Embed Size (px)
Citation preview
México D.F. Noviembre 2011
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN
“APLICACIÓN DE UN SISTEMA DE MONITOREO CONTINUO PARA EL INCREMENTO DE LOS CICLOS OPERATIVOS Y MEJORA DEL PROCESO DE ENFRIAMIENTO DE
ACEITE DEL MOTOR DE UN BARCO”
TESIS
QUE PARA OBTENER EL TITULO DE: INGENIERO EN CONTROL Y AUTOMATIZACIÓN
PRESENTAN:
PÉREZ ROSAS JOSÉ ANTONIO VARGAS PÉREZ TANIA JANETT
VENEGAS ÁNGELES JOSÉ EDUARDO
ASESORES: DR. IGNACIO CARVAJAL MARISCAL
M. EN C. CARLOS A. RIVERA GUEVARA
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-i-
INTRODUCCIÓN
Anteriormente el ferry de carga “MS European Endeavourde” ha estado involucrado en
accidentes de choque debido falta de mantenimiento en sus sistemas generales de navegación
y alimentación eléctrica, además de que no cuenta con un sistema de monitoreo que le
permita conocer el estado de sus equipos e instrumentos.
Este trabajo está enfocado a la aplicación de un monitoreo continuo a través de una HMI, que
permite observar la operación del sistema de lubricación de los Motores Diesel del barco, para
determinar la frecuencia del mantenimiento.
El monitoreo que se plantea permite que los operadores realicen hojas de especificaciones con
los datos de operación del intercambiador de calor, para observar su comportamiento y
determinar cuando este requiere un mantenimiento preventivo para así corregir las fallas antes
de que el equipo quede inutilizable, además esto permite mejorar los ciclos operativos debido
a que se mantiene operando al equipo en condiciones adecuadas.
Para resolver los problemas que se mencionan se determinara una estrategia de control y
monitoreo, para esto se identifican las condiciones de operación del intercambiador de calor
utilizado en el sistema de enfriamiento de aceite de los Motores Diesel del barco.
Se realizara también una simulación del proceso para observar sus respuestas ante las
perturbaciones que se pretenden controlar
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-ii-
PLANTEAMIENTO DEL PROBLEMA
Para el aceite lubricante utilizado en cualquier motor de combustión interna, el incremento en
la temperatura de operación por encima de los valores permitidos provoca la pérdida de las
propiedades del aceite.
En el barco se tiene un intercambiador de calor que se utiliza en el sistema de enfriamiento del
aceite que pertenece al sistema de lubricación de los Motores Diesel. La falta de
mantenimiento lleva a la empresa a remplazar el intercambiador de calor cada 8 meses debido
al taponamiento por incrustaciones de sal y microorganismos que se adhieren a las paredes y
tuberías del sistema. Para los operarios en el barco es difícil detectar cuando es necesario un
mantenimiento por lo que esto se deja de lado y se prefiere cambiarlo en lugar de aplicar un
mantenimiento.
Para asegurar que la temperatura del aceite es la adecuada el intercambiador utiliza agua de
mar como medio enfriante debido a que es abundante, ilimitada y de fácil acceso. El agua de
mar es altamente corrosiva para el intercambiador de calor pero es el medio enfriante más
económico con el que se cuenta por lo que es preferible reemplazar el equipo de intercambio
de calor que dar un tratamiento al agua de mar.
El uso de agua de mar genera problemas con incrustaciones salinas en el equipo y tuberías,
disminuyendo la eficiencia y los tiempos de operación del sistema.
En específico el agua de mar utilizada por el barco es agua del Mar Mediterráneo, el cual es
uno de los mares con mayor nivel de salinidad que genera un ambiente corrosivo para los
equipos, además de ser un mar que cambian sus propiedades físico-químicas dependiendo de
las estaciones del año.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-iii-
OBJETIVOS
Objetivo general:
Proponer un sistema de monitoreo continuo que permita observar el comportamiento de las
variables del sistema de enfriamiento de aceite del motor de un barco, para garantizar el
correcto funcionamiento del equipo, incrementar los tiempos de operación y la eficiencia del
proceso de intercambio de calor.
Objetivos particulares:
1. Monitorear el equipo de intercambio de calor a través de una HMI para determinar la
aplicación de un mantenimiento preventivo.
2. Proponer la estrategia de control para mantener la temperatura del aceite de los
Motores Diesel del barco, manipulando el flujo de agua de mar que pasa a través del
intercambiador de calor.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-iv-
ANTECEDENTES
En algunas situaciones el monitoreo en barcos se lleva a cabo a través de la tripulación. Esto
se hace de la siguiente manera; una persona se encuentra siempre atenta a todo lo que ocurre
en los cuartos de máquinas del barco y a su vez otras personas se encuentran vigilando otras
áreas relacionadas al motor, sistemas de enfriamiento y navegación y la comunicación se da
por medio de equipos de radio comunicación.
No siempre se cuenta con sistemas de monitoreo avanzados como lo es la aplicación de las
HMI. Aunque ya existen equipos pequeños y relativamente económicos que permiten su uso
dentro de embarcaciones de cualquier tipo, la utilización de estos dentro de los barcos aun es
muy escasa.
El monitoreo que se lleva a cabo por el personal de la tripulación del barco es relativamente
seguro pero el personal no es capaz de tomar decisiones respecto al control de los equipos
cuando estos se encuentran trabajando bajo condiciones extremas como las que ofrece el mar.
Esto puede derivar en situaciones problemáticas ya que cuando los equipos fallan por mal uso
o falta de mantenimiento por estar en ambientes extremos, es necesario parar el proceso para
realizar un mantenimiento correctivo que en algunos casos resultan inútiles.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-v-
JUSTIFICACIÓN
El monitoreo continuo en el sistema de enfriamiento de aceite del motor de un barco es
importante debido a los cambios en los índices de salinidad del agua de mar, que es el medio
enfriante utilizado en dicho sistema. Diversos factores alteran la salinidad y la composición
química del agua de mar y debido a que está en contacto directo con todos los equipos e
instrumentos del sistema de enfriamiento de aceite, es importante monitorearlos para
determinar cuando estos requieren un mantenimiento preventivo o correctivo.
En ocasiones se da un bajo rendimiento en los motores de barcos cuando no se encuentran
trabajando bajo las especificaciones correspondientes, se debe tener cuidado en las
condiciones de temperatura y lubricación en las que se encuentran trabajando los motores
dentro de los barcos y es importante mantener monitoreadas estas condiciones.
Anteriormente no se ha dado importancia al monitoreo continuo para los equipos que trabajan
al interior de los barcos. Debido a que los niveles de salinidad y composición química del agua
de mar han ido cambiando con los años, ya es factible monitorear el funcionamiento de los
equipos en ambientes corrosivos para asegurar que su tiempo de vida no se vea limitado.
El desechar equipos de intercambio de calor o no tener un buena eficiencia de equipos ya no
se justifica teniendo en la actualidad técnicas de monitoreo que nos pueden permitir aumentar
su tiempo de vida útil.
Utilizar un software HMI permite monitorear el funcionamiento del sistema de enfriamiento
del aceite, verificando los tiempos de operación nominales del intercambiador de calor que nos
permitirán identificar diversas alteraciones como el caso de incrustaciones salinas, alojamiento
de microorganismos y desechos en el sistema de enfriamiento para determinar las acciones de
mantenimiento correspondientes.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-vi-
INDICE
Introducción i
Planteamiento del Problema ii
Objetivos iii
Antecedentes iv
Justificación v
Índice de Figuras ix
Índice de Tablas viii
CAPÍTULO
Introducción al Sistema de Lubricación y Sistema de Enfriamiento
del Motor Diesel de un Barco 1
1.1 Motores diesel 1
1.1.1 Motor Diesel Marino 2
1.2 Sistema de Enfriamiento del Motor Diesel 3
1.3 Sistema de Lubricación del Motor Diesel 4
1.4 Intercambiadores de Calor 6
1.4.1 Intercambiador de Calor de Tubos y Carcasa 7
1.5 Especificaciones del Mar Mediterráneo 8
1.5.1 Parámetros Físico-Químicos del Mar Mediterráneo 9
1.6 Especificación del Barco 11
1.6.1 Especificaciones Técnicas de los Motores Diesel 12
1.6.2 Especificaciones del Lubricante 13
1
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-vii-
1.7 Instrumentación 15
1.8 Equipo 19
1.9 Interfaz Hombre-Máquina (HMI) 21
CAPÍTULO
Estrategia de Control y Monitoreo 24
2.1 Análisis del Sistema de Lubricación 24
2.2 Determinación de Parámetros de Control en el Intercambiador de Calor 26
2.2.1 Balance de Energía 26
2.2.2 Función de Transferencia del Intercambiador de Calor 29
2.2.3 Función de Transferencia de la Válvula de Control 32
2.3 Propuesta de la Estrategia de Control 33
2.3.1 Diagrama de Tuberías e Instrumentación 34
2.4 Propuesta de la Estrategia de Monitoreo 36
2.4.1 Mejora de los Ciclos Operativos del Intercambiador de Calor 36
CAPÍTULO
Instrumentación y Equipos 39
3.1 Selección de Instrumentación 39
3.2 Selección de Equipo 47
2
3
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-viii-
CAPÍTULO
Aplicación de Control y de Sistema de Monitoreo 51
4.1 Control para el Sistema de Enfriamiento 51
4.1.1 Control por Retroalimentación 51
4.1.2 Sintonización del Controlador 56
4.1.3 Respuestas del Sistema 61
4.2 Diseño y Programación de la HMI 72
4.2.1 Descripción de la HMI del Sistema de Lubricación 75
4.3 Programación del PLC 82
4.4 Comunicación PLC-HMI 93
CAPÍTULO
Propuesta Económica 102
5.1 Costos de Instrumentación y Equipo 102
5.2 Justificación Económica de la Implementación de la HMI 103
5.3 Costos de implementación de la HMI 105
Conclusiones 106
Bibliografía 107
Anexos 108
4
5
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-ix-
Índice de Figuras
CAPITULO 1
Figura 1.1.1-1 Motor diesel de un barco 2
Figura 1.2-1 Sistema de enfriamiento del Motor Diesel 4
Figura 1.3-1 Sistema de lubricación 6
Figura 1.4.1-1 Intercambiador de calor de tubos en “U” 8
Figura 1.5.1-1 Trayectoria de Navegación del “MS European Endeavourde” 11
Figura 1.6-1 Barco tipo ferry “MS European Endeavourde” 12
Figura 1.6.1-1 Motor Wärtsilä 9L38 13
Figura 1.7-1 Instrumentación industrial 16
Figura 1.7-2 Partes Principales de una válvula de globo 18
Figura 1.7-3 Válvula de Compuerta 18
Figura 1.8-1 Componentes principales de un PLC 20
Figura 1.8-2 Partes principales de una bomba centrifuga 21
CAPITULO 2
Figura 2.1-1 Diagrama de Tuberías e Instrumentación del sistema de enfriamiento
del aceite de un barco 25
Figura 2.2.1-1 Diagrama de entradas y salidas al intercambiador de calor 29
Figura 2.3-1 Diagrama de Tuberías e Instrumentación del sistema de enfriamiento
del aceite lubricante 35
CAPITULO 3
Figura 3.1-1 Transmisor de temperatura 40
Figura 3.1-2 Transmisor de presión 41
Figura 3.1-3 Transmisor de presión diferencial 41
Figura 3.1-4 Termopar tipo J 42
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-x-
Figura 3.1-5 Localización de las válvulas en bypass 42
Figura 3.1-6 Válvula de control 44
Figura 3.1-7 Válvula de compuerta manual 44
Figura 3.1-8 Válvula de globo manual 45
Figura 3.2-1 Intercambiador de calor 50
CAPITULO 4
Figura 4.1.1-1-Diagrama de bloques del sistema 51
Figura 4.1.1-2 Diagrama de bloques construido en Simulink 52
Figura 4.1.1-3 Bloque de planta a 15°C y 4 motores operando 53
Figura 4.1.1-4 Cuadro de parámetros de la función de transferencia 54
Figura 4.1.1-5 Bloque de medición 55
Figura 4.1.1-6 Bloque de control 55
Figura 4.1.2-1 Señal de entrada a la válvula 58
Figura 4.1.2-2 Curva de reacción del proceso 59
Figura 4.1.3-1 Respuesta de la temperatura del aceite a 15°C y 1 motor 62
Figura 4.1.3-2 Respuesta del flujo de agua de mar 15°C y 1 motor 62
Figura 4.1.3-3 Respuesta de la temperatura del aceite a 30°C y 1 motor 63
Figura 4.1.3-4 Respuesta del flujo de agua de mar a 30°C y 1 motor 63
Figura 4.1.3-5 Sintonización del PID con 1 motor en operación 64
Figura 4.1.3-6 Respuesta de la temperatura del aceite 15°C y 2 motores 64
Figura 4.1.3-7 Respuesta del flujo de agua de mar 15°C y 2 motores 65
Figura 4.1.3-8 Respuesta de la temperatura del aceite 30°C y 2 motores 65
Figura 4.1.3-9 Respuesta del flujo de agua de mar 30°C y 2 motores 66
Figura 4.1.3-10 Sintonización del PID con 2 motores en operación 66
Figura 4.1.3-11 Respuesta de la temperatura del aceite 15°C y 3 motores 67
Figura 4.1.3-12 Respuesta del flujo de agua de mar 15°C y 3 motores 67
Figura 4.1.3-13 Respuesta de la temperatura del aceite 30°C y 3 motores 68
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-xi-
Figura 4.1.3-14 Respuesta del flujo de agua de mar 30°C y 3 motores 68
Figura 4.1.3-15 Sintonización del PID con 3 motores en operación 69
Figura 4.1.3-16 Respuesta de la temperatura del aceite 15°C y 4 motores 69
Figura 4.1.3-17 Respuesta del flujo de agua de mar 15°C y 4 motores 70
Figura 4.1.3-18 Respuesta de la temperatura del aceite 30°C y 4 motores 70
Figura 4.1.3-19 Respuesta del flujo de agua de mar 30°C y 4 motores 71
Figura 4.1.3-20 Sintonización del PID con 4 motores en operación 71
Figura 4.2-1 Programación de la Interfaz Hombre-Máquina 72
Figura 4.2-2 Programación de la Interfaz Hombre-Máquina 73
Figura 4.2-3 Programación de la Interfaz Hombre-Máquina 74
Figura 4.2-4 Programación de la Interfaz Hombre-Máquina 75
Figura 4.2.1-1 Barra de switch´s de control 76
Figura 4.2.1-2 Caso 1 Indicadores de Motor Diesel 76
Figura 4.2.1-3 Caso 2 Indicadores de Motor Diesel 77
Figura 4.2.1-4 Caso 3 Indicadores de Motor Diesel 77
Figura 4.2.1-5 Indicadores de la instrumentación 78
Figura 4.2.1-6 Flujo de aceite en el tubo del intercambiador 78
Figura 4.2.1-7 Flujo de agua y aceite en el intercambiador de calor 79
Figura 4.2.1-8 Representación del caso 1 80
Figura 4.2.1-9 Representación del caso 2 81
Figura 4.2.1-10 Representación del caso 3 82
Figura 4-3-1 Configuración de entradas y salidas 83
Figura 4.3-2 Sub-programa LAD 2 CTL PID 85
Figura 4.3-3 Sub-programa LAD 2 CTL PID (continuación) 86
Figura 4.3-4 Sub-programa LAD 2 CTL PID (continuación) 87
Figura 4.3-5 Sub-programa LAD 2 CTL PID (continuación) 88
Figura 4.3-6 Sub-programa LAD 3 CTL BOMBAS 90
Figura 4.3-7 Sub-programa LAD 4 ALARMAS 91
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-xii-
Figura 4.3-8 Sub-programa LAD 5 COMPARADOR 92
Figura 4.3-9 Sub-programa LAD 6 INDICADOR 93
Figura 4.4-1 Creación de la conexión utilizando el protocolo de comunicación RS-232 94
Figura 4.4-2 Detección de la estación de trabajo y del PLC 95
Figura 4.4-3 PLC en línea 95
Figura 4.4-4 PLC comunicado y en línea 96
Figura 4.4-5 Creación de la comunicación OPC 97
Figura 4.4-6 Diseño de la Interfaz Hombre-Máquina 97
Figura 4.4-7 Ventana de propiedades del switch de la bomba de
pre-lubricación del Motor No. 1 98
Figura 4.4-8 Configuración de la vinculación 99
Figura 4.4-9 Árbol de componentes del RSLinx OPC Server 99
Figura 4.4-10 Ruta de vinculación 100
Figura 4.4-11 Comprobación de la vinculación 101
CAPITULO 5
Figura 5.2-1 Intercambiador de calor marca TERNAMIC 104
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-xiii-
Índice de Tablas
CAPITULO 1
Tabla 1.5-1 Composición de los iones principales del agua de mar (g/ml) 9
Tabla 1.6-1 Especificaciones del ferry “MS European Endeavourd” 12
Tabla 1.6.1-1 Especificaciones del Motor Wärtsilä 9L38 13
Tabla 1.6.2-1 Propiedades Fisico-Quimicas del aceite 14
Tabla 1.6.2-2 Datos de operación del aceite lubricante 14
Tabla 1.6.2-3 Variación de la viscosidad del aceite respecto a la temperatura 15
CAPITULO 2
Tabla 2.2.1-1 Parámetros de los fluidos 28
CAPITULO 3
Tabla 3.1-1 Índice de instrumentación 46
Tabla 3.2-1 Listado de entradas y salidas del controlador 47
Tabla 3.2-2 Especificaciones de los generales del PLC SLC 500-5/03 48
Tabla 3.2-3 Especificación de los módulos de entrada y salida analógicas
del PLC SLC 500-5/03 49
Tabla 3.2-4 Especificación de los módulos de entrada y salida digitales
del PLC SLC 500-5/03 49
Tabla 3.2-5 Especificación de dimensiones del intercambiador de calor 50
CAPITULO 4
Tabla 4.1.1-1 Valores de Tau y R 53
Tabla 4.1.1-2 Sintonizaciones de PID´s 56
Tabla 4.1.2-1 Parámetros de sintonización de un controlador por el Método de Dahlin 57
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-xiv-
CAPITULO 5
Tabla 5.1-1 Costo de la instrumentación propuesta 102
Tabla 5.1-2 Desglose de costos del PLC SLC500 103
Tabla 5.2-1 Características del mantenimiento 104
Tabla 5.2-2 Costos por reemplazo de equipo 104
Tabla 5.3-1 Costos de los softwares utilizados 105
Tabla 5.3-2 Costos totales de instrumento, controlador y software 105
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-1-
Introducción al Sistema de
Lubricación y Sistema de
Enfriamiento del Motor
Diesel de un Barco
CAPÍTULO
1.1 Motores Diesel
El ingeniero alemán Rudolf Diesel desarrolló en 1892 el motor que lleva su nombre, cuya
eficiencia es bastante mayor en comparación al motor de gasolina.
El motor diesel es un motor térmico de combustión interna alternativo en el cual el encendido
del combustible se logra por la temperatura elevada que produce la compresión del aire en el
interior del cilindro, según el principio del ciclo de funcionamiento del motor diesel.
El funcionamiento de un motor diesel comienza con la ignición sin chispa de la mezcla de aire
con el combustible. Como se mencionaba anteriormente, es necesaria la elevación de la
temperatura para la compresión del aire, lo que se produce en el denominado segundo tiempo
motor, la compresión. Posteriormente, el combustible es inyectado en la parte superior de la
cámara de compresión. Este proceso se realiza a una gran presión, lo que permite que el
combustible se atomice y se mezcle con el aire. Todo este proceso produce la combustión de
la mezcla en forma rápida, lo que hace que la mezcla que se ha acumulado en la cámara se
expanda, haciendo que el pistón se mueva hacia abajo. El movimiento del pistón es
transmitido a otras estructuras que hacen que este movimiento lineal se transforme en un
movimiento de rotación.
1
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-2-
Los motores diesel resultan de gran utilidad, ya que, debido a su bajo consumo de
combustible, resultan en el mediano y largo plazo más baratos que los motores a gasolina.
Debido a esto se ha incrementado la demanda de este tipo de motores para los automóviles,
por lo tanto, el precio del diesel se ha ido acercando cada vez más al de la gasolina, situación
que ha generado ciertos problemas, sobretodo, en el rubro de los transportes.
1.1.1 Motor Diesel Marino
Hay diferentes tipos de maquinaria que se utiliza en un barco, esto depende de las aplicaciones
y las necesidades que se tengan en el mismo, principalmente se utilizan las turbinas y los
motores diesel para la propulsión y la generación de energía eléctrica.
Los motores Diesel desplazaron completamente a las turbinas de vapor en el siglo pasado.
Salvo en grandes buques militares en los que también se emplean reactores nucleares para la
propulsión. Para arrancarlos es necesario inyectar aire a presión en los pistones de modo que
todo el conjunto comience a girar.
Figura 1.1.1-1 Motor diesel de un barco
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-3-
1.2 Sistema de Enfriamiento del Motor Diesel
En algunas partes del motor se tienen temperaturas mayores de 1000°C (cámara de
combustión). En un motor más de la tercera parte de energía que se le suministra a través del
combustible se pierde en forma de calor. El sistema de enfriamiento es el que se encarga de
que los diferentes componentes del motor se mantengan en temperaturas seguras y así evitar
que el motor sufra desgastes prematuros o daños graves y de esta manera lograr su máximo
rendimiento.
Algunas partes del motor que se deben enfriar constantemente son:
Cámara de combustión
Parte alta del cilindro
Cabeza del pistón
Válvulas de escape y de admisión
Cilindro
Los sistemas de enfriamiento modernos están diseñados para mantener una temperatura
homogénea entre 82° y 113°C en el motor. Un sistema que no cumpla los requisitos que se
exigen puede producir los siguientes efectos:
Desgaste prematuro de partes por sobrecalentamiento, especialmente en el pistón con
la pared del cilindro
Pre-ignición y detonación
Daño a componentes del motor o accesorios (radiador, bomba de agua, cabeza del
motor, monoblock, bielas, cilindros, etc.)
Corrosión de partes internas del motor
Entrada de refrigerante a las cámaras de combustión
Fugas de refrigerante contaminando el aceite lubricante
Evaporación del lubricante
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-4-
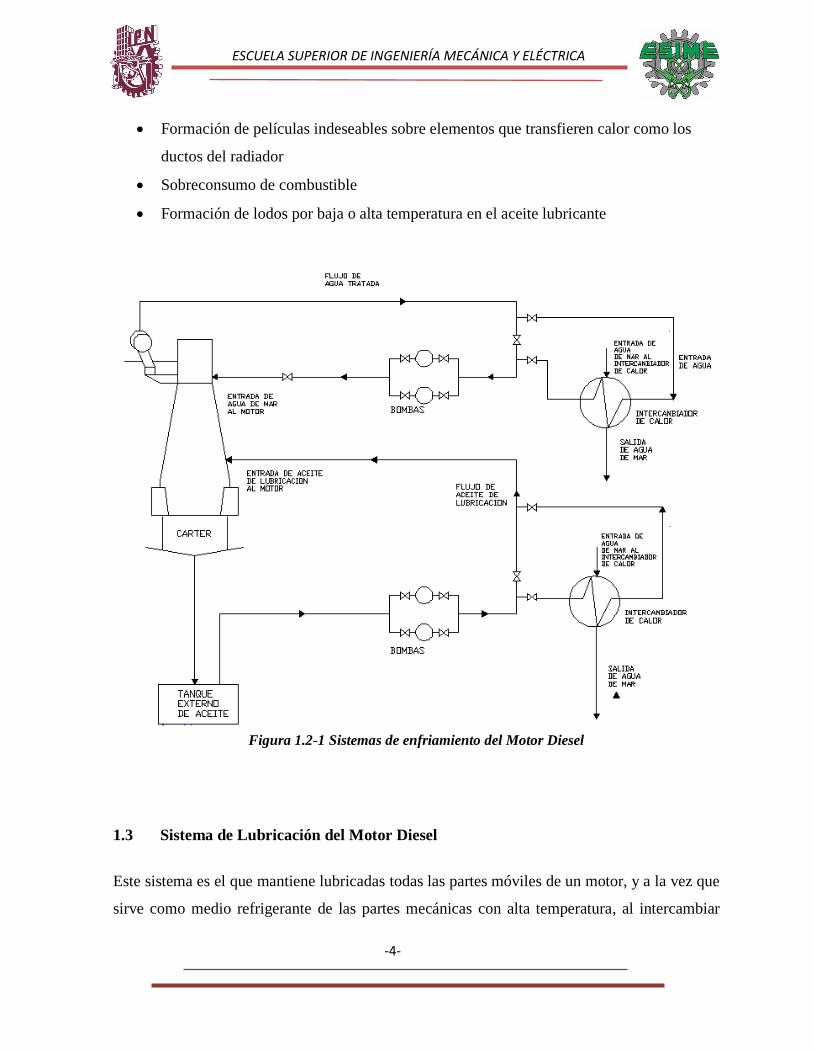
Formación de películas indeseables sobre elementos que transfieren calor como los
ductos del radiador
Sobreconsumo de combustible
Formación de lodos por baja o alta temperatura en el aceite lubricante
Figura 1.2-1 Sistemas de enfriamiento del Motor Diesel
1.3 Sistema de Lubricación del Motor Diesel
Este sistema es el que mantiene lubricadas todas las partes móviles de un motor, y a la vez que
sirve como medio refrigerante de las partes mecánicas con alta temperatura, al intercambiar
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-5-
calor con el medio ambiente cuando circula por zonas de temperatura más baja y
principalmente cuando se pasa a través de un enfriador de aceite.
La función es la de permitir la creación de una capa de aceite lubricante en las partes móviles
evitando el contacto metal con metal, permitiendo el movimiento entre los elementos evitando
al máximo los daños por rozamiento.
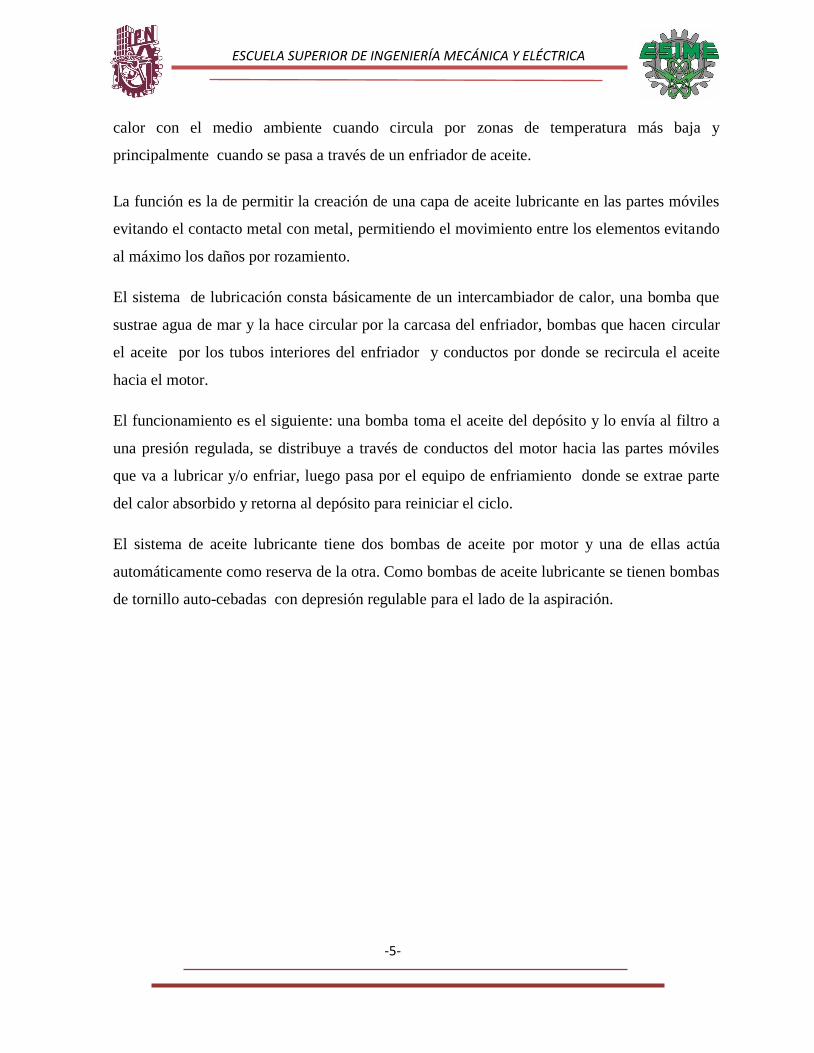
El sistema de lubricación consta básicamente de un intercambiador de calor, una bomba que
sustrae agua de mar y la hace circular por la carcasa del enfriador, bombas que hacen circular
el aceite por los tubos interiores del enfriador y conductos por donde se recircula el aceite
hacia el motor.
El funcionamiento es el siguiente: una bomba toma el aceite del depósito y lo envía al filtro a
una presión regulada, se distribuye a través de conductos del motor hacia las partes móviles
que va a lubricar y/o enfriar, luego pasa por el equipo de enfriamiento donde se extrae parte
del calor absorbido y retorna al depósito para reiniciar el ciclo.
El sistema de aceite lubricante tiene dos bombas de aceite por motor y una de ellas actúa
automáticamente como reserva de la otra. Como bombas de aceite lubricante se tienen bombas
de tornillo auto-cebadas con depresión regulable para el lado de la aspiración.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-6-
Figura 1.3-1 Sistema de lubricación
Conociendo el funcionamiento del sistema de enfriamiento, del sistema de lubricación y los
factores que los afectan se puede proponer un mejor control.
1.4 Intercambiadores de calor
Los medios de refrigeración a bordo del barco son principalmente intercambiadores de calor y
utilizan principalmente el agua de mar por ser fácilmente accesible y un fluido que se
encuentra disponible sin costo alguno.
El proceso de intercambio de calor se logra haciendo que los dos líquidos pasan en contra flujo
o en el mismo sentido a través de una superficie conductora que permite la transferencia de
calor entre ambos flujos. El calor del líquido caliente pasa al líquido frío por la superficie de
conducción, es decir, la pared del tubo.
Es habitual que en los intercambiadores de calor utilizados en barcos, los dos líquidos que
fluyen a través de él, vayan en contra flujo. Este arreglo proporciona una diferencia de
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-7-
temperatura rápida y constante entre los dos líquidos y por lo tanto la máxima transferencia de
calor en la superficie disponible.
Existen diversas maneras en las que se clasifican los intercambiadores de calor y en función de
sus características se utilizan para diferentes funciones. (Véase anexo 1).
1.4.1 Intercambiador de calor de tubos y carcasa
Los intercambiadores del tipo de coraza y tubo son equipos de transferencia de calor en las
plantas de procesos químicos. Por lo general el intercambiador carcasa y tubo, consiste en una
serie de tubos lineales colocados dentro de un tubo muy grande llamado carcasa y son la mejor
opción a la necesidad de una gran transferencia de calor.
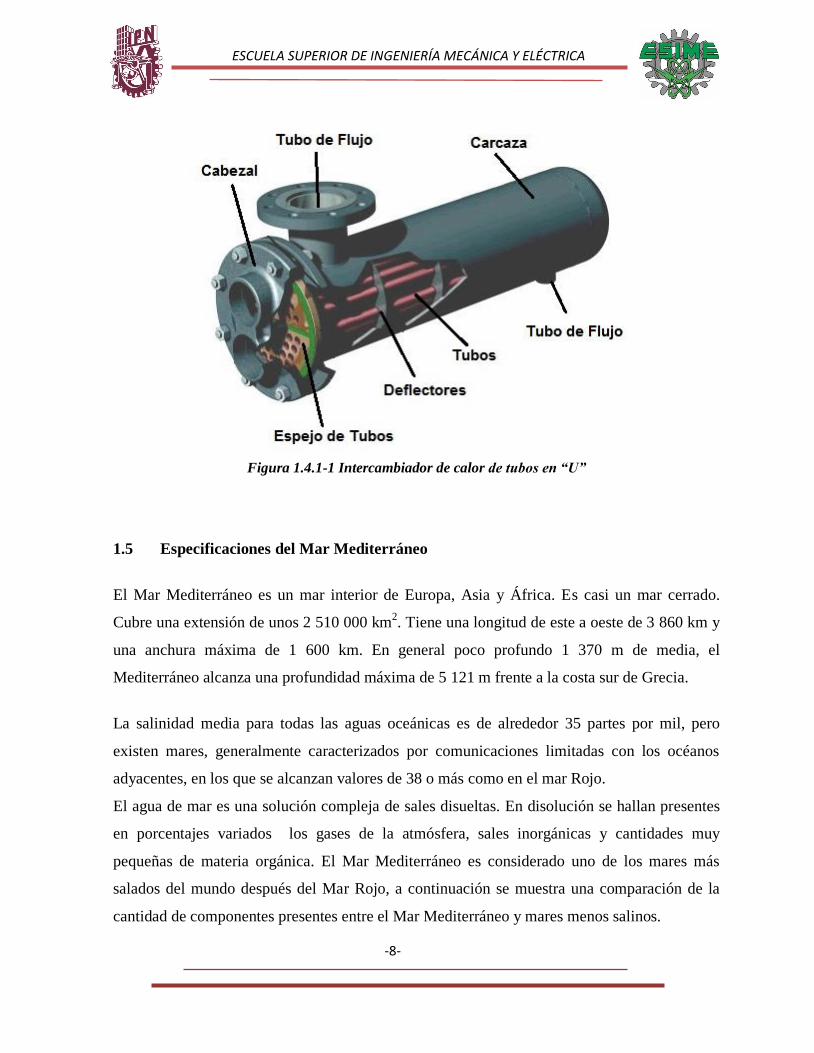
Dentro de este tipo de intercambiadores, se tiene al intercambiador de calor de tubos en “U” (o
de horquilla). El diseño consiste en que los tubos rectos son doblados en forma de U, el haz de
tubos es fijado con deflectores que se acomodan dependiendo del fluido exterior de los tubos.
En la carcasa se atornilla un cabezal para dirigir el fluido dentro del haz de tubos. El haz de
tubos se puede retirar de la coraza del intercambiador de calor.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-8-
Figura 1.4.1-1 Intercambiador de calor de tubos en “U”
1.5 Especificaciones del Mar Mediterráneo
El Mar Mediterráneo es un mar interior de Europa, Asia y África. Es casi un mar cerrado.
Cubre una extensión de unos 2 510 000 km2. Tiene una longitud de este a oeste de 3 860 km y
una anchura máxima de 1 600 km. En general poco profundo 1 370 m de media, el
Mediterráneo alcanza una profundidad máxima de 5 121 m frente a la costa sur de Grecia.
La salinidad media para todas las aguas oceánicas es de alrededor 35 partes por mil, pero
existen mares, generalmente caracterizados por comunicaciones limitadas con los océanos
adyacentes, en los que se alcanzan valores de 38 o más como en el mar Rojo.
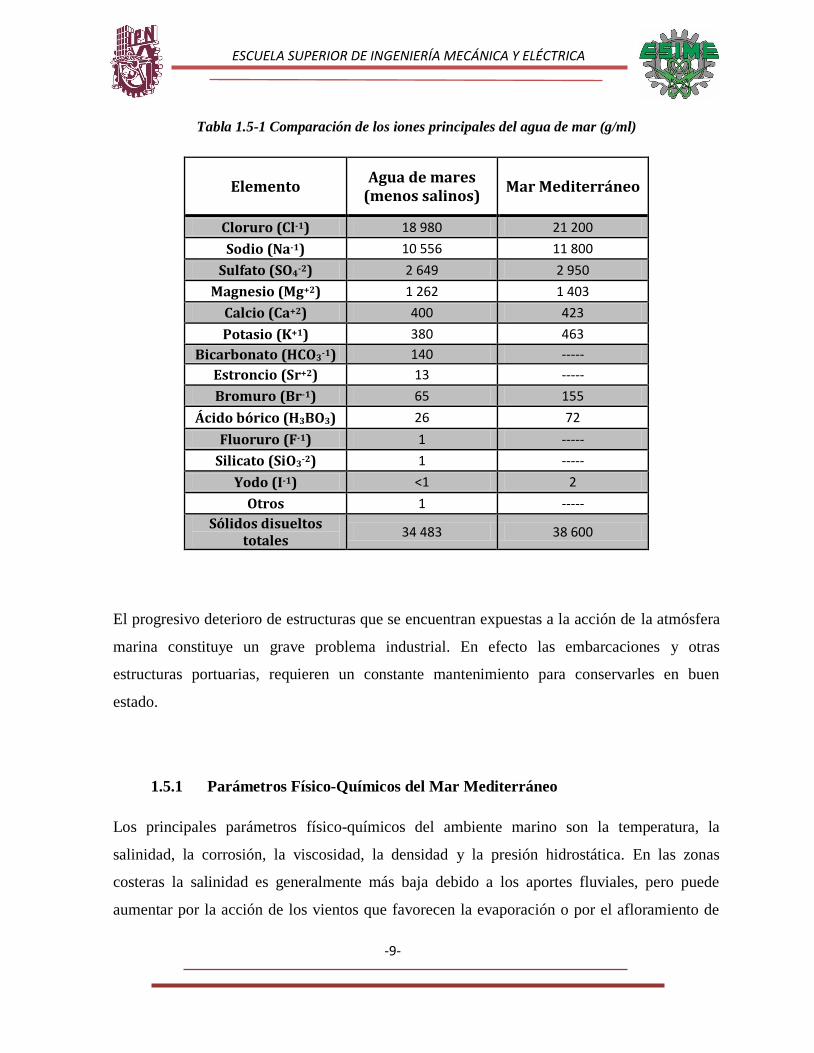
El agua de mar es una solución compleja de sales disueltas. En disolución se hallan presentes
en porcentajes variados los gases de la atmósfera, sales inorgánicas y cantidades muy
pequeñas de materia orgánica. El Mar Mediterráneo es considerado uno de los mares más
salados del mundo después del Mar Rojo, a continuación se muestra una comparación de la
cantidad de componentes presentes entre el Mar Mediterráneo y mares menos salinos.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-9-
Tabla 1.5-1 Comparación de los iones principales del agua de mar (g/ml)
Elemento
Agua de mares (menos salinos)
Mar Mediterráneo
Cloruro (Cl-1) 18 980 21 200
Sodio (Na-1) 10 556 11 800
Sulfato (SO4-2) 2 649 2 950
Magnesio (Mg+2) 1 262 1 403
Calcio (Ca+2) 400 423
Potasio (K+1) 380 463
Bicarbonato (HCO3-1) 140 -----
Estroncio (Sr+2) 13 -----
Bromuro (Br-1) 65 155
Ácido bórico (H3BO3) 26 72
Fluoruro (F-1) 1 -----
Silicato (SiO3-2) 1 -----
Yodo (I-1) <1 2
Otros 1 -----
Sólidos disueltos totales
34 483 38 600
El progresivo deterioro de estructuras que se encuentran expuestas a la acción de la atmósfera
marina constituye un grave problema industrial. En efecto las embarcaciones y otras
estructuras portuarias, requieren un constante mantenimiento para conservarles en buen
estado.
1.5.1 Parámetros Físico-Químicos del Mar Mediterráneo
Los principales parámetros físico-químicos del ambiente marino son la temperatura, la
salinidad, la corrosión, la viscosidad, la densidad y la presión hidrostática. En las zonas
costeras la salinidad es generalmente más baja debido a los aportes fluviales, pero puede
aumentar por la acción de los vientos que favorecen la evaporación o por el afloramiento de
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-10-
aguas profundas más saladas. La salinidad se deduce midiendo la conductividad eléctrica de
una muestra de agua marina, a partir de esto y de la temperatura original de la muestra, se
puede calcular la densidad del agua del mar en el punto donde se tomó dicha muestra.
La densidad del agua de mar esta en función de la salinidad, la temperatura y la presión. Su
importancia en oceanografía es notable porque determina la profundidad a la cual las masas de
agua alcanzan el equilibrio; las menos densas se disponen en superficie y las más densas y
pesadas en profundidad. La densidad varía de 1.02400 a 1.03000 g/cm3 (los valores más bajos
en superficie y cerca de las costas). La densidad del agua de mar se calcula mediante el uso de
ecuaciones matemáticas que la relacionan con la temperatura y la salinidad cuando la presión
se ha reducido a la atmosférica.
La viscosidad de un fluido es la resistencia interna al flujo debida al efecto combinado de las
fuerzas de adhesión y cohesión entre sus moléculas. La viscosidad del agua de mar es mayor
que la de las aguas dulces y depende de la salinidad.
El mar Mediterráneo es uno de los más salinos, por tanto es uno de los más corrosivos ya que
el nivel de salinidad en el agua es proporcional a la corrosión que esta ofrece. Pero también la
composición de iones disueltos es el agua afectan el nivel de corrosión debido a que hay un
cambio en el pH y por lo tanto un cambio en la acidez del agua.
