Embed Size (px)
Citation preview
1. INTRODUÇÃO
A área de automação industrial está sendo repensada em função do grande
desenvolvimento experimentado pelas técnicas digitais. No contexto industrial, há algumas
décadas os problemas de automação são cada vez mais importantes. A sociedade depara-se
com o avanço da tecnologia e com os seus desafios, que não são poucos. No entanto, observa-
se que algumas perguntas precisam ser respondidas para melhor encaminhar esta importante
área do conhecimento: como as instituições podem formar profissionais capazes de ter uma
capacitação técnica suficiente para contornar suas próprias dificuldades? E garantir uma
relação técnica com a sociedade sem assustá-la?
O assunto é diversificado, pois abrange desde tópicos relativos à arquitetura de
hardware e software, programação de controladores lógicos programáveis, controle de malhas
contínuas até o gerenciamento estratégico de uma empresa, passando pela supervisão dos
processos industriais e pela logística da produção. As técnicas desenvolvidas para o
tratamento desses problemas atingiram hoje um relativo grau de sofisticação tecnológica e
formal, exigindo pessoal técnico com formação específica para sua aplicação adequada [10].
Neste trabalho foi proposto o desenvolvimento de um sistema de automação, em
equipamento para envase de líquidos isotônicos. Para a execução do projeto, além de
conhecimentos adquiridos em sala de aula nas disciplinas de Controle, Microprocessadores e
Microcontroladores, Pneumática e Hidráulica, Instrumentação e Desenho Assistido por
Computador foram feitas pesquisas sobre o tipo de equipamento industrial e seu
funcionamento, levantamento de dados junto a professores e profissionais da área, e
conhecimento prático de participantes do grupo.
Após o grupo tomar conhecimento da parte funcional mecânica do sistema, foi feita a
pesquisa sobre os componentes que foram usados no projeto, dando assim, respaldo suficiente
para o desenvolvimento da lógica de comandos para automação do processo. Através de
breves descrições sobre os componentes, diagramas de etapas, fluxogramas, esquemas
elétricos, desenhos técnicos e ilustrativos, apresentamos o projeto final para atender ao que
nos foi proposto.
2
1.1 JUSTIFICATIVA
O controle e automação das atividades industriais é um dos principais requisitos para o
desenvolvimento econômico do país e para uma participação mais eficiente no sistema
produtivo. A automação utiliza ferramentas lógicas e eletrônicas para controlar de forma
autônoma e automática um sistema composto de componentes eletrônicos interligados via
software embarcado. Automatizar um processo é trazer inúmeros benefícios a sua produção.
Um processo de fabricação automatizado hoje na indústria, inclusive no ramo de fabricação
de bebidas, significa um produto final com maior qualidade e mais competitividade devido a
fatores como padronização do processo e produto, rapidez de produção, produção programada
e contínua, diminuição de desperdício e menores chances de errar. Evita contato do produto
com o humano, o que para a área de alimentos traz muito mais higiene ao processo,
credibilidade e qualidade ao produto final. Apesar do alto investimento, o retorno é imediato
[7].
Mas para que isto ocorra de forma efetiva um sistema de automação precisa dispor de
uma série de informações gravadas no seu interior que lhe permite interagir com o ambiente.
Estas informações geradas e inseridas no periférico controlador constituem a sua programação
feita em um software. O software é uma sequencia de linguagem e funções destinadas a um
dispositivo tecnológico que irá incorporar conhecimento e inteligência sobre um dado
processo.
Nesse sistema automatizado, a programação é gravada em um microcontrolador.
Microcontrolador é um componente que agrega em uma única pastilha a função de
microprocessador e memória, além de conter chipsets e componentes que enviam e recebem
dados, ou seja, todos os periféricos necessários à comunicação do circuito do
microcontrolador estão contidos nele mesmos. Por empregar uma menor quantidade de CI’s e
a sua estrutura ser compacta, o sistema fica mais simples. Um microcontrolador é um
dispositivo que controla componentes eletrônicos a partir dos seus pinos de entrada e saída
E/S(I/O). É a partir dele que o robô recebe e executa comandos que já foram previstos e
programados anteriormente. No projeto em questão, o microcontrolador que será utilizado é o
MICROLOGIX 1200 da família PLC. Esse dispositivo eletrônico será o responsável pelo
recebimento dos sinais dos sensores, e a partir daí as informações contidas no
microcontrolador serão processadas e então emitirá sinais pela porta de saída, ativando ou não
outros dispositivos, como, por exemplo, os motores. Esse comando eletrônico poderá ser
utilizado em diversos seguimentos de fabricação e produção [8].
3
1.2 OBJETIVO
Elaborar um projeto de automação industrial para uma empresa de pequeno e médio
porte na fabricação de bebidas isotônica baseado em esteira transportadora, controle
automático de temperatura e clp para controle do processo de evasão.
1.2.1 OBJETIVO ESPECÍFICO
Automatização do sistema de controle de Temperaturas dos Tanques;
Automatização da maquina enchedora;
Controle da velocidade da esteira;
Automatização da estação de expedição.
4
1.3 METODOLOGIA
O projeto em questão foi desenvolvido através de pesquisas e consultas a literaturas
de programação eletrônicas e desenvolvimento de processos industriais [10]. Inicialmente será
analisada a empresa e seu ramo de negócio, a fim de idealizar um embasamento correto sobre
esse tipo de atividade comercial, assim como um entendimento prático das atividades por ela
exercidas. Em sequencia, serão apurados os requisitos principais, baseando-se nas
dificuldades encontradas na situação atual. Também será observado o sistema que está sendo
implantado, identificando os recursos existentes no mesmo. Além disso, nessa etapa busca-se
reconhecer as necessidades de automatização. O próximo passo visa realizar estudos
referentes às tecnologias existentes no que diz respeito à automação comercial. Interpretar e
reconhecer ferramentas, periféricos e recursos em geral desse meio. Nessa etapa buscam-se,
de forma complexa, conhecimentos referentes a sensores, leitores, programação,
controladores, entre outras aplicações que se encaixam ao contexto. Pesquisam-se fórmulas
existentes que podem ser aplicadas nesse projeto de automação. A partir desses estudos,
desenvolve-se uma metodologia de automação dos processos, visando atender os requisitos
apontados na etapa de Matérias e Métodos contidos neste projeto.
5
2. REFERENCIAL TEÓRICO
Nesta parte do projeto serão apontados as ferramentas e componentes utilizados no
desenvolvimento do circuito eletrônico para controle das atividades do sistema de automação.
2.1 ELEMENTOS DE PROJETO
2.1.1 Atuadores e Sensores
Atuador é um elemento que produz movimento, atendendo a comandos que podem ser
manuais, elétricos ou mecânicos. Como exemplo, pode-se citar atuadores de movimento
induzido por cilindros pneumáticos ou cilindros hidráulicos e motores (dispositivos rotativos
com acionamento de diversas naturezas). Tal como o nome sugere, deve obedecer a
comandos. Sendo geralmente acoplados a um sistema conhecido como malha fechada, eles
informam ao sistema de comando se a tarefa solicitada foi executada. Uma das formas de
fazer isso é por meio de transdutores de posição como potenciômetros e encoder´s.
Também são atuadores dispositivos como válvulas, contatores, pás, cancelas ou
qualquer elemento que realize um comando recebido de outro dispositivo, com base em uma
entrada ou critério a ser seguido. Hoje em dia é raro encontrar alguma máquina que não
possua sensores, pois estes são responsáveis por grande parte das informações que
possibilitam o funcionamento de uma máquina, como o próprio nome sugere, sensores são
dispositivos capazes de “sensorear”, monitorar, detectar algo. O sensor ideal depende
basicamente do material a ser detectado, e para uma especificação correta devem-se conhecer
as principais famílias de sensores, suas características e vantagens.
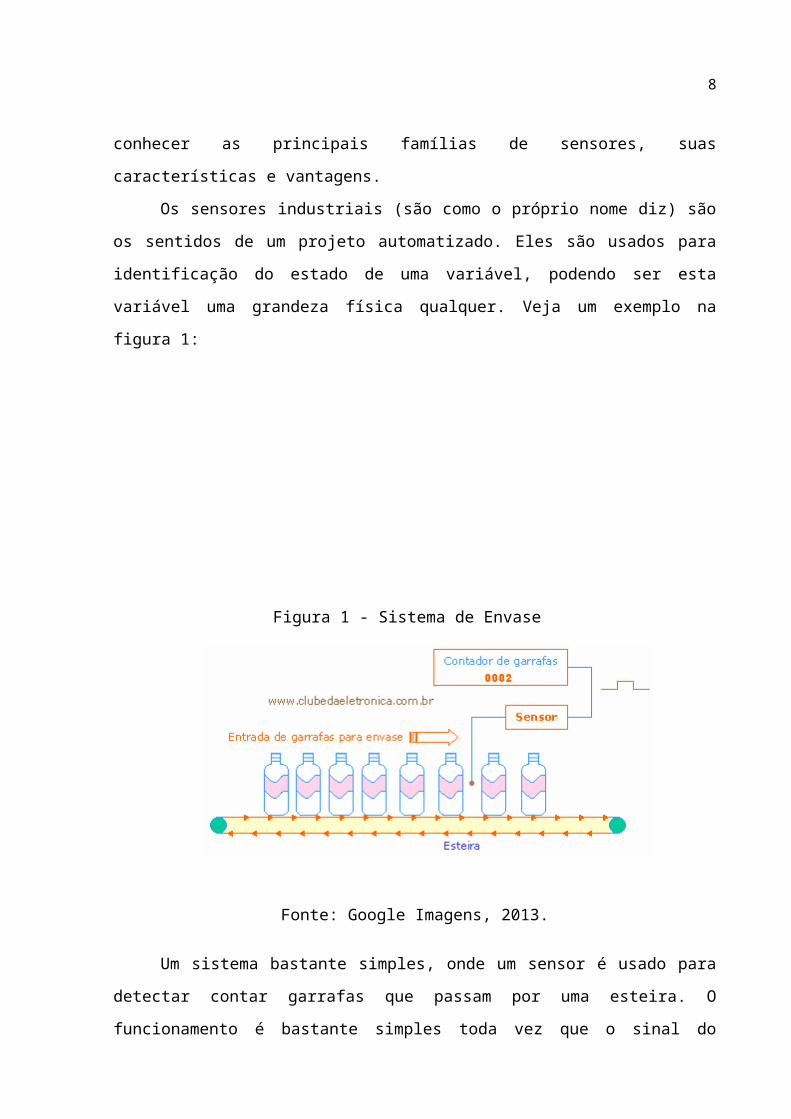
Os sensores industriais (são como o próprio nome diz) são os sentidos de um projeto
automatizado. Eles são usados para identificação do estado de uma variável, podendo ser esta
variável uma grandeza física qualquer. Veja um exemplo na figura 1:
6
Fonte: Google Imagens, 2013.
Um sistema bastante simples, onde um sensor é usado para detectar contar garrafas
que passam por uma esteira. O funcionamento é bastante simples toda vez que o sinal do
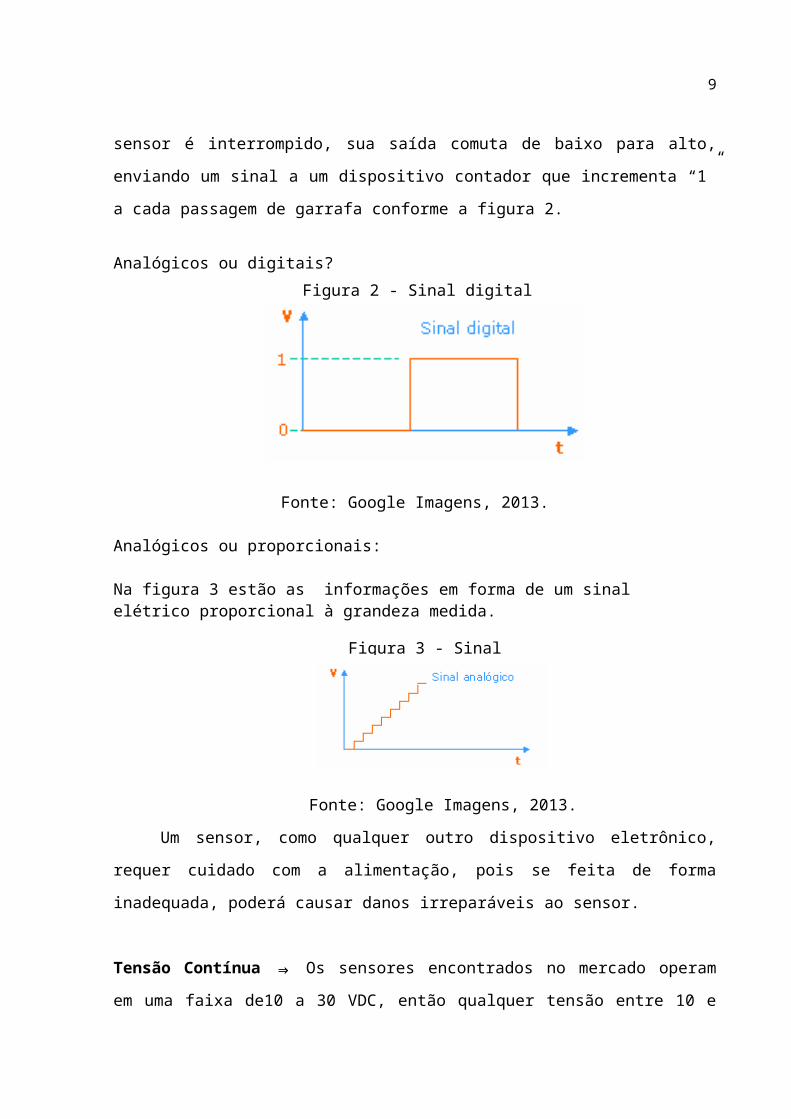
sensor é interrompido, sua saída comuta de baixo para alto, enviando um sinal a um
dispositivo contador que incrementa “1” a cada passagem de garrafa conforme a figura 2.
