-
Politecnico di BariCorso di Laurea in Ingegneria
Civile-AmbientaleTecnica delle Costruzioni
DICATEChDipartimento di Ingegneria Civile, Ambientale, del
Territorio, Edile e di ChimicaPolitecnico di Bari
Settembre 2015
Prof. Rita Greco
Analisi lineare delle strutture: richiami di teoria tecnica
delle travi, metodi di risoluzione dei sistemi iperstatici
-
Strutture: Concetti fondamentali
Si definisce struttura un corpo continuo o un insieme di
corpiconnessi tra loro e opportunamente vincolati, soggetti ad
azioniapplicate in punti diversi, in grado di "trasferire" i
carichi.
Lo scopo dell’analisi strutturale é quello di determinare lo
statodi cimento del sistema in questione, quando sia sottoposto
adun definito insieme di azioni.
La soluzione di questo problema si consegue con i metodi
dellaScienza delle Costruzioni da cui, nel caso specifico, si
fadiscendere la Meccanica delle Strutture.
Dicesi elemento strutturale un particolare corpo che siconviene
di poter assimilare a un modello semplice, per il qualesia
possibile la formulazione diretta di leggi rappresentative
dicomportamento.
-
Una classificazione degli elementi può essere fatta sulla
basedella loro configurazione geometrica. Possono essere
definitimonodimensionali quando una delle loro dimensioni
siapreponderante rispetto alle altre due (ad esempio travi )
;bidimensionali quando una dimensione sia ridotta rispetto
allealtre (ad esempio lastre e piastre ) ; tridimensionali nel
casopiù generale.
Se si riesce a far dipendere il comportamento dell’intero
sistemastrutturale da quello relativo a un numero finito di suoi
punti, lostudio può essere ricondotto alla determinazione di sforzi
espostamenti ad essi relativi e da questi si può dedurre
ilfunzionamento meccanico dell’intero complesso.
Ciò si verifica ad esempio nelle cosiddette strutture
ascheletro, composte esclusivamente di elementimonodimensionali le
cui caratteristiche di risposta si fannosolitamente dipendere da
quelle valutabili nei punti di incrociodetti nodi. In tal caso il
problema viene ricondotto a un numerofinito di parametri: si parla
perciò di Meccanica strutturalediscreta.
-
Alcune definizioni
Si definisce trave il solido monodimensionale generato da
unafigura piana che si sposta nello spazio
conservandosiperpendicolare alla traiettoria detta asse geometrico
o linea d'assedescritta dal suo baricentro. Tale traiettoria, può
essere una curvagobba o piana, continua e rettificabile, che si
ritiene dotata didebole curvatura. In particolare essa può ridursi
ad una retta.
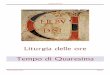
Si introduce una coordinata curvilinea s lungo la linea d'asse
conorigine nel baricentro di una delle sezioni di estremità, ad
esempioG0.Si scelgono due terne ortogonali destre di riferimento:
unaglobale, fissa, l' altra, locale con origine nel baricentro
dellasezione corrente s.
-
Terna Globale
Terna Locale
Ascissa corrente
-
Mentre l'asse x3 continua ad essere considerato diretto
secondola tangente alla linea d'asse e con verso concorde con
quelloassunto positivo per s, gli assi x1 ed x2 ed
vengonoconsiderati diretti rispettivamente secondo i due
assiprincipali d`inerzia ξ ed η della sezione.
Accanto alla legge A(s) con cui l'area della sezione
trasversalevaria con l'ascissa curvilinea s misurata lungo l'asse,
bisognaprecisare le leggi con cui si evolvono, in funzione ancora
di s, lecaratteristiche inerziali J1, J2, J3≡Jo della sezione
rispetto agliassi x1 ed x2 della terna locale e rispetto al
baricentro Gs.
-
Si indicano inoltre con q1(s), q2(s), q3(s); m1(s), m2(s), m3(s)
le componenti, sempre secondo la terna locale di riferimento, delle
distribuzioni q(s) ed m(s) rispettivamente di forze e coppie, lungo
la linea d'asse. Analogamente F ed M sono le eventuali forze e
coppie concentrate in punti dell'asse ed F1, F2, F3; M1, M2, M3 le
loro componenti; Z e W, nell`ordine, sono le forze e le coppie
reattive di componenti Z1, Z2, Z3; W1, W2, W3, applicate nei punti
d'asse e, comunque, nelle sezioni in cui sono localizzati gli
eventuali vincoli.
