Embed Size (px)
Citation preview

NOTES DE
MECANIQUE DES FLUIDES
A. COLIN DE VERDIERE
- SOMMAIRE -
Chapitre I : Généralités
Chapitre II : La cinématique
Chapitre III : Les équations du mouvement
Chapitre IV : Mouvements permanents
Chapitre V : Champs de vorticité et de déformation - Théorèmes de vorticité
Chapitre VI : l'écoulement autour d'obstacles
Chapitre VII : Ecoulements avec circulation
Chapitre VIII : Flots visqueux
Chapitre IX : Ondes dans les fluides – Quelques exemples
Chapitre X : Thermodynamique
Chapitre XI : Ecoulements compressibles
Chapitre XII : Instabilité hydrodynamiques
Chaptire XIII : Turbulences

1
Chapitre I
GENERALITES
L'objectif de la mécanique des fluides est de fournir les méthodes pour
comprendre la diversité et la grande richesse des écoulements réalisés dans la nature :
- Régime des vents ouest ou d'alizé dans l'atmosphère,
- Existence du Gulf Stream dans l'Océan le long des côtes américaines,
- Oscillation des Marées dans les ports,
- Vague déferlant sur une plage,
- Cheminée convective dans un cumulus (nuage)
- Ecoulement autour d'une aile d'avion, d'une voile de bateau, d'une hélice,
- Mélange turbulent du lait dans votre café,
- Ressaut hydraulique observé quand le jet d'eau issu d'un robinet tombe sur l'évier.
- et combien d'autres encore...
Newton a jeté les bases de la Mécanique dans ses "Principia" dès 1686 et les
2 siècles suivants ont vu l'émergence d'une mécanique rationnelle comme pouvant
expliquer le monde à partir de lois générales expliquant tant la chute des pommes que le
mouvement régulier des planètes autour du soleil. Depuis le début du 20ème
siècle de
nombreux physiciens tentant d'élaborer les théories décrivant les écoulements turbulents
ont progressivement remis en question le déterminisme glacé de Laplace. Le coup de
grâce fut donné par l'apparition du chaos, comportement irrégulier apériodique déjà
présent dans un système dynamique à 3 degrés de liberté seulement. Dans de tels
systèmes la sensibilité aux conditions initiales est telle que deux trajectoires initialement
voisines divergent fatalement au bout d'un temps fini. Dans ces systèmes non linéaires,
des causes "voisines" produisent des effets très différents à long terme. L'implication est
la perte du pouvoir de prédiction dont l'exemple le plus frappant est donné par la
difficulté de prévision du temps en Météorologie. Parallèlement cette nouvelle physique
permet d'analyser conceptuellement des comportements variés : les systèmes peuvent
bifurquer vers de nouveaux états de façon spontanée sous l'effet de petites perturbations
au voisinage de zones critiques. Que les équations de la Mécanique puissent permettre
une grande diversité est en accord avec ce que la nature offre quotidiennement à nos
yeux. Le renouveau actuel vient non pas d'une remise en cause des équations mais de
l'étude de leurs solutions dans des cas plus réalistes où les amplitudes et les interactions
des mouvements d'échelles variées sont plus grandes.

2
Propriétés physiques des fluides
Un fluide est caractérisé par sa facilité à se déformer, par son absence de
forme propre. En contraste avec un corps solide, la position relative des éléments fluides
change beaucoup avec les forces appliquées. On ira plus loin et on définira un fluide de
la façon suivante :
"Un fluide ne peut pas résister à une tendance à la déformation induite
par des forces appliquées qui laissent le volume fluide inchangé".
En d'autres termes, aussi petite que soit la force, il y aura
toujours écoulement. Les forces permettant ce changement de
forme sont des forces de cisaillement agissant parallèlement
aux facettes d'un élément de fluide :
Les solides peuvent aussi se déformer mais cette déformation est réversible tant que la
contrainte ne dépasse pas une certaine valeur appelée limite élastique. La rhéologie
concerne justement l'étude des lois entre la force ( ou contrainte )appliquée et la
déformation. Un solide élastique a ainsi une mémoire parfaite de sa forme alors qu'un
fluide n'en a aucune. Au-delà de la limite élastique du solide, une déformation
permanente apparaît qui peut conduire jusqu'à un écoulement et on parle alors de
plastification.
La figure ci-dessous résume quelques comportements :
Quand la relation déformation-contrainte est linéaire et part de l'origine on parlera de
fluide Newtonien. Le cas plastique ci-dessus peut être illustré par l'écoulement des
glaciers ou de la croûte terrestre où à chaque fois une certaine contrainte minimum est
nécessaire pour produire une déformation permanente. Dans d'autres fluides, la viscosité
(définie grossièrement comme le coefficient de proportionnalité entre contrainte et
déformation) varie avec la façon dont est appliquée la contrainte dans le temps ; elle
décroît en particulier avec le temps quand une contrainte est appliquée continûment pour
les fluides thixotropes (certaines peintures, le ketchup, la mayonnaise). D'autres
substances dites viscoélastiques ont un comportement intermédiaire entre fluide et
solides car leur structure interne dépend du temps caractéristique de la contrainte
appliquée. Quand celui-ci est faible, respectivement grand, elles se comportent comme
des solides ou des fluides (marchez plus ou moins rapidement sur le sable mouillé). Les
fluides étudiés ici seront newtoniens, en pratique des liquides ou des gaz présentant une
uniformité de composition.
F
Déformation
Fluide newtonien
Plastique
Contrainte

3
Les différences entre les liquides et les gaz dues à la densité ne sont pas très
importantes. Par contre la compressibilité différente entre un liquide et un gaz va induire
des comportements très différents quand les écoulements sont rapides.
Un fluide est composé de molécules animées de mouvements désordonnés
alors qu'à notre échelle quotidienne certains écoulements paraissent bien organisés. Une
hypothèse fondamentale de continuité du milieu va nous permettre de développer les
outils permettant de décrire l'aspect macroscopique des écoulements.
En l'absence de liaison chimique, la force entre deux molécules varie de la
façon suivante :
où d0 3.10-8
cm
La distance moyenne entre molécules est de
l'ordre de d0 dans les liquides et solides, et
de 10 fois d0 dans les gaz.
Bien que la densité ne change que de quelques % quand un solide fond, ceci
induit de grands changements dans la mobilité interne de la phase liquide. A l'échelle
moléculaire, la masse et la vitesse varient beaucoup et il paraît illusoire de vouloir
prédire la trajectoire de chaque molécule. Notre intérêt se porte sur des échelles
macroscopiques, visuelles, grandes par rapport aux échelles moléculaires.
Représentons la densité (masse volumique) mesurée par un instrument qui
fait une moyenne sur un volume de fluide proportionnel à la taille du capteur.
Quand le volume de fluide ne contient que quelques molécules, la densité
mesurée varie aléatoirement puis continûment si le volume de fluide est assez gros pour
contenir un grand nombre de molécules. Il ne doit pas être trop gros car sinon la densité
va varier avec l'échelle macroscopique que l'on veut décrire (par exemple, la largeur
F
répulsion
attraction
distance
d0
densité
Echelle de l'élément
de fluide vue par
l'instrument d0 L

4
d'une rivière si on étudie l'écoulement d'une rivière). La mécanique des fluides va tenter
de prédire le comportement fluide d'un volume intermédiaire dont l'échelle L >> d0 en
supposant les variables, vitesses, densité, température, pression, définies continues. On
assigne leurs valeurs à un point et (x, t) est une fonction continue de x et t.
L'hypothèse fondamentale de la mécanique des milieux continus est que le
comportement d'un fluide à une échelle macroscopique est le même que celui d'un fluide
à structure parfaitement continue. La structure des fluides tels que l'air et l'eau dans nos
expériences quotidiennes macroscopiques supporte à l'évidence l'intérêt dune telle
hypothèse.
Ce faisant on a oublié le "désordre" à l'échelle moléculaire, à l'échelle
inférieure au "point" précédemment défini. Dans un fluide réel (par opposition à un
fluide idéal) ce désordre est responsable de la viscosité et des phénomènes de diffusion.
On peut assez bien paramétriser ce désordre en fonction des échelles macroscopiques
mais on a besoin de mesurer un certain nombre de coefficients pour ce faire. [Ex. : si on
met de la teinture dans un fluide immobile tel que l'eau, la diffusion moléculaire tend à
étaler, diluer cette teinture dans le fluide avec une certaine rapidité que l'on peut mesurer
et qui traduit bien cet effet du désordre à l'échelle moléculaire].
Les différents types de forces :
- forces de volume (body force) :
Ce sont des forces externes qui agissent à grande distance et sur tous les
éléments du fluide (Ex. : la gravité, les forces d'inertie dans un fluide en rotation comme
les forces centrifuges ou Coriolis). Comme ces forces varient lentement, elles sont
proportionnelles au volume. La force sur un élément de volume V, de densité sera :
F(x,t) V
- forces de surface :
Elles ont une origine interne, moléculaire et décroissent très rapidement
avec la distance. Elles ne sont appréciables que pour des distances de l'ordre de la sépa-
ration des molécules et sont dépendantes d'un contact mécanique. La force agissant sur
un élément est proportionnelle à la surface de cet élément et l'on appellera contrainte le
coefficient de proportionnalité.
Cette contrainte dépend de l'orientation de la surface et un petit exemple
emprunté à la mécanique du solide suffit à le montrer. Soit une barre rectangulaire
homogène accrochée verticalement à un support.
T T '
Z
L
(a) (b)

5
Examinons les forces de contact dans les cas (a) et (b). Si la barre est homogène, les
contraintes sont uniformes sur la surface et équilibrées par le poids de la barre situé en
dessous :
en (a) F = T A = P z/l
où P est le poids de la barre et T la contrainte (ici une tension)
en (b) F' = T' A' = P z/l
mais A' = A/cos
si bien que T' = T cos
On va montrer ci-dessous comment calculer une contrainte sur une surface
d'orientation arbitraire si on connaît en un point le tenseur des contraintes.
Soit une surface plane séparant deux
régions, de normale n et d'élément d'aire A. La force
locale exercée par le fluide dans la région 2 sur le fluide
dans la région 1 sera spécifiée par :
A)t,x,n(
où est la contrainte exercée par 2 sur 1 quand la
normale n pointe vers 2. Ce vecteur dans le même sens
que n indiquera une tension pour le milieu 1 et dans le
sens opposé une compression.
La contrainte exercée par 1 sur 2 est )t,x,n( en vertu du principe
d'action et de la réaction, mais c'est aussi )t,x,n( .
On parlera tantôt d'une pression (ou d'une compression) quand la contrainte
est de signe opposé à la normale extérieure au volume considéré, et d'une tension dans le
cas inverse. A la différence des solides élastiques qui peuvent être soumis à compression
ou à tension, les forces de cohésion dans les fluides sont si faibles qu'elles ne peuvent
résister à une tension si petite soit-elle. Pour cette raison, les contraintes dans les fluides
sont toujours des compressions.
En mécanique du solide, on ne s'intéresse qu'aux forces de volume et aux
forces à la surface extérieure du solide car les positions relatives des éléments intérieurs
sont fixes. Il n'en est plus de même dans un milieu déformable où la distribution
intérieure des forces doit être considérée. Pour avancer il faudra aussi savoir comment
les forces de surface dépendent des propriétés locales du fluide et de son mouvement .ie.
se pencher sur ce que l'on appelle la rhéologie du fluide.
n
1
2

6
Le tenseur des contraintes :
On voudrait savoir comment la
contrainte ∑ qui est une force par unité de surface
dépend de l'orientation de la normale à la surface
sur laquelle elle agit. Pour cela on considère le
petit tétraèdre bâti sur les trois plans d'un système
d'axes a, b, c et sur la facette de normale n.
La somme des forces agissant sur ce
tétraèdre fluide est :
321 A)b(A)b(A)a(A)n(
Par projection de la surface A sur les plans des axes, on a :
A1 = a . n A
A2 = b . n A
A3 = c . n A
Notant le produit scalaire a.n ajnj (indice répété indiquant une somme) la ième
composante du vecteur contrainte ∑ peut donc s'écrire :
Anc)c(b)b(a)a()n( ji ji ji ji
Supposons maintenant que le tétraèdre diminue indéfiniment en gardant la
même forme. L'équilibre du tétraèdre dépend de la somme des forces de surface et des
forces de volume. Les forces de volume, proportionnelles au volume (comme les forces
d'inertie vx accélération) tendent vers 0 plus rapidement que les forces de surface ci-
dessus. A la limite, ces forces de volume sont négligeables (si les accélérations, densité
ont des limites finies) devant les forces de surface et donc dans cette limite le terme en
accolades ci-dessus est nécessairement nul. On en déduit que :
jijijijin)c(c)b(b)a(a)n(
(Ce premier résultat indique que si on veut obtenir un effet non nul des forces de surface
sur le tetraèdre élémentaire il faudra aller à un ordre d'approximation plus élevé et
considérer les variations spatiales de ces forces entre les différentes faces). Comme n et
sont 2 vecteurs qui ne dépendent pas du choix des axes, on en déduit que la quantité
entre crochets ci-dessus représente les 9 composantes d'un tenseur du second ordre,
également indépendant du choix des axes. On le note ij et on a :
jijin)n(
La contrainte locale du fluide sur n'importe quelle face d'orientation n peut se calculer
par la formule ci-dessus. ij est le tenseur des contraintes, quantité donc indépendante du
choix particulier d'une normale. ij est la ième
composante de la force par unité de surface
qui s'exerce à travers un élément de surface plane normale à la direction j. Son signe est
c
A1
A2
A3
b
a
n

7
positif quand la contrainte exercée par le fluide vers lequel n pointe, sur le fluide duquel
n s'éloigne, est du même sens que n.
Les 9 composantes de ce tenseur ne sont pas indépendantes. Si on considère
l'équilibre des moments des forces d'un petit volume de fluide par rapport à son centre,
on montre que ce tenseur est symétrique (Voir exercice).
ij = ji
Un tenseur d'ordre deux est une classe de matrices particulière. Rappelons qu'un vecteur
est défini comme une quantité qui change comme les composantes du vecteur position
dans une rotation des axes. On parle en particulier de transformation orthogonale quand
le repère orthogonal initial se transforme en un autre repère orthogonal sous l'action
d'une rotation. Si x' et x dénotent les composantes du nouveau et de l'ancien vecteur
dans le nouveau et l'ancien repère respectivement, on a :
x = P x'
et
x' = PT
x
où P est la matrice de passage de la transformation orthogonale entre le nouveau et
l'ancien repère. (Pour ces types de transformations, l'inverse est égale au transposé PT
).
Inversement on peut considérer que ces relations définissent le concept de vecteur.
De façon analogue on définit un tenseur d'ordre deux comme une matrice
qui se transforme sous l'effet d'une transformation orthogonale comme :
' = PT P
La propriété de symétrie et les coefficients réels indiquent que ce tenseur peut toujours
être diagonalisé. Il est possible donc de trouver des axes dits principaux où l'expression
du tenseur 'ij = 0 quand i j et ou donc dans ce système d'axes les composantes
tangentielles disparaissent [Dans cette diagonalisation la trace ii = 'ii se conserve].
Cas du fluide au repos - La Statique.
Considérons les forces de surface qui agissent sur une petite sphère fluide
dues au fluide extérieur :
Dans le système d'axes principaux on a :
On décompose le tenseur diagonalisé en une partie isotrope et le reste :
'11 = 1/3ii + ('11 – 1/3ii) etc…

8
En un point de la sphère de normale n, la force due à la première partie est 1/3ii n et est
en général une compression (ii < 0). Cette force est isotrope et le fluide peut y résister.
La deuxième partie du tenseur illustre des contraintes dont au moins l'une est une
compression et l'autre une tension (la troisième peut être l'une ou l'autre). Ceci tend à
déformer la sphère en un ellipsoïde sans en changer le volume. Il n'y a aucune façon de
pouvoir équilibrer ceci par des forces de volume plus petites. La déformation est donc
inéluctable. On en déduit donc que dans un fluide au repos cette partie anisotrope de la
contrainte ne peut pas être supportée par le fluide et elle est donc nulle. Dans un fluide
au repos, la définition que nous avons donné d'un fluide montre que le tenseur des
contraintes est isotrope et que les contraintes tangentielles de cisaillement sont nulles.
Les contraintes étant toujours normales (dans n'importe quel système d'axe),
le tenseur peut s'écrire :
ij = - p ij
(ij symbole de Kronecker = 1 si i = j, = 0 si i ≠ j)
p étant la pression et en général positive, le signe moins indique que les forces sont des
compressions. Dans un fluide au repos, la force de contact par unité d'aire qui s'exerce à
travers une surface plane de normale n est -p n. Les forces de pression statique agissent
donc de la même façon dans toutes les directions.
L'équilibre mécanique d'un fluide :
Un solide est en équilibre quand les résultantes des forces et des moments
extérieurs sont nulles. L'équilibre d'un fluide requiert que tous les éléments de fluide
soient simultanément en équilibre. Si F désigne les forces de volume, on doit donc avoir
pour un volume arbitraire :
0dAnPdVF
Le deuxième terme peut être transformé en intégrale de volume par un analogue du
théorème de la divergence s'appliquant à un scalaire p.
Si a est un vecteur, le théorème de la divergence donne :
dAnadVa
En appliquant ce théorème au vecteur pb où b est un vecteur constant arbitraire on
démontre que :
dVpdAnP
Et donc l'équilibre requiert :
0dVpdVF

9
Comme le volume d'intégration est arbitraire, ceci est nul si et seulement si l'intégrant
est nul :
F = p
En l'absence de couples liés aux forces de volume, la symétrie du tenseur
des contraintes assure que la résultante des moments est aussi nulle et la relation ci-
dessus est donc la condition nécessaire et suffisante pour l'équilibre d'un fluide.
Intéressons nous au cas particulier où F, la force de volume par unité de masse dérive
d'un potentiel :
F
étant l'énergie potentielle par unité de masse, on a:
- = p
En prenant le rotationnel :
= 0
Ceci indique que les surfaces de constant et constant coïncident. Quand c'est le cas,
ces surfaces sont aussi des isobares (Surface p = constante) et :
)(d
dP
Applications
1. gravité : = gz
La condition d'équilibre ci-dessus est appelée équilibre
hydrostatique :
gdz
dP
Soit une colonne fluide verticale d'un fluide homogène de
densité . Le fluide sera en équilibre si la pression p2 excède
p1 d'une quantité g H. Ainsi :
p2 - p1 = g H
où H est la hauteur de la colonne fluide. La pression augmente linéairement avec la
profondeur.
2. Qu'est-ce que la pression atmosphérique ? Dans l'expérience du
baromètre, lorsqu'on renverse un tube rempli de liquide dans
une cuve remplie du même liquide, on s'aperçoit que le niveau
dans le tube se stabilise à une hauteur h. Le volume en haut du
tube contient de la vapeur d'eau saturante du liquide considéré
de pression négligeable le. Les pressions en A et B étant les
mêmes, la pression de l'atmosphère en B est égale à g fois la
hauteur h de la colonne au-dessus de A.
P1
P2
H g
h B A

10
3. Cette relation est à la base de la mesure de
différence de pression statique lorsque l'on cherche
à mesurer la pression P dans une enceinte. La
pression étant la même à l'équilibre dans un plan
horizontal (et ce quelque soit la forme du récipient),
la mesure de la cote h fournit directement la
différence de pression entre l'intérieur du récipient
et l'atmosphère si celui-ci débouche à l'air libre :
P - Pa = gh
4. Supposons un océan de densité moyenne c. Si l'origine de l'axe z est à la surface, la
pression p, à une cote z, sera :
p = pa - cgz
où c est supposé constant, l'eau étant
peu compressible.
pa c 1 025 Kg/m3
La pression augmente donc de 1 bar
environ pour chaque dizaine de
mètres d'immersion.
Unités de pression : 1 bar = 105 Pascal
1 pascal = 1N/m2
Le bar est donc une pression considérable correspondant à une force au m2
appliquée par une masse de 10 tonnes !
5. Atmosphère : pour de l'air sec, l'équation d'état des gaz parfaits nous indique
comment la densité varie avec la pression :
p = RT
où R = 287.04 J/Kg/˚K
dans ce cas pour trouver la pression dans l'atmosphère :
dP / dz = - gP / RT
A 15 % près, l'atmosphère a une température relativement constante entre la surface
et 70 km, Tc ~ 250˚K.
On obtient : p = pa e-gZ/RTc
Hs = RTc/g (= 7.4 km) apparaît donc comme l'échelle de la variation de la pression et
de la masse volumique dans l'atmosphère.
P
Pa
h
p = pa
Z
Air
Ea
u p(Z)

11
L'équilibre d'un corps flottant :
Soit un corps solide plongé dans un liquide. La force résultante du fluide sur
le corps est Anp . Supposons que l'on remplace le corps solide par le fluide
environnant sans modifier les pressions. La force de volume agissant sur le fluide
"remplaçant" est V où et sont prolongées à l'intérieur par continuité à
partir de leurs valeurs à l'extérieur. Mais cette force est équilibrée par la résultante des
forces de pression sur la "frontière" qui valent donc V intégrée sur la
région occupée par le corps.
C'est la loi d'Archimède généralisée qui stipule qu' un corps solide immergé
est soumis à une flottabilité égale au poids du volume de liquide déplacé par le corps.
- bateau :
Analysons de façon élémentaire
son équilibre et les oscillations autour de
cet équilibre.
Nous supposerons pour simplifier que le bateau est un cylindre dont les
génératrices sont parallèles à 0y (axe perpendiculaire au plan de cette page). En G centre
de gravité s'applique le Poids P du navire tandis qu'en C, centre de carène ou centre de
masse du volume immergé de la carène, s'applique la résultante B des forces de
flottabilité, c'est-à-dire des forces de pression sur la surface mouillée. Soit d = ds dy un
élément de surface de la coque. La force de pression hydrostatique vaut gz d soit
gz d cos dans la direction verticale 0z si est l'angle entre 0z et la normale n.
Comme ds cos = dx, ceci est gz dx dy et la flottabilité est donc :
gVdydxzgB
V étant le volume du bateau. On vient de redémontrer de façon élémentaire la formule
d'Archimède. A l'équilibre C et G sont sur une même verticale, B équilibre le poids P du
bateau, et on retrouve ainsi directement le principe d'Archimède. Cette condition B = P
détermine le tirant d'eau du bateau.
Supposons maintenant que le
bateau roule, un cas fréquent, autour de
l'axe 0y. La forme de la carène immergée va
changer et le point C va se déplacer sur une
courbe dont le centre de courbure est appelé
métacentre M.
n
B
C
G
ds
n P
B
C G
M
P

12
Dans le cas de la figure il y a stabilité car le couple formé par P et B ramène le bateau
vers sa position d'équilibre. Cette stabilité est garantie si M se trouve au-dessus de G. La
distance MG = h est appelée hauteur métacentrique et permet de calculer la fréquence de
petites oscillations. Si J est le moment d'inertie du bateau autour d'un axe y la loi de la
dynamique appliquée aux mouvements de rotation est :
J d2/dt
2 + hP sin = 0
où est l'angle entre GM et CM.
Pour de faibles oscillations sin est environ et la fréquence de roulis est donné par :
= (hP/J)1/2
formule analogue à celle d'un pendule composé.
La recherche de la stabilité vise à augmenter la force de rappel et donc
augmenter h mais ceci aura tendance à augmenter aussi la fréquence de roulis. Pour
augmenter la stabilité on peut jouer sur la descente du centre de gravité le plus bas
possible mais aussi sur la forme du bateau. Ce dernier facteur est largement utilisé dans
les voiliers modernes dont la largeur augmente régulièrement au détriment du creux.
Un autre phénomène à considérer est la possibilité de résonance due au
champ de vagues externes. Pour assurer un bon confort il faudra essayer de placer la
fréquence propre du bateau en dehors de la gamme des fréquences majeures des vagues.

13
Chapitre II
LA CINEMATIQUE
Il existe plusieurs façons de décrire les champs de vitesse et d'accélération
dans un fluide. On peut par exemple, regarder le chemin tortueux suivi par une particule
fluide, noter le déplacement x (t) de cette particule et déduire l'accélération de la
particule fluide 2x/t
2. Une observation ordinaire (fumée de cigarette, cheminée, etc.)
nous montre rapidement da difficulté pratique de cette méthode à cause de la grande
complexité des trajectoires du fluide. Ainsi cette description dite "Lagrangienne" n'est
pas utilisée sauf dans des cas très simples. A celle-ci on préfère la description
"Eulérienne" qui consiste à spécifier à un instant t donné le champ de vitesse
u (x, y, z, t) partout dans l'espace. On oublie les trajectoires des particules. On définit les
lignes de courant comme étant les courbes tangentes en tous points au vecteur vitesse u.
Elles satisfont donc l'équation différentielle :
w
dz
v
dy
u
dx
On dit que l'écoulement est stationnaire ou permanent, si le champ de
vitesse u ne dépend pas explicitement du temps. Quand c'est le cas, une particule fluide
située à un instant donné sur une ligne de courant y reste puisque le vecteur vitesse (de
la particule) reste tangent à la courbe. Ainsi lignes de courant et trajectoires des
particules sont identiques quand u est indépendant du temps.
- lignes matérielles (ou encore filaments) : ce sont les lieux des particules qui ont
occupé une certaine région de l'espace à un instant donné. Par exemple, une ligne fluide
marquée de colorant est une ligne matérielle.
- accélérations d'une particule dans la représentation eulérienne
Si l'accélération d'une particule fluide est aisée à obtenir dans la description
lagrangienne, il n'en est pas de même dans le mode Eulérien. Soit une particule fluide
située en x à t où le champ de vitesse est u (x, t). A l'instant t plus tard la particule sera
au point x + x = x + u t où le champ de vitesse est u (x + x, t + t).
La variation de vitesse de la particule fluide est donc :
u = u(x + ut, t + t) – u(x, t) = t
u)u(
t
u + O(t
2)
et son accélération instantanée devient :
u)u(t
u
notée Du/Dt; le symbole D/Dt, appelée "dérivée matérielle" rappelle que l'on dérive en
suivant la particule fluide.

14
De même, la variation d'une autre propriété du fluide (comme la
température ou la concentration d'un polluant) le long de la trajectoire d'une particule
fluide se calculera comme :
u
tDt
D
En l'absence de diffusion et de sources ou de puits de , l'évolution de
dans le champ de vitesse u est gouvernée par l'équation différentielle partielle dite
d'advection :
0Dt
D
Cette relation signifie simplement que est conservée pour une particule fluide. Si le
champ de vitesse est donné, les problèmes de pollution (atmosphérique par exemple)
sont étudiés avec cette équation en calculant les nouvelles valeurs de à partir d'une
condition initiale donnée de . Mais il faut aussi rajouter au côté droit de cette équation
des termes de diffusion représentant le mélange turbulent de et les sources/puits de
Il est important de bien comprendre la signification et la façon de calculer
l'opérateur d'advection (u) u. Les parenthèses indiquent que l'on fait d'abord le produit
scalaire u , et que l'on applique l'opérateur scalaire ainsi obtenu sur le vecteur u.
Ainsi les 3 composantes de (u )u s'écrivent en coordonnées cartésiennes :
z
ww
y
wv
x
wu
z
vw
y
vv
x
vu
z
uw
y
uv
x
uu
Dans des systèmes de coordonnées orthogonales (polaire, cylindrique ou sphérique) des
termes métriques apparaissent qui ne contiennent pas de dérivées spatiales (ex : u2/r en
polaire).
La conservation de la masse
Localement, la conservation de la masse va nous fournir une équation
supplémentaire (en plus de la 2ème loi de Newton) qui est rendue nécessaire par
l'inconnue supplémentaire que représentent les forces de surface (ou de contact) au sein
du fluide. La masse d'un volume de fluide est V et quand on applique
l'opérateur D/Dt on doit donc avoir :
Dt
D(V) = 0
Soit encore en remarquant que les règles habituelles de dérivation d'un produit
s'appliquent :
VDt
D
V
1
Dt
D1

15
Considérons le petit cube élémentaire x, y, z. Il
se déforme au cours de son mouvement et :
zDt
D
z
1y
Dt
D
y
1x
Dt
D
x
1)zyx(
Dt
D
zyx
1V
Dt
D
V
1
Pour calculer chacun des termes ci-dessus évaluons l'élongation d'un
segment AB de fluide de longueur x dans la direction 0x.
A B A' B'
Des vitesses u différentes en A et B vont allonger le segment (si u/x est
positif) qui aura alors pour nouvelle longueur x + u/x x t dans l'intervalle de
temps t. Si bien que par unité de temps :
x
u
tAB
AB'B'A
Ceci n'est pas autre chose que la variation relative de l'élément x cherchée plus haut :
x
ux
Dt
D
x
1
avec 2 autres relations analogues sur les autres axes.
Ainsi uz
w
y
v
x
uV
Dt
D
v
1
La divergence du champ de vitesse est égale à la variation relative du
volume fluide au cours de son déplacement. Ainsi la conservation de la masse devient :
0uDt
D
2.1
que l'on peut aussi réécrire :
0ut
2.2
Cette dernière relation montre que l'on peut aussi dériver l'équation de la conservation
de la masse en prenant un volume fixe dans l'espace et en faisant le bilan de ce qui
rentre et de ce qui sort (voir exercice). Lorsque le mouvement est stationnaire, cette
relation traduit la conservation du débit de masse au sein d'un tube de courant.
xA
xB
x

16
Il s'agit d'une surface composée entièrement de lignes de courant :
Pendant un intervalle t, une masse S1q1t entre dans le tube, tandis qu'une
masse S2q2t en sort. Lorsque l'écoulement est stationnaire la conservation de la
masse dans le tube de courant implique 1 S1 q1 = 2 S2 q2 puisque aucun échange n'est
par définition possible au travers des parois latérales du tube. Si de plus la masse
volumique varie peu entre les positions 1 et 2, on voit ainsi que le long d'un tube de
courant, le produit Sq est constant ce qui est une traduction de la conservation du débit
en volume. En conséquence, les lignes de courant ne donnent pas seulement la direction
du flot mais aussi son intensité qui est inversement proportionnelle à l'écartement des
lignes. Ceci est très utile en pratique car on obtient ainsi bien plus rapidement l'image
d'un champ de vitesse qu'en regardant des milliers de petits vecteurs u
Hypothèse d'incompressibilité
La plupart des fluides sont compressibles dans le sens où une augmentation
de la pression augmente la densité. On montrera plus loin que le changement relatif de
densité / due à une variation de pression ∆ p s'écrit :
pC
12
où C = (pK)-1/2
est la vitesse du son dans le fluide et K le coefficient de compressibilité
p
1
.
Nous verrons aussi que les variations de pression dans un écoulement de
vitesse V sont de l'ordre de V2/2 . Ainsi on s'attend à des variations de densité dues à la
compressibilité de l'ordre de :
2
2
C
V
2
1
Pour bien des écoulements naturels ce rapport sera très petit puisque dans
l'eau par exemple ceau ~ 1 500 m s-1
. Dans l'air les vents atteignent rarement beaucoup
plus de 50 m/s induisant un rapport de 3 % ( cair ~ 300 m s-1
.)
Par contre pour les écoulements rapides dans l'air autour d'ailes d'avion, ou
de projectiles qui ont des vitesses de l'ordre de 1 000 km/h, le rapport / ne sera pas
petit et des phénomènes liés à la compressibilité telles que les ondes de choc
apparaîtront. Si on s'intéresse à des écoulements plus lents pour lesquels V/C << 1 une
approximation majeure dite d'incompressibilité peut être faite. L'ordre de grandeur de
chacun des termes de l'équation 2.1. peut être évalué si on suppose que l'écoulement
S1
S2
q2 q1
17
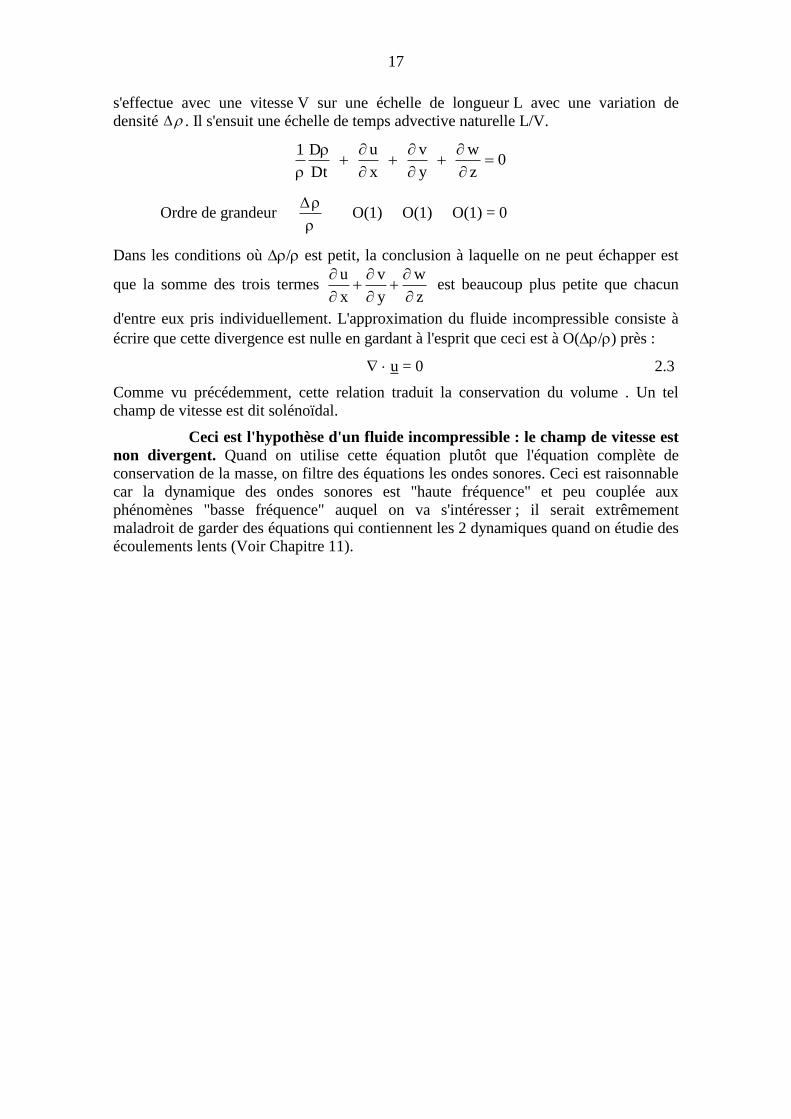
s'effectue avec une vitesse V sur une échelle de longueur L avec une variation de
densité . Il s'ensuit une échelle de temps advective naturelle L/V.
0z
w
y
v
x
u
Dt
D1
Ordre de grandeur
O(1) O(1) O(1) = 0
Dans les conditions où / est petit, la conclusion à laquelle on ne peut échapper est
que la somme des trois termes z
w
y
v
x
u
est beaucoup plus petite que chacun
d'entre eux pris individuellement. L'approximation du fluide incompressible consiste à
écrire que cette divergence est nulle en gardant à l'esprit que ceci est à O(/) près :
u = 0 2.3
Comme vu précédemment, cette relation traduit la conservation du volume . Un tel
champ de vitesse est dit solénoïdal.
Ceci est l'hypothèse d'un fluide incompressible : le champ de vitesse est
non divergent. Quand on utilise cette équation plutôt que l'équation complète de
conservation de la masse, on filtre des équations les ondes sonores. Ceci est raisonnable
car la dynamique des ondes sonores est "haute fréquence" et peu couplée aux
phénomènes "basse fréquence" auquel on va s'intéresser ; il serait extrêmement
maladroit de garder des équations qui contiennent les 2 dynamiques quand on étudie des
écoulements lents (Voir Chapitre 11).