Analógicos ou digitais?
Fonte: Google Imagens, 2013.
Analógicos ou proporcionais:
Na figura 3 estão as informações em forma de um sinal elétrico proporcional à grandeza medida.
Fonte: Google Imagens, 2013.
Figura 1 - Sistema de Envase
Figura 2 - Sinal digital
Figura 3 - Sinal analógico
7
Um sensor, como qualquer outro dispositivo eletrônico, requer cuidado com a
alimentação, pois se feita de forma inadequada, poderá causar danos irreparáveis ao sensor.
Tensão Contínua ⇒ Os sensores encontrados no mercado operam em uma faixa de10 a 30
VDC, então qualquer tensão entre 10 e 30 VDC é suficiente para o correto funcionamento dos
mesmos. Na automação é muito comum o uso de alimentação de 24 VDC.
Tensão Alternada ⇒ Para máquinas que não tem disponibilidade de uma fonte de
alimentação DC, os fabricantes disponibilizam também, sensores com alimentação alternada
de 90 a 265 VAC, tornando-os compatíveis com os padrões brasileiros.
Tensão Universal ⇒ O avanço da tecnologia proporcionou comodidade à automação e os
fabricantes disponibilizam capazes de operar em tensões de 12 a 250 V alternada ou continua.
É obvio que toda comodidade tem um preço.
Saída dos sensores⇒ Os sensores com saídas discretas possuem saídas com chaveamento
eletrônico, e estes podem ser NPN ou PNP.
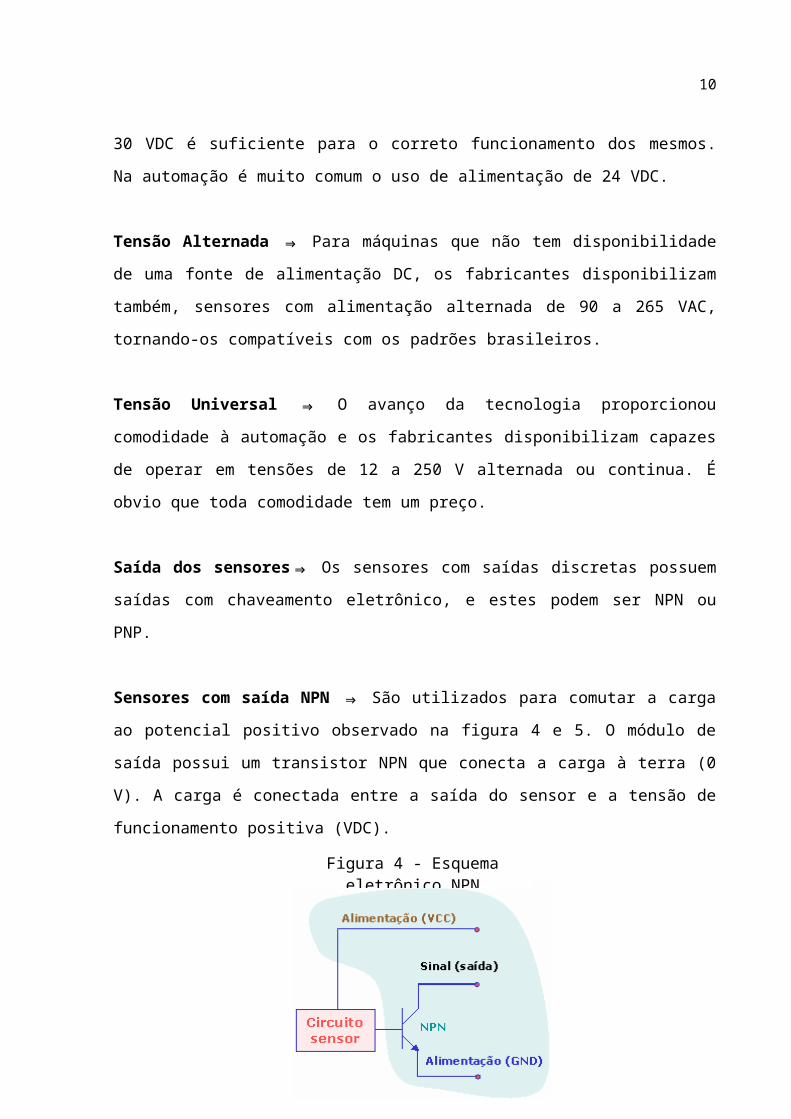
Sensores com saída NPN ⇒ São utilizados para comutar a carga ao potencial positivo
observado na figura 4 e 5. O módulo de saída possui um transistor NPN que conecta a carga à
terra (0 V). A carga é conectada entre a saída do sensor e a tensão de funcionamento positiva
(VDC).
Fonte: Google Imagens, 2013.
Figura 4 - Esquema eletrônico NPN
8
Fonte: Google Imagens, 2013.
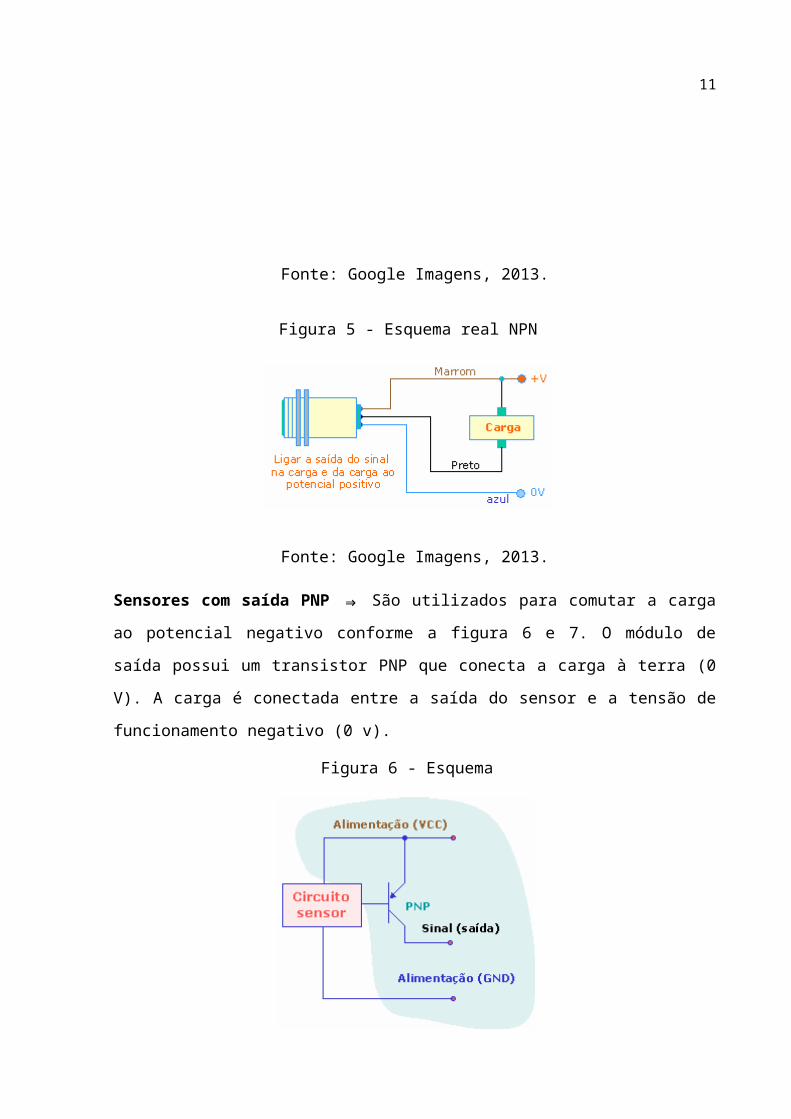
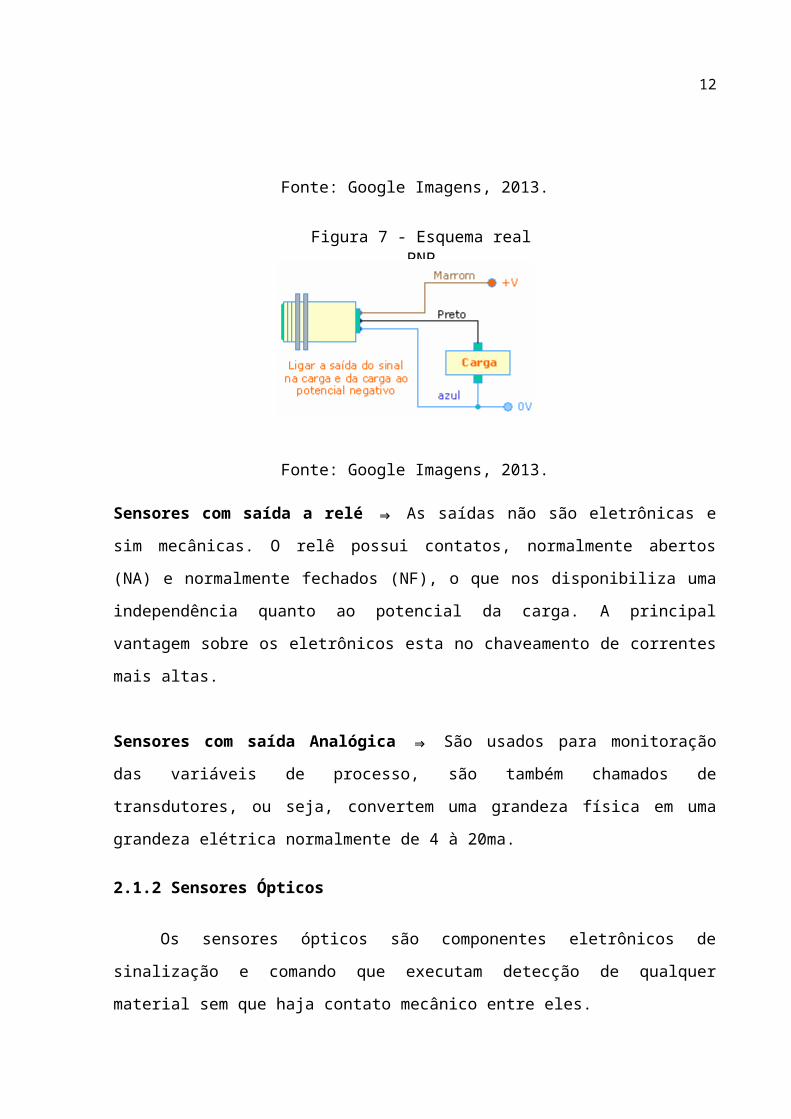
Sensores com saída PNP ⇒ São utilizados para comutar a carga ao potencial negativo
conforme a figura 6 e 7. O módulo de saída possui um transistor PNP que conecta a carga à
terra (0 V). A carga é conectada entre a saída do sensor e a tensão de funcionamento negativo
(0 v).
Fonte: Google Imagens, 2013.
Fonte: Google Imagens, 2013.
Figura 5 - Esquema real NPN
Figura 6 - Esquema eletrônico PNP
Figura 7 - Esquema real PNP
9
Sensores com saída a relé ⇒ As saídas não são eletrônicas e sim mecânicas. O relê possui
contatos, normalmente abertos (NA) e normalmente fechados (NF), o que nos disponibiliza
uma independência quanto ao potencial da carga. A principal vantagem sobre os eletrônicos
esta no chaveamento de correntes mais altas.
Sensores com saída Analógica ⇒ São usados para monitoração das variáveis de processo,
são também chamados de transdutores, ou seja, convertem uma grandeza física em uma
grandeza elétrica normalmente de 4 à 20ma.
2.1.2 Sensores Ópticos
Os sensores ópticos são componentes eletrônicos de sinalização e comando que
executam detecção de qualquer material sem que haja contato mecânico entre eles.
O princípio de funcionamento do sensor óptico baseia-se na existência de um emissor
e um receptor. A luz gerada pelo emissor deve atingir o receptor com intensidade suficiente
para fazer com que o sensor comute sua saída.
Princípios de Funcionamento
O sinal de luz gerado pelo emissor do sensor óptico é modulado numa determinada
frequência, ou seja, o emissor gera um sinal com certo número de lampejos por segundo. O
receptor do sinal do sensor é acoplado um filtro que somente considera válidos sinais com a
mesma frequência do emissor. Esta característica é empregada no sensor óptico para
minimizar os efeitos de possíveis interferências causadas por outras fontes luminosas que não
o emissor.
