Embed Size (px)
Citation preview
A BEFOGÁS STABILITÁSA A
KORLÁTOZOTT HÁROMTEST-PROBLÉMÁBAN
FRÖHLICH GEORGINA
Eötvös Loránd Tudományegyetem Természettudományi Kar
Fizika, Csillagász szak
Témavezető: Dr. Érdi Bálint
tanszékvezető egyetemi tanár ELTE TTK
Csillagászati tanszék
Budapest, 2004.

Tartalomjegyzék Bevezetés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5. I. Fejezet - Elméleti háttér . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7. I.1. Az általános n-test probléma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7. I.2. A kör korlátozott háromtest-probléma . . . . . . . . . . . . . . . . . . . . . . . .9. II. Fejezet - A kísérőbefogás dinamikája . . . . . . . . . . . . . . . . . . . . . .13. II.1. A periodikus pályák . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13. II.2. Egyensúlyi megoldások . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17. II.3. Reguláris és kaotikus mozgás . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23. III. Fejezet - A szimuláció . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43. III.1. A negyedrendű Runge-Kutta-módszer . . . . . . . . . . . . . . . . . . . . .43. III.2. A Bulirsch-Stoer-módszer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45. IV. Fejezet - Numerikus eredmények . . . . . . . . . . . . . . . . . . . . . . . . . 49. IV.1. Vizsgálatok Runge-Kutta-módszerrel . . . . . . . . . . . . . . . . . . . . . .49. IV.2. Vizsgálatok Bulirsch-Stoer-módszerrel . . . . . . . . . . . . . . . . . . . . 53. V. Fejezet - Konklúzió . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57. Irodalomjegyzék . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59.
3

Bevezetés A befogás jelensége rendkívül fontos az üstökösök, kisbolygók, holdak és műholdak mozgásának tanulmányozásakor – különösképpen a Naprendszer legnagyobb planétája, a Jupiter esetében. A kisbolygók eloszlásának fő jellegzetességei a Jupiterrel való középmozgás-rezonanciákhoz kapcsolódnak: a 3/2-es és az 1/1-es rezonanciánál csoportosulások vannak, az előbbinél a Hilda-csoport, az utóbbinál pedig a Trójai kisbolygók; a 3/1, 5/2, 7/3 és 2/1-es rezonanciáknál minimumok vannak az eloszlásban, ezek a Kirkwood-zónák. A Trójai kisbolygók mozgása igen érdekes. A Nap-Jupiter rendszer L4 és L5 Lagrange-pontjai körül librációs mozgást végeznek. Eredetükre több elmélet is létezik, az egyik szerint a Jupiter kialakulása során befogott bolygókezdemények (planetezimálok) maradványai. Egy másik elképzelés szerint üstökösök is befogódhatnak e pályákra, ahogy ezt például a P/Slaughter-Burnham-üstökösről feltételezik (A. Morbidelli, A. Giorgilli, 1990). A Jupiter külső holdjai elnyúlt, retrográd pályájukkal erősen üstökösre hasonlítanak, ezért feltételezik, hogy az ilyen irreguláris bolygókísérők befogásból származnak (egyébként erre a Triton a legnagyobb példa a Naprendszerben) (G. P. Kuiper, 1961). Numerikus szimulációval már felfedték a befogás dinamikáját a következőknél: P/Gehrels 3, P/Oterma és P/Helin-Roman-Crockett (A. Brunini, 1996). A következő ábrán a jelenlegi, belső Naprendszer-beli kisbolygó- és üstökös-eloszlás látható (C. Ronan, 1998):
5
A „legstabilabb” befogásra szép példa a darabjaira hullott Shoemaker-Levy-9-üstökösnek a Jupiterbe történő becsapódása 1994. júliusában. A befogás stabilitásával az elmúlt évtizedekben kezdtek el foglalkozni a csillagászok. A. Brunini 1996-os cikkében különböző befogási típusokat definiált (A. Brunini, 1996). A. Carusi, E. Pozzi és G. B. Valsecchi a szoros megközelítés és az időszakos befogás jelenségét vizsgálták numerikus szimulációval (A. Carusi, E. Pozzi, G. B. Valsecchi, 1979). R. B. Hunter, M. Hénon, J. M. Bailey, T. A. Heppenheimer és A. Brunini a Jacobi-állandót használták a stabilitás kritériumának (A. Brunini, 1996). M. Murison a direkt irányú pályák fázisterének homoklinikus pontjaival foglalkozott (M. A. Murison, 1989a). E. Belbruno és B. G. Mardsen hosszúperiódusú üstökösök vizsgálata során megfogalmazták a stabil befogás definícióját (E. Belbruno, B. G. Mardsen, 1997). Szenkovits Ferenc és társai feltérképezték a befogási tartományt polárkoordináta-rendszerben, s eredményeiket az Oterma-üstökös pályájának modellezésére használták (F. Szenkovits, Z. Makó, I. Csillik, A. Bálint, 2001). Dolgozatomban a Jupiter befogási tartományainak topológiáját tárom fel a kör korlátozott háromtest-probléma modelljét használva (s numerikus szimuláció segítségével), majd az általános n-test probléma segítségével figyelembe veszem a Jupiter-pálya inklinációját és excentricitását is, valamint a Szaturnusz perturbáló hatását.
6

I. Fejezet – Elméleti háttér
I.1. Az általános n-test probléma Az égi mechanika alapfeladata: határozzuk meg n számú pontszerű égitest mozgását, ha rájuk csak a Newton-féle kölcsönös gravitációs vonzóerők hatnak! Jelölje a tömegpontokat , tömegüket ! Legyen helyvektora egy Oxyz inerciarendszerben
nPPP ,..., 21 nmmm ,...,, 21 iP
ir , derékszögű koordinátái ! A tömegpontra a (j≠ i) által kifejtett gravitációs vonzóerő a Newton-féle
gravitációs törvény alapján:
),,( iii zyx
iP jP
,22
ij
ij
ij
jiij r
rrmm
kF ⋅=
ahol ,ijij rrr −=
,)()()( 222ijijijijij zzyyxxrr −+−+−==
[ ]1232150172020989.0 −−= TAMk a Gauss-féle gravitációs állandó,
és az erő irányát a -ből a felé mutató iP jP ijij rr egységvektor adja. A -re ható iP iF erő az ijF -k összegzésével adódik
.1
32
ij
n
j ij
jii r
rmm
kF ∑=
=
Az n-test probléma Newton-féle mozgásegyenletei így
,1
32
ij
n
j ij
jiii r
rmm
krm ∑=
=&& i=1,2,…,n,
ahol a pont a t idő szerinti deriválást jelenti. Az égi mechanikában szokásos
∑∑= =
=n
i
n
j ij
ji
rmm
kU1 1
2
21
7
erőfüggvényt bevezetve, a mozgásegyenletek komponensekben az
iii
ii
iii z
UzmyUym
xUxm
∂∂
=∂∂
=∂∂
= &&&&&& ,,
alakban írhatók. Ezek 3n számú közönséges másodrendű differenciálegyenletet jelentenek a meghatározandó függvények számára. A fenti differenciálegyenlet-rendszer így 6n-ed rendű. Megoldásának legkézenfekvőbb módja első integrálok keresése. Integrálásához 6n első integrálra lenne szükség, mely összesen 6n tetszőleges állandót tartalmaz. Általános megoldása ezen integrálokból lenne kifejezhető a t idő és a 6n tetszőleges állandó függvényeként.
)(),(),( tztytx iii
Az n-test problémára irányuló kutatások középpontjában hosszú időn keresztül a megfelelő számú első integrál keresése állott. A talált tíz első integrál felhasználásával a mozgásegyenletek egy (6n-10)-ed rendű differenciál-egyenletrendszerre transzformálhatók. n=2 esetén az új rendszer másodrendű, mely egyszerűen integrálható. n=3 esetén a redukált rendszer 8-ad rendű, melynek integrálásához további első integrálok lennének szükségesek. Sokáig próbálkoztak újabb első integrálok keresésével, mígnem H. Bruns bebizonyította, hogy a háromtest-problémának nem létezik a tíz klasszikus integráltól független algebrai első integrálja (mely a koordináták és sebességek algebrai függvénye lenne). Poincaré kimutatta, hogy a háromtest-problémára olyan transzcendens első integrálok sem léteznek, melyek a változók egyértékű függvényei lennének. Bruns és Poincaré eredményeit P. Painlevé általánosította az n-test problémára. Ezek az eredmények véget vetettek az n-test probléma integrálására irányuló próbálkozásoknak. Ha ugyanis találnának további első integrálokat, azok olyan bonyolultak lennének, hogy a mozgásegyenletek redukálására nem lennének alkalmazhatók. Ezért aztán napjainkban numerikus módszerekkel nagyságrendekkel pontosabban meg lehet határozni a mozgásegyenletek megoldását (B. Érdi, 1996).
8

I.2. A kör korlátozott háromtest-probléma A befogás jelenségét először a síkbeli kör korlátozott háromtest-probléma (KHTP) modelljével vizsgáltam. A tömegközépponthoz rögzített forgó koordináta-rendszerben a Napnak és a Jupiternek fix helye van, s a harmadik égitest hozzájuk képesti mozgását tanulmányozzuk:
A két elsődleges komponens P1 (Nap) és P2 (Jupiter), tömegük m1 és m2. Ezek a kölcsönös vonzás következtében körpályán mozognak (a Jupiter periódusa a tömegközéppont körül 2π, a középmozgása 1). A harmadik test (P3) tömege elhanyagolhatóan kicsi a többiéhez képest. Ekkor a harmadik test mozgásegyenletei a következők (Gy. Szebehely, 1967):
,2
,2
yxy
xyx
∂Ω∂
=+
∂Ω∂
=−
&&&
&&&
ahol:
( )[ ]
( )( )
,
,1
,
,1121
21
2
222
221
21
22
21
mmm
yxr
yxr
rrrr
+=
+−+=
+−=
+−
++−=Ω
µ
µ
µ
µµµµ
Ω a potenciál, a harmadik égitest Naptól, a Jupitertől mért távolsága, µ pedig a tömegparaméter (Nap-Jupiter rendszer esetén µ=9,538752533∗10
1r 2r-4).
9
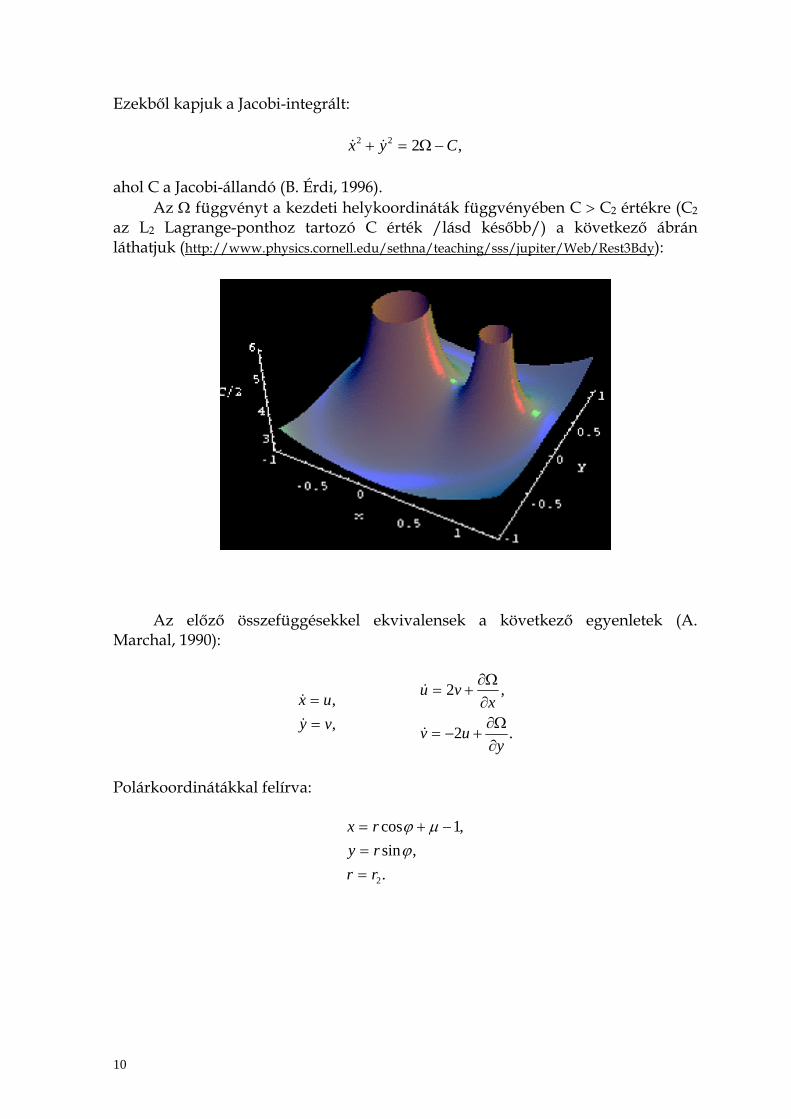
Ezekből kapjuk a Jacobi-integrált:
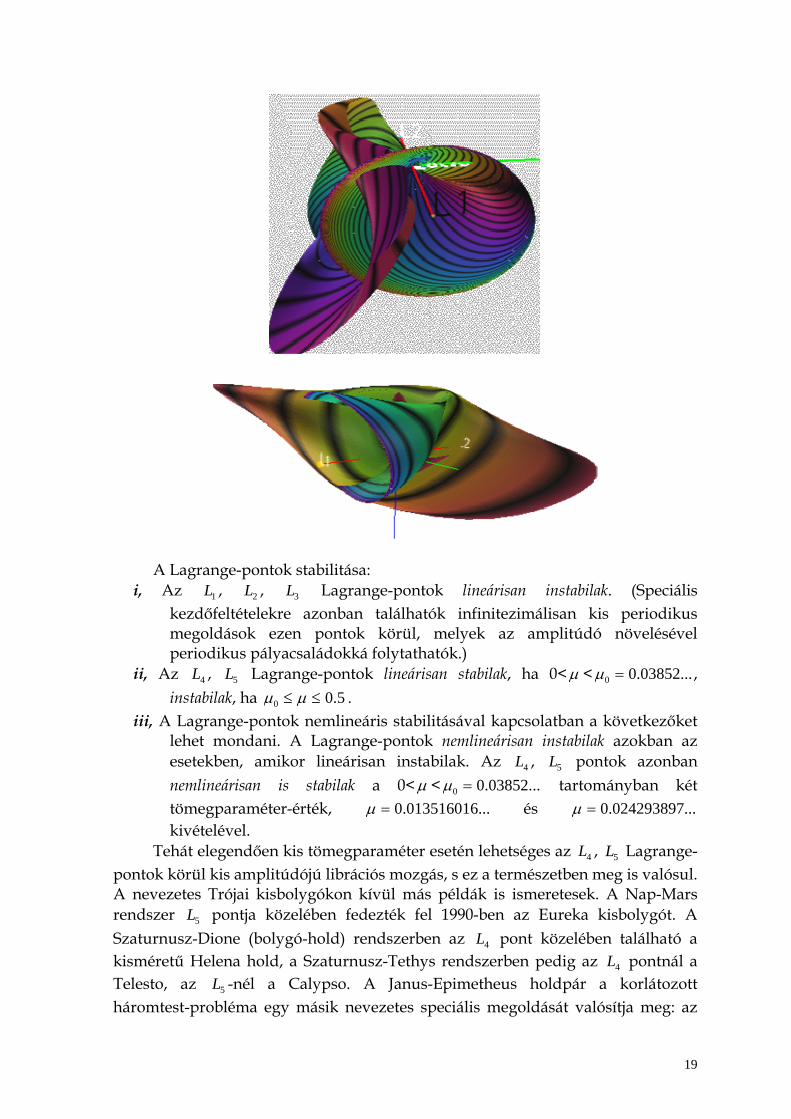
,222 Cyx −Ω=+ && ahol C a Jacobi-állandó (B. Érdi, 1996). Az Ω függvényt a kezdeti helykoordináták függvényében C > C2 értékre (C2 az L2 Lagrange-ponthoz tartozó C érték /lásd később/) a következő ábrán láthatjuk (http://www.physics.cornell.edu/sethna/teaching/sss/jupiter/Web/Rest3Bdy):
Az előző összefüggésekkel ekvivalensek a következő egyenletek (A. Marchal, 1990):
,,
vyux
==
&
&
.2
,2
yuv
xvu
∂Ω∂
+−=
∂Ω∂
+=
&
&
Polárkoordinátákkal felírva:
.,sin
,1cos
2rrryrx
==
−+=ϕ
µϕ
10

Ezekből:
( )
( ) ( )
.cos21
,11sin2
,111111cos2
,sincos
,sincos1
221
331
331
331
ϕ
µµϕ
µµµµµϕ
ϕϕ
ϕϕϕ
rrr
rrruv
rrrrrvu
vur
uvr
−+=
⎟⎟⎠
⎞⎜⎜⎝
⎛−
−−+−=
⎟⎟⎠
⎞⎜⎜⎝
⎛−−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−
−−−++=
+=
−=
&
&
&
&
És a kezdeti feltételek:
( )( ),0
,0
0
0
ϕϕ == rr
.cos
,sin
020
20
200
020
20
200
ϕϕ
ϕϕ
&&
&&
rrv
rru
+=
+−=
11
II. Fejezet - A kísérőbefogás dinamikája
II.1. A periodikus pályák A periodikus pályák vizsgálata az égi mechanika egyik legfontosabb kutatási területe. A periodikus pályák jelentőségét az adja, hogy egy nem integrálható dinamikai rendszer esetén gyakorlatilag egyedül ez a fajta megoldás határozható meg aránylag könnyen, és ez szolgáltat információt a rendszer mozgásáról minden időpontra. Ez az oka annak, hogy miért tett G. H. Darwin, F. R. Moulton és E. Strömgren (F. R. Moulton, 1914) a kutatások korai szakaszában olyan nagy erőfeszítéseket periodikus pályák numerikus meghatározására, jóllehet abban az időben az összes számítást kézzel végezték. Később, a számítógépek megjelenésével ezeket a korai munkákat újraszámították, javították, és igen sok új periodikus pályát is meghatároztak. A legutóbbi időkig majdnem minden munka a korlátozott háromtest-probléma periodikus megoldásaira irányult. A periodikus megoldások jelentőségét már Poincaré felismerte, aki szerint a háromtest-probléma egyedül a periodikus megoldásokon keresztül ismerhető meg. Poincaré híres sejtése is a periodikus megoldások fontosságát hangsúlyozza: ha adott a korlátozott háromtest-probléma egy partikuláris megoldása, ehhez mindig található egy periodikus megoldás (általában igen hosszú periódussal) úgy, hogy a két megoldás között az eltérés tetszőlegesen kicsi legyen bármely adott hosszúságú időintervallumban. K. Schwarzschild megfogalmazásában: a fázistér bármely pontjának tetszőlegesen szoros környezetében van olyan pont, amely periodikus pályát reprezentál. Ez azt jelenti, hogy tetszőleges kezdőfeltételek kis módosítással periodikus pályát eredményezhetnek, melynek általában igen hosszú a periódusa. Így a periodikus pályák referencia-pályaként használhatók. Erre az első példát G. W. Hill (1878) szolgáltatta, aki a Hold mozgáselméletét a korlátozott háromtest-probléma egy általa meghatározott periodikus megoldására, a Hill-féle variációs pályára alapozva dolgozta ki. Egy dinamikai rendszer mozgása periodikus, ha ugyanaz a konfiguráció szabályos időközönként ismétlődik. A periodicitás nem abszolút (fizikai) tulajdonság, függ a koordináta-rendszertől, amelyben a mozgást vizsgáljuk. Ha például a dinamikai problémát a Poincaré-leképezéssel (lásd később) reprezentáljuk, a dinamikai rendszer tulajdonságai a leképezés tulajdonságai alapján vizsgálhatók. Ekkor a rendszer periodikus mozgása egyszerűen a metszésfelület bizonyos pontjainak invarianciáját jelenti a leképezés során (periodikus mozgás esetén a fázistrajektória a metszésfelületet ugyanazokban a fixpontokban metszi). A korlátozott háromtest-probléma periodikus megoldásainak első rendszeres, numerikus vizsgálatát a koppenhágai obszervatóriumban végezték 1913-1939 között, E. Strömgren irányításával. A tömegparaméter 2/1=µ volt, ez
13

az ún. koppenhágai probléma. A periodikus mozgások Strömgren-féle osztályozása:
a, Retrográd periodikus pályák körül – direkt pályák nem léteznek. 3Lb, Retrográd periodikus pályák körül – direkt pályák nem léteznek. 1Lc, Retrográd periodikus pályák körül – direkt pályák nem léteznek. 2Ld, Periodikus pályák körül - 4L 5.0=µ -re nem léteznek. e, Periodikus pályák körül - 5L 5.0=µ -re nem léteznek. f, Retrográd periodikus pályák körül. 1Pg, Direkt periodikus pályák körül. 1Ph, Retrográd periodikus pályák körül. 2Pi, Direkt periodikus pályák körül. 2Pk, Periodikus pályák és körül – a mozgás direkt a forgó koordináta-
rendszerben. 1P 2P
l, Periodikus pályák és körül – a mozgás retrográd a forgó, direkt a nyugvó koordináta-rendszerben.
1P 2P
m, Periodikus pályák és körül – a mozgás retrográd mind a forgó, mind a nyugvó koordináta-rendszerben.
