Embed Size (px)
Citation preview
Appunti di
Fondamenti di Automatica
Universita del Salento, AA 2011-2012
Giovanni Indiveri
Universita del Salento - DII,Dipartimento di Ingegneria dell’Innovazione,
Via Monteroni,73100 Lecce, Italia
17 ottobre 2011
Sommario
Queste note sono da intendersi come integrative e non sostitutive rispetto ailibri di testo consigliati ed agli appunti delle lezioni e si riferiscono esclusivamenteall’anno accademico indicato. Si ringrazia anticipatamente per le segnalazioni dieventuali errori la cui assenza non e in alcun modo garantita.
1 Il programma del corso
Il corso mira a fornire i concetti e gli strumenti metodologici di base per l’analisi e lasintesi di sistemi di controllo a tempo continuo, lineari, tempo invarianti a singolo in-gresso e singola uscita. Si prevede che il programma del corso copra i seguenti punti:
Introduzione al corso ed ai concetti fondamentaliLo schema del controllo ad azione diretta ed in retroazione: considerazioni generali.Richiami generali al concetto di ”sistema”. Introduzione al concetto di robustezza aidisturbi e alle variazioni parametriche degli impianti. Richiami sulle equazioni differen-ziali e loro classificazione. Richiami sul concetto di equilibrio e di stabilita per equazionidifferenziali autonome. Stabilita e convergenza nel caso di equazioni lineari e non lineari.
Modelli per lo studio dei sistemi di controllo.Richiami sulla modellistica ingresso/uscita e nello spazio degli stati. Richiami sulletrasformate di Laplace e loro uso per la soluzione di equazioni LTI. La funzione di tra-sferimento e la trasformata della risposta libera. Introduzione all’algebra dei blocchied analisi di sistemi interconnessi. Riduzione di schemi a blocchi. Esame preliminaredel sistema in retroazione elementare. Riduzione degli schemi a blocchi per sistemi in-terconnessi. Introduzione ai sistemi del secondo ordine. Introduzione alla formulazione
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 2
standard in termnini di pulsazione naturale e coefficiente di smorzamento. Analisi di-mensionale.
I sistemi elementari del primo e secondo ordine nel dominio del tempo.Risposte indiciali ed impulsive dei sistemi elementari del primo e secondo ordine. Intro-duzione al concetto di poli dominanti. Introduzione all’analisi del ruolo degli zeri.
Analisi armonica e diagrammi polari.Analisi armonica. La funzione di risposta armonica, i diagrammi di Bode ed i diagram-mi polari. Regole di tracciamento ed analisi dei sistemi elementari del I e del II ordinein frequenza. Analisi del ruolo degli zeri. Introduzione ai sistemi a fase non minima.Effetto di ritardi finiti.
La stabilita dei sistemi in retroazione.Introduzione al concetto ed allo studio della stabilita in retroazione. Il criterio di Ny-quist. Il concetto della robustezza. I criteri del margine di fase e di guadagno. Il criteriodella pendenza o di Bode. Generalizzazione del criterio del margine di fase per sistemiinstabili. Il criterio di Routh-Hurwitz.
Le specifiche dei sistemi di controllo e la sintesi dei regolatori.Le specifiche dei sistemi di controllo nel dominio del tempo e della frequenza. Prestazio-ni statiche e dinamiche. Reiezione dei disturbi e sensitivita a variazioni parametriche.Cenno al ruolo del trasduttore. Il luogo delle radici. La sintesi in frequenza o loopshaping. Le reti standard: reti ad anticipo di fase, reti a ritardo di fase, reti PID. Lasintesi in frequenza per sistemi a fase non minima e per impianti instabili. Limitazionialla prestazioni ottenibili per impianti a fase non minima o instabili.
Schemi avanzati di controllo.Architetture a doppio anello. Il problema del wind-up e approcci alla sua gestione.Introduzione al predittore di Smith. Implementazione di regolatori PID con derivatadell’uscita e retroazione tachimetrica. Considerazioni finali sul corso.
Le lezioni sarrano corredate da esercizi ed esempi svolti in aula.
Il programma effettivo potra subire piccole variazioni in funzione di approfondimenti sutemi specifici o per altre esigenze didattiche. Il programma dettagliato per l’esame divalutazione sara reso disponibile in forma di diario delle lezioni sul sito del corso.
Testi di riferimento sono:
• Karl J. Astrom and Richard M. Murray, Feedback Systems, Princeton UniversityPress 2008 (online in formato elettronico sul sito degli autori).
• Giovanni Marro, Controlli Automatici, Zanichelli editore.
• P. Bolzern, R. Scattolini, N. Svchiavoni, Fondamenti di Controlli Automatici,McGraw-Hill editore, 1998.

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 3
2 Richiami sui numeri complessi
z ∈ C =⇒ z = a+ i b : i2 = −1
z = a+ i b = |z|ei φ : |z| =√a2 + b2 , φ = arg(z)
z∗ = a− i b = |z|e−i φ
zz∗ = |z|2 = a2 + b2
v =1
z=⇒
∣∣∣∣1z∣∣∣∣ = |v| =
√1
z
(1
z
)∗=
√1
z
1
z∗=
1√zz∗
=1
|z|,
arg(v) = − arg(z)
z = a+ i b ⇒ arg(z) = atan2(b, a) 6= arctan(b/a) (attenzione!)
3 Equazioni differenziali
Le equazioni differenziali sono alla base dei modelli matematici di moltissimi fenomeninaturali e sistemi artificiali di interesse, in particolare nell’ambito della teoria del con-trollo. In linea con la notazione piu diffusa, indicheremo con un punto sopra a ciascunavariable la sua derivata prima rispetto al tempo, con due punti la derivata seconda econ un esponente tra parentesi tonde le derivate di ordine superiore, i.e.
y ≡ dy
dt
y ≡ d2y
dt2
y(h) ≡ dhy
dth: h > 2.
Detto n l’ordine di derivazione massima della funzione incognita y(t) che compare inuna data equazioni differenziali, questa si puo in generale rappresentare come:
y(n) = f(y(n−1), . . . , y, u, t) (1)
essendo la funzione incognita y(t) l’uscita della equazione e la funzione nota u(t) l’in-gresso. Equazioni differenziali invarianti per traslazioni temporali, ovvero tali per cui
∂f
∂t= 0,
vengono dette tempo invarianti, equazioni (o sistemi) indipendenti da ingressi esterniu(t)
y(n) = f(y(n−1), . . . , y, t)
vengono dette autonome ed equazioni dipendenti dalla sola uscita incognita
y(n) = f(y(n−1), . . . , y)
vengono dette autonome tempo invarianti. Altri criteri di classificazione delle equazionidifferenziali si riferiscono alla natura lineare o meno della funzione f(·) rispetto agliingressi u(t) ed alle uscite y(t) ed alla presenza o meno di derivate parziali di y(t) o u(t).Equazioni differenziali in cui non compaiano derivate parziali vengono dette ordinarie.

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 4
A meno che non sia diversamente specificato, nel seguito le funzioni di ingresso e uscitasaranno intese essere scalari reali di variabile scalare reale.Esempio
y(x, t) = 3t+∂y
∂x+ y2(x, t)
eq. diff. alle derivate parziali, non lineare, tempo variante, autonoma
y(4) = −y + sin(y)
eq. diff. ordinaria del quarto ordine non lineare, tempo invariante, autonoma
y(t) = u(t)− y2(t)
eq. diff. ordinaria del primo ordine non lineare, tempo invariante, non autonoma
y(t) = u(t)− y(t) + 7y(t)
eq. diff. ordinaria del secondo ordine lineare, tempo invariante, non autonoma
Le tecniche di soluzione (integrazione) delle equazioni differenziali, cosı come i teoremi diesistenza ed unicita delle soluzioni, dipendono sensibilmente dalla particolare categoriadi equazioni di interesse, ma quale che essa sia le eventuali soluzioni dipenderannosempre da un numero di condizioni al contorno pari all’ordine della equazione. Spessole condizioni al contorno sono specificate all’istante iniziale t0 in cui si inizializza ilsistema. In questo caso si parla di condizioni iniziali. I sistemi naturali o artificialidescritti da equazioni differenziali sono detti sistemi dinamici: nel seguito, quando nondiversamente specificato, il termine sistema si riferira ad un sistema dinamico, ovveroad una equazione differenziale.
3.1 Punti di equilibrio e stabilita
Si consideri un sistema del primo ordine autonomo e tempo invariante
y = f(y). (2)
Un particolare valore iniziale y(t0) = yeq di y(t) tale per cui
f(yeq) = 0 (3)
e detto punto di equilibrio in quanto se il sistema viene inizializzato in y = yeq, allora lırimane per tutti i tempi futuri. Per un sistema autonomo tempo invariante di ordine n
y(n) = f(y(n−1), . . . , y, y)
si puo parlare di configurazione di equilibrio (y(n−1)(t0), . . . , y(t0), y(t0)) = (0, . . . , 0, yeq)quando
f(0, . . . , 0, yeq) = 0
che implica la permanenza nel punto yeq per tutti i tempi futuri. Tornando, senza lederela generalita della discussione, ai sistemi del primo ordine, si noti che dato un punto di

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 5
equilibrio generico yeq e possibile traslare la variabile y in modo da portare l’equilibrionell’origine. Infatti, data l’equazione (2) ed il suo equilibrio yeq (3), si puo sempre porre
z(t) ≡ y(t)− yeq =⇒ z(t) = y(t) =⇒z(t) = f(z(t) + yeq)
che ha un punto di equilibrio in z(t) = 0: alla luce di questa considerazione nellaformulazione dei teoremi e dei risultati circa le equazioni differenziali e abituale riferirsial punto di equilibrio come se fosse sempre nell’origine. Si noti che non tutte le equazionidifferenziali ammettano punti di equilibrio, es. y(t) = 2. Circa l’unicita dei punti diequilibrio (quando esistono), si noti come sia necessario distinguere tra il caso delleequazioni lineari e quelle non lineari. Le equazioni differenziali (ordinarie) lineari sonodel tipo
y(h) =h−1∑j=0
aj y(j) +
m∑l=0
bl u(l) : aj , bl sono costanti reali ∀ j, l (4)
e vengono dette omogenee se bl = 0 ∀ l, ossia se non dipendono da alcun ingresso u(t).Dalla linearita di questa equazione segue se i segnali y1(t), u1(t) e y2(t), u2(t) risolvonorispettivamente la (4), anche qualunque combinazione lineare del tipo
y3(t) = α y1(t) + β y2(t)
u3(t) = αu1(t) + β u2(t)
e ancora soluzione. Da qui segue che se una equazione omogenea ha due configurazioni diequilibrio distinte, allora ogni loro combinazione lineare sara ancora una configurazionedi equlibrio. Dunque le equazioni differenziali lineari del tipo (4) non ammettono puntidi equilibrio isolati. Al contrario equazioni differenziali nonlineari possono ammettereequlibri isolati, eventualmente anche in numero infinito come ad esempio per:
y = (y − yeq1)(y − yeq2)
y = sin(y(t))
che ammettono punti di equilibrio rispettivamente in y = yeq1, y = yeq2 ed in y = nπ :n = 0,±1,±2, . . ..
Una importante proprieta dei punti di equlibrio e la loro stabilita. Vediamo dapprimainformalmente a cosa si riferisca questo concetto. Come visto, un punto (o una configu-razione) di equilibrio e tale per cui un sistema lı inizializzato non evolve ulteriormentenel tempo. Puo essere di grande rilevanza capire cosa succeda se il sistema venga inizia-lizzato vicino ad uno suo equlibrio, ma non esattamente in esso. Tipicamente possonoverificarsi tre situazioni:
• che il sistema evolva nelle vicinanze del punto di equlibrio - e di quello da cui epartito - per tutti i tempi futuri senza necessariamente mai assestarsi nell’equilibrio
• che il sistema evolva inizialmente nelle vicinanze del punto di equlibrio - e diquello da cui e partito - (regime transitorio) per poi asintoticamente assestarsinell’equilibrio, i.e. convergere sull’equilibrio (regime permanente)
• che il sistema evolva allontanandosi indefinitivamente dal punto di equilibrio (e daquello di partenza) nonostante fosse stato avviato nei pressi dell’equilibrio.

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 6
Queste tre situazioni corrispondono ad equlibri detti rispettivamente marginalmentestabili (o semplicemente stabili), asintoticamente stabili ed instabili. Quando un pun-to di equlibrio viene detto stabile (senza altri aggettivi), si intende marginalmente ( osemplicemente) stabile. Un esempio concreto di equlibrio asintoticamente stabile, in-stabile e semplicemente stabile puo essere quello della ascissa y(t) di una pallina liberadi rotolare lungo un profilo curvo come schematizzato in figura (1) essendo soggetta adattrito ed alla accellerazione di gravita. Si noti che a volte, specie nell’ambito di appli-
xxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxy
eq
yeq
yeq
Figura 1: Da sinistra verso destra: equlibrio asintoticamente stabile, instabile,marginalmente stabile (o indifferente).
cazioni meccaniche, gli equilibri marginalmente stabili vengono anche detti indifferenti.Formalmente, dato un sistema del primo ordine autonomo tempo invariante avente unequilibrio in y = yeq
y(t) = f(y(t)) : f(yeq) = 0
questo e detto semplicemente stabile se
Def. di semplice stabilita
∀ε > 0 ∃ δε > 0 : |y(t0)− yeq| < δε =⇒ |y(t)− yeq| < ε ∀ t ≥ t0.
In parole cio significa che esiste sempre un intorno dell’equilibrio (|y(t0) − yeq| < δε)a partire dal quale l’evoluzione di y rimane comunque arbitrariamente vicina ad yeqper tutti i tempi futuri. Si tratta dunque di una sorta di continuita di y(t) rispetto lecondizioni inizali in un intorno dell’equilibrio yeq.
Def. di asintotica stabilitaUn equilibrio yeq semplicemente stabile per il quale δε della definizione di stabilitasemplice possa sempre essere scelto tale per cui
limt→∞
y(t) = yeq
si dice asintoticamente stabile.
In pratica si tratta di un equilibrio stabile tale per cui se il sistema viene avviato adesso sufficientemente vicino, l’uscita y(t) converge su esso. Si noti che in base a questadefinizione la convergenza asintotica di y(t) ad yeq non e sufficiente a qualificare yeq comeun equilibrio asintoticamente stabile, ma e anche necessario che yeq sia semplicementestabile. Si noti inoltre che dato un equilibrio yeq asintoticamente stabile la asintotica

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 7
convergenza di y(t) ad yeq potrebbe non verificarsi per particolari valori della condizioneiniziale y(t0), tipicamente potrebbe esserci una soglia δ∗ tale per cui se |y(t0)−yeq| ≥ δ∗allora limt→∞ y(t) 6= yeq. L’insieme delle condizioni iniziali y(t0) che garantiscono laconvergenza asintotica su yeq individuano il cosı detto bacino o dominio di convergenza.Quando questo insieme e limitato, la convergenza si dice locale e quando si estende atutti i possibili valori di y la convergenza si dice globale.
Def. di globale asintotica stabilitaUn equilibrio yeq semplicemente stabile per il quale
limt→∞
y(t) = yeq ∀ y(t0)
si dice globalmente asintoticamente stabile.
Esempi
y = y + 3 =⇒ y(t) = (y0 + 3)e(t−t0) − 3
yeq = −3 equlibrio instabile
y = −y − 3 =⇒ y(t) = (y0 + 3)e−(t−t0) − 3
yeq = −3 equlibrio globalmente asintoticamente stabile
y = (−y − 3)(1− y/10)
yeq = −3 equlibrio localmente asintoticamente stabile
yeq = 10 equlibrio instabile
y = −y : y |t=t0 = 0 =⇒ y(t) = y0 cos(t)
yeq = 0 equlibrio marginalmente stabile
y = 0 =⇒ y(t) = y0
yeq = y0 ∀ y0 equlibri marginalmente stabili
y = −y2 =⇒ y(t) =y0
y0(t− t0) + 1=
1
t− t0 + 1/y0
yeq = 0 equlibrio instabile
Dalle definizioni viste, risulta che i sistemi con un equilibrio globalmente asintoticamen-te stabile tendano a dimenticare la particolare condizione iniziale da cui si e avviatala loro evoluzione. Infatti quale che fosse y(t0), nel limite per t che tende all’infinitol’evoluzione del sistema si assesta sull’equilibrio. In altri termini ipotizzando di essereinteressati al solo regime permanente di un sistema globalmente asintoticamente stabi-le, poco importa quale fosse la specifica condizione iniziale da cui esso sia partito. Alcontrario, la dinamica di un sistema con un equilibro instabile ha un comportamentoasintotico che dipende drammaticamente dalla condizione iniziale: infatti se essa dovesse

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 8
coincidere perfettamente con l’equilibrio (y(t0) = yeq) allora l’evoluzione rimarra conge-lata in y(t) = yeq per tutti i tempi t ≥ t0, ma altrimenti se la condizione iniziale dovessediscostarsi di una quantita anche infinitesima dall’equilibrio (|y(t0)−yeq| ≥ ε > 0), alloray(t) potra assumere valori arbitrariamente lontani da yeq ed eventualmente anche diver-gere. Per denotare che la dinamica di un certo sistema nei pressi di un suo equilibrio emolto sensibile alla particolare condizione iniziale da cui l’evoluzione comincia, si diceche l’equilibrio e poco robusto rispetto le condizioni iniziali. Alla luce di quanto visto,gli equilibri instabili, marginalmente stabile, localmente asintoticamente stabili e global-mente asintoticamente stabili sono via via di natura piu robusta rispetto le specifichecondizioni iniziali da cui il sistema inizia ad evolvere.
Figura 2: P. A. M. Dirac nel 1960
4 Equazioni differenziali ordinarie lineari
La delta di Dirac (da Paul Adrien Maurice Dirac, 1902-1984) non e una vera e propriafunzione nel senso piu comune del termine, ma una distribuzione o funzione generalizza-ta. Essa e definibile implicitamente come quella quantita δ(t) tale che per ogni funzionecontinua f : R→ R valga: ∫ +∞
−∞f(τ)δ(t− τ)dτ = f(t). (5)
Da questa definizione si puo anche dedurre che:∫ +∞
−∞f(τ)δ(t− τ)dτ =
∫ +∞
−∞f(t− τ)δ(τ)dτ = f(t) (6)∫ +∞
−∞δ(τ)dτ = 1 (7)
per ogni funzione continua f(t). Dalle equazioni (6) e (7) segue in particolare che laδ di Dirac non sia adimensionata, ma abbia dimensioni inverse rispetto quelle del suoargomento. Per esempio se t indica un tempo espresso in secondi [t] = s, allora la δ(t)ha le dimensioni degli Hertz, [δ] = s−1. Alla luce delle equazioni (5)-(7), in terminiintuitivi la δ(t) puo essere pensata come una funzione nulla ovunque tranne nell’origine
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 9
dove e indefinita e tale che il suo integrale su un intervallo contenente l’origine sia 1.Poiche il supporto della δ(t) e la sola origine t = 0, vale anche che:∫ +b
−aδ(τ)dτ = 1 : ∀ a, b > 0 (8)
La δ(t) puo anche essere pensata come la derivata (generalizzata) della funzione a gradinounitario u(t) (a volte indicato come 1(t)) dato da
u(t) =
{0 t < 01 t ≥ 0
(9)
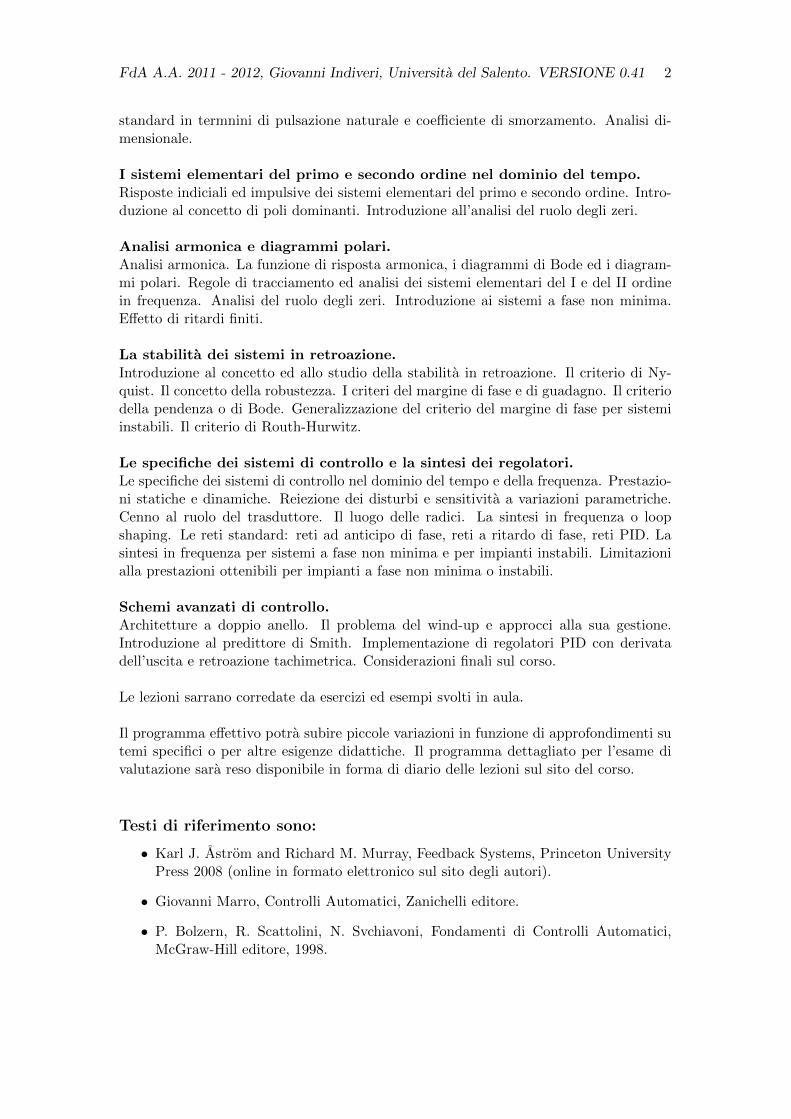
Si consideri a questo proposito la funzione sigmoide
uα(t) =1
2+
1
πarctan(αt) (10)
avente grafico riportato in (3). Per ogni α > 0, essa tende rispettivamente a 0 ed 1 per
−5 −4 −3 −2 −1 0 1 2 3 4 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
uα(t
)
t
α = 1
α = 2
α = 3
α = 4
Figura 3: Sigmoide di equazione (10) con α = {1, 2, 3, 4}.
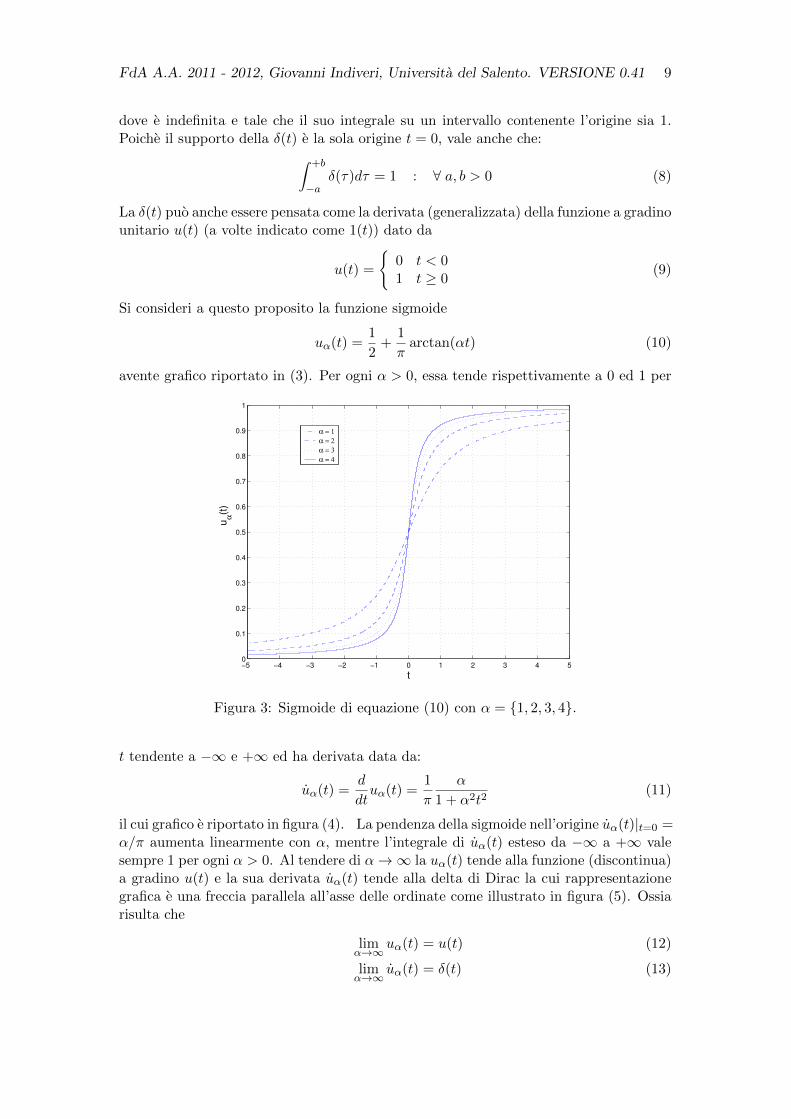
t tendente a −∞ e +∞ ed ha derivata data da:
uα(t) =d
dtuα(t) =
1
π
α
1 + α2t2(11)
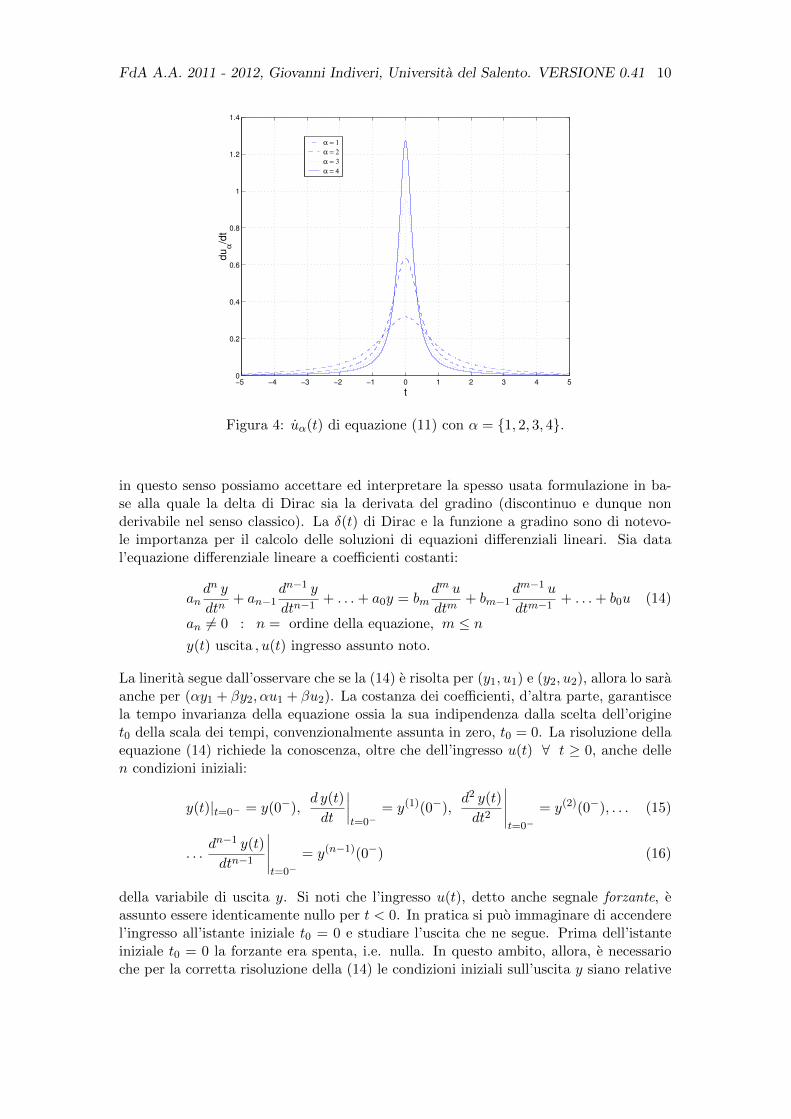
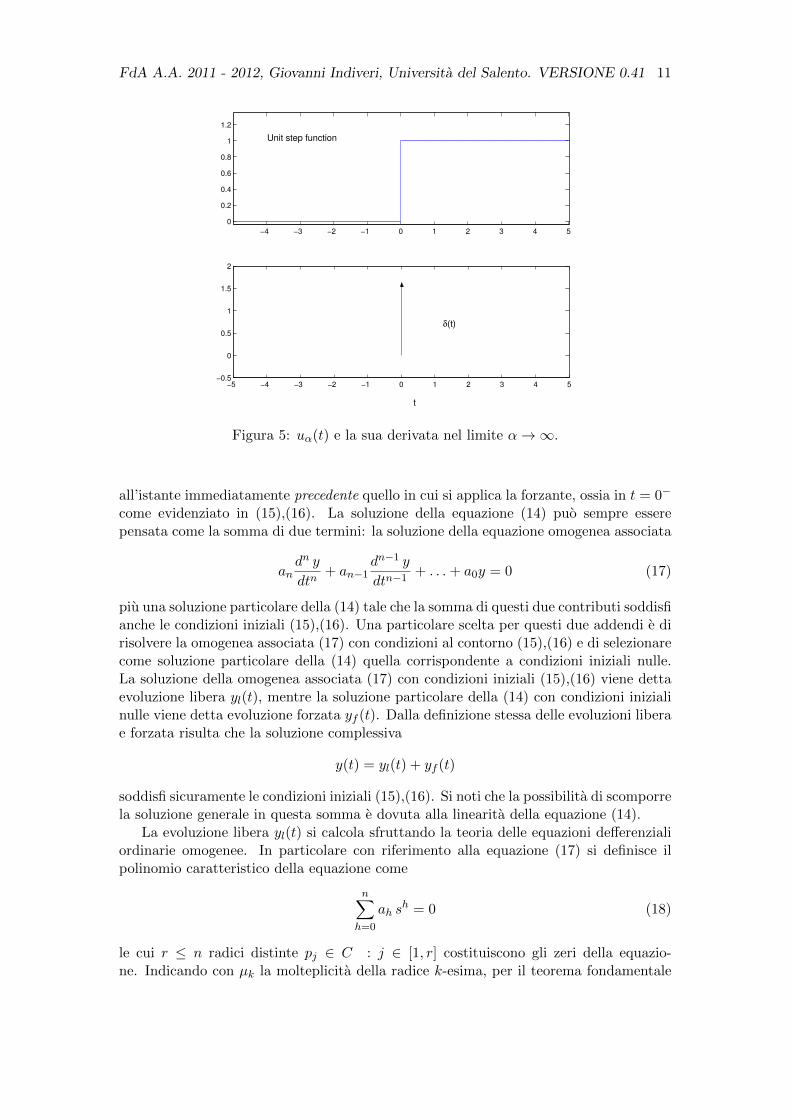
il cui grafico e riportato in figura (4). La pendenza della sigmoide nell’origine uα(t)|t=0 =α/π aumenta linearmente con α, mentre l’integrale di uα(t) esteso da −∞ a +∞ valesempre 1 per ogni α > 0. Al tendere di α→∞ la uα(t) tende alla funzione (discontinua)a gradino u(t) e la sua derivata uα(t) tende alla delta di Dirac la cui rappresentazionegrafica e una freccia parallela all’asse delle ordinate come illustrato in figura (5). Ossiarisulta che
limα→∞
uα(t) = u(t) (12)
limα→∞
uα(t) = δ(t) (13)
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 10
−5 −4 −3 −2 −1 0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
1.2
1.4
du
α/d
t
t
α = 1
α = 2
α = 3
α = 4
Figura 4: uα(t) di equazione (11) con α = {1, 2, 3, 4}.
in questo senso possiamo accettare ed interpretare la spesso usata formulazione in ba-se alla quale la delta di Dirac sia la derivata del gradino (discontinuo e dunque nonderivabile nel senso classico). La δ(t) di Dirac e la funzione a gradino sono di notevo-le importanza per il calcolo delle soluzioni di equazioni differenziali lineari. Sia datal’equazione differenziale lineare a coefficienti costanti:
andn y
dtn+ an−1
dn−1 y
dtn−1+ . . .+ a0y = bm
dm u
dtm+ bm−1
dm−1 u
dtm−1+ . . .+ b0u (14)
an 6= 0 : n = ordine della equazione, m ≤ ny(t) uscita , u(t) ingresso assunto noto.
La linerita segue dall’osservare che se la (14) e risolta per (y1, u1) e (y2, u2), allora lo saraanche per (αy1 + βy2, αu1 + βu2). La costanza dei coefficienti, d’altra parte, garantiscela tempo invarianza della equazione ossia la sua indipendenza dalla scelta dell’originet0 della scala dei tempi, convenzionalmente assunta in zero, t0 = 0. La risoluzione dellaequazione (14) richiede la conoscenza, oltre che dell’ingresso u(t) ∀ t ≥ 0, anche dellen condizioni iniziali:
y(t)|t=0− = y(0−),d y(t)
dt
∣∣∣∣t=0−
= y(1)(0−),d2 y(t)
dt2
∣∣∣∣∣t=0−
= y(2)(0−), . . . (15)
. . .dn−1 y(t)
dtn−1
∣∣∣∣∣t=0−
= y(n−1)(0−) (16)
della variabile di uscita y. Si noti che l’ingresso u(t), detto anche segnale forzante, eassunto essere identicamente nullo per t < 0. In pratica si puo immaginare di accenderel’ingresso all’istante iniziale t0 = 0 e studiare l’uscita che ne segue. Prima dell’istanteiniziale t0 = 0 la forzante era spenta, i.e. nulla. In questo ambito, allora, e necessarioche per la corretta risoluzione della (14) le condizioni iniziali sull’uscita y siano relative
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 11
−4 −3 −2 −1 0 1 2 3 4 5
0
0.2
0.4
0.6
0.8
1
1.2
−5 −4 −3 −2 −1 0 1 2 3 4 5−0.5
0
0.5
1
1.5
2
δ(t)
t
Unit step function
Figura 5: uα(t) e la sua derivata nel limite α→∞.
all’istante immediatamente precedente quello in cui si applica la forzante, ossia in t = 0−
come evidenziato in (15),(16). La soluzione della equazione (14) puo sempre esserepensata come la somma di due termini: la soluzione della equazione omogenea associata
andn y
dtn+ an−1
dn−1 y
dtn−1+ . . .+ a0y = 0 (17)
piu una soluzione particolare della (14) tale che la somma di questi due contributi soddisfianche le condizioni iniziali (15),(16). Una particolare scelta per questi due addendi e dirisolvere la omogenea associata (17) con condizioni al contorno (15),(16) e di selezionarecome soluzione particolare della (14) quella corrispondente a condizioni iniziali nulle.La soluzione della omogenea associata (17) con condizioni iniziali (15),(16) viene dettaevoluzione libera yl(t), mentre la soluzione particolare della (14) con condizioni inizialinulle viene detta evoluzione forzata yf (t). Dalla definizione stessa delle evoluzioni liberae forzata risulta che la soluzione complessiva
y(t) = yl(t) + yf (t)
soddisfi sicuramente le condizioni iniziali (15),(16). Si noti che la possibilita di scomporrela soluzione generale in questa somma e dovuta alla linearita della equazione (14).
La evoluzione libera yl(t) si calcola sfruttando la teoria delle equazioni defferenzialiordinarie omogenee. In particolare con riferimento alla equazione (17) si definisce ilpolinomio caratteristico della equazione come
n∑h=0
ah sh = 0 (18)
le cui r ≤ n radici distinte pj ∈ C : j ∈ [1, r] costituiscono gli zeri della equazio-ne. Indicando con µk la molteplicita della radice k-esima, per il teorema fondamentale

