Embed Size (px)
Citation preview
F. Cucco – Lezioni di Scienza delle costruzioni
150
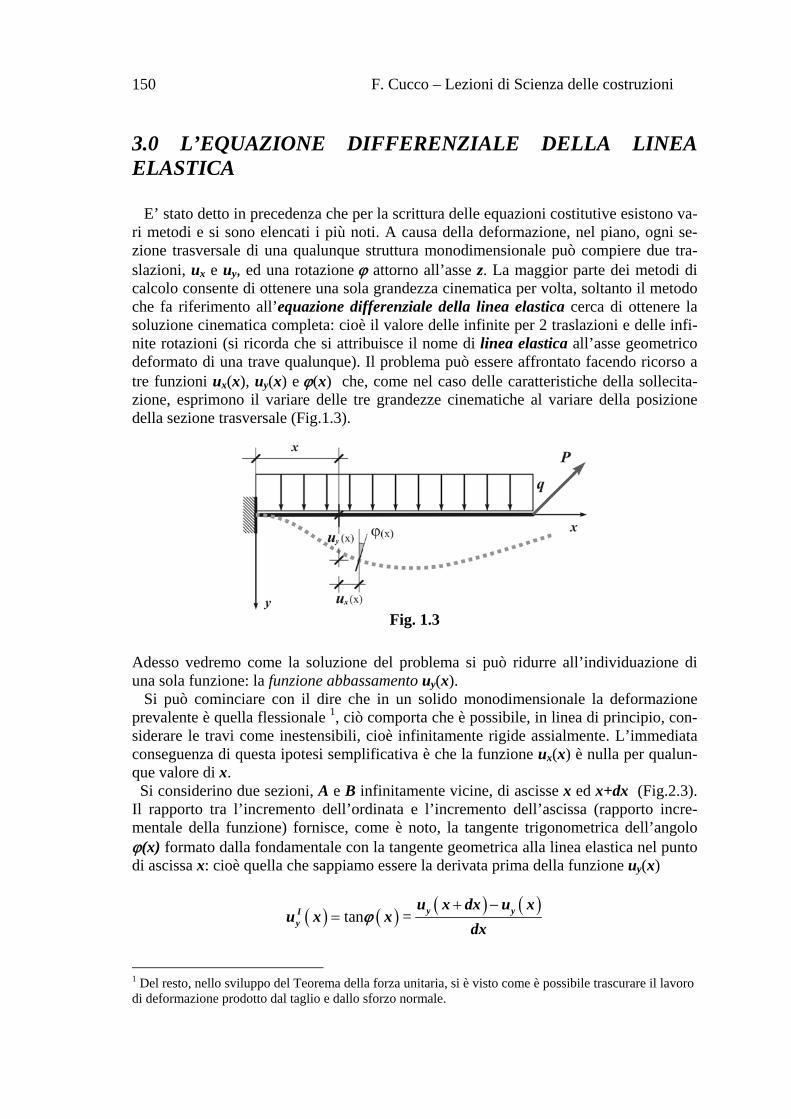
3.0 L’EQUAZIONE DIFFERENZIALE DELLA LINEA ELASTICA E’ stato detto in precedenza che per la scrittura delle equazioni costitutive esistono va-ri metodi e si sono elencati i più noti. A causa della deformazione, nel piano, ogni se-zione trasversale di una qualunque struttura monodimensionale può compiere due tra-slazioni, ux e uy, ed una rotazione attorno all’asse z. La maggior parte dei metodi di calcolo consente di ottenere una sola grandezza cinematica per volta, soltanto il metodo che fa riferimento all’equazione differenziale della linea elastica cerca di ottenere la soluzione cinematica completa: cioè il valore delle infinite per 2 traslazioni e delle infi-nite rotazioni (si ricorda che si attribuisce il nome di linea elastica all’asse geometrico deformato di una trave qualunque). Il problema può essere affrontato facendo ricorso a tre funzioni ux(x), uy(x) e(x) che, come nel caso delle caratteristiche della sollecita-zione, esprimono il variare delle tre grandezze cinematiche al variare della posizione della sezione trasversale (Fig.1.3).
Fig. 1.3
Adesso vedremo come la soluzione del problema si può ridurre all’individuazione di una sola funzione: la funzione abbassamento uy(x). Si può cominciare con il dire che in un solido monodimensionale la deformazione prevalente è quella flessionale 1, ciò comporta che è possibile, in linea di principio, con-siderare le travi come inestensibili, cioè infinitamente rigide assialmente. L’immediata conseguenza di questa ipotesi semplificativa è che la funzione ux(x) è nulla per qualun-que valore di x. Si considerino due sezioni, A e B infinitamente vicine, di ascisse x ed x+dx (Fig.2.3). Il rapporto tra l’incremento dell’ordinata e l’incremento dell’ascissa (rapporto incre-mentale della funzione) fornisce, come è noto, la tangente trigonometrica dell’angolo (x) formato dalla fondamentale con la tangente geometrica alla linea elastica nel punto di ascissa x: cioè quella che sappiamo essere la derivata prima della funzione uy(x)
tan =
y yI
y
u x dx u xu x x
dx
1 Del resto, nello sviluppo del Teorema della forza unitaria, si è visto come è possibile trascurare il lavoro di deformazione prodotto dal taglio e dallo sforzo normale.
F. Cucco – Lezioni di Scienza delle costruzioni
151
Poiché l’angolo (x) è molto piccolo, in quanto rappresenta la rotazione della sezione generica della trave nell’ambito dell’ipotesi di deformazioni infinitesime, possiamo scrivere che
tan Iyu x x x
Fig. 2.3
Abbiamo scoperto che la funzione (x), che fornisce le rotazioni delle varie sezioni al variare di x, non è altro che la derivata prima della funzione abbassamento uy(x). Quindi l’unica funzione da determinare è proprio la funzione uy(x) , nota essa, per derivazione, si otterrà anche la funzione rotazione (x). 3.1 Raggio di curvatura e curvatura Si considerino le 3 linee a), b) e c) (Fig.3.3). Esse sono tutte delle linee curve, in cosa differiscono tra loro? Possiamo dire, tra le altre cose, che la linea b) è più incurvata del-la a) e che, a sua volta, la linea c) è più incurvata della b). Questa caratteristica distintiva prende il nome di curvatura. Quindi, con un linguaggio più appropriato, possiamo affermare che le tre linee hanno certamente una diversa curvatura, ed essa risulta essere maggiore per la curva c). Nel caso di una linea retta si dice che la sua curvatura è nulla. In una linea la curvatura, quindi, può essere nulla, costante, come nel caso di un arco di cerchio d), oppure può variare da punto a punto e). Quale è il significato geometrico di curvatura e come se ne può individuare il valore? Una curva qualunque può sempre essere immaginata come formata da infiniti archi di cerchio il cui raggio r varia da punto a punto. Preso un tratto qualunque di una curva,
esso si può far rimpicciolire fino a far-lo coincidere, al limite, con una por-zione di arco di cerchio di raggio r. Ta-le cerchio tangente alla curva in un punto A e che ha con essa in comune una porzione ds della sua circonferen-za (Fig.4.3) prende il nome di cerchio osculatore ed il raggio di tale cerchio prende il nome di raggio di curvatura.
Fig. 4.3
Fig. 3.3
F. Cucco – Lezioni di Scienza delle costruzioni
152
La lunghezza dell’arco di cerchio in comune si può calcolare come prodotto dell’angolo al centro per il raggio ds d r : da cui
dsr
d
Prende il nome di curvatura k l’inverso del raggio di curvatura, pertanto
1 dk
r ds
Per ogni punto di coordinate (x, y), appartenente ad una certa curva di equazione y=f(x), è possibile definire, al variare di x, il valore della corrispondente curvatura k tramite la seguente espressione mutuata dalla Geometria Analitica
3 22
1
1
II
/I
f xk x
r x f x (1.3)
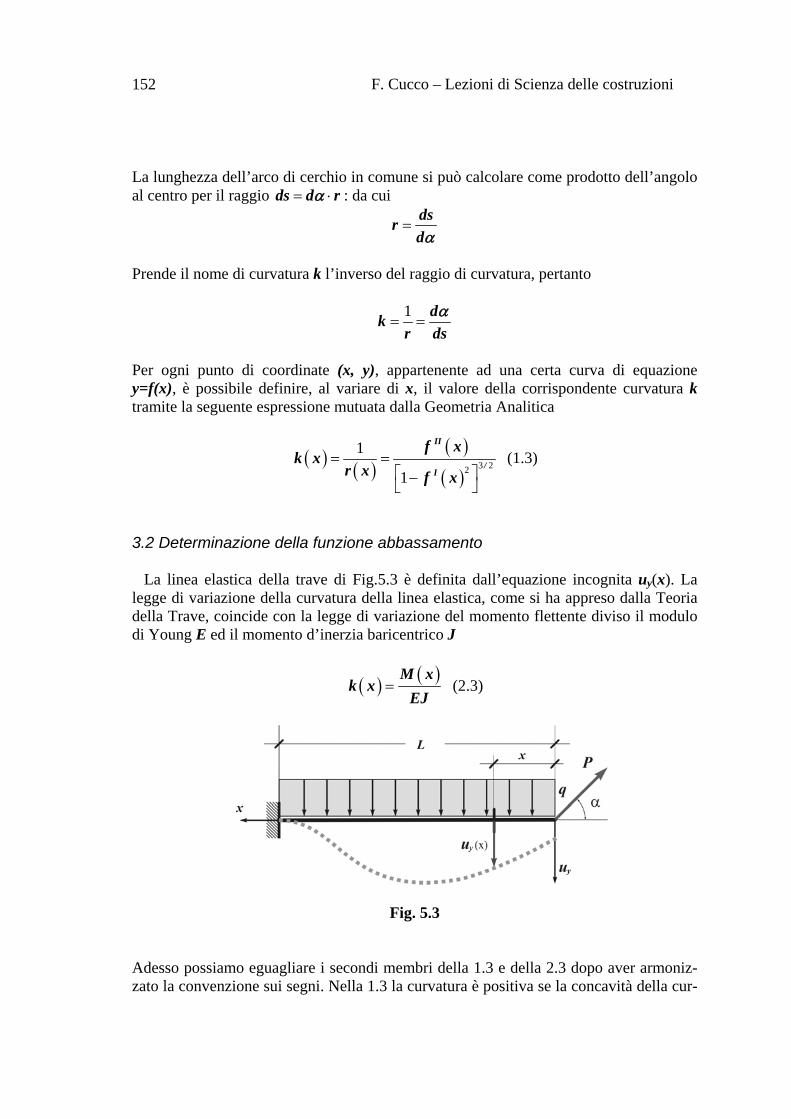
3.2 Determinazione della funzione abbassamento La linea elastica della trave di Fig.5.3 è definita dall’equazione incognita uy(x). La legge di variazione della curvatura della linea elastica, come si ha appreso dalla Teoria della Trave, coincide con la legge di variazione del momento flettente diviso il modulo di Young E ed il momento d’inerzia baricentrico J
M xk x
EJ (2.3)
Fig. 5.3
Adesso possiamo eguagliare i secondi membri della 1.3 e della 2.3 dopo aver armoniz-zato la convenzione sui segni. Nella 1.3 la curvatura è positiva se la concavità della cur-

