Embed Size (px)
Citation preview

ANALISIS DE METODOS DE COMPENSACION DE ARMONICOS CON FILTROS ACTIVOS
ALEXANDER GUTIERREZ ALVAREZ LINA MARIA TORRES CAMACHO
UNIVERSIDAD TECNOLÓGICA DE PEREIRA FACULTAD DE INGENIERÍA ELÉCTRICA
PEREIRA 2007

ANALISIS DE METODOS DE COMPENSACION DE ARMONICOS CON FILTROS ACTIVOS
ALEXANDER GUTIERREZ ALVAREZ LINA MARIA TORRES CAMACHO
Proyecto de grado
Director Ing. Alfonso Alzate
UNIVERSIDAD TECNOLÓGICA DE PEREIRA FACULTAD DE INGENIERÍA ELÉCTRICA
PEREIRA 2007

TABLA DE CONTENIDO INTRODUCCIÓN
1. ARMONICOS Y TEORIAS DE COMPENSACIÓN 1.1 DEFINICIONES
1.1.1 Armónicos
1.1.2 Clasificación de los armónicos
1.1.3 Fuentes de armónicos
1.1.4 Distorsión armónica total (THD)
1.1.5 Índice de desbalance de corriente (IDC)
1.1.6 Potencia activa y reactiva de un sistema trifásico
1.1.7 Compensación de armónicos
1.1.8 Tipos de compensación de armónicos
1.1.8 Filtro activo
1.2 TECNICAS DE COMPENSCION DE ARMONICOS CON FILTROS
ACTIVOS
1.2.1 Teoría Cruz
1.2.2 Teoría Cruz Modificada
1.2.3 Teoría PQ
1.2.4 Teoría PQ Modificada
1.2.5 Teoría Id-Iq
1.2.6 Método de Detección Síncrono
3

1.2.7 Método de Hosseini
2. MODELAMIENTO DEL SISTEMA Y ALGORITMOS DE COMPENSACIÓN
2.1 MATLAB
2.2. CONFIGURACIÓN PARA LA SIMULACIÓN
2.2.1 Configuración del sistema
2.2.2 Carga
2.2.3 Filtro activo
2.3 ALGORITMOS DE LOS METODOS DE COMPENSACIÓN DE ARMONICOS
2.3.1 Teoría Cruz
2.3.2 Teoría Cruz Modificada
2.3.3 Teoría PQ
2.3.4 Teoría PQ Modificada
2.3.5 Teoría Id-Iq
2.3.6 Método de Detección Síncrono
2.3.7 Método de Hosseini
2.4 BLOQUES DE MEDIDA
3. ANALISIS DE RESULTADOS
3.1 CARGA CASO 1
3.1.1 Corrientes de la fuente por fases para cada método de compensación caso 1
4

3.1.2 Tablas de resultados carga caso 1
3.1.3 Análisis de datos caso 1
3.2 CARGA CASO 2
3.1.1 Corrientes de la fuente por fases para cada método de compensación caso 2
3.1.2 Tablas de resultados carga caso 2
3.1.3 Análisis de datos caso 2
3.3 CARGA CASO 3
3.1.1 Corrientes de la fuente por fases para cada método de compensación caso 3
3.1.2 Tablas de resultados carga caso 3
3.1.3 Análisis de datos caso 3
3.4 COMPARACION PSCAD Y MATLAB
CONCLUSIONES
BIBLIOGRAFIA
5

INTRODUCCIÓN
Una de las principales causas por la cual la energía disminuye su calidad es por
la presencia de armónicos en los circuitos reales y teniendo en cuenta el impacto
de la energía eléctrica en el mundo actual, se debe garantizar un correcto
funcionamiento en los diferentes elementos que conforman una red eléctrica
como en transformadores, generadores, inductancias, capacitancia ,etc.
Los armónicos son generados por equipos que operan bajo la conmutación
produciendo saltos en las corrientes, y ya que dentro de la demanda actual se
encuentra una variedad de productos electrónicos que generan armónicos, se ha
abierto un campo de estudio para crear formas de controlar estos.
El estudio de este problema origina soluciones basadas en compensadores que a
la vez se apoyan en teorías de compensación de armónicos cuyo objetivo es
minimizar las perturbaciones de las redes eléctricas. Ante la variedad de teorías se
origina una pregunta: ¿Cuál es la teoría más conveniente para minimizar la
presencia de armónicos en los sistemas de potencia?.
6

Existen casos en que una teoría sea más conveniente que otra, pero para dar una
respuesta a dicha inquietud se requiere de un estudio detallado de las teorías más
importantes y de la comparación entre ellas con resultados obtenidos mediante la
simulación para cada uno de los posibles casos en que los armónicos puedan
presentarse en un sistema de potencia.
Por medio de las diferentes herramientas de simulación que ofrece en medio el
que se vive hoy en día, como lo son entre otros PSCAD y Matlab, se han hecho
estudios de compensación de armónicos los cuales han llevado a resolver muchos
problemas de la calidad de energía que se tiene actualmente.
La simulación permite obtener resultados en los que se puede comparar el grado
de armónicos que tienen algunas cargas que se presentan en la industria, y
también permite comparar las ventajas que trae una teoría sobre otra y así decidir
cual funciona mejor en cada uno de los posibles casos.
7

1. ARMONICOS Y TEORIAS DE COMPENSACIÓN
Este capítulo se estudia algunas definiciones importantes para el desarrollo de
este estudio y algunas de las teorías más importantes para la compensación de
corrientes armónicas.
1.1 DEFINICIONES 1.1.1 Armónicos
Los armónicos son corrientes o voltajes cuyas frecuencias son múltiplos de la
frecuencia fundamental. Son un subproducto de la electrónica moderna
producidos por computadores, impresoras, motores de velocidad regulable,
equipos médicos, ascensores y otros equipos que absorben corriente en forma de
pulsos cortos. Se representa mediante la siguiente ecuación:
...)3cos()2cos()cos()( 332211 ++++++= θwtvθwtvθwtvtv
y en forma compacta como:
8

∑=
+=h
nnn θnwtvtv
1)cos()(
donde:
nv se le define como el armónico de orden n y
nθ como el ángulo de la armónica n
1.1.2 Clasificación de los armónicos
Cada armónico tiene asociado nombre, frecuencia y secuencia, de la siguiente
forma:
Nombre Fundamental 2° 3° 4° 5° 6° 7°
Frecuencia 60 120 180 240 300 360 420 (Hz)
Secuencia + - 0 + - 0 +
Normalmente, las ondas que circulan por la red tienen las mismas componentes
positivas que negativas (simetría), con lo cual no suelen aparecer armónicos de
orden par. Así, lo habitual es encontrarse con
Nombre F 3° 5° 7° 9° 11° 13°
Frecuencia 60 180 300 420 540 660 780 (Hz)
Secuencia + 0 - + 0 - +
9

La secuencia se refiere al giro del fasor con respecto a la fundamental (F),
expresado en otras palabras indica el sentido en que giraría el rotor de un motor,
al ser excitado por esa señal. Secuencia directa (+) indica que el sentido de giro es
el horario. Secuencia inversa (-) indica un sentido de giro antihorario. Secuencia
cero (0) indica que no gira.
Dependiendo de su secuencia y rotación, los armónicos presentan diferentes
efectos:
1. Secuencia (+): Rotación Directa, puede producir calentamiento de
conductores, rotura de circuitos, etc.
2. Secuencia (-): Rotación Inversa, produce un freno en el motor, además
calentamiento de conductores y pueden quemar los motores de inducción
trifásicos.
3. Secuencia (0): Los armónicos de secuencia cero (llamados normalmente
triplens) se suman al neutro de la red (si ésta es de cuatro hilos) y son los
causantes de sobrecalentamientos.
1.1.3 Fuentes de armónicos
Los sistemas eléctricos de potencia son muy vulnerables a la presencia de
armónicos debido a la conexión de cargas no lineales en los sistemas de
distribución. Estas son básicamente de dos tipos: monofásicas y trifásicas. En las
oficinas predominan las cargas monofásicas no lineales, mientras que en el ámbito
industrial, las más comunes son las cargas trifásicas.
10
Una carga es lineal cuando excitada por una tensión senoidal, la corriente que
circula por ella también es senoidal de la misma frecuencia (aunque puede variar
su amplitud o fase). Así, las cargas típicas (resistencias, inductancias y
capacitancias) se comportan de forma lineal.
Una carga es no lineal si conectada a la red eléctrica absorbe corrientes en
impulsos bruscos, los cuales crean ondas de corriente distorsionadas que originan
a su vez corrientes armónicas de retorno hacia otras partes del sistema de
alimentación.
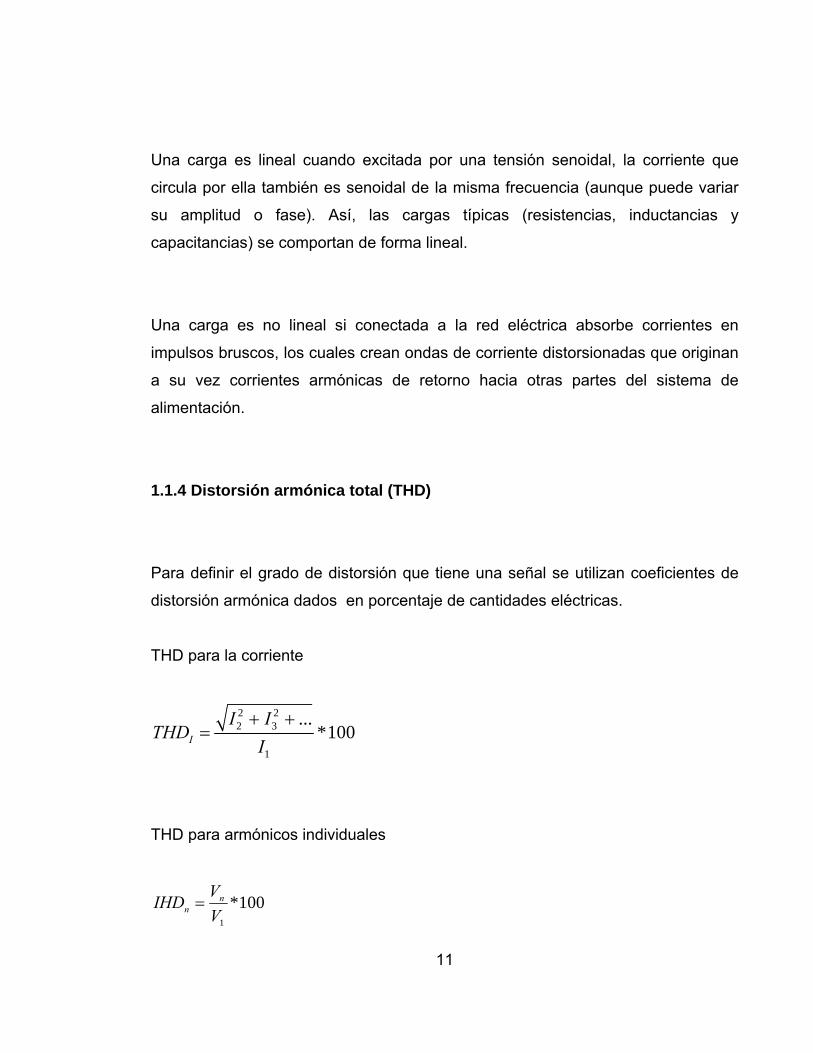
1.1.4 Distorsión armónica total (THD)
Para definir el grado de distorsión que tiene una señal se utilizan coeficientes de
distorsión armónica dados en porcentaje de cantidades eléctricas.
THD para la corriente
2 22 3
1
...*100I
I ITHD
I+ +
=
THD para armónicos individuales
100*1VVIHD n
n =
11

