Embed Size (px)
Citation preview

修士論文
3 次元再構成に基づく飛行経路設計による
空撮画像蓄積手法
氏 名:天見 高之
学籍番号:6611140003-3
指導教員:柴田 史久 教授
提出年月:2017 年 2 月 3 日
立命館大学大学院 情報理工学研究科 情報理工学専攻

i
概要
近年,マルチコプタータイプの無人航空機(Unmanned Air Vehicle; UAV)がドローンとし
て広く認知されるようになった.ドローンの活用例として,災害発生時の被災状況の確認や,人
が立ち入ることが困難な鉄橋下などインフラ設備の点検などにドローンを利用する試みがなさ
れている.災害発生時の被災状況の確認やインフラ設備の点検などの活用例からも,状態を観測
するために対象を撮影するという需要が存在することがわかる.
しかし,現状では操縦者が熟練していなければならず,また撮影技術も必要となるため,対象
を撮影して,対象を写す画像を蓄積することは難しい.このことから,本論文では撮影対象の形
状に応じたカメラパスすなわち飛行経路の設計手法について述べる.自律飛行するドローンを用
いて事前に撮影した画像から,画像情報が不足している視点を算出して飛行経路を再設計し,再
設計した経路に基づいて画像を蓄積する.本論では,飛行経路の再設計手法について述べ,ドロ
ーンを用いた空撮画像による 3 次元再構成を確認した.また,カメラパスの再設計による 3 次
元再構成について追加撮影前後での 3 次元再構成の比較し,考察した内容について述べる.
キーワード
ドローン
自律飛行
3 次元再構成
飛行経路設計

ii
目 次
第 1 章 緒論 ............................................................................................................................................................. 1
第 2 章 関連研究 ................................................................................................................................................... 3
2.1 操作補助に関する研究 ................................................................................................... 3
2.2 自律飛行に関する研究 ................................................................................................... 4
2.3 3 次元再構成に関する研究 ............................................................................................. 5
2.4 本研究の位置づけ .......................................................................................................... 5
第 3 章 提案手法 ................................................................................................................................................... 7
3.1 処理の流れ ..................................................................................................................... 7
3.2 センサを利用した自律飛行および撮影 .......................................................................... 7
3.3 蓄積画像による 3 次元再構成 ........................................................................................ 9
3.4 3 次元再構成に基づく飛行経路の設計 ......................................................................... 12
第 4 章 動作確認 ................................................................................................................................................ 14
4.1 動作確認環境について ................................................................................................. 14
4.1.1 使用するドローンについて ...................................................................................... 14
4.1.2 開発環境について .................................................................................................... 14
4.1.3 動作確認手順 ........................................................................................................... 16
4.2 ドローンの飛行制御および事前撮影時の 3 次元再構成 .............................................. 16
4.2.1 ドローンの飛行制御................................................................................................. 16
4.2.2 事前撮影時における 3 次元再構成 ........................................................................... 17
4.3 3 次元再構成に基づく飛行経路の再設計 ..................................................................... 17
4.4 3 次元再構成結果の比較 .............................................................................................. 20
第 5 章 結論 .......................................................................................................................................................... 23
謝 辞 ...................................................................................................................................................................... 24
参考文献 ................................................................................................................................................................. 25

1
第1章 緒論
近年,マルチコプタータイプの無人航空機(Unmanned Air Vehicle; UAV)がドローンとし
て広く認知されるようになった.そもそも,ドローンは第 2 次世界大戦末期には実戦で使用さ
れていたように,軍事利用が主な目的であり,図 1.1 のような攻撃機や偵察機の開発が盛んに行
われていた.しかし,現在では小型化や低価格化が進んできており,2010 年にフランスの Parrot
社[1]が発売した AR. Drone(図 1.2)は誰でも手軽に手に入れられるという利点から軍事用途に
留まらないドローン利用のきっかけとなった.この AR. Drone は,カメラを搭載し,4 つの回
転翼をもつマルチコプタータイプのドローンであり.スマートフォンを利用して,機体の操縦や
カメラの映像をリアルタイムに取得できることから,誰でも手軽に空撮を楽しめる商品として話
題となり,ドローンを身近なものにした.しかし,AR.Drone では低価格ゆえにカメラの性能や
ジンバルなどがなく,空撮を楽しむには物足りない部分もあった.そこで,さらに性能の高いカ
メラとジンバルを搭載したドローンや一眼レフカメラを搭載可能なプロ向けの空撮用ドローン
なども販売され,ドローンによる空撮が注目されていることがわかる.
しかし,誰でも手軽にドローンを使用できるようになったことから,我が国でも首相官邸に無
人機を意図的に墜落させた事件や米国のホワイトハウスに落下した事件なども発生しており,テ
ロへの利用が懸念される.また,落下事故の件数も増えてきており,ドローンに対して法規制を
行うことでドローンの利用を禁止しようという動きも見られた.一方,東日本大震災や箱根山の
立ち入り規制区域内の調査に使用されており,各自治体でも災害対策にドローンを活用する動き
もある.国土交通省がインフラ設備の点検に向けた現場検証を行なった例もあり,一般的に法規
制や安全対策が十分に行われるのであれば,ドローンは産業の発展に貢献できると考えられてい
る面もある.ドローンを販売する DJI 社[2]などでは,ドローン操縦者に対する安全講習を実施
しており,またドローン本体についても飛行禁止エリアではドローンを飛行できないようにする
など,ドローンが悪用されないための対策もとられている.そこで,これらの情勢を受けて 2015
年 11 月には航空法が改正され,ドローン利用のためのルールが制定された.これによって,ド
ローンはますます関心が強まり,多種多様な研究がなされると考えられる.
図 1.1 軍用攻撃機 MA-1 図 1.2 AR. Drone(仏・Parrot 社)

