Embed Size (px)
Citation preview
CHÚC MỪNG NĂM MỚI 2012
Tạp chí Khoa học Công nghệ Hàng hải Số 29 – 1/2012
50
Có nhiều công cụ hỗ trợ lập trình C cho vi điều khiển DSPIC ví dụ : MPLAB IDE, HTPIC, CCS v.v. Phần mềm MPLAB IDE là phần mềm rất hiệu quả dùng lập trình cho tất cả các vi điều khiển của hãng MICROCHIP đồng thời còn hỗ trợ cả chức năng mô phỏng, gỡ rối. Ở đây sử dụng phần mềm MPLAP IDE. Ngoài ra MPLAP IDE do chính hãng sản xuất chip phát hành nên được cập nhật thường xuyên và miễn phí phần mềm. Phần mềm HTPIC rất mạnh cho lập trình C nhưng muốn mô phỏng vẫn phải kết hợp với MPLAP. CCS mạnh về lập trình hướng đối tượng với cấu trúc đơn giản, dễ giao tiếp nhưng giá thành phần mềm tương đối cao, hỗ trợ mô phỏng ít. Do những lý do này tác giả đã sử dụng phần mềm MPLAP IDE để lập trình cho hệ thống.
5. Các đặc tính thực nghiệm Bộ biến tần được thiết kế dạng ghép nối các modul, mỗi modul làm một nhiệm vụ khác nhau
để dễ gỡ rối và nâng cấp. Biến tần được thiết kế chạy tốt và ổn định, dải điều chỉnh rộng, kết quả đo được của dòng điện pha trên động cơ ứng với các tần số và dạng tải khác nhau được thể hiện qua các hình chụp Osiloscope (Hình 4; 5).
6. Kết luận - Biến tần vector được chế tạo thành công trên những linh kiện có sẵn và thông dụng tại Việt
Nam hiện nay. Kinh phí chế tạo biến tần thấp hơn so với các biến tần cùng công suất hiện có trên thị trường, chỉ bằng 30% các biến tần ngoại nhập. Dòng điện điều khiển biến tần rất gần với hình sin.
- Dải tần số điều khiển động cơ được thiết kế rộng, từ 0,5Hz tới 125Hz phù hợp để điều khiển động cơ điện xoay chiều 3 pha rotor lồng sóc thông dụng. Độ phân dải tần số điều khiển đạt được là 0,1Hz.
Thông số của bộ biến tần đã xây dựng. Nguồn điện áp đầu vào: 1 pha 220VAC, 50HZ; Công suất ra: 1.5Kw;Dải tần số ra:
0 125Hz; Độ phân dải điều chỉnh: ~ 0.1Hz; Đối tượng điều khiển là động cơ 3 pha rotor lồng sóc UY = 200V
TÀI LIỆU THAM KHẢO
[1] Vũ Ngọc Minh, “Nghiên cứu thiết kế biến tần véc tơ”, Luận văn Thạc sĩ, Trường ĐHHH, 2007 [2] Nguyễn Văn Liễn, Nguyễn Mạnh Tiến, Đoàn Quang Vinh, “Điều khiển động cơ xoay chiều ba pha
cấp từ biến tần bán dẫn”, NXB Khoa học và kỹ thuật, Hà Nội. 2005 [3] Nguyễn Phùng Quang, “Về một phương pháp điều khiển động cơ xoay chiều ba pha không cần
đo tốc độ quay (Speed Sensorless Control)”, Tự động hóa ngày nay, 22(số tháng 5), Tr.28-32. 2002
[4] Joachim Holtz (2002), “Sensorless Control of Induction Motor Drives”, IEEE, Vol. 90, No. 8, pp.1359 -1394
Người phản biện: PGS.TS. Hoàng Xuân Bình
CHẾ ĐỘ LÁI TỰ ĐỘNG THEO HÀNH TRÌNH TRONG HỆ THỐNG LÁI SỐ (HÃNG ANCHUTZ-RAYTHEON – ĐỨC)
Track control operating on auto pilot system which used digital control of Raytheon
ThS. BÙI VĂN DŨNG Khoa Điện – Điện tử tàu biển, Trường ĐHHH
Tóm tắt Hiện nay trong vận hành khai thác hệ thống lái tự động trên tàu thuỷ, một số Sỹ quan, Thuỷ thủ hàng hải và một số ngưòi sử dụng hệ thống lái tự động vẫn còn chưa hiểu sâu sắc về chức năng của chế độ lái theo hành trình hướng đi ‘‘Track Control Mode’’. Bài báo giới thiệu về khái niệm, cũng như việc sử dụng chế độ lái theo hành trình của hệ thống lái tự động hãng Raytheon- Sperry (Đức) được trang bị trên tàu thuỷ.
