Embed Size (px)
DESCRIPTION
Aplicación desarrollada para generar el modelado de una mesa de planitud mediante curvas de Bezier de tercer grado.
Citation preview
Determinación de las desviaciones en una mesa de planitud
PROYECTO FINAL: INGENIERÍA DE PRECISIÓN
SEMESTRE 2015-2
Introducción
Las mesas de planitud proporcionan un plano de referencia exacto tanto para la medición como para la puesta a punto de equipos de precisión. Su alto grado de planitud las convierte en sistemas ideales para ensamblajes mecánicos de alta precisión, como bases de micromecanizado o para sofisticados dispositivos ópticos.
Generalmente están manufacturadas en granito bajo estrictos procesos de lapeado, sin embargo a pesar de este proceso se generan defectos de planitud que se encuentran en rangos micrométricos.
Para conocer los defectos de planitud se puede utilizar una curva de Bézier de grado dos.
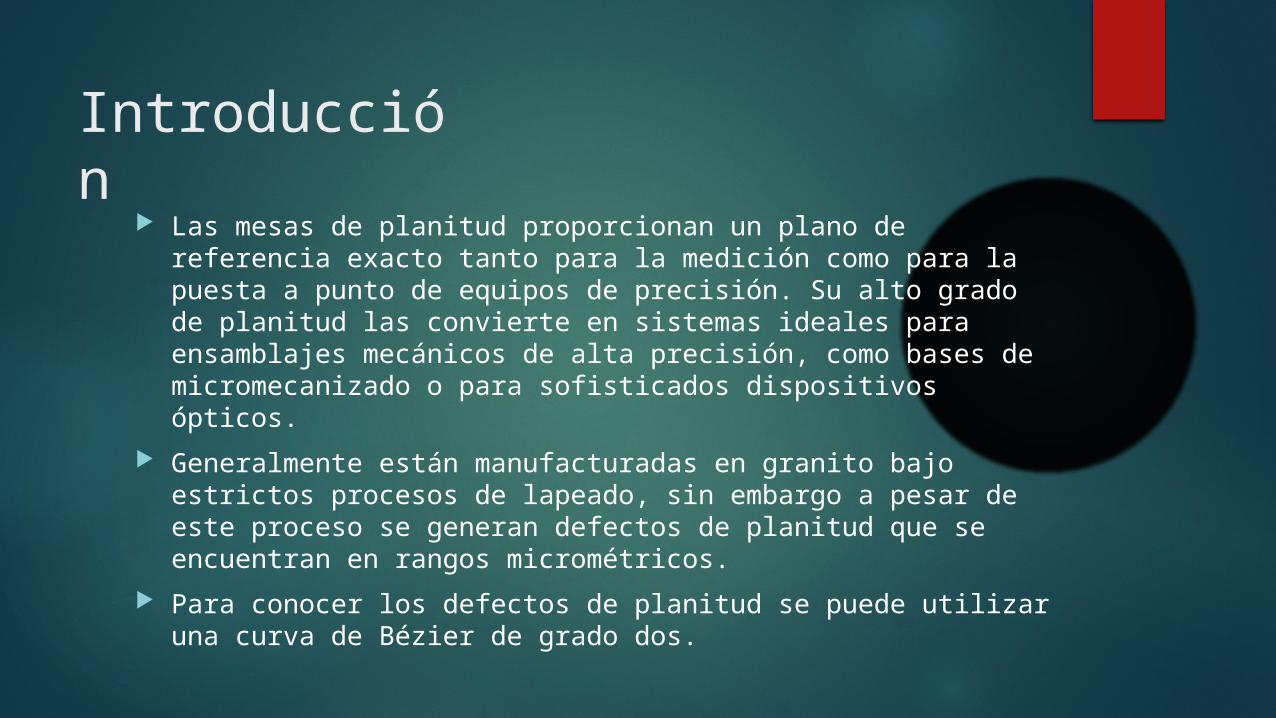
Curva de Bézier grado dos
La idea de definir geométricamente las formas no es demasiado compleja: un punto del plano puede definirse por coordenadas. Por ejemplo, un punto A tiene unas coordenadas (x1, y1) y a un punto B le corresponde (x2,y2). Para trazar una recta entre ambos basta con conocer su posición.
Si en lugar de unir dos puntos con una recta se unen con una curva, surgen los elementos esenciales de una curva Bézier; los puntos se denominan «puntos de anclaje» o «nodos». La forma de la curva se define por unos puntos invisibles en el dibujo, denominados «puntos de control», «manejadores» o «manecillas».
Una curva cuadrática de Bézier es el camino trazado por la función B(t), dados los puntos: P0, P1, y P2
Objetivo
Crear un programa computacional donde se utilicen los conceptos de una curva de Bézier de segundo grado para saber las desviaciones de una mesa de planitud a partir de ángulos registrados en distintos puntos de la mesa a estudiar (entre más puntos se evalúen, los resultados serán mas confiables).