-
Nella generica sezione s è possibile definire le sei
caratteristiche dellasollecitazione N, V1, V2, M1, M2, M3,
osservando che V1, V2, M1,M2 si identificano rispettivamente con i
tagli e i momenti flettentidiretti secondo gli assi principali di
inerzia della sezione. N è lo sforzonormale, M3=T il momento
torcente.
-
Alla trave si estendono i risultati del cosiddetto Problema di
Saint-Venant che, come noto, fornisce la soluzione del
problemadell'equilibrio elastico per un solido a forma di cilindro
retto,sufficientemente allungato, a sezione trasversale qualsiasi,
dimateriale linearmente elastico, omogeneo ed isotropo, conforze di
volume nulle, forze nulle sulla superficie laterale ediverse da
zero in corrispondenza delle basi, privo di vincoli.
Rinviando, per la giustificazione di quanto sopra, a quanto
illustrato atal proposito nell'ambito della Scienza delle
Costruzioni, ci si limitaqui ad osservare che tale modo di
procedere porta a ritenerepresenti, nel generico punto della trave,
le sole tensioni :
In funzione di queste si possono esprimere le sei
caratteristiche dellasollecitazione richiamate in precedenza.
31 32
-
Caratteristiche della sollecitazione
-
I sistemi pianiUn caso particolare molto importante è quello
della trave piana, che si presenta quando l’asse è contenuto in un
piano che è anche piano di simmetria geometrica e di carico. In
questo caso le componenti delle forze attive e reattive si riducono
a: F2, F3, M1=M, Z2, Z3, W1=W. Le componenti del carico distribuito
e delle coppie distribuite sono rispettivamente: q3(s), q2(s),
m1(s)=m(s)
Le caratteristiche della sollecitazione nella generica sezione
sono solamente: N, M1=M, V2=V e sono legate alle distribuzioni di
carico dalle equazioni indefinite di equilibrio in cui r indica il
raggio di curvatura della linea d’asse.
-
Derivando quest’ultima e sostituendo il valore della derivata
del taglio dalla seconda equazione si ottiene
Per travi ad asse rettilineo o con curvatura trascurabile
In assenza di coppie distribuite
-
La flessione e il taglio sono retti con x1 asse neutro della
flessione e x2 asse di sollecitazione e di flessione. Sono inoltre
diverse da zero le componenti dello spostamento e della rotazione
u2, u3 e γ1=γ.Estendendo i risultati del problema di Saint-Venant,
le due facce dell’elemento subiscono i seguenti spostamenti
relativi:
J e χ sono rispettivamente Momento di Inerzia e Fattore di
Taglio relativi all’asse x1.
L’energia di deformazione dunque si riduce a 3 termini,
ovvero:
-
Travi ad asse rettilineo: LA TRAVE INFLESSA
Nelle applicazioni è molto ricorrente una speciale trave piana:
quellaad asse rettilineo soggetta a forze e reazioni vincolari
esclusivamentenormali all'asse, detta trave inflessa. Per essa le
caratteristichedella sollecitazione relative a una generica sezione
sono al più il taglioed il momento flettente, essendo ovunque nullo
lo sforzo normale.La denominazione di trave inflessa che le viene
attribuita è peraltroda ritenersi impropria in quanto, nella grande
maggioranza dei casi,essa non è assoggettata a flessione semplice
ma piuttosto a flessionecomposta (a flessione cioè accompagnata da
taglio).
-
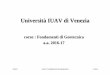
La trave inflessa ad asse rettilineo viene riferita ad una terna
di assicon origine nel baricentro di una delle sezioni di estremità
O≡A, diregola quella di sinistra; l'asse y3 coincide con l'asse
della trave,l'asse y2 è ortogonale ad esso. Il terzo asse y1,
perpendicolare alpiano medio della trave, è diretto a sua volta
verso l'osservatore ed ètale che la terna sia una terna destra.