2
図 1.3や図 1.4のような災害時の状況確認やインフレ設備の点検にドローンを利用する例では,
リアルタイムに取得できる画像を確認しながら,もしくは機体自身を目視で確認しながらドロー
ンを操縦している.そのため,ドローンの操縦に熟練している必要があり,活用の機会を損なっ
てしまう可能性がある.さらに,ドローンを利用して観測したい対象が存在する場合,観測対象
を写すための撮影技術も必要となってくる.そこで,ドローン活用の幅を広げることを目的とし
て,本研究では,観測対象が限定されている場合を想定し,前述した操縦技術や撮影技術を保有
していなくとも自動で観測対象を撮影し,空撮画像を効率的に漏れなく蓄積するための手法を提
案する.提案手法の概要として,まず観測したい対象を決定し,観測対象周辺をドローンの自律
飛行によって自動で撮影する.次に対象周辺の画像を 3 次元再構成し,再構成結果から画像情
報が不足している地点を追加撮影地点として設定し,再飛行用の経路を設計する.この再設計し
た経路に従ってドローンを自律飛行させることで,操縦技術や撮影技術がなくとも手軽に空撮画
像を蓄積することができる.
以下に本論文の構成と概要について述べる.第 2 章では,関連研究として,操縦補助や自律
飛行制御など,ドローンの研究利用について述べる.第 3 章では,自律飛行に必要となるドロ
ーンの制御方法と,本稿で提案する 3 次元再構成に基づいた飛行経路再設計手法について述べ
る.第 4 章では,ドローンの制御および自律飛行の結果,とシミュレータ上で自律飛行を行な
い 3 次元再構成の動作確認を行なった.また,シミュレータ上においてカメラパスの再設計手
法について動作確認を行ない,追加撮影後の 3 次元再構成結果について評価し考察内容を述べ
る.第 5 章では本研究のまとめと今後の課題について述べる.
図 1.3 箱根山火口調査 図 1.4 インフラ点検のための現場検証

3
第2章 関連研究
本章では,主にドローンの操縦の困難さを緩和することで,ドローンの活用の幅を広げること
を目的とした研究について主に取り上げて述べる.主に,ドローンから得られる画像などを利用
して操縦者の補助に特化した操縦補助や,ドローンに搭載したセンサなどを用いて環境をマッピ
ングしながら完全に自動で飛行を行う自律飛行の分野をはじめとして,本研究と関連のある空撮
画像を用いた 3D モデル作成などの分野について述べる.
2.1 操作補助に関する研究
ドローンをリアルタイムに取得できる画像だけを見て操作するには,操作技術が熟練している
必要が有る.本節では操作に慣れている熟練者でなくとも簡単に操縦できるようにするためのア
プローチを行なっている研究を操作補助に関する研究として扱う.ドローンの操作補助に関する
研究はおおまかに,ドローンが取得する画像に CG を重畳描画することで電子情報を付与する拡
張現実感(Augmented Reality; AR)技術を利用した視覚的な操作補助と,より直感的な動作で
ドローンを操縦可能にするなどの操作方法での操縦補助の 2 つに分けられる.
【AR 技術などによる視覚的な操作補助】
ドローンがリアルタイムに取得する画像に CG による注釈情報を付加することによって建物
までの距離などを可視化して衝突の可能性を減らす目的の研究がある.Zollman らは,図 2.1 の
ように経路やドローンの飛行経路やドローンの大きさなどを CG で可視化することによって建
物への衝突を防ぐための操作補助のための手法を提案している[3].また,James らは図 2.2 の
ように仮想空間に UAVの CGモデルとドローンが取得している画像を重畳描画することによっ
て,擬似的に UAV を後ろから見たような視点を生成することで,障害物との距離感の把握など
図 2.1 Zollman らの手法 図 2.2 James らの手法

4
を容易にする,といった操縦補助の研究を行なっている[4].
【直感的なインタフェースでの操縦方法】
基本的なドローンの操縦はラジコン操作であることが多く,操作に慣れていない場合にドロ
ーンからリアルタイムに取得できる画像のみで操作を行うのは難しい.そこで,樋口らは身体動
作に伴う頭部の移動をドローンの操作入力とすることで,運動状態からドローンの操作を可能と
した[5].また,吉田らは身体ジェスチャによる操作パラメータ入力システムを実演している[6].
Neseer らは,ドローンに搭載したデプスカメラを用いてジェスチャ認識や人間の追跡を行なっ
ている[7].
2.2 自律飛行に関する研究
本節では,主に SLAM(Simultaneous Localization and Mapping)技術を活用し,ドローン
を自律飛行させる研究について述べる.SLAM 技術とは自己位置推定と周辺環境のマッピング
を行う技術のことである.自律制御システム研究所[8]はドローンに搭載したデプスセンサによ
って取得した深度情報をもとに SLAM を行い,予め設定されたルートに障害物が存在した場合,
自動で避けて飛行するドローンを開発した(図 2.3).Simon らはドローンにステレオカメラを
搭載し,シーンをリアルタイムに 3 次元再構成することで,未知環境での飛行を可能にした[9].
Rui ら[10]は,単眼カメラを用いた画像中の特徴点による自己位置推定を行い,SLAM を実現す
図 2.3 SLAM による自律飛行(自律制御システム研究所)
(a) 対象環境 (b) マッピング結果および飛行経路
図 2.4 Rui らによる単眼 SLAM による自律飛行

5
ることによって,自律飛行を可能にした(図 2.4).
2.3 3 次元再構成に関する研究
本節では,まず画像中の特徴点を利用した 3 次元再構成の研究について述べ,次にドローン
を利用した 3 次元再構成について述べる.
Skypnk らはスケール変換や回転に対して不変な SIFT 特徴量[11]を用いて,画像間の特徴点
の対応付けを行い,特徴点の 3 次元位置を復元した[12].この手法は狭い環境においては実現可
能であったが,広域な環境への適応が困難であるという問題点があった.そこで,Noah ら[13]
は,広大な環境においても特徴点の 3 次元位置の推定及びカメラの位置姿勢推定が可能なシス
テムを開発した.また,Wu[14]は Noah のシステムを,GPGPU を用いて高速化しさらに GUI
にすることで利便性を向上させた VisualSFM(図 2.5)というツールを開発した.
Jun らは都市の 3D モデルに対して,空撮映像から最適なテクスチャを選択するための手法を
提案している[15].また,Gerardo らは RGB-D カメラと GPS 情報を利用して,未知の都市環
境でのドローンの位置姿勢および実環境の推定を行う手法を提案している[16].トプコンは地上
レーザスキャナやモバイル・マッピング・システムとドローンによる空中画像計測を組み合わせ
て,3 次元モデル作成システムを開発した[17].
2.4 本研究の位置づけ
これまでに述べたように,ドローンの操縦を補助することで誰にでも扱いやすくする研究や操
作せずとも自律飛行させる研究などが存在する.しかし,これらはドローンを利用するための操
作の難度などを解消しているに過ぎず,あくまで観測したい対象を容易にかつ漏れなく撮影する
という点には注目していない.また,2.3 節で述べた 3 次元再構成などを行う研究では操縦に関
しての難度などについては解消されておらず,操縦者が対象をカメラにおさめているかを確認し
ながら操作しなければならず,操作が非常に難しいという問題が存在している.そこで,本研究
では自律飛行によって操作の難度という問題を解消し,かつ対象を含んだ画像を蓄積する手法を
提案する.そこで,事前にドローンを自律飛行して観測対象周辺の画像を蓄積し,それらを 3
図 2.5 VisualSFM 図 2.6 Image Master UAS(トプコン)