F. Cucco – Lezioni di Scienza delle costruzioni
153
va è rivolta verso il basso, mentre nella 2.3 la curvatura è positiva se il momento è posi-tivo. Poiché, per convenzione, ad un momento positivo corrisponde una concavità verso l’alto, la 1.3 e la 2.3 hanno convezione opposta. Pertanto occorre scrivere
3 22
1
II
/I
f x M x
EJf x
Nel caso della trave di Fig.5.3 la funzione f(x) coincide con la funzione spostamento uy(x) e la derivata prima f I(x)= uI
y(x) coincide con la funzione rotazione (x), quindi sostituendo
3 22
1
IIy
/
u x M x
EJx (3.3)
Le rotazioni sono delle grandezze infinitesime che elevate al quadrato diventano assolu-
tamente trascurabili (infinitesimi di ordine superiore), quindi ponendo 20x , la 3.3
diventa
II
y
M xu x
EJ (4.3)
La 4.3 è quella che prende il nome di equazione differenziale della linea elastica ed è un’equazione differenziale del secondo ordine la cui soluzione (la funzione spostamento uy(x)) può ottenersi per semplice integrazione. Se la funzione –M(x), salvo a dividerla per EJ, rappresenta la derivata seconda della funzione cercata, basta calcolare il mo-mento flettente nella sezione generica x ed integrarlo due volte. ESEMPIO1.3 Si trovi la funzione abbassamento uy(x) e la conseguente funzione rotazione (x) della trave a mensola di Fig. 5.3. Il momento flettente nella sezione generica vale
2
sen2
qxM x P x
Pertanto l’equazione differenziale della linea elastica della trave è la seguente
2
sen2
IIy
qxEJ u x P x
Integrando una prima volta si ottiene la funzione rotazione

F. Cucco – Lezioni di Scienza delle costruzioni
154
3 2
1
sen
6 2
I
y
qx P xEJ u x EJ x C
(5.3)
Integrando una seconda volta si ottiene la funzione spostamento
4 3
1 2
sen
24 6
qx P xEJ u x C x C
(6.3)
Il problema non è ancora risolto, in quanto le costanti d’integrazione C1 e C2 sono delle quantità incognite. Per ottenere il valore delle costanti di integrazione occorre scrivere delle ulteriori equazioni che prendono il nome di equazioni al contorno. Tali equazioni possono essere, a seconda dei casi, o delle equazioni di congruenza o delle equazioni di equilibrio. Osservando la struttura di Fig. 5.3 ci accorgiamo che la presenza dell’incastro fa sì che la sezione di ascissa x=L non deve ne ruotare ne traslare. Pertanto al secondo mem-bro della 5.3 e della 6.3, sostituendo L al posto di x ed eguagliando a zero si ottiene un sistema di due equazioni nelle due incognite C1 e C2.
3 2
1
4 3
1 2
sen0
6 2
sen0
24 6
qL P LC
qL P LC L C
Dalla prima, risolvendo rispetto a C1 si ottiene
2 3
1
sen
2 6
P L qLC
Infine sostituendo nella seconda e risolvendo rispetto a C2
4 3 2 3
2
sen sen0
24 6 2 6
qL P L P L qLL C
4 4 3 3
2
sen sen
24 6 6 2
qL qL P L P LC
sommando i vari termini omogenei si ottiene
4 3
2
sen
8 3
qL P LC
Ottenute le costanti d’integrazione si sostituiscono nella 5.3 e nella 6.3 e, dividendo membro a membro per EJ, si ottengono le funzioni cercate

F. Cucco – Lezioni di Scienza delle costruzioni
155
3 2 2 3sen sen
6 2 2 6
qx P x P L qLx
EJ EJ EJ EJ
4 3 2 3 4 3sen sen sen
24 6 2 6 8 3
qx P x P L qL qL P Lu x x
EJ EJ EJ EJ EJ EJ
Le due funzioni precedenti contengono al loro interno tutte le infinite rotazioni ed ab-bassamenti di tutte le infinite sezioni della trave. Se si vuol calcolare ad es. quanto vale la rotazione della sezione di mezzeria basta sostituire, nella funzione rotazione (x), L/2 al posto di x
3 2 2 3
3 2 2 3 3 2
sen sen
2 6 2 2 2 2 6
sen sen 7 sen
2 48 8 2 6 48 2
L q L P L P L qL
EJ EJ EJ EJ
L qL P L P L qL qL P L
EJ EJ EJ EJ EJ EJ
Se si vuol calcolare lo spostamento verticale in corrispondenza dell’estremo libero basta sostituire, nella funzione spostamento uy(x), 0 al posto di x
4 3sen
08 3
y
qL P Lu
EJ EJ
Il valore ottenuto è il massimo spostamento, quella che in letteratura viene chiamata freccia elastica e si indica con f. ESEMPIO 2.3 Si trovi la funzione abbassamento uy(x) e la conseguente funzione rotazione (x) della trave di Fig. 6.3
Fig. 6.3
Questa volta, non essendo più in presenza di una trave a sbalzo, prima di ottenere la funzione M(x), occorre calcolare le reazioni dei vincoli esterni. Svincolando, scrivendo e risolvendo le equazioni di equilibrio si ottengono i valori riportati in Fig. 7.3
F. Cucco – Lezioni di Scienza delle costruzioni
156
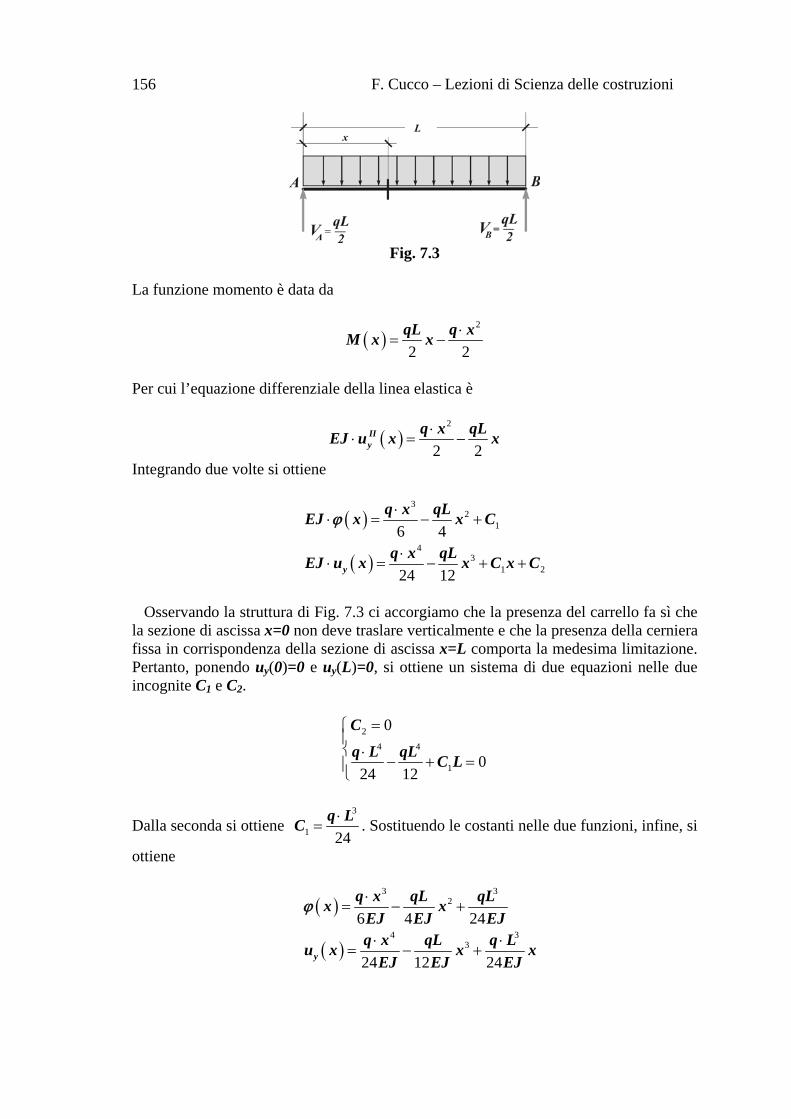
Fig. 7.3
La funzione momento è data da
2
2 2
qL q xM x x
Per cui l’equazione differenziale della linea elastica è
2
2 2
II
y
q x qLEJ u x x
Integrando due volte si ottiene
3
216 4
q x qLEJ x x C
4
31 224 12y
q x qLEJ u x x C x C
Osservando la struttura di Fig. 7.3 ci accorgiamo che la presenza del carrello fa sì che la sezione di ascissa x=0 non deve traslare verticalmente e che la presenza della cerniera fissa in corrispondenza della sezione di ascissa x=L comporta la medesima limitazione. Pertanto, ponendo uy(0)=0 e uy(L)=0, si ottiene un sistema di due equazioni nelle due incognite C1 e C2.
2
4 4
1
0
024 12
C
q L qLC L
Dalla seconda si ottiene 3
1 24
q LC
. Sostituendo le costanti nelle due funzioni, infine, si
ottiene
3 3
2
6 4 24
q x qL qLx x
EJ EJ EJ
4 3
3
24 12 24y
q x qL q Lu x x x
EJ EJ EJ
F. Cucco – Lezioni di Scienza delle costruzioni
157
L’abbassamento massimo, la così detta freccia elastica, si trova, per simmetria, in cor-rispondenza della sezione di mezzo, pertanto per ottenerne il valore basta sostituire L/2 al posto di x nella funzione spostamento
4 3 3 4 4 4
4
2 24 2 12 2 24 2 384 96 48
5
384
y
L q L qL L q L L qL qL q Lf u
EJ EJ EJ EJ EJ EJ
qLf
EJ
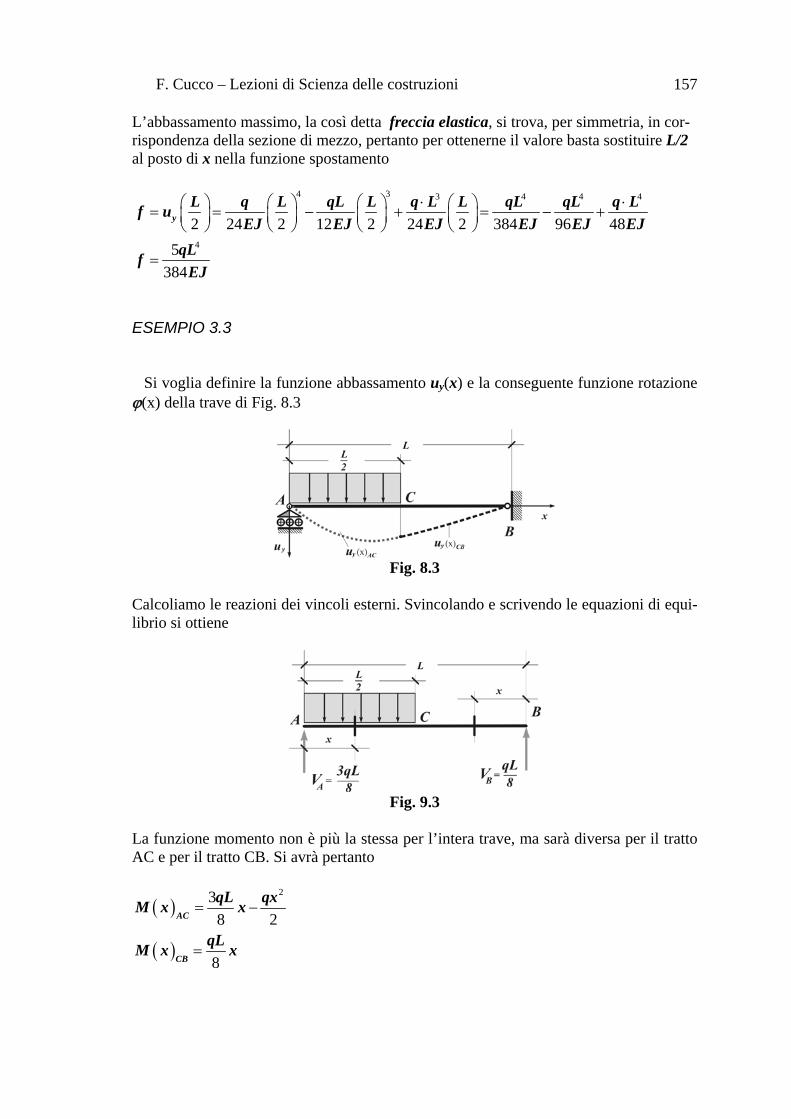
ESEMPIO 3.3 Si voglia definire la funzione abbassamento uy(x) e la conseguente funzione rotazione (x) della trave di Fig. 8.3
Fig. 8.3
Calcoliamo le reazioni dei vincoli esterni. Svincolando e scrivendo le equazioni di equi-librio si ottiene
Fig. 9.3
La funzione momento non è più la stessa per l’intera trave, ma sarà diversa per il tratto AC e per il tratto CB. Si avrà pertanto
23
8 2
8
AC
CB
qL qxM x x
qLM x x