Como se sabe, la atmosfera está estrechamente relacionada con el comportamiento de los
mares, es claro que la contaminación en la atmósfera, afecta directamente la composición
química de los mares, esto afecta a todo aquello que este en contacto con estos. En los estudios
recientes se ha determinado que la contaminación del aire (incremento de la presencia de
dióxido de carbono atmosférico) ha provocado una variación del pH en 0.3 a 0.5 en el Mar
Mediterráneo, por lo tanto se ha incrementado su acidez.
Tomando en cuenta trayectoria de navegación del barco “MS European Endeavourde”
podemos conocer las características del medio enfriante, en este caso el barco tiene una
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-11-
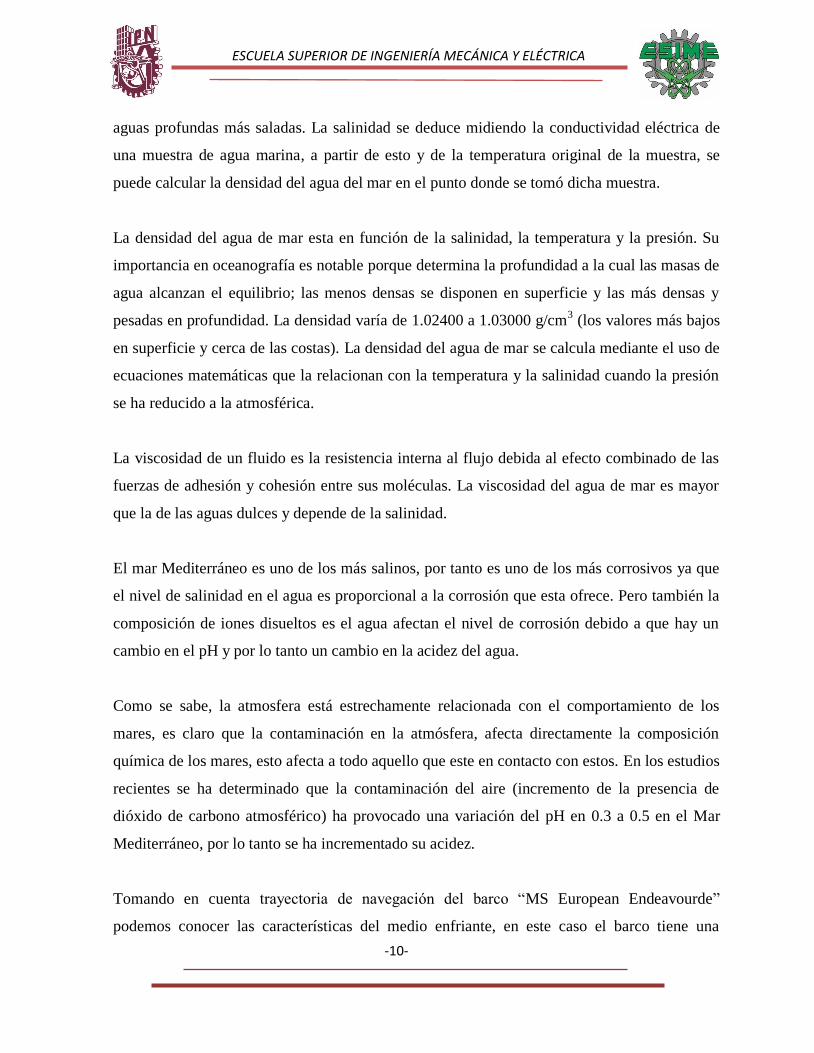
trayectoria, la cual se muestra en la Figura 1.5.1-1 por lo que se observa que el medio enfriante
utilizado para el sistema de lubricación del barco, es agua que se extrae del Mar Mediterráneo.
Figura 1.5.1-1 Trayectoria de Navegación del “MS European Endeavourde”
Teniendo en cuenta la ruta de navegación del barco, se tienen las siguientes características del
medio enfriante.
Temperaturas promedio del agua por estación del año:
21°C a 30°C en verano
15°C a 18°C en invierno
La salinidad promedio es la siguiente:
Salinidad = 38g/l
La densidad promedio que se ha registrado es la siguiente:
Densidad = 1.032 Kg/l
1.6 Especificación del Barco
El nombre del buque es “MS European Endeavourde” de una empresa en el Reino Unido
llamada P&O Ferris. Este barco cuenta con una sala en la que se distribuyen 4 motores
principales WÃRTSILÄ 9L38, acoplados a una reductora y de esta al eje de propulsión.

ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-12-
Figura 1.6-1 Barco tipo Ferry “MS European Endeavourde”
Este ferry de carga debe garantizar los tiempos de entrega por lo que no puede tener
interrupciones en el recorrido. A continuación se muestran las principales características del
barco.
Tabla 1.6-1 Especificaciones del ferry “MS European Endeavourde”
1.6.1 Especificaciones Técnicas de los Motores Diesel
En la figura 1.6.1-1 se muestra el motor WÄRTSILÄ 9L38, el cual es un motor de 4 tiempos,
de media velocidad, sobrealimentado, refrigerado y de inyección directa. En la tabla 1.6.1-1 se
indican las especificaciones del motor.
Longitud 179.95 m
Manga 25.24 m
Calado 6.5 m
Velocidad 22.5 nudos
Hélices Propulsoras 2 hélices
Tipo de Hélice Paso variable
Material de construcción Acero

ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-13-
Figura 1.6.1-1 Motor Wärtsilä 9L38
Tabla 1.6.1-1 Especificaciones del motor Wärtsilä 9L38
1.6.2 Especificaciones Técnicas del Lubricante
El aceite de lubricación que utilizan los Motores Diesel Wärtsilä 9L38 es un aceite tipo SAE
40, Castrol MHP 154, el cual presenta las siguientes propiedades:
POTENCIA DEL MOTOR EN CONDICIONES LOCALES
Potencia 100% (Kw)
Velocidad del Motor (rpm)
Ralentí (rpm)
5940 600 320
CONDICIONES DEL AMBIENTE DE OPERACIÓN
Presión atmosférica nominal (mbar)
Temperatura del refrigerante del aire de carga (°C)
Temperatura del aire de aspiración (°C)
Mín. Máx. Mín. Máx. 1000 25 38 15 45
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-14-
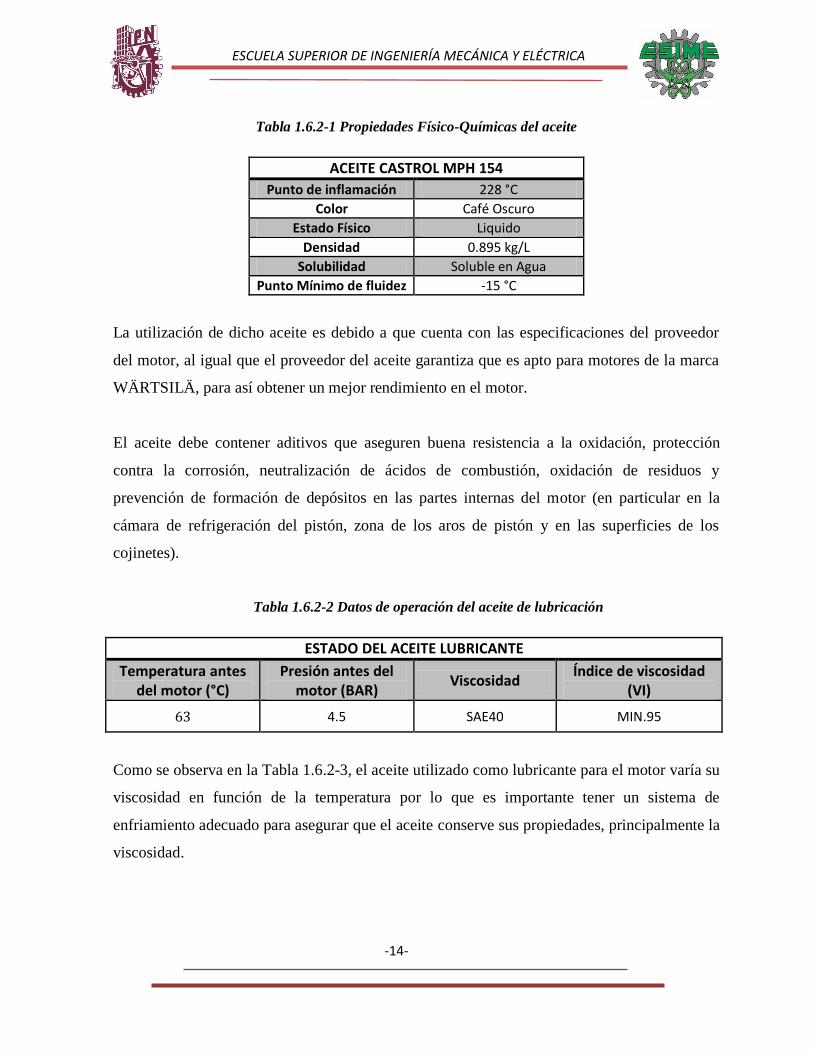
Tabla 1.6.2-1 Propiedades Físico-Químicas del aceite
ACEITE CASTROL MPH 154
Punto de inflamación 228 °C
Color Café Oscuro
Estado Físico Liquido
Densidad 0.895 kg/L
Solubilidad Soluble en Agua
Punto Mínimo de fluidez -15 °C
La utilización de dicho aceite es debido a que cuenta con las especificaciones del proveedor
del motor, al igual que el proveedor del aceite garantiza que es apto para motores de la marca
WÄRTSILÄ, para así obtener un mejor rendimiento en el motor.
El aceite debe contener aditivos que aseguren buena resistencia a la oxidación, protección
contra la corrosión, neutralización de ácidos de combustión, oxidación de residuos y
prevención de formación de depósitos en las partes internas del motor (en particular en la
cámara de refrigeración del pistón, zona de los aros de pistón y en las superficies de los
cojinetes).
Tabla 1.6.2-2 Datos de operación del aceite de lubricación
ESTADO DEL ACEITE LUBRICANTE
Temperatura antes del motor (°C)
Presión antes del motor (BAR)
Viscosidad Índice de viscosidad
(VI)
63 4.5 SAE40 MIN.95
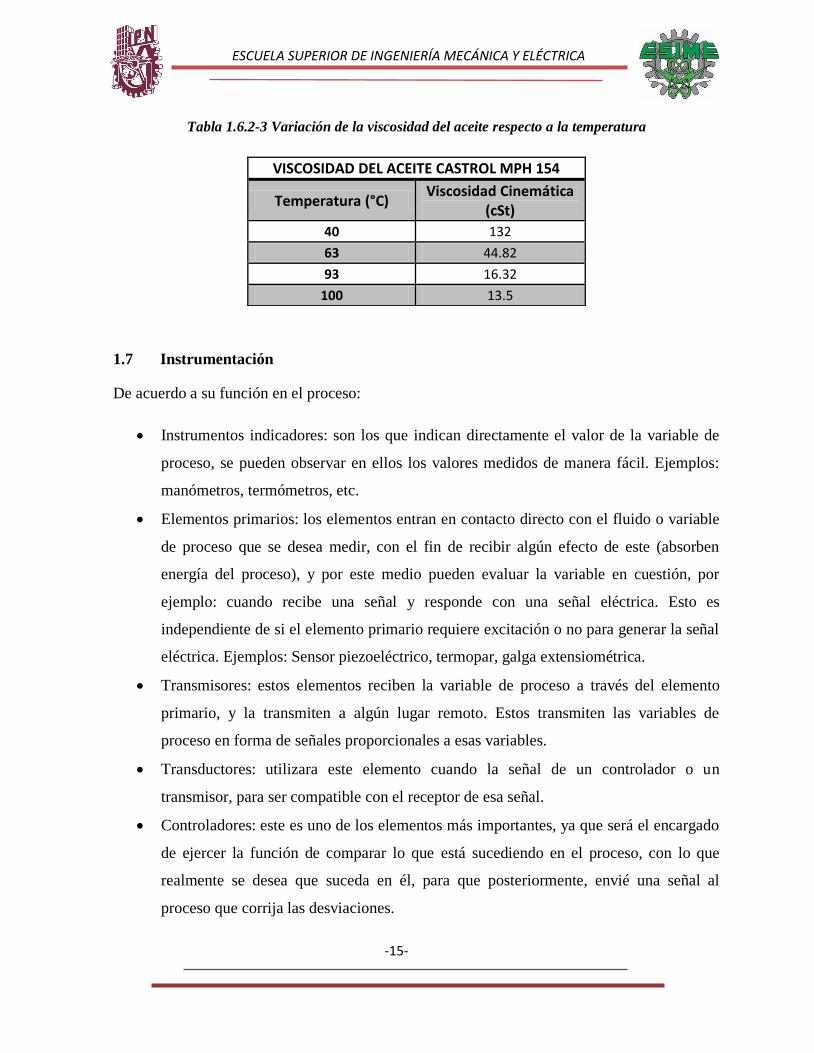
Como se observa en la Tabla 1.6.2-3, el aceite utilizado como lubricante para el motor varía su
viscosidad en función de la temperatura por lo que es importante tener un sistema de
enfriamiento adecuado para asegurar que el aceite conserve sus propiedades, principalmente la
viscosidad.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-15-
Tabla 1.6.2-3 Variación de la viscosidad del aceite respecto a la temperatura
1.7 Instrumentación
De acuerdo a su función en el proceso:
Instrumentos indicadores: son los que indican directamente el valor de la variable de
proceso, se pueden observar en ellos los valores medidos de manera fácil. Ejemplos:
manómetros, termómetros, etc.
Elementos primarios: los elementos entran en contacto directo con el fluido o variable
de proceso que se desea medir, con el fin de recibir algún efecto de este (absorben
energía del proceso), y por este medio pueden evaluar la variable en cuestión, por
ejemplo: cuando recibe una señal y responde con una señal eléctrica. Esto es
independiente de si el elemento primario requiere excitación o no para generar la señal
eléctrica. Ejemplos: Sensor piezoeléctrico, termopar, galga extensiométrica.
Transmisores: estos elementos reciben la variable de proceso a través del elemento
primario, y la transmiten a algún lugar remoto. Estos transmiten las variables de
proceso en forma de señales proporcionales a esas variables.
Transductores: utilizara este elemento cuando la señal de un controlador o un
transmisor, para ser compatible con el receptor de esa señal.
Controladores: este es uno de los elementos más importantes, ya que será el encargado
de ejercer la función de comparar lo que está sucediendo en el proceso, con lo que
realmente se desea que suceda en él, para que posteriormente, envié una señal al
proceso que corrija las desviaciones.
VISCOSIDAD DEL ACEITE CASTROL MPH 154
Temperatura (°C) Viscosidad Cinemática
(cSt)
40 132
63 44.82
93 16.32
100 13.5

ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-16-
Elemento final de control: será este elemento quien reciba la señal del controlador y
quien estando en contacto directo con el proceso, ejecute un cambio en este, de tal
forma que se cambien los parámetros hacia el valor deseado.
En el lazo de control por retroalimentación del proceso se tiene componentes importantes, los
cuales son:
Proceso
Sensor
Transmisor
Controlador
Elemento final de control
Estos componentes se deben seleccionar principalmente en base a su función y sus rangos de
operación.
Figura 1.7-1 Instrumentación industrial
Sensor de Temperatura
Debe detectar en tiempo real y de manera constante las variaciones de temperatura en el
proceso. La señal de salida del sensor puede ser:
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-17-
Resistencia eléctrica
Tensión
Corriente eléctrica
En base a la tecnología del censado se tienen a los:
RTD (Detector de la Temperatura de Resistencia): Pt 100 o Pt 1000 (precisos, estables
y que abarcan un amplio intervalo de temperatura).
Termopares: adaptados a temperaturas muy elevadas y son mecánicamente muy
estables.
Válvula de control
Esta ejecuta la acción ordenada por el controlador y dependiendo del proceso pueden ser
motores eléctricos o válvulas automáticas de control.
Para este proceso se determina el uso de una válvula de control debido a que es el modo más
común y eficiente de controlar flujo y es de mayor aplicación en la industria que el control con
bombas (motores).
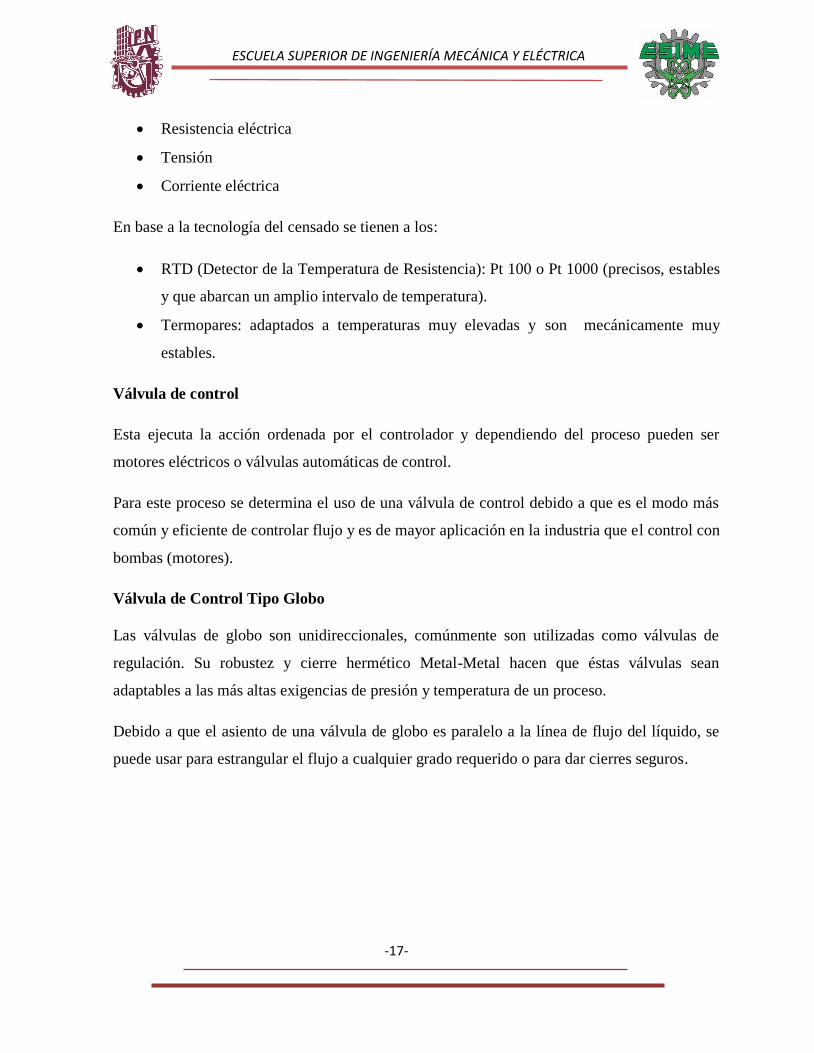
Válvula de Control Tipo Globo
Las válvulas de globo son unidireccionales, comúnmente son utilizadas como válvulas de
regulación. Su robustez y cierre hermético Metal-Metal hacen que éstas válvulas sean
adaptables a las más altas exigencias de presión y temperatura de un proceso.
Debido a que el asiento de una válvula de globo es paralelo a la línea de flujo del líquido, se
puede usar para estrangular el flujo a cualquier grado requerido o para dar cierres seguros.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-18-
Figura 1.7-2 Partes Principales de una válvula de globo
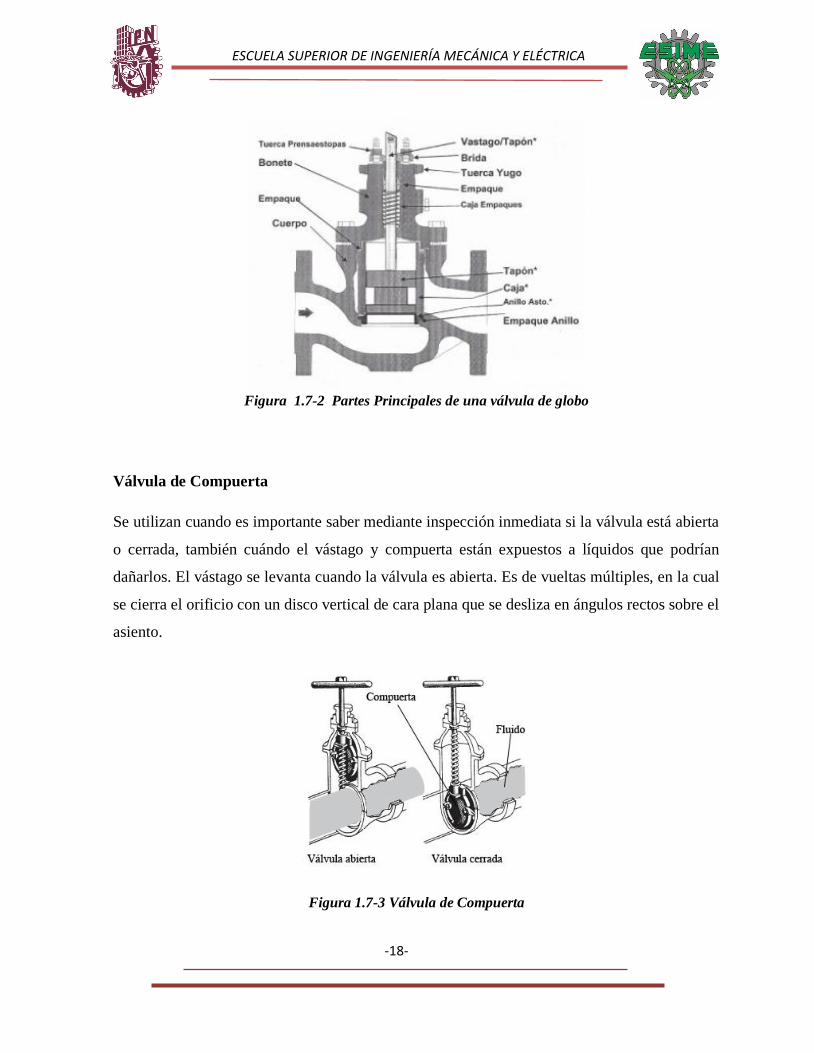
Válvula de Compuerta
Se utilizan cuando es importante saber mediante inspección inmediata si la válvula está abierta
o cerrada, también cuándo el vástago y compuerta están expuestos a líquidos que podrían
dañarlos. El vástago se levanta cuando la válvula es abierta. Es de vueltas múltiples, en la cual
se cierra el orificio con un disco vertical de cara plana que se desliza en ángulos rectos sobre el
asiento.
Figura 1.7-3 Válvula de Compuerta
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-19-
Recomendada para:
Servicio con apertura total o cierre total, sin estrangulación.
Para uso poco frecuente.
Para resistencia mínima a la circulación.
Para mínimas cantidades de fluido o liquido atrapado en la tubería.
Aplicaciones:
Servicio general, aceites y petróleo, gas, aire, pastas semilíquidas, líquidos espesos, vapor,
gases y líquidos no condensables, líquidos corrosivos.
Características:
Alta capacidad.
Cierre hermético.
Bajo costo.
Poca resistencia a la circulación.
Se requiere mucha fuerza para accionarla.
1.8 Equipo
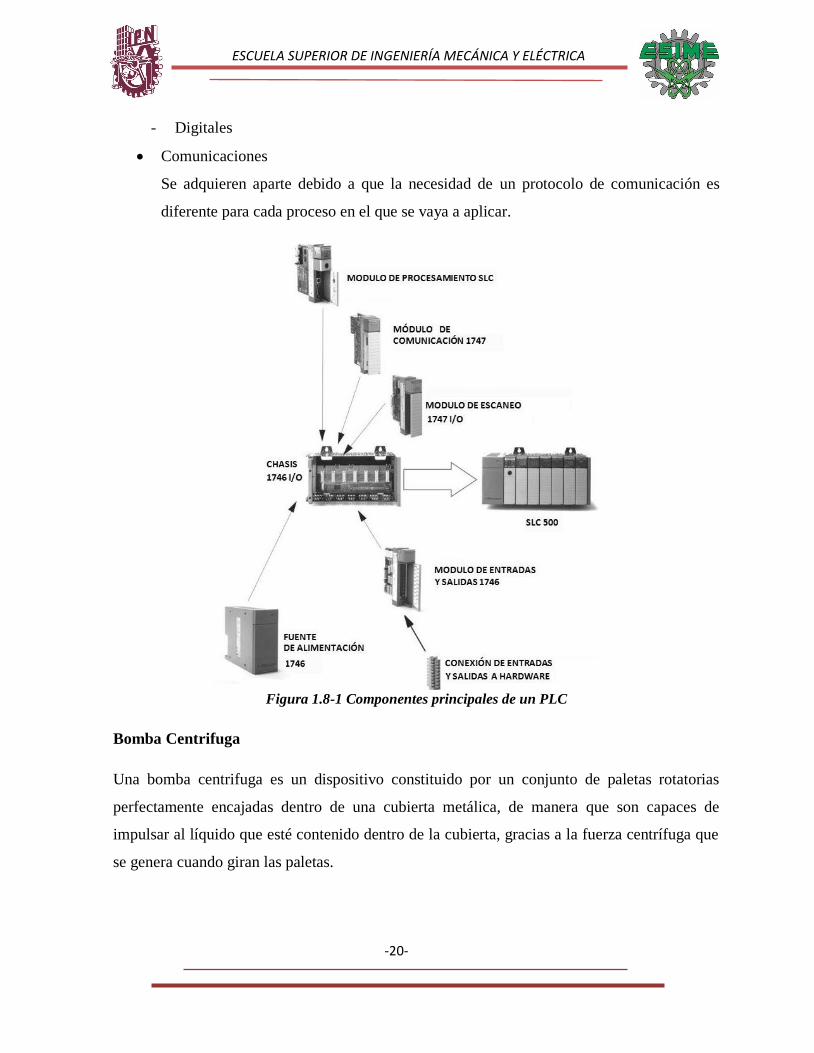
Básicamente un controlador lógico programable está construido en forma modular, teniendo
usualmente un procesador central, módulos de entrada/salida, fuente de poder y otros
accesorios.
Debido a la estructura modular de los PLC, en general pueden distinguirse en él los siguientes
componentes:
Procesador central (CPU)
Fuente de alimentación
Módulo de E/S
- Analógicas
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-20-
- Digitales
Comunicaciones
Se adquieren aparte debido a que la necesidad de un protocolo de comunicación es
diferente para cada proceso en el que se vaya a aplicar.
Figura 1.8-1 Componentes principales de un PLC
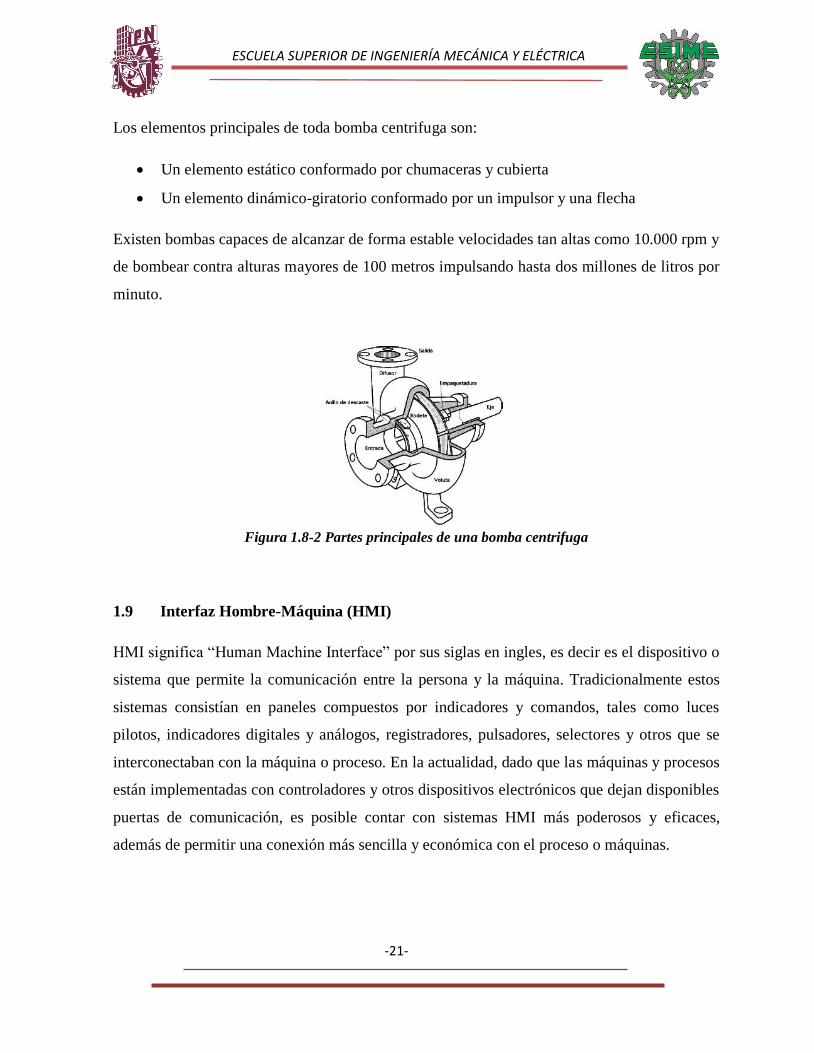
Bomba Centrifuga
Una bomba centrifuga es un dispositivo constituido por un conjunto de paletas rotatorias
perfectamente encajadas dentro de una cubierta metálica, de manera que son capaces de
impulsar al líquido que esté contenido dentro de la cubierta, gracias a la fuerza centrífuga que
se genera cuando giran las paletas.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-21-
Los elementos principales de toda bomba centrifuga son:
Un elemento estático conformado por chumaceras y cubierta
Un elemento dinámico-giratorio conformado por un impulsor y una flecha
Existen bombas capaces de alcanzar de forma estable velocidades tan altas como 10.000 rpm y
de bombear contra alturas mayores de 100 metros impulsando hasta dos millones de litros por
minuto.
Figura 1.8-2 Partes principales de una bomba centrifuga
1.9 Interfaz Hombre-Máquina (HMI)
HMI significa “Human Machine Interface” por sus siglas en ingles, es decir es el dispositivo o
sistema que permite la comunicación entre la persona y la máquina. Tradicionalmente estos
sistemas consistían en paneles compuestos por indicadores y comandos, tales como luces
pilotos, indicadores digitales y análogos, registradores, pulsadores, selectores y otros que se
interconectaban con la máquina o proceso. En la actualidad, dado que las máquinas y procesos
están implementadas con controladores y otros dispositivos electrónicos que dejan disponibles
puertas de comunicación, es posible contar con sistemas HMI más poderosos y eficaces,
además de permitir una conexión más sencilla y económica con el proceso o máquinas.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-22-
Clasificación de HMI´s:
Sin considerar el método tradicional, podemos distinguir básicamente dos tipos de HMI´s:
Terminal de Operador: consistente en un dispositivo, generalmente construido para ser
instalado en ambientes agresivos, pueden ser únicamente de despliegues numéricos,
alfanuméricos o gráficos. Pueden ser además con pantalla sensible al tacto (touch
screen).
PC + Software, esto constituye otra alternativa basada en un PC en donde se carga un
software apropiado para la aplicación. Como PC se puede utilizar cualquiera según lo
exija el proyecto, en donde existen los llamados Industriales (para ambientes
agresivos), los de panel (Panel PC) que se instalan en gabinetes dando una apariencia
de terminal de operador.
Funciones de un Software HMI:
Monitoreo. Es la habilidad de obtener y mostrar datos de la planta en tiempo real.
Estos datos se pueden mostrar como números, texto o gráficos que permitan una
lectura más fácil de interpretar.
Supervisión. Esta función permite junto con el monitoreo la posibilidad de ajustar las
condiciones de trabajo del proceso directamente desde la computadora.
Alarmas. Es la capacidad de reconocer eventos excepcionales dentro del proceso y
reportarlo estos eventos. Las alarmas son reportadas basadas en límites de control pre-
establecidos.
Control. Es la capacidad de aplicar algoritmos que ajustan los valores del proceso y así
mantener estos valores dentro de ciertos límites. Control va mas allá del control de
supervisión removiendo la necesidad de la interacción humana. Sin embargo la
aplicación de esta función desde un software corriendo en una PC puede quedar
limitada por la confiabilidad que quiera obtenerse del sistema.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-23-
Históricos. Es la capacidad de mostrar y almacenar en archivos, datos del proceso a
una determinada frecuencia. Este almacenamiento de datos es una poderosa
herramienta para la optimización y corrección de procesos.
Existen tres puntos de vista distintos en una HMI: el del usuario, el del programador y el del
diseñador. Cada uno tiene un modelo mental propio de la interfaz, que contiene los conceptos
y expectativas acerca de la interfaz, desarrollados a través de su experiencia.
Modelo del usuario. El usuario tiene su visión personal del sistema, y espera que éste
se comporte de una cierta forma, que se puede conocer estudiando al usuario
(realizando pruebas de usabilidad, entrevistas, o a través de una realimentación). Una
interfaz debe facilitar el proceso de crear un modelo mental efectivo.
Modelo del programador. Es el más fácil de visualizar, al poderse especificar
formalmente. Está constituido por los objetos que manipula el programador. Estos
objetos se deben esconder del usuario. Los conocimientos del programador incluyen la
plataforma de desarrollo, el sistema operativo, las herramientas de desarrollo,
especificaciones. Sin embargo, esto no significa necesariamente que tenga la habilidad
de proporcionar al usuario los modelos y metáforas más adecuadas.
Modelo del diseñador. El diseñador mezcla las necesidades, ideas, deseos del usuario y
los materiales de que dispone el programador para diseñar un producto de software. Es
un intermediario entre ambos. El modelo del diseñador describe los objetos que utiliza
el usuario, su presentación al mismo y las técnicas de interacción para su
manipulación.
El modelo tiene tres partes: presentación, interacción y relaciones entre los objetos.
Presentación: es lo que primero capta la atención del usuario, pero más tarde pasa a un
segundo plano. La presentación no es lo más relevante, y un abuso en la misma (por
ejemplo, en el color) puede ser contraproducente, distrayendo al usuario.
Interacción: a través de diversos dispositivos que utiliza el usuario.
Relaciones entre los objetos: es donde el diseñador determina la metáfora adecuada
que encaja con el modelo mental del usuario.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-24-
Estrategia de Control y
Monitoreo
CAPÍTULO
2.1 Análisis del Sistema de Lubricación
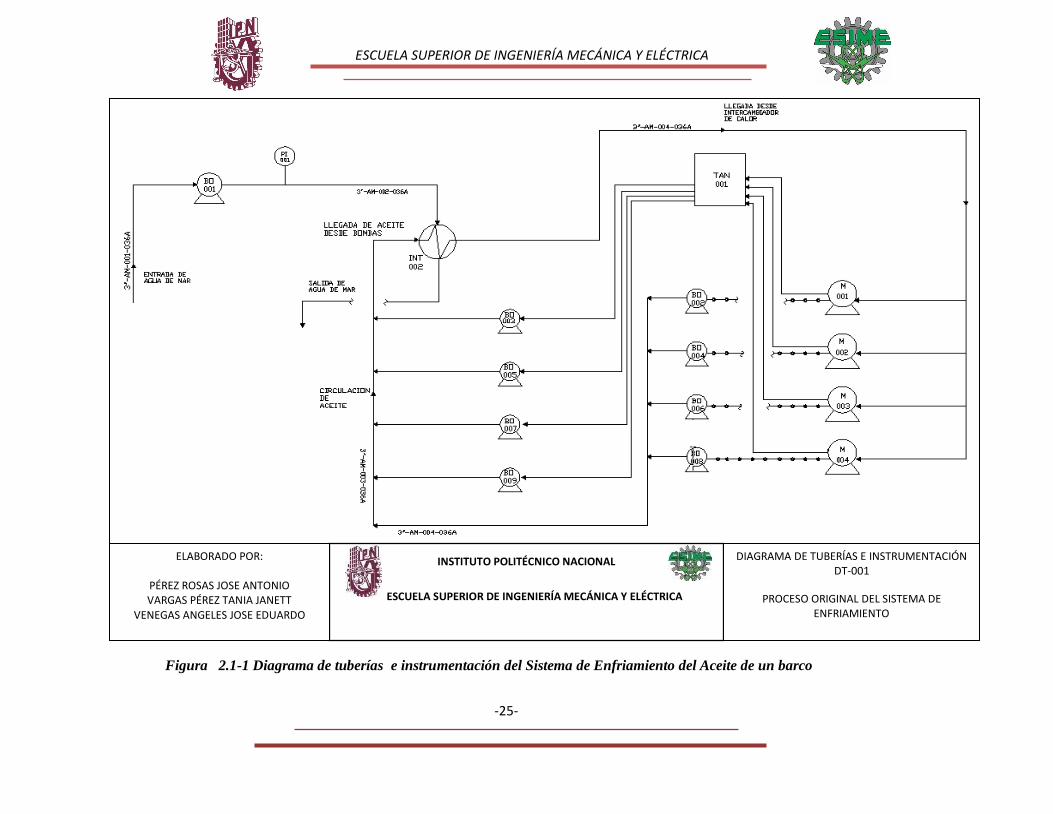
La propuesta del control comprende desde el desarrollo de un DTI del proceso en el cual se
puede encontrar la instrumentación adecuada para el control y el monitoreo del proceso, hasta
la propuesta del diagrama de bloques de la estrategia de control.
En la Figura 2.1-1 se observa el DTI del proceso antes de que se determine una estrategia de
control que permita el control del sistema de enfriamiento de aceite del barco.
Las variables a controlar en el sistema de enfriamiento del aceite de barco son la temperatura
del aceite y el flujo de agua requerida para lograr el intercambio de calor.
Se define que la variable controlada es la temperatura del aceite y la variable manipulada es el
flujo de agua de mar que pasa a través de la carcasa del intercambiador de calor.
2
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-25-
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
DIAGRAMA DE TUBERÍAS E INSTRUMENTACIÓN DT-001
PROCESO ORIGINAL DEL SISTEMA DE ENFRIAMIENTO
ELABORADO POR:
PÉREZ ROSAS JOSE ANTONIO VARGAS PÉREZ TANIA JANETT
VENEGAS ANGELES JOSE EDUARDO
Figura 2.1-1 Diagrama de tuberías e instrumentación del Sistema de Enfriamiento del Aceite de un barco
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-26-
2.2 Determinación de Parámetros de Control en el Intercambiador de Calor
Sabiendo el flujo de aceite que se debe enfriar, las temperaturas y las presiones a las que
trabaja el sistema, se realiza un balance de energía con el cual determinaremos el flujo de
agua de mar que deberá pasar por la carcasa del intercambiador de calor para enfriar
determinada cantidad de aceite. Esto se obtiene conociendo el flujo de calor que se debe
transferir del aceite al agua de mar mediante un balance de energía.
2.2.1 Balance de Energía
La energía en un sistema se puede transportar a través de las fronteras en forma de calor y en
forma de trabajo, en nuestro proceso la energía se transporta en forma de calor. La ecuación
2.2.1-1 expresa el calor que existe en un cuerpo.
2.2.1-1
Dónde:
Teniendo en cuenta que el calor transferido al fluido frio, menos el calor transferido al fluido
caliente es igual a cero y que las pérdidas en el sistema son despreciables, entonces se
establece que:
2.2.1-2
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-27-
Dónde:
Sustituyendo la ecuación 2.2.1-1 en la ecuación 2.2.1-2 obtenemos:
2.2.1-3
De la ecuación 2.1.1-3 el parámetro a calcular es el flujo másico de agua de mar, por lo que se
hace un despeje de dicho parámetro, mostrado en la ecuación 2.1.1-4
2.2.1-4
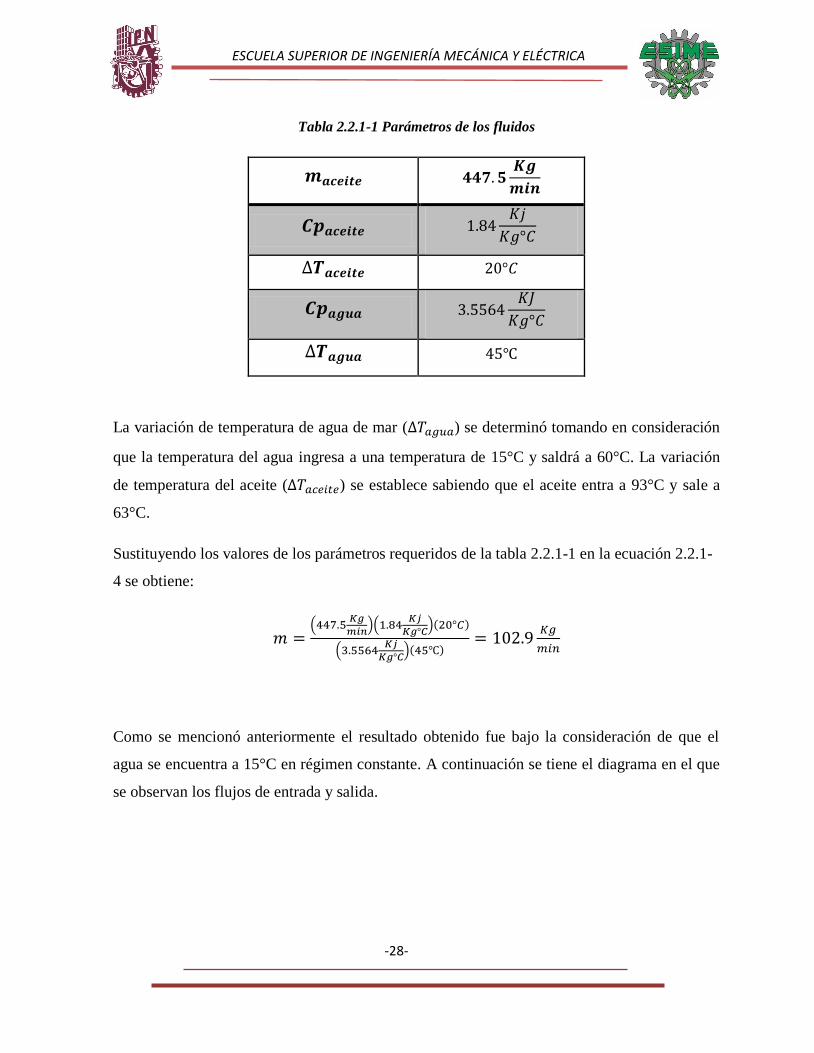
Debido a que cuando se tienen los cuatro Motores Diesel en operación el volumen de aceite
que ingresa al intercambiador de calor es aproximadamente de
, el cual debe ser
expresado como un flujo másico, sabiendo que tiene una densidad de
se puede
realizar la conversión. Por medio de la ecuación 2.2.1-4 se obtendrá el flujo de agua requerido
para enfriar dicha cantidad de aceite, por lo tanto son necesarios los parámetros de la tabla
2.2.1-1.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-28-
Tabla 2.2.1-1 Parámetros de los fluidos
La variación de temperatura de agua de mar ( ) se determinó tomando en consideración
que la temperatura del agua ingresa a una temperatura de 15°C y saldrá a 60°C. La variación
de temperatura del aceite ( ) se establece sabiendo que el aceite entra a 93°C y sale a
63°C.