6
次元再構成した結果から観測対象を撮影できるカメラ位置を計算し,飛行経路を再設計する.こ
れにより,操縦者がドローンの操縦に熟練していなくとも観測対象をおさめた画像を蓄積するこ
とが可能となる.さらに,複雑な形状の観測対象に対して,事前撮影で大まかな形状を推定し,
推定した凹凸などの形状から対象により近いカメラパスを設計することによって効率的な画像
の蓄積手法を提案する.
ドローンを利用する利点として,航空機と比較して対象を近い地点で撮影できるという利点が
ある.図 2.7 のように航空法では航空機が飛行できる高さに周辺で最も高い建物から 300m 以上
という高度の制限が存在する.しかし,ドローンでは最大高度などの制限はあるがこの航空機が
飛行できない領域の一部を飛行することができる.このような利点から本研究では空撮画像の蓄
積にドローンを採用した.
300m航空機を利用して撮影できない領域周辺で最も高い
建物の高さ
図 2.7 航空法による高度の規定

7
第3章 提案手法
3.1 処理の流れ
提案手法による画像蓄積のための手順について以下の図 3.1 に示す.提案手法では,まず観測
対象を決定し,ドローンの位置と姿勢が取得できるセンサを用いて観測対象周辺をドローンに自
律飛行させ,観測対象周辺の空撮画像を蓄積する.次に,蓄積した空撮画像を用いて観測対象の
3 次元形状と撮影時のカメラ位置姿勢を Structure from Motion によって推定する.Structure
from Motion による 3 次元再構成結果から観測対象周辺で蓄積されていない視点を算出し,飛行
経路を再度設計し,再度自律飛行および撮影を行う.
3.2 センサを利用した自律飛行および撮影
本研究では,撮影したい位置にドローンを制御する必要がある.自律制御を行う場合には目標
地点とドローンの位置姿勢が必要となる.しかし,これらを求めるには GPS などのセンサのみ
では測定誤差が蓄積するなどの問題が発生するため,不十分だとして 2 章で紹介したような
SLAM 技術を活用した研究や併用した研究も存在する.しかし,本研究ではドローンの完全な
自律飛行を研究の主目的とするわけではないため,ドローンの位置と姿勢がリアルタイムに推定
できる手法があればよいものとする.そこで,本研究では位置情報の取得に GPS を利用し,姿
勢情報の取得に地磁気センサを利用することで簡易に自律飛行を実現する.
まず,はじめの観測対象周辺の撮影では,観測対象を覆うような球面や円筒など,単純な閉曲
面を飛行経路として設定する(図 3.2).また,本論では円筒状に撮影する場合について想定し,
位置姿勢の取得については GPS を利用した場合について述べる.観測対象および設計された飛
撮影対象周辺を自律飛行・画像を撮影
撮影した画像から対象周辺を3次元再構成
再構成結果から追加撮影が必要な地点を算出
再設計した飛行経路に従って自律飛行・撮影
図 3.1 提案手法の手順

8
行経路上の任意の地点の GPS 情報の取得には,Google Maps API[18]や Apple の MapKit[19]
などを利用することで取得することができる.観測対象の存在する地点 O(x0,y0)の緯度経度を上
記方法などで取得し,この地点 O から一定距離 T の円周上の任意の角度 θ,高さ h から位置情
報を以下の式(3.1)で計算する.
cos0 Txx
sin0 Tyy
hz
(3.1)
偏角 θの範囲は 20 ≦≦ で高さ h は観測対象の高さに応じて,任意の範囲の高度を指定す
る.今回,この偏角θの範囲について,SfM を行なう際によいと言われる視差である 15°ごと
に分割することで SfM による 3 次元再構成の精度を高める.式(3.1)より求めた複数の位置情報
を上記 θ,h の組み合わせ毎に飛行制御プログラムに入力することで円筒状に飛行経路を設計す
ることができる.
ドローンの自律飛行には 3 軸方向の速度情報が必要となり,自律飛行の際に用いる速度の制
御方法には PID 制御が考えられる.まず,比例制御(P 制御)とは操作量を目標値と現在値と
の差に比例した大きさにすることであり,単純な ON/OFF 制御に比べスムーズに目標値に近づ
けることができる,制御方法の 1 つである.式(3.2)のように現在地点の位置を 0P ,目標地点の位
置を 1P ,比例定数 pK とすると制御速度V を表すことができる.
しかし,比例制御のみでは,目標値付近で操作量が小さくなりすぎ,残留偏差が発生する.こ
の残留偏差に対して操作量をますことで偏差をなくすよう積分動作を加えて制御することを PI
制御という.この PI 制御に微分動作を加える事で,制御応答の速さを改善することを PID 制御
という. 本論文では任意の地点の画像を得られればよいため,制御方法については簡易に実装
)( 01 PPKV p (3.2)
T
観測対象
図 3.2 事前飛行経路の設計