1P 2P
n, Retrográd, az y tengelyre aszimmetrikus periodikus pályák. o, Retrográd periodikus pályák, melyek az y tengelyre aszimmetrikusak, és
amelyek két aszimptotikus-periodikus pálya által határolt családot alkotnak.
r, Retrográd periodikus pályák, melyek az y tengelyre szimmetrikusak, és amelyek két aszimptotikus-periodikus pálya által határolt családot alkotnak.
Az a, b, c, osztályokat az , , pontok körüli infinitezimális periodikus pályák generálják. Az amplitúdó növekedésével az osztály meghatározásában szereplő „körül” határozószó érvényét veszti, ez szigorúan csak az infinitezimális generáló pályákra érvényes. Az f, g, h, i, osztályok is a vagy körüli infinitezimális pályákból származnak. A k, l, m, osztályokban a periodikus pálya mindkét tömegpontot átfogja. Az n, osztályú pályák a c, osztályhoz kapcsolódnak, de nem az körüli infinitezimális pályákból erednek. Mivel
1L 2L 3L
1P 2P
2L 5.0=µ esetén és instabil, nincsenek és körüli infinitezimális periodikus pályák. Léteznek
viszont ezen pontokat spirálisan megközelítő, vagy tőlük távolodó aszimptotikus pályák. Strömgren aszimptotikus-periodikus pályáknak nevezte azokat az aszimptotikus pályákat, amelyek az x tengelyt merőlegesen metszik (ötöt talált ilyenekből) (B. Érdi, 1996).
4L
5L 4L 5L
Az alábbi ábrán egy Jupiter körüli periodikus pálya látható (W. S. Koon, M. W. Lo, J. E. Marsden, S. D. Ross, 2001). Jól látszik, hogy a kisbolygó a mozgása során nem hagy el egy Jupiter körüli kis tartományt.
14
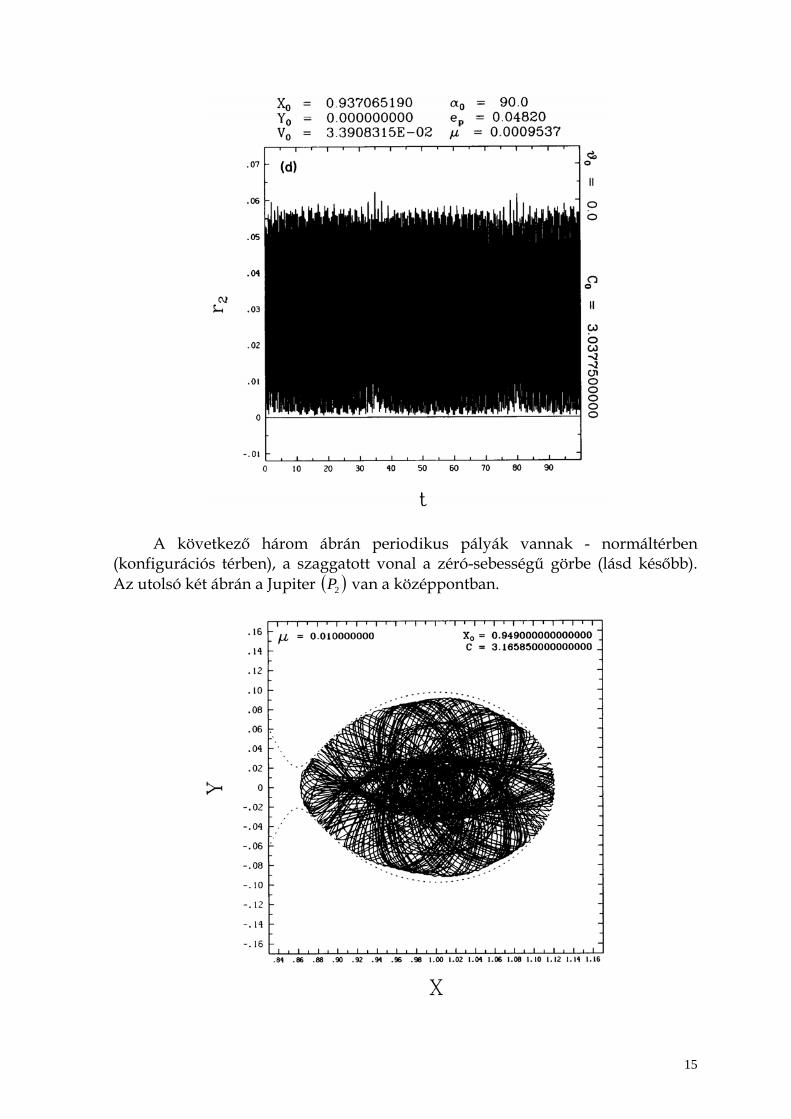
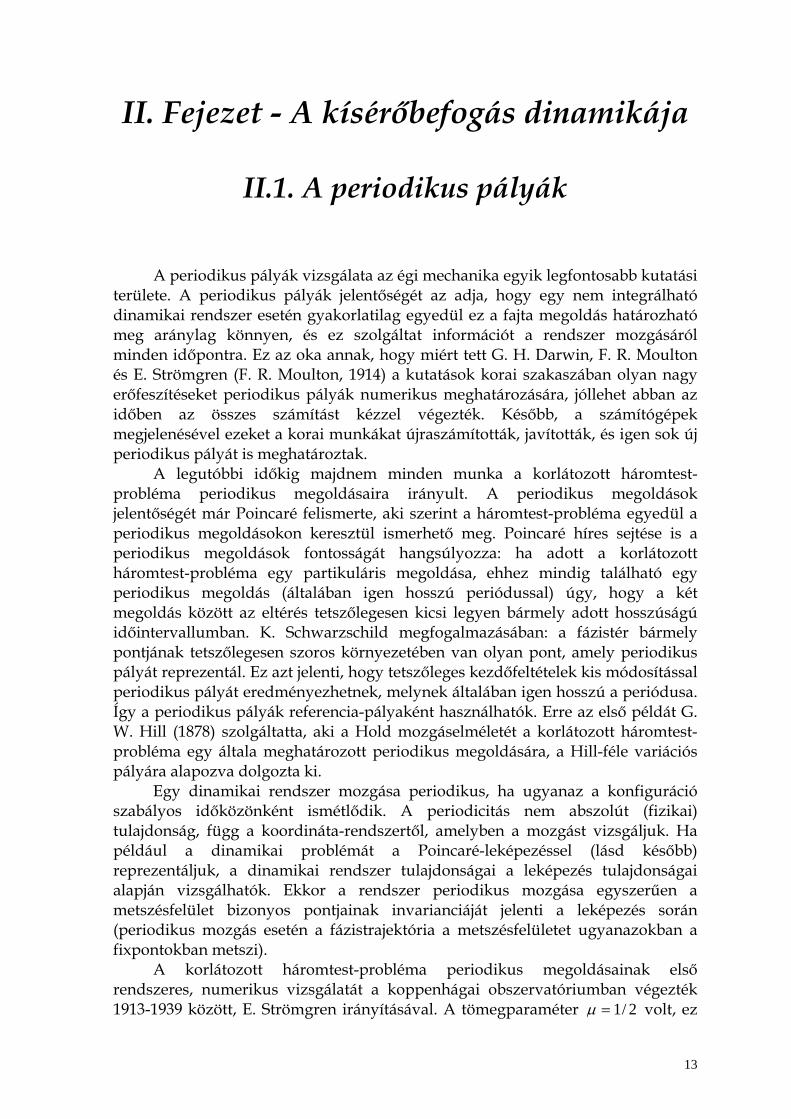
A következő három ábrán periodikus pályák vannak - normáltérben (konfigurációs térben), a szaggatott vonal a zéró-sebességű görbe (lásd később). Az utolsó két ábrán a Jupiter ( van a középpontban. )2P
15
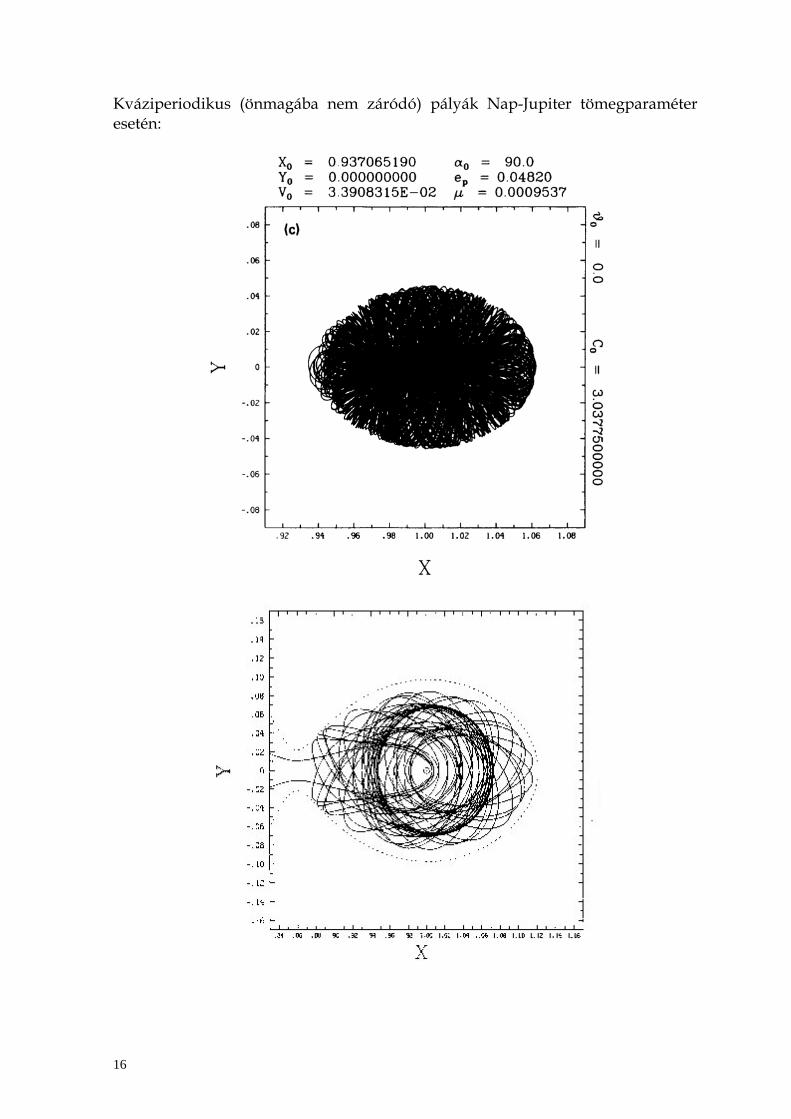
Kváziperiodikus (önmagába nem záródó) pályák Nap-Jupiter tömegparaméter esetén:
16

II.2. Egyensúlyi megoldások Keressük a KHTP mozgásegyenleteinek ,0== yx && feltételeket kielégítő egyensúlyi megoldásait. Ilyen megoldás létezéséhez az szükséges, hogy
0== yx &&&&
,0=∂Ω∂x
0=∂Ω∂y
legyen. Az ilyen pontokban tehát a harmadik test nyugalomban van (a forgó koordináta-rendszerben). A potenciálfüggvény jelentéséből következik:
.1
),1()(1
32
31
32
31
yr
yr
yy
xr
xr
xx
µµ
µµµµ
−−
−=∂Ω∂
−+−−−
−=∂Ω∂
Az egyensúlyi megoldásokat adó egyenletek így:
( ) ( )
.011
,01111
32
31
32
31
32
31
=⎟⎟⎠
⎞⎜⎜⎝
⎛−
−−
=−
−−
+⎟⎟⎠
⎞⎜⎜⎝
⎛−
−−
rry
rrrrx
µµ
µµµµµµ
A második egyenletből következik, hogy vagy y=0, vagy y≠0 és
.011 32
31
=−−
−rrµµ
Az utóbbi esetben az első egyensúlyi egyenletből következik, hogy Ezt az előzőbe írva kapjuk, hogy
.21 rr =.121 == rr A harmadik test tehát -től és -től
egységnyi távolságban van. Mivel azonban és egymástól való távolsága is 1, a három test egyenlő oldalú háromszög csúcsait alkotja. -at -hez és -höz képest kétféleképpen lehet egy egyenlő oldalú háromszög harmadik csúcsába elhelyezni, így az y≠0 esetben két egyensúlyi megoldás létezik. A következő ábrán ezek az , Lagrange-pontok (G. Fröhlich, 2003). Derékszögű koordinátáik:
1P 2P
1P 2P
3P 1P 2P
4L 5L
,23,
21:4 ⎟
⎟⎠
⎞⎜⎜⎝
⎛−µL .
23,
21:5 ⎟
⎟⎠
⎞⎜⎜⎝
⎛−−µL
17
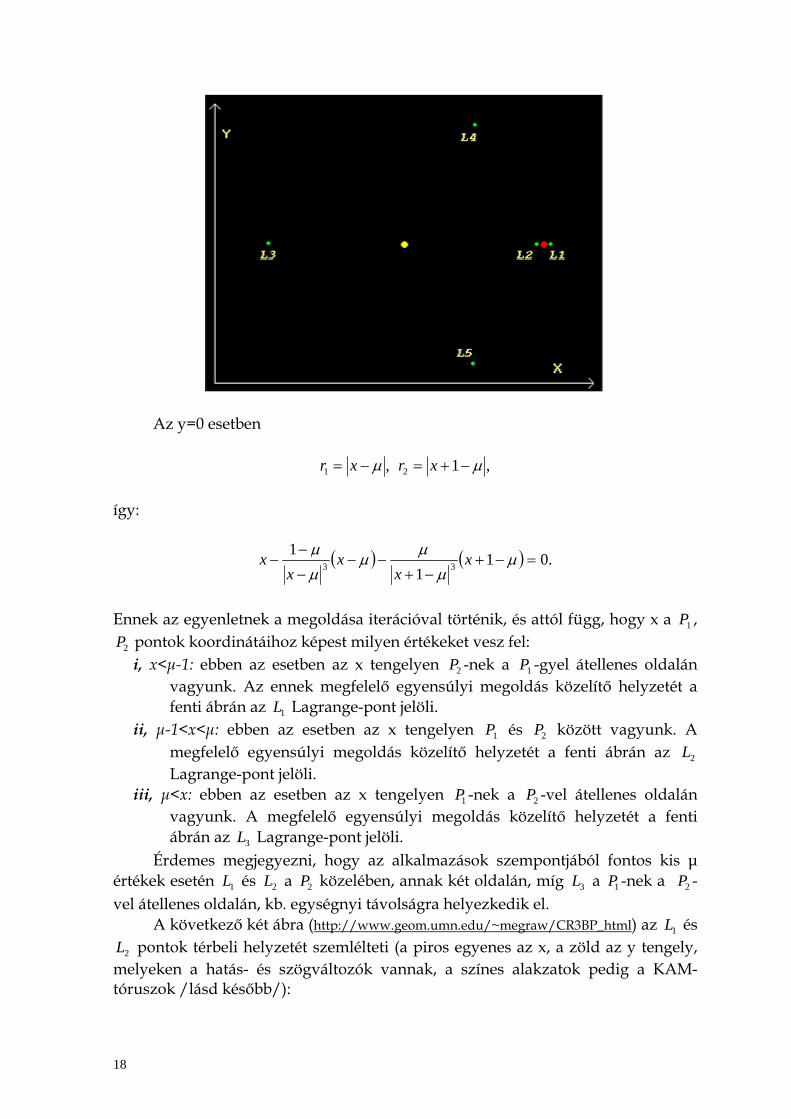
Az y=0 esetben
,1 µ−= xr ,12 µ−+= xr így:
( ) ( ) .011
133 =−+
−+−−
−
−− µ
µµµ
µµ x
xx
xx
Ennek az egyenletnek a megoldása iterációval történik, és attól függ, hogy x a ,
pontok koordinátáihoz képest milyen értékeket vesz fel: 1P
2P i, x<µ-1: ebben az esetben az x tengelyen -nek a -gyel átellenes oldalán
vagyunk. Az ennek megfelelő egyensúlyi megoldás közelítő helyzetét a fenti ábrán az Lagrange-pont jelöli.
2P 1P
1L ii, µ-1<x<µ: ebben az esetben az x tengelyen és között vagyunk. A
megfelelő egyensúlyi megoldás közelítő helyzetét a fenti ábrán az Lagrange-pont jelöli.
1P 2P
2L
iii, µ<x: ebben az esetben az x tengelyen -nek a -vel átellenes oldalán vagyunk. A megfelelő egyensúlyi megoldás közelítő helyzetét a fenti ábrán az Lagrange-pont jelöli.
1P 2P
3L Érdemes megjegyezni, hogy az alkalmazások szempontjából fontos kis µ értékek esetén és a közelében, annak két oldalán, míg a -nek a -vel átellenes oldalán, kb. egységnyi távolságra helyezkedik el.
1L 2L 2P 3L 1P 2P
A következő két ábra (http://www.geom.umn.edu/~megraw/CR3BP_html) az és pontok térbeli helyzetét szemlélteti (a piros egyenes az x, a zöld az y tengely,
melyeken a hatás- és szögváltozók vannak, a színes alakzatok pedig a KAM-tóruszok /lásd később/):
1L
2L
18
A Lagrange-pontok stabilitása: i, Az , , Lagrange-pontok lineárisan instabilak. (Speciális
kezdőfeltételekre azonban találhatók infinitezimálisan kis periodikus megoldások ezen pontok körül, melyek az amplitúdó növelésével periodikus pályacsaládokká folytathatók.)
1L 2L 3L
ii, Az , Lagrange-pontok lineárisan stabilak, ha 0<4L 5L µ < ...03852.00 =µ , instabilak, ha 5.00 ≤≤ µµ .
iii, A Lagrange-pontok nemlineáris stabilitásával kapcsolatban a következőket lehet mondani. A Lagrange-pontok nemlineárisan instabilak azokban az esetekben, amikor lineárisan instabilak. Az , pontok azonban nemlineárisan is stabilak a 0<
4L 5Lµ < ...03852.00 =µ tartományban két
tömegparaméter-érték, ...013516016.0=µ és ...024293897.0=µ kivételével.
Tehát elegendően kis tömegparaméter esetén lehetséges az , Lagrange-pontok körül kis amplitúdójú librációs mozgás, s ez a természetben meg is valósul. A nevezetes Trójai kisbolygókon kívül más példák is ismeretesek. A Nap-Mars rendszer pontja közelében fedezték fel 1990-ben az Eureka kisbolygót. A Szaturnusz-Dione (bolygó-hold) rendszerben az pont közelében található a kisméretű Helena hold, a Szaturnusz-Tethys rendszerben pedig az pontnál a Telesto, az -nél a Calypso. A Janus-Epimetheus holdpár a korlátozott háromtest-probléma egy másik nevezetes speciális megoldását valósítja meg: az
4L 5L
5L
4L
4L
5L
19
egyik holddal együtt forgó koordináta-rendszerből nézve a másik hold pályája közelítőleg lópatkó alakban fogja közre az , , Lagrange-pontokat. A Nap megfigyelését végző SOHO űrszondát a Nap-Föld rendszer Lagrange-pontja körüli speciális pályára állították (ez a pont a Nap és a Föld közé esik). Megjegyezzük még, hogy K. Kordylewski 1961-ben a Föld-Hold rendszer , pontjaiban a bolygóközi anyag sűrűsödését figyelte meg (Kordylewski-féle porholdak) (B. Érdi, 1996).
4L 3L 5L
2L
4L 5L
A korlátozott háromtest-problémának egyetlen első integrálja létezik, a Jacobi-integrál. Ez nem elég a mozgásegyenletek integrálásához, azonban segítségével meghatározhatók a mozgás számára lehetséges és tiltott tartományok. A Jacobi-integrál:
.222 Cyx −Ω=+ && Mivel a bal oldalon a sebesség négyzete áll, és ez nem lehet negatív, adott C-re a mozgó test az Oxy síknak csak olyan pontjaiba juthat el, ahol .2 C≥Ω A
.2 C=Ω egyenletű görbe tehát elválasztja egymástól a mozgás számára lehetséges és tiltott tartományokat. Mivel a Jacobi-integrál szerint a mozgó test sebessége nullára csökken, ha a görbe valamely pontját eléri, azért a fenti egyenlet által meghatározott alakzatot zéró-sebességű görbének nevezik. Meghatározásukhoz az függvény tulajdonságait kell ismerni: ),( yxΩ i, ha ,),( ∞→Ω yx ,∞→r vagy (r a pont távolsága az
origótól). 01 →r 02 →r 3P
ii, tehát szimmetrikus az x tengelyre. ).,(),( yxyx −Ω=Ω ),( yxΩ iii, ,23),( ≥Ω yx és az egyenlőség az , pontokban teljesül. 4L 5L iv, minimumhelyei az , , pontok. )0,(xΩ 1L 2L 3L v, ( ) ( ) ( ) ( ) ( ) .125.25.1 21354 ≤Ω≤Ω≤Ω≤Ω=Ω= LLLLL Mivel minimumhelyei a Lagrange-pontok, a egyenlet megoldásainak vizsgálatánál meghatározó szerepe van a Lagrange-pontokhoz tartozó C értékeknek. Legyen
),( yxΩ C=Ω2
( )ii LC Ω= 2 ! Az v, tulajdonság alapján
.25.43 21354 ≤≤≤≤== CCCCC A következő ábra 3.0=µ esetén mutat be zéró-sebességű görbéket C különböző értékeire (S. A. Astakhov, A. D. Burbanks, S. Wiggins, D. Farrelly, 2003):
20
C > esetén a mozgás három különálló tartományban lehetséges, ezek között nincs kapcsolat. A lehetséges és a tiltott tartományok C-től függően változnak, ebben meghatározó szerepe van a Lagrange-pontokhoz tartozó értékeknek. C csökkenésével a tiltott tartomány egyre szűkül, míg végül C < esetén a mozgás az egész síkon lehetővé válik.