Sustituyendo los valores de los parámetros requeridos de la tabla 2.2.1-1 en la ecuación 2.2.1-
4 se obtiene:
(
)(
)( )
(
)( )
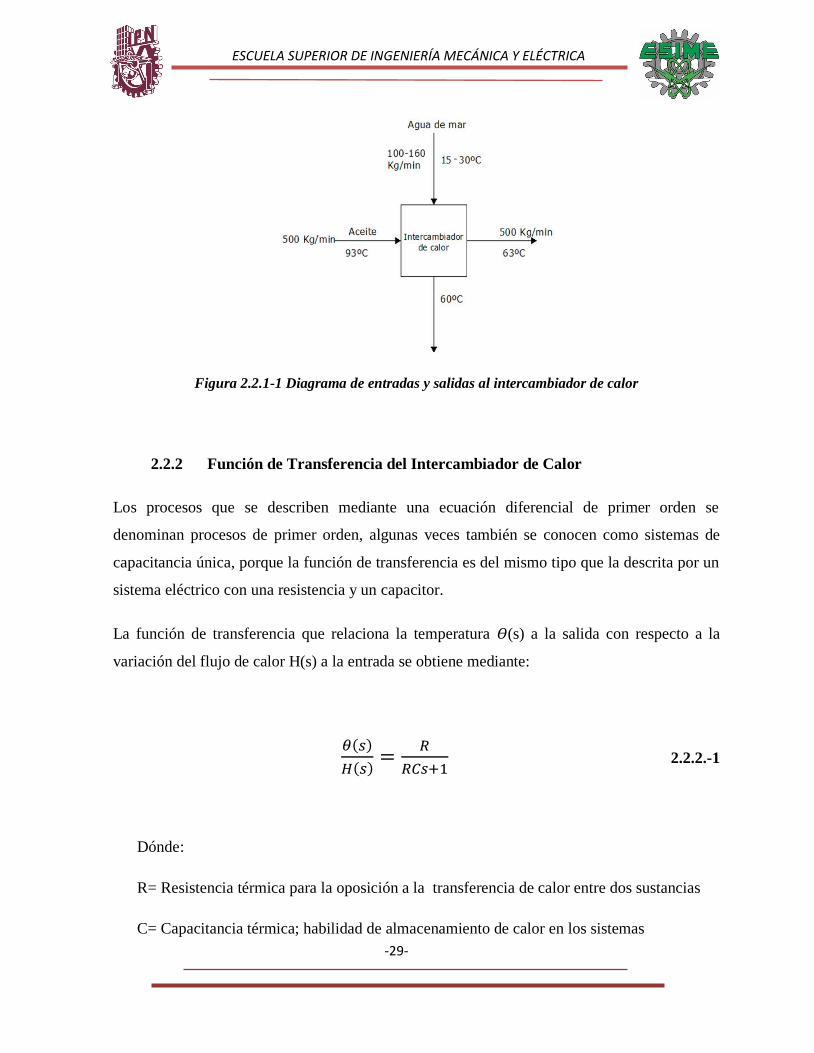
Como se mencionó anteriormente el resultado obtenido fue bajo la consideración de que el
agua se encuentra a 15°C en régimen constante. A continuación se tiene el diagrama en el que
se observan los flujos de entrada y salida.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-29-
Figura 2.2.1-1 Diagrama de entradas y salidas al intercambiador de calor
2.2.2 Función de Transferencia del Intercambiador de Calor
Los procesos que se describen mediante una ecuación diferencial de primer orden se
denominan procesos de primer orden, algunas veces también se conocen como sistemas de
capacitancia única, porque la función de transferencia es del mismo tipo que la descrita por un
sistema eléctrico con una resistencia y un capacitor.
La función de transferencia que relaciona la temperatura 𝛳(s) a la salida con respecto a la
variación del flujo de calor H(s) a la entrada se obtiene mediante:
( )
( )
2.2.2.-1
Dónde:
R= Resistencia térmica para la oposición a la transferencia de calor entre dos sustancias
C= Capacitancia térmica; habilidad de almacenamiento de calor en los sistemas

ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-30-
Los parámetros R y C están dados por la ecuación 2.2.2-2 y 2.2.2-3 respectivamente.
2.2.2-2
2.2.2-3
Entonces, para calcular el cambio en el flujo de calor se emplea la ecuación 2.2.1-1,
obteniéndose lo siguiente:
(
) (
) ( )
Tomando en cuenta que 1 Joule es igual a 0.23900574 Cal, se realiza la conversión de KJ a
Kcal para utilizarlos en las formulas 2.2.2-2 y 2.2.2-3.
La variación de temperatura del agua de mar corresponde al parámetro R y la variación de
temperatura del aceite corresponde al parámetro C. Sustituyendo el valor anterior y las
variaciones de temperatura correspondientes en las ecuaciones 2.2.2-2 y 2.2.2-3 se obtiene
que:

ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-31-
Una vez realizados los cálculos para la obtención de los parámetros anteriores, se determina
que es la constante de tiempo del sistema.
Dado:
2.2.2-4
Se determina lo siguiente:
Sabiendo que es la duración de un transitorio, es decir, el tiempo de respuesta del sistema
ante una variación de temperatura.
Por lo anterior se establece que la función de transferencia del intercambiador de calor, cuando
la temperatura del agua de mar es de 15°C con cuatro Motores Diesel en operación es:
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-32-
( )
( )
2.2.2-5
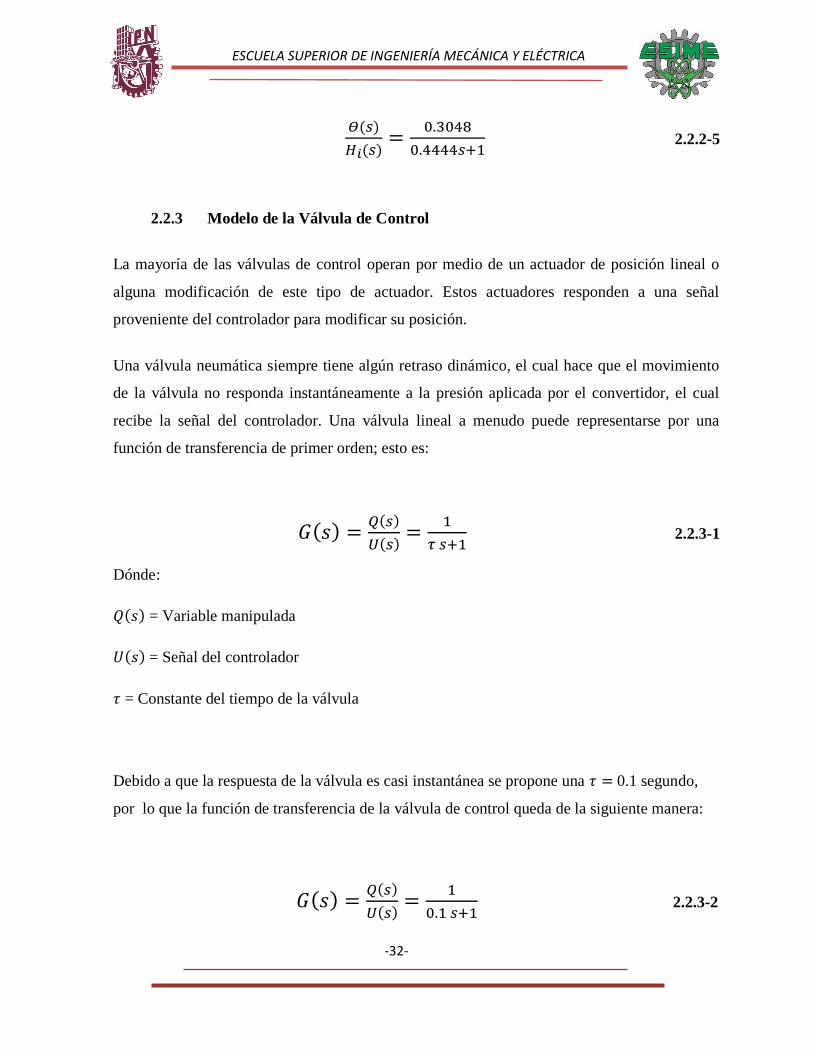
2.2.3 Modelo de la Válvula de Control
La mayoría de las válvulas de control operan por medio de un actuador de posición lineal o
alguna modificación de este tipo de actuador. Estos actuadores responden a una señal
proveniente del controlador para modificar su posición.
Una válvula neumática siempre tiene algún retraso dinámico, el cual hace que el movimiento
de la válvula no responda instantáneamente a la presión aplicada por el convertidor, el cual
recibe la señal del controlador. Una válvula lineal a menudo puede representarse por una
función de transferencia de primer orden; esto es:
( ) ( )
( )
2.2.3-1
Dónde:
( ) = Variable manipulada
( ) = Señal del controlador
= Constante del tiempo de la válvula
Debido a que la respuesta de la válvula es casi instantánea se propone una 0.1 segundo,
por lo que la función de transferencia de la válvula de control queda de la siguiente manera:
( ) ( )
( )
2.2.3-2
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-33-
2.3 Propuesta de la Estrategia de Control
Propuesta 1
Control por Acción Pre-calculada (feedforward)
Esta estrategia de control que se analizó porque aprovecha la información a priori para el
control del proceso, lo cual permite corregir el error antes de que se presente, considerando
perturbaciones tales como la temperatura del agua de mar y el cambio de flujo de aceite a la
entrada del intercambiador de calor.
Sin embargo esta estrategia de control es eficiente solo cuando el proceso consta de varias
etapas, lo cual no ocurre con este proceso. Además el costo se eleva debido a que se requiere
más instrumentación en el proceso. Debido a lo anterior esta estrategia de control no es la más
eficiente para controlar dicho sistema.
Propuesta 2
Control en Cascada
Se consideró esta estrategia de control principalmente porque ayuda a eliminar las
perturbaciones que afectan al sistema y porque mejora la dinámica del lazo de control.
El criterio más importante para aplicar este control es que se requiere que el lazo interno
(secundario) sea al menos 4 veces más rápido que el lazo externo (primario). Lo anterior se
acopla al proceso de la siguiente manera: el lazo que controla el flujo debe ser 4 veces más
rápido que el lazo que controla la temperatura. Sabiendo que el tiempo de respuesta de un lazo
de control está dado por la constante de tiempo ( ) y dado que del análisis de la respuesta en
lazo abierto del sistema se obtuvo que la velocidad de respuesta de los lazos de control es
similar, por lo tanto la estrategia de control se descartó.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-34-
Propuesta 3
Control Retroalimentado (Feedback)
Debido a que la acción correctiva se lleva a cabo tan pronto como la variable controlada se
desvía del set-point, y dado que el tiempo de respuesta del proceso es rápido, el error es
corregido con la misma velocidad. Además es una estrategia de control económica debido a la
poca instrumentación que se requiere en campo. En conjunto con un controlador PID se logra
un control versátil y robusto, por esto, es la estrategia de control más viable.
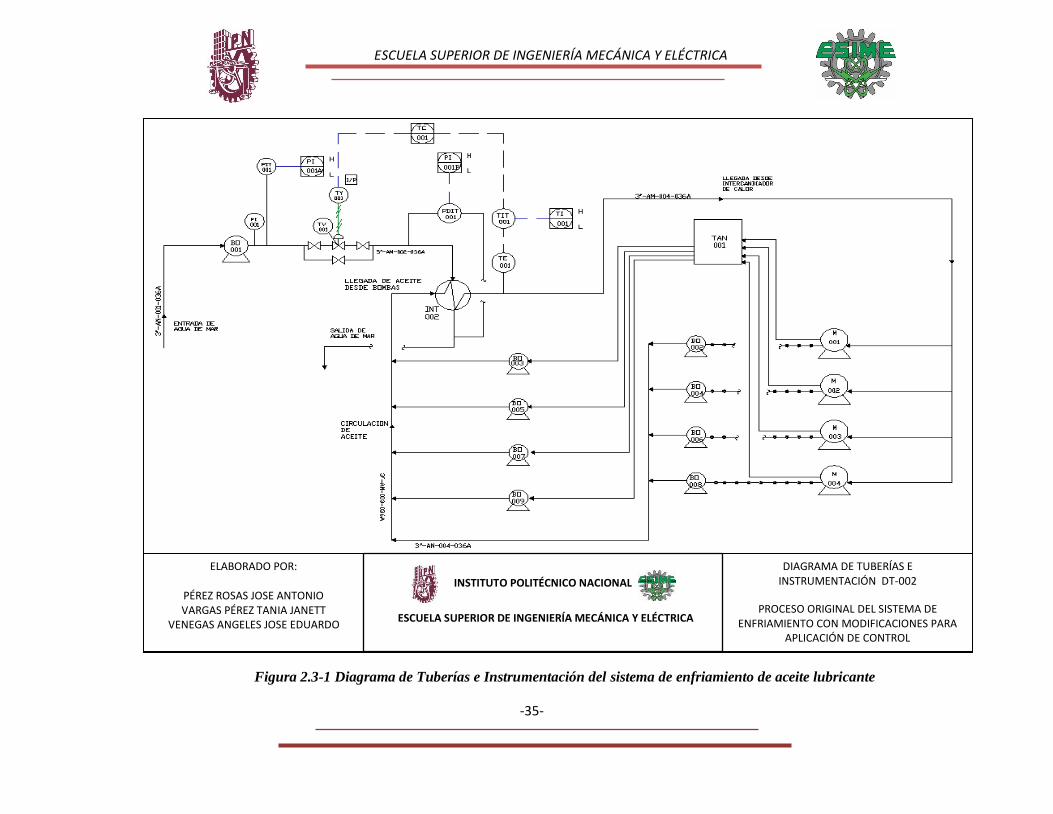
En el siguiente diagrama de tuberías e instrumentación se propone el control retroalimentado
para el sistema de enfriamiento del proceso de lubricación de los Motores Diesel.
2.3.1 Diagrama de Tuberías e Instrumentación
En el Diagrama de Tuberías e Instrumentación se presenta la propuesta de la estrategia de
control así como la instrumentación propuesta para lograr tanto el control como el monitoreo.
El DTI002 que se muestra en la figura 2.3-1 se diseño a partir del DTI001 de la figura 2.1-1.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-35-
DIAGRAMA DE TUBERÍAS E
INSTRUMENTACIÓN DT-002
PROCESO ORIGINAL DEL SISTEMA DE ENFRIAMIENTO CON MODIFICACIONES PARA
APLICACIÓN DE CONTROL
ELABORADO POR:
PÉREZ ROSAS JOSE ANTONIO VARGAS PÉREZ TANIA JANETT
VENEGAS ANGELES JOSE EDUARDO
Figura 2.3-1 Diagrama de Tuberías e Instrumentación del sistema de enfriamiento de aceite lubricante
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-36-
2.4 Propuesta de la Estrategia de Monitoreo
Anteriormente no se le daba importancia a los equipos en contacto con el agua de mar debido a
que el mantenimiento resultaba costoso ya que no se sabía con exactitud la frecuencia con la que
debía darse dicho mantenimiento, por ello, cuando el equipo de intercambio de calor estaba
sumamente incrustado de residuos de sal o microorganismos marinos, simplemente era
remplazado por uno nuevo. Hoy en día con los cambios climáticos que se han presentado, se ha
convertido en una tarea importante el monitoreo del equipo para garantizar que funcione el
tiempo que se requiere y así evitar el constante reemplazo de equipos.
Dada las condiciones anteriores se plantea el uso de una HMI y una nueva estrategia de control
para el sistema de enfriamiento para observar el comportamiento del sistema que enfría el aceite
que lubrica al motor.
La HMI nos permite visualizar las fallas que se presenten en el intercambiador de calor y permitir
dar un mantenimiento preventivo o correctivo que permita que el equipo funcione correctamente
el tiempo necesario además de que se evita la constante compra de equipos de intercambio de
calor.
La propuesta que se presenta es la de utilizar un software que nos permita tener un entorno
grafico en el que se muestren las variables del sistema y su comportamiento en tiempo real.
Además de que se plantea el uso de una HMI PC + Software que le ofrece al operario desde el
ambiente grafico hasta el elemento que permitirá la visualización desde el cuarto de control.
Uno de los softwares que nos permite el desarrollo de ambientes gráficos fácilmente accesibles al
operador es LabView de National Instruments.
2.4.1 Mejora de los Ciclos Operativos del Intercambiador de Calor
Se instalaran las siguientes alarmas en el ambiente de la HMI:
PAH (Alarma por alta Presión)
PAL (Alarma por baja Presión)
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-37-
TAH (Alarma por alta Temperatura)
TAL (Alarma por baja Temperatura)
Estas alarmas llaman la atención del operador para que se realicen las inspecciones
correspondientes por alguna irregularidad en el equipo. Para esto se determinaron valores
específicos en los que debe permanecer operando el intercambiador de calor. Los valores
especificados son los que ya se conocen de la operación del proceso, y cuando estos valores no
están dentro de los rangos especificados, las alarmas advierten al operador que existe una
anomalía.
Los operadores deben llenar hojas de especificaciones con los valores que se observan en la HMI
de manera periódica para tener históricos de comportamiento de las variables del sistema, en las
que se destaquen los siguientes puntos:
Presiones de operación (máximas y mínimas)
Los datos de la operación máxima y mínima serán los valores de operación que se
presenten a diario en la pantalla de la estación del operario (cuando esta trabajando el
equipo).
Temperaturas de operación ( máximas y mínimas)
La temperatura de operación también será la que se registre a diario en la pantalla de la
estación del operario.
Horas de uso del equipo
Realizar una comparación de los valores que muestran las alarmas con los valores
normales de operación.
Mantenimientos previos
Llevar a cabo los programas de mantenimiento preventivo que fueron determinados por el
fabricante del intercambiador de calor y revisar si ya se ha realizado previamente.
Estos datos deben ser recopilados cuando el equipo este en uso y detallados en la hoja de
especificaciones que deberá tener el equipo.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-38-
Se recomienda que una vez por mes se revisen las hojas de especificación y las memorias de
operación del equipo en las que se capturaron los valores nominales de trabajo del intercambiador
de calor. Esto se realiza para generar graficas o análisis en los que se observe el comportamiento
de las variables para saber si el equipo aun esta trabajando en condiciones óptimas o si ya es
necesario un mantenimiento programado.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-39-
Instrumentación y Equipos
CAPÍTULO
3.1 Selección de Instrumentación
La instrumentación debe estar especificada de modo que aseguren la adecuada operación del
proceso.
Transmisores
El transmisor de temperatura y los transmisores de presión se eligieron de acuerdo a lo siguiente:
Ubicación del equipo
Se especificó al fabricante del transmisor de su uso en agua de mar para que el equipo fuera
tropicalizado (protegido con aislamientos en su estructura interna).
Temperaturas de operación
En el trasmisor están incluidos los sensores que están en contacto directo con el fluido del
proceso por lo cual se especifican las temperaturas y presiones de operación máximas y mínimas
correspondientes para asegurar la funcionabilidad del sensor y su durabilidad.
3
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-40-
En el caso del sensor de temperatura se debe considerar, el tipo del sensor, su diámetro, la
construcción de la vaina y el calentamiento propio en el sensor.
La selección se hizo entre el Termopar tipo J y el sensor RTD y se determinó un Termopar tipo J
porque cumple con los rango de operación que se requieren, tiene una buena resistencia al agua
de mar, además de que en caso de avería, los termopares presentan un calentamiento inferior que
una termorresistencia (RTD) lo cual se toma en cuenta como medida de seguridad en caso de una
falla.
Fácil manejo
Deben ser accesibles para ser calibrados, aplicar mantenimiento y facilitar la toma de lecturas.
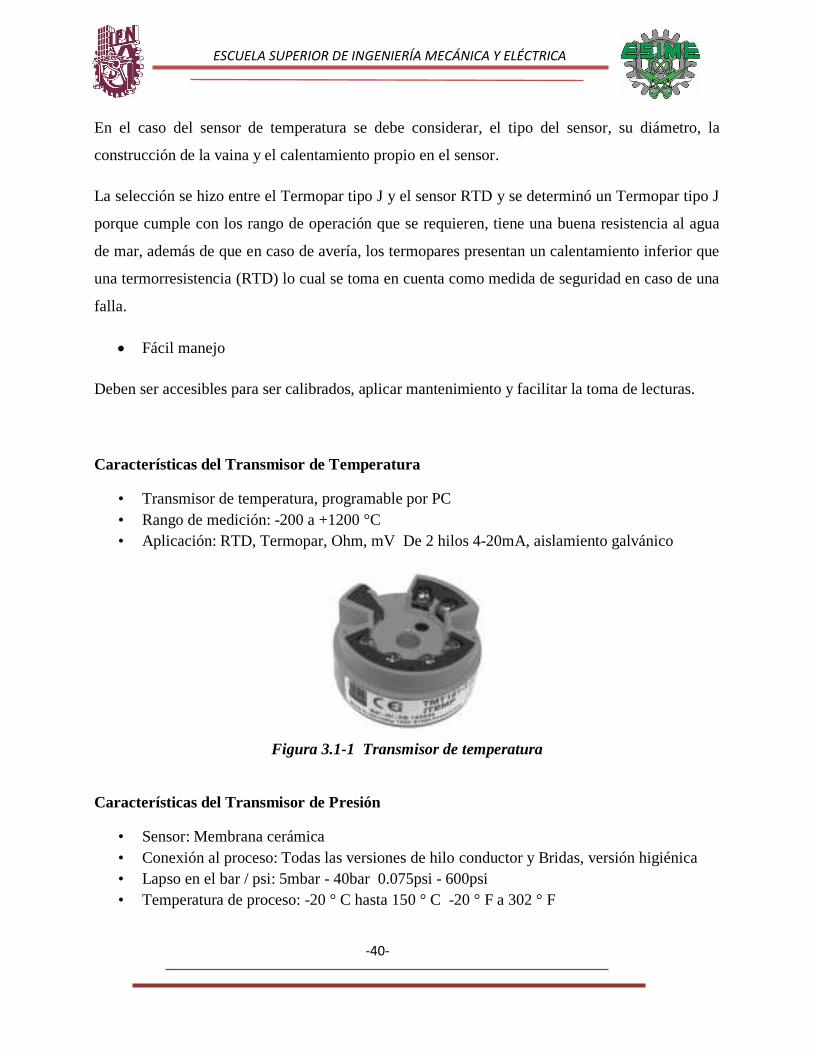
Características del Transmisor de Temperatura
• Transmisor de temperatura, programable por PC
• Rango de medición: -200 a +1200 °C
• Aplicación: RTD, Termopar, Ohm, mV De 2 hilos 4-20mA, aislamiento galvánico
Figura 3.1-1 Transmisor de temperatura
Características del Transmisor de Presión
• Sensor: Membrana cerámica
• Conexión al proceso: Todas las versiones de hilo conductor y Bridas, versión higiénica
• Lapso en el bar / psi: 5mbar - 40bar 0.075psi - 600psi
• Temperatura de proceso: -20 ° C hasta 150 ° C -20 ° F a 302 ° F
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-41-
Figura 3.1-2 Transmisor de presión
Características del Transmisor de Presión Diferencial
• Sensor: sondas piezoresistivas
• Conexión al proceso: bridas
• Lapso en el bar / psi: 5mbar - 16 bar 0.075psi - 240psi
• Temperatura de proceso: -40 ° C hasta 400 ° C -56 ° F a 752 ° F
Figura 3.1-3 Transmisor de presión diferencial
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-42-
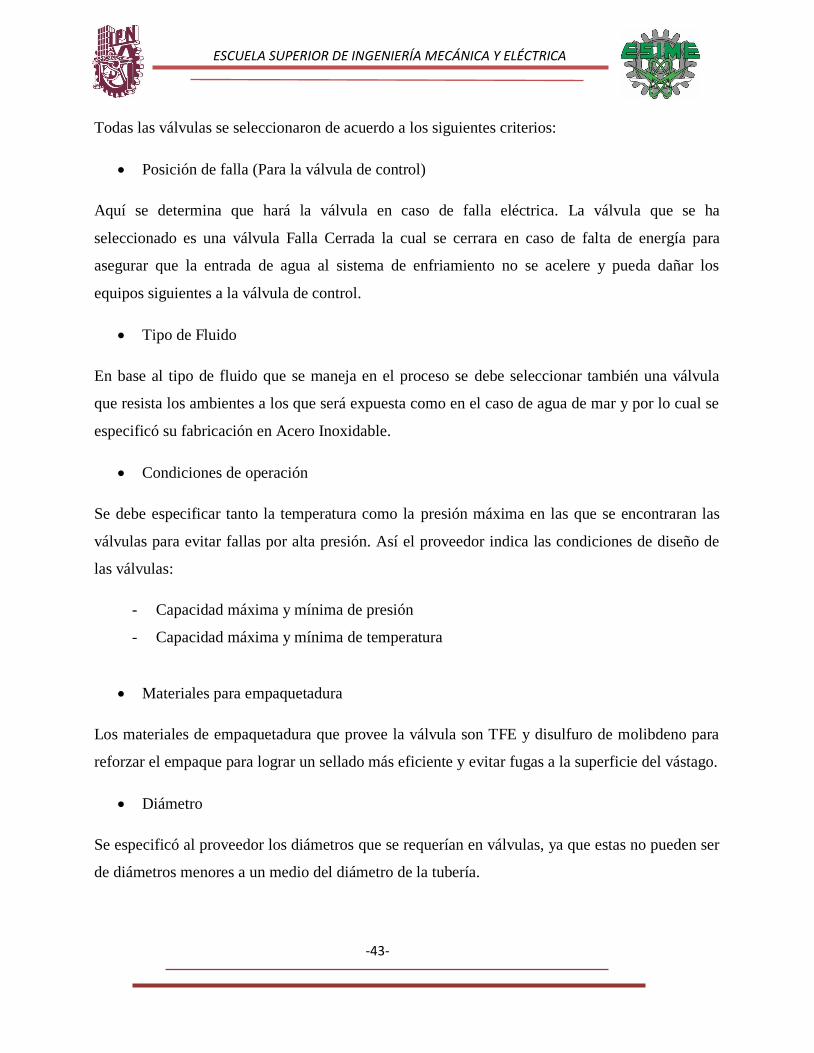
Características del Termopar tipo J
• Para atornillar Vaina ACC. DIN 43772/2G 3 G
• Tipo J (Fe-Cu Ni) Rango: -40 a 750 ° C (-40 a 1382 ° F)
Figura 3.1-4 Termopar tipo J
Válvulas
Se seleccionó la válvula de control de tipo globo, debido a que proporciona una buena regulación
del flujo.
Para la selección de válvulas usadas en el bypass, se determinaron de dos tipos: compuerta y
globo. Las válvulas de compuerta se encuentran en los extremos de la válvula de control, y la
válvula de globo es la que se ubica en la línea de recirculación del flujo.
Figura 3.1-5 Localización de las válvulas en bypass
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-43-
Todas las válvulas se seleccionaron de acuerdo a los siguientes criterios:
Posición de falla (Para la válvula de control)
Aquí se determina que hará la válvula en caso de falla eléctrica. La válvula que se ha
seleccionado es una válvula Falla Cerrada la cual se cerrara en caso de falta de energía para
asegurar que la entrada de agua al sistema de enfriamiento no se acelere y pueda dañar los
equipos siguientes a la válvula de control.
Tipo de Fluido
En base al tipo de fluido que se maneja en el proceso se debe seleccionar también una válvula
que resista los ambientes a los que será expuesta como en el caso de agua de mar y por lo cual se
especificó su fabricación en Acero Inoxidable.
Condiciones de operación
Se debe especificar tanto la temperatura como la presión máxima en las que se encontraran las
válvulas para evitar fallas por alta presión. Así el proveedor indica las condiciones de diseño de
las válvulas:
- Capacidad máxima y mínima de presión
- Capacidad máxima y mínima de temperatura
Materiales para empaquetadura
Los materiales de empaquetadura que provee la válvula son TFE y disulfuro de molibdeno para
reforzar el empaque para lograr un sellado más eficiente y evitar fugas a la superficie del vástago.
Diámetro
Se especificó al proveedor los diámetros que se requerían en válvulas, ya que estas no pueden ser
de diámetros menores a un medio del diámetro de la tubería.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-44-
Características de la Válvula de Control
• Temperatura de operación: -10°C a 180°C
• Forma de cuerpo 2/2 Vías
• Presión máxima: 7 bares
• Diámetro Nominal: 3”
• Viscosidad máxima: 600 Cst
• Temperatura ambiente: 60 °C
Figura 3.1-6 Válvula de control
Características de la Válvula de Compuerta Manual
• Diámetro nominal: 3”
• Material: Acero inoxidable
• Presión Max: 10 Bar
• Temperatura máx.: 200°C
Figura 3.1-7 Válvula de compuerta manual
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-45-
Características de la de Globo Válvula Manual
• Diámetro nominal: 3”
• Material: Acero inoxidable
• Presión Max: 10 Bar
• Temperatura máx.: 200°C
Figura 3.1-8 Válvula de globo manual
Toda la instrumentación requerida en el proceso se representa en el índice de instrumentación de
la tabla 3.1-1

ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-46-
Tabla 3.1-1 Índice de instrumentación
Para conocer todos los instrumentos que participan en el control del proceso y en el monitoreo se realiza un índice de
instrumentación en base al Diagrama de Tuberías e Instrumentación DT002 donde se especifica la localización de cada uno de los
instrumentos
Nº TAG Descripción del instrumento Servicio Localización Nº Tubería Nº DTI
PIT 001 Transmisor indicador de presión Agua de mar Campo 3”-AM-001-036A DT002
PI 001 Indicador de presión --- Sistema DT002
PAH 001 Alarma por alta presión --- Sistema DT002
PAL 001 Alarma por baja presión --- Sistema DT002
TCV 001 Válvula controladora de temperatura Agua de mar Campo 3”-AM-001-036A DT002
TY 001 Convertidor I/P Agua de mar Campo 3”-AM-001-036A DT002
TC 001 Controlador de temperatura Agua de mar Campo 3”-AM-001-036A DT002
TIT 001 Transmisor indicador de temperatura Agua de mar Campo 3”-AM-004-036A DT002
TE 001 Sensor de temperatura Aceite de lubricación Campo 3”-AM-004-036A DT002
TI 001 Indicador de temperatura --- Sistema DT002
TAH 001 Alarma por alta temperatura --- Sistema DT002
TAL 001 Alarma por baja temperatura --- Sistema DT002
PDIT 001
Transmisor indicador de presión diferencial Agua de mar Campo 3”-AM-002-036A DT002
PI 002 Indicador de presión Sistema DT002
PAH 002 Alarma por alta presión --- Sistema DT002
PAL 002 Alarma por baja presión --- sistema DT002
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-47-
3.2 Selección de Equipo
Controlador
Para seleccionar un controlador es importante saber el tipo de entradas y salidas que se tienen
en el proceso.
Criterios de selección del controlador
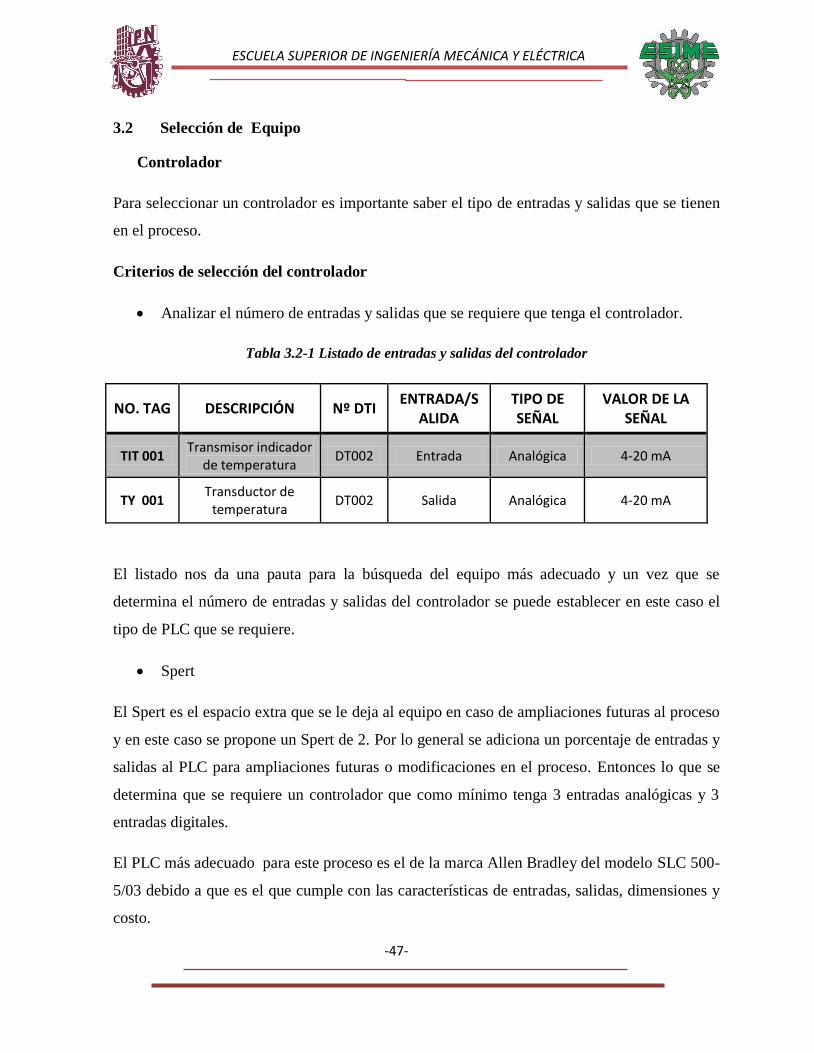
Analizar el número de entradas y salidas que se requiere que tenga el controlador.
Tabla 3.2-1 Listado de entradas y salidas del controlador
NO. TAG DESCRIPCIÓN Nº DTI ENTRADA/S
ALIDA TIPO DE SEÑAL
VALOR DE LA SEÑAL
TIT 001 Transmisor indicador
de temperatura DT002 Entrada Analógica 4-20 mA
TY 001 Transductor de
temperatura DT002 Salida Analógica 4-20 mA
El listado nos da una pauta para la búsqueda del equipo más adecuado y un vez que se
determina el número de entradas y salidas del controlador se puede establecer en este caso el
tipo de PLC que se requiere.
Spert
El Spert es el espacio extra que se le deja al equipo en caso de ampliaciones futuras al proceso
y en este caso se propone un Spert de 2. Por lo general se adiciona un porcentaje de entradas y
salidas al PLC para ampliaciones futuras o modificaciones en el proceso. Entonces lo que se
determina que se requiere un controlador que como mínimo tenga 3 entradas analógicas y 3
entradas digitales.
El PLC más adecuado para este proceso es el de la marca Allen Bradley del modelo SLC 500-
5/03 debido a que es el que cumple con las características de entradas, salidas, dimensiones y
costo.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-48-
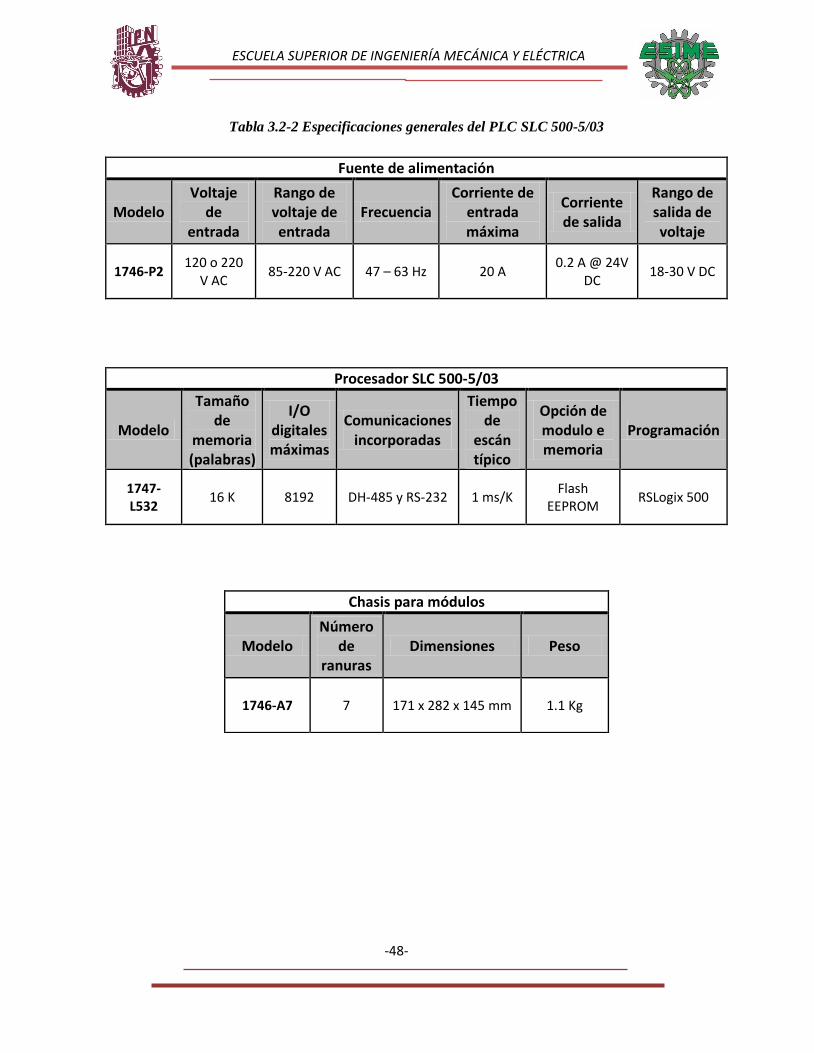
Tabla 3.2-2 Especificaciones generales del PLC SLC 500-5/03
Fuente de alimentación
Modelo Voltaje
de entrada
Rango de voltaje de entrada
Frecuencia Corriente de
entrada máxima
Corriente de salida
Rango de salida de voltaje
1746-P2 120 o 220
V AC
85-220 V AC
47 – 63 Hz 20 A
0.2 A @ 24V DC
18-30 V DC
Procesador SLC 500-5/03
Modelo
Tamaño de
memoria (palabras)
I/O digitales máximas
Comunicaciones incorporadas
Tiempo de
escán típico
Opción de modulo e memoria
Programación
1747-L532
16 K
8192
DH-485 y RS-232 1 ms/K Flash
EEPROM RSLogix 500
Chasis para módulos
Modelo Número
de ranuras
Dimensiones Peso
1746-A7 7
171 x 282 x 145 mm
1.1 Kg
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-49-
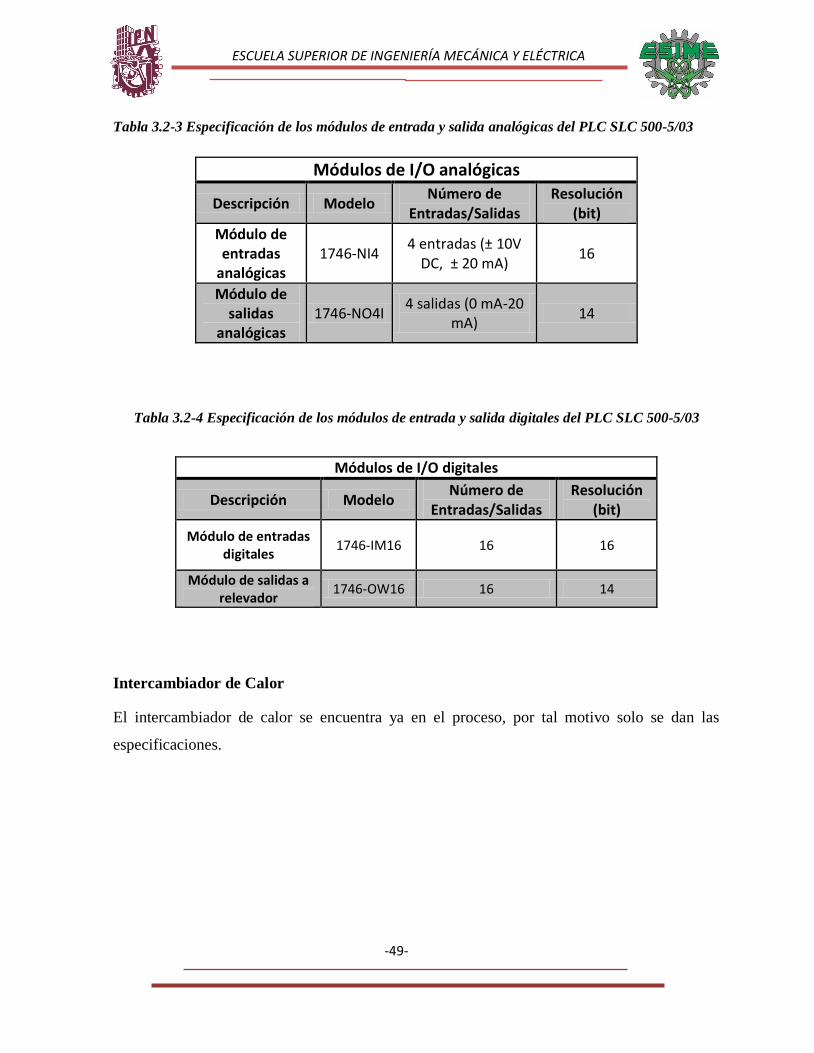
Tabla 3.2-3 Especificación de los módulos de entrada y salida analógicas del PLC SLC 500-5/03
Módulos de I/O analógicas
Descripción Modelo Número de
Entradas/Salidas Resolución
(bit)
Módulo de entradas
analógicas 1746-NI4
4 entradas (± 10V DC, ± 20 mA)
16
Módulo de salidas
analógicas 1746-NO4I
4 salidas (0 mA-20 mA)
14
Tabla 3.2-4 Especificación de los módulos de entrada y salida digitales del PLC SLC 500-5/03
Intercambiador de Calor
El intercambiador de calor se encuentra ya en el proceso, por tal motivo solo se dan las
especificaciones.