Le forze attive e reattive hanno componenti rispettivamente F2
eZ2≡V; le coppie attive e reattive sono M1 = M e W1=W; la
solacomponente del carico distribuito lungo l'asse è la q2(y3); le
eventualicoppie distribuite hanno la sola componente
m1(y3)≡m(y3).
-
Le caratteristiche della sollecitazione nella generica sezione
siriducono allo sforzo di taglio V(y3) e al momento flettenteM(y3)
i cui segni vengono fissati in base alle usuali convenzioni.Delle
componenti u3 e u2 dello spostamento del baricentro dellagenerica
sezione, rispettivamente parallela e normale all'asse, laprima è
trascurabile rispetto alla seconda.
S
S
S
S
M(y3) M(y3)
V(y3) V(y3)
-
La componente u2(y3) è detta perciò semplicemente spostamento
eil suo diagramma, riportato parallelamente alla direzione di y2,
si dicelinea elastica della trave. Le coordinate di quest' ultima
sonopositive se equiverse con y2 e dirette pertanto verso il basso;
larotazione γ1=γ della generica sezione è positiva se
antiorariaessendo l'asse y1 diretto verso l'osservatore.
Da quanto si è detto si deduce che, per una trave inflessa, in
assenza di sforzonormale, sono equivalenti, ai fini statici,
vincoli quali la cerniera fissa e l'appoggioscorrevole con
direzione efficace normale all'asse. Conseguentemente una
travevincolata agli estremi con due cerniere fisse, cinematicamente
iperdeterminata, risulta,per le particolari condizioni di carico
cui è sottoposta, staticamente isodeterminata.
AO B
y3
y2
(y )3
u2u' = - >02
y1
u2
-
AO B
y3
y2
(y )3
u2u' = - >02
y1
[C]
Dalle equazioni indefiniteproposte precedentemente
siricavano:
Legano le caratteristiche della sollecitazionedi taglio e
momento flettente al carico eall'eventuale distribuzione di
momento
-
Nell'ipotesi di piccoli spostamenti può confondersi l'angolo
dirotazione della generica sezione (pari all'angolo che tangente
allalinea elastica forma con l'asse ) con la sua tangente.Il segno
meno si giustifica rilevando che nei tratti in cui la lineaelastica
ha andamento crescente con y3 l'angolo γ risulta orario epertanto
negativo.
Se, ai fini deformativi, siconsidera il solo contributo
delmomento flettenteprescindendo dagli effetti deltaglio, si
ricava:
AO B
y3
y2
(y )3
u2u' = - >02
y1
-
Sostituendo l’espressione di γ:
Derivandola ancora rispetto a y3 si ottengono le seguenti
espressioni
È un'equazione differenzialedel quarto ordine allederivate
totali dettaequazione della lineaelastica. Essa è
l'equazionerisolvente in termini dispostamenti della traveinflessa,
cui vanno associatequattro condizioni alcontorno, cui
corrispondonole condizioni imposte daivincoli alla struttura.
-
Nel caso frequente di m(y3)=0 e di trave a sezione
costante,l'equazione differenziale del quart'ordine si semplifica
nella formaseguente:
Il problema della trave inflessa è un problema al contorno
allederivate totali in quanto la sua soluzione si ottiene
integrandol'equazione differenziale del quart'ordine e associando
adessa opportune condizioni in corrispondenza delle
sezionivincolate, generalmente coincidenti con le sezioni di
estremità.Tali condizioni possono essere di carattere cinematico o
statico.
-
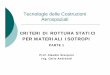
Esempio: Trave doppiamente incastrata conrotazione a
nell’estremo B
-
u2
V
M
Spostamento
Taglio
Momento Flettente
-
La determinazione delle caratteristiche di risposta di una
strutturadiscreta e, in particolare, di una struttura composta di
elementimonodimensionali (travi), implica l'individuazione delle
relazioniesistenti tra un certo numero di parametri divisi in due
categorie:spostamenti e forze.
Alla prima appartengono tutti i parametri che,
indipendentementedalla loro natura di spostamenti propriamente
detti o di rotazioni,sono indispensabili ai fini di descrivere la
struttura nella suaconfigurazione deformata.
Alla seconda, che comprende sia forze propriamente dette
checoppie, appartengono i parametri atti ad identificare la
condizione dicarico cui la struttura è sottoposta.