F. Cucco – Lezioni di Scienza delle costruzioni
158
Come conseguenza avremo due equazioni differenziali della linea elastica, una per cia-scun tratto di trave
2 3
2 8 II
yAC AC
qx qLEJ u x x
8
IIyCB CB
qLEJ u x x
E’ stato attribuito l’indice di appartenenza al tratto anche alle grandezze fisico geome-triche EJ in quanto, in generale, queste grandezze potrebbero essere diverse da tratto a tratto. Integrando due volte entrambe le equazioni si ottengono le funzioni rotazione e spo-stamento per i due tratti
32
1
43
1 2
3
6 16
3
24 48
AC AC
yAC AC
q x qLEJ x x C
q x qLEJ u x x C x C
21
31 2
16
48
CB CB
yCB CB
qLEJ x x D
qLEJ u x x D x D
Le costanti d’integrazione da calcolare sono 4, due per ciascun tratto. Studiando la strut-tura di Fig. 8.3 si osserva che la presenza del carrello impedisce alla sezione A di trasla-re verticalmente. Analogamente, la presenza della cerniera fissa in corrispondenza della sezione B comporta la medesima limitazione. Pertanto, ponendo uy(0)AC=0 e uy(0)CB=0, otteniamo due delle 4 equazioni al contorno ed il valore delle costanti C2 e D2:
2 0C
2 0D
Rimangono da scrivere altre due equazioni al contorno per il calcolo delle restanti co-stanti di integrazione C1 e D1. Le costrizioni cinematiche imposte dai vincoli esterni so-no state tutte sfruttate, che natura avranno queste ulteriori equazioni ? Si può far ricorso alle condizioni di compatibilità imposte dai vincoli interni ed in particolare alle condi-zioni imposte dal vincolo di continuità che collega mutuamente le 2 sezioni C’ e C” appartenenti ai due tratti CA e CB. Tali sezioni, essendo in pratica una sola sezione in virtù del vincolo di continuità, devono, ovviamente, subire sia la medesima traslazione verticale che la medesima rotazione: la traslazione verticale relativa e la rotazione rela-tiva devono essere nulle. Le ulteriori equazioni di congruenza sono le seguenti equazio-ni di continuità