18
Chapitre III
LES EQUATIONS DU MOUVEMENT
Les équations du mouvement pour un fluide traduisent très exactement la
2ème
loi de Newton :
(Masse) (Accélération) = Somme des forces
Nous allons l'écrire pour un volume matériel V
arbitraire. Pour un volume de fluide V limité par une
surface S, le premier terme Masse Accélération est
la somme sur le volume V de toutes les contributions
des volumes élémentaires dV. Pour un tel élément, la
masse est dV et l'accélération Du/Dt.
Donc dVDt
uD est le terme cherché.
Les forces de volume F effectuent une contribution dVF au terme de
gauche et les forces de surface, une contribution dAndA jiji … pour la
composante i.
L'équation du mouvement pour le volume V selon la composante i est donc :
dAndVFdVDt
Du
sjiji
i
le dernier terme à droite peut se réécrire dVx
ij
i
par application du théorème
de la divergence à chaque direction i. Par cette astuce, on transforme les forces de
surface en force de volume équivalente.
Comme la relation intégrale ci-dessus doit s'appliquer pour tout choix du
volume matériel V on en déduit que localement l'équation différentielle partielle du
mouvement dans chaque direction i (dérivée pour la première fois par Cauchy) est :
j
ij
ii
xF
Dt
Du
3.1
On ne peut progresser sans spécifier plus avant forces de volume et forces de
surface. Dans la plupart des cas les forces de volume F se réduisent à la force de gravité
due à l'attraction terrestre et aux forces d'inertie apparaissant dans les fluides en rotation.
dV
n
dA
U
19
Le tenseur des contraintes ij est plus complexe à déterminer car il englobe les réactions
internes du fluide et dépend du mouvement du fluide lui-même. Notons que les
contraintes de surface ne peuvent engendrer une accélération du fluide que si elles
varient spatialement dans le fluide de façon à ce que la divergence ij
jx
soit non
nulle. Si celle-ci est nulle, les forces de surface se borneront à déformer l'élément fluide
sans changer sa quantité de mouvement. C'est l'objet de la rhéologie que de fournir des
équations supplémentaires (généralement empiriques) reliant contraintes et
déformations.
Nous avons vu que dans un fluide au repos, le tenseur des contraintes était
isotrope, la pression étant définie par :
ij = - p ij 3.2
Dans un fluide en mouvement, les contraintes tangentielles sont, en général,
présentes, les contraintes normales dépendent de la direction de cette normale et donc la
relation (3.2) n'est plus valable. En analogie avec la notion de pression dans un fluide au
repos, nous allons définir mécaniquement la pression comme étant la valeur moyenne de
la composante normale de la contrainte :
p = -3
1ii
Quand on définit ainsi la pression, rien ne nous indique que cette "pression"
coïncidera avec la quantité pression introduite en thermodynamique (et nous aurons
pourtant besoin de cette coïncidence dont nous reparlerons quand nous discuterons de
l'équation de l'énergie). En thermodynamique la pression est définie à l'équilibre. Pour
avoir accord entre les définitions mécaniques et thermodynamiques de la pression il faut
supposer que l'on est toujours quasiment à l'équilibre et que l'ajustement
thermodynamique est rapide comparé à l'évolution de l'écoulement. L'expérience montre
que ceci est généralement le cas.
Avec ces définitions ij
dans un fluide en mouvement s'écrit :
ij = - p ij + dij
la partie non isotrope dij étant due entièrement au mouvement du fluide et restant à
déterminer.
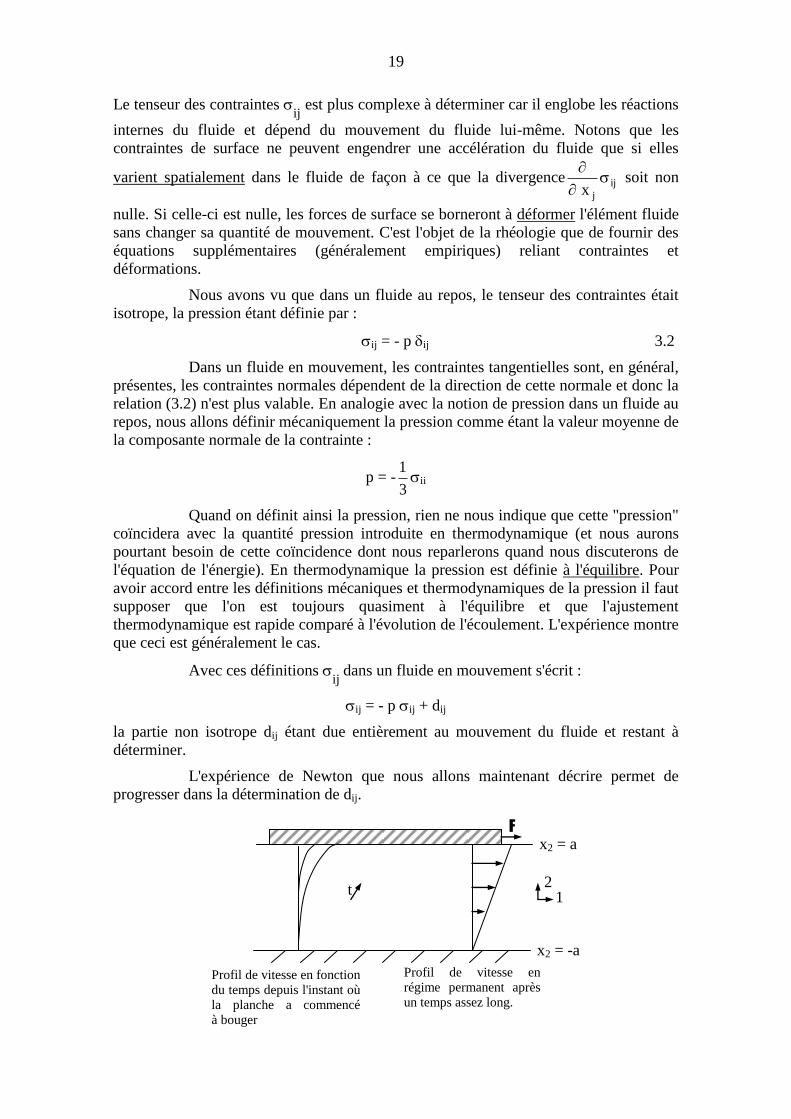
L'expérience de Newton que nous allons maintenant décrire permet de
progresser dans la détermination de dij.
t
F x2 = a
2 1
x2 = -a
Profil de vitesse en fonction du temps depuis l'instant où la planche a commencé à bouger
Profil de vitesse en régime permanent après un temps assez long.
20
Newton (ou son assistant) exerce une certaine force F dans un fluide
initialement au repos à l'aide d'une grande planche traînée en surface à une vitesse U. Au
départ seuls les éléments fluides à proximité immédiate de la planche bougent à la
vitesse U. En raison de la friction interne du fluide à l'échelle moléculaire, la quantité de
mouvement va se transmettre lentement vers le bas (vers les x2 < 0). Au bout d'un temps
assez long on observe un régime de vitesse linéaire qui n'évolue plus. En re-faisant cette
expérience pour un même fluide mais en variant la profondeur du canal, la force et la
taille de la planche, Newton a montré expérimentalement que :
profondeur
U
A
F
A étant l'aire de la planche et µ un coefficient de proportionnalité caractéristique du
fluide considéré et appelé coefficient de viscosité moléculaire. Les fluides qui obéissent
à cette loi expérimentale sont depuis nommés fluides "Newtoniens". Pour cet
écoulement unidirectionnel, il semble donc que la partie "dij" des contraintes dépende
linéairement du cisaillement u1/x2 soit :
2
112
x
ud
(dij ne peut dépendre de la vitesse elle-même car il est nécessairement nul quand le
mouvement relatif est nul).
Dans l'expérience de Newton, en régime permanent la contrainte d12 est
indépendante de la profondeur et donc égale en haut (x2 = a) à la force appliquée par
unité de surface, soit F/A. En bas le fluide colle à la paroi immobile et donc la vitesse
tangentielle est nulle :
U1 (x2 = -a) = 0.
Dans ces conditions la vitesse en tous points du fluide est :
U1 ( x2) = d12 x2+ a) / µ
Notez que la vitesse en x2 = a est aussi égale à U, de sorte que le fluide colle aussi à la
paroi mobile. Dans cette expérience simple, nous apprenons que le tenseur dij ne dépend
donc que des dérivées premières de la vitesse. Nous devons remarquer aussi que dans un
fluide en rotation solide, les dij sont nuls puisqu'il ne peut y avoir de forces de friction
interne. Ainsi on cherche une expression des dérivées de la vitesse qui soit aussi
invariante par rotation et la combinaison i
j
j
i
x
u
x
u
satisfait cette propriété (On
pourra vérifier que cette combinaison est nulle pour un écoulement en rotation solide).
Quand le milieu est isotrope (pas de direction privilégiée) et le tenseur
symétrique, on peut montrer que le tenseur de rang 2 le plus général permettant de
déterminer dij pour une géométrie d'écoulement quelconque est :
dij = 2 eij + ij ell
µ et étant deux coefficients de viscosité, positifs, caractéristiques du fluide et fonction
de son état thermodynamique (température, pression) et eij le tenseur des déformations

21
égal à
i
j
j
i
x
u
x
u
2
1 (voir chapitre V). Cependant comme dii = 0 d'après notre
définition mécanique de la pression, on déduit de l'expression ci-dessus que :
2 + 3 = 0 (car ii = 3)
Cette relation constitue l'hypothèse de Stokes car elle découle entièrement de la
définition mécanique de la pression faite plus haut qui est généralement adoptée. Dans
ces conditions :
dij = 2 eij - 3
2 ij ell 3.3
On notera que ell = k
k
x
u
(soit la divergence de u), ce qui implique que lorsque
l'écoulement est supposé incompressible l'expression de dij se réduit au premier terme
du membre de droite de 3.3.
Le coefficient positif µ ne change pas de façon appréciable avec la
température et la pression et il est souvent pris constant dans les applications. [Ce n'est
pas le cas cependant pour l'étude des mouvements lents du manteau terrestre où les
variations de µ sont fondamentales pour le mouvement.]
Voici quelques valeurs de la viscosité à 20 ˚C pour les deux fluides
importants :
Viscosité (g/cm.s)
µ
Viscosité cinématique
(cm2.s
-1) = µ/
eau 0.01 0.01
air 1.810-4
0.15
glycérine 8.5 6.8
Les relations 3.1 et 3.3 permettent d'écrire l'équation du mouvement dite de
"Navier Stokes" sous forme vectorielle :
Dt
uD = - p + (
2 u +
3
1 (u)) + g 3.4
Dans le cas important où le fluide est incompressible, .u = 0 et 3.4 devient :
Dt
uD = - p +
2 u + g 3.5
Quand la friction interne dans le fluide est négligeable on obtient l'équation (ou le
modèle) d'Euler :
Dt
uD = - p + g 3.6
3.4, 3.5 et 3.6 sont des équations différentielles partielles que l'on ne peut tenter de
résoudre que si on connaît les conditions initiales (à t = 0) et les conditions aux limites
aux frontières. Les opérateurs différentiels faisant intervenir les dérivées premières et

22
secondes de la vitesse par rapport aux variables d'espace, il faut en effet préciser
comment les calculer au voisinage des frontières.
Conditions aux limites :
La première condition aux limites a une origine cinématique. Sur une
frontière solide immobile, le fluide doit avoir une vitesse normale nulle :
u . n = 0 3.7
Si la frontière est mobile, la relation précédente devient :
(u -us).n = 0 3.8
où us est la vitesse de la frontière.
Ce type de condition est en accord total avec la conservation de la masse du
fluide (ou du volume du fluide quand celui-ci est incompressible) enclose par les
frontières solides et on s'en rendra compte en intégrant l'équation de conservation de la
masse sur un domaine fluide. Cette première condition est suffisante dans le modèle
d'Euler. Pour ce qui est des conditions initiales, les opérateurs temporels étant du
premier ordre, il suffit de préciser les valeurs initiales des 3 composantes de la vitesse
pour les équations de quantité de mouvement, 3.4, 3.5 ou 3.6.
Une forme analogue à cette condition est quelquefois utile pour imposer la
condition aux limites sur une surface libre séparant 2 fluides immiscibles, par exemple
l'interface air-eau. Une telle surface est dite matérielle et le fait que les 2 fluides ne
puissent pas s'interpénétrer se traduit par la continuité de la vitesse normale
perpendiculairement à la frontière.
Supposons que la surface séparant les milieux (1) et (2) ait pour équation :
F (x, y, z, t) = 0
Si une particule initialement sur cette surface y reste à une nouvelle position x + x à t +
t, on peut écrire :
F(x + x, t + t) = 0
Après un développement limité pour t petit, on obtient :
F(x,t) + x F + t t
F
= 0
Compte tenu des conditions initiales on obtient finalement :
Dt
DF = 0 3.9
qui représente la condition aux limites cherchée.
1
2
Surface
matérielle Mouvement des
particules fluides

23
Les conditions de type 3.7, 3.8 ou 3.9 sont suffisantes dans le cadre du
modèle d'Euler sans friction. Le fluide dans ce modèle glisse sans frottement sur les
frontières solides. Pour cette raison les conditions sont aussi appelées conditions de
glissement.
Le milieu du 19ème
siècle fut marqué par des discussions assez longues entre
Navier, Stokes et Poisson pour savoir quelle était la condition aux limites additionnelle
en fluide visqueux rendue nécessaire par les dérivées secondes présentes dans les
équations de Navier-Stokes 3.4 et 3.5. Cette condition est une condition de
non glissement. En effet dans les fluides réels, on observe qu'un élément de fluide au
voisinage d'une frontière solide colle à la paroi et la condition supplémentaire est donc :
u.t = 0 3.10
(t vecteur unitaire tangent à la surface)
ou (u - us).t = 0
quand la frontière est mobile.
Les 2 conditions de type 3.7 et de type 3.10 sont donc nécessaires dans le
cadre du modèle de Navier-Stokes. Le vecteur vitesse total est nul à la paroi et on parle
de condition de non glissement.
Discutons brièvement de l'hypothèse d'écoulement idéal, sans friction du
modèle d'Euler. Considérons un écoulement au-dessus d'un obstacle. Si effectivement
on peut négliger la friction dans l'intérieur du fluide dans un grand nombre de situations,
au voisinage de la paroi, le fluide réel, lui, colle à la paroi. On a souvent un très grand
cisaillement ∂U/∂y au voisinage de la paroi et donc même si µ est faible la Force/Aire
risque d'être très grande à la paroi (µ x ∂U/∂y). Dans une couche mince dite limite on n'a
plus le droit de négliger la friction et la question est de savoir si la dynamique de la
couche limite n'a pas des effets sur l'intérieur du fluide supposé idéal. C'est tout le
dilemme de l'application du modèle d'Euler à des fluides réels, dilemme qui a occupé
tout le 19ème
et la moitié du 20ème
siècle !
Dérivation élémentaire du gradient de pression
On revient en arrière pour donner une introduction plus simple aux forces de
pression qui interviennent comme le gradient de p dans les équations du mouvement
3.4, 3.5, 3.6. Ceci est souhaitable car ces forces de pression constituent une des
nouveautés de la dynamique des fluides par rapport à la dynamique des solides.
Profil de vitesse
de couche limite

24
Considérons un petit cylindre dont les faces
coïncident avec les surfaces isobares p et p + dp et dont les
génératrices sont parallèles à la normale aux surfaces
isobares. La force sur le cylindre est :
S (p + dp) - Sp
orienté dans la direction où p décroît. [La contribution latérale est nulle car la pression
est la même à une hauteur donnée sur le cylindre].
La force par unité de volume est donc :
S dp/(S dn) = dp/dn
Pour un cylindre suffisamment petit :
dp = ∂p/∂n dn
p a une direction vers les p croissants et un module ∂p/∂n. On voit donc que :
z
y
x
p
p
p
pvolumedeunité
pressiondeforce
Cette forme permet de déguiser les forces de surface en forces de volume qui seule
permettent de calculer l'accélération des particules matérielles.
Bilan des équations et des inconnues
Les équations à notre disposition sont 3 équations du mouvement du
type 3.4, 3.5 ou 3.6 pour chacune des 3 directions d'espace et d'une équation de
conservation de la masse. Ce qui fait 4 équations. Les inconnues sont les 3 composantes
de la vitesse u, v, w, la pression p et la densité , soient 5 inconnues. Il nous manque
donc une équation. Cette équation manquante est l'équation de l'énergie interne : en effet
si la friction agit dans le fluide on peut penser qu'il y aura échauffement du fluide et que
sa température augmentera. Si de plus le fluide est chauffé par des sources de chaleur
externes, il nous faut cette équation de l'énergie interne pour préciser comment la
température va évoluer. La température apparaît donc comme une inconnue
supplémentaire. A l'équilibre thermodynamique, il y aura une équation supplémentaire,
l'équation d'état liant densité température et pression. Ces considérations énergétiques
sont essentielles quand on veut étudier la propagation de la chaleur dans un fluide
chauffé. Nous n'allons pas aborder ces problèmes tout de suite car ils sont complexes.
Nous supposerons que le fluide est "suffisamment" incompressible et que la dissipation
d'énergie par friction ne change pas appréciablement la température, donc la densité.
Dans ce cadre, l'équation d'état que nous allons utiliser est simplement :
= cste 3.11
qui décrit le cas d'un fluide dit homogène. Ainsi le nombre des équations est égal au
nombre des inconnues u, v, w et p.
Diffusion
Nous avons vu comment la friction d'origine moléculaire a été introduite
dans les équations de la mécanique des fluides par la relation liant contrainte et
p + dp
p
dn

25
déformation, mais il est nécessaire de comprendre plus en détail les processus de
diffusion (la friction étant un cas particulier de diffusion de quantité de mouvement).
L'état d'équilibre d'un système fluide est caractérisé par une distribution
spatiale uniforme des propriétés du fluide (exemple température, vitesse, vorticité),
chaque élément étant alors en équilibre mécanique et thermique avec son
environnement. Si tel n'est pas le cas, la matière à l'échelle moléculaire interagit pour
restaurer l'équilibre. Ceci est rendu possible par l'existence de transports moléculaires de
chaleur, d'énergie etc..., dirigés par exemple d'une région chaude vers une région froide.
Le transport est tel que la différence entre les valeurs d'une propriété de chaque côté
d'une surface diminue. Ceci est une donnée expérimentale d'évolution des systèmes
naturels qui est à la base du deuxième principe de la thermodynamique. Supposons que
la propriété soit notée C(x,t). Le transport de la quantité associée à C à travers un
élément de surface de normal n et d'aire A (et par unité de temps) est f n A où f est
le vecteur flux qui peut être fonction de x ou t. Comme on ne peut pas mesurer f à
l'échelle moléculaire, on fait l'hypothèse que f est due aux interactions moléculaires au
voisinage immédiat de l'élément de surface de sorte que C varie approximativement
linéairement sur une distance grande par rapport à l'échelle moléculaire. On postule
alors que les composantes de f sont :
fi = Kij jk
C
où Kij est un tenseur du second ordre caractéristique du fluide à déterminer
expérimentalement.
Quand il n'y a pas de direction privilégiée dans le milieu (isotropie),
Kij k ij , et f est parallèle à C et f = - kC. C'est le cas pour les fluides usuels.
Dans cette expression f est dirigé en opposition au gradient C(k > 0) de façon à lisser la
distribution de C .
Dans le cas de la friction, f est le flux de quantité de mouvement et k la
viscosité. De façon analogue la diffusion moléculaire agit aussi sur la vorticité et
transporte chaque composante de la vorticité de façon à essayer de l'uniformiser dans
l'espace.
La diffusivité se définit comme la quantité transportée par unité d'aire et de
temps divisée par le gradient de la même quantité par unité de volume. Les unités sont
L2 T
-1 (la viscosité cinématique = / est un exemple de diffusivité appropriée pour la
vitesse ou la vorticité).
Supposons que nous ayons une discontinuité de
vitesse qui correspond donc à l'existence d'une feuille de
vorticité, à t 0. On peut montrer que sous l'effet de la
diffusion, l'épaisseur de la feuille croît comme t 1 2
.
[L'analogie avec le lissage d'un saut de température dans
un solide est complète].

26
Chapitre IV
MOUVEMENTS PERMANENTS
Dans le cas des écoulements permanents en fluide homogène et non
visqueux on peut obtenir assez simplement une première intégrale du mouvement
analogue à la conservation de l'énergie en mécanique du solide. Dans les géométries à
une dimension (tuyaux etc..) cette intégrale jointe à la conservation de la masse fournit
toute la solution. Les applications pratiques sont considérables.
Intégrale ou théorème de Bernouilli
Considérons le modèle d'Euler en fluide idéal et stationnaire (ou permanent)
(u ) u = - p + F
Supposons que les forces de volume F dérivent d'un potentiel :
F = -
(ex : pour la gravité = gz)
L'identité remarquable :
(u)u = u + 2
1q
2, q = |u|, = u
où est le vecteur vorticité (voir chapitre V), permet d'écrire l'équation du mouvement
sous la forme :
H = u
où
p
2
qH
2
Ainsi donc H est normal à u et au vecteur vorticité :
u . H = 0
. H = 0
et H est donc constante le long d'une ligne de courant et (ou) le long d'une ligne de
vorticité (tangente en tous points au vecteur vorticité) la première de ces relations étant
la plus employée :
p + gz + 2
q 2
= cst 4.1

27
Alors que le deuxième terme est l'énergie potentielle par unité de volume et le troisième
l'énergie cinétique par unité de volume, le premier représente clairement le travail des
forces de pression. La pression a donc une signification énergétique. Quand la pression
augmente dans la direction de l'écoulement, les particules fluides effectuent du travail
contre les forces de pression et perdent de l'énergie cinétique.
On peut aussi obtenir le résultat 4.1 en se rappelant l'expression de
l'accélération le long d'une courbe fixe (ici la ligne de courant). L'accélération a une
composante s
le long de la courbe et une composante normale q
2/R (où R est le
rayon de courbure) dirigé vers le centre de courbure. Ainsi l'équation du mouvement le
long de la courbe s'écrit :
0q2
1gzp
s
2
Si on définit l'excès de pression pe du au mouvement par pe = p + gz alors :
pe + 2
1 q
2 = cste
le long d'une ligne de courant. Selon la composante normale :
R
q
n
p 2e
où n est dirigé à l'opposé du centre de courbure : Un écoulement circulaire a
obligatoirement les plus basses pressions du côté du centre de courbure.
Quand la ligne de courant est droite, R ∞ et pe/n = 0, un résultat
quelque fois utile. On observera que les tourbillons formés après un coup de rame dans
l'eau présentent tous une dénivellation de la surface libre.
Remarque sur p :
Quand on introduit l'excès de pression p, la gravité disparaît du problème
quand le fluide est homogène . Elle ne disparaît totalement que si les conditions limites
ne la font pas réentrer. Lorsque le fluide est soit illimité soit contenu dans une enveloppe
solide les conditions aux limites sont de type vitesse et la gravité ne peut donc jouer
aucun rôle dynamique ! Quand les conditions aux limites font intervenir une surface
libre (par exemple à l'interface air-mer), on doit avoir continuité de la pression totale et
la gravité revient dans la dynamique. Si le fluide est stratifié en densité elle est bien sûr
présente à cause de l'existence des forces de flottabilité qui varient spatialement.
Remarque sur les flots irrotationnels
Par définition un flot est irrotationnel si u 0 partout. Dans ce
cas H = 0 et H = cst (même valeur dans tout l'espace). On retrouve la même valeur de
la constante sur toutes les lignes de courant.

28
Exemples :
Nous allons maintenant considérer plusieurs exemples d'application de cet
important théorème.
1) Vitesse d'un jet à l'orifice d'un container (Formule de Toricelli) :
Appliquons le théorème de Bernouilli
à une ligne de courant qui quitte la surface libre et
sort par l'orifice. Si le réservoir est assez grand, la
vitesse est négligeable en surface par rapport à la
vitesse en sortie. D'autre part une fois les effets
transitoires passés (après avoir retiré le bouchon)
le mouvement devient permanent. Ainsi entre les
points A et B, on peut écrire :
pa = pa + 2
1 q
2 - gh
et donc : q = 2
1
gh) (2
Ceci est la même vitesse que celle atteinte par un corps en chute libre tombant d'une
hauteur h. Dans un fluide, l'effet additionnel des forces de pression est simplement de
faire émerger le jet dans une direction perpendiculaire au mur sans changer sa vitesse
par rapport à celle de la chute libre.
2) Tube de pitot (anémomètre)
On veut déterminer la vitesse U d'un
écoulement en mesurant la différence de pression dans un
manomètre raccordé aux points A et B.
Si le tube de Pitot est assez petit, il modifie
peu l'écoulement en amont. Puisque les lignes
de courant sont rectilignes, la constante de
Bernouilli sur toutes les lignes de courant est
la même et on écrit :
p + 2
1 U
2 = pe +
2
1 q
2.
En A, le flot s'arrête, q = 0, et donc :
pe (A) = p +2
1 U
2
En B, après une certaine distance, le flot est à nouveau rectiligne et possède donc une
pression p (B) = P puisque toutes les lignes de courant non perturbées possèdent cette
propriété. La lecture de la différence de niveau entre C et D est donc proportionnelle à la
différence de pression ½ U2 entre A et B et permet donc de déterminer la vitesse.
3) Diagnostic sur la portance
A Z
B
h
D
B
A U C

29
L'écoulement sur une aile d'avion ou une voile de bateau a l'allure suivante :
Le flot accéléré au-dessus du profil est associé avec des différences de pressions par
excès p négatives alors qu'au-dessous la décélération fournit des vitesses plus faibles et
donc des pressions positives. Le résultat net est que les forces de pression du fluide
créent une portance, force normale à la direction de l'écoulement et dirigée ici vers le
haut.
4) Démonstration de Venturi
Les manomètres 1, 2, 3 indiquent des pressions fortes en 1 et 3 faibles en 2
quand le fluide circule dans ce tube. Comment peut-on expliquer cette expérience ?
Le théorème de Bernouilli fournit :
3232
221
12 pq
2
1pq
2
1pq
2
1
De plus la continuité fournit :
s1q1 = s2q2 = s3q3
On trouve facilement :
p2 – p1 =
22
22
12
S
S1
2
q
Quand S2 est plus petit que S1, la pression chute au point 2 quand le fluide accélère.
Si S3 = S1 on devrait récupérer la pression p1 au point 3. Dans l'expérience, ceci n'est pas
tout à fait réalisé à cause des pertes d'énergie par friction sur les bords du tube qui sont
négligées dans le théorème de Bernouilli. Comme il sera vu au chapitre VI, les pertes
sont importantes lorsque le flot diverge fortement (lorsque le tube s'élargit trop
brutalement).
1 3
2

30
5) L'écoulement au dessus d'un obstacle.
Il est nécessaire en hydraulique de connaître le débit d'un réservoir. On
positionne un obstacle large dans le lit de la rivière et on observe le niveau de la surface
libre en amont de l'obstacle :
Si q désigne la vitesse de l'écoulement
supposé uniforme selon la profondeur, le
débit est Q = qd, d étant la profondeur.
Pour des lignes de courant en
surface, la pression est toujours
atmosphérique et le théorème de
Bernouilli donne :
2
1 q
2 – gh = 0
où h est la déflexion de la surface libre. (On suppose ici qu'en amont le réservoir est
suffisamment grand pour que la vitesse y soit négligeable). Le débit est alors :
Q = (2 gh)1/2
d
et peut être calculé "en observant" h et d. On peut aller plus loin en calculant la
profondeur de l'obstacle d+h :
d + h = g2
q
q
Q 2
La courbe d + h en fonction de q a un
minimum obtenu pour q1 = (gQ)1/3
. Ce
minimum est obtenu au point le plus
haut de l'obstacle et en ce point :
h1 =
3/12
g
Q
2
1
d1 =
3/12
g
Q
Ainsi la seule mesure de h, (ou d) au point le plus haut de l'obstacle permet de
déterminer le débit Q. Nous verrons plus tard que la vitesse maximale des ondes de
surface dans un fluide de profondeur d est (gd)1/2
. Il n'est pas difficile de vérifier que la
vitesse du fluide q au point le plus haut de l'obstacle est juste égale à la vitesse
maximale des ondes de gravité. En amont, elle est inférieure (écoulement sous critique)
et en aval supérieure (écoulement super critique). Ainsi l'information (agitation de la
surface libre, vagues) existant en aval ne pourra pas être propagée en amont du point le
plus haut de l'obstacle : on y observe une eau plus tranquille.
Conservation de la quantité de mouvement
Dans la plupart des cas, la distribution des vitesses à l'intérieur du fluide est
l'inconnue majeure du problème considéré et on fait appel à la forme différentielle des
équations du mouvement pour les calculer. Il existe cependant des situations simples où
il n'est pas nécessaire de connaître la distribution des vitesses à l'intérieur du fluide pour
déterminer les forces exercées par le fluide sur des parois solides. Dans le cas particulier
du régime permanent, seule la distribution des vitesses en surface est requise, comme
nous allons le montrer.
Réservoir
h
d
d + h
d1 + h1
q1 = (gQ)1/3
q

31
Prenons un volume de fluide arbitraire fixe dans l'espace
et évaluons le bilan des forces et des accélérations si possible par une
intégrale sur la surface. Ceci nécessite une transformation de
l'accélération. Il n'est pas difficile de montrer que :
j
ij
i
x
uu
t
u
se réécrit :
j
j
i
j
jii
x
u
tu
x
uu
t
u
Or le terme entre crochets est nul d'après la conservation de la masse 2.2. Si on intègre
sur le volume V l'équation d'Euler, on obtient donc :
dAndApndAnuudvu
ti
s
i
s
jji
v
i
où on s'est permis d'écrire dans le cas où la densité est uniforme : g = - ()..
Dans le cas du mouvement permanent, le premier terme est nul, et on obtient
l'équation de conservation de la quantité de mouvement sous la forme d'une intégrale de
surface :
0dAnpnnuu iijji 4.2
Le premier terme représente la variation de quantité de mouvement à la frontière, ui
étant la composante i de la vitesse et uj nj ds, le taux de changement de la masse. Un
choix judicieux de la surface de contrôle A permet souvent de déterminer les forces de
pression sur la surface à l'aide de ce théorème qui s'énonce :
"Dans le cas du mouvement permanent d'un fluide homogène, non visqueux,
le flux de quantité de mouvement à travers une surface fixe limitant une
portion de fluide est égal à la résultante de la pression et du potentiel sur
cette surface."
Il faut aussi noter que le choix du référentiel dans lequel on applique le théorème est
important puisqu'il permet quelquefois de rendre stationnaire un écoulement.
Exemples :
1) L'exemple d'application le plus utile concerne les écoulements dans les tuyaux.
Ce faisant, on va redémontrer à partir de façon élémentaire le théorème précédent 4.2
(ainsi que 4.1).
Considérons un bloc de fluide L contenu
entre 2 sections de contrôle 1 et 2. Ce bloc
de fluide gagne un volume V2S2t à
l'avant et en perd V1S1t à l'arrière. La
conservation de la masse impose, S1V1 =
S2V2 et le fluide est donc accéléré quand il
entre dans la partie convergente du tube.
n
S
V
R
S2
P2
S1
P1
L

32
C'est la variation spatiale de vitesse le long du tube qui permet l'accélération, qui elle-
même doit être produite par des forces. Celles-ci sont les forces de pression en 1 et 2
plus la composante de la réaction R des parois, soit :
p1S1 – p2S2 – R
La variation de quantité de mouvement du bloc L est égale à la vitesse fois
le taux de changement de la masse entre 1 et 2 (soit 211VpS et 2
221 VSp respectivement).
Ainsi : 211
2222211 VSVSRSpSp
Notez qu'aucune hypothèse n'est faite sur la viscosité et que cette relation
s'applique aussi à un fluide réel. Cependant ces considérations sur la quantité de
mouvement montrent qu'elles sont insuffisantes pour déterminer R et p2 si les conditions
amont sont connues. La conservation de l'énergie doit aussi être considérée. Le taux de
changement de l'énergie est (S2V2) 22V
2
1 en 2 et (S1V1) 2V2
1 en 1.
Le travail des forces extérieures lui se réduit à p1S1V1 en 1 et –p2S2V2 en 2.
En effet comme u est perpendiculaire à R lorsque la viscosité est négligée, R ne
travaille pas. Ainsi :
112
12222222111 VSV
2
1VSV
2
1VSpVSp
Soit: 21
2221 V
2
1V
2
1pp
qui n'est pas autre chose que le théorème de Bernouilli. On peut alors calculer R :
R = P2 (S1 – S2) + 1
2212
2S
)SS(V
2
1
qui est donc la force exercée par les parois du tuyau sur le fluide. Si la décharge se fait à
l'air libre p2 = pa. Comme pa (S1 – S2) est aussi la force de pression exercée par
l'atmosphère sur l'extérieur du tuyau, la force que doit exercer un jardinier ou un
pompier pour tenir un tuyau d'arrosage se réduit à :
1
2212
2S
)SS(V
2
1
La question se pose de savoir si cette analyse non visqueuse donne des
résultats corrects en pratique. La réponse est affirmative quand le tuyau est convergent
et ne présente pas de variations abruptes de section. Dans le cas contraire les forces de
friction tangentielles aux frontières ne peuvent plus être négligées et une partie de
l'énergie cinétique sera dissipée en chaleur.
Dans ce cas :
aval
V2
1p
amont
V2
1p 2
222
11
33
et la chute de pression p1 p2 sera en réalité plus
grande que celle prédite par le théorème de Bernouilli.
C'est le cas en particulier pour un tuyau divergent. La
variation de section doit être tres douce pour
empêcher les couches limites de séparer sur les bords
et de générer de la turbulence et donc induire de la
dissipation d'énergie.
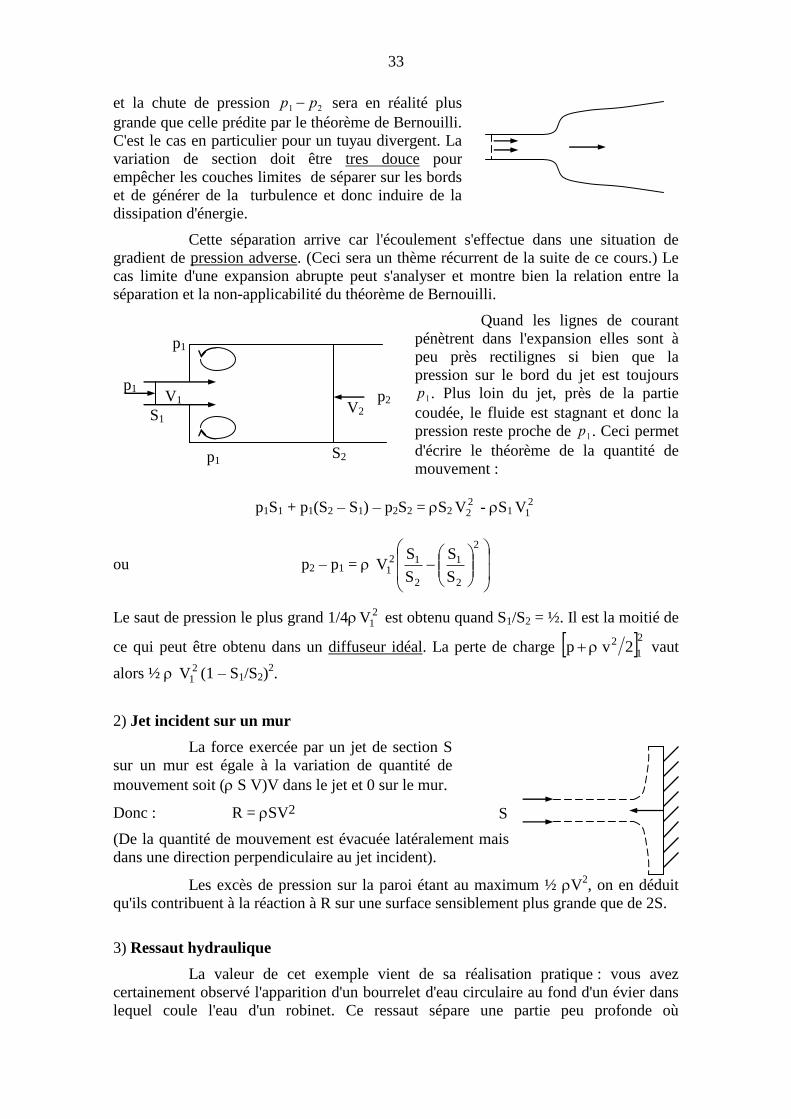
Cette séparation arrive car l'écoulement s'effectue dans une situation de
gradient de pression adverse. (Ceci sera un thème récurrent de la suite de ce cours.) Le
cas limite d'une expansion abrupte peut s'analyser et montre bien la relation entre la
séparation et la non-applicabilité du théorème de Bernouilli.
Quand les lignes de courant
pénètrent dans l'expansion elles sont à
peu près rectilignes si bien que la
pression sur le bord du jet est toujours p1. Plus loin du jet, près de la partie
coudée, le fluide est stagnant et donc la
pression reste proche de p1. Ceci permet
d'écrire le théorème de la quantité de
mouvement :
p1S1 + p1(S2 – S1) – p2S2 = S222V - S1
21V
ou p2 – p1 =
2
2
1
2
121
S
S
S
SV
Le saut de pression le plus grand 1/4 21V est obtenu quand S1/S2 = ½. Il est la moitié de
ce qui peut être obtenu dans un diffuseur idéal. La perte de charge 21
2 2vp vaut
alors ½ 21V (1 – S1/S2)
2.
2) Jet incident sur un mur
La force exercée par un jet de section S
sur un mur est égale à la variation de quantité de
mouvement soit ( S V)V dans le jet et 0 sur le mur.
Donc : R = SV2
(De la quantité de mouvement est évacuée latéralement mais
dans une direction perpendiculaire au jet incident).
Les excès de pression sur la paroi étant au maximum ½ V2, on en déduit
qu'ils contribuent à la réaction à R sur une surface sensiblement plus grande que de 2S.
3) Ressaut hydraulique
La valeur de cet exemple vient de sa réalisation pratique : vous avez
certainement observé l'apparition d'un bourrelet d'eau circulaire au fond d'un évier dans
lequel coule l'eau d'un robinet. Ce ressaut sépare une partie peu profonde où
S1
p1
p1 p2
p1 S2
V2
V1
S

34
l'écoulement est rapide avec des vitesses supérieures à la vitesse des ondes de gravité
[(gh)1/2
quand le fluide est très peu profond ce qui est le cas ici] d'une partie extérieure
où l'écoulement est plus lent (les vitesses étant inférieures à la vitesse des ondes de
gravité).
Si on introduit le nombre sans dimension de Froude, F = U/(gh)1/2
, celui-ci passe d'une
valeur "supercritique" supérieure à 1 à une valeur sous critique plus petite que 1 dans la
direction de l'écoulement. Aussi étrange que cela puisse vous apparaître à ce stade, le
phénomène est physiquement analogue à l'onde de choc créée par d'un avion volant à
vitesse supersonique (pour lequel les effets de compressibilité de l'air sont majeurs). A
faible coût vous pouvez d'ailleurs observer le sillage caractéristique en V d'un tel avion
en plongeant un clou dans la région supercritique du ressaut de votre évier ! Bien qu'au
ressaut lui-même les vagues déferlent et une zone turbulente de mélange apparaisse, le
théorème de la quantité de mouvement permet de relier les conditions amont et aval.
Pour simplifier considérons l'écoulement parallèle et uniforme dans la
direction X.
La conservation de la masse implique :
hU = h'U'
Appliquons maintenant le théorème sur la surface de contrôle en pointillés. Les forces
de pression sur AB et CD s'évaluent hydrostatiquement puisqu'il n'y a pas d'accélération
dans la direction verticale. Sur AB la pression moyenne vaut 1/2 gh2 fois la longueur
unité perpendiculairement à la figure. Si on néglige l'effet de la viscosité sur le fond du
canal le long de AD, le théorème de la quantité de mouvement donne :
U'2h' – U
2h = g
2
'h
2
h 22
h
ressaut
B
A
C
D
h' U'
U h
amont aval
x

35
Avec ces deux relations, on peut relier les conditions amont et aval :
2/1
2
)'hh(
'h
hg'U
et
2/1
2
)'hh(
h
'hg'U
vitesses U' et U respectivement inférieures à la vitesse des ondes de gravité en aval et en
amont, écoulement donc sous-critique en aval et supercritique en amont. Il est dès lors
impossible à une onde émanant de la région agitée du ressaut de remonter vers l'amont.
Si F le nombre de Froude amont U/(gh)1/2
est donné, la relation donnant U en fonction
de h et h' s'écrit :
gh'2 + ghh' – 2 U
2h = 0
équation dont la racine positive donne :
2
)F81(1
h
'h 2/1
montrant que si F > 1, h'/h est supérieure à 1.
La relation de Bernouilli est-elle valable dans cette situation ? Si on évalue
U2/2 + gh en amont et en aval on détermine une perte de charge (qui montre) que
l'énergie n'est pas conservée. Elle est dissipée au niveau du ressaut. Ces ressauts sont
utilisés en génie civil justement pour "détruire" l'énergie cinétique des chutes d'eaux en
produisant de la turbulence. A cette turbulence est associée une forte dissipation grâce
au transfert d'énergie très efficace vers les petites échelles où la viscosité moléculaire
devient prépondérante. L'énergie cinétique est ultimement transformée en énergie
interne et conduit à une augmentation de température.