Sistemi di coordinate
-
Allo scopo di individuare in maniera univoca i predetti
parametri si fauso di un sistema di coordinate che, associato al
particolareproblema strutturale che si intende esaminare, serve a
ordinare eidentificare le varie quantità che si ritengono
significative per lastruttura in studio.
La sua scelta dipende quindi dalla geometria strutturale,
dalladisposizione dei vincoli, dalla distribuzione delle forze e
dalleinformazioni richieste sugli spostamenti.
Generalmente un sistema di coordinate definisce spostamenti
eforze relativi ad un insieme discreto di sezioni strutturali in
terminidi componenti aventi specifiche direzioni.
Solitamente tali direzioni si assumono in modo tale che nel
sistemacoordinato, a ciascun punto prescelto sia associata una
triadeortogonale.
-
Una volta fissato il sistema di coordinate, sono univocamente
determinati sia gli spostamenti che le forze nodali esibite dalla
struttura: ui è lo spostamento letto in corrispondenza della
generica coordinata ed Fi la forza relativa ivi applicata.
L'indice i varia tra 1 ed N essendo N il numero dei parametri in
gioco.
In maniera analoga si possono individuare le quantità locali
riferite al generico elemento: esse vengono indicate con i simboli
:
Per gli spostamenti
Per gli sforzi interni associati alla coordinata i-esima
dell’elemento generico e (e=1,…,t)
-
Accanto ai vettori ad N componenti che definiscono spostamenti e
forze nodali:
Si hanno anche i vettori che contengono le quantità locali:
-
Relazioni di congruenza ed equilibrio
Nell’analisi di strutture monodimensionali composte di più
elementi è di particolare importanza lo studio delle relazioni che
legano tra loro le grandezze cinematiche globali e locali e,
dualmente, le forze esterne ed interne.
Nel primo caso si ha:
Vettore a componenti indipendenti
Matrice di congruenza
-
La matrice [A] ècostituita da 4 righe e 3colonne; la
secondacolonna ad esempiocomprende i valori delle{β} corrispondenti
aglispostamenti u2=1, uh=0per h≠2
-
Coefficienti di rigidezza e deformabilità: sistemi aduna
coordinata
La formulazione dei metodi di calcolo dei sistemi di travi
richiede ladefinizione di alcune quantità caratteristiche, dette
coefficienti dirigidezza e coefficienti di deformabilità,
strettamente legate allastruttura su cui si opera e al sistema di
coordinate prescelto.
La ricerca della risposta strutturale implica
innanzituttol'individuazione di un sistema di coordinate che,
associato alparticolare problema, identifichi e ordini i parametri
statici ecinematici coinvolti nell'analisi.
Problemi nei quali è sufficiente una sola coppia di parametri
(unaforza F, cioè, ed uno spostamento u ) a caratterizzare in
manieracompleta la risposta, individuano strutture ad una
solacoordinata.
-
In questo caso la relazione che lega la forza allo spostamento,
letticon riferimento all'unica coordinata associata ad entrambi,
puòscriversi, attesa la linearità del sistema, nella forma:
In tale relazione viene evidenziato il coefficiente di rigidezza
k che ,per una data struttura, è legato alla coordinata prescelta.
Essorappresenta infatti la forza da associare alla coordinata
considerataperchè il corrispondente spostamento sia unitario.
Una maniera alternativa per descrivere il comportamento
strutturale è basata sull'impiego del coefficiente di deformabilità
h, tale che:
Esso è definito come lo spostamento che si legge in
corrispondenza della coordinata, in conseguenza dell'applicazione
di una forza unitaria.