1.1.5 Índice de desbalance de corriente (IDC)
Cuantifica en magnitud la variación que existe entre las corrientes de línea, de las
corrientes de fase del sistema de potencia.
2rmsI
In
= ∑ ,Donde n representa él numero de fases.
1.1.6 Potencia activa y reactiva de un sistema trifásico
En un sistema trifásico los vectores instantáneos de voltaje (v ) y corriente ( i ) se
pueden definir como:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
c
b
a
vvv
v ; ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
c
b
a
iii
i
Los subíndices ‘a’, ‘b’ y ‘c’ denotan las fases respectivas.
La potencia activa instantánea del sistema está dada por:
[ ][ ]ivp .= (1)
12

Donde “.” Significa producto punto o producto escalar de vectores. La ecuación
anterior también se puede escribir como:
ccbbaa ivivivp ++=
La potencia reactiva instantánea se define como el producto cruz de los vectores
de voltaje y corriente, así:
[ ] [ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡==
c
b
a
qqq
ixvq (2)
⎥⎦
⎤⎢⎣
⎡=
cb
cba ii
vvq ⎥
⎦
⎤⎢⎣
⎡=
ac
acb ii
vvq ⎥
⎦
⎤⎢⎣
⎡=
ba
bac ii
vvq
q es un vector y su magnitud está dada por:
2 2a bq q q q= + + 2
c
1.1.7 Compensación de armónicos
13

La compensación de armónicos esta dividida en la compensación de voltaje o de
corriente de naturaleza armónica.
La compensación de voltaje armónico no es tan conocida, debido a que
normalmente los voltajes en el punto de acople del consumidor se mantiene dentro
de los limites permitidos para sobrevoltaje y distorsión armónica.
La compensación de corriente armónica es muy importante en aplicaciones de
baja y media potencia. La ventaja de aplicar la compensación de esta forma es
que reduce en gran parte la distorsión del voltaje en el punto de conexión de la
carga. Las corrientes armónicas pueden resultar muy malas para la red eléctrica,
producen perdidas y sobrecalentamiento en los transformadores, calentamientos
en los motores de inducción, perdidas en el cobre de los conductores por efecto
piel, perdidas dieléctricas en condensadores; pueden producir operaciones
anormales y fallas en los equipos, errores en los equipos de medida y efectos de
resonancia.
1.1.8 Tipos de compensación de armónicos
A partir de la existencia de armónicos dentro de las redes eléctricas, nace la
necesidad de crear soluciones a estos, ya sea tratando de eliminarlos o de
suavizar los efectos que tengan estos en la red. Dentro de las técnicas existentes
se encuentra el acondicionamiento pasivo y activo.
14

• Compensación pasiva
La compensación pasiva o acondicionamiento pasivo no busca eliminar las
corrientes armónicas del sistema, sino adecuar los elementos del sistema eléctrico
de manera que los equipos sean menos sensibles a la presencia de estos
armónicos.
• Compensación activa
Esta compensación se realiza mediante la instalación de sistemas de
acondicionamiento en las líneas como son transformadores conectados en forma
especial, filtros pasivos o filtros activos, ya sea para suprimir o contrarrestar los
armónicos en el sistema de potencia; estos métodos no logran eliminar totalmente
las corrientes de distorsión armónica.
1.1.9 Filtro activo
Los filtros activos como parte de los métodos de compensación activos en la
actualidad son de gran importancia dentro de la solución a este problema; estos
filtros son formados por equipo adicional basado en semiconductores, un método
de control que permite reducir los armónicos y deben operar en conjunto con un
filtro pasivo shunt para compensar los armónicos de la corriente de carga.
15

Los filtros activos pueden conectarse en forma shunt, serie o híbridos siendo una
combinación de ambos y pueden ser de dos, tres o cuatro hilos.
El estudio llevado a cabo se realiza con filtros activos en paralelo, basándose en el
principio de operación del filtro de potencia activo paralelo que generan corrientes
de igual magnitud y polaridad opuesta para que eliminen el contenido armónico y
finalmente se obtenga una señal sinusoidal pura.
El procesamiento que se le realiza a las señales se inicia con la transformación de
las corrientes de la carga a unas corrientes obtenidas por el método de control
que son las encargadas de producir los pulsos en el PWM para que el filtro activo
paralelo pueda inyectar las corrientes de compensación al sistema y eliminar o
suavizar el contenido armónico. Por lo tanto las características de compensación
dependen del método de control utilizado para calcular las corrientes de
compensación suministradas por el filtro activo.
1.2 TECNICAS DE COMPENSACION DE ARMONICOS CON FILTROS ACTIVOS
En las estrategias de control que existen para la compensación de armónicos con
filtros activos encontramos técnicas en el dominio del tiempo, de la frecuencia y
otro tipo de algoritmos donde se incluyen redes neuronales y técnicas adaptativas
de estimación.
16

Las técnicas que conciernen a este estudio son en el dominio del tiempo:
1. Teoría Cruz
2. Teoría Cruz Modificada
3. Teoría PQ
4. Teoría PQ Modificada
5. Teoría Id-Iq
6. Método de Detección Sincronía
7. Método de Hosseini
1.2.1 Teoría Cruz [6,7] La teoría cruz se basa en la descomposición de la corriente instantánea en dos
componentes ortogonales: corriente activa y corriente reactiva instantánea. Esta
teoría tuvo su origen en una nueva definición de potencia para formas de onda no
sinusoidales, teoría expuesta por Fryze en 1931, ya que se comprueba que la
definición clásica de potencia es contradictoria bajo régimen no sinusoidal,
entonces surgen diferentes teorías tratando de encontrar un significado físico al
flujo de potencia en éstas condiciones.
La ecuación de potencia sugerida por Fryze está basada en la descomposición de
corrientes dentro de componentes ortogonales en el dominio del tiempo. Él definió
una corriente activa ia como una componente de corriente que tiene la forma de
onda como el voltaje y una corriente pasiva ib ortogonal a ia .
17

uuPia 2∆
ab iii −∆
Como estas dos corrientes son mutuamente ortogonales, su producto escalar es
igual a cero, así:
222
ba iii +=
Multiplicando esta ecuación por 2u se obtiene la ecuación de potencia
222
FQPS +=
Con la definición de potencia reactiva:
bF iuQ ⋅∆
La teoría cruz de compensación de corriente armónica en un sistema trifásico se
basa en el cálculo de la potencia activa y reactiva instantáneas de la carga ( y
). Luego se hallan las potencias de referencia ( y ) necesarias para el
cálculo de las corrientes de compensación.
Lp
lq cp cq
Se calcula las potencias activa y reactiva de la carga ( y ) mediante (1) y (2),
estas dos cantidades se pueden descomponer en dos partes ( un valor DC y un
valor AC) así :
Lp lq
lll ppp ~+= , lll qqq ~+=
18

Donde lp y lq son la potencia activa y reactiva promedio (valores DC) originados
de la componente de secuencia positiva de la corriente de carga. lp es la
potencia activa promedio entregada a la carga, y lq es la potencia reactiva
promedio que circula entre las fases.
lp~ y lq~ son la potencia activa y reactiva de rizado (valores AC) que se deben a la
presencia de armónicos y a la componente de secuencia negativa de la corriente
de carga. lp~ representa la potencia que oscila entre la fuente y la carga, mientras
que lq~ indica la potencia que oscila entre las fases.
Para compensación de armónicos
lc pp ~= y lc qq ~=
Luego de hallar las potencias de compensación y , se procede a realizar el
calculo de las corrientes de compensación
cp cq
vvxvqv
vvpi cc
c ..+= (3)
19

1.2.2 Teoría Cruz Modificada [8]
La teoría cruz modificada también se basa en el calculo de las corrientes activa y
reactiva con la diferencia que el calculo de las potencias se realiza en la fuente y
no en la carga.Se puede obtener el vector corriente instantáneo de la fuente en
términos de la potencia activa y reactiva de la fuente, como sigue:
ss
ss
ss
sssqsps vv
xvqvvvp
iii..
+=+= (4)
Figura 1. Diagrama esquemático de un sistema de compensación trifásico con
filtro activo
En la figura 1, se observa que:
sjljfj iii −= , j=a,b,c
20

Aplicando la definición de la ecuación (2) y reemplazando en (4) se derivan las
expresiones para las corrientes de compensación del filtro activo. Así:
)(
,,
sbscscsbsas
cbajsj
lafa vqvqvpv
ii −+−=∑=
2
1
)(
,,
scsasascsbs
cbajsj
lbfb vqvqvpv
ii −+−=∑=
2
1
)(
,,
sasbsbsascs
cbajsj
lcfc vqvqvpv
ii −+−=∑=
2
1
1.2.3. Teoría PQ [9]
Conocida en ingles como: PQ Theory, Instantaneous Power Theory, Instantaneous
Active and Reactive Power Method ó Instantaneous Reactive Power Algorithm.
Esta teoría es uno de los primeros esquemas de compensación. La primera
publicación en inglés es el trabajo realizado por Akagi, Kanazawa y Nabae en
1983. [10.11]
De acuerdo a esta teoría las corrientes del filtro activo se obtienen de la potencia
activa y reactiva de la carga no lineal mediante cálculos previos que relacionan los
voltajes y corrientes de carga en un marco de referencia estacionario.
21

La teoría PQ se basa en la transformada , también conocida como la
Transformada de Clarke. Las corrientes y tensiones instantáneos se transforman
al sistema de ejes mediante:
0αβ
0αβ
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
c
b
a
β
α
vvv
vvv
23
230
21
211
21
21
21
320
;
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
c
b
a
β
α
iii
iii
23
230
21
211
21
21
21
320
donde , y son los voltajes de fase e , y son las corrientes de línea. av bv cv ai bi ci
La transformada inversa está dada por:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
β
α
c
b
a
vvv
vvv 0
23
21
21
23
21
21
012
1
32
;
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
β
α
c
b
a
iii
iii 0
23
21
21
23
21
21
012
1
32
En coordenadas a-b-c: los ejes a,b,c están fijos en el mismo plano separados
entre ellos 32π . En coordenadas : los ejes son ortogonales entre sí.
Una ventaja de aplicar la transformación , es que separa las componentes de
frecuencia cero al ubicarlas en el eje de secuencia cero. Si el sistema es de tres
hilos (no tiene conductor de neutro) no se tiene entonces componentes de
0αβ 0,, βα
0αβ
22

secuencia cero, por lo que la corriente y el voltaje se pueden eliminar de las
ecuaciones anteriores. En este caso las componentes , , , se expresan
como:
0i ov
αv βv αi βi
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−−=⎥
⎦
⎤⎢⎣
⎡
c
b
a
β
α
vvv
vv
23
230
21
211
32
;
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−−=⎥
⎦
⎤⎢⎣
⎡
c
b
a
β
α
iii
ii
23
230
21
211
32
Después de la transformación de voltajes y corrientes a coordenadas , sigue
el cálculo de los componentes de potencia instantánea de la teoría PQ. Donde:
0αβ
000 ivp = ; Potencia instantánea de secuencia cero
ββαα ivivp += ; Potencia real instantánea
βααβ ivivq −= ; Potencia imaginaria instantánea (por definición)
Las componentes y se relacionan con los mismos voltajes y corrientes .
Se pueden escribir juntos como:
p q αβ
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
=⎥⎦
⎤⎢⎣
⎡
β
α
αβ
βα
ii
vvvv
qp
(5)
donde es la potencia real instantánea y representa la energía total por unidad
de tiempo que pasa por el sistema de tres hilos, mientras que es la potencia
imaginaria instantánea y da la medida de la cantidad de corriente o potencia que
fluye en cada fase sin transportar energía en ningún instante.
p
q
23

