Embed Size (px)
DESCRIPTION
電機科行動研究. 題目: PIC16C7X 單晶片 報告人:謝易裕 報告日期: 91/10/02. 單晶片 PIC16C72. 單晶片 PIC16C72. PIC16C72 單晶片共有 28 隻接腳,其腳位如圖 2.9 所示。 提供單晶片電源的接腳為 20 , Vss 為第 8 和 19 接腳。. 單晶片 PIC16C72. 9 、 10 為震盪器震盪信號輸入接腳。 其中能夠進行類比 - 數位轉換的通道有 5 個,為第 2 、 3 、 4 、 5 、 7 隻接腳。. 單晶片 PIC16C72. - PowerPoint PPT Presentation
Citation preview

電機科行動研究
題目: PIC16C7X 單晶片
報告人:謝易裕
報告日期: 91/10/02

單晶片 PIC16C72


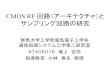
單晶片 PIC16C72 PIC16C72 單晶片共有 28 隻接腳,其腳
位如圖 2.9 所示。 提供單晶片電源的接腳為 20 , Vss 為第
8 和 19 接腳。

單晶片 PIC16C72 9 、 10 為震盪器震盪信號輸入接腳。 其中能夠進行類比 - 數位轉換的通道有
5 個,為第 2 、 3 、 4 、 5 、 7 隻接腳。

單晶片 PIC16C72 擷取 / 比較 /PWM 模組 (CCP) 功能的輸
出 / 輸入接腳為 13 。 輸入 / 輸出埠有三組,第一組接腳為 2~
6 ,第二組接腳為 21~28 ,第三組接腳為 11~18 。

21K
RA0/AN02
RA1/AN13
RA2/AN24
RA3/AN3/VREF5
RA4/T0CKI6
RA5/AN4/SS7
RB0/INT21
RB122
RB223
RB324
RB425
RB526
RB627
RB728
RC0/T1OSO/T1CKI11
RC1/T1OSI12
RC2/CCP113
RC3/SCK/SCL14
RC4/SDI/SDA15
RC5/SDO16
RC617
RC718
VS
S8
VS
S1
9
MCLR/VPP1
OSC1/CLKIN9
OSC2/CLKOUT10
VD
D2
0
U2
PIC16C72-04/SP(28)
7
220
8
22P
9
22P
104MHZ
1234
JP4
LED
11103
R1330
R2
330
R3330

壹、單晶片概論 一、 Microchip 的 PIC 單晶片: peripheral interface controller 1 、 PIC 系列的單晶片是 Microchip公司 的 8 位元 的微處理器。 2 、做為產品開發的工具

壹、單晶片概論一、 Microchip 的 PIC 單晶片: peripheral interface controller 1 、 PIC 系列的單晶片是 Microchip 公司的 8 位元 的微處理器。 2 、做為產品開發的工具

壹、單晶片概論 1 、不同單晶片的程式碼有相當高的相容 性 2 、 PIC 的價何在同級單晶片頗具競爭力 3 、 ICE 較貴,參考書籍較少 4 、 Data Book 、 ICE 模擬環境的 MPLAB 軟體、最新版本的 Assembler ,都可 以從 Microchip 的網站下載取得。

二、 Intel 的 8051 系列單晶片 1 、 8 位元的微處理器,以 byte 的資料型 態 2 、席捲工業界和教學單位,歷史悠久、 知名度響亮 3 、開發上的資源成熟度較強: ICE 模擬 器、組譯器與編譯器的成熟度都勝過 PIC ,參考書較多

三、單晶片的選擇: 一、你要選擇那一顆做為產品開發的工具,
有很多種類可選擇: 1 、單晶片的成本。 2 、開發過程中資源與支援的問題。 3 、單晶片供貨穩不穩定的問題。 4 、未來擴充性的問題。

5 、單晶片的耗電量: (1) 、 PIC 功率消耗: a 、 一般待命狀況下,低於 1μA b 、 電源 5V / 4MHZ 時,低於 2mA c 、 電源 3V 時,約為 15μA 。 (2) 、 8051 功率消耗: a 、 CHMOS 版本功率下降模式: 50μA ( 省電模式 )

單晶片的耗電量: 8051 的功率消耗: b 、 CHMOS 版本閒置模式: 5mA ( 省電模式 ) c 、 CHMOS 版本: 20mA d 、 一般 (HMOS 版本 ) :消耗 125mA

PIC 系列單晶片介紹 RISC 架構:採用 Harvard 雙匯流排
結構,將位址匯流排與資料匯流排分開,因此資料與位址可以同時傳送。
PIC16C5X 家族:入門型單晶片:沒有 A/D 轉換器、串列通訊埠、中斷、CCP 模組,最高速度 20MHZ( 可運作的時脈 )

PIC16CXXX 家族 提供 4~12 個中斷源的中斷功能,接腳:
18~40 腳 有 CCP 模組可以選擇 ( 擷取、比較、脈
波寬度調變等功能 ) 支援各種工作模式的串列通訊埠 PIC16C7X :提供 35 個指令, 28 腳或 4
0 腳,本科有 ICE 一台