2C
iC
4C
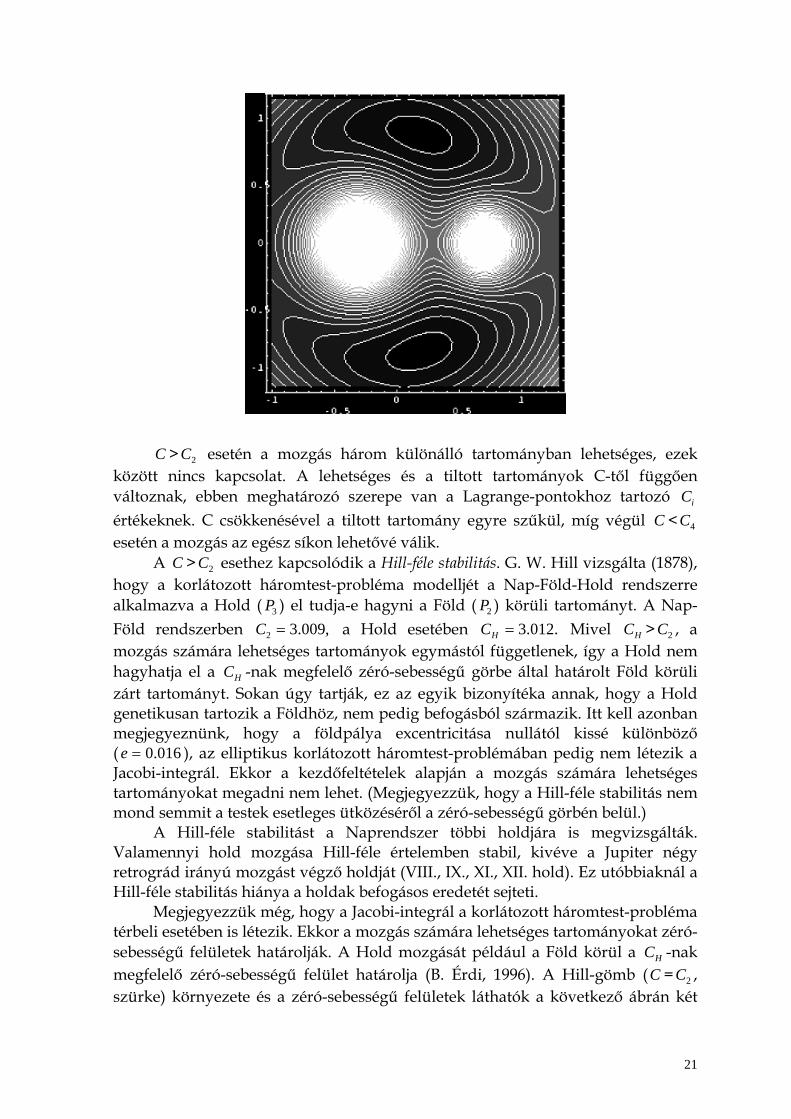
A > esethez kapcsolódik a Hill-féle stabilitás. G. W. Hill vizsgálta (1878), hogy a korlátozott háromtest-probléma modelljét a Nap-Föld-Hold rendszerre alkalmazva a Hold ( ) el tudja-e hagyni a Föld ( ) körüli tartományt. A Nap-Föld rendszerben a Hold esetében
C 2C
3P 2P,009.32 =C .012.3=HC Mivel > , a
mozgás számára lehetséges tartományok egymástól függetlenek, így a Hold nem hagyhatja el a -nak megfelelő zéró-sebességű görbe által határolt Föld körüli zárt tartományt. Sokan úgy tartják, ez az egyik bizonyítéka annak, hogy a Hold genetikusan tartozik a Földhöz, nem pedig befogásból származik. Itt kell azonban megjegyeznünk, hogy a földpálya excentricitása nullától kissé különböző ( ), az elliptikus korlátozott háromtest-problémában pedig nem létezik a Jacobi-integrál. Ekkor a kezdőfeltételek alapján a mozgás számára lehetséges tartományokat megadni nem lehet. (Megjegyezzük, hogy a Hill-féle stabilitás nem mond semmit a testek esetleges ütközéséről a zéró-sebességű görbén belül.)
HC 2C
HC
016.0=e
A Hill-féle stabilitást a Naprendszer többi holdjára is megvizsgálták. Valamennyi hold mozgása Hill-féle értelemben stabil, kivéve a Jupiter négy retrográd irányú mozgást végző holdját (VIII., IX., XI., XII. hold). Ez utóbbiaknál a Hill-féle stabilitás hiánya a holdak befogásos eredetét sejteti. Megjegyezzük még, hogy a Jacobi-integrál a korlátozott háromtest-probléma térbeli esetében is létezik. Ekkor a mozgás számára lehetséges tartományokat zéró-sebességű felületek határolják. A Hold mozgását például a Föld körül a -nak megfelelő zéró-sebességű felület határolja (B. Érdi, 1996). A Hill-gömb (C = , szürke) környezete és a zéró-sebességű felületek láthatók a következő ábrán két
HC
2C
21
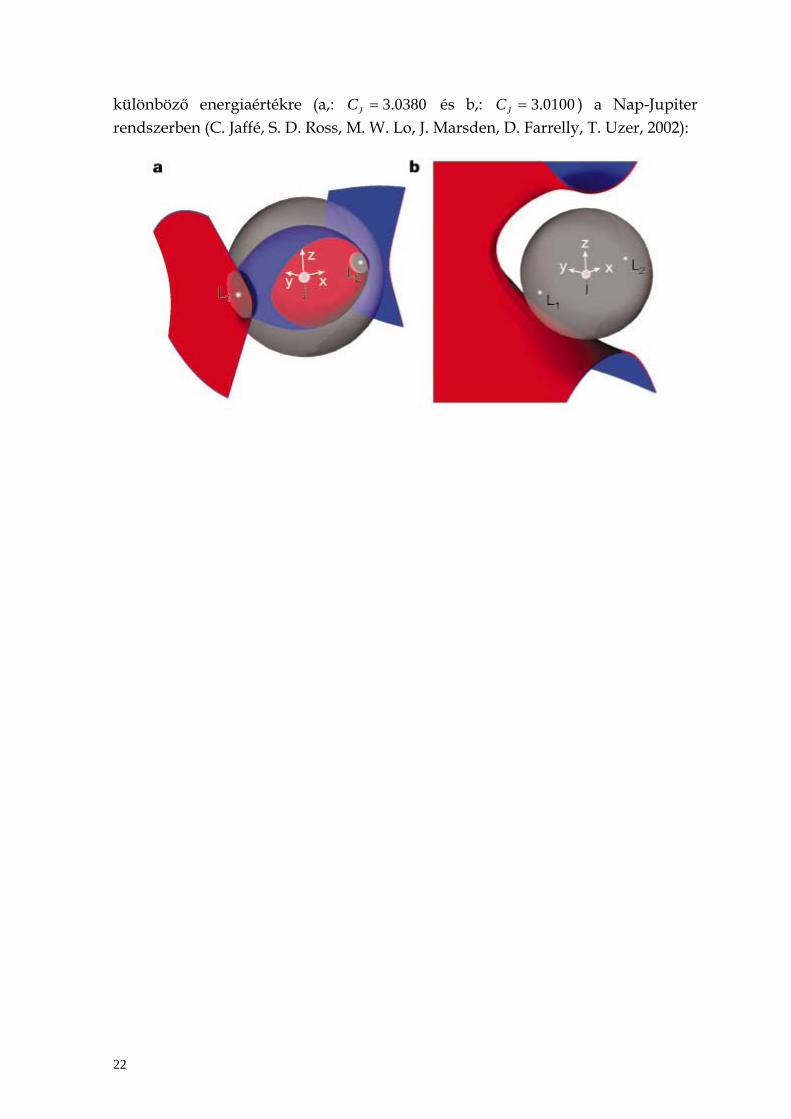
különböző energiaértékre (a,: 0380.3=JC és b,: 0100.3=JC ) a Nap-Jupiter rendszerben (C. Jaffé, S. D. Ross, M. W. Lo, J. Marsden, D. Farrelly, T. Uzer, 2002):
22
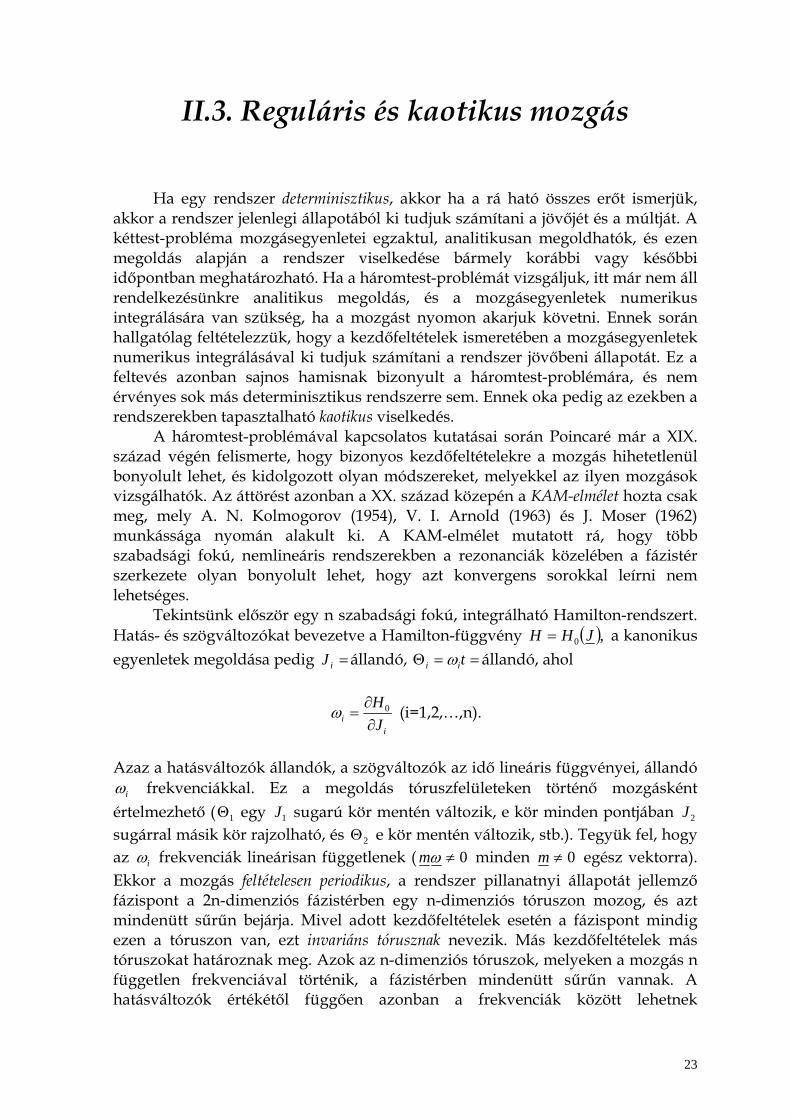
II.3. Reguláris és kaotikus mozgás Ha egy rendszer determinisztikus, akkor ha a rá ható összes erőt ismerjük, akkor a rendszer jelenlegi állapotából ki tudjuk számítani a jövőjét és a múltját. A kéttest-probléma mozgásegyenletei egzaktul, analitikusan megoldhatók, és ezen megoldás alapján a rendszer viselkedése bármely korábbi vagy későbbi időpontban meghatározható. Ha a háromtest-problémát vizsgáljuk, itt már nem áll rendelkezésünkre analitikus megoldás, és a mozgásegyenletek numerikus integrálására van szükség, ha a mozgást nyomon akarjuk követni. Ennek során hallgatólag feltételezzük, hogy a kezdőfeltételek ismeretében a mozgásegyenletek numerikus integrálásával ki tudjuk számítani a rendszer jövőbeni állapotát. Ez a feltevés azonban sajnos hamisnak bizonyult a háromtest-problémára, és nem érvényes sok más determinisztikus rendszerre sem. Ennek oka pedig az ezekben a rendszerekben tapasztalható kaotikus viselkedés. A háromtest-problémával kapcsolatos kutatásai során Poincaré már a XIX. század végén felismerte, hogy bizonyos kezdőfeltételekre a mozgás hihetetlenül bonyolult lehet, és kidolgozott olyan módszereket, melyekkel az ilyen mozgások vizsgálhatók. Az áttörést azonban a XX. század közepén a KAM-elmélet hozta csak meg, mely A. N. Kolmogorov (1954), V. I. Arnold (1963) és J. Moser (1962) munkássága nyomán alakult ki. A KAM-elmélet mutatott rá, hogy több szabadsági fokú, nemlineáris rendszerekben a rezonanciák közelében a fázistér szerkezete olyan bonyolult lehet, hogy azt konvergens sorokkal leírni nem lehetséges. Tekintsünk először egy n szabadsági fokú, integrálható Hamilton-rendszert. Hatás- és szögváltozókat bevezetve a Hamilton-függvény ( ),0 JHH = a kanonikus egyenletek megoldása pedig =iJ állandó, ==Θ tii ω állandó, ahol
ii J
H∂∂
= 0ω (i=1,2,…,n).
Azaz a hatásváltozók állandók, a szögváltozók az idő lineáris függvényei, állandó
iω frekvenciákkal. Ez a megoldás tóruszfelületeken történő mozgásként értelmezhető ( egy sugarú kör mentén változik, e kör minden pontjában sugárral másik kör rajzolható, és
1Θ 1J 2J
2Θ e kör mentén változik, stb.). Tegyük fel, hogy az iω frekvenciák lineárisan függetlenek ( 0≠ωm minden 0≠m egész vektorra). Ekkor a mozgás feltételesen periodikus, a rendszer pillanatnyi állapotát jellemző fázispont a 2n-dimenziós fázistérben egy n-dimenziós tóruszon mozog, és azt mindenütt sűrűn bejárja. Mivel adott kezdőfeltételek esetén a fázispont mindig ezen a tóruszon van, ezt invariáns tórusznak nevezik. Más kezdőfeltételek más tóruszokat határoznak meg. Azok az n-dimenziós tóruszok, melyeken a mozgás n független frekvenciával történik, a fázistérben mindenütt sűrűn vannak. A hatásváltozók értékétől függően azonban a frekvenciák között lehetnek
23
összefüggők. Ha például két szabadsági fok között rezonancia lép fel, ,srki =ωω ahol r és s relatív prímek, ilyenkor csak n-1 független frekvencia van, és a fázispont egy (n-1)-dimenziós rezonáns tóruszon mozog. Az ilyen tóruszok is mindenütt sűrűn vannak. Ugyanez mondható el az n-2,n-3,…,2,1 független frekvenciájú és ugyanilyen dimenziószámú rezonáns tóruszokról is. Az 1 független frekvencia esete periodikus megoldásnak felel meg, ekkor a fázispont egy önmagába záródó, 1-dimenziós fázistrajektóriát jár be. Lényeges, hogy bár mindegyik tórusz mindenütt sűrű halmazt alkot, azonban az n-dimenziós tóruszok egy teljes mértékű halmazt alkotnak a fázistérben, míg a rezonáns tóruszok uniójának Lebesgue-mértéke nulla (véletlenszerűen választott fázispont nulla valószínűséggel esik rezonáns tóruszra). Egy integrálható rendszer viselkedése időben tetszőleges hosszan megadható, mivel a mozgásegyenletek megoldása ismert. A kezdőfeltételeket megadva meg lehet mondani, mi fog történni. Ha a kezdőfeltételeket nem ismerjük pontosan, az ebből adódó hiba az idővel lineárisan nő. Integrálható rendszereknél az egymáshoz közeli fázispontokból kiinduló trajektóriák eltérése lineárisan nő. Mi történik, ha egy integrálható rendszert kis perturbáció ér? Poincaré szerint ez a dinamika alapproblémája. A perturbált rendszer Hamilton-függvénye:
( ) ( ) ( ),,, 10 Θ+=Θ JHJHJH ε ahol ε a perturbáció erősségére jellemző paraméter, a perturbációs függvény. A dinamika alapproblémájának megoldása perturbációszámítási módszerekkel nem volt lehetséges. A perturbációs megoldások csak rövid távra adnak jelzést a rendszer viselkedéséről. A rezonanciáknál a megoldásban fellépő kis nevezők miatt a sorfejtések divergensek lesznek, ezért ezek a mozgás globális viselkedéséről végtelen időintervallumban nem adnak felvilágosítást.