En el caso de un sistema cuya fuente de tensión es de secuencia positiva y en el
que la carga es balanceada (inductiva o capacitiva), la potencia reactiva definida
en (5) tendrá el mismo signo y la misma magnitud que la potencia calculada
usando la definición clásica de potencia reactiva (Q=3VISenΦ).
En el caso de cargas no lineales, las potencias real e imaginaria pueden dividirse
en componentes medios ( p y q ) y oscilatorios ( y ). El componente medio o
DC representa la potencia fundamental mientras que la componente oscilatoria se
relaciona con la potencia armónica. En forma matricial se tiene:
p~ q~
⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡qp
qp
qp
~~
Para obtener una corriente sinusoidal se debe compensar las componentes
armónicas de las potencias
ppc ~= ; qqc ~=
Las corrientes de compensación en coordenadas son αβ
2 2
1c c
c c
i v v pi v v qv vα α
β β αα β
−⎡ ⎤ ⎡ ⎤β ⎡ ⎤−=⎢ ⎥ ⎢ ⎥ ⎢ ⎥+ ⎣ ⎦⎣ ⎦ ⎣ ⎦
Aplicando la transformada inversa, las corrientes trifásicas de compensación se
obtienen mediante:
24
⎥⎦
⎤⎢⎣
⎡
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
β
α
c
b
a
ii
iii
23
21
23
21
01
32
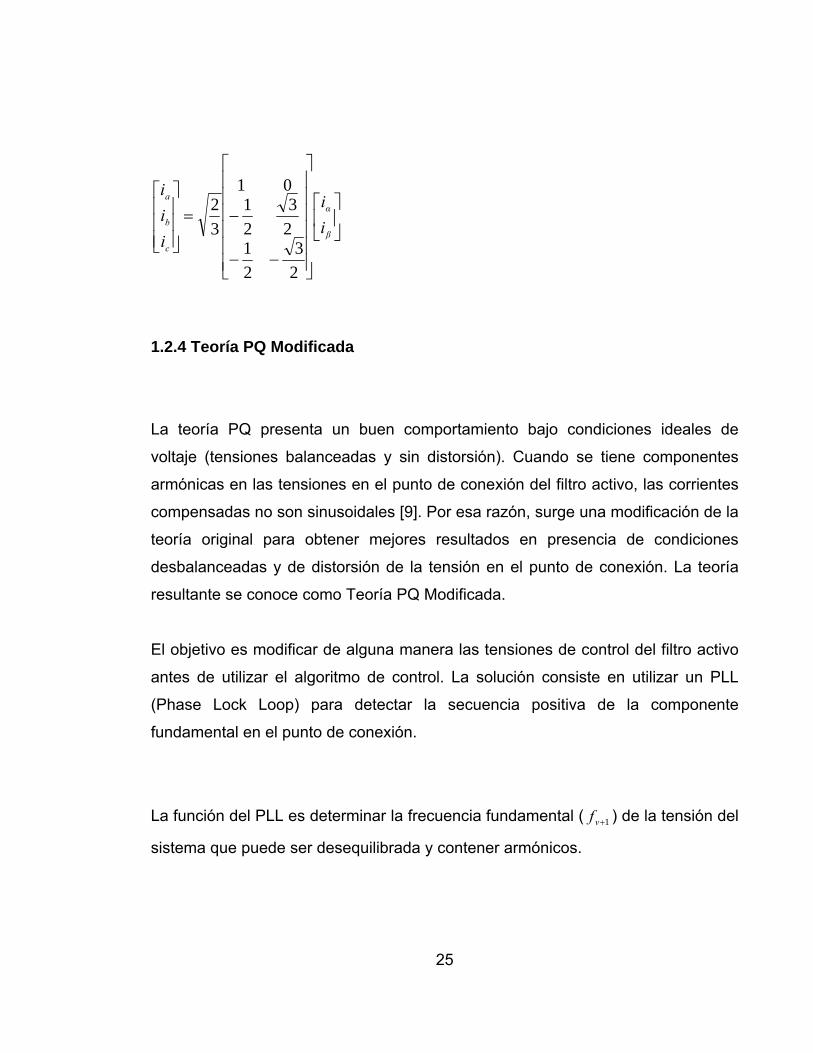
1.2.4 Teoría PQ Modificada La teoría PQ presenta un buen comportamiento bajo condiciones ideales de
voltaje (tensiones balanceadas y sin distorsión). Cuando se tiene componentes
armónicas en las tensiones en el punto de conexión del filtro activo, las corrientes
compensadas no son sinusoidales [9]. Por esa razón, surge una modificación de la
teoría original para obtener mejores resultados en presencia de condiciones
desbalanceadas y de distorsión de la tensión en el punto de conexión. La teoría
resultante se conoce como Teoría PQ Modificada.
El objetivo es modificar de alguna manera las tensiones de control del filtro activo
antes de utilizar el algoritmo de control. La solución consiste en utilizar un PLL
(Phase Lock Loop) para detectar la secuencia positiva de la componente
fundamental en el punto de conexión.
La función del PLL es determinar la frecuencia fundamental ( ) de la tensión del
sistema que puede ser desequilibrada y contener armónicos.
1+vf
25

La frecuencia fundamental obtenida es la señal de entrada de un generador de
senos que produce tres señales auxiliares ( ) de frecuencia . La amplitud
y el ángulo de fase no son importantes para el funcionamiento del detector, pero
deben tener igual amplitud y el ángulo entre ellas debe ser 120º. A éstas corrientes
y a las tensiones del sistema se les aplica la transformada de Clarke y luego se
calculan las potencias
''' ,, cba iii 1+vf
p y . De esas potencias interesa el valor medioq 'p y 'q .Estas potencias medias sólo tienen la secuencia positiva de la fundamental
debido a que las corrientes e sólo tienen esta componente.
1+V'' , ba ii
'ci
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−−+
=⎥⎦
⎤⎢⎣
⎡,
,
,,
,,
2,2,,
, 1qp
iiii
iivv
αβ
βα
βαβ
α
El bloque que calcula las tensiones de referencia realiza la operación que es la
operación inversa a (5). Los valores instantáneos de los voltajes ( v ) de la
secuencia positiva de la fundamental se determinan utilizando la transformada
inversa de Clarke.
''' ,, cba vv
Figura 2. Circuito del PLL.
El circuito de la figura 2 es el que se presenta en [12], y funciona como un PLL.
26

El diagrama de bloques es el mismo de la Teoría PQ excepto que los voltajes de
línea ( , y ), se cambian por los voltajes primados obtenidos mediante el
detector de secuencia positiva.
av bv cv
1.2.5 Teoría Id-Iq [16,17]
En este método las corrientes ciI son obtenidas a partir de las componentes de
corriente activa y reactiva (corriente Id e Iq) de cargas no lineales, al mismo tiempo
las señales de voltaje y de corriente son calculadas por medio de las
componentes αβ (Transformación de Clarke), mientras que las componentes de
corriente de carga (Id-Iq) se derivan de un marco de rotación sincrona basado en
la transformación de Park, donde θ representa el vector del ángulo de los voltajes
instantáneos.
iv ii
coscos
d
q
ii senii senα
β
θ θθ θ
⎡ ⎤⎡ ⎤ ⎡ ⎤= ⎢ ⎥⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦ ⎣ ⎦
1tanv
vβ
α
θ − ⎛ ⎞= ⎜
⎝ ⎠⎟
La Figura (3) muestra los vectores espaciales de voltaje y corriente en el estado
estacionario (αβ) y el marco de rotación (dq). Bajo condiciones de voltaje
sinusoidal y de balanceo el ángulo θ crece uniformemente en función del tiempo,
pero se debe tener mucho cuidado pues en la transformación, el ángulo se vuelve
sensible a los armónicos presentes las señales de voltaje y al desbalanceo en la
carga, por lo tanto dθ/dt no puede ser constante en los periodos de las señales
que lo originan.
27

Figura 3. Vectores espaciales de voltaje y corriente en el sistema estacionario (αβ)
y en el marco de referencia sincrono (dq).
Con la primera transformación la componente de voltaje es
2d dqv v v v v 2
αβ α= = = + β y la componente de cuadratura de voltaje siempre
es nula , así debido a las relaciones geométricas se convierte en: 0qv =
2 2
1d
q
v v ilil
ilil v vv v
α β α
ββ αα β
⎡ ⎤ ⎡ ⎤⎡ ⎤= ⎢ ⎥ ⎢ ⎥⎢ ⎥
−⎢ ⎥ ⎢ ⎥+ ⎢ ⎥⎣ ⎦ ⎣ ⎦⎣ ⎦
Las corrientes instantáneas de carga activa y reactiva y pueden
descomponerse en sus componentes oscilatorio y promedio y
. El primer armónico de corriente de secuencia positiva es
transformado en cantidades dc (cantidades constantes), , estos constituyen
los componentes de corriente promedio. Todas las componentes de corriente de
un alto orden armónico, incluyendo el primer armónico de corriente de secuencia
negativa, , son transformados en cantidades ac (cantidades
dil qil
d dil il Il= + d
qq qil il Il= +
1d q hil +
1d qnh d q hil il± −+
28
variables), las cuales que son afectadas por el espectro de frecuencia y que
constituyen las componentes de corriente oscilatorias. Estas suposiciones son
validas bajo condiciones de balanceo y voltajes sinusoidales. La componente de
corriente promedio se elimina por medio de un filtro pasaalto, de este modo la
corriente obtenida será la compensada d dic il= − y . Finalmente
mediante la transformada inversa dqo y la transformada inversa de Clarke se
obtienen las corrientes de compensación en el sistema de coordenadas abc.
qic il= − q
2 2
1 d
q
v vic ic
ic icv vv v
α βα
β β αα β
−⎡ ⎤⎡ ⎤ ⎡ ⎤= ⎢ ⎥⎢ ⎥ ⎢ ⎥
⎢ ⎥⎢ ⎥ + ⎢ ⎥ ⎣ ⎦⎣ ⎦ ⎣ ⎦
1 11
2 2 23 3 3
02 2
T
a
b
c
icic
icic
ic
α
β
⎡ ⎤⎡ ⎤ − −⎢ ⎥ ⎡ ⎤⎢ ⎥ ⎢ ⎥= ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦⎢ ⎥ −⎢ ⎥⎣ ⎦ ⎣ ⎦
Una de las características más importantes del método Id-Iq , es que las corrientes
de compensación son calculadas directamente sobre las señales de voltaje, así el
método se vuelve independiente de la frecuencia.
1.2.6 Método de Detección Síncrono [18]
La idea del método de detección síncrono es original de sistemas de
comunicación, y recientemente aplicado a sistemas de potencia. El desarrollo
matemático es muy simple. Además, no necesita transformación de coordenadas.
29

Para definir el algoritmo, se asumen corrientes trifásicas balanceadas después de
la compensación. Así:
a b cI I I= =
Donde, bI e cI son los valores pico de las corrientes del sistema de potencia
trifásico después de la compensación.
La potencia real consumida por la carga puede ser representada como:
[ ]a
a b c b
c
ip v v v i
i
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
La potencia real p es enviada a un filtro pasabajo para obtener su valor promedio
( ) . La potencia real es luego dividida en las tres fases de alimentación: dcP
dc aa
tot
P VPV
= , dc bb
tot
P VPV
= , dc cc
tot
P VPV
=
Donde, y es la amplitud de los voltajes de fase, y es la suma de, y. bV cV totV bV
Las corrientes deseadas se calculan como:
30