F. Cucco – Lezioni di Scienza delle costruzioni
159
2 2
2 2
AC CBAC CB
y yAC CBAC CB
L LEJ EJ
L LEJ u EJ u
Il segno meno nella rotazione a secondo membro discende dal fatto che nei due tratti il sistema di riferimento x, y, z è ruotato di 180° attorno ad y e pertanto se la rotazione po-sitiva per il pezzo di sinistra è quella oraria, per il pezzo di destra è quella opposta (Fig.10.3). Esplicitando si ottiene
3 2 2
1 1
3
6 2 16 2 16 2
q L qL L qL LC D
4 3 3
1 1
3
24 2 48 2 2 48 2 2
q L qL L L qL L LC D
Sviluppando ed ordinando
3
1 1
3
1 1
024
0192
qLC D
qLC D
Da cui risolvendo
3
1
3
1
7
384
9
384
qLD
qLC
Le equazioni finali sono
3 32
4 33
3 9
6 16 384
3 9
24 48 384
ACAC AC AC
y ACAC AC AC
q x qL qLx x
EJ EJ EJ
q x qL qLu x x x
EJ EJ EJ
Fig. 10.3
F. Cucco – Lezioni di Scienza delle costruzioni
160
32
33
7
16 384
7
48 384
CBCB CB
y CBCB CB
qL qLx x
EJ EJ
qL qLu x x x
EJ EJ
Se si vuole calcolare ad es. l’abbassamento e la rotazione della sezione di mezzeria, es-sendo la sezione C appartenente sia al tratto AC che al tratto CB, basta porre x=L/2 e sostituirlo in una delle due funzioni rotazione e abbassamento
3 45
2 384 2 768yCB CBCB CB
L qL L qL; u
EJ EJ
Se si vuole calcolare ad es. la rotazione della sezione distante L/4 dalla sezione A, es-sendo questa sezione appartenente al solo tratto AC, è necessario porre x=L/4 e sosti-tuirlo nella funzione rotazione del tratto AC
3 2 3 33 9
4 6 4 16 4 384 96AC AC AC AC AC
L q L qL L qL qL
EJ EJ EJ EJ
Da questo esempio ci si rende subito conto che le equazioni differenziali da risolvere sa-ranno sempre tante quanti sono i tratti di variabilità del momento flettente e che il nu-mero di equazioni al contorno sarà sempre uguale al numero dei tratti per 2. Pertanto se è vero che con tale metodo si ottiene una soluzione cinematica completa della struttura è altrettanto vero che la sua complessità cresce notevolmente al variare del numero e del-la distribuzione delle caratteristiche meccaniche agenti sulla trave. 3.3 Equazione differenziale della linea elastica per le strutture iperstatiche Si voglia definire la funzione abbassamento uy(x) e la conseguente funzione rotazione (x) della trave di Fig. 11.3
Fig. 11.3
F. Cucco – Lezioni di Scienza delle costruzioni
161
Si è visto in precedenza che la soluzione del problema consiste in una doppia integra-zione dell’equazione differenziale della linea elastica
II
y
M xu x
EJ (4.3)
in cui M(x) è la funzione momento flettente. Se la struttura è isostatica il calcolo di M(x) può avvenire, con una certa semplicità, mediante l’uso delle sole equazioni di e-quilibrio. Se, invece, la struttura è iperstatica, il calcolo di M(x) è più complesso e può essere effettuato soltanto dopo aver applicato il metodo delle forze o il metodo degli spostamenti. Esiste, tuttavia, un’equazione differenziale di ordine più elevato della precedente che consentirà di operare direttamente evitando la soluzione preventiva del sistema ipersta-tico. Derivando il primo e il secondo membro della (4.3) si ottiene
III
y
M' xu x
EJ (7.3)
Poiché la derivata prima della funzione momento flettente è la funzione taglio, la 7.3 si può anche scrivere
III
y
T xu x
EJ (8.3)
Derivando, ancora, il primo e il secondo membro della (8.3) si ottiene
IV
y
T' xu x
EJ (9.3)
Poiché la derivata prima della funzione taglio è la funzione carico qv(x) cambiata di se-gno, la 9.3 si può anche scrivere
vIV
y
q xu x
EJ (10.3)
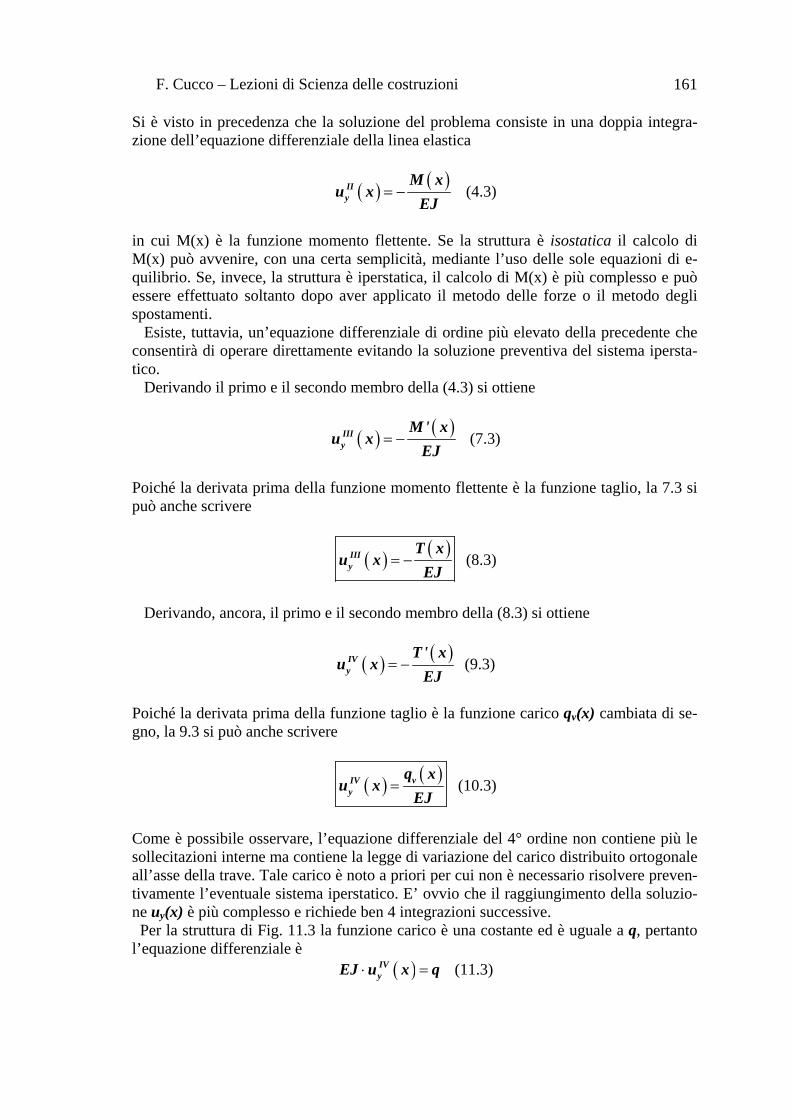
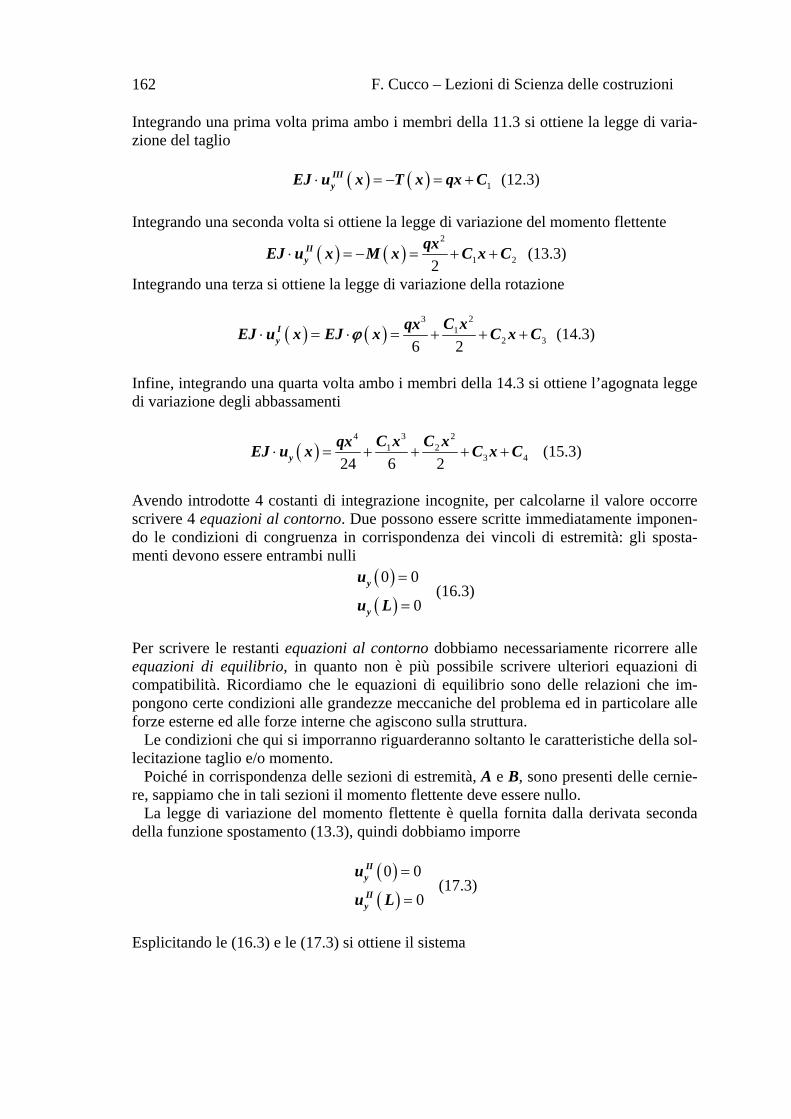
Come è possibile osservare, l’equazione differenziale del 4° ordine non contiene più le sollecitazioni interne ma contiene la legge di variazione del carico distribuito ortogonale all’asse della trave. Tale carico è noto a priori per cui non è necessario risolvere preven-tivamente l’eventuale sistema iperstatico. E’ ovvio che il raggiungimento della soluzio-ne uy(x) è più complesso e richiede ben 4 integrazioni successive. Per la struttura di Fig. 11.3 la funzione carico è una costante ed è uguale a q, pertanto l’equazione differenziale è
IVyEJ u x q (11.3)
F. Cucco – Lezioni di Scienza delle costruzioni
162
Integrando una prima volta prima ambo i membri della 11.3 si ottiene la legge di varia-zione del taglio
1 IIIyEJ u x T x qx C (12.3)
Integrando una seconda volta si ottiene la legge di variazione del momento flettente
2
1 22 II
y
qxEJ u x M x C x C (13.3)
Integrando una terza si ottiene la legge di variazione della rotazione
23
12 36 2
Iy
C xqxEJ u x EJ x C x C (14.3)
Infine, integrando una quarta volta ambo i membri della 14.3 si ottiene l’agognata legge di variazione degli abbassamenti
3 24
1 23 424 6 2
y
C x C xqxEJ u x C x C (15.3)
Avendo introdotte 4 costanti di integrazione incognite, per calcolarne il valore occorre scrivere 4 equazioni al contorno. Due possono essere scritte immediatamente imponen-do le condizioni di congruenza in corrispondenza dei vincoli di estremità: gli sposta-menti devono essere entrambi nulli
0 0
0
y
y
u
u L (16.3)
Per scrivere le restanti equazioni al contorno dobbiamo necessariamente ricorrere alle equazioni di equilibrio, in quanto non è più possibile scrivere ulteriori equazioni di compatibilità. Ricordiamo che le equazioni di equilibrio sono delle relazioni che im-pongono certe condizioni alle grandezze meccaniche del problema ed in particolare alle forze esterne ed alle forze interne che agiscono sulla struttura. Le condizioni che qui si imporranno riguarderanno soltanto le caratteristiche della sol-lecitazione taglio e/o momento. Poiché in corrispondenza delle sezioni di estremità, A e B, sono presenti delle cernie-re, sappiamo che in tali sezioni il momento flettente deve essere nullo. La legge di variazione del momento flettente è quella fornita dalla derivata seconda della funzione spostamento (13.3), quindi dobbiamo imporre
0 0
0
IIy
IIy
u
u L (17.3)
Esplicitando le (16.3) e le (17.3) si ottiene il sistema
F. Cucco – Lezioni di Scienza delle costruzioni
163
4
3 241 2
3 4
2
2
1 2
0
024 6 2
0
02
C
C L C LqLC L C
C
qLC L C
Sostituendo i valori nulli
341
3
2
1
024 6
02
C LqLC L
qLC L
Da cui si ricava
1
3
3
2
12
qLC
qLC
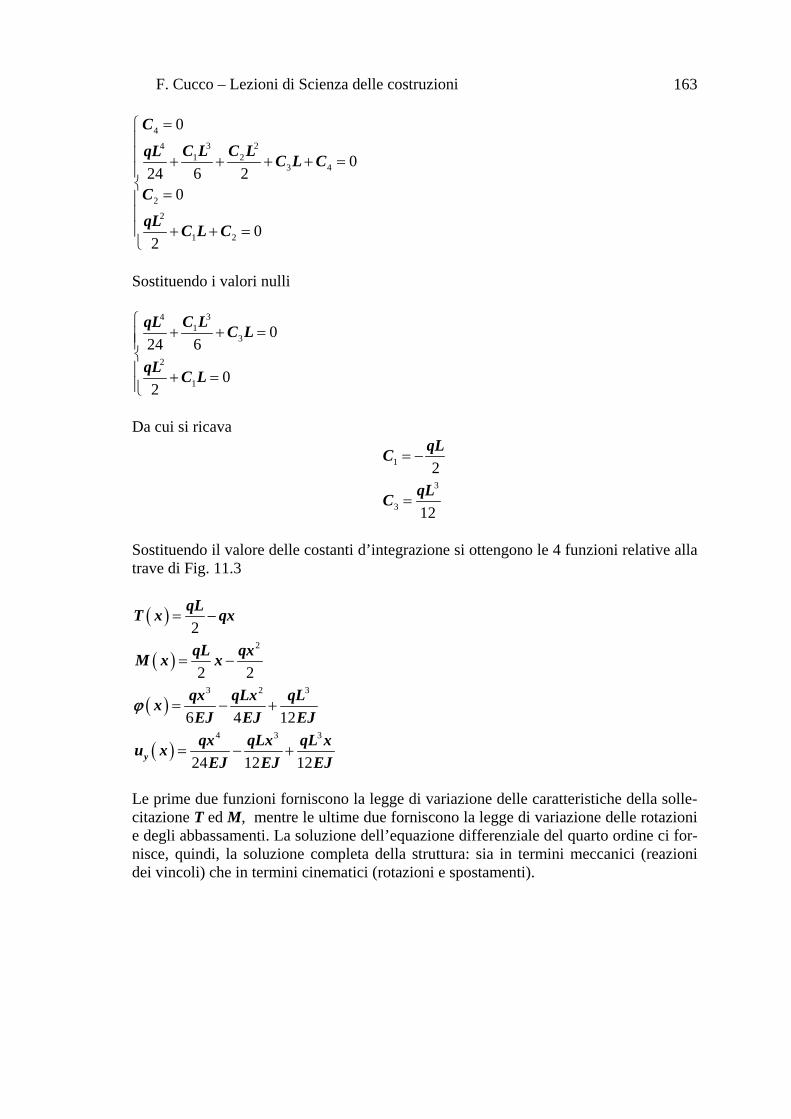
Sostituendo il valore delle costanti d’integrazione si ottengono le 4 funzioni relative alla trave di Fig. 11.3
2
3 2 3
4 3 3
2
2 2
6 4 12
24 12 12y
qLT x qx
qL qxM x x
qx qLx qLx
EJ EJ EJ
qx qLx qL xu x
EJ EJ EJ
Le prime due funzioni forniscono la legge di variazione delle caratteristiche della solle-citazione T ed M, mentre le ultime due forniscono la legge di variazione delle rotazioni e degli abbassamenti. La soluzione dell’equazione differenziale del quarto ordine ci for-nisce, quindi, la soluzione completa della struttura: sia in termini meccanici (reazioni dei vincoli) che in termini cinematici (rotazioni e spostamenti).

F. Cucco – Lezioni di Scienza delle costruzioni
164
ESEMPIO 4.3 Si vogliano definire, attraverso l’uso dell’equazione differenziale della linea elastica, la funzione taglio T(x), la funzione momento M(x), la funzione abbassamento uy(x) e la conseguente funzione rotazione (x) della trave 1 volta iperstatica di Fig. 12.3
Fig. 12.3
La funzione carico distribuito non è più la stessa per l’intera trave, ma sarà diversa per il tratto AC e per il tratto CB. Si avrà pertanto
0
AC
CB
q x q
q x
Come conseguenza avremo due equazioni differenziali della linea elastica
IVyAC AC
EJ u x q
0 IVyCB CB
EJ u x
E’ stato attribuito l’indice anche alle grandezze fisico geometriche EJ in quanto, in ge-nerale, queste grandezze potrebbero essere diverse da tratto a tratto. Integrando 4 volte entrambe le equazioni si ottengono le funzioni cercate
1
2
1 2
231
2 3
3 241 2
3 4
2
6 2
24 6 2
IIIyAC AC AC
IIyAC AC AC
AC AC
yAC AC
EJ u x T x qx C
qxEJ u x M x C x C
C xqxEJ x C x C
C x C xqxEJ u x C x C
(18.3)

F. Cucco – Lezioni di Scienza delle costruzioni
165
1
1 2
21
2 3
3 21 2
3 4
2
6 2
IIIyCB CB CB
IIyCB CB CB
CB CB
yCB CB
EJ u x T x D
EJ u x M x D x D
D xEJ x D x D
D x D xEJ u x D x D
(19.3)
Adesso occorrerà scrivere 8 condizioni al contorno. Tali condizioni, come vedremo, sa-ranno 4 di congruenza e 4 di equilibrio. Compatibilità con i vincoli esterni
0 0
0 0
yAC AC
CB CB
EJ u
EJ
Compatibilità con il vincolo interno in C
2 2
y yAC CBAC CB
L LEJ u EJ u
2 2
AC CB
AC CB
L LEJ EJ
Equilibrio
0 0 0
0 0 0
2 2 2 2
2 2 2 2
IIyAC AC AC
IIIyCB CB CB
II IIy yAC CB
AC CB AC CB
III IIIy yAC CB
AC CB AC CB
EJ u M
EJ u T
L L L LEJ u EJ u ; M M
L L L LEJ u EJ u ; T T
Esplicitando si ottiene
4
3
4 3 2 3 221 2 1 2
3 4 3 4
3 2 2
1 12 3 2 3
0
0
24 2 6 2 2 2 2 6 2 2 2 2
6 2 2 2 2 2 2 2
C
D
C C x D Dq L L L L L L LC C D D
C Dq L L L L LC C D D