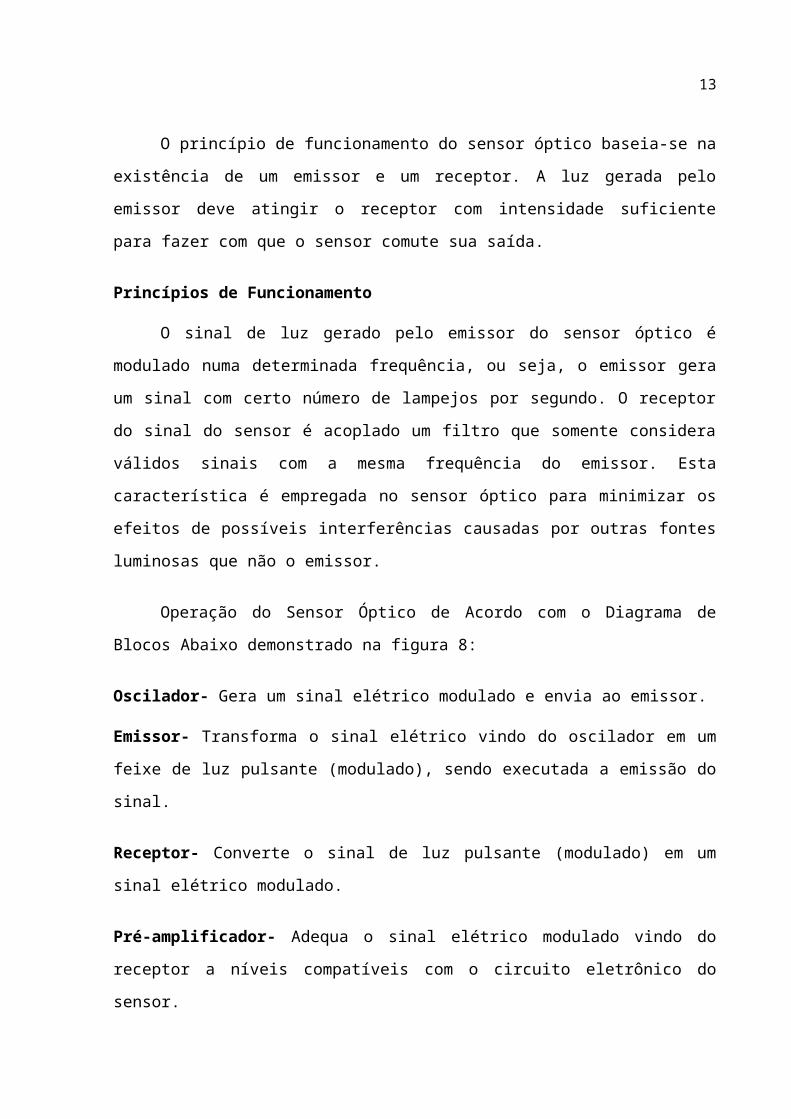
Operação do Sensor Óptico de Acordo com o Diagrama de Blocos Abaixo
demonstrado na figura 8:
Oscilador- Gera um sinal elétrico modulado e envia ao emissor.
Emissor- Transforma o sinal elétrico vindo do oscilador em um feixe de luz pulsante
(modulado), sendo executada a emissão do sinal.
Receptor- Converte o sinal de luz pulsante (modulado) em um sinal elétrico modulado.
10
Pré-amplificador- Adequa o sinal elétrico modulado vindo do receptor a níveis compatíveis
com o circuito eletrônico do sensor.
Analisador de Frequência - Compara a frequência do sinal recebido pelo receptor com a
frequência do sinal gerado pelo emissor, considerando apenas os sinais que sejam
compatíveis.
Discriminador - Compara o nível do sinal recebido do analisador de freqüência com níveis
pré-estabelecidos, definindo o estado do sensor.
Estágio de Saída - Recebe o sinal do discriminador e comuta a carga.
LED- Indicador de estado, sendo acionado pelo discriminador.
Fonte de Alimentação - A alimentação do circuito do sensor é feita por um Regulador
interno.
Fonte: Google Imagens, 2013.
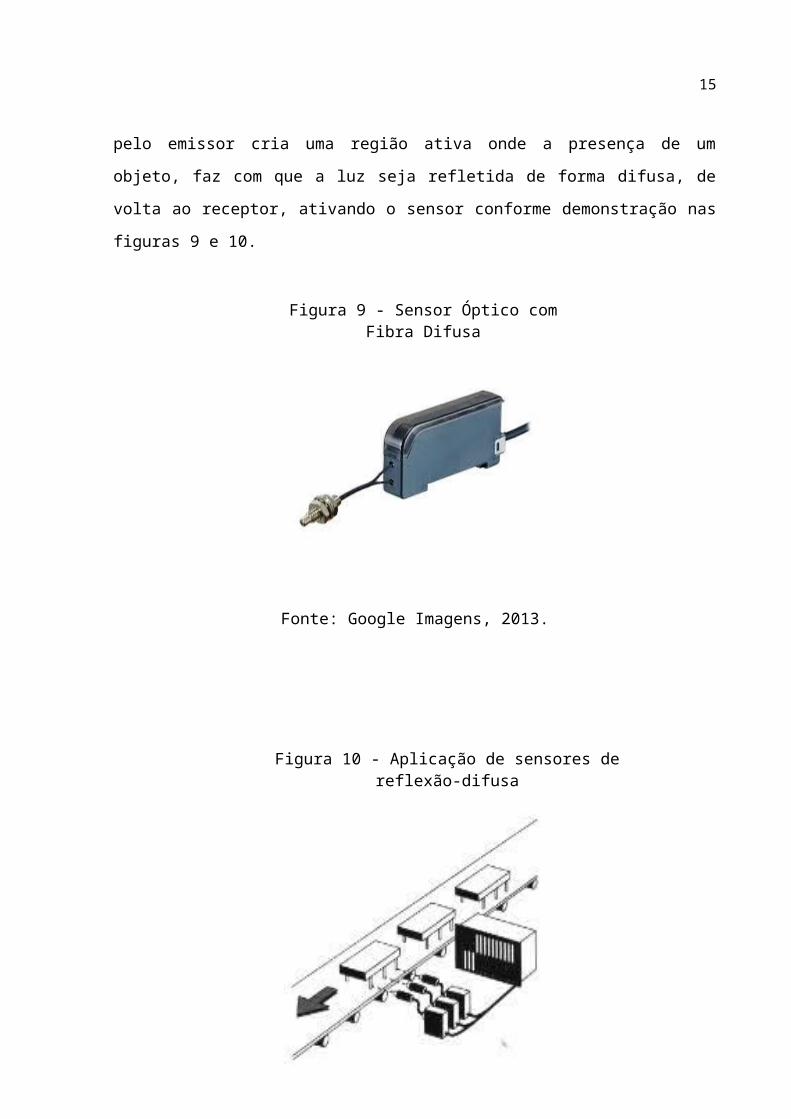
2.1.3 Sensor Óptico, Detecção por Reflexão Difusa.
O sensor óptico de detecção por reflexão-difusa possuem o emissor e o receptor
montados no mesmo corpo. A luz gerada pelo emissor cria uma região ativa onde a presença
de um objeto, faz com que a luz seja refletida de forma difusa, de volta ao receptor, ativando o
sensor conforme demonstração nas figuras 9 e 10.
Figura 8 - Operação do Sensor Óptico
11
Fonte: Google Imagens, 2013.
Fonte: Google Imagens, 2013.
Figura 9 - Sensor Óptico com Fibra Difusa
Figura 10 - Aplicação de sensores de reflexão-difusa
12
2.1.4 Controlador de Temperatura
Controladores de Temperatura são utilizados em inúmeros processos industriais,
garantindo qualidade de produtos de setores alimentícios, bebidas, automobilísticos, etc.
Resumidamente, o controle de temperatura envolve: entrada, valor de processo,
Setpoint e saída. Vejamos a seguir como funciona um processo de controle de temperatura:
Tomemos como exemplo um controle de processos químicos. Um termômetro, usado
para medir a temperatura da substância, é acoplado à entrada do CT (Controlador de
Temperatura) fazendo o monitoramento constante. O valor que chega à entrada é então,
comparado com o valor de Setpoint ajustado previamente para o processo, este valor é
extremamente importante para manter a qualidade do fluído, pois é a partir dele, que o
controle PID é acionado.
PID (Proporcional, Integral e Derivado) são as variáveis calculadas durante o processo
que permitem um controle de aquecimento sem oscilações, ou seja, o sinal é “filtrado” e é
feito um controle fino até o Valor de Processo (PV) atingir o Valor de Setpoint. A saída do
CT é responsável por aquecer o fluído químico, esta se manterá acionada até que a substância
atinja o valor necessário. O aparelho HW1440 (figura 11), usado nesse projeto, aceita uma
grande variedade de sensores de temperatura (termoelementos ou termoresistência Pt100),
mostrando a temperatura com precisão e oferece saída para controle (PID ou ON-OFF) para
manter um processo na temperatura desejada. Graças à sua versatilidade, um único aparelho
permite atender a uma grande variedade de aplicações, associado à facilidade de programação
por parte do operador [4].
Fonte: Google Imagens, 2013.
2.1.5 Termopares
Figura 11 - Controlador de Temperatura
13
Termopares são sensores de temperatura simples, robustos e da baixo custo, sendo
amplamente utilizados nos mais variados processos de medição de temperatura. Um termopar
é constituído de dois metais distintos que unidos por sua extremidade formam um circuito
fechado. O termopar desta maneira gera uma Força Eletro-Motriz (FEM), que quando
conectada a um Instrumento de Leitura consegue ler a temperatura do processo destes
Termopares. Diferentes tipos de Termopares possuem diferentes tipos de Curva FEM x
Temperatura [5].
Os termopares disponíveis no mercado têm os mais diversos formatos, desde os
modelos com a junção a descoberto que têm baixo custo e proporcionam tempo de resposta
rápido, até os modelos que estão incorporados em sondas. Está disponível uma grande
variedade de sondas, adequadas para diferentes aplicações (industriais, científicas,
investigação médica, etc.).
Quando se procede à escolha de um termopar deve-se ponderar qual o mais adequado
para a aplicação desejada, segundo as características de cada tipo de termopar, tais como a
gama de temperaturas suportada, a exatidão e a confiabilidade das leituras, entre outras.
Também deve-se levar em consideração, além da especificação do tipo de liga, a
construção física do termopar. Para cada processo é necessário uma construção física
específica, já que alguns processos agridem o material utilizado. Desta forma, é
imprescindível que na especificação do termopar, além da liga, seja levada em consideração
sua construção física externa.
2.1.5.1 Tipo J (Ferro / Constantan)
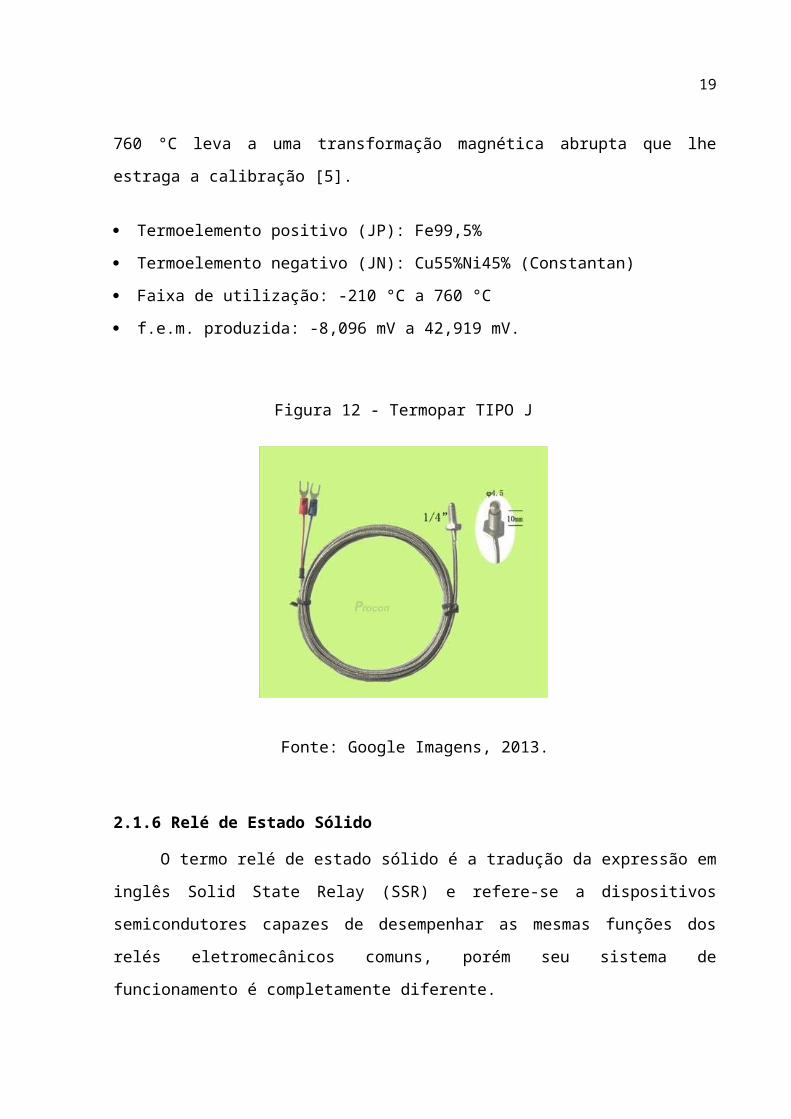
A sua gama limitada (-40 a 750 °C) é a responsável pela sua menor popularidade em
relação ao tipo K. Aplica-se, sobretudo com equipamento já velho que não é compatível com
termopares mais ‘modernos’. A utilização do tipo J (figura 12) acima dos 760 °C leva a uma
transformação magnética abrupta que lhe estraga a calibração [5].
