-
8/18/2019 2014 2015 NSU Predavanje 04 FazniProstor
1/14
NSU Predavanje 4 – Fazni prostor, singulariteti
Prof. Z. Vukić
2014/2015 1
Ak.g.2014/2015 Kolegij: Nelinearni sustavi upravljanja
1
Nelinearni sustavi upravljanja
Fazni prostor i trajektorije
Nelinearni sustavi upravljanja
Fazni prostor i trajektorije
Prof.dr.sc. Zoran Vukić
Tel: 01/6129 840, Fax:01/6129 809,
E-mail:[email protected]
Prof.dr.sc. Zoran Vukić
Tel: 01/6129 840, Fax:01/6129 809,
E-mail:[email protected]
DefinicijeDefinicije
Fazni prostor – prostor određen koordinatama
stanja ili tzv. faznim varijablama sustava danih sa:
Fazna točka – točka faznog prostora koja određuje
stanje ili fazu sustava
Fazna trajektorija – putanja promjene stanja ili
promjene faznih varijabli. Fazne točke formiraju
faznu trajektoriju
Fazni portret – familija faznih trajektorija
dobivena pri svim, za dati sustav mogućim,
početnim uvjetima
Fazni prostor – prostor određen koordinatama
stanja ili tzv. faznim varijablama sustava danih sa:
Fazna točka – točka faznog prostora koja određuje
stanje ili fazu sustava
Fazna trajektorija – putanja promjene stanja ili
promjene faznih varijabli. Fazne točke formiraju
faznu trajektoriju
Fazni portret – familija faznih trajektorija
dobivena pri svim, za dati sustav mogućim,
početnim uvjetima2
( 1)( ), ( ), ( ), , ( )n x t x t x t x t
http://math.rice.edu/~dfield/
Fazne trajektorije mogu se dobiti
analitički, grafički i simulacijom
Fazne trajektorije mogu se dobiti
analitički, grafički i simulacijom
Fazne trajektorije mogu se grafički prikazati za sustave
reda n ≤ 3.
Fazne trajektorije linearnih sustava pravilnog su oblika,
kod njih se može o ponašanju sustava zaključiti temeljem
poznavanja jedne fazne trajektorije, jer su sve ostale istog
oblika. Linearan sustav ima globalna svojstva.
Fazne trajektorije nelinearnih sustava općenito su nepra-
vilnog oblika. Kod nelinearnog sustava nije moguće
temeljem jedne trajektorije zaključiti o ponašanju neline-
arnog sustava u čitavom faznom prostoru. Nelinearni
sustav može imati različita lokalna svojstva.
Za sustave drugog reda fazni prostor je ravnina (2D), dok
je za sustave trećeg reda fazni prostor 3D.
Fazne trajektorije mogu se grafički prikazati za sustave
reda n ≤ 3.
Fazne trajektorije linearnih sustava pravilnog su oblika,
kod njih se može o ponašanju sustava zaključiti temeljem
poznavanja jedne fazne trajektorije, jer su sve ostale istog
oblika. Linearan sustav ima globalna svojstva.
Fazne trajektorije nelinearnih sustava općenito su nepra-
vilnog oblika. Kod nelinearnog sustava nije moguće
temeljem jedne trajektorije zaključiti o ponašanju neline-
arnog sustava u čitavom faznom prostoru. Nelinearni
sustav može imati različita lokalna svojstva.
Za sustave drugog reda fazni prostor je ravnina (2D), dok
je za sustave trećeg reda fazni prostor 3D.Kolegij:
Nelinearni sustavi upravljanja 3
Linearni sustav (LTI)Linearni sustav (LTI)
Za linearan vremenski nepromjenjiv sustav (LTI)
dan sa d2 x/dt2 + adx/dt+bx = 0 svojstvene
vr.
(korjeni karakteristične jednadžbe) su dani sa:
Ovisno o karakteru korjena moguće je 6 tipovasingularnih
točaka:
Za linearan vremenski nepromjenjiv sustav (LTI)
dan sa d2 x/dt2 + adx/dt+bx = 0 svojstvene
vr.