F. Cucco – Lezioni di Scienza delle costruzioni
166
2
1
2
1 2 1 2
1 1
0
0
2 2 2 2
2
C
D
q L L LC C D D
Lq C D
Sostituendo i valori nulli
4 3 2
1 23 4
3 2
13 2
2
1 2
1
24 2 6 2 2 2 2
6 2 2 2 2
2 2 2
02
C Dq L L L LC D
Cq L L LC D
q L LC D
Lq C
Risolvendo il sistema si ottiene
1
2
2
3
3
4
4
2
8
5
48
23
384
qLC
qLD
qLC
qLD
Sostituendo nelle 18.3 e 19.3 si ottengono le relazioni finali
2
2
2 2
IIIyAC AC AC
IIyAC AC AC
qLEJ u x T x qx
qL qxEJ u x M x x
F. Cucco – Lezioni di Scienza delle costruzioni
167
3 2 3
4 3 3
5
6 4 48
5
24 12 48
ACAC AC AC
y ACAC AC AC
qx qLx qLx
EJ EJ EJ
qx qLx qLu x x
EJ EJ EJ
(18.3)
2
2
2 42
0
8
8
23
16 384
IIIyCB CB CB
IIyCB CB CB
CBCB
y CBCB CB
EJ u x T x
qLEJ u x M x
qLx x
EJ
qL qLu x x
EJ EJ
Le prime due funzioni di ciascun tratto, ribadiamo, forniscono la legge di variazione delle caratteristiche della sollecitazione T ed M, mentre le ultime due forniscono la leg-ge di variazione delle rotazioni e degli abbassamenti. Dall’esempio svolto ci si rende subito conto che le equazioni differenziali da risolvere saranno sempre tante quanti sono i tratti di variabilità del carico distribuito qv(x) e che il numero di equazioni al contorno sarà sempre uguale al numero dei tratti per 4. Pertanto se è vero che con tale metodo si ottiene una soluzione completa della struttura iperstati-ca (meccanica e cinematica), è altrettanto vero che la sua complessità ne sconsiglia un uso sistematico per sistemi strutturali complessi.
F. Cucco – Lezioni di Scienza delle costruzioni
168
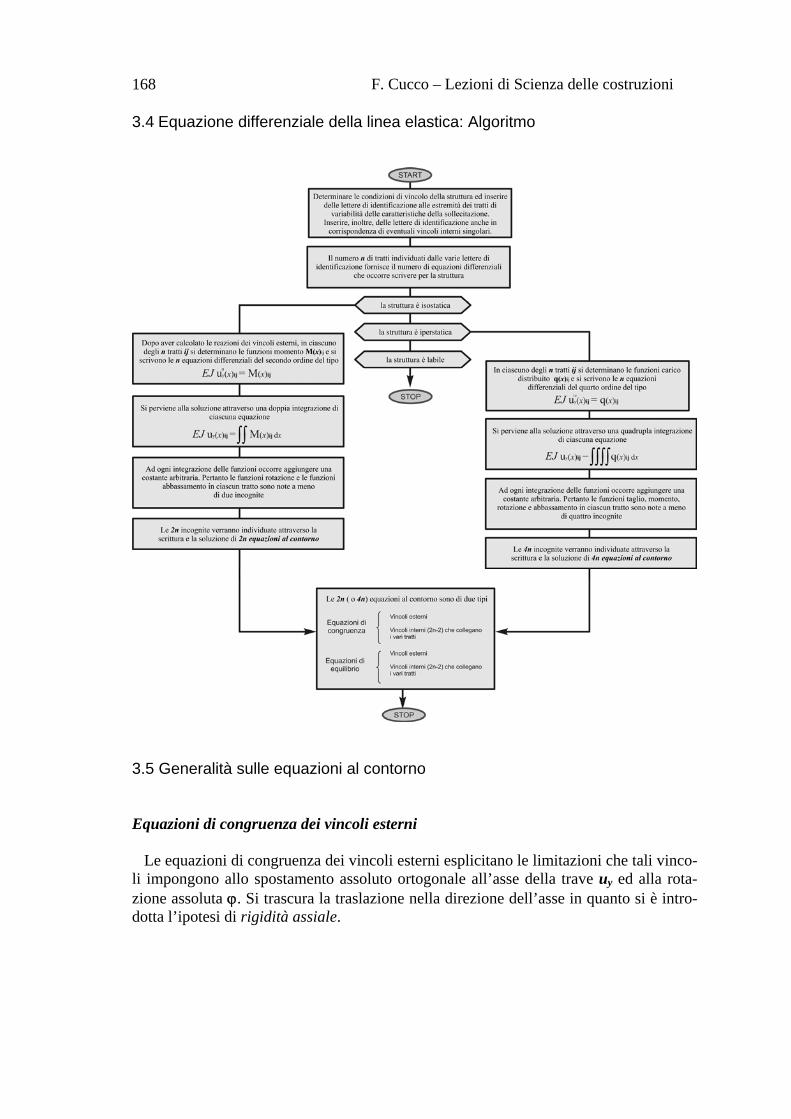
3.4 Equazione differenziale della linea elastica: Algoritmo
3.5 Generalità sulle equazioni al contorno Equazioni di congruenza dei vincoli esterni Le equazioni di congruenza dei vincoli esterni esplicitano le limitazioni che tali vinco-li impongono allo spostamento assoluto ortogonale all’asse della trave uy ed alla rota-zione assoluta . Si trascura la traslazione nella direzione dell’asse in quanto si è intro-dotta l’ipotesi di rigidità assiale.

F. Cucco – Lezioni di Scienza delle costruzioni
169
Fig. 13.3
Se il vincolo esterno è un incastro (Fig. 13.3a) esso impedisce sia la traslazione orto-gonale all’asse che la rotazione, pertanto è possibile scrivere le due equazioni di con-gruenza
0
0
Sy
S
u
Se il vincolo esterno è un carrello con piano di scorrimento verticale (Fig. 13.3b) esso impedisce soltanto la traslazione parallela all’asse della trave, pertanto non è possibile scrivere alcuna equazione di congruenza. Se il piano di scorrimento, invece, è orizzonta-le o diversamente inclinato2 è possibile scrivere l’equazione
0Syu
Se il vincolo esterno è un quadripendolo (Fig. 13.3c) esso impedisce la rotazione, per-tanto è possibile scrivere l’equazione di congruenza
0S
Se il vincolo esterno è una cerniera fissa (Fig. 13.3d) essa impedisce la traslazione or-togonale all’asse della trave, pertanto è possibile scrivere l’equazione di congruenza
0Syu
Se il vincolo esterno è un pattino con piano di scorrimento ortogonale all’asse (Fig.13.3e) esso impedisce la rotazione, pertanto è possibile scrivere l’equazione di congruenza
0S
Se il piano di scorrimento, invece, è orizzontale o diversamente inclinato è possibile scrivere anche l’equazione
0Syu
2 Occorre sempre ricordare l'ipotesi di indeformabilità assiale della trave essa non può né accorciarsi né allungarsi.
F. Cucco – Lezioni di Scienza delle costruzioni
170
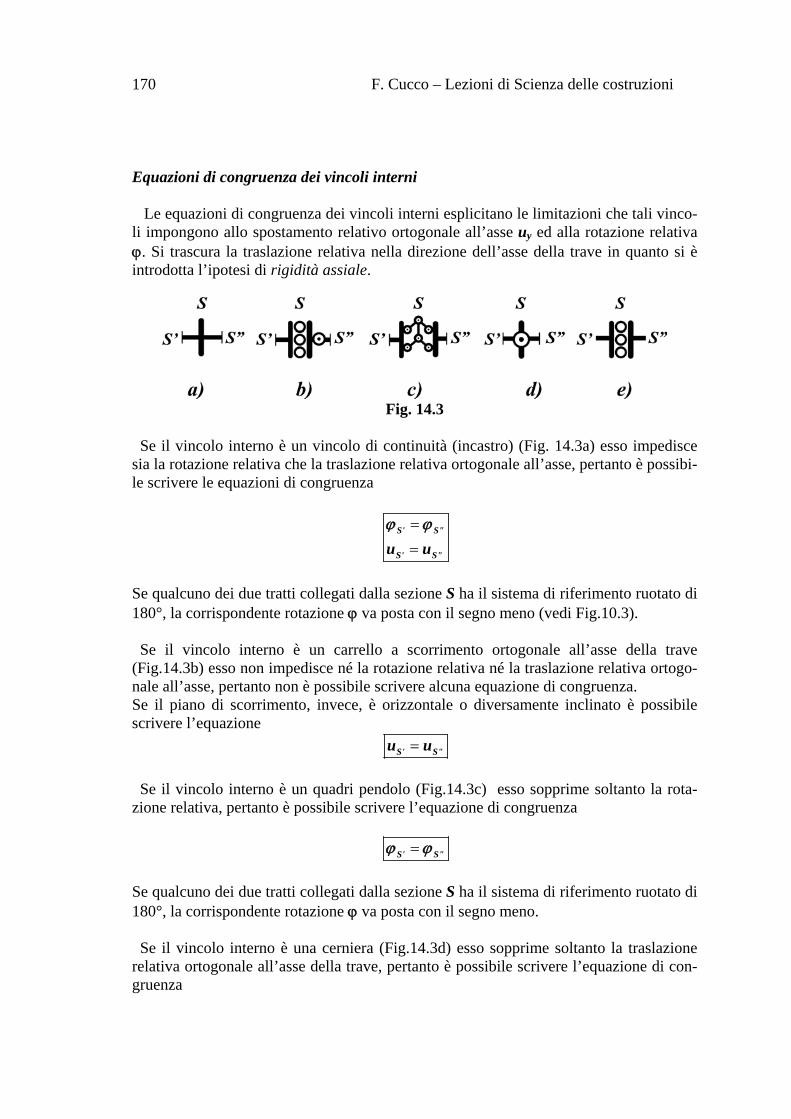
Equazioni di congruenza dei vincoli interni Le equazioni di congruenza dei vincoli interni esplicitano le limitazioni che tali vinco-li impongono allo spostamento relativo ortogonale all’asse uy ed alla rotazione relativa . Si trascura la traslazione relativa nella direzione dell’asse della trave in quanto si è introdotta l’ipotesi di rigidità assiale.
Fig. 14.3
Se il vincolo interno è un vincolo di continuità (incastro) (Fig. 14.3a) esso impedisce sia la rotazione relativa che la traslazione relativa ortogonale all’asse, pertanto è possibi-le scrivere le equazioni di congruenza
S' S"
S' S"u u
Se qualcuno dei due tratti collegati dalla sezione S ha il sistema di riferimento ruotato di 180°, la corrispondente rotazione va posta con il segno meno (vedi Fig.10.3). Se il vincolo interno è un carrello a scorrimento ortogonale all’asse della trave (Fig.14.3b) esso non impedisce né la rotazione relativa né la traslazione relativa ortogo-nale all’asse, pertanto non è possibile scrivere alcuna equazione di congruenza. Se il piano di scorrimento, invece, è orizzontale o diversamente inclinato è possibile scrivere l’equazione
S' S"u u
Se il vincolo interno è un quadri pendolo (Fig.14.3c) esso sopprime soltanto la rota-zione relativa, pertanto è possibile scrivere l’equazione di congruenza
S' S"
Se qualcuno dei due tratti collegati dalla sezione S ha il sistema di riferimento ruotato di 180°, la corrispondente rotazione va posta con il segno meno. Se il vincolo interno è una cerniera (Fig.14.3d) esso sopprime soltanto la traslazione relativa ortogonale all’asse della trave, pertanto è possibile scrivere l’equazione di con-gruenza