Abstract At present, when operating auto pilot system on ships, some of officers, saillors and users of auto pilot system still has not understands fully the funtion of Track Control Mode. The article introduced the concept, structure and using Track Control Mode of auto pilot on ships by made in Raytheon- Sperry (Đức).
CHÚC MỪNG NĂM MỚI 2012
Tạp chí Khoa học Công nghệ Hàng hải Số 29 – 1/2012
51
1. Giới thiệu chung hệ thống điều khiển lái Anchutz Hệ thống lái Anchutz là hệ thống lái tự động do hãng Raytheon của Đức chế tạo. Bộ điều
khiển lái được sử dụng là bộ điều khiển NP2015/2025, thuộc seri các bộ điều khiển tự động thích nghi NAUTOPILOT2000. Đây là hệ thống điều khiển hiện đại, được thiết kế cho các loại tàu biển có trọng tải khác nhau, cũng như cho các loại thiết bị vận tải đường sông.
Hệ thống có 2 chế độ điều khiển: Điều khiển hướng đi của tàu theo những hướng đi khác nhau (course control) và điều khiển tàu theo hành trình đi được đặt trước (track control). Ở cả 2 chế độ trên, người điều khiển có thể chọn lựa 1 trong 3 chức năng điều khiển sau :
- Chức năng điều khiển nhanh (QUICK TUNE): thường được sử dụng khi các thống số của tàu ở mức bình thường (tải trọng, độ trôi dạt, …) hoặc trong những điều kiện thời tiết bình thường.
- Chức năng điều khiển kinh tế ( ECONOMY ): chức năng này đảm bảo giảm số lần bẻ lái xuống mức thấp nhất, mà vẫn đảm bảo độ tin cậy cho phép, do đó tăng tính kinh tế trong quá trình sử dụng
- Chức năng điều khiển chính xác (PRECISION): chức năng này đảm bảo hướng đi của tàu là chính xác nhất