(korjeni karakteristične jednadžbe) su dani sa:
Ovisno o karakteru korjena moguće je 6 tipovasingularnih
točaka:
Kolegij: Nelinearni sustavi upravljanja 4
2
1,2( )2 2
a a x t b
-
8/18/2019 2014 2015 NSU Predavanje 04 FazniProstor
2/14
NSU Predavanje 4 – Fazni prostor, singulariteti
Prof. Z. Vukić
2014/2015 2
Ovisno o poziciji korjena, 6 tipova singularnih
točaka (ponašanja trajektorije) je moguće:
Ovisno o poziciji korjena, 6 tipova singularnih
točaka (ponašanja trajektorije) je moguće:
Kolegij: Nelinearni sustavi upravljanja 5
centar ( x1,2=±jω),
stabilan fokus ( x1,2 = - ± jω; σ >
0),
stabilan čvor ( x1 = 1 ; x2 = 2
; σ 1,2< 0),
nestabilan fokus ( x1,2 = ± jω; σ >
0),
nestabilan čvor ( x1 = 1 ; x2 = 2 ; σ
1,2 > 0),
sedlo ( x1 = 1 ; x2 = 2 ; σ 1<
0 ; σ 2 > 0), .
Singularne točke – LTI sustavSingularne točke – LTI sustav
Priroda singularnih točaka Priroda singularnih točaka
2
Pokazuje se da se trajektorije ponašaju na isti način u okol
ini
ranotežne točke. Ako se razmatra , . x Ax x R
1Tada je Mz A Mz z M A Mz
11
2
0
0 0r
k M AM J ili ili
λ λ α β
λ λ β α
(a) 1 2 0 & realniλ λ 1
2
2
1
2
1
1 1 1 1 10
2 2 2 2 20
2 1
20
10
( )
( )
( )
t
t
z z z t z e
z z z t z e
z cz
zc
z
λ
λ
λ
λ
λ
λ
λ
λ
stabilančvor
2 2Uvede li se uz det M 0 x Mz gdje M R
2 1 0λ λ
Te je
gdje
Fazni portreti – LTI sustavFazni portreti – LTI sustav
1 2, 0λ λ 1 2, 0λ λ
2 10 : sedloλ λ
stabilančvor nestabilan čvor
Fazni portreti (nastavak)Fazni portreti (nastavak)
(b) 1 2 0 & re a ln iλ λ
1 2kada 0,k z cz
jedna ili obje sv.vrijednosti su nula ravnotežni
potprostor
0λ 0λ
0λ 0λ
20
2
20
1021 ln,0
z
zk
z
z z zk
λ
1 1 2
1 10 20 2 20
2 2
( ) ( ), ( )t t
z z kz z t e z kz t z t z e
z z
λ λλ
λ
-
8/18/2019 2014 2015 NSU Predavanje 04 FazniProstor
3/14
NSU Predavanje 4 – Fazni prostor, singulariteti
Prof. Z. Vukić
2014/2015 3
Fazni portreti (nastavak)Fazni portreti (nastavak)
(c) 1,2 jλ α β
1 1 2
2 1 2
z z z z z z
α ββ α
2 2
1 2
1 2
1
tan
r z z z
zθ
r r αθ β
0
0
( )
( )
t r t r e
t t
α
θ θ β
0α 0α 0α
Let
stabilanfokus nestabilanfokus centar
Sustavi drugog redaSustavi drugog reda
),(
),(
y xgdt
dy
y x f dt
dx
Dvodimenzijalni LTI sustaviDvodimenzijalni LTI sustavi
y
x
d
b
c
a
dycx y
byax x
x
xx
,A
A
Primjer: OscilatorPrimjer: Oscilator
0
f ma
kx ma mx
mx kx
m k
x
xm
k v
v x
xv
v x
m
k 2
2
ωω
-
8/18/2019 2014 2015 NSU Predavanje 04 FazniProstor
4/14
NSU Predavanje 4 – Fazni prostor, singulariteti
