Embed Size (px)
Citation preview
งานประชมวชาการระดบชาต งานวจยและพฒนาเชงประยกต ครงท 11
นวตกรรมและเทคโนโลย 4.0 เพอการพฒนาทองถนและประเทศไทยอยางยงยน
วนท 4 - 7 มถนายน พ.ศ. 2562
ณ บานสวนคณตา กอลฟ แอนด รสอรท จงหวดอบลราชธาน
รวมจดโดย
ECTI-CARD 2019

สารบญ
สาสนจากอธการบดมหาวทยาลยราชภฏอบลราชธาน ............................................................. 1
สาสนจากนายกสมาคม ECTI ................................................................................................... 2
สาสนจากคณบดคณะเทคโนโลยอตสาหกรรม ......................................................................... 3
CONFERENCE COMMITTEE ................................................................................................. 5
ขอมลทวไป................................................................................................................................ 8
สถานทจดงาน ECTI-CARD 2019 ............................................................................................ 9
TECHNICAL TRACKS AND SPECIAL SESSIONS ................................................................. 10
กาหนดการสาหรบการประชม ECTI-CARD 2019 .................................................................. 11
ตารางการนาเสนอบทความ ..................................................................................................... 13
KEYNOTE SPEAKERS ............................................................................................................. 17
ABSTRACT .............................................................................................................................. 19

สาสนจากอธการบดมหาวทยาลยราชภฏอบลราชธาน
วสยทศนหนงของมหาวทยาลยราชภฏอบลราชธาน คอ ความสามารถ
ในการจดการศกษา วจย และ บรการวชาการเพอพฒนาทองถนในเขตอสาน
ตะวนออกและอนภมภาคลมนาโขง และในพนธกจหนงทตองดาเนนการ
คอ วจยและพฒนานวตกรรมเพอการพฒนาชมชนทองถน โดยสอดคลอง
กบยทธศาสตรท 3 ซงคณะเทคโนโลยอสาหกรรม เปนหนงในคณะฯ ทม
ความสามารถในสรางงานวจยและพฒนานวตกรรม ไดเปนอยางด ในการจด
งานการประชมวชาการ ECTI-CARD 2019 คร งท 11 ในหวขอ “นวตกรรม
รองศาสตราจารยธรรมรกษ ละอองนวล
อธการบดมหาวทยาลยราชภฏอบลราชธาน
และเทคโนโลย 4.0 เพอการพฒนาทองถนและประเทศไทยอยางยงยน” เปนการตอกยาถงความเปน
มหาวทยาลยเพอการพฒนาทองถนอยางยงยน และเปนไปตามนโยบายและยทธศาสตรของมหาวทยาลย
ซงทางคณะเทคโนโลยอตสาหกรรมไดดาเนนการอยางสอดคลองกบนโยบายของทางมหาวทยาลยฯ ท
ไดวางไว ขอใหการจดงานประชมวชาการฯ ในครงน สาเรจลลวงตามวตถประสงคทวางไวทกประการ
และหวงเปนอยางยงวาทกทานทมารวมงานในครงน มความสขในการประชม เหมอนกบวสยทศนของ
มหาวทยาลยทวา “มหาวทยาลยราชภฏอบลราชธาน เปนมหาวทยาลยแหงความสข”
1ECTI-CARD 2019
สาสนจากนายกสมาคม ECTI
การประชมวชาการ ECTI-CARD เปนการประชมวชาการระดบชาตท
มงเปาผลงานวจยทเปนการประยกตวศวกรรมไฟฟา คอมพวเตอร และ
เทคโนโลยสารสนเทศ ททาใหใชงานไดจรงและเปนประโยชนกบประชาชน
งานประชมวชาการน เรมจดขนโดยกรรมการของสมาคม ECTI ครงแรก
ศาสตราจารย ดร.โกสนทร จานงไทย
นายกสมาคม ECTI
ขอตอนรบนกวจยทกทานสการประชมวชาการ
งานวจย และพฒนาเชงประยกต ครงท 11 (ECTI-CARD 2019)
ณ จงหวดอบลราชธาน เมอ งแหงนกปราชญ
จดขนทมหาวทยาลยเกษตรศาสตร ในป ค.ศ. 2009 โดยการนาของ อ.อนนต ผลเพม และไดเวยนกนจด
ตอมาในจงหวดตาง ๆ ทวประเทศไทยโดยมหาวทยาลยตาง ๆ ไดแก มหาวทยาลยเทคโนโลยมหานคร
(2010) มหาวทยาลยรงสต (2011) มหาวทยาลยเทคโนโลยราชมงคลธญญบร (2012) มหาวทยาลย
เทคโนโลยสรนาร (2013) มหาวทยาลยเทคโนโลยราชมงคลลานนา (2014) มหาวทยาลยเทคโนโลย
ราชมงคลศรวชย (2015) มหาวทยาลยเทคโนโลยราชมงคลพระนครและสถาบนมาตรวทยา (2016)
มหาวทยาลยราชภฏอดรธานและมหาวทยาลยราชภฏสกลนครและมหาวทยาลยราชภฏเลย (2017) และ
มหาวทยาลยนเรศวร (2018)
ครงน นบเปนครงท 11 ซงมหาวทยาลยราชภฏอบลราชธาน โดย ผชวยศาสตราจารยสระเจตน
ออนฤทธ คณบดคณะเทคโนโลยอตสาหกรรม ไดใหเกยรตเปนประธานจดงานรวมกบสมาคม ECTI
ภายใตหวขอ “นวตกรรมและเทคโนโลย 4.0 เพอการพฒนาทองถนและประเทศไทยอยางยงยน”
ในปน คณะผจดงานไดเลอกโรงแรมบานสวนคณตา กอลฟ แอนด รสอรท เปนสถานทจดงาน
โดยโรงแรมน มทตงอยนอกเมองอบลราชธานฝงวารนชาราบและลอมรอบดวยสนามกอลฟและธรรมชาต
ทาใหมนใจไดวา ผเขารวมประชมจะมความสขในการรายงานผลงานวจย อภปรายองคความรใหม ๆ ทนา
มาแลกเปลยนกน และเกดความคดใหม ๆ ในเชงนวตกรรมจากสงแวดลอมทสวยงามและบรรยากาศท
เปนกนเอง นอกจากนน ผเขารวมประชมควรใชโอกาสน ในการเรยนรและศกษาขนบธรรมเนยมประเพณ
และวฒนธรรมของจงหวดอบลราชธาน
ในนามของสมาคม ECTI กระผมขอแสดงความขอบคณกรรมการผจดทกทาน คณะทางานจาก
ราชภฏอบลราชธาน ผแตงบทความวจย ผตรวจบทความวจย และทกทานททางานเกยวของกบการ
จดงานน ขอใหการประชมวชาการ ECTI-CARD 2019 ประสบความสาเรจและทาใหผเขารวมประชม
ทกทานมความสขกบการเรยนรวชาการททนสมยใหม ๆ และเรยนรวฒนธรรมของชาวอบลราชธาน กระผม
หวงเปนอยางยงวาจะไดเจอกบผเขารวมประชมทกทานท ECTI-CARD ทก ๆ ปตลอดไป
2 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11

สาสนจากคณบดคณะเทคโนโลยอตสาหกรรม
“การพฒนาทองถนถอเปนหวใจสาคญของยทธศาสตรคณะเทคโนโลย
อตสาหกรรม เนองดวยหากทองถนมการพฒนาอยางยงยน พนทตาง ๆ กจะ
เกดความเจรญทงทางดานเศรษฐกจ เทคโนโลย วฒนธรรม และอน ๆ”
ในการจดการประชมวชาการ ECTI-CARD 2019 ในหวขอ “นวตกรรม
และเทคโนโลย 4.0 เพอการพฒนาทองถนและประเทศไทยอยางยงยน”
เปนไปตามยทธศาสตรของคณะเทคโนโลยอตสาหกรรม และมหาวทยาลย
ผชวยศาสตราจารยสระเจตน ออนฤทธ
คณบดคณะเทคโนโลยอตสาหกรรม
มหาวทยาลยราชภฏอบลราชธาน
ราชภฏอบลราชธาน โดยไดรบความไววางใจจากทาง สมาคมวชาการไฟฟา อเลกทรอนกส คอมพวเตอร
โทรคมนาคมและสารสนเทศแหงประเทศไทย หรอ Electrical Engineering/Electronics, Computer,
Telecommunications and Information Technology Association of Thailand (ECTI Thailand)
มจดมงหมายหลกของการจดงานเพอรวบรวมผลงานวจย งานนวตกรรม สงประดษฐ และการพฒนา
เชงประยกต รวมถงเพอเปดโอกาสใหนกวจย ผพฒนา ผใชงาน และหนวยงานตาง ๆ ไดมโอกาสแลกเปลยน
เรยนรทางวชาการรวมกน อกท งสามารถนาผลงานทตพมพไปพฒนาตอยอดในระดบทองถน ระดบสากล
และพฒนาสผลตภณฑในเชงพาณชยได
ทางคณะเทคโนโลยอตสาหกรรม มความยนดเปนอยางยงทไดรบเกยรตในการจดงานในครงน
และทางคณะฯ ขอตอนรบคณาจารย นกวจย นกศกษา และผทมสวนเกยวของทกทาน เขาสเมอง
อบลราชธาน ซงไดชอวา “อบลเมองดอกบวงาม แมนาสองส มปลาแซบหลาย หาดทรายแกงหน ถนไทย
นกปราชญ ทวยราษฎรใฝธรรม งามลาเทยนพรรษา ผาแตมกอนประวตศาสตร ฉลาดภมปญญาทองถน
ดนแดนอนสาวรยคนดศรอบล”
ขอขอบคณ รองศาสตราจารยธรรมรกษ ละอองนวล อธการบดมหาวทยาลยราชภฏอบลราชธาน
ทใหการสนบสนนในทกดานของการจดงาน และขอขอบคณ ศาสตราจารย ดร.โกสนทร จานงไทย
นายกสมาคม ECTI ทใหโอกาสทางคณะฯ ในการจดประชมวชาการ ECTI-CARD 2019 หวงเปนอยางยง
วาทกทานจะไดรบความประทบใจในการจดงานครงน และอยในความทรงจาของทกทานตลอดไป
3ECTI-CARD 2019

4 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
Conference Committee
Advisory Chairs
รศ.ธรรมรกษ ละอองนวล อธการบดมหาวทยาลยราชภฏอบลราชธาน รศ. ดร.อนนต ผลเพม มหาวทยาลยเกษตรศาสตร
Honorary Chairs
รศ. ดร.วระเชษฐ ขนเงน สถาบนเทคโนโลยพระจอมเกลาเจาคณทหารลาดกระบง ผศ. พ.อ.ต.ภทระ เกดอนทร มหาวทยาลยราชภฏอบลราชธาน
General Chairs
ผศ.สระเจตน ออนฤทธ มหาวทยาลยราชภฏอบลราชธาน ศ. ดร.โกสนทร จานงไทย ECTI, มหาวทยาลยเทคโนโลยพระจอมเกลาธนบร รศ. ดร.สนชย กมลภวงศ ECIT, มหาวทยาลยสงขลานครนทร รศ. ดร.ชานนท วรสาร สถาบนเทคโนโลยพระจอมเกลาเจาคณทหารลาดกระบง
Technical Program Chairs
ผศ. ดร.อภรกษ จนทรสราง มหาวทยาลยเกษตรศาสตร ดร.ชยวฒน เจษฎาจนต สถาบนมาตรวทยาแหงชาต ผศ.เอกรนทร วทญญเลศสกล มหาวทยาลยราชภฏอบลราชธาน
Technical Program Committees
ผศ. ดร.จงลกษณ พาหะชา มหาวทยาลยพะเยา รศ. ดร.วนย ใจกลา สถาบนเทคโนโลยพระจอมเกลาเจาคณทหารลาดกระบง รศ. ดร.ชานนท วรสาร สถาบนเทคโนโลยพระจอมเกลาเจาคณทหารลาดกระบง รศ. ดร.พระยศ แสนโภชน มหาวทยาลยเกษตรศาสตร รศ. ดร.ศราวธ ชยมล มหาวทยาลยขอนแกน รศ. ดร.เอกรฐ บญเชยง มหาวทยาลยเชยงใหม ผศ. ดร.อภรกษ จนทรสราง มหาวทยาลยเกษตรศาสตร รศ. ดร.พรชย พฤกษภทรานนต มหาวทยาลยสงขลานครนทร ดร.ศรญญา ปะสะกว สถาบนมาตรวทยาแหงชาต
5ECTI-CARD 2019
รศ. ดร.ยศชนน วงศสวสด มหาวทยาลยมหดล ผศ .ดร.ประสทธ นางทน สถาบนเทคโนโลยปทมวน
Special Session Chairs
ชยพนธ ประการะพนธ มหาวทยาลยราชภฏอดรธาน ดร.วณา จนทรรชชกล สถาบนมาตรวทยาแหงชาต ผศ. ดร.กฤษฏา ยงขยน มหาวทยาลยเทคโนโลยราชมงคลลานนา ธญลกษม ดกา มหาวทยาลยราชภฏอบลราชธาน
Registration Chairs
อรอมา เนยมหอม มหาวทยาลยราชภฏอบลราชธาน รชฏาพร ศรสระ มหาวทยาลยราชภฏอบลราชธาน
Finance Chairs
ผศ. ดร.ยงรกษ อรรถเวชกล มหาวทยาลยแมโจ ดร.กญจนา พฒนวรพนธ มหาวทยาลยกรงเทพ ดวงตา ยตวน มหาวทยาลยราชภฏอบลราชธาน
Publication Chairs
ปยวทย เอยมพร ง มหาวทยาลยราชภฏอบลราชธาน บรบรณ ดกา มหาวทยาลยราชภฏอบลราชธาน
Publicities
ดร.นฤดม นวลขาว สถาบนมาตรวทยาแหงชาต
Secretary
ศรมาเมธวด ศรธนตรา มหาวทยาลยธรรมศาสตร ปยภทร โกษาพนธ มหาวทยาลยราชภฏอบลราชธาน
6 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
Steering Committees of ECTI-CARD
ศ. ดร.โกสนทร จานงไทย มหาวทยาลยเทคโนโลยพระจอมเกลาธนบร ผศ. ดร.อภรกษ จนทรสราง มหาวทยาลยเกษตรศาสตร รศ. ดร.อนนต ผลเพม มหาวทยาลยเกษตรศาสตร ผศ. กฤษดา ยงขยน มหาวทยาลยเทคโนโลยราชมงคลลานนา ผศ. ดร.ณฐพงศ พนธนะ มหาวทยาลยเทคโนโลยราชมงคลพระนคร ดร.ชยวฒน เจษฏาจนต สถาบนมาตรวทยาแหงชาต ดร.ศกดดา พรรณไวย บรษท ทางยกระดบดอนเมองจากด (มหาชน) ชยพนธ ประการะพนธ มหาวทยาลยราชภฏอดรธาน ผศ. ดร.สรเชษฐ กานตประชา มหาวทยาลยนเรศวร ผศ.สระเจตน ออนฤทธ มหาวทยาลยราชภฏอบลราชธาน ผศ. ดร.กนตพงษ ศรสถตย มหาวทยาลยเทคโนโลยราชมงคลรตนโกสนทร รศ. ดร.สนน ศรสข มหาวทยาลยนครพนม ผศ. ดร.ชยวฒน สากล มหาวทยาลยเทคโนโลยราชมงคลศรวชย
7ECTI-CARD 2019
ขอมลทวไป
เกยวกบ ECTI-CARD 2019
“นวตกรรมและเทคโนโลย 4.0 เพอการพฒนาทองถนและประเทศไทยอยางยงยน” จดโดย คณะเทคโนโลยอตสาหกรรม มหาวทยาลยราชภฏอบลราชธาน และสมาคมวชาการไฟฟา อเลกทรอนกส โทรคมนาคมและสารสนเทศประเทศไทย ระหวางวนท 4 - 7 มถนายน พ.ศ. 2562 ณ จงหวดอบลราชธาน มจดมงหมายหลกของการจดงานเพอรวบรวมผลงานวจย งานนวตกรรม สงประดษฐ และการพฒนาเชงประยกต รวมถงเพอ เปดโอกาสใหนกวจย ผพฒนา ผใชงาน และหนวยงานตาง ๆ ไดมโอกาสแลกเปลยนเรยนรทางวชาการรวมกน อกท งสามารถนาผลงานทตพมพไปพฒนาตอยอดในระดบทองถน ระดบสากล และพฒนาสผลตภณฑในเชงพาณชยได ซงบทความทสงมาน นจะไดรบการพจารณาคณภาพและความสมบรณของงานโดยผทรงคณวฒ บทความทไดรบการคดเลอก และไดนาเสนอในทประชม ECTI-CARD 2019 จะไดรบการตพมพในรายงานสบเนอง ECTI-CARD (ECTI-CARD Proceedings) ซง สามารถสบคนไดจากฐานขอมลของสมาคม ECTI
การจด ECTI-CARD Conference ครงทผานมา
• ECTI-CARD 2009, โรงแรมอมารดอนเมองแอรพอรต กรงเทพ, 4-6 พฤษภาคม พ.ศ. 2552• ECTI-CARD 2010, โรงแรมจอมเทยนปาลมบช พทยา ชลบร, 10-12 พฤษภาคม พ.ศ. 2553• ECTI-CARD 2011, โรงแรมอมารดอนเมองแอรพอรต กรงเทพ, 5-6 พฤษภาคม พ.ศ. 2554• ECTI-CARD 2012, คณะวศวกรรมศาสตรมหาวทยาลยเทคโนโลยราชมงคลธญบร , 21-22
มถนายน พ.ศ. 2555• ECTI-CARD 2013, มหาวทยาลยเทคโนโลยสรนารนครราชสมา , 8-10 พฤษภาคม พ.ศ.
2556 • ECTI-CARD 2014, โรงแรมเชยงใหมแกรนดวว, 21-23 พฤษภาคม พ.ศ.2557• ECTI-CARD 2015, โรงแรมธรรมรนทรธนา ตรง, 8-10 กรกฎาคม พ.ศ.2558• ECTI-CARD 2016, โรงแรมหวหนแกรนดแอนดพลาซา ประจวบครขนธ, 27-29 กรกฎาคม
พ.ศ. 2559• ECTI-CARD 2017, โรงแรมเชยงคาน รเวอรเมาทเทน เลย, 25-28 กรกฎาคม พ.ศ. 2560• ECTI-CARD 2018, ศนยวฒนธรรมภาคเหนอตอนลาง วงจนทน รเวอรวว พษณโลก, 26-29
มถนายน พ.ศ. 2561
8 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
สถานทจดงาน ECTI-CARD 2019
การประชมวชาการระดบชาต ECTI-CARD 2019 จดข นท บานสวนคณตา กอลฟ แอนด รสอรท จงหวดอบลราชธาน ใหบรรยากาศของธรรมชาตทแสนจะสดชน สถานทเงยบสงบและมสงอานวยความ
สะดวกครบครน หางจากใจกลางเมองอบลราชธาน เพยง 15 นาท
ขอมลการตดตอ W : http://www.baansuankhunta.com T : 0-4525-1288, 09-3498-8811, 08-7874-9585, 08-4707-0503 F : 0-4525-1290
9ECTI-CARD 2019
Technical Tracks and Special Sessions
กลมท 1 การเกษตรอจฉรยะ อตสาหกรรม การเกษตร กลมท 2 เทคโนโลยชวภาพ การแพทย วทยาศาสตรกายภาพ วทยาศาสตรการกฬา กลมท 3 การประหยดพลงงาน การจดการพลงงาน บานอตโนมต กลมท 4 การเรยนการสอนทางไกล การศกษาบนเทง คอมพวเตอร แอนเมชน กลมท 5 การกภย ระบบเตอนภย และ พยากรณ กลมท 6 การสอสาร การสนบสนนผใชตามบาน เครอขายสงคม เครอขายไรสาย กลมท 7 การขนสง การควบคมจราจร การจดการอตสาหกรรม กลมท 8 ธรกจการธนาคาร การทองเทยว และการโรงแรม กลมท 9 ระบบความปลอดภย การควบคมการเขาถง การยนยนตวตน ระบบตรวจจบ กลมท 10 มาตรวทยา การวดและควบคม กลมท 11 วศวกรรมและเทคโนโลยอตสาหกรรม กลมท 12 STEM เทคโนโลยการศกษา กลมท 13 หวขออน ๆ ทเกยวของ Special Session 1 ความทาทายและโอกาสจากการบรณาการเทคโนโลย IoT และแมเหลกไฟฟา
สาหรบนวตกรรมไทย 4.0 Special Session 2 นวตกรรมเครองมอวดและสมองกลฝงตวเพอเทคโนโลยการวดและการควบคม Special Session 3 นวตกรรมเพอพลงงานทดแทนและอตสาหกรรมอเลกทรอนกสอจฉรยะ Special Session 4 วศวกรรมและเทคโนโลยอตสาหกรรม Special Session 5 เทคโนโลยและนวตกรรมเพอการพฒนาชมชนทองถนและคณภาพชวตของ
มนษย Special Session 6 เทคโนโลยการวดข นสง และนวตกรรมไอท 4.0 Special Session 7 เทคโนโลยสาหรบเมองอจฉรยะ Special Session 8 Data Analytics/Visualization Special Session 9 การจดการและการควบคมระบบกกเกบพลงงานแบตเตอรในสมารทกรด
10 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
กาหนดการสาหรบการประชม ECTI-CARD 2019
วนองคาร ท 4 มถนายน 2562 เวลา รายการ สถานท
08.00 - 17.00 เตรยมสถานท & Technical Prepare บานสวนคณตา กอลฟ แอนด รสอรท วนพธ ท 5 มถนายน 2562
13.00 - 17.00 ลงทะเบยนรวมงาน บานสวนคณตา กอลฟ แอนด รสอรท 18.00 - 21.00 Welcome Party รมสระวายน า
วนพฤหสบด ท 6 มถนายน 2562 08.00 - 12.00 ลงทะเบยนรวมงาน หนาหองเอนกประสงค 09.00 - 09.15 - พธเปดงานประชม ECTI-CARD 2019
- กลาวรายงานการจดงานโดย คณบดคณะเทคโนโลยอตสาหกรรม
- ทานอธการบด มหาวทยาลยราชภฏอบลราชธาน ประธาน กลาวเปดงาน
- นายกสมาคม ECTI กลาวตอนรบ - ถายภาพรวมกน
หองเอนกประสงค
09.15 – 09.45 Keynote Speaker: รศ.ดร.พรชย พฤกษภทรานนต (มอ.)
หองเอนกประสงค
09.45 – 10.15 Keynote Speaker: รศ. ร.อ. ดร. วระเชษฐ ขนเงน (สจล.)
หองเอนกประสงค
10.15 - 10.30 รบประทานอาหารวาง หนาหองเอนกประสงค 10.30 – 11.00 Keynote Speaker:
Prof Dr.Dusit Niyato (NTU) หองเอนกประสงค
11.00 - 12.00 เสวนา หองเอนกประสงค 12.00 - 13.00 รบประทานอาหารกลางวน หนาหองเอนกประสงค 13.00 - 15.00 Workshop และการแขงขนการวดทางไฟฟา
โดย สถาบนมาตรวทยาแหงชาต (มว.) หองเอนกประสงค
13.00 - 15.00 นาเสนอผลงานภาคบรรยาย (1 เรอง 15 นาท) หองอมบญ 1, 4 – 6 และหองเธยรเตอร 14.00 - 16.00 ประชมกรรมการ Steering หองอมบญ 2,3 15.00 - 15.15 รบประทานอาหารวาง หนาหองประชม
11ECTI-CARD 2019
15.15 - 17.00 นาเสนอผลงานภาคโปสเตอร หองเอนกประสงค 18.00 - 23.00 Banquet
- กลาวตอนรบเขารวมงานเล ยง Banquet โดย นายกสมาคม ECTI
- ประกาศ Best Papers และขอบคณผเขารวมงาน ผสนบสนน และทมงานฝายตาง ๆ
- มอบธง ECTI-CARD และประชาสมพนธการจดงาน ECTI-CARD 2020
18.00 - 23.00
วนศกร ท 7 มถนายน 2562 08.30 - 10.40 นาเสนอผลงานภาคบรรยาย (1 เรอง 15 นาท) หองอมบญ 1, 4 – 6 และหองเธยรเตอร 09.00 - 12.00 ประชมคณะกรรมการ ECTI หองเอนกประสงค 10.40 - 11.00 รบประทานอาหารวาง บรเวณหนาหองเธยรเตอร 11.00 - 12.00 นาเสนอผลงานภาคบรรยาย (1 เรอง 15 นาท) หองอมบญ 1, 4 – 6 และหองเธยรเตอร 12.00 - 13.00 รบประทานอาหารกลางวน บรเวณหนาหองเธยรเตอร 13.00 - 15.00 นาเสนอผลงานภาคบรรยาย (1 เรอง 15 นาท) หองอมบญ 1, 4 – 6 และหองเธยรเตอร 15.00 - 15.15 รบประทานอาหารวาง บรเวณหนาหองเธยรเตอร
12 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
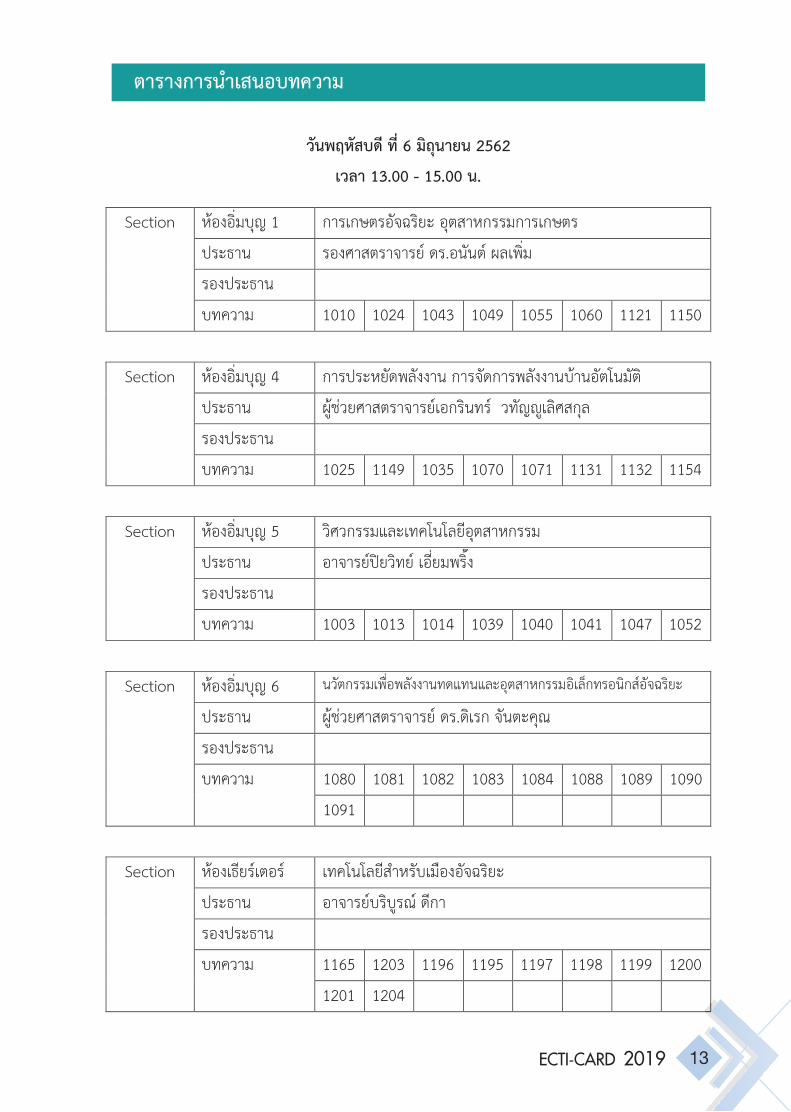
ตารางการนาเสนอบทความ
วนพฤหสบด ท 6 มถนายน 2562 เวลา 13.00 - 15.00 น.
Section หองอมบญ 1 การเกษตรอจฉรยะ อตสาหกรรมการเกษตร ประธาน รองศาสตราจารย ดร.อนนต ผลเพม รองประธาน บทความ 1010 1024 1043 1049 1055 1060 1121 1150
Section หองอมบญ 4 การประหยดพลงงาน การจดการพลงงานบานอตโนมต ประธาน ผชวยศาสตราจารยเอกรนทร วทญญเลศสกล รองประธาน บทความ 1025 1149 1035 1070 1071 1131 1132 1154
Section หองอมบญ 5 วศวกรรมและเทคโนโลยอตสาหกรรม ประธาน อาจารยปยวทย เอยมพร ง รองประธาน บทความ 1003 1013 1014 1039 1040 1041 1047 1052
Section หองอมบญ 6 นวตกรรมเพอพลงงานทดแทนและอตสาหกรรมอเลกทรอนกสอจฉรยะ
ประธาน ผชวยศาสตราจารย ดร.ดเรก จนตะคณ รองประธาน บทความ 1080 1081 1082 1083 1084 1088 1089 1090
1091
Section หองเธยรเตอร เทคโนโลยสาหรบเมองอจฉรยะ ประธาน อาจารยบรบรณ ดกา รองประธาน บทความ 1165 1203 1196 1195 1197 1198 1199 1200
1201 1204
13ECTI-CARD 2019
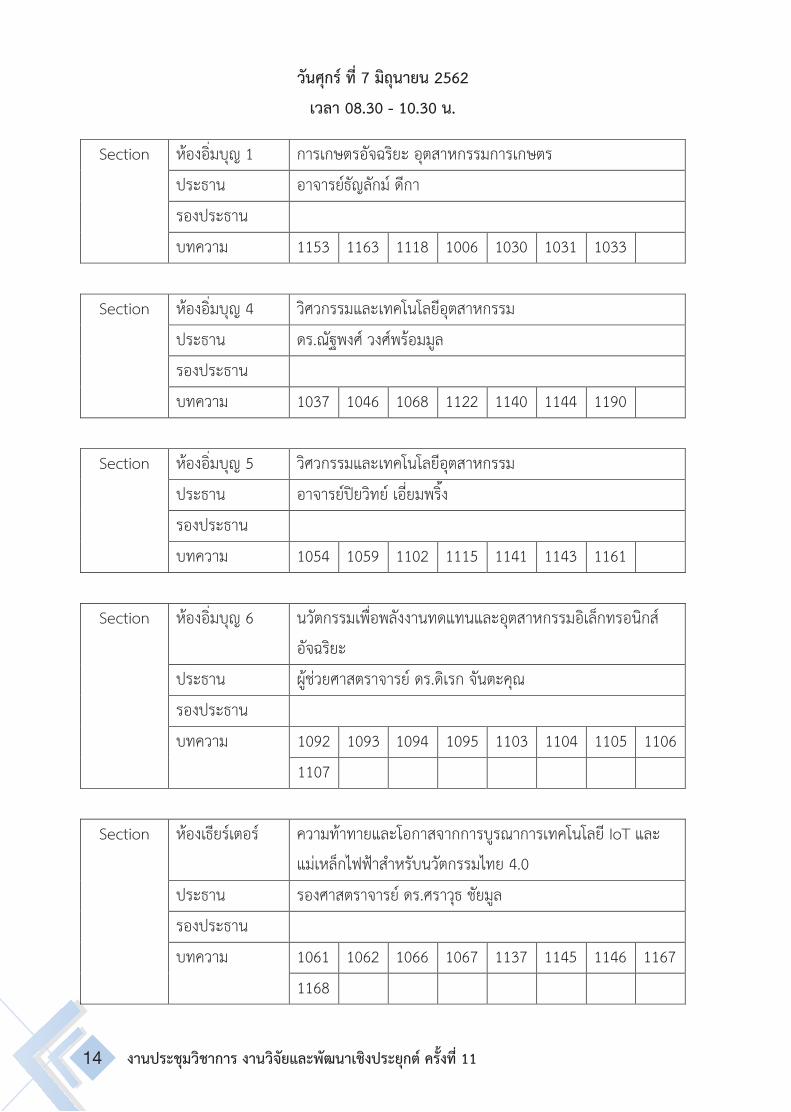
วนศกร ท 7 มถนายน 2562 เวลา 08.30 - 10.30 น.
Section หองอมบญ 1 การเกษตรอจฉรยะ อตสาหกรรมการเกษตร ประธาน อาจารยธญลกม ดกา รองประธาน บทความ 1153 1163 1118 1006 1030 1031 1033
Section หองอมบญ 4 วศวกรรมและเทคโนโลยอตสาหกรรม ประธาน ดร.ณฐพงศ วงศพรอมมล รองประธาน บทความ 1037 1046 1068 1122 1140 1144 1190
Section หองอมบญ 5 วศวกรรมและเทคโนโลยอตสาหกรรม ประธาน อาจารยปยวทย เอยมพร ง รองประธาน บทความ 1054 1059 1102 1115 1141 1143 1161
Section หองอมบญ 6 นวตกรรมเพอพลงงานทดแทนและอตสาหกรรมอเลกทรอนกสอจฉรยะ
ประธาน ผชวยศาสตราจารย ดร.ดเรก จนตะคณ รองประธาน บทความ 1092 1093 1094 1095 1103 1104 1105 1106
1107
Section หองเธยรเตอร ความทาทายและโอกาสจากการบรณาการเทคโนโลย IoT และแมเหลกไฟฟาสาหรบนวตกรรมไทย 4.0
ประธาน รองศาสตราจารย ดร.ศราวธ ชยมล รองประธาน บทความ 1061 1062 1066 1067 1137 1145 1146 1167
1168
14 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
วนศกร ท 7 มถนายน 2562 เวลา 10.45 - 12.00 น.
Section
หองอมบญ 1 การกภย ระบบเตอนภยและการพยากรณ ประธาน อาจารยบรบรณ ดกา รองประธาน บทความ 1128 1142 1151 1147 1036 1063 1098
Section
หองอมบญ 4 เทคโนโลยและนวตกรรมเพอการพฒนาชมชน ทองถนและ
คณภาพชวตของมนษย ประธาน ผชวยศาสตราจารยนนทรฐ บารงเกยรต รองประธาน บทความ 1023 1032 1042 1048 1053 1125
Section
หองอมบญ 5 วศวกรรมและเทคโนโลยอตสาหกรรม ประธาน อาจารยปยวทย เอยมพร ง รองประธาน บทความ 1180 1038 1129 1162 1015 1209 1210 1211
Section
หองอมบญ 6 นวตกรรมเพอพลงงานทดแทนและอตสาหกรรมอเลกทรอนกส
อจฉรยะ ประธาน ผชวยศาสตราจารย ดร.ดเรก จนตะคณ รองประธาน บทความ 1108 1109 1110 1111 1113 1114 1116
Section
หองเธยรเตอร เทคโนโลยการวดข นสง และนวตกรรมไอท 4.0 ประธาน ดร. วณา จนทรรชชกล รองประธาน บทความ 1169 1191 1099 1101 1139
15ECTI-CARD 2019
วนศกร ท 7 มถนายน 2562 เวลา 13.00 - 14.45 น.