Termoelemento positivo (JP): Fe99,5%
Termoelemento negativo (JN): Cu55%Ni45% (Constantan)
Faixa de utilização: -210 °C a 760 °C
f.e.m. produzida: -8,096 mV a 42,919 mV.
14
Fonte: Google Imagens, 2013.
2.1.6 Relé de Estado Sólido
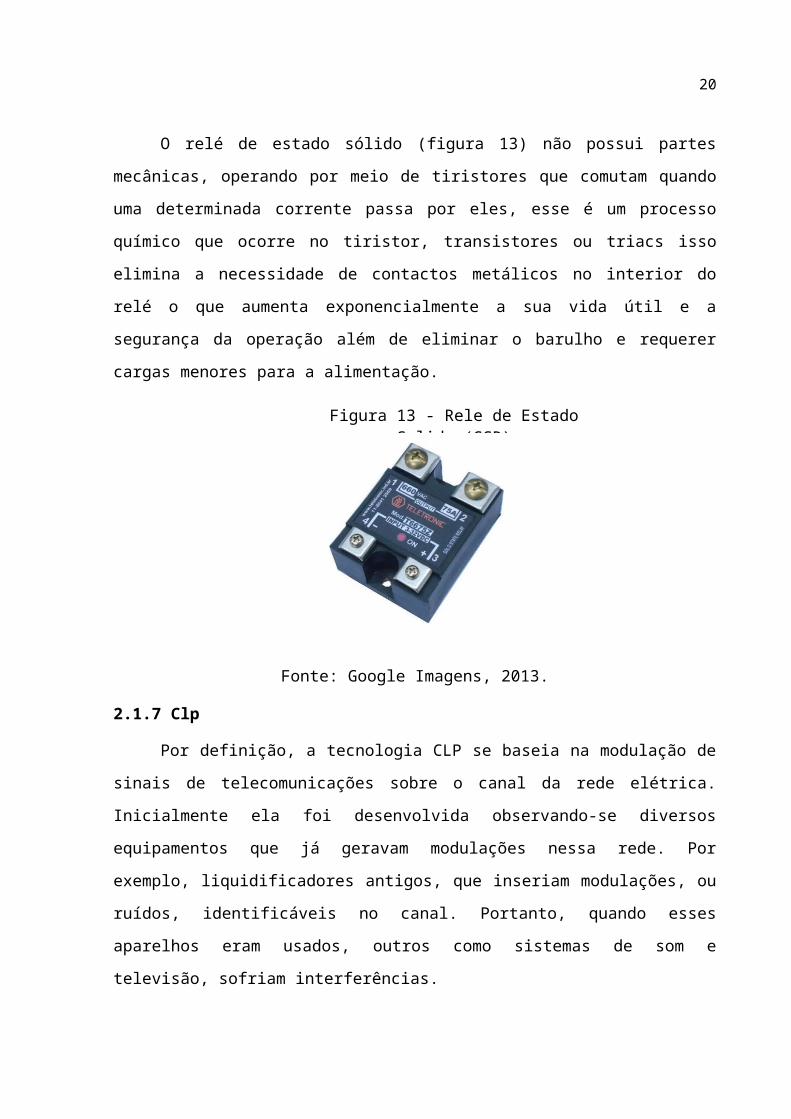
O termo relé de estado sólido é a tradução da expressão em inglês Solid State Relay
(SSR) e refere-se a dispositivos semicondutores capazes de desempenhar as mesmas funções
dos relés eletromecânicos comuns, porém seu sistema de funcionamento é completamente
diferente.
O relé de estado sólido (figura 13) não possui partes mecânicas, operando por meio de
tiristores que comutam quando uma determinada corrente passa por eles, esse é um processo
químico que ocorre no tiristor, transistores ou triacs isso elimina a necessidade de contactos
metálicos no interior do relé o que aumenta exponencialmente a sua vida útil e a segurança da
operação além de eliminar o barulho e requerer cargas menores para a alimentação.
Fonte: Google Imagens, 2013.
Figura 12 - Termopar TIPO J
Figura 13 - Rele de Estado Solido (SSR)
15
2.1.7 Clp
Por definição, a tecnologia CLP se baseia na modulação de sinais de telecomunicações
sobre o canal da rede elétrica. Inicialmente ela foi desenvolvida observando-se diversos
equipamentos que já geravam modulações nessa rede. Por exemplo, liquidificadores antigos,
que inseriam modulações, ou ruídos, identificáveis no canal. Portanto, quando esses aparelhos
eram usados, outros como sistemas de som e televisão, sofriam interferências.
Aparelhos como esses liquidificadores recebem eletricidade para o rotor de seus
motores por carvões, o que gera atrito, de onde centelhas acabam por introduzir na rede
elétrica sinais modulados. Tais sinais não são uniformes e possuem frequência bastante
próxima da velocidade de giro do motor, além das frequências harmônicas. Assim, como não
existem controladores do nível de modulação e filtros que impedissem a propagação, o sinal
modulado será conduzido pela fiação elétrica a outros equipamentos ligados próximos. Tendo
como base esse fenômeno, desenvolveu-se uma tecnologia que permitisse que se
transmitissem sinais controladamente, com frequências diferenciadas das que são utilizadas
por outros equipamentos e pela transmissão elétrica. Está é a tecnologia CLP, que atualmente
tem sido denominada Broadband PowerLine (BPL). Sistemas que usam essa tecnologia
utilizam a faixa de 1,6 a 30 MHz, com taxas de até 200Mbps.
O princípio elementar dessa tecnologia é que como a ordem da frequência do sinal
modulado é muito maior do que a do sinal elétrico, que opera na faixa de 50 a 60Hz, ambos
podem existir em harmonia no mesmo canal sem que ocorra perda de informação. Os sistemas
CLP trabalham com a camada de enlace do modelo OSI, podendo ser acoplada a redes
TCP/IP. De fato, as CLP’s são capazes de distinguir pacotes TCP e UDP, além de possuírem
agentes SNMP para que se possa monitorar e controlar a rede.
2.1.7.1 Tipos de CLP
Quanto a frequência:
a. CLP Faixa Larga (BroadBand): Este tipo utiliza grande faixa de frequências, variando de
1.6 a 30Mhz, enquanto que possui alta taxa de transmissão. Este é o tipo de CLP que mais
vem recebendo atenção em virtude de sua utilização para o acesso a internet e é o foco deste
trabalho em especial.
16
b. CLP Faixa Estreita(NarrowBand): Este tipo utiliza uma faixa de freqüência menor, na
faixa de 0.1 a 0.9 kHz, possuindo taxa de transmissão menor que 1Mbps. Suas aplicações
geralmente são nas áreas de gestão de energia elétrica, automação, medição remota, etc.
Quanto à localização:
a. Power Line Indoor Communication (PLIC): A CLP é feita para fins de se construir uma
rede local. É feita através de uma caixa comutadora que injeta dados de uma rede banda larga,
xDSL, Wifi na rede elétrica do local. Através de uma PLIC, todas as tomadas se tornam
pontos de conexão para a rede.
b. Power Line Outdoor Communication (PLOC): A CLP é feita como uma rede entre
subestações elétricas e redes locais/residenciais. No PLOC, existe o papel do Master, que tem
o papel de controlar e repetir o sinal transmitido, sendo conectado à distribuição primária ou
secundária. Através do Master que é possível que se tenha diferenciações na taxa de
transmissão de acordo com os contratos com os clientes. A quantidade de usuários que podem
se conectar a um mesmo Master costuma ser, no máximo quarenta, mas este número sofrer
variações. Através de testes, constata-se que um Master pode cobrir, sem perdas, até 2 km, se
estiver conectado a rede de distribuição primária, ou seja, aquela que possui tensão de
13,8KV.
A tecnologia Broadband over Power Lines(BPL) é o uso de PLOC para o acesso de
banda larga à Internet. Para tanto, é necessário um modem BPL ligado a rede elétrica para se
ter o acesso de alta-velocidade. Os modens utilizados usam 11 voltas para a transmissão em
alta frequência (1,6 a 30Mhz). A velocidade assimétrica desses modens costuma ficar na faixa
de 256kbps a 2,7Mbps, sendo que no repetidor que fica localizado do medidor da rede
elétrica, a velocidade é de até 45Mbps, que pode ser conectado até 256 modens. Vale ressaltar
que essas restrições são baseadas em requisitos para a qualidade do serviço, ou seja, caso elas
não sejam respeitadas haverá queda na qualidade da CLP em questão. Já nas estações de
média voltagem, a velocidade para a conexão a internet é de até 135Mbit/s.
Esta conexão pode ser feita através de, por exemplo, fibras ópticas ou conexões sem
fio. Cabe ressaltar que tanto nas PLOC, quanto nas PLIC, todas as tomadas estariam aptas a
serem pontos de acesso, sendo apenas diferenciadas na forma como é feito o controle,
interligação dos equipamentos e transmissão de dados.
17
Foi visto que a tecnologia CLP pode ter alguns benefícios em relação às conexões
usuais via cabo. De fato, ao usar a infraestrutura da rede elétrica já existente, torna-se possível
levar o acesso a internet a regiões remotas com relativamente pouco investimento. Sua rápida
implantação também permite que seja possível se realizar instalações massivas em períodos
de alto crescimento da demanda. Além disso, devido a sua forma de acesso, torna-se mais
fácil a conexão de aparelhos eletroeletrônicos, como televisões, geladeiras, aparelhos de som,
rádios, entre outros, ao sistema.
Atualmente, devido à quantidade de produtos CLP disponíveis no mercado, percebe-se
que essa tecnologia já atingiu certo grau de maturidade. Muitas empresas já fornecem
equipamentos para a utilização de CLP’s do tipo PLIC (Power Line Indoor Communication),
enquanto já se tem alguns casos de efetivas implementações de redes PLOC (Power Line
Outdoor Communication). Quanto a este último tipo, é interessante notar que sua utilização
como rede de acesso à internet, incentiva a competitividade no setor, principalmente no
referente à chama última milha da internet. Portanto, é certo se dizer que a Power Line
Communication é uma tecnologia comprovada e viável. Em nosso projeto utilizamos o CLP
Micrologix 1200, conforme Figura 14:
Fonte: Google Imagens, 2013.
2.1.8 Motor Elétrico
O motor elétrico é utilizado para transformar energia elétrica em mecânica. Dentre
todos os motores existentes este é o mais utilizado nas indústrias, pois combina o baixo custo
pela utilização de energia elétrica, bem como suas simplicidades na manutenção, facilidades
nos comandos, limpeza, transporte e versatilidade nas adaptações para melhores rendimentos.
Figura 14 - CLP Micrologix 1200
18
Geralmente os motores elétricos trabalham pelo eletromagnetismo, mas há também
motores em funcionamento através de outros fenômenos eletromecânicos, tais como forças
eletrostáticas. O princípio fundamental em que os motores eletromagnéticos são baseados é
que há uma força mecânica em todo o fio quando está conduzindo a eletricidade contida
dentro de um campo magnético. A força é descrita pela lei da força de Lorentz e é
perpendicular o fio e o campo magnético. Em um motor giratório, há um elemento girando, o
rotor. O rotor gira porque os fios e o campo magnético são arranjados de modo que um torque
seja desenvolvido sobre a linha central do rotor.
A maioria de motores magnéticos são giratórios, mas os tipos lineares existem
também. Em um motor giratório, a parte giratória (geralmente no interior) é chamada o rotor,
e a parte estacionária é chamada de estator ou bobina de campo.
Os tipos mais comuns de motores são os de corrente contínua e os de corrente
alternada, os quais especificaram abaixo:
• Corrente contínua – É necessária uma fonte de corrente contínua ou um dispositivo que
converta a corrente alternada para corrente contínua. As velocidades podem ajustadas para um
melhor controle na flexibilidade e precisão.
• Corrente alternada – os de maiores utilizações, pois a distribuição de energia elétrica é feita
normalmente na corrente alternada. Seu princípio de funcionamento é baseado no campo
girante, que surge quando um sistema de correntes alternadas trifásico é aplicada em polos
defasados fisicamente de 120º. Dessa forma, como as correntes são defasadas 120º elétricos,
em cada instante, um par de pólos possui o campo de maior intensidade, causando a
associação vetorial desse efeito o campo girante. Abaixo na Figura 15 pode-se visualizar um
modelo de motor elétrico.
Fonte: Google Imagens, 2013.