36
Chapitre V
CHAMPS DE VORTICITE ET DE DEFORMATION
- THEOREMES DE VORTICITE
Analyse locale du mouvement d'un fluide
En mécanique du solide rigide, nous avons vu que
seuls les mouvements de translation et de rotation sont possibles.
L'objet ici est de montrer comment quantifier la nouveauté, la
déformation qui apparaît dans un fluide. On effectue une analyse
locale du mouvement au voisinage d'un point C.
La vitesse relative du du point M par rapport au point C s'exprime par un
développement limité au premier ordre au voisinage de C comme :
j
iji
x
udxdu
5.1
Décomposons cette expression en une somme
de parties symétrique et antisymétrique
relativement aux indices i et j :
où ijjsi edxdu
ijjai rdxdu
avec
i
j
j
iij
x
u
x
u
2
1e
i
j
j
iij
x
u
x
u
2
1r
Comme rij n'est déterminé que par trois éléments, il doit être assimilable à
un vecteur et ces 3 éléments ne sont autres que les composantes du rotationnel de u, le
vecteur vorticité = u. On peut vérifier que :
xd2
1dua
i 5.2
On reconnaît dans cette expression le mouvement de rotation solide du
point M par rapport à C autour d'un axe donné par la direction et à la vitesse angulaire
1/2.
C
M u + du dx
u

37
On peut montrer que le moment angulaire d'une sphère de fluide centrée en
C est le produit du moment d'inertie et de ½ (Lighthill).
Le reste, c'est-à-dire sidu , ne peut représenter qu'une déformation qui est
entièrement définie par le tenseur E d'éléments eij.
Une matrice symétrique réelle peut toujours être diagonalisée car ses valeurs
propres sont réelles. Dans un nouveau repère cartésien orthonormé où les coordonnées
x', y, z' sont reliées aux anciennes x, y, z par une matrice de passage orthogonale L, on
a :
3
2
1
3
2
1
3
2
1
3
2
1
u
u
u
L
'u
'u
'u
x
x
x
L
'x
'x
'x
La matrice orthogonale L peut toujours être trouvée et possède la propriété
que L-1
= LT.
Les constantes 1, 2, 3 étant les valeurs propres de E, la matrice de
déformation E' dans le système des axes principaux s'écrira :
3
2
1
1
00
00
00
LELE
On aura : sidu' = i dx'i.
Sur la figure ci-contre
une élongation dans la direction
x'i (1 > 0) une contraction
(2 < 0) dans la direction x'2, plus
une élongation ou une contrac-
tion dans la direction x'3, trans-
forment la sphère de rayon en
un ellipsoïde de longueur de
demi axe (1 + 1dt),
(1 + 2dt), (1 + 3dt). Les
axes de l'ellipsoïde sont appelés
les axes principaux de la défor-
mation. En fluide incompressible,
le taux de variation du volume de
l'ellipsoïde est nul car :
1 + 2 + 3 = u' = 0
dans les nouveaux axes. Vu d'une
autre façon les trois axes princi-
paux représentent les trois
directions qui restent mutuel-
lement orthogonales au cours de
la déformation.

38
Un exemple particulier important qui permet d'illustrer la décomposition
générale précédente concerne les écoulements cisaillés où :
u =
0
0
sy
s étant une constante
Dans ce cas : =
s
0
0
000
002/s
02/s0
Ret
000
002/s
02/s0
E
E peut être diagonalisé par une rotation de π/4 des axes avec :
000
02/s0
002/s
LELet
200
011
011
21L 1
Le cisaillement transforme la sphère en un ellipsoïde de demi-axes
(1 + s/2 dt), (1 - s/2 dt), .
Dans cette figure le courant de cisaillement peut être vu comme la somme
d'une déformation pure le long d'axes inclinés à π/4 et 3 π/4 et d'une rotation pure dans
le sens inverse trigonométrique à la vitesse angulaire s/2. Bien entendu cette
décomposition n'est valable que pour des temps assez faibles pour lesquels le
développement de Taylor à l'ordre 1 reste suffisant. Pour des temps plus longs l'ellipse
se déforme et un regard sur un colorant dans un fluide en mouvement montre la
complexité et la richesse des étapes ultérieures.
Cinématique et dynamique de la vorticité
Dans la présentation précédente, 2 champs vorticité et déformation ont été
introduits. La vorticité tient une place prépondérante en dynamique des fluides que nous
allons expliciter ici. Comme () = 0, le vecteur vorticité est dit solénoïdal. On peut, à
Mouvement
total Déformation Rotation

39
un instant t, calculer des lignes de vorticité dans le fluide, courbes tangentes en tous
points au vecteur vorticité. Si ces composantes sont 1, 2, 3, ces lignes obéiront à :
3
3
2
2
1
1 dxdxdx
Quand ces lignes s'appuient sur une boucle on peut définir un tube de
vorticité en analogie avec les tubes de courant :
Le théorème de la divergence appliqué à sur le
domaine L limité par le tube permet d'obtenir :
0dVdSn
LL
Comme la partie latérale du tube ne
contribue pas :
0dSndSn 21
(Normales dirigées vers l'extérieur du tube)
Si on réoriente les normales n dans le sens de , on obtient :
cstedSn
Appliqué à un tube fin de vorticité, ce résultat indique que le produit de la
surface de la section du tube par la vorticité est constant : si le tube s'amincit, on s'attend
à ce que la vorticité augmente. Ce produit, flux du vecteur vorticité, définira l'intensité
de la vorticité.
Circulation :
Le résultat précédent peut s'exprimer de façon complémentaire avec l'aide
du théorème de Stokes.
La frontière de la surface S qui s'appuie sur le
tube de vorticité est une courbe fermée C qui entoure le
tube 1 fois. Le théorème dit alors que :
CS
dludSn
où
C
dlu est la circulation autour de C, composée de la somme d'élé-
ments udx + vdy + wdz et prise dans le sens positif par rapport à n. (Si le pouce de la
main droite est aligné selon la normale dirigée vers l'extérieur n, en fermant la main on
obtient le sens positif selon C). La circulation autour d'un tube de vorticité est donc
invariante. Ceci implique en particulier que les lignes de vorticité peuvent soit se
refermer sur elles-mêmes, soit se terminer sur une paroi solide. Elles ne peuvent en
aucun cas avoir d'extrémité libre dans le fluide. Si c'était le cas, le flux de vorticité à
travers une surface s'appuyant sur le contour entourant la ligne de vorticité aurait deux
déterminations arbitraires selon que la surface coupe ou ne coupe pas la ligne de
vorticité et il en serait donc de même pour la circulation et la vitesse créée par la ligne
de vorticité qui n'auraient pas de valeurs bien définies.
s1
s2
n2
n1
C
n

40
Théorème de Kelvin :
Dans le cadre du modèle d'Euler,
fluide idéal, sans frottement, de densité
constante, nous allons démontrer un
remarquable théorème sur la persistance de la
circulation autour d'une courbe fluide constituée
de particules fluides. Considérons une telle
courbe C dite matérielle et formons la
circulation autour de C.
La position relative de 2 particules fluides est dx
et le taux de changement de leur position
relative donne leurs vitesses relatives :
Dt
D dx = du
Ainsi : Dt
Du dx = u
Dt
D dx +
Dt
uD dx
Soit : Dt
D u dx =
2
1d|u|
2 + +
Dt
uD dx
Quand on veut obtenir la circulation, on doit faire la somme de termes de
type u dx tout autour de C. La courbe C va être représentée paramétriquement par x =
x(s,t), chaque particule de la courbe matérielle C ayant une valeur particulière de s,
disons entre 0 et 1.
Alors :
1
0
1
0)t(C
dss
xu
tds
s
xu
dt
dxdu
dt
d
où maintenant le /t est effectué à s constant, s représentant le label d'une particule.
Après avoir dérivé le produit et identifié les termes, ceci se réécrit :
CC
2xd
Dt
uDud
2
1xdu
dt
d
Le premier terme à droite est nul puisque |u|2 reprend la même valeur après un tour.
Quand au deuxième, l'équation du mouvement permet de le réécrire :
0dp1
xdp1
xdDt
uD
CC
Car p dx est la différentielle de p, dp dont l'intégrale est aussi nulle puisque la
pression ne peut prendre qu'une valeur. On obtient le théorème de Kelvin :
0xdudt
d
C 5.3
La circulation autour d'une courbe fluide (se déplaçant avec le fluide) est un
invariant du mouvement.
C
x+d x
x
u
u + d u

41
Le mouvement des lignes de vorticité :
Nous allons tout d'abord démontrer que les
tubes de vorticité se déplacent avec le fluide
c'est-à-dire que les particules fluides
composant la surface du tube se déplacent
toujours de façon à continuer à former un tube
de vorticité.
A la surface du tube n = 0, n désignant la normale extérieure. Pour toute courbe C
tracée sur le tube (et qui n'en fait pas le tour) le théorème de Stokes montre que la
circulation autour de cette courbe est nulle. Quand les particules se déplacent, C est
déformée mais la circulation autour de cette courbe est toujours nulle d'après le
théorème de Kelvin. Quand C est une petite boucle élémentaire ceci implique que
u n est toujours zéro sur la petite surface sur laquelle C s'appuie. Ce qui démontre
que le tube de vorticité reste un tube de vorticité. La même propriété à savoir que les
lignes de vorticité se déplacent avec le fluide s'en déduit puisque une ligne est un tube
de section infinitésimale. Ce résultat, connu sous le nom de théorème de Helmhotz, est
important pour la direction du vecteur vorticité dont on vient de montrer qu'elle suit la
direction de la chaîne de particules alignées sur la ligne en question. L'intensité du
vecteur vorticité quant à elle augmente ou diminue proportionnellement à l'élongation
ou à la contraction de cette chaîne de particules. Pour montrer cela appliquons le
théorème de Kelvin à une petite courbe fermée autour d'un tube fin de vorticité. La
circulation autour de cette courbe fermée entourant la ligne est égale au flux de vorticité
S où est la vorticité moyenne sur la surface élémentaire S. Cette quantité est un
invariant du mouvement puisque la courbe, partie intégrante du tube de vorticité se
déplace avec le fluide. Si une section du tube voit sa longueur l changer (élongation ou
contraction) au cours du mouvement, le volume occupé l S doit rester constant (en
fluide incompressible). Il en résulte que :
l
= cste
et donc que l'intensité de la vorticité change en proportion directe avec la longueur de
l'élément de fluide considéré. Ce résultat rappelle la conservation du moment angulaire
en mécanique du solide où le produit du moment d'inertie et de la vitesse angulaire est
conservée.
Elongation d'un tube de vorticité
Ce n'est pas surprenant car en fluide idéal, les seules forces agissantes sont les forces de
pression. Agissant vers le centre de la particule fluide, leur moment est donc nul et le
moment angulaire pour une sphère de fluide est nécessairement conservé. Ainsi les
n
C
l
S

42
composantes de la vitesse angulaire autour des axes principaux de déformation changent
de façon inversement proportionnelle aux moments d'inertie autour des axes
correspondants et donc de façon proportionnelle aux changements de longueur selon
l'axe considéré (Lighthill).
L'équation de la vorticité :
Les considérations précédentes font apparaître des propriétés intégrales
montrant que la notion de vorticité est fondamentale pour utiliser les notions liées au
moment angulaire. Il est utile de les retrouver au niveau local.
Une équation pour le vecteur vorticité peut être facilement déduite de
l'équation de la quantité de mouvement. Pour une plus grande généralité gardons ici les
termes de friction appropriés au cas du fluide incompressible :
up
Dt
uD 2
,
(viscosité cinématique)
En réécrivant l'équation :
u2
up
1u
t
u 2
2
En appliquant l'opérateur , et en utilisant l'identité :
( u) = (u ) - ( ) u valable lorsque
0
0u
on obtient : 2u)(Dt
D 5.4
qui est l'équation de vorticité cherchée.
L'équation 5.2 nous montre que la vorticité locale n'est pas conservée en
suivant une particule fluide, même en l'absence de diffusion. Le premier terme à droite
représente les gains ou pertes liés à l'élongation ou à la contraction de la ligne vortex vu
précédemment. En effet . représente une différentiation dans la direction de .
Soit P et Q, 2 points sur la ligne de vorticité et u la vitesse relative de Q
par rapport à P.
( ) u = PQ
ulim
0PQ
S'il y a élongation, u > 0, la vorticité augmente.
S'il y a contraction, u < 0u 0 , la vorticité diminue.
P
Q
u

43
Regardons maintenant comment évolue la ligne matérielle PQ, où
x = xQ – xP :
Dt
D x = uQ – uP = u
Le développement de Taylor de u donne :
u = (x )u
Si bien que : Dt
D x = (x )u 5.5
Comparons les expressions 5.4 et 5.5. En l'absence de diffusion, si x est
parallèle à à t = 0, x restera parallèle à à t 0. En d'autres termes l'évolution de
l'élément matériel x est gouvernée par exactement la même équation d'évolution que le
vecteur vorticité. On retrouve donc par une approche différentielle locale le résultat
obtenu à partir du théorème intégral de Kelvin à savoir que les lignes de vorticité se
déplacent avec le fluide.
L'équation 5.4 est importante pour l'étude phénoménologique de la
turbulence à cause de cette analogie entre lignes matérielles et lignes de vorticité.Le
deuxième terme à droite représente l'effet de la friction ; sur la vorticité, elle apparaît
comme une diffusion, phénomène qui tend à lisser les anomalies de vorticité. Bien
évidemment quand la diffusion est présente, on ne peut plus dire que les lignes de
vorticité se déplacent avec le fluide.
L'équation 5.4 a un cas particulier important. Considérons un écoulement
bidimensionnel dans le plan xy. Dans ce cas la vorticité est dans la direction z et le
terme d'élongation – contraction ( )u est identiquement nul et 5.4 se réduit à :
Dt
D z =
2 z 5.6
indiquant la conservation de la vorticité dans la direction z (en l'absence de diffusion).
En fait 5.6 permet de déterminer entièrement le flot via l'introduction d'une fonction
courant permettant de satisfaire la continuité :
u = - x
, v =
x
Alors z = 2 et 5.6 devient l'équation du mouvement :
,...)(J...
t
2 =
4 5.7
où J est l'opérateur jacobien :
J(a,b) = axby - aybx
Les mouvements de grande échelle dans l'océan ou dans l'atmosphère sont
très influencés par la rotation de la terre et deviennent approximativement bi-
dimensionnels, dans le plan perpendiculaire à l'axe de rotation de sorte que 5.7 a été très
utilisé comme modèle prototype de la turbulence grande échelle de ces milieux (la terre
est sphérique donc un terme additionnel important doit aussi être inclus dans 5.7).

44
Quelques exemples de distribution de vorticité
Comme la vorticité est souvent concentrée, des distributions idéalistes vont
être très utiles.
Lignes de tourbillon
Considérons tout d'abord le cas où la vorticité est nulle à peu près partout à
l'exception d'une région au voisinage immédiat d'une courbe particulière. Ainsi tous les
tubes de vorticité du fluide sont concentrés dans un tube de rayon autour de la courbe
particulière. On appellera une telle région ligne de tourbillon pour la distinguer d'une
ligne de vorticité. Une ligne de tourbillon se déplace avec le fluide puisque qu'elle
représente un tube constitué de tubes de vorticité qui ont cette propriété.
Ligne tourbillon : seule la région
hachurée possède de la vorticité.
En analogie avec l'intensité d'un tube de vorticité, on définit l'intensité d'une ligne
tourbillon comme la circulation K dans le sens positif autour d'une courbe quelconque
fermée qui effectue un seul tour autour de la ligne tourbillon sans la traverser. Il n'est
pas difficile de voir que ceci définit la circulation de façon unique (on prend 2 courbes
C1 et C2 et on bâtit la surface latérale qui s'appuie sur C1
et C2. Finalement on applique
le théorème de Stokes à cette surface qui est immergée dans le fluide irrotationnel).
Si on prend une courbe C qui est un petit cercle de rayon autour de la
ligne de tourbillon, le théorème de Stokes montre que :
s
c
dsndxuK
L'intensité K de la circulation est une intégrale de la composante de la vorticité tangente
à la ligne de tourbillon sur la surface enclose par le petit cercle. C'est aussi la somme de
l'intensité de tous les tubes de vorticité concentrés dans la région en question. Le
théorème de Kelvin indique que K est un invariant du mouvement. (Le rayon peut lui
augmenter par diffusion de vorticité et diminuer par élongation de la ligne de
tourbillon.)
Si on prend la circulation autour d'un cercle Cr de rayon r > dans un plan
normal à la ligne de tourbillon, on a :
Kdxurc
et la vitesse tangentielle moyenne le long de Cr est :
u K
2r
u = r2
K
C

45
La vitesse augmente donc très rapidement quand on se rapproche de la ligne de
tourbillon. Il paraît paradoxal qu'un tel champ de vitesse soit irrotationnel bien que les
particules fluides tournent autour de l'axe r = 0 mais la vorticité associée avec la
rotation autour de l'axe est exactement annulée par celle due au cisaillement latéral de
l'écoulement.
Un tourbillon isolé de cette sorte reste immobile mais que se passe-t-il
lorsque 2 lignes de tourbillons sont en présence ? Les lignes tourbillons se déplaçant
avec le fluide, le champ de vitesse de l'une va faire bouger l'autre et réciproquement.
Soient 2 lignes tourbillons d'axe parallèle et d'intensité K1 et K
2.
- Si K1 + K2 = 0 : l'ensemble des 2 tourbillons effectue une translation à la vitesse
r2|K| perpendiculairement à leur séparation.
- Si K1 = K2 les 2 tourbillons tournent autour du centre C de vorticité situé au milieu
de la ligne de séparation.
Plus généralement on montre que si le centre de vorticité C est défini par
0CAK2
1i
ii
, les tourbillons tournent à une vitesse angulaire 221 r2)KK(
autour de C. Des configurations plus importantes de vortex ont été étudiées et dès N = 4
des régimes chaotiques apparaissent.
Une autre curiosité hydrodynamique concerne les anneaux-tourbillons
(vortex rings), une situation dans laquelle le tube de vorticité se referme sur lui-même
comme une chambre à air de bicyclette.
Il s'agit d'une structure stable qui se propage avec une
vitesse propre, perpendiculairement au plan de la boucle comme la
symétrie le suggère.
On peut les créer soit en faisant tomber des gouttes d'un
fluide coloré dans un bocal d'eau soit en s'exerçant à fumer la pipe.
Avec une certaine pratique, on pourra générer 2 anneaux
consécutivement et observer une interaction fort originale dans
laquelle chaque anneau passe successivement au travers de son
prédécesseur.
K1
A1
K2
K2
K1
A1
A2
A2
C

46
Feuilles de vorticité
Une feuille de vorticité (on devrait dire tourbillon mais il n'y a pas de
confusion possible ici) est une surface au voisinage de laquelle la vorticité est
concentrée. L'intensité H d'une feuille de vorticité est ici définie comme l'intégrale de la
vorticité au travers de l'épaisseur de la feuille.
0
zd H
Quand est très petit, seules les composantes de qui impliquent des dérivées par
rapport à z sont importantes. Soient:
(-Vz, Uz, 0)
et donc l'intensité H devient : H = (-[V], [U], 0)
où
z
0z représente le saut d'une quantité au travers de la feuille.
Souvent lignes de tourbillon et feuilles de vorticité sont modélisées comme
ayant une épaisseur nulle et une intensité bien définie.
z

47

48
Chapitre VI
L'ECOULEMENT AUTOUR D'OBSTACLES
De nouvelles applications de la mécanique de fluides font leur apparition
pour ce qui concerne les fluides de l'environnement, air et eau bien sûr présents dans
l'atmosphère et les océans, mais aussi pour les fluides terrestres intérieurs (laves
volcaniques, manteau terrestre, noyau liquide). Historiquement et en pratique
industrielle encore aujourd'hui, la mécanique des fluides s'est cependant surtout occupée
à résoudre le problème de l'écoulement d'un fluide autour d'un obstacle solide. Ce sujet a
évidemment de grandes applications en aérodynamique, hydrodynamique qui justifient
cet intérêt. Il s'agit pour un écoulement défini en amont de l'obstacle de prédire l'allure
de l'écoulement au voisinage et en aval de l'obstacle et de calculer les forces exercées
par le fluide sur l'obstacle. Le problème comme nous allons le voir est complexe et fait
l'objet d'actives recherches encore aujourd'hui. Les avions sont récents et les
mathématiciens avaient prévu au début du siècle que ceux-ci ne pourraient pas voler sur
la base d'une théorie inviscide (sans friction, ...) ! Nous voulons explorer pourquoi de
telles théories (donc basées sur le modèle d'Euler) ne sont pas directement applicables,
et comment convenablement modifiées elles peuvent encore être utiles.
Les conséquences du théorème de Kelvin
Une catégorie importante d'écoulements concerne les écoulements
irrotationnels pour lesquels le vecteur vorticité est nul en tous points. Un élément de
fluide n'est soumis dans ce cas qu'à une translation et à une déformation pure sans
rotation.
Le théorème de Lagrange établit que si est nul à t 0, est nul à tout
instant postérieur dans le cadre du modèle d'Euler sans friction. Pour le démontrer,
considérons un petit disque élémentaire dont la normale n est dans la direction de la
composante selon Ox de la vorticité, 1 .
La vorticité sur le disque ne diffère pas
significativement de la vorticité en P au centre du disque.
La circulation autour du périmètre du disque est donc :
Sdxu 1
Maintenant le théorème de Kelvin dit que la circulation autour de ,
consistant des mêmes particules fluides, est invariante au cours du temps. Si donc 1 est
nul à t = 0, la circulation reste nulle autour de et 1 reste nul sur le disque.
L'application de ce raisonnement aux trois composantes de la vorticité démontre le
n
S
P

49
théorème de Lagrange. Un cas spécial d'applications de ce théorème concerne les
mouvements de fluide qui démarrent d'un état de repos : Si u = 0, à t = 0, la vorticité
initiale est nulle et le flot est donc irrotationnel à tout instant ultérieur.
Considérons encore le cas suivant d'un écoulement stationnaire sur un
obstacle. Si le flot est uniforme en amont, la vorticité y est nulle. Si maintenant on
marque en amont un contour fluide autour d'une ligne de courant, ce contour est advecté
en aval et d'après le théorème de Kelvin la circulation et donc la vorticité est nulle
partout en aval. Sur la base de cet argument l'écoulement serait irrotationnel dans tout
l'espace. Cet argument est fallacieux car pour les lignes de courants qui passent le long
de la surface du solide, la circulation du petit contour n'est pas conservée à cause de la
génération de vorticité par diffusion à la frontière. A cause des conditions aux limites de
non glissement à la frontière d'un fluide réel, l'écoulement irrotationnel n'est pas la
réponse complète au problème, loin s'en faut, sauf dans certains cas particuliers très
importants en pratique !
Phénoménologie de l'écoulement autour d'un obstacle
Supposons un fluide au repos et un obstacle immergé qui se met en
mouvement. Immédiatement un flot irrotationnel est créé avec une composante de
vitesse tangentielle non nulle sur l'obstacle car l'accélération locale u/t répond au
gradient de pression. Ainsi d'après le modèle d'Euler et dans le référentiel lié à l'obstacle
une discontinuité apparaît entre la vitesse extérieure irrotationnelle et la vitesse nulle sur
l'obstacle (composante tangentielle). Il y a donc apparition d'une feuille de vorticité
attachée à l'obstacle, d'épaisseur nulle initialement mais qui va croître par diffusion.
Cette région à l'intérieur de la ligne pointillée est appelée couche limite. Deux processus
déterminent son évolution :
1) la diffusion qui tend à faire croître l'épaisseur comme (vt)1/2
;
2) l'advection de vorticité qui tend à transporter les lignes de vorticité en aval de
l'obstacle en un temps l/U typiquement, si l est la longueur de l'obstacle et U la
vitesse caractéristique dans la partie extérieure de la couche limite.
Ce deuxième processus limite donc la croissance de la couche limite à une
valeur = 0(vl/U)1/2
car la vorticité générée à la surface solide est balayée vers l'aval en
un temps l/U, durant laquelle elle a diffusé sur cette épaisseur . Cette vorticité balayée
doit être remplacée de façon régulière par de la nouvelle vorticité générée à la surface de
l'obstacle pour maintenir intact l'intensité de la feuille de vorticité et donc le saut de
l
U

50
vitesse subi par le flot "extérieur". L'épaisseur de la couche limite par rapport à la
longueur de l'obstacle peut s'écrire :
2
1
v
U
ll
où R = Ul/v est le nombre de Reynolds.
En adimensionnalisant les termes d'inertie de l'équation du moment par U2/L
et les termes de friction par vU/L2 dans un flot d'échelle U et L, le rapport :
lU
uv0
uu02
est justement le nombre de Reynolds*. Basée sur l'échelle extérieure des flots, le nombre
de Reynolds est généralement très élevé car les viscosités sont faibles et les échelles
grandes.
Dès que Re > 104, les couches limites sont minces au sens de 6.1 et les
régions où les phénomènes de friction importent sont très limitées ce qui semble justifier
l'approche par le modèle d'Euler. Mais est-ce bien vrai ? Bien que les couches limites
soient très minces, peut-on réellement négliger leur influence ?
Voici justement un exemple où une adimensionnalisation naïve ne donne
qu'une réponse bien partielle à cette question. Une couche limite peut devenir turbulente
(remplie de petits tourbillons aléatoires) dès que R est 0(106). La turbulence a pour effet
d'augmenter la diffusivité au-dessus de sa valeur moléculaire et d'accroître les transferts
de vorticité au travers de la couche limite qui peut alors être plus épaisse. En pratique
elle reste "mince" même si elle est turbulente.
Un effet beaucoup plus perturbateur concerne la séparation de la couche
limite qui décolle de la surface solide et pénètre dans l'intérieur rendant la solution
irrotationnelle tout-à-fait académique et dénuée de sens. Les conditions sous lesquelles
cette séparation est probable peuvent être précisées et sont d'un grand intérêt pratique
(Lighthill). La figure suivante montre l'écoulement permanent autour d'un obstacle
elliptique. De l'amont jusqu'au milieu de l'obstacle, les tubes de courant sont comprimés
et la vitesse croît, pour décroître ensuite en aval. Si la couche limite (CL) peut être
considérée comme une feuille de vorticité attachée à l'obstacle, son intensité V (qui est
aussi la vitesse de l'écoulement juste à l'extérieur de la CL) augmente jusqu'au milieu de
l'obstacle pour diminuer ensuite. L'advection de vorticité est plus grande en B qu'en A
dans la CL car l'intensité de la vorticité est plus grande en B et le flot y est aussi plus
rapide : la vorticité en B, disparaît par advection plus rapidement que la vorticité n'arrive
de A. Pourtant la vorticité en B doit rester constante et V égal à la vitesse à l'extérieure
de la CL.
* L'importance du nombre de Reynolds fut découverte non pas dans le contexte des couches limites
(l'œuvre de L. Prandtl) mais dans les écoulements dans les tuyaux par Reynolds qui montra que
l'écoulement passe de laminaire à "turbulent ou chaotique" quand R dépasse une valeur critique.

51
Fig. 33. Separation of a boundary layer for flow around an elliptic cylinder at rest in an oncoming stream of
velocity U directed along the major axis of its elliptic cross-section.
(a) Streamlines, calculated by a method described in Chapter 9, with the flow assumed irrotational in the region
outside the boundary layer. The broken line is the plane of symmetry of the flow.
(b) Distribution of the velocity V just outside the boundary layer, as given by the same irrotational-flow
calculation. The boundary layer, then, consists of a vortex sheet of strength V.
(c) Between A and B, this strength V is increasing, thus requiring the generation of new positive vorticity at the
boundary so that the distributions of vorticity and fluid speed q within the boundary layer are changed as
shown (with the boundary-layer scale normal to the body surface hugely exaggerated).
(J. Lighthill. "An informal introduction
to theoretical fluid mechanics")

52
De la nouvelle vorticité est donc nécessairement produite à la surface solide
de même signe que la vorticité en B de façon à rétablir le déficit. Cette nouvelle vorticité
est diffusée puis (et) advectée dans la CL.
Si on applique les mêmes arguments entre C et D on arrive à une conclusion
différente : le flot étant retardé, V est plus faible en D qu'en C. L'advection enlève moins
de vorticité en D qu'il n'en arrive en C. A un point tel que en D, de la vorticité de sens
opposé à celle présente dans la CL doit être générée à la frontière solide pour équilibrer
l'excès dû à l'advection et permettre à l'intensité V de rester constante en D. Si le flot est
faiblement retardé, la diffusion de la partie centrale de la CL de vorticité positive vers le
mur est plus grande que la diffusion de la vorticité négative du mur vers le centre et la
vorticité négative n'apparaît pas (voir figure (d)).
Si le flot est très retardé (entre D et E), la vorticité négative doit diffuser
beaucoup plus largement et un flot opposé se développe donc le long de la frontière
correspondant à cette vorticité opposée. Le flot direct vers l'aval et le flot opposé se
rencontrent quelque part entre D et E et se séparent de la surface (fig. (e)). Le flot direct
extérieur continue vers l'aval mais maintenant une région épaisse de flot opposé se
développe près de la frontière et l'idée d'une mince CL disparaît.
Ainsi la dynamique de la vorticité fournit la conclusion suivante :
- Quand un écoulement accélère, (le gradient de pression est favorable) les
couches limites n'ont pas tendance à se séparer et restent minces.
- Quand un écoulement ralentit (le gradient de pression est défavorable) le
flot se sépare de la frontière solide à cause d'une génération importante de
vorticité à la frontière, de sens associé avec celui d'un flot opposé à
l'écoulement principal. Quand Re est plus grand et que les CL deviennent
turbulentes, la diffusion augmente : une décélération plus importante sera
nécessaire pour produire la séparation n'arrive et celle-ci se produira donc
plus loin en aval.
Ainsi dans l'usage qui suivra du modèle d'Euler on peut penser que ses
prédictions pour l'écoulement extérieur seront correctes quand le flot accélèrera, les CL
restant minces. Rien n'est moins sûr quand le flot sera retardé et on pourra s'attendre
dans ce cas à des différences majeures entre l'écoulement des fluides réels et des fluides
idéaux.
Finalement dans le cas où les flots sont séparés, une feuille libre de vorticité
est injectée dans l'intérieur. Celle-ci est sujette à instabilité dès que Re est modéré. On a
donc génération de turbulence et forte dissipation associée, un cas que l'on cherche en
général à éviter en pratique.

53

54
Les flots irrotationnels
Comme nous l'avons vu, le flot extérieur autour d'un obstacle est
irrotationnel si la vorticité générée à la frontière solide reste confinée dans les couches
limites (qui sont minces si le nombre de Reynolds est élevé). Il y a donc toujours un
intérêt à étudier les flots irrotationnels (non nécessairement permanents).
Considérons la situation suivante d'un obstacle initialement au repos qui
atteint la vitesse u s en un temps très court . Le fluide reçoit une impulsion via les
forces de pression mises en jeu. Pendant ce temps très court, la diffusion ou l'advection
de vorticité présente à la frontière n'a pas le temps de pénétrer l'intérieur. La quantité de
mouvement acquise par une particule fluide est donc :
0
dtpu
p étant toujours l'excès de pression.
Dans un tel cas transitoire à partir du repos, on voit que u dérive d'un
potentiel :
u = , = -
0
dtp2
1
et le mouvement est donc irrotationnel puisque = 0.
Pour arriver à faire bouger le fluide de façon significative quand est très
petit, les forces de pression doivent être très grandes. Ces excès de pression sont de plus
générés dans tout le fluide de façon quasi-instantanée car la propagation d'un
changement de pression se fait à la vitesse du son, grande par rapport aux vitesses
fluides (en hypothèse incompressible, ceci est effectivement instantané).
Pour des écoulements qui n'ont pas été créés par le mouvement impulsif d'un
obstacle, nous montrerons plus loin qu'un potentiel existe sous certaines conditions -
la région occupée par le fluide devant être simplement connectée [Ceci signifie que si on
trace une courbe quelconque dans la région, l'aire de cette courbe contenue dans le
fluide peut être rendue nulle par déformation continue sans couper la surface solide]. Si
un tel potentiel existe, le flot est nécessairement irrotationnel. L'équation d'Euler peut
s'écrire :
2u
2
1p
t
u 6.1
équation dans laquelle les accélérations relatives ne sont plus négligées. Comme u = ,
ceci se réécrit :
,0t
q2
1p 2
q = |u| 6.2
Ainsi : p + 2
1q
2 +
t
= f(t) 6.3
un résultat qui généralise les résultats du chapitre 4 aux écoulements irrotationnels,
instationnaires.

55
6.3 redonne les 2 cas particuliers importants :
1) écoulement impulsif ; est nul à t = 0 et croît rapidement à de très grandes valeurs si
bien que l'équilibre s'effectue entre p et - t, une relation en accord avec ce qui a
été dit précédemment.
2) écoulement permanent : alors est indépendant du temps et on retrouve les résultats
du chapitre 4 :
p + 2
1q
2 = cste
3) la constante f(t) dans 6.3 n'apporte pas d'arbitraire gênant car ce qui importe pour la
dynamique est le gradient du potentiel que l'on peut toujours redéfinir
'dt)'t(ft
0
Dans le cas général, l'excès de pression est distribuée entre une partie –
1/2 q2, appelée pression dynamique et une partie - t, appelée pression transitoire.
Existence d'un potentiel
L'étude des flots irrotationnels est grandement aidée par l'introduction de ce
potentiel de vitesse car il simplifie grandement le calcul du champ de vitesse. S'il est
connu, la relation 6.3 permet alors de calculer le champ des pressions en tous points.
D'autre part, comme nous allons le démontrer, son existence garantit l'unicité du champ
de vitesse étant donné les conditions aux limites (u – us).n = 0 à la surface du solide.
Sous quelles conditions, l'intégrale x
x0
dxu prise le long d'un sentier de
x0 à x dépend-elle du sentier choisi ?
La différence de l'intégrale pour ces 2 sentiers est :
xduxdu)2(xdu)1(x
x
x
x 00
Mais la circulation autour de la courbe fermée
dans les conditions d'applications du théorème de
Stokes est :
0dSnxdu (en fluide irrotationnel)
la surface S devant s'appuyer sur sans sortir du fluide pour l'application du théorème
de Stokes. On dira si c'est le cas, que la région est simplement connectée.
Alors la fonction égale à x
x0
dxu ne dépend pas du chemin suivi. La
quantité d correspondant à 2 points voisins x et x + dx est simplement
xduxdudxx
x
et u est donc !
Dans une région multiplement connectée, on ne peut pas démontrer
l'existence d'un potentiel de cette façon. Un exemple de telles régions :
x
x0
(1)
(2)

56
U C
Soufflerie
On ne peut appuyer une surface S sur la courbe C sans sortir du fluide. Un autre cas est
celui d'un fluide enfermé dans une région torique (en forme d'anneau). Nous
retrouverons ces situations plus loin et nous allons nous concentrer pour l'instant sur le
cas simplement connecté.
Unicité du champ de vitesses
irrotationnel Commençons par démontrer le lemme suivant : dans une région simplement
connectée où les frontières solides sont au repos, l'écoulement irrotationnel est nul.
Démonstration :
Comme u.n 0 à la frontière, u n = 0 sur la frontière. Le théorème de la
divergence donne :
0dv)u(
Mais (u) = |u|2 quand u = 0 et u = . Ainsi :
0dvu2
ce qui n'est possible que si u = 0 partout.
Ce résultat qui est démontré ici pour un fluide contenu dans une région
limitée par des frontières solides se démontre aussi mais plus difficilement pour un
fluide infini entourant un solide (qui est le cas le plus courant en pratique). Nous
l'admettrons ici (Voir Lighthill ou Batchelor). Nous avons vu comment le mouvement
impulsif d'un obstacle génère un flot irrotationnel. Le théorème précédent montre que le
flot compatible avec le mouvement instantané de l'obstacle est unique. En effet, s'il y en
avait 2, leur différence satisfairait u.n 0 à la frontière et nous venons de démontrer
que ceci implique un écoulement nul.
Ainsi l'écoulement irrotationnel dans une région simplement connectée ne
dépend que de la vitesse instantanée de la frontière, (et en particulier pas de son
accélération). Si l'obstacle en mouvement s'arrête, l'écoulement irrotationnel s'arrête. On
dit parfois que l'écoulement irrotationnel est sans mémoire. Ainsi si un mouvement
persiste dans les observations après arrêt de l'obstacle, ce mouvement est nécessairement
associé avec de la vorticité présente dans les couches limites.