2
2
a
aama V
Pvi = , 2
2
b
bbma V
Pvi = , 2
2
c
ccma V
Pvi =
Luego, se pueden calcular las corrientes de compensación como:
maaca iii −=
mbbcb iii −=
mcccc iii −=
1.2.7 Método de Hosseini [19]
Este método de compensación de corrientes armónicas se basa en la
transformación de las corrientes de la fuente a partir de un vector unitario
obtenido con los voltajes trifásicos de la fuente.
Las corrientes trifásicas de la carga con componente armónica son:
multiplicando por iLa y sin (wt) se obtiene:
31

multiplicando por iLa y cos (wt) se obtiene:
+
La componente DC se puede obtener con un filtro pasabajo y entonces I1se
obtiene de las ecuaciones anteriores.
donde: I1 es la amplitud fundamental de la corriente de carga. Se calcula la amplitud del voltaje de la fuente así
Con la magnitud de la amplitud del voltaje de la fuente se calcula un vector unitario
para el voltaje trifásico de la fuente en coordenadas abc.
Entonces se calculan las nuevas corrientes i*sa, i*sb, i*sc multiplicando el vector
unitario por la amplitud de la corriente fundamentar de la carga.
32

Y como se puede observar en la figura 1, la corriente de compensación entregada
por el filtro activo es
33

2. MODELAMIENTO DEL SISTEMA Y ALGORITMOS DE
COMPENSACIÓN
En este capítulo se hace el modelamiento del sistema de potencia con las
condiciones para la simulación, la implementación del mismo y de algunas de las
más importantes teorías de compensación de armónicos en el software Matlab en
su versión 2006 b.
2.1 MATLAB
Matlab es la abreviatura de Matrix Laboratory (laboratorio de matrices). Es un
programa de matemáticas creado por The MathWorks en 1984. Está disponible
para las plataformas Unix, Windows y MAC. Se pueden ampliar sus capacidades
con Toolboxes, algunas de ellas están destinadas al procesado digital de señal,
adquisición de datos, economía, inteligencia artificial, lógica difusa. También
cuenta con otras herramientas como Simulink, que sirve para simular sistemas. La
primera versión surgió con la idea de emplear unos paquetes de subrutinas
escritas en Fortran en los cursos de álgebra lineal y análisis numérico, sin
necesidad de escribir programas en Fortran. Usa un lenguaje de programación
creado en 1970 para proporcionar un sencillo acceso al software de matrices
LINPACK y EISPACK sin tener que usar Fortran. También tiene su propio
compilador. Es un software muy usado en universidades, centros de investigación
34

y por ingenieros. En los últimos años ha incluido muchas más capacidades, como
la de programar directamente procesadores digitales de señal, crear código VHDL
y otras.
MATLAB es un programa de cálculo numérico, orientado a matrices y vectores.
Por tanto desde el principio hay que pensar que todo lo que se pretenda hacer con
él, será mucho más rápido y efectivo si se piensa en términos de matrices y
vectores. Uno de sus puntos fuertes para la elaboración de este proyecto es la
herramienta simulink, que permite el uso directo en una representación grafica de
los componentes más habituales en los sistemas eléctricos, además de los nuevos
bloques y componentes que presenta en su versión 2006 b como el filtro activo.
2.2. CONFIGURACIÓN PARA LA SIMULACIÓN
2.2.1 Configuración del sistema
La configuración del sistema de potencia se hace como un sistema típico de
potencia con generación, distribución y transmisión, con características cercanas a
las reales y tener así un sistema aproximado al real. Cabe destacar que Matlab
2006b cuenta con muchas variables a ajustar en cada componente. La
configuración implementada se observa en la figura 4.
35

Figura 4. Configuración implementada en la simulación.
La fuente de voltaje trifásica es balanceada en serie con un brazo RL, de 13.2 kV
a 60 Hz con conexión interna Yg.
El transformador trifásico de 250 MVA tiene conexión el devanado primario D1, en
el secundario Yn, a relación de 13.2 kV/220 V.
2.2.2 Carga
Para estudiar los métodos de compensación de armónicos se definieron tres tipos
de carga, balanceada con contenido armónico y desbalanceada con y sin
contenido armónico.
36

CASO 1 Carga balanceada con un puente rectificador trifásico de seis pulsos con carga RL
(R=10 Ω, L=0.01 H) como aparece en la figura 5.
Figura 5. Carga caso 1
CASO 2
Cargas monofásicas con resistencia e inductancia desbalanceada con contenido
armónico.
37

Cuadro 1. Impedancias por fase casos 2 y 3
FASE A FASE B FASE C
R=12Ω, L=0.02 H R=7Ω, L=0.2 H R=12Ω, L=0.1 H
Figura 6. Carga caso 2
CASO 3
Carga desbalanceada con resistencia e inductancias con valores RL como
aparecen en el cuadro 1.
38

Figura 7. Carga caso 3
2.2.3 Filtro activo
La configuración para la conexión del filtro activo consta de un transformador
trifásico de acople de 220 kVA que tiene conexión YY, a relación de 220/220 V,
un filtro pasivo LC (L= 20 mH, C=7.1798 µf), el filtro activo y una fuente DC de
300 V. Como aparece en la figura 8.
39

Figura 8. Configuración para la conexión del filtro activo.
El filtro activo es un bloque de Matlab 2006b llamado Universal Bridge donde se
puede seleccionar él numero de pulsos de disparo, el dispositivo electrónico para
la configuración que en este caso es IGBT con diodos de protección de
sobrecorriente, los valores de resistencia y capacitancia de snubber. El
dispositivo es alimentado por los pulsos de disparo que entrega el PWM después
de procesar las señales de compensación que producen los diferentes métodos.
El PWM para este estudio se hizo mediante un algoritmo, a pesar que Matlab
2006b cuenta con este bloque no se utilizo finalmente porque no arrojo los
resultados esperados. El algoritmo implementado lo que hace es comparar cada
señal entregada por el método de compensación con una señal triangular de
40

frecuencia 660 Hz o 11 veces la frecuencia fundamental adaptada a cada caso la
amplitud de acuerdo a las amplitudes de las tres corrientes de compensación de
tal forma que la señal triangular envolviera las tres corrientes y finalmente producir
una serie de seis pulsos para alimentar el filtro activo.
ALGORITMO PARA EL PWM
function[output]=pwm(input)
Fa=input(1);
Fb=input(2);
Fc=input(3);
triangular=input(4);
if Fa>triangular
S1=1;
S4=0;
else S1=0;
S4=1;
end
if Fb>triangular
S3=1;
S6=0;
else S3=0;
S6=1;
end
if Fc>triangular
S5=1;
S2=0;
else S5=0;
S2=1;
end
output(1)=S1;
output(2)=S4;
41

output(3)=S3;
output(4)=S6;
output(5)=S5;
output(6)=S2;
Para ejecutar el algoritmo se hace un subsistema donde se encuentran las
entradas, salidas y el llamado a la función PWM como se observa en la figura 9.
Figura 9. Subsistema PWM.
2.3 ALGORITMOS DE LOS METODOS DE COMPENSACIÓN DE ARMONICOS
Cada teoría se implementa como un subsistema, donde se ingresan las entradas
al subsistema que ejecuta el método y entrega la salida que en este caso seria la
serie de seis pulsos. En casi todos los casos se realiza un filtrado de p y/o q para
eliminar la componente DC, dividiendo el algoritmo en dos partes.
42

2.3.1 Teoría Cruz
function[output]=cruz(input)
va=input(1);
vb=input(2);
vc=input(3);
ia=input(4);
ib=input(5);
ic=input(6);
v=[va;vb;vc];
i=[ia;ib;ic];
p=dot(v,i);
qa=(vb*ic-vc*ib);
qb=(vc*ia-va*ic);
qc=(va*ib-vb*ia);
output(1)=p;
output(2)=qa;
output(3)=qb;
output(4)=qc;
function[output]=cruzb(input)
va=input(1);
vb=input(2);
vc=input(3);
ifa=input(4);
ifb=input(5);
ifc=input(6);
pf=input(7);
qaf=input(8);
qbf=input(9);
qcf=input(10);
43

v=[va;vb;vc];
qf=[qaf;qbf;qcf];
ip=(pf*v)/(dot(v,v));
iq=(cross(qf,v))/(dot(v,v));
iref=ip+iq;
ierrora=iref(1,1)-ifa;
ierrorb=iref(2,1)-ifb;
ierrorc=iref(3,1)-ifc;
output(1)=ierrora;
output(2)=ierrorb;
output(3)=ierrorc
Figura 10. Subsistema Teoría Cruz
44

2.3.2 Teoría Cruz Modificada
ificada(input)
;
3);
=input(4);
b=input(8);
function[output]=cruzmod
vsa=input(1);
vsb=input(2)
vsc=input(
ia
ib=input(5);
ic=input(6);
isa=input(7);
is
isc=input(9);
ifa=input(10);
45

ifb=input(11);
ifc=input(12);
vs=[vsa;vsb;vsc];
is=[isa;isb;isc];
i=[ia;ib;ic];
ps=dot(vs,is);
qs=cross(vs,is);
isp=(ps*vs)/(dot(vs,vs));
isq=(cross(qs,vs))/(dot(vs,vs));
isr=isp+isq;
iref=i-isr;
ierrora=-iref(1,1)-ifa;
ierrorb=-iref(2,1)-ifb;
ierrorc=-iref(3,1)-ifc;
output(1)=ierrora;
output(2)=ierrorb;
utput(3)=ierrorc;
igura 11. Subsistema Teoría cruz modificada
o
F
46

2.3.3 Teoría PQ
b=input(2);
=input(6);
e clarke
(va-0.5*vb-0.5*vc);
(0.866025*vb)-(0.866025*vc));
-0.5*ib-0.5*ic);
function[output]=pq(input)
va=input(1);
v
vc=input(3);
ia=input(4);
ib=input(5);
ic
%transformada d
valpha=sqrt(2/3)*
vbeta=sqrt(2/3)*(
ialpha=sqrt(2/3)*(ia
47
ibeta=sqrt(2/3)*((0.866025*ib)-(0.866025*ic));
=(valpha*ialpha+vbeta*ibeta);
=(vbeta*ialpha-valpha*ibeta);
output(1)=valpha;
output(2)=vbeta;
output(3)=p;
output(4)=q;
function[output]=pqb(input)
valpha=input(1);
vbeta=input(2);
pf=input(3);
qf=input(4);
ifa=input(5);
ifb=input(6);
ifc=input(7);
k=(-1/((valpha*valpha)+(vbeta*vbeta)));
icalpha=k*((-valpha*pf)+(vbeta*qf));
icbeta=k*((vbeta*pf)+(valpha*qf));
efa=sqrt(2/3)*(icalpha);
efb=sqrt(2/3)*((-0.5*icalpha)+(0.866025*icbeta));
5*icbeta));
rrora=irefa-ifa;
rrorb=irefb-ifb;
%calculo de p y q
p
q
%calculo de pc y qc
ir
ir
irefc=sqrt(2/3)*((-0.5*icalpha)-(0.86602
ie
ie
ierrorc=irefc-ifc;
output(1)=ierrora;
output(2)=ierrorb;
output(3)=ierrorc;
48

Figura 11. Subsistema Teoría PQ
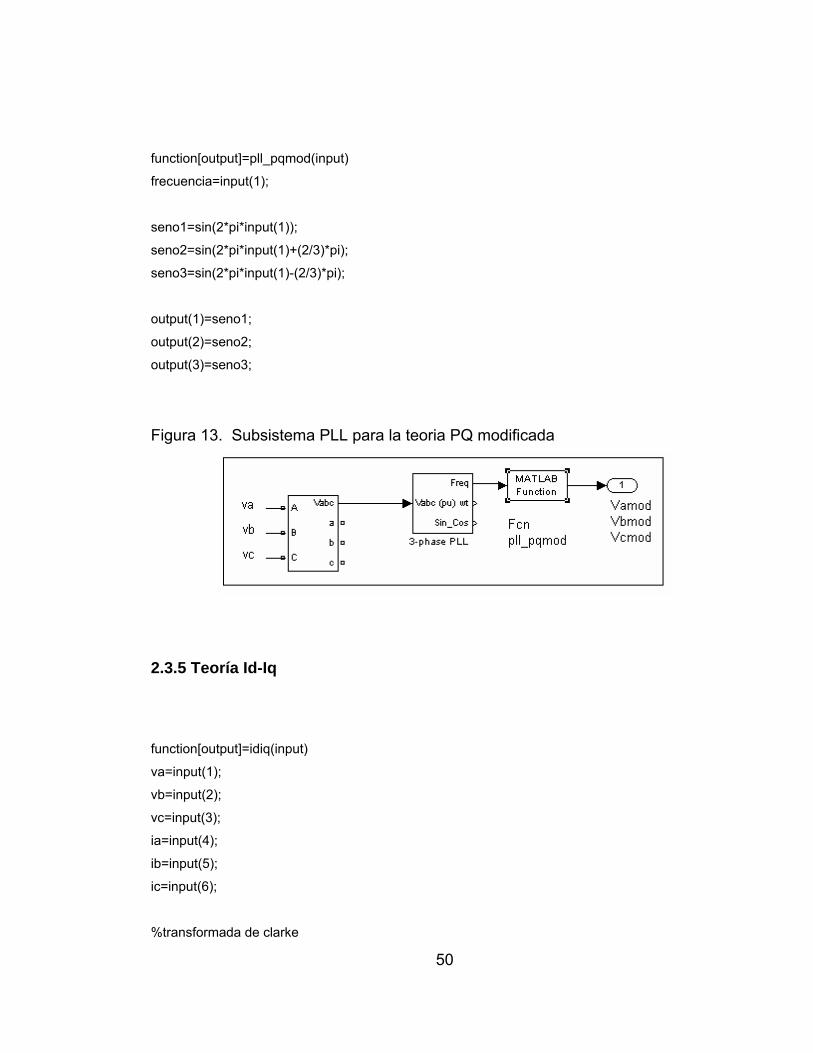
2.3.4 Teoría PQ modificada
modificación a la teoría PQ con un PLL que modifica los tres
oltajes de la carga (va, vb, vc) de forma que determina la frecuencia fundamental
e la tensión del sistema que puede ser desequilibrada y contener armónicos y
positiva de la componente fundamental en el punto de
modificar de alguna manera la tensión de control del filtro
s de utilizar la teoría PQ.
Esta teoría es una
v
d
detectar la secuencia
conexion para poder
activo ante
49
function[output]=pll_pqmod(input)
ut(1);
utput(2)=seno2;
ra la teoria PQ modificada
frecuencia=inp
seno1=sin(2*pi*input(1));
seno2=sin(2*pi*input(1)+(2/3)*pi);
seno3=sin(2*pi*input(1)-(2/3)*pi);
output(1)=seno1;
o
output(3)=seno3;
Figura 13. Subsistema PLL pa
2.3.5 Teoría Id-Iq
ut]=idiq(input)
a=input(1);
3);
);
%transformada de clarke
function[outp
v
vb=input(2);
vc=input(
ia=input(4
ib=input(5);
ic=input(6);
50

valpha=sqrt(2/3)*(va-0.5*vb-0.5*vc);
025*vb)-(0.866025*vc));
dqo
beta)/(abs(valpha)));
+sin(ang)*ibeta;
+cos(ang)*ibeta;
utput(2)=vbeta;
utput(3)=id;
function[output]=idiqb(input)
valpha=input(1);
vbeta=input(2);
idf=input(3);
iqf=input(4);
ifa=input(5);
ifb=input(6);
ifc=input(7);
%corrientes de compensacion
icd=-idf;
icq=-iqf;
%transformada inversa dqo
icalpha=(1/(sqrt(valpha*valpha+vbeta*vbeta))*(valpha*icd-vbeta*icq));
icbeta=(1/((sqrt(valpha*valpha+vbeta*vbeta))*(vbeta*icd+valpha*icq)));
%transformada inversa alphabeta
ica=sqrt(2/3)*icalpha;
b=sqrt(2/3)*(-0.5*icalpha+0.866025*icbeta);
c=sqrt(2/3)*(-0.5*icalpha-0.866025*icbeta);
vbeta=sqrt(2/3)*((0.866
ialpha=sqrt(2/3)*(ia-0.5*ib-0.5*ic);
ibeta=sqrt(2/3)*((0.866025*ib)-(0.866025*ic));
%transformada
ang=atan(abs(v
id=cos(ang)*ialpha
iq=-sin(ang)*ialpha
output(1)=valpha;
o
o
output(4)=iq;
ic
ic
51

ierrora=ica-ifa;
rrorb=icb-ifb;
ra;
rb;
rc;
Subsistema Teoría PQ modificada
ie
ierrorc=icc-ifc;
output(1)=ierro
output(2)=ierro
output(3)=ierro
Figura 14.
2.3.6 Método de Detección Sincrona
ut)
function[output]=ds(inp
52
va1=input(1);
=input(5);
=dot(v,i);
1;
utput(3)=vb1;
nction[output]=dsb(input)
b1=input(3);
c1=input(4);
a=input(5);
c=input(7);
=input(8);
=input(9);
=input(10);
=input(11);
put(12);
b=input(13);
c=input(14);
vb1=input(2);
vc1=input(3);
ia=input(4);
ib
ic=input(6);
v=[va1;vb1;vc1];
i=[ia;ib;ic];
p
output(1)=p;
output(2)=va
o
output(4)=vc1;
fu
pdc=input(1);
va1=input(2);
v
v
if
ifb=input(6);
if
ia
ib
ic
d
ma=in
m
m
53

d=ma+mb+mc;
ima=2*va1*pdc/d*ma;
imb=2*vb1*pdc/d*mb;
imc=2*vc1*pdc/d*mc;
ica=ia-ima;
icb=ib-imb;
icc=ic-imc;
ierrora=ica-ifa;
ierrorb=icb-ifb;
ierrorc=icc-ifc;
output(1)=ierrora;
output(2)=ierrorb;
output(3)=ierrorc;
Subsistema Teoría Detección Sincrona
Figura 15.
54

2.3.7 Método de Hosseini
hoss(input)
c=input(3);
a=input(7);
b=input(8);
c=input(9);
function[output]=
vsa=input(1);
vsb=input(2);
vs
ia=input(4);
ib=input(5);
ic=input(6);
is
is
is
55

ifa=input(10);
ifb=input(11);
ifc=input(12);
I1=input(13);
vm=sqrt((2/3)*(vsa*vsa+vsb*vsb+vsc*vsc));
is=[isa;isb;isc];
i=[ia;ib;ic];
usa=vsa/vm;
usb=vsb/vm;
usc=vsc/vm;
isan=I1*usa;
isbn=I1*usb;
iscn=I1*usc;
a=isan-ia;
b=isbn-ib;
c=iscn-ic;
rrorb=-icb-ifb;
rrorc=-icc-ifc;
igura 16. Subsistema método de Hosseini
ic
ic
is
ierrora=-ica-ifa;
ie
ie
output(1)=ierrora;
output(2)=ierrorb;
output(3)=ierrorc;
F
56

2.4 BLOQUES DE MEDIDA
e implementan dos bloque para realizar las mediciones necesarias para este
subsistema para medir el THD7 teniendo en cuenta los siete primeros
rmónicos que son los más importantes y los que más daños causan y un
ubsistema para la medición del índice de desbalance de corriente. También se
man medidas del bloque THD de Matlab 2006b donde el calculo se realiza con
dos los armónicos.
LGORITMO THD7
S
estudio, el
a
s
to
to
A
57

function[output]=thd(input)
a1=i put(1);
a2=i put(2);
a3=input(3);
a4=input(4);
a5=input(5);
6=input(6);
utput(1)=thd;
=input(1);
=input(2);
nput(3);
(sqrt(ia*ia+ib*ib+ic*ic))/3;
n
n
a
a7=input(7);
thd=(sqrt(a2*a2+a3*a3+a4*a4+a5*a5+a6*a6+a7*a7)/+a1)*100;
o
ALGORITMO INDICE DE DESBALANCE DE CORRIENTE
function[output]=des(input)
ia
ib
ic=i
I=
output(1)=I;
58

3. ANALISIS DE RESULTADOS
En este capitulo se muestran los resultados de la simulación de los algoritmos de
compensación de armónicos implementados en Matlab 2006b y un análisis
detallado de estos.
El estudio parte de unos datos Iniciales donde cada una de las condiciones de
arga se implementa sin compensación de armónicos con filtros activos y
a teoría y se obtienen las mediciones del THD
total, THD7, IDC, señales de las corrientes de carga y en la fuente.
3.1 CARGA CASO 1
El caso 1 es una carga balanceada con contenido armónico ya definida en el
capitulo 2. Se presentan a continuación los resultados previos a la compensación
es decir, sin el filtro activo ni métodos de compensación de armónicos.
Corrientes de carga caso 1 sin compensar:
c
posteriormente se implementa cad
59

Corrientes de la fuente por fases
60

3.1.1 Corrientes de la fuente por fases para cada método de compensación caso 1 Teoría cruz
Teoría cruz modificada
61

Teoría PQ
Teoría PQ modificada
62

Teoría Id-Iq
Método de detección sincrona
63

Método de Hosseini
3.1.2 Tablas de resultados carga caso 1 MAGNITUD DEL THD Matlab Y THD
7
uadro 2. THD y THD 7 para el caso 1
FASE THD MATLAB THD7
C
CIRCUITO A 30,4 24,6 SIN B 30,41 24,6 COMPENSAR C 30,4 24,6 THD RP(%) THD7 RP(%) TEORIA CRUZ A 23,58 22,4 19,29 21,6 B 23,13 23,9 18,38 25,4 C 22,6 25,7 18,06 26,6TEORIA CRUZ A 17,83 41,3 14,34 41,8
64