Figura 15 - Motor de Elétrico
19
2.1.9 Válvula Solenóide
Solenóide ou cilindro eletrodinâmico foi à designação dada por Ampère a um sistema
por si idealizado, composto por um conjunto de correntes circulares infinitamente pequenas e
infinitamente próximas umas das outras. O termo solenóide passou então a designar qualquer
instrumento constituído por um fio metálico condutor, enrolado em hélice com um
determinado número de espiras circulares, todas com a mesma área e percorridas pela mesma
corrente elétrica.
O solenóide é um dispositivo usado para transladar sinais elétricos ON/OFF em
movimentos mecânicos ON/OFF. Válvula é um dispositivo mecânico projetado para controlar
a vazão dos fluidos.
Válvula solenóide é uma combinação destes dois componentes básicos:
válvula contendo uma abertura com a posição de um disco ou haste para regular a vazão e
solenóide, que é o dispositivo eletromagnético com a bobina. A válvula é aberta ou fechada
pelo movimento do núcleo, que é comandado pela passagem ou não da corrente através da
bobina do solenóide. A válvula retorna automaticamente para sua posição original quando a
corrente é interrompida.
A vantagem das bobinas de baixa tensão é, obviamente, de segurança elétrica.
Hobbyists e faça-você-mesmo poder muitas vezes as válvulas solenóide de baixa tensão com
transformadores de parede. A maioria das pequenas válvulas 12 válvulas VDC pode ser
alimentado por um 12-Volt / fonte de alimentação de 50 MA. No entanto, sempre se certificar
de sua fonte de alimentação não atender ou exceder os requisitos de potência do solenóide. As
24 válvulas solenóides VAC apelam para hobbyists já que elas podem ser facilmente
controladas por temporizadores de irrigação. A maioria das aplicações industriais e máquinas
pesadas utilizam solenóides com 24 bobinas de VDC. Uma válvula de solenóide não requer
atual para permanecer em sua posição energizada. A energia elétrica é consumida apenas para
abrir e fechar a válvula, não para mantê-la em qualquer uma dessas posições. Válvulas de
travamento são frequentemente utilizadas em aplicações de bateria alimentada (por exemplo,
torneiras automáticas), pois só precisa de um poder de pulso para alterar o estado aberto /
fechado da válvula. A polaridade dos pulsos é invertida entre o pulso de abertura e
fechamento. A válvula solenóide mais comum tem duas portas: uma porta de entrada e uma
porta de saída, as mais avançadas podem ter três ou mais portas. Alguns projetos utilizam um
design de múltiplo tipo conforme demonstrado na figura 16.
20
Fonte: Google Imagens, 2013.
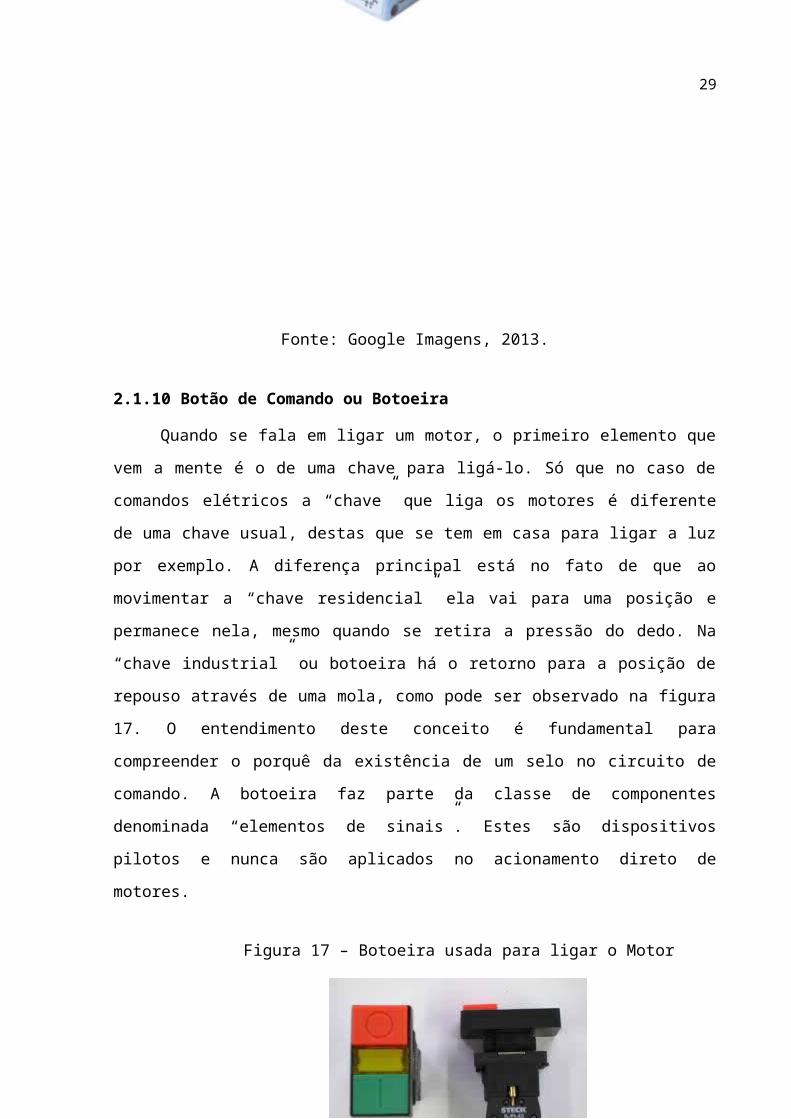
2.1.10 Botão de Comando ou Botoeira
Quando se fala em ligar um motor, o primeiro elemento que vem a mente é o de uma
chave para ligá-lo. Só que no caso de comandos elétricos a “chave” que liga os motores é
diferente de uma chave usual, destas que se tem em casa para ligar a luz por exemplo. A
diferença principal está no fato de que ao movimentar a “chave residencial” ela vai para uma
posição e permanece nela, mesmo quando se retira a pressão do dedo. Na “chave industrial”
ou botoeira há o retorno para a posição de repouso através de uma mola, como pode ser
observado na figura 17. O entendimento deste conceito é fundamental para compreender o
porquê da existência de um selo no circuito de comando. A botoeira faz parte da classe de
componentes denominada “elementos de sinais”. Estes são dispositivos pilotos e nunca são
aplicados no acionamento direto de motores.
Fonte: Google Imagens, 2013.
Figura 16 - Válvula Solenóide
Figura 17 – Botoeira usada para ligar o Motor
21
2.1.11 Relés
A história do relé começou com os estudos de Joseph Henry cientista norte americano
em 1830, enquanto construía eletroimãs, descobriu o fenômeno eletromagnético chamado
indução electromagnética ou autoindutância e a indutância mútua.
O seu trabalho foi desenvolvido independentemente de Michael Faraday, mas é a este
último que se atribuí a honra da descoberta por ter publicado primeiro as suas conclusões. A
Henry também é creditada a invenção do motor elétrico, embora mais uma vez, não tenha sido
o primeiro a registrar a patente. Seus estudos acerca do relê eletromagético foram a base do
telégrafo elétrico, inventado por Morse e Wheatstone.
As partes que compõem um relé eletromecânico são:
Eletroímã (bobina) - constituído por fio de cobre em torno de um núcleo de ferro
macio que fornece um caminho de baixa relutância para fluxo magnético;
Armadurade ferro móvel;
Conjuntos de contatos;
Mola de rearme;
Terminais - estes podem variar dependendo da aplicação: *Terminais tipo Faston;
*Terminais para conexão em Bases (Sockets); *Terminais para conexão em PCI´s
(Placas de Circuito Impresso).
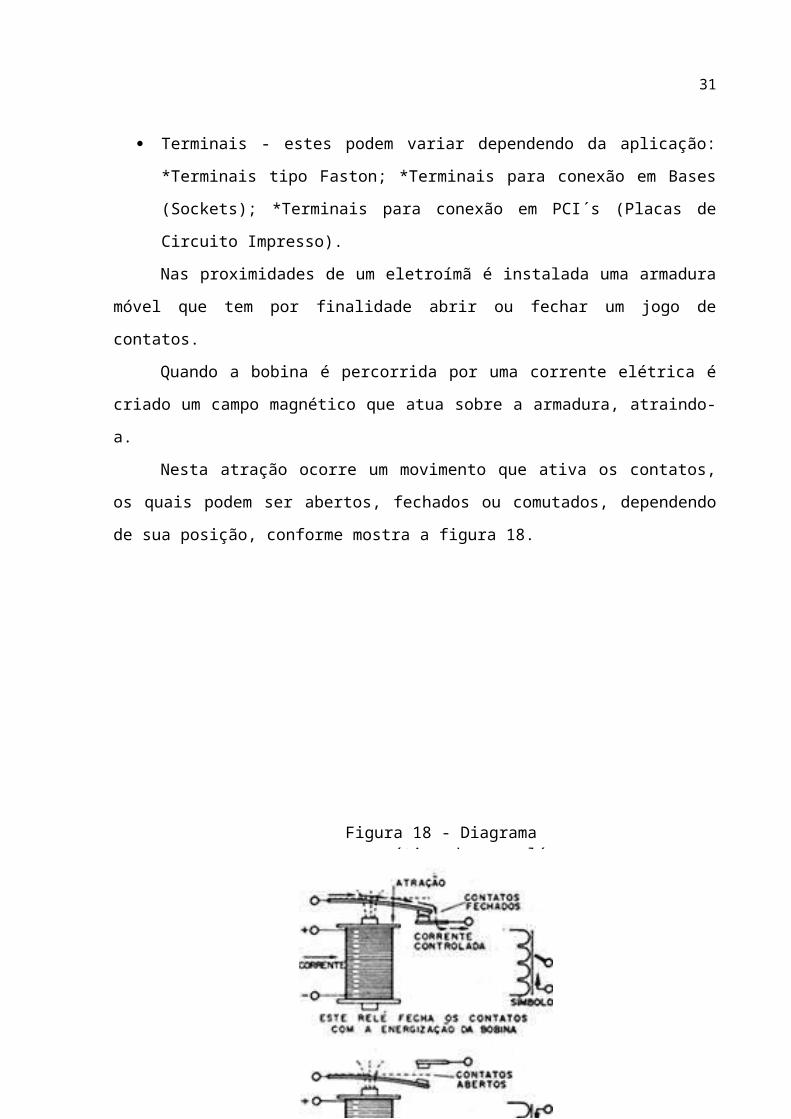
Nas proximidades de um eletroímã é instalada uma armadura móvel que tem por
finalidade abrir ou fechar um jogo de contatos.
Quando a bobina é percorrida por uma corrente elétrica é criado um campo magnético
que atua sobre a armadura, atraindo-a.
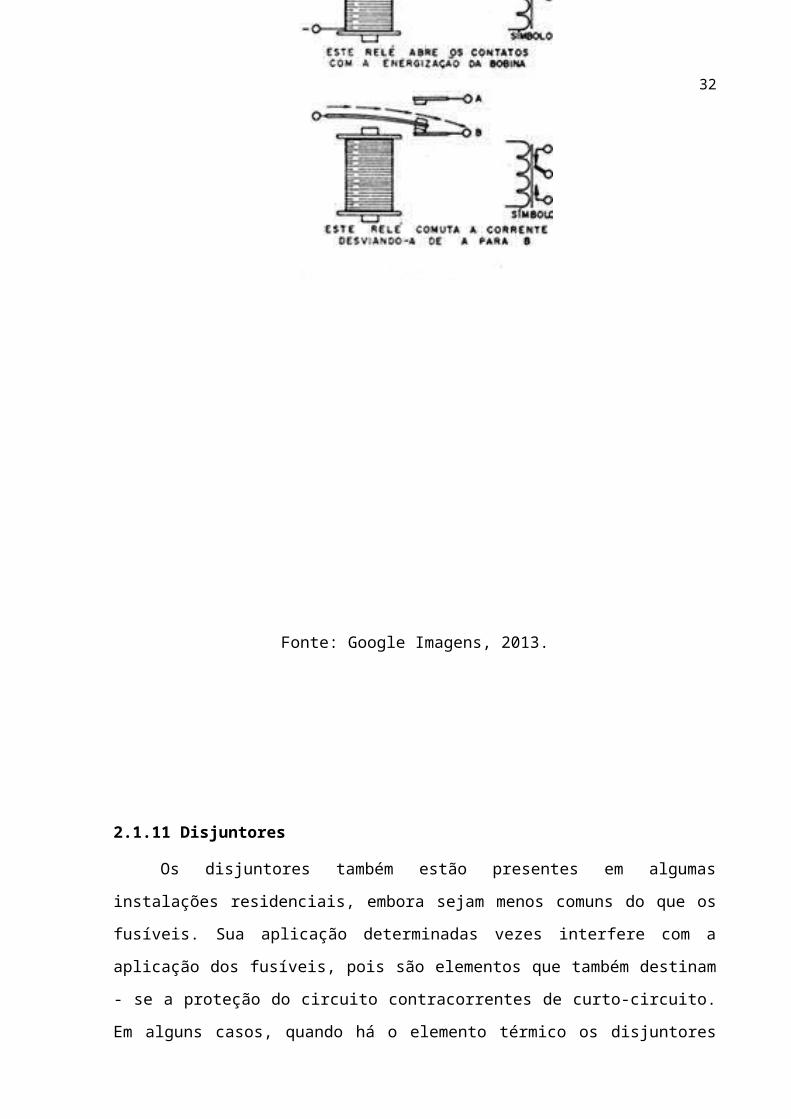
Nesta atração ocorre um movimento que ativa os contatos, os quais podem ser abertos,
fechados ou comutados, dependendo de sua posição, conforme mostra a figura 18.