1H
A probléma megoldásában meghatározó jelentőségű a KAM-tétel: Ha egy integrálható rendszert kis konzervatív perturbáció ér (melynek függvényalakja elegendően sokszor folytonosan differenciálható), akkor azok az invariáns tóruszok, melyek frekvenciái lineárisan függetlenek, és elegendően irracionálisak, nem tűnnek el, csak kissé deformálódnak. Másképp fogalmazva, a perturbációt a rezonanciától távoli n-dimenziós tóruszok „túlélik”. Ezeken a mozgás továbbra is feltételesen periodikus, ugyanazon frekvenciákkal, mint korábban. A megmaradó tóruszok azonban nem alkotnak sűrű halmazt, egymástól véges távolságban vannak. Kimutatható, hogy a hatásváltozók terében a megmaradó tóruszokhoz tartozó hatásváltozók Cantor-típusú halmazt alkotnak. A tóruszok közti tartományokban a mozgás kaotikus. Ez a döntő különbség az integrálható és a perturbált rendszerek között: integrálható rendszerekben a mozgás reguláris, feltételesen periodikus, perturbált rendszerekben a reguláris mozgások mellett kaotikus mozgások is fellépnek. A kaotikus viselkedés nem külső hatás eredménye. Determinisztikus rendszerek belső tulajdonsága a káosz. A perturbált rendszerek fázistere igen bonyolult, a reguláris és kaotikus tartományok bonyolultan egymásba ágyazott struktúrát alkotnak. A kaotikus tartomány jellemzője, hogy egymáshoz közeli
24
fázispontokból kiinduló trajektóriák exponenciálisan távolodnak egymástól. Kaotikus tartományban a mozgás igen érzékeny a kezdőfeltételekre, a kezdőfeltételekben lévő hiba exponenciálisan nő. Ezért ott a mozgást hosszú távra nem lehet pontosan előrejelezni: az analitikus sorfejtések divergálnak, a numerikus megoldások pedig a numerikus integrálás eredendő hibája miatt nem adnak valós megoldást. A kaotikus viselkedés minden legalább két szabadsági fokú, nemlineáris rendszerben fellép. A Naprendszer sok szabadsági fokú, nemlineáris rendszer, melyben számos rezonancia található. Kaotikus jelenségek így a Naprendszer égitestjeinek mozgásában is fellépnek. Ezek vizsgálata az 1980-as évektől az égi mechanika egyik fő kutatási területévé vált. Bár a KAM-elmélet már az 1960-as években megszületett, mégis hosszabb időnek kellett eltelnie, míg a számítástechnika fejlődése a nagy teljesítményű számítógépek megjelenésével lehetővé tette a Naprendszer-beli kaotikus jelenségek vizsgálatát. Vizsgáljuk például egy aszteroida mozgását egy bolygó szomszédságában! Ha az aszteroidára csak a Nap gravitációs vonzása hatna, mozgása tökéletesen előrejelezhető lenne. A bolygótól származó perturbációk miatt azonban a fázistér bizonyos tartományai kaotikusak. Ilyen tartományokban az aszteroida mozgása előre nem kiszámítható módon megy végbe: az egyik pályán az aszteroida becsapódik a bolygóba; alig különböző kezdőfeltételű másik pályán időlegesen befogódik a bolygó körüli pályára; a harmadik esetben a bolygó csak eltéríti azt. Ha nem ismerjük pontosan a kezdőfeltételeket, előre nem tudjuk megmondani, melyik eset fog bekövetkezni. Ezt a kezdőfeltételekre való nagyfokú érzékenységet szokás pillangó-effektusnak nevezni. A fogalmat kaotikus időjárási rendszerekkel kapcsolatban használták először: bizonyos feltételek esetén egy pillangó szárnycsapásai a Föld egy pontján hurrikánt okozhatnak a Föld egy más részén. Érdekes példát szolgáltat a (2060) Chiron kisbolygó. Perihéliuma a Szaturnusz pályáján belül, aféliuma az Uránusz pályájához közel van. Felfedezése után, az 1980-as években több kutató numerikus integrálással vizsgálta a kisbolygó mozgását. A kezdőfeltételeket a legpontosabbnak tartott pályaelemek alapján számított kezdőértékek körül változtatták. Az egymáshoz közeli, különböző kezdőfeltételekkel végzett integrálások azonban különböző végeredményre vezettek, ami tipikus jelenség kaotikus mozgás esetén. Így a Chiron végső sorsával kapcsolatban csak valószínűségi kijelentések tehetők. Eszerint 1/8 a valószínűsége annak, hogy a Szaturnusz hatására a Chiron olyan hiperbola pályára áll, melyen kidobódik a Naprendszerből. Nagyobb, 7/8 a valószínűsége annak, hogy a Szaturnusz szoros megközelítései során elszenvedett perturbációk a Chiront a Naprendszer belseje felé terelik, ahol azután a Jupiter gravitációs hatása alá kerül majd. A Chiront ma a Centaurok közé sorolják. Ezek olyan objektumok, melyek átmeneti pályán vannak az Edgeworth-Kuiper-övezetből a rövid periódusú üstökösök Jupiter-családjába. Egy másik példaként a Shoemaker-Levy-9 üstökös pályájának fejlődése említhető. Numerikus integrálással végzett számítások azt mutatják, hogy a Jupiterbe való becsapódása, 1994. júliusa előtt 1992-ben a Jupiter szoros megközelítése során szakadt darabokra. A Jupiter körüli pályára 1929-ben (±9 év)
25
fogódott be. A befogás előtti pályája a többi joviális üstököséhez lehetett hasonló: a Jupiter-pályán belüli, kis excentricitású pálya (B. Érdi, 2001). Végül pedig említsük meg az Oterma-üstököst, melyet a Jupiter gravitációs vonzása kerített hatalmába több évtizeden keresztül! Az Oterma-üstökös pályája 1910-1980 között az alábbi ábrákon látható ((a) a pálya Ekliptikára eső vetülete, (b) a homoklinikus-heteroklinikus „lánc” a forgó koordináta-rendszerben /lásd később/, (c) az Oterma pályája a forgó koordináta-rendszerben) (Koon & al, 2001):
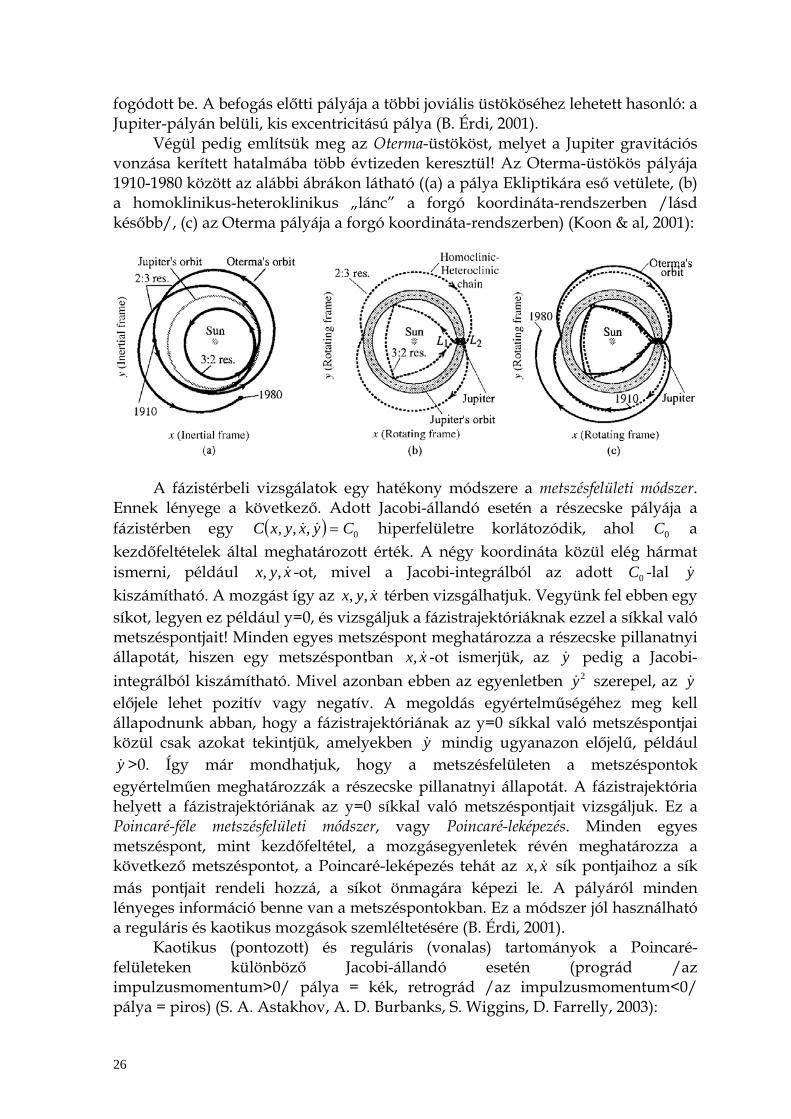
A fázistérbeli vizsgálatok egy hatékony módszere a metszésfelületi módszer. Ennek lényege a következő. Adott Jacobi-állandó esetén a részecske pályája a fázistérben egy ( ) 0,,, CyxyxC =&& hiperfelületre korlátozódik, ahol a kezdőfeltételek által meghatározott érték. A négy koordináta közül elég hármat ismerni, például -ot, mivel a Jacobi-integrálból az adott -lal kiszámítható. A mozgást így az térben vizsgálhatjuk. Vegyünk fel ebben egy síkot, legyen ez például y=0, és vizsgáljuk a fázistrajektóriáknak ezzel a síkkal való metszéspontjait! Minden egyes metszéspont meghatározza a részecske pillanatnyi állapotát, hiszen egy metszéspontban -ot ismerjük, az pedig a Jacobi-integrálból kiszámítható. Mivel azonban ebben az egyenletben szerepel, az előjele lehet pozitív vagy negatív. A megoldás egyértelműségéhez meg kell állapodnunk abban, hogy a fázistrajektóriának az y=0 síkkal való metszéspontjai közül csak azokat tekintjük, amelyekben mindig ugyanazon előjelű, például
>0. Így már mondhatjuk, hogy a metszésfelületen a metszéspontok egyértelműen meghatározzák a részecske pillanatnyi állapotát. A fázistrajektória helyett a fázistrajektóriának az y=0 síkkal való metszéspontjait vizsgáljuk. Ez a Poincaré-féle metszésfelületi módszer, vagy Poincaré-leképezés. Minden egyes metszéspont, mint kezdőfeltétel, a mozgásegyenletek révén meghatározza a következő metszéspontot, a Poincaré-leképezés tehát az sík pontjaihoz a sík más pontjait rendeli hozzá, a síkot önmagára képezi le. A pályáról minden lényeges információ benne van a metszéspontokban. Ez a módszer jól használható a reguláris és kaotikus mozgások szemléltetésére (B. Érdi, 2001).
0C
xyx &,, 0C y&xyx &,,
xx &, y&2y& y&
y&y&
xx &,
Kaotikus (pontozott) és reguláris (vonalas) tartományok a Poincaré-felületeken különböző Jacobi-állandó esetén (prográd /az impulzusmomentum>0/ pálya = kék, retrográd /az impulzusmomentum<0/ pálya = piros) (S. A. Astakhov, A. D. Burbanks, S. Wiggins, D. Farrelly, 2003):
26
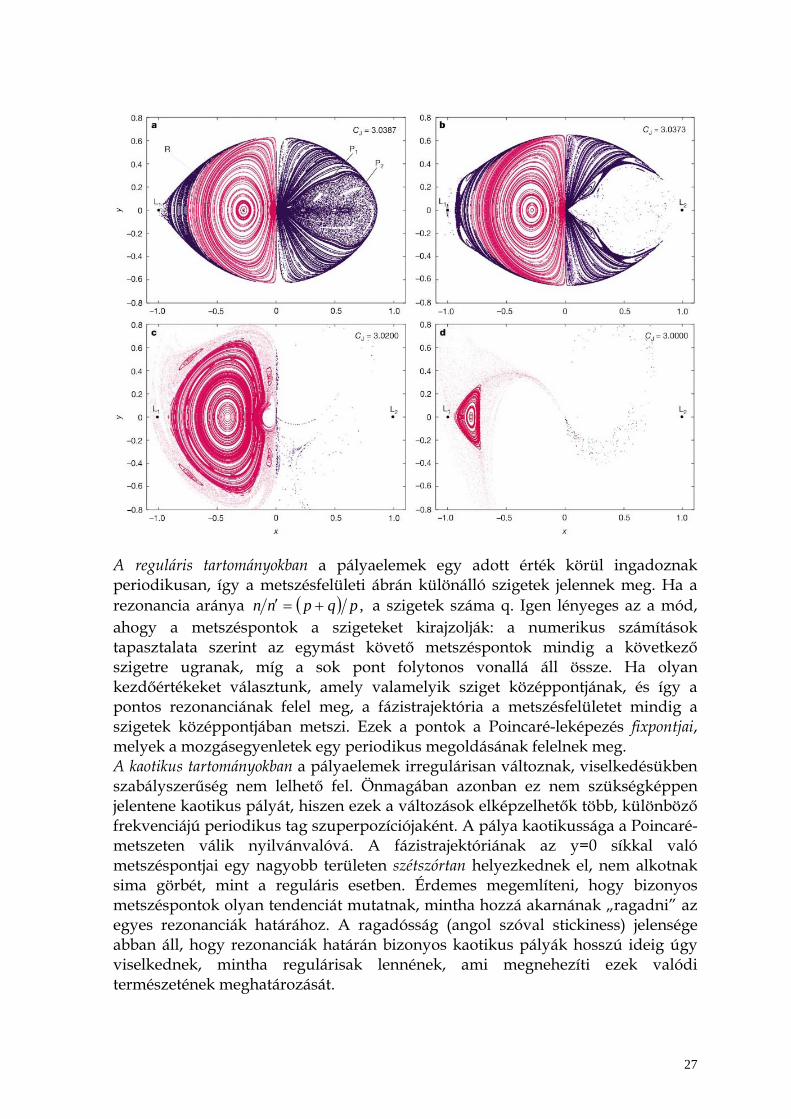
A reguláris tartományokban a pályaelemek egy adott érték körül ingadoznak periodikusan, így a metszésfelületi ábrán különálló szigetek jelennek meg. Ha a rezonancia aránya ( ) ,pqpnn +=′ a szigetek száma q. Igen lényeges az a mód, ahogy a metszéspontok a szigeteket kirajzolják: a numerikus számítások tapasztalata szerint az egymást követő metszéspontok mindig a következő szigetre ugranak, míg a sok pont folytonos vonallá áll össze. Ha olyan kezdőértékeket választunk, amely valamelyik sziget középpontjának, és így a pontos rezonanciának felel meg, a fázistrajektória a metszésfelületet mindig a szigetek középpontjában metszi. Ezek a pontok a Poincaré-leképezés fixpontjai, melyek a mozgásegyenletek egy periodikus megoldásának felelnek meg. A kaotikus tartományokban a pályaelemek irregulárisan változnak, viselkedésükben szabályszerűség nem lelhető fel. Önmagában azonban ez nem szükségképpen jelentene kaotikus pályát, hiszen ezek a változások elképzelhetők több, különböző frekvenciájú periodikus tag szuperpozíciójaként. A pálya kaotikussága a Poincaré-metszeten válik nyilvánvalóvá. A fázistrajektóriának az y=0 síkkal való metszéspontjai egy nagyobb területen szétszórtan helyezkednek el, nem alkotnak sima görbét, mint a reguláris esetben. Érdemes megemlíteni, hogy bizonyos metszéspontok olyan tendenciát mutatnak, mintha hozzá akarnának „ragadni” az egyes rezonanciák határához. A ragadósság (angol szóval stickiness) jelensége abban áll, hogy rezonanciák határán bizonyos kaotikus pályák hosszú ideig úgy viselkednek, mintha regulárisak lennének, ami megnehezíti ezek valódi természetének meghatározását.
27
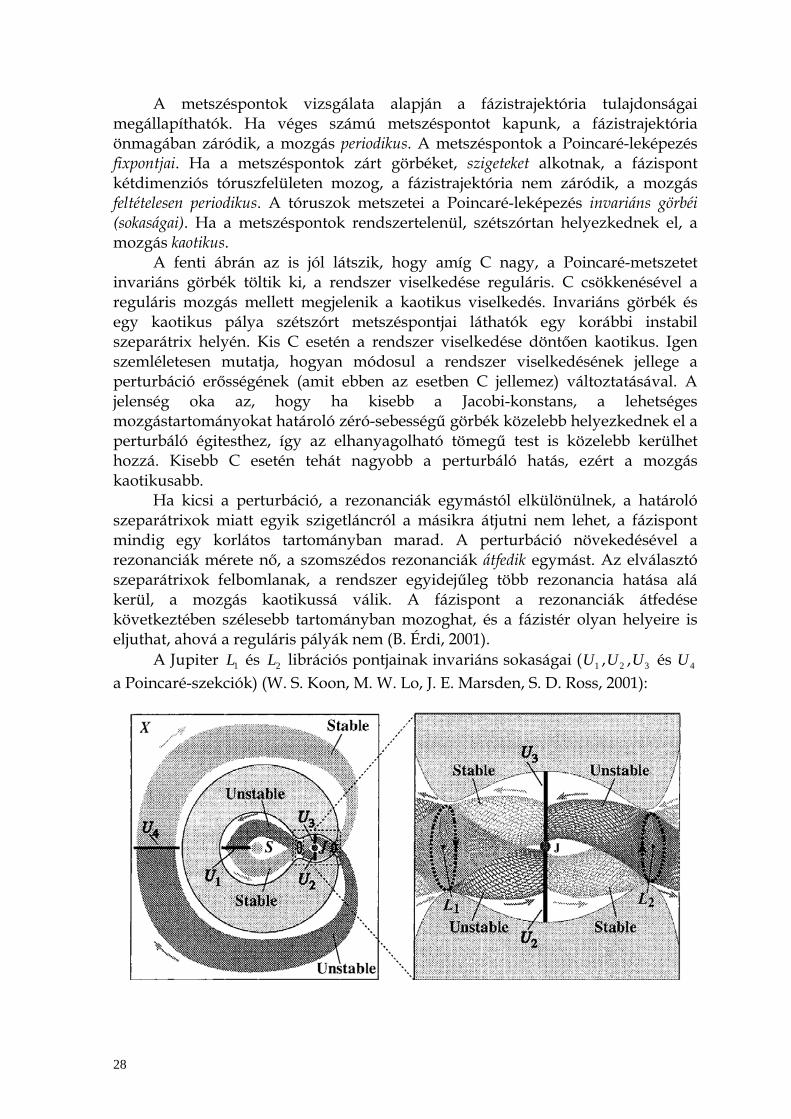
A metszéspontok vizsgálata alapján a fázistrajektória tulajdonságai megállapíthatók. Ha véges számú metszéspontot kapunk, a fázistrajektória önmagában záródik, a mozgás periodikus. A metszéspontok a Poincaré-leképezés fixpontjai. Ha a metszéspontok zárt görbéket, szigeteket alkotnak, a fázispont kétdimenziós tóruszfelületen mozog, a fázistrajektória nem záródik, a mozgás feltételesen periodikus. A tóruszok metszetei a Poincaré-leképezés invariáns görbéi (sokaságai). Ha a metszéspontok rendszertelenül, szétszórtan helyezkednek el, a mozgás kaotikus. A fenti ábrán az is jól látszik, hogy amíg C nagy, a Poincaré-metszetet invariáns görbék töltik ki, a rendszer viselkedése reguláris. C csökkenésével a reguláris mozgás mellett megjelenik a kaotikus viselkedés. Invariáns görbék és egy kaotikus pálya szétszórt metszéspontjai láthatók egy korábbi instabil szeparátrix helyén. Kis C esetén a rendszer viselkedése döntően kaotikus. Igen szemléletesen mutatja, hogyan módosul a rendszer viselkedésének jellege a perturbáció erősségének (amit ebben az esetben C jellemez) változtatásával. A jelenség oka az, hogy ha kisebb a Jacobi-konstans, a lehetséges mozgástartományokat határoló zéró-sebességű görbék közelebb helyezkednek el a perturbáló égitesthez, így az elhanyagolható tömegű test is közelebb kerülhet hozzá. Kisebb C esetén tehát nagyobb a perturbáló hatás, ezért a mozgás kaotikusabb. Ha kicsi a perturbáció, a rezonanciák egymástól elkülönülnek, a határoló szeparátrixok miatt egyik szigetláncról a másikra átjutni nem lehet, a fázispont mindig egy korlátos tartományban marad. A perturbáció növekedésével a rezonanciák mérete nő, a szomszédos rezonanciák átfedik egymást. Az elválasztó szeparátrixok felbomlanak, a rendszer egyidejűleg több rezonancia hatása alá kerül, a mozgás kaotikussá válik. A fázispont a rezonanciák átfedése következtében szélesebb tartományban mozoghat, és a fázistér olyan helyeire is eljuthat, ahová a reguláris pályák nem (B. Érdi, 2001). A Jupiter és librációs pontjainak invariáns sokaságai ( , , és a Poincaré-szekciók) (W. S. Koon, M. W. Lo, J. E. Marsden, S. D. Ross, 2001):