MODIFICADA B 18,43 39,4 14,75 40,1 C 17,69 41,8 14,4 41,5TEORIA PQ A 27,21 10,5 22,11 10,2 B 17,15 43,6 13,64 44,6 C 21,89 28 17,18 30,2TEORIA PQ A 20,05 34 16,35 33,6MODIFICADA B 20,42 32,9 16,49 33 C 19,94 34,4 16,17 34,3TEORIA ID-IQ A 21,42 29,5 17,45 29,1 B 21,39 29,7 17,19 30,2 C 21,78 28,4 17,41 29,3METODO DE A 28,64 5,79 22,95 6,78DETECCION B 28,47 6,38 23,6 4,18SINCRONA C 28,42 6,51 22,71 7,76METODO DE A 17,83 41,3 14,34 41,8HOSSEINI B 18,43 39,4 14,75 40,1 C 17,7 41,8 14,41 41,5
RP/ Relación porcentual entre los valores previos a la compensación y los
valores ya compensados. Si esta relación es positiva quiere decir que las
magnitudes disminuyeron y es negativa que aumentaron respecto a los valores
previos.
65
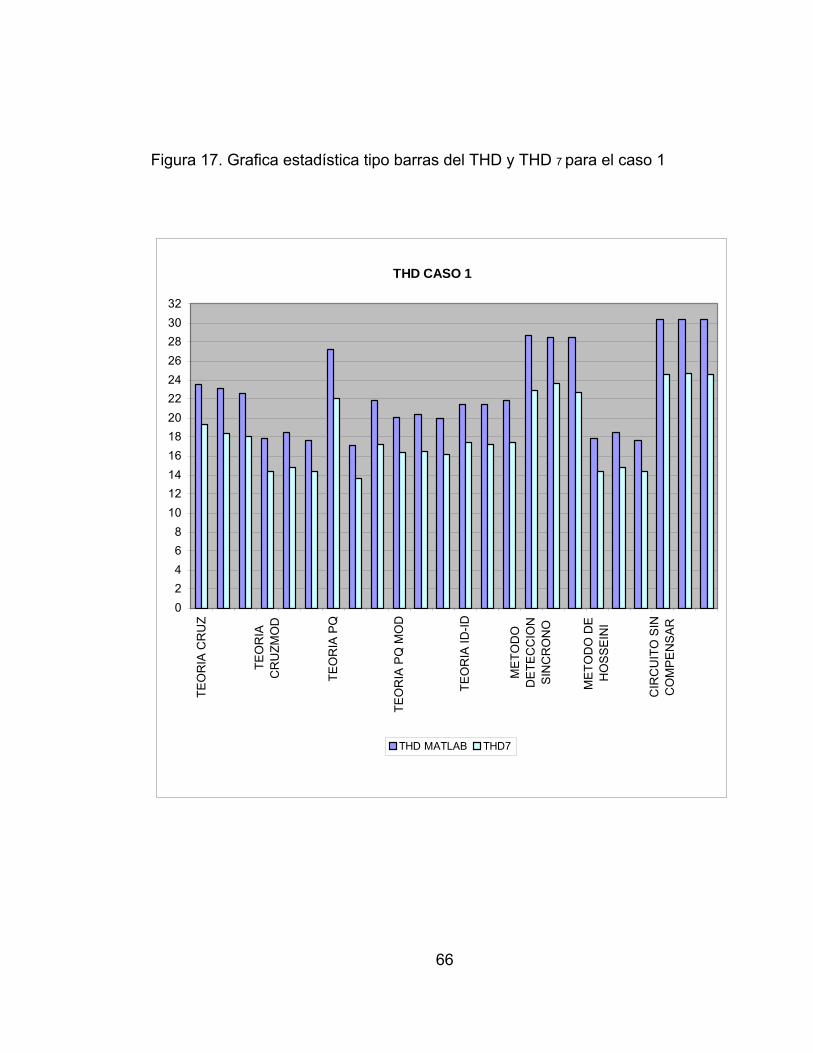
Figura 17. Grafica estadística tipo barras del THD y THD 7 para el caso 1
THD CASO 1
02468
101214161820222426283032
TEO
RIA
CR
UZ
TEO
RIA
CR
UZM
OD
TEO
RIA
PQ
TEO
RIA
PQ
MO
D
TEO
RIA
ID-ID
ME
TOD
OD
ETE
CC
ION
ME
TOD
O D
E
CO
MP
EN
SA
R
SIN
CR
ON
O
HO
SS
EIN
I
UIT
CIR
CO
SIN
T ATLABHD M THD7
66

CORRIENTES DE FASE Cuadro 3. Corrientes de fase caso 1
RFASE I / fase(A) P (%) CIRC 31.19 UITO SIN A COMPENSAR B 31.19 C 31.19 TEORIA CRUZ A 40,11 -28,5989 B 40,06 -28,4386 C 40,78 -30,747TEORIA CRUZ A 52,46 -68,1949 MODIFICADA B 52,56 -68,5155 C 53,04 -70,0545TEORIA PQ A 35,39 -13,4659 B 57,06 -82,9433 C 43,33 -38,9227TEORIA PQ A 47,65 -52,7733 MODIFICADA B 48,03 -53,9917 C 48,31 -54,8894TEORIA ID-IQ A 44,14 -41,5197 B 44,09 -41,3594 C 44,02 -41,135METODO DE A 33,15 -6,28407 DETECCIÓN B 34,32 -10,0353 SINCRONÍA C 33,87 -8,5925METODO DE A 52,46 -68,1949 Hosseini B 52,56 -68,5155 C 53,03 -70,0224
INDICE DE DESBALANCE DE CORRIENTE (IDC) Cuadro 4. Índice de desbalance de corriente caso 1
67

IDC(A) CIRCUITO SIN COMPENSAR 31.19TEORIA CRUZ 40,32TEORIA CRUZ MODIFICADA 52,69TEORIA PQ 46,14TEORIA PQ MODIFICADO 48,09TEORIA ID-IQ 44,09METODO DE DETECCIÓN SINCRONÍA 33,79METODO DE Hosseini 52,68
Figura 18. Grafica estadística tipo barras de las magnitudes de corriente por fase y del índice de desbalance de corriente para el caso 1.
IDC I / faseCaso1
-2
2
6
TEOR
IA P
Q
SSEI
NI
MPEN
SAR
10
14
18
54
58
TEOR
IA C
RUZ
TEOR
IA C
RUZM
OD
TEOR
IA P
Q MO
D
TEOR
IA ID
-ID
METO
DO D
ETEC
CION
SINC
RONO
METO
DO D
E HO
CIRC
UITO
SIN
CO22
26
30
34
38
42
46
50
68

3 .1.3 Análisis de datos caso 1
odificado con valores por fase de THDa=17.83, THDb=18.43 y THDc=17.69,
niendo como desventaja el aumento de corrientes de fase en la fuente y por
e Ia=52.46, Ib=52.56, Ic=53.04 y un
C de 52.69 A. En caso contrario el método que peores resultados arroja es el
método de detección sincrona con valores de THDa=28.64, THDb=28.47,
THDc=28.42, siendo también el método con menores aumentos de corriente.
Se observa que todos los métodos implementados compensaron armónicos con
una disminución porcentual en un rango de 5.79 % y 43.6% en el THD y las
corrientes en todos los casos aumentaron en un rango de 6.28% al 70.05% y por
lo tanto el IDC. La teoría PQ fue la única que produjo un desbalance notable en
las corrientes de la fuente con valores de Ia=35.39 A, Ib=57.06 A e Ic=43.33 A, y
un IDC=46.14 A, y por lo tanto la única teoría no apta para casos de cargas
balanceadas.
ste estudio se hace tomando mediciones de un THD total y un THD de los 7
primeros armónicos donde se observa para el caso 1 que hay una disminución
do es aproximadamente de igual resultados.
De acuerdo a los resultados obtenidos en la simulación para el caso 1, se observa
que el método de compensación que mejores resultados arroja es la teoría cruz
m
te
tanto un aumento en el IDC, con magnitudes d
ID
E
entre los dos pero el porcentaje arroja
69

3.2 CARGA CASO 2 El caso 2 es una carga desbalanceada con contenido armónico ya definida en el
capitulo 2. Se presentan a continuación los resultados previos a la compensación
es decir, sin el filtro activo ni métodos de compensación de armónicos.
Corrientes de carga caso 2 sin compensar
Corrientes de la fuente por fases
70
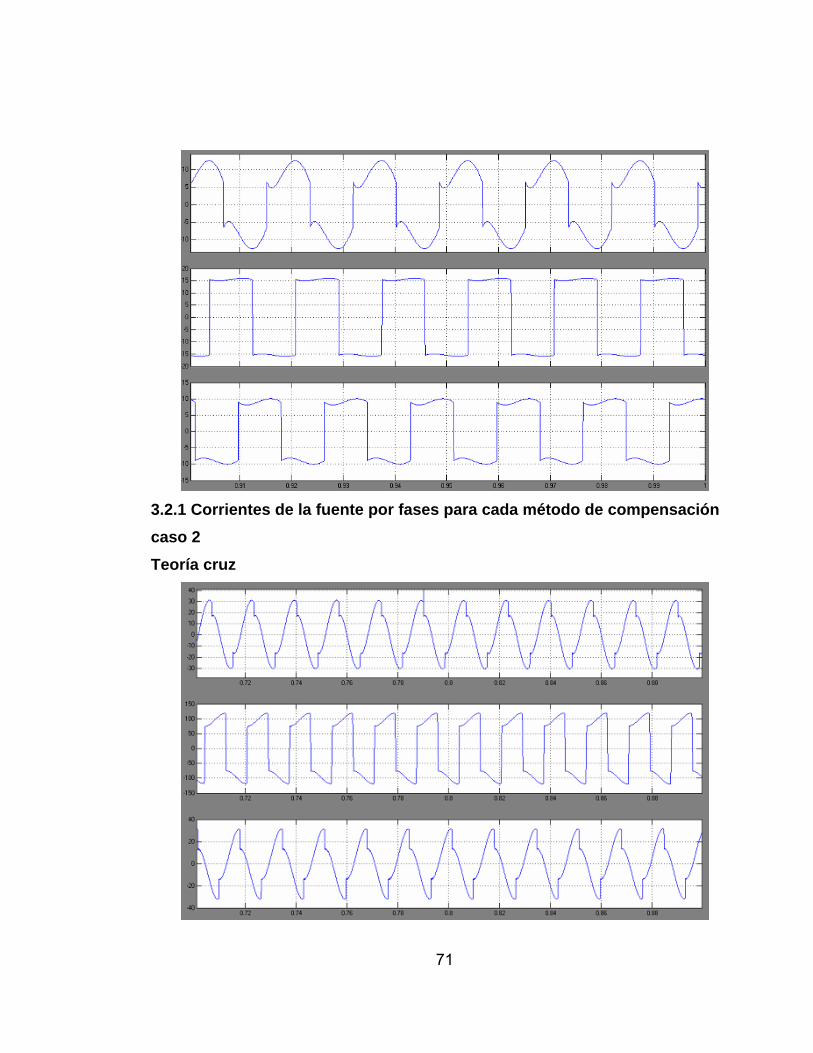
3.2.1 Corrientes de la fuente por fases para cada método de compensación aso 2
cTeoría cruz
71

Teoría cruz modificada
Teoría PQ
72

Teoría PQ modificada
Teoría Id-iq
73
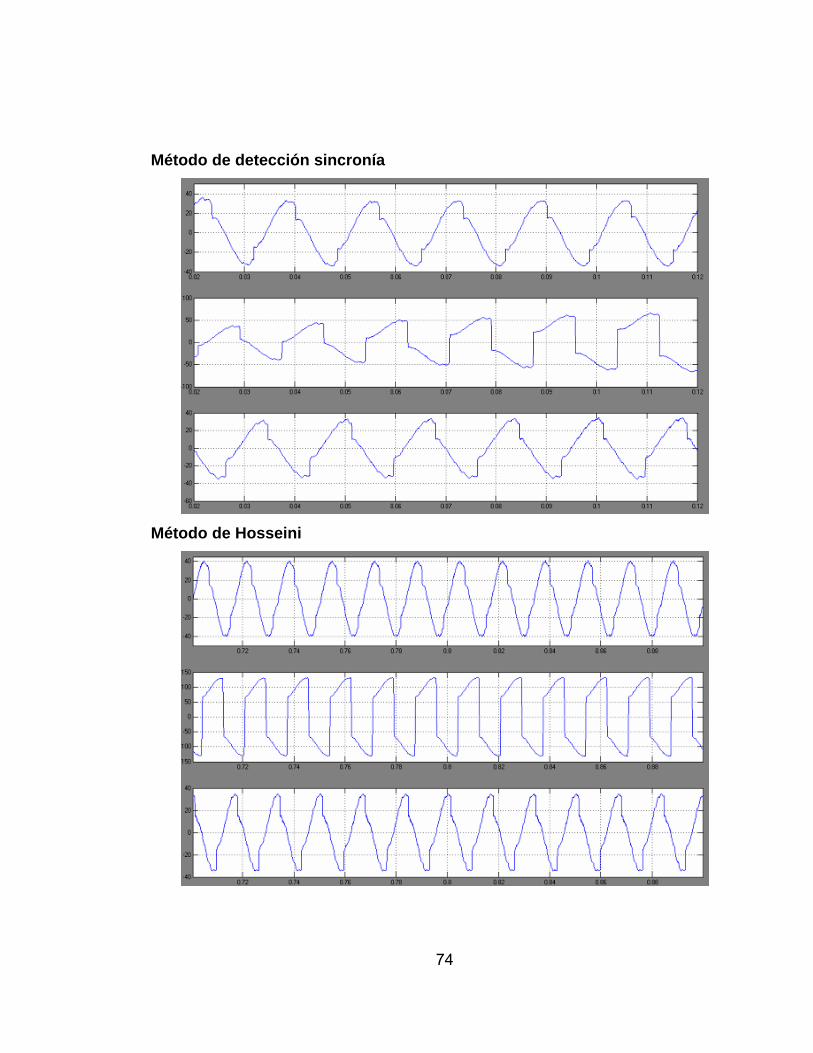
Método de detección sincronía
Método de Hosseini
74