Módulos de I/O digitales
Descripción Modelo Número de
Entradas/Salidas Resolución
(bit)
Módulo de entradas digitales
1746-IM16 16 16
Módulo de salidas a relevador
1746-OW16 16 14
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-50-
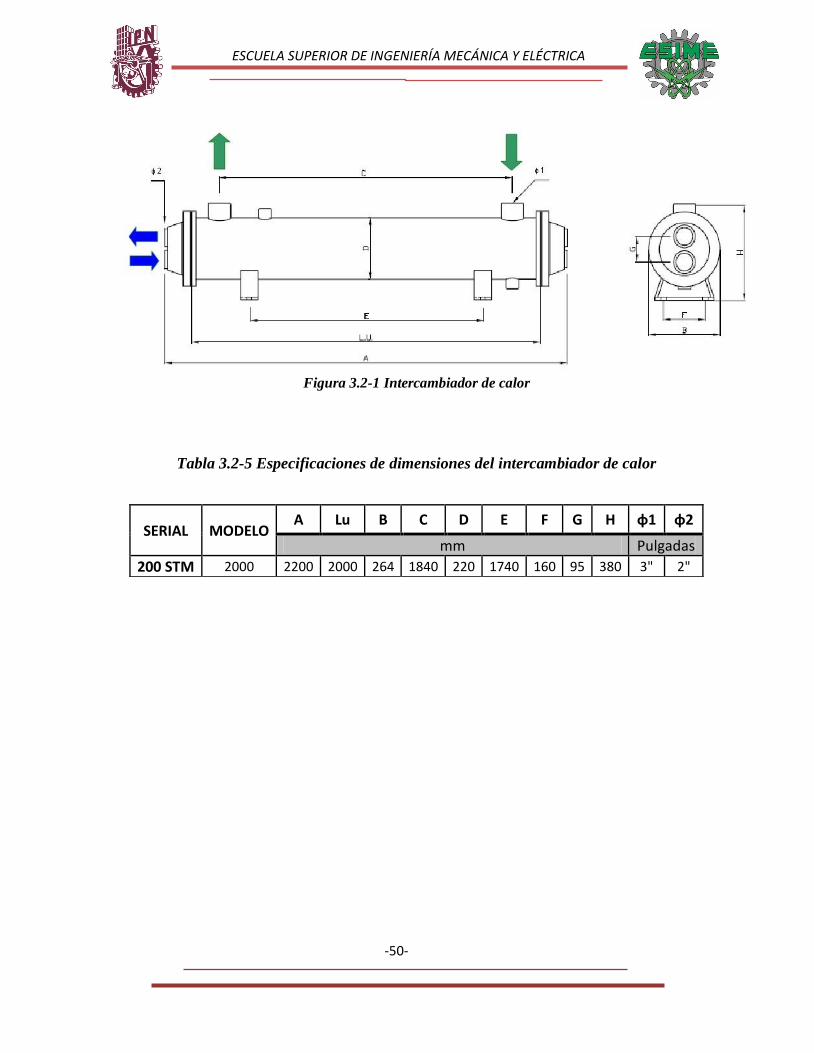
Figura 3.2-1 Intercambiador de calor
Tabla 3.2-5 Especificaciones de dimensiones del intercambiador de calor
SERIAL MODELO A Lu B C D E F G H ɸ1 ɸ2
mm Pulgadas
200 STM 2000 2200 2000 264 1840 220 1740 160 95 380 3" 2"
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-51-
Aplicación de Control y de
Sistema de Monitoreo
CAPÍTULO
4.1 Control para el Sistema de Enfriamiento
Después de que se analizaron varias propuestas para el control del sistema de enfriamiento de
aceite se determinó utilizar el control por retroalimentación que resultó ser el más sencillo
pero eficiente para este proceso.
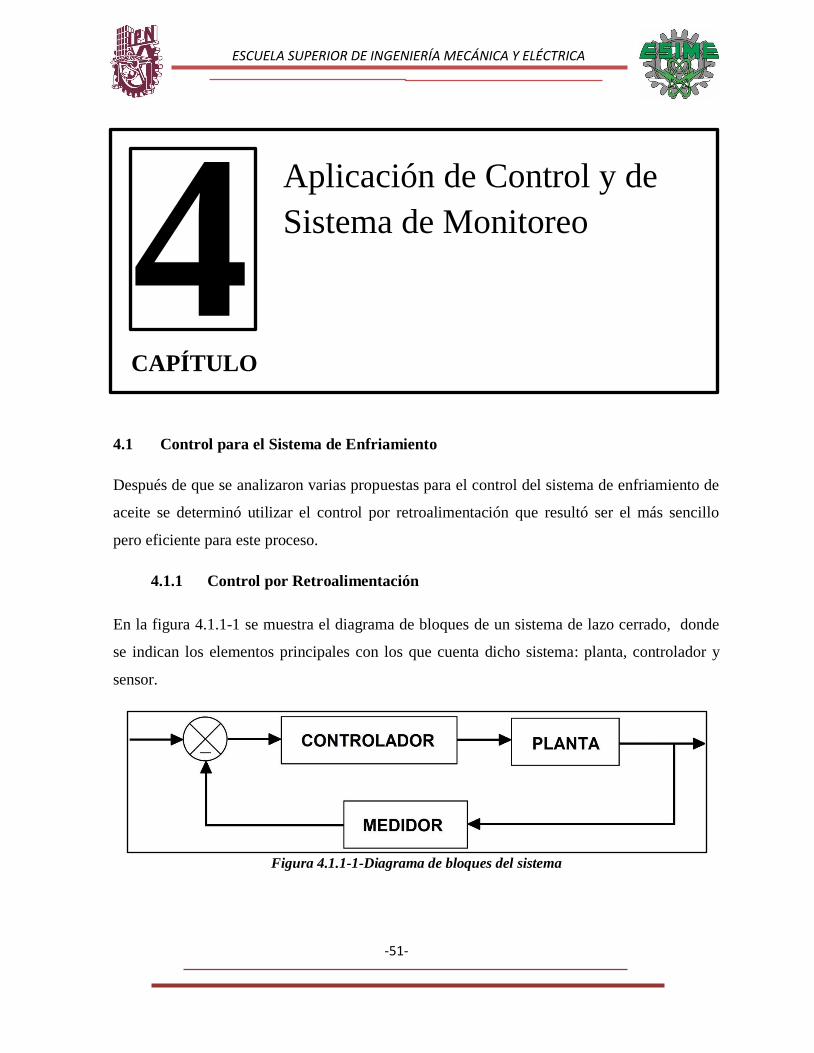
4.1.1 Control por Retroalimentación
En la figura 4.1.1-1 se muestra el diagrama de bloques de un sistema de lazo cerrado, donde
se indican los elementos principales con los que cuenta dicho sistema: planta, controlador y
sensor.
Figura 4.1.1-1-Diagrama de bloques del sistema
4
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-52-
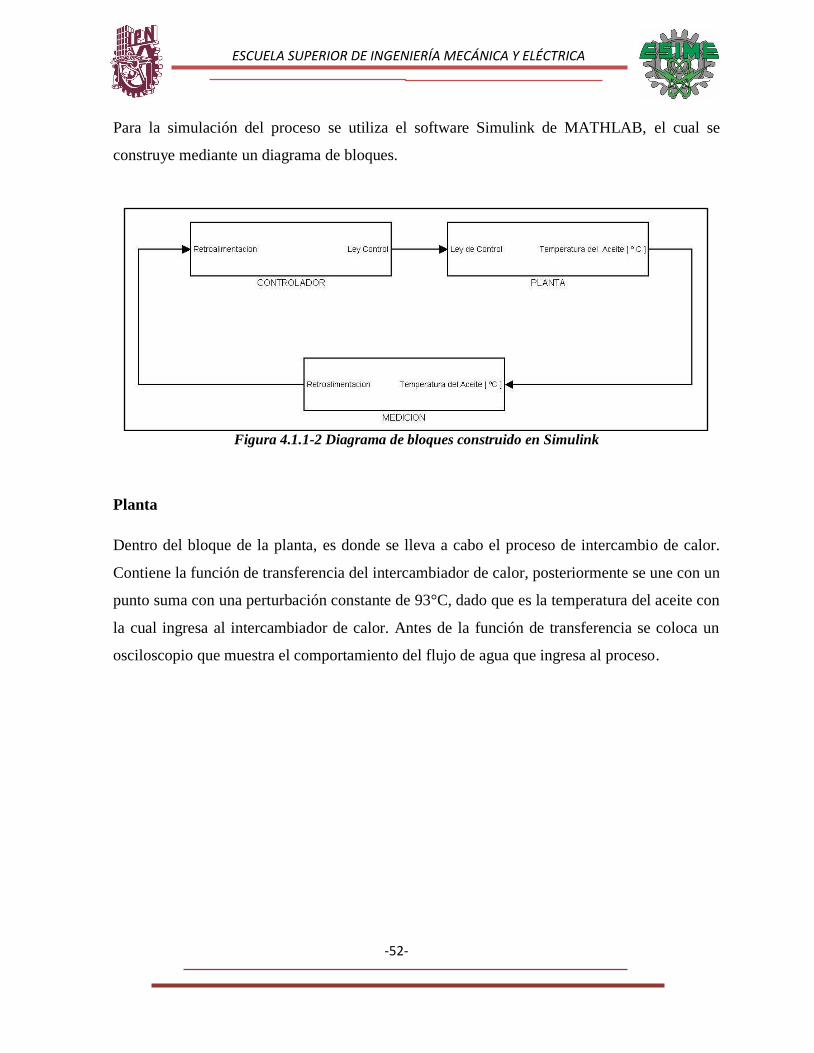
Para la simulación del proceso se utiliza el software Simulink de MATHLAB, el cual se
construye mediante un diagrama de bloques.
Figura 4.1.1-2 Diagrama de bloques construido en Simulink
Planta
Dentro del bloque de la planta, es donde se lleva a cabo el proceso de intercambio de calor.
Contiene la función de transferencia del intercambiador de calor, posteriormente se une con un
punto suma con una perturbación constante de 93°C, dado que es la temperatura del aceite con
la cual ingresa al intercambiador de calor. Antes de la función de transferencia se coloca un
osciloscopio que muestra el comportamiento del flujo de agua que ingresa al proceso.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-53-
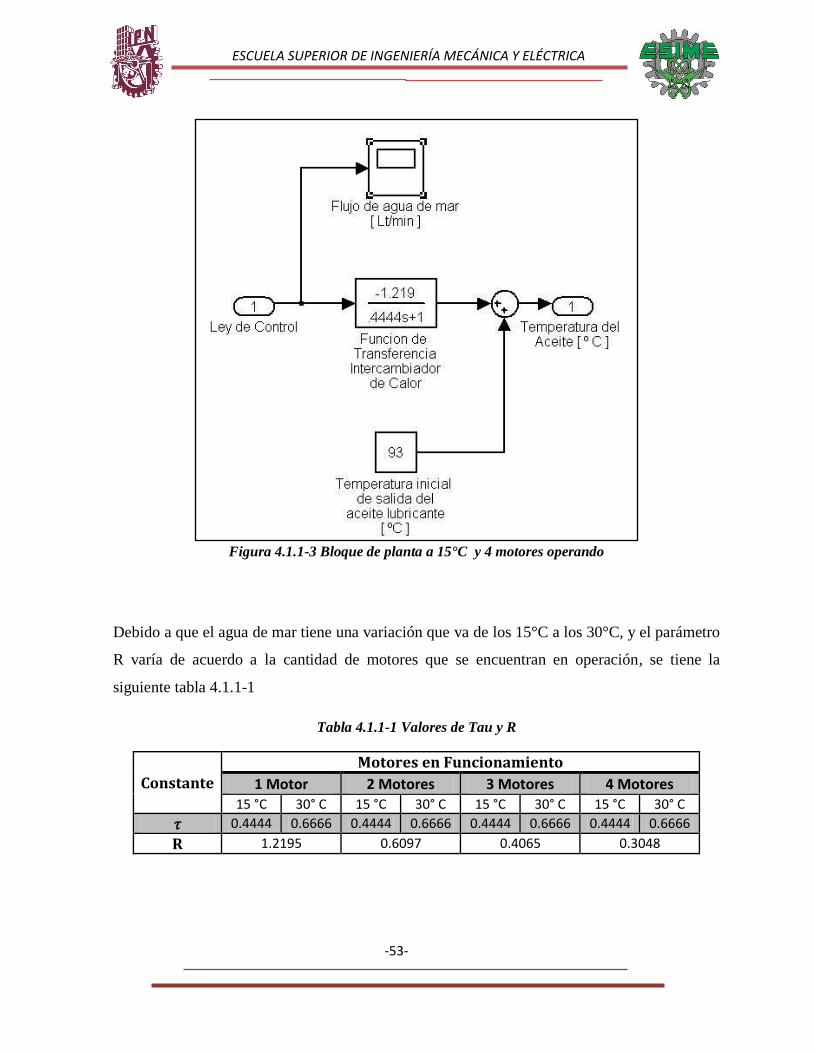
Figura 4.1.1-3 Bloque de planta a 15°C y 4 motores operando
Debido a que el agua de mar tiene una variación que va de los 15°C a los 30°C, y el parámetro
R varía de acuerdo a la cantidad de motores que se encuentran en operación, se tiene la
siguiente tabla 4.1.1-1
Tabla 4.1.1-1 Valores de Tau y R
Constante
Motores en Funcionamiento
1 Motor 2 Motores 3 Motores 4 Motores 15 °C 30° C 15 °C 30° C 15 °C 30° C 15 °C 30° C
0.4444 0.6666 0.4444 0.6666 0.4444 0.6666 0.4444 0.6666
R 1.2195 0.6097 0.4065 0.3048
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-54-
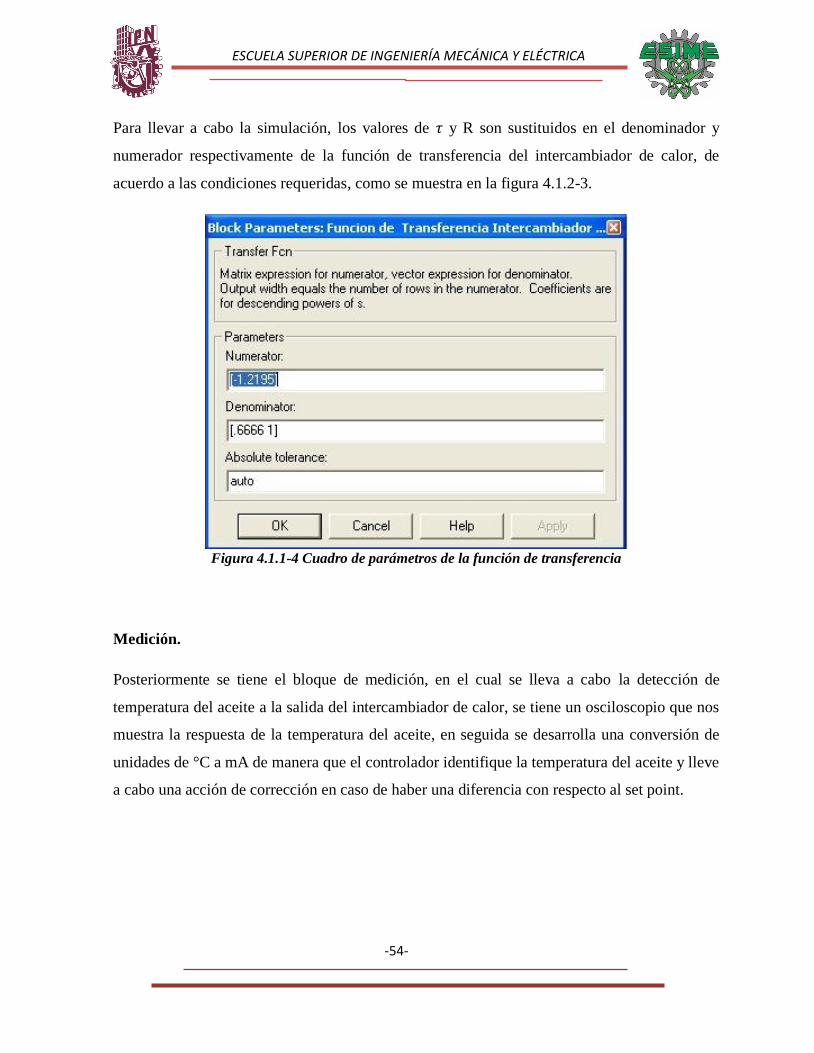
Para llevar a cabo la simulación, los valores de y R son sustituidos en el denominador y
numerador respectivamente de la función de transferencia del intercambiador de calor, de
acuerdo a las condiciones requeridas, como se muestra en la figura 4.1.2-3.
Figura 4.1.1-4 Cuadro de parámetros de la función de transferencia
Medición.
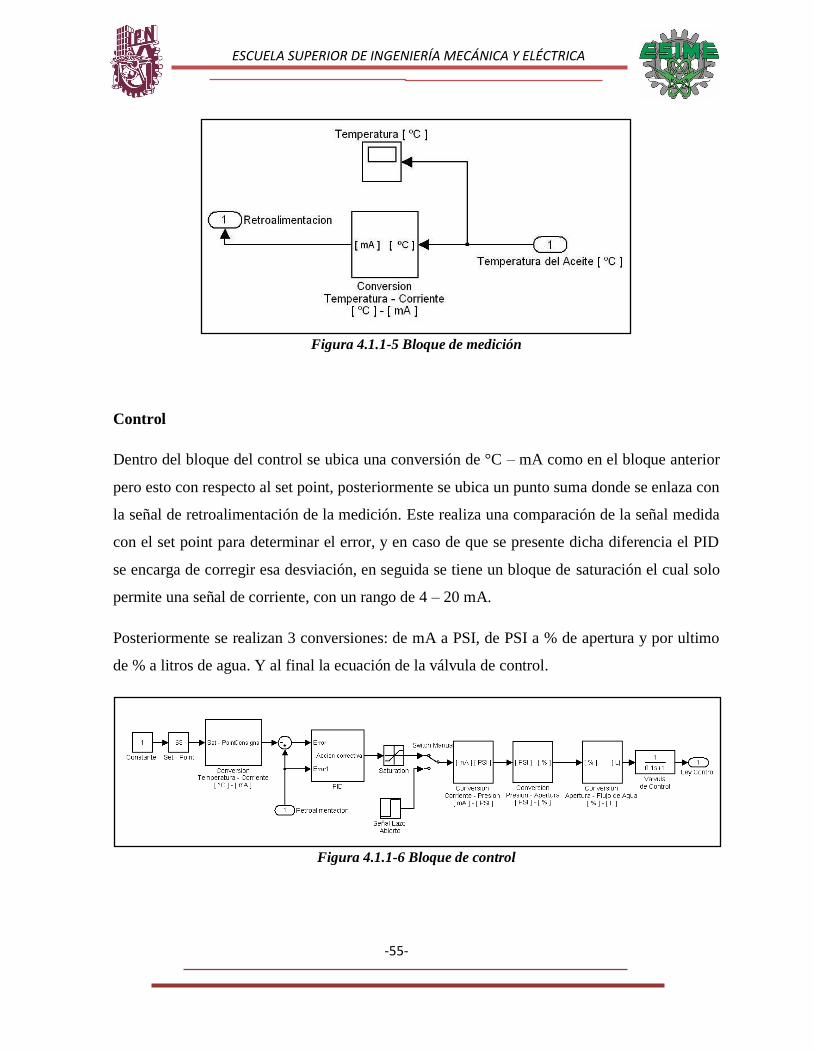
Posteriormente se tiene el bloque de medición, en el cual se lleva a cabo la detección de
temperatura del aceite a la salida del intercambiador de calor, se tiene un osciloscopio que nos
muestra la respuesta de la temperatura del aceite, en seguida se desarrolla una conversión de
unidades de °C a mA de manera que el controlador identifique la temperatura del aceite y lleve
a cabo una acción de corrección en caso de haber una diferencia con respecto al set point.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-55-
Figura 4.1.1-5 Bloque de medición
Control
Dentro del bloque del control se ubica una conversión de °C – mA como en el bloque anterior
pero esto con respecto al set point, posteriormente se ubica un punto suma donde se enlaza con
la señal de retroalimentación de la medición. Este realiza una comparación de la señal medida
con el set point para determinar el error, y en caso de que se presente dicha diferencia el PID
se encarga de corregir esa desviación, en seguida se tiene un bloque de saturación el cual solo
permite una señal de corriente, con un rango de 4 – 20 mA.
Posteriormente se realizan 3 conversiones: de mA a PSI, de PSI a % de apertura y por ultimo
de % a litros de agua. Y al final la ecuación de la válvula de control.
Figura 4.1.1-6 Bloque de control
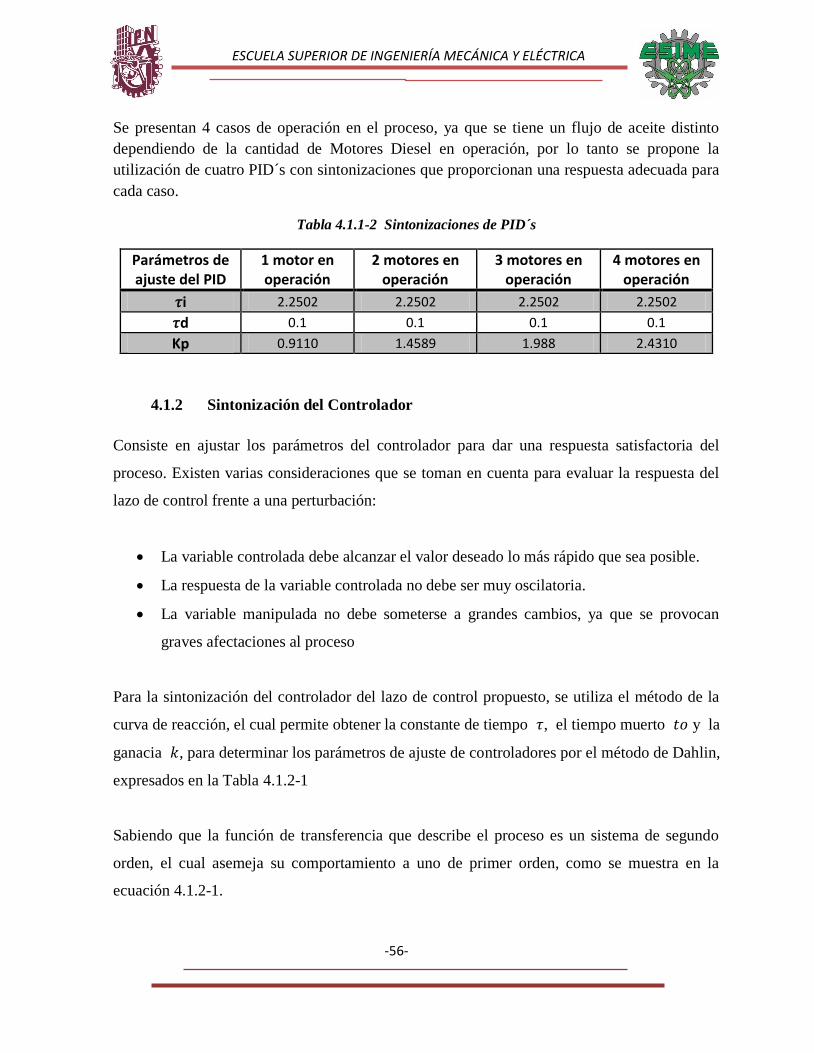
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-56-
Se presentan 4 casos de operación en el proceso, ya que se tiene un flujo de aceite distinto
dependiendo de la cantidad de Motores Diesel en operación, por lo tanto se propone la
utilización de cuatro PID´s con sintonizaciones que proporcionan una respuesta adecuada para
cada caso.
Tabla 4.1.1-2 Sintonizaciones de PID´s
Parámetros de ajuste del PID
1 motor en operación
2 motores en operación
3 motores en operación
4 motores en operación
i 2.2502 2.2502 2.2502 2.2502
d 0.1 0.1 0.1 0.1
Kp 0.9110 1.4589 1.988 2.4310
4.1.2 Sintonización del Controlador
Consiste en ajustar los parámetros del controlador para dar una respuesta satisfactoria del
proceso. Existen varias consideraciones que se toman en cuenta para evaluar la respuesta del
lazo de control frente a una perturbación:
La variable controlada debe alcanzar el valor deseado lo más rápido que sea posible.
La respuesta de la variable controlada no debe ser muy oscilatoria.
La variable manipulada no debe someterse a grandes cambios, ya que se provocan
graves afectaciones al proceso
Para la sintonización del controlador del lazo de control propuesto, se utiliza el método de la
curva de reacción, el cual permite obtener la constante de tiempo , el tiempo muerto y la
ganacia , para determinar los parámetros de ajuste de controladores por el método de Dahlin,
expresados en la Tabla 4.1.2-1
Sabiendo que la función de transferencia que describe el proceso es un sistema de segundo
orden, el cual asemeja su comportamiento a uno de primer orden, como se muestra en la
ecuación 4.1.2-1.
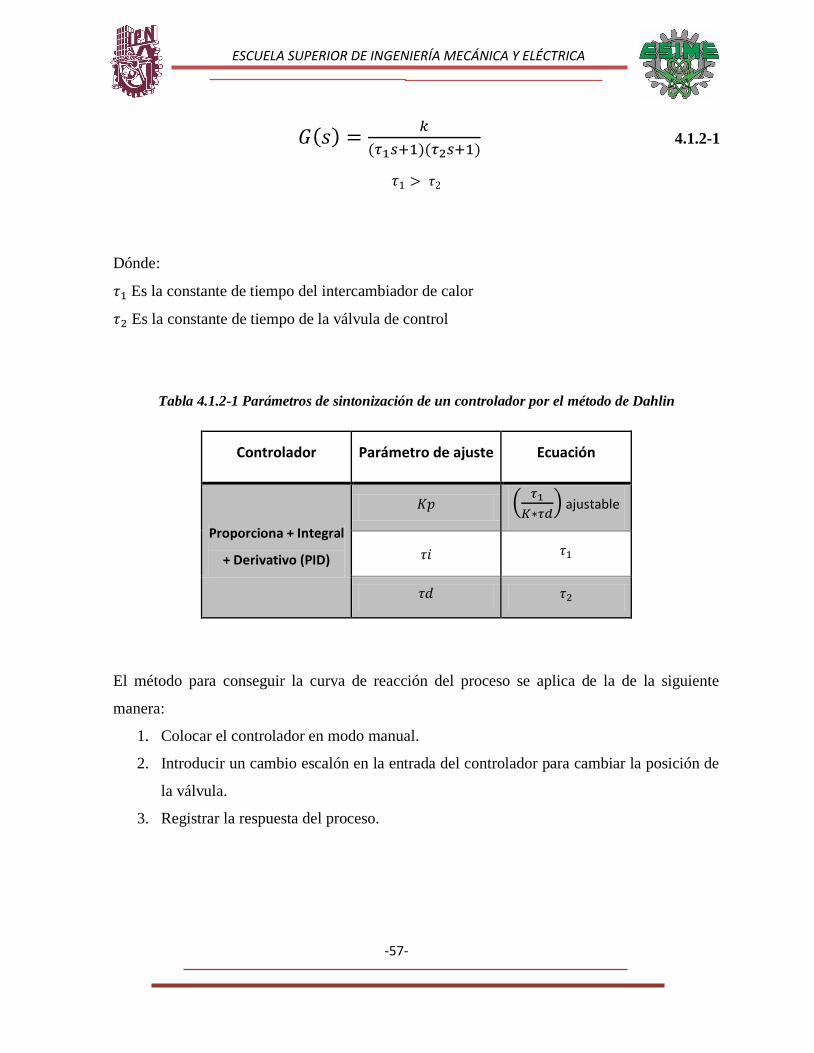
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-57-
( )
( )( ) 4.1.2-1
Dónde:
Es la constante de tiempo del intercambiador de calor
Es la constante de tiempo de la válvula de control
Tabla 4.1.2-1 Parámetros de sintonización de un controlador por el método de Dahlin
Controlador Parámetro de ajuste Ecuación
Proporciona + Integral
+ Derivativo (PID)
(
) ajustable
El método para conseguir la curva de reacción del proceso se aplica de la de la siguiente
manera:
1. Colocar el controlador en modo manual.
2. Introducir un cambio escalón en la entrada del controlador para cambiar la posición de
la válvula.
3. Registrar la respuesta del proceso.
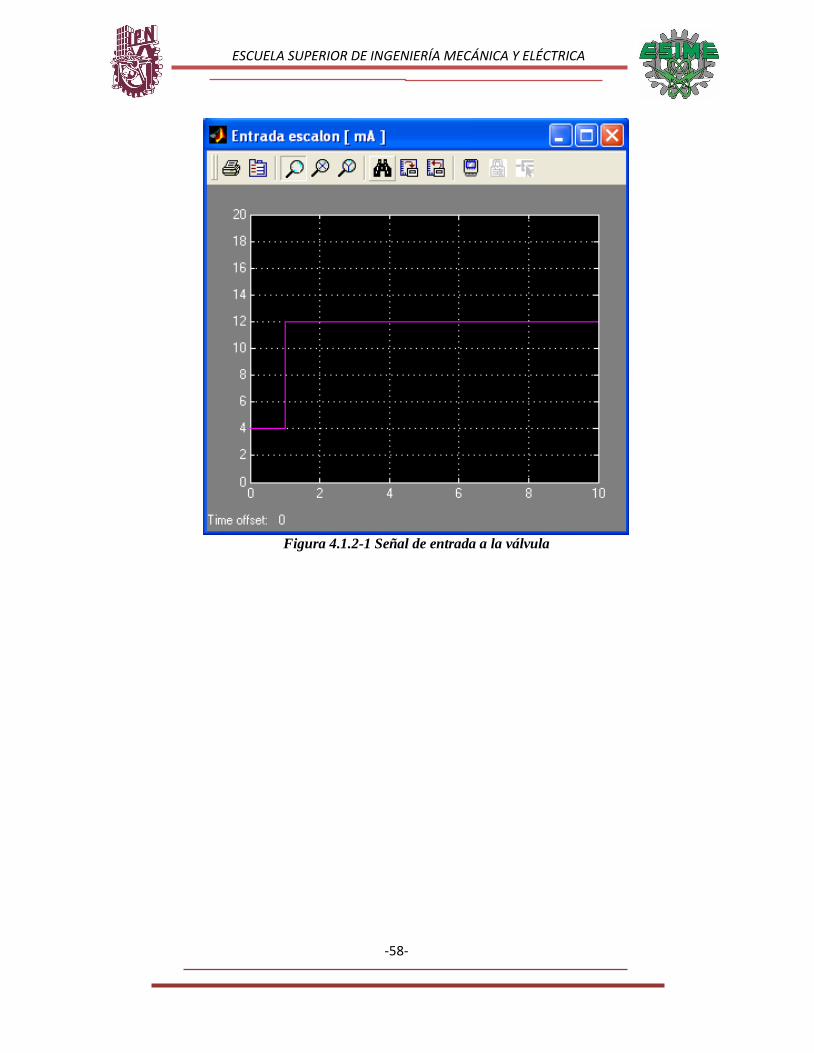
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-58-
Figura 4.1.2-1 Señal de entrada a la válvula
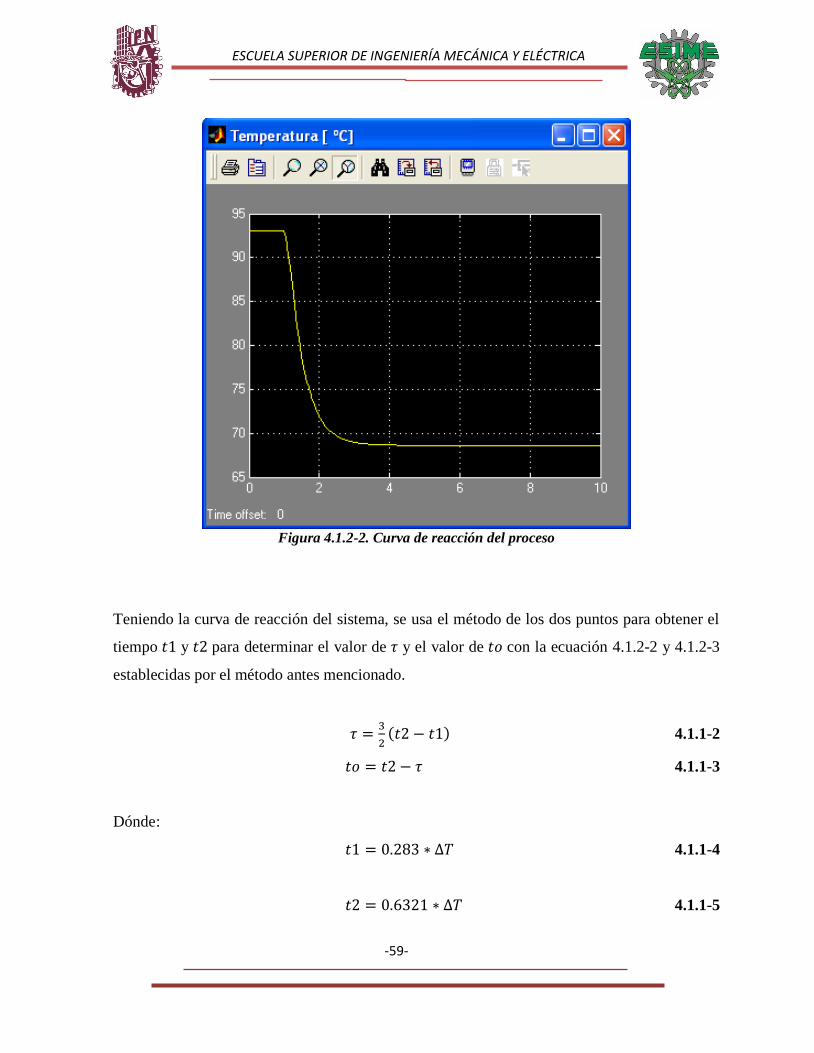
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-59-
Figura 4.1.2-2. Curva de reacción del proceso
Teniendo la curva de reacción del sistema, se usa el método de los dos puntos para obtener el
tiempo y para determinar el valor de y el valor de con la ecuación 4.1.2-2 y 4.1.2-3
establecidas por el método antes mencionado.
( ) 4.1.1-2
4.1.1-3
Dónde:
4.1.1-4
4.1.1-5

ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-60-
Sustituyendo valor obtenido de la curva de reacción en las ecuaciones 4.1.1-4 y
4.1.1-5:
( )
( )
Una vez obtenido y se sustituyen en la ecuación 4.1.1-2:
( )
Ahora se procede a calcular sustituyendo el valor de en la ecuación 4.1.1-3:
Después de que se obtuvo el valor de y , se procede a calcular el valor de la ganancia
expresada con la ecuación 3.1.2-5:
4.1.1-6
(
) 4.1.1-7
4.1.1-8

ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-61-
Dónde:
: Cambio en la salida del proceso con respecto a la señal de entrada
: Temperatura inicial de salida
: Variación en la temperatura de salida
: Cambio en la señal de entrada
: Señal inicial de entrada a la válvula
: Señal final de entrada a la válvula
Los valores necesarios para desarrollar las ecuaciones 4.1.1-7 y 4.1.1-8 se obtienen de la curva
de reacción del proceso y de la señal de entrada a la válvula mostrada en las figuras 4.1.1-1 y
4.1.1-2 Por lo tanto:
(
)
Una vez calculado la constante de tiempo , el tiempo muerto y la ganacia se calculan
los parámetros de ajuste por el método de Dahlin. Estos valores son ideales, pero pueden ser
modificados para obtener la mejor respuesta del sistema.
4.1.3 Respuestas del Sistema
A continuación se muestran las respuestas obtenidas del flujo y la temperatura en diversas
condiciones de operación.