9
が可能な P 制御を用いることとする.
3.3 蓄積画像による 3 次元再構成
本節では,3.2 節の方法で撮影した画像群に対して Structure from Motion を用いて 3 次元再
構成する手法について述べる.Structure from Motion とは,あるシーンを複数の視点から撮影
した画像を用い,そのシーンの 3 次元形状とカメラパラメータを推定する手法である.
Structure from Motion の流れは,まず撮影したある 2 枚の画像間で対応点を探索し,対応点
からカメラの位置と姿勢の関係を求める.求めたカメラの位置と姿勢の関係から,対応点の 3
次元空間中での位置を三角測量によって計算する.これによって 3 次元位置が計算された点を
観測しているカメラも位置と姿勢が算出できるようになり,任意の 2 枚の画像以外でもカメラ
位置と姿勢が推定できたものについては三角測量によって対応点の 3 次元位置を推定できる.
この処理を撮影した全ての画像に対して行うことで 3 次元空間中のカメラの移動とシーンの 3
次元形状を推定することができる.これらの各処理の具体的な方法について以下に述べる.
Structure from Motion では,同じシーンを撮影した 2 枚の画像間で対応する点を探索し,そ
れぞれの画像が指し示す 3 次元空間中のある 1 点を求める.この対応点の探索には主に特徴点
とその特徴量を用いることが多い.図 3.3 に示す 3 点を結ぶ三角形から,2 枚の画像間での移動
量とカメラの内部パラメータを含む基礎行列 F を算出し,基礎行列 F を分解することでそれぞ
れのカメラ位置姿勢が求められ,各画像間の対応点の 3 次元位置を三角測量の要領で推定するこ
とができる.
基礎行列 F を算出する手順について述べる.まず,図 3.3 に示される 3 次元空間中の点 P の
座標を同次座標で P~
=(P1, P2, P3, 1)Tと表す.この点Pを画像に投影した点p, p’を同次座標で pp ~,~
と表す.また, pp ~,~ の画像上の座標 m, m’を同次座標で mm ~,~ とする.このとき,カメラの内部
パラメータを A とすると,2 つのカメラにおける画像座標とカメラ座標の関係式は式 (3.3) で
表すことができる.A はカメラ固有の内部変数で,αu,αv,θ,u0,v0の 5 つのパラメータを持ち,
以下のような行列で表される.
図 3.3 エピポーラ幾何

10
pAm ~~ , mAp ~~ 1
(3.3)
pAm ~~ , mAp ~~ 1
100sin
0
cos
0
0
v
u
A v
uu
また,カメラ 1 を原点とすると,回転行列を単位行列 I,並進ベクトルを零行列 0 で表せる.
カメラ 2 の回転行列を R,並進ベクトルを T とすると,三次元空間中の点 P と各画像座標上の
点 p, p’の関係は式 (3.4) で表すことができる.式 (3.4) のλ,λ’はスカラー,R は 3×3 の回転行
列,T は 3×1 の並進ベクトルである.
PIp~
0~
(3.4)
PTRp~~
式 (3.4) の解 P~は画像上の座標 p~ , p~から一意に求めることができないため,この式の解を
式 (3.5) のように任意の実数ηを用いて表す.
(3.5)
式(3.4)と (3.5) より,点 p, p’に関して式 (3.6) のような関係を導くことができる.
TpRp ~~ (3.6)
式 (3.3) と (3.6) から,以下のような式 (3.7) を求める.ただし,[T]xは 3×3 の歪対称行列
である.
0~~ 1
mRATAm TT (3.7)
また,2 つのカメラ画像中の対応点 m, m’ 間において,式 (3.8) のようなエピポーラ方程式
が必ず成り立つ.
0~~ mFm T (3.8)
式 (3.7) と (3.8) より求められた 1
RATA Tが基礎行列 F である.基礎行列 F はカメラの
内部パラメータと外部パラメータを含んでいるため,カメラの相対的な位置関係を算出でき,三
角測量の原理で特徴点の 3 次元位置を推定することができる.

11
カメラの相対的な位置関係の算出には,式 (3.9) のように基礎行列 F と内部パラメータ A, A’
を用いて基本行列 E を計算する.
AFAE T (3.9)
本手法では,カメラ 1 台で疑似ステレオ視を行うため,内部パラメータは同一と考えられ.A
= A’となる.式 (3.9) で求めた基本行列 E を回転行列 R と並進ベクトル T に分解する.
RTE (3.10)
0
0
0
xy
xz
yz
tt
tt
tt
T (3.11)
ただし,スケールは任意であり,式 EET
= 0 から,T の単位ベクトル t は EETの最小固有値に
対応する固有ベクトルとして求められる.次に,式 (3.12) から T の長さも求められる.
)(2 Tt ttITEE (3.12)
また,式 (3.13) から R は式 (3.14) を最小化した解となる.
RTE (3.13)
2RTEC (3.14)
以上の手順で,カメラ位置の相対関係を算出することができる.この相対関係を利用して特徴
点の 3 次元位置を推定する.3 次元空間中で各カメラ位置とm~ , m~を結ぶ直線の交点を求める.
ただし,ノイズの影響で 2 本の直線が 1 点で交わることはないため,2 本の直線までのユークリ
ッド距離の自乗和が最小となる位置を,求める 3次元位置 Mとする.ある 3次元座標 M=[X Y Z]T
に対して,以下の式 (3.15) を誤差関数 ferrorとし,これを最小化する.
22 ~~ txRsMxsMferror (3.15)
このとき,ferrorを s, s’で微分したものをそれぞれ 0であるとし,前後それぞれの項を 0と置き,
M について立てた連立方程式を解くことで特徴点の 3 次元位置を求める.
txx
RxxRI
xx
RxxR
xx
xxIM
T
TT
T
TT
T
T
~~
~~
~~
~~
~~
~~2
1
(3.16)
この処理を,撮影した全ての画像に対して行う.しかし,基礎行列は式(3.7)からもわかるよ
う,全て同じものが算出されるとは限らないため,各点の投影されるべき位置と実際に観測した
3 次元位置には誤差が含まれる.この誤差を近さの尺度として画像上の 2 乗距離の和を用いて表
したものを再投影誤差と呼ぶ.この再投影誤差が最も小さくなるようバンドル調整[20]と呼ばれ
る最適化計算を行い,全体の位置関係を最適化し,カメラ位置姿勢及び特徴点の 3 次元位置推

12
定精度を高くすることができる.これらの処理を一括で行うソフトウェアが複数開発されている.
そこで,本論文では 3 次元再構成の手法の ß 研究が主ではないため,公開されているツールの 1
つである VisualSFM を用いる.
3.4 3 次元再構成に基づく飛行経路の設計
撮影対象周辺を 3 次元再構成し,その結果から対象に該当する点群の一部を利用者が GUI な
どを用いて選択することによって,不要に再構成された点群を除外する.次に,選択した点群に
対するカメラの分布を計算し,カメラ位置が存在しない地点を追加撮影地点とする.以下に具体
的な手順について述べる.
事前に自律飛行を行なって蓄積した画像に 3 次元再構成処理を行うことによって,撮影対象
周辺から抽出できる特徴点の 3 次元位置とそれぞれのカメラ位置姿勢を推定することができる.
特徴点の 3 次元位置が推定されることによって,撮影対象やその周辺の大まかな形状が把握で
きる.一般的に,同一の特徴点を捉える画像の枚数が多いほど 3 次元位置が正しく推定され,
再構成される 3 次元形状も正しくなる.すなわち,観測対象から 3 次元再構成するのに十分な
数の特徴点が検出できると仮定した場合,それぞれの特徴点の 3 次元位置が正しく推定されて
いれば,より正確に 3 次元形状を推定することができる.そのため,3 次元位置が推定された特
徴点に対して,接触することがなく,より近づいたカメラ位置姿勢を求めることで,凹凸などの
形状に合った撮影経路を設計することができる.
まず,対象周辺の 3 次元再構成を行なった場合,対象のみでなく図 3.4 のように背景部分も 3
次元再構成されることがある.対象物以外の特徴点に対して,追加撮影位置を決定してしまうと,
撮影対象を含まない画像を撮影してしまう場合が考えられる.そこで,事前に GUI などを利用
することで利用者が 3 次元再構成結果を確認し,不要な点群を削除する必要がある.
不要な点群を削除した後,3.3 節で説明した SfM により,事前に撮影した画像を用いて,観
測対象周辺の特徴点の 3次元位置 Pi (xi, yi, zi) とそれらを撮影した画像のカメラ位置姿勢 Ci (xi, yi,
zi) が求められているとする.まず,再構成された n 点の点群から点群の中心位置 Pcを式(3.17)
のように求める.
n
iic P
nP
1
1 (3.17)
また,撮影時に取得したセンサによるドローンの位置姿勢と SfM による推定したカメラ位置
姿勢から,SfM によって 3 次元再構成された特徴点群のスケールを撮影時のスケールと統一さ
せる.これは,後述する追加撮影地点の決定に必要となる.SfM によって 3 次元再構成した結
果は全て相対座標系に属しているため,再度自律飛行によって撮影を行うためには,座標系を変
換する必要がある.まず,スケール変換には 3 次元再構成を行うにあたって選ばれた初期の画
像ペアについて,センサで測定されたカメラの移動量 T1と SfM によって推定されたカメラの移
動量 T2を用いて以下の式(3.18)でスケール値 s を求める.

13
2
1
T
Ts (3.18)
また,座標系の変換にはスケール変換同様の画像ペアを選択し,センサ,SfM それぞれによ
って推定されたカメラ位置姿勢 MA, MVを用いる.これらとスケール値 s を用いた拡大行列 S に
よって,式(3.19)のような座標系への変換行列を求める.
11
1
V
V
V
VAA
A
A
Z
Y
X
SMMZ
Y
X
, )1,,,( sssdiagS (3.19)
求めた変換行列を用いて,SfM によって 3 次元再構成した結果から算出したカメラ位置姿勢
を変換する.また,各 3 次元点についてもスケール値 s を用いて変換することで,後述する衝突
の危険性の判断に用い,追加撮影地点の決定に利用する.次に,点群の重心を原点として各カメ
ラ位置を円筒座標系(r,θ,z)で表す.
22
iii yxr ,
22cossgn
ii
iii
yx
xArcy , ii zz (3.20)
このとき,1 度目の撮影では観測対象から一定の距離 T の円筒の面上に飛行経路を設定してい
るため全てのカメラ位置の極座標系の動経 r=T にあると.動経 r が一定であると仮定しているた
め,偏角 θと高さ h の分布によってカメラ位置の分布を把握することができ,この動経を小さく
した円筒上で追加撮影地点を決定していく.まず,動経を小さくしたとき,各偏角θと高さ h
について,前方 4m,上下左右 2m の範囲に 3 次元再構成された特徴点が存在しない場合,追加
撮影地点の候補とする.次に,動経をさらに小さくし,追加撮影地点の候補を決定する.動経が
0 になるまで,これを繰り返し,θ,h の組合せについて最も小さな動経 r のみを追加撮影地点
とすることで,最も撮影対象に接近した画像を撮影することができるようになる. 経路の設計
方法について述べる.これまでに求めた追加撮影地点は一定の高さに最大 24 視点追加される.
高さ h の偏角θに対して,動経が異なる視点は存在しないため,高さが同一のものを偏角θの
分布に合わせて,追加地点を登録していくことで,追加撮影用の経路を設計することができる.

14
第4章 動作確認
本章では,動作確認のために行なった実装内容,および前章で述べた 3 次元再構成に基づい
た飛行経路再設計の動作確認およびその有用性を確認するために行なった評価について述べる.
4.1 動作確認環境について
4.1.1 使用するドローンについて
今回,試作システムには AR.Drone 2.0 を使用する.AR.Drone 2.0 を使用する理由は,表 4.1
の AR.Drone 2.0 の仕様にも示すように,複数のセンサを積んでおり,また有志による API の開
発が盛んに行われていることから情報を得やすいといった利点があるためである.さらに,
AR.Drone 2.0 では飛行中のドローンの姿勢などの航行情報の取得だけでなく,速度の調整や向
きの変更など細かな制御を行なうことができる.
4.1.2 開発環境について
本研究では,Robot Operating System(以下,ROS)を用いて AR.Drone のプログラム実装お
よびシミュレートによる動作確認を行なう. また,屋外での飛行実験についてもシミュレータ
で使用するものと同じ ROS を用いたプログラムによって行う.
ROS とは,Open Source Robotics Foundation (OSRF) が開発・メンテナンスしているロボ
ット用ミドルウェアである.プログラムは Linux のプロセスに相当するノードやスレッドに相
当するノードレットとして動作する.また,ノード間の通信に図 4.1 に示すような特徴があり,
ノード間をトピックと呼ばれるデータバスで接続し,発信側のノードはトピック上にメッセージ
を発行し,受信側のノードはこのメッセージを受信することで通信を行う仕組みとなっている.
表 4.1 AR.Drone の仕様
重量 455g
最大飛行速度 5 m/s
飛行時間 約 12 分
内蔵カメラ 正面:HD カメラ 720p 30fps
下部:QVGA カメラ 60fps(飛行速度測定用)
OS Linux 2.6.32
搭載コンピュータ CPU:1GHz ARM Cortex A8
メモリ:1GB(DDR2)
Wi-fi b/g/n,USB2.0×1
フライトセンサー 3 軸磁気センサ,3 軸加速度センサ