Section
หองอมบญ 1 อนๆ ทเกยวของ ประธาน ผชวยศาสตราจารยเอกรนทร วทญญเลศสกล รองประธาน บทความ 1074 1119 1126 1133 1148 1160
Section
หองอมบญ 4 เทคโนโลยและนวตกรรมเพอการพฒนาชมชน ทองถนและ
คณภาพชวตของมนษย ประธาน ผชวยศาสตราจารยนนทรฐ บารงเกยรต รองประธาน บทความ 1057 1182 1051 1056 1069 1096 1124
Section
หองอมบญ 5 STEM เทคโนโลยการศกษา ประธาน อาจารยเอกราช ธรรมษา รองประธาน บทความ 1050 1065 1130 1206 1207 1208
Section
หองอมบญ 6 นวตกรรมเพอพลงงานทดแทนและอตสาหกรรมอเลกทรอนกสอจฉรยะ
ประธาน ผชวยศาสตราจารย ดร.ดเรก จนตะคณ รองประธาน บทความ 1120 1123 1127 1171 1172 1173 1176 1178
1177 1181 1183
Section
หองเธยรเตอร นวตกรรมเครองมอวดและสมองกลฝงตวเพอเทคโนโลยการวดและการควบคม
ประธาน ผชวยศาสตราจารย ดร.กฤษณ อางแกว รองประธาน บทความ 1159 1179 1157
16 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11

รศ.ดร.พรชย พฤกษภทรานนต Ph.D. (Electrical Engineering)
University of Minnesota The United States of America
Keynote Speakers
University of Minnesota The United States of America
รศ. ร.อ. ดร. วระเชษฐ ขนเงน Ph.D. (Electrical Engineering) Imperial College of Science, Technology and Medicine University of London
Imperial College of ity of
ศาสตราจารย ดร.ดสต นยะโต Doctor of Philosophy Electrical and
Computer Engineering, University of Manitoba, Winnipeg, MB, Canada
Computer Engineering, University of Manitoba,
17ECTI-CARD 2019

18 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
Abstract
19ECTI-CARD 2019
ID 1003
สายอากาศแพทชไมโครสตรปรปตวไอทมชนวางซอนดชนหกเหเทากบศนยและโครงสราง EBG รปแปดเหลยมสาหรบประยกตใชงานทความถ 2.4 GHz
ประพทธ อานมณ* และ พชชานนท วงศศรธร สาขาวชาวศวกรรมโทรคมนาคม คณะวศวกรรมศาสตรมหาวทยาลยเทคโนโลยราชมงคลรตนโกสนทร
คาสาคญ สายอากาศไมโครสตรป ช นวางซอน ดชนหกเหเทากบศนย โครงสราง EBG งานวจยน เสนอสายอากาศไมโครสตรปรปตวไอทมช นวางซอนดชนหกเหเทากบศนยและโครงสราง EBG รปแปดเหลยมสาหรบประยกตใชงานทความถ 2.4 GHz ช นวางซอนถกออกแบบจากอภพ นผวทมคณสมบตคาดชนหกเหเทากบศนยสาหรบเพมอตราขยายและโครงสราง EBG ถกออกแบบใหมเฟสการสะทอนเทากบศนยสาหรบลดสณฐานของสายอากาศ โครงสราง EBG ถกวางลอมรอบแพทชสายอากาศและช นวางซอนถกวางเหนอสายอากาศดวยระยะหาง 27 มลลเมตร แพทชสายอากาศถกดดแปลงเปนรปตวไอเพอลดขนาดแพทชสายอากาศและสามารถใชงานรวมกบโครงสราง EBG ได สายอากาศและช นวางซอนถกออกแบบบนวสดชนด FR-4 ขนาด 90x90 ตารางมลลเมตร หนา 0.8 มลลเมตร คาคงทไดอเลกตรกเทากบ 4.3 ผลการทดสอบสายอากาศมสมประสทธการสะทอนทตากวา -10 dB ต งแต 2.39 ถง 2.52 GHz มอตราขยายเทากบ 8.5 dBi ทความถ 2.45 GHz
ID 1004
การจดการคารบอนฟตพรนทสาหรบหมบานคารบอนตาบานหวยนากนและบานปาเมยง
ปฐมพงศ วงคคามา1* ปรเมนทร ดวงทพย1 นพพร พชรประกต1 และ ปกรณ เสรเผาวงศ2 1 สาขาวชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา เชยงราย 2 สาขาวชาวศวกรรมคอมพวเตอร คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา เชยงราย
คาสาคญ การจดการพลงงาน คารบอนไดออกไซด โครงงานน นาเสนอเพอจดการคารบอนฟตพร นทสาหรบหมบานคารบอนตาบานหวยน ากน 93 หลงคาเรอน บานปาเมยง 30 หลงคาเรอน จงหวดเชยงราย โดยการเกบขอมลในชมชนท ง 2 ช มชน ดานพลงงาน กาซ น ามน ไฟฟา ถาน ฟน การใชจายในชวตประจาวนรวบรวมขอมลมาวเคราะหปรมาณการใชพลงงานแลวคานวณหาคาการปลอยกาซคารบอนไดออกไซดออกมาตอปสรางกราฟเปรยบเทยบดานพลงงานหาจดนยสาคญในการใชพลงงานเพอทจะทาการลดใชพลงงานในชมชน จากการลงพ นทเกบขอมลบานหวยน ากน 93 หลงคาเรอนมการใชพลงงานท งหมด 282 ,809 จลตอปปลอยกาซคารบอนไดออกไซด 329,458 กโลกรมตอป บานปาเมยง 30 หลงคาเรอน 114,815 จลตอป ปลอยกาซคารบอนไดออกไซด 200,821 กโลกรมตอป
20 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1006
โตะเขยาแบบ 1 มต สาหรบการจาลองการเกดแผนดนไหว
เสนอ สะอาด* และ รงลาวลย ชสวสด 1 หลกสตรสาขาวชาวศวกรรมอเลกทรอนกส สาขาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลศรวชย
คาสาคญ การจาลองการเกดแผนดนไหว ตวตรวจรความเรง ไมโครคอนโทรลเลอร ดาตาลอกเกอร
บทความน นาเสนอโตะเขยาแบบ 1 มต สาหรบการจาลองการเกดแผนดนไหว เพอใชเปนชดทดลองในการทดสอบหาประสทธภาพของโครงสรางในรายวชาวศวกรรมโครงสราง สาขาวศวกรรมโยธา คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลศรวชย โตะเขย าถกออกแบบโดยใชเทคนคการจาลองแผนดนไหวดวยมอเตอรไฟฟาควบคมการทางานดวยไมโครคอนโทรลเลอร สามารถสงการทางานผานไมโครคอมพวเตอรม 2 รปแบบ คอ (1) แบบอตโนมต และ (2) แบบมผควบคม ปรบระดบความรนแรงในการจาลองแผนดนไหวได 4 ระดบ คอ ชา ปานกลาง เรว และแบบสม มตวตรวจรคาความเรงทาหนาทวดสญญาณทไดจากการจาลองการเกดแผนดนไหว จานวน 4 จด สามารถแสดงผลกราฟและจดเกบลงในฐานขอมลในรปแบบดาตาลอกเกอร เพอใชในการวเคราะหผลการจาลองการเกดแผนดนไหวไดในภายหลง ผลการทดสอบการทางานพบวาโตะเขยาแบบ 1 มต สามารถรองรบน าหนกโครงสรางไดไมนอยกวา 50 กโลกรม โดยมคาอตราเรง 360 GAL ทางานไดอยางตอเนองสงสด 15 นาท มกาลงงานสญเสยประมาณ 750 วตต
21ECTI-CARD 2019
ID 1009
การออกแบบกระเปาทาความเยนเพอเกบวคซนทางการแพทยแบบพกพาพรอมระบบควบคมอจฉรยะประดษฐ
วรญญา ไชยชาญยทธ พมล ผลพฤกษา และ มนตร ไชยชาญยทธ* ภาควชาวศวกรรมศาสตร สาขาวศวกรรมอเลกทรอนกส สถาบนเทคโนโลยพระจอมเกลาเจาคณทหารลาดกระบง วทยาเขตชมพรเขตรอดมศกด
คาสาคญ วคซน เทอรโมอเลกตรก เทอรโมคปเปล แผนเพลเทยร งานวจยฉบบน นาเสนอการออกแบบ และพฒนากระเปาทาความเยนเพอเกบวคซนทางการแพทยแบบพกพาพรอมระบบควบคมอจฉรยะประดษฐ โดยอาศยหลกการทาความเยนของเทอรโมอเลกตรก ใชไมโครคอนโทรลเลอร (MCS-51) เปนตวควบคมระดบความเยนภายในชองเกบ ซงโครงการวจยทออกแบบน มสวนประกอบดวยกน 4 สวน คอ 1.ภาคทาความเยน ใชแผนเพลเทยรเปนตวทาความเยน 2. ภาคตรวจจบอณหภม ใชเทอรโมคปเปลชนดเคเปนตวตรวจจบอณหภมภายในชองเกบวคซน 3.ภาคชารจแบตเตอรออกแบบใหสามารถใชชารจไดกบแหลงไฟฟากระแสสลบ(220Vac) พลงงานไฟฟาจากรถยนต และโซลาเซลล ซงโครงงานน ออกแบบระบบเกบพลงงานโดยใชพลงงานจากแบตเตอรขนาด 12V/11Ah 4.ภาคแสดงผลใชเอลอดเจดสวนเปนตวแสดงผลระดบอณหภมและระดบแบตเตอร จากผลการทดลอง ระบบทออกแบบจดสรางสามารถเกบวคซนขนาด 1 ml ไดสงสดจานวน 15 หลอด ทาความเยนและรกษาระดบชวงอณหภมท 22-25C ไดอยางมประสทธภาพ
22 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1010
ชดพนนาแรงดนสงเคลอนทแนวระนาบสาหรบควบคมอณหภมและความชนในโรงเรอนแบบปด ผานระบบปฏบตการแอนดรอยด
สถาพร สทธวงค* และ ชยยพล ธงชยสรชตกล
ภาควชาเทคโนโลยวศวกรรมไฟฟา วทยาลยเทคโนโลยอตสาหกรรม มหาวทยาลยเทคโนโลยพระจอมเกลาพระนครเหนอ
คาสาคญ ชดพนน า โรงเรอนแบบปด ไมโครคอนโทรลเลอร บทความน มวตถประสงคเพอออกแบบและสรางชดพนน าแรงดนสงเคลอนทแนวระนาบขบเคลอนดวยสเตปปงมอเตอร ควบคมดวยไมโครคอนโทรลเลอร ใชหวพนเนตาฟลมสาหรบการพนหมอก เพอควบคมอณหภม, ความช นในโรงเรอนแบบปด โดยทดสอบการปลกผกบงจนภายในโรงเรอน โดยสามารถแจงเตอนผาน Application Line ระบบการทางานใชการประมวลผลดวย Microcontroller PIC 18F4620 รบค าอนาลอกจากเซนเซอร SHT11 ซ งสามารถวดไดท งอณหภม , ความช น ไมโครคอนโทรลเลอรจะกาเนดสญญาณพลสจานวน 4 สญญาณ เพอควบคมสเตปปงมอเตอร จานวน 2 ตว เคลอนทไปแนวระนาบแกน X ระยะ 6 เมตรตอ 1 รอบการทางาน โดยใชวธการเปลยน Source Code ในการปรบระยะเวลาในการเปลยนสเตปของพลส ตดต งปมน าแรงดนสงขนาด 4.8 bar เพอพนหมอก สามารถควบคมการทางานไดจากตควบคมไดทโรงเรอนและควบคมผานระบบ Application Blynk โหมดการควบคมประกอบดวยโหมดอตโนมตและโหมดควบคมดวยมอ จากการทดสอบชดพนน าแรงดนสงสามารถแสดงอณหภม, ความช นในโรงเรอนไดท งระบบควบคมทตควบคมและระบบ Application วดอณหภม, ความช นเปรยบเทยบกบเครองวดมาตรฐาน ENVIRONMENT METER รน SP-8001 สามารถแสดงคาและแจงเตอนดวย Application Line ทก ๆ 30 นาท และถาอณหภม,ความช นเกนคาทต งไวจะแจงเตอนทนท ไดทดสอบปลกผกบงจน ควบคมอณหภมภายในโรงเรอน 36ºC และความช น 65 เปอรเซนต
23ECTI-CARD 2019
ID 1013
การประยกตใชการประมวลผลภาพสาหรบเครองซกรองเทากฬาชาญฉลาด
ณฐพงศ แพนอย* และ ชนมรตน ตตยะวรนนท สถาบนนวตกรรมมหานคร คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยมหานคร
คาสาคญ เครองซกรองเทากฬา การประมวลผลภาพ บทความน นาเสนอการประยกตใชการประมวลผลภาพสาหรบเครองซกรองเทากฬาชาญฉลาด โดยระบบน ใชไมโครคอนโทรลเลอร Raspberry Pi เปนตวควบคมหลกสาหรบการประมวลผลภาพ ไดผลการทดสอบการประมวลผลภาพโดยใชวธคาความคลาดเคลอนกาลงสองเฉลยสาหรบการเปรยบเทยบรปภาพ สดทายใชเวลาในการประมวลผลภาพนอยกวา 10 วนาท
ID 1014
ระบบทดสอบความทนทานอตโนมตสาหรบกลอนประตรถยนต
ชนมรตน ตตยะวรนนท สถาบนนวตกรรมมหานคร คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยมหานคร
คาสาคญ ระบบทดสอบความทนทานอตโนมต กลอนประตรถยนต บทความน กลาวเกยวกบระบบทดสอบความทนทานอตโนมตสาหรบกลอนประตรถยนตเปนการแกปญหาจากการทดสอบความทนทานของประตรถยนตของภาคอตสาหกรรมยานยนตม 8 ข นตอนสาหรบระบบทดสอบอตโนมตน ดงตอไปน : ข นตอนท (1) เสยบกญแจ ข นตอนท (2) บดกญแจเพอปลดลอก ข นตอนท (3) ดงกญแจออก ข นตอนท (4) เปดชดมอเปดประต ข นตอนท (5) เสยบกญแจ ข นตอนท (6) บดกญแจเพอลอก ข นตอนท (7) ดงกญแจออก และข นตอนท (8) จดบนทกอตโนมตสดทายใชเวลาในกระบวนการนอยกวา 45 วนาทสาหรบโหมดอตโนมต
24 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1015
การจดการเรยนรวชาเครองจกรกลอตโนมตเรองการจบยดชนงานระดบปรญญาตรโดยใชสะเตมศกษา
จตพร ใจดารงค1* บรรเลง คาเกต1 และ นชนาฏ ใจดารงค2 1 สาขาวศวกรรมอตสาหการ คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลศรวชย 2 สาขาวชาเทคโนโลยและสอสารการศกษา คณะศกษาศาสตร มหาวทยาลยทกษณ
คาสาคญ เครองจกรกลอตโนมต สะเตมศกษา การจดการเรยนร งานวจยน เปนการพฒนาการเรยนการสอนวชาเครองจกรกลอตโนมต ระดบปรญญาตร โดยใชสะเตมศกษามจดประสงคเพอจดการเรยนรรายวชาเครองจกรกลอตโนมตในหวขอการจบยดช นงานโดยการประยกตใชสะเตมศกษา สาหรบนกศกษาสาขาวศวกรรมอตสาหการ คณะวศวกรรมศาสตร การจดการเรยนการสอนโดยการประยกตแนวทางของสะเตมศกษาประกอบดวย 5 ข นตอน คอการระบปญหา การคนหาแนวคดทเกยวของ การวางแผนและพฒนา การทดสอบและประเมนผล และการนาเสนอผลลพธ ผลการวจยโดยการจดการเรยนการสอนแบบสะเตมศกษาพบวา นกศกษามความพงพอใจอยในระดบมากทสด (X =4.55, SD=0.28) เมอพจารณาเปนรายขอพบวา ผตอบแบบสอบถามมความพงพอใจในการทางานเปนทมมากทสด (X =4.94, SD=0.25) รองลงมา คอ การเลอกแนวทางในการแกไขปญหาดวยหลกการเหตและผล (X =4.81, SD=0.40) และขอทผตอบแบบสอบถามมความพงพอใจนอยทสด คอคณภาพและความทนสมยของอปกรณเครองมอ (X =4.06, SD=0.57)
25ECTI-CARD 2019
ID 1016
การอบแหงใบมะกรดดวยเครองอบแหงใชเชอเพลงจากยคาลปตสรวมกบการเคลอนทอากาศรอน ดวยหลกการเกดลม
ไพโรจน จนทรแกว* จกรพนธ ถาวรงามยงสกล และ ชาตร ศรถาวร
สาขาวศวกรรมเครองกล คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา ตาก คาสาคญ การอบแหงใบมะกรด เครองอบแหง ยคาลปตส หลกการเกดลม
งานวจยน มวตถประสงคเพออบแหงใบมะกรดดวยเครองอบแหงใชเช อเพลงจากยคาลปตสรวมกบการเคลอนทอากาศรอนดวยหลกการเกดลมเครองอบแหงมหลกการทางานคอเตาเผาใชถงเหลกขนาด 50 ลตร และมผนงกกเกบอากาศรอนเปนทรงสเหลยมครอบเตาไวความรอนท ไดจากการเผาไหมถกถายเทสงผานผนงเตา สงผลใหอากาศรอบเตามอณหภมสงข นสวนดานบนออกแบบเปนหองอบแหงสาหรบใหอากาศรอนเคลอนทจากขางลางข นดานบนมสวนประกอบหลกๆ คอ (1) หองอบแหง (2) ถาดวางผลตภณฑอบแหง (3) ปลองควน (4) เตาเผา 50 ลตร (5) ถาดวางฟนทาการทดสอบอบแหงใบมะกดมความช นเรมตนประมาณ 164% dry basis ทระดบอณหภม 70 80 และ90 oC จนไดใบมะกรดมความช นสดทายของใบมะกรดตากวา 10% dry basis พบวา เมออณหภมการอบแหงเพมข นสงผลใหเวลาทใชอบแหงลดลงทระดบอณหภม 70 80 และ 90 oC ใชเวลาในการอบแหง 75 60 และ 45 นาทตามลาดบ ท ง 3 อณหภมมอตราการใชไมยคาลปตสประมาณ 0.035±0.0019 kg/min
26 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1017
เครองวดการใชพลงงานไฟฟาแบบไรสาย 1 เฟส สาหรบบานพกอาศย
นรงฤทธ เสนาจตร ภาควชาวศวกรรมไฟฟากาลง คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยมหานคร
คาสาคญ เครองวดการใชพลงงานไฟฟาแบบไรสาย มเตอรวดพลงงาน บทความฉบบน ไดออกแบบสรางเครองวดคาการใชพลงงานไฟฟาแบบไรสายสาหรบบานพกอาศย โดยวดคาพลงงานไฟฟากระแสสลบ 1 เฟส แรงดนทวดไดไมเกน 300 Vac ความถ 50 Hz และวดกระแสไดไมเกน 15 A โดยมวตถประสงคเพอบนทกคา แรงดน กระแส กาลงไฟฟาและพลงงานไฟฟาทใชพรอมท งดคาดงกลาวไดแบบ Real Time และสามารถดขอมลการใชพลงงานไฟฟายอนหลงไดจากฐานขอมลทบนทกไวผานระบบอนเทอรเนต โดยตวเครองประกอบดวยสวนของ Hardware และ Software กลาวคอ สวนของ Hardware จะใช เซนเซอร PZEM-004T รวมกบ Microcontroller NodeMCUESP8266 เปนสวนของการควบคมและประมวลผลการวดคาตางๆ และสวนของ Software จะใช Arduino IDE ในการเขยนโปรแกรมควบคมการทางานของเครองวดคาการใชพลงงาน และใช Android Studio ในการสรางแอพพลเคชนใชในการแสดงผลแบบ Real Time และแสดงขอมลแบบยอนหลง พรอมท งใช NETPIE เปนตวกลางระหวาง Microcontroller และแอพพลเคชนทใชในการแสดงผล จากการทดลองเครองวดคาพลงงานทออกแบบสรางพบวาสามารถทาการประมวลผลและวดคาตางๆ ไดเปนอยางด โดยมคาความคลาดเคลอนในการวดคาตางๆ นอยกวา 3% ของพกด เมอเทยบกบเครองมอวดมาตรฐานในหองปฏบตการฯ อกท งสามารถเขาถงขอมลไดทกททมสญญาณอนเทอรเนตและนาผลทไดดงกลาวไปวเคราะหและใชประโยชนตอไปได
27ECTI-CARD 2019
ID 1022
การเปรยบเทยบวธวเคราะหปรมาณโลหะหนกในดนเพาะปลก บรเวณ อาเภอเมอง จงหวดนครราชสมา ดวยเทคนค EDXRF และ AAS
ชานาญ พรอมจนทก* ขจรเดช เวยงสงค และ นภาพร ทวแสง สาขาวชาฟสกส คณะวทยาศาสตรและเทคโนโลย มหาวทยาลยราชภฏนครราชสมา
คาสาคญ โลหะหนก เอกซเรยฟลออเรสเซนซแบบกระจายพลงงาน อะตอมมกแอบซอรพชนสเปกโทรสโกป
งานวจยน มวตถประสงคเพอเปรยบเทยบวธวเคราะหปรมาณโลหะหนกทปนเปอนในดนเพาะปลก โดยเทคนคเอกซเรยฟลออเรสเซนซแบบกระจายพลงงาน (EDXRF) และใชเทคนคอะตอมมกแอบซอรพชนสเปกโทรสโกป (AAS) โดยศกษาตวอยางดนจากแปลงเพาะปลกพชผกในเขตพ นทชมชนทอาศยอยใกล ลาคลองตะคองเกาและตะคองใหม ตาบลในเมอง อาเภอเมอง จงหวดนครราชสมา จานวน 5 ชมชน รวมเปน 7 แปลง จากผลการทดลองพบวา มการตรวจพบการปนเปอนโลหะหนกในดนเพาะปลกทกแปลง ซงชนดของธาตโลหะหนกทพบมอย 3 ชนด คอ แมงกานส สงกะส และทองแดง โดยแปลงเพาะปลกทพบคาโลหะหนกเฉลยสงสดคอบรเวณชมชนทอาศยอยใกลตะคองเกา แมวาผลการวเคราะหปรมาณโลหะหนกทไดมคาสงกวาระดบเกณฑพ นฐานของโลหะหนกในดนและคาสงสดของโลหะหนกเกณฑของกรมวชาการเกษตร กาหนดไว แตยงคงเปนคาทยอมใหมไดในกากตะกอนทจะนาไปใชในการเกษตร ดงน นจงทาใหดนในพ นทเพาะปลกของเกษตรกรดงกลาวยงไมวกฤตและสามารถทาการเกษตรได และจากผลการวเคราะหปรมาณโลหะหนกดวยเทคนคท งสอง พบวามความสอดคลองและแนวโนมไปในทางเดยวกน
28 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1023
โปรแกรมประยกตการตรวจจบสวตถในภาพสาหรบผมความบกพรองทางการมองเหน
วศรต คงศกดนาสาร ชนดาภา สวางไสว สณหณฐ จนทรวบล และ พรรณราย ศรเจรญ*
สาขาวชาวทยาการคอมพวเตอรประยกต ภาควชาคณตศาสตร คณะวทยาศาสตร มหาวทยาลยเทคโนโลยพระจอมเกลาธนบร
คาสาคญ การตรวจจบสวตถ การตรวจจบวตถดวย TensorFlow ผบกพรองทางการมองเหน
ImageSpeaker+ คอโปรแกรมประยกตชวยตรวจจบสของวตถสาหรบผมความบกพรองทางการมองเหน โดยโปรแกรมน ถกพฒนาข นบนระบบทใหสามารถตรวจจบและตกรอบวตถบนกรอบเครองมอเทนเซอรโฟลว (TensorFlow) ใหสามารถตรวจจบสวตถทผานเขามาทางกลองไดดวย ซงสทไดจากการตรวจจบจะถกอานออกเสยงไดท งภาษาไทยและภาษาองกฤษ ทสามารถต งคาทางภาษาไดบนสมารตโฟน โดย ImageSpeake+ สามารถตรวจจบสไดท งหมด 10 ส ไดแก สแดง สสม สเหลอง สเขยว สฟา สน าเงน สมวง สชมพ สขาว และสดา ดวยความถกตองแมนยาของการตรวจจบสของวตถสงถง 88.00% นอกจากน โปรแกรมยงไดรบการปรบปรงประสทธภาพดานการออกเสยงและดานการใชงานของระบบตนแบบ เพอใหผบกพรองทางการมองเหนสามารถรบรสของวตถไดอยางสะดวกสบายมากยงข น ทาใหผบกพรองทางการมองเหนสามารถนาไปใชงานไดจรงทนททตองการ
ID 1024
รถพนยากงอตโนมต
ทนพฒน ถระเจรญ ปยณฐ ทาพรก พลวต มณรตน และ ขวญจต ออกเวหา* สาขาวชาวศวกรรมไฟฟา คณะเทคโนโลยอตสาหกรรมการเกษตร มหาวทยาลยเทคโนโลยราชมงคลตะวนออก วทยาเขตจนทบร
คาสาคญ รถพนยา กงอตโนมต การควบคมระยะไกล บทความน นาเสนอการออกแบบและสรางรถพนยากงอตโนมตโดยใชพลงงานจากแบตเตอร รถพนยาควบคมการเคลอนทดวยรโมทใชในสวนมงคดขนาดเลกทมลกษณะพ นทเปนพ นทราบ เพอลดการใชแรงงาน และหลกเลยงการสมผสสารเคม รถพนยากงอตโนมตสามารถเลอกความเรวในการเคลอนทได 3 ระดบ การพนแบบละอองน า สงควบคมเปด – ปดระบบพน และควบคมการเคลอนทดวยรโมทโดยใชสญญาณวทย บงคบทศทางเล ยวขวา เล ยวซาย เดนหนา และถอยหลง การทดลองพนสามารถพนละอองน าไดสงสด 6 เมตร การพน 1 ถง (ความจ 20 ลตร) ใชความเรวระดบท 3 คอ 30.67 เมตรตอนาท เวลาทใชพนเฉลยตอถง 10.74 นาท จานวนตนมงคดเฉลย 4.5 ตน การใชพลงงานรวมท งหมดของรถพนยากงอตโนมต เปน 223.92 วตต ระยะการควบคมสงสด 85 เมตร
29ECTI-CARD 2019
ID 1025
ชดควบคมเครองสองไฟแบบอตโนมตสาหรบรกษาภาวะทารกตวเหลอง
นรรตน วฒนมงคล* และ ณทกร เกษมสาราญ ภาควชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยบรพา
คาสาคญ ภาวะตวเหลอง เครองสองไฟ ระบบควบคมแบบอตโนมต การมอดเลตเชงความกวางพลส
เครองสองไฟทนามาใชรกษาภาวะทารกตวเหลอง (Neonatal Hyperbilirubinemia) ในปจจบนจะใชหลอดแอลอดทมชวงความยาวคลน 450-460 นาโนเมตร และจะตองมระดบความเขมแสงเชงสเปกตรมมากกวา 30 uW/cm2/nm ข นไป ทระยะหางระหวางเครองสองไฟกบทารก 30 ถง 50 เซนตเมตร แตเนองจากเครองสองไฟแอลอดในปจจบนไมสามารถปรบระดบความเขมแสงใหสอดคลองกบความรนแรงของโรคตามการวนจฉยของแพทย จงเกดความไมสะดวกหากตองมการปรบระดบความสงของเครองสองไฟทกคร งเพอเพมหรอลดความเขมแสง อกท งทตวเครองส องไฟยงไมมหนาจอแสดงคาความเขมแสงเชงสเปกตรม บทความวจยฉบบน นาเสนอชดควบคมเครองสองไฟแบบอตโนมตสาหรบรกษาภาวะทารกตวเหลองโดยใชเทคนคการมอดเลตเชงความกวางพลส และการสรางสมการคณตศาสตรแสดงความสมพนธระหวางระยะหางจากเครองสองไฟจนถงตวทารกและคาความเขมแสงเชงสเปกตรม นอกจากน นแลว ยงมการตดต งจอแสดงผลแบบแอลซดเพมเตม คาความเขมแสงเชงสเปกตรมของเครองสองไฟน ไดจากมเตอรวดความเขมแสงยหอ BiliBlanket Light Meter II (S/N 40002204) ทผานการสอบเทยบและรบรองจากสถาบนมาตรวทยาแหงชาต (มว.) จากผลการทดสอบพบวาระบบควบคมแบบอตโนมตทพฒนาข นมความผดพลาดโดยเฉลยประมาณ 1%
30 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1027
ชดปองกนกระแสไฟฟาลดวงจรเมอเกดอทกภย
ชาญชย ชาคา บญชา สวดด และ ณฐพงษ มงพฤกษ* สาขาเทคโนโลยคอมพวเตอร คณะเกษตรศาสตรและเทคโนโลย มหาวทยาลยเทคโนโลยราชมงคลอสาน วทยาเขต สรนทร
คาสาคญ ชดปองกนกระแสไฟฟาลดวงจร ชดปองกนอทกภย ระบบเตอนอทกภย บทความน นาเสนอชดปองกนกระแสไฟฟาลดวงจรเมอเกดอทกภย โดยใชเซนเซอรเปนตวตรวจจบระดบน า ซงเปนเทคโนโลยทมความหนาสนใจเปนอยางมากในการตวตรวจจบระดบน า อนเนองมากจากความสะดวกสบายราคาถก มาประยกตใชกบ ระบบเครอขายโทรศพทมอถอเพอสงขอมลการแจงเตอน ความช น ซงชดปองกนกระแสไฟฟาลดวงจรเมอเกดอทกภย เปนการตรวจสอบระดบน า เพอควบคมกระแสไฟฟาลดวงจร และใหผใชเกดความปลอดภย สามารถรบรเหตการณน าทวมเขาบานได ผลการดาเนนงานชดปองกนกระแสไฟฟาลดวงจรเมอเกดอทกภย มประสทธภาพการเตอนและตดกระแสไฟฟา โดยทาการทดลองใชงานจรงไดผล 100 เปอรเซนต
31ECTI-CARD 2019
ID 1029
ก า รป ร ะด ษ ฐ อ ป ก รณ เป ล ง แ ส งแ บ บ เม ท ร ก ซ ช น ด ส า ร อ น ท ร ย ITO/PEDOT:PSS/MEH-PPV/Al โดยใชวธการเคลอบแบบจม
ไพโรจน ใจเดยว* และ ชานาญ พรอมจนทก สาขาวชาฟสกสและวทยาศาสตรทวไป คณะวทยาศาสตรและเทคโนโลย มหาวทยาลยราชภฏนครราชสมา
คาสาคญ อปกรณเปลงแสงชนดสารอนทรย ฟลมบาง เครองเคลอบฟลมบางแบบจม เครองเคลอบฟลมบางแบบหมนปน
การวจยคร งน ไดประดษฐอปกรณเปลงแสงแบบเมทรกซชนดสารอนทรย โดยใชวธการเคลอบแบบจมของฟ ลมบาง poly [2-methoxy-5-(2-ethylhexyloxy)-1, 4-phenylenevinylene] (MEH-PPV) ความเขมขน 1% ทไดสงเคราะหข น โดยการเคลอบฟลมบาง MEH-PPV ดวยการเคลอบแบบจมบนกระจกสไลดทเคลอบดวยออกไซดของอนเดยมและดบก ( ITO) เตรยมช นของ ITO โดยการกดลาย 4 แถวขนาด 2×25 มม2 แชในสารละลายกรดไนตรก 30% และกรดซลฟวรก 70% ทอณหภม 60 องศาเซลเซยสเปนเวลา 10-15 วนาท จะไดลายคมชด ช นฟลม PEDOT:PSS ถกเคลอบดวยการหมนปนบนพ นผวกระจกเคลอบ ITO ทความเรว 2,000 รอบตอนาท แลวสรางช นฟลม MEH-PPV ดวยวธการเคลอบแบบจมบน ITO/PEDOTทความเรว 20 รอบตอนาท ไดศกษาสมบตทางไฟฟาของฟลม MEH-PPV โดยสรางข วโลหะอะลมเนยมขนาด 1×25 มม2 จานวน 4 แถว เคลอบดานบนโดยการระเหยเปนไอดวยความรอนภายใตสญญากาศทความดนตา 10-5 ทอร และไดแสดงความสมพนธของกระแสและแรงดนไฟฟาเปนเสนโคงแบบเอกซโพเนนเซยนทไมสมมาตร เมอกลบข วการใหแรงดนไบแอส สงประดษฐสามารถเปลงแสงสเหลองแกมสมสามารถสงเกตไดวาอยในชวงความยาวคลน 537 นาโนเมตรในการวดความเขมแสงไดเมอแรงดนไฟฟาอย ในชวง 2.0-2.5 โวลท และเมอเพมแรงดนไฟฟาประมาณ 5-6 V พกเซลรอบขางจะเปลงแสงสเหลองแกมสม เนองจากมการนาไฟฟาทมากภายใตสนามไฟฟาสง ผลการวจยน สามารถนาไปพฒนาเปนจอแสดงผลหรอหลอดไฟ oled แบบบางในอนาคต
32 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1030
ชองสญญาณผกผนชนดเรกลารไรซอยางงายสาหรบระบบมลตยสเซอรไมโม
วรวฒ ฉมพด สชาดา สทธจงสถาพร* และ สมพนธ พรหมพชย บณฑตศกษา สาขาวชาวศวกรรมอเลกทรอนกส คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยมหานคร
คาสาคญ ชองสญญาณผกผน ระบบมลตยสเซอรไมโม บทความน นาเสนอชองสญญาณผกผนชนดเรกลารไรซอยางงายดวยวธคาเฉลยกาลงสองนอยทสดสาหรบระบบมลตยสเซอรไมโม โดยมจดประสงคทจะใชชองสญญาณผกผนเพอชวยลดผลท เกดจากสญญาณรบกวนทเพมเขามาในชองสญญาณและชวยใหอตราบตผดพลาดลดนอยลง โดยขณะทาการสงผานขอมลระหวางทางอาจมการรบกวนสญญาณ ทาใหขอมลผดพลาดไปจากขอมลจรงทไดสงไป เพอใหฝงรบไดรบขอมลทถกตองและเพอทจะปองกนการถกรบกวนจากสญญาณรบกวน ผลการจาลองการทางาน พบวา คาทไดจากการใชชองสญญาณผกผนชนดเรกลารไรซอยางง ายดวยวธคาเฉลยกาลงสองนอยทสด จะใหประสทธภาพทดกวาเมอเปรยบเทยบกบการใชชองสญญาณผกผน
ID 1031
การกาหนดมมควบคมเอสอารจทความเรวตากวาพกดโดยใชโครงขายประสาทเทยม
พรยะ สาราเอก* และ ไพโรจน ทองประศร ภาควชาวศวกรรมไฟฟา คณะวศวกรรมศาสตรศรราชา มหาวทยาลยเกษตรศาสตร วทยาเขตศรราชา
คาสาคญ เอสอารจ โครงขายประสาทเทยม ความเรวตากวาพกด บทความน นาเสนอวธการกาหนดมมควบคมเอสอารจโดยใชโครงขายประสาทเทยม เมอเอสอารจทางานทความเรวตากวาพกด ชดทดลองเครองกาเนดไฟฟาชนดเอสอารจ 4 เฟส 8 ข วสเตเตอร 6 ข วโรเตอร ควบคมดวยตวประมวลสญญาณดจทล TMS320F28335 ทางานในโหมดควบคมกระแสแบบชอปปงถกสรางข น ชดทดลองถกใชเพอเกบขอมลกาลงไฟฟาดานออกและมมควบคมทความเรวตาโดยควบคมใหแรงดนดซบสคงท ชดขอมลทไดจากการทดลองถกนาไปสรางแบบจาลองโครงขายประสาทเทยมซงมโครงสรางแบบฟดฟอรเวรดและการเรยนรแบบแพรยอนกลบโดยใชจานวนนวรอลในช นซอน 5 ตว และช นผลต 2 ตว สาหรบกาหนดมมควบคมเอสอารจ
33ECTI-CARD 2019
ID 1032
โปรแกรมประยกตบนเวบสาหรบการวเคราะหลกษณะนสยจากภาพโครงหนาและเทคโนโลยการตรวจจบใบหนา
สรกร ลมวงศพชรกล อารษา สขสมใจภกด* และ นนทฤทธ ศรนวกล
สาขาวชาวทยาการคอมพวเตอรประยกต ภาควชาคณตศาสตร คณะวทยาศาสตร มหาวทยาลยเทคโนโลยพระจอมเกลาธนบร
คาสาคญ โปรแกรมประยกตบนเวบ โหวงเฮง เทคโนโลยตรวจจบใบหนา ภาษา Ruby บน Rails API Skybiometry
โปรแกรมประยกตบนเวบสาหรบการวเคราะหลกษณะนสยจากภาพโครงหนาและเทคโนโลยการตรวจจบใบหนาถกพฒนาข นสาหรบบคคลหรอองคกรทมความตองการสรรหาบคลากรในการทางาน มตวชวยในการนาขอมลทวเคราะหไดจากโปรแกรมอตโนมตไปใชประกอบการตดสนใจในการรบบคลากร โดยโปรแกรมประยกตทพฒนาข นน ประยกตใชไลบราร Skybiometry เพอตรวจจบใบหนาเบ องตนทมแมนยา จากน นเทคนคการหาประเภทของโครงหนาจะถกพจารณาจากการเปรยบเทยบมมของความชนระหวางจดสาคญบนโครงหนา และอตราสวนของใบหนา โดยโปรแกรมถกพฒนาข นบนระบบ Ruby-Rails ทมโมเดลการออกแบบทมประสทธภาพ และรวมเขากบการทสามารถแสดงผลแบบ Responsive และออนไลนบน Heroku cloud แมวาการตรวจจบประเภทโครงหนาของมนษยน นจะมความซบซอน เนองจากแตละประเภทเงอนไขทใกลเคยงกน การทดสอบกบรปภาพหนาตรงจานวน 150 รป ความแมนยาของโปรแกรมสงถงเกอบ 70% โดยคานวณในเวลาทรวดเรวและเขาถงไดงาย
34 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1033
การปรบปรงความคมชดภาพอลตราซาวด โดยการรวมฮารมอนกซบ-อลตรา และ เทคนคการกรองไมเปนเชงเสน
จนดา สามคคสาขาวชาวศวกรรมโทรคมนาคม คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลศรวชย
คาสาคญ ความคมชดเชงเปรยบตาง ภาพอลตราซาวด ตวกรองไมเปน เชงเสน สงหนงทสาคญใน การปรบปรงคณภาพของภาพอลตราซาวด แบบใชสารเพมความคมชด คอการใชองคประกอบความถและเทคนคตว กรองสาหรบแยกความถออกจากสญญาณสะทอนของเน อเยอ เพอสรางเปนภาพ ความถฮารมอนกซบและอลตราเปนภาพอกหนงทางเลอกท สามารถชวยเพมความคมชดภาพระดบสงและการจดปญหาการใชภาพฮารมอนกทสองได การแยกสญญาณอลตราซาวดฮารมอนกซบและอลตราดวยแบบจาลองไมเปนเชงเสนโวลเทอราหนงอนพท-หนงเอาทพทน นม ขอจากดทไมสามารถทาได บทความน นาเสนอวธการเพม ความคมชด ภาพอลตราซาวดโดยการใชฮารมอนกซบและอลตราและวธการใชตว กรองโวลเทอราเพอใหสามารถแยกฮารมอนกซบและ อลตราได ผลการ ทดสอบจาลองแบบตวกรองทไดออกแบบสามารถทจะแยกฮารมอนกซบ และ อลตราได ซงวธน จะแสดงใหเหนถงศกยภาพในการเพมความคมชด ในภาพฮารมอนกซบและอลตราสาหรบการวนจฉยโรคดวยภาพอลตราซาวดทางการแพทย
35ECTI-CARD 2019
ID 1035
ระบบควบคมบานอจฉรยะสาหรบผสงอายดวยคาสงเสยง
จารณ ดวงสวรรณ* ศรรตน วณชโยบล เพญนภา สภาวไตร และ ภวเรศ จนทรดวง ภาควชาวทยาการคอมพวเตอร คณะวทยาศาสตร มหาวทยาลยสงขลานครนทร
คาสาคญ บานอจฉรยะ การประมวลผลภาษาธรรมชาต ผสงอาย งานวจยน นาเสนอตนแบบระบบควบคมบานอจฉรยะเพอ ผสงอายโดยสงการผานภาษาธรรมชาต ซงออกแบบใหอยในรปของเอเจนตทเปนตวแทนผสงอายในบทบาทตางๆ 4 ชนดไดแกเอเจนตผรบการดแลเอเจนตผใหการดแล เอเจนตผบรหารระบบ และเอเจนตผ ตรวจสอบสภาพแวดลอม เอเจนตแตละชนดถกพฒนาในรปของ mobile application บนระบบปฏบตการแอนดรอยดเพออานวยความสะดวกใหแกผสงอาย การพฒนาเอเจนตผรบการดแลทาหนาทเสมอนเปนตวแทนของผสงอายซงรบผดชอบในการจดการขอมลสวนตวของผสงอาย เอเจนตผใหการดแลทาหนาทเสมอนเปนตวแทนของผดแล ผสงอายโดยมหนาทเกยวกบการแจงเตอนกจกรรมหลกๆทผสงอายตองทาในแตละวน เชนการแจงเตอนเมอถงเวลากนอาหารกนยาหรอไปพบแพทย เปนตน เอเจนตผบรหารระบบ รบผดชอบเกยวกบการจดการ ขอมลของระบบ ไดแกขอมลการนดหมาย ขอมลยา และขอมลเพอการ โทรฉกเฉน และทาหนาทควบคมสภาพแวดลอมภายในทอยอาศยใหอย ในสภาวะทสะดวกสบาย เอเจนตท ง 4 ชนดสามารถทางานรวมกนเพอทา ใหระบบสามารถใหผสงอายใชงานและเพมความสะดวกในการดาเนน กจกรรมตาง ๆ ในแตละวนได
36 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1036
การประยกตขนตอนวธการผสมเกสรดอกไมเพอแกปญหาการจดเสนทางการขนสงแบบหลายยานพาหนะ
สภาภรณ สวรรณรงษ* และ เดชา พวงดาวเรอง ภาควชาวศวกรรมขนถายวสดและโลจสตกส คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยพระจอมเกลาพระนครเหนอ
คาสาคญ ข นตอนวธการผสมเกสรดอกไม ปญหาการจดเสนทางการ ขนสงแบบหลายยานพาหนะ การหาคาเหมาะทสดแบบมเงอนไข
ปญหาการจดเสนทางการขนสง (vehicles routing problem: VRP) ทเปนปญหาจรงสวนใหญจะเปนปญหาการจดเสนทางการขนสงแบบหลายยานพาหนะ (multiple vehicle routing problem: MVRP) ซงมความซบซอนกวาปญหาการจดเสนทางการขนสงแบบยานพาหนะเดยวปญหา MVRP สามารถพจารณาเปนปญหาการหาคาเหมาะทสดแบบมเงอนไข บทความน นา เสนอการประยกตข นตอนวธการผสมเกสรดอกไม (flower pollination algorithm: FPA) เพอแกปญหา MVRP มาตรฐานจานวน 5 ปญหา ผลการทดสอบไดรบการเปรยบเทยบกบข นตอนวธเชงพนธกรรม (genetic algorithm: GA) แ ล ะก ารห าค า เห ม าะ ท ส ด แ บ บ ฝ งอ น ภ าค (particle swarm optimization: PSO) จากผลการทดสอบพบวา FPA สามารถคนหาคาตอบสาหรบปญหา MVRP ทกปญหาไดดกวา GA และ PSO อยางมนยสาคญ
ID 1037
การพฒนาศกยภาพดานการอานสาหรบนกเรยนผพการทางสายตา โดยใชสออเลกทรอนกสมาตรฐาน EPUB 3
คณานนต สมคา* ชนกนต ใจเยน ธรรมนญ หวานชะเอม ระพพนธ แกวออน ชยวฒ ชรกษ และ พรชย เปลยมทรพยสาขาวชาวศวกรรม อเลกทรอนกสและระบบคอมพวเตอร คณะวศวกรรมศาสตรและเทคโนโลยอตสาหกรรม มหาวทยาลยศลปากร
คาสาคญ - โครงการน จดทา เพอพฒนาศกยภาพสาหรบนกเรยนผมปญหา เรองการบกพรองทางการมองเหนโดยใชสออเลกทรอนกสมาตรฐาน EPUB3 เพอทดแทนหนงสอทวไปและสอการเรยนรอนๆ ทไมเหมาะสม กบนกเรยนทบกพรองทางการมองเหนโดยในสออเลกทรอนกส มาตรฐาน EPUB3 มการอานวยความสะดวกสาหรบนกเรยนทบกพรอง ทางการมองเหน ซงจะแบงออกเปน 3 สวน คอ สวนของเสยงมการ รองรบการใชงาน Reading Screen และสามารถบนทกเสยงได สวนของการจดเกบมความสะดวก เนองจากเปนสออเลกทรอนกสทสามารถพกพา ไดงายโดยไมตองพกหนงสอหลายเลม สดทายคอสวนของฟงกชนการใช งานมปมกดเพอสรางความเขาใจใหมากข น.