2. Khai thác hệ thống ở chế độ lái tự động theo hành trình chuyến đi :
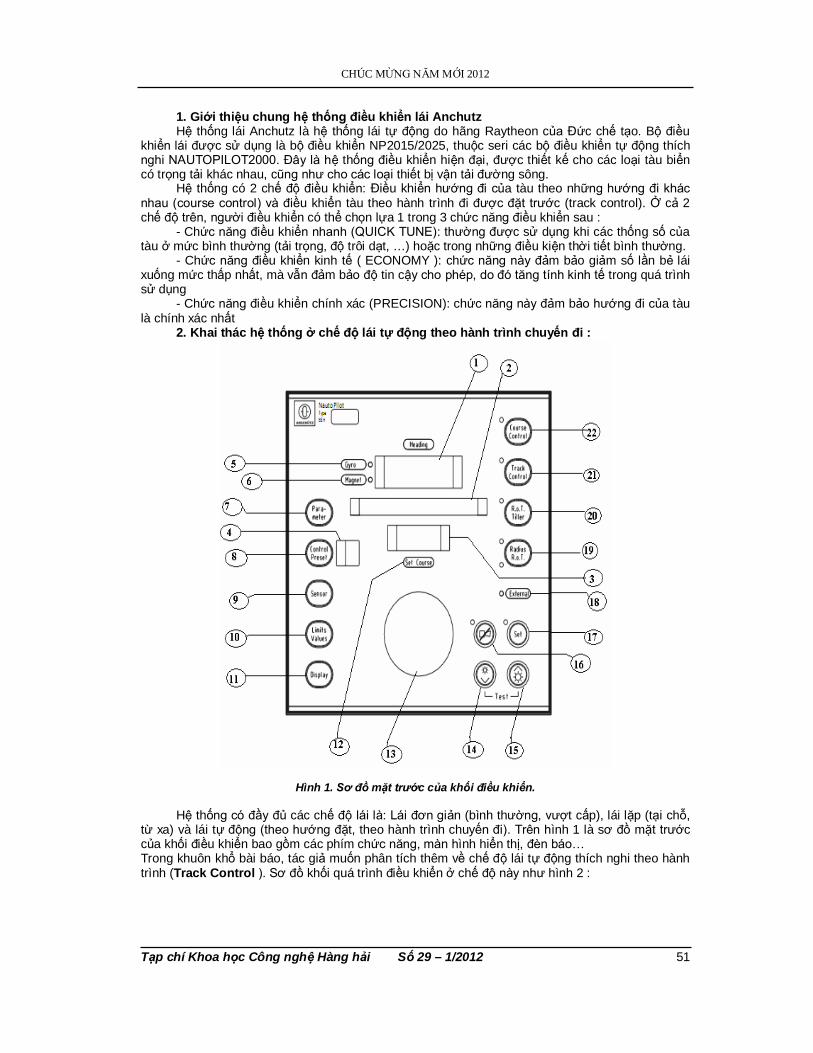
Hình 1. Sơ đồ mặt trước của khối điều khiển.
Hệ thống có đầy đủ các chế độ lái là: Lái đơn giản (bình thường, vượt cấp), lái lặp (tại chỗ, từ xa) và lái tự động (theo hướng đặt, theo hành trình chuyến đi). Trên hình 1 là sơ đồ mặt trước của khối điều khiển bao gồm các phím chức năng, màn hình hiển thị, đèn báo… Trong khuôn khổ bài báo, tác giả muốn phân tích thêm về chế độ lái tự động thích nghi theo hành trình (Track Control ). Sơ đồ khối quá trình điều khiển ở chế độ này như hình 2 :

CHÚC MỪNG NĂM MỚI 2012
Tạp chí Khoa học Công nghệ Hàng hải Số 29 – 1/2012
52
ARCP
DATA MANAGER
PC
CONNING DISPLAY RADAR RADARECDIS
BRIDGE STATIONECDIS
CHART STATIONROUTE
DITIZER
A
A
B C A B C CC A
POSITION FIXING SYSTEM
ALARM MANAGER
SIGNAL UNITC
SENSORDepthLog
WindDrift
DV BUS Back up office alarm
CENTER ALARM PANEL
SpeedSensor
B
HEADING
AUTOPILOT NP2015/2025
STANDAR 20 HEADINGREFERENCE SYSTEM
TRACK/TARGET
Hình 2. Sơ đồ khối điều khiển Track Control.
Trong đó : - CONNING DISPLAY : màn hình hiển thị mô phỏng - RADAR : hệ thống các radar dịnh vị - ECDIS BRIDGE STATION : trạm hiển thị hải đồ điện tử. - ARCP : bộ chuyển đổi trung gian tín hiệu giữa bộ điều khiển lái NP2015/2025 và hệ thống
ECDIS - POSITION FIXING SYSTEM : hệ thống định vị vị trí tàu Thông qua hệ thống định vị, vị trí thực (tín hiệu C) của tàu được đưa tới hệ thống radar.