3.2.2 Tablas de resultados carga caso 2 MAGNITUD DEL THD Matlab Y THD7
Cuadro 5. THD y THD 7 para el caso 2
FASE THD MATLAB THD7
CIRCUITO A 28.47 23.9 SIN B 47.64 41.2 COMPENSAR C 46.54 40.1 THD RP(%) THD7 RP(%) TEORIA CRUZ A 12.86 54.8 10.81 54.8 B 30.74 35.5 26.64 35.4 C 20.57 55.8 17.72 55.8TEORIA CRUZ A 11.37 60.1 9.044 62.2MODIFICADA B 26.65 44.1 21.85 47 C 17.31 62.8 14.95 62.7TEORIA PQ A 13.72 51.8 11.38 52.4 B 26.98 43.4 23.22 43.7 C 19.17 58.8 16.48 58.9TEORIA PQ A 12.42 56.4 10.26 57.1MODIFICADA B 28.39 40.4 24.06 40.03 C 19.31 58.5 16.63 58.5TEORIA ID-IQ A 13.78 51.6 10.86 54.6 B 28.58 40 24.47 40.7 C 20.61 55.7 17.6 56.1METODO DE A 12.46 56.2 10.18 57.4DETECCION B 27.82 41.6 23.82 42.2SINCRONA C 18.98 59.2 16.15 59.7METODO DE A 11.36 60.1 9.035 62.2HOSSEINI B 25.65 46.2 21.84 47 C 17.32 62.8 14.95 62.7
75

Figura 19. Grafica estadística tipo barras del THD y THD 7 para el caso 2
THD CASO 2
0
5
10
15
20
25
30
35
40
45
50
TEO
RIA
CR
UZ
TEO
RIA
PQ
OR
IA P
Q M
OD
TEO
RIA
ID-ID
ME
TOD
O
ME
TOD
O D
EH
OS
SE
INI
CIR
CC
OM
PE
NS
AR
TEO
RIA
CR
UZM
OD
DE
TEC
CIO
NS
INC
RO
NO
UIT
O S
IN
TE
THD MATLAB THD7
CORRIENTES D Cuadro 6. Corrie
E FASE
ntes por fase caso 2
76

FASE I / fase RP (%) CIRCUITO SIN A 12.95 COMPENSAR B 19.74 C 11.68 TEORIA CRUZ A 28.53-120.8 B 30.57-5486 C 26.44-126.4 TEORIA CRUZ A 33.36 -158.2 MODIFICADA B 37.61 -90.53 C 31.44 -169.2TEORIA PQ A 27.52 -113 B 34.73 -75.94 C 28.65 -145.3TEORIA PQ A 30.12 -133.1 MODIFICADA B 33.22 -68.29 C 28.33 -142.6TEORIA ID-IQ A 28.09 -117.4 B 33.39 -69.15 C 26.29 -125.1METODO DE A 30.68 -137.5 DETECCIÓN B 33.61 -70.26 SINCRONÍA C 28.58 -144.7METODO DE A 33.37 -158.3 Hosseini B 37.62 -90.58 C 31.44 -169.2
INDICE DE DESBALANCE DE CORRIENTE (IDC)
uadro 7. Índice de desbalance de corriente caso 2
IDC(A)
C
CIRCUITO SIN COMPENSAR 15.2TEORIA CRUZ 28.56TEORIA CRUZ MODIFICADA 34.23TEORIA PQ 30.34TEORIA PQ MODIFICADO 30.62TEORIA ID-IQ 29.41METODO DE DETECCIÓN SINCRONÍA 31.03METODO DE Hosseini 34.24
77

Figura 20. Grafica estadística tipo barras de las magnitudes de corriente por fase y del índice de desbalance de corriente para el caso 2
Caso2
0
4
8
40
12
16
20
24
28
32
36
TEOR
IA C
RUZ
TEOR
IA P
Q
TEOR
IA P
Q MO
D
TEOR
IA ID
-ID
METO
DODE
TECC
ION
SINC
RONO
METO
DO D
EHO
SSEI
NI
CIRC
UITO
SIN
COMP
ENSA
R
TEOR
IA C
RUZM
OD
IDC I / fase
3.2.3 Análisis de datos caso 2
e acuerdo a los resultados obtenidos en la simulación para el caso 2, se observa
ue los método de compensación que mejores resultados arroja son la teoría cruz
2,
D
q
modificado y el método de Hosseini con valores por fase de THDa=11.37,
THDb=26.65 y THDc=17.31, THDa=11.36, THDb=25.65 y THDc=17.3
78

respectivamente, teniendo como desventaja el aumento de corrientes de fase en
la fuente y por tanto un aumento en el IDC, con magnitudes de Ia=33.36, Ib=37.61,
Ic=31.44, con IDC=34.23 A y Ia=33.37, Ib=37.62, Ic=31.44, con un IDC de 34.34,
respectivamente. En caso contrario el método que peores resultados arroja es el
método de Id-Iq con valores de THDa=13.78, THDb=28.57, THDc=20.61, siendo
también el método con menores aumentos de corriente.
Se observa que todos los métodos implementados compensaron armónicos con
una disminución porcentual en un rango de 40 % y 62.8% en el THD y las
corrientes en todos los casos aumentaron en un rango de 54.86% al 169.2% y por
lo tanto el IDC. En comparación con el caso de cargas balanceadas los
porcentajes de disminución del THD fueron mejores con una disminución
promedio del 50% pero teniendo como desventaja mayores aumentos de
orriente, con casos donde inclusive aproxima a tres veces la corriente de
Este estudio se hace tomando mediciones de un THD total y un THD de los 7
primeros armónicos donde se observa para el caso 2 que hay una disminución
entre los dos pero el porcentaje arrojado es aproximadamente de igual resultados.
3.2 CARGA CASO 3
El caso 3 es una carga desbalanceada ya definida en el capitulo 2. Se muestran a
continuación los resultados obtenidos previos a la compensación de armónicos.
c
referencia.
79

Corrientes de carga caso 3 sin compensar
orrientes de la fuente por fases C
80

3.3.1 Corrientes de la fuente por fases para cada método de compensación caso 3 Teoría cruz
Teoría cruz modificada
81

Teoría PQ
Teoría PQ modificada
82

Teoría Id-Iq
étodo de detección sincronía M
83

Método de Hosseini
.3.2 Tablas de resultados carga caso 3
AGNITUD DEL THD Matlab Y THD7
uadro 8. THD y THD 7 para el caso 3
FASE THD MATLAB THD7
3 M
C
CIRCUITO A 0.09067 0.4522 SIN B 0.1958 0.5014 COMPENSAR C 0.2687 2.121
84

THD RP(%) THD7 RP(%) TEORIA CRUZ A 4.5 -4863.1 0.571 -26.27 B 6.153 -3042.5 1.259 -151.09 C 5.469 -1935.4 0.6209 70.72TEORIA CRUZ A 3.408 -3658.7 0.422 6.67MODIFICADA B 5.033 -2470.5 0.6761 -34.84 C 4.291 -1496.9 0.6853 67.68TEORIA PQ A 4.982 -5394.7 3.49 -671.78 B 8.569 -4276.4 5.549 -1006.7 C 7.729 -2776.4 4.793 -125.97TEORIA PQ A 3.467 -3723.8 0.9224 -103.98MODIFICADA B 5.569 -2744.2 0.8704 -73.59 C 5.572 -1973.7 1.229 42.05TEORIA ID-IQ A 4.18 -4510.1 0.5764 -27.46 B 6.553 -3246.8 0.9859 -96.62 C 5.868 -2083.8 0.8699 58.98METODO DE A 4.038 -4651.3 0.9256 -104.68DETECCION B 5.771 -2847.4 1.093 -117.99SINCRONA C 5.798 -2057.8 0.959 54.78METODO DE A 3.408 -3658.7 0.422 6.67HOSSEINI B 5.033 -2470.5 0.6761 -34.84 C 4.291 -1496.9 0.6853 67.68
85

86
Figura 21. Grafica estadística tipo barras del THD y THD 7 para el caso 3
CORRIENTES D Cuadro 9. Corrie caso 3
(%)
E FASE
ntes por fase
FASE I / fase RPCIRC 12.33UITO SIN A COMPENSAR B 2.32 C 4.44
THD Caso 3
00,5
11,5
22,5
33,5
44,5
55,5
66,5
77,5
88,5
9
TEO
RIA
CR
UZ
TEO
RIA
TEO
RIA
PQ
MO
D
TEO
RIA
ID-ID
MET
OD
OD
ETE
CC
ION
SIN
CR
ON
O
HO
SS
EIN
I
CR
UZ
TEO
M
RIA
OD
PQ
MET
OD
O D
E
CIR
CU
ITM
PE
O NS S
IN AR
CO
THD MATLAB THD7
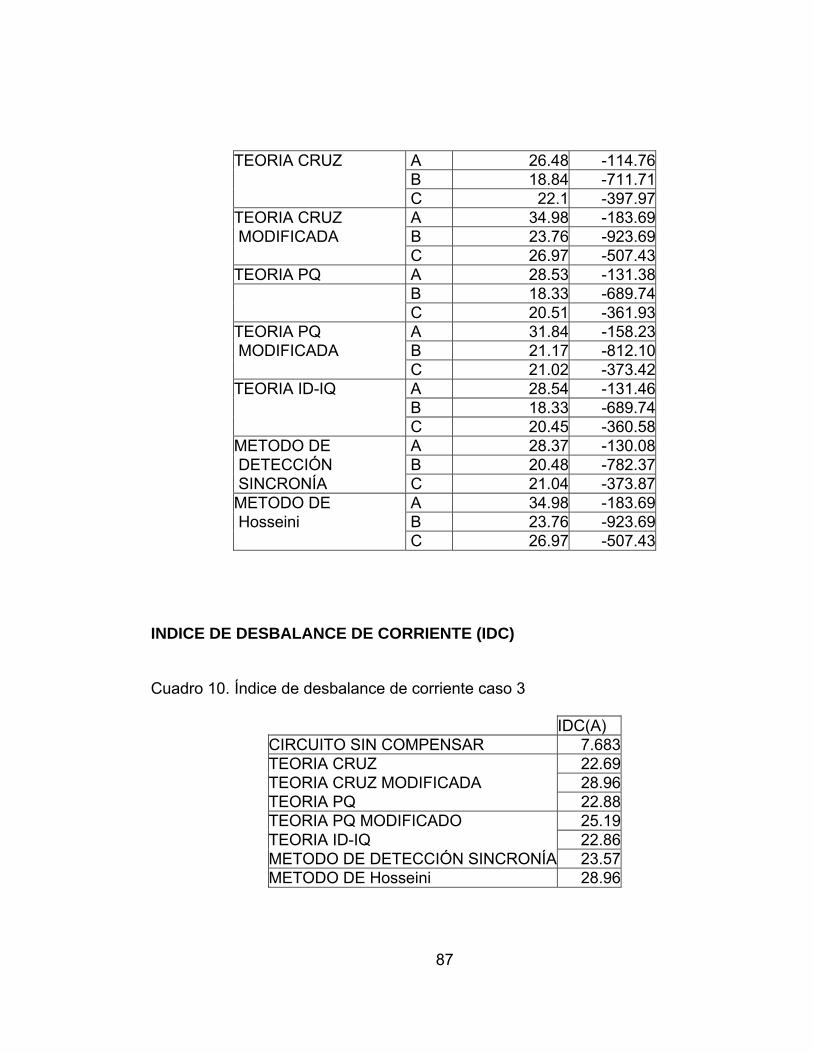
TEORIA CRUZ A 26.48 -114.76 B 18.84 -711.71 C 22.1 -397.97TEORIA CRUZ A 34.98 -183.69 MODIFICADA B 23.76 -923.69 C 26.97 -507.43TEORIA PQ A 28.53 -131.38 B 18.33 -689.74 C 20.51 -361.93TEORIA PQ A 31.84 -158.23 MODIFICADA B 21.17 -812.10 C 21.02 -373.42TEORIA ID-IQ A 28.54 -131.46 B 18.33 -689.74 C 20.45 -360.58METODO DE A 28.37 -130.08 DETECCIÓN B 20.48 -782.37 SINCRONÍA C 21.04 -373.87METODO DE A 34.98 -183.69 Hosseini B 23.76 -923.69 C 26.97 -507.43
INDICE DE DESBALANCE DE CORRIENTE (IDC) Cuadro 10. Índice de desbalance de corriente caso 3
IDC(A) CIRCUITO SIN COMPENSAR 7.683TEORIA CRUZ 22.69TEORIA CRUZ MODIFICADA 28.96TEORIA PQ 22.88TEORIA PQ MODIFICADO 25.19TEORIA ID-IQ 22.86METODO DE DETECCIÓN SINCRONÍA 23.57METODO DE Hosseini 28.96
87