57
Quelques résultats pour des écoulements de vorticité donnée
Le théorème précédent donne directement quelques informations sur les
écoulements avec vorticité. On se place dans une région simplement connectée.
Supposons 2 écoulements de même vorticité dans un domaine D :
u1 = avec (u1 – us) n = 0 sur la frontière D
u2 = avec (u2 – us) n = 0 sur la frontière D
Le champ différence u u 1 u 2 satisfait à :
u = 0 et u n = 0 sur D
D'après le théorème précédent u = 0. Ceci établit l'unicité (u1 = u2) du champ
de vitesse de vorticité donnée , le mouvement des frontières étant prescrit.
Soit maintenant le champ u 0 satisfaisant à :
u0 =
et u0 n = 0 (frontières immobiles)
le champ u1 – u0 est irrotationnel et satisfait (u1 – u0) n = us n.
Nous savons que ce champ est unique et dérive d'un potentiel :
u1 – 0 =
Considérons l'énergie cinétique :
dVudVuu2
1dV
2
1dVuu
2
1000
2
11
Comme u0 = (u0) le dernier terme est nul après utilisation du théorème de la
divergence. Le résultat est exprimé sous la forme du théorème de l'énergie de Kelvin :
"Parmi tous les écoulements qui satisfont des conditions limites données aux
frontières, le flot irrotationnel est celui qui a l'énergie cinétique minimum."
Ce théorème montre l'intérêt de l'étude des écoulements irrotationnels vis-à-
vis du point de vue du mouvement d'un obstacle dans un fluide. En effet la perturbation
du fluide par l'obstacle sera minimale si l'écoulement irrotationnel est réalisé.
Quelques exemples :
Soit une ligne tourbillon
(concentration de vorticité), d'intensité K,
située à une distance h d'une frontière solide.
Le champ de vitesse en milieu est azimutal avec u = K/2r. Mais ce
champ ne satisfait pas la CL sur la frontière (u n = 0). Considérons la différence entre
le vrai champ (à trouver) et ce champ en milieu . Cette différence est irrotationnelle et
représente le champ dont la distribution de vitesse à la frontière doit exactement annuler
la composante normale du champ en milieu . Il n'est pas difficile de voir que ce champ
est produit par l'image dans un miroir (qui serait le plan) de la source de vorticité. En
h

58
effet il est bien irrotationnel dans la région au-dessus du plan et si l'intensité de l'image
est - K la composante normale de la vitesse sur le plan est égale et opposée à celle
produite par la source + K au-dessus du plan.
L'unicité permet de dire que l'écoulement est donc la somme du champ
produit par la source d'intensité K et de son image par rapport au plan d'intensité - K.
(L'idée sous jacente est que les flots irrotationnels dans des situations complexes
peuvent souvent se ramener à des combinaisons d'éléments plus simples).
Cependant tout n'est pas terminé car la ligne tourbillon ne va pas rester
immobile : le champ de vitesse de l'image va déplacer la ligne de vorticité vers la droite
à une vitesse K/4h. Ceci est tout à fait analogue à l'interaction de 2 vortex déjà
mentionnés. Notez que la direction de translation est opposée à celle qu'aurait une roue
roulant sur le plan dans le même sens que le tourbillon. Ceci peut se tester dans une
tasse emplie de votre boisson préférée : une cuillère génère deux petits tourbillons qui
s'autoadvectent. Quand ils arrivent près du bord de la tasse ils se séparent précisément
pour la raison que nous venons d'évoquer :
Les régions doublement connectées :
Elles ont une importance dans le traitement des écoulements
bidimensionnels. Considérons le cas d'un fluide compris entre deux cylindres coaxiaux ;
sur la courbe C qui entoure le cylindre intérieur, il est effectivement impossible
d'appuyer une surface qui reste dans le fluide. Mettons une ligne tourbillon d'intensité K
au centre du cylindre intérieur. Elle produit un champ azimuthal u = K/2r dans la
partie fluide qui satisfait u n = 0 sur les 2 frontières solides. Ainsi dans une région
doublement connectée on peut créer un champ irrotationnel non nul en présence de
frontières immobiles! On a donc perdu l'unicité. On a aussi perdu l'existence du
h
-K
+K

59
potentiel . En effet si on calcule l'intégrale x
x0
xdu selon 2 chemins
différents OPQX et OPRX on ne trouve pas le même résultat :
La contribution est nulle selon OP. Selon une partie
circulaire on a :
d2
Krd
r2
Kxdu
Selon le chemin OPQX,
2
Kxdu
x
x0
, = Angle (0 x0, 0x)
Selon le chemin OPRX,
2
KK)2(
2
Kxdu
x
x0
et donc n'existe pas. D'autres circuits faisant plusieurs fois le tour de l'origine
donneraient encore des valeurs différentes, multiples de K. Pour une région doublement
connectée, la circulation autour d'une courbe quelconque fermée peut se déformer en la
circulation autour de la courbe C1 prise n fois, C1 étant la courbe qui fait une fois le tour
de l'origine. Ainsi le long de la circulation K autour de C1 détermine la circulation
autour de n'importe quelle autre courbe. Pour retrouver l'unicité des écoulements
irrotationnels dans une région doublement connectée, il faut ainsi ajouter une condition
supplémentaire qui est justement la valeur K de la circulation autour de C1. Soient en
effet 2 champs de vitesse u1 et u2 avec la même valeur de K et mêmes conditions aux
frontières. Alors u1 - u2 (qui a K = 0) aura une circulation nulle autour de n'importe
quelle courbe fermée. Ce champ différence dérive donc d'un potentiel (qui existe) et le
même raisonnement que précédemment montre que ce champ différence est nul si les
frontières sont immobiles.
Ainsi deux écoulements u1 et u2 qui satisfont la même condition aux
frontières et la même condition supplémentaire sur la circulation K sont nécessairement
identiques.
Exemples de flots irrotationnels 3D
Les flots irrotationnels obéissent une équation différentielle partielle
linéaire ; comme u = 0 et u = , on en déduit :
2 = 0
6.4
équation à laquelle on assujettit les conditions aux limites sur des frontières solides :
u n = us n 6.5
ou /n = us n
6.4 et 6.5 impliquent la recherche d'une solution de l'équation de Laplace
sous des conditions aux limites dites de Neumann (dérivée normale imposée). L'unicité
de la solution et la linéarité de l'équation fait que l'on peut obtenir des solutions à des
problèmes difficiles en combinant linéairement les solutions de problèmes plus simples.
P
O
R
x0
X

60
Avant de considérer ces problèmes simples, il est utile de remarquer que le champ de
vitesse u est normal aux lignes équipotentielles = constante et que donc
équipotentielles et lignes de courant forment un réseau de lignes orthogonales.
1 - Le Puits
Etudions l'écoulement correspondant à l'expérience
suivante : un tube aspire de l'eau à un certain débit
J (volume/unité de temps). Si on néglige la présence du tuyau,
l'écoulement possède la symétrie sphérique et la vitesse est
radiale (vers le puits situé à r = 0), et donnée par J/4r2. Ainsi
= J/4r.
Cette solution décrit bien l'expérience car le flot
accélère le long du tuyau et les couches limites ne séparent pas.
La moitié supérieure de ce même champ de
vitesse suffit pour décrire l'écoulement par un petit
orifice dans le fond d'un bocal. A nouveau comme les
courants accélèrent vers le puit comme J/2r2, les
couches limites sur le fond en fluide réel ne séparent
pas et la solution irrotationnelle reproduit bien
l'expérience ordinaire.
De ces exemples on pourrait tirer hâtivement la conclusion que le cas de la
source est analogue. Si on change J en -J, le flot précédent décrit effectivement la
solution irrotationnelle au-dessus d'une source. Cependant l'expérience est loin de
confirmer cette prévision théorique :
Le fluide injecté a la forme d'un jet turbulent qui
n'a pas grand chose à voir avec la solution
théorique. Ceci ne doit pas nous surprendre. En
effet le fluide injecté décélère le long des parois
solides, induisant une séparation des couches
limites et une injection de vorticité et donc de
turbulence dans l'intérieur. La solution
irrotationnelle ne décrit pas la réalité et n'est donc
pas une solution asymptotiquement correcte du
problème de la source quand le nombre de
Reynolds tend vers l'infini.
2 - Ecoulements axisymétriques
L'écoulement irrotationnel autour d'un obstacle particulier va être obtenu en
partant des considérations (apparemment éloignées) suivantes.
Considérons la solution théorique irrotationnelle constituées de 2 parties
irrotationnelles suivantes :
1) le flot d'un point source en r = 0,
2) courant uniforme de vitesse U parallèle à l'axe 0z.
Séparation

61
Le potentiel résultant est la somme de ces 2 éléments :
r4
JUz
Le potentiel étant symétrique autour de 0z on utilise les coordonnées cylindriques
S = x2 + y
2)1/2
et z.
Les lignes de courant ont l'allure suivante :
Pour r petit, la source domine, pour r grand, le flot uniforme U domine. Au point S sur
l'axe (OS = J/2u)1/2
, les 2 écoulements s'opposent également et le point S est dit de
"stagnation". La ligne de courant part "normalement" à 0z de S. Cette ligne de courant
"divise" l'écoulement en deux : le flot axial incident s'éloigne de l'axe puis, quand l'effet
de la source devient faible, reprend une direction parallèle à 0z ; si on fait tourner la
figure autour de 0z la ligne de courant "séparatrice" génère un tube de courant séparant
le fluide qui vient de l'amont, du fluide qui vient de la source. A l'intérieur de ce tube, le
débit de la sourceJ (vol / temps) s'équilibre nécessairement par une sortie vers l'aval et à
grande distance de la source :
a2U = J
une relation qui donne le rayon du tube séparateur loin de la source.
L'idée excellente de "Rankine" a été de n'utiliser que la partie de
l'écoulement extérieur au tube séparateur pour décrire le flot irrotationnel autour d'un
obstacle solide ayant exactement la forme du tube séparateur. Si ce flot irrotationnel est
réalisé expérimentalement on aura alors construit une "forme" qui présente la résistance
minimale à l'écoulement de fluide (voir plus loin).
Pour calculer entièrement la forme en question, on procède comme suit :
On considère un disque de rayon s situé à z +, ainsi que la surface du cylindre
s'appuyant sur ce disque et allant jusqu'au point M du tube. Le débit à travers cette
surface est toujours J mais se répartit en 2 : le flot uniforme a un débit s2U qui sort par

62
le disque à l'infini et le point source génère un débit à travers la surface latérale du
cylindre qui est :
z
2
3
222
zdz)zs(s
2
Jdzs2
s
Ainsi :
r
z1J
2
1UsJ 2 6.6
Soit encore en fonction de a :
2
122
2
2
sa(a2
1Sz
6.7
Ceci est l'équation du tube de courant séparateur.
La même technique peut être utilisée pour calculer les lignes de courant à l'extérieur du
tube séparateur en remplaçant la partie gauche de 6.6 par des débits supérieurs à J(2J,
3J, etc). Le module de la vitesse q se calcule à partir du potentiel :
42
2
3
222
r16
J
r2
UJzUq
En utilisant les coordonnées 6.7 du tube séparateur qui est maintenant l'obstacle, la
vitesse sur l'obstacle devient :
4
4
2
222
a
s3
a
s4Uq
Cette solution montre que l'introduction d'un obstacle dans un écoulement
uniforme augmente la vitesse au-dessus de U , mais quand cet obstacle a la forme de
"Rankine", ce gain est faible d'environ 15 % seulement. Ceci implique que la
décélération sur la partie "aval" de l'obstacle est également faible. Comme le flot est
faiblement retardé, les couches limites restent minces et ne séparent pas. Cette intuition
est correcte et l'écoulement irrotationnel de Rankine décrit bien le flot extérieur observé
autour d'une telle forme.
3 - Traînée autour d'un obstacle de Rankine
Pour une forme "hydro ou aérodynamique" telle que la forme de Rankine
vue plus haut, la séparation des couches limitée (CL)) est évitée et la solution

63
irrotationnelle décrit correctement le flot à l'extérieur des CL. Pour un écoulement
permanent autour de telles formes il est important de calculer la résultante des forces de
pression (p) sur la surface solide, résultante qui représentera la traînée de forme exercée
par le fluide sur l'obstacle. On peut s'attendre en effet à ce que les contraintes
tangentielles dues à la friction soient faibles par rapport à l'effet des forces de pression
normales à la surface lorsque le nombre de Reynolds est élevé.
L'équation de Bernouilli va nous permettre de calculer l'effet de pression
quand toutes les lignes de courant partent de l'amont où la vitesse est U et l'excès de
pression p = 0 :
22 u2
1q
2
1p
En utilisant la valeur de q sur la forme de Rankine, on obtient :
4
4
2
22
a
s3
a
s41u
2
1p
Ceci représente la pression dans le flot à l'extérieur des CL. Ceci est probablement assez
proche de la pression sur la surface solide elle-même car si R désigne le rayon de
courbure de l'obstacle et l'épaisseur de la CL, l'équation du mouvement normale aux
lignes de courant donne :
Rq0p 2
qui est donc faible si les CL ont une épaisseur faible par rapport au rayon de courbure
des obstacles.
Pour calculer la force
de pression sur une surface A
dans la direction axiale 0z, on a :
p sin A = p 2 s ds
A étant la couronne de
périmètre 2 s et largeur dl.
La résultante totale dans la direction 0z est donc :
a
0 4
4
2
22
a
0e 0dss2
a
s3
a
s41U
2
1dss2p
Ainsi la traînée due aux pressions de l'écoulement irrotationnel est nulle. On a certes des
excès de pression positifs près du nez de l'obstacle mais ceux-ci sont compensés par des
parties négatives sur tout le reste de l'obstacle.
Ce résultat obtenu dans le cas d'un flot sur un obstacle s'applique sans
changement dans le cas pratique de l'obstacle se déplaçant dans le fluide à la vitesse U
puisque les mouvements relatifs du solide et du fluide sont les mêmes. Quand l'obstacle
de Rankine se déplace à la vitesse U dans un fluide (au repos très loin de l'obstacle), il
s
dl

64
ne rencontre donc aucune résistance de forme due aux forces de pression. Ce résultat
n'est pas particulier et reste vrai quelle que soit la forme de l'obstacle sur la base de la
théorie irrotationnelle. Il se démontre ainsi :
Si un corps se déplace à la vitesse U, le mouvement irrotationnel du fluide
associé avec les vitesses aux frontières du corps est unique et possède une
énergie cinétique bien définie. Si le fluide freinait le corps avec une force D,
alors une force égale et opposée serait nécessaire pour pousser le corps à
travers le fluide. Cette poussée effectuerait du travail sur le fluide au
taux D U et l'énergie cinétique du fluide croîtrait. Si le flot reste
irrotationnel, son unicité lui fait garder la même valeur et, donc la même
énergie cinétique. Cette contradiction conduit nécessairement à conclure que
la traînée D est nulle.
Cette conclusion importante connue sous le nom de paradoxe de
"d'Alembert" n'est intéressante que pour les corps "suffisamment fins hydro- ou
aérodynamiquement" de façon à ce que la séparation des CL soit évitée, auquel cas le
flot extérieur reste proche du cas irrotationnel.
Quand les CL séparent, le sillage est formé de lignes de vorticité de
longueur croissante et d'énergie croissante. La traînée D est alors positive, tet est alors
associée avec des excès de pression Pe d'ordre ½ u2 qui ne s'annulent pas globalement.
Dans ce cas une traînée résultante de l'ordre de ½ u2A est attendue, A étant la section
frontale du corps (dans un plan perpendiculaire à l'écoulement).
Nous concluons que les formes "fines" vont subir une traînée bien moindre
que cela, si la séparation est évitée, la seule traînée résiduelle étant alors due aux
contraintes tangentielles induites par la friction dont l'importance se borne alors à la
couche limite. On peut dire que ce résultat est des plus importants. En pratique les
ingénieurs vont essayer de trouver des formes qui évitent la séparation des CL. Cette
recherche peut être effectuée soit expérimentalement en soufflerie soit plus récemment
directement par des simulations numériques de l'écoulement à partir des équations
complètes de Navier Stokes.
Sur la figure 1, on montre la solution irrotationnelle autour d'un cylindre. La
courbe du bas montre le coefficient de pression calculée :
2U2
1
pCp
et mesuré (en pointillé). On voit que l'expérience s'éloigne de la solution théorique
derrière l'obstacle et les figures 4, 5, et 6 montrent pourquoi. Quand le nombre de
Reynolds est assez grand, les couches limites décollent et génèrent un sillage aval de
fluide assez stagnant derrière l'obstacle. Dans cette région la pression est beaucoup plus
faible que sa valeur irrotationnelle et ceci implique une traînée non nulle. La figure 2
montre la solution sur un obstacle elliptique. Au vu de la distribution de vitesse, on peut
s'attendre à ce que la séparation soit retardée tout à fait à l'arrière de l'obstacle. Sur la
figure 3, la terminaison en pointe de l'arrière de l'obstacle montre une distribution de
vitesse qui ralentit très doucement jusqu'au "bord de fuite" : la solution irrotationnelle
doit être assez correcte pour ce type de profil et la traînée minimum : d'où l'intérêt pour
cette forme largement observée dans la nature.

65
Fig. 1
Fig. 2
Fig. 3

66
Fig. 4 : Représentation graphique de l'écoulement autour d'un
cylindre circulaire, Re 26 d'après une photographie [5.1.].
Fig. 5 : Représentation graphique de l'écoulement autour d'un cylindre circulaire,
Re 200 d'après une photographie [5.1.].
Fig. 6 : L'écoulement autour d'un cylindre circulaire, Re 2000 d'après une photographie [5.1.].

67
Dernier commentaire
Si on mesure la traînée adimensionnalisée par 2A/2 sur des cylindres ou
des sphères en soufflerie en fonction du nombre de Reynolds, on obtient la figure 7.
Plusieurs remarques :
1) Le coefficient de traînée est 0(1) (en fait 3 ou 4) même pour des Reynolds 0(1).ie. le
résultat irrotationnel n'est pas bon.
2) Le coefficient chute rapidement à une valeur 10 fois plus faible pour des Reynolds
plus élevés de l'ordre de 2 105
Ce dernier point s'explique par l'apparition de turbulence dans la couche
limite. L'effet majeur de la turbulence est d'augmenter les "mélanges et la diffusion". En
particulier ici le coefficient de diffusion effectif de vorticité devient beaucoup plus
grand. Ainsi la paroi solide est elle capable de produire de la vorticité à un taux
beaucoup plus rapide retardant vers l'aval la zone de séparation des CL et donc l'étendue
du sillage et donc réduisant la trainée. Cet effet est mis à profit notamment sur les balles
de golf dont les petites aspérités contribuent à l'apparition de turbulence et donc à des
traînées moindres et donc des portées supérieures !
4 - Ecoulement irrotationnel à 2 dimensions
Une théorie très complète existe pour trouver les solutions irrotationnelles
quand l'écoulement est bidimensionnel. Si on veut étudier l'écoulement autour d'une aile
d'avion par exemple, on peut par exemple noter que si l'aile est "longue", les variations
de vitesse (et de pression) le long de la corde de l'aile sont probablement beaucoup plus
faibles que les variations perpendiculaires, à travers une section xy de l'aile. Ainsi on
peut commencer par étudier un flot plus simple autour d'une aile "bidimmensionalisée"
représentée par sa section :
Fig. 7
y
x

68
Pour laquelle, l'équation de Laplace devient :
xx + yy = 0
l'écoulement étant supposé sans variation le long de l'axe z. Un tel modèle peut être testé
en soufflerie en attachant une aile aux 2 parois de la soufflerie ; nous avons noté
précédemment que dans ce cas, la région fluide est doublement connectée et que
l'unicité ne peut être obtenue que si on prescrit la circulation autour d'une courbe
entourant l'obstacle. Nous montrerons plus loin que la capacité des écoulements à
générer des "portances" sur les obstacles (forces perpendiculaires à la direction générale
de l'écoulement) est étroitement associée avec ces solutions irrotationnelles avec
circulation. (Reste ensuite à intégrer la solution bidimensionnelle ainsi obtenue dans un
écoulement toujours tridimensionnel en pratique).
Exemples :
Un exemple de flot 2D est celui créé par une ligne de tourbillons
perpendiculaire à un plan d'intensité K : le module de la vitesse q = K/2r et les lignes
de courant sont des cercles centrés en r = 0. Cet écoulement n'a pas de potentiel et
l'écoulement ne peut être obtenu par le mouvement impulsif de frontières. Si on essaie le
potentiel = K /2, celui-ci n'est pas une fonction à valeur unique. Cependant il peut
l'être si on restreint à :
- <
est alors discontinu en = si bien que satisfait = u partout sauf sur cette ligne.
Un deuxième exemple est celui du flot créé par une source ligne (débit/unité
de longueur = j) dont la vitesse radiale est donnée par q = j/2r et qui possède le
potentiel bien défini :
rlog2
j
Notons que ces 2 types d'écoulement ont une énergie cinétique par unité de longueur
parallèlement à 0z qui est infinie (si on calcule dydxq2/1 2 sur un domaine non
borné) et cette "singularité" ne peut être supprimée que si on considère les effets
tridimensionnels.
Les méthodes de calcul des écoulements 2D sont dues à la propriété
suivante :
Soit une fonction analytique f(z) dans le plan complexe (c'est-à-dire qui
possède une dérivée en tous points du plan), où z = x + iy.
On a : x
fi'if
y
z
dz
df
y
f
De plus, la théorie des fonctions d'une variable complexe indique que si une
fonction est analytique dans une région elle est différentiable un nombre quelconque de
fois. Si donc on recommence l'opération, on obtient :
2
22
2
2
x
fi
y
f
et comme i2 = - 1, on voit que f satisfait l'équation de Laplace à 2 Dim.

69
Soit et les parties réelles et imaginaires de f :
f = + i
En égalant partie réelle et imaginaire de l'équation ci-dessus, on voit que et satisfont
séparément l'équation de Laplace et que :
xyet
xy
conditions dites de Cauchy-Riemann satisfaites par les parties réelles et imaginaires
d'une fonction analytique. Inversement pour toute solution de l'équation de Laplace on
peut trouver une fonction telle que f étant analytique, d = + i. En effet pour
trouver , on doit intégrer :
)y,x(by
),y,x(ax
ce qui est assuré si a/y = b/x, qui est justement l'équation de Laplace pour quand
les équations de Cauchy-Riemann sont satisfaites. La théorie des potentiels des
écoulements bidimensionnels irrotationnels est donc identique à la théorie des fonctions
analytiques dans le plan complexe.
Le potentiel est la partie réelle de f et la partie imaginaire n'est autre que
fonction courant :
uy
etvx
On définit aussi la vitesse complexe w égale à df/dz :
ivudz
dfw
Les équations de Cauchy-Riemann pour la partie réelle et imaginaire de w sont
u/y = v/x et u/x + v/y = 0 soit la condition d'irrotationnalité et de continuité
respectivement. Ainsi w est aussi une fonction analytique.A titre d'exemples pour la
ligne source, w = j/2z tandis que pour la ligne de tourbillon, w = -iK/2z.. Pour obtenir
le potentiel complexe f(z), il est nécessaire d'utiliser les propriétés du logarithme d'une
variable complexe :
log z = z
1 z
dz

70
L'origine étant un pôle
de
l'intégrant (résidu 1),
l'intégrale a plusieurs
déterminations
augmentant de 2i
chaque fois que le pôle
est entouré une fois de
plus dans le sens
positif. Sur le contour
de la figure quand z =
r ei z r e
i, on a :
irlogder
erirlog
z
dzzlog
z
r i
iz
r
r
1
En incluant n boucles supplémentaires autour de l'origine dans le sens positif cette
valeur de l'intégrale peut être augmentée de 2ni. Ainsi pour la ligne source :
f(z) = + i = 2
1(log r + i)
Ceci indique que ici le potentiel est bien défini mais que la fonction courant est définie à
un multiple de j près (les lignes de courant sont les courbes = cste). Inversement pour
la ligne tourbillon :
f(z) =
2
iK( log r + i)
la fonction courant est bien déterminée mais le potentiel ne l'est plus. Cependant la
fonction K/2 qui augmente de K chaque fois que le vortex est entouré a son gradient
une fois de plus égal à u.
Un autre exemple utile d'application concerne la famille f(z) = CAzn pour
laquelle = Ar2 cos n et = Ar
n sin n. Comme est nul, quelque soit r quand = 0
et = /n cette famille permet de représenter les écoulements irrotationnels n dans un
secteur limité par 2 plans se coupant sous un angle /n.
Transformations conformes
Une méthode très puissante, la transformation conforme, permet de
construire des solutions de l'équation de Laplace. L'idée est la suivante : supposons
connue une fonction analytique dans un domaine D. Si on applique à chaque point de D
une transformation analytique on transforme D en un domaine E qui sous certaines
conditions est relié à D de façon biunivoque. On montre que la transformation
"conforme" appliquée à la fonction analytique de départ dans D fournit une fonction
analytique dans E qui prend les mêmes valeurs aux frontières de E que la fonction de
départ aux frontières de D. En choisissant judicieusement la transformation conforme,
on peut construire des solutions autour de "formes" compliquées à partir de solutions
autour de formes simples.
1 r
Z
1
Z
|r|

71
D'après ce qui a été vu, un écoulement irrotationnel peut être calculé en
déterminant un potentiel complexe f(z) fonction analytique dans le domaine D occupé
par le fluide satisfaisant des conditions aux limites sur un obstacle et en amont de cet
obstacle, soit f '(z) = U - iV à grande distance |z| d'un obstacle quand l'écoulement en
amont a pour vitesse (U,V). Sur la frontière de l'obstacle D, la condition de vitesse
normale implique /n = 0 ou encore que la fonction courant soit constante sur D.
On dira que 2 domaines D et E se correspondent par transformation
conforme s'il existe une fonction Z(z) analytique dans D possédant les 3 propriétés :
i) La même valeur Z ne peut être obtenue pour 2 points distinctes de D.
ii) Les valeurs de Z couvrent entièrement le domaine d'intérêt E.
iii) La dérivée Z' n'est jamais nulle dans D.
Sous ces conditions, la fonction réciproque z(Z) est nécessairement une fonction
analytique dans E car sa dérivée ds/dZ = dzdZ
1 existe. On peut d'autre part montrer
qu'une telle transformation conserve les angles entre 2 droites se coupant en un point
intérieur.
Supposons maintenant que l'on connaisse un potentiel complexe f(z)
satisfaisant les conditions aux limites appropriées sur D. On peut alors écrire un autre
potentiel f(z(Z)) satisfaisant des conditions limites correspondantes dans E. Comme :
df/dZ = df/dz ds/d, ce nouveau potentiel est analytique. De plus si la partie imaginaire
de f est constante sur D, elle doit prendre les mêmes valeurs sur E. Pour s'assurer de
plus que la limite de f'(z) pour les grands |z| est la même que celle de df/dZ, il faut
simplement choisir une transformation telle dz/dZ 1 à l'infini.
Quelques exemples
Soit la transformation conforme :
Z(z) = z +z
a 2
avec a > 0
En coordonnées polaires r et pour z et si Z = X + iY, on a :
sinr
arY
cosr
arX
2
2
Ainsi un cercle de rayon c, z = cei
se transforme en une ellipse de demi axes A = c +
a2/c et B = c – a
2/c (du moment que x > a). La relation ci-dessus définit une
transformation conforme entre D (défini comme l'extérieur du cercle r = a pour les
points - < et c > a) et E où les points - < et c > a définissent des
ellipses le couvrant entièrement. E inclut tous les points du plan à l'exception du
segment –2a X 2a et Y = 0 qui représente le cas limite c a.

72
-a +a
D
-2a +2a
E
Nous allons maintenant utiliser cette transformation conforme
successivement entre les domaines D et E.
Notons tout d'abord que le potentiel f(Z) = UZ dans E décrit un écoulement
uniforme de vitesse complexe U non perturbé par une plaque plane. Par application de
la transformation conforme, on obtient dans D :
f(z) = U
z
az
2
Ceci représente directement l'écoulement irrotationnel autour d'un cylindre de rayon a
dans le même écoulement uniforme U. La vitesse sur le cylindre valant q = 2U |sin |,
l'écoulement accélère du point de stagnation à = jusqu'à une valeur 2U à 2
avant de subir un ralentissement très important qui va nécessairement conduire au
décollement des couches limites mentionné précédemment (figure 1).
Considérons maintenant un domaine D1 inclus dans D correspondant à
l'écoulement autour d'un cylindre de rayon supérieur c > a. La transformation conforme
transforme D1 en E1 extérieur de l'ellipse précédemment introduite. Le flot doit donc
décrire dans E1 l'écoulement autour d'un obstacle elliptique. Sa vitesse complexe
dans E1 vaut :
w = f '(Z) = U
2
2
2
2
Z
a1
Z
c1
En terme des demi-axes de l'ellipse, la vitesse q sur le profil vaut :
q = U(A + B) |sin | (A2 sin
2 + B
2 cos
2 )
1/2
Ceci explique la figure 2 et démontre que la séparation ne va se produire que sur la
partie arrière de l'ellipse réduisant considérablement le sillage perturbateur par rapport
au cas du cylindre.

73

74
Chapitre VII
ECOULEMENTS AVEC CIRCULATION
On pourrait intituler ce chapitre "Et pourtant ils volent", paraphrasant
Galilée, chapitre dans lequel nous allons tenter de réconcilier ce que nous avons vu en
théorie irrotationnelle et la réalité faites d'avions qui volent, de voiliers qui avancent
contre le vent etc...
La topologie de l'espace 3D autour d'un obstacle est d'être simplement
connectée, ce qui implique l'existence d'un potentiel susceptible d'être créé par le
mouvement des frontières. Dans cette circonstance nous avons montré que le fluide
n'exerçait aucune force sur les frontières solides en théorie irrotationnelle. En 2D, la
région est doublement connectée et l'argument précédent ne peut être appliqué. Pourtant
on peut construire de façon unique un flot irrotationnel correspondant à un mouvement
des frontières et une circulation donnée, mais ce flot ne peut plus être créé
instantanément par mouvement des frontières.
Nous montrerons phénoménologiquement (sans calculs théoriques) que
quand une aile se déplace avec un certain angle d'incidence dans un fluide, le flot qui se
développe au bout d'une certaine période de temps est proche d'un flot irrotationnel avec
circulation à l'extérieur de fines couches limites. Dans ce flot, le fluide agit sur l'aile
avec une force perpendiculaire à la direction du mouvement relatif, appelée la portance.
Nous regarderons le problème essentiellement de façon 2D et commençons par regarder
des problèmes plus simples.
Cylindres en rotation
Le problème est de voir comment on peut créer un écoulement avec
circulation puisque l'existence de cette circulation semble directement liée à la notion de
portance. Le flot autour de cylindres en rotation permet de montrer cela assez
simplement.
1) Nous avons déjà montré l'unicité du flot irrotationnel avec circulation
entre deux cylindres concentriques, donné par le champ de vitesse q = K/2r, K étant la
circulation.
On peut générer cet écoulement si chaque cylindre tourne avec la loi de
vitesse ci-dessus appropriée à son rayon. Cette rotation différentielle génère des
vorticités égales et opposées dans des couches limites sur chaque cylindre. Ces couches
limites grossissent en diffusant vers l'intérieur comme (t)1/2
. Quand cette distance
dépasse la séparation entre les 2 cylindres, la diffusion aura mélangé les 2 vorticités
opposées et le flot sera effectivement irrotationnel avec circulation selon la loi de vitesse
ci-dessus. La création de circulation est donc possible mais très lente avec ce processus

75
de diffusion. Nous allons voir par la suite qu'il existe des mécanismes beaucoup plus
rapides qui dépendent du temps d'advection et permettent de générer de la circulation
autour d'obstacles de façon très efficace.
2) Nous allons considérer l'écoulement d'un cylindre tournant avec une
vitesse angulaire dans le sens négatif. Son rayon est a.
Le potentiel complexe d'un tel flot est :
zlog2
iK
z
azU)z(f
2
obtenu en additionnant l'écoulement irrotationnel autour d'un cylindre et l'écoulement
autour d'une ligne tourbillon d'intensité K dans le sens négatif. Les lignes de courant
(partie imaginaire de f) sont données par :
rlog2
Ksin
z
arU
2
A partir de la vitesse complexe on peut calculer la vitesse q sur le cylindre :
aU4
KsinU2q
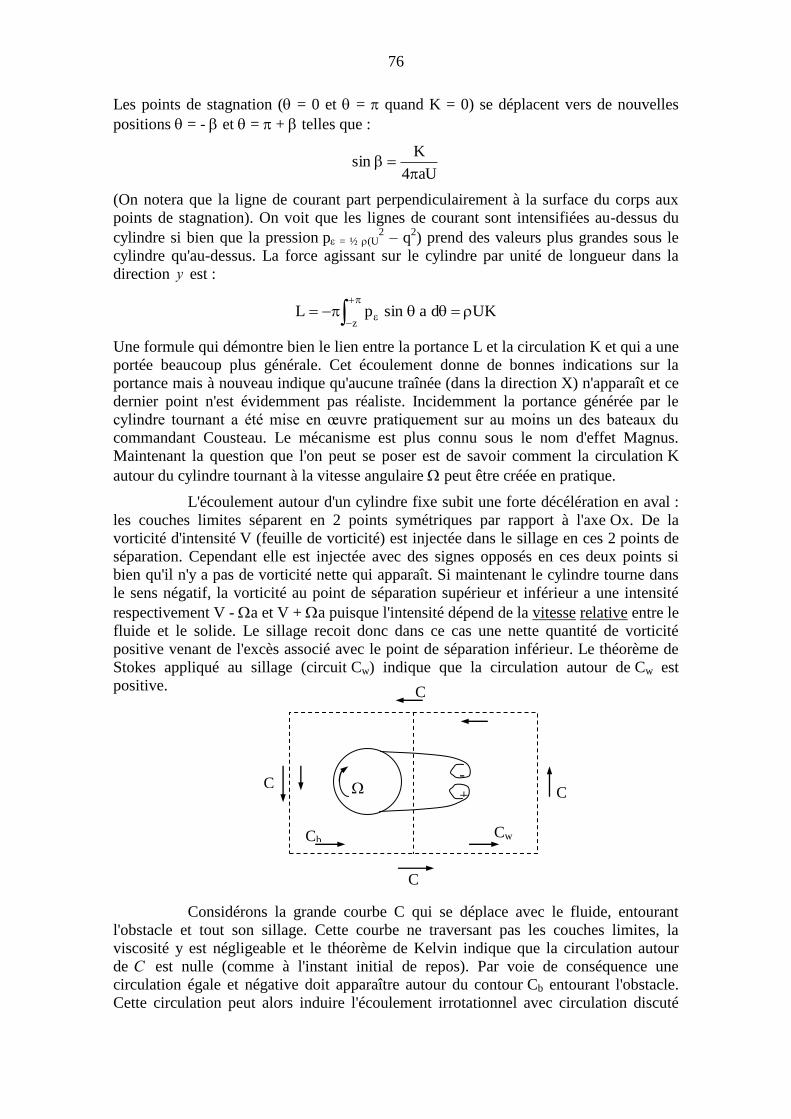
76
Les points de stagnation ( = 0 et = quand K = 0) se déplacent vers de nouvelles
positions = - et = + telles que :
aU4
Ksin
(On notera que la ligne de courant part perpendiculairement à la surface du corps aux
points de stagnation). On voit que les lignes de courant sont intensifiées au-dessus du
cylindre si bien que la pression p = ½ (U2 – q
2) prend des valeurs plus grandes sous le
cylindre qu'au-dessus. La force agissant sur le cylindre par unité de longueur dans la
direction y est :
zUKdasinpL
Une formule qui démontre bien le lien entre la portance L et la circulation K et qui a une
portée beaucoup plus générale. Cet écoulement donne de bonnes indications sur la
portance mais à nouveau indique qu'aucune traînée (dans la direction X) n'apparaît et ce
dernier point n'est évidemment pas réaliste. Incidemment la portance générée par le
cylindre tournant a été mise en œuvre pratiquement sur au moins un des bateaux du
commandant Cousteau. Le mécanisme est plus connu sous le nom d'effet Magnus.
Maintenant la question que l'on peut se poser est de savoir comment la circulation K
autour du cylindre tournant à la vitesse angulaire peut être créée en pratique.
L'écoulement autour d'un cylindre fixe subit une forte décélération en aval :
les couches limites séparent en 2 points symétriques par rapport à l'axe Ox. De la
vorticité d'intensité V (feuille de vorticité) est injectée dans le sillage en ces 2 points de
séparation. Cependant elle est injectée avec des signes opposés en ces deux points si
bien qu'il n'y a pas de vorticité nette qui apparaît. Si maintenant le cylindre tourne dans
le sens négatif, la vorticité au point de séparation supérieur et inférieur a une intensité
respectivement V - a et V + a puisque l'intensité dépend de la vitesse relative entre le
fluide et le solide. Le sillage recoit donc dans ce cas une nette quantité de vorticité
positive venant de l'excès associé avec le point de séparation inférieur. Le théorème de
Stokes appliqué au sillage (circuit Cw) indique que la circulation autour de Cw est
positive.
Considérons la grande courbe C qui se déplace avec le fluide, entourant
l'obstacle et tout son sillage. Cette courbe ne traversant pas les couches limites, la
viscosité y est négligeable et le théorème de Kelvin indique que la circulation autour
de C est nulle (comme à l'instant initial de repos). Par voie de conséquence une
circulation égale et négative doit apparaître autour du contour Cb entourant l'obstacle.
Cette circulation peut alors induire l'écoulement irrotationnel avec circulation discuté
Cb Cw
C
C
C
C -
+

77
auparavant. Cet écoulement asymétrique au-dessus et au-dessous du cylindre a une
portance normale à U à l'infini car les vitesses sont accélérées au-dessus et décélérées
en-dessous par rapport au cas sans circulation. Le théorème de Bernouilli associe donc
des pressions plus grandes au-dessous et plus faibles au-dessus, responsables de la
portance. Cet exemple contient l'information très importante que la création de
circulation dépend du taux de génération de vorticité dans le sillage. Dans cet
exemple l'écoulement modifié par la circulation peut complètement modifier cette
génération et éventuellement la stopper. Dans ce cas la circulation n'évolue plus.
Ainsi nous découvrons les principes suivants :
a) Un processus qui extrait de la vorticité positive d'un corps génère une
circulation négative autour de ce corps.
b) Ce processus peut agir rapidement dans le temps nécessaire pour que la
vorticité soit expulsée des frontières solides soit l/.U.
c) Le processus est autorégulateur : la génération de la circulation change le flot
extérieur de façon à éliminer l'expulsion de vorticité positive de sorte que la
circulation se stabilise.
Flot sur des profils à angle d'incidence
Tous les écoulements irrotationnels discutés ici se calculent bien avec la
transformation conforme dans le plan et vont être illustrés pour le cas de la plaque plane.
En remplaçant z par z e-i
dans la transformation z = z + a2/z, on obtient le
potentiel décrivant la solution irrotationnelle autour d'un cylindre sous incidence :
i
2i e
z
aezU)z(f
Les lignes de courants autour de la plaque en incidence sont tracées par les points de
coordonnées X,Y[r + a2/r) cos , Y(r – a
2/r) sin ] où r et sont liés par le fait que la
partie imaginaire de f(z), U(r – a2/r) sin( - ) f z est constante sur une ligne de
courant. La ligne = 0 approche la plaque à un point de stagnation et le quitte à un
autre respectivement sur la partie inférieure et supérieure de la plaque.
La figure 1 (p. 85) montre cette solution irrotationnelle autour d'une plaque
plane maintenue avec une incidence par rapport à l'écoulement. On observe 2 points de
stagnation de chaque côté de la plaque. De plus les vitesses deviennent infinies au bord
amont et aval de la plaque. Ceci peut se comprendre physiquement : quand on se
rapproche du bord de la plaque les lignes de courant ont un rayon de courbure qui tend
vers 0 (comme la plaque) et l'équilibre des forces dans une direction normale aux lignes
de courant produit des pressions et des vitesses infinies dans ce cas. On peut faire le
même calcul avec un profil elliptique dont le rayon de courbure ne tend pas vers 0 et les
vitesses restent finies. Dans ces conditions l'écoulement près du front de l'obstacle n'est
pas trop décéléré, si l'incidence n'est pas trop importante. Alors les CL restent minces
près du bord d'attaque.
Par contre l'effet est très différent au bord aval ou de fuite. On a une grande
vitesse au bord de fuite et un point de stagnation tout proche impliquant une forte
décélération et donc une séparation des CL. Dans ce cas il n'y a pas d'avantage à avoir
un bord de fuite "rond". Comme pour la plaque on aura une génération de vorticité dans

78
le sillage à l'arrière du profil de signe positif, et une bien moindre génération de vorticité
négative sur la partie supérieure du profil dû au retardement bien moindre.
Si on regarde maintenant la conséquence du décollement des CL près du
bord de fuite du profil sur la figure 3, on peut raisonner comme précédemment dans le
cas des cylindres en rotation : de la vorticité décolle du bord de fuite impliquant la
genèse de circulation autour du contour Cw entourant le sillage. Comme le théorème de
Kelvin impose que la circulation est nulle autour du grand contour C, une circulation
négative est forcément générée autour du profil Cb. L'effet de cette circulation est de
déplacer le point de stagnation S sur la partie supérieure du profil vers le bord de fuite T.
Quand la circulation est ainsi ajustée, (S étant en T ),les causes de la décharge de la
vorticité dans le sillage sont éliminées et il n'y a plus moyen de faire changer la
circulation qui reste à cette valeur. Quand on ajuste ainsi la circulation0, la vitesse au
bord de fuite est finie et différente de zéro. Ainsi l'effet de la viscosité dans la couche
limite est de causer l'établissement d'une circulation qui permet aux effets de la viscosité
d'être ignorés !
Connue originellement sous le nom d'hypothèse de Joukowski, cette
circonstance heureuse est maintenant mieux comprise à partir des études de couches
limites. La circulation demandée est proportionnelle à la vitesse U du profil. Si le profil
ralentit ou accélère, de la vorticité est produite dans le sillage qui change la valeur de la
circulation et l'adapte à la nouvelle vitesse. Ainsi la circulation K varie comme :
K = cU
où c est une constante de proportionnalité qui ne dépend que de la forme du profil et de
l'incidence du profil par rapport à l'écoulement. Cette constante peut être déterminée par
une analyse irrotationnelle en exigeant que le point de stagnation aval se déplace au bord
de fuite sous l'effet de la circulation. Comme nous allons le voir, la portance étant
proportionnelle à cette circulation, les études pratiques d'aéro ou hydrodynamique sont
largement concernées par la détermination de cette constante. La circulation ainsi
ajustée dans le cas de la plaque plane est montrée en figure 2. Les lignes de courant
serrées au-dessus du profil par contraste avec la partie inférieure indiquent une pression
plus faible
0 Le potentiel complexe approprié f(z) précédent auquel on ajoute une contribution iK/2 log(z e
-i)
permet d'ajuster la vitesse au bord de fuite en choisissant K = 4 a U sin .