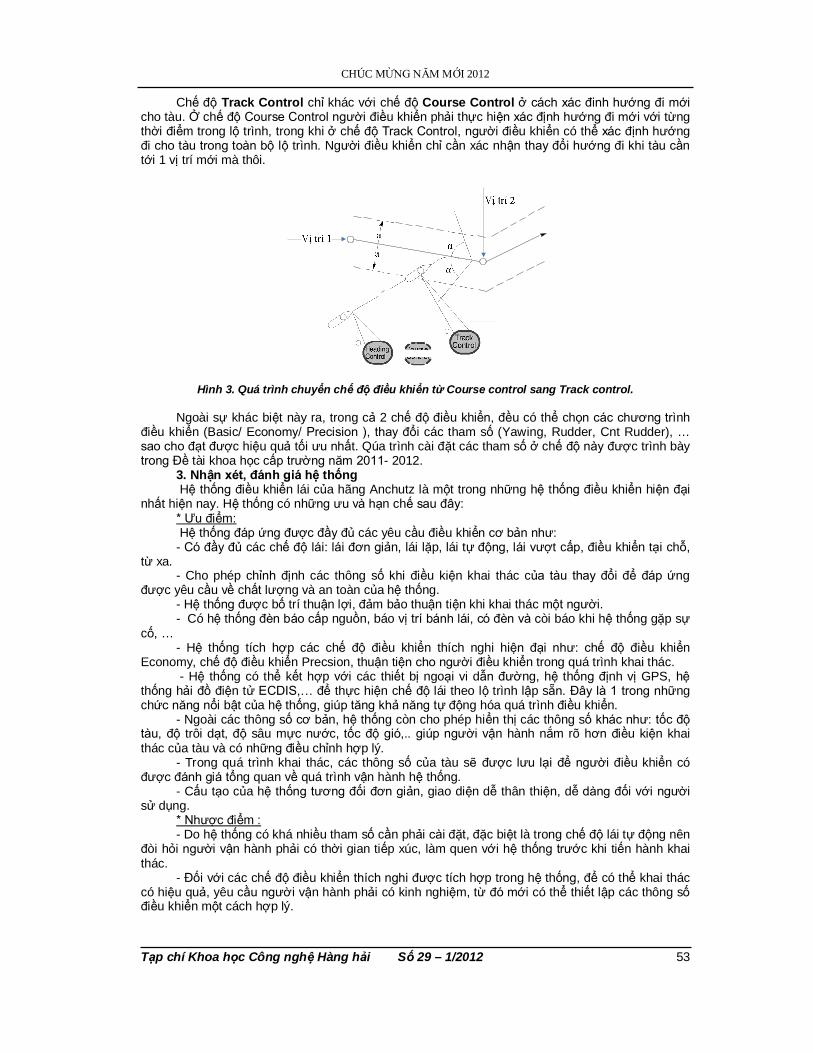
Đồng thời, hướng đi thực của tàu, thông qua hệ thống la bàn, sau khi được chuyển đổi (tín hiệu B), cũng được đưa tới hệ thống radar. Tín hiệu này, kết hợp với hệ thống hải đồ điện tử sẽ cho biết chính xác vị trí, hướng đi, lộ trình của tàu trong thực tế; từ đó có thể giúp người điều khiển lập được lộ trình cho tàu 1 cách tối ưu nhất. Quá trình lập lộ trình cho tàu được thực hiện trên màn hình CONNING DISPLAY. Tín hiệu báo vị trí của tàu, cũng như các thông số khác như: độ sâu mực nước, tốc độ tàu, độ gió, độ trôi dạt sẽ được đưa tới bộ quản lý dữ liệu DATA MANAGER. Tại đây, tín hiệu sau khi được xử lý sẽ được chuyển tới máy tính và hiển thị trên màn hình. Người điều khiển kết hợp các thông tin này, cộng với thông tin từ hải đồ điện tử ECDIS, sẽ lập ra lộ trình thích hợp cho tàu. Việc thiết lập này được thực hiện bằng cách xác lập các vị trí cần tới cho tàu trong suốt lộ trình. Chúng ta có thể xem quá trình tàu chuyển từ chế độ lái Course Control sang chế độ lái Track Control. (hình 3). Vị trí tàu cần đạt được là vị trí 2. Để đạt được vị trí này, tàu cần thực hiện quá trình bẻ lái với góc lái α, và biên độ của quá trình bẻ lái là a. Yêu cầu đối với người vận hành là phải chọn vị trí tới sao cho góc α không được vượt quá 600, biên độ giới hạn không được vượt quá 500m, nhằm đảm bảo an toàn cho tàu trong quá trình bẻ lái.
