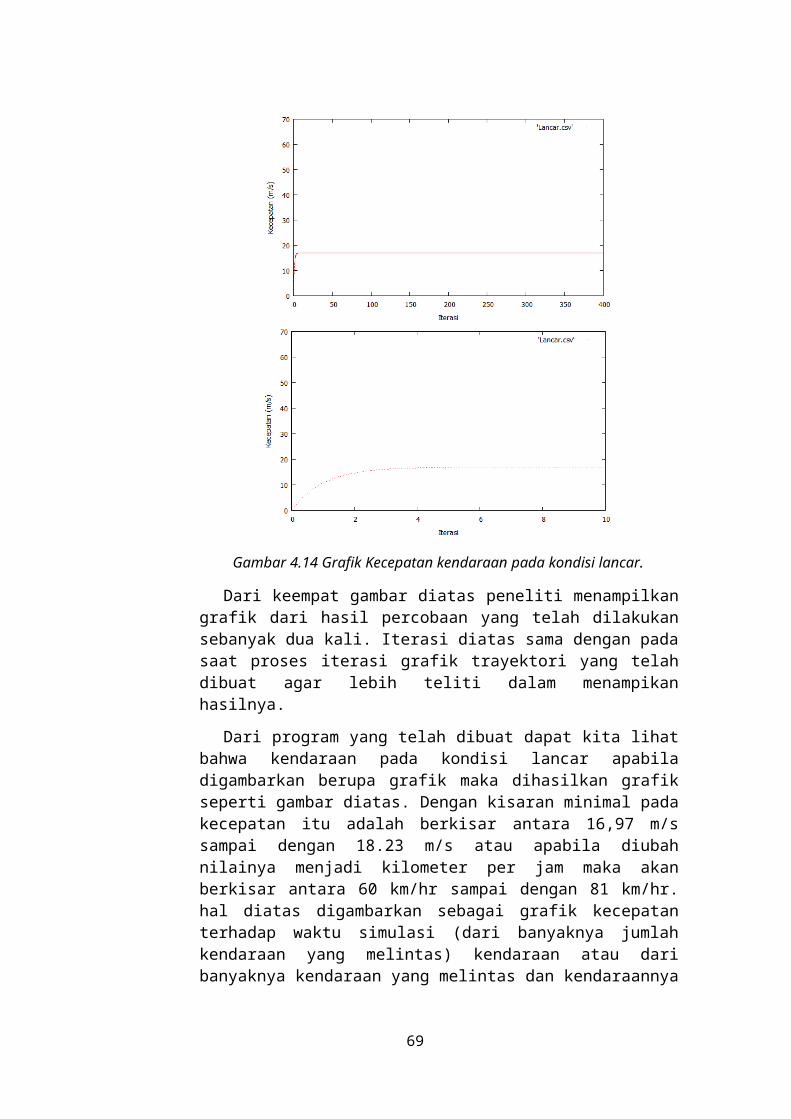
//kecepatan //if(v[i] > Vo) v[i] = Vo;
}
s_time += dt; /// hasil perubahan waktu s_time yang ditambah}//----------------------------------------------------------------------
/*** Initialization putting small perturbation to the uniform flow with amplitude eps ***/
void init(double x[], double v[]){
const double eps = 0.1; // gangguan pada grafik yang paling berpengaruh double ds = L/(double)N; // Hasil Deta X adalah, Jarak Kendaraan double iv = V(ds); // masih kurag tepat
for(int i=0;i<N;i++){ // posisi x[i] = L/(double)N*(double)i + eps*myrand();
// kecepatan v[i] = V(ds); }
/// apabila Programnya telah overload maka akan output seperti ini
cout << "# dt = " << dt << endl; cout << "# density = " << density << endl; cout << "# a = " << a << endl;}
//---------------------------------------------------------------------------------------//
/*** Main Function ***/
int main(void){ ofstream myfile("Lancar.csv"); if(myfile.is_open()) {
//srand(time(0)); static double x[N],v[N];
xxiii
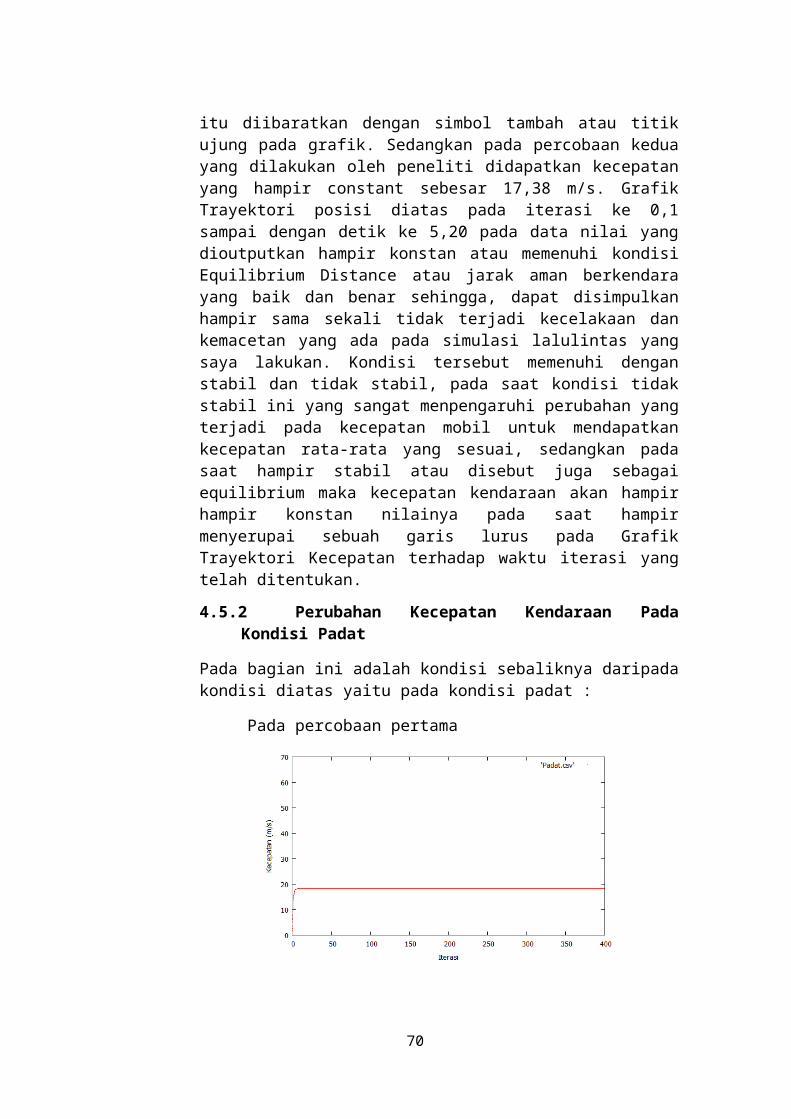
init(x,v);
char sh[1420];
//ofstream command("plot"); ofstream kecepatan("VinitialLancar"); for(int i=0;s_time<TIME;i++){
integrate(x,v);
if(i%INTERVAL){ cout << s_time << ";"; myfile << s_time << " "; for(int j=0;j<N;j++){ //kecepatan kecepatan << v[j] << endl; cout << v[j] << ";"; myfile << v[j] << " "; } cout << endl; myfile << endl; }
} //command.close(); kecepatan.close(); }
system("PAUSE");
return 0;}
//----------------------------------------------------------------------// End of ov.cc//----------------------------------------------------------------------
xxiv