F. Cucco – Lezioni di Scienza delle costruzioni
171
S' S"u u
Se il vincolo interno è un pattino a scorrimento ortogonale all’asse della trave (Fig.14.3e) esso impedisce soltanto la rotazione relativa, pertanto è possibile scrivere la equazione di congruenza
S' S"
Se qualcuno dei due tratti collegati dalla sezione S ha il sistema di riferimento ruotato di 180°, la corrispondente rotazione va posta con il segno meno. Se il piano di scorrimento, invece, è orizzontale o diversamente inclinato è possibile scrivere anche l’equazione
S' S"u u
Equazioni di equilibrio dei vincoli esterni
Le equazioni di equilibrio dei vincoli esterni si scrivono considerando tali vincoli iso-lati dalla struttura tramite un taglio nella sezione di estremità S. In corrispondenza del taglio vanno applicate le caratteristiche della sollecitazione MS e TS (Fig. 15.3). Sempre nella sezione terminale S potrebbero essere applicate una forza P ed una coppia K. Se il vincolo esterno è un incastro (Fig. 15.3a) non esiste alcuna possibilità di moto per cui le condizioni di equilibrio sono già soddisfatte.
Fig. 15.3
Se il vincolo esterno è un carrello (Fig. 15.3b) sono possibili una traslazione ed una ro-tazione, pertanto possono scriversi le due equazioni
0
0s
S
T P
M K
F. Cucco – Lezioni di Scienza delle costruzioni
172
Se la traslazione del carrello avviene secondo una direzione generica r è necessario pro-iettare su tale direzione sia il taglio che il carico P.
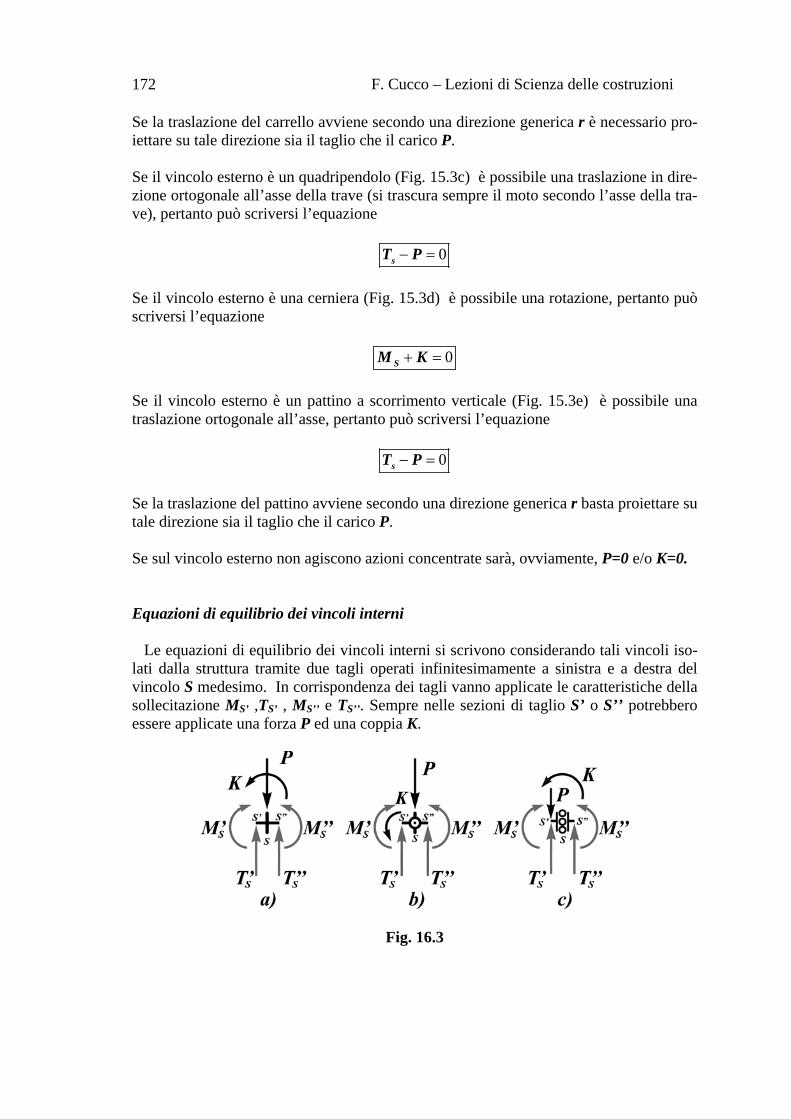
Se il vincolo esterno è un quadripendolo (Fig. 15.3c) è possibile una traslazione in dire-zione ortogonale all’asse della trave (si trascura sempre il moto secondo l’asse della tra-ve), pertanto può scriversi l’equazione
0sT P
Se il vincolo esterno è una cerniera (Fig. 15.3d) è possibile una rotazione, pertanto può scriversi l’equazione
0SM K
Se il vincolo esterno è un pattino a scorrimento verticale (Fig. 15.3e) è possibile una traslazione ortogonale all’asse, pertanto può scriversi l’equazione
0sT P
Se la traslazione del pattino avviene secondo una direzione generica r basta proiettare su tale direzione sia il taglio che il carico P. Se sul vincolo esterno non agiscono azioni concentrate sarà, ovviamente, P=0 e/o K=0. Equazioni di equilibrio dei vincoli interni
Le equazioni di equilibrio dei vincoli interni si scrivono considerando tali vincoli iso-lati dalla struttura tramite due tagli operati infinitesimamente a sinistra e a destra del vincolo S medesimo. In corrispondenza dei tagli vanno applicate le caratteristiche della sollecitazione MS’ ,TS’ , MS’’ e TS’’. Sempre nelle sezioni di taglio S’ o S’’ potrebbero essere applicate una forza P ed una coppia K.
Fig. 16.3

F. Cucco – Lezioni di Scienza delle costruzioni
173
Se il vincolo interno è un vincolo di continuità (incastro, Fig.16.3a), esso, isolato, pos-siede 3 gradi di libertà assoluti. Trascurando la traslazione in direzione dell’asse della trave si scriveranno le seguenti equazioni di moto assoluto
0
0
S S
''S S
' ''
'
T T P
M M K
Se il vincolo interno è una cerniera (Fig.16.3b), esso, isolato, possiede 3 gla e 1 glr, pertanto (trascurando sempre la traslazione secondo l’asse della trave, si scriveranno 2 equazioni di moto assoluto ed una di moto relativo. La eventuale coppia concentrata K, che interviene anche nel moto relativo, deve essere applicata su una delle due sezioni, S’ ed S”, che precedono e seguono il vincolo S.
0
0
0
S S
''S S
S
' ''
'
'
T T P
M M K
M K
Se il vincolo interno è un pattino a scorrimento verticale (Fig.16.3c), esso, isolato, possiede 3 gla e 1 glr, pertanto (trascurando sempre la traslazione secondo l’asse della trave, si scriveranno 2 equazioni di moto assoluto ed una di moto relativo. La eventuale forza concentrata P, che interviene anche nel moto relativo, deve essere applicata su una delle due sezioni, S’ ed S”, che precedono e seguono il vincolo S.
0
0
0
S S
''S S
S
' ''
'
'
T T P
M M K
T P
Se la traslazione del pattino avviene secondo una direzione generica r, nell’equazione alla traslazione relativa occorre proiettare su tale direzione sia il taglio che il carico P.
Fig. 17.3
Se il vincolo interno è un carrello a scorrimento verticale (Fig.17.3a), esso, isolato, possiede 3 gla e 2 glr, pertanto (trascurando sempre la traslazione secondo l’asse della
F. Cucco – Lezioni di Scienza delle costruzioni
174
trave) si scriveranno 2 equazioni di moto assoluto e 2 di moto relativo. La eventuale coppia K e la forza concentrata P, che intervengono anche nei moti relativi, devono es-sere applicate su una delle due sezioni, S’ ed S”, che precedono e seguono il vincolo S.
0
0
0
0
S S
''S S
S
S
' ''
'
'
'
T T P
M M K
T P
M K
Se la traslazione del carrello avviene secondo una direzione generica r, nell’equazione alla traslazione relativa occorre proiettare su tale direzione sia il taglio che il carico.
Se il vincolo interno è un quadripendolo (Fig.17.3b), esso, isolato, possiede 3 gla e 2 glr, pertanto (trascurando sempre la traslazione secondo l’asse della trave) si scriveran-no 2 equazioni di moto assoluto e 1 di moto relativo. La eventuale forza concentrata P, che interviene anche nel moto relativo, deve essere applicata su una delle due sezioni, S’ ed S”, che precedono e seguono il vincolo S.
0
0
0
S S
''S S
S
' ''
'
'
T T P
M M K
T P
Se sul vincolo interno non agiscono azioni concentrate sarà P=0 e/o K=0. ESEMPIO 5.3 Scrivere, in forma indicativa, le equazioni al contorno relative alla trave di Fig. 18.3.
Fig. 18.3
Si evidenzino i tratti di variabilità delle caratteristiche della sollecitazione inserendo delle lettere di identificazione in corrispondenza dei vincoli esterni, degli estremi liberi, dei punti di applicazione di forze e coppie concentrate, inizio e fine di carichi distribuiti ed in corrispondenza degli eventuali nodi. Ciò facendo si devono inserire le lettere A, B, C, D, E.