Sau khi đã thiết lập xong lộ trình lái, ta ấn phím Track Control trên bộ điều khiển NP2015/2025. Lúc này trên màn hình hiển thị hướng đi (Heading) sẽ hiển thị hướng đi hiện tại của tàu, còn trên dòng Text line sẽ cho biết hướng đi cần phải thực hiện để đạt được vị trí cần tới theo lộ trình. Để xác nhận, người điều khiển ấn phím Set. Khi đó, tàu sẽ thực hiện quá trình bẻ lái.
CHÚC MỪNG NĂM MỚI 2012
Tạp chí Khoa học Công nghệ Hàng hải Số 29 – 1/2012
53
Chế độ Track Control chỉ khác với chế độ Course Control ở cách xác đinh hướng đi mới cho tàu. Ở chế độ Course Control người điều khiển phải thực hiện xác định hướng đi mới với từng thời điểm trong lộ trình, trong khi ở chế độ Track Control, người điều khiển có thể xác định hướng đi cho tàu trong toàn bộ lộ trình. Người điều khiển chỉ cần xác nhận thay đổi hướng đi khi tàu cần tới 1 vị trí mới mà thôi.
Hình 3. Quá trình chuyển chế độ điều khiển từ Course control sang Track control.
Ngoài sự khác biệt này ra, trong cả 2 chế độ điều khiển, đều có thể chọn các chương trình điều khiển (Basic/ Economy/ Precision ), thay đổi các tham số (Yawing, Rudder, Cnt Rudder), … sao cho đạt được hiệu quả tối ưu nhất. Qúa trình cài đặt các tham số ở chế độ này được trình bày trong Đề tài khoa học cấp trường năm 2011- 2012.
3. Nhận xét, đánh giá hệ thống Hệ thống điều khiển lái của hãng Anchutz là một trong những hệ thống điều khiển hiện đại
nhất hiện nay. Hệ thống có những ưu và hạn chế sau đây: * Ưu điểm: Hệ thống đáp ứng được đầy đủ các yêu cầu điều khiển cơ bản như: - Có đầy đủ các chế độ lái: lái đơn giản, lái lặp, lái tự động, lái vượt cấp, điều khiển tại chỗ,
từ xa. - Cho phép chỉnh định các thông số khi điều kiện khai thác của tàu thay đổi để đáp ứng
được yêu cầu về chất lượng và an toàn của hệ thống. - Hệ thống được bố trí thuận lợi, đảm bảo thuận tiện khi khai thác một người. - Có hệ thống đèn báo cấp nguồn, báo vị trí bánh lái, có đèn và còi báo khi hệ thống gặp sự
cố, … - Hệ thống tích hợp các chế độ điều khiển thích nghi hiện đại như: chế độ điều khiển
Economy, chế độ điều khiển Precsion, thuận tiện cho người điều khiển trong quá trình khai thác. - Hệ thống có thể kết hợp với các thiết bị ngoại vi dẫn đường, hệ thống định vị GPS, hệ
thống hải đồ điện tử ECDIS,… để thực hiện chế độ lái theo lộ trình lập sẵn. Đây là 1 trong những chức năng nổi bật của hệ thống, giúp tăng khả năng tự động hóa quá trình điều khiển.
- Ngoài các thông số cơ bản, hệ thống còn cho phép hiển thị các thông số khác như: tốc độ tàu, độ trôi dạt, độ sâu mực nước, tốc độ gió,.. giúp người vận hành nắm rõ hơn điều kiện khai thác của tàu và có những điều chỉnh hợp lý.
- Trong quá trình khai thác, các thông số của tàu sẽ được lưu lại để người điều khiển có được đánh giá tổng quan về quá trình vận hành hệ thống.
- Cấu tạo của hệ thống tương đối đơn giản, giao diện dễ thân thiện, dễ dàng đối với người sử dụng.