79
qu'au-dessous et donc une portance vers le haut. Le théorème de Blasius démontre que
la portance L en théorie irrotationnelle avec circulation K a :
1) une direction perpendiculaire au flot à l’infini (non perturbée par le corps)
et
2) un module L = UK, L, Létant la force par unité de longueur normale à la
section du profil.
En pratique les ingénieurs qui calculent des avions ont un devis de poids et
de vitesse donnée. Ils doivent déterminer le profil qui fournit la portance nécessaire à la
vitesse de croisière choisie. Comme les avions décollent et atterrissent, les profils
doivent être capables de s'ajuster pour fournir la portance nécessaire à des vitesses plus
faibles. Ceci est possible en jouant sur la "cambrure" des profils. Il en est de même pour
les voiles de bateau pour lesquelles on joue sur le "creux" pour adapter la portance à des
conditions de résistance à l'avancement, différente.
Nous n'avons finalement décrit que des ailes bidimensionnelles. Qu'en est-il
en trois dimensions ? Le mécanisme qui génère de la circulation opère de la même
façon. Mais la circulation varie le long de l'aile et en particulier au bout des ailes elle
doit disparaître. Près de l'extrémité des ailes un autre effet apparaît : un écoulement est
possible des hautes pressions au-dessous de l'aile aux basses pressions en-dessus. Cet
écoulement est associé avec de la vorticité dans le sens de l'écoulement général U :
Bp
Hp
U
Les lignes pointillées représentent les lignes de vorticité qui tournent vers l'aval au bout
des ailes. Le résultat est une traînée induite par l'existence de cette vorticité dans le
sillage. Cette traînée induite s'ajoute aux effets de friction due à la viscosité dans les
couches limites.
Finalement pour clore cette première approche de l'écoulement autour
d'obstacles, vous ne manquerez pas de constater l'extraordinaire adaptation des animaux,
poissons et oiseaux pour se mouvoir dans les fluides. Que ce soit dans l'air ou dans l'eau,
il apparaît que l'évolution des espèces a maîtrisé les problèmes soulevés dans ce cours,
au cours de millions d'années d'améliorations successives : les formes sont rondes au
bord d'attache, fines au bord de fuites et les animaux semblent avoir totalement maîtrisé
comment rester en écoulement irrotationnel avec circulation pour se "porter ou se
déplacer" et minimiser ainsi leurs dépenses d'énergie.

80
Fig. 2
Fig. 1
Fig. 4
Fig. 3
*****

81

82
Chapitre VIII
FLOTS VISQUEUX
Nous allons considérer dans ce chapitre le type de flot qui apparaît lorsque
les forces de viscosité dominent sur les accélérations. Dans un problème particulier, les
conditions initiales et conditions aux limites permettent d’identifier des échelles de
vitesse U, de longueur L et de temps T sur lesquelles le flot va évoluer. On peut aussi les
visualiser par une expérience. On peut estimer l’ordre de grandeur des termes de
l’équation de Navier Stockes 3.5 en estimant l’ordre de grandeur d’une dérivée u/x
par U/L.
Ainsi : t
u
T
U, |u u|
L
U 2
, | 2 u|
2L
U
On n’estime pas le gradient de pression ; celui-ci s’ajustera à l’ordre de
grandeur des plus gros termes restant dans les équations. Les rapports entre les termes
fournissent les nombres sans dimensions :
u
uu2
= Re = UL/ le nombre de
Reynolds
u
tu2
= St = L
2/T le nombre de Stokes
Lorsque les nombres de Reynolds et des Stokes sont petits, c’est-à-dire pour
des flots lents de petite échelle, la viscosité domine et 3.5 se réduit à :
O = - p + 2 u 9.1
où la gravité a été introduite via son potentiel dans p. Une conséquence immédiate est
que la vorticité satisfait :
2 = 0 9.2
Les problèmes typiques sont ceux pour lesquels la vitesse est prescrite à l’
ou sur un obstacle et où l’on se propose de calculer le flot partout. La première remarque
évidente est que 9.1 est une équation linéaire.
Si on a une solution du flot correspondant à une vitesse imposée aux
frontières et si on change le signe des vitesses imposées alors la nouvelle solution est
simplement l’ancienne (vitesse et gradient de pression) changée de signe. Cette
réversibilité de l’écoulement est frappante dans le film de G.I. Taylor de la série du

83
MIT. On fait tourner un cylindre intérieur dans un sens de nombreux tours et une tache
initiale de colorant est cisaillée de façon à devenir presque invisible. Si maintenant on
renverse le sens de rotation du cylindre intérieur et que l’on effectue le même nombre de
tours, la tâche de colorant se reforme miraculeusement à l’endroit précis où on l’avait
mis initialement : un flot à faible nombre de Reynolds est quasi-réversible.
Bien que linéaires, les solutions de ces équations sont complexes à
déterminer et nous allons examiner des cas très simples.
Flot de Poiseuille (1839)
(i) plan
Il s’agit d’un écoulement plan x entre deux
frontières solides parallèles. L’écoulement étant uniforme
dans la direction x, la continuité prédit immédiatement que
la vitesse dans la direction y est nulle. Il n’est pas inutile
de re-dériver l’équation 9.1 dans ce cas très simple en
faisant le bilan des forces sur un rectangle fluide de côté
x, y :
Pour obtenir après un développement limité pour x et y petits :
Gx
p
y
u2
9.3
y = a
y = -a
p(x)y p(x + x)y
x)yy(y
u
x)y(y
u
Sens de rotation
du cylindre intérieur

84
Si u est indépendant de x, alors 9.3 indique que le gradient de pression l’est
aussi. Le flot est forcé par une différence de pression amont-aval mais la distribution de
p est linéaire en x. Avec les conditions de non glissement sur les parois, on obtient une
vitesse parabolique :
u = 2
G(a
2 – y
2)
On peut aussi calculer le débit :
3
aG2dyu
3a
a
(ii) tube circulaire
La physique est identique mais ce cas est un peu plus réaliste que le
précédent. Avec des coordonnées cylindriques, le flot u selon l’axe du tube de dépend
que de r. Le laplacien se réduit à :
Gr
ur
rr
1
avec maintenant u = 0 en r = a (le bord du tube).
On obtient :
)ra(4
Gu 22
dont le débit devient :
8
aGdrr2u
4a
0
Une telle mesure du débit dans un tube circulaire forcé par un gradient de
pression connu permet avec la relation précédente de décrire les premières instabilités
qui apparaissent lorsque le nombre de Reynolds dépasse O(103).
Ecoulement de Taylor- Couette (1890)
Il s’agit du flot entre 2 cylindres concentriques tournant à des vitesses
différentes. Si u est la vitesse azimutale l’équation 9.1 se réduit à :
0r
u
r
u
r
1
r
u22
2
dont les solutions possibles sont u = Ar + B/r
Les conditions de non glissement sur les parois des deux cylindres en r = r1
et r = r2 déterminent A et B :
A = (2 22r - 1
21r )/( 2
2r - 21r )

85
B = (1 - 2) 22r
21r /( 2
2r - 21r )
Cette expérience réalisée initialement par Couette est très intéressante car
sous certaines conditions le flot est instable. La prédiction théorique de ces seuils
d’instabilité par Taylor en accord avec les expériences peut être vu comme une des
validations importantes de l’équation de Navier-Stokes (voir Chapitre XIII).
Ecoulement de Stokes autour d’une sphère
Une des solutions historiquement les plus
fameuses de 9.1 est l’écoulement d’une sphère en translation
dû à Stokes. On prend des coordonnées sphériques
positionnées au centre de la sphère. La vitesse u normal au
plan de la figure est nulle (ainsi que les dérivées par rapport à
l’angle azimutal ).
La solution est compliquée et décrite dans Batchelor.
Si :
ur = sinr
12
u =
sinr
1 r
la fonction courant est au final pour une sphère de rayon a :
= U r2 sin
3
3
r
a
4
1
r4
a3
Les lignes de courants de la figure montrent que la perturbation due à la
sphère s’étend à de grandes distances de sorte que l’on s’attend à ce que l’interaction
entre plusieurs particules (par exemple en sédimentation) soit forte.
Malheureusement on peut aussi montrer que cette solution viole les
hypothèses d’accélération négligeables à grande distance de la sphère.
Pour trouver la force exercée par le fluide sur la sphère on évalue les
contraintes en r = 0. L’intégrale de surface qui donne la traînée est finalement :
D = 6 aU
r
U

86
Comme la traînée d’un obstacle est souvent mise sous la forme D= CD ½
U2A, où A est l’aire de l’obstacle projeté sur un plan perpendiculaire au flot incident,
on trouve que :
CD = 24/Re où Re = 2a U/
On peut alors calculer la vitesse terminale d’une sphère de densité
tombant par gravité en écrivant :
6a U = ga3
4 3
Soit : U =
1
ga
g9
2 2
En pratique cette vitesse de Stokes est suffisamment correcte pour des
Reynolds inférieurs à 1 (et non pas très inférieurs à 1 comme les hypothèses de départ le
suggéreraient).
Flot dans un film mince
On considère maintenant l’écoulement entre deux plaques rigides z = 0 et z
= h. Soient U et L vitesse et échelle dans le plan des plaques. On va supposer que :
h << L
Dans ces conditions, le terme visqueux est dominé par :
2u
2
2
z
u
On peut estimer les différents termes de l’accélération et des termes
visqueux comme :
u u L
U2
(1, 1, h/L)
2
2
z
u
2h
U(1, 1, h/L)
Les composantes selon z sont plus petites car w et O (Uh/L) d’après la
continuité. Ainsi le terme d’accélération est-il plus petit que le terme visqueux si :
UL(h/L)
2 << 1
Le nombre de Reynolds aura beau être grand, les forces de viscosité
domineront si h/L est assez petit. Dans ces conditions les équations 9.1 s’appliquent.
P = 2
2
z
u

87
Comme w est beaucoup plus petit que u et v, p/z est beaucoup plus petit
que p/x et p/y et on peut prendre P fonction de x,y seulement en première
approximation. On imagine un flot forcé entre les deux plaques par un gradient de
pression horizontal. Après application des conditions de non glissement, on a
effectivement un flot de Poiseuille entre les deux plaques :
u = x
p
2
1
z(h – z)
v = y
p
2
1
z(h – z)
Bien que u et v dépendent de z, le rapport u/v n’en dépend pas. De plus la
vorticité selon z :
z = y
u
x
v
= 0
Si on met un obstacle entre les deux plaques, le flot à un z donné est donc
l’écoulement irrotationnel autour de l’obstacle ! Des cellules dites de Hele-Shaw, sont
utilisées pour produire ces flots irrotationnels 2D expérimentalement.
Pour conclure notons que la géophysique des couches externes de la terre
appartient à ce régime dominé par la viscosité lorsque l’on considère les échelles de
temps de l’ordre du million d’années. Des applications récentes de ces régimes visqueux
ont aussi été faites récemment concernant les flots dans les chambres magmatiques
(sous les volcans) et le flot de al lave sur les volcans. Deux processus doivent être
inclus, les changements de phase liquide - solide, et les forces de flottabilité (la densité
varie).

88
Chapitre IX
ONDES DANS LES FLUIDES
Quelques exemples
Quand des particules matérielles sont soumises à des forces de rappel, un
écart à l'équilibre entraîne des oscillations périodiques. Si le milieu a une certaine
continuité matérielle, le mouvement d'une particule entraîne celui de ses voisines et
selon certaines conditions l'oscillation peut se propager dans le milieu. L'expérience
classique de Reynolds de pendules couplés en est une démonstration. On a affaire à un
phénomène ondulatoire capable de propager de l'information et de l'énergie sans avoir
recours à un net transport de masse. Dans le cas d'un fluide, quand la propagation
l'emporte sur l'advection, on est amené à définir deux grandes classes d'onde :
- les ondes non dispersives : leur vitesse de propagation ne dépend pas de la
longueur d'onde et un paquet d'ondes constitué d'une longueur d'onde dominante et de
quelques composantes de Fourier voisines reste intact au cours de sa propagation.
- les ondes dispersives dont les vitesses de phase et d'énergie (maintenant
différentes) sont fonction de la longueur d'onde, un paquet d'ondes ayant alors tendance
à s'étaler (se disperser) au cours de son mouvement.
La plupart des ondes dans les fluides géophysiques sont dispersives à la
différence des ondes électromagnétiques dans le vide. Elles sont aussi anisotropes
puisque les propagations sont différentes selon la direction considérée.
Les forces de rappel peuvent provenir des propriétés mécaniques du fluide
ou bien des forces extérieures : les ondes acoustiques ont leur origine dans les propriétés
mécaniques du fluide quand il résiste à un changement de volume. Puisqu'il n'y a pas de
direction privilégiée dans le fluide elles sont isotropes. Parmi les forces extérieures qui
sont considérées, on trouve la gravité (vagues, ondes internes) et les forces d'inertie liées
à la rotation du fluide (ondes d'inertie, ondes de Rossby etc...). Ces dernières sont très
importantes en météorologie et en Océanographie. Elles introduisent une direction
privilégiée dans le fluide et les ondes correspondantes sont anisotropes. La présentation
des ondes de gravité sera ici linéaire et on négligera tout effet du second ordre lié aux
amplitudes finies des ondes. Les phénomènes naturels océaniques sont rarement dans
cet état linéaire sauf justement les ondes de surfaces (vagues de mer) ou encore les
ondes de marée.
Cependant, l'observation de vagues déferlantes sur une plage ou du mascaret
dans les estuaires nous indiquent qu'au-delà d'une certaine amplitude les phénomènes
non linéaires doivent également être considérés.

89
L'équation d'onde en milieu non dispersif
A une dimension, l'équation prototype de propagation de la lumière ou des
ondes acoustiques ou mieux encore des vibrations sur une corde est :
0x
Uc
t
U2
22
2
2
9.1
où c est la vitesse de phase supposée constante.
Des conditions initiales doivent être imposées pour trouver la solution de
cette EDP (équation différentielle partielle) qui est de type hyperbolique.
Supposons que u représente un "pulse" f(x) à t = 0.
u(x,O) = f(x)
t
u
(x, 0) = 0
Si |u|2 est intégrable on peut prendre la transformée de Fourier (TF) de l'équation 9.1
pour obtenir :
2
2
t
U
(k,t) = -c
2k
2 U(k,t) 9.2
où U(k,t) =
)t,x(u e
ikx dx
9.2 est maintenant à résoudre avec les CI (conditions initiales)
U(k,O) = F(k) où F(k) est la TF de f(x)
t
U
= 0
et on trouve aisément : U(k,t) = f(k) cos (kct)
et donc : dkee2
)k(F
2
1)t,x(u )ctx(ik)ctx(ik
soit : )ctx(f)ctx(f2
1)t,x(u
Notre pulse se sépare en
2, une moitié allant vers les x > 0 et
l'autre vers les x < 0 à la même
vitesse c.
ou encore sur un diagramme caractéristique x, t :
t = 0
x
x
t x
x
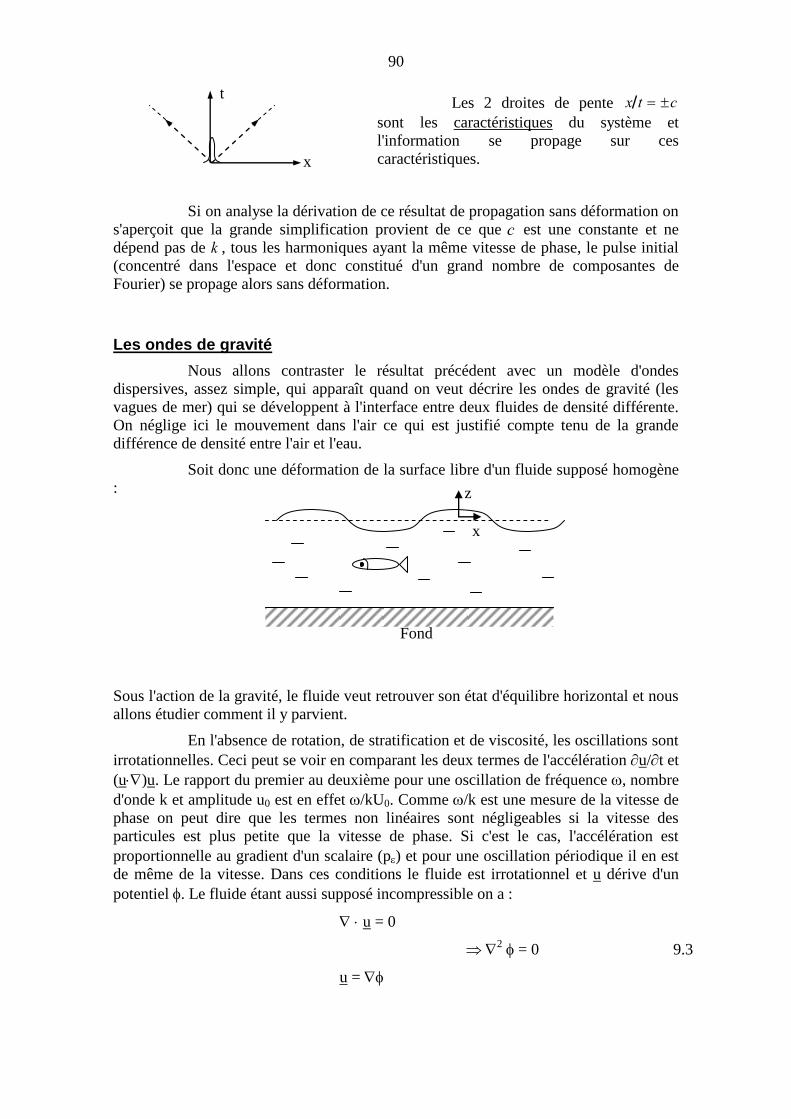
90
Les 2 droites de pente x t c
sont les caractéristiques du système et
l'information se propage sur ces
caractéristiques.
Si on analyse la dérivation de ce résultat de propagation sans déformation on
s'aperçoit que la grande simplification provient de ce que c est une constante et ne
dépend pas de k , tous les harmoniques ayant la même vitesse de phase, le pulse initial
(concentré dans l'espace et donc constitué d'un grand nombre de composantes de
Fourier) se propage alors sans déformation.
Les ondes de gravité
Nous allons contraster le résultat précédent avec un modèle d'ondes
dispersives, assez simple, qui apparaît quand on veut décrire les ondes de gravité (les
vagues de mer) qui se développent à l'interface entre deux fluides de densité différente.
On néglige ici le mouvement dans l'air ce qui est justifié compte tenu de la grande
différence de densité entre l'air et l'eau.
Soit donc une déformation de la surface libre d'un fluide supposé homogène
:
Sous l'action de la gravité, le fluide veut retrouver son état d'équilibre horizontal et nous
allons étudier comment il y parvient.
En l'absence de rotation, de stratification et de viscosité, les oscillations sont
irrotationnelles. Ceci peut se voir en comparant les deux termes de l'accélération u/t et
(u)u. Le rapport du premier au deuxième pour une oscillation de fréquence , nombre
d'onde k et amplitude u0 est en effet /kU0. Comme /k est une mesure de la vitesse de
phase on peut dire que les termes non linéaires sont négligeables si la vitesse des
particules est plus petite que la vitesse de phase. Si c'est le cas, l'accélération est
proportionnelle au gradient d'un scalaire (p) et pour une oscillation périodique il en est
de même de la vitesse. Dans ces conditions le fluide est irrotationnel et u dérive d'un
potentiel . Le fluide étant aussi supposé incompressible on a :
u = 0
2 = 0 9.3
u =
t
x
Fond
z
x

91
obéit à l'équation de Laplace et le mouvement est donc déterminé entièrement par les
conditions aux limites en surface. La surface libre étant une surface matérielle
d'équation F(x,z,t) = z - (x,t) = 0 on doit avoir DF/Dt = 0 pour que la particule reste sur
la surface, soit :
w = Dt
D sur z = (x,t) 9.4a
A la surface de discontinuité entre l'eau et l'air, la contrainte normale des forces de
surface doit aussi être continue pour éviter des accélérations infinies. Cette condition
dynamique impose alors :
p = pa sur z = (x,t) 9.4b
où pa est la pression atmosphérique.
Sur le fond (supposé plat), la vitesse verticale doit être nulle :
w = 0 sur z = - d 9.4c
L'équation intérieure 9.3 est linéaire mais les conditions aux limites en
surface 9.4a et b ne le sont pas puisque les conditions aux limites sont imposées sur une
surface inconnue a priori. Toute la difficulté du problème est donc contenue dans la
condition aux limites sur une surface libre. Pour avancer, il nous faut faire des
approximations. En fluide irrotationnel, la fonction de Bernouilli :
gz2
up
t
2
est constante dans l'espace et ne peut dépendre que du temps t, variable que l'on peut
incorporer à la définition de sans problème.
A la surface libre on a donc :
en z = csteg2
p
t
2
a
soit encore si pa ne dépend pas du temps :
0gw2Dt
D
tDt
D2
9.5
La linéarisation de 9.5 implique de négliger les termes quadratiques.
Certains sont visibles directement dans 9.5 mais d'autres sont liés à l'application de
l'équation en z = . On suppose donc suffisamment faible pour ramener l'équation 9.5
en z = 0 grâce à un développement de Taylor (limité au premier terme) en z = 0. On est
conduit à :
0zen
0gt
z2
2

92
Le problème de valeurs propres à résoudre est donc :
2 = 0 (a)
z = 0, z = - d (b) 9.6
2
2
t
+ gz = 0, z = 0 (c)
Cherchons des solutions ondulatoires du type F(z)eikx-t
. Il n'est pas difficile de voir
que 9.6a et b déterminent F(z) = cos hk(z + d) où k = |k|. Pour satisfaire 9.6c une relation
appelée relation de dispersion doit exister entre et k :
2 = gk tanh (kd) 9.7
9.7 est le premier exemple de relation de dispersion que nous rencontrons, et qui résume
toute la dynamique linéaire de propagation des ondes. Elle indique déjà que la
propagation est isotrope puisque seul le module de k intervient dans (7). La vision des
ondes circulaires générées par la chute d'un caillou dans l'eau est donc expliquée ! 9.7 a
2 limites intéressantes :
- kd >> 1, tanh(kd) 1 et 2 = gk
qui est la limite en eau profonde où la longueur
d'onde est faible devant la profondeur. Ce cas est discuté
plus loin .
- kd << 1, tanh (kd) kd et 2/k
2 = gd
Cette limite en eau peu profonde montre des ondes non dispersives se propageant toutes
à la vitesse (gd)1/2
.
En eau profonde, il n'est pas difficile de montrer que les particules fluides se
déplacent sur des cercles, le mouvement décroissant exponentiellement en ekz
avec la
profondeur. Dans le cas peu profond les particules oscillent en bloc sur des segments
horizontaux. Examinons de plus près les deux limites concernées.
Ondes longues
Il est très instructif de retrouver le cas "peu profond" directement. En effet la
longueur d'onde étant très grande par rapport à la profondeur, on peut penser que la
pression est hydrostatique et que les équations linéarisées du mouvement sont
simplement :
ut = 0
xp
t = 0
yp
0 = - pz – g 0
(on suppose le fluide de
densité constante)

93
Les courants horizontaux sont alors indépendants de la profondeur puisque le gradient
de pression, la force génératrice, est indépendante de la profondeur. On peut alors
intégrer verticalement l'équation de continuité pour obtenir :
0)d(w)(wud
H
et dans le cas linéarisé qui nous intéresse :
t
+ du = 0 9.8
(Bien que les courants horizontaux soient indépendants de la profondeur, la vitesse
verticale w varie linéairement avec la profondeur : w = (z + d) u)
Comme : p = g0 - g0z + pa
0
p
= g
et les équations du mouvement dans les nouvelles variables u, v et sont :
ut = - g
t + du = 0
On élimine u pour obtenir : 2
2
t
= gd
2
Nous retrouvons directement une équation hyperbolique (à 2 dimensions) de la
forme 9.1 dans cette limite en eau peu profonde.
Cette limite de mouvement de grande échelle par rapport à la profondeur est
très importante pour les grands mouvements de l'atmosphère et des océans (cependant la
"grande échelle" force aussi à introduire les effets de la rotation terrestre dans la
dynamique ci-dessus). Telle quelle, la dynamique des ondes longues sans rotation
peut-être utilisée pour étudier les oscillations de petits lacs, la propagation de la marée
dans les estuaires, et plus généralement les oscillations de gravité de période assez
courte par rapport à la période de rotation de la terre, et de longueur d'onde assez grande
par rapport à la profondeur du fluide.
Ondes courtes et vitesse de groupe
Les ondes de surface en eau profonde fournissent un cadre concret idéal pour
étudier la propagation dans les systèmes dispersifs. Nous avons en effet trouvé que la
fréquence d'une onde sinusoïdale dépend non linéairement (en k1/2
) de son nombre
d'onde afin que les équations du mouvement soient satisfaites. Dans une théorie linéaire
la considération de ces solutions sinusoïdales est essentielle pour deux raisons :
- Une déformation arbitraire peut toujours être décomposée en séries (ou
intégrales) de Fourier.
- La somme des composantes de Fourier solutions des équations, est aussi
une solution des équations.

94
Ainsi supposons une tempête générant des vagues à la surface de l'océan. On
peut supposer que près de la source les effets non-linéaires seront peut-être importants
mais que à quelque distance, l'énergie par unité de surface sera assez faible pour que la
théorie linéaire puisse s'appliquer. La relation de dispersion indique alors que les
composantes de Fourier vont se déplacer à des vitesses différentes. Ainsi encore plus
loin de la source, on peut penser qu'à un instant donné, un observateur devrait voir des
ondes localement sinusoïdales, les effets de dispersion jouant l'effet d'un filtre spatial.
Pour introduire les différents concepts, nous allons analyser le problème à une
dimension, c'est-àdire considérer la propagation dans une direction 0x normale aux
crêtes du système. Cette situation s'applique directement au cas bi- ou tridimensionnel
quand la propagation est isotrope (ce qui est le cas des ondes de surface).
Nous allons partir de cette idée de trains d'ondes localement sinusoïdaux
dont les caractéristiques fréquence et nombres d'onde varient lentement. On va ainsi
considérer un mouvement ondulatoire de la forme :
= 1(x,t) ei(x,t)
(x,t) est la phase de l'onde (dont la valeur est un multiple de 2 sur une crête si par
exemple 1 > 0) qui varie lentement. Si la fonction amplitude varie aussi lentement,
sera approximativement sinusoïdal. En effet on peut développer au premier ordre en
série de Taylor autour d'un point x0 à l'instant t0 :
(x,t) = (x0, t0) + x
(x – x0) +
t
(t – t0)
Ce développement permet de définir la fréquence et le nombre d'onde au point x0, t0 :
k = - x
et =
t
9.9
étant entendu qu', k et peuvent varier lentement dans l'espace et le temps.
C'est-à-dire que par exemple k va varier d'une quantité très petite quand on se déplace
en x d'une longueur d'onde (2/k).
Les relations 9.9 impliquent :
xt
k
= 0 9.10
équation qui ressemble à une équation de continuité pour la phase. On peut d'ailleurs
montrer que 9.10 est analogue à une conservation du nombre de crêtes dans un petit
volume fixe. Dans cette approximation, de trains d'onde lentement variables, les crêtes
(ou les creux) ne peuvent soudainement apparaître ou disparaître.
Nous avons maintenant vu que pour une onde exactement sinusoïdale, la
relation de dispersion doit être satisfaite :
= (k) 9.11
Si, localement, les ondes sont sinusoïdales on peut penser que cette relation de
dispersion reste approximativement vérifiée pour un train d'onde lentement variable. La
substitution de 9.11 dans 9.10 donne :

95
x
k
dk
d
t
k
= 0 9.12
Relation dans laquelle d/dk apparaît comme une vitesse que nous appellerons la
vitesse de groupe U. 9.12 est une équation différentielle partielle du premier ordre qui
s'étudie par la méthode des caractéristiques. La fonction k est constante le long des
caractéristiques définies par :
Udt
dx
Mais comme U n'est fonction que de k, les caractéristiques sont donc des droites
d'équation x – Ut = cste.
Pour les ondes dispersives nous sommes ainsi amenés à la conclusion que
les ondes de nombre d'onde donné k se déplacent à une vitesse de groupe différente de
la vitesse de phase. De plus comme 9.11 associe une fréquence bien définie à chaque
nombre d'onde, une onde de fréquence donnée se déplace aussi à une vitesse de groupe
donnée :
Si on calcule t
:
t
k
dk
d
t
mais en utilisant 9.10, on obtient :
0xdk
d
t
9.13
ce qui démontre cette affirmation.
Cette vitesse de groupe est fort différente de la vitesse de déplacement des crêtes que
nous sommes mieux habitués à visualiser. [On peut également démontrer le résultat très
important que l'énergie moyenne du train d'onde se déplace à cette vitesse de groupe]
Appliquons ces résultats aux ondes de surface :
= (gk)1/2
La vitesse de déplacement des crêtes ou encore vitesse de phase vaut :
c = 2
c
k
g
k
2/1
tandis que la vitesse de groupe est :
2
c
k
g
2
1
dk
dU
2/1
soit la moitié de la vitesse de phase.
Imaginons un train d'onde de caractéristique (,k) partant de x0 = 0 à t = 0.
Nombre d'onde et fréquence se propageant à la vitesse de groupe, on peut écrire :

96
2
g
k
g
2
1
t
xx2/1
0
de sorte que : )xx(2
gt
0
2
0
2
)xx(4
gtk
Un observateur en un point fixe donné verra la fréquence augmenter
linéairement dans le temps alors q'une photographie montrera les longueurs d'onde
augmenter comme le carré de la distance à la source. Connaissant comment et k
varient, on voit que la phase = k x - t s'écrit :
(x,t) = )xx(4
gt
0
2
Les lignes de crêtes sont donc des paraboles.
Ces résultats sont illustrés sur la figure ci-dessous tiré de "Waves in fluids"
(J. Lighthill).
Les droites épaisses sont les caractéristiques d'autant plus rapides que k est
petit (grandes échelles) et le long desquels k et sont conservés. Les courbes fines
représentent les trajectoires des crêtes qui se déplacent plus rapidement : elles
apparaissent à l'arrière du groupe avec de petites longueurs d'onde et disparaissent à
l'avant du groupe, la longueur d'onde ayant augmenté. Les sillages de bateau sont
particulièrement appropriés pour "observer" ce phénomène où des crêtes apparaissent à
l'intérieur d'un groupe de vagues et remontent dans le groupe pour venir disparaître à
1'avant. L'utilisation de tels diagrammes caractéristiques est très utile pour rendre
compte de l'évolution des trains d'onde des ondes dispersives. Le concept de vitesse de
groupe permet aussi de comprendre la réponse du fluide à un forçage localisé oscillant
ou en translation.
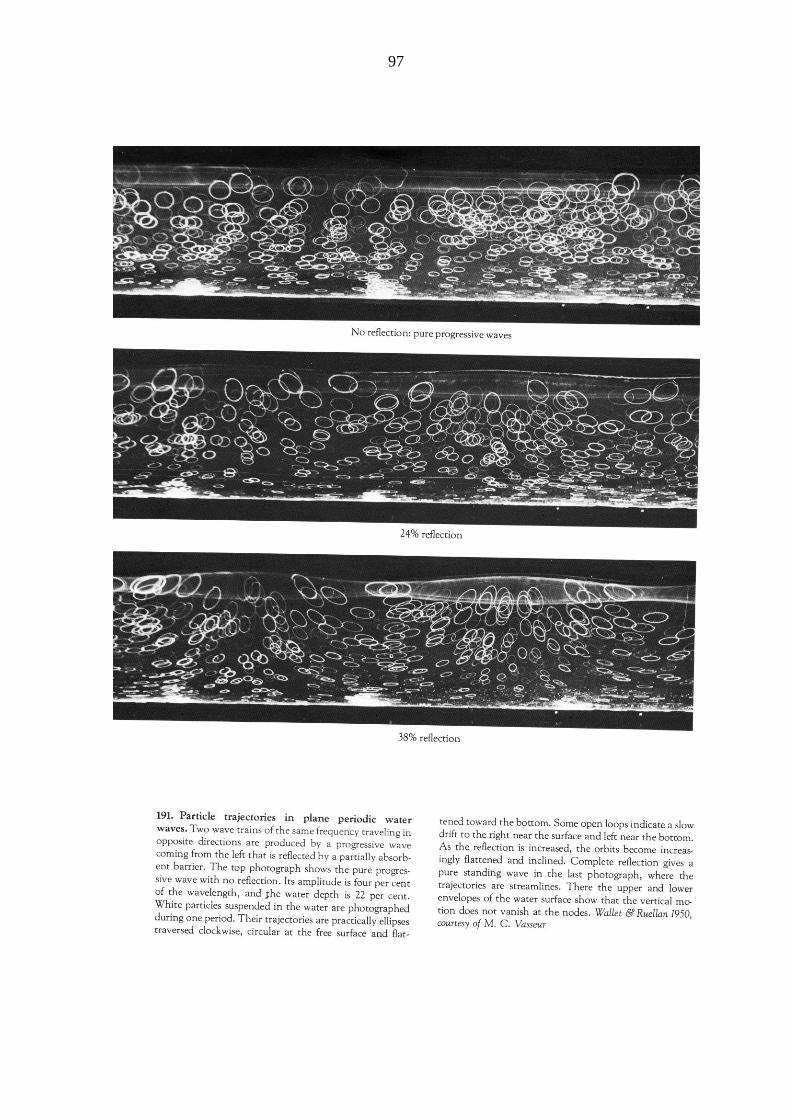
97

98
Chapitre X
THERMODYNAMIQUE
Préliminaires
Les phénomènes naturels évoluent dans le temps d'une façon bien
déterminée impliquant que le signe du temps semble avoir une grande importance.
- Une balle lâchée d'une hauteur rebondit pour finalement se trouver au
repos sur le sol :
- Deux corps chauds et froids mis en contact évoluent de telle façon que la
chaleur passe du chaud au froid.
- Une tache de colorant dans un fluide au repos diffuse pour occuper tout
l’espace uniformément.
- N molécules de gaz initialement d'un côté d'une partition d'une boîte
remplissent uniformément la boite entière quand la barrière est retirée :
N molécules
N/2 N/2
Les processus naturels sont donc irréversibles. Ceci est paradoxal du point de vue des
équations de la mécanique qui sont, elles, parfaitement réversibles quand on néglige les
frottements. Si à un instant donné on renverse les vitesses de toutes les particules en
interaction, le système doit revenir précisément sur ses pas. Maintenant que les vitesses
de toutes les molécules du dessin de droite soient renversées à un instant donné à une
probabilité infime même si l’éventualité ne peut être exclue. D’ailleurs sans parler des
milliards de molécules dans la boite, même avec seulement 3 corps en interactions
gravitationnelles on sait que pour faire rebrousser chemin à l’évolution de ces 3 corps, il
faut connaître les positions et vitesses initiales avec une grande précision. Le système est
non linéaire et les trajectoires sont très sensibles aux conditions initiales. Si les valeurs
de celles-ci diffèrent tant soit peu des conditions du point de retour, les trajectoires
retour vont finir par diverger au bout d’un temps fini des trajectoires aller comme les
travaux récents sur le chaos l’ont rappelé. La thermodynamique a pour objectif de
prévoir l'équilibre de systèmes macroscopiques contenant un grand nombre de particules

99
en interaction entre elles. Ses principes ont été originellement découverts par Carnot se
demandant comment arriver à transformer de la chaleur en travail, l'inverse étant
particulièrement aisé à vérifier en frottant simplement votre doigt sur cette feuille de
papier. Ils ont été ensuite réinterprétés par la physique statistique au niveau moléculaire.
Celle-ci pose comme principes que :
1) Si un système isolé (car n'échangeant ni chaleur, ni travail avec l'extérieur) est en
équilibre, tous ses états accessibles sont également probables et réciproquement.
2) Un système isolé tend à atteindre avec une plus grande probabilité la situation
macroscopique dont le nombre d'états microscopiques accessibles est le plus grand
possible.
Ainsi dans l'exemple ci-dessus, il n'y a qu'une façon de placer les N
molécules d'un côté de la boîte mais 2N quand on se permet le choix de l’un ou l’autre
des côtés de la boite. La répartition de droite a donc une bien plus grande chance d'être
observée dès lors que N est significativement grand.
Une quantité S l'entropie mesure quantitativement ce nombre d'états
accessibles et le deuxième principe de la thermodynamique spécifie que lors d'un
changement d'état d'un système isolé, la variation de S est toujours positive.
Quand l'état thermodynamique d'un système n'évolue plus dans le temps il est à
l'équilibre et la thermodynamique décrit ces équilibres. En appliquant les résultats de la
thermodynamique à des systèmes fluides en évolution on fera l'hypothèse bien vérifiée
qu'un élément de fluide constitué d'un grand nombre de molécules animées de vitesses
considérables est toujours approximativement en équilibre thermodynamique et qu'il
transite donc par une succession de tels états d'équilibres. Ceci veut dire que le temps
pour atteindre l’équilibre thermodynamique est très petit devant les échelles de temps de
l’écoulement.
- L'équation d'état est une relation fonctionnelle entre les paramètres décrivant l'état d'un
système à l'équilibre. Ainsi si p, v, T sont ces paramètres, l'équation d'état f (p, v, T) = 0
réduit le nombre des variables indépendantes de 3 à 2.
- Une transformation thermodynamique permet un changement d'état. Si celui est un état
d'équilibre ceci ne peut venir que des conditions externes au système. Cette
transformation est dite quasi-statique si les conditions externes changent suffisamment
lentement pour que le système soit toujours en équilibre. Elle sera réversible si elle
retourne sur ses pas quand les conditions externes retracent leur histoire.
- Le travail W effectué sur un système dans une transformation infinitésimale au cours
de laquelle le volume diminue de dv est positif et vaut:
W = - pdv
- On définira la chaleur comme étant ce qui est absorbé par un système quand sa
température croit quand aucun travail n'est effectué. La capacité calorifique C est
donnée par :
TCQ

100
quand Q est la quantité de chaleur absorbée. Pour le même T, Q est différent selon
la manière de chauffer le système. On définit ainsi Cv et Cp capacités calorifiques
correspondant respectivement à un chauffage à volume et pression constante.
- Une transformation d'un système thermiquement isolé est appelée adiabatique.
- Le gaz parfait idéal est un système important car tous les gaz se comportent de cette
manière quand ils sont suffisamment dilués. Son équation d'état définit la température
absolue T :
PV = nRT
(n nombre de moles du gaz, et R = 8,315 Joule/degrés K)
1. Le premier principe de la thermodynamique
Soit Q la quantité de chaleur reçue par un système et W le travail effectué
sur le système, au cours d'une transformation arbitraire. Le premier principe indique que
la quantité E,
E = Q + W
est la même pour toutes les transformations d'un état initial donné à un état final donné.
Il définit ainsi une nouvelle fonction d'état, l'énergie interne E. Chaleur et travail sont
des formes d'énergie transitoires apparaissant à la frontière du système. L'énergie interne
réside au contraire dans la matière et est une mesure du mouvement aléatoire des
molécules.
Le travail peut être défini comme le transfert d'énergie tendant à donner aux
particules un mouvement cohérent alors que la chaleur est un transfert d'énergie qui
tend à donner aux particules un mouvement incohérent.
Dans une transformation infinitésimale, le premier principe se réduit à
indiquer que la différentielle dE est exacte, soit :
dE = Q + W 0 10.1
Une propriété qui n'est pas partagée par Q et W individuellement. Notons qu'une autre
variable d'état intéressante l'enthalpie H peut-être aussi définie à partir de E, p et v :
H = E + pv
Rappelons maintenant les conséquences de l'existence d'une variable d'état.
Considérons des systèmes à deux variables indépendantes (un gaz parfait
homogène par exemple). Un couple quelconque formé des paramètres p, v, T, E ou H
peut être utilisée comme variables indépendantes spécifiant complètement l'état du
système. Par exemple on peut choisir E fonction de p, v auquel cas :
dvv
Edp
p
EdE
PV
0 On considérera dans ce qui suit que les expressions pour l'énergie interne, le volume et toutes autres quantités
extensives sont ramenées à l'unité de masse. Dans ce cas le volume v qui apparaît est le volume spécifique, soit l'inverse de la masse volumique.