Prof. Z. Vukić
2014/2015 4
Oscilator: Fazna ravnina (1)Oscilator: Fazna ravnina (1)
xv
v x
2ω
x
v
Fazni portret
Fiksna točka
Zatvorena putanja
Trajektorija
Oscilator: Fazna ravnina (2)Oscilator: Fazna ravnina (2)
x
v
X=0
(a)
(b)
(c)
(d)
(a)
(b)
(c)
(d)
Primjer: Kanonički sustavPrimjer: Kanonički sustav
t
at
e yt y
e xt x
y y
ax x
y
xa
y
x
a
0
0
)(
)(
.1
0
0
1
0
0A
A
xx
Simetrični čvor (Zvijezda):Simetrični čvor (Zvijezda):
a = -1a = -1
t
at
e yt y
e xt x
0
0
)(
)(
-
8/18/2019 2014 2015 NSU Predavanje 04 FazniProstor
5/14
NSU Predavanje 4 – Fazni prostor, singulariteti
Prof. Z. Vukić
2014/2015 5
Stabilan čvor:Stabilan čvor:
a < -1a < -1
t
at
e yt y
e xt x
0
0
)(
)(
-1 < a < 0
t
at
e yt y
e xt x
0
0
)(
)(
Linija fiksiranih točaka:Linija fiksiranih točaka:
a = 0 a = 0
t
at
e yt y
e xt x
0
0
)(
)(
Sedlo:Sedlo:
a > 0a > 0
t
at
e yt y
e xt x
0
0
)(
)(
Stabilan Manifold/Kolektor
Nestabilan Manifold
Opća analiza linearnih sustava (1)Opća analiza linearnih sustava
(1)
U svim slučajevima trajektorije koje započinju na x ili y osi
ostaju natim osima zauvijek. Fiksirane točke su točke u presjecištu
ovih osiju.
U svim slučajevima trajektorije koje započinju na x ili y osi
ostaju natim osima zauvijek. Fiksirane točke su točke u presjecištu
ovih osiju.
-
8/18/2019 2014 2015 NSU Predavanje 04 FazniProstor
6/14
NSU Predavanje 4 – Fazni prostor, singulariteti
Prof. Z. Vukić
2014/2015 6
Opća analiza linearnih sustava (1)Opća analiza linearnih sustava
(1)
Trajektorije se mogu općenito dobiti iz: Trajektorije se mogu
općenito dobiti iz:
A
A ,
želimo izraziti rješenja u formi: 0
A A A
:svojstvene vr. od A (dinamika promjene)
:svojstveni vektori od A (smjer promjene)
t
t t
a b x
c d y
(t) e
e e
λ
λ λλ λ
λ
x x
x
x v , v
x x v v v v
v
2
2
2
1
Karakteristična jednadžba iz koje se mogu dobiti sv.
vrijednosti: det(A-λI) 0
λ A det 0λ
0
λ ( )λ 0
( )λ λ 0
det( )
4λ
a b a bc d c d
(a λ)(d λ)-bc
a d (ad - bc)
a d trag A
ad bc A
ττ
τ τ
2
1
4, λ
2 2
τ τ
Opća analiza linearnih sustava (2)Opća analiza linearnih sustava
(2)
1
1 2
1 1
1
za svaku sv. vrijednost ( , ) postoji sv.vektor takav da:
A , A
Kada su sv. vrijednosti poznate sv. vektori se mogu lako
izračunati
Opće rješenje za sustav je oblika:
x(t) c eλ
λ λ
λ λ
1 1 2 2v v v v
2
1 2 2cv e vλ
Opća analiza linearnih sustava (3)Opća analiza linearnih sustava
(3) Primjer:Primjer:
2
1 2
1
1 1
2
2 2
2
1 1
2 2
4 2
1 1 .