PIC16CXXX 家族 PIC16C8X : 18 支接腳 EEPROM PIC16F8X : 18 支接腳 Flash 型態,無
A/D 、串列傳輸功能

PIC16CXXX 家族 PIC16F87X :內建 ICD(In-circuit-Debug)
功能,可以在不需要 ICE 的情況下進行進行軟體的開發,利用一個轉接頭連接電路和 PC ,就可以直接把程式碼下載到單晶片中,直接進行模擬偵錯的工作。這對於抱著學習目的來使用 PIC 的人來說可算是低價的又方便的學習方案。

PIC16C92X :提供 LCD 控制模組, 64支腳的單晶片
PIC17CXXX 家族:具備了 8 位元乘以 8位元的硬體乘法器,最高速度提高至 33MHZ ,可使用的指令也增加為 58 個
PIC16CXXX 家族

USB : Microchip已經在從事 USB周邊的支援,而且是架構在 PIC16C7X 的單晶片之上 (PIC16C745/765) ,因此對於未來要從事 USB介面開發的應用來說,也是一大福音。
PIC16CXXX 家族

PIC16C7X 程式記憶體

PIC16C7X 程式記憶體

PIC16C72 的資料記憶體 一般用途暫存器在 bank0 的 20h~70h

新式電動自行車電路之研究 21K
RA0/AN02
RA1/AN13
RA2/AN24
RA3/AN3/VREF5
RA4/T0CKI6
RA5/AN4/SS7
RB0/INT21
RB122
RB223
RB324
RB425
RB526
RB627
RB728
RC0/T1OSO/T1CKI11
RC1/T1OSI12
RC2/CCP113
RC3/SCK/SCL14
RC4/SDI/SDA15
RC5/SDO16
RC617
RC718
VSS
8
VSS
19
MCLR/VPP1
OSC1/CLKIN9
OSC2/CLKOUT10
VD
D20
U2
PIC16C72-04/SP(28)
310K
8
22P
9
22P
104MHZ
1 2
VC
C14
GN
D7
TTL1A
SN74LS04
123
654
14
PC900V13
220
C4100uF
11
W3
22
1610K
C347uF
1710K
B1
C2
E3
Q1C1384
1950
270.1
290.1
G1
D2
S3
FET1MOSFET N
C10.1uF
12
JP1
M+
12
JP2
M-
12
34
B+
12
37
B-Vin
1
GN
D2
Vout3
3678H05
Vin1
GN
D2
Vout3
3578H12
1234
JP4
LED
DDIODE
R1330
R2
330
R3330
+5
+5
+5
+12
+24
+24
+24
+5+12 +12
+24
+24
+5
+12
R4
1KB
1
C2
E3
Q59013
+5
S1
BZ
R633K
12
JP6
L
C5474K C6
10u
R1460.4K
R810K
RC16.8K
RE11K
RC21.5K
RE2820
B1
C2
E3
T1C1384
B1
C2
E3
T2C1384
C747u
D2
DIODE
C833uf
R112k
C10
104
D34001
D4
4001
D5
DIODE
R12
33012
JP5
LED
R9100
Q6NPN
R10100
R13100K
11
W3
22
R153K
123
JP7
CON3+5

研究動機 鑒於市售之電動自行車大多採用有磨損的可變電阻來調速,在安全保護功能上也不理想,例如:剎車時無馬達斷電之功能而有發生意外暴衝之虞,且自行車時常在戶外使用容易受到風吹雨打

研究動機 用戶常常因為可變電阻的故障而送修,
造成消費者的在使用中的不便與不安全感,提供的功能也過於簡略,無法滿足消費者對於自行車多方面的要求。
部份廠商則採用紅外線感測之控制器,但由於採用一對一的二極體發射與接收,故無法調整電動自行車的速度,調速特性不佳。

研究動機 我們創新研發出一套以電感式感測的電動車控制裝置,達到無磨損與優越調速之性能,並開發自行車安全保護功能,強化剎車安全與用電安全,以亮燈顯示提醒駕駛人注意車速與更換電池,保障使用者在騎乘中的安全。

研究目的 研發電感式調速感測電路,以達成交流
小訊號轉換成直流電壓之目的。
了解電感式調速感測電路之調速特性
比較各式調速感測電路之優劣

研究目的 開發自行車安全保護功能,以保障使用
者在騎乘中的安全。 提示駕駛人自行車已送電 提醒駕駛人已啟動煞車裝置 防止駕駛人在煞車時發生暴衝或無法即時停車 提醒駕駛人注意車速 保護消費者在安裝或更換電池時之安全 提醒使用者應適時更換電池以免發生交通
事故 過載時馬達自動斷電,以維人車安全

研究過程與方法 1 、蒐集市售電動自行車之相關資料 2 、了解電磁感應之原理及特性 (1) 法拉弟定律: e=N△Φ/△t :
在線圈中,單位時間內,磁通量的變化,會在線圈兩端感應電壓。
改變磁通量→改變電感量 (感抗 ) →改變線圈感應電壓→ PIC A/D
轉換調速

研究過程與方法 3 、研發電感感測電路及記錄
4 、了解單晶片之原理及特性
5 、設計自行車安全保護電路

製作重點 研究價值:自行車電路的創新與強化自
行車的安全電路與措施。 所有電路和程式由學生親自操作、實驗、
接線、創造 所有使用之零件由學生親自購買,以增
加學生對材料來源的了解 輪子改以馬達代替,只以自行車頭和控
制器呈現,以示教板代替實物

報 告 完 畢