Practicas de Diseno de Sistemas Avanzados de
Control: control adaptativo
Abel Alberto Cuadrado Vega
7 de junio de 2006
1. Control Adaptativo
El control adaptativo supone, como caso mas sencillo, un proceso
lineal yvariante a controlar. Al ser variante el proceso, los
coeficientes de su funcion detransferencia varan con el tiempo. El
control adaptativo consiste en la identifi-cacion de parametros del
proceso y el calculo de un nuevo regulador, todo elloen tiempo
real, siguiendo las variaciones de los parametros y mientras se
realizael control.
Un caso semejante de uso de identificacion+calculo del
regulador, pero noconsiderado control adaptativo, es el de un
proceso lineal e invariante (parame-tros constantes) de parametros
desconocidos. Al iniciar el sistema de control sepuede ejecutar un
procedimiento unico de identificacion+calculo del regulador,que a
partir de ah quedara fijo.
2. Realizacion de la practica
Esta practica se realizara con un ejemplo relacionado con ambos
casos:
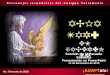
Un proceso variante: el motor de continua con un lazo interno de
controlde velocidad con un regulador continuo proporcional con Kp
variante. Ael le aplicamos nuestro lazo externo de control de
posicion digital.
MotorReg.
continuo(P)
A/D
D/A
-
posicin
velocidadReguladorcontinuo
(P)
control
Reguladordiscreto
-
K p
referencia
Un sistema de control que permite lanzar en cualquier momento la
iden-tificacion y el calculo de un nuevo regulador (de tiempo
finito de ordenincrementado).
1
La particularidad consiste en que tanto el cambio en los
parametros del procesocomo el lanzamiento de la identificacion y
calculo del regulador, se hara de formamanual. El cambio de la Kp
se realiza con un potenciometro en el modulo PIDcontinuo (con las
acciones I y D desactivadas). La identificacion se puede iniciarcon
la pulsacion de una tecla en el programa de control (y se puede
detenercon la misma tecla). El calculo a partir de los parametros
identificados y lasustitucion inmediata del regulador en
funcionamiento por este se puede realizarcon la pulsacion de otra
tecla (valido tanto mientras esta en funcionamiento
laidentificacion, como cuando ya ha sido detenida).
2.1. Consideraciones de uso
2.1.1. Persistencia en la excitacion
En cualquiera de los casos, para permitir la correcta
identificacion, la entradadel sistema debe tener una variacion
suficiente. En este caso (cadena cerrada) noescogemos directamente
la entrada del proceso, sino la referencia del control. Elregulador
es el que genera la entrada del proceso y puede influir en la
capacidadde la accion de control para excitar todos los modos del
proceso.
2.1.2. Factor de olvido
La implementacion de la identificacion usada en esta practica se
ha hechocon = 1. Eso quiere decir que en la identificacion
intervienen todos los datosdesde que se comenzo la identificacion.
Si los parametros del proceso cambiandurante la identificacion el
resultado no es correcto.
2.1.3. Punto de funcionamiento
Para que el algoritmo de identificacion funcione correctamente
con sistemasno lineales, identificando la funcion de transferencia
del sistema linealizado res-pecto a un punto de funcionamiento,
dicho algoritmo debe usar por una lado < 1 (los parametros
cambian, pero en este caso con el punto de funciona-miento), y por
otro debe estimar el punto de funcionamiento y usar valoresde
entrada y salida respecto a ese punto de funcionamiento (o bien
anadir untermino independiente en la ecuacion en diferencias). El
programa de controlusado en esta practica no implementa ninguna de
estas caractersticas, as queno se podra usar con sistemas no
lineales.
2
Control AdaptativoRealizacin de la prcticaConsideraciones de
usoPersistencia en la excitacinFactor de olvidoPunto de
funcionamiento