37ECTI-CARD 2019
ID 1038
เครองจาแนกสโดยเทคนคโมเดลส HSI
วทยา ศรกล* ธรรมกร ครองไตรภพ สภทรา เกดเมฆ และ จรนนท อวชาวนา สาขาวชาวศวกรรมคอมพวเตอร คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลอสาน
คาสาคญ อาดยโน ระบบสเอชเอสไอ การจาแนกส บทความน กลาวถงการตรวจจบสวตถ ซงหลกการน สามารถนาไปประยกตใชในอตสาหกรรมไดหลากหลาย อยางเชนในกระบวนการผลต การคดแยกบรรจภณฑ ในอตสาหกรรมอาหาร เชนการใชรหสสของผลตภณฑเพอเปนมาตรการควบคมคณภาพ ดงน นผวจยไดสรางเครองจาแนกส โดยใช แอลดอาร (LDR) และ โฟโตทรานซสเตอร (Phototransistor) เปนอปกรณตรวจจบส สวนแอลอดสแดง น าเงน เขยว เปนแหลงกาเนดแสง เราออกแบบการทดลองเทยบผลการตอบสนองตอแอลดอาร และ โฟโตทรานซสเตอร ทมผลตอแสงสะทอนจากวตถ โดยพจารณาผลลพธของเซนเซอรและนาขอมลเพอประมวลผลโดยไมโครคอนโทรลเลอรอาดยโน แสดงคาตอบแสดงผลผานจอแอลซด เครองจาแนกสน สามารถจาแนกสได 12 ส โดยการใชระบบสแบบเอชเอสไอ (HSI) มาวเคราะหและจาแนกส จากผลการทดลองเครองจาแนกสมความแมนยาในการจาแนกสรอยละ 99.16
ID 1039
การวเคราะหเสถยรภาพของระบบไฟฟากาลงเอซเปนดซทมโหลดเปนวงจรแปลงผนแบบบคกทมการควบคม
จฑาทพย กลาสงคราม1* กองพน อารรกษ1 และ เทพพนม โสภาเพม2 1 สาขาวชาวศวกรรมไฟฟา สานกวชาวศวกรรมศาสตร มหาวทยาลยเทคโนโลยสรนาร 2 ภาควชาวศวกรรมไฟฟากาลง คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยมหานคร
คาสาคญ โหลดกลงไฟฟาคงตว วงจรแปลงผนกาลงแบบบคก เกณฑเสถยรภาพของมดเดลบรค
บทความน ไดนาเสนอการวเคราะหเสถยรภาพของระบบไฟฟากาลงเอซเปนดซทมโหลดเปนวงจรแปลงผนแบบบคกทมการควบคม ซงโหลดในลกษณะน จะมพฤตกรรมเปรยบเสมอนโหลดกาลงไฟฟาคงตว โดยการวเคราะหเสถยรภาพจะเรมจากการหาแบบจาลองทางคณตศาสตรของระบบแลวนาแบบจาลองทาง คณตศาสตรทไดไปใชในการวเคราะหเสถยรภาพตอไป ซงในบทความน ไดนาเสนอการวเคราะหเสถยรภาพไว 2 วธ คอ การวเคราะหเสถยรภาพโดยอาศยทฤษฎบทคาเจาะจง และเกณฑเสถยรภาพของมดเดลบรค
38 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1040
แบบจาลองทางคณตศาสตรของระบบไฟฟากาล งเอซเปนดซท มโหลดกาลงไฟฟาคงตว สาหรบการบรรเทาการขาดเสถยรภาพโดยใชลปปอนไปหนา
รฐพล โพธสงข1* กองพน อารรกษ1 และ เทพพนม โสภาเพม2 1 สาขาวชาวศวกรรมไฟฟา สานกวชาวศวกรรมศาสตร มหาวทยาลยเทคโนโลยสรนาร 2 ภาควชาวศวกรรมไฟฟากาลง คณะวศวกรรรมศาสตร มหาวทยาลยเทคโนโลยมหานคร
คาสาคญ แบบจาลองทางคณตศาสตร การบรรเทาการขาดเสถยรภาพ ลปปอนไปหนา วธดคว วธคาเฉลยปรภมสถานะทวไป
ในบทความน ไดนาเสนอแบบจาลองทางคณตศาสตรสาหรบระบบทมการบรรเทาการขาดเสถยรภาพโดยใชลปปอนไปหนา ซงโดยทวไปการหาแบบจาลองของระบบดงกลาวจะเปนแบบจาลองทข นกบเวลาอนเนองมาจากอปกรณสวตช และเมอนาแบบจาลองไปใชในการวเคราะหเสถยรภาพจะทาใหมความซบซอนยงยาก ดงน นในบทความน จะนาเสนอการหาแบบจาลองทางคณตศาสตรท เปน แบบจาลองไมข นกบเวลา โดยใชวธรวมกนระหวางวธดควและวธคาเฉลยปรภมสถานะทวไป ซงจะทาใหงายตอการวเคราะหเสถยรภาพ การตรวจสอบความถกตองของแบบจาลองจะอาศยผลการเปรยบเทยบดวยการจาลองสถานการณบนโปรแกรม MATLAB ซงแสดงใหเหนวาแบบจาลองใหผลตอบสนองถกตองท งในสภาวะชวครและสภาวะอยตว
39ECTI-CARD 2019
ID 1041
โรงเรอนเลยงไกตนแบบควบคมอณหภมและความชนอตโนมต
ธรศาสตร คณาศร1* สนต นรากลนนท1 ประสทธ มงคลเกษตร1 และ อลงกต หนองขนสาร2
1 สาขาวชาเทคโนโลยอเลกทรอนกส คณะศลปศาสตรและวทยาศาสตร มหาวทยาลยราชภฏรอยเอด 2 สาขาวชาเทคโนโลยไฟฟา คณะศลปศาสตรและวทยาศาสตร มหาวทยาลยราชภฏรอยเอด
คาสาคญ อณหภมและความช น จดคมทน บอรด Arduino การวจยน พฒนาโรงเรอนเล ยงไกตนแบบมระบบควบคมอณหภม และความช นอตโนมตใชพลงงานไฟฟาจากเซลลแสงอาทตย วตถประสงคมดงน เพอออกแบบ และสราง ตนแบบโรงเรอนควบคมอณหภมอตโนมต ควบคมดวยไมโครคอนโทรลเลอร บอรด Arduino ผานเครอขายแอพพลเคชน มมอเตอร 12 VDC ขบเคลอนพดลมระบายอากาศขนาดใบพด 12 น ว จานวน 2 ตว โรงเรอนมโครงสรางขนาด กวาง x ยาว x สง เทากบ 2 x 1 x 1 เมตร ใชหลกการของพดลมจะดดอากาศรอนออกจากโรงเรอนทางานรวมกบเซนเซอรตรวจสอบระบบควบคมอณหภม สงใหพดลมระบายอากาศรอนออก จากน นดดอากาศทผานการลดอณหภมดวยน าเยนในแผนรงผ ง ใหอากาศผานเขามาในโรงเรอนแทนทอากาศทดดออกไป การทดสอบใชลกไกเน ออาย 15 วน จานวน 25 ตว จาลองเล ยงในโรงเรอนตนแบบระยะเวลา 35 วน เปรยบเทยบผลการศกษา ความช น อณหภมสภาพแวดลอม และน าหนกไกเน อกบวธเล ยงแบบเปดธรรมชาต ผลการทดสอบพบวา การเล ยงไกเน อตอเนองระยะเวลา 12 ชวโมงตอวน โรงเรอนตนแบบใชพลงงานไปท งหมด 432 วตต ซงการเล ยงไกในโรงเรอนอตราการรอดเทากบ 100 เปอรเซนต เนองจากสามารถลดอณหภมไดเทากบ 6 องศาเซลเซยส และ การควบคมอตโนมตไดความช นเทากบ 60-70 เปอรเซนต สงผลตอการเจรญเตบโตไกมอตราการแลกเปลยนเน อสงกวาวธเล ยงแบบเปดธรรมชาต
40 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1042
เครองตดสายรดพลาสตกกงอตโนมตสาหรบงานสานไมกวาดทางมะพราวของ ชมชนวดสะพานอฐ ต.ทะเลชบศร อ.เมอง จ.ลพบร
ชชชย เขยวบตร ลกษณวฒ เปลงศรรตน และ วดนาถ วรรณสวสดกล*
สาขาวชาวศวกรรมสารสนเทศและการสอสาร คณะเทคโนโลยอตสาหกรรม มหาวทยาลยราชภฏเทพสตร คาสาคญ เครองตดสาย สายรดพลาสตก PIC16F877A
บทความน นาเสนอวธการออกแบบและสรางเครองตดสายรดพลาสตกกงอตโนมตสาหรบงานสานไมกวาดทางมะพราวของมชนทข นชอของชมชนวดสะพานอฐ ต.ทะเลชบศร อ.เมอง จ.ลพบร โดยทาการเขยนโปรแกรมควบคมระบบลงบนตวประมวลผล PIC16F877A เพอทาใหเครองตดสายรดพลาสตกสามารถตดสายทความยาว 915 มลลเมตรไดในจานวน 34 เสนสาหรบทาไมกวาด 100 อนและจานวน 68 เสนสาหรบทาไมกวาด 200 อน ผลการทดลองเครองตดสายรดพลาสตกสามารถตดสายรดพลาสตกทความยาว 914.27 มลลเมตรไดภายในเวลาเฉลย 2.10 วนาทตอ 1 เสน ซงไวกวาการตดแบบเดม 65.22% สาหรบการตดสายรดพลาสตกจานวน 34 เสน และใชเวลาไวกวาการตดแบบเดม 453.78% สาหรบการตดสายรดพลาสตกจานวน 68 เสน
41ECTI-CARD 2019
ID 1043
เครองตนแบบปลกผกอตโนมต
ยงยธ สจโต ปยะพร มลทองชน และ สวพล มหศกดสกล* สาขาวชาวศวกรรมคอมพวเตอร คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลศรวชย
คาสาคญ เครองตนแบบปลกผกอตโนมต ออรแกนค แอโรโพนกส หลอดไฟสาหรบปลกผก โหนดเอมซย
บทความน นาเสนอเครองตนแบบปลกผกอตโนมตซงเปนการปลกผกสลดกรนโอคและเรดโอคในระบบปดท งแบบออรแกนค และแอโรโพนกส เพอหาตวแปรตาง ๆ ทใชในการปลกผก ไดแก การใหแสง การใหปย และการใหน า เพอทาใหมผลผลตคณภาพสมาเสมอและปลอดสารพษ โดยมการออกแบบ 3 สวนคอ 1. ชดกลองปลกผก 2. ระบบ ควบคมการทางานดวยไมโครคอนโทรลเลอร ทาหนาทควบคมการใหน า ปย และใหแสงเลยนแบบแสงอาทตย ผลการทดสอบการทางานพบวา เครองตนแบบปลกผกอตโนมต แบบออรแกนค สามารถปลกผกสลดได ผลผลตทมขนาดและคณภาพเทยบเทากบการปลกบนดนทวไป แตมคณภาพทดกวาในดานของความกรอบ ไมมกลนเหมนเขยว ไดตวแปรทเหมาะสมสาหรบในการปลกดงน 1) ใหแสงไฟสมวงเปนเวลา 22 ชวโมง 2) ปยทเหมาะสมเปนปย 3 ชนดคอ ยเรยน าจลนทรยหนอกลวย จลนทรยสงเคราะหแสง โดยปยจะผสมกบน าทใชรดวนละ 4 เวลา คร งละ 10 นาท 3) ดนทใชปลกดนบานฟารมสข สวนการปลกผกอตโนมตแบบแอโร โพนกส สามารถปลกผกไดผลผลตขนาดและคณภาพเทยบเทากบการ ปลกแบบไฮโดรโปนกส แตใชปรมาณน านอยกวา ไดตวแปรทเหมาะสม สาหรบในการปลกดงน 1) ใหแสงไฟสมวงเปนเวลา 22 ชวโมง 2) ปยท ใชเปนสารละลาย เอบ ผสมในน าฉดพนสารละลาย ทกๆ 3 นาท 3) ควบคมความช นภายในถงเพาะใหมคาระหวาง 60 - 70 เปอรเซนต โดย ผกทปลกไดท งสองแบบ ไมมสารเคมตกคาง ไมมแมลงรบกวน และปลก ไดทกฤดกาล เมอเปรยบเทยบกบการปลกทวไปในปจจบน
42 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1046
โปรแกรมทดสอบอณหภมและความชนในดนสาหรบโรงเรอนอจฉรยะเพอใชปลกผกออรแกนค
จรศกด วงษบงกชไพศาล* รตนาพร องคณารงรตน อรณชา แซตง ระพพนธ แกวออน ชยวฒ ชรกษ พรชย เปลยมทรพย และ กตตธช พาพลเพญ สาขาวชาวศวกรรมอเลกทรอนกสและระบบคอมพวเตอร คณะวศวกรรมศาสตรและเทคโนโลยอตสาหกรรม มหาวทยาลยศลปากร
คาสาคญ - บทความน นาเสนอโปรแกรมทดสอบอณหภมและความช นในดนสาหรบโรงเรอนอจฉรยะ แบบการใชสเปรยละอองน า และการรดน าแบบอตโนมต Arduino รบสญญาณอนาลอกจากเซนเซอรวดอณหภมและความช นในดนและทาการประมวลผลแสดงคาอณหภมและความช นในดนทวดไดบนจอ LCD ทหนาตควบคม ระบบควบคมทออกแบบสามารถทางานไดท งแบบการควบคมดวยมอและแบบอตโนมต ผลการทดสอบจากโรงเรอนทชมชนมลนธพลตรจาลอง ศรเมอง จงหวดกาญจนบร พบวา ระบบควบคมอณหภมสามารถรกษาอณหภมภายในโรงเรอนไมเกน 30 องศาเซลเซยสได ซงเปนอณหภมทเหมาะสมสาหรบการปลกผกออรแกนค และระบบรดน าอตโนมตสามารถทางานไดตรงตามเงอนไขทกาหนดไวได ประโยชนของระบบควบคมอตโนมตเชน ประหยดเวลา ใชกาลงคนนอยลง ระยะเวลาในการทางานของระบบจะข นอยกบสภาพอากาศ ณ ขณะน น โครงงานน สามารถนาไปใชควบคมการทางานของโรงเรอนเพาะปลกไดเปนอยางด.
43ECTI-CARD 2019
ID 1047
แบบจาลองทางคณตศาสตรของระบบไฟฟากาลงเอซเปนดซทเชอมตอโหลดกาลงไฟฟาคงตวทมการบรรเทาการขาดเสถยรภาพดวยวธอารวซ
กษมา รงรตนธวชชย1* กองพน อารรกษ1 และ เทพพนม โสภาเพม2 1 สาขาวชาวศวกรรมไฟฟา สานกวชาวศวกรรมศาสตร มหาวทยาลยเทคโนโลยสรนาร 2 ภาควชาวศวกรรมไฟฟากาลง คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยมหานคร
คาสาคญ การบรรเทาการขาดเสถยรภาพ โหลดกาลงไฟฟาคงตว วงจรแปลงผนกาลงทมการควบคม.
บทความน นาเสนอแบบจาลองทางคณตศาสตรสาหรบวงจรเรยงกระแสสามเฟสแบบบรดจทมโหลดเปนวงจรแปลงผนกาลงแบบบคกทมการบรรเทาการขาดเสถยรภาพดวยวธอารวซ (Reference Voltage-Based Active Compensator : RVC) ซงโดยทวไปจะเปนแบบจาลองทข นอยกบเวลาเนองจากการสวตชของอปกรณอเลกทรอนกสกาลงในระบบซงสามารถพสจนหาแบบจาลองทางคณตศาสตรโดยใชวธดคว (DQ) และวธคาเฉลยปรภมสถานะแบบทวไป (generalized state space averaging : GSSA) เพอใหไดแบบจาลองทาง คณตศาสตรของระบบทไมข นอยกบเวลาสาหรบการวเคราะหเสถยรภาพของระบบตอไปการตรวจสอบความถกตองของแบบจาลองทาง คณตศาสตรทาไดโดยทาการเปรยบเทยบผลการจาลองสถานการณของแบบจาลองทางคณตศาสตรทนาเสนอเป ร ยบ เท ยบ ก บ ผลการจ า ลอ ง ส ถาน การณ ขอ งช ดบ ล อ ก ไฟ ฟ าก าล งด ว ย โป รแกรม MATLAB/Simulink พบวาผลการตอบสนองของแบบจาลองทางคณตศาสตรมความสอดคลองกนท งในสภาวะชวคร และในสภาวะอยตว
44 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1048
ผลการใชบทเรยนคอมพวเตอรชวยสอน เรอง นตกรรม ประกอบการเรยนรายวชากฎหมายธรกจ ของนกศกษาชนปท 1 สาขาวชาการบญช คณะวทยาการจดการ มหาวทยาลยราชภฏเทพสตร
เบญจพร บญสยมภ สาขาวชานตศาสตร คณะมนษยศาสตรและสงคมศาสตร มหาวทยาลยราชภฏเทพสตร
คาสาคญ บทเรยนคอมพวเตอรชวยสอน นตกรรม การวจยน มวตถประสงคเพอสรางบทเรยนคอมพวเตอรชวยสอน ซงเปนการวจยดานการพฒนาอปกรณประกอบการเรยนการสอน โดยเน อหาของบทเรยนคอมพวเตอรชวยสอนน เกยวของกบเรอง นตกรรม ของวชากฎหมายธรกจ รหสวชา บธ3000204 สาขาวชาการบญช คณะวทยาการจดการ มหาวทยาลยราชภฏเทพสตร ผลสมฤทธทางการเรยนรของบทเรยนคอมพวเตอรชวยสอนทสรางข นโดยอาศยเครองมอทใชในการวจยประกอบดวย บทเรยนคอมพวเตอรชวยสอนและแบบทดสอบวดผลสมฤทธกอนเรยนและหลงเรยน โดยใชกลมตวอยางเปนนกศกษาสาขาวชาการบญชทลงทะเบยนเรยน วชากฎหมายธรกจจานวน 127 คน ผลการวจยของบทเรยนคอมพวเตอรชวยสอนโดยไดคะแนนสอบหลงเรยนมากกวาคะแนนสอบกอนเรยนอยในเกณฑรอยละ 64.15/89.25
ID 1049
หนยนตคดแยกขนาดไข
กรณการ มลโพธ สาขาวชาวศวกรรเมคคาทรอนกส สถาบนนวตกรรมมหานคร คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลย มหานคร
คาสาคญ หนยนต หนยนตคารทเชยน เครองคดแยกขนาดไข คดไขไก บทความน ไดพฒนาการคดแยกขนาดไขไก โดยใชหนยนตทมหลกการการเคลอนทเปนเสนตรงมาแนวแกน 3 แกน ในการหยบจบไขไกแทนมนษย และไดพฒนาการคดแยกขนาดไขไกแบบเกาทเปนการชงน าหนกโดยใชเทคนคสมดลแรงหรอคานกระดก เปนการใชอปกรณอเลกทรอนกสทชอวาโหลดเซลลในการชงน าหนกแทน เพอเพมความแมนยาในการคดแยกขนาด ซงจากผลการทดสอบการทางานจรงพบวา หนยนตคดแยกขนาดไขไกน สามารถคดแยกไขไกไดไมตากวา 4,700 ฟองตอวน และมประสทธภาพในการคดแยกไขไกไดจรงโดยมคาความผดพลาดในการคดแยก 2% และแสดงผลการคดแยกออกทางหนาจอแอลซด
45ECTI-CARD 2019
ID 1050
การตรวจวดและประเมนประสทธภาพของมอเตอรเหนยวนา 3 เฟส ทสภาวะการทางานจรง:โครงการวจยสหกจศกษาระดบปรญญาตร
สมต ชยศกดเลศ เอกชย ดศร* และ ชยรตน วสทธรตน ภาควชาวศวกรรมไฟฟาและอเลกทรอนกสประยกต คณะวศวกรรมศาสตร มหาวทยาลยศรปทม
คาสาคญ ประสทธภาพ มอเตอรไฟฟา 3 เฟส ปมสบน า บทความน เปนตรวจวดและประเมนหาประสทธภาพของมอเตอรเหนยวนา 3 เฟส ท สภาวะการทางานจรง โดยการตรวจวดคากระแสไฟฟา แรงดนไฟฟา และกาลงไฟฟาของมอเตอรทสภาวะการทางานงานจรงในแตละรปแบบการใชงาน ผลการทดสอบมอเตอรจะมคาประสทธภาพลดลงประมาณ1%-2.9% สาเหตเกดจากการขบโหลดทตากวาคาพกดหรอการชารดภายในตวของมอเตอรเพยงเลกนอย แตไมไดสงผลกระทบตอประสทธภาพของมอเตอรมากนก จากการประเมนหาประสทธภาพของมอเตอรน นถอวามอเตอรยงคงมประสทธภาพการใชงานทดอย
46 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1051
ระบบการพสจนตวตนและบนทกการเขาออกศนยคอมพวเตอรดวยวธการวเคราะหใบหนา
วชรนนท ปม สาขาวชาคอมพวเตอรธรกจ คณะวทยาการจดการและเทคโนโลยสารสนเทศ มหาวทยาลยนครพนม
คาสาคญ ระบบควบคมการเขาออกศนยคอมพวเตอร อปกรณสมองกลแบบฝงตว การวเคราะหใบหนา การจดการเทคโนโลยสารสนเทศ
บทความวจยน นาเสนอผลการศกษาระบบความปลอดภยข นส งเพอควบคมการเขาออกศนยคอมพวเตอรโดยใชวธการตรวจจบและวเคราะหรปแบบของใบหนามนษยโดยใชอปกรณสมองกลแบบฝงตวทสามารถหาซ อไดงายและราคาถกในทองตลาดปจจบนมาพฒนาและทาการทดสอบเสมอนจรงท งในหองทดลอง และในพ นทศนยคอมพวเตอร ทมวจยไดศกษาทดลองและออกแบบท งดานฮารดแวร และซอฟตแวรควบคกนไปจนไดช นงานทดลองตนแบบทนาพอใจซงสามารถนามาแกไขปญหาวจยทต งไวไดเกอบท งหมด เชน ปญหาดานงบประมาณจดซ อและตดต งระบบความปลอดภยข นสงสาหรบควบคมการเขาออกศนยคอมพวเตอรทมความสามารถวเคราะหใบหนา อกท งปญหาระบบบนทกและแจงเตอนทโดยทวไปไมสามารถเชอมกบฐานขอมลภายนอกได และปญหาการแจงเตอนทใชไดเพยงการสงขอความส น (SMS) เปนตน อกท งนกวจยยงไดนาองคความรทไดจากการศกษางานวจยน รวบรวมเปนหลกสตรระยะส นถายทอดใหแกนกศกษา และบคลากรภายนอกในทกแงมมของการทดลอง เชน การทดสอบภาคสนาม และการปรบใชงานในสภาพแวดลอมจรงอนเปนประโยชนตอนกศกษาตลอดจนผดแลระบบทสนใจสามารถนาไปสรางระบบความปลอดภยข นสงเพอควบคมการเขาออกศนยคอมพวเตอรโดยใชวธการตรวจจบใบหนาไดต งแตข นตอนออกแบบ การเลอกอปกรณ และเพอนาองคความรอนจากงานวจยน ไปปรบใชในองคกรไดตอไป
47ECTI-CARD 2019
ID 1052
การวดและการถอดแบบคาเกบประจเชอมตอของสายสญญาณในวงจรรวมขนาดใหญ
อสรยา นสสย1* รงสรรค เมองเหลอ1 และ อนชา เรองพานช2 1 ภาควชาวศวกรรมอเลกทรอนกส คณะวศวกรรมศาสตร สถาบนเทคโนโลยพระจอมเกลาเจาคณทหารลาดกระบง 2 ศนยเทคโนโลยไมโครอเลกทรอนกส (TMEC) ศนยเทคโนโลยอเลกทรอนกสและคอมพวเตอรแหงชาต
คาสาคญ การเชอมตอดวยตวเกบประจ การเชอมตอภายใน บทความน นาเสนอการออกแบบการวดและการถอดแบบคา เกบประจเชอมตอของสายสญญาณในวงจรขนาดใหญ (VLSI) ใช โครงสรางแบบ multi-fringe ของสายสญญาณช น โลหะ 1 และ สายสญญาณช นโลหะ 2 โดยมมพ นทเทากบ 2.8×104 µm2 และความยาวเสนรอบวง 3.16×104 µm (L = 400 µm, no. strip = 80) อตราสวนระหวางความกวางของสายสญญาณกบระยะหางของสายสญญาณ (W/LS) มคาเปน 0.9/0.6, 0.9/0.9, 0.9/1.05 และ 0.9/1.2 ตามลาดบ ความถทวด 10kHz, 100kHz, 250kHz, 500kHz, 1MHZ และ 5 MHz ผลการทดลองแสดงใหเหนวา คาเกบประจเชอมตอของสายสญญาณ หนวยความยาว 1 หนวย (F/µm) มคาเพมข นเมอชองวางระหวางสายสญญาณลดลง แบบจาลองคาเกบประจเชอมตอของสายสญญาณมความสาคญอยางมากในการจาลองการทางานของวงจรขนาดใหญทตอบสนองตอความถ
48 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1053
โปรแกรมชวยแปลอกษรเบรลลสาหรบครผสอนทมผเรยนเปนผพการทางสายตา
ธนะชย จาดจร อภสทธ เทยงธรรม และ นนทรฐ บารงเกยรต* สาขาวชาวศวกรรมสารสนเทศและการสอสาร คณะเทคโนโลยอตสาหกรรม มหาวทยาลยราชภฏเทพสตร
คาสาคญ อกษรเบรลล ผพการทางสายตา การประมวลผลภาพดจทล งานวจยน น นาเสนอโปรแกรมชวยแปลอกษรเบรลลสาหรบครผสอนทมผเรยนเปนผพการทางสายตา ซงเปนงานวจยเชงประยกตเพอสรางโปรแกรมสาหรบการแปลตวอกษรภาษาองกฤษ ตวเลขอารบกและตวอกษรเบรลล ทอยในรปแบบของจากภาพดจทลใหครผสอนทมผเรยนเปนผพการทางสายตาเขาใจได ซงผวจยไดนาหลกการประมวลผลภาพดจทลสาหรบการแปลงภาพตวอกษรเบรลลเปนตวอกษรภาษาองกฤษ และแปลภาพอกษรภาษาองกฤษเปนอกษรเบรลล ซงอยในรปแบบของการสรางหนาตางตดตอผใชงานเพอสะดวกตอการใชงาน ผลการออกแบบและสรางโปรแกรมน ผลการทดลอง พบวา การแปลรปภาพดจทลตวอกษรภาษาองกฤษเปนอกษรเบรลลจานวน 20 ภาพ และจากการแปลรปภาพอกษรเบรลลใหเปนตวอกษรภาษาองกฤษจานวน 20 ภาพ คาเฉลยเปอรเซนตความถกตองทได คอ 100% และผลการประเมนความพงพอใจของของครผสอนหรอผดแลผพการทางสายตาทใชงานตอการใชงานโปรแกรม มคาเฉลยผลการประเมนความพงพอใจเฉลยของครผสอนหรอผดแลผพการทางสายตาทใชงานโปรแกรมทมตอการใชงานโปรแกรมมคา 4.20 หรอมความพงพอใจรอยละ 84
49ECTI-CARD 2019
ID 1054
ระบบตรวจสอบการทางานของเครองปรบอากาศดวยเทคโนโลยการสอสารไรสาย
ชตสรรค วชโต1* สนน จนทรพรม1 พทธพงษ แหลมทอง1 และ ธวชชย จารวงศวทยา2 1 สาขาวชาวศวกรรมคอมพวเตอร คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลอสาน 2 สาขาวชาวศวกรรมการทาความเยนและการปรบอากาศ คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลอสาน
คาสาคญ การสอสารแบบไรสาย เครองปรบอากาศ บทความน มวตถประสงคเพอนาเสนอการพฒนาระบบตรวจสอบความผดปกตของเครองปรบอากาศดวยเทคโนโลยการสอสารไรสายผานอนเทอรเนต โดยใชบอรดไมโครคอนโทลเลอร NodeMCU ทาหนาทรบสญญาณจากเซนเซอรมาทาการประมวลผล และสงสญญาณผานเครอขายอนเตอรเนต สาหรบการตรวจสอบจากระยะไกล และระบบทพฒนาข นสามารถตรวจสอบการทางานของมอเตอรพดลมคอยลเยน อณหภมของเครองปรบอากาศ และความเรวลมของชดคอยลเยน เพอวเคราะหหาความผดปกตของเครองปรบอากาศ ผลการวจยพบวา ระบบท พฒนาข น ชวยลดการส นเปลองพลงงานไฟฟาในกรณทเครองปรบอากาศขาดการดแลรกษา และชวยใหผดแลเครองปรบอากาศสามารถวเคราะหปญหาทเกดข นไดอยางถกตองและรวดเรว เหมาะกบหนวยงานทมเครองปรบอากาศเปนจานวนมาก
50 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1055
ระบบควบคมสภาพแวดลอมสาหรบการเพาะผกไมโครกรนแบบอตโนมต
สหพงศ สมวงค* กฤษฎา พวงสวรรณ และ สายณ ละอองโชค1 หลกสตรวศวกรรมอเลกทรอนกส สาขาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลศรวชย
คาสาคญ ระบบเพาะอตโนมต ผกไมโครกรน การควบคมสภาพแวดลอม บทความน ไดนาเสนอการออกแบบและพฒนาระบบควบคมสภาพแวดลอมสาหรบเพาะผกไมโครกรนแบบอตโนมต โดยควบคมปจจยทสงผลตอการงอกและการเจรญเตบโต ของผกไมโครกรน เพอใหมการเจรญเตบโตทรวดเรวกวาวธทวไป และไดผลผลตทมคณภาพ ดงน นผวจยไดออกแบบระบบเพาะอตโนมตใหมการควบคมสภาพแวดลอมภายใน เชนอณหภม ความช นสมพทธ ความช นในดนและปรมาณแสง ใหเหมาะสมสาหรบการเจรญเตบโตของผกไมโครกรน ดวยการตรวจวดสภาพแวดลอมผานตวตรวจร และควบคมสภาพแวดลอมภายในระบบดวยไมโครคอนโทรลเลอร ภายในระบบเพาะประกอบดวย 3 สวน คอสวนควบคมการระบายอากาศ สวนควบคมแสง และสวนควบคมความช นภายในใหเหมาะสมสาหรบการเพาะผกไมโครกรน จากการทดลองพบวาระบบเพาะสามารถควบคมสภาพภายในตใหเหมาะสมสาหรบการเพาะผกไมโครกรนได และจากการทดสอบเพาะเมลดผกบง ปรมาณ 300 กรมดวยระบบ ซงมการควบคมสภาพแวดลอมใหเหมาะสมอยางสมาเสมอ และการปองกนการรบกวนจากศตรพช พบวาผกไมโครกรนมการเจรญเตบโตเรวกวาการปลกแบบทวไป โดยมระยะเวลาเกบเกยวเพยง 4-5 วน จากปกตตองใชระยะเวลา 7-8 วน ซงเรวกวาการเพาะแบบทวไปประมาณ 30-40%
51ECTI-CARD 2019
ID 1056
ระบบแจงเตอนผปวย-ผสงอายหกลมแบบเวลาจรงดวยการกระจายตวแบบเกาสเซยนโดยใชวธรจารปแบบการเคลอนทดวยวธไดนามกไทมวอรปปง.
วรางคณา เหนอคเมอง1 และ เกศศกดดา ศรโคตร2* 1 สาขาวชาวศวกรรมคอมพวเตอร คณะครศาสตรอตสาหกรรม มหาวทยาลยเทคโนโลยราชมงคลอสาน วทยาเขตขอนแกน 2 สาขาวชาวศวกรรมอเลกทรอนกสและโทรคมนาคม คณะครศาสตรอตสาหกรรม มหาวทยาลยเทคโนโลยราชมงคลอสาน วทยาเขตขอนแกน
คาสาคญ ระบบเฝาระวงผปวย-ผสงอาย การรจารปแบบ dynamic time warping บทความน ไดนาเสนอวธเฝาระวงผปวย-ผสงอายหกลมแบบเวลาจรงทสรางข นบนระบบสมองกลฝงตว และแจงเตอนในกรณทเกดอบตเหต ดวยการเปรยบเทยบความเหมอนของสญญาณความเรงทเกดข นในแตละคร งเทยบกบ รปแบบการเคลอนท ททราบรปแบบทแนนอนในฐานขอมล ดวยวธ Dynamic Time Warping (DTW) เพอหาการเปรยบเทยบท เหมาะสมทสดระหวางสองสญญาณทมการเปลยนแปลงในแกนเวลา จากผลการทดสอบจะพบวาวธการทนาเสนอใหผลการตดสนใจทแมนยากวาวธ Euclidian distance จากรอยละ 81.8 เปน 86.8
ID 1057
การวเคราะหโหวงเฮงโดยใชการตรวจจบลกษณะปาก
ทศพร คงแสน ญาณศา เอยวสหยก และ พรรณราย ศรเจรญ*
สาขาวทยาการคอมพวเตอรประยกต คณะวทยาศาสตร มหาวทยาลยเทคโนโลยพระจอมเกลาธนบร คาสาคญ ระบบการรจาใบหนา วเคราะหองคประกอบใบหนา โหงวเฮง
การวเคราะหลกษณะของใบหนาเปนสงททาใหคาดเดาอปนสย และทศนคตตามชวงอายตาง ๆ ไดถกใชอยางแพรหลาย ในชอของศาสตรท เรยกวา โหวงเฮง งานวจยน ไดนาเรองของโหงวเฮงมาประยกตรวมกบเทคโนโลยตรวจจบใบหนา เพอเพมทางเลอกใหผใชงานสามารถดลกษณะ ใบหนาไดโดยไมตองพงพาผเชยวชาญโดยตรง โดยในการพฒนาน นได มงเนนทลกษณะสาคญอนเปนจดสงเกตทชดเจน คอ ลกษณะของปาก ประเภทปากบาง ปากรปสเหลยม ยกตวอยางเชน การมมมปากทโคงข นเปน ลกษณะทดทจะนาความสขมาหาเจาของ รวมไปถงการพจารณาความกวาง ระหวางค วประกอบ ในการทดสอบโปรแกรมทพฒนาข นพบวาความ ประสทธภาพแมนยาในการคานวณระยะสดสวนของโปรแกรมอยท 81.25% เมอเทยบกบการคานวณโดยวธการวดในหนวยพกเซล และจากการนาไปใชงานเบ องตนพบวาสามารถเปนทางเลอกใหผใชงานสามารถเขาถง การวเคราะหใบหนาไดงายและสะดวกมากข น
52 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1058
การควบคมแบบปอนกลบวงจรทอนแรงดนไฟฟาสาหรบการประจแบตเตอร
อธปตย จนทรด* และ ชนวตร ชาญศลปากร1 ภาควชาวศวกรรมไฟฟากาลง คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยมหานคร
คาสาคญ วงจรทอนแรงดนไฟฟากระแสตรง การตอบสนองคาความผดพลาด บทความฉบบน นาเสนอการศกษาและออกแบบสรางวงจรควบคมแบบปอนกลบสาหรบวงจรแปลงผนกาลงไฟฟากระแสตรงชนด ทอนแรงดนไฟฟา (Buck Converter) ขนาดพกดไมเกน 100 วตต โดยมขนาดแรงดนไฟฟากระแสตรงดานเขาขนาด 12 โวลต และแรงดนไฟฟากระแสตรงดานออกท 4 ถง 8 โวลต ขนาดความถ 10 กโลเฮรตช สาหรบประจสาแบตเตอรขนาดไมเกน 6 โวลต และมการควบคมการประจแบตเตอรดวยวธการควบคมแบบปอนกลบแบบ PI Control ศกษาการทางานและออกแบบวงจรทอนแรงดนไฟฟา (Buck converter) ในการประจแบตเตอรชนดตะกว – กรด (Lead Acid) ขนาด 6 โวลต และทาการจาลองวงจรในโปรแกรม MATLAB ควบคมสญญาณดานออกดวยวธ PI Control เพอผลตอบสนองทมคาความผดพลาดทเกดข นลดลง และทดสอบดวยวงจรจรงโดยเขยนโปรแกรมการควบคมดวยไมโครคอนโทรลเลอร
ID 1059
การสรางและหาประสทธภาพชดการสอนเรองการมอดเลตเชงขนาด และการประยกตใชกบการสอนอาชวศกษา
ณฐวฒ พานชเจรญ1* อญชล พานชเจรญ1 และ ประภาพร พลอยยอด2 1 คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนาตาก 2 คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลพระนคร
คาสาคญ เอเอม การมอดเลตเชงขนาด ชดการสอน การวจยคร งน มวตถประสงคเพอสรางและหาประสทธภาพชดการสอนการมอดเลตทางขนาด วงจรทออกแบบข นไดทดสอบวดสญญาณใหสมรรถนะออกมาตามทคาดหวง เพอเปนการนาองคความรทไดจากสรางและหาประสทธ ภาพวงจรการมอดเลตทางขนาด จงนาชดการสอนทสรางข นไปถายทอดใหกบกลมตวอยาง ไดแก นกศกษาระดบประกาศนยบตรวชาชพช นสง ทลงทะเบยนเรยนวชาระบบโทรคมนาคมภาคเรยนท 2 ป การศกษา 2561 มหาวทยาลยเทคโนโลยราชมงคลลานนาตาก จานวน 33 คน ดวยการเลอกแบบเจาะจง แลวใหทาการทดสอบเพอวดผลสมฤทธทางการเรยน หล งจากน นนาคะแนนทไดมาคานวณหาประสทธภาพชดการสอน ผลการวจยคร งน ปรากฏวาชดการสอนทผวจยสรางข นมประสทธภาพเทากบ 80.30/80.15 และความพงพอใจของนกศกษาอยทระดบมาก (𝑥= 4.48) แสดงวาชดการสอนการมอดเลตทางขนาดมประสทธภาพเปนตามสมมตฐานการวจย
53ECTI-CARD 2019
ID 1060
การตรวจสอบคณภาพมะมวงนาดอกไมผานการประมวลผลภาพ
สมหมาย บวแยมแสง* ชนนท วงษใหญ และ อภรกษ ภกดวงษ สาขาวชาวศวกรรมคอมพวเตอร คณะวศวกรรมศาสตร มหาวทยาลยรงสต
คาสาคญ ไดเลชน อโรสชน เทมเพลต องคประกอบส บทความน เกยวกบการตรวจสอบคณภาพของมะมวงน าดอกไมโดยใชการประมวลผลภาพดวยโปรแกรม MATLAB เพอชวยใหเกษตรกรหรอผใชงานสามารถตรวจสอบคณภาพรวมถงระบขนาดของมะมวงน าดอกไมไดโดยใชภาพทถายจากกลองดจตอลมาประมวลผล การทางานของโปรแกรมเรมจากแปลงภาพมะมวงจากภาพสใหเปนภาพขาวดา จากน นทาการลดสญญาณรบกวนของภาพโดยใชวธไดเลชนและอโรสชน ตอไปทาการเปรยบเทยบกบเทมเพลตเพอหาขนาดและตาหนวาตรงกบกลมของเทมเพลตใด ข นตอนสดทายทาการเปรยบเทยบคาองคประกอบสของมะมวง ขอมลการวเคราะหตาง ๆ จะถกนามาพจารณาในการตรวจสอบคณภาพ จากการทดสอบโปรแกรมจากภาพมะมวงจานวน 36 ภาพและทาการทดสอบท งหมด 36 คร งผลทไดพบวามความถกตอง 86 เปอรเซนต สวนทผดพลาดเกดจากปญหาในการอานคาสและตาแหนงการวางทคลาดเคลอนไป
ID 1061
เทคโนโลยการเชอมตอและเครอขายไรสายสาหรบอนเตอรเนตของสรรพสง
ศราวธ ชยมล1* และ กมล บญลอม2 1สาขาวชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยขอนแกน 2 สานกวชาคอมพวเตอรและเทคโนโลยสารสนเทศ มหาวทยาลยราชภฏเชยงราย
คาสาคญ โปรโตคอลสอสารไรสาย IEEE 802.11 LPWAN 5G IPv6 คาดวาในป ค.ศ. 2025 จะมอปกรณอจฉรยะเชอมตอกน ถง 1 พนลานตวจากววฒนาการของอนเตอรเนตของสรรพสง (IoT) โดยการเชอมตอเหล าน นตองการการเชอมตอจานวนมากไดระยะทางไกล ใชเวลานอย ใชพลงงานตำเพอรองรบการออกแบบงาน เฉพาะอยางของ IoT และการ สอสารอน ๆ ดงน น เทคโนโลยการเชอมตอและเครอขายไรสายเปนทคาดหวงวาจะเปนกญแจสาคญทจะทาให IoT เปนไปตามทตองการ ถงแมวาปจจบนจะมเทคโนโลยสอสารไรสายตาง ๆ อยแลว
แตเทคโนโลยใหมทเหมาะสมกบ IoT โดยเฉพาะจงตองถกนามาพจารณา ซงเปนสวนททาใหสามารถ เลอกใชเทคโนโลยอยางเหมาะสม รวมท งความทาทายของววฒนาการของ IoT จะถกนามาพจารณา
54 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1062
IoT บนพนฐานระบบควบคมอปกรณไฟฟาในบานอจฉรยะ
หรญ รอดนวล สราวธ จนทเขต สรสวด กลบญ กอเกอ เจรญเกยรต โพธชยยะ จกรวฒน บตรบญช และ ศราพร ศกดพรหม* สาขาวชาวศวกรรมไฟฟา สานกวชาวศวกรรมศาสตรและเทคโนโลย มหาวทยาลยวลยลกษณ
คาสาคญ ระบบบานอจฉรยะ Raspberry Pi แอพพลเคชนมอถอ MIT App inventor บทความน นาเสนอระบบควบคมอปกรณไฟฟาในบานเพอรองรบการใชงานในระบบบานอจฉรยะ โดยผใชสามารถควบคมและตรวจสอบเครองใชไฟฟา พรอมท งสงการผานเปด -ปดอปกรณผานทาง แอพพลเคชนบนมอถอในระบบแอนดรอยดดวยการกดปมหรอสงดวยเสยง Raspberry Pi เปนไมโครคอนโทรลเลอรทถกใชเชอมตอกบระบบเพอควบคมการทางานของรเลยทถกเชอมตอกบอปกรณไฟฟาภายในบานผาน Wi-Fi แอพพลเคชนบนมอถอโดยนา MIT App inventor โปรแกรมมาใชซงงายตอการเขยนแอพลเคชนบนสมารทโฟน และใช PHP สรางหนาตางคาสงทเชอมตอกบ แอปพลเคชนเพอทาหนาทเปนตวกลางปอนคาสงสงไปยง Raspberry Pi ซงเหมาะสมสาหรบการใชงานภายในบานเพอสรางระบบอานวยสะดวกทอจฉรยะและทนสมยตอไป
55ECTI-CARD 2019
ID 1063
เครองวดคณภาพสสาหรบปายจราจรดวยตวตรวจรสโดยอาศยอนเตอรเนตทกสรรพสง
ฉตรชย โชคชย* ประพฒนพงษ สขด และ ศภวทน ยมแพร ภาควชาวศวกรรมอเลกทรอนกสและโทรคมนาคม คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลธญบร
คาสาคญ คณภาพส ตวตรวจรส ปายจราจร อนเตอรเนตทกสรรพสง บทความน นาเสนอการออกแบบและสรางเครองวดคณภาพส สาหรบปายจราจรดวยตวตรวจรสโดยอาศยอนเตอรเนตทกสรรพสงใน ระบบ RGB เพอวดคาสของแผนสะทอนแสงทตดต งในงานปายจราจร บรเวณทางหลวงโดยใชตวตรวจรส TCS230 ในการอานคาส และใช Node MCU สงขอมลข นไปเกบไวบนฐานขอมลกอนเมฆ โดยใชคาอางองจากการ วดคาสดวยเครอง BYK Spectro - Guide ในระบบ xyY ซงนาขอมลทไดมา แปลงเปนระบบ RGB ดวยโปรแกรม Convert xyY to RGB เพอเปรยบเทยบ กบคาทวดไดจากเครองมอทสรางข นมา จากทดสอบเครองวดทสรางข น สามารถวดไดท งหมด 7ส คอ สเหลอง สแดง สเขยว สน าเงน สขาว สสม และสน าตาล โดยมเปอรเซนตความผดพลาดของแตละสดงน 4.9%, 2.78%, 5.25%, 2.73%, 5.08%, 7.62%, และ 7.41% ตามลาดบ เครองตนแบบทสราง ข นมขนาดกะทดรด น าหนกเบา มแบตเตอรภายในเครองสามารถใชงาน ตอเนองได 3 ชวโมง สามารถสงขอมลข นบนฐานขอมลกอนเมฆ และ แสดงผลการวดทดสอบผานแอพพลเคชนบนระบบปฏบตการแอนดรอยดได
ID 1064
รถเขนไฟฟาคนพการทมตวควบคมแบบพไอด
เทพพนม โสภาเพม ภาควชาวศวกรรมไฟฟากาลง คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยมหานคร
คาสาคญ รถเขนไฟฟา บอรดไมโครคอนโทรเลอร ตวควบคมพไอด บทความน นาเสนอการสรางรถเขนไฟฟาคนพการโดยอาศยการเขยนโปรแกรมควบคมผานบอรดไมโครคอนโทรลเลอรทสามารถทาใหรถเขนดงกลาวเคลอนทไดอยางมสมรรถนะทด และมความปลอดภย ซงการควบคมความเรวของรถเขนไฟฟาจะอาศยตวควบคมแบบพไอด ทมอนพตเปนคนโยกไฟฟา ในการสงคาสญญาณแบบระบทศทางไปยงบอรดไมโครคอนโทรลเลอร เพอทาใหรถเขนมการเคลอนทตามคนโยกไดอยางแมนยาและนมนวล ท งน การเลอกขนาดมอเตอรและชดขบเคลอนไดอาศยวธการคานวณในทางทฤษฎ รวมถงการยนยนผลดวยการทดสอบ ซงแสดงใหเหนวา รถเขนไฟฟาทไดนาเสนอในบทความน สามารถทางานไดอยางมความมนคง อกท งยงไดเพมเตมในสวนระบบตรวจจบการชนจากดานหนา เพอใหมความปลอดภยมากยงข น
56 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1065
ก า รพ ฒ น าช ด ฝ ก อ บ รม เร อ ง ก า ร เช อ ม โย งแ ล ะค วบ ค ม บ อ ร ดไมโครคอนโทรลเลอรผานคอมพวเตอร สาหรบครวศวกรรมไฟฟา
กนกวรรณ เรองศร1* ผดงรตน ปรองพมาย1 พนจ เนองภรมย2 และ สมศกด อรรคทมากล3 1 สาขาอเลกทรอนกสอตสาหกรรม คณะเทคโนโลยอตสาหกรรม สถาบนเทคโนโลยจตรลดา 2 สาขาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา 3 ภาควชาครศาสตรไฟฟา คณะครศาสตรอตสาหกรรม มหาวทยาลยเทคโนโลยพระจอมเกลาพระนครเหนอ
คาสาคญ ชดฝกอบรม การเชอมโยงและควบคมบอรดไมโครคอนโทรลเลอร ประสทธภาพชดฝกอบรม
บทความวจยน นาเสนอการพฒนาและหาประสทธภาพชดฝกอบรม เรอง การเชอมโยงและควบคมบอรดไมโครคอนโทรลเลอรผานคอมพวเตอร สาหรบครวศวกรรมไฟฟา ทประกอบไปดวย ชดฝกปฏบตการ ใบเน อหา และโปรแกรมนาเสนอ สาหรบนาไปใชในการฝกอบรมกบผเขาฝกอบรม จานวน 30 คน ผลการดาเนนการมดงน 1) ชดฝกอบรมทพฒนาข นทผานการประเมนคณภาพดวยผเชยวชาญจานวน 9 ทาน พบวามความเหมาะสมอยในระดบมาก (คาเฉลย 4.45) 2) ประสทธภาพทางการเรยนรของชดฝกอบรมมคาเฉลยเทากบ 89/86 ซงสงกวาเกณฑมาตรฐาน (E1/E2) ทระดบ 80/80 และระดบความพงพอใจของผเขาฝกอบรมทมตอชดฝกอบรมทพฒนาข น อยในระดบมาก (คาเฉลย 4.56) ดงน นชดฝกอบรมทพฒนาข นสามารถนาไปใชถายทอดองคความรและรองรบกบนโยบายไทยแลนด 4.0 ไดอยางมประสทธภาพ
57ECTI-CARD 2019
ID 1066
การวเคราะหเทคนคการหาตาแหนงของตาหนผาสาหรบการตรวจสอบคณภาพในระบบการทางานแบบเวลาจรง
ธรรมรส รกธรรม* และ ไตรรตน พรหมบตร ภาควชาวศวกรรมไฟฟาและอเลกทรอนกส คณะวศวกรรมศาสตร มหาวทยาลยอบลราชธาน
คาสาคญ ตวตรวจจบผา การประมวลผลภาพ การแปลงเวฟเลต ตวกรอง Gabor โครงงานน นาเสนอการวเคราะหเทคนคทถกนามาใชในการหาตาแหนงของตาหนผา เพอการพฒนาเครองตรวจสอบตาหนในโรงงานอตสาหกรรม งานวจยน มการวเคราะหเทคนคทใชหาตาแหนงตาหนผาจากหลกการทเปนทนยมคอ Wavelet transform และ Gabor Filter เพอศกษาความเปนไปไดและเปนแนวทางสการนามาประยกตใชในเครองตรวจสอบตาหนผาทตองทาการตรวจสอบในเวลาจรงซงมความแตกตางจากการวเคราะหบนระบบคอมพวเตอรในหลายมต ในงานวจยน การวเคราะหหาตาหนผาทาผานใชโปรแกรม Matlab และการทดลองน นทาโดยเครองตรวจสอบตาหนทถกพฒนาข นดวยความรวมมอของบรษทแทรคอนเตอรเทรดและมหาวทยาลยอบลราชธาน จากการคนควาทดลอง ผลการทดลองแสดงใหเหนถงขอดและขอเสยของการวเคราะหภาพโดยใช Wavelet transform และ Gabor Filter ควบคกบเทคนค Image Subtraction เพอใชในการตรวจสอบตาหนผาในโรงงานอตสาหกรรม
58 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1067
ระบบตรวจวดมลพษฝนละอองแบบตนทนตาโดยใชเทคโนโลย LoRaWAN สาหรบเมองอจฉรยะ
พงศธร อารกคด1* กมล บญลอม1 และ ศราวธ ชยมล2 1 ศนยความเชยวชาญทางคลนไมโครเวฟและเทคโนโลยหนยนต มหาวทยาลยราชภฏเชยงราย 2 สาขาวชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยขอนแกน
คาสาคญ อนเตอรเนตสรรพสง มลพษทางอากาศ เมองอจฉรยะ มลพษทางอากาศน นเกดจากฝนละออง โมเลกลชวภาพ หรอวตถอนตราย ในช นบรรยากาศ และคณภาพของอากาศในเมองจดเปนปญหามลพษโลก และเปนปญหาทเลวรายทสดตามรายงานขององคการอนามยโลก (WHO) ดงน นในการทจะปองกนหรอแกปญหาจงจาเปนจะตองมระบบตรวจวดปรมาณและการแสดงผลขอมลเพอบงช ถงปรมาณมลภาวะทางอากาศทเกดข น ในงานวจยน ผวจยมงเนนถงการพฒนาระบบตรวจวดมลพษฝนละอองโดยการนาเทคโนโลยอนเตอรเนตสรรพสงโดยใชเทคโนโลย LoRaWAN เขามาประยกตใชเพอทาการสงขอมลกบทาการเกบขอมลและแสดงผล โดยทคาปรมาณทแสดงผลการวดประกอบดวย คาปรมาณฝนละอองขนาดเลกไมเกน 2.5 ไมครอน (PM2.5) คาปรมาณฝนละอองขนาดเลกไมเกน10 ไมครอน (PM10) คาอณหภมและคาความช นสมพทธ จากผลการทดลองอปกรณทถกพฒนาสามารถวดคาปรมาณฝนละอองขนาดเลก PM2.5 เฉลยอยท 27.5 และ PM10 เฉลยอยท 19.88 คาอณหภมเฉลยอยท 23.125 oC และคาความช นสมพทธเฉลยอยท 57.88 % ในชวงเวลาการเกบขอมลใน 24 ชวโมงของการทดลอง จากผลงานวจยน เนองจากมตนทนตาและงายตอการตดต งสามารถนาไปประยกตใชงานกบการวดฝนละอองสาหรบเมองอจฉรยะไดอยางดในอนาคต
59ECTI-CARD 2019
ID 1068
เทคโนโลย IoT สาหรบตปลกผกออรแกนคในครวเรอน
ณฐวด สวสด ดลญาฉตร พฤกษเยนกรกล เวณกา สายทอง และ กณธดา พนธเจรญ* สาขาอเลกทรอนกสและระบบคอมพวเตอร คณะวศวกรรมศาสตรและเทคโนโลยอตสาหกรรม มหาวทยาลยศลปากร วทยาเขตพระราชวงสนามจนทร
คาสาคญ เทคโนโลย IoT ตปลกผก ปลกผกออรแกนค บทความน นาเสนอการออกแบบตปลกผกออรแกนคดวยเทคโนโลย IoT สาหรบใชในครวเรอนผกสลด 3 ชนดทนามาทดลองปลกไดแก เคล กรนโอค และกรนคอส ตปลกผกออรแกนคน ถกออกแบบมาใหเหมาะกบการใชงานในครวเรอนทมพ นทในการปลกทจากด และเหมาะกบบคคลทไมมเวลามากเพยงพอในการดแลแปลงเพาะ เทคโนโลย IoT ทนามาใชสาหรบตปลกผกน จะชวยควบคมดแลกระบวนการเพาะปลกท งระบบ เพอใหสามารถเพาะปลกผกไดอยางมประสทธภาพและใชระยะเวลาในการปลกนอยกวาการปลกในพ นทปกตเนองจากมการควบคมปจจยในการเจรญเตบโตของผก เชน อณหภม ความช น และแสง อยางเปนระบบ การทางานโดยรวมของตปลกผกออรแกนคน จะเรมจากระบบควบคมสวนกลาง (NodeMCU ESP8266) ควบคมการทางานของอปกรณและเซนเซอรในระบบท งหมดใหทางานโดยอตโนมตเพอควบคมอณหภม ความช น และแสง ใหเหมาะกบการเจรญเตบโตของพชและมการแสดงสถานะปจจบนของระบบผาน Application และ Web App ซงผใชงานสามารถเลอกควบคมระบบดวยตนเองผานทาง Blynk Application และ NETPIE Server เพมความสะดวกใหกบผใชงานอกทางหนง
ID 1069
ตเกบยาอจฉรยะสาหรบผสงอายและผพการทางสายตา โดยใชเทคโนโลยอารเอฟไอด
พพฒนพงศ สมมะวง* ธเนศ คณะด กมล บญลอม อธคม ศร และ กานตพชชา บญลอม ศนยความเชยวชาญทางคลนไมโครเวฟและเทคโนโลยหนยนต มหาวทยาลยราชภฏเชยงราย
คาสาคญ เทคโนโลย อารเอฟไอด เครองอานฉลากยา ตเกบยาอจฉรยะ ในการวจยน ไดทาการออกแบบและสรางตเกบยาอจฉรยะสาหรบผสงอายและผพการทางสายตา โดยใชเทคโนโลยอารเอฟไอด โดยตเกบยาอจฉรยะสาหรบผสงอายและผพการทางสายตา โดยใชเทคโนโลยอารเอฟไอด สามารถบอกชนดของยาและวธการใชยาวนเดอนปทหมดอายของยา โดยจะมหนวยประมวลผลและสงการดวยไมโครคอนโทรลเลอรและสามารถตดตอกบผใชผานทางจอแอลซดรวมกบสญญาณเสยงซงสามารถชวยลดปญหาการใชยาทไมถกชนดหรอปญหาของยาทหมดอายสาหรบผสงอายและผพการทางสายตาไดเปนอยางด
60 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1070
การหาคาตอบการไหลของกาลงงานไฟฟาทเหมาะสมทสดแบบแยกกาลงงานไฟฟาจรงและกาลงงานไฟฟารแอคทฟ โดยวธการหาคาทเหมาะสมทสดของอนภาคกลม
คณาธป โรจนวรหรญ* และ กรต ชยะกลคร1 สาขาวชาวศวกรรมศาสตร คณะวศวกรรมไฟฟา มหาวทยาลยเทคโนโลยสรนาร
คาสาคญ การหาคาเหมาะทสดของอนภาคกลม การไหลของกาลงไฟฟาทเหมาะสมทสด ตนทนการผลตรวมตาสด กาลงงานจรงสญเสยรวมตาทสด
บทความน นาเสนอวธการหาคาตอบการไหลของกาลงงานไฟฟาทเหมาะสมทสดแบบแยกกาลงงานไฟฟาจรงและกาลงงานไฟฟารแอคทฟ (Real and reactive power decomposition optimal power flow : PQDOPF) โดยใชวธการหาคาทเหมาะสมทสดแบบกลมอนภาค (Particle Swarm Optimization : PSO) ท งน ในวธการ PQDOPF ทนาเสนอไดแยกออกเปนสองปญหายอย คอ ปญหาคาใชจายในการผลตไฟฟารวมตาทสด และกาลงงานไฟฟาจรงสญเสยตาทสด โดยระบบทใชในการทดสอบ วธการทนาเสนอคอระบบ IEEE-30 บส ซงผลการทดลองแสดงใหเหนวาวธการทไดนาเสนอสามารถลดคาใชจายในการผลตไฟฟารวมและกาลงงานไฟฟาจรงสญเสยของระบบไดอยาง มประสทธภาพ
ID 1071
การเพมประสทธภาพการบรหารจดการพลงงานไฟฟาภายใน มหาวทยาลยราชภฏนครสวรรค
เทดพนธ ชกร สาขาวชาไฟฟาอตสาหกรรม คณะเทคโนโลยการเกษตรและเทคโนโลยอตสาหกรรม มหาวทยาลยราชภฏนครสวรรค
คาสาคญ พลงงานไฟฟา ระบบตรวจวดการใชพลงงานไฟฟา มาตรไฟฟาอจฉรยะ การบรหารจดการพลงงานไฟฟา
บทความวจยน นาเสนอการออกแบบและพฒนาระบบตรวจวดการใชพลงงานไฟฟาทสามารถบนทกและรายงานขอมลการใชพลงงานไฟฟายอนหลงผานอปกรณพกพาสมารตโฟนและคอมพวเตอร ชวยเพมความตระหนกรใหกบผใชงานอปกรณไฟฟาได สนบสนนใหเกดการใชเทคนคการลดคาใชจายดานพลงงานไฟฟาดวยวธการบรหารจดการพลงงานไฟฟาภายในองคกรและกาหนดแผนนโยบายสาหรบการใชพลงงานไฟฟาในมหาวทยาลยราชภฏนครสวรรคไดอยางมประสทธภาพ สรางจตสานกและทศนคตทดตอการประหยดพลงงานไฟฟาโดยมงใหทกคนภายในองคกรแบบมสวนรวม
61ECTI-CARD 2019
ID 1074
แอพพลเคชนมเตอรแทกซ
อภรกษ ภกดวงษ* สมหมาย บวแยมแสง และ ชนนท วงษใหญสาขาวชาวศวกรรมคอมพวเตอร คณะวศวกรรมศาสตร มหาวทยาลยรงสต
คาสาคญ รถแทกซ คาโดยสารรถแทกซ จพเอส แอนดรอยด บทความน นาเสนอการพฒนาและทดสอบแอพพลเคชนมเตอรแทกซโดยมวตถประสงคเพออานวยความสะดวกผใชบรการแทกซ โดยสามารถไดประเมนคาบรการตามระยะทางและเวลาในการเดนทางล ว งห น า เพ อท ผ ใช บ ร ก ารแท ก ซ (Taxi) จะได เต ร ยมต ว ก อน เร ย ก ใช บ ร ก าร และ ใน แอพพลเคชนยงมสวนของการคานวณคาโดยสารขณะเดนทาง (real time) และสามารถบนทกเปนขอมลอางองเมอเดนทางถงปลายทาง โดยทโครงงานน เปนการพฒนาแอพพลเคชนบนสมารตโฟนระบบปฏบตการแอนดรอยด เวอรชน 6.0 ข นไป ผใชงานสามารถเลอกจดหมายปลายทางบนแอพพลเคชน ระบบจะแสดงเสนทางจาก Google Maps โดยทางานรวมกบระบบระบตาแหนงบนพ นโลก (GPS) เพอใชในการคานวณ ระยะทาง เวลาการเดนและเวลารถทตด รวมถงคานวณสรปเปนคาโดยสารอกดวย ผลการทดสอบแอพพลเคชนพบวา สามารถทางานไดอยางด
62 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1080
การสรางวงจรกรองความถแบบดจทลทมผลตอบสนองอมพลสจานวนจากดโดยใชเอฟพจเอ
ธนาฒน สกนวล* ถนอมศกดโสภณ วรรณรย วงศไตรรตน สญญา ถมจอหอ และ รฐธรรมนญ รวยกระบอ สาขาวชาวศวกรรมอเลกทรอนกส คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลอสาน นครราชสมา
คาสาคญ เอฟพจเอ เอฟไอสอาร วเอชดแอล บทความน นาเสนอการสรางวงจรกรองความถแบบดจทล FIR Filter ซงเปนวงจรกรองความถทมการตอบสนองอมพลสในลกษณะเฟสเชงเสน และสรางวงจรบน FPGA Xilinx Spartan6 (XC6SL-TQG144) โดยใชภาษา VHDL โดยมวตถประสงคเพอนาไปใชกรองความถเสยงในยานความถ 20 Hz – 20 kHz โดยมความถต งแตยาน 60 Hz – 2 kHz, 2 kHz – 4 kHz, 4 kHz – 6 kHz, 6 kHz – 20kHz โดยคณะผจดทาไดออกแบบการควบคมโดยใชสมการทางคณตศาสตรซงมอยสองวธทใชออกแบบ คอ การออกแบบโดยใชฟงกชนหนาตาง (Window Method) และการออกแบบโดยเทคนคสมความถ (Frequency Sampling Method) จากน นนามาทดลองการทางานบนโปรแกรม Xilinx Vivado โดยผานวงจร ADC และ DAC เพอทาการแปลงสญญาณ และทาการทดสอบโดยใช Function Generator ในการปอนสญญาณอนพตและแสดงผลออกทาง Oscilloscope เมอทดสอบจนมนใจแลว จงนาไปทดสอบกบสญญาณเสยงโดยมการแสดงผลออกทางลาโพง เพอเปนการพสจนวาวงจรกรองความถแบบดจทลน น สามารถใชงานไดจรง
63ECTI-CARD 2019
ID 1081
การสรางตวควบคม PID โดยใช FPGA และน าไปประยกต ใชสาหรบ การควบคมความเรวมอเตอร
พทธาวฒ ลกลธร* ณฐสต จนทรบญเรอง โสภณ มงคลกจทวผล ไมตร ธรรมมา วชชพงษ วบลเจรญ และ ธนาฒน สกนวล สาขาวชาวศวกรรมอเลกทรอนกส คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลอสาน นครราชสมา
คาสาคญ เอฟพจเอ ระบบควบคมแบบสดสวน วเอชดแอล บทความน นาเสนอการสรางตวควบคม PID หรอระบบควบคมแบบสดสวน-ปรพนธ-อนพนธ บน FPGA Xilinx Spartan 6 (XC6SLX9-TQG144) ซงเปนอปกรณลอจกแบบโปรแกรมไดสามารถพฒนาใหเปนวงจรทางดจตอลทมความซบซอนสงโดยใชภาษา HDL ( Hardware Description Language) ซงเปนการเขยนโคดเพอสรางฮารดแวรข นมาโดยแตละฮารดแวรจะทางานอสระตอกน ตางจากไมโครคอนโทรลเลอรทการทางานจะทางานตามคาสงเปนลาดบข นจากบรรทดบนลงลาง (Sequential) ซง FPGA สามรถทางานไดท งแบบลาดบข น (Sequential) และทางานแบบพรอมกนท งหมด (Concurrent) เหมาะกบงานทตองการความเรวสง หรอทางานทความถสง สามารถแยกงานออกมาประมวลผลพรอมกนไดหลาย ๆ งาน ดงน นทางคณะผจดทาจงไดนา FPGA มาประยกตสรางตวควบคมแบบ PID ซงเปนระบบควบคมแบบปอนกลบทใชกนอยางกวางขวาง ซงคาทนาไปใชในการคานวณเปนคาความผดพลาดทหามาจากความแตกตางของตวแปรในกระบวนการและคาทตองการ ตวควบคมจะพยายามลดคาผดพลาดให เหลอนอยทสดดวยการปรบคาสญญาณขาเขาของกระบวนการ คาตวแปรของ PID ทใชจะปรบเปลยนตามระบบใหไดผลตอบสนองทเหมาะสม ในบทความน จะนามาใชงานสาหรบควบคมความเรวมอเตอรใหทาความเรวรอบใหไดตามทกาหนด จากการทดลองพบวาการออกแบบตวควบคม PID สามารถควบคมความเรวมอเตอรไดความเรวตามตองการ
64 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1082
ระบบควบคมอณหภมแบบพไอดสาหรบเตาบดกรแผนวงจรพมพ
พพฒน อมตฉายา ชนะวฒน ผงคล รจฬาพร พมพปร ณฐพล ตางสนเทยะ ศภชย ฤาชาญและ ธนาฒน สกนวล* สาขาวชาวศวกรรมอเลกทรอนกส คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลอสาน
คาสาคญ พไอด เตาบดกรแผนวงจรพมพ กระบวนการประสาน บทความน นาเสนอระบบควบคมอณหภมแบบพไอดสาหรบเตาบดกรแผนวงจรพมพโดยใชเทอรโมคอปเปลมาวดอณหภมภายในเตาอบ และทาการประมวลผลของสญญาณโดยใชไมโครคอนโทรลเลอรนามาคานวณหาความแตกตางระหวางคาทต งไวกบคาเอาทพตปจจบนลดความผดพลาดใหเหลอนอยทสด เพอนามาควบคมอนฟาเรดฮตเตอรใหอณหภมภายในเตาอบคงท และเปนไปตามกระบวนการ Reflow Soldering สามารถแสดงอณหภมและสงการผานหนาจอสมผสโดยบนทกขอมลการทางานไวในหนวยความจา (Data logger)
ID 1083
การออกแบบระบบควบคมสาหรบแขนกลคดแยกชนงานอตโนมต
วชชพงษ วบลเจรญ* อรอษา แซกอ ณรงคชย ศกดกลพทกษ ธนาฒน สกนวล และ ไมตร ธรรมมา คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลอสาน
คาสาคญ ระบบควบคมตาแหนง แขนกลคดแยกช นงานอตโนมต มอเตอรไฟฟากระแสตรง ตวควบคมแบบพไอ
บทความน นาเสนอการออกแบบระบบควบคมตาแหนงสาหรบแขนกลคดแยกช นงานอตโนมตดวยระบบควบคมระบบปด โดยมวตถประสงคเพอปรบปรงผลการตอบสนองของระบบใหเสถยรมากข น รวมท งกาจดคาผดพลาดทเกดจากระบบการควบคมแบบเปดในการควบคมตาแหนงของมอเตอรไฟฟากระแสตรง และชวยอานวยความสะดวกแกผใชงานจรง ระบบควบคมระบบควบคมตาแหนงสาหรบแขนกลคดแยกช นงานอตโนมตประกอบไปดวยชดขบมอเตอรและชดขบแขนกล โดยใชเอนโคดเดอรเปนตวตรวจจบความเรวของมอเตอร และใชไมโครคอนโทรลเลอร ARM9 ของ Lego รน EV3 เปนตวควบคม เขยนโปรแกรมควบคมโดยใช Matlab/Simulink แสดงผลแบบเวลาจรงผานพอรตอนกรม ผลของการทดลองพบวาการออกแบบตวควบคมแบบพไอ สามารถควบคมตาแหนงของแขนกลไดตามทตองการ
65ECTI-CARD 2019
ID 1084
การสรางสญญาณอลวนแบบมวนคดวยโปรแกรม Matlab Simulink
ถนอมศกด โสภณ เสถยรพร ออมไธสง ขนษฐา วรรณคง ธนาฒน สกนวล และ วชชพงษ วบลเจรญ* สาขาวชาวศวกรรมอเลกทรอนกส คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลอสาน
คาสาคญ สญญาณอลวนแบบมวนค วงจรฉว วงจรไมเปนเชงเสน สญญาณอลวน บทความน นาเสนอการประยกตใชสญญาณอลวนแบบมวนค (Even-scroll Chaos signal) โดยใชโปรแกรม MatlabSimulink ในการออกแบบและสรางสญญาณอลวนแทนการสรางสญญาณดวยอปกรณอเลกทรอนกสเพอใหมความงายตอการปรบเปลยนสภาวะอลวน และลดปญหาทเกดจากความคลาดเคลอนของสญญาณอลวนทมกเกดจากความรอนและอายการใชงานทเสอมสภาพตามระยะเวลาท ใช งานของอปกรณ อ เลกทรอนกส ผลการจ าลองสถานการณ ด วยโปรแกรม MatlabSimulink และการสรางสญญาณอลวนดวยประมวลผลและสงออกสญญาณ ดวยบอรดไมโครคอนโทรลเลอร Arduino Due พบวาสญญาณอลวนทสรางข นสามารถนาไปใชงานแบบเวลาจรงไดเปนอยางด
66 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1088
การออกแบบตวควบคมพไอดสาหรบระบบลกตมผกผนแบบจดหมนเคลอนทบนตวรถ
ไมตร ธรรมมา* วรธน อวยชย ชยศร สมบรณ และ วชชพงษ วบลเจรญ สาขาวชาวศวกรรมการทาความเยนและการปรบอากาศ คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลอสาน
คาสาคญ ระบบลกตมผกผนแบบเชงเสน ตวควบคมแบบพไอด เทคนคทางเดนราก บทความน นาเสนอการออกแบบและประยกตใชงานตวควบคมพไอด สาหรบควบคมระบบลกตมผกผนแบบจดหมนเคลอนทบนตวรถ ซงจะมองคประกอบสาคญอย 2 สวน คอ ตวรถและลกตม ระบบลกตมผกผน ซงเปนระบบทไรเสถยรภาพเมอลกตมอยในตาแหนงสภาพคงทในแนวดง และมความพลศาสตรสง ดงน นการควบคมระบบจงทาไดยาก การหาแบบจาลองคณตศาสตรของระบบจะพจารณาพฤตกรรมทางดานพลศาสตรของระบบรวมกบการใชกฎการเคลอนทขอท 2 ของนวตน ในขณะทตวควบคมแบบพไอดจะถกออกแบบโดยใชวธเทคนคทางเดนของรากและจาลองสถานการณเพอควบคมระบบดวยโปรแกรม MATLAB/Simulink แตอยางไรกตามคาพารามเตอรของตวควบคมทไดยงไมเหมาะสม ซงจะทาการปรบปรงอกเลกนอยเพอใหไดผลตอบสนองเอาตพตตามตองการ หลงจากน นนาคาพารามเตอรทไดไปสรางตวควบคมดวยไมโครคอนโทรลเลอร STM32F417IG เพอทาการควบคมระบบจรง ซงจากการทดลองทไดแสดงใหเหนวาผลตอบสนองเอาตพตจากการทดลองจรงมคาใกลเคยงกบคาจากการจาลองสถานการณ และเมอมการรบกวนระบบ ตวควบคมยงสามารถกาจดสงรบกวนและสามารถรกษาเสถยรภาพของลกตมผกผนใหอยในตาแหนงสภาพคงทในแนวดงได
67ECTI-CARD 2019
ID 1089
เทคนคการเพมอตราขยายของสายอากาศไมโครสตรปดวยการเพมไดอเลกตรกหนาสายอากาศ
เภาภทรา คาพกล1* ศรนย คมภรภทร2 พทยา ปนตาจนทร2 และ นฤเบศร ครแพทย2 1 ภาควชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเชยงใหม 2 สาขาวชาวศวกรรมอเลกทรอนกส คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลอสาน
คาสาคญ การเพมอตราขยาย, สายอากาศไมโครสตรป, วสดไดอเลกตรก บทความวจยน นาเสนอการศกษาและการออกแบบเทคนคการเพมอตราขยายของสายอากาศไมโคร สตรปดวยการเพมวสดไดอเลกตรกชนด FR4 ทหนาสายอากาศ เพอทาหนาทเปนวงจร เรโซแนนซใหแกสายอากาศ และวสดไดอเลกตรกชนดซปเปอรลน (Superlene หรอ Polyamide) สาหรบการปรบปรงคาสมประสทธการสะทอนกลบ (S11) ใหดยงข น และมความกวางแถบ (Bandwidth: BW) ทกวางมากข น จากการศกษาการออกแบบและจาลองผลสายอากาศดวยโปรแกรมสาเรจรป พบวาสายอากาศไมโครสตรปทนาเสนอน มอตราขยายเพมข นจาก 1.91 dBi เปน 8.79 dBi หรอประมาณ 6.8 dBi จากอตราขยายเดม ทความถปฏบตการ 9.4 GHz
ID 1090
การปรบปรงอตราขยายสาหรบสายอากาศโมโนโพลโดยใชโครงสรางตวกลางแบบเสนลวดแนวตง
ศรนย คมภรภทร1 สรนทร ออนนอม1* เอกภพ นาระสระนอย1 และ เภาภทรา คาพกล2 1 สาขาวชาวศวกรรมอเลกทรอนกส คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลอสาน 2 ภาควชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเชยงใหม
คาสาคญ การปรบปรงอตราขยาย สายอากาศโมโนโพล โครงสรางตวกลางแบบเสนลวด งานวจยน นาเสนอการปรบปรงอตราขยายของสายอากาศโมโนโพล /4 ดวยโครงสรางตวกลางแบบเสนลวดแนวต ง ซงจดเปนอภวสดชนดหนง ทสามารถชวยเพมประสทธภาพของสายอากาศในเรองของอตราขยาย ระดบโหลบขางและหลง และคลนผว โดยงานวจยน ไดทาการออกแบบและจาลองผลสายอากาศทความถปฏบตการ 1 GHz และมความกวางแถบครอบคลมชวงความถ 0.9 – 1.1 GHz ซงสามารถรองรบการประยกตใชงานยานความถ L-Band ได จากการจาลองผลดวยโปรแกรมสาเรจรป พบวาสายอากาศโมโนโพลทมโครงสรางตวกลางแบบเสนลวดแนวต งลอมรอบสายอากาศ มอตราขยายเทากบ 5.045 dBi หรอเพมข นจากเดมประมาณ 3.2 dBi
68 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1091
การเพมประสทธภาพของสายอากาศไดโพลบนแผนวงจรพมพโดยใชชองวางแถบแมเหลกไฟฟา
ศรนย คมภรภทร1* ชศกด ทอเกาะ1 ศรพงษ วงคศรวฒนา1 และ เภาภทรา คาพกล2 1 สาขาวชาวศวกรรมอเลกทรอนกส คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลอสาน 2 ภาควชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเชยงใหม
คาสาคญ การเพมความกวางแถบและอตราขยาย สายอากาศไดโพลบน แผนวงจรพมพ โทรทศนในระบบดจตอล ชองวางแถบแมเหลกไฟฟา
งานวจยน ไดอธบายการออกแบบการเพมการเพมประสทธภาพสายอากาศไดโพลบนแผนวงจรพมพ สาหรบรบสญญาณโทรทศน ในระบบดจตอล บนยานความถส งย ง หรอ UHF (Ultra High Frequency) โดยใชเทคนคอภวสด ทเปนโครงสรางชองวางแถบแมเหลกไฟฟา (Electromagnetic Band Gap: EBG) ทมรปรางคลายดอกเหด (Mushroom like EBG) ซงเปนโครงสรางแบบ 2 มต วางดานหลงสายอากาศไดโพล เพอทาหนาทเปนตวสะทอนคลน (Reflector) และรปรางกองฟนแบบโคง (Curved woodpile EBG) ทเปนโครงสรางแบบ 3 มต วางดานหนาสายอากาศสาหรบเปนวงจร เรโซแนนซ (Resonant circuit) จากผลการจาลองดวยโปรแกรมสาเรจรปพบวาสายอากาศไดโพลบนแผนวงจรพมพทมโครงสราง EBG มความกวางแถบเพมข นจาก 396 MHz เปน 413 MHz หรอประมาณ 17 MHz มการแมตชของสายอากาศทดข น และมอตราขยายทสงข นดงน ทความถ 514 MHz มคาเทากบ 9.72 dBi ทความถ 650 MHz มคาเทากบ 10.13 dBi และทความถ 786 MHz มคาเทากบ 9.36 dBi หรอเพมข นประมาณ 2.4 dBi, 2.7 dBi และ 1.9 dBi ตามลาดบ สงผลใหประสทธภาพโดยรวมของสายอากาศดยงข น เมอเทยบกบสายอากาศไดโพลบนแผนวงจรพมพแถบความถกวางรวมกบแผนสะทอน EBG จากงานวจย S. Pimpol and R. Wongsan
69ECTI-CARD 2019
ID 1092
ระบบควบคมและตรวจสอบสถานะเครองใชไฟฟาผานทางโทรศพทมอถอ
วญญ ศลาบตร* ศรนย คมภรภทร ศรนวล มะโนสนธ และ ไวทยา แมนทอง สาขาวศวกรรมอเลกทรอนกส วศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลอสาน
คาสาคญ ระบบ IoT ไมโครคอนโทรลเลอร เซนเซอรตรวจจบอณหภมและความช น บทความน เปนการนาเสนอเกยวกบระบบควบคมและตรวจสอบสถานะเครองใชไฟฟาภายในบานผานทางโทรศพทมอถอ ระบบประกอบดวยอปกรณควบคมเครองใชไฟฟาซงจะถกตดต งไวในบานและแอพพลเคชนทสงงานบนโทรศพทมอถอสาหรบควบคมเครองใชไฟฟาภายในบาน อปกรณจะรบคาสงเปดปดเครองใชไฟฟาจากโทรศพทมอถอผานทางระบบอนเตอรเนต นอกจากน อปกรณดงกลาวยงมเซนเซอรสาหรบตรวจวดอณหภมภายในบานเพอสงขอมลดงกลาวไปแสดงผลยงโทรศพทมอถอ จากการทดลองระบบจะถกทดสอบดวยการสงคาสงจากแอพพลเคชนบนมอถอเพอทจะเปดและปดเครองใชไฟฟา (20 คร ง) ผลการทดลองแสดงใหเหนวาระบบสามารถทางานได 100 % และคาความคลาดเคลอนจากการตรวจวดอณหภมมคาเทากบ 11.11 %
ID 1093
การศกษาเพอหาขนาดทเหมาะสมของอเจคเตอรดวยระเบยบวธการหาคาตอบสาหรบปญหาทมหลายเปาหมาย
ธวชชย จารวงศวทยา* อภเดช บญเจอ และ สาธต ทลไธสง สาขาวศวกรรมการทาความเยนและการปรบอากาศ คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลอสาน
คาสาคญ โปรแกรมพลศาสตรของไหลเชงคานวณ อตราสวนอตราการไหล อเจคเตอร การศกษาน เปนการหาขนาดทเหมาะสมของอเจคเตอร ซงประกอบดวยมมบานออกของหวฉด ความยาวของสวนทมพ นทหนาตดคงท และมมของตวกระจาย สาหรบระบบทาความเยนแบบอเจคเตอร ชนดอดคร งเดยว โดยใชน าเปนสารทาความเยน โดยระเบยบวธการหาคาตอบสาหรบปญหาทมหลายเปาหมาย ดวยโปรแกรมพลศาสตรของไหลเชงคานวณในการหาตวแปรอสระทเหมาะสมทจะนามาใชในการสรางระบบอเจคเตอรทใหผลตอบสนองทดทสด เพอหาขนาดของอเจคเตอรททาใหระบบทาความเยนแบบอเจคเตอรมประสทธภาพสงทสด ภายใตอณหภมระเหย 10 C อณหภมควบแนน 32 C และอณหภมเครองกาเนดไอทมการเปลยนแปลง 140 C ผลจากการวเคราะห พบวาอเจคเตอรมมมบานออกของหวฉด 11.60 ความยาวของพ นทหนาตดคงท 122.33 mm และมมของตวกระจาย 5.91 เปนขนาดททาใหอเจคเตอรมอตราสวนอตราการไหลสงทสดคอ 0.64
70 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1094
การประยกตใชทอความรอนเพอเพมประสทธภาพการทางานของระบบทาความเยนแบบอดไอ
อภเดช บญเจอ* และ ภาณ ศกดมลศร สาขาวชาวศวกรรมการทาความเยนและการปรบอากาศ คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลอสาน
คาสาคญ ทอความรอน เครองปรบอากาศ สารทาความเยน การวจยน เปนการเปรยบเทยบการเพมประสทธภาพของเครองปรบอากาศ เมอตดต งทอความรอนททางออกของคอมเพรสเซอรและทางเขาของคอมเพรสเซอร เพอแลกเปลยนความรอนของสารทาความเยน ในระบบเครองปรบอากาศขนาด 1 ตน วสดทสรางทอความรอนใชทอทองแดง ขนาดเสนผานศนยกลางทอทองแดงภายนอก 22 mm และภายใน 16 mm มความยาว 69 cm ใชสารทาความเยน R-134a และ R-11 เปนสารทางาน โดยเตม 50% ของปรมาตรทอความ พารามเตอรทใชในการศกษาไดแก อณหภมสารทาความเยนและความดนททางเขาคอมเพรสเซอร ในการทดสอบจะเกบขอมลทกๆ 1 นาทต งแตเวลา 8.00-16.00 น. ผลการทดสอบทอความรอนทใชสารทางาน R-134a มคาสมประสทธสมรรถนะในการทาความเยน (COP) 4.51 มคาเพมข น 19.31% และคาประสทธภาพการใหความเยน (EER) เทากบ 12.99 คาเพมข น 20.17% เมอเปลยนสารทางานเปน R-11 มคา COP 4.05 คาเพมข น 7.14% และ EER 12.60 คาเพมข น 16.56% ในงานวจยน สารทางาน 134a มคาประสทธภาพการทาความเยนสงกวาสารทางาน R-11
71ECTI-CARD 2019
ID 1095
อทธพลของสภาวะการทางานทสงผลตอขนาดของอเจคเตอรทใชเปนอปกรณขยายตวของระบบทาความเยนแบบอดไอ
ชญานนท แสงมณ* และ อภเดช บญเจอ สาขาวชาวศวกรรมการทาความเยนและการปรบอากาศ คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลอสาน
คาสาคญ อเจคเตอรแบบสองสถานะ สมประสทธสมรรถนะ อปกรณ ขยายตว ระบบทาความเยนแบบอดไอ
งานวจยน มจดประสงคเพอศกษาอทธพลของสภาวะ การทางานทสงผลตอขนาดของอเจคเตอรทใชเปนอปกรณขยายตวของระบบทาความเยนแบบอดไอ สมการทางคณตศาสตรถกใชวเคราะหความสมพนธของสภาวะการทางานและขนาดของอเจคเตอร สภาวะ การทางานทใชศกษา คอ ระบบทมวสยสามารถการทาความเยน 3.5 kW เครองควบแนนและเครองระเหยทางานในชวงอณหภม 38 - 55C และ 0 - 18C ตามลาดบ และใช R-22 เปนสารทาความเยน ในการศกษาน พบวา สภาวะการทางานท เปล ยนแปลงสงผลกระทบตอขนาดของอเจค -เตอรเปนอยางมาก นอกจากน ความสมพนธทไดรบจากการศกษาน สามารถใชเปนแนวทางในการออกแบบระบบทาความเยนแบบอดไอทใชอเจคเตอรเปนอปกรณขยายตวไดอกดวย
72 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1096
การประยกตเทคนคการเหนยวนาความรอนมาใชตรวจสอบแรเงนแท
อนสรณ เราเทา ครศาสตรอตสาหกรรมวศวกรรมอเลกทรอนกสและโทรคมนาคม คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา
คาสาคญ เทคนคการเหนยวนาความรอน การตรวจสอบ แรเงนแท งานวจยน มวตถประสงคเพอพฒนารปแบบการตรวจสอบแรเงนแทผานการใหความรอนดวยเทคนคการเหนยวนาความรอนโดยไดพฒนาเครองใหความรอนแกแรเงนดวยเทคนคการเหนยวนาความรอน ใหมความสามารถวดอณหภมทปรากฏบนแรเงนแบบอตโนมตเพอแจงเตอนสถานะทพรอมดาเนนการคดแยกแรเงนปลอมจากแรเงนจรง และเพมชดระบายความรอนทเกดข นบนขดลวดความรอนลดอนตรายตอผใชงานขณะทหยบจบแยกแรเงนและยดอายการทางานของอปกรณอเลกทรอนกสทใชในวงจรตาง ๆ ของเครอง ผลจากการพฒนาพบวา อณหภมทเหมาะสมในการคดแยกแรเงนปลอม คอ 365 องศาเซลเซยส เพราะแรเงนปลอมเปลยนจากสเงนเปนสดา ระยะเวลาทใชในการเพมอณหภมเพอแยกแรเงนปลอม 8 นาท 32 วนาท การทางานของเครองใหความรอนสาหรบตรวจสอบแรเงนดวยเทคนคการเหนยวนาความรอน ใชกาลงงานไฟฟา 311.70 วตต ประสทธภาพของชดระบายความรอนสามารถลดอณหภมทปรากฏบนขดลวดความรอนจากเดม 90.1 องศาเซลเซยส เหลอ 27.5 องศาเซลเซยส
ID 1099
ระบบเตอนภยอตโนมตภายในบานผานทวตเตอร
กฤษณ อางแกว* และ สรชย จนทรฉาย ภาควชาวศวกรรมเครองมอวดและอเลกทรอนกส คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยพระจอมเกลาพระนครเหนอ
คาสาคญ ระบบเตอนภยอตโนมต ไมโครคอนโทรลเลอร ทวตเตอร บทความน นาเสนอการออกแบบและสรางระบบเตอนภยอตโนมตภายในบานผานทางทวตเตอรซงเปนการประยกตใช UNO Ethernet Shield W5100 R3 กบเซนเซอรตรวจจบความเคลอนไหวทเกดจาก ผบกรก เซนเซอรตรวจจบการรวไหลของแกสและเซนเซอรตรวจจบควนจากเหตเพลงไหม สงการดวยบอรดไมโครคอนโทรลเลอร Arduino Mega 2560 R3 โดยระบบจะตรวจจบคาความผดปกตทเกดข น แลวสงคาความผดปกตเพอแจงเตอนเจาของบานผานจอ LCD ทางเสยงและทางทวตเตอรระบบสามารถทางานได 2 โหมดคอโหมดทมผพกอาศยภายในบานและโหมดไมมผพกอาศย
73ECTI-CARD 2019
ID 1100
การปรบปรงประสทธภาพในขนตอนปรบแตงผวเบาะหนงของรถยนตโดย ฮตเตอรแบบสวงอารม
ศรณย เหลาพา1* กฤษนณจ แพงดวง1 และ วราภรณ จนทรเวยง2 1 สาขาวชาวศวกรรมเครองกล โครงการจดต งคณะวศวกรรมศาสตรและเทคโนโลยอตสาหกรรม มหาวทยาลยราชภฏชยภม 2 สาขาวชาวศวกรรมการผลต โครงการจดต งคณะวศวกรรมศาสตรและเทคโนโลยอตสาหกรรม มหาวทยาลยราชภฏชยภม
คาสาคญ เบาะหนงรถยนต ฮตเตอร งานวจยน เกยวของกบการปรบแตงเบาะหนงซงเปนข นตอนสดทายในการผลตเบาะรถยนตเพอทาใหเบาะไมมรอยยนหรอยบกอนสงตอใหลกคา โดยไดทาการศกษาและวเคราะหถงขอผดพลาด รวมถงหาวธการปรบปรงกระบวนการและหาตนตอของสาเหตของการเมอยลาในการทางานของพนกงาน โดยการศกษาพบวาระบบการทางานแบบเดมจะใชพนกงานปรบแตงเบาะหนงโดยวธใชเครองเปาลมรอนและเหลกสไลดในตกแตงช นงานใหไดคณภาพตามทลกคากาหนด ซงลกษณะการทางานแบบน ไมสามารถควบคมอณหภมทเปาใหเบาะหนงและเวลาในการปฏบตงานตอช นงานหนงช นใหคงทได และยงทาใหพนกงานเกดความเมอยลาในการทางาน จงทาใหประสทธภาพในการปรบแตงเบาะหนงไมมความแนนอน ทางผจดทาจงไดมการปรบปรงแกไขปญหาทเกดข นโดยออกแบบชดสวงอารมทมการตดต งฮตเตอรไว โดยชดสวงอารมจะยดตดกบโตะปฏบตการ เพอชวยผอนแรงน าหนกในการยกทาใหลดความเมอยลาได จากน นทาการกาหนดระยะหางระหวางฮตเตอรกบเบาะหนงไวท 5 เซนตเมตร และเวลาทใชในการใหความรอนตอช นท 40 วนาท แลวหาทดลองใหอณหภมทเหมาะสมสาหรบช นงาน โดยการทดลองพบวาอณหภมทเหมาะสมททาใหผวของเบาะหนงเรยบพอดอยท 71 – 73 องศาเซลเซยส โดยมคาเฉลยอยท 72 องศาเซลเซยส หลงจากการปรบปรงพบวาสามารถลดเวลาในการทางานตอ 1 ช นลงไดจากเดมเฉลยท 68.98 วนาท เปน 40 วนาท
74 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1101
การพฒนาเครองวดอณหภมสาหรบการประกอบหวอานฮารดดสกในเครอง พาเลทอนไลนยวเคยว
กนกวรรณ เรองศร1* อต พงษพาชานาญเวช1 พรชนก วานช1 ประธาน ชมเมองปก2 และจกรวรรด ดยง2 1 สาขาอเลกทรอนกสอตสาหกรรม คณะเทคโนโลยอตสาหกรรม สถาบนเทคโนโลยจตรลดา 2 ฝายวจยและพฒนากระบวนการผลต บรษท เวสเทรน ดจตอล (ประเทศไทย) จากด
คาสาคญ เครองวดอณหภมสาหรบเครองพาเลทอนไลนเคยว ไมโครคอนโทรลเลอร ประสทธภาพของเครอง
บทความวจยน นาเสนอพฒนาเครองวดอณหภมสาหรบเครองพาเลทอนไลนเคยวซงเปนเครองฉายยวเพออบกาวใหแหงสาหรบกระบวนการประกอบหวอานเขยน (Head Gimbal Assembly, HGA) ซงจาเปนจะตองควบคมอณหภมใหอยในระดบทเหมาะสม โดยการสรางและออกแบบเครองวดอณหภมทมความสามารถวดอณหภมของแสงอลตราไวโอเลต (Ultraviolet) และกาซไนโตรเจน (N2) เครองมอวด อณหภมประกอบไปดวยชดวงจรรบคาอณหภมซ งใช เทอรมสเตอร จท 103 (Thermistor) เปนเซนเซอร (Sensor) เชอมตอกบไมโครคอนโทรลเลอร อาดอโนไมโคร (Arduino micro) โดยจะแสดงผลบนจอ แอลซด (LCD) และเกบคาอณหภมไวใน เอซด การด (SD card) สาหรบการตรวจสอบขอมลยอนหลงไดอกดวย ผลการทดสอบการทางานของเครองวดอณหภมสาหรบเครองพาเลทอนไลนเคยว (Pallet in-line cure) ทางานไดตามวตถประสงคและขอบเขตของการจดทาเครองวดอณหภม เครองวดอณหภมสามารถนาไปใชในกระบวนการผลตไดจรง
75ECTI-CARD 2019
ID 1102
การศกษาและพฒนาระบบปญญาประดษฐสาหรบแขนกลอตสาหกรรม
ธรรมรส รกธรรม* และ ศรณย อเนกนวล ภาควชาวศวกรรมไฟฟาและอเลกทรอนกส คณะวศวกรรมศาสตร มหาวทยาลยอบลราชธาน
คาสาคญ - งานวจยน ไดพฒนาระบบปญญาประดษฐทสามารถนามาใชไดกบหนยนตอตสาหกรรมเพอเพมศกยภาพของหนยนตแขนกลประเภทตางๆ ใหมความสามารถในการเรยนรใหสามารถแยกประเภท ตาแหนง และการวางตวของสงของ เพอใชในการคานวณหาการเคลอนททเหมาะสมกบการหยบจบวตถสงของเหลาน นไดโดยอตโนมต ในงานวจยน ยงไดมการพฒนาระบบแขนกลเพอนามาใชในการทดลอง โดยระบบแขนกลทถกพฒนาข นใชการเรยนรแบบทาซ าเพอหาคาพารามเตอรทเหมาะสมทสดในการเคลอนท ระบบจะควบคมการเคลอนทของแตละขอตอของหนยนตแขนกลเพอลดคาความผดพลาดในการเคลอนทเขาสตาแหนงเปาหมาย โดยการเคลอนทของระบบน นใชเซอรโวมอเตอรในการขบเคลอน การคานวณหามมของมอเตอรแตละตวไดใช Forward Kinematic ในการคานวณ ระบบสมองกลของหนยนตไดมการออกแบบโดยใชการจบภาพผานกลอง Microsoft Kinect และประมวลผลภาพเบ องตนในภาษา Python และขอมลทไดจากการประมวลผลจะไดนาไปเขาสกระบวนการเรยนร เพอจาแนกประเภท และคานวณหาตาแหนง พรอมทศทางการวางตว ผานโปรแกรมทมการวางเงอนไขรวมกบการวเคราะหดวย TensorFlow ในการเปรยบเทยบขอมล
ID 1103
แมแรงไฟฟาควบคมโดยรโมทไรสายอตโนมต
ชยพนธ ประการพนธ* ปรญญา นยมพงษ วฒพงศ ไชยชาต และ กตตพนธ สหาบตร สาขาวชาวศวกรรมแมคคาทรอนกสและหนยนต คณะเทคโนโลย มหาวทยาลยราชภฏอดรธาน
คาสาคญ - บทความนาเสนอการออกแบบและสรางแมแรงไฟฟาควบคมดวยรโมทไรสาย สาหรบการเปลยนอะไหลรถยนตขนาดเลกและรถยนตขนาดกลางทมน าหนกไมเกน 1500 กโลกรม โดยการออกแบบแมแรงไฟฟาฟาควบคมดวยรโมทไรสายจะทางานดวย โปรแกรม Arduino Mega 2560 เปนระบบประมวลผลและสงการใหระบบตาง ๆ ทางาน โดยมการแจงเตอนเมอแมแรงไฟฟาทางานและจะหยดเตอนเมอแมแรงหยดทางาน Arduino Mega 2560 จะยงสงใหไฟเตอนทางาน อย โดยจากทดสอบ แมแรงไฟฟา ควบคมดวยรโมทไรสายชวยใหประหยดเวลาและสะดวกข นโดยไมตองใชแรงจากมนษยและผหญงสามารถใชงานไดแตตองทาตามคมอของแมแรงไฟฟาควบคมดวยรโมทไรสาย ซงการทดสอบผลทดลองเบ องตนสามารถทางานไดจรงและมประสทธภาพ
76 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1104
การประยกตใชโครงขายประสาทเทยมเพอทานายปรมาณแกสไนโตรเจนออกไซดทเกดจากหวพนไฟวสดพรนเมดกลมอดแนน
ปฏวต วรามตร1* รพพงศ เปยมสวรรณ1 บณฑต กฤตาคม1 โสภณ สนสราง1 และ นนทวฒน วระยทธ2 1 สาขาวชาวศวกรรมเครองกล คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร 2 ภาควชาวศวกรรมเครองกล คณะวศวกรรมศาสตร มหาวทยาลยอบลราชธาน
คาสาคญ หวพนไฟวสดพรน วสดพรนเมดกลมอดแนน โครงขายประสาทเทยม บทความวจยน มวตถประสงคเพอนาเสนอการทานายปรมาณแกสไนโตรเจนออกไซด (NOx) ทเกดจากการเผาไหมของแกสแอลพจ (LPG) ในหวพนไฟวสดพรนเมดกลมอดแนนโดยใชโครงขายประสาทเทยม ซงวสดพรนทามาจากหนตปลาเมดกลมทมขนาดเสนผานศนยกลาง (d) และคาความพรน () เทากบ 1.55 เซนตเมตร และ 0.362 อตราเรวเชงปรมาตรของเช อเพลงแกสผสมกอน (Vmix) ระหวางแกสแอลพจกบอากาศถกสงเขามายงช นวสดพรนในชวงความเรว 5 – 40 m3/h อตราสวนสมมลของเช อเพลง () อยในชวง 0.48 – 0.84 โดยทาการวดปรมาณแกส NOx ทระดบความสงของช นวสดพรนเทากบ 5 เซนตเมตร ตามลาดบ ซงในบทความวจยน ไดนาปรมาณแกสทวดคาจากการทดลองมาเปรยบเทยบกบผลการทานายปรมาณแกสโดยใชโครงขายประสาทเทยม ผลจากการศกษาพบวาโครงขายประสาทเทยมแบบหลายช นปอนไปขางหนาซงมกระบวนการเรยนรแบบแพรกระจายยอนกลบของเลเวนเบรก-มาควาดทสามารถทานายปรมาณแกส NOx ทปลอยออกมาจากหวพนไฟวสดพรนเมดกลมอดแนนได
77ECTI-CARD 2019
ID 1105
เครองสขาวอเนกประสงคขนาดเลก
จนดาพร สบขาเพชร1* และ มณ จนทะรง2 1สาขาฟสกส คณะวทยาศาสตร มหาวทยาลยราชภฏบรรมย 2สาขาเทคโนโลยไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยราชภฏมหาสารคาม
คาสาคญ เครองสขาวขนาดเลก ขาวกลอง ขาวขาว เครองสขาวอเนกประสงคมมอเตอร 1 กาลงมา มลกยางกะเทาะ 4 ลก แตละลกถกหมนโดยพเลย 4 น ว จะมความเรวรอบ 813 ± 5 rpm ลกยางกะเทาะทมพเลย 3 น ว จะมความเรวรอบ 507 ± 5 rpm และมชดขดขาวขาว ขาวท ใชในการทดลองใชขาวเจาหอม พนธหอมมะล 105 และหาประสทธภาพของเครองสขาวอเนกประสงค จากการทดลองการสขาวกลอง 1 รอบการส เวลาเฉลยในการสเทากบ 3.49 นาท ไดปรมาณขาวกลองสมบรณ เฉลยคดเปนรอยละ 63.32 การทดลองการสขาวกลอง 2 รอบการส พบวาเวลาเฉลยในการสมคาเทากบ 6.17 นาท ไดปรมาณขาวกลองสมบรณโดยเฉลย คดเปนรอยละ 50.78 การทดลองสขาวขาว การหมนทปรบขาวขาวออกมา 7.5 รอบ จะไดขาวขาวเตมเมลดโดยเฉลยคดเปนรอยละ 34.85 ซงมขาวขาวเตมเมลดนอยกวาการหมนทปรบขาวขาวออกมา 10 รอบ ทไดขาวขาวเตมเมลดโดยเฉลยคดเปนรอยละ 39 ในการตรวจสอบสของขาวขาวทออกมาจากเครองขดขาว โดยการหมนทปรบขาวขาวออกมา 7.5 รอบ จะไดคาความสวาง(L) ต งแต 69.2 - 70.2 คาสแดง(a) มคาต งแต +0.1 - +0.3 และคาสเหลอง(b) มคาต งแต +10.5 - +10.9 สาหรบรอบการหมน 10 รอบ มคาความสวาง(L) ต งแต 66.7 - 68.5 คาสแดง(a) มคาต งแต +1.3 - +1.5 และคาสเหลอง(b) มคาต งแต +13.6 - +15.5
78 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1106
เครองตนแบบผลตปยหมกอตโนมตจากผกตบชวาดวยระบบถงปดเตมอากาศแบบถงหมน
ธวช ธรรมบตร* ชาญ สงหแกว สทธพงษ ฟงเดช และ นรตม กลสวรรณ สาขาวชาครศาสตรอตสาหกรรมอเลกทรอนกสและโทรคมนาคม คณะครศาสตรอตสาหกรรมมหาวทยาลยเทคโนโลยราชมงคลอสาน วทยาเขตขอนแกน
คาสาคญ ปยหมก เครองผลตปยหมกอตโนมต ผกตบชวา งานวจยน มวตถประสงคเพอออกแบบและสรางเครองตนแบบผลตปยหมกอตโนมตจากผกตบชวาดวยระบบถงปดเตมอากาศแบบถงหมน โดยในการวจยคร งน เปนการประยกตองคความร จากในและตางประเทศมาพฒนาเครองตนแบบ ผลการทดสอบประสทธภาพเครองพบวา เครองสามารถปรบความเรวรอบในการหมนของถงหมกโดยการควบคมดวยอนเวอรเตอรโดยปรบความเรวไดต งแต 30-300 รอบตอนาท และการวดคาอณหภมภายในถงหมกจานวน 3 ตาแหนง ไดคาความผดพลาดเทากบ 2.94 2.94 และ 1.37% ตามลาดบ และในสวนของการวดความช นไดคาผดพลาดเทากบ 2.80 0.85 และ 1.22% ตามลาดบ และเครองตนแบบน สามารถทางานไดในโหมดอตโนมตและโหมดปกต
79ECTI-CARD 2019
ID 1107
การประยกตใชงานราสเบอรรพายสาหรบนกศกษาประกาศนยบตรวชาชพชนสงกรณศกษาการสรางโอหมดจตอลมเตอร
ศราวฑ คงลาพนธ1* และ อดเรก จนตะคณ2 1 สาขาวชาครศาสตรอตสาหกรรมอเลกทรอนกสและโทรคมนาคม คณะครศาสตรอตสาหกรรม มหาวทยาลยเทคโนโลยราชมงคลอสาน วทยาเขตขอนแกน 2 สาขาวศวกรรมอเลกทรอนกสและโทรคมนาคม คณะครศาสตรอตสาหกรรม มหาวทยาลยเทคโนโลยราชมงคลอสาน วทยาเขตขอนแก
คาสาคญ โอหมมเตอร ราสเบอรรพาย สาหรบการเรยนการสอนในหองปฏบตการแตเครองมลตมเตอรน น นกศกษาจาเปนตองซ อเครอง มลตมเตอรมาไวใช ทาในสวนของนกศกษาน นจะทาใหไมคอยเขาใจในหลกการทางานของเครองดจตอลมลตมเตอร ซงผใชควรรและเขาใจหลกการทางานของเครองมลตมเตอรวามหลกการทางานวธสรางและวธดาเนนการ ผจดทาจงมความคดทจะสรางดจตอลมเตอรข นมาไวใชงานในแผนกอเลกทรอนกส เพอสงผลใหนกศกษารและเขาใจหลกการทางานทเกยวกบอปกรณอเลกทรอนกส เพมมากข น อปกรณอเลกทรอนกสในปจจบนน นมากมายในทองตลาด แต ราสเบอรพายเปนอปกรณทมความสามารถเทยบเทากบคอมพวเตอรและโนตบค ซงสามารถนาราสเบอรพายมาประยกตกบงานหลายรปแบบและงายตอการเขยนโปรแกรมและควบคม และการนาเอาราสเบอรพายมาสรางเปนมเตอรดจตอลน นกมความสามารถน นการวดคา วดกระแส โอหม และแรงดนตกครอม ไดอยางแมนยา ไมแตกตาง จากมเตอรดจตอลทวไป ซงความสามารถของราสเบอรพายยงข นอยกบผใชจะสามารถประยกต ราสเบอรพายกบอปกรณอนและการเขยนโปรแกรมใหกบตวราสเบอรพาย
80 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1108
การออกแบบชดสาธตระบบการทางานของอนเวอรเตอรทใหสญญาณเอาตพตแบบสเหลยม
ณฐวฒน พบพมพสย ณฐพล มาตสวง และ สทธเดช เหลาจม* มหาวทยาลยเทคโนโลยราชมงคลอสาน วทยาเขตขอนแกน
คาสาคญ อนเวอรเตอรแบบสญญาณสเหลยม อนเวอรเตอร ชดสาธต งานวจยน นาเสนอการออกแบบชดสาธตการทางานของอนเวอรเตอรทใหสญญาณเอาตพตเปนแบบสเหลยม (Square wave) และมกาลงทางเอาตพตขนาด 100 วตต โดยหลกการทางานของวงจรจะทาหนาทแปลงแรงดนไฟฟากระแสตรง 12 โวลต เปนไฟฟากระแสสลบมแรงดนทางเอาตพต 220 โวลต(vrms) เหมาะสาหรบโหลดทมแหลงจายไฟฟาเปนแบบสวตชชง (Switching power supply) ซงโครงสรางของชดสาธตแบงออกเปน 5 สวนดงน 1.ชดกาเนดสญญาณPWM (SG3525) ทาหนาทสรางสญญาณ PWM ความถสง เพอสวตชชดขบ 2. ชดวงจรสวตชแบบพชพล (Push Pull) ทาหนาทสวตชไฟฟาเขาขดลวดทหมอแปลง 3.หมอแปลงความถสง (High frequency Transformer) ทาหนาทเพมระดบแรงดนทความถสง 4.วงจรเรยงกระแสทาหนาทแปลงไฟฟากระแสสลบเปนไฟฟากระแสตรง 5.วงจรกรองระดบของแรงดนไฟฟาใหเรยบ เพอนาไปใชกบโหลดทมภาคจายไฟเปนแบบสวตชชง(Switching power supply) เชน โทรทศน โทรศพท คอมพวเตอร และ หลอดไฟฟาแบบแอลอด การทางานของวงจรสามารถใหกาลงทางเอาตพตสงสด 105 วตต แรงดน 220 โวลต (VAC) เมอผานวงจรเรยงกระแสไดแรงดน 310 โวลต (VDC) เมอผานวงจรเรยงกระแส ชดสาธตทออกแบบงายตอการเรยนรระบบการทางานดวยตนเอง และเหมาะทจะนาไปใชประกอบเปนสอการเรยนการสอนไดเปนอยางด
81ECTI-CARD 2019
ID 1109
การออกแบบชดสาธตระบบการทางานของอนเวอรเตอรเพยวไซน แบบ 1 เฟส
สทธเดช เหลาจม* ณฐวฒน พบพมพสย และ ณฐพล มาตสวง มหาวทยาลยเทคโนโลยราชมงคลอสาน วทยาเขตขอนแกน
คาสาคญ อนเวอรเตอรเพยวไซน อนเวอรเตอรแบบ 1 เฟส ชดสาธต งานวจยน นาเสนอการออกแบบชดสาธตการทางานของอนเวอรเตอรเพยวไซน ทใหสญญาณเอาตพตเปนแบบ 1 เฟส และมกาลงทางเอาตพตขนาด 100 วตต โดยหลกการทางานของวงจรจะทาหนาทแปลงแรงดนไฟฟากระแสตรง 12 โวลต เปนไฟฟากระแสสลบมแรงดนทางเอาตพต 220 โวลต ความถ 50 เฮรตซ โครงสรางของชดสาธตแบงออกเปน 4 สวนดงน 1.บอรดควบคม (EG8010) ทาหนาทสรางสญญาณ PWM ความถสง และความถตา เพอสวตชชดขบ 2. ชดวงจรสวตชแบบฟลบรดจ (Full Bridge Drive) ทาหนาทสวตชสญญาณไซน 3.หมอแปลง (Transformer)ทาหนาทเพมระดบแรงดน 4.วงจรกรองความถทาหนาทกรองสญญาณความถสง หรอสญญาณรบกวนท ง การทางานของวงจรสามารถใหกาลงทางเอาตพตสงสด 105 วตต แรงดน 220โวลต ความถ 50 เฮรตซ สามารถใชกบโหลดทเปนมอเตอรได ชดสาธตทออกแบบใชงานไดด งายตอการเรยนรระบบการทางานดวยตนเอง และเหมาะทจะนาไปใชประกอบเปนสอการเรยนการสอนไดเปนอยางด
82 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1110
การพฒนาชดสาธตมอเตอรไฟฟา
มานะชย พมพคา ฉกาจ ฤทธวฒ และ สทธพงษ ฟงเดช* สาขาวชาครศาสตรอตสาหกรรมอเลกทรอนกสและโทรคมนาคม คณะครศาสตรอตสาหกรรม มหาวทยาลยเทคโนโลยราชมงคลอสาน วทยาเขตขอนแกน
คาสาคญ ชดสาธต มอเตอรไฟฟากระแสตรง มอเตอรไฟฟากระแสสลบ บทความน นาเสนอการพฒนาและหาคณภาพสอการสอนประเภทชดสาธตเรองมอเตอรไฟฟา สาหรบการเรยนการสอนในรายวชาหลกมลของวศวกรรมไฟฟา หลกสตรครศาสตรอตสาหกรรมบณฑต สาขาวศวกรรมอเลกทรอนกสและโทรคมนาคม คณะครศาสตรอตสาหกรรม มหาวทยาลยเทคโนโลยราชมงคลอสาน วทยาเขตขอนแกน จากการวเคราะหหลกสตรรายวชาและผลจากการเกบขอมลพบวามอเตอรไฟฟามความจาเปนอยางมากในการใชงานในปจจบนท งเกษตรกรรมและอตสาหกรรมทเกยวของกบระบบกงอตโนมตและระบบอตโนมตตองมความเกยวของกบมอเตอรไฟฟาท งส น ดงน นเพอเปนการศกษาท งดานโครงสรางสวนประกอบตลอดจนหลกการทางานผวจยจงมแนวคดสรางชดสาธตมอเตอรไฟฟาข น ซงประกอบดวย มอเตอรไฟฟากระแสตรง มอเตอรไฟฟากระแสสลบ 1 เฟส มอเตอรไฟฟากระแสสลบ 3 เฟสและคมอการใชงาน จากน นใหผเชยวชาญจานวน 5 ทานประเมนคณภาพสอชดสาธตเพอนาผลมาประเมนมาทดสอบสมมตฐาน ผลการการพฒนาไดชดสาธตซงประกอบดวย มอเตอรไฟฟากระแสตรง มอเตอรไฟฟากระแสสลบ 1 เฟส มอเตอรไฟฟากระแสสลบ 3 เฟสและคมอการใชงาน โดยมผลการประเมนคณภาพชดสาธตจากผ เชยวชาญอยในระดบด (x = 4.20)
83ECTI-CARD 2019
ID 1111
เครองตดฟองนาแบบอตโนมตสาหรบการปลกพชไฮโดรโปนกส
จตธรณ นลไชย และ สทธพงษ ฟงเดช* สาขาวชาครศาสตรอตสาหกรรมอเลกทรอนกสและโทรคมนาคม คณะครศาสตรอตสาหกรรม มหาวทยาลยเทคโนโลยราชมงคลอสาน วทยาเขตขอนแกน
คาสาคญ เครองตดฟองน า การปลกพชไฮโดรโปนกส บทความวจยน มวตถประสงคเพอออกแบบและสรางเครองตดฟองน าแบบอตโนมตสาหรบการปลกพชไฮโดรโปนกส ตวเครองประกอบดวยวงจรการทางาน 4 สวน ไดแก 1) ภาควงจรควบคมโดยใชไมโครคอนโทรลเลอร PIC16F877A ทาหนาทควบคมการทางานของวงจรภายในเครองตดและเจาะฟองน าแบบอตโนมต 2) ภาคควบคมมอเตอร ทาหนาทควบคมการทางานของมอเตอรในการเลอนชดรบฟองน า 3) ภาคควบคมความรอนของเสนลวด จายแรงดนไฟฟาและกระแสใหกบขดลวดทใชในการตดฟองน า 4) แหลงจายไฟทาหนาทแปลงไฟฟากระแสสลบ 220 โวลตเปนไฟฟากระแสตรง 12 โวลต เพอจายใหกบวงจร ในการออกแบบเครองตดฟองน าแบบอตโนมตสาหรบการปลกพชไฮโดร โปนกส สามารถตดฟองน าได 3 ขนาด คอ ขนาดท 1 เทากบ 2.5 ซม. x 2.5 ซม. x 2.5 ซม. ขนาดท 2 เทากบ 3 ซม. x 3 ซม. x 2.5 ซม. และขนาดท 3 เทากบ 4 ซม. x 4 ซม. x 2.5 ซม. จากการทดสอบประสทธภาพพบวา เครองตดฟองน าแบบอตโนมตสาหรบการปลกพชไฮโดรโปนกส น นสามารถทางานไดตามขอบเขตทกาหนด คดเปนคาประสทธภาพสงกวารอยละ 80
84 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1113
ระบบจาลองการควบคมอตโนมตแบบไรสายของโครงขายการจายนาอยางชาญฉลาดดวยการเพมประสทธภาพนาหนกเฉลยหลายเซนเซอร
สภาพร ปานคม* และ อดเรก จนตะคณ สาขาวศวกรรมอเลกทรอนกสและโทรคมนาคม คณะครศาสตรอตสาหกรรม มหาวทยาลยเทคโนโลยราชมงคลอสาน วทยาเขตขอนแกน
คาสาคญ จาลองการควบคมอตโนมตแบบไรสาย เซนเซอร งานวจยน มจดประสงคเพอออกแบบและสรางระบบจาลองการควบคมการจายน าอตโนมตทเปลยนแปลงตามสภาพความช นในดนสาหรบการทาการเกษตรบรเวณกวางเพอใชควบคมความช นในแปลงเกษตรจาลองการจายน ายอยจานวน 4 พ นท แตละพ นทยอยจะมแผงควบคมยอย (slave) ทาหนาทควบคมการเปดปดของโซลนอยดวาลวเพอสงวาลวน าปลอยน าแบบกระจายหยดน าจากดานบนสดานลาง และสงสญญาณคาความช นจากชดเซนเซอรท งหมด 4 ตว ไปยงแผงควบคมหลก (Master) ซงจะทาการเกบขอมลคาความช น, พ นท, วนและเวลา ลงหนวยความจาเพอใชในการวเคราะหและเปนฐานขอมลของการทางานท งหมด การคานวณการปลอยน าโปรแกรมจะคานวณหาคาเฉลยใหไดจดทสมดลซงเปนปรมาณการจายน าทเหมาะสมทสดใชการเพมประสทธภาพน าหนกเฉล ยหลายเซนเซอร เพอทจะสงใหโซลนอยดวาลวปลอยน าไดอยางเหมาะสม ผลการทดลองระบบจาลองการควบคมอตโนมตแบบไรสายของโครงขายการจายน าอยางชาญฉลาดสาหรบการทาการเกษตรบรเวณกวางสามารถใชงานตามสอดคลองกบเงอนไขทต งไว
85ECTI-CARD 2019
ID 1114
ระบบเฝาระวงการเกดเชอราในดนสาหรบการปลกมะเขอเทศภายในโรงเรอน โดยใชเครอขายเซนเซอรไรสาย
กองภพ ชาอามาตย1* อาจศก มามกล1 กตตวฒน จบแกว1 กฤษฎา พรหมพนจ1 ธานล มวงพล2
และ สญญา ควรคด3
1 สาขาวชาไฟฟาและอเลกทรอนกส คณะเทคโนโลยอตสาหกรรม มหาวทยาลยราชภฏสกลนคร 2 สาขาวชาเทคโนโลยคอมพวเตอร คณะวทยาศาสตรและเทคโนโลย มหาวยาลยราชภฏนครปฐม 3 สาขาวชาวศวกรรมไฟฟา คณะวทยาศาสตรและเทคโนโลย มหาวทยาลยราชภฏนครปฐม
คาสาคญ ไมโครคอนโทรลเลอร โมดล Xbee อณหภมในโรงเรอน ความช นในดน เครอขายแบบไรสาย
งานวจยน เสนอการออกแบบระบบเฝาระวงปจจยทกอใหเกดเช อราในดนโดยใชไมโครคอนโทรลเลอรในการควบคมการทางาน ทาการตดต งตวตรวจจบในบรเวณโรงเรอนปลกมะเขอเทศราชนของกลมเกษตรกรบานนางอย อาเภอเตางอย จงหวดสกลนคร สาหรบตรวจวดคาปจจยตางๆทจะส งผลทาใหเกดเช อราในดนซงกอใหเกดโรคเหยวเหลอง เชน คาอณหภมในโรงเรอน คาความช นในดน และคาความเปนกรด-ดาง จากน นทาการสงคาททาการตรวจวดผานเครอขายแบบไรสายดวยโมดล XBee และทาการสงขอความคาความเปนกรด-ดางไปยงเกษตรกรดวยระบบโทรศพท GSM 900 ผลการทดลองสงขอมลคาปจจยตางๆดวยโมดล XBee สามารถสงคาของขอมลไดทระยะทางสงสด 100 เมตรและระบบสงขอความมความคลาดเคลอนของเวลาในการสง 1-2 นาท
ID 1115
การหาสมการอมพแดนซทตวกลางเปนมนแกวบนสายอากาศ
ชาตวรทธ ภทรสเมธ คณะวศวกรรมศาสตร มหาวทยาลยราชภฏมหาสารคาม
คาสาคญ โพรงทรงกระบอก ทฤษฎภาวะยอนกลบ ทฤษฎปฏกรยา บทความน นาเสนอการหาสมการอมพแดนซทตวกลางเปนมนแกวบนโพรงทรงกระบอกซอนกน ปอนกาลงงานดวยทอนาคลนโมดสนามแมเหลกตามขวางและโมดสนามไฟฟาตามขวางจากการอาศยสมการ สนามแมเหลกไฟฟาภายในโพรงทรงกระบอก ทฤษฎภาวะยอนกลบ ทฤษฎปฏกรยา สมการแอตมตแตนซเชอมโยง และพารามเตอรกระจดกระจาย โดยแสดงสมการสนามแมเหลกไฟฟารวมทแสดงฟงกชนคลนและความหนาแนนกระแสไฟฟาและกระแสแมเหลก เพอนามาหาสมการแอตมตแตนซเชอมโยงททาปรพนธของเครลสนามแมเหลกไฟฟาตามแนวมม และแนวแกน ทดอทกบเวกเตอรทต งฉากกบระนาบปากของทอนาคลนสเหลยมผนผามมฉากท งสองโมดทใชปอนกาลงงานใหแกโพรงทรงกระบอกซอนกน
86 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1116
การพฒนาเครองใหอาหารปลาอตโนมต
สราวฒ บญเกดรมย1* และ ถนอมศกด วงศมแกว2 1 โปรแกรมวชาไฟฟาและอเลกทรอนกส คณะเทคโนโลยอตสาหกรรม มหาวทยาลยราชภฏสกลนคร จงหวดสกลนคร 2 ภาควชาวทยาการคอมพวเตอรและสารสนเทศ คณะวทยาศาสตรและวศวกรรมศาสตร มหาวทยาลยเกษตรศาสตร วทยาเขตเฉลมพระเกยรต จงหวดสกลนคร
คาสาคญ การใหอาหารปลา บอปลา เครองอตโนมต บทความน เปนการพฒนาเครองใหอาหารปลาอตโนมต โดยตดต งอปกรณต งเวลาไวทเครองและจะทางานเมอถงเวลาทผใชกาหนดซงข นอยกบปรมาณและขนาดของปลาบอปลาทเล ยง เครองใหอาหารปลาอตโนมตประกอบดวย มอเตอรไฟฟากระแสตรงเปนตวสงกาลงสาหรบขบใบสกรเพอนาอาหารจากถงเกบทเตรยมไวใหเคลอนทในทอลาเลยงเพอไปปลอยในตาแหนงทกาหนด เครองใหอาหารปลาอตโนมตยงมระบบปองกนในกรณทตาแหนงทปลอยเกดการขดของและจะหยดทางานทนทเ พอปองกนการปอนในปรมาณมากเกนความตองการของปลา การทดลองนาไปใชในบอเล ยงปลาจรงเปนเวลา 30 วนและใสอาหารปลาในถงเกบจนเตม ผลการทดลองพบวาเครองใหอาหารปลาอตโนมตมประสทธภาพสามารถทางานไดตรงเวลาตามทกาหนด อกท งสามารถใชงานงายและเคลอนยายสะดวก
87ECTI-CARD 2019
ID 1118
สออนโฟกราฟกแนะนาชดดนกบการปลกไมปาของสถานวนวฒนวจยในชองจงหวดกระบ
นธพร วรรณโสภณ* ภาณพงศ ทองสงค2 สาธต ฤทธอนทร สาขาวทยาศาสตรคอมพวเตอร คณะวทยาศาสตรและเทคโนโลย มหาวทยาลยเทคโนโลยราชมงคลศรวชย
คาสาคญ มลตมเดย อนโฟกราฟก ชดดน พนธไมปา การวจยเรอง การพฒนาสออนโฟกราฟกแนะนาชดดนกบการปลกไมปาของสถานวนวฒนวจยในชองจงหวดกระบ เพอเผยแพรกลมชดดนและพนธไมปาของจงหวดกระบ มวตถประสงคเพอ 1) ออกแบบและพฒนาสออนโฟกราฟก แนะนาชดดนกบการปลกไมปาของสถานวนวฒนวจยในชอง จงหวดกระบ 2) ใหความรเกยวกบชดดนและตนไมปาของจงหวดกระบ 3) ศกษาความพงพอใจของกลมตวอยางหลงรบชมสออนโฟกราฟกทพฒนาข น 4) ศกษาความพงพอใจของผเขาชมสอมลตมเดย ผานสอสงคมออนไลน กลมตวอยางทใชในการวจย ไดแก นกศกษาทวไปและผทสนใจเรองราวของชดดนและพนธไมปาของจงหวดกระบ ผเขาชมสออนโฟกราฟกผานสอสงคมออนไลน จานวน 139 คน โดยวธการสมแบบบงเอญ เครองมอทใชในการวจย ไดแก 1) สออนโฟกราฟกแนะนาชดดนกบการปลกไมปาของสถานวนวฒนวจยในชองจงหวดกระบ 2) แบบประเมนคณภาพสออนโฟกราฟก 3) แบบประเมนความพงพอใจทมตอสออนโฟกราฟก 4) การเผยแพรสอมลตมเดยผานสอสงคมออนไลน ท งน สถตทใชในการวเคราะหขอมล ไดแก รอยละ คาเฉลย และสวนเบยงเบนมาตรฐาน
ID 1119
การตรวจจบคณภาพของการออกกาลงกายบรหารหนาทอง
ปฏมากร จนทรพรม* และ ฉตรชย จนทรพรม สาขาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลศรวชย
คาสาคญ เซนเซอรความเรง การตรวจจบ การเคลอนไหว บทความน ศกษาลกษณะพฤตกรรมความเรงของรางกายขณะ ออกกาลงกายนง-นอนดวยอปกรณบรหารหนาทองโดยตรวจจบทาทาง การเคลอนไหวของรางกายจากเซนเซอรความเรงแบบ 3 แกนตดทลาตว การตรวจจบใชตาแหนงขอบขาข นของสญญาณทสอดคลองกบการ เปลยนแปลงความเรงตามแนวแกนทมทศออกจากลาตวไปขางหนากบ ความเรงตามแนวแกนทมทศพงข นเหนอศรษะ ผลการทดลองพบวา สามารถตรวจจบทาทางนง-นอน นบจานวนคร งและแสดงเวลาทใชออกกาลงกายนง-นอนในแตละคร งได อกท งยงสามารถแสดงแนวโนมของ การใชเวลาในแตละคร งตลอดระยะเวลาของการออกกาลงกาย ทาใหสามารถเปรยบเทยบดพฒนาการของการออกกาลงกายแตละคร งได
88 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1120
เครองกาเนดแรงดนอมพลส
วนย เมธาวทต* และ ชยณรงค วเศษศกดวชย สาขาวชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลกรงเทพ
คาสาคญ เครองกาเนดแรงดนอมพลส บทความน นาเสนอเครองกาเนดแรงดนอมพลส เพอใชในการสรางรปคลนฟาผามาตรฐาน 1.2/50 ไมโครวนาท โดยนาตวเกบประจอมพลสขนาด 2.2 ไมโครฟารด ประกอบเขากบความตานทานปรบหนาคลนและความตานทานปรบหลงคลนเพอใชกบตวเกบประจโหลดหลายคา ความตานทานปรบหนาคลนและความตานทานปรบหลงคลน เปนแบบมคาความเหนยวนามาก และแบบคาความเหนยวนาตา ทาการทดลองศกษาเมอเปลยนแปลงคาความตานทานปรบหนาคลนและความตานทานปรบหลงคลน โดยเพมและลดคาความตานทานลงจากคาทออกแบบไว พบวาสามารถศกษาแนวทางในการออกแบบและสรางเครองกาเนดแรงดนอมพลสไดเปนอยางด
ID 1121
การพฒนาระบบเฝาระวงและตดตามพฤตกรรมของสกรด วยเทคโนโลยตรวจจบการเคลอนทผานเครอขายอนเทอรเนตแบบเวลาจรง
อรรถพล พลานนท* และ ศภากร ศรทอง สาขาเทคโนโลยคอมพวเตอรอตสาหกรรม คณะวทยาศาสตรและเทคโนโลย มหาวทยาลยราชภฏนครปฐม
คาสาคญ สกร การตรวจจบการเคลอนท ไมโครคอนโทรลเลอร ในการเล ยงสกรของเขตพ นทภาคกลางตอนลางและพ นทใกลเคยง มเกษตรกรเพาะเล ยงสกรอยางแพรหลายท งฟารมขนาดใหญและการเล ยงตามบานเรอน ซงการเล ยงสกรน นมกพบเจอปญหาในการเล ยงมากมาย ท งดานสขอนามย สภาพแวดลอม รวมถงอาหารการกนของสกรซงจะสงผลตอสขภาพและการเจรญเตบโตของสกร หรอทาใหสกรเสยชวตลงได โดยสงตางๆเหลาน สามารถสงเกตไดจากการแสดงออกมาทางพฤตกรรมการเดน การกน การนอน และอารมณของสกรตอสงเรารอบขาง ซงจากปญหาดงกลาวจงไดมการนาเอาเทคโนโลยการจบการเคลอนท รน SW-420 มาประยกตใชงานรวมกบการสอสารไรสายเพอแสดงคาพฤตกรรมการเคลอนทของสกรผานหนาเวบเพจ โดยทดลองเปรยบเทยบสกร 5 ตวกบคามาตรฐานการเคลอนทของสกร ซงในการทดลองเล ยงจรง 90 วน สกรท ง 5 ตวมคาการเคลอนทปกต ซงหมายถงไมพบสกรทปวยตลอดเวลาในการเล ยงนนเอง
89ECTI-CARD 2019
ID 1122
การประยกตใชขอมลจาก IoT กบ ปญญาประดษฐ เพอเรยนรพฤตกรรม การใชงานเครองใชไฟฟา
ปวณวช นาถประชา* รณพร บญรตน วรชย เขอนแกว หรรษวส ขนตยาภรตกล และ ณฐพงศ วงศพรอมมล ภาควชาวศวกรรมไฟฟา คณะวศวกรรมศาสตรและเทคโนโลยอตสาหกรรม มหาวทยาลยศลปากร วทยาเขตพระราชวงสนามจนทร
คาสาคญ อนเตอรเนตในทกสง ปญญาประดษฐ เครองใชไฟฟา บทความน นาเสนอ การสรางปญญาประดษฐ (Artificial Intelligence: AI) ททาหนาท เรยนรพฤตกรรมการ เปด/ปด เครองใชไฟฟาจากผใชงาน โดยระบบจะทาการบนทกขอมล เมอมการ เปด/ปด เครองใชไฟฟาผานระบบอนเตอรเนตในทกสง (Internet of Things: IoT) หรอปมควบคม หลงจากน น AI จะทาการเรยนรและวเคราะหขอมลประวตการใชงานรวมกบขอมลพยากรณอากาศจากเวบไซต ระบบจะทาการแจงเตอน เมอผลการวเคราะหไมตรงกบสถานะ เปด/ปด ของอปกรณไฟฟา หรอเมอเกดพฤตกรรมทไมเปนไปตามปรกตในแตละวน ใชงานยงสามารถอนญาตให AI ทางานแทนไดโดยอตโนมต หรอสามารถต งคาการทางานแทนตามระยะเวลาทกาหนดได
ID 1123
ประสทธภาพของชดรบลมจากคอยลรอนของเครองปรบอากาศสาหรบ การผลตไฟฟา