101
Connaissant dE, supposons que l’on veuille remonter aà E. On peut le faire uniquement
si dE est une différentielle exacte ce qui exige que les conditions suivantes soient
satisfaites :
VPPVv
E
pp
E
v
On peut aussi écrire de façon équivalente que :
0dE
pour tout sentier fermé dans le plan p, v.
De ceci, on peut déduire que : vv
vT
E
T
QC
et
PPPP
PT
H
T
vp
T
E
T
QC
L'expérience de Joule :
L'expérience de Joule définit l'énergie interne d'un gaz idéal. Il s'agit de
l'expansion d'un gaz idéal dans le vide :
Le bain est isolé avec l’extérieur. On trouve qu'à la fin de l'expérience T2=T1. D'une part
W = 0 puisque le gaz n'effectue aucun travail sur son environnement. D'autre part il n’y
eu aucun echage de chaleur et donc Q = 0 puisque T = 0 et finalement E = 0 d'après
le premier principe.
Ainsi 2 états de même température et de volume différent ont la même
énergie interne mais comme on peut prendre E comme fonction de 2 paramètres
indépendants v et T, on en déduit que l'énergie interne d'un gaz parfait ne dépend que de
sa température.
Ainsi dT
dECv et supposant Cv indépendant de T on déduit :
E = CvT + constante
Avant
Gaz Vide
Bain d’eau
T1 Après
Gaz
Bain d’eau
T2 = T1
Gaz

102
De même l'enthalpie d'un gaz idéal n'est une fonction que de T.
TRCpvEH v
Comme dT
dHCp , on obtient : Cp – Cv = R
Cette dernière relation montre qu'il est donc plus efficace de chauffer un gaz
à volume constant qu'à pression constante. Ceci est logique car à volume constant aucun
travail n'est effectué et toute la chaleur fournie augmente l'énergie interne.
2. Le deuxième principe de la thermodynamique
Il s'agit d'un postulat exprimé sous différentes formes qui permet à la
thermodynamique d'incorporer le résultat des faits expérimentaux comme ceux
mentionnés dans l'introduction : la balle sur le sol ne se refroidit pas spontanément pour
sauter au plafond convertissant ainsi la chaleur perdue en énergie potentielle.
Enoncé de Kelvin :
"Il n'existe aucune transformation thermodynamique dont le seul effet est d'extraire
une quantité de chaleur d'un réservoir de chaleur et de la convertir entièrement en
travail".
Enoncé de Clausius :
Il n'existe aucune transformation thermodynamique dont le seul effet est d'extraire
une quantité de chaleur d'un réservoir plus froid et de la délivrer à un réservoir
plus chaud.
Le mot seul effet est crucial. Il signifie que l’on ramène le système à son état initial après
un cycle. Supposons qu'un gaz idéal se détende de façon réversible et isotherme. Du
travail est effectué par ce gaz. Comme E = 0 dans ce processus, le travail produit est
égal à la chaleur absorbé par le gaz dans la détente et donc une certaine quantité de
chaleur est convertie en travail. Ce processus est permis par le deuxième principe car ce
n'est pas le seul effet de la transformation. En effet le gaz occupe un plus grand volume
dans l'état final : le cycle n’est pas fermé.
Dans le cadre du deuxième principe, une nouvelle fonction d'état, l'entropie
est introduite. Elle doit son existence au théorème de Clausius. Dans toute
transformation cyclique pour laquelle la température est définie, celui-ci stipule que :
0T
Q
Si la transformation est réversible, l'inégalité devient une égalité et alors on peut définir
l'entropie S(A) d'un état A comme :

103
A
o T
Q)A(S
où le chemin est n'importe quel chemin réversible d'un état de référence arbitraire 0 à
l'état A. Pour une transformation réversible infinitésimale :
TQdS
Les propriétés de l'entropie sont les suivantes :
a) pour une transformation arbitraire de l'état A à B :
B
A )A(S)B(S
T
Q
b) , conséquence de a) indique que l'entropie d'un système thermiquement isolé ne
décroît jamais.
S(B) S(A)
l'égalité ayant lieu si la transformation est réversible.
D'une façon générale l'irréversibilité est en général un processus peu
économique et l'entropie peut être vue comme une mesure de la non disponibilité
d'énergie réellement utilisable de l'état en question 2.
De la relation TdS = Q dans une transformation réversible on déduit que :
TdS= dE+pdV 10.2
Mais comme le deuxième principe introduit S comme variable d'état, la relation ci-
dessus qui ne lie que des variables d'état, reste aussi valable dans une transformation
irréversible. 10.1 et 10.2 sont les deux relations fondamentales dont nous allons avoir
besoin pour déduire les équations pour l’entropie et l’énergie interne en mécanique des
fluides. Explorons quelques unes des conséquences de 10.2. En exprimant dans 10.2, dE
en termes des variables v, T, on obtient :
dvv
EpdT
T
ETdS
Tv
2 On notera que la conduction de chaleur est un processus irréversible augmentant l'entropie totale. Si
une barre métallique conduit de la chaleur d'un réservoir T2 à un réservoir T1 (T2 > T1) au taux de Q
par seconde, l'augmentation d'entropie par seconde du système complet est :
0T
1
T
1Q
21

104
En divisant par T, on obtient l’expression pour dS. On écrit ensuite que les dérivées
secondes sont indépendantes de l’ordre des différentiations par rapport à T et v
respectivement et après un peu de calcul on obtient :
pT
pT
v
E
VT
Cette expression est l’une des relations thermodynamiques de Maxwell. En particulier
pour un gaz parfait, si on utilise l'équation d'état on déduit que le terme de droite est nul
et l'on retrouve ainsi le fait expérimental déduit de l'expérience de Joule que l'énergie
interne E ne dépend que de T. Ceci apparaît maintenant comme une conséquence du
2ème
principe et de l’existence de la fonction d’état entropie.
Par substitution et en utilisant la définition de Cv on obtient :
dvT
pTdTCTdS
V
v
10.3
En exprimant dans 10.2, dE et dV en terme des variables p et T, on obtient :
dpp
vp
p
EdT
T
vp
T
ETdS
TTPP
en exprimant à nouveau que dS est une différentielle exacte on obtient :
PTT
v
p
S
et donc : dpT
vTdTCTdS
P
p
10.4
En définissant les quantités expérimentalement mesurables :
PT
V
V
1
: coefficient de compensibilité thermique
T
TP
V
V
1K
: coefficient de compressibilité isotherme
S
SP
V
V
1K
: coefficient de compressibilité adiabatique
10.3 et 10.4 peuvent se réécrire :
dvK
TdTCTdS
T
V
10.5
TvdpdTCTdS P 10.6

105
Pour obtenir des expressions valables quand les quantités sont rapportées à l'unité de
masse, les capacités calorifiques Cp et Cv deviennent alors des chaleurs spécifiques, S
devient l'entropie par unité de masse et il suffit de remplacer v par 1/ dans les
expressions ci-dessus. C'est ce qui sera fait dans le paragraphe suivant.
Nous aurons également besoin d'une fonction auxiliaire l'énergie de Gibbs F
défini comme :
F = U - TS
F est particulièrement utile pour déterminer l'état d'équilibre d'un système qui n'est pas
isolé. Soit un système subissant une transformation arbitraire isotherme d'un état A à un
état B. Nous savons que :
ASBST
QB
A
ou puisque T est constant : ST
Q
Q représentant la quantité de chaleur absorbée pendant la transformation.
Ceci peut se réécrire : W - E + T S
W étant ici le travail effectué par le système :
soit W - F
l'égalité s'appliquant si le processus est réversible. Ainsi pour un système
mécaniquement isolé et gardé à la même température, l'énergie libre passe par un
minimum à l'équilibre.
3. Applications aux fluides en mouvements
Si on considère comme système thermodynamique, la particule fluide en
mouvement qui échange chaleur et travail avec son environnement en passant par une
succession d'états d'équilibre thermodynamique, les relations 10.2 et 10.6 deviennent par
unité de masse :
1
Dt
Dp
Dt
DE
Dt
DST 10.7
Dt
DPT
Dt
DTCp
Dt
DST
10.8
Après utilisation de la conservation de la masse :
u.1
Dt
D1
Dt
D2
1

106
auquel cas 10.7 se réécrit : u.P
Dt
DE
Dt
DST
10.9
Il nous reste maintenant à exprimer travail et chaleur échangé entre la
particule fluide et son environnement pour obtenir l'équation de l'énergie.
1. Le travail
Le travail effectué sur un volume de fluide par les forces de volume F et
les forces de surface est simplement :
dSnudvFu jijV S
iii
En particulier si la surface S est celle d'un solide immobile, le deuxième terme est
identiquement nul d'après les conditions aux limites sur une surface solide.
Avec le théorème de la divergence ceci peut se réécrire :
dvux
Fu iij
j
i
V
i
et le travail total sur un élément de fluide par unité de masse est donc :
j
iij
j
ijiii
x
u
x
uFu
En vertu des équations du mouvements les deux premiers termes contribuent au gain
d'énergie cinétique Dt
Duu i
i de l'élément de fluide. Le troisième terme est logiquement
interprété comme le travail effectué pour déformer l'élément sans changer sa vitesse. Il
doit donc apparaître comme une augmentation de l'énergie interne du fluide.
2. la chaleur
Les échanges de chaleur entre des éléments de fluide relèvent plus
généralement de ce qu'il est convenu d'appeler les phénomènes de transport dans la
matière. Celle-ci est en équilibre si les propriétés du matériau (comme la température
par exemple) ont une distribution spatiale uniforme, une situation d'homogénéité
spatiale. Si ce n'est pas le cas des échanges vont se produire à l'échelle moléculaire pour
restaurer l'équilibre thermique. Le problème est donc de déterminer la rapidité des
échanges en présence de non uniformité. Supposons que celle-ci soit mesurée par la
température. Dans ce cas un transfert de chaleur va exister à travers un élément d'aire
A de normale n que l'on définit à l'aide du vecteur flux f :
f n A

107
Comme le transport moléculaire effectue l'échange en question, le transport est dominé
par ce qui se passe au voisinage de A. Si la distribution de température T est
suffisamment lisse, c'est-à-dire évolue sur une échelle grande par rapport au libre
parcours moyen moléculaire, il est logique de supposer que f ne dépend que des
variations de T et ce d'une façon linéaire si celles-ci ne sont pas trop grandes, soit :
j
ijix
Tkf
Pour un fluide isotrope : kij = -kij et f = - kT indiquant que le flux de chaleur est
opposé au gradient (comme il se doit pour pouvoir l'affaiblir). Le coefficient de
conductivité thermique k est une caractéristique du fluide déterminée
expérimentalement. D'après cette loi de transport un volume de fluide échangera de la
chaleur à travers sa surface par conduction moléculaire comme :
dSnx
Tk i
Si
ou encore : dvx
Tk
x iV
i
Soit encore localement par unité de masse
ii x
Tk
x
1
Le premier principe pour un élément de fluide se traduit donc finalement
par :
iij
iij
x
Tk
xx
u
Dt
DE 10.10
En vertu de la symétrie de ij, on peut écrire :
ijij
j
iij e
x
u
En utilisant la loi de comportement
ijiiijijij e
3
1e2p 10.10 se
réécrit :
ii
2
iiijij
i
i
x
Tk
xe
3
1 e e2
x
up
Dt
DE 10.11
Le premier terme représente le travail effectué par la partie isotrope des contraintes (la
pression) pour déformer l'élément. Il représente l'énergie de compression et est capable
d'être rendu sans perte au système quand l'élément de fluide se détend 3. Le deuxième
dénoté est le travail effectué par les contraintes de cisaillement. Cette dernière
3 Ceci n'est possible qu'approximativement. Il existe une seconde viscosité dite d'expansion (dont nous
ne parlerons pas ici) qui peut être à considérer dans certains problèmes.

108
contribution est non négative et représente la part de l'énergie mécanique
irréversiblement perdue. Elle est équivalente à une addition irréversible de chaleur.
Maintenant l'équation de l'énergie mécanique s'obtient simplement en faisant
le produit scalaire de la vitesse par l'équation de la dynamique soit :
ii
j
ij
i
2
i Fux
u2
u
Dt
D
10.12
En combinant 10.10 et 10.12, on obtient l'équation de l'énergie totale :
ii
iiiji
j
2
i
x
Tk
xFuu
xE
2
u
Dt
D
10.13
Quand les forces de volume dérivent d'un potentiel fonction de position et
non du temps, F = - et :
Dt
DFu ii
et représente alors l'énergie potentielle du système (par unité de masse).
L’équation pour l’énergie totale, la somme de l’énergie interne, de l’énergie
cinétique et de l’énergie potentielle s’écrit :
ii
iji
j
i
i
2
i
x
Tk
xdu
xup
xE
2
u
Dt
D
10.14
où dij est la partie du tenseur des contraintes qui dépend de la viscosité,
cad : dij = 2 (eij – 3
1eii ij)
La relation générale0 )u()ρ(
tDt
Dρ
est utile lorsqu’on cherche
l’énergie totale en intégrant 10.14 sur un volume. Si les vitesses aux frontières de ce
volume sont nulles, le travail total des contraintes est nul et si les parois sont des
isolants thermiques (le flux de chaleur est nul), il n’y a pas d’ajouts ou de pertes de
chaleur aux frontières et on obtient la conservation de l’énergie totale :
0dV]E2
u[
t
2
i
10.15
0 Utiliser la conservation de la masse pour la démontrer.

109
Finalement si on combine 10.11 et 10.9, on obtient l'équation pour
l'entropie :
ii x
Tk
x
1
Dt
DST 10.16
indiquant que celle-ci change à cause des irréversibilités dues à la dissipation et
l'addition de chaleur par conduction.
En utilisant 10.8, 10.16 se réécrit en fonction des variables T et p :
ii
px
Tk
xDt
DpT
Dt
DTC 10.17
Jointe à l'équation d'état, 10.17 est l'équation manquante qui permet de déterminer toutes
les variables dans un fluide compressible et conducteur thermique. Du fait de la
présence des opérateurs différentiels agissant sur T, des conditions aux limites sur T
sont à imposer aux frontières. Comme le flux de chaleur doit être continu à la frontière
pour éviter l'accumulation de chaleur, deux cas se présentent. Si la frontière est celle
d'un isolant thermique, le gradient normal de T est nul. Si au contraire le fluide est mis
en contact au travers d'une paroi conductrice avec un réservoir thermique, la température
sera imposée sur la frontière. On notera que le coefficient k/Cp a des dimensions de m2
s-1
et est donc la diffusivité thermique appropriée pour la température. Si on évalue
l'entropie totale sur un élément matériel de volume V,
dvDt
DSSdv
dt
d
VV
et 10.16 permet d'écrire après quelques manipulations :
dvT
Tkdv
TSdv
dt
d2
V
2
VV
10.18
où il a été supposé l'absence de transfert thermique à travers la surface frontière. Ainsi
l'entropie totale du fluide isolé croît car les deux termes à droite dans 10.18 sont définis
positifs en accord avec le deuxième principe de la thermodynamique. A l'inverse si on
pose le deuxième principe de la thermodynamique comme hypothèse de départ, ceci
justifie que les coefficients de viscosité et de conductivité thermique soient choisis
positifs.

110
Chapitre XI
ECOULEMENTS COMPRESSIBLES
Les phénomènes pour lesquels la compressibilité effective des fluides doit
être prise en compte sont nombreux. Les sons musicaux se propagent dans l'air comme
des ondes de compressibilité longitudinales et l'étude de leur caractéristiques constituent
une application fort agréable de la physique.
A l'autre extrême, les grandes vitesses des avions modernes ont montré la
situation critique qui se produit dans l'écoulement quand les vitesses atteignent la vitesse
du son. Des chocs (ou discontinuités) se produisent alors de façon analogue au ressaut
hydraulique déjà mentionné dans le contexte des ondes de gravité.
L'accent jusqu'à présent a été mis sur la physique incompressible des écoulements
fluides à un point tel que l'on a oublié que les liquides comme le gaz et les solides sont
aussi des milieux élastiques. A ce titre, tous subissent des changements de volume sous
l'effet d'une contrainte de pression. (Ils diffèrent par contre notablement les uns des
autres dans la façon dont ils répondent à des contraintes de cisaillement). Un coefficient
caractéristique du matériau, le module d'Young Ey mesure la variation de la pression
nécessaire pour une variation relative donnée du volume ou de la densité:
d
dpE y
Le coefficient de compressibilité étant lui défini par l'inverse dpd1
. Si une
compression sur de la matière est effectuée de façon graduelle, on peut supposer que
chaque élément de matière reçoit instantanément chaque incrément de compression.
Mais en fait, ces incréments se propagent dans les corps à une vitesse finie, celle des
ondes élastiques que nous devons déterminer. La définition des coefficients ci-dessus est
pour l’instant assez vague car ρ dépend non seulement de p mais aussi de la
température. La température serait-elle constante dans les écoulements compressibles ?
Nous allons voir qu’une bien meilleure hypothèse (qui explique beaucoup mieux les
observations) est que l’entropie des particules fluides est constante : les échelles de
temps sont rapides et la diffusion thermique n’ a pas vraiment le temps de jouer.
1) Théorèmes de Bernouilli
Nous les avons rencontrés pour le cas des fluides incompressibles et ils sont
généralisés ici. Si l'on repart de l'équation pour l'énergie totale (interne + cinétique)

111
10.14, on peut la réécrire après quelques lignes de calcul dans l'hypothèse isentropique
(les effets de dissipation par viscosité et de conductivité thermique sont négligeables) :
t
p1pE
2
u
Dt
D2
11.1
Ainsi si la pression ne dépend pas explicitement du temps on en déduit que
la quantité :
uqoù,p
E2
qI
2
11.2
est conservée le long d’une ligne de courant. Lorsque la pression ne dépend pas du
temps, l'écoulement est normalement stationnaire et on en déduit la généralisation du
théorème de Bernouilli:
"La quantité I est conservée le long d'une ligne de courant d'un écoulement
permanent "non visqueux et non conducteur de chaleur". Les deux derniers
qualificatifs impliquent d'après l'équation 10.16 que l'entropie S est également conservée
et on parle alors d'écoulement isentropique. Cependant les constantes I et S varient
généralement d'une ligne de courant à l'autre et nous allons examiner maintenant de
quelle façon. A un instant donné, la différence entre 2 éléments fluides d'entropie,
d'énergie interne est reliée par 10.2 :
1pEST
Si on élimine E au profit de I :
p1
q2
1STI 2
D'autre part, l'équation d'Euler permet d'écrire (voir chapitre 3).
p1
q 2
1 x u 2
et ainsi x u STI 11.3
une relation trouvée par Crocco (1937). Cette relation montre que l'uniformité de I et S
d'une ligne de courant à l'autre implique soit = 0, c'est-à-dire un écoulement
irrotationnel soit que u et et soient parallèles (un écoulement particulier dit de
Beltrami).
Un écoulement pour lequel S (respectivement I) est uniforme spatialement,
est appelé homentropique (respectivement homénergique). Lorsque l'écoulement est

112
homentropique, on voit que I est constant le long des lignes de vorticité et le long des
lignes de courant. Notons que la constance de I (11.2) peut se réécrire en fonction de
l'enthalpie H précédemment introduite :
pEH
Si de plus les variations de sont beaucoup plus faibles que celles des autres termes (et
ce sera le cas en dynamique des gaz), alors approximativement :
2q
21HI 11.4
est constant le long d'une ligne de courant.
Applications
a) Fluide incompressible
Dans ce cas, la densité d'un élément fluide n'étant pas affectée par la
pression, l'énergie interne ne pourrait changer que par conduction de chaleur ou travail
des forces de frottement. En leurs absences 10.11 et 10.16 indiquent que E et S sont
conservées à une particule fluide :
0Dt
DE et 0
Dt
DS
et on retrouve le théorème vu au chapitre III à savoir que
p
q2
1I 2 est
constant le long d'une ligne de courant.
b) Gaz parfait
Dans ce cas l'enthalpie H dans 11.4 est simplement Cp T. Si on suppose
comme c'est souvent le cas que Cp (et Cv) sont indépendants de la température sur la
gamme considérée (on parle alors de gaz polytrope), ainsi 11.4 devient-il :
TCq2
1I p
2 11.5

113
Si en particulier on définit l'enthalpie de stagnation CpT0 à l'endroit où la vitesse du gaz
est nulle on a :
0pp
2 TCTCq2
1
Le gaz est d'autant plus chaud que sa vitesse est lente. A entropie constante,
la différentielle dH vaut dp
et donc les variations d'enthalpie et de pression se font
dans le même sens. Ainsi quand la vitesse décroît, sa pression augmente ainsi que sa
température, résultat du travail lié à la compression qui modifie l’ énergie interne. La
vitesse la plus rapide est obtenue quand T = 0 auquel cas p est aussi zéro, et donc :
0pTC2q
Ceci est la vitesse maximale obtenue lors de l'expansion adiabatique d'un gaz dans le
vide. Si par exemple de l'air s'échappe d'une enceinte où la température est de 20°C vers
une autre enceinte maintenue à un vide parfait, on obtient une vitesse V=767ms-1!
(sachant que Cp à cette température vaut 1006 JKg-1 K-1).
2) Equations du mouvement d'un écoulement isentropique
Les écoulements pour lesquels les transports moléculaires de quantité de
mouvement et de chaleur sont absents, forment un cas particulier très important de la
dynamique des fluides qui permet d'aller assez loin dans les prédictions de façon
analytique. En pratique c'est toujours une approximation. L'équation de l'entropie 10-16
montre que sous ces approximations :
0Dt
DS
Dt
DpT
Dt
DTCp
11.6
Comme il a été également rappelée, la constance de l'entropie implique la notion de
réversibilité et les écoulements isentropiques devront être clairement non turbulents
pour satisfaire à cette exigence. La relation 11.6 qui lie alors constamment température
et pression permet de voir la densité comme donnée par l'équation d'état:
Sp , 11.7
où est une fonction différente de p pour différentes particules d'entropie différente (à
moins que le flot ne soit homentropique). La grande simplification vient de ce que les
échanges entre l'énergie interne et les autres formes d'énergie sont réversibles, l'énergie
interne (et donc la température) s'adaptant passivement à la compression de l'élément
fluide selon 11.6. Définissons arbitrairement pour l'instant c (une vitesse) comme :

114
S
pc2
que l'on peut toujours calculer à partir de l'équation d'état 11.7. Ainsi un écoulement
isentropique obéit à :
0
Dt
DSpuisque
Dt
Dc
Dt
Dp 2
et les équations d'un écoulement isentropique peuvent-elles s'écrire :
S,p
FpDt
uD
0uDt
Dp
c
1.2
11.8
* Cas particulier du gaz parfait polytrope :
Dans ce cas E - E0 = cv T et H - H0 = cp T
Comme dans ce cas on peut calculer S explicitement :
1d
T
p
T
dES
L'usage de l'équation d'état fournit :
v
pv0
p0
v0
c
cpcSS
pRTcSS
RTcSS
avec ln
ln ln
ln ln
-
Cette dernière relation permet de voir que p est dans ce cas proportionnel à γ lors d'un
écoulement isentropique. Alors après usage de l'équation d'état des gaz parfaits
(R' = R/M où M est la masse moléculaire du gaz).
T'Rp
c2
11.9
gaz monoatomique 5/3
gaz diatomique 7/5
gaz polyatomique 1.1-1.2

115
On notera que 1cEE
1cHH
2
0
2
0
et en fonction de la quantité c.
3) Ondes acoustiques
Supposons que l'on considère une masse de fluide au repos de densité 0 et
pression p0. Des forces extérieures existent en général induisant une distribution de
pression :
00 pF
Si on considère de petites perturbations autour de cet état de repos caractérisées par de
petits écarts 0101 ppp, , on obtient facilement l'équation du mouvement
linéarisée en négligeant les produits de petites quantités dans 11.8 :
0ut
p
c
1
pFt
u
1
2
0
110
(a )
(b )
11.10
où 22
0 cc est évalué à 00 ,p , de sorte que l’équation d’état est : 2
011 cp
Eliminant .u entre ces 2 équations :
2
0
111
2
2
1
2
2
0 c
pFFp
t
p
c
1
11.11
Dans le cas de la gravité, F = (g) est un vecteur constant, sa divergence s'annule et si la
pression varie sur des échelles L petites devant gc2
0 le dernier terme est négligeable.
Sous cette approximation, 11.11 est équivalent à l'équation d'onde classique de
propagation de la lumière dans le vide. La quantité c précédemment introduite apparaît
donc comme la vitesse de propagation de ces ondes acoustiques. Elles sont non
dispersives, isotropes et aussi longitudinales. Prenons en effet, une propagation dans
une direction x choisie arbitrairement. Il est alors facile de vérifier que les expressions
suivantes sont solutions de 11.11 ( après omission dernier terme à droite):
tcxf ou tcxfp 001
Ceci veut dire que la forme du signal est préservée lors de la propagation d’où le terme
non dispersif (toutes les composantes de Fourier se déplacent a la même vitesse).Après
usage de 11.10 on trouve aussi que seule la vitesse dans la direction x de propagation est
non nulle (d’où le terme longitudinal):
0
10
00
1 cc
pu

116
On notera :
1) que les fluctuations de pression de l'ordre de 0c0u sont très grandes dans une onde
acoustique, bien supérieures à la valeur 2
0u21 observée pour les écoulements
incompressibles.
2) quand les forces extérieures sont conservatrices en prenant le rotationnel de 11.10 (a),
on remarque que la vorticité obéit à :
0t
et donc qu'elle ne se propage pas ! Ainsi la partie rotationnelle du champ de vitesse
est indépendante du temps et seule la partie irrotationnelle (qui dérive d'un potentiel
de vitesse) est associée avec la propagation du son.
Newton découvrit très tôt les lois de cette propagation, à peu près en même
temps que les premières expériences pour déterminer l'équation des gaz étaient
réalisées. Il mesura assez bien expérimentalement la valeur de c ( en utilisant l'écho sur
les murs du cloître du Trinity College) mais crut que la propagation d'une onde
acoustique s'effectuait de façon isotherme. Dans l'air à 20°C, ceci implique
0
02 pc
soit 290 m s
-1, une valeur assez significativement plus basse que la valeur
expérimentale de 340 m s-1
. Laplace, un siècle plus tard, reconnut que dans une onde
acoustique les éléments de fluide sont comprimés et effectuent du travail qui augmente
l'énergie interne et donc la température de l'élément. Ces échanges s'effectuant de façon
réversible, la propagation n'est pas isotherme mais isentrope; dans ce cas la relation 11.9
fournit la valeur correcte pour un gaz parfait. De la connaissance de l'équation d'état de
l'eau, on peut également déduire la vitesse du son dans l'eau qui est de l'ordre de 1 400
m s-1
plus rapide certes, mais pas du tout dans le rapport des densités entre air et eau qui
est lui de l'ordre de 103. Les ondes acoustiques dans l’océan sont très utilisées pour
transmettre des signaux. A des fréquences assez basses (200 Hz) des portées de 1000 a
1500 Km peuvent être obtenues.
4 ) Dynamique des gaz
Étudions maintenant quelques propriétés des écoulements à grande vitesse pour lesquels
la considération des effets compressibles est fondamentale.
Ecoulement permanent compressible dans un tuyau de section variable
On va supposer que la section du tube A change lentement
de façon que l’écoulement reste à peu près 1D. De plus l’écoulement
est isentropique (pour l’instant). Les trois équations qui permettent de
prédire comment le flot évolue le long du tuyau sont les suivantes :
Masse : ρVA = cste
v

117
Euler : VdV = - dP/ (on néglige les forces de frottement sur les
parois).
Equation d’état :
S
2 Pc
d
dP
Si M = V/c est le nombre de Mach on obtient assez facilement:
)M1(V
dV
A
dA 2
et aussi : )M1(V
dp
A
dA 2
2
Nozzle and diffuser shapes as a function of initial Mach number.
(i) dA = 0 : deux possibilités : soit dV = 0, V ne change pas, soit M = 1 et donc V
= c.
(ii) Convergent (une buse) dA < 0. SI le flot est subsonique on voit que le flot
accélère (dV > 0). Comme le flot accélère, la pression diminue (d’après
l’équation d’Euler). Par contre si le flot est supersonique (M > 1), le flot
ralentit et la pression augmente.
Les cas opposés se retrouvent pour un divergent dA > 0 (voir figure). Si on
veut obtenir une poussée maximum pour une fusée, on a intérêt à éjecter les gaz à la
plus grande vitesse possible et donc à dépasser la vitesse du son.
Il faut d’abord accélérer le fluide dans le régime subsonique via un
convergent puis ensuite quand l’écoulement devient supersonique il faut un divergent.
A la section minimale de la tuyère on est dans le cas (i) et M = 1. La buse de Laval ci-
dessous est utilisée pour créer une soufflerie supersonique :
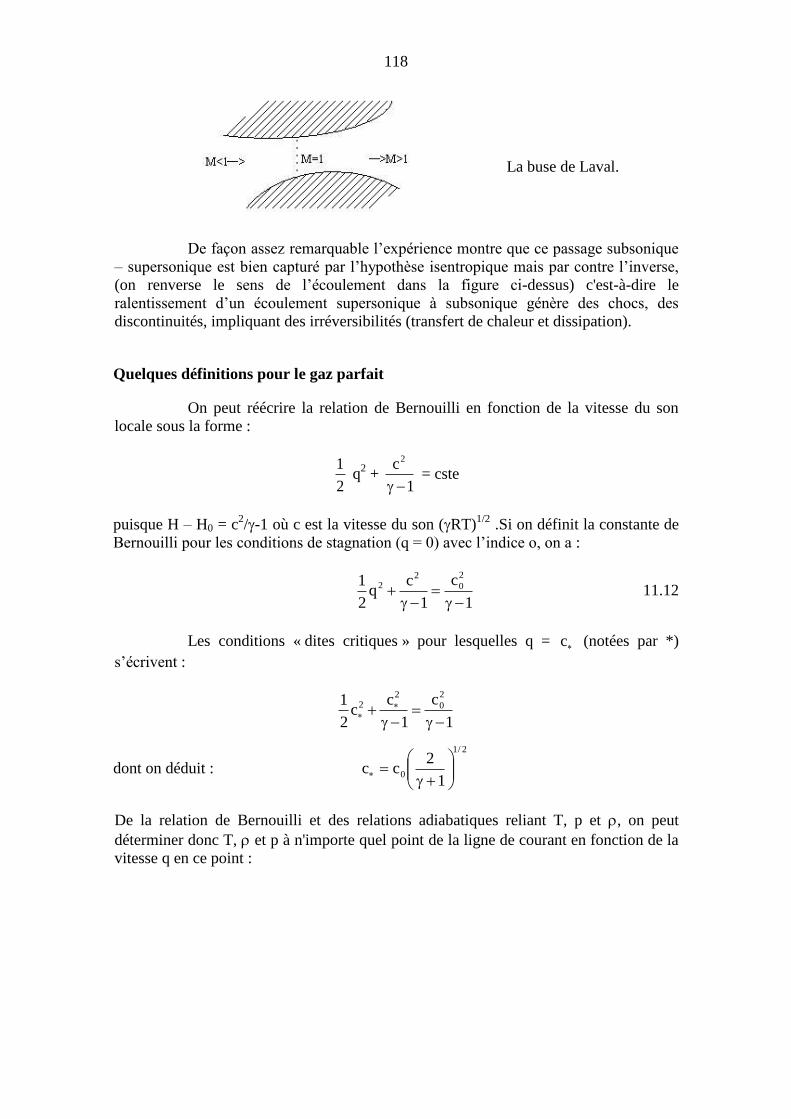
118
De façon assez remarquable l’expérience montre que ce passage subsonique
– supersonique est bien capturé par l’hypothèse isentropique mais par contre l’inverse,
(on renverse le sens de l’écoulement dans la figure ci-dessus) c'est-à-dire le
ralentissement d’un écoulement supersonique à subsonique génère des chocs, des
discontinuités, impliquant des irréversibilités (transfert de chaleur et dissipation).
Quelques définitions pour le gaz parfait
On peut réécrire la relation de Bernouilli en fonction de la vitesse du son
locale sous la forme :
2
1 q
2 +
1
c2
= cste
puisque H – H0 = c2/-1 où c est la vitesse du son (RT)
1/2 .Si on définit la constante de
Bernouilli pour les conditions de stagnation (q = 0) avec l’indice o, on a :
1
c
1
cq
2
12
0
22
11.12
Les conditions « dites critiques » pour lesquelles q = c (notées par *)
s’écrivent :
1
c
1
cc
2
12
0
22
dont on déduit :
2/1
01
2cc
De la relation de Bernouilli et des relations adiabatiques reliant T, p et , on peut
déterminer donc T, et p à n'importe quel point de la ligne de courant en fonction de la
vitesse q en ce point :
La buse de Laval.

119
1
2
0
2
0
11
2
0
2
0
2
0
2
0
C
q1
2
11pp
C
q1
2
11
C
q1
2
11TT
Maintenant tout ceci présuppose qu'aucune discontinuité ne se présente dans
l'écoulement. Pour certaines conditions amont-aval, ceci n'est pas vrai.
Les Ondes de choc
L’expérience la plus simple est celle où un piston accélère pour accélérer un
fluide initialement au repos. L’ajustement se fait par émission d’ondes acoustiques
représentées dans le diagramme caractéristique de la figure ci-dessous.
(a) Development of a shock wave by a piston accelerating into a gas-filled tube ;
(b) Development of a rarefaction wave by a piston accelerating out of a gas filled
tube
Comme la pression augmente par « derrière », les ondes acoustiques voient
leur vitesse augmenter. Les ondes émises plus tard rattrapent les ondes émises plus tôt et
le schéma montre comment au cours du temps le front de p se raidit pour devenir
vertical : un choc apparaît. La figure montre aussi le cas inverse (l’expansion) où le
piston se retire. Les vitesses des ondes dans le diagramme (x,t) forme un éventail et
aucun choc n’apparaît.

120
Nous n'analyserons que ce qui est couramment appelé le choc normal, le
vecteur vitesse étant dans ce cas normal à la surface de discontinuité. Celle-ci est très
mince, de l'ordre du libre parcours moyen des molécules et donc de très forts gradients
de propriétés existent au travers d'un choc conduisant à des états hors d'équilibre et des
irréversibilités posant beaucoup de problèmes difficiles.
En général ces chocs se propagent avec leur vitesse propre différente de la
vitesse locale du fluide. Si on se place donc dans un référentiel lié au choc l'écoulement
est stationnaire. Si on dénote par [ ] la différence entre les variables de part et d'autre du
choc, conservation de la masse, de la quantité de mouvement et de l'énergie au passage
du choc impliquent :
0q2
1Het
0pq
0q
2
2
Gaz 1 Gaz 2
p1
1 v1
h1
p2
v2 2
h2
choc
On considère que l’écoulement du côté 1 est connu et on se propose de
déterminer les propriétés de l’écoulement du côté 2.
La deuxième équation s’écrit : p2 – p1 = 1 V1 (V1 – V2)
La troisième est ré-écrite : H1 – H2 + ½ (V1 + V2)( V1 – V2) = 0
Soit en remplaçant au profit de p2 – p1 :
H1 – H2 + ½ (V1 + V2)11
12
V
)pp(
= 0
En utilisant la conservation de la masse 1v1 = 2V2 on élimine les vitesses
pour obtenir la relation de Rankine – Hugoniot :
H1 – H2 +
21
11
2
1 (p2 – p1) = 0
On l’appelle aussi adiabate dynamique du gaz. Comme l’enthalpie est connue en
fonction de p et de , pour le gaz parfait ce sera H = /( - 1) p/ on en déduit :

121
1
2
1
2
1
1
2
1
11
1
21
p
p
courbe tracée sur la figure ci-dessous :
Courbe de Rankine-Hugoniot d’un gaz parfait (γ = 1,4).
Maintenant à partir de l’équation de continuité et de la quantité de mouvement :
21
11
12 vvpP
En se servant de la relation Bernouilli (énergie) ré-écrite comme :
2
c
1
1v
2
1p
1v
2
1p
1
2
2
2
2
22
1
1
1
= cste
d’où : 1
1
2
11
1 v2
1
v
c
2
H
v
p
et 2
2
2
22
2 v2
1
v
c
2
H
v
p
Mais comme : v2 – v1 = 22
2
11
1
11
12
v
p
v
p
v
)pp(
on obtient au final : v2 – v1 = )vv(2
1
v
1
v
1c
2
112
21
2
Cette équation a une solution triviale v1 = v2 et une autre donnée par :

122
v1 – v2 = 12
122 ppc
Lorsque la vitesse 2 (en aval) est subsonique, la relation précédente montre que v1 est
alors supersonique. On peut vérifier que ceci est le seul cas possible en calculant la
variation d’entropie au travers du choc qui est dans ce cas positive. Si on renversait le
sens de l’écoulement, le 2ème
principe serait violé. Donc le choc ne se produit que lors
de la transition supersonique – subsonique. A partir des relations précédentes, on peut
calculer les rapports de toutes les quantités en fonction du nombre de Mach incident M1
= v1 /c1. Elles sont illustrées sur la figure :
Variation de p, , T, p0 et M à travers une onde de choc normale (γ = 1,4).
Lors d’un vol supersonique on voit que la vitesse diminue au voisinage du nez de
l’avion et un choc va se former lorsque M = 1. Plus près de la paroi l’écoulement
redevient subsonique. L’élévation soudaine de la pression lors du choc fait séparer la
couche limite, la traînée augmente dangereusement et l’écoulement devient turbulent.
Les premiers vols supersoniques après la fin de la 2ème
guerre mondiale se sont terminés
tragiquement.
Finalement il est intéressant de considérer l’avion comme source d’ondes acoustiques et
de voir comment celles-ci se propagent selon la vitesse de la source.