Figura 22. Grafica estadística tipo barras de las magnitudes de corriente por fase y del índice de desbalance de corriente para el caso 3.
CASO 3
34363840
02468
10
161820
283032
TEO
RIA
PQ
TEO
RIA
ID-ID
ME
TOD
OD
ETE
CC
ION
SIN
CR
ON
O
ME
TOD
O D
EH
OS
SE
INI
222426
1214
TEO
RIA
CR
UZ
TEO
RIA
CR
UZM
OD
TEO
RIA
PQ
MO
D
CIR
CU
ITO
SIN
CO
MP
EN
SA
R
IDC I / fase
3.2.3 Análisis de datos caso 3 Es de esperarse estos resultados de aumento del THD ya que el circuito utilizado
s un circuito con carga desbalanceada sin presencia de armónicos, y lo que sé e
88

esta haciendo con el filtro es inyectarle armónicos al sistema lo cual provoca el
aumento exagerado en los datos de THD que arroja el sistema.
Se nota un aumento en la corriente de la fuente y presencia de armónicos en las
ión del caso 3 logro los objetivos de
isminuir el THD y de balancear las corrientes de la fuente.
3.4 COMPARACION ENTRE PSCAD Y Matlab 2006b Dentro de los objetivos de este estudio esta hacer una comparación entre los
entació
compensación de armónicos e y en Matlab
implementados e
los elementos, tipos de carga e cada uno de es cuenta con
ara aju
que si se pretende es simu ic
estudio ya realizado “Estudio C
Compensación de Armónicos e e Potencia” sos:
argas con contenido armónic balanceado y desbalanceado, y para el estudio
ibilidades y ad
anceado sin contenido armónico.
corrientes las cuales producen un efecto negativo de distorsión en las señales
provocando una distorsión armónica evidente.
Ninguno de los métodos de compensac
d
resultados de la implem n de algunas de las teoría
n PSCAD [20]
mas importantes para la
.
Los circuitos n cada software son difer
y ya qu
entes en magnitudes de
tos paquetes
parámetros diferentes p star a cada elemento, los c
lar casos típ os de un siste
omparativo de las Teorías
n Sistemas d
ircuitos no son idénticos,
ma de potencia. Para el
más Importantes para la
se plantearon dos ca
lo
c o
actual se contemplaron las mis
carga desbal
mas dos pos icional a este un caso de
89

Los resultados obtenidos en el presente estudio fueron mas satisfactorios que en
[20], ya que en todos los casos con contenido armónico se logra una disminución
en el THD a diferencia del anterior donde en algunos casos encontraron
aumentos.
o se considera que se pueda realizar una comparación equivalente entre los
aquetes de simulación y los resultados obtenidos en cada estudio, pero se
N
p
encontraron algunos puntos de ventajas y desventajas entre PSCAD y Matlab
2006b, entre los cuales se encuentra:
Cuadro 11.Comparación PSCAD y MATLAB 2006b
CARACTERISTICA
PSCAD
MATLAB 2006b
Tiempo de simulación Corto: entre 10 y 15 min.
cada circuito
Largo: entre 14 y 15
horas cada circuito
Bloques proporcionados por
el software
Muy pocos bloques.
Demasiados bloques de
control
Buena cantidad de
bloques, comprimiendo
los circuitos
Resultados esperados
No se obtuvo buenos
resultados, en algunos
casos los T
Mejores resultados, en
todos los casos con
HD
aumentaron.
contenido armónico los
THD disminuyeron.
Requerimientos del equipo
de computo
Muy pocas Procesador de ultima
generación.
90

e compensación de armónicos implementadas en Matlab 2006b disminuyen los
HD en los casos con contenido armónico balanceado y desbalanceado, es decir
entro de las teorías de compensación de armónicos implementadas la que
ejores resultados arrojo tanto para cargas balanceadas como desbalanceadas
on contenido armónico es la Teoría Cruz Modificada, teniendo como desventaja
ue este método requiere de nueve variables, es decir tres mas que los otros
étodos que son seis corrientes de fuente y carga y tres voltajes, lo cual
presenta una dificultad en su implementación real.
a teoría PQ fue la única teoría de las implementadas no apta para casos
alanceados ya que compensa armónicos pero desbalanceada las corrientes en la
ente.
CONCLUSIONES
La conclusión más importante que se da en este estudio es que todas las teorías
d
T
que cumplieron el objetivo de compensación pero teniendo como desventaja
aumentos excesivos en las corrientes entregadas por la fuente de alimentación.
En cuanto a los casos desbalanceados sin contenido armónico se puede concluir
que las teorías no son útiles ya que aumentan los THD y las magnitudes de
corrientes.
D
m
c
q
m
re
L
b
fu
91

Se observa que existe una relación
disminución en el THD y el au esto las teorías con menores
isminuciones en el THD también deben ser contempladas como una solución
orque no generan aumentos excesivos de corriente, tal es el caso de la teoría de
por
atlab 2006b como herramienta para la simulación de sistemas de potencia
de
llam
empo de solución de cada circuito y el ajuste de los parámetros de cada
directamente proporcional entre una
mento de corriente, por
d
p
Detección Sincrona para casos balanceados con contenido armónico donde el
centaje de mejora del THD es del 33% y un aumento de corriente solo del 8%.
M
cuenta con ventajas para la implementación de los algoritmos de compensación
armónicos siendo fácil de realizar por medio de subsistemas donde se hace un
ado a las funciones en el editor y una gran desventaja de este software es el
ti
elemento.
92
] COLLOMBET, Christian; LUPIN, Jean-Marc y SCHONEK, Jacques. Los
undo
001/5/Acevedo.pdf
82
[5] al. Using Active Power Filters to Improve Power Quality.
Disponible en internet: http://www2.ing.puc.cl/power/paperspdf/dixon/37a.pdf
[6]
ensation Based on the Generalized Instantaneous Reactive Power
BIBLIOGRAFÍA
[1
Armónicos en las Redes Perturbadas y su Tratamiento. Parte I. M
Eléctrico. Revista Especializada del Sector Electrico. Vol 17 Número 52 (jul.-
sep. 2003), p. 111-116.
[2] Componentes Armónicas en Redes de Distribución Eléctricas. Conceptos,
Normas Vigente en Chile y Alternativas de Solución al Problema 2001.
Disponible en Internet: http://www.revistamarina.cl/revistas/2
[3] Recomendaciones Prácticas y Requerimientos de la IEEE para el Control de
Armónicos en Sistemas Eléctricos de Potencia. Disponible en internet:
http://www.techstreet.com/cgi-bin/detail?product_id=73
[4] MADRIGAL, Manuel. Análisis Armónico en Sistemas Eléctricos. Disponible en
internet: http://elec.itmorelia.edu.mx/armonico/Temario.htm
MORAN, Luis et
PENG, Fang; OTT, George and ADAMS, Donald. Harmonic and Reactive
Power Comp
93

Theory for Three-Phase Four-Wire Systems. En: IEEE Transactions on Power
Electronics. Vol. 13, No. 6 (nov. 1998); p. 1174-1181.
PENG, Fang and LAI, Jih. Generalized Instanta
[7] neous Reactive Power Theory
for Three-Phase Power Systems. En: IEEE Transactions on Instrumentation
[8] t a-b-c Reference Frame-Based
Algorithm in an Active Power Filter for Reactive Power Compensation Under
[9] Filtros
Activos: Problemas y Soluciones”. Disponible en internet:
[10
Instantaneous reactive Power in Three-Phase Circuits. IPEC’ 83-Int. Power
[11 d NABAE, A. Instantaneous Reactive Power
Compensators Comprising Switching Devices without Energy Storage
2] WATANABE, E.H., AREDES, M., AKAGI, H. The P-Q Theory for Active Filter
and Measurement. Vol. 45, No. 1 (feb. 1996); p. 293-297.
HOSSEINI, S. and ZARE, K. An Efficien
Unbalanced Conditions. Disponible en internet:http://ieeexplore.ieee.org.
SALVIA, Adriana. Análisis del Trabajo “Teoría PQ para Control de
http://iie.fing.edu.uy/ense/asign/faica/monografia_salvia.pdf
] AKAGI, H.; KANAZAWA, Y. and NABAE, A. Genaralized Theory of the
Electronics Conf., Tokyo, Japan, 1983; p. 1375-1386.
] AKAGI, H.; KANAZAWA, Y. an
Components. En: IEEE Transactions on Industry Applications. Vol. 1A-20 (may-
jun 1984); p. 625.
[1
Control: Some Problems and Solutions. XIV Congresso Brasileiro de
Automática
94

95
[14] KARSLI, Vedat; TÜMAY, Mehmet y SÜSLÜOGLU, Turkey. An Evaluation of
Time Domain Techniques for Compensating Currents of Shunt Active Power
Filters. Disponible en internet:
http://eleco.emo.org.tr/eleco2003/posterA.htm
[15] AREDES, M.; HAFNER, J. and HEUMANN, K. Three Phase Four-Wire Shunt
Active Filter Control Strategies. En: IEEE Transactions on Power Electronics.
Vol. 12, No. 2. (mar 1997); p. 311-318.
[16] SOARES, Vasco; VERDELHO, Pedro and MARQUES, Gil. An Instantaneous
Active and Reactive Current Component Method for Active Filters. En: IEEE
Transactions on Power Electronics. Vol.15, No. 4 (jul. 2000); p. 660-669.
[17] BUSO, Simone; MALESANI, Luigi and MATTAVELLI, Paolo. Comparation of
Current Control Techniques for Active Filter Applications. En: IEEE
Transactions on Industrial Electronics. Vol. 45, No. 5 (oct. 1998); p. 723-729.
[18] CHANG, W. and SHEE, T. A Comparative Study of Active Power Filter
Compensation Approaches. En: IEEE Power Engineering Society Summer
Meeting , Vol. 2 (2002); p. 1017.
[19] HOSSEINI, S.H, HAQUE M.T and SHAHMOHAMMADI S. A Shunt Active
Power Filter Control for unbalanced Conditions. En: IEEE Power Engineering
Society Summer Meeting , Vol. 7 (2003); p. 830.
[20] MURILLO YARCE, Duberney; PARDO ZAPATA, Gustavo Adolfo. Estudio
Comparativo de las Teorías más Importantes para la Compensación de Armónicos
en Sistemas de Potencia. Universidad Tecnologica de Pereira, tesis de pregrado
(2004).