22
Fonte: Google Imagens, 2013.
2.1.11 Disjuntores
Os disjuntores também estão presentes em algumas instalações residenciais, embora
sejam menos comuns do que os fusíveis. Sua aplicação determinadas vezes interfere com a
aplicação dos fusíveis, pois são elementos que também destinam - se a proteção do circuito
contracorrentes de curto-circuito. Em alguns casos, quando há o elemento térmico os
Figura 18 - Diagrama esquemático de um relé
23
disjuntores também podem se destinar a proteção contra correntes de sobrecarga A corrente
de sobrecarga pode ser causada por uma súbita elevação na carga mecânica, ou mesmo pela
operação do motor em determinados ambientes fabris, onde a temperatura é elevada. A
vantagem dos disjuntores é que permitem a religação do sistema após a ocorrência da
elevação da corrente, enquanto os fusíveis devem ser substituídos antes de uma nova
operação.
Fonte: Google Imagens, 2013.
Para a proteção contra a sobrecarga existe um elemento térmico (bi-metálico). Para a
proteção contra curto-circuito existe um elemento magnético. O disjuntor precisa ser
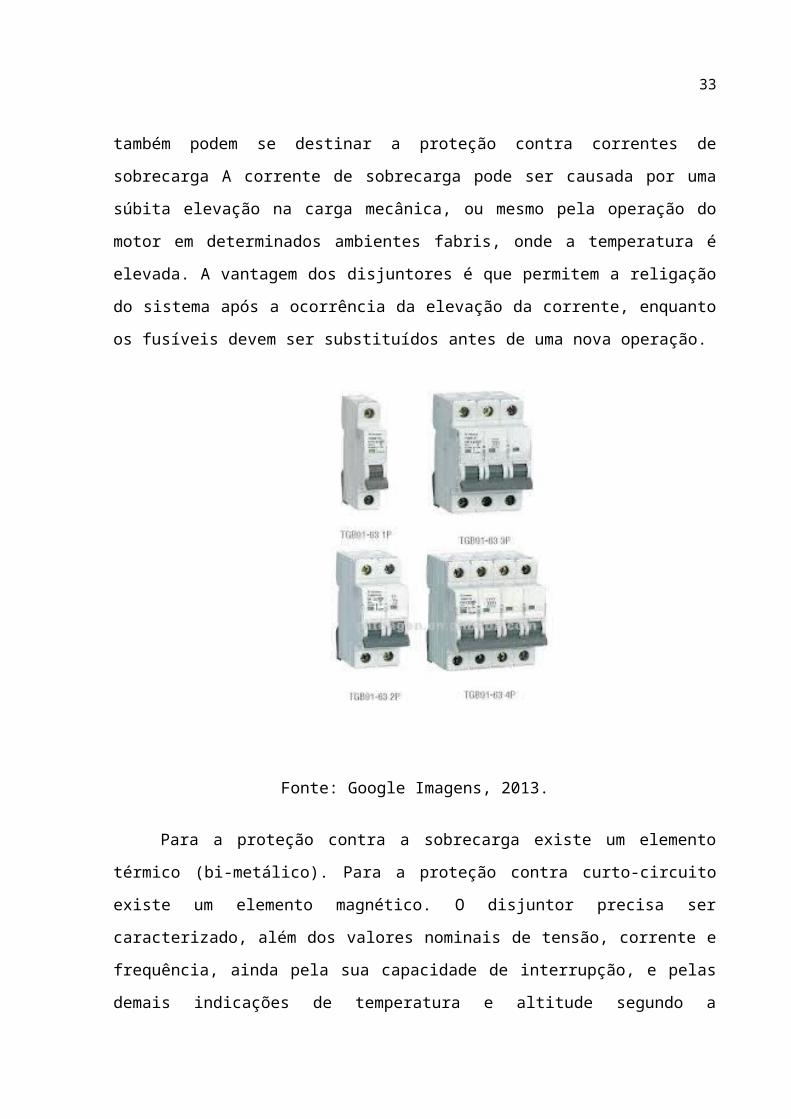
caracterizado, além dos valores nominais de tensão, corrente e frequência, ainda pela sua
capacidade de interrupção, e pelas demais indicações de temperatura e altitude segundo a
respectiva norma, e agrupamento de disjuntores, segundo informações do fabricante, e outros,
que podem influir no seu dimensionamento. A figura 19 mostra o aspecto físico dos
disjuntores comerciais.
2.1.12 Inversor de Frequência
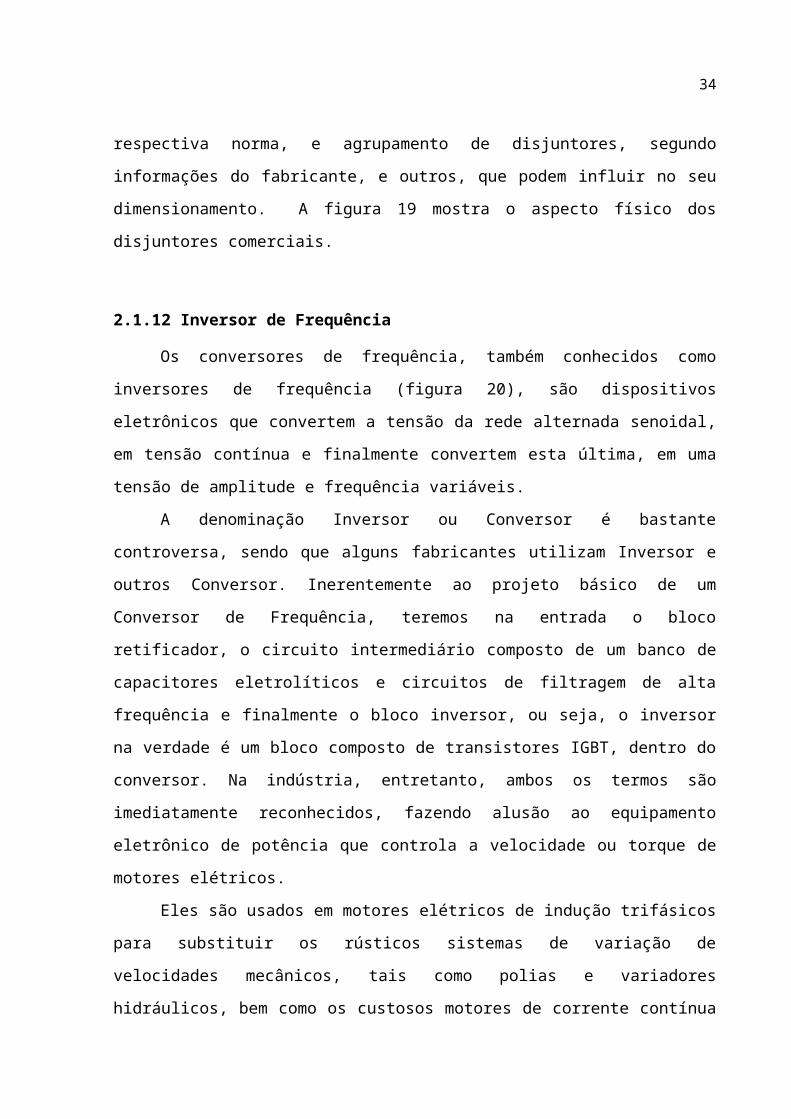
Os conversores de frequência, também conhecidos como inversores de frequência
(figura 20), são dispositivos eletrônicos que convertem a tensão da rede alternada senoidal,
24
em tensão contínua e finalmente convertem esta última, em uma tensão de amplitude e
frequência variáveis.
A denominação Inversor ou Conversor é bastante controversa, sendo que alguns
fabricantes utilizam Inversor e outros Conversor. Inerentemente ao projeto básico de um
Conversor de Frequência, teremos na entrada o bloco retificador, o circuito intermediário
composto de um banco de capacitores eletrolíticos e circuitos de filtragem de alta frequência e
finalmente o bloco inversor, ou seja, o inversor na verdade é um bloco composto de
transistores IGBT, dentro do conversor. Na indústria, entretanto, ambos os termos são
imediatamente reconhecidos, fazendo alusão ao equipamento eletrônico de potência que
controla a velocidade ou torque de motores elétricos.
Eles são usados em motores elétricos de indução trifásicos para substituir os rústicos
sistemas de variação de velocidades mecânicos, tais como polias e variadores hidráulicos,
bem como os custosos motores de corrente contínua pelo conjunto motor assíncrono e
inversor, mais barato, de manutenção mais simples e reposição profusa.
Os conversores de frequência costumam também atuar como dispositivos de proteção
para os mais variados problemas de rede elétrica que se pode ocorrer, como
desbalanceamento entre fases, sobrecarga, queda de tensão, etc.
Normalmente, os conversores são montados em painéis elétricos, sendo um dispositivo
utilizado em larga escala na automação industrial. Podem trabalhar em interfaces com
computadores, centrais de comando, e conduzir, simultaneamente, dezenas de motores,
dependendo do porte e tecnologia do dispositivo. Os conversores costumam ser
dimensionados mais precisamente, pela corrente do motor.
O dimensionamento pela potência do motor pode também ser feita, entretanto, a
corrente é a principal grandeza elétrica limitante no dimensionamento. Importante também
notar outros aspectos da aplicação, durante o dimensionamento, como por exemplo, demanda
de torque (constante ou quadrático), precisão de controle, partidas e frenagens bruscas ou em
intervalos curtos ou muito longos, regime de trabalho, e outros aspectos particulares de cada
aplicação. Dentre os diversos fabricantes deste produto, temos uma vasta coleção de catálogos
e normas, que devem sempre ser consultados.
Quando o acionamento elétrico não exige variação da velocidade do motor, querendo-
se apenas uma partida mais suave, de forma que limite-se a corrente de partida evitando assim
quedas de tensão da rede de alimentação costuma-se utilizar soft-starters.
25
Os conversores de frequência tem uma vasta aplicação na indústria de máquinas e
processos em geral. Com a capacidade inerente de variar a velocidade de motores elétricos
trifásicos de Corrente Alternada, permitem a aos projetistas, desenvolver máquinas que sem
os mesmos, seriam praticamente impossíveis de serem fabricadas. Os conversores de
frequência de última geração, não somente controlam a velocidade do eixo de motores
elétricos trifásicos de corrente alternada, como também, controlam outros parâmetros
inerentes ao motor elétrico, sendo que um deles é o controle de Torque.
Fonte: Google Imagens, 2013.
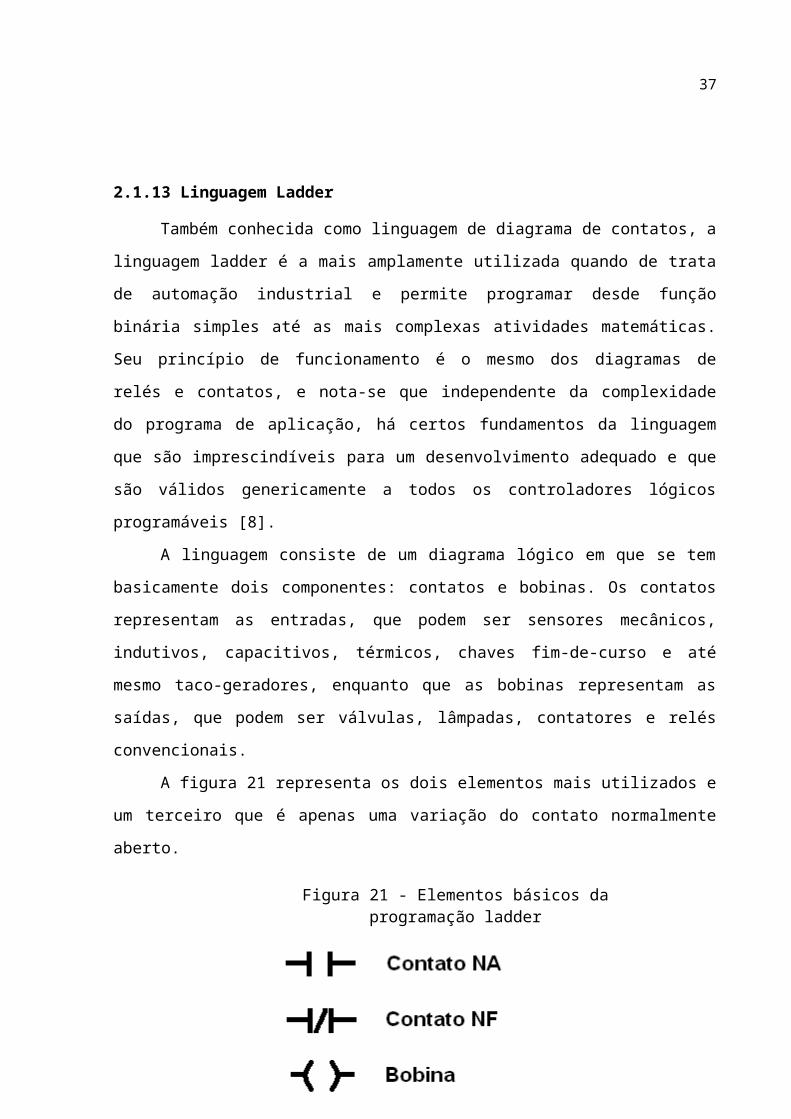
2.1.13 Linguagem Ladder
Também conhecida como linguagem de diagrama de contatos, a linguagem ladder é a
mais amplamente utilizada quando de trata de automação industrial e permite programar
desde função binária simples até as mais complexas atividades matemáticas. Seu princípio de
funcionamento é o mesmo dos diagramas de relés e contatos, e nota-se que independente da
complexidade do programa de aplicação, há certos fundamentos da linguagem que são
Figura 20 - Inversor de frequência
26
imprescindíveis para um desenvolvimento adequado e que são válidos genericamente a todos
os controladores lógicos programáveis [8].