1L 2L 1U 2U 3U 4U
28
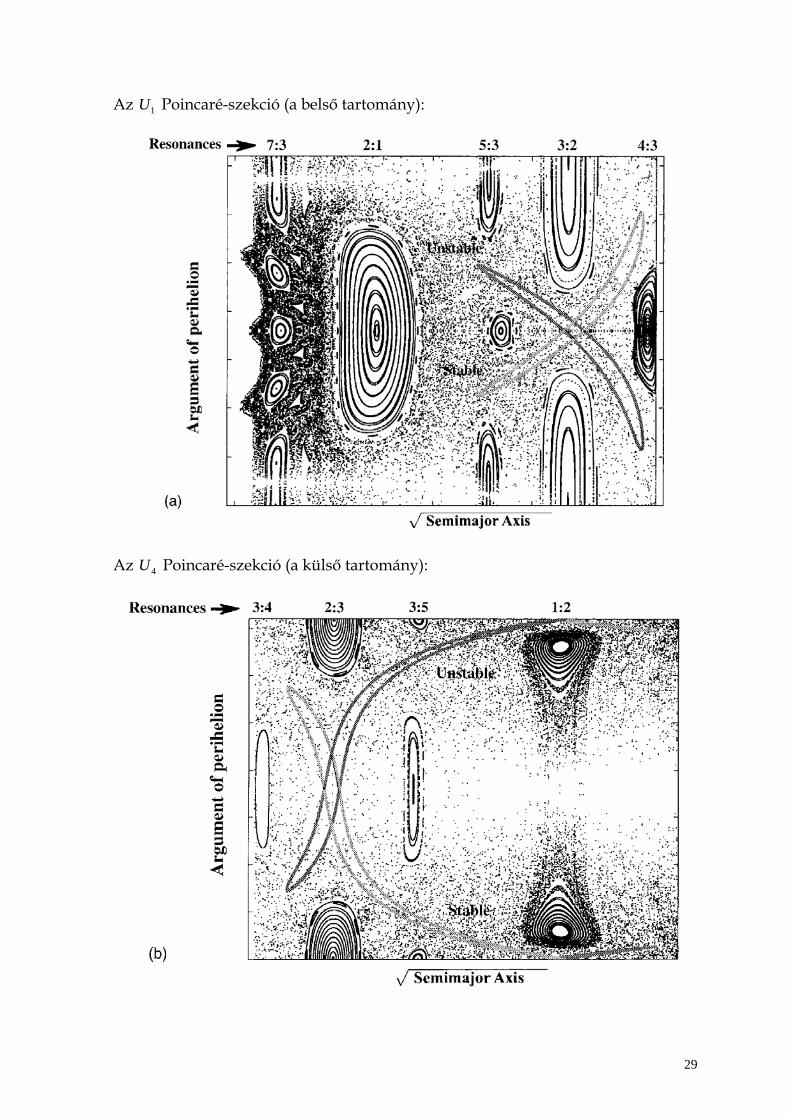
Az Poincaré-szekció (a belső tartomány): 1U
Az Poincaré-szekció (a külső tartomány): 4U
29
A fázistér szerkezetét tehát döntően a rezonanciák határozzák meg. A metszésfelületen az egyes rezonanciáknak megfelelő stabil és instabil fixpontok helyzete, a rezonanciák erőssége határozza meg a reguláris és kaotikus tartományok elhelyezkedését és méretét. A rezonanciák osztályozhatók elsődleges és másodlagos rezonanciákra: Elsődleges rezonancia akkor lép fel, ha az elhanyagolható tömegű test (aszteroida) és a perturbáló égitest (Jupiter) középmozgása rezonáns arányban áll egymással. Elsődleges rezonanciának periodikus megoldás, zárt fázistrajektória és a metszésfelületen véges számú metszéspont (fixpont) felel meg. Egy elsődleges rezonancia közelében lévő fázistrajektória a metszésfelületet olyan pontokban metszi, melyek sima, zárt görbéket, elsődleges szigeteket alkotnak a fixpont körül. Ezek azoknak a tóruszoknak a metszetei, melyeken a fázispont mozog. A fázistrajektória nem záródik, a mozgás feltételesen periodikus. Másodlagos rezonancia esetén egy elsődleges sziget körbejárási frekvenciája áll rezonáns arányban az elsődleges rezonancia frekvenciájával. Ennek is periodikus megoldás és az elsődleges szigetek mentén véges számú fixpont felel meg. Ezen fixpontok körül másodlagos szigeteket hoznak létre a másodlagos rezonanciához közeli fázistrajektóriák metszéspontjai. A reguláris (periodikus és feltételesen periodikus) trajektóriák bonyolultan egymásba ágyazott struktúrát alkotnak. Elsődleges rezonanciák körül elsődleges szigetek vannak, azokhoz másodlagos rezonanciák kapcsolódnak, a másodlagos rezonanciák körül másodlagos szigetek, és így tovább ad infinitum. Kissé perturbált rendszerekben a rezonanciák környékének ez a jellemző képe: elliptikus és hiperbolikus fixpontok felváltva követik egymást, az elliptikus pontokat invariáns görbék veszik körül, a hiperbolikus pontokat szeparátrixok kötik össze. Az elliptikus fixpontok közelében lévő pontok a leképezés során a fixpont környékén akarnak maradni. Egy elliptikus fixpont környezete finomabb skálán olyan, mint az egész rendszeré: magasabb rendű rezonanciáktól távoli invariáns görbék között magasabb rendű rezonanciák invariáns görbéinek szétdarabolódásából visszamaradt fixpont-láncolatok találhatók, és ez folytatódik egyre finomabb skálákon. A hiperbolikus fixpontok környékén lévő pontok a leképezés során „vadul” viselkednek, minden szabályszerűség nélkül, kaotikusan követik egymást. A kaotikus viselkedés rezonanciák hiperbolikus fixpontjai közelében alakul ki. A vadság magyarázata a homoklinikus pontok létezésében rejlik. Egy hiperbolikus fixpontban négy görbe találkozik, kettő befelé haladó stabil szeparátrix és kettő kifelé távolodó instabil szeparátrix. Egy hiperbolikus fixpont stabil és instabil szeparátrixainak metszéspontjai a homoklinikus pontok. Ezek száma végtelen. Másfelől a leképezés területtartó, így két egymást követő homoklinikus pont között a szeparátrixok által közrefogott terület a következő hasonló területbe képződik. Mivel a homoklinikus pontok a hiperbolikus fixpont felé közeledve sűrűsödnek (távolságuk exponenciálisan csökken), és a szeparátrixok önmagukat át nem metszhetik, a területtartás követelménye miatt a szeparátrixok egyre vadabbul kanyarognak. Mindezek miatt a leképezés rendkívüli módon érzékeny a
30
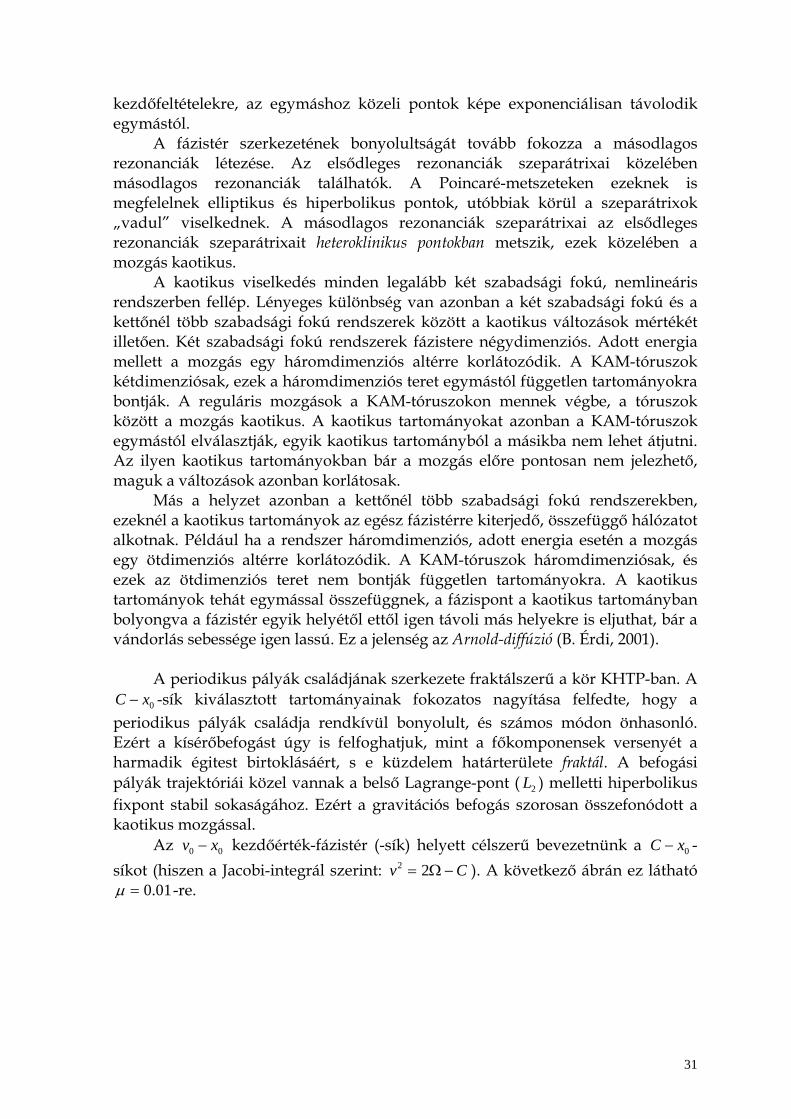
kezdőfeltételekre, az egymáshoz közeli pontok képe exponenciálisan távolodik egymástól. A fázistér szerkezetének bonyolultságát tovább fokozza a másodlagos rezonanciák létezése. Az elsődleges rezonanciák szeparátrixai közelében másodlagos rezonanciák találhatók. A Poincaré-metszeteken ezeknek is megfelelnek elliptikus és hiperbolikus pontok, utóbbiak körül a szeparátrixok „vadul” viselkednek. A másodlagos rezonanciák szeparátrixai az elsődleges rezonanciák szeparátrixait heteroklinikus pontokban metszik, ezek közelében a mozgás kaotikus. A kaotikus viselkedés minden legalább két szabadsági fokú, nemlineáris rendszerben fellép. Lényeges különbség van azonban a két szabadsági fokú és a kettőnél több szabadsági fokú rendszerek között a kaotikus változások mértékét illetően. Két szabadsági fokú rendszerek fázistere négydimenziós. Adott energia mellett a mozgás egy háromdimenziós altérre korlátozódik. A KAM-tóruszok kétdimenziósak, ezek a háromdimenziós teret egymástól független tartományokra bontják. A reguláris mozgások a KAM-tóruszokon mennek végbe, a tóruszok között a mozgás kaotikus. A kaotikus tartományokat azonban a KAM-tóruszok egymástól elválasztják, egyik kaotikus tartományból a másikba nem lehet átjutni. Az ilyen kaotikus tartományokban bár a mozgás előre pontosan nem jelezhető, maguk a változások azonban korlátosak. Más a helyzet azonban a kettőnél több szabadsági fokú rendszerekben, ezeknél a kaotikus tartományok az egész fázistérre kiterjedő, összefüggő hálózatot alkotnak. Például ha a rendszer háromdimenziós, adott energia esetén a mozgás egy ötdimenziós altérre korlátozódik. A KAM-tóruszok háromdimenziósak, és ezek az ötdimenziós teret nem bontják független tartományokra. A kaotikus tartományok tehát egymással összefüggnek, a fázispont a kaotikus tartományban bolyongva a fázistér egyik helyétől ettől igen távoli más helyekre is eljuthat, bár a vándorlás sebessége igen lassú. Ez a jelenség az Arnold-diffúzió (B. Érdi, 2001). A periodikus pályák családjának szerkezete fraktálszerű a kör KHTP-ban. A
-sík kiválasztott tartományainak fokozatos nagyítása felfedte, hogy a periodikus pályák családja rendkívül bonyolult, és számos módon önhasonló. Ezért a kísérőbefogást úgy is felfoghatjuk, mint a főkomponensek versenyét a harmadik égitest birtoklásáért, s e küzdelem határterülete fraktál. A befogási pályák trajektóriái közel vannak a belső Lagrange-pont ( ) melletti hiperbolikus fixpont stabil sokaságához. Ezért a gravitációs befogás szorosan összefonódott a kaotikus mozgással.
0xC −
2L
Az kezdőérték-fázistér (-sík) helyett célszerű bevezetnünk a 00 xv − 0xC − -síkot (hiszen a Jacobi-integrál szerint: ). A következő ábrán ez látható Cv −Ω= 22
01.0=µ -re.
31
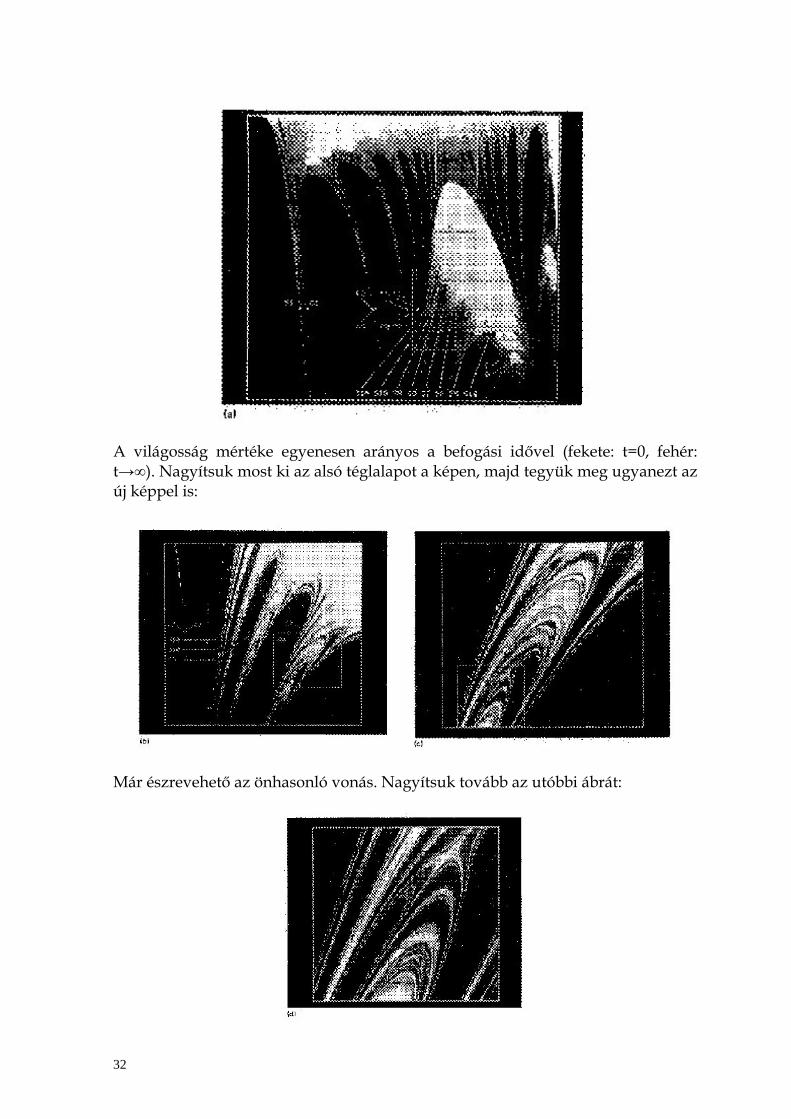
A világosság mértéke egyenesen arányos a befogási idővel (fekete: t=0, fehér: t→∞). Nagyítsuk most ki az alsó téglalapot a képen, majd tegyük meg ugyanezt az új képpel is:
Már észrevehető az önhasonló vonás. Nagyítsuk tovább az utóbbi ábrát:
32

Az alsó téglalapban lévő „hangvilla”-alakzat kinagyítva:
Nyomon követhető, ahogy a (periódus-kettőző) bifurkáció többszörösen önmagába ágyazódott. Nagyítsuk ki a felső téglalapot is:
Végül pedig az első ábra felső téglalapjának nagyítása, majd az tovább nagyítva:
A talán vég nélkül önmagukba ágyazódó struktúrák azt mutatják, hogy a periodikus pályák szerkezete a 0xC − -síkon önhasonló, fraktál. Ha a befogást versengésnek tekintjük a két főkomponens között a harmadik égitest birtoklásáért,
33
akkor a rövid befogású tartományokban -nek tiszta uralma van, míg a hosszú befogások esetén a küzdelem nélküli győztes. A köztes tartomány pedig rendkívül izgalmas.
1m
2m
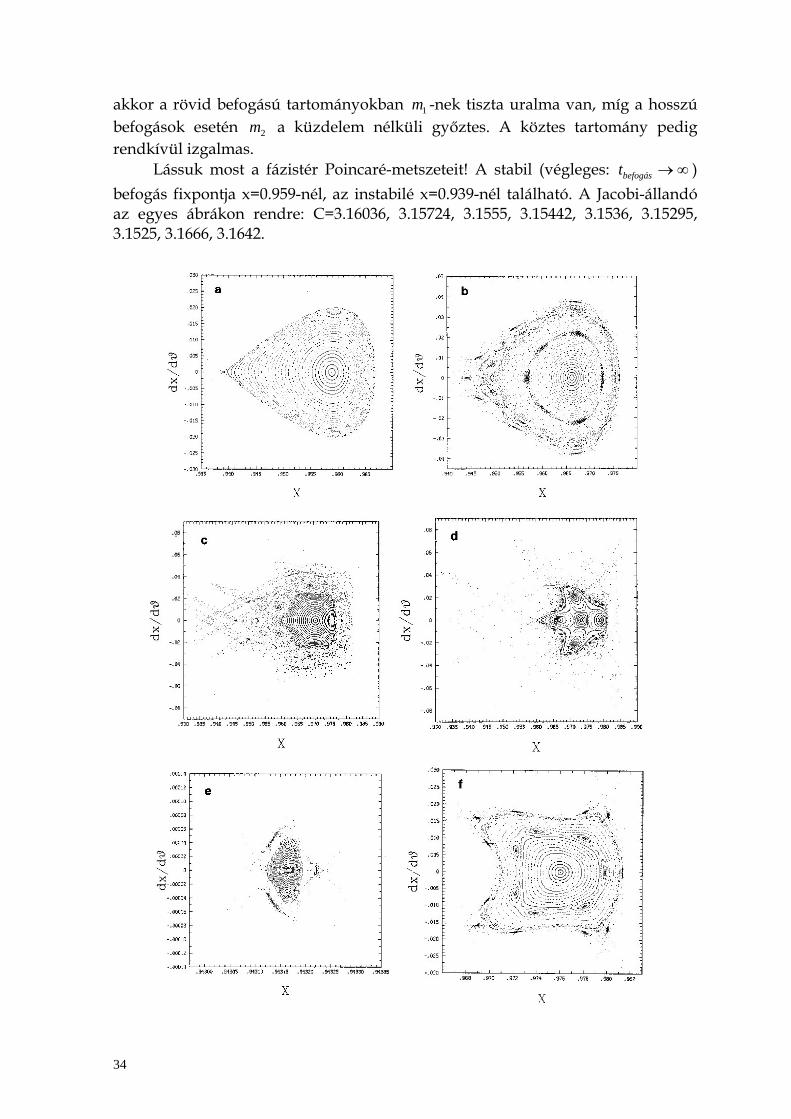
Lássuk most a fázistér Poincaré-metszeteit! A stabil (végleges: ∞→befogást ) befogás fixpontja x=0.959-nél, az instabilé x=0.939-nél található. A Jacobi-állandó az egyes ábrákon rendre: C=3.16036, 3.15724, 3.1555, 3.15442, 3.1536, 3.15295, 3.1525, 3.1666, 3.1642.
34
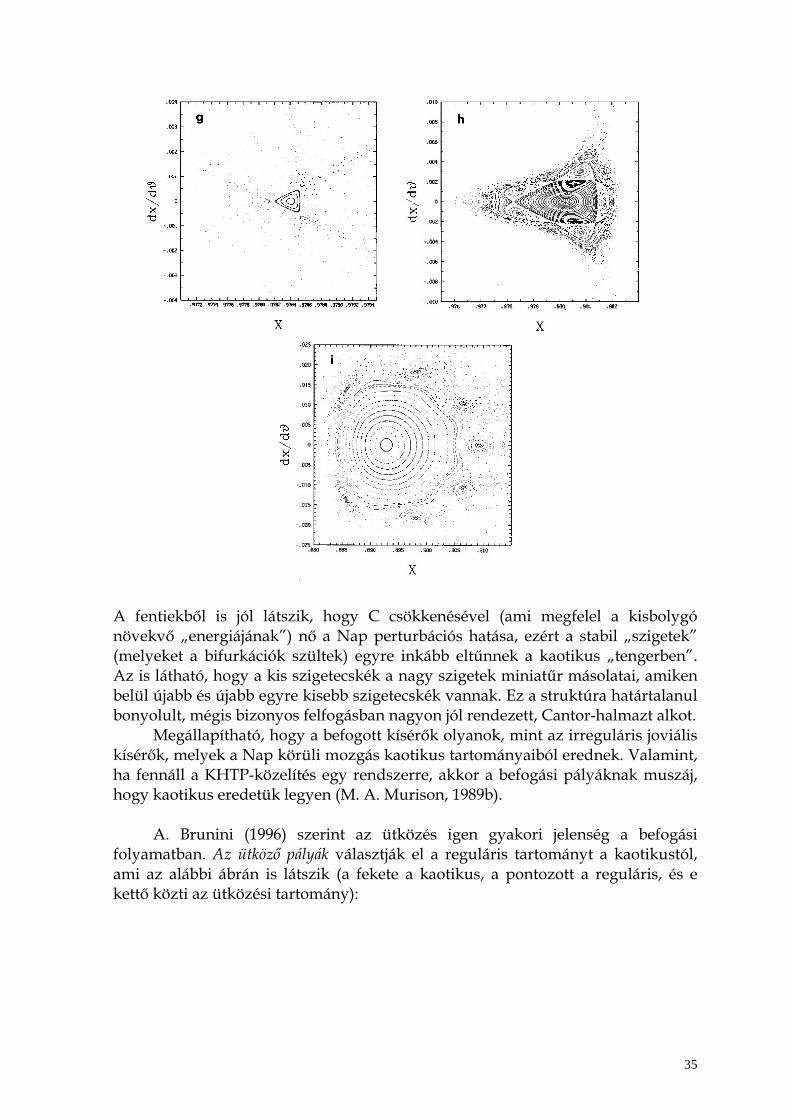
A fentiekből is jól látszik, hogy C csökkenésével (ami megfelel a kisbolygó növekvő „energiájának”) nő a Nap perturbációs hatása, ezért a stabil „szigetek” (melyeket a bifurkációk szültek) egyre inkább eltűnnek a kaotikus „tengerben”. Az is látható, hogy a kis szigetecskék a nagy szigetek miniatűr másolatai, amiken belül újabb és újabb egyre kisebb szigetecskék vannak. Ez a struktúra határtalanul bonyolult, mégis bizonyos felfogásban nagyon jól rendezett, Cantor-halmazt alkot. Megállapítható, hogy a befogott kísérők olyanok, mint az irreguláris joviális kísérők, melyek a Nap körüli mozgás kaotikus tartományaiból erednek. Valamint, ha fennáll a KHTP-közelítés egy rendszerre, akkor a befogási pályáknak muszáj, hogy kaotikus eredetük legyen (M. A. Murison, 1989b). A. Brunini (1996) szerint az ütközés igen gyakori jelenség a befogási folyamatban. Az ütköző pályák választják el a reguláris tartományt a kaotikustól, ami az alábbi ábrán is látszik (a fekete a kaotikus, a pontozott a reguláris, és e kettő közti az ütközési tartomány):
35
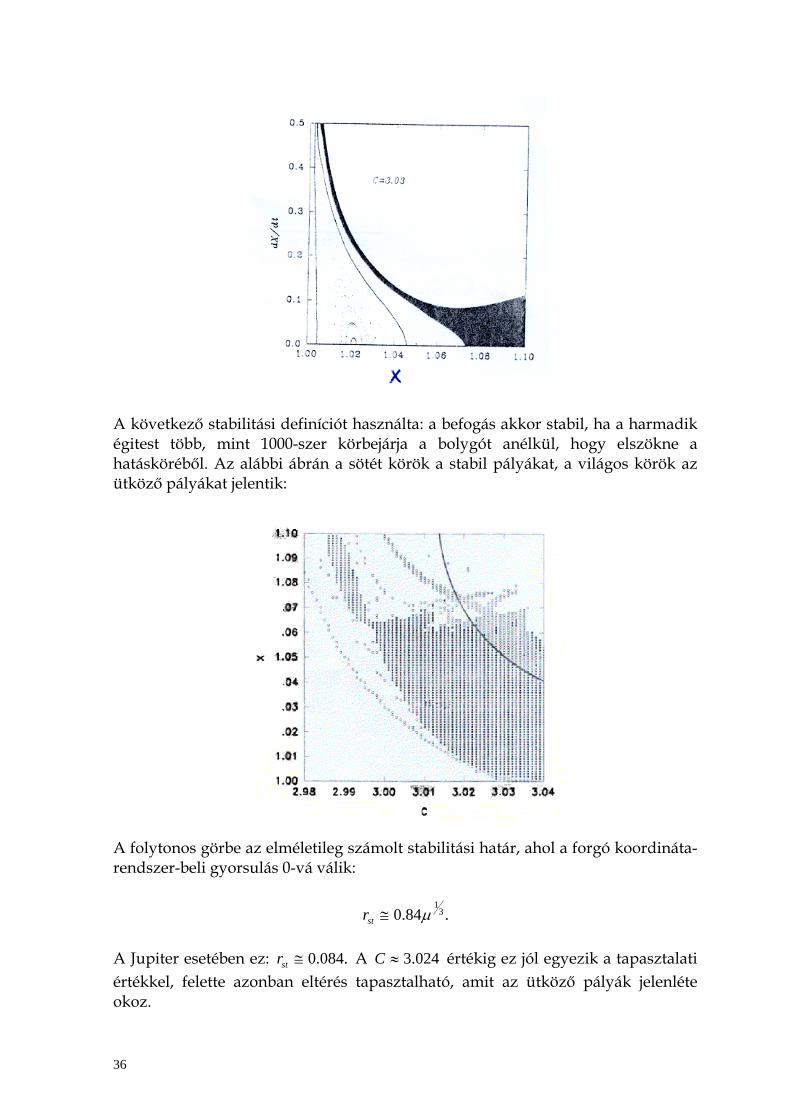
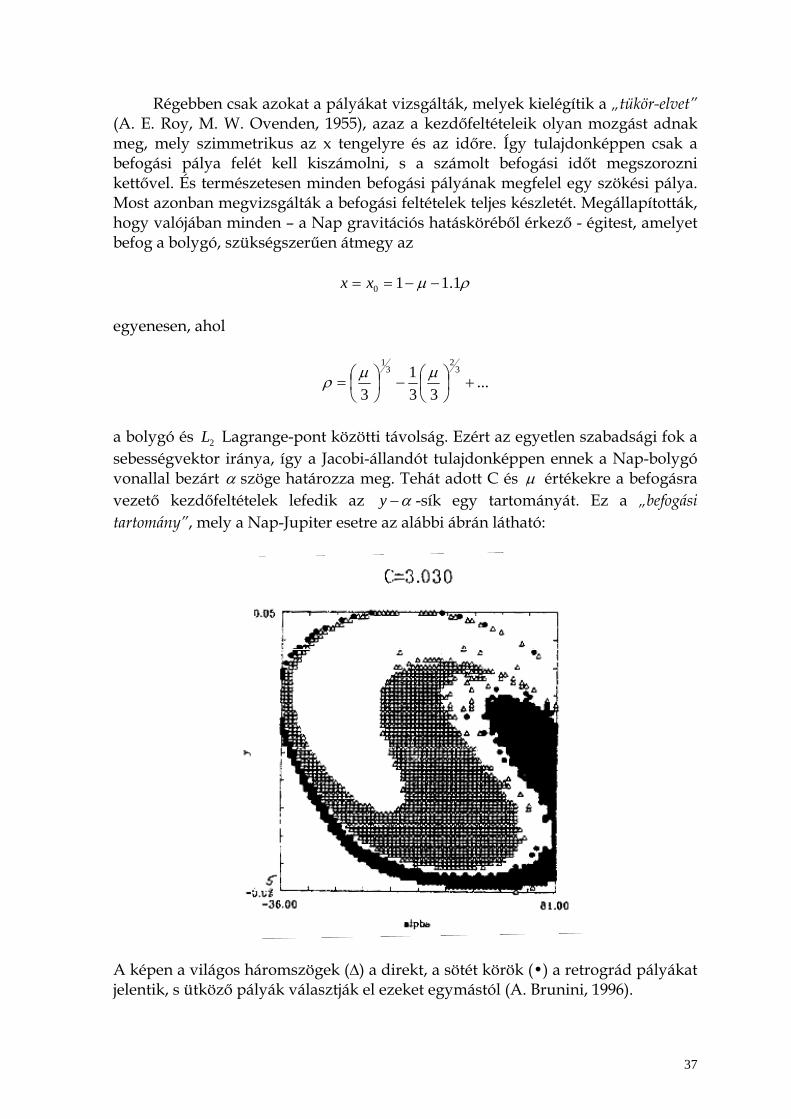
A következő stabilitási definíciót használta: a befogás akkor stabil, ha a harmadik égitest több, mint 1000-szer körbejárja a bolygót anélkül, hogy elszökne a hatásköréből. Az alábbi ábrán a sötét körök a stabil pályákat, a világos körök az ütköző pályákat jelentik:
A folytonos görbe az elméletileg számolt stabilitási határ, ahol a forgó koordináta-rendszer-beli gyorsulás 0-vá válik:
.84.0 31
µ≅str
A Jupiter esetében ez: A .084.0≅str 024.3≈C értékig ez jól egyezik a tapasztalati értékkel, felette azonban eltérés tapasztalható, amit az ütköző pályák jelenléte okoz.
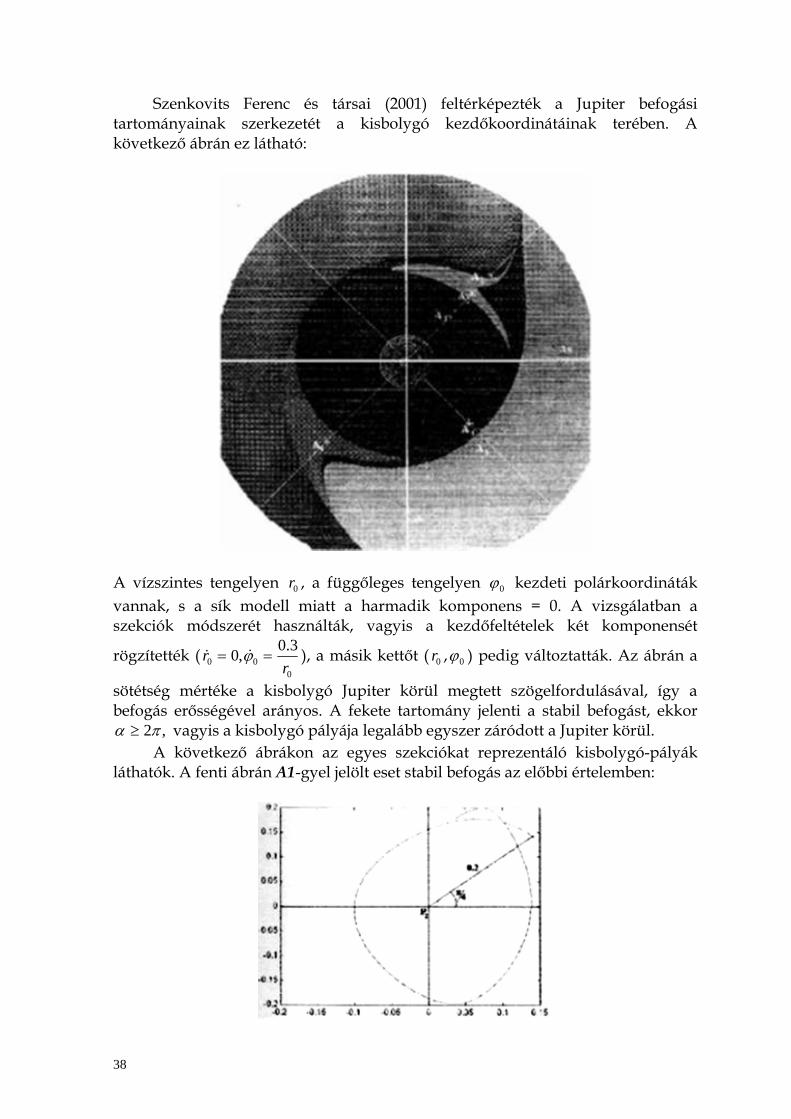
36
Régebben csak azokat a pályákat vizsgálták, melyek kielégítik a „tükör-elvet” (A. E. Roy, M. W. Ovenden, 1955), azaz a kezdőfeltételeik olyan mozgást adnak meg, mely szimmetrikus az x tengelyre és az időre. Így tulajdonképpen csak a befogási pálya felét kell kiszámolni, s a számolt befogási időt megszorozni kettővel. És természetesen minden befogási pályának megfelel egy szökési pálya. Most azonban megvizsgálták a befogási feltételek teljes készletét. Megállapították, hogy valójában minden – a Nap gravitációs hatásköréből érkező - égitest, amelyet befog a bolygó, szükségszerűen átmegy az
ρµ 1.110 −−== xx egyenesen, ahol
...33
13
32
31
+⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛=
µµρ
a bolygó és Lagrange-pont közötti távolság. Ezért az egyetlen szabadsági fok a sebességvektor iránya, így a Jacobi-állandót tulajdonképpen ennek a Nap-bolygó vonallal bezárt
2L
α szöge határozza meg. Tehát adott C és µ értékekre a befogásra vezető kezdőfeltételek lefedik az α−y -sík egy tartományát. Ez a „befogási tartomány”, mely a Nap-Jupiter esetre az alábbi ábrán látható:
A képen a világos háromszögek (∆) a direkt, a sötét körök (•) a retrográd pályákat jelentik, s ütköző pályák választják el ezeket egymástól (A. Brunini, 1996).
37
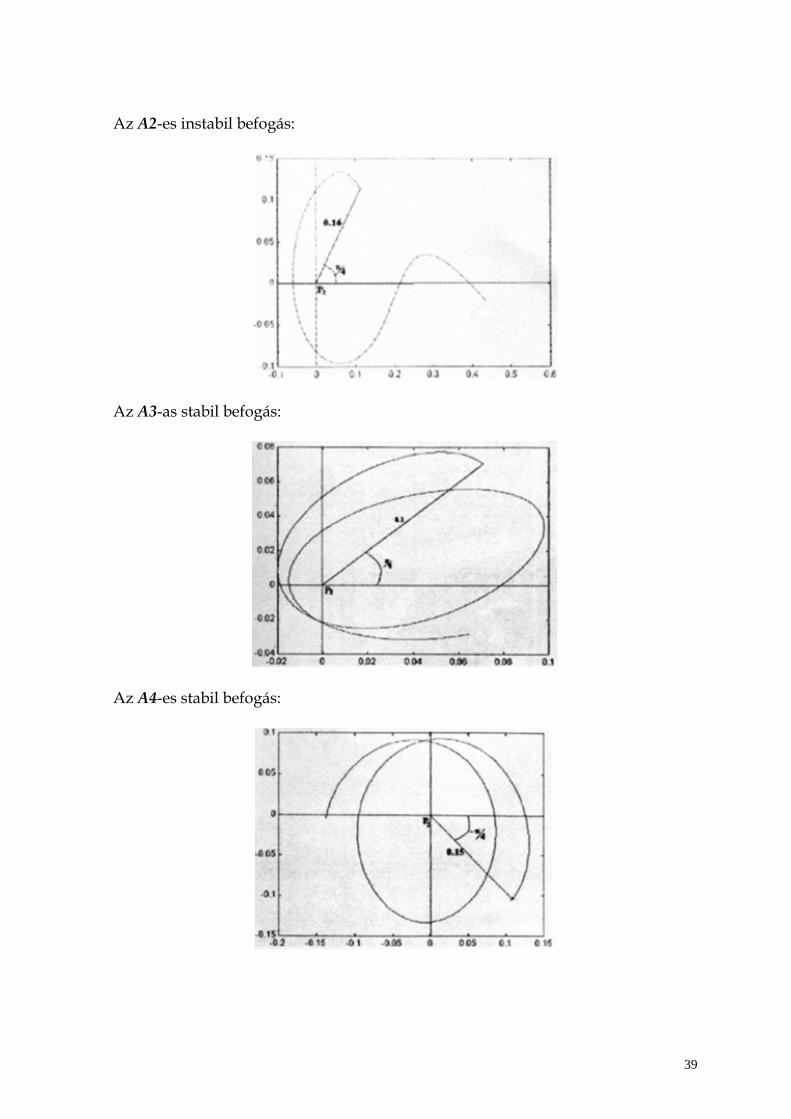
Szenkovits Ferenc és társai (2001) feltérképezték a Jupiter befogási tartományainak szerkezetét a kisbolygó kezdőkoordinátáinak terében. A következő ábrán ez látható:
A vízszintes tengelyen , a függőleges tengelyen 0r 0ϕ kezdeti polárkoordináták vannak, s a sík modell miatt a harmadik komponens = 0. A vizsgálatban a szekciók módszerét használták, vagyis a kezdőfeltételek két komponensét
rögzítették (0
003.0,0
rr == ϕ&& ), a másik kettőt ( ,0r 0ϕ ) pedig változtatták. Az ábrán a
sötétség mértéke a kisbolygó Jupiter körül megtett szögelfordulásával, így a befogás erősségével arányos. A fekete tartomány jelenti a stabil befogást, ekkor
,2πα ≥ vagyis a kisbolygó pályája legalább egyszer záródott a Jupiter körül. A következő ábrákon az egyes szekciókat reprezentáló kisbolygó-pályák láthatók. A fenti ábrán A1-gyel jelölt eset stabil befogás az előbbi értelemben:
38
Az A2-es instabil befogás:
Az A3-as stabil befogás:
Az A4-es stabil befogás:
39
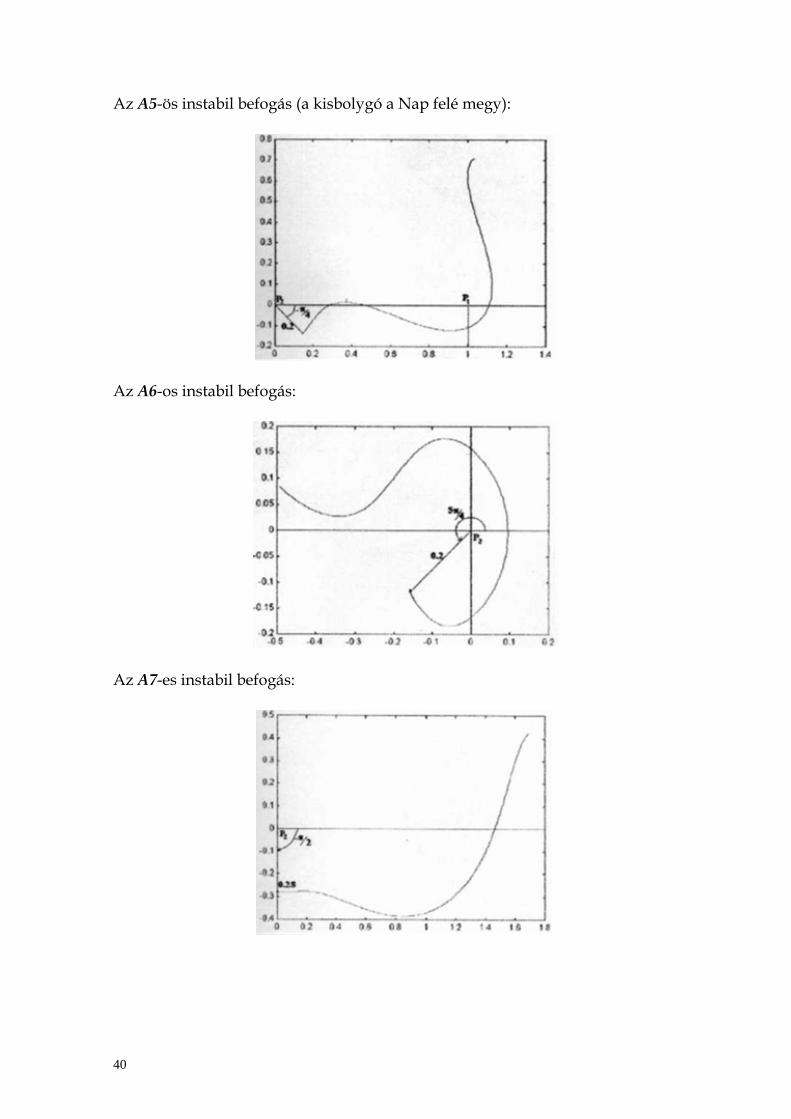
Az A5-ös instabil befogás (a kisbolygó a Nap felé megy):
Az A6-os instabil befogás:
Az A7-es instabil befogás:
40
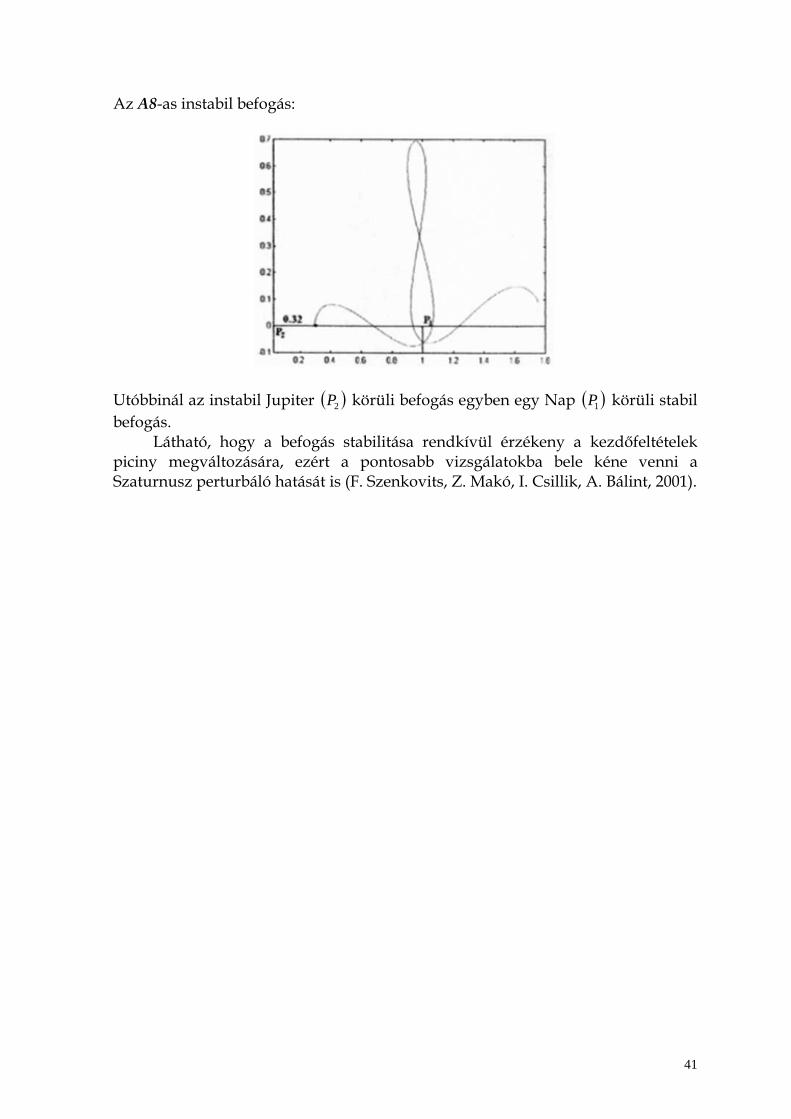
Az A8-as instabil befogás:
Utóbbinál az instabil Jupiter körüli befogás egyben egy Nap ( körüli stabil befogás.
( )2P )1P
Látható, hogy a befogás stabilitása rendkívül érzékeny a kezdőfeltételek piciny megváltozására, ezért a pontosabb vizsgálatokba bele kéne venni a Szaturnusz perturbáló hatását is (F. Szenkovits, Z. Makó, I. Csillik, A. Bálint, 2001).
41

III. Fejezet - A szimuláció
III.1. A negyedrendű Runge-Kutta-módszer A KHTP mozgásegyenleteit numerikus integrálással oldottam meg a különböző kezdeti paraméterekre. A kifejlesztett C++ program két részből áll: az egyik az általános, a másik a korlátozott háromtest-probléma mozgásegyenleteit oldja meg. Az előzőre azért van szükség, mert kirajzolja a tényleges normálteret, így jól követhető rajta az égitestek mozgása, másrészt rögzíteni lehet bármely égitestet, és megfigyelni a többi mozgását hozzá képest. Mindkét rész alapja egy negyedrendű Runge-Kutta-eljárás (RK), mely a beírt egyenleteket a sorfejtés negyedik tagjáig megoldja. Ezen kívül be van építve egy időosztás-finomítás is: ha az egy lépés alatti energia-változás nagyobb, mint 10-16 – égimechanikai mértékegységekben -, akkor nyolcadára csökkenti a beállított lépésközt (ugyanis a rendszer összenergiája első közelítésben állandó). Így nagy sebességek esetén is (amikor két égitest nagyon közel kerül egymáshoz) kellően pontos a számítás. A programban be lehet állítani az integrálás lépésközét, a tömegparamétert, a Jupiter periódusát, a Nap-Jupiter távolságot, az egyes égitestek átmérőjét (az ütközés miatt), a kezdeti hely- és sebesség-koordinátákat, valamint meg lehet adni, hogy milyen koordináta-rendszerben adjuk meg és milyenben ábrázolja az adatokat, illetve átszámol a kettő között (Descartes és polár). Választani lehet, hogy a két tengelyen mit ábrázoljon ( )CEEtvvvrvvvzyx Keplerösszrzyx ,,,,,,,,,,,,,,, ωϕωϕ , és milyen felbontással. A fázisteret (pl. xvx − sík) normál (nem forgó) koordináta-rendszerben ábrázolja, az origója választható. Ezen kívül be vannak építve a Lagrange-pontok koordinátái is, a harmadik testet gombnyomásra beteszi a program ezekbe. A program kellő pontosságát ezek segítségével ellenőriztem: - és –ben stabilan ott maradt a test, , és
-ban csak néhány napig – ahogy ez a valóságban is van. 4L 5L 1L 2L
3L
43

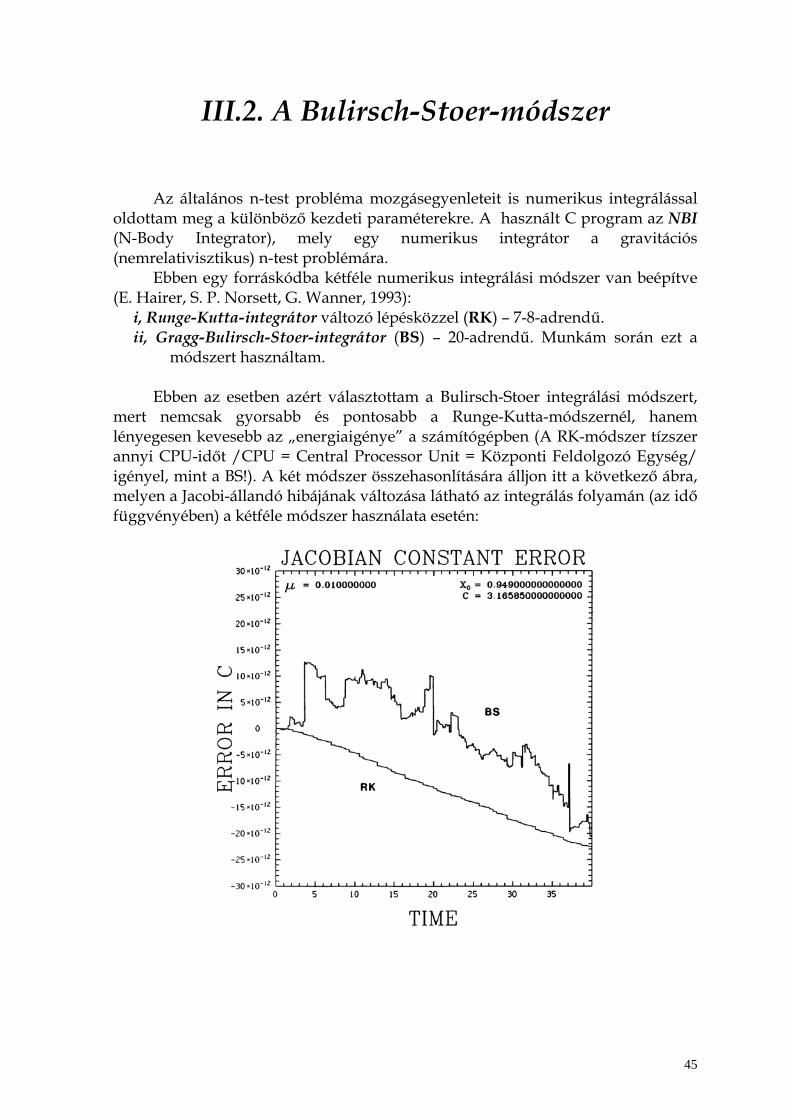
III.2. A Bulirsch-Stoer-módszer Az általános n-test probléma mozgásegyenleteit is numerikus integrálással oldottam meg a különböző kezdeti paraméterekre. A használt C program az NBI (N-Body Integrator), mely egy numerikus integrátor a gravitációs (nemrelativisztikus) n-test problémára. Ebben egy forráskódba kétféle numerikus integrálási módszer van beépítve (E. Hairer, S. P. Norsett, G. Wanner, 1993): i, Runge-Kutta-integrátor változó lépésközzel (RK) – 7-8-adrendű. ii, Gragg-Bulirsch-Stoer-integrátor (BS) – 20-adrendű. Munkám során ezt a
módszert használtam. Ebben az esetben azért választottam a Bulirsch-Stoer integrálási módszert, mert nemcsak gyorsabb és pontosabb a Runge-Kutta-módszernél, hanem lényegesen kevesebb az „energiaigénye” a számítógépben (A RK-módszer tízszer annyi CPU-időt /CPU = Central Processor Unit = Központi Feldolgozó Egység/ igényel, mint a BS!). A két módszer összehasonlítására álljon itt a következő ábra, melyen a Jacobi-állandó hibájának változása látható az integrálás folyamán (az idő függvényében) a kétféle módszer használata esetén:
45
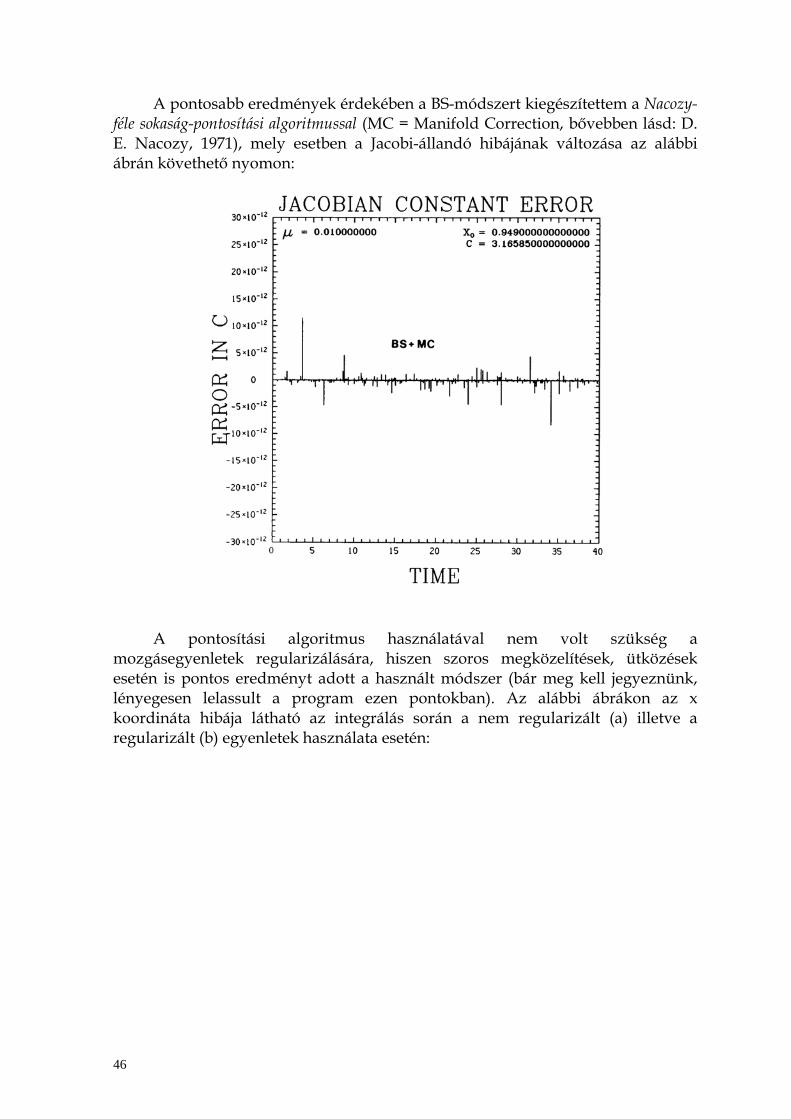
A pontosabb eredmények érdekében a BS-módszert kiegészítettem a Nacozy-féle sokaság-pontosítási algoritmussal (MC = Manifold Correction, bővebben lásd: D. E. Nacozy, 1971), mely esetben a Jacobi-állandó hibájának változása az alábbi ábrán követhető nyomon:
A pontosítási algoritmus használatával nem volt szükség a mozgásegyenletek regularizálására, hiszen szoros megközelítések, ütközések esetén is pontos eredményt adott a használt módszer (bár meg kell jegyeznünk, lényegesen lelassult a program ezen pontokban). Az alábbi ábrákon az x koordináta hibája látható az integrálás során a nem regularizált (a) illetve a regularizált (b) egyenletek használata esetén:
46
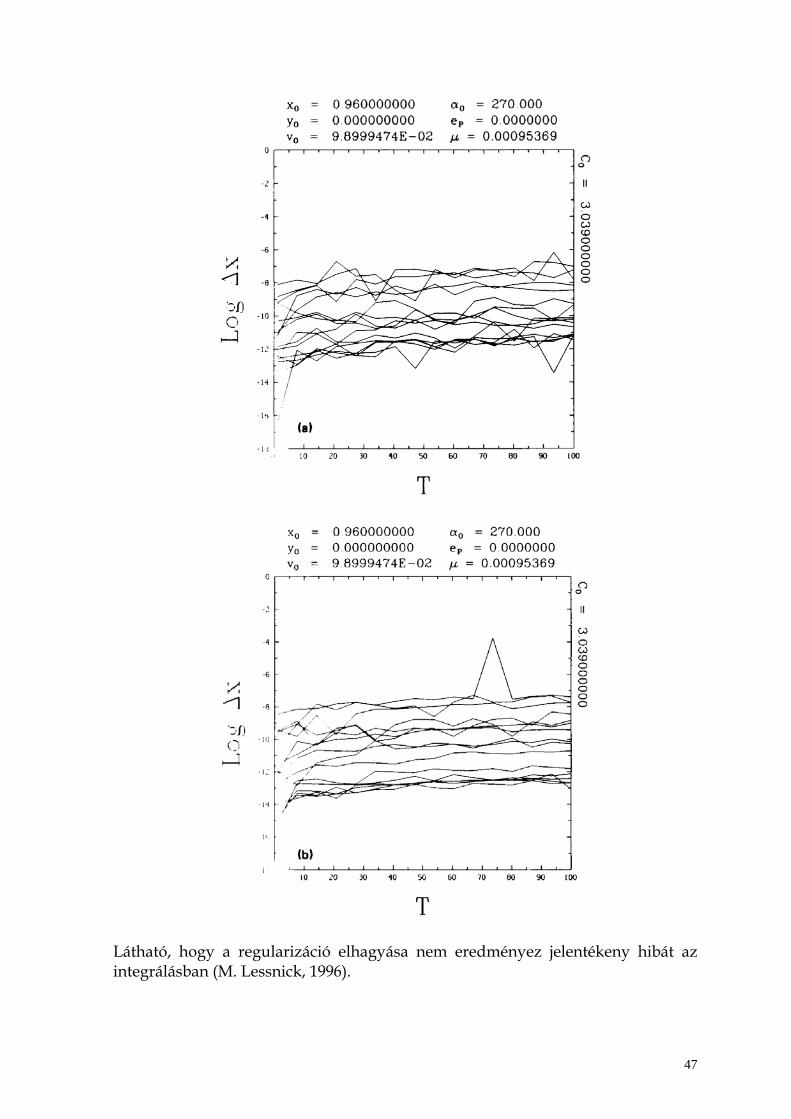
Látható, hogy a regularizáció elhagyása nem eredményez jelentékeny hibát az integrálásban (M. Lessnick, 1996).
47
A programban beállíthatók a következő paraméterek: a használni kívánt módszer [RK vagy BS], az integrálás kezdete [év], az integrálás vége [év], az induló lépésköz [középnap], mekkora időközönként írja ki az adatokat [év], a program belső pontossága [ε], a megengedett minimális lépésköz [év], a bolygók száma [maximum 2100 db], a kisbolygók (próbatestek, a tömegük=0) száma, a kezdőfeltételek típusa [0=pályaelemek vagy 1=heliocentrikus koordináták] valamint az égitestek kezdőfeltételei (és tömegük). A program tartalmazza ezenkívül a Jupiter átmérőjét is, hiszen a befogás vizsgálatakor az ütközéssel is foglalkoznunk kell (egyébként az égitesteket tömegpontként kezeli). Az eredmény-fájlban a következők szerepelnek: minden égitest pályaelemei (a: a pálya fél nagytengelye [cs.e.], e: a pálya excentricitása, i: a pályahajlás [°], ω: a perihélium-hosszúság [°], Ω: a felszálló csomó hossza [°], M: középanomália [°]) és heliocentrikus koordinátái, sebessége ( )dzdydxzyx ,,,,, - minden időpontban (t [középnap]). Ez alól csak a Nap a kivétel, az ő paraméterei a bemenő-fájlban vannak tárolva: 0.0, 0.0, 0.0, 0.0, 0.0, 0.0 és a tömege=1.0 [ ]. Napm Az NBI-t egy másik program futtatta le az adott kezdőfeltételek mátrixán, majd az eredmények szükséges részét egy fájlba mentette. Szintén e program számolta a Kepler-energiát és a kisbolygó Jupiter körüli szögelfordulását. Az ábrák Gnuplot 3.8 ábrázolóprogrammal készültek.
48
IV. Fejezet - Numerikus eredmények
IV.1. Vizsgálatok Runge-Kutta-módszerrel A befogási tartomány szerkezetét a szekciók módszerével térképeztem fel. Rögzítettem a kezdeti és sebesség-koordinátákat (xv yv ,0=xv de más sebességértékek esetén sem tér el jelentősen az eredmény), és változtattam
,0=yvx és
hely-koordinátákat a Jupiter közelében. A sík modell miatt y
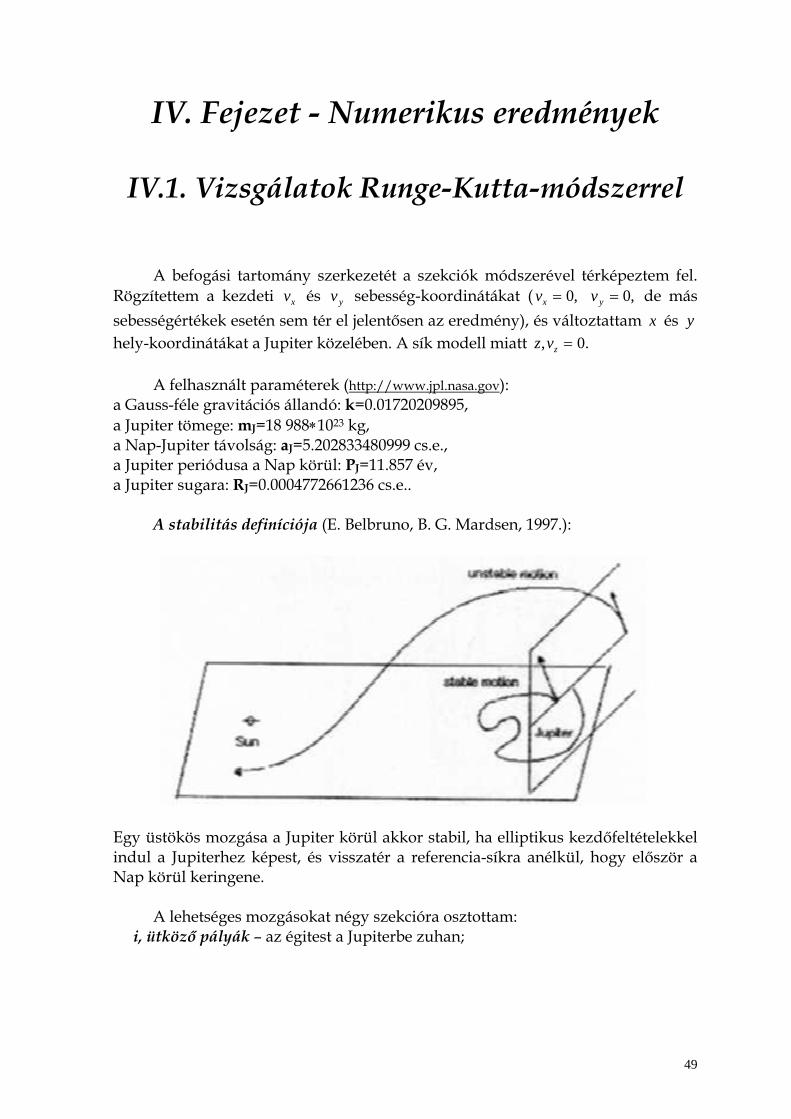
.0, =zvz A felhasznált paraméterek (http://www.jpl.nasa.gov): a Gauss-féle gravitációs állandó: k=0.01720209895, a Jupiter tömege: mJ=18 988∗1023 kg, a Nap-Jupiter távolság: aJ=5.202833480999 cs.e., a Jupiter periódusa a Nap körül: PJ=11.857 év, a Jupiter sugara: RJ=0.0004772661236 cs.e.. A stabilitás definíciója (E. Belbruno, B. G. Mardsen, 1997.):
Egy üstökös mozgása a Jupiter körül akkor stabil, ha elliptikus kezdőfeltételekkel indul a Jupiterhez képest, és visszatér a referencia-síkra anélkül, hogy először a Nap körül keringene. A lehetséges mozgásokat négy szekcióra osztottam: i, ütköző pályák – az égitest a Jupiterbe zuhan;
49
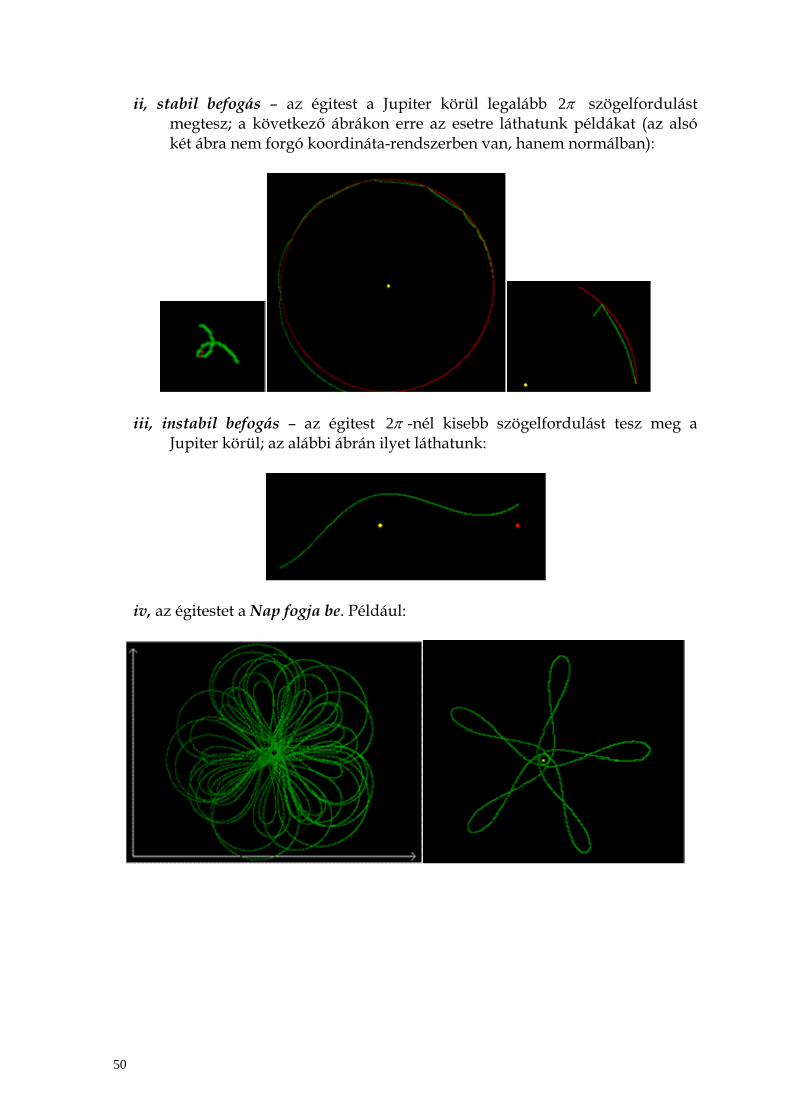
ii, stabil befogás – az égitest a Jupiter körül legalább π2 szögelfordulást megtesz; a következő ábrákon erre az esetre láthatunk példákat (az alsó két ábra nem forgó koordináta-rendszerben van, hanem normálban):
iii, instabil befogás – az égitest π2 -nél kisebb szögelfordulást tesz meg a
Jupiter körül; az alábbi ábrán ilyet láthatunk:
iv, az égitestet a Nap fogja be. Például:
50
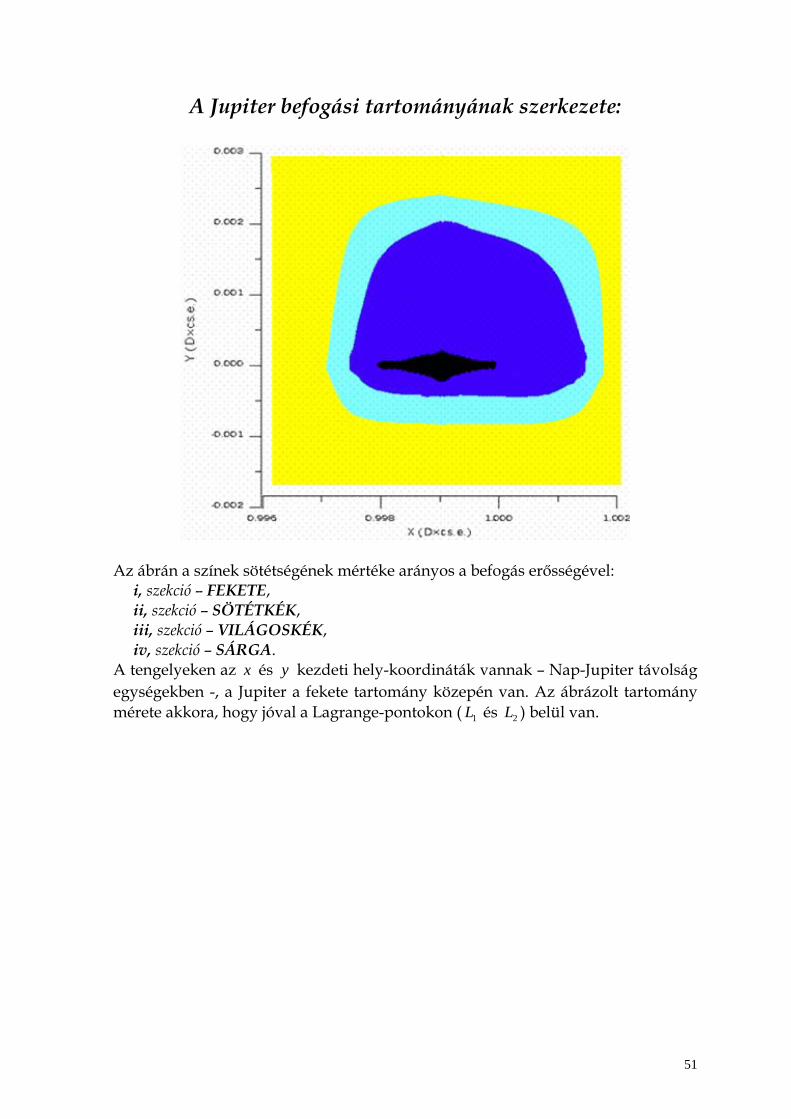
A Jupiter befogási tartományának szerkezete:
Az ábrán a színek sötétségének mértéke arányos a befogás erősségével: i, szekció – FEKETE, ii, szekció – SÖTÉTKÉK, iii, szekció – VILÁGOSKÉK, iv, szekció – SÁRGA. A tengelyeken az x és kezdeti hely-koordináták vannak – Nap-Jupiter távolság egységekben -, a Jupiter a fekete tartomány közepén van. Az ábrázolt tartomány mérete akkora, hogy jóval a Lagrange-pontokon ( és ) belül van.
y
1L 2L
51

IV.2. Vizsgálatok Bulirsch-Stoer-módszerrel A Jupiter befogási tartományának feltérképezését ez esetben is a szekciók módszerével végeztem. Itt azonban nagyobb tartományon, nagyobb pontossággal és lényegesen nagyobb felbontásban. A nagybolygók (Jupiter, Szaturnusz) pályaelemei (forrásuk: Jet Propulsion Laboratory’s Digital Ephemeris 403, http://www.jpl.nasa.gov) szerepelnek a programban, így azokat három dimenzióban vizsgáltam. A stabilitás definíciója megegyezik az eddigivel. Azt azonban, hogy mettől meddig tart a befogás, a kisbolygó Jupiterhez képesti Kepler-energiája dönti el:
( )[ ] ,sincos21 2
22
rmkuvrE J
Kepler −−+= ϕϕ&
ahol a Jupiter tömege. Ugyanis a befogódó égitest Kepler-energiája a befogó testhez (Jupiter) képest negatívvá válik a befogás pillanatában. A befogásnak akkor van vége, ha a Kepler-energia ismét pozitívvá válik (F. Szenkovits, Z. Makó, I. Csillik, A. Bálint, 2001).