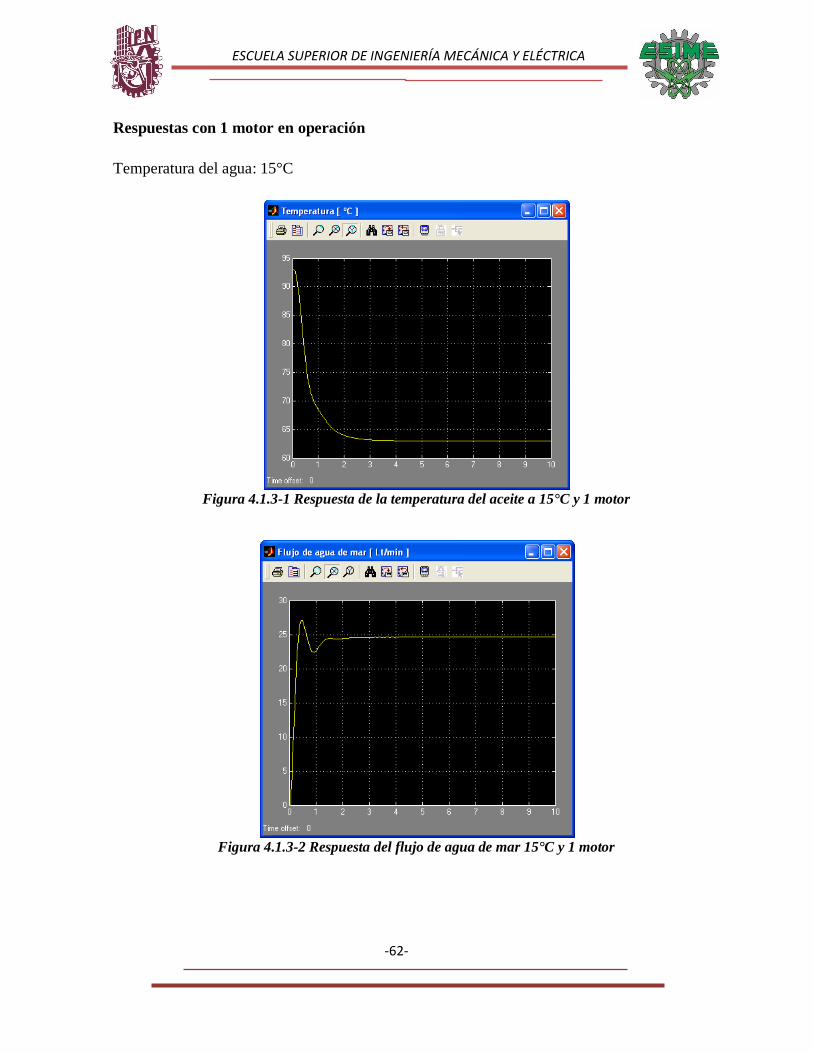
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-62-
Respuestas con 1 motor en operación
Temperatura del agua: 15°C
Figura 4.1.3-1 Respuesta de la temperatura del aceite a 15°C y 1 motor
Figura 4.1.3-2 Respuesta del flujo de agua de mar 15°C y 1 motor
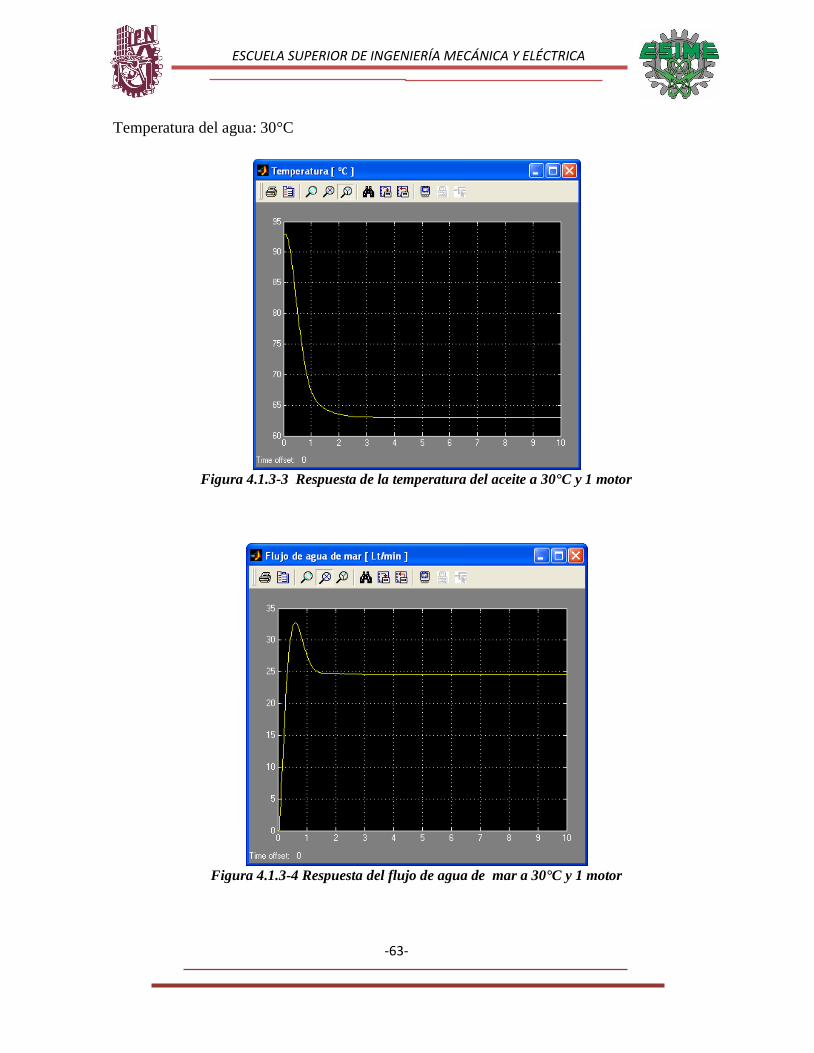
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-63-
Temperatura del agua: 30°C
Figura 4.1.3-3 Respuesta de la temperatura del aceite a 30°C y 1 motor
Figura 4.1.3-4 Respuesta del flujo de agua de mar a 30°C y 1 motor
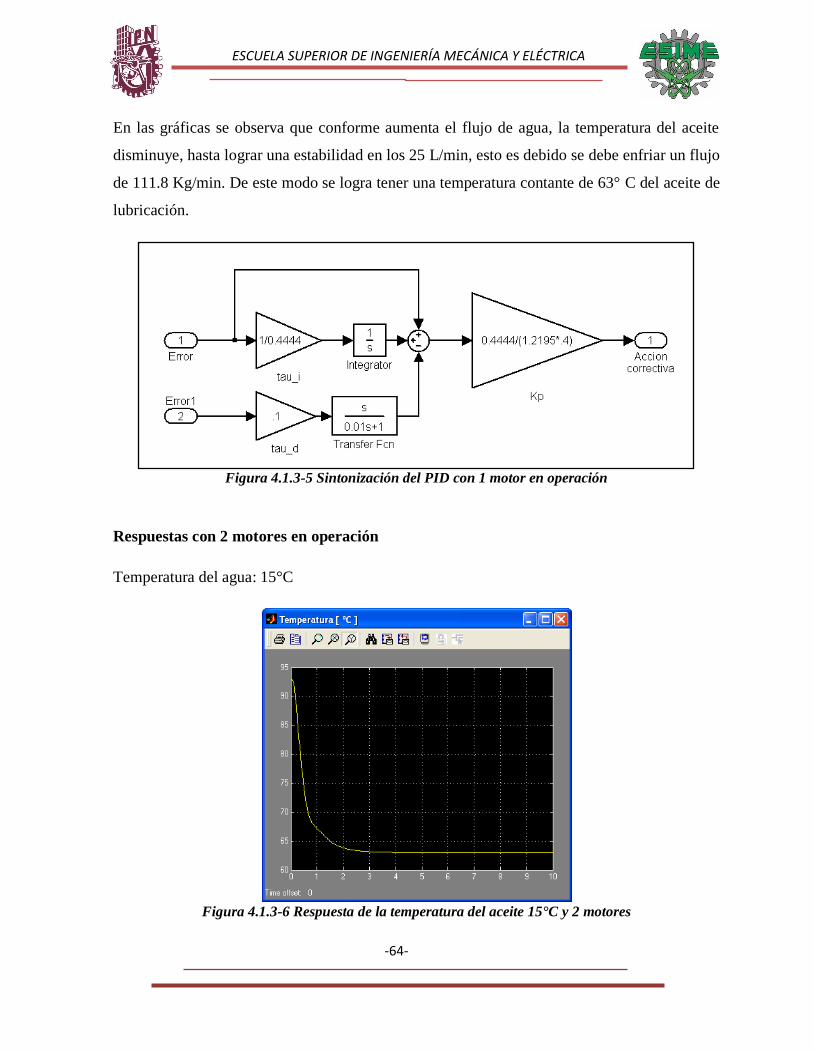
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-64-
En las gráficas se observa que conforme aumenta el flujo de agua, la temperatura del aceite
disminuye, hasta lograr una estabilidad en los 25 L/min, esto es debido se debe enfriar un flujo
de 111.8 Kg/min. De este modo se logra tener una temperatura contante de 63° C del aceite de
lubricación.
Figura 4.1.3-5 Sintonización del PID con 1 motor en operación
Respuestas con 2 motores en operación
Temperatura del agua: 15°C
Figura 4.1.3-6 Respuesta de la temperatura del aceite 15°C y 2 motores
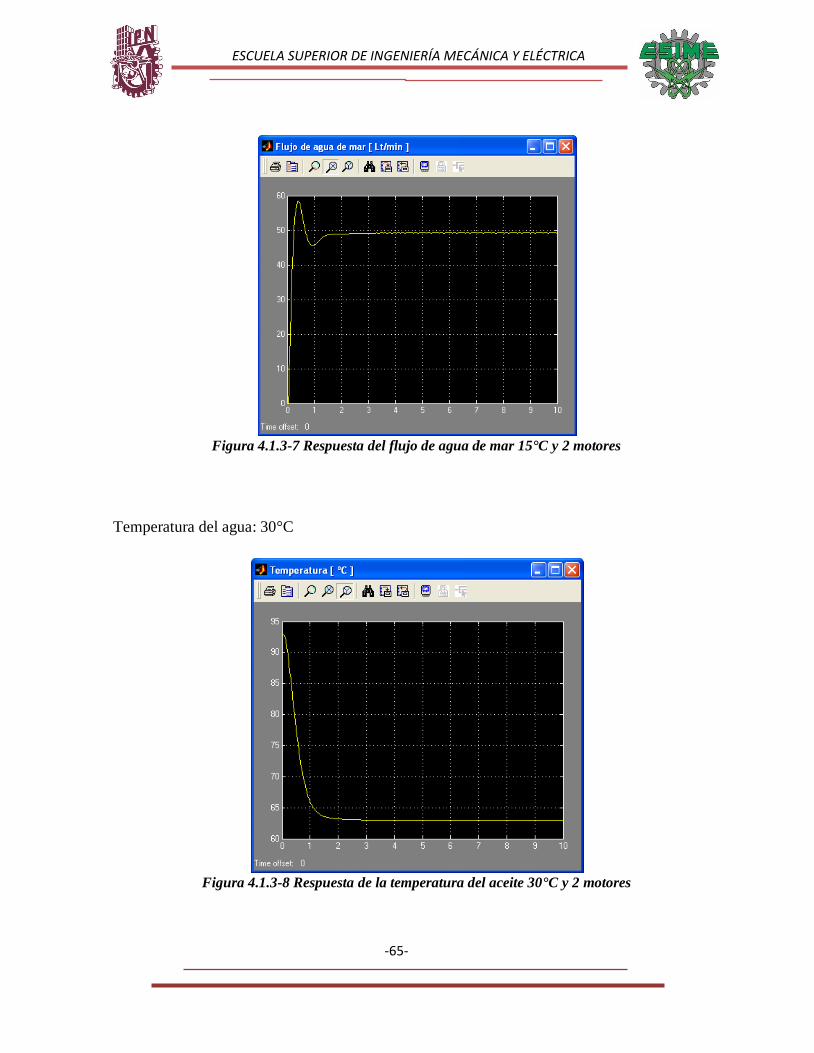
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-65-
Figura 4.1.3-7 Respuesta del flujo de agua de mar 15°C y 2 motores
Temperatura del agua: 30°C
Figura 4.1.3-8 Respuesta de la temperatura del aceite 30°C y 2 motores
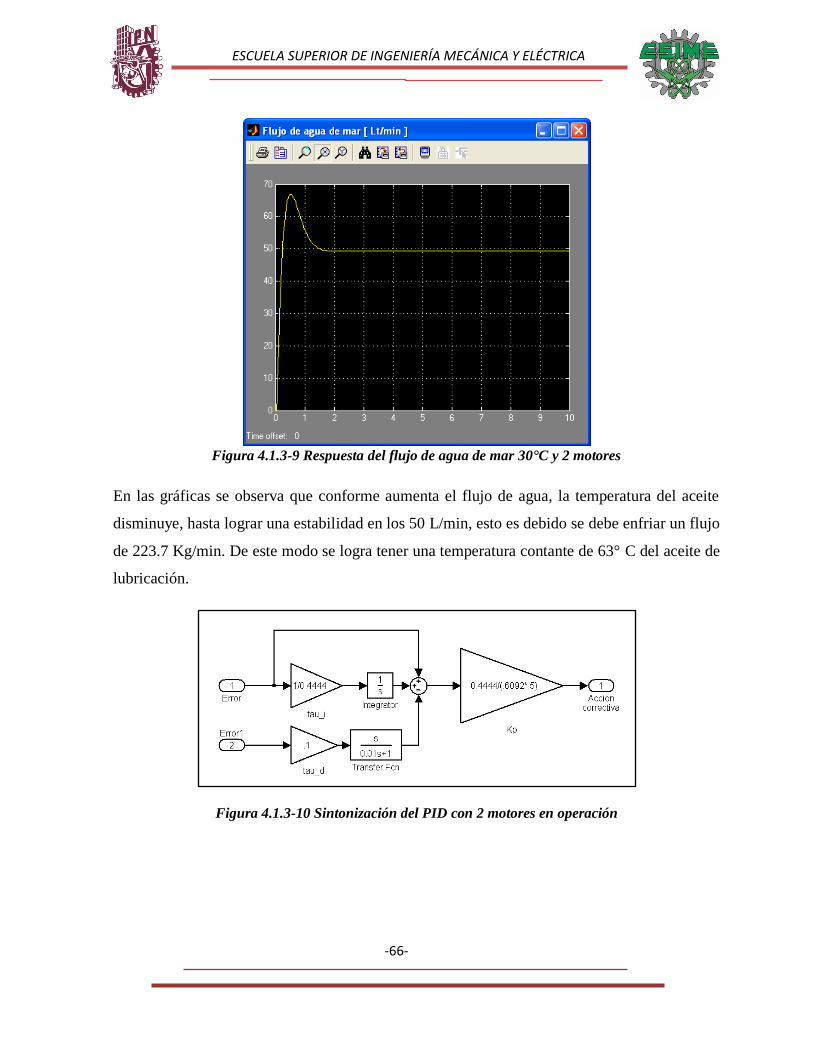
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-66-
Figura 4.1.3-9 Respuesta del flujo de agua de mar 30°C y 2 motores
En las gráficas se observa que conforme aumenta el flujo de agua, la temperatura del aceite
disminuye, hasta lograr una estabilidad en los 50 L/min, esto es debido se debe enfriar un flujo
de 223.7 Kg/min. De este modo se logra tener una temperatura contante de 63° C del aceite de
lubricación.
Figura 4.1.3-10 Sintonización del PID con 2 motores en operación
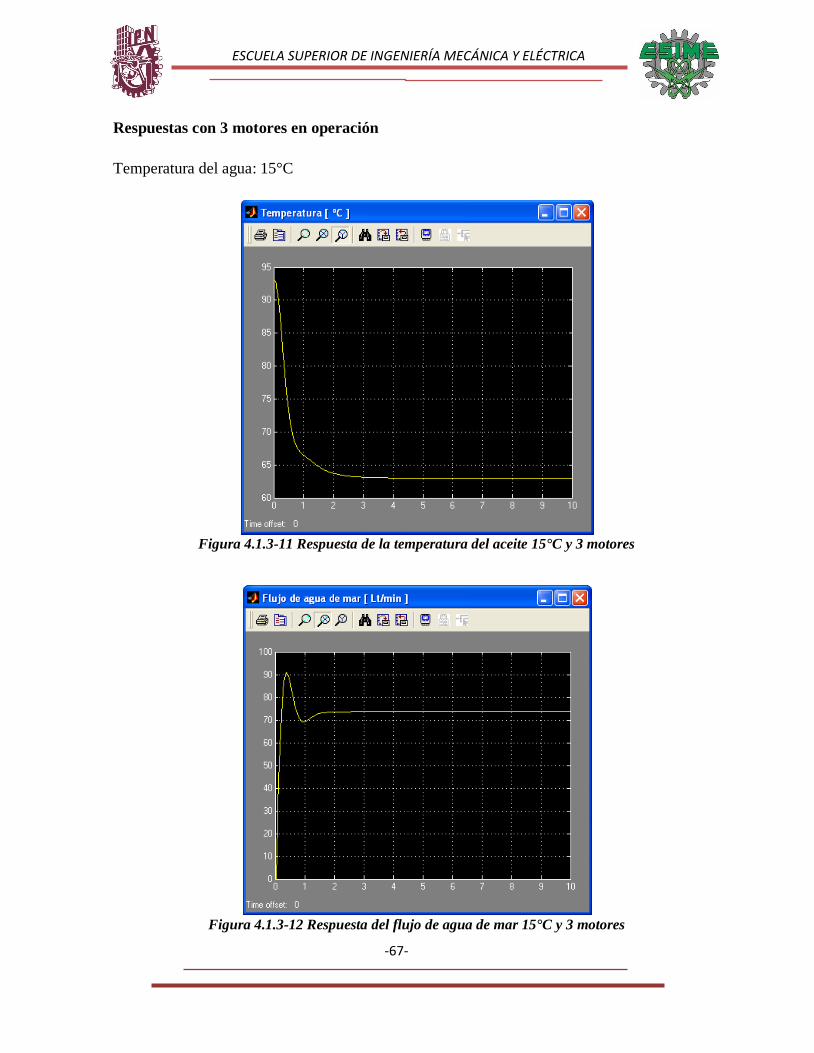
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-67-
Respuestas con 3 motores en operación
Temperatura del agua: 15°C
Figura 4.1.3-11 Respuesta de la temperatura del aceite 15°C y 3 motores
Figura 4.1.3-12 Respuesta del flujo de agua de mar 15°C y 3 motores
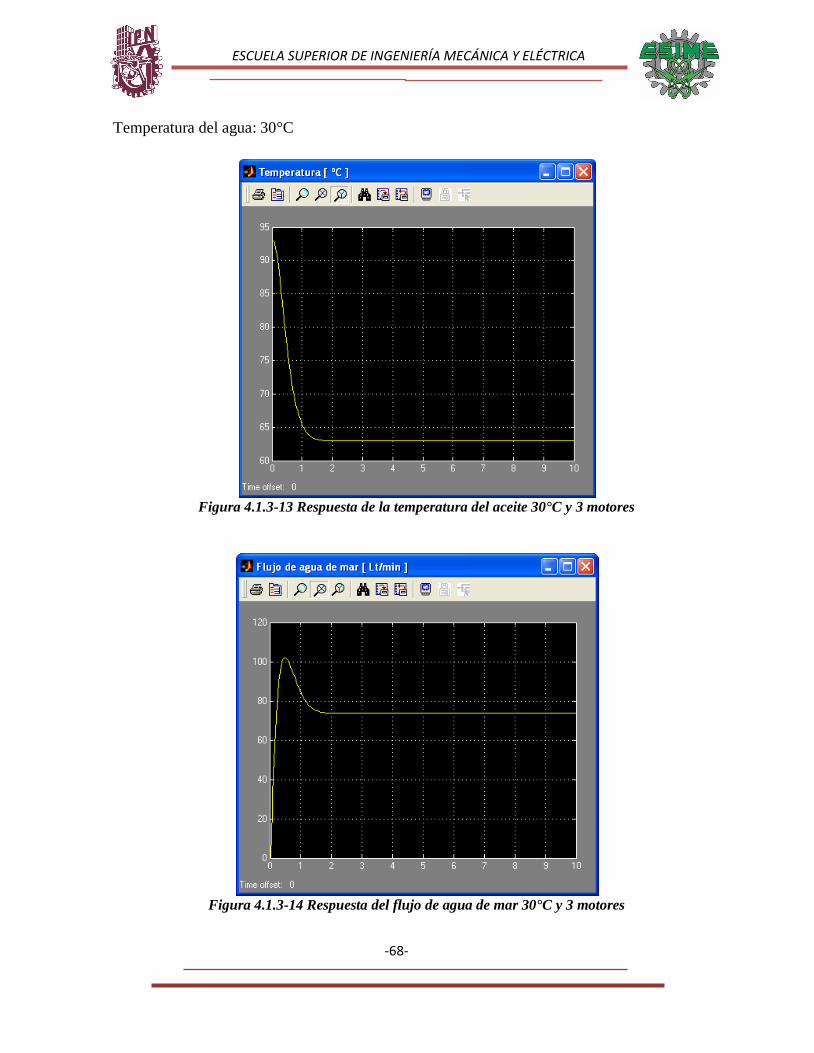
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-68-
Temperatura del agua: 30°C
Figura 4.1.3-13 Respuesta de la temperatura del aceite 30°C y 3 motores
Figura 4.1.3-14 Respuesta del flujo de agua de mar 30°C y 3 motores
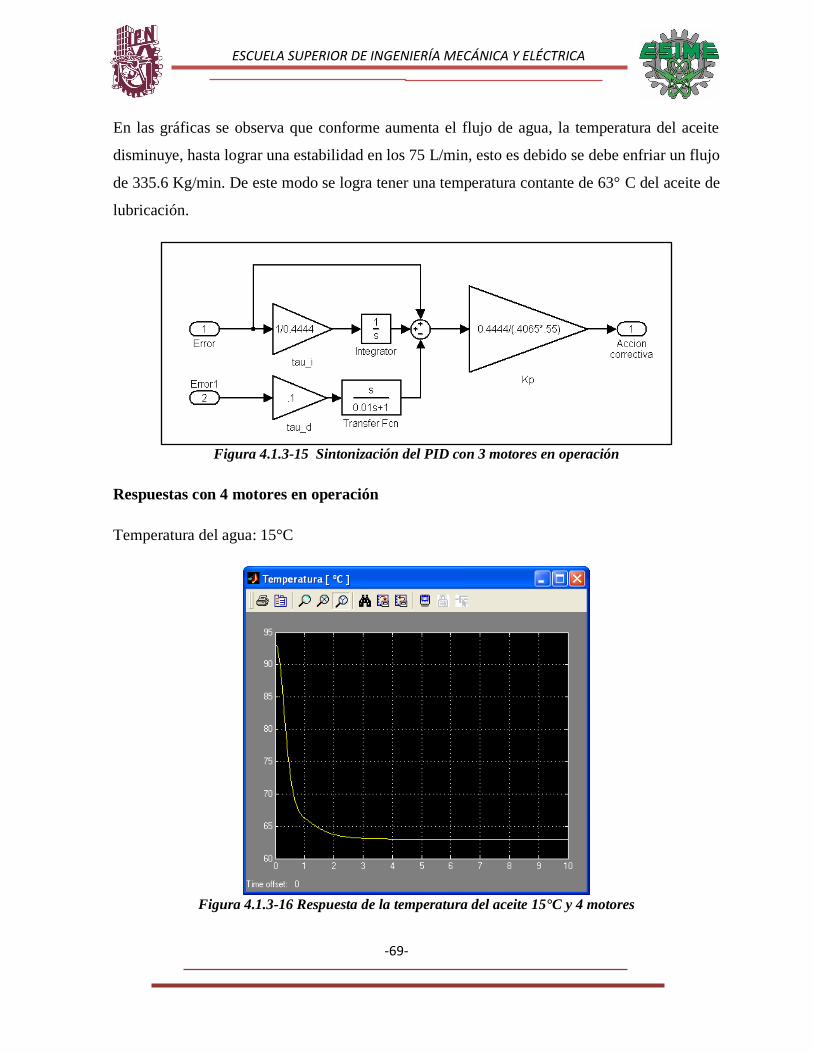
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-69-
En las gráficas se observa que conforme aumenta el flujo de agua, la temperatura del aceite
disminuye, hasta lograr una estabilidad en los 75 L/min, esto es debido se debe enfriar un flujo
de 335.6 Kg/min. De este modo se logra tener una temperatura contante de 63° C del aceite de
lubricación.
Figura 4.1.3-15 Sintonización del PID con 3 motores en operación
Respuestas con 4 motores en operación
Temperatura del agua: 15°C
Figura 4.1.3-16 Respuesta de la temperatura del aceite 15°C y 4 motores
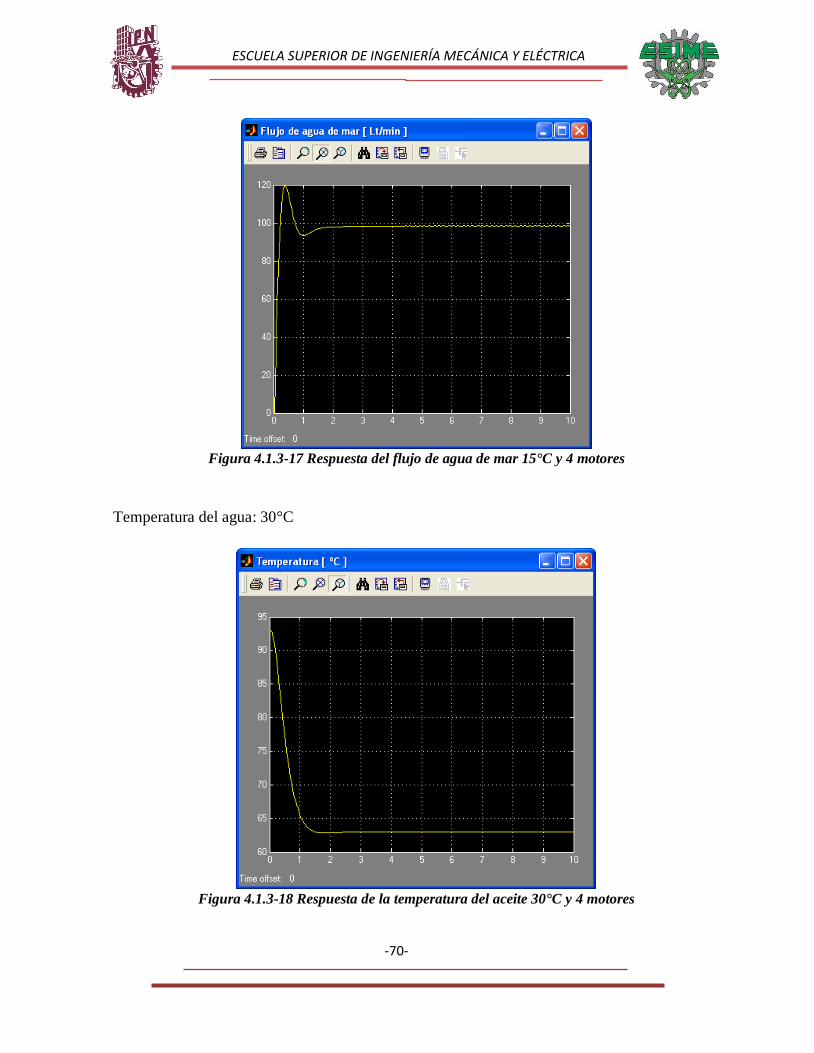
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-70-
Figura 4.1.3-17 Respuesta del flujo de agua de mar 15°C y 4 motores
Temperatura del agua: 30°C
Figura 4.1.3-18 Respuesta de la temperatura del aceite 30°C y 4 motores
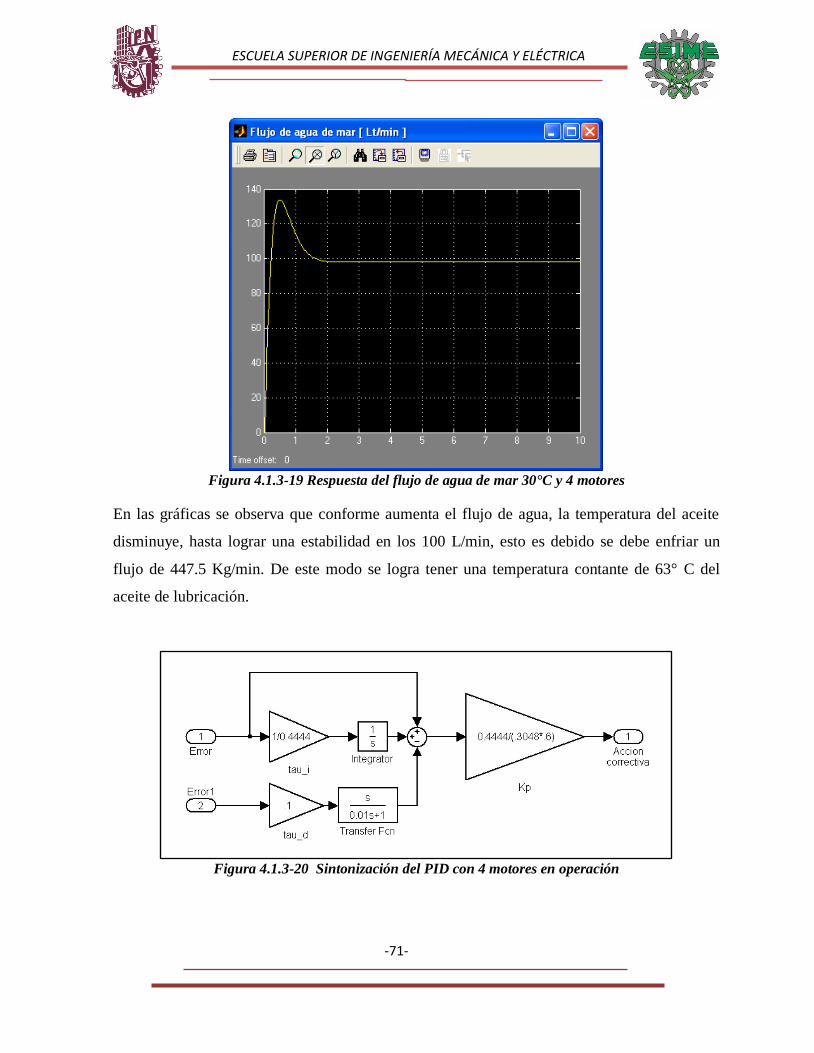
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-71-
Figura 4.1.3-19 Respuesta del flujo de agua de mar 30°C y 4 motores
En las gráficas se observa que conforme aumenta el flujo de agua, la temperatura del aceite
disminuye, hasta lograr una estabilidad en los 100 L/min, esto es debido se debe enfriar un
flujo de 447.5 Kg/min. De este modo se logra tener una temperatura contante de 63° C del
aceite de lubricación.
Figura 4.1.3-20 Sintonización del PID con 4 motores en operación
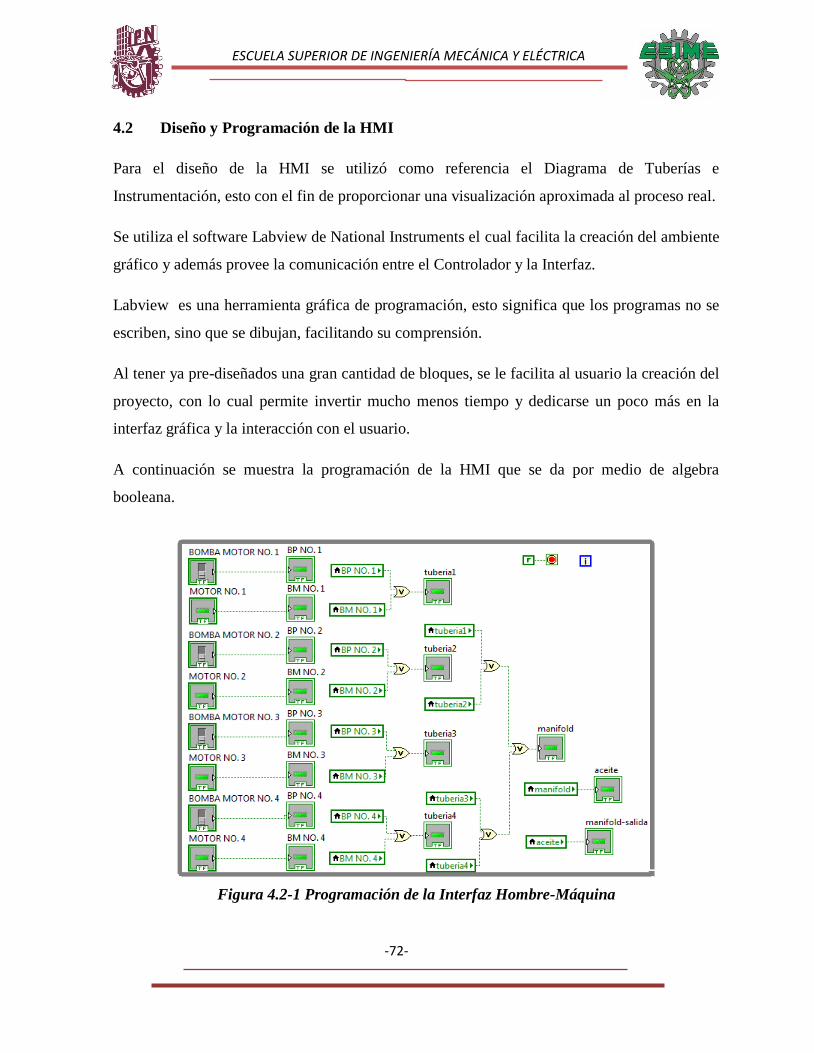
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-72-
4.2 Diseño y Programación de la HMI
Para el diseño de la HMI se utilizó como referencia el Diagrama de Tuberías e
Instrumentación, esto con el fin de proporcionar una visualización aproximada al proceso real.
Se utiliza el software Labview de National Instruments el cual facilita la creación del ambiente
gráfico y además provee la comunicación entre el Controlador y la Interfaz.
Labview es una herramienta gráfica de programación, esto significa que los programas no se
escriben, sino que se dibujan, facilitando su comprensión.
Al tener ya pre-diseñados una gran cantidad de bloques, se le facilita al usuario la creación del
proyecto, con lo cual permite invertir mucho menos tiempo y dedicarse un poco más en la
interfaz gráfica y la interacción con el usuario.
A continuación se muestra la programación de la HMI que se da por medio de algebra
booleana.
Figura 4.2-1 Programación de la Interfaz Hombre-Máquina
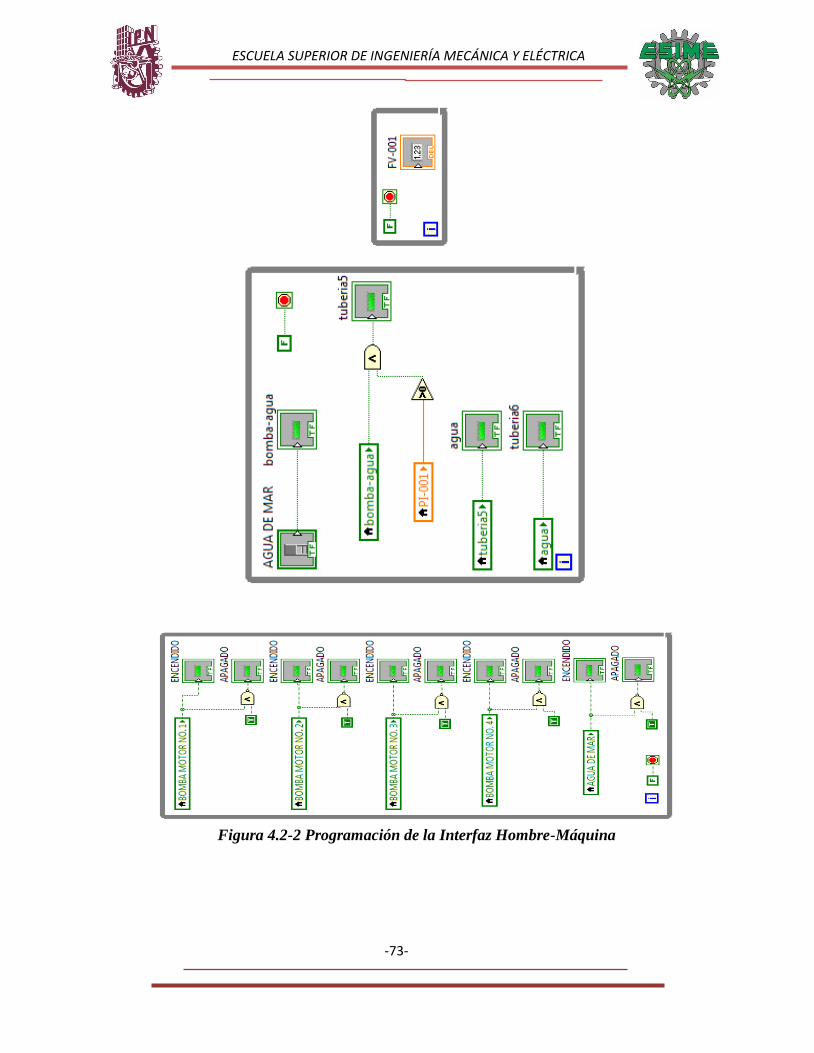
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-73-
Figura 4.2-2 Programación de la Interfaz Hombre-Máquina
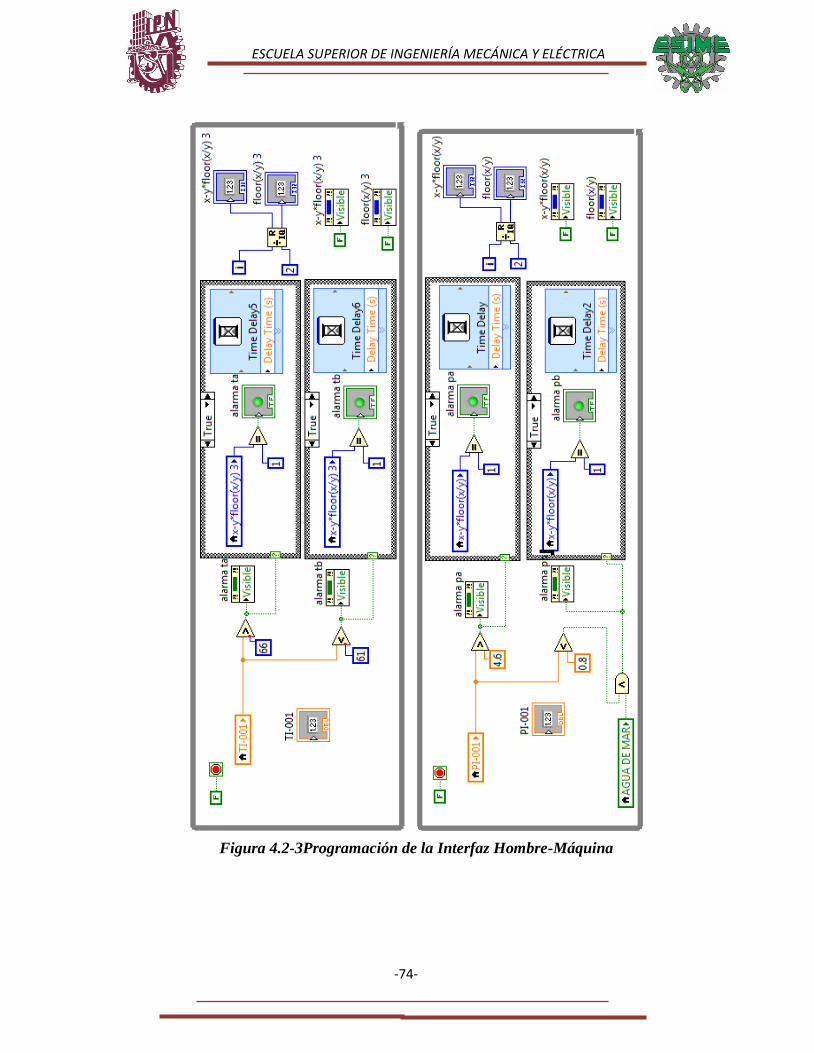
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-74-
Figura 4.2-3Programación de la Interfaz Hombre-Máquina
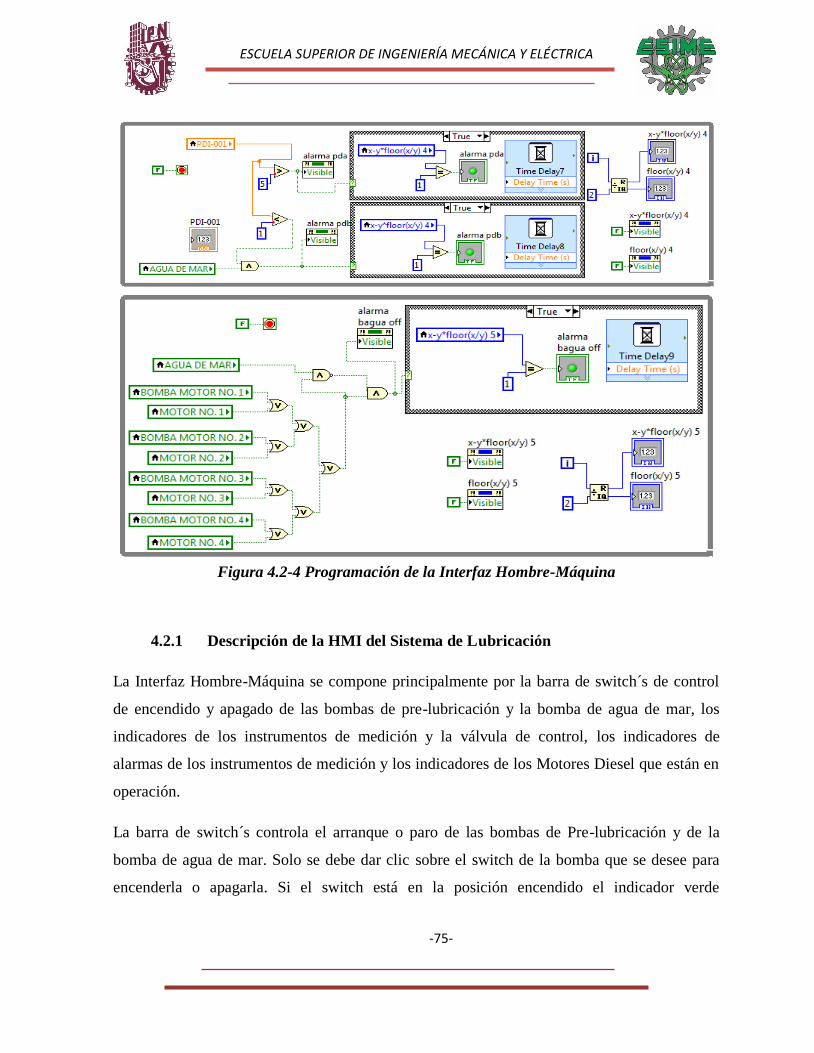
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-75-
Figura 4.2-4 Programación de la Interfaz Hombre-Máquina
4.2.1 Descripción de la HMI del Sistema de Lubricación
La Interfaz Hombre-Máquina se compone principalmente por la barra de switch´s de control
de encendido y apagado de las bombas de pre-lubricación y la bomba de agua de mar, los
indicadores de los instrumentos de medición y la válvula de control, los indicadores de
alarmas de los instrumentos de medición y los indicadores de los Motores Diesel que están en
operación.