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 12
dell’algebra valer∑
k=1
µk = n
essendo r il numero di radici distinte di (18). La soluzione della equazione omogenea(17) e data da
yo(t) =r∑
k=1
µk−1∑h=0
ck, hth
h!epkt : ck, h ∈ C, (19)
ossia e una combinazione lineare a coefficienti complessi di funzioni a valori complessim(t) = tk ept/k! : k ∈ N, p ∈ C dette modi della risposta libera. I coefficienti dellacombinazione lineare sono determinati dalle condizioni iniziali (15),(16) ed una voltacalcolati determinano l’effettiva risposta libera yl(t). Si noti che se una radice del poli-nomio caratteristico p ha parte immaginaria non nulla, anche il suo complesso coniugatosara sicuramente uno zero della equazione; in virtu di cio si verifica che il risultato del-le sommatorie in equazione (19) dove ck, h ∈ C, m(t) ∈ C dia sempre luogo ad unarisultante yo(t) puramente reale. I modi funzionali m(t) possono essere di tre tipi:
• convergenti
• limitati
• divergenti
Esempio
y + 2ξωn y + ω2n y = 0
y(0−) = 1, y(0−) = −1/2 condizioni iniziali
s2 + 2ξωn s+ ω2n = 0 polinomio caratteristico
p± = ωn
(−ξ ±
√ξ2 − 1
)zeri della equazione caratteristica
y(t) = c1ep+t + c2e
p−t =⇒ c1 + c2 = 1
y(t) = p+ c1 ep+t + p− c2 e
p−t =⇒ p+ c1 + p− c2 = −1/2
si calcolino p±, c1, c2, y(t) per ωn = 1 e ξ = −1/2,−2, 1/2, 1, 2, 0
Per calcolare la evoluzione forzata e utile introdurre l’integrale di convoluzione:
(f ∗ g) (t) :=
∫ +∞
−∞f(t− τ)g(τ)dτ (20)
Simmetria:
(f ∗ g) (t) = (g ∗ f) (t) (21)
infatti definendo la variabile z = t− τ l’equazione (20) puo essere scritta come
(f ∗ g) (t) =
∫ −∞+∞
f(z)g(t− z)(−dz) =
=
∫ +∞
−∞g(t− z)f(z)dz = (g ∗ f) (t). (22)

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 13
Limitandosi a considerare funzioni identicamente nulle nell’insieme aperto (−∞, 0) l’in-tegrale di convoluzione varra:
(f ∗ g)(t) =
{0 : t < 0∫ t+
0− f(t− τ)g(τ)dτ : t ≥ 0(23)
dove gli estremi di integrazione sono stati fissati in 0− e t+ piuttosto che in 0 e t pertenere in considerazione possibili comportamenti impulsivi di f o g nell’intervallo diinteresse.
Il teorema di Leibnitz:
∂
∂x
∫ f(x)
g(x)F (x, z)dz = F (x, f(x))
∂f(x)
∂x− F (x, g(x))
∂g(x)
∂x+
∫ f(x)
g(x)
∂F (x, z)
∂xdz (24)
permette di assicurare che la derivata dell’integrale di convoluzione (23) coincida conquella dell’equazione (20), ossia:
d
dt(f ∗ g)(t) =
(df
dt∗ g)
(t). (25)
Sfruttando la proprieta di simmetria si puo verificare che:
d
dt(f ∗ g)(t) =
(df
dt∗ g)
(t) =
(f ∗ dg
dt
)(t) =
(dg
dt∗ f)
(t); (26)
inoltre analoghi risultati sono dimostrabili per derivate di ordine arbitrario, ossia ingenerale:
dn
dtn(f ∗ g)(t) =
(dnf
dtn∗ g)
(t) =
(dng
dtn∗ f)
(t). (27)
In aggiunta alla proprieta commutativa (simmetria) gia dimostrata, il prodotto di con-voluzione gode anche delle prorieta associativa e distributiva, ossia rispettivamente
f1 ∗ (f2 ∗ f3) = (f1 ∗ f2) ∗ f3 (28)
f1 ∗ (f2 + f3) = f1 ∗ f2 + f1 ∗ f3 (29)
le cui dimostrazioni sono lasciate come esercizio.L’importanza dell’integrale di convoluzione nel calcolo della risposta forzata di un
sistema lineare tempo invariante (LTI, linear time invariant) e legata alla osservazioneche la risposta forzata relativa ad un segnale forzante arbitratio u(t) e calcolabile comel’integrale di convoluzione tra u(t) e la risposta all’impulso h(t). In altri termini sia
h(t) := soluzione della equazione (14) con u(t) = δ(t) e condizioni iniziali nulle,
allora la evoluzione forzata yf (t) relativa ad un ingresso forzante u(t) arbitrario, concondizioni iniziali nulle per definizione stessa di evoluzione forzata, vale:
yf (t) = (h ∗ u)(t) =
∫ t+
0−h(t− τ)u(τ)dτ. (30)
Si osservi che dalla definizione di h(t) appena fornita e dalla linearita della equazione(14) segue che h(t) non abbia le stesse dimensioni di y(t), bensı [h] = [y][u]−1[δ(t)] =

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 14
[y][u]−1[t]−1 e che, coerentemente, la yf (t) data dalla equazione (30) abbia le dimen-sioni di y. Per dimostrare ora la (30) si osservi che dalla definizione stessa di rispostaall’impulso h(t) vale:
andn h
dtn+ an−1
dn−1 h
dtn−1+ . . .+ a0h = bm
dm δ
dtm+ bm−1
dm−1 δ
dtm−1+ . . .+ b0δ (31)(
n∑k=0
akdk h
dtk
)∗ u =
m∑j=0
bjdj δ
dtj
∗ u =⇒
(n∑k=0
akdk h
dtk∗ u)
(t) =
m∑j=0
bjdj δ
dtj∗ u
(t) =⇒
n∑k=0
akdk
dtk(h ∗ u)(t) =
m∑j=0
bj
(δ(t) ∗ d
j u(t)
dtj
)=⇒
n∑k=0
akdk
dtk(h ∗ u)(t) =
m∑j=0
bjdj u(t)
dtj(32)
che dimostra come (h ∗ u)(t) soddisfi la equazione (14) per qualunque forzante ammis-sibile. Per concludere la dimostrazione della relazione (30), resta da verificare che laequazione (32) sia soddisfatta per condizioni iniziali nulle. Indubbiamente dalla defi-nizione stessa di integrale di convoluzione (23) per segnali nulli per t < 0 segue che lecondizioni iniziali
(h ∗ u)(t)|t0=0− , . . . ,dn−1
dtn−1(h ∗ u)(t)
∣∣∣∣∣t0=0−
sono tutte nulle poiche 0− e minore di zero. Questo risultato e di grande importanzapratica: esso mostra come, supposta nota la risposta all’impulso h(t), la evoluzione for-zata di un sistema per una qualunque forzante ammissibile si possa calcolare risolvendoun semplice integrale piuttosto che una equazione differenziale non omogenea. Natural-mente resta da calcolare la risposta all’impulso, ma questa e di facile individuazione unavolta noti i modi della risposta libera.
Con riferimento all’equazione (31), considerata la natura dell’impulso di Dirac e ladefinizione di h(t), essa deve soddisfare in t = 0−, t = 0 e t > 0 rispettivamente:
(h ∗ u)(t)|t0=0− = 0, . . . ,dn−1
dtn−1(h ∗ u)(t)
∣∣∣∣∣t0=0−
= 0 (33)
andn h
dtn+ an−1
dn−1 h
dtn−1+ . . .+ a0h = (34)
= bmdm δ
dtm+ bm−1
dm−1 δ
dtm−1+ . . .+ b0δ, m ≤ n, t = 0
andn h
dtn+ an−1
dn−1 h
dtn−1+ . . .+ a0h = 0 t > 0 (35)
da cui si deduce che necessariamente la h(t) ha la forma:
h(t) = α δ(t) +r∑
k=1
µk−1∑h=0
βk, hth
h!epkt 1(t) (36)
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 15
essendo pk gli zeri del polinomio caratteristico della omogenea associata ed 1(t) la fun-zione gradino unitario. Si noti che dovendo soddisfare la equazione (35), h(t) ha lastessa struttura della risposta libera yl(t) salvo la presenza del termine impulsivo e delfattore 1(t) necessario a garantire che h(t) sia comunque identicamente nulla per t < 0.Il calcolo delle costanti α, βk, h avviene sostituendo la h(t) nella equazione (31).
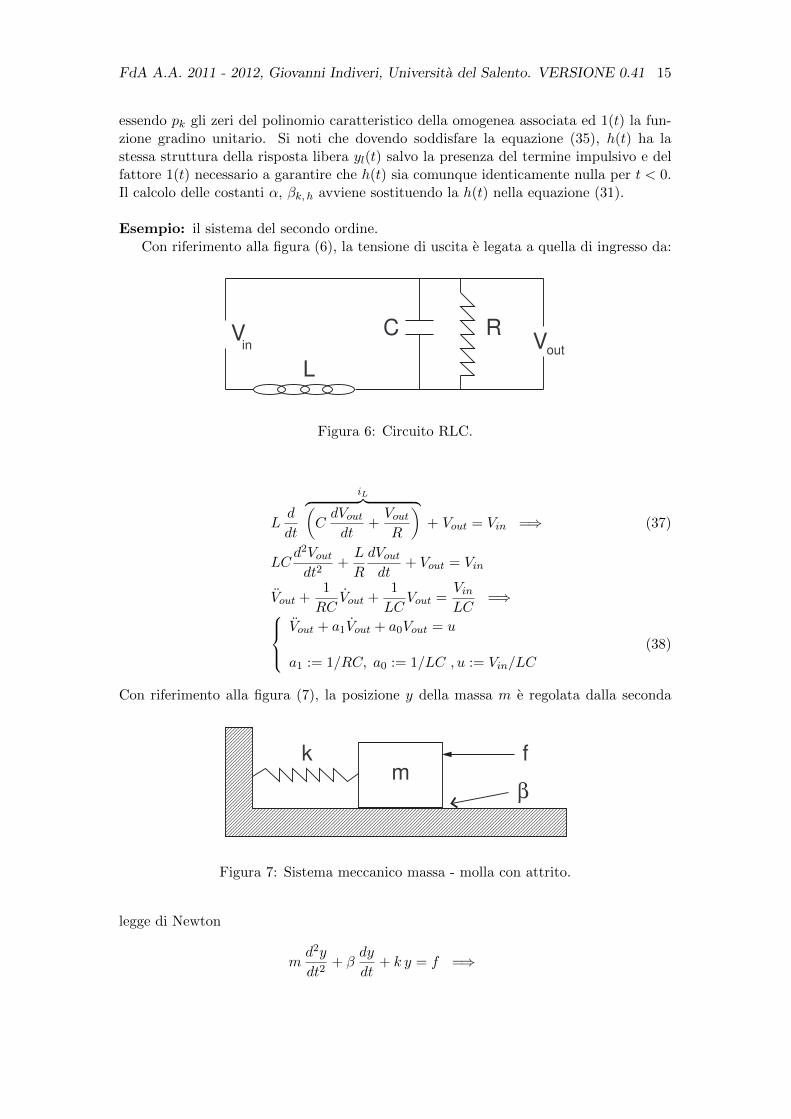
Esempio: il sistema del secondo ordine.Con riferimento alla figura (6), la tensione di uscita e legata a quella di ingresso da:
RC
L
Vin
outV
Figura 6: Circuito RLC.
Ld
dt
iL︷ ︸︸ ︷(CdVoutdt
+VoutR
)+ Vout = Vin =⇒ (37)
LCd2Voutdt2
+L
R
dVoutdt
+ Vout = Vin
Vout +1
RCVout +
1
LCVout =
VinLC
=⇒Vout + a1Vout + a0Vout = u
a1 := 1/RC, a0 := 1/LC , u := Vin/LC
(38)
Con riferimento alla figura (7), la posizione y della massa m e regolata dalla seconda
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
mk
β
f
Figura 7: Sistema meccanico massa - molla con attrito.
legge di Newton
md2y
dt2+ β
dy
dt+ k y = f =⇒

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 16
d2y
dt2+β
m
dy
dt+k
my =
f
my + a1y + a0y = u
a1 := β/m, a0 := k/m , u := f/m(39)
Si noti che nonostante le equazioni (38) e (39) descrivano fenomeni di natura diversa,la loro struttura matematica e identica. In particolare e utile osservare che qualunquesia la dimensione della variabile di uscita (posizione y in (39) e tensione Vout in (38)) lecostanti a0 ed a1 hanno sempre e comunque le medesime dimensioni (unita di misura),ossia
[a1] = [t]−1 (40)
[a0] = [t]−2 (41)
un tempo alla meno uno per a1 ed un tempo alla meno due per a0. Per risolverel’equazione differenziale ordinaria del secondo ordine in equazione (38) o (39) si consideridapprima l’omogenea associata. Il suo polinomio caratteristico
s2 + a1 s+ a0 = 0 (42)
ha radici
s± =−a1 ±
√a2
1 − 4a0
2. (43)
Se a0 < 0, allora necessariamente Im(s±) = 0 e s+ > 0, ossia ci sarebbe sicuramenteun modo della risposta libera divergente. Poiche in generale i sistemi di interesse nonhanno modi funzionali divergenti, volendo a priori escludere la presenza di radici positivedel polinomio caratteristico dovute al segno negativo del coefficiente a0 e volendo anchesottolineare come a0 abbia le dimensioni di una pulsazione al quadrato, si usa indicarea0 come ω2
n ossiaa0 := ω2
n ≥ 0 (44)
dove la lettera ω ricorda che le dimensioni di a0 siano [a0] = [t]−2. Evidentemente allaluce delle considerazioni appena sviluppate vale anche che [a1] = [ωn] e dunque possiamosempre porre:
a1 := 2 ξ ωn : ξ adimensionata (45)
dove il fattore 2 serve solo a semplificare il calcolo del discriminante della equazionecaratteristica che risulta ora essere:
s2 + 2 ξ ωn s+ ω2n = 0 =⇒ (46)
s± = ωn (−ξ ±√ξ2 − 1 ). (47)
I parametri introdotti ξ ed ωn sono detti rispettivamente smorzamento e pulsazionenaturale del sistema del secondo ordine. Al loro variare le radici s± del polinomiocaratteristico descrivono la curva riportata in figura (8). In particolare quando |ξ| < 1le radici s± hanno parte immaginaria non nulla ed al crescere di |ξ| da zero ad uno simuovono su archi di cerchio di raggio ωn aventi origine nei punti (0,± j ωn).

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 17
Re
Im ξ=0
−1<ξ<0
−1<ξ<0
ξ<−1ξ>1
0<ξ<1
0<ξ<1
ξ=0
Figura 8: Luogo degli zeri del polinomio (46).
ξ = 0 Re(s±) = 0, radici puramente immaginarie in ± j ωn−1 < ξ < 0 Re(s±) > 0, Im(s±) 6= 0, radici complesse coniugate,
i.e. simmetriche rispetto l’asse reale nel primo e quarto quadrante.
ξ < −1 Re(s±) > 0, Im(s±) = 0, radici reali positive.
0 < ξ < 1 Re(s±) < 0, Im(s±) 6= 0, radici complesse coniugate,i.e. simmetriche rispetto l’asse reale nel secondo e terzo quadrante.
ξ > 1 Re(s±) < 0, Im(s±) = 0, radici reali negative.
Per ξ = ± 1 le radici sono reali coincidenti in ∓ωn, mentre al crescere di |ξ| > 1 le radicirimangono reali e nel limite |ξ| � 1 vale che
|ξ| � 1 =⇒{s− −→ −2ξωns+ −→ −ωn
2ξ(48)
ossia, in modulo, una delle due radici tende a zero e l’altra all’infinito lungo l’asse reale,ma rimangono sempre di segno concorde. In altri termini il modello (46) non ammetteradici reali di segno discorde, ovvero un polinomio del tipo (s − 1)(s + 2) = 0 con unaradice in −2 e l’altra in +1 non ammette una parametrizzazione equivalente a quelladi equazione (46) perche per costruzione con la equazione (44) abbiamo imposto che ilsegno del termine noto a0 del polinomio fosse sempre positivo, ovvero sempre concordecon quello del monomio di grado massimo. Al contrario solo polinomi del secondo gradocon termine noto e termine di ordine 2 di segno discorde possono ammetere radici realidi segno discorde. Alla luce di queste osservazioni, risulta naturale parametrizzare nellaforma (46) i polinomi di grado 2 aventi radici a parte immaginaria non nulla, i.e. |ξ| < 1,per i quali la posizione delle radici nel piano complesso puo essere pensata in coordinatepolari di modulo ωn e fase θ con
tan(θ) =
√1− ξ2
ξ: |ξ| < 1.

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 18
I polinomi di grado 2 a radici reali z1 e z2, invece, sono piu semplicemente parametriz-zabili come
(s− z1)(s− z2) = 0 (49)
che, qualora z1 e z2 avessero segno concorde, equivarrebbe ad una equazione nella formacanonica (46) con coefficiente di smorzamento |ξ| > 1.
Tornando alla risoluzione della equazione omogenea associata alle equazioni (38) e(39), assumendo che |ξ| < 1 si ponga:
ω := ωn
√1− ξ2 : |ξ| < 1 (50)
s± = −ξ ωn ± j ωn√
1− ξ2 (51)
yl(t) = c1 e−ξωn tejω t + c2 e
−ξωn te−jω t : c1, c2 ∈ C (52)
c1 = r1 + jq1 (53)
c2 = r2 + jq2. (54)
Imponendo le condizioni iniziali
yl(t)|t=0− = y0 ∈ R (55)
yl(t)|t=0− = y0 ∈ R (56)
si puo verificare per calcolo diretto che necessariamente le costanti c1 e c2 sono complesseconiugate, i.e.
c1 = c∗2
e postor := r1 = r2, q := q1 = q2
si trova che:
r =y0
2(57)
q =−y0 − ξωn y0
2ω. (58)
Sostituendo c1 = r + j q, c2 = r − j q in equazione (52) risulta:
yl(t) = (r + j q)e−ξωn tejω t + (r − j q)e−ξωn te−jω t =
= r e−ξωn t(ejω t + e−jω t) + j q e−ξωn t(ejω t − e−jω t) =
= 2r e−ξωn t cos(ωt)− 2q e−ξωn t sin(ωt) =
= 2 e−ξωn t[r cos(ωt)− q sin(ωt)] =
= 2Ae−ξωn t[cos(ωt) cosφ− sin(ωt) sinφ] =
= 2Ae−ξωn t cos(ωt+ φ) =
= 2Ae−ξωn t cos
(ωn t
√1− ξ2 + φ
): (59)
r = A cosφ (60)
q = A sinφ (61)
A :=√r2 + q2 (62)
φ := arcsin(q/A) ∀ A 6= 0 (63)

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 19
da cui si vede che in assenza di smorzamento (ξ = 0) la risposta libera sarebbe unsegnale cosinusoidale di ampiezza costante e frequenza ωn. Per questo il sistema delsecondo ordine privo di smorzamento e detto oscillatore armonico e la pulsazione ωn edetta pulsazione naturale. Conoscendo l’evoluzione libera si puo calcolare la rispostaall’impulso h(t) da cui, attraverso l’integrale di convoluzione (30), la risposta forzata.
Esempio: la evoluzione forzata.Per il calcolo della risposta forzata si consideri il sistema:
dy
dt+ a y =
du
dt+ b u : a, b > 0
che e proprio, ma non strettamente proprio. La radice della equazione caratteristica es = −a da cui segue che la risposta all’impulso vale:
h(t) = δ(t) k0 + k1 e−at1(t)
essendo k0, k1 due costanti ed 1(t) il gradino unitario. La presenza del termine impulsivok0δ(t) e dovuta alla natura non strettamente propria del sistema. Per determinare lecostanti k0, k1 e sufficiente sostituire h(t) nell’equazione del sistema con ingresso u(t) =δ(t) ottenendo:
h(t) = k0 δ(t) + k1 e−atδ(t)− a k1 e
−at 1(t) =
= k0 δ(t) + k1 δ(t)− a k1 e−at 1(t) (64)
h(t) + ah(t) = δ(t) + b δ(t) =⇒ (65)
k0 δ(t) + k1 δ(t)− a k1 e−at 1(t) + a (δ(t) k0 + k1 e
−at1(t)) =
= δ(t) + b δ(t) =⇒δ(t)(k0 − 1) + δ(t) (a k0 + k1 − b) = 0. (66)
Dovendo valere la equazione (66), necessariamente deve essere:
k0 = 1 (67)
k1 = b− a (68)
da cui la risposta all’impulso per il sistema in esame e:
h(t) = δ(t) + (b− a)e−at 1(t)
che consente di calcolare la risposta forzata per un qualunque ingresso u(t).
Esempio: ingresso ad onda quadra...
5 La Trasformata di Laplace, richiami
La definizione di trasformata (unilaterale) di Laplace consiste in
L [f(t)] =
∫ +∞
0f(t)e−st dt (69)
dove f(t) e assunta essere identicamente nulla per t ≤ 0: questa ipotesi non e in generalestrettamente necessaria a garantire l’esistenza della trasformata (69), che comunque

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 20
Figura 9: Pierre Simon Laplace (1749 - 1827)
ignora i valori eventualmente assunti da f(t) per t < 0, quanto a garantire la biunivocitadella antitrasformata che e ben definita per t ≥ 0. Poiche il risultato della integrazionein (69) e invariante rispetto discontinuita isolate e di ampiezza finita di f(t), bisognaprestare attenzione a come modellare esplicitamente l’effetto di discontinuita in f(t)che possono essere rilevanti nello studio di uno specifico problema. Questo punto emolto importante nelle applicazioni pratiche, poiche gli ingressi a sistemi dinamici sonospesso caratterizzati da discontinuita nell’origine: si ipotizzi, per esempio, di accenderel’ingresso ad un sistema al tempo t0 = 0 e che questo ingresso sia cosinusoidale. Si trattadel segnale u(t) = 1(t) cos(t) (1(t) e il gradino unitario) il cui grafico e riportato in figura(10). Rispetto ad una cosinusoide definita sui reali, presenta una discontinuita in t = 0.Per chiarire questo punto, introduciamo l’operatore L+ consistente nella trasformata di
−10 −8 −6 −4 −2 0 2 4 6 8 10−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
t
1(t
) co
s(t
)
Figura 10: Cosinusoide
Laplace calcolata a partire da 0+ piuttosto che 0, i.e.
L+ [f(t)] =
∫ +∞
0+f(t)e−st dt = L [f(t)] (70)

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 21
Il valore del limite per t tendente a 0− non influenza in alcuna maniera la trasformataL+ [f(t)] data dalla equazione (70): l’informazione circa una eventuale discontinuitapresente tra gli istanti 0− e 0+ viene persa nel calcolare la trasformata di Laplace definitadalla equazione (69) a causa della scelta di 0+ come estremo inferiore di integrazione. Pertentare di tenere in esplicita considerazione il limite limt→0− f(t), si potrebbe ridefinreuna nuova trasformata ottenuta dalla (69) sostituendo 0− al posto di 0+ nella equazione(70). Indichiamo questa trasformata con L [f(t)] data da:
L [f(t)] =
∫ +∞
0−f(t)e−st dt (71)
Si ipotizzi, ora, che
f : R −→ R limitata (72)
∃ L+ [f(t)] =
∫ +∞
0+f(t)e−st dt (73)
limt→0−
f(t) 6= limt→0+
f(t). (74)
In queste ipotesi f(t) e discontinua in 0 (condizione 74) ed e interessante osservareche qualora una f(t) soddisfi le ipotesi (72,73,74), nonostante la discontinuita di f(t)nell’origine risulta L+ [f(t)] = L [f(t)] = L [f(t)]. Questo fatto segue dall’osservare che:
L [f(t)] =
∫ +∞
0−f(t)e−st dt =
∫ 0+
0−f(t)e−st dt+
∫ +∞
0+f(t)e−st dt =
= 0 + L+ [f(t)]
ed e strettamente legato alla ipotesi (72) di limitatezza di f(t). Se f(t) rimane semprecomunque limitata il suo integrale e invariante rispetto cambiamenti di f(t) in un numerofinito di punti isolati (insieme di misura nulla). Rimanendo f(t) limitata, estenderel’intervallo di integrazione da 0− a 0+, ossia su un insieme di misura nulla, non puodeterminare alcun cambiamento nell’integrale stesso. Si puo dunque concludere chevalendo le ipotesi (72,73,74), la trasformata L+ [f(t)] contiene tutta e sola l’informazionecontenuta nella trasformata L [f(t)] e nella trasformata L [f(t)].
La situazione e diversa qualora la discontinuita sia impulsiva, ossia nel caso in cui laf(t) sia, per esempio, somma di una funzione limitata e di un impulso δ(t) cosı da nonsoddisfare la ipotesi (72). Basti osservare che
L+ [δ(t)] =
∫ +∞
0+δ(t) e−st dt = 0 (75)
L [δ(t)] =
∫ +∞
0−δ(t) e−st dt = 1. (76)
Dunque se la funzione f(t) presenta una discontinuita impulsiva nell’origine, le trasfor-mate date dalle equazioni (69) e (71) sono indubbiamente diverse: mentre la trasformata(69) non tiene in conto la discontinuita, la (71) ne risulta influenzata.
Questa osservazione suggerisce di usare la equazione (71) come definizionedi trasformata di Laplace al posto della (69).