123
Propagation of sound waves from a moving source : The mach cone.
La figure résume la situation. Si v est supersonique les fronts d’onde sont contenus dans
un cône, le cône de Mach dont le demi-angle au sommet se détermine ainsi :
A
H
O

124
A t = 0 une onde est émise en A et arrive en H à t donc HA = c t. Mais dans le même
temps l’avion est en O donc OA = v t et sin =c/v = M-1
. Notez également que la
projection de la vitesse de l’avion sur HA est précisément égale à c.
De l’angle du « cône de bruit », on peut ainsi remonter à la vitesse. On a réalisé
expérimentalement que la traînée sur une aile supersonique pouvait être diminuée
considérablement en donnant aux ailes un angle inférieur à l’angle du cône de Mach.
Modèle idéalisé de formation de chocs
La formation de chocs est la marque des systèmes hyperboliques non
linéaires dont les équations de la dynamique des gaz forment un cas particulier. Des
phénomènes analogues existent pour les ondes de gravité. Il est possible de comprendre
physiquement ce qui arrive avec des exemples plus simples que ceux de la dynamique
des gaz. Mathématiquement, il faut aborder la théorie des caractéristiques qui permet
de trouver les solutions d'équations différentielles, partielles, du premier ordre quasi-
linéaires.
Considérons l'équation d'onde :
t + c0 x = 0
La solution = f(x – c0t) indique bien une propagation sans déformation de la condition
initiale f(x). On peut aussi observer que est constant le long de la courbe dans le plan
x, t donnée par:
000 xtcxou cdt
dx
Cette courbe est appelée caractéristique. Cette notion de caractéristique se généralise
pour résoudre des problèmes non linéaires du type :
0c xt 11.13
La nouveauté est maintenant que la vitesse de propagation c est fonction de l'amplitude.
Cette équation contient de façon surprenante les idées essentielles sur la propagation
d'ondes hyperboliques non linéaires. On peut voir que t + c()x est la dérivée totale
de la fonction (x, t) le long d'une courbe C de pente :
cdt
dx
Pour toute courbe C dans le plan x-t, x et peuvent être considérés comme fonction de t
et alors :

125
xdt
dx
tdt
d
On voit qu'il est possible de déterminer simultanément la courbe C et la solution sur
C à partir des 2 équations différentielles ordinaires :
cdt
dx
0dt
d
11.14
Dans ce cas particulier, comme est constant sur C , c() est constant et la courbe C
est une droite dans le plan (x, t) de pente c() correspondant à la valeur de sur cette
droite.
Supposons que = f(x), t = 0 sur - < x < + et construisons le diagramme
caractéristique :
Si une droite C coupe
t=0 en x = alors = f() sur cette
droite. Sa pente est c(f() = F(), et
F() est une fonction connue de :
la droite a alors pour équation :
x = + F() t 11.15
et sur cette droite la valeur de est
f(). Vérifions que ceci redonne la
solution quand est vu comme
fonction de x, t :
t = f ’()t et x = f ’()x
En utilisant 11.15 que l’on dérive successivement par rapport à x puis par rapport à t:
x
t
t'F11
t'F1F0
On obtient :
t'F1
'f
t'F1
'fFt
x
indiquant que 11.13 est bien vérifié ainsi que la condition initiale. Les droites en
question sont les caractéristiques de ce problème. Chaque caractéristique représente une
onde transportant de l'information sur la solution. On peut dire que différentes valeurs
de se propagent avec la vitesse particulière c(). La solution à un instant t peut être
construite en déplaçant chaque point de la courbe initiale d'une distance c()t à droite.
La grande nouveauté vient de ce que cette distance n'est pas constante. Supposons c'()
> 0, alors :

126
les valeurs fortes de se propageant plus vite que les valeurs faibles, un point de
déferlement est atteint en 2 pour atteindre en 3 une solution à 3 valeurs pour . Cette
singularité dans la solution (on parlera de choc) arrivera dès que x et t deviennent
infini. Soit pour :
B
B'F
1t
c'est-à-dire sur la caractéristique = B pour laquelle F'() < 0 et de valeur absolue
maximum. Dans le diagramme caractéristique ce choc apparaît comme la première
intersection des caractéristiques. A partir du moment où le choc arrive, la solution
mathématique cesse de représenter un processus physique et on doit retourner vers les
équations de départ pour rajouter ce qui manque : les processus de diffusion -
dissipation sont des candidats évidents pour guérir ces singularités. La formation des
chocs en dynamique des gaz ou en eau peu profonde est certes plus compliquée à étudier
que 11.13 mais la formation de choc dans les systèmes hyperboliques non linéaires vient
toujours de ce que la vitesse de propagation de l'onde dépend maintenant de l'amplitude
de la perturbation.
x

127
Ecoulement supersonique autour d’un profil mince
L’écoulement supersonique autour d’un profil mince ressemble à ceci :
Il n’y a aucune déformation de l’écoulement amont à l’exception de al zone entre les
lignes de Mach. Cherchons l’écoulement permanent, 2D, de petite amplitude autour
d’un profil mince. Comme pour les ondes acoustique on va linéariser autour de
l’écoulement uniforme :
u = U + u1
v = v1
p = p0 + p1
= 0 + 1
Comme précédemment, p1 et 1 sont reliés par :
P1 = 20C 1
L’équation d’Euler (2D) linéarisée devient :
0 U x
u1 = - p1
En éliminant la pression l’équation de vorticité devient :
0 U x
= 0
ce qui montre que la vorticité est indépendante de x, mais comme elle est nulle loin en
amont et loin en aval, elle est donc nulle partout et il existe un potentiel dont dérive les
composante de u1. On en déduit :
p1 = - 0 U x
D’autre part l’équation de conservation de la masse linéarisée devient :
C
E F
D
A B

128
0 u1 + x
1
+ à
Après substitution au bénéfice de dans cette équation, on obtient :
(1 – M2)
2
2
x
+
2
2
y
= 0
Considérons les conditions aux limites sur le profil. La surface supérieure est définie par
l’équation y = f(x), 0 < x < L et donc :
1
1
uU
v
= f ’(x) sur y = f(x)
Comme les perturbations sont petites devant U, on réalise que ceci n’est possible que si
| f’(x) | << 1 qui est donc la condition aux limites ci-dessus donne :
v1 = y
= U f ’ (x) sur y = O
+
Il y a bien sûr une condition similaire pour y = O-.
Lorsque M > 1, l’équation ci-dessus est une équation d’onde et les solutions sont de la
forme :
= F (x – By) + G (x + By)
où B = (M2 – 1)
1/2.
Les droites x – By = cst et x + By = cst sont les lignes de Mach et sra nul en amont de
AC et AE. Comme est continu sur AC :
O = F(O) + G (2x)
Ce qui montre que G est constant et l’on peut choisir G = 0. En aval de AC on a :
= F(x – By)
avec F(O) = 0
Pour déterminer la fonction F, on applique la CL en y = O+ :
- B F’(x) = U f’(x)
O < x < L
de sorte que F(x) = - U/B f(x)
et ainsi : = -U/B f(x – By) pour y > 0, 0 < x – By < L

129
et “en dessous” :
= -U/B f(x + By) pour y > 0, 0 < x + By < L
Ainsi est aussi zéro en aval de BD et BF. Notez que :
v1 = U f ’ (x – By) pour y > 0
Ceci veut dire qu’entre AC et BD la pente des ligne de courant (v1/U) est f ’ (x – By) qui
est constante sur x – By = cste. Ainsi entre les lignes de Mach les lignes de courant ont
la même forme que l’aile !
Le coefficient de pression Cp = 2
1
U2
1
p
devient :
Cp = U
u2 1 =
2/12 )1M(
)x('f2
La pression en un point du profil ne dépend que de la pente de la surface en ce point.
C’est une forte différence avec l’écoulement subsonique où une région du profil en
influence une autre. La portance L et la traînée D (par unité de largeur) sont :
L = -
dx)x('f
1M
2U
2 2
2
D =
dx)x('f
1M
2U
2 2
2
Les intégrales étant effectuées sur les surfaces supérieures et inférieures. Ces relations
montrent que la grande efficacité d’une aile en écoulement subsonique est perdue
quand le flot devient supersonique : en effet les pressions en régime supersonique
montrent une distribution antisymétrique pression positive en amont et négative en
aval, créant une « traînée de forme » non nulle.
La physique comparée ainsi décrite peut se comparer avec le cas incompressible :
+
-

130
Sur le dessin ci-dessus les lignes de courant du flot compressible sont plus déformées
(plus élargies) que celles du flot incompressible (pointillé). En effet à vitesse
supersonique, le tube de courant « doit » s’élargir lorsque la pression chute et que la
vitesse augmente. Ceci est une conséquence directe de l’élasticité du fluide dont le
volume augmente lorsque la pression diminue. On s’attend donc à ce que la déformation
créée par le profil s’atténue beaucoup moins vite avec la distance au profil.

131
Chapitre XII
INSTABILITES HYDRODYNAMIQUES
L'étude des processus conduisant aux instabilités d'un écoulement particulier
joue un rôle très important en Hydrodynamique. Ceci est logique, car les écoulements
stables ont les plus grandes chances d'être observés en pratique. Une tendance vers
l'instabilité peut se produire si des gradients d'énergie cinétique ou d'énergie potentielle
sont présents. D'une façon générale si ces gradients sont suffisamment forts,
l'écoulement deviendra instable. De petites perturbations sont alors amplifiées
rapidement conduisant parfois à une situation où les "échelles" de l'écoulement sont si
nombreuses et où les interactions entre ces échelles sont si fortes que le flot sera qualifié
de turbulent. Ces perturbations ont néanmoins toujours l'effet de lisser les gradients à
l'origine de l'instabilité et de restaurer une situation d'équilibre. Dans la plupart des
systèmes naturels, l'équilibre observé n'est pas celui d'un écoulement permanent isolé
mais, celui d'un écoulement en interaction non linéaire incessante avec des
perturbations. Ces situations sont très complexes et font l'objet de beaucoup de
recherches tant en Météorologie qu'en Océanographie. Le problème de l'équilibre du
climat terrestre par exemple, relève complètement du domaine de la stabilité
hydrodynamique.
1. Concepts de base
Si on considère un pendule rigide, l'étude de l'équilibre montre qu'il existe
deux positions d'équilibre, pour lesquelles la droite passant par le centre de gravité et le
point d'appui est vertical.
Seule une étude de la stabilité permet de dire laquelle sera observée en
pratique. Ecartons très légèrement le pendule de sa position d'équilibre.
A B

132
En A la perturbation s'amplifie alors qu'en B, le pendule revient vers sa position
d'équilibre et oscille autour de celle-ci : B représente donc une configuration stable
susceptible d'être observée : elle l'est.
Ce petit exemple contient tous les ingrédients nécessaires à l'étude de la stabilité
hydrodynamique. La première étape consiste à déterminer un écoulement de base U (x,t)
dans une situation d'équilibre cad qui satisfait les équations du problème. Ainsi il s'agit
de déterminer l'évolution temporelle des perturbations u (x,t)-U (x,t).
Définition :
On parlera de stabilité au sens de Liapunov si :
t,xUt,xu 0,xU0,xu ,0
traduisant le fait que si l'écart à l'écoulement moyen est petit initialement à l'instant
t = 0, il restera petit pour tout temps ultérieur. On parlera de stabilité asymptotique si :
t
0 t,x Ut,x u lim
On va se borner dans ce qui suit à étudier la stabilité linéaire d'écoulements
permanents. On considère un écoulement de base U (x) plus une perturbation u' (x,t).
Introduisant cette forme dans les équations du mouvement, on simplifie ensuite celles-
ci, en négligeant tous les produits de perturbations u'2, u'v' etc. Cette étape dite de
linéarisation implique que l'on va étudier la stabilité au regard de perturbations
infinitésimales de l'équilibre. *
On obtient alors un système d'équations différentielles partielles homogènes
à coefficients dépendant de l'espace mais pas du temps. On peut donc chercher des
solutions de la forme :
Re (p (x) e st) où s= i .
L'objectif est de déterminer valeurs et modes propres du système homogène (c'est-à-dire
s et p(x)). Quand le système a des symétries spatiales, on pourra utiliser des
transformées de Fourier spatiales pour exprimer p(x) sous la forme :
p (x) = p (k, l, m, s)e i(kx + ly + mz) dk dl dm
auquel cas les fonctions p eik. x sont les modes propres du système (encore appelés
modes normaux en Mécanique). Pour assurer la stabilité au sens de Liapunov, il faut
d'autre part que les modes soient complets pour qu'une déformation arbitraire puisse être
décomposée de façon unique sur ces modes. (C'est évidemment le cas des modes de
Fourier). Reportant l'expression pour un mode dans l'équation différentielle, on obtient
l'équation aux valeurs propres :
F (s, k, l, m) = 0

133
Dû à la linéarité de l'équation de départ, chaque mode apparaît indépendamment des
autres, ce qui simplifie considérablement l'étude de l'équation aux valeurs propres
(appelée aussi relation de dispersion).
Si = Re(s) > 0 le mode est instable
= 0 le mode est neutre
0 le mode est stable asymptotiquement.
Une notion importante est celle de stabilité marginale. La stabilité est en
effet gouvernée par des paramètres proportionnels aux gradients des quantités à l'origine
de l'instabilité. Si pour une valeur critique de ces paramètres, est nul alors que pour
une valeur infiniment voisine, est positif, la stabilité est dite marginale. La courbe ou
surface de stabilité marginale dans l'espace des paramètres indique alors le seuil
d'instabilité. Dans la majorité des cas l'objectif sera donc de déterminer ces surfaces de
stabilité marginale dans l'espace des paramètres.
D'autre part si 0 et =Im(s) 0, on parle alors d'instabilité oscillatoire
ou de sur-stabilité tandis que si = 0, l'instabilité apparaît comme un écoulement
secondaire également stationnaire. On parle alors dans ce dernier contexte "du principe
d'échange de stabilités". Ces différentes possibilités sont illustrées dans les exemples qui
suivent.
2. L'instabilité de Kelvin - Helmholtz
Il s'agit ici de déterminer sous quelques conditions deux fluides superposés
de densité différente peuvent glisser sans frottement l'un au-dessus de l'autre.
Le fluide léger (2 < 1) étant au-dessus du lourd, la situation représente par
exemple l'eau légère "Atlantique" rentrant en Méditerranée au-dessus de l'eau plus salée
et plus dense sortant par le détroit de Gibraltar. Le fluide étant initialement irrotationnel
(à l'exception de l'interface qui représente une feuille de vorticité), il reste irrotationnel
dans chacune des couches.
* Notons qu’un écoulement stable au regard de perturbations infinitésimales n’implique nullement la stabilité vis-à-vis de perturbations d’amplitude finie.
z
x
2
1

134
Dans l'hypothèse d'un fluide incompressible, on a dans chaque couche :
0i
2
z
U lim avec ii
L'interface est une surface matérielle Dt
D ,z i
iz , et la pression est continue. Le
théorème de Bernouilli donne :
i
i
ii2
i Cp
gzt2
1
Ces conditions se ramènent pour les perturbations linéarisées à :
xU
tDt
D où
gDt
Dg
Dt
D
Dt
D
ii
'
22
2
'
11
1
i'
iz
[On a utilisé le résultat que le flot de base satisfait aussi à l’écoulement de Bernouilli
pour obtenir 2
222
2
111 U2
1CU2
1C ]. Les coefficients des équations
différentielles étant constants, les modes normaux dans le plan horizontal sont des
modes de Fourier :
KZ
11
KZ
22
21
22
st +ly + kxi''
i
e A
e A
: aon ,lkK Si
eˆ , ,

135
En reportant dans les conditions aux limites, on obtient après quelques lignes de calcul,
l'équation aux valeurs propres :
Kg UU
k U U
iks2
1
21
212
212
2 1
212
21
2211
12-1
12-1 permet de conclure rapidement, quant aux valeurs réelles ou complexes de s.
La condition : 22121
22
2
2
1 UU k Kg
est une condition nécessaire et suffisante de stabilité pour le mode (k, l). En définissant
la gravité réduite g' par 21
21g
et le nombre de Froude F (sans dimension) par
21
21 L 'g/UU (L étant une échelle de longueur arbitraire), la courbe de stabilité
marginale est définie par :
221
212
.
2
. FcosKL
12-2
étant l'angle que fait le vecteur d'onde horizontal K avec l'axe Ox. 12-2 montre que les
modes les plus instables ont leur crêtes perpendiculaires à l'écoulement moyen ( = =
0). Pour cette valeur de et pour une valeur du cisaillement donné, il est toujours
possible de trouver une valeur de K suffisamment élevée pour être dans le domaine
instable. Ainsi comme le montre la figure ci-dessous, l'instabilité est plus favorable aux
ondes courtes. (Un effet négligé, ici "la tension de surface à l'origine de la capillarité"
stabilisera l'écoulement aux très petites longueurs d'ondes)
Le facteur déstabilisant dans l'instabilité de Kelvin Helmholtz est bien
entendu le cisaillement de courant, l'influence de la stratification étant par contre
stabilisant. Si on laisse agir les instabilités, celles-ci vont lisser les gradients de densité
et de vitesse de l'écoulement moyen.
instable
stable
F
kL

136
(a) (b) densité vitesse
Dans la situation en pointillé obtenue après un certain temps, l'énergie
potentielle de l'écoulement moyen a augmenté en (a) (le centre de gravité a monté) alors
que son énergie cinétique a diminué en (b). C'est donc bien cette dernière qui est à
l'origine de l'instabilité, une fraction ayant été également utilisée pour élever le centre de
gravité du système. Cet effet est à l'origine des différences de comportement du vent
entre la journée et la nuit. Le vent augmente généralement en altitude et est instable
particulièrement dans la journée où le sol chaud réduit considérablement les différences
de densité. Le refroidissement nocturne par rayonnement infrarouge crée à l'inverse une
stratification très stable (les météorologistes parlent d'inversion) et la turbulence générée
par le cisaillement est considérablement amortie. Les vents nocturnes sont beaucoup
moins turbulents.
On notera les limites intéressantes de 12-1 :
a) K'g0UU 2
21 relation de dispersion des ondes internes se
propageant le long de l'interface. Il s'agit de modes stables largement observés dans
l'atmosphère et l'océan dont la dynamique est ici proche de celle des vagues à l'interface
air-mer. Ce sont des ondes dispersives (leur fréquence varie non linéairement avec le
nombre d’onde).
b) 212121 UU k 2
1 UU iks C’est la situation d'une feuille
de vorticité qui est donc toujours instable. Le taux de croissance de l'instabilité est
d'autant plus grand que la longueur d'onde est courte. En pratique, une feuille de
vorticité a toujours une certaine épaisseur de transition causée par la diffusion et l'on
observe que les perturbations les plus instables ont une échelle caractéristique de l'ordre
de cette épaisseur.

137

138
3. Ecoulements parallèles
Puisque le cisaillement de courant est à l'origine de l'instabilité de Kelvin-
Helmholtz, sa distribution a fait l'objet de nombreuses études mathématiques pour tenter
de classer les différents profils quant à leur stabilité. Le problème peut s'étudier en
bidimensionnel car le théorème de Squire précise qu'à chaque perturbation instable 3D
correspond une plus instable 2D. Explorons la situation suivante d'un écoulement
parallèle dans un canal.
L'équation pour les perturbations d'un profil moyen U (y) est obtenue en écrivant
simplement que la vorticité d'une particule fluide est conservée en 2D :
0Dt
D 12-3
où ,dy
dU2 étant la fonction courant associée aux perturbations et la
composante de la vorticité perpendiculaire au plan de l'écoulement. Après linéarisation
pour de petites perturbations on obtient :
0U x
Ut
yyx
2
12-4
Les conditions aux limites associées à cette équation dite de Rayleigh sont simplement
que x est nul ce qui implique ici 0. 12-4 étant invariante par translation en x on
peut choisir ctxike y Re .
Décomposant c = cr+ici, on voit que l'étude se résume à déterminer les valeurs propres
de i en fonction de k :
Si ci > 0 : stabilité
ci < 0 : instabilité
ci = 0 : neutralité

139
L'équation aux valeurs propres est :
0yy avec
0 UkcU
21
yy
2
yy
12-5
Cette équation 12-5 est évidemment difficile à résoudre analytiquement (elle présente
notamment une singularité irrégulière lorsque U-c s'annule sur l'axe réel), mais Rayleigh
a pu dire beaucoup de choses sans calculer explicitement les modes et valeurs propres
d'un profil U (y) donné.
Si on prend le complexe conjugué de 12-5, on voit que si est un mode
propre associé à c pour une certaine valeur de k alors le conjugué * est associé à c*
pour la même valeur de k. Comme à chaque valeur positive de ci en correspond une
autre négative, la stabilité exige que ci soit nul.
Le théorème de Rayleigh
Supposons que 'l'écoulement soit instable (ci 0), alors U- c n'est jamais
nul et on peut réécrire 12-5 :
0cU
U k
yy2
yy
12-6
Multiplions 12-6 par * et intégrons sur l'intervalle [y1, y2]. Après quelques intégrations
par parties, on trouve :
0dy cU
U dy k 2
2y
1y
yy2y
1y
222
y
12-7
La partie imaginaire de 12-7 fournit :
0dy cU
U c
22y
1y 2
yy
i
12-8
Si l'écoulement est instable, 12-8 prédit que Uyy doit prendre des valeurs positives et
négatives sur l'intervalle [y1, y2] et qu'il existe donc nécessairement un point d'inflexion
yi pour lequel :
21iyy y ,y ypour 0U 12-9
En d'autres termes la vorticité de l'écoulement de base doit présenter un extremum pour
qu'il y ait instabilité. Si cela n'est pas le cas, l'absence de point d'inflexion dans le profil
fournit une condition suffisante pour conclure sur la stabilité de l'écoulement.

140
Théorème de Fjortoft
La considération de la partie réelle de 12-7 fournit une condition plus forte
d'instabilité :
0dy kdy cU
cUU
2y
1y
222
y
2
2
r2y
1yyy
Maintenant si (ci 0), 12-8 permet d'écrire :
0dy cU
U Uc
22y
1y 2
yy
ir
où Ui est la valeur de U au point d'inflexion en y=yi On en déduit :
0 dy cU
UU U 2
2
i
2y
1yyy
et donc la quantité Uyy (U-Ui) est nécessairement négative quelque part sur l'intervalle.
Considérons les profiles suivants :
(a) (b)
(c) (d)(e)
(a) et (b) sont stables puisque dénués de points d'inflexion. (c) a un point d'inflexion
mais les cisaillements maximum étant situés aux frontières, le théorème de Fjortoft
permet de conclure à la stabilité. Les profils (d) et (e) répondent aux 2 conditions
nécessaires de Raleigh et Fjortoft et sont donc potentiellement instables.

141
Pour juger de l'intérêt de ces résultats en pratique, il ne faut pas oublier que
l'on a toujours affaire à un fluide réel. Quand les effets de viscosité sont ajoutés 12-5
devient l'équation de Orr-Sommerfeld une équation différentielle du quatrième ordre qui
a été largement étudiée numériquement. Pour un profil U = U0 tanh ly
(qui ressemble
au profil (d) ci-dessus) la courbe de stabilité marginale à l'allure suivante.
klstable
instable
Ci=0
Re
Le paramètre Re est le nombre de Reynolds lUo qui gouverne l'étude de la stabilité.
Pour un nombre d'onde donné, il existe une valeur critique du nombre de Reynolds en-
dessous (en-dessus) de laquelle le flot est stable (instable). Notons que même quand le
nombre de Reynolds est très faible (viscosité dominante), l'écoulement est instable pour
les grandes longueurs d'onde. L'étude sur de nombreux profils montre qu'en général la
théorie non visqueuse présentée précédemment donne d'assez bons résultats.
4. Instabilités thermiques (ou convectives)
Parmi toutes les instabilités, celles qui sont causées par l'existence d'un
gradient de température, tiennent une place considérable du fait de leur applications si
diverses tant parmi les sciences de l'ingénieur que celles des fluides terrestres
(atmosphère, océan, intérieur de la terre). Dans le paragraphe 2 l'existence d'une
stratification en densité a déjà été rencontrée dans une configuration de stabilité
correspondant au cas où le fluide chaud est en haut et le fluide froid en bas. Dans bien
des situations le forçage du fluide se fait en chauffant par dessous et en refroidissant par
dessus auquel cas les forces de flottabilité joue un rôle déstabilisant : c’est le cas de
l’atmosphère chauffée par le sol, des couches externes de la terre plus froides que
l’intérieur, de l’océan soumis à refroidissement hivernal. Dans un fluide réel, viscosité
et diffusion vont s'opposer à cette déstabilisation et la question se pose de savoir qui va
l'emporter et dans quelles conditions. Le problème classique est celui dit de Rayleigh-
Bénard d'un fluide maintenu entre 2 plaques infinies, horizontales maintenues à
température constante T1 en haut (T2 en bas) avec T2 > T1. Il n'y a aucune échelle de
longueur dans le fluide si ce n'est l'épaisseur d'entre les plaques et une prédiction
importante va donc être de déterminer les échelles horizontales et verticales des
perturbations quand il y a instabilité. Une solution est de faire des expériences (ce qui
fut le cas de Bénard) et une poêle à frire remplie d'une mince couche d'huile sur laquelle
on aura saupoudré une poudre de cacao, montrera les belles structures convectives qui
apparaissent dès que le chauffage est suffisant. Malheureusement l’interprétation de
cette expérience simple avec surface libre fait aussi intervenir la variation de la tension
de surface avec la température (effet Marangoni). Rayleigh, quant à lui s'intéressa au
problème théorique, ce que nous allons faire avec lui.

142
Les paramètres physiques décrivant la situation sont :
: viscosité cinématique
k : diffusité thermique
gT : l'accélération liée aux forces de flottabilité (T = T2 – T1 >0 et le coefficient
de compressibilité thermique)
d : épaisseur du fluide
Avec ces 4 grandeurs on peut former 2 nombres sans dimensions :
k
le nombre de Prandtl
k
TdgRa
3
le nombre de Rayleigh
Expérimentalement, on s'aperçoit que le fluide reste au repos tant que Ra reste en-
dessous d'une certaine valeur critique Rac dont la détermination constitue l'objectif
essentiel de la théorie linéaire. Pour des valeurs croissantes de Ra (super critiques)
l'écoulement passe par un certain nombre de bifurcations correspondant à des structures
nouvelles avant de devenir complètement turbulent. Ces bifurcations font l'objet de
recherches actives sur le sujet depuis la découverte du "chaos dit déterministe" (voir
chapitre 13).
Lorsqu'une particule fluide est accélérée sur une hauteur h pendant un temps a par les forces de flottabilité on doit avoir :
2
a
h Tg
Z
T1
T2
T2 > T1 d

143
Par contre le lissage des gradients de vitesse par la viscosité et des gradients
de température par la diffusion thermique se fait sur des échelles de temps respectives
et T données par :
k
het
h 2
T
2
v
et le nombre de Rayleigh Ra s'exprime au moyen de ces échelles de temps comme :
2
a
TvaR
Si la viscosité et diffusion dominent, une particule échange sa vitesse et sa température
par diffusion avec ses voisines dans un temps court par rapport au temps qu'elle met
pour doubler sa vitesse sur une hauteur h. Le nombre de Rayleigh est alors petit devant
un et les fluctuations sont totalement amorties. Lorsqu'il devient supérieur à un, c'est
l'inverse et l'on doit s'attendre à des perturbations instables faiblement dissipées.
Les équations dites de Boussinesq permettent d'étudier la stabilité linéaire de
façon assez peu compliquée en négligeant la compressibilité du fluide :
ugp
Dt
Du 2
TkDt
DT 2 12-10
00 TT1
0u.
Comme dans tout problème de stabilité, l'écoulement de référence Ur doit
d'abord être défini. Ici il s'agit d'un état purement conductif : le fluide est au repos et le
transfert thermique entre la paroi chaude et la paroi froide est entièrement effectuée par
la diffusion moléculaire. Les équations 12-10 deviennent :
Ur = 0
- prZ - gr = 0 12-11
2Tr = 0
fournissant d
z.TTT 2r

144
Le profil de température de l'état de référence est donc linéaire. Considérons
maintenant l'équation verticale de quantité de mouvement selon 0z pour les fluctuations
autour de cet état de référence :
ggppDt
'Dw' rzrzr
où l'on a posé = r + ’ p = pr + p’ w = w’
En tenant compte de 12-11 cette équation se réécrit :
'g'pDt
'Dw'1 z
r
r
Si les perturbations de densité (d'échelle ) sont petites, on peut faire une
approximation supplémentaire qui consiste à écrire :
r
r
r
r ordrel' à '
1
Si de plus T est telle que T est petit devant 1 dans l'équation d'état, r n'est jamais
très différent de la densité constante 0 .Cette approximation est largement utilisée pour
l'étude des océans où mêmes pour de grosses perturbations en vitesse, les variations de
densité restent très faibles pour les conditions de températures rencontrées. Le cas de
l’atmosphère est plus compliquée car on ne peut pas négliger la compressibilité.
Sous cette approximation de Boussinesq, l'équation pour les perturbations
devient :
u'
gp
Dt
uD 2
00
12-12
et l'approximation revient donc simplement à ne prendre en compte les variations de
densité que dans le terme de flottabilité. Partout ailleurs la densité est prise constante et
égale à 0 .
Après linéarisation, les équations générales pour les perturbations sont les
suivantes (en négligeant les primes) :
0u.
Tkd
TwT
ukT gp
u
2
t
2
0
t
12-13
145
dans lesquelles k est un vecteur unitaire vertical dirigé selon 0z, vers le haut. Ces
équations peuvent être arbitrairement adimensionnalisées de la façon suivante :
2
0
2
2
d p'p
T
T'T
du'u
d
k.t't
d
x'x
les variables "primées" représentant maintenant les quantités adimensionelles. Quand on
effectue ce changement de variable dans 12-13, on obtient des équations pour les
variables adimensionelles suivantes (sans réécrire à nouveau les primes)
0u.
TwT
ukT Rapu
2
t
2
t
12-14
Dans ces équations on retrouve bien sur nos deux nombres adimensionnels
Prandtl et Rayleigh. Aux équations 12-14, il faut adjoindre des conditions aux limites.
Certaines sont évidentes :
w = 0 en z = 0,1 (vitesse normale nulle à la paroi)
T = 0 en z = 0,1 (perturbation de température nulle puisque l'on maintient les
parois à température constante).
Pour les autres variables u et v, on peut soit imposer la condition habituelle
de non glissement u = v = 0 soit supposer le glissement (frontières libres) auquel cas les
contraintes ne s'annulent que si uz = vz = 0. En termes de w, le non glissement impose
wz = 0 d'après la continuité. (En effet si u = v = 0 sur la paroi, les dérivées ux, vy sont
aussi nulles). Le glissement lui impose wzz = 0 pour les mêmes raisons. Le calcul
théorique pouvant être mené jusqu’au bout, Rayleigh choisit ces conditions de
glissement tout en sachant que les expériences, elles, présupposent le non glissement.
Pour référence ultérieure l'équation de vorticité obtenue en prenant le
rotationnel de 12-14 est :
2
tTxk Ra 12-15
Le premier terme à droite indique clairement que la vorticité ne peut
s'amplifier que s'il existe des couples des forces de flottabilité causés par les gradients
horizontaux de température et générant de la vorticité horizontale perpendiculaire à ces

146
mêmes gradients. Si par exemple la température diminue dans la direction y, alors de la
vorticité positive se crée dans la direction x qui correspond à des vitesses de rotation
dans le plan yz qui a tendance à ramener les isothermes dans la position d’équilibre
horizontal. Ces couples qui créent du mouvement sont en compétition avec le deuxième
terme à droite qui représente l'effet amortissant lié à la diffusion de vorticité.
Avant de déterminer les modes normaux, il est particulièrement indiqué de
réduire le système 12-14 à une seule variable dépendante w (ou T). En prenant le
Laplacien de l'équation verticale de quantité de mouvement, on obtient :
2wt 2 pz Ra 2T 4w
et en prenant la divergence des équations de quantité de mouvement :
2 p Ra Tz 0
Soit après élimination de p au profit de T et w :
2wt Ra h
2T 4w
Tt w 2T 12-16
En éliminant T dans 12-16 on obtient l'équation cherchée du sixième ordre.
w Rawtt
2
h
222
12-17
Reste à transformer la condition aux limites T=0 en termes de w. Ce qui est possible
grâce à 12.16 appliquée sur l’une ou l’autre des frontières z=0, 1:
ww 4
t
2
Les coefficients de 12-17 étant constants, on cherche les modes normaux sous la forme
de Fourier habituelle :
stxkiezww
En posant a2 k
2, 12-17 fournit l'équation ordinaire pour w (z) :
wa RawaDasDasD 2222222
12-18
équation dans laquelle on a posé : dz
dD
Il est possible de montrer à partir de 12-18 que lorsque Ra est positif, la
partie imaginaire de s est nulle. On parle alors du principe d'échange de stabilité. En
conséquence la stabilité marginale est déterminée par s = 0 et l’état de stabilité
marginale apparaît donc comme un régime permanent de cellules de convection. (Voir
Chandrasekhar (1961), Hydrodynamic and Hydromagnetic Stability, Dover).