La barra de switch´s controla el arranque o paro de las bombas de Pre-lubricación y de la
bomba de agua de mar. Solo se debe dar clic sobre el switch de la bomba que se desee para
encenderla o apagarla. Si el switch está en la posición encendido el indicador verde
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-76-
“ENCENDIDO” se ilumina y si el switch está en la posición apagado el indicador rojo
“APAGADO” se ilumina.
Figura 4.2.1-1 Barra de switch´s de control
Los indicadores de estado de los Motores Diesel pueden mostrar tres diferentes casos.
Caso 1. La bomba de pre-lubricación está apagada. El Motor Diesel No.1 está apagado, por lo
tanto la bomba mecánica de lubricación No.1 está detenida y no hay flujo de aceite por la
tubería.
Figura 4.2.1-2 Caso 1 Indicadores de Motor Diesel
Caso 2. La bomba de pre-lubricación No.2 está apagada. El Motor Diesel No. 2 está en
operación y el indicador “MOTOR NO.2” de color verde se enciende por lo tanto la bomba
mecánica de lubricación No. 2 indica que se genera un flujo de aceite que pasa por la tubería.
Figura 4.2.1-3 Caso 2 Indicadores de Motor Diesel
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-77-
Caso 3. La bomba de pre-lubricación está encendida y genera un flujo de aceite por la tubería.
El Motor Diesel está apagado entonces el indicador “MOTOR NO.3” no está iluminado y la
bomba mecánica No.3 está detenida.
Figura 4.2.1-4 Caso 3 Indicadores de Motor Diesel
El indicador de presión (instrumento de color azul) muestra la presión después de la bomba de
agua de mar. El indicador de presión diferencial (instrumento de color amarillo) sirve para
determinar si existe algún taponamiento en el intercambiador de calor. El indicador de
temperatura (instrumento de color verde) se encarga de mostrar la temperatura de salida del
aceite. Por último está el indicador de la bomba de agua de mar el cual estar de color verde si
está encendida y estar de color rojo si está apagada.
El indicador de la válvula de control muestra la apertura de la misma expresada en porcentaje,
el cual se determina mediante un cálculo algebraico que realiza el PLC, esto se hace con el fin
de realizar comparaciones de las condiciones de operación en diferentes periodos, los que
servirán para establecer la frecuencia de aplicación de Mantenimiento Preventivo al
intercambiador de calor.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-78-
Figura 4.2.1-5 Indicadores de la instrumentación
El indicador del intercambiador de calor tiene 2 casos el primer es cuando el flujo de agua de
mar se interrumpe y el aceite se mantiene fluyendo.
Figura 4.2.1-6 Flujo de aceite en el tubo del intercambiador
En el segundo caso se encuentra en condiciones normales de operación, porque existe un flujo
de agua de mar por la carcasa y un flujo de aceite por el tubo del intercambiador de calor.
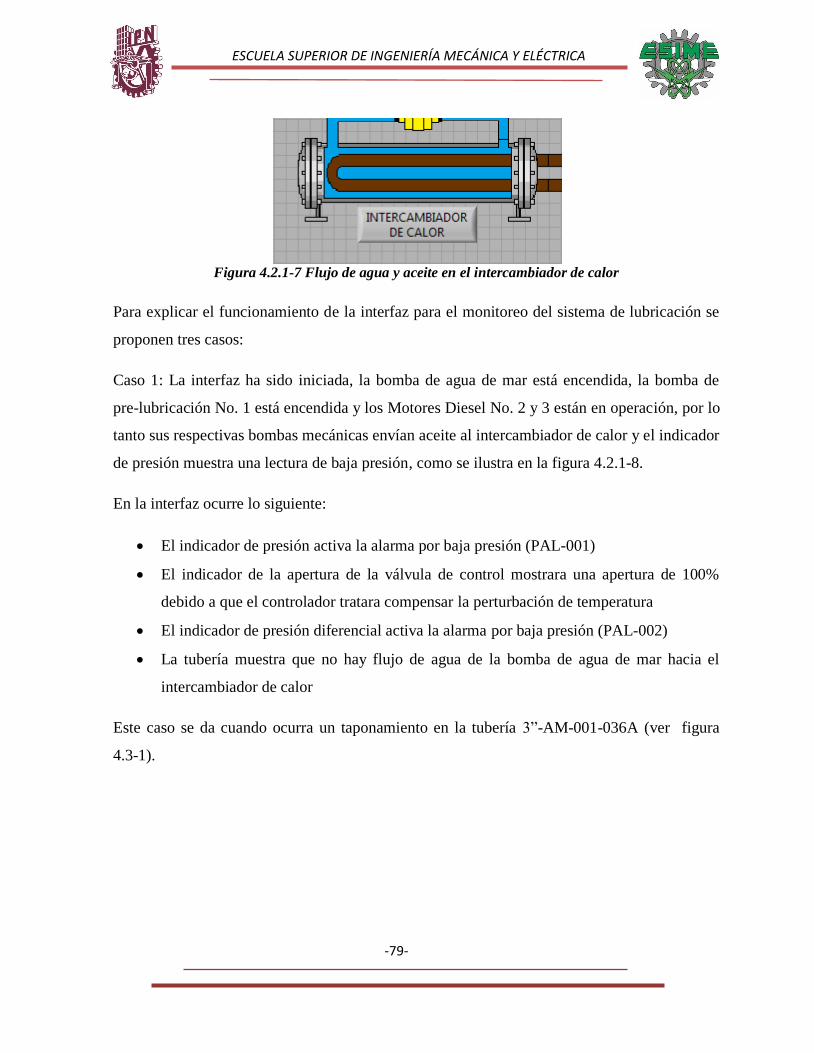
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-79-
Figura 4.2.1-7 Flujo de agua y aceite en el intercambiador de calor
Para explicar el funcionamiento de la interfaz para el monitoreo del sistema de lubricación se
proponen tres casos:
Caso 1: La interfaz ha sido iniciada, la bomba de agua de mar está encendida, la bomba de
pre-lubricación No. 1 está encendida y los Motores Diesel No. 2 y 3 están en operación, por lo
tanto sus respectivas bombas mecánicas envían aceite al intercambiador de calor y el indicador
de presión muestra una lectura de baja presión, como se ilustra en la figura 4.2.1-8.
En la interfaz ocurre lo siguiente:
El indicador de presión activa la alarma por baja presión (PAL-001)
El indicador de la apertura de la válvula de control mostrara una apertura de 100%
debido a que el controlador tratara compensar la perturbación de temperatura
El indicador de presión diferencial activa la alarma por baja presión (PAL-002)
La tubería muestra que no hay flujo de agua de la bomba de agua de mar hacia el
intercambiador de calor
Este caso se da cuando ocurra un taponamiento en la tubería 3”-AM-001-036A (ver figura
4.3-1).
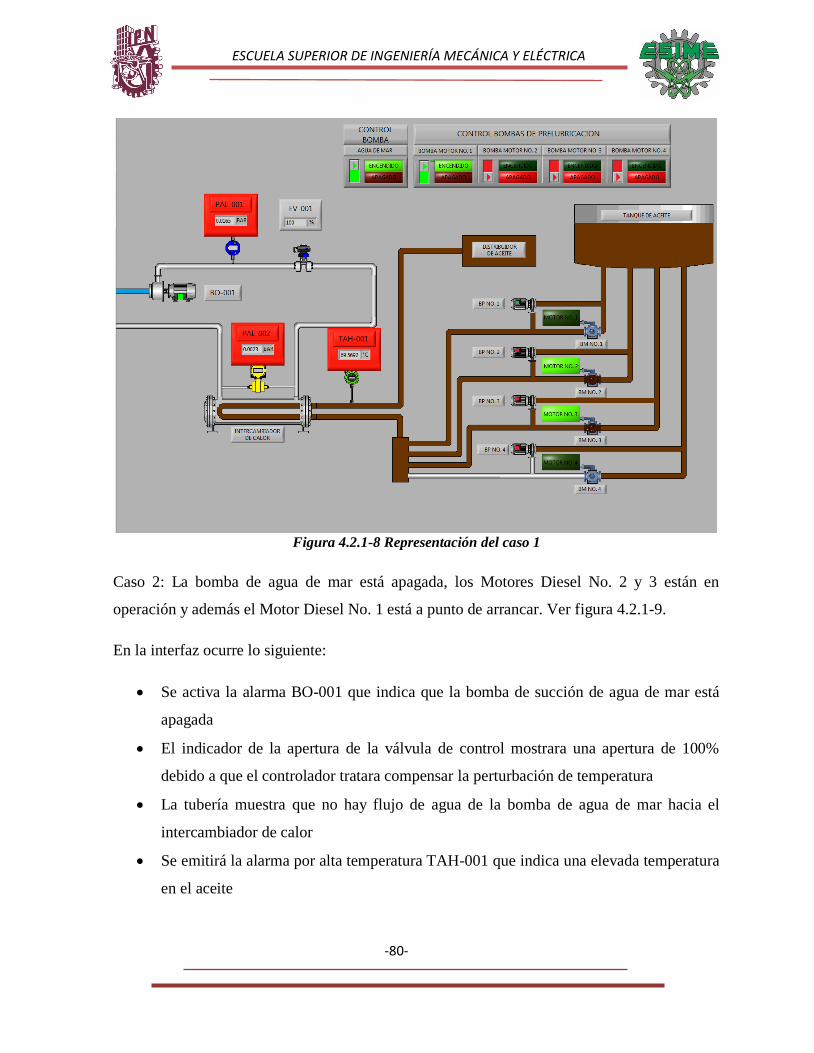
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-80-
Figura 4.2.1-8 Representación del caso 1
Caso 2: La bomba de agua de mar está apagada, los Motores Diesel No. 2 y 3 están en
operación y además el Motor Diesel No. 1 está a punto de arrancar. Ver figura 4.2.1-9.
En la interfaz ocurre lo siguiente:
Se activa la alarma BO-001 que indica que la bomba de succión de agua de mar está
apagada
El indicador de la apertura de la válvula de control mostrara una apertura de 100%
debido a que el controlador tratara compensar la perturbación de temperatura
La tubería muestra que no hay flujo de agua de la bomba de agua de mar hacia el
intercambiador de calor
Se emitirá la alarma por alta temperatura TAH-001 que indica una elevada temperatura
en el aceite
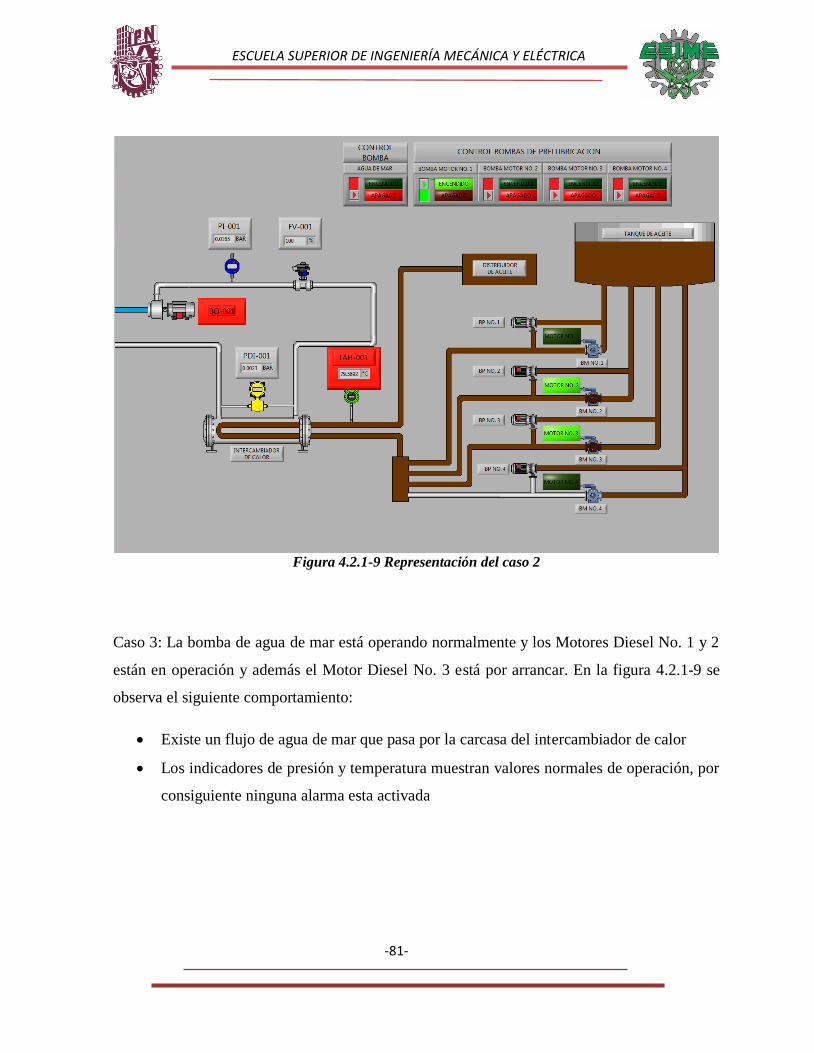
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-81-
Figura 4.2.1-9 Representación del caso 2
Caso 3: La bomba de agua de mar está operando normalmente y los Motores Diesel No. 1 y 2
están en operación y además el Motor Diesel No. 3 está por arrancar. En la figura 4.2.1-9 se
observa el siguiente comportamiento:
Existe un flujo de agua de mar que pasa por la carcasa del intercambiador de calor
Los indicadores de presión y temperatura muestran valores normales de operación, por
consiguiente ninguna alarma esta activada
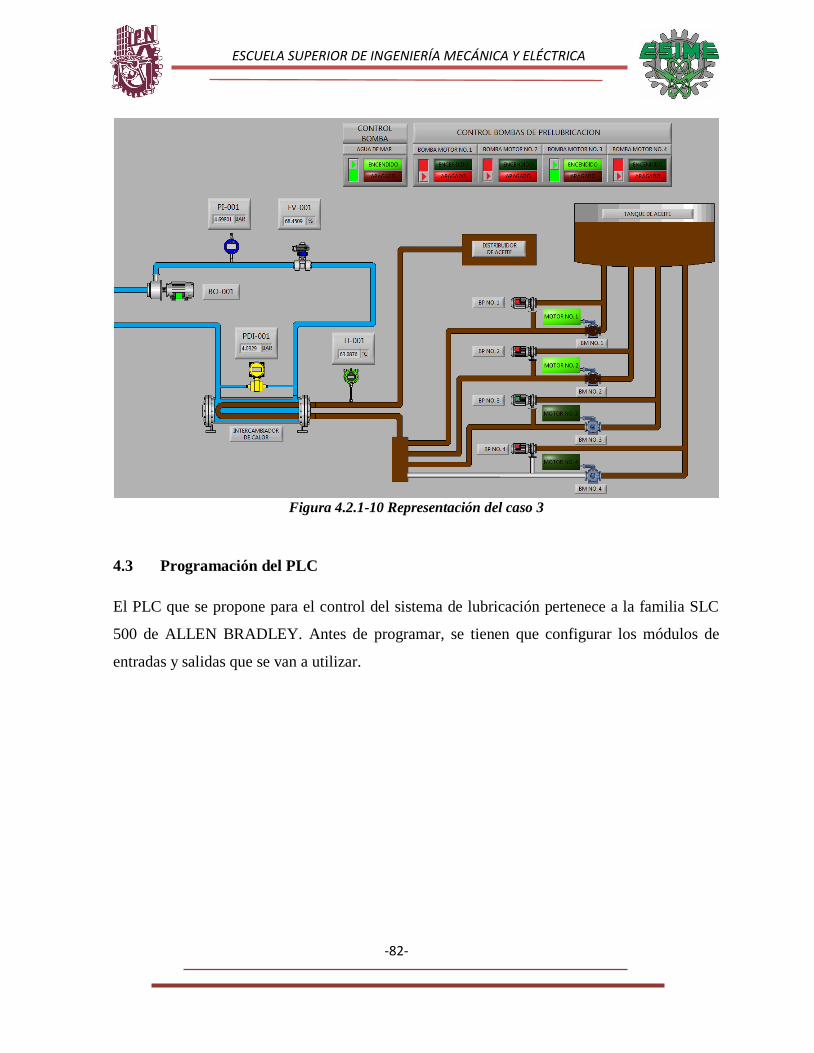
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-82-
Figura 4.2.1-10 Representación del caso 3
4.3 Programación del PLC
El PLC que se propone para el control del sistema de lubricación pertenece a la familia SLC
500 de ALLEN BRADLEY. Antes de programar, se tienen que configurar los módulos de
entradas y salidas que se van a utilizar.
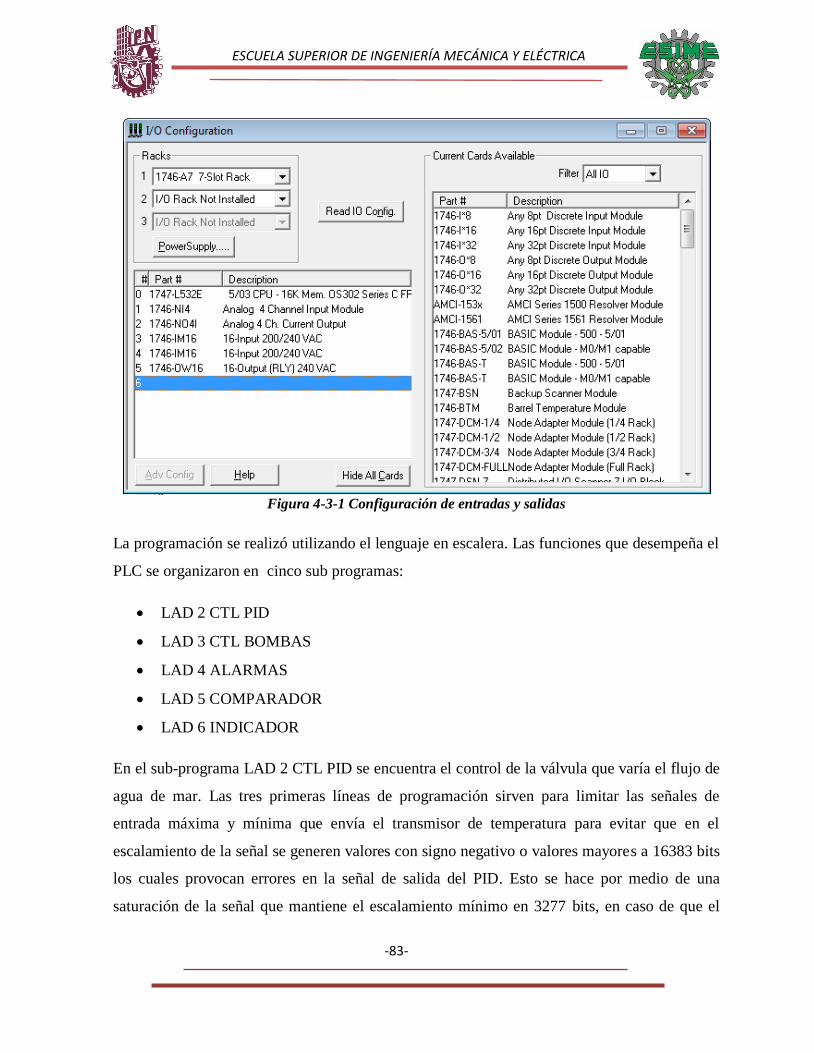
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-83-
Figura 4-3-1 Configuración de entradas y salidas
La programación se realizó utilizando el lenguaje en escalera. Las funciones que desempeña el
PLC se organizaron en cinco sub programas:
LAD 2 CTL PID
LAD 3 CTL BOMBAS
LAD 4 ALARMAS
LAD 5 COMPARADOR
LAD 6 INDICADOR
En el sub-programa LAD 2 CTL PID se encuentra el control de la válvula que varía el flujo de
agua de mar. Las tres primeras líneas de programación sirven para limitar las señales de
entrada máxima y mínima que envía el transmisor de temperatura para evitar que en el
escalamiento de la señal se generen valores con signo negativo o valores mayores a 16383 bits
los cuales provocan errores en la señal de salida del PID. Esto se hace por medio de una
saturación de la señal que mantiene el escalamiento mínimo en 3277 bits, en caso de que el
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-84-
módulo de entradas analógicas reciba una señal menor de 4 mA y el escalamiento máximo en
16383 bits en caso de recibir señales analógicas mayores a 20 mA.
En la línea 0003 del programa se lleva a cabo el escalamiento de la señal del transmisor de
temperatura por medio del bloque llamado “SCP” dentro del que se realiza un cálculo
algebraico que asigna un número entero a cada valor de corriente. De este modo si en la
entrada se recibe 3277 bits, estos generara un valor entero igual a 0 y si se recibe un valor de
16383 bits se generara un valor entero igual a 16383 bits.
El las líneas de programación 0004, 0005 y 0006 se realiza una asignación de un número
entero igual a 1 cuando el Motor Diesel No. 1 o su bomba de pre-lubricación se encuentren en
operación y un número entero igual a 0 cuando cualquiera de estos dos elementos estén
apagados. De las líneas 0007 a la 0015 se lleva a cabo la misma operación para cada uno de
los motores restantes.
En las siguientes tres líneas se realiza una suma algebraica de los números enteros anteriores,
para saber el número de motores y/o bombas de pre-lubricación que encuentran en operación.
A partir de la línea 0019 hasta la 0026 se hace una comparación para determinar el uso del
PID correspondiente.
En la línea 0027 se realiza el escalamiento de la señal de respuesta del PID para llevarla de
nuevo a una señal estandarizada de 4 – 20 mA que es enviada a la salida O:2/0 del módulo de
salidas analógicas al que está conectada la válvula de control.
La línea 0028 envía los valores de la entrada analógica de presión a un número entero (N7:95)
y posteriormente se realiza el escalamiento de las señal del transmisor de presión. La misma
operación se realiza en las últimas dos líneas de este subprograma para obtener el
escalamiento de la señal del transmisor de presión diferencial. Dado que esas señales solo se
utilizan en la interfaz para indicar o determinar las alarmas convenientes, no se necesita saturar
las señales de entrada.
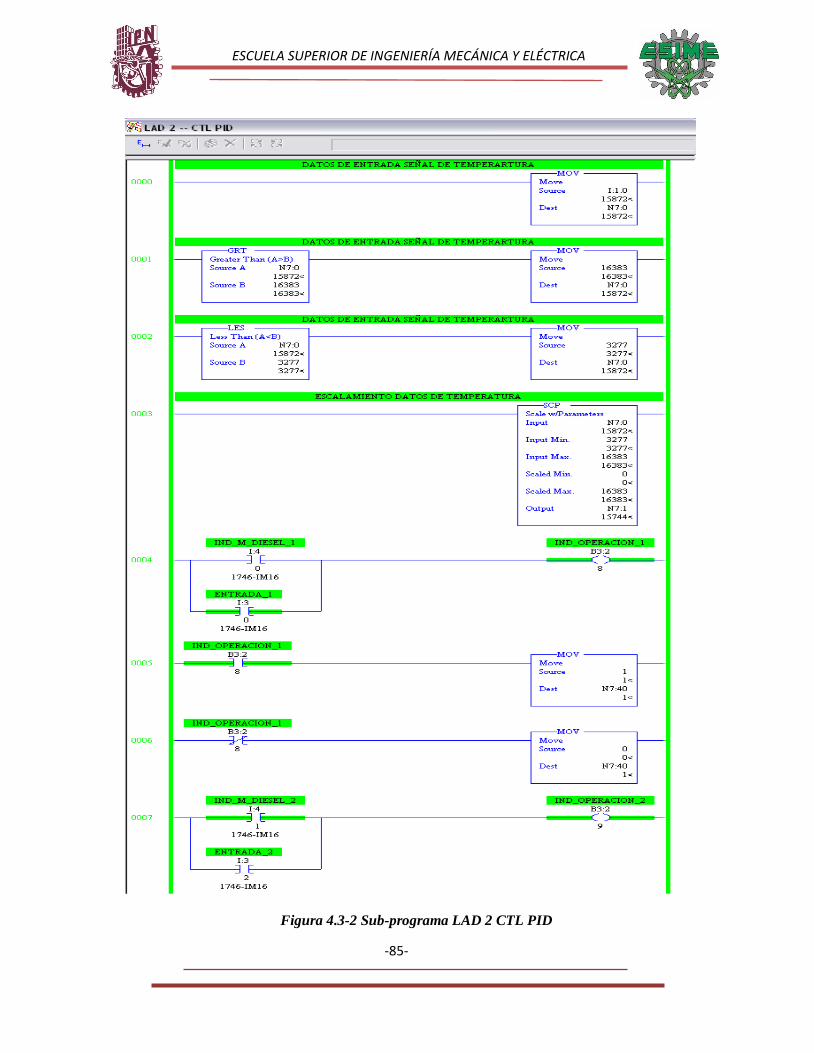
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-85-
Figura 4.3-2 Sub-programa LAD 2 CTL PID
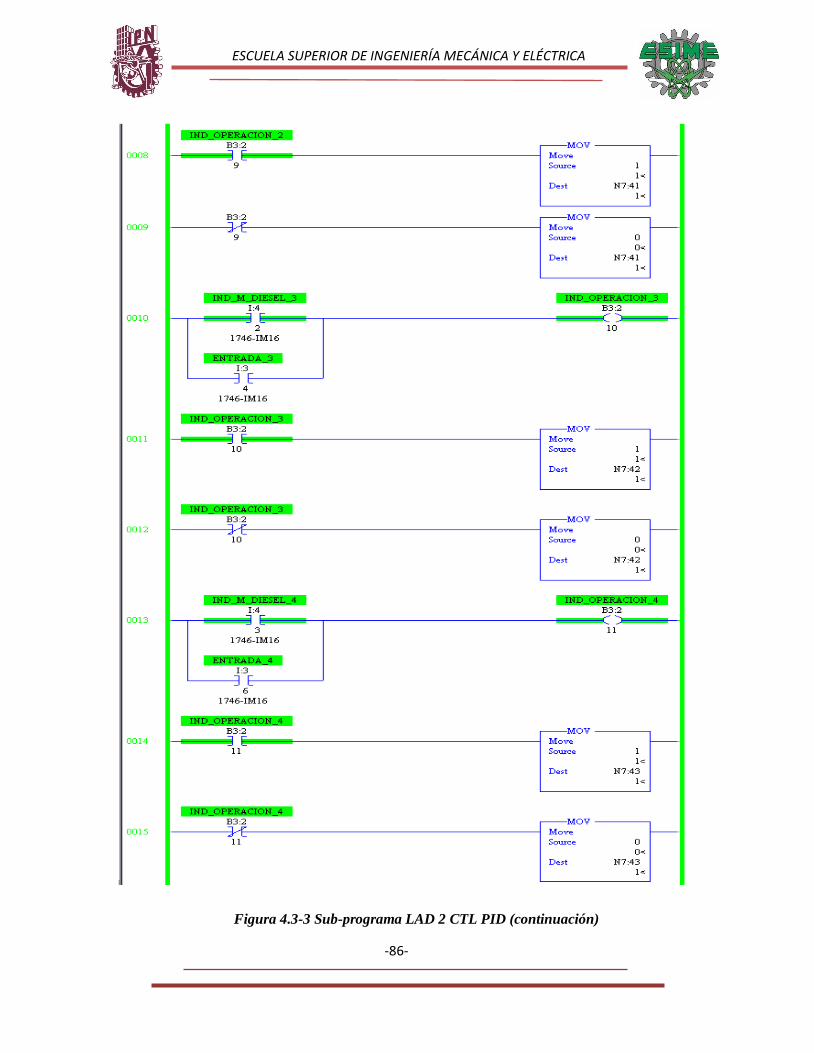
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-86-
Figura 4.3-3 Sub-programa LAD 2 CTL PID (continuación)
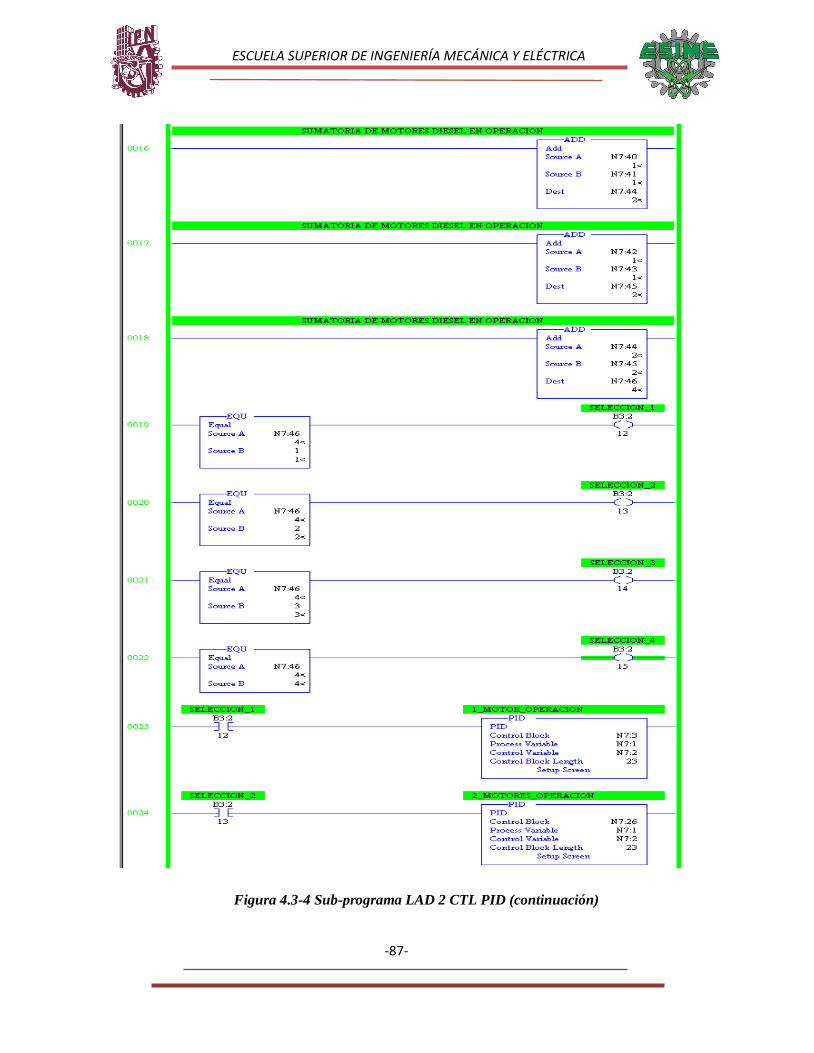
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-87-
Figura 4.3-4 Sub-programa LAD 2 CTL PID (continuación)
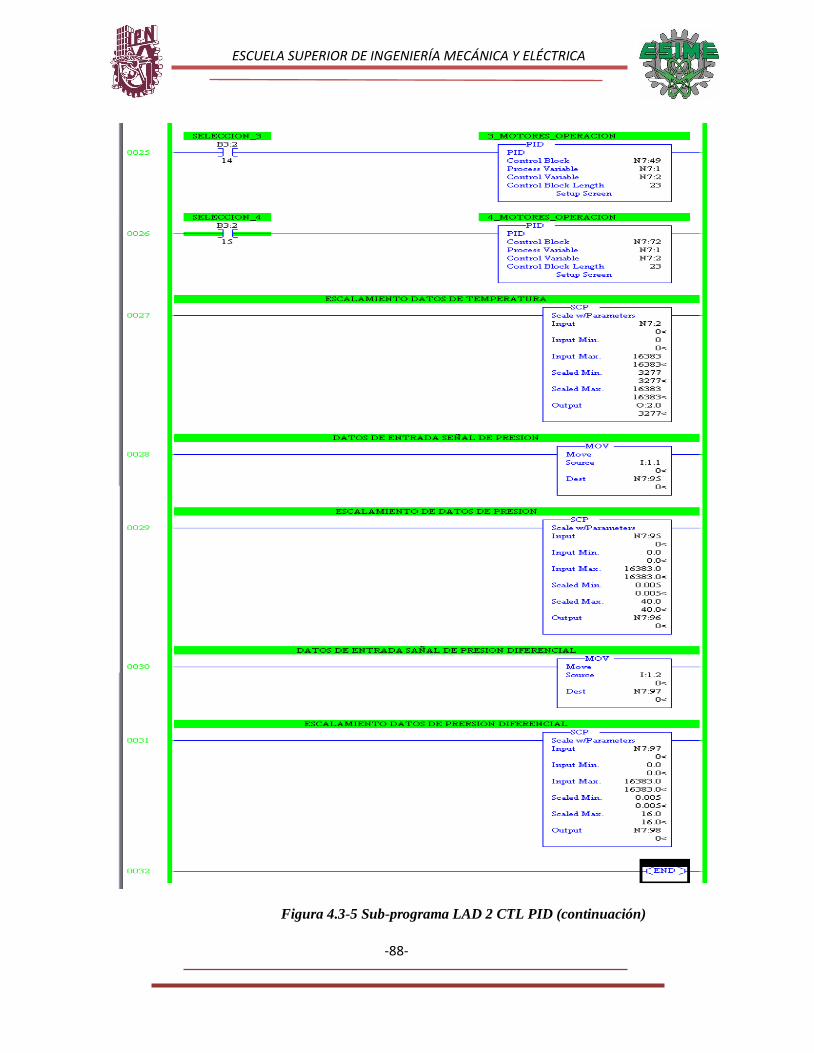
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-88-
Figura 4.3-5 Sub-programa LAD 2 CTL PID (continuación)
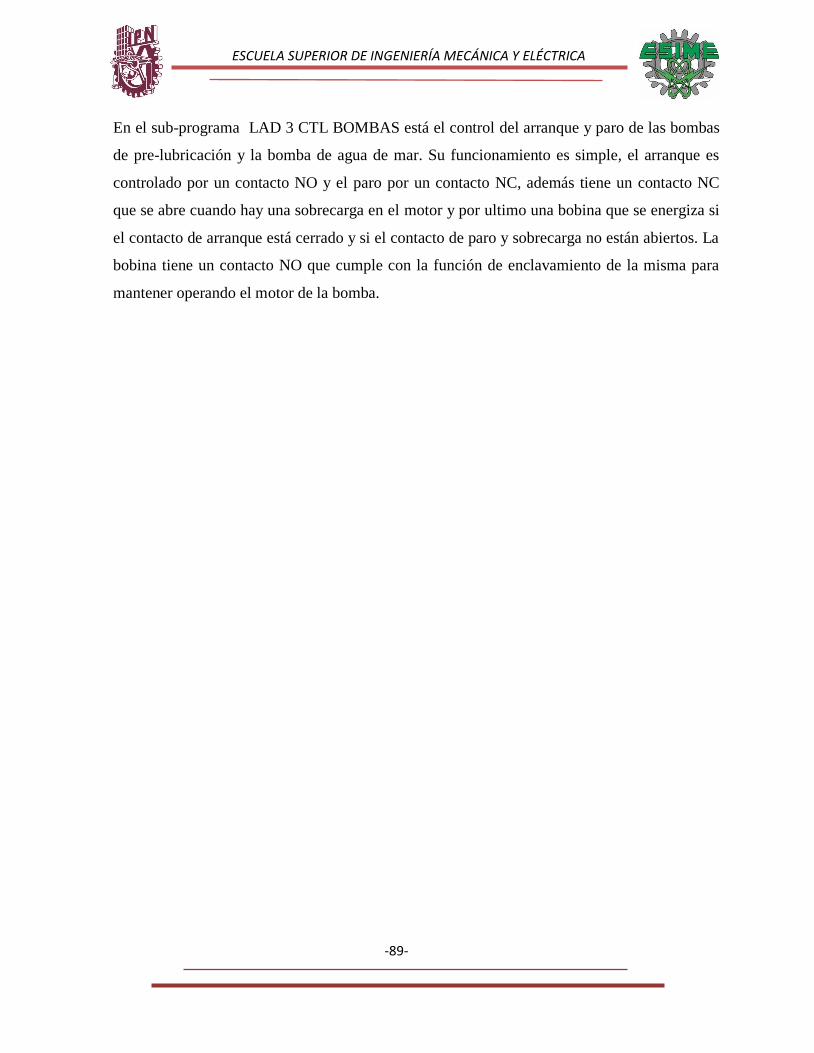
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-89-
En el sub-programa LAD 3 CTL BOMBAS está el control del arranque y paro de las bombas
de pre-lubricación y la bomba de agua de mar. Su funcionamiento es simple, el arranque es
controlado por un contacto NO y el paro por un contacto NC, además tiene un contacto NC
que se abre cuando hay una sobrecarga en el motor y por ultimo una bobina que se energiza si
el contacto de arranque está cerrado y si el contacto de paro y sobrecarga no están abiertos. La
bobina tiene un contacto NO que cumple con la función de enclavamiento de la misma para
mantener operando el motor de la bomba.
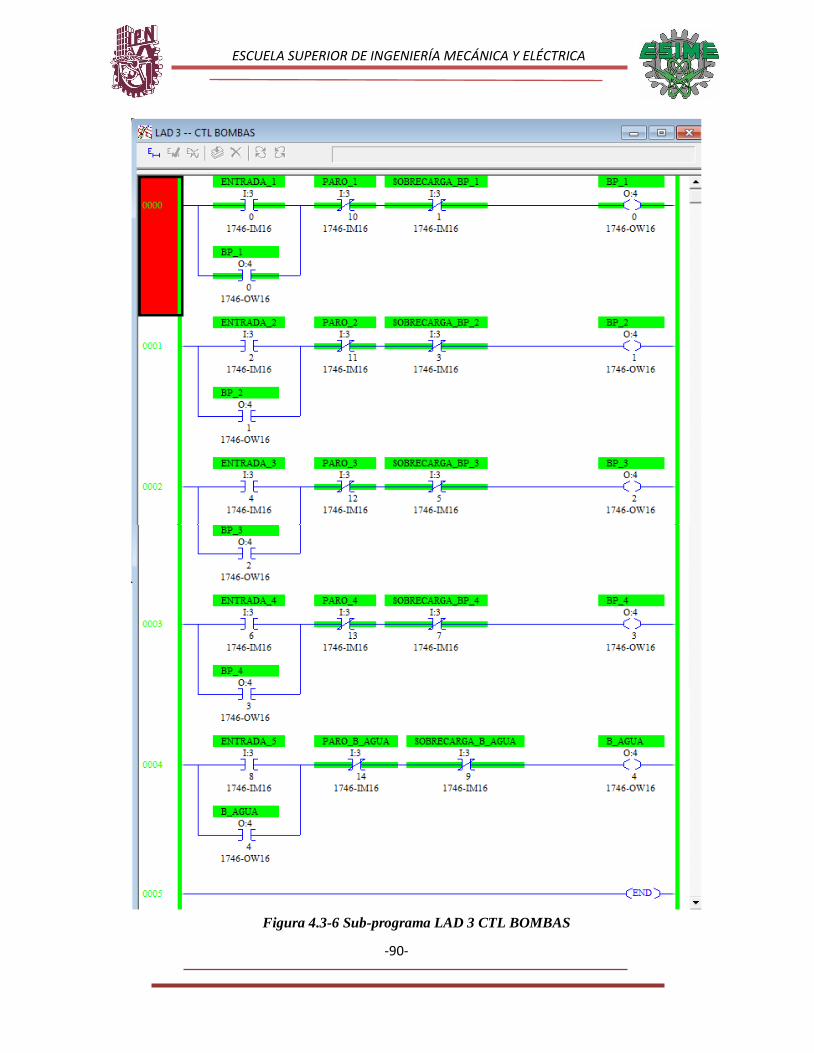
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-90-
Figura 4.3-6 Sub-programa LAD 3 CTL BOMBAS
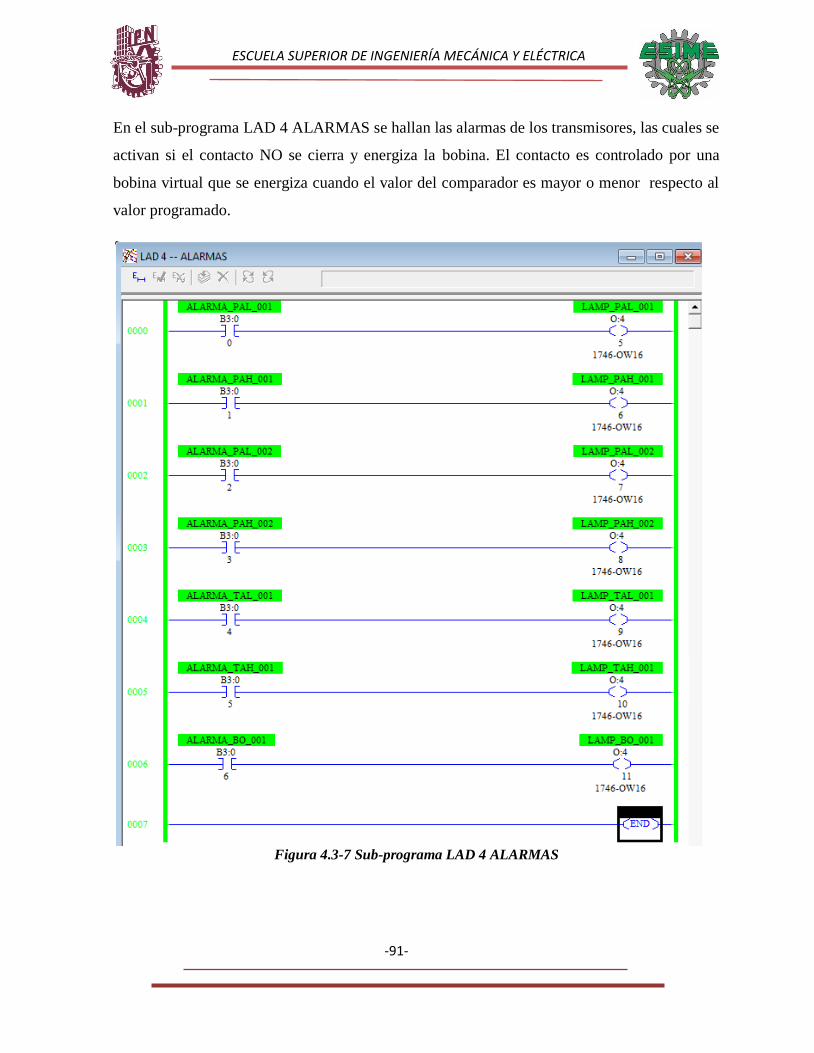
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-91-
En el sub-programa LAD 4 ALARMAS se hallan las alarmas de los transmisores, las cuales se
activan si el contacto NO se cierra y energiza la bobina. El contacto es controlado por una
bobina virtual que se energiza cuando el valor del comparador es mayor o menor respecto al
valor programado.