4 2
λ λ-6 0
2 , 3
A
za λ :
1 1 1 2 0
4 2 1
za λ :
1 1 3
4 2
x x y
y x y
x x
y y
v vv v
v v
v v
v v
λ λ
λ
1 1
v v
v
2
14 0
4v v
1 2v
Svojstveni vektori:
y
x
-
8/18/2019 2014 2015 NSU Predavanje 04 FazniProstor
7/14
NSU Predavanje 4 – Fazni prostor, singulariteti
Prof. Z. Vukić
2014/2015 7
Primjer:Primjer:
2 1kada 0:λ λ
y
x
Brzi svojstveni smjer Spori svojstveni smjer
Primjer:Primjer:
2 1kada 0:λ λ
y
x
Kompleksne sv. vrijednosti (1)Kompleksne sv. vrijednosti (1)
2
2
1,2
2
1 2
2
1,2
λ λ 0
( )
det( )
τ 4Δ
2
Ako τ 4Δ 0 ta da su λ i λ kon jugi ra no-kompleksne veličine:τ
4Δ
1, ,2 2
(t) sadrži modove
(cos
(α iω)t
(α iω)t αt
a d trag A
ad bc A
i i
e
e e t i
τ
τ
τλ
τλ α ω α ω
ω
x
sin )
Prema tome sustav ima oscilatorno ponašanje
t ω
ω
πα
ωω
ωτ
αωαλ
2periodomsnoscilatorasustav jetada0ako
)sin(cos
članovesadrži(t)
2
4Δτ,
2,1
2
2,1
T
t it ee
e
ii
αt iωω)(α
iωω)(αx
Centar
Kompleksne sv. vrijednosti (2)Kompleksne sv. vrijednosti (2)
-
8/18/2019 2014 2015 NSU Predavanje 04 FazniProstor
8/14
-
8/18/2019 2014 2015 NSU Predavanje 04 FazniProstor
9/14
NSU Predavanje 4 – Fazni prostor, singulariteti
Prof. Z. Vukić
2014/2015 9
1-33
NTI Sustav drugog reda -
izokline
NTI Sustav drugog reda -
izokline
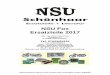
Izokline
Skup svih trajektorija na ravnini → Fazni portret
Treba zapaziti da je nagib trajektorije na bilo kojoj
točkix dana sa: S(x) =
f 2(x1 ,x2)/f 1(x1 ,x2)
Izokline
Skup svih trajektorija na ravnini → Fazni portret
Treba zapaziti da je nagib trajektorije na bilo kojoj
točkix dana sa: S(x) =
f 2(x1 ,x2)/f 1(x1 ,x2)
1 1 1 2
2 2 1 2
( ) ( ) , ( )
( ) ( ) , ( )
:
i
i
x t f x t x t
x R x t f x t x t
f R R R
2 2
glatka funkcija
( ) : smjer trajektorije na svakom f x R R x
1 x
2 x
( ) f x
Zove se “vektorsko polje”
Izokline (nastavak)Izokline (nastavak)
S(x) = c prema tome definira krivulju (izoklinu) u
prostoru stanja duž koje trajektorije imaju nagib c.
Izoklina je geometrijsko mjesto točaka sa istim
konstantnim nagibom tangente na faznu
trajektoriju.
Crtanje fazne trajektorije metodom izoklina
olakšava skiciranje faznih trajektorija.
Jednadžba izokline dobije se uvrštavanjem
konstantnog iznosa u diferencijalnu jednadžbu
sustava dy(t)/dt = S(x) = c = konstantno
S(x) = c prema tome definira krivulju (izoklinu) u
prostoru stanja duž koje trajektorije imaju nagib c.
Izoklina je geometrijsko mjesto točaka sa istim
konstantnim nagibom tangente na faznu
trajektoriju.
Crtanje fazne trajektorije metodom izoklina
olakšava skiciranje faznih trajektorija.
Jednadžba izokline dobije se uvrštavanjem
konstantnog iznosa u diferencijalnu jednadžbu
sustava dy(t)/dt = S(x) = c = konstantno
Kolegij: Nelinearni sustavi upravljanja 34
1-35
Izokline (nastavak)Izokline (nastavak)
Krivulja c naziva se izoklina: kada trajektorija prolazi kroz
izoklinu ona ju prolazi pod nagibom c, povezivanjemizoklina
moguće je dobiti rješenje.