15
受信側ノードがメッセージを受信するとノード内のコールバック関数が呼び出され,その関数内
でメッセージによって伝えられた情報の処理を行う.
また,ROS にはクライアント・サーバシステムのように,クライアント側ノードがサーバ側
ノードにリクエストを発行し、クライアント側ノードがサーバ側ノードからのレスポンスを待つ
仕組みもあり, この仕組みはサービスと呼ばれている.サービスの場合もサーバ側ノードがリク
エストを受け取るとノード内のコールバック関数が呼び出され,その関数内でリクエストによっ
て伝えられた情報を処理し,レスポンスを返します。メッセージとの違いはサーバ側ノードがク
ライアント側ノードへレスポンスを返すところにある.
そして,今回 ROS を採用するにあたって,最も大きな利点としてシミュレータとロボット実
機を同一のプログラムで動作させることが容易なことにある.図 4.2 に示されるように,シミュ
レータ用のインタフェース向けにロボットモデルを定義することで,同一のプログラムでシミュ
レータと実機を動作させることができる.今回採用した AR.Drone は開発が盛んに行われてい
るため,実機とシミュレータで同様に動作を行うロボットモデルの定義が既に用意されているこ
とも採用した理由の一つである.
Topic
Node Node
Publish Subscribe
Service Call
図 4.1 ROS の通信方式
プログラム(ノード)
インタフェースインタフェース(シミュレータ)
Gazebo(シミュレータ)
実機
ROS
図 4.2 ROS のロボット制御

16
4.1.3 動作確認手順
動作確認の手順について以下に示す.
1. 事前撮影の経路設計,自律飛行のシミュレート
2. シミュレートした位置姿勢をモデリングソフトに適用,画像をレンダリング
3. レンダリング結果から 3 次元再構築
4. 再構築結果から追加撮影経路を構築
5. 追加撮影地点について自律飛行をシミュレート,2,3 の手順を実行
自律飛行のシミュレートには Gazebo とよばれるシミュレータを用いる.また,シミュレート
した位置姿勢を基にレンダリングを行うためのモデリングソフトには Blender を用いる.
Gazebo でシミュレートしたカメラの位置姿勢を用いて Blender 上でレンダリングを行うため
には,座標系の変換が必要になる.図 4.3 に示したそれぞれの座標系から,Gazebo の座標系か
ら Blender の座標系への位置姿勢の変換には Z 軸周りに 90 度回転させることで,座標系を変換
することができる.
4.2 ドローンの飛行制御および事前撮影時の 3 次元再構成
4.2.1 ドローンの飛行制御
ドローンの飛行制御についてはドローンの位置姿勢の推定には GPS および地磁気センサを用
いて,P 制御の実装を行なった.式(3.2)ではドローンの座標系と世界座標系の関係やドローンの
姿勢が考慮されていないため,ドローンの姿勢や座標系を考慮する必要がある.そこで,ドロー
ンの 3 軸回りの回転角(Roll,Pitch,Yaw)を回転行列 R に変換し,以下の式(4.1)のように速
度V を求めることでドローンの制御を行なった.
011 PPKRV p ・ (4.1)
【動作確認】
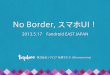
シミュレータ上で,半円筒状に自律飛行をシミュレートした.撮影対象は(x, y)=(0, 0)に存在
すると仮定して,半円周を 15 度毎に分割し,高度を 2m と 4m と 6m の 3 段階に分けて,計 36
地点への移動についてシミュレートを行なった.xy 軸の移動については 4m,6m の結果について
は 2m 時同様の傾向であるため,2m 時の結果のみを図 4.4 に示す.センサの誤差が存在するた
x
y
z
Blender座標系
y
x
z
Gazebo座標系
図 4.3 Blender および Gazebo の座標系

17
め,綺麗な円を描くようにはなっておらず,シミュレート結果が実機に近い状況を再現している
ことがわかる.また,z 軸についても図 4.5 に示すが最大 0.5m 程度の誤差はあるが,各目標値
付近で飛行していることがわかる.これも同様に実機に近い状況をシミュレートしていることが
わかる.この結果から,自律飛行のシミュレートについては正しく動作していることを確認でき
たとする.また,これらの結果はシミュレータを利用することでセンサの誤差など,より実機に
近い状況を再現しており,正解となるカメラ位置姿勢を用いて動作確認を行なったわけではない
ことを示している.
4.2.2 事前撮影時における 3 次元再構成
前項で実装した自律飛行プログラムを用いて半円周上に高さを 3 段階に分けて自律飛行をシ
ミュレートし,撮影対象の画像を Blender でレンダリングし,レンダリング結果を用いて 3 次
元再構成を行なった様子について図 4.6 に示す.カメラ位置姿勢をシミュレートした結果と目標
値を表示した結果についても示しているが理想的に自律飛行を行なった場合,黒線で描かれた円
周上にカメラ位置が綺麗に重なるはずであるが,そうではないことがわかる.目標値を赤の球体
でプロットしているが,シミュレート結果のカメラ位置はその球体の位置ともずれていることが
わかり,実機に即したデータを用いて動作確認を行なっていることを示している.
今回,レンダリングした各画像の位置と姿勢および各特徴点の 3 次元位置の推定には
VisualSFM を利用した.図 4.7 に示す 3 次元再構成結果からわかるようにドローンの自律飛行
をシミュレートして,レンダリングしたカメラ位置姿勢が円周上に推定されていることがわかる.
これによって,ドローンを自律飛行させてセンサによる誤差が生じた場合でも大まかに撮影対象
の形状が判別できる程度に再構成できた.
4.3 3 次元再構成に基づく飛行経路の再設計
本節では,事前撮影時と追加撮影時のカメラ位置や 3 次元再構成結果の比較を行い,提案手
法である飛行経路再設計手法の動作確認および有用性の確認を行った内容について述べる.
本動作確認において,VisualSFM によって 3 次元再構成した結果は全て VisualSFM 内で設
定された相対座標系に属しているため,再度自律飛行によって撮影を行うためには,Gazebo シ
ミュレータの座標系に変換する必要がある.これは 3.4 節で述べた計算によって求める. 求め
-16
-14
-12
-10
-8
-6
-4
-2
0
2
-16 -12 -8 -4 0 4 8 12 16
y(
m)
x(m)
シミュレーション値
目標値
0
1
2
3
4
5
6
7
0 10 20 30 40
高さ(m)
地点番号
シミュレーション値
目標値
図 4.4 シミュレート結果(x−y) 図 4.5 シミュレート結果(z)