Figura 4.3-7 Sub-programa LAD 4 ALARMAS
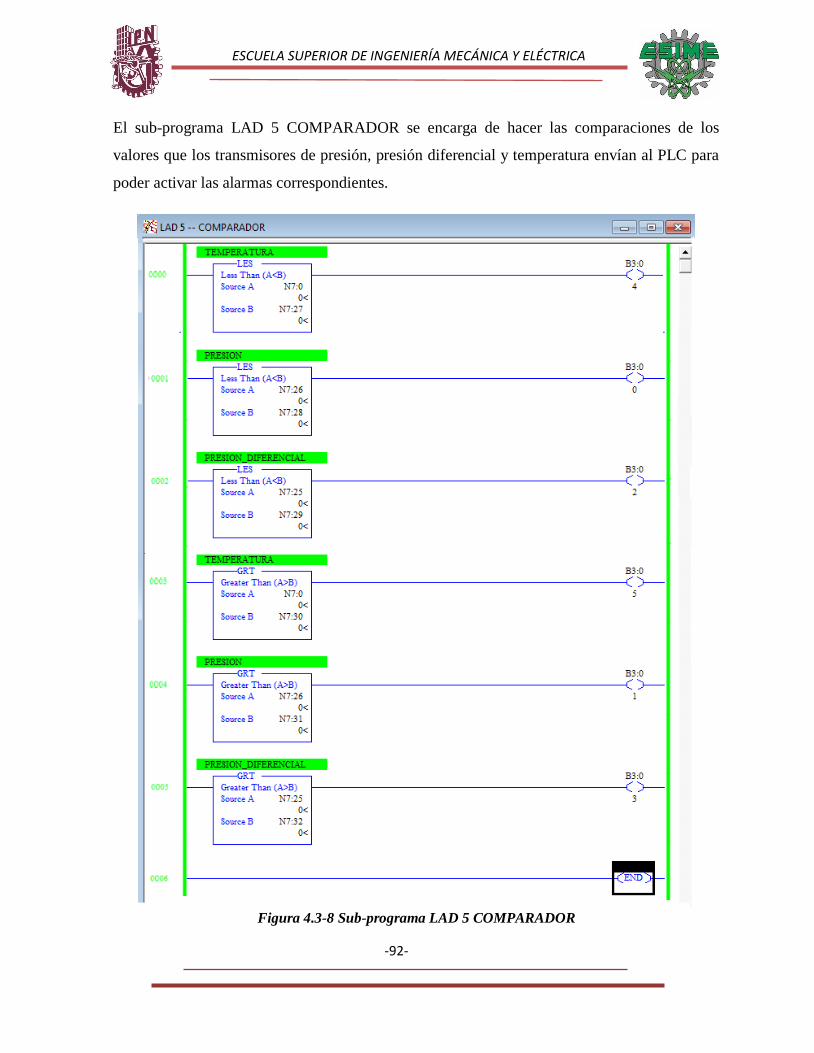
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-92-
El sub-programa LAD 5 COMPARADOR se encarga de hacer las comparaciones de los
valores que los transmisores de presión, presión diferencial y temperatura envían al PLC para
poder activar las alarmas correspondientes.
Figura 4.3-8 Sub-programa LAD 5 COMPARADOR
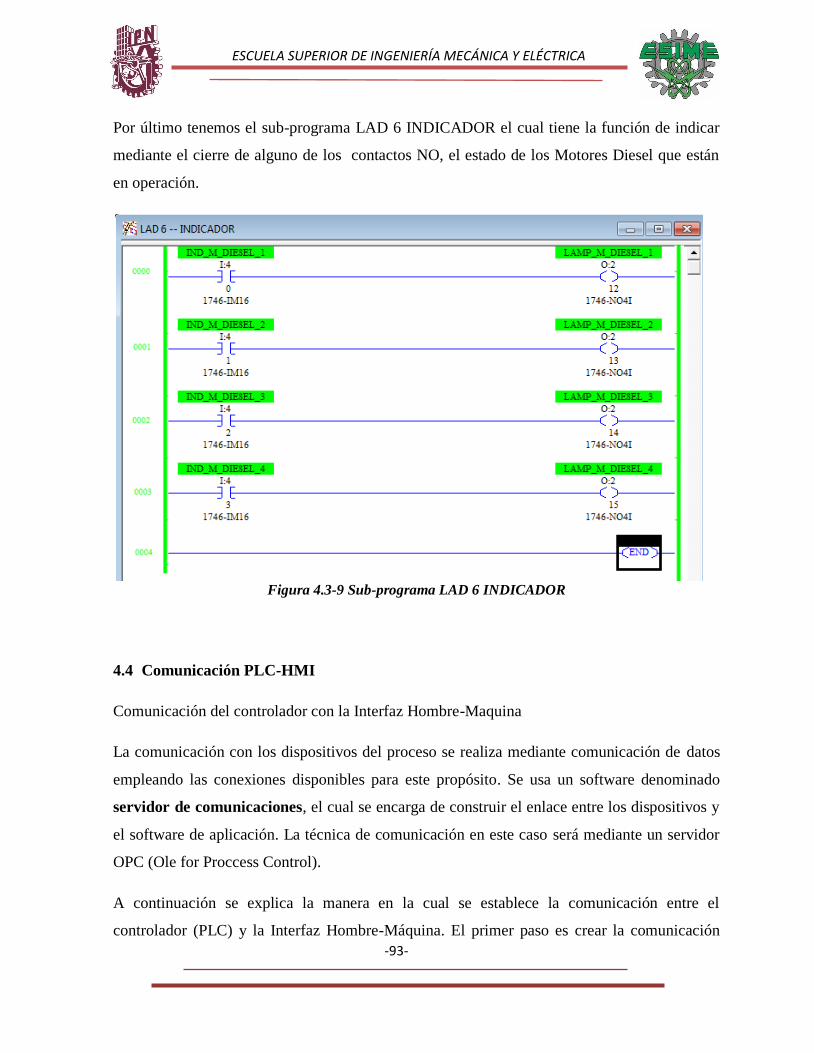
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-93-
Por último tenemos el sub-programa LAD 6 INDICADOR el cual tiene la función de indicar
mediante el cierre de alguno de los contactos NO, el estado de los Motores Diesel que están
en operación.
Figura 4.3-9 Sub-programa LAD 6 INDICADOR
4.4 Comunicación PLC-HMI
Comunicación del controlador con la Interfaz Hombre-Maquina
La comunicación con los dispositivos del proceso se realiza mediante comunicación de datos
empleando las conexiones disponibles para este propósito. Se usa un software denominado
servidor de comunicaciones, el cual se encarga de construir el enlace entre los dispositivos y
el software de aplicación. La técnica de comunicación en este caso será mediante un servidor
OPC (Ole for Proccess Control).
A continuación se explica la manera en la cual se establece la comunicación entre el
controlador (PLC) y la Interfaz Hombre-Máquina. El primer paso es crear la comunicación
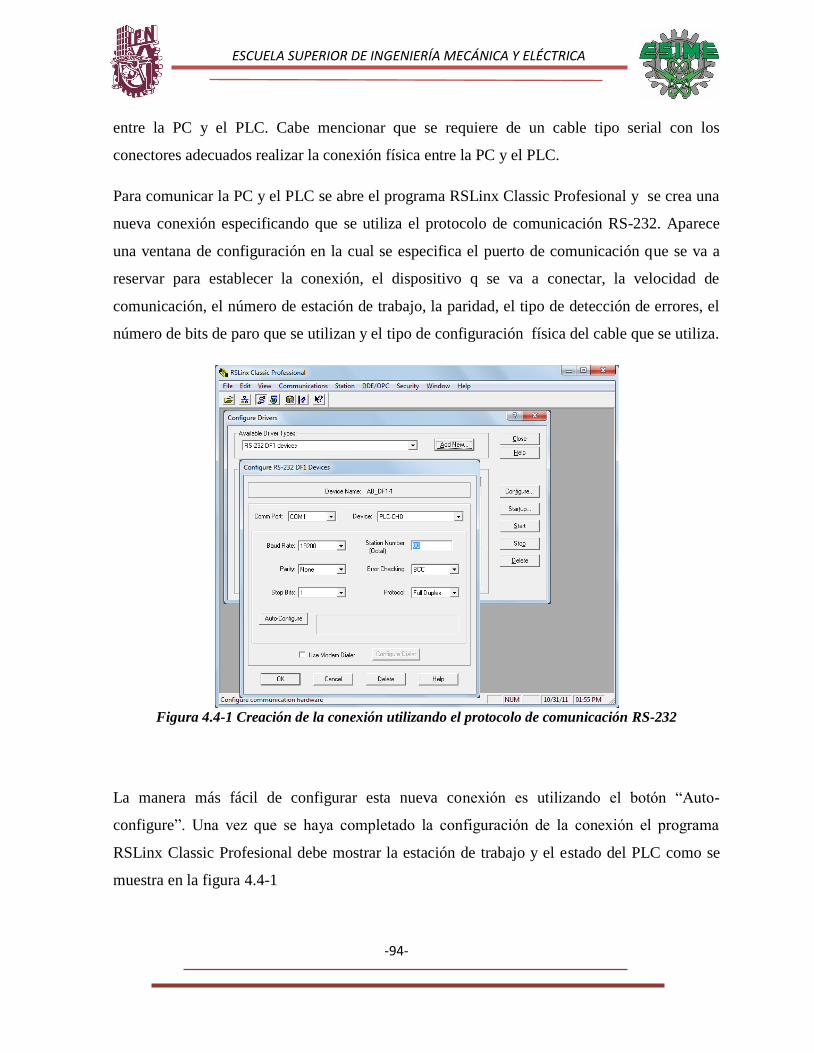
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-94-
entre la PC y el PLC. Cabe mencionar que se requiere de un cable tipo serial con los
conectores adecuados realizar la conexión física entre la PC y el PLC.
Para comunicar la PC y el PLC se abre el programa RSLinx Classic Profesional y se crea una
nueva conexión especificando que se utiliza el protocolo de comunicación RS-232. Aparece
una ventana de configuración en la cual se especifica el puerto de comunicación que se va a
reservar para establecer la conexión, el dispositivo q se va a conectar, la velocidad de
comunicación, el número de estación de trabajo, la paridad, el tipo de detección de errores, el
número de bits de paro que se utilizan y el tipo de configuración física del cable que se utiliza.
Figura 4.4-1 Creación de la conexión utilizando el protocolo de comunicación RS-232
La manera más fácil de configurar esta nueva conexión es utilizando el botón “Auto-
configure”. Una vez que se haya completado la configuración de la conexión el programa
RSLinx Classic Profesional debe mostrar la estación de trabajo y el estado del PLC como se
muestra en la figura 4.4-1
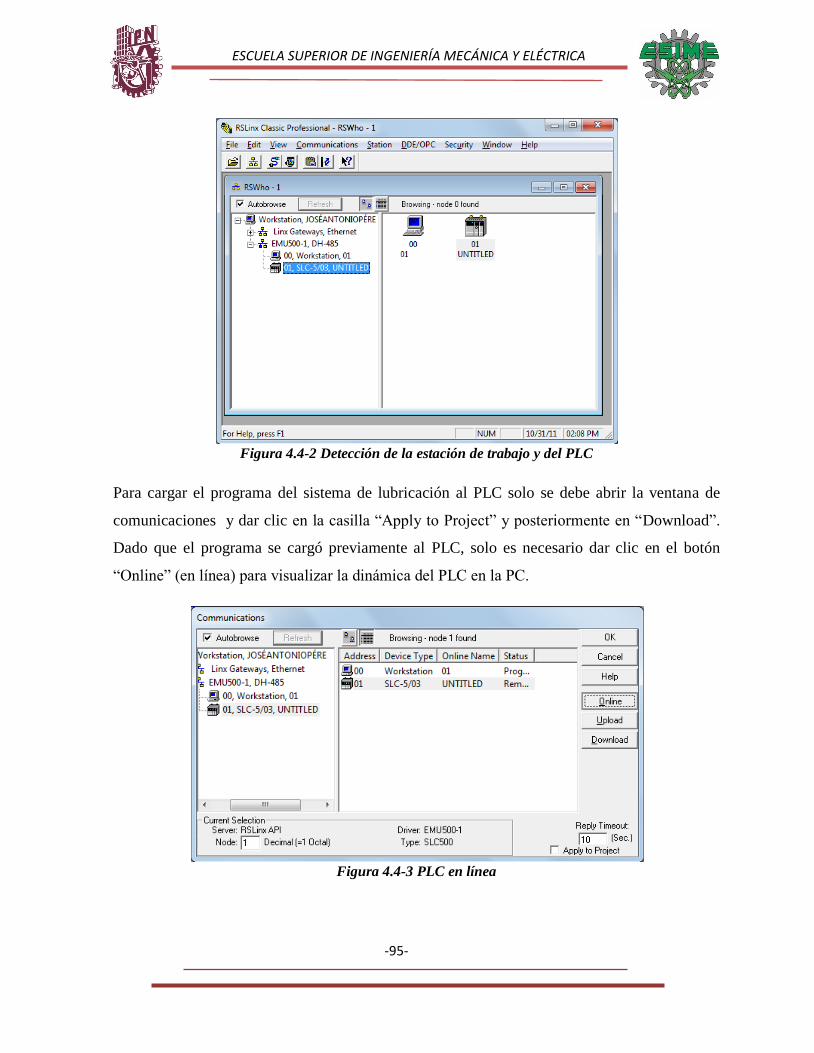
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-95-
Figura 4.4-2 Detección de la estación de trabajo y del PLC
Para cargar el programa del sistema de lubricación al PLC solo se debe abrir la ventana de
comunicaciones y dar clic en la casilla “Apply to Project” y posteriormente en “Download”.
Dado que el programa se cargó previamente al PLC, solo es necesario dar clic en el botón
“Online” (en línea) para visualizar la dinámica del PLC en la PC.
Figura 4.4-3 PLC en línea
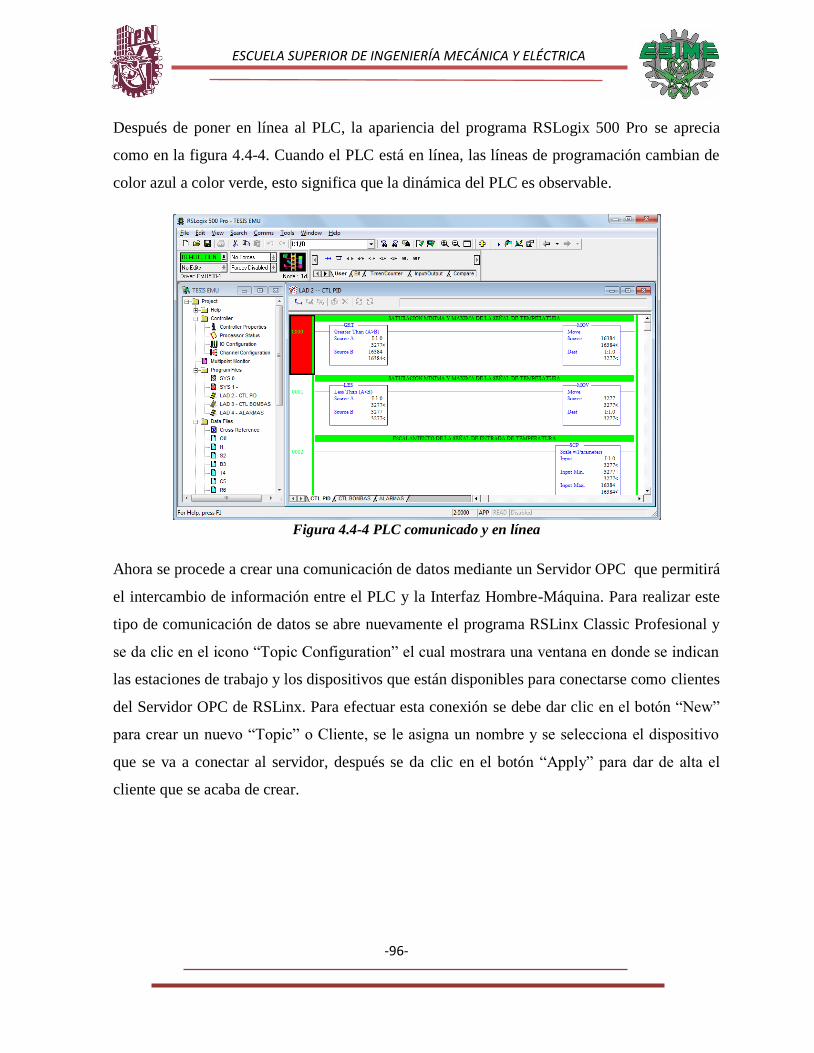
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-96-
Después de poner en línea al PLC, la apariencia del programa RSLogix 500 Pro se aprecia
como en la figura 4.4-4. Cuando el PLC está en línea, las líneas de programación cambian de
color azul a color verde, esto significa que la dinámica del PLC es observable.
Figura 4.4-4 PLC comunicado y en línea
Ahora se procede a crear una comunicación de datos mediante un Servidor OPC que permitirá
el intercambio de información entre el PLC y la Interfaz Hombre-Máquina. Para realizar este
tipo de comunicación de datos se abre nuevamente el programa RSLinx Classic Profesional y
se da clic en el icono “Topic Configuration” el cual mostrara una ventana en donde se indican
las estaciones de trabajo y los dispositivos que están disponibles para conectarse como clientes
del Servidor OPC de RSLinx. Para efectuar esta conexión se debe dar clic en el botón “New”
para crear un nuevo “Topic” o Cliente, se le asigna un nombre y se selecciona el dispositivo
que se va a conectar al servidor, después se da clic en el botón “Apply” para dar de alta el
cliente que se acaba de crear.
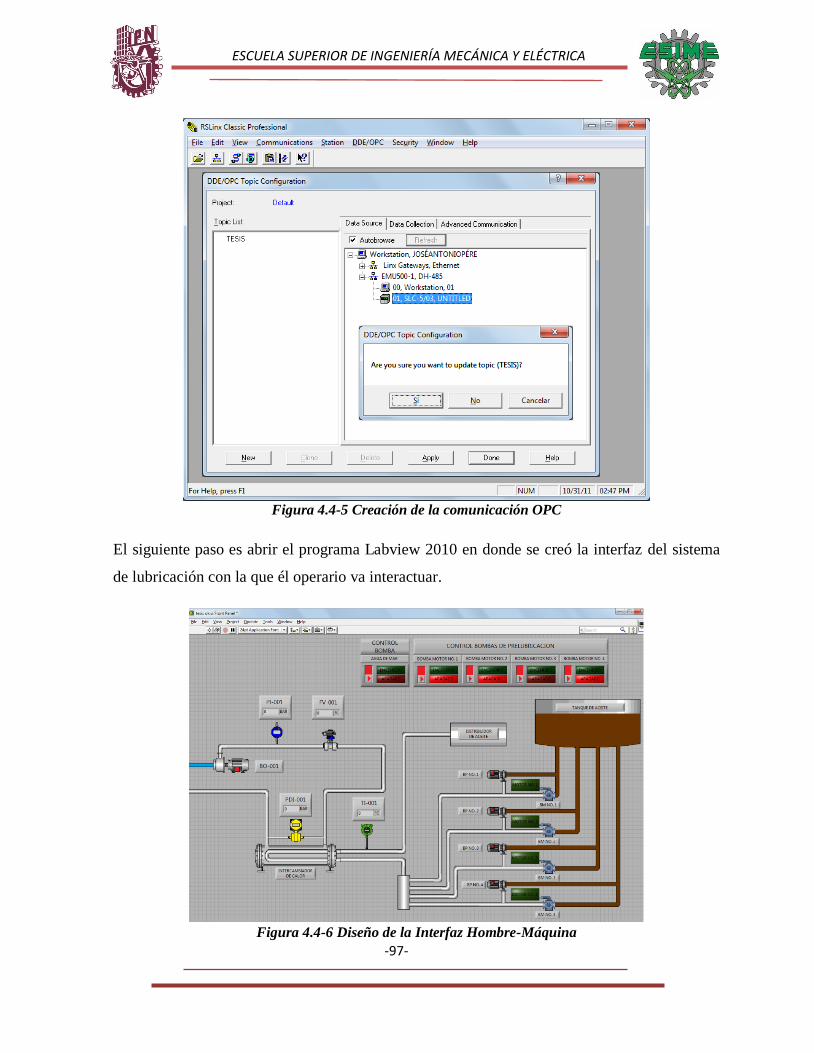
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-97-
Figura 4.4-5 Creación de la comunicación OPC
El siguiente paso es abrir el programa Labview 2010 en donde se creó la interfaz del sistema
de lubricación con la que él operario va interactuar.
Figura 4.4-6 Diseño de la Interfaz Hombre-Máquina
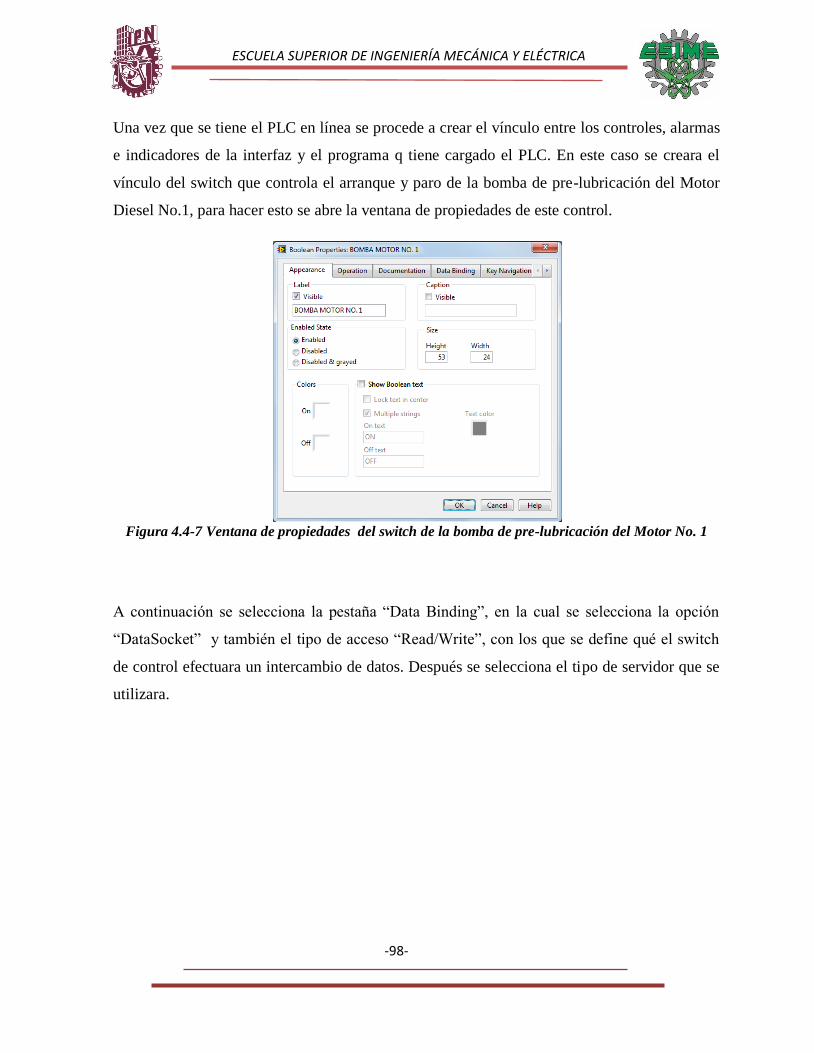
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-98-
Una vez que se tiene el PLC en línea se procede a crear el vínculo entre los controles, alarmas
e indicadores de la interfaz y el programa q tiene cargado el PLC. En este caso se creara el
vínculo del switch que controla el arranque y paro de la bomba de pre-lubricación del Motor
Diesel No.1, para hacer esto se abre la ventana de propiedades de este control.
Figura 4.4-7 Ventana de propiedades del switch de la bomba de pre-lubricación del Motor No. 1
A continuación se selecciona la pestaña “Data Binding”, en la cual se selecciona la opción
“DataSocket” y también el tipo de acceso “Read/Write”, con los que se define qué el switch
de control efectuara un intercambio de datos. Después se selecciona el tipo de servidor que se
utilizara.
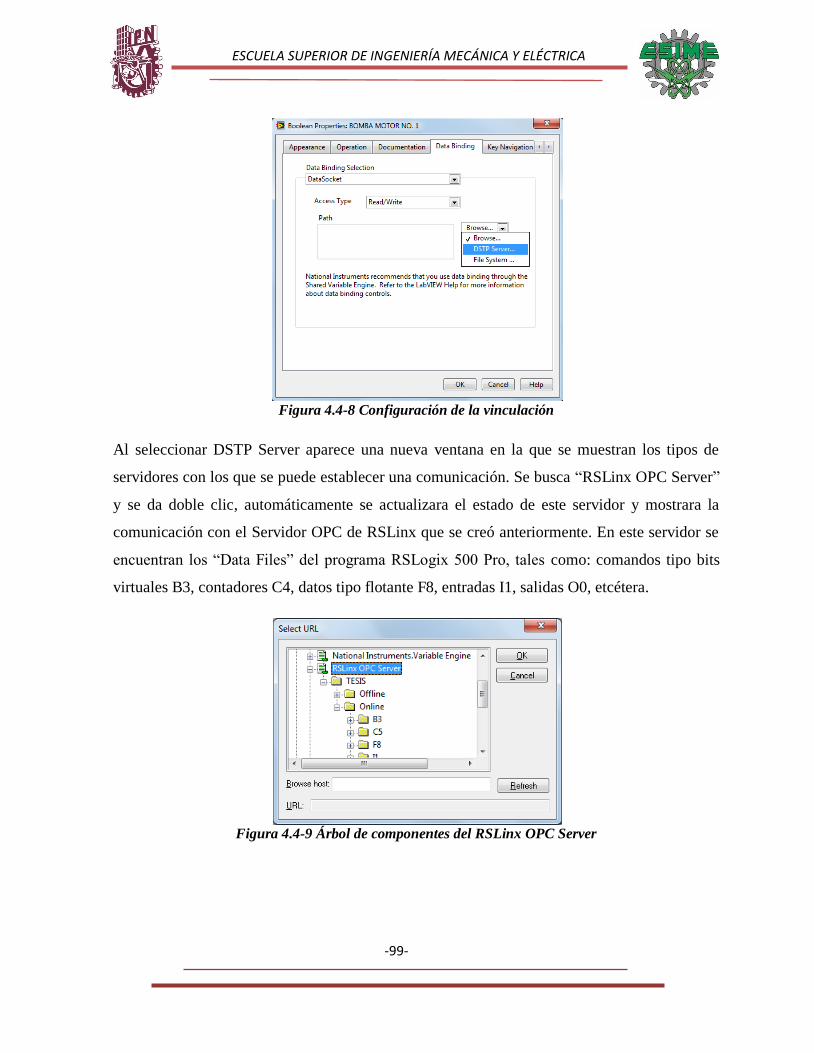
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-99-
Figura 4.4-8 Configuración de la vinculación
Al seleccionar DSTP Server aparece una nueva ventana en la que se muestran los tipos de
servidores con los que se puede establecer una comunicación. Se busca “RSLinx OPC Server”
y se da doble clic, automáticamente se actualizara el estado de este servidor y mostrara la
comunicación con el Servidor OPC de RSLinx que se creó anteriormente. En este servidor se
encuentran los “Data Files” del programa RSLogix 500 Pro, tales como: comandos tipo bits
virtuales B3, contadores C4, datos tipo flotante F8, entradas I1, salidas O0, etcétera.
Figura 4.4-9 Árbol de componentes del RSLinx OPC Server
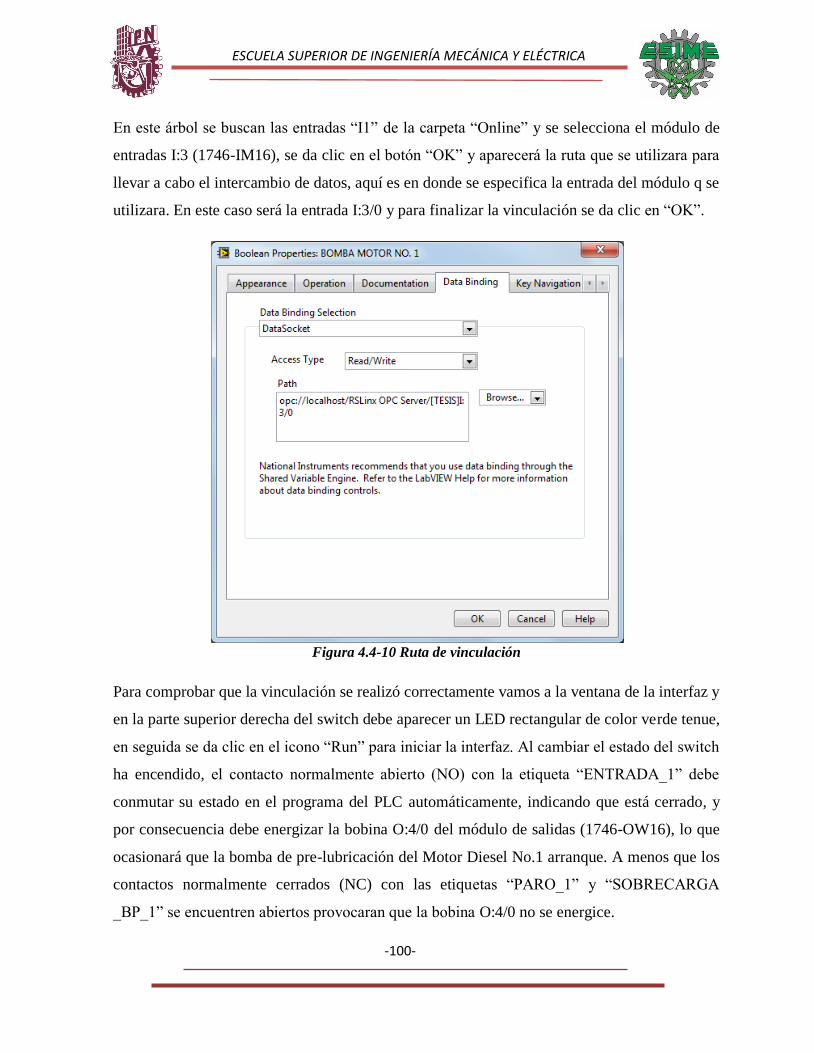
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-100-
En este árbol se buscan las entradas “I1” de la carpeta “Online” y se selecciona el módulo de
entradas I:3 (1746-IM16), se da clic en el botón “OK” y aparecerá la ruta que se utilizara para
llevar a cabo el intercambio de datos, aquí es en donde se especifica la entrada del módulo q se
utilizara. En este caso será la entrada I:3/0 y para finalizar la vinculación se da clic en “OK”.
Figura 4.4-10 Ruta de vinculación
Para comprobar que la vinculación se realizó correctamente vamos a la ventana de la interfaz y
en la parte superior derecha del switch debe aparecer un LED rectangular de color verde tenue,
en seguida se da clic en el icono “Run” para iniciar la interfaz. Al cambiar el estado del switch
ha encendido, el contacto normalmente abierto (NO) con la etiqueta “ENTRADA_1” debe
conmutar su estado en el programa del PLC automáticamente, indicando que está cerrado, y
por consecuencia debe energizar la bobina O:4/0 del módulo de salidas (1746-OW16), lo que
ocasionará que la bomba de pre-lubricación del Motor Diesel No.1 arranque. A menos que los
contactos normalmente cerrados (NC) con las etiquetas “PARO_1” y “SOBRECARGA
_BP_1” se encuentren abiertos provocaran que la bobina O:4/0 no se energice.
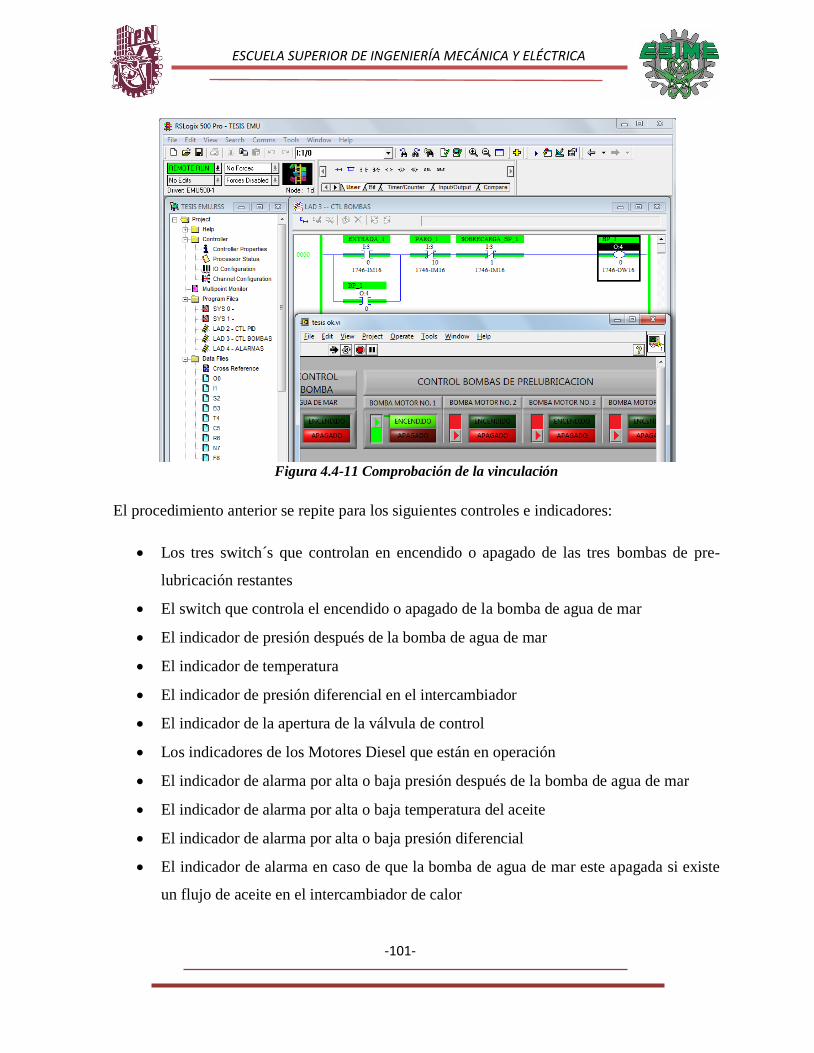
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-101-
Figura 4.4-11 Comprobación de la vinculación
El procedimiento anterior se repite para los siguientes controles e indicadores:
Los tres switch´s que controlan en encendido o apagado de las tres bombas de pre-
lubricación restantes
El switch que controla el encendido o apagado de la bomba de agua de mar
El indicador de presión después de la bomba de agua de mar
El indicador de temperatura
El indicador de presión diferencial en el intercambiador
El indicador de la apertura de la válvula de control
Los indicadores de los Motores Diesel que están en operación
El indicador de alarma por alta o baja presión después de la bomba de agua de mar
El indicador de alarma por alta o baja temperatura del aceite
El indicador de alarma por alta o baja presión diferencial
El indicador de alarma en caso de que la bomba de agua de mar este apagada si existe
un flujo de aceite en el intercambiador de calor
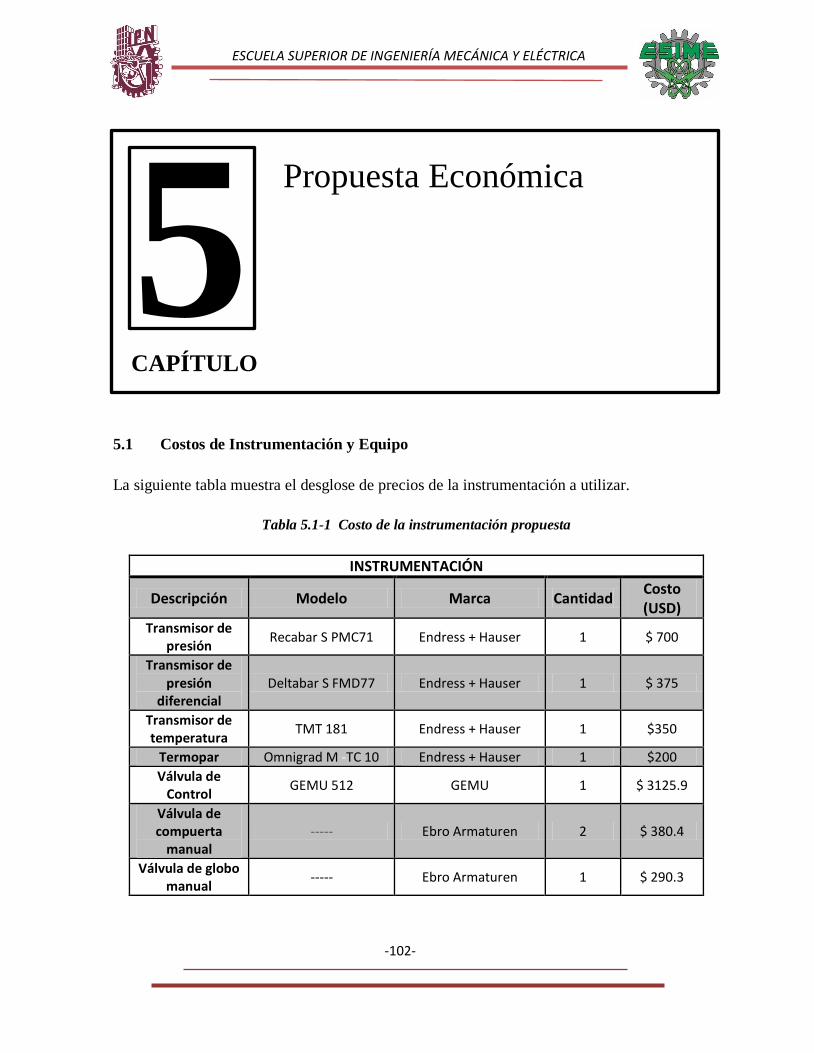
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-102-
Propuesta Económica
CAPÍTULO
5.1 Costos de Instrumentación y Equipo
La siguiente tabla muestra el desglose de precios de la instrumentación a utilizar.