Jm
Három égitest (Nap-nagybolygó-kisbolygó) esetén az n-test probléma mozgásegyenletei egyenértékűek az elliptikus korlátozott háromtest-probléma egyenleteivel (M. J. Valtonen, 1988). Az ábrákon az egyes szekciókat különböző színű görbék határolják, ezek az ún. „izoanguláris” vonalak, hiszen azonos szögelfordulásoknak felelnek meg. Az x tengelyen a kisbolygó kezdeti (heliocentrikus) koordinátája [cs.e.], az y tengelyen a kezdeti (heliocentrikus) koordinátája [cs.e.], a z tengelyen pedig a Jupiter körüli
0x
0yα szögelfordulása [rad] található.
Először az előző eredményekkel való összehasonlításképpen a Jupitert (síkbeli) körpályán indítottam el, így megfelel a kör KHTP esetének. Eredménye a következő ábrán látható:
53
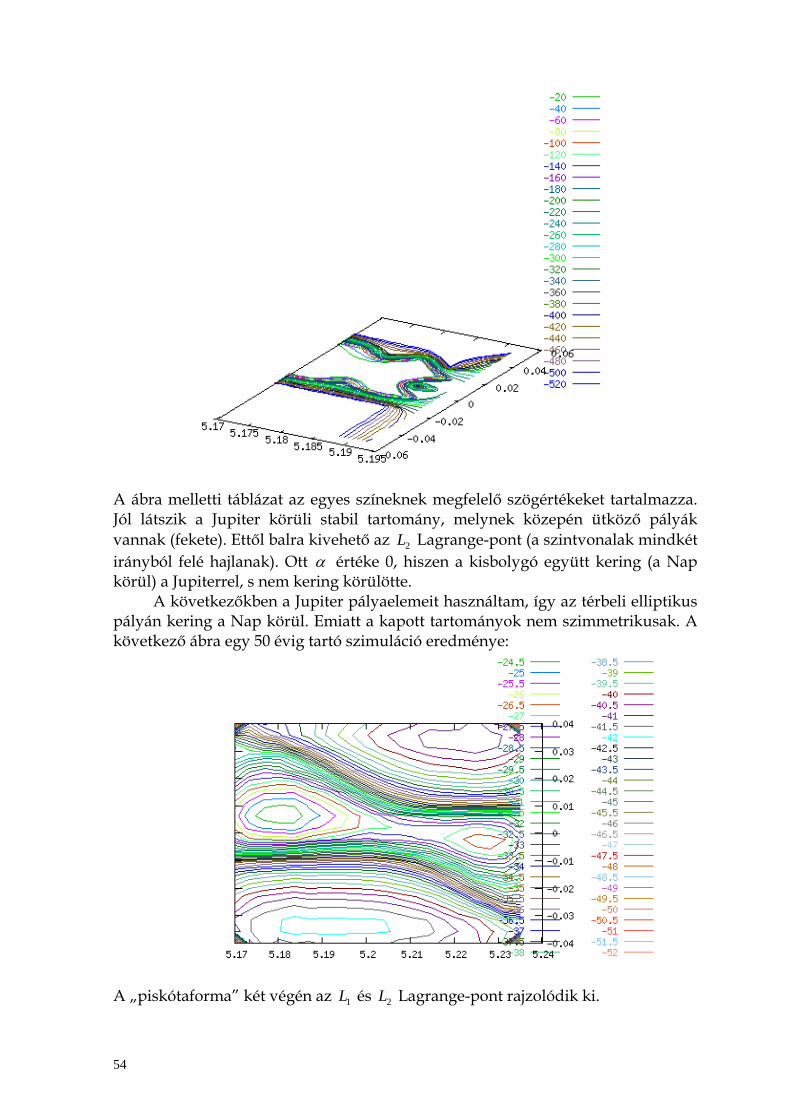
A ábra melletti táblázat az egyes színeknek megfelelő szögértékeket tartalmazza. Jól látszik a Jupiter körüli stabil tartomány, melynek közepén ütköző pályák vannak (fekete). Ettől balra kivehető az Lagrange-pont (a szintvonalak mindkét irányból felé hajlanak). Ott
2Lα értéke 0, hiszen a kisbolygó együtt kering (a Nap
körül) a Jupiterrel, s nem kering körülötte. A következőkben a Jupiter pályaelemeit használtam, így az térbeli elliptikus pályán kering a Nap körül. Emiatt a kapott tartományok nem szimmetrikusak. A következő ábra egy 50 évig tartó szimuláció eredménye:
A „piskótaforma” két végén az és Lagrange-pont rajzolódik ki. 1L 2L
54
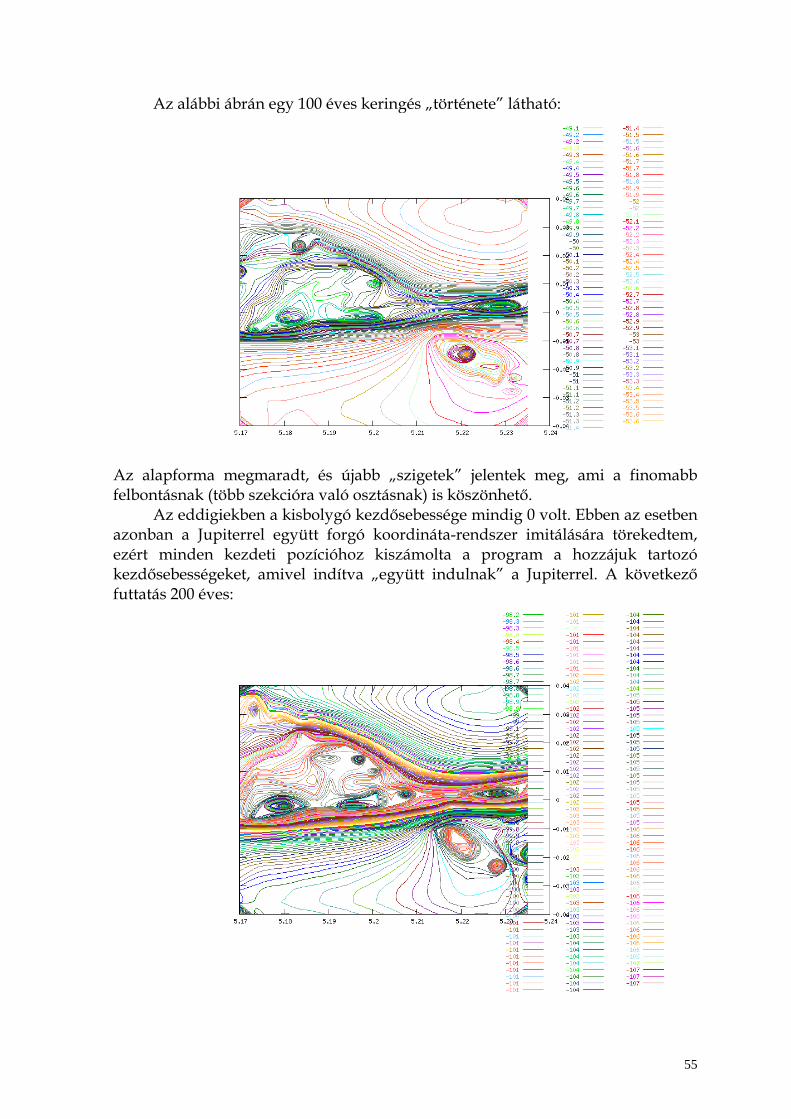
Az alábbi ábrán egy 100 éves keringés „története” látható:
Az alapforma megmaradt, és újabb „szigetek” jelentek meg, ami a finomabb felbontásnak (több szekcióra való osztásnak) is köszönhető. Az eddigiekben a kisbolygó kezdősebessége mindig 0 volt. Ebben az esetben azonban a Jupiterrel együtt forgó koordináta-rendszer imitálására törekedtem, ezért minden kezdeti pozícióhoz kiszámolta a program a hozzájuk tartozó kezdősebességeket, amivel indítva „együtt indulnak” a Jupiterrel. A következő futtatás 200 éves:
55
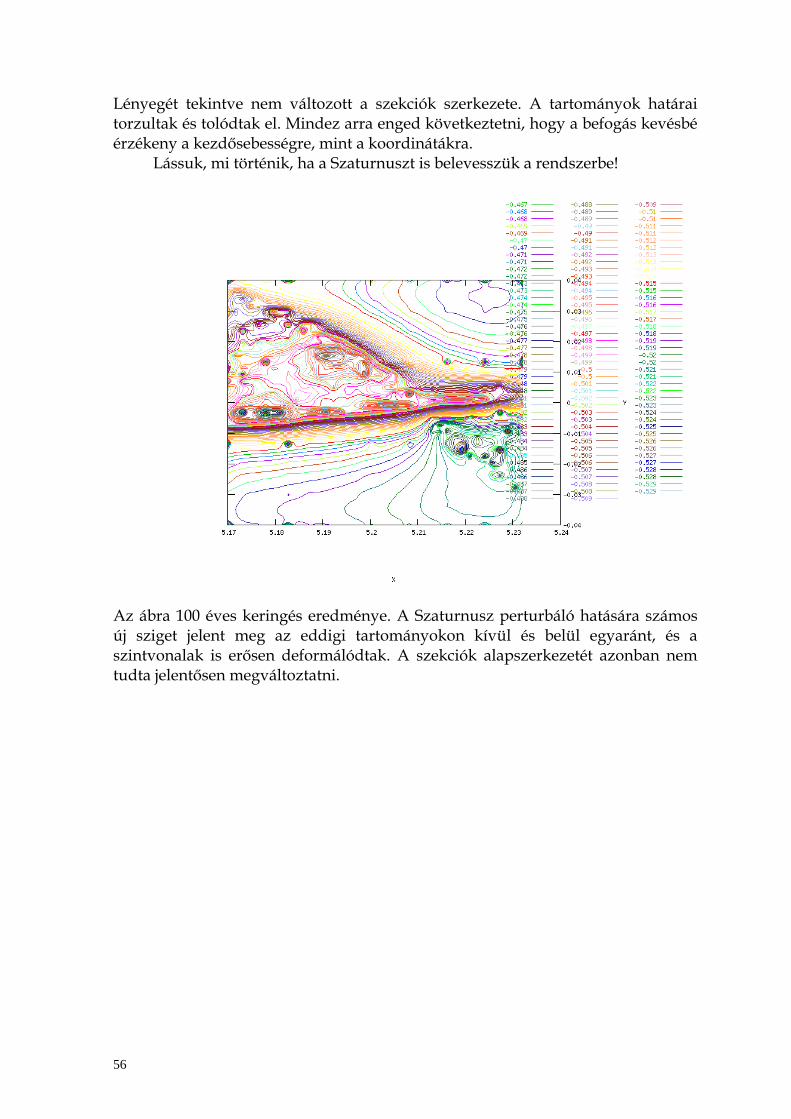
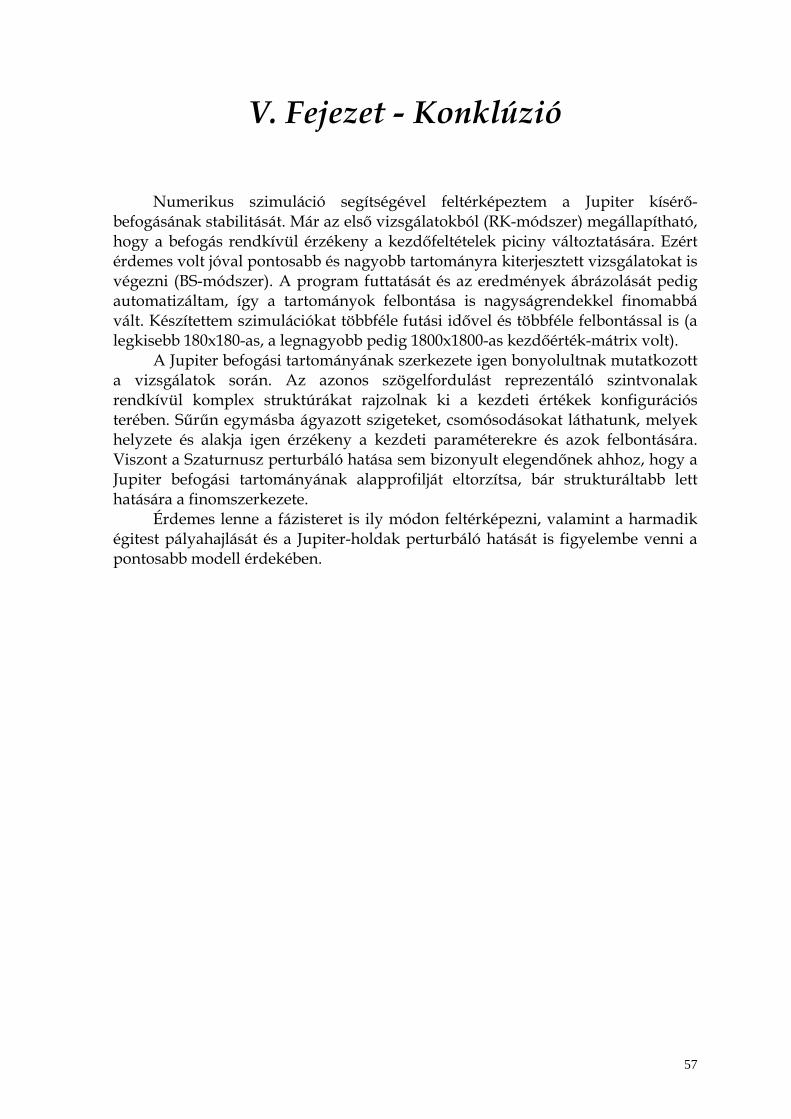
Lényegét tekintve nem változott a szekciók szerkezete. A tartományok határai torzultak és tolódtak el. Mindez arra enged következtetni, hogy a befogás kevésbé érzékeny a kezdősebességre, mint a koordinátákra. Lássuk, mi történik, ha a Szaturnuszt is belevesszük a rendszerbe!
Az ábra 100 éves keringés eredménye. A Szaturnusz perturbáló hatására számos új sziget jelent meg az eddigi tartományokon kívül és belül egyaránt, és a szintvonalak is erősen deformálódtak. A szekciók alapszerkezetét azonban nem tudta jelentősen megváltoztatni.
56
V. Fejezet - Konklúzió Numerikus szimuláció segítségével feltérképeztem a Jupiter kísérő-befogásának stabilitását. Már az első vizsgálatokból (RK-módszer) megállapítható, hogy a befogás rendkívül érzékeny a kezdőfeltételek piciny változtatására. Ezért érdemes volt jóval pontosabb és nagyobb tartományra kiterjesztett vizsgálatokat is végezni (BS-módszer). A program futtatását és az eredmények ábrázolását pedig automatizáltam, így a tartományok felbontása is nagyságrendekkel finomabbá vált. Készítettem szimulációkat többféle futási idővel és többféle felbontással is (a legkisebb 180x180-as, a legnagyobb pedig 1800x1800-as kezdőérték-mátrix volt). A Jupiter befogási tartományának szerkezete igen bonyolultnak mutatkozott a vizsgálatok során. Az azonos szögelfordulást reprezentáló szintvonalak rendkívül komplex struktúrákat rajzolnak ki a kezdeti értékek konfigurációs terében. Sűrűn egymásba ágyazott szigeteket, csomósodásokat láthatunk, melyek helyzete és alakja igen érzékeny a kezdeti paraméterekre és azok felbontására. Viszont a Szaturnusz perturbáló hatása sem bizonyult elegendőnek ahhoz, hogy a Jupiter befogási tartományának alapprofilját eltorzítsa, bár strukturáltabb lett hatására a finomszerkezete. Érdemes lenne a fázisteret is ily módon feltérképezni, valamint a harmadik égitest pályahajlását és a Jupiter-holdak perturbáló hatását is figyelembe venni a pontosabb modell érdekében.
57

Irodalomjegyzék
Astakhov, S. A., Burbanks, A. D., Wiggins, S., Farrelly, D.: 2003, „Chaos-assisted capture of irregular moons”., Nature, 423.
Belbruno, E., Mardsen, B. G.: 1997, „Resonance hopping in comets”., The Astronomical Journal, 113./4., pp. 1433-1444.
Brunini, A.: 1996, „On the satellite capture problem”., Celestial Mechanics, 64., pp. 79-92.
Carusi, A., Pozzi, E., Valsecchi, G. B.: 1979, Dynamics of the Solar System, D. Reidel, Dordrecht, 185.
Érdi, B.: 2001, A Naprendszer dinamikája, ELTE Eötvös Kiadó, Budapest Érdi, B.: 1996, Égi mechanika, Nemzeti Tankönyvkiadó, Budapest Fröhlich, G.: 2003, „Befogás a korlátozott háromtest-problémában”.,
OTDK dolgozat, ELTE TTK, Budapest Hairer, E., Norsett, S. P., Wanner, G.: 1993, Solving Ordinary Differential
Equations, Second Revised Edition Hill, G. W.: 1878, „Researches in the Lunar Theory”., American Journal of
Mathematics, 1./5., pp. 129-245. Jaffé, C., Ross, S. D., Lo, M. W., Marsden, J., Farrelly, D., Uzer, T.: 2002,
„Statistical Theory of Asteroid Escape Rates”., Physical Review Letters, 89./1.
Koon, W. S., Lo, M. W., Marsden, J. E., Ross, S. D.: 2001, „Resonance and capture of Jupiter comets”., Celestial Mechanics and Dynamical Astronomy, 81., pp. 27-38.
Kuiper, G. P.: 1961, Planets and Satellites, University of Chicago Press, 575.
Lessnick, M.: 1996, „Stability Analysis of Symplectic Integration Schemes”., Ph.D. Dissertation, Univ. of California, Los Angeles, Dept. of Mathematics
Marchal, A.: 1990, „The three-body problem”., in: Studies in Astronautics, Elsevier
Moons, M.: 1996, Celestial Mechanics and Dynamical Astronomy, 65./175. Moons, M., Morbidelli, A.: 1993, „The Main Mean Motion
Commensurabilities in the Planar Circular and Elliptic Problem”., Celestial Mechanics and Dynamical Astronomy, 57., pp. 99-108.
Morbidelli, A.: 1993, Celestial Mechanics and Dynamical Astronomy, 55./101.
Morbidelli, A., Giorgilli, A.: 1990, „On the Dynamics in the Asteroid Belt”., Celestial Mechanics and Dynamical Astronomy, 47., pp.145-204.
Moulton, F. R.: 1914, An introduction to Celestial Mechanics, The Macmillan Company, New York
59
Murison, M. A.: 1989a, „On an efficient and accurate method to integrate restricted three-body orbits”., The Astronomical Journal, 97./5.
Murison, M. A.: 1989b, „The fractal dynamics of satellite capture in the circular RTBP”., The Astronomical Journal, 98./6., pp. 2346-2386.
Murray, C., Dermott, S. F.: 1995, Solar System Dynamics, Univ. of London Publ.
Nacozy, D. E.: 1971, Astrophys. Space Sci., 14./40. Ronan, C.: 1998, Megmagyarázzuk a Világegyetemet, Helikon Kiadó Roy, A. E.: 1988, Orbital Motion, Institute of Physics Publishing, Bristol Roy, A. E., Ovenden, M. W.: 1955, Monthly National Royal Astronomical
Society, 115., 296. Szebehely, Gy.: 1967, Theory of Orbits, Academic Press, New York,
London Szenkovits, F., Makó, Z., Csillik, I., Bálint, A.: 2001, „Capture model in
the restricted three-body problem”., Babes-Bolyai University, Kolozsvár
Valtonen, M. J.: 1988, The Few Body Problem, Kluwer, Dordrecht Wisdom, J.: 1987, „Chaotic Dynamics of the Solar System”., Icarus, 72.,
pp. 241-275. http://www.geom.umn.edu/~megraw/CR3BP_html http://www.jpl.nasa.gov http://www.physics.cornell.edu/sethna/teaching/sss/jupiter/Web/
/Rest3Bdy
60