Primjer:
1 2
2 1
1
2
2 1
( ) ( )
( ) sin ( )
sin ( )( )
( )
1( ) sin ( )
x t x t
x t x t
x t S x c
x t
x t x t c
2
1
2 1
0
0 0
14sin
4
c x
c x
c x x
Kolegij: Nelinearni sustavi upravljanja 36
Primjer: 2
2
2
2
( ) ( ) 0
( ) ( )
( ) ( ) 0 :
( )( ) ( )
0( )( ) ( )
( ) ( )
( ) ( )
x t x t
y t x t
y t x t y x
dy t
y t x t dt
dx t x t y t dt
dy t x t
dx t y t
ω
ω
ω
ω
Nagib tangente u svakoj točki izoklinena faznu trajektoriju je
konstantan:
tgα = dy/dx = c = konst.
-
8/18/2019 2014 2015 NSU Predavanje 04 FazniProstor
10/14
NSU Predavanje 4 – Fazni prostor, singulariteti
Prof. Z. Vukić
2014/2015 10
Kolegij: Nelinearni sustavi upravljanja 37
Jednadžba izokline je:2
2
( )
( ):
1( ) ( )
x t c
y t odnosno
y t x t c
ω
ω
Za različite iznose konstante c dobiti će se familija izoklina.U
našem slučaju izokline su pravci kroz ishodište
koordinatnog sustava (fazne ravnine).
Crtanje fazne trajektorijeCrtanje fazne trajektorije
Postoje dva načina
Prvi način: iz početne točke A (početnog uvjeta) povuci
pravac pod srednjim nagibom c12 = 0.5(c1+c2 ) -
odredi
kut pravca α12 = arctg c12
Postoje dva načina
Prvi način: iz početne točke A (početnog uvjeta) povuci
pravac pod srednjim nagibom c12 = 0.5(c1+c2 ) -
odredi
kut pravca α12 = arctg c12
Kolegij: Nelinearni sustavi upravljanja 38
α12
A
B
c1
c2
x
y Tamo gdje povučeni pravacsiječe izoklinu nalazi se
sljedeća točka (B) fazne
trajektorije.
Slobodnom rukom skiciratitrajektoriju od A do B.
Drugi način:
Iz početne točke (A) povuče se pravac pod kutem
(tangente fazne trajektorije) s nagibom α1= arctgc1.
Između izoklina c1 i c2 povuci pravac OD. Presjecište
pravca povučenog iz točke A i pravca OD predstavlja
pomoćnu točku B. Kroz ovu točku B povuci pravac snagibom
tangente na faznu trajektoriju α
2
= arctgc2
.
Presjecište tog pravca s izoklinom c2 daje točku C
kroz koju će proći trajektorija. Nagib fazne
trajektorije u točki A je α1 a u točki C je α2.
Drugi način:
Iz početne točke (A) povuče se pravac pod kutem
(tangente fazne trajektorije) s nagibom α1= arctgc1.
Između izoklina c1 i c2 povuci pravac OD. Presjecište
pravca povučenog iz točke A i pravca OD predstavlja
pomoćnu točku B. Kroz ovu točku B povuci pravac snagibom
tangente na faznu trajektoriju α
2
= arctgc2
.
Presjecište tog pravca s izoklinom c2 daje točku C
kroz koju će proći trajektorija. Nagib fazne
trajektorije u točki A je α1 a u točki C je α2.