Tabla 5.1-1 Costo de la instrumentación propuesta
INSTRUMENTACIÓN
Descripción Modelo Marca Cantidad Costo (USD)
Transmisor de presión
Recabar S PMC71 Endress + Hauser 1 $ 700
Transmisor de presión
diferencial Deltabar S FMD77 Endress + Hauser 1 $ 375
Transmisor de temperatura
TMT 181 Endress + Hauser 1 $350
Termopar Omnigrad M -TC 10 Endress + Hauser 1 $200
Válvula de Control
GEMU 512 GEMU 1 $ 3125.9
Válvula de compuerta
manual ----- Ebro Armaturen 2 $ 380.4
Válvula de globo manual
----- Ebro Armaturen 1 $ 290.3
5
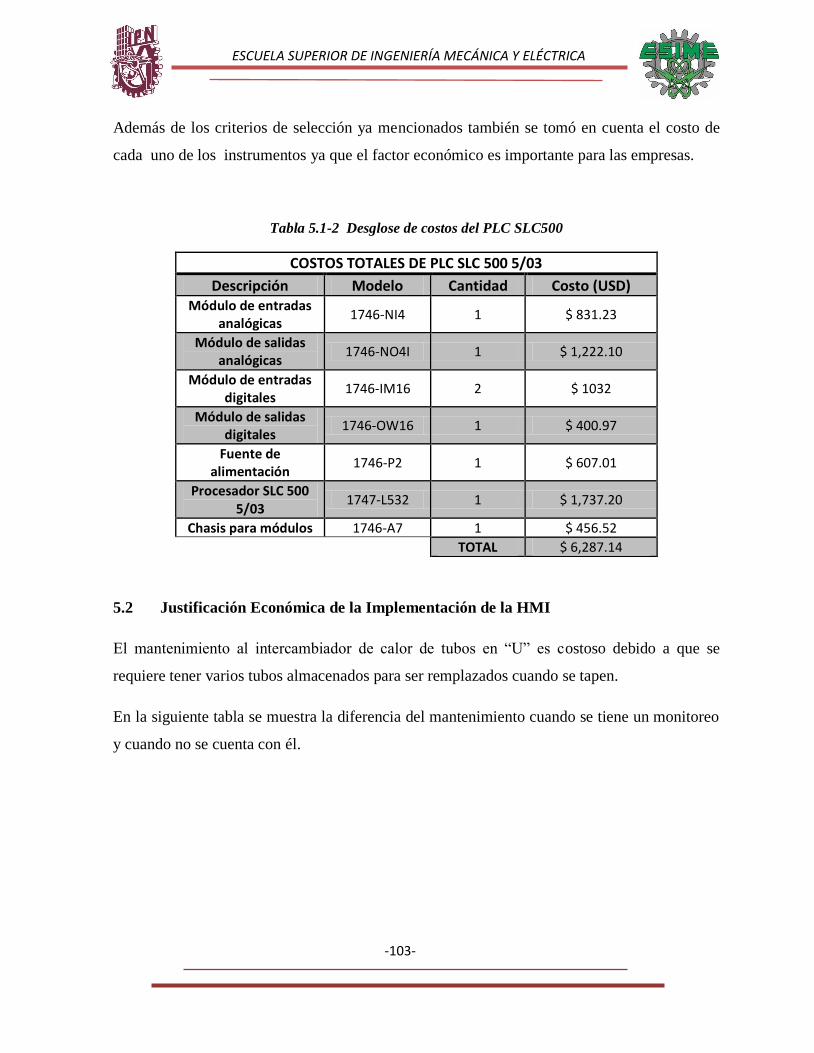
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-103-
Además de los criterios de selección ya mencionados también se tomó en cuenta el costo de
cada uno de los instrumentos ya que el factor económico es importante para las empresas.
Tabla 5.1-2 Desglose de costos del PLC SLC500
COSTOS TOTALES DE PLC SLC 500 5/03
Descripción Modelo Cantidad Costo (USD) Módulo de entradas
analógicas 1746-NI4 1 $ 831.23
Módulo de salidas analógicas
1746-NO4I 1 $ 1,222.10
Módulo de entradas digitales
1746-IM16 2 $ 1032
Módulo de salidas digitales
1746-OW16 1 $ 400.97
Fuente de alimentación
1746-P2 1 $ 607.01
Procesador SLC 500 5/03
1747-L532 1 $ 1,737.20
Chasis para módulos 1746-A7 1 $ 456.52
TOTAL $ 6,287.14
5.2 Justificación Económica de la Implementación de la HMI
El mantenimiento al intercambiador de calor de tubos en “U” es costoso debido a que se
requiere tener varios tubos almacenados para ser remplazados cuando se tapen.
En la siguiente tabla se muestra la diferencia del mantenimiento cuando se tiene un monitoreo
y cuando no se cuenta con él.
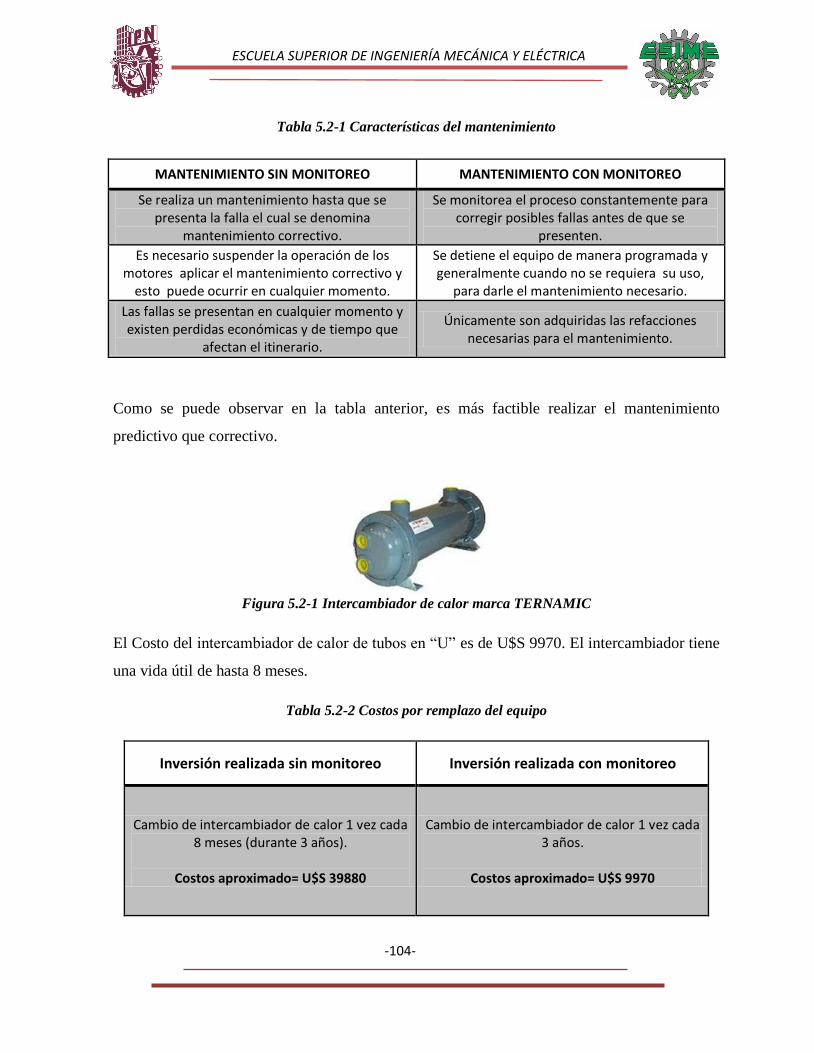
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-104-
Tabla 5.2-1 Características del mantenimiento
Como se puede observar en la tabla anterior, es más factible realizar el mantenimiento
predictivo que correctivo.
Figura 5.2-1 Intercambiador de calor marca TERNAMIC
El Costo del intercambiador de calor de tubos en “U” es de U$S 9970. El intercambiador tiene
una vida útil de hasta 8 meses.
Tabla 5.2-2 Costos por remplazo del equipo
Inversión realizada sin monitoreo Inversión realizada con monitoreo
Cambio de intercambiador de calor 1 vez cada 8 meses (durante 3 años).
Costos aproximado= U$S 39880
Cambio de intercambiador de calor 1 vez cada 3 años.
Costos aproximado= U$S 9970
MANTENIMIENTO SIN MONITOREO MANTENIMIENTO CON MONITOREO
Se realiza un mantenimiento hasta que se presenta la falla el cual se denomina
mantenimiento correctivo.
Se monitorea el proceso constantemente para corregir posibles fallas antes de que se
presenten.
Es necesario suspender la operación de los motores aplicar el mantenimiento correctivo y
esto puede ocurrir en cualquier momento.
Se detiene el equipo de manera programada y generalmente cuando no se requiera su uso,
para darle el mantenimiento necesario.
Las fallas se presentan en cualquier momento y existen perdidas económicas y de tiempo que
afectan el itinerario.
Únicamente son adquiridas las refacciones necesarias para el mantenimiento.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-105-
Cabe destacar que el tiempo de vida de 3 años en intercambiadores de calor varía dependiendo
de las condiciones de trabajo, es decir, las condiciones climáticas presentes.
5.3 Costos de la Implementación de la HMI
La implementación de una HMI en este caso considera el uso del programa LabVIEW y para
el controlador se requiere el programa que debe adquirirse por separado.
Tabla 5.3-1 Costos de los softwares utilizados
Costos del software
Software Desarrollador Costo (USD)
LabVIEW National Instrumenst $ 1803.54
RSLogix 500 Pro
Rockwell Automation $ 3393.60
TOTAL $ 5,197.14
Las licencias que se cotizaron son licencias profesionales que permiten su uso en proyectos y
desarrollar trabajos para empresas.
En la tabla 5.3-2 se muestra el costo aproximado de la aplicación de una HMI, sin considerar
los costos del personal requerido.
Tabla 5.3-2 Costos totales en instrumentos, controlador y software
CONTROLADOR INSTRUMENTACIÓN SOFTWARE
$ 5771.14 $5421.6 $ 5197.14
Costo total (USD) $16389.78
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-106-
CONCLUSIONES
La instrumentación que se propone cumple con las características necesarias para su
aplicación en campo y permite la correcta aplicación de la estrategia de control que se plantea.
La estructura del programa de PLC así como la sintonización del PID son propuestas que
deben adecuarse cuando pretendan implementarse en el sistema de enfriamiento de aceite, ya
que en la simulación no se pueden obtener las mismas condiciones y perturbaciones del
proceso real.
Se presentaron condiciones de trabajo ideales que cambian al trabajar en el proceso real, por lo
que pueden presentarse diferencias en los resultados, sin embargo estos valores pueden
tomarse como base para adecuarlos y aplicarlos a dicho proceso.
El planteamiento del monitoreo continuo observa el funcionamiento del sistema de
lubricación en el ferry de carga “MS European Endeavourde” el cual permite que se generen
registros que permitan tomar decisiones respecto al mantenimiento del intercambiador de
calor.
Se presenta una posible solución al problema de remplazar continuamente los
intercambiadores de calor en el barco, de una manera sustentable por medio del control y
monitoreo, que buscan disminuir las fallas en el intercambiador de calor y alargar el tiempo
de vida útil, los cuales se proponen en este trabajo.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-107-
BIBLIOGRAFÍA
Ogata, katsuhiko. INGENIERÍA DE CONTROL MODERNO. 4ª Edición, Prentice Hall,
España, Año 2003
Ortiz, Frida. METODOLOGIA DE LA INVESTIGACIÓN 1ª Edición. Editorial Limusa,
México, 2004
Creus, Antonio. INSTRUMENTACIÓN INDUSTRIAL 7ª Edición. Editorial Alfaomega,
México, 2006
Smith, Carlos. CONTROL AUTOMÁTICO DE PROCESOS. Editorial Limusa, México 200
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-108-
ANEXOS
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-109-
ANEXO 1
ESPECIFICACIONES DEL AGUA DE MAR
En general, la solución del agua de mar puede aproximarse a una solución 0,5 M de NaCl. Los
efectos más importantes de las sales disueltas son disminuir el punto de congelación y el
relativo al máximo de densidad (4º C para el agua). Esta condición se produce porque las sales
disueltas impiden la formación de grupos ordenados de moléculas, de modo que la densidad es
controlada exclusivamente por los efectos de la expansión térmica.
Dicho efecto constituye un elemento fundamental de distinción entre las aguas dulces y las
salinas, e incide de manera importante en la circulación oceánica y la formación de los hielos
en las áreas polares.
Del total de radiación electromagnética procedente del sol, sólo el 0,25% llega al mar y al
suelo. Esta cantidad sería suficiente para hacer aumentar la temperatura del primer metro de
agua en más de 3º C diarios si no interviniera la mezcla que se da en la superficie, que
transfiere parte del calor absorbido a las capas inmediatamente inferiores y a la atmósfera. Este
mecanismo, junto a la elevada capacidad térmica del agua de mar, impide los fuertes cambios
de temperatura que se observan en el suelo entre el día y la noche. De hecho, la luz solar no
penetra mucho en profundidad.
Los intercambios de calor tienen lugar en la capa superficial y puede considerarse al océano
como un sistema ineficiente desde el punto de vista termodinámico. La pérdida de calor de la
superficie oceánica se realiza durante el día y la noche, y en todas las estaciones, mediante tres
procesos fundamentales:
La radiación hacia el espacio, a la que contribuye la reflexión que para el mar es muy
pequeña (hasta el 3% de la radiación incidente), mientras que sobre el suelo es muy
alta (hasta el 90% para la nieve).
La evaporación del agua.
El caldeamiento de la atmósfera.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-110-
El calor latente de evaporación sustraído a la superficie durante dicho proceso es devuelto a la
atmósfera cuando el vapor de agua se condensa en lluvia o nieve en las capas superiores de la
misma. Finalmente, una pequeña parte del calor es transferida por conducción a la atmósfera
que, al menos en sus capas más bajas, se calienta. Por lo general, la superficie del agua
oceánica es más caliente que la capa de aire en contacto con ella (aproximadamente 1º C).
Las capas superficiales del mar son las que están sometidas a las variaciones térmicas
estacionales más amplias, en particular en las zonas templadas, pero por debajo de los 150-200
m desde la superficie los efectos directos de la radiación solar se extinguen, y el campo
térmico por debajo de los 1000 m resulta prácticamente constante. La temperatura en
superficie, además de variar durante el mismo día (en hasta algunos ºC) depende obviamente
de la alternancia de las estaciones, de la cercanía de los bloques continentales, de la acción del
viento y de las corrientes, de la nubosidad y en general, de todos los factores climáticos que
interfieren en la irradiación solar. Las temperaturas superficiales más altas se observan en las
áreas ecuatoriales, con un gradiente negativo según nos desplazamos hacia el norte y el sur,
hacia las áreas polares.
Como consecuencia del caldeamiento de la superficie oceánica se origina una estructura
térmica en tres capas: una capa superficial mezclada, en la que el calor debido a la irradiación
solar se transmite en profundidad a causa de la mezcla producida por los vientos; una zona de
transición en la que la temperatura disminuye de modo repentino (termoclina permanente), y
una zona profunda en la que la temperatura se mantiene relativamente constante alrededor de
las 2-3º C al aumentar la profundidad. A dicha profundidad el efecto de la presión hidrostática
influye sobre la temperatura, que alcanza valores de algunos grados por encima de la que
tendría si fuera transportada adiabáticamente a la superficie.
En los mares templados, como por ejemplo el Mediterráneo, durante los meses de julio a
septiembre se forma una termoclina estacional, cerca de la superficie, entre los 25 y los 40 m
de profundidad, que desaparece durante el invierno. Su importancia para los procesos
biológicos es enorme. La presencia de un fuerte gradiente de temperatura (de más de 10 º C)

ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-111-
en pocos metros de la columna de agua e inmediatamente por debajo de la capa superficial
mezclada da asimismo lugar a fuertes incrementos de densidad (picnoclina).
Comportamiento de la densidad en las aguas respecto a su profundidad.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-112-
ANEXO 2
TIPOS DE INTERCAMBIADORES DE CALOR SEGÚN SU CONSTRUCCIÓN
Si bien los intercambiadores de calor se presentan en una inimaginable variedad de formas y
tamaños, la construcción de los intercambiadores está incluida en alguna de las dos siguientes
categorías: carcasa y tubo o plato. Como en cualquier dispositivo mecánico, cada uno de estos
presenta ventajas o desventajas en su aplicación.
• Carcasa y tubo
La construcción más básica y común de los intercambiadores de calor es el de tipo tubo y
carcasa.
Este tipo de intercambiador consiste en un conjunto de tubos en un contenedor llamado
carcaza. El flujo de fluido dentro de los tubos se le denomina comúnmente flujo interno y
aquel que fluye en el interior del contenedor como fluido de carcaza o fluido externo. En los
extremos de los tubos, el fluido interno es separado del fluido externo de la carcasa por la(s)
placa(s) del tubo. Los tubos se sujetan o se sueldan a una placa para proporcionan un sello
adecuado. En sistemas donde los dos fluidos presentan una gran diferencia entre sus presiones,
el líquido con mayor presión se hace circular típicamente a través de los tubos y el líquido con
una presión más baja se circula del lado de la cáscara. Esto es debido a los costos en
materiales, los tubos del intercambiador de calor se pueden fabricar para soportar presiones
más altas que la cáscara del cambiador con un costo mucho más bajo. Las placas de soporte
(support plates) mostradas en figura (1) también actúan como bafles para dirigir el flujo del
líquido dentro de la cáscara hacia adelante y hacia atrás a través de los tubos.
• Platos
El intercambiador de calor de tipo plato, consiste de placas en lugar de tubos para separar a los
dos fluidos caliente y frío Los líquidos calientes y fríos se alternan entre cada uno de las placas
y los bafles dirigen el flujo del líquido entre las placas. Ya que cada una de las placas tiene un
área superficial muy grande, las placas proveen un área extremadamente grande de
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-113-
transferencia de térmica a cada uno de los líquidos .Por lo tanto, un intercambiador de placa es
capaz de transferir mucho más calor con respecto a un intercambiador de carcaza y tubos con
volumen semejante, esto es debido a que las placas proporcionan una mayor área que la de los
tubos. El intercambiador de calor de plato, debido a la alta eficacia en la transferencia de calor,
es mucho más pequeño que el de carcaza y tubos para la misma capacidad de intercambio de
calor.
Sin embargo, el tipo de intercambiadores de placa no se utiliza extensamente debido a la
inhabilidad de sellar confiablemente las juntas entre cada una de las placas. Debido a este
problema, el tipo intercambiador de la placa se ha utilizado solamente para aplicaciones donde
la presión es pequeña o no muy alta, por ejemplo en los refrigeradores de aceite para
máquinas. Actualmente se cuentan importantes avances que han mejorado el diseño de las
juntas y sellos, así como el diseño total del intercambiador de placa, esto ha permitido algunos
usos a gran escala de este tipo de intercambiador de calor. Así, es más común que cuando se
renuevan viejas instalaciones o se construyen nuevas instalaciones el intercambiador de la
placa está substituyendo paulatinamente a los intercambiadores de carcaza y tubo.
Tipos de intercambiadores de calor según su operación
Ya que los intercambiadores de calor se presentan en muchas formas, tamaños, materiales de
manufactura y modelos, estos son categorizados de acuerdo con características comunes. Una
de las características comunes que se puede emplear es la dirección relativa que existe entre
los dos flujos de fluido. Las tres categorías son: Flujo paralelo, Contraflujo y Flujo cruzado.
• Flujo paralelo.
Existe un flujo paralelo cuando el flujo interno o de los tubos y el flujo externo o de la carcasa
ambos fluyen en la misma dirección. En este caso, los dos fluidos entran al intercambiador por
el mismo extremo y estos presentan una diferencia de temperatura significativa. Como el calor
se transfiere del fluido con mayor temperatura hacia el fluido de menor temperatura, la
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-114-
temperatura de los fluidos se aproxima la una a la otra, es decir que uno disminuye su
temperatura y el otro la aumenta tratando de alcanzar el equilibrio térmico entre ellos.
Debe quedar claro que el fluido con menor temperatura nunca alcanza la temperatura del
fluido más caliente.
• Contraflujo
Se presenta un contraflujo cuando los dos fluidos fluyen en la misma dirección pero en sentido
opuesto. Cada uno de los fluidos entra al intercambiador por diferentes extremos Ya que el
fluido con menor temperatura sale en contraflujo del intercambiador de calor en el extremo
donde entra el fluido con mayor temperatura, la temperatura del fluido más frío se aproximará
a la temperatura del fluido de entrada. Este tipo de intercambiador resulta ser más eficiente
que los otros dos tipos mencionados anteriormente. En contra con el intercambiador de calor
de flujo paralelo, el intercambiador de contraflujo puede presentar la temperatura más alta en
el fluido frío y la más baja temperatura en el fluido caliente una vez realizada la transferencia
de calor en el intercambiador
• Flujo cruzado
Como en el intercambiador de calor de flujo cruzado uno de los fluidos fluye de manera
perpendicular al otro fluido, esto es, uno de los fluidos pasa a través de tubos mientras que el
otro pasa alrededor de dichos tubos formando un ángulo de 90◦ Los intercambiadores de flujo
cruzado son comúnmente usado donde uno de los fluidos presenta cambio de fase y por tanto
se tiene un fluido pasado por el intercambiador en dos fases bifásico.
Un ejemplo típico de este tipo de intercambiador es en los sistemas de condensación de vapor,
donde el vapor exhausto que sale de una turbina entra como flujo externo a la carcasa del
condensador y el agua fría que fluye por los tubos absorbe el calor del vapor y éste se
condensa y forma agua líquida. Se pueden condensar grandes volúmenes de vapor de agua al
utiliza este tipo de intercambiador de calor.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-115-
En la actualidad, la mayoría de los intercambiadores de calor no son puramente de flujo
paralelo, contraflujo, o flujo cruzado; estos son comúnmente una combinación de los dos o
tres tipos de intercambiador. Desde luego, un intercambiador de calor real que incluye dos, o
los tres tipos de intercambio descritos anteriormente, resulta muy complicado de analizar. La
razón de incluir la combinación de varios tipos en uno solo, es maximizar la eficacia del
intercambiador dentro de las restricciones propias del diseño, que son: tamaño, costo, peso,
eficacia requerida, tipo de fluidos, temperaturas y presiones de operación, que permiten
establecer la complejidad del intercambiador.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-116-
ANEXO 3
ESPECIFICACIONES API CF
El API (American Petroleum Institute) Instituto Americano del Petróleo es una organización
técnica y comercial que representa a los elaboradores de productos de petróleo en los E.E.U.U.
A través de su asociación con la SAE (Society of Automotive Engineers) Sociedad de
Ingenieros Automotrices y ASTM (American Society for Testing of Materials) Sociedad
Americana para Ensayos de Materiales, han desarrollado numerosos ensayos que se
correlaciona con el uso real y diario (motores/vehículos).
Cada motor tiene, de acuerdo con su diseño y condiciones de operación, necesidades
específicas que el lubricante debe satisfacer. Se puede entonces clasificar a los aceites según
su capacidad para desempeñarse frente a determinadas exigencias.
API ha desarrollado un sistema para seleccionar y recomendar aceites para motor basado en
las condiciones de servicio.
Cada clase de servicio es designada por dos letras. Como primera letra se emplea la “S” para
identificar a los aceites recomendados para motores naftenos, para autos de pasajeros y
camiones livianos “Service” y la letra “C” para vehículos comerciales, agrícolas, de la
construcción y todo terreno que operan con combustible diesel “Comercial”.
En ambos casos la segunda letra indica la exigencia en servicio, comenzando por la “A” para
el menos exigido, y continuando en orden alfabético a medida que aumenta la exigencia.
Castrol MHP excede las especificaciones API CF, ofreciendo una mayor detergencia
(desplazamiento, con ayuda de una solución acuosa, de toda clase de contaminaciones
grasosas situadas sobre superficies sólidas como textiles, metales, vidrio, piel etc.) y la
estabilidad oxidativa, un rendimiento mejorado a altas temperaturas. Este producto también
presenta gran capacidad de carga, lo cual le permite ser utilizado como un aceite común para
motor y sistemas de transmisión.
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-117-
ANEXO 4
ESPECIFICACIÓN DE VISCOSIDAD SAE 40
La Sociedad de Ingenieros Automotrices SAE clasifica a los aceites de acuerdo a la
viscosidad del lubricante y los divide en: monogrados (a estos se les asigna un número el cual
es indicativo de su viscosidad) y multigrados (se les asigna dos números y entre ellos se coloca
la letra W de Winter que significa invierno en inglés).
Los aceites monogrados tienen la característica de que su viscosidad cambia de manera
importante con la temperatura, cuando ésta baja, su viscosidad se incrementa y cuando
aumenta su viscosidad disminuye.
Entre los aceites monogrados se tienen:
SAE40 Usado en motores de trabajo pesado y en tiempo de mucho calor (verano)
SAE30 Sirve para motores de automóviles en climas cálidos
SAE20 Empleado en climas templados o en lugares con temperaturas inferiores a 0°C,
Desde 1964 se utilizan aceites multigrados en los motores. Estos aceites tienen la
característica de que su viscosidad también cambia con la temperatura pero lo hacen de una
manera menos drástica que los aceites monogrados.
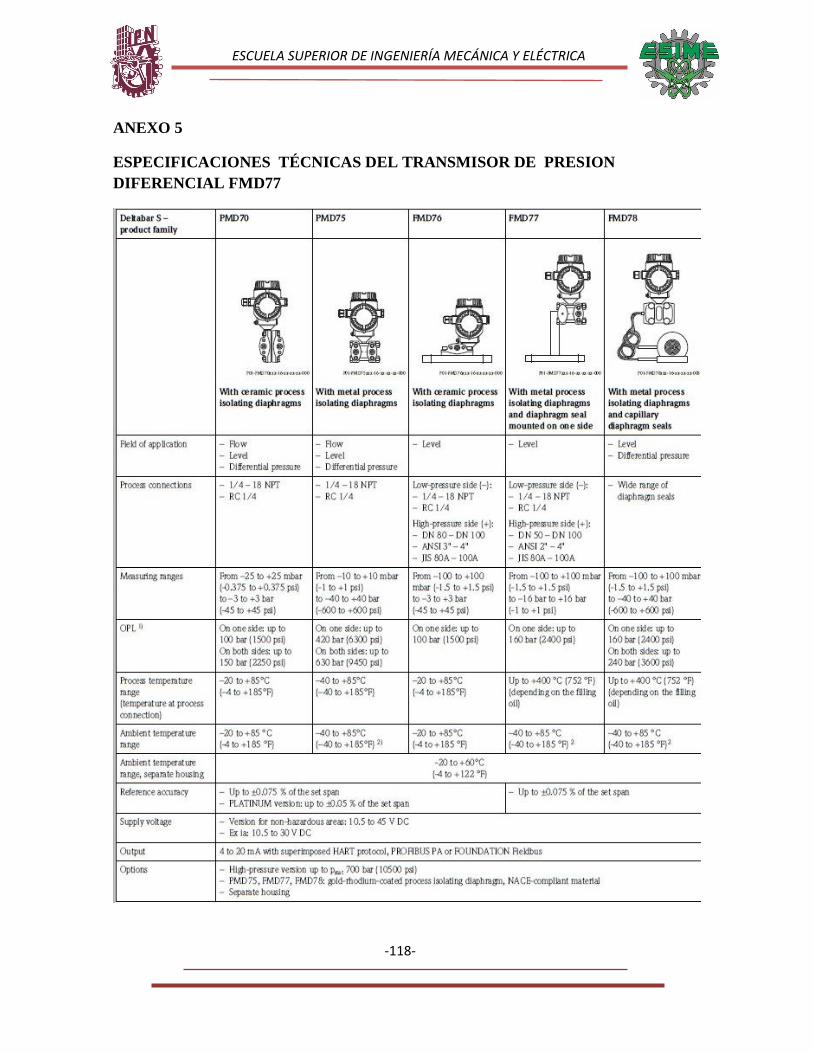
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-118-
ANEXO 5
ESPECIFICACIONES TÉCNICAS DEL TRANSMISOR DE PRESION
DIFERENCIAL FMD77
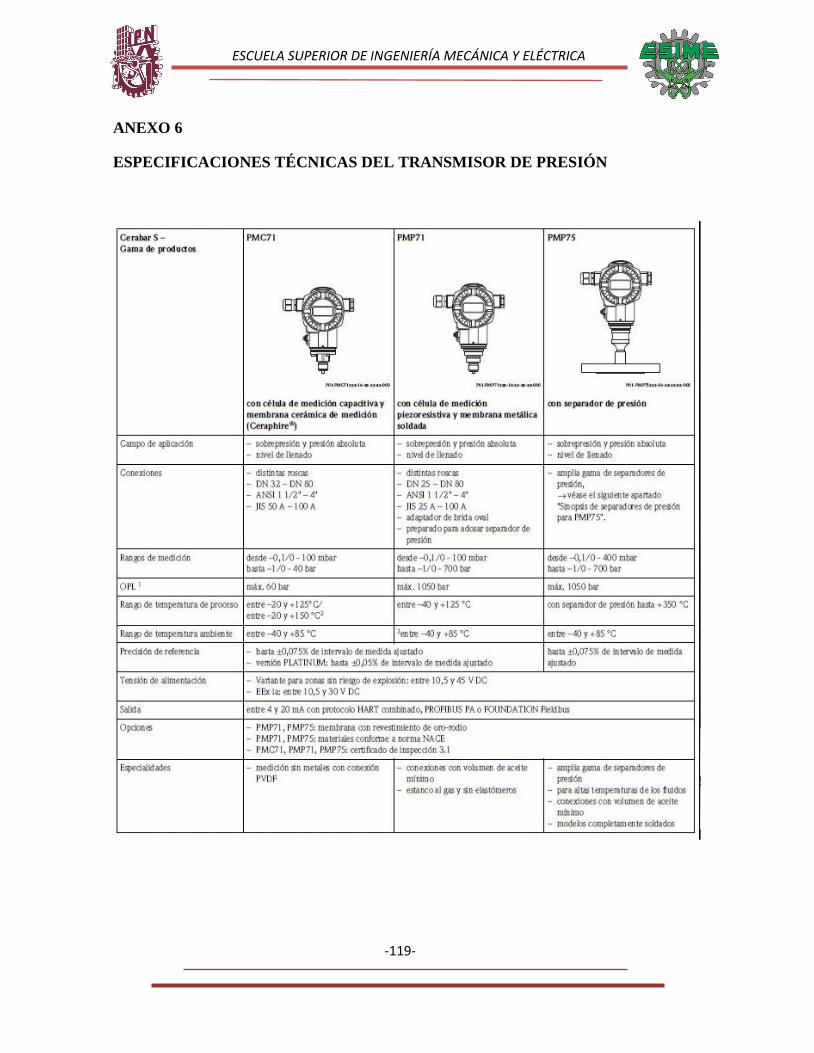
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-119-
ANEXO 6
ESPECIFICACIONES TÉCNICAS DEL TRANSMISOR DE PRESIÓN
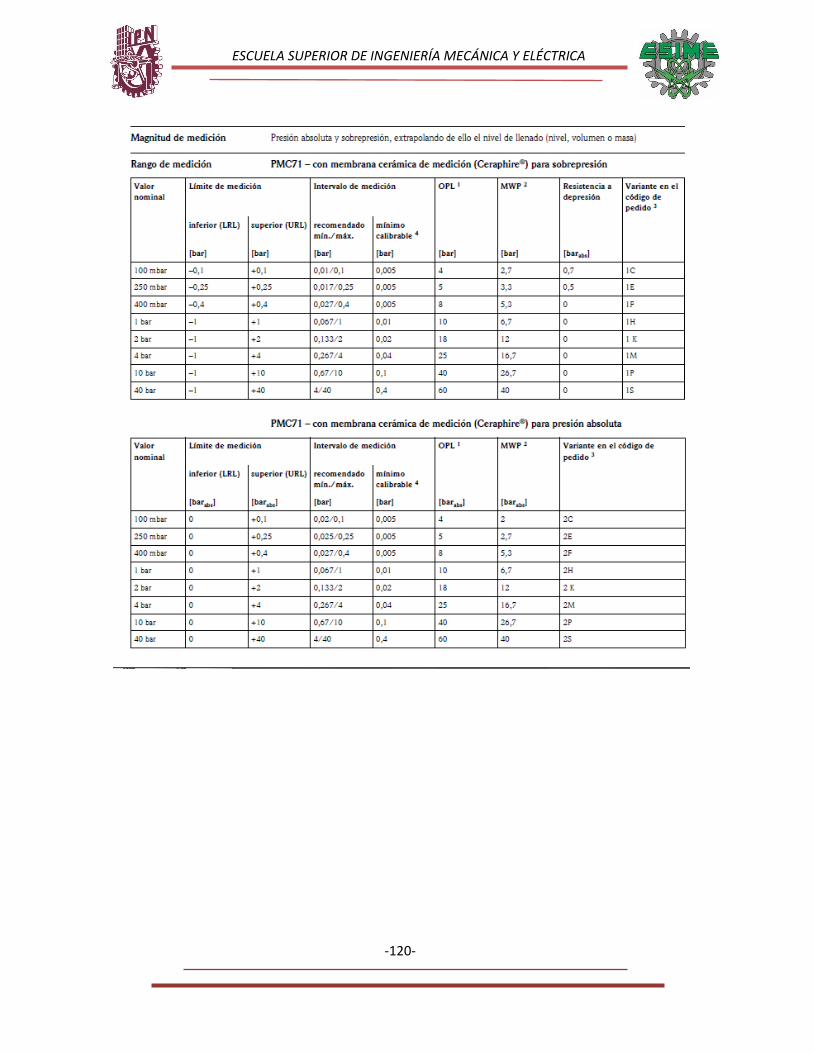
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-120-
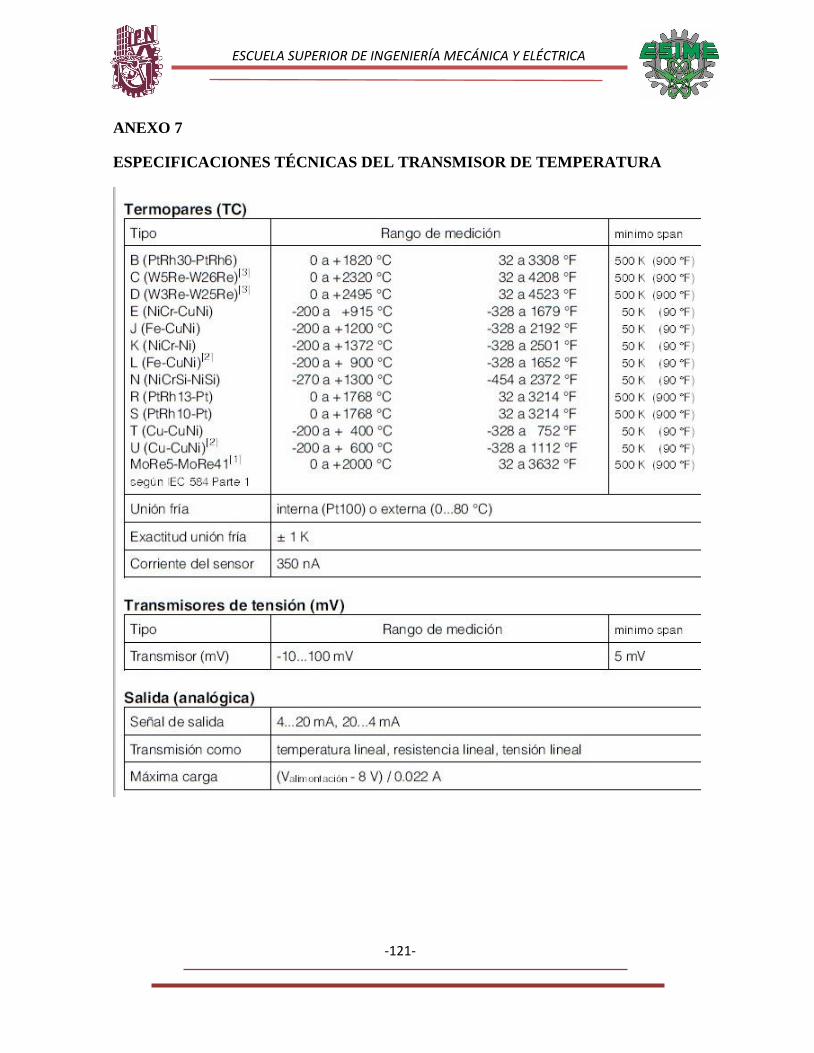
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-121-
ANEXO 7
ESPECIFICACIONES TÉCNICAS DEL TRANSMISOR DE TEMPERATURA
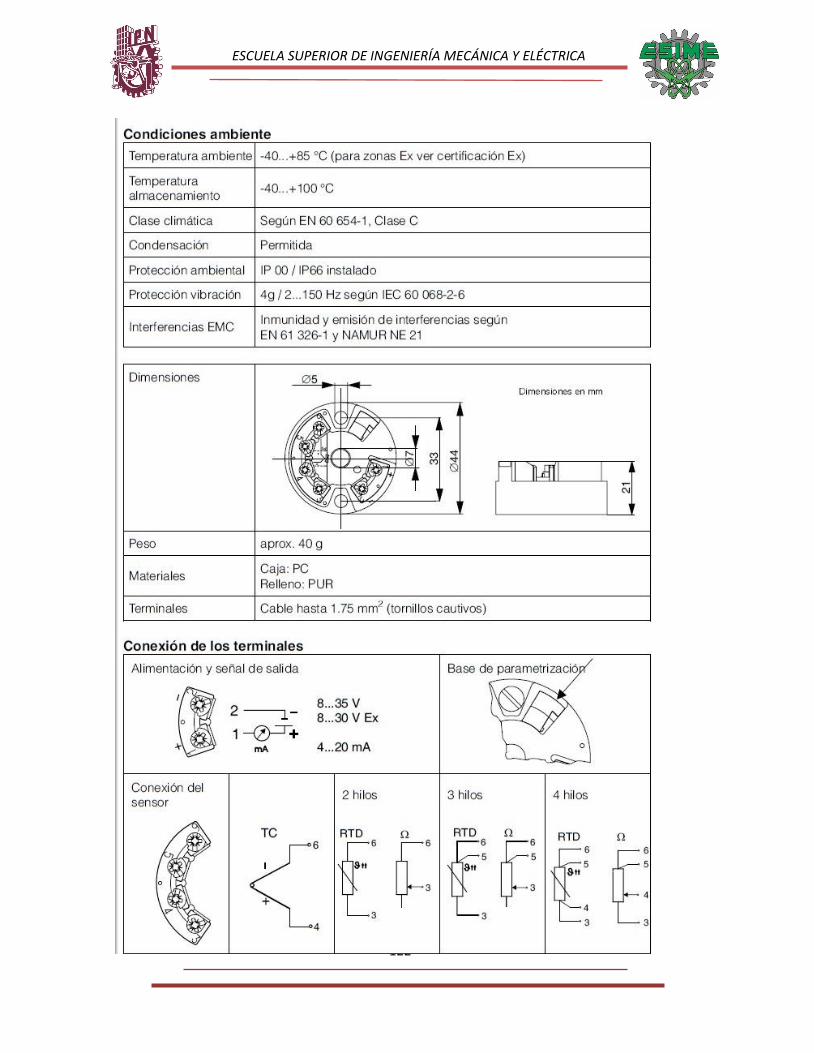
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-122-
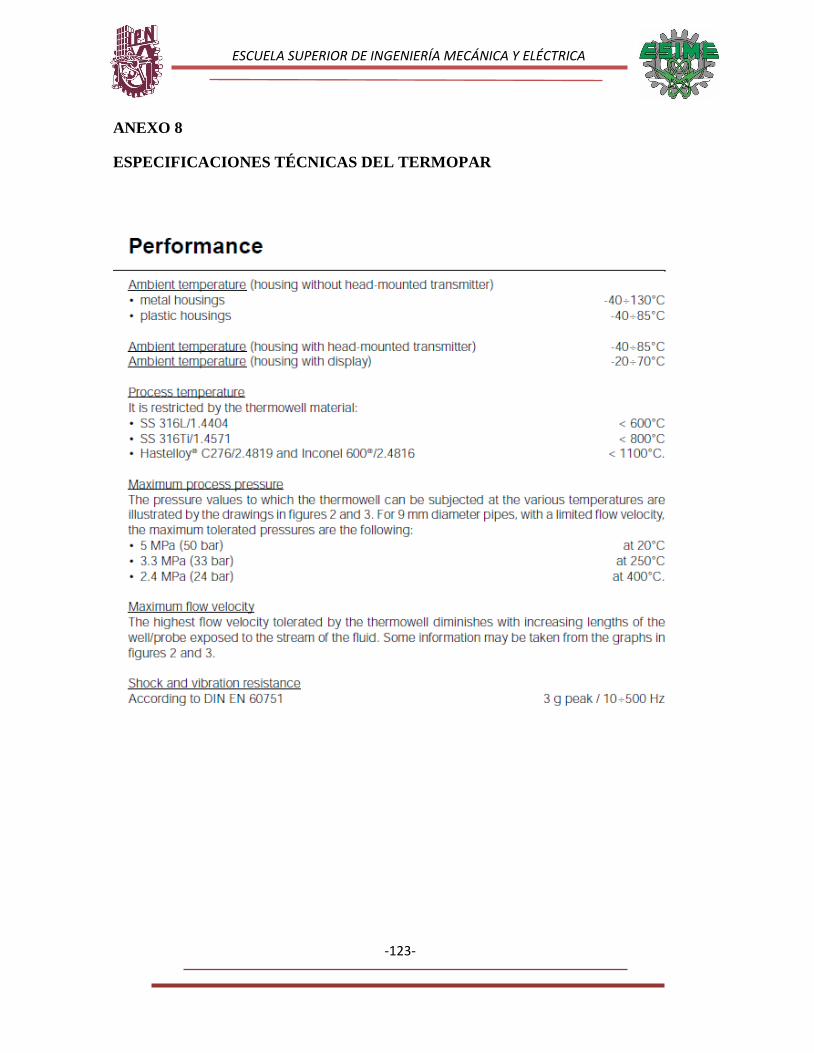
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
-123-
ANEXO 8
ESPECIFICACIONES TÉCNICAS DEL TERMOPAR