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 22
5.1 Alcune proprieta della trasformata di Laplace.
La trasformata della derivata di una funzione e
L
[d
dtf(t)
]=
∫ ∞0−
f ′(t)e−stdt =[f(t)e−st
]∞0−−∫ ∞
0−f(t)e−st(−s)dt =
= s F (s)− f(0−) (77)
dove si e usata la regola di integrazione per parti. Analogamente la trasformata delladerivata seconda f ′′(t) e data da:
L
[d2
dt2f(t)
]=
∫ ∞0−
f ′′(t)e−stdt =[f ′(t)e−st
]∞0−−∫ ∞
0−f ′(t)e−st(−s)dt =
= sL
[d
dtf(t)
]− f ′(0−) = s2 F (s)− s f(0−)− f ′(0−) (78)
ed iterando il ragionamento si ottiene che la trasformata della derivata n−esima di f(t)e:
L
[dn
dtnf(t)
]= sn F (s)−
n−1∑k=0
sk f (n−1−k)(0−) (79)
E un utile esercizio quello di calcolare le seguenti trasformate:
L+ [sinωt] (80)
L [sinωt] (81)
L+ [1(t) sinωt] (82)
L [1(t) sinωt] (83)
L+ [cosωt] (84)
L [cosωt] (85)
L+ [1(t) cosωt] (86)
L [1(t) cosωt] (87)
L+
[d
dtsinωt
](88)
L
[d
dtsinωt
](89)
L+
[d
dt(1(t) sinωt)
](90)
L
[d
dt(1(t) sinωt)
](91)
L+
[d
dtcosωt
](92)
L
[d
dtcosωt
](93)
L+
[d
dt(1(t) cosωt)
](94)
L
[d
dt(1(t) cosωt)
](95)

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 23
ricordando che le derivate sono da intendersi in senso generalizzato. La funzione 1(t) eil gradino unitario. Si notera che in presenza di un impulso, le trasformate L[ ] ed L+[ ]possono differire, ma non sono necessariamente diverse.
5.2 I teoremi del valor finale e del valor iniziale.
Teorema del valor iniziale:
Se esiste finito lims→∞
s F (s) =⇒ lims→∞
s F (s) = f(0+) (96)
Teorema del valor finale:
Se esistono finiti lims→0
s F (s) e limt→∞
f(t), allora sono uguali. (97)
Dim.
L
[d
dtf(t)
]= s F (s)− f(0−) = lim
t→∞
∫ t
0−
d
dτf(τ) e−sτ dτ (98)
da cui la (96) segue osservando che:
s F (s)− f(0−) =
∫ 0+
0−
d
dτf(τ) e−sτ dτ + lim
t→∞
∫ t
0+
d
dτf(τ) e−sτ dτ =
= f(0+)− f(0−) + limt→∞
∫ t
0+
d
dτf(τ) e−sτ dτ
da cui calcolando il limite per s→∞ segue la tesi (96).Dalla (98) calcolando il limite per s→ 0 si ha:
lims→0
s F (s)− f(0−) = limt→∞, s→0
∫ t
0−
d
dτf(τ) e−sτ dτ
= limt→∞
f(t)− f(0−)
che e la tesi (97).
Esempi:
Si valutino i limiti per t→∞, 0+ di f(t) tali che:
F (s) =1
s+ aper: a > 0, a < 0, a = 0
F (s) =1
s2 + 1
F (s) =s
s2 + 1
5.3 Trasformata dell’integrale di convoluzione.
Per calcolo diretto si verifica che:
L[(f ∗ g)(t)] = F (s)G(s) (99)

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 24
ossia la trasformata del prodotto di convoluzione e il prodotto algebrico delle trsformate.Infatti:
t− τ := z
L[(f ∗ g)(t)] =
∫ ∞0−
e−st∫ ∞
0−f(τ)g(t− τ)dτ dt =
=
∫ ∞0−
∫ ∞0−
e−sτe−szg(z)f(τ)dzdτ =
=
∫ ∞0−
e−sτf(τ)dτ
∫ ∞0−
e−szg(z)dz = F (s)G(s).
5.4 Trasformata di funzioni traslate nel tempo.
L[f(t− T )] =
∫ +∞
0−e−stf(t− T ) dt =
∫ +∞
0−e−ste−sT e+sT f(t− T ) dt =
= e−sT∫ +∞
0−e−s(t−T )f(t− T ) dt = e−sT F (s) (100)
5.5 Trasformata di funzioni moltiplicate per termini eat.
L[eatf(t)] =
∫ +∞
0−e−steat f(t) dt =
∫ +∞
0−e−(s−a)t f(t) dt = F (s− a) (101)
6 Equazioni differenziali ordinarie lineari e modelli di sta-to.
Come noto dall’analisi, una equazione differenziale lineare ordinaria di ordine n puoessere rappresentata come un sistema di n equazioni differenziali lineari ordinarie diordine 1. Per esempio, data l’equazione
dn y
dtn+ an−1
dn−1 y
dtn−1+ . . .+ a0y = u (102)
con il cambio di variabili:
y = x1
dy
dt= x2
d2y
dt2= x3
......
...dn−1y
dtn−1= xn
si ha:
x1 = x2 (103)
x2 = x3 (104)
... (105)
xn + an−1xn + an−2xn−1 + . . .+ a0x1 = u (106)
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 25
ovvero, in termini vettoriali:x1
x2...xn
=
0 1 . . . 00 0 1 0 . . ....
......
...−a0 −a1 . . . −an−1
x1
x2...xn
+
00...1
u (107)
y = (1 0 . . . 0)
x1
x2...xn
. (108)
Questo esempio e rappresentativo di una situazione piu generale in base alla quale unaqualunque equazione differenziale lineare ordinaria causale di ordine n e scrivibile come:
x = Ax+Bu (109)
y = Cx+Du (110)
essendo ora
x ∈ Rn×1 vettore di stato
A ∈ Rn×n matrice dinamica
B ∈ Rn×1 matrice dell’ingresso
C ∈ R1×n matrice dell’uscita
D ∈ R matrice dell’azione diretta di u su y.
Questa rappresentazione del sistema dinamico e detta rappresentazione di stato. Essapermette, per esempio, di generalizzare lo studio dei sistemi dinamici dal caso SISO(single input single output) in cui l’usicta y e l’ingresso u sono scalari, al caso MIMO(multi input multi output) in cui y ed u sono vettori di dimensioni opportune. In questocaso, infatti, e sufficiente considerare nelle relazioni (109) e (110) matrici di dimensioniappropriate. La rappresentazione di un sistema LTI in forma di equazione differenzialeche lega l’ingresso u all’uscita y viene anche detta rappresentazione ingresso-uscita perdistinguerla dalla rappresentazione nello spazio degli stati.
Il concetto di vettore di stato e legato alla dinamica interna del sistema. Unainterpretazione intuitiva di questo risultato si puo avere integrando l’equazione (109)
x(t) = x0 +
∫ t
0(Ax(τ) +Bu(τ)) dτ. (111)
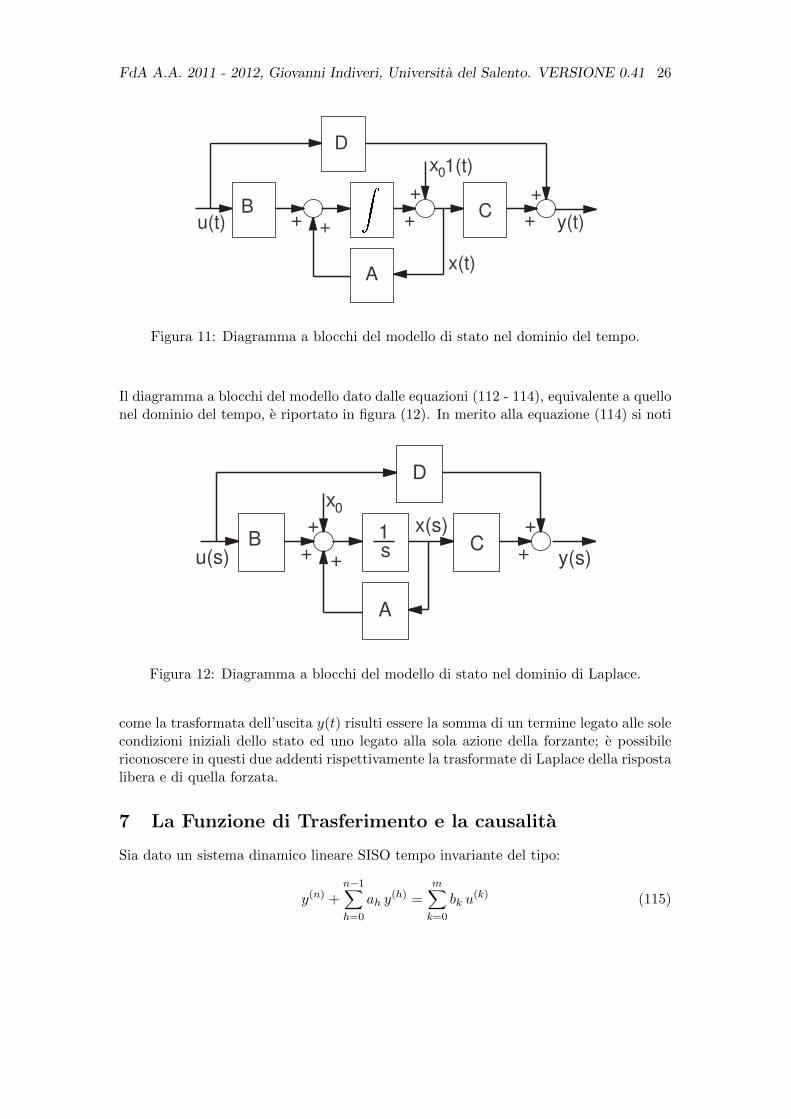
ed analizzando il diagramma a blocchi risultante per l’equazione (110) riportato in figu-ra (11). Dalla figura (11) appare chiaro come la dinamica del vettore di stato, pilotatadall’ingresso u, generi l’uscita y e ne rappresenti quindi, in qualche modo, la dinamicainterna. E bene notare che i metodi delle trasformate di Laplace si estendono natural-mente ai modelli di stato, per cui trasformando secondo Laplace l’equazione (109) siottiene:
sX(s)− x0 = AX(s) +B U(s) =⇒ (112)
X(s) = (sI −A)−1x0 + (sI −A)−1B U(s) (113)
Y (s) =[C (sI −A)−1B +D
]U(s) + C (sI −A)−1x0. (114)
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 26
B C
A
D
u(t) y(t)
x(t)
x0
+
+
+
++
1(t)
+
Figura 11: Diagramma a blocchi del modello di stato nel dominio del tempo.
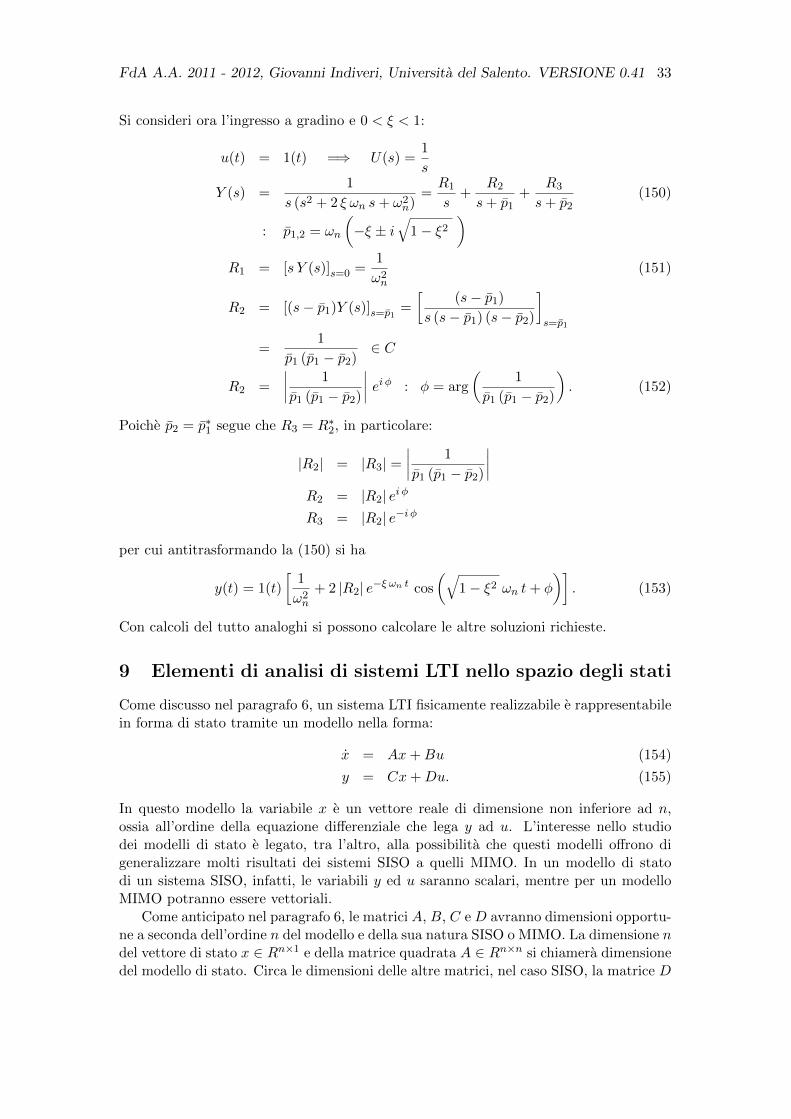
Il diagramma a blocchi del modello dato dalle equazioni (112 - 114), equivalente a quellonel dominio del tempo, e riportato in figura (12). In merito alla equazione (114) si noti
B C
A
D
u(s) y(s)
x(s)
x0
+
+
+
++
1s
Figura 12: Diagramma a blocchi del modello di stato nel dominio di Laplace.
come la trasformata dell’uscita y(t) risulti essere la somma di un termine legato alle solecondizioni iniziali dello stato ed uno legato alla sola azione della forzante; e possibilericonoscere in questi due addenti rispettivamente la trasformate di Laplace della rispostalibera e di quella forzata.
7 La Funzione di Trasferimento e la causalita
Sia dato un sistema dinamico lineare SISO tempo invariante del tipo:
y(n) +n−1∑h=0
ah y(h) =
m∑k=0
bk u(k) (115)

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 27
dove y e l’uscita ed u l’ingresso del sistema. Trasformando secondo Laplace entrambi imembri, si ottiene:
Y (s) =
∑mk=0 bk s
k
sn +∑n−1h=0 ah s
hU(s) + T.c.i. (116)
dove T.c.i. rappresenta i termini dipendenti dalle condizioni iniziali. Si puo verificare percalcolo diretto che questo termine e nullo se si assumono tutte le condizioni iniziali nulle.Il rapporto tra la trasformata dell’uscita a condizioni iniziali nulle (risposta forzata) equella dell’ingresso e detto funzione di trasferimento del sistema. Nel caso specifico delmodello (115) si ha:
T (s) ≡ Y (s)
U(s)
∣∣∣∣c.i.=0
=
∑mk=0 bk s
k
sn +∑n−1h=0 ah s
h. (117)
Alla luce dell’equazione (99) e ricordando che la trasformata di Laplace dell’impulso vale1, la funzione di trasferimento e anche interpretabile come la trasformata di Laplacedella risposta all’impulso del sistema. Anche la funzione di trasferimento, cosı comel’equazione differenziale corrispondente nel dominio del tempo, e detta rappresentazioneingresso-uscita del sistema.
Perche sia soddisfatto il principio di causalita tra uscita ed ingresso, ossia affinchey(t) possa essere considerata come effetto di u(t), e necessario che valga m ≤ n. Siricorda che y(t) si puo definire effetto di u(t) (o equivalentemente u(t) si puo definirecausa di y(t)) se vale che:
∀ t∗ > 0 y(t∗) dipende al piu da u(t) ∀ t ∈ [0, t∗]
dove tutti i segnali si sottointendono nulli per t < 0. Alla luce di questa definizione, lacondizione m ≤ n puo essere al meglio compresa da un controesempio. Supponiamo chesia m > n, in particolare n = 0,m = 1, b1 = 1, b0 = 0: il sistema sarebbe un derivatorepuro, i.e.
y(t) =d
dtu(t) ⇒ Y (s) = s U(s)− u(0−)
e supponiamo di applicare in ingresso due tipi di segnali, il gradino unitario
1(t) =
{0 ∀ t ≤ 01 ∀ t > 0
in un caso ed un ingresso identicamente nullo nel secondo. L’uscita relativa al gradinounitario sarebbe la delta di Dirac
δ(t) =
{0 ∀ t 6= 0indefinita t = 0
e l’uscita relativa all’ingresso nullo sarebbe identicamente nulla. E chiaro che all’istantet = 0 i due possibili ingressi considerati sarebbero identici (ossia nulli), ma le uscitesarebbero diverse: indefinita nel primo caso e nulla nel secondo. Ossia non sarebberispettato il principio di causa. Per rispondere con la δ(t) al gradino al tempo t = 0 ilsistema dovrebbe predire che all’istante futuro 0+ l’ingresso sara unitario piuttosto chenullo, e questo viola il principio di causa.

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 28
In altri termini possiamo dire che un sistema che si comporti come un derivatorepuro non e fisicamente realizzabile; indubbiamente come e noto nell’ambito della teoriadei segnali non e possibile valutare istantaneamente la derivata di un segnale.
Nel caso piu generale n > 0 ed m > n, si puo dimostrare per calcolo diretto (divisionedi polinomi) che la T (s) data in (117) avrebbe modi funzionali corrispondenti ad un de-rivatore puro, ovvero non rappresenterbbe un sistema fisicamente realizzabile. Pertantosi definiscono i sistemi con m > n impropri, quelli con m = n propri o semplicementepropri e quelli con m < n strettamente propri. Si noti che per quanto non fisicamenterealizzabili, i sistemi impropri sono oggetti matematicamente ben definiti che possonocomparire nell’ambito dell’analisi dei sistemi di controllo.
Le radici (o zeri) del denominatore della funzione di trasferimento di un sistema sonoi poli del sistema.
7.1 Richiami sulle propieta dei polinomi
Sia data l’equazione:m∑k=0
bk sk = 0. (118)
Essa ha m radici pi ∈ C ∀ i = 1, 2, . . . ,m (teorema fondamentale dell’algebra o diGauss). Indicando con ρ ≤ m il numero di radici distinte e con µi la propria molteplicita,vale
∑ρj=1 µj = m. Inoltre la (118) puo sempre essere scritta come:
m∑k=0
bk sk = bm (s− p1)µ1(s− p2)µ2 . . . (s− pρ−1)µρ−1(s− pρ)µρ = 0 (119)
avendo distinto con una barra (p) le radici a parte immaginaria non nulla da quellepuramente reali (senza barra). Se una radice p ha parte immaginaria non nulla, anchela sua coniugata p∗ e radice: ne segue che nello sviluppo (119) i fattori corrispondentia radici con parte immaginaria non nulla p possono essere raccolti e scritti nella formacanonica di un termine del secondo ordine s2 + 2 ξωn s + ω2
n : ξ ∈ (−1, 1) (se fosse|ξ| ≥ 1 le radici sarebbero reali). Alla luce di questa osservazione, la (119) puo sempreessere pensata nella forma:
m∑k=0
bk sk = bm s
h(s− p1)µ1(s− p2)µ2 . . . (s2 + 2ξj ωn,j s+ ω2n,j)
µj = 0
: ξj ∈ (−1, 1) ∀ j (120)
che mette esplicitamente in evidenza h radici nell’origine, le radici puramente reali pie quelle a parte immaginaria non nulla rappresentate dai fattori del secondo ordineciascuna con la propria molteplicita.
8 Antitrasformazione
Sia data una funzione di trasferimento T (s) razionale come nell’equazione (117), i.e.:
T (s) =
∑mk=0 bk s
k
sn +∑n−1h=0 ah s
h(121)

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 29
e sia m ≤ n. Dalla (119) segue che questa puo essere scritta come:
T (s) =
∑mk=0 bk s
k
sh(s− p1)µ1(s− p2)µ2 . . . (s− pρ−1)µρ−1 (s− pρ)µρ(122)
dove ancora una volta si sono indicate con una barra le radici a parte immaginaria nonnulla e senza quelle puramente reali. Dalla teoria della divisione dei polinomi risulta chel’equazione (122) puo sempre essere riscritta nella forma:
T (s) = R0 +µ1∑j=1
R1,j
(s− p1)j+
µ2∑l=1
R2,l
(s− p2)l+ . . .+
µρ∑h=1
Rρ,h(s− pρ)h
. (123)
I parametri R sono detti residui dello sviluppo e sono numeri reali o complessi a secondadel polo a cui si riferiscono. Il residuo reale di ordine zero R0 e non nullo solo se m = n,mentre e sempre nullo qualora il sistema sia strettamente proprio (m < n). In particolaresi noti che:
R0 = lims→∞
T (s)
Data una funzione T (s) razionale e conoscendo i poli del sistema, i residui possonoessere calcolati analiticamente. Supponiamo che la T (s) sia strettamente propria e chealcuni poli abbiano molteplicita uno. Per fissare le idee, sia il polo a parte immaginarianon nulla pρ ad avere molteplicita uno, ossia µρ = 1. Moltiplicando entrambi i latidell’equazione (123) per (s− pρ) si ha:
T (s)(s− pρ) =µ1∑j=1
R1,j (s− pρ)(s− p1)j
+µ2∑l=1
R2,l (s− pρ)(s− p2)l
+ . . .+Rρ,1 (s− pρ)
(s− pρ)(124)
da cui segue che:Rρ,1 = T (s)(s− pρ)|s=pρ . (125)
Nel caso piu generale di poli a molteplicita maggiore di uno, i residui possono esserecalcolati dalla seguente formula:
Rh,j =1
(µh − j)!
[dµh−j
dsµh−j(T (s)(s− ph)µh)
]s=ph
∀ j ∈ [1, µh] (126)
Si noti che se s = pρ e un polo a parte immaginaria non nulla, sicuramente anche ilsuo coniugato p∗ρ e un polo. Vogliamo dimostrare che:
Data una T (s) strettamente propria, razionale come in equazione (117), i residui di polireali sono reali e quelli dei poli complessi coniugati sono a loro volta complessi coniugati.
Per fissare le idee consideriamo ancora il caso in cui i poli del sistema abbianomolteplicita unitaria. Per semplicita, ma senza ledere la generalita della dimostrazione,supponiamo di avere solo tre poli con molteplicita uno di cui uno reale e due a parteimmaginaria non nulla (necessariamente l’uno il complesso coniugato del secondo), i.e.:
T (s) =N(s)
(s− p)(s− p)(s− p∗)=
R1
(s− p)+
R2
(s− p)+
R3
(s− p∗). (127)

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 30
in cui N(s) sia un polinomio in s di grado minore o uguale a 2. Vogliamo dimostrareche R1 e reale e che R2 = R∗3. Dalla (125) segue che
R1 = T (s)(s− p)|s=p
da cui, calcolando il complesso coniugato di entrambi i memebri, segue:
R∗1 =[T (s)(s− p)|s=p
]∗= T (s)∗(s∗ − p)|s∗=p
dove p = p∗ essendo p per ipotesi puramente reale. Per una proprieta fondamentaledella trasformata di Laplace vale anche che
T (s)∗ = T (s∗) (128)
per cui sostituendo,
R∗1 = T (s∗)(s∗ − p)|s∗=p =
=
[R1 (s∗ − p)
(s∗ − p)+R2 (s∗ − p)
(s∗ − p)+R3 (s∗ − p)(s∗ − p∗)
]s∗=p
= R1.
Analogamente per R2 vale,
R2 = T (s)(s− p)|s=p =⇒
R∗2 =[T (s)(s− p)|s=p
]∗= T (s)∗(s∗ − p∗)|s∗=p∗ =
= T (s∗)(s∗ − p∗)|s∗=p∗ =
=
[R1 (s∗ − p∗)
(s∗ − p)+R2 (s∗ − p∗)
(s∗ − p)+R3 (s∗ − p∗)
(s∗ − p∗)
]s∗=p∗
= R3
Come volevasi dimostrare, R1 coincide con il suo complesso coniugato quindi e pura-mente reale ed R2 coincide con il complesso coniugato di R3.
Una volta sviluppata la T (s) razionale in fratti semplici come in (123), l’antitrasfor-mata puo essere valutata ricordando le seguenti trasformate speciali:
L[eatf(t)] = F (s− a) (129)
L[1(t) cosω t] =s
s2 + ω2(130)
L[1(t) sinω t] =ω
s2 + ω2(131)
L[1(t) tn] =n!
sn+1. (132)
La (132) fornisce direttamente i modi funzionali corrispondenti a poli nell’origine. Dalle(129) e (132) segue che i modi funzionali corrispondenti a poli puramente reali sono deltipo:
K0 ept, K1 t e
pt, . . . , Kµ−1 tµ−1 ept (133)
essendo µ la molteplicita del polo p. Infine gli addendi corrispondenti a termini com-plessi coniugati nello sviluppo (123) possono essere raccolti per formare addendi i cui

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 31
numeratori siano polinomi del secondo grado elevati alle potenze 1, 2, . . . , µ essendo µla molteplicita del polo p. Nel caso di molteplicita unitaria, si hanno termini del tipo:
T (s) = . . .+R
s− p+
R∗
s− p∗+ . . . =
s(R+R∗)− (R p∗ +R∗ p)
s2 + 2 ξ ωn s+ ω2n
=
=s(R+R∗)
s2 + 2 ξ ωn s+ ω2n
− (R p∗ +R∗ p)
s2 + 2 ξ ωn s+ ω2n
=
=s(R+R∗)
(s+ ξ ωn)2 + ω2n(1− ξ2)
− (R p∗ +R∗ p)
(s+ ξ ωn)2 + ω2n(1− ξ2)
. (134)
I numeratori delle due frazioni in (134) sono reali. Inoltre dalle (129), (130) e (131)segue che i due addendi in (134) danno luogo a modi funzionali del tipo:
K1 e−ξ ωn t cos
(ωn
√1− ξ2 t
)(135)
K2 e−ξ ωn t sin
(ωn
√1− ξ2 t
). (136)
Se i poli a parte immaginaria non nulla hanno molteplicita maggiore di uno a questimodi funzionali si aggiungeranno termini del tipo
Kh th e−ξ ωn t cos
(ωn
√1− ξ2 t
)(137)
Kh th e−ξ ωn t sin
(ωn
√1− ξ2 t
)(138)
h = 1, 2, . . . , µ− 1 : µ molteplicita di p.
Esempio
Sia dato un sistema descritto da:
y = −b y − k y + u : b, k > 0 (139)
si calcoli y(t) per gli ingressi:
u(t) = δ(t) (140)
u(t) = 1(t) (141)
u(t) = 1(t) e−a t : a > 0 (142)
u(t) = 1(t) sinω t (143)
a partire da condizioni iniziali nulle.
SoluzionePoiche si richiede di risolvere a partire a condizioni iniziali nulle, e sufficiente calcolarela trasformata del sistema, moltiplicarla per le trasformate degli ingressi forzanti edantitrasformare usando lo sviluppo in fratti semplici.
(s2 + b s+ k)Y (s) = U(s) (144)
ω2n = k ; 2 ξ ωn = b =⇒ ωn =
√k ; ξ =
b
2√k
i poli sono p± = ωn
(−ξ ±
√ξ2 − 1
)