A linguagem consiste de um diagrama lógico em que se tem basicamente dois
componentes: contatos e bobinas. Os contatos representam as entradas, que podem ser
sensores mecânicos, indutivos, capacitivos, térmicos, chaves fim-de-curso e até mesmo taco-
geradores, enquanto que as bobinas representam as saídas, que podem ser válvulas, lâmpadas,
contatores e relés convencionais.
A figura 21 representa os dois elementos mais utilizados e um terceiro que é apenas
uma variação do contato normalmente aberto.
Fonte: Google Imagens, 2013.
Segundo [7], existem regras básicas para constituição do diagrama ladder (ou
diagrama de contatos):
Os contatos estão sempre à esquerda e as bobinas mantêm-se sempre à direita, próximos
às linhas verticais, conhecidas como linhas-mãe.
Todos os elementos ficam contidos entra duas linhas verticais e tem-se uma sequência
semelhante aos degraus de uma escada.
A sequência de causa e efeito, além de estarem de acordo com a lógica, vão da esquerda
pra direita e de cima para baixo.
As bobinas só são acionadas se a linha horizontal correspondente estiver ativa. Logo, uma
bobina é acionada de acordo com a lógica dos contatos à esquerda de sua linha.
Nota-se que, para que uma bobina (ou qualquer outro elemento de saída) seja
acionada, é necessário que ela tenha diferença de potencial. Logo, emprega-se o conceito de
corrente lógica fictícia, ou seja, supondo que entre as barras verticais exista uma diferença de
Figura 21 - Elementos básicos da programação ladder
27
potencial (a barra da esquerda com potencial maior que a barra da direita), haverá a circulação
de corrente da esquerda para a direita se a lógica de controle permitir tal fato [9].
Vale lembrar que cada elemento básico (contato ou bobina, por exemplo) da lógica de
controle representa uma instrução da linguagem ladder sendo alocada em um endereço
específico e consumindo uma quantidade determinada de memória (Word) disponível para
armazenamento do programa de aplicação, conforme a CPU utilizada [8]. Um mesmo
símbolo gráfico da linguagem ladder (contato normalmente fechado, por exemplo) pode
representar instruções diferentes, dependendo da localização na lógica de controle. Além dos
elementos básicos, que constituem praticamente uma lógica binária para a programação,
existem também elementos como, por exemplo: temporizadores, contadores, blocos de
função, podendo até mesmo realizar operações lógicas e algébricas.
28
3. PROJETO DA SOLUÇÃO
O projeto consiste de dois tanques que terão a temperatura de seus líquidos controlada
por resistências e termopares. A função do termopar nos tanques é enviar a temperatura de
momento ao controlador, que recebe essa informação e converte o sinal recebido do termopar
em graus.
Após essa temperatura chegar ao valor ideal de trabalho, o controlador mandar um
sinal de confirmação para o plc dizendo que a temperatura dos tanques esta conforme
desejado, só após essa confirmação que será também identificada através de uma lâmpada
luminosa no painel é que se pode iniciar o processo da evasora de liquido.
Ao longo do processo o plc recebera informações de sensores para identificação cada
etapa do processo. O primeiro sensor será responsável pela verificação de entrada de material
(frasco) na esteira. Se a esteira tiver ligada e não passar material dentro de um certo tempo
setado no programa, será acionado um alarme sonoro para alertar o operador de falta de
material na esteira.
O segundo sensor será responsável pela parada da esteira e pela confirmação de
material na frente da válvula que injetara liquido no frasco por um tempo determinado no
programa, apos o fim desse tempo à esteira volta a funcionar. O terceiro sensor também ira
para a esteira para ser colocado manualmente à tampa no frasco. Toda vez que a esteira parar
por um sensor, ela só ira funcionar após a confirmação que todos os processos forem
concluídos. E por fim o quarto sensor será responsável pela retirada do material da esteira.
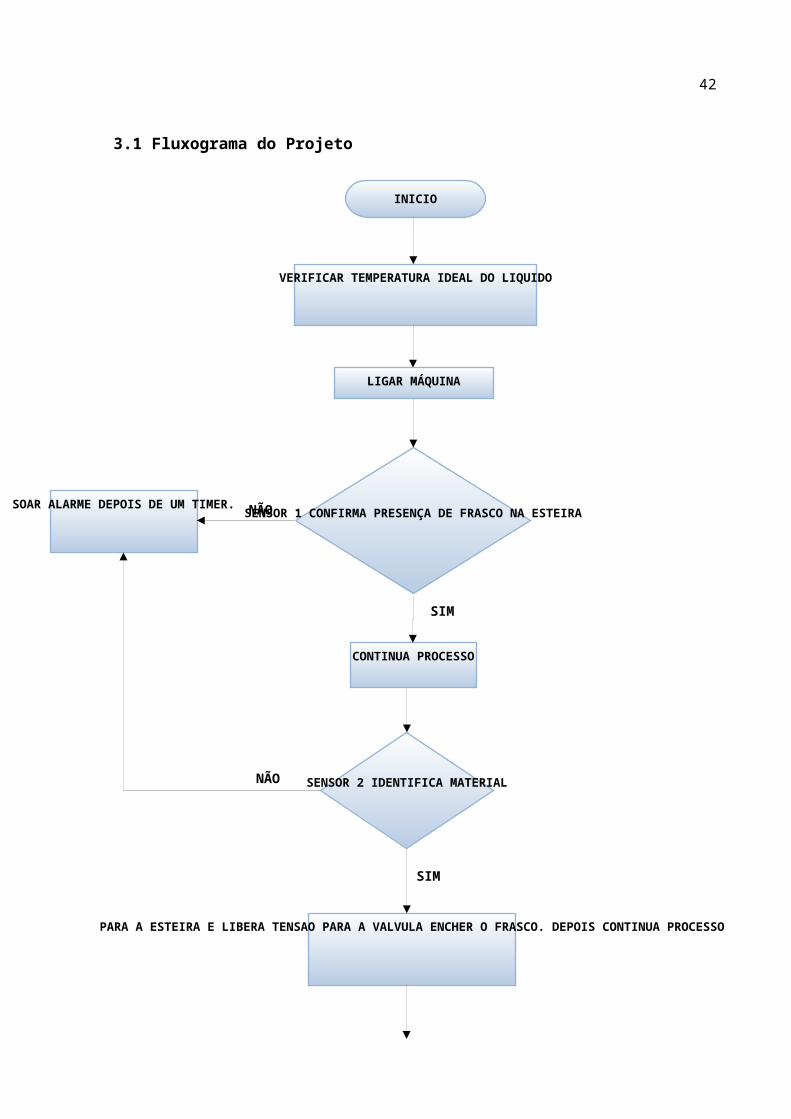
INICIO
VERIFICAR TEMPERATURA IDEAL DO LIQUIDO
PARA A ESTEIRA E LIBERA TENSAO PARA A VALVULA ENCHER O FRASCO. DEPOIS CONTINUA PROCESSO
SOAR ALARME DEPOIS DE UM TIMER.
CONTINUA PROCESSO
SENSOR 1 CONFIRMA PRESENÇA DE FRASCO NA ESTEIRA
NÃO
SIM
NÃO
LIGAR MÁQUINA
SENSOR 2 IDENTIFICA MATERIAL
SIM
29
3.1 Fluxograma do Projeto
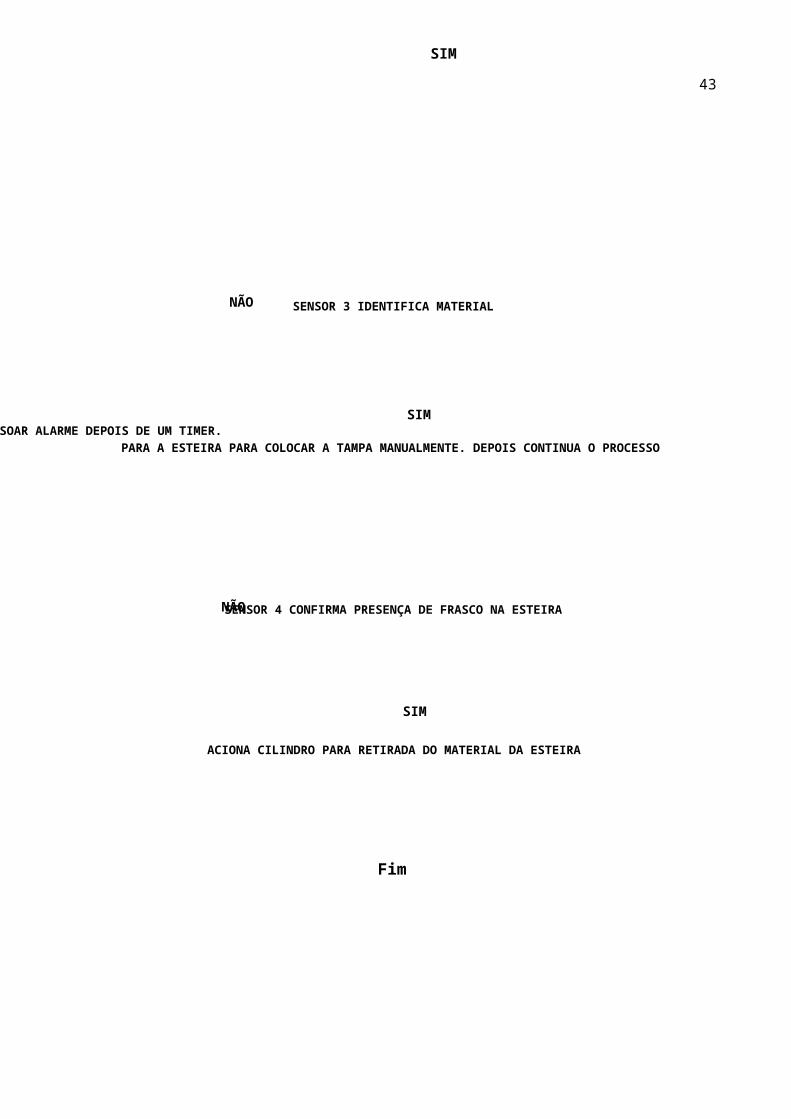
PARA A ESTEIRA PARA COLOCAR A TAMPA MANUALMENTE. DEPOIS CONTINUA O PROCESSO
Fim
SOAR ALARME DEPOIS DE UM TIMER.
ACIONA CILINDRO PARA RETIRADA DO MATERIAL DA ESTEIRA
SENSOR 4 CONFIRMA PRESENÇA DE FRASCO NA ESTEIRA
SIM
NÃO
SIM
SENSOR 3 IDENTIFICA MATERIAL
NÃO
30
31
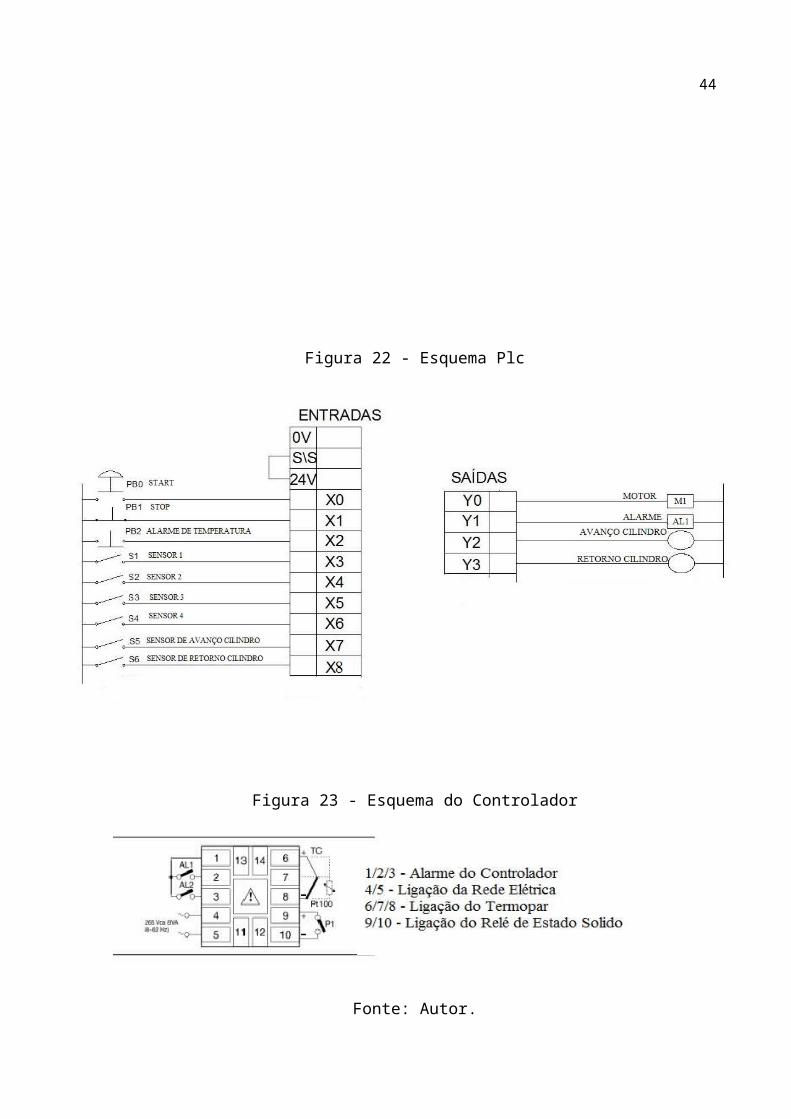
Figura 22 - Esquema Plc
Fonte: Autor.