Kolegij: Nelinearni sustavi upravljanja 39
Dinamika NTI sustava drugog reda
(kontinuirani sustav)
Dinamika NTI sustava drugog reda
(kontinuirani sustav)
Harmonički linearni oscilator (njihalo)
Fazni portret
Njihalo s prigušenjem
Nelinearno njihalo
Prinudne oscilacije
Harmonički linearni oscilator (njihalo)
Fazni portret
Njihalo s prigušenjem
Nelinearno njihalo
Prinudne oscilacije
-
8/18/2019 2014 2015 NSU Predavanje 04 FazniProstor
11/14
NSU Predavanje 4 – Fazni prostor, singulariteti
Prof. Z. Vukić
2014/2015 11
Oscilatoran LTI
sustav
Oscilatoran LTI
sustav
2
2
d xm kx
dt
2
2
1d qq
LC dt
2
2
d g
Ldt
θθ
22
2
d x x
dt ω
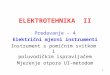
Fazni portret LTI sustava zaFazni portret LTI sustava za
0 1
0
x xd k
v vdt m
dxv
dt
dv k x
dt m
2
2
d xm kx
dt
Ravnotežno stanje (točka):
0 0, 0dx dv
x vdt dt
Klasifikacija po sv. vrijednostima:
20
k
mλ
-5 0 5-5
-4
-3
-2
-1
0
1
2
3
4
5
y(2) vs y(1)
y(1)
y ( 2 )
Sustav:
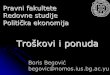
Prigušene oscilacije LTI sustavaPrigušene oscilacije LTI
sustava
2
2
d x dxm kx b
dt dt
0 1
/ /
x xd
v k m b m vdt
2 0m b k λ λ
Sustav:
Klasifikacija prema sv. vrijednostima:
2 4
2 2
b b mk
m mλ
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2DampedPendulum
x
y
Nelinearno njihalo
(Nelinearni oscilator)
Nelinearno njihalo
(Nelinearni oscilator)
2
2sin
d x g x
Ldt
-8 -6 -4 -2 0 2 4 6 8-5
-4
-3
-2
-1
0
1
2
3
4
5vvs x
x
v
•Integrabilan Hamiltonski sustav
•Separatrisa
•Perturbacije – isprepletena stabilna/nestabilna područja
-
8/18/2019 2014 2015 NSU Predavanje 04 FazniProstor
12/14
NSU Predavanje 4 – Fazni prostor, singulariteti
Prof. Z. Vukić
2014/2015 12
Prigušeno nelinearno njihaloPrigušeno nelinearno njihalo
-8 -6 -4 -2 0 2 4 6 8-5
-4
-3
-2
-1
0
1
2
3
4
5vvs x
x
v
-8 -6 -4 -2 0 2 4 6 8-5
-4
-3
-2
-1
0
1
2
3
4
5vvs x
x
Bez prigušenja Sa prigušenjem
Prinudne oscilacijePrinudne oscilacije2
2cos 2
d xm kx A ft
dt π
0 1 0
/ 0 cos 2
x xd
v k m v A ft dt π
Sustav:
Rezonancija
Fazni portret – prinudne
oscilacije nelinearnog njihala
Fazni portret – prinudne
oscilacije nelinearnog njihala
-8 -6 -4 -2 0 2 4 6 8-5
-4
-3
-2
-1
0
1
2
3
4
5
vvs x
x
v
-8 -6 -4 -2 0 2 4 6 8-5
-4
-3
-2
-1
0
1
2
3
4
5vvs x
x
v
Bez prigušenja Sa prigušenjem1-48
LinearizacijaLinearizacija
Linearizacija Linearizacija ( ) x f x1
Pretpostavlja se da su rješenja , .k
e e x x
Nelinearansustav može se prikazati s više linearnihsustava od
kojih svaki
vrijedi u malom okolišu oko x ei upotrebom
linearizacije.
Pretpostavlja se da je f(x)
; x Є Rn kontinuirano derivabilna
funkcija,
Ako se odabere jedno ravnotežno stanje,
recimo xei
te uvede supstitucija:i i
e e z x x x z x
Tada ( ) ( ) . . ( )ie
i i
e e
x x
f z f z x f x z HOT z
x
1 1
1
1
n
n n
n
f f
x x f
x f f
x x
= 0
gdje
Ra zmatra se ( ) 0.e f x
-
8/18/2019 2014 2015 NSU Predavanje 04 FazniProstor
13/14
NSU Predavanje 4 – Fazni prostor, singulariteti
Prof. Z. Vukić
2014/2015 13
1-49
Linearizacija (nastavak)Linearizacija (nastavak)
Razmatra li se dovoljno mala kugla Br Є Rn oko x e
i
{ : }n ii e
B x R x x ε
Linearizacija dx/dt = f(x) oko x ei definirana je sa:
( ) ( )
g d j e j eie
i
i
x x
z t A z t
f A
x
Primjer:
1 2
2 1 2
( ) ( )
( ) sin ( ) ( )
x t x t
x t a x t bx t
1 20
,0 0
e e x xπ
1
0 1
cos
f
a x b x
1
0 1, A
a b
2
0 1 A
a b
1-50
Linearizacija (nastavak)Linearizacija (nastavak)
1 2
2 1 2
1
( ) ( )
( ) ( ) ( )unutar
z t z t
z t az t bz t B
1 2
2 1 2
2
( ) ( )
( ) ( ) ( )unutar
z t z t
z t az t bz t B
1 2
2 1 2
( ) ( )
( ) sin ( ) ( )
x t x t
x t a x t bx t
π π
2 B2 B1 B
Tada su dvije linearizacije:
Nelinearan sustav – singularitetiNelinearan sustav –
singulariteti
Nelinearan sustav Nelinearan sustav
1 1 1 2
2 2 1 2
( , )
( , )
x f x x
x f x x
( ) 0 lin earizacija ( )e e f x z A x z
Pretpostavimo da priroda singularne točke kod linearnog sustava
može poprimitirazne forme: [ vor, fokus, centar, sedlo]α
Kakva je priroda singularne točke nelinearnog sustava?