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 32
Se 0 < ξ < 1 (si noti che b, k > 0 per ipotesi) i poli hanno parte immaginaria non nullae la risposta all’impulso sara:
u(t) = δ(t) =⇒ U(s) = 1
Y (s) =1
s2 + 2 ξ ωn s+ ω2n
=1
(s+ ξ ωn)2 + ω2n(1− ξ2)
=
=1
ωn√
(1− ξ2)
ωn√
(1− ξ2)
(s+ ξ ωn)2 + ω2n(1− ξ2)
y(t) = L−1[Y (s)] =1
ωn√
(1− ξ2)e−ξ ωn t sin
(ωn
√(1− ξ2) t
)(145)
Se ξ > 1 i poli sono distinti e puramente reali: indicandoli con p1, p2, la rispostaall’impulso sara:
u(t) = δ(t) =⇒ U(s) = 1
Y (s) =1
(s− p1)(s− p2)=
R1
(s− p1)+
R2
(s− p2)(146)
p1, p2 ∈ R =⇒ R1, R2 ∈ R.
I residui R1, R2 possono essere calcolati o per calcolo diretto, i.e.
R2(s− p1) +R1(s− p2) = 1 =⇒{s(R2 +R1) = 0−p1R2 − p2R1 = 1
=⇒{R2 = −R1
(p1 − p2)R1 = 1
=⇒{R1 = 1
p1−p2R2 = 1
p2−p1
o applicando la formula (125):R1 = [(s− p1)Y (s)]s=p1 =
[(s−p1)
(s−p1)(s−p2)
]s=p1
= 1(p1−p2)
R2 = [(s− p2)Y (s)]s=p2 =[
(s−p2)(s−p1)(s−p2)
]s=p2
= 1(p2−p1)
Avendo calcolato i residui, si puo antitrasformare la (146) ottenendo
u(t) = δ(t) =⇒
y(t) = L−1 [Y (s)] = L−1[
R1
s− p1
]+ L−1
[R2
s− p2
]=
=ep1 t
p1 − p2+
ep2 t
p2 − p1(147)
Se ξ = 1 i poli sono reali e coincidenti, in particolare p1 = p2 = −ωn per cui la funzionedi trasferimento diventa:
Y (s) =1
(s+ ωn)2=
R1
(s+ ωn)+
R2
(s+ ωn)2(148)
R1 = 0, R2 = 1
y(t) = L−1 [Y (s)] = L−1[
1
(s+ ωn)2
]= t e−ωn t (149)
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 33
Si consideri ora l’ingresso a gradino e 0 < ξ < 1:
u(t) = 1(t) =⇒ U(s) =1
s
Y (s) =1
s (s2 + 2 ξ ωn s+ ω2n)
=R1
s+
R2
s+ p1+
R3
s+ p2(150)
: p1,2 = ωn
(−ξ ± i
√1− ξ2
)R1 = [s Y (s)]s=0 =
1
ω2n
(151)
R2 = [(s− p1)Y (s)]s=p1 =
[(s− p1)
s (s− p1) (s− p2)
]s=p1
=1
p1 (p1 − p2)∈ C
R2 =
∣∣∣∣ 1
p1 (p1 − p2)
∣∣∣∣ ei φ : φ = arg
(1
p1 (p1 − p2)
). (152)
Poiche p2 = p∗1 segue che R3 = R∗2, in particolare:
|R2| = |R3| =∣∣∣∣ 1
p1 (p1 − p2)
∣∣∣∣R2 = |R2| ei φ
R3 = |R2| e−i φ
per cui antitrasformando la (150) si ha
y(t) = 1(t)
[1
ω2n
+ 2 |R2| e−ξ ωn t cos
(√1− ξ2 ωn t+ φ
)]. (153)
Con calcoli del tutto analoghi si possono calcolare le altre soluzioni richieste.
9 Elementi di analisi di sistemi LTI nello spazio degli stati
Come discusso nel paragrafo 6, un sistema LTI fisicamente realizzabile e rappresentabilein forma di stato tramite un modello nella forma:
x = Ax+Bu (154)
y = Cx+Du. (155)
In questo modello la variabile x e un vettore reale di dimensione non inferiore ad n,ossia all’ordine della equazione differenziale che lega y ad u. L’interesse nello studiodei modelli di stato e legato, tra l’altro, alla possibilita che questi modelli offrono digeneralizzare molti risultati dei sistemi SISO a quelli MIMO. In un modello di statodi un sistema SISO, infatti, le variabili y ed u saranno scalari, mentre per un modelloMIMO potranno essere vettoriali.
Come anticipato nel paragrafo 6, le matrici A, B, C e D avranno dimensioni opportu-ne a seconda dell’ordine n del modello e della sua natura SISO o MIMO. La dimensione ndel vettore di stato x ∈ Rn×1 e della matrice quadrata A ∈ Rn×n si chiamera dimensionedel modello di stato. Circa le dimensioni delle altre matrici, nel caso SISO, la matrice D

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 34
e uno scalare. Esso, inolte, e non nullo se e solo se la funzione di trasferimento associataal sistema e semplicemente propria. In merito al legame tra la funzione di trasferimentodi un sistema SISO ed una sua rappresentazione nello spazio degli stati, si noti che dallaequazione (114) risulta che sia:
G(s) =Yforzata(s)
U(s)=(C (sI −A)−1B +D
). (156)
Per altro se il sistema fosse MIMO, varrebbe una identica relazione, ma la risultate G(s)sarebbe una matrice di trasferimento piuttosto che una semplice funzione di trasferi-mento. Dall’analisi delle trasformate di Laplace del modello di stato, equazioni (112,113 e 114), risulta anche che la trasformata dell’evoluzione libera sia:
Ylibera(s) = L[ylibera(t)] = C (sI −A)−1x0. (157)
Al fine di meglio comprendere il legame tra la rappresentazione nello spazio degli statidi un sistema lineare, la sua rappresentazione ingresso-uscita nel dominio di Laplace edin quello del tempo, e opportuno calcolare la soluzione delle equazioni (154-155). A talfine e necessario discutere alcuni preliminari matematici legati alla matrice esponenzialedi matrice.
9.1 Matrice esponenziale di una matrice
Dato uno scalare α 6= 0, la funzione esponenziale eα t puo essere sviluppata (nell’origine)in serie di Taylor dando luogo a:
eα t =∞∑h=0
αh th
h!. (158)
Analogamente, data una matrice reale quadrata A si puo dimostrare che la serie
∞∑h=0
Ah th
h!
e sempre convergente per qualunque A quadrata reale. Di conseguenza e sempre lecitocalcolare questa serie il cui valore viene convenzionalmente indicato come eAt, ossia sipone
eAt :=∞∑h=0
Ah th
h!(159)
per qualunque matrice reale quadrata A. Tale quantita prende nome di matrice espo-nenziale. La notazione e sintomatica delle seguenti prorieta fondamentali che possonoessere dimostrate per calcolo diretto e che sono lasciate per esercizio:
AeAt = eAtA. (160)
eAt e sempre invertibile per ogni A quadrata e vale:[eAt]−1
= e−At (161)
eAt∣∣∣t=0
= I (162)
d
dteAt = AeAt = eAtA. (163)

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 35
Sia T una qualunque matrice quadrata invertibile della stessa dimensione di A, alloravale anche
T eAt T−1 = e(T AT−1)t. (164)
9.2 Soluzione del modello di stato nel dominio del tempo
Alla luce delle proprieta della matrice esponenziale e con riferimento alle equazioni distato (154-155), si noti che vale:
d
dt
[e−At x
]= −e−AtAx+ e−At x =
= −e−AtAx+ e−At(Ax+Bu) = e−AtBu. (165)
Integrando l’equazione (165) a destra e sinistra nel tempo tra zero (istante iniziale) e tsi ottiene: ∫ t
0
d
dt
[e−At x
]dt = e−At x(t)− x(0) =
∫ t
0e−Aτ Bu(τ)dτ (166)
da cui, moltiplicando tutto per eAt, si ha:
x(t) = eAt x(0) +
∫ t
0eA(t−τ)Bu(τ)dτ (167)
che rappresenta l’evoluzione temporale dello stato. In particolare il primo addendo neltermine di destra della equazione (167) e l’evoluzione libera dello stato ed il secondol’evoluzione forzata dello stato.
Ricordando che l’uscita y e legata all’ingresso ed allo stato da y = Cx + Du segueche:
y(t) = CeAt x(0) +
∫ t
0
(CeA(t−τ)B +Dδ(t− τ)
)u(τ)dτ. (168)
Si noti che nel membro di destra dell’equazione (168) possono essere riconosciute l’evo-luzione libera dell’uscita:
ylibera(t) = CeAt x(0) (169)
e la risposta forzata yforzata(t) calcolata come convoluzione tra la risposta all’impulsoh(t) e la forzante u(t), ossia
yforzata(t) = h ∗ u =
∫ t
0
(CeA(t−τ)B +Dδ(t− τ)
)u(τ)dτ (170)
essendo evidentemente la risposta all’impulso h(t) data da:
h(t) = CeAtB +Dδ(t). (171)
Confrontando le equazioni (156 - 157) con le (169, 170 e 171) segue che:
L[eAt]
= (sI −A)−1 (172)
L[CeAt
]= C(sI −A)−1 (173)
L[CeAtB +Dδ(t)
]= C(sI −A)−1B +D (174)

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 36
9.3 Non unicita della rappresentazione di stato
Ipotizzando di conoscere la rappresentazione ingresso-uscita di un sistema lineare, einteressante chiedersi se la sua rappresentazione nello spazio degli stati (che si puodimostrare esiste) sia unica o meno. La risposta e negativa: ossia in genere esistono infi-nite rappresentazioni nello spazio degli stati corrispondenti alla stessa rappresentazioneingresso-uscita di un sistema. In particolare, un sistema nello spazio degli stati che cor-risponda ad un dato modello ingresso-uscita si indica come una particolare realizzazionedel sistema. Vogliamo dunque illustrare come in genere esistano infinite realizzazioninello spazio degli stati di un modello ingresso-uscita di un sistema.
Innanzi tutto, ipotizziamo di conoscere una particolare realizzazione. Ossia ipotiz-ziamo che sia dato un sistema LTI SISO di cui sia nota la rappresentazione ingressouscita nel dominio del tempo e di Laplace (m ≤ n):
dny
dtn+n−1∑h=0
ahdhy
dth=
m∑k=0
bkdku
dtk(175)
G(s) =Yforzata(s)
U(s)=
∑mk=0 bk s
k
sn +∑n−1h=0 ah s
h(176)
e di conoscerne una particolare realizzazione (A,B,C,D) con A ∈ Rn×n, B ∈ Rn×1,C ∈ R1×n e D ∈ R
x = Ax+Bu (177)
y = Cx+Du (178)
tale che
G(s) =Yforzata(s)
U(s)=
∑mk=0 bk s
k
sn +∑n−1h=0 ah s
h=(C (sI −A)−1B +D
). (179)
Sia T ∈ Rn×n una qualunque matrice invertibile e
z = Tx =⇒ (180)
z = T x = TAx+ TBu = (TAT−1)z + TBu (181)
y = CT−1z +Du. (182)
La funzione di trasferimento associata alla realizzazione in z sara data da:
G(s) =
(CT−1
(sI − (TAT−1)
)−1TB +D
)=
=
(CT−1
(T (sI −A)T−1
)−1TB +D
)=
=(CT−1 T (sI −A)−1 T−1TB +D
)=
=(C (sI −A)−1B +D
)(183)
che coincide con quella di partenza associata al vettore di stato x. Questo dimostrache la funzione di trasferimento (e dunque la risposta forzata dell’uscita) e invarianterispetto trasformazioni lineari invertibili dello stato. Indubbiamente anche la risposta

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 37
libera dell’uscita e invariante rispetto trasformazioni lineari invertibili dello stato. Conriferimento alle equazioni (169) e (157) si ha
ylibera(t) = CT−1e(TAT−1)t z(0) = CT−1TeAt T−1z(0) = CeAt x(0) (184)
Ylibera(s) = CT−1 (sI − (TAT−1))−1z0 = CT−1T (sI −A)−1T−1z0 =
= C (sI −A)−1 x0 (185)
In aggiunta all’analisi appena sviluppata, la non unicita della rappresentazione nellospazio degli stati puo anche dipendere dalla dimensione dello spazio degli stati. Perchiarire questo concetto, si ipotizzi ancora che sia data una realizzazione A,B,C,Ddi dimensione n come nelle equazioni (177) e (178) corrispondente alla funzione ditrasferimento assegnata G(s). Allora anche alla seguente realizzazione, per esempio,corrispondera la stessa funzione di trasferimento:
A =
A 0 . . . 00 α1 . . . 0...
.... . .
...0 0 0 αr
∈ R(n+r)×(n+r) (186)
B =
Bβ1...βr
∈ R(n+r)×1 (187)
C = (C, 0, . . . , 0) ∈ R1×(n+r) (188)
D = D. (189)
Si chiamera realizzazione minima di un funzione di trasferimento G(s) il modello di stato(A,B,C,D) di dimensione minima a cui corrisponda G(s).
Esempio
Sia x1 un fondo finanziario del Sig. Ricco ed x2 un fondo di proprieta dei figli. Il fondox2 viene depositato in banca sul conto del Sig. Ricco insieme ad x1. Essendo un padreavaro, egli riscuote gli interessi del fondo totale x1 + x2 a favore del proprio capitale x1.Indicando con a1 il tasso di interessi riscosso dalla banca e con u il flusso finanziario(entrate meno uscite per unita di tempo) associato al fondo x1, la dinamica di x1 risultaessere:
x1 = a1(x1 + x2) + u.
I figli del Sig. Ricco, d’altra parte, non hanno redditi (entrate) ed utilizzano il fondo x2
con una velocita proporzionale ad x2 stesso
x2 = −a2x2.
Volendo studiare la dinamica del patrimonio complessivo y = x1 +x2 il sistema dinamiconello spazio degli stati risulta essere
x = Ax+Bu (190)
y = Cx (191)

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 38
con
x =
(x1
x2
)(192)
A =
(a1 a1
0 −a2
)(193)
B =
(10
)(194)
C = (1 1) (195)
9.4 La stabilita interna di un modello di stato
da completare ...
Figura 13: Adolf Hurwitz (26 Marzo 1859 -18 Novembre 1919) a sinistra e Edward JohnRouth (20 Gennaio 1831 - 7 Giugno 1907) a destra.
9.5 Il criterio di Routh - Hurwitz
Come si e visto, la stabilita della risposta di un sistema dinamico lineare SISO e de-terminata dalla posizione nel piano complesso dei poli della funzione di trasferimento:se il polinomio a denominatore della funzione di trasferimento ha grado maggiore di 2,il calcolo analitico delle sue radici non e in generale banale. Ai fini della analisi dellastabilita, sarebbe allora utile poter capire, dato un polinomio, se esso ha radici a partereale nulla o positiva senza doverle calcolare esplicitamente. Si tratta di affrontare ilseguente problema:
Problema: Dato un polinomio
sn +n−1∑h=0
ah sh = 0 : ah ∈ R ∀ h = 0, 1, 2, . . . , n− 1 (196)
valutare quante delle sue n radici in C siano a parte reale positiva o nulla.
Soluzione: Come primo passo enunciamo una condizione necessaria per avere tutte leradici nel semi-piano sinistro. Questa e nota come condizione di Hurwitz:

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 39
• condizione necessaria perche tutte le radici abbiano parte reale strettamente ne-gativa e che tutti i coefficienti ah ∈ R ∀ h = 0, 1, 2, . . . , n− 1 siano strettamentepoitivi, i.e.: ah > 0 ∀ h = 0, 1, 2, . . . , n− 1.
• condizione necessaria perche alcune radici abbiano parte reale nulla e le altre partereale strettamente negativa e che tutti i coefficienti pari ah ∈ R ∀ h = 0, 2, 4, . . .siano poitivi e gli altri nulli oppure che tutti i coefficienti dispari ah ∈ R ∀ h =1, 3, 5, . . . siano poitivi e tutti gli altri nulli.
Esempio: Si valuti la stabilita di sistemi aventi i seguenti polinomi caratteristici:
s3 − s2 + 3s+ 4 = 0 sicuramente instabile
s5 + 3s3 − 2s = 0 sicuramente instabile
s5 + 3s3 + 2s = 0 al piu marginalmente stabile
s5 + s2 + 3s+ 4 = 0 sicuramente instabile
s5 + 3s4 + 7s3 + s2 + 3s+ 4 = 0 non si puo concludere nulla
Essendo queste condizioni di Hurwitz solo necessarie, in presenza di un polinomio contutti coefficienti strettamente positivi non possiamo ancora garantire che abbia polia parte reale strettamente negativa. Per ottenere una condizione sia necessaria chesufficiente si puo ricorrere al metodo di Routh (da Edward John Routh, 1831 -1907).Questo consiste nel calcolare una tabella a partire dai coefficienti del polinomio e valutarepoi i segni degli elementi della prima colonna di questa tabella.
sn 1 an−2 an−4 . . .sn−1 an−1 an−3 an−5 . . .sn−2 x1 y1 z1 . . .sn−3 x2 y2 z2 . . .
......
......
...s0 . . . . . . . . . . . .
dove
x1 = − 1
an−1det
(1 an−2
an−1 an−3
); y1 = − 1
an−1det
(1 an−4
an−1 an−5
)
z1 = − 1
an−1det
(1 an−6
an−1 an−7
); . . . . . .
x2 = − 1
x1det
(an−1 an−3
x1 y1
); y2 = − 1
x1det
(an−1 an−5
x1 z1
)
z2 = − 1
x1det
(an−1 an−7
x1 . . .
); . . . . . .
Complessivamente la tabella deve contenere n+ 1 righe. Nello sviluppare questi calcoli,si possono presentare due casi: i) gli elementi della prima colonna sono tutti non nullioppure ii) un elemento della prima colonna risulta nullo, impedendo di completare ilcomputo della tabella secondo l’algoritmo indicato. Al presentarsi di questa seconda

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 40
circostanza bisognera usare le regole alternative indicate nel seguito. In entrambi i casi,completata la tabella, vale il seguente risultato:
Il polinomio in esame ha tante radici nel semi-piano destro quante sono le variazionidei segni degli elementi della prima colonna della tabella di Routh. Esso ha tante radicinel semi-piano sinistro quante sono le permanenze dei segni degli elementi della primacolonna della tabella di Routh. In assenza di righe della tabella di Routh identicamentenulle il polinomio non ha radici sull’asse immaginario.
Per completare la tabella quando il primo elemento di una riga e nullo bisognadistinguere due casi:
• il primo elemento di una riga e nullo, ma non tutti quelli appartenenti alla stessariga sono nulli
• una riga intera risulta essere nulla.
Nel primo caso per completare la tabella e sufficiente sostituire l’elemento nullo dellaprima colonna con un numero reale ε piccolo a piacere e di segno arbitrario e completarepoi i calcoli seguendo l’algoritmo solito. Nel secondo caso, invece, si potra applicareancora il criterio dei segni degli elementi della prima colonna, ma bisognera completareil computo della tabella in modo alternativo. In particolare bisogna sostituire la riganulla con i coefficienti della derivata rispetto ad s del polinomio ausiliario cosı ottenuto:sia k la potenza relativa alla riga immediatamente precedente a quella nulla e sia essacomposta dagli elementi b, c, d, . . . (da sinistra verso destra); si costruisca il polinomiof(s) = bsk + csk−2 + dsk−4 + . . . . La riga nulla viene sostituita dai coefficienti didf/ds. Si noti che in questo caso le radici del polinomio ausiliario f(s) sono dispostesimmetricamente rispetto all’origine e che sono anche radici del polinomio di partenza.Queste ultime osservazioni implicano che il polinomio di partenza avra radici o nelsemi-piano destro o, nella migliore delle ipotesi, sull’asse immaginario. Per verificarel’eventuale presenza di poli a parte reale positiva sara sufficiente completare l’analisidi Routh. Se a conti terminati la prima colonna non avra cambi di segno si potraconcludere che ci sono alcune radici a parte reale negativa ed altre sull’asse immaginario.La stabilita di un sistema il cui polinomio caratteristico ha una riga nulla nella tabelladi Routh potra essere al piu marginale.
Si noti che nel calcolare la tabella di Routh si puo moltiplicare una riga per unacostante positiva senza che cio cambi la sequenza dei segni della prima colonna.Esempi. Si riconsideri l’ultimo polinomio dell’esempio precedente, ossia:
s5 + 3s4 + 7s3 + s2 + 3s+ 4 = 0 =⇒
s5 1 7 3s4 3 1 4s3 −(1− 21)/3 −(4− 9)/3 0
moltiplicando la riga s3 per 3/5 si ha:

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 41
s5 1 7 3s4 3 1 4s3 4 1 0s2 −(3− 4)/4 −(0− 16)/4 0
s5 1 7 3s4 3 1 4s3 4 1 0s2 1 16 0s1 −(64− 1) 0 0s0 16 0 0
Dai conti svolti risulta che non ci sono righe identicamente nulle: dunque non ci sonoradici sull’asse immaginario. Inoltre la prima colonna ha tre permanenze di segni e duevariazioni: ci saranno allora tre radici nel semi-piano sinistro e due in quello destro. Aconferma di cio si noti che calcolando le radici numericamente con un calcolatore esserisultano essere:
−1.5093 + 2.1441 i−1.5093 − 2.1441 i+0.3879 + 0.7861 i+0.3879 − 0.7861 i−0.7572
Si consideri ora il polinomio:
s5 + s4 + s3 + s2 + 5s+ 2 = 0 =⇒
s5 1 1 5s4 1 1 2s3 0→ ε 3 0s2 1− 3/ε 2 0
s1(3− 2 ε2
ε−3
)→ 3 0 0
s0 2 0 0
Questo esempio illustra il caso in cui il primo elemento di una riga sia nullo, ma nontutti gli altri della stessa riga. Come acennato, per proseguire il computo della tabellae sufficiente sostituire l’elemento nullo della prima colonna con un termine ε di modulopiccolo a piacere. Nell’esempio specifico non ci sono righe tutte nulle, dunque non cisono radici sull’asse immaginario. Ci sono due variazioni e tre permanenze di segni nellaprima colonna, quindi tre radici a parte reale negativa e due a parte reale positiva. Ineffetti le radici del polinomio in esame sono:
−1.1029 + 1.0530 i−1.1029 − 1.0530 i+0.8151 + 1.1670 i+0.8151 − 1.1670 i−0.4245

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 42
+
-
U K(s+z)
s+p
1
s+as2
Y
Figura 14: Sistema in ciclo chiuso
Sia dato il sistema in retroazione unitaria di figura (14). La funzione di trasferimentotra l’uscita Y e l’ingresso U e
T (s) =K(s+ z)
s(s+ a)(s+ p) +K(s+ z): a, p, z > 0
i cui poli sono le radici del polinomio
s3 + (p+ a)s2 + (ap+K)s+Kz = 0.
Applicando il criterio di Routh, si ha:
s3 1 ap+Ks2 p+ a Kzs1 x 0s0 Kz 0
dove x = −Kz−(p+a)(ap+K)p+a .
Essendo per ipotesi a, p, z > 0 la condizione necessaria e sufficiente per avere tutti e trei poli a parte reale strettamente negativa e x > 0, i.e.:
(p+ a)(ap+K) > Kz. (197)
Per fissare le idee, sia a = p = 1 e z = 5 nel qual caso la condizione (197) si traducein K < 2/3. Qualunque valore di K maggiore di 2/3 darebbe luogo ad un sistema inciclo chiuso instabile con due poli nel semi-piano destro. Nelle stesse ipotesi a = p = 1e z = 5 si vede dalla tabella di Routh che il caso critico K = 2/3 comporterebbe x = 0e dunque la presenza di una intera riga di zeri, quella relativa ad s. Sia dunque dato ilpolinomio
s3 + 2s2 +5
3s+
10
3= 0.
Nello sviluppare la tabella si troverebbe la seguente situazione:
s3 1 5/3s2 2 10/3s1 0 0
Questa circostanza comporta la necessita di definire il polinomio ausiliario
f(s) = 2s2 + 10/3.

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 43
Le radici di f(s) sono sempre simmetriche rispetto l’origine e sono anche radici delpolinomio di partenza; in questo caso specifico le radici di f(s) sono± i
√5/3 che saranno
dunque anche poli del sistema. Per valutare il numero di radici a parte reale positiva onegativa bisogna proseguire la costruzione della tabella di Routh sostituendo alla riganulla i coefficienti di df/ds = d
ds(2s2 + 10/3) = 4s:
s3 1 5/3s2 2 10/3
- - - - - - - - - - -s1 4 0s0 10/3 0
dove la riga tratteggiata indica la presenza di una riga identicamente nulla. La tabellanon ha variazione di segni nella prima colonna, dunque non c’e alcuna radici nel semi-piano destro, ma due sono sull’asse immaginario. La terza e reale negativa, in particolarele radici sono: in −2 e ±
√5/3 i.
Figura 15: Jean Baptiste Joseph Fourier (21 Marzo 1768 - 16 Maggio 1830).
10 Analisi armonica
Sia data una funzione di trasferimento T (s) avente tutti i poli a parte reale negativa. Sel’ingresso al sistema e una funzione sinusoidale di ampiezza γ > 0 e pulsazione ω, ossia
U(s) = γω
s2 + ω2(198)
l’uscita sara:
Y (s) = γ T (s)ω
s2 + ω2=
γ T (s)ω
(s+ i ω)(s− i ω). (199)
La Y (s) avra tutti i poli della T (s) piu quelli di U(s). In particolare, sviluppando Y (s)in fratti semplici come in (123) risulteranno modi funzionali asintoticamente convergentia zero in corrispondenza dei poli della T (s) (tutti a parte reale strettamente negativaper ipotesi) e due addendi realtivi ai poli complessi coniugati p = ±i ω dell’ingressoU(s). I termini relativi ai poli asintoticamente stabili rappresentano la parte transitoriadella risposta forzata del sistema, mentre i termini relativi ai poli puramente immaginariprovenienti dalla U(s) rappresentano la parte stazionaria della risposta forzata. Dalla

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 44
formula (125) per il calcolo dei residui risulta che la risposta stazionaria Yst(s) sara datada:
Yst(s) =R
s− i ω+
R∗
s+ i ω(200)
R =γ T (i ω)
2 i=γ |T (i ω)|ei φ(ω)
2 i
R∗ = −γ T (i ω)∗
2 i= −γ |T (i ω)|e−i φ(ω)
2 i=⇒
yst(t) = L−1 [Yst(s)] = Rei ω t +R∗ e−i ω t =
= γ |T (i ω)|(ei (ω t+φ(ω)) − e−i (ω t+φ(ω))
2 i
)= γ |T (i ω)| sin(ω t+ φ(ω)) (201)
essendo φ(ω) l’argomento del numero complesso T (i ω).
Dato un sistema dinamico lineare con funzione di trasferimento T (s) e tutti i poli a partereale strettamente negativa, la sua risposta asintotica (ossia superato il transitorio) ad uningresso sinusoidale di pulsazione ω e a sua volta un segnale sinusoidale avente identicapulsazione ω, ampiezza amplificata del fattore |T (i ω)| e sfasamento pari all’argomentodi T (i ω).
10.1 La stabilita BIBO
Un secondo concetto di stabilita oltre a quello visto per la risposta libera di un siste-ma, riguarda la risposta forzata. Un sistema si dice ingresso limitato - uscita limitata(bounded input, bounded output) se per ogni segnale in ingresso di ampiezza limitata,l’uscita del sistema rimane anch’essa limitata. Anche questo tipo di stabilita e legataalla posizione dei poli del sistema: in particolare, se un sistema ha tutti i suoi poli aparte reale strettamente negativa, ossia se la risposta all’impulso e asintoticamente sta-bile, allora esso e ingresso limitato - uscita limitata. Si noti che la eventuale marginalestabilita della risposta all’impulso di un sistema non e sufficiente a garantire la stabilitaBIBO. Si consideri, per esempio, un sistema avente funzione di trasferimento
T (s) =1
s2 + ω2
che modella, per esempio, un sistema massa-molla privo di atrito: da quanto visto alparagrafo precedente, se applicassimo a questo sistema un ingresso sinusoidale (dun-que limitato) di ampiezza qualunque, ma frequenza ω, l’uscita verrebbe amplificata di|T (i ω)| che in questo caso diverge. Questo fenomeno e chiamato risonanza ed e legatoalla presenza di poli puramente immaginari nella funzione di trasferimento del sistema.Per comprendere almeno intuitivamente il motivo per cui la presenza di soli poli a partereale strettamente negativa nella T (s) garantisce la stabilita ingresso limitato - uscitalimitata, ci si riferisca all’esempio appena citato e allo sviluppo in fratti semplici di unafunzione razionale: l’uscita del sistema sara l’antitrasformata del prodotto della funzio-ne di trasferimento T (s) per la trasformata dell’ingresso U(s). I poli della trasformatadella uscita Y (s) saranno dunque la somma dei poli di T (s) piu quelli di U(s). Se u(t)e limitata la sua U(s) avra poli a parte reale minore o uguale a zero; quelli a parte reale

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 45
nulla avranno molteplicita al piu unitaria (altrimenti u(t) non sarebbe limitata). Nesegue che se i poli di T (s) sono a parte reale strettamente negativa, complessivamentequelli di Y (s) saranno a parte reale minore o uguale a zero, e quelli a parte reale nullaavrebbero la stessa molteplicita che avevano in U(s), ossia al piu uno.
11 Il concetto di poli dominanti
Come si e visto, le proprieta di stabilita di un dato sistema lineare avente funzione ditrasferimento razionale sono legate alla posizione nel piano complesso dei propri poli.Ipotizziamo che non ci sia alcuno polo nel semi-piano destro, ossia che il sistema siastabile.
I poli aventi parte immaginaria non nulla compaiono sempre a coppie, ossia se un poloha parte immaginaria non nulla, anche il suo coniugato e un polo. Dallo sviluppo in frattisemplici delle trasformate di Laplace razionali si deduce che la risposta temporale y(t)a un dato ingresso sara sempre somma di tanti modi funzionali quanti sono i poli dellatrasformata considerata. Questi modi funzionali contengono sempre fattori esponenzialidel tipo eRe(p) t essendo Re(p) la parte reale del polo p (si noti che questo vale anchese Re(p) = 0). I poli piu distanti dall’asse immaginario nel semi-piano sinistro delpiano complesso, daranno luogo ad addendi in y(t) con gli esponenziali piu rapidamentedecrescenti. In altre parole, la dinamica legata ai poli piu distanti dall’asse immaginarionel semi-piano sinistro si esaurira molto piu in fretta di quella legata a poli piu prossimiall’origine. E per questo che i poli piu vicini all’asse immaginario si dicono dominantirispetto a quelli la cui parte reale sia, in modulo, molto maggiore. Intuitivamente ci si
Re
Im
X
X
X
X X
X
X
X
X
>10
Figura 16: Poli dominanti
aspetta che il contributo alla risposta y(t) dei poli piu distanti dall’asse immaginario siesaurisca molto prima di quello legato ai poli piu vicini all’asse immaginario: ossia chesuperato un breve1 transitorio la risposta y(t) sia ben approsimabile dal contributo deisoli poli dominanti.
1Breve rispetto la costante di tempo del polo piu vicino all’asse immaginario

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 46
In termini di funzione di trasferimento cio si traduce nelle possibilita di aprossimarlacon un modello di ordine inferiore. La modalita con cui ottenere, ove possibile, unmodello aprossimante di ordine inferiore verra discussa nel seguito.
EsercizioDato un sistema con poli instabili si puo lo stesso immaginare di definire il concetto dipoli dominanti? Discutere.
EsercizioData la funzione di trasferimento
T (s) =1
(s+ a)(s2 + 2 ξ ωn s+ ω2n)
: a > 0 (202)
individuare gli eventuali poli dominanti nei casi:
ωn � a
ωn � a
ωn ≈ a
al variare di ξ ≥ 0. Suggerimento: si grafichino i poli nel piano complesso e si studi laloro posizione al variare dei coefficienti indicati.
Figura 17: Hendrik W. Bode (1905 - 1982)
12 I diagrammi di Bode
Alla luce della interpretazione di T (i ω) vista al paragrafo (10), puo essere molto utileanalizzare i grafici di |T (i ω)| e di arg T (i ω): questi sono detti rispettivamente dia-grammi della ampiezza e della fase o diagrammi di Bode di una funzione di trasferimen-to. Se questa e razionale il tracciamento del diagramma delle ampiezze risulta moltosemplificato se effettuato su scala logaritmica. Sia data una funzione di trasferimento
T (s) = K†(s− z1)(s− z2) . . . (s2 + 2 ξh ωn,h s+ ω2
n,h)
(s− p1)(s− p2) . . . (s2 + 2 ξj ωn,j s+ ω2n,j)
(203)
razionale e propria. Siano zh, pj rispettivamente gli zeri ed i poli del sistema aventi parteimmaginaria nulla. I termini realitivi a zeri e poli con parte immaginaria non nulla sono

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 47
raccolti rispettivamente nei fattori (s2 + 2 ξh ωn,h s + ω2n,h) e (s2 + 2 ξj ωn,j s + ω2
n,j).Mettendo in evidenza gli zeri ed i poli nell’origine e raccogliendo opportunamente, la(203) puo essere riscritta come:
T (s) = K(1− sgn(z1) τ1 s)(1− sgn(z2) τ2 s) . . .
(1 +
(s
ωn,h
)2+ 2 ξh s
ωn,h
)sl (1− sgn(p1) τ1 s)(1− sgn(p2) τ2 s) . . .
(1 +
(s
ωn,j
)2+
2 ξj sωn,j
) (204)
dove
sgn(x) ≡
+1 ∀ x > 0−1 ∀ x < 00 se x = 0
l ≥ 0 molteplicita del polo nullo
τh ≡ 1
|zh|costanti di tempo degli zeri reali non nulli
τj ≡1
|pj |costanti di tempo dei poli reali non nulli
K ≡ K†(−z1)(−z2) . . . ω2
n,h
(−p1)(−p2) . . . ω2n,j
costante di Bode.
Si noti che la costante di Bode K non ha necessariamente lo stesso segno di K†:sicuramente lo ha se tutti i poli e tutti gli zeri hanno parte reale negativa.
Nello sviluppo (204) si e ipotizzato di avere l ≥ 0 poli nell’origine, ma nessunozero nullo. Il motivo e che i sistemi piu comunemente oggetto di studio hanno rispostaal gradino asintoticamente non nulla; se ci fosse uno zero nell’origine si avrebbe unsistema con ingresso costante non nullo ed uscita asintoticamente nulla. Questo fattosegue dall’applicare il teorema del valor finale: si abbia una T (s) = sm T (s) essendom > 0 la molteplicita dello zero nell’origine e T (s) una funzione razionale senza poli nezeri nell’origine e con tutti i poli a parte reale strettamente negativa (asintoticamentestabile). In queste ipotesi l’uscita a regime relativa all’ingresso u(t) = 1(t) sarebbe:
limt→∞
y(t) = lims→0
s T (s)U(s) = lims→0
s (sm T (s))1
s= 0
Alla luce di questa osservazione se non altrimenti specificato, considereremo sistemi prividi zeri nell’origine ossia nella forma data dalla equazione (204). Con riferimento alla(204) e per ragioni che saranno illustrate nel seguito, la costante di Bode viene anchechiamata:
Costante di posizione o guadagno statico se l = 0Costante di velocita se l = 1Costante di acellerazione se l = 2
essendo l la molteplicita del polo nell’origine. Per tracciare il diagramma delle ampiezzeriscriviamo la (204) omettendo di indicare esplicitamente i termini sgn(), ossia:
T (s) = K(1− τ1 s)(1 + τ2 s) . . .
(1 +
(s
ωn,h
)2+ 2 ξh s
ωn,h
)sl (1− τ1 s)(1 + τ2 s) . . .
(1 +
(s
ωn,j
)2+
2 ξj sωn,j
) (205)

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 48
dove le costanti τ sono per definizione numeri reali positivi ed il segno + o − nei fattoridel primo ordine 1±τ s dipendono dal segno del polo o zero relativo come esplicitamentecalcolato nella (204). Per tracciare il diagramma delle ampiezze e sufficiente osservareche calcolando il logaritmo della funzione (205) valutata in s = i ω si ottiene:
log |T (i ω)| = log |K|+ log |(1− τ1 i ω)|+ log |(1 + τ2 i ω)|+ . . .
+ log
∣∣∣∣∣(
1− ω2
ω2n,h
+2 ξh i ω
ωn,h
)∣∣∣∣∣− l log(ω)− log |(1− τ1 i ω)|
− log |(1 + τ2 i ω)|+ . . .− log
∣∣∣∣∣(
1− ω2
ω2n,j
+2 ξj i ω
ωn,j
)∣∣∣∣∣ (206)
da cui segue che basta saper tracciare i diagrammi relativi a sistemi del primo e secondoordine per tracciare quelli di sistemi di ordine superiore.
Per il tracciamento dei diagrammi elementari dei sistemi del primo e secondo ordinesi rimanda al testo di G. Marro.
12.1 I decibel
Essendo molto utile tracciare i diagrammi di Bode su scala logaritmica, e anche moltoutile misurare le amplificazioni (adimensionate) in una unita logaritmica detta decibel.Sia data una quantita adimensionata A, il suo valore in decibel dB si definisce come:
(20 log10A) dB (207)
da cui segue che:
A = 1/100 ⇒ (20 log10 10−2) dB = −2(20 log10 10) dB = −40 dBA = 1/10 ⇒ (20 log10 10−1) dB = −1(20 log10 10) dB = −20 dBA = 1 ⇒ (20 log10 1) dB = 0 dBA = 10 ⇒ (20 log10 10) dB = 20 dBA = 100 ⇒ (20 log10 102) dB = 2(20 log10 10) dB = 40 dBA = 1000 ⇒ (20 log10 103) dB = 3(20 log10 10) dB = 60 dB
...
A volte anche grandezze dimensionate vengono (impropriamente) convertite in decibel.In questo caso per poter risalire alla grandezza di partenza e necessario conoscere l’unitadi misura usata per la conversione. Per esempio se una lunghezza L = 10m venisseespresa in decibel usando il metro come unita di misura si avrebbe
20 log10
10m
1m= 20 dB,
ma se la stessa lunghezza venisse converita esprimendola in centimetri si avrebbe
20 log10
10 ∗ 102cm
1cm= 60 dB
da cui e chiaro come sia sempre indispensabile dichiarare quale fosse l’unita di misuradi partenza.
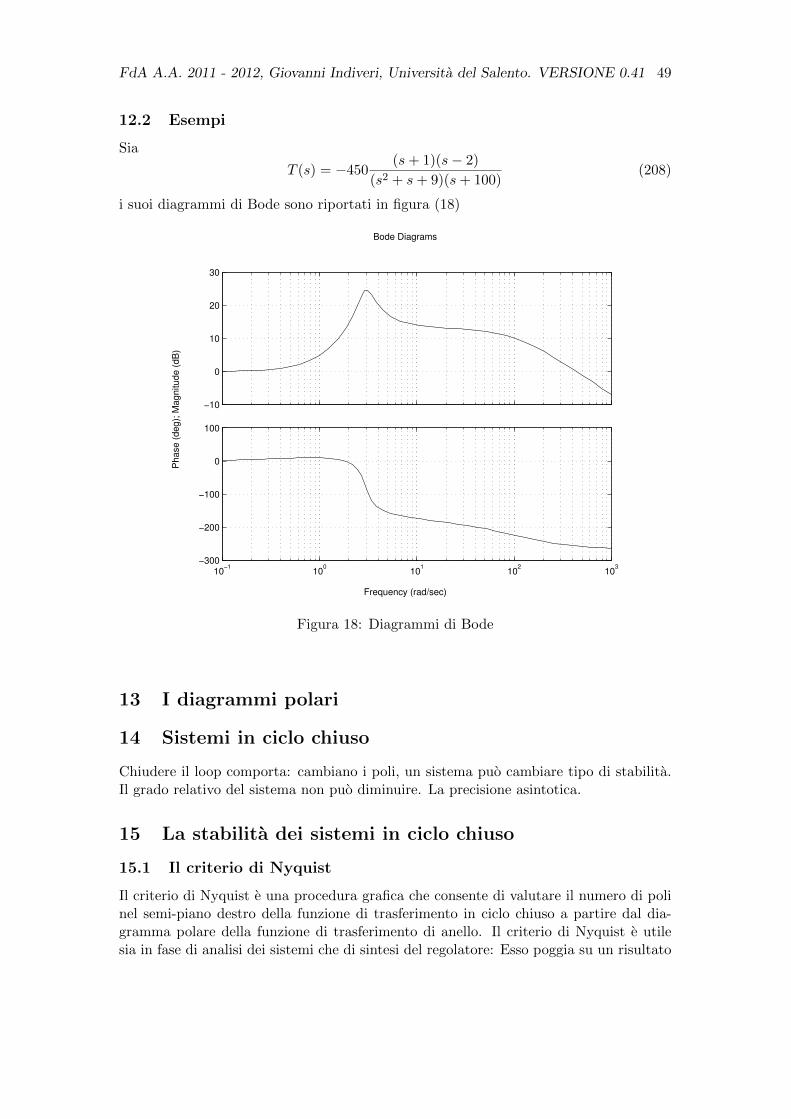
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 49
12.2 Esempi
Sia
T (s) = −450(s+ 1)(s− 2)
(s2 + s+ 9)(s+ 100)(208)
i suoi diagrammi di Bode sono riportati in figura (18)
Frequency (rad/sec)
Phase (
deg);
Magnitude (
dB
)
Bode Diagrams
−10
0
10
20
30
10−1
100
101
102
103
−300
−200
−100
0
100
Figura 18: Diagrammi di Bode
13 I diagrammi polari
14 Sistemi in ciclo chiuso
Chiudere il loop comporta: cambiano i poli, un sistema puo cambiare tipo di stabilita.Il grado relativo del sistema non puo diminuire. La precisione asintotica.
15 La stabilita dei sistemi in ciclo chiuso
15.1 Il criterio di Nyquist
Il criterio di Nyquist e una procedura grafica che consente di valutare il numero di polinel semi-piano destro della funzione di trasferimento in ciclo chiuso a partire dal dia-gramma polare della funzione di trasferimento di anello. Il criterio di Nyquist e utilesia in fase di analisi dei sistemi che di sintesi del regolatore: Esso poggia su un risultato

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 50
R+
-
u
y
eG
+
+
d
r +
n
Figura 19: Controllo in retroazione
Figura 20: Harry Nyquist (1889 - 1976)
preliminare dell’analisi complessa noto come Teorema dell’indice logaritmico.
Teorema dell’indice logaritmico: sia Γ una curva chiusa in un dominio D del pianos ed F (s) una funzione analitica in D ad eccezione di un numero finito di poli. Indicandocon ∆ arg(F (s)) la variazione dell’argomento di F (s) al variare di s lungo Γ per un girocompleto in senso orario, vale:
∆ arg(F (s)) = −2π (z − p)
essendo z e p rispettivamente il numero di zeri e poli di F (s) circondati da Γ e contaticon la loro molteplicita.
Per una dimostrazione si rimanda al testo di Giovanni Marro, Controlli Automatici,Zanichelli editore. Si consideri una funzione di trasferimento propria razionale fratta
T (s) = K(s− z1)(s− z2) . . . (s− zm)
(s− p1)(s− p2) . . . (s− pn). (209)
Per ogni s fissata, T (s) puo essere calcolata esprimendo ogni termine s − z ed s − p incoordinate polari ottenendo:
s− zh = rh ei θh (210)
s− pk = ρk ei φk (211)
T (s) = Kr1r2 . . . rmρ1ρ2 . . . ρn
ei(θ1+θ2+...+θm−φ1+...−φn). (212)
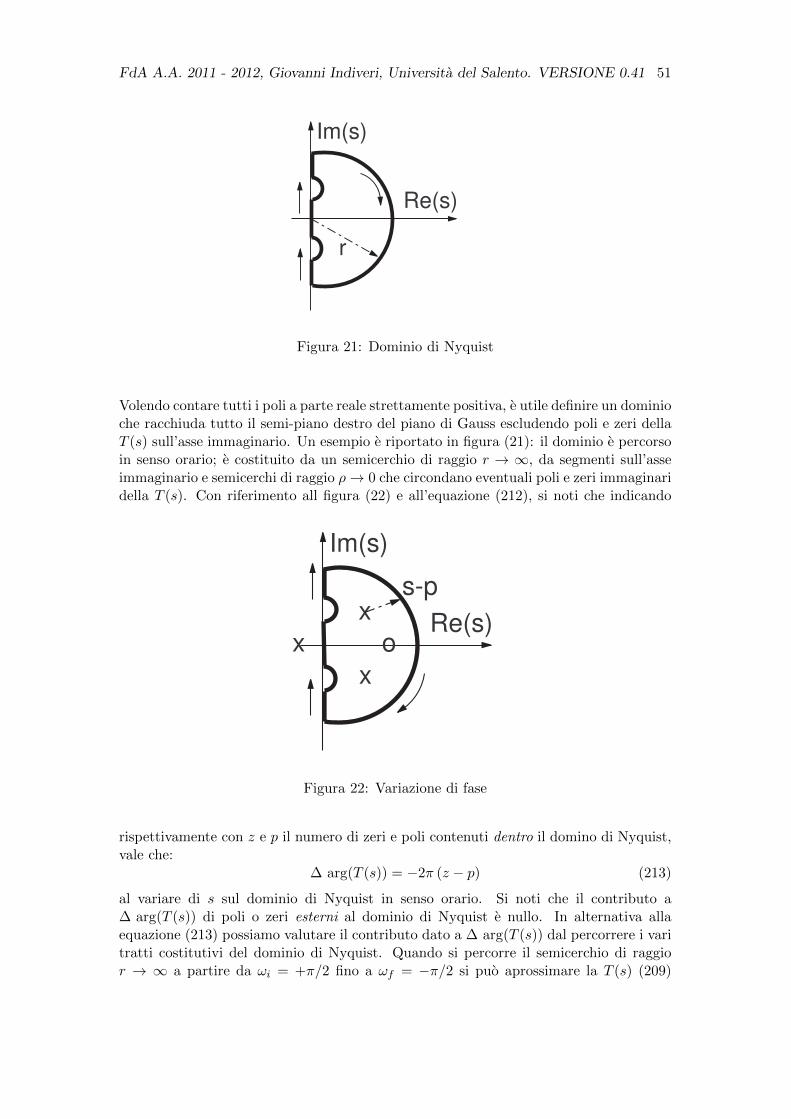
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 51
Im(s)
Re(s)
r
Figura 21: Dominio di Nyquist
Volendo contare tutti i poli a parte reale strettamente positiva, e utile definire un dominioche racchiuda tutto il semi-piano destro del piano di Gauss escludendo poli e zeri dellaT (s) sull’asse immaginario. Un esempio e riportato in figura (21): il dominio e percorsoin senso orario; e costituito da un semicerchio di raggio r → ∞, da segmenti sull’asseimmaginario e semicerchi di raggio ρ→ 0 che circondano eventuali poli e zeri immaginaridella T (s). Con riferimento all figura (22) e all’equazione (212), si noti che indicando
Im(s)
Re(s)x
o
x
x
s-p
Figura 22: Variazione di fase
rispettivamente con z e p il numero di zeri e poli contenuti dentro il domino di Nyquist,vale che:
∆ arg(T (s)) = −2π (z − p) (213)
al variare di s sul dominio di Nyquist in senso orario. Si noti che il contributo a∆ arg(T (s)) di poli o zeri esterni al dominio di Nyquist e nullo. In alternativa allaequazione (213) possiamo valutare il contributo dato a ∆ arg(T (s)) dal percorrere i varitratti costitutivi del dominio di Nyquist. Quando si percorre il semicerchio di raggior → ∞ a partire da ωi = +π/2 fino a ωf = −π/2 si puo aprossimare la T (s) (209)

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 52
con T (s) ≈ K sm−n = K r ei(m−n)θ che comporta una variazione di fase di T (s) pari a(m− n)(ωf − ωi) = −π (m− n), i.e.:
∆ arg(T (s))|semicerchio r→∞ = −π (m− n)
essendo m ed n i gradi dei polinomi a numeratore e denominatore di T (s). I contributialla variazione di fase della T (s) dati dagli zeri immaginari sono quelli relativi al percor-rere i semicerchi di raggio tendente a zero lungo l’asse immaginario. Per fissare le ideesia z1 uno zero immaginario di molteplicita h: quando si percorre il semicerchio relativoa z1, s vale s = z1 + r1 e
iθ1 e si puo aprossimare la T (s) come:
T (s) ≈ K rh1 ei h θ1 (z1 − z2) . . . (z1 − zm)
(z1 − p1) . . . (z1 − pn).
Poiche il dominio di Nyquist e percorso in senso orario come indicato in figura (21),la variazione di fase relativa allo zero immaginario sara quindi h (θf − θi) = h (π/2 −(−π/2)) = hπ, i.e. il contributo cumulativo di tutti i µ zeri immaginari e:
∆ arg(T (s))|semicerchi zeri im. r→0 = π µ.
Indicando con ν il numero complessivo di poli puramente immaginari della T (s), conragionamento anlogo a quello appena visto per gli zeri immaginari si ottiene:
∆ arg(T (s))|semicerchi poli im. r→0 = −π ν.
Rimangono da conteggiare le variazioni di fase della T (s) al variare di s lungo l’asseimmaginario da ωi → −∞ fino a ωf →∞: questo contributo corrisponde alla rotationeattorno all’origine del vettore T (i ω) per ω che va da −∞ a∞. Indicandolo con Θ, questotermine si puo valutare graficamente sul diagramma polare di T (i ω). Raccogliendo tuttii contributi trovati e ricordando la equazione (213) possiamo scrivere:
−2π (z − p) = −π (m− n) + π µ− π ν + Θ
da cui dividendo per −2π:
z = p+m− n
2− µ
2+ν
2+Nf (214)
dove
• z zeri a parte reale positiva di T (s)
• p poli a parte reale positiva di T (s)
• m grado del numeratore di T (s)
• n grado del denominatore di T (s)
• µ zeri puramente immaginari di T (s)
• ν poli puramente immaginari di T (s)
• Nf rotazioni del vettore T (i ω) attorno all’origine per ω che va da −∞ a +∞.Nf > 0 per rotazioni orarie.

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 53
L’equazione (214) si puo usare per valutare il numero di poli instabili di un sistema inretroazione: sia dato il sistema in figura (19) per il quale la funzione di trasferimentotra y ed r e:
Y
Yd=
RG
1 +RGH.
avendo indicato con Yd la trasformata di Laplace di r(t). Sia F (s) = 1 +R(s)G(s)H(s);i poli di Y/Yd sono gli zeri di F (s), dunque per valutare la stabilita di Y/Yd si tratta dicontare gli zeri a parte reale positiva di F (s). A tal fine si puo usare la relazione (214):p rappresenta il numero di poli a parte reale strettamente positiva di F (s), ma questicoincidono con quelli di RGH. Infatti se
RGH =N(s)
D(s)⇒ F (s) = 1 +RGH =
N(s) +D(s)
D(s)
da cui si evince che i poli di F (s) coincidono con quelli del guadagno di anello RGH.Inoltre da questa relazione, ricordando che deve necessariamente essere deg(N(s)) ≤deg(D(s)), segue che il grado m del numeratore di F (s) coincide con il grado n del suodenominatore, ossia n = m. I termini µ e ν in (214) sono gli zeri ed i poli puramenteimmaginari di F (s) = 1 + RGH: come gia osservato, i poli coincidono con quelli delguadagno di anello RGH, mentre gli zeri puramente immaginari di F (s) saranno assentise il diagramma polare di RGH(i ω) non passa per il punto critico −1 + i 0: questacircostanza e verificabile graficamente dall’analisi del diagramma polare (o di Nyquist)del guadagno di anello RGH(i ω). Da ultimo bisogna valutare Nf per F (i ω), ossia ilnumero di giri che F (i ω) compie attorno all’origine quando ω va da −∞ a +∞ (Nf > 0per rotazioni orarie). Evidentemente questo valore di Nf coincide con il numero dirotazioni (positive quando orarie) compiute dal vettore che origina in −1 + i 0 e chepunta su RGH(i ω) quando ω va da −∞ a +∞. Riassumendo questi risultati, il criteriodi Nyquist puo essere cosı descritto:
• si traccia il diagramma polare della funzione RGH(i ω) per ω ∈ [0,∞)
• si contano i poli p a parte reale strettamente positiva di RGH
• si contano i poli ν puramente immaginari di RGH
• si verifica che il diagramma polare di RGH(i ω) non passi per il punto critico−1 + i 0
• si contano le rotazioni Nf (positive quando orarie) attorno al punto critico −1+i 0del vettore avente origine in −1 + i 0 e che punta su RGH(i ω) al variare di ω da−∞ a +∞
• si contano i poli a parte reale strettamente positiva z di Y/U = RG1+RGH dalla
formula di Nyquist
z = p+ν
2+Nf .
NoteQuando necessario, i conteggi dei poli a parte reale positiva o nulla di RGH possonoessere realizzati con il criterio di Routh.Se il diagramma polare di RGH(i ω) passa per il punto critico −1 + i 0 significa chesicuramente Y/U ha un polo marginalmente stabile.

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 54
Poiche T ∗(s) = T (s∗), segue che il diagramma polare di RGH(i ω) per valori negativi diω e simmetrico rispetto alle ascisse del diagramma polare di RGH(i ω) : ω ∈ [0,∞). Pervalutare Nf e allora sufficiente contare i giri compiuti attorno a −1 + i 0 per ω ∈ [0,∞)e moltiplicare il valore cosı ottenuto per due.
Da ultimo si osservi che il criterio di Nyquist enunciato vale anche per funzioni ditrasferimento non razionali fratte, ad esempio anche in presenza di termini del tipo e−sT
che modellino ritardi finiti tra ingresso ed uscita del sistema.
Esempio: Si riconsideri la funzione di trasferimento (208): si voglia valutare la stabilitadi un sistema in retroazione unitaria avente quandagno di anello RGH pari alla T (s)data dalla equazione (208). Il suo diagramma polare e riportato in figura (23). La RGH
Real Axis
Ima
gin
ary
Axis
Nyquist Diagrams
−10 −5 0 5 10 15−20
−15
−10
−5
0
5
10
15
20
Figura 23: Esempio di diagramma polare: sistema instabile
in esame non ha poli positivi o immaginari, ma dal diagramma in figura (23) risulta cheNf = 2, dunque ci si aspetta di avere
z = p+ν
2+Nf = 0 + 0 + 2
due poli instabili. Indubbiamente i poli in ciclo chiuso sono:
347.37593.2289−1.6048.
Dal diagramma polare (23) si intuisce che un guadagno statico minore puo servire astabilizzare il sistema: se, infatti, il punto critico −1 + i 0 non venisse abbracciato daldiagramma di RGH, allora risulterebbe Nf = 0 e non ci sarebbero poli instabili in ciclochiuso. Indubbiamente tracciando il diagramma polare della stessa T (s) (208) divisa
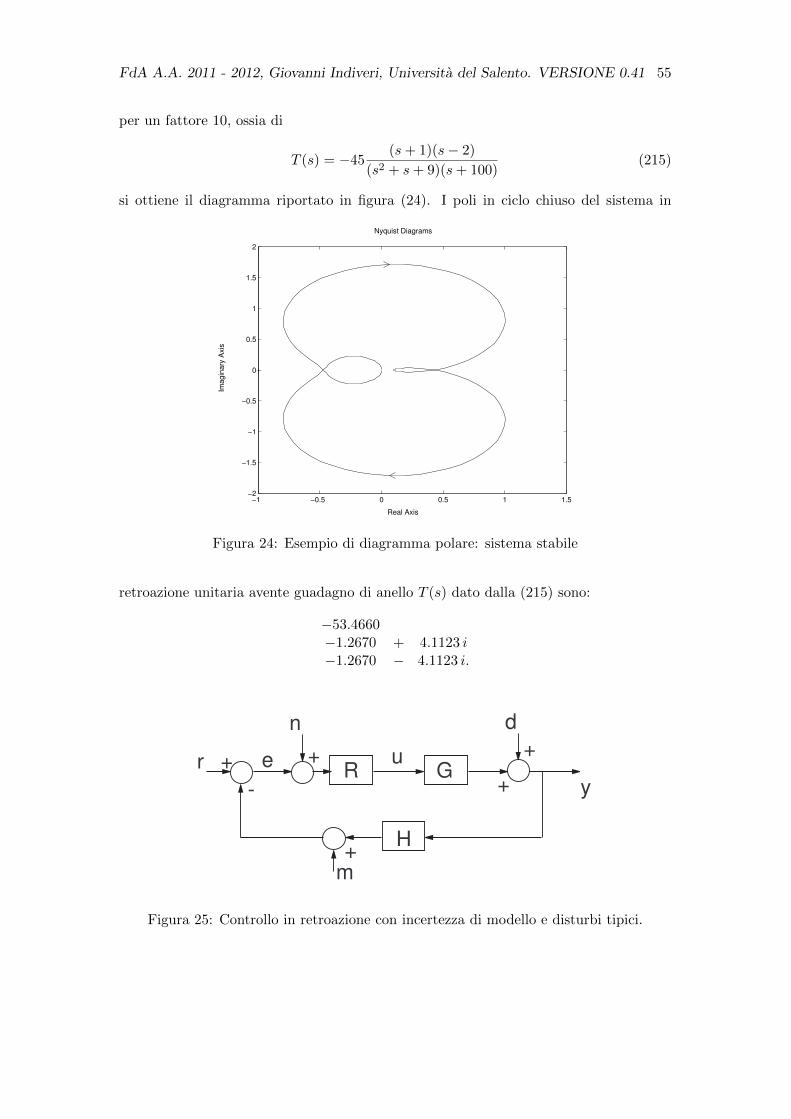
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 55
per un fattore 10, ossia di
T (s) = −45(s+ 1)(s− 2)
(s2 + s+ 9)(s+ 100)(215)
si ottiene il diagramma riportato in figura (24). I poli in ciclo chiuso del sistema in
Real Axis
Ima
gin
ary
Axis
Nyquist Diagrams
−1 −0.5 0 0.5 1 1.5−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Figura 24: Esempio di diagramma polare: sistema stabile
retroazione unitaria avente guadagno di anello T (s) dato dalla (215) sono:
−53.4660−1.2670 + 4.1123 i−1.2670 − 4.1123 i.
R+
-
u
y
eG
H
+
+
d
r
+m
+
n
Figura 25: Controllo in retroazione con incertezza di modello e disturbi tipici.

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 56
15.2 Introduzione al concetto di robustezza nei sistemi di controlloretroazionati
Con riferimento allo schema riportato in figura (25) e utile valutare le funzioni di tra-sferimento tra i segnali di uscita y, controllo u ed errore e ed il riferimento r, il disturbosull’impianto d, quello di misura m e di ingresso n. Da calcolo diretto segue che:
Tyr =RG
1 +RGH:= F (s) (216)
Tyn =RG
1 +RGH= F (s) (217)
Tym = − RG
1 +RGH= −F (s) (218)
Tyd =1
1 +RGH:= S(s) (219)
Tur =R
1 +RGH:= Q(s) (220)
Tun =R
1 +RGH= Q(s) (221)
Tum = − R
1 +RGH= −Q(s) (222)
Tud = − RH
1 +RGH= −H Q(s) (223)
Ter =1
1 +RGH= S(s) (224)
Ten = − RGH
1 +RGH= −H F (s) (225)
Tem = − 1
1 +RGH= −S(s) (226)
Ted = − H
1 +RGH= −H S(s) (227)
dove S(s) rappresenta la funzione di sensitivita, F (s) la funzione di sensitivita comple-mentare o funzione di trasferimento in ciclo chiuso e Q(s) la funzione di sensitivita delcontrollo. Indicando con Yd(s) := L[r(t)] la trasformata di Laplace del riferimento r(t)(per non confonderla con la funzione di trasferimento del regolatore R(s)), si considerila relazione: Y (s)
U(s)E(s)
=
Tyr(s) Tyd(s) Tyn(s) Tym(s)Tur(s) Tud(s) Tun(s) Tum(s)Ter(s) Ted(s) Ten(s) Tem(s)
Yd(s)D(s)N(s)M(s)
=
=
F (s) S(s) F (s) −F (s)Q(s) −H Q(s) Q(s) −Q(s)S(s) −H S(s) −H F (s) −S(s)
Yd(s)D(s)N(s)M(s)
. (228)
Da questa relazione si possono capire i requisiti ideali di un sistema di controllo. Inparticolare l’inseguimento ottimo del riferimento e la completa insensitivita dell’usictae dell’errore dal disturbo d(t) si avrebbero per
F (s) = 1 ∪ S(s) = 0.

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 57
Si noti, pero, che non e possibile assegnare indipendentemente F (s) ed S(s) con la solascelta di R(s) poiche F (s) ed S(s) non sono indipendenti, ma tali che
S(s) +H F (s) = 1. (229)
Inoltre assumendo che G(s) sia strettamente propria ed R(s) al piu semplicemente pro-pria, nel limite di alte pulsazioni ω → ∞ necessariamente si avra che S(s) → 1 edF (s)→ 0 mostrando come i requisiti ideali siano irrealizzabili, almeno se riferiti a tuttele pulsazioni. Evidentemente il regolatore dovra garantire |S(s)| quanto minore possibilee F (s) quanto piu prossima all’unita possibile su un opportuna banda di frequenze. Sinoti in particolare che i disturbi m(t) ed n(t) hanno lo stesso peso relativo del riferi-mento r(t) sulla uscita. Questo indica che l’unica possibilita per ridurre il loro effettosull’uscita e di accertarsi che disturbi e riferimenti abbiano spettri disgiunti e quindisintetizzare il regolatore tale che F (s) abbia banda passante disgiunta dallo spettro dim(t) ed n(t).
Le funzioni di sensitivita introdotte risultano essere molto utili nell’analisi della robu-stezza della stabilita di sistemi retroazionati. Indicando con L(s) := RGH(s) la funzionedi trasferimento di anello, vale
S(s) =1
1 + L(s)
F (s) =1
H
L(s)
1 + L(s).
Supponiamo che l’impianto di controllo di figura (25) sia asintoticamente stabile e sivoglia analizzare la stabilita del sistema da esso ottenuto al variare di G(s). Ovverosostituendo all’impianto descritto dalla G(s) uno descritto da{
Gm(s) = G(s) + δG(s)|δG(jω)| ≤ γ(w) ∀ ω (230)
con γ(ω) nota, ci si chiede sotto quali condizioni il sistema in ciclo chiuso continui adessere asintoticamente stabile. Per rispondere si puo ricorrere al criterio di stabilitadi Nyquist. In particolare ipotizziamo che Gm(s) abbia lo stesso numero di poli aparte reale positiva di G(s): in questo caso il sistema in ciclo chiuso con funzione ditrasferimento di anello Lm(s) = RGmH sara a sua volta asintoticamente stabile se ilnumero di rotazioni dei vettori Lm(jω) ed L(jω) attorno al punto critico −1 + j0, alvariare di ω da −∞ a +∞, coincidono. Osservando che Lm(s) = L(s) + δG(s)R(s)H(s)segue che Lm(jω) e contenuto in un cerchio centrato su L(jω) di raggio γ(ω)|RH(jω)|e dunque la condizione di asintotica stabilita del sistema perturbato e necessariamentegarantita se
γ(ω)|RH(jω)| < |1 + L(jω)| ∀ ω (231)
ovvero se la funzione di sensitivita S(s) garantisce:
|S(jω)| < 1
γ(ω)|RH(jω)|∀ ω. (232)
La equazione (232) richiede in pratica di avere bassa sensitivita nelle zone di frequenza adalta indeterminazione (γ(ω)) della funzione di trasferimento dell’impianto. Alla luce di

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 58
queste considerazioni si puo introdurre come parametro di misurazione della robustezzadella stabilita la quantita:
SM := supω|S(jω)| (233)
che si richiede di essere quanto piu piccola possibile. Moltiplicando la equazione (232)per |RGH(jω)| a destra e sinistra si puo ottenere una condizione necessaria di stabilitaasintotica equivalente in termini della funzione F (s), in particolare si ottiene:
γ(ω)
|G(jω)|<
1
|H| |F (jω)|∀ ω. (234)
dove il termine di sinistra rappresenta l’incertezza relativa sull’impianto G(s). L’equa-zione (234) rivela che per garantire asintotica stabilita a fronte di una grande incertez-za relativa sull’impianto, e necessario che il regolatore R(s) garantisca di minimizzarequanto piu possibile la quantita:
FM := supω|F (jω)| (235)
che rappresenta dunque un secondo parametro di stima della robustezza della stabilitadel sistema di controllo in ciclo chiuso. Questa analisi spiega l’importanza dei parametridei margini di fase e guadagno.
15.3 Il margini di guadagno ed il margine di fase.
Con riferimento alla figura (26) si definiscono
Re
Im
-1
cφ
m
m1/k
φc
Figura 26: Interpretazione grafica dei margini di guadagno e fase.
km :=1
|L(jωπ)|: argL(jωπ) = −180o Margine di guadagno (236)
φm := 180o + φc : φc = argL(jωc), |L(jωc)| = 1 Margine di fase. (237)

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 59
Il margine di fase e particolarmente significativo come indice di robustezza rispetto aeventuali ritardi finiti nella catena diretta. Sempre con riferimento alla figura (26) si notiche |1+L(jωc)| rappresenta la lunghezza del vettore avente origine in −1+ j0 e terminenel punto c e che se φm > 0o allora φm π/180 rappresenta la lunghezza dell’arco tra−1 + j0 e c della circonferenza unitaria. Di conseguenza ricordando che per definizione|L(jωc)| = 1 e che per costruzione geometrica |1 + L(jωc)| < φm π/180 vale che:
φm >1
SM
180
π
φm >1
FM
180
π
che mostrano come il margine di fase sia legato ai parametri di stabilita robusta FM , SMprima introdotti.
Si noti che se il diagramma polare della funzione di anello L(jω) fosse completamentecontenuto nella circonferenza di raggio unitaria e centro nell’origine il sistema in ciclochiuso sarebbe robusto a ritardi di entita arbitraria. Altrimenti in generale il massimoritardo tollerabile nella funzione di anello e pari a:
τmax =φmωc
π
180(238)
che rivela come sistemi a larga banda passante siano intrisencamente piu sensibili adeventuali ritardi nella funzione di anello.
15.4 Il criterio di stabilita del margine di fase.
Si applica quando RGH(s) e G soddisfano le quattro ipotesi seguenti:
• G(s) non ha poli nel semipiano positivo, ma tutti i suoi poli hanno parte realeminore o uguale a zero (notare che sono ammessi poli puramente immaginari).
• Assenza di cancellazioni incrociate tra zeri e poli di RGH sull’asse immaginario onel semi-piano destro.
• Guadagno di Bode di RGH(s) positivo.
• Il diagramma di modulo (di Bode) interseca l’asse delle ascisse una sola voltadall’alto verso il basso.
Si noti che sono ammessi sistemi con zeri nel semipiano destro (zeri positivi) e sistemicon ritardi finiti.
Il criterio di Nyquist applicato ad un sistema che soddisfi le ipotesi riportate rivelache la stabilita e garantita se e solo se
Nf +ν
2= 0
che, graficamente, equivale a richiedere che il punto critico (−1, j0) nel piano di Gaussnon sia abbracciato dal diagramma polare di RGH. Questa condizione equivale, a suavolta, ad avere un margine di fase maggiore di zero gradi. In particolare la condizione
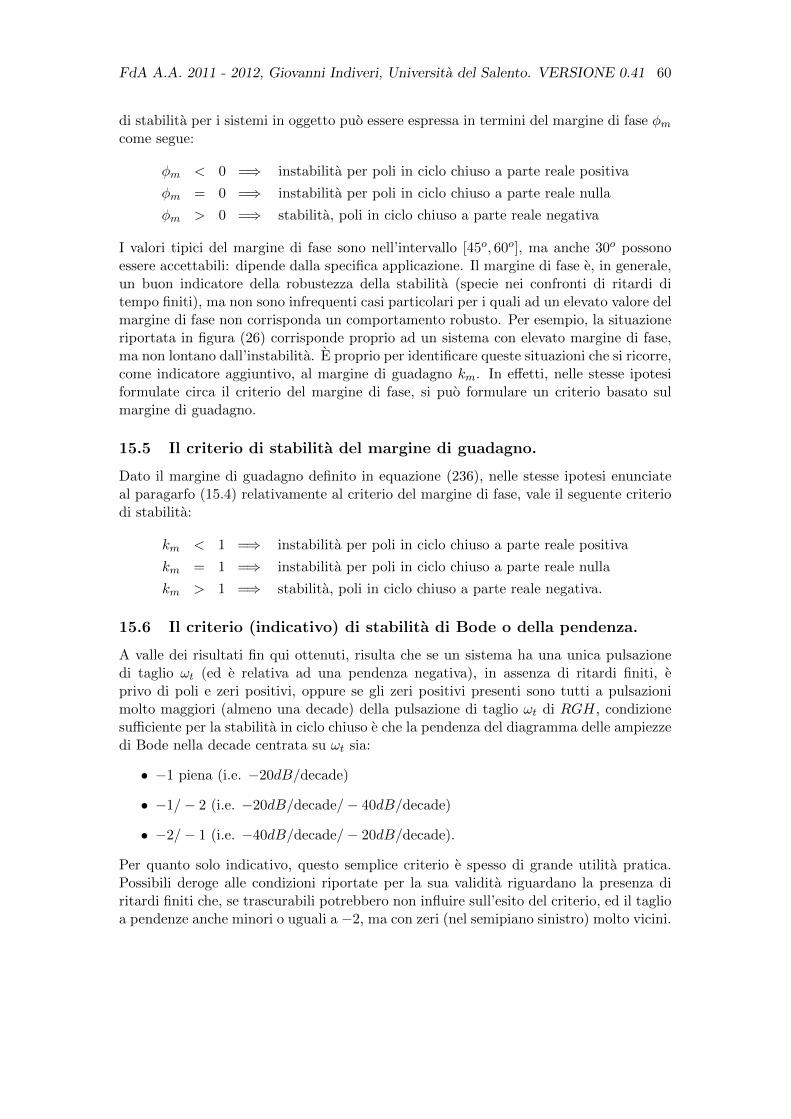
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 60
di stabilita per i sistemi in oggetto puo essere espressa in termini del margine di fase φmcome segue:
φm < 0 =⇒ instabilita per poli in ciclo chiuso a parte reale positiva
φm = 0 =⇒ instabilita per poli in ciclo chiuso a parte reale nulla
φm > 0 =⇒ stabilita, poli in ciclo chiuso a parte reale negativa
I valori tipici del margine di fase sono nell’intervallo [45o, 60o], ma anche 30o possonoessere accettabili: dipende dalla specifica applicazione. Il margine di fase e, in generale,un buon indicatore della robustezza della stabilita (specie nei confronti di ritardi ditempo finiti), ma non sono infrequenti casi particolari per i quali ad un elevato valore delmargine di fase non corrisponda un comportamento robusto. Per esempio, la situazioneriportata in figura (26) corrisponde proprio ad un sistema con elevato margine di fase,ma non lontano dall’instabilita. E proprio per identificare queste situazioni che si ricorre,come indicatore aggiuntivo, al margine di guadagno km. In effetti, nelle stesse ipotesiformulate circa il criterio del margine di fase, si puo formulare un criterio basato sulmargine di guadagno.
15.5 Il criterio di stabilita del margine di guadagno.
Dato il margine di guadagno definito in equazione (236), nelle stesse ipotesi enunciateal paragarfo (15.4) relativamente al criterio del margine di fase, vale il seguente criteriodi stabilita:
km < 1 =⇒ instabilita per poli in ciclo chiuso a parte reale positiva
km = 1 =⇒ instabilita per poli in ciclo chiuso a parte reale nulla
km > 1 =⇒ stabilita, poli in ciclo chiuso a parte reale negativa.
15.6 Il criterio (indicativo) di stabilita di Bode o della pendenza.
A valle dei risultati fin qui ottenuti, risulta che se un sistema ha una unica pulsazionedi taglio ωt (ed e relativa ad una pendenza negativa), in assenza di ritardi finiti, eprivo di poli e zeri positivi, oppure se gli zeri positivi presenti sono tutti a pulsazionimolto maggiori (almeno una decade) della pulsazione di taglio ωt di RGH, condizionesufficiente per la stabilita in ciclo chiuso e che la pendenza del diagramma delle ampiezzedi Bode nella decade centrata su ωt sia:
• −1 piena (i.e. −20dB/decade)
• −1/− 2 (i.e. −20dB/decade/− 40dB/decade)
• −2/− 1 (i.e. −40dB/decade/− 20dB/decade).
Per quanto solo indicativo, questo semplice criterio e spesso di grande utilita pratica.Possibili deroge alle condizioni riportate per la sua validita riguardano la presenza diritardi finiti che, se trascurabili potrebbero non influire sull’esito del criterio, ed il taglioa pendenze anche minori o uguali a −2, ma con zeri (nel semipiano sinistro) molto vicini.

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 61
15.7 Analisi delle funzioni di sensitivita.
Con riferimento alla rappresentazione di Bode (204) della funzione di trasferimento dianello L(s) = RGH(s) si possono valutare i limiti per s −→ 0 delle funzioni S(s) edF (s):
lims→0
S(s) = lims→0
sl
sl +K=
1
1+K , l = 0
0 , l > 01 , l < 0
(239)
lims→0
F (s) = lims→0
K
sl +K=
K
1+K , l = 0
1 , l > 00 , l < 0
(240)
dove si e ipotizzato chelims→0
H(s) = 1,
K e la costante di Bode ed l il tipo della funzione di anello L(s). Questi limiti mettono inevidenza come non sia in generale opportuno avere zeri nell’origine della funzione d’anel-lo, mentre poli nell’origine garantiscono errori a regime nullo per riferimenti stazionari.Per tipici sistemi di controllo valgono le approssimazioni:
|S(jω)| =1
|1 + L(jω)|≈{
1|L(jω)| , ω ≤ ωc1 , ω > ωc
(241)
|F (jω)| =|L(jω)||1 + L(jω)|
≈{
1 , ω ≤ ωc|L(jω)| , ω > ωc
(242)
|Q(jω)| =|R(jω)|
|1 +RGH(jω)|≈{
1|HG(jω)| , ω ≤ ωc|R(jω)| , ω > ωc
. (243)
Questa ultima relazione mostra come la eventuale volonta di ottenere una banda pas-sante in ciclo chiuso molto superiore a quella del sistema in ciclo aperto implichi neces-sariamente elevati guadagni del regolatore ad alte frequenze, ossia la estensione dellabanda passante del sistema in ciclo aperto si paga in termini di sforzo di controllo. Perquanto riguarda la robustezza rispetto incertezze parametriche sull’impianto G, si notiche:
F :=RG
1 +RGH(244)
1
F
∂F
∂θ=
1
F
R∂G∂θ (1 +RGH)−RG RH ∂G
∂θ
(1 +RGH)2=
=∂G
∂θ
[R
1 +RGH− R2GH
(1 +RGH)2
]1 +RGH
RG=
=∂G
∂θ
[1
G− RH
1 +RGH
G
G
]=∂G
∂θ
[1
G− F
GH
]=
1
G
∂G
∂θ[1− FH] =
=1
G
∂G
∂θS (245)
da cui segue che l’incertezza relativa sulla funzione di trasferimento in ciclo chiuso dovutaa variazioni o incertezze parametriche su G e legata alla rispettiva incertezza relativa
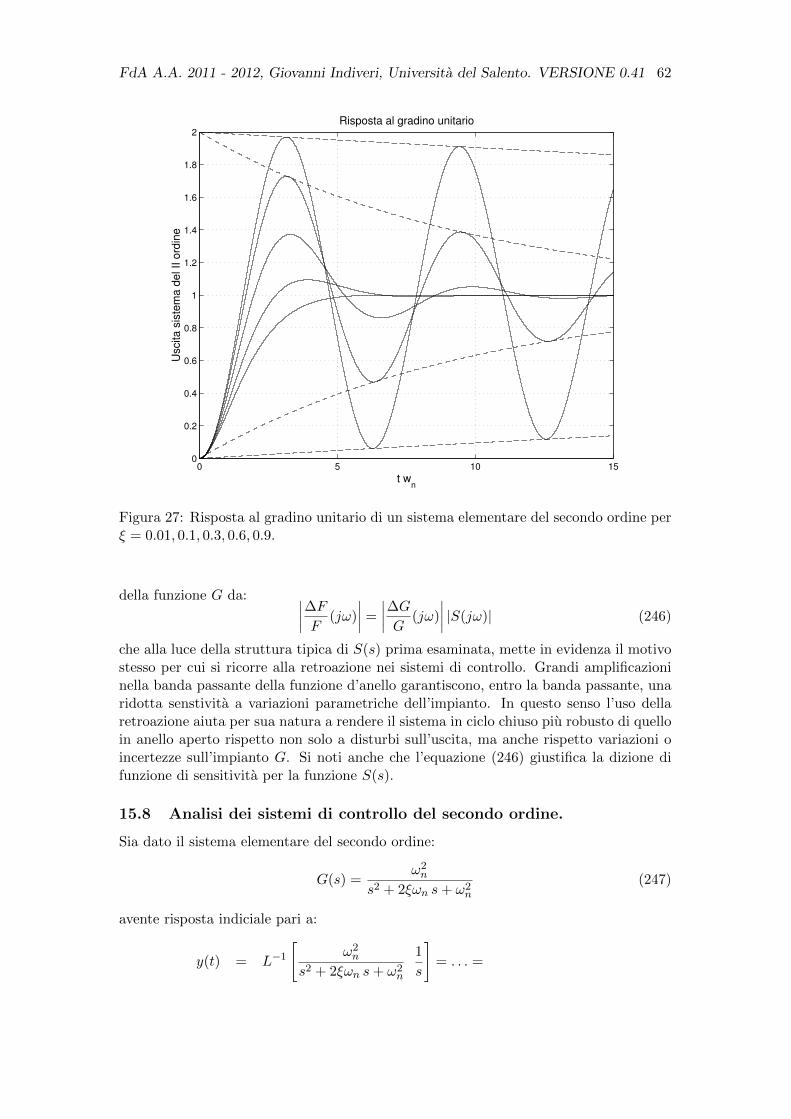
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 62
0 5 10 150
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
t wn
Uscita s
iste
ma d
el II o
rdin
e
Risposta al gradino unitario
Figura 27: Risposta al gradino unitario di un sistema elementare del secondo ordine perξ = 0.01, 0.1, 0.3, 0.6, 0.9.
della funzione G da: ∣∣∣∣∆FF (jω)
∣∣∣∣ =
∣∣∣∣∆GG (jω)
∣∣∣∣ |S(jω)| (246)
che alla luce della struttura tipica di S(s) prima esaminata, mette in evidenza il motivostesso per cui si ricorre alla retroazione nei sistemi di controllo. Grandi amplificazioninella banda passante della funzione d’anello garantiscono, entro la banda passante, unaridotta senstivita a variazioni parametriche dell’impianto. In questo senso l’uso dellaretroazione aiuta per sua natura a rendere il sistema in ciclo chiuso piu robusto di quelloin anello aperto rispetto non solo a disturbi sull’uscita, ma anche rispetto variazioni oincertezze sull’impianto G. Si noti anche che l’equazione (246) giustifica la dizione difunzione di sensitivita per la funzione S(s).
15.8 Analisi dei sistemi di controllo del secondo ordine.
Sia dato il sistema elementare del secondo ordine:
G(s) =ω2n
s2 + 2ξωn s+ ω2n
(247)
avente risposta indiciale pari a:
y(t) = L−1
[ω2n
s2 + 2ξωn s+ ω2n
1
s
]= . . . =
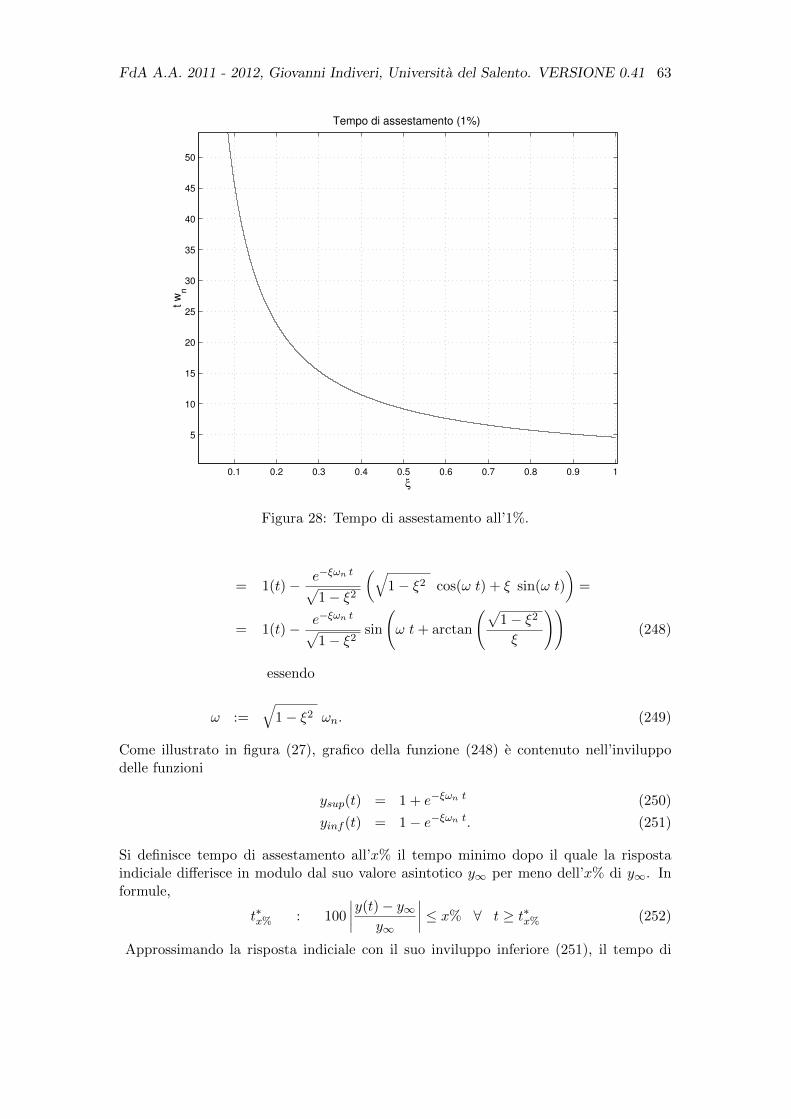
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 63
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
5
10
15
20
25
30
35
40
45
50
ξ
t w
n
Tempo di assestamento (1%)
Figura 28: Tempo di assestamento all’1%.
= 1(t)− e−ξωn t√1− ξ2
(√1− ξ2 cos(ω t) + ξ sin(ω t)
)=
= 1(t)− e−ξωn t√1− ξ2
sin
(ω t+ arctan
(√1− ξ2
ξ
))(248)
essendo
ω :=√
1− ξ2 ωn. (249)
Come illustrato in figura (27), grafico della funzione (248) e contenuto nell’inviluppodelle funzioni
ysup(t) = 1 + e−ξωn t (250)
yinf (t) = 1− e−ξωn t. (251)
Si definisce tempo di assestamento all’x% il tempo minimo dopo il quale la rispostaindiciale differisce in modulo dal suo valore asintotico y∞ per meno dell’x% di y∞. Informule,
t∗x% : 100
∣∣∣∣y(t)− y∞y∞
∣∣∣∣ ≤ x% ∀ t ≥ t∗x% (252)
Approssimando la risposta indiciale con il suo inviluppo inferiore (251), il tempo di
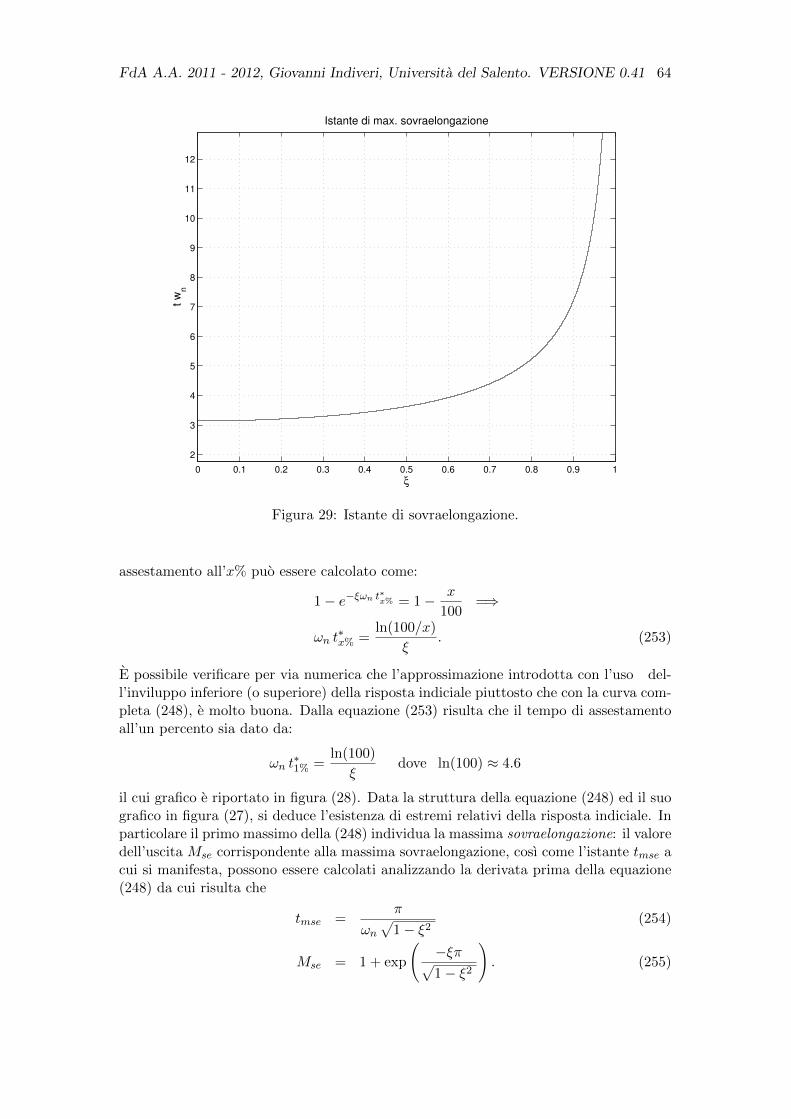
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 64
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
2
3
4
5
6
7
8
9
10
11
12
ξ
t w
n
Istante di max. sovraelongazione
Figura 29: Istante di sovraelongazione.
assestamento all’x% puo essere calcolato come:
1− e−ξωn t∗x% = 1− x
100=⇒
ωn t∗x% =
ln(100/x)
ξ. (253)
E possibile verificare per via numerica che l’approssimazione introdotta con l’uso del-l’inviluppo inferiore (o superiore) della risposta indiciale piuttosto che con la curva com-pleta (248), e molto buona. Dalla equazione (253) risulta che il tempo di assestamentoall’un percento sia dato da:
ωn t∗1% =
ln(100)
ξdove ln(100) ≈ 4.6
il cui grafico e riportato in figura (28). Data la struttura della equazione (248) ed il suografico in figura (27), si deduce l’esistenza di estremi relativi della risposta indiciale. Inparticolare il primo massimo della (248) individua la massima sovraelongazione: il valoredell’uscita Mse corrispondente alla massima sovraelongazione, cosı come l’istante tmse acui si manifesta, possono essere calcolati analizzando la derivata prima della equazione(248) da cui risulta che
tmse =π
ωn√
1− ξ2(254)
Mse = 1 + exp
(−ξπ√1− ξ2
). (255)
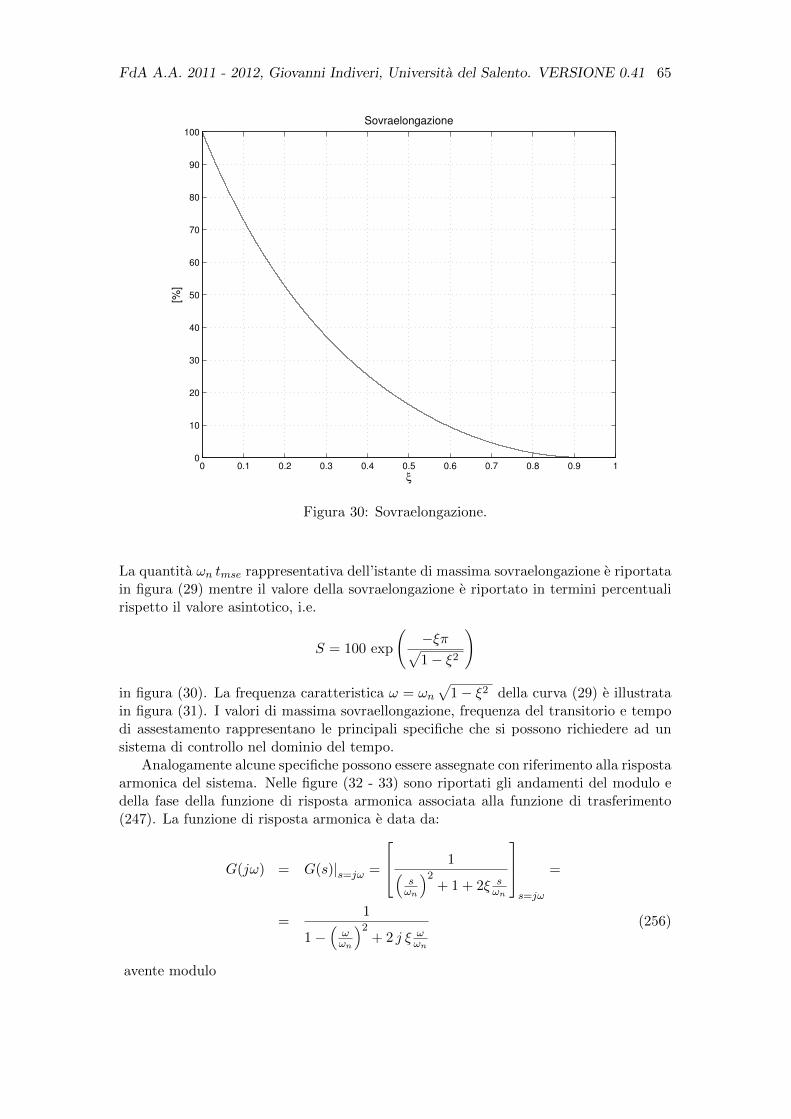
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 65
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
100
ξ
[%]
Sovraelongazione
Figura 30: Sovraelongazione.
La quantita ωn tmse rappresentativa dell’istante di massima sovraelongazione e riportatain figura (29) mentre il valore della sovraelongazione e riportato in termini percentualirispetto il valore asintotico, i.e.
S = 100 exp
(−ξπ√1− ξ2
)
in figura (30). La frequenza caratteristica ω = ωn√
1− ξ2 della curva (29) e illustratain figura (31). I valori di massima sovraellongazione, frequenza del transitorio e tempodi assestamento rappresentano le principali specifiche che si possono richiedere ad unsistema di controllo nel dominio del tempo.
Analogamente alcune specifiche possono essere assegnate con riferimento alla rispostaarmonica del sistema. Nelle figure (32 - 33) sono riportati gli andamenti del modulo edella fase della funzione di risposta armonica associata alla funzione di trasferimento(247). La funzione di risposta armonica e data da:
G(jω) = G(s)|s=jω =
1(sωn
)2+ 1 + 2ξ s
ωn
s=jω
=
=1
1−(ωωn
)2+ 2 j ξ ω
ωn
(256)
avente modulo

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 66
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
ξ
w / w
n
Frequenza transitorio
Figura 31: Frequenza del transitorio ω = ωn√
1− ξ2 .
|G(j ω)| =1√(
1−(ωωn
)2)2
+ 4 ξ2(ωωn
)2= (257)
=1√
(1− x)2 + 4 ξ2 x: x = (ω/ωn)2 (258)
Dalla equazione (258) si puo dedurre la banda passante a −3dB (attenuazione di 1/√
2)del sistema elementare del secondo ordine imponendo:
(1− x)2 + 4 ξ2 x = 2
risolvendo la quale si ottiene:
ωb/ωn =
√(1− 2ξ2) +
√(2ξ2 − 1)2 + 1 (259)
il cui andamento funzionale e riportato in figura (34). Dalla equazione (258) si puo anchededurre la pulsazione di risonanza e la corrispondente ampiezza risonante. In particolarela pulsazione di risonanza per sua definizione e la pulsazione alla quale si manifesta ilmassimo relativo del modulo della funzione di risposta armonica. Tale massimo si puoindividuare cercando il minimo del radicando in equazione (258), ossia:
f(x) = (1− x)2 + 4 ξ2 x
f ′(x) = 0 =⇒
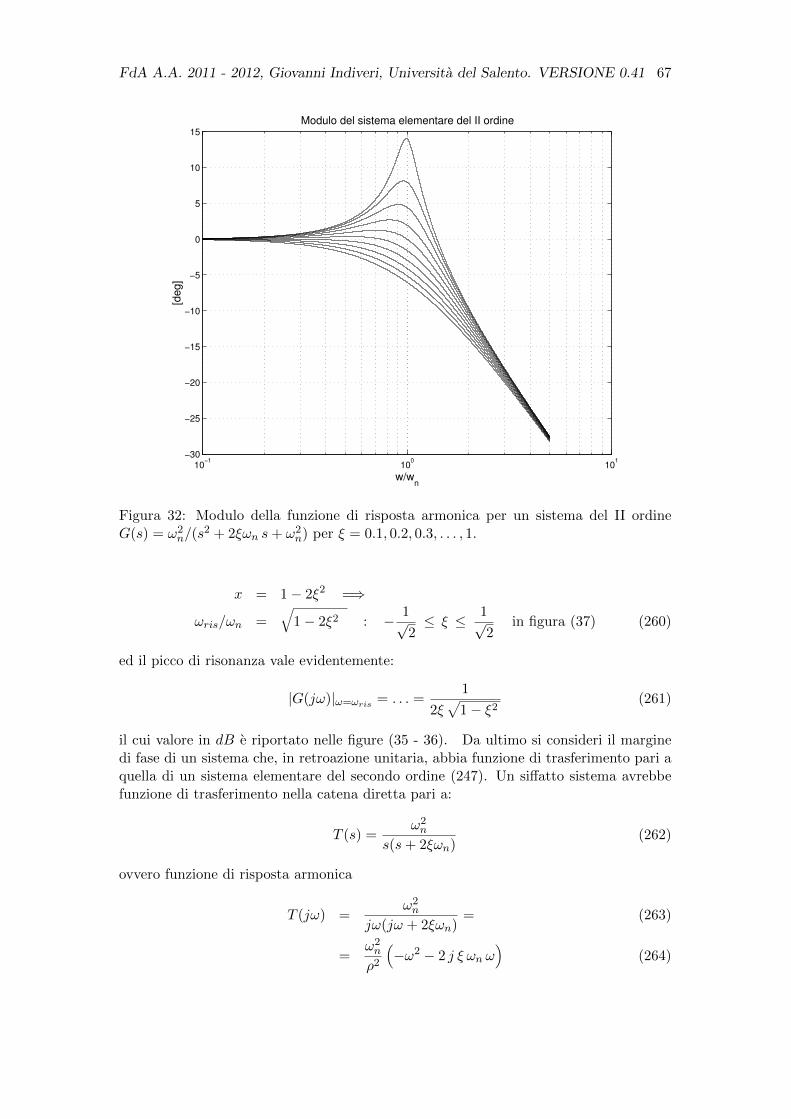
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 67
10−1
100
101
−30
−25
−20
−15
−10
−5
0
5
10
15
[de
g]
w/wn
Modulo del sistema elementare del II ordine
Figura 32: Modulo della funzione di risposta armonica per un sistema del II ordineG(s) = ω2
n/(s2 + 2ξωn s+ ω2
n) per ξ = 0.1, 0.2, 0.3, . . . , 1.
x = 1− 2ξ2 =⇒
ωris/ωn =√
1− 2ξ2 : − 1√2≤ ξ ≤ 1√
2in figura (37) (260)
ed il picco di risonanza vale evidentemente:
|G(jω)|ω=ωris = . . . =1
2ξ√
1− ξ2(261)
il cui valore in dB e riportato nelle figure (35 - 36). Da ultimo si consideri il marginedi fase di un sistema che, in retroazione unitaria, abbia funzione di trasferimento pari aquella di un sistema elementare del secondo ordine (247). Un siffatto sistema avrebbefunzione di trasferimento nella catena diretta pari a:
T (s) =ω2n
s(s+ 2ξωn)(262)
ovvero funzione di risposta armonica
T (jω) =ω2n
jω(jω + 2ξωn)= (263)
=ω2n
ρ2
(−ω2 − 2 j ξ ωn ω
)(264)
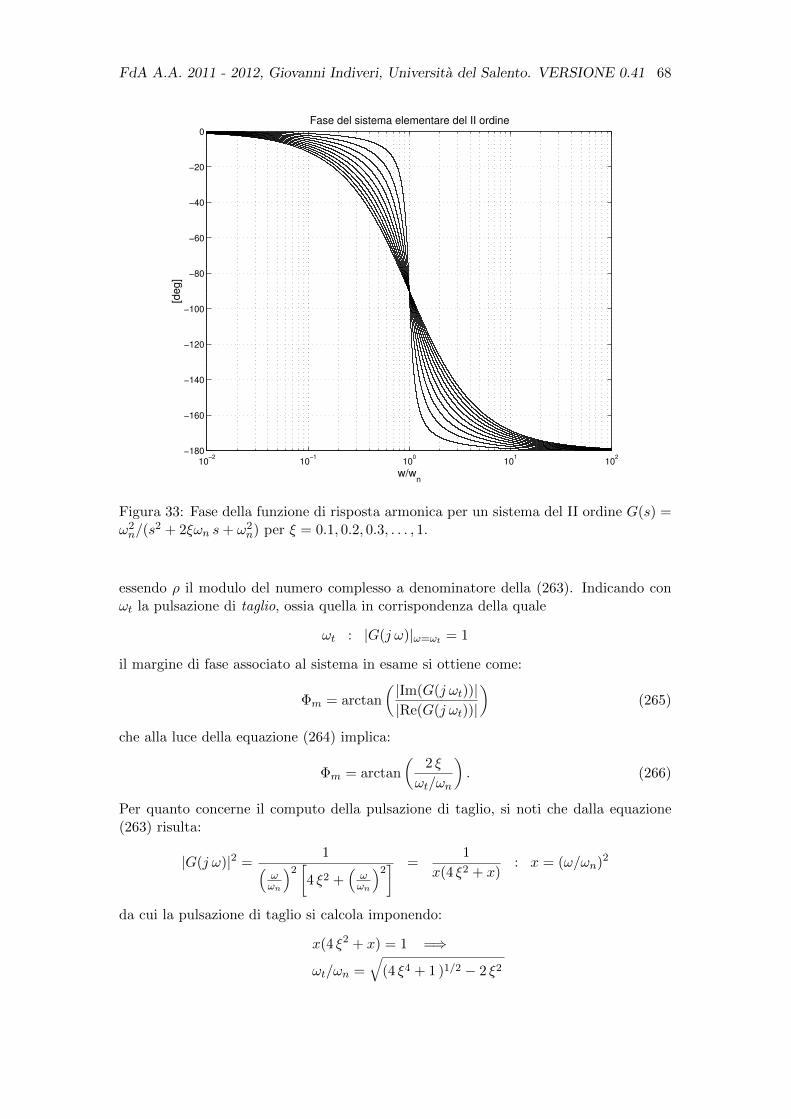
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 68
10−2
10−1
100
101
102
−180
−160
−140
−120
−100
−80
−60
−40
−20
0
[de
g]
w/wn
Fase del sistema elementare del II ordine
Figura 33: Fase della funzione di risposta armonica per un sistema del II ordine G(s) =ω2n/(s
2 + 2ξωn s+ ω2n) per ξ = 0.1, 0.2, 0.3, . . . , 1.
essendo ρ il modulo del numero complesso a denominatore della (263). Indicando conωt la pulsazione di taglio, ossia quella in corrispondenza della quale
ωt : |G(j ω)|ω=ωt = 1
il margine di fase associato al sistema in esame si ottiene come:
Φm = arctan
( |Im(G(j ωt))||Re(G(j ωt))|
)(265)
che alla luce della equazione (264) implica:
Φm = arctan
(2 ξ
ωt/ωn
). (266)
Per quanto concerne il computo della pulsazione di taglio, si noti che dalla equazione(263) risulta:
|G(j ω)|2 =1(
ωωn
)2[4 ξ2 +
(ωωn
)2] =
1
x(4 ξ2 + x): x = (ω/ωn)2
da cui la pulsazione di taglio si calcola imponendo:
x(4 ξ2 + x) = 1 =⇒
ωt/ωn =√
(4 ξ4 + 1 )1/2 − 2 ξ2
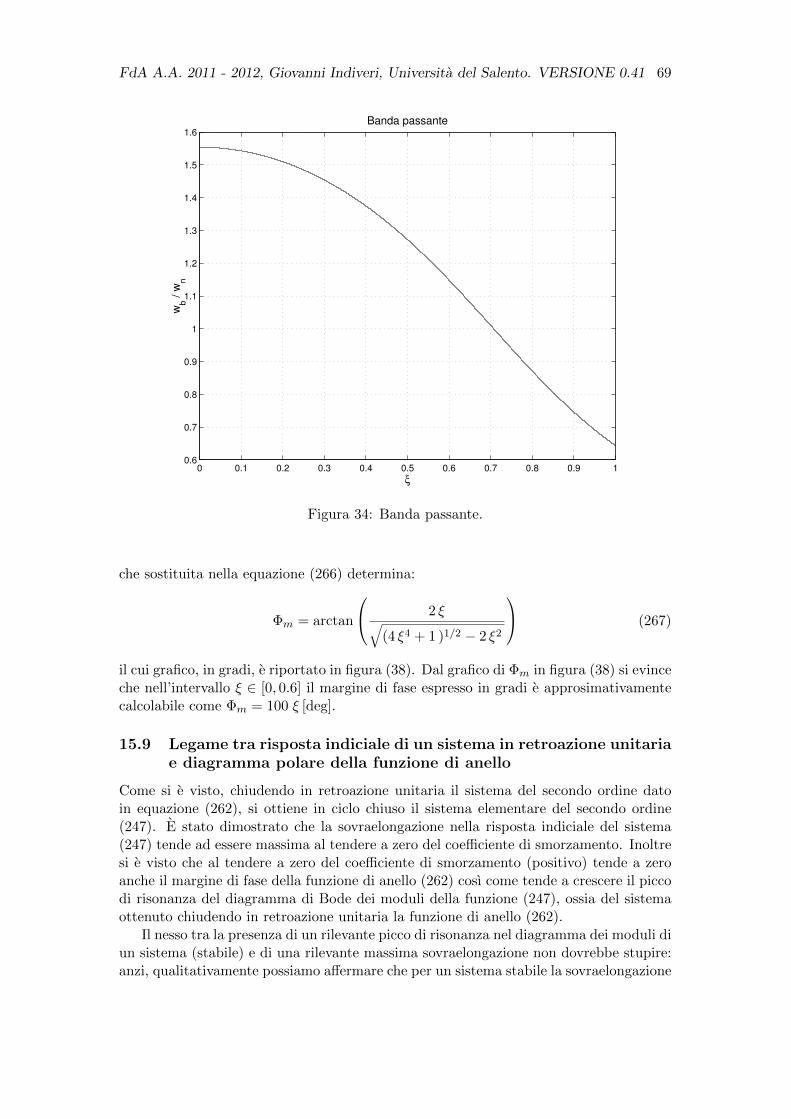
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 69
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6
ξ
wb / w
n
Banda passante
Figura 34: Banda passante.
che sostituita nella equazione (266) determina:
Φm = arctan
2 ξ√(4 ξ4 + 1 )1/2 − 2 ξ2
(267)
il cui grafico, in gradi, e riportato in figura (38). Dal grafico di Φm in figura (38) si evinceche nell’intervallo ξ ∈ [0, 0.6] il margine di fase espresso in gradi e approsimativamentecalcolabile come Φm = 100 ξ [deg].
15.9 Legame tra risposta indiciale di un sistema in retroazione unitariae diagramma polare della funzione di anello
Come si e visto, chiudendo in retroazione unitaria il sistema del secondo ordine datoin equazione (262), si ottiene in ciclo chiuso il sistema elementare del secondo ordine(247). E stato dimostrato che la sovraelongazione nella risposta indiciale del sistema(247) tende ad essere massima al tendere a zero del coefficiente di smorzamento. Inoltresi e visto che al tendere a zero del coefficiente di smorzamento (positivo) tende a zeroanche il margine di fase della funzione di anello (262) cosı come tende a crescere il piccodi risonanza del diagramma di Bode dei moduli della funzione (247), ossia del sistemaottenuto chiudendo in retroazione unitaria la funzione di anello (262).
Il nesso tra la presenza di un rilevante picco di risonanza nel diagramma dei moduli diun sistema (stabile) e di una rilevante massima sovraelongazione non dovrebbe stupire:anzi, qualitativamente possiamo affermare che per un sistema stabile la sovraelongazione

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 70
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
0
1
2
3
4
5
6
7
8
9
10
ξ
Mris [dB
]
Picco di risonanza
Figura 35: Picco di risonanza in dB.
nella risposta indiciale sia la manifestazaione nel dominio del tempo del picco di riso-nanza in frequenza. Questo perche il picco di risonanza segnala che una porzione dellospettro del gradino in ingresso (forzante che genera la risposta indiciale) viene amplifi-cata sensibilmente di piu delle porzioni adiacenti (sia a destra che a sinistra del picco).Ne segue che se il picco di risonanza e sufficientemente pronunciato, lo spettro dellarisposta forzata avra un massimo relativo in prossimita della frequenza di risonanza.Questo massimo nello spettro della risposta indiciale produce, nel dominio del tempo,le tipiche oscillazioni della risposta indiciale che determinano la sovraelongazione.
E importante osservare, pero, che esiste anche un nesso tra massima sovraelongazione(o natura sensibilmente oscillante) della risposta indiciale di un sistema in retroazioneunitaria ed i margini di fase e guadagno della relativa funzione di anello. In altri termini,l’osservazione quantitativa che e stata dimostrata rigorosamente per un sistema delsecondo ordine, che a margine di fase piccolo della funzione di anello corrisponde grandesovraelongazione (o natura fortemente oscillante) nella risposta indiciale del sistemain ciclo chiuso, e generalizzabile. Per chiarire questo punto, si consideri un genericodiagramma polare di una funzione di anello L(s) per la quale si possano applicare icriteri di stabilita del margine di fase e di guadagno: si ipotizzi di chiudere L(s) inretroazione unitaria. Il vettore avente origine nel punto critico (−1, j0) e termine sullacurva L(jω) ha modulo |1 + L(jω)|. Ne segue che se il diagramma polare passa moltovicino al punto critico (−1, j0) (eventualmente in seguito ad un margine di fase o diguadagno molto piccolo), significa che nei pressi della pulsazione di taglio ωt (dove perdefinizione |L(jωt)| = 1) ci sara una pulsazione ω∗ ≈ ωt per la quale |1 +L(jω∗)| � 1 e
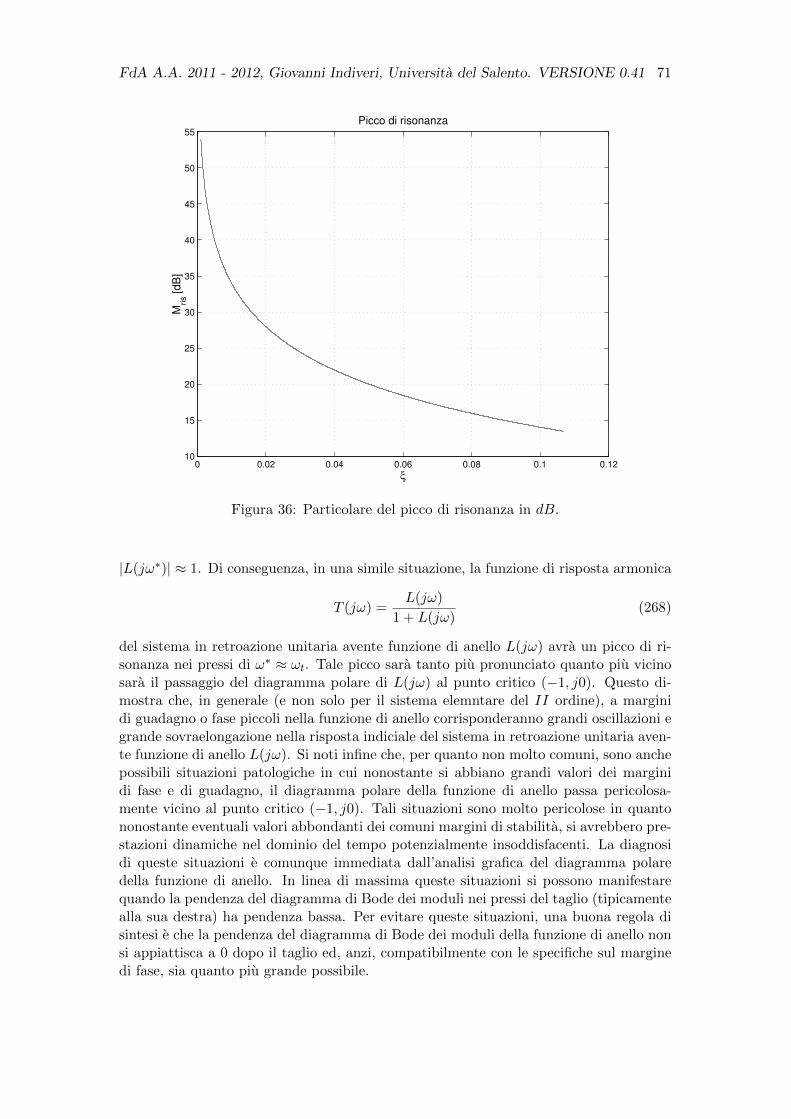
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 71
0 0.02 0.04 0.06 0.08 0.1 0.1210
15
20
25
30
35
40
45
50
55
ξ
Mris [dB
]
Picco di risonanza
Figura 36: Particolare del picco di risonanza in dB.
|L(jω∗)| ≈ 1. Di conseguenza, in una simile situazione, la funzione di risposta armonica
T (jω) =L(jω)
1 + L(jω)(268)
del sistema in retroazione unitaria avente funzione di anello L(jω) avra un picco di ri-sonanza nei pressi di ω∗ ≈ ωt. Tale picco sara tanto piu pronunciato quanto piu vicinosara il passaggio del diagramma polare di L(jω) al punto critico (−1, j0). Questo di-mostra che, in generale (e non solo per il sistema elemntare del II ordine), a marginidi guadagno o fase piccoli nella funzione di anello corrisponderanno grandi oscillazioni egrande sovraelongazione nella risposta indiciale del sistema in retroazione unitaria aven-te funzione di anello L(jω). Si noti infine che, per quanto non molto comuni, sono anchepossibili situazioni patologiche in cui nonostante si abbiano grandi valori dei marginidi fase e di guadagno, il diagramma polare della funzione di anello passa pericolosa-mente vicino al punto critico (−1, j0). Tali situazioni sono molto pericolose in quantononostante eventuali valori abbondanti dei comuni margini di stabilita, si avrebbero pre-stazioni dinamiche nel dominio del tempo potenzialmente insoddisfacenti. La diagnosidi queste situazioni e comunque immediata dall’analisi grafica del diagramma polaredella funzione di anello. In linea di massima queste situazioni si possono manifestarequando la pendenza del diagramma di Bode dei moduli nei pressi del taglio (tipicamentealla sua destra) ha pendenza bassa. Per evitare queste situazioni, una buona regola disintesi e che la pendenza del diagramma di Bode dei moduli della funzione di anello nonsi appiattisca a 0 dopo il taglio ed, anzi, compatibilmente con le specifiche sul marginedi fase, sia quanto piu grande possibile.
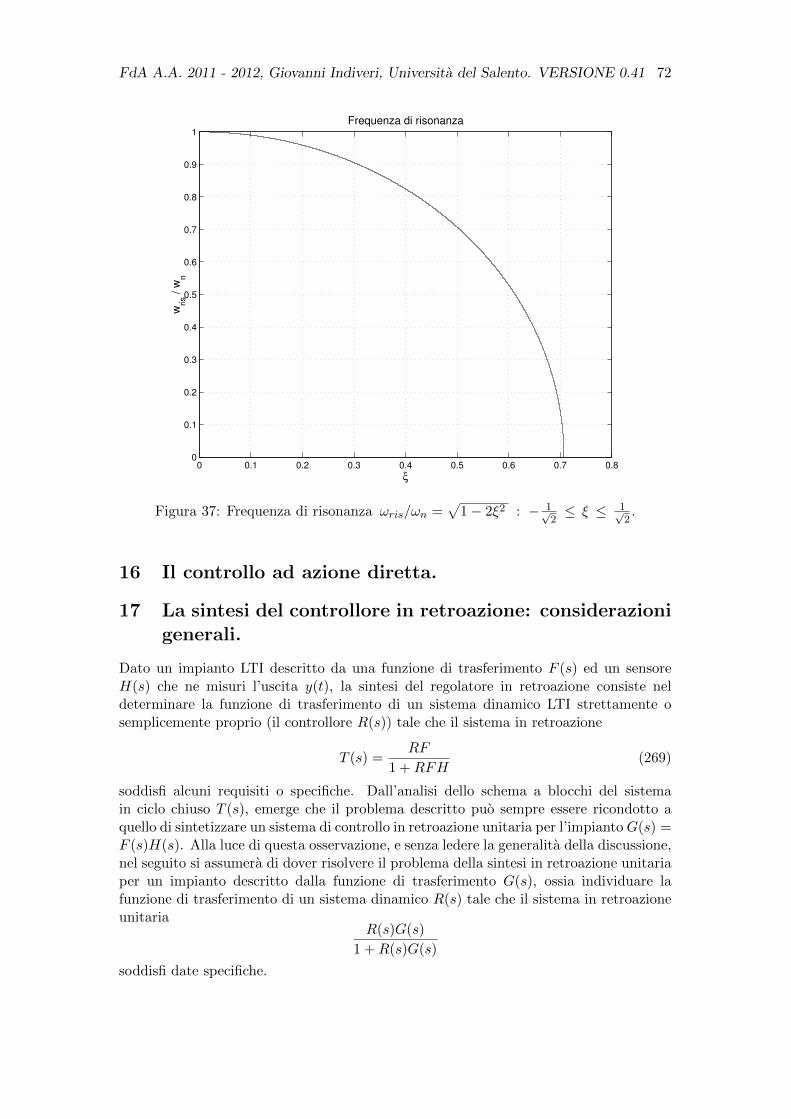
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 72
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
ξ
wris / w
n
Frequenza di risonanza
Figura 37: Frequenza di risonanza ωris/ωn =√
1− 2ξ2 : − 1√2≤ ξ ≤ 1√
2.
16 Il controllo ad azione diretta.
17 La sintesi del controllore in retroazione: considerazionigenerali.
Dato un impianto LTI descritto da una funzione di trasferimento F (s) ed un sensoreH(s) che ne misuri l’uscita y(t), la sintesi del regolatore in retroazione consiste neldeterminare la funzione di trasferimento di un sistema dinamico LTI strettamente osemplicemente proprio (il controllore R(s)) tale che il sistema in retroazione
T (s) =RF
1 +RFH(269)
soddisfi alcuni requisiti o specifiche. Dall’analisi dello schema a blocchi del sistemain ciclo chiuso T (s), emerge che il problema descritto puo sempre essere ricondotto aquello di sintetizzare un sistema di controllo in retroazione unitaria per l’impiantoG(s) =F (s)H(s). Alla luce di questa osservazione, e senza ledere la generalita della discussione,nel seguito si assumera di dover risolvere il problema della sintesi in retroazione unitariaper un impianto descritto dalla funzione di trasferimento G(s), ossia individuare lafunzione di trasferimento di un sistema dinamico R(s) tale che il sistema in retroazioneunitaria
R(s)G(s)
1 +R(s)G(s)
soddisfi date specifiche.
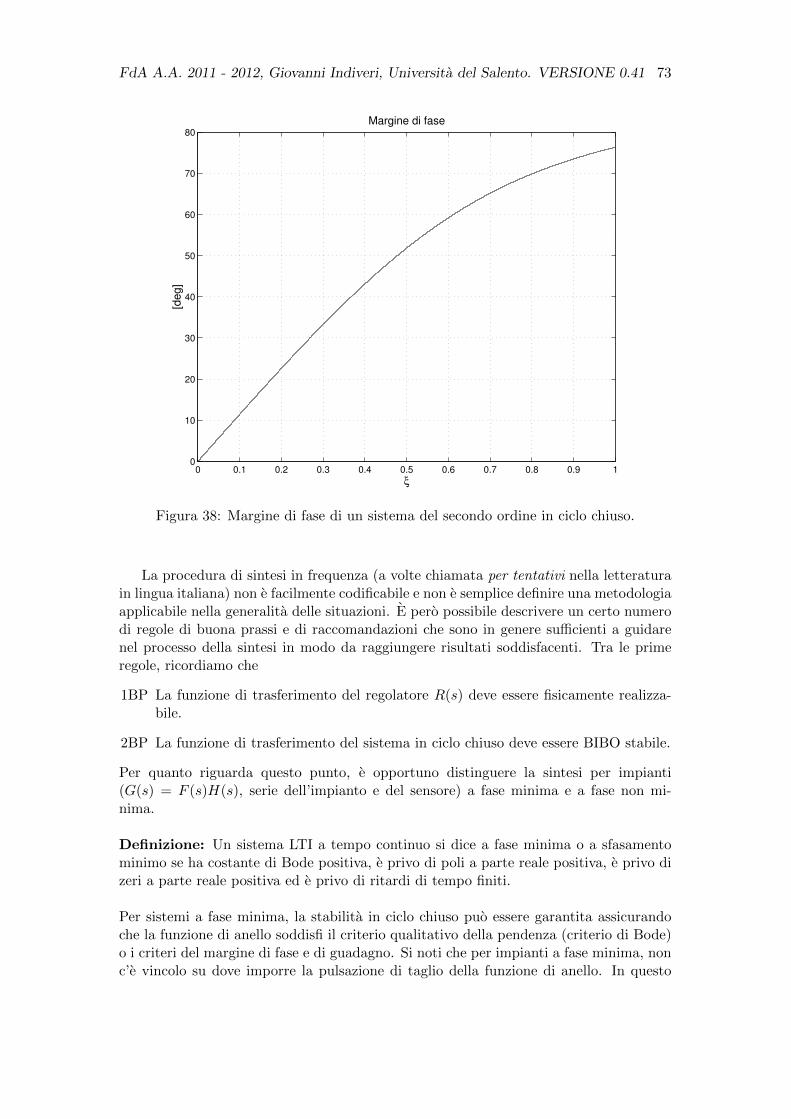
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 73
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
ξ
[de
g]
Margine di fase
Figura 38: Margine di fase di un sistema del secondo ordine in ciclo chiuso.
La procedura di sintesi in frequenza (a volte chiamata per tentativi nella letteraturain lingua italiana) non e facilmente codificabile e non e semplice definire una metodologiaapplicabile nella generalita delle situazioni. E pero possibile descrivere un certo numerodi regole di buona prassi e di raccomandazioni che sono in genere sufficienti a guidarenel processo della sintesi in modo da raggiungere risultati soddisfacenti. Tra le primeregole, ricordiamo che
1BP La funzione di trasferimento del regolatore R(s) deve essere fisicamente realizza-bile.
2BP La funzione di trasferimento del sistema in ciclo chiuso deve essere BIBO stabile.
Per quanto riguarda questo punto, e opportuno distinguere la sintesi per impianti(G(s) = F (s)H(s), serie dell’impianto e del sensore) a fase minima e a fase non mi-nima.
Definizione: Un sistema LTI a tempo continuo si dice a fase minima o a sfasamentominimo se ha costante di Bode positiva, e privo di poli a parte reale positiva, e privo dizeri a parte reale positiva ed e privo di ritardi di tempo finiti.
Per sistemi a fase minima, la stabilita in ciclo chiuso puo essere garantita assicurandoche la funzione di anello soddisfi il criterio qualitativo della pendenza (criterio di Bode)o i criteri del margine di fase e di guadagno. Si noti che per impianti a fase minima, nonc’e vincolo su dove imporre la pulsazione di taglio della funzione di anello. In questo

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 74
senso la situazione e molto piu complessa ed articolata per sistemi a fase non minima.Per garantire la stabilita in ciclo chiuso per sistemi a fase minima sulla base dei criteridi Bode o del margine di fase, e frequente l’uso di reti ad anticipo del tipo
K ′s+ z
s+ p: z < p reali (270)
con z < ωt < p essendo ωt la pulsazione di taglio della funzione di anello.In molte circostanze la sintesi della rete ad anticipo di fase e semplificata utilizzando
la seguente parametrizzazione:
Ranticipo(s) = K1 + τ s
1 + α τ s: τ,K > 0, α ∈ (0, 1]. (271)
Analizzando il diagramma polare di questa rete, che e un semicerchio per ω ∈ [0,∞), sievince che il massimo della sua fase φmax soddisfa:
α =1− sinφmax1 + sinφmax
(272)
e si manifesta alla pulsazione
ω∗ =1
τ√α. (273)
Infine, ponendoK =
√α (274)
si garantisce che il taglio del diagramma di Bode dei moduli di Ranticipo(s) sia proprioin ω∗.
3BP La funzione di anello L(s) = R(s)G(s) deve essere di tipo passa-basso con unaunica pulsazione di taglio ottenuta in corrsipondenza di una pendenza negativadel diagramma dei moduli di Bode.
Data la natura passa-basso di L(s), si e soliti indicare con i termine bassa frequenza lospettro su cui |L(s)| � 1, media frequenza lo spettro su cui |L(s)| ≈ 1 e di alta frequenzalo spettro su cu |L(s)| � 1. Naturalmente la pulsazione di taglio di L(s) individuerala banda passante, ovvero la prontezza, del sistema in ciclo chiuso. Questa deve esserescelta compatibilmente allo sforzo di controllo ammissibile e alla specifica applicazione inesame. In particolare, si ricorda che se l’impianto G(s) e strettamente proprio, imporreuna pulsazione di taglio ωt sulla funzione di anello a destra dell’ultima pulsazione dirottura ω∗ di G(jω) determinera che in una porzione di spettro dell’ordine di (ω∗, ωt) ilmodulo della funzione di risposta armonica R/(1 +RG) tra l’uscita del regolatore ed ilriferimento tendera a 1/|G(jω)|.
Si noti che queste regole di buona prassi vanno rispettate contemporaneamente.Dunque per quanto riguarda, per esempio, i punti 2BP e 3BP, il numero di reti adanticipo di fase da poter usare nella zona di media frequenza sara superiormente limitato.
4BP La funzione di anello L(s) = R(s)G(s) ed il regolatore R(s) devono essere di tipocompatibile con le specifiche di reiezione dei disturbi sull’ingresso e l’uscita di G(s)e di robustezza a variazioni parametriche.
5BP E bene che non ci siano cancellazioni tra zeri nell’origine del controllore e polinell’origine dell’impianto, ossia R(s)G(s) deve essere di tipo maggiore o uguale aquello di G(s).