F. Cucco – Lezioni di Scienza delle costruzioni
175
In aggiunta, si identifichino con delle lettere supplementari gli eventuali vincoli interni singolari presenti. La posizione del pattino viene identificata dalla lettera F. Le lettere inserite evidenziano n=5 tratti. La trave è vincolata in modo iperstatico (i=1), pertanto occorre scrivere n=5 equazioni differenziali del quarto ordine, una per ciascun tratto. Alla soluzione si perviene effet-tuando, per ciascuna equazione, 4 integrazioni. Ne consegue che le costanti di integra-zione, quindi le equazioni al contorno, saranno 4n=20. Si cominci con lo scrivere le equazioni di congruenza in corrispondenza dei vincoli esterni A e B. Le equazioni di congruenza dei vincoli esterni esplicitano le limitazioni che tali vincoli impongono allo spostamento assoluto ortogonale all’asse uy ed alla rota-zione assoluta .
0AyA u ; 0
0
By
B
uB
Si scrivano, adesso, le equazioni di congruenza in corrispondenza dei vincoli interni C D, E e F. Le equazioni di congruenza dei vincoli interni esplicitano le limitazioni che tali vincoli impongono allo spostamento ortogonale relativo all’asse uy ed alla rotazione relativa .
CF CD DC DB EA EFFE FC
CF CD DC DB EA EF
C ; D ; E ;Fu u u u u u
Se esistono dei tratti in cui il sistema di riferimento è ruotato di 180°, la corrispondente rotazione va posta con il segno meno (Fig.10.3).
Si scrivano, adesso, le equazioni di equilibrio in corrispondenza dei vincoli esterni A e B. In A è presente una cerniera e non esiste alcuna coppia concentrata, pertanto deve essere
0AA M
In B è presente un incastro e, pertanto, non va scritta alcuna equazione di equilibrio.
Si scrivano, adesso, le equazioni di equilibrio in corrispondenza dei vincoli interni. C D, E e F. In C abbiamo un vincolo di continuità ed una forza concentrata P, pertanto scriveremo
sen 0
0
CF CD
CF CD
T T PC
M M
F. Cucco – Lezioni di Scienza delle costruzioni
176
In D abbiamo un vincolo di continuità ed una coppia concentrata K, pertanto scriveremo
0
0
DC DB
DC DB
T TD
M M K
In E abbiamo un vincolo di continuità e nessuna azione concentrata, pertanto scrivere-mo
0
0
EA EF
EA EF
T TE
M M
In F abbiamo un pattino con scorrimento ortogonale all’asse della trave e nessuna azio-ne concentrata, pertanto scriveremo
0
0
0
FE FC
FE FC
FC
T T
F M M
T
Come è possibile constatare le equazioni al contorno complessivamente sono proprio 20, pari al numero delle costanti di integrazione.
F. Cucco – Lezioni di Scienza delle costruzioni
177
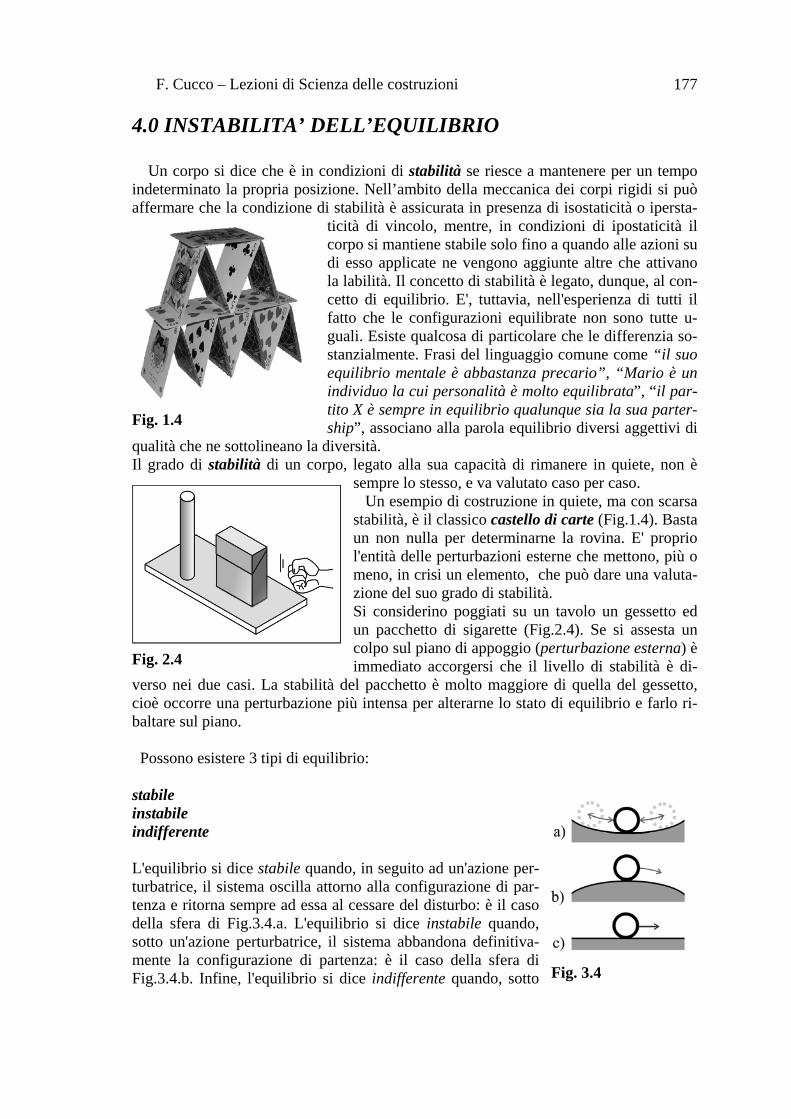
4.0 INSTABILITA’ DELL’EQUILIBRIO Un corpo si dice che è in condizioni di stabilità se riesce a mantenere per un tempo indeterminato la propria posizione. Nell’ambito della meccanica dei corpi rigidi si può affermare che la condizione di stabilità è assicurata in presenza di isostaticità o ipersta-
ticità di vincolo, mentre, in condizioni di ipostaticità il corpo si mantiene stabile solo fino a quando alle azioni su di esso applicate ne vengono aggiunte altre che attivano la labilità. Il concetto di stabilità è legato, dunque, al con-cetto di equilibrio. E', tuttavia, nell'esperienza di tutti il fatto che le configurazioni equilibrate non sono tutte u-guali. Esiste qualcosa di particolare che le differenzia so-stanzialmente. Frasi del linguaggio comune come “il suo equilibrio mentale è abbastanza precario”, “Mario è un individuo la cui personalità è molto equilibrata”, “il par-tito X è sempre in equilibrio qualunque sia la sua parter-ship”, associano alla parola equilibrio diversi aggettivi di
qualità che ne sottolineano la diversità. Il grado di stabilità di un corpo, legato alla sua capacità di rimanere in quiete, non è
sempre lo stesso, e va valutato caso per caso. Un esempio di costruzione in quiete, ma con scarsa stabilità, è il classico castello di carte (Fig.1.4). Basta un non nulla per determinarne la rovina. E' proprio l'entità delle perturbazioni esterne che mettono, più o meno, in crisi un elemento, che può dare una valuta-zione del suo grado di stabilità. Si considerino poggiati su un tavolo un gessetto ed un pacchetto di sigarette (Fig.2.4). Se si assesta un colpo sul piano di appoggio (perturbazione esterna) è immediato accorgersi che il livello di stabilità è di-
verso nei due casi. La stabilità del pacchetto è molto maggiore di quella del gessetto, cioè occorre una perturbazione più intensa per alterarne lo stato di equilibrio e farlo ri-baltare sul piano. Possono esistere 3 tipi di equilibrio: stabile instabile indifferente L'equilibrio si dice stabile quando, in seguito ad un'azione per-turbatrice, il sistema oscilla attorno alla configurazione di par-tenza e ritorna sempre ad essa al cessare del disturbo: è il caso della sfera di Fig.3.4.a. L'equilibrio si dice instabile quando, sotto un'azione perturbatrice, il sistema abbandona definitiva-mente la configurazione di partenza: è il caso della sfera di Fig.3.4.b. Infine, l'equilibrio si dice indifferente quando, sotto
Fig. 1.4
Fig. 2.4
Fig. 3.4
F. Cucco – Lezioni di Scienza delle costruzioni
178
un'azione perturbatrice, il sistema passa sempre da una configurazione equilibrata ad un'altra che è anche essa in equilibrio (Fig.3.4.b). L'aneddoto dell'uovo di Colombo, oltre che un atto di sopraffina furbizia, è anche una esemplificazione abbastanza convincente del passaggio da una configurazione di equili-
brio instabile ad una configurazione di equilibrio stabile. Un caso di applicazione pratica della statica dei corpi rigidi all' industrial design è quello della famo-sa lampada Tizio®, progettata da Richard Sapper per Artemide™ (1972). Un sistema articolato di aste è stato posto in una condizione di e-quilibrio indifferente con un sa-piente gioco di pesi e contrappesi.
La lampada rimane in equilibrio in qualunque configurazione la si spo-sta (Fig.4.4). Questo è un’esempio lampante di come i concetti della Fisica possano, se adeguatamente sfruttati, fungere da Musa ispiratrice anche nel mondo del design. Se i corpi e i vincoli fossero realmente rigidi ed infinitamente resi-stenti il problema della stabilità si ridurrebbe soltanto a valutarne l’isostatiticità o l’iperstaticità. Però, di fatto, anche se di piccolissima entità, le deformazioni sono presenti e possono influenzare notevol-mente il grado di stabilità di un corpo. Si consideri un elemento sotto-posto a sforzo normale semplice, ad es. il pilastro di Fig. 5.4. Nella se-zione generica s-s l’unica sollecitazione presente è lo sforzo normale. Ciò si verifica, ovviamente, se la geometria è perfetta: l’asse geometri-
co del solido è assolutamente verticale e la retta d’azione di P è coin-cidente con esso. Lievi imperfezioni farebbero nascere un certo brac-cio tra il carico ed il baricentro con la conseguente nascita di un mo-mento flettente. Se la trave fosse indeformabile il valore di M reste-rebbe congelato nel tempo al suo valore, ma la trave è deformabile, per cui, a causa del momento, nascerà una certa curvatura che tenderà ad incrementare sia il momento che la deformazione. Se la tendenza allo svergolamento viene controbilanciata dalla tendenza della trave elastica a ritornare nella sua configurazione deformata di partenza si noterà una semplice deformazione flessionale e nulla più (Fig.6.4), ma se viene superata questa capacità di ritorno, si innescherà un fe-nomeno progressivo che porterà la struttura al collasso per flessione. Il fenomeno che tende, in un elemento semplicemente compresso, a far nascere flessione prende il nome di carico di punta.
A trazione non si innesca nessun fenomeno di instabilità in quanto, a causa della de-formazione stessa, l’asse tende naturalmente a diventare rettilineo e a coincidere con la retta d’azione dello sforzo N. Basta prendere un semplice foglio di carta per rendersi conto del fenomeno: esso virtualmente non ha alcuna resistenza a compressione, se compresso, infatti, si inflette immediatamente senza offrire alcuna resistenza. Se il fo-glio, invece, si sottopone a trazione, non solo esso offrirà un’energica resistenza ma tenderà ad assumere una conformazione quanto più rettilinea possibile. Lo stesso succe-de se si prende in considerazione una fune.
Fig. 4.4
Fig. 5.4
Fig. 6.4

F. Cucco – Lezioni di Scienza delle costruzioni
179
In un elemento semplicemente compresso, fino a quando le sue capacità di ritorno ela-stico contrasteranno efficacemente la tendenza alla deformazione flessionale progressi-
va? Si consideri l’elemento di Fig.5.4 e si faccia crescere monotonicamente il carico P. Possono prospettarsi due scenari completamente diversi: o l’elemento si romperà a causa della compressione eccessiva (N/A>r, Fig.7.4a) oppure, improvvisamente, sbanderà lateralmente e si romperà per flessione in corrispondenza della sezione di minore resistenza (Fig.7.4b). Sarà possibile prevedere a priori quale sarà il meccanismo di rottura? In effetti tro-veremo che il meccanismo di tipo b) si innescherà per le così dette travi snelle, salvo a definire in termini geome-trici esatti il significato di tale termine. Se si sottopone una trave snella ad un carico P crescente
monotonicamente e con lentezza3 (carico quasi statico) si riscontreranno in essa tutte le 3 forme di equilibrio definite in precedenza.
Per valori di P inferiori ad un particolare valore Pcr, che prende il nome di carico critico di Eulero (1707-1783), l’equilibrio si mantiene stabile: cioè applicando una perturbazione al sistema esso oscillerà nell’intorno della configurazione iniziale per ritornarvi alla fine dell’eccitazione (Fig. 8.4a). Per P esattamente uguale a Pcr, l’equilibrio del corpo si trasforma nel tipo indifferente: cioè spostando il cor-po in una posizione qualunque, purché poco discosta da quella iniziale, esso resterà fermo in tale configurazione (Fig. 8.4b). Infine, non appena verrà superato il carico
critico l’equilibrio si trasforma in instabile ed avviene la rovina per flessione. Nostra in-tensione sarà quella di riuscire a calcolare il valore del carico critico e di fornire una e-satta definizione di snellezza di un solido monodimensionale. Supponiamo di essere nel caso b) e che la struttura rimanga in equilibrio in corrispon-denza di una qualunque configurazione deformata (Fig.9.4). Se chiamiamo con f la freccia elastica, in corrispondenza di una sezione generica a distanza x nascerà un certo momento flettente pari a
( ) crM P f u x
essendo u(x) lo spostamento generico a distanza x. L’equazione differenziale della linea elastica della trave è
3 Carichi applicati con una certa rapidità (azioni dinamiche) producono degli effetti maggiori rispetto ai medesimi carichi applicati gradualmente (azioni quasi statiche). Se si poggia lentamente un corpo su una bilancia, l’ago si sposterà progressivamente e si fermerà quando il peso sarà interamente rilasciato. Il me-desimo corpo lasciato cadere da una certa altezza farà spostare l’ago della bilancia bel al di là del suo pe-so reale, e l’ago oscillerà fino a stabilizzarsi nella sua posizione definitiva.
Fig. 7.4
Fig. 8.4