147
Physiquement l'instabilité apparaît pour le gradient de température minimum
pour lequel un équilibre peut être maintenu de façon permanente entre la dissipation
d'énergie et sa production par les forces d'Archimède. Les équations gouvernant l'état
marginal s'obtiennent donc en imposant s = 0 dans 12-18 :
w a RawaD 2322 12-19
Dans le cas du glissement, les conditions aux limites sont satisfaites si :
znsinw
12-19 fournit alors la relation de stabilité marginale :
3
2
222
a
a nRa
2
Pour une échelle horizontale 1/a donnée, les plus petites valeurs de Ra sont
donnés pour n = 1 et le minimum de la courbe ci-dessus correspond à une demi longueur
d'onde de 2d . On s'attend donc à ce que les rouleaux convectifs au seuil de stabilité
marginale soient des modes graves de rapport d'aspect proche de 1. Le cas du non
glissement est un peu plus compliqué à traiter car les modes propres ne sont pas aussi
simples. Il conduit à un Rayleigh critique plus élevé Rac=(1708). L'allure de la courbe
marginale peut se rationaliser physiquement à partir de l'équation de vorticité 12-15.
Si on augmente a, (réduction d'échelles), la dissipation et diffusion
deviennent plus importantes et vont finir par stabiliser l'écoulement. L'équation de
vorticité montre clairement que si a diminue, les couples de flottabilité vont diminuer
comme les gradients de température. La source d'instabilité diminue et le flot doit à
nouveau se stabiliser pour les grandes échelles. Cette théorie linéaire prédit bien les
démarrages de l'instabilité de Rayleigh Bénard. En pratique la mesure du transfert de
chaleur entre plaques est effectuée. La courbe de variation de cette quantité en fonction
du nombre de Rayleigh présentant une discontinuité à Rc, le Rayleigh critique peut être
assez bien déterminé. D'autre part, le mode vertical le plus bas n = 1 est bien celui qui
apparaît en premier, le rapport d'aspect étant proche de 1 :
Ra
n = 1
instable
stable
657
a

148
(L'excitation de modes verticaux plus élevés est prévue théoriquement pour des
Rayleigh beaucoup plus élevés mais pour ceux-ci la théorie linéaire perd tout intérêt).
Par contre la comparaison avec la théorie de l'observation expérimentale de la forme des
cellules de convection s'est avérée très confuse. Ceci est dû au fait que les expériences
initiales de Bénard (1900) démontraient l'importance du beau pavage hexagonal (ci-
dessous). Réalisées avec des surfaces libres on sait maintenant que l'origine de cette
instabilité n'est pas due seulement aux forces de flottabilité mais vient de la variation de
la tension de surface avec la température. En convection pure entre 2 plaques rigides
dans un milieu infini, la forme des cellules dans un plan horizontal reste arbitraire. En
effet seul le module a, du vecteur d'onde intervient et il n'y a pas de points ou de
directions privilégiées dans le plan. Les rouleaux bidimensionnels sont communs mais
d'autres possibilités existent. Sous certaines conditions on peut paver le plan avec des
cellules polygonales à N côtés. L'angle interne étant de N
21 , le pavage uniforme
nécessite que N
212 M2 où M est un entier. Les seules solutions entières sont
N = 3, 4, 6 et donc M=6, 4, 3 correspondant à des triangles, carrés et hexagones. Dans
les expériences, la forme de la frontière détermine la forme des cellules : les rouleaux
bidimensionnels sont les structures les plus simples et souvent observés dans des boîtes
rectangulaires. En géométrie cylindrique des rouleaux toriques apparaissent sous forme
de cercles concentriques…
Pour des valeurs du nombre de Rayleigh de l'ordre de 105, la convection est
complètement turbulente et les jolies structures ordonnées ont disparu. La plupart des
réalisations géophysiques de ce processus ont des nombres de Rayleigh quasi infinis de
sorte que l’on est dans un régime complètement turbulent (nuages convectifs, formation
d'eaux profondes océaniques).
1/4 d
d

149

150
5. Instabilités de Taylor-Couette
Une instabilité remarquable, celle de l'écoulement de Couette, a été
énormément étudiée et du fait de la facilité de sa réalisation expérimentale sert de base
pour l'exploration des régimes non linéaires encore aujourd'hui.
a. L'écoulement de Couette
On s'intéresse à l'écoulement stationnaire entre 2 cylindres concentriques
tournant à des vitesses angulaires différentes, 1 et 2, respectivement pour le cylindre
intérieur et extérieur. Couette (1890) construisit initialement une expérience avec 1 = 0
et 2 0 pour mesurer la viscosité du fluide en mesurant le couple exercé par le
cylindre extérieur sur le cylindre intérieur par l'intermédiaire du fluide. Lorsque 2 est
faible il nota que le couple est proportionnel à 2, mais par contre croît beaucoup plus
vite lorsque 2 est grand. Dans le premier cas le régime est laminaire et il mesura ainsi
la viscosité du fluide. Le second régime découvert semblait donc ne pas obéir aux
équations de Navier-Stokes mais on comprend maintenant qu'il s'agit en fait d'une
transition vers un régime turbulent pour lequel la "viscosité effective du fluide" est au
dessus de la viscosité moléculaire.
Le régime laminaire à lignes de courants circulaires obéit à :
r
p1
r
u 2
12-20
22
2
r
u
r
u
r
1
r
up
r
1
t
u 12-21
r
p10
u étant la vitesse azimuthale dans un système de coordonnées cylindriques r, , z. Si u
n'est fonction que de r et t, il n'est pas difficile de montrer (avec 12-21) que p est
indépendant de et que l'équation d'évolution de u se réduit à :
22
2
r
u
r
u
r
1
r
u
t
u
Une phase transitoire de mise en régime est initiée lorsque les cylindres commencent à
tourner. Après un temps diffusif de l'ordre 2
12 RR le régime permanent est atteint
avec la solution générale :
r
BAru

151
La vitesse intérieure devant s'ajuster à la vitesse de chaque cylindre, on obtient :
2
1
2
2
2
2
2
121
2
1
2
2
2
11
2
22
rr
rrB
rr
rrA
b. L'instabilité de Taylor
Après Couette, Taylor (1923) examina la stabilité linéaire de cet écoulement
et montra que sous certaines conditions le flot est instable, l'instabilité prenant la forme
de vortex de Taylor régulièrement répartis :
Avant d'examiner cette solution, Rayleigh (1916) dans un autre contexte produisit un
remarquable critère non visqueux au sujet de la stabilité d'un flot circulaire régi par une
loi de vitesse angulaire r .
"En l'absence de viscosité, la condition nécessaire et suffisante pour qu'une
distribution de vitesse angulaire soit stable est que la quantité ddr r
2
2
soit positive partout dans l'intervalle considéré ; si la quantité est négative
quelque part alors il y a instabilité."
L'argument suppose que l'on perturbe le système de façon axisymétrique.
Dans l'état permanent :
r
p1
r
u 2
la force centrifuge équilibrant le gradient de pression radial. Déplaçant un anneau de
fluide de r1 (où la vitesse est u1) à r2 (> r1) (où la vitesse est u2), le moment angulaire est
conservé en l'absence de viscosité. L'anneau aura alors une vitesse u’1 telle que :
1211 urur
Taylor Vortices (reproduced by permission,
from Schlichting, "Boundary-Layer Theory"
McGraw-Hill, New York, 1968)

152
Le gradient de pression à r2 équilibre un anneau tournant à la vitesse u2 mais si 2
2
2
1 uu ,
ce gradient de pression sera trop faible pour équilibrer la force centrifuge de l'anneau
déplacé : celui-ci continuera vers l'extérieur et nous conclurons à l'instabilité si donc :
2
2
2
2
2
1
2
1 ruru
On peut se demander ce que ce critère inviscide implique pour la stabilité de
l'écoulement de Couette. Lorsque les cylindres tournent dans le même sens, il indique la
stabilité si :
2
2
1
1
2
r
r
L'analyse linéaire avec viscosité a été effectuée par Taylor et permet de juger de la
valeur de la prédiction non visqueuse de Rayleigh. Notez le parallèle de la
démonstration avec celle de la stabilité d’une particule fluide en fluide stratifie en
densité ou on déplace à nouveau une particule fluide sans changer sa densité ni le
gradient de pression de l’état de base.
Pour démontrer l'essentiel de l'instabilité sans sombrer dans les calculs, un
certain nombre d'approximations sont effectuées, la première d'entre elles étant de
postuler des perturbations axisymétriques (indépendantes de ) au seuil de l'instabilité.
Ceci est largement une intuition dictée par l'expérience. Ainsi on cherche des solutions
perturbées de l'écoulement de base U(r) :
zr u ,urU ,uu
les perturbations étant fonction de r, z et t seulement.
Après linéarisation, les équations du mouvement sont :
z
2z
2
2rr
2
rr
2r
uz
p1
t
ur
uu
r
Uu
dr
dUu
t
u
r
uu
r
p1
r
Uu2
t
u
12-22
0u
rurr
1 zr

153
2 étant l'expression du Laplacien en cylindrique :
2
2
2
22
zrr
1
r
Du fait de la géométrie cylindrique, les équations sont encore complexes et
l'approximation suivante est de considérer l'espace entre les 2 cylindriques très petit par
rapport au rayon du cylindre : d = r2 –r1 << r1. Ceci permet de négliger les termes
métriques en u/r devant u/r.
Si 2
tL
, les équations 12-22 deviennent :
0z
u
r
u )d(
z
p1Lu )c(
0Au2Lu )b(r
p1u
r
U2Lu )a(
zr
z
r
r
12-23
Après élimination de p et u entre (a), (c) et (d) :
L2ur 2U
r
2u
z2 12-24
12-24 et 12-23 (b) sont deux équations couplées dont on peut chercher les solutions en
modes normaux sous la forme :
st
re ,r e nz cos ru ,ruRuu
On suppose le cylindre infiniment long et négligeant les effets d'extrémité, on cherche
des solutions périodiques selon z. On obtient :
unr
U2unDsnD )b(
Au2usnD )a(
2
r
2222
r
22
12-25
avec dr
dD .
Les conditions aux limites de non glissement aux parois impliquent :
21zr r ,rr à 0uuu
La continuité 12-23 (d) implique aussi 0uD r et l'équation 12-25 )b( donne à la
frontière :

154
21r
22
r
4 r ,rr à 0uDs
n2uD
Les coefficients sont constants à l'exception du terme U/r qui est la vitesse angulaire de
l'écoulement de base. Si l'on fait l'hypothèse supplémentaire que 1 et 2 ne sont pas
très différents on peut sans doute remplacer U/r par la moyenne de 1 et 2 sans
faire d'erreurs très appréciables. Après élimination de u on obtient :
r
2
r
22222 unA4unDsnD 12-26
Si l'on suppose (comme en convection thermique) que l'instabilité apparaît lorsque
s passe d'une valeur négative à une valeur positive (ie sans partie imaginaire et donc
oscillations), l'état marginal est obtenu en insérant s = 0 dans 12-26 :
r
2
r
3
2
2
2
uTauadx
d
12-27
avec : 1,0x à 0udx
da2u
dx
du
dx
du r2
22
r4
4
rr
où drrx 1 , a = nd et T le nombre de Taylor :
1
2
32
22
2
11
r
drr2T
Le problème aux
valeurs propres 12-27
est très similaire au
problème de
convection de
Rayleigh-Bénard, le
Nombre de Taylor
remplaçant le nombre
de Rayleigh.
Calculated and observed conditions ofr instability in water between
two rounting cylinders. = 0.88 ; = 185. Also maked is the line separating unstable an stable conditions according to rayleigh’s criterion. After Taylor (1923).
1/n
50
100
150
2500
Stable
Unstable
-250 -200 -150 -100 -50 0 50 100 150 200
292.121R
22R
2
1
Observed points
Calculated points

155
Une analyse conduit à montrer que l'instabilité centrifuge se produit pour T > 1708, la
valeur critique de n étant 3,1/d. La hauteur des cellules dans l'état marginal est donc /n
= d/3,1, , démontrant le rapport d'aspect presque unité au seuil d'instabilité.
Taylor (1923) dans un papier monumental a également réalisé l'expérience en
augmentant progressivement la vitesse de rotation du cylindre intérieur 1 (2 = 0). Il
nota un excellent accord entre d'une part la valeur de , à la transition marginale et
d'autre part la forme des rouleaux toroïdaux. Ces expériences étaient réalisées dans de
longs cylindres avec un faible écartement pour se mettre dans le cadre des
simplifications théoriques. Au-delà de la stabilité marginale il montra l'existence de flots
ondulatoires dépendant du temps et non-axisymétriques. L'accord remarquable entre
théorie et expérience sur la figure ci-dessus (assez rare en Mécanique des Fluides pour
être souligné) fut considéré comme un élément important pour croire aux équations de
Navier-Stokes.

156

157
Chapitre XIII
TURBULENCE
La plupart des écoulements observés dans la nature ou dans des contextes
industriels (aérodynamiques) présentent une large gamme d'échelles temporelles et
spatiales. La composante de la vitesse près du centre d’un jet turbulent est montrée ci-
dessous:
La même expérience répétée quelques instants plus tard, montre que le
signal ne se reproduit pas exactement pareil. Par contre il a la même allure lorsqu’on
construit un histogramme de la vitesse (le nombre de fois ou la vitesse est observée
entre les valeurs u et u +du). Le signal manque de périodicité et semble multi-échelles :
on observe une large gamme de fréquences avec une certaine amplitude mais d'une
expérience à l'autre les phases de ces modes de Fourier semblent être choisies au hasard.
Ce type de comportement complexe est toujours observé dès lors que "l'amplitude" de
l'écoulement est suffisamment élevée. Le paramètre qui gouverne ce seuil est ici le
nombre de Reynolds. Le temps météorologique semble être d'une certaine façon
l'exemple quotidien d'un comportement turbulent que nous pouvons caractériser par les

158
propriétés qui seront illustrées :
- richesse d'échelles spatiales et temporelles,
- échanges d'énergie rapides entre ces échelles,
- forte dissipation d'énergie,
- mélange très efficace,
- prévision très limitée dans le temps,
- présence de vorticité.
L’aspect aléatoire d’un écoulement turbulent rend une approche déterministe
inappropriée. En effet si on change un tout petit peu les conditions initiales,
l’écoulement change beaucoup au bout de très peu de temps d’une simulation à l’autre.
Cependant si on moyenne les vitesses instantanées sur un temps assez long, on récupère
un profil du jet moyen comme sur la figure ci-dessous qui apparaît bien défini. Cela
fournit l’objectif d’essayer de déterminer plutôt le profil moyen que le jet instantané.
L’objectif d’une théorie de la turbulence est de prédire non pas les signaux eux-mêmes
mais leur statistique (moyenne, variance, histogramme, etc…).
Comme nous le verrons, ces théories se heurtent à des obstacles si
fondamentaux que ce qui est connu aujourd'hui de la turbulence provient largement de
l'analyse d’expériences. On pourrait penser que les difficultés théoriques résultent du

159
fait que les équations de Navier Stokes ne sont plus valables dans un régime turbulent.
Si on produit un écoulement dans un tuyau par un gradient de pression stationnaire, on
peut obtenir facilement les solutions exactes des équations de Navier Stokes (le profil
parabolique). Comme nous l'avons vu dans le chapitre "stabilité", pour être observé un
écoulement doit aussi être stable devant de petites perturbations. Dans le cas présent, O.
Reynolds a montré expérimentalement que dès que le nombre de Reynolds dépasse 104,
l'écoulement devient instable et la transition vers la turbulence inéluctable. C'est donc
l'aspect "instable" des solutions des équations dès lors que la viscosité est assez faible
qui est à l'origine de la turbulence. L'étude des dernières années des systèmes
différentiels non linéaires ont montré que des solutions de systèmes à petit nombre de
degré de liberté (au minimum 3) peuvent devenir extrêmement sensibles aux conditions
initiales dans le sens où une solution diverge exponentiellement rapidement d'une autre
ayant des conditions initiales voisines. C'est cette sensibilité aux conditions initiales
découverte dans ce qu'on appelle depuis, le chaos déterministe, qui est à l'origine de la
perte de prédictabilité (capacité de prédiction) associée aux comportements turbulents.
Même si, les recherches en physique non linéaire actuelles permettent de comprendre
maintenant quelques étapes de la transition entre un écoulement laminaire et turbulent,
la turbulence pleinement développée, dont il est question ici, reste toujours un des
piliers non résolus de la physique. En conséquence, les applications industrielles font
largement appel à l'étude expérimentale de fluides réels puis, depuis une vingtaine
d'années de fluides dits numériques.
1. Outils descriptifs
En turbulence, une variable observée est assimilée à une variable aléatoire
car on ne peut extrapoler le futur à partir d'un enregistrement du passé de cette variable.
Au lieu de s'intéresser à un enregistrement individuel d'une variable, on va faire porter
l'attention sur une famille d'enregistrements obtenus à partir d'un ensemble
d'expériences réalisés dans les mêmes conditions et ne différant que par les conditions
initiales
On définit alors la moyenne d'ensemble à un instant t, de la variable u (une vitesse
observée en un point) par :
N
1
iN tuN
1lim)t(u 13-1
Les propriétés importantes d'une telle moyenne d’ensemble de réalisations
sont les suivantes :
< A + B > = < A > + < B >
t
A
t
A
<< A > B > = < A > < B >
(et idem avec les
dérivées spatiales)

160
Bien souvent en nature l'observateur n'a
accès qu'à une expérience, et il lui faut alors remplacer
une moyenne d'ensemble par un autre opérateur.
Plusieurs choix sont possibles en général dictés par la
faisabilité des mesures ; dans le cas de l'écoulement
dans un tuyau, il peut soit mesurer en continu la
vitesse au point A et fabriquer la moyenne temporelle :
'dt 't uT
1limtu
Tt
tT0
0
0
13-2
soit "prendre une photo" de tout l'écoulement et moyenner par exemple la vitesse u le
long du pointillé dans la figure ci-dessus. On peut en effet penser intuitivement que la
moyenne ne dépend pas de la position longitudinale du point de mesure dans le tuyau
mais seulement de sa position radiale. En pratique on va donc remplacer l'opérateur de
moyenne d'ensemble par des moyennes spatiales ou temporelles. Bien entendu
l'enregistrement est fini et se pose le problème de la convergence de la moyenne
temporelle:
'dt 't uT
1T ,tu
tt
t0
0
0
13-3
De façon pratique, T ,tu 0 converge vers 13-2 et devient indépendante de T
si on moyenne sur une échelle de temps T supérieure à la plus longue période présente
dans le signal. La convergence implique donc que la bande de fréquence du signal soit
limitée. Lorsque l’on admet que moyenne d’ensemble et moyenne temporelle coïncident
on parle d’hypothèse ergodique. Une autre propriété très désirable est bien sur que u
soit indépendant de 0t , l'instant où l'on a commencé les mesures. Pour qu'il en soit ainsi
les effets transitoires associés à la mise en régime de l'écoulement doivent avoir disparu
et l'on parle alors de turbulence stationnaire. De même lorsque l'on fait des moyennes
spatiales dans une direction donnée, l'on désire que la moyenne soit indépendante du
point initial où l'on a démarré et la turbulence possédant cette propriété est alors
qualifiée d'homogène. Lorsqu'aucune direction n'est privilégiée dans le flot, et que les
moyennes sont indépendantes de la direction choisie, la turbulence sera qualifiée
d'isotrope.
Bien entendu la moyenne de la vitesse ne suffit pas pour décrire l’effet de la
turbulence. On peut construire un histogramme représentant la distribution relative des
valeurs de u comprises entre différents seuils qui permet d'introduire la notion de densité
de probabilité de la variable aléatoire u. La quantité p(u)du est définie comme la
probabilité de trouver u entre u et u + du. Elle satisfait les propriétés suivantes :
1du up
0up
La moyenne d'une fonction quelconque de u, f(u) se calcule alors comme :
A

161
du u p uf uf
Les quantités très utilisées, la moyenne et la variance sont les deux premiers moments
de p(u) à savoir < u > et < (u - < u >)2. En présence de 2 variables aléatoires u et v, on
définit de la même manière, la densité de probabilité jointe (u,v). Une quantité
particulièrement importante, la covariance entre les deux variables est alors définie
comme :
u v u v u,v du dv
On dira que les deux variables, (ramenées au préalable à une valeur moyenne nulle),
sont non corrélées si :
< u v > = 0
L'indépendance des deux variables est plus exigeante car elle requiert que :
(u,v) = u(u) v(v)
Lorsque l'on mesure un champ de vitesse u(t) en un point en fonction du temps, on va
construire l’auto-covariance de u mesurée a deux instants différents t et t’ :
R(t,t’) = )'t(u)t(u
En turbulence stationnaire, elle pourra se réécrire :
R() = )t(u)t(u
puisque l'origine des temps n'est plus importante. De plus :
R() = R(-)
L'inégalité de Schwartz implique également :
R() R(0)
De façon plus générale on définira les covariances spatiales et temporelles du champ de
vitesse de composante ui en turbulence homogène et stationnaire par :
)rx,t(u)x,t(u)r(R
)x ,t(u)x ,t(u)(R
ji
'
ij
jiij
Pour une variable particulière u, on définit le spectre comme la transformée de Fourier
de la corrélation :

162
de)(RS i 13-4
Si û()est la transformée de Fourier de u(t), on montre que :
2û*ûûS
(u* désignant le complexe conjugué de u). S()d représente aussi la contribution à la
variance de u provenant de la bande de fréquence comprise entre et + d. Ainsi :
dSu
0
2
R() et S() prennent en général la forme suivante pour un signal turbulent :
C’est le fait que R() décroisse rapidement avec qui rend compte du fait
qu’un signal turbulent n’est pas prévisible : la vitesses mesurée à un instant postérieur
suffisamment grand perd tout lien statistique ave »c la vitesse mesurée « avant ».
L'échelle intégrale de la turbulence li est définie lorsqu'elle existe, par :
d R0
il
Normalement en turbulence R() tend vers 0 suffisamment rapidement pour que li
existe. Ceci implique également une limite finie pour S(0) dans 13-4.
Le spectre est "large et continu" par opposition au cas d'un ensemble d'ondes
pour lesquelles le spectre serait constitué de pics discrets. En général il contient plus
d'énergie aux basses fréquences. La richesse d'échelles d’un écoulement turbulent est
parfaitement illustré par cette nature large du spectre.
L'échelle intégrale, le centre de gravité du spectre, le passage à zéro de la
fonction de corrélation sont autant de façons de caractériser l'échelle des tourbillons qui
contiennent l'énergie. Comme nous allons le voir dans le paragraphe suivant d'autres
échelles beaucoup plus petites vont jouer un rôle primordial dans la dissipation de la
turbulence. Dans cette introduction élémentaire, mentionnons simplement que cette
définition du spectre se généralise au cas de plusieurs dimensions en prenant la
transformée de Fourier à trois dimensions de la corrélation Rij(r) du champ de vitesse.
R() S()

163
Turbulence de grille et ses trois zones, génération en amont, turbulence bien
développée au milieu et turbulence en déclin en aval:

164
2. Les cascades d'énergie
La turbulence est sur la figure ci-dessus générée par un écoulement à travers
une grille. On peut distinguer trois régions en allant de l’amont à l’aval. Une zone de
production de turbulence, une zone de turbulence pleinement développée puis une zone
où la turbulence est dissipée. La photo du bas correspond a une grille a mailles plus
fines. Appelons U la vitesse imposée en amont et l l’échelle de la grille. La taille des
tourbillons significatifs (c'est-à-dire les gros tourbillons) l0 et leur vitesse v0 varient
typiquement comme l et U les échelles externes imposées par l’expérimentateur.
Evidemment le nombre de Reynolds R0 = v0l0/ des gros tourbillons est très grand. On
va définir le temps de retournement d’un tourbillon (eddy turn over time) comme 0 =
l0/v0. Ce temps est très petit devant le temps de dissipation moléculaire v = l02/ car R0
= v/0 >> 1 par hypothèse, ainsi la dissipation est négligeable.
Les termes non linéaires u u fabriquent eux des petites échelles. Pour s’en
convaincre, prendre u = sin k0x où k0 est le nombre d’onde associé aux tourbillons
d’échelle l0 (k0 l0-1
). Ainsi le terme )xk2sin(2
k
x
uu 0
0
fabrique t-il du u à 2 k0 soit à
l’échelle l0/2. Il y a donc un transfert d’énergie vers les petites échelles qui doit être
indépendant de la viscosité. On va noter ce flux d’énergie (par unité de masse) vers les
petites échelles par . Maintenant il est observé qu’un tourbillon d’échelle l0 perd son
énergie (par interactions non linéaires) très rapidement typiquement en un temps de
retournement 0. On s’en convaincra en laissant tomber une goutte d’encre dans de l’eau
et en observant que la production de tourbillons toujours plus petits est très rapide. Ainsi
on observe que :
v0
2 /0 v0
3 l0
Considérons maintenant la gamme des tourbillons d’échelle l plus petits que
l0 mais pour lesquels Rl = vl l/ >> 1. On appelle cette gamme le régime inertiel car la
viscosité n’y est toujours pas importante. Par contre, ces tourbillons ont probablement
oublié les conditions externes de production de turbulence et l’hypothèse de
Kolmogorov est que cette turbulence inertielle est homogène et isotrope. Le flux
d’énergie à travers les échelles de tourbillons l0/2, l0/4 etc… doit être constant si
l’énergie totale est constante. On est ainsi amené à écrire aussi que :
ll
3v
et donc vl = ( l)1/3
= v0 (l/l0)1/3
Ce qui permet encore d’écrire : Rl = R0 0ll4/3
On illustre ce processus en parlant de cascade inertielle d’énergie vers les
petites échelles qui persiste tant que Rl >> 1. En fait il s’agit d’une cascade dans
l’espace des echelles et donc des nombres d’onde. Si E(k)dk est l’énergie cinétique
associée au module du vecteur d’onde comprise entre k et k + dk alors l’énergie
cinétique totale K est :
K =
0)k(E dk

165
Ainsi peut on écrire :
E(k) k (l)2/3
ou encore comme kl 1 : E(k) = C 2/3
k-5/3
où on a mis le signe = en introduisant C( 1.5) constante universelle (supposée
indépendante des particularismes d’une expérience donnée). Ceci est la fameuse
prédiction de Kolmogorov pour le spectre en k-5/3
. La figure ci-dessous montre cette
pente observée sur une grande variété d’expériences.
En pratique on observe plus facilement des spectres en fréquence qu’en
nombre d’ondes mais on peut dans certains cas passer de l’un à l’autre en disant que la
turbulence est simplement advectée par l’écoulement moyen (Taylor’s frozen turbulence
hypothesis).
Sur la figure on voit aussi que le spectre s’effondre aux grands nombres
d’ondes. Mais si l’échelle devient petite, on peut s’attendre à ce que la viscosité
redevienne importante et cela apparaîtra dès que le temps de retournement l devient

166
comparable avec l’échelle de diffusion v. Ceci définit l’échelle de dissipation de
Kolmogorov lk :
lk
2 1/ 3
lk
2
et donc : lk =
3 1/ 4
ou encore : 4/3
00k R ll
L’échelle lk définit donc la barrière au-delà de laquelle l’énergie est
complètement dissipée par les effets moléculaires. Cette échelle n’est pas fixe mais
dépend du transfert d’énergie à travers la région inertielle. Plus le Reynolds externe est
élevé et plus la cascade inertielle s’étend loin vers les petites échelles.
3. Transport turbulent
Une des propriétés majeures de la turbulence est sa capacité à mélanger très
efficacement un fluide à des taux supérieurs de plusieurs ordres de grandeurs au taux
moléculaire. Une remarquable relation découverte par Taylor en 1921 permet de
quantifier expérimentalement l'effet du mélange. Elle fournit le pivot autour duquel
s'articule toutes les études de transport d'un polluant dans un écoulement turbulent. Bien
que la plupart des flots réels soient souvent inhomogènes et instationnaires, nous allons
nous placer dans une situation où la turbulence est statistiquement stationnaire et
localement homogène.
En un point a on relâche des particules
marquées que l'on suit dans le fluide. Si leur
marquage ne différencie pas leur comportement de
celles de particules fluides, leur position au cours du
temps est donnée pour chaque composante i par :
'dt 't,auat,aXt
tiii
0
où ui est la vitesse lagrangienne de la particule lâchée au point a à l'instant t0. Si l'on
effectue un ensemble d'expériences de lâchers de particules au même point, on peut
construire la moyenne d'ensemble de la quantité :
< Yi uj > où Yi est le déplacement Xi - ai de la particule.
Comme : a
j
jt
Yt,au
On a : jiji YYdt
d
2
1u Y
Mais c'est aussi : 'dttu'tuuY j
t
t
ij i
0
Xi à t
a,
t = t0

167
La turbulence étant stationnaire, on peut choisir t0 = 0 et transformer
l'intégrale en posant = t – t’. Ainsi Taylor (1921) déduit il:
dRY Ydt
d
2
1u YK
t
0
L
ijjijiij 13-6
où L
ijR est la covariance des vitesses lagrangiennes le long de la trajectoire de la
particule lâchée en a avec :
aji
L
ij tutuR
13-6 représente le tenseur de diffusion turbulente Kij. Ainsi une quantité comme
2
11Ydt
d
2
1 représente le taux de dispersion de particules marquées au point a dans la
direction 1. Cette relation très générale 13-6 permet de prédire le comportement de Kij.
Lorsque t est petit, les vitesses de la particule a t et t-sont très bien corrélées de sorte
que:
Kij ui u j t 13-7
Cette croissance linéaire du coefficient de diffusion est associée avec une
dispersion < Yi Yj > croissant quadratiquement. Ceci ne peut persister très longtemps
car les vitesses des particules séparées par des temps de plus en plus long vont se
décorréler. Ainsi lorsque t tend vers l'infini on s'attend à ce que l'intégrale en 13-6 tende
vers une valeur constante que l'on écrira :
L
ijjiij Tu uK 13-8
Cette expression 13-8 définit l'échelle de temps intégrale Lagrangienne
comme :
d R
RT0 0ij
L
ij
L
ij
Dans cette limite, la dispersion croît donc linéairement en t et il est clair que
l'on retrouve à partir de considérations purement cinématiques, une limite où la
diffusion turbulente ressemble à la diffusion moléculaire mais, avec un coefficient de
diffusion beaucoup plus grand donné par 13-8. C'est le régime de dispersion associé
avec le mouvement brownien, une marche aléatoire consistant en une suite de
déplacements non corrélés les uns avec les autres. Expérimentalement dans les
applications, l'objectif majeur est donc de déterminer la valeur lorsqu'elle existe de cette
échelle de temps intégrale lagrangienne car c'est d'elle que dépend l'intensité de la
diffusion turbulente. Par exemple dans l’océan elle est de l’ordre d’une dizaine de jours
mais seulement d’un jour ou deux dans l’atmosphère.

168
4. Les équations de la turbulence
A défaut de pouvoir prédire les détails d'une réalisation d'un écoulement
turbulent, il apparaît logique de se tourner vers une théorie statistique et de tenter de
prédire les premiers moments de la distribution de probabilité de l'écoulement :
moyennes, variances etc…
Comme nous allons le voir cette approche se heurte à des difficultés
majeures liées au caractère nonlinéaire des équations. Considérons donc non plus une
réalisation mais un ensemble de réalisations d'une expérience particulière effectuée en
gardant constant les paramètres externes de contrôle. On peut définir une moyenne
d'ensemble permettant de décomposer chaque variable en une partie moyenne et une
perturbation. Ici j’omets les <…> pour alléger l’ écriture :
ui = Ui + u’i
p = P + p’
T = T + T’
Pour obtenir les équations gouvernant l'évolution des quantités moyennes, il
suffit d'introduire la décomposition ci-dessus dans les équations du mouvement et
d'appliquer l'opérateur de moyenne d'ensemble (qui commute avec les opérateurs
différentiels). Appliquée aux équations de Boussinesq d'un fluide incompressible (0)
(voir chapitre 12). On obtient :
a) T
ij
j
2
j
i
2
3i0
ij
ij
i0
xx
UTg
x
P
x
UU
t
U
b) 0x
U
i
i
13-9
c) T
j
j
2
j
2
j
j0 Qx
Tx
Kx
TU
t
TCp
On reconnaît dans les équations 13-9 pour l'évolution des quantités moyennes, deux
nouveaux termes :
'
j
'
i0
T
ij u u 13-10
et ''
jp0
T
j TuC Q 13-11
qui apparaissent par l'intermédiaire de leur divergence dans les équations 13-9. Le
premier représente le flux turbulent de quantité de mouvement qui est non nul dès lors
0 On supposera ici pour simplifier la présentation, que l'on a affaire à un fluide incompressible dont
l'équation d'état est du type 0 1 T T0 et dont la diffusivité thermique est constante. Bien
entendu le même formalisme peut s'appliquer aux équations plus générales des fluides compressibles.

169
que des corrélations entre deux composantes de vitesse des fluctuations apparaissent. De
même une nette contribution au bilan de chaleur moyen se développe si il existe des
corrélations turbulentes vitesse-température impliquant le flux turbulent de chaleur T
jQ .
Ainsi les équations pour la moyenne (moment d'ordre 1) ne sont elles pas
fermées puisqu'elles font apparaître les moments d'ordre 2. De même, si on essaie
d'obtenir des équations pour les moments d'ordre 2, celles-ci feront apparaître les
moments d'ordre 3 etc. On se heurte ici au problème majeur à savoir que les équations
pour les différents moments ne sont pas « fermées ». Cela a été la tâche des théories
statistiques de la turbulence que de proposer des hypothèses de « fermetures » reliant les
moments d'ordre plus élevés aux moments d'ordres inférieurs. D'une certaine façon ces
fermetures visent à déterminer la « rhéologie » d’un fluide turbulent. En effet comme les
tensions turbulentes T
ij et flux turbulents de chaleur T
jQ sont inconnus, tout se passe
dans ces théories comme si l'on voulait connaître le comportement d'un fluide sans
connaître sa viscosité ou sa conductivité thermique moléculaire.
Avant de présenter la plus classique et la plus discutable de ces fermetures, il
est intéressant de regarder aussi l'équation d'énergie pour les fluctuations. Pour cela on
retranche des équations complètes, les équations pour la moyenne et on multiplie
scalairement les équations de quantité de mouvement pour les fluctuations ainsi
obtenues par la vitesse des fluctuations :
i
i''
3
j
i'
j
'
i
j
jx
FT ug
x
Uu uq
xU
t
13-12
a b c d
L'énergie cinétique turbulente 2'
iu2
1q est produite par 2 mécanismes :
- le terme a qui représente l'échange entre l'énergie cinétique moyenne et
celle des fluctuations. Il est positif si les corrélations sont dirigées contre le gradient
moyen. Bien entendu ceci est complètement en accord avec ce qui a été vu dans le
chapitre "Instabilités" sur le rôle "déstabilisant" du cisaillement moyen,
- le terme b qui représente un terme d'échange entre énergie potentielle et
énergie cinétique. Si les corrélations entre température et vitesse verticale sont positives
(le chaud monte ou le froid descend), l'énergie potentielle de la distribution moyenne est
transformée en énergie cinétique des fluctuations. C'était la situation précédemment
décrite de l'instabilité convective de Rayleigh-Bénard,
- le terme c représente la dissipation des fluctuations
2'
ije 2
'
ije étant le tenseur de déformation turbulent.
- quant au dernier terme d (où
2'
j
'
i0'
ij
'
j
'
i
'
i0 u u2
e uu pF )

170
il représente quant à lui, un terme de transport d'un endroit à un autre et
peut-être de n'importe quel signe. Il fait apparaître des corrélations triples, comme il se
doit pour l'équation d'évolution d'un moment d'ordre 2. Il ne produit pas d'effet net sur
13-12 : puisque il apparaît par sa divergence, l’ intégrale de celle-ci sur un domaine clos
par des frontières immobiles est nulle.
5. La viscosité turbulente
Le problème central restant est donc de paramétriser les effets de la
turbulence pour fermer les équations 13-9 pour l'écoulement moyen. L'idée la plus
ancienne proposée par Boussinesq est d'écrire qu'en analogie avec ce qui apparaît à
l'échelle moléculaire, l'effet de la turbulence se borne à ramener l'écoulement moyen
vers la stabilité grâce à une "dissipation turbulente" dont il suffit dès lors de mesurer (ou
d’imposer) le coefficient de diffusivité.
Si la turbulence est isotrope les seules composantes non nulles du tenseur
13-10 sont sur la diagonale et l'effet de la turbulence sur la moyenne dans 13-9 (a)
apparaît sous la forme d'une force conservatrice
2'
i
i
ux
qui sera incapable de
modifier la vorticité des grandeurs moyennes. Par contre en présence d'un écoulement
moyen cisaillé la turbulence ne peut pas rester isotrope et on s'attend à voir apparaître
des corrélations à l'extérieur de la diagonale du tenseur T
ij . Considérons la situation
simplifiée suivante d'un écoulement plan cisaillé :
Soit une particule fluide en x1, à l'instant t = 0 et
ayant une vitesse U1(0) + u1(0).. Elle se retrouve à
une distance x2 = quelque instant plus tard avec
un déficit de quantité de mouvement M par
rapport à l'écoulement qui existe en x2, qui est :
0uxu0UxUM '
12
'
1121
Si x2 est petit devant l'échelle LM de l'écoulement moyen un développement de Taylor
du premier terme fournit :
2
120
x
U x M
expression dans laquelle on a négligé volontairement le deuxième terme. Le flux de
quantité de mouvement selon x1, par unité d'aire et de temps est donc :
2
12202
x
Uu xu M
En analogie avec la formule de Taylor précédemment discutée on s'attend à ce que la
corrélation < x2 u2 > soit forte initialement lorsque le déplacement x2 de la particule est
petit puis décroisse pour devenir nul à une distance . Cette distance appelée longueur
de mélange par Prandtl permet d'écrire qu'en ordre de grandeur :
rms'
222 u u x
x2 (x2) U1
x1

171
(rms signifiant root mean square ou racine carrée de la moyenne des carrés, urms
est une
caractéristique de la vitesse).
On écrit alors : 2
1rms'
20
T
12x
U cu
expression dans laquelle rms'
2u c joue le rôle d'un coefficient de diffusivité turbulente de
quantité de mouvement :
rms'
2T u c
Notons que < x2 u2 > est aussi le coefficient K22 de diffusivité lagrangienne introduit en
13-6 et plutôt que la longueur de mélange on peut donc utiliser l'échelle intégrale
lagrangienne pour déterminer T. Ces considérations fournissent la base d'une fermeture
turbulente empirique particulièrement simple calquée sur ce qui se passe à l'échelle
moléculaire. Cependant à la grande différence du coefficient de viscosité moléculaire
qui est une caractéristique du fluide, le coefficient de viscosité turbulente est une
caractéristique de l'écoulement et doit donc être adapté par des considérations ad-hoc à
chaque nouvelle situation.
Pour conclure il faut dire que la venue des gros calculateurs scientifiques est
en train de modifier assez sérieusement l'approche de l'étude de la turbulence. Ceux-ci
permettent de reculer de plus en plus loin les limites spatiales à laquelle la turbulence
doit être paramétrisée. Avec une résolution spatiale de plus en plus fine, les échelles qui
contiennent l'énergie commencent à être calculées numériquement de façon de plus en
plus convaincantes sans pour cela que l'on s'affranchisse des hypothèses à l'échelle de la
maille élémentaire. Celles-ci se bornent souvent à mettre un coefficient de viscosité
turbulent numérique le plus faible possible pour fournir le minimum de dissipation (et
maximiser le nombre de Reynolds) de façon compatible avec le schéma numérique
d'intégration des équations. Des considérations analogues sont appliquées pour
l'équation de conservation de la chaleur.
Appliquons cette idée de diffusion turbulente à l’étude de la couche limite
turbulente sur une plaque plane. On va s’intéresser à la turbulence pleinement
développée, stationnaire, et on va supposer que le gradient de pression P/x est nul.
Cela veut dire qu’on est loin du bord d’attaque et que la couche limite est assez épaisse
pour développer de la turbulence sur une large gamme d’échelles. Sur la plaque (y = 0),
le flot s’annule. Là on va caractériser le flot moyen par son cisaillement U/y ou encore
la friction à la paroi *.
0y0 y
U*
En effet les tensions de Reynolds sont nulles. Malheureusement il est impossible d’aller
mesurer ce cisaillement à la paroi. Définissons une vitesse de frottement v* telle que :
2
0
**

172
On peut ainsi construire une échelle de longueur y* = /v* de sorte qu’on peut
adimensionaliser y et U par :
y+ =
*y
y et U
+ =
*v
U
Près de la plaque dans ce qu’on appelle la sous-couche visqueuse, le cisaillement moyen
domine la friction mais ce cisaillement décroît rapidement quand y croît de sorte qu’on
se retrouve rapidement dans une région où les tensions de Reynolds dominent les
tensions moléculaires. Modélisons les tensions de Reynolds par une viscosité turbulente
T(y) :
xy /0 u'v' T
U
y
L’équation pour l’écoulement moyen se réduit avec les hypothèses faites à :
0y
xy
et donc
y
UT
= cste
où la constante est la tension au mur */0. Reste à définir T. Comme v* et y sont les
deux échelles dont on dispose, on va écrire en suivant l’idée du paragraphe précédent :
T = v* y
où est la constante dite de Von Karman. Sous ces hypothèses :
U
y
1
v *
y
et donc U(y) =
v *
lny + cste
ou encore U+(y
+) =
1
ln y
+ + C
C’est l’observation de cette loi logarithmique qui justifie l’hypothèse proposée et les
expériences fournissent :
0,41 et C 5,2
constante universelles (sous ces hypothèses). La région « où cela marche » est la couche
limite dite inertielle. Près de la plaque, cette loi ne marche pas puisque le log diverge.
Mais dans cette région de la sous-couche limite visqueuse on a :
y
U
=
0
*
et après intégration, on trouve : U+ = y
+

173
On s’aperçoit expérimentalement que cette loi linéaire est valable pour y+ < 3 et la loi en
log pour 3 < y+ < 40. Pour les trop grand y, la loi en log diverge aussi ! Cette loi doit
s’ajuster au flot extérieur U pour y > t où t est l’épaisseur de la couche limite
turbulente. Dimensionnellement on doit avoir :
y
U
=
tt
yf
*v
Pour ajuster cette expression avec celle plus haut, valable dans l’intérieur, on va écrire :
)y(f
1
y où
t
yy
lorsque y << 1. Dans la région extérieure, U se détermine par :
U
y
v *
y
et donc
U(y) U v *
lny
où U = U pour y = 1. Seul le domaine y t nous intéresse et on va écrire « the
velocity defect law » comme :
U U U(y)
v *
1
ln(y )
Ces lois permettent notamment de trouver comment varie le coefficient de friction
2U2
1* en fonction du nombre de Reynolds.

174
Bibliographie :
Tennekes and Lumley, 1987 : A first course in turbulence, The MIT press
Manneville P. , 2004 : Instabilities, Chaos et Turbulence, Imperial College Press
(existe en francais)
Lesieur, M : Turbulence (en francais)
Pope S. B., 2000, Turbulent flows, Cambridge University Press.
Atkinson, Turbulence (titre exact ?)
Van Dyke, M., 1982 : An album of fluid motions, Parabolic Press.





![NAU [ náw ] nef: grand navire caractérisé par ses trois ou quatre mats, conçu au XV° siècle par les Portugais. Elle fut l'un des premiers types de navires](https://img.pdfslide.tips/doc/110x75/551d9d95497959293b8cbc6e/nau-naw-nef-grand-navire-caracterise-par-ses-trois-ou-quatre-mats-concu-au-xv-siecle-par-les-portugais-elle-fut-lun-des-premiers-types-de-navires.jpg)