-
Costituendo le due precedenti equazioni due modi alternativi
perdescrivere la stessa relazione, i coefficienti k ed h sono l'uno
l'inversodell'altro, nel modo che risulti cioè:
Si immagina che i sistemi rappresentati nella figura seguente
sianocostituiti da aste a sezione costante il cui momento di
inerziarispetto all'asse baricentrico della sezione trasversale sia
J.Detto E il modulo di elasticità longitudinale del
materialecostitutivo, i coefficienti in parola valgono
rispettivamente:
-
Sistemi a più coordinate
-
h12
-
-
-
Sintesi dirigidezze edeformabilitàper travi aduna campata
-
Il metodo degli spostamenti
Questo metodo deve il suo nome al fatto che la soluzione per
un’assegnata struttura è ottenuta assumendo come incognite
vspostamenti indipendenti, la cui conoscenza permette di risalire
allo stato di sollecitazione interno. Tali spostamenti sono detti
gradi di libertà cinematici della struttura. Il metodo si basa
sulla scrittura delle equazioni:
che legano, attraverso i coefficienti di rigidezza kij = kji, le
forze Fiapplicate in corrispondenza degli spostamenti incogniti ui
agli stessi spostamenti, resi attivi uno per volta. Più in sintesi
esse diventano:
i
-
Se la struttura non è labile, le proprietà della matrice [K] di
rigidezzaassicurano l’invertibilità delle equazioni precedenti, e
quindi ladeterminazione degli spostamenti incogniti ui.
Noti questi ultimi, si può risalire allo stato di sollecitazione
interna.
L’algoritmo tuttavia non è generale; esso opera nell’ipotesi
distrutture caricate da forze Fi, correlative agli spostamenti ui,
dettegeneralmente forze nodali.
L’estensione del metodo a condizioni di carico diverse
(carichiapplicati agli elementi costitutivi, variazioni termiche
ecc.) èconseguibile tramite la procedura seguente.
Si può infatti immaginare di separare l’effetto dei carichi non
nodalida quello dei carichi nodali, studiando la struttura come
sommadi due schemi.
-
Nel primo schema, unitamente ai carichi non nodali
(carichiapplicati in campata, autotensioni, ecc.) si applica un
sistema di forzenodali Fi(o), capaci di azzerare i spostamenti ui
nella condizione dicarico considerata.
La conoscenza degli ui che, nella particolare condizione di
caricoimposta, sono tutti nulli, consente di determinare lo stato
disollecitazione interno corrispondente. Attraverso condizioni
diequilibrio nodale quindi si determinano le Fi
(o) .
Il ripristino della condizione di carico assegnata è ottenuto
sommandoalla soluzione ricavata dal primo schema, quella relativa
alle dateforze nodali, non ancora considerate, e alle forze Fi
(o) , cambiate disegno, introdotte allo scopo di azzerare gli
ui.
La soluzione di questo secondo schema avviene mediante equazioni
del tipo:
Carichi nodali
-
Il metodo degli spostamenti: un esempio
-
rappresenta gli spostamenti nodali
dovuti alle Fi
Si ponga:
Rappresenta gli spostamenti provocatida tutte le altre
azioni
-
Sommando le due espressioni
Che consente di determinare il vettore spostamento {u} noto che
sia il vettore {F(0)}
-
In definitiva, il metodo degli spostamenti si articola nelle
seguentifasi:
1.da un esame della tipologia strutturale e delle condizioni di
carico siindividuano spostamenti indipendenti ui che si assumono
qualiincognite del problema. Essi devono essere tali da consentire
dirisalire allo stato di sollecitazione interno di ciascuno degli
elementicostitutivi;
2.bloccando tutti gli spostamenti ui attraverso opportune forze
F(0)(i
= 1,2,...,v) si studia la struttura sotto i carichi nodali
determinandole sollecitazioni E(0);
3.imponendo alla struttura scarica lo spostamento ui=1 e
bloccandocontemporaneamente tutti gli altri, si determinano le
forze kij(i =1,2,...,v) in grado di mantenere il sistema in
equilibrio in questaconfigurazione deformata. Si costruisce così
per colonne la matrice dirigidezza [K];
4.si impongono gli equilibri nodali per la struttura caricata
dalle forze(F – F(0)) e, tramite il sistema si determinano gli
spostamenti ui;
-
4. Noti gli ui si ricava lo stato di sollecitazione della
struttura. DettoE(i)(i = 1,2,...,v) il valore che la generica
sollecitazione assumeper ui = 1, si può porre il valore E dovuto ai
spostamenti nellaforma
5. Lo stato di sollecitazione finale si ottiene sommando alle E,
cosìricavate, le E(0) ottenute nella prima fase. Risulta cioè
-
Esempio