ยทธศกด ทอดทอง* และ กฤษฎา ศรศกดา สาขาวศวกรรมไฟฟา คณะเทคโนโลย มหาวทยาลยราชภฏอดรธาน
คาสาคญ พลงงานลม เครองปรบอากาศ การผลตไฟฟา ในอาคารทไดมการใชงานเครองปรบอากาศ คอยลรอนของเครองปรบอากาศกทางานเชนกน ซงลมทออกมาจากคอยลรอนสามารถนามาเปลยนเปนพลงงานอนได งานวจยน มวตถประสงคเพอออกแบบและสรางแผงรบลมจากคอยลรอนของเครองปรบอากาศ เพอเปลยนพลงงานลมมาเปนพลงงานไฟฟา รวมถงหาประสทธภาพของการออกแบบ จากแนวความคดน ทางคณะผจดทาไดใชมอเตอรกระแสตรงเปนชดรบลมจากคอยลรอนและใชเปนตวกาเนดไฟฟา โดยไดออกแบบชดรบลมท ง 2 และ 3 มต เพอเปรยบเทยบประสทธภาพของการผลตไฟฟา และการสญเสยพลงงานของเครองปรบอากาศทระยะตางๆ จากผลการทดลองพบวา ชดรบลมแบบ 3 มต สามารถผลตไฟฟาไดดกวาและสญเสยพลงงานนอยกวา แบบ 2 มต อยางเหนไดชด
90 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1124
การเพมปรมาณออกซเจนในนาดวยปมพลงงานแสงอาทตย
กญญารตน บญเชดช1 กฤษฎา แสงเดชา1 และ เชาวนวฒน เออเฟอ2* 1 ภาควชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยบรพา 2 สานกงานจดการศกษา คณะวศวกรรมศาสตร มหาวทยาลยบรพา
คาสาคญ ปรมาณออกซเจนละลายในน า ปมพลงงานแสงอาทตย การเพมปรมาณออกซเจนละลายน าดวยปมพลงงาน แสงอาทตย (Dissolving oxygen with solar pump model) มระบบการ ควบคมดวยไมโครคอนโทรลเลอร Arduino UNO R3 โดยมหลกการ ทางานเมออณหภมเทากบหรอมากกวาถง 30 องศาเซลเซยส ปมจะทางาน เพอเพมปรมาณออกซเจนละลายน า และหยดทางานทอณหภม 27 องศาเซลเซยส โดยใชแผงเซลลแสงอาทตยชนด Mono-Crystalline 80W และ แบตเตอรขนาด12 V 18 Ah เปนแหลงพลงงาน จากการทดสอบปรมาณ ออกซเจนละลายน ามคาเฉลยท 4.96 คาสงสดท 7 mg/l และคา pH ของน า เฉลยท 6.60 คาสงสด ท 7
ID 1125
ระบบควบคมนาดมเพอสขภาพ
ณฐพรรณ เจรญโภคทรพย1 นรศรา สระเศษ1 มารสา เชยงพนธ1 กนตพฒน ตงพรเจรญสข1 และ เชาวนวฒน เออเฟอ2* 1 ภาควชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยบรพา 2 สานกงานจดการศกษา คณะวศวกรรมศาสตร มหาวทยาลยบรพา
คาสาคญ ระบบควบคม น าดม เพอสขภาพ ระบบควบคมน าดมเพอสขภาพ ใชไมโครคอนโทรลเลอร ควบคมการทางานของมอเตอรปมน าและ โซลนอยดวาวล โดยสงน าผานทอทวางบรเวณแมเหลกถาวรชนดนโอไดเมยม เพอเพมคาอลคาไลน และคาpH (Potential of Hydrogen) พบวาขณะระบบทางานตอเนองคาอลคาไลนเฉลย เทากบ55.96 mg/l และคา pH ทดสอบเฉลย 8.04 คาpH แสดงผลเฉลย 8.00 สวนคาอลคาไลน และคาpHของน าทปลอยท งไว18 ชวโมงพบวาคาอลคาไลนเฉลย เทากบ 55.6 mg/l และคา pH ทดสอบเฉลย7.75 คา pH แสดงผลเฉลย 7.8
91ECTI-CARD 2019
ID 1126
การพฒนาเครองจดระเบดแบบตงเวลาหนวงได
คณตพงศ เพงวน1* ธราดล โกมลมศร1 และ ไพรช จรญพฒนพงศ2 1 ภาควชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเชยงใหม 2 ภาควชาวศวกรรมเหมองแรและปโตรเลยม คณะวศวกรรมศาสตร มหาวทยาลยเชยงใหม
คาสาคญ เครองจดระเบด หวชนวน บทความน กลาวถงการพฒนาเครองจดระเบดแบบต งเวลาไดซงเปนเครองมอสาคญในการทาเหมองแร ไมโครคอนโทรลเลอรถกนามาใชควบคมวงจรทาใหการจดระเบดเปนไปดวยความแมนยา และเพมฟงกชนเพอความสะดวกในการใชงาน เครองสามารถจดชนวนได 5 ลป ลปละ 40 ดอก รวมท งหมด 200 ดอก และต งเวลาหนวงได 1-500 ms
ID 1127
อปกรณตรวจวดประสทธภาพของแผงโซลาเซลลโดยใชโปรแกรมอาดโน
อภยภกด ประทมทพย สาขาวชาวศวกรรมไฟฟา คณะเทคโนโลย มหาวทยาลยราชภฏอดรธาน
คาสาคญ - บทความน นาเสนอการพฒนาอปกรณตรวจวดประสทธภาพของแผงโซลาเซลลโดยใชโปรแกรมอาดโน ทใชกบแผงโซลาเซลลไมเกน 24 V ตรวจจบคาแรงดนไฟฟาและกระแสไฟฟาโดยใชโมดลทเชอมตอบอรดอาดโน และแสดงผลในลกษณะ real time บนจอแอลซด 3.2 น ว อปกรณสามารถปรบโหลดตวตานทานไดต งแต 10 Ω ถง 80 Ω เพอใชหาคากาลงไฟฟาสงสดของแผงโซลาเซลล คาความคลาดเคลอนของอปกรณไมเกน 10% และเกบขอมลในรปแบบไฟล Excel ซงสามารถนาไปประยกตในงานวจยอนได
92 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1128
หมวกกนนอคอจฉรยะสาหรบแจงเตอนอบตเหต
นรเสฏฐ วชยพาณชย* สทศ บารงสข และ สาธต ถาวรคง ภาควชาวศวกรรมอเลกทรอนกสและโทรคมนาคม คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลธญบร
คาสาคญ โมดลไจโรสโคปเรง 3 แกน สายอากาศรบสญญาณจพเอส โมดล 3 จ อารดโน บทความน นาเสนอหมวกกนนอคอจฉรยะสาหรบแจงเตอนการเกดอบตเหตโดยอาศยอนเตอรเนตทกสรรพสง โมดลไจโรสโคปเรง 3 แกน รน GY-521 (MPU5060) ถกใชเพอวดคามมการหมนและความเรงของแกนท ง 3 แตแกนทเราสนใจคอแกนต ง (Y axis) โดยกาหนดใหมการแจงเตอนเมอคามมมคาสงกวา 90 องศา สายอากาศรบสญญาณดาวเทยมจพเอส (GPS Antenna) ถกใชรบสญญาณเพอระบตาแหนงทต งของตวอปกรณ โมดล 3 จ (GSM/GPRS 3G Shield) ทาหนาทในการสงขอความ SMS และโทรศพทไปยงอปกรณ อปกรณท งสามถกตดต งบนหมวกกนนอค และถกใชงานเชอมตอผานบอรดอาดโน อโน (Arduino UNO) หลกการทางานของหมวกกนนอคอจฉรยะคอเมอโมดล ไจโรสโคปเรง 3 แกนมคามมในแกนต งมากกวา 90 องศาจะสงผลใหบอรดอารดโนทาการรบคาตาแหนงทต งปจจบนจากสายอากาศรบสญญาณดาวเทยมจพเอสแลวทาการโทรแจงเตอนอบตเหตไปยงเบอรโทรศพทปลายทางจานวน 2 เลขหมาย และทาการแจงตาแหนงทต งปจจบนดวยการสงขอความผาน SMS ผลการทดสอบของบทความน แสดงใหเหนหมวกกนนอคอจฉรยะสาหรบการแจงเตอนอบตเหตสามารถแจงเตอนการเกดอบตเหตดวยการโทรเขา และสงขอความขอความชวยเหลอพรอมท งระบตาแหนงไปยง 2 เลขหมายปลายทางไดเมอมมของแนวแกนต ง (แกนวาย) มคามมมากกวา 90 องศา
ID 1129
การวดวงจรกรองความถแบบพาสซพดวยภาษาไพธอน
สรภพ ตประกาย* ศภเทพ เอกอดมชย ศภวชญ ตงสมคด และ สมณะ นชรตน ภาควชาวศวกรรมโทรคมนาคม คณะวศวกรรมศาสตร สถาบนเทคโนโลยพระจอมเกลาเจาคณทหารลาดกระบง
คาสาคญ ออสซลโลสโคป วงจรกรองความถตาผาน วงจรกรองความถสงผาน ภาษาไพธอน บทความน นาเสนอการออกแบบและพฒนาโปรแกรมทใชในการวดและควบคมการทางานของออสซลโลสโคปผานคอมพวเตอรรวมไปถงการนาผลลพธทไดจากออสซลโลสโคปน นมาประมวลผลเพอสรางเปนกราฟผลตอบสนองทางความถของวงจรกรองความถตาผานและวงจรกรองความถสงผานแบบพาสซพโดยใชภาษาไพธอน
93ECTI-CARD 2019
ID 1130
การพฒนาทกษะนกการตลาดดวยระบบการเรยนรเชงการขาย
วลาวณย พรพชรพงศ คณะวทยาการสารสนเทศ มหาวทยาลยมหาสารคาม
คาสาคญ การเรยนการสอนผานเวบ ทกษะนกการตลาด การขาย นกการตลาด การวจยคร งน มวตถประสงคเพอ 1) พฒนาระบบการเรยนรเชงการขายเพอพฒนาทกษะนกการตลาด 2) ศกษาผลการทดลองใชระบบการเรยนรเชงการขายเพอพฒนาทกษะนกการตลาด และ 3) ศกษาความพงพอใจตอระบบการเรยนรเชงการขายเพอพฒนาทกษะนกการตลาด ผลการวจยพบวา 1) ระบบการเรยนรเชงการขายเพอพฒนาทกษะนกการตลาด ประกอบดวยองคประกอบ 3 สวน ไดแก 1) ปจจยนาเชา ไดแก เน อหาทสงเสรมแนวคดนกการตลาดและการขาย 2) กระบวนการ ไดแก การผลตงานเชงการตลาดผสมผสานกบการขาย 3) ปจจยสงออก ไดแก การประเมนผลทกษะนกการตลาด โดยผ เร ยนจะสามารถเข า ใช ระบบการเรยนการสอน อ เล กทรอน กส ผ าน โด เมน https://www.wbi.msu.ac.th 2) ผลการทดลองใชระบบการเรยนรเชงการขายเพอพฒนาทกษะนกการตลาด พบวา ผเรยนทเรยนดวยระบบการเรยนรเชงการขายเพอพฒนาทกษะนกการตลาดมผลงานออกแบบทแสดงถงการมแนวคดนกการตลาดและการขายในระดบด 3) ผลการศกษาความ พงพอใจตอระบบการเรยนรเชงการขายเพอพฒนาทกษะนกการตลาด พบวา ผเรยนมความพงพอใจโดยรวมในระดบมาก (𝑥=3.88)
94 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1131
ตนแบบบานพลงงานอจฉรยะ “ปทมวน”
กตตพงศ ศรอาหมด ทองเพยร พรมบตร รฐพงษ ขาไชโย ประสทธ นางทน* ไพฑรย วรรณสตร และ ศราวฒ อนนตแขนงวชาพลงงาน คณะวศวกรรมศาสตร สถาบนเทคโนโลยปทมวน
คาสาคญ บานพลงงานอจฉรยะ พลงงานทดแทน พลงงานแสงอาทตย แขนงวชาพลงงาน คณะวศวกรรมศาสตร สถาบนเทคโนโลยปทมวน เลงเหนความสาคญในการเผยแพรความรในการประหยดพลงงานภายในทอยอาศย ผานการสรางโมเดลบานตนแบบพลงงานอจฉรยะ “ปทมวน” จากการศกษางานวจยในดานการใชพลงงานทดแทนโดยเฉพาะพลงงานแสงอาทตย เนองจากความเหมาะสมของภมประเทศของไทยทอยใกลเสนศนยสตร ทาใหทกภมภาคไดรบแสงอาทตยสมาเสมอตลอดป การดาเนนโครงการน ไดรบความรวมมอท งจากนกศกษาปจจบน ศษยเกา รวมถงภาคเอกชนเพอระดมความคด ทนทรพย และแรงกาย สรางตนแบบบานพกข นมา ผลจากการดาเนนโครงการ ไดตนแบบบานพกเพอการอยอาศยโดยใชพลงงานแสงอาทตยเพยงอยางเดยวเปนแหลงจายพลงงานแกเครองใชไฟฟาภายในบาน โดยแสดงเปรยบเทยบถงการใชพลงงานใน 2 ลกษณะคอ ตนแบบบานทใชพลงงานแสงอาทตยกบอปกรณไฟฟาแบบกระแสสลบ (on grid system) และตนแบบบานทใชพลงงานแสงอาทตยกบอปกรณไฟฟาแบบกระแสตรง (off grid system) พรอมกบแสดงผลอตราการใชพลงงานของอปกรณไฟฟาแตละช นในบานแตละหลงเพอเปรยบเทยบขอมลการใชไฟฟา พบวาบานตนแบบระบบกระแสตรงมอตราการใชพลงงานตากวาระบบกระแสสลบ 4.16 เทา นอกจากน ยงตดต งเซนเซอรในอปกรณไฟฟารวมกบระบบสอสารเพอใหสามารถกาวสการทางานแบบบานพลงงานอจฉรยะอยางเตมรปแบบตอไป
95ECTI-CARD 2019
ID 1132
การควบคมความตองการพลงไฟฟาสงสดโดยวธการอนรกษและ แบงปนพลงงาน
ธนานนต ชแสง1* วนย จนทรสข1 ประสทธ นางทน2 1 สาขาวชาเทคโนโลยอเลกทรอนกส วทยาลยเทคนคปทมธาน สถาบนการอาชวศกษาภาคกลาง 1 2 สาขาวชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร สถาบนเทคโนโลยปทมวน
คาสาคญ ความตองการพลงไฟฟาสงสด ระบบไฟฟาอจฉรยะ โซลาเซลล พแอลซ พฤตกรรมการใชไฟฟาของผคนเปลยนแปลงไปตามภาวะโลกรอนรวมถงการใชไฟฟาจากแหลงพลงงานไฟฟาตาง ๆ เชน พลงงานแสงอาทตย และพลงงานลม เปนตน ซงพลงงานไฟฟาทไดจากธรรมชาตจะมความไมเสถยรทาใหสงผลตอประสทธภาพในการใชพลงงานไฟฟาในระบบหลก งานวจยน นาเสนอวธการผสมผสานระหวางการอนรกษและการแบงปนพลงงานเพอลดความตองการใชพลงงานไฟฟาสงสด (peak load) ในระบบโครงขายไฟฟาอจฉรยะยอย (smart grid) โดยการสรางแบบจาลองบานพกอาศยจานวน 4 หลง ซงประกอบดวยแหลงจายพลงงานไฟฟาและโหลดทางไฟฟา ซงแหลงจายพลงงานไฟฟาจะประกอบดวยระบบเปลยนพลงงานแสงอาทตยมาเปนพลงงานไฟฟาบนหลงคา ระบบจดเกบพลงงานในแบตเตอร และระบบจายไฟฟาปกต สาหรบสวนของโหลดไฟฟาจะประกอบไปดวย เครองปรบอากาศ ตเยน ตแชแขง พดลม ปมน า หมอหงขาว โทรทศน กาตมน า คอมพวเตอรแบบพกพา และเครองทาน าอน จากน นตดต งเครองวดพลงงานในแตละบานเพอตรวจจบกระแสไฟฟา แรงดน ตวประกอบกาลงไฟฟา กาลงไฟฟา และพลงงานและตดต งพแอลซ (PLC) เพอทาหนาทเปนตวควบคมการจดการกบโหลดท งหมดภายในบานและทาหนาทแบงปนพลงงานไฟฟาระหวางบาน ผลการทดลองวธการทนาเสนอสามารถลดความตองการพลงสงสดภายในบาน และสามารถแบงปนพลงงานไฟฟาจากบานทใชพลงงานไฟฟาตาไปสบานทใชพลงงานสงไดเปนอยางด
96 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1133
ตอบแหงพลงงานแสงอาทตยควบคมอณหภมความชนดวย ไมโครคอนโทรลเลอรโดยใชเทคนคการควบคมความเรว พดลมระบายอากาศภายใน
ฤทธรงค วงศแพรพนธ* ธเนศ คณะด กมล บญลอม อธคม ศร และ พงศธร อารกคด ศนยความเชยวชาญทางคลนไมโครเวฟและเทคโนโลยหนยนต มหาวทยาลยราชภฏเชยงราย
คาสาคญ ไมโครคอนโทรลเลอร ตอบแหงพลงงานแสงอาทตย ปจจบนประเทศไทยไดมการสงเสรมใหนาพลงงานความรอนทไดรบจากรงสอาทตยมาใชเนองจากเปนพลงงานทสะอาด ไมปลดปลอยกาซเรอนกระจกเมอใชแลวสามารถเกดข นใหมไดไมมวนหมดอกท งประเทศไทยมพ นททเหมาะสมในการนาพลงงานรงสอาทตยมาใชงานดานความรอน เนองจากมปรมาณรงสรวมจากดวงอาทตยคอนขางสมาเสมอตลอดป เฉลยวนละ 18 MJ/m2 หรอ คดเปน 5.05 kW/hr ซงเพยงพอในการนาไปใชงานดานความรอนโดยกลมอตสาหกรรมการอบแหงผลผลตทางการเกษตรเพอแปรรป เปนกลมหนงทควรสงเสรมใหมการอนรกษพลงงานในกระบวนการผลตเพอลดตนทนทางดานพลงงานตอบแหงพลงงานแสงอาทตยกเปนนวตกรรมอกรปแบบหนงทไดมการนาพลงงานความรอนทไดรบจากรงสอาทตยมาใชและปญหาหนงทเกดข น คอ ปรมาณความช นทเกดข นภายในตขณะทกาลงอบแหงมปรมาณทมาก ทาใหเกดไอน าซงจะทาใหประสทธภาพในการอบแหงลดลง ตอบแหงพลงงานแสงอาทตยควบคมอณหภมความช นดวยไมโครคอนโทรลเลอรโดยใชเทคนคการควบคมความเรวพดลมระบายอากาศภายในเปนนวตกรรมทสามารถรกษาอณหภมและกาจดความช นโดยทาการควบคมความเรวพดลมระบายอากาศททาการขบไลความช นภายในตอบโดยไมโครคอนโทรลเลอรจะทาการอานคาอณหภมและความช นภายในตอบ ซงหากมความช นเกดข นไมโครคอนโทรลเลอรจะทาการสรางสญญาณพลสเพอควบคมความเรวมอเตอรพดลมเพอขบไลความช น โดยอตราความเรวของมอเตอรพดลมจะข นอยกบปรมาณความช นทอยภายในตอบ ซงทา ใหสามารถรกษาอณหภมและขบไลความช นทอยภายในตอบไดเปนอยางดซงสามารถนาไปประยกตใชงานในดานอตสาหกรรมอนตอไปในอนาคต
97ECTI-CARD 2019
ID 1135
ระบบควบคมการใชงานอปกรณเครองใชไฟฟาภายในบานผานเวบไซตดวยเทคโนโลยอนเทอรเนตทกสรรพสง
วศวะ สอสวรรณ สาขาวชาเทคโนโลยคอมพวเตอรอตสาหกรรม คณะวทยาศาสตรและเทคโนโลย มหาวทยาลยราชภฏนครปฐม
คาสาคญ อนเทอรเนตทกสรรพสง บานอจฉรยะ ควบคมระยะไกล การวจยคร งน มวตถประสงคเพอพฒนาระบบการควบคมการทางานของเครองปรบอากาศ สมารททว และเครองใชไฟฟาในครวเรอนดวยการสงงานผานเวบเบราเซอร โดยไมทาการดดแปลงอปกรณตางๆของเครองใชไฟฟา เครองมอทใชในการพฒนาคอ ไดโอดเปลงแสงอนฟราเรด NodeMCU และ Raspberry Pi3 ModelB โดยทาการสรางระบบควบคมดวยเวบไซตและฐานขอมล มการสงงานไปยง NodeMCU เพอควบคมการทางานของไดโอดเปลงแสงอนฟราเรด ผลการวจยพบวา ไดโอดเปลงแสงอนฟราเรดสามารถทางานไดดจากการควบคมดวย NodeMCU ท งเครองปรบอากาศและสมารททว โดยสามารถใชงานแทนรโมทของอปกรณทมอย และยงสามารถควบคมการจายไฟใหกบอปกรณอนดวย สวตซตด-ตอวงจรแบบอเลกทรอนกสไดเปนอยางด
98 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1137
การพฒนาเครองซลถงแบบสญญากาศสาหรบผลตภณฑชมชน กรณศกษาการบรรจขาวอนทรย
เฉลยว เกตแกว* นตพงษ จมพรม พล แสงพลาย และ ฤทธเกยรต พมพวง สาขาวชาวศวกรรมไฟฟา ศนยสพรรณบร คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลสวรรณภม
คาสาคญ เครองซลถงขาว ระบบสญญากาศ บทความน เปนการศกษาออกแบบและพฒนาเครองซลข นรปถงขาวระบบสญญากาศเพอบรรจขาวเกษตรอนทรย สาหรบกลมแมบานเกษตรดอนลานในจงหวดสพรรณบร โดยพฒนาจากเครองเดมใหสามารถทางานไดอยางมประสทธภาพ มขนาดทกะทดรด เคลอนยายไดงาย ประหยดไฟและยงเพมตวบนทกขอมลเพอจะเกบคาพารามเตอรทางไฟฟา เชน แรงดนไฟฟา กระแสไฟฟา จานวนถงททาการซล คาตวประกอบกาลงไฟฟา และพลงงานไฟฟา ผลทไดจากการทดสอบใชงานพบวาเครองซลสามารถข นรปถงขาวระบบสญญากาศและบนทกขอมลการผลตขาวไดทออกแบบจดสรางข นสามารถซลข นรปถงขาวทรงเหลยมขนาด 1 กโลกรมและถงขาวทรงเหลยมขนาด 0.5 กโลกรม โดยทถงขาวทรงเหลยมท งสองขนาดใชเวลาทาการซลสญญากาศเฉลยอยทระยะเวลา 35 วนาทตอถง และความดนสญญากาศ - 0.056 Pa ถงขาวทรงเหลยมขนาด 1 กโลกรมใชพลงงานไฟฟาเฉลย 1.31 วตตชวโมงในการซลข นรปถงขาวระบบสญญากาศตอขาว สาร 1 ถง และถงขาวทรงเหลยมขนาด 0.5 กโลกรม ใชพลงงานไฟฟาเฉลย 1.304 วตตชวโมงในการซลข นรปถงขาวระบบสญญากาศตอขาวสาร 1 ถง เครองซลข นรปถงขาวระบบสญญากาศทจดสรางข นกอนหนาน มน าหนก 45 กโลกรม เครองทจดสรางข นน มน าหนก 14 กโลกรม โดยเครองทนาเสนอน มความกระทดลดและมน าหนกเครองลดลง 69 เปอรเซนต
99ECTI-CARD 2019
ID 1139
นาฬกาขอมอสาหรบชวยเหลอผสงอาย
ณฐพร พรสวสด ณฐภทร สมบรณสข ดลวฒน ณวพนธ และ พพฒน พรหมม* ภาควชาวศวกรรมโทรคมนาคม คณะวศวกรรมศาสตร สถาบนเทคโนโลยพระจอมเกลาเจาคณทหารลาดกระบง
คาสาคญ ตรวจจบการลม สญญาณชพจร แจงเตอนเวลากนยา ไมโครคอนโทรลเลอร บทความน เปนการออกแบบอปกรณตดตามดแล เฝาระวงสขภาพของผสงอายแทนลกหลานหรอผดแลจากระยะไกล โดยอปกรณถกทาใหอยในรปแบบของนาฬกาขอมอ การทางานภาพรวมอปกรณจะถกควบคมดวยไมโครคอนโทรลเลอร Wemos D1 Mini เปนหนวยประมวลผลหลก อปกรณถกแบงออกเปน 2 สวนคอ สวนของการประมวลผลทนาฬกาและสวนของการแจงเตอนไปยงผดแล ในสวนการประมวลผลทนาฬกา ไดแก ระบบตรวจจบการลมทใชเซนเซอรวดความเรงเชงเสนและอตราเรวเชงมมในการวเคราะห การกดปมขอความชวยเหลอการแจงเตอนเวลากนยาดวยรปกราฟกรวมกบ Buzzer และการวดอตราการเตนของหวใจดวย Pulse Sensor หากพบความผดปกตเชน การลม นาฬกาจะแจงเตอนไปยงผดแล โดยการเชอมตออนเตอรเนตไรสายแลวแจงไปยงผดแลผานแอปพลเคชน Line และ Blynk ซงสามารถต งเวลากนยาไดผานแอปพลเคชนน
ID 1140
ชอนรกษาความเสถยรสาหรบผปวยโรคพารกนสน
ณรงคศกด มโนสทธชย กรวชญ เชอทอง กญญารตน คาราม และ กลสตร จราพนธ* ภาควชาวศวกรรมโทรคมนาคม คณะวศวกรรมศาสตร สถาบนเทคโนโลยพระจอมเกลาเจาคณทหารลาดกระบง
คาสาคญ ความเสถยร โรคพารกนสน เซนเซอร GY-521 Arduino Nano บทความน นาเสนอการออกแบบและจดทาชอนรกษาความเสถยรสาหรบผปวยโรคพารกนสนเพอชวยใหผปวยสามารถรบประทานอาหารไดดวยตนเอง และเปนอกทางเลอกหนงทมคาใชจายตากวาผลตภณฑชอนสาหรบผปวยโรคพารกนสนทมวางจาหนายในทองตลาดเปนอยางมาก ในดานการทางานของชอนน นเกดจากการประมวลผลความเรงและความถการสนรวมถงการเอยงของปลายชอนทเซนเซอร GY-521 ตรวจจบไดดวยไมโครคอนโทรลเลอร Arduino Nano และนามาสรางการสนของชอนและความเอยงของชอนใหหกลางกบความถการสนและความเอยงของมอ ซงจะทาใหผปวยพารกนสนสามารถตกอาหารรบประทานเองได
100 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1141
ระบบควบคมของอปกรณตดตอนภายในสถานไฟฟายอยอตโนมต ตามมาตรฐาน IEC 61850 สาหรบรปแบบการจดเรยงบสแบบ Main and Transfer Bus
ณฐวด สทธธรรมรกษ* และ สมพร สรสาราญนกล ภาควชาวศวกรรมไฟฟาและคอมพวเตอร คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยพระจอมเกลาพระนครเหนอ
คาสาคญ ระบบควบคมของอปกรณตดตอน สถานไฟฟายอยอตโนมต มาตรฐาน IEC 61850 GOOSE message
การนามาตรฐาน IEC 61850 ทเปนมาตรฐานของเครอขายและระบบสอสารของสถานไฟฟายอยมาใช จะทาใหการแลกเปลยนขอมลและสญญาณทเปนคาสงใหอปกรณทางานถกสงไดงายข น โดยการใชระบบอเทอรเนต และยงกาหนดรปแบบโมเดลขอมลและโปรโตคอลทงายตอการจดการการรบสงขอมลทมรปแบบเดยวกนท งระบบ การสงขอมลของระบบควบคมอตโนมตน นจะสงเปนขอความ GOOSE ซงจะมความเรวสงทสามารถตอบสนองตามความตองการของระบบ ในบทความน มการออกแบบและหลกการทางานตามมาตรฐาน IEC 61850 ดวยการทดลองจรงของระบบควบคมของอปกรณตดตอนสาหรบรปแบบการจดเรยงบสแบบ Main and Transfer Bus ซงเปนรปแบบการจดเรยงบสทมความนาเชอถอสงและนยมใชกนมาก
101ECTI-CARD 2019
ID 1142
การพยากรณการผลตไฟฟาจากโรงไฟฟาพลงงานแสงอาทตยโดยใชโครงขายประสาทเทยม
นรชา เอกะกลานนต* และ สมพร สรสาราญนกล ภาควชาวศวกรรมไฟฟาและคอมพวเตอร คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยพระจอมเกลาพระนครเหนอ
คาสาคญ การพยากรณ พลงงานแสงอาทตย โครงขายประสาทเทยม ระบบไฟฟากาลงไดเหนการเพมข นของพลงงานแสงอาทตยเปนอยางมากเนองจากการสนบสนนการใชพลงงานทดแทน เพราะกาลงผลตไฟฟาของพลงงานแสงอาทตยเปนแบบไม สมาเสมอและไมสามารถควบคมได การพยากรณการผลตไฟฟาจากโรงไฟฟาพลงงานแสงอาทตยจงเปนปจจยทสาคญมากสาหรบการตดสนใจของผควบคมระบบไฟฟา บทความน ไดมการใชประยกตใชโครงขายประสาทเทยม เพอทาการพยากรณการผลตไฟฟาจากโรงไฟฟาพลงงานแสงอาทตย ระยะเวลาการพยากรณทสนใจ คอ แบบวนลวงหนา และภายในวน โดยแบบจาลองน ใชขอมลจรงจากทางอตนยมวทยาและจากโรงไฟฟา รวมท งขอมลทเกยวของสาหรบการฝกสอน เชน ฤดกาล กระบวนการเรยนร และ จานวนหนวยในช นซอน ดชนความคลาดเคลอนไดถกนาเสนอเพอประเมนประสทธภาพของแบบจาลองการพยากรณ ผลการจาลองแสดงใหถงความถกตองทยอมรบไดสาหรบวนทใชเปนตวอยางในการพยากรณ
102 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1143
การดาเนนการฟงกชนปองกนความลมเหลวของเซอรกตเบรกเกอร ในสถานไฟฟายอยแบบ Main and Transfer ตามมาตรฐาน IEC 61850
ชนนทร แซงราชา* และ สมพร สรสาราญนกล ภาควชาวศวกรรมไฟฟาและคอมพวเตอร คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยพระจอมเกลาพระนครเหนอ
คาสาคญ ฟงกชนปองกนความลมเหลวของเซอรกตเบรกเกอร ขอความ GOOSE IEC 61850 50BF
มาตรฐาน IEC 61850 คอมาตรฐานการสอสารทนามาใชภายในสถานไฟฟายอยผานเทคโนโลยการสอสารแบบอเทอรเนตทขอมลการสอสารตางๆ ระหวางอปกรณจะถกสงผานสายสอสารเพยงเสนเดยว เนองจากการนาเทคโนโลยการสอสารมาใช ความยากทเพมข นจากเดมคอวธการกาหนดรปแบบการสอสารระหวางอปกรณตางๆ ใหเปนไปตามทมาตรฐานกาหนด บทความน กลาวถงการนาหลกการของฟงกชนปองกนความลมเหลวของเซอรกตเบรกเกอรภายในสถานไฟฟาทมรปแบบการจดเรยงบสประเภท Main and Transfer มาประยกตใชกบระบบสอสารตามมาตรฐาน IEC 61850 อยางเตมรปแบบ ผลการทดสอบภายในหองปฏบตการพบวาการประยกตใชฟงกชนปองกนน สามารถทางานไดอยางถกตองตามเงอนไขการทางานทกประการ
ID 1144
หนยนตไตผนง ขบเคลอน 4 ลอ
ภทรศร จนทรอมพร สขมพนธ วงศวฒนากล สรเสกข จนเจรญ ปวช ชอยขนทด และ ภมร ศลาพนธ* ภาควชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร และเทคโนโลยอตสาหกรรม มหาวทยาลยศลปากร
คาสาคญ หนยนต ไตผนง ขบเคลอน 4 ลอ งานวจยน มจดมงหมายเพอทจะศกษา การสรางหนยนตไตผนงขบเคลอน 4 ลอทสามารถเคลอนทบนพ นราบ และสามารถไตผนง (ชน 90 องศา) ข นไดอยางตอเนอง ในการเคลอนทจะใช Servo motor ท ง 4 เปนลอในการเคลอนท และในการไตผนงจะใชความแตกตางของความดน ทภายในของหนยนตจะคลายกบสญญากาศ ใช Brushless motor ใหหมนใบพดเพอดดอากาศจากภายในหนยนตออกสภายนอก ความดนบรรยากาศภายนอกจะกดตวหนยนตใหตดกบผนง และยงสามารถเคลอนทบนผนงได โดยการบงคบแบบไรสาย การออกแบบหนยนตจะสงผลโดยตรงกบการไตผนง ซงตองคานกถงน า หนก และชองวางระหวางช นสวนของหนยนตเปนสงสาคญ ในการทดลองจะนาหนยนตเคลอนทบนพ นราบและไตข นบนผนงเรยบ เชน ผนงเรยบ กระจก เปนตน ซงผลการทดลองนาพอใจอยางยง
103ECTI-CARD 2019
ID 1145
การตรวจวดความชนขาวเปลอกในเตาอบดวยคลนไมโครเวฟเซนเซอร ระบบอนเตอรเนตของสรรพสง
ธาน สมวงศ* และ สมพร ศรวฒนพล สาขาวชาวศวกรรมอเลกทรอนกสโทรคมนาคม คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลสวรรณภม
คาสาคญ ไดโพล เรโซเนเตอร ความช น บทความน นาเสนอ การศกษาการวดความช นขาวเปลอกดวยการสงผานคลนความถยาน UHF ทาการวดความช นขาวเปลอกทบรรจในไซโลรปกรวย ทาการออกแบบและทดสอบทความถ 400MHz ถง 500MHz โดยใชเซนเซอรทมลกษณะเปนสายอากาศไดโพลเรโซเนเตอรคจดวางบนวสดฐานรอง FR-4 ตอรวมกบวงจรอเลกทรอนกสรวมกบสมองกลแปรผลเปนคาความช น โดยขอมลความช นถกสงดวยระบบอนเตอรเนตของสรรพสงมชวงการตรวจวดความช นขาวเปลอก อยระหวาง12% - 30% ทความถกตองสงสด 93% ตามลกษณะการเคลอนตวขาวเปลอก
ID 1146
ตปลกพชไมโครกรนภายในทอยอาศยทควบคมการเปด -ปดแสงและนาอตโนมตโดยใชเทคโนโลย NB-IoT
ปณณกา ปรชญาจฑา สปรชญ พรอมอทธกล* และ วาทต เบญจพลกล ภาควชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร จฬาลงกรณมหาวทยาลย
คาสาคญ ไมโครกรน อาดโน NB-IoT ตปลกพชในทอยอาศย ในปจจบนคนไทยใหความใสใจดแลสขภาพมากยงข น ไมโครกรนหรอตนออนของพชทสามารถรบประทานได ซงมคณคาทางสารอาหารสง จงเปนทรจกและนยมรบประทานกนอยางแพรหลาย แตในประเทศไทยมเพยงกลมคนจานวนนอยทมความรในการปลก ทาใหมความยากลาบากในการหาซ อรบประทาน บทความวจยน จงไดนาเสนอตสาหรบปลกไมโครกรนในทอยอาศยทสามารถควบคมและดแลการเจรญเตบโตไดโดยอตโนมต ซงจะมแอปพลเคชนใชควบคกบตปลก ทมการแสดงขอมลสถานะตาง ๆ ของตปลก และแจงเตอนเมอเกดสงผดปกตหรอถงชวงเวลาเกบเกยว โดยระบบจะถกควบคมโดยอาดโน (Arduino) และสงขอมลไปยงแอปพลเคชนผานระบบ NB-IoT
104 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1147
การเพมความเสถยรของการสงขอมลระยะไกลดวยโดรน
เอกรตน สถตวฒนาสนต สชยศร ไลออน นนท เขยวหวาน ชยพร ใจแกว อภรกษ จนทรสราง และ อนนต ผลเพม* หองปฏบตการเครอขายไรสาย (IWING) ภาควชาวศวกรรมคอมพวเตอรคณะวศวกรรมศาสตรมหาวทยาลยเกษตรศาสตร
คาสาคญ โดรน ลอรา pixhawk การลาเลยงขอมล ความแรงสญญาณ บทความน กลาวเกยวกบการรบ-สงขอมลระยะไกลภายในพ นททเขาถงไดยาก หรอทบดบงสญญาณ เชน ปาไม ภเขา โดยใชโดรนบนข นไปชวยทาการรบ-สงขอมล เพราะวาการทบนโดรนสงกวาระยะทถกบงจะชวยใหสญญาณในการรบ-สงดข นและสามาถรบ-สงขอมลได โดยอปกรณประกอบดวยสองสวนหลกๆ คอ ลอรา และโดรน ซงใชเปนโดรน 6 ใบพด เพราะสามารถรบน าหนกเพมไดด และใชตวคอนโทรลเลอรเปนบอรด pixhawk เพราะเปนซอฟแวรทสามารถนามาปรบใชเองไดงาย ผลการทดสอบการทางานพบวาการทใชโดรนบนข นจากพ นดนเพอรบสญญาณ พบวาสญญาณทไดรบมความแรงมากข น ทาใหการสงขอมลมความเสถยรข น
105ECTI-CARD 2019
ID 1148
การพฒนาระบบสรางชดขอสอบและวเคราะหขอสอบ
สภทรา เกดเมฆ* วทยา ศรกล และ สนน จนทรพรม สาขาวชาวศวกรรมคอมพวเตอร คณะวศวกรรมศาสตรและสถาปตยกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลอสาน
คาสาคญ สรางชดขอสอบ การออกขอสอบ การวเคราะหขอสอบ บทความน มวตถประสงคเพอพฒนาระบบสรางชดขอสอบทสามารถนาผลการสอบกลบมาวเคราะหขอสอบได เครองมอทใชในการพฒนาระบบ ไดแก Visual C# และ MySQL ใชวงจรการพฒนาระบบแบบน าตก (Waterfall Model) และใช โครงสรางการว เคราะหระบบและวธการออกแบบ (Structured System Analysis and Design Methodology: SSADM) ระบบพฒนาข นในรปแบบใชงานบนคอมพวเตอรเครองเดยว (Stand Alone Application) โดยระบบไดแบงการทางานออกเปน 3 สวนหลก คอ สวนแรกเปนสวนของการออกขอสอบ อาจารยผสอนสามารถสรางขอคาถามได 5 ประเภท ไดแก ขอสอบปรนย ขอสอบถกผด ขอสอบเตมคา ขอสอบแบบตอเนอง และขอสอบอตนย โดยอาจารยผสอนสามารถนาเขาขอมลขอสอบได 2 วธคอ การปอนขอมลขอสอบเขา และการนาเขาขอมลขอสอบในรปแบบไฟล .xls หรอ .xlsx สวนทสองเปนสวนของการสรางชดขอสอบ มฟงกชนการสลบขอคาถาม การสลบตวเลอก และการสรางชดขอสอบหลาย ๆ ชด สวนทสามเปนสวนของการวเคราะหขอสอบตามทฤษฎการทดสอบแบบคลาสสคไดแก คาความเชอมน คาอานาจจาแนก และคาความยากงาย โดยอาจารยผสอนสามารถนาเขาขอมลการวเคราะหได 2 วธคอ การปอนขอมลเขาทละคน และการนาเขาในรปแบบไฟลตารางขอมล .xls หรอ .xlsx ผลการประเมนความพงพอใจทมตอระบบอยในระดบด มคาเฉลยเทากบ 4.39 คดเปนรอยละ 87.75
106 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1149
ระบบทดสอบความคลองแคลววองไวสาหรบนกกฬาแบดมนตน
ชานนท องปญสตวงศ1 อนนต ผลเพม1 ชยพร ใจแกว1 อภรกษ จนทรสราง1* ณฐกา เพงล2 นาทรพ ผลใหญ2 และ วชาญ มะวญธร2 1 หองปฏบตการเครอขายไรสาย(IWING) ภาควชาวศวกรรมคอมพวเตอร คณะวศวกรรมศาสตรมหาวทยาลยเกษตรศาสตร 2 ภาควชาพลศกษา คณะศกษาศาสตร มหาวทยาลยเกษตรศาสตร
คาสาคญ ระบบทดสอบสมรรถภาพ ความคลองแคลววองไว กฬาแบดมนตน อนเตอรเนตในทกสง นกกฬา
การทดสอบสมรรถภาพดานความคลองแคลววองไวสาหรบนกกฬาแบดมนตนจาเปนตองใชระบบการทดสอบทมความแมนยาสง และตองการการรายงานผลแบบจดตอจดและเวลารวมเพอวเคราะหความสามารถของนกกฬาในการเคลอนท โดยผลทไดผฝกสอนสามารถนาไปใชในการวางแผนการฝกซอมใหกบนกกฬาได ดงน นในการวจยน ไดนาเสนอระบบทดสอบความคลองแคลววองไวโดยนาอนเตอรเนตในทกสง (IoT: Internet of Things) มาประยกตใชในการสงขอมลและบนทกเวลาในการเคลอนทแตละจดตามรปแบบของรายการทดสอบความคลองแคลววองไวทสอดคลองกบกฬาแบดมนตน จากการทดลองระบบโดยนาผลมาเปรยบเทยบกบเวลาในวดโอทบนทกขณะทดสอบ พบวา ระบบมความคลาดเคลอนท 4.774% ในขณะทการจบเวลาดวยนาฬกาจบเวลามความคลาดเคลอนท 6.982%
107ECTI-CARD 2019
ID 1150
ระบบควบคมแสงและอณหภมในตเพาะเลยงเนอเยอ
คณตม อนทรใจเออ1 ชยพร ใจแกว1 อภรกษ จนทรสราง1 อนนต ผลเพม1* และ วรรณรตน ผลเพม2 1 หองปฏบตการเครอขายไรสาย(IWING) ภาควชาวศวกรรมคอมพวเตอร คณะวศวกรรมศาสตรมหาวทยาลยเกษตรศาสตร 2 ภาควชาชวเคม คณะวทยาศาสตร มหาวทยาลยเกษตรศาสตร
คาสาคญ ตเพาะเล ยงเน อเยอ ตรวจวดอณหภม ตรวจวดความช น ตรวจวดความสวาง ไมโครคอนโทรลเลอร ระบบอนเตอรเนตในทกสงเพอใชในการควบคมและตรวจวดสภาพแวดลอมภายในตแชเชงพาณชย