Figura 23 - Esquema do Controlador
32
4. DESENVOLVIMENTO DO PROJETO
Os itens básicos para a elaboração do projeto foram:
Esteira
Inversor de Frequência
Motor
Rele
Rack com CLP (Controlador Lógico Programável)
Tanques de armazenamento
Sensores
Abaixo demonstramos o inicio da construção do projeto nas Figuras 24 a 28.
Fonte: Autor.
A figura 24 mostra a válvula dosadora de liquido. A mesma será colocada nos tanques
para enchimento dos frascos. Uma das dificuldades encontradas no projeto foi em relação à
alimentação dessa válvula dosadora. Pois a mesma trabalha com tensão de 110vac e o plc
trabalha com tensão de 24vdc. Para solucionar esta dificuldade, colocamos um reles de 24vdc
para habilitar a mesma. Alimentação de saída do plc habilita o rele que fecha seu contato
liberando 110vac para a válvula.
Figura 24 - Válvula dosadora
Figura 25 - Tanque de armazenamento
33
Fonte: Autor.
A figura 25 mostra o tanque que utilizaremos para armazenamento do liquido. O
mesmo é feito de aço inox para aguentar o aquecimento da resistência.
Fonte: Autor.
A figura 26 mostra a resistência com potencia de 200W e alimentação de 110v para
aquecimento do liquido dentro do tanque.
.
Figura 26 - Resistência
Figura 27 - Rack com Plc
34
Fonte: Autor.
A figura 27 mostra o rack que utilizaremos para controlar nossa esteira envasora de líquidos.
No centro do rack esta o clp 1200 micrologix da Rockwell Automation. Do lado direito do clp
estão suas saídas (vermelhos) e o comum (preto). Do lado esquerdo temos as entradas do clp
(preto) e o 24vdc (vermelho), totalizando 12 entradas e 8 saídas.
Fonte: Autor.A figura 28 mostra a construção do painel de controle que terá os controladores de
temperaturas, botões start e stop do processo além da lâmpada indicadora de temperatura ideal
do processo.
Figura 28 - Construção do Painel de Controle
35
5. CONCLUSÃO
Neste projeto pode-se aprender e conhecer sobre o processo de planejamento,
desenvolvimento e implantação de um processo de fabricação de bebidas isotônicas. Esse
sistema possibilita ao graduando, conhecer ferramentas que auxiliem na resolução de
problemas que possam surgir no dia-dia. Compreendemos que as disciplinas cursadas neste
período foram de extrema importância para potencializar os nossos conhecimentos e nos
ajudaram a executar atividades de diversos meios e métodos. E importante ressaltar que o
trabalho em equipe é de extrema importância para que os componentes da equipe alcancem o
êxito em conjunto e individual, pois o projeto é um só, mais existem varias atividade a serem
executadas para se chegar ao resultado esperado. Para tanto, diversos critérios foram
utilizados, como a analise de especificações técnicas dos componentes, seguindo parâmetros
de normas nacionais e internacionais, utilizando componentes com o melhor custo/beneficio.
Com base na pesquisa realizada encontraram-se diversos benefícios, tais como,
grandes ganhos em eficiência, qualidade, precisão e produção, Os quais acarretam redução de
custos e maior lucratividade.
36
REFERÊNCIA BIBLIOGRÁFICA
[1] NEWTON. C. Braga, (2012). Relés Circuitos e Aplicações. São Paulo: 2012
[2] www.clubedaeletronica.com.br. Acessado em 22 de Novembro de 2013.
[3] http://www.technosupply.com.br/blog/?p=1755. Acessado em 22 de Novembro de 2013.
[4] http://www.bagarel.com.br/coel/manuais/manual_HW1440_Rev1_08-00.pdf. Acessado
em 23 de Novembro de 2013.
[5] http://pt.wikipedia.org/wiki/Termopar. Acessado em 25 de Novembro de 2013.
[6] http://pt.wikipedia.org/wiki/Rel%C3%A9_de_Estado_S%C3%B3lido. Acessado em 26 de
Novembro de 2013.
[7] MORAES, C. C. de, CASTRUCCI, P. de L. Engenharia de automação
industrial. 1ª Edição. Rio de Janeiro: LTC Editora, 2001. p. 29-47.
[8] Apostila de PLC – Básica. 6ª Edição. São Paulo: OMRON, 2004, p. 6-8.
[9] Fundamentos da programação LADDER, p. 3-6. Disponível em:
http://www.engprod.ufjf.br/epd_automacao/EPD030_Ladder1.pdf, acessado em
17/10/2013.
[10] FERNANDES A. M. C., SUGITA F. I. Automação de Esteira Transportadora em
Célula de Manufatura. 2007, p.28-29. Trabalho de Conclusão de Curso. Universidade
de São Paulo.
LISTAS DE FIGURAS
Figura 1 - Sistema de Envase.................................................................................................................6
Figura 2 - Sinal digital............................................................................................................................6
Figura 3 - Sinal analógico......................................................................................................................6
Figura 4 - Esquema eletrônico NPN.......................................................................................................7
Figura 5 - Esquema real NPN.................................................................................................................8
Figura 6 - Esquema eletrônico PNP........................................................................................................8
Figura 7 - Esquema real PNP.................................................................................................................8
Figura 8 - Operação do Sensor Óptico..................................................................................................10
Figura 9 - Sensor Óptico com Fibra Difusa..........................................................................................11
Figura 10 - Aplicação de sensores de reflexão-difusa...........................................................................11
Figura 11 - Controlador de Temperatura..............................................................................................12
Figura 12 - Termopar TIPO J...............................................................................................................14
Figura 13 - Rele de Estado Solido (SSR).............................................................................................14
Figura 14 - CLP Micrologix 1200........................................................................................................17
Figura 15 - Motor de Elétrico...............................................................................................................18
Figura 16 - Válvula Solenóide..............................................................................................................20
Figura 17 – Botoeira usada para ligar o Motor.....................................................................................20
Figura 18 - Diagrama esquemático de um relé.....................................................................................22
Figura 19 - Aspecto dos disjuntores.....................................................................................................22
Figura 20 - Inversor de frequência........................................................................................................25
Figura 21 - Elementos básicos da programação ladder.........................................................................26
Figura 22 - Esquema Plc......................................................................................................................31
Figura 23 - Esquema do Controlador....................................................................................................31
Figura 24 - Válvula dosadora...............................................................................................................32
Figura 25 - Tanque de armazenamento.................................................................................................33
Figura 26 - Resistência.........................................................................................................................33
Figura 27 - Rack com Plc.....................................................................................................................34
Figura 28 - Construção do Painel de Controle......................................................................................34
SUMÁRIO
1. INTRODUÇÃO..................................................................................................................................1
1.1 JUSTIFICATIVA..............................................................................................................................2
1.2 OBJETIVO.....................................................................................................................................3
1.2.1 OBJETIVO ESPECÍFICO............................................................................................................3
1.3 METODOLOGIA............................................................................................................................4
2. REFERENCIAL TEÓRICO.............................................................................................................5
2.1 ELEMENTOS DE PROJETO.............................................................................................................5
2.1.1 Atuadores e Sensores............................................................................................................5
2.1.2 Sensores Ópticos...................................................................................................................9
2.1.3 Sensor Óptico, Detecção por Reflexão Difusa......................................................................10
2.1.4 Controlador de Temperatura...............................................................................................12
2.1.5 Termopares.........................................................................................................................13
2.1.5.1 Tipo J (Ferro / Constantan)...............................................................................................13
2.1.6 Relé de Estado Sólido..........................................................................................................14
2.1.7 Clp........................................................................................................................................15
2.1.8 Motor Elétrico.....................................................................................................................17
2.1.9 Válvula Solenóide................................................................................................................19
2.1.10 Botão de Comando ou Botoeira........................................................................................20
2.1.11 Relés..................................................................................................................................21
2.1.11 Disjuntores........................................................................................................................22
2.1.12 Inversor de Frequência......................................................................................................23
2.1.13 Linguagem Ladder.............................................................................................................25
3. PROJETO DA SOLUÇÃO..............................................................................................................28
3.1 Fluxograma do Projeto...............................................................................................................29
4. DESENVOLVIMENTO DO PROJETO........................................................................................31
5. CONCLUSÃO...................................................................................................................................35
REFERÊNCIA BIBLIOGRÁFICA....................................................................................................36
RESUMO
A finalidade básica deste projeto é mostrar um Sistema de Automação Industrial,
desenvolvido para uma empresa de Pequeno/Médio porte, que deseja automatizar um
processo de produção de bebidas isotônicas. O desenvolvimento deste projeto se deu com
base em estudos e pesquisas diretamente ligadas a este tipo de sistema de automatização
industrial, onde se priorizou alternativas simples, eficazes e de baixos custos para a
implantação da automação do processo de produção. O projeto é composto por uma esteira,
dois tanques controlados por um CLP e acionado por Relés, dois termopares do tipo “J”, dois
controladores de temperaturas, duas resistências para aquecimento da água, quatro sensores
ópticos (com fibra difusa), um motor e uma válvula solenoide para água.
PALAVRAS-CHAVE: Automação Industrial, Bebidas Isotônicas.
ABSTRACT
The basic purpose of this project is shows an Industrial Automation System,
developed for a company of Small / Medium-sized, you want to automate a process for the
production of sports drinks. The development of this project was made based on studies and
research directly related to this type of industrial automation system, where the priority was
simple, effective and low cost to implement the automation of the production process
alternatives. The project consists of a treadmill, two tanks controlled by a PLC and driven
relays, two thermocouples type "J" two temperature controllers, two resistances to heat water,
four optical sensors (with diffuse fiber) a motor step and a solenoid valve for water.
Word-key: Industrial Automation, Isotonic Drinks.
UNIVERSIDADE PAULISTA
PROJETO INTEGRADO MULTIDISCIPLINAR
CURSO SUPERIOR DE AUTOMAÇÃO INDUSTRIAL
AUTOMATIZAÇÃO DA MAQUINA DE ENVASE
Manaus
2013
Diego Patrício B54196-2
Arthur Victor B14HIA-4
Isaac Lima B522JA-0
Marco Antonio B536GG-8
Marco Tulio B52379-4
AUTOMATIZAÇÃO DA MAQUINA DE ENVASE
Projeto Integrado Multidisciplinar (PIM),
apresentado como exigência parcial para
conclusão do terceiro Semestre do Curso
Superior em Tecnologia em Automação
Industrial, da Universidade Paulista – UNIP,
campus Manaus, sobe a orientação do Prof.
Sergio Alencar.
Manaus
2
2013
Diego Patrício B54196-2
Arthur Victor B14HIA-4
Isaac Lima B522JA-0
Marco Antonio B536GG-8
Marco Tulio B52379-4
AUTOMATIZAÇÃO DA MAQUINA DE ENVASE
Aprovado: em ________________________/2013.
BANCA EXAMINADORA
Prof (a): Data: Assinatura:
_________________________________________________________________
Prof (a): Data: Assinatura:
_________________________________________________________________
Prof (a): Data: Assinatura:
_________________________________________________________________
AGRADECIMENTOS
Primeiramente agradecemos a Deus, a quem humildemente agradecemos pela
conclusão deste trabalho.
Agradecimento ao quadro docente da instituição pela forma briosa e atenciosa que
transmitem o conhecimento.
A todos de nossas famílias que nos encorajaram, compreendendo-nos e suportando
nossos momentos de ausência na difícil caminhada para a conquista de nossos ideais.
A todos aqueles que de alguma forma, nos apoiaram sendo solidários no decorrer desta
jornada fica registrado o nosso eterno agradecimento.
Epígrafe
“Não confunda derrotas com fracasso nem vitórias com sucesso. Na vida de um campeão sempre haverá algumas derrotas, assim como na vida de um perdedor sempre haverá vitórias. A diferença é que, enquanto os campeões crescem nas derrotas, os perdedores se acomodam nas vitórias.”
Roberto Shinyashiki





