Odgovor: Ista, osim za centar. Naime, centar kod linearnog
sustava razlikuje seod centra kod nelinearnog sustava. Centar kod
linearnog sustava ima pravilnuformu (kružnica ili elipsa) dok kod
nelinearnog sustava singularna točka tipacentar predstavlja
zatvorenu konturu – granični krug (limit cycle). Kod
linearnogsustava govorimo o rubu stabilnosti ( oscilacijama
konstantne apmplitude ifrekvencije), dok kod nelinearnog sustava
govorimo o vlastitim oscilacijama(engl. Limit cycles)
Ravnotežna točka nelinearnog sustava kod koje linearizacija ne
daje svojstvenevrijednosti na imaginarnoj osi naziva se
hiperbolička ravnotežna točka.
Nelinearan sustav (nastavak)Nelinearan sustav (nastavak)
1 2
2 1 2
( ) ( )
( ) sin ( ) ( )
x t x t
x t a x t bx t
11
0 0 1stabilna
0e x A
a b
2
1
0 1nestabilna
0e x A
a b
π
gdje je: 1, 0.5a b
Primjer:
-
8/18/2019 2014 2015 NSU Predavanje 04 FazniProstor
14/14
NSU Predavanje 4 – Fazni prostor, singulariteti
Prof. Z. Vukić
2014/2015 14
Zaključak 1/2Zaključak 1/2
Kod linearnih sustava o ponašanju se možezaključiti temeljem
jedne fazne trajektorije jer su
sve ostale slične Kod nelinearnih sustava to nije moguće
Separatrisa – fazna trajektorija koja dijeli fazniprostor na
područja različitih režima radanelinearnog sustava
Amplituda i frekvencija periodičkih oscilacija
kodnelinearnih sustava (vlastite oscilacije) ne ovisi opočetnim
uvjetima već isključivo o strukturisustava
Kod linearnih sustava o ponašanju se možezaključiti temeljem
jedne fazne trajektorije jer su
sve ostale slične Kod nelinearnih sustava to nije moguće
Separatrisa – fazna trajektorija koja dijeli fazniprostor na
područja različitih režima radanelinearnog sustava
Amplituda i frekvencija periodičkih oscilacija
kodnelinearnih sustava (vlastite oscilacije) ne ovisi opočetnim
uvjetima već isključivo o strukturisustava
53
Zaključak 2/2Zaključak 2/2
Kod linearnog sustava singularne točke su
Kod nelinearnog sustava imamo singularitete: Točkasti
(ravnotežni):
Ciklički (periodički):
Torusni (kvaziperiodički)
Čudni (kaotični) atraktor
Granični krug – zatvorena trajektorija nepravilnog oblikakoja
pokazuje da postoje vlastite oscilacije koje mogubiti stabilne i
nestabilne
Kod linearnog sustava singularne točke su
Kod nelinearnog sustava imamo singularitete: Točkasti
(ravnotežni):
Ciklički (periodički):
Torusni (kvaziperiodički)
Čudni (kaotični) atraktor
Granični krug – zatvorena trajektorija nepravilnog oblikakoja
pokazuje da postoje vlastite oscilacije koje mogubiti stabilne i
nestabilne
54
[čvor, fokus, centar, sedlo]α
[čvor, fokus, sedlo]α
[granični krug]α