![[Abdullah Azzam] Tarbiyah Jihadiyah 07](https://img.pdfslide.tips/doc/110x75/577cc0371a28aba7118f485c/abdullah-azzam-tarbiyah-jihadiyah-07.jpg)

![[Abdullah Azzam] Tarbiyah Jihadiyah 12](https://img.pdfslide.tips/doc/110x75/577cc0371a28aba7118f4866/abdullah-azzam-tarbiyah-jihadiyah-12.jpg)



![[Abdullah Azzam] Tarbiyah Jihadiyah 11](https://img.pdfslide.tips/doc/110x75/577cc0371a28aba7118f4864/abdullah-azzam-tarbiyah-jihadiyah-11.jpg)

![[Abdullah Azzam] Tarbiyah Jihadiyah 09](https://img.pdfslide.tips/doc/110x75/577cc0371a28aba7118f4860/abdullah-azzam-tarbiyah-jihadiyah-09.jpg)
![[Abdullah Azzam] Tarbiyah Jihadiyah 10](https://img.pdfslide.tips/doc/110x75/577cc0371a28aba7118f4861/abdullah-azzam-tarbiyah-jihadiyah-10.jpg)








![[Abdullah Azzam] Tarbiyah Jihadiyah 08](https://img.pdfslide.tips/doc/110x75/577cc0371a28aba7118f485e/abdullah-azzam-tarbiyah-jihadiyah-08.jpg)