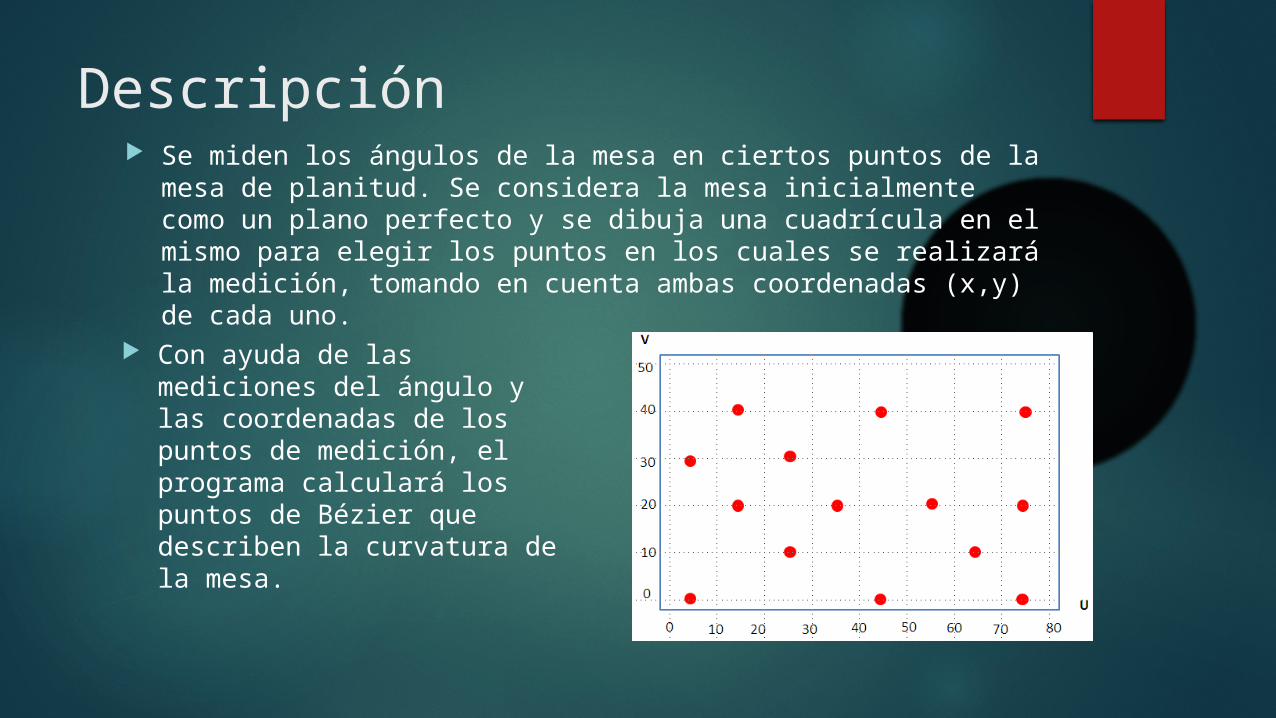
Descripción Se miden los ángulos de la mesa en ciertos puntos de la mesa de
planitud. Se considera la mesa inicialmente como un plano perfecto y se dibuja una cuadrícula en el mismo para elegir los puntos en los cuales se realizará la medición, tomando en cuenta ambas coordenadas (x,y) de cada uno.
Con ayuda de las mediciones del ángulo y las coordenadas de los puntos de medición, el programa calculará los puntos de Bézier que describen la curvatura de la mesa.
Metodología
Para desarrollar el programa se deben primero entender las variables que se van a calcular y lo que significa cada una:
: Es el ángulo medido en orientación de x en cada uno de los puntos elegidos
: Es el ángulo medido en orientación y en los mismos puntos
: Es la razón de la coordenada en x de cada punto entre la longitud x de la mesa
: Es la razón de la coordenada en y de cada punto entre la longitud y de la mesa
: Es la pendiente de los ángulos
: Es la pendiente de los ángulos
Independientemente de la cantidad (n) de puntos que se elijan para hacer la medición, el número de datos de alturas que se obtendrán para modelar la mesa de planitud es 16, ya que dividiremos la mesa en tres segmentos iguales en orientación x, y tres segmentos iguales en orientación y. Por lo tanto la matriz de alturas de los puntos de Bézier es:
Debido a que para nuestros cálculos se utilizarán diferencias de alturas se realizan algunos cambios de variable para simplificar la representación.
Para calcular la primer secuencia de diferencia de alturas , se utilizan los ángulos obtenidos en dirección x.
Para cada uno de los puntos evaluados existe una coordenada u, y una coordenada v, para cada uno de ellos se tiene que:
Dado que se tienen n puntos a evaluar se puede crear una matriz Q definida como:
Teniendo la matriz se resuelve la ecuación matricial:
Para calcular la primer secuencia de diferencia de alturas , se utilizan los ángulos obtenidos en dirección x.
Para cada uno de los puntos evaluados existe una coordenada u, y una coordenada v, para cada uno de ellos se tiene que:
Dado que se tienen n puntos a evaluar se puede crear una matriz Q definida como:
Teniendo la matriz se resuelve la ecuación matricial: