Embed Size (px)
Citation preview
7/24/2019 Apostila Cap 10
http://slidepdf.com/reader/full/apostila-cap-10 1/5
10 – Estabilidade de Sistemas de Controle em Malha Fechada
A inclusão de uma malha de controle pode causar respostas oscilatórias. Sob certascircunstancias, as oscilações podem ter amplitude que aumenta com o tempo até que o limite
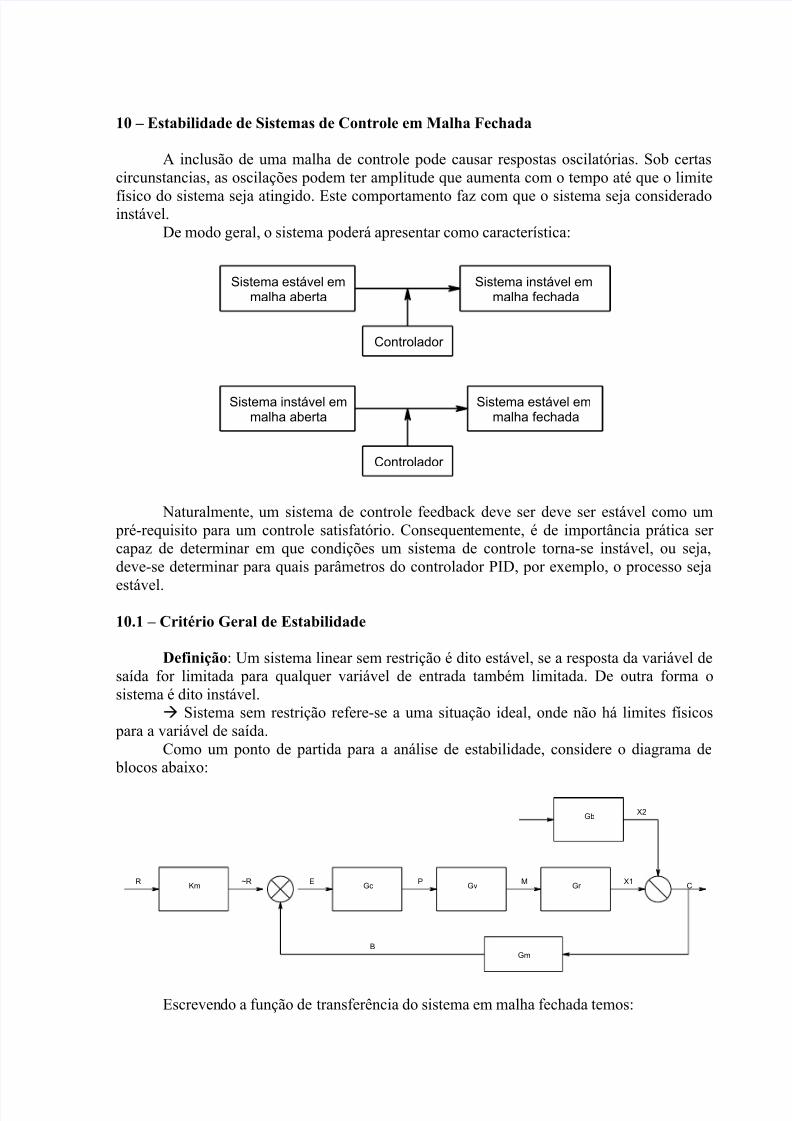
físico do sistema seja atingido. Este comportamento faz com que o sistema seja consideradoinstável.De modo geral, o sistema poderá apresentar como característica:
Sistema estável em
malha aberta
Sistema instável em
malha fechada
Controlador
Controlador
Sistema instável em
malha aberta
Sistema estável em
malha fechada
Naturalmente, um sistema de controle feedback deve ser deve ser estável como um pré-requisito para um controle satisfatório. Consequentemente, é de importância prática sercapaz de determinar em que condições um sistema de controle torna-se instável, ou seja,deve-se determinar para quais parâmetros do controlador PID, por exemplo, o processo seja
estável.
10.1 – Critério Geral de Estabilidade
Definição: Um sistema linear sem restrição é dito estável, se a resposta da variável desaída for limitada para qualquer variável de entrada também limitada. De outra forma osistema é dito instável.
Sistema sem restrição refere-se a uma situação ideal, onde não há limites físicos para a variável de saída.
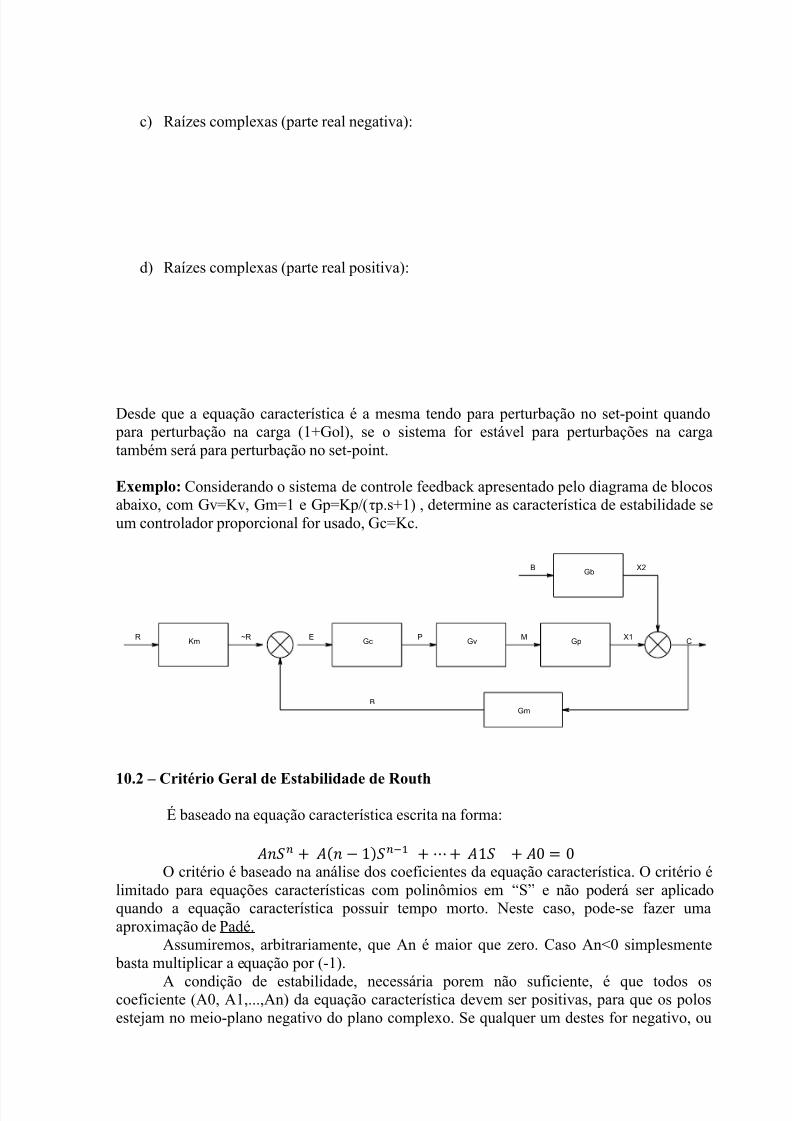
Como um ponto de partida para a análise de estabilidade, considere o diagrama de blocos abaixo:
Gm
Km
Gc
Gv
Gr
Gb
R ~R E
B
P M X1
X2
C
Escrevendo a função de transferência do sistema em malha fechada temos:

7/24/2019 Apostila Cap 10
http://slidepdf.com/reader/full/apostila-cap-10 2/5
Onde Gol=Gc.Gv.Gr.Gm, é função de transferência em malha aberta.
Considerando apenas perturbações na Set-Pointe:
De forma genérica, a função de transferência pode ser escrita como:
( )( ) ( )
( )( ) ( )
Onde K’ é o ganho, Para ser fisicamente realizável, n ≥ m. Comparando-se (*) com (**) percebe-se que os polos são as raízes da equação
característica do sistema em malha fechada:
1 + Gol = 0
A localização dos polos no plano complexo irá definir a estabilidade do sistema.Para uma perturbação degrau unitário na set-point, R(S)=1/S;
()
(
)(
) ( )( )( ) ( )
()
( )
( )
( )
Para esta situação, pode-se definir como critério de estabilidade: O sistema de controle feedback é estável se e somente se todas as raízes da equação
característica forem negativas ou tiverem a parte real negativa. De outra forma osistema é instável.
De acordo com a localização das raízes poderemos ter as seguintes situações:a) Raiz real negativa:
b) Raiz real positiva:
7/24/2019 Apostila Cap 10
http://slidepdf.com/reader/full/apostila-cap-10 3/5
c) Raízes complexas (parte real negativa):
d) Raízes complexas (parte real positiva):
Desde que a equação característica é a mesma tendo para perturbação no set-point quando para perturbação na carga (1+Gol), se o sistema for estável para perturbações na cargatambém será para perturbação no set-point.
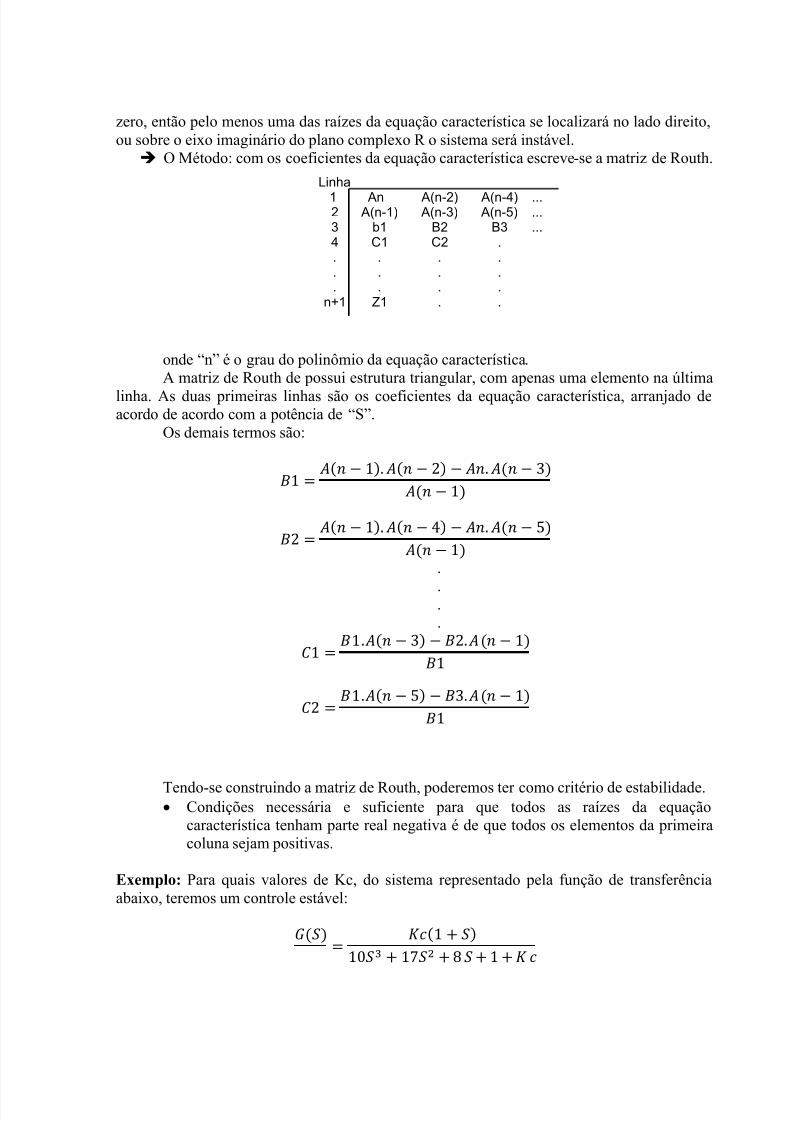
Exemplo: Considerando o sistema de controle feedback apresentado pelo diagrama de blocosabaixo, com Gv=Kv, Gm=1 e Gp=Kp/(τp.s+1) , determine as característica de estabilidade seum controlador proporcional for usado, Gc=Kc.
Gm
Km
Gc
Gv
Gb
R ~R E
B
P X1
X2
CGp
M
B
10.2 –
Critério Geral de Estabilidade de Routh
É baseado na equação característica escrita na forma:
( ) O critério é baseado na análise dos coeficientes da equação característica. O critério é
limitado para equações características com polinômios em “S” e não poderá ser aplicadoquando a equação característica possuir tempo morto. Neste caso, pode-se fazer umaaproximação de Padé.
Assumiremos, arbitrariamente, que An é maior que zero. Caso An<0 simplesmente basta multiplicar a equação por (-1).
A condição de estabilidade, necessária porem não suficiente, é que todos oscoeficiente (A0, A1,...,An) da equação característica devem ser positivas, para que os polosestejam no meio-plano negativo do plano complexo. Se qualquer um destes for negativo, ou
7/24/2019 Apostila Cap 10
http://slidepdf.com/reader/full/apostila-cap-10 4/5
zero, então pelo menos uma das raízes da equação característica se localizará no lado direito,ou sobre o eixo imaginário do plano complexo R o sistema será instável. O Método: com os coeficientes da equação característica escreve-se a matriz de Routh.
Linha
1234...
n+1
An A(n-1)
b1C1...Z1
A(n-2) A(n-3)
B2C2....
A(n-4) A(n-5)
B3.....
...
...
...
onde “n” é o grau do polinômio da equação característica.A matriz de Routh de possui estrutura triangular, com apenas uma elemento na última
linha. As duas primeiras linhas são os coeficientes da equação característica, arranjado deacordo de acordo com a potência de “S”.
Os demais termos são:
( ) ( ) ( )
( )
( ) ( ) ( )
( )
.
..
.
( ) ( )
( ) ( )
Tendo-se construindo a matriz de Routh, poderemos ter como critério de estabilidade. Condições necessária e suficiente para que todos as raízes da equação
característica tenham parte real negativa é de que todos os elementos da primeiracoluna sejam positivas.
Exemplo: Para quais valores de Kc, do sistema representado pela função de transferênciaabaixo, teremos um controle estável:
()
( )
7/24/2019 Apostila Cap 10
http://slidepdf.com/reader/full/apostila-cap-10 5/5
10.3 – Método da Substituição Direta
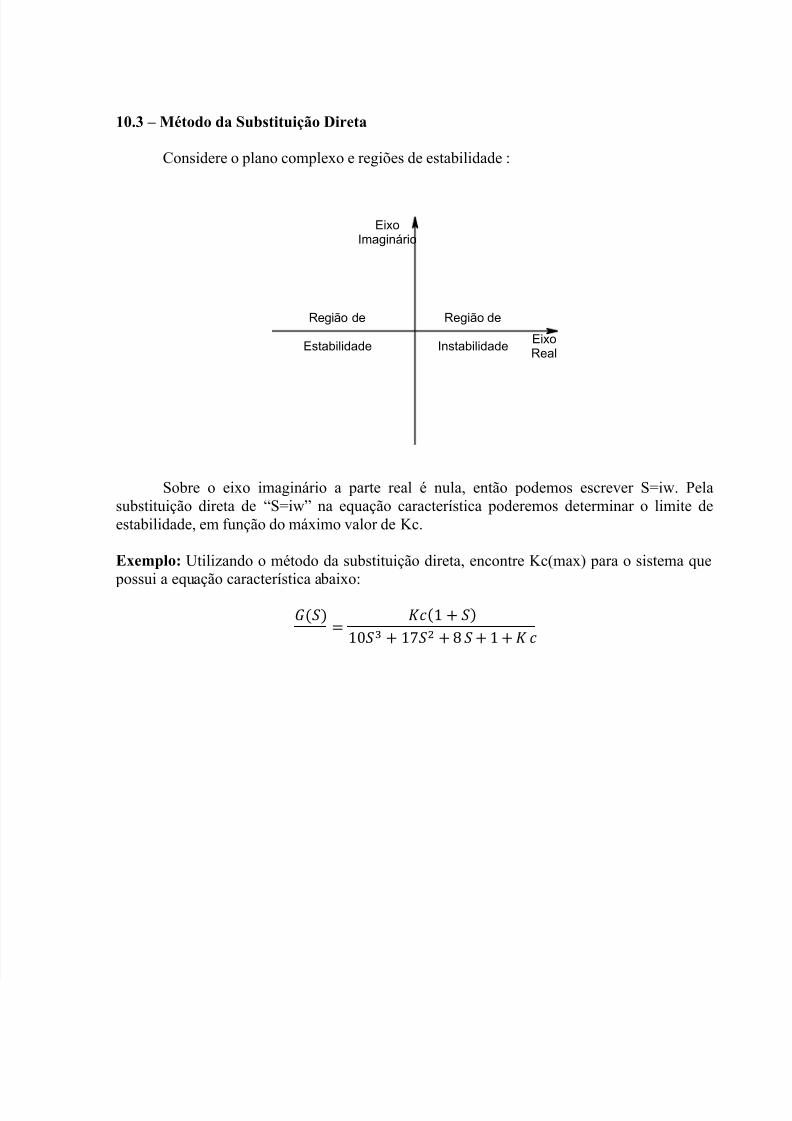
Considere o plano complexo e regiões de estabilidade :
EixoReal
EixoImaginário
Região de
Estabilidade
Região de
Instabilidade
Sobre o eixo imaginário a parte real é nula, então podemos escrever S=iw. Pelasubstituição direta de “S=iw” na equação característica poderemos determinar o limite deestabilidade, em função do máximo valor de Kc.
Exemplo: Utilizando o método da substituição direta, encontre Kc(max) para o sistema que possui a equação característica abaixo:
()
( )

![Hidrologia Apostila Cap 3[1]](https://img.pdfslide.tips/doc/110x75/5571fd44497959916998bbb9/hidrologia-apostila-cap-31.jpg)



