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 75
6BP Se la funzione di anello e di tipo zero, il guadagno statico L(0) della funzione dianello deve essere sufficientemente elevato da garantire che l’errore asintotico perriferimenti a gradino sia sufficientemente piccolo.
Indicando con ωt la pulsazione di taglio di L(jω), i punti 4BP e 6BP possono sempreessere soddisfatti moltiplicando la R(s) che non li soddisfacesse rispettivamente per retidi tipo proporzionale - integrale (PI) ed a ritardo di fase agenti nella zona di bassafrequenza, ossia per (
s+ z
s
)n: n ≥ 1, z � ωt (275)
e1
α
1 + α τ s
1 + τ s: α ∈ (0, 1),
1
ατ� ωt. (276)
7BP A parita di prestazioni ottenute con due controllori diversi, e sempre preferibileutilizzare quello di struttura piu semplice (i.e. con il minore numero di poli e zeri)o eventualmente quello che garantisce il minor sforzo di controllo.
Una tecnica da considerare per cercare di ottenere controllori piu semplici possibili consi-ste, una volta sintetizzato R(s), nel verificare tramite il suo diagramma di Bode e quellodell’impianto G(s), se sia possibile mantenere una analogo andamento del diagrammadi Bode di R(s) e della funzione di anello eliminando alcuni poli e/o zeri di R(s). Puosuccedere, per esempio, che nella sintesi si siano introdotti poli di R(s) in alta frequenza(ossia dove |L(jω)| � 1); se questi non fossero necessari a garantire la fisica realizzabilitadi R(s) potrebbe essere possibile eliminarli senza modificare sensibilmente le prestazionicomplessive.
Valutando nel complesso le regole esposte, si noti che la procedura di sintesi delcontrollore (almeno per sistemi a fase minima) puo essere pensata per zone di frequenzadistinte. In altri termini dato il diagramma di Bode del sistema G(s) da controllare,si puo procedere a correggerlo per zone di frequenza fattorizzando il regolatore nelleregioni di bassa, media ed alta frequenza (rispettivamente indicate con i pedici bf , mfed af)
R(s) = Rbf (s)Rmf (s)Raf (s) (277)
e scegliendo ciascun fattore in modo che abbia guadagno unitario (o comunque costante)e fase nulla nelle altre zone. Tipicamente nelle zone di bassa frequenza si inserisconotermini atti a soddisfare le prestazioni asintotiche: per esempio, reti PI o a ritardo difase che garantiscano guadagni elevati per pulsazioni tendenti a zero e tali che abbianofase tendente a zero e modulo tendente ad uno in media ed alta frequenza. Nella zonadi media frequenza si inseriscono termini che garantiscano la BIBO stabilita in ciclochiuso con il rispetto delle eventuali specifiche sui margini di fase e guadagno. Spessoquesti obiettivi sono raggiunti con l’uso (in media frequenza) di reti ad anticipo difase opportunamente centrate. In alta frequenza potrebbero essere presenti poli atti agarantire la fisica realizzaibilita del controllore ed il rispetto delle specifiche sul marginedi guadagno.
Si noti che le prime regole fin qui esposte valgono in generale, ovvero per sistemia fase minima e per sistemi a fase non minima. La differenza sostanziale tra le dueclassi di sistemi consiste nella possibilita per i sistemi a fase minima di garantire laBIBO stabilita in ciclo chiuso sulla base dei semplici criteri di stabilita dei margini difase e guadagno o della pendenza (criterio di Bode). In presenza di sistemi a fase non

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 76
minima, tali criteri potrebbero non valere rendendo il problema di garantire la BIBOstabilita in ciclo chiuso piu difficile. Naturalmente in presenza di sistemi a fase nonminima si potra sempre ricorrere al criterio di Nyquist per analizzare la stabilita in ciclochiuso, ma a differenza dei criteri dei margini di fase, guadagno e della pendenza, ilcriterio di Nyquist nella sua forma generale non indica in maniera esplicita e direttaquali modifiche effettuare alla funzione di anello per garantire la BIBO stabilita in ciclochiuso. Il problema generale della sintesi per sistemi a fase non minima puo essere inparte semplificato distinguendo alcuni casi particolari.
17.1 La sintesi del controllore per sistemi a fase non minima: consi-derazioni generali
Un impianto G(s) (serie del sistema e del sensore) da controllare in retroazione (unitaria)puo essere a fase non minima per diversi motivi. In particolare una qualunque funzionedi trasferimento a fase non minima puo sempre essere fattorizzata come
G(s) = Gfm(s)Gfnm(s) (278)
essendo Gfm(s) a fase minima e Gfnm(s) no. La natura a fase non minima di Gfnm(s)puo dipendere da diversi fattori:
• costante di Bode negativa, Gfnm(s) = −1
• presenza di zeri a parte reale positiva,
Gfnm(s) =∏h,l
(1− τh s)(
1 + 2ξlωls+
(s
ωl
)2)
: τh > 0, ξl ∈ (−1, 0) ∀ l, h
(279)
• presenza di ritardi di tempo finiti,
Gfnm = e−sT : T > 0 (280)
• presenza di poli a parte reale positiva,
Gfnm(s) =1∏
h,l(1− τh s)(
1 + 2 ξlωl s+(sωl
)2) : τh > 0, ξl ∈ (−1, 0) ∀ l, h
(281)
• una qualunque combinazione dei punti precedenti.
17.1.1 Sistemi con costante di Bode negativa.
Le situazioni corrispondenti ai precedenti punti sono in ordine di complessita crescente:se un sistema e a fase non minima a causa del solo segno della costante di Bode, sarasufficiente pensare il controllore nella forma R(s) = −R1(s) e procedere alla sintesi diR1(s) per il sistema a fase minima −G(s). Dunque la presenza della sola costante diBode negativa in G(s) si risolve banalmente.
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 77
17.1.2 Sistemi con zeri destri.
Se, invece, G(s) e a fase non minima per la presenza di soli zeri destri, la situazione epiu articolata. Innanzi tutto, notiamo che questi zeri non possono e non devono esserecompensati per cancellazione da parte di R(s). Per comprendere il motivo di questa im-possibilita, notiamo che nelle ipotesi correnti la Gfnm(s) sara data dall’equazione (279),ossia la natura di fase non minima di G(s) e dovuta alla presenza di soli zeri a parte realepositiva. Supponiamo ora di procedere compensando per cancellazione gli zeri destri delsistema G(s) per poter poi trattare il rimanente sistema come fosse a fase minima. Siadunque R(s) = R(s) G−1
fnm(s) avendo indicato con Gfnm(s) la nostra stima degli zeri
destri di G(s). Se ipotizzassimo che G−1fnm(s)Gfnm(s) = 1, ossia che la cancellazione
fosse perfetta, dovremmo procedere scegliendo R(s) in modo che la funzione di anello afase minima R(s)Gfm(s) soddisfi il criterio di Nyquist (e/o della pendenza, del marginedi fase, del margine di guadagno). Dunque per questa funzione di anello dovremmo ga-rantire che z = Nf +ν/2 = 0 essendo p = 0 in virtu dell’ipotesi di perfetta cancellazione
G−1fnm(s)Gfnm(s) = 1. Questa ipotesi, pero, e assurda e fisicamente non realizzabile in
quanto richiederebbe una infinita precisione nella conoscenza degli zeri destri di G(s)ed una infinita precisione nella realizzazione di G−1
fnm(s). Dunque dall’analisi di Nyquistsegue che procedendo come appena descritto avremmo esattamente z = p = r poli destriin ciclo chiuso. La conclusione di questa analisi e che la cancellazione tra poli destri delcontrollore e zeri destri del sistema da regolare e sempre rigorosamente vietata.
Come si deve procedere allora in presenza di una Gfnm(s) come quella data inequazione (279)? Per rispondere, e bene analizzare in dettaglio quale sia la difficoltatecnica nel garantire la BIBO stabilita in ciclo chiuso indotta dalla presenza di zeridestri. Si noti che se G(s) ha costante di Bode positiva e Gfnm(s) non contiene polidestri (come nell’ipotesi corrente in cui la Gfnm(s) e data dalla equazione (279), valeil criterio del margine di fase. Dunque la BIBO stabilita sara garantita se il marginedi fase e positivo. Si immagini di aver sintetizzato un controllore R0(s) tale che lapulsazione di taglio ωt della funzione di anello sia molto a sinistra rispetto il primo zerodestro reale e la prima pulsazione naturale associata a zeri destri complessi coniugati diGfnm(s). Ovvero, con riferimento alla equazione (279) si definisca zmin = minh,l{τh, ωl}la prima pulsazione di rottura presente nel diagramma di Bode di Gfnm(s) (equazione(279)) e si ipotizzi che R0(s) garantisca una pulsazione di taglio della funzione di anelloωt � zmin. Cio equivale ad avere lasciato la Gfnm(s) completamente nella zona ad altafrequenza della funzione di anello ed, in particolare, per costruzione si e garantito che glizeri destri non influenzino negativamente il margine di fase del sistema. Nella situazionedescritta, finche vale ωt � zmin, R0(s) puo essere sintetizzata come se il sistema dacontrollare fosse il solo Gfm(s). In particolare scegliendo R0(s) in modo che il taglioin ωt � zmin si verifichi con pendenza di −20 dB/decade, si garantira un marginedi fase dell’ordine di 90 gradi (ragionevolmente il massimo possibile volendo avere altiguadagni a sinistra del taglio ed un sufficiente margine di guadagno). Supponiamoche la pendenza di −20dB/decade del diagramma di Bode dei moduli della funzioneR0(s)Gfm(s) si conservi inalterata fino a abbracciare interamente la decade centrata suzmin. Cio consente di aumentare la pulsazione di taglio ωt aumentando la costante diBode KBR0 di R0(s). Al crescere di KBR0 ωt tendera a zmin mentre la fase diminuirae la pendenza del diagramma dei moduli anche! Nella piu benevola delle ipotesi incui zmin fosse relativo ad uno zero reale semplice isolato (ovvero distante almeno unadecade dai successivi zeri destri di Gfnm(s)), in prossimita di ωt = zmin si avrebbe

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 78
fase della funzione di anello dell’ordine di −135 gardi (margine di fase dell’ordine di 45gradi), ma pendenza del diagramma asintotico pari a zero. Aumentando ancora KBR0
il taglio non sarebbe piu definito in quanto la pendenza tenderebbe a zero e la fasea destra di zmin continuerebbe a diminuire. Si noti che una simile situazione non puoessere recuperata con l’aggiunta di reti ad anticipo (le uniche in grado di aggiungere fasepositiva senza introdurre poli destri) in quanto non farebbero che aumentare ancora lapendenza! Se zmin non fosse semplice e isolato, il quadro non sarebbe che peggiore. Daquesto esempio concettuale dovrebbe risultare chiaro che in presenza di una Gfnm(s)come in equazione (279), non e tecnicamente possibile garantire pendenze negative alladestra del primo zero destro con margine di fase positivo. L’unica soluzione possibile peravere un unico taglio della funzione di anello con pendenza negativa e margine di fasepositivo in presenza di sistemi nella forma G(s) = Gfm(s)Gfnm(s) con Gfnm(s) comein equazione (279) e di lasciare Gfnm(s) nella zona di alta frequenza, ossia progettarecontrollori tali che il taglio della funzione di anello si manifesti alla sinistra del primo zerodestro (o della prima pulsazione naturale associata a zeri destri complessi coniugati). Insintesi, la presenza di zeri destri limita inevitabilmente la banda passante del sistema inciclo chiuso. Dunque i sistemi nella forma G(s) = Gfm(s)Gfnm(s) con Gfnm(s) comein equazione (279) vanno trattati come fossero a fase minima imponendo un taglio dellafunzione di anello alla sinistra di zmin, ossia vincolando Gfnm(s) a rimanere confinatanella zona di alta frequenza della funzione di anello.
17.1.3 Sistemi con ritardo di tempo finiti.
Le difficolta associate ad una Gfnm(s) = e−sT : T > 0 sono abbastanza simili aquelle relative alla presenza di zeri destri. In particolare, la presenza di ritardi di tempofiniti limita la massima banda passante della funzione in ciclo chiuso. Data G(s) =Gfm(s) e−sT , oltre al sempre valido criterio di stabilita di Nyquist, vale ancora ancheil criterio del margine di fase e di guadagno. Trascurando per il momento il terminedi ritardo temporale finito e−sT , si ipotzzi di avere sintetizzato un controllore R0(s)che compensi Gfm(s) imponendo che R0(s)Gfm(s) abbia pendenza negativa di −20dB/decade a cavallo del taglio ωt, dunque margine di fase dell’ordine di −90 gradi (comegia osservato, il massimo ragionevolmente possibile). In presenza del ritardo temporale,questo margine di fase verrebbe ridotto di 180
π ωt T gradi dimostrando che la pulsazionedi taglio ωt dovra sicuramente soddisfare
ωt T <π
2.
Nella pratica, assumendo che si possa accettare una riduzione del margine di fase indottadal ritardo di tempo finito dell’ordine di 5 gradi (approssimativamente 1/10 di radiante),si dovra imporre la condizione piu stringente
ωt T ≤1
10.
Si noti che, come nel caso di zeri destri, cio e dovuto alla impossibilita di recuperare lafase perduta con reti ad anticipo nel controllore poiche queste aumentando le pendenzeoltre al minimo possibile di −20 db/decade violerebbero la condizione di unico taglioottenuto con pendenza negativa per la funzione di anello.
Analogamente al caso di zeri destri, la sintesi per sistemi affetti da ritardo di tempofinito va realizzata vincolando la pulsazione di taglio della funzione di anello a regioni
FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 79
delle spettro dove la perdita di fase indotta dal ritardo di tempo finito non incida si-gnificativamente sul margine di fase in ciclo chiuso. Per il resto, in generale si possonoseguire gli stessi criteri e metodi usati per trattare sistemi a fase minima.
17.1.4 Sistemi con poli destri.
Per i sistemi a fase non minima per la sola presenza di poli destri, ossia per i quali la fun-zione di trasferimento fattorizzata come in equazione (278) presenti una Gfnm(s) comein equazione (281), non si possono applicare i criteri di stabilita del margine di fase e delmargine di guadagno. Naturalmente sara ancora valido il criterio di Nyquist, ma nonvalendo (per esempio) quello del margine di fase non ci sono semplici procedure opera-tive generali (come aumentare la fase nel taglio) per garantire la BIBO stabilita in ciclochiuso. Risulta dunque difficle individuare metodi di sintesi generali da poter applicareal caso generico di impianti instabili in ciclo aperto, specie se sia richiesto, come quasisempre, di soddisfare altre specifiche (come un vincolo sul tempo di assestamento nellarisposta indiciale o la reiezione di dati disturbi) oltre alla BIBO stabilita in ciclo chiuso.Come spesso accade in molti ambiti ingegneristici, per risolvere questo difficile proble-ma e utile cercare di scomporlo in sotto-problemi piu semplici per i quali si conoscanoprocedure operative ben codificate. Nel caso specifico in esame, una possibile soluzioneconsiste nel progettare due anelli di retroazione distinti: il primo (anello piu interno) sipone come unico obiettivo la stabilizzazione del sistema. Ossia l’individuazione di uncontrollore R0(s) tale che la funzione in ciclo chiuso
G1(s) =R0(s)G(s)
1 +R0(s)G(s)(282)
sia BIBO stabile. Ne segue che la funzioneG1(s) sara a fase minima (nel caso R0(s) abbiacostante di Bode positiva e sia priva di zeri destri e ritardi di tempo finiti) o, comunquea fase non minima, ma priva di poli destri (nel caso R0(s) non sia a fase minima perla presenza di una costande di Bode negativa e/o di zeri destri e/o di ritardi di tempofiniti). Dunque si potra sempre procedere alla sintesi di un secondo controllore R1(s) coni metodi esaminati per sistemi privi di poli destri tale che siano soddisfatte eventuali altrespecifiche di controllo oltre alla BIBO stabilita in ciclo chiuso. L’architettura di controllorisultante si chiama a doppio anello. Naturalmente la difficolta maggiore rimane lasintesi del controllore stabilizzante R0(s): i metodi per risolvere questo problema disintesi sono sostanzialmente due. Il primo consiste nell’utilizzare il criterio di Nyquist.In particolare dall’analisi del diagramma polare della funzione G(s) assegnata, si cerca diindividuare la struttura di una rete tale per cui l’equazione di Nyquist z = p+ ν/2 +Nf
applicata al sistema R0(s)G(s) abbia soluzione z = 0. Purtroppo non esistono regolegenerali per risolvere questo problema di sintesi, ma bisogna esaminare il singolo casoin funzione della natura della G(s) assegnata. Il secondo metodo e basato sull’uso diuno strumento analitico noto come luogo delle radici che permette di analizzare comevariano le posizioni dei poli di un sistema al variare di alcuni suoi parametri. Il metododel luogo delle radici e descritto nel seguito.
17.1.5 Sistemi a fase non minima per la presenza concomitante di piu cause.
Il problema della sintesi per sistemi la cui natura di fase non minima sia indotta da piudi una delle singole cause prima descritte puo essere trattato in modo ragionevolmente

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 80
semplice una volta comprese in dettaglio le situazioni relative ai casi precedenti. Siipotizzi di progettare il regolatore fattorizzandolo come R(s) = R0(s)R1(s). Qualunquesia la combinazione di concause determinanti la natura a fase non minima dell’impianto,l’eventuale presenza di una costante di Bode negativa puo essere banalmente eliminatascegliendo R0(s) = −1 ed avendo cura che R1(s) abbia costante di Bode positiva. Se,inoltre, tra le diverse concause presenti fosse assente la presenza di poli destri, dall’analisisvolta relativamente alla presenza di soli zeri destri e di un ritardo di tempo finito, segueche sarebbe sufficiente procedere alla sintesi di R1(s) come se il sistema da regolare fosseprivo di ritardi di tempo finiti e zeri destri avendo cura che questi siano vincolati atrovarsi nella zona di alta frequenza della funzione di anello e che lo sfasamento associatoal ritardo di tempo finito sia trascurabile in prossimita della pulsazione di taglio dellafunzione di anello.
In presenza di poli destri ed altre concause che rendano l’impianto da regolare a fasenon minima, si potra procedere come descritto al paragrafo (17.1.4): ossia, si potra primaindividuare un controllore stabilizzante (anello di controllo in retroazione piu interno)tramite l’analisi in frequenza (criterio di Nyquist) e/o il luogo delle radici. Terminataquesta fase, si sara individuato un sistema (il sistema stabilizzato in retroazione) privodi poli destri e, in generale, ancora a fase non minima per la concomitanza di piu cause(esclusa la presenza di poli destri). A questo punto si potra trattare questo nuovo sistemacon i metodi e le cautele appena descritte per sistemi a fase non minima e privi di polidestri.
18 Il luogo delle radici
Figura 39: Walter R. Evans (1920 - 1999)
Il luogo delle radici e un metodo di analisi e sintesi per sistemi di controllo LTI atempo continuo sviluppato da Walter R. Evans (1920 -1999) sul finire degli anni 1940.In estrema sintesi, il metodo consiste nel studiare la posizione nel piano complesso delleradici del polinomio caratteristico di un sistema LTI SISO in retroazione al variare dideterminati parametri della funzione di anello. Nella sua formulazione piu semplice ecomune, la funzione di anello e razionale fratta priva di ritardi finiti ed il parametro infunzione del quale si esamina il luogo delle radici della funzione di trasferimento in ciclochiuso e la costante di guadagno della funzione di anello. In particolare sia
L(s) = R(s)G(s)H(s) (283)

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 81
una funzione di anello priva di ritardi finiti dove R(s), G(s) e H(s) sono, rispettiva-mente, le funzioni di trasferimento del controllore, dell’impianto e del trasduttore. Lafunzione di trasferimento in retroazione sara (omettendo di indicare in modo esplicitola dipendenza da s)
T =RG
1 +RGH=RG
F(284)
avendo postoF := 1 +RGH. (285)
Al fine di sviluppare il metodo, si scriva la funzione di anello come
L(s) = KNR(s)NG(s)NH(s)
DR(s)DG(s)DH(s)= K
NL(s)
DL(s)(286)
avendo indicato con NA(s) e DA(s) rispettivamente il numeratore ed il denominatore,entrambi in forma monica, della funzione razionale A(s).
DefinizioneIl luogo delle radici e il luogo dei punti del piano complesso che sono radici del polinomiocaratteristico della funzione in ciclo chiuso T (s) in equazione (284) per qualche valoredella costante di guadagno K ∈ (−∞,∞) della funzione di anello definita come inequazione (286). Convenzionalmente il luogo delle radici relativo a K ∈ (0,∞) e dettoluogo positivo e quello relativo a K ∈ (−∞, 0) e detto luogo negativo.
Si noti che, in generale, la costante di guadagno K in equazione (286) non coincide conla costante di Bode KB della funzione di anello. Sebbene, infatti, il moduolo di KB sarasempre proporzionale al modulo di K, le due costanti possono differire sia in moduloche in segno.
Sulla base dell’equazione (286), introduciamo la seguente notazione
L(s) :=NL(s)
DL(s)=⇒ L(s) = K L(s) (287)
in termini della quale il luogo delle radici sara individuato, quando K 6= 0, dai punti sper i quali vale:
1 +K L(s) = 0 =⇒{|K|
∣∣∣L(s)∣∣∣ = 1
argK + arg L(s) = (2n+ 1)π : n intero.(288)
Fissato un punto s del piano complesso, esso appartiene al luogo delle radici se esisteun K reale ed un n intero per cui entrambe le condizioni espresse dalla equazione (288)siano soddisfatte. Poiche qualunque sia s la condizione di modulo puo sempre esseresoddisfatta scegliendo
|K| = 1∣∣∣L(s)∣∣∣ ,
il luogo delle radici puo essere determinato sulla base della condizione sulle fasi. Questapuo essere rielaborata come segue
arg L(s) = (2n+ 1)π − argK =
{(2n+ 1)π − 2mπ se K > 0(2n+ 1)π − (2m+ 1)π se K < 0
(289)
per qualche n ed m interi. Ricordando che

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 82
• la somma (o differenza) di due numeri pari e pari
• la somma (o differenza) di due numeri dispari e pari
• la somma (o differenza) di un numeri pari e uno dispari e dispari
dalla equazione (289) segue che il luogo delle radici per K 6= 0 sara individuato da
arg L(s) =
{(2 ν + 1)π : ν intero se K > 02 ν π : ν intero se K < 0
. (290)
Ricordando che L(s) e il rapporto di polinomi in forma monica, si tratta di individuaredelle regole operative che aiutino ad individure i punti s nel piano complesso per i qualisiano soddisfatte le condizioni (290).
18.1 Regole per il tracciamento del luogo delle radici
Regola 1 Il luogo delle radici ha tanti rami quanti sono i poli della funzione di anello.
dim. per esercizio.
Regola 2 Il luogo delle radici e simmetrico rispetto l’asse reale.
dim. per esercizio.
Regola 3 Ogni ramo del luogo delle radici ha origine nei poli della funzione di anello L(s)(per K = 0) e termine negli zeri della funzione di anello oppure all’infinito (per|K| → ∞).
dim. Segue osservando che il polinomio caratteristico pc(s) della funzione di trasferi-mento T (s) data dall’equazione (284) e
pc(s) = DL(s) +KNL(s) = K
(DL(s)
K+NL(s)
)
Regola 4 Un punto s dell’asse reale appartiene al luogo positivo se lascia alla sua destra unaquantita dispari tra zeri e poli reali della funzione di anello
Regola 4 bis Un punto s dell’asse reale appartiene al luogo negativo se lascia alla sua destrauna quantita pari tra zeri e poli reali della funzione di anello
dim. Notando che
L(s) =
∏mh=1(s− zh)∏ni=1(s− pi)
seguono direttamente dalle condizioni (290) (verificare graficamente).
Regola 5 Indicando con n ed m i gradi rispettivamenti dei polinomi DL(s) ed NL(s) dellafunzione di anello L(s), il luogo delle radici ha n−m (grado relativo) asintoti cheformano una stella centrata nel punto del piano reale
c =1
n−m
(n∑h=1
ph −m∑i=1
zi
)(291)

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 83
e orientati con angoli
θ =2 ν + 1
n−mπ se K > 0 (292)
θ =2 ν
n−mπ se K < 0 (293)
con ν intero. In sintesi,
n−m # asintoti angoli [deg] per K > 0 angoli [deg] per K < 0
0 0 −−− −−−1 1 180 0
2 2 ±90 0, 180
3 3 ±60, 180 0,±120
4 4 ±45,±135 0, 180,±90...
......
...
dim. Omessa.
Regola 6 Ad una radice multipla di ordine µ corrisponde un punto del luogo delle radicicomune a µ rami. Questi punti sono individuati, oltre che dalle equazioni (288),dalle equazioni
dk
dskF (s) = 0 : k = 0, 1, 2, . . . , µ− 1 (294)
essendo F (s) data dall’equazione (285). Nel caso frequente in cui valga µ = 2,queste condizioni possono essere espresse come:
m∑i=1
1
s− zi−
n∑j=1
1
s− pj= 0 (295)
K = − 1
L(s): K 6= 0 reale (296)
dim. La prima parte della regola segue dalla definizione di F (s) e del luogo stesso.La seconda segue dall’osservare che per µ = 2 le condizioni su F (s) diventano,nell’ipotesi K 6= 0,
L(s) = −1/K
K dds L(s) = 0
}=⇒ d
dsln L(s) = 0 =⇒ (297)
d
ds
[ln
∏mh=1(s− zh)∏ni=1(s− pi)
]=
d
ds
[m∑h=1
ln(s− zh)−n∑i=1
ln(s− pi)]
=
=m∑h=1
1
s− zh−
n∑i=1
1
s− pi= 0.
Si noti che per individuare i punti s sede di intersezione tra due rami del luogodelle radici devono valere entrambe le equazioni (295) e (296).
Regola 7 I µ rami che si incontrano in un polo s∗ di molteplicita µ formano in s∗ una stellain cui ogni ramo entrante e intercalato ad uno uscente formando con esso un angolodi π/µ radianti.

FdA A.A. 2011 - 2012, Giovanni Indiveri, Universita del Salento. VERSIONE 0.41 84
dim. Omessa.
Regola 8 L’angolo secondo cui il luogo delle radici lascia un polo della funzione di anello oquello secondo cui raggiunge uno zero della funzione di anello puo essere calcolatosulla base della equazione di fase (290).
dim. Dalla definizione.

Indice analitico
regolatore, 1
stabilita, 1
85