18
た変換行列を用いて,VisualSFM によって 3 次元再構成した結果から算出したカメラ位置姿勢
および 3 次元点群をシミュレータの座標系へと変換することでシミュレータ用の追加撮影が必
要なカメラ位置姿勢を求めることができる.
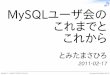
求めた追加撮影地点について,4.2.1 項と同様の自律飛行プログラムによってシミュレートを
行なった結果を x-y 軸について図 4.8 に示す.z 軸ついては事前撮影時同様の結果であるため,
割愛する.シミュレート結果には事前撮影時のカメラ位置についてもプロットしているが,プロ
図 4.6 撮影対象とカメラ位置姿勢のシミュレート結果
図 4.7 事前撮影時の 3 次元再構成結果

19
ットされている追加撮影時のカメラ位置は事前撮影時のカメラ位置に比べ,撮影対象に近づいて
いることが確認できる.各高度において 10 視点ずつ追加され,計 30 視点が追加された.また,
提案手法によって算出した追加撮影地点についてシミュレート結果を Blender で表示した結果
を図 4.9 に示す.また,同時に事前撮影時のカメラ位置に緑の球体を配置することで,事前撮影
時のカメラ位置を可視化している.この結果から x-y 軸のみのグラフ同様に撮影対象の形状に応
じてより近い位置で撮影するようなカメラ位置姿勢を求められていることが確認できた.この結
果から,本手法によって撮影対象の凹凸に合わせた追加撮影位置を求め,飛行経路の再設計が実
現できることを確認した.
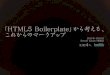
また,事前撮影時の 3 次元再構成結果を図 4.10 に,提案手法によって追加撮影した場合の 3
次元再構成結果を図 4.11 に示す.3 次元再構成によって推定される形状については事前撮影時と
変化はないが,追加撮影によって増加した視点によって 3 次元位置が推定される特徴点数が増
加した.事前撮影時に 3 次元位置が推定された特徴点数は 13941 点であったが,追加撮影によ
って 3 次元位置が推定された特徴点数は 25852 点に増加したことを確認した.さらに,事前撮
影時には 3 視点以上された観測される特徴点に対してその特徴点を観測する視点数の総和は
67424 点であった.しかし,追加撮影後に 3 視点以上から観測された特徴点に対してその特徴
点を観測する視点数の総和は 153351 点であった.事前撮影時には 39 視点撮影を行なっていた
が,追加撮影では追加した視点数は 30 視点である.視点数の増加は 1.76 倍程度で 3 視点以上
観測された特徴点に対する視点数の総和は 2.27 倍増加したことから提案手法によって形状に応
じた飛行経路を再設計できたと考えられる.
-16
-14
-12
-10
-8
-6
-4
-2
0
2
-16 -11 -6 -1 4 9 14
Y(
m)
X(m)
追加撮影時
事前撮影時
図 4.8 追加撮影時のシミュレート結果(x−y)

20
4.4 3 次元再構成結果の比較
本節では,提案手法によって撮影対象の形状に合わせて効率的に画像を撮影した場合と,形状
によって撮影地点を減らすなどの考慮をせず,撮影可能な場所についてすべて撮影した場合の 3
次元再構成結果について比較を行い,提案手法の有用性を示す.
撮影可能な場所すべて撮影した場合を,高さ 6m の半円筒について半径を 9,12,15m のそ
れぞれにおいて 15°毎に撮影を行なった場合と仮定してシミュレートした結果を図 4.12 に示す.
また,提案手法と撮影可能範囲をすべて撮影した場合の 3 次元再構成結果についてそれぞれ図
4.13,図 4.14 に示す.
提案手法によって撮影を行なった場合は,25852 点の特徴点の 3 次元位置が推定され,撮影
可能範囲について全て撮影を行なった場合については 21160 点の特徴点の 3 次元位置が推定さ
れた.3 次元再構成された特徴点数自体は,提案手法によって撮影した場合のほうが少ないが,
ほぼ同数程度の特徴点について 3 次元位置が推定されていることがわかる.そして,3 視点以上
図 4.9 追加撮影時のシミュレート結果
図 4.10 結果(事前撮影時) 図 4.11 結果(追加撮影後)

21
された観測される特徴点に対してその特徴点を観測する視点数の総和については,提案手法では
153351 点,撮影可能な範囲を全て撮影した場合は 116103 点であった.提案手法による視点数
は計 69 点であるが,撮影可能範囲について全て撮影した場合については 80 点であった.
撮影数が増えれば基本的に 3 次元位置が推定できる特徴点は増加するが,本シーンでは提案
手法によって撮影枚数を削減した場合のほうが特徴点数は多い結果となった.一般的に 3 次元
再構成される特徴点数が多すぎる場合は,特徴点のマッチングに失敗し本来であれば同一の点で
あるはずの特徴点が誤差の乗った別の特徴点として再構成されることがある.そういった場合,
特徴点ごとの視点数の総和を見ることで,その問題が発生しているか確認することもできる.視
点数の総和が極端に少ない場合,そのような問題が発生していると考えられるが本動作確認では
図 4.12 全視点撮影時のシミュレート結果
図 4.13 提案手法による再構成結果 図 4.14 全視点撮影時の再構成結果

22
その傾向は確認されなかった.
また,撮影可能な場所すべて撮影した場合の 3 次元再構成結果を見ると,カメラ位置姿勢の
推定が明らかに間違っているものが複数あるのがわかる.これは,撮影対象の真ん中の凹み部分
などが奥行の推定を困難にしたためであると考えられる.このことから,今回のようなシーンに
おいては,提案手法のほうが撮影枚数を削減したことによってカメラ位置姿勢の推定精度がよく
なり,3 次元再構成の結果もよくなったと考えられる.よって,本手法は本動作確認で対象とし
たようなシーンであれば,全撮影する場合に比べて良い 3 次元再構成結果を得られることがわ
かり,本手法の有用性を確認することができた.

23
第5章 結論
ドローンを利用した操作補助や自律飛行,また 3 次元再構成に関する研究の現状として,対
象を撮影する需要については一般的に確認されているが,撮影対象の形状を考慮して効率的に撮
影する手法というものはなかった.そこで,本論では事前に対象周辺を自律飛行して撮影した画
像を 3 次元再構成することで撮影対象の大まかな形状を推定し,推定した形状を基に撮影対象
の凹凸に応じて飛行経路を再設計することによって,撮影対象の形状に応じた効率的な画像の蓄
積手法について提案した.
ドローンの自律飛行制御およびシミュレートに ROS を導入し,シミュレータを用いて自律飛
行について動作確認を行なった.そして,撮影対象周辺の自律飛行をシミュレート,シミュレー
ト結果を用いて Blender にてレンダリングを行い,レンダリング結果を用いて 3 次元再構成を
行なった.そして,3 次元再構成結果に基づいて追加撮影地点を算出し,飛行経路の再設計を行
なった.この再設計した飛行経路についても自律飛行のシミュレートを行い,対象の大まかな形
状から,事前撮影時には不足していた視点が算出できることを確認した.事前撮影時と追加撮影
後のそれぞれの 3 次元再構成について点群の比較を行い,3 次元再構成に基づく飛行経路の再設
計が有用であることを確認した.また,撮影可能な地点についてまんべんなく撮影を行った場合
と提案手法によって撮影地点を削減して効率的に撮影した場合の 3 次元再構成結果の比較を行
い,撮影対象の形状が一部のみ凹凸が多く,他が一様であるといった条件下においては,ほぼ同
数の特徴点の 3 次元位置が推定でき,3 次元再構成結果に大きな違いがないことが確認でき,本
手法の有用性を確認した.
今後の展望として,今回実験では円筒座標系を用いたが,極座標系を用いることでさらに対象
に近いカメラパスを設計することが可能になると考えられ,本手法による画像蓄積の効率的なカ
メラパス設計が実現できると考えられる.また,AR.Drone のようなカメラが固定の機種ではな
く,カメラも制御可能な機種を用いることで球面上での撮影が可能になる.また,本研究によっ
て画像の効率的な蓄積が可能となるため,これらの蓄積した画像を応用することでさらにドロー
ンの活用の幅が広がることが期待される.

24
謝 辞
本研究の全過程を通じて懇切丁寧な御指導を賜った立命館大学情報理工学部 柴田史久教授に,
深く感謝の意を表する次第である.
本研究に関して,立命館大学 田村秀行教授,同大学情報理工学部 木村朝子教授,池田聖講師
および橋口哲志特任助教には本研究を進める上で多数の御助言を戴いた.ここに心より感謝申し
上げる.
また,樋口健太氏,平野愛子氏,畑祐育氏には,研究に関して細部に至るまで御議論,研究の
多岐にわたっての様々な助言を戴いたこと,感謝申し上げる.
最後に,モバイルコンピューティング研究室及びリアリティメディア研究室の皆様には日頃か
ら研究室での生活などで大変お世話になった.ここに感謝申し上げる.

25
参考文献
[1] Parrot 社公式:http://www.parrot.com/jp/ (2017 年 1 月 28 日)
[2] DJI 社公式:http://www.dji.com/jp (2017 年 1 月 28 日)
[3] S.Zollmann, et al. ,”FlyAR: Augumented reality supported micro aerual vehicle navigation”, IEEE
Transactions on Visualization and Computer Graphics , Volume 20, Issue 4, pp.560 - 568, 2014
[4] J. T. Hing, et al., “Improving unmanned aerial vehicle pilot training and operation for flying in
cluttered environments,”pp. 5641 – pp. 5646, IROS2009.
[5] 樋口他:“移動感覚の拡張が可能なフライングテレプレゼンスプラットフォーム”,日本バ
ーチャルリアリティ学会論文誌,Vol. 19, No. 3, pp. 397 – 404, 2014.
[6] 吉田他:“ジェスチャ操作型ロボットによる身体性の拡張”,情報処理学会インタラクショ
ン 2012,pp. 403 – pp. 408.
[7] T. Nasser, et al, “FollowMe: Person following and gesture recognition with a quadrocopter”, IEEE
Int. Conf. on Intelligent Robots and Systems 2013, pp. 624 – pp. 630, 2013.
[8] 自律制御システム研究所:http://ja.acsl.co.jp/ (2017 年 1 月 28 日)
[9] S. Schopferer,et al, :”Rapid trajectory time reduction for unmanned rotorcraft navigating in
unknown terrain”, IEEE Int. Conf. on Unmanned Aircraft Systems 2014, pp. 305 – pp. 316, 2014.
[10] R. Huang et al, “Monocular vision-based autonomous navigation system on a toy quadcopter in
unknown environments,” IEEE Int. Conf. on Unmanned Aircraft Systems 2015, pp. 1260 – pp.
1269.
[11] D. G. Lowe: “Distinctive image features from scale-invariant keypoints,” Int J.Comput.Vision, Vol.
60, No. 2, pp. 91 - 100, 2004.
[12] I. Skrypnyk, and D. G. Lowe: “Scene modelling, recognition and tracking with invariant image
features,” Proc. ISMAR ’04, pp. 110 - 119, 2004.
[13] N. Snavely, et al, “Photo Tourism: Exploring image collections in 3D,” Proceedings of the 33rd
annual conference on Computer graphics and interactive techniques, Special Interest Group on
Computer Graphics (SIGGRAPH), 2006.
[14] VisualSFM: http://ccwu.me/vsfm/ (2017 年 1 月 28 日)
[15] J. Wu, et al, “Automatic retrieval of optimal texture from aerial video for photo-realistic 3D
visualization of street environment”, IEEE Int. Conf. on Image and Graphics 2007, pp. 943 - pp.947.
[16] G. Flores, et al, “A vision and GPS-based real-time trajectory planning for MAV in unknown urban
environments,” IEEE Int. Conf. on Unmanned Aircraft Systems 2013, pp.1150 – pp. 1155, 2013.
[17] 株式会社トプコン:http://www.topcon.co.jp/ (2017 年 1 月 28 日)
[18] Google Maps API:https://developers.google.com/maps/?hl=ja (2017 年 1 月 28 日)

26
[19] iOS Developer Library:https://developer.apple.com/ (2017 年 1 月 28 日)
[20] R. I. Hartley, and A. Zisserman: “Multiple view geometry in computer vision”, Cambridge
University Press, second edition, 2004.
研究業績
天見高之,木村朝子,柴田史久:クライアントサーバモデルに基づく携帯端末の位置姿勢推定機
構(7)~照明変化による特徴点の誤対応への対策~,第 19 回日本バーチャルリアリティ学会大会
論文集,31B-6, pp. 387 – 390, 2014.