บทความน กลาวถงการออกแบบและดดแปลงตแชเชงพาณชยเพอนามาทดแทนตเพาะเล ยงเน อเยอ โดยมคณสมบตทสามารถควบคมและรกษาสภาพแวดลอมภายในตททาการพฒนาและดดแปลงเพอเพมความสามารถในการควบคมสภาพแวดลอม ประกอบดวยระบบการควบคม LED ทสามารถปรบเปลยนสและความเขมของแสงและมระบบตรวจวดททาการบนทกคาแสง อณหภม และความช นภายในต และทาการสงออกสระบบอนเทอรเนต โดยอาศยหลกการทางานของระบบอนเตอรเนตในทกสง ท งน ระบบจะทาการบนทกคาและสารองขอมล และนามาแสดงผลในรปแบบของตารางและกราฟ ระบบภายในตมการควบคมสงงานไดสองทางคอผานแผงควบคม และผานระบบอนเทอรเนต ผลการทดสอบการใชงานพบวาคาทตรวจวดและควบคมมคาใกลเคยงกบเครองมอวดมาตรฐาน
108 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1151
ระบบสงขอมลระยะไกลสาหรบอปกรณโทรมาตรในพนท อบสญญาณโทรศพทเคลอนท
จรพนธ สองทอง1 อนนต ผลเพม1 อภรกษ จนทรสราง1 สรพนธ อนแกว2 และ ชยพร ใจแกว1* 1 หองปฏบตการเครอขายไรสาย (IWING) ภาควชาวศวกรรมคอมพวเตอรคณะวศวกรรมศาสตรมหาวทยาลยเกษตรศาสตร 2 สานกบรหารจดการน าและอทกวทยา กรมชลประทาน
คาสาคญ เซนเซอรวดระดบน า การสอสารระยะไกล ระบบโทรมาตร เทคโนโลย LoRa งานวจยน นาเสนอกระบวนการแกปญหาการรบสงขอมลจากเซนเซอรวดระดบน า ทสถานตรวจวดของกรมชลประทานซงต งอยในพ นททไมมสญญาณโทรศพท โดยการนาเทคโนโลย LoRa ซงเปนระบบการสงขอมลระยะไกลทใชพลงงานตา มาประยกตใช โดยจะทาการสงสญญาณไปยงจดทมสญญาณโทรศพทเพอทาการทวนสญญาณเขาสระบบอนเทอรเนต และสงขอมลไปยงฐานขอมลของกรมชลประทานเพอวเคราะหและแจงเตอนภยพบตลวงหนา จากการทดสอบการอานและสงคาขอมลวดพบวา ความหนวงเวลาระหวางเซนเซอรวดระดบน ากบฝงสงและฝงรบการสอสารระยะไกลมคาเฉลย 2.19 วนาท และการทดสอบคาความแรงของคลนความถวทยทวดทตวรบ ซงมผลกระทบตอระยะทาง พบวา เมอเพมระยะทางจะทาใหคาความแรงของคลนความถวทยทวดทตวรบลดลง จากการทดสอบการสอสารในพ นทจรงพบวา การสอสารขอมลระยะไกลมสญญาณทระยะทางหางจากจดสง 8.8 กโลเมตรและสามารถผานสงกดขวางทมความสงต งแต 0 – 215 เมตรจากระดบน าทะเล จดตดต งอปกรณรบสญญาณทเหมาะสมคอ แทงคน าทบานวงดน โดยจะมการดดแปลงอปกรณเกบขอมลตรวจวดทสถานหวยสก(Y.20)
109ECTI-CARD 2019
ID 1153
อปกรณวดความชนในดนแบบความลกหลายระดบโดยใชเทคนค การกาเนดความถเรโซแนนท แสดงผลผานอนเตอรเนตสรรพสง
ณฐพล ไชยวงค1* ประทป บญวงค1 กมล บญลอม1 ศราวธ ชยมล2 1 ศนยความเชยวชาญทางคลนไมโครเวฟและเทคโนโลยหนยนต มหาวทยาลยราชภฏเชยงราย 2 สาขาวชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยขอนแกน
คาสาคญ ความช นในดน อนเตอรเนตสรรพสง ความถเรโซแนนท การวดความช นในดนมความสาคญตอการทาการเกษตรอยางมากทาใหสามารถทราบปรมาณของน าทกระจายอยตามชองระหวางเมดดน ในบทความวจยน นาเสนอการออกแบบและสรางอปกรณสาหรบการวดความช นในดนทสามารถวดไดความลก 3 ระดบ เพอใหเหมาะกบพชในแตละชนดทตองการความลกของรากทระดบแตกตางกนออกไป โดยอปกรณน สามารถสงขอมลเพอทาการแสดงผลของขอมลความช นจากการวดผานอนเตอรเนตสรรพสง โดยผลจากการทดลองในงานวจยน สามารถบอกไดวาอปกรณวดความช นในดนน สามารถทาการวดความช นไดในชวงต งแต 0-100%RH โดยมคาความถเรโซแนนททกาเนดข นอยในชวง 435-487 เฮรตซ มคาความผดพลาดจากการวดเมอเทยบกบเครองมอวดความช นในดนในชวง ±5 เปอรเซนต ซงจากงานวจยน สามารถนาไปประยกตใชงานดานการวดความช นในดนสาหรบการเกษตรอจฉรยะไดดในอนาคต
110 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1154
การควบคมความตองการพลงไฟฟาสงสดโดยวธการพยากรณโหลดลวงหนา
อาวธ เครอเขอนเพชร* และ ประสทธ นางทน สาขาวชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร สถาบนเทคโนโลยปทมวน
คาสาคญ ความตองการพลงไฟฟาสงสด ระบบไฟฟาอจฉรยะ การจดการพลงงาน พแอลซ
ความไมแนนอนของความตองการใชไฟฟาสงสดมาจากพฤตกรรมของกระแสไฟฟาทเปลยนแปลงไปตามภาวะโลกรอนและความไมแนนอนของการผลตไฟฟาจากเซลลแสงอาทตยเปนปญหาหลกของความนาเชอถอของระบบโครงขายไฟฟาอจฉรยะ ในบทความน คณะผวจยเสนอการควบคมความตองการพลงไฟฟาสงสดดวยวธการพยากรณโหลดลวงหนา อนดบแรกคณะผวจยไดกาหนดบานตวอยาง 20 หลง ทใชอตราคาไฟฟาตามชวงเวลาการทางาน TOU สาหรบใชในการทดลอง จากน นคณะผวจยใชเครองวดพลงงานเพอตรวจสอบตวแปรพฤตกรรมของโหลดในบาน ตวแปรพฤตกรรมประกอบดวย เวลา กระแสไฟฟา แรงดนไฟฟา ตวประกอบกาลง กาลงไฟฟา และพลงงานไฟฟา ตวแปรท งหมดถกใชในการทานายความตองการใชพลงไฟฟาสงสด และผลการทานายเหลาน จะถกใชในการควบคมสถานะของแตละภาระในบาน ข นตอนสดทาย PLC ถกใชในการควบคมการโหลดตามผลการทานาย ผลการทดลองทไดวธการทนาเสนอไมเพยงแตลดความตองการไฟฟาสงสดของแตละบานเทาน น แตยงชวยลดพลงงานไฟฟาของบานอกดวย
ID 1155
การพฒนาระบบแจงเตอนทางแอปพลเคชนไลน และการนาระบบฐานขอมลออนไลนมาใชเกบขอมล
ดเรก เสอสนาค* ปพน ปลมวงศโรจน และ ทกษณาวด คามลมาตย1 ภาควชาวศวกรรมชวการแพทย คณะวศวกรรมศาสตร มหาวทยาลยศรนครนทรวโรฒ
คาสาคญ IoT Health Notification งานวจยน ศกษาการแจงเตอนผานทางแอปพลเคชนไลนและการสงขอมลทไดรบไปเกบไวยงระบบฐานขอมลออนไลน เมอคาทอานไดจากเซนเซอรเกนขอบเขตทกาหนดไวโดยรบคาอณหภมรางกายและอตราการเตนของหวใจจากเซนเซอรสองชนดตามลาดบ งานวจยน มงเนนการนาพ นฐานของเทคโนโลย IoT มาปรบใชในทางการแพทยโดยมการนาแอปพลเคชนไลนมาใชในการแจงเตอนใหกบทางผดแลของผปวย ทอาจจะมอณหภมรางกายทสงหรอมอตราการเตนของหวใจมากผดปกตและเกบขอมลคาความผดปกตเหลาน ไปยงระบบฐานขอมลออนไลนซงประสทธภาพในการทดสอบ ระบบสามารถแจงเตอนผานทางแอปพลเคชนไลนและเกบขอมลไปยงฐานขอมลออนไลนไดจรง
111ECTI-CARD 2019
ID 1156
การกาหนดคาพารามเตอรทเหมาะสมของอลกอรทมอาณานคมผงประดษฐสาหรบปญหาการหาคาทเหมาะสมแบบตวแปรตอเนอง
อภรกษ ขดวลาศ สาขาวชาวศวกรรมเครองกล คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา ตาก
คาสาคญ อลกอรทมอาณานคมผ งประดษฐ การกาหนดคาพารามเตอร การหาคาทเหมาะสม เมตาฮวรสตกส
งานวจยน มวตถประสงคเพอศกษาการทางานของอลกอรทมอาณานคมผ งประดษฐ และการกาหนดคาพารามเตอรทเหมาะสม ในการทดสอบอลกอรทมไดนาฟงกชนทางคณตศาสตรจานวน 9 ฟงกชน คอ ฟงกชนทอดด, ฟงกชนคาเมลแบค, ฟงกชนโกลดสเตนไพรซ, ฟงกชนมอนทโกเมอร, ฟงกชนพาราโบลก, ฟงกชนเรสไตรจน, ฟงกชนโรเซนบรอค, ฟงกชนชเคล และฟงกชนดจอง มาใชในการทดสอบอลกอรทมอาณานคมผ งประดษฐ สาหรบการออกแบบการทดลองน นถกแบงเปน 2 การทดลอง คอ การออกแบบการทดลองเพอหาพารามเตอรทเหมาะสมของอลกอรทมอาณานคมผ งประดษฐ และ การทดลองเพอตรวจสอบความแมนยาของพารามเตอรทไดจากการทดลองท 1 ผลจากการทดสอบพบวา อลกอรทมอาณานคมผ งประดษฐกบคาพารามเตอรทไดจากการทดลองสามารถพบคาคาตอบทดทสดของแปดฟงกชนทดสอบ แตสาหรบฟงกชนคาเมลแบคอลกอรทมไมสามารถหาคาคาตอบไดเทากบคาทดทสดของฟงกชน เนองจากคาทดทสดของฟงกชนเขาใกลคาอนนต
ID 1157
ระบบระบตาแหนงภายในอาคารดวยเทคโนโลยบลทธพลงงานตา
กานตชนา วนาธรตน และ ยทธพงษ รงสรรคเสร* คณะวศวกรรมศาสตร สถาบนเทคโนโลยพระจอมเกลาเจาคณทหารลาดกระบง
คาสาคญ การระบตาแหนงภายในอาคาร เทคโนโลยบลทธพลงงานตา Amazon Web Service
บทความน เสนอการออกแบบพฒนาระบบระบตาแหนงภายในอาคารดวยเทคโนโลยบลทธพลงงานตา (BLE) ระบบประกอบดวยสองสวน ไดแก อปกรณรบสญญาณไรสายทตดต ง ตามจดตางๆ ภายในอาคาร เรยกวา Anchor และอปกรณสงสญญาณไรสายเรยกวา Tag ทาหนาทสงสญญาณออกอากาศเปนระยะ ภายในอปกรณรบสญญาณยง ประกอบดวยตวสแกนเนอร BLE ทพฒนาข นเองและไมโครคอนโทรลเลอร Espressif ESP32 ทาหนาทส งขอมลไปประมวลผลบน Amazon Web Services ผาน เชอมตอ Wi-Fi การระบตาแหนงสามารถคานวณไดโดยใชวธสามเหลยมระยะ (trilateration) จากขอมล RSSI ทวดไดจากอปกรณรบสญญาณไรสายอยางนอย 3 จดในเวลาเดยวกนระบบทสรางข นไดรบการทดสอบแลววาใชงานไดภายในอาคารจรง
112 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1159
ระบบจาลองสงคมไรเงนสด
นภทร สระเอยม* กตตพงษ ทองคงหาญ ฐากร ประถมบตร และ ณฐสทธ เหลองอดมชย ภาควชาวศวกรรมโทรคมนาคม คณะวศวกรรมศาสตร สถาบนเทคโนโลยพระจอมเกลาเจาคณทหารลาดกระบง
คาสาคญ ไรเงนสด แอปพลเคชน แอนดรอยด รายการธรกรรม บทความน นาเสนอระบบจาลองสงคมไรเงนสด โดยใชเครดตในแอปพลเคชนบนระบบปฏบตการ แอนดรอยดเปนตวกลางในการแลกเปลยนสนคาและบรการ มวตถประสงคเพอแสดงใหเหนวาระบบสงคมไรเงนสดเขามามผลทาใหการแลกเปลยนสนคาและบรการมความสะดวกและรวดเรวมากกวาระบบสงคมเงนสด โดยระบบแบงออกเปน 3 สวนคอ สวนของแอปพลเคชน ระบบใหบรการและสวนของรานคา จะมการยนยนสทธในการเขาถงขอมลทางการเงนของผใชเพอทาการเรยกขอมลในระบบฐานขอมลมาแสดงผานแอปพลเคชนและใชขอมลทางการเงนในการแลกเปลยนสนคาและบรการ การแลกเปลยนสนคาและบรการผานแอปพลเคชนสามารถทาได 2 วธคอ ระบเลขกระเปาเงนของผรบและแสกน ควอารโคดของผรบ รวมท งแอปพลเคชนจะมฟงกชนในการจดการขอมลทางการเงนของผใชเพอวางแผนทางการเงนของผใช และสวนของรานคาและบรการอตโนมตเพอแสดงใหเหนวาระบบไรเงนสดสามารถใชแลกเปลยนสนคาและบรการไดจรง
113ECTI-CARD 2019
ID 1160
โตะควบคมอณหภมของขวดไวนอตโนมต
ณฐพงศ พนธนะ* สมเกยรต ทองแกว กฤษณ เปยมชน ชยวฒน เผอกพวง และ พทวส ธารารมย1 สาขาวชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลพระนคร
คาสาคญ ระบบควบคม พวเธยร ขวดไวน ปจจบนอตสาหกรรมอาหารและเครองดมในยคอตสาหกรรม 4.0 มการแขงขนสงมากการนาเขาและสงออกสนคา อตสาหกรรมน มมลคานบพนลานบาททวโลก เครองดมทไดรบความนยมมาชานานชนดหนงคอไวน ซงไวนผลตมาจากไรองนทมอยในทกทวปทวโลก ผานกรรมวธการผลตตางๆ มากมาย และเกบหมกใหรสชาตดมากกวา 1 ปข นไป ทาใหราคาของไวนในแตละขวดมราคาทโดดเดนตามพนธขององนและจานวนปทหมก การดมไวนไมเพยงแตจะใหผลดทางสขภาพแลวรสชาตกเปนเรองสาคญ โดยวธการดมไวนนกชมไวนจะพถพถนในการดมมากเปนพเศษ อณหภมจงเปนเรองสาคญในการคงรสชาตใหคงทอยางสมาเสมอ ดงน นในโครงงานวจยน ไดนาเสนอการออกแบบและสรางโตะสาหรบชมไวนดวยการควบคมอณหภมของไวนใหคงทอยางสมาเสมอท 12 -15 องศาเซลเซยส ดวยการใช Peltier ในการลดอณหภมใหไดตามตองการ และใชการระบายความรอนของ Peltier ดวยระบบน าวน ผลการทดลองพบวาสามารถทาใหอณหภมภายในตคงทระหวาง 12-15 องศาเซลเซยส และทาใหสามารถทาใหอณหภมตาสด 4 องศาเซลเซยส
ID 1161
วงจรกรองความถอนดบหาโครงสรางทางเลอก GM-C บนไดปลายคสองดานดวยการประมาณคาแบบบตเตอรเวรต
อานาจ ประจง* และ สรยา อดเรก สาขาวชาไฟฟาอตสาหกรรม คณะเทคโนโลยการเกษตรและอตสาหกรรม มหาวทยาลยราชภฏนครสวรรค
คาสาคญ วงจรกรองพาสซฟ วงจรกรองบนไดปลายคสองดาน จเอม-ซ ซ-มอส บทความน นาเสนอวธการแปลงวงจรกรองความถพาสซฟบนได(Ladder)ใหเปนวงจรกรอง Gm-C โครงสรางมาตรฐานและใหใชไดในวงจรกรองความถอนดบหาโครงสรางทางเลอก Gm-C บนไดปลายคสองดาน ดวยการประมาณคาแบบบตเตอรเวรต (Butterworth) จากผลการจาลองการทางานพบวาวงจรกรอง Gm-C โครงสรางทางเลอกทนาเสนอมผลตอบสนองทรานเซ ยนต และมความเปนเชงเสนดกวาวงจรกรอง Gm-C โครงสรางมาตรฐาน ขณะเดยวกนมผลตอบสนองความถสญญาณรบกวน และการบรโภคกาลงงานงานทเทากน
114 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1162
ชดทดลองการสอสารเสนใยแกวนาแสงผานอปกรณเพมลดและแยกสญญาณ
วทวส สฏฐกล1* ศรญญา ปะสะกว2
1 สาขาเทคโนโลยวศวกรรมอเลกทรอนกส วทยาลยเทคโนโลยอตสาหกรรม มหาวทยาลยเทคโนโลยพระจอมเกลาพระนครเหนอ 2 ฝายมาตรวทยาไฟฟา สถาบนมาตรวทยาแหงชาต
คาสาคญ Optical communication, Circulator, Laser diode, Photodiode, FBG, OTDR
บทความน มวตถประสงคเพอสรางชดทดลองการสอสารเสนใยแกวนาแสงผานอปกรณเพมลดและแยกสญญาณ เนองจากไมมชดการทดลองเพอจะสาธตการทางานทราคาถกและงายตอการผลต ทาใหผใชงานจรงทไมเขาใจในการใชอปกรณตองเสยเวลาและคาใชจายอยบอยคร ง โดยชดการทดลองภายในประกอบดวย ภาคสงซงจะใชเลเซอรไดโอด (FP –laser Diode) จานวนสามตว เปนตวกาเนดแสง มคลนแสงสามความยาวคลน 850, 1310 และ 1550 นาโนเมตร, ภาครบจะใชโฟโตไดโอด (PIN Photodiode) จานวน 3 ตวเปนตวรบแสงในยานดงกลาว ชดทดลองเพมลดและรวมแยกสญญาณแสง จะใชหลกการของอปกรณดงตอไปน : คปเปลอรทาหนาทรวมและแยกแสง, ไฟเบอรแบรกกเกรตตง (FBG) ทาหนาทกรองแสง และตวไหลเวยนแสง (Circulator) ทาหนาทหมนเวยนแสง โดยภายในชดทดลองเราจะใชเครองมอวดกาลงทางแสง (OTDR) ในการทดสอบคากาลงแสงในยานตางๆวาตรงตามทออกแบบหรอไม ซงผลการทดลองพบวาชดทดลองเพมลดและรวมแยกสญญาณแสงใหคาทใกลเคยงกบทฤษฎ
115ECTI-CARD 2019
ID 1163
การวดคาความชนในดนดวยอปกรณราสเบอรรพายและไมโครคอนโทรลเลอร ESP8266 สาหรบการพฒนานวตกรรมเกษตรกรรมอจฉรยะตนทนตา
ศรญ ดวงสวรรณ* อนนา ชสงแสง สทธพร คงนาสาร และ ปณยวร จามจรกลกาญจน สาขาวชาวศวกรรมสารสนเทศ สถาบนเทคโนโลยพระจอมเกลาเจาคณทหารลาดกระบง วทยาเขตชมพรเขตรอดมศกด
คาสาคญ การวดคาความช นในดน อปกรณราสเบอรรพาย ไมโครคอนโทรลเลอร ESP8266 นวตกรรมเกษตรกรรมอจฉรยะ
ปจจบนมการใชงานเทคโนโลยอเลกทรอนกสและระบบสารสนเทศในการทาเกษตรกรรมฟารมแมนยาเพมมากข น เนองจากชวยใหผดแลฟารมสามารถเขาใจและเขาถงขอมลไดสะดวกรวดเรว หนงในระบบทถกนามาประยกตใชงานมากทสด คอ การวดคาความช นในดน เพอประโยชนในการบรหารจดการน าในฟารมเกษตรกรรม อยางไรกตาม อปกรณทนามาใชจะตองมประสทธภาพภาพและตนทนตา ในบทความน นาเสนอหลกการประยกตใชงานอปกรณราสเบอรรพายและไมโครคอนโทรลเลอร ESP8266 สาหรบทาหนาทประมวลผลขอมลคาความช นดน โดยอปกรณราสเบอรรพายสามารถออกแบบใหรองรบปรมาณการเชอมตอกบไมโครคอนโทรลเลอร ESP8266 ไดมากกวา 10 ตวพรอมกนได และยงสามารถเชอมตอเขากบระบบเครอขายอนเทอรเนตไดทนท ผลการทดลองพบวาการทางานระหวางอปกรณราสเบอรรพายและไมโครคอนโทรลเลอร ESP8266 สามารถประมวลผล ขอมลคาความช นในดนไดอยางรวดเรว และสามารถบนทกขอมลไดทก ๆ 1 วนาท ประโยชนทไดรบ คอ สามารถนาไปพฒนาเปนอปกรณตนแบบสาหรบชดวดคาความช นในดนตนทนตาได
116 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1165
แอปพลเคชนเพอเชคราคารบซอขาวเปลอกของโรงสขาวในเขตอาเภอเมอง จงหวดอบลราชธาน บนระบบปฏบตการแอนดรอยด
ปยะวฒน อฒจกร สาขาวชาเทคโนโลยคอมพวเตอร คณะเทคโนโลยอตสาหกรรม มหาวทยาลยราชภฏอบลราชธาน
คาสาคญ แอปพลเคชน รบซ อขาวเปลอก เชคราคา ระบบปฏบตการแอนดรอยด บทความน นาเสนอการพฒนาและทดสอบ แอปพลเคชนเพอเชคราคารบซ อขาวเปลอกของโรงสขาว แบงการทางานออกเปน 2 สวนคอ สวนของเวบ ในสทธของผดแลระบบ สามารถจดการสทธในการใชงาน และจดการขอมลประเภทและความช นของขาวเปลอก ในสทธของเจาหนาท สามารถอพเดทราคารบซ อขาวเปลอก ในสวนของแอปพลเคชนในสทธของสมาชก สามารถเชคราคารบซ อขาวเปลอกของโรงสขาวได โดยแอปพลเคชนพฒนาดวย IONIC Framework จากผลการทดลอง ระบบสามารถเชคราคารบซ อขาวเปลอกไดโดยจะเรยงลาดบจากความคมคามากทสดไปถงนอยทส ด และผลการทดสอบจากผใชงานระบบแอปพลเคชน จานวน 20 คน พบวา ในสวนของระบบแอปพลเคชน ผลการทดสอบความพงพอใจผใชงาน พบวา สมาชก จานวน 10 คน มความพงพอใจอยในระดบมาก คดเปนรอยละ 80.54 ในสวนของเวบ จานวน 10 คน พบวา ผดแลระบบ จานวน 5 คน มความพงพอใจอยในระดบมาก คดเปนรอยละ 84.89 และกลมของเจาหนาท จานวน 5 คน มความพงพอใจอยในระดบมาก คดเปนรอยละ 83.56
ID 1167
ระบบการแสดงผลขอมลอณหภมแบบเรยลไทม
อาทตย เชอหอม* อภสทธ บญเตม อภชาต อครวฒวงศ และ วณา จนทรรชชกล สาขาวชาวทยาการคอมพวเตอร คณะวทยาศาสตรและเทคโนโลย มหาวทยาลยเทคโนโลยราชมงคล ธญบร
คาสาคญ เซนเซอรวดอณหภม โมดลสอสารไรสาย โครงงานน มวตถประสงคเพอพฒนาระบบการแสดงผลขอมลอณหภม เปนการแสดงขอมลแบบเรยลไทมและเลอกดสถตยอนหลง โดยใชเทคโนโลยอนเตอรเนตในทกสรรพสง (Internet of Thing : IoT) ไดแก Arduino UNO R3 มาเปนตวกลางในการตดตอสอสารระหวางอปกรณและนาโมดลทมชอวา XBee เขามาชวยในการรบ/สงขอมลอณหภม ซง สามารถแสดงขอมลอณหภมแบบเรยลไทมและสามารถดขอมลแบบยอนหลงได มระบบการแจงเตอนถงความผดพลาดของอปกรณแบบเรยลไทมหรอการแจงเตอนอณหภมสง/ตากวาทกาหนด อยางไรกตาม XBee น นมยงคงมความผดพลาดและเกดปญหาในขณะสงทาใหตองใชความหนวงของเวลาเขามาชวยในการแกไขปญหาความผดพลาดทเกดข น
117ECTI-CARD 2019
ID 1168
การพฒนาเกมเพอชวยสอนตรรกะสาหรบเขยนโปรแกรม
ภรวฒน วรรณะ* จตวฒน หงสขนทอง และ วณา จนทรรชชกล สาขาวชาวทยาการคอมพวเตอร คณะวทยาศาสตรและเทคโนโลย มหาวทยาลยเทคโนโลยราชมงคลธญบร
คาสาคญ เกมเขยนโปรแกรม เกมอาเขต รายวชาการเขยนโปรแกรมเปนรายวชาทสาคญสาหรบสาขาวชาทเปดสอนในหลกสตรทเกยวของกบคอมพวเตอร เชน วทยาการคอมพวเตอร เทคโนโลยสารสนเทศ วศวกรรมคอมพวเตอร เปนตน วชาการเขยนโปรแกรมเปนวชาทตองใชตรรกะ การคด การวเคราะหอยางเปนข นตอน ซ งทาใหรายวชาน เปนรายวชาทเขาใจยาก เปนสาเหตของความเบอหนายและขาดความสนใจ ทาใหผทศกษาในรายวชาการเขยนโปรแกรมน นไมเขาใจและไมสามารถเขยนโปรแกรมได จงทาใหมความคดทจะทาเกมทเกยวของกบการเขยนโปรแกรม
118 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1169
แอปพลเคชนแนะนาภาษามอผานคาสงเสยงในหมวดหมการทกทายเบองตน
อนนตา สาโรวาท1* สภาภร จนพ1 วณา จนทรรชชกล1 และ บรสกร อยสข2 1 สาขาวชาวทยาการคอมพวเตอร คณะวทยาศาสตรและเทคโนโลย มหาวทยาลยเทคโนโลยราชมงคลธญบร 2 สาขาวชาวศวกรรมคอมพวเตอร คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลพระนคร
คาสาคญ ภาษามอ, ระบบรจาเสยง การทกทายเบ องตน ผบกพรองทางการไดยน บรการแปลงเสยงพดเปนขอความ
งานวจยน มวตถประสงคคอ เพอใหผใชสามารถเรยนรภาษามอสาหรบสอสารกบผพการทางการไดยน เนองจากผทเปนปกตสวนใหญแลวจะไมมความรดานภาษามอ และไมมความกลาทจะสอสารกบผพการทางการไดยน จงเปนปญหาในดานการสอสารระหวางผพการทางการไดยนกบผทเปนปกต ดวยเหตน ผวจยจงไดพฒนาแอปพลเคชนแนะนาภาษามอผานคาสงเสยงในหมวดหมการทกทายเบ องตนข น โดยเปนแอปพลเคชนททาข นเพอรองรบการทางานของผทเปนปกต ใหสามารถเรยนรภาษามอเพอนาไปสอสารกบผพการทางการไดยนได แอปพลเคชนรบคาสงเสยง พมพคนหาได และประโยคทกทายเบ องตนมท งหมด 50 ประโยค วธการดาเนนงานเรมจากการสอบถามขอมลจากสมาคมคนหหนวกแหงประเทศไทย จากน นนาขอมลทไดมาวเคราะห และออกแบบระบบ จงพฒนาแอปพลเคชน และสดทายทดสอบผล โดยขอมลภาษามอทนามาใช ไดรบความอนเคราะหจากสมาคมคนหหนวกแหงประเทศไทยเชนกน ผลการทดสอบประสทธภาพการใชงานแอปพลเคชน สวนของกลมตวอยางผใชงานจานวน 30 คน และสวนของผเชยวชาญ จานวน 5 คน พบวามความพงพอใจตอการใชงานระบบในระดบด แสดงใหเหนวา แอปพลเคชนแนะนาภาษามอผานคาสงเสยงในหมวดหมการทกทายเบ องตน ประสบความสาเรจตามวตถประสงคทต งใจไว คอแอปพลเคชนสามารถชวยใหผใชเรยนรภาษามอเพอนาไปสอสารกบผพการทางการไดยนไดดข น
119ECTI-CARD 2019
ID 1171
การออกแบบสออนโฟกราฟกเรอง การปฏบตตนในการใชบรการบอนารอนควนแคงอาเภอกนตง จงหวดตรง
อภชาต เชดชม* พงษสนต จนทรเพญ ฤทธเกยรต เจรญ และ หทยรตน บญเนตร
สาขาวชาเทคโนโลยวศวกรรม คณะวศวกรรมศาสตรและเทคโนโลย มหาวทยาลยเทคโนโลยราชมงคลศรวชย คาสาคญ บอน ารอน อนโฟกราฟค
การวจยคร งน มวตถประสงค เพอออกแบบสออนโฟกราฟกเรอง การปฏบตตนในการใชบรการบอน ารอนควนแคงอาเภอกนตง จงหวดตรงและศกษาความพงพอใจของสออนโฟกราฟกเรอง การปฏบตตนในการใชบรการบอน ารอนควนแคงอาเภอกนตง จงหวดตรง ซงกลมตวอยางทใชในการศกษาคร งน คอ ผใชบรการบอน ารอนควนแคงอาเภอกนตง จงหวดตรง จานวน 100 คน เครองมอทใชในการวจยคอ สออนโฟกราฟกเรอง การปฏบตตนในการใชบรการบอน ารอนควนแคงอาเภอกนตง จงหวดตรง และแบบสอบถาม การวเคราะหขอมลใชสถตดงน คอ คาเฉลย และสวนเบยงเบนมาตรฐาน จากการวจยพบวา สออนโฟกราฟกเรอง การปฏบตตนในการใชบรการบอน ารอนควนแคงอาเภอกนตง จงหวดตรง ไดรบการประเมนจากกลมตวมความพงพอใจโดยรวมอยท 4.63 ซงมความพงพอใจอยในระดบมากทสด
ID 1172
การออกแบบอนโฟกราฟกเรอง แนวปฎบตในการควบคมและปองกนภาวะความอวนในนกเรยน ป.6
เฉลมชย สหลง* วรศรา ตะเหลบ ลกษกา แกวจนทร หทยรตน บญเนตร และ ชยวฒน สากล สาขาวชาเทคโนโลยวศวกรรม คณะวศวกรรมศาสตรและเทคโนโลย มหาวทยาลยเทคโนโลยราชมงคลศรวชย
คาสาคญ โรคอวน อนโฟกราฟค การวจยคร งน มวตถประสงค เพอออกแบบสออนโฟกราฟกเรอง แนวปฏบตในการควบคม และปองกนภาวะความอวนในนกเรยน ป.6 และศกษาความพงพอใจของสออนโฟกราฟกเรอง แนวปฏบตในการควบคม และปองกนภาวะความอวนในนกเรยน ป.6 ซงกลมตวอยางทใชในการศกษาคร งน คอ นกเรยนช นประถมศกษาปท 6 จากโรงเรยนบานปากเมง อาเภอสเกา จงหวดตรง จานวน 33 คน โดยเครองมอทใชในการวจยคอ สออนโฟกราฟกเรอง แนวปฏบตในการควบคม และปองกนภาวะความอวนในนกเรยน ป.6 และแบบสอบถาม การวเคราะหขอมลใชสถตดงน คอ คาเฉลย และสวนเบยงเบนมาตรฐาน จากการวจยพบวา สออนโฟกราฟกเรอง แนวปฏบตในการควบคม และปองกนภาวะความอวนในนกเรยน ป.6 ไดรบการประเมนจากกลมตวอยางเฉลย 4.68 ผลความพงพอใจในระดบดมาก
120 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1173
สอเชงโตตอบ 2 มต เรอง ระบบสรยะ
ปญญาวธ กลาเงน* ศรญาทพย เนยมบาง ปรารถนา เพชรสวาง จรวฒ บญอย และ พาสนา เอกอดมพงษ สาขาวชาเทคโนโลยสารสนเทศ คณะวศวกรรมศาสตรและเทคโนโลย มหาวทยาลยเทคโนโลยราชมงคลศรวชย
คาสาคญ ระบบสรยะ เออารโคด สอเชงโตตอบ การวจยคร งน มวตถประสงค เพอสรางเพอสรางสอเชงโตตอบ 2 มต เรอง ระบบสรยะ โดยใชเทคโนโลย เออารโคด ศกษาความพงพอใจ และผลการรบรการใชสอเชงโตตอบ 2 มต เรอง ระบบสรยะซงกลมตวอยางทใชในการศกษาคร งน คอ นกเรยนโรงเรยนบ านเขาไมแกวจานวน 20 คน ซงไดมาโดยวธการเลอกแบบเจาะจง เกบขอมลจากการทดลองใชสอเชงโตตอบ 2 มต เรอง ระบบสรยะ ระหวางชวงเดอนมนาคม - พฤศจกายน 2561 เครองมอทใชในการวจยคอ สอเชงโตตอบ 2 มต เรอง ระบบสรยะ และแบบสอบถาม การวเคราะหขอมลใชสถตดงน คอคาความถ คารอยละ คาเฉลย และสวนเบยงเบนมาตรฐาน จากการวจยพบวา สอเชงโตตอบ 2 มต เรอง ระบบสรยะ ไดรบการประเมนจากผเชยวชาญอยในเกณฑดมาก ผเรยนผานสอเชงโตตอบ 2 มต เรอง ระบบสรยะ มการรบรการใชพพธภณฑสตวน าเชงโตตอบในระดบด และผลความพงพอใจในระดบด
121ECTI-CARD 2019
ID 1176
ระบบแจงเตอนปรมาณนาฝนแบบอจฉรยะ
ณฐพงศ บตรธน* ชยพนธ ประการะพนธ เลศลกษณ แสงใส นนทศกด ประสาน และ รชนก ไตรยนโพธ สาขาวชาวศวกรรมแมคคาทรอนกสและหนยนต และ สาขาวชาวศวกรรมไฟฟา คณะเทคโนโลย มหาวทยาลยราชภฏอดรธาน
คาสาคญ เครองวดปรมาณน าฝน ระบบแจงเตอนปรมาณน า บทความน นาเสนอระบบวดปรมาณน าฝน โดยสรางเครองวดปรมาณน าฝน ประกอบดวยกน 2 สวน สวนท 1 คอ กรวยรบน าฝน ตดต งบนปากกระบอก เสนผาศนยกลาง 110 มม. รบน าฝนลงสกระบอกวดน าฝนขนาดเสนผาศนยกลาง 60 มม. ทาดวยทอ PVC ขนาด 2 น ว สง 135 มม. มทอระบายน าออกเสนผาศนยกลาง 10 มม. ระบายน าออกเมอฝนหยดตกโดยมเซนเซอรวดน าฝนเปนตวกาหนด สวนท 2 คอ ชดสงขอมลแบบไรสาย ใชพลงงานไฟฟาจากโซลาเซลล ซงจะเกบคาทก 10 นาท บนทกขอมลใน Data Logger และในขณะเดยวกนขอมลปรมาณน าฝนจะถกสงขอมลผานเครอขายอนเตอรเนต สสมารทโฟน ซงขอมลน สามารถเปลยนเปนความเขมน าฝน ดงน ฝนตกเลกนอย มคาเทากบ 0.1-10 มม. ปลานกลาง มคาเทากบ 10.1-35 มม. หนก มคาเทากบ 35.1-90 มม. และหนกมาก มคาเทากบ 90.1 ข นไป เพอนาขอมลไปใชประโยชนแจงเตอนในชมชน หรอ เตอนภยน าทวมสาหรบพ นทการเกษตรได
122 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1177
การประยกตหนยนตแกนหมน 2 ขอตอสาหรบยอมสเมยรเลอด
ปองพล แสนสอน สาขาวชาวศวกรรมแมคคาทรอนกสและหนยนต คณะเทคโนโลย มหาวทยาลยราชภฏอดรธาน
คาสาคญ หนยนต ยอมสเมยรเลอด บทความน นาเสนอ การสรางประยกตหนยนตแกนหมน 2 ขอตอสาหรบยอมสเมยรเลอด มวตถประสงคเพอลดเวลาและความผดพลาดการยอมสสเมยรเลอดโดยวธการปกต ระบบประกอบดวย ชดคาสงควบคมการทางาน และระบบกลไกสาหรบการยอมส ผลการวจยพบวา 1) การเคลอนทของหวยอมสเมยรเลอดของหนยนตตามตาแหนงแกน X พกด 120 มลลเมตร 160 มลลเมตร และแกน Y ทพกด -100, -60, -20, 20, 60, 100 มลลเมตรทาการทดลองซ าจานวน 10 คร งมคาความผดพลาดเฉลยนอยกวา 2 เปอรเซนต 2) ข นตอนการทางานทโปรแกรมไวทาการทดลอง 10 คร งโดยแบงเวลาการทางานแตละข นตอนเปน 5 10 15 20 25 30 วนาทตามลาดบพบวามการทางานตามข นตอนทกาหนดไวอยางถกตอง 3) นาหนยนตไปทาการหาความพงพอใจจากผใชงานโดยใชแบบสอบถามแบบ 5 ระดบจานวน 3 ทานพบวามวามพงพอใจในการใชงานระดบดมาก (คาเฉลย = 4.5 ) และเมอสอบถามเกยวกบการลดเวลาในการทางานเปรยบเทยบกบวธการปกตอยในระดบดมาก(คาเฉลย = 4.45 ) ความสะดวกในการใชงานอยในระดบด(คาเฉลย = 4.15 ) ดงน นหนยนตแกนหมน 2 ขอตอสาหรบยอมสสเมยรเลอดสามารถทางานไดตามวตถประสงคทต งไว
123ECTI-CARD 2019
ID 1178
ระบบตรวจวดและระบบควบคมแกสไรสาย
บววรณ ไชยธงรตน* วธวทย ภมชยโชต ชชวาลย อตจนทรพงษ และ สเมธ พรหมสขนธ สาขาวชาวชาเทคโนโลยอเลกทรอนกสและวศวกรรมไฟฟา คณะเทคโนโลย มหาวทยาลยราชภฏอดรธาน
คาสาคญ แกสแอลพจ เซนเซอร ไรสาย กาซแอลพจหรอแกสหงตมเปนแกสทไดรบความนยมนามาใชในภาคครวเรอนมากทสด เพอปองกนอนตรายทเกดจากการระเบดซงเกดจากการรวไหลของแกสแอลพจ บทความน มวตถประสงคเพอพฒนาระบบการตรวจวดและการปองกนอนตรายจากการรวของแก สแอลพจ โดยนาเซนเซอรตรวจวดแกสประยกตรวมกนกบเทคโนโลยไรสาย ประกอบดวย บอรด ESP8266 Aduino เซนเซอร MQ-5 โซลนอยดวาลว และพดลม ซงขอมลการรวของแกสจะถกสงข นแอปพลเคชนบนมอถอ ผใชสามารถตรวจสอบการใชงานได โดยเมอมแกสแอลพจรวออกมาในปรมาณทจะเกดอนตราย (1,000 ppm) และเปดการแจงเตอนพรอมกบโซลนอยดวาลวทาหนาทปดการไหลของแกสบนมอถอและพดลมระบายอากาศระบายแกสทตกคางภายในออก นอกจากน นผใชยงสามารถ เป ด–ป ด แกสผานมอถอได
ID 1179
การแกไขจดอบของสญญาณโทรศพท
ถาวร อภยศลา และ สรภพ ตประกาย* ภาควชาวศวกรรมโทรคมนาคม คณะวศวกรรมศาสตร สถาบนเทคโนโลยพระจอมเกลาเจาคณทหารลาดกระบง
คาสาคญ จดอบสญญาณ Site Remote Site Small Cell ความแรงของสญญาณ บทความน นาเสนอการเชอมตอระบบคลนความถของสญญาณโทรศพทท มจดอบสญญาณ โดยใชเทคนคการออกแบบตดต ง Site Remote หรอ Site Small Cell เพอเชอมตอสญญาณโทรศพทในพ นทอบสญญาณใหสามารถใชงานไดอยางตอเนอง เมอเทยบกบแบบเดมทมการออกแบบไว และสามารถลดงบประมาณในการสรางสถานฐาน โดยจาลองการทางานโดยใชโทรศพทมอถอยหอ SUMSUNG รน J7 และโปรแกรม G-NETTRACLITE และ SPEED TEST เพอเกบผลจาลองการทางานน
124 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11

ID 1180
Prediction of arm motion using electrocorticographic signals in monkeys
Pakakul Wilaiprasitporn* and Yuttana Kitjaidure
Faculty of Engineering King Mongkut's Institute of Technology Ladkrabang คาสาคญ -
Brain–machine interfaces (BMIs) is a direct communication pathway between brain and an external device. BCIs are often directed at researching, mapping, assisting, or repairing human cognitive or sensory-motor functions. Electrocorticographic (ECoG) signals have been contain reliable information about the direction of arm movements. These findings indicate that the ECoG is a potential basis for a brain-machine interface (BMI) for application in paralyzed patients. Determining a person’s intent, e.g., where and when to move, from brain signals rather than from muscles would have important applications in clinical or other domains. Detecting the onset and direction of actual movements are a first step in this direction. This paper also demonstrate in a simulation that the information encoded in ECoG from monkeys about these movements may improve performance in a targeting task. In summary, the results in this paper suggest that detection of intended movement is possible, and may serve useful functions.