* Nhược điểm : - Do hệ thống có khá nhiều tham số cần phải cài đặt, đặc biệt là trong chế độ lái tự động nên
đòi hỏi người vận hành phải có thời gian tiếp xúc, làm quen với hệ thống trước khi tiến hành khai thác.
- Đối với các chế độ điều khiển thích nghi được tích hợp trong hệ thống, để có thể khai thác có hiệu quả, yêu cầu người vận hành phải có kinh nghiệm, từ đó mới có thể thiết lập các thông số điều khiển một cách hợp lý.

CHÚC MỪNG NĂM MỚI 2012
Tạp chí Khoa học Công nghệ Hàng hải Số 29 – 1/2012
54
TÀI LIỆU THAM KHẢO [1] Hệ thống lái tự động hãng Rolls- Royce (Na–uy). [2] Hệ thống lái tự động hãng Raytheon Anchuz ( Đức). Người phản biện: PGS.TS. Lưu Kim Thành
MÔ PHỎNG SỐ CẤU TRÚC XOÁY ĐỈNH CÁNH TRÊN CHÂN VỊT TÀU THỦY
NUMERICAL SIMULATION OF THE STRUCTURE OF PROPELLER’S TIP VORTEX
TS. VŨ VĂN DUY Viện khoa học Cơ sở, Trường ĐHHH
Tóm tắt Một nét đặc trưng của chân vịt khi hoạt động là tạo ra cấu trúc xoắn ốc kéo dài phía sau, điều này là do hiện tượng xoáy đỉnh cánh gây ra. Xoáy đỉnh cánh được tạo ra do sự chênh áp giữa 2 miền áp suất lớn (mặt đẩy) và miền áp suất thấp (mặt hút), khi đó các phần tử lỏng phía cao áp sẽ cuộn qua đỉnh cánh sang mặt hút, nhưng chỉ được giới hạn nhất định chúng sẽ bị cuốn theo dòng đi xa tạo ra cấu trúc xoắn ốc trong không gian. Hiện tương này xảy ra sẽ làm giảm hệ số lực nâng trên cánh.
Abstract One of the notable features of the propeller wake is the helical vortex structure formed by the blade tip vortices. Tip vortices occur at the ends of lifting surfaces where the higher-pressure flow leaks around to the lower-pressure region on the suction side, rolling up the bound vortex sheet into a flow structure attached to the tip of the leading edge and extending far into the wake. These effects may act to decrease significantly the lift force on a surface with low aspect ratio such as a marine propeller blade.
1. Giới thiệu Trong lĩnh vực máy thủy lực cánh dẫn hướng trục nói chung thì vấn đề khe hở đỉnh cánh là
không thể tránh khỏi vì vậy việc xuất hiện xoáy đỉnh cánh đã được nhiều tác giả nói tới, để minh chứng cho vấn đề này đã có hàng loạt nghiên cứu thực nghiệm trên bơm hướng trục, tua bin hướng trục hay chân vịt tàu thủy. Tuy vậy việc đánh giá ảnh hưởng của chúng tới hiệu suất làm việc của máy là rất phức tạp. Việc nghiên cứu bằng phương pháp số cho phép ta mổ xẻ vấn đề để đánh giá mức độ ảnh hưởng theo từng khía cạnh khác nhau. Trong bài báo này tác giả sử dụng phương pháp số để mô phỏng cấu trúc xoáy đỉnh cánh để khẳng định tính đúng đắn và tiện lợi trong nghiên cứu bằng phương pháp số, từ đây có thể mở rộng để đánh giá mức độ ảnh hưởng tới các thông số làm việc của máy theo các hướng khác nhau.
2. Nội dung phương pháp 2.1. Cơ sở lý thuyết Phương trình cơ bản cho bài toán mô phỏng dòng chảy chính là phương trình liên tục,
phương trình Navier-Stokes và phương trình năng lượng [1], [2], [5]:
Hình 1.1. Hình ảnh minh họa cấu trúc xoáy trong không gian bánh công tác chân vịt tàu thủy [6].