F. Cucco – Lezioni di Scienza delle costruzioni
180
( ) ( ) II crPu x f u x
EJ
sviluppando il prodotto ed ordinando a primo membro si ottie-ne
( ) + ( ) f 0 II cr crP Pu x u x
EJ EJ (1.4)
Essendo crP
EJuna quantità sicuramente positiva possiamo porre
crP
EJ (2.4)
per cui l’equazione 1.4 diventa
2( ) + ( ) f 0 IIu x u x (3.4)
L’equazione differenziale del secondo ordine (3.4) non può più risolversi per semplice integrazione, in essa, oltre alla derivata seconda della funzione, è presente anche la fun-zione stessa u(x). La soluzione generale della 3.4 è la seguente
( ) sen cos f u x A x B x (4.4)
Dove A e B sono delle costanti d’integrazione arbitrarie. Per verificare ciò basta trovare la derivata seconda della 4.4 e sostituirla, insieme all’espressione di u(x), nell’equazione 3.4. Ricordando che la derivata della funzione sen(x) è la funzione cos(x), che la derivata della funzione cos(x) è –sen(x) e che la derivata di una funzione di funzione è il prodot-to della derivata dell’argomento per la derivata della funzione, possiamo scrivere
( ) cos sen Iu x A x B x
Integrando una seconda volta
2 2( ) sen cos IIu x A x B x (5.4)
Sostituendo la 5.4 e la 4.4 nella 3.4
2 2 2sen cos + sen cos f f 0 A x B x A x B x
Sviluppando
2 2 2 2 2sen cos + sen cos f f 0 A x B x A x B x
Fig. 9.4

F. Cucco – Lezioni di Scienza delle costruzioni
181
Il primo membro si annulla per cui l’equazione è soddisfatta, la 4.4 è effettivamente la funzione soluzione dell’equazione differenziale della linea elastica (3.4). Per calcolare le costanti di integrazione occorre imporre le equazioni al contorno che sono
(0) sen 0 cos 0 f = 0
(0) cos 0 sen 0 0
u A B
A B
f = 0
0
B
A
La soluzione è B = -f
0A pertanto la legge di variazione degli spostamenti è
( ) f cos f u x x (6.4)
La linea elastica sotto carico di punta assume la forma di una cosinusoide. Ricordando che il valore dello spostamento in sommità, per x=h, deve essere pari alla freccia f, possiamo scrivere
f cos f = f h
Da cui
f cos = 0 h
Il prodotto si annulla solo se uno dei due termini (o entrambi) è nullo, poiché la freccia f non può essere nulla in quanto la deformazione esiste, deve essere nullo il secondo membro: l’argomento del coseno deve essere il più piccolo angolo che lo annulla, cioè /2, quindi
2 h
(7.4)
Ricordando la posizione (2.4) si ha 2
crPh
EJ
. Elevando ambo i membri al quadrato e
risolvendo rispetto a Pcr si ottiene proprio il valore del carico critico
2
24cr
EJP
h
(8.4)
Ripetendo le medesime operazioni che hanno condotto alla (8.4) per travi vincolate in modo differente, si ottengono i risultati riportati in Fig. 10.4. Tutti i valori del carico cri-tico differiscono per la quantità che compare al denominatore

F. Cucco – Lezioni di Scienza delle costruzioni
182
Fig. 10.4 Il valore del momento d’inerzia che compare nell’espressione del carico critico deve es-sere quello minimo in quanto noi vogliamo trovare il più piccolo valore del carico assia-le che trasforma l’equilibrio da stabile a indifferente. Tale valore è il più piccolo dei due momenti d’inerzia principali. Ponendo, inoltre, la quantità a denominatore uguale a 2
0h
l’espressione del carico critico si può generalizzare nella seguente
2min
20
cr
EJP
h
(9.4)
La quantità 0h prende il nome di lunghezza libera d’inflessione ed è funzione della lun-
ghezza h della trave e delle condizioni di vincolo alle estremità
0 h h
Il coefficiente , come si evince dalle varie espressioni di Pcr, assume il valore 2, 1, 0,7 o 0,5 a seconda che la trave sia incastrata ad un estremo e libera all’altro (Fig.9.4), dop-piamente incernierata (Fig.10.4a), incastrata ed incernierata (Fig.10.4b) oppure doppia-mente incastrata (Fig.10.4c). Adesso dividiamo primo e secondo membro della 9.4 per l’area A della sezione tra-sversale della trave
2min
20
crP EJ
A A h
Il rapporto tra il carico critico e l’area fornisce il valore della tensione normale associata
al carico critico (tensione critica cr), mentre, dalla geometria delle masse, sappiamo
che il rapporto Jmin/A è il quadrato del raggio d’inerzia minimo min della sezione tra-sversale

F. Cucco – Lezioni di Scienza delle costruzioni
183
2 2
min20
cr
E
h
Il rapporto tra la lunghezza libera d’inflessione 0h ed il raggio d’inerzia minimo min
prende il nome di coefficiente di snellezza e si pone
0
min
h
(10.4)
esso è funzione della lunghezza h della trave, della condizione di vincolo e della ge-
ometria della sezione trasversale min. L’espressione definitiva della tensione critica, o tensione di Eulero, è la seguente
2
2cr
E
(11.4)
E’ stato detto in precedenza che i modi di rottura di un’asta semplicemente compressa sono due: collasso per schiacciamento dovuto al superamento della tensione limite di
rottura R4 , oppure rottura per svergolamento laterale (carico di punta) Fig. 7.4. La
funzione 11.4 esprime la relazione biunivoca che esiste tra la tensione critica ed il coefficiente di
snellezza . Se si disegna il grafico della funzione 11.4 (curva di Eulero) si osserva che esisterà pre un particolare valore della snellezza a cui cor-risponde una tensione critica esattamente uguale alla tensione di proporzionalità o, per i materiali duttili, di snervamento. Per ottenere tale valore ba-
sta sostituire p ( o n) al posto di cr e risolvere
rispetto a (Fig.11.4). Il valore funge da spar-tiacque tra i così detti corpi tozzi ed i corpi snelli. Se la trave ha un coefficiente di snellezza
*
il corpo sarà tozzo e la sua rottura avverrà per schiacciamento, altrimenti sarà snello e la rottura avverrà per carico di punta
4 In effetti, sotto l’ipotesi di materiale perfettamente elastico, la tensione limite da non superare è la ten-
sione di proporzionalità p che, di fatto, per i materiali duttili, coincide con la tensione di snervamento n .
Fig. 11.4

F. Cucco – Lezioni di Scienza delle costruzioni
184
4.1 Verifiche di resistenza
Si voglia effettuare la verifica di resistenza di un’asta di acciaio lunga 10 m, del tipo HEA 120, sottoposta ad uno sforzo normale di compressione pari a 400 KN. L’acciaio è del tipo S235 e la sua tensione caratteristica di snervamento è fyk=2350 daN/cm2.
Considerando un coefficiente parziale di sicurezza M1=1,05 la tensione di lavoro risul-ta
fyd=2350/1,05 daN/cm2 = 2238 daN/ cm2. La snellezza limite, come da tabelle, è =19,
mentre calcolata come f yk
E sarebbe 94.
Le verifiche di resistenza possibili sono 2 Verifica a schiacciamento: se *
yd
Nf
A
Verifica a carico di punta: se *
yd
Nf
A
(12.4)
Il coefficiente (omega) è un coefficiente amplificativo tabellato in funzione della
snellezza e del tipo di acciaio. La prima fase consiste sempre nell’andare a valutare il coefficiente di snellezza
0
min min
h h
Essendo la trave doppiamente incastrata il coefficiente è uguale a 0,5, pertanto, in centimetri, la lunghezza libera d’inflessione è h0=0,5x1000=500 cm. Il quadrato del gi-ratore d’inerzia minimo è il rapporto tra il momento d’inerzia principale minimo e l’area della sezione trasversale. Da un comune manuale si ricava che un profilo del tipo HEA120 ha i seguenti valori
Jmin= 231 cm4 , A=25,30 cm2, min
2313 0317
25 30 ,
, cm
Il coefficiente di snellezza è =500/3,0317 =165> la trave è snella e pertanto occor-re effettuare la verifica a carico di punta con il metodo omega. Nelle tabelle relative
all’acciaio S235 si trova che ad una snellezza di 165 corrisponde un coefficiente =3,9, pertanto la verifica si effettua tramite la 12.4

F. Cucco – Lezioni di Scienza delle costruzioni
185
3 9 40000
616625 30
N ,
A ,
daN/cm2
Poiché il valore della tensione di lavoro fyd viene superato, la verifica non ha successo e occorre, pertanto, adoperare un elemento con una sezione maggiore. Proviamo con un profilo HEA180 per cui
Jmin= 925 cm4 , A=45,30 cm2, min
9254 52
45 30 ,
, cm
Il coefficiente di snellezza è =500/4,52 =111> la trave è snella e pertanto occorre effettuare la verifica a carico di punta con il metodo omega. Nelle tabelle relative all’acciaio S235 si trova che ad una snellezza di 111 corrisponde un coefficiente
=2,07, pertanto la verifica si effettua tramite la 12.4
2 07 400001828
45 30
N ,
A ,
daN/cm2
Questa volta la verifica è pienamente soddisfatta, la trave, pur essendo snella, sotto quel particolare sforzo normale non ha alcuna tendenza a rompersi per svergolamento. C’è da sottolineare che la normativa pone anche un limite massimo alla snellezza di un soli-do monodimensionale compresso. Nel caso delle strutture in acciaio esso è pari a 200.
Se non si procede ad alcuna verifica, il pericolo di instabilità è elevatissimo e quindi occorre senz’altro ridimensionare l’elemento strutturale. Con le nuove normative, basate sugli Eurocodici, si provvede ad effettuare delle nuo-ve verifiche agli stati limite, ma ciò esula dai limiti del nostro corso.












![Gastroschisi 2012 [modalità compatibilità] - sdb.unipd.it 2012... · Diagnosi Differenziale • Onfalocele • Ectopia cordis: cuore ectopico per difetto di fusione della linea](https://img.pdfslide.tips/doc/110x75/5c62e93509d3f28c208bb57a/gastroschisi-2012-modalita-compatibilita-sdbunipdit-2012-diagnosi.jpg)