125ECTI-CARD 2019
ID 1181
การควบคมและรายงานความผดพรองทางไฟฟาของมอเตอร เหนยวนาสามเฟสผานสมารทโฟน
ชศกยฐ กมลขนตธร* วนย เมธาวทต ณฐพล ทองคาอย และ อนชา ลนลา สาขาวชาวศวกรรมไฟฟา ภาควชาวศวกรรมไฟฟาและโทรคมนาคม คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลกรงเทพ
คาสาคญ ความผดพรองทางไฟฟา มอเตอรเหนยวนาสามเฟส ไอซ MCP3208, Arduino NodeMCU ESP8266 สมารทโฟน
บทความวจยน นาเสนอการควบคมและรายงานความ ผดพรองทางไฟฟาผานสมารทโฟน สาหรบมอเตอรเหนยวนาสามเฟส โดยการใชหมอแปลงตรวจวดระดบแรงดน เซนเซอรกระแส ACS759 และเซนเซอรอณหภม DS18B20 เพอตรวจวดความผดพรองทเกดข นกบมอเตอร โดยคาทไดจากเซนเซอรแรงดน กระแส และอณหภมจะสงคาไปยงไอซ MCP3208 ทาหนาทแปลงสญญาณแอนะลอกเปนสญญาณดจตอล และสงไปยงบอรด ArduinoNodeMCU ESP8266 ทาหนาทประมวลผลขอมลเปรยบเทยบกบคาท ไดกาหนดไว เพอตรวจสอบความถกตองและนาคาท ไดไปแสดงบนหนาจอแสดงผล หากคาจากเซนเซอร มความแตกตางจากคาทกาหนดไว ระบบจะสงสญญาณเตอนผานแอพพลเคชนในสมารทโฟน และรายงานความผดพรองทางไฟฟาทเกดข นกบมอเตอรเหนยวนาสามเฟส
ID 1182
การพฒนาระบบแจงเตอนการลมในหองนาผานแอปพลเคชนไลน
สรศร มตรานนท* ปรดา สดาจนทร กฤษณ มาลาวงษ บญเรอง วงศลาบตร เสกสรร ไชยจตต และ ปณณวชญ ภทรสรณสร คณะวศวกรรมศาสตร สถาบนเทคโนโลยปทมวน
คาสาคญ ไมโครคอนโทรลเลอร แอปพลเคชนไลน สรรพสงองกบอนเตอรเนต บทความน นาเสนอการพฒนาระบบการแจงเตอนการลมในหองน าผานแอปพลเคชนไลน ซงเหมาะสาหรบการแจงเตอนใหผดแลเมอเกดอบต เหตข นในหองน า ระบบทนาเสนอประกอบดวยไมโครคอนโทรลเลอร อาดยโนจะรบสญญาณจากเซนเซอร และทาการตรวจสอบดวยอลกอลทมตรวจจบการลม และการนา NodeMCU มาประยกตใชงานกบอนเตอรเนตสาหรบทาการสงขอมลการแจงเตอนไปทแอปพลชนไลน โดยผลการทดสอบพบวา ระบบทนาเสนอมความเทยงตรงและมประสทธภาพสง
126 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1183
การออกแบบตวควบคมพไอดดวยบอรดคดไบรท
สมพร เตยเจรญ* สมชาย เตยเจรญ
สาขาคอมพวเตอรศกษา คณะศกษาศาสตร มหาวทยาลยภาคตะวนออกเฉยงเหนอ คาสาคญ ตวควบคมแบบพไอด บอรดคดไบรท ระบบควบคมตาแหนง
ในอตสาหกรรมสวนใหญเปนตวควบคมแบบพไอดแตอปกรณทใชอยอาจจะไมมฟงกชนของตวควบคมแบบพไอด บทความน จงไดนาเสนอแนวทางในการออกแบบตวควบคมแบบพไอดเพอเปนแนวทางในการสรางอปกรณในการควบคมอตสาหกรรมหรอสรางอปกรณเสรมในระบบควบคม ตวควบคมแบบพไอดถกพฒนาบนบอรดคดไบรทซงเปนบอรดทมความสามารถสงและใชงานไดงาย ตวควบคมแบบพไอดทพฒนาข นมาสามารถปรบคาตวควบคมไดท งคาอตราขยายการควบคมแบบพ คาอตราขยายการควบคมแบบไอและคาอตราการขยายควบคมแบบด ตวควบคมแบบพไอดถกทดสอบดวยการสรางระบบควบคมอณหภมโดยมการกาหนดคาอณหภมทตองการแลววดผลอณหภมจรง จากผลการทดลองตวควบคมแบบพไอดสามารถควบคมอณหภมไดในชวงทกาหนด
127ECTI-CARD 2019
ID 1190
การจาแนกเชอเพลงระหวางการเผาไหมโดยใชสารสนเทศความรอน
ธรพงศ สอจนทรา1 โกสนทร จานงไทย1* และ ศรชย เตมโชคเกษม2 1 สาขาวชาวศวกรรมไฟฟา-วศ.อเลกทรอนกส คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยพระจอมเกลาธนบร 2 ภาควชาวศวกรรมไฟฟาและอเลกทรอนกส คณะวทยาศาสตร มหาวทยาลยกรงเทพ
คาสาคญ การจาแนกเช อเพลงระหวางการเผาไหม กลองตรวจจบความรอน ซพพอรทเวกเตอรแมชชน การเรยนรเชงลก
การจาแนกเช อเพลงระหวางการเผาไหมมความสาคญตอการเลอกชนดของถงดบเพลง ระบบการตรวจจบเพลงไหมทมอยในปจจบนไมไดถกสรางข นสาหรบการจาแนกเช อเพลง บทความน เสนอวธการจาแนกเช อเพลงระหวางการเผาไหมโดยใชสารสนเทศความรอนเนองจากเปลวไฟทเกดข นในระหวางการเผาไหมจะข นอยกบชนดของเช อเพลงและจดหลอมเหลวทแตกตางกน ดงน นการกระจายความรอนของเช อเพลงจงแตกตางกน การกระจายความรอนเปนรปแบบในการเรยนรและทดสอบนาไปสการจาแนกเปลวไฟใหเปนประเภทเช อเพลงหาประเภทตามมาตรฐาน NFPA10 โดยใชเครองมอการเรยนรเชงลกและอลกอรทมซพพอรทเวกเตอรแมชชนสาหรบการคดแยกคณลกษณะเดนและการจาแนกตามลาดบการทดลองถายภาพตวอยางเปลวไฟ 600 ภาพ ซงเกดจากเช อเพลงสามประเภท ไดถกตองรอยละ 99.286
ID 1191
ระบบคนหาหอพกผานการอพเดตจากไลน
จกรน ทองจตร* ปณธาน บญรอง วณา จนทรรชชกล สาขาวชาวทยาการคอมพวเตอร คณะวทยาศาสตรและเทคโนโลย มหาวทยาลยเทคโนโลยราชมงคลธญบร
คาสาคญ คนหาหอพก แอปพลเคชน แอนดรอยด ฐานขอมล ระบบคนหาหอพกผานการอพเดตจากไลน จดทาข นเพอใหมแอปพลเคชนสาหรบการหาหอพกในพ นทรอบมหาวทยาลยเทคโนโลยราชมงคลธญบร ซงแอปพลเคชนน จะใชไดแคในระบบปฏบตการแอน-ดรอยดเทาน นและมการอพเดตขอมลผาน Line Application โดยคณะผจดทาไดนาโปรแกรม Android Studio ซงใชภาษา Java มาพฒนาแอป-พลเคชนสาหรบคนหาหอพก ภายในแอปพลเคชนจะมฟงกชน สมครสมาชก, ลอคอนเขาสระบบ, การคนหาหอพก, ดขอมลหอพก และคณะผจดทาไดทาการพฒนา Line Bot ใหสามารถอพเดตขอมลหอพกผาน Line Application เพอสงไปเกบยงฐานขอมล โดยใช Dialogflow มาชวยในการโตตอบของตว Line Bot ใหดเปนธรรมชาต โดยใช Firebase ในการจดเกบขอมลหอพก
128 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1195
การพฒนาระบบสนบสนนการตดสนใจซอมบารงรกษาเครองปรบอากาศดวยเทคนคเครอขายเซนเซอร
เฉลมเกยรต สตาชา สาขาวชาวศวกรรมเครอขายคอมพวเตอร คณะเทคโนโลยอตสาหกรรม มหาวทยาลยราชภฏอบลราชธาน
คาสาคญ ระบบสนบสนนการตดสนใจ บารงรกษาเครองปรบอากาศ เครอขายเซนเซอร ปจจบนเทคโนโลยมความกาวหนาและพฒนาไปอยางรวดเรว ทาใหชวตของมนษยตองพงพาเทคโนโลยในการใชชวตประจาวน บทความการพฒนาระบบสนบสนนการตดสนใจบารงรกษาเครองปรบอากาศดวยเทคนคเครอขายเซนเซอรไดออกแบบโดยใชบอรดโหนดเอมซยพฒนาบนโปรแกรมอาดโนไอดอดวยภาษาซพลสพลสทางานรวมกบเซนเซอรวดความช นสมพทธอณหภมแบบดจทลรน DHT11 และเซนเซอรวดอนภาคทางอากาศรน PMS5003 จะทาการสงคาความช นสมพทธ อณหภม และอนภาคสงสกปรกในอากาศ ผานอปกรณและเทคโนโลยเครอขายไรสายดวยเทคนคเครอขายเซนเซอร ซงระบบสามารถเขาดคาทตรวจวดไดผานเวบไซตในเวลาจรง จากผลการทดลองแบงออก 2 สวน คอ สวนท 1 สวนการทดลองประสทธภาพการทางานของระบบ พบวาการทางานของระบบในทโลงแจงน นระยะทเหมาะสม คอ ระยะไมเกน 40 เมตร และ ในพ นทในตวอาคาร คอ ระยะไมเกน 30 เมตร สวนท 2 การสอบถามความพงพอใจพบวาความพงพอใจในภาพรวมท งหมดอยในระดบมากทสด (x = 4.9, S.D = 0.31)
129ECTI-CARD 2019
ID 1196
ระบบแจงเตอนการรบบรจาคโลหตในกรณฉกเฉน กรณศกษา มหาวทยาลย ราชภฏอบลราชธาน
ณฐวตร คมเฉยบ* และ รตนชฎาพร ศรสระ สาขาวชาวศวกรรมเครอขายคอมพวเตอร คณะเทคโนโลยอตสาหกรรม มหาวทยาลยราชภฏอบลราชธาน
คาสาคญ แอปพลเคชน บรจาคโลหต ขอรบบรจาคโลหต ระบบปฏบตการแอนดรอยด ปจจบนการขาดแคลนโลหตมการเพมมากข นเรอย ๆ ไมวาจะเปนความตองการเลอดจากอบตเหต หรอผปวยทเกดจากโรค และตองการโลหตอยางเรงดวนเพอชวยชวตในระยะฉบพลน จงทาใหมความตองการขอรบบรจาคโลหตเพอชวยในการรกษา ถงแมปจจบนจะมหนวยงานทคอยรบบรจาคโลหตเพอเกบสะสมไวในยามฉกเฉน แตกยงไมเพยงพอตอความตองการของบคคล ดงน น จงพฒนา แอปพลเคชนขอรบบรจาคโลหตข นมา การพฒนาระบบแจงเตอนการรบบรจาคโลหตในกรณฉกเฉน กรณศกษา มหาวทยาลยราชภฏอบลราชธาน โดยผใชงานแบงออกเปน 2 สวนคอผใชงานทวไปและสมาชก ผใชงานทวไปสามารถดขอมลการประชาสมพนธ และประกาศการขอรบบรจาคโลหตได สวนสมาชกจะตองมการสมครเปนสมาชกของระบบแอปพลเคชนกอนโดยจะสามารถแจงขอมลบรจาคโลหต ขอมลบรจาคโลหต ขอมลขาวสาร ขอมลสวนตว แจงวนทบรจาคโลหต และดสถตรวมการขอรบหรอบรจาคโลหต การพฒนาจะใชโปรแกรม Android Studio ในการออกแบบแอปพลเคชน ใชโปรแกรมภาษา Java ในการเขยนชดคาสงในการรบ-สงขอมฃ สามารถรนบนสมารทโฟนทรองรบระบบปฏบตการแอนดรอยด เวอรชน 4.0 ข นไป ในการจดเกบขอมลจะบนทกลงในโปรแกรม MySQL จากผลการทดลองระบบแอปพลเคชน ระบสามารถแจงเตอนไดเมอมบคคลทตองการขอรบบรจาคโลหตในกรณฉกเฉนได เพอใหผใชงานระบบสามารถทราบขอมลเมอมบคคลตองการโลหตไดและผลการทดสอบจากผใชงานแอปพลเคชน จานวน 50 คน พบวา ในสวนของระบบแอปพลเคชน ผลการทดสอบความพงพอใจผใชงาน พบวา ผใชงานทวไป จานวน 10 คน มความพงพอใจอยในระดบมาก คดเปนรอยละ 80.80 สมาชก จานวน 40 คน มความพงพอใจอยในระดบมาก คดเปนรอยละ 77.20
130 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1197
การพฒนาเวบไซต KM การทางพเศษแหงประเทศไทย โดยใชแนวคด KM Deployment Strategy เพอจดการองคความรภายในองคกรแบบยงยน
อทย วงชยศร* ธวชชย รกษาชาต เอกรนทร เหลองวลย และ เทพฤทธ รตนปญญากร กองวจยและพฒนา การทางพเศษแหงประเทศไทย
คาสาคญ การจดการความร การทางพเศษแห งประเทศไทย (กทพ.) ได พฒนาเวบไซตการจดการความร (Knowledge Management, KM) ซงเปนคลงความรเพอสนบสนนกระบวนการเรยนรขององคกร มการปรบปรงใหมเมอ 4 ทผานมา แตพบวายงไมเขาถงผใชงานมากพอสมควร ไมรองรบกบการแสดงผลบนโทรศพทมอถอ การเขาถงขอมลคลงความรนอย ไมกอใหเกดการปฏสมพนธระหวางผใชงานกบคลงความร สงผลใหคลงความรไมเกดการเชอมโยงกบผใชและไมเกดการขยายตว ทาใหเปนอปสรรคตอการพฒนาองคกรไปสองคกรแหงการเรยนร จงไดทาการปรบปรงระบบคลงความรข นใหมโดยบรณาการเทคโนโลยสารสนเทศ และองคความรของบคคลากรดานคอมพวเตอรและสารสนเทศภายในองคกร ไดเลอกใชโอเพนซอรซในการพฒนา เพอแกไขปญหาใหครอบคลมท งมตการเขาใชงานและมตการสรางปฏสมพนธระหวางผใชงานกบคลงความร เกดการเชอมโยง สรางความสามารถในการขยายตว และทาใหการพฒนาตวเองของคลงความร นอกจากน นยงไดปรบใชแนวคด BLUE OCEAN เพอประเมนระบบทพฒนาข นใหมทาใหเหนภาพรวมของการพฒนาไดชดเจนและงายตอการปรบปรงในอนาคต
131ECTI-CARD 2019
ID 1198
การทบทวนเทคนคเครองวดฝน PM 2.5
ศภรดา หบแกว1* เอกรนทร เหลองวลย1 เทพฤทธ รตนปญญาก1 และ กฤษฎา จนทรเสนา2 1 แผนกวจยและพฒนาระบบจราจร กองวจยและพฒนา การทางพเศษแหงประเทศไทย 2 แผนกตดตามตรวจสอบผลกระทบสงแวดลอม กองจดการสงแวดลอม ฝายนโยบายและแผน การทางพเศษแหงประเทศไทย
คาสาคญ เครองตรวจวด PM 2.5 ฝนละออง มลพษทางอากาศ ป 2562 ประเทศไทยประสบปญหามลพษทางอากาศเนองจากฝนควน มกระทบตอสขภาพของประชาชนเปนอยางมาก เรองฝน PM 2.5 เกดเปนกระแสสงคมและเกดการตนตว มการรายงานปรมาณฝนละอองผาน Application Air4Thai แตกไมครอบคลมทกพ นท จงมความตองการจดหาเครองวดปรมาณฝนละออง แตในตลาดมเครองวดฝนละอองหลายรน หลายราคา และแตละเครองกวดปรมาณฝนออกมาไมตรงกน เกดเปนความไมเชอมนในวธการตรวจวด อกท งเครองวดฝนเปนเรองใหมในประเทศไทย จงไดรวบรวมเครองวดฝนทองตลาด 19 รนมาพจารณา พบวา ใชเทคนค Light Scatter ซงการวดทางออม นาไปเทยบกบขอมลสถานตรวจวดโดยตรงไมได แตกไปในทศทางเดยวกน มการสอบเทยบหรอปรบแก Parameter ได กจะแสดงผลไดถกตองมากข น ความช นมผลตอการตรวจวด ดงน น ควรใชสาหรบภายในอาคาร หรอภายนอกอาคารในวนทความช นไมสงนก
132 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1199
การพฒนา API เพอสรางฐานขอมลสภาพการจราจร
อดมโชค สรยะจรสแสง* เอกรนทร เหลองวลย และ เทพฤทธ รตนปญญากร กองวจยและพฒนา การทางพเศษแหงประเทศไทย ถนนพหลโยธน แขวงเสนานคม เขตจตจกร กรงเทพมหานคร
คาสาคญ ระบบรายงานสภาพจราจร Smart VMS ปจจบนมหลายหนวยงานทใหการรายงานสภาพจราจร ท งบนถนนในเขตกรงเทพมหานคร บนทางหลวง และบนทางพเศษ ลกษณะเปนปายไฟแขวนสงแบบ LED (Smart VMS) ในรปแบบแผนทอยางยอ (Schematic Map) เพอแสดงขอมลเฉพาะถนนทตองการแสดง เสนสเขยว เหลอง แดง และแดงเขม แทนสภาพจราจรคลองตว หนาแนน ตดขดและตดขดมากตามลาดบ การไดมาซงขอมลสภาพจราจรจะใหเจาหนาทดสภาพจราจรผานกลอง CCTV บางใชอปกรณตรวจวดปรมาณจราจรแบบอตโนมต (Traffic Sensor) บางดผาน Application ทมหลากหลายในปจจบน อาท Google Map, LongDo Map, TomTom, Here Map เปนตน Application เหลาน แสดงเสนสสภาพจราจรไดอยางครอบคลมบนแผนทตามมาตราสวนจรง เจาหนาทดสแลวจงกรอกขอมลลงในแผนทอยางยอเพอแสดงข นปายไฟอกคร งหนง แตการกรอกขอมลอาจมความคลาดเคลอนและเปนภาระแกเจาหนาท จงไดพฒนาเปน API เพอการสรางขอมลสภาพการจราจรข นมาเสรม ใชวธการ Capture ภาพและปกหมดบนตาแหนงถนนทตองการ จากน นอานคาสแบบ RGB เกบลงฐานขอมลเปน 4 ระดบเพอใหปายไฟนาไปแสดงอกคร ง วธการน จงทาใหไดขอมลสภาพจราจรทถกตองและเปนปจจบนไดอยางตอเนอง
133ECTI-CARD 2019
ID 1200
การพฒนาระบบระบตาแหนงอปกรณของทางพเศษโดยใชแอพพลเคชนบนโทรศพทมอถอ
ชตกาญจน จอง* เสาวน ศรสวรรณ เอกรนทร เหลองวลย และ เทพฤทธ รตนปญญากร กองวจยและพฒนา, การทางพเศษแหงประเทศไทย
คาสาคญ ระบบสารสนเทศภมศาสตร เทคนคการสารวจ Theodolite ภาษา PHP ทางพเศษในกรงเทพมหานครและปรมาณฑล มระยะทางท งหมด 224.6 กโลเมตร มโครงสรางทางพเศษ อปกรณควบคมการจราจรบนทางพเศษเปนจานวนมาก จงไดมการสรางระบบบรหารจดการสนทรพยในรปแบบฐานขอมลสารสนเทศภมศาสตร (GIS Based Asset Management System ) ซงบรรจตาแหนง GPS ของอปกรณ , ขอมลทเกยวของและภาพถาย แตเนองจากในข นตอนของ การเกบและบนทกขอมลในรปแบบเดมทาไดคอนขางยาก จงไดพฒนานาโทรศพทมอถอมาใชใน การส ารวจ แตภ าพถายเป นต าแหน ง GPS ของกลอง ไม ใช อปกรณ จ งใช แอพพล เคชน “Theodolite” ควบคกบ เครองวดระยะอเลกทรอนกส (Electronics Distance Measurement: EDM) แบบเลเซอร เพอถายภาพและระยะทางถงอปกรณ จากน นสงขอมลทางอเมลผานแอพพลเคชน Theodolite โดยตรง เพอนาเขาและจดเกบขอมลในฐานขอมลระบบสารสนเทศภมศาสตร (GIS Database) ซงใชโปรแกรม ArcGIS ในการน จงไดพฒนา PHP Script เพออานขอมลในอเมลและบรรจขอมลลงในฐานขอมลแบบกงอตโนมต ทาใหการสารวจอปกรณจานวนมากสามารถทาไดรวดเรวและสะดวกมากยงข น
134 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1201
การปรบปรงความแมนยาของระบบแสดงตาแหนงสาหรบ Mobile Application บนทางพเศษ
ธวชชย รกษาชาต* อทย วงชยศร เอกรนทร เหลองวลย และ เทพฤทธ รตนปญญากร แผนกวจยและพฒนาระบบจราจร กองวจยและพฒนา การทางพเศษแหงประเทศไทย
คาสาคญ ระบบแสดงตาแหนงพกดโลก แอพพลเคชน โทรศพทมอถอ ทางพเศษ ระบบทางพเศษของการทางพเศษแหงประเทศไทยแบงเปน 7 สายทาง แตละสายทางจะมศนยควบคม (Central Control Building: CCB) ทาหนาทอานวยการจราจรรวมถงรบแจงเหตฉกเฉนตาง ๆ ซงแตละ CCB มหมายเลขโทรศพทสายตรงเพอรบแจงเหตหรอขอความชวยเหลอในกรณตางๆ ตอมาไดมการทา Mobile Application “EXAT Traffic” เพอใหขอมลเกยวกบทางพเศษและสามารถโทรแจงเหตไดดวย ใน Application มระบบการแสดงตาแหนงของโทรศพท (Location Based System) จะทาการระบตาแหนงของโทรศพทวาอยบนทางพเศษสายใด ผใชสามารถโทรเขา CCB ทดแลพ นทน นไดโดยตรงโดยทไมจาเปนตองทราบหมายเลข และไมจาเปนตองทราบวาอยบนทางพเศษสายทางใด การระบตาแหนงใชวธการสรางพ นทตรวจจบ (Detector Zone) ขนาดประมาณ 118 x 118 ตารางเมตรรอบตาแหนงโทรศพทเทยบกบพกดอางองของทางพเศษ แตพกดอางองมระยะหางไมเทากน บางจดหางกนกวา 100 เมตร แตทางพเศษมความกวางเพยง 14 เมตร จงทาใหเกดความคลาดเคลอนในการระบตาแหนงโทรศพทวา อยบนทางพเศษหรอไม เพราะจดพกดอางองของทางพเศษหางมากเกนไป จงไดพฒนา Algorithm ทาการสรางพกดทางพเศษ (เพมเตม) ข นมาในระบบดวยวธ Linear Iteration จากพกดทางพเศษเดมทมอย จากเดมทเคยหางกนกวา 100 เมตร ใหลดลงเหลอไมเกน 8 เมตร ดวยวธน ทาใหสามารถลดขนาด Detection Zone ลงเหลอเพยง 8 x 8 ตารางเมตรซงทาใหการตรวจสอบตาแหนงบนทางพเศษ มความแมนยาข นเปนอยางมาก
135ECTI-CARD 2019
ID 1203
การพฒนาแบบจาลองระบบรดนาอตโนมตดวยแอปพลเคชน
วจราภรณ ประชมรกษ* สระเจตน ออนฤทธ จรวฒน ดดวงพนธ ดารง กลางมณ และ ทวศกด กลนอม สาขาวชาเทคโนโลยคอมพวเตอร คณะเทคโนโลยอตสาหกรรม มหาวทยาลยราชภฏอบลราชธาน
คาสาคญ ระบบรดน าอตโนมต แอปพลเคชน เซนเซอรวดความช นในดน อาดยโน โมดล ESP-8266
การพฒนาแบบจาลองระบบรดน าดวยแอปพลเคชน มวตถประสงคในการจดทาข นเพอเปน แอปพเคชนในการใชงานดานเกษตรกรรม เพอชวยลดภาระของชาวเกษตรกรทปลกพชผกชวยประหยดระยะเวลาในการดแล และยงชวยใหสะดวกสบายในการทาเกษตรกรรมมากข นจากเดม การพฒนาแบบจาลองระบบรดน าดวยแอปพลเคชน มหลกการทางานแอปพล เคชนหลก ๆ อย 2 ระบบ คอ ระบบท 1 แบบกาหนดเอง โดยการควบคมการทางานของระบบดวยตนเองผานแอปพลเคชน แบบท 2 แบบอตโนมต โดยการต งเวลาการทางานของระบบแอปพลเคชนใหทางานตามเวลาทกาหนด จากการทดลองการพฒนาแบบจาลองระบบรดน าดวยแอปพลเคชน ผจดทาไดทดสอบประสทธภาพของระบบจากการทดลอง โดยไดแบงการทดลองเปน 3 สวนคอ สวนท 1 การทดลอง ปดน า-เปดน า ของตวเครอง สวนท 2 การทดลอง ปดน า-เปดน า ของน าจากระดบเซนเซอรวดความช นในดนทกาหนด สวนท 3 การทดลองการวดความช นของดนในแตละพ นทเพาะปลก จากผลการทดลองท ง 3 สวน พบวา การทดลองสวนท 1 การ ปดน า-เปดน า ของตวเครองไดทาการทดลอง จานวน 10 คร ง พบวาการทางานมความถกตองคดเปนรอยละ 90 การทดลองสวนท 2 การทดลอง ปดน า-เปดน า จากระดบของเซนเซอรวดความช นในดนทไดทาการทดลองจานวน 10 คร ง ผลการทดลองความถกตองของการวดคาความช น พบคาความถกตองคดเปนรอยละ 70 และสวนท 3 การทดลองวดความช นของดนในแตละพ นทเพาะปลกผลการทดลองวดคาความช น พบคาความถกตองคดเปนรอยละ 100
136 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1204
การออกแบบระบบแนะนาการเลอกโมเดลการเรยน รของเครองและคาพารามเตอรทเหมาะสมกบชดขอมล
จตตภ พลวน1* และ ธนาภรณ ทองคณ2 1 คณะเทคโนโลยอตสาหกรรม สาขาการจดการเทคโนโลยมหาบณฑต มหาวทยาลยราชภฏวไลอลกรณ ในพระบรมราชปถมภ 2 นกวเคราะหนโยบายและแผน กองแผนงาน มหาวทยาลยสโขทยธรรมาธราช
คาสาคญ การเรยนรของเครอง การทาเหมองขอมล การจาแนกขอมล ในบทความน ไดอธบายถงปญหาการประมวลผลการเรยนรของเครองทเกดความผดพลาดในการประมวลผลการท าเหมองขอมล (Data Mining) ในส วนของการกาหนดเลอกโมเดลและคาพารามเตอรทเหมาะสมกบขอมล ซงไดการออกแบบสวนประกอบคอ สวนการตรวจสอบขอมล สวนจดการโพรไฟลในการเรยนร สวนการควบคมการเรยนร และสวนการเรยนรและสรางโมเดล เพอชวยใหสามารถแนะนาการเลอกโมเดลในการจาแนกขอมล (Data Classification) ในการประเมนผลการออกแบบระบบแนะนา โดยใชชดขอมลจากฐานขอมล UCI ผลการประเมนแสดงถงการทดสอบระบบตนแบบสามารถเลอกเทคนคการประมวลผลการเรยนรของเครองและกาหนดคาพารามเตอรใหกบชดขอมลได การสรางระบบตนแบบแสดงใหเหนวาสามารถแนะนาได ซงจะชวยใหผใชทไมมความเชยวชาญสามารถใชงานได
ID 1206
การพฒนาชดทดลองเพอศกษาปรากฏการณ สนามแมเหลกหมนและสนามแมเหลกกระเพอม
บชาภทร ปานศร1 กตตพนธ เสยงเสนาะ1 ชยนต คมภย2 ธเนศ ธนตยธรพนธ3* 1 ภาควชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยพระจอมเกลาธนบร 2 โมดลไฟฟา มหาวทยาลยเทคโนโลยพระจอมเกลาธนบร ราชบร 2 3 ภาควชาครศาสตรไฟฟา คณะครศาสตรอตสาหกรรมและเทคโนโลย มหาวทยาลยเทคโนโลยพระจอมเกลาธนบร
คาสาคญ สนามแมเหลกกระเพอม สนามเหลกหมน เครองกลไฟฟาเหนยวนา เครองกลไฟฟาซงโครนส
บทความน มวตถประสงคในการพฒนาชดทดลอง ในหวขอของสนามแมเหลกหมนและสนามแมเหลกกระเพอม โดยนาจดทถกมองขามในการอธบายในหวขอของการเปลยนรปพลงงานตามกฎอนรกษพลงงาน ใชการอธบายในภาพรวมซงสอดคลองกบประสทธภาพทเกดข นจรงภายในเครองกลไฟฟา ไดนาแนวคดจากแผนผงวงจรภายในตาราเรยนทใชในปจจบนมาออกแบบเพอใหผเรยนสามารถเหนการเกดปรากฎการณภายในเครองกลไฟฟา มการทดลองการทางานของมอเตอรซงโครนสและมอเตอรเหนยวนา รปแบบการทดลองทมจดประสงคเพอใหเกดความเขาใจพ นฐานของเครองกลไฟฟาและการเปลยนรปพลงงานของเครองกลไฟฟา ทเปนพ นฐานในการเรยนรายวชาทสงข นตอไป
137ECTI-CARD 2019
ID 1207
การจดการเรยนรโดยใชวงลอโอหมเพอสงเสรมทกษะในเรองการอานคาแถบสตวตานทาน
ธณภณ ธารงคณานน ธเนศ ธนตยธรพนธ* กฤษดา กจโสภ สาขาวชาวศวกรรมวศวกรรมไฟฟา คณะครศาสตรอตสาหกรรมและเทคโนโลย มหาวทยาลยเทคโนโลยพระจอมเกลาธนบร
คาสาคญ วงลอโอหม สตวตานทาน วงจรไฟฟา การจดทาวจยในช นเรยน เรอง กจกรรมการจดการเรยนรโดยใชวงลอโอหมเพอสงเสรมทกษะในเรองการอานคาแถบสตวตานทานสาหรบนกศกษาภาควชาครศาสตรไฟฟา ในภาคเรยนท 1 ปการศกษา 2561 จดทาข นเพอศกษาหาแนวทางในการพฒนาการเรยนการสอน ในรายวชาวงจรไฟฟา โดยการนาสอการเรยนร “วงลอโอหม” มาประยกตใชกบการจดการเรยนสอนแบบสาธต เพอใหการจดการเรยนการสอนมความนาสนใจมากข น สามารถกระตนใหผเรยนเกดความอยากรอยากเรยนมากข น และเพอเพมผลสมฤทธทางการเรยนของผเรยนใหมากข น ประชากร/กลมตวอยางทใชในการวจยคร งน เปนนกศกษาภาควชาครศาสตรไฟฟา จานวน 20 คน ทสนใจสมครเขารวมโครงการ เครองมอทใชในการวจย ไดแก แบบทดสอบวดผลสมฤทธทางการเรยนเรอง การอานคาแถบสตวตานทานซงเปนขอสอบแบบปรนยเลอกตอบ 4 ตวเลอก จานวน 10 ขอ ,แบบประเมนคณภาพสอ “วงลอโอหม” โดยใชการจดการเรยนรแบบสาธตเพอพฒนาทกษะของนกศกษา และแบบประเมนความพงพอใจทมตอแนวทางการจดการเรยนรโดยใชวงลอโอหมเพอสงเสรมทกษะในเรองการอานคาแถบสตวตานทาน และ วเคราะหขอมลโดยใชคาเฉลย (𝑥),คาการกระจายของขอมล (S.D.) และคารอยละ (%) การวจยคร งน ปรากฏผลวา ผลสมฤทธทางการเรยนหลงจากนาสอการเรยนร “วงลอโอหม” มาประยกตใชกบการจดการเรยนสอนแบบสาธต พบวาหลงเรยนมผลสมฤทธสงกวากอนเรยน ผลจากการศกษาวจยคร งน ช ใหเหนถงความสาคญของสอการเรยนร “วงลอโอหม” มาประยกตใชกบการจดการเรยนสอนแบบสาธต ซงสามารถพฒนาการเรยนรของผเรยนได และสามารถนาไปใชประโยชนตอรายวชาอนๆ ทางไฟฟาทใชในชวตประจาวนของผเรยน ตลอดจนใชเปนแนวทางการพฒนาการเรยนทางดานวชาชพของตวเองในอนาคตได
138 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11
ID 1208
การศกษาแนวทางการจดการเรยนการสอนทบรณาการ การเรยนรกบการทางาน (Work-Integrated Learning : WIL)
ปรารถนา ใจมธรรมด ธเนศ ธนตยธรพนธ* ธณภณ ธารงคณานน สาขาวชาวศวกรรมวศวกรรมไฟฟา คณะครศาสตรอตสาหกรรมและเทคโนโลย มหาวทยาลยเทคโนโลยพระจอมเกลาธนบร
คาสาคญ ระบบฝกงานและระบบการฝกหด จดการเรยนการสอนทบรณาการการเรยนรกบการทางาน ระบบทวภาค ระบบสหกจศกษา
การวจยคร งน มวตถประสงค เพอนยามการจดการเรยนการสอนทบรณาการการเรยนรกบการทางาน (Work Integrated Learning) วเคราะหองคความรเกยวกบ หลกการ/แนวคด ปรชญาจดมงหมายพฒนาการและความ จาเปนในการจดการเรยนการสอนท บรณาการการเรยนรกบการทางานในสถาบนอดมศกษาตลอดจนวเคราะห โครงสรางองคกรระบบการบรหาร จดการปจจย/เงอนไขของความสาเรจ พฒนาแนวทางการจดการเรยนการสอนทตามแผนการพฒนาการศกษาระดบอดม ศกษา สานกงานคณะกรรมการการอดมศกษาเพอใหอดมศกษาเปนแหลงองคความรและพฒนากาลงคนระดบสงทม คณภาพเพอการพฒนาชาตอยางยงยน สรางสงคมการเรยนรตลอดชวตตามแผนพฒนาเศรษฐกจและสงคมแหงชาต ฉบบท 11 (พ.ศ.2555-2559) การบรณาการการเรยนรกบการทางานภายใตหลกการ/แนวคดปรชญาจดมงหมายพฒนาการและความ จาเปนในการจดการเรยนการสอนใน รปแบบดงกลาวตลอดจนวเคราะห โครงสรางองคกรระบบการบรหาร จดการปจจย/เงอนไขของความ สาเรจภายใตรปแบบตางๆทเหมาะสมและสอดคลองกบ วฒนธรรมองคกรของสถาบนอดมศกษาไทย และออกแบบการประเม นผลผเรยนหลงจากผานการจดการเรยนการสอนทบรณาการการเรยนรกบการทางาน (Work Integrated Learning) ผลการวจยสรปไดวา แนวทางการจดการเรยนการสอนทบรณาการการเรยนรกบการทางานในสถาบนอดมศกษาของประเทศไทยมหลกการแนวคด/ปรชญาการจดการ ศกษาเชงบรณาการกบการทางาน เปนกรณหนงของการเรยนรเชง ประสบการณทชวยใหนกศกษาม โอกาสในการประยกตความร ทกษะ การทางานและทกษะเฉพาะทสมพนธกบวชาชพไดรจกชวตการทางานทแท จรงกอนสาเรจการศกษาจดมงหมาย การจดการเรยนการสอนทบรณาการ การเรยนรกบการทางานไดแกสถาบน การศกษาไดมการเชอมโยงโลกการ ศกษากบภาคธรกจอตสาหกรรมเขา ดวยกนทาใหประเทศมทรพยากร มนษยทมสมรรถนะสงสามารถแขงขน ในระดบนานาชาตไดโครงสราง ความรวมมอประกอบดวยสถานศกษา สถานประกอบการ และองคกร วชาชพ รปแบบการจดการเรยนการสอนทบรณาการการเรยนรกบการ ทางานม 4 รปแบบไดแก ระบบทวภาค (DVT) ระบบสหกจศกษา (Cooperative) ระบบฝกงาน (Apprentice) ระบบการฝกหด (Internship) และปจจยเงอนไขของ ความสาเรจไดแก สถาบนการศกษา และสถานประกอบมนโยบายทชดเจน ในการสนบสนน มผรบผดชอบระดบตางๆ ทชดเจนรวมท งมการสราง ความเขาใจใหแกทกฝายทเกยวของมกระบวนการในการเตรยมความและแนวทางการประเมนผลผเรยน
139ECTI-CARD 2019
ID 1209
Fictitious Reference Iterative Tuning Method for Velocity Control of Mecanum-wheeled Mobile Robot
Apichai Sompolpong Naphatsaminh Sirichai Pitaktai Subpoolpoech and Itthisek Nilkhamhang*
Department of Electronics and Communication Engineering, Sirindhorn International Institute of Technology, Thammasat University
คาสาคญ Mecanum Wheels, Omni-directional Movement, Velocity Control, PID, FRIT
This paper presents the intention to develop a Mecanum-wheeled mobile robot that is capable of executing non-holonomic movements in succession. To enable such task, a motor control algorithm based on input command format was designed. For the feedback loop control, the feedback signal was collected using photoelectric speed sensor, and the controller used was PI controller, tuned using Fictitious Reference Iterative Tuning (FRIT) method. Furthermore, the robot’s position, heading, and position error were captured using a bird-eye-view camera.
140 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11

ID 1210
The Intelligence Overhead Crane
Karnrawee Manochomphu Phatcharaphong Thongchim and Sarawan Wongsa* Department of Control System and Instrumentation Engineering, Faculty of Engineering
คาสาคญ Overhead Crane, IoT, NodeMCU, Firebase, P-controller This paper develops an overhead crane which can be controlled its position via webpage site connected to the internet and able to lift a load up to 3 kg. The crane model is designed by scaling down the actual overhead crane in the WPA factory. This model has movement along two axes, which are the y-axis and x-axis. We develop a web application that allows the user to select a desired target position on the factory map. The crane will move to the target location, starting by moving along the y axis and then moving along the x axis. The system has two ultrasonic sensors to measure the distances of y and x axis, in relative to the reference point. A potentiometer is used as an angle sensor to monitor the load swing angle and two microcontrollers are used for receiving sensors data, controlling dc motors to drive the crane, and to communicate with the webpage. On the webpage, there are the factory map and two control buttons; the MOVE button is used to start moving the crane to the target and the HOME button is used to force the crane to go back to the home position at the center of the factory map. We also provide the crane’s current position and path to the target on the webpage for online monitoring. According to the preliminary results, the model can function properly as designed with position control accuracy not greater than 1 cm.
141ECTI-CARD 2019

ID 1211
A Light-weighted and Accurate Crowd Level Estimation Model by Pseudo Ground-truth and Transfer Learning
Pongpisit Thanasutives Ravit Pichayavet Boonserm Kijsirkul and Manop Wongsaisuwan* Department of Computer and Electrical Engineering, Faculty of Engineering, Chulalongkorn University
คาสาคญ Crowd level estimation, Transfer learning, k-means clustering This paper aims to develop a light-weighted and accurate crowd-levels estimation model by using transfer learning method from a state-of-the-art model in crowd counting task, MCNN [1]. We make our own training dataset by using pseudo-label predicted from an existing state-of-the-art model, CSRNet [2], and classify the output into various sets of crowd-levels by k-means clustering algorithm, from low to high. We also propose a more generalized crowd-counting model which yields similar performance to CSRNet on ShanghaiTech B test set but achieves better performance in our own dataset without any further training. With this method, we are able to train our network from the dataset that we collected locally without human effort on labeling the data. The network architecture is selected only a branch of MCNN original architecture to reduce the complexity. Finally, we evaluate our model with the test set and report its accuracy.
142 งานประชมวชาการ งานวจยและพฒนาเชงประยกต ครงท 11